4.1. Matemática - Teoria - Livro 4
40
– 1 FRENTE 1 Álgebra MÓDULO 49 Permutações 1. PERMUTAÇÕES SIMPLES São arranjos simples de n ele- mentos tomados k a k em que n = k. Assim, permutações simples são agrupamentos que diferem entre si apenas pela ordem de seus ele- mentos. Podemos dizer que uma permu- tação de n elementos é qualquer agrupamento ordenado desses n ele- mentos. Por exemplo, as permutações dos elementos distintos A, B e C são ABC, ACB, BAC, BCA, CAB e CBA. O número de permutações sim- ples de n elementos é dado por 2. PERMUTAÇÃO COM REPETIÇÃO Sejam α elementos iguais a a, β elementos iguais a b, γ elementos iguais a c, . . ., λ elementos iguais a l, num total de α + β + γ + ... + λ = n elementos. O número de permutações dis- tintas que podemos obter com esses n elementos é 3. PERMUTAÇÕES CIRCULARES O número de permutações circu- lares de n elementos é dado por n! P n = A n,n = ––––––––– = n! (n – n)! P n = n! n! P n (α, β, γ, ..., λ) = –––––––––––––––– α! . β! . γ!… λ! P’ n = (n – 1)! 1. COMBINAÇÕES SIMPLES São agrupamentos que diferem entre si apenas pela natureza de seus elementos. Podemos dizer que uma com- binação de n elementos distintos to- mados k a k ( n ≥ k) é uma escolha não ordenada de k dos n elementos dados. Por exemplo, as combinações dos 4 elementos distintos A, B, C e D, tomados 3 a 3, são ABC, ABD, ACD e BCD. É bom notar que ABC e BAC, bem como todas as permutações de A, B e C, representam a mesma com- binação. O mesmo acontece com cada um dos agrupamentos ABC, ACD e BCD. O número de combinações sim- ples de n elementos, tomados k a k, ou classe k (n ≥ k), é dado por 2. ARRANJOS COM REPETIÇÃO O número de arranjos com repe- tição de n elementos k a k é dado por 3. COMBINAÇÕES COM REPETIÇÃO O número de combinações com repetição de n elementos k a k é dado por A n,k n! n C n,k = –––––– = –––––––––– = P k k!(n – k)! k n! C n,k = –––––––––– k!(n – k)! A* n, k = n k n + k – 1 C * n,k = C n+k – 1,k = ( ) k 1. CONCEITO DE PROBABILIDADE Seja uma experiência em que pode ocorrer qualquer um de n resultados possíveis. Cada um dos n resultados possíveis é chamado ponto amostral e o conjunto S de todos os pontos amostrais é chamado espaço amostral; qualquer sub- conjunto A do espaço amostral S é chamado de evento. Chama-se probabilidade de ocor- rer um evento A de um espaço amos tral S ≠ Ø ao número , em que n(A) é o número de elementos n(A) P(A) = ––––– n(S) MÓDULO 52 Probabilidade, Definição e União de Eventos MÓDULOS 50 e 51 Combinações Simples e Arranjos e Combinações com Repetição C4_3oMAT_TEO_CONV_Rose 04/03/11 08:38 Página 1
-
Upload
leonardomorais -
Category
Documents
-
view
243 -
download
1
description
para estudar
Transcript of 4.1. Matemática - Teoria - Livro 4

– 1
FRENTE 1 Álgebra
MÓDULO 49 Permutações
1. PERMUTAÇÕES SIMPLES
São arranjos simples de n ele -
men tos tomados k a k em que n = k.
Assim, permutações simples são
agru pamentos que diferem entre si
apenas pela ordem de seus ele -
mentos.
Podemos dizer que uma per mu -
ta ção de n elementos é qualquer
agru pa mento orde nado desses n ele -
mentos.
Por exemplo, as permuta ções dos
elementos distintos A, B e C são ABC,
ACB, BAC, BCA, CAB e CBA.O número de permutações sim -
ples de n elementos é dado por
2. PERMUTAÇÃO COM REPETIÇÃO
Sejam α elementos iguais a a, βelementos iguais a b, γ elementosiguais a c, . . ., λ elementos iguais a l,num total de α + β + γ + ... + λ = nelementos.
O número de permutações dis -
tintas que podemos obter com esses
n elementos é
3. PERMUTAÇÕESCIRCULARES
O número de permutações cir cu -lares de n elementos é dado por
n!Pn = An,n = ––––––––– = n!
(n – n)!Pn = n!
n!Pn
(α, β, γ, ..., λ)= ––––––––––––––––
α! . β! . γ! … λ!
P’n = (n – 1)!
1. COMBINAÇÕES SIMPLES
São agrupamentos que diferem
entre si apenas pela natureza de
seus elementos.
Podemos dizer que uma com -
binação de n elementos dis tintos to -
mados k a k ( n ≥ k) é uma escolha
não ordenada de k dos n elementos
dados.
Por exemplo, as combinações
dos 4 elementos distintos A, B, C e D,
tomados 3 a 3, são ABC, ABD, ACDe BCD.
É bom notar que ABC e BAC,
bem como todas as permutações de
A, B e C, representam a mesma com -
binação. O mesmo acontece com
cada um dos agrupamentos ABC,
ACD e BCD.O número de combinações sim -
ples de n elementos, tomados k a k,ou classe k (n ≥ k), é dado por
2. ARRANJOS COM REPETIÇÃO
O número de arranjos com repe -tição de n elementos k a k é dado por
3. COMBINAÇÕES COM REPETIÇÃO
O número de combinações comrepetição de n elementos k a k é dadopor
An,k n! n Cn,k = –––––– = –––––––––– =� �Pk k!(n – k)! k
n!Cn,k = ––––––––––
k!(n – k)!
A*n, k = nk
n + k – 1C*
n,k = Cn+k – 1,k = ( )k
1. CONCEITO DE PROBABILIDADE
Seja uma experiência em quepode ocorrer qualquer um de nresultados possíveis. Cada um dos n
resultados possíveis é chamadoponto amostral e o conjunto S detodos os pontos amostrais é chamadoespaço amostral; qualquer sub -con junto A do espaço amostral S échamado de evento.
Chama-se probabilidade de ocor -rer um evento A de um espaço amos
tral S ≠ Ø ao número ,
em que n(A) é o nú mero de elementos
n(A)P(A) = –––––
n(S)
MÓDULO 52 Probabilidade, Definição e União de Eventos
MÓDULOS 50 e 51Combinações Simples e Arranjos e Combinações com Repetição
C4_3oMAT_TEO_CONV_Rose 04/03/11 08:38 Página 1

de A, e n(S) é o número de elementosde S.
Na prática, costuma-se dizer queprobabilidade é o quociente entreo número de casos favoráveis,que é n(A), e o número de casospossíveis, que é n(S).
2. PROPRIEDADES
Sendo S ≠ Ø um espaço qual quer,A, um evento de S e A
—, o com -
plementar de A em S, valem asseguintes propriedades:
• P(Ø) = 0
• P(S) = 1
• 0 ≤ P(A) ≤ 1
• P(A) + P(A—
) = 1
3. UNIÃO DE DOIS EVENTOS
Sejam A e B dois eventos de umespaço amostral S ≠ Ø.
A probabilidade de ocorrer A ouB é dada por
Observe que o número de ele -mentos de A ∪ B, n(A ∪ B), é dado porn(A ∪ B) = n(A) + n(B) – n(A ∩ B) ⇔
⇔ = + – ⇔
⇔ P(A ∪ B) = P(A) + P(B) – P(A ∩ B).
Se A ∩ B = Ø, A e B são chama -dos eventos mutuamente exclusivos.Neste caso,
Se A ∩ B = Ø e A ∪ B = S, A e B
são chamados eventos exaustivos.
Então,
Generalizando: sejam n eventos
A1, A2, A3, ..., An de um espaço
amostral S, tais que
A1 ∪ A2 ∪ A3 ∪ ... ∪ An = S.Assim,
P(A1 ∪ A2 ∪ A3 ∪ ... ∪ An) =
= P(S) = 1
Além disso, se A1, A2, A3, ... , Ansão, dois a dois, mutuamente exclu si -vos, então eles são eventos exausti vos.
Assim sendo,
P(A1 ∪ A2 ∪ A3 ∪ ... ∪ An) =
= P(A1) + P(A2) + P(A3) + ... + P(An) = 1
✍ Exercício ResolvidoNuma urna, existem 10 bolas nu -meradas de 1 a 10. Retirando-se,ao acaso, uma bola dessa urna,
qual a probabilidade de se tera) um múltiplo de 2 ou um múlti -
plo de 3?b) um número ímpar ou um múlti -
plo de 6?
ResoluçãoO espaço amostral é
S = {1; 2; 3; ... ; 10} e n(S) = 10.
a) 1) O evento “múltiplo de 2” é
A = {2; 4; 6; 8; 10} e n(A)= 5.
2) O evento “múltiplo de 3” é
B = {3; 6; 9} e n(B) = 3.
3) A ∩ B = {6} e n(A ∩ B) = 1.
4) P(A) = = ,
P(B) = = e
P(A ∩ B) = = .
5) P(A∪B) =P(A) + P(B) – P(A ∩ B).
Logo,
P(A ∪ B) =
= + – = = 70%
b) 1) O evento “número ímpar” é
A = {1; 3; 5; 7; 9} e n(A) = 5.
2) O evento “múltiplo de 6” é
B = {6} e n(B) = 1.
3) A ∩ B = Ø e n(A ∩ B) = 0
(A e B são mutuamente ex -
clusivos).
4) P(A) = = ,
P(B) = = e
P(A ∩ B) = 0.
5) P(A ∪ B) =
=P(A)+P(B)–P(A∩B)=P(A)+P(B)
Logo,
P(A∪B)= + = = 60%.
Respostas: a) 70% b) 60%
P(A ∪ B) = P(A) + P(B) – P(A ∩ B)
n(A ∪ B)––––––
n(S)n(A)––––n(S)
n(B)––––n(S)
n(A ∩ B)––––––
n(S)
P(A ∪ B) = P(A) + P(B)
P(A ∪ B) = P(A) + P(B) = 1
5––10
n(A)––––n(S)
3––10
n(B)––––n(S)
1–––10
n(A ∩ B)––––––––
n(S)
7––10
1––10
3––10
5––10
5––10
n(A)––––n(S)
1––10
n(B)––––n(S)
6––10
1––10
5––10
2 –
C4_3oMAT_TEO_CONV_Rose 04/03/11 08:38 Página 2

– 3
MÓDULO 53Probabilidade Condicional e Intersecção de Eventos
1. PROBABILIDADECONDICIONAL
Dados dois eventos A e B de umespaço amostral S ≠ Ø, chama-seproba bilidade de A condicionada a Ba probabilidade de ocorrer A, saben -do-se que já ocorreu ou vai ocorrer oevento B.Indica-se por P(A/B).
Observe que
P(A/B) = ⇔
⇔ P(A/B) = ⇔
⇔ P(A/B) =
2. EVENTOS INDEPENDENTES
Os eventos A e B de um espaçoamos tral S são independentes se
.
3. INTERSECÇÃO DE DOIS EVENTOS
❑ Propriedade
Se A e B são independentes,
então P(B/A) = P(B) e
.
P(A ∩ B)P(A/B) = –––––––––––
P(B)
n(A ∩ B)–––––––––
n(B)
n(A ∩ B)–––––––––
n(S)––––––––––––
n(B)––––n(S)
P(A ∩ B)––––––––
P(B)
P(A/B) = P(A) OU P(B/A) = P(B)
P(A ∩ B) = P(A) . P(B/A) = P(B) . P(A/B)
A e B independentes ⇔
⇔ P(A ∩ B) = P(A) . P(B)
A e B dependentes ⇔
⇔ P(A ∩ B) ≠ P(A) . P(B)
P(A ∩ B) = P(A) . P(B)
MÓDULO 54 Lei Binomial de Probabilidade
Considere uma experiência que érealizada várias vezes, sempre nasmes mas condições, de modo que oresul tado de cada uma seja indepen -dente das demais. Considere, ainda,que cada vez que a experiência é rea -li zada ocorre, obrigatoriamente, umevento A cuja probabili da de ép ou o complemento A
—cuja
probabilidade é 1 – p.
1. PROBLEMA
Realizando-se a experiência des -cri ta exatamente n vezes, qual é aprobabilidade de ocorrer o evento Asomente k vezes?
2. RESOLUÇÃO DO PROBLEMA
a) Se ocorre apenas k vezes oevento A, num total de n experiên -cias, então deverá ocorrer exata men -te n – k vezes o evento A
—.
b) Se a probabilidade de ocorrero evento A é p e do evento A
—é
1 – p, então a probabilidade de ocor -rer k vezes o evento A e n – kvezes o evento A
—, numa certa
ordem, é
p . p . p . ... . p .
k fatores
. (1 – p) . (1 – p) . (1 – p) . ... . (1 – p) =
(n – k) fatores
= pk . (1 – p)n – k
c) As k vezes em que ocorre o
evento A são quaisquer entre as nvezes possíveis. O número de manei -
ras de escolher k vezes o evento A é,
pois, Cn, k.
d) Existem, portanto, Cn,k even -
tos diferentes, todos com a mesma
probabilidade pk . (1 – p)n – k e,
assim sendo, a probabilidade procu -
ra da é
Observações
a) Fala-se em lei binomial de pro -
ba bilidade, porque a fórmula repre sen -
ta o termo Tk + 1 do de sen vol vi men to
de [p + (1 – p)]n.
b) O número Cn, k pode ser subs -
tituído por Cn, n – k ou Pnk, n – k, já que
Cn, k = Cn, n – k = Pnk, n – k = .
Cn,k . pk . (1 – p)n – k
n!–––––––––k! (n – k)!
C4_3oMAT_TEO_CONV_Rose 04/03/11 08:38 Página 3

4 –
O número real x que substitui ca da um dos númerosreais x1, x2, x3, … xn é a sua média. Podemos ter:
• Média aritmética
x1 + x2 + x3 + … + xn =
= x + x + x + … + x ⇒
⇒
• Média geométrica
x1 . x2 . x3 . … xn =
= x . x . x . … x ⇒
⇒
• Média harmônica1 1 1 1
––– + ––– + ––– + … + ––– = x1 x2 x3 xn
1 1 1 1= –– + –– + –– + … + –– ⇒
x x x x
⇒
• Média aritmética ponderada
P1 . x1 + P2 . x2 + … + Pn . xn =
= P1 . x + P2 . x + … + Pn . x ⇒
⇒
x1 + x2 + x3 +…+ xnx = ––––––––––––––––––––––n
xn = x1 . x2 . x3 . … xn
1x = ––––––––––––––––––––––––––––
1 1 1 1––– + ––– + ––– + … + ––– x1 x2 x3 xn––––––––––––––––––––––––––n
P1 . x1+P2 .x2+…+Pn . xnx = ––––––––––––––––––––––––––––
P1 + P2 + … + Pn
MÓDULO 55 Médias
MÓDULO 56 Noções de Estatística I
1. CONCEITO
Estatística é um ramo da Mate -mática Aplicada. A palavra Estatísticaprovém da palavra latina Status e éusada em dois sentidos:
• ESTATÍSTICAS (no plural) refe -rem-se a dados numéricos e sãoinformações sobre determinado as -sunto, coisa, grupo de pessoas etc.obtidas por um pesquisador.
• ESTATÍSTICA (no singular) sig - nifica o conjunto de métodos usa dosna condensação, aná li ses e inter -pretações de dados numéri cos.
De um modo geral, conceitua-seEstatística da seguinte forma:
É ciência, quando estuda popu la -ções; é método, quando serve deinstrumento a uma outra ciência. Étam bém arte, ciência-método e mé to -do-ciência, segundo vários trata dis -tas, daí advindo uma varie dade dede finições. Eis algumas:
“Conjunto dos processos que tempor objeto a observação, a clas si -ficação formal e a análise dos fenô -menos coletivos ou de massa, e porfim a indução das leis a que tais fe -nômenos obedecem globalmente”(Mil ton da Silva Rodrigues).
“A Estatística é a parte da Mate -mática Aplicada que se ocupa em ob -ter conclusões a partir de dadosobservados” (Ruy Aguiar da SilvaLeme).
“A Estatística é o estudo numé -rico dos fatos sociais” (Levasseur).
“É observação metódica e tãouni versal quanto possível dos fatoscon siderados em globo, reduzidos agrupos homogêneos e interpretadosmediante a indução matemática”(Ferraris).
2. POPULAÇÃO E AMOSTRA
❑ PopulaçãoÉ um conjunto de elementos
com uma característica comum.
O termo é mais amplo que nosen so comum, pois envolve aglo me -ra do de pessoas, objetos ou mesmoideias.
ExemploTodos os alunos do Ensino Médio
do Brasil.❑ Amostras
São subconjuntos da população,que conservam, portanto, a carac te -rís tica comum da população e são re -tira das por técnicas adequadas,cha madas de amostragem.
Exemplo500 alunos do Ensino Médio do
Brasil.
❑ ParâmetrosSão características numéricas da
população. ExemploQI médio dos estudantes do En -
sino Médio do Brasil.
❑ EstimativasEm geral, por problemas de tem -
po e dinheiro, trabalha-se com amos -tras e não com a população.
C4_3oMAT_TEO_CONV_Rose 04/03/11 08:38 Página 4

– 5
Os elementos numéricos carac-terísticos de uma amostra são esti ma -tivas dos elementos corres pon dentesna população, que são os parâ me -tros.
3. DISTRIBUIÇÃO DE FREQUÊNCIAS
Quando se vai fazer um levan ta -men to de uma população, um dospas sos é retirar uma amostra dessapopulação e obter dados relativos àvariável desejada nessa amostra.
Cabe à Estatística sintetizar es sesdados na forma de tabelas e gráficosque contenham, além dos va lores dasvariáveis, o número de ele mentoscorrespondentes a cada variável.
Ilustramos, a seguir, esse proce -dimento, acompanhando com umexem plo.❑ Dados brutos
É o conjunto dos dados numéri -cos obtidos e que ainda não foramorganizados.
ExemploA partir de uma lista de chama -
da, em ordem alfabética, obteve-se oconjunto de alturas, em cm, de 20estudantes:
168, 168, 163, 164, 160, 160,164, 166, 169, 169, 166, 168,162, 165, 165, 164, 168, 166,161, 168.
❑ RolÉ o arranjo dos dados brutos em
ordem crescente (ou decrescente).No exemplo apresentado, temos
o seguinte rol:160, 160, 161, 162, 163, 164,164, 164, 165, 165, 166, 166,166, 168, 168, 168, 168, 168,169, 169.
❑ Amplitude total (H)É a diferença entre o maior e o
me nor dos valores observados. Noexemplo:
H = 169 – 160 ⇒ H = 9
❑ Frequência absoluta ( fi ) É o número de vezes que o
elemento aparece na amostra:
❑ Frequência relativa ( fr )
É dada por:
em que n é o número de elementos da
amostra ( n = ∑ fi )
Observe que ∑ fr = 1
❑ Frequência relativa percentual ( ƒ% )
❑ Frequência absoluta acumulada (fa)É a soma da frequência do valor
da variável com todas as frequências
anteriores:
❑ Frequência relativa acumulada ( fra )É a soma da frequência relativa
do valor da variável com todas asfrequências relativas anteriores.
❑ Frequência percentualacumulada ( ƒ%a )
❑ Distribuição defrequênciasÉ o arranjo dos valores da variá -
vel e suas respectivas frequências.
fifr = –––
n
xi fi
160161162163164165166167168169
2111323052
∑ 20
xi fi fr
160
161
162
163
164
165
166
167
168
169
2
1
1
1
3
2
3
0
5
2
2 ÷ 20 = 0,10
1 ÷ 20 = 0,05
1 ÷ 20 = 0,05
1 ÷ 20 = 0,05
3 ÷ 20 = 0,15
2 ÷ 20 = 0,10
3 ÷ 20 = 0,15
0 ÷ 20 = 0
5 ÷ 20 = 0,25
2 ÷ 20 = 0,10
∑ 20 1,00
ƒ% = fr . 100
xi fi fr f%
160161162163164165166167168169
2111323052
0,100,050,050,050,150,100,1500,250,10
10555
151015
02510
∑ 20 1,00 100
xi fi fr f% fa
160
161
162
163
164
165
166
167
168
169
2
1
1
1
3
2
3
0
5
2
0,10
0,05
0,05
0,05
0,15
0,10
0,15
0
0,25
0,10
10
5
5
5
15
10
15
0
25
10
0 + 2 = 2
2 + 1 = 3
3 + 1 = 4
4 + 1 = 5
5 + 3 = 8
8 + 2 = 10
10 + 3 = 13
13 + 0 = 13
13 + 5 = 18
18 + 2 = 20
∑ 20 1,00 100
ƒ%a = fra . 100
C4_3oMAT_TEO_CONV_Rose 04/03/11 08:38 Página 5

6 –
4. CLASSES
O número de elementos de umaamostra, de um modo geral, é gran de.Para condensá-los, os valo res obtidosdevem ser, normalmente, distribuídosem classes.
A distribuição de frequências dos dados de uma amostra distri -buídos em classes é idêntica à que éfeita com cada valor da variável, ado -tan do-se as seguintes normas:
❑ O número de classes (nc)É da ordem de ���n, em que n é o
número total de elementos da amos -
tra.
❑ A amplitude da classe (h)É, aproximadamente, o quocien te
entre a amplitude total (H) e o númerode classes (nc).
❑ O ponto médio da classe (PM)É a média aritmética entre o limi -
te inferior e o limite superior de cada
classe. É o valor da variável que re pre -
senta a classe: PM = Xi.
❑ ExercícioNum teste de raciocínio numéri co,
obtiveram-se os seguintes da dosbrutos:
nc � ���n
Hh � ––––
nc
xi fi fr f% fa fra f%a
160
161
162
163
164
165
166
167
168
169
2
1
1
1
3
2
3
0
5
2
0,10
0,05
0,05
0,05
0,15
0,10
0,15
0
0,25
0,10
10
5
5
5
15
10
15
0
25
10
2
3
4
5
8
10
13
13
18
20
0,10
0,15
0,20
0,25
0,40
0,50
0,65
0,65
0,90
1,00
10
15
20
25
40
50
65
65
90
100
∑ 20 1,00 100
76 – 60 – 41 – 55 – 78 – 48 –69 – 85 – 67 – 39 – 60 – 85 – 57 – 74 – 65 – 84 – 77 – 65 –52 – 33 – 80 – 61 – 45 – 77 – 53 – 59 – 73 – 55 – 91 – 41 –94 – 65 – 94 – 98 – 89 – 88 –66 – 66 – 73 – 42 – 71 – 35 – 68 – 54 – 47 – 74 – 64 – 35 –50 – 61
Fazer a distribuição de fre -quên cias dos dados dessa amos -
tra, distribuindo-os em classes.
❑ Resolução
• Cálculo do rol
33 – 35 – 35 – 39 – 41 – 41 –
42 – 45 – 47 – 48 – 50 – 52 –
53 – 54 – 55 – 55 – 57 – 59 –
60 – 60 – 61 – 61 – 64 – 65 –
65 – 65 – 66 – 66 – 67 – 68 –
69 – 71 – 73 – 73 – 74 – 74 –
76 – 77 – 77 – 78 – 80 – 84 –
85 – 85 – 88 – 89 – 91 – 94 –
94 – 98
• Cálculo da amplitude total
H = 98 – 33 = 65
• Cálculo do número de classes
nc ≅ ���n
nc ≅ �����50 ≅ 7
• Cálculo da amplitude de classe
h = = ≅ 9,3
Adotaremos h = 10.
65––––
7
H––––nc
• Distribuição de frequências
Classes PM fi fr f% fa fra f%a
30 � 40
40 � 50
50 � 60
60 � 70
70 � 80
80 � 90
90 � 100
35
45
55
65
75
85
95
4
6
8
13
9
6
4
0,08
0,12
0,16
0,26
0,18
0,12
0,08
8
12
16
26
18
12
8
4
10
18
31
40
46
50
0,08
0,20
0,36
0,62
0,80
0,92
1,00
8
20
36
62
80
92
100
∑ 50 1,00 100
5. REPRESENTAÇÃO GRÁFICADA DISTRIBUIÇÃO DEFREQUÊNCIAS
As tabelas de distribuição defrequências vistas no item 4 podemser representadas graficamente.
A finalidade principal disso éfornecer as infor mações analíticas deuma maneira mais rápida. Descre -veremos apenas três tipos de grá -ficos: histogramas, polí gonos defre quên cias e polígonos de frequên -cias acumuladas.
❑ HistogramasÉ a representação gráfica de uma
distribuição de frequências por meiode retângulos justapostos. Noeixo das abscissas, temos os limi tesdas classes e no eixo das or de nadas,as frequências (fi ou fr ou ƒ%).
❑ Polígono de frequênciasÉ um gráfico de linhas que se
obtém unindo os pontos médios dospa tamares dos retângulos do his to -grama.
C4_3oMAT_TEO_CONV_Rose 04/03/11 08:38 Página 6

– 7
❑ Polígono de frequências acumuladasPolígono de frequências acu mu ladas ou OGIVA DE
GALTON é uma representação gráfica que tem no eixodas abscissas os limites das classes e no eixo dasordenadas, as fre quências acumuladas (fa ou fra ou ƒ%a)que se situam abaixo de um determinado limite superior.
❑ ExemploFazer a representação gráfica da distribuição de
frequências apresen tada na tabela a seguir:
Observações– Conforme vemos na figura, o his to grama e o polí -
gono de fre quên cias em termos de fi, fr e ƒ% têmexatamente o mesmo as pec to, mudando apenas aes cala vertical.
– Observe que, como o 1o. valor é bem maior que zero,adotamos aproximá-lo do zero segundo a con -venção:
Classes PM fi fr f% fa fra f%a
30 � 4040 � 50
50 � 60
60 � 70
70 � 80
80 � 90
90 � 100
35
45
55
65
75
85
95
4
6
8
13
9
6
4
0,08
0,12
0,16
0,26
0,18
0,12
0,08
8
12
16
26
18
12
8
4
10
18
31
40
46
50
0,08
0,20
0,36
0,62
0,80
0,92
1,00
8
20
36
62
80
92
100
∑ 50 1,00 100
6. MEDIDAS DE POSIÇÃO
As medidas de posição servem para localizar osdados sobre o eixo da variável em questão. As mais im -por tantes são: a média, a me dia na e a moda.
A média e a mediana tendem a se localizar emvalores centrais de um conjunto de dados. Por essa ra -zão, costuma-se dizer que são me didas detendência central. A moda, por sua vez, indica aposição de maior concentração de dados.
❑ Média aritmética
– Dados não agrupadosSendo X1, X2, X3, ..., Xn os n valo res de uma variável
X, define-se mé dia aritmética, ou simplesmente mé dia,como sendo:
ExemploA média aritmética dos valores 3; 5; 7; 8 é
–– 3 + 5 + 7 + 8X = ––––––––––––– = 5,75
4– Dados agrupadosSendo X1, X2, X3, ..., Xn os n va lores da variável X
com frequên cias f1, f2, f3, ..., ƒn, respectiva mente, de fine-se média aritmética, ou sim ples mente média, como
n∑ Xi— i = 1
X = –––––––n
C4_3oMAT_TEO_CONV_Rose 04/03/11 08:38 Página 7

8 –
sendo
sendo ∑ fi = n.
ExemploA média aritmética da distribui ção
de dados a seguir é:
1 . 1 + 3 . 2 + 5 . 3 + 1 . 4—X = –––––––––––––––––––––––––
10—X = 2,6
– Dados agrupados em classes
A média aritmética é calculada
co mo no item anterior, lembrando que
cada classe é representada pelo seu
ponto médio (Xi = PM).
Exemplo
5. 3 + 10 . 5 + 14 . 7 + 8 . 9 + 3 . 11—X = –––––––––––––––––––––––––––––––– ⇒
40
⇒—X = ⇒ X = 6,7
❑ Moda (Mo)Define-se moda (ou modas) de
um conjunto de valores dados como
sendo o valor de frequência má -xima (ou os valores da fre quên ciamáxi ma).
Exemplosa) A moda do conjunto de dados 2,
2, 5, 7, 9, 9, 9, 10, 11, 12 é 9.Observe que 9 é o elementomais frequente.
b) O conjunto de dados 2, 3, 3, 3, 4,4, 5, 6, 6, 7, 8, 8, 8, 9, 10, 10 tem duas modas:
e
c) Para a distribuição
a moda é 248, pois é o valor de
frequência máxima (23).
d) Para os dados agrupados emclas ses, a seguir, podemos di zer,pelo menos, que a classe mo dalé 2 � 3.
❑ Mediana (Md)Colocando-se os valores da va riá -
vel em ordem crescente, a me dianaé o elemento que ocupa a posiçãocen tral. Em outras palavras: amedia na divide um conjunto de ndados em dois subconjuntos comigual número de elementos.
• Cálculo da mediana para dados não agrupados
– Se n for ímpar, a mediana é o
valor central dos n dados do rol.
É o elemento de ordem .
Exemplo
A mediana dos dados 5; 7; 8; 10;
15 é 8, que é o 3o. termo do rol.
– Se n for par, a mediana é a mé -dia aritmética dos dois dadoscentrais do rol. É a média ari t mé -tica entre os dados de ordem
e + 1
ExemploOs valores centrais do rol 5; 7; 8;
10; 14; 15 são o 8 e o 10.
A mediana dos valores deste rol é
• Cálculo da mediana para dados agrupadosem classes
Calcula-se e, pela frequência
acumulada, identifica-se a classe quecontém a mediana. Em seguida,calcula-se a mediana usando umafórmula. O mais prático, porém, é usaro gráfico de frequências acu muladaspercentuais (OGIVA DE GALTON).
Exemplo
n∑ fiXii = 1X
–= ––––––––––n
268––––40
Mo = 9
Mo1= 3 Mo2
= 8
Mo = 248
n + 1–––––
2
5 + 1(––––––) = 32
n––2
n––2
8 + 10Md = –––––––– = 9
2
n––2
xi fi1234
1351
∑ 10
Classes PM = xi fi
2 � 44 � 66 � 88 � 10
10 � 12
3579
11
5101483
∑ 40
Classes fi
0 � 11 � 22 � 33 � 44 � 5
3101785
xi 243 245 248 251 307
fi 7 17 23 20 8
Classes fi fa
34 � 45
45 � 55
55 � 65
65 � 75
75 � 85
85 � 95
5
12
18
14
6
3
5
17
35
49
55
58
C4_3oMAT_TEO_CONV_Rose 04/03/11 08:38 Página 8

– 9
C4_3oMAT_TEO_CONV_Rose 04/03/11 08:38 Página 9

10 –
1o.) no ponto B, temos fa = 58, que corres -ponde a ƒ%a = 100.
2o.)o ponto A é médio de OBe, nesse ponto, temos fa = 29, que correspon dea ƒ%a = 50.
3o.) o valor da variável asso -ciado a ƒ%a = 50 é amedia na.
4o.) da OGIVA, concluímos,pois, que Md ≅ 62.
Construída a OGIVA, a partir dos dados, note que:
MÓDULO 57 Noções de Estatística II
1. MEDIDAS DE DISPERSÃO
❑ IntroduçãoAs medidas de posição vistas até
aqui, média, mediana e moda, têmcon ceitos diferentes, detalhes pró - prios, que ajudam semelhan te men te
a representar um conjunto de dados.Entretanto, a informação forneci -
da pelas medidas de posição, emgeral, necessita ser completada pe -las MEDIDAS DE DISPERSÃO. Estasservem para indicar o quanto os da -
dos se apresentam dispersos em tor -no da região central. Carac terizam,portanto, o grau de variação existen -te no conjunto de valores e, por isso,são também chamadas MEDIDAS DEVARIABILIDADE.
C4_3oMAT_TEO_CONV_Rose 04/03/11 08:38 Página 10

– 11
ExemploSuponha que as notas de 2 alu -
nos no decorrer do ano foram:
Aluno A: 2; 3; 4; 3; 8;10 →—X = 5
Aluno B: 5; 6; 4; 5; 4; 6 →—X=5
Ambos obtiveram a mesma mé dia(X–
= 5), entretanto percebe-seclaramente que o aluno A, de péssi -mos resultados iniciais, conseguiurecuperar-se no fim, enquanto o alunoB manteve-se praticamente no mes -mo nível.
Isso significa que as notas do alu - no B não foram dispersas como asno tas do aluno A.
Portanto, a medida de posiçãopo derá ser completada por uma me -dida de dispersão (amplitude, desviomédio, desvio padrão, variância) quepassaremos a descrever.
❑ AmplitudeAmplitude (H), ou intervalo
total, é definida como a diferençaen tre os valores extremos da série, ouseja:
ExemploSejam os valores 4; 5; 7; 9; 10; 13
Por depender de apenas dois va -lores do conjunto de dados, a ampli -tude contém relativamente poucainformação quanto à dispersão, poisse sujeita a grandes flutuações deuma amostra para outra.
Suponhamos que numa classe,os pesos dos alunos se distribuamentre 45 e 75 kg, a amplitude sejaH = 75 – 45 = 30 kg. Se entrar nessaclasse um aluno com 100 kg, a nova
am plitude será 100 – 45 = 55kg,quase o dobro da anterior apenas porcausa de um aluno.
❑ DesvioUma maneira de medir o grau de
dispersão ou concentração de cada
valor da variável em relação às me -
didas de tendência central é fazer a
diferença entre o valor da variável e a
média.
Esta diferença é chamada des -vio e representada por D.
Exemplo
Um aluno que obteve as notas 2,
3, 4, 3, 8, 10 conseguiu uma média
X–
= = 5.
Os desvios de cada uma das no -
tas são:
Observe que ∑Di = 0.
❑ ObservaçãoAo calcular a média dos desvios,
para conhecer um desvio global do
conjunto, o resultado é sempre ZE RO,
pois ∑Di = 0.
Assim, para obter um resultadoque exprima a média dos desvios,costuma-se proceder de dois modos:
a) calcular a média dos módulosde cada desvio;
b) calcular a média dos quadra -dos dos desvios e em se gui daextrair a raiz quadrada.
O primeiro é chamado desvio
médio (Dm) e o segundo é chamado
desvio padrão (s).
❑ Desvio médio (Dm)
ou
❑ Desvio padrão (s)
❑ Variância
É o quadrado do desvio padrão.
H = Xmáx – Xmín
H = 13 – 4 = 9
Di = Xi – X—
2 + 3 + 4 + 3 + 8 + 10––––––––––––––––––––––
6
∑ |Di|Dm = –––––––
n
∑ fi|Di|Dm = ––––––––
n
∑ fi Di2
s2 = ––––––––––n
xi Di = Xi –—X
2343810
– 3– 2– 1– 2
35
∑ fiDi2
s = ––––––––n
C4_3oMAT_TEO_CONV_Rose 04/03/11 08:38 Página 11

12 –
1. RAZÃO
Razão entre dois números a e b
(b ≠ 0), nessa ordem, é o quociente
(ou a : b). O número a é cha mado
de primeiro termo ou antecedente, e
o número b é chamado segundo
termo ou consequente. A razão in -
versa de a e b é (a ≠ 0).
2. PROPORÇÃO
Dizemos que os números a, b, ce d (b ≠ 0 e d ≠ 0), nessa ordem,formam uma PROPORÇÃO se, e so -men te se, a razão entre a e b é igualà razão entre c e d. Indicação:
= (ou a : b = c : d),
em que a e d são chamados extre -mos e b e c são chamados meios.
3. PROPRIEDADES DAS PROPORÇÕES
Dados os números a, b, c e d(b ≠ 0 e d ≠ 0), então:
1) (Fundamental)
⇔
3) ⇔
(b + d ≠ 0)
4) ⇔
(se ab tem o mesmo sinal de cd)
4. GRANDEZAS PROPORCIONAIS
❑ Notação
Em geral, letras maiúsculas do
nos so alfabeto representam GRAN -
DEZAS QUAISQUER, e letras minús -
culas do nosso alfabeto, cada uma
com um índice numérico, represen -
tam os VALORES dessas grandezas.
Assim, quando escrevemos:
A = (a1, a2, a3, ...) e B = (b1, b2, b3, ...),estamos referindo-nos às grande zasA e B e aos seus valores a1, a2, a3, ...e b1, b2, b3, ... num dado pro ble ma.Estamos dizendo ainda que, nesseproblema, “quando a gran deza Aassume o valor a1(ou a2 ou a3 ou ...),a grandeza B assume o valor b1(ou b2ou b3 ou ...), respec ti va mente”, e que“a1 e b1 (ou a2 e b2 ou a3 e b3ou ...) são VALORES COR RES PO N -DENTES das grandezas A e B”.
❑ Grandezas Diretamente Proporcionais (GDP)Uma grandeza A é DIRETAMEN-
TE PROPORCIONAL a uma gran de za
B se, e somente se, AS RAZÕES entre
os valores de A e os corres pon -
dentes valores de B forem CONS -
TANTES, isto é, se A = (a1, a2, a3, ...)
e B = (b1, b2, b3, ...); então:
⇔
⇔
em que k é constante.
❑ Grandezas Inversamente Proporcionais (GIP)
Uma grandeza A é INVER SA -
MEN TE PROPORCIONAL a uma
gran deza B se, e somente se, OS
PRODUTOS entre os valores de A e
os corres pon dentes valores de B fo -
rem CONS TAN TES, isto é, se A = (a1,
a2, a3, ...) e B = (b1, b2, b3, ...); então:
⇔
⇔
em que k é constante.
❑ Observações1) É evidente que, “se A é GDP (ou
GIP) a B, então B é GDP (ou GIP,respectivamente) a A”.
2) Quando dizemos que “A e B sãogran dezas diretamente (ou inver -sa men te) proporcionais”, esta mosquerendo dizer que “A é umagran deza diretamente (ou inver -sa men te, respectivamente) pro -por cio nal à grandeza B”.
3) Quando dizemos que “A e B sãogran dezas proporcionais”, omi tin -do a especificação “DIRETA -MENTE” ou “INVERSAMENTE”, éporque ou essa especificaçãoestá suben tendida no problema,ou o problema não depende des -sa es pecificação.
4) É evidente que duas grandezasquaisquer podem NÃO SER dire -tamente NEM inversamente pro -porcionais.
5) PROPRIEDADE: se a grandezaA = (a1, a2, a3, …) É INVERSA -MEN TE PROPORCIONAL à gran -deza B = (b1, b2, b3, …), então agrandeza A = (a1, a2, a3, …) é DI -RETAMENTE PROPORCIONAL àgrandeza
( 1 1 1 )B' = –––, –––, –––, … , b1 b2 b3
com b1 ≠ 0, b2 ≠ 0, b3 ≠ 0, …
Demonstração
Se A = (a1, a2, a3, … ) e B = (b1,
b2, b3, …) são GIP, então temos que:
a1b1 = a2b2 = a3b3 = … ⇒
a––b
b––a
c––d
a––b
ad = bca c–– = ––b d
a c a + b c + da) –– = –– ⇔ –––––– = ––––––b d b d
(a ≠ 0 e c ≠ 0)
a c a + b c + db) –– = –– ⇔ –––––– = ––––––b d b d
�2)
a + c c c–––––– = ––– =––b+ d b d
a c–– = ––b d
ac a2 c2–––– = –––– =–––bd b2 d2
a c–– = ––b d
A é GDP a B
a1 a2 a2–––– = –––– = –––– = ... = kb1 b2 b3
A é GIP a B
a1b1 = a2b2 = a3b3 = ... = k
MÓDULO 58 Grandezas Proporcionais
C4_3oMAT_TEO_CONV_Rose 04/03/11 08:38 Página 12

– 13
a1 a2 a3⇒ ––––– = ––––– = ––––– = … ⇒
1 1 1–––– –––– ––––b1 b2 b3
⇒ A = (a1, a2, a3, …) e
1 1 1B' = ( –––, –––, –––, …), com b1,
b1 b2 b3
b2 e b3 ≠ 0, são GRANDEZAS DI -
RETAMENTE PRO POR CIONAIS.
5. DIVISÃO PROPORCIONAL
a) DIVIDIR um número N em
PARTES (suponhamos: x, y e z)
DIRETAMENTE PROPOR CIO -
NAIS aos núme ros a, b e c
significa deter minar os núme -
ros x, y e z, de tal modo que:
(I) as sequências (x, y, z) e (a, b,
c) sejam diretamente propor -
cio nais;
(II) x + y + z = N.
Para isso, usando a definição
de GDP e as propriedades das
proporções, podemos usar a
seguinte TÉCNICA OPERA TÓ -
RIA:
x y z––– = ––– = –––a b c� ⇔
x + y + z = N
x + y + z x y z–––––––––– = –– = –– = ––a + b + c a b c⇔ � ⇔
x + y + z = N
N x––––––––– = ––a + b + c a
N y⇔ �––––––––– = ––
a + b + c b
N z––––––––– = ––a + b + c c
e então calculamos x, y e z.
b) DIVIDIR um número M em PAR -
TES INVERSAMENTE PROPOR -
CIONAIS aos números m, n e p É
O MESMO QUE DIVIDIR M em
PARTES DIRETAMENTE PRO -
POR CIO NAIS aos INVERSOS:
, , ,
com m ≠ 0, n ≠ 0 e p ≠ 0.
1––m
1––n
1––p
MÓDULO 59 Regra de Três
1. REGRA DE TRÊS SIMPLES (R3S)
❑ DefiniçãoÉ o método prático empregado
para resolver o seguinte problema:
“Quando comparamos duasgran dezas A e B propor cio nais,
relacionando dois valores de A com
dois valores corres pondentes de B,
determinamos um dos qua tro va -lo res, uma vez que se jam conhe -cidos os outros três.”
❑ Técnica operatória
a1 ................ b1Valores � a2 ................ b2
(um dos quatro é a incógnita doproble ma). Se A e B forem GDP,montamos a proporção:
=
(da qual calculamos o valor desco -
nhe cido).
Se A e B forem GIP, montamosuma das proporções:
= ou =
(invertemos uma das razões e calcu -lamos o valor desconhecido).
2. REGRA DE TRÊS COMPOSTA (R3C)
❑ DefiniçãoÉ o método prático empregado
para resolver proble ma análogo ao da
regra de três simples, só que en vol -
vendo MAIS DE DUAS GRAN DEZAS
PROPOR CIONAIS.
❑ Propriedades
Se uma grandeza A(a1, a2, ...) é
diretamente proporcional a uma gran -
deza B(b1, b2, ...) e a uma gran deza
C(c1, c2, ...), então:
❑ Técnica operatória
(fundamental)
a1 ..... b1 ..... c1 ..... d1Valores � x ..... b2 ..... c2 ..... d2
Comparamos cada grandeza (B,C, D etc.) com a grandeza funda men -tal A (a que contém a incógnita) sepa -ra damente.
Suponhamos que ocorram:
B e A (GDP), C e A (GIP) e D e A
(GDP).Nesse caso, montamos a propor -
ção:
a1 b1 c2 d1––– = ––– . ––– . –––, com base na qualx b2 c1 d2
calculamos x.
GrandezaD
GrandezaC
GrandezaB
GrandezaA
a1 b1 c1–––– = –––– . ––––a2 b2 c2
b2–––b1
a1–––a2
b1–––b2
a2–––a1
b1–––b2
a1–––a2
Grandeza B
Grandeza A
C4_3oMAT_TEO_CONV_Rose 04/03/11 08:38 Página 13

14 –
1. PORCENTAGEM
❑ Noção intuitiva
Exemplo“O índice de analfabetismo da cidade X é de 12%
(lê-se 12 por cento)” significa que, em média, 12 de cada
100 habitantes são anal fa betos.
❑ Nomenclatura usual
Exemplo
Em “25% de R$ 80,00 é R$ 20,00”, temos:
o PRINCIPAL é P = 80� a TAXA é i = 25(%)a PORCENTAGEM é p = 20
ObservaçãoUsa-se também o símbolo “ ‰ ”, que significa “por
mil”.
Exemplos
1) “O índice de mortalidade infantil do país Y é de 15‰ao ano” significa que, em média, de cada 1000crianças que nascem por ano, 15 morrem.
2) Em “25‰ de R$ 80,00 é R$ 2,00”, temos:
o PRINCIPAL é P = 80� a TAXA é i = 25(‰)a PORMILAGEM é p = 2
❑ Técnica operatóriaPara resolver problemas, estabe lecemos a seguinte
REGRA DE TRÊS SIMPLES:
100 (ou 1000) ..............................Pi ................................................... p'
da qual, por REGRA DE TRÊS SIM PLES, obtemos o valor
desconhecido.
ExemploCalcule 25% de 80.
Temos:100% correspondem a 8025% correspondem a x
Então:
100 80 25 . 80–––– = ––– e, portanto, x = ––––––––, isto é, x = 20.25 x 100
Ao escrevermos p%, estamos representando o
número ou p : 100.
Assim, temos:
a) (20%)2 = 4%, pois: (20%)2 =
20 2 2 2 4= (––––) = (–––) = –––– = 4%
100 10 100
b) 25% de 400 é igual a 100, pois:
2525% . 400 = –––– . 400 = 100
100
c) 32 é 80% de 40, pois:
32 ––– p GDP 32 40� ⇒ ––– = –––– ⇒
p 10040 ––– 100
⇒ p = 80 ou 32 = p% . 40 ⇒
p⇒ 32 = –––– . 40 ⇒ p = 80
100
d) 40 é 125% de 32, pois:
40 ––– p GDP 40 32� ⇒ ––– = –––– ⇒
p 10032 ––– 100
⇒ p = 125 ou 40 = p% . 32 ⇒
p⇒ 40 = –––– . 32 ⇒ p = 125
100
e) Um valor, ao passar de 32 para 40, aumentou 25%,
pois:
(100 + p)% . 32 = 40 ⇒
100 + p⇒ ––––––––. 32 = 40 ⇒ p = 25
100
f) Um valor, ao passar de 40 para 32, decresceu 20%,
pois:
(100 – p)% . 40 = 32 ⇒
100 – p⇒ –––––––– . 40 = 32 ⇒ p = 20
100
p––––100
Grandezado problema
Grandeza% (ou ‰)
MÓDULO 60 Porcentagem e Juros
C4_3oMAT_TEO_CONV_Rose 04/03/11 08:38 Página 14

– 15
g) Um valor de 50, após um aumento de 15%, passa aser 57,5, pois:
115(100 + 15)% . 50 = –––– . 50 = 57,5
100
h) Um valor de 50, após um decrés cimo de 15%, passa
a ser 42,5, pois: 85
(100 – 15)% . 50 = –––– . 50 = 42,5100
i) Um valor de 50, após um au mento de 15% e, em
seguida, um desconto de 15%, passa a ser 48,875,
pois:
(100 + 15)% . 50 . (100 – 15%) =
115 85= ––––– . 50 . –––– = 48,875
100 100
j) Um aumento de 10% seguido de um aumento de
10% não é um aumento de 20%, pois:
110% . 110% . x = 121% x =
= (100 + 21)% . x
Corresponde a um único aumen to de 21%!
k) Um desconto de 10% seguido de um desconto de
10% não é um desconto de 20%, pois:
90% . 90% . x = 81% x =
= (100 – 19)% . x
Corresponde a um único descon to de 19%!
2. JUROS SIMPLES
Denominamos juros simples aqueles que não sãosomados ao ca pital durante o tempo de seu em prego.Assim, a taxa incide apenas sobre o capital aplicadoinicialmente.
Sendo
J = juros,
C = capital,
i = taxa,
t = tempo,
M = montante,
temos:
e
3. JUROS COMPOSTOS
Neste sistema, após cada perío do (dia, mês, anoetc.), os juros são somados ao capital acumulado atéentão (juros sobre juros). Em se guida, a taxa incide sobreo novo valor obtido, e assim suces siva mente.
Então:
e
ExemploCalcule o montante ao final de três meses, com a
aplicação de um capital de R$ 10 000,00 à taxa de 4% ao
mês, pelo sistema:
a) de juros simples;
b) de juros compostos.
Resolução:
a) J =
J = = 1200
M = C + J == 10000 + 1200 = 11200
b) M = C . (1 + i)t
M = 10000 . 1 + 3
=
= 10000 . (1,04)3 =
= 10000 .1,124864 = 11248,64
Obs.: J = M – C = 11248,64 – 10000 = 1248,64
Respostas: a) R$ 11200,00b)R$ 11248,64
�4–––––100�
10000 . 4 . 3––––––––––––
100
Cit–––––100
J = M – C
M = C . (1 + i)t
M = C + J
CitJ = –––––––
100
C4_3oMAT_TEO_CONV_Rose 04/03/11 08:38 Página 15

16 –
FRENTE 2 Álgebra
1. PROPRIEDADES
• Se A é invertível, então A–1 é úni ca.
• Se A é invertível, então (A–1)–1 = A.
• Se A e B são invertíveis e de mesma ordem, então (A . B)–1 = B–1 . A–1.
• Se A é invertível, então (At)–1 = (A–1)t.
• Se A é invertível, então det (A–1) = .1
–––––––det (A)
MÓDULO 25Propriedades da Matriz
Inversa e Equações Matriciais
1. SISTEMAS LINEARES
• Um sistema (S) de m equa -
ções lineares (m ∈ �*) com n
incógnitas (n ∈ �*), x1, x2, x3, …, xn, é
um conjunto de equações da forma:
com m ≥ 2 e n ≥ 2
no qual os coeficientes aij são núme -
ros reais não todos nulos simultanea -
mente e os termos bi são números
reais quaisquer.
• Se todos os mesmos bi forem
nulos (i = 1, 2 …, m), então (S) é um
sistema linear homogêneo.
• Dizemos que a n-upla de nú -me ros reais (α1, α2, …, αn) é umaSOLUÇÃO do sistema (S) se foremverdadeiras todas as sentenças de(S) fazendo-se xi = αi.
• Um sistema (S) é COMPATÍ VEL
(ou possível) se existir pelo me nos
uma solução; (S) é INCOM PATÍVEL
(ou impossível) se não admite so -
lução.
Se "V" é o conjunto solução (ouconjunto verdade) do sistema (S), en -tão devemos ter uma das seguintessituações:
– Compatível e determina -do: quando V é um conjunto unitário.
– Compatível e indetermi -na do: quando V é um conjuntoinfinito.
– Incompatível: quando V é o
conjunto vazio.
❑ Matrizes de um sistemaNum sistema linear, definem-se as
duas matrizes seguintes:
que recebem o nome de:
MI = matriz incompleta.
MC = matriz completa (ou as -
socia da ao sistema).
Se a matriz M.I. for quadrada, o
seu determinante é dito deter mi -nan te do sistema (D).
(s) �a11x1 + a12x2 + … + a1nxn = b1
a21x1 + a22x2 + … + a2nxn = b2
……………………….....……………...
am1x1 + am2x2 + … + amnxn = bm
a11 a12 … a1na21 a22 … a2n……………………………………………………am1 an2 … amn
MI =
a11 a12 … a1n b1a21 a22 … a2n b2…………………….…………………………….…am1 an2 … amn bm
MC =
MÓDULO 26Sistema Normal,
Regra de Cramer e Escalonamento
C4_3oMAT_TEO_CONV_Rose 04/03/11 08:38 Página 16

Exemplo
• O sistema
é possível e determinado, pois apre sen ta uma única soluçãoque é S = {(1, 2)}.
• O sistema
é possível e indeterminado, pois apre senta infinitassoluções da forma S = {(k, k – 2)}.
Observe, nesse exemplo, que a se gunda equação é a
primeira com am bos os membros multiplicados por 2.
• O sistema
é impossível, pois não existe par or de nado (x, y) que torne
as duas sen tenças verdadeiras "simultanea men te".
• No sistema , de finem-se:
Ml = e MC =
e o determinante do sistema D = det MI =
2. SISTEMA NORMAL
• O sistema linear (S) com "m" equações e "n"incógnitas será "NORMAL" quando:
e
❑ Resolução de um sistema normal• Teorema de Cramer
Qualquer sistema normal admite uma e uma só
solução dada por:
x1 = ; x2 =
x3 = ; …; xn = onde:
– D é o determinante do sistema.
– Di é o determinante que se ob tém de D, trocando
a iésima coluna da matriz M.I. por b1, b2, b3, …, bn.
Exemplo
• O sistema
é normal, pois o número de equações é igual ao número
de incógnitas e o determinante do sistema:
D = = – 2 ≠ 0
O Teorema de Cramer nos garan te que a solução éúnica e obtida por:
x = = = 1, pois Dx = = – 2
y = = = 2, pois Dy = = – 4
{x – y = 22x – 2y = 4
{x – y = 2x – y = 4
{x + 2y = 53x + 4y = 11
13
24 1
324
511
13
24
m = n D ≠ 0
511
24
– 2–––– 2
Dx–––D
13
511
– 4–––– 2
Dy–––D
13
24
{x + 2y = 53x + 4y = 11
Dn–––D
D3–––D
D2–––D
D1–––D
x + 2y = 5x + y = 3{
– 17
MÓDULO 27 Escalonamento (Método de Gauss)
1. DEFINIÇÃO: SISTEMASEQUIVALENTES
Dizemos que dois sistemas sãoequivalentes se e somente se apre -sen tarem o mesmo conjunto solução.
Para transformar um sistema numsistema equiva lente mais simples,pode-se
• permutar duas equações;• multiplicar qualquer uma das
equações por um número real dife -rente de zero;
• multiplicar uma equação porum número real e adicioná-la à outraequação.
Exemplo
Vamos resolver o sistema:
x – y + z = –2 (a1)(l) x – 2y – 2z = –1 (b1)�
2x + y + 3z = 1 (c1)
transformando-o num sistema equi -
valente mais simples, seguindo o se -
guin te roteiro:
• para obter (b2), multiplique (a1)
por –1 e adicione o resultado a (b1);
• para obter (c2), multiplique (a1)
por –2 e adicione o resultado a (c1).
x – y + z = –2 (a1)(ll) – y – 3z = 1 (b2)�
3y + z = 5 (c2)
• para obter (b3), multiplique (b2)
por (–1); para obter (c3), multiplique
(b2) por 3 e adicione o resultado a
(c2).
x – y + z = –2 (a1)(lll) y + 3z =–1 (b3)�
– 8z = 8 (c3)
Assim, como (l), (ll) e (lll) são equi -
valentes:
• de (c3), obtém-se z = –1;
• substituindo-se em (b3), ob -
tém-se y = 2 e substituindo-o em (a1),
obtém-se x = 1.
Logo, V = {(1; 2; –1)}
C4_3oMAT_TEO_CONV_Rose 04/03/11 08:38 Página 17

2. DISCUSSÃO
Se for possível transformar um sistema (S) num
sistema equivalente mais simples do tipo
pode-se discuti-lo em função da variação de a e de b.
Assim, se• a ≠ 0 ⇒ o sistema é possível e determinado.
• a = 0 e b = 0 ⇒ o sistema é possível eindeterminado.
• a = 0 e b ≠ 0 ⇒ o sistema é impossível.
x – y + z = – 2y + 3z = – 1
az = b�
18 –
1. SUBMATRIZ
Seja a matriz A = [ aij ]mxn
Submatriz de A é qualquer ma -
triz que se obtém de A eliminando-se
"r" linhas e "s" colunas. Seu deter -
minante é chamado "menor" de A, se
a matriz for quadrada.
❑ Característica de A"É a ordem máxima dos meno res
não todos nulos que se pode ex trair
de A".
2. TEOREMA DE KRONECKER
Característica de uma matriz é "p"se, e somente se:
l. Existir pelo menos um "menor"de ordem p diferente de zero(de terminante de ordem p ≠ zero).
ll. Todos os "menores" orlados ao
"menor" do item (l) de ordem
p + 1 são iguais a zero.
❑ Propriedades da característicaA característica de uma matriz
não se altera quandol. trocamos entre si duas filas
paralelas.ll. trocamos ordenadamente li -
nhas por colunas.lll. multiplicamos uma fila por uma
constante k ≠ 0.lV. acrescentamos ou eliminamos
filas nulas.
V. acrescentamos ou eliminamosuma fila que seja combinaçãolinear de outras filas paralelas.
Vl.somamos a uma fila uma com -bi nação linear de outras filasparalelas.
Exemplos
1 2 3 • Se M = 4 1 5 , então
0 – 3 – 3
p = 2, pois existe um "menor" deordem 2 diferente de zero. Por exem -plo:
1 2 e o "menor" de ordem 3 é�4 1 �
igual a zero:
1 2 3 4 1 5 = 00 – 3 – 3
1 2 –1 5 –1 • Se M = 3 1 0 4 –1 ,
4 3 –1 9 2
então p = 3, pois existe um menor de
ordem 3 diferente de zero:
1 2 –13 1 –1 = – 20 ≠ 04 3 2
e a ordem 3 é a máxima possível.
• A característica da matriz
1 2 3 4 1 50 – 3 – 3
é igual à característica das seis ma tri -zes abaixo.
1 3 2• 4 5 1 (prop. l)
0 – 3 – 3
1 4 0 • 2 1 – 3 (prop. ll)
3 5 – 3
1 10 3 • 4 5 5 (prop. lll)
0 – 15 – 3
1 2 3 0 • 4 1 5 0 (prop. lV)
0 – 3 – 3 0
1 2 3 6 • 4 1 5 10 (prop. V)
0 – 3 – 3 – 6
1 2 3 – 2 • 4 1 5 – 1 (prop. VI)
0 – 3 – 3 + 3
3. TEOREMA DE ROUCHÉ-CAPELLI
Seja (S) um sistema linear e se jam:
• "p" a característica da matriz
incompleta (Ml);
• "q" a característica da matriz
completa (MC);
• "m" o número de equações;
• "n" o número de incógnitas.
❑ Teorema de Rouché-Capelli
• p ≠ q ⇔ Sistema Impossível (SI)
• p = q = n ⇔ Sistema Possível e
Determinado (SPD)
• p = q < n ⇔ Sistema Possível e
Indeterminado (SPI)
MÓDULO 28Característica de uma Matriz e Teorema de Rouché-Capelli
C4_3oMAT_TEO_CONV_Rose 04/03/11 08:38 Página 18

Observação
No (SPI), o número Gi = n – p é
chamado grau de indeterminação do
Sistema.
Exemplos
Sejam p e q as características
das matrizes incompleta e completa,
respectivamente.
• O sistema
é impossível, pois
MI = ⇒ p = 1,
MC = ⇒ q = 2,
e portanto p ≠ q
• O sistema
é possível e indeterminado, pois
MI = ⇒ p = 1,
MC = ⇒ q = 1,
e como n = 2, temos p = q < n
• O sistema
é possível e determinado, pois
MI = ⇒ p = 2,
MC = ⇒ q = 2,
e como n = 2, temos p = q = n
11
– 1– 1
11
– 1– 1
24
� x – y = 22x – 2y = 4
12
– 1– 2
12
– 1– 2
24
� x + 2y = 5x + y = 3
11
21
11
21
53
x – y = 2x – y = 4{
– 19
1. SISTEMA LINEAR HOMOGÊNEO (SLH)
Para um sistema linear homogê neo:• as matrizes M.l. e M.C., em bo ra diferentes, terão
certamente a mes ma característica (p = q). Um S.L.H. é,pois, sempre possível;
• a ênupla (0, 0, …, 0) sempre é solução da equa -ção ai1x1 + ai2x2 + … + ainxn = 0, ai ∈ � (chamada trivial);
• A "C.N.S." para o S.L.H. admitir
– só uma solução trivial é p = n.– outras soluções além da trivial é p < n.
Exemplox + 2y + z = 0
O sistema � 3x + y – z = 0
ax + 2y – z = 0 é sempre possível, pois:
• (0, 0, 0) é solução;
1 2 1 • MI = 3 1 – 1 tem
a 2 – 1
ca racterística p ≥ 2, pois existe um menor de ordem 2diferente de zero:
� 1 2 �3 1
A característica p é igual a 2 se o menor de ordem 3for igual a zero, ou seja:
13� 1 2 1 � – 3a + 13 = 0 ⇔ a = ––––3 1 – 1 =3
a 2 – 1
A característica p é igual a 3 se o menor de ordem
3 for diferente de zero, ou seja, se a ≠ .
Assim,se a = , o sistema ad mite infinitas soluções
além da forma tri vial (0, 0, 0), soluções da forma
S = { k, – , }. E, se a ≠ , o sistema admite
somente a solução trivial (0, 0, 0).
13–––3
13–––3
4k–––3
5k–––3
13–––3
MÓDULO 30 Sistema Linear Homogêneo
1. TEOREMA DE CRAMER
• det MI = D ≠ 0 ⇒ o sistema é possível e
determinado.
2. TEOREMA DE ROUCHÉ-CAPELLI
• p ≠ q ⇔ o sistema é impossível.• p = q = n ⇔ o sistema é possí vel e determinado.• p = q < n ⇔ o sistema é pos sível e indeterminado,
sendo:p – característica da MI
q – característica da MC
n – número de incógnitas
3. MÉTODO DE GAUSS
A equação az = b do sistema (S), de três equaçõesa três incógnitas (x, y, z) após o escalonamento, po derápermitir a discussão:
• a ≠ 0 ⇒ o sistema é possível e determinado.• a = b = 0 ⇒ o sistema é possí vel e indeterminado.• a = 0 e b ≠ 0 ⇒ o sistema é impossível.
MÓDULO 29 Discussão de Sistemas Lineares
C4_3oMAT_TEO_CONV_Rose 04/03/11 08:38 Página 19

20 –
FRENTE 3 Geometria Analítica
MÓDULO 25 Circunferência: Equações Reduzida e Geral
A circunferência é um dos mais importantes lugaresgeométricos (L.G.), merecendo, pois, um estudodetalhado.
1. DEFINIÇÃO
Dado um ponto C de um plano (chamado centro) e
uma medida r não nula (chamada raio), denomina-se
circunferência ao lugar geo métrico (L.G.) dos pontos do
plano que distam r do ponto C.
2. EQUAÇÃO REDUZIDA (OU CARTESIANA) DA CIRCUNFERÊNCIA
Seja a circunferência de centro C(a; b) e raio r.Considerando um ponto genérico P(x; y) pertencente àcircunferência, teremos:
P ∈ circunferência ⇔ dPC = r ⇔
⇔ �����������������������(x – a)2 + (y – b)2 = r ⇔ (x – a)2 + (y – b)2 = r2
A equação
é denominada equação reduzida da circunferência.
• Caso particular: Se o centro da circunferência é a
origem, C(0; 0), então a equação reduzida resulta
Exemplos
1) Obter a equação reduzida da circunferência de
centro C(– 2; 3) e raio 5.
ResoluçãoA partir da equação (x – a)2 + (y – b)2 = r2, resulta:
⇔(x – (–2))2+ (y –3)2 = 52 ⇔ (x + 2)2 + (y – 3)2 = 25,
denominada equação reduzida.
2) Obter a equação reduzida da cir cunferência decentro na origem e raio 5.
Resolução
A partir da equação (x – a)2 + (y – b)2 = r2, temos:
(x – 0)2 + (y – 0)2 = 52 ⇔ x2 + y2 = 25
3. EQUAÇÃO GERAL (OU NORMAL) DA CIRCUNFERÊNCIA
Desenvolvendo a equação reduzida da circunfe rên -
cia: (x – a)2 + (y – b)2 = r2, obtemos:
x2 – 2ax + a2 + y2 – 2by + b2 = r2 ⇔
⇔ x2 + y2 –2ax– 2by+a2+b2 – r2 = 0
Fazendo-se – 2a = m; – 2b = n e a2 + b2 – r2 = p,
resulta:
que é denominada equação geral da circunferência.
Exemplo
Determine a equação geral da cir cun ferência de
centro C(–1; 3) e raio 5.
Resolução
A partir da equação
(x – a)2 + (y – b)2 = r2, temos a equa ção reduzida:
(x + 1)2 + (y – 3)2 = 25, que, desen volvida, resulta:
x2 + 2x + 1 + y2 – 6y + 9 = 25 ⇔
⇔ x2 + y2 + 2x – 6y – 15 = 0,
denominada equação geral da circunferência.
(x – a)2 + (y – b)2 = r2
x2 + y2 = r2
x2 + y2 + m . x + n . y + p = 0
C4_3oMAT_TEO_CONV_Rose 04/03/11 08:38 Página 20

– 21
MÓDULO 26 Determinação do Centro e do Raio
1. DETERMINAÇÃO DO CENTRO E DO RAIO DE UMA CIRCUNFERÊNCIA
❑ Equação reduzidaDada a equação reduzida de uma circunferência:
(x – a)2 + (y – b)2 = r2 , de imediato conclui-se que
o centro é C(a ; b) e o raio é r.
Exemplo
A circunferência de equação (x – 2)2 + (y + 5)2 = 9
tem centro C (2; – 5) e raio r = 3.
❑ Equação geralDada a equação geral de uma circunferência,
x2 + y2 + m . x + n . y + p = 0, o centro e o raio são
obtidos comparando-se essa equação com a equa ção
x2 + y2 – 2a . x – 2b . y + a2 + b2 – r2 = 0.
Notando-se que os coeficientes de x2 e y2 são
iguais a 1, a obtenção do centro e do raio é feita da
seguinte forma:
• Na determinação das coordenadas do centro, os
coeficientes de x e y (m e n) devem ser divididos por
(–2), pois a partir das equações, conclui-se que:
Assim, as coordenadas do centro são:
• Obtido o centro C(a; b), o raio é determinado a par tir
da fórmula: , (com a2 + b2 – p > 0),
visto que das equações, temos:
p = a2 + b2 – r2 ⇔ r2 = a2 + b2 – p
Observações
• Quando a2 + b2 – p = 0, a equação representa
apenas o ponto C(a; b).
• Quando a2 + b2 – p < 0, a equação nada repre -
sen ta.
�m
– 2a = m ⇔ a = ––––– 2n
– 2b = n ⇔ b = ––––– 2
r = ��������������a 2 + b2 – p
m n C�––––; ––––�– 2 – 2
a b
Seja a circunferência de centro C(a; b) e raio r, com
equa ção (x – a)2 + (y – b)2 = r2 e um ponto P(x0; y0) do
plano cartesiano.
A posição do ponto P em relação à circunferência é
obtida pelo cálculo da distância do ponto P ao centro Cda circunferência e comparada com a medida do raio r.
Dessa forma, temos:
• P(x0; y0) pertence à circun fe rên cia ⇔
⇔ (x0 – a)2 + (y0 – b)2 = r2
• P(x0; y0) é interno à circun fe rência ⇔
⇔ (x0 – a)2 + (y0 – b)2 < r2
• P(x0; y0) é externo à circun fe rência ⇔
⇔ (x0 – a)2 + (y0 – b)2 > r2.
Exemplo
Representar gra ficamente os pon tos que satisfa -
zem à inequação x2 + y2 ≤ 9.
Resolução
A equação x2 + y2 = 9 repre senta uma circunferên cia
de centro C(0; 0) e raio r = 3. Des sa forma, a inequa ção
x2 + y2 ≤ 9 representa os pon tos da circunferência e os
pon tos internos a esta, e sua representação gráfica é:
MÓDULO 27Posição dos Pontos do Plano
em Relação a uma Circunferência
C4_3oMAT_TEO_CONV_Rose 04/03/11 08:38 Página 21

22 –
1. DEFINIÇÃO
Dados dois pontos F1 e F2 (focos) de um plano, com
F1F2 = 2f, e uma medida 2a (2a > 2f), chama-se ELIP -
SE ao lugar geométrico dos pontos P do plano, tal que:
2. ELEMENTOS PRINCIPAIS
• Centro é o ponto C;
• Distância focal = F1F2 = 2 . f;
• Eixo maior = A1A2 = 2 . a;
• Eixo menor = B1B2 = 2 . b;
• Vértices são os pontos A1 e A2;
• Polos são os pontos B1 e B2;
• Focos são os pontos F1 e F2.
A partir do triângulo retângulo CB1F1, da figura, temos:
3. EQUAÇÃO REDUZIDA
❑ Seja a elipse com eixo maior (e focos) contido no
eixo dos “x” e centro na origem:
A equação reduzida dessa elipse é:
❑ Seja a elipse com eixo maior (e focos) contido no
eixo “y” e centro na origem:
A equação reduzida da elipse, neste caso, é:
PF1 + PF2 = 2a
a2 = b2 + f2
x2 y2⎯⎯ + ⎯⎯ = 1a2 b2
x2 y2–––– + –––– = 1b2 a2
MÓDULO 28 Elipse
C4_3oMAT_TEO_CONV_Rose 04/03/11 08:38 Página 22

– 23
4. OBSERVAÇÕES
Se o centro da elipse for o ponto C (g; h) e os eixos
da elipse forem paralelos aos eixos coordenados, te re -
mos as seguintes figuras e equa ções reduzidas:
a)
b)
5. EXCENTRICIDADE
Chama-se EXCENTRICIDADE da elipse à razão:
. Como 0 < f < a, então 0 < e < 1.
(x – g)2 (y – h)2–––––––––– + ––––––––– = 1
b2 a2
fe = ––a
(x – g)2 (y – h)2––––––––– + ––––––––– = 1
a2 b2
MÓDULO 29 Hipérbole
1. DEFINIÇÃO
Dados dois pontos F1 e F2 (fo cos) de um plano, com
F1 F2 = 2f, e uma medida 2a (2a < 2f), chama-se
HIPÉRBOLE ao lugar geométrico dos pontos P do
plano, tal que:
2. ELEMENTOS PRINCIPAIS
• Centro é o ponto C;
• Distância focal = F1F2= 2 . f;
• Eixo transverso = A1A2 = 2 . a;
• Eixo conjugado = B1B2 = 2 . b;
• Vértices são os pontos A1 e A2;
• Polos são os pontos B1 e B2;
• Focos são os pontos F1 e F2;
• Assíntotas são as retas d1 e d2.
A partir do triângulo retângulo CB1D da figura, temos:
3. EQUAÇÃO REDUZIDA
❑ Seja a hipérbole com eixo trans verso (e focos) conti -do no eixo dos “x” e centro na origem.
Sendo:
• focos: F1(f; 0) e F2(– f; 0)� • vértices: A1(a; 0) e A2 (– a; 0)
• polos: B1(0; b) e B2(0; – b)
a equação reduzida da hipérbole resulta:
❑ Seja a hipérbole com eixo trans verso (e focos)contido no eixo “y” e centro na origem.
| PF1 – PF2 | = 2a
f2 = a2 + b2
x2 y2
–––– – ––––– = 1a2 b2
C4_3oMAT_TEO_CONV_Rose 04/03/11 08:38 Página 23

24 –
Sendo:
• focos: F1(0; f) e F2(0; – f)� • vértices: A1(0; a) e A2(0; – a)
• polos: B1(b; 0) e B2(– b; 0)
a equação reduzida da hipérbole resulta:
4. COMPLEMENTOS
Se a hipérbole tiver centro no ponto C(g; h) e oseixos paralelos aos eixos coordenados, teremos as se -guin tes figuras e equações redu zi das:
a)
b)
5. HIPÉRBOLE EQUILÁTERA
❑ Uma hipérbole é denominada equilátera quan doas medidas dos eixos transversal e conjugado sãoiguais, isto é, quando as me di das a e b são iguais(a = b).
As equações reduzidas das hi pér boles equiláteras,
com centro na origem, resultam:
ou
As assíntotas, nesses casos, são as bissetrizesdos quadrantes pares e ímpares.
❑ Um caso importante de hipérbole equilátera é obtido
fazendo-se uma rotação (nos casos acima) de mo do a
deixar os eixos cartesianos como assín to tas e
focos nas bis setrizes dos quadrantes:
• Focos na bissetriz dos qua dran tes ímpares
(y = x). A equação, nesse caso, resulta ,
com k > 0.
• Focos na bissetriz dos qua dran tes pares (y = – x).
A equação, nesse caso, resulta , com k < 0.
6. EXCENTRICIDADE
, como f > a, então e > 1.
(y – h)2 (x – g)2–––––––––– – –––––––––– = 1
a2 b2
x2 – y2 = a2 y2 – x2 = a2
x . y = k
x . y = k
(x – g)2 (y – h)2–––––––––– – –––––––––– = 1
a2 b2
y2 x2
–––– – –––– = 1a2 b2
fe = –––
a
C4_3oMAT_TEO_CONV_Rose 04/03/11 08:38 Página 24

– 25
1. DEFINIÇÃO
Dados um ponto F (foco) e uma reta d (diretriz), com
F ∉ d, per tencentes a um mesmo plano, chama-se
PARÁBOLA ao lugar geométrico dos pontos P do pla -
no, equidistantes do ponto F e da reta d.
2. ELEMENTOS PRINCIPAIS
• Foco é o ponto F;
• Diretriz é a reta d;
• Vértice é o ponto V;
• Parâmetro = 2 . f (VF = Vd = f).
3. EQUAÇÃO REDUZIDA
❑ Seja a parábola com eixo de si metria contido no eixo“x”, vértice na origem e voltada para a “direita”.
Sendo:
{• foco: F (f; 0)• diretriz: x = – f
a equação reduzida da pará bola será:
❑ Se a parábola, nas condições an teriores, estiver
voltada para a “es que r da”, teremos:
{• foco: F (– f; 0)• diretriz: x = f
e sua equação reduzida será:
❑ Seja a parábola com eixo de si me tria contido no eixo
“y”, vértice na origem e voltada para “cima”.
Sendo:
{• foco: F(0; f)
• diretriz: y = – f
a equação reduzida da pará bola será:
❑ Se a parábola, nas condições an teriores, estiver vol -
ta da para “bai xo”, teremos:
{• foco: F(0; – f)• diretriz: y = f
y2 = 4 . f . x
y2 = – 4 . f . x
x2 = 4 . f . y
PF = Pd
MÓDULO 30 Parábola
C4_3oMAT_TEO_CONV_Rose 04/03/11 08:38 Página 25

26 –
e sua equação reduzida será:
4. COMPLEMENTOS
❑ Se a parábola apresentar vértice no ponto V (g; h),eixo de simetria paralelo ao eixo “x” e voltada para a“direita”, sua equação reduzida será:
❑ Se a parábola, nas condições an teriores, estiver vol -tada para a “es quer da”, sua equação reduzida será:
Desenvolvida a equação redu zi da, resultará da
forma: ,com a ≠ 0.
❑ Se a parábola apresentar vértice no ponto V (g; h),eixo de simetria paralelo ao eixo “y” e voltada para“cima”, sua equação reduzida será:
❑ Se a parábola, nas condições an teriores, estiver vol -
tada para “bai xo”, sua equação reduzida será:
Desenvolvida a equação redu zi da, resultará da
forma: , com a ≠ 0.
5. EXCENTRICIDADE
Chama-se EXCENTRICIDADE na parábola à razão:
x = a . y2 + b . y + c
(x – g)2 = 4 . f . (y – h)
(x – g)2 = – 4 . f . (y – h)
y = a . x2 + b . x + c
PFe = –––– = 1Pd
(y – h)2 = – 4 . f . (x – g)
(y – h)2 = 4 . f . (x – g)
x2 = – 4 . f . y
C4_3oMAT_TEO_CONV_Rose 04/03/11 08:38 Página 26

– 27
FRENTE 4 Geometria Métrica e de Posição
1. SECÇÃO PARALELA À BASE DE UMA PIRÂMIDE
Quando interceptamos todas as arestas laterais dapirâmide por um plano paralelo à base, que não con témesta, nem o vértice, obte mos uma secção poligonal, talque:
• As arestas laterais e a altura ficam divididas namesma razão.
• A secção obtida e a base são polígonos seme -lhantes.
• A razão entre as áreas da sec ção (As) e da base(Ab) é igual ao quadrado da razão entre suas distân ciasao vér tice.
• A razão entre os volumes das pirâmidessemelhantes VA’B’C’... e VABC ... é igual ao cubo darazão entre suas alturas.
• A “parte” (região) da pirâmide compreendida
entre a base e a cita da secção é denominada TRON -CO DE PIRÂ MI DE DE BASES PARA LE LAS.
2. CÁLCULO DO VOLUME DE UM TRONCODE PIRÂMIDE DE BASES PARALELAS
Sendo AB e Ab as áreas das ba ses, H, a altura(distância entre os planos das bases) e V, o volume deum tronco de pirâmide de bases pa ra lelas, tem-se:
3. TRONCO DE CONE DE BASES PARALELAS
Seccionando-se um cone por um plano paralelo àbase dele, obtêm-se dois sólidos: um novo cone e umtron co de cone de bases para lelas.
Sendo R e r osraios das bases e ha altura do tronco decone de ba ses para -lelas, tem-se que oseu volu me é dadopor:
e sua área lateral é dada por:
4. SÓLIDOS SEMELHANTES
Em sólidos semelhantes, a razão entre as áreas éigual ao quadrado da razão de semelhança, e a razãoentre os volumes é igual ao cubo da razão de se me lhan -ça.
Assim, se dois sólidos de áreas, respectivamente,iguais a A1 e A2, e volumes, respectivamente, iguais aV1 e V2 são semelhantes numa razão K, então:
e
VA’ VB’ VC’ h–––– = –––– = –––– = … = –––VA VB VC H
As h2
–––– = ––––Ab H2
VVAB’C’... h3
––––––––– = ––––VVABC... H3
HV = ––– (AB + Ab + �����������AB . Ab )
3
π hVt = ––––– (R2 + r2 + R r)3
A� = π (R + r) g
V1–––– = K3V2
A1–––– = K2A2
MÓDULO 25 Troncos
C4_3oMAT_TEO_CONV_Rose 04/03/11 08:38 Página 27

28 –
MÓDULO 26 A Esfera e suas Partes
1. SUPERFÍCIE ESFÉRICA
É a superfície gerada pela revo lução completa de
uma semicircun ferência (ABA’) em torno de seu diâ metro
(AA’), como mostra a figura.
A área de uma superfície esfé rica de raio R é dadapor:
2. ESFERA
É o sólido limitado por uma su per fície esférica.
O volume de uma esfera de raio R é dado por:
3. PARTES DA SUPERFÍCIE ESFÉRICA
• Fuso esférico
• Zona esférica
• Calota esférica
4. PARTES DA ESFERA
• Cunha esférica
• Setor esférico
ASE = 4 π R2
π R2 α°Af = ––––––––
90°
Azona = 2π R h
Acal = 2π R h
π R3 α° Vc = ––––––––
270°
4Vesf = ––– π R3
3
2V = –– π R2 h
3
C4_3oMAT_TEO_CONV_Rose 04/03/11 08:38 Página 28

• Segmento esférico de uma base • Segmento esférico de duas bases
π hV = ––––– (3r2 + h2)
6
π hV = –––– [3 (r1
2 + r22 ) + h2]
6
– 29
MÓDULO 27 Inscrição e Circunscrição de Sólidos
1. ESFERA INSCRITA NO CUBO
r + r = a ⇔
2. CUBO INSCRITO NA ESFERA
(2R)2 = (a���2 )2
+ a2 ⇔ar = ––– 2
a���3R = ––––––
2
C4_3oMAT_TEO_CONV_Rose 04/03/11 08:38 Página 29

3. ESFERA INSCRITA NO CILINDRO
e
4. CILINDRO INSCRITO NA ESFERA
5. CILINDRO INSCRITO NO CUBO
e
6. CUBO INSCRITO NO CILINDRO
e
7. ESFERA INSCRITA NO CONE
No triângulo retângulo BCA, de acordo com oTeorema de Pitágoras, tem-se:
(2R)2 = (2r)2 + h2
h = a aR = –––2
h = a a���2R = ––––––
2r = R h = 2 . R
g2 = h2 + R2
30 –
C4_3oMAT_TEO_CONV_Rose 04/03/11 08:38 Página 30

Da semelhança dos triângulos retân gulos DOA eBCA, resulta:
8. CONE INSCRITO NA ESFERA
No triângulo retângulo MAO, de acordo com o
Teorema de Pitágoras, tem-se:
9. ESFERA INSCRITA NUMA PIRÂMIDEREGULAR DE BASE QUADRADA
No triângulo retângulo AMV, de acordo com o Teo -
rema de Pitágoras, tem-se:
Da semelhança dos triângulos retân gulos POV e
AMV, resulta:
⇔
� 2g2 = h2 + (––)2
2r h – r––– = ––––––� g
r h – r–––– = ––––––�/2 gR2 = r2 + (h – R)2
r h – r––– = ––––––R g
– 31
C4_3oMAT_TEO_CONV_Rose 04/03/11 08:38 Página 31

1. ENTES PRIMITIVOS
Entende-se por “entes primitivos”tudo o que não pode ser definido. Nageometria, usamos três conceitos pri -mi tivos: o PONTO, a RETA e o PLA -NO. Apesar de não poder defini-los,po demos estudá-los e rela cioná-los, eé isso o que a “geo me tria de posi ção”faz.
Representam-se o PONTO, aRETA e o PLANO da seguinte forma:
Observe que para os pontos usa -mos geralmente letras maiús culas,para as retas, letras minús culas epara plano, letras do alfabeto grego.
2. POSTULADOS
Entende-se por “postulado” todapropriedade que não possui de mons - tração e que, portanto, só pode seraceita por ser evidente.
❑ Postulados de existênciaa)Na reta ou fora dela
exis tem infinitos pontos:
b)No plano ou fora deleexis tem infinitos pontos:
❑ Postulado da inclusãoSe dois pontos distintos de uma
reta pertencem a um plano, ela estácontida neste plano.
❑ Postulados dadeterminação
a)Determinação da reta
Dois pontos distintos determi -
nam uma reta.
b)Determinação do planoTrês pontos não colineares de -
ter mi nam um plano.
3. CASOS DE DETERMINAÇÃODE PLANOS
Além do caso abordado no itemanterior, têm-se mais três outrasformas de se determinar um plano,que são as seguintes:
❑ Por um ponto e uma retaUma reta e um ponto não per ten -
cente a ela determinam um plano.
❑ Por duas retas concor ren tesDuas retas concorrentes de ter -
minam um plano.
❑ Por duas retas paralelas distintasDuas retas paralelas distintas de -
terminam um plano.
32 –
MÓDULOS 28 e 29Paralelismo, Perpendicularismo no
Espaço e Projeções Ortogonais
C4_3oMAT_TEO_CONV_Rose 04/03/11 08:38 Página 32

4. POSIÇÕES RELATIVAS
❑ Entre retasa)Coincidentes
Possuem todos os pontos em co -mum.
b)Concorrentes
Possuem um único ponto em co -mum.
c)Paralelas (distintas ou coincidentes)
Quando coincidem ou quandonão possuem pontos em comum eexiste um plano que as contém.
d)Reversas
Quando não existe plano que ascontém.
❑ Entre reta e plano
a)Contida
Quando todos os pontos da retaper ten cem ao plano.
b) Incidente
Quando a reta e o plano pos suemum único ponto em comum.
c)Paralela
Quando a reta e o plano não pos -suem pontos em comum.
❑ Entre planos
a)Coincidentes
Possuem todos os pontos em co -mum.
b)Secantes
Interceptam-se numa reta.
c)Paralelos
Quando coincidem ou possuemin tersecção vazia.
5. INTERSECÇÃO DE PLANOS
❑ Intersecção de dois planosSe dois planos distintos pos suem
um ponto em comum, então eles seinterceptam numa reta.
P ∈ α, P ∈ β e α ≠ β ⇒ ∃ | r |α ∩ β = r
❑ Intersecção de três planosSe três planos distintos se inter -
cep tam dois a dois em três retas,então ou elas são concorrentes nummesmo ponto, ou são paralelas.
– 33
C4_3oMAT_TEO_CONV_Rose 04/03/11 08:38 Página 33

6. TEOREMA FUNDAMENTAL DOPARALELISMO DE RETA COM PLANO
A condição necessária e sufi cien te para que umareta seja para lela a um plano é que não esteja con tidanele e seja paralela a uma reta desse plano.
7. TEOREMA FUNDAMENTAL DO PARALELISMO DE PLANOS
A condição necessária e sufi cien te para que doisplanos distintos sejam paralelos é um deles conter duasretas concorrentes entre si e pa ralelas ao outro.
r � α, r // βs � α, s // β } ⇔ α // βr � s = {P}
8. TEOREMA DE TALES
Um feixe de planos paralelos determina sobre duastransversais segmentos correspondentes respec tiva -mente proporcionais.
α //β // γ // ζ // …⇒ = = …AB
–––––A’B’
BC–––––B’C’
CD–––––C’D’
34 –
C4_3oMAT_TEO_CONV_Rose 04/03/11 08:38 Página 34

9. PERPENDICULARISMO ENTRE RETA E PLANO
❑ DefiniçãoUma reta é perpendicular a um pla no se, e somente
se, ela é per pen dicular a todas as retas do plano quepassam pelo ponto de intersecção dela com o plano(pé).
❑ Teorema fundamental doperpendicularismo entre reta e plano
A condição necessária e su fi ciente para que umareta seja per pen dicular a um plano é que forme ân guloreto com duas concor rentes do plano.
❑ Teorema das três perpendiculares
Sendo r perpendicular a α no ponto P, s contida em
α e passando por P, t contida em α, não passando por
P e perpendicular a s em Q, e R um ponto qualquer de
r, então a reta RQ↔
é perpendicular à reta t.
❑ Propriedades do perpendicularismo de reta com plano
a) Duas retas perpendiculares a um mesmo plano
são paralelas.
b) Dois planos perpendiculares a uma mesma retasão paralelos.
t ⊥ r � αt ⊥ s � α } ⇒ t ⊥ αr � s = {P}
r ⊥ α } ⇒ r // ss ⊥ α
α ⊥ r } ⇒ α // ββ ⊥ r
– 35
C4_3oMAT_TEO_CONV_Rose 04/03/11 08:38 Página 35

10.PERPENDICULARISMO ENTRE PLANOS
Dois planos são perpendiculares se, e somente se,
um deles contém uma reta perpendicular ao outro.
❑ Propriedades do perpendicularismo de planos
a) Se uma reta é perpendi cular a um plano, qualquer
plano que a contenha é perpendicular ao primeiro.
b) Se dois planos secantes são perpendiculares aum ter cei ro plano, a sua intersecção também seráperpendicular a este terceiro plano.
c) Se dois planos são perpen dicu lares, toda reta deum, per pen dicular à intersecção, é per pendi cular aooutro.
11. PROJEÇÕES ORTOGONAIS
❑ Projeção de um pontoA projeção ortogonal de um ponto num plano é o “pé
da perpen dicular” ao plano pelo ponto.
O ponto P’ é a projeção ortogonal de P em α. O
plano α é chamado plano de projeção e a reta
perpendicular r é chamada reta projetante.
β ⊥ α
γ ⊥ α � ⇒ r ⊥ α
β ∩ γ = r
α ⊥ β
α ∩ β = s � ⇔ r ⊥ βr ⊂ α
r ⊥ s
r � α } ⇒ α ⊥ βr ⊥ β
r ⊥ α β ⊥ α
r � β γ ⊥ α
r � γ � ⇒ �δ ⊥ α
r � δ
36 –
C4_3oMAT_TEO_CONV_Rose 04/03/11 08:38 Página 36

❑ Projeção de uma figura
A projeção ortogonal de uma figura num plano é o
conjunto das projeções ortogonais dos pontos da figura.ExemploA projeção ortogonal de um cilindro num plano
paralelo ao eixo é um retângulo. A projeção do mesmo
cilindro num plano paralelo à base é um círculo.
❑ Projeção de uma retaA projeção ortogonal de uma reta num plano é o
conjunto das projeções ortogonais dos pontos da reta
neste plano.
a) Se a reta for perpendicular ao plano, a sua pro -
jeção orto gonal será um ponto.
Na figura, P é a projeção orto gonal de r em α.
b) Se a reta não for perpen di cular ao plano, a suaprojeção ortogonal será outra reta.
Na figura, r’ é a projeção ortogonal de r em �.
❑ Ângulo entre reta e planoSe uma reta é perpendicular a um plano, o ângulo
entre ela e o plano é reto. Se a reta é oblíqua em relação
ao plano, o ângulo entre ela e o plano é o ângulo que elaforma com a sua projeção ortogonal.
Na figura, temos:
a) A reta s forma ângulo reto com �.
b) O ângulo � que a reta r forma com o plano � é o
ângulo que a reta r forma com sua pro jeção
ortogonal r’.
❑ Retas de maior decliveChamamos de retas de maior declive de um plano �
em relação a um plano � às retas de � que formam omaior ângulo possível com �. Prova-se que, se os doisplanos são secantes, as retas de maior declive de umem relação ao outro são per pendiculares à intersecção.
Na figura, r é uma reta de maior declive de � em
relação a �.
❑ Ângulos entre planosDefine-se ângulo entre dois planos como sendo o
ângulo que uma reta de maior declive de um forma como outro.
Na figura,r é uma reta de maior declive de � em relação a �r’ é a projeção ortogonal da reta r em �
� é o ângulo entre � e �
– 37
C4_3oMAT_TEO_CONV_Rose 04/03/11 08:38 Página 37

1. DIEDROS
❑ DefiniçãoDois planos secantes α e β de ter minam no espaço
quatro semiespa ços.
Chama-se DIEDRO a intersecção não vazia de doisdesses semies pa ços.
Na figura, os semiplanos α e β são faces e a reta aé a aresta do diedro determinado pela intersecção dossemiespaços I e I’.
❑ Secção normal (ou reta) de um diedroChama-se secção normal (ou re ta) de um diedro a
intersecção desse diedro com um plano perpendicularà sua aresta.
Observações
a) Todas as secções retas do mesmo diedro são
congruentes.
b) A medida de um diedro é a medida da sua secção
reta.
c) Dois diedros são congruentes quando suas
secções retas são con gruentes.
2. TRIEDROS
❑ Definição
Dadas três semirretas Va
→, Vb
→e Vc
→de mesma origem
V e não copla nares, consideremos os semiespa ços I, II
e III, como se segue:
I com origem no plano (bc) e contendo Va
→
II com origem no plano (ac) e contendo Vb
→
III com origem no plano (ab) e contendo Vc→
Chama-se triedro determinado por Va
→, Vb
→e Vc
→a
intersecção dos semiespaços I, II e III.
V(a; b; c) = I ∩ II ∩ III
38 –
MÓDULO 30 Poliedros Convexos e Regulares
C4_3oMAT_TEO_CONV_Rose 04/03/11 08:38 Página 38

O ponto V é denominado vértice do triedro: as
semirretas Va
→, Vb
→e Vc
→são as arestas, os ângulos aV
^b,
aV^
c e bV^
c (ou ab, ac, e bc ) são as faces, e d1, d2, e d3
são os diedros do triedro.
❑ Relações entre as faces de um triedroa) Em todo triedro, qualquer face é menor que a
soma das outras duas.
Assim, sendo f1, f2 e f3 as faces de um triedro, temos:
b) A soma das medidas (em graus) das faces de um
triedro qual quer é menor que 360°.
Assim:
❑ Relações entre os diedros de um triedroa) Em qualquer triedro, a medida (em graus) de um
diedro aumentada de 180° supera a soma das medidas
dos outros dois.
Assim, sendo d1, d2 e d3 as me didas (em graus) dos
diedros de um triedro, temos:
b) A soma dos diedros de um trie dro está com -
preendida entre 2 re tos (180°) e 6 retos (540°).
Assim, sendo d1, d2 e d3 as me didas (em graus) dos
diedros de um trie dro, temos:
180° < d1 + d2 + d3 < 540°
3. POLIEDROS CONVEXOS
❑ DefiniçãoConsideremos um número finito n (n ≥ 4) de
polígonos convexos, tal que:– dois polígonos não estão num mesmo plano;– cada lado de polígono é co mum a dois e somente
dois polígo nos;
– o plano de cada polígono dei xa todos os demais
polígonos num mes mo semiespaço.
Assim, ficam determinados n se mi espaços, cada um
dos quais tem origem no plano de um polígono e contém
os demais.
A intersecção desses n semies paços é denominada
poliedro conve xo.
❑ ElementosUm poliedro convexo possui: fa ces, que são os
polígonos con vexos; arestas, que são os lados dos
polí gonos, e vértices, que são os vér tices dos po -
lígonos. A reunião das faces é denomi nada super fíciedo poliedro.
❑ Relação de Euler
Para todo poliedro convexo de V vértices, A arestas
e F faces, ou para sua superfície, vale a relação:
❑ Soma dos ângulos das facesEm todo poliedro convexo de V vértices, a soma dos
ângulos de to das as suas faces é dada por:
4. POLIEDROS DE PLATÃO
Um poliedro é denominado polie dro de Platão
quando:
a) todas as faces têm o mesmo número de lados;
b) em todos os vértices, concorre o mesmo número
de arestas;
c) vale a relação de Euler:
(V – A + F = 2).
f1 < f2 + f3� f2 < f1 + f3f3 < f1 + f2
f1 + f2 + f3 < 360°
d1 + 180° > d2 + d3� d2 + 180° > d1 + d3d3 + 180° > d1 + d2 V – A + F = 2
S = (V – 2) . 360°
– 39
C4_3oMAT_TEO_CONV_Rose 04/03/11 08:38 Página 39

ObservaçãoExistem apenas cinco classes de poliedros de Platão.
5. POLIEDROS REGULARES (THODI)
São os poliedros de Platão em que as faces são regulares e con gruen tes.
Existem, portanto, apenas cinco tipos de poliedros regulares:
1) Tetraedros regulares
2) Hexaedros regulares (cubos)
3) Octaedros regulares
4) Dodecaedros regulares
5) Icosaedros regulares
40 –
C4_3oMAT_TEO_CONV_Rose 04/03/11 08:38 Página 40










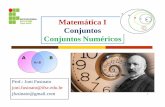




![Teoria Matemática Da Informação 2 - SHANNON [19!03!12]](https://static.fdocumentos.com/doc/165x107/563db811550346aa9a904479/teoria-matematica-da-informacao-2-shannon-190312.jpg)