
9. ANÁLISE DINÂMICA de SISTEMAS COM N...
30
FEUP - 2000 Raimundo Delgado & António Arêde 61 9. ANÁLISE DINÂMICA de SISTEMAS COM N GRAUS DE LIBERDADE 9 . ANÁLISE DINÂMICA de SISTEMAS COM . ANÁLISE DINÂMICA de SISTEMAS COM N GRAUS GRAUS DE LIBERDADE DE LIBERDADE Num sistema com N graus de liberdade, a solução depende de N parâmetros. No caso dos pórticos planos, por exemplo, tem-se Para um sistema de forças qualquer: Para um sistema de forças horizontais apenas : 3 G.L. por nó 1 G.L. por andar A caracterização do comportamento dinâmico da estrutura requer a definição de Matriz de RIGIDEZ Matriz de MASSA Matriz de AMORTECIMENTO K M C 9.1 MATRIZ DE RIGIDEZ f u K = Como é bem conhecido K ij – Força de restituição elástica desenvolvida na direcção i devida a um deslocamento unitário na direcção j
Transcript of 9. ANÁLISE DINÂMICA de SISTEMAS COM N...
FEUP - 2000 Raimundo Delgado & António Arêde 61
9. ANÁLISE DINÂMICA de SISTEMAS COM N GRAUS DE LIBERDADE
99. ANÁLISE DINÂMICA de SISTEMAS COM . ANÁLISE DINÂMICA de SISTEMAS COM NN GRAUS GRAUS DE LIBERDADEDE LIBERDADE
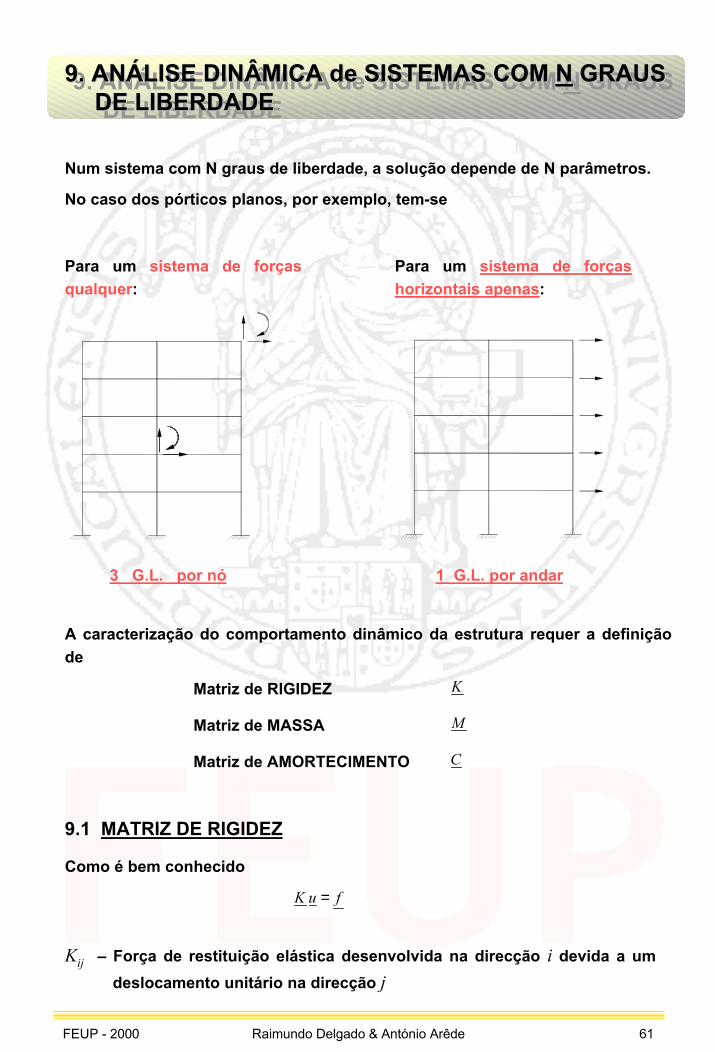
Num sistema com N graus de liberdade, a solução depende de N parâmetros.
No caso dos pórticos planos, por exemplo, tem-se
Para um sistema de forças qualquer:
Para um sistema de forças horizontais apenas:
3 G.L. por nó 1 G.L. por andar
A caracterização do comportamento dinâmico da estrutura requer a definição de
Matriz de RIGIDEZ
Matriz de MASSA
Matriz de AMORTECIMENTO
K
M
C
9.1 MATRIZ DE RIGIDEZ
fuK =
Como é bem conhecido
Kij – Força de restituição elástica desenvolvida na direcção i devida a um deslocamento unitário na direcção j

FEUP - 2000 Raimundo Delgado & António Arêde 62
Quando a massa é distribuída, procede-se do seguinte modo
Neste exemplo, “não havendo massa nos pilares”, não há transmissão de forças de inércia entre pisos, i.e. m21 = m31 = m23 = 0, donde
m1
m2
m331m
21m
m11u1
1.0
1u u3
4u
u2
x
u(x) ψ (x)1
9.2 MATRIZ DE MASSA
De modo semelhante para a matriz de massa, designa-se
mij – Força de inércia desenvolvida na direcção i devida a uma aceleração unitária na direcção j
No caso de massas concentradas só nas direcções dos g.l. escolhidos:
=
3
2
1
000000
mm
mM Matriz de Massa Diagonal
Seja uma aceleração na direcção de u1. Por derivação de u(x) em ordem ao tempo, obtém-se
( ) ( ) ( )tuxtxu 11, ψ=
( ) ( ) ( )tuxtxu 11, &&&& ψ=
e as forças de inércia correspondentes vêm
( ) ( ) ( )tuxmtxum 11, &&&& ψ=
FEUP - 2000 Raimundo Delgado & António Arêde 63
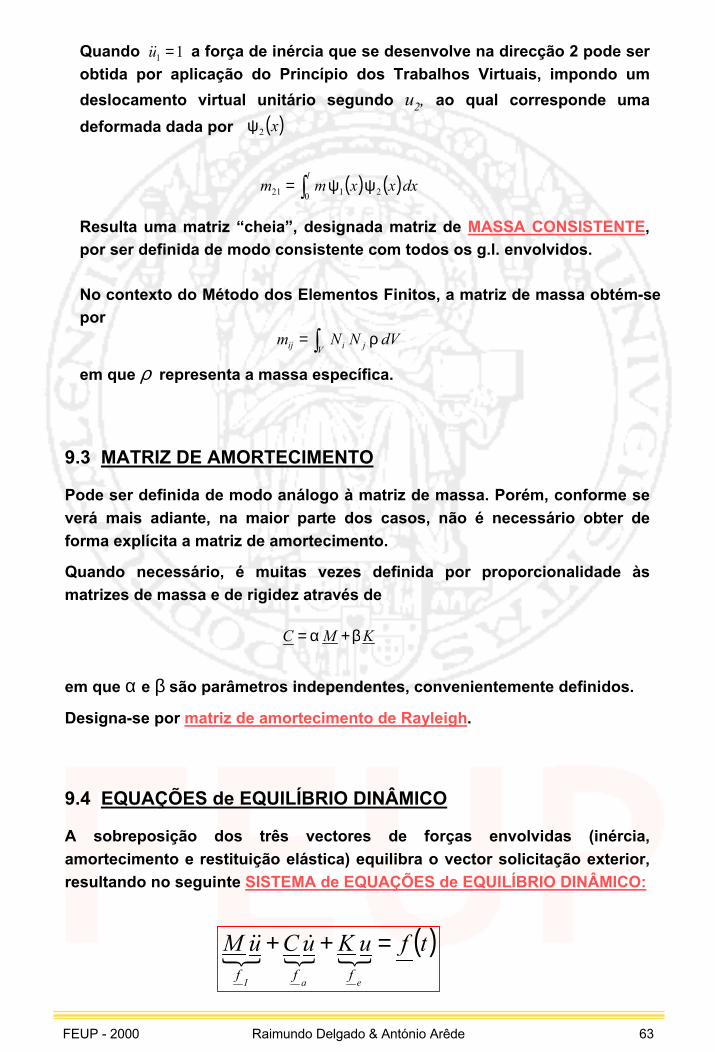
Quando a força de inércia que se desenvolve na direcção 2 pode ser obtida por aplicação do Princípio dos Trabalhos Virtuais, impondo um deslocamento virtual unitário segundo u2, ao qual corresponde uma deformada dada por
11 =u&&
( )x2ψ
( ) ( )∫ ψψ=l
dxxxmm0 2121
Resulta uma matriz “cheia”, designada matriz de MASSA CONSISTENTE, por ser definida de modo consistente com todos os g.l. envolvidos.
No contexto do Método dos Elementos Finitos, a matriz de massa obtém-se por
dVNNmV jiij ∫ ρ=
em que ρ representa a massa específica.
9.3 MATRIZ DE AMORTECIMENTO
Pode ser definida de modo análogo à matriz de massa. Porém, conforme se verá mais adiante, na maior parte dos casos, não é necessário obter de forma explícita a matriz de amortecimento.
Quando necessário, é muitas vezes definida por proporcionalidade às matrizes de massa e de rigidez através de
em que α e β são parâmetros independentes, convenientemente definidos.
Designa-se por matriz de amortecimento de Rayleigh.
KMC β+α=
9.4 EQUAÇÕES de EQUILÍBRIO DINÂMICO
A sobreposição dos três vectores de forças envolvidas (inércia, amortecimento e restituição elástica) equilibra o vector solicitação exterior, resultando no seguinte SISTEMA de EQUAÇÕES de EQUILÍBRIO DINÂMICO:
{ { { ( )tfuKuCuMeaI
fff
=++ &&&

FEUP - 2000 Raimundo Delgado & António Arêde 64
9.5 MOVIMENTO LIVRE SEM AMORTECIMENTO
Tal como nos sistemas de 1 g.l., a equação de equilíbrio dinâmico reduz-se a
0=+ uKuM &&
Vejamos em que condições pode ocorrer um movimento que satisfaça esta equação.
Seja uma deformada u cuja grandeza varie sinusoidalmente com o tempo:
twu senφ=
φ - caracteriza a forma da deformada, não dependendo do tempo, pelo que
1φ
φ2
φ3
φφφ
=φ
3
2
1
twwu sen2φ−=&&
Substituindo, vem então
0sensen2 =φ+φ− wtKwtwM
Sendo estas equações válidas para qualquer instante, implica que
( ) 02 =φ− MwK
Além da solução trivial (nula), este sistema terá outras soluções não nulas se o respectivo determinante for nulo (sistema indeterminado):
Temos assim um problema de valores e vectores próprios, em que os valores próprios são os w2.
( ) 0det 2 =− MwK

FEUP - 2000 Raimundo Delgado & António Arêde 65
Para uma estrutura com N graus de liberdade, a condição de determinante nulo conduz a uma equação polinomial de grau N nos w2.
Trata-se da Equação Característica do sistema, da qual se pode obter Nsoluções que são as frequências dos N modos de vibração dos sistema.
222
21 ,,, Nwww K
Para cada wn , temos o correspondente φn, modo de vibração que se obtém resolvendo o seguinte sistema de equações:
que tem uma simples infinidade de soluções (ou seja, o vector φn não é determinado em grandeza).
Obtém-se uma solução particular, por exemplo, fazendo unitária uma dascomponentes do vector: φ1n=1 .
O sistema, de N-1 equações em ordem às restantes componentes de φn, permite determinar este vector:
Vector próprio que caracteriza a deformada do n -ésimo modo de vibração.
φ
φφ
=φ
Nn
n
n
nM
2
1
( ) 02 =φ−nn MwK
A determinação de valores e vectores próprios pode ser feita com recurso a diversos métodos numéricos (método de Jacobi, de Stodola, de sequências de Sturm, de iterações por sub-espaços)

FEUP - 2000 Raimundo Delgado & António Arêde 66
9.5.1 Condições de Ortogonalidade
Sejam dois modos de vibração φm e φn.
Para o modo φn tem-se
43421
nf
MwKnn n φ=φ 2
Forças de inércia
De igual forma para o modo φm
i j
f jninf
nφ
φimf
jmf
m
Aplicando o teorema de Betti, pode escrever-se
( ) ( )
nT
mmmTnn
n
T
mmm
T
nn
n
T
m
T
MwMw
MwMw
ffmn
φφ=φφ
φφ=φφ
φ=φ
22
22
donde
( ) 022 =φφ−m
T
nmn Mww
Assim, se resulta22mn ww ≠
n m se ≠=φφ 0m
Tn
M
Do mesmo modo se pode proceder em relação à matriz de rigidez:
n m se ≠=φφ 0m
T
nK
43421
mf
MwKmm m φ=φ 2
Estas expressões são as designadas CONDIÇÕES de ORTOGONALIDADEdos modos de vibração em relação à matriz de MASSA e à matriz de RIGIDEZ.

FEUP - 2000 Raimundo Delgado & António Arêde 67
1P
5.03.
03.
0
=160 kN
=160 kN2P
0.3x
0.3
0.3x
0.3
I=∞
I=∞
Exemplo: Considere-se o pórtico de 2 andares abaixo representado, com vigas supostas de rigidez infinita.
27 /102 mkNE ×=
a) Matriz de RIGIDEZ
1.0
21K
K11
1.0
K12
K22
kN/mK
kN/mK
kN/mK
kN/mlEIK
24000
12000
12000
12000212
22
12
21
311
=
−=
−=
=×=
−
−=
24000120001200012000
K
b) Matriz de MASSA
tonmi 33.168.9
160 ==
=
33.160033.16
M

FEUP - 2000 Raimundo Delgado & António Arêde 68
c) Determinação das FREQUÊNCIAS de VIBRAÇÃO
−−−−
=− 2
22
33.1624000120001200033.1612000
ww
MwK
( ) ( )( ) 01200033.162400033.16120000det 2222 =−−−⇒=− wwMwK
Hzfsradw
Hzfsradw
0.7;/86.43
7.2;/76.16
22
11
==
==
d) Determinação dos MODOS de VIBRAÇÃO
1º MODO ( )( )
076.1633.162400012000
1200076.1633.161200021
112
2
=
φφ
×−−−×−
0.618
1.0Fazendo 618.00.1 2111 =φ→=φ
=φ618.00.1
1
2º MODO ( )( )
086.4333.162400012000
1200086.4333.1612000
22
122
2
=
×−−−×−
φφ
Fazendo 618.00.1 1222 −=φ→=φ
1.0
0.618
−
=φ0.1618.0
2
FEUP - 2000 Raimundo Delgado & António Arêde 69
11φ
21φ x Y
12φ
φ221 u2
1u
+ =x Y2
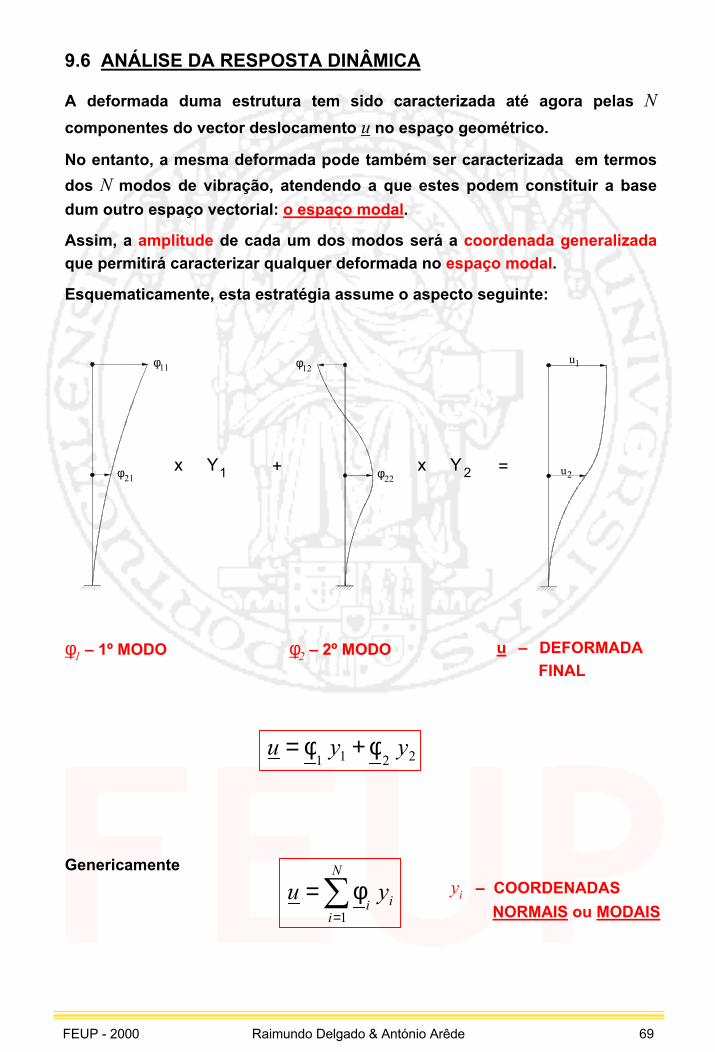
9.6 ANÁLISE DA RESPOSTA DINÂMICA
A deformada duma estrutura tem sido caracterizada até agora pelas Ncomponentes do vector deslocamento u no espaço geométrico.
No entanto, a mesma deformada pode também ser caracterizada em termos dos N modos de vibração, atendendo a que estes podem constituir a base dum outro espaço vectorial: o espaço modal.
Assim, a amplitude de cada um dos modos será a coordenada generalizadaque permitirá caracterizar qualquer deformada no espaço modal.
Esquematicamente, esta estratégia assume o aspecto seguinte:
2211yyu φ+φ=
φ1 – 1º MODO φ2 – 2º MODO u – DEFORMADA FINAL
Genericamente
∑=
φ=N
iii
yu1
yi – COORDENADAS NORMAIS ou MODAIS

FEUP - 2000 Raimundo Delgado & António Arêde 70
9.6.1 Equações de Equilíbrio Desligadas Sem Amortecimento
Retomando a equação
( )tfuKuM =+&&
e substituindo u e ∑=
φ=N
iii
yu1
&&&&
( )tfyKyMN
iii
N
iii
=
φ+
φ ∑∑== 11
&&
Pré-multiplicando por T
nφ
( )tfyKyM Tn
N
iii
Tn
N
iii
Tn
φ=
φφ+
φφ ∑∑== 11
&&
e atendendo a que, devido às condições de ortogonalidade, se tem
nn
T
nNN
T
nnn
T
n
T
n
T
n
N
iii
T
nyMyMyMyMyMyM &&&&
43421K&&K&&
43421&&
43421&& φφ=φφ++φφ+φφ+φφ=
φφ ∑=
0
2
0
21
0
11
nn
T
nNN
T
nnn
T
n
T
n
T
n
N
iii
T
nyKyKyKyKyKyK φφ=φφ++φφ+φφ+φφ=
φφ ∑= 43421
KK43421321
0
2
0
21
0
11
resulta
( )tfyKyM T
nnn
T
nnn
T
nφ=φφ+φφ &&
Definindo
( ) ( )tFtF
KK
MM
T
nn
n
T
nn
n
T
nn
φ=
φφ=
φφ= massa generalizada para o modo n
rigidez generalizada para o modo n
força generalizada para o modo n

FEUP - 2000 Raimundo Delgado & António Arêde 71
Obtém-se a seguinte equação de equilíbrio dinâmico no modo n
( )tFyKyM nnnnn =+&&
que é uma equação com apenas uma variável incógnita.
Portanto, em vez de um sistema com N equações diferenciais a Nincógnitas, fica-se reduzido a N equações com apenas uma incógnita cada – são as N equações de equilíbrio desligadas.
Pode ainda verificar-se que nnn MKw /2 =
De facto, pré-multiplicando a equação Tnnn
MwK n φφ=φ por2
n
n
nn
M
nTn
K
nTn
MKw
MwK
MwK
n
n
n
n
n
=
=
φφ=φφ
2
2
2
43421321
A resolução das N equações desligadas permite determinar as coordenadas modais Y1 , Y2 , ... , Yn , ... , YN , e a deformada final obtém-se, tal como já apresentado, somando as contribuições dos vários modos de vibração:
∑=
φ=N
iii
yu1
Esta é a base do designado MÉTODO DA SOBREPOSIÇÃO MODAL !!!
Verifica-se ainda que, sobrepondo apenas as contribuições dos primeiros mmodos de vibração ( com m << N ) se obtêm excelentes resultados
∑=
φ≅m
iii
yu1
poupando-se um significativo esforço de cálculo em relação à solução exacta.

FEUP - 2000 Raimundo Delgado & António Arêde 72
9.6.2 Equações de Equilíbrio Desligadas Com Amortecimento
Admitindo a ortogonalidade dos modos de vibração, também em relação à matriz de massa, i.e.
n m se ≠=φφ 0m
Tn
C
e definindo o amortecimento generalizado para o modo n, resulta
n
T
nn CC φφ=
( )tFyKyCyM nnnnnnn =++ &&&
ou ( )n
nn
n
nn
n
nn M
tFyMKy
MCy =++ &&&
Tal como para um simples oscilador de 1 g.l., pode definir-se o amortecimento crítico para o modo n que virá dado por
nncritn wMC 2=
e o correspondente coeficiente de amortecimento do modo n será
nnnncritn
nn wMC
CC 2ξ=⇒=ξ
obtendo-se finalmente
( )n
nnnnnnn M
tFywywy =+ξ+ 22 &&&
uma expressão formalmente idêntica à obtida para um oscilador de 1 g.l.
Portanto, todas as metodologias abordadas para obtenção da resposta forçada de osciladores de 1 g.l. são directamente aplicáveis ao cálculo da resposta modal, em particular o integral de Duhamel e as expressões da resposta à acção sísmica.
Fica assim bem patente a vantagem do método de sobreposição modal.

FEUP - 2000 Raimundo Delgado & António Arêde 73
9.6.3 Resumo do Método de Sobreposição Modal
1º EQUAÇÕES DE EQUILÍBRIO
2º FREQUÊNCIAS e MODOS de VIBRAÇÃO
3º MASSA e FORÇA GENERALIZADAS
A partir do cálculo de K e M determinam-se os ww e φφ.
4º EQUAÇÕES de MOVIMENTO DESLIGADAS
( )tfuKuCuM =++ &&&
( )n
nnnnnnn M
tFywywy =+ξ+ 22 &&&
5º RESPOSTA MODAL À SOLICITAÇÃO
Cada equação pode ser resolvida pelo método mais adequado, por exemplo usando o integral de Duhamel
( ) ( ) ( ) ( )∫ ττ−τ= τ−ξ−t
atw
nan
n dtweFwM
tyn
nn
n0
sen1
( ) NNwwwMwK φφφ→→=φ− ,,,,,,0 21212 KK
( ) ( )tFtFMM T
nnn
T
nn φ=φφ=
No caso de existirem deslocamentos ou velocidades iniciais, é necessário adicionar uma parcela correspondente à vibração livre:
( ) ( ) ( ) ( )
+ξ+= ξ− twytw
wwyyety
nn
n
nnana
a
nnnntwn cos0sen00&

FEUP - 2000 Raimundo Delgado & António Arêde 74
As condições iniciais em termos de coordenadas modais podem ser relacionadas com as correspondentes condições iniciais no espaço geométrico
( ) ( )00 yy & e
( ) ( )00 uu & e
De facto, tendo ∑=
φ=N
iii
yu1
e pré-multiplicando por vemMT
nφ
nnnn
T
n
N
iii
T
n
T
nyMyMyMuM =φφ=
φφ=φ ∑=1
ou seja
n
Tn
nn
Tn
n MuM
yM
uMy
&&
φ=
φ= ;
pelo que
( ) ( ) ( ) ( )n
Tn
nn
Tn
n MuM
yM
uMy
00;
00
&&
φ=
φ=
6º DESLOCAMENTOS EM TERMOS DE COORDENADAS GERAIS
7º FORÇAS ELÁSTICAS
( ) ∑=
φ==N
iiie
yKuKtf1
ou, atendendo a que iiMwK i φ=φ 2
∑=
φ=N
iii
yu1
( )
φ= ∑=
N
iiiie
ywMtf1
2
Estas forças são depois aplicadas à estrutura como quaisquer outras forças, a fim de conhecer os esforços por elas induzidos.

FEUP - 2000 Raimundo Delgado & António Arêde 75
10.1 ANÁLISE MODAL
A generalização da equação de equilíbrio dinâmico de sistemas de 1 g.l. sob solicitação sísmica, agora para sistemas de N g.l. conduz a
0=++ uKuCuM t &&&
e atendendo a que
{ } { } gt
gt uuuuuu &&&&&& 11 +=+= e
{ } guMuKuCuM &&&&& 1−=++
Em que
resulta
Em que {1} representa uma matriz coluna de valores unitários.
efnnnnnnn FyKyCyM =++ &&&
De acordo com o que foi visto no método de sobreposição modal, aequação de equilíbrio dinâmico associada ao modo de vibração n é
{ } gT
nef
n u
nL
MF &&43421
1φ=
sendo Ln o Factor Modal de Excitação Sísmica
gn
nnnnnn u
MLywywy
n&&&&& =+ξ+ 22
10. RESPOSTA A ACÇÕES SÍSMICAS DE SISTEMAS COM N GRAUS DE LIBERDADE
1010. RESPOSTA A ACÇÕES SÍSMICAS DE . RESPOSTA A ACÇÕES SÍSMICAS DE SISTEMAS COM SISTEMAS COM NN GRAUS DE LIBERDADEGRAUS DE LIBERDADE

FEUP - 2000 Raimundo Delgado & António Arêde 76
A resolução do sistema de um grau de liberdade
guuwuwu &&&&& =+ξ+ 22
conduziu a Sd(w,ξ), o deslocamento que pode ser obtido no espectro de resposta.
Assim, a equação para o modo de vibração n conduzirá a
Porém, o valor máximo da resposta total não pode ser obtido, em geral, adicionando as máximas respostas modais, porque estes máximos não ocorrem todos ao mesmo tempo.
( ) ( )nnan
nnnd
n
nn wS
MwLwS
MLy
n
ξ=ξ= ,, 2
Alternativamente pode ser usado o Método da Combinação Quadrática Completa, válido para qualquer relação de frequências:
O processo mais corrente para obter a máxima resposta total a partir dos valores espectrais é calcular a raiz quadrada da soma dos quadrados das respostas modais:
...22
21max maxmax
++= uuu
Este método é aplicável sempre que as frequências próprias dos modos de vibração que contribuem de forma significativa para a resposta estiverem bem separadas (i.e., se a relação entre duas quaisquer frequências estiver fora do intervalo 0.67 a 1.5).
Caso não seja aplicável aquele método, deve-se adicionar as respostas modais correspondentes às frequências que não estão bem separadas.
Se, por exemplo f2 e f3 não estão bem separadas:
( ) ...24
232
21max maxmaxmaxmax
++++= uuuuu
∑∑= =
=n
i
n
jjiji uquu
1 1max maxmax
em que o coeficiente de correlação qij é dado por
( )( ) ( ) j
iij w
wrrrr
rrq =+ξ+−
+ξ= ;141
182222
232

FEUP - 2000 Raimundo Delgado & António Arêde 77
EXEMPLO: Continuação do problema do capítulo anterior
e) Determinação das massas generalizadas
f) Determinação dos factores modais de excitação sísmica
g) Valores do espectro de resposta
Seja ξ = 5% ; Terreno tipo 2 ; Acção Sísmica tipo I
{ } 57.22618.01
33.160033.16
618.01111 =
=φφ= MM T
{ } 57.221618.0
33.160033.16
1618.0222 =
−
−=φφ= MM T
{ } { } 42.2611
33.160033.16
618.01111 =
=φ= ML T
{ } { } 24.611
33.160033.16
1618.0122 =
−=φ= ML T
22
21
/4000.7
/3107.2
2
1
scmSHzf
scmSHzf
a
a
=→=
=→=
h) Coordenadas modais
my 00388.03.0757.16
1.357.2242.26
21 =××=
my 00017.03.086.430.4
57.2224.6
22 =××=
coef. de sismicidade da zona

FEUP - 2000 Raimundo Delgado & António Arêde 78
i) Deslocamentos modais
=φ=00240.000388.0
111 yu
1º Modo 2º Modo
−
=φ=00017.0000106.0
222 yu
i) Deslocamentos modais
j) Deslocamentos máximos
mu 00388.0000106.000388.0 22max1 =+=
mu 00241.000017.00024.0 22max2 =+=
l) Forças modais por andar
kNuKfs
=
−
−==
04.1176.17
00240.000388.0
24000120001200012000
11
kN
SMLM
wS
MLwMywMf
aS
aa
s
=×××
=
φ=φ=φ=
99.1078.17
3.01.357.2242.26
618.01
33.160033.16
1
111
112
11
11
2111
21
43421
ou, recorrendo às forças de inércia
Operando de forma análoga para o 2º modo, vem kNfs
−
=4.5336.3
2
kNR 89.28064.282.28 22max =+=Corte Basal Máximo:

FEUP - 2000 Raimundo Delgado & António Arêde 79
10.2 MÉTODO DE RAYLEIGH
Considere-se na análise apenas o 1º modo e admita-se que pode ser obtido pelo seguinte processo:
gmF ii =
Solicitação gravítica na horizontal
=→=
Nd
dd
dFdK...
2
1
Resulta então em que1
121 M
Kw = dMdMdKdK TT == 11 e
Mas ∑==i
iiT dFFdK1 { }
=
N
NT
F
FF
dddFd...
... 2
1
21
→=
NN
T
d
dd
m
mm
gdgMdMgMO2
1
2
1
1
∑= 2ii dF
{ } { } ∑= 2221121 ...,,,...,,, iiNNN dFFdFdFdddd
∑∑= 2
ii
ii
dFdFg
w∑∑= 22
1
ii
ii
dFdFg
fπ
↓aS
A aceleração modal máxima vem então
aSMLy
1
11 =&&
{ } aii
iiiiT SdFdF
yg
dFMdL
∑∑∑ === 211 ;1 &&
F1
F2
F3
F4
d
4d
d3
2
d1
Donde:

FEUP - 2000 Raimundo Delgado & António Arêde 80
Donde a componente j do vector aceleração devida ao 1º modo vem
ja
jaii
iij d
gSwdS
dFdF
u2
21 ==∑∑&&
E as forças de inércia serão dadas por jja
jjj dmwgSumF 2
11 == &&
Estas forças aplicadas na estrutura permitem obter a sua resposta à acção sísmica.
Este método conduz a resultados que comparam bem com os obtidos pela análise modal.
Resolução do problema em estudo pelo método de Rayleigh
=0266.00399.0
d
160 kNd1
160 kN
= 0.0399
= 0.02662d
918.2822 ==∑∑
∑∑
i
i
ii
ii
dd
dFdF 2scm/310Hz7.2918.288.9
21 =→=×= aSfπ
rad/s83.16=w kN68.1152.17
0266.00399.0
8.916083.16
8.93.01.3 2
=
×××=F
A resposta da estrutura à acção sísmica obtém-se determinando os deslocamentos e esforços devidos a esta acção.
11.68 kN
17.52 kN

FEUP - 2000 Raimundo Delgado & António Arêde 81
Através de:
Espectros de RESPOSTA Análise DINÂMICA
Espectros de POTÊNCIA Análise DINÂMICA
10.3.1 Caracterização da Acção dos Sismos
10.3 ASPECTOS REGULAMENTARES (R.S.A.)
Coeficiente Sísmico de Referência Método Simplificado de Análise Estática
Dependem do Terreno: Tipo I , II ou III
Dependem da Zona Sísmica: A , B , C ou D
Coeficiente de Sismicidade α
Há que considerar Duas Acções Sísmicas:
Acção Sísmica Tipo 1 – corresponde a sismos de magnitude moderada a pequena distância focal
Acção Sísmica Tipo 2 – corresponde a sismos de maior magnitude a maior distância focal
10.3.2 Determinação dos Efeitos da Acção dos Sismos
Há diversos métodos com diferentes graus de rigor, generalidade e de complexidade.
Método Simplificado de Análise Estática
Métodos Gerais e “Exactos”
COMPLEXIDADE

FEUP - 2000 Raimundo Delgado & António Arêde 82
i) MÉTODO PADRÃO
Estrutura Tridimensional, Análise Dinâmica e Não-Linear
gu&&
uF
u
40%
60%
Redução para 60%Redução para 40%
Elástico
Fe,máx.
Desde que a estrutura tenha DUCTILIDADE adequada, podem obter-se menores esforços, ou melhor: podem ser adoptadas menores forças sísmicasde dimensionamento.
ii) Estrutura Tridimensional, Análise Dinâmica, Comportamento Linear e Coeficientes de Comportamento
iii) Estruturas Planas, Análise Dinâmica, Comportamento Linear, Coeficientes de Comportamento e Correcção de Efeitos de Torção
iv) Método Simplificado de Análise Estática
v) Método de Recurso 0.22 α Fi

FEUP - 2000 Raimundo Delgado & António Arêde 83
Em qualquer dos métodos existe um limite inferior para o efeito da acção dos sismos, de modo a garantir uma resistência mínima a forças horizontais.
R (θ) – máxima força de reacção horizontal na direcção θ (ex: X ou Y)
P – peso da estrutura
R – mínimo de R (θ)
α≥=δ 04.0PR
δαα<δ 04.004.0 por resultados rmultiplicaSe
Limite Inferior
Existe também um limite superior: α<δ 16.0
αδα>δ 16.016.0 por resultados os se-dividir podeSe
As massas a considerar na análise correspondem ao valor médio das cargas permanentes + valor quase-permanente das cargas variáveis.
As características de rigidez e amortecimento devem corresponder a valores médios das propriedades dos materiais.
10.3.3 Método Simplificado de Análise Estática
i) A distribuição de massa e de rigidez em planta deve ser proporcionada
Condições de Aplicação
C g
RC
< 0,15a
a
< 0,15b b

FEUP - 2000 Raimundo Delgado & António Arêde 84
ii) Distribuição vertical de massa e de rigidez sem grandes variações
Centro de Rigidez de um piso (Cr) - Ponto no qual a aplicação de uma força horizontal, origina apenas deslocamento de translação na direcção da força (não provoca rotação).
iii) Malha ortogonal e pouco deformável
pisos de nº ou )(85.0 =>> nHzn
fHzf
%5.1,1
1 <−
+
+
ii
ii
hdd
iv) Pisos indeformáveis no seu plano
A acção do sismo é quantificada através de:
ηβα=β 0
Coeficiente Sísmico Coeficiente Sísmico
de Referência
Coeficiente de Comportamento
F xI~yR
~ I yF
xR
RC
1 2 3 4 5 6 7 f(Hz)
0.04 α < β < 0.16 α
A S1
S2A
β0
200
400
β0a
S ,ξ = 5 %

FEUP - 2000 Raimundo Delgado & António Arêde 85
Valores e Distribuição das Forças Estáticas
Estimativa da Frequência:
Hzhbf
Hzn
f
nHzn
f
6
16
)(12
=
=
==
Parede Tipo Estrutura
Parede-Pórtico Tipo Estrutura
pisos de nº Pórtico Tipo Estrutura
∑
∑
=
=β= n
jjj
n
jj
iik
Gh
GGhF
i
1
1
aplicadas, em cada piso i, com as seguinte excentricidades relativas ao centro de massa
Quando há simetria e distribuição uniforme de rigidez em planta pode afectar-se os resultados do seguinte factor de correcção dos efeitos de torção
ax6.01+=ξ
ae
abe
i
ii
05.0
05.05.0
2
1
=
+=
a
b i
CRie2i 1ie
Cgi
iF
onde x é a distância do elemento em estudo ao centro de massa (ou de rigidez, uma vez que ambos coincidem)
As forças Fki nos pisos devem ser consideradas todas com as excentricidades e1i
ou todas com e2i, conforme o que for mais gravoso para o elemento em estudo.

FEUP - 2000 Raimundo Delgado & António Arêde 86
Justificação dos Valores e Distribuição das Forças Estáticas
Quantificação da força de corte basal
Distribuição de Rb em altura de acordo com a forma triangular invertida que tem por base a contribuição do 1º modo apenas e com uma configuração linear (aproximação aceitável apenas para estruturas regulares em altura).
h1
ih
h n
mi
mnnu
n-1u
ui
u
F1
Fi
2F
Fn-1
nF
Rb
nn
ii u
hhu &&&& =
==
n
niiiii h
uhmumF&&
&&
∑∑∑===
=
==
n
iii
n
nn
i n
nii
n
iib hm
hu
huhmFR
111
&&&&⇒
∑∑==
=n
ii
n
iii
n
n mghmhu
11β&&⇒
( )∑
∑
=
==
∴ n
iii
n
ii
n
n
hm
mg
hu
1
1β&&
∑⋅==
n
iib mgR
1βComo:
declive da deformada
==∑
∑
∑
∑
=
=
=
=n
iii
n
ii
iin
iii
n
ii
iii
hG
GhG
hm
mghmF
1
1
1
1 ββEntão:

FEUP - 2000 Raimundo Delgado & António Arêde 87
Excentricidade das forças sísmicas (RSA) (justificação)
0.05 a – Parcela que se destina a atender à componente da rotação do sismo(ou melhor à diferente intensidade com que actua nos diversos elementos verticais da base do edifício ao longo da direcção normal à da acção sísmica), e ainda ao facto de, havendo comportamento não linear, se gerarem assimetrias de rigidez porque um dos lados pode entrar primeiro em regime não-linear do que o seu simétrico, ficando portanto com menor rigidez.
No caso de haver simetria estrutural e de massa, Cr = Cg , as excentricidades coincidem em valor (mas não em sentido, pelo quehá que considerar ambos)
0.5 bi – Parcela para atender ao facto de a resultante das forças de inércia reais não passarem exactamente pelo centro de massa, devido à natureza dinâmica do problema, i.e., por existirem massas a vibrar que se podem deslocar, alterando portanto a posição da resultante das respectivas forças de inércia.
aeabe iii 05.0//05.05.0 21 =+=
2ie 1iegicric
ib
O factor de correcção para efeitos de torção em estruturas simétricas com rigidez uniformemente distribuída (ξ = 1+0.6 x/a) pode ser deduzido a partir da condição de que |e1i| = |e2i| = 0.05a e da distribuição uniforme de rigidez (ou seja, da distribuição uniforme de forças resistentes ao nível do piso).

FEUP - 2000 Raimundo Delgado & António Arêde 88
10.4 EXEMPLO DE APLICAÇÃO
Dimensões:
Coeficientes de comportamento:
Terreno tipo I
Local: Porto ( α = 0.3)
Vigas: b = 0,2m; h = 0,5m
Pilares: b = 0,35m; h = 0,35m
(até ao 3º piso)
b = 0,25m; h = 0,25m
(restantes pisos)
E = 21.0 GPa
Cargas
G = 5,5 kN/m2 ; Q = 2,0 kN/m2
Peso próprio de vigas e pilares:
1.0 kN/m2
Cargas permanentes por piso:
(8x15,0)x(5,5+1,0) = 780 kN
Sobrecargas por piso:
8,0 x 15,0 x 2,0 = 240 kN
Gi = 780 + ψ2 x 240 =
= 780 + 0,2 x 240 = 828 kN
5.0m5.0m5.0m
4.0m
4.0m
3.0m
3.0m
3.0m
3.0m
4.0m
Esforços: η = 2,5
Deslocamentos: η = 1,0
Estrutura Porticada Simples – Análise Sísmica na maior direcção
FEUP - 2000 Raimundo Delgado & António Arêde 89
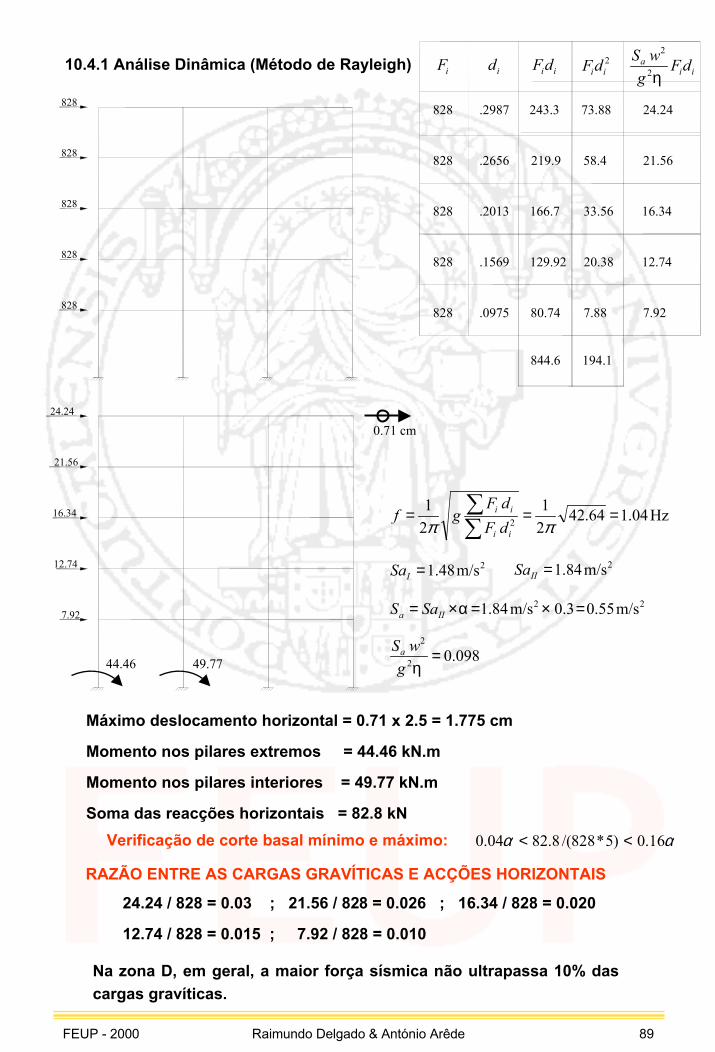
Na zona D, em geral, a maior força sísmica não ultrapassa 10% das cargas gravíticas.
7.92
24.24
12.74
16.34
21.56
Máximo deslocamento horizontal = 0.71 x 2.5 = 1.775 cm
Momento nos pilares extremos = 44.46 kN.m
Momento nos pilares interiores = 49.77 kN.m
Soma das reacções horizontais = 82.8 kN
24.24 / 828 = 0.03 ; 21.56 / 828 = 0.026 ; 16.34 / 828 = 0.020
12.74 / 828 = 0.015 ; 7.92 / 828 = 0.010
RAZÃO ENTRE AS CARGAS GRAVÍTICAS E ACÇÕES HORIZONTAIS
Hz04.164.4221
21
2 ===∑∑
ππ ii
ii
dFdF
gf
10.4.1 Análise Dinâmica (Método de Rayleigh)
2m/s48.1=ISa 2m/s84.1=IISa
098.02
2
=ηgwSa
828
828
828
828
828 828
828
828
828
828
.0975
.1569
.2013
.2987
.2656
80.74
129.92
166.7
219.9
243.3
844.6 194.1
7.88
20.38
33.56
58.4
73.88
7.92
12.74
16.34
21.56
24.24
iia dFg
wSη2
2
iidF 2iidFiF id
22 m/s55.03.0m/s84.1 =×=α×= IIa SaS
0.71 cm
49.7744.46
αα 16.0)5*828/(8.8204.0 <<Verificação de corte basal mínimo e máximo:

FEUP - 2000 Raimundo Delgado & António Arêde 90
Hz4.25
1212 ===η
f
10.4.2 Análise Estática (método simplificado)
10.4.2.1 Usando a estimativa do R.S.A. para a frequência
26.017.00 == fβ 031.05.23.026.00 =×==
ηαββ
048.016.0031.0012.004.0 =<<= αα
( )( ) ii
ii
iiiki hh
GhG
GhF 567.216131074
11111828031.0 =++++
++++==∑∑β
Máximo deslocamento horizontal = 1.14 x 2.5 = 2.85 cm (+ 61%)
Momento nos pilares extremos = 68.96 kN.m (+ 55%)
Momento nos pilares interiores = 77.27 kN.m (+ 55%)
Soma das reacções horizontais = 128.35 kN (+55%)
COMPARAÇÃO COM A ANÁLISE DINÂMICA (método de Rayleigh)
10.4.2.2 Usando a frequência calculada pelo método de Rayleigh
Máximo deslocamento horizontal: 2.85 x (.173/.26) = 285 x .67 = 1.9cm (+ 7.0%)
Momento nos pilares extremos = 68.96 x .67 = 45.88 kN.m (+ 3.0%)
Momento nos pilares interiores = 77.27 x .67 = 51.4 kN.m (+ 3.3%)
Soma das reacções horizontais = 128.35 x .67 = 85.4 kN (+3.1%)
10.268
17.969
25.67
33.371
41.072
1.14 cm
77.2768.96
173.004.117.00 ==β


















