Análise Dinâmica de Mecanismos. Introdução Projeto de máquinas –Cinemática => Movimento e...
64
Análise Dinâmica de Mecanismos
-
Upload
moises-faro-diegues -
Category
Documents
-
view
240 -
download
10
Transcript of Análise Dinâmica de Mecanismos. Introdução Projeto de máquinas –Cinemática => Movimento e...
Análise Dinâmica de Mecanismos
Introdução• Projeto de máquinas– Cinemática => Movimento e geometria– Dinâmica => Força e movimento– Cálculo de tensões e deformações– Modos de falha => Fratura por tensão e interferência
por deflexão– Definição dos esforços atuantes
• Mecanismos com altas velocidades como:– Motores– Eixos– Rotores
• Considera-se a inércia dos mecanismos.• A flutuação das forças de natureza dinâmica são as
causadoras de fadiga.
2ª Lei de Newton e Principio de D’Alembert
mF a
0
0I
m
F a
F F
2º Lei de Newton
Principio de D’Alembert
• Relação entre força e movimento• Dinâmica da partícula
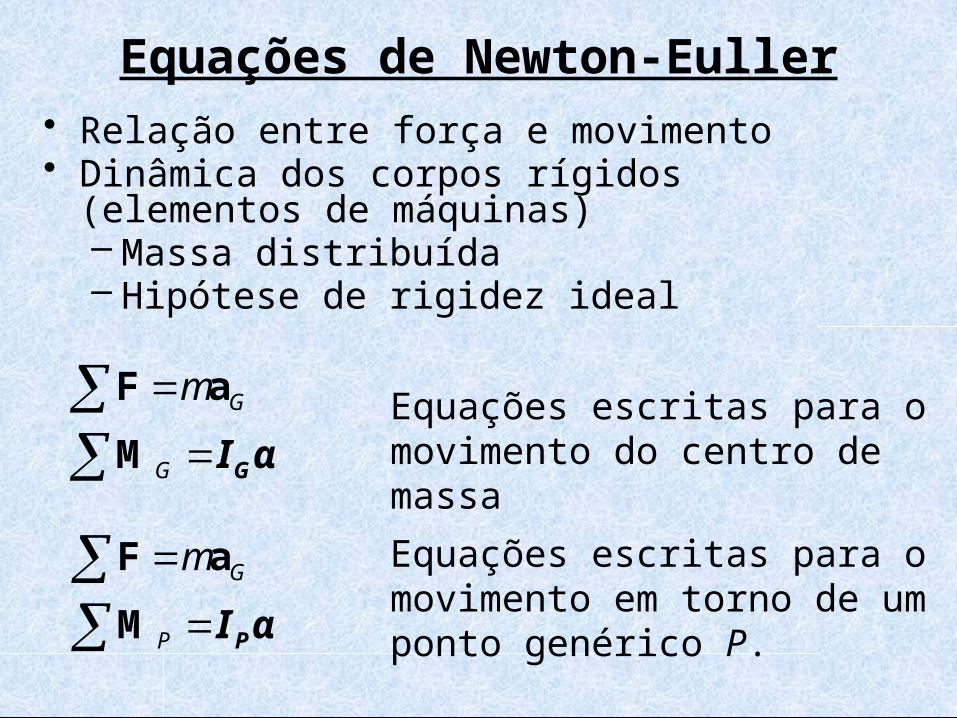
Equações de Newton-Euller
G
G
m
F a
M GI αEquações escritas para o movimento do centro de massa
G
P
m
F a
M PI α
Equações escritas para o movimento em torno de um ponto genérico P.
• Relação entre força e movimento• Dinâmica dos corpos rígidos (elementos de
máquinas)–Massa distribuída– Hipótese de rigidez ideal
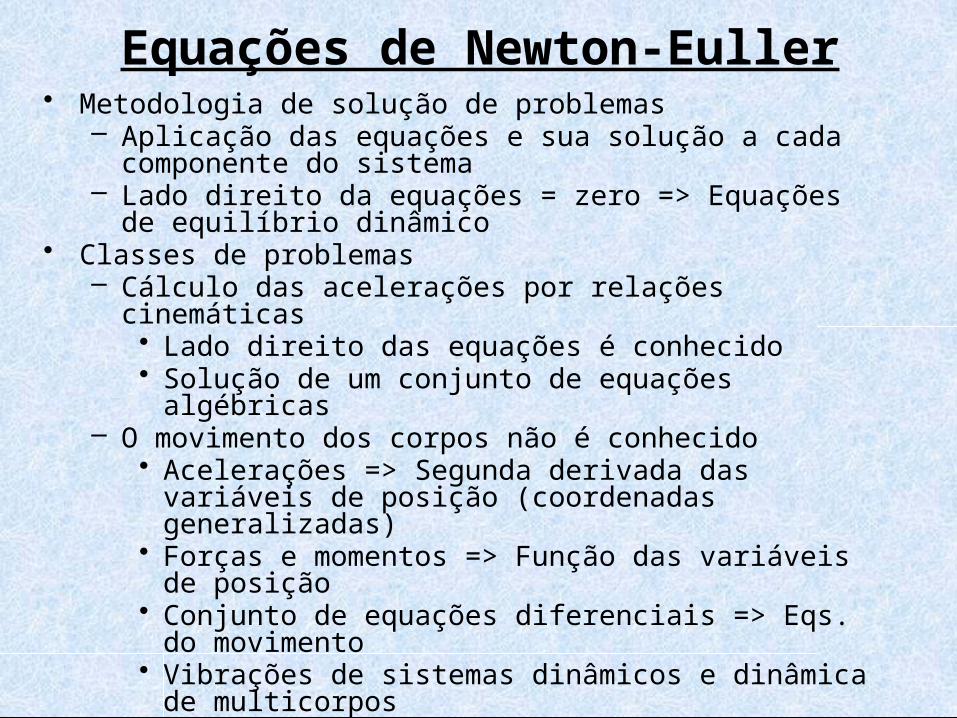
Equações de Newton-Euller• Metodologia de solução de problemas
– Aplicação das equações e sua solução a cada componente do sistema
– Lado direito da equações = zero => Equações de equilíbrio dinâmico
• Classes de problemas– Cálculo das acelerações por relações cinemáticas
• Lado direito das equações é conhecido• Solução de um conjunto de equações algébricas
– O movimento dos corpos não é conhecido• Acelerações => Segunda derivada das variáveis de
posição (coordenadas generalizadas)• Forças e momentos => Função das variáveis de posição• Conjunto de equações diferenciais => Eqs. do movimento• Vibrações de sistemas dinâmicos e dinâmica de
multicorpos• Dinâmica de máquinas
– Movimento de um componente de “entrada” é conhecido => Problema da primeira classe
Problemas solúveis utilizando dinâmica da partícula ou sistema de partículas
• Problemas que não envolvam rotação• Peças tratadas como partículas• Análise cinemática das posições relativas das
peças• Obtenção das acelerações
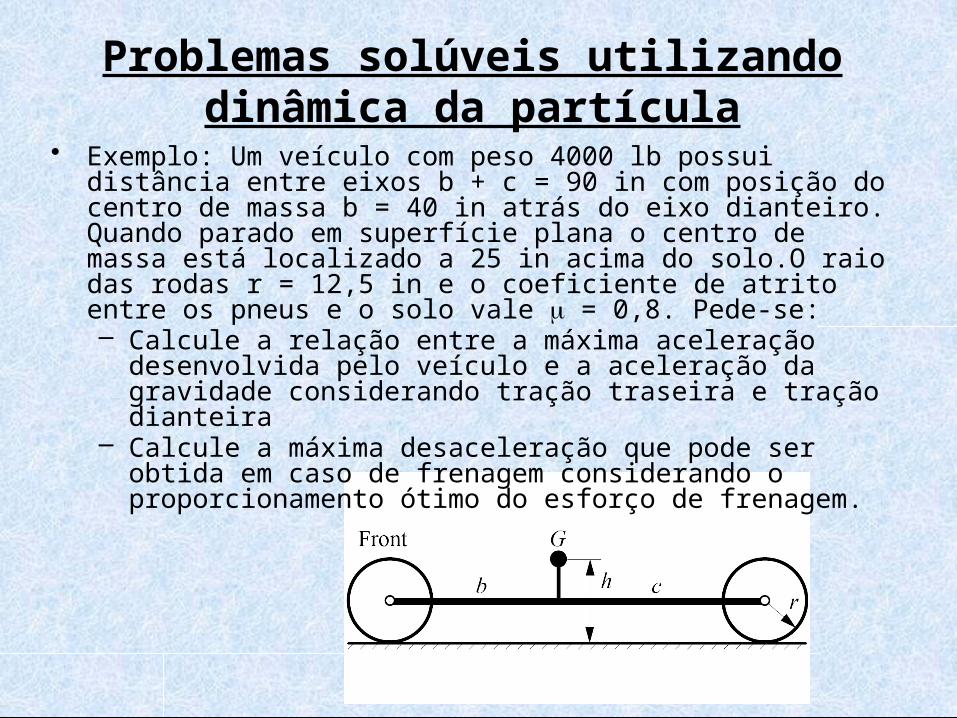
Problemas solúveis utilizando dinâmica da partícula
• Exemplo: Um veículo com peso 4000 lb possui distância entre eixos b + c = 90 in com posição do centro de massa b = 40 in atrás do eixo dianteiro. Quando parado em superfície plana o centro de massa está localizado a 25 in acima do solo.O raio das rodas r = 12,5 in e o coeficiente de atrito entre os pneus e o solo vale m = 0,8. Pede-se:– Calcule a relação entre a máxima aceleração desenvolvida pelo
veículo e a aceleração da gravidade considerando tração traseira e tração dianteira
– Calcule a máxima desaceleração que pode ser obtida em caso de frenagem considerando o proporcionamento ótimo do esforço de frenagem.
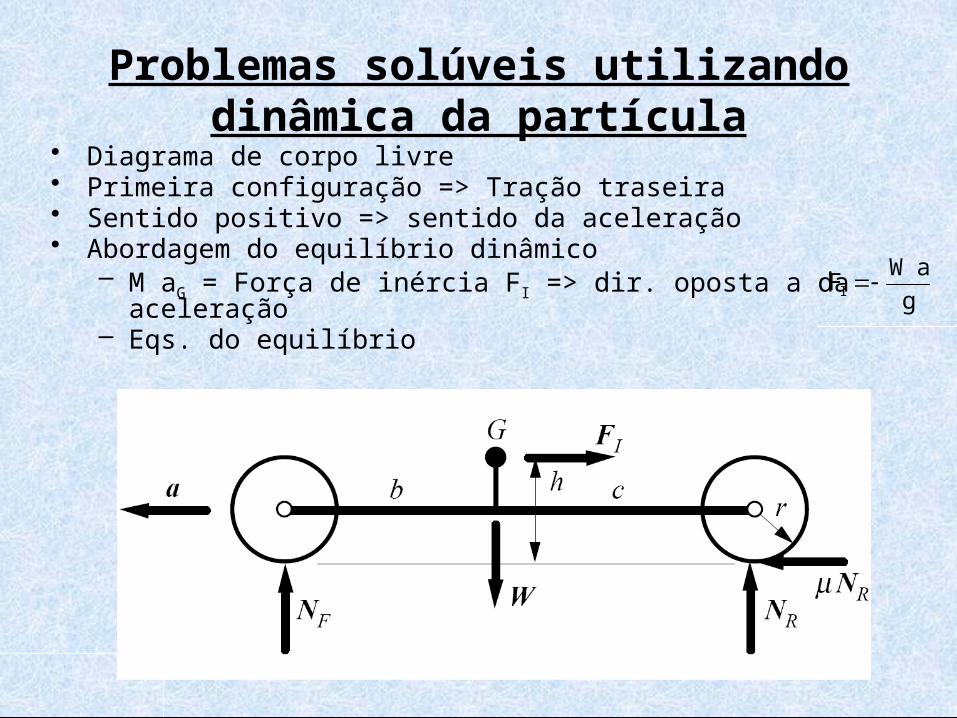
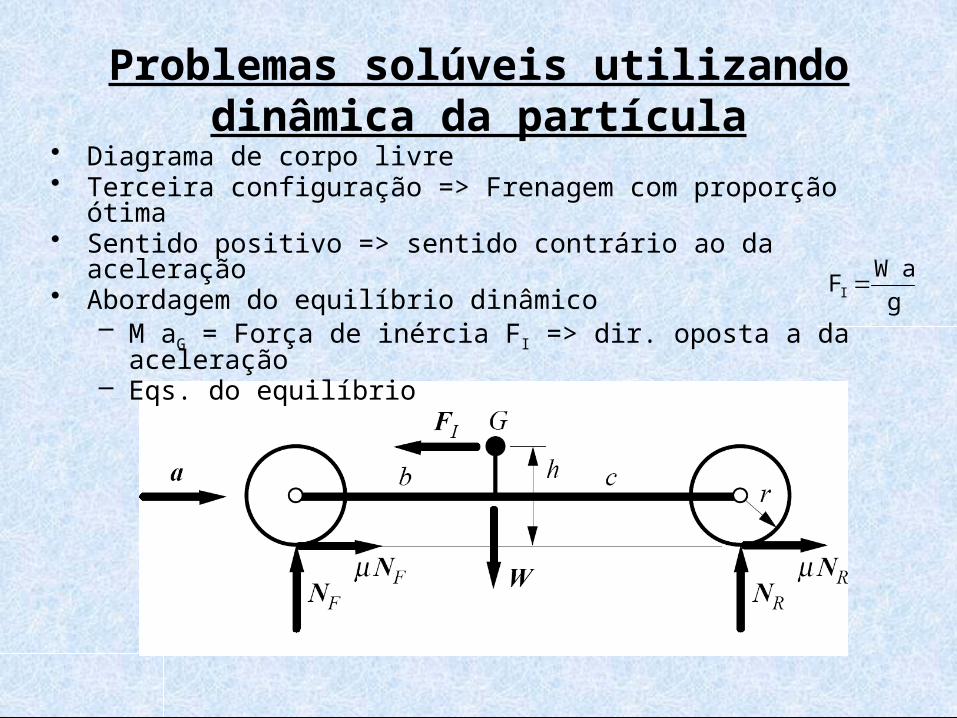
Problemas solúveis utilizando dinâmica da partícula
• Diagrama de corpo livre• Primeira configuração => Tração traseira• Sentido positivo => sentido da aceleração• Abordagem do equilíbrio dinâmico
– M aG = Força de inércia FI => dir. oposta a da aceleração– Eqs. do equilíbrio g
a WFI
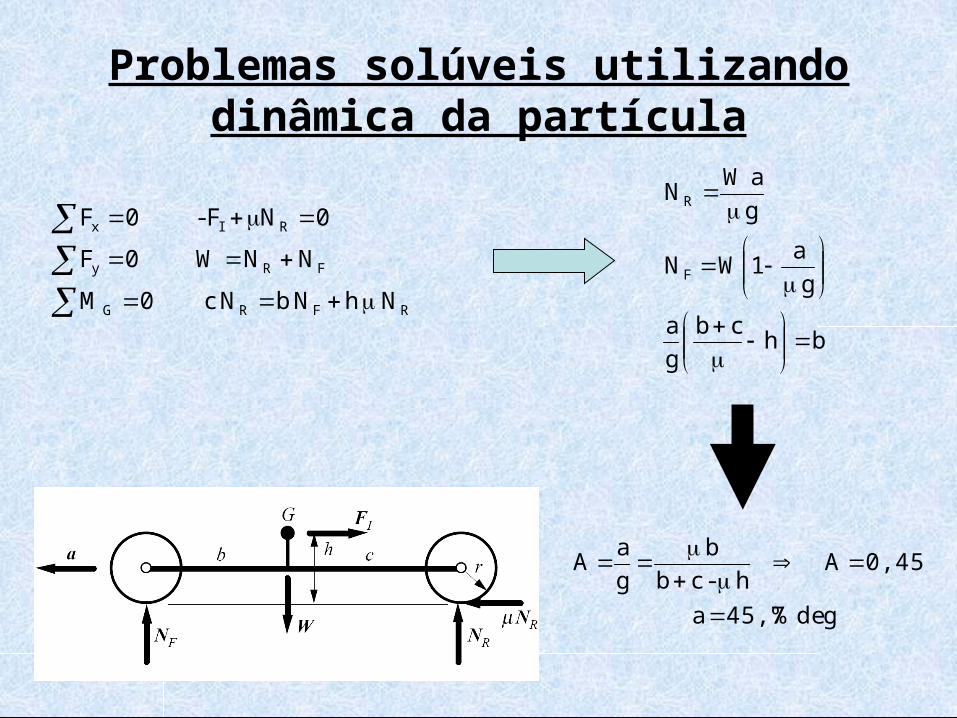
Problemas solúveis utilizando dinâmica da partícula
RFRG
FRy
RIx
N hN bN c 0M
NNW 0F
0NF- 0F
m
m
bhc bga
g a1WN
g aW N
F
R
m
m
m
g de % 45,7 a
0,457A h - c b
b gaA
m
m
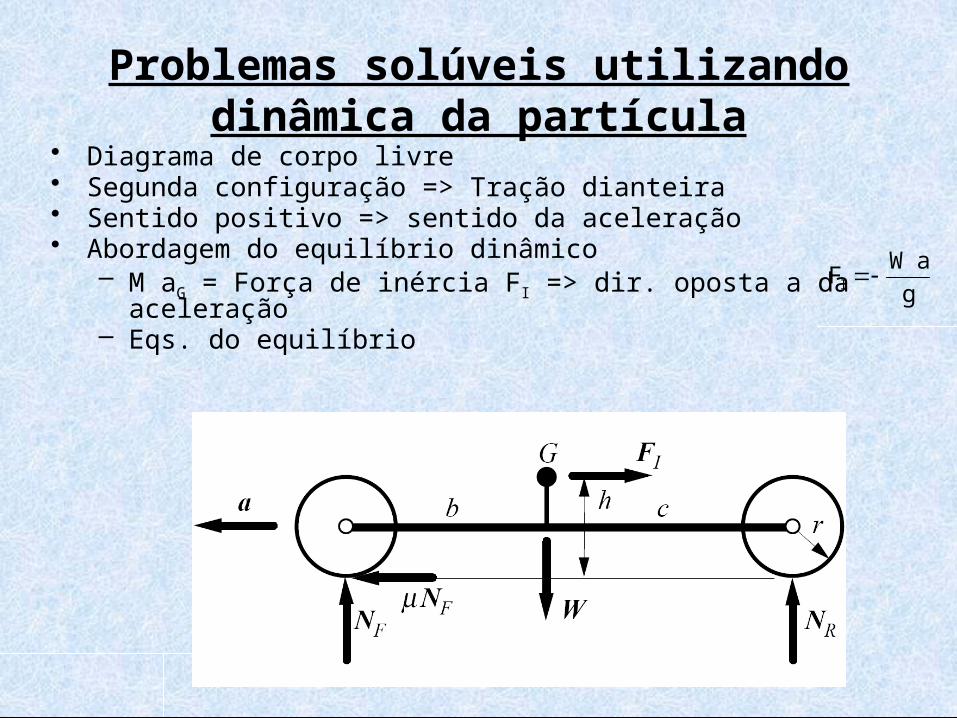
• Diagrama de corpo livre• Segunda configuração => Tração dianteira• Sentido positivo => sentido da aceleração• Abordagem do equilíbrio dinâmico
– M aG = Força de inércia FI => dir. oposta a da aceleração– Eqs. do equilíbrio
Problemas solúveis utilizando dinâmica da partícula
ga WFI
Problemas solúveis utilizando dinâmica da partícula
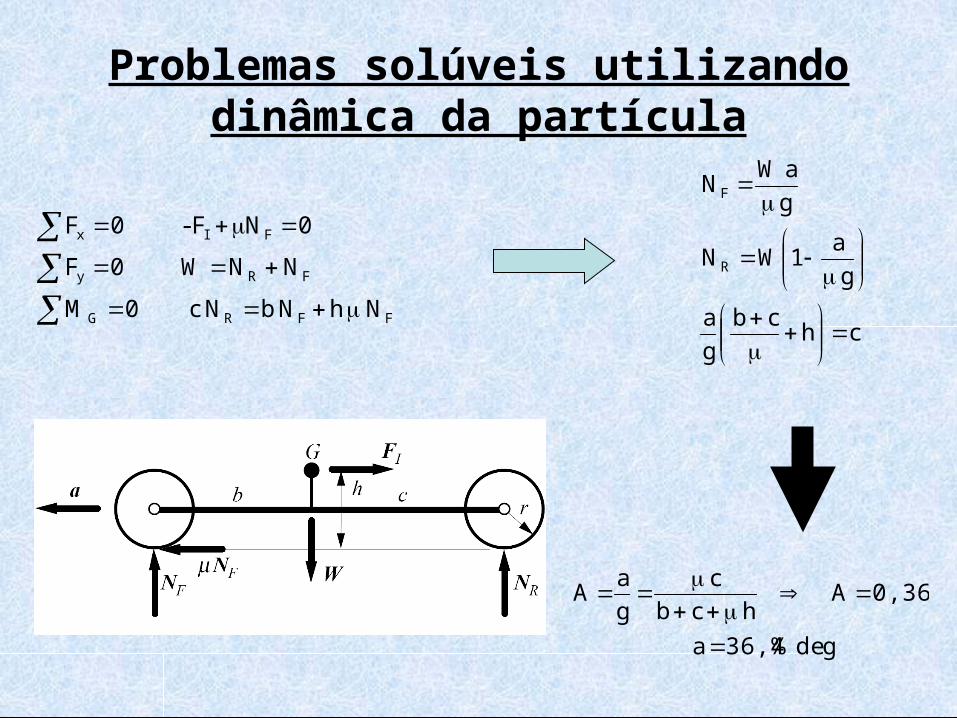
FFRG
FRy
FIx
N hN bN c 0M
NNW 0F
0NF- 0F
m
m
chc bga
g a1WN
g aW N
R
F
m
m
m
g de % 36,4 a
0,364A h c b
c gaA
m
m
• Diagrama de corpo livre• Terceira configuração => Frenagem com proporção ótima• Sentido positivo => sentido contrário ao da aceleração• Abordagem do equilíbrio dinâmico
– M aG = Força de inércia FI => dir. oposta a da aceleração– Eqs. do equilíbrio
Problemas solúveis utilizando dinâmica da partícula
ga WFI
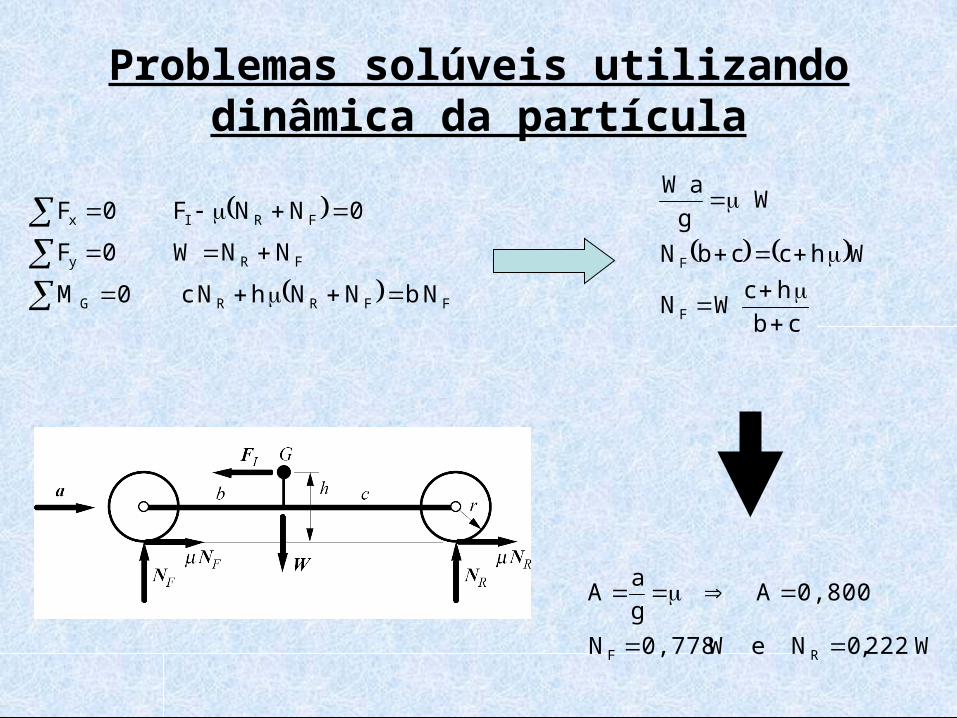
Problemas solúveis utilizando dinâmica da partícula
m
m
FFRRG
FRy
FRIx
N bNN hN c 0M
NNW 0F
0NNF 0F
c bh c WN
W hccbN
Wg aW
F
F
m
m
m
W222,0N e W 0,778N
0,800A gaA
RF
m
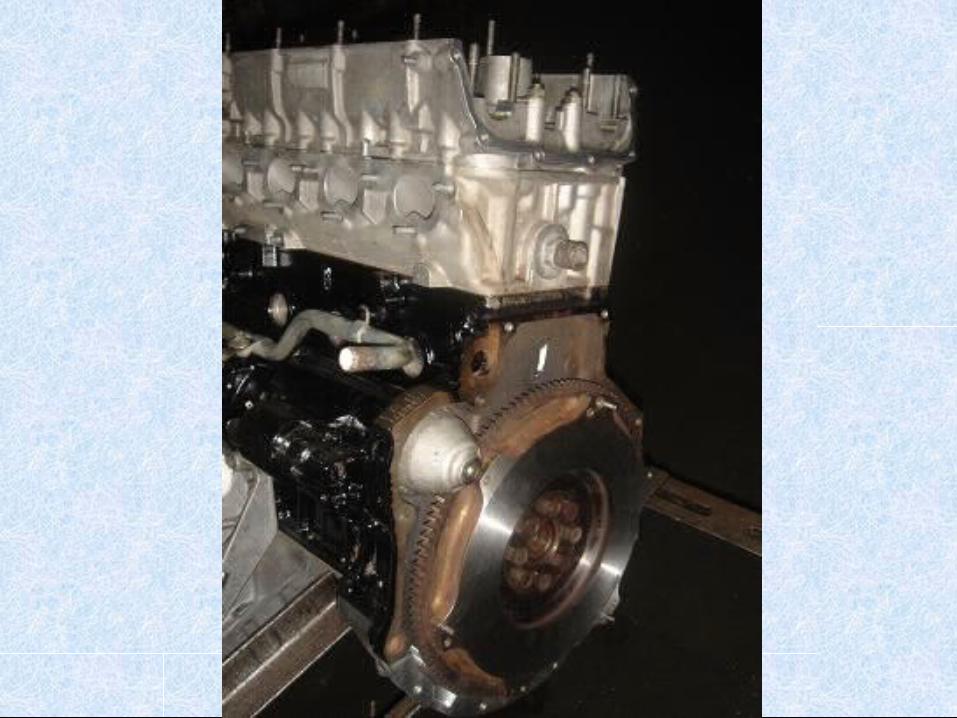
Volantes de Inércia
• Dispositivos utilizados para o armazenamento de energia na forma de energia cinética de rotação.
• Suaviza as flutuações de velocidades em motores.
• Utilizado em prensas, tesouras rotativas (siderúrgicas), etc.

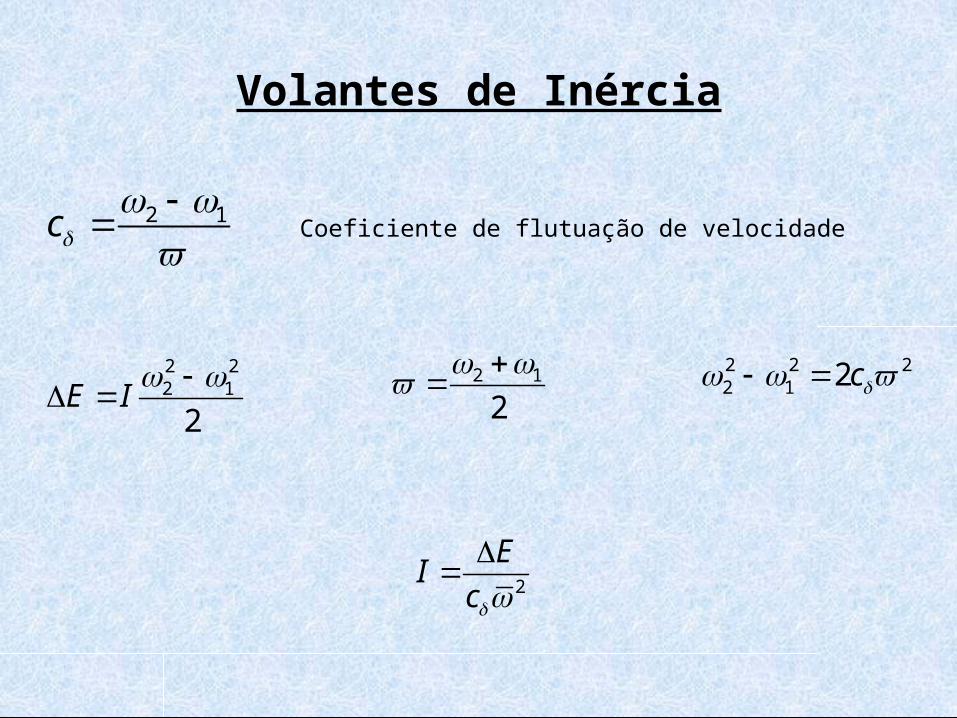
Volantes de Inércia
2 1c
Coeficiente de flutuação de velocidade
2 22 1
2E I
2 1
2
2 2 22 1 2c
2
EIc
Balanceamento e Forças Harmônicas• Máquinas rotativas e alternativas podem produzir forças periódicas
de magnitudes elevadas, como em:– Motores (Combustão interna, elétricos, etc)– Compressores– Geradores– Turbinas– Bombas– Ventiladores
• Objetivo de análise– Reduzir a magnitude das forças flutuantes– Efeito de fadiga– Transmissão para a base– Comprometimento ambiental– Desconforto
Balanceamento e Forças Harmônicas• Máquinas funcionando em altas velocidades
– 2 tipos de forças atuantes => Forças externas e forças de inércia– Forças de inércia
• Peças submetidas a acelerações elevadas• Magnitude maior que as forças externas• Consideração para dimensionamento• Função das características de inércia e do movimento• Potencial de redução• Redução das massas e momentos de inércia• Substituição de materiais• Otimização geométrica• Redução dos níveis de aceleração• Acelerações angulares geralmente não podem ser reduzidas• Acelerações lineares podem ser reduzidas => Reposicionamento dos
centros de massa em direção a pontos de aceleração nula => Balanceamento
– Forças externas• Associadas à função da máquina e seu acionamento• Pouca coisa pode ser feita para sua minimização
Balanceamento em 1 Plano
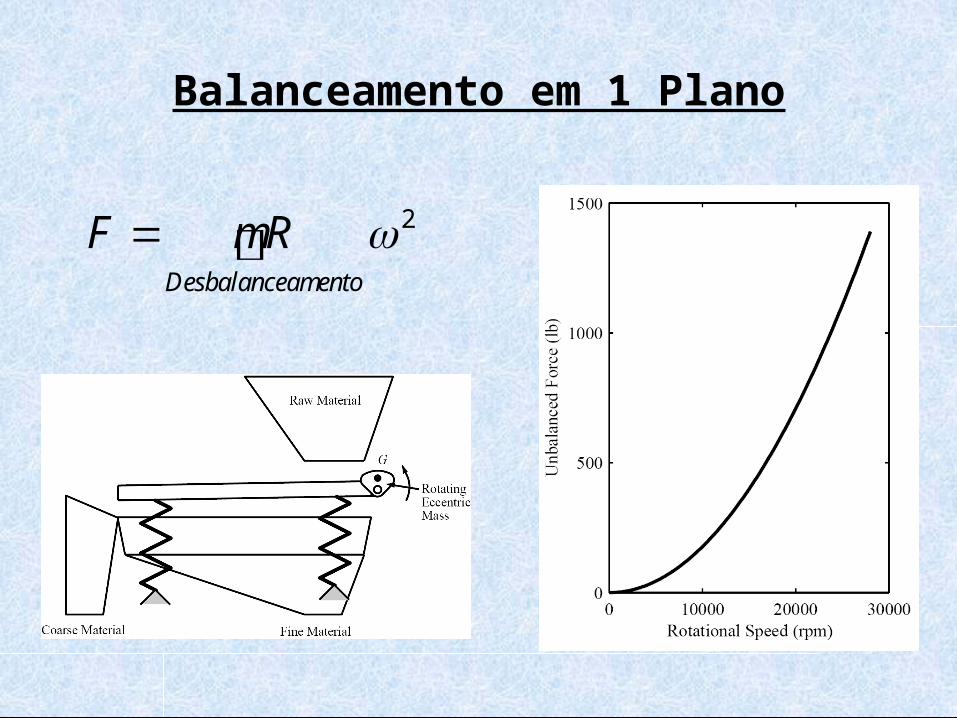
2
Desbalanceamento
F mR
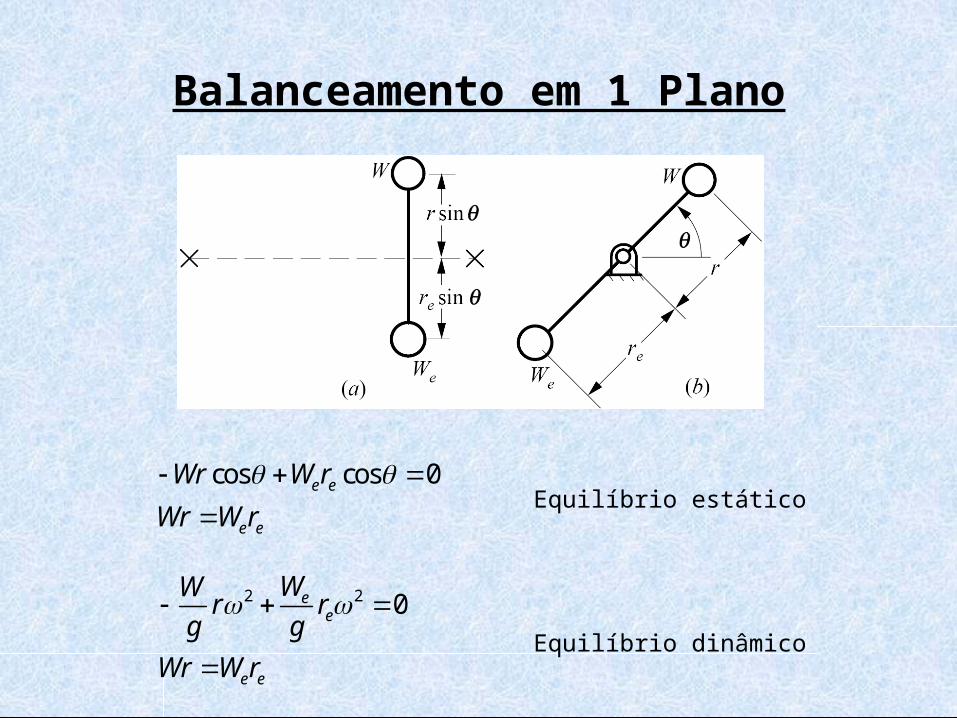
Balanceamento em 1 Plano
cos cos 0e e
e e
Wr W rWr W r
Equilíbrio estático
2 2 0ee
e e
WW r rg g
Wr W r
Equilíbrio dinâmico
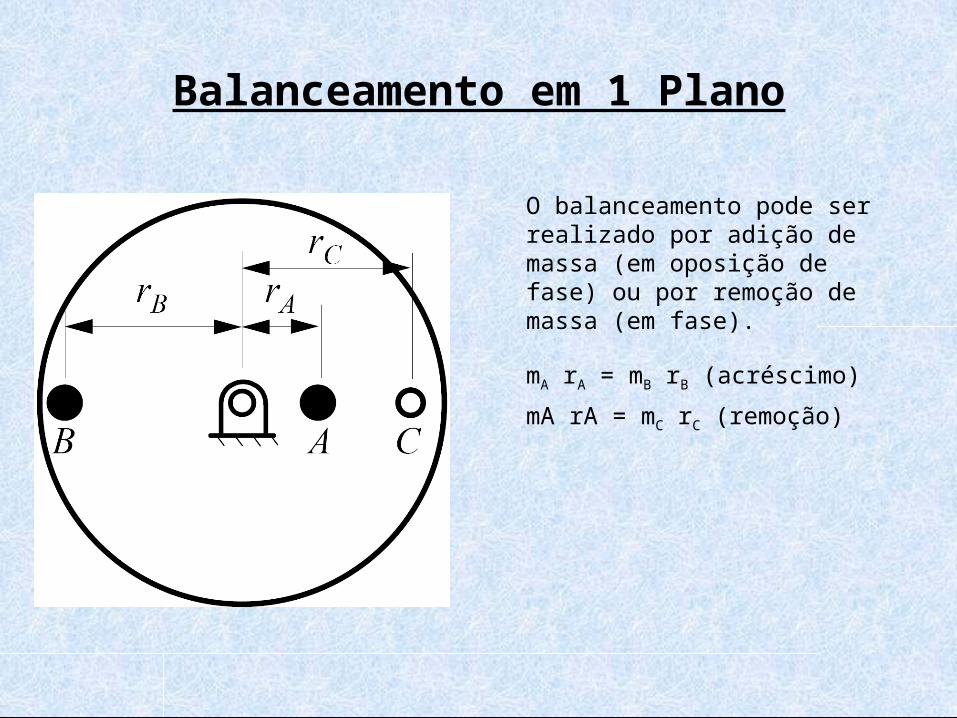
Balanceamento em 1 Plano
O balanceamento pode ser realizado por adição de massa (em oposição de fase) ou por remoção de massa (em fase).
mA rA = mB rB (acréscimo)
mA rA = mC rC (remoção)




Balanceamento em mais de 1 Plano
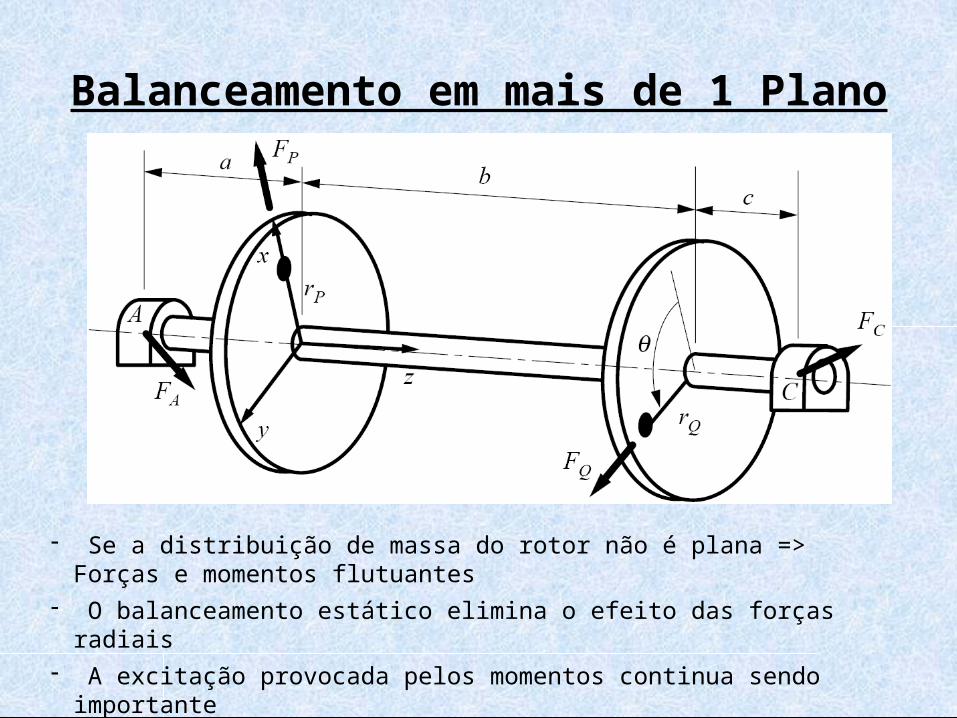
- Se a distribuição de massa do rotor não é plana => Forças e momentos flutuantes
- O balanceamento estático elimina o efeito das forças radiais- A excitação provocada pelos momentos continua sendo importante
Balanceamento em mais de 1 Plano
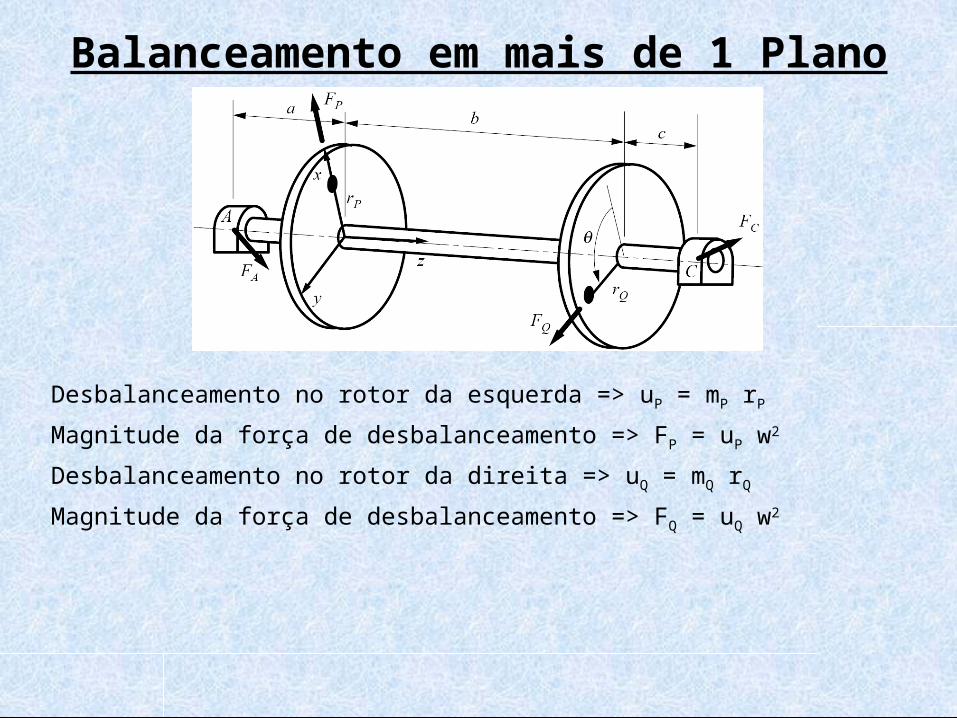
Desbalanceamento no rotor da esquerda => uP = mP rP
Magnitude da força de desbalanceamento => FP = uP w2
Desbalanceamento no rotor da direita => uQ = mQ rQ
Magnitude da força de desbalanceamento => FQ = uQ w2
Balanceamento em mais de 1 Plano
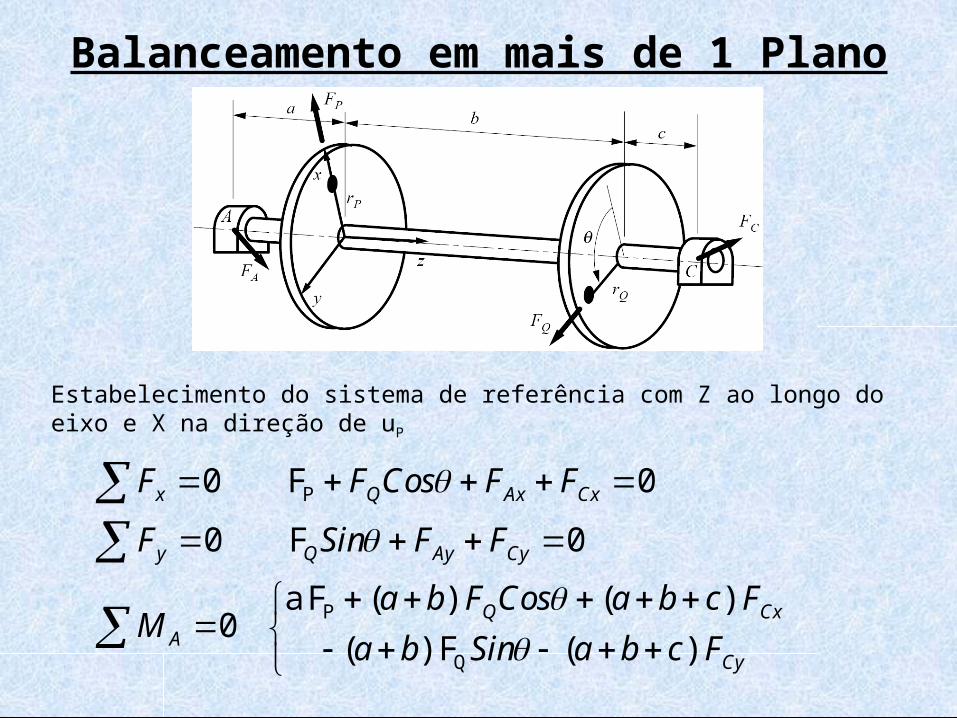
Estabelecimento do sistema de referência com Z ao longo do eixo e X na direção de uP
P
P
Q
0 F 0
0 F 0
a F ( ) ( ) 0
( ) F ( )
x Q Ax Cx
y Q Ay Cy
Q CxA
Cy
F F Cos F F
F Sin F F
a b F Cos a b c FM
a b Sin a b c F
Balanceamento em mais de 1 Plano
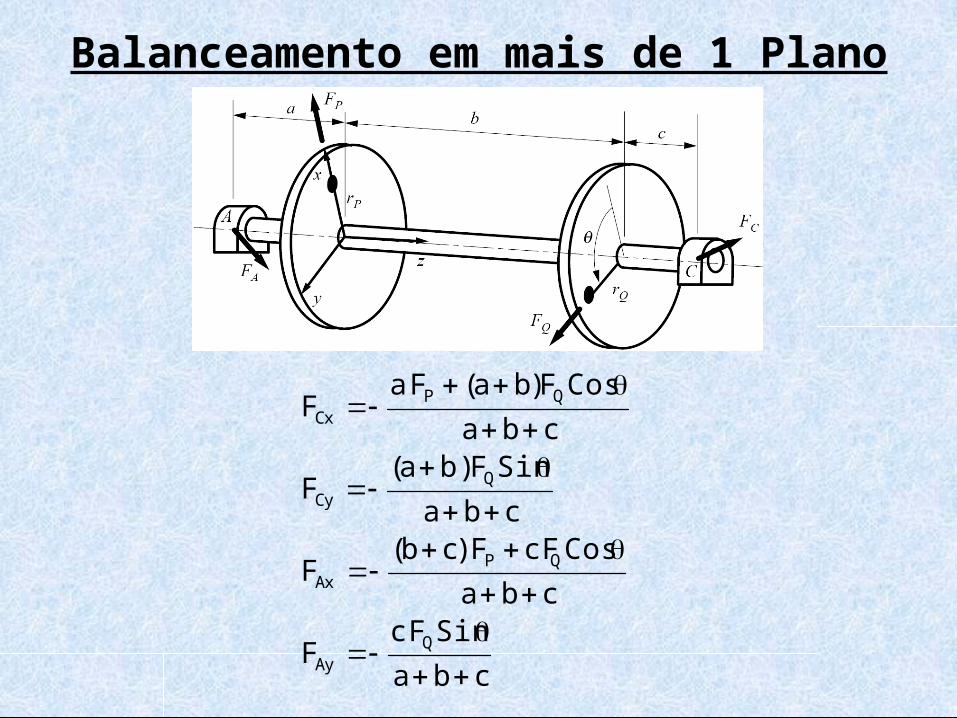
cbaSinF c
F
cbaCoscFF )cb(
F
cbaSinF b)a(
F
cbaCosF)ba(F a
F
QAy
QPAx
QCy
QPCx
Balanceamento em mais de 1 Plano
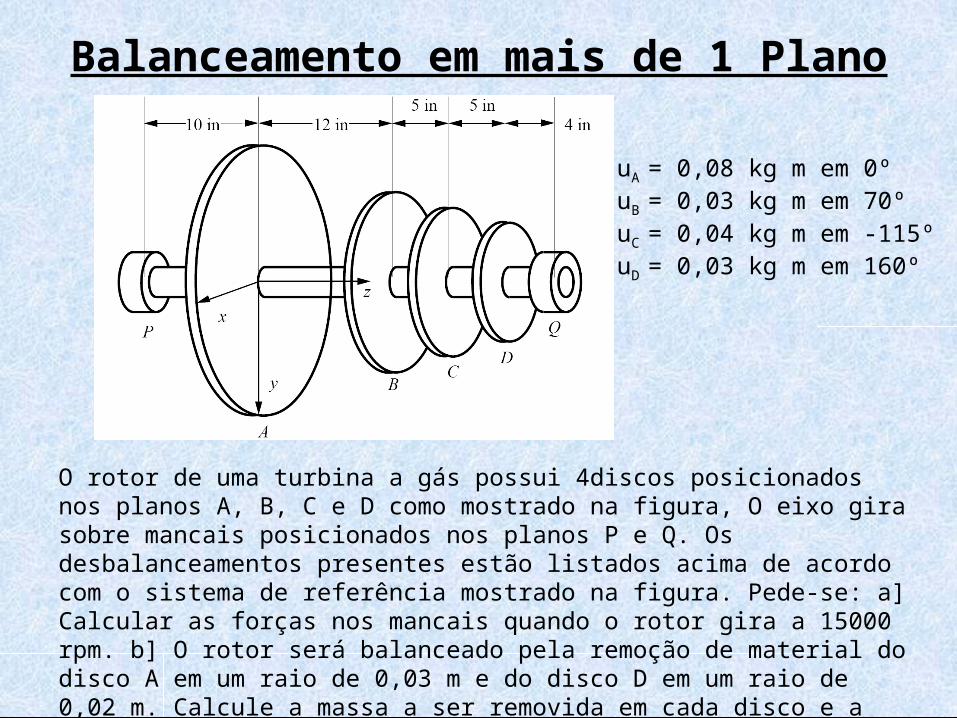
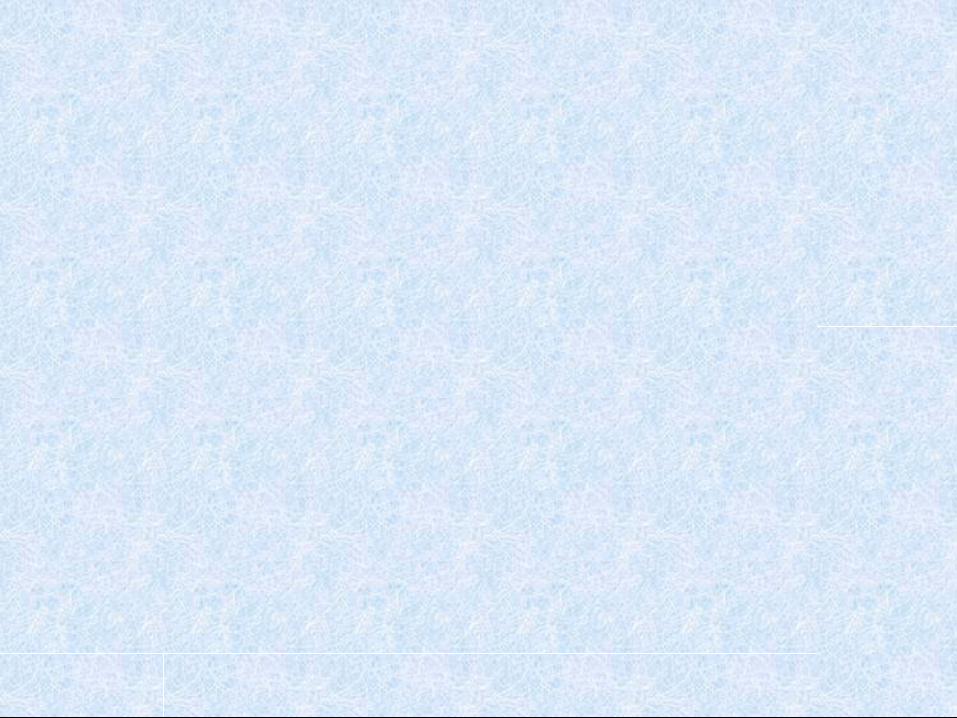
O rotor de uma turbina a gás possui 4discos posicionados nos planos A, B, C e D como mostrado na figura, O eixo gira sobre mancais posicionados nos planos P e Q. Os desbalanceamentos presentes estão listados acima de acordo com o sistema de referência mostrado na figura. Pede-se: a] Calcular as forças nos mancais quando o rotor gira a 15000 rpm. b] O rotor será balanceado pela remoção de material do disco A em um raio de 0,03 m e do disco D em um raio de 0,02 m. Calcule a massa a ser removida em cada disco e a posição angular da remoção.
uA = 0,08 kg m em 0ºuB = 0,03 kg m em 70ºuC = 0,04 kg m em -115ºuD = 0,03 kg m em 160º
Balanceamento em mais de 1 Plano
Equilíbrio dinâmico de sistemas articulados
1. Resolver o problema cinemático2. Determinar as forças decorrentes das juntas e
as forças de inércia.3. Montar o diagrama de corpo livre,
considerando um referencial pré definido.4. Para mecanismos planos escrever as
equações de equilíbrio de forças e a equação de equilíbrio de momento.
5. Resolva o sistema de equações lineares.
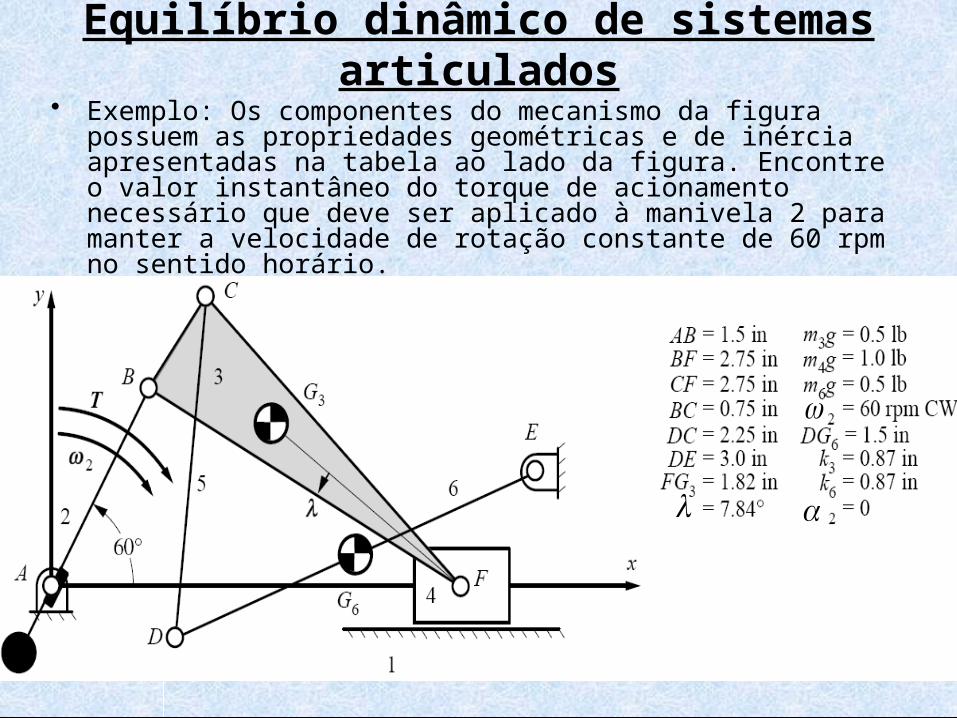
• Exemplo: Os componentes do mecanismo da figura possuem as propriedades geométricas e de inércia apresentadas na tabela ao lado da figura. Encontre o valor instantâneo do torque de acionamento necessário que deve ser aplicado à manivela 2 para manter a velocidade de rotação constante de 60 rpm no sentido horário.
Equilíbrio dinâmico de sistemas articulados
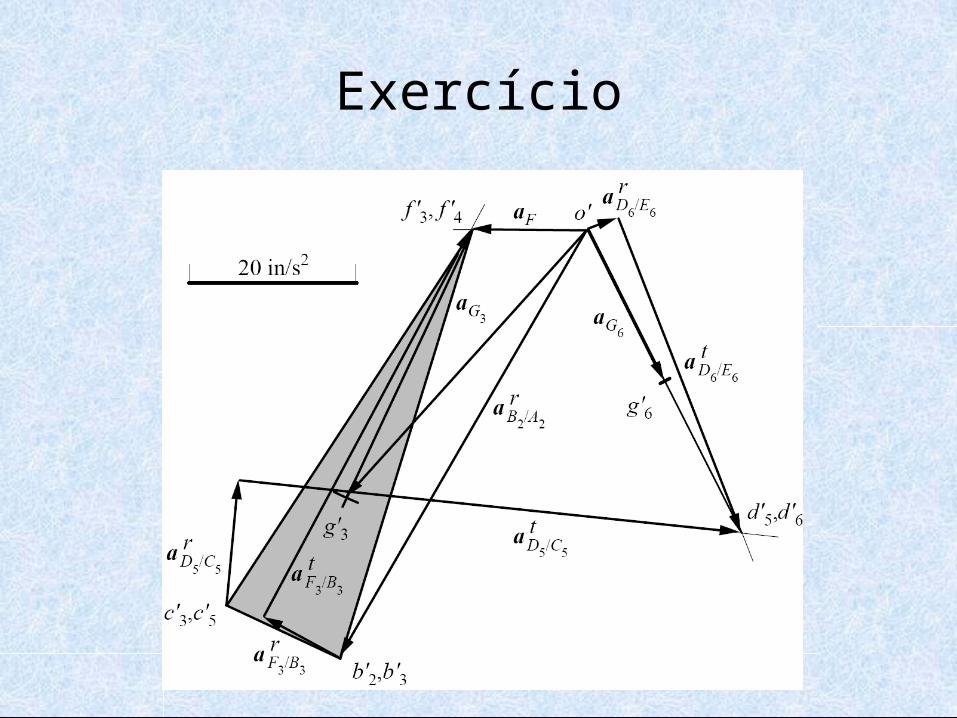
Exercício
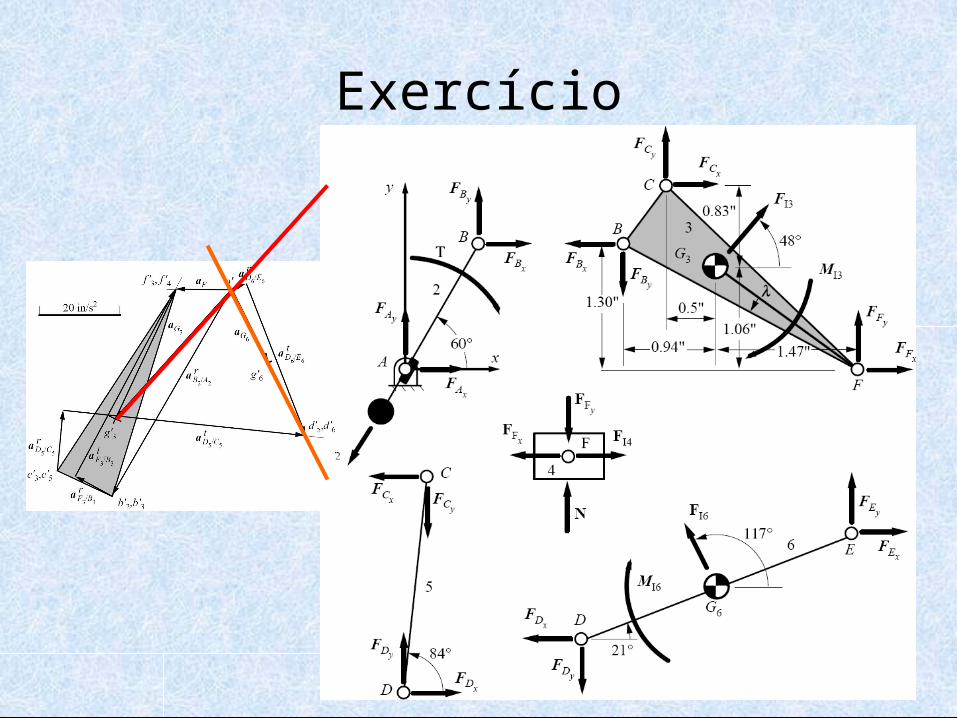
Exercício
Balanceamento de Mecanismos Alternativos
• Massas com movimento alternativo são a
segunda maior fonte de excitação em
máquinas.
• Fontes com mais de um componente de
freqüência, movimento periódico.
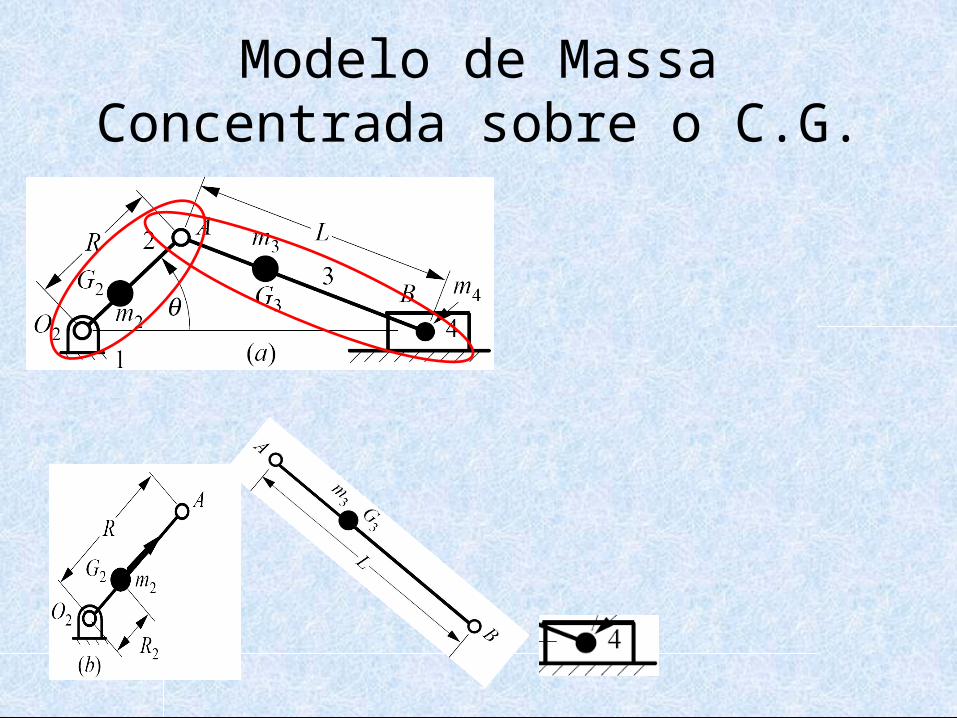
Modelo de Massa Concentrada sobre o C.G.
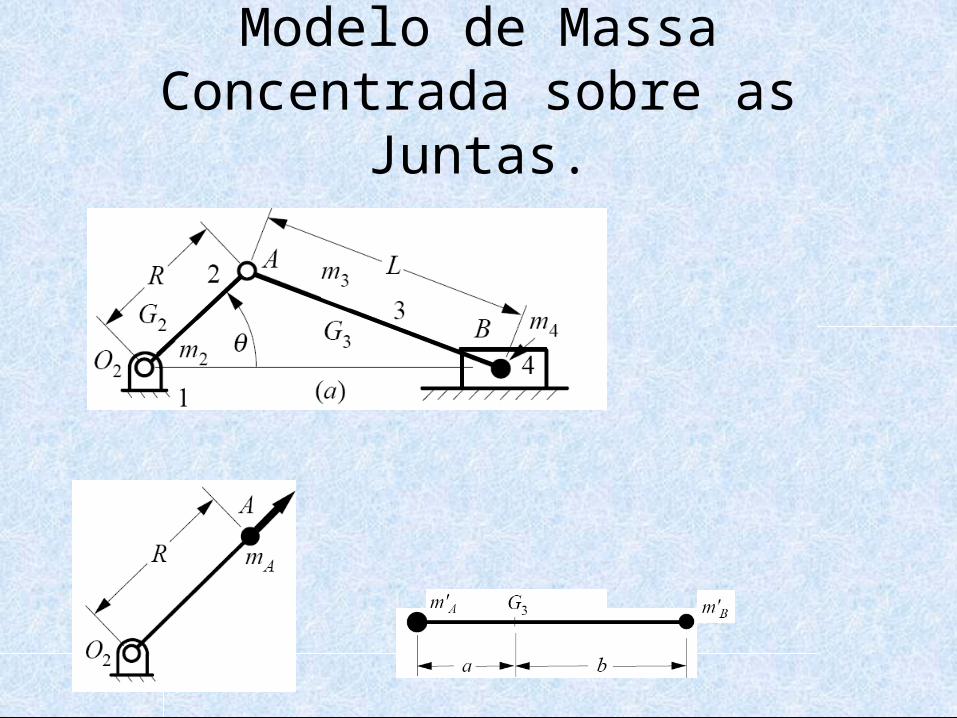
Modelo de Massa Concentrada sobre as Juntas.
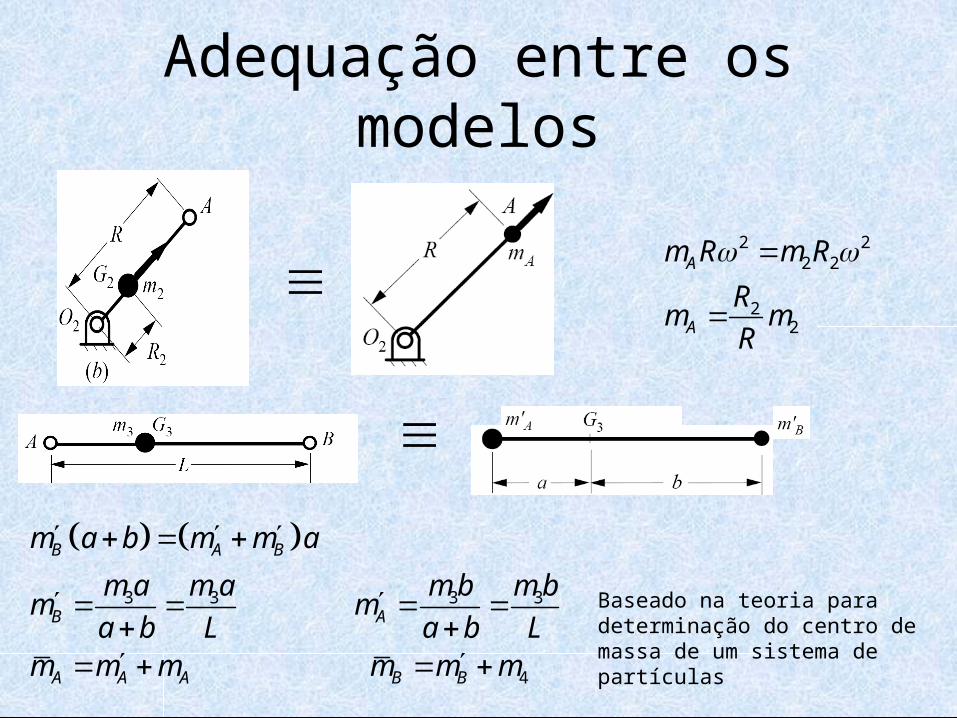
Adequação entre os modelos
2 2
2 2
22
A
A
m R m RRm mR
3 3 3 3
4
B A B
B A
A A A B B
m a b m m a
m a m a m b m bm ma b L a b L
m m m m m m
Baseado na teoria para determinação do centro de massa de um sistema de partículas
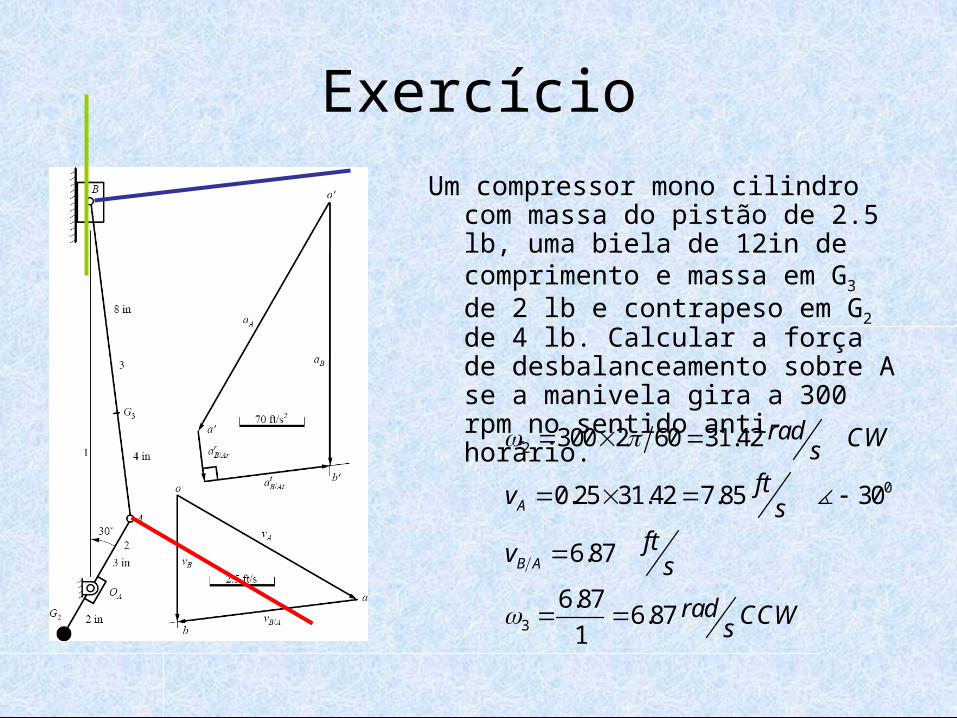
ExercícioUm compressor mono cilindro com
massa do pistão de 2.5 lb, uma biela de 12in de comprimento e massa em G3 de 2 lb e contrapeso em G2 de 4 lb. Calcular a força de desbalanceamento sobre A se a manivela gira a 300 rpm no sentido anti-horário.
2
0
3
300 2 60 31.42
0.25 31.42 7.85 30
6.87
6.87 6.871
A
B A
rad CWsftv s
ftv s
rad CCWs
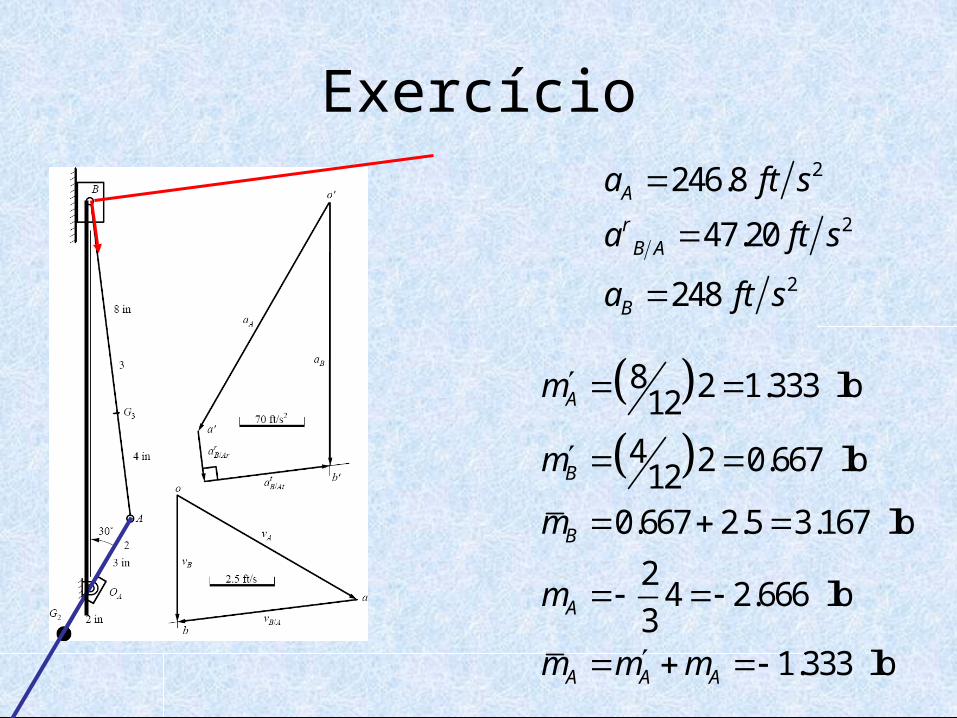
Exercício2
2
2
246.8
47.20
248
A
rB A
B
a ft s
a ft s
a ft s
8 2 1.333 lb124 2 0.667 lb12
0.667 2.5 3.167 lb2 4 2.666 lb3
1.333 lb
A
B
B
A
A A A
m
m
m
m
m m m
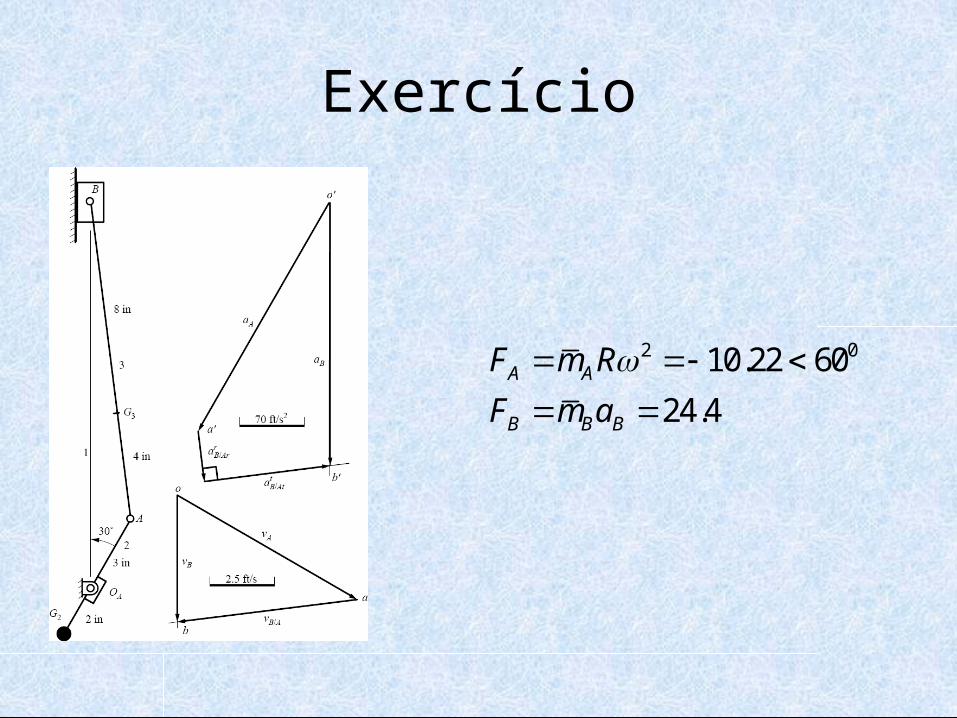
Exercício
2 010.22 6024.4
A A
B B B
F m RF m a
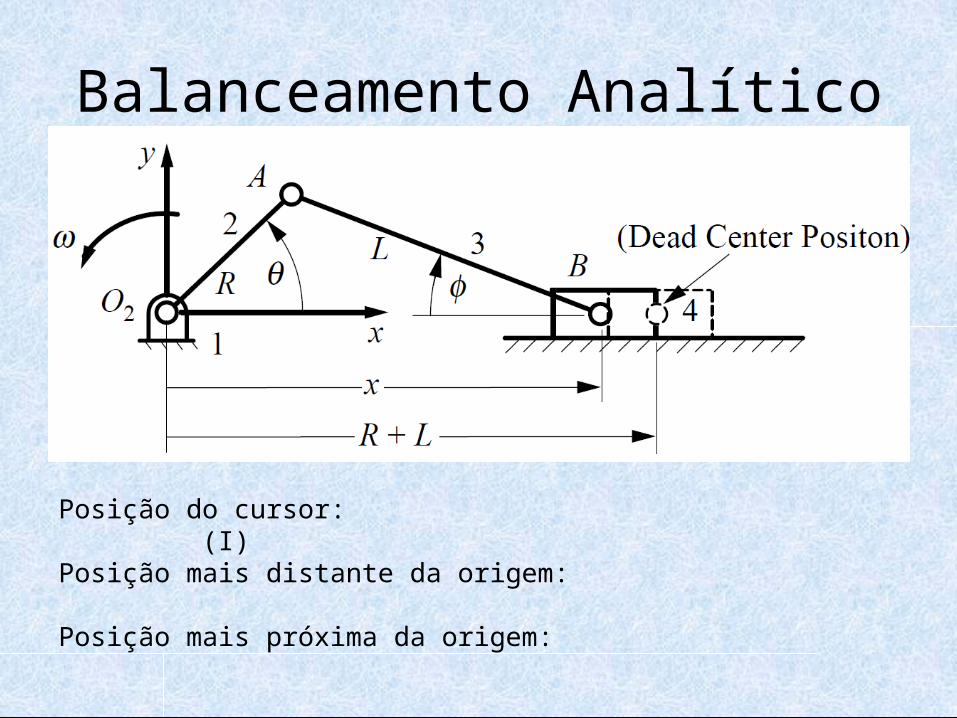
Balanceamento Analítico
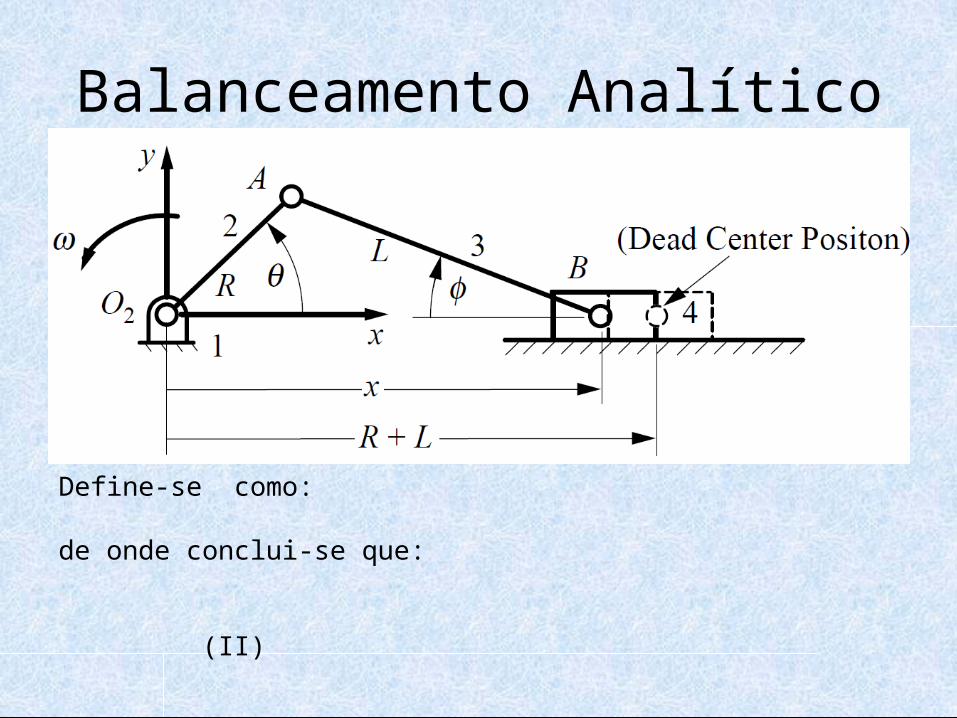
Posição do cursor:(I)
Posição mais distante da origem:
Posição mais próxima da origem:
Balanceamento Analítico
Define-se como:
de onde conclui-se que:
(II)
Balanceamento Analítico
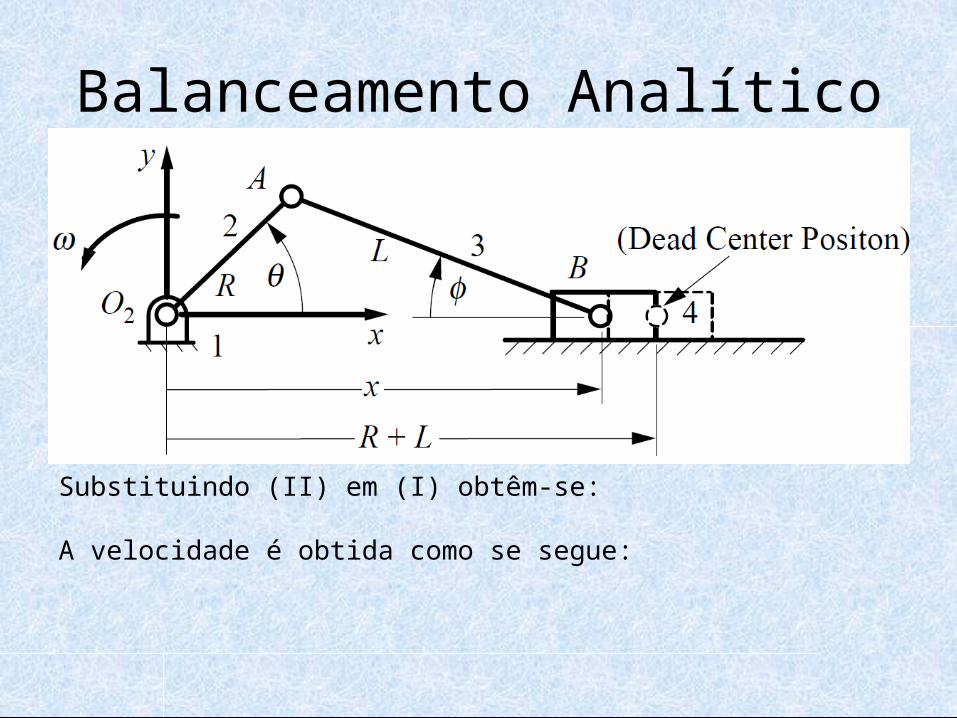
Substituindo (II) em (I) obtêm-se:
A velocidade é obtida como se segue:
Balanceamento Analítico
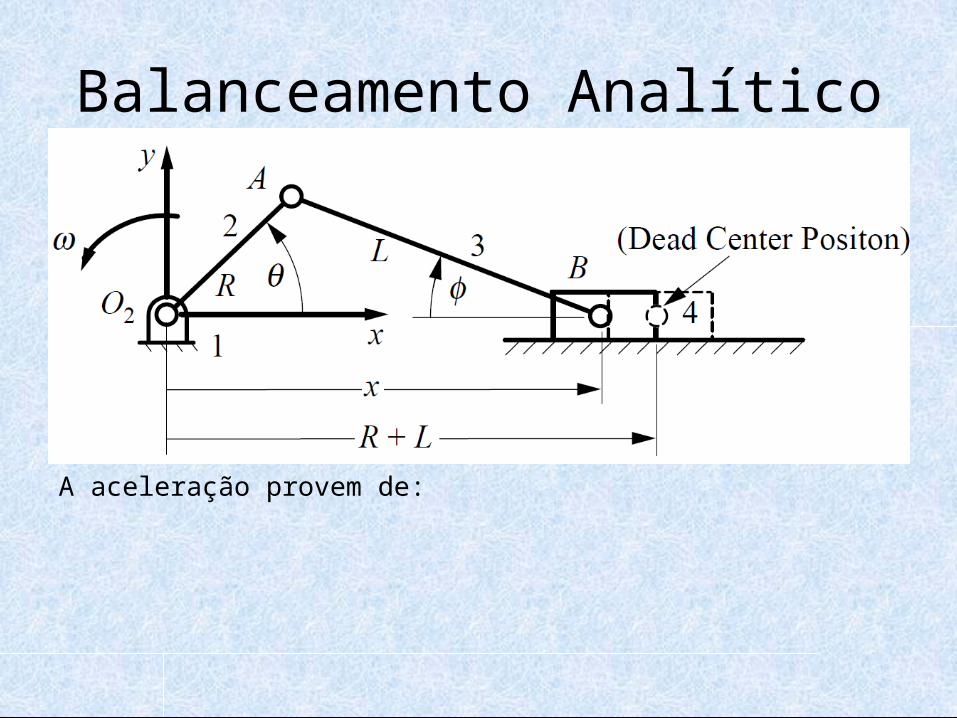
A aceleração provem de:
Balanceamento Analítico
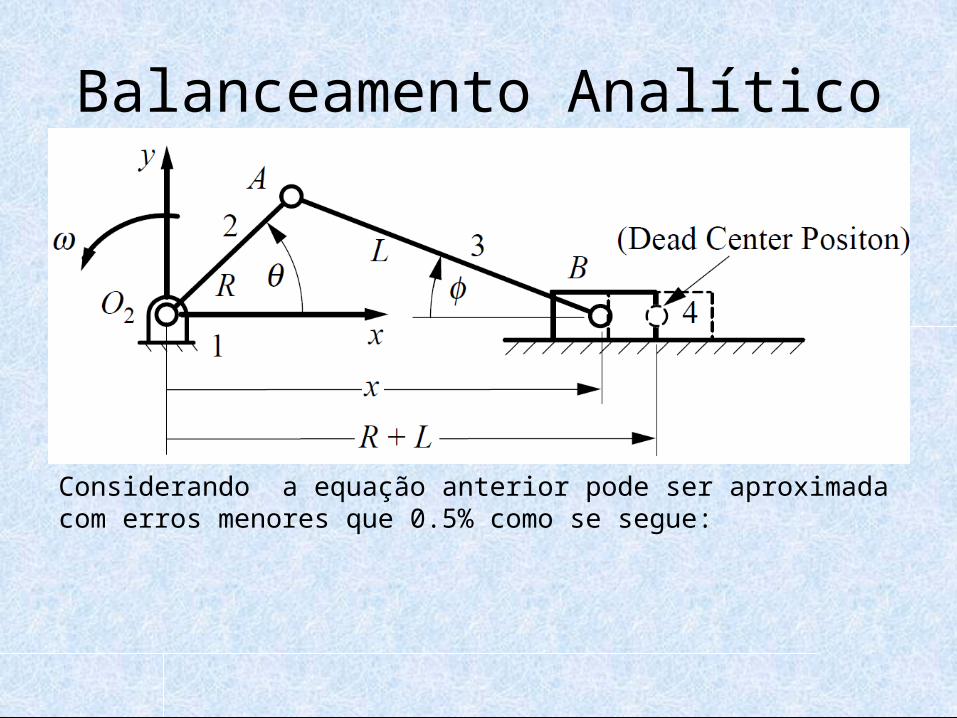
Considerando a equação anterior pode ser aproximada com erros menores que 0.5% como se segue:
Balanceamento Analítico
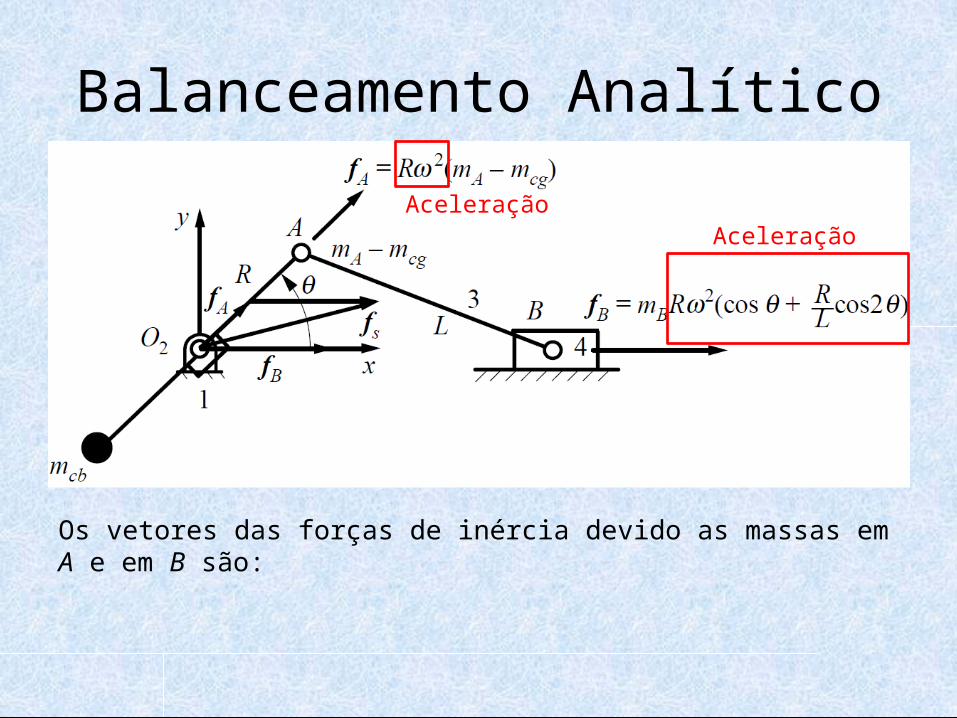
Aceleração Aceleração
Os vetores das forças de inércia devido as massas em A e em B são:
Balanceamento Analítico
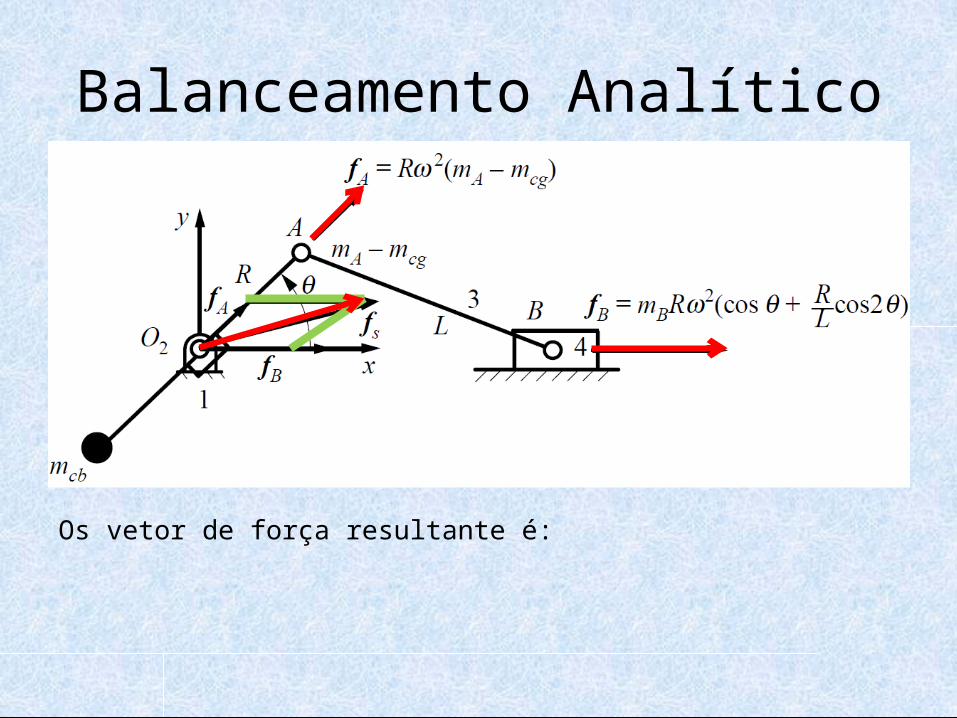
Os vetor de força resultante é:
Balanceamento Analítico
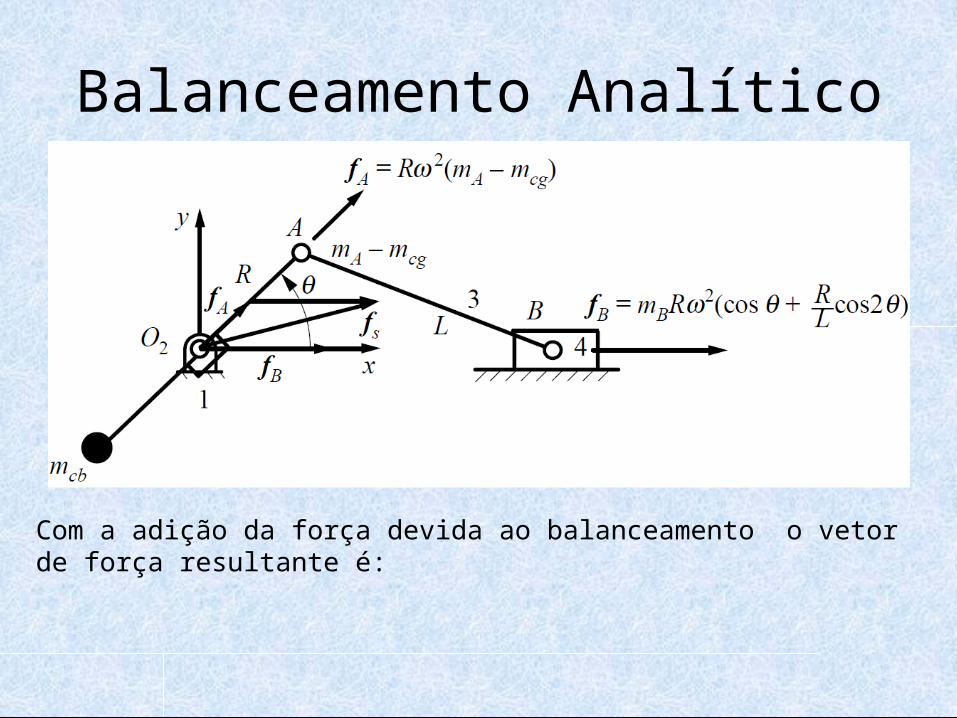
Com a adição da força devida ao balanceamento o vetor de força resultante é:
Balanceamento Analítico
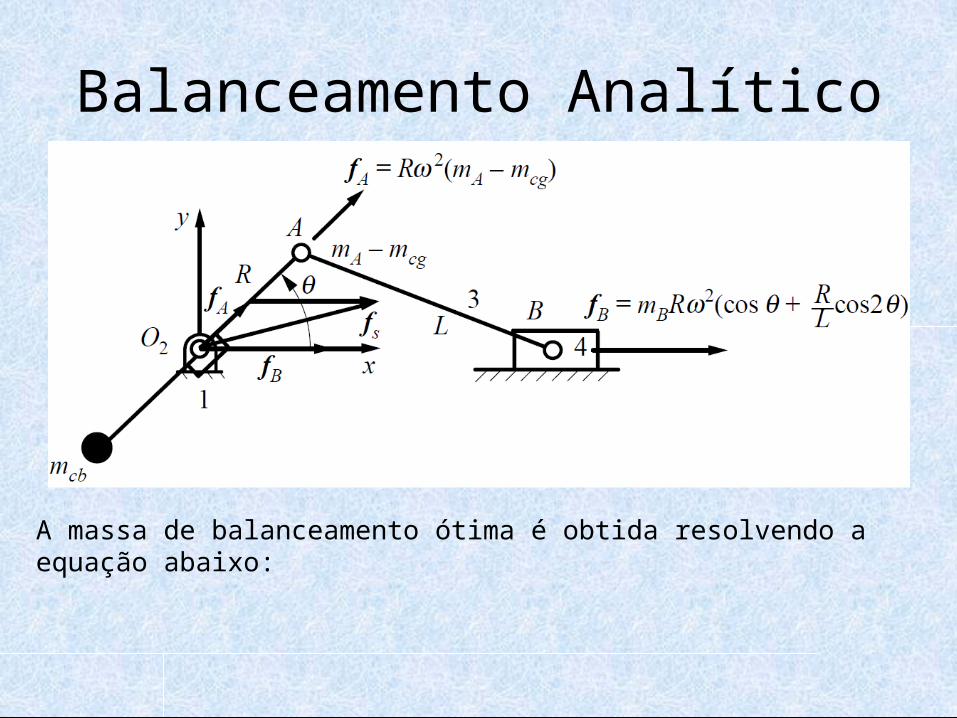
A massa de balanceamento ótima é obtida resolvendo a equação abaixo:
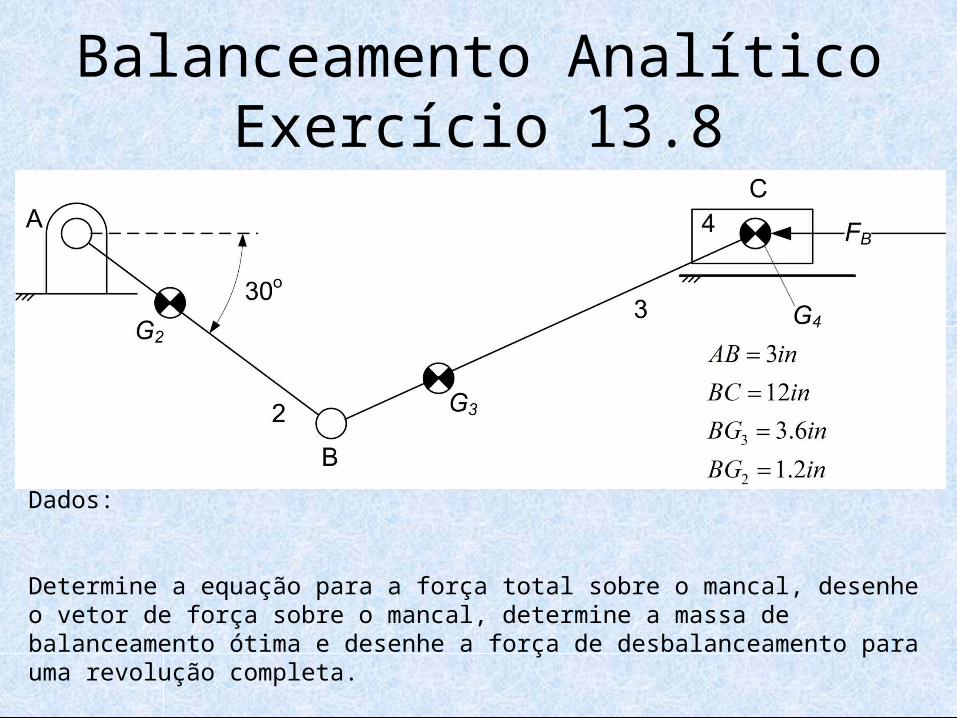
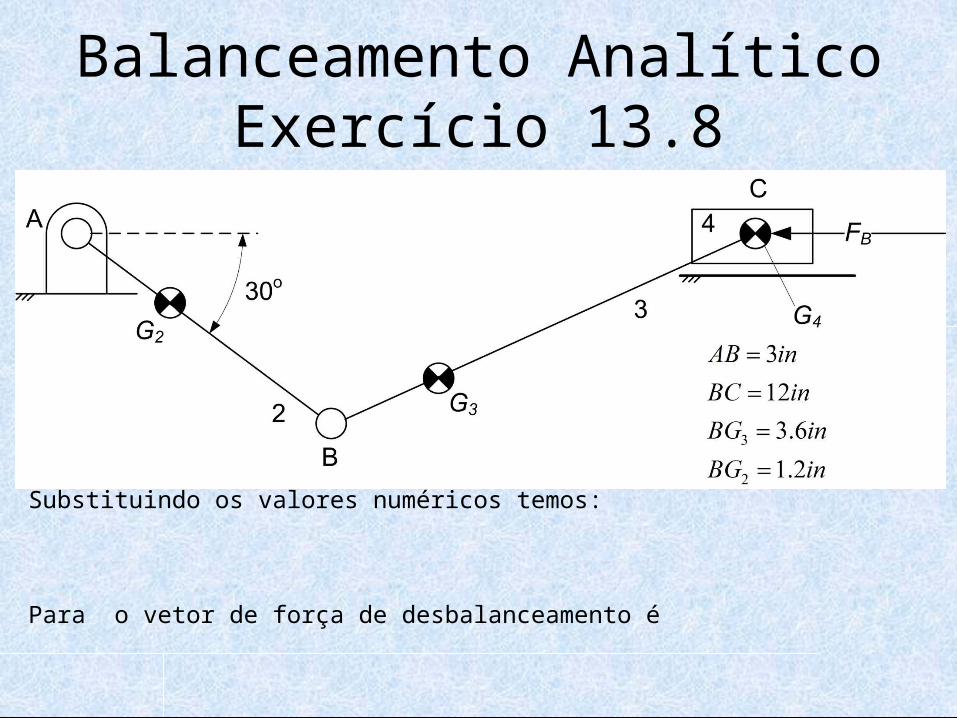
Balanceamento AnalíticoExercício 13.8
Dados:
Determine a equação para a força total sobre o mancal, desenhe o vetor de força sobre o mancal, determine a massa de balanceamento ótima e desenhe a força de desbalanceamento para uma revolução completa.
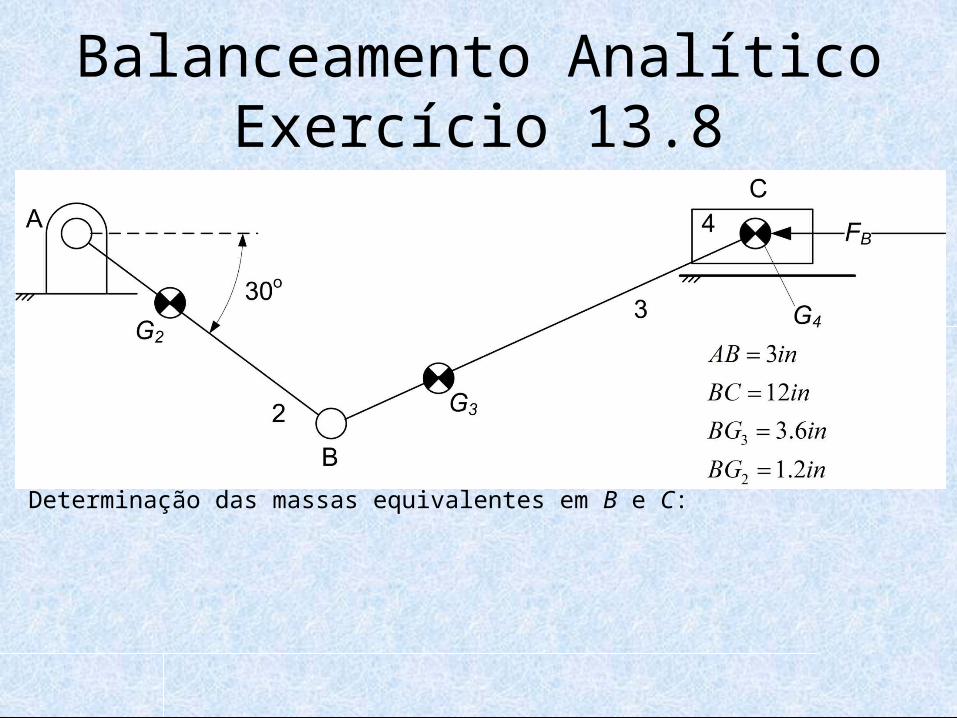
Balanceamento AnalíticoExercício 13.8
Determinação das massas equivalentes em B e C:
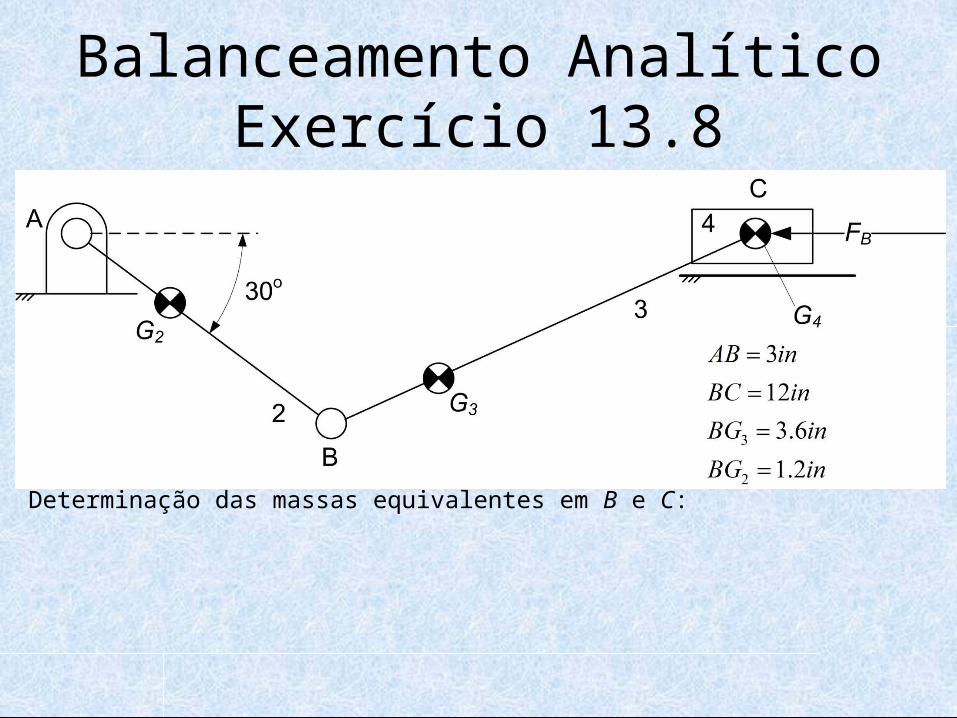
Balanceamento AnalíticoExercício 13.8
Determinação das massas equivalentes em B e C:
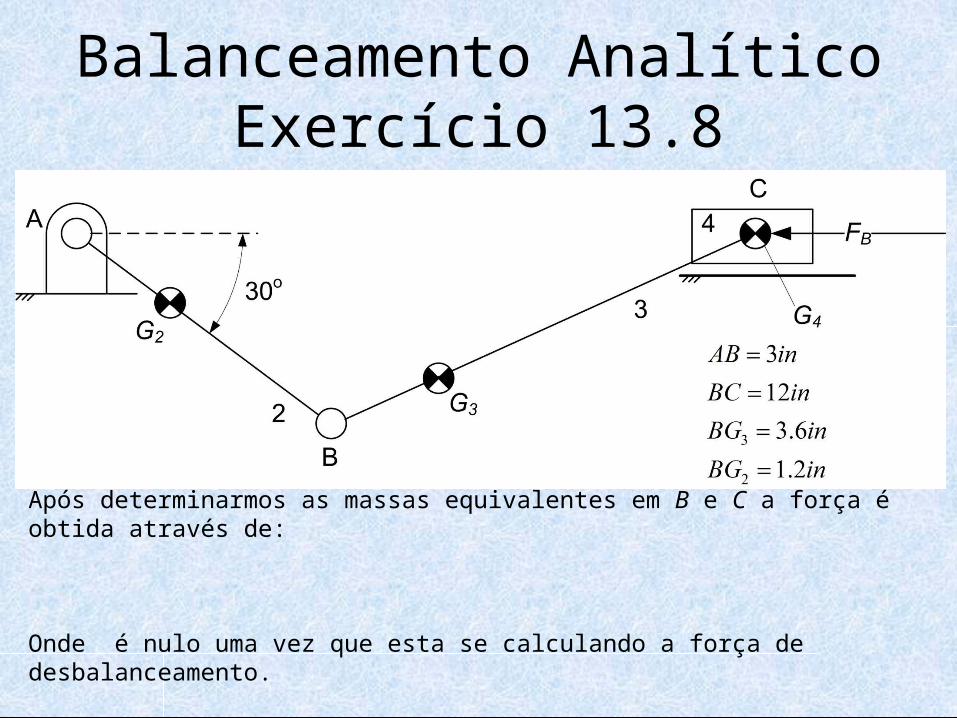
Balanceamento AnalíticoExercício 13.8
Após determinarmos as massas equivalentes em B e C a força é obtida através de:
Onde é nulo uma vez que esta se calculando a força de desbalanceamento.
Balanceamento AnalíticoExercício 13.8
Substituindo os valores numéricos temos:
Para o vetor de força de desbalanceamento é
Balanceamento AnalíticoExercício 13.8
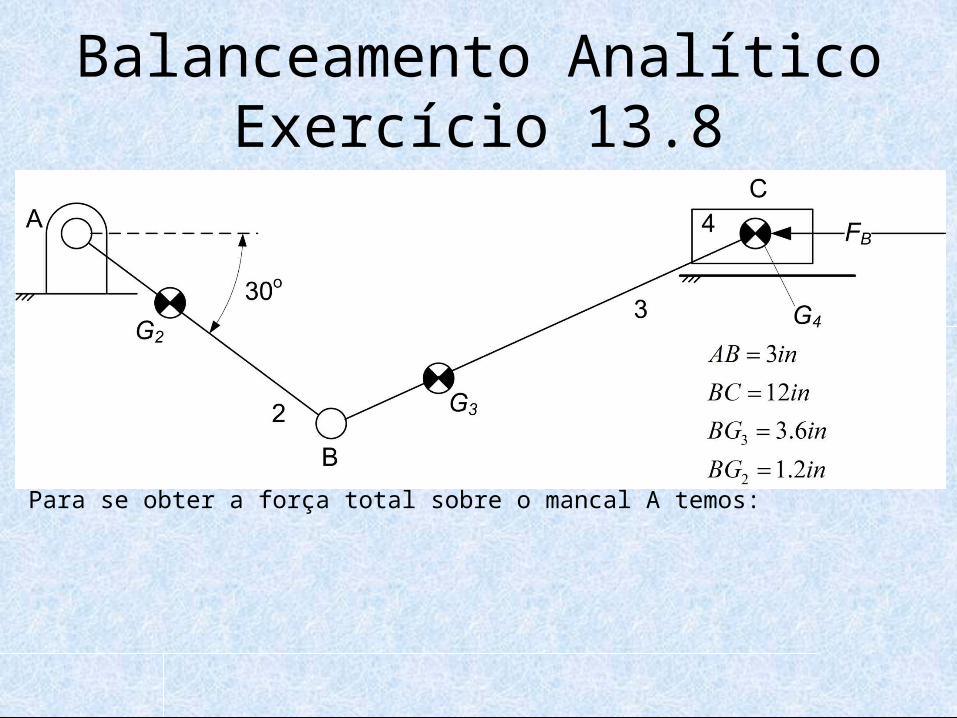
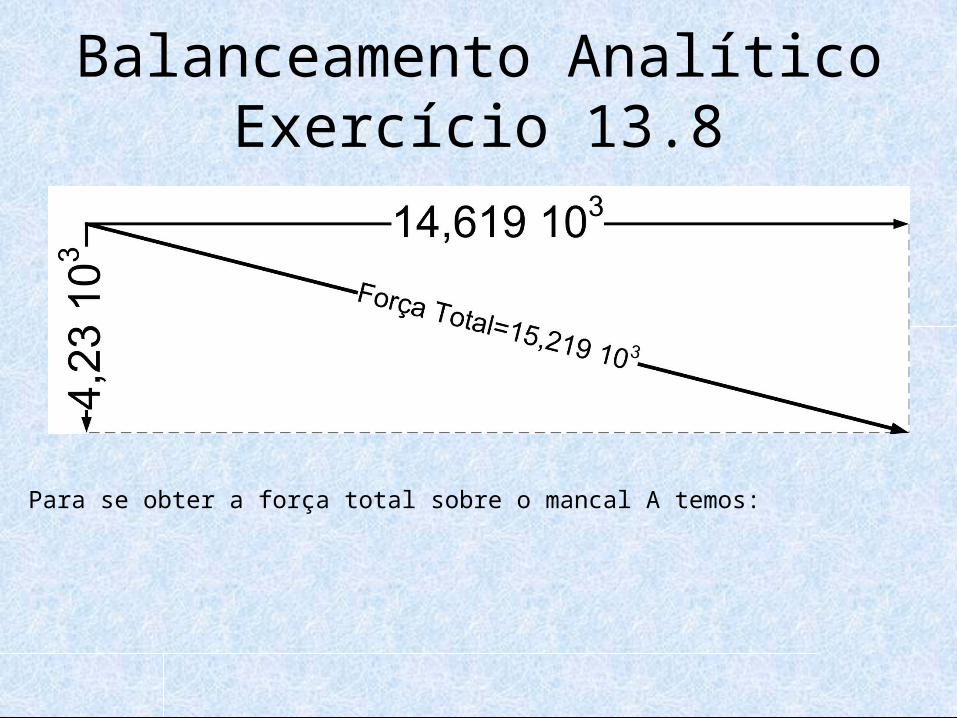
Para se obter a força total sobre o mancal A temos:
Balanceamento AnalíticoExercício 13.8
Para se obter a força total sobre o mancal A temos:
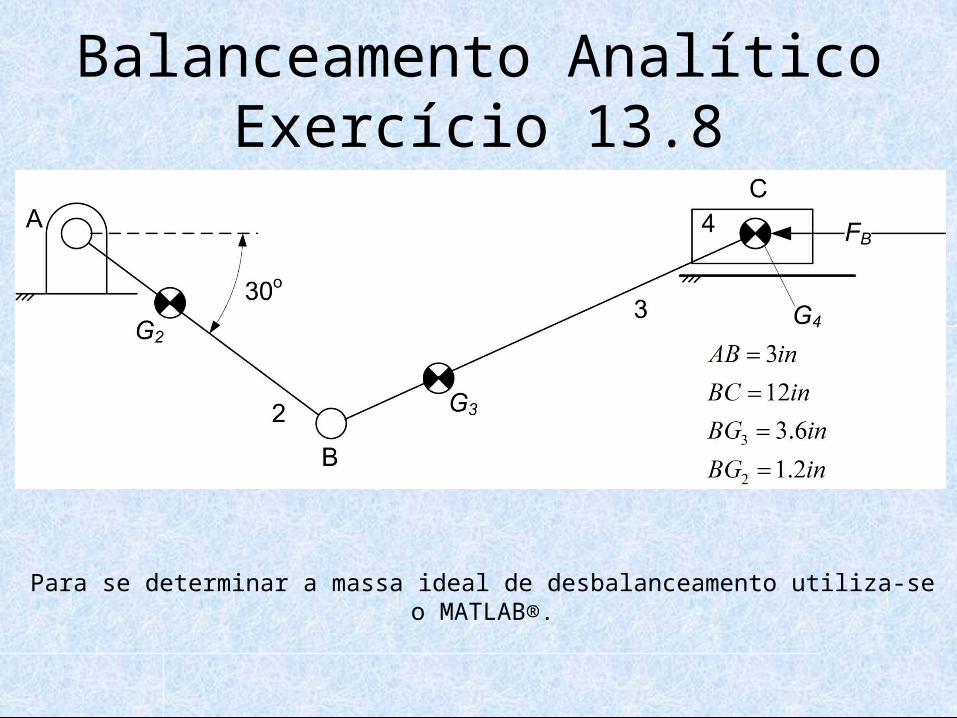
Balanceamento AnalíticoExercício 13.8
Para se determinar a massa ideal de desbalanceamento utiliza-se o MATLAB®.