“JÚLIO DE MESQUITA FILHO” Ilha Solteira · Bem-aventurados os que têm fome e sede de...
122
Ilha Solteira Ilha Solteira UNIVERSIDADE ESTADUAL PAULISTA “JÚLIO DE MESQUITA FILHO” Campus de Ilha Solteira - SP LUIZ FRANCISCO SANCHES BUZACHERO CONTROLE ROBUSTO CHAVEADO DE SISTEMAS LINEARES VARIANTES NO TEMPO COM APLICAÇÃO EM FALHAS ESTRUTURAIS Ilha Solteira - SP 2014
Transcript of “JÚLIO DE MESQUITA FILHO” Ilha Solteira · Bem-aventurados os que têm fome e sede de...

Ilha SolteiraIlha Solteira
UNIVERSIDADE ESTADUAL PAULISTA
“JÚLIO DE MESQUITA FILHO”
Campus de Ilha Solteira - SP
LUIZ FRANCISCO SANCHES BUZACHERO
CONTROLE ROBUSTO CHAVEADO DE SISTEMAS
LINEARES VARIANTES NO TEMPO COM APLICAÇÃO
EM FALHAS ESTRUTURAIS
Ilha Solteira - SP
2014


LUIZ FRANCISCO SANCHES BUZACHERO
CONTROLE ROBUSTO CHAVEADO DE SISTEMAS
LINEARES VARIANTES NO TEMPO COM APLICAÇÃO
EM FALHAS ESTRUTURAIS
Tese apresentada à Faculdade de Engenharia doCampus de Ilha Solteira - UNESP como partedos requisitos para obtenção do título de Doutorem Engenharia Elétrica.Especialidade: Automação.
Prof. Dr. Edvaldo Assunção
Orientador
Ilha Solteira - SP
2014

FICHA CATALOGRÁFICA
Desenvolvido pelo Serviço Técnico de Biblioteca e Documentação.
Buzachero, Luiz Francisco Sanches.B991c Controle robusto chaveado de sistemas lineares variantes no tempo com
aplicação em falhas estruturais / Luiz Francisco Sanches Buzachero.- IlhaSolteira : [s.n.], 2014
120 f.:il.
Tese (doutorado) - Universidade Estadual Paulista. Faculdade de Engenhariade Ilha Solteira. Área de conhecimento: Automação, 2014
Orientador: Edvaldo Assunção
Inclui bibliografia
1. Controle robusto. 2. Desigualdades matriciais lineares e bilineares. 3.Incertezas variantes no tempo.



À minha esposa Elisabete
À minha mãe Rosa Maria
À minha avó Remedios


AGRADECIMENTOS
Dedico meus sinceros agradecimentos:
– A Deus, pela misericórdia e amor incondicional;
– Ao meu orientador, professor Dr. Edvaldo Assunção, pelos ensinamentos, pelo incentivo,
pela confiança, paciência e amizade, pelos agradáveis momentos de convivência, exemplo de
homem de bem, em cuja atuação pretendo me espelhar na vida pessoal e profissional;
– Aos professores Doutores Marcelo C. M. Teixeira e Rodrigo Cardim, pelos diálogos cons-
trutivos e descontraídos durante estes anos, pelo acompanhamento e pelas sugestões, extrema-
mente valiosas para este trabalho;
– À minha esposa Elisabete, à minha mãe Rosa Maria e à minha avó Remedios, por terem
me ensinado o verdadeiro significado da palavra "amor" e pelo apoio moral, imprescindível
para o desenvolvimento deste trabalho;
– Aos meus amigos e companheiros dos laboratórios LPC e LCPC: Emerson, Wallysonn,
Manoel, Victor, Herbert, Luiz Antônio, Edson, Gisele, Fernando, André e Jefferson pelos mo-
mentos felizes de convivência que lembrarei para sempre e aos demais amigos e colegas que de
forma direta ou indireta me ajudaram;
– À UNESP, que me possibilitou realizar o sonho de cursar a graduação, o mestrado e o
doutorado em engenharia elétrica;
– Ao IFSP, Instituto Federal de Educação, Ciência e Tecnologia de São Paulo, Campus de
Birigui, por ter-me concedido o afastamento integral para finalizar este doutorado;
– À FAPESP (Processo no. 2011/17610-0), CAPES e CNPq por darem suporte financeiro
para o desenvolvimento deste trabalho;
– Aos desenvolvedores doABNTEX, um pacote de classes LATEX para a criação e formatação
de documentos conforme as normas da ABNT.


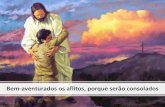
“Bem-aventurados os humildes de espírito, porque deles
é o Reino dos Céus! Bem-aventurados os que choram,
porque serão consolados! Bem-aventurados os mansos,
porque possuirão a terra! Bem-aventurados os que têm
fome e sede de justiça, porque serão saciados!
Bem-aventurados os misericordiosos, porque
alcançarão misericórdia! Bem-aventurados os puros de
coração, porque verão Deus! Bem-aventurados os
Defensores da Paz, porque serão chamados filhos de
Deus!”
(Mateus, 5:3-9)
“Se toda a literatura espiritual da Humanidade
perecesse, e só se salvasse o Sermão da Montanha, nada
estaria perdido.”
Mahatma Gandhi (1869-1948)


RESUMO
Nesta tese apresentam-se resultados para a estabilidade robusta de sistemas lineares sujeitos a
incertezas paramétricas do tipo politópicas, variantes notempo (do inglêsLinear Parameter
Varying- LPV). De início, expõe-se um método aprimorado para o projeto com otimização da
norma de controladores robustos via desigualdades matriciais lineares (do inglêsLinear Matrix
Inequalitites- LMIs), com base na teoria de estabilidade segundo Lyapunov. Esta nova formu-
lação foi manipulada utilizando o lema de Finsler, e permitiu encontrar melhores resultados de
factibilidade com o acréscimo de matrizes extras e redução do número de LMIs. Neste novo
equacionamento houve a inclusão do índice de desempenho da taxa de decaimento, responsável
por diminuir o tempo de duração do período transitório, e também da otimização da norma
dos controladores, responsável por menores ganhos mantendo a mesma eficiência dos requisi-
tos de projeto. Devido a importantes resultados da literatura para o projeto de controladores
robustos com incertezas variantes no tempo, optou-se por explorar o projeto de controladores
dinâmicos chaveados, inovando-se no tocante ao acréscimo da taxa de decaimento e à otimiza-
ção da norma dos controladores chaveados, o que possibilitou encontrar melhores resultados
de implementação. Por fim, foram propostos critérios menos conservadores para a análise de
estabilidade e projeto de controladores chaveados, utilizando funções de Lyapunov quadráticas
por partes do tipo mínimo. A vantagem desse procedimento está no aumento dos parâmetros
de relaxação porém, concebido através de formulações baseadas em desigualdades matriciais
bilineares (do inglêsBilinear Matrix Inequalitites- BMIs), nos quais os termos e se encontram
no produto entre variáveis escalares de otimização e matrizes, que também são variáveis do
procedimento de otimização. Apresentam-se, no corpo do texto, exemplos numéricos e simu-
lados a fim de ilustrar a eficiência das metodologias propostas em relação às demais existentes.
Ainda, implementaram-se os controladores projetados usando-se essas novas propostas em um
helicóptero de bancadaThree Degrees Of Freedom(3-DOF) ou no sistemaShake Table II(STII)
+ Active Mass Dumper - One Floor(AMD-1), com o objetivo de validar na prática as teorias
propostas.
Palavras-chave: Desigualdades matriciais lineares (LMIs). Desigualdadesmatriciais bili-
neares (BMIs). Controle robusto. Incertezas politópicas. Controle chaveado. Falhas estruturais.
Incertezas variantes no tempo (LPV).


ABSTRACT
This thesis presents results for robust stability of linearsystems subject to polytopic time-
varying parametric uncertainties (LPV). To start with, an improved method for the optimal gain
design of robust controllers via Linear Matrix Inequalities (LMI), based on Lyapunov stability
theory is presented. This new formulation was manipulated using the Finsler lemma, which en-
abled finding better feasibility results with the addition of extra matrices and reducing the num-
ber of LMIs. In this new equation it was included the decay rate performance index, responsible
for reducing the transitional period time, as well as the controllers norm optimization, respon-
sible for lower gains while maintaining the same project requirements efficiency. Then, due to
important results in literature regarding the design of robust controllers with time-varying un-
certainties, the design of switched dynamic controllers was explored by including the decay rate
index and the optimization of the switched controllers normin the equation, which allowed find-
ing better implementation results. Finally, less conservative criteria were proposed for stability
analysis and design of switched controllers using minimum-type piecewise quadratic Lyapunov
functions. The advantage of this procedure lies in the increase of relaxation parameters, how-
ever, designed through formulations based on Bilinear Matrix Inequalities (BMIs), where the
bilinear terms are in the product between optimization scalar variables and matrices, which are
also variables on the optimization procedure. Numerical examples are presented and simulated
to illustrate the efficiency of the proposed methodologies in relation to other existing through-
out the text. The designed controllers were implemented using these new proposals in a Three
Degrees Of Freedom (3-DOF) helicopter or in the Shake Table II (STII) + Active Mass Dumper
- One Floor (AMD-1) system, in order to validate in practice the proposed theories.
Keywords: Linear matrix inequalities (LMI). Bilinear matrix inequalities (BMIs). Robust
control. Polytopic uncertanties. Switched control. Structural failures. Linear parameter varying
(LPV).


LISTA DE FIGURAS
Figura 1 Esquemático do controle chaveado para uma planta incerta. . . . . . . 29
Figura 2 Helicóptero 3-DOF da Quanser pertencente ao LPC da FEIS - UNESP. 47
Figura 3 Modelo esquemático do Helicóptero 3-DOF. . . . . . . . .. . . . . . 48
Figura 4 Implementação prática do controlador projetado por estabilidade pro-
jetiva com o método de otimização apresentado em (BUZACHERO et
al., 2012). . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 52
Figura 5 Implementação prática do controlador projetado por estabilidade es-
tendida com o método de otimização apresentado em (BUZACHERO
et al., 2012). . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 52
Figura 6 Implementação prática do controlador projetado pela nova formulação
de estabilidade estendida com o método de otimização. . . . . .. . . 53
Figura 7 Quantidade de controladores com menor norma para 1000 politopos
gerados aleatoriamente considerando o incremento deα - Comparação
entre as técnicas Quadrática e Proposta. . . . . . . . . . . . . . . . .53
Figura 8 Quantidade de controladores com menor norma para 1000 politopos
gerados aleatoriamente considerando o incremento deα - Comparação
entre as técnicas Estendida, Projetiva e Proposta. . . . . . . .. . . . 54
Figura 9 Sistema massa-mola-massa. . . . . . . . . . . . . . . . . . . . .. . 64Figura 10 Nuvem de autovalores paraα = 0,4 do sistema massa-mola-massa var-
rendoλ (t) para 63 partições det entre(0, 2π10) realimentado tanto com
K1 como comK2. . . . . . . . . . . . . . . . . . . . . . . . . . . . . 65
Figura 11 Simulação do sistema realimentado projetado comα = 0,4. . . . . . 66
Figura 12 Sinal de controle e controlador ativo paraα = 0,4. . . . . . . . . . . 66
Figura 13 Nuvem de autovalores paraα = 1 do sistema massa-mola-massa var-
rendoλ (t) para 63 partições det entre(0, 2π10) realimentado tanto com
K1 como comK2. . . . . . . . . . . . . . . . . . . . . . . . . . . . . 67
Figura 14 Simulação do sistema realimentado projetado comα = 1. . . . . . . . 67
Figura 15 Sinal de controle e controlador ativo paraα = 1. . . . . . . . . . . . 68
Figura 16 Esquemático do controle chaveado para a planta do helicóptero 3-DOF. 69
Figura 17 Implementação prática dos controladores projetados para falha de 30%
e α = 0,5. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 70

Figura 18 Sinais de controle e controlador ativo para falha de 30% eα = 0,5. . 70
Figura 19 Zoomno chatteringpara o controlador ativo (0< t < 9s) - falha de
30% eα = 0,5. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 71
Figura 20 Implementação prática dos controladores projetados para falha de 90%
e α = 0,4. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 72
Figura 21 Sinais de controle e controlador ativo projetado para falha de 90% e
α = 0,4. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 72
Figura 22 Implementação prática dos controladores ótimos para falha de 30% e
α = 0,5. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 74
Figura 23 Sinais de controle e controlador ótimo ativo para falha de 30% eα =
0,5. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 74
Figura 24 Implementação prática dos controladores ótimos para falha de 90% e
α = 1. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 75
Figura 25 Sinais de controle e controlador ótimo ativo para falha de 90% eα = 1. 76
Figura 26 Busca pelos melhores valores deγ do Exemplo 1 para LMIs do Teo-
rema 12. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 85
Figura 27 Resultados de factibilidade do Exemplo 1 para: Estabilidade Quadrática
(♦) e critério de estabilidade Lyapunov-Metzler - Teorema 12 (o). . . 86
Figura 28 Resultados de Factibilidade do Exemplo 1 para: Estabilidade Quadrática
(♦), critério de Estabilidade Lyapunov-Metzler - Teorema 12 (o) e
critério de estabilidade menos conservador utilizando função de Lya-
punov quadrática por partes - Teorema 13 (x). . . . . . . . . . . . . .86
Figura 29 Resultados de Factibilidade para Exemplo 1: Estabilidade Quadrática
(♦), critério de Estabilidade Lyapunov-Metzler - Teorema 12 (o) e
critério de estabilidade generalizado comM = 4 conforme Teorema
14 (x). . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 87
Figura 30 Resultados de Factibilidade do Exemplo 1 para: Estabilidade Quadrática
(♦), critério de Estabilidade Lyapunov-Metzler - Teorema 12 (o) e for-
mulação utilizando o Lema de Finsler - Teorema 15 (x). . . . . . .. . 87
Figura 31 Busca pelos melhores valores deγ do Exemplo 2 para LMIs do Teo-
rema 12. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 89
Figura 32 Análise de factibilidade para o Exemplo 2 utilizando Estabilidade Quadrática
(♦) e Estabilidade Metzler adequada a sistemas lineares - Teorema 12
(o). . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 89

Figura 33 Resultados de Factibilidade do Exemplo 2 para: Estabilidade Quadrática
(♦), critério de Estabilidade Lyapunov-Metzler - Teorema 12 (o) e
critério de estabilidade menos conservador utilizando função de Lya-
punov quadrática por partes - Teorema 13 (x). . . . . . . . . . . . . .90
Figura 34 Resultados de Factibilidade para o Exemplo 2: Estabilidade Quadrática
(♦), critério de Estabilidade Lyapunov-Metzler - Teorema 12 (o) critério
menos conservador generalizado comM = 4 conforme Teorema 14 (x). 90
Figura 35 Resultados de Factibilidade do Exemplo 2 para: Estabilidade Quadrática
(♦), critério de Estabilidade Lyapunov-Metzler - Teorema 12 (o) for-
mulação utilizando o Lema de Finsler - Teorema 15 (x). . . . . . .. . 91
Figura 36 Protótipo AMD-1 da Quanser pertencente ao LPC da FEIS - UNESP. . 99
Figura 37 Modelo esquemático do AMD-1. . . . . . . . . . . . . . . . . . .. . 100
Figura 38 Dados obtidos durante o terremoto de Northridge em1994 e reproduzi-
dos com o STII. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 104
Figura 39 Oscilações no piso superior do AMD-1 para os controladores chavea-
dos com formulação via BMIs. . . . . . . . . . . . . . . . . . . . . . 105
Figura 40 Diferença entre as oscilações no piso superior (xf (t) [m]) e o deslo-
camento do piso inferior (xs(t) [m]) do AMD-1 para os controladores
chaveados - formulação via BMIs. . . . . . . . . . . . . . . . . . . . 105
Figura 41 Sinal de controle e controlador ativo para uma falha de 40% - formu-
lação via BMIs. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 106
Figura 42 Oscilações no piso superior do AMD-1 para os controladores chavea-
dos com formulação via BMIs com generalização das funções. . .. . 107
Figura 43 Diferença entre as oscilações no piso superior (xf (t) [m]) e o deslo-
camento do piso inferior (xs(t) [m]) do AMD-1 para os controladores
chaveados - formulação via BMIs com generalização das funções. . . 107
Figura 44 Sinal de controle e controlador ativo para uma falha de 40% - formu-
lação via BMIs com generalização das funções. . . . . . . . . . . . . 108


LISTA DE TABELAS
Tabela 1 Parâmetros do helicóptero 3-DOF . . . . . . . . . . . . . . . .. . . 49
Tabela 2 Parâmetros do sistema AMD-1 . . . . . . . . . . . . . . . . . . . .. 100


ABREVIATURAS E ACRÔNIMOS
LMI Linear Matrix Inequalities
BMI Bilinear Matrix Inequalities
LPV Linear Parameter Varying
MatLabr MATrix LABoratory
T-S Takagi-Sugeno
gevp generalized eigenvalue minimization
3-DOF Three Degrees Of Freedom
AMD-1 Active Mass Dumper - One Floor
STII Shake Table II
CQLF Common Quadratic Lyapunov Function
PDLF Parameter-Dependent Lyapunov Functions
FLF Funções de Lyapunov Fuzzy
FLFM Funções de Lyapunov Fuzzy-Metzler


SUMÁRIO
1 INTRODUÇÃO 27
2 PROPRIEDADES E CONCEITOS INICIAIS 33
2.1 Estabilidade quadrática 34
2.2 Estabilidade robusta utilizando taxa de decaimento 35
2.2.1 Otimização da norma de K para o projeto utilizando uma CQLF 37
2.3 Lema de Finsler 37
2.3.1 Estabilidade robusta utilizando o Lema de Finsler e taxa de decaimento 38
2.3.2 Otimização da norma de K para o projeto utilizando o Lema de Finsler 40
2.4 Lema da projeção 40
2.4.1 Estabilidade robusta utilizando o Lema da projeção e taxa de decaimento 41
2.4.2 Otimização da norma de K para o projeto utilizando o Lema da projeção 42
3 PROJETO DE CONTROLADORES ROBUSTOS UTILIZANDO O LEMA
DE FINSLER 43
3.1 Nova formulação utilizando o Lema de Finsler e taxa de decaimento 43
3.2 Helicóptero 3-DOF 47
3.2.1 Implementação das diferentes técnicas de projeto ótimo no Helicóptero 3-DOF 50
3.3 Comparação geral dos três métodos de projeto com otimização 51
3.4 Conclusões parciais 54
4 PROJETO DE CONTROLADORES ROBUSTOS CHAVEADOS 55
4.1 Chaveamento entre subsistemas 55

4.1.1 Matrizes Metzler 56
4.1.2 Condições para estabilidade robusta 57
4.1.3 Projeto robusto de controladores chaveados 59
4.2 Projeto robusto chaveado e restrição de taxa de decaimento 61
4.3 Otimização da norma de controladores chaveados 62
4.4 Exemplo de Aplicação: Sistema massa-mola-massa 63
4.5 Implementação de controladores chaveados no helicóptero 3-DOF 68
4.5.1 Implementação com restrição de taxa de decaimento 69
4.5.2 Implementação com restrição de taxa de decaimento e otimização da norma de K 73
4.6 Conclusões parciais 76
5 NOVOS RESULTADOS PARA ESTABILIDADE DE SISTEMAS CHAVEA-
DOS 77
5.1 Sistemas chaveados utilizando desigualdades de Lyapunov-Metzler 77
5.2 Novos resultados utilizando uma função de Lyapunov mínima e quadrática por partes 80
5.3 Generalização da função de Lyapunov candidata e quadrática por partes 81
5.4 Formulação utilizando o Lema de Finsler 82
5.5 Factibilidade de sistemas politópicos 84
5.5.1 Exemplo numérico 1 84
5.5.2 Exemplo numérico 2 88
5.6 Conclusões parciais 91
6 NOVOS RESULTADOS PARA O PROJETO DE CONTROLADORES CHAVEA-
DOS 93
6.1 Projeto robusto chaveado com flexibilização via BMIs 93

6.2 Projeto robusto chaveado com flexibilização extra via BMIs 96
6.3 Exemplo Numérico 97
6.4 Implementação prática no sistema AMD-1 98
6.4.1 Implementação das técnicas de controle flexibilizadas 102
6.5 Conclusões parciais 108
7 CONCLUSÕES 111
7.1 Perspectivas Futuras 112
REFERÊNCIAS 113
APÊNDICE A - Método path-followingpara solução de BMIs 119


27
1 INTRODUÇÃO
Entre as diversas técnicas de projeto de controladores desenvolvidas durante a história da
engenharia de controle, o projeto de controladores robustos (ou projeto de controladores por es-
tabilidade quadrática) usando LMIs destacou-se por resolver problemas envolvendo incertezas
paramétricas, sem solução conhecida até então, utilizandopacotes computacionais especializa-
dos (GAHINET et al., 1995). Em consequência do potencial da técnica, as pesquisas e publi-
cações envolvendo a teoria de controle com soluções via LMIscresceram muito nas últimas
décadas. A teoria retratada em (BOYD et al., 1994) se tornou ummarco na história das LMIs,
abrindo um leque muito grande para diversas abordagens, como análise de estabilidade robusta
de sistemas lineares (LEITE et al., 2004), abordagens de otimização por meio de LMIs (WANG
et al., 2008), controle robustoH2 ouH∞ (CHILALI; GAHINET, 1996; APKARIAN; TUAN;
BERNUSSOU, 2001; GEROMEL; OLIVEIRA, 2001; MA; CHEN, 2006; ASSUNÇÃO et al.,
2007a; GEROMEL; KOROGUI, 2008) e outros, projeto de controladores robustos de sistemas
sujeitos a incertezas com realimentação das derivadas dos estados (ASSUNÇÃO et al., 2007b;
CARDIM et al., Saint Petersburg; SILVA et al., 2011, 2012) e projeto ótimo de controladores
robustos de sistemas sujeitos a incertezas com realimentação dos estados, em que um caso par-
ticular pode ser visto como falha estrutural (BUZACHERO et al., 2010, 2012).
Publicações recentes constataram um certo conservadorismo inserido na análise de estabili-
dade quadrática, o que levou a uma busca por soluções mais relaxadas. O Lema de Finsler
(SKELTON; IWASAKI; GRIGORIADIS, 1997) vem sendo muito utilizado na teoria de contro-
le para a análise de estabilidade por LMIs (LEITE et al., 2004), com resultados equivalentes
aos das LMIs de estabilidade quadrática. Esta técnica possibilita o uso de matrizes variáveis ex-
tras e a função de Lyapunov dependente do parâmetro incerto (do inglêsParameter-Dependent
Lyapunov FunctionPDLF). Isso proporciona uma certa relaxação na análise de estabilidade
(denominada de “estabilidade estendida” segundo (LEITE etal., 2004)), obtendo-se uma região
de factibilidade maior em relação à análise de estabilidadequadrática. Como esta técnica uti-
liza funções do tipo PDLF, as incertezas da planta devem ser tratadas como invariantes no
tempo, devido ao fato de se desprezar a derivada temporal da matriz de Lyapunov, o que limita

28 1 INTRODUÇÃO
a sua aplicação prática. Além disso, quando associada à otimização da norma dos controladores
(BUZACHERO et al., 2010), as funções do tipo PDLF acabam por inserir LMIs extras, podendo
tornar mais difícil a busca de soluções. Outras publicaçõessobre o assunto encontraram resul-
tados interessantes em se tratando de factibilidade (SKELTON; IWASAKI; GRIGORIADIS,
1997; LEITE et al., 2004; BUZACHERO et al., 2012), porém nessas metodologias garantem
apenas a estabilidade para incertezas invariantes no tempo, ou com taxa de variação muito pe-
quena (DAHLEH; DAHLEH, 1991; SOLO, 1994).
Pelo motivo exposto, buscaram-se formulações aprimoradasutilizando-se uma função de
Lyapunov quadrática (Common Quadratic Lyapunov Function(CQLF)) com uma técnica de
adição de matrizes extras na formulação das LMIs, reduzindoassim o número de LMIs para
garantir a estabilidade do sistema. Com o objetivo de se obterem ganhos menores de contro-
ladores robustos, conservando o mesmo desempenho dinâmicooptou-se por otimizar a norma
dos controladores, impondo também ao sistema realimentadoum período transitório mais curto
através da inserção da taxa de decaimento (BOYD et al., 1994) na formulação das LMIs, agora
com a possibilidade de tratar incertezas do tipo LPV.
Em razão do conservadorismo existente nas condições de estabilidade quadrática, uma
vez que uma única matriz de Lyapunov é imposta a todos os subsistemas quando se utiliza
uma CQLF, optou-se, neste trabalho, pela abordagem da teoriade sistemas chaveados (tam-
bém conhecidos como sistemas híbridos), em função dos importantes resultados, na literatura,
que viabilizam o projeto de controladores robustos, considerando incertezas do tipo LPV (DE-
CARLO et al., ; LIN; ANTSAKLIS, 2005; LIBERZON, 2003; SHORTEN et al., 2007), quando
os sistemas em questão são lineares (DEAECTO; GEROMEL, 2008), levando-se em conta a
possibilidade de chaveamento entre subsistemas (BRANICKY, 1998; HESPANHA, 2004).
Um método eficaz para o projeto de controladores robustos foiproposto por (SKAFIDAS
et al., 1999), com base na determinação de uma regra de chaveamento estabilizante a qual pro-
move o chaveamento entre um certo número de controladores com realimentação estática da
saída, porém, também utilizando CQLF, tendo, como consequência, resultados conservadores.
Outros pesquisadores abordaram o mesmo problema (JI; WANG;XIE, 2005), entretanto, os
controladores de realimentação dos estados e a regra de chameamento foram projetados simul-
taneamente. O traço comum entre esses artigos é o fato de trabalharem com um sistema in-
certo cuja realização depende linearmente da incerteza, impondo a todos os subsistemas reali-
mentados uma função de Lyapunov única, como uma consequência natural das condições de
estabilidade propostas por (WICKS; PELETIES; DECARLO, 1994).
Em (GEROMEL; COLANERI, 2006; GEROMEL; KOROGUI, 2006) foram propostas téc-

1 INTRODUÇÃO 29
nicas eficazes para a estabilidade de sistemas lineares chaveados, entre as quais se apresentou
uma função Lyapunov-Metzler quadrática por partes, com umaregra de chaveamentoσ baseada
na escolha do mínimo da função energia, viabilizando o projeto de controladores robustos para
sistemas incertos e limitados por norma (GEROMEL; DEAECTO, 2009). Estas pesquisas cul-
minaram em condições de estabilidade de sistemas sujeitos aincertezas politópicas do tipo LPV,
garantindo que o sistema fosse globalmente assintoticamente estável (DEAECTO; GEROMEL;
DAAFOUZ, 2011). Esta técnica inovadora possibilitou encontrar resultados menos conser-
vadores e com um melhor desempenho global quando comparada com as técnicas tradicionais.
Em contrapartida, uma busca unidimensional deve ser realizada para que o problema possa ser
trabalhado com condições LMIs, o que acaba por restringir a quantidade de variáveis de folga
do problema.
Com base nessa teoria, abordam-se nesta tese dois pontos críticos no projeto de contro-
ladores chaveados para sistemas robustos. O primeiro pontotrabalhado é a problemática dos
altos ganhos dos controladores projetados que influenciam na aplicação prática da técnica e,
portanto, tornam interessante uma otimização para viabilizar a implementação (otimização da
norma dos controladores chaveados). O outro ponto é o fato deque o tempo de duração do
transitório pode ser maior do que as especificações de projeto. Para resolver este problema,
propõem-se LMIs para limitar a taxa de decaimento. Ilustra-se essa estratégia de chaveamento
na Figura 1.
Figura 1 - Esquemático do controle chaveado para uma planta incerta.
x(t)u(t) SistemaLinearIncerto
K1
K2
KN
σ(t)
Fonte: Adaptado de (GEROMEL; DEAECTO, 2009)
Outra abordagem muito difundida e consolidada na literatura é a de sistemas não lineares,
ou sistemas Fuzzy Takagi-Sugeno (T-S) (TAKAGI; SUGENO, 1985), técnica muito eficiente
quando há um aumento da complexidade dos sistemas. Os sistemas T-S possibilitam represen-
tar sistemas dinâmicos não lineares, de forma aproximada ouexata em alguns casos, através

30 1 INTRODUÇÃO
de modelos lineares locais descrevendo o comportamento do sistema em diferentes pontos de
operação no seu espaço de estados (TANAKA; IKEDA; WANG, 1998), fazendo assim a es-
colha da melhor estratégia de controle por meio de funções depertinência. Como consequên-
cia do sucesso desta técnica surgiram publicações sobre controle sistemas Fuzzy chaveados
(TANAKA; IWASAKI; WANG, 2000a, 2000b; YANG; DONG, 2010; SOUZA et al., 2013)
ditando a regra de chaveamento conforme as variáveis premissas.
Assim como para o caso linear, a busca por condições menos conservadoras de estabilidade
também foi largamente explorada nos sistemas Fuzzy T-S. Em trabalhos muito conceituados da
literatura foram propostas condições mais relaxadas de estabilidade utilizando Funções de Lya-
punov Fuzzy (FLF) (TANAKA; HORI; WANG, 2003; TEIXEIRA; ASSUNÇÃO; AVELLAR,
2003; MOZELLI et al., 2009), garantido a estabilidade assintótica através da interpolação de
funções quadráticas segundo as mesmas funções de pertinência dos modelos Fuzzy T-S. Porém
foi em (ESTEVES, 2011), satisfazendo condições de estabilidade global e utilizando Funções
de Lyapunov Fuzzy-Metzler (FLFM) resolvidas através de LMIs que se obteve a flexibilização
das mesmas, ficando apenas por solucionar a problemática de uma busca unidimensional que
deveria ser realizada, mantendo uma dificuldade na solução do problema.
Recentemente, propuseram-se condições baseadas em uma classe particular de BMIs, uti-
lizando funções de Lyapunov quadrática por partes (CHEN et al., 2012), resolvidas pelo método
path-following(HASSIBI; HOW; BOYD, 1999). Essa solução contornou a problemática da
busca unidimensional citada anteriormente e alcançou melhores resultados de factibilidade, pos-
sibilitando uma flexibilização ainda maior, porquanto os escalares de relaxação que aparecem
na multiplicação de matrizes variáveis podem se adaptar convenientemente durante o método,
na busca por factibilidade. De posse destes resultados, propuseram-se métodos mais gerais para
sistemas Fuzzy chaveados (SOUZA, 2013; SOUZA et al., 2014),em que os ganhos de otimiza-
ção são escolhidos em dois estágios. O primeiro estágio segue a mesma regra de (CHEN et al.,
2012), selecionando a função de Lyapunov mínima e quadrática por partes. O segundo estágio
ocorre através da escolha de uma função auxiliar que minimiza a derivada temporal da função
de Lyapunov, escolhendo, assim, o ganho adequado a cada instante de tempo.
Devido aos ótimos resultados obtidos com a teoria de controladores Fuzzy chaveados,
propõe-se, também, neste estudo, uma nova técnica para a estabilidade de sistemas lineares
incertos, com a incerteza podendo ser do tipo LPV, baseada nométodopath-followingpara
solução de BMIs, apresentado por (CHEN et al., 2012). Nesta nova formulação, houve uma re-
dução no conservadorismo encontrado nas formulações existentes, através do aumento na quan-
tidade de funções de Lyapunov candidatas e quadráticas por partes. Assim, as desigualdades de

1 INTRODUÇÃO 31
Lyapunov-Metzler, apresentadas neste trabalho, se basearam nas existentes em (GEROMEL;
COLANERI, 2006; DEAECTO, 2010; CHEN et al., 2012), porém, agora,com uma generaliza-
ção das funções, com a vantagem da facilidade de tratamento de sistemas linearizados, tornando
esta técnica mais viável para implementação.
Utilizam-se os seguintes símbolos e notações no texto:
Notações:M > 0 (< 0, ≥ 0, ≤ 0) indica queM é simétrica positiva (negativa, positiva-
semi, negativa-semi) definida;(′) indica transposição de um vetor ou matriz;(′−1) indica a
inversa de uma matriz transposta;Sym{M} indica M +M′; (∗) indica termos transpostos em
uma matriz simétrica; diag(·, ·, . . . , ·) indica uma matriz diagonal de dimensões adequadas e�
indica o final de demonstração.
A estrutura do texto é organizada da seguinte forma:
• Capítulo 2: Apresentam-se conceitos básicos, propriedadese resultados já conhecidos da
literatura, necessários para o desenvolvimento teórico dotrabalho e para a comparação
com as técnicas propostas.
• Capítulo 3: Propõe-se uma técnica para o projeto e a otimização da norma de contro-
ladores robustos de sistemas dinâmicos lineares incertos,utilizando realimentação dos
estados. As técnicas de projeto utilizadas se baseiam em LMIs formuladas com base na
teoria de estabilidade segundo Lyapunov, utilizando o Lemade Finsler. As LMIs uti-
lizadas tiveram o acréscimo da restrição da taxa de decaimento, responsável por diminuir
o tempo de duração do transitório dos sistemas realimentados. Realizaram-se compara-
ções qualitativas e quantitativas entre os métodos de projeto com otimização da norma
dos controladores, visando alternativas de controladorescom menor custo e melhor de-
sempenho que atendam às restrições do projeto. Uma implementação laboratorial ilustra
a eficiência da proposta.
• Capítulo 4: Em razão da busca por alternativas para o projeto de controle de sistemas
com incertezas do tipo LPV via LMIs, propõe-se, neste capítulo, uma técnica de projeto
para garantir a estabilidade de sistemas lineares chaveados contínuos no tempo. Trata-se
de uma extensão da teoria de sistemas chaveados existente naliteratura. Esta técnica é
de natureza realimentada (dependente da trajetória) e o projeto se baseia na solução das
chamadas desigualdades de Lyapunov-Metzler, a partir da qual expressa-se a condição
de estabilidade (incluindochattering). O índice de desempenho utilizado é a taxa de de-
caimento (um índice que faz parte daD-estabilidade), que objetiva reduzir o tempo de
duração do transitório, estipulando que os autovalores do sistema realimentado fiquem à

32 1 INTRODUÇÃO
esquerda da reta Re{s}< −α, no plano complexo. A outra ferramenta importante uti-
lizada é a otimização da norma dos controladores que visa reduzir os ganhos e facilitar sua
implementação prática. Para verificar a eficiência da técnica proposta, realizou-se uma
implementação prática no Helicóptero 3-DOF da Quanser, sujeito a uma falha estrutural
no motor traseiro, caracterizada como uma incerteza politópica.
• Capítulo 5: Apresenta-se, neste capítulo, uma nova estratégia que proporciona uma flexi-
bilização na análise de factibilidade para a estabilidade de sistemas lineares com in-
certezas do tipo LPV, utilizando funções de Lyapunov quadráticas por partes. A es-
tratégia foi inspirada em uma formulação para projeto de controladores Fuzzy chaveados
com base em uma classe particular de BMIs, que podem ser resolvidas pelo métodopath-
following, tendo o termo bilinear o produto de escalares de relaxação ematrizes variáveis.
Na formulação proposta houve um acréscimo de matrizes e escalares consequentemente
diminuindo o conservadorismo na formulação. Foi também proposta uma formulação
utilizando-se o lema de Finsler com o mesmo intuito. Comparações envolvendo factibili-
dade de sistemas foram feitas utilizando exemplos conhecidos na literatura.
• Capítulo 6: Neste capítulo são apresentadas as técnicas de projeto de controladores chavea-
dos baseadas nas formulações do Capítulo 5. Os controladoresprojetados foram imple-
mentados no sistema STII + AMD-1 validando na prática a técnica proposta.
• Em seguida, apresentam-se as conclusões e estabelecem-se as perspectivas futuras para a
continuidade deste trabalho.
• Encerra-se a tese com o Apêndice A, onde se detalha o algoritmo do métodopath-
following para a solução das BMIs, utilizado nas condições de estabilidade de sistemas
chaveados apresentadas.

33
2 PROPRIEDADES E CONCEITOS INICIAIS
Para a obtenção dos resultados propostos, utilizam-se, ao longo do texto, as Propriedades
1 e 2, sendo a primeira utilizada para verificação da possibilidade de inversão de matrizes não
simétricas e a segunda conhecida na literatura como complemento de Schur (BOYD et al.,
1994).
Propriedade 1. Para toda matriz M não simétrica(M 6= M′), se M+M′ < 0, então M é in-
vertível.
Demonstração.Veja (BOYD et al., 1994). �
Propriedade 2. Uma matriz simétrica M=
[
M1 M2
M′2 M3
]
é definida positiva se e somente se:
1. M1 > 0 e M3−M′2(M1)
−1M2 > 0,
ou
2. M3 > 0 e M1−M2(M3)−1M′
2 > 0.
Demonstração.Veja (BOYD et al., 1994). �
Parte deste estudo visa obter melhores resultados para o projeto de controladores robustos
com otimização da norma, por meio de LMIs de sistemas com incertezas do tipo LPV e taxa de
decaimento. Para tanto, a formulação proposta será comparada à teoria de projeto ótimo com
estabilidade quadrática e taxa de decaimento (Teorema 1). Adicionalmente, com a intenção de
alcançar melhores resultados para a norma dos controladores ótimos, comparar-se-á a formu-
lação proposta com as formulações apresentadas na literatura (BUZACHERO et al., 2012) para
sistemas com incertezas invariantes no tempo ou com taxa de variação suficientemente peque-
nas que são: o projeto com estabilidade estendida (Teorema 3) e o projeto com estabilidade
projetiva (Teorema 5), ambos com otimização da norma e taxa de decaimento.
Discriminam-se os resultados aqui apenas para orientação.Indicam-se todas as demostrações
na respectiva literatura.

34 2 PROPRIEDADES E CONCEITOS INICIAIS
2.1 Estabilidade quadrática
Considere o sistema linear incerto abaixo:
x(t) = Aλ x(t), x(0) = x0, (1)
definido para todot ≥ 0, sendox0 a condição inicial,λ ∈ Λ, x(t) ∈ Rn o vetor de estado eAλ ,
matriz que representa a dinâmica do sistema incerto, definida como
Aλ =N
∑j=1
λ jA j , (2)
sendo que o índicej se refere ao vértice do politopo eN o número de vértices. Ainda,Λ é
definido pelo seguinte simplex unitário:
Λ = {λ ∈ RN : λ j ≥ 0,
N
∑j=1
λ j = 1}. (3)
Assim tem-se
x(t) =N
∑j=1
λ jA jx(t). (4)
Uma condição suficiente para que se garanta a estabilidade dosistema incerto (1) é dada
pela existência de uma matriz de LyapunovP= P′ ∈ Rn×n tal que as LMIs
A′λ P+PAλ < 0, (5)
P> 0, (6)
sejam verificadas (BOYD et al., 1994). Esta condição de estabilidade é conhecida como estabili-
dade quadrática e pode ser facilmente verificada na prática devido à convexidade da desigual-
dade de Lyapunov que faz com que as condições (5) e (6) tenham como condição suficiente a
verificação da existência deP= P′ ∈ Rn×n tal que
A′jP+PAj < 0, (7)
P> 0, (8)
para todoj ∈K, sendo o conjuntoK= {1,2, ...,N}.
Pode-se observar que (5) pode ser obtida de (7) multiplicando a última porλ j ≥ 0 e somando
os termos dej = 1 até j = N.
Por ser apenas uma condição suficiente e exigir a existência de uma única matriz definida

2.2 Estabilidade robusta utilizando taxa de decaimento 35
positivaP, satisfazendo asN desigualdades simultaneamente, geram-se resultados conservadores
para a garantia de estabilidade do sistema incerto.
Sendo assim, com o objetivo de se obterem condições mais gerais do que a estabilidade
quadrática, desenvolveu-se o conceito de controle chaveado, conforme se verá nos Capítulos 4
e 5.
2.2 Estabilidade robusta utilizando taxa de decaimento
Considere o sistema incerto linear controlável e invarianteno tempo descrito na forma de
espaço de estados:
x(t) = Aλ x(t)+Bλ u(t). (9)
Esse sistema pode ser descrito como combinação convexa dos vértices do politopo:
x(t) =N
∑j=1
λ jA jx(t)+N
∑j=1
λ jB ju(t), (10)
sendoN o número de vértices do politopo,λ j ∈ Λ conforme (3) (BOYD et al., 1994),A j ∈Rn×n
e B j ∈ Rn×m os vértices do politopo que representa a dinâmica do sistemaincerto,x(t) ∈ R
n
o vetor de estado eu(t) ∈ Rm o vetor de entrada de controle. O projeto do controlador com
realimentação dos estados consiste em encontrar uma matrizK ∈ Rm×n, tal que o sistema (9)
realimentado com a entrada de controle (11),
u(t) =−Kx(t), (11)
seja assintoticamente estável, sendo o sistema realimentado representado por (12):
x(t) = (Aλ −Bλ K)x(t). (12)
Levando-se em conta o sistema controlado (9), a taxa de decaimento (ou maior expoente de
Lyapunov) é definida como a maior constante positivaα, tal que
limt→∞
eαt ||x(t)||= 0, (13)
e se mantenha para todas as trajetóriasx(t), t > 0.
Utiliza-se a função quadrática de Lyapunov
V(x(t)) = x′(t)Px(t), (14)

36 2 PROPRIEDADES E CONCEITOS INICIAIS
para estabelecer um limite inferior sobre a taxa de decaimento de (9), com
.V (x(t))≤−2αV(x(t)), (15)
para todas as trajetórias (BOYD et al., 1994).
De (14) e (12), tem-se que
.V (x(t)) = x′(t)Px(t)+x′(t)Px(t)
= x(t)′(Aλ −Bλ K)′Px(t)+x(t)′P(Aλ −Bλ K)x(t). (16)
Incorporando-se a restrição da taxa de decaimento (15) na equação (16) e realizando as
simplificações apropriadas, tem-se:
(Aλ −Bλ K)′P+P(Aλ −Bλ K)<−2αP, (17)
P> 0. (18)
Considerando o sistema incerto (10) e a teoria de Lyapunov existente para projeto de con-
troladores, tem-se o seguinte teorema (BOYD et al., 1994):
Teorema 1. Uma condição suficiente para que se garanta a estabilidade dosistema incerto
(10) sujeito a taxa de decaimento maior ou igual aα é a existência de matrizes X= X′ ∈Rn×n
e G∈ Rm×n, tais que
A jX−B jG+XA′j −G′B′
j +2αX < 0, (19)
X > 0, (20)
com j= 1, ..., r.
Sendo asLMIs (19) e (20) factíveis, uma matriz de realimentação de estados que estabiliza
o sistema pode ser dada por
K = GX−1. (21)
Demonstração.Vide (BOYD et al., 1994). �
Assim, pode-se realimentar o sistema incerto apresentado em (9), sendo (19) e (20) condições
suficientes para a estabilidade assintótica do politopo, para um sistema com realimentação dos
estados com restrição de taxa de decaimento. Se, para o sistema incerto, a solução das LMIs
for factível, a estabilidade do sistema estará garantida.
As LMIs (19) e (20) garantem não somente a estabilidade, comotambém a taxa de decai-

2.3 Lema de Finsler 37
mento. Se o objetivo for somente a estabilidade, atribui-se, em (19),α = 0.
2.2.1 Otimização da norma de K para o projeto utilizando uma CQLF
Teorema 2. Dada uma constanteµ0 > 0, obtém-se um limitante para a norma da matriz K∈
Rm×n de realimentação dos estados, com K= GX−1, X = X′ > 0, X ∈ R
n×n e G∈ Rm×n
encontrando o valor mínimo deβ , β > 0, tal que K′K < βµ0
In. Pode-se obter o valor mínimo
deβ através da solução do seguinte problema de otimização:
minβ
s.a
[
X G′
G β Im
]
> 0,(22)
X > µ0In, (23)
(LMI (19)) (24)
sendo que Im e In denotam as matrizes identidades de ordem m e n respectivamente.
Demonstração.Vide (BUZACHERO et al., 2012). �
Note que a LMI (20) não é necessária, pois com as restrições (22) e (23), a LMI (20) será
redundante.
2.3 Lema de Finsler
Utiliza-se o Lema de Finsler para expressar condições de estabilidade em termos de de-
sigualdades matriciais, com vantagens sobre a teoria já existente de Lyapunov (BOYD et al.,
1994), uma vez que introduz novas variáveisµ eX em condições que envolvem matrizes com
estruturas particulares e com dimensões adequadasL , B eB⊥ (OLIVEIRA, 2004) conforme
é visto no Lema 1.
Lema 1 (Finsler). Considere w∈ Rnx, L ∈ R
nx×nx e B ∈ Rmx×nx com rank(B) < nx e B⊥
uma base para o espaço nulo deB (isto é,BB⊥ = 0). Então as seguintes condições são
equivalentes:
1. w′L w< 0,∀w 6= 0 : Bw= 0;
2. B⊥′L B⊥ < 0;
3. ∃µ ∈ R : L −µB′B < 0;

38 2 PROPRIEDADES E CONCEITOS INICIAIS
4. ∃X ∈ Rnx×mx : L +X B+B′X ′ < 0.
Demonstração.Vide (SKELTON; IWASAKI; GRIGORIADIS, 1997) ou (OLIVEIRA; SKEL-
TON, 2001). �
2.3.1 Estabilidade robusta utilizando o Lema de Finsler e taxa de decai-mento
Definindo w = [xx], B = [ (Aλ−Bλ K) −I ], B⊥ =
[
I(Aλ−Bλ K)
]
e L =[
2αPλ PλPλ 0
]
, note que
Bw = 0 corresponde ao sistema realimentado comK e w′L w < 0 corresponde à restrição
de estabilidade com taxa de decaimento formulada a partir dafunção quadrática de Lyapunov
dada em (19) (BOYD et al., 1994). Neste caso, as dimensões das variáveis do Lema 1 são:
nx = 2n emx = n.
Conclui-se, pela prova existente do Lema de Finsler, que as Propriedades de 1 a 4 são
equivalentes. Assim, podemos reescrever a Propriedade 4 daseguinte forma:
4. ∃X ∈ R2n×n, P= P′ > 0 tais que
[
2αPλ Pλ
Pλ 0
]
+X
[
(Aλ −Bλ K) −I]
+
[
(Aλ −Bλ K)′
−I
]
X′ < 0, (25)
escolhendo convenientemente a matriz de variáveisX =[
ZaZ
]
, comZ∈Rn×n não simétrica ea
uma constante de relaxação que tem a função de flexibilizar a matrizX na LMI (PIPELEERS
et al., 2009). Pode-se obter esta constante adequadamente através de uma busca unidimensional.
Aplicando a transformação de congruência[
Z−1 00 Z−1
]
à esquerda e[
Z−1 00 Z−1
]′à direita, na quarta
propriedade e fazendoY = Z′−1; G= KY eQλ =Y′PλY, encontraram-se as seguintes LMIs:
[
AλY+Y′A′λ −Bλ G−G′B′
λ +2αQλ Qλ +aY′A′λ −aG′B′
λ −Y
Qλ +aAλY−aBλ G−Y′ −aY−aY′
]
< 0, (26)
Qλ > 0. (27)
sendoY ∈ Rn×n, Y 6=Y′, G∈ R
m×n eQλ ∈ Rn×n.
Essas LMIs, quando factíveis, atendem às restrições para a estabilidade assintótica do sis-
tema com a realimentação de estado (11) e (21). A garantia de estabilidade resultante das LMIs
deduzidas a partir do Lema de Finsler é comumente denominadaestabilidade estendida (LEITE
et al., 2004). A vantagem do uso desta formulação, mediante autilização do Lema de Finsler
para análise de estabilidade robusta é a liberdade de escolha da estrutura da função de Lyapunov
que agora pode ser, por exemplo, uma PDLF, definida comoQλ =N∑j=1
λ jQ j ,N∑j=1
λ j = 1, λ j ≥ 0

2.3 Lema de Finsler 39
e j ∈ K. Sabendo queQλ depende deλ , o uso da matriz de Lyapunov adequa-se apenas a
incertezas politópicas invariantes no tempo ou permitindo-se taxa de variação suficientemente
pequena, em (BUZACHERO et al., 2010), apresenta-se o seguinte teorema:
Teorema 3.Uma condição suficiente que garante a estabilidade do sistema incerto (10) sujeito
a taxa de decaimento maior ou igual aα é a existência de matrizes Y∈Rn×n, Qj =Q j
′ ∈Rn×n,
G∈ Rm×n e um escalar a> 0, tais que
[
A jY+Y′A j′−B jG−G′B j
′+2αQ j Q j +aY′A j′−aG′B j
′−Y
Q j +aAjY−aBjG−Y′ −aY−aY′
]
< 0, (28)
Q j > 0, (29)
com j∈K
Sendo as LMIs (28) e (29) factíveis, uma matriz de realimentação de estados que estabiliza
o sistema, garantindo a taxa de decaimento maior ou igual aα, pode ser dada por
K = GY−1. (30)
Demonstração.Vide (BUZACHERO et al., 2010) ou (BUZACHERO et al., 2012). �
Este resultado foi publicado em (BUZACHERO et al., 2012), tendo como foco a obtenção
de menores valores para a norma dos controladores robustos com restrição da taxa de decai-
mento.
Assim, pode-se realimentar o sistema incerto, sendo (28) e (29) condições suficientes para a
estabilidade assintótica de todo sistema, com restrição detaxa de decaimento, com parâmetros
pertencentes ao politopo.
Infelizmente, esta formulação contempla apenas incertezas politópicas invariantes no tempo
ou com taxa de variação suficientemente pequena, sendo inadequada para implementações onde
a incerteza varia ao longo do tempo, conforme se verificará naSeção 3.2.1.
Em diversas situações, a norma da matriz de realimentação dos estados é alta, dificultando a
sua implementação prática. Em (ASSUNÇÃO et al., 2007b), propôs-se um método de otimiza-
ção que minimiza os ganhos do controlador projetado com o usodas LMIs (19) e (20), que
garantem estabilidade, porém essa formulação apresenta conservadorismo. Em (BUZACHERO
et al., 2012), apresentaram-se novas formas de otimizar a norma do controladorK reduzindo
o conservadorismo das LMIs por meio do Lema de Finsler e do Lema da Projeção Recíproca,
mostrado a seguir.

40 2 PROPRIEDADES E CONCEITOS INICIAIS
2.3.2 Otimização da norma de K para o projeto utilizando o Lema deFinsler
Em (BUZACHERO et al., 2010), houve uma dificuldade para aplicar a teoria já existente de
otimização da norma deK (ASSUNÇÃO et al., 2007b) à nova estrutura de LMIs. Isso ocorreu
devido a matriz de síntese do controladorY não ser simétrica, condição necessária para o desen-
volvimento das LMIs quando a matriz de síntese do controlador eraX = P−1. Para contornar
a problemática utilizou-se a ideia do procedimento de otimização para reprojeto apresentado
em (CHANG et al., 2002), propondo-se em (BUZACHERO et al., 2010) a adequação do novo
método de otimização com a minimização de um escalarβ , sendo a relação de minimização
K′K < βPj comPj a função de Lyapunov referente a cada vértice:
Teorema 4. Obtém-se um limitante para a norma da matriz K∈ Rm×n de realimentação
dos estados, com K= GY−1 e Qj =Y′PjY, sendo Y∈ Rn×n, G∈ R
m×n e Pj = P′j > 0∈ R
n×n
encontrando o valor mínimo deβ , β > 0, tal que K′K < βPj com j∈K. Pode-se obter o valor
ótimo deβ através da solução do seguinte problema de otimização:
minβ
s.a
[
Q j G′
G β Im
]
> 0(31)
(LMI (28)) (32)
Demonstração.Vide (BUZACHERO et al., 2010). �
Essa forma de otimizar a norma deK revelou melhores resultados que a apresentada em
(ASSUNÇÃO et al., 2007b). Entretanto, por estar vinculada àsmatrizes de LyapunovPj , a
relação de otimização ainda não apresenta os ganhos mínimosque seriam encontrados para
atender os requisitos de projeto devido ao aumento do númerode LMIs por acrescentar mais
uma LMI para cada vértice do politopo.
Para melhorar o desempenho do procedimento de otimização, encontra-se uma alternativa
para otimizar a norma do controladorK, diminuindo o conservadorismo das LMIs de projeto
deK com uma manipulação conveniente mostrada na próxima subseção.
2.4 Lema da projeção
Outra ferramenta que se pode utilizar para a análise de estabilidade através de LMIs é o
lema da projeção recíproca (APKARIAN; TUAN; BERNUSSOU, 2001) enunciado a seguir:

2.4 Lema da projeção 41
Lema 2 (Projeção Recíproca). Considere P= P′ > 0 uma matriz dada, matrizes simétricasψe X, e matrizes não simétricas S, W e V. As seguintes afirmaçõessão equivalentes
1. ψ +S+S′ < 0,
2. A LMI abaixo é factível em relação a W[
ψ +P− (W+W′) S′+W′
S+W −P
]
< 0,
3. Desde que A seja Hurwits,∃ V, X tais que
−(V +V ′) V ′A′+X V′
AV+X −X 0
V 0 −X
< 0.
Demonstração.Vide (APKARIAN; TUAN; BERNUSSOU, 2001). �
2.4.1 Estabilidade robusta utilizando o Lema da projeção e taxa de decai-mento
A fim de verificar as vantagens da formulação proposta no Capítulo 3 desta tese, um outro
exemplo de projeto ótimo deK apresentado em (BUZACHERO et al., 2012) foi utilizado para
fim de comparação. Como no caso da estabilidade estendida, a vantagem de usar o Lema da
Projeção Recíproca para análise de estabilidade robusta é o grau de liberdade da PDLF, agora
definida comoPλ =N∑j=1
λ jPj ,N∑j=1
λ j = 1, λ j ≥ 0 e j ∈K. Tal como descrito anteriormente, o uso
dePλ é adequado a incertezas politópicas invariantes no tempo, permitindo-se taxa de variação
suficientemente pequena. Para verificar isso, segue o Teorema 5.
Teorema 5. Uma condição suficiente que garante a estabilidade do sistema incerto (10) é a
existência de matrizes V∈Rn×n, Pj =Pj
′ ∈Rn×n e Z∈R
m×n, tal que aLMI (33) seja satisfeitas.
−(V +V ′) V ′A′j −Z′B′
j +αV ′+Pj V ′
A jV −B jZ+αV +Pj −Pj 0
V 0 −Pj
< 0 (33)
com j ∈K.
Sendo a LMI (33) factível, uma matriz de realimentação dos estados que estabiliza o sistema
pode ser dada por (34).
K = ZV−1 (34)

42 2 PROPRIEDADES E CONCEITOS INICIAIS
Demonstração.Vide (BUZACHERO et al., 2012) �
2.4.2 Otimização da norma de K para o projeto utilizando o Lema daprojeção
O Teorema 6 mostra a otimização da norma deK para a LMI (33). Pode-se verificar que
apenas uma LMI é utilizada para otimizar a norma do controlador, diferentemente do procedi-
mento apresentado no Teorema 4.
Teorema 6. Pode-se obter um limitante para a norma da matriz K∈ Rm×n de realimentação
dos estados, com K= ZV−1, V ∈ Rn×n e Z∈ R
m×n encontrando o valor mínimo deβ , β > 0,
tal que K′K < βM, sendo M= V ′−1V−1 e desta forma M= M′ > 0. Pode-se obter o valor
ótimo deβ através da solução do seguinte problema de otimização:
minβ
s.a
In Z′
Z β Im
> 0(35)
(LMI (33)) (36)
Demonstração.Vide (BUZACHERO et al., 2012) �
Neste trabalho, realiza-se a solução numérica das LMIs em microcomputadores, utilizando
o software MATrix LABoratory(MatLabr) com seusolver(resolvedor) padrãoLMIlab contido
no “Robust Control Toolbox” (GAHINET et al., 1995).

43
3 PROJETO DE CONTROLADORES ROBUSTOSUTILIZANDO O LEMA DE FINSLER
Neste capítulo, apresenta-se uma formulação mais adequadaà abordagem de controladores
robustos ótimos em sistemas LPV e, consequentemente, à implementação prática desses con-
troladores com restrição da taxa de decaimento baseada no Lema de Finsler, devido à utilização
de uma CQLF.
3.1 Nova formulação utilizando o Lema de Finsler e taxa dedecaimento
Definindo as matrizesB = [A′ −I ], B⊥ =[
IA′
]
eL =[
−BG−G′B′+2αX XX 0
]
como parâmetros
do Lema 1 e considerando queX é a matriz utilizada para a definição da função quadrática de
Lyapunov, teremos a propriedade 2 do Lema de Finsler escritacomo:
2. ∃X = X′ > 0 tal que[
I
A′
]′[
−BG−G′B′+2αX X
X 0
][
I
A′
]
< 0,
o que resulta, desenvolvendo o produto matricial, na condição equivalente para a estabilizabili-
dade do sistema, incluindo o limitante para a taxa de decaimento:
2. AX−BG+XA′−G′B′+2αX < 0.
Apesar desta formulação caracterizar estabilidade por meio de uma função de Lyapunov
quadrática (V(x(t)) = x(t)′Px(t)), inserem-se novas variáveis no espaço de busca por meio de
uma escolha conveniente de matriz de variáveisX conforme abaixo.
Sendo as matrizes do Lema de Finsler definidas anteriormente, pode-se reescrever a pro-
priedade 4 da seguinte forma:

44 3 PROJETO DE CONTROLADORES ROBUSTOS UTILIZANDO O LEMA DE FINSLER
4. ∃X ∈ R2n×n, X = X′ > 0 tais que
[
−BG−G′B′+2αX X
X 0
]
+X
[
A′ −I]
+
[
A
−I
]
X ′ < 0.
Conclui-se, pela prova existente do Lema de Finsler (Lema (1)), que as propriedades 2 e 4 são
equivalentes. Desta forma, escolhendo convenientemente amatriz de variáveisX =[
Y1Y2
]
, com
Y1 eY2 ∈ Rn×n e desenvolvendo a propriedade 4, tem-se:
[
−BG−G′B′+2αX X
X 0
]
+
[
Y1A′ −Y1
Y2A′ −Y2
]
+
[
AY′1 AY′
2
−Y′1 −Y′
2
]
< 0.
Assim, encontraram-se as seguintes LMIs sujeitas a taxa de decaimentoα:
[
AY′1−BG+Y1A′−G′B′+2αX X−Y1+AY′
2
X−Y′1+Y2A′ −Y2−Y′
2
]
< 0, (37)
X > 0. (38)
sendoY1 eY2 ∈ Rn×n, Y1 6=Y′
1, Y2 6=Y′2, G∈ R
m×n eX ∈ Rn×n, X = X′ > 0.
Essas LMIs atendem às restrições para a estabilidade assintótica do sistema com a reali-
mentação de estado. Verifica-se que o primeiro menor principal da LMI (37) possui a estrutura
do resultado encontrado no teorema de estabilidade com taxade decaimento. Não obstante,
observa-se também relaxação do espaço de busca, conforme enunciado no Lema de Finsler, pois
as matrizes variáveisY1 eY2, que garantem a estabilidade do sistema, não precisam ser simétri-
cas e, para uma abordagem de estabilidade robusta, estas podem ser politópicas:Y1λ =N∑j=1
λ jY1 j
eY2λ =N∑j=1
λ jY2 j ,N∑j=1
λ j = 1, λ j ≥ 0 e j ∈K. Sendo assim, propõe-se o seguinte teorema:
Teorema 7. Para que se garanta a estabilidade do sistema incerto (10) sujeito a taxa de de-
caimento maior ou igual aα é condição suficiente a existência de matrizes Y1 j e Y2 j ∈ Rn×n,
X = X′ ∈ Rn×n e G∈ R
m×n, tais que
[
A jY′1 j −B jG+Y1 jA′
j −G′B′j +2αX X−Y1 j +A jY′
2 j
X−Y′1 j +Y2 jA′
j −Y2 j −Y′2 j
]
< 0, (39)
j ∈K
[
A jY′1k−B jG+AkY′
1 j −BkG+Y1kA′j −G′B′
j +Y1 jA′k−G′B′
k+4αX
2X−Y′1 j −Y′
1k+Y2 jA′k+Y2kA′
j
...
...2X−Y1 j −Y1k+AkY′
2 j +A jY′2k
−Y2 j −Y′2 j −Y2k−Y′
2k
]
< 0,
(40)

3.1 Nova formulação utilizando o Lema de Finsler e taxa de decaimento 45
j = 1, ..., r −1;k= j +1, ..., r
X > 0. (41)
Quando asLMIs (39), (40) e (41) são factíveis, uma matriz de realimentação de estado que
estabiliza o sistema pode ser dada por
K = GX−1. (42)
Demonstração.Assuma que as LMIs (39), (40) e (41) são factíveis. Considerando λ j > 0
para j ∈K, teremos:
N
∑j=1
λ 2j
[
A jY′1 j −B jG+Y1 jA′
j −G′B′j +2αX X−Y1 j +A jY′
2 j
X−Y′1 j +Y2 jA′
j −Y2 j −Y′2 j
]
+ (43)
N−1∑j=1
N∑
k= j+1λ jλk
[
A jY′1k−B jG+AkY′
1 j −BkG+Y1kA′j −G′B′
j +Y1 jA′k−G′B′
k+4αX
2X−Y′1 j −Y′
1k+Y2 jA′k+Y2kA′
j
...
...2X−Y1 j −Y1k+AkY′
2 j +A jY′2k
−Y2 j −Y′2 j −Y2k−Y′
2k
]
< 0.
Sabendo que, genericamente
N
∑i=1
λi
N
∑j=1
λ j =N
∑j=1
λ 2j +2
N−1
∑j=1
N
∑k= j+1
λ jλk, (44)
e consequentemente
N
∑i=1
λi
N
∑j=1
λ jHiRj =N
∑j=1
λ 2j H jRj +
N−1
∑j=1
N
∑k= j+1
λ jλk(H jRk+HkRj), (45)
tem-se que as seguintes igualdades são verdadeiras:
N
∑i=1
λi
N
∑j=1
λ jAiY′1 j =
N
∑j=1
λ 2j A jY
′1 j +
N−1
∑j=1
N
∑k= j+1
λ jλk(A jY′1k+AkY
′1 j),
N
∑i=1
λi
N
∑j=1
λ jB jG=N
∑j=1
λ 2j B jG+
N−1
∑j=1
N
∑k= j+1
λ jλk(B jG+BkG),
N
∑i=1
λi
N
∑j=1
λ jY1 j =N
∑j=1
λ 2j Y1 j +
N−1
∑j=1
N
∑k= j+1
λ jλk(Y1 j +Y1k),
N
∑i=1
λi
N
∑j=1
λ jY2 j =N
∑j=1
λ 2j Y2 j +
N−1
∑j=1
N
∑k= j+1
λ jλk(Y2 j +Y2k),

46 3 PROJETO DE CONTROLADORES ROBUSTOS UTILIZANDO O LEMA DE FINSLER
eN
∑i=1
λi
N
∑j=1
λ jX =N
∑j=1
λ 2j X+2
N−1
∑j=1
N
∑k= j+1
λ jλkX.
Desta forma, (43) pode ser escrita como
N∑
i=1λi
N∑j=1
λ j
[
AiY′1 j −B jG+Y1iA′
j −G′B′j +2αX X−Y1 j +AiY′
2 j
X−Y′1 j +Y2iA′
j −Y2 j −Y′2 j
]
< 0, (46)
e consequentemente
N∑
i=1λiAi
N∑j=1
λ jY′1 j −
N∑j=1
λ jB jG+N∑
i=1λiY1i
N∑j=1
λ jA′j −G′
N∑j=1
λ jB′j +2αX
X−N∑j=1
λ jY′1 j +
N∑
i=1λiY2i
N∑j=1
λ jA′j
...
(47)
...
X−N∑j=1
λ jY1 j +N∑
i=1λiAi
N∑j=1
λ jY′2 j
−N∑j=1
λ jY2 j −N∑j=1
λ jY′2 j
< 0.
Então (47) pode ser reescrita como
[
AλY′1λ −Bλ G+Y1λ A′
λ −G′B′λ +2αX X−Y1λ +AλY′
2λ
X−Y′1λ +Y2λ A′
λ −Y2λ −Y′2λ
]
< 0, (48)
sendoY1λ =N∑j=1
λ jY1 j e Y2λ =N∑j=1
λ jY2 j , comN∑j=1
λ j = 1, λ j ≥ 0 e j ∈K. �
Verifica-se uma vantagem na utilização da nova formulação (39) e (40) utilizando o Lema
de Finsler em relação a (28) para a otimização da norma do controlador, que se deve à inserção
de duas matrizes politópicasY1 j eY2 j , relaxando o sistema quando comparado com a formulação
(28) que utiliza apenas a matriz de Lyapunov politópicaQ j e desta forma aumenta o número
de LMIs de otimização, já queQ j entra na composição destas (vide Teorema 4). Além disso,
tal como descrito no Capítulo 2, o uso deQλ é adequado a incertezas politópicas invariantes
no tempo, permitindo-se taxa de variação suficientemente pequena, ao contrário desta nova
formulação em que a matriz de LyapunovX não é politópica, permitindo variações deλ ao
longo do tempo, ou seja, sistema LPV.
Dada a utilização de uma CQLF, a otimização da norma deK é simplificada utilizando ape-
nas uma LMI para tal, conforme apresentado no Teorema 2. Desta forma teremos as LMI (22) e

3.2 Helicóptero 3-DOF 47
(23) em conjunto com as LMIs (39) e (40), apresentando melhores resultados para minimização
dos módulos dos ganhos do controlador dada a utilização de ummenor número de LMIs para
tal, como se verá na Seção 3.2.1.
3.2 Helicóptero 3-DOF
Considere o modelo esquemático mostrado na Figura 3 do helicóptero 3-DOF da Quanser
mostrado na Figura 2. Este equipamento é um patrimônio do LPCda FEIS - UNESP. Dois
motores DC estão montados nas extremidades de uma haste retangular e acionam duas hélices
propulsoras. Os eixos dos motores são paralelos e o vetor de impulsão é normal à haste retangu-
lar. A estrutura do sistema é suspensa por uma articulação montada próximo à extremidade do
braço de sustentação, tornando o mesmo livre para se deslocar em torno do centro. Na extremi-
dade oposta do equipamento, existe um contrapeso utilizadopara aliviar o esforço dos motores
para elevar todo o sistema.
Figura 2 - Helicóptero 3-DOF da Quanser pertencente ao LPC daFEIS - UNESP.
Fonte: Elaborado pelo autor
Uma diferença de tensão aplicada no motor dianteiro em relação ao motor traseiro causa
uma inclinação positiva, enquanto uma diferença de tensão no motor traseiro em relação ao
dianteiro causa uma inclinação negativa (ângulopitch (ρ)). Uma tensão positiva nos dois mo-
tores causa uma elevação de todo o corpo (ânguloelevation(ε) do braço). Se o corpo inclina, o

48 3 PROJETO DE CONTROLADORES ROBUSTOS UTILIZANDO O LEMA DE FINSLER
vetor impulsão resulta no deslocamento do corpo (ângulotravel (θ ) do braço). O objetivo deste
experimento é elaborar um sistema de controle que consiga regular os ângulos de elevação e de
deslocamento do helicóptero 3-DOF (QUANSER, 2002).
Figura 3 - Modelo esquemático do Helicóptero 3-DOF.
mw.g
Contra-peso lw
Eixo elevationε ≥ 0
θ ≥ 0
Eixo
travel
lhlh
la
mf xg
mhxgmbxg
Motor traseiroFb
Eixo pitch
ρ ≥ 0Ff Motor dianteiro
Sup. de sustentação
Fonte: (QUANSER, 2002)
O modelo em espaço de estado que descreve o helicóptero é (QUANSER, 2002):
ερθερθξα
= A
ερθερθξα
+B
[
Vf
Vb
]
. (49)
As variáveisξ eα representam as integrais dos ângulosε de elevação eθ de deslocamento,
respectivamente. As matrizes A e B são apresentadas da seguinte forma:

3.2 Helicóptero 3-DOF 49
A=
0 0 0 1 0 0 0 00 0 0 0 1 0 0 00 0 0 0 0 1 0 00 0 0 0 0 0 0 00 0 0 0 0 0 0 0
02mf la−mwlwg
2mf la2+2mf lh2+mf lw2 0 0 0 0 0 0
1 0 0 0 0 0 0 00 0 1 0 0 0 0 0
e B=
0 00 00 0
lakf 1mwl2w+2mf l2a
lakf 2mwl2w+2mf l2a
12
kf 1mf lh
− 12
kf 2mf lh
0 00 00 0
. (50)
Os valores das parâmetros utilizadas no projeto robusto, que aparecem descritos na Tabela
1, foram os mesmos utilizados no projeto do fabricante para aimplementação do controlador
original, mantendo assim fidelidade ao modelo do fabricante.
Tabela 1 - Parâmetros do helicóptero 3-DOF
Constante da força de propulsão da hélice dianteirakf 1 0,1188Constante da força de propulsão da hélice traseirakf 2 0,1188
Massa do corpo do helicóptero (Kg) mh 1,15Massa do contra-peso (Kg) mw 1,87
Massa do conjunto da hélice dianteira (Kg) mf mh/2Massa do conjunto da hélice traseira (Kg) mb mh/2Distância: eixo de pitch - cada motor (m) lh 7x0,0254Distância: eixo de elev. - helicóptero (m) la 26x0,0254Distancia: eixo de elev. - contra-peso (m) lw 18,5x0,0254
Constante gravitacional (m/s2) g 9,81
A fim de verificar a eficiencia das técnicas de controle robusto, implementou-se uma queda
de 30% da potência do motor traseiro, simulando uma falha física nos rolamentos dos motores
em um helicóptero real, sendo esta formulada como uma incerteza na constante da força de
propulsão da hélice traseira (0,08312≤ kf 2 ≤ 0,1188). A falha foi implementada fisicamente
através da inserção de uma chave temporizada conectada a um amplificador com ganho no
sinal controle de 0,7 diretamente na tensão de atuação sobre o motor. Assim, constitui-se um
politopo de dois vértices com uma incerteza na matriz de entrada do sistema do helicóptero,
atuando sobre a tensão traseira entre 0,7Vb e Vb. Os vértices do politopo são descritos na
sequência.
Vértice 1 (kf 2 = 0,1188):
A1 =
0 0 0 1 0 0 0 00 0 0 0 1 0 0 00 0 0 0 0 1 0 00 0 0 0 0 0 0 00 0 0 0 0 0 0 00 −1,2304 0 0 0 0 0 01 0 0 0 0 0 0 00 0 1 0 0 0 0 0
e B1 =
0 00 00 0
0,0858 0,08580,5810−0,5810
0 00 00 0
. (51)

50 3 PROJETO DE CONTROLADORES ROBUSTOS UTILIZANDO O LEMA DE FINSLER
Vértice 2 (kf 2 = 0,08312):
A2 =
0 0 0 1 0 0 0 00 0 0 0 1 0 0 00 0 0 0 0 1 0 00 0 0 0 0 0 0 00 0 0 0 0 0 0 00 −1,2304 0 0 0 0 0 01 0 0 0 0 0 0 00 0 1 0 0 0 0 0
e B2 =
0 00 00 0
0,0858 0,06010,5810−0,4067
0 00 00 0
. (52)
3.2.1 Implementação das diferentes técnicas de projeto ótimo no Helicóptero3-DOF
Para comprovar a eficiência da nova técnica proposta neste capítulo, realizaram-se imple-
mentações práticas dos controladores, com o objetivo de visualizar o controlador atuando em
sistemas reais sujeitos a falhas.
A trajetória do helicóptero foi dividida em três estágios. Oprimeiro estágio é de deco-
lagem, em que o helicóptero sobe 27,5o alcançando o ângulo de elevaçãoε = 0o. No segundo
estágio, o helicóptero viaja 120o mantendo a mesma elevação, ou seja, o helicóptero alcança
θ = 120o tendo como referência o ponto de decolagem. No terceiro estágio, o helicóptero reali-
za a aterrissagem retomando o ângulo de elevação inicialε = −27,5o. Durante a aterrissagem
do helicóptero, mais precisamente no instante 22s, insere-se a perda de 30% da potência do mo-
tor traseiro. O controlador robusto deverá manter a estabilidade do helicóptero na ocorrência
desta falha.
Fixandoα = 0,8, projetaram-se três controladores: com estabilidade estendida (Teorema
3) e otimização (Teorema 4), com estabilidade projetiva (Teorema 5) e otimização (Teorema
6) e com a nova formulação proposta com estabilidade estendida (Teorema 7) também com
a respectiva otimização (Teorema 2) para, em seguida, realizar a implementação prática dos
mesmos. Neste exemplo, a constante de relaxaçãoa da LMI (28) foi encontrada através de uma
varredura periódica, sendo verificado os melhores resultado de norma dos controladores para
a= 10−6. As hipóteses dos Teoremas 3 e 5 estabelecem uma variação suficientemente pequena
deλ . No entanto, para fins de comparação dos Teoremas 3 e 5 com o Teorema 7, o mesmo teste
de perda abrupta de potência feito com o controlador (55) foirealizado para os controladores
(53) e (54).
As normas dos controladores projetados foram, respectivamente, 110,46 para o contro-
lador projetado com estabilidade projetiva (Teorema 5) e otimização (Teorema 6), 56,47 para
o controlador projetado por estabilidade estendida (Teorema 3) com a otimização (Teorema 4)
e 44,84 para o controlador projetado pela nova formulação de estabilidade estendida (Teorema

3.3 Comparação geral dos três métodos de projeto com otimização 51
7) e otimização (Teorema 2).
Na sequência, apresenta-se o controlador projetado com as LMIs do Teorema 5 e otimização
do Teorema 6 para a implementação ilustrada na Figura 4 e sua norma:
K =[
50,7121 28,7596 −35,1829 29,8247 7,9563 −41,0906 28,8974−11,740566,5405−31,9853 34,7642 38,3173−9,9376 42,0298 38,3418 11,8207
]
, (53)
||K||= 110,46.
Na sequência, apresenta-se o controlador projetado com as LMIs do Teorema 3 e otimização
do Teorema 4 para a implementação ilustrada na Figura 5 e sua norma:
K =[
23,7152 12,9483 −9,8587 18,7322 4,9737 −14,3283 10,7730−2,678033,8862−15,2923 11,6132 25,4922−6,0776 16,5503 15,8350 3,4475
]
, (54)
||K||= 56,47.
Na sequência, apresenta-se o controlador projetado com as LMIs do Teorema 7 e otimização
do Teorema 2 para a implementação ilustrada na Figura 6 e sua norma:
K =[
18,8559 12,5461 −11,3752 13,9628 4,5026 −15,1159 9,1565 −3,407127,8671−10,8534 7,8933 20,0978−4,5951 11,3897 13,6784 2,3623
]
, (55)
||K||= 44,84.
Nas Figuras 4, 5 e 6, apresenta-se o trajeto das variáveis:elevation(ε), pitch (ρ) e travel
(θ ) em graus para a trajetória previamente estabelecida com a implementação dos controladores
(53), (54) e (55) respectivamente. As três figuras mostram, também respectivamente, o sinal de
controle (tensão) nos motores dianteiro (Vf ) e traseiro (Vb), para os quais é possível verificar
que os sinais de controle da Figura 6 são mais suaves quando comparados com os das Figuras
4 e 5. Esta suavidade se deve ao fato de que a norma do controlador (55) é menor que a dos
outros dois.
Note que além do método proposto proporcionar menor norma que os apresentados pelos
autores em (BUZACHERO et al., 2010) e (BUZACHERO et al., 2012),o transitório antes e
após a falha, é praticamente o mesmo com pequena diferença deamplitude.
3.3 Comparação geral dos três métodos de projeto com otimiza-ção
Com a finalidade de verificar qual técnica apresenta melhores resultados para a norma
dos controladores em conjunto com a factibilidade dos sistemas, fez-se uma comparação mais

52 3 PROJETO DE CONTROLADORES ROBUSTOS UTILIZANDO O LEMA DE FINSLER
Figura 4 - Implementação prática do controlador projetado por estabilidade projetiva com ométodo de otimização apresentado em (BUZACHERO et al., 2012).
0 5 10 15 20 22 25 30 35 40−40
−20
0
20
40
60
80
100
120
140
160
Variá
veis
dees
tado
[gra
us]e
10xTen
são
[V]
ε(t)
ρ(t)
θ(t)
10xVb(t)
10xVf (t)
Falha
t[s]
Fonte: Elaborado pelo autor
Figura 5 - Implementação prática do controlador projetado por estabilidade estendida com ométodo de otimização apresentado em (BUZACHERO et al., 2012).
0 5 10 15 20 22 25 30 35 40−40
−20
0
20
40
60
80
100
120
140
160
Variá
veis
dees
tado
[gra
us]e
10xTen
são
[V]
ε(t)
ρ(t)
θ(t)
10xVb(t)
10xVf (t)
Falha
t[s]
Fonte: Elaborado pelo autor
geral entre as mesmas. A princípio, foram comparadas as técnicas de projeto por estabilidade
quadrática com otimização da norma (Teorema 1) e projeto ótimo pela formulação proposta
(Teorema 7). Em seguida, comparou-se as três técnicas de projeto ótimo: estabilidade proje-
tiva, estabilidade estendida e formulação proposta.
Para a comparação, foram gerados aleatoriamente 1000 politopos de sistemas incertos de

3.3 Comparação geral dos três métodos de projeto com otimização 53
Figura 6 - Implementação prática do controlador projetado pela nova formulação de estabilidadeestendida com o método de otimização.
0 5 10 15 20 22 25 30 35 40−40
−20
0
20
40
60
80
100
120
140
160
Variá
veis
dees
tado
[gra
us]e
10xTen
são
[V]
ε(t)
ρ(t)
θ(t)
10xVb(t)
10xVf (t)
Falha
t[s]
Fonte: Elaborado pelo autor
segunda ordem, com um parâmetro incerto (dois vértices). Os1000 politopos foram gerados
factíveis em pelo menos um dos casos de projeto e otimização paraα = 0,5 e, em seguida,
analisaram-se as consequências do aumento deα conforme Figuras 7 e 8.
Figura 7 - Quantidade de controladores com menor norma para 1000 politopos geradosaleatoriamente considerando o incremento deα - Comparação entre as técnicas Quadráticae Proposta.
0.5 10.5 20.5 30.5 40.5 50.5 60.5 70.5 80.5 90.5 100.50
100
200
300
400
500
600
700
800
900
Núm
ero
deco
ntro
lado
res
com
men
orno
rma
α
Projeto por estabilidade quadrática com otimização da norma (Teo. 1)Projeto ótimo pela formulação proposta (Teo. 7)
Fonte: Elaborado pelo autor
É possível verificar das Figuras 7 e 8 que o melhor método de projeto ótimo é a formu-

54 3 PROJETO DE CONTROLADORES ROBUSTOS UTILIZANDO O LEMA DE FINSLER
lação proposta, além de possibilitar a varição da incertezano tempo, o que demonstra ser mais
interessante, do ponto de vista de aplicações práticas, em sistemas sujeitos a falhas durante o
funcionamento.
Figura 8 - Quantidade de controladores com menor norma para 1000 politopos gerados aleato-riamente considerando o incremento deα - Comparação entre as técnicas Estendida, Projetivae Proposta.
0.5 10.5 20.5 30.5 40.5 50.5 60.5 70.5 80.5 90.5 100.50
100
200
300
400
500
600
700
800
Núm
ero
deco
ntro
lado
res
com
men
orno
rma
α
Projeto por estabilidade projetiva com otimização da norma (Teo. 5)Projeto por estabilidade estendida com otimização da norma (Teo. 3)Projeto ótimo pela formulação proposta (Teo. 7)
Fonte: Elaborado pelo autor
3.4 Conclusões parciais
A nova formulação proposta para a estabilidade estendida com o método de otimização
apresentou melhores resultados em comparação com os métodos expostos em Buzachero et al.
(2010) e Buzachero et al. (2012). Implementaram-se os controladores para todos os métodos de
projeto no helicóptero 3-DOF. Para a performance dos controladores no sistema, verificou-se
que o método proposto apresentou um desempenho melhor, com sinais de controle mais suaves,
também devido a uma norma razoavelmente menor do que a das técnicas existentes. Além
disso, as técnicas existentes admitem apenas variações suficientemente pequenas das incertezas.
Assim sendo, foi possível implementar a falha abrupta apenas devido à avaliação de que o
sistema passou para outro ponto de operação, considerando como condições iniciais o ponto de
operação antes da falha, enquanto que a nova formulação permite variações deλ (sistema com
incerteza LPV), pois a matriz de Lyapunov não é politópica, mostrando a vantagem do método
proposto para a implementação em sistemas LPV.
Na análise de mil politopos gerados aleatoriamente, a técnica proposta mostrou-se melhor
em todos os casos de comparação. Os respectivos projetos de controladores foram realizados
usando o pacote “Robust Control Toolbox” do softwareMatLabr (GAHINET et al., 1995).

55
4 PROJETO DE CONTROLADORES ROBUSTOSCHAVEADOS
Introduzem-se neste capítulo conceitos que serão usados para o projeto de controladores
robustos chaveados com restrição de taxa de decaimento e otimização da norma dos contro-
ladores. Uma característica marcante da técnica que será abordada é a possibilidade de controle
de sistemas LPV, sem a necessidade de medir o parâmetro incerto a cada instante de tempo,
além das vantagens de desempenho já conhecidas de sistemas chaveados.
4.1 Chaveamento entre subsistemas
Suponha um sistema composto por uma planta com incertezas politópica, cuja a estabili-
dade deste sistema será verificada através do chaveamento conveniente entre funções de Lya-
punov quadráticas por partes. Esse sistema pode então ser denominado como sistema politópico
chaveado, tendo como vantagem a possibilidade do sistema ser do tipo LPV (DEAECTO;
GEROMEL; DAAFOUZ, 2011). A abordagem apresentada a seguir éapenas introdutória.
Concebem-se aqui, condições de estabilidade para o sistema incerto através de funções de Lya-
punov quadráticas por partes, para que se formule, nas próximas seções, o chaveamento entre
sistemas realimentados com restrição de taxa de decaimentoe otimização.
Desta forma, considere o sistema politópico chaveado na forma de espaço de estado, tendo
a estratégia de chaveamento conforme ilustrado na Figura 1:
x(t) = Aλσ x(t), x(0) = x0, (56)
sendo definido para todot ≥ 0 para algumσ(x(t)) ∈ K, comK = {1,2, ...,N}, sendo queN
é o número de vértices do politopo de incertezas,λ pertence ao simplex unitárioΛ conforme
definido em (3), sendox(t) ∈ Rn o vetor dos estado e a matrizAλσ dada por
Aλσ =N
∑j=1
λ jA jσ , (57)
sendo que o primeiro índice deA jσ refere-se ao vértice do politopo e o segundo à regra de
chaveamento, que será responsável pela escolha que verificará a estabilidade do sistema incerto.

56 4 PROJETO DE CONTROLADORES ROBUSTOS CHAVEADOS
Definindo a função de Lyapunov quadrática por partes (GEROMEL; COLANERI, 2006):
v(x) := mini∈K
x′(t)Pix(t) = minλ∈Λ
(N
∑i=1
λix′(t)Pix(t)), (58)
sendo{P1,P2, ...,PN} ∈Rn×n simétricas e definidas positivas. Verifica-se que (58) não é diferen-
ciável para todox(t) ∈ Rn dada a existência de descontinuidades no chaveamento das funções.
Desta forma, foi econtrada umag(x(t)) : Rn → N, e as condições para que a regra de chavea-
mento dada por
σ(t) = ming(x(t)), (59)
faça com que a origem do sistema (56) seja globalmente assintoticamente estável. Para este
aspecto, definiu-se o conjunto
I(x) = {i : v(x) = x′(t)Pix(t)}, (60)
sendov(x) solução de (58) e desta formaI(x) pode possuir mais de um elemento cuja função
(58) não é diferenciável, ou seja, a solução do mínimo não é única.
4.1.1 Matrizes Metzler
Para a compreensão do teorema a seguir, considere a matriz deMetzler denotada porM
(LUENBERGER, 1979; GEROMEL; COLANERI, 2006), consistindo de todas as matrizes
Π ∈ RN×N, sendo os termosπ ji elementos da j-ésima linha e i-ésima coluna deΠ, tais que
π ji ≥ 0, ∀ j 6= i,N
∑j=1
π ji = 0, ∀i. (61)
O ponto importante para a obtenção das condições de estabilidade é utilizar uma ma-
triz Metzler dependente do parâmetro desconhecido, isto é,Π(λ ) : Λ → KN×N (GEROMEL;
DEAECTO, 2009) cujos elementos são definidos por
π ji :=
{
γλ j , j 6= i
γ(λi −1) , j = i, (62)
comγ ≥ 0.
Pode-se verificar que eles constituem uma matriz de MetzlerΠ(λ ) ∈ M para todoλ ∈ Λ.
De fato, pela definição (62) todos os elementos fora da diagonal principal são não negativos e

4.1 Chaveamento entre subsistemas 57
as identidades
N∑j=1
π ji (λ ) = [N∑j=1j 6=i
γλ j ]+ γ(λi −1)
= γ(N∑j=1
λ j −1)
= 0,
são verificadas para cadai ∈K e todoλ ∈ Λ.
Além disso, utilizandoΠ(λ ) ∈ M , temos que as igualdades
N∑j=1
π ji (λ )Pj =N∑j=1j 6=i
γλ jPj + γ(λi −1)Pi
= γN∑j=1
λ jPj − γPi
= γN∑j=1
λ j(Pj −Pi),
(63)
são verdadeiras para cadai ∈ K e todoλ ∈ Λ. Este é um resultado fundamental para o projeto
de controle robusto em questão e que tornou possível a obtenção das condições de estabilidade
robusta que serão vistas na sequência.
4.1.2 Condições para estabilidade robusta
De posse dos conceitos introduzidos, o Teorema 8 a seguir foiadequado a partir do apre-
sentado em (DEAECTO, 2010) e será estendido para inclusão da taxa de decaimento.
Teorema 8. (DEAECTO, 2010) Sendo{Q1,Q2, ...,QN} um conjunto de matrizes simétricas
semidefinidas positivas, se existirem um conjunto de matrizes simétricas definidas positivas
{P1,P2, ...,PN} e γ ∈ M satisfazendo as seguintes desigualdades de Lyapunov-Metzler
A′ji Pi +PiA ji + γ(Pj −Pi)+Qi < 0, (64)
sendo i, j ∈K, então a lei de controle
σ(t) = g(x(t)) = argmini∈K
x′(t)Pix(t), (65)
faz com que o sistema(56)seja assintoticamente estável.
Reproduziu-se a prova do Teorema 8 aqui para ser útil nas demostrações dos próximos
teoremas.

58 4 PROJETO DE CONTROLADORES ROBUSTOS CHAVEADOS
Demonstração.Assuma que as matrizes simétricasPi para todoi ∈ K são soluções das
desigualdades (64) para algumγ ≥ 0. Logo, multiplicando o resultado porλ j ≥ 0 e somando
para todoj = 1,2, ...,N, obtém-se
A′λ iPi +PiAλ i + γ
N
∑j=1
λ j(Pj −Pi)+Qi < 0. (66)
Uma vez que (66) vale para todoλ ∈ Λ, utilizando o resultado apresentado em (63), verifica-se
que o mesmo ocorre para
A′λ iPi +PiAλ i +
N
∑j=1
π ji (λ )Pj +Qi < 0, (67)
com i ∈K, Π(λ ) ∈ M e λ ∈ Λ.
Como (58) não é diferenciável para todox(t) ∈ Rn, utiliza-se a derivada de Dini (GARG,
1998) à direita de (58) que, por definição, é dada por
D+v(x(t)) = limh→0+
supv(x(t +h))−v(x(t))
h. (68)
Sabendo que a regra de chaveamento é dada porσ(t) = g(x(t)) = i, utilizando o Teorema de
Danskin (LASDON, 1970) tem-se que
D+v(x(t)) = limh→0+
supv(x(t)+hAλ ix(t))−v(x(t))h
= minl∈I(x(t))
x′(t)(Aλ i′Pl +PlAλ i)x(t)
≤ x′(t)(Aλ i′Pi +PiAλ i)x(t),
(69)
em que a desigualdade assegura o fato de quei ∈ I(x(t)).
Por ourto lado lembrando quex′(t)Pjx(t)≥ x′(t)Pix(t) = v(x) obtém-se de (67) que
D+v(x(t)) < x′(t)(−N∑j=1
π ji Pj −Qi)x(t)
= x′(t)(−N∑j=1j 6=i
π ji Pj −πii Pi −Qi)x(t)
≤ x′(t)(−N∑j=1j 6=i
π ji Pi −πii Pi −Qi)x(t)
= −(N∑j=1
π ji )x′(t)Pix(t)−x′(t)Qix(t)
= −x′(t)Qix(t)
≤ 0.
(70)
Logo (70) prova que o sistema (56) é assintoticamente estável. �

4.1 Chaveamento entre subsistemas 59
Na seção a seguir será abordada a técnica de projeto robusto chaveado robustos. Adicional-
mente, abordar-se-á a inserção da taxa de decaimento, de acordo com (BOYD et al., 1994) e
utilizando-se a derivada de Dini (GARG, 1998):D+v(x(t))≤−2αv(x(t)).
4.1.3 Projeto robusto de controladores chaveados
Considere um sistema politópico descrito pela equação:
x(t) = Aλ x(t)+Bλ u(t), x(0) = x0, (71)
sendox(t) ∈ Rn o vetor de estado eu(t) ∈ R
m a entrada de controle. As matrizes(Aλ ,Bλ ) de
dimensões compatíveis são tais que
(Aλ ,Bλ ) =N
∑j=1
λ j(A j ,B j), (72)
sendo que os vértices(A j ,B j) do politopo são matrizes conhecidas para todoj ∈ K, e λ =
[λ1,λ2, ...,λN]′ ∈ R
N pertence ao simplex unitárioΛ, conforme (3).
No contexto de sistemas LPV o parâmetroλ é variante no tempo:λ = λ (t) ∈ Λ para
todo t ≥ 0. Desta forma o objetivo é determinar um ganho de realimentaçãoKλ de forma que
utilizando a entrada de controleu(t) = Kλ x(t), o sistema em malha fechada
x(t) = (Aλ (t)+Bλ (t)Kλ (t))x(t), (73)
seja globalmente assintoticamente estável. De posse dos resultados apresentados em (GEROMEL;
COLANERI, 2006) o seguinte lema pode ser provado conforme apresentado em (DEAECTO;
GEROMEL; DAAFOUZ, 2011).
Lema 3. (DEAECTO; GEROMEL; DAAFOUZ, 2011) Se existir uma matriz simétrica definida
positiva S∈ Rn×n, matrizes simétricas Qi ∈ R
n×n e matrizes Yi ∈ Rn×n para todo i∈ K satis-
fazendo
A jS+B jYi +SAj′+Yi
′B j′+Q j −Qi < 0, (74)
para todo i, j ∈K×K, então o ganho LPV dado por Kλ =Yλ S−1 torna o sistema(71) global-
mente assintoticamente estável.
Demonstração.(DEAECTO; GEROMEL; DAAFOUZ, 2011) Multiplicando (74) sucessi-
vamente porλi ≥ 0 e porλ j ≥ 0 e somando para todoi ∈K e j ∈K, obtemos
Aλ S+BλYλ +SAλ′+Y′
λ Bλ′ < 0, (75)

60 4 PROJETO DE CONTROLADORES ROBUSTOS CHAVEADOS
válido para todoλ ∈ Λ. Logo multiplicando ambos os lados de (75) porS−1 = P e rearranjando
os termos obter-se-á
(Aλ +Bλ Kλ )′P+P(Aλ +Bλ Kλ )< 0. (76)
Portanto, a prova segue da função de Lyapunov quadráticav(x) = x′Px pois v(x)< 0 para todo
x 6= 0∈ Rn. �
Dois pontos devem ser considerados sobre esta abordagem. AsmatrizesQ1,Q2, ...,QN po-
dem reduzir o conservadorismo, e se faz necessário seu uso para encontrar factibilidade em
muitas situações. Em segundo lugar, o controle LPV dado poru(t) = Kλ x(t) exige que o
parâmetroλ (t) seja medido a cada instante de tempo, inviabilizando este tipo de implemen-
tação quando a incerteza é tratada como falha, pois se desconhece a forma como irá ocorrer.
Além disso, conforme explanado em (DEAECTO; GEROMEL; DAAFOUZ, 2011), nesta for-
mulação a matrizP não pode ser dependente de parâmetro, pois sua derivada em relação ao
tempo,P(λ (t)), teria de ser incluída nas condições de estabilidade. Assimsendo, trocando (74)
por
A jSi +B jYi +SiA j′+Yi
′B j′+Q j −Qi < 0, (77)
comSi = Si′ > 0 para todoi, j ∈ R, e obtém-se consequentemente
(Aλ +Bλ K(λ ))′P(λ )+P(λ )(Aλ +Bλ K(λ ))< 0, (78)
sendo queKλ =Yλ S−1λ e P(λ ) = S−1
λ dependem não linearmente do parâmetro incertoλ ∈ Λ.
Entretanto, a estabilidade assintótica não pode ser assegurada, pois a desigualdade (78) não
implica que a derivada no tempo dev(x) = x′P(λ )x seja negativa, o que naturalmente impõe
alguma limitação sobre||λ (t)|| (DEAECTO; GEROMEL; DAAFOUZ, 2011). Verifica-se desta
forma, que as condições (77) com as seguintes restrições adicionais (DEAECTO, 2010):
Q j −Qi = γ(SiS−1j Si −Si), (79)
para todoi, j ∈R eγ > 0, as quais podem ser escritas em termos de LMIs, asseguram a existên-
cia de um conjunto de ganhos de realimentação de estado e uma regra de chaveamentoσ(t)
com as seguintes propriedades (DEAECTO; GEROMEL; DAAFOUZ, 2011):
• O sistema em malha fechada variante no tempo é globalmente assintoticamente estável
sem que nenhuma exigência seja feita sobre a magnitude da derivada no tempo deλ (t) ∈Λ;
• A entrada de controleu(t)=Kσ(t)x(t) não depende explicitamente do parâmetroλ (t)∈Λ,
o que permite a sua implementação sem a necessidade de medirλ (t).

4.2 Projeto robusto chaveado e restrição de taxa de decaimento 61
4.2 Projeto robusto chaveado e restrição de taxa de decai-mento
O objetivo nesta seção é determinar uma regra de chaveamentoestabilizante para sistemas
politópicos realimentados conforme se apresentou na Figura 1, sujeitos a taxa de decaimento
maior ou igual a um escalarα, descritos pela seguinte equação em espaço de estado
x(t) = (Aλ +Bλ Kσ )x(t),x(0) = x0. (80)
Para isso, propõe-se o seguinte teorema.
Teorema 9.Se existirem matrizes simétricas definidas positivas Si =Pi−1, matrizes Yi para todo
i ∈K um escalarγ ≥ 0 e um escalarα ≥ 0 satisfazendo as desigualdades de Lyapunov-Metzler
[
Sym{A jSi +B jYi}+(2α − γ)Si γSi
γSi −γSj
]
< 0, (81)
i, j ∈K
então a regra de chaveamentoσ(x(t)) = argmini∈Kx(t)′Si−1x(t) e os ganhos de realimentação
Ki =YiSi−1 para todo i∈ K fazem com que a origem x= 0 do sistema em malha fechada seja
um ponto de equilíbrio globalmente assintoticamente estável e o sistema estará sujeito a taxa
de decaimento maior ou igual aα.
Demonstração.Considere que as matrizes simétricas definidas positivasSi = Pi−1 e que
Yi = KiSi para todoi ∈K são soluções das desigualdades (81) para algumγ ≥ 0 eα ≥ 0. Multi-
plicando ambos os lados da desigualdade pordiag{Si−1, I} e, então, aplicando o complemento
de Schur em relação à segunda linha e à segunda coluna de (81),obtém-se:
Sym{Pi(A j +B jKi)}+ γ(Pj −Pi)+2αPi < 0. (82)
Multiplicando o resultado porλ j ≥ 0 e somando para todoj = 1,2, ...,N obtém-se
Sym{Pi(Aλ +Bλ Ki)}+ γN
∑j=1
λ j(Pj −Pi)+2αPi < 0. (83)
Uma vez que (83) vale para todoλ ∈ Λ, utilizando o resultado apresentado em (63), verifica-se
que o mesmo ocorre para
Sym{Pi(Aλ +Bλ Ki)}+N
∑j=1
π ji (λ )Pj <−2αPi, (84)

62 4 PROJETO DE CONTROLADORES ROBUSTOS CHAVEADOS
com i ∈K, Π(λ ) ∈ M e λ ∈ Λ.
Assim sendo, a prova decorre do Teorema 8 (DEAECTO, 2010), lembrando quex′(t)Pjx(t)≥
x′(t)Pix(t) = v(x) obtém-se de (64) que
D+v(x(t)) < x′(t)(−N∑j=1
π ji Pj −2αPλ )x(t)
≤ −(N∑j=1
π ji )x′(t)Pix(t)−2αx′(t)Pix(t)
= −2αx′(t)Pix(t)
< 0.
(85)
De (85) está provado que a origem do sistema (80) é globalmente assintoticamente estável e o
sistema estará sujeito a taxa de decaimento maior ou igual aα, garantindo que a mínima função
energia estará sempre ativa, lembrando que ˙v(t)≤−2αv(x), sendov(x) = mini∈K
(x′(t)Pix(t)).
Note que, se a restrição de taxa de decaimento for satisfeita, a estabilidade robusta também
o será. �
Na Seção 4.4, é verificada a eficiência do método com a inserçãoda taxa de decaimento.
4.3 Otimização da norma de controladores chaveados
Em muitas situações os controladores com chaveamento em sistemas com restrição de taxa
de decaimento possuem ganhos elevados, dificultando assim sua implementação prática. A fim
de contornar esta dificuldade foi proposto o Teorema 10 adicionalmente ao Teorema 9, para
minimizar a norma deKi e garantir a taxa de decaimento maior ou igual aα.
Teorema 10. Dada uma constanteµ0 > 0, utilizada apenas para flexibilizar a obtenção de
factibilidade, obtém-se um limitante para a norma dos controladores Ki ∈ Rm×n, com Ki =
YiS−1i , Si = S′i > 0, Si ∈ R
n×n e Yi ∈ Rm×n encontrando o valor mínimo deβ , β > 0 tal que
K′i Ki <
βµ0
In. O valor mínimo deβ pode ser encontrado resolvendo o seguinte problema de
otimização com restrição de taxa de decaimento maior ou igual a α:
minβ
s.a
[
Si Y′i
Yi β Im
]
> 0,(86)
Si > µ0In, (87)[
Sym{A jSi +B jYi}+(2α − γ)Si γSi
γSi −γSj
]
< 0, (88)

4.4 Exemplo de Aplicação: Sistema massa-mola-massa 63
i, j ∈K
sendo Im e In são matrizes identidade de ordem m e n respectivamente.
Demonstração.Aplicando o complemento de Schur para a primeira desigualdade de (86)
resulta em (89)
β Im > 0 e Si −Y′i (β Im)
−1Yi > 0. (89)
Assim, a partir de (89), encontra-se (90)
Si >1β
Y′i Yi ⇒Y′
i Yi < βSi . (90)
SubstituindoYi = KiSi em (90) resulta em (91)
SiK′i KiSi < βSi ⇒ K′
i Ki < βS−1i (91)
Assim, a partir de (87) e (91), pode-se deduzir (92).
K′i Ki <
βµ0
In, (92)
na qualKi são controladores ótimos associados a (81). �
Conclui-se, desta forma, que minimizar a norma de uma matriz éequivalente a minimizar
um escalarβ > 0 tal queK′i Ki <
βµ0
In, comµ0 > 0.
4.4 Exemplo de Aplicação: Sistema massa-mola-massa
Considere o sistema da Figura 9. Este sistema envolve dois carros, cujas massas nomi-
nais sãom1 = m2 = 1 kg, conectadas por uma mola de constante elásticak = 1,25 N/m
(DEAECTO, 2010). O problema consiste em atuar na entrada de controle u de forma a ter
o tempo de duração do transitório reduzido convenientemente por meio da realimentação de
estado de dois controladores chaveados{K1,K2} projetados com taxa de decaimento, sendo a
regra de chaveamentoσ(x(t)) conforme definida anteriormente.

64 4 PROJETO DE CONTROLADORES ROBUSTOS CHAVEADOS
Figura 9 - Sistema massa-mola-massa.
m1m2
x1x2
ku
Fonte: (SKAFIDAS et al., 1999)
O modelo em espaço de estado que descreve o sistema é:
.x1.x2..x1..x2
=
0 0 1 0
0 0 0 1
− km1
km1
0 0k
m2− k
m20 0
x1
x2.x1.x2
+
0
0
0
1
u. (93)
Considerar-se-á que a constante da mola é modelada como um parâmetro incerto variante
no tempo 0,5≤ k(t) ≤ 2,0 para todot ≥ 0. Desta forma, constituir-se-á um politopo definido
pelos vértices:
A1 =
0 0 1 0
0 0 0 1
−0,5 0,5 0 0
0,5 −0,5 0 0
, A2 =
0 0 1 0
0 0 0 1
−2 2 0 0
2 −2 0 0
. (94)
Deseja-se realizar o projeto conjunto de controladores{K1,K2} e a regra de chaveamento
σ de modo a assegurar a estabilidade com taxa de decaimento maior ou igual aα.
Para propostas de simulação, considera-seλ (t)∈Λ dada comoλ1(t) = 0,5−0,5sen(10t) e
λ2(t) = 0,5+0,5sen(10t), correspondente ak(t) = 1,25+0,75sen(10t) para todot ≥ 0. Note
queλ1(t)+λ2(t) = 1,∀t.
Utilizando o Teorema 9 comγ = 0,01 encontrado através de uma busca unidimensional,
projetaram-se controladores para diferentes taxas de decaimento e, em seguida, simulou-se o
comportamento do sistema conforme resultados apresentados nas Figuras 11 e 14.

4.4 Exemplo de Aplicação: Sistema massa-mola-massa 65
Fixandoα = 0,4 para a taxa de decaimento, foram encontrados os seguintes controladores:
K1 =[
16,6137 −56,6729 −87,6048 −8,8614]
, (95)
K2 =[
16,5626 −56,4807 −87,2974 −8,8373]
. (96)
A Figura 10 representa a nuvem de autovalores do sistema incerto, varrendoλ (t) parat
entre 0 e2π10 realimentado tanto comK1 como comK2.
Figura 10 - Nuvem de autovalores paraα = 0,4 do sistema massa-mola-massa varrendoλ (t)para 63 partições det entre(0, 2π
10) realimentado tanto comK1 como comK2.
−5.5 −5 −4.5 −4 −3.5 −3 −2.5 −2 −1.5 −1 −0.4
−6
−4
−2
0
2
4
6
α = 0,4
Par
teim
agin
ária
dos
auto
valo
res
Parte real dos autovalores
Fonte: Elaborado pelo autor
Dadas as condições iniciaisx0 =[
1 −1 0 0]′
, o sistema apresentou o comportamento
conforme a Figura 11. Apresentaram-se o sinal de controle e ocontrolador ativo em cada
instante de tempo na Figura 12.
Com o objetivo de verificar a eficiência para restrições maiores de taxa de decaimento
fixou-seα = 1 e foram encontrados os seguintes controladores.
K1 =[
−1,4620 −0,5279 −2,0869 −0,0345]
×103. (97)
K2 =[
−1,4603 −0,5273 −2,0845 −0,0345]
×103. (98)

66 4 PROJETO DE CONTROLADORES ROBUSTOS CHAVEADOS
Figura 11 - Simulação do sistema realimentado projetado comα = 0,4.
0 1 2 3 4 5 6−2
−1
0
1
2
3
4
5
6
7
8
x(t)
para
deca
imen
toα=
0,4
x1(t)x2(t)x1(t)x2(t)
t[s]
Fonte: Elaborado pelo autor
Figura 12 - Sinal de controle e controlador ativo paraα = 0,4.
0 1 2 3 4 5 6−40
−20
0
20
40
60
80
100
u(t)
para
deca
imen
toα=
0,4
u(t)chaveamento do controlador
K1 atuando
K2 atuando
t[s]
Fonte: Elaborado pelo autor
A Figura 13 representa a nuvem de autovalores do sistema incerto, varrendoλ (t) parat
entre 0 e2π10 realimentado tanto comK1 como comK2, consuderando agoraα = 1.

4.4 Exemplo de Aplicação: Sistema massa-mola-massa 67
Figura 13 - Nuvem de autovalores paraα = 1 do sistema massa-mola-massa varrendoλ (t) para63 partições det entre(0, 2π
10) realimentado tanto comK1 como comK2.
−25 −20 −15 −10 −5 −1
−10
−8
−6
−4
−2
0
2
4
6
8
10 α = 1
Par
teim
agin
ária
dos
auto
valo
res
Parte real dos autovalores
Fonte: Elaborado pelo autor
Dadas as condições iniciaisx0 =[
1 −1 0 0]′
, o sistema apresentou o comportamento
conforme Figura 14, sendo o sinal de controle e o controladorativo em cada instante de tempo
apresentado na Figura 15.
Figura 14 - Simulação do sistema realimentado projetado comα = 1.
0 1 2 3 4 5 6−20
−15
−10
−5
0
5
10
15
20
x(t)
para
deca
imen
toα=
1
x1(t)x2(t)x1(t)x2(t)
t[s]
Fonte: Elaborado pelo autor

68 4 PROJETO DE CONTROLADORES ROBUSTOS CHAVEADOS
Figura 15 - Sinal de controle e controlador ativo paraα = 1.
0 1 2 3 4 5 6−1500
−1000
−500
0
500
u(t)
para
deca
imen
toα=
1
u(t)chaveamento do controladorK1 atuando
K2 atuando
t[s]
Fonte: Elaborado pelo autor
Verifica-se que, com um incremento na taxa de decaimento (α de 0,4 para 1), houve um au-
mento considerável dos ganhos dos controladores, podendo tornar inviável a aplicação prática
desta técnica. Para resolver esse problema, pode-se utilizar as LMIs de otimização apresentadas
no Teorema 10, que foram adaptadas à nova situação de controladores comutados. Dada a possi-
bilidade de implementar a técnica com otimização no helicóptero 3-DOF, optou-se por encerrar
o exemplo e testar a técnica de otimização da norma do controlador na prática, conforme se vê
na seção a seguir.
4.5 Implementação de controladores chaveados no helicóptero3-DOF
Com base na implementação no Helicóptero 3-DOF apresentado na Seção 3.2, cuja planta
incerta é dada pela equação (49), sendo as matrizesA e B dadas em (50), realizaram-se modifi-
cações no diagrama de blocos do sistema, conforme Figura 16,de modo a viabilizar o chavea-
mento entre dois controladores, tendo a equação (65) como lei de chaveamento entre os contro-
ladores.
Sendo assim, optou-se por utilizar, a princípio, o mesmo politopo apresentado na Seção 3.2
onde há uma queda de 30% da potência do motor traseiro, constituindo-se, assim, um politopo
de dois vértices, com a incerteza formulada como uma falha naconstante da hélice de propulsão
traseira do helicóptero, conforme foi mostrado em (51) e (52).

4.5 Implementação de controladores chaveados no helicóptero 3-DOF 69
Figura 16 - Esquemático do controle chaveado para a planta dohelicóptero 3-DOF.
x(t)u(t)Planta Incerta:
Helicptero
3−DOF
K1
K2
σ(t)
Fonte: Adaptado de (GEROMEL; DEAECTO, 2009)
4.5.1 Implementação com restrição de taxa de decaimento
Fixando a taxa de decaimento emα = 0,5, comγ = 0,01 (valor encontrado por meio de
uma busca unidimensional), projetaram-se os controladores com as LMIs do Teorema (9):
K1 =[
−44,3379−45,5873 69,1638 −26,1167−8,4741 72,0474 −21,5287 26,5047−56,8409 12,8806 −7,7320−33,5474 5,3329 −11,0419−28,0442−2,3395
]
, (99)
sendo||K1||= 127,6734
K2 =[
−44,3142−45,6449 69,1270 −26,0883−8,5321 72,0314 −21,5224 26,4858−56,8689 12,8301 −7,6649−33,5570 5,2910 −11,0278−28,0573−2,2985
]
, (100)
sendo||K2||= 127,6622.
Na Figura 17, apresentaram-se as variáveis:elevation(ε), pitch (ρ) e travel (θ ) em graus
para a trajetória estabelecida na Seção 3.2 para os controladores (99) e (100). Note a ocorrência
da queda de 30% na potência do motor traseiro, no instante 22 sda trajetória.
As Figuras 18 e 19 mostram as tensões nos motores dianteiro (Vf ) e traseiro (Vb) com
o controlador ativo a cada instante de tempo, e umzoomno chatteringpara visualizar mais
claramente qual controlador está ativo a cada instante de tempo.
Nas duas Figuras 18 e 19 o nível 0 a 4 constam apenas para distinguir quando o controlador
K1 ou o controladorK2 estarão ativos.
Aumentou-se o parâmetro incerto para verificar as vantagensno projeto de controladores
chaveados com restrição de taxa de decaimento. Agora o projeto irá considerar uma falha de
90% no motor traseiro, que é considerada pelo grupo de pesquisa como uma falha extremamente
severa. Para este caso de incerteza, o projeto por estabilidade quadrática com a mesma restrição

70 4 PROJETO DE CONTROLADORES ROBUSTOS CHAVEADOS
Figura 17 - Implementação prática dos controladores projetados para falha de 30% eα = 0,5.
0 5 10 15 20 25 30 35 40−40
−20
0
20
40
60
80
100
120
140
160
Variá
veis
dees
tado
[gra
us]
ε(t)
ρ(t)
θ(t)
Falha
t[s]
Fonte: Elaborado pelo autor
Figura 18 - Sinais de controle e controlador ativo para falhade 30% eα = 0,5.
0 5 10 15 20 25 30 35 400
2
4
6
8
10
12
14
16
Sin
ais
deco
ntro
le[V
]eco
ntro
lado
rat
ivo
Vf (t)
Vb(t)
K1 ativo
K2 ativo
t[s]
Fonte: Elaborado pelo autor
de taxa de decaimento não pode ser implementado devido aos altos ganhos (norma do contro-
lador maior que 500), mesmo utilizando a otimização da normado controlador (ASSUNÇÃO
et al., 2007b).
Desta forma, a incerteza na constante da força de propulsão da hélice traseira será formulada
entre 0,0119≤ kf 2 ≤ 0,1188, e a implementação no sistema permitirá que a tensão no motor
traseiro varie entre 0,1Vb eVb. O politopo é descrito em (101) e (102).

4.5 Implementação de controladores chaveados no helicóptero 3-DOF 71
Figura 19 -Zoomnochatteringpara o controlador ativo (0< t < 9s) - falha de 30% eα = 0,5.
0 1 2 3 4 5 6 7 80
0.5
1
1.5
2
2.5
3
3.5
4
C
ontr
olad
orat
ivo
K1 ativo
K2 ativo
t[s]
Fonte: Elaborado pelo autor
Vértice 1 (kf 2 = 0,1188):
A1 =
0 0 0 1 0 0 0 00 0 0 0 1 0 0 00 0 0 0 0 1 0 00 0 0 0 0 0 0 00 0 0 0 0 0 0 00 −1,2304 0 0 0 0 0 01 0 0 0 0 0 0 00 0 1 0 0 0 0 0
e B1 =
0 00 00 0
0,0858 0,08580,5810−0,5810
0 00 00 0
. (101)
Vértice 2 (kf 2 = 0,0119):
A2 =
0 0 0 1 0 0 0 00 0 0 0 1 0 0 00 0 0 0 0 1 0 00 0 0 0 0 0 0 00 0 0 0 0 0 0 00 −1,2304 0 0 0 0 0 01 0 0 0 0 0 0 00 0 1 0 0 0 0 0
e B2 =
0 00 00 0
0,0858 0,00860,5810−0,0581
0 00 00 0
. (102)
Fixando o parâmetro da taxa de decaimento emα = 0,4 (paraα ≥ 0,5 os motores seriam
forçados desnecessariamente devido aos altos ganhos e poderiam ser danificados), comγ = 0,01
foram projetados os controladores com as LMIs do Teorema 9:
K1 =[
−55,5049 −40,9199 57,8231 −43,6479 −5,6217 63,0498 −19,4287 20,8321−306,8891 45,0160 0,0990 −241,3830 35,6740 −12,6514−107,8750 0,2160
]
, (103)
onde||K1||= 414,8748

72 4 PROJETO DE CONTROLADORES ROBUSTOS CHAVEADOS
K2 =[
−55,3989 −41,0142 57,6339 −43,5856 −5,7157 63,0437 −19,3857 20,7201−306,8414 45,0471 0,0159 −241,3605 35,6716 −12,7051−107,8488 0,1810
]
, (104)
onde||K2||= 414,7950.
Os mesmos ensaios mostrados nas Figuras 17 e 18 são agora apresentados nas Figuras 20
e 21 respectivamente, porém agora para o projeto prevendo uma falha de 90% na potência do
motor traseiro.
Figura 20 - Implementação prática dos controladores projetados para falha de 90% eα = 0,4.
0 5 10 15 20 25 30 35 40−40
−20
0
20
40
60
80
100
120
140
160
Variá
veis
dees
tado
[gra
us]
ε(t)
ρ(t)
θ(t)
Falha
t[s]
Fonte: Elaborado pelo autor
Figura 21 - Sinais de controle e controlador ativo projetadopara falha de 90% eα = 0,4.
0 5 10 15 20 25 30 35 40−15
−10
−5
0
5
10
15
20
25
Sin
ais
deco
ntro
le[V
]eco
ntro
lado
rat
ivo
Vf (t)
Vb(t)
K1 ativo
K2 ativo
t[s]
Fonte: Elaborado pelo autor

4.5 Implementação de controladores chaveados no helicóptero 3-DOF 73
Pode-se verificar que as duas implementações tanto para o projeto prevendo falha de 30%
como para o projeto prevendo falha de 90% foram eficientes, porém, os ganhos no caso de 90%
foram altos originando um sinal de controle mais agressivo.Assim sendo, faz-se necessário
considerar um limitante para a norma controlador, de modo a facilitar a sua aplicação.
Cabe colocar aqui que a tensão enviada aos motores é limitada entre−24V a 24V, sendo
saturada fora destes limites. No casos estudados neste trabalho, não houve nenhuma situação
onde a tensão ultrapassou os limites de saturação de 24V, sendo o sinal de controle enviados
sem saturação para os motores.
4.5.2 Implementação com restrição de taxa de decaimento e otimizaçãoda norma de K
Nesta subseção, usou-se o Teorema 10 juntamente com a teoriadiscutida na seção anterior
(Teorema 9) com o objetivo de projetar os controladores ótimos chaveados.
Os mesmos vértices com queda de 30% na potência do motor traseiro mostrados em (51)
e (52) na subseção anterior foram utilizados. Desta forma, fixando o limite para a taxa de
decaimento emα = 0,5, comγ = 0,01 foram projetados os controladores chaveados conforme
(105) e (106) para o sistema com otimização da norma dos controladores.
K1 =[
−7,8546 −5,2683 1,7896 −8,7819 −3,1169 3,8647 −2,4646 0,3331−11,3572 4,5384 −1,2462−12,4826 3,0941 −2,9212−3,5958−0,2319
]
, (105)
sendo||K1||= 21,0702
K2 =[
−7,9085 −5,2697 1,7932 −8,7866 −3,1158 3,8697 −2,4925 0,3337−11,4089 4,5449 −1,2494−12,4765 3,0945 −2,9279−3,6219−0,2325
]
, (106)
sendo||K2||= 21,1242.
Note que as respectivas normas são menores do que as encontradas para os controladores
(99) and (100), isto é, a norma dos controladores (105) e (106) são apenas 16% da norma dos
controladores (99) e (100).
Os mesmos resultados mostrados nas Figuras 17 e 18 são agora apresentados nas Figuras
22 e 23 respectivamente, para uma falha de 30% na potência do motor traseiro, porém, agora
com otimização da norma dos controladores.
Pode-se verificar que os sinais de controle da Figura 23 são mais suaves quando comparados
com os da Figura 18 devido à otimização, alcançando a mesma eficiência dos requisitos de
projeto (α = 0,5), e evitando desgastes desnecessários.

74 4 PROJETO DE CONTROLADORES ROBUSTOS CHAVEADOS
Figura 22 - Implementação prática dos controladores ótimospara falha de 30% eα = 0,5.
0 5 10 15 20 25 30 35 40−50
0
50
100
150
200
Variá
veis
dees
tado
[gra
us]
ε(t)
ρ(t)
θ(t)
Falha
t[s]
Fonte: Elaborado pelo autor
Figura 23 - Sinais de controle e controlador ótimo ativo parafalha de 30% eα = 0,5.
0 5 10 15 20 25 30 35 400
2
4
6
8
10
12
Sin
ais
deco
ntro
le[V
]eco
ntro
lado
rat
ivo
Vf (t)
Vb(t)
K1 ativo
K2 ativo
t[s]
Fonte: Elaborado pelo autor
Agora, para verificar a eficiência da metodologia proposta, oprojeto com otimização foi
realizado para uma falha de 90% no motor traseiro.
Os mesmos vértices com queda de 90% na potência do motor traseiro mostrado em (101) e
(102) na subseção anterior foram utilizados. Devido à otimização da norma dos controladores, a
taxa de decaimento pode ser aumentada para esta implementação. Desta forma, fixando o limite
para a taxa de decaimento emα = 1, comγ = 0,01 foram projetados controladores chaveados,

4.5 Implementação de controladores chaveados no helicóptero 3-DOF 75
com restrição da taxa de decaimento e otimização da norma doscontroladores conforme (107)
e (108).
K1 =[
−19,6049 −18,3121 16,2003 −13,9020 −6,4905 21,9296 −9,8636 4,6754−219,5329 33,8628 −1,5543−140,2262 21,0920 −15,8793−115,7144−0,4486
]
(107)
sendo||K1||= 289,0915
K2 =[
−19,7372 −18,2731 16,1788 −13,9375 −6,4805 21,8910 −9,9654 4,6684−219,6227 33,8753 −1,5537−140,1989 21,0891 −15,8888−115,8014−0,4483
]
(108)
sendo||K2||= 289,1957.
Note que as respectivas normas são menores que as obtidas para os controladores (103) e
(104), isto é, a norma dos controladores (107) e (108) equivalem a 70% da norma dos contro-
ladores (103) e (104). Além disso, a taxa de decaimento pôde ser aumentada consideravelmente,
neste caso deα = 0,5 paraα = 1.
Os mesmos ensaios mostrados nas Figuras 20 e 21 são agora apresentados nas Figuras 24 e
25, respectivamente, porém agora com otimização da norma dos controladores.
Figura 24 - Implementação prática dos controladores ótimospara falha de 90% eα = 1.
0 5 10 15 20 25 30 35 40−40
−20
0
20
40
60
80
100
120
140
160
Variá
veis
dees
tado
[gra
us]
ε(t)
ρ(t)
θ(t)
Falha
t[s]
Fonte: Elaborado pelo autor
De forma similar ao ocorrido nas Figuras 18 e 23, pode-se verificar claramente que os sinais
de controle da Figura 25 são mais suaves comparado com os da Figura 21 devido à otimização,
alcançando uma eficiência maior devido a taxa de decaimento poder ter sido aumentada (α = 1),
e devido aos ganhos reduzidos que evitaram desgastes desnecessários.

76 4 PROJETO DE CONTROLADORES ROBUSTOS CHAVEADOS
Figura 25 - Sinais de controle e controlador ótimo ativo parafalha de 90% eα = 1.
0 5 10 15 20 25 30 35 40−15
−10
−5
0
5
10
15
20
Sin
ais
deco
ntro
le[V
]eco
ntro
lado
rat
ivo
Vf (t)
Vb(t)
K1 ativo
K2 ativo
t[s]
Fonte: Elaborado pelo autor
4.6 Conclusões parciais
Neste capítulo, propôs-se um método aprimorado para o projeto de controladores robustos
chaveados, restrição de taxa de decaimento e otimização da norma dos controladores. Associou-
se a condição de estabilidade robusta garantida com a teoriade chaveamento, com a restrição de
taxa de decaimento maior que um escalarα e a otimização da norma do controlador, expressas
através de LMIs com um escalar adicionalγ fixo.
Na fase de implementação no Helicóptero 3-DOF, o chaveamento entre controladores provou
ser eficaz, combinado com a taxa de decaimento, proporcionando um voo durante a trajetória
com poucas oscilações. À medida que se impôs falhas mais severas, os ganhos dos contro-
ladores também aumentaram, exigindo um procedimento de otimização para facilitar a apli-
cação desta técnica. Os controladores projetados com a técnica de otimização proposta apresen-
taram valores reduzidos para a norma, quando comparados comos outros controladores. Estes
valores reduzidos causam sinais de controle mais suaves, com a vantagem de se obter a mesma
eficiência dos requisitos de projeto, mostrando assim o benefício da metodologia proposta em
relação ao custo de implementação e esforços requeridos dosmotores. Estas características
de otimização tornam o projeto interessante sob o ponto de vista de aplicações práticas para
sistemas com parâmetros incertos, garantindo estabilidade robusta por meio da teoria de con-
trole chaveado. Ainda possibilitou baixas oscilações na ocorrência de falhas devido à taxa de
decaimento e à facilidade de aplicação nos sistemas que exigem menor custo de implementação.

77
5 NOVOS RESULTADOS PARA ESTABILIDADE DESISTEMAS CHAVEADOS
Neste capítulo, propõe-se uma técnica menos conservadora para a análise de estabilidade
de sistemas lineares incertos, utilizando funções de Lyapunov quadráticas por partes. A van-
tagem desta técnica está no aumento dos escalares de relaxaçãoγ vistos na seção anterior. Estes
escalares são agora variáveis nesta abordagem e desta formaestão livres para se adaptar. Con-
sequentemente se faz necessária a utilização de BMIs, em que os termos bilineares estão no
produto dos escalares de relaxação e de matrizes variáveis.A classe de BMIs em questão pode
ser resolvida pelo métodopath-following, como será visto na sequência.
5.1 Sistemas chaveados utilizando desigualdades de Lyapunov-Metzler
De forma similar ao abordado no Capítulo 4, considere o sistema linear com comutação
abaixo (GEROMEL; COLANERI, 2006):
x(t) = Aσ(t)x(t), x(0) = x0, (109)
definido para todot ≥ 0, em quex(t) ∈ Rn, σ(t) é a regra de comutação ex0 é a condição
inicial. A partir de um conjunto conhecido de matrizes constantesAi ∈ Rn×n, i ∈K, é possível,
em cada instante de tempo, escolher a regra de comutaçãoσ(t) para todot ≥ 0, e desta forma
selecionar uma matrizAσ(t) ∈ Rn×n dentre aquela pertencentes ao conjunto mostrado abaixo:
Aσ(t) ∈ {A1,A2, ...,AN}. (110)
Assim sendo, cadaAσ(t) pode comutar instantaneamente deAi paraAk para algumi 6= k∈
K quando ocorrer comutação deσ = i paraσ = k e Aσ(t) é comutado entre osN possíveis
subsistemas{A1,A2, ...,AN}.

78 5 NOVOS RESULTADOS PARA ESTABILIDADE DE SISTEMAS CHAVEADOS
Define-se a função de Lyapunov mínima e quadrática por partes:
v(x) := mini∈K
{vi(x(t))}, vi(x(t)) = x′(t)Pix(t), (111)
com{P1,P2, ...,PN} ∈ Rn×n ePi > 0 para todoi ∈K. Esta função fornece condições favoráveis
para análise de factibilidade e projeto de controle.
Como (111) não é diferenciável para todox(t) ∈ Rn encontrou-se uma funçãog(x(t)) =
{g|Vg(x(t)) = mini∈K
{vi(x(t)}}, e condições para a regra de comutação dadas por
σ(t) = ming(x(t)), (112)
que possibilitam a verificação da estabilidade assintóticade (109). Para este caso foi definido
um conjuntoI(x) = {i : v(x) = x′(t)Pix(t)} que tem mais de um elemento cuja função (111) não
é diferenciável, isto é, a solução mínima não é única.
O teorema a seguir foi retirado de (GEROMEL; COLANERI, 2006) e fornece condições
de estabilidade considerando a possibilidade de comutaçãoentre os subsistemas, utilizando a
função (111).
Teorema 11.(GEROMEL; COLANERI, 2006) Seja Q≥ 0, e se existir um conjunto de matrizes
simétricas definidas positivas{P1,P2, ...,PN} e um escalar positivoγ satisfazendo as desigual-
dades modificadas de Lyapunov-Metzler
A′iPi +PiAi + γ(Pj −Pi)+Qi < 0, j 6= i ∈K (113)
então a lei de controle(112)faz com que o sistema(109)seja assintoticamente estável.
Demonstração.Demonstração similar a apresentada no Teorema 8. �
O impasse existente na aplicação desta teoria é a comutação entre os subsistemas, pois, no
foco em questão, o sistema é único com parâmetros incertos necessitando para tanto garantir
a convexidade das LMIs. Muitos trabalhos têm encontrado formulações mais relaxadas para a
estabilidade de sistemas lineares incertos invariantes notempo ou com taxa de variação sufi-
cientemente pequenas dos parâmetros incertos (SKELTON; IWASAKI; GRIGORIADIS, 1997;
OLIVEIRA; GEROMEL; HSU, 1999; OLIVEIRA; BERNUSSOU; GEROMEL, 1999).
A seguir, apresentam-se condições de estabilidade convexapara sistemas lineares incertos,
baseadas na estabilidade de sistemas com comutação, onde o sistema pode ter incertezas vari-
antes no tempo (LPV). O teorema proposto a seguir foi baseadoem resultados apresentados em
(DEAECTO, 2010).

5.1 Sistemas chaveados utilizando desigualdades de Lyapunov-Metzler 79
Teorema 12. O sistema linear incerto dado em(1) é assintoticamente estável, se existirem
matrizes simétricas positivas definidas Pi e Qi, escalaresγ ≥ 0, com i, j ∈ K, satisfazendo as
seguintes desigualdades matriciais:
A′jPi +PiA j + γ(Pj −Pi)+Qi < 0, (114)
e exista uma escolha conveniente das funções mínimas em cadainstante de tempo, conforme a
regra (112).
Demonstração.Considerando a função de Lyapunov (111), como a funçãov(x(t)) não é
diferenciável para todox ∈ Rn, a derivada de Dini (GARG, 1998; GEROMEL; COLANERI,
2006) à direita da função (111) será
D+v(x(t)) = mini∈K
[x′(t)Pix(t)+x′(t)Pi x(t)]. (115)
Substituindo (4) em (115)
D+v(x(t)) = mini∈K
[
N
∑j=1
λ j(x′(t)A′
jPix(t)+x′(t)PiA jx(t))
]
= mini∈K
{
x′(t)
[
N
∑j=1
λ j(A′jPi +PiA j)
]
x(t)
}
. (116)
Considerando que
x′(t)(Pλ −Pi)x(t) = x′(t)N
∑j=1
λ j(Pj −Pi)x(t)≥ 0,
γ ≥ 0, para todoi, j ∈K, então de (116) parax(t) 6= 0,
D+v(x(t)) ≤ x′(t)
{
N
∑j=1
λ j[
A′jPi +PiA j + γ(Pj −Pi)
]
}
x(t)
< x′(t)
{
N
∑j=1
λ j[
A′jPi +PiA j + γ(Pj −Pi)+Qi
]
}
x(t) (117)
< 0.
�
O contraponto na aplicação desta técnica é o uso do escalarγ, que é fixo e predetermi-
nado, por meio de uma busca unidimensional, inserindo um certo conservadorismo na busca
por factibilidade.

80 5 NOVOS RESULTADOS PARA ESTABILIDADE DE SISTEMAS CHAVEADOS
Na seção a seguir, a função candidata foi modificada de forma aobter condições mais
relaxadas para a estabilidade de sistemas lineares incertos, utilizando uma técnica eficiente
baseada em BMIs que podem reduzir o conservadorismo.
5.2 Novos resultados utilizando uma função de Lyapunov mí-nima e quadrática por partes
Em (CHEN et al., 2012) foram propostas condições menos conservadoras para o projeto de
controladores chaveados Fuzzy. Estas condições foram formuladas por meio de BMIs, através
do produto de variáveis matriciais e variáveis escalares, responsáveis por reduzir o conser-
vadorismo para a garantia de factibilidade. Conforme (CHEN etal., 2012), estas BMIs podem
ser resolvidas pelo métodopath-following(HASSIBI; HOW; BOYD, 1999), apresentado no
Apêndice A.
Dada a possibilidade de solução de BMIs com o métodopath-following, o Teorema 12
pode ser generalizado no Teorema 13, onde os escalares de relaxação aparecerão em maior
quantidade possibilitando um maior grau de liberdade, em função destes estarem livres para se
adaptarem. Nas Seções 5.5.1 e 5.5.2, é possível verificar as vantagens na obtenção de factibili-
dade desta técnica através de exemplos.
Teorema 13. O sistema linear incerto(1) é assintoticamente estável, se existirem matrizes
positivas definidas Pi, matrizes negativas definidas Yji , escalaresγi js ≥ 0 eα < 0, com i, j,s∈K,
satisfazendo as seguintes desigualdades:
A′jPi +PiA j +
N
∑s=1
γi js(Ps−Pi)−Yji < αPi , (118)
e exista um escolha conveniente das funções mínimas em cada instante de tempo conforme
regra (112).
Demonstração.Considere a função de Lyapunov candidata e quadrática por partes (111).
Suponha quev(x(t)) = mini∈K
{x′(t)Pix(t)}= x′(t)Pσ x(t), sendoσ escolhido conforme (112). De
(CHEN et al., 2012) sev(x(t+))≤ vi(x(t+)) então ˙v(x(t+))≤ vi(x(t+)), ou
v(x(t)) = limt+→t
v(x(t+))−v(x(t))t+− t
= limt+→t
v(x(t+))−vσ (x(t))t+− t
e, por outro lado,
vσ (x(t)) = limt+→t
vσ (x(t+))−vσ (x(t))t+− t
.

5.3 Generalização da função de Lyapunov candidata e quadrática por partes 81
Comov(x(t+))≤ vσ (x(t+)) tem-se que
v(x(t)) = limt+→t
v(x(t+))−vσ (x(t))t+− t
≤ limt+→t
vσ (x(t+))−vσ (x(t))t+− t
= vσ (x(t)).
Sendo assim, comα < 0 a fim de conceber restrições que podem ser resolvidas com o
métodopath-following:
v(x(t))−αv(x(t)) ≤ vσ (x(t))−αvσ (x(t)) = x′(t)Pσ x(t)+x′(t)Pσ x(t)−αx′(t)Pσ x(t)
≤N
∑j=1
λ jx′(t)(A j
′Pσ +Pσ A j −αPσ )x(t).
Baseado na estrutura de (111), fica claro que
x′(t)N
∑s=1
γσ js(Ps−Pσ )x(t)≥ 0 (119)
procede para cadaσ , j,s∈ K e todoλ ∈ Λ, ondeγσ js ≥ 0 são parâmetros de relaxação, e
v(x(t+))≤ vσ (x(t+)). Considerando os parâmetros de relaxaçãoγσ js ≥ 0, de (119) segue para
x(t) 6= 0,
v(x(t))−αv(x(t)) ≤N
∑j=1
λ jx′(t)
[
A j′Pσ +Pσ A j −αPσ +
N
∑s=1
γσ js(Ps−Pσ )
]
x(t)
≤N
∑j=1
λ jx′(t)
[
A j′Pi +PiA j −αPi +
N
∑s=1
γi js(Ps−Pi)−Yji
]
x(t)
< 0
e desta forma, seα < 0 pode-se verificar que ˙v(x(t))< 0. �
Na próxima seção, a função de Lyapunov candidata e quadrática por partes foi manipulada
para a obtenção de condições ainda mais relaxadas para a estabilidade de sistemas lineares
incertos.
5.3 Generalização da função de Lyapunov candidata e qua-drática por partes
Pode-se verificar que a função mínima e quadrática por partes(111) não precisa neces-
sariamente estar limitada a quantidade de vértices do polito de incertezas, podendo assumir a
quantidade de subfunções que proporcionem uma maior flexibilização na região de factibili-
dade. Sendo assim a quantidade de subfunções utilizada assume agora um valorM genérico,

82 5 NOVOS RESULTADOS PARA ESTABILIDADE DE SISTEMAS CHAVEADOS
sendoM > N.
Considere desta forma o caso em que a função de Lyapunov candidata e quadrática por
partes, seja composta deM subfunções, sendo criada para tanto, um conjuntoKM, tal que nesta
situaçãoσ ∈KM, comKM = {1,2, ...,M}:
v(x) := mink∈KM
{vk(x(t))}, vk(x(t)) = x′(t)Pkx(t), (120)
com{P1,P2, ...,PM} ∈ Rn×n e Pk > 0 para todok ∈ KM. Desta forma, o Teorema 13 pode ser
flexibilizado conforme apresentado no Teorema 14 a seguir:
Teorema 14. O sistema linear incerto(1) é assintoticamente estável, se existirem matrizes
simétricas positivas definidas Pk, matrizes negativas definidas Yjk, escalaresγ jks ≥ 0 e α ≤ 0,
com j∈K e k,s∈KM, tal que as seguintes desigualdades matriciais sejam satisfeitas:
A′jPk+PkA j +
M
∑s=1
γ jks(Ps−Pk)−Yjk < αPk (121)
e exista uma escolha conveniente das funções mínimas em cadainstante de tempo conforme
regra σ(t) = mingM(x(t)), com gM(x(t)) = {g|Vg(x(t)) = mink∈KM
{vk(x(t))}}.
Demonstração.Demonstração similar a apresentada no Teorema 13. �
Devido ao aumento na quantidade de funções quadráticas por partes, este método apre-
senta um grau extra de flexibilidade, uma vez que os escalaresde relaxação estão livres para se
adaptarem e satisfazerem as desigualdades. Note que as BMIs apresentadas em (121) podem
ser resolvidas com o métodopath-followingdetalhado no Apêndice A.
5.4 Formulação utilizando o Lema de Finsler
Com o objetivo de proporcionar uma relaxação maior nas BMIs utilizando uma função
de Lyapunov mínima e quadrática por partes, propõe-se, na sequência, um equacionamento
utilizando o Lema de Finsler (Lema 1). Assim sendo, convencionando as matrizesB = [A j −I ],
B⊥ =[
IA j
]
e L =
[ N∑
s=1γi js(Ps−Pi)−Yji Pi
Pi 0
]
como parâmetros do Lema 1, teremos a propriedade 2
do Lema de Finsler escrita como:
2. ∃Pi = P′i > 0,∃Ps = P′
s > 0 eYji =Y′ji ≥ 0 tal que
[
I
A j
]′
N∑
s=1γi js(Ps−Pi)−Yji Pi
Pi 0
[
I
A j
]
< 0,

5.4 Formulação utilizando o Lema de Finsler 83
resultando nas condições equivalentes às do Teorema 13:
2. A′jPi +PiA j +
N∑
s=1γi js(Ps−Pi)−Yji < 0.
Da prova existente do Lema de Finsler, pode-se concluir que as propriedades 2 e 4 são
equivalentes. Assim, reescreve-se a propriedade 4 como segue:
4. ∃X ∈ R2n×n, ∃Pi = P′
i > 0, ∃Ps = P′s > 0 eYji =Y′
ji ≥ 0 tal que
N∑
s=1γi js(Ps−Pi)−Yji Pi
Pi 0
+X
[
A j −I]
+
[
A′j
−I
]
X ′ < 0.
Escolhendo convenientemente a matriz de variáveisX =[
W1 jib2 jiW2 ji
]
, comW1 ji e W2 ji ∈
Rn×n, e escalares eb2 ji > 0 para fins de relaxação das desigualdades, pode-se desenvolver a
propriedade 4, obtendo:
N∑
s=1γi js(Ps−Pi)−Yji Pi
Pi 0
+
[
W1 ji A j −W1 ji
b2 jiW2 ji A j −b2 jiW2 ji
]
+
[
A′jW
′1 ji b2 ji A′
jW′2 ji
−W′1 ji −b2 jiW′
2 ji
]
< 0.
Assim, encontraram-se as seguintes BMIs:
A′jW
′1 ji +W1 ji A j +
N∑
s=1γi js(Ps−Pi)−Yji Pi −W1 ji +A′
jb2 jiW′2 ji
Pi −W′1 ji +b2 jiW2 ji A j −b2 jiW2 ji −b2 jiW′
2 ji
< 0, (122)
Pi > 0. (123)
sendoW1 ji eW2 ji ∈ Rn×n, W1 ji 6=W′
1 ji eW2 ji 6=W′2 ji . Com base nesta formulação, propõe-se o
teorema a seguir.
Teorema 15. Uma condição suficiente para que se garanta a estabilidade assintótica do sis-
tema incerto(1) é a existência de matrizes W1 ji ,W2 ji ∈Rn×n, Yji ,Pi ∈R
n×n e escalares b2 ji > 0,
γi js > 0 e α < 0, com i, j,s∈K satisfazendo as desigualdades
A′jW
′1 ji +W1 ji A j +
N∑
s=1γi js(Ps−Pi)−Yji Pi −W1 ji +b2 ji A′
jW′2 ji
Pi −W′1 ji +b2 jiW2 ji A j −b2 jiW2 ji −b2 jiW′
2 ji
< 0, (124)
Pi > 0, (125)
Yji < αPi . (126)

84 5 NOVOS RESULTADOS PARA ESTABILIDADE DE SISTEMAS CHAVEADOS
e exista uma escolha conveniente das funções mínimas em cadainstante de tempo conforme
regra (112).
Demonstração.Multiplicando (124) porλ j ≥ 0, e somandoj, de j = 1 até j = N, tem-se
A′λW′
1λ i +W1λ iAλ +N∑
s=1γiλs(Ps−Pi)−Yλ i Pi −W1λ i +b2λ iA
′λW′
2λ i
Pi −W′1λ i +b2λ iW2λ iAλ −b2λ iW2λ i −b2λ iW
′2λ i
< 0, (127)
Pi > 0, (128)
Yλ i < αPi . (129)
comN∑j=1
λ j = 1, e i, j ∈K.
Da equivalência existente entre as propriedades 2 e 4 do Lemade Finsler (Lema (1)) tem-se
que a desigualdade (127) pode ser escrita como:
A′λ Pi +PiAλ +
N
∑s=1
γiλs(Ps−Pi)−Yλ i < 0. (130)
Desta forma de (129), tem-se que:
A′λ Pi +PiAλ +
N
∑s=1
γiλs(Ps−Pi)< αPi . (131)
�
Assim sendo, (127), (128) e (129) são condições suficientes para que o ponto de equilíbro
x= 0 do sistema (1) seja assintoticamente estável. Verifica-senesta formulação que os termos
b2 jiW2 ji que aparecem através da escolha conveniente deX são também bilineares, podendo
ser resolvidos pelo métodopath-following, o que resulta em BMIs ainda mais relaxadas para a
busca de factibilidade.
5.5 Factibilidade de sistemas politópicos
5.5.1 Exemplo numérico 1
Na sequência abordar-se-á um exemplo inspirado em (DEAECTO,2010), utilizado inicial-
mente em (SHORTEN et al., 2007) que mostrará as vantagens dosteoremas propostos neste
trabalho. Considere o sistema linear incerto (1) podendo serrepresentado como combinação
convexa dos vértices

5.5 Factibilidade de sistemas politópicos 85
A1 =
[
0 1
−2 α
]
e A2 =
[
0 1
−10 β
]
.
Os parâmetrosα e β foram tomados nos intervalos[−2,0] e [−5,0] respectivamente, ob-
tendo, desta forma, para cada ponto da partição um novo sistema para ser testado. Aplicaram-se,
para esses valores, os critérios: estabilidade quadrática, estabilidade Lyapunov-Metzer, con-
forme Teorema 12; critério menos conservador utilizando função de Lyapunov quadrática por
partes, conforme Teorema 13; a metodologia generalizada, conforme Teorema 14 comM = 4
e, por fim, a metodologia utilizando o Lema de Finsler, apresentada no Teorema 15.
Primeiramente, realizou-se uma comparação de factibilidade utilizando o Teorema 12 e o
critério de estabilidade quadrática. Para o Teorema 12, fez-se uma busca, tendo como base a
factibilidade para cadaγ, para verificar qual valor apresenta melhores resultados. Conforme a
Figura 26 varreu-seγ entre 0,1 e 10 e verificou-se que 6< γ < 8 apresentaram os melhores
resultados de testes factíveis. Desta forma optou-se porγ = 7.
Figura 26 - Busca pelos melhores valores deγ do Exemplo 1 para LMIs do Teorema 12.
0 1 2 3 4 5 6 7 8 9 10350
360
370
380
390
400
410
420
430
440
Qua
ntid
ade
depo
litop
osfa
ctív
eis
γ
Fonte: Elaborado pelo autor
A Figura 27 refere-se à factibilidade do método de estabilidade com comutação, similar
ao apresentado em (DEAECTO, 2010), ajustado para sistemas politópicos incertos, conforme
Teorema 12, utilizandoγ = 7.
A Figura 28 se refere às vantagens do critério menos conservador, utilizando função de
Lyapunov quadrática por partes, conforme Teorema 13. A Figura 29 apresenta as vantagens da

86 5 NOVOS RESULTADOS PARA ESTABILIDADE DE SISTEMAS CHAVEADOS
Figura 27 - Resultados de factibilidade do Exemplo 1 para: Estabilidade Quadrática (♦) ecritério de estabilidade Lyapunov-Metzler - Teorema 12 (o).
−5 −4.5 −4 −3.5 −3 −2.5 −2 −1.5 −1 −0.5−2
−1.8
−1.6
−1.4
−1.2
−1
−0.8
−0.6
−0.4
α
βFonte: Adaptado de (DEAECTO, 2010)
metodologia generalizada, conforme Teorema 14. Os resultados foram encontrados utilizando
o métodopath-following, detalhado no Apêndice A.
Figura 28 - Resultados de Factibilidade do Exemplo 1 para: Estabilidade Quadrática (♦),critério de Estabilidade Lyapunov-Metzler - Teorema 12 (o)e critério de estabilidade menosconservador utilizando função de Lyapunov quadrática por partes - Teorema 13 (x).
−5 −4.5 −4 −3.5 −3 −2.5 −2 −1.5 −1 −0.5−2
−1.8
−1.6
−1.4
−1.2
−1
−0.8
−0.6
−0.4
β
α
Fonte: Elaborado pelo autor
Pode-se verificar que os resultados utilizando o Teorema 14 apresentam uma maior região
de factibilidade para sistemas lineares incertos, implicando, desta forma, uma redução no con-

5.5 Factibilidade de sistemas politópicos 87
Figura 29 - Resultados de Factibilidade para Exemplo 1: Estabilidade Quadrática (♦), critériode Estabilidade Lyapunov-Metzler - Teorema 12 (o) e critério de estabilidade generalizado comM = 4 conforme Teorema 14 (x).
−5 −4.5 −4 −3.5 −3 −2.5 −2 −1.5 −1 −0.5−2
−1.8
−1.6
−1.4
−1.2
−1
−0.8
−0.6
−0.4
β
α
Fonte: Elaborado pelo autor
servadorismo, quando comparado com os resultados existentes na literatura.
Na sequência, apresenta-se a Figura 30, que expõe as vantagens, agora, da formulação com
relaxação utilizando o Lema de Finsler (Lema 1), apresentado no Teorema 15.
Figura 30 - Resultados de Factibilidade do Exemplo 1 para: Estabilidade Quadrática (♦),critério de Estabilidade Lyapunov-Metzler - Teorema 12 (o)e formulação utilizando o Lemade Finsler - Teorema 15 (x).
−5 −4.5 −4 −3.5 −3 −2.5 −2 −1.5 −1 −0.5−2
−1.8
−1.6
−1.4
−1.2
−1
−0.8
−0.6
−0.4
β
α
Fonte: Elaborado pelo autor

88 5 NOVOS RESULTADOS PARA ESTABILIDADE DE SISTEMAS CHAVEADOS
Os resultados de factibilidade, utilizando o Teorema 15, também apresentaram vantagens,
comparando-se com as técnicas existentes, porém apresentando alguns pontos degenerados,
necessitando assim de um aprimoramento da técnica. Provavelmente isso se deve ao aumento
das dimensões das LMIs em relação aos demais métodos, dificultando assim a solução numérica
do solvergeneralized eigenvalue minimization(gevp).
5.5.2 Exemplo numérico 2
O exemplo numérico a seguir foi retirado de (ESTEVES, 2011),adaptado aqui para sis-
temas lineares incertos, com o intuito de uma segunda comparação entre as técnicas. Sendo
assim, considere o sistema linear incerto (1) podendo ser representado como combinação con-
vexa dos vértices:
A1 =
[
−5 −4
−1 a
]
e A2 =
[
−2 −4
b −2
]
.
Os parâmetrosa e b foram tomados nos intervalos[−300,0] e [0,2000], respectivamente,
assim obtendo, para cada variação, um novo sistema para ser testado. Da mesma forma como
se fez para o exemplo anterior, para cada variação foram aplicados os critérios de estabilidade
anteriormente descritos.
Para a utilização do Teorema 12, fez-se uma busca tendo como base a factibilidade para
cadaγ a fim de verificar qual valor apresenta melhores resultados. Conforme Figura 31, varreu-
seγ entre 0,1 e 1000 e se pôde verificar, aproximadamente, que 300< γ < 330 apresentaram
os melhores resultados de testes factíveis. Sendo assim, optou-se porγ = 300 para a utilização
no critério do Teorema 12.
A Figura 32 se refere aos resultados factibilidade do métodopara o método do Teorema 12,
utilizandoγ = 300, em comparação com o critério de estabilidade quadrática. Nota-se que, para
este exemplo, houve pouca diferença entre as técnicas.
A Figura 33 se refere às vantagens do critério utilizando função de Lyapunov quadrática
por partes do Teorema 13 e a Figura 34 se refere às vantagens dametodologia generalizada,
conforme Teorema 14 comM = 4. Os resultados deste exemplo também foram encontrados
utilizando o métodopath-followingdetalhado no Apêndice A.
Pode-se constatar, conforme já verificado no exemplo anterior, que os resultados utilizando
o Teorema 14 apresentam uma maior região de factibilidade, implicando, assim, numa redução
no conservadorismo, quando comparado com os resultados existentes na literatura.
Na sequência, apresenta-se a Figura 35 que expõe as vantagens, agora, da formulação com

5.5 Factibilidade de sistemas politópicos 89
Figura 31 - Busca pelos melhores valores deγ do Exemplo 2 para LMIs do Teorema 12.
0 100 200 300 400 500 600 700 800 900 1000290
295
300
305
310
315
320
325
330
335
340
Qua
ntid
ade
depo
litop
osfa
ctív
eis
γ
Fonte: Elaborado pelo autor
Figura 32 - Análise de factibilidade para o Exemplo 2 utilizando Estabilidade Quadrática (♦) eEstabilidade Metzler adequada a sistemas lineares - Teorema 12 (o).
−300 −250 −200 −150 −100 −50 00
200
400
600
800
1000
1200
1400
1600
1800
2000
a
b
Fonte: Elaborado pelo autor
relaxação utilizando o Lema de Finsler (Lema 1), apresentado no Teorema 15.
Para o Exemplo 2, a formulação utilizando o Teorema 15 tambémapresentou vantagens de
factibilidade, em comparação com os outros métodos, apesardos pontos degenerados, necessi-
tando assim um aprimoramento da técnica.

90 5 NOVOS RESULTADOS PARA ESTABILIDADE DE SISTEMAS CHAVEADOS
Figura 33 - Resultados de Factibilidade do Exemplo 2 para: Estabilidade Quadrática (♦),critério de Estabilidade Lyapunov-Metzler - Teorema 12 (o)e critério de estabilidade menosconservador utilizando função de Lyapunov quadrática por partes - Teorema 13 (x).
−300 −250 −200 −150 −100 −50 00
200
400
600
800
1000
1200
1400
1600
1800
2000
b
a
Fonte: Elaborado pelo autor
Figura 34 - Resultados de Factibilidade para o Exemplo 2: Estabilidade Quadrática (♦), critériode Estabilidade Lyapunov-Metzler - Teorema 12 (o) critériomenos conservador generalizadocomM = 4 conforme Teorema 14 (x).
−300 −250 −200 −150 −100 −50 00
200
400
600
800
1000
1200
1400
1600
1800
2000
b
a
Fonte: Elaborado pelo autor

5.6 Conclusões parciais 91
Figura 35 - Resultados de Factibilidade do Exemplo 2 para: Estabilidade Quadrática (♦),critério de Estabilidade Lyapunov-Metzler - Teorema 12 (o)formulação utilizando o Lema deFinsler - Teorema 15 (x).
−300 −250 −200 −150 −100 −50 00
200
400
600
800
1000
1200
1400
1600
1800
2000
b
a
Fonte: Elaborado pelo autor
5.6 Conclusões parciais
Neste capítulo, propuseram-se novas técnicas com o intuitode diminuir o conservadorismo
das formulações existentes, para a garantia de estabilidade de sistemas lineares incertos podendo
ser variantes ou invariantes no tempo. As técnicas apresentadas tiveram como contribuição a
solução de BMIs, por meio de um método de linearização (vide Apêndice A). A técnica se
baseia em utilizar funções de Lyapunov quadráticas por partes com matrizes extras na formu-
lação e também escalares de relaxação, aumentando a factibilidade e garantindo a estabilidade
através da escolha do valor mínimo de uma função. A teoria desenvolvida foi testada em exem-
plos numéricos conhecidos na literatura.
Verificou-se nas Figuras 29 e 34 um aumento da região de factibilidade para a técnica
proposta, quando comparada com as técnicas de estabilidadequadrática e com a técnica de
estabilidade baseada nas desigualdades de Lyapunov-Metzler.
A formulação utilizando o lema de Finsler apresentou algunspontos degenerados, conforme
visto nas Figuras 30 e 35, indicando que a formulação deve seraprimorada, porém, promissora,
em função dos ganhos que apresentou em comparação com as outras técnicas.

92 5 NOVOS RESULTADOS PARA ESTABILIDADE DE SISTEMAS CHAVEADOS

93
6 NOVOS RESULTADOS PARA O PROJETO DECONTROLADORES CHAVEADOS
Neste capítulo, propõem-se métodos mais gerais para o projeto de controladores chaveados
que os apresentados no Capítulo 4, por não ser mais necessáriaa realização de uma busca uni-
dimensional, tendo como base as técnicas propostas no Capítulo 5. Para o desenvolvimento dos
métodos de projeto, também foram utilizadas condições baseadas em BMIs, técnica inspirada
em (CHEN et al., 2012), em que termo bilinear se encontra no produto de variáveis escalares
e variáveis matriciais. Estas BMIs são eficientemente resolvidas pelo métodopath-following
(HASSIBI; HOW; BOYD, 1999).
A princípio, um dos métodos propostos foi utilizado em um exemplo de comparação, con-
siderado como referência na literatura para resultados de flexibilização na estabilidade de sis-
temas Fuzzy Takagi-Sugeno (CHEN et al., 2012), com a finalidade de verificar a eficácia de
relaxação do método.
Na sequência, projetaram-se controladores chaveados com as técnicas apresentadas para a
implementação em um protótipo laboratorial chamado AMD-1,que será visto com mais deta-
lhes durante o texto.
6.1 Projeto robusto chaveado com flexibilização via BMIs
Nesta seção, propõe-se um método para o projeto de controlesrobustos chaveados, adap-
tado a partir da técnica Fuzzy T-S, apresentada em (CHEN et al., 2012), na qual os controladores
chaveados são obtidos através da solução de critérios de estabilidade que envolvem BMIs, con-
forme já abordado no Capítulo 5.
Considere, assim, o sistema apresentado em (71), sendo o controlador chaveado e a regra
de comutação dados por:
u(t) = Kσ x(t) e σ(t) = argmini∈K
{x′(t)Pix(t)}. (132)

94 6 NOVOS RESULTADOS PARA O PROJETO DE CONTROLADORES CHAVEADOS
Tomando como base a função de Lyapunov mínima e quadrática por partes (120), propõe-se
o teorema a seguir.
Teorema 16.Se existirem matrizes simétricas positivas definidas Xi ∈Rn×n, matrizes Yji ,Q ji ∈
Rn×n, matrizes Gi ∈ R
m×n e escalaresγi js > 0, α < 0 para todo i, j,s∈ K, satisfazendo as
seguintes desigualdades:
Yji < αXi , (133)
Q ji < 0, (134)
M ji ∗ ∗ . . . ∗
γi j1Xi −γi j1X1 0 . . . 0
γi j2Xi 0 −γi j2X2 . . ....
......
.... .. 0
γi jN Xi 0 . . . 0 −γi jN XN
< 0, (135)
sendo Mji = XiA j′+A jXi +Gi
′B j′+B jGi −
N∑
s=1γi jsXi −Yji −Q ji .
Então a lei de controle chaveadoσ(t) = argmini∈K
{x′(t)Pix(t)} torna o ponto de equilíbrio
x= 0 do sistema(71)globalmente assintoticamente estável, sendo Pi = X−1i e os controladores
dados por Ki = GiXi−1, i, j ∈K .
Demonstração.Considerando a função de Lyapunov candidata e quadrática porpartes (120),
suponha quev(x(t)) =mini∈K
{x′(t)Pix(t)}= x′(t)Pσ x(t), sendoσ escolhido conforme (132). Com
base na análise apresentada na demostração do Teorema 13, sev(x(t+)) ≤ vσ (x(t+)) então
v(x(t+))≤ vσ (x(t+)). Assim, comα < 0 para se obterem restrições que possam ser resolvidas
pelo métodopath-following:
v(x(t))−αv(x(t)) ≤ vσ (x(t))−αvσ (x(t)) = x′(t)Pσ x(t)+x′(t)Pσ x(t)−αx′(t)Pσ x(t)
=N
∑j=1
λ jx′(t)(A j
′Pσ +Pσ A j +Pσ B jKσ +K′σ B′
jPσ −αPσ )x(t). (136)
Tomando como base a estrutura de (120), fica claro que
x(t)′N
∑s=1
γσ js(Ps−Pσ )x(t)≥ 0. (137)
procede para cadaσ , j,s∈ K e todoλ ∈ Λ, ondeγσ js ≥ 0 são parâmetros de relaxação, e
v(x(t+))≤ vσ (x(t+)).

6.1 Projeto robusto chaveado com flexibilização via BMIs 95
Desta forma de (136) e de (137) segue que
v(x(t))−αv(x(t))
≤N∑j=1
λ jx′(t)
[
A j′Pσ +Pσ A j +Pσ B jKσ +K′
σ B′jPσ −αPσ +
N∑
s=1γσ js(Ps−Pσ )
]
x(t)
< 0.
(138)
Supõe-se agora a existência de matrizes simétricasWji eZ ji , i, j ∈K, tais que
A j′Pi +PiA j +PiB jKi +K′
i B′jPi +
N
∑s=1
γi js(Ps−Pi)−Wji −Z ji ≤ 0, i, j ∈K. (139)
Supõe-se ainda, para a obtenção de condições favoráveis à utilização do solver gevp que
Z ji < αPi , (140)
assim:
A j′Pi +PiA j +PiB jKi +K′
i B′jPi +
N
∑s=1
γi js(Ps−Pi)−Wji −αPi < 0, i, j ∈K. (141)
Portanto de (138) e (141) conclui-se que
v(x(t))−αv(x(t))<N
∑j=1
λ jx′(t)Wjσ x(t)< 0, (142)
e consequentemente
Wji < 0. (143)
Desta forma, comoα < 0 verifica-se que ˙v(x(t))< 0.
Definindo agoraXi = P−1i , Yji = XiZ ji Xi, Q ji = XiWji Xi, Gi = KiXi e multiplicando as
equações (140), (143) e (139) a esquerda e a direita porXi, obtém-se respectivamente as equações
(133), (134) e
XiA j′+A jXi +B jGi +G′
iB′j +
N
∑s=1
γi js(XiPsXi −Xi)−Q ji −Yji ≤ 0. (144)
Aplicando o complemento de Schur em (144) obtém-se (135), concluindo assim a de-
mostração.

96 6 NOVOS RESULTADOS PARA O PROJETO DE CONTROLADORES CHAVEADOS
6.2 Projeto robusto chaveado com flexibilização extra via BMIs
Considere novamente o sistema (71), sendo agora o controlador chaveado e a regra de
comutação concebidos através da generalização da função deLyapunov candidata e quadrática
por partes apresentada em (120):
u(t) = Kσ x(t) e σ(t) = arg mink∈KM
{x′(t)Pkx(t)}. (145)
Considerando, assim, a função de Lyapunov mínima e quadrática por partes (120), abordada
no Capítulo 5, propõe-se o teorema a seguir.
Teorema 17.Se existirem matrizes simétricas positivas definidas Xk ∈Rn×n, matrizes Yjk,Q jk ∈
Rn×n, matrizes Gk ∈ R
m×n e escalaresγ jks > 0, α < 0 para todo j∈ K e todo k,s∈ KM,
satisfazendo as seguintes desigualdades:
Yjk < αXk, (146)
Q jk < 0, (147)
M jk ∗ ∗ . . . ∗
γ jk1Xk −γ jk1X1 0 . . . 0
γ jk2Xk 0 −γ jk2X2 . . ....
......
..... . 0
γ jkMXk 0 . . . 0 −γ jkMXM
< 0, (148)
sendo Mjk = XkA j′+A jXk+Gk
′B j′+B jGk−
M∑
s=1γ jksXk−Yjk −Q jk.
Então a lei de controle chaveadoσ(t) = arg mink∈KM
{x′(t)Pkx(t)} torna o ponto de equilíbrio
x= 0 do sistema(71)globalmente assintoticamente estável, sendo Pk = X−1k e os controladores
dados por Kk = GkXk−1, j ∈K e k,s∈KM.
Demonstração. Demonstração similar a apresentada no Teorema 16.
Verifica-se, assim, uma maior flexibilidade nas BMIs do Teorema 17, em comparação com
as BMIs do Teorema 16, devido ao aumento na quantidade de subfunções que compõem a
função (120).
A generalização das funções de Lyapunov quadráticas por partes tem como consequência o
aumento da quantidade de controladores chaveados, que nesta generalização assume o valorM
comM > N, possibilitando uma maior versatilidade na escolha do controlador em cada instante

6.3 Exemplo Numérico 97
de tempo. Note que a quantidade de controladores pode ser ajustada para cada projeto, caso o
problema seja mais complexo e exija uma maior flexibilidade.
6.3 Exemplo Numérico
O exemplo apresentado a seguir é considerado referência de comparação para critérios de
estabilidade Fuzzy T-S flexibilizados (CHEN et al., 2012; SOUZA, 2013), sendo adaptado aqui
para ser tratado como sistema linear chaveado, adequando-se, assim, a utilização dos Teoremas
propostos neste capítulo.
Considere, assim, um sistema linear chaveado representado pelos subsistemas:
A1 =
[
1,59 −7,29
0,01 0
]
e B1 =
[
1
0
]
,
A2 =
[
0,02 −4,64
0,35 0,21
]
e B2 =
[
8
0
]
,
A3 =
[
−a −4,33
0 0,05
]
e B3 =
[
−b+6
−1
]
.
Fixandoa= 2, foram realizados testes de factibilidade, utilizando asrestrições (146), (147)
e (148), propostas no Teorema 17 considerando agoraM = 9, com o parâmetrob incrementado
no intervalo de 0 à 7 com passo 0,5.
Obteve-se neste exemplo, como valor máximo de factibilidade b= 6,5, através do método
path-following(vide Apêndice A) comα = −0,0038 eη = 40. Neste caso, os controladores
projetados e as matrizes da função de Lyapunov quadrática por partes foram:
K1 = [−0,5281−0,0550] , K2 = [−1,2438 2,9026] , K3 = [−1,4689 5,3030] ,
K4 = [−1,3519 4,1453] , K5 = [−0,8210 0,6195] , K6 = [−0,7592 0,3511] ,
K7 = [−1,6019 7,1947] , K8 = [−1,0182 1,5053] , K9 = [−0,6059 0,0280] ,
(149)

98 6 NOVOS RESULTADOS PARA O PROJETO DE CONTROLADORES CHAVEADOS
P1 =
[
0,0170 0,0117
0,0117 0,1696
]
, P2 =
[
0,0168 0,0120
0,0120 0,1701
]
, P3 =
[
0,0167 0,0121
0,0121 0,1703
]
,
P4 =
[
0,0168 0,0120
0,0120 0,1702
]
, P5 =
[
0,0169 0,0118
0,0118 0,1699
]
, P6 =
[
0,0169 0,0118
0,0118 0,1698
]
,
P7 =
[
0,0167 0,0122
0,0122 0,1705
]
, P8 =
[
0,0168 0,0119
0,0119 0,1700
]
, P9 =
[
0,0169 0,0118
0,0118 0,1697
]
.
(150)
Pode-se observar que o resultado de factibilidade obtido com b= 6,5 é superior aos obti-
dos em (DELMOTTE; GUERRA; KSANTINI, 2007; SOUZA, 2013), para sistemas Fuzzy T-S
em que se encontrou factibilidade com valor máximo parab= 6, e igual, em factibilidade, ao
encontrado em (MONTAGNER; OLIVEIRA; PERES, 2009) comb= 6,5, sendo superado ape-
nas por (CHEN et al., 2012), onde obteve-se factibilidade para b= 7 comN = 4. Porém, vale
ressaltar que, neste trabalho, o foco é propor novas técnicas de projeto de controladores chavea-
dos com flexibilização para sistemas lineares incertos, objetivo distinto daquele alcançado em
(MONTAGNER; OLIVEIRA; PERES, 2009; CHEN et al., 2012), onde foram abordadas técni-
cas flexibilizadas para o projeto dos controladores Fuzzy T-S.
6.4 Implementação prática no sistema AMD-1
O protótipo Active Mass Dumper - One Floor(AMD-1), apresentado na Figura 36, é
composto por uma estrutura simulando uma edificação, tendo no piso superior um sistema de
amortecimento ativo com uma massa móvel. Este experimento tem como foco o desenvolvi-
mento de estudos para o projeto de sistemas de controle que amorteçam vibrações causadas por
terremotos ou por fortes ventos. O equipamento também possibilita investigar ações de controle
em estruturas (QUANSER, 2012a).
O objetivo do experimento é atuar na massa móvel através de ummotor, reduzindo assim
oscilações e vibrações indesejadas na estrutura. O sistemautilizado no deslocamento da base
é chamado de STII e foi originalmente desenvolvido com o intuito de pesquisa ou ensino, en-
volvendo sistemas de vibração (QUANSER, 2012b). Neste trabalho, utilizaremos este equipa-
mento apenas para gerar registros de terremotos com os quaisserão testadas as estratégias de
controle.

6.4 Implementação prática no sistema AMD-1 99
Figura 36 - Protótipo AMD-1 da Quanser pertencente ao LPC da FEIS - UNESP.
Fonte: Elaborado pelo autor
Considere o esquemático apresentado na Figura 37. O deslocamento do carro (xc) que
simboliza a massa móvel (Mc) é considerado positivo para a direita quando vista pelo leitor,
assim como o deslocamento do patamar superior (xf , que tem como massaM f ).
Para pequenas variações angulares do piso superior, o sistema pode ser tratado como um
sistema massa-mola padrão de constanteK f a uma alturaH f do chão, viabilizando assim uma
aproximação coerente na modelagem do sistema.

100 6 NOVOS RESULTADOS PARA O PROJETO DE CONTROLADORES CHAVEADOS
Figura 37 - Modelo esquemático do AMD-1.
xc > 0xc
Mcxf > 0
xfFc
K f
M f
H f
Fonte: (QUANSER, 2012a)
Os parâmetros utilizados neste exemplo para o sistema AMD-1são dados na Tabela 2.
Tabela 2 - Parâmetros do sistema AMD-1
Resistência de armadura do motor (ω) Rm 2,6Constante de torque do motor (N.m/A) Kt 0,00767
Eficiência eletromecânica do motor ηm 1Constante de eficiência do motor (V.s/rad) Km 0,00767
Eficiência do redutor planetário ηg 1Altura do patamar superior (m) H f 0,5334Massa do patamar superior (Kg) M f 1,38
Constante da mola para a modelagem (N/m) K f 500,9Inércia do rotor (Kg.m2) Jm 3,9×10−7
Massa total do carro (Kg) Mc 0,65Relação da engrenagem Kg 3,71
Raio do pinhão (engrenagem) (m) rmp 6,35×10−3
Coeficiente de amortecimento viscoso eq. (N.s/m) Beq 3
O modelo em espaço de estados que descreve o sistema AMD-1 é:

6.4 Implementação prática no sistema AMD-1 101
.xc.xf..xc..xf
= A
xc
xf.xc.xf
+BFc, (151)
sendo queA eB são dadas por:
A=
0 0 1 00 0 0 1
0Mcr2mpKf
Mcr2mpMf +JmK2gMc+JmK2
gMf−
r2mpBeq(Mc+Mf )
Mcr2mpMf +JmK2gMc+JmK2
gMf0
0 −Kf (Mcr2mp+JmK2
g)
Mcr2mpMf +JmK2gMc+JmK2
gMf
McBeqr2mpMcr2mpMf +JmK2
gMc+JmK2gMf
0
e
B=
00
r2mpBeq(Mc+Mf )
Mcr2mpMf +JmK2gMc+JmK2
gMf
−Mcr2mp
Mcr2mpMf +JmK2gMc+JmK2
gMf
. (152)
Nota-se, neste caso, que a entrada de controle é igual a forçaimpressa pelo carro na aproxi-
mação massa-mola (u= Fc). Desta forma, com o intuito de inserir uma incerteza na entrada do
sinal de controle, optou-se por transformar a mesma na tensão do motor que move o carro, ou
seja, (u=Vm), dada a relação existente entreFc eVm apresentada abaixo:
Fc =−ηgK2
gηmKtKmxc(t)
Rmr2mp
+ηgKgηmKtVm
Rmrmp. (153)
Assim, modificando as matrizesA eB, considerando agora a entrada de controle do sistema
comou=Vm, as mesmas são dadas por:
A=
0 0 1 00 0 0 1
0Mcr2mpKf
Mcr2mpMf +JmK2gMc+JmK2
gMf−
−McηgK2gηmKt Km+McBeqRmr2mp+Mf ηgK2
gηmKt Km+Mf BeqRmr2mp
Rm(Mcr2mpMf +JmK2gMc+JmK2
gMf )0
0 −Kf (Mcr2mp+JmK2
g)
Mcr2mpMf +JmK2gMc+JmK2
gMf
Mc(ηgK2gηmKt Km+BeqRmr2mp)
Rm(Mcr2mpMf +JmK2gMc+JmK2
gMf )0
e
B=
00
ηgKgηmKt rmp(Mc+Mf )
Rm(Mcr2mpMf +JmK2gMc+JmK2
gMf )
−McηgKgηmKt rmp
Rm(Mcr2mpMf +JmK2gMc+JmK2
gMf )
. (154)
Inserindo então, uma incerteza na modelagem do sistema, simbolizando uma falha por
desgaste ou queima de componentes no módulo amplificador quealimenta o sistema, pode-
se validar as técnicas de projeto robusto apresentadas neste capítulo. Desta forma a potência

102 6 NOVOS RESULTADOS PARA O PROJETO DE CONTROLADORES CHAVEADOS
do sistema será reduzida em 40%, e o sistema poderá ser representado como um politopo de
incertezas. Apresenta-se abaixo, os vértices, que atravésde uma combinação convexa geram o
politopo:
Vértice 1 (100% do ganho de amplificação):
A1 =
0 0 1 0
0 0 0 1
0 278,9341 −18,6497 0
0 −336,0626 5,9716 0
e B1 =
0
0
2,9975
−0,9598
. (155)
Vértice 2 (60% do ganho de amplificação):
A2 =
0 0 1 0
0 0 0 1
0 278,9341 −18,6497 0
0 −336,0626 5,9716 0
e B2 =
0
0
1,7985
−0,5759
. (156)
6.4.1 Implementação das técnicas de controle flexibilizadas
A fim de testar a eficácia das técnicas flexibilizadas de controle chaveado, as mesmas foram
implementadas no sistema AMD-1 com o intuito de garantir a estabilidade robusta do sistema
sujeito a uma falha no motor de controle, descrevendo-se o politopo de incertezas como combi-
nação dos vértices (155) e (156).
A primeira precaução adotada antes da implementação foi tentar definir os autovalores do
sistema incerto realimentado próximos dos sugeridos pelo fabricante (−6+15i, −6−15i, −8
e−6) para preservar o equipamento. A solução para este problema foi restringir a norma dos
controladores chaveados, uma vez que a otimização não pode ser feita devido à utilização do
solver gevp. Assim, para esta finalidade, considere o Colorário 1, como proposição resultante
do Teorema 10 para a otimização da norma dos controladores.
Corolário 1. Obtém-se um limitante para a norma dos controladores chaveados Ki ∈ Rm×n,
com Ki = GiX−1i , Xi = X′
i > 0, Xi ∈ Rn×n e Gi ∈ R
m×n ou Kk ∈ Rm×n, com Kk = GkX
−1k ,
Xk = X′k > 0, Xk ∈R
n×n e Gk ∈Rm×n, através de uma restrição dada por um valorβ , β > 0 tal
que K′i Ki < β In ou K′kKk < β In. O valor deβ deverá ser definido convenientemente em conjunto

6.4 Implementação prática no sistema AMD-1 103
com a solução de um dos problemas:
[
Xi G′i
Gi β Im
]
> 0, (157)
Xi > In, (158)
BMIs (133), (134) e (135),
i, j,s∈K
ou[
Xk G′k
Gk β Im
]
> 0, (159)
Xk > In, (160)
BMIs (146), (147) e (148),
j ∈K e k,s∈KM
sendo que Im e In são matrizes identidade de ordem m e n respectivamente.
No Corolário 1, as LMIs de restrição da norma dos controladores (157) e (158) deverão ser
utilizadas em conjunto com as BMIs (133), (134) e (135) referentes ao Teorema 16 e as LMIs
de restrição da norma dos controladores (159) e (160) deverão ser utilizadas em conjunto com
as BMIs (146), (147) e (148) referentes ao Teorema 17.
Para a implementação dos controladores, agora com as restrições nos ganhos, definiu-se
β = 180000, e também o escalarα < −8, presente no algoritmo dopath-followingque pode
ser utilizado para garantir um decaimento no sistema. Destaforma, os autovalores do sistema
realimentado ficariam mais próximos da região sugerida pelofabricante, tornando a implemen-
tação das técnicas mais segura e preservando assim a integridade do equipamento.
Utilizando, a princípio, o Corolário 1, em conjunto com as restrições (133), (134) e (135)
do Teorema 16, foram projetados os seguintes controladoreschaveados considerando o sistema
incerto como combinação dos vértices (155) e (156):
K1 =[
55,3781 −244,9699 6,3203 1,9945]
, (161)
K2 =[
74,8243 −229,2725 7,8454 4,8094]
. (162)

104 6 NOVOS RESULTADOS PARA O PROJETO DE CONTROLADORES CHAVEADOS
O sistema AMD-1 possibilita a implementação de dados gravados de terremotos reais,
em escala laboratorial, aumentando assim a realidade do experimento. Para este trabalho,
foram escolhidos os dados do terremoto ocorrido em 1994, tendo como epicentro o distrito
Northridge, em San Fernando Valley, região de Los Angeles (QUANSER, 2012a). Na Figura
38, apresentam-se os dados deste terremoto, assim como sua reprodução utilizando o STII.
Figura 38 - Dados obtidos durante o terremoto de Northridge em 1994 e reproduzidos com oSTII.
0 2 4 6 8 10 12 14 16−0.5
0
0.5
1
0 2 4 6 8 10 12 14 16
−3
−2
−1
0
1
2
3
4
Ace
lera
ção
dopi
so[m/s
2]
Pos
ição
dopi
so[c
m]
Dados reaisDados reproduzidos
t[s]
t[s]
Fonte: (QUANSER, 2012b)
A implementação no AMD-1 foi separada em três etapas. Primeiramente, realizou-se o
experimento por completo no modo passivo, onde não existe ação de controle e o motor que
atua na massa móvel será responsável apenas por não permitirque o carro deslize sobre o trilho
simulando assim como se o sistema estivesse travado. Do contrário, estando solto, o carro
poderia colidir com as extremidades causando danos ao sistema de controle. Em seguida, no
instante 18s realizou-se o experimento novamente sem falhas. No instante 36s inseriu-se uma
falha de 40% na entrada de controle, repetindo-se novamenteo experimento e possibilitando a
visualização do desempenho do sistema com e sem falhas.
Sendo assim, implementaram-se os controladores chaveados(161) e (162) para os dados
do terremoto de Northridge, cujos resultados são apresentados nas Figuras 39 à 41.
Nas Figuras 39 e 40, apresentam-se, respectivamente, a posição do piso superior (xf (t)) e
a diferença entre a posição do piso superior e a posição do piso inferior (xf (t)−xs(t)) em cada
instante de tempo para a implementação com e sem controle e antes e depois da falha.

6.4 Implementação prática no sistema AMD-1 105
Figura 39 - Oscilações no piso superior do AMD-1 para os controladores chaveados com for-mulação via BMIs.
0 5 10 15 20 25 30 35 40 45 50−0.03
−0.02
−0.01
0
0.01
0.02
0.03
Des
loca
men
todo
piso
supe
rior
[m]
xf (t)
Instante da falhaInício da ação de controleSem ação de controle
t[s]
Fonte: Elaborado pelo autor
Figura 40 - Diferença entre as oscilações no piso superior (xf (t) [m]) e o deslocamento do pisoinferior (xs(t) [m]) do AMD-1 para os controladores chaveados - formulação via BMIs.
0 5 10 15 20 25 30 35 40 45 50−0.05
−0.04
−0.03
−0.02
−0.01
0
0.01
0.02
0.03
0.04
0.05
Pos
ição
rela
tiva
entr
ex f(t)[
m]e
x s(t)[
m]
xf (t)−xs(t)
Instante da falhaInício da ação de controleSem ação de controle
t[s]
Fonte: Elaborado pelo autor
Na Figura 41, verifica-se a tensão de controle do motor (Vm) e o controlador escolhidos a
cada instante de tempo (K1 eK2) conforme regra (112).

106 6 NOVOS RESULTADOS PARA O PROJETO DE CONTROLADORES CHAVEADOS
Figura 41 - Sinal de controle e controlador ativo para uma falha de 40% - formulação via BMIs.
0 5 10 15 20 25 30 35 40 45 50−6
−4
−2
0
2
4
6
Instante da falhaInício da ação de controleSem ação de controle
Vm(t)K1 ativo
K2 ativo
Sin
ais
deco
ntro
le[V
]eco
ntro
lado
rat
ivo
t[s]
Fonte: Elaborado pelo autor
Utilizando agora o Corolário 1 em conjunto com as restrições (146), (147) e (148) do
Teorema 17, comM = 4, foram projetados e implementados, para os dados do terremoto de
Northridge, os seguintes controladores chaveados para o mesmo sistema incerto:
K1 =[
61,6049 −361,0803 8,1843 3,8264]
(163)
K2 =[
80,2630 −348,7216 9,6752 6,5303]
(164)
K3 =[
75,5424 −352,4761 9,3131 5,8957]
(165)
K4 =[
93,6604 −343,3580 10,9156 9,2794]
(166)
Seguindo a mesma sequência de implementação anteriormenteapresentada, nas Figuras 42
e 43, apresentam-se, respectivamente, a posição do piso superior (xf (t)) e a diferença entre a
posição do piso superior e a posição do piso inferior (xf (t)−xs(t)) em cada instante de tempo
para a implementação com e sem controle e antes e depois da falha.

6.4 Implementação prática no sistema AMD-1 107
Figura 42 - Oscilações no piso superior do AMD-1 para os controladores chaveados com for-mulação via BMIs com generalização das funções.
0 5 10 15 20 25 30 35 40 45 50
−0.03
−0.02
−0.01
0
0.01
0.02
0.03
Des
loca
men
todo
piso
supe
rior
[m]
xf (t)
Instante da falhaInício da ação de controleSem ação de controle
t[s]
Fonte: Elaborado pelo autor
Figura 43 - Diferença entre as oscilações no piso superior (xf (t) [m]) e o deslocamento do pisoinferior (xs(t) [m]) do AMD-1 para os controladores chaveados - formulação via BMIs comgeneralização das funções.
0 5 10 15 20 25 30 35 40 45 50−0.05
−0.04
−0.03
−0.02
−0.01
0
0.01
0.02
0.03
0.04
0.05
Pos
ição
rela
tiva
entr
ex f(t)[
m]e
x s(t)[
m]
xf (t)−xs(t)
Instante da falhaInício da ação de controleSem ação de controle
t[s]
Fonte: Elaborado pelo autor
Na Figura 44, verifica-se a tensão de controle do motor (Vm) e o controlador escolhidos a
cada instante de tempo (K1, K2, K3 eK4) conforme regra (112).

108 6 NOVOS RESULTADOS PARA O PROJETO DE CONTROLADORES CHAVEADOS
Figura 44 - Sinal de controle e controlador ativo para uma falha de 40% - formulação via BMIscom generalização das funções.
0 5 10 15 20 25 30 35 40 45 50−8
−6
−4
−2
0
2
4
6
8
Instante da falhaInício da ação de controleSem ação de controle
Vm(t)
K1 ativoK2 ativo
K3 ativo
K4 ativo
Sin
ais
deco
ntro
le[V
]eco
ntro
lado
rat
ivo
t[s]
Fonte: Elaborado pelo autor
Pode-se verificar nas Figuras 39, 40, 42 e 43 que a ação dos controladores chaveados robus-
tos resultaram em menores oscilações no piso superior do sistema AMD-I, sendo as diferenças
de oscilações entre o piso superior e o piso inferior reduzidas, porém ainda existentes em função
do atraso do sensor no piso superior em relação às oscilaçõesdo piso inferior.
Verifica-se também, conforme Figuras 41 e 44 um esforço por parte do sistema para com-
pensar a falha de 40%, com um chaveamento significativo entreos controladores antes e após a
falha, indicando que a existência de controladores para chaveamento possibilitou uma atuação
eficiente para a garantia de estabilidade do sistema robusto.
6.5 Conclusões parciais
Neste capítulo, apresentaram-se novas técnicas para o projeto de controladores chaveados
para a garantia de estabilidade de sistemas lineares incertos, utilizando funções de Lyapunov
quadráticas por partes. As técnicas foram formuladas por meio de BMIs (algoritmo apresentado
no Apêndice A), tendo como vantagem uma redução no conservadorismo da formulação para o
aumento de factibilidade na garantia de estabilidade do sistema.
As técnicas foram implementadas em um protótipo laboratorial conhecido como AMD-1,
mostrando as vantagens da técnica flexibilizada, apresentada no Teorema 17, em cuja imple-

6.5 Conclusões parciais 109
mentação houve um chaveamento mais intenso entre os controladores, levando a concluir que
a nova técnica não apenas aumenta a factibilidade mas tambémcontribui para o desempenho
global do sistema.

110 6 NOVOS RESULTADOS PARA O PROJETO DE CONTROLADORES CHAVEADOS

111
7 CONCLUSÕES
Apresentaram-se, nesta tese, diferentes técnicas para síntese de controladores e análise de
factibilidade de sistemas robustos, com incertezas do tipoLPV, utilizando-se, a princípio, uma
CQLF e, por fim, funções de Lyapunov quadráticas por partes cujas formulações se basearam
em LMIs e BMIs.
De início, no Capítulo 3, propôs-se uma técnica formulada como lema de Finsler, utilizando
uma CQLF, cujo mérito se baseou na redução do número de LMIs para o projeto ótimo de
controladores sujeitos a taxa de decaimento maior ou igual aα. A técnica mostrou grande
vantagem na otimização da norma dos controladores quando comparada com as técnicas de
projeto ótimo existentes, em função dos resultados obtidospor meio de implementações práticas
no helicóptero 3-DOF, sujeito a uma falha estrutural de 30% no motor traseiro. Também foram
realizadas comparações envolvendo a norma dos controladores para 1000 politopos incertos
gerados aleatoriamente em função do aumento da taxa de decaimento. Essa técnica proposta,
com otimização, apresentou melhores resultados para a norma dos controladores em todos os
casos de comparação.
No Capítulo 4, apresentam-se formulações envolvendo o chaveamento entre controladores,
incluindo taxa de decaimento e otimização da norma deK, tendo como ponto fundamental
a utilização de uma função de Lyapunov quadrática por partes, em que a escolha do contro-
lador é baseada no mínimo valor desta função. A formulação apresentada foi implementada
no helicóptero 3-DOF, e mostrou vantagens expressivas na implementação de controladores
garantindo a estabilidade para falhas estruturais de até 90% no motor traseiro, tanto para o pro-
jeto apenas com taxa de decaimento, como para o projeto com taxa de decaimento e otimização
da norma deK.
Propuseram-se técnicas menos conservadoras, no Capítulo 5,para a análise de estabili-
dade de sistemas lineares incertos, utilizando funções de Lyapunov quadráticas por partes, cuja
vantagem está na utilização de BMIs que podem ser resolvidas pelo métodopath-following,
detalhado no Apêndice A, em que o termo bilinear está no produto de escalares de relaxação

112 7 CONCLUSÕES
e matrizes variáveis incrementando, assim, os resultados de factibilidade. Foi concebida tam-
bém uma flexibilização na formulação, por meio do lema de Finsler, inserindo mais escalares
e matrizes extras, ampliando ainda mais os resultados de factibilidade. As formulações foram
testadas em exemplos numéricos conhecidos na literatura.
Expõem-se técnicas mais gerais, no Capítulo 6, para o projetode controladores, baseadas
nas técnicas apresentadas no Capítulo 5, em que os controladores são chaveados através da
escolha de uma função mínima e quadrática por partes, encontrada a cada instante de tempo.
Os controladores projetados foram implementados no equipamento laboratorial STII + AMD-1,
sujeito a uma falha de 40% na potência da entrada de controle,constatando-se, assim, a garantia
da estabilidade robusta e um aumento no desempenho global dosistema.
7.1 Perspectivas Futuras
• Técnicas de controle robustoH2 e H∞ por meio de BMIs encontradas com o método
path-followingutilizando funções de Lyapunov quadráticas por partes;
• Técnicas de controle discreto chaveado utilizando como base os resultados apresentados
nos Capítulos 5 e 6;
• Técnicas de filtragem robusta para sistemas lineares incertos utilizando os resultados do
Capítulo 5.

113
REFERÊNCIAS
APKARIAN, P.; TUAN, H. D.; BERNUSSOU, J. Continuous-time analysis, eigenstructureassignment, andH2 synthesis with enhanced linear matrix inequalities (LMI) characterizations.IEEE Transactions on Automatic Control, Notre Dame, v. 46, n. 12, p. 1941–1946, 2001.
ASSUNÇÃO, E.; MARCHESI, H. F.; TEIXEIRA, M. C. M.; PERES, P. L. D. Globaloptimization for theH∞-norm model reduction problem.International Journal of SystemsScience, Hants, v. 38, n. 2, p. 125–138, 2007a.
ASSUNÇÃO, E.; TEIXEIRA, M. C. M.; FARIA, F. A.; SILVA, N. A. P. D.; CARDIM,R. Robust state-derivative feedback LMI-based designs for multivariable linear systems.International Journal of Control, Hants, v. 80, n. 8, p. 1260–1270, 2007b.
BOYD, S.; GHAOUI, L. E.; FERON, E.; BALAKRISHNAN, V.Linear matrix inequalities insystems and control theory. 2. ed. Philadelphia: SIAM Studies in Applied Mathematics,1994.
BRANICKY, M. S. Multiple Lyapunov functions and other analysistools for switched andhybrid systems.Automatic Control, IEEE Transactions on, Piscataway, v. 43, n. 4, p. 475–482,1998.
BUZACHERO, L. F. S.; ASSUNÇÃO, E.; TEIXEIRA, M. C. M.; FARIA, F. A.;SILVA,E. R. P. da. Otimização de controladores robustos de sistemasdinâmicos sujeitos a falhasestruturais. In: CONGRESSO BRASILEIRO DE AUTOMÁTICA, 18., 2010,Bonito-MS.Anais...Bonito-MS, 2010. p. 4068–4075.
BUZACHERO, L. F. S.; ASSUNÇÃO, E.; TEIXEIRA, M. C. M.; SILVA, E. R. P. da. Newtechniques for optimizing the norm of robust controllers ofpolytopic uncertain linear systems.In: Frontiers in advanced control systems. Rijeka: InTech, 2012. p. 75–100.
CARDIM, R.; TEIXEIRA, M.; FARIA, F.; ASSUNÇÃO, E. LMI-based digital redesign oflinear time-invariant systems with state-derivative feedback. In: CONTROL APPLICATIONS,(CCA) INTELLIGENT CONTROL, (ISIC), 2009 IEEE. Saint Petersburg. Conference ofthe...Saint Petersburg: IEEE, 2009, p. 745–749. Acesso em: 01 abr.2014. Disponível em:<http://ieeexplore.ieee.org/stamp/stamp.jsp?tp=&arnumber=5281065>.
CHANG, W.; PARK, J. B.; LEE, H. J.; JOO, Y. H. LMI approach to digital redesign of lineartime-invariant systems.IEE Proceedings-Control Theory and Applications, Stevenage, v. 149,n. 4, p. 297–302, July 2002.
CHEN, Y.-J.; OHTAKE, H.; TANAKA, K.; WANG, W.-J.; WANG, H. Relaxed stabilizationcriterion for T-S fuzzy systems by minimum-type piecewise-lyapunov-function-basedswitching fuzzy controller.Fuzzy Systems, IEEE Transactions on,Piscataway, v. 20, n. 6, p.1166–1173, 2012.

114 REFERÊNCIAS
CHILALI, M.; GAHINET, P. H∞ design with pole placement constraints: An LMI approach.IEEE Transactions on Automatic Control, New York, v. 41, n. 3, p. 358–367, 1996.
DAHLEH, M.; DAHLEH, M. A. On slowly time-varying systems.Automatica, Tarrytown,v. 27, p. 201–205, 1991.
DEAECTO, G. S.Projeto de controladores dinâmicos com comutação :aplicação em sistemasmecânicos e conversores de potência CC-CC. Tese (Doutorado) — Universidade Estadual deCampinas, Campinas, 2010.
DEAECTO, G. S.; GEROMEL, J. C. Controle de sistemas lineares comcomu-tação.Sba: Controle & Automação Sociedade Brasileira de Automatica, Campi-nas, v. 19, n. 4, p. 431 – 443, 2008. Acesso em: 01 abr. 2014. Disponível em:<http://www.scielo.br/pdf/ca/v19n4/a06v19n4.pdf>.
DEAECTO, G. S.; GEROMEL, J. C.; DAAFOUZ, J. Switched state-feedback control forcontinuous time-varying polytopic systems.International Journal of Control,Abingdon, v. 84,n. 9, p. 1500–1508, 2011.
DECARLO, R. A.; BRANICKY, M. S.; PETTERSSON, S.; LENNARTSON, B. Perspectivesand results on the stability and stabilizability of hybrid systems. In:Proceedings of the IEEE,New York. [s.n.]. v. 88, n. 7, p. 1069–1082, 2000. Acesso em: 01 abr. 2014. Disponível em:<http://ieeexplore.ieee.org/stamp/stamp.jsp?tp=&arnumber=871309>.
DELMOTTE, F.; GUERRA, T.; KSANTINI, M. Continuous takagi-sugeno’s models:reduction of the number of LMI conditions in various fuzzy control design technics.FuzzySystems, IEEE Transactions on,Piscataway, v. 15, n. 3, p. 426–438, June 2007.
ESTEVES, T. T.Análise da estabilidade de sistemas fuzzy Takagi-Sugeno utilizando asdesigualdades de Lyapunov-Metzler.2011. 101 f. Dissertação (Mestrado em Automação) —Faculdade de Engenharia, Universidade Estadual Paulista,2011.
GAHINET, P.; NEMIROVSKI, A.; LAUB, A. J.; CHILALI, M. LMI control toolbox - For usewith MATLAB. [S.l.], 1995.
GARG, K. Theory of differentiation:a unified theory of differentiation via new derivatetheorems and new derivatives. New York: John Wiley & Sons, 1998. 525 p.
GEROMEL, J.; KOROGUI, R. Analysis and synthesis of robust control systems using linearparameter dependent lyapunov functions.IEEE Transactions on Automatic Control, New York,v. 51, n. 12, p. 1984–1989, 2006.
GEROMEL, J.; KOROGUI, R.H2 robust filter design with performance certificate via convexprogramming.Automatica, Tarrytown, v. 44, n. 4, p. 937–948, 2008.
GEROMEL, J.; OLIVEIRA, M. D.H2 andH∞ robust filtering for convex bounded uncertainsystems.IEEE Transactions on Automatic Control, New York, v. 46, n. 1, p. 100–107, 2001.
GEROMEL, J. C.; COLANERI, P. Stability and stabilization of continuous-time switchedlinear systems.SIAM Journal Control Optimization, Philadelphia, v. 45, p. 1915–1930, 2006.

REFERÊNCIAS 115
GEROMEL, J. C.; DEAECTO, G. S. Switched state feedback controlfor continuous-timeuncertain systems.Automatica, Tarrytown, v. 45, n. 2, p. 593–597, 2009.
HASSIBI, A.; HOW, J.; BOYD, S. A path-following method for solving BMI problems incontrol. In: PROCEEDINGS OF THE AMERICAN CONTROL CONFERENCE. San Diego.Proceedings of the...San Diego: IEEE, 1999. v. 2, p. 1385–1389. Acesso em: 01 abr. 2014.Disponível em:<http://ieeexplore.ieee.org/xpl/articleDetails.jsp?arnumber=783595>.
HESPANHA, J. P. Uniform stability of switched linear systems: extensions oflasalle’s invariance principle.IEEE Transactions on Automatic Control, NewYork, v. 49, p. 470–482, 2004. Acesso em: 01 abr. 2014. Disponível em:<http://ieeexplore.ieee.org/stamp/stamp.jsp?arnumber=01284711>.
JI, Z.; WANG, L.; XIE, G. Quadratic stabilization of switched systems.International Journalof Systems Science, Abingdon, v. 36, n. 7, p. 395–404, 2005.
LASDON, L. S.Optimization theory for large systems. Macmillan: Courier Dover Publications,1970. 523 p.
LEITE, V. J. S.; MONTAGNER, V. F.; OLIVEIRA, P. J.; OLIVEIRA, R. C. L. F.; PERES, P.L. D. Estabilidade robusta de sistemas lineares através de desigualdades matriciais lineares.Revista Controle & Automação, Campinas, v. 15, n. 1, p. 24–40, 2004.
LIBERZON, D. Switching in systems and control. Boston: Birkhäuser, 2003. 233 p. (Systems& control).
LIN, H.; ANTSAKLIS, P. Stability and stabilizability of switched linear systems: Ashort survey of recent results. In: PROCEEDINGS OF THE INTELLIGENT CONTROL,2005, PROCEEDINGS OF THE 2005 IEEE INTERNATIONAL SYMPOSIUM ON,MEDITERREAN CONFERENCE ON CONTROL AND AUTOMATION, 2005. Limassol.Proceedings of the...Limassol: IEEE, 2005. p. 24–29. Acesso em: 01 abr. 2014. Disponívelem:<http://ieeexplore.ieee.org/stamp/stamp.jsp?arnumber=01466986>.
LUENBERGER, D.Introduction to dynamic systems: theory, models, and applications. NewYork: John Wiley & Sons, 1979. 446 p.
MA, M.; CHEN, H. ConstrainedH2 control of active suspensions using lmi optimiza-tion. In: CONTROL CONFERENCE, CCC, CHINESE, 2006. HarbinConference ofthe...Harbin: IEEE, 2006. p. 702 –707. Acesso em: 01 abr. 2014. Disponível em:<http://ieeexplore.ieee.org/stamp/stamp.jsp?tp=&arnumber=4060613>.
MONTAGNER, V.; OLIVEIRA, R. C. L. F.; PERES, P. L. D. Convergent LMI relaxations forquadratic stabilizability andH∞ control of takagi-sugeno fuzzy systems.Fuzzy Systems, IEEETransactions on, Piscataway, v. 17, n. 4, p. 863–873, Aug 2009.
MOZELLI, L.; PALHARES, R.; SOUZA, F.; MENDES, E. Reducing conservativeness inrecent stability conditions of {TS} fuzzy systems.Automatica, Tarrytown, v. 45, n. 6, p. 1580 –1583, 2009.
OLIVEIRA, M. C.; BERNUSSOU, J.; GEROMEL, J. C. A new discrete-timerobust stabilitycondition.Systems Control Letters, Amsterdam, v. 37, n. 4, p. 261–265, 1999.

116 REFERÊNCIAS
OLIVEIRA, M. C. de. Novos testes de estabilidade para sistemaslineares.Revista Controle &Automação, Campinas, v. 15, n. 1, p. 17–23, 2004.
OLIVEIRA, M. C. de; GEROMEL, J. C.; HSU, L. Lmi characterizationof structural androbust stability: the discrete-time case.Linear Algebra and its Applications, Philadelphia,v. 296, n. 1-3, p. 27 – 38, 1999.
OLIVEIRA, M. C. de; SKELTON, R. E. Stability tests for constrained li-near systems. In: MOHEIMANI, S. O. R. (ED.).Perspectives in robust con-trol. London: Springer Berlin, 2001. p. 241–257. Lectures notes in controland information sciences, 268. Acesso em: 01 abr. 2014. Disponível em:<http://books.google.com.br/books?id=mz2r1XJqtPAC&printsec=frontcover&hl=pt-PT&source=gbs_ge_summary_r&cad=0♯v=onepage&q&f=false>.
PIPELEERS, G.; DEMEULENAERE, B.; SWEVERS, J.; VANDENBERGHE, L. ExtendedLMI characterizations for stability and performance of linear systems.Systems & ControlLetters, Amsterdam, v. 58, n. 7, p. 510 – 518, 2009.
QUANSER.3-DOF Helicopter Reference Manual. [S.l.], 2002.
QUANSER.Active Mass Damper - One Floor (AMD-1), User Manual. [S.l.], 2012a.
QUANSER.Specialty Plant: Shake Table II - Position Control and Earthquake Analysis, UserManual. [S.l.], 2012b.
SHORTEN, R.; WIRTH, F.; MASON, O.; WULFF, K.; KING, C. Stability criteria for switchedand hybrid systems.SIAM Review, Philadelphia, v. 49, p. 545–592, 2007.
SILVA, E. R. da; ASSUNÇÃO, E.; TEIXEIRA, M. C.; FARIA, F. A.; BUZACHERO, L. F.Parameter-dependent Lyapunov functions for state-derivative feedback control in polytopiclinear systems.International Journal of Control, Abingdon, v. 84, n. 8, p. 1377–1386, 2011.
SILVA, E. R. da; ASSUNÇÃO, E.; TEIXEIRA, M. C.; FARIA, F. A.; BUZACHERO,L. F. Less conservative control design for linear systems with polytopic uncertainties viastate-derivative feedback.Mathematical Problems in Engineering, New York, v. 2012, p. 1–21,2012.
SKAFIDAS, E.; EVANS, R.; SAVKIN, A.; PETERSEN, I. Stability results for switchedcontroller systems.Automatica, Tarrytown, v. 35, n. 4, p. 553–564, 1999.
SKELTON, R. E.; IWASAKI, T. E.; GRIGORIADIS, K.A unified algebric approach to controldesign. Bristol: Taylor & Francis, 1997. 304 p.
SOLO, V. On the stability of slowly time-varying linear systems.Mathematics of Control,Signals, and Systems (MCSS), London, v. 7, p. 331–350, 1994.
SOUZA, W. A.; TEIXEIRA, M. C. M.; SANTIM, M. P. A.; CARDIM, R.; ASSUNÇÃO,E. On switched control design of linear time-invariant systems with polytopic uncertainties.Mathematical Problems in Engineering, New York, v. 2013, p. 10 p., 2013.
SOUZA, W. A.; TEIXEIRA, M. C. M.; SANTIM, M. P. A.; CARDIM, R.; ASSUNÇÃO,

REFERÊNCIAS 117
E. On switched regulator design of uncertain nonlinear systems using takagi-sugeno fuzzymodels.IEEE Transactions on Fuzzy Systems, 2014. Acesso em: 01 abr. 2014. In press.Disponível em:<http://ieeexplore.ieee.org/stamp/stamp.jsp?arnumber=0672291>.
SOUZA, W. A. de.Projeto de controladores robustos chaveados para sistemasnão linearesdescritos por modelos Fuzzy Takagi-Sugeno.2013. 92f. Tese (Doutorado em Automação) —Faculdade de Engenharia, Universidade Estadual Paulista,Ilha Solteira, 2013.
TAKAGI, T.; SUGENO, M. Fuzzy identification of systems and its applications to modelingand control.IEEE Transactions on Systems, Man, and Cybernetics, New York, v. 15, n. 1, p.116–132, 1985.
TANAKA, K.; HORI, T.; WANG, H. A multiple Lyapunov function approach to stabilizationof fuzzy control systems.IEEE Transactions on Fuzzy Systems, Piscataway, v. 11, n. 4, p.582–589, 2003.
TANAKA, K.; IKEDA, T.; WANG, H. Fuzzy regulators and fuzzy observers: relaxed stabilityconditions and lmi-based designs.IEEE Transactions on Fuzzy Systems, Piscataway, v. 6, n. 2,p. 250–265, 1998.
TANAKA, K.; IWASAKI, M.; WANG, H. Stability and smoothness conditions for switchingfuzzy systems. In: PROCEEDINGS OF THE AMERICAN CONTROL CONFERENCE,2000.Chicago.Proceedings of the...Chicago: IEEE, 2000a. v. 4, p. 2474–2478. Acesso em: 01 abr.2014. Disponível em:<http://ieeexplore.ieee.org/stamp/stamp.jsp?tp=&arnumber=878627>.
TANAKA, K.; IWASAKI, M.; WANG, H. Stable switching fuzzy control and its applicationto a hovercraft type vehicle. In: FUZZY SYSTEMS, 2000, FUZZ IEEE 2000. ONCONFERENCE THE IEEE INTERNATIONAL, 19. San Antonio, 2000.Conference on...SanAntonio: IEEE, 2000b. v. 2, p. 804–809.
TEIXEIRA; ASSUNÇÃO, E.; AVELLAR, R. G. On relaxed LMI-based designs for fuzzyregulators and fuzzy observers.IEEE Transactions on Fuzzy Systems, Piscataway, v. 11, n. 5,p. 613–623, 2003.
WANG, J.; LI, X.; GE, Y.; JIA, G. An LMI optimization approachto lyapunovstability analysis for linear time-invariant systems. In:CONTROL AND DECI-SION CONFERENCE, 2008. CCDC 2008, CHINESE. Yantai.Conference on...Yantai: IEEE, 2008. p. 3044–3048. Acesso em: 01 abr. 2014. Disponível em:<http://ieeexplore.ieee.org/stamp/stamp.jsp?tp=&arnumber=4597885>.
WICKS, M.; PELETIES, P.; DECARLO, R. Construction of piecewise lyapunov functionsfor stabilizing switched systems. In: ON CONFERNCE DECISION ANDCONTROL,PROCEEDINGS OF THE IEEE CONFERENCE, 33, 1994. Lake Buena Vista.Proceedings ofthe...Lake Buena Vista: IEEE, 1994. v. 4, p. 3492 –3497,.
YANG, G. hong; DONG, J. Switching fuzzy dynamic output feedback H∞ control fornonlinear systems.IEEE Transaction on Systems, Man, and Cybernetics, Part B: Cybernetics,New York, v. 40, n. 2, p. 505–516, 2010. Acesso em: 01 abr. 2014. Disponível em:<http://ieeexplore.ieee.org/stamp/stamp.jsp?arnumber=05291778>.

118 REFERÊNCIAS

119
APÊNDICE A - MÉTODO
PATH-FOLLOWING PARA SOLUÇÃO DE BMIS
Neste apêndice insere-se o algoritimo utilizado para a solução das BMIs (121) aplicando o
métodopath-following(HASSIBI; HOW; BOYD, 1999). A ideia básica deste método (CHEN
et al., 2012), consiste em resolver BMIs linearizadas restringindo o tamanho do incremento
das variáveis bilineares. Devido a este tipo de linearização, os termos linearizados de segunda
ordem podem ser desprezados.
Baseado no apêndice de (CHEN et al., 2012), especificam-se, a seguir, os passos para a
solução do critério de estabilidade do Teorema 14 com o método path-following. Note que o
algoritmo pode ser utilizado para solucionar as BMIs dos Teoremas 13, 15, 16 e 17, com as
devidas adequações.
Passo 1:Definaη = 0 e escolha aleatoriamenteγ jks > 0;
Passo 2:Escolhaγ jks = γ jks(η) e solucione o seguinte problema de otimização:
minPk
α sujeito a Pk > 0 e (121); (167)
Passo 3:ParaPk obtido noPasso 2, resolva o seguinte problema de otimização, com as
versões linerizadas das desigualdadesPk > 0 e (121) em torno dePk e γ jks:
min∆Pk,δγ jks
α sujeito a (169)− (173) (168)
Pk+∆Pk > 0, k∈KM (169)
γ jks+δγ jks > 0, j ∈K e k,s∈KM (170)
[
0,05P2k ∆Pk
∆Pk In
]
> 0, k∈KM (171)

120 APÊNDICE A - Método path-following para solução de BMIs
[
0,05γ2jks δγ jks
δγ jks In
]
> 0, j ∈K e k,s∈KM (172)
ATj (Pk+∆Pk)+(Pk+∆Pk)A j +
M∑
s=1[γ jks(Ps−Pk)+
γ jks(∆Ps−∆Pk)+δγ jks(Ps−Pk)]−Yjk < α(Pk+∆Pk).
(173)
As LMIs (171) e (172) foram adicionadas para minimizar a perturbação das variáveisPk e
γ jks, para que a aproximação linear seja válida.
Passo 4:Paraδγ jks obtido noPasso 3, incrementeγ jks tal queγ jks(η+1) = γ jks(η)+δγ jks.
Assim, definaη = η +1 e volte para oPasso 2.
Critério de parada: A busca ser encerrada quando obtém-seα < 0 no Passo 2, impli-
cando que foi encontrado um resultado factível com o Teorema14. A busca também pode se
encerra quandoα > 0 eα não pôde ser decrementado nas últimas iterações, implicando que a
factibilidade neste algoritmo não pôde ser encontrada pelométodopath-following.
Observação 1.Os Passos 2 e 3 podem ser eficientemente resolvidos com o solver de minimiza-
ção generalizada dos autovalores chamado "gevp" (GAHINET etal., 1995).