APLICAÇÃO DOS MÉTODOS QUASE-NEWTON NA ANÁLISE DE VASOS DE ...
185
N° 39 TESE DE MESTRADO PRONUCLEAR APLICAÇÃO DOS MÉTODOS QUASE-NEWTON NA ANÁLISE DE VASOS DE PRESSÃO AXISSIMÊTRÍCOS DÉBORA ATTILA COSTA PARISI RECIFE
Transcript of APLICAÇÃO DOS MÉTODOS QUASE-NEWTON NA ANÁLISE DE VASOS DE ...

N° 39TESE DE MESTRADO
PRONUCLEAR
APLICAÇÃO DOS MÉTODOS QUASE-NEWTON NA ANÁLISEDE VASOS DE PRESSÃO AXISSIMÊTRÍCOS
DÉBORA ATTILA COSTA PARISI
RECIFE

DÉBORA ATTILA COSTA PARISI
APLICAÇÃO DOS MÉTODOS CÜASE-NEWTON
MA ANALISE DE VASOS DE PRESSÃO
AXISSIMÊTRICOS
Dissertação apresentada ao Cursode Mestrado em Ciências e Tecnologia Nuclear da Universidade Federal de Pernambuco, em cumprimentodas exigências para obtenção doGrau de Mestre.
AREA DE CONCENTRAÇÃO: Engenharia Nuclear
Orientador: Bernardo Horowitz
Co-orientador: Ezio da Rocha Araújo
Março/87

Dissertação apresentada ao Departamento de Energia Nuclear da Uni-
versidade Federal de Pernambuco, fazendo parte da Comissão Exami-
nadora os seguintes professores :
G^TULIOljZIDORO KATZ - Ph.D. em MatemáticaDepartamento de Matemática da UniversidadeFederal de Pernambuco - UFPE
JÚLIO ALVES HERMlNIO - DoutorDepartamento de Engenharia Mecânica da Universidade Federal do Rio Grande do NorteUFRN
PAULO JOSÉ CHAVES ARAtJJO E S^LVA - DoutorDepartamento de Engenharia Civil da Universidade federal de Pernambuco - UFPE
Visto e permitida a impressão
Recife, março de 1987.
Coord' iador do Curso de Mestrado em Ciên-cia e Vecnologia Nuclear do Departamentode Energia Nuclear da Universidade Fede-ral de Pernambuco.
- i -
A meus pais, meu
63poso Gerlando e
meus filhos Gerlando
e Painel] c.
AGRADECIMENTOS
Ao Professor Bernardo Horowitz pela sugestão e
orientação deste trabalho.
Ar» Professor Ezio da Rocha Araújo pela inestimá
vel colaboração.
A ffltiU . pais Costa e Ma th i Ide pela cooperação e
ceio apoio que roe of' eceram.
A Kátia pela colaboração na datilografia deste
t_
A todos os colegas e amigos que,, de alguma for
, contribuíram para a realização do pi.:sente trabalho.
- ii -
RESUMO
Esta tese trata da aplicação de métodos Quase - Newton
na análise não-linear física de vasos de pressão axissimétri
cos pelo método dos elementos finitos.
Na formulação o comportamento do material é descrito
por um modelo elastoplastico isotrõpico com endurecimento por
deformação. O domínio é discretizado por elementos finitos
triangulares de sólido axissimétrico com interpolação linear pa
ra o campo de deslocamentos. As equações incrementais que gove£
nam o problema são obtidas do princípio dos trabalhos virtuais.
A solução do sistema de equações não lineares resultan
te são resolvidas iterativamente pelo método BFGS. O desempenho
do método implementado é comparado com o método de Newton-Raph
son e algumas de suas variantes, mediante alguns exemplos de
aplicação selecionados.
- iii -

ABSTRACT
This work studies the application of Quasi—Newton tech
niques to material nonlinear analysis of axisymmetrical pressu
re vessels by the finite element method.
In the formulation the material behavior is described
by an isotropic elastoplastic model with strain hardening. The
continum is discretized through triangular finite elements of
axisymmetrical solids with linear interpolation of the displa
cement field. The incremental governing equations are derived
by the virtual work.
The solution of the system of simultaneous nonlinear
equations is solved iteratively by the Quasi-Newton method em
ploying the BFGS update. The numerical performace of the propo
sed method is compared with the Newton-Raphson method and some
of its variants through some selected examples.
- iv -

Í N D I C E
Páginas
I - INTRODUÇÃO 1
1.1 - Considerações Gerais 1
1.2» Objetivo é Abrangência 4
1.3 - Breve Descrição da Tese , 4
II - DECLARAÇÃO DO PROB'*"*" . 6
2.1- Introdução 6
2.2 - Equações Gerais da Mecânica do Continuo e
Linearizações 7
2.2.1 - Deslocamentos e Deformações 7
2.2.2 - Equações de Equilíbrio 8
2.2.3 - Principio dos Trabalhos Virtuais. 9
2.3 - Relações Constitutivas na Elastoplastici
dade 10
2.3.1 - Princípios Gerais 10
2.3.2 - A Função de Fluência 13
2.3.3 - Endurecimento 17
2.4 - Expressões Básicas para o Problema Axissi
métrico 20
2.5 - Discretização do Continuo pelo Método dos
Elementos Finitos 22
2.5.1 - O Elemento Utilizado 73
2.5.2 - Equações de Equilíbrio do Sólido.. 28
III - SOLUÇÃO DAS EQUAÇÕES DE EQUILÍBRIO 31
3.1 - Introdução 31
- v -

Páginas
3.2 - O Processo Incremental-Iterativo 32
3.3 - O Né iodo de Newton-Raphson 33
3.4 - O Método de Newton-Raphson Modificado .... 37
3.5 - Outros Métodos 38
IV - C MÉTODO QÜASE-NEWTON 40
4.1- Introdução 40
4.2 - A Equação Quase—Newton 41
4.3 - As Atualizações Quase-Newton '..... 43
4 . 4 - 0 Método BFGS 48
4.4.1 - Desenvolvimento do Método 49
4.4.2 - Outras Implementações 54
V - IMPLEMENTAÇÃO E DESEMPENHO 57
5.1 - Introdução 57
5 . 2 - 0 Elemento Finito Triangular Axissimétrico 57
5 . 3 - 0 Algoritmo de Elastoplasticidade 59
5.4 - Os Métodos de Análise Não-Linear 64
5.5 - Aplicações Numéricas 65
5.5.1 - Cilindro de Paredes Grossas 55
5.5.2 - Vaso de Pressão Esférico 72
CONCLUSÕES 78
REFERENCIAS BIBLIOGRÁFICAS 79
APÊNDICES
A - DESCRIÇÃO DO PROGRAMA 82
B - MANUAL DE ENTRADA DE DADOS 86
C ' LISTAGEM DO PROGRAMA 92
- vi -
ÍNDICE DE FIGURAS
FIGURA ' . PAGINA
(2.3.2.1) Representação geométrica das superfícies de
escoamento de Tresca e Von Mises no - espaço
das tensões principais 15
(2.3.2.2) Representação dos critérios de escoamento
de Tresca e Von Mises no plano (o-, - o3) e
(o2 - ó3) 16
(2.5.1.1) Elemento Finito triangular axissimétrico
(a) Elemento de um sólido axissimétrico ... 24
(b) Convenção de tensões e deformações .... 24
(c) Representação bidimensional 24
(3.1.1) Matriz de rigidez secante para uma dimen -
são 32
(3.3.1) Método de Newton-Raphson para o caso unidi
mensional 35
(4.1.1) Método Quase-Newton no caso unidimensional- 42
(5.3.1) Mudança incrementai nas tensões
(a) Em um elemento já plastificado 61(b) Em um elemento elástico 61
(5.3.2) Processo de sub-incremento, para reduzir um
ponto de tensão ã superfície de fluência .. 63
(5.5.1.1) Cilindro de Paredes Grossas - malhaeproprie
dades do material empregado 66
- vii -

FIGURA PAGINA
í5.5.1.2) Curva pressão interna x deslocamento radi-
al (r = a) 67
(5.5.1.3) Distribuição das tensões no cilindro de pa
redes grossas.
(a) Tensões radiais 69
(b) Tensões circunferenciai. 69
(5.5.2.1) Malhas utilizadas para modelar o vaso de
pressão esférico.
(a) Setor de 909 com 72 elementos 73
(b) Setor de 909 com 144 elementos 73
(c) Setor de 7,59 com 16 elementos 73
(5.5.2.2) Curva pressão x deslocamento radial de um
ponto na face interna para as três malhas
utilizadas 74
(5.5.2.3) Distribuição das tensões no vaso de pressão
esférico.
(a) Tensões radiais , 75
(b) Tensões circunferênciais , 75
- viii -

ÍNDICE DE TABEiAS
TABELA PAGINA
(5.1) Deslocamentos (mm) na face interna do cilin
dro de paredes grossas pelos 5 métodos (32
elementos) 67
(5.2) Desempenho dos métodos para o exemplo do c.i
.lindro de paredes grossas 68
(5.3) Tensões radiais (or) para uma pressão
P = 16 dN/mm2 no cilindro de paredes gros
sas, utilizando os 5 métodos 70
(5.4) Tensões circunferenciais (og) para uma
são P = 16 dN/mm2 no cilindro de paredes
grossas, utilizando os 5 métodos 71
(5.5) Desempenho dos métodos para o exemplo do
vaso de pressão esférico 76
- ix -

SIMBOLOGIA
x^ . - componentes do vetor posição de um ponto
do corpo no estado indeformado.
x. - componentes do vetor posição de um ponto
do corpo na posição deformada.
u., u - componentes do vetor e vetor deslocamen
to de um ponto.
ds - segmento de reta definido por dois pon
tos infinitamente próximos na configura
ção indeformada.
dS - segmento de reta definido por dois pontos
infinitamente próximos na configuração
deformada.
e?., e?,, e,. - componentes do tensor de deformação elas
tica, plástica e total.
o.. - componentes do tensor de tensões.
b^ , b - componentes do vetor e vetor de forças de
massa.
t. , t - componentes do vetor e vetor de forças
de superfície,
n. - cosseno do ângulo entre a normal ã super3 fície e o eixo x*,
- x -

fie.
'ijkl
"a
Vi °kk
dA
dV
WT
resultante dai; forças que atuam na área
dA.
campo virtual de deslocamentos infinite
sintais.
- campo de deformações oriundo dé
- componentes do tensor de elasticidade.
m
- componentes do tensor elastoplastico.
- componentes do tensor desviador.
- componente hidrostática do tensor de ten
soes.
l:1 se i = j, delta de Kronecker.
0 se i + j
X«E v/(l + v) (1 - V)
Vi * E/2 (1 + v)
- elemento de área.
- elemento de volume.
- tensão de escoamento ã tração do material
- deformação plástica efetiva.
- volume.
- trabalho virtual.
- trabalho plástico total.
constantes de Lamé.
- xi -

E - modulo de elasticidade de Young.
v - coeficiente de Poisson.
h - parâmetro de endurecimento.
dX - multiplicador plástico.
Jl» ^2' J3 ~ invariantes do tensor de tensões.
A - tangente a curva ov - e_ do ensaio uni
axial de tração.
a - raio interno do cilindro ou esfera,
b - raio externo do cilindro ou esfera,
p - pressão aplicada.
F(Oj- h) - função de fluência.
g - tensor de tensões.
- tensões longitudinais.0 0 0Z, X, 4
tr - tensão de cizalhamento.
§ - tensor de deformações.
e2, er, es - deformações longitudinais.
- deformação transversal.
a - vetor de fluxo.
N,, N., Nm - funções de interpolação nodais,
- xii -

- motriz identidade.
- operador linear.
- :r.e.triz de deformação.
- -ensor de elasticidade.
- tensor elastopiástico.
- forças nodais equivalentes de massa do
elemento.
- forças nodais equivalentes de superfície
do elemento.
- forças internas nodais do elmento.
..' - reúne todas as fore ÍS nodais equivalen
tes do elemento.
- forças nodais equivalentes aplicadas a
estrutura.
~ forças nodais internas da estrutura.
- vetor de resíduos nodais.
- matriz de rigidez do elemento.
- matriz de rigidez da estrutura.
- 3ií>/3u . Jacobiano.
;>,. - aproximação para o Jacobiano.-r
- XÍÜ -

u. - - u. - diferença entre os vetores deslocamentos
em duas iterações consecutivas.
•jc+l"~ •jt ~ diferença entre os vetores resíduos no
dais em duas iterações consecutivas.
Xe - matriz de rotação.
Le - matriz booleana.
- xiv -
CAPITULO I
INTRODUÇÃO
1.1 - Considerações Gerais
Os requisitos de economia dentro de padrões exigentes de
segurança têm estimulado a engenharia estrutural moderna na bus
ca de representações mais realistas de componentes estruturais.
Para Usinas Nucleares em particular o alto padrão de segurança
desejado requer análises especiais detalhadas,que frequentemen
te levam o modelo a um nível de sofisticação muito além do nor
malmente exigido para estruturas convencionais. Na simulação de
acidentes e condições extremas de cargas algum tipo de não 1^
nearidade é freqüentemente introduzida, sem a qual fica sem sen
tido a predição da resposta estrutural.
Quando a estrutura é levada a condições extremas de car
ga o seu comportamento estrutural torna-se não-linear,devido ã
sua mudança de forma e pela alteração das leia do comportamen
to do material que a compõe.
Os procedimentos analíticos de solução de problemas es
truturais não-lineares mostram-se bastante limitados, ou seja,
a gama de problemas para os quais se pode estabelecer equações
- 1 -
e obter sua solução exata é suite pequena. A &aa abordagem me
diante métodos numéricos aproximados com o uso de computadores
digitais tem-se mostrado mais eficaz.
Dentre rs métodos numéricos disponíveis aquele que mais
atenção ter. recebido por parte dos pesquisadores é sem dúvida
o método dos elementos finitos. C sucesso do método deve - se
principalmente .» forma sistemática e simples de se construir
funções de interpolação locais,para as variáveis do problema,
bem como à sua habilidade para tratar quaisquer condições de
forma e de contorno.
A análise de problemas lineares pelo Método dos Elemen
tos Finitos resulta geralmente na solução de um sistema de equa_
ções algébricas lineares simultâneas. Para a solução desses sis
temas já se dispõe de técnicas que permitem a solução eficien
te de sistemas com dezenas de milhares de incógnitas, tornando
possível a solução de problemas relativamente complexos,a eus
tos admissíveis ã engenharia atual.
As primeiras aplicações do método dos elementos finitos
à análise não linear tinham base intuitiva e consistiam de su
cessivas análises lineares para a obtenção de soluções de pro
blemas particulares conhecidos [22]. Desde então a análise não
linear tem sido continuamente aperfeiçoada e nos dias de hoje
já se dispõe de grandes programas gerais para a análise não li.
near de problemas da Mecânica do Contínuo, ^om grandes biblio
tecas de elementos finitos e de modelos de materiais, ou mesmo
pondo à disposição do usuário alguns métodos de solução de equa
ções não lineares.
A solução de problemas não lineares sempre requer proce
diroentos iterativos, e quando fortes não linearidades estão pre
sentes o custo pode suplantar algumas dezenas de vezes oda aná
lise linear. Isto atualmente restringe consideravelmente o uso
de modelos não lineares na engenharia estrutural.
- 2 -

A literatura registra una abundância de métodos de solu
ções de sistema de equações não lineares, a maioria dos quais
de alguma forma já usadas no método dos elementos finitos. Ca
da método .possui em geral alguma vantagem quando usado em al
gum tipo especifico de problema. Nenhum método parece impor-se
aos demais em toda categoria de problema. Porém, em geral,o me
todo de Newton-Raphson, ou slguma variação dele tem tido gran
de aceitação por parte da grande maioria dos usuãiros de ele
mentos finitos, principalmente pelas suas fortes característ_i
cas de convergência e sua possibilidade de bem aproveitar a es
parsidade das matrizes envolvidas no método dos elementos fini
tos.
Um dos problemas mais pertinentes ao projeto estrutural
de centrais nucleares é a análise de vasos de pressão. A maio
ria dos vasos de pressão são axissimétricos ou podem ser consi
derados como tal. São exemplo de vasos de pressão o próprio va
so do reator nuclear, as tubulações dos circuitos primários e
secundários e a própria casca envolvente do prédio do reator.
As leis constitutivas do material são geralmente modeladas coro
base na teoria da Plasticidade Incrementai. Isto introduz for
tes não linearidades nas ralações tensões - deformações,tornan
do impossível sua consideração no projeto de vasos de reatores,
nucleares, mediante procedimento que acompanha o traçado do áía
grama carga x deformação, desde o inicio do escoamento até o
colapso do vaso.
A estabilidade dos algoritmos elastoplásticos é dependen
te do tamanho dos incrementos de carga utilizados na análise.
Pequenos incrementos são em geral necessários para garantia de
estabilidade daqueles algoritmos. Isto faz aumentar o custo da
análise não linear, enfraquecendo as vantagens dos métodos de
solução de equações não lineares,em especial o método de Newton
- Raphson, geralmente o empregado.
- 3 -
1.2 - Cbjetivo e Abrangência
Ultimamente una nova classe de métodos para solução de
sistemas de equações não lineares denominados de Métodos Quase
- Newton surgiu na literatura como resultado de pesquisas na
área de otimização. Estes métodos vem sendo aplicado com suces
so no contexto de Elementos-*initos.
O presente trabalho tem por objetivo a implementação e
a aplicação do método BPGSr pertencente ã categoria dos Métodos
Quase-Newton,na análise não linear de vasos de Pressão - Axissi
métricos, pelo Método dos Elementos Finitos. Na formulação usa
da o comportamento não linear do material é descrito pela teo
ria Matemática da Plasticidade Incrementai. O desempenho do mé
todo BFGS é comparado com métodos do tipo Newton-Raphson.
1.3 - Breve Descrição da Tese
O Capitulo II apresenta as equações da Mecânica do Con
tinuo empregadas, enfatizando-se as linearizações geométricas
efetuadas. As relações Constitutivas da Elastoplasticidade são
a seguir descritas de uma forma bastante geral. Elas são justa
mente a fonte de não linearidade considerada no trabalho. Em
seguida as expressões genéricas são particularizadas para o pro
blema axissimétrico e então efetuada a discretização do conti
nuo pelo Método dos Elementos Finitos, utilizando-se o elemento
triangular com três noa e dois graus de liberdade por nó com
função de interpolação linear para o campo de deslocamentos em
seu interior. As equações de equilíbrio do sólido são então es
tabelecidas com base no Principio dos Trabalhos Virturais.
No Capitulo IIJ discute-se os procedimentos geralmente
utilizados na solução do sietama de equações não lineares re
- 4 -
sultante da discretização do continuo pelo método dos elementos
finitos, com ênfase aos processos incrementais - iterativos. O
método de Newton-Raphson é reapresentado bem como algumas de
suas variantes que mais tarde serão usadas para comparação de
desempenho.
No Capitulo IV discute-se os aétodos Quase-Newton a par
tir do método de Broyden, e outros julgados relevantes. O meto
do de Broyden é então usado como base para a formulação e di£
cussão do método BP6S em uma maior riqueza de detalhes. Discu
te-se suas características de implementação, e suas proprieda
des de convergência bem como suas vantagens e desvantagens f ren
te aos métodos do tipc Newton-Raphson.
No Capitulo V compara-se o desempenho do método propôs
to com os métodos do tipo Newton-Raphson através de exemplos
de aplicação.
Encerra-se esta tese sumarizando-se as principais con
clusões e sugerindo áreas para pesquisas posteriores.
Uma .listagem completa do programa fonte elaborado em 7.in
guagem FORTRAN é colocada no Apêndice C.
- 5 -

CAPITULO II
DECLARAÇÃO DO PROBLEMA
2.1 - Introdução
A análise estrutural de vasos de pressão axissinétricos
é um problema bidimensional da Mecânica dos Meios Contínuos. 0
principal interesse deste trabalho é portanto a determinação
dos campos de tensões e de deformações nos sólidos de geometria
e cargas axissimétricas.
Considera-se apenas os processos estáticos de deformação,
ou seja, aqueles que não envolvem velocidades e acelerações a
preciáveis. Matematicamente o problema resultante é um proble
ma de valor do contorno não linear. A única fonte de não linea
ridade considerada é aquela proveniente das relações constitu
tivas do material.
Neste capítulo são inicialmente expostos os princípios ge
rais da Mecânica dos Meios Contínuos, em que se fundamenta es
ta tese, evidenciando-se as linearizações geométricas efetua
das. Na formulação das leis constitutivas do material descreve
- se os princípios usados da Teoria Matemática da Plasticidade
Incrementai. Por fim descreve-se o processo de discretização
- 6 -

do domínio espacial pelo Método dos Elementos Finitos, desde a
formulação para um elemento até a obtenção das eqoações não l_i
neares de equilíbrio incrementai para todo osólido, fazendo-se
uso do Principio dos Trabalhos Virtuais.
2.2 - Equações Gerais da Mecânica do Contínuo e Linearizações
2.2.1 - Deslocamentos e Defor»ações
Considere-se um corpo no seu estado indefornado, con
sua posição descrita pelas coordenadas cartesianas x ^ d » 1,2,3)
de seus pontos. A Medida em que o corpo sofre a ação de forças
externas esses pontos deslocam-se para novas posições x^. Para
cada um dos pontos do corpo define-se um vetor deslocamento co
mo a diferença entre sua nova coordenada e a coordenada na po
sição indeformada, isto é -
ui ' *i - xi
O segmento de reta ds definido por dois pontos infini
tesimalmente próximos na configuração indeformada assumirá um
novo comprimento dS devido ao processo de deformação. Usando a
convenção de somação para tensores cartesianos, a variação do
quadrado do comprimento desse segmento pode ser expresso exata
mente como
dS» - dsa = 2cij ãx± dx.
onde e--j são as componentes do tensor de deformação de Green da
da. por <l'2>
Vi VJ1
- 7 -
onde a vírgula indica a derivada com respeito à coordenada no
estado indefornado.
O tensor de deformações é simétrico e quadratico. Nes
ta tese assumimos que o processo de carga induz no corpo apenas
deformações infinitesimais. As componentes do tensor de defor
ções podem então ser linearizadas, desprezando os termos quadra
ticos nas derivadas dos deslocamentos, restando
eij " T (ui,j + Uj,i> . (2.2.1.1,
que é o tensor de deformações infinitesimais.
Supõe-se também aqui que o campo de deslocamentos não
seja muito grande de tal forma que as posições deformada e in
deformada do corpo sejam suficientemente próximas (pequenos áes
locamentos), tal que as equações de equilíbrio do corpo possam
ser formuladas identicamente em ambas as configurações.
2.2.2 - Equações de Equilíbrio
Sob as condições anteriormente expostas,de pequenos ães
locamentos e pequenas deformações,as equações de equilíbrio no
interior de um corpo carregado estaticamente podem ser escritas
em termos das tensões referidas à configuração indeformada co
mo '
o. . . + b. = 0 (2.2.2.1)J f J
onde o ^ são os elementos do tensor simétrico de tensões, e b^
as componentes do vetor de forças de massa.
Na fronteira do corpo as equações de equilíbrio são ex
pressas pela fórmula de Cauchy '*'2'
- 8 -

nj (2.2.2.2)
onde ti são as forças de superfície que atuam na área dA de nor
mal dada-pelo vetor de cossenos diretores n^. Sendo df^ aresuL
tante das forcas que atuam na área dA, as componentes do vetor
de forças de superfície são definidos por r
dfi/dA
2.2.3 - Principio dos Trabalhos Virtuais
As condições de equilíbrio de um sólido deformável da
das pelas equações (2.2.2.1) e (2.2.2.2) podem ser expressas de
forma mais adequada pelo principio dos trabalhos virtuais como
segue. Considere-se um corpo de volume indeformado V emequilí
brio sob a ação de forças de massa b^ em seu interior e de for
ças de superfície t na parte Clr de sua fronteira ft. Mantendo
todas as forças constantes e aplicando um campo virtual de des
locamentos inf initesimais ôu^, tal que fiu^ = 0 na região fi, on
de u^ são prescritos,o trabalho virtual das forças externas
pode ser escrito
6H = f b, ôu, dV + [ t. Ôu. dfi (2.2.3.1)iv X X h 1 1
O principio dos trabalhos virtuais declara que ' se
o corpo está em equilíbrio e satisfaz as condições de contor
no em Q: e ft; então
ÓW = [ o4. óe^. dV (2.2.3.2)ij
onde ôc^j é o campo de deformações oriundo de 6uif e portanto,
compatível. A expressão final do principio dos trabalhos vir
tuais assume a forma
- 9 -
f t± ÔUi d£i=[ o^ i e ^ dV ( 2 . 2 . 3 . 3 )
Jn JvdV +
Essa expressão será usada mais tarde para expressar as
condições de equilíbrio também do continuo discretizado pelo mé
todo dos elementos finitos.
2.3 - Relações Constitutivas na Elastoplasticidade
2.3.1 - Princípios Gerais
Sob cargas de pequena intensidade a deformação de um "
sólido é em geral um processo elástico linear. Por elástico en
tende-se um processo termodinâmico reversível, tal que retira
da a causa das deformações o corpo retorna à sua configuração
original uão deixando registro do processo a que foi submetido.
Por linear entende-se que as componentes do tensor de deforma
ções são proporcionais às do tensor de tensões.
Ultrapassado um certo limite de tensões (ou de deforma
ções) a maioria dos materiais usados na engenharia,sofrem uma
deteriorização de sua estrutura interna,tornando o processo de
deformação subsequente parcialmente irreversível. Macroscópica
mente isto é observado pelas deformações residuais no sólido
após a retirada do carregamento. Se o processo de deformações
continuar ativo sobrevem finalmente a ruptura do material.
Os materiais desse tipo, diz-se comportarem-se não li.
nearmente. Para tais materiais o tensor de deformações pode ser
decomposto em
e ^ = ef, + e?, (2.3.1.1)
- 10 -

e ponãe eAj e a parcela de deformação elástica (recuperável) e e^jé a parcela de deformação plástica (residual).
»A equação constitutiva para materiais elastoplasticos
é obtida a partir das três seguintes hipóteses adotadas nesta
tese, que se constituem nos princípios básicos da Teoria Mate
mãtica da Plasticidade Incrementai:
(a) todo incremento de tensões é devido apenas a incre
mentos de deformações elásticas, ou seja
d°ij - D!jkl d£kl • Díjkl (dekl - «íl> (2.3.1.2)
onde Dj i-i representam as componentes do tensor de elasticidjaj^i p pde 49 ordem, dadas por {1'2'4)
D!jkl " X8ij 6kl + ^ik 6jl + *6il 6jk (2-3.1.3)
onde X e u são as constantes de Lamé, e iy é o delta de Kro
necker. As constantes X e y relacionam-se como módulo de Young
E e o coeficiente de Poisson v por
E v E" " (1+v) (1-vT v 2 (1+v)
(b) existe uma função convexa F(o^j h) a valores reais
chamada funçãc de fluência tal que os estados mecânicos poss_í
veis do corpo se caracterizam por
Estado elástico : F (o.. h) < 0•*• J t
Estado elastoplastico: F (o.. h) = 0
sendo F (o^j h) > 0 um estado mecânico impossível de ser atin
o ido.
0 parâmetro h está relacionado com o endurecimento por
- 11 -

deformação do material durante a fase elastoplastica, e ê em
geral dependente das componentes do tensòr de deformações pláj>
ticas.»
(c) existe um potencial plástico G tal que podemos for
mular uma lei de fluxo plástico após iniciado o escoamento co
mo
Em geral não ê possível determinar G. Usa-se aqui G=F,
dando origem a lei associativa representada pelo principio da
normalidade.
deij = ãX l o (2.3.1.5)
dX é uma constante de proporcionalidade denominada multiplica
dor plástico. Com essa hipótese as componentes do tensor de de
formação plástica são proporcionais as componentes do gradien
te da função de fluência no espaço das tensões.
A partir das hipóteses acima a equação constitutiva in
cremental relacionando os incrementos de tensões com os incre(3 4 5 6)mentos de deformações totais sao obtidas ' ' '
d°ij • Dijkl d£kl (2.3.1.6)
onde D 6 ? ^ são as componentes do tensor elastoplastico dados
por
ijkl 9 o " v vep _ ne ^^ rs mn ,, , . 7.
Dijkl - Dijkl " d F ~è T F (2.3.1.7)3 ars ' rsmn ' T ^
- 12 -

válido para o material no estado elastoplâstico. A constante A
acima relaciona-se coin o multiplicador plástico dX a partir de
dF s 0 como
#
' dx " X -rfrr âoij - - X Ti" dh 12.3.1.8)
A constante A é obtida a partir das hipóteses a serem formula
das sobre o parâmetro de endurecimento h e de resultados expe
rimentais do material. Isso será discutido no contexto das hi
póteses especificas usadas nesta tese, na seção seguinte.
2.3.2 - A Função de Fluência
Nesta seção expõe as características gerais da função
de fluência F, suas conseqüências, e as formas especificas pa
ra materiais metálicos adotados.
A função F pode ser escrita sem perda de generalidade
F (o, . h) = f (o..) - k (h) = 0 (2.3.2.1)
onde f (OJ.-Í) é alguma função do estado de tensões do corpo obti
da geralmente a partir de considerações teóricas e empíricas. O
parâmetro de endurecimento h, em geral função de e^j, vai indi
car a maneira pela qual a função f (o^j) se modificará com a
continuidade das deformações plásticas. A função f (oij) é a
projeção instantânea de F(o^j h) no espaço de tensões.
£ suposto aqui que o material é isotrópico. Desta for
ma o escoamento plástico deve depender apenas da magnitude das
tensões principais, e não de suas direções. Portanto f deve ser
expressa como
f (J. J, J,) = k (h) (2.3.2.2)i. , if i
- 13 -

onde J,, J2 e J3 são os invariantes do tensor de tensões que ex
pressos em função das tensões principais air o2 e o, são
Jl " °1.+ °2 + °3 J2 = °1°2 + °1°3 * °2O3 J3 = °l °2 °3
Os únicos materiais tratados aqui são os metais dúcteis,
para os quais evidências experimentais indicam que oescoamento
plástico (em uma primeira aproximação) não é afetado por mode
radas pressões hidrostaticas, quer aplicadas sozinha ou em com
binação com qualquer outro estado de tensão . Matematicamente
isto significa que f depende apenas das componentes principais
do tensor desviador definido por
°ij = °ÍJ - -r 6ÍJ °kk = °ÍJ - - r Ji
onde -j- o k k é a componente hidrostática do estado de tensão.
Desde que o primeiro invariante do tensor desviador é nulo po
demos escrever a forma genérica final para f como
f (J ' j,') = k (h) (2.3.2.3)
onde J2 e J3 são o segundo e o terceiro invariantes do tensor
desviador dados por
J2 = \ °ij °ij J3 = 4 °ij °jk °ki
Duas das mais bem sucedidas formas de f são aqui adota
das. A primeira é a função de Von Mises
fVM = fVM ( J 2 ) - $2 * kVM {h) (2.3.2.4)
e a segunda a de Tresca
fTR = f (a^ o3) = a1 - o3 = k T R (h)
- 14 -

onde Oj 2 o2 2 oi são as tensões principais. Esta última forma
pode também ser coxocada em função de Jj e J»*7*, resultando no
entanto eu uma forma de mai.> difícil tratamento matemático.m
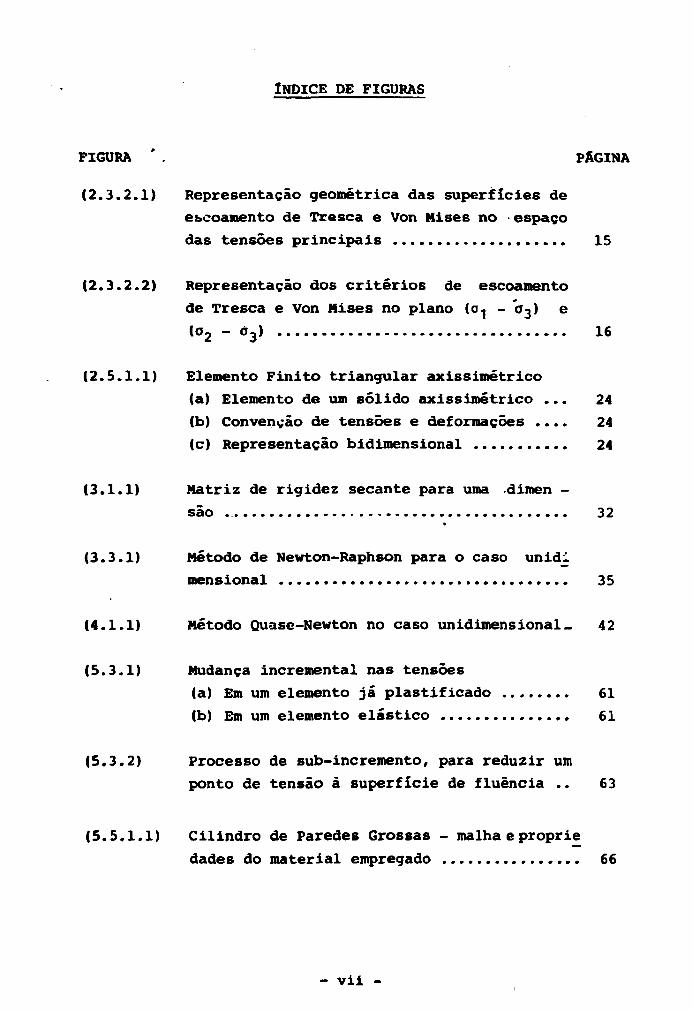
Uma representação geométrica dessas funções pode ser
feita convenientemente no espaço das tensões principais, cons^
derando todos os possíveis estados de tensão, conforme figura
2.3.2.1. o plano ir mostrado é aquele definido por at * a2 + o3 =
0.
FIGURA 2.3.2.1 - Representação geométrica das superficies de
escoamento de Tresca e Von Mises no espaço
das tensões principais.
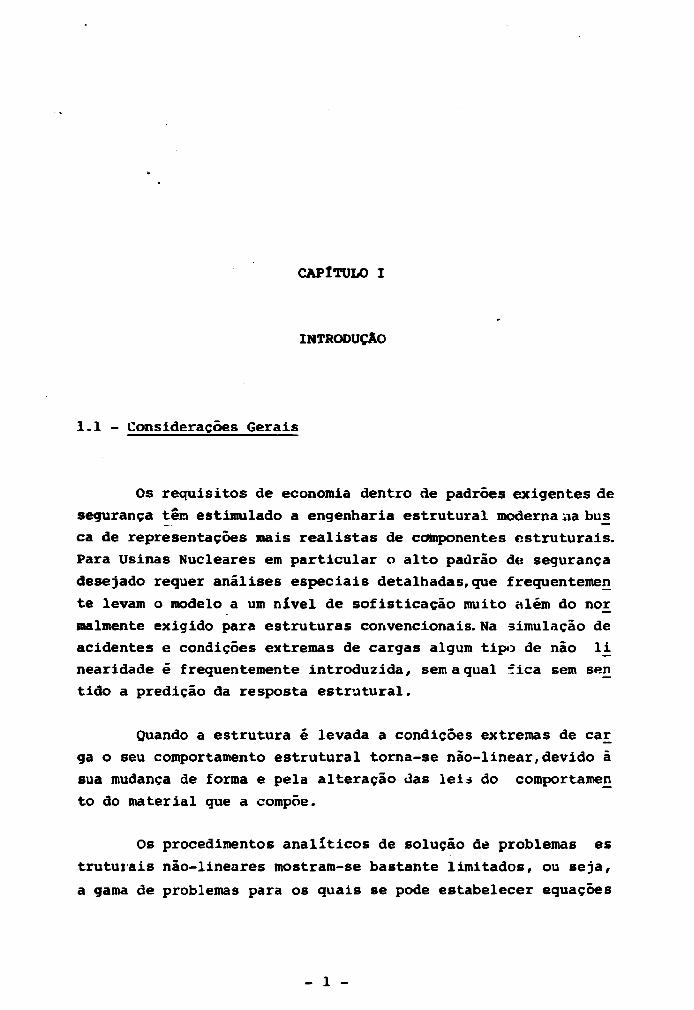
Pode ser mostrado que todas as funções da forma
(2.3.2.3) podem ser representadas no plano de coordenadas oz-c
e o2 - o3, ou seja
f (J_ , J, ) = f (ot - o3, a2 - o3)
No caso das funções de V.Mises e TrescB e representação é a
da figura 2.3.2.2.
- 15 -

a,-o,
FIGURA 2.3.2.2 -Re
presentação dos cri
térios de escoanen
to de Tresca e Von
Mises no plano
(Oj - o3) e <°2~ °3*
Cs valores de k(h) são retirados de ensaios em estados
simples de tensão. É convencional usar o ensaio de tração unia
xial para este fi., para o qual oa = oy(h), o2 = a3 = 0, onde
a1(h) e a tensão de escoamento a tração do material. Para as
duas funções adotadas
VM(2.3.2.5)
TR- kTR(n)
resultando
1 ay(h)
Com os valores de k(h) retirados do ensaio uniaxial, a
máxima diferença entre os dois critérios se dará no caso de ci
salhar.iento simples onde o critério de V.Mises prevê o escoamen
to com Cj superior 2//T vezes o de Tresca.0 critério de V.Mises
relaciona-se melhor com os experimentos para a grande maioria
dos metais dúcteis, devendo portanto ser o preferido dentre os
- 16 -
dois. A inclusão nesta tese do critério de Tresca,resulta do fa
to de que para tal critério alguma solução analítica fechada
existe,permitindo uma comparação com os algaritmos de plastici
dade empregados.
O valor da função f tem a dimensão de tensão.Define-se
coro tensão efetiva ou tensão equivalente o múltiplo de f que
deve ser comparado com ov (h) para determinar se o ponto em ques_
tão atingiu ou não o estado de plastificação. Assim, chamando
õ este valor teremos para os dois critérios adotados.
5VM « fVM - t-V> Va (2.3.2.7)
5TR = fTR = o. - °B (2.3.2.8)
2.3.3 - Endurecimento
O valor experimental de o^(h) da tensão de escoamento
uniaxial medido em ensaios de materiais virgens (materiais que
ainda não sofreram deformações plásticas) é suficiente para com
pletar a descrição do comportamento elastoplástico. Aqui despre
za-se o efeito Bauschingir (pelo qual o material apó> atin
gir o escoamento pela primeira vez adquire alguma anísotropia)
considerando-se uma evolução progressiva de f, com o modelo cha
mado de endurecimento isotrópico. A expansão progressiva de f
é definida postulando o parâmetro h. Usa-se aqui a hipótese ter(3 4) ~
modinamicamente mais geral ' d e que h e o próprio trabalhoplástico total (por unidade de volume) definido como
W = h = í o i. dejj\. (2.3.3.1)
Para determinação das constantes ainda não explicitadas no pr£
sente modelo exige-se mais uma vez que ele reproduza os resul
tados do ensaio uniaxial.
- 17 -

W - h = íoy deP (2.3.3.2)
onde de , é o incremento de deformação plástica no ensaio unia_
xial. É útil definir uma medida de deformação plástica total
chamada deformação plástica efetiva ê tal que seu incremento
dê = jm (deÇ.. dej.) (2.3.3.3)
onde o fator /2/3 é usado para que dêp = de ao ensaio uniaxiaL
Neste caso (8)
W = h = o de (2.3.3.4)
As constantes A e dX podem agora ser identificadas. Pa
ra t^zei isto é conveniente reescrever o critério de escoamen
to como
F (oi. h) = õ (oij) - oy(h) = 0 (2.3.3.5)
A equação (2.3.1.8) de definição de A pode ser escrita
A d X = a 0F, doij = " TIT d h (2.3.3.6)
Da equação (2.3.3.1) e da equação (2.3.1.5) temos
dh = a±. deP = dX -~-^— o±.
mas de (2.3.3.5) podemos escrever
3 F 3 5—r 0 , • - , 0 . .
- 18 -

exigindo que o (e portanto f (o..|) seja uma função homogênea
de grau 1 em o i j r esta última equação pode ser escrita (condi
ção de Euler para funções homogêneas).
levando na expressão de dh acima
dh = dX oy
e, pela equação (2.3.3.2) dh = ov de_. Concluindo portanto por
comparação que
dX = dep
0 valor de A pode ser retirado levando esta última na equação
(2.3.3.6)
obtendo assim
(2.3.3.7)
ou seja, A é a tangente à curva o* — E p do ensaio uniaxial de
tração.
Se A é identicamente nulo o material é dito elastoplás
tico perfeito. Valores negativos de A significa material insta
vel, e não será considerado aqui. Materiais com valores positi
vos de A são chamados de materiais com endurecimento. Conside
ra-se apenas materiais com A = constante, chamados materiais
com endurecimento linear. Os seguintes estados de carga podem(8)ser identificados para os materiais com endurecimento
- 19 -

(a) Carregamento : õ = oy
fb) Carregamento neutro: o « aJ do
Ic) Descarregamento
Para materiais com endurecimento as deformações plãsti
cas ocorrem apenas no caso (a) - Para materiais elastoplásticos
perfeitos o caso (a) não existe, e as deformações plásticas
ocorrem no caso (b). Por hipótese o descarregamento sempre ocor
re elasticamente, de acordo com (2.3.1.2).
2.4 - Expressões Básicas para o Problema Axissimétrico
As expressões desenvolvidas até agora são aplicáveis ao
continuo tridimensional. O problema axissimétrico é um proble
ma bidimensional e será descrito em coordenadas cilíndricas.
Nesta seção aquelas expressões serão particularizadas para o
caso axissimétrico, introduzindo simultaneamente a notação roa
tricial que facilitara a descrição posterior do processo de dis
cretização pelo método dos elementos finitos, bem como sua im
plementação computacional.
Um ponto P do sólido axissimétrico é identificado pelas
coordenadas r,8 e z nesta ordem. O campo de deslocamentos será
identificado por
u = <u, v ) 1 (2.4.1)
onde u é descolamento na direção radial e v na direção axial.
- 20 -

As deformações infinitesiaais são colocadas sob a forma
s.- «•.. s.«.. {*.H--S-.H •*?)*«*•«•«
onde ez er e ee são as deformações longitudinais (diagonal do
tensor de deformações), e Y r 2= 2 Erz a âexorBacão transversal,
onde c E Z * czr são as únicas componentes não nulas fora da dia
gonal do tensor de deformações. As tensões correspondentes são
o = (o o o. t 1z, r, o, rz (2.4.3)
O tensor de deformações elásticas é dado por
E (1-V)(1+v) (l-2v)
V(1-v)
V
TT^v)
1
V
TT^vT
(2.4.4)
2 (1-v
Durante o estado elastoplastico o vetor de fluxo será
tLJT 8 F 9 F
°r ' 3 °9 ' * ^rz(2.4.5)
A matriz que representa o tensor constitutivo elasto
plástico.
D a a DDep = De - — ::—:: -— (2.4 6)
A + a1 De a
- 21 -
Enquanto que os vetores de forca de massa e de superfi
cie serão, respectivamente,
b =* (b , b , b , b ) t e t = (t , t , t , t )fc (2.4.7)— • * i o rz - z t o r*
Finalmente, a expressão matemática do principio dos trabalhos
virtuais, toma a forma
iu1 b dV + «u* t dí2 = f õe* o dV (2.4.8)
2.5 - Discretização do Continuo pelo Método dos Elementos Fini
tos
(9)Matematicamente o método dos elementos finitos pode
ser descrito como um procedimento sistemático através do qual
quelquer função continua é aproximada por um modelo discreto.
Esse modelo discreto consiste de um conjunto de valores da fun
ção em um número finito de pontos em seu domínio, chamados pon
tos nodais, conjuntamente com a discretização também do domínio
em um número finito de subdominios, os elementos finitos,conec
tados entre si através dos pontos nodais. A função é aproxima
da localmente em cada elemento finito por funções contínuas que
são definidas univocamente por seus valores, e possivelmente pe
los valores de suas derivadas até uma certa ordem, nos pontos
nodais conectados a cada elemento.
Um aspecto importante do conceito de elementos finitos
é que os elementos finitos podem inicialmente serem considera
dos disconectados para o propósito de aproximar a fur.ção local,
mente no elemento, independentemente do comportamento da função
em outros elementos.
Quando aplicado a problemas mecânicos estruturais, o
- 22 -

continuo é aproximado por elementos finitos, em cada um dos
quais todos os princípios mecânicos e propriedades do material
são modelados, e a função, deslocamentos, tensões ou ambos são
então aproximados localmente e seus valores interpolados a par
tir de valores nodais do elemento. Em seguida os elementos são
conectados através de um subconjunto de seus pontos nodais re
sultando em um modelo discreto com um número finito de graus
de liberdade que aproxima o continuo real de infinitos graus
de liberdade.
Se o conjunto de funções de interpelação escolhidas sa
tisfazem certos critérios de conpletividade e compatibilidade(9)
, é possível demonstrar que o comportamento do sistema dis
creto converge monotonicamente para o sistema continuo. Assim,
teoricamente, o discreto aproximará o continuo com um grau de
aproximação que se fizer necessário.
As equações do método dos elementos finitos podem ser
obtidas por uma variedade de caminhos. Neste trabalho é aproxi.
mado o campo de deslocamentos do elemento, resultando no chama
do modelo dos deslocamentos, para o qual resulta um sistema de
equações não lineares cujas incógnitas são os deslocamentos no
dais do contínuo.
0 elemento finito utilizado é bastante conhecido na li
teratura , tendo sido utilizado também em elastoplasticida
de ' i ü . o campo de deslocamentos no interior do elemento é
aproximado por funções lineares dos deslocamentos nodais,resol
tando em um elemento que satisfaz os critérios de completivida
de e compatibilidade necessários a convergência monotõnica. Al
guns detalhes de sua formulação são dados na seção seguinte.
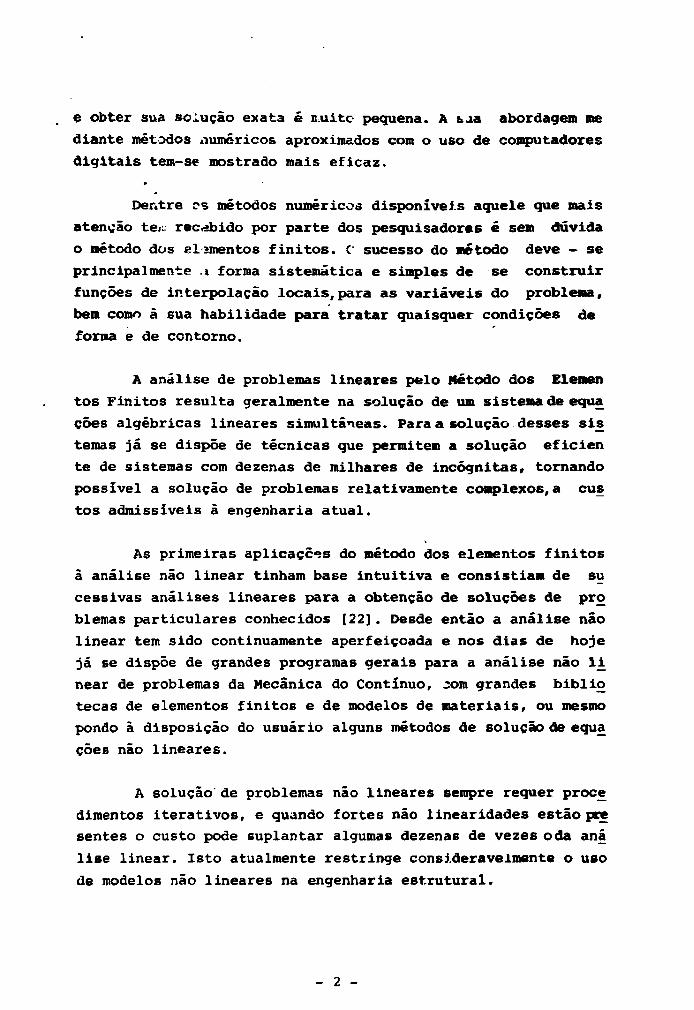
2.5.1 - O Elemento Utilizado
0 elemento é o triangular com 3 nós e 2 graus de liber
dade por nó, esquematizado na figura (2.5.1.1). O campo de des
- 23 -

(o)
(b)
(e)
FIGURA 2.5.1.1 - Elemento finito triangular axissimétrico(a) Elemento de um sólido axissimétrico(b) Convenção de tensões e deformações(c) Representação bidimensional
- 24 -

locamentos no interior do elemento sendo aproximado por
u = ax+ a2r + a3 z
a r + o z
As 6 constantes a. podem ser colocadas em função dos desloca
mentos nodais
si - (ui, V *
Denominando i, j, m os 3 nós do elemento, os deslocamentos de
todos os seus nós são designados por
onde o símbolo e sobre o vetor indica valor nodal do elemento.
0 campo de deslocamentos interiores ao elemento podem ser escri
tos como
u = iu,v)t = I N,, I N., I N ue =N u e (2.5.1.1)|_- l ~ J - m j - - -
onde I é a matriz'identidade de ordem 2, e N^, Nj e N são as
funções de interpelação nodais dadas por
Ni = (ai + b i r + c i z ) / <2 A )' e t c
onde
ai = r j " z m " rm- zj
bi s zj " zm = Zjm
ci = rm " rj " rmj
- 25 -

na ordem cidica direta, e A é a área do elemento triangular.
As deformações infinitesimais no interior do elemento
serão
G = L U = L N u e = B ue (2.5.1.2)
onde L é o operador linear e B a matriz de deformação. Explici
tamente tem-se
"" n a
L =
3 r
1r
0
d3r
Bc z
c.
0
0
C.
m
r + Dj +
c. z a
- r - ° -F + bm
m
m
ra
A expressão do trabalho virtual para um elemento será,
utilizando a presente notação e a equação (2.4,8)
[ 6ufc b dV + í ou1 t dfl =t dfl = | ôeu o dVv
(2.5.1.3)
onde b é o vetor de forças de massa atuando sobre o elemento, t
as forças de superfície sobre o contorno do elemento.Usando as
- 26 -

expressões (2.5.1.1) e (2.5.1.2) nà (2.5.1.3) obtém-se, apôs
por em evidência os incrementos de deslocamentos nodais virtu
ais.
óue,t fv ü S avt |flNt o dV (2.5.1.4)
Como o principio dos trabalhos virtuais é válido para qualquer
incremento virtual não nulo de pequenos deslocamentos obtem-se
f Nfc b dV • f •* t dfl = f ç S•»» iv
(2.5.1.5)
Introduzindo a notação seguinte para os valores nodais do ele
men to
- I N* b ÓV; te = f N t. tj v _ - j^ - t d£2; f e = f Bfc o dV (2.5.1.6)
a expressão (2.5.1.5) torna-se
be + t
e = fe (2.5.1.7)
Os valores b e te são chamados de forças nodais equivalentes
do elemento, de massa e superfície, respectivamente. O vetor fe
são as forças internas nodais do elemento necessárias para e
quilibrar o campo interno de tensões.
A equação (2.5.1.7) expressa a condição de equilíbrio
do elemento em termos de forças nodais do elemento. Ela deve
ser satisfeita durante todo o processo de carga do sólido. Es
sa equação pode ser escrita
pe - fe (2.5.1.8)
- 27 -
onde Pe = b e + te reúne todas forças nodais equivalentes do ele
mento.
2.5.2 - Equações de Equilíbrio do Sólido
As equações de equilíbrio da estrutura são conseguidas
mediante a soma das contribuições de todos os elementos inci
dentes em cada nó, resultando nas equações de equilíbrio nodal
da estrutura. O processo de montagem dessas equações reveste-se
de duas preocupações. A primeira diz respeito a orientação das
quantidades vetoriais e tensoriais, ou seja, se os sistemas de
eixos de cada elemento possuem orientações distinta, cuidado
deve ser tomado para rotacionar as quantidades para um sistema
de eixos comuns. Para o presente elemento este problema é re
soivido adotando um único sistema de eixos para todos os elemen
tos coincidente coro o adotado para a descrição da estrutura.Pa
ra que isto seja realizado automaticamente é suficiente que se
defina univocamente a ordem de numeração dos nós dos elementos.
Adota-se aqui que esses nós devem ser numerados no sentido tri
gonométricô. A segunda preocupação diz respeito a identificação
inequívoca dos elementos incidentes em cada nó. Este problema
é tradicionalmente resolvido de forma inversa mediante a defi
nição de uma lista de conectividades pelas quais se define
quais os nós pelo qual o elemento se conecta a estrutura.Esses
nós recebem uma numeração seqüencial única para toda a estrutu
ra. Assim pode-se definir uma matriz de rotação X e uma
matriz booleana Le para cada elemento tal que a equação de equi
líbrio nodal da estrutura resulte.
Z L X P - Z L e Xe fe = 0 (2.5.2.1)1--- ! - - -
onde n é o número de elementos e Xe é, na nossa formulação a
matriz identidade, ou simplesmente
Ji • P-- f • 0 (2.5.2.2)
- 28 -

onde P e f são o vetor de forças nodais equivalentes aplicadas
ã estrutura e o vetor de forças nodais internos da estrutura,
respectivamente. O vetor ty de resíduos nodais deve ser ident_i
camente'nulo se a estrutura está em equilíbrio estático.
A solução de equação não linear (2.5.2.2) éa principal
preocupação desta tese. A não linearidade desta equação vem do
fato de que para calcular as forças nodais f é necessário de
terminar o nível de tensões de cada elemento. Se durante o pro
cesso de carga a estrutura permanece elástica linear pode-se
reduzir a equação (2.5.2.2) ã solução de um único sistema de
equações algébricas lineares, ou seja, pelo uso de (2.5.1.6),
(2.5.1.2) e (2.3.1.2) sob a forma matricial e não incrementai,
obtendo
P = K u (2.5.2.3)
onde
; L* f B D e B dV h 6 f =Z L e * X e Ke \ e > t ( 2 . 5 . 2 . 4 )
- ee a matriz de rigidez da estrutura, K a do elemento e n o numero de elementos.
Porém quando algum elemento plastifica durante oproce^
so de carga, para aplicar a teoria da plasticidade incrementai
desenvolvida na seção 2.3 a equação (2.5.2.2) deve ser escrita
sob forma incrementai
dip = dP - df = 0 (2.5.2.5)
ou
= dP - km. du = 0 (2.5.2.6)
- 29 -
onde K.J, é a matriz de rigidez tangente, com a mesma fona de
(2.5.2.4) porém substituindo-se a matriz D e pela corresponde»
te Dep dada P° r (2.4.6) para os elementos plastificados. A for
ma explicita da matriz de rigidez tangente l£ para o elemento
em estudo é dada na referência [11]. Ela pode também ser obti
da por integração numérica sobre cada elemento. Nesta tese am
bas as formas foram implementadas. As vantagens e desvantagens
das duas implementações serão discutidas no Capitulo V.
Não é numericamente possível nem economicamente viável
usar incrementos infinitesimais como indicado pela equação
(2.5.2.5). De fato, na prática os incrementos infinitesimals
são substituídos por incrementos finitos, tais que a equação
(2.5.2.5) transforma-se em
A* = AP - Af (2.5.2.7)
A equação acima em geral não é identicamente nula, fa
zendo-se então necessário usar algum procedimento iterativo pa
ra levar Ai|/ o mais próximo de zero quando se julgar convenien
te. Os métodos normalmente usados e o método proposto nesta te
se são discutidos nos capítulos seguintes.
Outro problema introduzido pela equação (2.5.2.7) em in
crementos finitos, dentro da própria teoria da plasticidade in
cremental, é abordado no Capitulo V.
- 30 -

CAPITULO III
SOLUÇÃO DAS EQUAÇÕES DE EQUILÍBRIO
3.1 - Introdução
Diversos algoritmos foram propostos na literatura para
a solução de sistemas de equações algêbricas não lineares. Ne£
te capitulo são revistos aqueles de maior sucesso no contexto
do método dos elementos finitos.
0 problema é encontrar uma solução do sistema de n equa
ções não lineares da forma
$ (x) = 0 (3.1.1)
em n variáveis x^. Não existe um método analítico geral para a
obtenção da solução exata . Portanto métodos numéricos de
vem ser usados para a obtenção de soluções com um pré-estabele
cido grau de aproximação da solução exata, que assume-se exis
tir. Na análise não linear pelo método dos elementos finitos,
uma forma explicita de ty (x) em termos de x não é em geral co
nhecida, entretanto, para um dado x, existe uma bem definida
seqüência de operações para avaliar ty (x). Assim, métodos nume
ricos são apropriados.
- 31 -

Neste trabalho usa-se o modelo dos deslocamentos, para
o qual a equação (3.1.1) é a equação (2.5.2.2) onde x são os
deslocamentos nodais do sólido discretizado.
= P - f(u) = P - K(u) u = 0 (3.1.2)
onde K(u) é chamada de matriz de rigidez secante, representada
na figura 3.1.1.
FIGURA 3.1.1 -Matriz de rigidez secante
para uma dimensão.
Neste capitulo discute-se os métodos de solução mais co
nhecidos da literatura mostrando as suas vantagens e limitações
e a necessidade de se buscarem métodos mais eficientes do que
os utilizados hoje.
3.2 - ü Processo Incrementai - Iterativo
Em geral uma análise não linear pelo método dos elemen
tos finitos é efetuada mais eficientemente usando uma formula
ção incrementai na qual as variáveis são atualizadas incremen
- 32 -

talmente a cada sucessiva etapa de carga, de modo a traçar o
curso completo da solução até o colapso . Nesta solução é
importante que as equações de equilíbrio sejam satisfeitas a
cada etapa de carga com exatidão suficiente. Se isto não ocor
re os erros podem acumular—se e levar a soluções posteriores
inaceitáveis com erros acumulados indetectáveis, e eventualmen
te a instabilidades numéricas, no caso de fortes não - lineari
dades.
Pode-se sempre conseguir uma solução precisa das equa
ções não-lineazes do método dos elementos finitos escolhendo -
se incrementos de carga suficientemente pequenos. Porém esta so
lução pode torna-se excessivamente dispendiosa devido ao grande
número de incrementos necessários .
Objetivando resolver o sistema de equações eficientemen
te, e simultaneamente manter o controle na precisão da solução,
deve-se empregar incrementos de cargas maiores, com o uso de mé
todos iterativos que assegurem uma solução precisa. Tal proces_
-so é chamado incremental-iterative
Dentro de um processo incremental-iterativo deve-se dar
atenção particular â escolha do número e tamanhos adequados dos
incrementos bem como ao processo iterativo associado. Atualmen
te pesquisas estão em desenvolvimento visando uma escolha auto
mática desses incrementos à medida que a solução avança
Nesta tese a seleção dos incrementos é feita antes do inicio
da análise, e discute-se apenas o comportamento de um processo
iterativo dentro de um incremento.
3.3 - 0 Método de Newton-Raphson
0 método usado mais freqüentemente para a solução de
equações não lineares do método dos elementos finitos é o meto
do de Newton-Raphson ou alguma modificação dele. A idéia do mé
- 33 -

todo é construir um node Io linear para • (u) no ponto u.
que se Au. e una pertubação de u., temosU5T
Auk
tal
(3.3.1)
onde f(u) deve ser continuamente diferenciavel tal que
3 • (u)
u u "(3.3.2)
é o Jacobiano de •(u) no ponto u. . Em seguida, como deseja-se
a raiz de 'Muk+1)» tem-se a partir de (3.3.1)
J(uk) (3.3.3a)
+ Au, (3.3.3b)
Desde que ufc+1 provavelmente não será a raiz de (3.1.2),
as equações (3.3.3) são aplicadas iterátivãmente a partir de um
ponto de partida uQ, resolvendo o sistema de equações indicado
em (3.3.3a) e atualizando o valor de u pela equação (3.3.3b) ,
constituindo assim o algoritmo de Newton-Raphson.
Aplicando este algoritmo a (3.1.2) identificamos
3 *(3.3.4)
ondeonde jç = Kt(uj,.) é a matriz de rigidez tangente de (2.5.2.6).
Nessa última equação desprezamos possíveis variações da carga
com os deslocamentos (carga conservativa), mantendo desta for(14)ma a Jacobiano simétrico
- 34 -
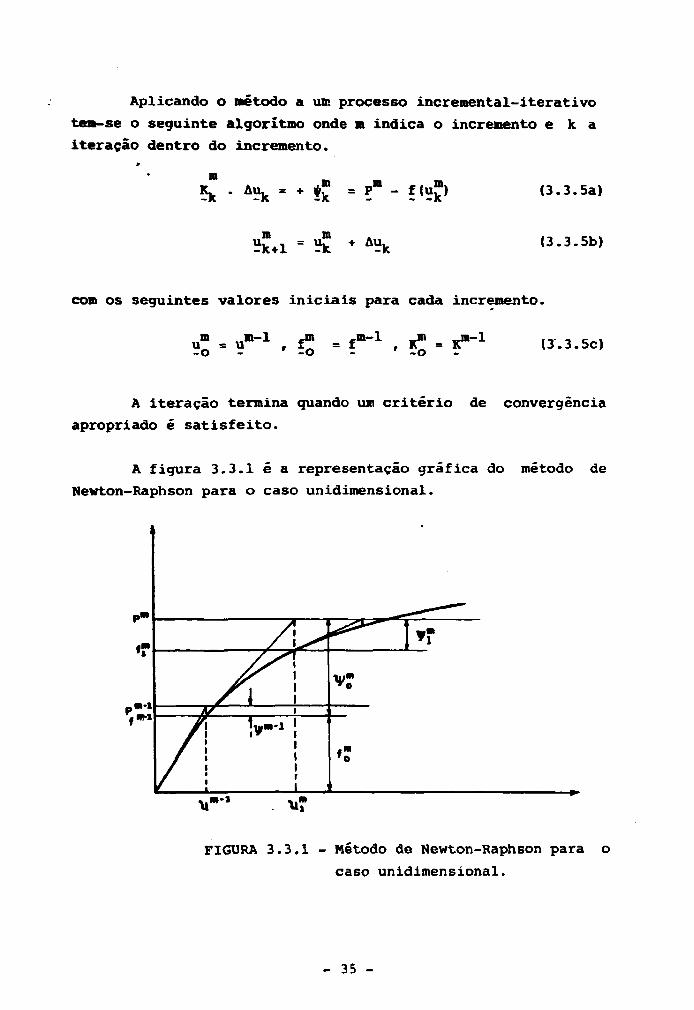
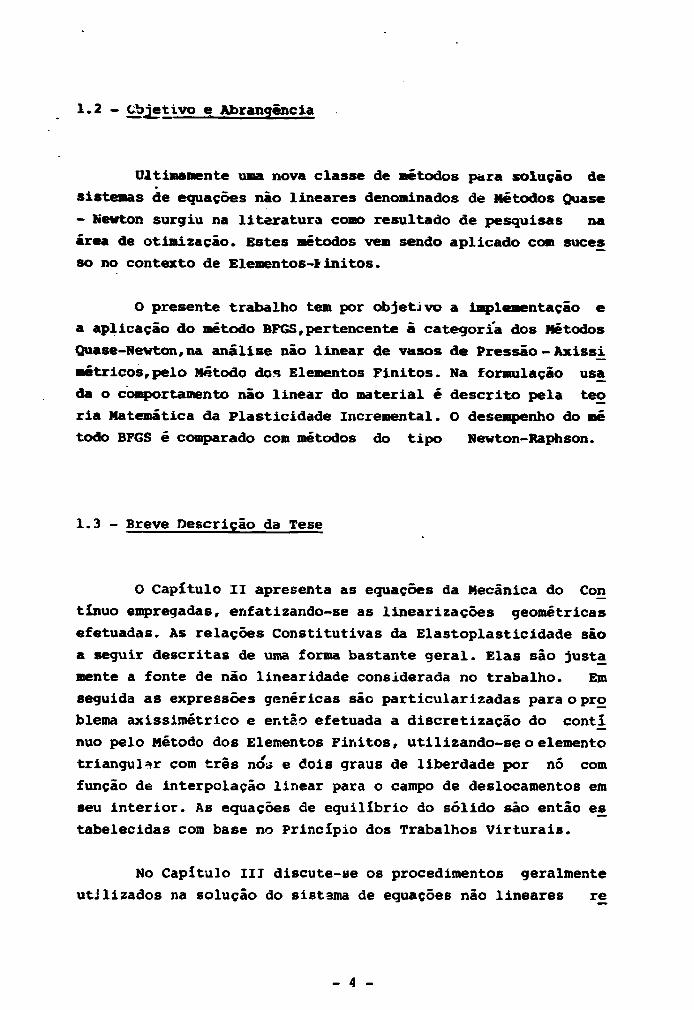
Aplicando o método a um processo incremental-iterativo
tem-se o seguinte algoritmo onde m indica o incremento e k a
iteração dentro do incremento.
ro(3.3.5a)
m mIr. i = U. + AU,
uk + Auk (3.3.5b)
com os seguintes valores iniciais para cada incremento.
u™ = u*-1 , fj = f 1 , K™ = K*-1 (3.3.5c)
A iteração termina quando um critério de convergência
apropriado é satisfeito.
A figura 3.3.1 é a representação gráfica do método de
Newton-Raphson para o caso unidimensional.
— • — •
/r r
.*-»
FIGURA 3.3.1 - Método de Newton-Raphson para o
caso unidimensional.
- 35 -
0 algoritmo descrito pode ser bastante eficiente em
certas análises não lineares especificas. As principais vanta
gens do algaritmo são enumeradas abaixo Í 1 0 » 1 2 - ! © ) ^
1 - Pode-se demonstrar que se i|>(u) é continuamente
diferenciãvel e se o Jacobiano na solução é não singular e pos
sui certas condições de continuidade em um conjunto aberto em
torno da solução uA, então a seqüência fu^l gerada pelo método
de Newton-Raphson é bem definida e converge quadraticamente pa
ra u*, ou seja, existe um 0>O tal que
1 - u J | < 6 1 u k - u# II'
Essa característica de convergência quadrática local é
a principal vantagem do algoritmo.
2 - Em problemas estruturais J (u ) é a-matriz de rigidez
elástica. Essa matriz possui um certo grau de esparsidade que
geralmente é levado em consideração na análise. Um fator impo£
tante é que J(um) mantém o mesmo grau de esparsidade de J(u ),
não requerendo memória adicional para o seu armazenamento.
Por outro lado o método de Newton-Raphson possui sérios
inconvenientes:
1 - A cada iteração a matriz de rigidez tangente KÍ" pre
cisa ser atualizada e decomposta para resolver (3.3.5a).Na aná
lise elastoplástica isto ocorre em todas as iterações após o
escoamento do primeiro ponto do sólido. Esse processo é computa
cionalmente dispendioso. Para uma solução eficiente é necessá
rio contrabalançar o custo com relativamente grandes incremen
tos. Porém em análise elastoplástica o tamanho do incremento é
restrito por considerações de estabilidade e precisão do algo-
ritmo elastoplástico .Além do mais, aproximações imprecisas
para os deslocamentos nas iterações podem introduzir erros si£
nificantes porque as propriedades do material dependem da his
tória das tensões e deformações.
- 36 -

2 - Quando a estrutura aproxima-se do colapso o Jacobia
no torna-se mal condicionado e a iteração diverge repentinanen
te.
Na seção seguinte discutiremos algumas modificações no
método de Newton-Raphson propostas na literatura que objetivam
eliminar ou diminuir as desvantagens do método.
3.4 - O Método de Newton-Raphson Modificado
Para reduzir o número de avaliações e decomposições da
matriz de rigidez, tem sido proposto ~ que a matriz de ri
gidez seja reavaliada apenas em determinadas iterações pré-fi
xadas. Chamando K esta matriz o algoritmo de Newton-Raphson mo
dificado torna-se
K . Auk = - $5 (3.4.1a)
com os seguintes valores iniciais para cada incremento
um um-um = um-\ fj = f-1 (3.4.1c)
Uma das possibilidades mais usadas é fazer K = KQ, a ma
triz elástica inicial. Esse método é também chamado de método
da tensão inicial. A vantagem deste esquema é que a matriz pre
cisa ser montada e triangularizada apenas uma vez, reduzindo
bastante o custo por iteração. Isto se dá ãs custas de uma con
vergência apenas linear, ' ou seja, existe um 0 < B < 1 tal
que
- 37 -
se o método convergir. Como conseqüência o número de iterações
por incremento pode ser excessivo. Um algoritmo para ser comp£
titivo deve ter no mínimo convergência superlinar .As obser
vações píáticas mostram que perto da solução, quando J(u^) é
singular, o método converge demasiadamente lento, quando con
verge.
Uma vantagem deste método é que a matriz de rigidez é
sempre não singular e bem condicionada.
Para melhorar a taxa de convergência do método é comum
atualizar K no início de cada incremento: K = K m . Alguns au(4) - -
tores sugerem apôs a primeira iteração de cada incremento pa
ra captar em K novos elementos plastificados: K = K1?. Esses e^
quemas geralmente diminuem o número de iterações por incremen
to, às custas de tantas montagens e decomposições, quantas fo
rem as atualizações. 0 número de atualizações da matriz de ri.
gidez para um custo mínimo é dependente de cada problema,e ain
da não se conseguiu automatizar o processo de atualização de K.
Alguns autores ' tem proposto o uso de aceleradores
de convergência ao método de Newton-Raphson modificado. Entre
tanto, tais aceleradores apresentam em geral problemas de diver
gência de solução. Nenhum deles parece apresentar garantias de
convergência
3.5 - Outros Métodos
Diversos outros métodos foram utilizados para a solução
alemãs
demos citar
de problemas não lineares em elementos finitos. Entre eles po(12,18)
1 - Método puramente incrementai ou incrementai conven
cional.
- 38 -
2 - Método incremental modificado
3 - Incremental auto-corretivo de primeira-ordem
4 - Runge-Kutta de quarta-ordem
3 - "Predictor - corrector" de Hamming
6 - "Continuations Methods"
7 - Métodos de minimização
8 - Métodos Quase-Newton
Alguns desses métodos (1,2,3) são ãs vezes usados para
estimar o curso da solução de ur novo problema no qual se des
conhece o grau de não linearidace ou o comportamento da estru
tura, e em geral não se tem garantias da precisão da solução
ou mesmo da convergência.
Outros (4 e 5) comportam-se muito bem em algumas aplica
ções, porém muitas vezes ãs custas de múltiplas avaliações da
função i/Mu) em cada iteração podendo surpreender com o custo
total excessivo ou mesmo com divergências.
Os métodos que se enquadram em 6 e 7 estão hoje em con
tínua evolução, merecendo pesquisas posteriores, e alguns dt;j.es(12)parecem promissores
Os métodos classificados como Quase-Newton são o objeto
deste trabalho e são discutidos no capítulo seguinte.
- 39 -

CAPÍTULO IV
O MÉTODO QUASE-NEWTON
4.1 - Introdução
Neste capítulo discute-se uma classe de métodos chamados
pelos nomes de Quase-Newton, secante, métrica variável, modifi- (19)cação ou atualização . Tais métodos surgiram da idéia de Da
vidon em otimização e Broyden em equações não lineares
de aproximar o Jacobiano (a matriz Hessiana em otimização) de
uma maneira simples em cada iteração, em lugar de recalculá-lo
(método de Newton-Raphson) ou mantê-lo fixo (método de Newton
-Raphson modificado).
A idéia vem do fato de que a atualização do Jacobiano
numa iteração requer 0(n3) operações, onde n é a sua dimensão,
enquanto é possível aproximá-lo a partir da iteração anterior
com apenas 0(n2) operações. 0 preço pago por isto, é reduzir a
taxa de convergência de quadrática para superlinear.
0 objetivo deste capítulo é apresentar os fundamentos
teóricos dos métodos Quase-Newton juntamente com uma revisão da
literatura, principalmente no que diz respeito ao seu uso no
no método dos elementos finitos e em particular ao método usa

do nesta tese, conhecido como BFGS.
4.2- A Equação Quase-Newton
Como no método de Newton-Rãphson parte-se de um modelo
linear local para a função \(i (u), no ponto u, .
Na impossibilidade de avaliar o Jacobiano J, , = J (u. .)
procura-se uma boa aproximação Alc+^. Existem muitas possibili
dades na escolha da aproximação A^+i para o Jacobiano. Nos mé
todos quase-Newton A^+^ é escolhida satisfazendo (4.2.1) iden
ticamente, ou seja
que é geralmente escrita na forma
*k+i- ?k • yk <4-2-3)
onde y^ = ty, , - ip, e s. = u. , - u, . Esta equação é chamada
de equação quase-Newton ou equação secante. Como no algoritmo
de Newton-Raphson o algoritmo quase-Newton gera uma seqüência
de vetores u, , que espera-se convergir para a solução u# do
problema i|>(u*) = 0, porém usando em cada iteração uma aproxima
ção A, , para o Jacobiano Jk+1/ aproximação esta que deve sa
tisfazer a equação quase-Newton (4.2.3).
No caso unidimensional, n=l, a equação quase-Newton de
termina unicamente A k + 1 = yk / sk, constituindo-se no conhecido
método secante, figura (4.1.1). Para os casos n>la equação qua
- 41 -

se-Newton não determina A k + 1 unicamente. Na verdade, se s^ i 0
existe um subespaçc afim de dimensão n(n-l) de matrizes sati£
fazendo (4.2.3)
#
Os algoritmos quase-Newton diferem entre si pela manei
ra de escolher a aproximação A k + 1 de J^+i'0 caminho mais imedia
to para escolher A k + 1 é exigir que ela satisfaça a equação qua
se-Newton também em iterações anteriores. Pode-se mostrar
que neste caso, embora a taxa de convergência seja teoricamen
te boa, o problema resultante é mal condicionado enecessita-se
n2 posições de memória adicionais, tornando o algoritmo mal su
cedido nas aplicações.
Existem outras possibilidades na escolha de Ajç^. As
mais bem sucedidas, conforme registro na literatura são discu
tidas na seção seguinte.
p
fb•B
//
/
t /
/ / / i
/ // /
/ /& ir 1
Jrr
• —
1»k
¥k •*hU
FIGURA 4.1.1 - Método Quase-Newton no ca
so unidimensional.
- 42 -

4.3 - As Atualizações Quase-Newton
0s. procedimentos para gerar A. , mais bem sucedidos ba
seiam-se no fato de que a única informação disponível após ca
da iteração é a equação quase-Newton, não se justificando por
tanto diferenças drásticas entre A, e A, ,, devendo-se preser
var tanto quanto possível as informações contidas em A,. Basea
dos neste principio o procedimento seguido é obter A. , a par
tir de A, , adicionando—se a esta última termos corretivos visan
do atualizar a aproximação do Jacobiano com base nas informa
ções contidas na equação quase-Newton.
A atualização mais seriamente usada na literatura para
a solução de sistemas de equações não lineares é a devida a
Broyden ' . Pelo menos duas maneiras bastante intuitivas
existem para desenvolver a atualização de Broyden.
No primeiro desenvolvimento parte-se da hipótese que qual
quer aproximação do Jacobiano que satisfaz a equação quase-New
ton é lima boa candidata para A, ,. Desejando-se preservar tan
to quanto possível as informações contidas em A,f Broyden pro
pôs que as duas matrizes difiram apenas de uma de posto um, ou
seja
A k + i - A k • íic- YÊ lA-2-1)
onde w, e v. são vetores n-dimensionais. Levando esta equação
na equação quase-Newton obtém-se
Y k ; k ? k * 0 (4.3.2); , v . s
-k ?k
A aproximação A k + 1 tem então a seguinte forma geral pa
ra atualizações de posto unitário
- 43 -
(4-3-3>
7I-k 3
Qiiando vk.s, = 0, a equação (4.3.1) ê identicamente nu
Ia e a correção não deve ser feita. Permanece a questão de de
terminar o vetor y^. Como após a k-ésima iteração á única infor
maçãc adicional é a direção determinada por s^, Broyden argüiu
que não existe qualquer razão para a transformação A^+j dife
rir de A^ na sua aplicação ao complemento ortogonal de s^. Por
tanto, se z^ é um vetor n-dimensional ortogonal a' sk, a candi
data a A ^ i , deve satisfazer
4-
-k + 1 fk ' VV fir ' zk * fk ~ »••.->.*i
Substituindo (4.3.1) nesta equação tem-se
(w vj). z = 0 , s}. Z. = 0 (4.3.5)
que determina unicamente v, = s,. A atualização de Broyden tem
assim a expressão recursiva
tI V — A <5 I <;•I\r " V Ir' V
A, . = A. + T (4.3. o)"JC + X •* JC "C
O algoritmo de Broyden em sua forma mais básica pode
ser escrito como:
Dados: u , , A , para k = 0,1,...
Resolva Ak §k = - ^k para §k 14.3.7)
Atualize u k + 1 = uk + § k
Calcule yk
- 44 -

(v " PL. S \ sAtualize A^ , = A. + - ^ I* " k — —
A expressão de A k + 1 pode ser simplificada notando as
definições de y. e de §. , para
?k ?
Esta última expressão não envolve o produto de unia matriz por
um vetor e é portanto levemente mais econômica. Entretanto, é
necessário decompor Ak+j a cada iteração. Formas mais econõmi
cas de atualizações serão desenvolvidas mais adiante.
Pode-se chegar ao método de Broyden de uma forma mat£
maticantente mais rigorosa. Ê possível demonstrar ' que a
atualização de Broyden é um mudança mínima de A. consistente
com a equação quase-Newton, e se a mudança '.Ak+ - A^) for me
dida na norma de Frobenius, ela é única. Ou seja, a eq (4.3.6)
é uma solução para o problema
Minimizar llAv+, - A. fl
Ak+1 (4.3.9)
Submetido a: Ak+1- sR = yR
onde || . || significa qualquer norma matricial tal que || A. B | <
II A II- II § II ' e' em especial, se || . || for a norma de Frobenius:
HA,, |U il I | A , J 2 ) l/> (4.3.10)
então a solução é única.
- 45 -

£ possível mostrar que se o valor inicial u for su
ficientemente próximo da solução u A, se J(uA) não for singular,
e se A for suficientemente próxima de J(u o), então a seqüência
converge para u A superlinearmente, ou sejaí U
uk+l " u * "
Este tipo de convergência é em geral obtida nos métodos
quase-Newton . É possível demonstrar também que A. não con
verge em geral para o Jacobiano da solução J(u*),'e que uma con
vergência no mínimo superlinear é obtida se A. convergir para
J(uA) apenas ao longo das sucessivas direções s. do processo
iterativo, ou seja:
|| I \ - J(u.) ] s ||lim — — — = 0 (4.3.12)
O método de Broyden tem sido extensivamente empregado na
literatura. No método dos elementos finit^os sua aplicação tem
sido bastante limitada, principalmente pelo fato de que embora
partindo de uma matriz A = K simétrica, a matriz aLualizada
não é mais simétrica. Isto significa a necessidade do dobro de
memória computacional, aumentando o custo total da análise.
No contexto da Mecânica dos Sólidos o fato de que o Ja
cobiano é simétrico é equivalente a ip(u) ser gradiente de algu
ma função escalar II (u). Uma atualização que preserve a proprie
dade de simetria contida no Jacobiano deve ser portanto prefe
rida.
É fácil ver que se a atualização é de posto unitário e
iji. , não é colinear com s, (problema não linear) a única forma
de manter a simetria é com v^ = yk - A^ sk na fórmula geral
(4.3.3). Esta atualização simétrica de posto um foi primeiro a
presentada por Davidon , e tem a forma
- 46 -

. . + % k h ) k j k / _ k+l & 1 < 4 , „ .A., = K* r = \ • —r (4.3.13)
Esta atualização tem apresentado instabilidades numéri
cas nas aplicações. Tal dificuldade tem motivado a procura de
outras atualizações simétricas.
Dentre as atualizações simétricas quase-Newton, a devi
da a Powel tem merecido destaque na literatura. Ela corres
ponde ã versão de posto dois do método de Broyden. Para obter
sua forma simétrica, Powel projetou ' , com a norma de Fro
benius, a atualização de Broyden, eq.(4.3.6), no subespaço das
matrizes simétricas, isto eqüivale a tomar
(?k " ^k sk ) sk} ^ +
somar com sua transposta e dividir por dois, obtendo
Obviamente (A k + 1 ) 2 é simétrica, poréra não satisfaz a
equação quase-Newton. Continuando o processo no entanto, para
m = 1,2,..., tem-se
sk
m+1 J
Powel mostrou que este processo converge para
(4.3.14)
- 47 -

que satisfaz a equação quase-Newton. Esta expressão é chamada
de atualização simétrica do Powel e Broyden (PSB) . No desenvol.
vipento, pode-se provar que cada lAk+l*2m+l ® a m a t r i z *Jue "^is
se aproxima de (A^+i)5_ satisfazendo a equação quase-Newton, e quee a simétrica mais próxima de (Ak+^) 2m+^-£ possível
também provar que se s. ^ 0, a expressão (4.3.14) é a solu
ção do problema.
Minimize
Ak+1Submetido a: AJc+1. sk = yk, ÍAj^ ~ A^) simétrica (4.3.15)
As características de convergência do PSB são as mesmas do mé
todo de Broyden.
Este método tem no entanto um inconveniente quando a
plicado a problemas de Mecânica dos Sólidos.A matriz de rigidez
tangente que se está querendo aproximar, além de simétrica épo
sitiva definida, pelo menos até quando a estrutura não atingir
o colapso, ou seja, enquanto a curva carga-deformação for a£
cendente. Isto significa que o trabalho realizado por um incre
mento de carga é positivo. Usando a atualização (4.3.14)não se
tem garantia que partindo de A^ positiva definida obtem-se A k + 1
também positiva definida. Existem atualizações quase-Newton que
preservam a simetria bem como a positividade da matriz, e devem
de preferência serem usadas. Na próxima seção será discutido o
método usado nesta tese que satisfaz estas duas exigências.
4 . 4 - 0 Método BFGS
Do exposto na seção anterior conclui-se que dados § k^0,
yk e Ak simétrica e positiva definida, o objetivo deve ser en
contrar uma matriz A k + 1 que preserve a simetria e positividade,
- 48 -

além de satisfazer a equação quase-Newton uma vez que desta for
ma tem-se alguma garantia de proximidade entre A. 1 e o Jaco
biano J^^j- 0 método usado nesta tese para atingir esse objeti
vo é corfhecido na literatura como BFGS por ter sido proposto
independentemente por Broyden, Fletcher, Goldfarb e Shanno em
1970. Em problemas de otimização é geralmente reconhecido como
a melhor atualização ' . Nesta seção o método é desenvolvi
do visando sua aplicação às equações não lineares do método dos
elementos finitos.
4.4.1 - Desenvolvimento do Método
A matriz A, , será simétrica e positiva definida see só
se existir alguma matriz X, . não singular tal que
Ak +1 - *k+l & 1 (4.4.1.1)
A equação quase-Newton torna-se portanto-
2Í+r ?k - Xk (4.4.1.2)
Pode-se mostrar que se s^ i 0, então X. existirá se e só se
s v. y. > 0. Este é o caso em elastoplasticidade mesmo quando o(5)solido sofre descarga
No início do primeiro incremento de um método quase-New
ton parte-se seir.pre com a matriz de rigidez elástica K° que é
justamente a Jacobiano J = J(u = 0). Para determinar o primei
ro incremento de deslocamento §o, necessita-se resolver o siste
ma de equações dado pelo algoritmo básico (4.3.7). Escolhendo
o método de Cholesky, decompõe-se inicialmente o Jacobiano em
JQ = L Q L onde L é uma matriz triangular inferior. Assim, na
K-esima iteração tem-se
- 49 -

= ífc ¥* (4.4.1.3)
Desta forma pode-se reescrever (4.4.1.2) como
X k + 1. yk = yk (4.4.1.4)
X k + 1 . sR = yk (4.4.1.5)
Em lugar de aproximar diretamente o Jacobiano por A, ,,
procura-se uma aproximação X k + 1 para Lk de (4.4.1.3), satisfa
zendo a equação quase-Newton (4.4.1.4). Dos resultados da seção
4.3 conclui-se que é conveniente usar o método de Broyden para
obter X, , tão próxima de L k quanto possível:
X. , = L. + — ^ - ^ — — (4.4.1.6)
~k ~k
O v e t o r yk deve s a t i s f a z e r s imultaneamente a equação
( 4 . 4 . 1 . 5 ) . Levando ( 4 . 4 . 1 . 6 ) em ( 4 . 4 . 1 . 5 ) t e m - s e
t t (vk " Lk sk> %v - V <! - T « ? + v ~ " ~ Í4 4 1 71
Ir ~ V * l V- ~ V V V J. i f l .H.J. . /)
-k -k
Esta equação pode somente ser satisfeita se yk for colinear com
Lk sk, ou seja,
-k = ak i*k -k ' ak e R (4.4.1.8)
Substituindo-se (4.4.1.8) em (4.4.1.7) <*k é determinado
yk sk yk ska^ = ~ K—Z* = ~K ~K (4.4.1.9)
Como Ak é positiva definida e §k + 0 então §k Ak. §k > 0,
- 50 -
e a equação (4.4.1.9) tem solução real já que y£. s^ > 0. Esco
lhendo-se a raiz positiva em (4.4.1.9) e levando-a a (4.4.1.8)
obtem-se
(4.4.1.10)
A expressão final para X, 1 será portanto
X. . « L. + - ^ "". ~ " V ~ — - J V ~~ (4.4.1.11)" " o. s* L. L* s.
k -k -k -k -k
Na implementação do algoritmo a matriz At, deve ser ar1 -K -
mazenada em -=- n(n+l) posições de memória, e a matriz L, deve
ocupar a mesma área de A ,, tomando-se assim partido da simetria.
Entretanto X ^ ^ obtida por (4.4.1.11) não é simétrica nem trian
guiar. Considerando-se que se deseja L^+j e não X.+,, resta a
questão de como obter L, , sem efetivamente gerar X^ i, com o
mínimo de operações. Nesta tese esta questão é resolvida utili^
zando-se a fatorização Q R de XJt+^ a partir da fatorização Q Rde Ljç, onde Q é uma matriz ortogonal e R uma matriz triangular
superior. O procedimento seguido é descrito a seguir
Pode-se reescrever (4.4.1.11) sob a forma (4.3.1)
= L. + w. tj (4.4.1.12)
onde, usando (4.4.1.6)
w k = yk - L k vk (4.4.1.13a)
t. = -r^— (4.4.1.13b)
Ú Yk
Deseja-se a fatorização Q^i Bk+i ^ e xk+l*
zação é em geral obtida em 5n V3 operações, o que seria excess
- 51 -
sivo. No entanto pode-se fazer uso de particularidades de
(4.4.1.12) para obter diretamente L^i de (4,4.1.12) em apenas
0(n2) operações. Para isto, primeiramente note-se que Lt de A, =t - ~ - t
^k ^k e *in*-ca assim a decomposição Q^ Rj,_ = L^ fornece R^ = Lk,
Qj. = I, uma vez que Rj. também é triangular superior. Pode -se
portanto escrever a fatorização Qjt+i ?ir+i e X, icomo
- 9k ?
e obter a fatorização Q R de Rk + t
(4.4.1.14)
onde, por (4 .4 .1 .14) tem-se Q = Q^+i e R
pode ser imediatamente i d e n t i f i c a d a como
^k+l = ?k+l 5ç+l = Pk+1 9k+l 9k+l ?k+l = ?k
(4.4.1.15)
A matriz L, ,
como segue
k+1 íík+1
(4.4.1 .16)
jã que ainda aqui a decomposição A, , = tk+1 Lk+1 ® única.
Desta forma, dada a fatorização
L^, Q. =
wv) onde L
de L, , onde R. =x ^k ^?k + 1kobtem-se a fatorização
R, ,. Não é necessário formar explicitamente a
matriz Qk+1-
O procedimento seguido na obtenção de R. -, usa sucess^
vas rotações de Jacobi. Uma rotação de Jacobi é uma matriz o£
togonal P(i,j,ct,B) de dimensão nxn, com a estrutura:
- 52 -

1
a
• 1
1
. . ã
(4.4.1.17a)
onde õ e 6 são escolhidos para zerar o elemento (i,j) da matriz
pela qual P(i, j,a,g) premultiplicar, e mudando apenas duas linhas
da matriz. A rotação de Jacobi é na verdade uma rotação bidi.
mensional dentro de uma matriz n-dimensional, n 12. Os valores
5 e $ são definidos tais que, para quaisquer a e 3 reais
a = a
V - B2, B = * 0 (4.4.1.17b)
As rotações de Jacobi são aplicadas para tornar
uma matriz triangular superior. Como R já é triangular
superior, sucessivas rotações de Jacobi são aplicadas para ze
rar as linhas n, n-1, ..., 2 de t w . isto é efetuado com (n-1)
rotações de Jacobi aplicadas ao vetor t, zerando sucessivamen
te os elementos n, n-1, ... 2 desse vetor, ou seja
t ; t=(
(4.4.1.18)
- 53 -

Essas rotações são simultaneamente aplicadas aR^.O efei
to disto é transformá-la em uma matriz Hessrmberg superior R^.
A matriz total resultante Hk = (£k + ( |j t \ 2 0) vfc) é então
transformada em uma matriz triangular superior com mais (n-1)
rotações de Jacobi:
(4.4.1.19;
onde h. . é o elemento (i,j) de H. .1,3 -K
A fatorização descrita requer 0(nJ)operações. Um número
de operações maior é nccessãrio para formar os vetores t e w.
Para obtê-los em 0(n2) operações eles são escritos da seguinte
forma
?k = ?k - ak ^k <?* ?k> (4.4.1.70a)
"E V
ou = . ~\ ' (4.4.1.20c)
0 procedimento descrito foi o implementado nesta tese. A
principal vantagem é a redução do número de operações. Porém,
possui a desvantagem de não aproveitar a cara terística de ma
triz banda existente na matriz de rigidez. Na seção seguinte
discute-se sumariamente outras implementações já usadas na li
teratu; a do método dos elementos finitos.
4.4.2 - Outras i: olementações
Utilizando as equações (4.4.1.11) e (4.4.1.1) outem-se

A k + 1 = Ak -i - ^ — — - ~ ~* ~r ^ — (4.4.2.1)Yi* S, s. A,
Esta forma de atualização direta de A, requer 0(n3} operações
para sua impleme itação, não sendo em geral usada.
Ê possivel também implementar o BF' S atualizando a in
versa de Av. A forma inversa é obtida com 4.4.;.. 12) e a fórmu(19) ~~
Ia de Sherman Morrison - Woodbuiry ,
(M + u y*)" 1 = M"1 - - r M"1 u vt M"1 , M . Rnxn, não singular
o =
e, após substituição em (4.4.1.1) produz a forma '
w. = ~k (4.4.1.2)
Yk ?k
l. A, s. - -'.~k -k -~K
0 incremento de deslocamentos em cada iteração é obtido
diretamente
?k*i = - (? + k YK> - - - (í + o Ú] Í 1 (í + Yo é - < i + Yk $
(4.4.2.3)
Esta forma de implementação permite aproveitar a carac
terlstica de banda da matriz A^ = K°. Os vetores v, e v, de ca
da iteração são armazenados em memória secundária para uso nas
- 55 -

iterações subsequentes em (4.4.2.3). : s ^ forma é bastante con
veniente em sistemas com grande númerj tt graus de liberdade.
No entanto, quando o número i'e it rações totais cresce énece£
sário resolver o Jacobiano p; ra continuar o processo iterati
vo. O tempo de acesso â memória secundária pode vir a se tor
nar excessivo, dependendo do aroiente corr mtacional. Este es
quema tem sido usaâo com sucesso por alguns aurores
Em vez de usar a decomposição QR como na s cão ante
rior é possível usar a decomposição de Cr -mt A^ = L^ Djç L, e
atualizá-la em 0(n2) operações. Este esqu ma foi usado pelos
autores da referência [16] em análise não linear geométrica e
física, sem plasticidade.
- 56 -
CAFÍTUL V
IMPLEMLNTAÇ&C E LESEMPENHO
5.1 - Introdução
O principal objetivo deste capítulo é comparar o desem
penho do método proposto com o Método de Newton-Raph >on e suas
variações. O desempenho de um algoritmo e'sta intimamente rela
cionado com a sua implementação computacional. Faz-se necessá_
rio portanto anteceder a medida do desempenho por uma apresen
tação dos principais aspectos ligados ã implementação dos algo
ritmos nesta tese.
Neste capitulo inicialmente descreve-se os aspectos re
levantes do elemento finito triangular axissimétrico implemen
tado, seguido do algoritmo elastoplastico empregado. São a se
guir sumarizadas as implementações dos algoritmos para a solu
ção do sistema de equações não lineares e o critério de conver
gência empregado. Finalmente são efetuadas comparações nume ri.
cas entre os algoritmos, com deis exemplos de aplicação.
5.2 - 0 elemento finito triangular axissimétrico
- 57 -

A implementação do elemento passa por 3 importantes f£
ses: a determinação das forças nodais equivalentes às forças
distribuídas externas, ou seja e determinação cos valores b ee 't àe. equação (2.5-1.6); a segun.a fase e a determinação da m£
triz da rigidez do elemento in luíàa na expressão (2.5.2.4); i
terceira fase é a determinação das fon as internas fe da égua
ção (2.5.1.6), a partir do nível de tensões do elemento apôs
uma iteração, para a determinação to vetor de resíduos \\>.
A primeira fase não oferece qua.1 quer dific Idade, e pode
ser obtida explícitament'. , sem causar . aalquer incove iiente nu
mérico.
A expressão explícita dr matriz de rigidez do elemento
quer para o comportame: to elástico ou elastoplástico foi obtida
na referência [11} e implementada nesta te e. O principal inco
veniente da forma explícita são as express es dependentes de
termos coir. logarítmo natural da coordenada radial causando pro
blemas numéricos. Implementou-se também o cálculo da matriz de
rigidez por integração numérica (Gauss - Radan - Hammer [9]).
Não se obteve ainda a forma explícita para o cálculo das
forças internas f para este elemento. Uma expressão aproximada
pode ser obtida supondo-se as tensões constantes ao longo do ele
mento. Observou-se neste trabalho que esta prática introduz re
síduos adicionais em ty com erros da ordem de 1%. Implementou-se
também a obtenção de f por integração nur, ?rica, eliminando-se
esta dificuldade.
Como resultado das aplicações numéricas deste trabalho
sugere-se que a matriz de rigidez e as forças internas sejam ob
tidas por integração numérica. 0 custo computacional adicional
é irrisório, uma vez que as quantidade:; sêo calculadas com ap£
nas um ponto de integração no domínio (centroido,.
- 58 -

5.3 - O Algoritmo de Elasto-Pasticidade
O «algoritmo empregado é bem descrito na referência [4].
Aqui sumariza-se a descries :> do algoritme e suas particularida
des para o elemento em cues cão.
Durante a aplicação ce um incremento de carga um elemen
to inicialmente elástico pode pie :tificar. O presente elemento
plastifica integralmente uma vez rue apenas um ponto de integra^
ção é usado para o domínio. Para qualquer incremento de carga
é necessário determinar que proporção é puramente elástica e
qual parte da carga produz deformação plástica,e assim ajustar
os estados de tensões e defornações v.ria ido metodicamente as
componentes destes tensores até que ai leis constitutivas e o
critério de escoamento sejam satisfeitos.
0 procedimento adotado é o seguinte:
Eta >a a - As forças aplicadas na k-ésima iteração são as for
ças residuais i|i, dada pela equação (3.1.2)que pro
duzem o incremento de deslocamento Au, e o incremen
to de deformação de*4 = B dui,. do elemento.
k e i .Etapa b - Compute as mudanças incrementais dge = D deK, onde
o subscrito e indica que está-se assumindo comporta
mento linear.
Etapa c - Acumule as tensões totais do elemento no controidek k—1como oa = o +
na iteração k-1.
k k—1 k k—1como o^ = o^ + do onde o sao as tensões finais
Etapa d - Esta etapa depende se o elemento plastificou ou não
na iteração anterior (k-1). Para determinar isto ve
rifique se
- 59 -

ond? õ é a tensão equivalente o^a tensão de es
coamento instantânea, e r a t :nsão de escoamento
inicial co material. A ê parâmetro de endureci
" . mento liaear da equaçêo (. 3.3.7) . êp~ é a defor
inação efetiva exi tem a ap5s a iteração (k-1) . Se
a resposta é pos: iva segue-se o procedimentc abai.
so, se negativa o d.2;
Etapa d. 1 - fcsste caso o elemento plastificou na iteração ante—k k—1 k
rior. Verificar se oe > onde õe ç a tensão ef£
tiva baseada em ge. Se resposta é negativa signi
fica que o elemento est descarregando (penetrando
na função de fluência) elasticamente, vã para aeta
pa g. Se a resposta é positiva o elemento além de
ter plastificado na iteração anterior, continua a
plastificar, já que as tensões continuam aumen.an
do. Assim, todo excesso de tensões deve ser reduzi
do à superfície da função de fluên ia, conforme fi
gura (5.3.1a), com o fator R, que aefine a porção
das tensões que devem : er modificadas para satisfa
zer o critério de escoamento, igual a 1.
Etapa d.2 - Neste caso o elemento não escoou previamente. É ne
cessário verificar se ele escoou durante a presenk v -~te iteração, para isto verifique se õe > o
1 Se nao
o elemento ainda permanece elástico, vã para a eta
pa g. Se positivo então o elemento escoou durante
a presente iteração, conforme figura (5.3.1b).
A parte das tensões maior que o valor de escoamen
to deve ser reduzida à superfície de fluência.O va
lor de R é dado por
AC " _k _k-I
- 60 -

(b)
FIGURA 5.3.1 - Mudança incremental nas tensões.
(a) Em um elemento já plastificado
(b) Em um elemento elást ico.
- 61 -
Eta^a e - Para elemento plastificado calcule a parte das ten
soes totais que satisfazem o critério de escoamen
to como ç*"1 + (1-R) dok, ou seja f (o14"1 + (1-R).
' . dgk) = 0
Etapa f - A parte remanescen e das tensões, R dçe, deve ser
diminuida de alguma forma. Assim o ponto A deve ser
trazido ã superfície da função de f uêrcia permitiri
do que a deformação plástica ocorra N carregamen
to a pa: tir do ponto C o ponto de tensão move - se
elasticamente até a superfície de fluência em B. S*
o comportamento fosse elástico ele iria até o ponte
A. Poré.r. como a condição de escoamento deve ser SÍ
tisfe:.ta, F = 0 , o pent o de tensão não deve me /er-sc
para fora da superfície de fluência. Como consequên
cia o ponto de tensão não pode cruzar a superfície
de fluêncie a .é que, tanto as equações de equilíbrio
como as equações consti' -.*ivas sejam satisfeitas.
Das equações (2.3.1.6), . 3 . - 7 ) , (2.3.1.8)e (2.4.5),
sob forma matricial, poàerr.os \ scre^er:
de " = D e p dek = De dek - dX Dea
ou
ok = ok"1 + dak - dX De a
que são as tensões totais satisfazendo as condições de elasto-k-1
plasticidade quando as tensões sao incrementa ;ac a partir de o
Pelas figuras (5.3.1 a e b) note-se que o ponto de tensão sai day
função de fluência devido ao tamanho finito de do^. Se o incre
mento de carga for suficientemente pequeno isto poãe ser prat_i
camente eliminado. Para incrementos um pouco maiores o ponto o
pode ser trazido â superfície por escalonamento:k -. ok. E- , o1'. - 2 - ^ 2
V Jok -. ok. E- , o
V 7 J
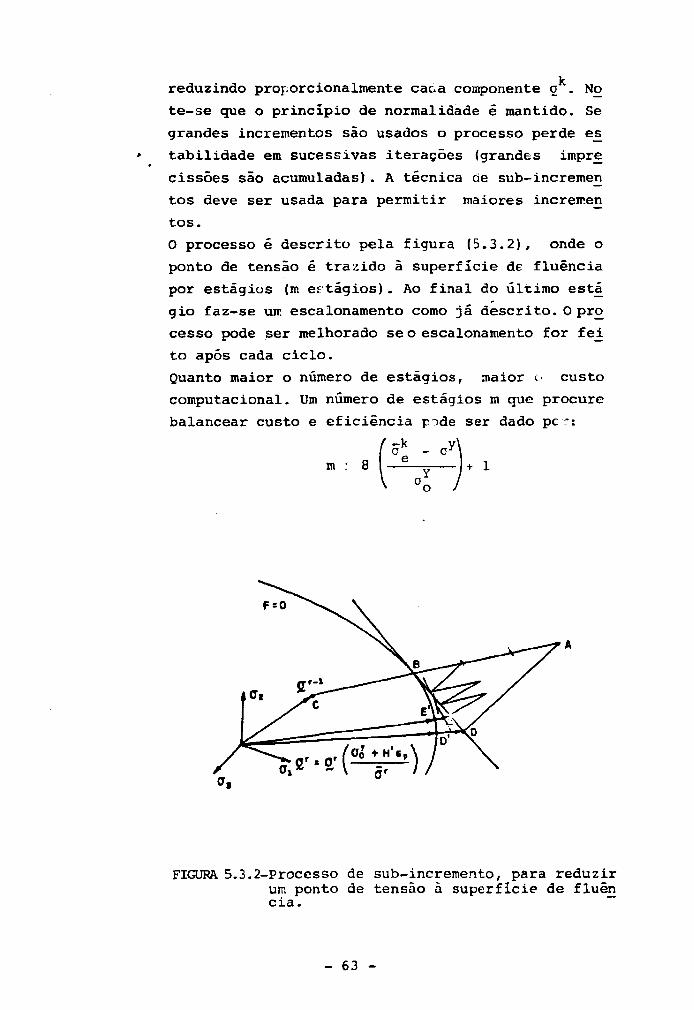
reduzindo proporcionalmente caca componente o . No
te-se que o principio de normalidade é mantido. Se
grandes incrementos são usados o processo perde e£
tabilidade em sucessivas iterações (grandes impre
cissões são acumuladas). A técnica de sub-incremen
tos deve ser usada para permitir maiores increir.en
tos.
0 processo é descrito pela figura (5.3.2), onde o
ponto de tensão é trazido à superfície de fluência
por estágios (m ertágios). Ao final do último está
gio faz-se uir. escalonamento como já descrito. 0 pro
cesso pode ser melhorado se o escalonamento for f ei.
to após cada ciclo.
Quanto maior o número de estágios, maior <•• custo
computacional. Um número de estágios m que procure
balancear custo e eficiência p^e ser dado pc -:
m 8 + 1
FIGURA 5.3.2-Processo de sub-incremento, para reduzirum ponto de tensão â superfície de fluência.
- 63 -
k k—1Etapa g - Para elementos elásticos, apen; calcule 0 = 0
Etapa h -• A última etapa t onsis^« em obter fe pela equação
(2.5.1.6), de preferência por integração numérica
(fer = B* ok dv
5.4 - Os métodos de análise não .inear
Na implementação dos métodos tipo Newton-Raphson descri,
tos no Capítulo 3 seguiu-se procedimentos convencionais.Na arma
zenag-em da matriz de rigidez tomou-se partido de sua caracterís
ticÍ de banda mantida durante toda a análise. O algoritmo uti^i
zac o para a resoluçã > do sistema de eqi ações não-lineares algé
bricas simultâneas foi o de Crount (decomposição LDL )
No método BFGS não se pode tomar partido da característi
ca de banda original, já que durante as sucessivas iterações a
única característica topológica mantida i a simetria. Assim são
necessárias (n2 + n)/2 posições de memória para armazenar a ma
triz aproximativa do Jacobiano, contrastando com nb.n posições
necessárias nos métodos tipo Nev«ton-Raphson. O método de resolu
ção do sistema de equações não lineares a cada iteração é o de
Cholesky (decomposição LL ), conforme já citado no Capítulo 4, e
levemente mais custoso que o ile Crout.
Para posterior referência os algoritmos são simbolizados:
NRM - Newton-Raphson modificado: matriE de rigidez mantida
constante durante toda a análise.
NR - Newton-Raphson completo: atualização da matriz de rigi
dez a cada iteração.
NRM 1 - Newton-Raphson com atualização da matriz de rigidez na
primeira iteração de cada incremento.
NRM 2 - Newton-Raphson com atu:lização da matr:z de riridez na
segunda iteração de caca incremento.
BFGS - algoritmo desc ito no Capitulo 4.
Existem vários critérios de convergência descritos na li
teratura, apropriados a cada problei i. Aqui usa-se um único cri
tério: o processo diz-se ter convergido após a k-ésima iteração
quando
X 10( TüLER
onde || . I) indica a norma euclidiana, v o resíduo após a k-ésima
iteração, P o vetor de forças nodais aplicadas, e TOLER um parei
metro de convergência estipulado a priori (usualmente ú 1%) Adi
cionalmente, procura-se controlar a componente «JJ . de ^ de máxi
mo valor absoluto.
5.5 - Aplicações Numéricas
5.5.1 - Cilindro de Paredes Grossas
O primeiro problema estudado é o do colapso de um cilin
dro de paredes grossas de comprimento infinito (condição de e^
tado plano de deformações) sujeito a uma pressão interna crescen
te p. A malha utilizada com 32 elementos encontra-se na figura
(5.5.1.1) juntamente com as propriedaães usadas.
- 65 -

l i
f. io interrRaio exterMódulo âi .Coef icier*» v.
Twitfioe tscc •iK-rtto i-nicxic!-
Por6meiu! de rncJurscirnontr-Critério de Tret ca
o=?0.
<jY -- :
íN/nni»
I.C'iri/fcr:»
FIGURA 5.5.1.1 - Mí.lha e pr< priedades do material empregado.
A análise teórica indica -ue a plastificação é iniciada
pela face mais interna, propagar o-t-e com um raio a < c ú b ao
longo do cilindro tal que a pressão para uin dado raio de plasti
ficaçao c e dado por * '
p =Jln (^-) + -±-
Assim a pressão de escoamento iniciaiI é de p = 9 dN/mn,
e a de colapso P u l t = 16,6355 dN/mm" . Teor: jamente no valor p
o cilindro sofrerá deslocamento infinito cie seus pontos, sendo
portanto de se esperar que este valor licite não ac-ja alcançado
por qualquer algoritmo.
A figura (5.5.1.2) mostra a. curva pressão x deslocamento
da face imerna. Como se pocit aoduzir c TÒ-ÍJÍI,; 5.1 não existe

diferença apreciável no resultado numérico para os métodos usa
dos. Es .e problema pode ser caracterizado como medianamente não
linear. A taxa de convergência (TOLER) usada foi de 0,l%,basten
te rigorosa.
TABELA 5.1 - Deslocamentos (mm) n<- face interna pelos 5
métodos (32 elementos)
INCR.
01020304
05
060708
PRESSÃO(dN/mnt2)
9 . 0
11.013.014.015.016.016.516.6
MÉTODOS (deslocamentos)N R M
0.081680.10-770.13 410.16J37
0.196950.25280O.3113t0.33491
N R f NRM 10.08168 > 0.081680.103780.137400.16 ."35
0.196970.253060.312230.33646
0.103770.137400.16236
0.197060.253090.312310.33664
NRM 20.08168 '0.103780.137400.16238
0.197020.253070.312310.33660
Q N
0.081680.103860.137570.162710.197180.253160.312670.33782
£* 1 8 0
•£ 16J0z•o
*• 13.0
1.0
£ 9.0
0 02 0.4DESLOCAMENTO N ACE INTERNA, u(mm)
FIGURA 5.5.1.2 - Curva pressão interna x deslocamento rad ia lr = a.
- 67 -

Na tabela 5.2 estão as i srações necessárias a convergên
cia de cada método, bem como o terpo total de CPU (DEC-10,UFPE),
mostrando claramente a superioridade do método BFGS com rela_
ção ao te'mpo de CPU e número de iterações para convergência.
TABELA 5.2 - Desempenh > dcs métodos para o exemplo daficara 5.^.1.1.
INCR.
01
02
03
04
05
06
07
08
PRESSÃO(dN/mm2)
9 . 0
1 1 . 0
13.0
14.0
15.0
16.0
16.5
16.6
TOTAL
C P U
MÉTODOS (iterações)
N R M
01
09
13
16
23
37
74
70
243
1:07.58
N R ; NKR 1
01
07
08
08
10
15
27
26
102
1:16.65
01
09
10
09
1?
li:
33
28
1 2 1
3 7 . 9 1 .
NMR 2
0 1 "
07
08
09
1 1
3 j
31
28
111
35.30
U N
Cl
04
06
07
07
07
06
05
43
2 1 . 1 1
As tabelas 5.3 e 5.4 mostram a distribuição de tensões
circunferenciais e radias exatas e as obtidas com os diferentes
métodos, com os respectivos erros percentuais dados por.
exatoerro % = a - o
exato
para a pressões p = 16 dN/mm*
Nas figuras 5.5.1 3a e b são mostradas as curvas de ten
são (o_) e (cr ) exatas e as obtidas utilizando o método Quase-r 0
Newton para as pressões p = 14 dN/miri2 e p - 16 dN/mm2 .
- 68 -

100 129DIST&KCtA RADIAL, r (mm)
350 ITS SOO
1 - 8 . 0az
tft
-16.00(a)
ti:;
FIGURA 5.5.1.3 - Distribuição das tensões (a) radiais e (b) cir
ei nferenciais no cilindro de paredes çrossas.
- 69 -
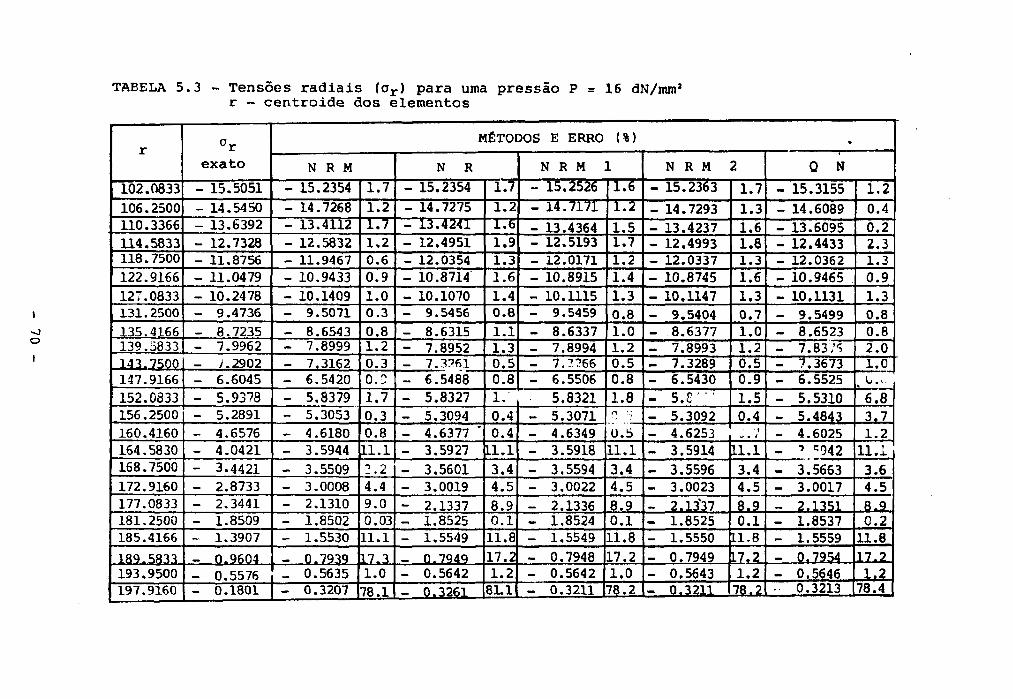
TABELA 5.3 - Tensões radiais (or) para uma pressão P = 16 dN/mm2
r - centroide dos elementos
x
102106110114118122127131
135139
.0833
.2500
.Jibb
.5833
.7500
.9166083325004166
.58337500
147.9166152.0833156.160.164.168.172.177.181.185.189.193.197.
25004160583075009160083325004166583395009160
°rexato
- 15.5051- 14.5450- 13.6392- 12.7328- 11.8756- 11.0479- 10.2478- 9.4736- 8.7235- 7.9962- /.2902- 6.6045- 5.9378- 5.2891- 4.6576- 4.0421- 3.4421- 2.8733- 2.3441- 1.8509- 1.3907- 0.9604- 0.5576- 0.1801
N R M
- 15.2354- 14.7268- 13.4112- 12.5832- 11.9467- 10.9433- 10.1409- 9.5071- 8.6543- 7.8999- 7.3162- 6.5420- 5.8379- 5.3053- 4.6180- 3.5944- 3.5509- 3.0008- 2.1310- 1.8502- 1.5530- 0.7939_ 0.5635- 0.3207
1.71.2
1.71.20.60.91.00 . 3
0 .81.20.3
o . :1.70.30.811.13.24.49.00.03
11.117 31.0
7R,1
- 15- 14
- 13- 12- 12- 10- 10- 9- 8- 7_ 7- 6- 5- 5- 4- 3- 3- 3.- 2.- 1- 1.
_ 0.- 0.- 0.
N R
.2354
.7275
.4241
.4951
.0354
.8714
.1070
.5456
.6315
.8952
. 3?61
.5488
.832730946377592756010019133785255549794956423?61
MÉTODOS
•
1.71.21.61.91.31.61.40 . 8
1.11.30 . 50 .8
1.0.40.4
L l . l3.44.58.90 .1
11.817.21.2
8L1
--
-—---—__-
——_—_
—
—-
E ERRO
N R M
15.252614.717113.436412.519312.017110.891510.11159.54598.63377.89947.??666.55065.83215.30714.63493.59183.55943.00222.13361.85241.55490.79480.56420.3211
(%)
1
1.61.2
1.51.71.21.41.30.81.01.20.50.81.8
0 .511.13.44.58.90 .111.817.21.0
78.2
N R M
- 15.2363- 14.7293- 13.4237- 12.4993- 12.0337- 10.8745- 10.1147- 9.5404- 8.6377- 7.8993- 7.3289- 6.5430- 5 . £ ' "- 5.3092- 4.6253- 3.5914- 3.5596- 3.0023- 2.1Í37- 1.8525- 1.5550- 0.7949- 0.5643- 0.3211
2
11111110110
.7
.3
.6
.8
.3
.6
.3
.7
.0
.2
.50.910
LI3480
11
.5.4
• T• i
.1
.4
.5,9. 1.8
i.7,2179
.2.2
Q N
- 15.3155- 14.6089- 13.6095- 12.4433- 12.0362- 10.9465- 10.1131- 9.5499- 8.6523- 7.837S- 7.3673- 6.5525- 5.5310- 5.4843- 4.6025- ~> C942- 3.5663- 3.0017- 2.1351- 1.8537- 1.5559- 0.7954- 0.5646• 0.3213
10021010021b
6
11134.
011.YL
.2
.4
.2
.3
.3
.9
.3
.8
.8
.0
.0
.872
, i
65
928
21,2
4
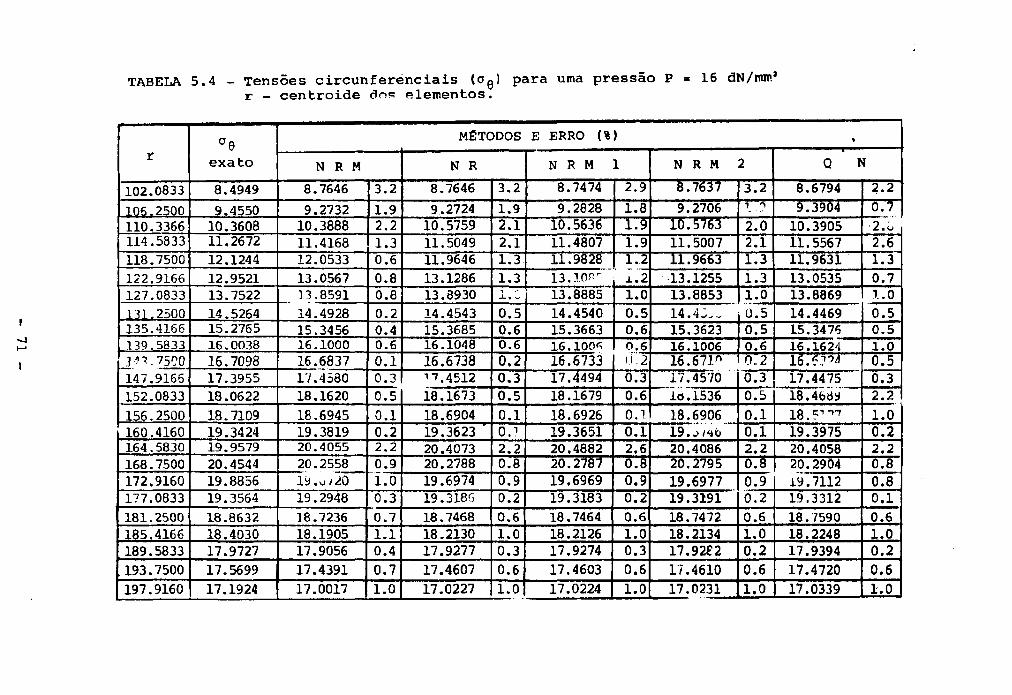
TABELA 5.4 - Tensões circunferenciais (Og) para uma pressão P = 16 dN/nun*r - centroide dos elementos.
r
102.0833
106.2500110.3366114.5833
118.7500
122.9166127.0833
131-2500135.4166139.58331^.7500147.9165
152.0833
156.2500160.4160164.5830168.7500172.9160177.0833
181.2500185.4166189.5833
193.7500
197.9160
exato
8.4949
9.455010.360811.2672
12.1244
12.952113.7522
14.526415.276516.003816.709817.3955
18.0622
18.710919.342419.957920.454419.885619.3564
18.863218.403017.9727
17.5699
17.1924
N R M
8.7646
9.273210.388811.416812.0533
13.0567]3.8591
14.492815.345616.100016.683717.4580
18.1620
18.694519.381920.405520.2558ly.o/2019.2948
18.723618.190517.9056
17.4391
17.0017
3.2
1.92.2
1.30.6
0.80.8
0.20.40.60.10.3
0.5
0.10.22.2
0.91.00.3
0.7
1.10.4
0.7
1.0
MÉTODOS
N R
8.7646
9.272410.5759
11.504911.9646
13.128613.8930
14.454315.368516.104816.6738
•n.451218.1673
18.690419.362320.407320.278819.6974
19.3186
18.746818.213017.9277
17.4607
17.0227
3.2
1.9
2.12.11.3
1.3J-. -
0.50.60.60.20.3
0.5
0.10.1
2.20.80.90.2
0.61.00.3
0.6
1.0
E ERRO (%)
N R M
8.7474
9.282810.5636
11.480711.9828
13.10P'13.8885
14.454015.366316.100*16.673317.4494
18.1679
18.692619.365120.488220.278719.696919.3183
18.746418.212617.9274
17.4603
17.0224
1
2.9
1.8
1.91.91.2
x.21.0
0.50.60.6LI. 20.3
0.6
0.10.12.60.8
0.90.2
0.61.00.3
0.6
1.0
N R M
8.7637
9.270610.5763
11.500711.9663
13.125513.8853
14.4:.-15.362316.100616.671"17.4570
16.1536
18.690619.J/*4t»20.408620.2795
19.697719.3191
18.747218.213417.92E2
17.4610
17.0231
2
3.2
.1 ?
2.02.11.3
1.31.0
0.50.50.60.20.3
0.5
0.10.12.20.8
0.90.2
0.61.00.20.61.0
*
Q N
8.6794
9.3904
10.390511.556711.9631
13.053513.8869
14.446915.347616.162416.f?W
17.447518.466*
16.^^
19.397520.405820.2904
19.711219.3312
18.759018.224817.9394
17.4720
17.0339
2.2
0.7
•2.o
2.6
1.3
0.7
1..00.50.51.00.50.32.2
1.00.22.20.8
0.80.1
0.61.00.20.61.0

5.5.2 - Vaso de Pressão Esférico
0 .segundo problema estudado consiste de um vaso òa pre£
são esférico. Mais uma vez supõe-se que o material obedeça ao
critério de Tresca. Neste caso a referência [3] fornece a solu
ção exata do problema.
As propriedades do material usadas nesta aplicação são:
E = 2,1 x 10 kgf/cm2 , v = 0,30 e oy = 2.500kgf/cn,1. O raio in
terno da esfera é a = 22cm e o externo é b = 31cm. Uma press;D
interna p crescente foi aplicada até valores perto do colapso
p = 1715 kgf/cm2.
O problema foi modulado com as três malhas da figura
5.5.2.1. Nas malhas (a) e (b) modelou-se um setor, 90°. Os nós
de coordenada radial r nulos não introduziram qualquer dificul
dade na integração numérica enquanto a esfera permanece elásti
ca. A partir do início de plastificaçao os resultados começam
a apresentar discrepancias com relação aos resultados exatos
em ambas as malhas. A análise dos resultados destas duas malhas
indicam uma velocidade de plastificaçao maior na região de raio
nulo dando origem a uma instabilidade localizada prematura na
matriz de rigidez. A introdução de valores levemente diferen
tes de zero nas coordenadas radiais não conseguiu melhorar subs
tancialmente o desempenho do elemento.
O problema foi então analisado com a malha (c) que usa
um setor de 7,5°, com apenas 16 elementos. 0 uso desta malha
exigiu a introdução de condições de contorno inclinadas em rela_
ção aos eixos r e z no programa desenvolvido. A curva carga -
deslocamento de um ponto da face interna para as três malhas
usadas encontra-se na figura 5.5.2.2. Os resultados demonstram
a deficiência no desempenho do elemento finito utilizado quan
do seus pontos nodais estão sobre o eixo de revolução.
- 72 -
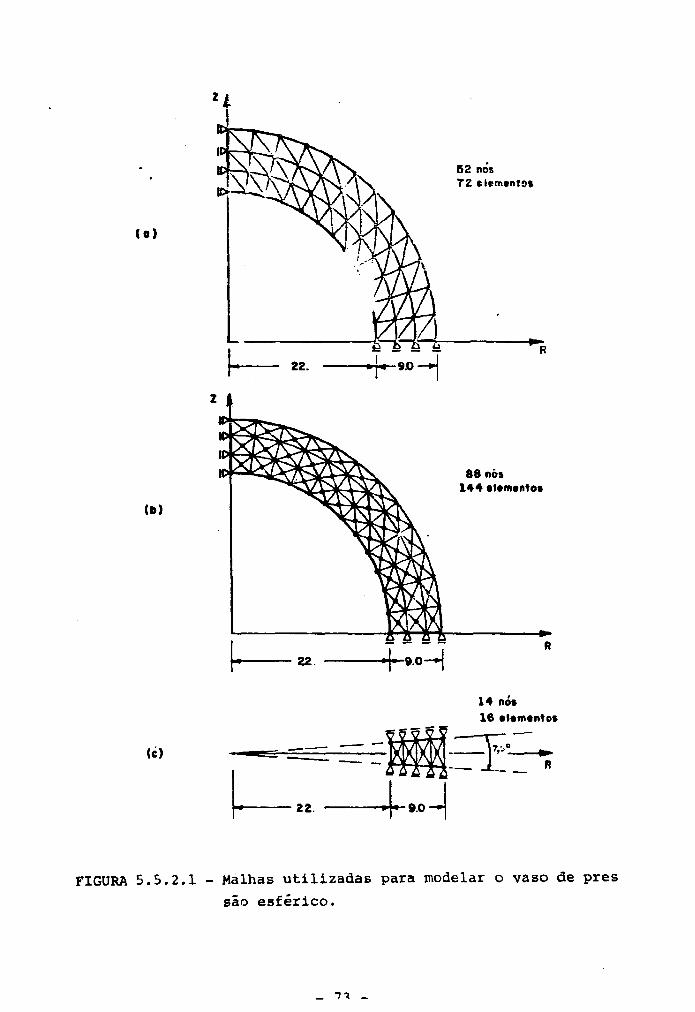
52 nosTZ cirrr.vnto»
(o)
(b)
(c)
68 nós144 «Umtnto»
.0 —\
14 nós16 «Umtntot
FIGURA 5.5.2.1 - Malhas utilizadas para modelar o vaso de pres
são esférico.

in
r:c
soc
100
Setcr í V - ' •- in ! '•' '•
S s t o r K • . b i l < I'.'. <•'••
feator (ãC ; tit:* 7 E el
' • • • *
£00DESLOCAMENTO
400
FIGURA 5.5.2.2 - Curva pressão x deslocamento radial de um pon
to na face interna para as três malhas util i
za; as.
Com a malha (c) foi possível chegar a valores bem pró
ximos da pressão de colapso sem qualquer dificuldade em todos
os algoritmos utilizados.
A distribuição de tensões para as pressões de 14 e 16
kgf/cm2 encontram-se na figura 5.5.2.3. Os resultacos são con
siderados excelentes para a malha utilizada. Os valores dos grá
ficos são tirados no centroide de et ia elemento.
0 desempenhe dos métodos de análise não linear estão
sumarizados na tabula 5.5. Os resultados demonstram mais uma
vez a superioridade do método BFGS quer no tempo total de CPU,
quer no número de iterações necessárias a convergência. Os valo
res numéricos dos resultados obtidos entre oz métodos distin
tos não apresentam diferenças apreciáveis.
- 74 -

DISTANCIA RADIAL, R (evaj27
£* 1900
I5talKw
ooIO
990
22
FIGURA 5 . 5 . 2 . 3
P»1600Kçf/cmc
P« 1400K4f/cm*
27 31DISTÂNCIA RADIAL, R (Cffl)
Distribuição das tensões (a) nodais e (b) cir
cunferenciais nc vaso de pressão esférico.
- 75 -

TABELA 5.5 - Desempenho dos mêtocos para o exemplo da figura
5.5.2.1 (c).
INCR.
01
02
03
04
05
06
07
08
PRESSÍD
(kgf/cm2)
1000
1100
1200
1300
1400
1500
1600
1650
TOTAL
C P U
CPU/ i te ração
MÉTODOS ( i t e r a ç õ e s )
N R M
01
01
04
05
06
08
11
12
48
9.73
0.203
N R
01
01
03
05
05
07
08
09
39
20.54
0.527
NRM 1
0 1
0 1
04
04
05
06
09
10
40
10.61
0.265
NRM 2
0 1
0 1
03
0 5
05
16
0 8
10
39
10.16
0.260
Q N
01
02
04
0 3
C3
03
04
0 5
2 5
6.94
0.278
Ê interessante observar, que o tempo médio de CPU por
iteração é maior no método de Newton Raphson (NR) com atualizei
ção em cada iteração, seguido do método BFGS. Entretanto ambos
necessitam de i m menor número de interações por incremento. No
método BFGS no entanto a redução no número de iterações por in
cremento é mais drástica ã medida que avança a plastificaçao ao
longo da espessura da parede da esfera indicando possivelmente
sua maior estabilidade numérica. Isto é obtido pelo fato de
conseguir-se avançar as cargas mais próximas da carga de colag
so com o BFGS do que com o NR.
Observe-se que a carga inicial exata de plastificaçao
é p = 1070,96 kgf/cn3, ene. íanto a carga de plastif icaçao no cen
troide do elemento 1 (malha c é p = 1124,49. Assim como o prime .i
ro incremento foi efetuado c<m p = 1000 kgf/cma e o segundo
- 76 -

com p = 1100 kgf/cm2, e as tensões são calouladcs no centroide,
o elemento 1 não plastificou em nenhura dos dois : .icrementos.Des
ta forna a matriz de rigidez no métc o de Wewtor.-r^phson e seus
variances-eram ainda exatas (linear) durante o segundo incren2n
to, convergindo cada método em apenas uma iteração como espera
do. 0 nétodo Quase-Newton no entanto faz a sua atualização BFGS
nó inicio do segundo incremento produzindo uma rnatr.z de rigj.
d»z apenas aproximada da exata e necessitando então de 2 (duas)
iterações para a convergência. A tolerância para a convergência
usada foi de 1% (Toler = 1 % ) .
- 77 -

CONCLUSÕES
O método BFGS mostra-se sem dúvida competitivo frente
aos métodos tipo Newton-Raphson quando aplicado ã análise não
linear de vasos de pressão. Nos dois exemplos apresentados pr£
cisou ce um menor número de iterações e menor tempo total de
CPU para cada nível de carga até o colapsc.
Outras implementações do metoao são possíveis com van
tagens e desvantagens para o desempenho global do algoritmo, e
algumas delas foram mostradas no Cap-tulo IV.
A principal desvantagem do algoritmo BFGS é não pre
servar a característica de banda da matriz de rigidez inicial.
Isto pode se tornar um inconveniente sério para matrizes com
pequenas larguras de banda. Alternativas para a solução deste
problema são as implementações seguidas em (13) e (17) e descri,
tas no Capítulo IV, além de sugeridas em (16), todas às custas
do aumento do tempo de acesso ã memória secundária.Um algoritmo
Quase-Newton eficiente que preserve a e spars idade da matriz in_i
ciai além da positividade e da simetria não foi até o presente
elaborado.
A formulação usada nesta teso conseguirá um desempenho
ainda melhor se usada em problemas de análise não linear loca
lizada em conjunção com técn cas de subestruturaçao. Com estas
técnicas o método BFGS seria aplicado apenas àestrutura não li
neares conseguindo-se uma grande economia c ? memória e preser
vando as demais vantagens do método.
- 78 -
REFERÊNCIAS BIBLIOGRÃFICi S
1. DYM, C.L.; SHAME., I.H Sjlid Mechanics, A Varia-
tional Aproach, MacGraw-Hill, 1973.
2. TAUCHERT, T.R. Ene, gy Principles in Structural Me
chanics, MacGraw-Hill, 1974.
3. HILL, R. The Mathematical Theory of P3 .sticity,
Oxford University Press, 1983.
4. OWEN, D.R.J.; HINTON, E. Finite Elements in Plas
ticity, Pineridge Press Limited, 1980.
5. FEIJÕ, R.A.; TAROCO, E. Introdução a Plasticidade
e sua Formulação Variacional, Métodos Variacionais em Mecâni-
ca dos Sólidos, Vol.2, 1980.
6. VELOSO, D.; GUERREIRO, J.; LOULA.A. Análise Dinâ-
mica Elastoplastica de Tubulações, Anais do 29 Simpósio Brasi
leiro sobre Tubulações c Vasos de Pressão, Salvador, Brasil,
1980.
7. PRAGÜER, W.; HODGE, P.G. Theory of Perfectly Plas
tic Solids, John Wiley & Sons, 1951.
- 79 -
8. MENDELSON, A. Plasticity: Theory and Application,
Mac Millan, 1968.
9: ZIENCKIEWICZ, O.C.; CHEUNGfY.K. The Finite Element
Method in Strutural and Continuum Mechanics, Ma< Graw-Hill,1978.
10. DODDS, R.H.; LOPES, L.A,; PECKNOLD, D.A. Numerical
and soft-ware Requirements fcr General Nonlinear Finite Elf -
roents Analysis, Civil Engineering Studies, university of Illi-
nois, 1978.
11. RICH, T.P. Closed Form Elastic-Plastic Stiffness
Matrix for Axisymetric Finite Elements, Internacional Journal
for Numerical Methods in Engineering, Vol.12, 59-65, 1978.
12. RYU, YEON S.; ARORA; JASFI, S. Review of Nonline
ar FE Methods with Substructures, Journal of Engineering Me-
chanics, Vol.11, No.11, 1985.
13. BATHE, K.J.; CIMENTO, A.P. Some Practical Procedu-
res for the Solution of Nonlinear Finite Elements Equations,
Computer Methods in Applied Mechanics and Engineering, Vol.22,
59-85, 1980.
14. CRISFIELD, M.A. A Fast Incremental/Iterative Solu-
tion Procedure that Handles Snop-through, Computer & Structures,
Vol.13, 55-62, 1981.
15. DENNIS, JOHN E.; SCHNABEL, ROBERT B. Numerical Me-
thods for Unconstrained Optimization and Nonlinear Equations,
Prentice-Hall, 1983.
- 80 -

16. HOROWITZfB.; ARAÚJO, .R. ; CODES, R. A. Um Método
Quase-Newtoniano para Solução âe Sistemas de 5çuaçres não Li-
neares em Elementos Finitos, DEC/UFPE, Publicaçii Interna,
1981.
17. STRANG, G.; MATTHIES, H. The Solution of Nonli -
neai Finite Element Equations, International Journal for Nu-
mer:=al Methods in Engineering, Vol.14, 1613-1626, 1979.
18. CODES, R.A. For .ml acro e Métodos de Solução naAná
lise Não-Linear de Treliças Bspai .ais, Te-;e de Mestrado na
COPPE-UFRJ, 1978.
19. DENNIS, J.E.; wORÉ, J.J. Quase-Nt vton Met hods,Mo-
tivation and Theory, Sian Review, Vol.19, n9 1, Jan.1977.
20. DAVTDON, W.C. Variable Metric for minimization,
Rep. ANL-5990 Rev. Argonne Nation Laboratories, Argonne, Illi-
nois.
21. BROYDEN, C.G. A class of Methods for Solving Non-
linear simultaneoaus equations, Moth. Comp.,19, pp. 577-593,
1965.
22. TURMER, M.J.; DILL, E.H.; MARTIf H.C.; MEL0SH,R.J.
Large Deflection Analisys of Complex Structures Subjected to
Heating and External Loads, J. Aerospace Sci., 27,97-1*6,1960.
- 81 -

APÊNDICE A
DESCRIÇÃO DO PROGRAMA
O Programa foi desenvolvido em linguagem FORTRAN para
o Computador DEC-10 da UFPE. Na figura A-l está o diagrama de
blocos do programa indicando as etapas básicas dos algoritmos
de análise não linear implementado, j programa desenvolvido
bem como a estrutura básica é apresentada na referência (4), pa£
ticularmente no que se refere aos elementos de elastcplastici
dade. As partes relativas ao algoritmo BFGS segue a orientação
da referência (15).
- 82 -
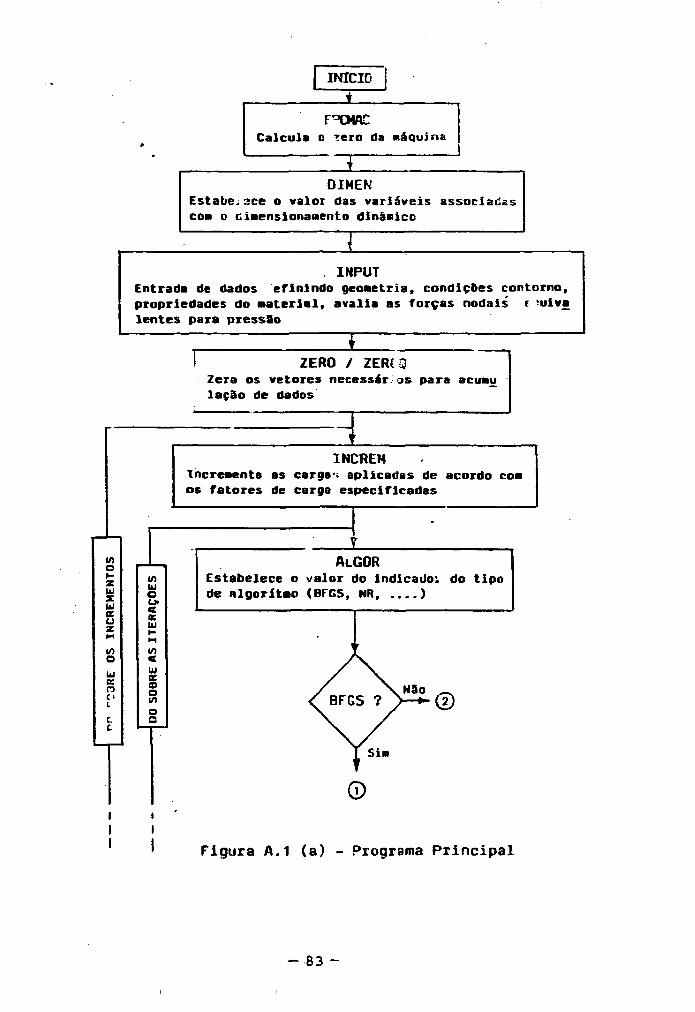
INICIO
J_F°CMAC
Calcula o rero da máquina
4DIMEK
Estabe. see o valor das variáveis associadascoa o ciaensionanento dinâmico
INPUTEntrada de dados efinindo geoaetria, condições contorno,propriedades do Material, avalia as forças nodais t mivalentes para pressSo
±ZERO / ZER(Q
Zera os vetores necessár as para acuatilaçao de dados
INCREMtncreaenta as cargas aplicadas de acordo COMos fatores de carga especificadas
O
(0«UKeoins
ALGOR
Estabelece o valor do indicado; do t ipode nlgoritao (BFGS, NR )
Figura A.1 (a) - Programa Principal
- 8 3 -

NSo
ZERD5TZera a Matriz de rigidez
si»
ISTIFFMonta a «atr iz de rigidezcoa integraçfio numérica
STIFFPMonta a mrtriz de rigidez.con integ- ção explicita
_Toicc
Introduz condições te contorno na Matriz de rigidez
±CHOLDEDecomposição de cholesky da matriz de ripidez
ICCCIntroduz condições de contorno no vetor de cargas
ICCCIntroduz condições de contorno no vetor de cargas
Calcule: , - ? K±BFGS
Obter
CHOLSOLVEResolve o sisteaa de equações lineares Cholesky
¥K 41
RESIOUCalcula o vetor de resíduos: Z\ 1)
NSo CONVERVerifica se o processo convergiu
VSimOUTPUT
Imprinir safoa de resultados
Figura A.1 (b.) - BFGS- 84 -

II II *
I Siir
2ERDSTZera a matriz de rigice:
S i *
ISTIFFMon a a aatriz de rigidezco* integração mmérica
STIFFPHonta a matriz de rigidezCos integração explicita
JIt J
Introduz condições de contorno na Matriz de rigidez
ICCCIntroduz condições de contorno nc vetor de cargas
1SOLVE
Resolve o sistema de equações lineares por Crount
i
RESIDUCalcula o vetor de resíduos: u'k +1
NSc COKVERVerifica se o pr- cesso convergiu
Sin>
OUTPUTImpriair saida de resultados
FIM
Figura A.1 (c ) - NR
- 85 —

APÊNDICE B - MANUAL DE ENTRADA DE DADOS
A- seguir apresentamos um manual de entrada de dados on
de as variáveis possuem o seguinte significado:
MPOIN - Número máximo de nós da estrutura.
MELEM - Número máximo de elementos da estrutura.
MMATS - Numere máximo de materiais da estrutura.
MVFIX - Número máximo de nõs r >s quais um ou mais graus de
liberdade estão restritos.
NPROP - Número de propriedade do mataria!.
MAXLB - Máxima largura de banda.
As variáveis acima definidas são fornecidas através da
subrotina DIMEN, para pern.itir um dimensionamento dinâmico. As
que se seguem são introduzidas pela subrotina IMPUT. e INCREM.
NDOFN - Número de graus de liberdade por nó.
NPOIN - Número cie nõs da estrutura.
NELEM - Número de elementos da estrutura.
NVFIX - Número de nós nos quais um ou mais graus de liberda
de estão restritos.
NNODE - Número de nõs do elemento.
NMATS - Número de materiais da estrutura.
NALGO - Indicador do algoritmo a ser utilizado para resolu
ção do sistema de equações.
NINCS - Número de incrementos de carga.
NSTRE - Número de componentes de tensão independentes.
NCRIT - Indicador do critério de escoamento.
NOFIX - Número do nó restrito.
- 86 -
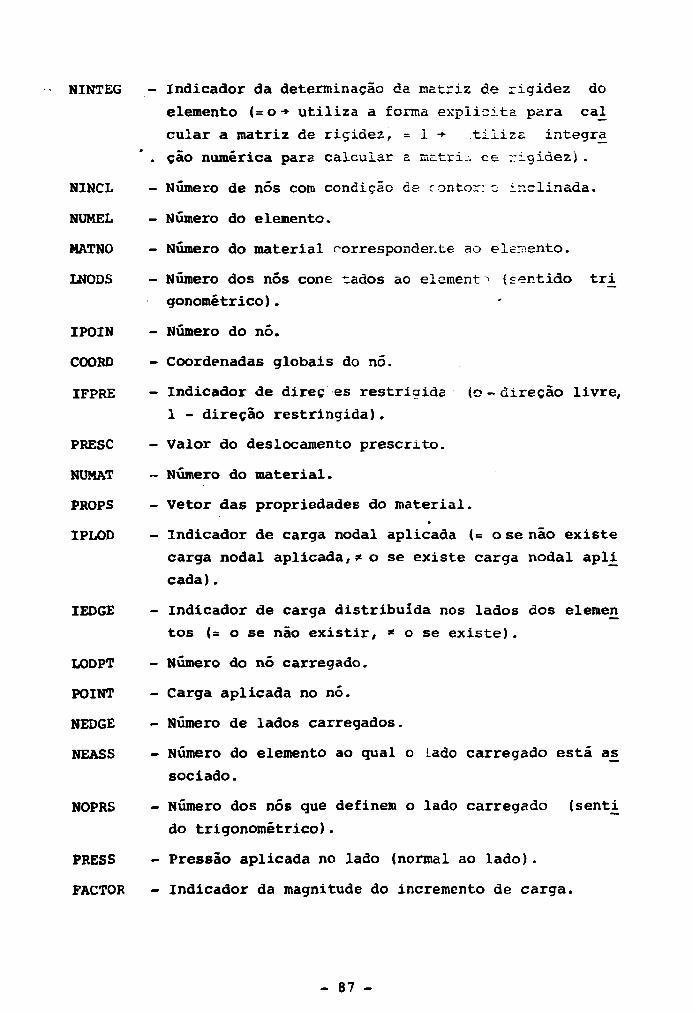
NINTEG - Indicador da determinação da raatriz de rigidez do
elemento (=o-»- utiliza a forma explicita para cal.
cular a matriz de rigidez, = 1 •+• tiliza integra^
. ção numérica para calcular a iae.tri- ce rigidez) .
NINCL - Número de nós com condição tíe contorro inclinada.
NUMEL - Número do elemento.
MATNO - Número do material correspondente ao elemento.
LNODS - Número dos nós cone rados ao element^ (sentido tri.
gonométricô).
- Número do nó.
- Coordenadas globais do nó.
IPOIN
COORD
IFPRE - Indicador de direç es restrigida (o - direção livre,
1 - direção restringida).
PRESC - Valor do deslocamento prescrito.
NUMAT - Número do material.
PROPS - Vetor das propriedades do material.
IPLOD - Indicador de carga nodal aplicada (= o se não existe
carga nodal aplicada,* o se existe carga nodal apli
cada).
IEDGE - Indicador de carga distribuída nos lados dos elemen
tos (= o se não existir, * o se existe).
LODPT - Número do nó carregado.
POINT - Carga aplicada no nó.
NEDGE - Número de lados carregados.
NEASS - Número do elemento ao qual o Lado carregado está as;
soeiado.
NOPRS - Número dos nós que definem o lado carregado (sent_i
do trigonométrico).
PRESS - Pressão aplicada no lado (normal ao lado).
FACTOR - Indicador da magnitude do incremento de carga.
- 87 -

TOLER - Indicador da tolerar cia p< mitida no processo de con
vergência (%).
MI TER ' .- Número máximo de iterações permitidas.
NOÜTP(l) - = 1, imprime apenas os deslocamentos após a 1* ite
ração de cada incre ..ent .
= 3, imprime os deslocai tentos e tensões após a 1?
iteração de cada incremento.
NOUTP(2) - = 1, imprime apenas os deslocamentos finais, após
convergir.
= 3 , imprime deslocamentos e tensões finais, após
convergir.
- 88 -

00
N<? DECARTÕES
1
VARIÁVEIS
NPOIN.NELEM, NVFIX, NNODE,NMATS, NALGO, NINCS, NSTRE,NCRIT, NINTEG, NINCL.
FORMATOS
1115
•
COMENTÁRIOS
NALGO = 1 •+ NRM (Newton-Rapl.son cora a matriz de rigidez% mantidaconstante).
NALGO = 2 •*• NR (Newton-Raphson coro atualização *a matriz de rigidez a cada iteração).
NALGu = 3 + NRM 1 (Newton-Raphson com atualização da matriz derigidez na primeira iteração de cada Incremento) .
NALGO = 4 •*• NRM 2 (Newton-Raphson com atualização da matriz de'çfidez na segunda ite
ração de cada incremento).
NALGO = 5 •*• QN (Quase-Newtc^, .
NCRIT = 1 -• Critério rle Escoamento deTresca.
NCRIT = 2 •* Critério «>_ scodia^nto deVon Mises.
NINTEG = 0 •*• Matriz de rigidez do elemento calc''1^--^ pela forma explicita.
NINTEG = 1 -»• f'~' -••? de rigidez do elemento calculada com inteqração numérica.

V0O
NELEM
NPOIN
NVFIX
NMATS
1
I, MATNO (I), (LNODS (I,J),
J = 1, NNODE)
I, (COORD (I,J), J=1,NDOFN)
I, IFPRE, (PRESC(I,J), J = 1
NDOFN)
I» (PROPS (I,J), J = l NPROP)
IPLOD, IEDGE
515
15, 2F10.3
215, 2F10.3
15, 6F10.3
215
I B Número do elemento.
I = Número do nõ. *
COORD (1,1) = Coordenada na direção RCOORD (1,2) = Coordenada na direção Z
I = Número do nõ restrito.
IFPRE » 01 (o livre na direção R,
1 fixo na direção Z)
= 10 (jL fixo na direção R,
o livre na direção Z)
I = Número do material.
PROPS (1,1) = E, módulo elasticid: .12
PROPS (1,2) = v, . r.ljiente de Poisson
PROPS(1,3) = t, espessura do material
PROPS(1,4) = p, densidade de massa
PROPS(1,5) = Oy, tensão de escoamentouniaxial
PROPS (1,6) = H1, parâmetro de endurecimento
IPLOD * o -»• se existir carga nodal *pliCada
IEDGE * o + se existir carga distribuídanos lados

I
*
1
NEDGE
NINCS
LOPDT, (POINT (I), I = I,
NDOFN)
NEDGE
NEASS, (NOPRS(I) I = 1,2),
PRESS
FACTOR, TOLER, MITER,
NOUT.(I), NOUTP(2)
15, 2F10.3
15
315, F10.3
2F10.5, 315
* 0 número de cartões inbroduzidos é"exa
tamente o número de nós carregados +
1, caso o último nô não esteja carre
gado. 0 último nó sempre deve ser in
troduzido, pois ele determina o último
cartão introduzido.
POINT (1) •+ carga nodal na direção R
POINT(2) •*• carga nodal na direção Z,
para o caso axissimétrico.
Variáveis ±nt_r~*••->-•<• .aves da
subroutine '" REM

APÊNDICE C
LISTAGEM DO PROGRAMA
- 92 -
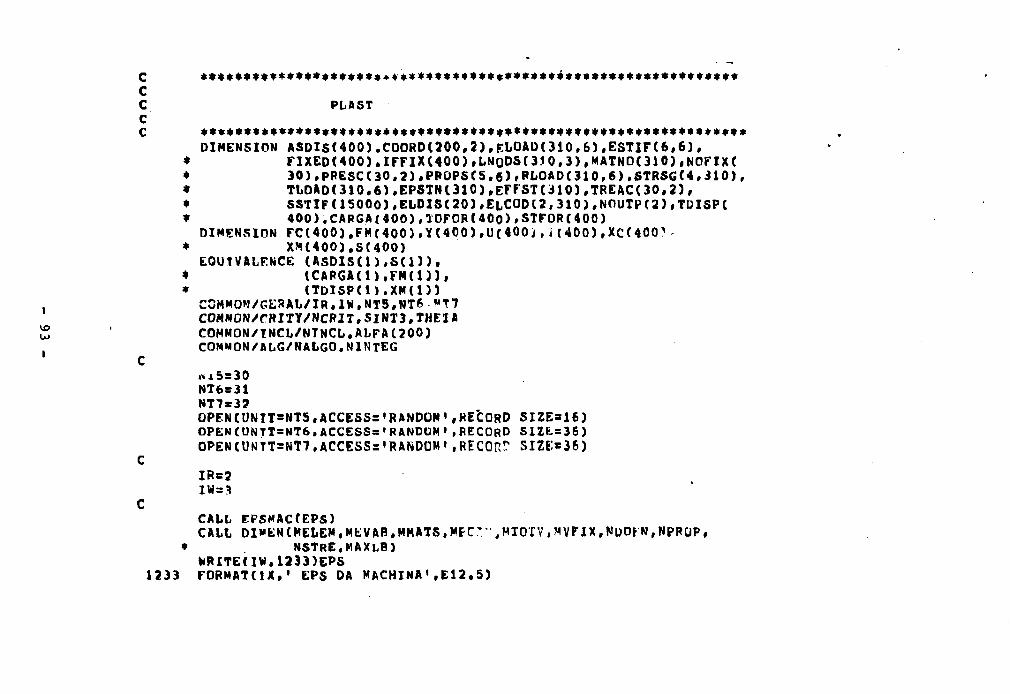
ccccc
IV£>
**************************************************************
PLA5T
***************************************************************DIMENSION ASDIS(400).COORD(200,2),ELOAD(310,6),ESTIF(6,6),
FIXED(400).IFFIX(400).LNQDS(310,3),MATNO(310).NOFIXC3O).PRESC(30,2),PR0PS(S.6)fRLOAD(310,6),STRSG(4,J10),TLOAD(310.6).EPSTN1310),EFFST(310),TREAC(30,2),SSTIF(1S000),ELDIS(20),ELCODC2,310),NOUTP(2).TDISPC400).CARGA 1400),TOFOR(400)>STFOR(400)
DIMENSION FC(400),FMf400).Y(400),U(400j , J ( 400) , XCÍ400 ">X»(400),S(400)
EQUIVALENCE (ASDISC1),S(1)),(CARGA(l),FM(l))i(TDISP(I).XM(I))
COMMON/GERAL/IR,1W,NT5,NT6 W T 7COMMON/CRITY/NCRIT,SINT3,THE1ACOHMON/TNCL/NTNCL.ALFA(200)COMMON/ALG/NALGO.N1NTEG
.^5=30NT6r31NT7*33ÜPFN(UNTT=NTb,ACCESS='RANDÜM',HECORD SIZE=16)OPEN(UNTT=NT6.ACCESSs'RANDOM>.RECORD SlZt=36)0PEN(UNTT=NT7,ACCESS='RAND0M« ,RECOnr SIZE:=36)
1233
CALL EPSMACfEPS)CALL DIMfcNCMELEM,MfcVABfMMATS,WFC~",MTOTV,MVFlX,NUOrN,NPROP,
NSTRE.MAXLB)WRITE(IW.1233)EPSFORMATdX.' EPS DA MACHINA ' ,E12,5)

CALL INPUT(COURD.IFFlX,LNODS,MATNO,MELEM,MEVAB,MMATS,MPOIN,* MVFIX,NAIÇO.NDOFN,NELEM,NP01N,NEVAB,NINCS,NMAT$,* NOFIX,NPROP,N5IRE,NTCIV,NVFIX,PR0PvS,P"l!:srfRll0A0,* MTOTV,NNODE.NSTR1»LB,NINTEG)CALL ZEPO(ELOAD.MELEM,MEVAB,MPUIN,MTUTV,NDOFN.NELEM,NEVAB,
* NSTR1.EPSTN.EFFST,NTOTV.NVFIX.STRSG.TFACT,TLOAD,* TRLACMVFIX.TDISP)
IF(NALGO.EQ.S) CALL ZEROQ(FC,XC,Y.U.T.NTOTV)
DO 100 TINCSsl .NlNCSMUIINCS
TALL INCREMtELOAD.FIXED,Hi,MELEM.MEVBB,MITER.HTOTV.MVFIX,* NDOFN.NEl.EH,NEVAB,NCUTP,NOFIX.MUTV,NVFIX,PRESC,* RLOAQ.TFACT.TL0A0.10LER)
DO 50 IITERsl .MIIERMJsIITER
K«RITE(5.7)M1.M27 FOHMATÍ '
NRITE(IW.S000)M25000 FORMAT(5X.«11ERACAO NUMEKOa',13,//)
CALL ALGUR(FJXED,Ml,M2,KRESL,MTOTV,NALtíO,NTOTV)IF(NALGO.EQ.S) THEN
IF(KRESL.EQ.1)TH£NCALL ZEROSTÍSSTIF.NTOTV.NTOTV.NTOTV)IF(NINTEG.LO.O)THENCALL STIFFP(CDORD,EPSTN,M1,LNODS,
* *ATN0,MEVAB,MMAT5,MP0IN,NT0TV,* NtLEM,NEVAB,NNODE,NSTRE,NSTR1,* PROPS,MELEM,STPSG,SSTIF,LB,MAXLB,* KTOTV)
ELStCALL IsTIFF(COOFC._.:TN,Ml,LNODS,
* MATN0,HEVAB,MMAT5,MP0IN,NT0TV,* NfcLEM,NEVAB,NNOUE,NSTRE,NSTR1,* PROPS,MELEM,STRSG,SSTIF»LC.MAXLB,

*
**
12
14
ELSE
WTOTV)END IFCALL GlCCCSSTIF.NOrTX,IFFIX,MVFlX,
NTOTV #NVF1X,NDOFN.NTOTV)CALL CHOLDECNTOTV.SSTIF.EPS.NTOTV)CALL ICCCC£LOAD,FM,LNOD5,NOFIX,
IfFlX,MVFIX,MTOTV,NVFIX,NDOFN,NELEM,NNODE,NTOTV,MELEM,MEVAB)
CALL ICCC(tLOAD,FM#LNODS,NüFIX,IFF1X,MVFIX,NTOTV,NVFIX,NDOFN,NtLEM,NNODE,NTOTV,MELEM,MEVAB}
DO 12 I«1,NTOTVy(I)s-£FM(I)-FC(I))
CONTINUECALL BFGS(SSTIF,EPS.S,y.U.T,NTOTV,
END IFCALL CHOLSO(NTOTV,FM,S5TIF,S,NTOTV)DO 14 I = 1,NT(JTV
XM(I)sXC(I)+S(I)CALL n-SlDu(S,COORD,eFFSX,ELC^,
FACTO,M2.LNÜDS.LPROP.MATNO,MELEM,MMAIS,MpOlN#MIOTV,NDDFN,NKLtM,NEVAB,NNODF.,NsTRl, PROPS, NSTkc,uiRSG,XM,
CALL CONVER(ELUAD,M2,LNOD5,KiELeM,MEVAB,MTOIV,NCHEK,NDOFN,NfcLEM,;; . ,NNODE,NTOTVfPvALU,STFüR,TLOftD,TUrüR,TüLE.R,NOFIX,IFFIX,MVFIX,NVFIX)
ir Í(II1ER.EO.1).AND.(NOL1TPC1).GT,O))CALL 0UXPUT(M2,MELr" "TOTV,HVFIX,
NELEM,NOFIX.NOUTP,NPOIN,NVFIX,STRSti,XM,TREAC,EPSTN,NCHE,K)
DO 16

CONTINUEIF(NCHEK.EQ.O)GO TO 74
ELSEIFLAG*2IF(KRESL.EQ.1)THEN
CALL ZEPOST(SSTIF.MTOTV,NTOTV,LB)1F(NINTEG.EO.O)THENCALL STIFFP(COO*D.EPSTN.M1,LNODS,
* *ATN0,MEVAB,MMAT8,MP0IN,MT0TV,* NELEM,NEVAB,NNODE,NSTRE,NSTH1,* PROpS,MfcLb.H#STRSG,SSTIF,LB#MAXLB,* NTOTV)
ELSECALL ISTIFF(COORD,EPSTN,ML,LNOOS,
* NELEM!NEVABÍNNOÜE',NSTRE,'NSTRIÍ* PROPS,MELEM,5TRSG,SSTIF,LB,MAXLB,• NTOTV)
END IFCALL IcC(SSTIF,NOFIX,lFPlX,LB,MVFir,
• MTOTV,NVHX,NDOFN)END IF
CALL' ""CCtELOAD,CARGA,LüüDS,NOFIX,• IFFlX,MVFIX,MTnTV.NVFIX,NDOFN,* NELEM#NNOUE,NTOii- ,MELEM,MEVAB)
CALL SOLVECSSTIF,CARGA,TJB.NTOTV,• FTOTV,IFLAG)
DO 30 1*1,NTOTV
30 TD25PCl)=TDISP(I)+ASDlStI)CALL RE.S1DU(ASDIS.COORD,EFFST.ELOAU,
* FACTO,M2,LNUDS,LPROP,NATNO,MELEM.* MMAIS,MpOIN,MTOTV,NDOíN,NEL£M,NKVAB,* NNHDE.NSTRI,PROPS,NSTRÊ.STRSG,TDISP,

SO
100
EPSTN,ELD1S,ELCUD,NI0TV)CÜLL "-'VEpttLüAü.HS.LNODS,MELEM,HEVAB,
HIOIV,NCHt;K,NDOFN,Nfc;Lfc;M,NEVAB,NNODE,NIOTV,PvALU,STFOR,TLGAD,TOFUR,TOLER,NOFlXjlFFIXfMVTiX.NVFlXjIF (ÍÍITER. EQ.i). AND. (NOUTPO ) .GT.O) JCALL OUTPUTCM2,MELEM,MTOTV,MVFIX,
NELrM.NOFIX,NOUTP,NPOIN.NVFIX,STRSG,XDISP.TRtAC.EPSTN,iJCHEK)
IF(hCHEK.EO.O)GO TO 74END IF
CONTINUEIF(NAtt;n.EQ."2)G0 TO 74STOPCONTINÜFCALT. OUTPUKM2.MELEM.HTOTV,HVFlX,NF.LEffNOFlX,NUUTP,WPOIN,NVFIX,
STRSG.TDISP.TREACEPSTN.NCHEK)CONTINUFSTOPEND

SUBROUTINE DlMKrUMELE^U:VAB,MMAlS,MPOIN,MTOTV,MVFlX,NDOFN,• NPHUP,NSTKE,KAXLB)
CCC . FAR.A FUKiJECKK AS VARIÁVEIS ASSOCIADAS COM O DJMENSIONA-C wfcMlo nitiA'-IICU
cc * * * * * * ^^******^*** ********* *******^********* ii***^******** ***$tn
KPROFsb
RF.TLIHNK ••; u

SUHRUUTIUK IiiPUT(CUUpD.IFFlXfLN0D5,MAIN0,MEl.f:MrMEVABrMMATS,* MPOlNtHVFJX,NALGG,Nl>OFN,Nf:LEM,Nt>QlN,NEVAB,• NlNCS.NMATS,NOFIX,fiPKUP,NSTRC,NTOTV,NVFIX,• PKOpS.PRESC,KLOAD,MTOrv,NNOl)E,NSTR.i,LB,NINTtG)
Cc v*•*•**••*•***•*••**•**•••••***•**••*•*••••••**••*•****•**•*••cC ***t>HO(;RAMA PARAC .LFR PAHfUETROS DE CONTHOLEC .LFR fc-LfcMENTOS K CONECCUESC .LFR COORDENADAS NODAISC .LFR RtSTRlCOtS E CONDICCES DF CONTORNOC . l,KK WROPklEDADCS DCS MATERIAISC .LTK TIPO DE CARREGAMENTO,CARGAS NODA1S E DISTRIBUÍDASC
******************************************************COüRO(t-)PUlN»2), tFFIX(K10TV)»LNUDS(Mf;LEM,3),MATNDC
* ííELF.,O , HUF lX(MVFlX) , PRtSCC MVF IX , NDOFN) , PRn"^ (MMATS ,• .iFfvOr»1» ELC0LU2.3),NCFFÈ»C?),RL0AD(Mlr;LEM,6),P01NI(2),• K (b , 6 )
DT.-IKíSIOtí KK(b)COMÍU1N' /TKKAL/IR . IW , MT5 » NT6 , HI 7
CC ***r.r.R FTMt-Hl-'iR nS PAFAMtTi<OS CtC
KKAPdK.gOOlfiPfllM.WtLFM.KVflX^^ODR, N^ATS , NALGH, MNCS , NSTRK ,* ;iCliIT,tilNTfcG,HINCI.
900
.VTOTVsi-JPi)i;i*rjD()FN
]F(r>INCI,.Gl.ü) CALL INCLbt MNCL. IR , IW)ft'RITSt1w,901)NPPIN,NELEM,NVF1X,NNODE,NMAIS,NEVAB,NALGO,NINCE,
* NSTRE,NCRIT,NIN1E(,,MNCL901 FOHHATÍ// BH NPOIK =,I4,«iX,BH NELEM S , H , 4 X , 8 H MVFlX s,l4,4X,

* RH NfJODK s , I 4 , 4 X . 0 H MMA'JS s , j 4 , / / , B H MEVAÜ s , I 4 , 4 X ,* Rh i.fcLGO = . 1 4 , 4 X . 8 H N I N C 5 s , l 4 , 4 X , f l H N S T R E s l 4 , 4 X .* 8r i Í . C R I T s . I 4 , / / , é H h J M t Ü 5 , I 4 , « H N I N C L s , I 4 )
CC • • • U P E lMPKlr-!lR ELEMENTÜS.TIKC Do MATERIAL,CUNECCOES***C
902 H W A T ( / / 9 h ELKMENTO, 3X , 8HMATERIAL ,6X , 14HNUMER0 DOS NOS)
fc-L. 1NUDE) , INOUE»1 ,NNO* DE)
Ff)RMAT(SI5)
904 H j R M ü T ( I X , l ! > , 1 9 , b X , 3 l 5 )C CALCULA» LAK*j!Jr(A DF HANDA LPC
0 0 COOK K ( J ) a
K K ( * ) = a » L-MDllt- ( I EbEH , J.)DO «01 T=l,6K=KK(IJUÜ (Í02 ,1 = 1,0L=KK ( , J ) - K H
802801800 COMTU'UF
ccC * * *Z t :PA U Vbl'OR ÜE COORDENADAS ANTFS DEC
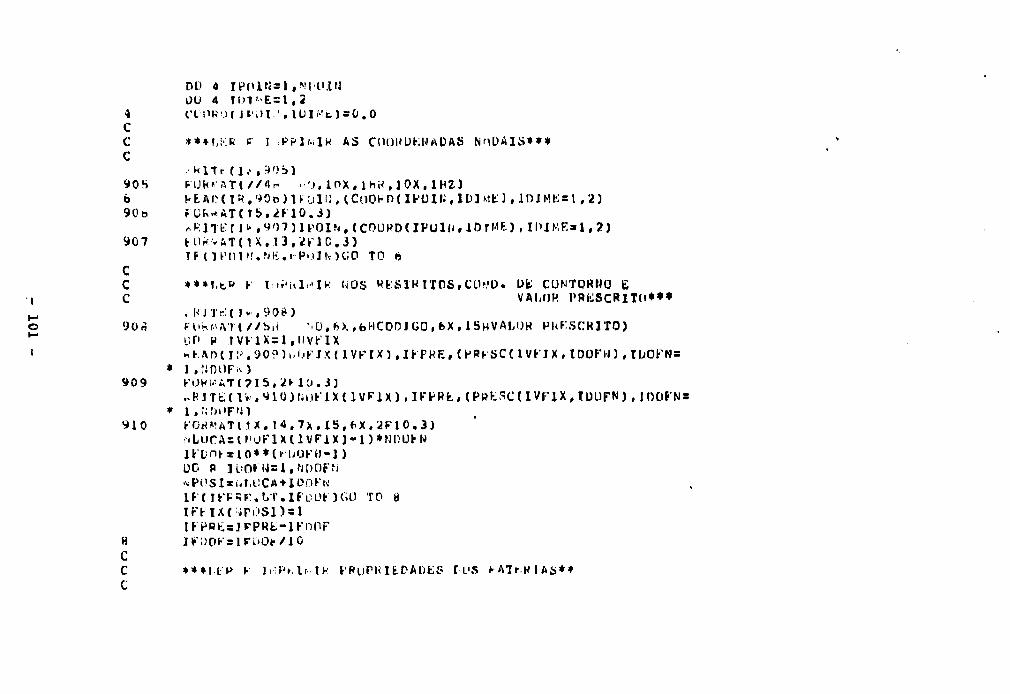
DD 4 IP01Hsi#*!K l . l»OÜ 4 TDV"E=l , 2
4 CtMUíOC JI-1 i 1T . ' . 1 U 1 I V C ) S O . O
CC •**?,!•• . ! ! e I PP1 r.ilR AS COOWUKNAUASC
^ l T r ( 1 , - , Í O b )9 0 S p - l J H ' - - A T » / / 4 n i••'.), 1 O X , l h i - í . l O X . l H Z )b V l AT ( IH . 9 O D ) 1 FUI I!, (CuOh D (IPUIN , 1D ] Mt J , 1D J MKs l , 2 )90b füK.«AT(Tb.mO.J)
9 0 7 H i r - i T ( U . l 3 , Z K l C . 3 )TF ( I t ' l l l M . N e . r ' P u l h)t iO TO ft
CC * * * r , t » !•• l i . ? i a ^ I t . : NOS WfcSIMTClSfCUvD. Ut CUNTOHHO E
, C VAI.ORM .• h' J I'r: C 1 - . 9 0 » )o «JOB fl»Kr.iATl//í>ii ' iü.feXífeHCDDJGCfcX.lSHVALOH^ Ud H I V K i X s l . N V K I X
909 KüWi'-AT(?15,2M'J.3). -PITE (IV . > í l ü ) f a . i b i X ( l V F l X ) , I F l i B t # ( P » h ; S C ( I V r j X , I Ü U F N ) , ] l ) O F N :
• l f i D U F N )910 ,
1 F ( I K P Í ? F . I * T . I F 0 L > F ) G Ü TD D
8 IFiJOKslFL'Of/l 0CC » » * | t k h l r i f r l r l k P P U P K I E . D A D E S t U S
C
t f l * , 9 1 1 )911 KURNftT(//7H tJUMEktl.hX.ilHPHOtRlbDAofcS DO MATERIAL, h., I' iT »
* 10Hp.SlG>.AV.h. / )DO 10 I"A'J'i;sl.nMATS•^ Apt lK.'n;<)i'U'.«AT. lPPOPS(Nl^AI,lPRr»P),lPROP=l .NPRUP)
91210913 FOKrATJJX.a4,3x.6E10.4JCC ***7t\Khu n V'KJ'nH DE CAHRAS NUDATS***C
DU 1/ I f- uCi - 1 » nb:i.fcr;00 1 / IPVA-* = 1 , Í ! Í .VAB
12 «LUJÍLM IF l .E ; . IEVAÜ)=0 .0CC •*U.fcU E 1HPH1MIH PARÂMETROS OUE C P M T R Ü L A M ü TIPO DEC CARREGAMKMTO***
914.•iR 1 Tt; ( 1'.-, 91 b J J pUüU. 1 fcDGE
915 F U R » I Í V T ( / / . 7 H lPbOU= , 13 , 3X ,6H1 hDGfc = , ICC •*»t.ER K IMPUlh l * US PONTOS NOUA.ISC
l F ( l P | . i i p . c ! J . O ) t ; U TO 500»«rtTTL( 1 . , 9 1 fa)
916 KORM4TI//, Ui) NO C A R R E G A D U , bX , 9HUI»fc I.AÜ R , 3X , 9MniRECA0 Z)14
917A R I T Ü Í l l - . ' , 9 m i . 0 D P T , ( P O l M ' l i n u F I - i ) , InOI-Msl , ? )
918 F O R M A T ( 5 X . l 5 . a x ! 2 F 1 0 . 3 JCC «••BSv'idriAR A CARGA NODAL I-UNIUAL COM UM KI.KMF.UTD***C
1)0 1o I e LE" ' = 1 .ri

DO 16 JNUDK=1NLÜCA=1ABS(LNUOS(1£LRM,1NODE)
16 IF(L0nPT,fO.MLOCA)G0 TO 1818 DO 70 JPQFM=1.2
NPÜS1=(20 XLOAD
lF(LOnPT,Lf.MPOlM)GO TU 14500 COHTINl'F
1F(ILDGF.EQ,0)GO TO 600CC ***l,hP E TMPFIMIR NUMERO TOTAL DE LADOS CARREGADOS***C
919 FORMAT(IS]wRITfcflw,920)NFDUE
920 FOP-1AT(//"28H «UMtRÜ DE LADOS CARRF.GADOSs, 15, //)CC ***U:R F. IMPRIMIR CARGA DISTRIBUÍDA NOS LADOS***Q
N0DFG=2921 FUtH<AT(5X.43HM5TA DOS LAÜUS CARRERAUÜS ti CARCA APLICAÜA,/ / )CC * * *PARi CADA LADO CARREGADO***C
DO ?4 IFOGE = 1 .NElíGECC * * * I L P F IMPRIMIR O LADO CAPKtGADO fc À CARGA APLICADA***
RKA(HlR.c>22)NeAS5. CNOPRS(IUPEG) ,10nfcHi=l .NOOEG) rPRF.SS922 FU«MAT{3I5,F1O.3)
WRITt>(lW,923)NtA5S.(NüPPS(I0DFC;),If)Ut.G=l,N0DKG),PRF;SS923 FÜRMATdOH ELE«E,NT[:)=.I3.3X,32HPL1NToS NODAIS DO LADO CARREGADO*,
* lã . 1 »4E . T5. 3X , BHPRL6SA0= . F X0. 3 , / / JCC •**CALCl'LO DAS COORDENADAS DOS NOS Dü LADO DO ELEMENTO

C CARREUAIH)***C
DD •)>
DO 7i iniMt=1.222 f.LCOUr iniMK.IODEOsCoORDdKOüE, I D I M K )CC •***C'A?,C"LO ÜA3 CUMPOUEriTES Dfc. CAHGAS NHDAJS KOUIVA|,KNTfcS***c
CALL rii«::P(r4EASs#tLCQD. PRESS, HNUDfc , l.NODS , NQPHS , RLl) AR# MKLKM,
CC ***FÜCHEVEK AS CARGAS NODAIS PARA CAÜA ELEMENTO***C24600
K I T E ( I , 9 2 ]924 FÜHMA1'{5X.4OH FOftCAS MUDAIS TD1A1S PAHA CADA
H 5 C R }1)0 20 IFLEH=l,NfcLEM
26 «RlTEf IW,925)1 EI.LH, (R1.0ADÍIELEH , lEvAH) , IEVAH = 1 ,NKVAB)925 KüRi'AT(lX,l5,bX,btl2.4,/)
IKMMCI..GT.0) THENDO 40 IEljEhsl.WELEMCALL IfJCl,O(R.IELEP,LNODS,i»ttE:H»NNODE,KONT}iKCKOMT.GT.O) CALL 1 tiCh J IRLOA»» MÜLEH , IELEM , R )
40 C 0 l l ) kKIU! IF
SUHROUTTNE CNEp(NEASS.ELCOl), PRESS. NNODfc.LNODS.NOPRS.RLOAD, MELEM,• NDUEU.NDOFN)
Cc #•***••••*•*•*•*•*•#•••*•••••*•*••**•**••#**••••*•*#•*•*•*••*••*CC ***k'POC;RAHA PARAC .CBLCUL.AR AS COMPUNENTES DAS CAHGAS N Ü D A I S EQUIVALENTESC .ASSOCIAR A5 CARGAS NODAI5 KQuIVALENTES CüM UM ELEMENTOCC ******•**••****•**•**»*$****•****•**•********••***•***•***•****
DlMFNSinN £^000(2,3).LNOÜStMELt^,3).NOPP5(23,PLOAD(MELEM,6),• PRCOM(2).PZCOM(2)
PI=4.*ATAN(1.0)CC ***rAT,CULO DAS COMPONENTES DAS CARf.AS NODAIS EQUIVALENTES***
I CM ZPOSI=t?COn(2.2)-ELCOD(2.1)o RP0Sl = KI,cnü(l,2]-ELCüDtl .1)"* .1 ) + ELCÜD( 1,2)
.tJ+2*ELCOD(1,2)PRCOHf1)=+PI*PRESS*ZP0SI*RR0SI/3P Z C O M Í I ) = - P I * P R E S S * R P O S J * R R O S I / 3PRCPM(2!s+P!*PRES5*ZPOSI*ZROSI/3
cC ***ASSOriA AS CARGAS NOÜAIS tOUIVALENTKS COM UM ELEMENTÜ***c
DO ? TNnDF=l,NNODENLQCA=lAHS(LwODS(NEASS,IMODE))IFtNhrCA.EQ.NUPRStUlGO TO 4
2 COWTlMUr4 JNUnEsIMUnEl + KODfc'G-l
KtMJNTsOUO f- KM"l>E=IiKmE,JWODElFíKMfiDF.E0.4)KM0DE=lKUUVTsKnUNT+1

I
o
I
-l)*ND0FN+2
CONTINUAUETUPN

SUBROUTINE ZERO(KLÜAD.MELEM,MEVAB.HPOIM.MTUTV.NDOFN.NBLEM,NEVAB,• NSIRl,EPSTN,EFFSI,NTÜTV,NVFIX,STRSG,TFACT,TLOAD.* TRKAC.MVFIX,TDJSP)
CC *************************************************************cC ***PROGRAHAC .PAHA ZERAR VAR.IUS VETORESC
c *************************************************************DIMENSION ELOAD(MELEM,MEVAB),STFSG(4,MELEM),TDISPCMTOTV),
* TbOAIJ(KEl.EM,MEVAb),THEACfMVFlX,2),EPSTNCMELEM),• KFFST(MELEM)
TFAC'fsO.OPO "?O IKLEM=1 , MELEMDO 30 IPVAD=1,NEVABELUAD(IFLEh,IEVAU)=0.0
30 TliOAOf IEL£ft,IEVAH)=0.00Ü 40 ITOTV=1.UTUTV
40 TOISPtITOTV)sO.ODÜ 50 IVFIXsl,fjVFIXDO 50 inüFi\i = t,NDOFN
50 TRLAC{IVFTX,IOUKN)=0.0DO 60 lFLt-;H=l.NELEM
DO fO ISTR1=1,NSTR160 STRSGdSTRl.IELEMjsO.O
RETURNt'.rif)

SUBPÜUTTUE IUCREMtELOAD.FIXED, HlvCS.MfcLEM.MEVAB.MITER,MTOTV,* MVFIX.NDÜFN.NELEM,NEVAB,NOUTP,NÜF1X,NTOTV,* NVFIX.PRtSC,Rl.üAD,TFACT.TLUAÜ,TOLF.R)
CC t************************************************************cC ***PRPGRAMAC .PaRA I Í J C R E N E N T A R A CARGA APLICADACC *************************************************************
cDlHFlíSIflh ELOAíX MELEM, HEVAB) ,FIXED(MTOTV J ,
* íJOHX(MVFIX) ,NOUTP(2) ,FREvSC(MVFlX,NDOFN) ,* rtLOADfKRLEM.MEVAB),TLCAD(MfciLEM,HKVAH)
COf'!WüN/r,ERAL/lR,IW,NT5,NT6,NT7.vHJT&f IW.9OO)HNCS
1 900 FURMATC5X.16H INCREMENTO HUMERü,15, / / )g V.RlTtf 5 .940)oo 940 FÜKMATC IliTRODUZIR FACTOP , TüLER ,MTTER , NOUTP ( 1 ) , N0UTPÍ2 ) = ? ' ), REAn(TH.95ü)KACTU.TaLER.M3TE.H,NÜUTp(l) ,NÜUTPl2)
9bO FORMAT(?F10.J.3I5)TFArT=TKACT+FACTOnRITEfTW,96ODTFACT,TOLER,MlTER,NOUTP(13,NOUTPC2)
960 F0RK"AT(!?X.16H KAIOR DE CARGA= .1-10 . «5 , 5X , 21H TOLERÂNCIA DE CONVER* 7HGKUCI* = »F10.5,5X,26H NUMfcRO MAX* l)t INTERACOES= , 15, / / , &X , 5HPARAH* 'ETRÜ DF: RAIDA IN ICIAL» ' , I5 ,5X,2 feH PARÂMETRO DE SAÍDA FINAL»,15/ )
DO RODO 60
80 TL0ADfIFLEM,IiíVAH)=TLOADCItLk;M,It.VAB}*Rl,UAD(IE:LEM,IEVAB)*FACT0CC ***Al>líf:SEMTA DADOS FIXOS NA FORPA DE VETUR***C
DO 100 TTOTVsl.NlOTV100 FIXEüf1TUTV)=O.O
DO 1 in TVFIXsl.NVFIX

O
[JL.ÜCA=(WUFIX(IUKIX)-1i)0 UO
H o CCIIMTIHUF:RETUHM

SUBROUTINE Al-GOR(FIXED. I INCS, 11TE.R .XRESL, MTUTV, NALGO, NTOTV)CC ^0^4*t*9********************************************************cC ***PRfifiRAMAC ,WBKA ESTABELECER O ALGURITIMa OK SOLUCAOCC ^Tnm**m******w************************************************
cDIMFMSION FIXEDfHTUTV)IF(NAI,GO.EQ.l.ANO.llNCS.EO.i.AND.IrTER.F.Q.l)KRESLsllF(NALGO.EQ.2)KRESL=iIF(NAl.Gn.EQ.3.ANU.I3TER.EO.IF(NAI.c;n.FQ.4.AND.IlNCS.EO.IF(NAfCO.tG.4.AND.IiTFR.KO.XF(NAf,GO.EQ.S.AND.IlNCS.EQ.
| IF(IITER.Eü.l)RETURN0 DO 100 iTOTVsi.NTOTV1 FIXED(IT0TV)=0.0
100 CUNTIMUF

cc
Sl.iBHOUTPJK ÜEF C ( l ) . X C < l ) . Y ( l ) . U C l ) , T ( l l
DO 1 0 0 1 = 1 .
c
cc
c
c
cc# • •
cccccc
1(11=0100 COf'Tl i .
u • • «i* , i f»Kr x LI W r:
KM?
SUHKDUDIMEMS
Uij 100DO ](H>
100 SST1» IKETURü
En D
* * W » l
* 4 * p 1
I'E
T l M t '/.KWIlSTtSSTlF , M . M , N 2 )7(IM S ü T I F ( M . l )
1 = 1.MJsl.N2
1 .. l)=0.
*
JDTIfJt: UlCC(SSTlF,NOílX(IhFIX,MVHX,MT0TV,NVFIX,NüüFN,NI0TV)fffT*TTT*ÍT#T'*¥™T¥T™TTTTfTTflpT'T"T™f¥ífff#fff»^*T"fffffTf
íUCFfA 'ft.PAHA I'JTHUOUZlP AS CnWi:jC(jF..s Ut CONTORNO NA MATRI2 UK
WIGIDfcZ. HA tSTRUTUPA
t * * * * * 4 * 4 4 * * * * * * * 4 * 4 4 4 * 4 4 * » 4 4 4 * + * 4 4 * 4 4 * * * 4 * * * * * * * * * * * 4 * * 4 »

DIMENSION SSTIF(NTOTV,1 ) ,^OHX<MVFI*) , IFFIX(NTOTV)DO SOO N=l.UVFIXI=KOFIX(N)NRO*R3f I-l)*NiiUFNDO 490 Msl.MDOFN^untiiDwkiuni.inA 1
CONTINUERETURN
SURHDUTINE 1,TSULV(M.Y,L,X,N)C **************************************************************CC ***HPOnRAMAC .PAHA RESOLVER L * X=Y,FAFA XC (Al.GClRTTMU A3.2.3H(LTSOLVE) .L1VRO DO UfcNNlS,PAG 309,AP.A)CC **************************************************************
DIMKMSION Y(M).L(M,l)fX(MJRfcAL LX(N)=YfN)/L(N.N)I F f f i . E O . l J RETURNI = MDO 2 Ks l .N-11=1-1SUW = 0 .
1 CONTTNUtX(T)a(Y(T)-SUM)/L(I.I)
2 CONTINUEPETÜPNENDSUBROUTINE CHOLSOLVECH,G»L,S,N)
C *************************************************************CC ***PRCJGRAMAC .PARA «EsOLVER O SISTEMA CE F0UACUE5(METUDü DF CHOLESKY)C TC CLt)S=-G,PARASC ULGORITIMU A3.2.3CCHOIS(3LVE).LIVPU DO DENNIS.PAG 307,AP.A)C

«««ft********************************************************DIMENSION b ( M , l ) , t i ( M ) , S ( M )HEAL LCAf.b L R O L V E ( M . G , 1 . , S . N )CAf.L L T S U L V t C M . S . L . S . N )
ENPSUBROUTINE .
Q ***** **********************•••«»•*••**••***••«••*•**•*****•*•*•CC ***PROGKAMAC .PAHA EFKTUAH A DECOMPOSIÇÃO DA MATRIZ DE RIGIDEZ (METO-C Dü DF CHOLESKY)C ÍALíJORITIMO Ab.5.2fCHOLDECOMP).LlVRU DO DENNIS, PAG. 318 , AP. A )Cç * * * • * * * • • * * • * • * • * • * * * * • * * * * * • • * • • * • • • • * • * * * • • * * * • • * * * • * * * * • • • • •
DIMEWSTON L(M.l)COitMÜN/^ERAL/IR. IW.NT5.NT6,NT7
RKiL LCC * * * K T A P A 1 . 2CcC * * * k . T A P A S 3 . 4C
DO 4 J s i . W1 1 = J - 1SUM=0.DO 4 1 1 = 1 . 1 1
41 CüiMTTNUE
DQ 43 T=«.U.NSUM=O.DU 4 3 1 K = 1 . I 1
SUMsSUH+lJ(T,K)*L(J.K)431 CONTINUE
L I T . , J ) = L ( J . J ) - . S U «43 CONTlIiUK
IF ÍL, (J .Ü) .LE.ETA) THENWRJTE(Ifc.bb5) J.L(J.J)
bbS FÜRMATC/.' L(J.J) NAO PnSlTI VÜ. >]• ' , 15, • LJJ= • ,Ei2.5)STOP
t H D T rL(J.vl)=fiQRT(L(J,J))no 46 r=.Jl.HL ( T . J ) s b C l . J ) / L ( J , J )
46 CUHTIMtlE4 CONTTNUK
HKTUPM
SU&RPUTTMf. OHUPDA(N,U.V,M,ETA,MM)CCC •••PROGRAMAC .PARA ATUALIZAR A MATRIZ DECnHPASTAC (AT.ViílRiTIhn A3.4.1.(ORUPDATE),LlVpO PU DFHNIS.PAG 311fAp.A)CC **t**^ * * * * * * * * * * * * * * * * * * * * * * * * * * * * * * ***********************ii*^
U(l),VC1).M(MH.l)RKAL M
CcC •**fcTAPA 1.2C
UTK.LF.1J «U TÜ 2IFÍAP;Í(U(K)).(;T.ETA) Gn TO

60 TO 12 COMTTNUK
cC * * * £ T A P A 3C
IsKno j J=I.K-II=T-1CALL v j a C R O T C N . I , U ( I ) . - U l I +
U ( I ) s * B S C U ( I + l ) )KbSEU( l ) rS0RT(U( I ) *U ( l )+U( I + lEiin I F
3 CONTTfjnt;CC ***tTAPA -1,5C
DO 1 J s l i H
4 CONTINUEDO b J = l . K - iCAT.L
5 COWTINUK
SURHOUTINE JACROT(N.I,A,B,W,E1A#MM)Q 4 4* .t 4 t*****-f *************************************************CC J.LGÜRITIMO A 3 . 4 . 1 A (JACROTATK), L i VHO DC) DENNIS,PAG312 'CC ^^t***********************************************************
DlMfcNSIOM HCMH. l )HfcftL M

C •**k,TAPA 1C
1Kr AKS f A).LE.fcTA)THENCsO.OS=l.S=SIGN(S.B)
C=A/DKM
KM D TKC
c
ÜU 2 Ü B I . N
Y=M(T.,1)
»i(T.J)=C*Y-S*W
CONTINUE
tunSUBROUTINE BFGS(L.ETA,S,V,U,T,N,TnL.»XM,XC#GM,GC,M)
ccCC .PAHA ATUALIZAR A MATRIZ CE R I Ü I Ü E Z DA ESTRUTURAÍBFGS)C «-AT,r,nKTT»«U A9.4.2 (BFGSKAC) ,LIVRO DU DENNIS,PAG. 356,AP. A)C
l)IMtwSTUN L(M.1).S(1),Y(1)»U(1),T(1),XM(1),XC(1),GH(1),GC(1)RKRL Li-OGJrAr. S K I P
CC ETAPAS 1.2.3

TKMPlsQ.SNsO.YNsU,DO 1C 1=1.N
:i)*¥(i)
10 CUM
SKaSORT(Sii)PsSORTfEIA)*SM«YN
1
H"
no
1
ccc
41
42
***ETAPAS 4 ( 4 . 1 . 4 . 2 . 4 . 3 , 4 . 5 , 4 . 6 )
IFfTEMPI,GE.PJTHENno 41 J = I , NT(I)=O.DO 41 JsI.NTdJsTÍD+tCJíD^Sdl)TtMPZrO.ÜÜ 42 1=1,NTtMP2=TEMP2*T(I)*T(I)ALFA=80KT(ltMt'l/TtMp2)SKlPs.TRUE.00 46 1=1,NTEHP3=0.DO 461 J = 1 , I
461
IF(ADS(Y(I)-TEMP3).f;E;.(T0L«AMAXl(ABGrlABGM)))• SKIPS.FALSE.
U(I)sym-ALFA»TEMPl46 CONTINUEC

C *•* ETAPA 4.7C
IFt .NOT.SK It') THEN
DO 472 1=1,N
00 473 1=2,NDO 4731 J=1,I-1l,(J.I)sL(T.J)L(I,J)=O.
4731 CONTINUE473 CONTINUE
CALL QHUPDA(N.T,U,L,KTA,M)DO 475 1 = 2,NDO 4751 Jsl.I-1L(I.J)=L(v),I)COUTINUECONTINUE
4751475
fcMDENn
TFTF
RKTURiJEMI>SUBROUTINC QBiGK3D(KSlIF,lELEK,LN0DSfHTUTV,SSlIF,MEVABiMELEM,
* NELEM.NTUTV)C **t^.*4********************************************************CC •••PPDCRAMAC .PAHA hOHTAR A MATRIZ DE B I G T D ^ Z DA ESTRUTURA.[CHEIA)Ccc *************************************************************
COMMON/GERAL/IR.1W.NIS.NT6.NT7IUNENSTON KK(fe),E5TIF(MfcVAB,f»bVAB) , L,NÜDS( MKLEM , 3 ) , S5TIF ( NTOTV , 1 )KKfi)=

too
KKr41=2*LN0DS(IKLfc:M.2)KKf51s?*LN0DS(IEl.tM.3)-lM<r6)=?*L[«'ODSCIfcLEM,3)DO 400 1=1.0
DO 300 J=l,fcL=KKfJ)SSTIF(K.L)sSSTlF(K,L)tEST]F(l,J)
300 CONT1N1JK400 CONTINUE
I F f IFLPM.IIE.NEI.KMJGO TO 7 0 0C W H I T F ( I * , b O 0 )CbOO FURMHTP Mft'lRlZ DK RIGIDEZ DA EoTRUlURA'JC \ N H l T F ( T W . 6 0 0 ) ( ( S S T I F ( I . J ) . J = l » N T O r V ) , 1 = 1 .NTOTV)C600 H I H M A i r 8 ( f c l 4 . 3 . 5 X ) . / )700 RE.TURN
cSUPROUTIi«IE tPSMAC(LPS)EPS=1.
10 KKS=FPS/2.IFn i . - f fMSJ.LE. l . JGQ TO 1 bGO TO 10
15 LPS=?.*tP5RfcTURUEiJD
CC WRTMUTt ESCREVER MATHIZ A(l!M,ljN)C
E WRTVAT(A.M,N,TITUL0.K.MMfIW5A(MM.l)
CHftfUrT£R*l TITULO(N)C
W R T T K C T - I » 1 ) ( T I I Ü I . Ü ( I ) , I = 1 # K )1 F Ü R M Ü T Í 3 O ( : A 1 3 )
OU 1 0 0 I s l . ü« « I T E : < T W . S O K A ( I , V J )
50 FURr-lAT f / . l O O K l ? . 5 )100 CONTTfciMfc
RETUPIM
I
SUHPOU'MNE STlFFP(COOPD.EPSTN,IlNCStLNODS,MATNO,MEVAB,riATS,* MPOIN.MTOTV.NELEM.NEVAÜ.NNODE»NSTRE,NSTP1,* PROPS.MELEM,SIRSG.SSTIF.LB,MAXLB,NTOTV)
C #•*•****•••*•••**•*•$**••*•*••*»*•«,•**•**•*••*****•***•*****•**
cC .P8«A AVALIAR A MATRIZ DE PlGlDt-Z DE CADA ELEMENTOCÇ «*«**4.***^4***4>*****t** * * * * * * * * * * * * * * * * * * * * * * * * * * * * * * * * * * * * * * * *
DJMFU51OU BMATX(6.6).CUPRD(MPOIN,2),DMATX(4,4),DEVIA(4),ELCOD* (2,3).fc;pSTM(MELfc:M),F.SlIF(6,6),LNODS(MELEM,3),MATNa(* f -eLEM).PHOPS{MMAIS,6J,STRES(4) fDVeCTí4) ,AVECT(4J,A(3) .* B(3 ) .CC3) .MOS(J) ,ZUSC3) ,qF(3 ) ,RB(3) ,STRSG(4 ,MELEM) ,* SSTlF(MTOTV.l)
i<tAI. MUSroer
CC *«»?.(?np SOüPK CADA ELEMENTO***C
l)ü 7^M isT Kl,KM
CC ***Pt:Tk:P fINA AS COORDENADAS DOS POIOTUS NUDAIS DO ELEMENTO***c
DO 10 1NOÜE=l.NNODfc
i)U 10lPU
10
cC ***7(-:vaw A MATKIZ Db) R I G I P t Z 130 El.FHfc.NT0***C
1>U 70 1FVAB=1 , .»iKV*hUÜ ?O Js;VAB=l . N'KVAB
20 t S ) T F f I « r V A h . d i : v A b 1 = 0 . 0CC ***PHTKRMIMA A MATRIZ ÜF. Tt WS A0-ÜEF0KM ACA0 , £ \) ]C
CAI.il. "nr>PS(Dr.ATX,LPRrjP,MMATS,PRCPS,w.*}CC ***Dfe;TFPMTtiA A MATRI/. DE Db FOHMACAn • IB JC
CALT, OMaTPS(eMATX.fcLC0D,M3,Rl , l \ , R2 . W , R3 . Z3 , ARFA)C
, l F ( l l N C S . E 0 . n « 0 TO BOC «KTTF tTW,2000HfcLtM.EPSTNCI tL fcV)
!3 C2000 F O P : A T ( ' IELCws • . 1 3 , 5X . ' FPSTN ( IfeLpM ) s • , Kl 4 . 3 )w IF(AHSCFPSTNCieLLM)}. l fc: .DELTA)GC T(i 80i C * K T l F t T * . 3 4 b 9 i
C 34h9 F D K U T r i X , 1 ELEMENTO PLASTIFICADO :CALC11LARALTERACAO DE D ' )00 «O ISIR1=1.NSTP1
90 .STHFSÍ ISTWJ )=STRSG£ ISTP1 ,IELEM)CAL1, Tt!VAR(ÜLVIA.STE;FF,STÍKP lVAP\32.Ylk;Ln)CAL! YIFtnFCAVECT.UEVIA.STfcFf ,VAhJ? ,M5TR1)CALL FLnAlPLÍAVKCT.ABETA.DVECTtPRÜPS.LPROP.f^STPl.NMATS)DO IDO TSTREsl.NSTREf>C 1Ü^ JSTPEsl.NSTRE
100 üMATXf iSTRt..JSTRIi:)=DMATXCISTRfe:,JíTpKJ-AHfc:TA*nVL'CTClSTRt)** DVET'l f JSTRt)
80 CHÜTIPUF
cC ***rALCMLO DAS RJGIDEZKS DU tLtftMTO**•C
D C 1 1 0 1 = 1 . 3

1=0.0no zosm=o.o
Atnsf (P2*Z3)-(R3*Z2))/(2.0*ARLA)
C(11=(P3-P2)'12.0*AREA)C(2>=f»l-R3)/(2.0*AREAJ
TO 140120130
140
150
160170
IF(P3IF (PIc;u TUtfOSf 1CO TUMGSf 2GO TU••'1OSÍ3ZOSf 17 n w t otwo i /
ZOSf 3WFÍ11
. f S " . R 2 ) G 0
.WF.R3)GO170
)=fz?-zn/170
)=fZ3-Z2)/no
)=fZ3-Zl ) /)=Z1-(MOSCw?O«f uncfJ —/• « V wU'v> I
)=Z3-(woS(= K1
TO 150TU 160
(K2-R1)
(R3-R2)
f R 3 - R l )l ) * H l l4 ) * K * )3 ) # R 3 )
DO 1HP T=l("bVABDÜ 1B0 >1=I.M
180 ESTlFtI.J)=0.0DO 190 T=1.5.200 190 ,1=1,5,2

190
3,3J J*B(L)* fOr*ftTXl?.4)+üMATX(3.4))*BCL)*C(K)4{DHATX(4,2)+DMATX(4, J))*• C(L-)*MK)4ÜMATX(4.4)*C(L)*C(K)
A2=fOMATX(3,2)+DMAlXr3,3))*A(L)»B(K)+(l>MATX(2.3)+DMATX(3,3))* •H(T>*flfK)+D.vATX(3.4)*A(L)*C(KJ*DMATX(4,3)*C(L)*AfK)
A3=nr.ATX(3,3)*A(l.)*A(K)A4=f DiHTX(2,3) + l)HAlX(3,.13)*BlL)*C(K)*(UMATX(3,
• •C(L)*BfK)+(DMATX(3.4)+DHATXt4,3jJ*C(L)*C(K)A5=n^ATX(3.3)*A(l.)*C(K)+DMATXC3,3)*C(L)*A(K)
DO 140 M=1.3X = AM,Sf Rf(M)-BB(M) )IF (X.ri*:.HELTA)GO TU 1 90
• *.1/3)-»(KF(M)**3-RÜ(Ml**3)/3+CAl*ZnS(M)*A2*MüSCM)*A4*MOS(M)*ZOSf •')
/3)*(ALn<;(PFCM))-ALUG(KB(H))))
= 1.5.2is2.fr, 2
AlsrnMflTX(2.1)4DMATX(3.1})*B{L)*C((O+UMATX(4,4)*C(L)*H(K)•(DMATX
3.1)*A(ü)*CíK)+üMATX(3,4)*A(L)1»B(K)
1FO.T.E.DELTA)GO TU 200kSTTFt T.J)st&TlF(J , J) + 2*PI* ( (Al*M0.s('<i) + A3*H0S(M) »*2/2) *
• -Pbf>)**i)/3+(Al*ZOSCM)+A2*MOS(M)+a3*Mt)S(M)*ZDS(M))»CRFCM)**2* -RLM l)**2D/2+(42*ZUS(M)+A3*ZÜSlV)**2/2)*(PF(M)-RBCM)))

200 CONTINUFDO ?IO T=2.6,2DO
Al=(UHATXC1.2)+DHATX(l,3))*C(L>*B(K)+DMATX(4,4)*H(L)*CCK)+(nMATXf4.7)+DVATX(4,3))*B(L)*BCK)+l>MATX<J,4)•C(L)*CCK)A2 = PMATXU.3)*CCL)*A(K)+L)MATX(4,3)*B(L)*A(K)A3=nMftTXÍl,3)*C(L)*C(KJ+üMATX(4,3)*B(L)*C(K)00 910 M=l,3
1F(X.IE.ÜE!,TA)GO TO 210
* -RHfM)**3)/3+(Al*ZOS(M)+A2*M'JS(l»)+A3*MOS(M)*ZOS(M))*(RF(M>**2-* RB{f'J**2)/2+(A2*Z0S(M)+A3*Z05(H)**?/2)*CRF(M)-PBCM)))
210 L'ONT'IMUF1)0 72 0 1=2,6,2no ?20 J=2,6,2L5(T+1)/2K=(J+l)/2Al=nMaTX(l,l)«;(L)*C(K}+DHATX(1.4)*B(L)*C(L)+DMATX(4,l)*C(L)*B(
* K)*lv-iATX(4,4)*BtL)*B(K)no 920 M=l,3
lKX.LE.PCLTAJGO TO 720ESTTFfl.J}=ESTlF(I.J)+2*PI*(Al*M0S(M)*(HF(M)**3-WB(MJ**3)/3+
• Al*7OS(M)*(RF(M)**2-RB(M)**2}/2)220 CO^TINUPCC ***GUftRnAR A MATRIZ.[K]***C
C <KKI1'F(TW.2)
C2 FüK.^BTC MA1RIZ DE RIGFDEZ ÜÜ ELEv-STIFFPC WKTTF{TW,5)((ESTIf(I.J).l=i,NtVAB},J=1C5 FnR-»RTf6Ct;l2.5,5X) ,//)

cC M*nni 'THH A H A T R I Z VV. RltilCEZ DA 'EsTKU THRA***C
H ( ! '4 l ,< :n . ; i f c .S ) GU TO 1 0 0 0CAM | - > r l t ; K 3 ( k S T ] K . l t l , E M . L N U n S , M O T V . S S T l h , ME V AB , MK
* f.KlEM.NTfjTV)(,U T.i in
1000 C Ü Í J T I N U FCAI I PJf:K3l)(t.STlF.M3.L.NODS,MTüTV,S.sXlF,MKVAB,MELfc;M,NKrJt;M,LB
* .N.AXLn.vTOTV)70 COi.TH'UF
to

SUHHOUTTNK ISTTFFtCOnPD.EPSTN.llNCS.IjNUDS.MATNO.MEVAB.MMATS»* MPnIN.MTUTV.NELEM.NEVAB,NN0DE,N5IRE,NSTRl,* t'KUPS.ME.LEH,s™SG.SSTIF.lB,MAXtiB,NTOTV)
Ç 444************************************************************CC ***PhnGPAMAC .PBPA AVALIAR A MATRIZ ÜE PlGlDtZ DE CADA ELEMENTOCC 44*44**********************************************************
1)1 MEWS ION HMATXC6.fe).CÜ0RD(MP01N,2}.DMATX{4.4),DEVlA(4),ElC0D* (2,i).EPSTN(MEiJEN),E5TIF(6,6),LN0D5(HELEH.3),MATN0C* rKLEM).PKOPS(MMATS,6),STRESÍ4),DVECTC4).AVECT{4),A{3).* b(3J.C(3),MOS(3)tZüS(3J,pFC3),RBC3),STRSG(4,MELEM),* SSTIí'(MTUTV.l),DhRlVC2,t.] ,SHAPEf4) ,CARTD(2,6) .GPCOD* (2,6),DBMAT(4.6)#K(6,6)
w COf, PI=4.*ATAM(1.O)
Twl)P.l=2.*PlDELTAsÜ.ÜOOOül
Cc ***r.onf SOBRE CADA ELEMENTU***c
1)0 70
CC ***DKTEPMINA As COORDENADAS üOS POwTÜS NÜÜAIS VO ELEMENTU***C
DO 10 INUDFsl.HNODE
IP0S!Jsíf,'-JODE-l)*2DO 10 TDIMtsl.2

10 e t C n n n n i M E , !Honb)sC00HD(I>N0DE,IDlME)THirKsPPOPSdPkOP. 3)
cC ***7FRAR A MATPIU Dt K1GIDLZ DU tl.FMfc.NTO***c
DU 90 IFVAb = lDU 90 .JFVABst
20 ESTTf( i rVAB.JHvABl=0.0CC * * 4 7 iJTKRKACAO MUMKHITA***C
ETASV'sl . /3 .C
I C ***nKT|:v?MIUA A MATKIZ DE TENSAO-DEFORMACAO,c
>o CALL MnrPS(l)MATX,LPR0P.MMATS,PRCPS,M3)
1 C ***rAT.C"liA AS FUMCUES DE FDP^ A , VOLt)ME, t T C . * * *C
CAl.t.CAL!.[)Vpt,Wrl),1ACb*TW0PI *GPCOP ( 1 . 1 )
CC •**i>KTfRMlHA AS MATRIZES IN) E IB) X [U] *•*C
CAM. P ' U T P S ( B M A T X . E L C O Ü . H 3 , R 1 ,Zl ,R? , L7 , R3 , £3 , AREA )C
IF(TINCS.EO.IK;O TO BOC KiKTTFC J W , 2 0 0 0 ) I E L E M . E P S T N ( I E L E f )C2000 FORMBTf » IF.LEMS» . 1 3 . 5 X . «EPS! N ( I t L R M ) a ' . E J 4 . 3 )
I F ( A b S ( F F S T i U l E L K M ) ) . L E . D E L T A ) G C TO «0C W R I T F ( n . , 3 4 ó 9 }C 3469 F d P i R T r l X . » ELEMENTO PLASTIFICADHjCALCULARALTERACAO Dfc Ü 1 )
DO ou ISTRlsl.íJSTRl

90 STHFS(lSTRl)sSTRSG(ISTRl.1ELEM)CALL 1 UVARC DEVI A, STEFF.STfcKP.VARja, YIELD)CAM, YTKLDFCAVtCT.DEVlA.STEFF,VARJ2.NSTP11CAM. FLPWPl.(>\Vk;CT.ABETft,OVfcCT,FKüVS,tPRni>,NSTRifMMATS)00 ion TSTRE'sl , NSTREOü 100 ,1STRE=1 , N5THF.
100 J'.vtTXfl?iTHK.• LfVLCT(JPTHE)
80CALt,
Cc ***rAt,cinJn DAS RIGIUEZES DOc
ÜD ^0 IFVABsl.WEVABHO 30 JFVABalEVAB.NEVAB
' DÜ 3 0 ISTRF=1.MSTRE{-* 30 ESTTFfo • *nH«*AT(TSTRK.JKVAB)*l)VOIiU
C •••OKTÊPHINA A MATRIZ ÜE RIGIDEZ TPIANGULAR INFERIUR***C
DO 60 IKVA«=1.NEVAWÜU 60 JFVADslEvAB.NEVAB
60 rSTmjFVAR,lEVAB)=ESTlF(JEVAB»J*:VAH)C
iFfNTtMCL.GT.O) TMtNCALL lNCliOtR.lELEM.LNÜDS.PELEM.NNÜDE.KONT)IFfKONT.nT.O) CALL I N C L 1 ( R . E S T l f )
LND IFC * * * G U A R n A R A M A T R I Z , [ K ] * * *C
W R l T E f N T T ' I E L K M M t E S T I F d . J D . J s l . e ) , ! * ] . 6 )C WRTTF(TW,2HEl,EMC2 FOPfiftlf' MATRIZ Üb RIGJÜEZ DO F L E M - S T I F F P ' , 1 4 )C W K T T F ( r » ! . 5 H ( E S T 3 K ( I . J } f I =C5

cC ***M()MT»R A MATHI7- Dfc RIGIDEZ DA ESTRUTURA***
cIK(NALí;n.NE.5) GÜ TO 1000CRLT OHTGK3(KST1F . 1 LI.L'M , LNODS , HTOTV. SSTIF . MEVAB, MELEM ,
* NEI.KM.IJTOTV)t;() TU 70
1000 COhTlNUn:CAL!. PinK3D(ESTlF.M3.LN0DS,M10TV#SsTlF,MEVABfMElEM,NELEM,lB
* .^AXLP.'iTOTVJ70 CONTINUE
l«.PTTfc;(5.1238)1238 KORMATC * * * * * * * * S A I N D U DE I S T I F p * * * * * * * * ' )
REÍIIHHKM D
I

SUaWLlUTTUE HüDPS(DMAT>,LPHOP,MMAlS,PRüFS,IELEM)CC t*********^*****************************************************cC * * *PROGWAMAC .PUHA DtTKRMINAR A MATRIZ, tD]CC ***4************************************************************
l)MATX(4,4) ,PROPS(MMAlS.fe), IW , NTb , N16 , N'l 7
, 2)DO 10 I.SIRlsl.4UÜ 10 JSTRl=l,4
I C
M C ***»'ATRTZ ID] PARA O CASO AXI - S I M K T P 1CU***OJ Q10 CONST=VnUHG*ll.0-POlsS)/C(1.0+FClSs)*(1.0-2.0*PniSS))1
OHATX(1.1)=CDNSTDKATX(2.2)sCONST
D.VATXf4.4)=CüNST*(1.0-2.0*POIS6)/(2.0*(1.0-PniSS))DMATXCl.2)sCUNST*C0NSSDKATXd .3)sCUNST*CONSSUNATX(2.1)=CUNST*CUNSSI>* ATX ( 2 . 3 )=COf)ST*CONSS
CC *»*(;UAROAR A MATRIZ.C
WRITEfHTS'1EbEM),C(DMATX(J,J},J=1,4),1=1,4)PETUKM

SUBROUTINE BMATPSíBMATX,ELCOD,1ELEM.RI,Zl,R2,Z2,R3,Z3,AREA)C ******************************************••****•********•*•****
cC ***PHOGRAMaC .PURA DETERMINAR A MATRIZ,IB]Cc ****************************************************************
8MAIXÍ6.6). ELCODC2,3)R1=FLCOD(1.1)
1 /3=ELCnn(2.3)M Cw C ***rAI.CMLO DA ARLA DO KLEMtNTO***
KKrOIF(R1.NF.R2)6O TO 2TEHPsRlH1 = P3R3=TEMPTEMP=Z17,1 = 73
HKIGHT=SQRT(HEIGHT*HEIGHT)hASF=SORT(tRl-R2)*CRl-R2)+lZl-Z2)*(Zl-Z2))ARfc.'A=0.5*BASE*HEIGHTIF(ARFA.GT.0.0)GÜ TO 4WRlTKfJW.3O)
30 FORMATdOX.1 ElFMENTn DE APEA MJLA OU NEGATIVA PEX .TKRMINADA')STOP 13

CONTINUEIFCKK.i-ie.DGO TO 6
R1=R3W3=Tt
Zl=73
6 CO
cC ***r/UCULO DAS COORDKNADAS DO CENTROlDfc DO ELEMENTO***C
C ***MATHTZ TBJ.PARA O CENTPOI DE*.**£ C"*" 1)11 fl T = l ,4
8 BHATX(l.J)=0.0BMATXri,2)=(K3-R2)/(2.*AREA)BMATX(1.4)=(Pl-R3)/(2.*AREA)BNATX(J,b)=(R2-Rl)/(2.*AREA)BMATX{2.1)=(Z2-Z3)/(2.*AREA)(»MATX(2.3) = (i:3-Zl)/(2.*AREA)BNATX(2.5J=(2l-72)/(2.*AREA)BKATX(3.n=(((H2*Z3)-(R3*Z2))/R+Z2-Z3+(((R3-R2)*Z)/R))/(2.*AREA)
3. b) = (C(Rl*72J-(R?*Zl))/lHZl-Z2+(((R2-Rl)*Z)/R))/(?.•AREA)8MRTX(4.n=Bi«.ATX(l,2)BivATX(4.2)=B-tATX(2,l)HMATXf 4.3)=BriATX(l .45B!^ATX(4.4)rBMATX(2.3lB^ATXf4.b)=BVATX(l.61WATX(4.61=«>"

C • * * G U f t R ! ) A ftC
W H I T e ( N T f a ' l E L E M ) ( f B M A T X ( I . J ) , J s l , 6 ) . 1 = 1 . 4 )
SUüWUUTTNE irJVAP(UEVlft,STEFF,SIFMP,VARJ2,YIELD)
c •CC •••PRPGPAMAC . DF'fKRMlNflR OS INVARIANTES DE TENSÃO,J2 1 E J3»C .DFTEPMlNftR O VAL-OW ATUAL DA FUUCAO Dt LSCOAMLMTOC
Ctirni i .)N/rHlTV/NCRIT.SlNT3»THEIAOt'IiTAsO. ÜO0OO1RüüT i= l .73205080757
OtVTAf3 )=STEM^( í J -l)KVTA(4')=STEMP(4j
>D6.VI6C3)*nEVlAC3))
TO 10S l H T 3 = - 3 . 0 * H n U T 3 * V A K j 3 / f 2 .l F f S I N T 3 . G T . 1 . 0 ) 5 I N T 3 = 1 . 0GO TO 20
10 SlMT.JaO.020 Ct)ivT
IK{J5IK 'T1.«T. l .O)STfJT3=1.0THKTA=ASIN(SIN13)/3.Ot ü T O Í l , 2 ) N C K I T
CCc

I
MU>
I
RFTIJKKCC * * * V O HC
2 m:i,»sRETUHH
C
SUBPOUTTWFC ^*t**^4t********************************************************
cC 4 * * P r t O ( ^ A M AC . p a HA ü tTFRMlWAR U VETOR DE F l ,UXí ) ,AC
4 ^ 4 t * * * * * * * * * * * * * * * * * * * * * * * * * * * * * * * * * * * * * * * * * * * * * * * * * * * * * * * *A V f c C T ( 4 ) , D K V I A ( 4 ) . V E C A 1 ( 4 > . V K C A ? ( 4 ) , V K C » 3 ( 4 )
OtLTAeO.OOOOOlIF(STFFF.LE.OE[JTA)Rfc:rURN
•SlNTHsSTWÍTHfeTA)COSTHsCOS(THtTA3CÜST3=CnS(3.0*THLTA)ROOT3=1.73205080757
C ***rALCULO ÜD Vfc'TDK A l * * *C
VLCtlfJi=1.0Vfc-CAIf 41=0.0
cC ***rAí.CliLA O VKTÜR A2***C
00 10 JSTRI=1.NS1R110 VECA2ri$TRl)sOeVlA(ISTRl)/(2.0*STEFF)
CC •**rAl>CI>LA U VtTOK A 3 * * *C
VECA3f n=DEVIA(2)*t)EVTAf 3) + VAPJ2/3.0VKCAim=DKVlA(l)*UE VIA C3J + VARJ 2/3,0

VECA3Í 3)=!)fc;VlA(l)*utVlAf2)-DEVIAC4'»*l)EVIAf4)+VAHu'2/3.0VKCft 3 f 41 =-2 . O*nFVIA ( 3 ) *nt:V IA ( 4)GO TO (1.2)NCRIT
CC
c1
20
i Cc
1 2
40
A H TIt (
COt:
CUM
GO
HKsüf
SJ = U.T U 4 O
S3=fr?TO 40
•••von M
CCM Sl=0.
.1.1.29.
0
0*(CUST
IStiS***
0
*b7.29577951308)O)G(J TO 2 0
H+SINTH*TANT3)TH/(VAPJ?*CÜST3)
DO SO 15TRl3l*ri5TRl50 . AVferTf ISTHl)=C0tJSl*VKCAl(I6TRl)4€GHS2*Vt;CA2(lSTRl)-fCl)NS3*
* VfcCAirRETUPH

,n,.jPLfAVF!Cr.AHtTA,UVECT.P»UPS.LFKOP,NSTRl»MMATS)C j»*»**:M***4***«r************************************ * * * * * * * * * * * * *
cC ***PKOGWAMAC .PRWA DfciTklHHINAR U VETOK,U = l)*AC DCC $••*•****••••****•*•**••*****•*•*••*•*•*•****•* * * * * * * * * * * * * * * * * *
ÜMKiJSIPM AVLCTC4) ,I)VECT(4) , PRüPS ( "M AT.S , b )Cn,-im;iM/pfc1f?AL/lH.IW,NT5.NT6,NT7
. 1), 2 )
HAPnSsPWUPvS(liP»OP.6)H-MUMrYnUMG/U.O + POISS)Fr!ür.2=ynUM(;*pOjSS*(AvKCT(l)4AVtCT(?)+AVFCT(3)) / ( ( l . O + POISSJ*
1 * C l . o - 5 . n * P U I S S ) )i- DVrfTf n = F.-iUL
DO 10 IST«1=1.USTR110

SUKRUUTTNE RI(JK3D(TSTIF.IELFTF.LN0DS»MT0TV.S5TTF,MEVAB, MELEM,• NLLIM.LB,MAXLB,NTOTV)
cC 4*ft**4t******************************************************cC • **Pi<0<1RA*AC .PflHfl ^UffTAR A MATRIZ DE RJGlnL'X DA ESTRUtüRA fEM BANDA)C
KK(6) .tSTlF(MEVAB,HEVAb) , INOUS ( MELEM , 3 J , 5STIFÍ MTUTV ,1)
CUMMOM/OKRAL/1R.1W,K K ( 1 ) s 2
KK ( 3 ) = 2 * ! i N U n s ( 1 EI.EP . ? ) - 1KK(4)= '2*LNni )S ( lKliFM ,7)
E[iEK. J )DC 4 0 0 1=1.b
DO 10 0 ,1=1,6L=KK(JJ-K+1IFCL .T .T . l ) GO TCI 300
IF(?.,».f íT.MAXLB) STOP 'LARGURA PE BAWDA SUPEPIUR A MAXLB1
S S l f F f K . L ) = S S T l F ( K , b i + K S T I F ( I # J )300 C'OtJTXMUF400 COlJTIf.'UF
1FC ni:i.,l::M.riB.Ht:LEH)(i0 TO 700C WR1TKfIW.500)LB.NTOTVCbOO FORM4T( «flATRXZ ÜE P IGIDFZ 1>A ESTRUTUKA-Hl • , • LBs > , 13 , • WTOTV= ' , I 3 )C YiHITKf I W , h O 0 ) ( ( S S T l K ( I , J J , J s l , L B ) , lC hOO F O « M A T ( « ( E 1 4 . 3 , 5 X ) . / )700

S»JtíRU'!TTS«K SKR 2 (L>fc"K I V . L T A S P , EX J S P , Nt40Dfc,SHAPfc)C ** + *t**** ***********************************************•********!CC ***PRnt;wAHA PAPAC .ürTKHMIM&K A3 FUNÇÕES DP FORMA PARA O ELEMENTO TRIANGULARC .OFTKNM1NAP AS DERIVADAS DAS pUNCÜKS DF FORMAC
cC ***FlH»CnES Dr; FORMA***C
SHAPE M l =SSHAPEf21=T
^ S H AP?-r 11 s i, ~a—Tto CI C •••PERIVADAS DAS FUNÇÕES DE FORMA***
DtRTV(1 .1) = 1.DERTVd ,2)=0.ntRIVfl ,i)s-l.U«-:R7V(2.1)=O.
UFRT\,'(2.2)=1.DERTVf2.3)=-l.RKTUrtW

SUBROUTINE JACnb2(CARTD.Dfc.RIV,DdACR,£l.CDD,GPCnD.IELEM,NNüDE,* SHAPE}
PAPAC .CALCULAR A MATKIZ JACOBIANAC .CALCULAR AS DEH1VAUA5 CAHTESlANAS DAS FUNÇÕES DE FORMACC ttOM*********************************************************
Dlri-.iSinM CAKTO(2.6),DbHIV(2,6),6LCOl>(2.3),GPCC)D(2,6),SHAPK(4)t* X.JACI(2.2).XJACM2,2)
COMMúH/CEPAL/ 1 K . IW , NT5 . HT6 , NT7CC •••TAI.CtH.A AS rnfiHUKMADAS DOS PC'NTnS (GAUvSS)C
Dd ? TDTME=1,2«PCOU(in!ME,l)=0.0DO 7
2 trocC *#*rHTA A fATRIZ JACOIUANA***
c[)O 4 1UTMK=1,2DO 4 JUTHfc:=l,2
[)O 4 IKDDEsl • MfiODKXjí\nnTnlME.JDIMí:)
* kLCrOfjnlMt,ifi((|)£-)4 C
cC ***rALCULA O DETERMINANTE E A INVERSA ÜA MATRIZ JACOBIANA***C
Ov)AriisXt7ACM(l,l)*XjACW(2,2)-XJACM(l , 2 ) *X.JACM C2 ,1 )IK(l).JAC»)6.b»8

STOP
H l . l ) s X J A C M ( 2 , 2 ) / D i ) A C ü
XJAClí1.2)3-XJACM(l,2)/DJACBÀJATU 2.1 )=-XJACM(Z. D/DJACB
CC ***rAICHLA Afí Ü^HTVADAS CARTtSIANAs*•*C
Uí) 10 I M H ' : 1 , VD l 1 1 •> l
po i o «injMKsl . 2CAKTüf i n T K K . l M ü D K ) « C A R T D d D IME, I N O n E ) * X J A C K I D I M K f J D I M E )
* •Db:RlV(»1[) IME, lNU0E)10 CÜ IT lMUrfiOO F0RM4TC//,' fcXKCUCAO DU PRüGKAfiA P A R A L I Z A D A NA SUBROUTINA JACOH
* 2'./.llX.' »KKA NEGATIVA ÜU NULA',/.10X,' NUMURO Oü ELEMENTO1,* 13)

lK DbR(BMATX.DbMAT,DMATX,MFVAB,NEVAB,NSTRE,NSTRl)
CC ***FSTA SUHHClllTirJA MULTIPLICA A MATRIZ H PELA MATRIZ DC
DI MFÍIS J ON BMATX ( b . 6 ) . PBM AT ( 4 , 6 ) , UM*1X ( 4 , 4 )UD 7 TvSTKRsl ,MSTK£UO 1 TKUA«=1 .f'FlVAKDPMATfTSTHfc;,IKVAB)=0.01)0 ? JSTKKsl , MSTRfc.
T S T « t ; . i e v A B ) = D H M A T ( I S T R E , T t V A B ) + l ) M A T X ( I S T R E , J S T R E ) *
«ETURMEND

SUBROUTINE INCLOfH.IELKM.LNCjDS.KiELEM.NNODt.KONT)DIMENSION R(6,b) ,LNÜÜS(Ht'LKN .3)Crn'HPtj/lMCL/^JNt'l., ALFA( 1 )
CDtLTftsO.OOOlKONT=O00 10u IVODE=1»NNODt
tLEM.INüDL) J) .GT.DELIA) KUNl=KO«T+l
100 CONTINUEIF(KONT.FÜ.O) RHTUKU
CÜU 200 1=1.bDO 200 J=1.6
200 R(I.,n=0.DO 300 1 = 1 ,b
100 PtI.T)=l.
00 400 INODF.= 1,M«ODELilODF=IAM£>(LNüC'S(IELEM.INUDL) )J M AHS (A1,h ft (LMOUFn.LT. DELTA) GO TO 4U0Jr/.+ T1*J-1
AsALFAíLMODr)Rf 1 .1JsCOS(A)H ( J . , l ) = » f I . l )R f J , J ) = S T N ( A )H ( J . T ) s - R d . J )
-100 CüMTMJECC « ) K l T F ( 4 2 . 2 2 1 ) l E L E M . ( ( R ( I . J ) . I c l , 6 ) . J s l > b )C2?l FORMftTf1 IKbTM ='.1b.6(/,bE12 , 5) )
KETURÜ
r.b. I M C M C R . f c S T l F )D T M L ! - i J > T t ) n H C f > , b ) . K S T I F ( b . b ) . A U X 1 6 . 6 )
CC . ' .KTTf- C - i ; . 2 2 1 ) i ( « U S T i l - ( 1 , J ) . 1 = 1 . 6 ) , J = l . MC 2 ? l K . l K ' u l f 1 f - S T I H t M I H C U ' , t > l / , 6 t 1 2 . « S ) )
D O l P i i I r l . b1>U 1 5 J J = l ,bA r r f t .
Of I H i ) K = l , b
Al'X( t
100c
iJf 20y J -1 , bDn ??i) .1=1 ,bA = ( > .D f j V<<.> K s l . b
230 A = A + R l T . h ) * A U X ( K . J )KSTJFt l , ,n= f t
22n cowrTuu»-2 0 0 C u ' t T T i l iF .
CC l B K l T r ( r t 2 . > ! 2 1 ) C i K S T I F t l . J l , I = l , 6 ) , J = l , b )
cC2?l
120
subDI u*H I
f'UfcUP
DuA r iAU>CON
k'f]Gr]»•
-am
i ?I P
( T
1 T
uS(
()
1 INKI 0 f'42 .( <
T =
.; =. ' . T= i>
2t1
1
)
1ÍICL2KL0IS(71)(ELI . H I S K. b
. b* t . I , [ . ' l S
CtLUIS.6 ) . R ( s .D I S ( I ) ,M TNCL3
f J )
H)b )1 =i
•
, A U X1 . 6bEl
)2
( 6 )
. 5 )

Üü 200 1=1,6200 tL.DlS(T)sAUX(I)
W H I X F ( ' » 2 . ? 2 1 ) ( 6 : L D 1 S ( 1 1 .Irl.fe)HKTURNKM D
[NE irJCL.3(Rr.0AD. MELEM, I ELE H,R)KL('AÜ(MELtM,6) ,H(6,b),A(JXfb)
C WH1 IP ( 4 ü . 22 1 ) ( WhüAD (1ELEM , I) . 1 = 1, t>)C221 FüRMATr1 MLiJAU t:M IUCL3 ' ,/6E1 2 . 5 )
Üü 100 1=1.b
DO 170 Jrl.bI.CAD(IELEM.J)
1U0 CUMTiaifc".DO 200 1=1.6
1 ?00 RLOADÍ IKr.fiH ,1•^ C W K 1 T F ( 4 2 . 2 2 1 ) ( R L O A D C I E L Í : M , I ) . I = ]oo H
• c- \>i t 1
S ü b H U U T I M h . I W C I ' 5 ( W I N C b . J R . i n i )
*. .2)2 F o H i a r t 1 uns COM ROTACAU ' )
Du i n T=1,NINCLPf AOf Í P . 1 )IhCL..AI.FA(JMCrJ)
1 K)RN.Ai ' ( lS,F10.!>)1%H1IF(TW.3)INCL.ALFA(TNCL)
3 KORMATf IX, ' fl>) = '.15.1 ALFA ='.H0.5,« GRAUS»)ALFAf INCI.)sALFA(IíiCL)*4.0*AIAU(1.0)/lH0.
10 CuNTlNUK
fc. ii D

.lünuK lCC('(b:i.UAl).CARGA,LMt)C&.Mt)FlX,lFFIX,MVFIX.MTüTV,* HVFI X . HOUFfl, MELE* , ^HÍIDÊ , NTüTV , MELEM, MBV AB )
ç « t . * * * * * * * * * * * * * * * * * * * * * * * * * * * * * * * * * * * * * * * * * * * * * * * * * * * * * * * * * * * * * *cC •••PKni.;pAHAC . k-nHA INTKUUUZIR AS CUNDICCES üt. CONTORNO NO VETOR ÜEC CARGAS**CC * * 1 * * * * * * * * •?* * f<r#** 1 | r * *#4**4 * * * * * * * * * * • • • * » * • • • * • * • * • • * • • • • * ^ » * *
!>lMfr-SinN ELOAijCHELEM.MKVAB) , NOF I X ( V VFIX ) . IFF TX t HTüT V) ,CARGAC* I Í T U T V ) ,LNOpS(Mh;Lh,M,NKCDF:)
Cür-.MUM/f:tRAL/lP.IW,NT5,NT6.N17CC *#*lwTRfiUUZIK U VETÜR ELOAD NO Vf.TnK OK CAHGA TOTAL (CARGA ) • • •C
L'H 100 TTOTV=1. NTÜTV300 CAHGA(ITOTV)=0.
C
C O VFl'pH CAHGA E O Vf^TüR DE RtSJCUCSC
DL- 410 TELfcH=l . iJbl.EMJ.=0DO 40n T
DO 400 TPUFMsl.NDOFN1 = 1 + 1
400 CONTINUF410 COiiTC W R TC ?000 F0KVí.T(' VíTHR UFJ CARGAS (RES IÜUoSÍ NKSTA ITERAÇÃO • ,//)C «PITfcf lV/,->lOO)(I,CAPüfl(I).I=l,NTnTV)C2100 FPKfATÍlXfl5.5Xffcl0.3»/)

O
HO 500 M=1,NVFIXlsWOFTXTN)ijHüv*B5(T-l)*fiünFr1)0 4' jn M=l,riL)O(ri|
IF(TCrtin450,450.43!0420 CAHGftf»ROWH)=0.4bO COtJTINO»"490 COUTINUFbOO cnrJTlKUr
KETMKW

SUBROUTINE HtSjDUC ASpIS.COÜRU,EFKSTt *LUAU,FACTU,1ITER»LNODS,* LPRUP,MATNO,MELFM,MMATS,MPOIN,MTOTV,NDOI-'N,
NELEM,NEVAB,NNOOE,N5TK1,PROPS#NSTRE,STRSG#
TDISP,EPSTN/fcLDfS.ELCOD.NTOTV)C
Q
CCC .RF'JUZIR AS TENSOfc'S PARA A SUpEKFIClE DE ESCOAMENTOC .CALCULAM AS FORCAS NÚDAIS fcÜUlVALENTESCC **.***.^*t*******************************************************
ÜlMFüSlOM ASDtS(MTUTV).AVKCT(4J,C0ní<D(NP0IW.2)lDEVIA(4),DVECT(* 4).EFFST(MÊLtM),ELCUUC2,NNODE),ELDISCNEVAD)>
* EL0AD(MELtM,6)»LNOnS(MELEM,3),PROPS{MMATS,6),* STRAN(4).SIRKSC4),sTKSG(4,MELEM),DfcSI«(4) ,* SlGMA(4),S(iTUTl4).DMATX(4,4),EPSTN(MELEM),TDISP* (MTC)TV),HATNOCMELEwi)»BMATXC6,6),A(3),B(3),C(3),* MOS(3).ZUS(3),PFl3).KB(3),BMVOL(6,6),R(6,6)
CU1í.'üH/GKRAL/lR.IW.NT5,NT6,NT7CCliiMuN/CKITY/MCRIT.SlNT3,THETA
R U O T 3 = 1 . 7 3 2 0 5 0 8 0 7 5 7T W O P 1 = B . * A T A N ( 1 . 0 )0Ü 1 0 lF-LrEM=l rNELKMü ü 1Ü I f . : V A r i = l , f j E V A O
1 0 h L U A U C I K I . ( £ ' , , I £ V A b ) = 0 . 0DO 2 0
C l F ( - H 4 . ( a i . 5 ) < ; 0 TÜ 1 0 0 1 1C vitfT r r ( ] •», 1 0 0 0 2 ) M 4C I O Ü O ^ í - ü R U T f 1 E L E w E N T O s i . I 5 . 5 X , «EU R E s I Ü U ' , / / / )C 1 0 Ü H C t > j J r H " u -
C WRTTFt I.1.', I O Ü O O ) U i U A X . H A R l ) SC1OOOU F O R t - A T f U i . l A X s ' , K 1 2 . 3 , 5 X , MIARDSr ' , E 1 2 . 3 , 5 X , 'EM R E S I U U 1 , / / )C1OO12 COMTTfi l l tCC * * * D K 7 K P . U I J A As COORDENADAS E INCRK.MfcNTA OS DKSLUCAMfcNTOSC DOS P U N i U S MUDAIS DO E L E M E N T U * * *C
1 = 01.1 U 10 JNODtlsl • MNUDE
DO HO i m j F ' i i s l ,1 = 1+1
• (1POFW, 1 Nl)DK)sCOORD(LWOUE, IDOFN)ro 30 tLJTif 11=ASDIS(NPÜ5N), IF(MIMCI-.GT.O) THEN
CALL lMCL0CR,IELEM,LNODS,MFLtM,NKODE#KONTJIFCKO^T.GT.O) CALL 1NCL2 (E|,D1S,H)
KUU 1 'C IFftl4.rt.5JG0 TU 10013C *R 11F( TW, 1 0001 KELDISÍ I), 1* 1,6)C10001 p-ORf-UTC COORD. i^ODAlS(ELDIS)= ' , 6 (E12. 3, 5X ) , //)C10013 CUNT
CALL
CALL p>'ATPS(B'!ATX.fc:LCOD.M4,Rl,Zl,R2,Z2,R3.Z3,AREA)
C^ KüRMAlf1 BMATX= (RES1DU)',//)C WR1fF(Tw.3JI(BMATX(I,J),Jalf6), I = 1,4}
CALL l.INKAR (N1ATX , h,LDlS . DM ATX , hM ATs , NDOFN , NNUDE , LPROP , NSTRE,

in
C IFf i i4.Ge.b)t ;ü TU I0014C WWM'f(líí.l0003)(5TRANÍISTRE)»ISTRK=l,N5TRl)C100OJ FuH- iATf INC. DEF. Nil CRN'IROIDE CsTK A H ) * • , 4 ( E l 2 . 3 , 5X) ,C * •(-.*•> RfcSlUU' . / / )C hHTTFÍT'.-., l 00 04)(vSTRKS(I) , 1*1 ,NS1R1)C100U4 FURi f t rC I N C . Dfc TFNSAO NO CEMRoll 'b. (STRtS )= ' , 4 ( E l 2 .3 , 5X) ,C * 'fcf-i P t i S l D U ' , / / / )C10014 COMl i lUE
DO ISTK1=1,NSTR1
1STR1 )TO 10015
( S I G M A ( I ) , l s l , N S T H l )NO CL'NTROIDF= ' , 4( E 1 2 . 3 , 5X ) , • £M R t S I D U 1 , / / )
300C IK^.C
C1000i> KDR..iATfC10015 COu
CALLWR1\r{42,5800)JELEM,YIELDFUP'-lATi ' ieLE'i=' .X5.5X. 'Y1ELD=' ,Ei0.3,/)
tSPRtsfeTKST (IEIJEM) -PREYS
CbbOO FuRi-iHT(' ESHRfe:= ' • tl0.3 , / )IF(KSFRF.G£.0.0)GO TO 50LSCUKsiIt-LD-PHEYS
CC5900
csaoo
CC6000
50CCbbOO
l f (RSCUR.LE.Ü.0)GO TO 60KFACTsiESCUW/(!fl ELD-fcFF ST ( I
wR]TE(TW.600 0)RFACTFORr'aTC «FACTS' , U 0 . 3 , / )
GO TU 70
ESCUKsYThLD-LFFST(IKLFM)WRIlK(IW,b600)ESCURFDP-AX( • l-.SCURs' . E lO . J . / )
lMKSCUP. l , r - .0 .0 )UU T() 60H»- A f T s l .0
) )

7 0 i-:i* I'HTsKSCUK*!* . O/IJNJ AX + 1 . 0C A K T i h ( T . * , 5 7 0 Q ) i . S T K ^Cb700 K i R , M ( ' r , S l c p = ' , 1 5 . / )
kfc.LMJC=) . ü - P K A C rDU «•./ I SIR 1 = 1 . i .STRlrtCilUlf JSTfil ) sST»6GClSTPl , ItLfcW )+PEDUC*STNfÜ USTR 1 )
kiA C 1 Ú L ^' / T r f i} I ^ ^ Uk A i ' i 'E C'PU d C f T ^iTU 1 ^ / A C T k P
c I F ( ! ' 4 . ( ; K : . S ) < ; U T O í o o i bC * * T T k ( ! r t . 1 0 ü O f e ) ( S G T í ) T ( . T ) , ] = 1 . N S l R l )C100C6 F H R i B l C ' PAHTE DA TEfcSAÜ TOTAL Qnfc; SAT18KAZ 0C * fcSfi'iV ; t f ' T n ( f c ; r O T ) ' , / / . 5 X , 4 ( f c l 2 . .i,bX) ,//•)C « N l i F I I.-. , 1 O O Ü 7 ) ( S T R E S ( I ) , 1 = 1 ,NSTH1)C10007 H)R. A i f PARTE DA TENSÃO A SEF- E[,IM1NADA (STRK5) ' , / / , 5X ,C • 1 C K 1 2 . 3 . 5 X ) , / / )C A>k] T f c : ( l ' • , 1 0 0 0 8 )
1 ClOOOb F t lR i .AT f 1 SO»wE CADA l'AS5<i D l hEDnCAO' )^ c i o o i f c . cs jMT i i j i j t ;S 1)0 90 ISTEF'sl .MSTEP, CALL TMVttRCDt-VlA.STEFF , SGTOT , VAF J2 , YlfcLD)
C i F C ^ ü . r K . b l U Ü TO 1 0 0 1 7CC 1 0 0 0 9 U t R i f t l f ' i \ S l t . P = ' , 1 5 . / .C 1 0 0 1 7 C D i ^ r i u V K
CA LT Y 1 FLDfr ( A VKCT . Ufc VI A . S T E F F , V A Rvl? , MS'l'P 1 )C I K f i - ' 4 . r t . i > ) G 0 TU 1 0 Q 1 8C fcklil- C T « , 1 O O 1 O ) ( A V L C T C I ) , I « 1 , N S T R l )C10010 KUf i -A i f» vtT(»R DL FLUXOÍ A ) = ( , 4 (E t 2 . 3 , 5X ) , / / )C1001b CUNTTMHE
CALL Fl,n.iPl,(AVKCT.AHfcTA.0VECT,PPCP5#LPK0P,IJSTRl,MMATS)C I F f -4.CE.5JGO TV 10019C * R m ( T * . t ' J 0 2 , m D V E C T ( I ) . I s l , N S T R l )C10022 FüR.-tATC Vr.TuR LD = I)*A (DVECT ) = ' , 4 ( E l i.. .1, 5X) , / / )C10019
HO 1 i»P TSTIí 1 = 1 . 1 'STHl

100 AGASHsAKASH + AVKCTClSTRl )*STPh.S(ISTRl)
UGASHsO.ODO HO lSTRls l .HSTHl
110
C IFf ^.Cfcl.SJOU TU 10020CC10021 HJR^ftTCDEF. PL,ASI1CA= ' , (fc.12 . 3 ) , / / )C10020 CONTINUEn CONTINUE
CAU, TMVARlDbVTA,STEFF,SGT0T,VARJ2,YlEL.D)
IK C YI Kl.n . GT . CUR YS ) HRI NG=CUK YS / * 1 ELPDO Jhn i S T R l s l . N S T R l
260 SifcSut ISTRl . lEbtiM) =BRlNEH-'SIT IFLKH)=HRIi1iG*YlELDGU I'O 190
60 DG itíO ISTRl=l.MSTKl
C WHT TKTw, 1000) IELtM,(STRSG(l,IfcLEH)» 1 = 1 , NSTR1)C1000 FORM«T( ' l E L E N s ' . I J . «TENSOtS t>/ Ó CALCUL ÜE ELOAD ZZ, RR ,TT,RZ= ' , /C * 4 ( F 1 0 . 3 . 5 X ) )
EFFSl(lFLEr!)=YlELDCC ***CALCHLA AS FORCAS NÜDAIS EOUIVALENTKS E ASSOCIAC CUM 05 NOS 'JO ELEMENTO***C190 C0NT1MUF
CALL F^^l(lt!jt:M,Ht;L.C^,HSTRL,Nk;VAB,NN0UE,NDOFN,TWOPI,

CALL *>>X(^ .L^A lX* rjUUK" ,t4S'IHE , PI ,F2,R3.fc.LOAD)
tin"' It-''20 CD ml Iruir
r>u '10CALL I M C I J O C R , J L L t M , I I^OoS, MELEM # NN0DE, KON'J1)l F ( K O N T . G T . O ) CALL U C l , 3 U IÜA.D , KFJLhM , I&1.KM,P.)
•JO
IO.

Sli»«UUTTrJE•
CC ^^mt^^tiif****-*^* * * * * * * * * * * * * * * * * * * * * * * * * * * * * * * * * * * * * * * * * * * * * * * * * *
CC ***t-"R(H,RA'-i&C ,1'ARA CALC'LAH TENSÕES t UÉFÜPMACUES ASSUMIDO COMPORTAMENTOC fcT.ASTICO-LINEAHC
**m**i,*** * ****** ***************************************Hf'ATx(6.6J . ELUIS (NtV AB ) ,P»ATX(4#4) , PROPS(HMATS, 6) ,
* STKAN(4),STFES(4)CO"MON/RERAl/IH.IW,MT5.NT6,HT7
C wC3 F U P ^ T f POTSSs' . E 1 2 . 3 . 5 X , ' f cLD IS= ' . b ( b l 2 . 3 . 5X ) / / )CC • • • rA I .CMl iO 1>AS UEFURMACOES NU Cfc NT»U X D K * * *c
ÜU Í0 ISTREsl.fjiSTRESTRAIUIRTRt-JsO.ODO 3U JSTRE=1.MEVAD
30 STRAUf lSTRt;i=STRAN(IST»<F)-»bMATX(XSTMfc;,JSTRE)*FLDIS(J5TRE)CC **»rAT,CI»LO PAS TENSÕES COPNKÍSFUNTJENTKS***
CI.)U 40 ISTPKsl .NSTRE5TRFS(ISTRE)=0.0t)0 4 0 JSTRE*1,NS1RE
40 STRFSf ISTRE;J=STPES(TsTRE)'»L)MATX(lSTRfc;,JSTRK)*BTRAN(JSTREjRETIW

£
SHHPOUlTriK K K t X d .* Kl.Zl.H?.Z2.H3,Z3.APfcA,SlRSG,ElOAD)
C
CC «••PRHGFAMAC .CiLCUJAM AS KOPCAS NODAIS tOUl VALfcNTKS(INTfcGRANDO tB] fcC X HFLA TKNSAü wO CKNTMUIDKJC .K ASSOCIAR C(JM f)5 NC5 DOCC *********:
UIMHÚS1PN A(3).B(3) ,C(3),M?S(3),ZOS(3),Ri- ( 3) , RB( 3) , BMVULÍ 6 # 6) ,*
DO 7hO 1 = 1 , 3A ( n > o. o
2bO ZÜSfDsO.O3)-(RJ*Z2n/(2.0*ARK*)J)-{Pl*Z3))/f2.0*ARtA)
A)
C( l l = f h i - R 2 ) / ( 2C ( 2 1 = r n i - H J J / ( 2 . 0 * A R K A )
tFCHl.Nr.R2)GQ TU 140120 1F(R3.UF.R2)G() TU 150130 IFCP1.NF.R3JG0 TO 160
GO TO 170140 iiOSf llr(Z2-Zl)/(H2-Rl)
GO 10 12'J150 ^ C ü f í l = f Z 3 - 7 2 ) / ( K 3 - R ? )
UU T ' i \ *<»160 MO6f31 = f / 3 - Z I ) / ( K 3 - « l )170 ZOSf 1 >s71-(Wf_iS( I J *K1 )
Z'JS f 2 > = 7 2 - 11- i.'S ( 2 ) *fc 7 )i : t ; t í 3 > = 7 . 3 - ( ' - ' ü S ( 3 ] * H 3 )K F ( 1 ) = K tH P ( 1 ] = K ?v?r r ? )=«-?
K M . l )= '^1" M l U s MDC» ?t>0 T = 1 , iKSTKfDO 9'iO t t = l , i'KVRB
200 F^ VdL ( 1 . J ) = 0 . 0DO "J1O .1 = 1 . 5 . 2
DO 510 " = 1 , ÍM M V n i , ( ^ . J ) = b M V ( i L ( 2 , J ) + T W 0 P I * ( B ( l ) *w()S [f>,) • ( RF ( M ) * * 3 - R B ( M ) * * 3 ) / 3
• • » t I O * Z n s ( f > i * ( » ? K ( M ) * * 2 - M D ( M ) * * 2 ) / 2 )BMVPM i . . J D = » ! V ( i L . ( 3 . J ) + T W U P l * ( ( Ü ( L ) • MUS ( M ) t C ( L ) *MUS (M ) **2/ 2 ) *
* (HF( i . ) * * 3 - R H ( ? ) * * 3 ) / 3 + l A ( L ) * H C 5 ( M ) - » B ( ) J ) * Z 0 S ( M ) - » C C L ) * H 0 S ( M ) ** ZDSf ••) ) * ( R K C ) * * 2 - K P ( M ) * * 2 ) / 2 + l A ( L ) * 2 . O S ( M ) + C ( L ) * Z O S ( M ) * * 2 / 2 ) *• t R K f ) R f ' ( í ) ) )
BMVOLf 4 . J)=fc*s..V0L(4. J )+TWOP1* CC (LJ • \iO6 C M ) • ( RF ( M ) * • 3-Rh» (M ) * • 3 ) / 3* + C ( L J * / i n S t M ) * ( W K l M ) * * 2 - K B C H ) * * 2 ) / 2 )
2 1 0 C O t l T l K i U v[)L> 72 0 .1 = 2. b, ?•l . = U> + 1 1 / 2DU ?;o '• = ! . . }BHVOL( 1 ...n=H|. VI 11,(1 ,J)+TWOP1*(C(L J* iv i )S(M)* tRF(H)**3-RB(H)» t *3) /3
* + C C M * / n S ( > i ) * ( w F ( M ) * * 2 - R f c ( M * * 2 ) / 2 )4 J T P I * C B ( L ) *
• + H ( L ) + / ' ) 5 ( f D*C'i- ( M ) * * 2 - R B ( M ) * * 2 ) / 2 )220 COl- IT l r ' l r
DO 9B0 TUP»-"1=1 . UDDPNWPOSXsMPOSI+1ÜÜ ?fit> TSTKEsl .f-'STHK
280 ELllftr)(irLFli.M^nSI)• STRStííISTRE. IffjtM)
C l«RIXF(IW.20ü0)lt l ,EMC200O FüRüRTf» ftfc.Mt:NTO = ' . I S , ' 6.LUAD tMC WRTTF(TW,2100)(El,OAD(It:LÉ;M,I) ,IsiC2100 K U R i f t l f 6 ( E 1 0 . 3 , b X ) . / )

SUUPOHTTNE FilEc(IEL.EM.»MATX.STKSG,M'ELEM,ARh;A,TWOPI,HNODE,• NDUFN.USTRE.Kl,R2,p3,El.OAD)
Cc ^t*^*********************************************************cC •••PPHGRAMA VbuhC .CHLCULAH AS KÜRCAS NHDAIS EQUIVALENTES(UTILIZANDO CBJC CAl.dJTAnO HO CENTPUlnE X TtNSAO NO CPNTHOJDE X 2 X PI X H)C .f Av<5Sf)ClA COh NDO ELEMENTCCQ 4f^- t^%^4^****^f*1,^ t* ******************************************
BMATX(6.6) .STRSC ( 4 * HELbM ) ,ELUAÜf MELRM , 6)
DO ?8O THÜüEsl .DO ?HO TUOFN=1.NUOFNMFl'SIs.-POSI + l
»• LORUf IFL.EM,MPnSl ) =KLP AD CI L L t ^ . K<POsl)+TWUPI*R* AREA*• {iMATXf IS'lVf- . i -PUSI)*STP«G(lSTKF , Ifcl.KN)
280 CÜWTIMUF
F. N n

T NE CO'JVEh ( ELUAD . I ITEM , LNüOs . MELEM . MEVAB , MTOTV ,NCHEK ,• WDOFN.NELEM,NEVAR,NNUDE.NTUTV.PVALU#STFOR.• T L Ü A U . T C K O R . T O L E R , N O F I X . 1 F F I X , M V F I X , N V F I X )
cc • *t************************************** ***********************
cC ***PKPGPAMAC .HARA VEPTFICAP A CONVfcRGfe.NCI A UO PROCESSO INTF.HATIVOCC ****************************************************************
eLUAD(HEI.EM.tfEVAB) ,LNGUS[Mfc.LfcM#3) ,STFORCMTUTV ) ,TU.FUR(•JiTUlV),TtOAD(MELbM,PEVAB)NOFlX(NVFIX),IFFIXCfTCTV)
10 DO S TIMTVsl, MTOTVI STFOlU TTOTV)=0.0
5 CQlTUUFCALL TCCCÍTLUAD.IOFOR.LNUDS.MOFIX.IFFIX.MVFIX.MTOTV.
• NVKIX.MPOFN.WELEM.NNUDt.MlUTV,MELEM.MEVAB)CALL ICrCtfc.LOAD.STFOR.LNODS.NOH'X» I FF1X .MVFIX . MTOTV.
• nVKTX.MPUFN.WbLKM.I-JNOnt.MTUTV.h'ELEM, MEVAB)C hKITF(TW.lOOO) 'C tOOO FOHVATC VALORES DE STFCiR E IOFOR NESTA INTERAÇÃO',//)C «RITtfIW.I 100)(I,STFURCI).TÜFCB(T).1 = 1,NTOTV)C 1100 FOKVAT(lX.100CIb,E)2.5,lX,E12.5,/))
DO 50 ITUTV=1.UTOTVREFOKsTPFORCIToTV)-STFOP(ITOTV)E
WETnlrMFTOT+TOFOh(11UTV1*TOFOR(ITOTV)ACASHsAMStHKiOR)
5Ü iF

I
OU If.)1)0 l õ I A B l . V A
1 0 E l O A U f i r L E M . I E V A Ü ) = T t . C A D C T E l , K K . I t V A B ) - t L O A U f I E L E M , I F . V A B )
HtTOTrSOHKWETOTJ
J »• ( W AT I o.GT.TObKR 1ÜCHEKS 11KIT L T b R . P Q . D G O TO 20IFf WATin.r;r.PVAL.U)iiCHf K
20 PVAr.U = «!U'lUi Kl r w ( 4 2 . ÍO)f4CHEK , PÁTIO . PKM AX
«RITEf lN.30]riCHEK.KATlO.REMAX30 FIWATÍ3X.24HCODIGU Ut CONVERGINCIA = . I 5 , 3X , 1 3HNORMA DA TAXA
• 11H RLS1ÜÜAL = . E l 4 . 6 , 3 X , 2 3 H F Ü t « C A RESIÜHAT, MAXIMA = ,* «=• l 4 . b. / / )

SU6RUUTTNR OUTPUT (I ITF.B . MELEM , KlOTV • MVFIX , NELEF , NOFIX, NOUTP,* tJPülN.NVFIX,£>lHSGfTDISP,TRt:AC,EPSTN,NCHEK)
CCCCC .PPHA SAIDA DOS DtSlOCAMEMOS, P-H-ACOLS E TENSÕESC
:iOFlX(K<Vl<rx).NOUTP(2)fSTR5G(4.i4ELE:H)vSTRSP(3)»TDISP(MTOTV),TPEAC(MV?IX,2),tPçTN(MELEM)
I I- ( T H fP . fJT . 1 ) KOUTPSNOUTP ( 2 }TF(TlTKR.I íQ. l .ANL). IJCHhK.EQ,0)KüUTPsNl) IJ lP(2)
CC •••SATPft DOS DKRLUCAMFNTUS***C
TK(KUUH--.I,T.l )(;P TO 10
900 FÜKMATCiÁ.liHDKSLOCAHENTOS,/)UP I T E í I K . 9 b 5 )
955 t-OfcMAT(*X.2HriO.6X.9HR-DESLüC. ,7X , 9 H ? - D E S I 0 C .UO ?0 IPUIH=1.NPUIN
20 ' ; .wm:nw.9 iom>fUN, ( T D I S P ( I G A S H ) , IGASH=NÜISH,NGASH)rUJ Tt: f 4 ? . 9 U ) T U I S P ( 1 ) . T D I S K 2 ) , TlJ I S P C 1 6 J ) , T D 1 S P ( 1 6 2 )
9 1 1 K U i < M A T ( 2 F 1 2 . b . ' K ' . 7 F 1 2 . S )9 1 0 F O R V A T ( T 1 0 , 2 F U . € > )1 0 C'Jf . 'Tirf lJFCC •**PA1DT DAS RFlACOfc^S*»*CC lF íK rU !TP .LT .2 )Gü 1U 3ÜC
ClJ ? 0 F »m. < M" Í / / , S X . 7 U HI" A CUE.5 , / )C UK i r«rt T . V . < Í 6 5 )
CVbb Fiití iaiíòX,2HNl.i,bX#7HH-RfcAC.,7X#7H7,-kfc:AC.,/)C |;tj -iO T V K i X s l . N V F I XC i 0 v• PT i (• ( T .••. 91 O) 1,'OF IX ( r V H X ) , C1 P t AC ( I V H X , IUDKM ) , I l)OFM= 1 , 2 )3 0 ( JÜ : iTX ' i »Fc
cn iKU!!TP.r,i .3)Gu ru 50v* »• n r r 1 w, 9 7 b)
97b Kttc í«T(1X.KHt.LEMLNT0.6X.9HZZ-lt.NSAn.í>X,9Hí}R-TEfJSA0,5X,• «Hri-TL,iSAO,5X.9HRZ-TbMSÍO,6X» H'HNAX-TEMSAO, 6X#* 1 ü UK I !;-TEI-iSAO.3X.6HANGULC, 3 K. 15MUKF.PL. AST. EfET.)
2. I t J , E M ) t 5 T R S ( i ( l # J E L E M ) ) * 0 . b2 , I E L L M ) - S T K S t ; ( l ,
bO .-PlTf f TW ,940)Ti:LLM, C STHSG (ISTF1 i.Ul,F>•) , I5TRJ =1 , 4 ) , (* SIHSPÍ IS'I'HF) , ISlRtsl. ?) ,h.PSTN(]ELKM)
940 K1Hri..T(Tb.bX.6(Kj4.6.3X),l'8.3,tl4.f)
h; TCXCSSTIF .NOFIX , IF FIX , LR,MVF IX .MTCJTV, NVFIX , NDOFN)C
c ************************************************************cC ***PHdGKAMAC .HikR IliTWllbUZlP AR CUNDICChlS DB CONTORNOCC +**4*******************************************************
SS11KCMTUTV.1 ) , NOFIX ( K VF ! X ) , 1FF1X ( MTOTV)= l . NVFIX
Irl-iDFTXf .M)170 -190 Ksl.MDüFN!vHUwy = N»Q^H+lTCOM=lFFtX(.MHnwO)IF(TCOii)'Í50,450.4?0
420 SSTTF(JkaWij.n = l .DU 430 Js2,LUSSTTF í UBUWIJ,J)=O.
IK(NK)430.430.425S5ITFfNP.J)=0.
430450490500

l i . iTTiiK SOLVE ( S , R , M i i n i l » , NbOpMl'OTV » J •• I. AC)
CCC .kftRA KKSoT.VFW 0 ÜJ3TEMA UE h :Qll ACUK.S. ( MhTUDO DE GAUSS)CQc
n l M K - M H . ' J S t i T i l T V . l ) . P ( V T O 1 V JcC * * * P H P 4 O CASH Ofc UMA OU MAIS EQUAcntS INIJKPENÜENTfciS***C
IF( f b i l i n . C T . 1 K;O TU 69000
• Kt~ 690 Gü TU n 0 0 , 8 0 0 ) I F t . A G
c **»RKnnrAo ous COEFICIENTES UA PATPIZ DE RIGIDEZ***c7 00 DO 7 90 t?=l ,IJKO
D(i 7-jO T=2,MbAfM)IK f S t . D . t - i u . O l G O Tu 7H0T s i J + h - 1C = S f - . 1 W S ( f ! , 1 )
7í>0
780 r O > T J ' ! ) i790 CO.-TT'Jlif-1
cC * * * i « i m.Tf tn DL' VK inK DEC

ao o nu f- a- i' = i ,fjh.oo(i p ,r, i = 2 . " Í* n ii nI F I S Í » • • . ! . ) . k o . u ) < ; u T O P ? oI=ML-1
820 COwTTf-'UKS 3 0 H ( i • 1 = P I N ) / S ( i i , l )CC 4** | ) t TcR -i thA OS LtSLdCAK.KNinS PDH HACK-SUBSTITUTION***C
Dü S'if I. = 2I F ( S O ' . r . ) . t ; 0 . 0 ) G 0 TO
o > K = i 1 •• t . - l
I 8b>0Bt>0