Atratores para equações de reação-difusão em domínios ...€¦ · mais simples, e o c´...
99
Atratores para equações de reação-difusão em domínios arbitrários Henrique Barbosa da Costa
Transcript of Atratores para equações de reação-difusão em domínios ...€¦ · mais simples, e o c´...

Atratores para equações de reação-difusão em domínios arbitrários
Henrique Barbosa da Costa

Atratores para equações de reação-difusão em domínios arbitrários
Henrique Barbosa da Costa
Orientadora: Profa. Dra. Maria do Carmo Carbinatto
Dissertação apresentada ao Instituto de Ciências
Matemáticas e de Computação - ICMC-USP, como parte
dos requisitos para obtenção do título de Mestre em
Ciências - Matemática . VERSÃO REVISADA
USP – São Carlos
Junho de 2012
SERVIÇO DE PÓS-GRADUAÇÃO DO ICMC-USP
Data de Depósito: 18/06/2012
Assinatura:________________________
______

Ficha catalográfica elaborada pela Biblioteca Prof. Achille Bassi e Seção Técnica de Informática, ICMC/USP,
com os dados fornecidos pelo(a) autor(a)
C837aCosta, Henrique Barbosa da Atratores para equações de reação-difusão emdomínios arbitrários / Henrique Barbosa da Costa;orientadora Maria do Carmo Carbinatto. -- SãoCarlos, 2012. 86 p.
Dissertação (Mestrado - Programa de Pós-Graduação emMatemática) -- Instituto de Ciências Matemáticas ede Computação, Universidade de São Paulo, 2012.
1. Atratores globais. 2. Equações parabólicas. 3.Equações de reação-difusão. 4. Estimativas detruncamento. I. Carbinatto, Maria do Carmo, orient.II. Título.

“E aqueles que foram vistos dancando
foram julgados insanos por aqueles que nao
podiam escutar a musica”.
Friedrich Nietzsche


Agradecimentos
Agradeco a minha famılia pelas horas passadas em casa, que sempre foram confortantes,
independente do momento. Em especial a minha mae, que sempre me guiou e aconselhou nas
encruzilhadas que passamos. Fico feliz em dizer que ela cumpriu bem o seu papel, que segundo
ela mesma e “criar asas”para que possa ficar tao longe da famılia e nao me sentir triste e “manter
raızes”para que sempre saiba onde procurar conselhos e se sentir em casa. E agradeco ao meu
pai pelos genes, afinal, a culpa por seguir esta profissao tem que ser de alguem.
Agradeco aos meus irmaos. A quem eu deveria servir de exemplo, por ser o primogenito,
mas que, as vezes, sinto que sao mais exemplos para mim do que sou a eles.
Agradeco a minha namorada, que sempre fez tao bem pra mim, apesar da distancia. Por me
apoiar, sustentar e me amar apesar de todos pesares. Eu sei que e difıcil, mas se fosse facil, que
graca teria?
Agradeco aos meus amigos. Os amigos de Sete Lagoas por serem meu escape. Como dizem,
os amigos sao a famılia que nos deixam escolher, e creio que escolhi meus irmaos muito bem.
E os amigos de Sao Carlos que tornaram minha moradia aqui quase nada complicada, fazendo
estudar matematica parecer facil e divertido (talvez tenha exagerado um pouco aqui).
Agradeco a minha orientadora, Maria do Carmo Carbinatto, pela paciencia, devocao e cui-
dado. Por toda a orientacao, que nao teria como ser melhor. Pelo fim dessa jornada me sinto
orgulhoso em poder chama-la de amiga.
Agradeco, por fim, a FAPESP pela confianca e apoio financeiro.


Resumo
Neste trabalho estudamos a dinamica assintotica de uma classe de equacoes diferenciais
de reacao-difusao definidas em abertos de R3 arbitrarios, limitados ou nao, com condicoes de
fronteira de Dirichlet. Utilizando a tecnica de estimativas de truncamento, como nos artigos de
Prizzi e Rybakowski, mostramos a existencia de atratores globais.
Palavras-chave: Atratores globais, equacoes parabolicas, equacoes de reacao-difusao, estima-
tivas de truncamento.


Abstract
In this work we study the asymptotic behavior of a class of semilinear reaction-diffusion
equations defined on an arbitrary open set of R3, bounded or not, with Dirichlet boundary
conditions. Using the tail-estimates technic based on papers of Prizzi and Rybakowski, we
prove existence of global attractors.
Key words: Global attractors, parabolic equations, reaction-diffusion equations, tail-estimates.


Sumario
Introducao 1
1 Preliminares 3
1.1 Medidas espectrais . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 3
1.2 Operadores de Nemytskiı . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 7
1.3 Medida de nao-compacidade de Kuratowski . . . . . . . . . . . . . . . . . . . 9
1.4 Operadores m-dissipativos . . . . . . . . . . . . . . . . . . . . . . . . . . . . 10
1.5 Operadores setoriais . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 11
1.6 Semifluxos e atratores globais . . . . . . . . . . . . . . . . . . . . . . . . . . 21
1.7 Equacoes diferenciais parabolicas . . . . . . . . . . . . . . . . . . . . . . . . 24
2 O problema linear 31
2.1 Um resultado de analise funcional . . . . . . . . . . . . . . . . . . . . . . . . 31
2.2 Resultados auxiliares sobre espacos de potencias fracionarias . . . . . . . . . . 34
2.3 O problema linear abstrato . . . . . . . . . . . . . . . . . . . . . . . . . . . . 51
3 O problema nao-linear 57
3.1 Estimativas nao-lineares . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 57
i

3.2 A equacao de evolucao abstrata . . . . . . . . . . . . . . . . . . . . . . . . . . 65
4 Dinamica assintotica 69
4.1 Equacoes parabolicas semilineares . . . . . . . . . . . . . . . . . . . . . . . . 69
4.2 Construcao da funcao de Lyapunov . . . . . . . . . . . . . . . . . . . . . . . . 73
4.3 Estimativas de truncamento . . . . . . . . . . . . . . . . . . . . . . . . . . . . 76
4.4 Compacidade assintotica e existencia de atrator . . . . . . . . . . . . . . . . . 80
5 Consideracoes finais 83
Referencias bibliograficas 85
ii
Introducao
A teoria de sistemas dinamicos descreve fenomenos que evoluem com o tempo. Dessa
forma, sistemas dinamicos servem de modelo para varias areas das ciencias aplicadas. Uma
questao que podemos colocar e entender o compartamento assintotico de um determinado sis-
tema dinamico. Neste contexto, podemos investigar a existencia de conjuntos invariantes com
determinadas propriedades ou, em particular, a existencia de atratores globais. O papel dos
atratores globais esta diretamente relacionado com o estudo da dinamica assintotica dos siste-
mas dinamicos. A existencia de um atrator global nos fornece a garantia de que o fenomeno se
aproxima de um padrao no futuro.
Neste trabalho, estudamos uma classe de equacoes diferenciais parciais parabolicas e apre-
sentamos condicoes para existencia de um atrator global. Mais especificamente, consideramos
a seguinte equacao de reacao-difusao semilinear
ut +β (x)u−∑i, j ∂i(ai j(x)∂ ju) = f (x,u), t ≥ 0, x ∈Ω,
u(x, t) = 0, t ≥ 0, x ∈ ∂Ω,(ERD)
onde Ω e um aberto arbitrario em RN (limitado ou nao), β : Ω→R e f : Ω×R→R sao funcoes
dadas e Lu := ∑i, j ∂i(ai j(x)∂ ju) e o operador diferencial de segunda ordem na forma divergente.
Existe uma vasta literatura tratando da existencia de atratores para equacoes de reacao-
difusao em domınios limitados (ver, por exemplo, os livros [14], [2], [7], [17] e [23]). Neste
caso, a compacidade assintotica das solucoes e obtida da compacidade da inclusao de Sobolev
H1(Ω)⊂ L2(Ω).
Para caso de domınios nao limitados, esta inclusao nao e compacta e necessitamos de ou-
tras ferramentas para obter a propriedade da compacidade assintotica das solucoes. Nos traba-
lhos [3], [1], [21], [24] os autores mostram a existencia de atrator global para uma equacao de
1

2
reacao-difusao definida em um domınio nao limitado. O objetivo deste trabalho e apresentar o
trabalho desenvolvido em [21].
Em [21], os autores mostram a existencia de atrator global para a equacao parabolica (ERD)
definida em um domınio Ω nao limitado de R3 (isto e, N = 3) sem supor qualquer condicao de
regularidade na fronteira ∂Ω de Ω ou nas funcoes ai j(·). No trabalho, os autores exploram da
tecnica de estimativas de truncamento desenvolvida por Wang em [24] e o fato de que a equacao
do calor admite um funcional de Lyapunov.
Observamos que sem hipoteses de regularidade sobre ∂Ω e em ai j(·) nao e possıvel estudar
(ERD) em Lq(Ω) com q 6= 2. Isso se da porque nao podemos usar a teoria de regularidade das
equacoes elıpticas para caracterizar os espacos de potencias fracionarias gerados pelo operador
−L+β (x)I. Contudo, de modo a trabalhar em L2(Ω), devemos impor condicoes de crescimento
em f . No caso particular em que N = 3 o expoente crıtico e ρ = 5.
Para descrever o trabalho [21] organizamos a apresentacao como segue. No Capıtulo 1
enumeramos alguns conhecimentos preliminares importantes que foram estudados para o de-
senvolvimento do trabalho.
No Capıtulo 2 apresentamos as Hipoteses (HL1), (HL2) e (HL3). Com estas hipoteses
o operador u 7→ −Lu+ β (x)u define um operador positivo auto-adjunto A : D(A) ⊂ X → X ,
onde X = L2(Ω). Apresentamos as propriedades importantes do operador A e construımos uma
famılia de operadores auto-adjuntos A(α), α ∈ R tal que A(α) : Xα → Xα−1.
No Capıtulo 3 apresentamos a Hipotese (HNL) e determinamos um α ∈ [0,1) tal que a partir
uma funcao f satisfazendo Hipotese (HNL) obtemos um operador de Nemytskiıf : H10 (Ω)→
X−α . Munido dos resultados sobre equacoes parabolicas apresentados no Capıtulo 1 obtemos
que (ERD) gera um semifluxo global π em H10 (Ω).
Finalmente, no Capıtulo 4, demonstramos o principal resultado deste trabalho que diz que
assumindo as Hipoteses (HL1), (HL2), (HL3) e (HNL), o semifluxo π possui um atrator global
(ver Teorema 4.4.2).

Capıtulo
1
Preliminares
Neste capıtulo apresentamos os diversos conceitos e resultados basicos estudados.
1.1 Medidas espectrais
As referencias [10] e [16] foram consultadas para esta secao.
A teoria espectral para operadores fechados tem como objetivo representar operadores li-
neares fechados de um modo mais simples. Se X e um espaco de Banach e A : D(A)⊂ X → X
e um operador linear fechado, o elemento principal dessa teoria e o espectro do operador A,
σ(A).
Outra consequencia importante da teoria espectral, alem de escrever o operador de forma
mais simples, e o calculo operacional. Com o calculo operacional podemos “aplicar” funcoes a
operadores lineares. Isso e, se A e um operador linear fechado e f : R→ R tem certas proprie-
dades, poderemos definir f (A) que sera um operador linear limitado em L (X) = B : X → X |B e linear e limitado.
As medidas espectrais ou famılias espectrais se encontram nesse contexto. Quando X e um
espaco de Hilbert e A e um operador auto-adjunto podemos definir uma famılia de subespacos de
X que se relaciona de modo biunıvoco com o operador A. E possıvel tambem aplicar o calculo
operacional para estas famılias e realizar o calculo de funcoes de operadores. No caso particular
estudado aqui, o calculo operacional sera importante na geracao das famılias de espacos de
3

4 1. Preliminares
potencias fracionarias de X .
Dessa forma, no que segue X denota um espaco de Hilbert com produto interno 〈·, ·〉X .
Vamos entao, definir de uma forma mais abstrata, o conceito de famılia espectral.
Seja Eλλ∈R uma famılia de projecoes ortogonais em X . Dado x ∈ X definimos
E−∞x = limλ→−∞
Eλ x,
E+∞x = limλ→∞
Eλ x e
Eλ+0x = limε→0+
Eλ+εx.
Definicao 1.1.1. Uma famılia Eλλ∈R de projecoes ortogonais em X e chamada uma famılia
espectral ou resolucao da identidade se satisfaz as condicoes:
(i) Eλ Eµ = Eminλ ,µ, para todo λ , µ ∈ R.
(ii) E−∞ = 0 e E+∞ = I.
(iii) Eλ+0 = Eλ para todo λ ∈ R.
Observamos que os limites acima sao tomados na norma de X .
Proposicao 1.1.2. Seja Eλλ∈R uma famılia espectral em X. Entao para todo u, v ∈ X a
funcao
λ ∈ R 7→ 〈Eλ u,v〉X ∈ R (1.1.1)
e uma funcao de variacao limitada em todo intervalo limitado da reta. Alem disso, sua variacao
total V (λ ;u,v) satisfaz
V (λ ;u,v)≤ |u||v|, para todo u, v ∈ X e λ ∈ R.
Sejam [α,β ] ⊂ R um intervalo fechado de R, f : R→ C uma funcao e u ∈ X . Considere
uma particao π = α = λ1,λ2, . . . ,λn = β do intervalo [α,β ]. Defina a norma de π por
‖π‖= maxj∈1,...,n
|λ j+1−λ j|.

1. Preliminares 5
Para cada j ∈ 1, . . . ,n seja λ ′j ∈ (λ j,λ j+1]. A soma
n
∑j=1
f (λ ′j)(Eλ j+1−Eλ j)u
e chamada a soma de Riemann da funcao f com relacao a particao π .
Proposicao 1.1.3. Com a notacao introduzida acima, suponha que f : R→C seja uma funcao
contınua. O limite forte em X
limπ→0
n
∑j=1
f (λ ′j)(Eλ j+1−Eλ j)u (1.1.2)
existe, para qualquer que seja a escolha de λ ′j no intervalo (λ j,λ j+1], j ∈ 1, . . . ,n.
Denotamos o limite (1.1.2) por ∫β
α
f (λ )dEλ u.
Se u ∈ X e f : R→ C e uma funcao contınua tal que os limites (forte em X)
limα→−∞
∫β
α
f (λ )dEλ u e limβ→∞
∫β
α
f (λ )dEλ u
existem, dizemos que a integral∫ +∞
−∞
f (λ )dEλ u existe.
Teorema 1.1.4. Sejam u ∈ X e f : R→ C uma funcao contınua. As seguintes afirmativas sao
equivalentes:
(i)∫ +∞
−∞
f (λ )dEλ u existe.
(ii)∫ +∞
−∞
| f (λ )|2d|Eλ u|2 < ∞.
(iii) A aplicacao v 7→ F(v) :=∫ +∞
−∞
f (λ )d〈Eλ v,u〉X e um funcional linear contınuo.
Teorema 1.1.5. Seja f : R→ R uma funcao contınua. Defina o seguinte subconjunto de X:
D =
u ∈ X |
∫ +∞
−∞
| f (λ )|2d|Eλ u|2 < ∞
.

6 1. Preliminares
Entao D e denso em X. Definimos operador por
〈Tu,v〉X =∫ +∞
−∞
f (λ )d〈Eλ u,v〉X , u ∈ D e v ∈ X. (1.1.3)
Entao T e um operador auto-adjunto em X com domınio D(T ) = D.
Com a notacao do Teorema 1.1.5, para o caso particular em que f (λ ) = λ , λ ∈R, definimos
〈Au,v〉X =∫ +∞
−∞
λd〈Eλ u,v〉X , para u ∈ D(A)⊂ X e v ∈ X ,
onde
D(A) =
u ∈ X |∫ +∞
−∞
λ2d|Eλ x|2 < ∞
.
No que segue o operador A sera denotado, simbolicamente, por
A =∫ +∞
−∞
λdEλ (1.1.4)
e chamamos (1.1.4) a representacao espectral do operador auto-adjunto A no espaco de Hilbert
X.
Reciprocamente, se A : D(A)⊂ X → X e um operador linear auto-adjunto, podemos definir
uma famılia espectral Eλλ∈R correspondente ao operador A. Descrevemos esta conexao no
Teorema Espectral a seguir.
Teorema 1.1.6 (Teorema Espectral). Sejam X um espaco de Hilbert complexo e A : D(A)⊂X→X um operador auto-adjunto. Entao existe uma unica famılia espectral Eλλ∈R associada ao
operador A. Alem disso para cada λ ∈ R e ξ ∈ C/R temos
〈(ξ −A)−1u,v〉X =∫ +∞
−∞
1ξ −λ
d〈Eλ u,v〉X , para todo u, v ∈ X .
Finalmente obtemos
Corolario 1.1.7. Sejam X um espaco de Hilbert e A um operador auto-adjunto em X. Existe

1. Preliminares 7
uma unica famılia espectral Eλλ∈R tal que
〈Au,v〉X =∫R
λd〈Eλ u,v〉X ,
Au =∫R
λdEλ u.
Concluımos observando que existe uma correspondencia entre operadores auto-adjuntos no
espaco de Hilbert X e famılias espectrais. Dessa maneira, analogamente ao Teorema 1.1.4,
podemos definir os operadores f (A). Se f for uma funcao em R a valores complexos limitada
em σ(A), o espectro de A, entao f (A) e um operador linear limitado em X e, ainda,
‖ f (A)‖ ≤ supλ∈σ(A)
| f (λ )|.
Escrevemos, anolagamente a equacao (1.1.4) e ao Corolario 1.1.7,
f (A) =∫ +∞
−∞
f (λ )dEλ . (1.1.5)
f (A)u =∫ +∞
−∞
f (λ )dEλ u, para todo u ∈ X . (1.1.6)
1.2 Operadores de Nemytskiı
Para os conceitos apresentados e demonstracoes dos resultados enunciados, sugerimos [12].
Sejam N ≥ 1 um numero natural e Ω ⊂ RN um subconjunto aberto de RN . Dizemos que
f : Ω×R→ R e uma funcao de Caratheodory se
1) para cada s ∈ R, a funcao Ω 3 x 7→ f (x,s) e (Lebesgue) mensuravel e
2) para q.t.p. x ∈Ω, a funcao R 3 s 7→ f (x,s) e contınua em R.
Denotemos por M o conjunto das funcoes mensuraveis de Ω em R.
Teorema 1.2.1. Se f : Ω×R→ R e uma funcao de Caratheodory, entao a funcao Ω 3 x 7→f(x,u(x)
)e mensuravel para todo u ∈M .

8 1. Preliminares
Portanto, uma funcao de Caratheodory f define uma aplicacao f : M →M , chamada
aplicacao de Nemytskiı.
Muitos resultados importantes requerem que o subconjunto Ω de RN seja limitado e como
nao estamos nos restringindo a apenas este caso enumeramos apenas alguns resultados que nao
necessitem desta restricao em Ω.
Teorema 1.2.2. Seja Ω um subconjunto aberto de RN e seja f : Ω×R→ R uma funcao de
Caratheodory. Suponhamos que existam c > 0, b ∈ Lq(Ω), 1≤ q≤ ∞, e r > 0 tais que
| f (x,s)| ≤ c|s|r +b(x), para todo x ∈Ω e s ∈ R.
Entao f : Lqr(Ω)→ Lq(Ω) e uma funcao contınua. Alem disso a imagem de subconjuntos
limitados e um conjunto limitado.
E impressionante saber que a condicao suficiente do Teorema 1.2.2 e tambem necessaria
para um funcao de Caratheodory definir uma aplicacao de Nemytskiı. Mais precisamente temos:
Teorema 1.2.3. Seja Ω um subconjunto aberto de RN e seja f : Ω×R→ R uma funcao de
Caratheodory. Suponhamos que existam p, q ∈ [1,∞) tais que f : Lp(Ω)→ Lq(Ω). Entao
existem c > 0 e b ∈ Lq(Ω) tais que
| f (x,s)| ≤ c|s|p/q +b(x), para todo x ∈Ω e s ∈ R.
Para nossos objetivos precisamos, ainda, de condicoes que garantam a diferenciabilidade da
aplicacao de Nemytskiı. Para isso enunciamos o seguinte resultado sobre diferenciacao.
Teorema 1.2.4. Seja Ω um subconjunto aberto de RN e seja f : Ω×R→ R uma funcao de
Caratheodory. Suponhamos que existam c > 0, b ∈ Ln(Ω), 1≤ n≤ ∞ e m > 0 tais que∣∣∣∣∂ f∂ s
(x,s)∣∣∣∣≤ c|s|m +b(x), para todo x ∈Ω e s ∈ R.
Entao as aplicacoes de Nemytskiı
f : Lp(Ω)→ Lq(Ω) e f ′ : Lp(Ω)→ Ln(Ω),
onde f ′ =∂ f∂ s
, p = mn, q =mn
m+1, estao bem definidas. Mais ainda f e continuamente Frechet

1. Preliminares 9
diferenciavel com D f : Lp(Ω)→L (Lp(Ω),Lq(Ω)) definida por
D f (u)[v] = f ′(u)v = f ′(·,u(·))v(·)), para todo u,v ∈ Lp(Ω).
1.3 Medida de nao-compacidade de Kuratowski
Nosso objetivo nesta secao e definir uma medida que nos mostre, dado um subconjunto
limitado de um espaco de dimensao infinita, o quao “nao-compacto” e este conjunto. Uma
referencia para o topico e [11]. Seja X um espaco de Banach e denote por B o conjunto dos
subconjuntos limitados em X .
No que segue dado um subconjunto A de X , diam(A) denota o diametro do conjunto A. A
bola aberta de centro em a ∈ X e raio r > 0 e denotada por B(a,r).
Dado A ∈B definimos
βK(A) = inf
d > 0 | A⊂
n⋃j=1
K j com diam(K j)≤ d, j ∈ 1, . . . ,n
.
A aplicacao βK : B → [0,∞) e chamada a medida de nao-compacidade de Kuratowski.
Dado A ∈B podemos tambem definir
βB(A) = inf
r > 0 | existem a j ∈ X , j ∈ 1, . . . ,n, tais que A⊂
n⋃j=1
B(a j,r)
.
A aplicacao βB : B→ [0,∞) e chamada a medida de nao-compacidade por bolas.
Com estas medidas definidas seguem os resultados que serao importantes no decorrer do
trabalho.
Proposicao 1.3.1. Suponha que X seja um espaco de Banach de dimensao infinita e seja B a
famılia de limitados de X e β : B→ [0,∞) a medida de nao-compacidade de Kuratowski ou a
medida de nao-compacidade por bolas. Entao
(i) β (A) = 0 se, e somente se, A e compacto.
(ii) β e uma seminorma.

10 1. Preliminares
(iii) Sejam A1, A2 ∈ B tais que A1 ⊆ A2. Entao β (A1) ≤ β (A2) e β (A1 ∪ A2) =
maxβ (A1),β (A2).
(iv) β (convA) = β (A), para todo A ∈B. Aqui convA denota a envoltoria convexa de A.
(v) β e contınua com respeito a distancia de Hausdorff dH dada por
dH(A1,A2) = max
supx∈A1
infy∈A2|x− y|, sup
x∈A2
infy∈A1|x− y|
, A1, A2 ∈B.
Em particular, β (A) = β (A).
1.4 Operadores m-dissipativos
Nesta secao definiremos os chamados operadores dissipativos e m-dissipativos. Tais ope-
radores sao usualmente encontrados em exemplos e possuem boas propriedades para nossos
objetivos. As demonstracoes dos resultados apresentados podem ser encontradas em [6]. No
que segue considere X um espaco de Banach.
Definicao 1.4.1. Um operador A : D(A)⊂ X → X em X e dito dissipativo se
|u−λAu| ≥ |u|, para todo u ∈ D(A) e todo λ > 0.
Definicao 1.4.2. Um operador A : D(A) ⊂ X → X em X e dito m-dissipativo se as seguintes
condicoes estao satisfeitas:
(i) A e dissipativo;
(ii) para todo λ > 0 e para todo v ∈ X, existe u ∈ D(A) tal que u−λAu = v.
A proposicao a seguir oferece uma condicao necessaria e suficiente para que um operador
dissipativo seja tambem m-dissipativo.
Proposicao 1.4.3. Seja A : D(A)⊂ X → X um operador dissipativo em X. As seguintes propri-
edades sao equivalentes:
(i) A e m-dissipativo em X.

1. Preliminares 11
(ii) Existe um λ0 > 0 tal que para todo v ∈ X, a equacao u−λ0Au = v possui uma solucao
u ∈ D(A).
Agora, vamos restringir ao caso em que X e um espaco de Hilbert e analisar o conceito de
dissipatividade e m-dissipatividade. Seja X um espaco de Hilbert. O produto interno definido
em X sera denotado por 〈·, ·〉. No que segue dado A : D(A) ⊂ X → X um operador linear
densamente definido, o seu operador adjunto sera denotado por A∗.
Apresentamos um criterio de dissipatividade para operadores definidos em espacos de Hil-
bert:
Proposicao 1.4.4. Um operador A : D(A) ⊂ X → X e dissipativo em X se, e somente se,
〈Au,u〉 ≤ 0, para todo u ∈ D(A).
Uma consequencia importante e o seguinte
Corolario 1.4.5. Seja A : D(A)⊂X→ X um operador m-dissipativo em X. Entao D(A) e denso
em X.
Os resultados a seguir relacionam operadores dissipativos e m-dissipativos com o operador
adjunto e operadores auto-adjuntos.
Teorema 1.4.6. Seja A : D(A)⊂ X → X um operador linear densamente definido e dissipativo
em X. Entao A e m-dissipativo se, e somente se, A e um operador fechado e A∗ e um operador
dissipativo.
Corolario 1.4.7. Seja A : D(A)⊂ X → X um operador auto-adjunto em X tal que 〈Au,u〉 ≤ 0,
para todo u ∈ D(A). Entao A e m-dissipativo.
Proposicao 1.4.8. Seja A : D(A) ⊂ X → X um operador simetrico e densamente definido tal
que 〈Au,u〉 ≤ 0 para todo u ∈ D(A) em X. Entao A e m-dissipativo se, e somente se, A e
auto-adjunto.
1.5 Operadores setoriais
Operadores setoriais tem uma relevancia muito grande no estudo dos semigrupos linea-
res, pois estes sao geradores dos conhecidos semigrupos analıticos que possuem inumeras
aplicacoes no estudo das equacoes diferenciais parciais parabolicas.

12 1. Preliminares
Nesta secao faremos uma breve exposicao dos operadores setorias e apresentamos as
notacoes e resultados que serao utilizados no texto. Em [7], [8] e [15] encontramos mais deta-
lhes sobre o assunto.
Iniciamos recordando algumas definicoes e resultados da teoria geral de semigrupos.
Nesta secao X denota um espaco de Banach e denotamos por L (X) o conjunto dos opera-
dores lineares limitados de X em X .
Definicao 1.5.1. Um semigrupo de operadores linerares ou um C0-semigrupo e uma famılia de
operadores lineares T (t) | t ≥ 0 em L (X) que satisfaz as seguintes propriedades:
(i) T (0)x = x, para todo x ∈ X.
(ii) T (t + s)x = T (t)T (s)x, para todo s, t ≥ 0 e x ∈ X.
(iii) T (t)x→ x, quando t→ 0+, para todo x ∈ X.
Definicao 1.5.2. Um semigrupo uniformemente contınuo de operadores e uma famılia de ope-
radores lineares T (t) | t ≥ 0 em L (X) que satisfaz as seguintes propriedades:
(i) T (0)x = x, para todo x ∈ X.
(ii) T (t + s)x = T (t)T (s)x, para todo s, t ≥ 0 e x ∈ X.
(iii) ‖T (t)− I‖→ 0, quando t→ 0+, para todo x ∈ X.
E claro que todo semigrupo uniformemente contınuo de operadores e um C0-semigrupo.
Teorema 1.5.3. Seja T (t) | t ≥ 0 um C0-semigrupo em X. Entao existem constantes ω ≥ 0 e
M ≥ 1 tais que
‖T (t)‖ ≤Meωt , para todo t ∈ [0,∞).
O resultado acima nos mostra que um C0-semigrupo e uniformemente limitado em interva-
los limitados da reta.
Corolario 1.5.4. Se T (t) | t ≥ 0 e um C0-semigrupo em X, entao [0,∞)×X 3 (t,x) 7→ T (t)x∈X e uma aplicacao contınua.

1. Preliminares 13
Seja T (t) | t ≥ 0 um C0-semigrupo em X e considere o conjunto
D =
x ∈ X | limt→0+
T (t)x− xt
existe.
Definimos o operador linear A : D(A)⊂ X → X , onde D(A) = D e
Ax = limt→0+
T (t)x− xt
, para x ∈ D(A).
O operador A definido acima e chamado gerador infinitesimal do semigrupo T (t)) | t ≥ 0 em
X .
Teorema 1.5.5. Sejam T (t) | t ≥ 0 um C0-semigrupo em X e A : D(A)⊂ X → X seu gerador
infinitesimal. As seguintes propriedades sao satisfeitas:
1. limh→0+
1h
∫ t+h
tT (τ)dτ = T (t)x, para todo x ∈ X, t ∈ [0,∞).
2.∫ t
0T (τ)xdτ ∈ D(A) e A
(∫ t
0T (τ)xdτ
)= T (t)x− x, para todo x ∈ X, t ∈ [0,∞).
3. T (t)x ∈D(A), se x ∈D(A) e t ∈ [0,∞). Alem disso, para x ∈D(A), a funcao [0,∞) 3 t 7→T (t)x ∈ X e diferenciavel e
ddt
T (t)x = AT (t)x = T (t)Ax.
4. T (t)x−T (s)x =∫ t
sT (τ)Axdτ =
∫ t
sAT (τ)xdτ , para x ∈ D(A) e t, s ∈ [0,∞), com s≤ t .
Corolario 1.5.6. Se A : D(A) ⊂ X → X denota o gerador infinitesimal de um C0-semigrupo
T (t) | t ≥ 0, entao A e um operador linear fechado e D(A) = X.
Passamos a definicao de operadores setorias e listaremos alguns resultados importantes.
Dados α ∈ R e φ ∈ (0,π/2), definimos o setor Sα,φ do plano complexo por
Sα,φ := λ ∈ C | φ ≤ |arg(λ −α)| ≤ π,λ 6= α.
Um operador linear fechado A : D(A) ⊂ X → X densamente definido em X e dito um ope-
rador setorial em X se existirem constantes α ∈ R, φ ∈ (0,π/2) e M > 0 tais que

14 1. Preliminares
(i) ρ(A) contem o setor Sα,φ ,
(ii) para cada λ ∈ Sα,φ vale a estimativa
‖(λ −A)−1‖ ≤ M|λ −α|
.
Proposicao 1.5.7. Seja A : D(A)⊂ X → X um operador linear fechado e densamente definido
em X. As seguintes afirmativas sao equivalentes:
(a) A+ωI e um operador setorial em X para algum ω ∈ R.
(b) A+ωI e um operador setorial em X para todo ω ∈ R.
(c) Existem constantes k, ω ∈ R tais que o conjunto ρ(Aω) contem o semiplano λ ∈ C |reλ ≤ k e
‖λ (λ I−Aω)−1‖ ≤M, para todo reλ ≤ k.
Aqui, Aω := A+ωI.
Suponhamos que T (t) | t ≥ 0 seja um C0-semigrupo de operadores lineares em X e que
existem um setor do plano complexo
∆φ = z ∈ C | |argz|< φ, com 0 < φ ≤ π/2,
e uma famılia T (z) | z∈∆φ de operadores em L (X) que coincide com T (t) para z= t ∈ [0,∞)
e tal que
(i) a aplicacao z 7→ T (z) e analıtica em ∆φ\0,
(ii) T (z1 + z2) = T (z1)T (z2), se z1,z2 ∈ ∆φ ,
(iii) para todo x ∈ X , limz→0z∈∆φ
T (z)x = x.
O C0-semigrupo T (t) | t ≥ 0 e chamado semigrupo analıtico (fortemente contınuo).
Lema 1.5.8. Seja T (t) | t ≥ 0 um semigrupo analıtico em ∆φ , com 0 < φ ≤ π/2. Existem
M ≥ 1 e ω ≥ 0 tais que ‖T (z)‖ ≤Meω rez, z ∈ ∆φ .

1. Preliminares 15
O teorema a seguir caracteriza os geradores de semigrupos analıticos e uma prova detalhada
pode ser encontrada em [8].
Teorema 1.5.9. Seja A : D(A)⊂ X→ X um operador linear fechado e densamente definido. As
seguintes afirmativas sao equivalentes:
(i) A e o gerador infinitesimal de um semigrupo analıtico.
(ii) −A e um operador setorial em X.
Lema 1.5.10. Seja 0 < φ ≤ π/2. Seja T (t) | t ≥ 0 um semigrupo analıtico no setor ∆φ =
z ∈ C | |argz|< φ, tal que para constantes C ≥ 1 e a ∈ R,
‖T (z)‖ ≤Ce−a rez, z ∈ ∆φ
e suponha que A : D(A) ⊂ X → X seja seu gerador infinitesimal. As seguintes propriedades
estao satisfeitas:
(1) T (z) =1
2πi
∫Γ
eλ z(λ −A)−1dλ , para z ∈ ∆Φ\0, onde Γ e a curva consistente dos se-
guintes segmentos orientados conforme a parametrizacao:
Γ1 = −a− re−i(π/2+φ) | −∞ < r ≤ 1;
Γ2 = −a+ eiψ | −π/2−φ ≤ ψ ≤ π/2+φ;
Γ3 = −a+ rei(π/2+φ) | 1≤ r < ∞.
(2) Para todo 0 < ε < φ e x ∈ X, temos
T (z)x→ x, se z→ 0 e z ∈ ∆φ−ε .
(3) Se t > 0, entao T (t)x ∈ D(A) para todo x ∈ X eddt
T (t)x = AT (t)x, para todo x ∈ X.
Nosso intuito agora e definirmos as potencias fracionarias que sao elementos importantes
no estudo das equacoes parabolicas e suas solucoes.
Definicao 1.5.11. Um operador A : D(A)⊂ X → X sera dito operador positivo se as seguintes
condicoes forem satisfeitas:

16 1. Preliminares
(i) A e um operador fechado e densamente definido,
(ii) (−∞,0]⊂ ρ(A) e
(iii) existe um N ≥ 1 tal que
‖(s−A)−1‖ ≤ N1+ |s|
, para todo s≤ 0.
O operador A da definicao acima tambem e dito operador positivo do tipo N, onde N e como
em (iii).
Lema 1.5.12. Suponha que A : D(A) ⊂ X → X seja um operador positivo do tipo N. Entao o
setor
ΣN =
λ ∈ C | existe um s≤ 0 tal que |λ − s| ≤ 1+ |s|
2N
esta contido em ρ(A). Alem disso
‖(λ −A)−1‖ ≤ 2N +11+ |λ |
,para todo λ ∈ ΣN .
Nas condicoes do Lema 1.5.12 pode ser mostrado queλ ∈ C | |argλ | ≥ π− arcsen
12N
∪
λ ∈ C | |λ | ≤ 12N
⊂ ΣN .
Lema 1.5.13. Seja A : D(A)⊂ X→ X um operador positivo do tipo N. Para cada z ∈C tal que
rez≤ 0, definimos
B(z) =−12πi
∫Γ
λz(λ −A)−1dλ , (1.5.1)
onde Γ e a curva em ΣN\(−∞,0] que consiste dos tres segmentos
Γ1 =−se−iθ | s ∈ (−∞,−1/(4N))
,
Γ2 =(1/(4N))eiψ | |ψ| ≤ θ
,
Γ3 =
seiθ | s ∈ [1/(4N),∞),
onde θ ∈ [π − arcsen(1/(2N)),π), orientada pela parametrizacao. Entao para z fixado B(z)
esta bem definida, isto e, nao depende da escolha de θ . Alem disso, B(z) ∈L (X) para todo
z ∈ C com rez < 0 e tambem, a aplicacao z 7→ B(z) e analıtica em z ∈ C | rez < 0.

1. Preliminares 17
Note que, o Teorema de Cauchy implica que podemos modificar o comportamento de Γ
em torno do 0 ∈ C. E, com o Lema 1.5.13, podemos definir as potencias fracionarias de um
operador positivo, se rez < 0.
Definicao 1.5.14. Seja A : D(A)⊂ X → X um operador positivo do tipo N. Para z ∈Π0 = z ∈C | rez < 0, definimos
Az :=−12πi
∫Γ
λz(λ −A)−1dλ ∈L (X), (1.5.2)
onde Γ e dada como no Lema 1.5.13 com θ ∈ [π− arcsen(1/(2N)),π).
No que segue utilizaremos a notacao A0 = I, onde I denota a a aplicacao identidade em X .
Proposicao 1.5.15. Seja A : D(A)⊂ X → X um operador positivo. Entao
(i) Az1+z2 = Az1 Az2 , para quaisquer z1,z2 ∈Π0∪0.
(ii) Para n ∈ N, temos A−n = (A−1)n, onde A−1 denota a inversa de A.
(iii) Az e injetor, para cada z ∈ C com rez < 0.
Segue da Proposicao 1.5.15 que podemos definir as potencias fracionarias de um operador
positivo quando rez > 0.
Definicao 1.5.16. Seja A : D(A)⊂ X → X um operador positivo. Definimos
Az = (A−z)−1 : R(A−z)⊂ X → X ,
para z ∈ C com rez > 0.
Podemos tambem definir a potencia fracionaria de um operador positivo quando rez = 0,
porem este caso nao sera importante nos nossos estudos e portanto nao sera retratado nesta
secao. Abaixo, enumeramos fatos importantes sobre as potencias fracionarias de um operador
positivo.
Teorema 1.5.17. Seja A : D(A)⊂ X → X um operador positivo. As seguintes propriedades sao
satisfeitas:

18 1. Preliminares
(1) Az e um operador fechado em X, para todo z ∈ C, com rez > 0,
(2) se z1,z2 ∈ C, com rez1 > rez2 > 0, entao D(Az1)⊂ D(Az2)⊂ X,
(3) para cada z ∈ C, com rez > 0, temos D(Az) = X.
Dizemos que um operador A : D(A)⊂ X→ X e um operador setorial positivo se A e setorial
em X e reσ(A)> 0.
Lema 1.5.18. Suponha que −A : D(A)⊂ X → X seja o gerador infinitesimal de um semigrupo
T (t) | t ≥ 0 e que a > 0 e M ≥ 1 sejam constantes positivas tais que
‖T (t)‖ ≤Me−at , para todo t ≥ 0.
Entao A e um operador positivo.
Observamos que em particular, segue do Lema 1.5.18 que se A e um operador setorial
positivo, entao A e um operador positivo.
Teorema 1.5.19. Seja −A : D(A) ⊂ X → X o gerador infinitesimal de um semigrupo T (t) |t ≥ 0 e suponha que existam constantes a > 0 e M ≥ 1 tais que
‖T (t)‖ ≤Me−at , para todo t ≥ 0.
Entao, se z ∈ C com rez > 0, temos
A−zx =1
Γ(z)
∫∞
0tz−1T (t)xdt, x ∈ X . (1.5.3)
Vamos agora restringir o estudo as potencias fracionarias reais de operadores positivos. Seja
A : D(A)⊂ X → X um operador positivo. Dado α ≥ 0, Xα denota o espaco D(Aα) = R(A−α).
Em Xα consideraremos a com a norma
|u|Xα = |Aαu|, u ∈ D(Aα).
A famılia Xαα≥0 e uma famılia de espacos de Banach.

1. Preliminares 19
Lema 1.5.20. Seja 0≤ α ≤ β , entao Xβ e um subespaco denso de Xα e a inclusao Xβ → Xα
e contınua, mais precisamente, existe uma constante C ≥ 0 tal que
|u|Xα ≤C|u|Xβ , para todo u ∈ Xβ .
Teorema 1.5.21. Seja A : D(A) ⊂ X → X um operador positivo. Se 0 ≤ α < 1, entao existe
uma constante c > 0 tal que para todo x ∈ X1, temos
|x|Xα ≤ c|x|1−α
X |x|α1 .
Teorema 1.5.22. Sejam A um operador setorial positivo e T (t) | t ≥ 0 o semigrupo analıtico
gerado por −A. As seguintes propriedades sao satisfeitas:
(i) T (t) : X → D(Aα), para todo α ≥ 0 e t > 0.
(ii) T (t)Aαu = AαT (t)u, para todo α ≥ 0, u ∈ D(Aα) e t ≥ 0.
(iii) AαT (t) ∈L (X). Alem disso existe um a > 0 e para cada α ≥ 0 existe uma constante
positiva Cα tal que
‖AαT (t)‖ ≤Cαt−αe−at , para todo t > 0.
(iv) Se 0 < α ≤ 1, entao
‖(T (t)− I)u‖ ≤ 1α
C1−αtα |Aαu|, para todo u ∈ D(Aα) e t > 0,
onde C1−α e a constante positiva de (iii).
Proposicao 1.5.23. Sejam α,γ ≥ 0 e θ ∈ [0,1] . Escreva β = (1− θ)α + θγ . Entao existe
constante C ≥ 0 tal que:
|Aβ u| ≤C|Aαu|1−θ |Aγu|θ , para cada u ∈ X . (1.5.4)
O seguinte resultado e encontrado em [13] e [15].
Lema 1.5.24. Sejam X, Y espacos de Banach, A : D(A) ⊂ X → X um operador setorial com
reσ(A) > 0 e B : D(B) ⊂ X → Y uma transformacao linear. Suponhamos que D(B) ⊃ D(A) e

20 1. Preliminares
que existam α ∈ [0,1) e c≥ 0 tais que
|Bx|Y ≤ c|Ax|α |x|1−α , para todo x ∈ D(A).
Entao para todo β ∈ (α,1], B possui uma unica extenso a um transformacao linear contınua
de Xβ em Y , isto e, BA−β e transformacao linear contınua.
Finalizamos esta secao enunciando alguns resultados sobre operadores setoriais para o caso
em que X for um espaco de Hilbert. A seguir apresentamos uma condicao suficiente para que
um operador seja setorial para espacos de Hilbert.
Proposicao 1.5.25. Suponha que (X ,〈·, ·〉) seja um espaco de Hilbert. Seja A : D(A)⊂ X → X
um operador linar auto-adjunto, densamente definido e suponha que exista uma constante a∈Rtal que
〈Ax,x〉 ≥ a〈x,x〉, para todo x ∈ D(A).
Entao A e setorial.
Corolario 1.5.26. Seja (X ,〈·, ·〉) seja um espaco de Hilbert. Se A : D(A) ⊂ X → X e auto-
adjunto, densamente definido e reσ(A)> 0, entao A e setorial.
No caso particular em que X e um espaco de Hilbert, se A for auto-adjunto e definido
positivo, entao A sera setorial positivo, como enunciado no Corolario 1.5.26.
Finalmente, em vista da teoria espectral para operadores auto-adjuntos feita na Secao 1.1 se
A for auto-adjunto, setorial positivo em X espaco de Hilbert, podemos escrever:
A−α =∫R
λ−αdEλ (1.5.5)
onde Eλλ∈R ⊂L (X) representa a famılia espectral gerada pelo operador A em X . Portanto,
a partir de uma aplicacao da Desigualdade de Holder em (1.5.5), obtemos a
Proposicao 1.5.27. Sejam α,γ ≤ 0, tais que α ≤ γ , e θ ∈ [0,1] . Escreva β = (1−θ)α +θγ .
Entao:
|Aβ u| ≤ |Aαu|1−θ |Aγu|θ , para todo u ∈ X . (1.5.6)

1. Preliminares 21
1.6 Semifluxos e atratores globais
Neste trabalho estamos interessados na existencia de atratores. Os atratores sao importantes
objetos no estudo da dinamica assintotica dos sistemas dinamicos. Nesta secao vamos expor
os principais elementos para a definicao dos atratores e listar suas propriedades importantes.
Tambem apresentaremos condicoes necessarias e suficientes para que um sistema dinamico
possua atrator.
As referencias [5], [7], [14] e [17] apresentam a teoria de atrator global para sistemas
dinamicos nao lineares.
Para esta secao, a referencia [7] foi utilizada para o estudo dos atratores e o conceito de
semifluxo local e como apresentado em [22].
Sejam X um espaco metrico e D um aberto de [0,∞)×X . Uma aplicacao π : D→ X e um
semifluxo local em X se
(a) para cada u ∈ X , existe um ωu = ω(π,u) ∈ (0,∞] tal que (t,u) ∈ D se, e somente se,
t ∈ [0,ωu);
(b) π(0,u) = u, para todo u ∈ X ;
(c) sempre que (t,u) ∈ D e (s,uπt) ∈ D, temos (t + s,u) ∈ D e π(t + s,u) = π(s,π(t,u)).
Escrevemos π(t,u) = uπt, para (t,u) ∈ D.
Se um semifluxo e tal que ωu =+∞ para todo u∈ X , entao dizemos que este e um semifluxo
global.
Dado um intervalo I ⊂R, uma aplicacao σ : I→R e chamada uma solucao de π se sempre
que t ∈ I e s ∈ [0,∞) sao tais que t + s ∈ I, entao σ(t)πs e bem definido e σ(t)πs = σ(t + s).
Se I = R entao σ e chamada solucao global de π .
Um subconjunto A de X e chamado π-invariante se para todo u ∈ A existe uma solucao
global σ tal que σ(R)⊂ A e σ(0) = u.
Um ponto u ∈ X e chamado equilıbrio (de π) se uπt = u, para todo t ∈ [0,ωu).

22 1. Preliminares
Dados um semifluxo local π em X e um subconjunto N de X , dizemos que π nao explode
em N se sempre que u ∈ X e uπ[0,ωu)⊂ N, implicar ωu =+∞.
No restante desta secao π denota um semifluxo global definido num espaco de Banach X .
A seguinte definicao e apresentada em [7].
Definicao 1.6.1. Dizemos que um subconjunto B ⊂ X e (π-)eventualmente limitado se existe
um tB ∈ [0,∞) tal que o conjunto uπt | u ∈ B, t ∈ [tB,∞) e limitado.
Pode ser encontrado na literatura o conceito de semifluxo (semigrupo) eventualmente limi-
tado. Neste caso, dizemos π e eventualmente limitado se todo limitado de X e eventualmente
limitado conforme a Definicao 1.6.1
Seja B⊂ X . A orbita positiva de B por π e definida como o conjunto
γ+(B) :=
⋃t∈[0,∞)
Bπt =⋃
t∈[0,∞)
uπt | u ∈ B.
O conjunto
γ+t (B) :=
⋃s∈[0,∞)
Bπ(s+ t) =⋃
s∈[t,∞)
Bπs
e chamadoa orbita de Bπt. O conjunto ω-limite de B e definido como
ω(B) =⋂
t∈[0,∞)
γ+t (B).
Proposicao 1.6.2. Seja B⊂ X. Entao
(i) ω(B) e fechado.
(ii) Seja v ∈ X. Entao v ∈ ω(B) se, e somente se, existem sequencias (tn)n em [0,∞) e (un)n
em B tais que tn→ ∞ e unπtn→ v quando n→ ∞.
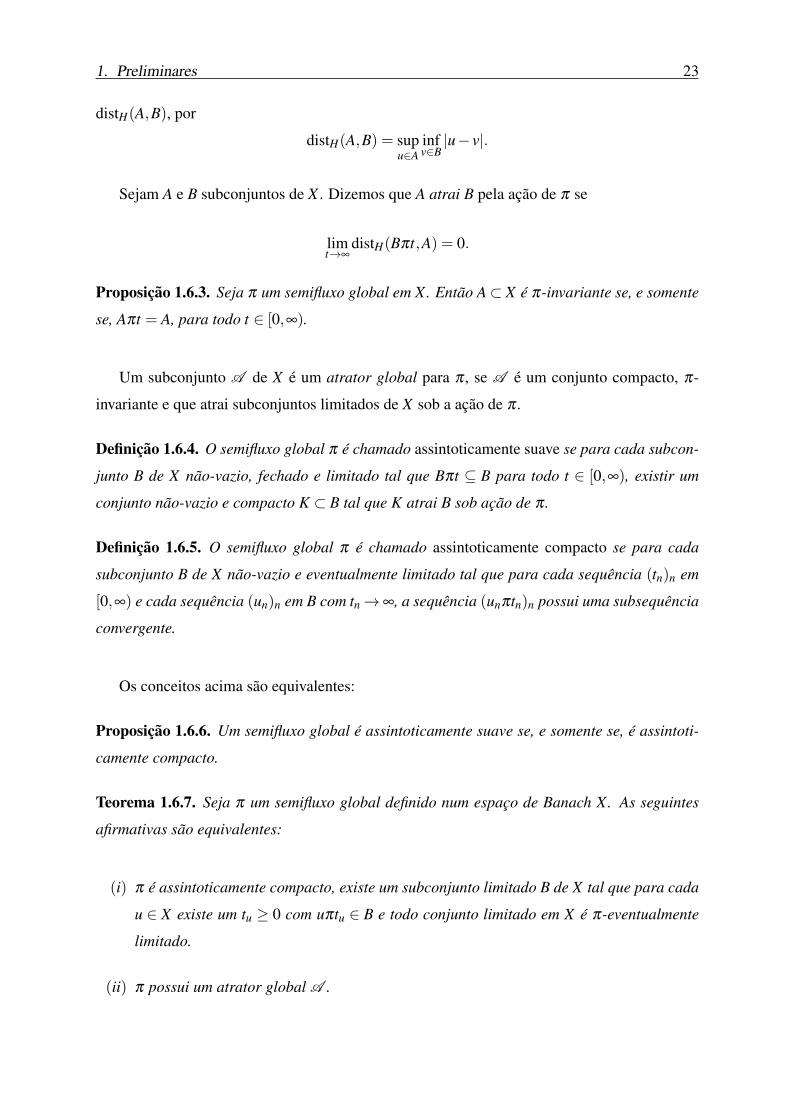
Precisamos da nocao de atracao sobre o semifluxo π de modo a definirmos o conceito do
atrator. Mas primeiro vamos definir a semidistancia de Hausdorff entre dois conjuntos. Sejam
A e B subconjuntos de X . Definimos a semidistancia de Hausdorff entre A e B, denotada por
1. Preliminares 23
distH(A,B), por
distH(A,B) = supu∈A
infv∈B|u− v|.
Sejam A e B subconjuntos de X . Dizemos que A atrai B pela acao de π se
limt→∞
distH(Bπt,A) = 0.
Proposicao 1.6.3. Seja π um semifluxo global em X. Entao A⊂ X e π-invariante se, e somente
se, Aπt = A, para todo t ∈ [0,∞).
Um subconjunto A de X e um atrator global para π , se A e um conjunto compacto, π-
invariante e que atrai subconjuntos limitados de X sob a acao de π .
Definicao 1.6.4. O semifluxo global π e chamado assintoticamente suave se para cada subcon-
junto B de X nao-vazio, fechado e limitado tal que Bπt ⊆ B para todo t ∈ [0,∞), existir um
conjunto nao-vazio e compacto K ⊂ B tal que K atrai B sob acao de π .
Definicao 1.6.5. O semifluxo global π e chamado assintoticamente compacto se para cada
subconjunto B de X nao-vazio e eventualmente limitado tal que para cada sequencia (tn)n em
[0,∞) e cada sequencia (un)n em B com tn→∞, a sequencia (unπtn)n possui uma subsequencia
convergente.
Os conceitos acima sao equivalentes:
Proposicao 1.6.6. Um semifluxo global e assintoticamente suave se, e somente se, e assintoti-
camente compacto.
Teorema 1.6.7. Seja π um semifluxo global definido num espaco de Banach X. As seguintes
afirmativas sao equivalentes:
(i) π e assintoticamente compacto, existe um subconjunto limitado B de X tal que para cada
u ∈ X existe um tu ≥ 0 com uπtu ∈ B e todo conjunto limitado em X e π-eventualmente
limitado.
(ii) π possui um atrator global A .

24 1. Preliminares
A seguir definiremos o que e conhecido por funcional de Lyapunov. Semifluxos que pos-
suem um funcional de Lyapunov sao chamados de semifluxos gradiente e possuem boas pro-
priedades que nos levam a um teorema de existencia de atrator global mais direto do que o
Teorema 1.6.7.
Um funcional L : X → R contınuo em X e limitado inferiormente e chamado funcional de
Lyapunov para π se
1. para cada u ∈ X a aplicacao (0,∞) 3 t 7→L (uπt) ∈ R e nao-crescente,
2. se u ∈ X e tal que existe um ku ∈ R com
L (uπt) = ku, para todo t ≥ 0,
entao u e um ponto de equilıbrio de π .
Podemos agora, apresentar o teorema que sera utilizado para demonstrar a existencia de
atrator global no nosso trabalho.
Teorema 1.6.8. Seja π um semifluxo global definido num espaco de Banach X. Suponha que:
(a) π e assintoticamente compacto,
(b) todo subconjunto limitado em X e eventualmente limitado,
(c) o conjunto dos pontos de equilıbrio de π e limitado e
(d) existe um funcional de Lyapunov para o semifluxo π .
Entao existe um atrator global para π .
1.7 Equacoes diferenciais parabolicas
Nesta ultima secao apresentamos resultados utilizados sobre as equacoes diferenciais pa-
rabolicas. Seguimos a notacao e resultados apresentados em [15] e [18].

1. Preliminares 25
Suponha 0 ≤ α < 1 e seja U um conjunto aberto em Xα . Seja g : U → X uma funcao
localmente Lipschitziana. Considere a equacao:
dudt
+Au = g(u). (1.7.1)
Seja u0 ∈U e t0 ≥ 0. Uma solucao de (1.7.1) em (t0, t1) tal que em t0 vale u0 e uma funcao
contınua u : [t0, t1)→ X tal que
1. u(t0) = u0;
2. u(t) ∈U para t ∈ (t0, t1);
3. u e diferenciavel em (t0, t1);
4. u(t) ∈ D(A) para t ∈ (t0, t1);
5. [t0, t1) 3 t 7→ g(u(t)) ∈ X e contınua;
6. a equacao (1.7.1) esta satisfeita para todo t ∈ (t0, t1).
A definicao de solucao e como em [18].
A seguir apresentamos um teorema de existencia e unicidade de solucoes maximais para
a equacao (1.7.1) com condicao inicial u(t0) = u0 ∈ U cuja demonstracao e adaptada das
demonstracoes de [15].
Teorema 1.7.1. Seja A um operador setorial em X e seja g : U → X uma funcao localmente
Lipschitziana, onde U e um conjunto aberto em Xα , para algum 0 ≤ α < 1. Entao para todo
t0≥ 0 e para todo u0 ∈U, existe um intervaldo maximal [t0,ωu0), onde ωu0 ∈ (0,∞] e uma unica
solucao t 7→ u(t,u0) dedudt
+Au = g(u)
tal que u(t0) = u0 definida em [t0,ωu0).
No restante do texto se A : D(A) ⊂ X → X e um operador setorial em X , o semigrupo
analıtico gerado por −A sera denotado por e−At | t ≥ 0.
Para demonstrar a existencia de solucao no Teorema 1.7.1 utilizamos o seguinte lema:

26 1. Preliminares
Lema 1.7.2. Seja u uma solucao do problema (1.7.1) em (t0, t1) com valor inicial u(t0) = u0.
Entao
u(t) = e−A(t−t0)u0 +∫ t
t0e−A(t−s)g
(u(s)
)ds, para t ∈ [t0, t1). (1.7.2)
Reciprocamente, se u : [t0, t1)→ Xα e [t0, t1) 3 t 7→ g(u(t)) ∈ X sao funcoes contınuas, e a
equacao integral (1.7.2) e satisfeita para t ∈ (t0, t1), entao u e uma solucao da equacao diferen-
cial (1.7.1).
Para a demonstracao do Lema 1.7.2, ver [15] e [18].
A formula (1.7.2) e conhecida como a Formula da Variacao das Constantes.
No que segue vamos supor que A e um operador setorial positivo, isto e, A e setorial e
reσ(A) > 0, g : Xα → X uma funcao Lipschitziana em limitados de Xα , com 0 ≤ α < 1 e,
tambem, que t0 = 0. Para cada u0 ∈U e t ∈ [0,ωu0), defina u0πt := u(t,u0). Dessa forma π e
um semifluxo local em U .
Vamos assumir tambem que g : U → X seja uma funcao Lipschitziana em limitados, isto e,
dado B⊂U limitado existe uma constante LB ≥ 0 tal que
|g(u)−g(v)|X ≤ LB|u− v|, para todo u, v ∈ B.
A seguir enunciamos e demonstramos resultados gerais que serao utilizado nos proximos
capıtulos.
Proposicao 1.7.3. Seja B⊂U um subconjunto limitado tal que para cada u ∈ B, uπt ∈ B, para
todo t ∈ [0,ωu). Entao ωu =+∞.
Demonstracao. Seja u ∈ B. Logo, uπt ∈ B, para todo t ∈ [0,ωu). Suponhamos por absurdo que
ωu < ∞. Sejam 0 < α < β < 1 e s ∈ (0,ωu).
Afirmamos que o conjunto |uπt|Xβ | t ∈ [s,ωu) e limitado. De fato, seja t ∈ [s,ωu). Utili-

1. Preliminares 27
zando a Formula da Variacao das Constantes temos
|uπt|Xβ ≤ |e−Atu|Xβ +∫ t
0|e−A(t−s)g(uπs)|Xβ ds
≤ |Aβ−αe−At ||Aαu|+∫ t
0|Aβ e−A(t−s)g(uπs)|X ds
≤maxCβ−α ,Cβ LB(tβ−α |u|Xα +∫ t
0(t− s)−β ds)
≤maxCβ−α ,Cβ LB,1(tβ−α |u|Xα + t1−β ).
Como [s,ωu) 3 t 7→ tβ−α |u|Xα + t1−β e limitada, a afirmativa esta demonstrada.
Sejam s≤ τ < t < ωu. A Formula da Variacao das Constantes implica que
uπt−uπτ =(
e−A(t−τ)− I)
uπτ +∫ t
τ
e−A(t−s)g(uπs)ds.
Portanto,
|uπt−uπτ|Xα ≤ 1β −α
C1−β+α‖A−α‖(t− τ)β−α |u0πτ|Xβ +CαLB
∫ t
τ
(t− s)−αds
≤ 1β −α
C1−β+α‖A−α‖(t− τ)β−α +CαLB(t− τ)1−α
≤ C(t− τ)β−α ,
onde C = max 1β −α
C1−β+α‖A−α‖,CαLB(t− τ)1−β.
Como β > α , o Criterio de Cauchy implica que o limite, quando t → ω−u , existe. Seja
u1 o valor deste limite e defina v(t) = uπt, se t ∈ [0,ωu) e v(ωu) = u1. Segue que v e uma
solucao de (1.7.1) com v(0) = u definida em [0,ωu]. Porem isso contradiz a maximalidade de
ωu. Portanto, ωu =+∞ para todo u ∈ B.
O proximo resultado pode ser encontrado na Proposicao 3.2.1 e Lema 3.2.1 em [7].
Proposicao 1.7.4. Seja B⊂ Xα um subconjunto limitado em Xα . Entao para todo t ∈ (0,ωB),
Bπt e limitado em X γ , para cada α ≤ γ ≤ 1.
Concluımos o capıtulo com um resultado de regularidade que pode ser encontrado em [15].
Como apresentaremos a demonstracao desse resultado, enunciamos um lema auxiliar.

28 1. Preliminares
Lema 1.7.5 (Desigualdade de Gronwall Singular). Sejam 0 ≤ α < 1, 0 ≤ β < 1, a ≥ 0, b ≥ 0
constantes e T ∈ (0,∞). Se u : [0,T ]→ R e uma funcao integravel tal que
0≤ u(t)≤ at−α +b∫ t
0(t− s)−β u(s)ds, para quase todo t ∈ [0,T ],
entao existe uma constante positiva M tal que
0≤ u(t)≤ aMt−α , para quase todo t ∈ (0,T ].
Teorema 1.7.6. Assuma a notacao apresentada acima. Seja u uma solucao de (1.7.1) em [t0, t1]
e γ ∈ (0,1). Entaodudt∈ X γ e existe uma constante C > 0 tal que
∣∣∣∣dudt
∣∣∣∣Xγ
≤C(t− t0)α−γ−1, para t0 < t ≤ t1.
Demonstracao. Seja β > 0 tal que maxα,γ< β < 1.
Denotemos f (t) := g(u(t)), para t ∈ [t0, t1]. Como [t0, t1] e compacto, sejam B e L constantes
positivas tais que, para todo t ∈ [t0, t1] e h0 ≥ 0, com t0 ≤ t ≤ t +h≤ t1 e 0≤ h≤ h0,
| f (t)| ≤ B, (1.7.3)
| f (t +h)− f (t)| ≤ L |u(t +h)−u(t)| . (1.7.4)
Para t0 < t < t +h≤ t1 temos:
u(t +h)−u(t) = e−A(t+h−t0)u(t0)+∫ t+h
t0e−A(t+h−s) f (s)ds
− e−A(t−t0)u(t0)−∫ t
t0e−A(t−s) f (s)ds
= (e−Ah− I)e−A(t−t0)u(t0)+∫ t0+h
t0e−A(t+h−s) f (s)ds
+∫ t
t0e−A(t−s)[ f (s+h)− f (s)]ds.

1. Preliminares 29
Desse modo,
|u(t +h)−u(t)|Xα ≤∣∣∣(e−Ah− I)e−A(t−t0)u(t0)
∣∣∣Xα
+∫ t0+h
t0
∣∣∣e−A(t+h−s) f (s)∣∣∣Xα
ds
+∫ t
t0
∣∣∣e−A(t−s) f (s+h)− f (s)∣∣∣Xα
ds
≤ β−1C1−β hβ
∣∣∣Aβ e−A(t−t0)Aαu(t0)∣∣∣X+∫ t0+h
t0Cα(t +h− s)−αKBds
+∫ t
t0Cα(t− s)−αKL|u(s+h)−u(s)|Xα ds
≤ β−1C1−β hβCβ (t− t0)−β K|u(t0)|Xα +CαKBh(t− t0)−α+
+CαKL∫ t
t0(t− s)−α |u(s+h)−u(s)|Xα ds
≤ Khβ (t− t0)−β +CαKL∫ t
t0|u(s+h)−u(s)|Xα ds,
onde K = β−1C1−βCβ K(t1− t0)β−α |u(t0)|Xα . Portanto, a Desigualdade de Gronwall Singular,
Lema 1.7.5, implica que existe uma constante M ≥ 0 tal que
|u(t +h)−u(t)|Xα ≤Mhβ (t− t0)−β ,
para todo t ∈ (t0, t1), 0≤ h≤ h0.
Afirmamos que, para todo t ∈ (t0, t1),
A∫ t
t0e−A(t−s) f (s)ds =
∫ t
t0Ae−A(t−s)[ f (s)− f (t)]ds+ f (t)− e−A(t−t0) f (t). (1.7.5)
De fato, note que para t ∈ (t0, t1) temos
∫ t
t0Ae−A(t−s) f (t)ds =
∫ t
t0
dds
(e−A(t−s) f (t)
)ds = f (t)− e−A(t−t0) f (t).
Logo, para t ∈ (t0, t1),
∫ t
t0Ae−A(t−s) f (s)ds =
∫ t
t0Ae−A(t−s)[ f (s)− f (t)]ds+ f (t)− e−A(t−t0) f (t)
e portanto temos∣∣∣∣∫ t
t0Ae−A(t−s) f (s)ds
∣∣∣∣≤ ∫ t
t0K(t− s)β−1(t− t0)−β ds+B+B‖e−A(t−t0)‖.

30 1. Preliminares
Como 0 < β < 1, temos∣∣∣∣∫ t
t0Ae−A(t−s) f (s)ds
∣∣∣∣ define um numero real. Como A e um operador
fechado, a igualdade (1.7.5) segue e afirmativa esta demonstrada. Portanto, para t ∈ (t0, t1)
temos
dudt
=−Au(t)+ f (t) =−A(e−A(t−t0)u(t0)+∫ t
t0e−A(t−s)g(s)ds)+ f (t)
=−Ae−A(t−t0)u(t0)+ e−A(t−t0) f (t)+∫ t
t0Ae−A(t−t0)[ f (t)− f (s)]ds
e ∣∣∣∣dudt
∣∣∣∣Xγ
≤Cγ+1−αK(t− t0)α−γ−1|u(t0)|α +CγB(t− t0)−γ
+∫ t
t0Cγ+1KL(t− s)β−γ−1(t− t0)β ds.
E facil ver que para t ∈ (t0, t1)
∫ t
t0Cγ+1KL(t− s)β−γ−1(t− t0)β ds≤ (t− t0)α−γ−1Cγ+1L(t− t0)1−α(β − γ)−1.
Portanto, ∣∣∣∣dudt
∣∣∣∣Xγ
≤C(t− t0)α−γ−1, para t ∈ (t0, t1],
onde C =
Cγ+1−α |u(t0)|α +BCγ(t1− t0)1−α +LCγ+1(β − γ)−1(t1− t0)1−α
e isso conclui a
demonstracao.
Capıtulo
2
O problema linear
Neste capıtulo analisamos o problema linear abstrato associado a equacao (ERD). Na
secao 2.3 apresentamos as hipoteses (HL1), (HL2) e (HL3). Com estas hipoteses o opera-
dor u 7→ −Lu + β (x)u apresentado na Introducao define um operador positivo auto-adjunto
A : D(A) ⊂ X → X , onde X = L2(Ω). Nessa secao apresentamos as propriedades importantes
do operador A e construımos uma famılia de operadores auto-adjuntos A(α), α ∈ R tal que
A(α) : Xα → Xα−1.
Para a construcao do operador A necessitamos de alguns resultados auxiliares que sao co-
nhecidos na literatura, contudo as demonstracoes nao sao encontradas facilmente. Em [21]
os autores reuniram estes fatos elementares na Proposicao 2.2. Na secao 2.2 apresentamos a
demonstracao dessa proposicao.
Iniciamos o capıtulo demonstrando um resultado de analise funcional que sera utilizado na
Secao 2.3. A referencia para este capıtulo e o artigo [21].
2.1 Um resultado de analise funcional
Os lemas abaixo foram demonstrados na Secao 4 de [21].
Lema 2.1.1. Suponha que (Y,〈·, ·〉Y ) e (X ,〈·, ·〉X) sejam espacos de Hilbert tais que Y ⊂ X, Y
e denso em (X ,〈·, ·〉X) e a inclusao j : (Y,〈·, ·〉Y )→ (X ,〈·, ·〉X) e contınua. Entao para cada
31

32 2. O problema linear
u ∈ X existe um unico wu ∈ Y tal que
〈v,wu〉Y = 〈v,u〉X , para todo v ∈ Y.
A aplicacao B : X → X, u 7→ wu e linear, simetrica e positiva.
Demonstracao. Para cada u ∈ X , a funcao Y 3 v 7→ 〈v,u〉X e linear e contınua. Logo, pelo
Teorema de Representacao de Riesz existe um unico wu ∈ Y tal que
〈v,u〉X = 〈v,wu〉Y , para todo v ∈ Y.
Alem disso do Teorema de Representacao de Riesz segue que B e linear. Para u,v ∈ X , note que
〈Bu,v〉X = 〈Bu,Bv〉Y = 〈u,Bv〉X .
Logo B e uma aplicacao simetrica e, como 〈Bu,u〉X = 〈Bu,Bu〉Y ≥ 0, B e tambem positiva.
Assuma a notacao e as hipoteses do Lema 2.1.1. Seja B1/2 a raiz quadrada de B, isto e,
B1/2 : X → X e uma aplicacao linear, simetrica e e tal que B1/2 B1/2 = B.
Lema 2.1.2. Com a notacao e as hipoteses do Lema 2.1.1, temos B e B1/2 sao aplicacoes
linereares injetoras e R(B) e um conjunto denso em Y .
Demonstracao. Se u ∈ X e tal que Bu = 0, entao
0 = 〈v,Bu〉Y = 〈v,u〉X , para todo v ∈ Y.
Como Y e denso em X , segue que u = 0 e, portanto, B e injetora. Analogamente mostramos que
B1/2 e injetora.
Para concluir a demonstracao, seja v ∈ Y tal que 〈v,Bu〉Y = 0, para todo u ∈ X . Entao
〈v,u〉X = 0, para todo u ∈ X e entao v = 0, o que nos mostra que R(B) e denso em Y .
Assuma a notacao e as hipoteses do Lema 2.1.1. Considere X1/2 = X1/2B = R(B1/2) e
B−1/2 : X1/2→ X a aplicacao inversa de B1/2. E facil ver que
〈u,v〉1/2 := 〈B−1/2u,B−1/2v〉X , u, v ∈ X1/2,

2. O problema linear 33
define um produto interno em X1/2. Mais ainda, (X1/2,〈·, ·〉1/2) e um espaco de Hilbert.
Lema 2.1.3. Com a notacao e as hipoteses do Lema 2.1.1, temos Y = X1/2 e 〈·, ·〉Y = 〈·, ·〉1/2.
Demonstracao. Afirmamos que R(B) e um conjunto denso em X1/2. De fato, como B1/2 e uma
aplicacao simetrica, para v ∈ X1/2 e u ∈ X , temos
〈v,Bu〉1/2 = 〈B−1/2v,B1/2u〉X = 〈v,u〉X .
Logo, se 〈v,Bu〉1/2 = 0, para todo u ∈ X , segue que v = 0 e nossa afirmativa esta mostrada.
Agora afirmamos que
〈u,v〉Y = 〈u,v〉1/2, para u,v ∈ R(B). (2.1.1)
De fato, se u,v ∈ R(B), existem u, v ∈ X tais que u = Bu e v = Bv. Logo,
〈u,v〉Y = 〈u,Bv〉Y = 〈u, v〉X
e
〈u,v〉1/2 = 〈B1/2u,B1/2v〉X = 〈Bu, v〉X = 〈u, v〉X ,
provando, assim, a afirmacao.
A continuidade de B1/2 : X → X implica que para todo u ∈ X1/2 temos
|u|X ≤ ‖B1/2‖|B−1/2u|X = ‖B1/2‖|u|1/2,
e, portanto, a inclusao i : (X1/2, | · |1/2)→ (X , | · |X) e contınua.
Seja u∈Y . Logo, existe uma sequencia (un)n em R(B) tal que |un−u|Y → 0 quando n→∞.
Logo, (un)n e uma sequencia de Cauchy em Y . A igualdade (2.1.1) implica que (un)n tambem e
sequencia de Cauchy em X1/2. Logo, existe um v∈ X1/2 tal que |un−v|X1/2→ 0 quando n→∞.
Como as inclusoes j : (Y,〈·, ·〉Y )→ (X ,〈·, ·〉X) e i : (X1/2, | · |1/2)→ (X , | · |X) sao contınuas
temos |un− u|X → 0 e |un− v|X → 0 quando n→ ∞. Portanto, u = v e, assim, u ∈ X1/2. Ou
seja, Y ⊆ X1/2. Pelo mesmo argumento obtemos X1/2 ⊆ Y .
Finalmente, a densidade de R(B) em Y e igualdade (2.1.1) implicam 〈u,v〉1/2 = 〈u,v〉Y , para

34 2. O problema linear
todo u,v ∈ Y .
2.2 Resultados auxiliares sobre espacos de potencias fra-
cionarias
Nesta secao demonstramos a Proposicao 2.2 de [21].
Sejam X um espaco de Banach e A : D(A)⊂ X → X um operador setorial positivo. Logo A
e setorial em X , reσ(A) > 0 e −A e o gerador infinitesimal de um semigrupo analıtico e−At |t ≥ 0 de operadores lineares em X (cf. Teorema 1.5.9).
Para α > 0 definimos, como usual, o operador A−α : X → X como
A−αu =1
Γ(α)
∫∞
0tα−1e−Atudt, u ∈ X .
Denote por Xα = R(A−α), α ≥ 0, a famılia de espacos de potencias fracionarias em X
gerada por A. Xα e um espaco de Banach com a norma |u|Xα := |Aαu|X , u ∈ Xα .
Se β > α ≥ 0 entao Xβ e denso em Xα . Ainda mais,
A−αA−β x = A−α−β x, α,β ∈ (0,∞), x ∈ X . (2.2.1)
Seja agora X um espaco de Hilbert e A : D(A) ⊆ X → X um operador auto-adjunto em X
com reσ(A)> 0. Entao A e setorial em X e, para α ∈ (0,∞),
A−α =∫
∞
0λ−αdEλ
onde Eλλ∈R e a medida espectral definida por A. Nesse caso, Xα e um espaco de Hilbert com
respeito ao produto interno
〈u,v〉Xα := 〈Aαu,Aαv〉X , u,v ∈ Xα .
Para α ∈ (0,∞) seja X−α = X−α
A o espaco dual de Xα . Definimos em X−α o produto interno

2. O problema linear 35
〈·, ·〉X−α dual ao produto interno 〈·, ·〉Xα , isto e,
〈u′,v′〉X−α := 〈R−1α u′,R−1
α v′〉Xα , u′,v′ ∈ X−α ,
onde Rα : Xα → X−α e o isomorfismo de Frechet-Riesz u 7→ 〈·,u〉Xα . O espaco de Hilbert X−α
e chamado espaco de potencia fracionaria de ordem −α .
Denotemos por ϕ a aplicacao dualidade de X em X ′, isto e,
ϕ(x) = 〈·,x〉, x ∈ X .
Lema 2.2.1. Sejam β > 0 e x ∈ X e defina o funcional linear fx : Xβ → R dado por
fx(y) = 〈y,x〉X , para todo y ∈ Xβ .
Entao fx ∈ X−β .
Demonstracao. Sejam β > 0 e x ∈ X fixados. Claramente fx e linear e esta bem definida.
Mostremos que fx e limitada de Xβ . De fato, como Xβ esta continuamente imerso em X ,
existe constante B≥ 0 tal que
|y|X ≤ B|y|Xβ , para todo y ∈ Xβ .
Portanto, se y ∈ Xβ ,
fx(y) = 〈y,x〉X ≤ |y|X |x|X ≤ B|x|X |y|Xβ .
Concluindo que fx e limitada em Xβ e ‖ fx‖ ≤ B|x|X .
Sejam α,β ∈ R arbitrarios. Nosso objetivo e definir aplicacoes lineares contınuas entre os
espacos Xα e Xβ .
(i) Se β ≥ α ≥ 0, defina ϕβ ,α : Xβ → Xα como sendo a aplicacao inclusao.
(ii) Se β ≥ α > 0, defina entao a aplicacao ϕ−α,−β : X−α → X−β por ϕ−α,−β (y′) = y′|Xβ ,
para y′ ∈ X−α .

36 2. O problema linear
(iii) Se β > 0, defina ϕ0,−β : X0 = X → X−β por ϕ0,−β (x) = fx, onde fx ∈ X−β e como no
Lema 2.2.1.
(iv) Finalmente, se α > 0 e β > 0, entao ϕβ ,−α := ϕ0,−α ϕβ ,0.
Apresentamos a seguir diversas propriedades das aplicacoes que acabamos de definir.
Proposicao 2.2.2. Para todo α , β ∈ R com β ≥ α a aplicacao ϕβ ,α : Xβ → Xα esta bem
definida, e linear, limitada e injetora. O subespaco ϕβ ,α(Xβ ) e denso no espaco de Hilbert Xα .
Demonstracao. Sejam α , β ∈R com β ≥ α . E claro que a aplicacao ϕβ ,α : Xβ → Xα esta bem
definida e e linear.
Afirmamos que ϕβ ,α e uma aplicacao limitada, injetora e sua imagem e um conjunto denso
em Xα . Para mostrar este fato teremos que considerar tres casos.
Primeiro Caso:
Suponha β ≥ α ≥ 0. Neste caso a aplicacao ϕβ ,α e a inclusao e a injetividade e clara, assim
como a continuidade. Ainda, Xβ e denso em Xα , logo ϕβ ,α(Xβ ) e denso em Xα .
Segundo Caso:
Suponha α < 0≤ β . Logo ϕβ ,α = ϕ0,α ϕβ ,0. Segue do Primeiro Caso que ϕβ ,0 e limitada,
injetora e sua imagem e densa em X0 = X . Portanto, resta mostrarmos que ϕ0,α : X → Xα
tambem e uma aplicacao limitada, injetora e possui imagem densa em Xα . Recordemos que
dado x ∈ X , ϕ0,α(x) : X−α → R (−α > 0) e dado por ϕ0,α(x)(y) = 〈y,x〉X , para y ∈ X−α .
Para x ∈ X , pelo Teorema de Hahn-Banach sabemos que
‖ fx‖= supw∈X−α
|w|X−α =1
fx(w) = supw∈X−α
|w|X−α =1
〈w,x〉X .
Logo
‖ fx‖ ≤ supw∈X−α
|w|X−α =1
|w|X |x|X ≤ supw∈X−α
|w|X−α =1
B|w|X−α |x|X ≤ B|x|X .
Portanto a aplicacao X 3 x 7→ fx ∈ Xα e limitada.

2. O problema linear 37
Seja x ∈ X e suponha que ϕ0,α(x) = 0 ∈ Xα . Logo,
〈y,x〉X = 0 para todo y ∈ X−α .
Como X−α e denso em X , segue que x = 0. Portanto, ϕ0,α e injetora.
Seja, agora, z ∈ X−α tal que ϕ0,α(w)(z) = fw(z) = 0, para todo w ∈ X . A fim de mostrar
que ϕ0,α(X) e denso em Xα , devemos mostrar que z = 0. De fato, apenas note que fw(z) =
〈z,w〉X = 0, para todo w ∈ X e, portanto, z = 0. Como era desejado.
Terceiro caso:
Suponha, por fim, que α ≤ β < 0. Temos que ϕβ ,α : Xβ → Xα e a restricao de funcionais
definidos em X−β a X−α (notemos que −β > 0 e −α > 0).
Dado x∗ ∈ Xβ , pelo Teorema de Frechet-Riesz existe um x ∈ X−β tal que
x∗(y) = 〈y,x〉X−β , para todo y ∈ X−β .
Logo, para w ∈ X−α , ϕβ ,α(x∗)(w) = 〈w,x〉X−β . E, analogamente ao Segundo Caso, teremos
ϕβ ,α limitada de Xβ em Xα .
Mostremos que ϕβ ,α e injetora. De fato, seja x ∈ Xβ tal que ϕβ ,α(x) = 0 ∈ Xα . Isto e,
ϕβ ,α(x)(v) = x(v) = 0, para todo v ∈ X−α .
Como X−α e denso em X−β , segue que x = 0.
Finalmente, seja v ∈ X−α tal que ϕβ ,α(x)(v) = 0, para todo x ∈ Xβ . Analogamente ao caso
anterior devemos mostrar que v = 0. Porem, note que
ϕβ ,α(x)(v) = x|X−α v = x(v), (2.2.2)
uma vez que v ∈ X−α . Portanto, como X−α e um subespaco denso de X−β , (2.2.2) implica que
x≡ 0, concluindo a demonstracao.

38 2. O problema linear
Proposicao 2.2.3. Para todo α , β ∈ R com β ≥ α a aplicacao ϕβ ,α : Xβ → Xα satisfaz
ϕα,α = IXα , para todo α ∈ R e
ϕγ,α = ϕβ ,α ϕγ,β , para α,β ,γ ∈ R com γ ≥ β ≥ α .
Demonstracao. E facil ver que ϕα,α = IXα , para qualquer α ∈ R. Sejam α , β , γ ∈ R com
γ ≥ β ≥ α . A demonstracao de que ϕγ,α = ϕβ ,α ϕγ,β sera dividada em cinco casos.
Primeiro Caso: α ≥ 0.
Todas as funcoes em questao sao inclusoes, desse modo fica claro que ϕγ,α = ϕβ ,α ϕγ,β .
Segundo Caso: γ < 0.
Todas as funcoes em questao sao restricoes de funcionais lineares a subespacos encaixados,
isto e, X−γ ⊃ X−β ⊃ X−α e ϕγ,α f = f |X−α . Por outro lado, ϕβ ,α ϕγ,β f = ϕβ ,α f |X−β = f |X−α .
Logo ϕγ,α = ϕβ ,α ϕγ,β .
Terceiro Caso: β ≥ 0 e α < 0.
Segue da definicao que ϕγ,α = ϕ0,α ϕγ,0 e ϕβ ,α = ϕ0,α ϕβ ,0. Logo,
ϕβ ,α ϕγ,β = ϕ0,α ϕβ ,0 ϕγ,β
= ϕ0,α ϕγ,0 = ϕγ,α ,
onde, na segunda igualdade, usamos o resultado para γ ≥ β ≥ 0.
Quarto Caso: γ = 0 e β < 0.
Note que ϕβ ,α e a restricao de funcionais lineares e, para y ∈ X−β , ϕ0,β (x)(y) = 〈y,x〉X ,
x ∈ X . Logo, sua restricao a Xα e exatamente ϕ0,α .
Quinto Caso: γ > 0 e β < 0.
Segue da definicao que ϕγ,β = ϕ0,β ϕγ,0 e ϕγ,α = ϕ0,α ϕγ,0. Logo,
ϕβ ,α ϕγ,β = ϕβ ,α ϕ0,β ϕγ,0
= ϕ0,α ϕγ,0 = ϕγ,α ,

2. O problema linear 39
onde, na segunda igualdade, usamos o resultado para 0 > β ≥ α .
Proposicao 2.2.4. Para todo α,γ ∈ R, θ ∈ [0,1] com α ≤ γ e β = (1−θ)α +θγ vale a desi-
gualdade de interpolacao:
|ϕγ,β x|Xβ ≤ |ϕγ,αx|1−θ
Xα |x|θXγ , para todo x ∈ X γ . (2.2.3)
Demonstracao. Combinando as Proposicoes 1.5.23 e 1.5.27 obtemos
|Aβ x|X ≤ |Aαx|1−θ
X |Aγx|θX , para todo x ∈ Xδ (2.2.4)
e todo α,γ ∈ R, δ ≥ 0, θ ∈ [0,1], com α ≤ γ ≤ δ e β = (1−θ)α +θγ .
Afirmamos que para todo α > 0, β ≥ 0
|ϕβ ,β−αA−β x|Xβ−α = |A−αx|X , para todo x ∈ X . (2.2.5)
De fato, sejam α > 0 e β ≥ 0. Suponha que β ≥ α . Temos
|ϕβ ,β−αA−β x|Xβ−α = |Aβ−αϕβ ,β−αA−β x|X = |A−αx|X , para todo x ∈ X .
Suponha agora que β < α . Note que, pela definicao de ϕ0,β−α , temos R−1β−α
(ϕβ ,β−αA−β x
)=
Aβ−2αx para todo x ∈ X e portanto
|ϕβ ,β−αA−β x|Xβ−α = |Aα−β R−1α−β
ϕβ ,β−αA−β x|X
= |Aα−β Aβ−2αx|X
= |A−αx|X ,
para todo x ∈ X . A igualdade (2.2.5) esta demonstrada.
Em particular, se β = 0 em (2.2.5), obtemos
|ϕδ ,αx|Xα = |Aαx|X , para todo x ∈ Xδ (2.2.6)
e todo α ∈ R, δ ∈ [0,∞) com δ ≥ α . Agora, a Proposicao 2.2.2 e as equacoes (2.2.4) e (2.2.6)

40 2. O problema linear
demonstram que para todo α,γ ∈ R, θ ∈ [0,1] e β = (1−θ)α +θγ temos:
|ϕγ,β x|Xβ ≤ |ϕγ,αx|1−θ
Xα |x|θXγ , para todo x ∈ X γ .
A proposicao esta demonstrada.
Para cada α ≥ 0 e β ≥ 0 defina a aplicacao
A−β
(α):= A−β |Xα : Xα → Xβ+α . (2.2.7)
Proposicao 2.2.5. Com a notacao introduzida acima, para todo α ≥ 0 e β ≥ 0 a aplicacao
A−β
(α)e uma isometria linear bijetora.
Demonstracao. E claro que A−β
(α)e uma aplicacao linear e injetora. Mostremos que e sobreje-
tora. Seja y ∈ Xβ+α . Logo existe um x ∈ X tal que A−β−αx = y. Em particular, segue de (2.2.1)
que A−β A−αx = y. Considere z := A−αx ∈ Xα e teremos A−β
(α)z = A−β A−αx = y. Portanto A−β
(α)
e sobrejetora.
Note que, se y ∈ Xα , entao
|A−β y|Xβ+α = |A−(β+α)Aαy|Xβ+α = |Aαy|X = |y|Xα ,
ou seja, A−β
(α)e uma isometria.
Para provar o proximo resultado necessitaremos de um fato auxiliar que e simples e conhe-
cido cuja demonstracao nao sera apresentada.
Lema 2.2.6. Sejam Ek,Fk, k ∈ 1,2 espacos vetoriais (sobre R ou C) com E2 e F2 completos.
Suponha que e : E1→ E2, f : F1→ F2 e B1 : E1→ F1 sejam isometrias lineares com B1 bijetora.
Se o conjunto e(E1) e denso em E2 e o conjunto f (F1) e denso em F2 entao existe uma unica
isometria linear bijetora B2 : E2→ F2 tal que B2 e = f B1.
Proposicao 2.2.7. Para todo α > 0 e β ≥ 0 existe uma unica isometria linear bijetora
A−β
(−α): X−α → Xβ−α tal que
A−β
(−α)ϕ0,−α = ϕβ ,β−α A−β . (2.2.8)

2. O problema linear 41
Demonstracao. Se β > 0, considere em Xβ a norma ηβ−α(·) dada por ηβ−α(x) = |Aβ−αx|X ,
x∈ Xβ . Observamos que, em geral, (Xβ ,ηβ−α(·)) nao e um espaco de Banach. Formula (2.2.1)
implica que ϕβ ,β−α : Xβ → Xβ−α e uma isometria entre (Xβ ,ηβ−α(·)) e o espaco de Hilbert
(Xβ−α , | · |Xβ−α ).
Se β = 0, considere em X a norma η−α(·) dada por η−α(x) = |A−αx|X , x ∈ X . Novamente,
temos ϕ0,−α : X → X−α isometria entre (X ,η−α(·)) e o espaco de Hilbert (X−α , | · |X−α ).
Assim, como A−β e uma isometria bijetora de X munido com a norma η−α em Xβ−α
munido com a norma ηβ−α , aplicando o Lema 2.2.6, com E1 = X (munido com a norma
η−α ), E2 = X−α , F1 = Xβ (munido com a norma ηβ−α ), F2 = Xβ−α , B1 = A−β , e = ϕ0,−α
e f = ϕβ ,β−α , segue que existe uma unica isometria linear bijetora B2 := A−β
(−α)tal que
A−β
(−α)ϕ0,−α = ϕβ ,β−α A−β .
Dados γ ∈ R e β > 0, segue das Proposicoes 2.2.5 e 2.2.7 que esta bem definida uma
isometria linear bijetora A−β
(γ): X γ → Xβ+γ . No caso em que γ ≥ 0, A−β
(γ)e a restricao de A−β a
X γ . Se γ < 0, entao A−β
(γ)e tal que A−β
(γ)ϕ0,γ = ϕβ ,β+γ A−β .
Quando β > 0 e α ∈ R, definimos a aplicacao Aβ
(α): Xα → X−β+α por
Aβ
(α)= (A−β
(−β+α))−1. (2.2.9)
Denote por A(α) := A1(α).
Proposicao 2.2.8. Com a notacao introduzida acima, para todo γ,γ ′ ∈ R, com γ > γ ′, e todo
β ∈ R
ϕ−β+γ,−β+γ ′ Aβ
(γ)= Aβ
(γ ′) ϕγ,γ ′.
Demonstracao. Sejam γ , γ ′ ∈ R tais que γ > γ ′ e β ∈ R. Suponhamos, primeiramente, que
β ≤ 0 e note que, neste caso Aβ
(γ ′) ϕγ,γ ′ = Aβ
(γ ′) ϕγ,γ ′ . Consideremos tres possibilidades:
Primeiro Caso: γ ≥ 0 > γ ′.
Como γ ′ < 0, temos que Aβ
(γ ′) ϕ0,γ ′ = ϕ−β ,−β+γ ′ Aβ . Alem disso, como γ ≥ 0, temos

42 2. O problema linear
ϕ−1−β+γ,−β
Aβ ϕγ,0 = Aβ
(γ). Portanto,
Aβ
(γ ′) ϕγ,γ ′ = ϕ−β ,−β+γ ′ Aβ ϕγ,0
= ϕ−β+γ,β+γ ′ ϕ−1−β+γ,−β
Aβ ϕγ,0
= ϕ−β+γ,−β+γ ′ Aβ
(γ).
Segundo Caso: 0 > γ.
Para mostrarmos a igualdade desejada basta verificarmos que
ϕ−β+γ,−β+γ ′ Aβ
(γ)ϕ−1γ,γ ′ ϕ0,γ ′ = ϕ−β ,−β+γ ′ Aβ ,
pois a unicidade da aplicacao Aβ
(γ ′) implicara o resultado. Observe que ϕ0,γ ′ = ϕγ,γ ′ ϕ0,γ e
ϕ−β+γ,−β+γ ′ Aβ
(γ)ϕ−1γ,γ ′ ϕ0,γ ′ = ϕ−β+γ,−β+γ ′ Aβ
(γ)ϕ0,γ
= ϕ−β+γ,−β+γ ′ϕ−β ,−β+γ Aβ
= ϕ−β ,−β+γ ′ Aβ ,
como era desejado.
Terceiro Caso: γ ′ ≥ 0.
Como −β ≥ 0 as aplicacoes ϕγ,γ ′ e ϕ−β+γ,−β+γ ′ sao inclusoes. Portanto, se x ∈ X γ , por um
lado
Aβ
(γ ′) ϕγ,γ ′(x) = Aβ x ∈ X γ ′−β .
Por outro lado ϕ−β+γ,−β+γ ′ Aβ
(γ)(x) = Aβ x ∈ X γ ′−β e segue a igualdade desejada.
Para completar a demonstracao, suponhamos que β > 0. Neste caso, Aβ
(γ)= (A−β
(−β+γ))−1.
Como −β + γ >−β + γ ′, temos
ϕγ,γ ′ A−β
(−β+γ)= A−β
(−β+γ ′) ϕ−β+γ,−β+γ ′.

2. O problema linear 43
Portanto suas inversas sao iguais e temos
(A−β
(−β+γ))−1 ϕ
−1γ,γ ′ = ϕ
−1−β+γ,−β+γ ′ (A
−β
(−β+γ ′))−1.
Logo, ϕ−β+γ,−β+γ ′ Aβ
(−β+γ)= Aβ
(γ ′) ϕγ,γ ′ .
Para demonstrar o proximo resultado novamente dividiremos a demonstracao em casos. Em
cada caso, teremos que fazer novas divisoes o que tornara a demonstracao um tanto quanto
tecnica.
Proposicao 2.2.9. Com a notacao introduzida acima, para todo α,β ,γ ∈ R
Aβ
(−γ+α)Aγ
(α)= Aβ+γ
(α).
Demonstracao. Dividiremos a demonstracao em quatro casos.
Primeiro Caso: β ≤ 0 e γ ≤ 0.
Suponha que α > 0. Com isso temos
Aβ+γ
(α)x = Aβ+γx ∈ Xα−β−γ , para todo x ∈ Xα .
Por outro lado,
Aγ
(α)x = Aγx ∈ Xα−γ , para todo x ∈ Xα
e, assim, Aβ
(−γ+α)Aγx = Aβ (Aγx) = Aβ+γx ∈ Xα−β−γ .Portanto Aβ
(−γ+α)Aγ
(α)= Aβ+γ
(α).
Suponha que α ≤ 0 com −γ +α > 0. Segue da Proposicao 2.2.7 que
Aγ
(α)ϕ0,α = ϕ−γ,−γ+α Aγ ,
Aβ+γ
(α)ϕ0,α = ϕ−β−γ,−β−γ+α Aβ+γ .
Alem disso, Aβ
(−γ+α)e a restricao de Aβ a X−γ+α ⊂ X e Aβ
(−γ)e a restricao de Aβ a X−γ ⊂ X

44 2. O problema linear
(ver formula (2.2.7)). Portanto,
Aβ
(−γ+α)Aγ
(α)ϕ0,α = Aβ
−γ+αϕ−γ,−γ+α Aγ
= ϕ−β−γ,−β−γ+α Aβ
(−γ)Aγ
= ϕ−β−γ,−β−γ+α Aβ+γ .
e isso implica a desigualdade desejada.
Para completar a demonstracao do Primeiro Caso, suponha que α ≤ 0 com −γ +α ≤ 0.
Proposicao 2.2.7 implica que
Aβ
(−γ+α)ϕ0,−γ+α = ϕ−β ,−β−γ+α Aβ ,
Aγ
(α)ϕ0,α = ϕ−γ,−γ+α Aγ
Aβ+γ
(α)ϕ0,α = ϕ−β−γ,−β−γ+α Aβ+γ .
Como −β − γ ≥ −β ≥ −β − γ +α , temos ϕ−β−γ,−β−γ+α = ϕ−β ,−β−β+αϕ−β−γ,−β . As
aplicacoes ϕ−γ,0 e ϕ−β−γ,−β sao inclusoes e portanto:
Aβ
(−γ+α)Aγ
(α)ϕ0,α = Aβ
(−γ+α)ϕ−γ,−γ+α Aγ
= Aβ
(−γ+α)ϕ0,−γ+α ϕ−γ,0 Aγ
= ϕ−β ,−β−γ+α Aβ ϕ−γ,0 Aγ
= ϕ−β−γ,−β−γ+α ϕ−1−β−γ,−β
Aβ ϕ−γ,0 Aγ
= ϕ−β−γ,−β−γ+α Aβ+γ
e isso implica a desigualdade desejada.
Segundo Caso: β > 0, γ > 0 e α ∈ R.
Utilizando a definicao descrita na formula (2.2.9) temos
Aβ
(−γ+α)= (A−β
−β−γ+α)−1,
Aγ
(α)= (A−γ
(−γ+α))−1,
Aβ+γ
(α)= (A−β−γ
−β−γ+α)−1.

2. O problema linear 45
Defina α =−β−γ+α , β =−γ e γ =−β . Segue que β ≤ 0 e γ ≤ 0 e aplicando a igualdade
obtida no Primeiro Caso temos
A−γ
(−γ+α)A−β
(−β−γ+α)= A−β−γ
(−β−γ+α).
Logo,
Aβ+γ
(α)= (A−β−γ
−β−γ+α)−1 = (A−γ
(−γ+α)A−β
(−β−γ+α))−1 = (A−β
−β−γ+α)−1 (A−γ
(−γ+α))−1
= Aβ
(−γ+α)Aγ
(α).
Resta agora considerarmos os dois casos em que β e γ tem sinais contrarios.
Terceiro Caso: β > 0, γ ≤ 0 e α ∈ R.
Utilizando a definicao descrita na formula (2.2.9) temos Aβ
−γ+α = (A−β
(−β−γ+α))−1. Suponha
que β +γ > 0. Novamente, temos Aβ+γ
(α)= (A−β−γ
(−β−γ+α))−1. Como γ ≤ 0,−β −γ ≤ 0 e−β ≤ 0,
o Primeiro Caso com α =−β − γ +α , β = γ e γ =−β − γ implica
Aγ
(α)A−β−γ
(−β−γ+α)= A−β
−β−γ+α.
Logo,
Aβ+γ
(α)= (A−β−γ
(−β−γ+α))−1 = (A−β
(−β−γ+α))−1 Aγ
(α)= Aβ
(−γ+α)Aγ
(α).
Se β + γ ≤ 0, o Primeiro Caso com α = α , β =−β e γ = β + γ implica que
A−β
(−β−γ+α)Aβ+γ
(α)= Aγ
(α)
e obtemos a igualdade desejada.
Quarto Caso: β ≤ 0 e γ > 0 e α ∈ R.
A demonstracao e analoga a do Terceiro Caso.
Sejam α , β > 0. Segue da Proposicao 2.2.2 que a aplicacao ϕβ−α,−α e bijetora de Xβ−α

46 2. O problema linear
em ϕβ−α,−α(Xβ−α). Defina a aplicacao
Aβ
(−α):= Aβ
(β−α)ϕ−1β−α,−α
: ϕβ−α,−α(Xβ−α)⊆ X−α → X−α . (2.2.10)
Denote por A(−α) = A1(−α). A aplicacao Aβ
(−α)e bijetora, ja que e composicao de aplicacoes
bijetoras. Defina
A−β
(−α):= (Aβ
(−α))−1. (2.2.11)
Segue, da definicao em (2.2.10), que
A−β
(−α)= ϕβ−α,−α A−β
(−α).
Lema 2.2.10. Com a notacao introduzida acima, Aβ
(−α)e uma aplicacao auto-adjunta com
respeito ao produto interno em X−α .
Demonstracao. Primeiramente, afirmamos que:
(R−1α ϕ0,−α)(x) = A−2αx, x ∈ X , (2.2.12)
onde Rα : Xα → X−α e o isomorfismo de Frechet-Riesz. De fato, seja x ∈ X . O funcional linear
ϕ0,−α(x) : Xα → R e dado por ϕ0,−α(x)(y) = 〈y,x〉X , para y ∈ Xα . Por outro lado, como A e
auto-adjunto temos
〈y,x〉X = 〈Aαy,AαA−2αx〉X = 〈y,A−2αx〉Xα .
Portanto, ϕ0,−αx(·) = 〈·,A−2αx〉Xα e, desse modo, (Rα A−2α)x = ϕ0,−α(x) e (2.2.12) esta
demonstrada.
Formula (2.2.12) implica que para todo u, v ∈ X temos
〈ϕ0,−αu,ϕ0,−αv〉X−α = 〈A−2αu,A−2αv〉Xα = 〈A−αu,A−αv〉X . (2.2.13)
Como Aβ
(β−α)= (A−β
(−α))−1 e Aβ = (A−β )−1, Proposicao 2.2.7 implica que
Aβ
(β−α)ϕβ ,β−α = ϕ0,−α Aβ .

2. O problema linear 47
Assim, para u ∈ Xβ , temos
(ϕ0,−α Aβ )(u) = (Aβ
(β−α)ϕβ ,β−α)(u) = (Aβ
(−α)ϕβ−α,−α ϕβ ,β−α)(u). (2.2.14)
Para u, v ∈ Xβ , defina x = ϕβ−α,−αϕβ ,β−αu e y = ϕβ−α,−αϕβ ,β−αv. E facil ver que y =
ϕβ−α,−αϕβ ,β−αv = ϕ0,−αϕβ−α,0ϕβ ,β−αv = ϕ0,−αϕβ ,0v. Como ϕβ ,0 e a aplicacao inclusao
temos
〈Aβ
(−α)x,y〉X−α = 〈A−αAβ u,A−αv〉X . (2.2.15)
Analogamente, obtemos
〈x, Aβ
(−α)y〉X−α = 〈A−αu,A−αAβ v〉X .
Como AαAβ = Aα+β e Aβ e simetrica em X , temos
〈Aβ
(−α)x,y〉X−α = 〈Aβ A−αu,A−αv〉X = 〈A−αu,Aβ A−αv〉X = 〈x, Aβ
(−α)y〉X−α .
Ou seja, mostramos que
〈Aβ
(−α)x,y〉X−α = 〈x, Aβ
(−α)y〉X−α , para todo x,y ∈ ϕβ−α,−α(ϕβ ,β−α(X
β )). (2.2.16)
Por densidade e (2.2.16) segue que
〈Aβ
(−α)x,y〉X−α = 〈x, Aβ
(−α)y〉X−α , para todox,y ∈ ϕβ ,β−α(X
β ).
Isso mostra que Aβ
(−α)e auto-adjunta.
Segue do Lema 2.2.10 que A−β
(−α), a aplicacao invesa de Aβ
(−α), e simetrica em X−α .
Lema 2.2.11. Com a notacao introduzida acima, para todo α,β ,γ ∈ (0,∞) temos
A−β−γ
(−α)= A−β
(−α) A−γ
(−α).

48 2. O problema linear
Demonstracao. Notemos que
A−β−γ
(−α)= ϕβ+γ−α,−α A−β−γ
(−α),
A−β
(γ−α)= ϕβ ,β+γ−α A−β ϕ
−10,γ−α
.
A igualdade da Proposicao 2.2.9 implica que A−β−γ
(−α)= A−β
(γ−α)A−γ
(−α). Portanto,
A−β−γ
(−α)= ϕβ+γ−α,−α A−β
γ−α ϕ−1γ−α,−α ϕγ−α,−α A−γ
(−α).
O lema esta demonstrado.
Proposicao 2.2.12. Seja α > 0. A aplicacao B := A(−α) : D(B) = ϕ1−α,−α(X1−α) ⊂ X−α →X−α e auto-adjunta em X−α e reσ(B) > 0. Se β > 0, seja B−β a potencia fracionaria basica
de B de ordem −β e Xβ
B o espaco de potencia fracionaria correspondente. Entao
B−β = A−β
(−α)e Xβ
B = ϕβ−α,−α(Xβ−α).
A aplicacao ϕβ−α,−α e uma isometria entre os espacos de Hilbert Xβ−α e Xβ
B .
Demonstracao. Como reσ(A)> 0, existe um δ > 0 tal que 〈Ax,x〉X ≥ δ 〈x,x〉X , para todo x∈X .
As igualdades (2.2.14) e (2.2.15) implicam que para u ∈ X1 e x = ϕ1−α,−αϕ1,1−αu temos
〈A1(−α)x,x〉X−α = 〈A−αu,A1A−αu〉X ≥ δ 〈A−αu,A−αu〉X = δ 〈x,x〉X−α .
Logo, pela densidade de ϕ1,1−α(X1) em ϕ1−α,−α(X1−α) = D(A1(−α)), obtemos
reσ(A1(−α)) > 0. Portanto B := A(−α) gera a famılia B−β , β > 0, de espacos de potencias
fracionarias de B. Portanto
B−β−γ = B−β B−γ , β , γ ∈ (0,∞). (2.2.17)
Afirmamos que
B−β = A−β
(−α), para todo β > 0. (2.2.18)
De fato, seja Z o conjunto formado por β ∈ (0,∞) tal que B−β = A−β
(−α). E facil ver que
1 ∈ Z e usando um argumento de inducao, a igualdade (2.2.17) e o Lema 2.2.11, mostramos

2. O problema linear 49
que Z contem todos os numeros inteiros.
Como um operador simetrico nao-negativo definido em espacos de Hilbert possui uma unica
raiz quadrada nao-negativa, novamente um argumento de inducao (em k ∈ N) implica que Z
contem todos os numeros da forma m/2k, com m, k ∈ N. Defina Z0 = m/2k | m,k ∈ N. Logo
Z0 e denso em (0,∞). Dado β > 0 seja (βn)n uma sequencia em Z0 tal que βn → β quando
n→ ∞.
Utilizando a igualdade (1.5.3), temos
B−βnx =1
Γ(βn)
∫ 1
0tβn−1e−Btxdt, para cada n ∈ N e x ∈ X−α ,
B−β x =1
Γ(β )
∫ 1
0tβ−1e−Btxdt para cada x ∈ X−α .
Portanto,
B−βnx−B−β x =1
Γ(βn)Γ(β )
[∫ 1
0(Γ(β )tβ−1−Γ(βn)tβ−1)e−Btxdt
].
Logo, para cada x ∈ X−α ,
|B−βnx−B−β x|X−α → 0, quando n→ ∞.
Analogamente mostramos que para cada x ∈ X
|A−βnx−A−β x|X → 0, quando n→ ∞.
Seja u∈X . Como A−βn(−α)
ϕ0,−αu=ϕ0,−αA−βnu para todo n∈N e A−β
(−α)ϕ0,−αu=ϕ0,−αA−β u
obtemos
|B−βnϕ0,−αu−B−βϕ0,−αu|X−α → 0, quando n→ ∞.
Tambem |A−βnu−A−β u|X→ 0, quando n→∞, e desse modo |ϕ0,−αA−βnx−ϕ0,−αA−β u|X−α →0, quando n→ ∞. Portanto,
|A−βn(−α)
ϕ0,−αu− A−β
(−α)ϕ0,−αu|X−α → 0, u ∈ X .

50 2. O problema linear
Recordemos que βn ∈ Z0 para todo n ∈N. Logo B−βn = A−βn(−α)
, para todo n ∈N e segue que
B−βϕ0,−αu = A−β
(−α)ϕ0,−αu, para todo u ∈ X .
Como o conjunto ϕ0,−α(X) e denso em X−α , temos β ∈ Z e isto prova nossa afirmativa. A
igualdade (2.2.18) implica que Xβ
B = ϕβ−α,−α(Xβ−α).
Afirmamos agora para todo β > 0, ϕβ−α,−α e uma isometria de Xβ−α em Xβ
B . De fato,
sejam x, y ∈ Xβ−α arbitrarios e defina x = ϕβ−α,−α x e y = ϕβ−α,−α y.
Consideremos primeiro o caso em que existam u, v ∈ Xβ tais que x = ϕβ ,β−αu e y =
ϕβ ,β−αv. Como Aβ
(β−α)ϕβ ,β−α = ϕ0,−αAβ , temos
Bβ x = Aβ
(−α)x = Aβ
(β−α)ϕ−1β−α,−α
ϕβ−α,−α x
= Aβ
(β−α)ϕβ ,β−αu = ϕ0,−αAβ u.
Analogamente mostramos que Bβ y = ϕ0,−αAβ v. Usando (2.2.13) temos
〈x,y〉Xβ
B= 〈Bβ x,Bβ y〉X−α = 〈ϕ0,−αAβ u,ϕ0,−αAβ v〉X−α
= 〈A−αAβ u,A−αAβ v〉X = 〈Aβ−αu,Aβ−αv〉X .
Agora, se β −α ≥ 0, como ϕβ ,β−α e uma aplicacao inclusao, temos
〈Aβ−αu,Aβ−αv〉X = 〈u,v〉Xβ−α = 〈x, y〉Xβ−α .
Por outro lado, se β −α < 0, temos
〈Aβ−αu,Aβ−αv〉X = 〈A−(α−β )u,A−(α−β )v〉X
= 〈ϕ0,−(α−β )u,ϕ0,−(α−β )v〉X−(α−β ) = 〈x, y〉X−(α−β ).
Portanto, em ambas as situacoes, temos 〈x,y〉Xβ
B= 〈x, y〉Xβ−α . O caso geral segue do fato do
conjunto ϕβ ,β−α(Xβ ) ser denso em Xβ−α e do primeiro caso. Concluımos a demonstracao da
proposicao.

2. O problema linear 51
Proposicao 2.2.13. Se α ∈ [0,1/2), x ∈ X1−α e v ∈ X1/2 ⊆ Xα , temos
(A(1−α)x).v = 〈x,v〉X1/2,
onde o ponto ‘.’ denota a funcao avaliacao entre um elemento de X−α e Xα .
Demonstracao. Suponha que x ∈ X1. Segue da Proposicao 2.2.7 que
A(1−α)x = ϕ0,−αAx.
O Teorema de Frechet-Riesz e a formula (2.2.12) implicam que para todo v ∈ X1/2 temos
(A(1−α)x
).v = 〈v,R−1
α
(A(1−α)x
)〉α = 〈v,R−1
α ϕ0,−αAx〉α
= 〈v,A−2αAx〉α = 〈Aαv,AαA−2αAx〉X
= 〈v,Ax〉X = 〈v,x〉X1/2 .
Portanto, o resultado esta demonstrado sempre que x ∈ X1. O caso geral segue da densidade de
X1 em X1−α e em X1/2.
2.3 O problema linear abstrato
Vamos agora analisar o problema linear abstrato associado a equacao (ERD).
Nesta secao vamos assumir tres hipoteses basicas para desenvolver nosso trabalho.
(HL1) Sejam a0, a1 ∈ (0,∞) constantes positivas e para cada i, j = 1 . . . ,N consideremos funcoes
ai j : Ω→ R, em L∞(Ω) tais que ai j = a ji e para qualquer que seja ξ ∈ RN e para quase
todo x ∈Ω suponha que
a0|ξ |2 ≤N
∑i, j=1
ai j(x)ξiξ j ≤ a1|ξ |2. (2.3.1)
No que seja utilizaremos a notacao A(x) := (ai j(x))Ni, j=1, x ∈Ω.

52 2. O problema linear
(HL2) Seja β : Ω→ R uma funcao mensuravel tal que para todo ε > 0 existe uma constante
Cε ≥ 0 tal que
∣∣∣|β |1/2u∣∣∣2L2(Ω)
≤ ε|u|2H1(Ω)+Cε |u|2L2(Ω), para todo u ∈ H10 (Ω). (2.3.2)
(HL3) Suponhamos tambem que
λ1 := inf
∫Ω
[ N
∑i, j=1
ai j∂iu∂ ju+β |u|2]dx | u ∈ H1
0 (Ω), |u|L2 = 1
> 0.
Podemos dizer que a Hipootese (HL3) significa que a solucao do problema estacionario
−Lu+β (x)u = 0
em Ω com potencial β e com condicoes de fronteira de Dirichlet possui energia positiva.
Suponha que as Hipoteses (HL1), (HL2) e (HL3) sejam validas. Consideremos o espaco
das distribuicoes em Ω, D ′(Ω), e o operador L: H10 (Ω)→D ′(Ω) definido por
Lu =N
∑i, j=1
∂i(ai j∂ ju), u ∈ H10 (Ω).
A definicao de derivadas de distribuicoes implica que
(Lu−βu)(v) =−∫
Ω
[N
∑i, j=1
ai j∂iu∂ jv+βuv
]dx, u ∈ H1
0 (Ω), v ∈D(Ω). (2.3.3)
Segue por densidade, de H10 (Ω) em L2(Ω) e de D(Ω) em H1
0 (Ω), que
〈Lu−βu,v〉L2(Ω) =−∫
Ω
[N
∑i, j=1
ai j∂iu∂ jv+βuv
]dx (2.3.4)
para u,v ∈ H10 (Ω) com Lu−βu ∈ L2(Ω).
Lema 2.3.1. Assuma as Hipoteses (HL1), (HL2) e (HL3). Seja κ ∈ [0,λ1) arbitrario. Para cada
ε ∈ (0,a0), existe um ρ ∈ (0,1) tal que c := minρ(a0−ε),(1−ρ)(λ1−κ)−ρ(ε +Cε +κ)>

2. O problema linear 53
0 e
c(|∇u|2L2(Ω)+ |u|
2L2(Ω)
)≤∫
Ω
[N
∑i, j=1
ai, j∂iu∂ ju+(β −κ)|u|2]
dx
≤C(|∇u|2L2(Ω)+ |u|
2L2(Ω)
), u ∈ H1
0 (Ω),
onde C := maxa1 + ε,ε +Cε.
Demonstracao. Seja ε ∈ (0,a0). Como a0− ε > 0 temos que
0 <λ1−κ
(λ1−κ)+(ε +κ +Cε)< 1.
Seja ρ ∈ R tal que
0 < ρ <λ1−κ
(λ1−κ)+(ε +κ +Cε)< 1.
Com esta escolha de ρ ∈ (0,1) temos que
(1/ρ−1)(λ1−κ)> (ε +κ +Cε)
e, portanto, c > 0. Note que, a definicao λ1 na Hipotese (HL3) implica que qualquer que seja
u ∈ H10 (Ω) temos
λ1|u|2L2(Ω) ≤∫
Ω
[N
∑i, j=1
ai j∂iu∂ ju+β |u|2]
dx.
Logo,
∫Ω
[N
∑i, j=1
∂iu∂ ju+(β −κ)|u|2]dx≥ ρa0|∇u|2L2 +ρ
∫Ω
(β −κ)|u|2dx+
+(1−ρ)λ1|u|2 +(1−ρ)∫
Ω
κ|u|2dx
= ρa0|∇u|2L2(Ω)+(1−ρ)(λ1−κ)|u|2L2(Ω)+ρ
∫Ω
(β −κ)|u|2dx
≥ ρa0|∇u|2L2(Ω)+(1−ρ)(λ1−κ)|u|2L2(Ω)−ρε|u|2H1(Ω)
−ρCε |u|2L2(Ω)−ρκ|u|2L2(Ω)
= ρ(a0− ε)|∇u|2L2(Ω)+(1−ρ)(λ1−κ)|u|2L2(Ω)−ρ(ε +Cε +κ)|u|2L2(Ω)
≥ c(|∇u|2L2(Ω)+ |u|
2L2(Ω)
).

54 2. O problema linear
Por outro lado
∫Ω
[N
∑i, j=1
∂iu∂ ju+(β −κ)|u|2]dx≤∫
Ω
a1|∇u|2dx+ ε|u|2H1(Ω)+Cε |u|2L2(Ω)−κ
∫Ω
|u|2dx
≤ a1|∇u|2L2(Ω)+ ε|∇u|2L2(Ω)+(ε +Cε −κ)|u|2L2(Ω)
≤C|∇u|2L2(Ω)+C|u|2L2(Ω).
E concluımos a demonstracao do lema.
As estimativas feitas no Lema 2.3.1 demonstram o seguinte
Lema 2.3.2. Assuma as Hipoteses (HL1), (HL2) e (HL3). Para u, v ∈ H10 (Ω) defina
〈u,v〉1 =∫
Ω
[N
∑i, j=1
ai j∂iu∂ jv+βuv
]dx. (2.3.5)
Entao 〈·, ·〉1 e um produto interno em H10 (Ω) e a norma definida pelo produto interno e equiva-
lente a norma usual em H10 (Ω).
Seja D(A) o conjunto formado por todos u ∈ H10 (Ω) tais que Lu−βu ∈ L2(Ω). Para u ∈
D(A) defina
Au =−Lu+βu. (2.3.6)
Proposicao 2.3.3. O operador A : D(A)→ L2(Ω) e auto-adjunto em X = L2(Ω) com reσ(A)>
0. Alem disso, se Xα , α ≥ 0, denota a famılia de espacos de potencias fracionarias gerada por
A, entao X1/2 =H10 (Ω) e o produto interno em X1/2 e identico ao produto interno 〈·, ·〉1 definido
no Lema 2.3.2.
Demonstracao. Denote o produto interno em L2(Ω) por 〈·, ·〉. Segue da formula (2.3.4) que
〈−Au,v〉 = 〈u,−Av〉, u,v ∈ D(A). (2.3.7)
O Lema 2.3.1 implica que
〈−Au,u〉 ≤ 0, u ∈ D(−A).
Portanto, provamos que −A e simetrico e dissipativo. Afirmamos que o operador −A e m-
dissipativo. Para isso devemos mostrar para todo λ > 0 e para todo g ∈ L2(Ω) existe um u ∈

2. O problema linear 55
D(−A) tal que
u+λAu = g.
De fato, defina a forma bilinear b : H10 (Ω)×H1
0 (Ω)→ R por
b(u,v) =∫
Ω
uvdx+λ
∫Ω
[N
∑i, j=1
ai j∂iu∂ jv+βuv
]dx, u,v ∈ H1
0 (Ω).
As Hipoteses (HL1), (HL2) e (HL3), o Lema 2.3.1 e a Desigualdade de Schwarz implicam
que existe constante c > 0 tais que para u,v ∈ H10 (Ω)
|b(u,v)| ≤ (1+λc)|u|H10 (Ω)|v|H1
0 (Ω) e b(u,u)≥ c|u|H10 (Ω).
Uma aplicacao do Teorema de Lax-Milgram implica que para cada g ∈ L2(Ω) existe um u ∈H1
0 (Ω) tal que
b(u,v) = 〈g,v〉, v ∈ H10 (Ω).
Em particular, u+λ (−Lu+βu) = g no sentido de distribuicoes e, portanto,−Lu+βu∈ L2(Ω).
Logo u ∈ D(A) = D(−A) e u+λAu = g. A afirmativa esta demonstrada.
Agora a Proposicao 1.4.8 implica que −A e um operador auto-adjunto e segue do
Lema 2.3.1 que reσ(A)> 0.
Para finalizar, resta mostrarmos que X1/2 = H10 (Ω) e que o produto interno em X1/2 tem a
forma do produto interno definido no Lema 2.3.2.
Considere (X ,〈·, ·〉X) = (L2(Ω),〈·, ·〉) e (Y,〈·, ·〉Y ) = (H10 (Ω),〈·, ·〉1), onde 〈·, ·〉1 e o produto
interno definido no Lema 2.3.2. Logo, Y e denso em X e a inclusao j : Y → X e uma aplicacao
contınua. Seja B : X → X o operador inverso de A. Segue que para cada u ∈ X , temos que
Bu ∈ Y . Ainda mais, formula (2.3.4) implica que para todo v ∈ Y
〈v,u〉X = 〈v,Bu〉Y .
Portanto, o operador linear B esta nas condicoes do Lema 2.1.1 e o resultado segue.

56 2. O problema linear
Capıtulo
3
O problema nao-linear
Neste capıtulo apresentamos a equacao de evolucao abstrata associada a equacao (ERD).
Na secao 3.1 a hipotese (HNL) e apresentada e determinamos um α ∈ [0,1) tal que de uma
funcao f satisfazendo hipotese (HNL) obtemos um operador de Nemytskiıf : H10 (Ω)→ X−α . A
partir dos resultados sobre equacoes parabolicas apresentados no Capıtulo 1, solucoes de (ERD)
geram um semifluxo global π em H10 (Ω). O semifluxo π e definido na Secao 3.2.
A referencia para este capıtulo e o artigo [21]. Observamos que neste Capıtulo N = 3.
3.1 Estimativas nao-lineares
Iniciamos a secao com o seguinte resultado auxiliar.
Lema 3.1.1. Sejam X um espaco Banach e A : D(A)⊂X→X setorial com reσ(A)> 0, gerando
a famılia de potencias fracionarias Xα , α ≥ 0. Suponhamos que X1/2 esteja continuamente
imerso em L6(Ω) e que X = X0 esteja continuamente imerso em L2(Ω). Entao para todo
p ∈ [2,6) existe um β ∈ [0,1/2) tal que para todo α ∈ (β ,1), Xα esta continuamente imerso
em Lp(Ω).
Demonstracao. Se u ∈ X1/2, entao u ∈ L2(Ω)∩L6(Ω) e segue da Interpolacao para Espacos de
Lebesgue que u ∈ Lp(Ω) e
|u|Lp(Ω) ≤ |u|β
L2(Ω)|u|1−β
L6(Ω),
57

58 3. O problema nao-linear
onde β =6− p
2p. Seja B : X1/2→ Lp(Ω) a aplicacao inclusao de X1/2 em Y = Lp(Ω). Segue
do Teorema de Interpolacao para Espacos de Potencias Fracionarias (cf. Teorema 1.5.21) que
existe uma constante C ≥ 0 tal que
|u|X1/2 ≤C|u|1/2X0 |u|
1/2X1 , para todo u ∈ X1.
Logo, se u ∈ D(A) = X1 ⊂ X1/2 = D(B) temos
|Bu|Y ≤ |u|βL2(Ω)|u|1−β
L6(Ω)≤C′|u|βX0|u|
1−β
X1/2
≤C′|u|βX0(C|u|1/2X0 |u|
1/2X1 )≤CC′|u|βX1|u|
1−β
X0
≤CC′|Au|βX0|u|1−β
X0 ,
onde β =1−β
2e C′ e uma constante positiva. Agora, segue do Lema 1.5.24 que para todo
α ∈ (β ,1) a aplicacao B A−α e definida e contınua de X em Y . Logo Xα = R(A−α) esta
continuamente imerso em Lp(Ω).
Definicao 3.1.2. Seja w : Ω→R uma funcao mensuravel e γ ∈ (0,1] um numero real. Dizemos
que w ∈ Eγ se, e so se, uma das condicoes abaixo e satisfeita:
(1) 0 < γ < 1 e existe uma constante c > 0 tal que para todo ε > 0 e para todo u ∈ H10 (Ω)
temos ∣∣∣|w|1/2u∣∣∣L2(Ω)
≤ c(γε|u|H1(Ω)+(1− γ)ε−γ/(1−γ)|u|L2(Ω));
(2) γ = 1 e existe uma constante c > 0 tal que para todo u ∈ H10 (Ω)
∣∣∣|w|1/2u∣∣∣L2(Ω)
≤ c|u|H1(Ω).
Pode ser mostrado a seguinte caracterizacao das funcoes em Eγ , γ ∈ (0,1].
Proposicao 3.1.3. Seja w : Ω→R uma funcao mensuravel e seja γ ∈ (0,1]. Entao w ∈ Eγ se, e
somente se, existe uma constante C′ =C′(w)> 0 tal que
∣∣∣|w|1/2u∣∣∣L2(Ω)
≤C′|u|γH1(Ω)|u|1−γ
L2(Ω), para todo u ∈ H1
0 (Ω).
Vamos demonstrar o seguinte lema auxiliar.

3. O problema nao-linear 59
Lema 3.1.4. Suponha que X seja um espaco Banach, A : D(A) ⊂ X → X seja um operador
setorial com reσ(A) > 0 e Xα , α ≥ 0, seja a famılia de espacos de potencias fracionarias
gerada por A. Suponhamos que X1/2 esteja continuamente imerso em H10 (Ω) e que X = X0
esteja continuamente imerso em L2(Ω). Seja w : Ω→ R e suponha que exista um γ ∈ (0,1) tal
que w ∈ Eγ . Entao para todo α ∈ (γ/2,1) a aplicacao u 7→ |w|1/2u define um operador linear
e limitado de Xα em L2(Ω).
Demonstracao. Defina B : X1/2→ Y = L2(Ω) por B(u) = |w|1/2u, u ∈ X1/2 ⊂ H10 (Ω).
O Teorema de interpolacao de espacos de potencias fracionarias implica que existe uma
constante C ≥ 0 tal que
|u|X1/2 ≤C|u|1/2X0 |u|
1/2X1 , para todo x ∈ X1.
Logo, existem constantes positivas C′′ e C tais que para cada u ∈ X1 = D(A) ⊂ X1/2 = D(B)
temos
|Bu|Y =∣∣∣|w|1/2u
∣∣∣L2(Ω)
≤C′|u|γH1(Ω)|u|1−γ
L2(Ω)≤C′C′′C|u|γ
X1/2|u|1−γ
X0
≤C′C′′C|u|1−γ
X0 (C|u|1/2X0 |u|
1/2X1 )
γ
=C′C′′CCγ |u|γ/2X1 |u|
1−γ/2X0 =C′C′′CCγ |Au|γ/2
X0 |u|1−γ/2X0 ,
onde C′ e a constante positiva da Proposicao 3.1.3. Uma aplicacao do Lema 1.5.24 mostra que
para todo α ∈ (γ/2,1) a aplicacao BA−α e definida e limitada de X em Y . Portanto, B e uma
aplicacao linear e limitada de Xα = R(A−α) em Y = L2(Ω), como desejado.
Nesta secao, consideremos a seguinte hipotese:
HIPOTESE (HNL):
(a) c≥ 0 e ρ ≥ 0 sao constantes com ρ ∈ [2,4) e c : Ω→ [0,∞) e uma funcao em L1(Ω);
(b) a : Ω→ R e uma funcao mensuravel tal que a ∈ Eγ , para algum γ ∈ (0,1);
(c) f : Ω×R→R e uma funcao tal que Ω3 x 7→ f (x,u) e uma funcao Lebesgue-mensuravel
para todo u ∈ R e R 3 u 7→ f (x,u) e uma funcao de classe C1 para q.t.p. x ∈Ω;

60 3. O problema nao-linear
(d) |∂u f (x,u)| ≤ c(a(x)+ |u|ρ), para todo u ∈ R e q.t.p. x ∈Ω;
(e) f (·,0) ∈ L2(Ω);
(f) f (x,u)u≤ c(x) e∫ u
0f (x,s)ds≤ c(x) para q.t.p. x ∈Ω e todo u ∈ R.
No restante desta secao vamos considerar X = L2(Ω), A : D(A) ⊂ X → X um operador
setorial com reσ(A)> 0, gerando a famılia de espacos de potencias fracionarias Xα , α ≥ 0.
Suponhamos que X1/2 esteja continuamente imerso em H10 (Ω). Seja f : Ω×R→ R uma
funcao satisfazendo Hipotese (HNL). Sejam q = (6/(ρ +1)) e p = (q/(q−1)).
Se ρ > 2 ou a2 /∈ E1, entao escolhemos α ∈ (0,1/2) tal que
α > max
γ/2,1− (6− p)/2p
2
. (3.1.1)
O Lema 3.1.1 implica que Xα esta continuamente imerso em Lp(Ω) e segue do Lema 3.1.4 que
a aplicacao u 7→ |a|1/2u e limitada de Xα em X .
Se ρ = 2 e a2 ∈ E1, escolhemos α = 0.
Seja F : Ω×R→ R a funcao dada por
F(x,u) =∫ u
0f (x,s)ds, (3.1.2)
sempre que s 7→ f (x,s) for contınua e F(x,u) = 0, caso contrario.
Proposicao 3.1.5. Com a notacao introduzida acima, para todo u ∈ X1/2, F(u), o opera-
dor de NemytskiıF em u, esta em L1(Ω). Alem disso F : X1/2 → L1(Ω) e um operador de
NemytskiıFrechet diferenciavel com
DF(u).h = f (u).h, para todo u, h ∈ X1/2.
Demonstracao. Notemos que se u∈ X1/2, entao u∈ L2(Ω)∩L6(Ω) e, portanto, u∈ Lr(Ω), para
todo r ∈ [2,6]. Em particular, as aplicacoes f (u) : Ω→ R e F(u) : Ω→ R sao mensuraveis.

3. O problema nao-linear 61
Mostremos que F(u) ∈ L1(Ω) para todo u ∈ X1/2. De fato, seja u ∈ X1/2, temos
∫Ω
∣∣∣F(u)(x)∣∣∣dx =
∫Ω
|F(x,u(x))|dx≤∫
Ω
∫ u(x)
0| f (x,s)|dsdx
≤∫
Ω
[∫ u(x)
0| f (x,s)− f (x,0)|ds+
∫ u(x)
0| f (x,0)|ds
]dx.
Temos que
f (x,s)− f (x,0) =∫ 1
0
ddt
f (x,st)dt =∫ 1
0
∂
∂uf (x,st)sdt.
Como ∂u f e contınua para q.t.p. x ∈Ω, o Teorema do Valor Medio implica que
| f (x,s)− f (x,0)| ≤ maxξ∈[0,s]
|∂u f (x,ξ )||s|. (3.1.3)
Segue da Hipotese (HNL) que
|∂u f (x,ξ )| ≤C(|a(x)|+ |ξ |ρ), para todo ξ ∈ R e q.t.p. x ∈Ω. (3.1.4)
Utilizando desigualdade (3.1.4) em (3.1.3) obtemos
| f (x,s)− f (x,0)| ≤C(|a(x)|+ |s|ρ)|s|, para q.t.p x ∈Ω. (3.1.5)
Logo,
∫Ω
∫ u(x)
0
∫ 1
0|∂u f (x,st)| |s|dtdsdx≤C
∫Ω
∫ u(x)
0
∫ 1
0(|a(x)|+ |ts|ρ)|s|dtdsdx
≤C∫
Ω
∫ u(x)
0(|a(x)||s|+ |s|ρ+1)dsdx
≤C∫
Ω
(|a(x)| |u(x)|
2
2+ |u(x)|ρ+2
)dx.
Com isso,
∫Ω
|F(u)(x)|dx≤∫
Ω
| f (x,0)u(x)|dx+∫
Ω
∫ u(x)
0
∫ 1
0|∂u f (x,st)| |s|dtdsdx
≤∫
Ω
| f (x,0)u(x)|dx+C∫
Ω
(∣∣∣|a(x)|1/2u(x)|2∣∣∣+ |u(x)|ρ+2
)dx < ∞
e isso mostra que F(u) ∈ L1(Ω) sempre que u ∈ X1/2.

62 3. O problema nao-linear
Afirmamos que para cada u ∈ X1/2, a aplicacao X1/2 3 h 7→ f (u).h ∈ L1(Ω) e linear e
limitada. A prova da linearidade da aplicacao e imediata. Sejam u, h ∈ X1/2. Utilizando a
desigualdade (3.1.5) temos
∫Ω
| f (u).h|dx =∫
Ω
| f (x,u(x))h(x)|dx
≤∫
Ω
| f (x,0)h(x)|dx+∫
Ω
| f (x,u(x))− f (x,0)||h(x)|dx
≤ | f (0)|L2(Ω)|h|L2(Ω)+C∫
Ω
|a(x)u(x)h(x)|dx+C∫
Ω
|u(x)|ρ |u(x)h(x)|dx
≤ | f (0)|L2(Ω)|h|L2(Ω)+C∣∣|a|1/2u
∣∣L2(Ω)
∣∣|a|1/2h∣∣L2(Ω)
+C|u|ρ+1Lr(Ω)|h|L6(Ω),
onde r = (ρ +1)6/5. Portanto, concluımos que existe uma constante Mu ≥ 0 tal que
| f (u).h|L1(Ω) ≤ Mu|h|X1/2, para todo h ∈ X1/2
e isso significa que a aplicacao h 7→ f (u) ·h e linear e limitada para cada u ∈ X1/2.
Mostraremos que o operador de Nemytskiı F : X1/2→ L1(Ω) e Frechet diferenciavel e que
DF(u).h = f (u).h, para todo u, h ∈ X1/2. De fato, sejam u, h ∈ X1/2. Notemos que
|F(u+h)− F(u)− f (u).h|L1(Ω)
=∫
Ω
|F(x,u(x)+h(x))−F(x,u(x))− f (x,u(x))h(x)|dx.
Como
F(x,u(x)+h(x))−F(x,u(x)) =∫ 1
0
ddt
F(x,u(x)+ th(x))dt
=∫ 1
0
∂
∂uF(x,u(x)+ th(x))h(x)dt
=∫ 1
0
∂
∂u
(∫ u(x)+th(x)
0f (x,s)ds
)h(x)dt
=∫ 1
0f (x,u(x)+ th(x))h(x)dt,

3. O problema nao-linear 63
segue que
|F(u+h)− F(u)− f (u)h|L1(Ω) (3.1.6)
≤∫
Ω
∫ 1
0| f (x,u(x)+ th(x))− f (x,u(x))| |h(x)|dtdx.
Com um calculo semelhante ao anterior obtemos
| f (x,u(x)+ th(x))− f (x,u(x))| ≤Ct|h(x)|[|a(x)|+2ρ−1
(|u(x)|ρ +(t|h(x)|)ρ
)]e substituindo em (3.1.6) obtemos
|F(u+h)− F(u)− f (u)h|L1(Ω) ≤∫
Ω
∫ 1
0C|h(x)|2|a(x)|tdtdx+
+∫
Ω
∫ 1
0
[2ρ−1
(|u(x)|ρt + tρ+1|h(x)|ρ
)]dtdx
≤∫
Ω
C2
∣∣∣|a(x)|1/2h(x)∣∣∣2 dx+
+∫
Ω
C|h(x)|22ρ−1(|u(x)|ρ + |h(x)|ρ)dx
≤C∣∣∣|a|1/2h
∣∣∣2L2(Ω)
+C2ρ−1(|u|ρLr(Ω)+ |h|ρLr(Ω)
)|h|2L6(Ω),
onde r = (6ρ)/4. Ou seja, mostramos que existem constantes M, K ≥ 0 tais que
|F(u+h)− F(u)− f (u)h|L1(Ω) ≤C[K +2ρ−1M(|u|ρLr(Ω)
+ |h|ρLr(Ω))]|h|2X1/2.
A demonstracao da proposicao esta completa.
Se ρ > 2 ou a2 /∈ E1, para cada u ∈ X1/2, considere a funcao f(u) : Xα → R definida por
v 7→∫
Ω
f (x,u(x))v(x)dx.
Se ρ = 2 e a2 ∈ E1, para cada u ∈ X1/2, defina f(u) := f (u) ∈ X = X−α .
Proposicao 3.1.6. Suponha a notacao desta secao. Se ρ > 2 ou a2 /∈ E1, para todo u ∈ X1/2,
f(u) ∈ X−α . Alem disso, em ambos os casos definidos acima, a aplicacao f : X1/2 → X−α e
Lipschitziana em subconjuntos limitados de X1/2.
Demonstracao. Considere o caso ρ > 2 ou a2 /∈ E1. Seja u ∈ X1/2. Como Xα esta continua-

64 3. O problema nao-linear
mente imerso em L2(Ω) e em Lp(Ω), para todo v ∈ Xα temos
∫Ω
| f (x,u(x))v(x)|dx≤∫
Ω
[| f (x,0)v(x)|+ | f (x,u(x))− f (x,0)||v(x)|
]dx
≤ | f (0)|L2(Ω)|v|L2(Ω)+∫
Ω
C|a(x)u(x)v(x)|+C|u(x)|ρ+1|v(x)|dx
≤ | f (0)|L2(Ω)|v|L2(Ω)+C∣∣∣|a|1/2u
∣∣∣L2(Ω)
+C|u|ρ+1L6(Ω)|v|Lp(Ω)
≤ C(| f (0)|L2(Ω)+CK
∣∣∣|a|1/2u∣∣∣L2(Ω)
+C|u|ρ+1L6(Ω)
)|v|Xα ,
onde C, K sao constantes em [0,∞). Mostramos que a funcao f(u) : Xα→R, dada por f(u)(v) =∫Ω
f (x,u(x))v(x)dx, v ∈ Xα , esta bem definida, e linear e limitada, ou seja, f(u) ∈ X−α .
Analogamente, se u, h ∈ X1/2 e v ∈ Xα , obtemos
∫Ω
|(
f (x,u(x)+h(x))− f (x,u(x)))
v(x)|dx≤C∫
Ω
(|a(x)h(x)v(x)|
)|v(x)|dx
+∫
Ω
2ρ−1((|u(x)|ρ + |h(x)|ρ)|h(x)|
)|v(x)|dx
≤C(∣∣∣|a|1/2h
∣∣∣L2(Ω)
+2ρ−1(|u|ρL6(Ω)+ |h|ρL6(Ω)
)|h|L6(Ω)
)|v|Lp(Ω)
≤ C(
CK∣∣∣|a|1/2h
∣∣∣L2+2ρ−1C(|u|ρL6(Ω)
+ |h|ρL6(Ω))|h|L6(Ω)
)|v|Xα
o que demonstra que a aplicacao f : X1/2→ X−α esta bem definida e e Lipschitziana em sub-
conjuntos limitados de X1/2.
Para concluir a demonstracao, se ρ = 2 e a2 ∈ E1, com calculos analogos mostramos que as
desgiualdades
| f (u)|L2(Ω) ≤ | f (0)|L2(Ω)+C(|au|L2(Ω)+ |u|ρ+1L2(ρ+1)(Ω)
)
e
| f (u+h)− f (u)|L2(Ω) ≤C|ah|L2(Ω)+2C(|u|ρ
L2(ρ+1)(Ω)+ |h|ρ
L2(ρ+1)(Ω)
)|h|L2(ρ+1)(Ω)
sao verdadeiras. Disso segue que o operador f : X1/2→ X−α = X e bem definido e Lipschitz
em limitados de X1/2.

3. O problema nao-linear 65
3.2 A equacao de evolucao abstrata
Neste secao vamos assumir as Hipoteses (HL1), (HL2), (HL3) e (HNL). Sejam A o operador
linear definido na Secao 2.3 e Xα , α ∈R, a famılia de espacos de potencias fracionarias gerados
por A. Sejam A(α), α ∈ R e −A(−α), α ∈ (0,∞) os operadores definidos na Secao 2.2, onde
A = A. Seja f : Ω×R→ R uma funcao satisfazendo Hipotese (HNL).
Se ρ = 2 e a2 ∈ E1, entao a equacao parabolica
u =−Au+ f(u) (3.2.1)
define um semifluxo local π em X1/2 e para cada u ∈ X1/2, t ∈ [0,ωu), uπt ∈ X .
Se ρ ∈ (2,4) ou a2 /∈ E1, escolha um α ∈ (0,1/2) como em (3.1.1).
Notemos que segue da Proposicao 2.2.12 que o operador A(−α) e auto-adjunto com
reσ(A(−α)) > 0. Alem disso, os espacos de potencias fracionarias gerados por A e A(−α)
sao isometricamente isomorfos. Com isso a equacao parabolica
˙u =−A(−α)u+ f(ϕ−11/2,−α
u) (3.2.2)
define um semifluxo local π em ϕ1/2,−α(X1/2).
Para este caso, seja π o semifluxo local em X1/2 definido como o semifluxo conjugado a π
pela aplicacao ϕ1/2,−α : X1/2→ ϕ1/2,−α(X1/2).
E claro que o semifluxo local π depende de α . O proximo resultado mostra que isso nao
ocorre com o semifluxo local π .
Proposicao 3.2.1. Suponha que ρ ∈ (2,4) ou a2 /∈ E1 e seja α ∈ (0,1/2) como em (3.1.1). O
semifluxo π em X1/2, definido como o semifluxo conjugado a π pela aplicacao ϕ1/2,−α : X1/2→ϕ1/2,−α [X1/2], independe da escolha de α .
Demonstracao. Sejam α , β ∈ (0,1/2) como em (3.1.1). Note que X1/2 e isometricamente
ismorfo a ϕ1/2,−α(X1/2) e a ϕ1/2,−β (X1/2) por meio de ϕ1/2,−α e ϕ1/2,−β respectivamente.
Logo, os espacos Xα := ϕ1/2,−α(X1/2) e Xβ := ϕ1/2,−β (X1/2) sao isometricamente isomorfos
pela aplicacao ϕ1/2,−β ϕ−11/2,−α
= ϕ−α,−β : Xα → Xβ .

66 3. O problema nao-linear
Consideremos πα e πβ os semifluxos gerados pelas solucoes das equacoes parabolicas
˙u =−A(−α)u+ fα(ϕ−11/2,−α
u),
˙v =−A(−β )v+ fβ (ϕ−11/2,−α
v),
respectivamente. Seja πβ o semifluxo local definido em Xβ o qual e conjugado ao semifluxo πα
pela aplicacao ϕ−α,−β : Xα → Xβ . Logo, para v ∈ Xβ ,
vπβ t = ϕ−α,−β (ϕ−1−α,−β
(v)παt), para todo t ∈ [0,ωπβ ,v).
A Formula da Variacao das Constantes do Lema 1.7.2 implica que para t ∈ [0,ωπβ ,v)
vπβ t = ϕ−α,−β
(e−A(−α)tϕ−1
−α,−βv+
∫ t
0e−A(−α)(t−s)fα
(ϕ−11/2,−α
[ϕ−1−α,−β
vπαs])
ds
)= ϕ−α,−β
(ϕ−1−α,−β
e−A(−β )tv)+
+ϕ−α,−β
(∫ t
0ϕ−1−α,−β
e−A(−β )(t−s)ϕ−α,−β fα
(ϕ−11/2,−β
ϕ−α,−β [ϕ−1−α,−β
vπαs])
ds
)= e−A(−β )tv+
∫ t
0e−A(−β )(t−s)fβ (ϕ
−11/2,−β
vπβ s)ds.
Portanto, segue da unicidade da solucao para equacoes parabolicas que t ∈ [0,ωπβ t) e vπβ t =
vπβ t. Analogamente, se t ∈ [0,ωπβ ,v) temos t ∈ [0,ωπβ ,v) e uπβ t = uπβ t. Ou seja, os semifluxos
πα e πβ sao conjugados pela aplicacao ϕ−α,−β .
Consideremos, agora, πα e πβ os semifluxos locais definidos em X1/2 os quais conjugados
com πα e πβ , respectivamente. Para u ∈ X1/2 e para cada t ∈ [0,ωπβ ,u) temos
uπβ t = ϕ−11/2,−β
(ϕ1/2,−β uπβ t) = ϕ−11/2,−β
(ϕ−α,−β (ϕ
−1−α,−β
ϕ1/2,−β u)παt)
= ϕ−11/2,−β
ϕ−α,−β
(ϕ1/2,−αuπαt
)= ϕ
−11/2,−α
(ϕ1/2,−αuπαt).
Logo, t ∈ [0,ωπα ,u) e uπβ t = uπαt. Analogamente, se t ∈ [0,ωπα ,u) temos t ∈ [0,ωπβ ,u) e
uπβ t = uπαt. Com isso demonstramos esta completa.
Escolhendo α = 0 se ρ = 2 e a2 ∈ E1, o seguinte resultado segue da definicao de π:

3. O problema nao-linear 67
Proposicao 3.2.2. Sejam T ∈ (0,∞), u : [0,T )→ X1/2 uma solucao de π . Entao u e contınua
em [0,T ), diferenciavel (em X1/2) em (0,T ) e, para t ∈ (0,T ), temos
ϕ0,−α(u(t)) =−A(1−α)u(t)+ f(u(t)), (3.2.3)
onde u(t) := ∂ (u;X1/2)(t) = ∂ (u;X0)(t).
Demonstracao. A definicao de solucao implica que a funcao u e contınua e diferenciavel. Como
X1/2 esta continuamente imerso em X0, entao ∂ (u;X1/2)(t) = ∂ (u;X0)(t), onde ∂ (u;Xβ )(t) de-
nota a derivada parcial de u em Xβ no instante t, para qualquer β . Portanto, devemos demonstrar
apenas a igualdade (3.2.3).
Note que A(1−α) = ϕ0,−α Aϕ−11,1−α
. Como α ∈ (0,1/2), se u0 := u(0) ∈ X1/2, temos
u(t) = u0πt = ϕ−11/2,−α
(ϕ1/2,−αu0πt
), para t ∈ (0,T ).
Logo,
ϕ1/2,−α u(t) =−A(−α)ϕ1/2,−αu(t)+ f(ϕ−11/2,−α
ϕ1/2,−αu(t))
e, portanto
ϕ0,−αϕ1/2,0u(t) =−A(1−α)ϕ−11−α,−α
ϕ1/2,−αu(t)+ f(u(t))
e obtemos a igualdade (3.2.3).

68 3. O problema nao-linear

Capıtulo
4
Dinamica assintotica
Finalmente neste capıtulo demonstramos o principal resultado deste trabalho: assumindo
as hipoteses (HL1), (HL2), (HL3) e (HNL) o semifluxo π possui um atrator global (ver Teo-
rema 4.4.2).
Na secao 4.2 mostramos que π (definido na Secao 3.2) e um semifluxo gradiente, isto e
construimos uma funcao de Lyapunov associada a π .
Na secao 4.3 apresentamos a ferramenta do trucamento inspirada pelo trabalho [24] que
os autores Prizzi e Rybakowski utilizaram em [21] para concluir que o semifluxo global π e
assintoticamente compacto.
Iniciamos o capıtulo com um resultado geral de perturbacao de solucoes para equacoes
parabolicas semilineares e um resultado geral sobre regularidade de conjuntos invariantes em
espacos de Hilbert.
A referencia basica para este capıtulo e o artigo [21].
4.1 Equacoes parabolicas semilineares
Suponha que X seja um espaco de Banach e A : D(A) ⊂ X → X seja um operador setorial.
Seja k ∈ [0,∞) uma constante tal que re(A+ kI)> 0 e seja Xβ , β ≥ 0, a famılia dos espacos de
potencias fracionarias geradas pelo operador A+ kI.
69

70 4. Dinamica assintotica
Seja 0≤ α < 1 e seja g : Xα → X uma funcao Lipschitziana em conjuntos limitados de Xα .
No que segue nesta secao π denota o semifluxo local definido em Xα gerado pelas solucoes da
equacao de evolucao
u+Au = g(u). (4.1.1)
Proposicao 4.1.1. Assuma a notacao apresentada acima. Seja T ∈ (0,∞) e suponha que
u : [0,T ]→ Xα e uk : [0,T ]→ Xα , k ∈ N, sejam solucoes de π . Suponha que exista uma cons-
tante R≥ 0 tal que
|u(t)|Xα ≤ R e |uk(t)|Xα ≤ R, para todo k ∈ N e todo t ∈ [0,T ].
Se |uk(0)−u(0)|X → 0, quando k→ ∞, entao para todo T0 ∈ (0,T ],
|uk(t)−u(t)|Xα → 0, quando k→ ∞,
uniformemente para t ∈ [T0,T ].
Demonstracao. Como g e uma funcao Lipschitziana em conjuntos limitados de Xα , se v1,v2 ∈v ∈ Xα ; |v|Xα ≤ R, existe L = L(R)> 0 tal que
|g(v1)−g(v2)|X ≤ L|v1− v2|Xα .
O Lema 1.7.2 implica que para todo k ∈ N
uk(t)−u(t) = e−At(uk(0)−u(0))+∫ t
0e−A(t−s)[g(uk(s))−g(u(s))]ds.
Logo
|uk(t)−u(t)|Xα ≤∣∣∣e−At(uk(0)−u(0))
∣∣∣Xα
+∫ t
0
∣∣∣e−A(t−s)(g(uk(s))−g(u(s)))∣∣∣Xα
ds
≤∣∣∣Aαe−At
∣∣∣ |uk(0)−u(0)|X +∫ t
0
∣∣∣Aαe−A(t−s)||g(uk(s))−g(u(s))∣∣∣X
ds
≤Cαt−α |uk(0)−u(0)|X +CαL∫ t
0(t− s)−α |uk(s)−u(s)|Xα ds,
onde Cα ∈ [0,∞) e a constante como no Teorema 1.5.22. Uma aplicacao do Lema 7.1.1 em [15]

4. Dinamica assintotica 71
implica que existe uma constante C′ ∈ [0,∞), dependendo somente de α , Cα , L e T , tal que
|uk(t)−u(t)|Xα ≤C′t−α |uk(0)−u(0)|X , para todo k ∈ N, t ∈ (0,T ].
Como |uk(0)−u(0)|X → 0, quando k→ ∞, segue para todo T0 ∈ (0,T ],
|uk(t)−u(t)|Xα → 0, quando k→ ∞.
Alem disso, a convergencia e uniforme para t ∈ [T0,T ].
No proximo teorema apresentamos um resultado de compacidade para o caso em que X seja
um espaco de Hilbert e A um operador auto-adjunto limitado inferiormente.
Suponha agora que X seja um espaco de Hilbert e A : D(A) ⊂ X → X um operador auto-
adjunto limitado inferiormente. Seja k ≥ 0 tal que reσ(A+ kI) > 0 e Xβ , β ∈ R, a famılia
de espacos de potencias fracionarias gerados por A+ kI. Sejam α ∈ [0,1) e g : Xα → X uma
funcao Lipschitziana em subconjuntos limitados de Xα e π o semifluxo local em Xα gerado
pelas solucoes da equacao diferencial
u+Au = g(u).
Neste caso valem as propriedades demonstradas na Secao 2.2 e serao utilizadas para de-
monstrar o seguinte resultado.
Teorema 4.1.2. Com a notacao introduzida acima, se K ⊂ Xα e um conjunto π-invariante e
compacto, entao K ⊂ X1 = D(A) e K e compacto em X1.
Demonstracao. Como K e π-invariante, a Proposicao 1.7.4 implica que K e limitado em X γ
para todo γ ∈ (α,1].
Afirmamos que K e compacto em X1. De fato, seja (un)n uma sequencia em K. Logo, existe
uma sequencia de solucoes (un)n de π em K tais que un(0) = un, para todo n ∈ N.
Fixemos 0 < β < 1, com β > α . Para todo n∈N, un e diferenciavel em Xβ e uma aplicacao

72 4. Dinamica assintotica
do Teorema 1.7.6 implica que existe uma constante C > 0 tal que
|vn|Xβ ≤C, para todo n ∈ N, (4.1.2)
onde vn := ∂ (un;Xβ )(0), n∈N, isto e, para cada n∈N, vn e a derivada de un em Xβ no instante
t = 0.
Como K e um conjunto compacto em Xα , existem uma subsequencia (unm)m de (un)n e um
u ∈ K tais que
|unm−u|Xα → 0, quando m→ ∞.
Recordemos que as formulas (2.2.8) e (2.2.9) implicam que ϕ0,α−1(A+kI) = A(1−α)ϕ1,α e,
portanto, e uma aplicacao contınua. Logo
|ϕ0,α−1(A+ kI)(unm)−ϕ0,α−1(A+ kI)(u)|Xα−1 → 0, quando m→ ∞.
Alem disso
|g(unm)−g(u)|X → 0, quando m→ ∞.
Portanto,
|−ϕ0,α−1Aunm +ϕ0,α−1g(unm)− (−ϕ0,α−1Au+ϕ0,α−1g(u))|Xα−1 → 0, quando m→ ∞.
Por outro lado,
∂ (un;Xα)(t) =−Aun(t)+g(un(t)), para todo n ∈ N e todot ∈ R.
Aqui para cada n ∈ N, ∂ (un;Xα)(t), denota a derivada de un em Xα no instante t. Concluımos
que
|ϕ0,α−1vnm− (−ϕ0,α−1Au+ϕ0,α−1g(u))|Xα−1 → 0, quando m→ ∞,
uma vez que Xβ esta continuamente imerso em Xα , e, portanto, vn = ∂ (un;Xα)(0). Para finali-
zar a demonstracao afirmamos que
|vnm− (−Au+g(u))|X0 → 0, quando m→ ∞. (4.1.3)

4. Dinamica assintotica 73
De fato, pela Desigualdade de Interpolacao da Proposicao 2.2.4,
|vnm− (−Au+g(u))|X ≤∣∣ϕα,α−1(vnm +Au−g(u))
∣∣αXα−1 |vnm +Au−g(u)|1−α
Xα
≤∣∣ϕ0,α−1(vnm +Au−g(u))
∣∣αXα−1
(|vnm|Xβ + |Au+g(u)|Xα
)1−α
≤ C|ϕ0,α−1(vnm +Au−g(u))|αXα−1,
onde C e uma constante positiva dada por (C+|Au−g(u)|)1−α . Logo, a convergencia em (4.1.3)
esta demonstrada.
A convergencia em (4.1.3) implica que | −Aunm + g(unm)− (−Au+ g(u))|X → 0 quando
m→ ∞. Como |g(unm)− g(u)|X → 0 quando m→ ∞, temos que |Aunm −Au|X → 0 quando
m→ ∞. Portanto,
|(A+ kI)unm → (A+ kI)u|X → 0 quando m→ ∞,
ou seja, |unm−u|X1 → 0 quando m→ ∞. Portanto, K ⊂ X1 e compacto.
4.2 Construcao da funcao de Lyapunov
Nesta secao vamos assumir as Hipoteses (HL1), (HL2), (HL3) e (HNL) e toda notacao
introduzida nos Capıtulos 2 e 3. Seja π o semifluxo definido na Secao 3.2.
Nosso objetivo e mostrar que com as hipoteses consideradas, o semifluxo π e gradiente. Para
isso devemos exibir uma funcao de Lyapunov L : X1/2→ R. Notemos que H10 (Ω) = X1/2.
Defina L : H10 (Ω)→ R por
L (u) =12〈u,u〉H1
0 (Ω)−∫
Ω
F(x,u(x))dx, u ∈ H10 (Ω).
Proposicao 4.2.1. Sejam T ∈ (0,∞] e u : [0,T )→ H10 (Ω) uma solucao de π . Entao L u e
contınua em [0,T ), diferenciavel em (0,T ) e para t ∈ (0,T )
(L u)′(t) =−|u(t)|2L2(Ω) (4.2.1)
Demonstracao. Uma aplicacao da Proposicao 3.1.5 nos fornece que u 7→∫
Ω
F(x,u(x))dx e

74 4. Dinamica assintotica
Frechet diferenciavel. Logo L tambem e Frechet diferenciavel e
DL (w).v = 〈w,v〉H10 (Ω)−
∫Ω
f (w(x))v(x)dx, para w, v ∈ H10 (Ω).
A Proposicao 3.2.2 implica que L u e contınua em [0,T ) e diferenciavel em (0,T ) e
(L u)′(t) = DL (u(t)).u(t) = 〈u, u〉H10 (Ω)−
∫Ω
f (u(t)(x))u(t)dx, para t ∈ (0,T ). (4.2.2)
Suponhamos que ρ > 2 ou a2 /∈ E1. Segue da Proposicao 2.2.13 que
〈u(t),u′(t)〉H10 (Ω) =
(A(1−α)u(t)
).u′(t), para t ∈ (0,T ).
Alem disso, aplicando a Proposicao 3.1.5 temos que
f(u(t)
).u′(t) =
∫Ω
f(u(t)(x)
)u(t)(x)dx, para t ∈ (0,T ).
Portanto, para t ∈ (0,T ) obtemos
(L u)′(t) = (A(1−α)u(t)).u(t)− f(u(t)).u(t)
=(A(1−α)u(t)− f(u(t))
).u(t)
=−(ϕ0,−α u(t)
).u(t) =−〈u(t), u(t)〉L2(Ω).
Para completar a demonstracao, suponha agora ρ = 2 e a2 ∈ E1. Entao
(L u)′(t) = 〈u(t), u(t)〉H10 (Ω)−〈u(t), f (u(t))〉L2(Ω)
=(A(1−α)u(t)
).u(t)− f(u(t)).u(t)
=−(ϕ0,−α u(t)
).u(t) =−〈u(t), u(t)〉L2(Ω).
A demonstracao esta completa.
Segue da Proposicao 4.2.1 que L e uma funcao de Lyapunov para o semifluxo π . Mais
precisamente:
Corolario 4.2.2. π e um semifluxo global em Y = H10 (Ω) e satisfaz as seguintes propriedades:
(a) todo conjunto limitado de Y e eventualmente limitado;

4. Dinamica assintotica 75
(b) o conjunto de equilıbrio de π e limitado;
(c) existe L : Y → R contınua, limitada inferiormente, nao-crescente sobre solucoes de π e
sempre que L (xπt) = L (x), para todo t ∈ [0,∞), entao x e ponto de equilıbrio.
Demonstracao. As Proposicoes 3.1.5 e 3.2.2 mostram que L e contınua e nao-crescente sobre
solucoes de π . Seja u0 ∈H10 (Ω) e escreva u(t) = u0πt, para t ∈ [0,ωu0). Temos que L (u(t))≤
L (u0), ou seja,
12〈u(t),u(t)〉H1
0 (Ω)−∫
Ω
F(x,u(t)(x))dx≤ 12〈u0,u0〉H1
0 (Ω)−∫
Ω
F(x,u0(x))dx, t ∈ [0,ωu0).
Logo,
12〈u(t),u(t)〉H1
0 (Ω) ≤12〈u0,u0〉H1
0 (Ω)−∫
F(x,u0(x))dxΩ +∫
Ω
F(x,u(t)(x))dx
≤L (u0)+∫
Ω
c(x)dx, t ∈ [0,ωu0).
Portanto, temos que toda solucao de π e limitada em H10 (Ω) e segue da Proposicao 1.7.3 que
π e um semifluxo global e, portanto, π nao explode em subconjuntos limitados de H10 (Ω). Da
mesma maneira, segue que todo subconjunto B limitado em H10 (Ω) e π-eventualmente limitado,
tomando tB = 0. Tambem dado u ∈ H10 (Ω) temos
L (u) =12〈u,u〉H1
0 (Ω)−∫
Ω
F(x,u(x))dx≥−∫
Ω
F(x,u(x))dx≥−∫
Ω
c(x)dx,
ou seja, L e limitado inferiormente.
Seja u : [0,∞)→ H10 (Ω) uma solucao de π sobre a qual L e constante. A Proposicao 4.2.1
implica que u(t) = 0, para todo t > 0 e, portanto, u(t) e uma solucao constante. Logo u(0) e um
ponto de equilıbrio de π .
Finalmente, seja u0 um ponto de equilıbrio de π . Suponha ρ > 2 ou a2 /∈ E1. Entao
A(1−α)(u0) esta definido e A(1−α)(u0) = f(u0). Portanto,
〈u0,u0〉H10 (Ω) = (A(1−α)u0).u0 = f(u0).u0
=∫
Ω
f (x,u0(x))u0(x)dx≤∫
Ω
c(x)dx < ∞.
Logo, o conjunto dos equilıbrios de π e limitado em H10 (Ω). Um argumento similar mostra

76 4. Dinamica assintotica
que se ρ = 2 e a2 ∈ E1, temos novamete que o conjunto dos equilıbrios de π e limitado em
H10 (Ω).
4.3 Estimativas de truncamento
Nesta secao vamos assumir as Hipoteses (HL1), (HL2), (HL3) e (HNL) e toda notacao
introduzida nos Capıtulos 2 e 3. Seja π o semifluxo definido na Secao 3.2.
Passamos agora para a estimativas de truncamento. Seja φ : R→ [0,1] uma funcao de classe
C1 com φ(s) = 0 para s ∈ (−∞,1] e φ(s) = 1 para s ∈ [2,∞). Seja φ := φ2. Para k ∈ N defina a
funcao φ k : RN → R e φk : RN → R por
φ k(x) = φ(|x|2/k2) e φk(x) = φ(|x|2/k2), x ∈ RN .
Defina tambem
Cφ = 2√
2supy∈R|φ ′(y)| e C
φ= 2√
2supy∈R|φ ′(y)|,
e seja κ ∈ (0,λ1) arbitrario, onde λ1 e como definido na Hipotese (HL3). Para cada k ∈ N,
sejam
bk =
(a1(Cφ
)2
k2
)e ck =
∫Ω
φk(x)c(x)dx.
Lema 4.3.1. As seguintes estimativas sao validas:
supx∈Ω
|∇φk(x)| ≤Cφ/k e supx∈Ω
|∇φ k(x)| ≤Cφ/k.
Demonstracao. Observemos que para x ∈ RN ,
∇φk(x) =( 2
k2
)φ′( |x|2
k2
)x e ∇φ k(x) =
( 2k2
)φ′( |x|2
k2
)x.
Como supp(φ ′)⊆ [1,2], segue que
supx∈Ω
|∇φk(x)| ≤2k2 sup|x|≤√
2kφ′( |x|2
k2
)|x|=Cφ/k.

4. Dinamica assintotica 77
Analogamente mostramos a segunda desigualdade.
Temos a seguinte estimativa importante para o resultado de existencia de atratores.
Teorema 4.3.2. Sejam R≥ 0, τ > 0 e u : [0,∞)→H10 (Ω) solucao de π tal que |u(t)|H1
0 (Ω) ≤ R,
para todo t ∈ [0,τ). Entao para todo t ∈ [0,τ)
∫Ω
φk(x)|u(t)(x)|2dx≤ R2e−2κt +bkR2 + ck
κ. (4.3.1)
Demonstracao. Afirmamos que para todo u ∈ D(A) = X1 ⊂ H10 (Ω),
(−A(1−α)u).(φku)+κ
∫Ω
φk(x)|u(x)|2dx≤∫
Ω
a1C2φ
k−2|u|2dx. (4.3.2)
Suponhamos primeiro que ρ > 2 ou a2 /∈ E1. De fato, para u ∈ X1, temos
(−A(1−α)u).(φku) = (−ϕ0,−αAϕ−11,1−α
u).(φku)
= (−ϕ0,−αAu).(φku) = 〈−Au,φku〉L2(Ω).
Se ρ = 2 e a2 ∈ E1, entao lembremos que α = 0 e dessa forma
(−A(1−α)u).(φku) = 〈−A(1−α)u,φku〉X = 〈−Au,φku〉L2(Ω).
Notemos tambem que
〈Lu−βu,φku〉L2(Ω) =∫
Ω
[∑i, j
ai j(x)∂iu(x)∂ jφku(x)−β (x)u(x)φku(x)]dx, (4.3.3)
A∇u.∇φku = ∑i, j
ai j(x)∂iu(x)∂ jφku(x). (4.3.4)
Portanto,
(−A(1−α)u).(φku)+κ
∫Ω
φk(x)|u(x)|2dx =∫
Ω
(−Au(x))φk(x)u(x)+κ
∫Ω
φk(x)|u(x)|2dx
=∫
Ω
(Lu)(x)(φku)(x)−β (x)u(x)φk(x)u(x)dx+κ
∫Ω
φk(x)|u(x)|2dx
=∫
Ω
(A∇u)(x)(∇φku)(x)dx−(β (x)−κ
)∫Ω
|φ ku(x)|2dx
=∫
Ω∑i, j
ai j(x)∂iu(x)∂ jφku(x)dx−(β (x)−κ
)∫Ω
|φ ku(x)|2dx.

78 4. Dinamica assintotica
Observemos que
∂ jφku = ∂ j(φ2ku) = 2uφ k∂ jφ k +φk∂ ju (4.3.5)
e
∂i(φ ku)∂ j(φ ku) = |u|2∂iφ k∂ jφ k +2uφ k∂iφ k∂ ju+φk∂iu∂ ju. (4.3.6)
Formula (4.3.5) implica que
(−A(1−α)u).(φku)+κ
∫Ω
φk(x)|u(x)|2dx =
−∫
Ω
(∑i, j
2uφ kai j∂iu∂ jφ k +∑i, j
φkai j∂iu∂ ju)
dx (4.3.7)
−(β (x)−κ
)∫Ω
|φ ku(x)|2dx.
Somando e subtraindo o termo |u|2 ∑i, j
ai j∂iφ k∂ jφ k na integral em (4.3.7) e utilizando igualdade
(4.3.6), obtemos
(−A(1−α)u).(φku)+κ
∫Ω
φk(x)|u(x)|2dx =∫
Ω∑i, j
ai j|u|2∂iφ k∂ jφ k
−[∫
Ω∑i, j
ai j(x)∂i(φ ku)(x)∂ j(φ ku)(x)dx+(β (x)−κ
)∫Ω
|φ ku(x)|2dx].
Notemos que o Lema 2.3.1 implica que
∫Ω
∑i, j
ai j(x)∂i(φ ku)(x)∂ j(φ ku)(x)dx+(β (x)−κ
)∫Ω
|φ ku(x)|2dx≥ 0.
Logo,
(−A(1−α)u).(φku)+κ
∫Ω
φk(x)|u(x)|2dx≤∫
Ω
|u|2(A∇φ k).∇φ kdx,
concluindo a demonstracao da desigualdade (4.3.2).
Para cada k ∈ N defina a funcao Vk : H10 (Ω)→ R por
Vk(u) =12
∫Ω
φk(x)|u(x)|2dx, u ∈ H10 (Ω).
Temos que Vk e Frechet diferenciavel e
DVk(u)v =∫
Ω
φk(x)u(x)v(x)dx, u,v ∈ H10 (Ω).

4. Dinamica assintotica 79
Seja u : [0,∞)→ H10 (Ω) uma solucao de π . Pela Proposicao 3.2.2 temos que Vk u e dife-
renciavel em (0,∞) e, para t ∈ (0,∞), temos
(Vk u)′(t) = DVk(u(t))u(t) =∫
Ω
φk(x)u(t)(x)u(t)(x)dx
= 〈u(t),φku(t)〉L2(Ω).
Como φku(t) ∈ H10 (Ω) = X1/2 ⊂ Xα , segue que para t ∈ (0,∞)
〈u(t),φku(t)〉L2(Ω) = (ϕ0,−α u(t)).(φku(t)) =(−A(1−α)u(t)+ f
(u(t)
)).(φku(t)).
Portanto,
(Vk u)′(t)+2κ(Vku)(t) =(−A(1−α)u(t)
).(φku(t)
)+∫
Ω
f (u(t))(x)φk(x)u(t)(x)dx+κ
∫Ω
φk(x)|u(t)(x)|2dx
≤(−A(1−α)u(t)
)(φku(t))+κ
∫Ω
φk(x)|u(t)(x)|2dx+∫
Ω
φk(x)c(x)dx
≤∫
Ω
a1C2φ
k−2|u(t)|2dx+∫
Ω
φk(x)c(x)dx.
Logo, sempre que R≥ 0, τ ∈ (0,∞) e |u(t)|H10≤ R para todo t ∈ [0,τ], temos
(Vk u)′(t)+2κ(Vk u)(t)≤ bkR2 + ck, t ∈ (0,τ].
Disto segue que
Vk(u(t))≤ e−2κtVk(u(t))+bk(R2 + ck)/2κ, para todo t ∈ [0,τ],
ou seja, ∫Ω
φk(x)|u(t)(x)|2dx≤ e−2κR2 +bk(R2 + ck)/κ, para todo t ∈ [0,τ].
A demonstracao esta completa.

80 4. Dinamica assintotica
4.4 Compacidade assintotica e existencia de atrator
Podemos demonstrar agora que π satisfaz a condicao (a) do Teorema 1.6.8 de existencia de
atratores.
Teorema 4.4.1. O semifluxo π e assintoticamente compacto.
Demonstracao. Sejam B um subconjunto eventualmente limitado em Y = H10 (Ω), (vn)n uma
sequencia em B e (tn)n uma sequencia em [0,∞) com tn→ ∞. Devemos mostrar a existencia de
uma subsequencia de (vnπtn)n convergente em H10 (Ω).
Como B e eventualmente limitado existem tB ∈ [0,∞) e R≥ 0 tais que
|vπt|H10 (Ω) ≤ R, para todo v ∈ B e t ≥ tB.
Podemos assumir, sem perda de generalidade, que tn ≥ tB +1, para todo n ∈ N.
Para cada n∈N, defina sn := tn−tB e seja un : [0,∞)→H10 (Ω) dado por un(s) = vnπ(tB+s),
s≥ 0. Para cada n ∈ N, τn := sn−1≥ 0 e un e uma solucao de π com
|un(s)|H10 (Ω) ≤ R, para todo s ∈ [0,∞)
e un(sn) = vnπtn.
Afirmamos que existem uma sequencia crescente (nm)m em N e um v ∈ H10 (Ω) tais que
(unm(τnm))m converge para v em L2(Ω).
Considere βK a medida de nao-compacidade de Kuratowski em X = L2(Ω) como na Secao
1.3.1. Para todo k ∈ N e n0 ∈ N, temos
βK(un(τn) | n ∈ N)≤ βK((1−φ k)un(τn) | n ∈ N)+βK(φ kun(τn) | n ∈ N)
= βK((1−φ k)un(τn) | n ∈ N)+βK(φ kun(τn) | n≥ n0).
Seja ε > 0. Como τn→ ∞ quando n→ ∞, podemos escolher n0 ∈ N tal que
R2e−2κτn < ε/2, para n≥ n0. (4.4.1)

4. Dinamica assintotica 81
Alem disso podemos escolher um k0 > 0 tal que
bk0R2 + ck0 < εκ/2. (4.4.2)
Segue do Teorema 4.3.2 e das desigualdades (4.4.1) e (4.4.2) que
|φ k0un(τn)|L2(Ω) =
∫Ω
φk0(x)|un(τn)(x)|2dx < ε , para n≥ n0.
Logo, mostramos que para cada ε > 0, existe um k0 ∈ N tal que
βKun(τn) | n ∈ N ≤ βK(1−φ k0)un(τn) | n ∈ N+ ε.
Como 1−φ k ∈C10(RN), a aplicacao u 7→ (1−φ k)u e compacta de H1
0 (Ω) em L2(Ω), para todo
k ∈ N, logo βK(1−φ k)un(τn) | n ∈ N= 0. Portanto,
βKun(τn) | n ∈ N ≤ ε, para todo ε > 0
o que implica que βKun(τn) | n ∈ N = 0. Segue da Proposicao 1.3.1 que un(τn) | n ∈ N e
um subconjunto relativamente compacto de L2(Ω). Logo existe uma sequencia crescente (nm)m
em N e existe um v ∈ L2(Ω) tais que
|unm(τnm)− v|L2(Ω)→ 0, quando m→ ∞.
Para completar a demonstracao da afirmativa resta mostrarmos que v ∈ H10 (Ω). Note que
a sequencia (unm(τnm))m e limitada em H10 (Ω), e, tomando uma sequencia de (unm(τnm))m se
necessario, podemos supor que existe um w ∈ H10 (Ω) tal que (unm(τnm))m converge fracamente
em H10 (Ω) para w. Logo, unm(τnm) w, quando m→ ∞, em L2(Ω) e pela unicidade do limite
fraco e forte, segue que v = w ∈ H10 (Ω).
A fim de concluir a demonstracao do teorema vamos considerar dois casos. Suponhamos,
primeiramente, que ρ > 2 ou a2 /∈ E1.
Defina un =ϕ1/2,−α un, para n∈N. Entao un e uma solucao de π e a sequencia (unm(τnm))m
converge para v := ϕ1/2,−α(v) em ϕ0,−α(X). Logo, a sequencia (unm(τnm))m converge para v
em X−α .

82 4. Dinamica assintotica
Pela Proposicao 4.1.1 segue que (unm(τnm + 1))m converge para vπ1 em ϕ1/2,−α(X1/2).
Como ϕ1/2,−α(X1/2) = X1/2+α
A(−α)
e ϕ1/2,−α e contınua, segue que (unm(snm))m converge para vπ1
em X1/2, completando a prova neste caso.
Finalmente, suponha que ρ = 2 e a2 ∈ E1. Neste caso existe uma constante M ≥ 0 tal que
|unm(τnm + t)|H10 (Ω) ≤M e |vπt|H1
0≤M, para todo t ∈ [0,T ]. Logo, |unm(τnm)− vπ0|L2(Ω)→ 0
quando m→ ∞ e segue da Proposicao 4.1.1 que |unm(τnm +1)−vπ1|L2(Ω)→ 0 quando m→ ∞.
Logo, a prova esta completa para este caso.
Agora podemos provar o resultado final.
Teorema 4.4.2. O semifluxo global π possui um atrator global A . Alem disso, A esta em
X1−α e e um conjunto compacto na norma de X1−α .
Demonstracao. O Corolario 4.2.2 e o Teorema 4.4.1 implicam que as hipoteses do Teo-
rema 1.6.8 estao satifeitas. Portanto, π possui um atrator global A .
Se ρ = 2 e a2 ∈ E1, como α = 0 neste caso, Teorema 4.1.2 implica a segunda parte do
teorema.
Se ρ > 2 ou a2 /∈ E1, como π e um semifluxo global segue que π e um semifluxo global
em ϕ1/2,−α(X1/2) e tambem possui um atrator global A := ϕ1/2,−α(A ). Portanto, segue do
Teorema 4.1.2 que A esta em ϕ1−α,−α(X1−α) e e compacto em ϕ1−α,−α(X1−α). A prova da
segunda parte do teorema para este caso esta completa.
Capıtulo
5
Consideracoes finais
Nosso trabalho de mestrado teve como finalidade entender os conceitos e tecnicas desenvol-
vidas para demonstrar a existencia de atratores globais para uma classe de equacoes parabolicas.
Baseamos nosso trabalho no artigo [21], que e o primeiro de uma sequencia de tres artigos dos
autores Prizzi e Rybakowski. Em todos as equacoes diferencias parciais consideradas sao defi-
nidas em domınios arbitrarios.
Em [20], os autores consideram a seguinte classe de equacoes das ondas amortecidas
εutt +α(x)ut +β (x)u−∑i j ∂i(ai j(x)∂ ju) = f (x,u), t ≥ 0, x ∈Ω,
u(x, t) = 0, t ≥ 0, x ∈ ∂Ω,(DWε )
onde N ∈ N, Ω e um conjunto aberto em RN arbitrario, ε > 0 e α,β : Ω→ R e f : Ω×R→ R
sao funcoes dadas. Em [20] mostram, para cada ε > 0, a existencia de atrator global Aε (em
H10 (Ω)× L2(Ω)) para a equacao (DWε ). Novamente nesse trabalho a tecnica de trucamento
como apresentada em [21] foi utilizada. Um fato importante obtido nas demonstracoes apre-
sentadas em [20] e que as estimativas para a solucao u(t,x) de (DWε ) sao uniformes com relacao
ao parametro ε > 0.
Obsversamos que para N = 3 e α ≡ 1 a equacao (DWε ) possui um problema parabolico
limite que e o problema estudado neste trabalho. Como demonstrado em [21], e exposto aqui,
o problema limite possui um atrator global A0 em H10 (Ω). Em [19] os autores mostram que
A0 pode ser mergulhado em um conjunto compacto A0 ⊂ H10 (Ω)×L2(Ω) e que a famılia de
atratores (Aε)ε∈[0,∞) e semi-contınua superiormente quando ε → 0.
83

84 5. Consideracoes finais

Referencias Bibliograficas
[1] J.M. Arrieta, J.W. Cholewa, T. Dłtoko e A. Rodrigues-Benal, Asymptotoic behavior and
attractors for reaction-diffusion equations in unbounded domains, Nonlinear Anal. 56
(2004), 515–554.
[2] A.V. Babin e M.I. Vishik, Attractor of Evolution Equations, North Holland, Amsterdam,
1991.
[3] A.V. Babin e M.I. Vishik, Attractor of partial differential evolution equations in an un-
bounded domain, Proc. Roy. Soc. Edinburgh Sect. A 116 (1990), 221–243.
[4] H. Brezis, Analisis Funcional, Alianza Universidad Textos 88, Madrid, 1984.
[5] A.N. Carvalho, Sistemas Dinamicos nao Lineares, Notas de Aula. Modelo de documento
digital disponıvel em <http://www.icmc.usp.br/˜andcarva/SDNL2009.pdf>. Acesso em:
13 de marco de 2012.
[6] T. Cazenave e A. Haraux, An Introduction to Semilinear Evolution Equations, Oxford
Science Publications, Oxford, 1998.
[7] J.W. Cholewa e T. Dłtoko, Global Attractors in Abstract Parabolic Problems, Cambridge
University Press, Cambridge, 2000.
[8] R. Czaja, Differential Equations with Sectorial Operator, Wydawnictwo Uniwersytetu
Slaskiego, Katowice, 2002.
[9] R. Dautray e J-L. Lions, Mathematical Analysis and Numerical Methods for Science and
Technology, Volume 2, Springer-Verlag Berlin Heiddelberg, 1990.
[10] R. Dautray e J-L. Lions, Mathematical Analysis and Numerical Methods for Science and
Technology, Volume 3, Springer-Verlag Berlin Heiddelberg, 1990.
85

86 REFERENCIAS BIBLIOGRAFICAS
[11] K. Deimling, Nonlinear Functional Analysis, Springer-Verlag, 1985.
[12] D.G. de Figueiredo, The Ekeland Variational Principle with Applications and Detours,
Tata Institute of Fundamental Research, 1989.
[13] A. Friedman, Partial Differential Equations, Holt, Rinehart and Winston, New York, 1969.
[14] J. Hale, Asymptotic Behavior of Dissipative Systems, American Mathematical Society,
Providence, 1988.
[15] D. Henry, Geometric Theory of Semilinear Parabolic Equations, Springer-Verlag, Berlin,
1981.
[16] T. Kato, Perturbation Theory for Linear Operators, Springer-Verlag Berlin, 1995.
[17] O. Ladyzenskaya, Attractors for Semigroups and Evolution Equations, Cambridge Uni-
versity Press, Cambridge, 1991.
[18] M. Miklavcic, Stability for semilinear parabolic equations with noninvertible linear ope-
rator, Pacific Journal of Mathematics 118 (1985), 199–214.
[19] M. Prizzi e K. P. Rybakowski, Attractors for singularly perturbed damped wave equations
on arbitrary unbounded domains, Top. Meth. in Nonlinear Anal. 32 (2008), 1–20.
[20] M. Prizzi e K. P. Rybakowski, Attractors for semilinear damped wave equations on arbi-
trary unbounded domains, Top. Meth. in Nonlinear Anal. 31 (2008), 49–82.
[21] M. Prizzi e K. P. Rybakowski, Attractors for reaction-diffusion equations on arbitrary
unbounded domains, Top. Meth. in Nonlinear Anal. 30 (2007), 251–277.
[22] K.P. Rybakowski, The Homotopy Index and Partial Differential Equations, Springer-
Verlag, Berlin, 1987.
[23] R. Temam, Infinite Dimensional Dynamical Systems in Mechanics and Physics, Springer-
Verlag, New York, 1997.
[24] B. Wang, Attractors for reaction-diffusion equations in unbounded domains, Physica D
179 (1999), 41–52.