Bastos*, L. F.; Tavares*,** J. M. R. S. RESUMO · Assim, procedeu-se à utilização de um método,...
16
UTILIZAÇÃO DE MODELAÇÃO FÍSICA E TÉCNICAS DE OPTIMIZAÇÃO NA DETERMINAÇÃO DE CORRESPONDÊNCIAS ENTRE NODOS DE OBJECTOS NO ESPAÇO MODAL Bastos*, L. F.; Tavares*,** J. M. R. S. *Laboratório de Óptica e Mecânica Experimental, DEMEGI-FEUP, Rua Dr. Roberto Frias, s/n 4200-465 Porto PORTUGAL, {]bastos(i1fe.up.pt, tavares)fe.up.pt} **DEMEGtFFUP {http://www.fe.up.pt/-tavares } RESUMO Neste trabalho, é utilizada urna metodologia, previarnente existente, baseada em modela ção fisica, para o emparelhamento de dois objectos, constituídos por dados pontuais (hodos,L Enquanto a referida metodologia íttiiiza uma abordagem tocai, neste artigo é apresentada uma aplica ç&o de técnicas de optimização global, de forma a ser considerada a interacção entre todos os nodos. foi também desenvolvida uma solução, aplicável a objectos do ttpo contorno, após o emparelhamento habitual do t4o “um com um “, que permite emparelhar satisfatoriamente (caso existam) os nodos em excesso. Neste artigo é também descrito ítm método utilizado para a determinação da transformação rígida existente entre dois objectos. 1. INTRODUÇÃO A análise do movimento tem vindo a ser, movimento, numa sequência de imagens ou vídeo, é útil na determinação da posição e/ou outros parâmetros do movimento (ou deformação) de um objecto, perceptível nessa sequência. A determinação de correspondências, entre imagens de objectos distintos ou de instantes diferentes de um mesmo objecto, é um processo útil em vários domínios da visão por computador, como por exemplo: o seguimento e análise do movimento/deformação de objectos, identificação e inspecção de peças industriais, etc. Com a metodologia base ($claroff, 1995; Tavares, 2000, 2000a, 2000b, 2000c, 2002) utilizada neste trabalho para a determinação das correspondências, constrói-se urna matriz (de afinidade) que relaciona os dados pontuais que constituem os dois objectos a emparelhar. Essa matriz, construída a partir da utilização do método dos elementos finitos e da análise modal, nas duas últimas décadas, urna área importante de investigação no domínio da visão por computador. O problema da análise de movimento é tradicionalmente definido como a determinação do movimento de üm objecto a partir de uma sequência de imagens, a duas ou três dimensões (2D ou 3D), capturadas em dois ou mais instantes de témpo. Seguir o 125
Transcript of Bastos*, L. F.; Tavares*,** J. M. R. S. RESUMO · Assim, procedeu-se à utilização de um método,...

UTILIZAÇÃO DE MODELAÇÃO FÍSICA E TÉCNICAS DEOPTIMIZAÇÃO NA DETERMINAÇÃO DE CORRESPONDÊNCIAS
ENTRE NODOS DE OBJECTOS NO ESPAÇO MODAL
Bastos*, L. F.; Tavares*,** J. M. R. S.
*Laboratório de Óptica e Mecânica Experimental, DEMEGI-FEUP,Rua Dr. Roberto Frias, s/n 4200-465 Porto PORTUGAL, {]bastos(i1fe.up.pt, tavares)fe.up.pt}
**DEMEGtFFUP {http://www.fe.up.pt/-tavares }
RESUMO
Neste trabalho, é utilizada urna metodologia, previarnente existente, baseada em modelaçãofisica, para o emparelhamento de dois objectos, constituídos por dados pontuais (hodos,LEnquanto a referida metodologia íttiiiza uma abordagem tocai, neste artigo é apresentadauma aplicaç&o de técnicas de optimização global, de forma a ser considerada a interacçãoentre todos os nodos. foi também desenvolvida uma solução, aplicável a objectos do ttpocontorno, após o emparelhamento habitual do t4o “um com um “, que permite emparelharsatisfatoriamente (caso existam) os nodos em excesso. Neste artigo é também descrito ítmmétodo utilizado para a determinação da transformação rígida existente entre dois objectos.
1. INTRODUÇÃO
A análise do movimento tem vindo a ser,
movimento, numa sequência de imagens ouvídeo, é útil na determinação da posiçãoe/ou outros parâmetros do movimento (oudeformação) de um objecto, perceptívelnessa sequência. A determinação decorrespondências, entre imagens de
objectos distintos ou de instantes diferentesde um mesmo objecto, é um processo útilem vários domínios da visão porcomputador, como por exemplo: oseguimento e análise domovimento/deformação de objectos,identificação e inspecção de peçasindustriais, etc.
Com a metodologia base ($claroff, 1995;Tavares, 2000, 2000a, 2000b, 2000c, 2002)utilizada neste trabalho para a determinaçãodas correspondências, constrói-se urnamatriz (de afinidade) que relaciona osdados pontuais que constituem os doisobjectos a emparelhar. Essa matriz,construída a partir da utilização do métododos elementos finitos e da análise modal,
nas duas últimas décadas, urna áreaimportante de investigação no domínio davisão por computador. O problema daanálise de movimento é tradicionalmentedefinido como a determinação domovimento de üm objecto a partir de umasequência de imagens, a duas ou trêsdimensões (2D ou 3D), capturadas em doisou mais instantes de témpo. Seguir o
125

relaciona os dois objectos a emparelhar,pela análise dos, deslocamentos de cadanodo no respectivo espaço modal. Destaforma, quanto menor é o valor de umelemento da matriz de afinidade, maior é asemelhança entre os deslocamentos dosnodos associados a esse elemento, e maior éa probabilidade dessa correspondência seradequada.
Entradi;
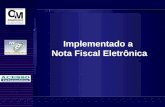
O diagrama apresentado na Figura 1descreve sucintamente a metodologiaglobal utilizada neste trabalho, para adeterminação das correspondëncias entredois objectos. A zona delimitada a traçodescontinuo indica a área onde se insere otrabalho realizado (fase da determinaçãodas correspondências).
r1oos pooLosissrados como
nodos de modelode elementos finitos
Fig 1 — Etapas da metodologia global utilizada para o emparelhamento de objectos, baseada na modelação fisicae análise modal. (A zona delimitada a traço descontínuo indica a etapa onde este trabalho se concentrou.)
Após a construção dessa matriz deafinidade, é utilizada, na metodologia baseadoptada, uma filosofia baseada numabusca local de correspondências, o que emmuitos casos pode ser uma desvantagem,pois considera cada nodo como umelemento independente e não comopertencente a um modelo global. Para tentarultrapassar esta desvantagem, é considerada.neste trabalho urna abordagem de carizglobal, utilizando métodos de optimização.
No entantó, caso o número de nodos dosobjectos a emparelhar seja diferente,existirão necessariamente nodos, do objectocom o maior número de elementos, que nãoestarão correspondidos, pois oemparelhamento considerado é o habitual“um com um”. Em muitas situações, estetipo de emparelhamento temnecessariamente desvantagens, pois talacarreta uma perda de informação, que serámais relevante se as imagens em questão
pertencerem a uma sequência. Para evitarque tal aconteça, é apresentada neste artigouma solução aplicável a objectos do tipocontómo, que permite o emparelhamentodos nodos em excesso de forma satisfatória.
Ao longo deste trabalho, também severificou que era de especial interesse adeterminação da transformação geométricarígida existente entre dois objectos, quandosão conhecidas todas õu algumas dascorrespondências entre os seus dados.Assim, procedeu-se à utilização de ummétodo, anteriormente implementado(Tavares, 2000, 2002), para a suadeterminação. O referido método é baseadoem quaternions unitários e obtém atransformação geométrica existente atravésde uma minimização, por mínimosquadrados, do erro da transformaçãodeterminada. Este método obtém bonsresultados mesmo quando o número decorrespondências utilizado não é muito
(Construçdo do modelo físico:N eternnaçáo dos modosprópnos:
[M](Ü) + [K](u) = R)Delerrwmir es de
messa e ri9idez para o modelode e tn5Oics Solias
= 2[2’4](Ø)
Resver o problema de valrosveores próprios çeneraLrado
[M1fÜ)+[Kltu) =(R)Determirar as mames de
massa e wiqidez pare o modelode cl ieoias Solias
= 2[M](Ø
Resolver o problema de valoresveroreo próprios generaiizado
126

elevado.
Na secção seguinte, é apresentado ométodo utilizado para a determinação datransformação rígida existente entre doisobjectos devidamente emparelhados. Apósa descrição deste método, é apresentadaresumidarnente a metodologia base para adeterminação das correspondências. Deseguida, é descrito sumaríamente oproblema de optimização e indicados osmétodos utilizados. Após a referidadescrição, é apresentada á soluçãodesenvolvida para solucionar o problema daexistência de nodos em excesso, quando osobjectos a emparelhar são do tipo contorno.Seguidarnente, são apresentados algunsresultados experimentais, obtidos com ametodologia proposta neste artigo.Finalmente, são apresentadas algumasconclusões e enunciadas perspectivas dedesenvolvimentos futuros.
2. DETERMINAÇÃO DA TRANSFORMAÇÃO RÍGIDA ENTRE DOIS OBJECTOS UTILIZANDO QUATERNIONS UNITÁRIOS
A determinação da transformação rígida1(Foley, 1991; Hali, 1993) entre doisobjectos é um problema frequente nosdiversos domínios da visão porcomputador. Nesta secção é apresentadoum método, com base no iniciairnenteproposto em (Hom, 1987), implementadoem (lavares, 2000, 2002) para adeterminação da transformação rígida,constituída por urna rotação em torno de umeixo que passa pela origem, umescalarnento relativamente à origem e urnatranslação. O método adoptado baseia-se naminimízação por mínimos quadrados doerro da transformação determinada enecessita, no mínimo, da correspondênciaentre três pontos para estimar atransformação envolvida.
entre as coordenadas do centróide doobjecto t e as coordenadas do centróide doobjecto t +1, previarnente rodado eescalado; o escalamento é determinado peloquociente da raiz quadrada dos desviosquadráticos das coordenadas dos doisobjectos relativamente aos centróidescorrespondentes. O qitaternion unitário querepresenta a rotação é o vector próprioassociado ao valor próprio positivo maiselevado de uma matriz quadrada e simétricade dimensões (4x4).
2.1. Introdução aos qttaternions unitários
Um cjuaternion c pode ser definidocorno um vector com quatro componentes,resultante da composição de um escalar eum vector 3D, ou como um númerocomplexo com três partes imagináriasdistintas (Tavares, 2000). Utilizando anotação dos números complexos, umquaternion pode ser representado corno:
=q0+qi+q,j+qk,
onde q0 é a parte real e q, -q) e as
partes imaginárias. Considerando o• resultado da composição de um escalar q eum vector 3D , um qttaternion pode serrepresentado como:
onde q = q0 e= (qqqT
Um quaternion unitário é um quqternion
cuja anplitude é igual a um.
2.2. Relações com outras representações
Como é possível verificar em (Hom,1987) as partes imaginárias do quaternion
unitário representam a direcção do eixo derotação i, enquanto o ângulo de rotação Opode ser obtido a partir da parte real e daamplitude da parte imaginária:Para a
utilizadostranslação
representação da rotação são• quaternions unitários; a
é determinada pela diferença
Sobre transformações rígidas ver, por exemplo, (lavares,1995, 1995a).
=(w,w,w)T /ll1sul O = 2q ,
127

cos = (q2 — 2) ponto P’ com = [R] P, correspondente
ao qitaternion unitário q definida doA matriz ortonormal [R] para a rotação, seguinte modo (Hom, 1987):
que transforma um ponto P num outro
• (q2 2—q2
_q2) 2(qq1, —q0cj) 2(qq. +q0q) 1• 2(q3,q + qoqz)
(q02— q2 + q2 — q2) 2(q3,q
— qoq)
2 (qcj—
qq) 2 (qq,, + qoq)(q02
— q2 — q2 +q2)]
2.3. Algoritmo— X
—G11.1,1+1 — i,t+1
O algoritrno utilizado pode ser resumido Utilizando um quaternion unitárioda seguinte forma, (Tavares, 2000):
para representar a rotação, e o método dosEm primeiro lugar, devem-se determinar mínimos quadrados, de maneira a diminuir
os centróides G e G,1 de cada objecto. As os erros residuais associados à rotação,coordenadas dos centróides determinados obtém-se o produto 4’T {N]4’ (Horn, 1987),são subtraídas às coordenadas de cada que deverá ser maxirnizado com a restriçãoponto i (X1 e Xj.+I) do respectivo de 4’ ser unitário e onde a matriz [N] éobjecto, de modo a obter as coordenadas simétrica e construída a partir dascentrais de cada um (X = [x y,’ z]T): coordenadas dos pontos dos dois objectos:
= - G1,
[(s+s3, +s) s—s 1(S_S1),_S_)
[N]=—s s,+s (—s+s—s)
(_S_$)y+S)]
com ••• $ determinados, mesma matriz.
calculando-se os nove produtos possíveis O escalarnento existente pode serxx1, xy1,
...,z’z,’÷1 das coordenadas determinado pelo quociente da raiz
respectivas para cada par de pontos quadrada dos desvios médios quadráticos,
emparelhados: dos dois conjuntos de coordenadasrelativamente aos seus centróides:
n n1/2S =xx1, S =xy1
1=1 $
=
2/ ‘, ]O quaternion unitário 4’ que maxirniza o ,1 1t
produto 4” [N] 4’ (Hom, 1987) é um vector Analisando esta equação verifica-se que
unitário com a mesma direcção do vectorpara a determinação do escalamento não énecessária a prévia determinação da
próprio da matriz [N] (Bathe, 1996; rotação.Chapra, 1988; Press 1992) associado ao
Finalmente, a melhor solução para avalor próprio positivo mais elevado da
12$

transiação {T} é obtida pela diferença
entre as coordenadas do centróide doobjecto t +1 e as coordenadas do centró idedo objecto t, previarnente rodado eescalado:
{T}=G+—s[R]G,.
Deve-se notar que este é um métododirecto, e assim não, existe a necessidade decorrecção iterativa (Tavares, 2000).
2.4. Consideração da confiança associadaàs coordenadas dos pontos
Quando os erros esperados para ascoordenadas dos pontos não são todosiguais, devem-se considerar os respectivospesos, de forma a considerar tais medidasde incerteza (Tavares, 2000). Assim, oscentróides tomam-se centróidesponderados:
G, =jx1t/w1,
=
onde w. é a medida de confiança associada
às coordenadas do ponto i.
A determinação do melhor escalamentoé alterada pela utilização das medidas deconfiança:
2 21/2
= /, ,A única mudança no método para a
determinação da rotação envolvida está nofacto de os produtos nos somatórios seremagora ponderados, isto é:
= = Ê w1x;y1,1=1 i=1
3. METODOLOGIA BASE
Na metodologia base adoptada, para adeterminação das correspondências entre
dois objectos, é construída uma matriz querelaciona os dois conjuntos de pontos,(Sclaroff, 1995; Tavares, 2000, 2000a,2000b, 2000c). Essa matriz é construída apartir da utilização do método doselementos finitos e da análise modal.
Resumidamente, as vantagens dautilização do método dos elementos finitossão: (a) a equação do movimento para osistema global é obtida pelo agrupamentodas equações de cada elemento finitoutilizado na modelação; e (b) ageneralização de problemas 2D e 3D,construídos com vários materiais e comfronteiras irregulares, pode ser obtida comfacilidade.
No presente contexto, a vantagem dautilização do método dos elementos finitosprende-se com a atribuição de umcomportamento físico aos objectos emquestão, através da adopção de um dadomaterial virtual na modelação. Aspropriedades do material virtual, adoptadona constrüção do modelo de elementosfinitos, regem o comportamento do objectorespectivo.
Podemos expor o sistemado equilíbrio dinâmico doelementos finitos agrupados:
{M]{ü}+[c]{Ú}+[K]{u} = {R},
onde {ü} e {ü} são a primeira e segunda
derivadas de {u} em ordem ao tempo;
[M], [K] e [c] as matrizes de massa,
rigidez e amortecimento, e {R} o vector de
cargas; numa base definida pelos vectores
próprios de [Mf1 [K], resolvendo
seguinte sistema:
[K][] =
onde, [] é a matriz dos vectores próprios
ordenados por coluna e em ordem crescentedas frequências que lhes estão associadas; e
[Q] é a matriz diagonal dos valores
próprios, também ordenados por ordemcrescente. Na equação anteriormente
de equaçõesmodelo de
o
129

= — {u}, 112 + fl{v}, {v},÷.
= —112 — {7} 112 +11{w},1 — {WI 112
Na metodologia previamentedesenvolvida (Tavares, 2000, 2002), adeterminação das correspondências, decariz local, consiste em encontrarsequencialmente, na matriz de afinidade, omenor elemento em cada linha eemparelha-lo com a coluna associada, seeste for também o menor elemento damesma e se o nível de confiança pré-estabelecido for respeitado.
4. PROBLEMA DE OPTIMIZAÇÃO
Os problemas de optimização sãoproblemas de maximização ou minimizaçãode funções de variáveis num determinadodomínio, normalmente definido por umconjunto de restrições nas variáveis. Oproblema da determinação decorrespondências pode ser escrito como umproblema de afectação, que é um casoparticular dos problemas de optimização. Oproblema de afectação clássico pressupõe aexistência de 11 nodos no objecto t, paraemparelhar com n nodos no objecto t +1 eo conhecimento do custo da afectação decada nodo iem t com cada nodojem t+i:C11, i, j 1,2,. . ., n. Este custo de afectação
Neste tipo de problemas, pretende-sedeterminar o modo de distribuição dosemparelhamento, de forma a que:
• Cada nodo em t seja emparelhadoapenas com um nodo em t +1;
• Cada nodo em t +1 seja emparelhadoApos a construçao das matrizes eapenas com um nodo em t;
• Sejam minimizados os custos totais deafectação/emparelhamento.
Euclidiana entre os vectores característicados dois objectos considerados, da seguinteforma para objectos 2D e 3D,respectivamente:
apresentada, para um objecto 2Dconstituído por m nodos, tem-se:
{u}
r
[1 [{}j•• {}2rn]
= {u}e =
{v}
{v}T
e para um objecto 3D constituído por rnnodos:
{u}
{}T
{v}’
[] = [{}H I{}3l,1]= e [Q] =
{v}T
{w}
{w}T
O vector coluna {ç5}. descreve o
deslocamento modal para cada nodo domodelo devido ao modo de vibração 1;enquanto os vectores {u}. e {v}. (e {w}.
para objectos 3D) são os vectorescaracterística e, em conjunto, descrevem alocalização do nodo i no espaço modal.
Os primeiros modos da matriz {] são os
modos de corpo rígido (três em 2D e seisem 3D). Os restantes modos associam-se amovimentos não rígidos, sendo osprimeiros deste tipo associados adeformações mais globais e os últimos (deelevada frequência) a deformaçõesessencialmente locais, (Tavares, 2000).
é equivalente ao valor do elemento damatriz de afinidade, correspondente a (i, f).
para dois modelos de elementos
finitos, t e t±1,emparelhar, define-se[Z], determinada a
de doisa matriz
partir
objectos ade afinidade,da distância Para a formulação de um problema desta
natureza, consideremos:
se nodo i de t for afecto ao nodo j de t + 1x. =
‘:1 lo caso contrário
130

com i,j = l,2,...,n.
Então, a formulação do problema deafectação clássico é a seguinte:
minimizar f =1=1 --l
sujeito a >Zx1, =1, com i=1,2,...,n
[O nodo i de t é afecto apenas umnodo de t + 1 j,
Zx11=1, com
[O nodo j de t +1 é afecto apenas aum nodo de tj,
e Vi,j.
Na metodologia proposta neste artigo,para a determinação de correspondências deforn-ia global, foram utilizados três métodosde optimização (Bastos, 2003): o métodoHúngaro, que é o método mais simples econhecido para a resolução de problemas deafectação; o método Simptex, (U5bel,2000), para problemas de fluxo, que sãoproblemas de optimização mais gerais doque os problemas de afectação; e o métodoLAPm, (Volgenant, 1996), que é ummétodo especifico para a resolução deproblemas de afectação, criado com ointuito de tomar essa resoluçãocomputacionalmente mais eficiente.
Na metodologia implementada, após aobtenção da solução óptima do problema deoptimização, prossegue-se à rejeição dosemparelhamentos, que fazem parte dessasolução, mas não respeitam o nível deconfiança pré-estabelecido. Esta restrição,tal como era considerada na soluçãopreviamente desenvolvida de cariz local,previne a correspondência entre nodos quetenham uma fraca afinidade entre si.
5. SOLUÇÃO PARA OS NODOS EMEXCESSO
Caso o número de nodos nos doisobjectos a emparelhar não seja o mesmo,com a restrição habitual de emparelhamento
do tipo “um com um”, existemnecessariamente nodos em excesso que nãoserão emparelhados. A solução encontradafoi inicialmente acrescentar nodos fictíciosao modelo com o menor número de dados,solucionando-se assim o requisito dasmatrizes a optimizar terem necessariamentede ser quadradas. Após a fase deoptimização, os nodos em excesso sãocorrespondidos de forma adequadautilizando-se um critério de vizinhança.Desta fonna são permitidascorrespondências do tipo “um com vários”e vice-versa para os nodos em excesso.
Este ernpaíelhamento, baseado nocritériõ de vizinhança, pode ser descritoresumidamente do seguinte modo: Paracada um dos nodos não emparelhados, oalgoritrno implementado enquadra-o entreos nodos vizinhos mais próximos jácorrespondidos. A partir dascorrespondências desses nodos vizinhos nooutro objecto, determina-se a melhorcorrespondência, minimizando o custo,considerando que os nodos vizinhos devempermanecer vizinhos e não devem existircorrespondências cruzadas. Tal corno nafase de optimização, os emparelhamentosobtidos só serão considerados, se o nível deconfiança pré-estabelecido for respeitado.
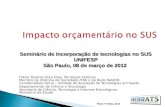
A Figura 2, esquematiza dois exemplospara facilitar a compreensão do algoritmoimplementado com o objectivo deemparelhar nodos correspondidos çornnodos fictícios. Este algoritmo, denominadopor ADCom, na versão actual daimplementação desenvolvida, só pode seraplicado em objectos do tipo contornos,pois os critérios de vizinhança consideradossó são aplicáveis a estes.
Na Figura 2(a), o número de nodos doprimeiro objecto é superior ao número denodos do segundo. Nessa figura os nodos v1e v3 foram emparelhados, na fase deoptimização, com os nodos v4 e v5,respectivamente. Na mesma fase, o nodo v2foi emparelhado com um nodo fictício. Oalgoritmo ADCom procura nos nodos entrev4 e v5, o que apresenta a maior afinidadecom o nodo v2, emparelhando-os caso onível de confiança pré-estabelecido seja
131

Tipa Vários com um 1 Tipa Um com vários”
(a) (b)
Fig 2 — Exemplificação dos procedimentos do algoritmo ÁDCom.
respeitado. Para estes nodos tem-se umemparelhamento do tipo “vários com um”.Na Figura 2(b), o número de nodos doprimeiro objecto é inferior ao número denodos do segundo. Neste caso, oprocedimento é idêntico, sendo a análiseefectuada do segundo objecto para oprimeiro resultando para estes nodos umemparelhamento do tipo “um com vários”.
Note-se que, para todos os algoritmosimplementados, não é considerada nenhumainformação sobre a sequência de imagensoriginal nem qualquer relação entre osobjectos a emparelhar.
6. RESULTADOS EXPERIMENTAIS
Nesta secção são apresentados alguns
exemplos de resultados experimentaisobtidos com a metodologia global, propostaneste artigo, utilizando na modelação decada objecto em causa o elemento finitoisoparamétrico de Sclaroff (Sclaroff, 1995;Tavares, 2000) e borracha como materialvirtual. Outros resultados podem serconsultados em (Bastos, 2003, 2003 a)
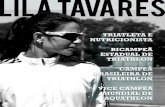
O primeiro exemplo apresentado écomposto por dois conjuntos de dadospontuais de contornos de uma “árvore”,com duas orientações distintas. Os doisobjectos a emparelhar são apresentados naFigura 3. Alguns resultados numéricos,provenientes da determinação dascorrespondências, são apresentados noQuadro 1 e ilustrados na Figura 4.
Fig 3 — Dados pontuais do primeiro exemplo 2D — treel (62 nodos) e tree2 (62 nodos), respectivamente.
Quadro 1: Resultados do exemplo 2D — treel e tree2.
________________ _______ _______
Tempo deAlgoritmo % Emp. Custo execução [s] Figura
Sem Optimização 87% 0,0 16 0,03 4(a)Método Húngaro 100% 0,0020 69,56 4(b), (e) e (d)Método Sirnplex 100% 0,0020 0,04 4(b), (c) é (d)Método LAFm 100% 0,0020 0,06 4(b), (c) e (d)
--
u4 )
132

Através da análise dos resultados obtidos,é possível verificar que o custo total dosemparelhamentos é superior quando éutilizado um método de optimi-zação, noentanto com estes métodos é obtido o maiornúmero de emparelhamentos possível. Otempo de execução da método-logia baseadanos métodos de optimização é superior aotempo de execução da metodologia base.Nesse aspecto, o método Húngaro pode serconsiderado pouco eficiente, pois revelou-seo mais lento. Pela análise das figurasapresentadas, também é possível confirmarque o método utilizado para estimar atransformação rígida envolvida obtém bonsresultados.
O segundo exemplo 2D é constituído pordois conjuntos de dados pontuais docontorno de um “avião”, com amostragense escalas diferentes (Figura 5). Nas figuras6 (a), (5) e. (c) são apresentados osresultados do emparelhamento, utilizando: asolução previamente existente de índolelocal; optimização; e o algoritmo ADCom.Na Figura 6 (c) está circundada uma daszonas em que são visíveis emparelhamentosdo tipo “vários com um”, entre os doisobjectos da Figura 5. No Quadro 2 sãoapresentados alguns resultados numéricosdeste exemplo.
Fig 5—Dados pontuais do segundo exemplo 2D —aüplaneÁ (57 nodos) e airplane3 (43 nodos), respectivamente.
Quadro 2: Resultados do exemplo 2D — airplaneA e airptaneB.
_______________ _______ _______ _________
Ternto deAlgoritmo N° Emp. % Emp. CustoxlO3 execução [s] figura
Sem Optimização 31 72% 2,87 0,01 6(a)Método Húngaro 43 100% 4,0$ 184,205 6(b)Método Simplex 43 100% 4,0$ 0,04 6(b)Método LAFrn 43 100% 4,0$ 0,461 6(b)
Método ADCom 57 100% 5,5954 - 6(c)
1‘\
Ã3 J \p
L
____
7ê
1%
%7\
ti.
(a) (b) (c)
Fig 4— Emparelhamentos obtidos entre os objectos treel e tree2, utilizando o método (a) Sem Optimização; (b) Com Optimização(métodos Húngaro, Simples e LÁPm); (c) Com optimização e aplicação da transformação rígida estimada (sem o factor de escala);
(d) Com optimização e aplicaçãoda transformação rígida estimada, com o factor de escala considerado.
(d)
133

1Fig 6(b)—Exemplo do emparelhamentode dois objectos 2D, utilizando a solução
proposta.
O exemplo que se segue é constituídopor dois objectos 3D, compostos por dadospontuais de uma semi-esfera, comdiferentes escalas e posições (Figura 7). NoQuadro 3 encontram-se os resultados dadeterminação das correspondências,
• utilizando os algoritmos sem optimização(local), Húngaro, Símplex e LAPm. Asilustrações desses resultados encontram-senas figuras 8 e 9.
Os resultados do Quadro 3, indicam quea metodologia baseada nos métodos deoptimização é mais eficiente do que ametodologia de cariz local previamenteexistente, visto que consegue o númeromáximo possível de emparelhamentos (dotipo “um com um”) entre os dois objectos,independentemente do método deoptimização utilizado. Como consequênciadesse maior número de emparelhamentos, o
custo total associado às correspondênciasdeterminadas, com a metodologia de carizglobal, é superior, mas a percentagem deemparelhamentos atinge os 100%. Nesteexemplo, o método “Sem Optimização”distingue-se pelo menor tempo deexecução.
No último exemplo apresentado sãoemparelhados dois objectos (Figura 10),extraídos de duas imagens obtidas numexame de pedobarografia dinâmica,(Tavares, 2000, 2000a). Alguns resultadosnuméricos, obtidos na realização desteensaio, são apresentados no Quadro 4. Nasfiguras 11 e 12 são apresentadas as imagensresultantes do emparelhamento dos doisobjectos referidos. O método Húngaro nãofoi aplicado a este exemplo, devido aolongo tempo de execução.
19 23 26 29 33 36 40 43 47 50 -12 -3 6 14 23 31 40 48 57 66
Fig 7— Dados pontuais do primeiro exemplo 3D — semiesfera] (25 nodos) e semiesfera2 (25 nodos), respectivamente.
Fig 6(a)—Exemplo do emparelhamentode dois objectos 2D, utilizando a solução
anterior (local).
Fig 6(c)—Exemplo da conespondênciados nodos em excesso (ADCom).
LeeI Levei
134

Sem Optimização 60% 3,13938 0,000 8
Método Húngaro 100% 5,95533 3,555 9
Método $implex 100% 5,95533 0,01 9
Método LAFm 100% 5,95533 0,05 9
-12 -3 5 14 23 31 40 48 57 65 -12 -3 6 14 23 31 40 48 57 65
_____
_____
•
____
Fig $ — Emparelhamentos entre os objectos semiesferal e semiesfera2, utilizando o método “Sem Optimização” (duasvistas distintas).
-12 -3 6 14 23 31 40 48 57 85 -12 -3 6 14 23 31 40 48 57 65
Fig 9 — Emparelhamentos entre os objectos serniesferal e serniesfera2, utilizando um método “Com Optimização”(Húngaro, Sirnplex e LAFm) (duas vistas distintas).
Quadro 3: Resultados do primeiro
Algoritmo % Emp.
exemplo 3D — semiesft’ra] e semiesfera2.
________
Tempo de
CustoxlO2 execução [s] figura
Levei Levei
Levei Levei
Fig 10 — Dados pontuais do segundo exemplo 3D —pel (117 nodos) epe2 (112 nodos), respectivamente.
135

segundo exemplo 3D —pe] epe2.
__________
Tempo de
CustoxlO2 execução {sj Figura
Sem Optimização 29% 5,38808 0,13 11
Método Simplex 100% 21,9715 0,141 12
MétodoLAFm 100% 21,9715 12,588 12
Fig 12 — Emparelhamentos entre os objectos pel epe2, utilizando um método “Com Optimização” ($implexe LAFm) (vista de frente e vista de trás, respectivamente).
Os emparelhamentos encontrados nãosão completamente satisfatórios, emnenhum dos métodos utilizados (sem oucom optimização). No entanto, o método“Com Optimização” determina 100%correspondências, sendo a maior partedestas satisfatórias, enquanto o método“Sem Optimização” só determina 29%.
7. CONCLUSÕES E PERSPECTIVASDE DESENVOLVIMENTOS FUTUROS
Os vários ensaiosrealizados, alguns reportadospermitem a apresentaçãoobservações e conclusões.
Relativamente à estimaçãotransformação rígida envolvida entre os
objectos a emparelhar, pelos resultadosexperimentais obtidos2, pode-se concluirque o método adoptado e apresentado nesteartigo determina soluções bastanteaceitáveis. Para uma aplicação satisfatóriado referido método, não é necessárioutilizar um. número muito elevado decorrespondências, pelo que se podemconsiderar apenas as correspondênciasobtidas com elevado grau de confiança.
A metodologia proposta neste artigo,para a determinação de correspondênciasentre dois objectos, baseada em técnicas deoptimização, quando comparada com ametodologia base previamente existente (decariz local), obteve sempre um númerosuperior de emparelhamentos satisfatórios,
2 Outros resultados podem ser analisados em (Tavares,2000, 2000b, 2000c).
Quadro 4: Resultados do
Algoritmo % Emp.
-J
Fig 11 — Emparelhamentos entre os objectos pel e pe2, utilizando o método “Sem Optimização”(vista de frente e vista de trás, respectivamente).
experimentaisneste artigo,de algumas
da
136

nos resultados experimentais considerados.Também se verificou, que o número deemparelhamentos é independente dométodo de optimização considerado.
Em aluns ensaios experimentaisefectuados notou-se que, para se obterresultados de emparelhamento satisfatórios,a escolha dos parâmetros para a construçãoda matriz de afinidade teve que ser “maiscuidada”, quando foi utilizado o método deemparelhamento previamente existente (deíndole local). Nesses mesmos exemplos, aaplicação do método de emparelhamentoproposto neste artigo, baseado em técnicasde optimização, além de produzir bonsresultados de emparelhamento, revelou-semenos sensível aos valores dos váriosparâmetros considerados na metodologiaglobal. Tal sugere que com o método deemparelhamento proposto é possível tornara metodologia global, baseada no métododos elementos fiflÍtOS e na análise modal,mais fácil de usar e adaptável a diferentesaplicações.
Em alguns dos exemplos considerados, onúmero de modos de vibração necessáriospara a obtenção de correspondênciassatisfatórias utilizando o método deemparelhamento proposto, baseado emtécnicas de optimização, foi inferior aonúmero de modos necessários com ométodo de emparelhamento previamenteexistente. Por exemplo, nas imagens dasduas semi-esferas (primeiro exemplo 3Dapresentado) foram apenas necessários 50%dos modos, para obter 100% dosemparelhaiiientos, utilizando o método deemparelhamento proposto. No entanto, paraobter 96% dos emparelhamentos utilizandoo método de emparelhamento local, foinecessário considerar 75% dos modos. Talsugere que com o método deemparelhamento proposto o esforçocomputacional total exigido pelametodologia global é menor.
O algoritmo de emparelhamento queutiliza o método Húngaro, mostrou-sepouco eficiente em termos do tempo deexecução. Note-se que este método é oúnico que utiliza um algoritmo deoptimização, que não guarda informação
sobre emparelhamentos encontrados emiterações anteriores. Tal acarreta um custocomputacional adicional. Já o algoritmoSirnplex para problemas de fluxo mostrou-se o mais eficiente, nos várjos exemplosexperimentais efectuados. O algoritmoLAFm obteve um tempo de execuçãosuperior ao segundo (Simplex), mesmosendo um algoritmo mais específico para otipo de problemas em questão. Pensa-se quetal facto se deve ao intervalo em que seencontram os elementos da matriz deafinidade, [0; 2], pois quando estealgoritrno foi testado em (dell’ Ãmico,2000) revelou-se o mais eficiente quandoconsiderado o intervalo ti; 100].
Nos vários ensaios experimentaisrealizados, o algoritmo proposto para adeterminação de correspondências dosnodos em excesso, obtém emparelhamentossatisfatórios, quando utilizado em objectosdo tipo contorno. Tal permite-nos concluirque o referido algoritmo poderá constituiruma base interessante, para odesenvolvimento de novas soluções para adeterminação de correspondências do tipo“um com vários” e vice-versa, e que a suaaplicabilidade deverá ser estendida aobjectos mais complexos.
O emparelhamento do tipo “um comvários” ou vice-versa podérá ser apenasaplicadó a parte de um objecto. Talaplicação poderá ser interessante em zonasem que ocorra dilatação/contracção e/ou emzonas com amostragens diferentes.
Na optimização das correspondênciasdeverão ser consideradas nos trabalhosfuturos as restrições de vizinhança e ordem,para além do nível de confiança jáconsiderado. Para tal sugere-se a utilizaçãodo nível de confiança de cadaemparelhamento, para a escolha dos nodosque deverão “guiar” o decurso de talprocesso.
O desenvolvimento de uma aplicaçãoque determine as correspondências ao longode sequências de imagens, é também umatarefa a realizar. Nessa aplicação, deverãoser incluídas restrições a considerar aolongo de toda a sequência de imagens emestudo; corno por exemplo, ao longo da
137

mesma a ordem dos nodos não deverá seralterada em demasia. Também nestaaplicação deverá ser utilizada/integrada ainformação que vai sendo obtida ao longoda sequência; a título de exemplo, se oponto A do objecto t está emparelhadocom o ponto B do objecto t +1, então noobjecto t +2, o ponto a emparelhar com B,deverá estar na vizinhança desse.
8. REFERÊNCIAS
Bastos, L.F., Dissertação de Mestrado(subrnetída em Janeiro de 2003): Optimizaçãoda Determinação das correspondênciasentre Objectos Deformáveis no EspaçoModal, Faculdades de Engenharia e Ciências,Universidade do Porto, 2003.
Bastos, L. F., Tavares, J.; Técnicas deOptimizaço na Determinação decorrespondências entre ObjectosDeformáveis, VII Congresso de MecânicaAplicada e Computacional, Universidade deEvora, Abril de 2003a.
(bttp://www.fe.up.pt/-’.tavares/downloads/puhlicaionsirtigosLLuisa%20BastosVflCMAc.pdÍ)
Bathe, K.-J., finite Element Frocedures.Prentice-Hali, mc. 1996.
Chapra, S. C., Canale, R. P., NumericalMethodsfor Engineers, McGraw-Hiil, 1988.
deli’ Arnico, M. and Tooth, P., Atgorithms andCodes for Dense Assignment Problems: TheState Of The Art; Discrete AppliedMathematics, N° 100, pp. 274-278, 2000.
foley, van Dam, Feiner, Highes, Ii ComputerGraphics, Addison-Wesiey, 1991.
Hali, E. L., Fundamental Principtes OfRobotVision, Spie Vol. 2056 Intelhgent Robots andComputer Vision Xii, pp. 321/333, 1993.
P., Closed-form Sohttion OfOrientation Uing Unit
Journal of the Optical Society of America A,Vol. 4, 629/642, April 1987.
Uibel, A., MFC - A Network SimplexImplementation, 2000.
(http://www.zib.de/Qptimization’$oftware/J\ilcf’)
T., fiannery, B. P., Numerical Rectpes in C -
The Art of Scientfic Compítting, CarnbridgeUniversity Press, 1992.
Sclaroff, S.E., PhD Thesis: Modal Mãtching - AMethod for Describing, comparing, andIvIantulating Digital Signals, MassachusettsInstitute of Technology, University ofMassachusetts. 1995.
1995.
(http://www.fe.up.pt/’—tavares’downloads,’publjcatiofls’re1aton’fêrrarnentas%20djp)
Tavares, 1., Dissertação de Mestrado: Obtençãode Estrïttttra Tridimensional a Partir de
Movimento de câmara, Faculdade deEngenharia da Universidade do Porto, 1995a.
(http://www.f.ii.pt/._-tavares/downloads’pub1ications/tesesitese%2Ornscp)
Tavares, J., Tese de Doutoramento: Análise deMovimento de corpos Dejármáveis UsandoVisão Compíttacional, faculdade deEngenharia, Universidade do Porto, 2000.(http:i’www.fe.up.pu.--tavaresídown1oads,pubIícations/teses/tese%2ophd.zip)
Tavares, J., Barbosa, J., Padilha, A., MatchingImage Ohjects in Dynamic Pedobarogrqphy,RecPad’2000 - 1 lth Portuguese Conferenceon Pattern Recognition, Porto, 2000a.
(http://vww. fe.up.pt/’—’tavares”downloads/publications/artigos/artigo%2Orecpad2000.pdt)
Tavares, J., Barbosa, J., Padilha, A.,Determinação da Correspondência entreObjectos Utilizando Modelação Física, 90
Encontro Português de Computação Gráfica,Marinha Grande, Portugal, fevereiro de2000b.
(http://www.fe.up.pt/-tavares’downloads/publícations/artígos/artigo%209epcg.pdf)
Tavares, 1., Barbosa, J., Padilha, A.,Determinação da Correspondência entreModelos de Contorno e de Superficie,Utilizando Modelização por Elementosfinitos e Análise Moda/ em Visão porComputador, VI Congresso Nacional deMecânica Aplicada e Computacional, Aveiro,Portugal, Abril de 2000c.
(http://www.fe.up.pt/-tavares/c1ownloads/publications/attigos/a;iigo%20vicnmacdf)
Tavares, J., AlgttmasTridimensional porde Engenharia da
Ferramentas para VisãoComputador, faculdadeUniversidade do Porto,
Horn B. K.AbsoluteQuaternions,
Press, W. H., Teukolsky, S. A., Vetterling, W.
138

Tavares, 1., Barbosa, 1., Padilha, A.,Apresentação de um Banco deDesenvolvimento e Ensaio para ObjectosDeJrmáveis, RESI — Revista Electrónica deSistemas de Informação — ISSN: 1677 — 3071
Volume OLN° f)1, 2002.
(http::’www.fe.up.pt/-tavares/down1oads!pUb1ic
Volgenant, A., Linear and Semi-ÁssignmentProbtems: A Core Orientcd Approach,Computers and Operations Research, Vol. 23,N° 10, 1996.
139