Corpo humano. O corpo Organização do corpo: Célula tecido órgão sistema organismo.
Cap.12: Rotação de um Corpo Rígido
Do professor para o aluno ajudando na avaliação de compreensão do capítulo.
Fundamental que o aluno tenha lido o capítulo.
12.8 Equilíbrio Estático
► Estudamos que uma partícula está em equilíbrio quando ela se move com velocidade constante porque a força resultante que age sobre ela é zero.
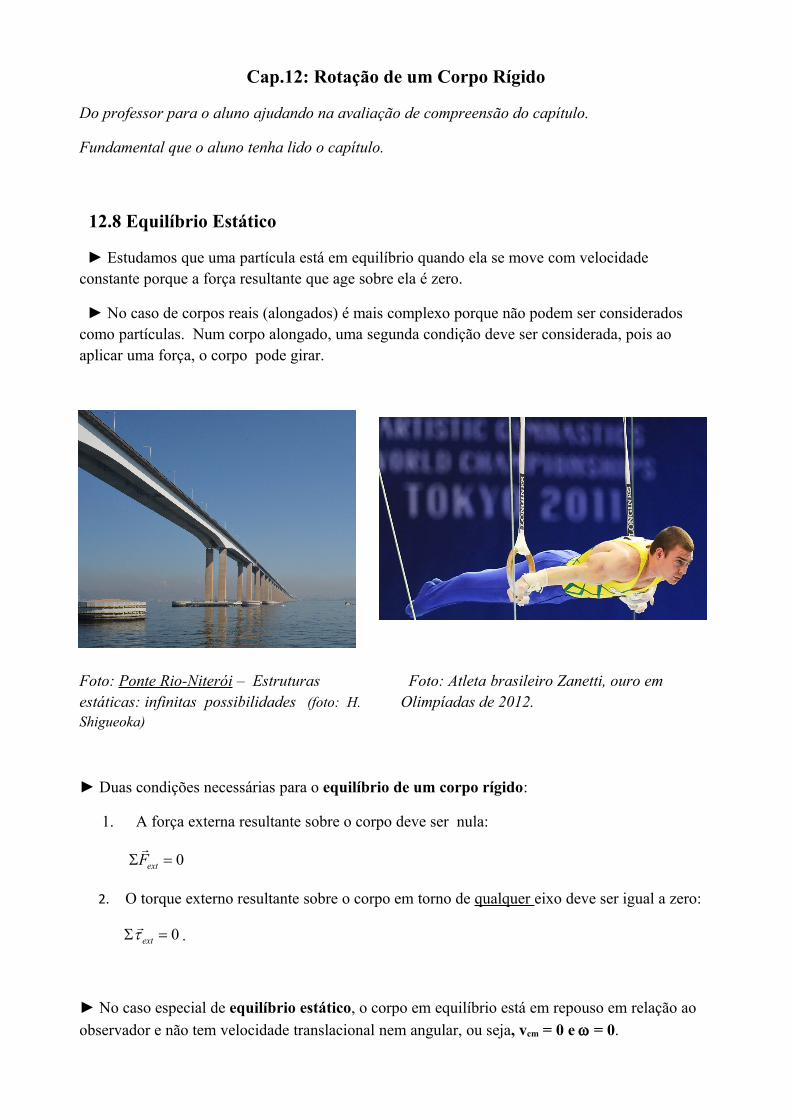
► No caso de corpos reais (alongados) é mais complexo porque não podem ser considerados como partículas. Num corpo alongado, uma segunda condição deve ser considerada, pois ao aplicar uma força, o corpo pode girar.
Foto: Ponte Rio-Niterói – Estruturas estáticas: infinitas possibilidades (foto: H. Shigueoka)
Foto: Atleta brasileiro Zanetti, ouro em Olimpíadas de 2012.
► Duas condições necessárias para o equilíbrio de um corpo rígido:
1. A força externa resultante sobre o corpo deve ser nula:
0extFS =r
2. O torque externo resultante sobre o corpo em torno de qualquer eixo deve ser igual a zero:
0exttS =r
.
► No caso especial de equilíbrio estático, o corpo em equilíbrio está em repouso em relação ao
observador e não tem velocidade translacional nem angular, ou seja, vcm = 0 e = 0.
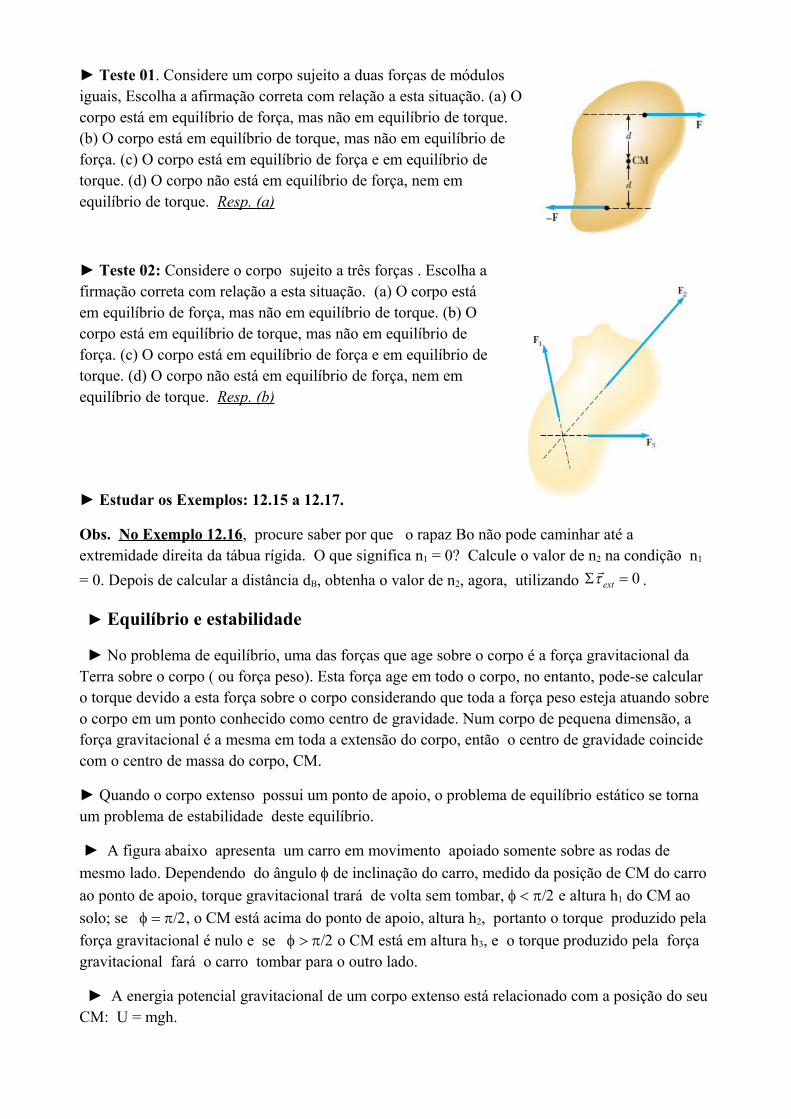
► Teste 01. Considere um corpo sujeito a duas forças de módulosiguais, Escolha a afirmação correta com relação a esta situação. (a) Ocorpo está em equilíbrio de força, mas não em equilíbrio de torque.(b) O corpo está em equilíbrio de torque, mas não em equilíbrio deforça. (c) O corpo está em equilíbrio de força e em equilíbrio detorque. (d) O corpo não está em equilíbrio de força, nem emequilíbrio de torque. Resp. (a)
► Teste 02: Considere o corpo sujeito a três forças . Escolha afirmação correta com relação a esta situação. (a) O corpo estáem equilíbrio de força, mas não em equilíbrio de torque. (b) Ocorpo está em equilíbrio de torque, mas não em equilíbrio deforça. (c) O corpo está em equilíbrio de força e em equilíbrio detorque. (d) O corpo não está em equilíbrio de força, nem emequilíbrio de torque. Resp. (b)
► Estudar os Exemplos: 12.15 a 12.17.
Obs. No Exemplo 12.16, procure saber por que o rapaz Bo não pode caminhar até a extremidade direita da tábua rígida. O que significa n1 = 0? Calcule o valor de n2 na condição n1
= 0. Depois de calcular a distância dB, obtenha o valor de n2, agora, utilizando 0exttS =r
.
► Equilíbrio e estabilidade
► No problema de equilíbrio, uma das forças que age sobre o corpo é a força gravitacional da Terra sobre o corpo ( ou força peso). Esta força age em todo o corpo, no entanto, pode-se calcular o torque devido a esta força sobre o corpo considerando que toda a força peso esteja atuando sobreo corpo em um ponto conhecido como centro de gravidade. Num corpo de pequena dimensão, a força gravitacional é a mesma em toda a extensão do corpo, então o centro de gravidade coincide com o centro de massa do corpo, CM.
► Quando o corpo extenso possui um ponto de apoio, o problema de equilíbrio estático se torna um problema de estabilidade deste equilíbrio.
► A figura abaixo apresenta um carro em movimento apoiado somente sobre as rodas de
mesmo lado. Dependendo do ângulo de inclinação do carro, medido da posição de CM do carro
ao ponto de apoio, torque gravitacional trará de volta sem tombar, e altura h1 do CM ao
solo; se , o CM está acima do ponto de apoio, altura h2, portanto o torque produzido pela
força gravitacional é nulo e se o CM está em altura h3, e o torque produzido pela força gravitacional fará o carro tombar para o outro lado.
► A energia potencial gravitacional de um corpo extenso está relacionado com a posição do seu CM: U = mgh.
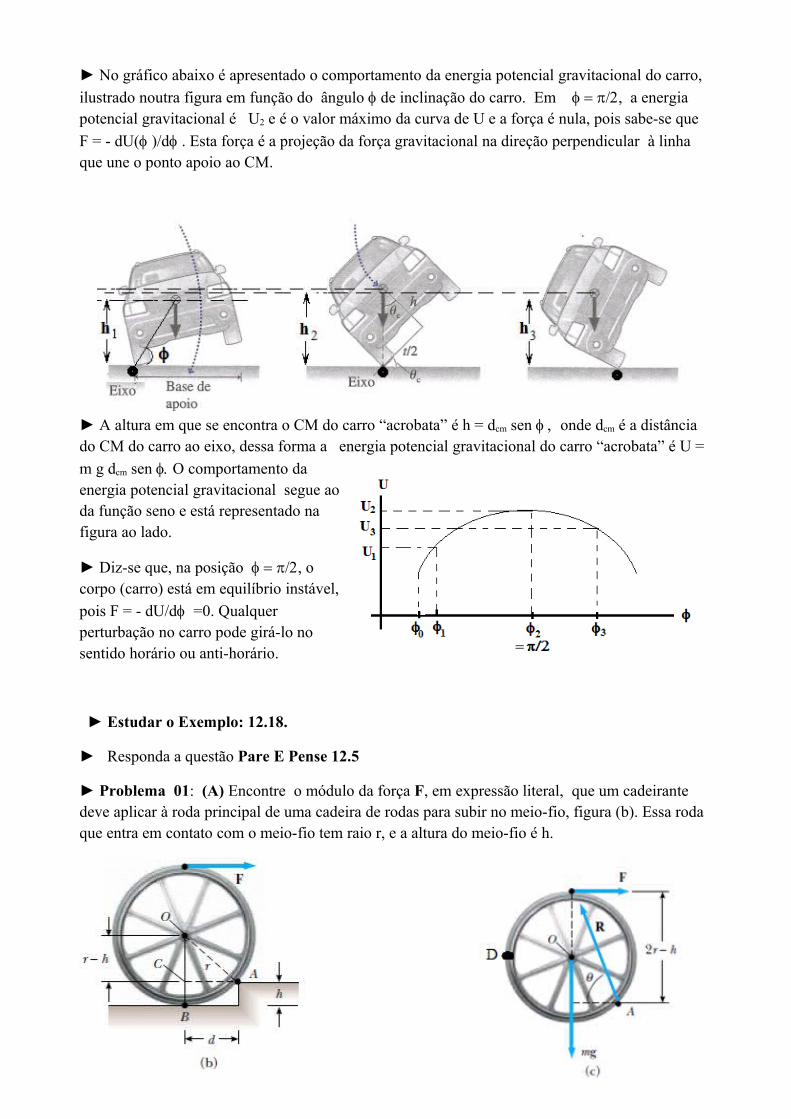
► No gráfico abaixo é apresentado o comportamento da energia potencial gravitacional do carro,
ilustrado noutra figura em função do ângulo de inclinação do carro. Em , a energia potencial gravitacional é U2 e é o valor máximo da curva de U e a força é nula, pois sabe-se que
F = - dU( )/d . Esta força é a projeção da força gravitacional na direção perpendicular à linha que une o ponto apoio ao CM.
► A altura em que se encontra o CM do carro “acrobata” é h = dcm sen onde dcm é a distância do CM do carro ao eixo, dessa forma a energia potencial gravitacional do carro “acrobata” é U =
m g dcm sen O comportamento daenergia potencial gravitacional segue aoda função seno e está representado nafigura ao lado.
► Diz-se que, na posição , ocorpo (carro) está em equilíbrio instável,
pois F = - dU/d =0. Qualquerperturbação no carro pode girá-lo nosentido horário ou anti-horário.
► Estudar o Exemplo: 12.18.
► Responda a questão Pare E Pense 12.5
► Problema 01: (A) Encontre o módulo da força F, em expressão literal, que um cadeirante deve aplicar à roda principal de uma cadeira de rodas para subir no meio-fio, figura (b). Essa roda que entra em contato com o meio-fio tem raio r, e a altura do meio-fio é h.

(B) Considere o raio de roda r = 30 cm, a altura de meio-fio h = 30 cm, o peso do conjunto (cadeira mais a pessoa) mg = 1,4x 103 N e, ainda, supor que a cadeira de rodas e a pessoa são simétricos e que cada roda suporta um peso de 700 N. Obtenha o valor de força F, item (A), aplicada pelo cadeirante sobre uma roda.
(C) Determine o módulo e direção de R, fig (c), força de reação do meio-fio em A sobre a roda.
(D) Uma nova força FD é aplicada no ponto D na roda, fig. (c) e a sua direção é tangente à roda. Calcule a relação desta força pela anterior: FD/F.
Sugestões e Respostas:
(A) Consulte a fig. (b) e expresse o torque resultante em relação a um eixo que passa por A,
0At =å . A força normal exercida pelo chão sobre a roda no ponto B é nula. Por quê? Resulta
em
22
2
mg rh hF
r h
-=
-
(B) O valor é F = 3 x 10 2 N.
(C) Aplicar a primeira condição de equilíbrio à roda: 0F =år
.
Obtém - se a direção 070q = e a reação 28 10R N= ´ .
(D) Proceder como no item (A), ou seja , aplicar o torque das forças em relação ao eixo que passa por A. A força FD está aplicada na roda tal que o torque em relação ao ponto A está orientado nosentido horário. O braço de seu momento em torno de um eixo que passa por A é d + r, Resulta em
2
2
2
2D
mg rh hF
rh h r
-=
- +
E o valor numérico da relação obtida é
0,96DF
F=
12.9 Movimento de rolamento
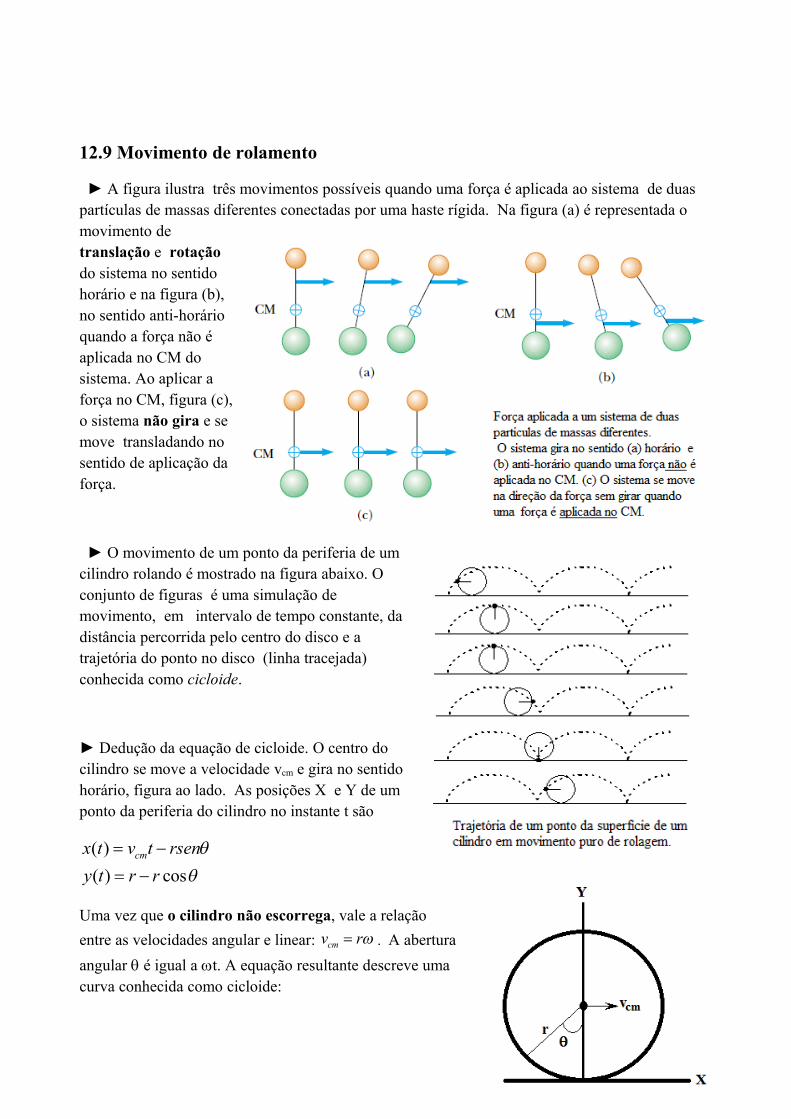
► A figura ilustra três movimentos possíveis quando uma força é aplicada ao sistema de duas partículas de massas diferentes conectadas por uma haste rígida. Na figura (a) é representada o movimento de translação e rotaçãodo sistema no sentidohorário e na figura (b),no sentido anti-horárioquando a força não éaplicada no CM dosistema. Ao aplicar aforça no CM, figura (c),o sistema não gira e semove transladando nosentido de aplicação daforça.
► O movimento de um ponto da periferia de umcilindro rolando é mostrado na figura abaixo. Oconjunto de figuras é uma simulação demovimento, em intervalo de tempo constante, dadistância percorrida pelo centro do disco e atrajetória do ponto no disco (linha tracejada)conhecida como cicloide.
► Dedução da equação de cicloide. O centro docilindro se move a velocidade vcm e gira no sentidohorário, figura ao lado. As posições X e Y de umponto da periferia do cilindro no instante t são
( )
( ) coscmx t v t rsen
y t r r
= -
= -
Uma vez que o cilindro não escorrega, vale a relação
entre as velocidades angular e linear: cmv rw= . A abertura
angular é igual a t. A equação resultante descreve umacurva conhecida como cicloide:
( ) ( )
( ) (1 cos )
x t r sen
y t r
q qq
= -= -
► A expressão
cmv rw=
determina o vínculo de rolamento, a ligação entre os movimentos de translação e rotação para corpos rígidos que rolam sem se derrapar.
► O módulo da aceleração linear do CM para o movimento de rolagem puro é
cmcm
dv da r r
dt dt
w a= = =
onde a é a aceleração angular do corpo.
► O ponto mais baixo de um corpo que rola se encontra instantaneamente em repouso. Significa que o corpo rola sem deslizar. Fisicamente se diz que existe força de atrito estático agindo neste ponto mais baixo do corpo.
► Neste caso a energia mecânica se conserva.
► Se o atrito for cinético, o corpo rola e desliza e a energia mecânica não se conserva.
►Problema 02: Uma lata de refrigerante, empurrado por uma régua desde a posição inicial mostrada na figura, rola para frente sobre a mesa a distância L/2, igual à metade do comprimento da régua. Não ocorreescorregamento em nenhumdos contatos. Onde estará arégua então? Que distânciafoi percorrida pela mão?
Energia cinética de um objeto em rolamento
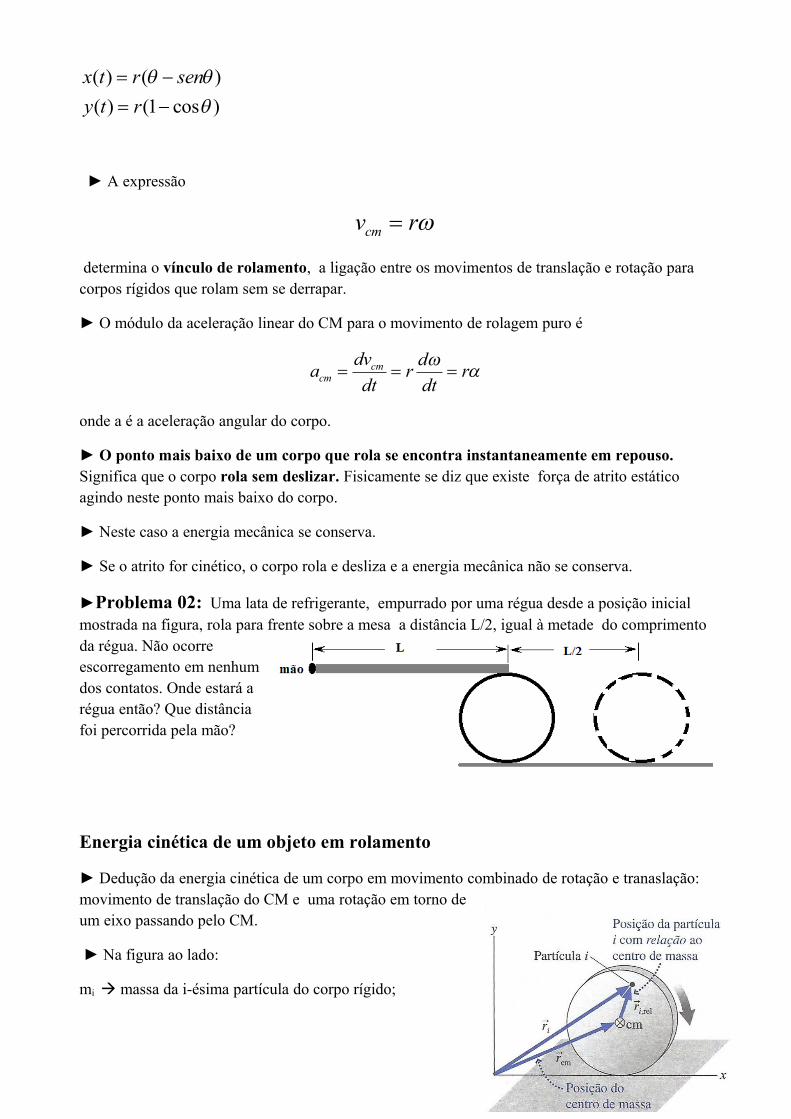
► Dedução da energia cinética de um corpo em movimento combinado de rotação e tranaslação: movimento de translação do CM e uma rotação em torno deum eixo passando pelo CM.
► Na figura ao lado:
mi massa da i-ésima partícula do corpo rígido;

ri vetor posição da i-ésima partícula em relação ao sistema de referência inercial;
ri,rel vetor posição da i-ésima partícula relativa ao CM ;
rcm vetor posição do CM
Escrevemos o vetor posição da partícula i:
,i cm i relr r r= +r r r
Derivando em relação ao tempo, obtemos a velocidade da partícula i:
,i cm i relv v v= +r r r
► Energia cinética da partícula i :
2
, ,( ) ( )2 2 2i i i i i i
i cm i rel cm i rel
m v m v v mK v v v v
×= = = + × +
r r r r r r
2 2, ,( 2 )
2i
i cm cm i rel i rel
mK v v v v= + × +
r r
► Energia cinética do corpo rígido em rolamento: 1
ii
K K¥
=
=å
2 2, ,
1 1 1
( ) ( ) ( )2 2
i icm i cm i rel i rel
i i i
m mK v m v v v
¥ ¥ ¥
= = =
= + × +å å år r
Como a velocidade do centro de massa independe do elemento de massa do corpo rígido, então pode-se colocar fora do somatório:
2 2, ,
1 1 1
( ) ( ) ( )2 2
i icm cm i i rel i rel
i i i
m mK v v m v v
¥ ¥ ¥
= = =
= + × +å å år r
No primeiro termo, temos 1
ii
m M¥
=
=å ; massa do corpo rígido; no segundo termo,
, ,1
( )i i rel cm reli
m v Mv¥
=
=å r r, onde ,cm relv
r é a velocidade do centro de massa e é nula, pois, é medida em
relação ao centro de massa; no terceiro termo é a soma de todos os elementos de massa do corpo rígido, determinado pelo cálculo de suas velocidades em relação ao centro de massa. Este último
termo, apresentado anteriormente, é 21
2 cmI w .
► Finalmente, obtemos
2 2
2 2cm cmMv I
Kw
= +
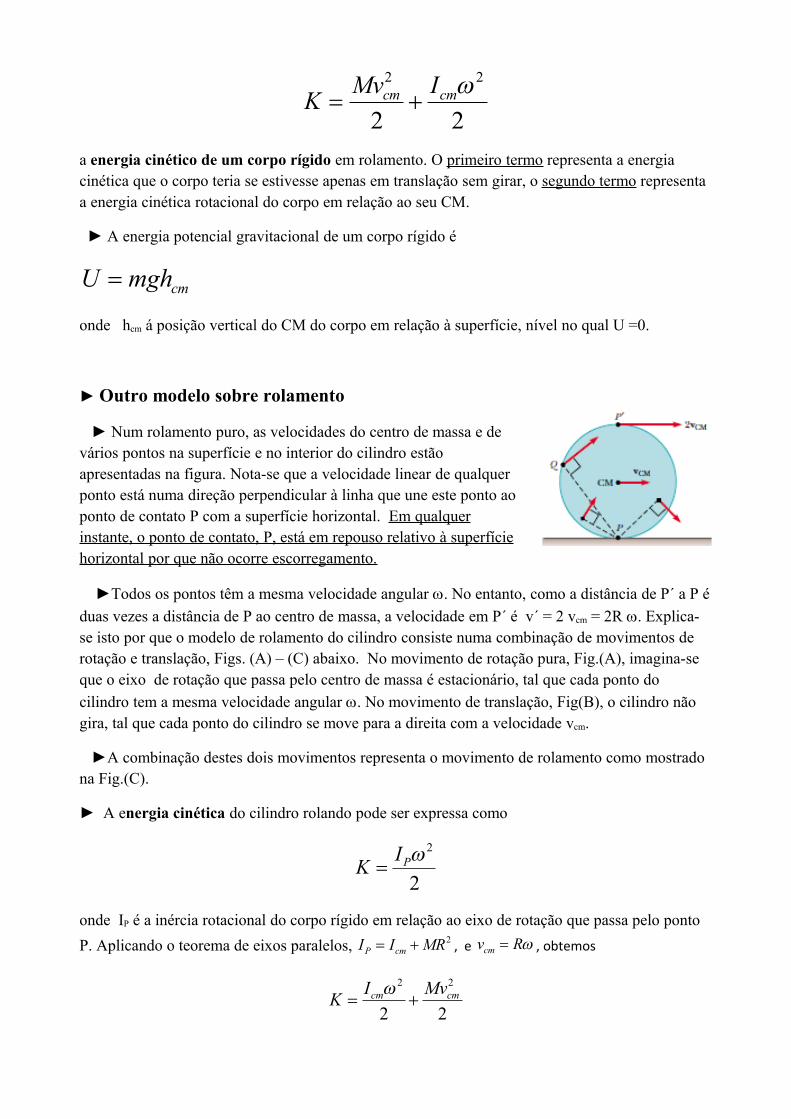
a energia cinético de um corpo rígido em rolamento. O primeiro termo representa a energia cinética que o corpo teria se estivesse apenas em translação sem girar, o segundo termo representa a energia cinética rotacional do corpo em relação ao seu CM.
► A energia potencial gravitacional de um corpo rígido é
cmU mgh=
onde hcm á posição vertical do CM do corpo em relação à superfície, nível no qual U =0.
► Outro modelo sobre rolamento
► Num rolamento puro, as velocidades do centro de massa e devários pontos na superfície e no interior do cilindro estãoapresentadas na figura. Nota-se que a velocidade linear de qualquerponto está numa direção perpendicular à linha que une este ponto aoponto de contato P com a superfície horizontal. Em qualquerinstante, o ponto de contato, P, está em repouso relativo à superfíciehorizontal por que não ocorre escorregamento.
►Todos os pontos têm a mesma velocidade angular . No entanto, como a distância de P´ a P é
duas vezes a distância de P ao centro de massa, a velocidade em P´ é v´ = 2 vcm = 2R. Explica-se isto por que o modelo de rolamento do cilindro consiste numa combinação de movimentos de rotação e translação, Figs. (A) – (C) abaixo. No movimento de rotação pura, Fig.(A), imagina-se que o eixo de rotação que passa pelo centro de massa é estacionário, tal que cada ponto do
cilindro tem a mesma velocidade angular . No movimento de translação, Fig(B), o cilindro não gira, tal que cada ponto do cilindro se move para a direita com a velocidade vcm.
►A combinação destes dois movimentos representa o movimento de rolamento como mostrado na Fig.(C).
► A energia cinética do cilindro rolando pode ser expressa como
2
2PI
Kw
=
onde IP é a inércia rotacional do corpo rígido em relação ao eixo de rotação que passa pelo ponto
P. Aplicando o teorema de eixos paralelos, 2P cmI I MR= + , e cmv Rw= , obtemos
2 2
2 2cm cmI Mv
Kw
= +
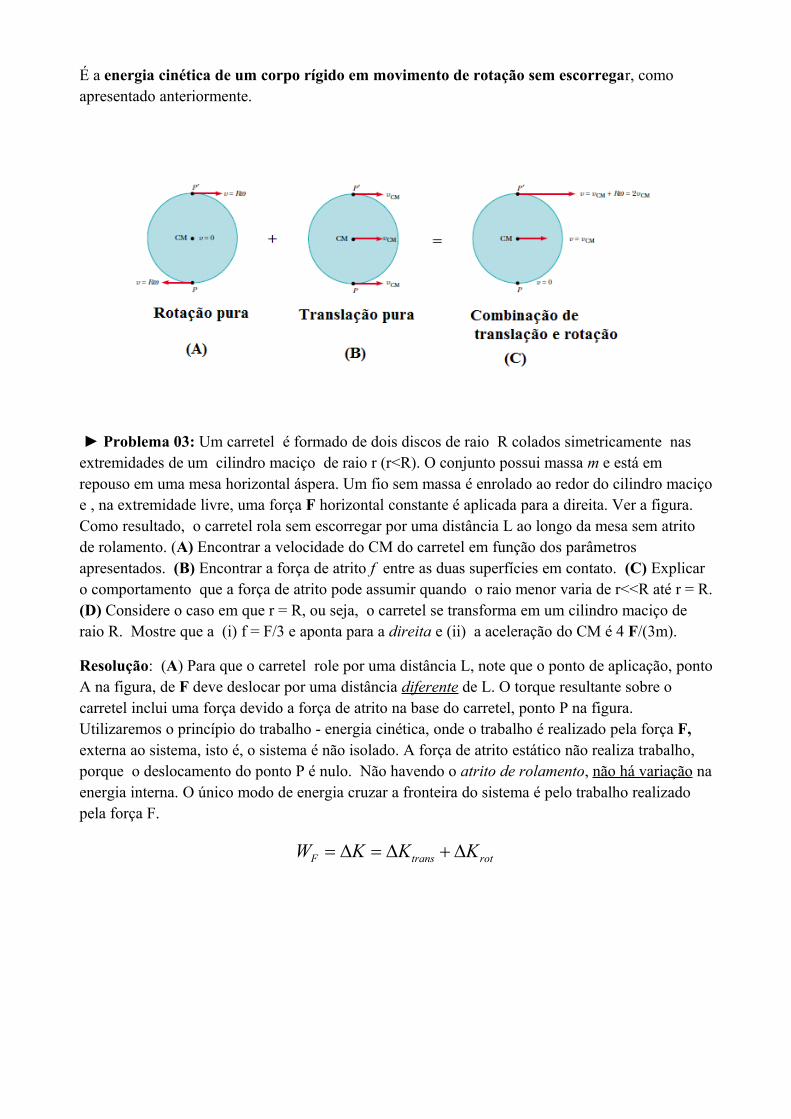
É a energia cinética de um corpo rígido em movimento de rotação sem escorregar, como apresentado anteriormente.
► Problema 03: Um carretel é formado de dois discos de raio R colados simetricamente nas extremidades de um cilindro maciço de raio r (r<R). O conjunto possui massa m e está em repouso em uma mesa horizontal áspera. Um fio sem massa é enrolado ao redor do cilindro maciçoe , na extremidade livre, uma força F horizontal constante é aplicada para a direita. Ver a figura. Como resultado, o carretel rola sem escorregar por uma distância L ao longo da mesa sem atrito de rolamento. (A) Encontrar a velocidade do CM do carretel em função dos parâmetros apresentados. (B) Encontrar a força de atrito f entre as duas superfícies em contato. (C) Explicar o comportamento que a força de atrito pode assumir quando o raio menor varia de r<<R até r = R.(D) Considere o caso em que r = R, ou seja, o carretel se transforma em um cilindro maciço de raio R. Mostre que a (i) f = F/3 e aponta para a direita e (ii) a aceleração do CM é 4 F/(3m).
Resolução: (A) Para que o carretel role por uma distância L, note que o ponto de aplicação, pontoA na figura, de F deve deslocar por uma distância diferente de L. O torque resultante sobre o carretel inclui uma força devido a força de atrito na base do carretel, ponto P na figura. Utilizaremos o princípio do trabalho - energia cinética, onde o trabalho é realizado pela força F, externa ao sistema, isto é, o sistema é não isolado. A força de atrito estático não realiza trabalho, porque o deslocamento do ponto P é nulo. Não havendo o atrito de rolamento, não há variação naenergia interna. O único modo de energia cruzar a fronteira do sistema é pelo trabalho realizado pela força F.
F trans rotW K K K= D = D + D

► A distância que o ponto de aplicação da força F desloca é igual ao comprimento do arco de
raio r compreendido pelo ângulo , ângulo de giro do eixo do carretel, s = r, mais o comprimento
do arco de raio R compreendido pelo mesmo ângulo, L = R. Obtemos
rs r L
Rq= =
Dessa forma a distância total do ponto de aplicação da força F é
(1 )r
d s L LR
= + = +
O trabalho realizado pela força F sobre o fio é
(1 )F
rW Fd FL
R= = +
Escrevemos,
2 2
(1 )2 2
cm cmmv IrFL
R
w+ = +
e, usando a condição de rolamento puro, cmv Rw= ,
22
1(1 ) ( )
2 cm
r IFL m v
R R+ = +
que resulta em
2
2 (1 / )
(1 /cm
FL r Rv
m I mR
+=
+
Esta expressão é a velocidade linear do CM do carretel.
(B) Como a força de atrito estático não realiza trabalho porque ocarretel não escorrega, não se pode utilizar a abordagem de

energia. Em sala de aula, este item foi resolvido utilizando o teorema impulso-momento. Agora, utilizaremos a dinâmica rotacional, a segunda lei de Newton da rotação. O cilindro translada e rola:
F f ma mR
rF Rf I
aa
- = =- - = -
O sinal negativo na segunda equação significa que o sentido do torque é horário. Foi utilizada a relação
entre as acelerações linear e angular: a Ra= . Resolvendo as equações acima para força de atrito estático f,obtemos
2
I mrRf F
I mR
-æ ö= ç ÷+è ø
► Análises: (a) O sentido da força de atrito, f, é para a esquerda, como está representada no diagrama, se I – mrR for positivo para determinado valores de r diferentes de zero. (b) O termo I – mr0R = 0 para r = r0, a força de atrito é nula. Nesse caso o carretel somente translada. (c) Para
valores de r , 0r r R< £ , temos I – mrR < 0 e o sentido da força de atrito é para a direita.
O aluno deve demonstrar as conclusões apresentadas acima.
► Problema 04: No problema anterior em que r = R, o carretel se torna um cilindro simétricoe mostre que a aceleração do centro de massa é 4F/(3 m) e a força de atrito é igual a F/3.
►
A grande corrida ladeira abaixo
► Método de energia pode ser usado para resolver problemas relacionados ao movimento de rolamento de um corpo em uma rampa áspera.Considereuma esfera maciça, apresentada na figura, que rola sem escorregar após ser liberada do repouso no topo da rampa.O movimento de rolamentosó é possível se houver uma força de atrito entre a esfera e a rampa afim de produzir um torque resultante em relação ao centro de massa. Mesmo com a presença de atrito a energia mecânica do sistema s e conserva pois não há perda de energia mecânica porque o ponto de contato está em repouso em relação à superfície em qualquer instante.
► Na realidade, o atrito de rolamento causa a tranformação da energia mecância em energia interna. O atrito de rolamento é causado pela deformação na superfície de contato do corpo em rolagem. Em nossos estudos, ao menos que seja mencionado, desprezamos o atrito de rolamento.
► Em um movimento de rolamento puro, vcm = R w, a energia cinética é escrita como
22 22
2 2 2 2cm cm cmMv Mv vI I
KR
w æ ö= + = + ç ÷è ø
22
1
2 cm
IK M v
Ræ ö= +ç ÷è ø

►Define-se a configuração zero da energia potencial gravitacional como sendo quando a esfera está na base da rampa. Dessa forma conservação da energia mecânica resulta em
A velocidade e aceleração do centro de massa da esfera são encontradas
► Discussões: (a) A aceleração (velocidade) do centro de massa não depende nem da massa nemdo tamanho do corpo rígido. Por exemplo, as esferas de massas e raios diferentes têm a mesma aceleração linear. (b) A aceleração (velocidade) do centro de massa depende somente da forma geométrica do corpo rígido.
► Teste 03: Uma bola rola para baixo na rampa A, sem escorregar, a partir do repouso. Ao mesmo tempo, uma caixa sai do repouso e desliza pela rampa B, que é idêntica à A, mas não tem atrito. Elas partem da mesma altura. Qual delas, a bola ou a caixa, chega primeiro à base da rampa ou ambas chegam ao mesmo tempo?
► Teste 04: Duas esferas A e B diferentes rolam sem escorregar rampa abaixo, a partir do repouso, ao mesmo tempo e da mesma altura. Qual delas chega à base da rampa primeiro - aquela que tem maior massa ou maior raio ou ambas chegam ao mesmo tempo?
► Teste 05: Uma esfera e um cilindro de mesma massa e raio rolam para baixo numa rampa, sem escorregar, a partir do repouso, ao mesmo tempo e da mesma altura. Qual delas chega à base da rampa primeiro ou ambas chegam ao mesmo tempo?
►
12.10 A descrição vetorial do movimento de rolamento
►
Produto vetorial de vetores e o vetor velocidade angular
f f i iK U K U+ = +
22
10 0
2 cm
IM v Mgh
Ræ ö+ + = +ç ÷è ø
2
2
21
cm
gv h
IMR
æ öç ÷
= ç ÷ç ÷+è ø
21cm
ga
IMR
=+
►
► Consultar o texto A deste capítulo.
12.11 Momentum angular
►
Consultar o texto C deste capítulo.