Capítulo 11 Rotações e Momento Angular 11.pdf · Terra nesse referencial será a soma vetorial...
12
1 Capítulo 11 – Rotações e Momento Angular Corpo Rígido Um corpo rígido é um corpo ideal indeformável de tal forma que a distância entre 2 pontos quaisquer do corpo não muda nunca. Um corpo rígido pode realizar 2 movimentos: translação e rotação em torno de um eixo (enunciado pela primeira vez por Chasles -1830) . A rotação em torno de um eixo faz que com o movimento de um ponto não pertencente ao eixo seja um movimento circular. Um corpo rígido tem 6 graus de liberdade: 3 de translação e 3 de rotação. Senão vejamos. Para fixar a posição de um ponto A do corpo rígido precisamos de 3 coordenadas espaciais; um segundo ponto B do corpo rígido, a uma distância r de A, estará sobre uma esfera de raio r – podemos localizar B com 2 ângulos (latitude e longitude); um terceiro ponto qualquer C do corpo rígido será obtido por uma rotação em torno do eixo AB...logo bastam 3 coordenadas de posição (translação) e 3 ângulos de rotação. Outra maneira de ver os 6 graus de liberdade é lembrar que a posição de qualquer ponto pertencente ao corpo rígido pode ser determinada conhecendo-se o vetor posição de 3 pontos A, B e C, não colineares, o que nos daria 9 coordenadas, mas como temos 3 equações de vínculo – distâncias AB, BC e AC, sobram 6 coordenadas. O Produto Vetorial Sejam e dois vetores quaisquer. Definimos um novo vetor como o produto vetorial de e onde a direção de é perpendicular ao plano que contém simultaneamente os vetores e (veja figura), o sentido de é dado pela regra do saca-rolha (convenção) e o módulo de é dado por
Transcript of Capítulo 11 Rotações e Momento Angular 11.pdf · Terra nesse referencial será a soma vetorial...

1
Capítulo 11 – Rotações e Momento Angular
Corpo Rígido
Um corpo rígido é um corpo ideal indeformável de tal forma que a distância entre 2 pontos
quaisquer do corpo não muda nunca.
Um corpo rígido pode realizar 2 movimentos: translação e rotação em torno de um eixo
(enunciado pela primeira vez por Chasles -1830) .
A rotação em torno de um eixo faz que com o movimento de um ponto não pertencente ao eixo
seja um movimento circular.
Um corpo rígido tem 6 graus de liberdade: 3 de translação e 3 de rotação. Senão vejamos.
Para fixar a posição de um ponto A do corpo rígido precisamos de 3 coordenadas espaciais; um
segundo ponto B do corpo rígido, a uma distância r de A, estará sobre uma esfera de raio r –
podemos localizar B com 2 ângulos (latitude e longitude); um terceiro ponto qualquer C do
corpo rígido será obtido por uma rotação em torno do eixo AB...logo bastam 3 coordenadas de
posição (translação) e 3 ângulos de rotação.
Outra maneira de ver os 6 graus de liberdade é lembrar que a posição de qualquer ponto
pertencente ao corpo rígido pode ser determinada conhecendo-se o vetor posição de 3 pontos A,
B e C, não colineares, o que nos daria 9 coordenadas, mas como temos 3 equações de vínculo –
distâncias AB, BC e AC, sobram 6 coordenadas.
O Produto Vetorial
Sejam e dois vetores quaisquer. Definimos um novo vetor como o produto vetorial de e
onde a direção de é perpendicular ao plano que contém simultaneamente os vetores e
(veja figura), o sentido de é dado pela regra do saca-rolha (convenção) e o módulo de é
dado por

2
Por conseguinte, é igual à área do paralelogramo formado no plano de e .
Como o sentido de rotação de para é oposto ao de para , teremos
O produto vetorial é, portanto, anti-comutativo. Repare que
O produto vetorial é distributivo
Em coordenadas cartesianas, e , logo teremos
Rotação
Construímos o vetor de rotação com convenção da regra do saca-rolha
Consideremos um ponto P na secção transversal xy de um corpo rígido que gira de um ângulo
infinitesimal em torno do eixo Oz (perpendicular ao plano transversal xy). O vetor
deslocamento infinitesimal pode ser escrito
3
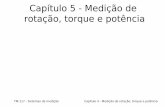
Se o vetor não estiver no plano (veja figura abaixo), ainda a expressão ,
continuará valendo, já que
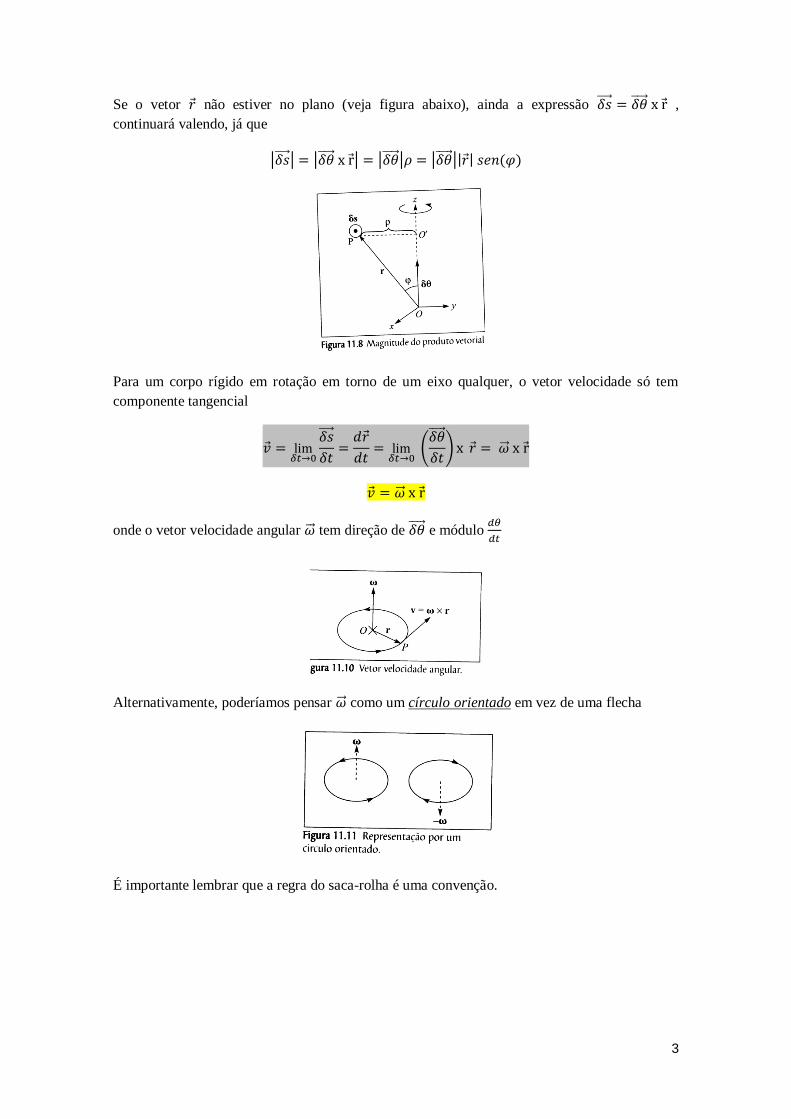
Para um corpo rígido em rotação em torno de um eixo qualquer, o vetor velocidade só tem
componente tangencial
onde o vetor velocidade angular tem direção de e módulo
Alternativamente, poderíamos pensar como um círculo orientado em vez de uma flecha
É importante lembrar que a regra do saca-rolha é uma convenção.

4
Um vetor qualquer troca de sinal quando o sistema de coordenadas sofre a ação de uma
transformação de paridade na qual: .
Para um vetor polar , ou simplesmente vetor, essa transformação leva . Exemplos
importantes de vetores polares são: , etc.
Para um vetor axial , ou simplesmente pseudo-vetor, essa transformação leva .
Exemplos importantes de vetores axiais são: , etc. Na definição do vetor velocidade
angular, sob a ação da transformação de paridade, temos
O movimento mais geral de um corpo rígido poderá sempre ser descrito por um movimento de
translação e um de rotação, de modo que o vetor velocidade instantânea de um ponto P de
um corpo rígido á dado por
onde é a velocidade instantânea de translação do ponto P e é a componente tangencial
da velocidade em torno de um eixo de rotação instantâneo com a direção e sentido de . Esse
eixo de rotação instantâneo pode, em geral, mudar de direção a cada instante t.
Torque
A cinemática unidimensional e a cinemática das rotações (que em torno de um eixo, é
unidimensional, pois só tem um grau de liberdade de rotação θ em torno desse eixo) têm as
seguintes correspondências:
Já a dinâmica unidimensional conduz ao trabalho infinitesimal
Portanto, o trabalho infinitesimal de uma rotação infinitesimal deve ser
onde é chamado de Torque.

5
Vejamos o trabalho infinitesimal de uma força para girar uma haste rígida em torno de uma
extremidade fixa
Como a componente longitudinal não realiza trabalho (pois não tem deslocamento),
podemos analisar somente a componente perpendicular . Para ângulos pequenos
teremos , logo,
portanto,
De maneira geral, podemos escrever o vetor torque em relação ao ponto O
O torque é então, em módulo, igual à força perpendicular vezes o “braço” r.
A dimensão do torque τ é a mesma de energia 1 joule = 1 N. m
Para a força central o torque é sempre nulo pois

6
Momento Angular
Na analogia entre dinâmica unidimensional e rotação em torno de um eixo temos
Mas, como
onde é o vetor momento angularem relação ao ponto O
e
Observe que tanto quanto dependem do ponto O, portanto, é preciso sempre especificar esse
ponto.
Uma situação importante é aquela em que o torque se anula
Exemplos:
1) Partícula Livre
Se uma partícula livre de massa m e velocidade v se move numa direção que está a uma
distância b do ponto O, então
b é o parâmetro de impacto definido em colisões.
2) Forças Centrais
Como para forças centrais , o vetor momento angular se conserva em módulo,
direção e sentido.

7
Essa conservação está relacionada diretamente à 2ª. Lei de Kepler que diz que o raio vetor que
liga o Sol ao planeta varre áreas iguais em tempos iguais.
Na figura abaixo temos a área infinitesimal varrida num tempo infinitesimal
Logo,
Como L é constante, a chamada velocidade areolar,
, também será constante. Isso demonstra
a 2ª. lei de Kepler. Isso explica porque no periélio um planeta se move mais rapidamente do que
no afélio ( ).
3) Disco puxado por um fio
Considere um corpo de massa m que desliza sem atrito numa mesa horizontal preso a
uma corda (sem massa) que passa por um orifício O puxado verticalmente por uma
força F, se movendo com velocidade v

8
Para que o corpo realize um movimento circular de raio r, é necessário que a força F externa
aplicada seja igual à força centrípeta
. Como essa força é central, o vetor momento
angular L se conserva.
Na figura, L é perpendicular ao plano e aponta para cima.
Seu módulo é
onde introduzimos o momento de inércia do corpo em relação a ponto O.
Vemos que se diminuirmos r aumentamos v.
Na analogia
ou seja, o momento de inércia faz o papel da massa.
Momento de Angular de um sistema de partículas
Seja um sistema de N partículas de massas , vetor posição e velocidade ,
Então o vetor momento angular total do sistema no referencial de laboratório será
O momento angular do sistema no referencial do CM será
mas, e , onde e são os vetores posição e velocidade do CM
medidos no referencial de laboratório. Lembrando que ;
;
e substituindo essas relações em (2), teremos
ou seja, o momento angular do sistema medido no laboratório é igual ao momento angular
medido no CM mais o momento angular do CM.

9
Por exemplo, se imaginarmos um referencial de laboratório fixo no Sol, o momento angular da
Terra nesse referencial será a soma vetorial do momento angular de sua rotação em torno do
CM (dia), , mais o movimento de rotação em torno do Sol (ano), (vetor perpendicular
ao plano da órbita elíptica).
Os vetores e não são paralelos e formam entre si um ângulo de 23,5o.
Torque de um Sistema de Partículas
Referencial Inercial de Laboratório
Lembramos que para o vetor momento linear de um sistema de partículas temos
Para o torque de um sistema de N partículas teremos
Num referencial inercial vale a 2ª. Lei de Newton
onde é a força externa sobre a partícula i e
são as forças internas que as N-1
partículas fazem sobre i. Substituindo (3) em (2)
mas

10
logo,
pois, da 3ª. Lei,
como , teremos
Note que se houverem forças externas então o CM tem aceleração dada por
. Neste caso, a passagem em que utilizamos a 2ª. Lei estará incorreto.
Numa situação como essa (com ) , o melhor é utilizar o referencial do CM.
Neste caso,
como Substituindo
Como , independente de ser igual zero ou não
Uma vez que , então o 2º. termo é nulo e

11
Exemplo: Suponha um haltere composto por 2 corpos de massa ligados por uma barra de
massa desprezível e comprimento . Suponha que duas forças constantes (com módulos
diferentes , e sentidos opostos) e sempre perpendiculares à barra atuam sobre esses
corpos. O CM está no meio da barra.
O CM executa um movimento uniformemente acelerado (em relação a um referencial inercial),
o vetor torque no CM, , está mostrado na figura e as 2 massas executam um movimento
circular uniformemente acelerado.
Supondo , a aceleração do CM será
, o torque tem módulo
Os vetores momentos angulares têm a mesma direção e sentido do vetor
torque, logo podemos escrever
. Como
então
, donde
Um importante caso é quando , neste caso temos o chamado Binário ou
Conjugado cujo torque é simplesmente .
Observação: Se a força externa total é zero então o valor do torque é o mesmo independente da
origem O
Seja a nova origem e o vetor posição que liga para
pois,
.

12
Simetrias e Leis de Conservação
Suponha um sistema de N partículas com vetores posição e que a energia potencial U seja
também dependente explicitamente de t, isto é,
então
1) Invariância por translação temporal
Conservação de Energia Mecânica
De (1)
mas
logo
2) Invariância por translação espacial Conservação de Momento Linear Total
Seja e façamos todo o sistema transladar espacialmente de . Então a
invariância dU=0
Como é qualquer então
3) Invariância por rotação (isotropia espacial) Conservação de Momento Angular
Total
Seja e façamos todo o sistema rodar infinitesimalmente de um ângulo
, de sorte que o vetor posição se desloca
então a invariância dU=0
como no produto misto vale a propriedade cíclica então
como vale para qualquer então