Dados do período; - Destacar pontos positivos; - Destacar pontos ...

Fotogrametria Básica - Métodos Fotogramétricos Aproximados Antonio M. G. Tommaselli
2009 176
CAPÍTULO 7
MÉTODOS FOTOGRAMÉTRICOS APROXIMADOS 7.1 INTRODUÇÃO A extração de informações geométricas a partir de fotografias aéreas pode ser feita por vários processos, variando no grau de rigor ao tratamento que é dado aos vários erros inerentes ao processo fotogramétrico. Neste capítulo serão discutidas algumas técnicas aproximadas que partem da hipótese de que as fotografias são perfeitamente verticais. 7.2 DIFERENÇAS ENTRE FOTOGRAFIA AÉREA E CARTA
TOPOGRÁFICA As fotografias aéreas, bem como as imagens de satélite, são, às vezes, confundidas com um documento cartográfico. Por isto é importante destacar que a fotografia aérea é um dos dados de entrada no processo e o mapa (ou carta) é o resultado. Algumas diferenças devem ser enfatizadas: • o sistema de projeção da fotografia aérea é perspectiva central enquanto
que o da carta é ortogonal;
• a escala da fotografia aérea é variável;
• a fotografia aérea pode ter sido obtida com o eixo ótico inclinado;
• as objetivas das câmaras fotográficas possuem distorções óticas;
• as fotografias não são estáveis dimensionalmente;
Uma das distorções freqüentemente esquecidas pelos usuários de
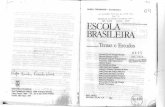
fotografias aéreas é o deslocamento devido ao relevo, cuja origem está na geometria perspectiva da fotografia. A variação de relevo provoca um deslocamento radial em relação ao centro da foto, e este deslocamento pode ser usado para calcular a altura de objetos, por exemplo, edifícios e reservatórios d'água. Da figura 7.1, por semelhança de triângulos podem ser estabelecidas as relações:

Fotogrametria Básica - Métodos Fotogramétricos Aproximados Antonio M. G. Tommaselli
2009 177
b
b
rr
zz
rr Δ
=Δ
=Δ
(7.1)
onde: z é a altura de vôo (Hv); rb é a distância radial do centro da fotografia até o ponto; Δrb é o deslocamento devido ao relevo na fotografia; Δz é a altura do objeto ou a diferença de nível entre dois pontos; Δr é deslocamento equivalente no terreno; r é a distância radial no terreno;
Da expressão (7.1) pode-se estabelecer a expressão que permite o cálculo do deslocamento devido ao relevo:
bb rzzr .Δ
=Δ (7.2)
De modo similar, é possível calcular a altura de um objeto, por exemplo, uma torre de transmissão, a partir do deslocamento radial na fotografia, através da expressão:
Δrb
rb
z
Δrr
Δz
Figura 7.1 Deslocamento devido ao relevo.

Fotogrametria Básica - Métodos Fotogramétricos Aproximados Antonio M. G. Tommaselli
2009 178
b
b
rzr
z.Δ
=Δ (7.3)
Como exemplo, suponha uma fotografia aérea na escala 1:8.000, tomada de uma altura de vôo de 1.216 m; uma variação do relevo de 30 m provocará um deslocamento na foto de 3,99mm. 7.3 EXTRAÇÃO MONOSCÓPICA DE FEIÇÕES
Uma maneira mais simples de obter as feições planimétricas é colocar uma folha transparente (overlay) sobre a fotografia da esquerda do estereopar e traçar todas as feições de interesse. As altitudes dos pontos podem ser, posteriormente, obtidas a partir de medidas na barra de paralaxe. As curvas de nível podem, então ser interpoladas e traçadas diretamente sobre o overlay, observando-se, simultaneamente o modelo estereoscópico para melhorar o desenho das curvas. Como as feições foram traçadas diretamente sobre a fotografia, o mapa resultante estará em projeção perspectiva, o que significa que a escala varia com altitude dos pontos. No caso do primeiro método, como as coordenadas foram calculadas e plotadas, o desenho final estará em projeção ortográfica.
Uma alternativa mais moderna ao traçado usando overlay seria utilizar um scanner para digitalizar a fotografia aérea e um software gráfico para desenhar os vetores sobre a imagem. Da mesma maneira que no método gráfico, o mapa resultante estará em projeção perspectiva e, portanto, afetado pelos deslocamentos devido ao relevo, além dos erros devido à inclinação da aeronave e às variações na altitude de vôo. 7.4 MAPEAMENTO APROXIMADO USANDO BARRA DE PARALAXE E
ESTEREOSCÓPIO Quando não há necessidade de alta precisão, é possível utilizar o estereoscópio de espelhos e a barra de paralaxe para produzir mapas aproximados, que podem ser úteis para o planejamento e outras aplicações. Uma maneira de executar o mapeamento é trabalhar com a restituição numérica de todas as feições planimétricas e gerar as curvas de nível por interpolação, a partir de uma malha de pontos medidos com a barra de paralaxe. Para restituir as feições planimétricas é necessário medir as coordenadas xa, ya na foto da esquerda e determinar a paralaxe pa de pontos que descrevem a feição, normalmente como um polígono. Após a medição no estereopar, as coordenadas Xa, Ya, ha são calculadas usando as equações descritas nas seções anteriores. Basta, então, plotar estas coordenadas e desenhar as feições. A plotagem pode ser feita em papel, usando o coordenatógrafo polar ou o coordenatógrafo retangular, ou, ainda, usando o computador e um software de CAD (Computer Aided Design). Para a restituição da altimetria pode-se coletar uma malha de pontos sobre o modelo, devendo-se medir também xa, ya e pa para cada ponto. Esta malha pode ser regular, com os pontos regularmente espaçados ou irregular com os

Fotogrametria Básica - Métodos Fotogramétricos Aproximados Antonio M. G. Tommaselli
2009 179
pontos medidos sobre as feições mais significativas, como linhas de drenagem e espigões divisores. O procedimento descrito anteriormente demanda bastante tempo, embora seja didaticamente recomendável, por resumir algumas etapas do mapeamento digital utilizado atualmente.
Outra maneira simples de compilar mapas expeditos é usar alguns instrumentos construídos com esta finalidade. O mais conhecido destes equipamentos é o estereopantômetro, da fábrica Zeiss Jena, da antiga Alemanha Oriental, hoje absorvida pela Zeiss. Outro instrumento deste tipo é o stereocomparagraph, da Alan Gordon Enterprises. Na figura 7.2 mostra-se o estereopantômetro Zeiss. Estes instrumentos são estereoscópios de espelhos e barra de paralaxe aos quais foram acoplados alguns acessórios: uma mesa de luz com vidro fosco, com a linha de vôo já desenhada; um carro para o movimento x e y do estereoscópio e da barra; uma folha de acetato transparente para a proteção das fotos e uma lapiseira para o desenho das feições. A barra de paralaxe recebe a adaptação de um parafuso para compensação manual da paralaxe em y, que aparece por várias razões, a serem discutidas adiante.
Para utilizar o estereopantômetro deve-se, inicialmente, orientar as fotos como descrito nas seções anteriores, com a vantagem de já haver gravada na mesa de luz, uma linha de vôo. As fotos são fixadas e podem ser
Estereoscópiode espelhos
Oculares
Mesa de luz
Estereômetro oubarra de paralaxe
Parafusos deajuste da barra
Lapiseira paradesenho
Área de desenho
Carroparalelo
Micrômetroda barra
Parafuso decompensação da
paralaxe em y
Cobertura deacetato para
proteção das fotos
Figura 7.2 O estereopantômetro Zeiss.para restituição expedita.

Fotogrametria Básica - Métodos Fotogramétricos Aproximados Antonio M. G. Tommaselli
2009 180
cobertas com um acetato transparente, para protegê-las durante a operação. A barra de paralaxe deve ser, então, fixada e regulada para permitir a observação correta e evitando-se leituras negativas no modelo. O estereoscópio e a barra podem ser movimentados livremente sobre o estereomodelo, sem os inconvenientes do estereoscópio normal, como esbarrar sobre o par e perder a estereoscopia e a orientação seguidamente.
Para traçar as feições planimétricas (rodovias, cercas, divisas, construções, rios, vegetação, etc...) deve-se colocar a marca flutuante tocando o terreno sobre os pontos que descrevem a feição e marcá-los com a lapiseira conectada ao carro XY, sobre a folha de papel. Outra possibilidade é manter o lápis sobre o papel e percorrer as feições de modo contínuo. Registrando-se uma leitura adequada na barra, é possível traçar diretamente as curvas de nível, mantendo-se a marca flutuante em contato com o terreno enquanto a barra é movimentada sobre o estereomodelo, sem alterar a leitura da barra. O cálculo das leituras a serem introduzidas, pode ser feito de várias maneiras, que serão discutidas a seguir.
Para calcular qual leitura corresponde a determinada altitude, que dará origem a uma curva, basta realizar o processo inverso ao cálculo de altitudes a partir de medidas de paralaxe. Qualquer das equações usadas anteriormente podem ser empregadas.
Wolf (1980) emprega a equação de paralaxe básica, que é:
)'(.
aaa xx
fBHh−
−= (7.4)
Para obter a paralaxe, em função da altura (eq. 7.5):
)(.
aa hH
fBp−
= (7.5)
Lembrando que a paralaxe é calculada a partir da leitura e da
constante como:
aa lCp += (7.6) Como as curvas de nível são traçadas em altitudes e com
eqüidistância preestabelecidas, em função da escala do mapeamento, sabe-se a priori a altitude que se deseja e, a partir da equação (7.5) pode-se calcular a paralaxe do ponto. Usando a equação (7.7) pode-se calcular a leitura a ser introduzida na barra:
Cpl aa −= (7.7)

Fotogrametria Básica - Métodos Fotogramétricos Aproximados Antonio M. G. Tommaselli
2009 181
Pode-se tomar o seguinte exemplo: Suponha uma câmara com distância focal de 304 mm, voando a uma altitude de 2.320m em relação ao nível médio dos mares, com uma aerobase de 410m. A constante da barra foi calculada como 68 mm.
Antes de calcular as leituras que corresponderão às cotas das curvas de nível, é interessante medir as paralaxes e calcular as altitudes do ponto mais alto e do ponto mais baixo do modelo, para verificar quais são as curvas que deverão ser traçadas. Estas altitudes são calculadas pelas fórmulas descritas nas seções anteriores. No exemplo, supondo que o ponto mais baixo tem cota 796,8 m e o ponto mais alto tem cota 854,3 m, deverão ser traçadas as curvas 800 a 850m.
Deseja-se calcular as leituras a serem introduzidas na barra para traçar as curvas de nível de 800, 810, 820, 830, 840 e 850m. Os resultados são mostrados na tabela 7.1, deixando-se para o leitor os cálculos nas últimas linhas.
Tabela 7.1 Cálculo das leituras da barra para traçado direto de curvas de nível.
Altitude da curva
H (m) H-h (m)
)(.
aa hH
fBp−
= (mm) Cpl aa −=
(mm)
800 1520 82,00 14,00 810 1510 82,54 14,54 820 1500 83,09 15,09 830 1490 840 850
Da mesma maneira que no traçado direto sobre a foto, o mapa
traçado pelo estereopantômetro estará em projeção perspectiva, além de estar afetado pelos erros devido à inclinação da foto da esquerda. Em áreas de pequena variação de relevo, o efeito de perspectiva causa pouca variação na posição planimétrica dos pontos, mas em áreas de relevo acentuado é necessário introduzir correções.
Outra possibilidade é usar a equação de diferenças de nível, particularmente quando não se conhecem os dados de altitude de vôo ou não estão disponíveis pontos de controle. Neste caso, o mais razoável é tomar como origem o centro perspectivo da foto da esquerda e, em relação a este ponto de referência, traçar as curvas de nível. Basta usar a leitura da barra neste ponto como origem e calcular as diferenças de paralaxe que corresponderão a uma determinada diferença de nível, subtraindo-se ou somando-se, conforme a curva a ser traçada esteja acima ou abaixo do ponto de referência.
Partindo-se da equação de cálculo de desníveis:

Fotogrametria Básica - Métodos Fotogramétricos Aproximados Antonio M. G. Tommaselli
2009 182
)'(.
pbpzh
Δ+Δ
=Δ (7.8)
Manipulando-se algebricamente:
pzpbh Δ=Δ+Δ .)'.( Finalmente:
)('.
hzhbp
Δ−Δ
=Δ (7.9)
Aplicando-se a equação acima ao exemplo anterior, considerando a
eqüidistância de 10m, o ponto de altitude 800m como referência e supondo-se, ainda, que a fotobase da foto da direita (b’) seja 88mm, obtém-se:
Δp = (88x10)/(1520-10) = 0,58 mm Observa-se uma pequena discrepância em relação ao valor obtido
anteriormente, que pode ser atribuída às várias hipóteses simplificadas usadas nas equações.
7.5 FONTES DE ERROS NO CÁLCULO DE ALTITUDES COM A BARRA
DE PARALAXE.
Como já foi mencionado brevemente, o processo de medição de alturas com a barra de paralaxe é aproximado, pois parte-se do pressuposto de que as fotografias são perfeitamente verticais e tomadas de uma mesma altitude. Na prática, entretanto, é impossível tomar fotografias aéreas com estas condições, o que provoca uma deformação no modelo estereoscópico visualizado.
Várias são as fontes de erros que influem na precisão final das altitudes calculadas pelos processos descritos anteriormente:
a) as fotografias não são normais:
• o eixo ótico é ligeiramente inclinado (não vertical); • as fotos não tem a mesma altitude (variação da altitude de vôo) e,
portanto, não tem exatamente a mesma escala;
b) as fotografias possuem erros sistemáticos: • existem distorções óticas nas fotografias que não foram
compensadas; • a distância focal calibrada pode sofrer variações com o tempo;

Fotogrametria Básica - Métodos Fotogramétricos Aproximados Antonio M. G. Tommaselli
2009 183
• o centro fiducial não coincide com o ponto principal da fotografia; • o papel fotográfico “trabalha”, isto é, sofre dilatação ou contração de
acordo com as variações de umidade e temperatura; • a refração atmosférica produz algumas distorções nas fotos, que
também não são compensadas neste processo simplificado;
c) são cometidos erros de orientação e medição: • ocorrem pequenos erros na marcação do centro fiducial e na
transferência do centro para a foto vizinha; este mesmo erro se repete no centro da segunda foto;
• ocorre um erro no alinhamento das fotos sobre a linha de vôo; • a medição das fotobases b e b’ e das coordenadas dos pontos na
foto é feita com escalas com erro de décimos de milímetros; • a medição das paralaxes com a marca flutuante está sujeita à
acuidade visual e, mesmo com a prática existe uma flutuação probabilística nestas medidas;
d) as coordenadas dos pontos de controle não são isentas de erro:
• as coordenadas dos pontos de controle (quando disponíveis) foram extraídas de uma carta ou determinadas em campo (processo mais preciso), mas em qualquer caso sempre haverá um erro às coordenadas destes pontos.
O leitor pode se questionar sobre a utilidade do processo,
considerando a presença de tantos erros não compensados. É importante ressaltar que, para aplicações de requeiram baixa precisão, estes erros serão de pequena magnitude e adequados ao processo. Quando se exigir maior precisão deve-se recorrer ao processo fotogramétrico de restituição com instrumentos restituidores, que compensam a maior parte dos erros ou, pelo menos, os de maior magnitude. Este processo será visto nos capítulos subsequentes.
É possível avaliar qual a precisão a ser obtida na medida de altitudes, usando a lei de propagação de erros ou de covariâncias. Partindo-se da equação de paralaxe:
)'(.
aaa xx
fBHh−
−= (7.10)
Aplicando-se a lei de propagação de erros a todas as variáveis:
22
22
22
22
2a
a
a dppFdB
BFdf
fFdH
HFdh ⎟⎟
⎠
⎞⎜⎜⎝
⎛∂∂
+⎟⎠⎞
⎜⎝⎛
∂∂
+⎟⎟⎠
⎞⎜⎜⎝
⎛∂∂
+⎟⎠⎞
⎜⎝⎛
∂∂
= (7.11)
onde:

Fotogrametria Básica - Métodos Fotogramétricos Aproximados Antonio M. G. Tommaselli
2009 184
1=⎟⎠⎞
⎜⎝⎛
∂∂HF
ap
fBF
=⎟⎠⎞
⎜⎝⎛
∂∂
ap
BfF
=⎟⎟⎠
⎞⎜⎜⎝
⎛∂∂
2
.
aa pfB
pF
=⎟⎟⎠
⎞⎜⎜⎝
⎛∂∂
Substituindo as derivadas parciais na equação de propagação de
erros:
22
22
22
22 .
aaaa
a dpp
fBdfpBdB
pfdHdh ⎟⎟
⎠
⎞⎜⎜⎝
⎛+⎟⎟
⎠
⎞⎜⎜⎝
⎛+⎟⎟
⎠
⎞⎜⎜⎝
⎛+= (7.12)
Se forem considerados desprezíveis os erros em H, B e f, com o
objetivo de avaliar apenas o efeito do erro acidental na medida de paralaxe, a equação acima fica simplificada para:
aa
a dpp
fBdh ⎟⎟⎠
⎞⎜⎜⎝
⎛= 2
. (7.13)
Krauss (1993) expressa de modo ligeiramente diferente a exatidão das coordenadas Z (profundidade) obtidas pelo processo fotogramétrico, considerando o caso normal – fotografias tomadas com eixos óticos perpendiculares à base:
2 2 2 2 2 2' . . ' ..Z B f px
H = f d B d H dB fσ ± + + (7.12_a)
onde: σZ é o erro esperado na profundidade; B é a base, isto é, a separação entre as câmaras; H’ é a altura de vôo; f é a distância focal; dpx é o erro esperado na medida de paralaxe; dB é o erro esperado na medida da base; df é o erro esperado na distância focal da câmara; A precisão a ser obtida com este procedimento é fortemente dependente da configuração, especialmente da relação Base/Altura e da precisão com que são medidas as coordenadas na imagem. Negligenciando os erros na medida da base e o erro na distância focal, a expressão fica:

Fotogrametria Básica - Métodos Fotogramétricos Aproximados Antonio M. G. Tommaselli
2009 185
' ' ..z px
H= H dB f
σ ± (7.13_b)
A parcela H’/f é o denominador da escala da foto (mf) e B/H’ é a relação base/altura. Também por propagação de erros pode-se chegar à precisão das coordenadas X,Y para o caso normal (Kraus, 1993):
( )2
2' .X f px f xx H = m d m df Bσ
⎛ ⎞+⎜ ⎟
⎝ ⎠ (7.14)
( )2
2' .Y f px f yy H = m d m df Bσ
⎛ ⎞+⎜ ⎟
⎝ ⎠ (7.15)
onde: mf é o denominador da escala da foto; dx e dy são os erros de medida das fotocoordenadas na imagem. Observando-se as equações anteriores pode-se chegar às denominadas leis gerais da exatidão fotogramétrica, como compiladas por Kraus (1993) 1. Para uma relação Base/Altura (B/H’) constante o Erro Médio Quadrático (EMQ) das coordenadas XYZ são diretamente proporcionais à escala da foto. Consequentemente pode-se atingir qualquer exatidão desejada escolhendo-se a escala da foto adequada; 2. Considerando a escala da foto constante o EMQ em Z é inversamente proporcional à relação B/H’. O EMQ planimétrico ou das coordenadas XY, por outro lado, tem um aumento insignificante com a diminuição da relação B/H’. Se a relação B/H’ estiver em torno de 1, então as 3 coordenadas X,Y,Z terão exatidão similar; 3. Para uma base constante o EMQ em Z aumenta proporcionalmente ao quadrado da altura de vôo. As regras acima são também mencionadas por outros autores, como Blachut (1979), Slama (1980), Wolf (1983) e Moffitt & Mikhail (1980). É importante mencionar, ainda, o erro planimétrico que é causado pelo erro de pontaria em Z, particularmente no caso da produção de ortoimagens. Portanto, no caso de ortoimagens, pode-se esperar menores erros planimétricos com câmaras normais ou de ângulo pequeno.

Fotogrametria Básica - Métodos Fotogramétricos Aproximados Antonio M. G. Tommaselli
2009 186
Como exemplo, consideremos agora duas câmaras, uma com focal 300mm e outra com focal 150mm. Para calcular o fator de erro altimétrico entre ambas, pode-se fazer uma relação entre as expressões:
300300
300 300
150150
150 150
' ' ..' ' ..
px
px
H H dB ffalt H H dB f
= (7.17)
Os termos H’/f e dpx se anulam (denominador da escala da foto), ou seja, o fator de aumento do erro altimétrico é dado pela relação entre os inversos das relações base/altura. Considerando que as relações base/altura para as câmaras em questão são: B/H’300 = 0,3 B/H’150 = 0,6 Então o fator de erro altimétrico será 2, ou seja, espera-se um erro altimétrico duas vezes maior ao usar câmaras com focal 300mm em relação a uma câmara 150mm.
Usando como exemplo a situação apresentada na tabela 7.1 e
supondo um erro na medida de paralaxe de 0.08mm, o erro na altitude calculada seria:
mmmmm
mmmdha 48,1))(08.0.())(82(
)(304).(4102 =⎟
⎟⎠
⎞⎜⎜⎝
⎛=
O erro cometido na medida de paralaxe pode ser avaliado através
de uma série de leituras no mesmo ponto, calculando-se a média e o desvio padrão e usando este último valor como o erro observacional.
É importante ressaltar que a estimativa de erro calculada anteriormente leva em conta apenas o erro na medida da paralaxe.
7.6 PARALAXE EM Y Ao trabalhar inicialmente com o estereoscópio de espelhos, não se percebe com facilidade a existência da paralaxe em y (ou paralaxe vertical), pois o estereoscópio e a barra são movimentados independentemente. Ao utilizar instrumentos do tipo do estereopantômetro, entretanto, é freqüente observar pontos na periferia do modelo estereoscópico, nos quais as marcas flutuantes não se fundem no sentido do eixo y. Esta paralaxe aparece por

Fotogrametria Básica - Métodos Fotogramétricos Aproximados Antonio M. G. Tommaselli
2009 187
várias causas que estão ligadas à não verticalidade perfeita das fotografias aéreas e à orientação imprecisa do estereopar. Uma das premissas para observação estereoscópica confortável é a de que as linhas ligando pontos homólogos nas fotos de um estereopar sejam paralelas à linha de vôo (Figura 7.3.(a)). Quando isto não ocorre então há paralaxe em y no ponto. A principal conseqüência da existência de paralaxe em y é uma certa fadiga ocular. Se houver excesso de paralaxe em y, pode mesmo ser inviável a observação estereoscópica.
Uma das causas mais comuns de paralaxe em y é a orientação incorreta do estereopar sobre a linha de vôo. Isto ocorre tanto pela transferência incorreta dos pontos principais quanto pelo posicionamento impreciso sobre a linha de vôo. Na figura 7.3.(b) pode-se observar esta
(a)
(b) Figura 7.3 Paralaxe em y ou paralaxe vertical:
(a) Estereopar orientado corretamente; (b) Estereopar com erro na orientação, que causa paralaxe em y.
Linha de vôo
Distância entre pontos homólogos

Fotogrametria Básica - Métodos Fotogramétricos Aproximados Antonio M. G. Tommaselli
2009 188
situação, pois a foto da direita foi orientada incorretamente, causando paralaxe em y nos pontos a e b e, provavelmente, em todo o modelo. Outra causa comum de paralaxe em y é a variação na altitude de vôo entre fotos sucessivas, durante a cobertura fotogramétrica. Na figura 7.4.(a) a foto da esquerda foi tomada à uma altitude de vôo menor do que a da foto da direita, possuindo, consequentemente, uma escala maior. Mesmo que as fotos fossem perfeitamente verticais e que o modelo fosse orientado corretamente, a paralaxe em y apareceria, como pode ser visto na figura 7.4. Para minimizar esta paralaxe deve-se mover a foto da direita para cima, quando se estiver trabalhando na parte superior do modelo e movê-la para baixo, quando na parte inferior.
A inclinação das fotos durante a tomada é outra das causas importantes de aparecimento de paralaxe em y no modelo e que só pode ser corrigida com a restituição rigorosa do estereopar. Na figura 7.4.(b) a foto da esquerda é perfeitamente vertical e mostra-se um quadrado composto pelos pontos a, b, c e d, que está sobre um terreno plano. Na foto da direita o quadrado aparece deformado devido à inclinação da foto em torno do eixo y
(a)
(b)
Figura 7.4 Causas da paralaxe em y:
(a) Variação na altitude de vôo; (b) Inclinação da foto;

Fotogrametria Básica - Métodos Fotogramétricos Aproximados Antonio M. G. Tommaselli
2009 189
(ϕ), o que causa a paralaxe em y. Na prática, as inclinações ocorrem tanto em x quanto em y e o efeito é de difícil predição. Como os vôos são feitos procurando-se manter a câmara verticalizada, os efeitos das inclinações e das variações da altitude de vôo, são muito pequenos. Na maioria das vezes, o aparecimento de paralaxe em y de grande magnitude indica uma orientação imprecisa do estereopar sobre a linha de vôo. 7.7 CORREÇÃO DAS PARALAXES USANDO PONTOS DE CONTROLE A existência de todos aqueles erros mencionados nas seções anteriores faz com que as paralaxes medidas estejam afetadas por duas componentes: uma sistemática e outra acidental. A componente sistemática pode ser eliminada ao passo que a componente acidental, normalmente devida aos erros de leitura e observação, não é conhecida. A existência destes erros, que causam uma deformação no modelo, faz com que dois pontos de mesma altitude tenham paralaxes diferentes. Para eliminar os erros sistemáticos pode-se recorrer a pontos de apoio previamente conhecidos, que podem ser determinados no campo, por processos topográficos ou geodésicos, por aerotriangulação ou, ainda, por interpolação em cartas existentes. Identifica-se, inicialmente, estes pontos de apoio nas fotos e faz-se a leitura de paralaxe nestes, usando a marca flutuante e a barra de paralaxe. O princípio básico do método de correção das paralaxes é determinar quais as correções nos pontos de apoio e depois interpolar os valores de correção para os demais pontos. Para determinar a correção nos pontos de apoio, compara-se o valor medido da paralaxe com o valor calculado a partir da altitude conhecida. Esta paralaxe “ideal”, que existiria se o modelo não estivesse deformado, pode ser calculada com a expressão abaixo, já apresentada nas seções anteriores:
)(.
aa hH
fBp−
= (7.16)
A altura de vôo em relação a um ponto conhecido pode ser
calculada como:
cc p
fBhH .=− (7.17)
Para considerar a paralaxe de um ponto em relação a um ponto de controle, já foi desenvolvida a expressão:

Fotogrametria Básica - Métodos Fotogramétricos Aproximados Antonio M. G. Tommaselli
2009 190
)( ca
ca hHpphh −
Δ+= (7.18)
Substituindo as expressões (7.16) e (7.17) em (7.18), obtém-se:
)(.
..
a
cca
hHfBp
fBphh
−
Δ=−
Após algumas manipulações algébricas:
ca
ca phHhh
p)()(
−−
=Δ (7.19)
lembrando que: ca ppp −=Δ A expressão (7.19) permite o cálculo da diferença de paralaxe entre um ponto qualquer a e um ponto de controle c. A construção de um gráfico de correção de paralaxe exige alguns pontos de controle regularmente distribuídos pelo modelo, como na figura 7.5, onde estão assinalados com um círculo. No exemplo mostrado na figura 7.5, estão disponíveis 6 pontos (de A a F), na área de superposição longitudinal de um par de fotos obtidas a partir de uma altura de vôo de 2.103,12m. As altitudes destes pontos de apoio são mostradas na segunda coluna da tabela 7.2. e as leituras feitas com a barra de paralaxe sobre estes mesmos pontos são mostradas na terceira coluna. Tabela 7.2 Planilha para o cálculo das correções de paralaxe (Adaptado de
Wolf, 1980)
Pto
Altitude (m)
Leitura da
Barra (mm)
Diferenças de
paralaxe Δp’ = li-lc (mm)
Diferenças de paralaxe
calculadas, (mm)
ca
ca phHhh
p)()(
−−
=Δ
Correção
Cp = Δp’-Δp (mm)
A 326,44 19,86 0,64 0,55 0,09 B 345,94 20,81 1,59 1,46 0,13 C 314,55 19,22 ------------- -------- ------ D 335,28 20,27 1,05 0,96 0,09 E 360,88 21,65 2,43 2,17 0,26 F 340,15 20,57 1,35 1,19 0,16

Fotogrametria Básica - Métodos Fotogramétricos Aproximados Antonio M. G. Tommaselli
2009 191
Seleciona-se um dos pontos de controle como referência, normalmente o de menor altitude, e calculam-se as diferenças de paralaxe em relação a este ponto (quarta coluna da tabela 7.2). Como as altitudes verdadeiras dos pontos de controle são conhecidas é possível calcular as diferenças de paralaxe corretas entre estes pontos e o ponto c, tomado como referência. Utiliza-se, para tanto, a equação (H) e os resultados são mostrados na quinta coluna da tabela 7.2. Se não houvesse nenhum tipo de erro e o modelo não estivesse deformado, os resultados das colunas (4) e (5) deveriam ser iguais. Como isto não acontece, é possível utilizar as diferenças como correções a serem introduzidas à diferenças de paralaxes medidas. Estas correções são calculadas e mostradas na sexta coluna da tabela 7.2. Com estas correções será possível interpolar correções para quaisquer paralaxes medidas no modelo. Para interpolação das correções é possível gerar um gráfico de correções de paralaxe (figura 7.5) ou usar um modelo polinomial de interpolação, que será descrito adiante.
Para construir o gráfico de correção de paralaxe, coloca-se um overlay transparente sobre uma das fotos do modelo, marcando-se as posições dos pontos de controle. Anota-se as correções de paralaxe ao lado de cada ponto e interpola-se curvas de correção, como se fossem isolinhas.
Pontos de controle vertical
Figura 7.5 Gráfico de correção de paralaxe (Fonte: Wolf, 1980)

Fotogrametria Básica - Métodos Fotogramétricos Aproximados Antonio M. G. Tommaselli
2009 192
A partir deste gráfico (figura 7.5) pode-se aplicar a correção a qualquer ponto que tenha sido medido. Por exemplo, o ponto 1, mostrado na figura, foi lido com a barra de paralaxe e a diferença em relação ao ponto de referência c foi calculada. Na tabela 7.3 mostra-se a seqüência de cálculos para a aplicação das correções. Na segunda coluna está a leitura da barra, na terceira a diferença em relação ao ponto de referência e na quarta o valor da correção, interpolado do gráfico de correção, mostrado na figura 7.5. Aplica-se esta correção interpolada ao valor da terceira coluna, gerando-se uma diferença de paralaxe corrigida. Na última coluna, mostra-se o valor da altitude do ponto 1, determinado a partir da diferença de paralaxe corrigida. Deixa-se para o leitor, a título de exercício, a interpolação e o cálculo para os demais pontos. Tabela 7.3 Cálculo de elevações a partir de paralaxes corrigidas. Pto Leitura
da Barra (mm)
Diferença de paralaxe medidas Δp’ = li-lc
(mm)
Correções de paralaxe
interpoladas do gráfico (mm)
Diferenças de paralaxe corrigidas Δp=Δp’- Cp
(mm)
Altitude (m)
)( ca
ca hHpphh −
Δ+=
1 19,82 0,60 0,07 0,53 326,136 2 19,32 316,1 3 18,63 300,6 4 19,01 307,6 5 21,67 364 6 20,60 340,8 7 21,01 348,4 8 21,75 364,6 Outra possibilidade de interpolação das correções a serem introduzidas é utilizar um polinômio de interpolação, ao invés de gerar um gráfico de interpolação. Para tanto pode-se utilizar a equação (7.20) abaixo:
243210 ..... iiiiip xayxayaxaaC ++++= (7.20)
Para obter os coeficientes a1, ..., a4 deve-se montar um sistema de equações lineares com os valores conhecidos das correções e coordenadas dos pontos de apoio (no mínimo 5 pontos) e determiná-los como incógnitas. Se estiverem disponíveis mais que 5 pontos de apoio, então se pode determinar os coeficientes usando o Método dos Mínimos Quadrados, tomando-se as correções conhecidas (nos pontos de apoio) como observações e os coeficientes como incógnitas. Uma vez determinados os coeficientes é possível calcular as correções para qualquer ponto medido, desde que suas coordenadas x e y sejam conhecidas, simplesmente usando a equação (7.20).

Fotogrametria Básica - Métodos Fotogramétricos Aproximados Antonio M. G. Tommaselli
2009 193
7.8 CÁLCULO DA AEROBASE E ALTITUDE DE VÔO A altura de vôo (Hv) e a aerobase são elementos fundamentais para o cálculo de desníveis a partir de medidas de paralaxe. A altura de vôo pode ser facilmente calculada usando a expressão:
)___..( fotodaescaladenfH v = (7.21) onde: f é a distância focal da câmara; A altitude de vôo (H), por outro lado, pressupõe o conhecimento de altitudes de referência sobre o terreno. Considerando hm a altitude de um plano médio, a altitude de vôo poderia ser calculada como:
H = Hv + hm (7.22) A aerobase (B) pode ser calculada, de modo aproximado, a partir da média das fotobases:
fotoescdenbbB __.2
)'( += (7.23)
Se houver um ponto de controle no estereopar, com altitude conhecida, a altitude de vôo pode ser calculada usando a equação:
aa p
fBhH .+= (7.24)
Na expressão anterior, deve-se conhecer a aerobase e a paralaxe do ponto de controle. De modo análogo, se a altitude de vôo for conhecida, usando a mesma expressão (7.24) é possível calcular a aerobase B:
( )f
phHB a
a .−= (7.25)
Pode-se calcular a aerobase de modo mais preciso usando uma distância conhecida (Wolf, 2000). Sabe-se que a distância planimétrica entre dois pontos A e B é dada por:
( ) ( )22ABABAB YYXXD −+−= (7.26)

Fotogrametria Básica - Métodos Fotogramétricos Aproximados Antonio M. G. Tommaselli
2009 194
Lembrando que as coordenadas dos pontos podem ser expressas em função da aerobase, das fotocoordenadas e da paralaxe:
a
aA p
xBX = (6.14)
a
aA p
yBY = (6.15)
e substituindo na (7.26), leva à seguinte expressão para a distância.
22....
⎟⎟⎠
⎞⎜⎜⎝
⎛−+⎟⎟
⎠
⎞⎜⎜⎝
⎛−=
a
a
b
b
a
a
b
bAB p
yBpyB
pxB
pxB
D (7.27)
Finalmente, a aerobase pode ser calculada como:
22
⎟⎟⎠
⎞⎜⎜⎝
⎛−+⎟⎟
⎠
⎞⎜⎜⎝
⎛−
=
a
a
b
b
a
a
b
b
AB
py
py
px
px
DB (7.28)