
Cap´ıtulo 1 Electrost´atica: cargas y...
231
Cap´ ıtulo 1 Electrost´ atica: cargas y campos. versi´ on final 3.0, 28 de Mayo del 2007 En este cap´ ıtulo estudiaremos los conceptos esenciales de la F´ ısica de las cargas el´ ectricas estacionarias, es decir, la electrost´ atica. Las secciones que veremos: Algo de historia. Carga el´ ectrica; conservaci´ on, invariancia y cuantizaci´ on. Ley de Coulomb. Energ´ ıa de un sistema de cargas. Campo el´ ectrico. Flujo el´ ectrico. Ley de Gauss. Ejemplo de evaluaci´ on del campo el´ ectrico. Fuerza sobre una carga superficial. Energ´ ıa asociada a un campo el´ ectrico. 1.1. Algo de historia. La electricidad a trav´ es de los fen´ omenos de la electrost´ atica se conoce desde tiempos muy antiguos. Teofrato (321 AC) y probablemente Tales (600 AC) sab´ ıan que el ´ ambar al ser frotado con otras substancias secas adquir´ ıan la habilidad de atraer cuerpos livianos como plumas o trozos de paja. Cerca de 2000 a˜ nos despu´ es el m´ edico de la Reina Isabel I de Inglaterra, William Gilbert (1544-1603) us´ o la palabra griega para ´ ambar, elektron, para describir estas fuerzas que llam´ o vis electrica. Tambi´ en se observ´ o que existen dos tipos de electricidad. Por ejemplo, si una barra de vidrio se frota con seda, estos dos cuerpos quedan cargados con dos tipos distintos de elec- tricidad. As´ ı , dos barras frotadas con seda se repelen. Benjam´ ın Franklin (1706-1790) le dio 1
Transcript of Cap´ıtulo 1 Electrost´atica: cargas y...
Capıtulo 1
Electrostatica: cargas y campos.
version final 3.0, 28 de Mayo del 2007
En este capıtulo estudiaremos los conceptos esenciales de la Fısica de las cargas electricasestacionarias, es decir, la electrostatica. Las secciones que veremos:
Algo de historia.
Carga electrica; conservacion, invariancia y cuantizacion.
Ley de Coulomb.
Energıa de un sistema de cargas.
Campo electrico.
Flujo electrico.
Ley de Gauss.
Ejemplo de evaluacion del campo electrico.
Fuerza sobre una carga superficial.
Energıa asociada a un campo electrico.
1.1. Algo de historia.
La electricidad a traves de los fenomenos de la electrostatica se conoce desde tiemposmuy antiguos. Teofrato (321 AC) y probablemente Tales (600 AC) sabıan que el ambaral ser frotado con otras substancias secas adquirıan la habilidad de atraer cuerpos livianoscomo plumas o trozos de paja. Cerca de 2000 anos despues el medico de la Reina Isabel Ide Inglaterra, William Gilbert (1544-1603) uso la palabra griega para ambar, elektron, paradescribir estas fuerzas que llamo vis electrica.
Tambien se observo que existen dos tipos de electricidad. Por ejemplo, si una barra devidrio se frota con seda, estos dos cuerpos quedan cargados con dos tipos distintos de elec-tricidad. Ası , dos barras frotadas con seda se repelen. Benjamın Franklin (1706-1790) le dio
1
2 CAPITULO 1. ELECTROSTATICA: CARGAS Y CAMPOS.
el nombre de positiva a la electricidad con que queda la barra de vidrio y negativa a la dela seda. Ahora se sabe que en este experimento electrones son traspasados de la barra a laseda. Ası decimos que los electrones tienen carga negativa.
1.2. Carga electrica; conservacion, invariancia y cuan-
tizacion.
Hechos experimentales que se conocen sobre la carga:
Existen dos variedades: Positivas y Negativas.
Las de igual signo se repelen.
Las de distinto tipo se atraen.
1.2.1. Propiedades de la carga.
Se conserva.
La carga total de un sistema aislado, es decir, la suma algebraica de las cargas positivasy negativas en cierto instante, no varıa nunca.
Por un sistema aislado entendemos: aquel en el que no esta permitido el flujo de materiaa traves de sus paredes. Un ejemplo de la conservacion de la carga es la creacion depares (electron-positron.)
La carga es un invariante relativista.
Esta cuantizada.
En 1909 Millikan demostro experimentalmente que la carga siempre se presenta comomultiplo entero de una unidad fundamental de carga que llamaremos e.
Se dice que la carga esta cuantizada, es decir
Q = Ne N ∈ Z .
Se ha mostrado experimentalmente que la diferencia en el valor absoluto de las cargade un proton y de un electron si existiera serıa menor que 10−20e
Existen los quark con carga +2e/3 (u), -e/3 (d), -e/3 (s), +2e/3 (c), -e/3 (b), +2e/3(t). Pero no se detectan quark libres. p(uud) y n(ddu). La cuantizacion de la cargaescapa del alcance del electromagnetismo clasico. Nosotros lo ignoraremos, usaremosdistribuciones continuas de carga.

1.3. LA LEY DE COULOMB. 3
1.3. La Ley de Coulomb.
12
0
r r
1
1
2
2r
La fuerza de interaccion entre dos cargas es la Ley de Coulomb
~F12 =kq1q2r212
r12 =kq1q2r312
~r12 (1.1)
donde ~r12 = ~r1 − ~r2, r12 = |~r12|, r12 = ~r12/|~r12|, ~F12, es la fuerza sobre q1 debido a q2. Losqi, son escalares con sus signos respectivos y finalmente k, tiene en cuenta las unidades. Elvector unitario r12 indica que la fuerza es paralela a la recta que une a las dos cargas.
Sabemos que por accion y reaccion: ~F12 = −~F21.Las unidades: si r12 [cm], F [dinas], qi [ues] k = 1. Si por el contrario r12 [m], F [Newton],
qi [Coulomb] entonces
k =1
4πε0= 8.9875× 109
[Nm2
C2
], (1.2)
La constante ε0 se conoce como constante dielectrica o permitividad del vacıo, y tiene unvalor:
ε0 = 8.8542× 10−12
[C2
Nm2
]. (1.3)
El factor de conversion entre [Coulomb] y [ues]
1[C] = 2.998× 109 [ues] , (1.4)
y la carga del electron en [ues] es
e = 4.803250(21)× 10−10 [ues] (1.5)
Un hecho experimental es que la fuerza con la cual dos cargas interactuan no se modificapor la presencia de una tercera, es mas, sea cual fuere el numero de cargas presentes ennuestro sistema la ley de Coulomb puede utilizarse para calcular la interaccion de cada par.Este hecho es conocido como el Principio de superposicion.
4 CAPITULO 1. ELECTROSTATICA: CARGAS Y CAMPOS.
Una configuracion de cargas qiNi=1 con vectores ~riN
i=1 ejercen una fuerza ~F0 sobre una
partıcula de carga q0 ubicada en ~r0 respecto a algun origen comun. ~F0 se puede escribir:
~F0 =N∑
i=1
q0qir0i
r20i
(1.6)
1.3.1. Ejercicios.
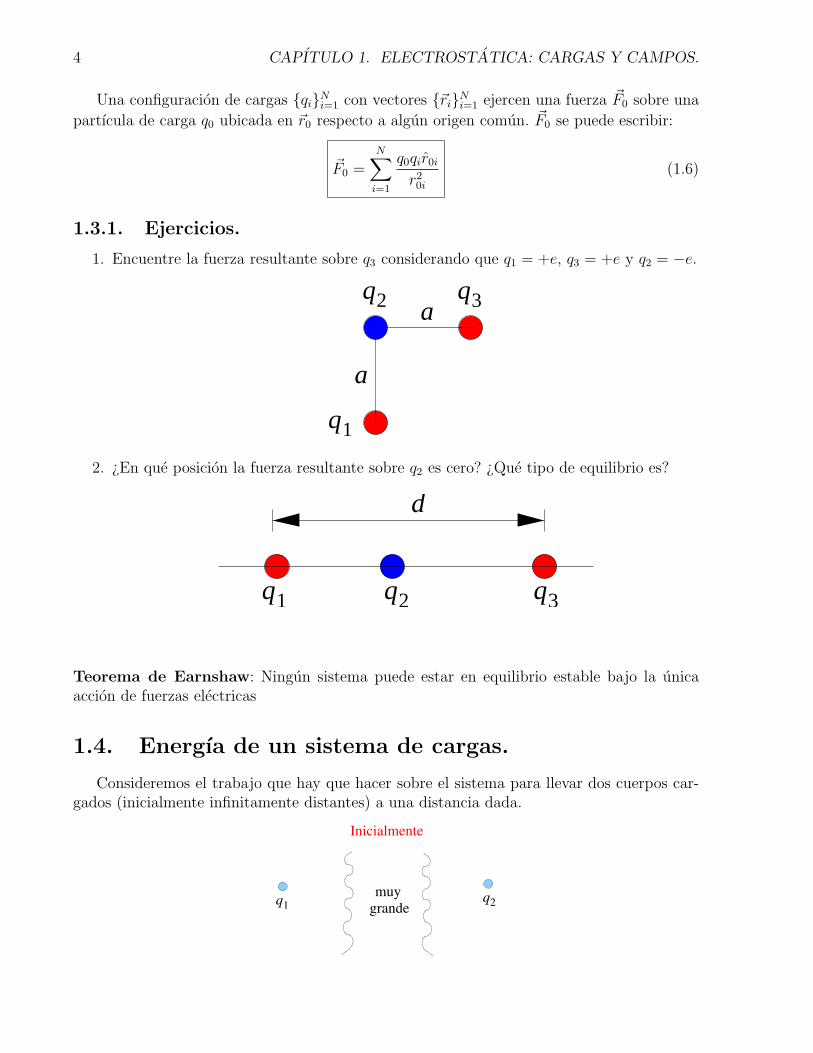
1. Encuentre la fuerza resultante sobre q3 considerando que q1 = +e, q3 = +e y q2 = −e.
q1
q3q2 a
a
2. ¿En que posicion la fuerza resultante sobre q2 es cero? ¿Que tipo de equilibrio es?
q1 q2 q3
d
Teorema de Earnshaw: Ningun sistema puede estar en equilibrio estable bajo la unicaaccion de fuerzas electricas
1.4. Energıa de un sistema de cargas.
Consideremos el trabajo que hay que hacer sobre el sistema para llevar dos cuerpos car-gados (inicialmente infinitamente distantes) a una distancia dada.
q1q2
muygrande
Inicialmente

1.4. ENERGIA DE UN SISTEMA DE CARGAS. 5
q1
q2
r 12
Después
Estamos omitiendo la energıa necesaria para “crear” las partıculas cargadas.
1.4.1. Calculo del trabajo.
W =
∫~F · ~ds =
∫ r12
+∞
q1q2r2
r · dr(−r) = +q1q2
∫ r12
+∞−drr2
=q1q2r12
.
El origen esta en q1 y traemos q2 desde infinito.
q1r
dsq2
F
W =q1q2r12
(1.7)
debe ser mayor que cero si las cargas tienen el mismo signo.
Sabemos que si la Fuerza es conservativa el trabajo es el mismo independiente del caminousado.
cos θds = dr
F ds =−Fdr
q
r
r+dr
θdr
ds
Debido a que la fuerza es central los tramos de camino entre r y r+dr requieren el mismotrabajo, por lo tanto, la Fuerza es conservativa.

6 CAPITULO 1. ELECTROSTATICA: CARGAS Y CAMPOS.
Si acercamos una tercer partıcula a r31 de q1 y a r32 de q2 el trabajo sera
W3 =
∫~F3 · ~ds =
∫(~F31 + ~F32) · ~ds
=
∫~F31 · ~ds+
∫~F32 · ~ds ,
por lo tanto, es la suma de los trabajos
1.4.2. Energıa de un sistema de cargas.
W3 =q1q3r31
+q2q3r32
.
El trabajo total efectuado U , para reunir las tres cargas en estas posiciones, sera por lotanto,
U =q1q2r21
+q1q3r31
+q2q3r32
. (1.8)
U corresponde a la energıa potencial electrica del sistema. El cero de U lo elegimos cuandolas cargas estan infinitamente separadas.
1.4.3. Propiedades de U .
U es independiente del orden de colocacion.
U es independiente del camino.
U solo depende de la disposicion final de las cargas.
En general para un sistema de N cargas qi
U =1
2
N∑j=1
∑k 6=j
qjqkrkj
(1.9)
1.4. ENERGIA DE UN SISTEMA DE CARGAS. 7
1.4.4. Un ejemplo.
−e
−e
−e
−e+2e
b
b
b
−e
−e
−e
−e
U = 8−2e2
(√
3/2)b+
12e2
b+
12e2√2b
+4e2√3b
=4.32e2
b.
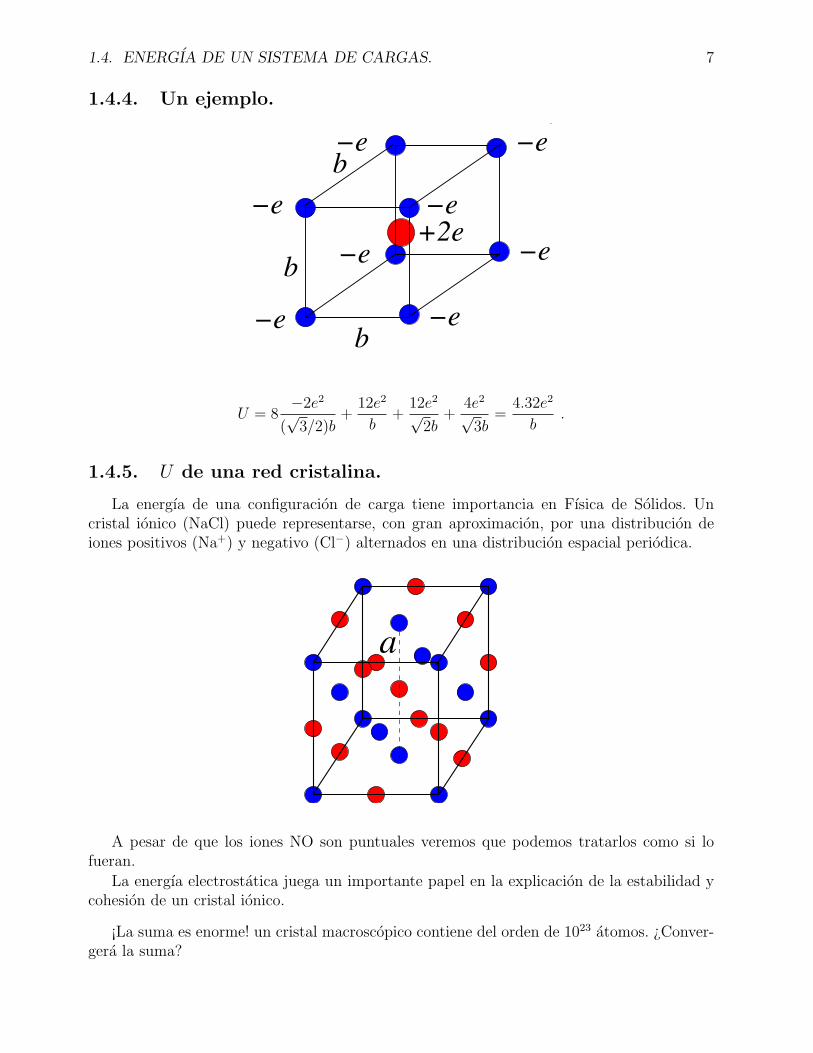
1.4.5. U de una red cristalina.
La energıa de una configuracion de carga tiene importancia en Fısica de Solidos. Uncristal ionico (NaCl) puede representarse, con gran aproximacion, por una distribucion deiones positivos (Na+) y negativo (Cl−) alternados en una distribucion espacial periodica.
a
A pesar de que los iones NO son puntuales veremos que podemos tratarlos como si lofueran.
La energıa electrostatica juega un importante papel en la explicacion de la estabilidad ycohesion de un cristal ionico.
¡La suma es enorme! un cristal macroscopico contiene del orden de 1023 atomos. ¿Conver-gera la suma?

8 CAPITULO 1. ELECTROSTATICA: CARGAS Y CAMPOS.
Lo que se desea hallar es la energıa potencial por unidad de volumen o de masa, la cualdeberıa ser independiente del tamano del cristal. Obviamente 2 gramos de NaCl tiene el doblede energıa que un gramo.
Cualquier ion positivo esta en una posicion equivalente a cualquier otro.
La distribucion de iones negativos en torno a uno positivo es la misma que la de ionespositivos en torno a uno negativo.
Tomemos un ion cualquiera, elijamoslo como centro y sumemos sus interacciones contodos los demas y multipliquemos por el numero total de iones de ambas clases.
U =1
2
N∑j=1
∑k 6=j
qjqkrkj
=1
2N
N∑k=2
q1qkr1k
.
Los terminos principales de la suma anterior son
U =1
2N
[−6e2
a+
12e2√2a− 8e2√
3a+ . . .
].
La serie no converge absolutamente. Este calculo es “delicado”
U = −0.8738Ne2
a,
donde N es el numero de iones.
1.5. El campo electrico.
Un conjunto de cargas qiNi=1 fijas en el espacio y una carga q0 en la posicion (x, y, z), la
fuerza sobre q0 es
~F0 =N∑
j=1
q0qjr20j
r0j .
Dividamos la ecuacion anterior por q0 obteniendo una magnitud vectorial que depende dela estructura del sistema de cargas y de la posicion (x, y, z).
A este vector, el cual es funcion de (x, y, z), lo llamamos el campo electrico originado
por las cargas (qi) y lo denotamos por ~E.
~E(x, y, z) =N∑
j=1
qj r0j
r20j
[dinas
ues
]. (1.10)
La condicion de que las cargas sean fijas se puede reemplazar exigiendo que q0 sea infini-tesimal para no alterar la distribucion de carga inicial, i.e.
~E(x, y, z) = lımq0→0
~F
q0. (1.11)
No es tan riguroso como parece ya que q < e no se observan.
1.5. EL CAMPO ELECTRICO. 9
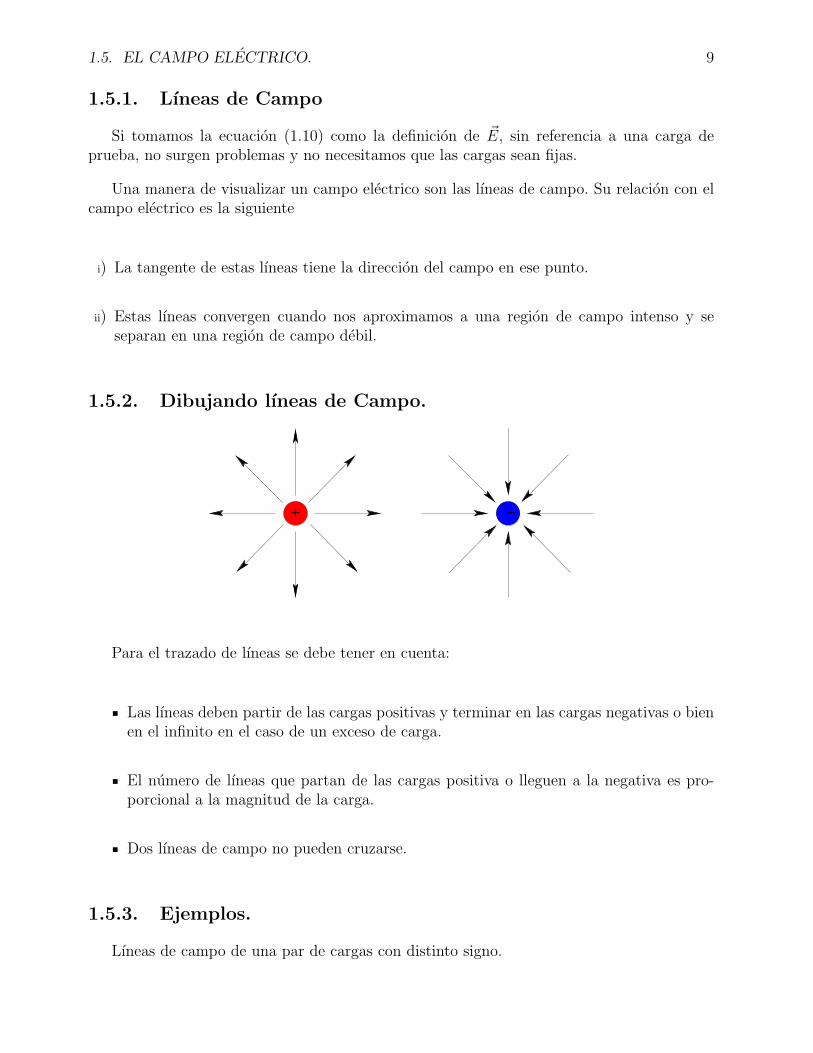
1.5.1. Lıneas de Campo
Si tomamos la ecuacion (1.10) como la definicion de ~E, sin referencia a una carga deprueba, no surgen problemas y no necesitamos que las cargas sean fijas.
Una manera de visualizar un campo electrico son las lıneas de campo. Su relacion con elcampo electrico es la siguiente
i) La tangente de estas lıneas tiene la direccion del campo en ese punto.
ii) Estas lıneas convergen cuando nos aproximamos a una region de campo intenso y seseparan en una region de campo debil.
1.5.2. Dibujando lıneas de Campo.
+ −
Para el trazado de lıneas se debe tener en cuenta:
Las lıneas deben partir de las cargas positivas y terminar en las cargas negativas o bienen el infinito en el caso de un exceso de carga.
El numero de lıneas que partan de las cargas positiva o lleguen a la negativa es pro-porcional a la magnitud de la carga.
Dos lıneas de campo no pueden cruzarse.
1.5.3. Ejemplos.
Lıneas de campo de una par de cargas con distinto signo.

10 CAPITULO 1. ELECTROSTATICA: CARGAS Y CAMPOS.
Lıneas de campo de una par de cargas con igual signo.
1.6. Distribuciones de carga
Ahora vamos a generalizar pasando de cargas puntuales a una distribucion continua decarga.
La distribucion de carga esta caracterizada por una funcion de la posicion ρ(x, y, z) lla-mada densidad de carga volumetrica y tiene dimensiones de [carga/volumen]
Para evaluar el campo
1.6. DISTRIBUCIONES DE CARGA 11
Punto de Observación
Origen
r
r − r ’
r ’
( r )= (x’,y’,z’)ρρ
dx’dy’dz’=d 3r’
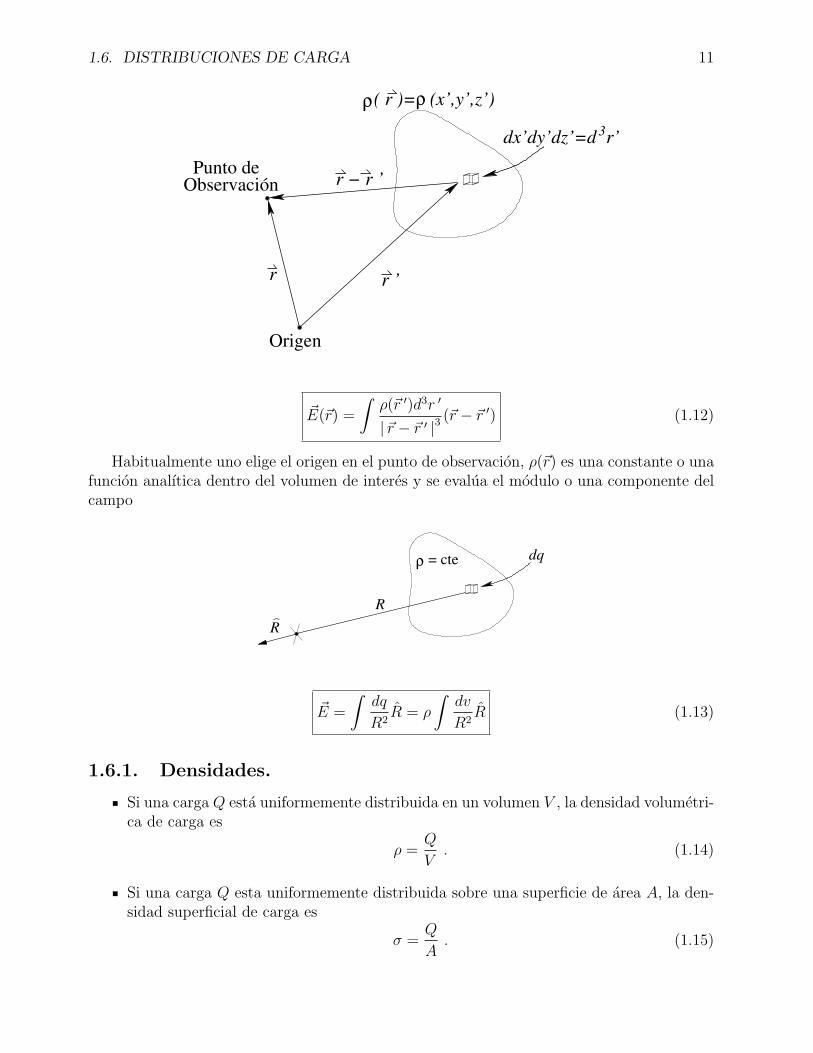
~E(~r) =
∫ρ(~r ′)d3r ′
|~r − ~r ′ |3(~r − ~r ′) (1.12)
Habitualmente uno elige el origen en el punto de observacion, ρ(~r) es una constante o unafuncion analıtica dentro del volumen de interes y se evalua el modulo o una componente delcampo
ρ = cte dq
R
R
~E =
∫dq
R2R = ρ
∫dv
R2R (1.13)
1.6.1. Densidades.
Si una carga Q esta uniformemente distribuida en un volumen V , la densidad volumetri-ca de carga es
ρ =Q
V. (1.14)
Si una carga Q esta uniformemente distribuida sobre una superficie de area A, la den-sidad superficial de carga es
σ =Q
A. (1.15)
12 CAPITULO 1. ELECTROSTATICA: CARGAS Y CAMPOS.
Si una carga Q esta uniformemente distribuida sobre una lınea de longitud L, la den-sidad lineal de carga es
λ =Q
L. (1.16)
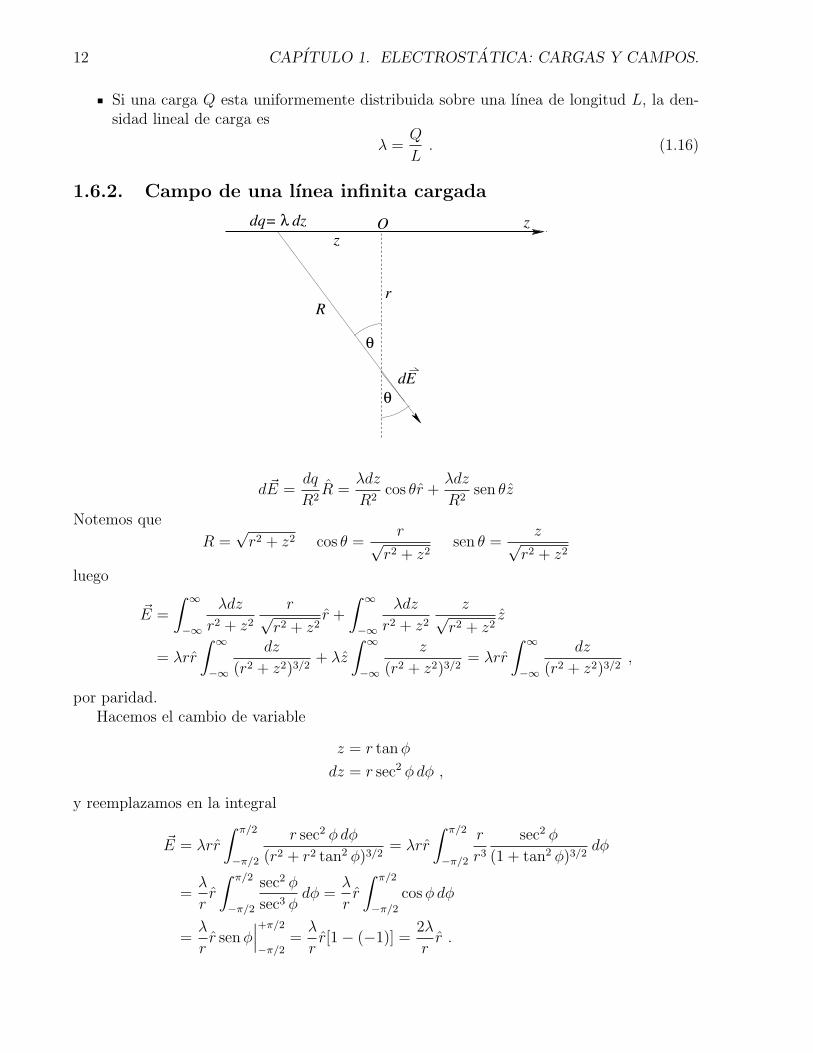
1.6.2. Campo de una lınea infinita cargada
R
z
r
dE
θ
θ
dq= dzλ O z
d ~E =dq
R2R =
λdz
R2cos θr +
λdz
R2sen θz
Notemos que
R =√r2 + z2 cos θ =
r√r2 + z2
sen θ =z√
r2 + z2
luego
~E =
∫ ∞
−∞
λdz
r2 + z2
r√r2 + z2
r +
∫ ∞
−∞
λdz
r2 + z2
z√r2 + z2
z
= λrr
∫ ∞
−∞
dz
(r2 + z2)3/2+ λz
∫ ∞
−∞
z
(r2 + z2)3/2= λrr
∫ ∞
−∞
dz
(r2 + z2)3/2,
por paridad.Hacemos el cambio de variable
z = r tanφ
dz = r sec2 φ dφ ,
y reemplazamos en la integral
~E = λrr
∫ π/2
−π/2
r sec2 φ dφ
(r2 + r2 tan2 φ)3/2= λrr
∫ π/2
−π/2
r
r3
sec2 φ
(1 + tan2 φ)3/2dφ
=λ
rr
∫ π/2
−π/2
sec2 φ
sec3 φdφ =
λ
rr
∫ π/2
−π/2
cosφ dφ
=λ
rr senφ
∣∣∣+π/2
−π/2=λ
rr[1− (−1)] =
2λ
rr .

1.6. DISTRIBUCIONES DE CARGA 13
Resumiendo
~E(~r) =2λ
rr (1.17)
1.6.3. Campo de una distribucion de carga plana e indefinida
dE
x
y
dq= dxdy
R
σ
θ
Por simetrıa solo interesa la componente z (las otras se anulan)
Ez =
∫dq
R2cos θ =
∫ ∞
−∞
∫ ∞
−∞
σdxdy
x2 + y2 + z2cos θ ,
donde cos θ =z
(x2 + y2 + z2)1/2, luego la integral nos queda:
Ez = zσ
∫ ∞
−∞
∫ ∞
−∞
dxdy
(x2 + y2 + z2)3/2.
Usemos coordenadas polares planas sobre el plano
r2 = x2 + y2 ,
rdrdφ = dxdy .
La integral nos queda
Ez = zσ
∫ 2π
0
dφ
∫ ∞
0
r dr
(r2 + z2)3/2= 2πσz
∫ ∞
0
r dr
(r2 + z2)3/2
= 2πσz−1
(r2 + z2)−1/2
∣∣∣∣∞0
= 2πσz
[0−
(−1√z2
)]= 2πσ
z
|z|.
Resumiendo
~E(~r) = 2πσ sgn(z)z (1.18)

14 CAPITULO 1. ELECTROSTATICA: CARGAS Y CAMPOS.
1.7. Flujo Electrico.
Consideremos cierto campo vectorial ~F (~r) en el espacio, y en ese espacio cierta superficiecerrada S arbitraria.
Podemos definir el flujo de ~F a traves de esa superficie como:
Φ =
∫S
~F · d~a (1.19)
Donde la integral es sobre S, i.e. toda la superficie. Si se trata del campo electrico ~E(~r)entonces el el flujo electrico a traves de esa superficie S es
Φ =
∫S
~E · d~a (1.20)
1.7.1. La normal
Definimos el vector normal n a la superficie es aquel que apunta hacia afuera del volumendefinido por la superficie cerrada.
n
da
da = n da
1.7. FLUJO ELECTRICO. 15
1.7.2. Analogıa con un fluido.
Sea v el campo de velocidades del fluido
aa
a60 o
cos 60 ovaFlujo:Flujo: 0Flujo: va
El flujo es el volumen del fluido que atraviesa la superficie por unidad de tiempo.
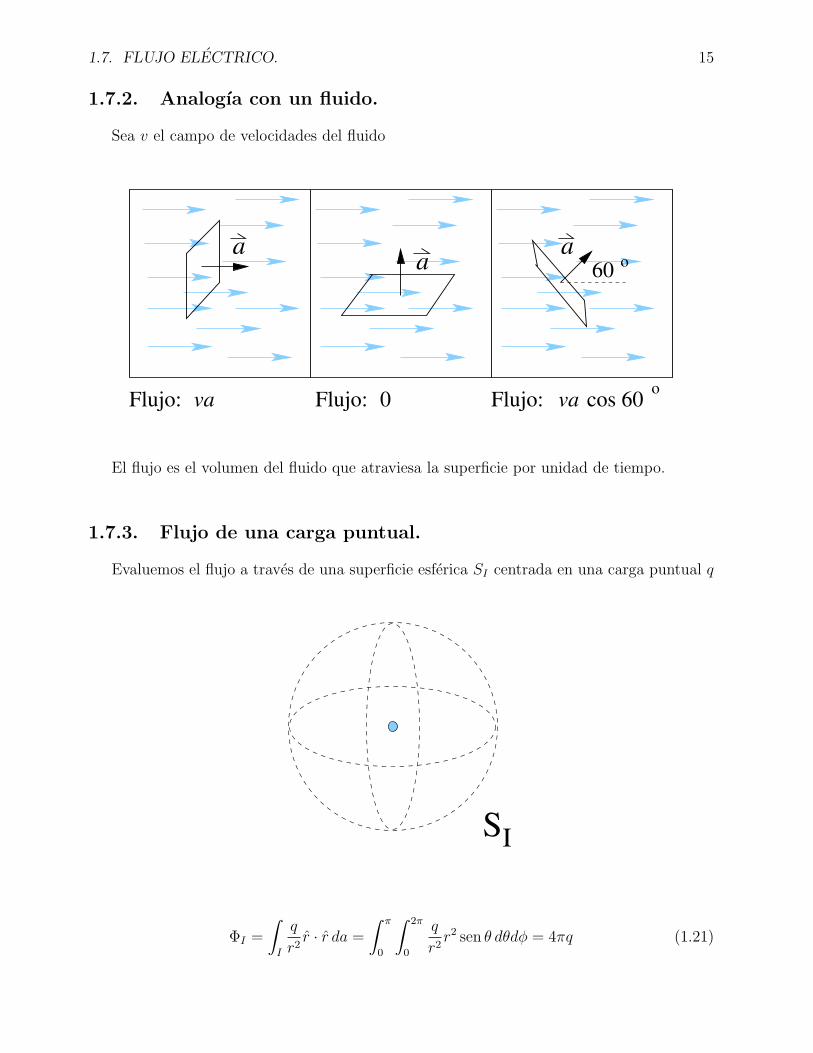
1.7.3. Flujo de una carga puntual.
Evaluemos el flujo a traves de una superficie esferica SI centrada en una carga puntual q
SI
ΦI =
∫I
q
r2r · r da =
∫ π
0
∫ 2π
0
q
r2r2 sen θ dθdφ = 4πq (1.21)
16 CAPITULO 1. ELECTROSTATICA: CARGAS Y CAMPOS.
SI
SIII
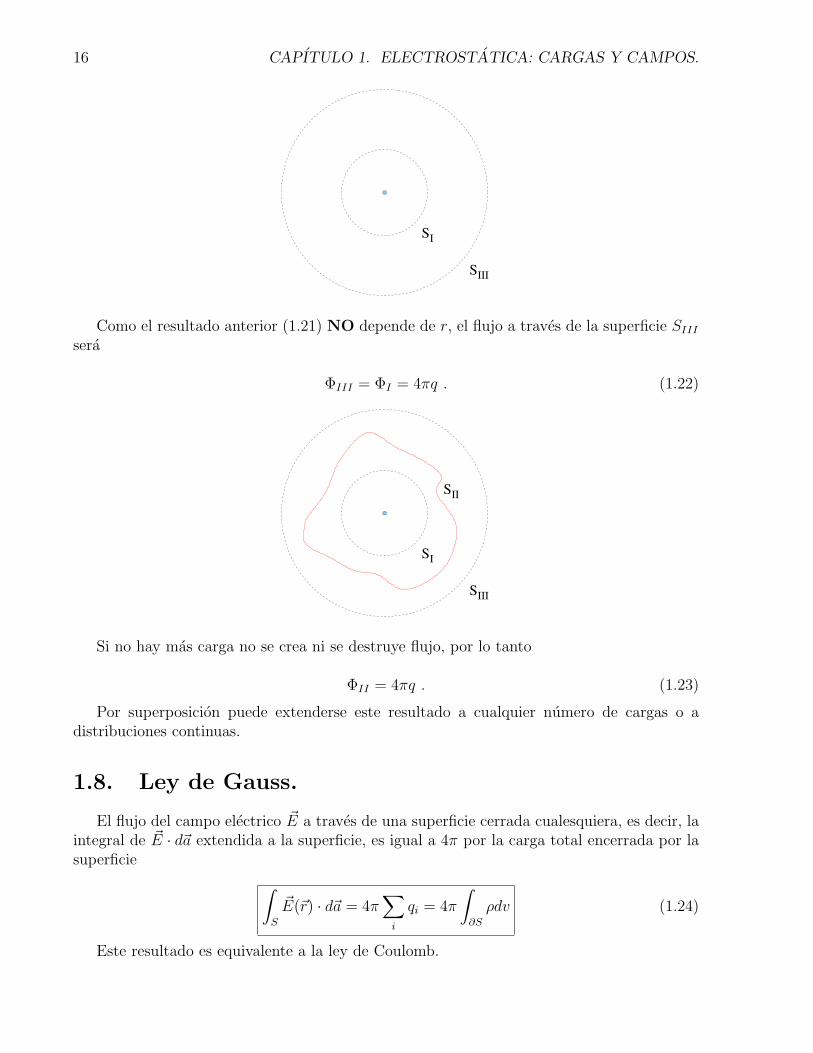
Como el resultado anterior (1.21) NO depende de r, el flujo a traves de la superficie SIII
sera
ΦIII = ΦI = 4πq . (1.22)
SI
SIII
SII
Si no hay mas carga no se crea ni se destruye flujo, por lo tanto
ΦII = 4πq . (1.23)
Por superposicion puede extenderse este resultado a cualquier numero de cargas o adistribuciones continuas.
1.8. Ley de Gauss.
El flujo del campo electrico ~E a traves de una superficie cerrada cualesquiera, es decir, laintegral de ~E · d~a extendida a la superficie, es igual a 4π por la carga total encerrada por lasuperficie ∫
S
~E(~r) · d~a = 4π∑
i
qi = 4π
∫∂S
ρdv (1.24)
Este resultado es equivalente a la ley de Coulomb.

1.9. EJEMPLOS DE EVALUACION DEL CAMPO ELECTRICO. 17
1.9. Ejemplos de evaluacion del campo electrico.
1.9.1. Cascaron esferico.
SI SII
r<
r>Q
R
La densidad superficial σ es
σ =Q
4πR2. (1.25)
Existen dos regiones de interes, r > R y r < R.
region r > R
Consideremos la superficie SII para evaluar ~E en la primera region. Dada la simetrıa delproblema postulamos ~E(r) = E(r)r, claramente para la superficie d~a = dar
∫~E · d~a =
∫E(r)r · rda = 4πQ
E(r)
∫SII
da = 4πQ
E(r)4πr2 = 4πQ
E(r) =Q
r2.
Luego para r > R
~E(~r) =Q
r2r (1.26)
region r < R
Consideremos la superficie SI para evaluar ~E en la segunda region. Dada la simetrıa delproblema nuevamente postulamos ~E(r) = E(r)r, para la superficie d~a = dar
18 CAPITULO 1. ELECTROSTATICA: CARGAS Y CAMPOS.
∫~E · d~a =
∫E(r)r · rda = 0
E(r)
∫SI
da = 0
E(r)4πr2 = 0
E(r) = 0 .
Luego para r < R
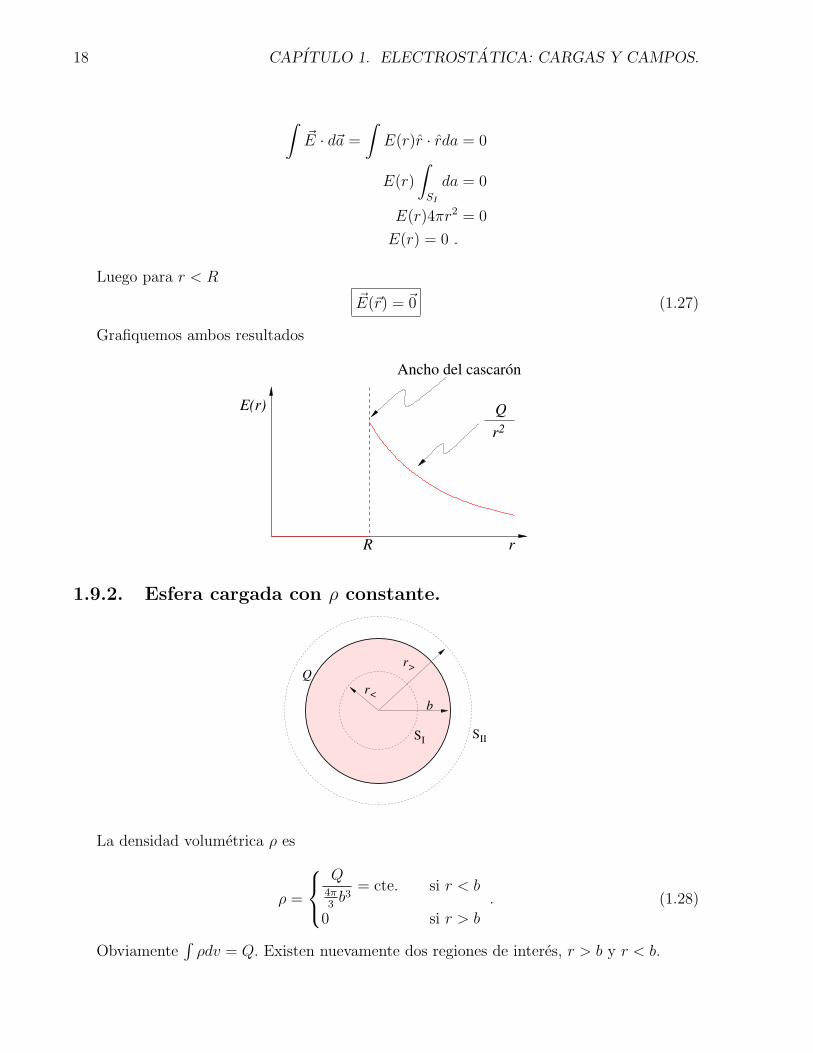
~E(~r) = ~0 (1.27)
Grafiquemos ambos resultados
r2
Q
R r
Ancho del cascarón
E(r)
1.9.2. Esfera cargada con ρ constante.
SI SII
r<
r>Q
b
La densidad volumetrica ρ es
ρ =
Q
4π3b3
= cte. si r < b
0 si r > b. (1.28)
Obviamente∫ρdv = Q. Existen nuevamente dos regiones de interes, r > b y r < b.

1.9. EJEMPLOS DE EVALUACION DEL CAMPO ELECTRICO. 19
region r > b
Consideremos la superficie SII para evaluar ~E en la primera region. Dada la simetrıa delproblema postulamos ~E(r) = E(r)r, claramente para la superficie d~a = dar
∫~E · d~a =
∫E(r)r · rda = 4π
∫ρ dv
E(r)
∫sII
da = 4π
∫ρ dv
E(r)4πr2 = 4πρ4π
3b3 =
Q
r2.
Luego para r > b
~E(~r) =Q
r2r (1.29)
region r < b
Consideremos la superficie SI para evaluar ~E en la segunda region. Dada la simetrıa delproblema nuevamente postulamos ~E(r) = E(r)r, para la superficie d~a = dar
∫~E · d~a =
∫E(r)r · rda = 4π
∫ρ dv
E(r)
∫sI
da = 4π
∫ρ dv
E(r)4πr2 = 4πρ4π
3r3 =
Q
b3r .
Luego para r < b
~E(~r) =Q
b3rr (1.30)
Grafiquemos ambos resultados
r2
Qa3
Q r
r
E(r)
a

20 CAPITULO 1. ELECTROSTATICA: CARGAS Y CAMPOS.
1.9.3. Cascaron esferico grueso.
r>
r<
ri
R1
R2
SII
SIII
SI
Q
La densidad ρ es
ρ =Q
4π3R3
2 − 4π3R3
1
. (1.31)
Existen tres regiones de interes, r > R2, R1 < r < R2 y r < R1.
Evaluacion en la region r > R2.
Consideremos la superficie SI para evaluar ~E en la primera region. Dada la simetrıa delproblema postulamos ~E(r) = E(r)r, claramente para la superficie d~a = dar
∫~E · d~a =
∫E(r)r · rda = 4πQ
E(r)
∫SI
da = 4πQ
E(r)4πr2 = 4πQ =Q
r2.
Luego para r > R
~E(~r) =Q
r2r (1.32)
Evaluacion en la region R1 < r < R2.
Consideremos la superficie SII para evaluar ~E en la segunda region. Dada la simetrıa delproblema nuevamente postulamos ~E(r) = E(r)r y para la superficie d~a = dar

1.9. EJEMPLOS DE EVALUACION DEL CAMPO ELECTRICO. 21
∫~E · d~a =
∫E(r)r · rda = 4π
∫ρ dv
E(r)
∫SII
da = 4πρ
∫dv
E(r)4πr2 = 4πρ4π
3
(r3 −R3
1
)=Q
r2
(r3 −R3
1
R32 −R3
1
).
Luego para R1 < r < R2
~E(~r) =Q
r2
(r3 −R3
1
R32 −R3
1
)r (1.33)
region r < R1.
Consideremos la superficie SIII para evaluar ~E en la segunda region. Dada la simetrıapostulamos ~E(r) = E(r)r, para la superficie d~a = dar
∫~E · d~a =
∫E(r)r · rda = 0
E(r)
∫SIII
da = 0
E(r)4πr2 = 0
E(r) = 0 .
Luego para r < R1
~E(~r) = ~0 (1.34)
r2
Q
R1 R2
R13R2
3 _
R133r _
r2
Q
r
E(r)

22 CAPITULO 1. ELECTROSTATICA: CARGAS Y CAMPOS.
Caso lımite, R1 → 0.
~E(~r) =
Q
r2r r > R2
Q
R32
rr r < R2
(1.35)
Caso lımite, R1 → R2.
~E(~r) =
Q
r2r r > R2
~0 r < R2
(1.36)
1.9.4. Esfera cargada con ρ(r) variable.
r<
r>
SISII
b
Q
La densidad volumetrica ρ es
ρ(r) =
5Q
πb5r(b− r) si r < b
0 si r > b. (1.37)
Debemos probar que∫ρdv = Q y luego encontrar el campo electrico en las dos regiones
de interes, r > b y r < b. Integramos la densidad en todo el espacio∫ρ(~r)dv =
∫ ∞
0
∫ π
0
∫ 2π
0
ρ(r)r2 sen θdrdθdφ = 4π
∫ b
0
5Q
πb5r(b− r)r2 dr
=20Q
b5
[∫ b
0
r3b dr −∫ b
0
r4 dr
]=
20Q
b5
[b5
4− b5
5
]=
20Q
b5b5
20
= Q .

1.9. EJEMPLOS DE EVALUACION DEL CAMPO ELECTRICO. 23
region r > b.
Consideremos la superficie SI para evaluar ~E en la primera region. Dada la simetrıa delproblema postulamos ~E(r) = E(r)r, claramente para la superficie d~a = dar
∫~E · d~a =
∫E(r)r · rda = 4π
∫ρ dv
E(r)
∫sI
da = 4π
∫ρ dv
E(r)4πr2 = 4πQ
=Q
r2.
Luego para r > b
~E(~r) =Q
r2r (1.38)
region r < b.
Consideremos la superficie SII para evaluar ~E en la segunda region. Dada la simetrıa delproblema nuevamente postulamos ~E(r) = E(r)r, para la superficie d~a = dar∫
~E · d~a =
∫E(r)r · rda = 4π
∫ρ dv
E(r)
∫sII
da = 4π
∫ρ dv
E(r)4πr2 = 4π
∫ r
0
∫ π
0
∫ 2π
0
ρ(u)u2 sen θdudθdφ
E(r) =4π
r2
∫ r
0
5Q
πb5u(b− u)u2 du
E(r) =20Q
b5r2
[∫ r
0
bu3 du−∫ r
0
u4 du
]
E(r) =20Q
b5r2
[br4
4− r5
5
]
=Q
b5[5br2 − 4r3
]Luego para r < R
~E(~r) =Q
b5[5br2 − 4r3
]r (1.39)

24 CAPITULO 1. ELECTROSTATICA: CARGAS Y CAMPOS.
1.9.5. Lınea cargada infinita.
da=−da z
da= da zL
z
λda= da RR
La figura muestra las diferentes normales de la superficie de Gauss elegida.
Calculo del campo electrico.
Suponemos el campo electrico con la siguiente forma ~E(~r) = E(R)R con R el radio delas coordenadas cilındricas. La Ley de Gauss nos dice
∫~E · d~a = 4πQencerrada
La carga encerrada corresponde a λL, luego
2
∫tapas
E(R)R · (±z) da+
∫manto
E(R)R · R da = 4πλL
E(R)2πRL = 4πλL
E(R) =2λ
R.
Luego
~E(~r) =2λ
RR (1.40)

1.9. EJEMPLOS DE EVALUACION DEL CAMPO ELECTRICO. 25
1.9.6. Plano infinito cargado.
z
A
σ
La figura muestra la seccion del plano que define el cilindro al atravesarlo.
Calculo del campo electrico.
Suponemos el campo electrico con la siguiente forma
~E(~r) =
+E(z)z z > 0
−E(z)z z < 0(1.41)
La Ley de Gauss nos dice ∫~E · d~a = 4πQencerrada
La carga encerrada, en este caso, corresponde a σA, luego
2
∫tapas
±E(z)z · (±z) da+
∫manto
E(z)z · R da = 4πσA
2E(z)A = 4πσA
E(z) = 2πσ .
Luego
~E(~r) = 2πσ sgn(z)z (1.42)

26 CAPITULO 1. ELECTROSTATICA: CARGAS Y CAMPOS.
1.9.7. Problemas de flujo.
Consideremos una carga q situada en el centro de un cubo. ¿Cuanto flujo sale por una delas caras?
q
Φ =1
6× 4πq =
2πq
3(1.43)
Consideremos una carga q situada en un vertice de un cubo. ¿Cuanto flujo sale por cadauna de las caras?
q
Por las caras que contiene a la carga el flujo es nulo y por las otras tres el flujo es igual.Agregamos siete cubos en el entorno tal de dejar la carga al centro de un nuevo cubo mas
grande, ahora podemos usar el resultado anterior
q
Φ =1
4× 1
6× 4πq =
πq
6(1.44)

1.10. FUERZA SOBRE UNA CARGA SUPERFICIAL. 27
1.10. Fuerza sobre una carga superficial.
r0
uescm2σ
dAσ
E= 4πσ
Q=4π σr02
E=0
¿A que se debe y cual es la fuerza que actua sobre un elemento superficial de carga σdA?La fuerza es debida a la repulsion que experimenta por parte de todo el resto de los
elementos de carga de la esfera.¿Que valor del campo debemos usar sobre la lamina?
Eext =Q
r20
= 4πσ , Ein = 0 . (1.45)
Usemos el promedio1
2(Eext + Ein) = 2πσ (1.46)
Una manera de entender esto es suponer que el espesor NO es nulo. Supongamos que noes una densidad superficial sino una densidad volumetrica ρ (uniforme) en un ancho ∆r talque ρ∆r = σ.
∆ r ∆ r ∆ r∆ r
E= 4πσE= 4πσ E= 4πσ E= 4πσ
∆ r
0
E=0 E=0 E=0 E=0 ρ = cte.=σρ
La carga superficial real NO se hallara en una capa de espesor cero y densidad volumetricainfinita, ası que nuestra representacion es mas realista que la del caso lımite. Por ejemplo:una carga de superficie en un metal puede tener varios [A] de espesor.

28 CAPITULO 1. ELECTROSTATICA: CARGAS Y CAMPOS.
La fuerza sobre un elemento de carga superficial
dF =1
2(Eext + Ein) dq = 2πσσdA = 2πσ2dA . (1.47)
La fuerza por unidad de area vale 2πσ2. Esta es una fuerza hacia el exterior originada porla repulsion de las cargas. Naturalmente si las cargas no escapan esta fuerza debe estar equi-librada con alguna fuerza de origen atomico o molecular, no incluida en nuestras ecuaciones.Si cargamos un globo de goma, la repulsion calculada tenderıa a dilatarlo.
1.10.1. El trabajo para comprimir.
Recıprocamente, deberıamos efectuar trabajo sobre el sistema para acortar el diametromientras Qtotal =cte.
r0
r0_ dr
dr
Supongamos que deseamos disminuir el radio de la esfera de r0 a r0−dr. El trabajo contralas las fuerzas electricas
dW = (2πσ2)(4πr20) dr = 8π2σ2r2
0 dr .
En funcion de la carga total Q = 4πr20σ tenemos
dW =Q2dr
2r20
(1.48)
1.11. Energıa asociada a un campo electrico.
Notemos que al disminuir la esfera, en lo que al campo se refiere, es crear la intensidad decampo 4πσ en una capa entre r0 y r0− dr donde el campo antes era nulo. En todos los otrospuntos del espacio el campo permanece exactamente igual que antes. Esta parte del campo,puede decirse, que ha sido creada a costa del trabajo dW .
dW =Q2dr
2r20
=Q2 × 4πr2
0 × dr
2× 4πr20 × r2
0
=Q2
8πr40
dv =E2
8πdv (1.49)
Este es un ejemplo particular de un teorema mucha mas general, que no demostraremos.

1.11. ENERGIA ASOCIADA A UN CAMPO ELECTRICO. 29
1.11.1. El teorema.
La energıa potencial U de un sistema de cargas, la cual es el trabajo total requerido paraformar el sistema, puede calcularse a partir del campo electrico propio simplemente asignandouna cantidad de energıa (E2/8π)dv a cada elemento de volumen dv e integrando para todoel espacio donde existe el campo electrico.
U =1
8π
∫ ∣∣∣ ~E ∣∣∣2 dv (1.50)
donde la integral es sobre todo el espacio.
1.11.2. Energıa de la esfera usando el campo.
Usando la ecuacion (1.50) podrıamos calcular al energıa asociada a nuestra esfera cargada.El campo en todo el espacio es
~E =
Q
r2r r > r0
0 r < r0
(1.51)
La energıa es
U =1
8π
∫E2 dv =
1
8π
∫ ∞
r0
Q2
r44πr2 dr =
Q2
2
∫ ∞
r0
1
r2dr = −Q
2
2r
∣∣∣∣∞r0
,
finalmente
U =Q2
2r0(1.52)
1.11.3. Energıa de la esfera calculando el trabajo.
A partir de la ecuacion (1.49) considerando una esfera de radio arbitrario r y que la dismi-nuiremos desde un radio∞ a un radio r0 dado. (Recordemos que la fuerza y el desplazamientoson antiparalelos luego debe haber un signo (-)),
U =
∫ r0
∞−Q
2dr
2r2=
∫ ∞
r0
Q2
2r2dr = −Q
2
2r
∣∣∣∣∞r0
=Q2
2r0. (1.53)
Nuevamente obtenemos el resultado (1.52)
U =Q2
2r0(1.54)
Una imagen usual es que la energıa esta almacenada en el campo.
Siendo el sistema conservativo, esta cantidad de energıa puede ser recuperada permi-tiendo a las cargas “separarse”.
30 CAPITULO 1. ELECTROSTATICA: CARGAS Y CAMPOS.
La energıa estaba en alguna parte.
Nuestra consideracion aparece correcta si imaginamos que la energıa esta almacenadaen el espacio con una densidad | ~E|2/8π en [erg/cm3].
Sin embargo, solo es fısicamente medible la energıa total
Capıtulo 2
Potencial electrico.
En este capıtulo veremos:
Integral de lınea del campo electrico.
Diferencia de potencial y funcion potencial.
Gradiente de una funcion escalar.
Deduccion del campo a partir del potencial.
Potencial de una distribucion de cargas.
Disco cargado uniformemente.
Divergencia de una funcion vectorial.
Teorema de Gauss y forma diferencial de la Ley de Gauss.
La divergencia en coordenadas cartesianas.
El Laplaciano.
La ecuacion de Laplace.
Rotacional de una funcion vectorial.
Teorema de Stokes.
Rotacional en coordenadas cartesianas.
Significado fısico del rotacional.
31

32 CAPITULO 2. POTENCIAL ELECTRICO.
2.1. Integral de lınea del campo electrico.
Supongamos que una cierta distribucion estacionaria de carga produce un campo ~E,entonces ∫ P2
P1
~E · d~s , (2.1)
a traves de cierto camino. Significa:
Dividir el camino en pequenos segmentos.
Representar cada segmento por un vector que una sus extremos.
Efectuar el producto escalar del vector asociado al segmento del camino por el campo~E en ese lugar.
Sumar estos productos para todo el camino.
La integral corresponde al lımite de esta suma al hacer los segmentos cada vez maspequenos y numerosos.
1P
2P
cam
ino
1P
2P
1P
2P
dsE
2.1.1. Un ejemplo.
Consideremos el campo vectorial ~E = Kyx+Kxy. Queremos evaluar la integral de lıneaa traves del camino de la figura
1 2
1
2
x
y
A
B C

2.1. INTEGRAL DE LINEA DEL CAMPO ELECTRICO. 33
La integral es separable ∫ C
A
~E · d~s =
∫ B
A
~E · d~s+
∫ C
B
~E · d~s . (2.2)
El elemento de camino d~s = dxx + dyy y el campo por componentes ~E = Kyx + Kxyluego
~E · d~s = Kydx+Kxdy . (2.3)
En la primera parte del camino (de A a B) y = 2x (una recta) lo que implica dy = 2dx,por lo tanto, ∫ B
A
~E · d~s = K
∫ B
A
(ydx+ xdy)
= K
∫ 1
0
2xdx+ 2xdx
= 4K
∫ 1
0
x dx = 2K . (2.4)
A lo largo del camino de B a C, y = 2 y dy = 0∫ C
B
~E · d~s = K
∫ C
B
(ydx+ xdy)
= K
∫ 2
1
2dx = 2K . (2.5)
La suma de ambos tramos ∫ C
A
~E · d~s = 2K + 2K = 4K (2.6)
2.1.2. Otro camino.
Consideremos ahora el camino de la figura
x
y
A
C
B21
1
2
Sobre el camino A→ B y = 0 luego dy = 0∫ B
A
~E · d~s = 0 , ya que ~E ⊥ d~s. (2.7)
34 CAPITULO 2. POTENCIAL ELECTRICO.
Sobre el camino B → C x = 2 luego dx = 0∫ C
B
~E · d~s =
∫ 2
0
K2 dy = 2Ky
∣∣∣∣∣2
0
= 4K . (2.8)
2.1.3. Independencia del camino.
El campo electrico de una carga puntual es radial y depende solamente de r. Si P1 y P2
son dos puntos cualesquiera en el campo de una carga puntual es directo que la integral delınea de ~E es la misma para todas las trayectorias que unen P1 y P2.
Lo anterior puede verificarse usando una argumentacion equivalente a la usada cuandoevaluamos el trabajo.
Por superposicion, la integral de lınea de ~E (debido a todos los manantiales) debe serindependiente del camino. Es decir, la integral∫ P2
P1
~E · d~s (2.9)
Tiene el mismo valor para todos los caminos que unen a P1 y P2 en un campo electrostatico.
2.2. Diferencia de potencial y funcion potencial.
Debido a que la integral de lınea en el campo electrostatico es independiente del camino,podemos usarla para definir una magnitud escalar ϕ21 como sigue
ϕ21 = −∫ P2
P1
~E · d~s (2.10)
Donde ϕ21 es el trabajo por unidad de carga efectuado al mover una carga positiva desdeP1 a P2 en el campo ~E.
Ademas, ϕ21 es una funcion escalar unıvoca de las dos posiciones P1 y P2 que llamaremosdiferencia de potencial entre los dos puntos.
En sistema CGS las unidades de diferencia de potencial son [erg/ues]=[statvolt]. En sis-tema MKS las unidades de diferencia de potencial son [Joule/Coulomb]=[Volt].
1 [Volt] =1
299.79[statvolt] (2.11)
2.2.1. Funcion potencial.
Supongamos que mantenemos P1 fijo en cierta posicion de referencia. Entonces ϕ21 esfuncion solo de P2. Podemos escribir
E(x,y,z)ϕ (x,y,z)Campo escalar
Potencial asociado aCampo vectorial
2.2. DIFERENCIA DE POTENCIAL Y FUNCION POTENCIAL. 35
Dado ~E se determina ϕ salvo por una constante aditiva debido a la arbitrariedad en laeleccion de P1.
Supongamos que tenemos dos definiciones para la funcion potencial, ϕA y ϕB, que solodifieren en el punto P1, es decir
ϕA = −∫ ~r
A
~E · d~s , ϕB = −∫ ~r
B
~E · d~s . (2.12)
A ϕA lo podemos escribir como
ϕA = −∫ ~r
A
~E · d~s
= −∫ B
A
~E · d~s−∫ ~r
B
~E · d~s
= cte. + ϕB
ϕA = ϕB + cte.
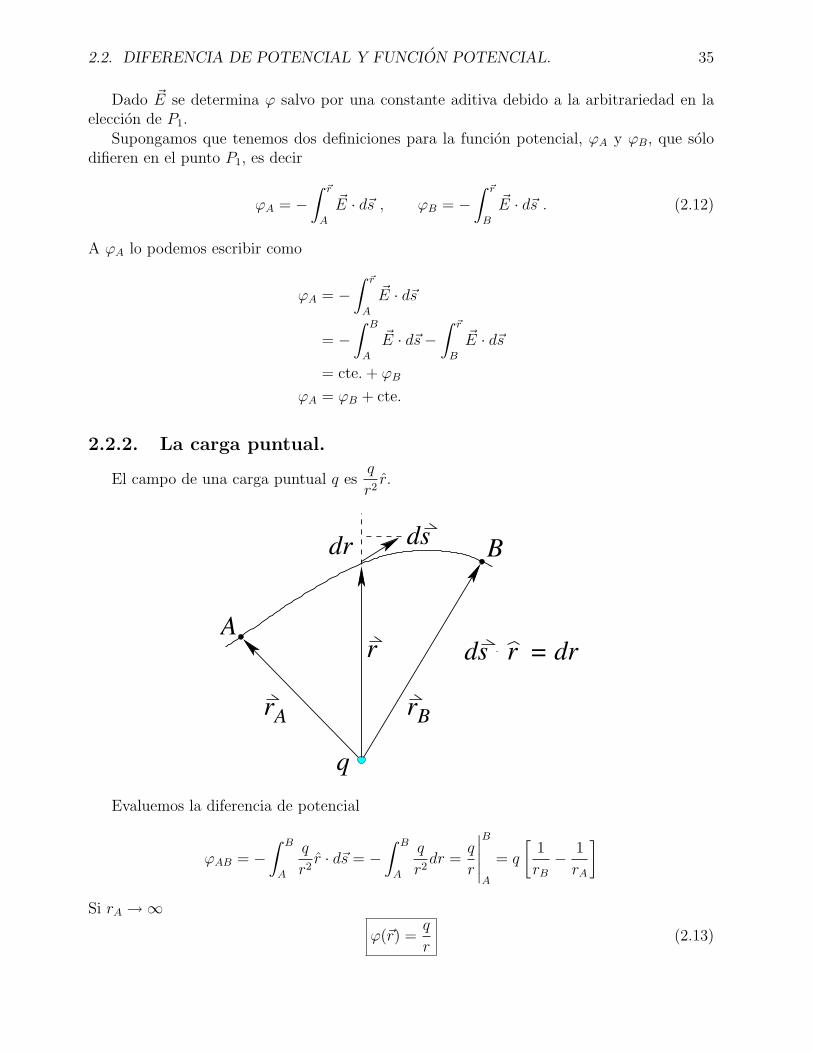
2.2.2. La carga puntual.
El campo de una carga puntual q esq
r2r.
rA rB
r
ds
rds = drA
B
q
dr
Evaluemos la diferencia de potencial
ϕAB = −∫ B
A
q
r2r · d~s = −
∫ B
A
q
r2dr =
q
r
∣∣∣∣∣B
A
= q
[1
rB
− 1
rA
]Si rA →∞
ϕ(~r) =q
r(2.13)

36 CAPITULO 2. POTENCIAL ELECTRICO.
2.2.3. Dos cargas en el plano.
Nos interesa encontrar el potencial en todo el plano de la configuracion de dos cargaspuntuales de la figura
1q 2q
r 1 r 2
(x,y)y
x0b a
El potencial es la suma de los potenciales individuales
ϕ(x, y) =q1r1
+q2r2
=q1√
(x+ b)2 + y2+
q2√(x− a)2 + y2
2.2.4. Otro ejemplo.
Nos interesa encontrar el potencial en todo el plano del campo ~E(x, y) = Kyx + Kxyeligiendo nuestro punto de referencia P1 = (0, 0). Usaremos el camino de integracion mostradoen la figura.
(x,y)y
x(0,0)
ϕ(x, y) = −∫ (x,y)
(0,0)
~E · d~s
= −∫ (x,0)
(0,0)
Exdx−∫ (x,y)
(x,0)
Eydy
= K(y = 0)
∫ x
0
dx−Kx
∫ y
0
dy = 0−Kxy
= −Kxy

2.3. GRADIENTE DE UNA FUNCION ESCALAR. 37
A todos los resultados anteriores le podemos sumar una constante. Esto solamente indi-carıa que el punto de referencia al cual se asigna ϕ = 0 se puso en otra parte.
No hay que confundir Potencial con energıa potencial de un sistema.
La energıa potencial de un sistema de cargas es el trabajo total requerido para reunirlas.
El potencial asociado al campo serıa el trabajo por unidad de carga requerido paratraer una carga de prueba positiva desde el infinito al punto (x, y, z) en el campo ~E delsistema de cargas.
2.3. Gradiente de una funcion escalar.
Sabemos que dado el campo electrico podemos hallar la funcion potencial electrico, queresulta ser una funcion escalar.
Si quisieramos proceder en sentido contrario, es decir, a partir del potencial deducir elcampo electrico de la ecuacion
ϕ21 = −∫ P2
P1
~E · d~s , (2.14)
Parecerıa que el campo es en algun sentido una derivada de la funcion potencial. Paraprecisar esto presentamos el gradiente de una funcion escalar:1
grad f = ~∇f(x, y, z) =∂f
∂xx+
∂f
∂yy +
∂f
∂zz . (2.15)
El gradiente de una funcion escalar es un vector en la direccion de la maxima pendienteen sentido ascendente y su modulo es la pendiente medida en aquella direccion
1La derivada parcial respecto a la variable x de una funcion f(x, y, z), escrita simplemente ∂f/∂x, significala razon de variacion de la funcion respecto a x manteniendo constante las otras variable (y, z), i.e.
∂f
∂x= lım
∆x→0
f(x + ∆x, y, z)− f(x, y, z)∆x
,

38 CAPITULO 2. POTENCIAL ELECTRICO.
Dirección de lamáximo crecimiento
x
y
(x,y)
0.1 0.2 0.3 0.4 0.5 0.6 0.7 0.8 0.9 1
exp(−x*x−y*y)
−1−0.5
0 0.5
1
−1−0.5
0 0.5
1
0.1 0.2 0.3 0.4 0.5 0.6 0.7 0.8 0.9
1
2.4. Deduccion del campo a partir del potencial.
Consideremos la diferencial de la funcion escalar de tres variables ϕ(x, y, z)
dϕ =∂ϕ
∂xdx+
∂ϕ
∂ydy +
∂ϕ
∂zdz , (2.16)
ademas de
ϕ21 = −∫ P2
P1
~E · d~s→ dϕ = − ~E · d~s , (2.17)
y comodϕ = ~∇ϕ · d~s = − ~E · d~s . (2.18)
Identificamos~E = −~∇ϕ (2.19)
El signo menos da cuenta de que el campo electrico esta dirigido de una region de mayorpotencial hacia una region de menor potencial, mientras que el vector ~∇ϕ se define de maneraque se dirija en el sentido creciente de ϕ.
2.4.1. Ejemplos.
Carga puntual.
~E = −~∇ϕ = −~∇(qr
)= − ∂
∂r
(qr
)r =
q
r2r .
Dos cargas.
ϕ =q1√
(x+ b)2 + y2+
q2√(x− a)2 + y2
=⇒
~E =q1[(x+ b)x+ yy]
((x+ b)2 + y2)3/2+q2[(x− a)x+ yy]
((x− a)2 + y2)3/2.
2.5. POTENCIAL DE UNA DISTRIBUCION DE CARGA. 39
Otro ejemplo.
ϕ = −Kxy =⇒
~E = − ∂
∂x(−Kxy)x+
∂
∂y(−Kxy)y
= Kyx+Kxy .
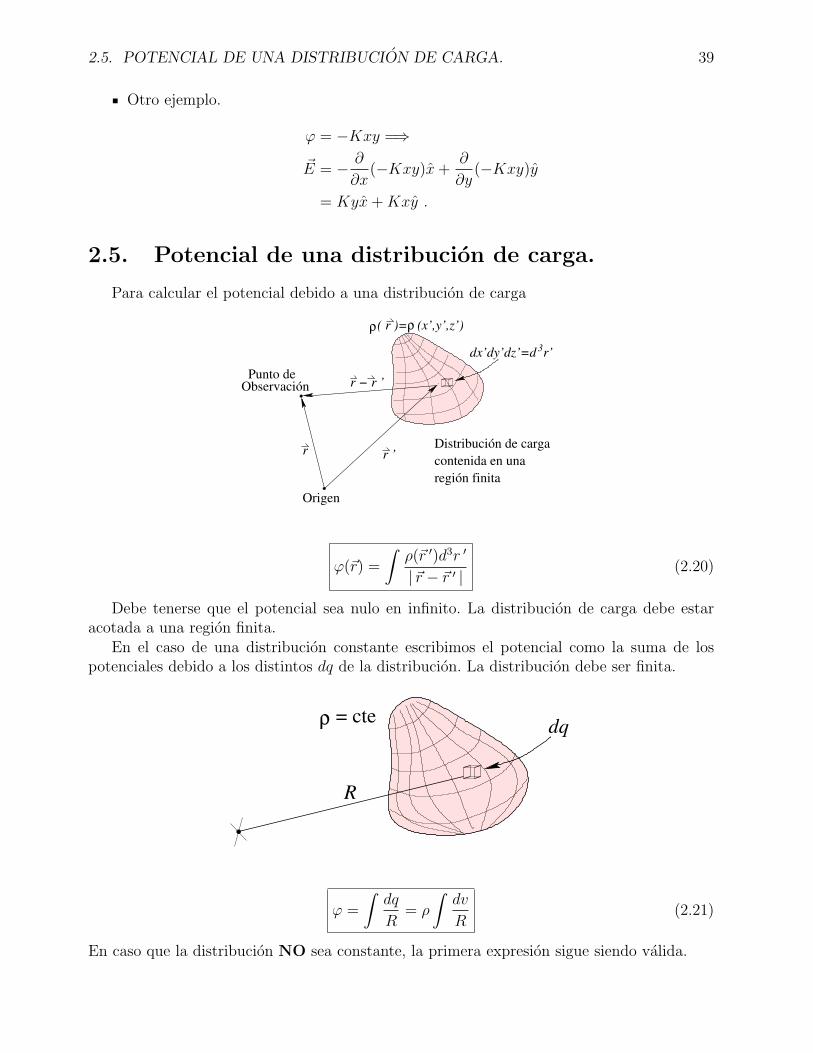
2.5. Potencial de una distribucion de carga.
Para calcular el potencial debido a una distribucion de carga
Punto de Observación
Origen
r
r − r ’
r ’
( r )= (x’,y’,z’)ρρ
dx’dy’dz’=d 3r’
Distribución de carga
región finitacontenida en una
ϕ(~r) =
∫ρ(~r ′)d3r ′
|~r − ~r ′ |(2.20)
Debe tenerse que el potencial sea nulo en infinito. La distribucion de carga debe estaracotada a una region finita.
En el caso de una distribucion constante escribimos el potencial como la suma de lospotenciales debido a los distintos dq de la distribucion. La distribucion debe ser finita.
ρ = cte dq
R
ϕ =
∫dq
R= ρ
∫dv
R(2.21)
En caso que la distribucion NO sea constante, la primera expresion sigue siendo valida.

40 CAPITULO 2. POTENCIAL ELECTRICO.
2.5.1. Las lıneas equipotenciales.
El lugar geometrico de los puntos con un valor particular de ϕ es una superficie, llamadaequipotencial la cual se representa en dos dimensiones por una curva y en tres por unasuperficie.
q
La familia de curvas equipotenciales son ortogonales a las lıneas de fuerzas.
2.5.2. Potencial de un hilo largo cargado.
Calculemos el potencial de un hilo infinito cargado con densidad uniforme λ medianteintegracion directa.
R
z
r
dq= dzλ O z
dϕ =dq
R=
λdz√z2 + r2
ϕ =
∫ ∞
−∞
λdz√z2 + r2
=
∫ ∞
−∞
λ√(zr
)2
+ 1
dz
r
Usando la paridad del integrando y haciendo el cambio de variable u =z
r, tenemos
ϕ = 2λ
∫ ∞
0
du√u2 + 1
,

2.6. DISCO CARGADO UNIFORMEMENTE. 41
haciendo u = tan θ con du = sec2 θ dθ
ϕ = 2λ
∫ π/2
0
sec2 θ dθ
(tan2 θ + 1)1/2
= 2λ
∫ π/2
0
sec θ dθ
= 2λ log(sec θ + tan θ)
∣∣∣∣∣π/2
0
→∞ .
La divergencia de la integral se debe a que la distribucion de carga no esta contenida enun region finita (hay carga en ∞).
Calculemos la diferencia de potencial entre dos puntos cualesquiera usando la expresionpara el campo electrico de una lınea infinita uniformemente cargada
ϕ21 = −∫ P2
P1
~E · d~s = −∫ r2
r1
2λ
rdr
= 2λ log(r1)− 2λ log(r2) .
Fijamos arbitrariamente el punto P1 para obtener la funcion potencial
ϕ = −2λ log(r) + cte. (2.22)
Claramente
−~∇ϕ = −r ∂ϕ∂r
=2λ
rr .
2.6. Disco cargado uniformemente.
Consideremos un disco no conductor cargado con una distribucion uniforme σ [ues/cm2]de espesor infinitesimal.
La carga total corresponde a Q = πa2σ. No hay dos capas.Si el disco fuera conductor habrıa redistribucion de carga acumulandose hacia los bordes.
P1(0,y,0)
2P
x
z
Ra
dq
y
σ

42 CAPITULO 2. POTENCIAL ELECTRICO.
Evaluemos el potencial en el punto P1 = (0, y, 0)
ϕ(0, y, 0) =
∫dq
R=
∫ 2π
0
∫ a
0
σrdθdr√y2 + r2
= 2πσ
∫ a
0
r√y2 + r2
dr = 2πσ√y2 + r2
∣∣∣∣∣a
0
ϕ(0, y, 0) = 2πσ[√y2 + a2 − y] , si y > 0.
Por simetrıa debemos tener ±√y2
ϕ(0, y, 0) = 2πσ[√y2 + a2 + y] , si y < 0.
El valor en el centro ϕ(0, 0, 0) = 2πσa
singularidaden la derivada
ya−a
ϕ
0
Estudiemos el comportamiento de ϕ(0, y, 0) para valores grandes de y. Para y a tenemos
√y2 + a2 − y = y
√1− a2
y2− 1
= y
[1 +
1
2
a2
y2. . .− 1
]≈ a2
2y.
De aquı tenemos
ϕ(0, y, 0) =πa2σ
y=Q
y, para y a. (2.23)
Donde πa2σ = Q es la carga total, luego este serıa el potencial de una carga puntual de esevalor. Desde muy lejos el disco se ve puntual.
El potencial para puntos fuera del eje de simetrıa no es facil, las integrales resultan serelıpticas (
∫dφ/√
1− k2 sen2 φ)
2.6.1. Potencial en el borde del disco.
Evaluemos el potencial en el punto P2 = (a, 0, 0)

2.6. DISCO CARGADO UNIFORMEMENTE. 43
P2
θ
r
a
2a
dr
σ
ϕ(a, 0, 0) =
∫dq
r=
∫σ2rθdr
r=
∫2σθdr .
De la figura r = 2a cos θ luego dr = −2a sen θdθ. Reemplazando en la integral
ϕ(a, 0, 0) =
∫ 0
π/2
2σθ(−2a sen θ) dθ
=
∫ π/2
0
4σaθ sen θ dθ
= 4σa [sen θ − θ cos θ]
∣∣∣∣∣π/2
0
= 4σa .
Comparando este valor con el del centro del disco (2πσa) el potencial disminuye. Estoimplica que el campo electrico tiene componente en el plano del disco y hacia afuera. Porlo anterior, si la carga pudiese moverse se distribuirıa hacia los bordes. Podemos calcular elcampo electrico en el eje de simetrıa directamente del potencial
Ey = −∂ϕ∂y
= − d
dy2πσ
[√y2 + a2 − y
]= 2πσ
[1− y√
y2 + a2
]y > 0 .
Tomemos el lımite y → 0 por la derecha y por la izquierda.
Si y tiende a cero+ entonces ~E → 2πσy.
Si y tiende a cero− entonces ~E → −2πσy.
Este es el campo que corresponde a un lamina indefinida (infinita) con densidad superficialhomogenea σ.
Podemos encontrar el campo cerca del disco usando Gauss. Como superficie de Gaussusamos la “cajita” de la figura.

44 CAPITULO 2. POTENCIAL ELECTRICO.
El campo noes al plano
A
Φ = AE+y − AE−
y + (flujo lateral)
El primer termino corresponde al campo inmediatamente por delante, el segundo al campopor detras en un caso la normal apunta hacia adelante y en el otro apunta hacia atras. El flujolateral se puede hacer tan pequeno como se quiera aplanando la caja. (Mientras el campoparalelo sea finito.) La carga encerrada es σA luego la ley de Gauss
AE+y − AE−
y = 4πσA ,
o bien lo podemos reescribir como
E+y − E−
y = 4πσ (2.24)
Esto vale para cualquier distribucion superficial de carga uniforme o no. Si σ es la densi-dad local de una capa superficial cargada, existe un cambio brusco o discontinuidad en lacomponente perpendicular del campo electrico.
2.6.2. La energıa del sistema.
Recordemos la expresion para la energıa total asociada a un campo ~E
U =1
8π
∫Todo el espacio
∣∣∣ ~E ∣∣∣2 dv . (2.25)
Escribamos la energıa ahora en terminos del potencial. Utilizamos que ~E = −~∇ϕ, luegotenemos
U =1
8π
∫Todo el espacio
∣∣∣ ~∇ϕ ∣∣∣2 dv . (2.26)
Hay otra forma de calcular la energıa almacenada
U =1
2
N∑j=1
∑k 6=j
qjqkrjk
. (2.27)

2.7. DIVERGENCIA DE UNA FUNCION VECTORIAL. 45
Si reescribimos la ecuacion anterior de la forma
U =1
2
N∑j=1
qj
[∑k 6=j
qkrjk
].
El termino entre parentesis corresponde a la contribucion de todas las cargas al potencial enla posicion de qj. Podemos sumarlas y llamarles ϕj (potencial en la posicion de qj debido atodas las otras cargas) luego
U =1
2
N∑j=1
qjϕj . (2.28)
Si tenemos una distribucion continua
U =1
2
∫ρϕ dv (2.29)
2.7. Divergencia de una funcion vectorial.
Sea ~F (x, y, z) una funcion vectorial. Consideremos el flujo total a traves de la superficieS
Φ =
∫S
~F · d~a .
daS
V
F
V1
V2
S 1 incluye D
S 2 incluye D
D
Si dividimos V en dos partes, diagrama de la derecha, el flujo es el mismo
Φ =
∫S1
~F · d~a+
∫S2
~F · d~a ,
ya que los flujos sobre D se anulan.Podemos dividir V sucesivamente hasta tener V1, V2, . . . , VN con superficies S1, S2, . . . , SN ,
podemos afirmar
Φ =
∫S
~F · d~a =N∑
i=1
∫Si
~F · d~ai .

46 CAPITULO 2. POTENCIAL ELECTRICO.
Si consideramos el lımite N → ∞ las integrales∫
Si
~F · d~ai → 0. Es decir, se hacen cada vezmas pequenas, al igual que cada Vi, a medida que N crece. Pero si consideramos la razonentre ambas magnitudes ∫
Si
~F · d~ai
Vi
,
encontramos que tiene un lımite cuando N →∞. Este lımite es una propiedad caracterısticade la funcion vectorial (campo vectorial) ~F en esa region.
Llamaremos divergencia de ~F a esta propiedad:
div ~F (x, y, z) = ~∇ · ~F ≡ lımV→0
1
V
∫S
~F · d~a (2.30)
donde V es un volumen que incluye al punto (x, y, z) y S es la superficie donde se extiende laintegral, ademas es la superficie de V . La condicion de que el lımite exista y sea independientedel metodo de subdivision, lo estamos dando por supuesto.
La div ~F corresponde al flujo saliente de V por unidad de volumen en el lımite en que Ves infinitesimal. Es una magnitud escalar, que depende de la posicion y puede variar de unlugar a otro.
2.8. Teorema de Gauss y forma diferencial de la ley de
Gauss.
Consideremos un volumen V cuya superficie es S. Hagamos una particion en N subvo-lumenes Vi cuya superficie es Si escribamos el flujo total a traves de S en funcion de laparticion.
Φ =
∫S
~F · d~a =N∑
i=1
∫Si
~F · d~ai =N∑
i=1
Vi
[∫Si
~F · d~ai
Vi
].
En el lımite que N →∞ y Vi → 0, tenemos∫S
~F · d~a =
∫V
div ~F dv (2.31)
Este resultado es conocido como teorema de Gauss o teorema de la divergencia. Secumple para todo campo vectorial para el cual existan los lımites involucrados.
Apliquemos el teorema de la divergencia al campo electrico∫S
~E · d~a =
∫V
div ~E dv . (2.32)
Recordemos la Ley de Gauss que satisfacıa el campo electrico sobre el mismo volumen ysuperficie ∫
S
~E · d~a = 4π
∫V
ρ dv . (2.33)

2.9. LA DIVERGENCIA EN COORDENADAS CARTESIANAS. 47
Como ambas ecuaciones se cumplen para cualquier volumen
div ~E = ~∇ · ~E = 4πρ (2.34)
Esta ultima ecuacion es conocida como la forma diferencial de la ley de Gauss ycorresponde a la primera ecuacion de Maxwell.
2.9. La divergencia en coordenadas cartesianas.
Veamos la forma que tiene el operador divergencia en coordenadas cartesianas
div ~F = ~∇ · ~F =∂Fx
∂x+∂Fy
∂y+∂Fz
∂z(2.35)
La divergencia es un escalar y en coordenadas cartesianas corresponde al producto escalarentre el operador vectorial ~∇ y el campo vectorial. Si div ~F > 0 el flujo es saliente. Si div ~F < 0el flujo es entrante.
Consideremos un cilindro infinito de radio a, cargado con densidad uniforme ρ.
yx
z
a
ρ
Usando la ley de Gauss podemos encontrar el campo en todo el espacio,
E(r) =
2πρa2
rr > a
2πρr r < a
Proyectemos el campo en coordenadas cartesianas
Ex(r) =x
rE =
2πρa2x
x2 + y2r > a
= 2πρx r < a
Ey(r) =y
rE =
2πρa2y
x2 + y2r > a
= 2πρy r < a
Ez = 0

48 CAPITULO 2. POTENCIAL ELECTRICO.
En el exterior de la carga cilındrica la div ~E
∂Ex
∂x+∂Ey
∂y= 2πρa2
[1
x2 + y2− 2x2
(x2 + y2)2+
1
x2 + y2− 2y2
(x2 + y2)2
]= 0 ,
dentro∂Ex
∂x+∂Ey
∂y= 2πρ(1 + 1) = 4πρ .
Contabamos con ambos resultados.
2.9.1. El Laplaciano.
Tenemos
~E = − gradϕ = −~∇ϕ = −(x∂ϕ
∂x+ y
∂ϕ
∂y+ z
∂ϕ
∂z
).
Por otra parte
div ~E = ~∇ · ~E =∂Ex
∂x+∂Ey
∂y+∂Ez
∂z.
Combinandolas
div ~E = − div gradϕ = −(∂2ϕ
∂x2+∂2ϕ
∂y2+∂2ϕ
∂z2
)Definamos el operador Laplaciano
∇2 =∂2
∂x2+
∂2
∂y2+
∂2
∂z2(2.36)
La notacion ∇2 se explica como sigue:
~∇ = x∂
∂x+ y
∂
∂y+ z
∂
∂z.
Si lo tratamos como un vector
~∇ · ~∇ =∂2
∂x2+
∂2
∂y2+
∂2
∂z2.
El Laplaciano en coordenadas cartesianas. En otras coordenadas esto NO es cierto. En ge-neral, el Laplaciano es
∇2 ≡ div (grad) (2.37)

2.10. LA ECUACION DE LAPLACE. 49
2.9.2. La ecuacion de Poisson.
Utilizando la definicion del Laplaciano, y la forma diferencial de la ley de Gauss obtenemos
∇2ϕ = −4πρ (2.38)
Esta ecuacion es conocida como la ecuacion de Poisson. Esta escrita en coordenadas carte-sianas
∂2ϕ
∂x2+∂2ϕ
∂y2+∂2ϕ
∂z2= −4πρ (2.39)
Esta es la forma no homogenea de la ecuacion y corresponde al caso en que hay presenciade densidad de carga.
2.10. La ecuacion de Laplace.
Donde quiera que la densidad sea nula, i.e. ρ = 0, el potencial electrico satisfacen laecuacion homogenea, conocida como la ecuacion de Laplace
∇2ϕ =∂2ϕ
∂x2+∂2ϕ
∂y2+∂2ϕ
∂z2= 0 (2.40)
Esta ecuacion la encontramos en muchas ramas de la Fısica. Las funciones que satisfacenla ecuacion de Laplace se conocen como armonicas.
2.10.1. Propiedades de las funciones armonicas.
Si ϕ(x, y, z) es armonica, es decir, solucion de la ecuacion de Laplace, entonces el valormedio de ϕ sobre la superficie de una esfera cualesquiera (NO necesariamente pequena) esigual al valor de en el centro.
Demostracion: En el caso de un potencial electrico en regiones sin carga. El trabajopara traer Q distribuida sobre una esfera en presencia de q serıa: Q veces el valor mediosobre la esfera del potencial debido a q.
q
Q distribuídasobre la esfera
Pero sabemos que este trabajo serıa el mismo que si hubiesemos tenido primero la cargade prueba y luego traemos a q desde el infinito. En este caso el trabajo serıa el mismo que siQ estuviera en el centro de la esfera en lugar de estar distribuida sobre la superficie.
Si hay mas fuentes usamos el principio de superposicion tal de incluir todos los manan-tiales.
50 CAPITULO 2. POTENCIAL ELECTRICO.
2.10.2. Equilibrio estable.
Lo anterior esta estrechamente relacionado con el teorema de imposibilidad de equilibrioestable en un campo electrostatico.
Supongamos que tenemos un campo en que existe un punto P en el cual una partıculacargada estuviese en equilibrio estable. Esto implica que cualquier desplazamiento pequenoa partir de P debe llevarla a un lugar donde actue un campo que empuje hacia P . Pero loanterior significa que una pequena esfera alrededor de P debe estar dirigido hacia el interioren todos los puntos de la superficie. Lo anterior contradice la Ley de Gauss, ya que no haycarga negativa dentro de la region.
En otras palabras, no se puede tener una region vacıa donde el campo electrico este dirigidotodo hacia el interior o todo hacia el exterior y esto es es necesario para un equilibro estableconsiderando ambos signos de la carga.
Para expresar lo anterior en funcion del potencial una posicion estable debe ser tal queϕ sea menor que el de todos los puntos proximos (si la carga es positiva) o mayor (si esnegativa).
Evidentemente ninguno de los dos es posible para una funcion cuyo valor medio sobre laesfera es igual al valor en el centro. Es posible atrapar y mantener estable una carga con uncampo electrico tiempo dependiente.
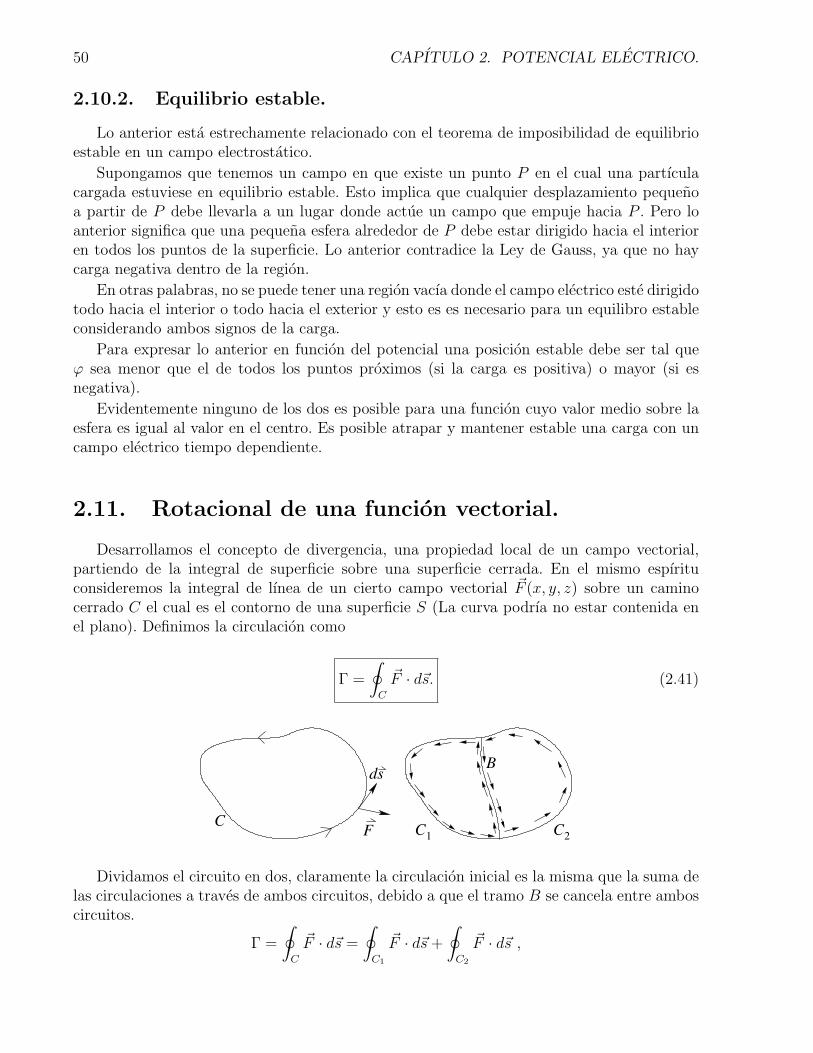
2.11. Rotacional de una funcion vectorial.
Desarrollamos el concepto de divergencia, una propiedad local de un campo vectorial,partiendo de la integral de superficie sobre una superficie cerrada. En el mismo espırituconsideremos la integral de lınea de un cierto campo vectorial ~F (x, y, z) sobre un caminocerrado C el cual es el contorno de una superficie S (La curva podrıa no estar contenida enel plano). Definimos la circulacion como
Γ =
∮C
~F · d~s. (2.41)
ds
FC C1 C2
B
Dividamos el circuito en dos, claramente la circulacion inicial es la misma que la suma delas circulaciones a traves de ambos circuitos, debido a que el tramo B se cancela entre amboscircuitos.
Γ =
∮C
~F · d~s =
∮C1
~F · d~s+
∮C2
~F · d~s ,

2.12. TEOREMA DE STOKES. 51
Si consideramos una particion en N circuitos Ci cada uno con circulacion Γi y areadelimitada ai y normal ni podemos escribir
Γ =N∑
i=1
Γi =
∮C
~F · d~s =N∑
i=1
∮Ci
~F · d~s .
Definamos una cantidad cuyo lımite exista y sea independiente de la particion
lımai→0
Γi
ai
= lımai→0
∮Ci
~F · d~sai
n
ai
i
Asociamos a cada superficie ai su vector normal ni mediante la regla de la mano derechapara su sentido. De esta manera nuestro lımite lo interpretamos como una magnitud vectorial,que llamaremos rotor de ~F , en la direccion de ni.
(rot ~F ) · ni = lımai→0
Γi
ai
= lımai→0
∮Ci
~F · d~sai
(2.42)
2.12. Teorema de Stokes.
Consideremos una particion de un circuito C en N circuitos Ci con circulacion Γi, area ai
y normal ni. Escribamos la circulacion total sobre C como una suma de las circulaciones Γi
Γ =
∮C
~F · d~s = lımN→∞
N∑i=1
Γi
= lımN→∞,ai→0
N∑i=1
ai
[Γ
ai
]
= lımN→∞,ai→0
N∑i=1
ai rot ~F · ni =
∫S
d~a · rot ~F .
Ası podemos resumir el anterior resultado en lo que se conoce como el Teorema de Stokes.∮C
~F · d~s =
∫S
rot ~F · d~a (2.43)

52 CAPITULO 2. POTENCIAL ELECTRICO.
2.13. Rotacional en coordenadas cartesianas.
Sea ~F = ~F (x, y, z) entonces
rot ~F = x
[∂Fz
∂y− ∂Fy
∂z
]+ y
[∂Fx
∂z− ∂Fz
∂x
]+ z
[∂Fy
∂x− ∂Fx
∂y
]. (2.44)
Tambien lo podemos escribir en coordenadas cartesianas como el determinante siguiente
rot ~F =
∣∣∣∣∣∣x y z∂∂x
∂∂y
∂∂z
Fx Fy Fz
∣∣∣∣∣∣ (2.45)
Si consideramos al operador nabla como
~∇ = x∂
∂x+ y
∂
∂y+ z
∂
∂z,
podemos escribir el rot ~F en coordenadas cartesianas como
rot ~F = ~∇× ~F (2.46)
2.14. Significado fısico del rotacional.
Un campo con rotacional distinta de cero tiene circulacion o turbulencia.
Supongamos un campo de velocidades ~G y tal que rot ~G 6= 0. Entonces las velocidades eneste campo tiene superpuestas ©<· o ©
<· superpuesto a la circulacion general en una direccion.
Por ejemplo: el campo de velocidades del agua al vaciar una banera adquiere circulacion, dehecho lo que flota gira mientras avanza.
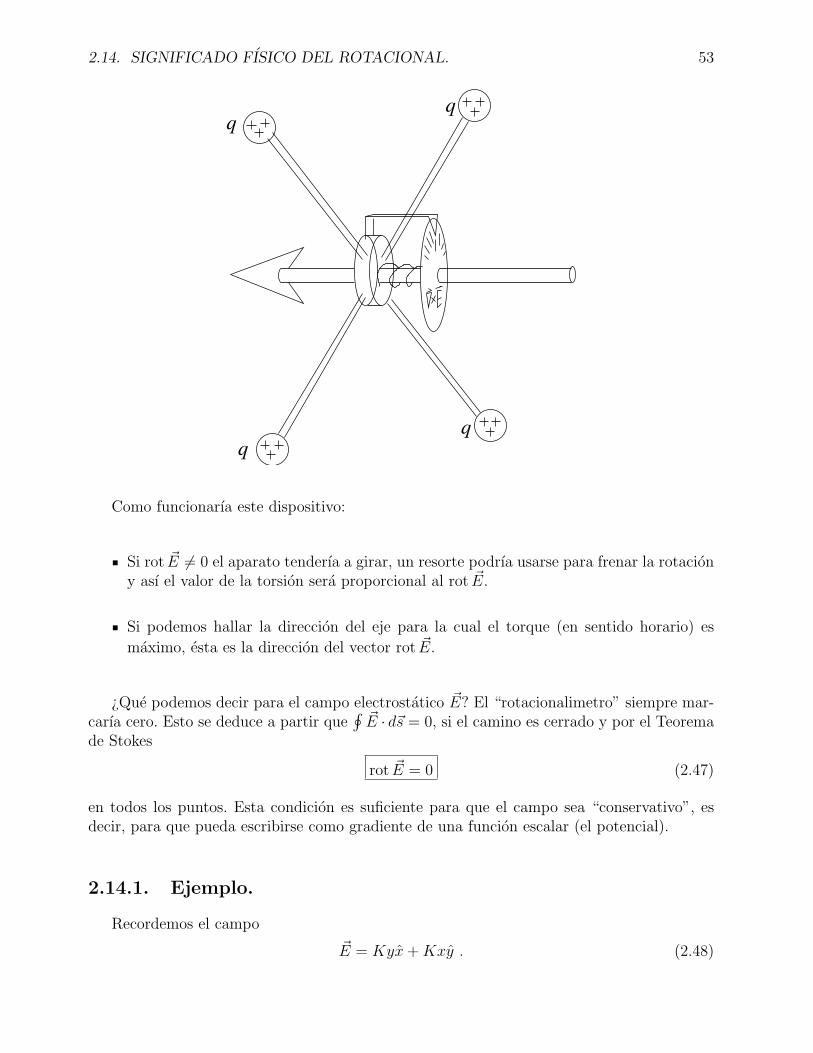
Un “Rotacionalimetro” imaginario para el campo electrico.
2.14. SIGNIFICADO FISICO DEL ROTACIONAL. 53
Como funcionarıa este dispositivo:
Si rot ~E 6= 0 el aparato tenderıa a girar, un resorte podrıa usarse para frenar la rotaciony ası el valor de la torsion sera proporcional al rot ~E.
Si podemos hallar la direccion del eje para la cual el torque (en sentido horario) es
maximo, esta es la direccion del vector rot ~E.
¿Que podemos decir para el campo electrostatico ~E? El “rotacionalimetro” siempre mar-carıa cero. Esto se deduce a partir que
∮~E · d~s = 0, si el camino es cerrado y por el Teorema
de Stokes
rot ~E = 0 (2.47)
en todos los puntos. Esta condicion es suficiente para que el campo sea “conservativo”, esdecir, para que pueda escribirse como gradiente de una funcion escalar (el potencial).
2.14.1. Ejemplo.
Recordemos el campo
~E = Kyx+Kxy . (2.48)

54 CAPITULO 2. POTENCIAL ELECTRICO.
Calculemos las componentes del rotor de ~E
(rotE)x =
[∂Ez
∂y− ∂Ey
∂z
]= 0
(rotE)y =
[∂Ex
∂z− ∂Ez
∂x
]= 0
(rotE)z =
[∂Ey
∂x− ∂Ex
∂y
]= K −K = 0 .
Esto nos dice que este campo (2.43) es el gradiente de un potencial escalar. Este campocasualmente tiene tambien divergencia nula
div ~E =
[∂Ex
∂x+∂Ey
∂y+∂Ez
∂z
]= 0 .
Por lo tanto, representa un campo electrostatico en una region libre de carga. Si definimosun campo
~F = Kyx−Kxy
luego(rotF )z = −2K
no podrıa ser un campo electrostatico.
Capıtulo 3
Campo electrico en conductores.
Conductores y aisladores.
Conductores en el campo electrostatico.
Problema electrostatico general: Teorema de unicidad.
Algunos sistemas simples de conductores.
Condensadores y capacidad.
Potenciales y cargas en varios condensadores.
Energıa almacenada en un condensador.
Otros puntos de vista de los problemas de contorno.
3.1. Conductores y aisladores.
Dos tipos de materiales: Conductores y aisladores.Los conductores: son materiales en los que las cargas electricas se mueven con bastante
libertad. Los buenos conductores son tıpicamente metales.Los aisladores: son materiales en que las cargas se mueven con mucha dificultad. El vidrio,
el caucho y los plasticos son buenos aisladores.Los conductores difieren de los aisladores en su conductividad del orden de 1020.Diferencia entre un conductor y un aislador es tan grande como entre un solido y un
lıquido. Ambas propiedades dependen de la movilidad de las partıculas. En un caso losportadores de carga y en otro caso los atomos mismos. Sustancias con fluidez entre el lıquidoy el solido, (en electricidad son los semiconductores).
Los semiconductores: son una tercera clase de materiales. Sus propiedades electricas seencuentran entre las de los aisladores y las de los conductores. El Silicio y el Germanio sonejemplos bien conocidos de semiconductores utilizados comunmente en electronica actual.Las propiedades electricas de los semiconductores pueden cambiarse en varios ordenes demagnitud anadiendo a los materiales pequenas cantidades de otros elementos (dopaje).
55
56 CAPITULO 3. CAMPO ELECTRICO EN CONDUCTORES.
3.2. Conductores en el campo electrostatico.
Estudiemos sistemas en que intervienen conductores. Nos interesa el estado estacionario,es decir, cuando ya se han producido todas las redistribuciones de carga en el conductor.Todos los aisladores presentes los supondremos perfectos.
Cuando la carga se ha reacomodado: ¿Que podemos decir sobre el campo electrico dentrode la materia conductora?.
El campo es NULO, de no ser ası los portadores de carga sentirıan una fuerza y semoverıan, luego, la situacion no serıa estacionaria. (en ausencia de ~f externas)
Nos estamos refiriendo al campo medio promediado en una region grande comparada conlos detalles de la estructura atomica.
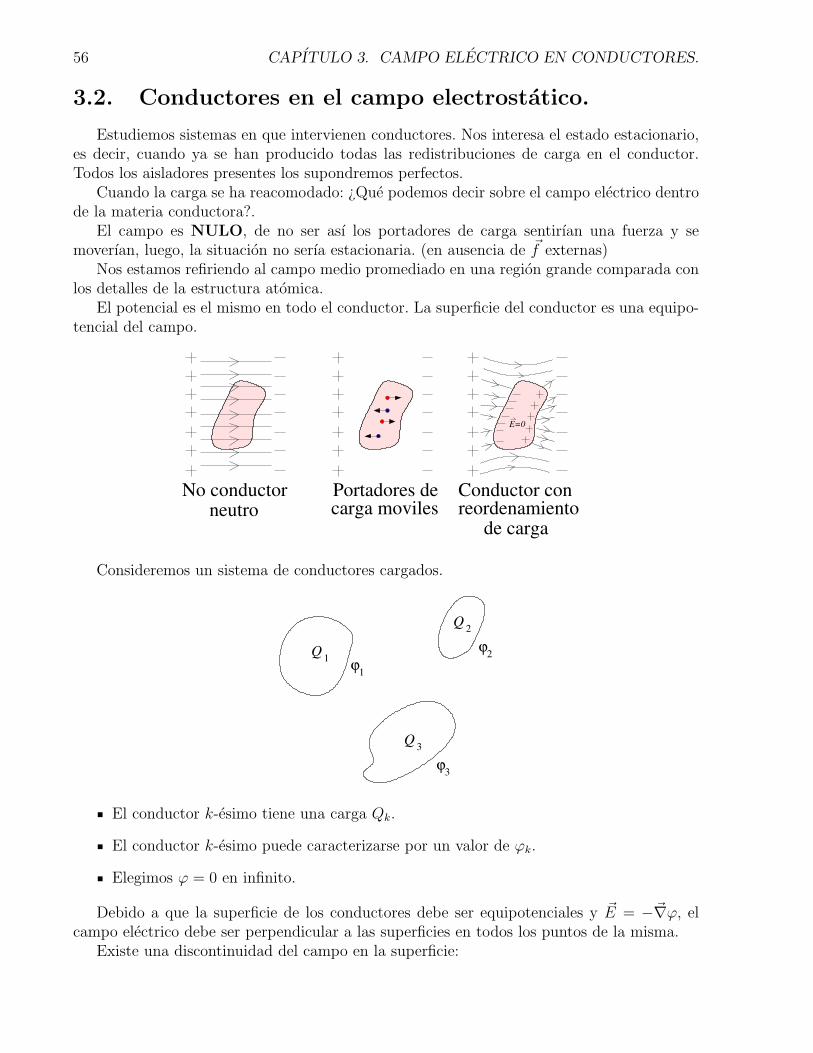
El potencial es el mismo en todo el conductor. La superficie del conductor es una equipo-tencial del campo.
E=0
No conductorneutro
Portadores decarga moviles
Conductor conreordenamiento
de carga
Consideremos un sistema de conductores cargados.
ϕ1
ϕ3
ϕ2Q 1
Q 2
Q 3
El conductor k-esimo tiene una carga Qk.
El conductor k-esimo puede caracterizarse por un valor de ϕk.
Elegimos ϕ = 0 en infinito.
Debido a que la superficie de los conductores debe ser equipotenciales y ~E = −~∇ϕ, elcampo electrico debe ser perpendicular a las superficies en todos los puntos de la misma.
Existe una discontinuidad del campo en la superficie:

3.3. PROBLEMA ELECTROSTATICO GENERAL: TEOREMA DE UNICIDAD. 57
~E = 0 adentro~E 6= 0 afuera
=⇒ Densidad de carga
en la superficie σ
Aplicamos la Ley de Gauss
A
Con
duct
or
Caja
∫~E · d~a = 4πσA
EnA+ 0A = 4πσA
En = 4πσ
la componente normal del campo. La carga superficial debe dar cuenta de las carga total Qk,es decir, la integral de σ sobre toda la superficie debe dar cuenta de Qk
En general para un sistema de conductores
ϕ = ϕk en todos los puntos de la superficie del conductor k-esimo.
En todo punto exterior junto al conductor, ~E es perpendicular a la superficie, el moduloes E = 4πσ donde σ es la densidad local de carga superficial
Qk =
∫Sk
σda =1
4π
∫Sk
~E · d~a (3.1)
No hay que pensar σ como la fuente de ~E. El campo total es debido a todas las cargasdel sistema, proximas y lejanas, de las cuales la carga superficial es solo una parte. La cargasuperficial esta obligada a un reajuste propio hasta que cumpla E = 4πσ
3.3. Problema electrostatico general: Teorema de uni-
cidad.
Podemos plantear el problema desde el punto de vista del potencial ϕ, pues si hallamos ϕpodemos deducir ~E. En cualquier punto (x, y, z), exterior a los conductores, ϕ debe satisfacerla ecuacion de Laplace
∇2ϕ = 0 ,∂2ϕ
∂x2+∂2ϕ
∂y2+∂2ϕ
∂z2= 0 (3.2)
58 CAPITULO 3. CAMPO ELECTRICO EN CONDUCTORES.
El problema es hallar un ϕ que satisfaga (3.2) y tambien las condiciones especificadas enlas superficie de los conductores. Las condiciones pueden ser establecidas de diferentes formas
Los potenciales ϕk son fijados.
Pueden fijarse las cargas Qk.
En un sistema real los potenciales pueden fijarse mediante conexiones permanentes abaterıas a ϕ cte. Entonces ϕ(x, y, z) debe tomar el valor correcto en todos los puntos de cadauna de las superficies.
3.3.1. Condiciones de borde.
Estas superficies en su totalidad limitan la region en la cual esta definida ϕ, si incluimosuna superficie grande (en el infinito, por ejemplo) donde se exige que ϕ tienda a cero. Tenemosun caso de condiciones de borde tipo Dirichlet, (Dirichlet boundary condition).
Por otra parte podemos especificar las Qk (no ademas los ϕk esto sobre-determinarıa elproblema), con las cargas dadas tenemos fijado el valor de gradϕ sobre la superficie de cadaconductor. Tenemos un caso de condiciones de borde tipo Neumann, (Neumann boundarycondition).
Los dos casos son distintos desde el punto de vista matematico. Ademas, podemos com-binar los dos tipos de condiciones del contorno. Condiciones de borde mixta.
Un problema general de interes es este: con las condiciones de contorno dadas de algunamanera, el problema: tiene o no solucion, tiene una solucion o tiene mas de una solucion.
3.3.2. Unicidad.
No se intenta responder la pregunta de todas las formas que puede presentarse, pero uncaso importante puede ser ilustrativo.
Supongamos que se ha fijado el potencial ϕk de cada conductor, junto con la condicionde que ϕ tienda a cero a distancia infinita.
Demostremos que tiene solucion unica.
Como problema fısico es evidente que tiene una solucion. Desde el punto de vistamatematico supondremos que existe una solucion ϕ(x, y, z) y demostraremos que esunica.
Supongamos que existe otra funcion ψ(x, y, z) que es tambien solucion de la ecuacionde Laplace y satisface las condiciones de contorno.
La ecuacion de Laplace es lineal, es decir, si ϕ y ψ la satisfacen c1ϕ + c2ψ tambien loes. En particular
W (x, y, z) = ϕ(x, y, z)− ψ(x, y, z) .
3.4. ALGUNOS SISTEMAS SIMPLES DE CONDUCTORES. 59
Por supuesto W no satisface las condiciones de contorno, de hecho en cada superficieW = 0 porque ϕ y ψ tienen el mismo valor ϕk sobre cada Sk. Ası que W es solucion deotro problema electrostatico, uno con los mismos conductores mantenidos a potencialcero.
Podemos afirmar que W es nula en todo el espacio pues si no lo fuera debe existir unmaximo o un mınimo en alguna parte recordemos que W = 0 en infinito.
Si W tiene un extremo en cierto punto p, consideremos una esfera centrada en p. Comoya vimos en el capıtulo anterior una funcion que satisface la ecuacion de Laplace suvalor medio es igual a su valor en el centro.
W no tiene maximos ni mınimos, entonces ϕ = ψ, es decir, solamente puede existir unasolucion que satisfaga las condiciones de borde prescritas.
Ahora podemos demostrar otro hecho notable. En el espacio interior a un conductor huecode cualquier forma, si asimismo este espacio esta libre de cargas, el campo electrico es nulo.Esto es cierto cualquiera sea el campo exterior.
E=0
El potencial ϕ dentro de la caja debe satisfacer Laplace el contorno esta a ϕ = ϕ0, luego lasolucion es ϕ = ϕ0 en todo el volumen. ~E = −~∇ϕ = 0 en todo el volumen, ya que ϕ = cte.Apantallamiento, parece sorprendente el reacomodo “inteligente” de carga, tal de anular ~Een el interior.
3.4. Algunos sistemas simples de conductores.
3.4.1. Esferas conductoras.
Dos esferas metalicas concentricas de radios R1 y R2 que contienen cargas totales Q1 yQ2.

60 CAPITULO 3. CAMPO ELECTRICO EN CONDUCTORES.
R1
Q2Q1R2
El potencial en la esfera exterior es ϕe =Q1 +Q2
R1
. El potencial en la esfera interior es
ϕi =Q1
R1
+Q2
R2
.
Si las dos esferas contienen la misma cantidad de carga pero de signos contrarios Q1 =−Q2, el campo electrico es distinto de cero solamente en el espacio entre ellas.
3.4.2. Carga cerca de un plano conductor.
El sistema, mas simple, en el cual queda en evidencia la movilidad de las cargas en unconductor, es la una carga puntual proxima a un conductor plano.
Q
h
x
y
z
ϕ=0
¿Que tipo de campo y que distribucion de carga debemos esperar?

3.4. ALGUNOS SISTEMAS SIMPLES DE CONDUCTORES. 61
Q
Conductor
3.4.3. Metodo de imagen.
Consideremos un sistema de dos cargas puntuales equidistantes del plano x− y. Sobre elplano el potencial es cero. Calculemos el campo
ϕ=0 el plano
z
h
rA A
−Q
Q
hCarga imagen
θ
Evaluemos el campo sobre el plano sumando la contribucion de la carga y de la cargaimagen:
~E =Q
r2 + h2cos θ(−z) +
−Qr2 + h2
cos θ(z)
=−2Q
r2 + h2
h
(r2 + h2)1/2z
Luego la componente z del campo
Ez =−2Qh
(r2 + h2)3/2(3.3)
La densidad superficial de carga σ
σ =Ez
4π=
−Qh2π(r2 + h2)3/2
(3.4)

62 CAPITULO 3. CAMPO ELECTRICO EN CONDUCTORES.
La carga superficial total qT debe valer −Q. Como comprobacion podrıamos integrar paratoda la superficie y ver que ocurre.
qT =
∫ 2π
0
∫ ∞
0
σ rdrdφ = 2π
∫ ∞
0
−Qhr2π(r2 + h2)3/2
dr
=
∫ ∞
0
−Qhr dr(r2 + h2)3/2
= −Qh[
−1
(r2 + h2)1/2
]∞0
= −Qh[−1
∞− −1
h
]= −Q
El metodo de imagen podrıa llamarse “ajuste del contorno de la solucion”.
3.5. Condensadores y capacidad.
Consideremos un sistema de dos placas planas conductoras cargadas separadas por unadistancia s
ϕ1
ϕ2
Aárea
Carga Q
Carga −Q
s
Sea A el area de cada placa y supongamos que una placa contiene la carga Q y la otra−Q. Los potenciales en cada una de las placas son ϕ1 y ϕ2. Excepto en los bordes el campoes casi uniforme en la region entre las placas.
Líneas de fuerza
Si consideramos uniforme el valor del campo tenemos
ϕ1 − ϕ2 = −∫ 1
2
~E · d~s = E
∫ 1
2
ds = Es .
Podemos escribir el campo como
E =ϕ1 − ϕ2
s(3.5)
3.5. CONDENSADORES Y CAPACIDAD. 63
La densidad de carga superficial de la superficie interior de las placas es
σ =E
4π=ϕ1 − ϕ2
4πs(3.6)
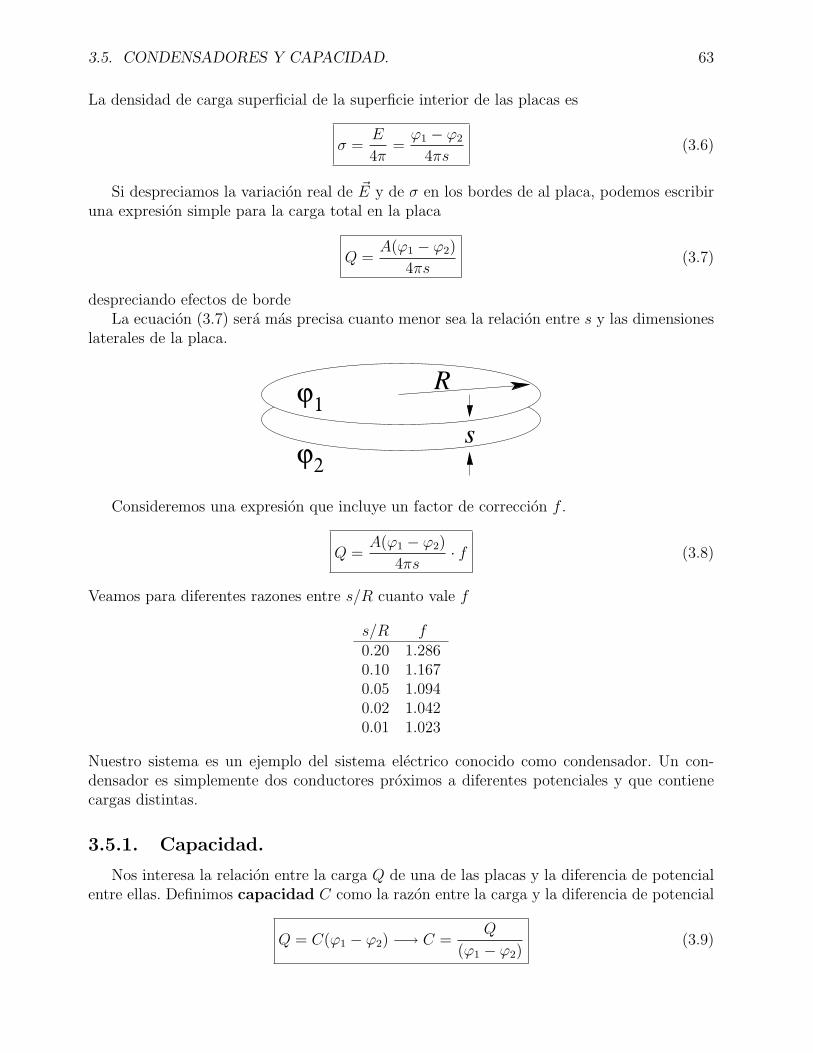
Si despreciamos la variacion real de ~E y de σ en los bordes de al placa, podemos escribiruna expresion simple para la carga total en la placa
Q =A(ϕ1 − ϕ2)
4πs(3.7)
despreciando efectos de bordeLa ecuacion (3.7) sera mas precisa cuanto menor sea la relacion entre s y las dimensiones
laterales de la placa.
ϕ1
ϕ2
R
s
Consideremos una expresion que incluye un factor de correccion f .
Q =A(ϕ1 − ϕ2)
4πs· f (3.8)
Veamos para diferentes razones entre s/R cuanto vale f
s/R f0.20 1.2860.10 1.1670.05 1.0940.02 1.0420.01 1.023
Nuestro sistema es un ejemplo del sistema electrico conocido como condensador. Un con-densador es simplemente dos conductores proximos a diferentes potenciales y que contienecargas distintas.
3.5.1. Capacidad.
Nos interesa la relacion entre la carga Q de una de las placas y la diferencia de potencialentre ellas. Definimos capacidad C como la razon entre la carga y la diferencia de potencial
Q = C(ϕ1 − ϕ2) −→ C =Q
(ϕ1 − ϕ2)(3.9)

64 CAPITULO 3. CAMPO ELECTRICO EN CONDUCTORES.
para nuestro particular sistema, ecuacion (3.7)
C =A
4πs
[cm2]
[cm](3.10)
Depende solo de aspectos geometricos del sistema. La unidad de capacitancia en CGS esel [cm]. Cuando uno se enfrenta a circuitos no usa estas unidades sino las del sistema practico.Usando unidades MKS tenemos para la capacidad,
C =Q
∆ϕ
[coulomb]
[volts]= [farad] (3.11)
1[farad] =[coulomb]
[volts]=
3× 109
1/300
[ues]
[statvolt]
= 9× 1011 [ues]
[statvolt]
1[farad] = 9× 1011[cm]
Un condensador de 1 [farad] serıa gigantesco: dos placas separadas 1 [mm] deberıan teneruna area de 100 [km2]. Lo usual es [µF ].
Todo par de conductores, prescindiendo de la forma y disposicion, pueden considerarseun condensador.
ϕ1
Q2(i)
Q1
Q2(e)
ϕ2 S
Luego Q(i)2 = −Q1, ya que el flujo es nulo sobre al superficie S. El campo es nulo en el
interior de un conductor. Es decir, Q(e)2 no interviene.
C =Q
ϕ1 − ϕ2
3.6. Potenciales y cargas en varios condensadores.
Estudiemos la relacion entre las cargas y los potenciales de un cierto numero de conduc-tores. Para fijar ideas consideremos 3 conductores separados rodeados todos por una capaconductora.

3.6. POTENCIALES Y CARGAS EN VARIOS CONDENSADORES. 65
ϕ=0
2ϕ
1ϕ
3ϕ
Los potenciales en los tres conductores son ϕ1, ϕ2 y ϕ3. El teorema de unicidad garantizaque dados ϕ1, ϕ2 y ϕ3 el campo electrico esta determinado en todo el sistema Se deduce quelas cargas Q1, Q2 y Q3 en los conductores estan asimismo determinados unıvocamente. Lacarga en la superficie interna de la capa que rodea es −(Q1 +Q2 +Q3).
ϕ=0
2ϕ
1ϕ
3ϕ
Q1 Q2 Q3+ +( )_
Los potenciales ϕ2 = ϕ3 = 0
ϕ=0
1ϕ
2ϕ =0
3ϕ =0
Los valores para las cargas
Q1 = C11ϕ1 , Q2 = C21ϕ1 , Q3 = C31ϕ1 . (3.12)
Las constantes solo dependen de la forma y disposicion de los conductores.Los potenciales ϕ1 = ϕ3 = 0
ϕ=0
3ϕ =0
1ϕ =0
2ϕ

66 CAPITULO 3. CAMPO ELECTRICO EN CONDUCTORES.
Los valores para las cargas
Q1 = C12ϕ2 , Q2 = C22ϕ2 , Q3 = C32ϕ2 . (3.13)
Las constantes solo dependen de la forma y disposicion de los conductores.Los potenciales ϕ1 = ϕ2 = 0
ϕ=0
1ϕ =0
3ϕ
2ϕ =0
Los valores para las cargas
Q1 = C13ϕ3 , Q2 = C23ϕ3 , Q3 = C33ϕ3 . (3.14)
Las constantes solo dependen de la forma y disposicion de los conductores.La superposicion de los tres estados posibles donde ni ϕ1, ni ϕ2 ni ϕ3 son necesariamente
nulos.La expresion que relaciona las cargas y los potenciales se obtiene sumando las ecuaciones
(3.12), (3.13) y (3.14) tenemos
Q1 = C11ϕ1 + C12ϕ2 + C13ϕ3
Q2 = C21ϕ1 + C22ϕ2 + C23ϕ3 (3.15)
Q3 = C31ϕ1 + C32ϕ2 + C33ϕ3
Solo se necesitan seis de las nueve constantes ya que C12 = C21, C13 = C31 y C23 = C32.Esto NO es evidente y puede probarse por conservacion de energıa. Las constantes Cij de laecuacion (3.15) se les conoce como coeficientes de capacidad.
Puede resolverse el sistema para hallar los ϕi en funcion de las Qj.
ϕ1 = P11Q1 + P12Q2 + P13Q3
ϕ2 = P21Q1 + P22Q2 + P23Q3 (3.16)
ϕ3 = P31Q1 + P32Q2 + P33Q3
Los Pij se le conocen como coeficientes de potencial y pueden calcularse a partir de los Cij.Tambien se puede escribir la ecuacion en forma matricialϕ1
ϕ2
ϕ3
=
P11 P12 P13
P21 P22 P23
P31 P32 P33
Q1
Q2
Q3
Donde P es un tensor simetrico.

3.7. ENERGIA ALMACENADA EN UN CONDENSADOR. 67
3.7. Energıa almacenada en un condensador.
Consideremos un condensador de capacidad C con una diferencia de potencial ϕ12 entrelas placas. La carga Q es igual a Cϕ12. Hay carga Q en una placa y −Q en la otra.
Supongamos que aumentamos la carga de Q a Q+ dQ transportando una carga positivadQ de la placa negativa a la positiva contra la diferencia de potencial ϕ12.
dW = ϕ12dQ =QdQ
C.
Para cargar un condensador partiendo del estado descargado a un estado con carga Qf
W =1
C
∫ Q=Qf
Q=0
QdQ =Q2
f
2C. (3.17)
Usando que Q = Cϕ la energıa U almacenada en el condensador es
U =Q2
2C=
1
2Cϕ2
12 (3.18)
Para el condensador de placas planas con area A y separacion entre las placas s tenemos que
C =A
4πs, E =
ϕ12
s.
Luego
U =1
2Cϕ2
12 =1
2
(A
4πs
)(Es)2
=E2
8πAs =
E2
8πvolumen
3.8. Otros puntos de vista de los problemas de con-
torno.
Existen algunos metodos generales para tratar los problemas de contorno. Nosotros con-sideraremos tres metodos distintos para atacar este problema:
Representacion conforme. Metodo analıtico en dos dimensiones.
Metodos de relajacion. Un tipo de metodo numerico.
Metodo de mınima energıa. Un metodo variacional.
Estos no son los unicos metodos de solucion, tanto analıticos como numericos, por ejemplo:expansion en funciones ortogonales y diferencia finita respectivamente.

68 CAPITULO 3. CAMPO ELECTRICO EN CONDUCTORES.
3.8.1. Mapeo conforme.
Este metodo esta basado en la teorıa de funciones complejas. Lamentablemente solo esaplicable a dos dimensiones, es decir, ϕ(x, y) en ese caso la ecuacion de Laplace se reduce a
∂2ϕ
∂x2+∂2ϕ
∂y2= 0 . (3.19)
Hay sistemas que pueden ser reducido a dos dimensiones, por ejemplo, los sistemas cilındricosen los cuales no hay variacion en el eje z o sistemas rectangulares como planos infinitos adiferente potencial. Tanto la parte real como la parte imaginaria de cualquier funcion analıticaen el plano complejo son armonicas. Una aplicacion f es conforme si mantiene los angulosorientados. Es decir, si dos curvas C1, C2 formaban un angulo φ1 en el punto z entoncessus respectivas imagenes bajo f , digamos C ′
1 y C ′2 forman el mismo angulo en z′. La idea es
encontrar una aplicacion conforme que me permita transformar las condiciones de borde aunas mas faciles para resolver el problema.
3.8.2. Metodo de relajacion.
Es un tipo de metodo numerico para encontrar en forma aproximada el potencial elec-trostatico con ciertos valores de contorno dados. El metodo es simple y casi universalmenteaplicable y esta basado en el hecho de que todas las funciones armonicas en un punto soniguales al valor medio en las proximidades del punto. En este metodo se discretiza el espacioϕ(~xi) y todos los valores (salvo el contorno) se ajustan tal que cumplan con el promedio delos valores vecinos. Repetimos este proceso hasta que los cambios sean despreciables (o tanpequenos como se quiera teniendo en cuenta la precision numerica).
3.8.3. Metodo de mınima energıa.
Si consideramos la energıa del sistema como un funcional del potencial:
U =1
8π
∫ ∣∣∣ ~∇ϕ ∣∣∣2 dv (3.20)
Enunciado como principio variacional: el funcional de la energıa sera mınimo cuando ϕ seala solucion al problema fısico. Entre mas se aproximan la funcion de prueba a la solucion delproblema menor sera U . Luego podemos elegir una familia parametrica de funciones de pruebay variar los parametros hasta encontrar el mınimo. Si la familia de prueba elegida incluyeentre sus miembros la solucion del problema fısico, cuando minimicemos la encontraremos.
3.8.4. Ejemplo de mapeo conforme.
Consideremos el siguiente problema en el plano con las condiciones de contorno especifi-cadas.

3.8. OTROS PUNTOS DE VISTA DE LOS PROBLEMAS DE CONTORNO. 69
Voϕ= ϕ=0Aislador
x
y
Escribimos un punto x, y en el plano por un complejo z = x + iy o bien en su forma polarz = reiθ. Usamos el mapeo conforme
w = u+ iv = Log z = Log reiθ = Log r + iθ .
Entonces el problema se mapea en
ϕ=0
Voϕ=
Voϕ= ϕ=0Aislador
x
y
w= Log zz w
u
v
π
La primera semi-recta θ = 0 −→ v = 0. La segunda semi-recta θ = π −→ v = π.
La solucion en el plano w es ϕ(u, v) =Vo
πv =
Vo
πθ, con 0 ≤ θ ≤ π. En terminos de las
coordenadas cartesianas
ϕ(x, y) =Vo
πarctan
y
x.
3.8.5. Relajacion
Consideremos el siguiente problema
ϕ=0 ϕ=10
x=10x=0
Con solucion
ϕ(x) = x .
La solucion numerica, en la primera columna el numero de iteraciones y en las siguientes losvalores del potencial ϕ(x) para x = 0, 1, 2, 3, . . . , 9, 10.
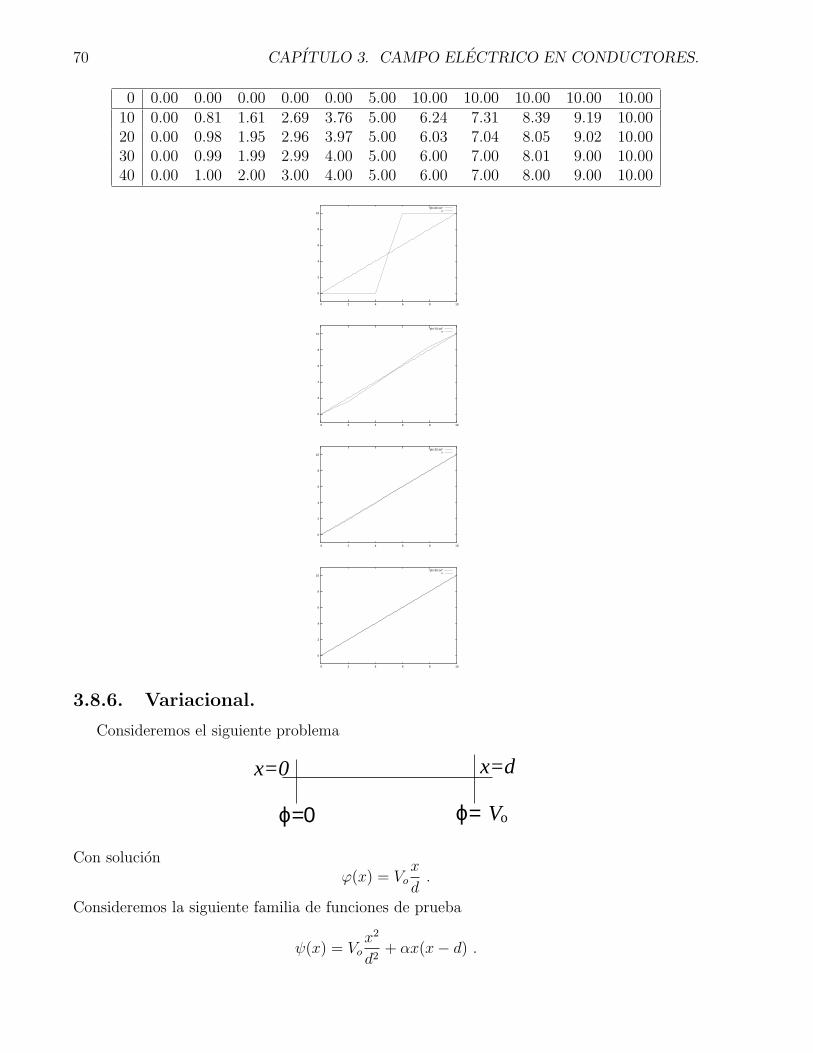
70 CAPITULO 3. CAMPO ELECTRICO EN CONDUCTORES.
0 0.00 0.00 0.00 0.00 0.00 5.00 10.00 10.00 10.00 10.00 10.0010 0.00 0.81 1.61 2.69 3.76 5.00 6.24 7.31 8.39 9.19 10.0020 0.00 0.98 1.95 2.96 3.97 5.00 6.03 7.04 8.05 9.02 10.0030 0.00 0.99 1.99 2.99 4.00 5.00 6.00 7.00 8.01 9.00 10.0040 0.00 1.00 2.00 3.00 4.00 5.00 6.00 7.00 8.00 9.00 10.00
0
2
4
6
8
10
0 2 4 6 8 10
"phi-00.txt"x
0
2
4
6
8
10
0 2 4 6 8 10
"phi-10.txt"x
0
2
4
6
8
10
0 2 4 6 8 10
"phi-20.txt"x
0
2
4
6
8
10
0 2 4 6 8 10
"phi-30.txt"x
3.8.6. Variacional.
Consideremos el siguiente problema
Voϕ=0
x=0 x=d
ϕ=
Con solucionϕ(x) = Vo
x
d.
Consideremos la siguiente familia de funciones de prueba
ψ(x) = Vox2
d2+ αx(x− d) .

3.8. OTROS PUNTOS DE VISTA DE LOS PROBLEMAS DE CONTORNO. 71
Donde α es un parametro. Las condiciones de borde son satisfechas ψ(0) = 0 y ψ(d) = Vo.
ψ(x) = Vox2
d2+ αx2 − αdx
~∇ψ =∂ψ
∂xx =
(2Vo
x
d2+ 2αx− αd
)x∣∣∣ ~∇ψ ∣∣∣2 = 4
(Vo
d2+ α
)2
x2 − 4
(Vo
d2+ α
)αdx+ α2d2
Luego en la funcional
U =1
8π
∫ ∣∣∣ ~∇ψ ∣∣∣2 dvU =
1
8π
∫ d
0
[4
(Vo
d2+ α
)2
x2 − 4
(Vo
d2+ α
)αdx+ α2d2
]dx
=1
8π
[4
3
(Vo
d2+ α
)2
d3 − 2
(Vo
d2+ α
)αd3 + α2d3
]
=1
8π
[4
3
V 2o
d+
2
3Vodα+
1
3d3α2
]Derivamos el funcional respecto al parametro α e igualamos a cero.
∂U
∂α=
1
8π
[2
3Vod+
2
3d3α
]= 0
Al resolver para α.
Vod+ d3α = 0 =⇒ α = −Vo
d2.
Al reemplazar en la solucion
ψ(x) = Vox2
d2+ αx(x− d)
= Vox2
d2− Vo
x2
d2+ Vo
xd
d2
= Vox
d= ϕ(x) .

72 CAPITULO 3. CAMPO ELECTRICO EN CONDUCTORES.

Capıtulo 4
Corriente electricas.
Lo que veremos en este capıtulo sera:
Transporte de carga y densidad de corriente.
Corrientes estacionarias.
Conductividad electrica y ley de Ohm.
Un modelo para la conduccion electrica.
Donde falla la ley de Ohm.
Conductividad electrica de los metales.
Resistencia de los conductores.
Circuitos y elementos de circuitos.
Disipacion de energıa en la circulacion de corriente.
Fuerza electromotriz y pilas voltaicas.
Corriente variables en condensadores y resistencia.
4.1. Transporte de carga y densidad de corriente.
Las corrientes electricas se deben al movimiento de los portadores de carga. La corrienteelectrica en un hilo es la medida de la cantidad de carga que pasa por un punto del hilo porunidad de tiempo. La unidad de corriente electrica en sistema CGS es [ues/s]. La unidadde corriente electrica en sistema MKS es [Ampere]=[Coulomb/s]. La conversion entre ambasunidades es:
1 [A] = 3× 109[ues
s
]= 6.2× 1018
[e−
s
].
Por supuesto que lo que cuenta es el transporte de carga neta, es decir, con la debidaconsideracion de signo. El movimiento de un cuerpo neutro podrıa decirse que supone el
73
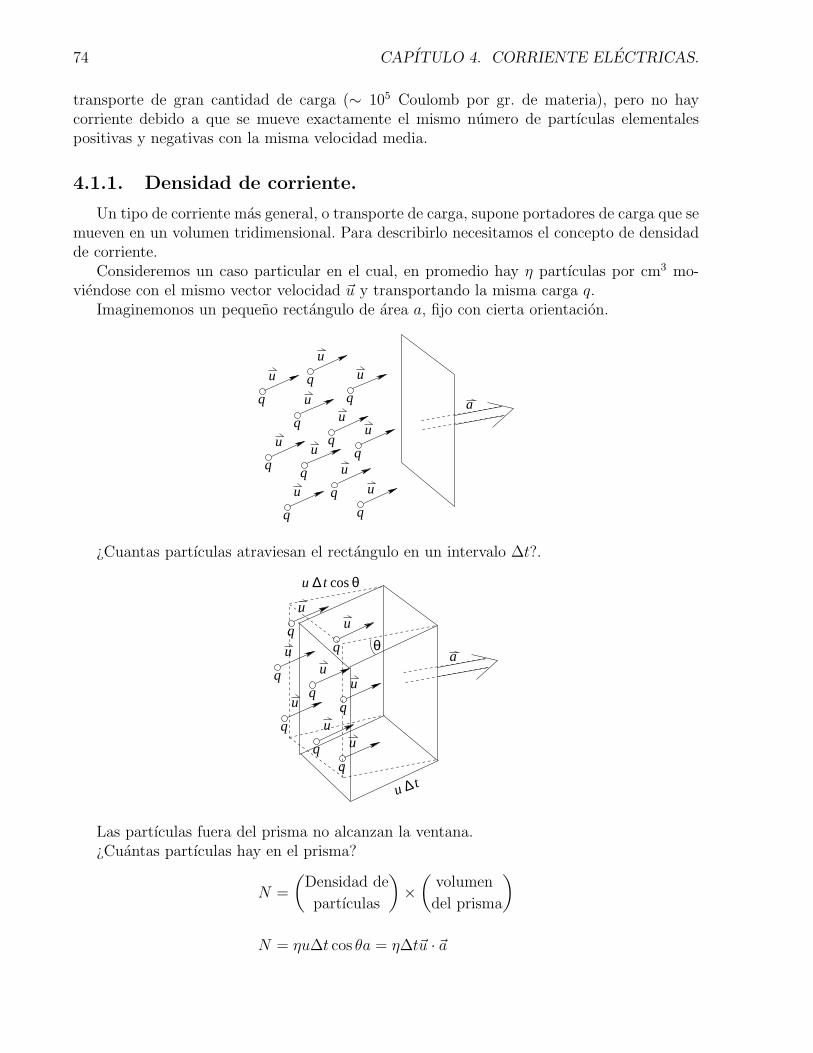
74 CAPITULO 4. CORRIENTE ELECTRICAS.
transporte de gran cantidad de carga (∼ 105 Coulomb por gr. de materia), pero no haycorriente debido a que se mueve exactamente el mismo numero de partıculas elementalespositivas y negativas con la misma velocidad media.
4.1.1. Densidad de corriente.
Un tipo de corriente mas general, o transporte de carga, supone portadores de carga que semueven en un volumen tridimensional. Para describirlo necesitamos el concepto de densidadde corriente.
Consideremos un caso particular en el cual, en promedio hay η partıculas por cm3 mo-viendose con el mismo vector velocidad ~u y transportando la misma carga q.
Imaginemonos un pequeno rectangulo de area a, fijo con cierta orientacion.
u
q
u
q
u
q
u
q u
q
u
q
u
q
u
q u
q
u
q
u
q a
¿Cuantas partıculas atraviesan el rectangulo en un intervalo ∆t?.
u
q
u
q
u
q
u
q
u
q
a
u
q
u
q
u
q
∆u t
∆u t cos θ
θ
Las partıculas fuera del prisma no alcanzan la ventana.¿Cuantas partıculas hay en el prisma?
N =
(Densidad de
partıculas
)×(
volumen
del prisma
)
N = ηu∆t cos θa = η∆t~u · ~a

4.2. CORRIENTES ESTACIONARIAS Y CONSERVACION DE LA CARGA. 75
Calculemos la corriente I(a) a traves de a,
I(a) =qN
∆t=qη~u · ~a∆t
∆t= ηq~u · ~a . (4.1)
Supongamos que tenemos distintas partıculas en el conjunto que difieren en la carga y enel vector velocidad. Denotemos cada clase por el subındice k, teniendo
I(a) = η1q1~a · ~u1 + η2q2~a · ~u2 + . . . = ~a ·∑
k
ηkqk~uk . (4.2)
La magnitud vectorial que multiplica a ~a la llamamos la densidad de corriente.
~J =∑
k
ηkqk~uk (4.3)
En sistema CGS la unidad para la densidad de corriente es [ues/s cm2] y en el sistemaMKS la unidad es [A/m2].
Consideremos la contribucion a la densidad de corriente de los e−, los cuales puedenestar presentes con distintas velocidades (casi al azar en un conductor). Sea Ne el numerototal de electrones por unidad de volumen, considerando todas las velocidades. Evaluemos lavelocidad media
〈~u〉 =1
Ne
∑k
ηk~uk . (4.4)
Podemos escribir el aporte de los electrones a la densidad de corriente
~Je = eNe〈~u〉 qk = −e ∀k . (4.5)
La densidad de corriente depende de la velocidad media de los portadores. Al describir 〈~ue〉un vector promedio; para una distribucion isotropica de velocidades, sera nulo independientede cual fueran los modulos.
4.2. Corrientes estacionarias y conservacion de la car-
ga.
La corriente transportada por un conductor largo como un hilo, por supuesto, es la integralde la densidad de corriente ~J extendida a la seccion recta del hilo. En realidad, la corrienteI que circula a traves de cualquier superficie S es precisamente la integral de la superficie.
I =
∫S
~J · d~a (4.6)
Donde I es el “flujo” asociado al vector ~J , en este caso el nombre es adecuado. Consi-deremos el caso de corrientes estacionarias, es decir, cuando ~J permanece constante con eltiempo en todo punto. Se debe satisfacer la conservacion de la carga.
Consideremos una region del espacio limitada por una superficie cerrada S. La integral desuperficie de ~J extendida sobre S da la velocidad con que la carga sale del volumen encerrado.

76 CAPITULO 4. CORRIENTE ELECTRICAS.
u u
n1 n2
u n1Neq . u n2Neq .
q q
S
Las cargas que atraviesan no contribuyen a la∫~J · d~a. Ya que ~u · n1 = −~u · n2. Como no
se puede crear carga
No se puede dar
4.2.1. Divergencia de ~J.
Por lo tanto ∫S
~J · d~a = 0 =⇒ div ~J = 0 , (4.7)
si las distribuciones de carga son independientes del tiempo.Supongamos que la corriente NO es estacionaria ya que
∫s~J ·d~a es la velocidad instantanea
con que la carga total abandona el volumen cerrado, mientras que∫
V (S)ρdv es la carga en el
interior del volumen, en un instante cualquiera tenemos∫S
~J · d~a = − d
dt
∫V (S)
ρ dv . (4.8)
Usando el teorema de la divergencia
div ~J = −∂ρ∂t
,
En el caso que las distribucion de carga dependa del tiempo.
4.2.2. Ecuacion de continuidad.
La relacion anterior la podemos reescribir
~∇ · ~J +∂ρ
∂t= 0 (4.9)
Esta ecuacion es conocida como la ecuacion de continuidad y expresa la conservacion dela carga.

4.3. CONDUCTIVIDAD ELECTRICA Y LEY DE OHM. 77
4.3. Conductividad electrica y ley de Ohm.
Existen varias maneras de producir el movimiento de las cargas:
En un generador electrostatico Van der Graaff se da una carga superficial a una correaaislada que la conduce a otro electrodo por transporte (como una escalera mecanica).
En la atmosfera pequenas gotas de agua cargadas que caen a causa de su peso, consti-tuyen un componente del sistema de corriente de la Tierra.
Sin embargo, el agente mas comun del transporte de carga es la fuerza ejercida por uncampo electrico sobre un portador de carga.
Un campo electrico tiende a mover los portadores de carga y ası tiende a producir unacorriente electrica. El que esto ocurra o no, depende de la naturaleza fısica del sistema en elcual actua el campo, es decir, el medio.
Uno de los primeros descubrimientos experimentales acerca de las corrientes electricas enla materia se resume en la Ley de Ohm:
I =V
R(4.10)
Donde I es la corriente que circula por un hilo.
V = ϕ12 es la diferencia de potencial entre sus extremos.
R La resistencia.
Para un trozo de hilo mantenido a la misma temperatura, la resistencia R, no dependede la corriente que circula.
La resistencia depende de la geometrıa, siendo directamente proporcional a la longitud Le inversamente proporcional al area de la seccion recta A.
R = ρL
A, (4.11)
donde ρ la resistividad de la substancia, depende del material. La resistencia R se mide enOhm [Ω](con Ampere y Volt). La resistividad se da en [Ω cm].
El hecho fundamental que refleja las ecuaciones (4.11) es este: En los materiales solidoshomogeneos la densidad de corriente en un punto es proporcional al campo electrico y laconstante de proporcionalidad depende solo de la substancia (y no de la forma del conductorpor ejemplo.)
~J = σ ~E , (4.12)
donde σ es una constante caracterıstica de la substancia. La conductividad σ podrıa, y dehecho en algunos casos lo es, ser un tensor.
En el interior de la mayorıa de los conductores son equivalente fısicamente tres direccionesperpendiculares. Por ejemplo, el cobre (fcc) sin embargo, es policristalino la cual hace todaslas direcciones equivalentes a gran escala.
Al no existir una direccion privilegiada ~J tiene la misma que ~E y la constante es escalar.

78 CAPITULO 4. CORRIENTE ELECTRICAS.
V1V2
EJ
Densidad decorriente
L
Corriente I
área A
resistividad ρIntensidad del campo eléctrico
~J = σ ~E
I
A= σ
V
L
I =σA
LV , Ley de Ohm
R =1
σ
L
A=⇒ 1
σ= ρ
El cobre puro a temperatura ambiente tiene una resistividad ρ = 1.7× 10−6 [Ω cm] y unaconductividad σ = 5.8× 10−5 [Ω cm]−1.
En CGS no existe nombre especial para la unidad de conductividad o resistividad.
Resistividad =Intensidad de campo
Densidad de corriente
=(carga
cm2
)/(carga/s
cm2
)(4.13)
La cual se reduce a segundos. Es decir, en el sistema CGS la unidad de la resistividad esel [s] y la de la conductividad es 1/[s]. En estas unidades el cobre tiene una resistividad deρ = 10−18 [s] y la del vidrio es ρ = 103 [s].
4.3.1. Un modelo para la conduccion electrica
Intentaremos describir el proceso de conduccion electrica mediante un sistema modelo.Sera razonablemente para un gran numero de conductores, pero no en todos.
Necesitamos portadores de carga, imaginemos un medio que consista en portadores decarga positivos y negativos en igual numero, N de cada clase por centımetro cubico.
Los portadores positivos son iones de masa M+ y conducen carga +e.
Los portadores negativos son iones de masa M− y conducen carga −e.
La densidad de corriente ~J esta determinada por la velocidad media de los portadores.Se aplica un campo electrico ~E, constante con el tiempo, que ejerce una fuerza, sobre
cada uno de los portadores de carga q ~E (Como si la carga estuviera en reposo).

4.3. CONDUCTIVIDAD ELECTRICA Y LEY DE OHM. 79
Una fuerza constante sobre un portador de carga libre debe producir una aceleracionconstante. Pero la densidad de corriente constante esta asociada a una velocidad constante,no a una aceleracion constante. Si nuestro sistema obedece la Ley de Ohm debe ser debido aque la velocidad media es proporcional a la fuerza en nuestros portadores.
Lo anterior nos advierte que los portadores de carga no pueden moverse libremente;debe haber algo que se oponga al movimiento que produce e campo electrico. No hay queesforzarse demasiado para hallar una fuente de impedimento friccional. Surge de las colisionesque experimentan los portadores de carga al moverse por entre los demas y entre todas lasotras partıculas que puedan ocupar el medio.
El como esto tenga lugar dependera de los detalles de nuestro modelo. Particularicemosy consideremos un gas consistente de atomos neutros, iones positivos y iones negativos conuna densidad algo parecida a la de un gas normal, es decir, de unos 1019 [atomos/cm3].Supongamos que hay preponderancia de atomos neutros, con iones + y − entre ellos.
La distancia entre partıculas, neutras o cargadas, es mucho mayor que los radios atomicos oionicos de manera tal que la mayorıa del tiempo el ion no interviene en colisiones. En ausenciade campo electrico los atomos y iones se mueven en direcciones al azar, con velocidadesdeterminadas por la temperatura. La relacion entre la temperatura y el valor medio de laenergıa cinetica, nos la da la teorıa cinetica de los gases.
En un instante determinado (t = 0) un ion se mueve con velocidad ~u, ¿que ocurre despues?.El ion se movera en lınea recta con velocidad constante hasta colisionar (K y ~p se conservan)pero la velocidad variara ~u −→ ~u′ y luego de otra colision a ~u′′ y ası sucesivamente. En efectoes que el ion se olvida de su velocidad ~u a t = 0. Digamos despues de un tiempo τ esto ocurre.
Este tiempo τ es caracterıstico del sistema y es el lapso de tiempo que conducen a unaperdida de correlacion entre la velocidad inicial y final del sistema. Ahora podemos aplicarle~E, haremos mas simple la discusion si suponemos que la perdida de memoria ocurre en unasola colision (por ej.esferas elasticas). Nuestra conclusion es independiente de esta suposicion.Despues de una colision el ion parte en una direccion al azar denotemosla por ~uc.
Al cabo de un tiempo ∆t el efecto de campo es aportarle un ∆~p = ~Ee∆t, el cual se sumaa ~pinicial = M~uc + ~Ee∆t. Si el incremento es pequeno podemos esperar que la otra colisionocurra como si no hubiera ~E. En otras palabras, el valor medio del tiempo entre colisiones〈t〉 es independiente del campo ~E. Si esto no es muy intenso. El ∆~p por efecto del campo essiempre en la misma direccion. Pero se desorienta en cada colision.
¿Cual es el promedio de las cantidades de movimiento de todos los iones positivos, en uninstante dado?
M+〈~u+〉 =1
N
∑j
(M+~u
cj + e ~E∆tj
), (4.14)
donde ~ucj es la velocidad del j-esimo ion precisamente despues de su ultima colision que
ocurrio hace ∆tj segundos. Como ~ucj estan distribuidos al azar su contribucion es nula. El
valor medio de la velocidad de un ion positivo en presencia del campo estacionario ~E es.
〈~u+〉 =e ~E〈t+〉M+
. (4.15)
Esto muestra que el valor medio de la velocidad de un portador de carga es proporcional ala fuerza a el aplicada. Si observamos solamente la velocidad media, parece como si el medioofreciese una resistencia al movimiento con una fuerza proporcional a la velocidad.

80 CAPITULO 4. CORRIENTE ELECTRICAS.
Es una especie de resistencia viscosa, siempre que los portadores de carga se comportende este modo podemos esperar algo parecido a la ley de Ohm.
La expresion para ~J
~J = Ne
(e ~E〈t+〉M+
)−Ne
(−e ~E〈t−〉M−
)
Factorizando la expresion para ~J tenemos:
~J = Ne2(〈t+〉M+
+〈t−〉M−
)~E (4.16)
Nuestra teorıa predice que el sistema obedecera a la ley de Ohm. La ecuacion (4.16)
expresa una relacion lineal entre ~J y ~E siendo las demas caracterısticas del medio.La constante
Ne2(〈t+〉M+
+〈t−〉M−
),
se presenta en el papel de la conductividad σ. En general
σ ≈ e2(N+〈t+〉M+
+N−〈t−〉M−
), (4.17)
donde τ± corresponde al tiempo de perdida de la correlacion, los N± corresponden al numerode portadores de cambos signos de carga.
Todo sistema que sus portadores de carga libre sean frecuentemente desorientados porcolisiones u otra interaccion con el sistema debe cumplir la ley de Ohm. Si ~E no es demasiadointenso.
4.3.2. Donde falla la ley de Ohm.
Si el campo ~E es lo suficientemente intenso para que un ion adquiera, entre colisiones, unavelocidad adicional comparable a su velocidad termica. Lo anterior afectarıa notablemente el
tiempo entre colisiones 〈t±〉, estos tiempos como funcion de ~E. =⇒−→J ∝
−→E 2.
En gases a baja presion y campos muy debiles pueden presentarse discrepancias con laley de Ohm.
Otro efecto del campo muy intenso es producir variaciones en el numero de portadores.Los portadores adquieren suficiente energıa con el campo para que sus colisiones con losotros atomos sean lo suficientemente violentas para ionizarlos produciendo mas portadores.La avalancha resultante es un derrumbamiento de la ley de Ohm.
Si el campo se aplica por un tiempo muy corto, inferior a τ deberemos revisar nuestradeduccion. Al aplicar un campo alterno de perıodo muy corto comparado con % la respuestade los portadores estara determinada en gran parte por su inercia.
Existen dispositivos no-ohmicos diodo (deja pasar la corriente en un sentido) uniones dedos materiales semiconductores, etc. Si todos los dispositivos fueran ohmicos la tecnologıaelectronica moderna desaparecerıa.
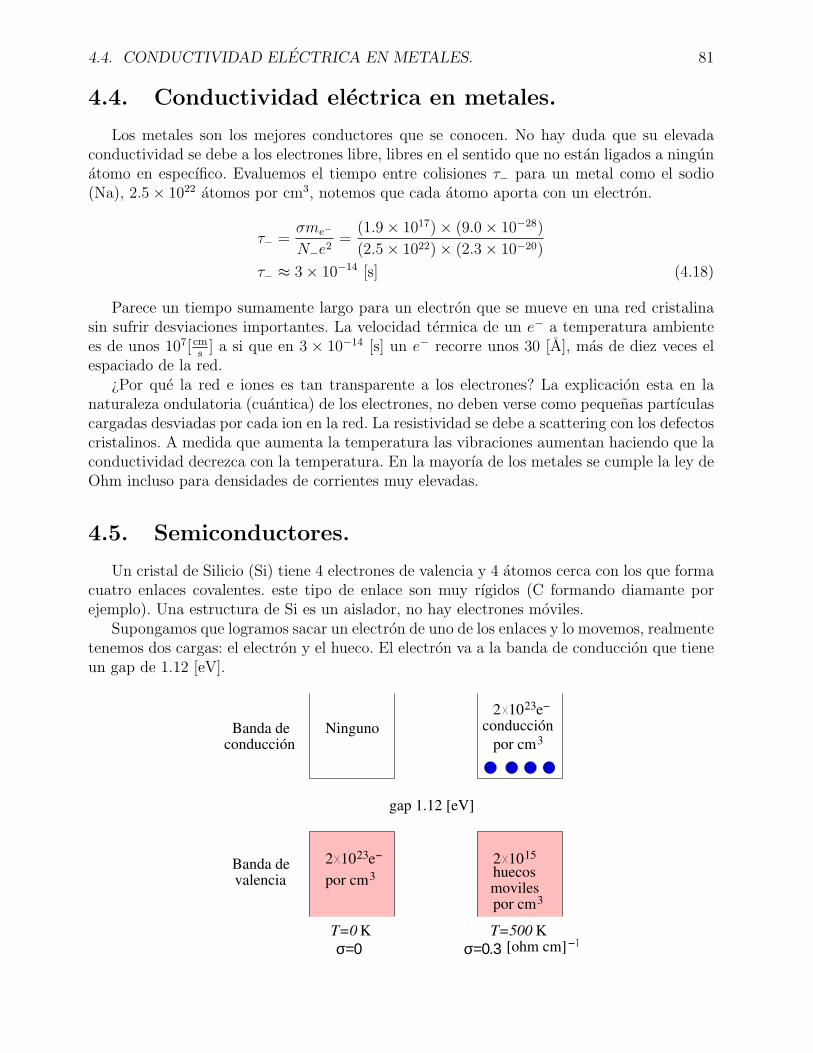
4.4. CONDUCTIVIDAD ELECTRICA EN METALES. 81
4.4. Conductividad electrica en metales.
Los metales son los mejores conductores que se conocen. No hay duda que su elevadaconductividad se debe a los electrones libre, libres en el sentido que no estan ligados a ningunatomo en especıfico. Evaluemos el tiempo entre colisiones τ− para un metal como el sodio(Na), 2.5× 1022 atomos por cm3, notemos que cada atomo aporta con un electron.
τ− =σme−
N−e2=
(1.9× 1017)× (9.0× 10−28)
(2.5× 1022)× (2.3× 10−20)
τ− ≈ 3× 10−14 [s] (4.18)
Parece un tiempo sumamente largo para un electron que se mueve en una red cristalinasin sufrir desviaciones importantes. La velocidad termica de un e− a temperatura ambientees de unos 107[ cm
s] a si que en 3 × 10−14 [s] un e− recorre unos 30 [A], mas de diez veces el
espaciado de la red.¿Por que la red e iones es tan transparente a los electrones? La explicacion esta en la
naturaleza ondulatoria (cuantica) de los electrones, no deben verse como pequenas partıculascargadas desviadas por cada ion en la red. La resistividad se debe a scattering con los defectoscristalinos. A medida que aumenta la temperatura las vibraciones aumentan haciendo que laconductividad decrezca con la temperatura. En la mayorıa de los metales se cumple la ley deOhm incluso para densidades de corrientes muy elevadas.
4.5. Semiconductores.
Un cristal de Silicio (Si) tiene 4 electrones de valencia y 4 atomos cerca con los que formacuatro enlaces covalentes. este tipo de enlace son muy rıgidos (C formando diamante porejemplo). Una estructura de Si es un aislador, no hay electrones moviles.
Supongamos que logramos sacar un electron de uno de los enlaces y lo movemos, realmentetenemos dos cargas: el electron y el hueco. El electron va a la banda de conduccion que tieneun gap de 1.12 [eV].
T=0 K
2 1023e−
por cm3
2 1015
por cm3
2 1023e−
por cm3Banda de
conducción
Banda devalencia
gap 1.12 [eV]
T=500 K
huecosmoviles
conducciónNinguno
[ohm cm]−1σ=0 σ=0.3
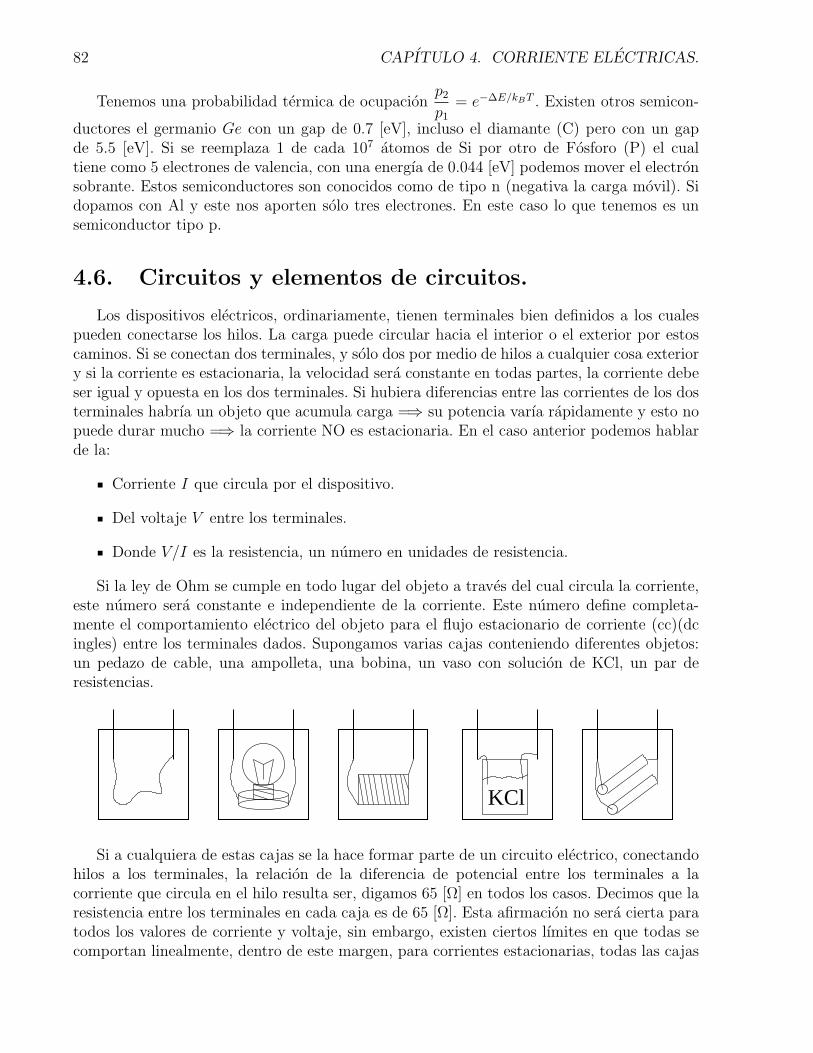
82 CAPITULO 4. CORRIENTE ELECTRICAS.
Tenemos una probabilidad termica de ocupacionp2
p1
= e−∆E/kBT . Existen otros semicon-
ductores el germanio Ge con un gap de 0.7 [eV], incluso el diamante (C) pero con un gapde 5.5 [eV]. Si se reemplaza 1 de cada 107 atomos de Si por otro de Fosforo (P) el cualtiene como 5 electrones de valencia, con una energıa de 0.044 [eV] podemos mover el electronsobrante. Estos semiconductores son conocidos como de tipo n (negativa la carga movil). Sidopamos con Al y este nos aporten solo tres electrones. En este caso lo que tenemos es unsemiconductor tipo p.
4.6. Circuitos y elementos de circuitos.
Los dispositivos electricos, ordinariamente, tienen terminales bien definidos a los cualespueden conectarse los hilos. La carga puede circular hacia el interior o el exterior por estoscaminos. Si se conectan dos terminales, y solo dos por medio de hilos a cualquier cosa exteriory si la corriente es estacionaria, la velocidad sera constante en todas partes, la corriente debeser igual y opuesta en los dos terminales. Si hubiera diferencias entre las corrientes de los dosterminales habrıa un objeto que acumula carga =⇒ su potencia varıa rapidamente y esto nopuede durar mucho =⇒ la corriente NO es estacionaria. En el caso anterior podemos hablarde la:
Corriente I que circula por el dispositivo.
Del voltaje V entre los terminales.
Donde V/I es la resistencia, un numero en unidades de resistencia.
Si la ley de Ohm se cumple en todo lugar del objeto a traves del cual circula la corriente,este numero sera constante e independiente de la corriente. Este numero define completa-mente el comportamiento electrico del objeto para el flujo estacionario de corriente (cc)(dcingles) entre los terminales dados. Supongamos varias cajas conteniendo diferentes objetos:un pedazo de cable, una ampolleta, una bobina, un vaso con solucion de KCl, un par deresistencias.
KCl
Si a cualquiera de estas cajas se la hace formar parte de un circuito electrico, conectandohilos a los terminales, la relacion de la diferencia de potencial entre los terminales a lacorriente que circula en el hilo resulta ser, digamos 65 [Ω] en todos los casos. Decimos que laresistencia entre los terminales en cada caja es de 65 [Ω]. Esta afirmacion no sera cierta paratodos los valores de corriente y voltaje, sin embargo, existen ciertos lımites en que todas secomportan linealmente, dentro de este margen, para corrientes estacionarias, todas las cajas

4.6. CIRCUITOS Y ELEMENTOS DE CIRCUITOS. 83
son equivalentes. Equivalentes en el sentido de que si un circuito contiene una de estas cajas,el comportamiento del circuito no difiere segun cual sea la caja.
La representamos por el sımbolo: reemplaza a la caja en el diseno del circuito delcual es uno de los componentes. Un circuito electrico o una red es una agrupacion de taleselementos, unidos uno a otro por conductores de resistencia despreciable.
Tomando una red constituida por algunos elementos conectados entre sı y eligiendo dospuntos como terminales, podemos considerar que el conjunto es equivalente, en lo que serefiere a los terminales, a una sola resistencia.
4.6.1. Resistencias en serie.
Dos o mas resistencias conectadas de modo que la misma carga fluye a traves de cadauna de ellas; se dice que estan conectadas en serie.
R1R2
a b c
I
(Fig 1)
Por ambas resistencias debe circular la misma corriente. La caıda de potencial entre losextremos de ambas resistencias (desde el punto a al c) es
V = IR1 + IR2 = I(R1 +R2)
Definimos la resistencia equivalente Re en serie como
Re =V
I= R1 +R2 (4.19)
El circuito equivalente al de la Figura es
R =e R +1 R2
c
I
a
Cuando existen mas de dos resistencias en serie la resistencia equivalente es
Re = R1 +R2 +R3 + . . . .
4.6.2. Resistencias en paralelo
Dos o mas resistencias conectadas de modo de que la diferencia de potencial entre susextremos sea la misma; se dice que estan conectadas en paralelo.
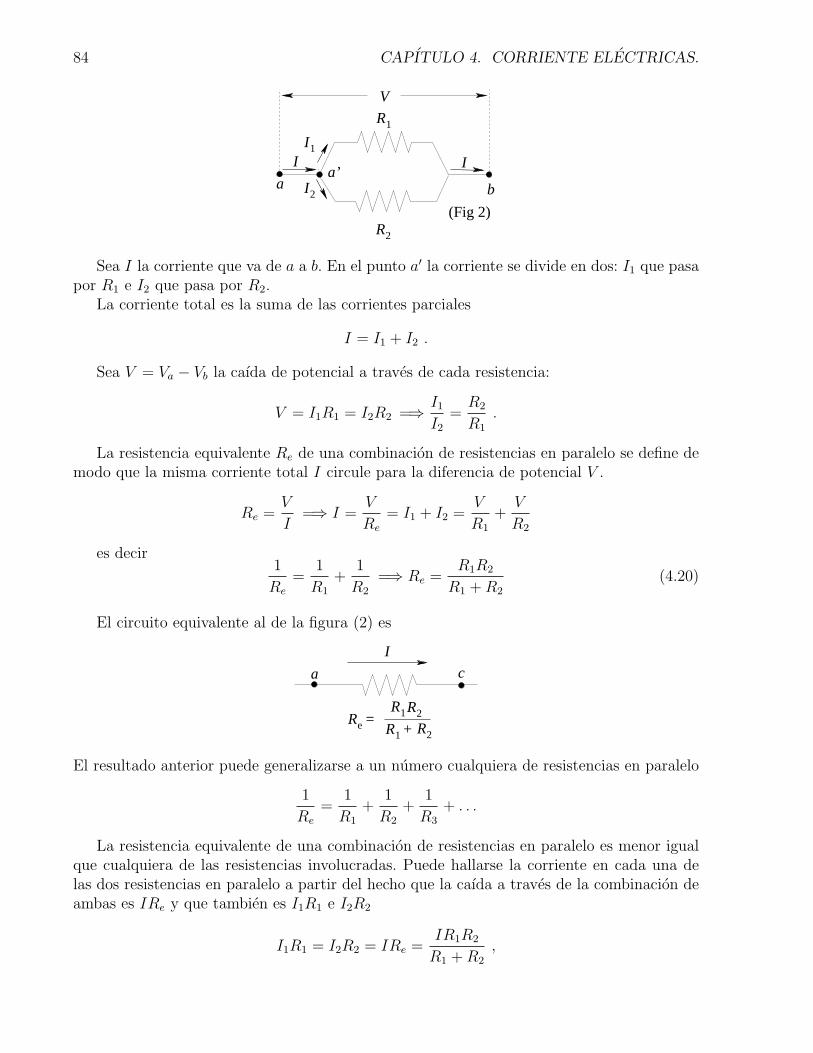
84 CAPITULO 4. CORRIENTE ELECTRICAS.
R1
R2
I1
I2a
(Fig 2)
I I
V
a’b
Sea I la corriente que va de a a b. En el punto a′ la corriente se divide en dos: I1 que pasapor R1 e I2 que pasa por R2.
La corriente total es la suma de las corrientes parciales
I = I1 + I2 .
Sea V = Va − Vb la caıda de potencial a traves de cada resistencia:
V = I1R1 = I2R2 =⇒ I1I2
=R2
R1
.
La resistencia equivalente Re de una combinacion de resistencias en paralelo se define demodo que la misma corriente total I circule para la diferencia de potencial V .
Re =V
I=⇒ I =
V
Re
= I1 + I2 =V
R1
+V
R2
es decir1
Re
=1
R1
+1
R2
=⇒ Re =R1R2
R1 +R2
(4.20)
El circuito equivalente al de la figura (2) es
R =e
R2R1
R +1 R2
c
I
a
El resultado anterior puede generalizarse a un numero cualquiera de resistencias en paralelo
1
Re
=1
R1
+1
R2
+1
R3
+ . . .
La resistencia equivalente de una combinacion de resistencias en paralelo es menor igualque cualquiera de las resistencias involucradas. Puede hallarse la corriente en cada una delas dos resistencias en paralelo a partir del hecho que la caıda a traves de la combinacion deambas es IRe y que tambien es I1R1 e I2R2
I1R1 = I2R2 = IRe =IR1R2
R1 +R2
,
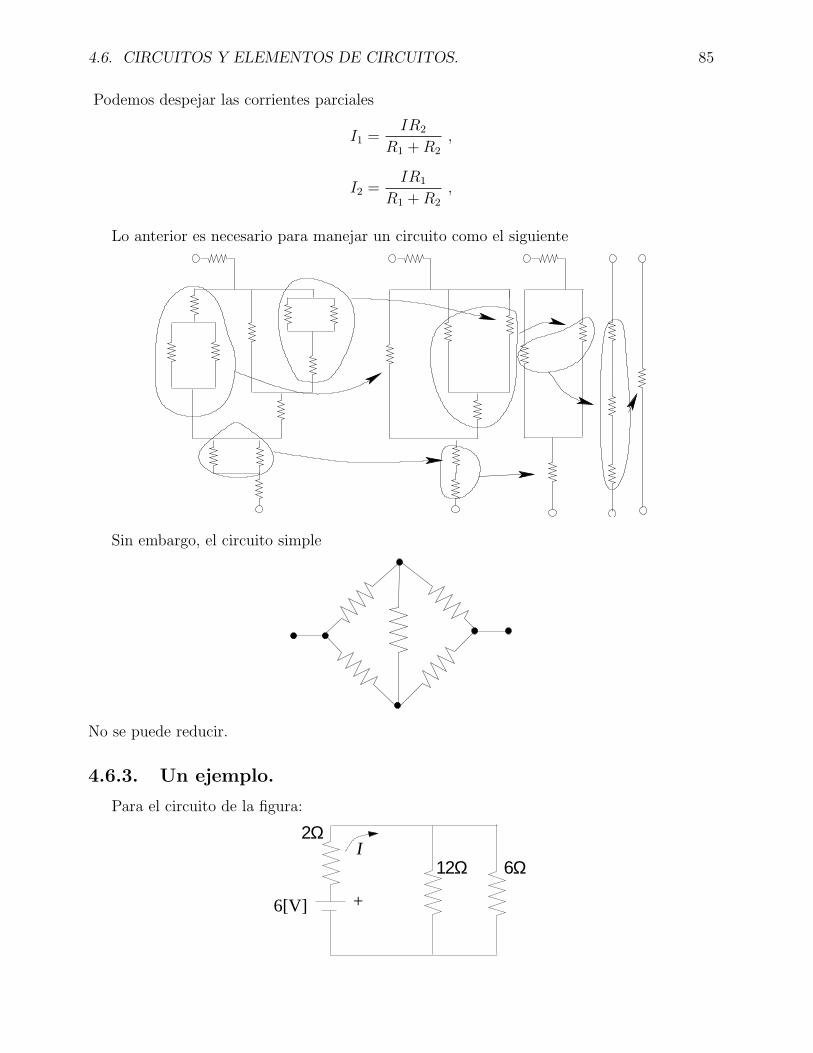
4.6. CIRCUITOS Y ELEMENTOS DE CIRCUITOS. 85
Podemos despejar las corrientes parciales
I1 =IR2
R1 +R2
,
I2 =IR1
R1 +R2
,
Lo anterior es necesario para manejar un circuito como el siguiente
Sin embargo, el circuito simple
No se puede reducir.
4.6.3. Un ejemplo.
Para el circuito de la figura:
6[V] +
I12Ω 6Ω
2Ω

86 CAPITULO 4. CORRIENTE ELECTRICAS.
Hallar la resistencia equivalente.
La corriente que circula por cada resistencia en paralelo
La corriente total
Solucion:Hacemos la reduccion del circuito a sus resistencias equivalentes:
R1
R2 R3V
R1
R1eV
R2e
V
Calculemos el valor de las resistencias equivalentes
R1e =R2R3
R2 +R3
=72
18[Ω] = 4[Ω]
R2e = R1 +R1e = 2[Ω] + 4[Ω] = 6[Ω]
La corriente total
I =V
R=
6
6
[V]
[Ω]= 1[A] .
Las corrientes en R2(I2) y en R3(I3)
I2 =R3
R2 +R3
I =6
12 + 6× 1 =
1
3[A]
I3 =R2
R2 +R3
I =12
12 + 6× 1 =
2
3[A]
Claramente I2 + I3 = I.
4.6.4. Leyes de Kirchhoff.
En un circuito de corriente continua tıpico se conectan varias baterıas o pilas y resistenciasde un modo determinado y han de encontrarse los valores de la corriente en diversas partesdel mismo. Para esto se necesitan metodos mas generales. Toda red de resistencias por lasque circula una corriente constante, tiene que satisfacer las siguientes condiciones:
i) La corriente a traves de cada elemento debe ser igual a la diferencia de potencial entrelos extremos de este elemento dividida por la resistencia del mismo.

4.6. CIRCUITOS Y ELEMENTOS DE CIRCUITOS. 87
ii) En un nudo de la red, un punto donde se reunen tres o mas hilos de conexion, la sumaalgebraica de las corrientes hacia el nudo debe ser nula. (Esta es la conservacion de lacarga expresada en el circuito).
iii) La suma de las diferencias de potencial, tomadas a lo largo de una malla de la red, uncamino que empieza y termina en el mismo nudo, debe ser nula. (Esta es la expresion
para un circuito de la propiedad general del campo electrico estatico∮ −→Ed−→s = 0 para
todo camino cerrado)
Las ultima dos condiciones se conocen como leyes de Kirchhoff.El planteo algebraico de estas condiciones, para cualquier red, nos dara exactamente el
numero de ecuaciones linealmente independientes necesarias para afirmar que solo hay unasolucion y solo una para la resistencia equivalente entre dos nudos elegidos. Afirmamos estosin demostrarlo.
Una red de cc es un sistema lineal los voltajes y corrientes estan regidos por un sistemade ecuaciones lineales, que corresponden a la expresion de las condiciones i), ii) y iii).
Por lo tanto, la superposicion de distintos estados posibles de la red es tambien un estadoposible.
I1
I2I2
V2
V3
V1
I6
I6
I5
I4
I3
I4
La seccion de la red de la figura con ciertas corrientes, I1, I2, I3,. . . circulando por loshilos y ciertos potenciales V1, V2,. . . . . . en los nudos. Sı algun otro sistema de corrientes ypotenciales como I ′1,. . . ,V
′1 ,. . . es otro estado de hechos posible en esta seccion de la red,
entonces tambien lo es el sistema (I1 + I ′1),. . . . . . (V1 + V ′1)
Estas corrientes y voltajes correspondientes a la superposicion tambien satisfaran a lascondiciones i), ii), iii).
Encuentre las corrientes para el siguiente circuito.
R =1 12 [Ω] R =2 1 [Ω]
R =4 1 [Ω]
=1 18 [V]ε
=2 12 [V]ε1 2
R =3 6 [Ω]I2
I1+
+
IA

88 CAPITULO 4. CORRIENTE ELECTRICAS.
En el primer loop 1 : ε1 = IR1 + I1R3
En el segundo loop 2 : ε2 = I2R4 − I1R3 + I2R2
En el nodo A : I = I1 + I2Reordenando tenemos
IR1 +I1R3 +0 = ε1
0 −I1R3 +I2(R4 +R2) = ε2
I −I1 −I2 = 0
El sistema en forma matricial:12 6 00 −6 21 −1 −1
II1I2
=
18120
Invirtiendo la matriz resolvemos para las corrientes I
I1I2
=
0.075 0.056 0.1110.019 −0.111 −0.2220.056 0.167 −0.0667
18120
El resultado final I
I1I2
=
2−1
3
El signo menos en la segunda componente significa que nos equivocamos al elegir el sentido
de I1.
4.7. Disipacion de energıa en la circulacion de corrien-
te.
El flujo de corriente en una resistencia lleva consigo disipacion de energıa. Sea una fuerza~F para mover un portador de carga con una velocidad media ~v (trabajo por unidad de tiempo)~F~v y como ~F = q ~E el trabajo por unidad de tiempo es q ~E~v. La energıa consumida de estemodo se manifiesta eventualmente en forma de calor. En nuestro modelo de conduccion. Laexplicacion es evidente:
El ion adquiere, entre colisiones, cierta energıa cinetica adicional al igual que momen-tum.
Unas cuantas colisiones restablecen la direccion al azar del momentum, pero no nece-sariamente su energıa cinetica.
El ion transfiere energıa al obstaculo que lo desvıa, los atomos neutros. De esta manerael trabajo efectuado por la fuerza electrica al mover a los portadores de carga, setransfiere eventualmente al medio en reposo como energıa cinetica al azar o calor.

4.8. FUERZA ELECTROMOTRIZ. 89
La potencia disipada por una resistencia R por la cual circula una corriente I es
P = I2R (4.21)
Podemos usar la ley de Ohm IR = V para obtener otras expresiones para la potencia disipada
P = I2R = IV =V 2
R.
Este efecto de disipar energıa en forma de calor cuando circula una corriente a traves deuna resistencia es conocido como efecto Joule. Las unidades son [Volt×Ampere]=[Watt].
4.8. Fuerza electromotriz.
El origen de la fuerza electromotriz en un circuito de corriente continua es cierto mecanis-mo que trasporta portadores de carga en el sentido opuesto al que el campo electrico intentamoverlos.
Un generador electrostatico de Van de Graaff es un ejemplo a gran escala.
V=Vo
E
EE
V=0
I
R
Con un movimiento continuo aparece una corriente en la resistencia externa, que circulaen el sentido del campo ~E. Disipandose allı energıa (que aparece en forma de calor) IV0 o I2R
por unidad de tiempo. Dentro de la columna de la maquina hay un ~E dirigido hacia abajo,las cargas se mueven en la correa hacia arriba. La energıa necesaria para mover la correa sesuministra en forma externa. Este generador de Van de Graaff es efectivamente una baterıacon una fuerza electromotriz, bajo estas condiciones, de V0 volt.
En las baterıas ordinarias, es la energıa quımica la que hace que los portadores de cargase muevan en una region donde el campo electrico se opone al movimiento. Es decir, unportador de carga positiva puede desplazarse a un lugar de potencial electrico mas elevado sial hacerlo ası puede intervenir en una reaccion quımica que dara mas energıa que la requeridapara escalar el “desnivel” electrico.
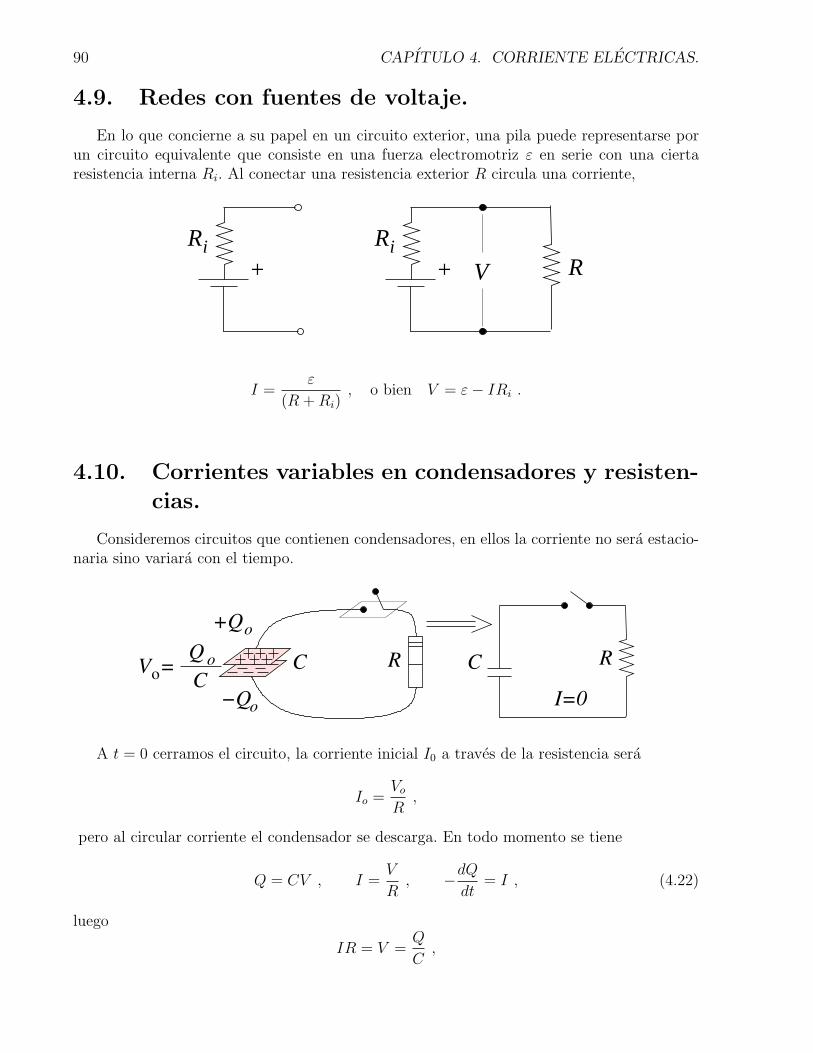
90 CAPITULO 4. CORRIENTE ELECTRICAS.
4.9. Redes con fuentes de voltaje.
En lo que concierne a su papel en un circuito exterior, una pila puede representarse porun circuito equivalente que consiste en una fuerza electromotriz ε en serie con una ciertaresistencia interna Ri. Al conectar una resistencia exterior R circula una corriente,
Ri+
Ri+ V R
I =ε
(R +Ri), o bien V = ε− IRi .
4.10. Corrientes variables en condensadores y resisten-
cias.
Consideremos circuitos que contienen condensadores, en ellos la corriente no sera estacio-naria sino variara con el tiempo.
+Qo
−Qo
Q oV =o C
RCR
I=0
C
A t = 0 cerramos el circuito, la corriente inicial I0 a traves de la resistencia sera
Io =Vo
R,
pero al circular corriente el condensador se descarga. En todo momento se tiene
Q = CV , I =V
R, −dQ
dt= I , (4.22)
luego
IR = V =Q
C,

4.10. CORRIENTES VARIABLES EN CONDENSADORES Y RESISTENCIAS. 91
Eliminemos la corriente
−RdQdt
=Q
C=⇒ dQ
dt= − Q
RC(4.23)
Escribamosla como ecuacion diferencial
dQ
dt+
Q
RC= 0 =⇒ Q(t) = Qoe
−t/RC . (4.24)
El tiempo tc = RC es la constante de tiempo del circuito, Q decae en 1/e. la corriente Lacorriente
I(t) = −dQdt
=Qo
RCe−t/RC =
Vo
Re−t/RC = Ioe
−t/RC .
R
C
+
s
ε
Cerramos el interruptor a t = 0
ε = VR + VC = IR +Q
C, y I =
dQ
dt
Eliminemos la corriente
dQ
dtR +
Q
C= ε =⇒ dQ
dt+
Q
RC=
ε
R.
Q(t) = Ae−t/RC + εC
Q(t = 0) = 0 ⇒ A = −εC
Q(t) = εC(1− e−t/RC
)La corriente
I(t) =dQ
dt=
ε
Re−t/RC .
εR
εCI
t
Q
t

92 CAPITULO 4. CORRIENTE ELECTRICAS.
Condensadores en paralelo
C1 C2 C3
Paralelo
Cef = C1 + C2 + C3
Condensadores en serie
C1 C2 C3
Serie
1
Cef
=1
C1
+1
C2
+1
C3
Durante el proceso de cargado fluye una carga total, la obtenemos integrando
Qf =
∫ ∞
0
I(t) dt =
∫ ∞
0
ε
Re−t/RC dt
= εC[−e−t/Rc
∣∣∞0
]= εC
La baterıa hace un trabajoW = Qfε = ε2C
La energıa almacenada en el condensador
U =1
2QV =
1
2Qfε =
1
2ε2C .
La energıa disipada por efecto Joule
WR =
∫ ∞
0
I2(t)Rdt =
∫ ∞
0
ε2
R2e−2t/RCRdt
=ε2C
2
∫ ∞
0
e−2t/RCd
(2t
RC
)=ε2C
2
∫ ∞
0
e−x dx =ε2C
2
[−e−x
∣∣∞0
]WR =
ε2C
2
Cuando un condensador es cargado la energıa entregada por la baterıa es: la mitad alma-cenada en el condensador y la mitad disipada por efecto Joule independiente del valor de laresistencia R.

Capıtulo 5
Los campos de cargas en movimiento.
En este capıtulo veremos las siguientes secciones:
Desde Oersted a Einstein.
Fuerzas magneticas.
Medidas de carga en movimiento.
Invariancia de la carga.
Medidas de campo electrico en diferentes sistemas de referencia.
Campo de un punto cargado moviendose con velocidad constante.
Campo de una carga que parte o se detiene.
Fuerza sobre una carga en movimiento.
Interaccion entre cargas en movimiento.
5.1. De Oersted a Einstein.
En 1819 Oersted experimenta con una brujula e hilos por las que circula una corriente.Al poner paralelo el hilo y la aguja y hacer circular corriente se produce un movimiento dela aguja. Ampere y Faraday efectuaron una descripcion esencialmente completa y exacta dela accion magnetica de las corrientes electricas. Ademas, de los anteriores descubrimientosexperimentales se desarrollo la teorıa clasica completa del electromagnetismo. Formuladamatematicamente por Maxwell y triunfalmente corroborada por la demostracion de Hertz delas ondas electromagneticas, en 1888. La relatividad restringida tiene sus raıces historicas enel electromagnetismo. El artıculo de Einstein en 1905 fue titulado Acerca de la electrodinamicade los cuerpos en movimiento.
Hoy en dıa esperamos que toda teorıa completa sea relativisticamente invariante. Esdecir, debe expresar lo mismo en todos los sistemas de referencia inerciales. La teorıa elec-tromagnetica de Maxwell lo era antes de que se reconociera la importancia de esto.
93
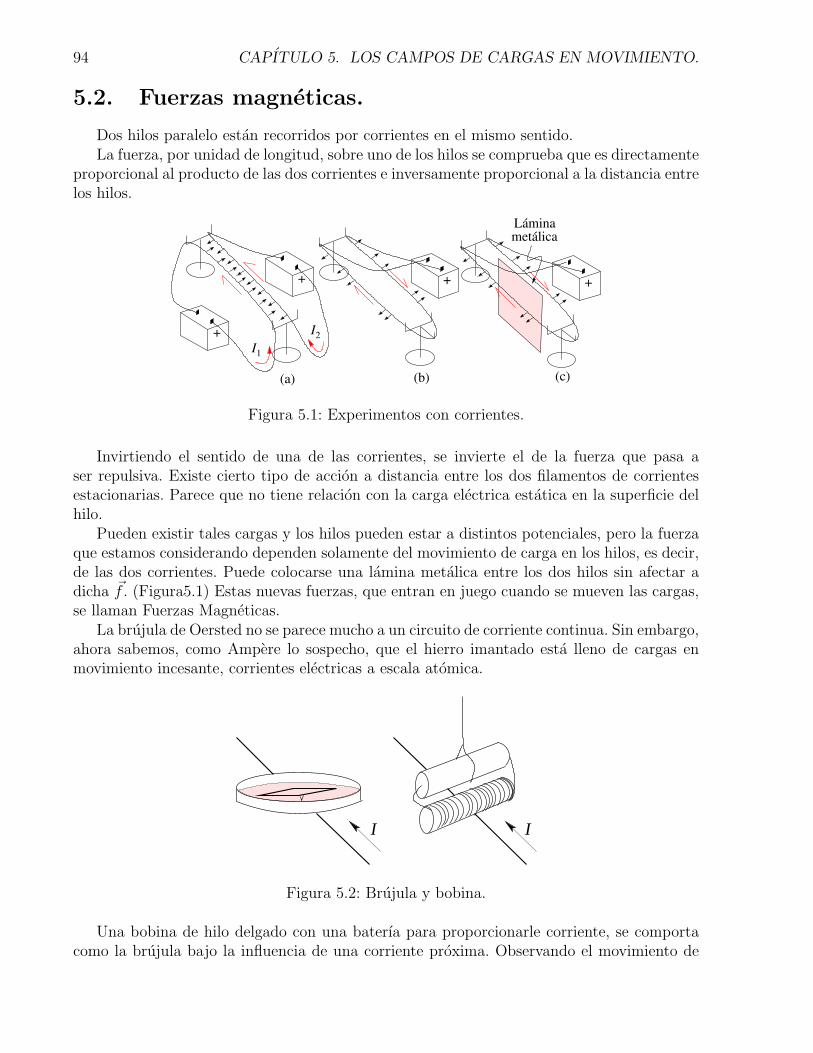
94 CAPITULO 5. LOS CAMPOS DE CARGAS EN MOVIMIENTO.
5.2. Fuerzas magneticas.
Dos hilos paralelo estan recorridos por corrientes en el mismo sentido.La fuerza, por unidad de longitud, sobre uno de los hilos se comprueba que es directamente
proporcional al producto de las dos corrientes e inversamente proporcional a la distancia entrelos hilos.
+ +
metálicaLámina
+
+
I1
I2
(a) (b) (c)
Figura 5.1: Experimentos con corrientes.
Invirtiendo el sentido de una de las corrientes, se invierte el de la fuerza que pasa aser repulsiva. Existe cierto tipo de accion a distancia entre los dos filamentos de corrientesestacionarias. Parece que no tiene relacion con la carga electrica estatica en la superficie delhilo.
Pueden existir tales cargas y los hilos pueden estar a distintos potenciales, pero la fuerzaque estamos considerando dependen solamente del movimiento de carga en los hilos, es decir,de las dos corrientes. Puede colocarse una lamina metalica entre los dos hilos sin afectar adicha ~f . (Figura5.1) Estas nuevas fuerzas, que entran en juego cuando se mueven las cargas,se llaman Fuerzas Magneticas.
La brujula de Oersted no se parece mucho a un circuito de corriente continua. Sin embargo,ahora sabemos, como Ampere lo sospecho, que el hierro imantado esta lleno de cargas enmovimiento incesante, corrientes electricas a escala atomica.
I I
Figura 5.2: Brujula y bobina.
Una bobina de hilo delgado con una baterıa para proporcionarle corriente, se comportacomo la brujula bajo la influencia de una corriente proxima. Observando el movimiento de
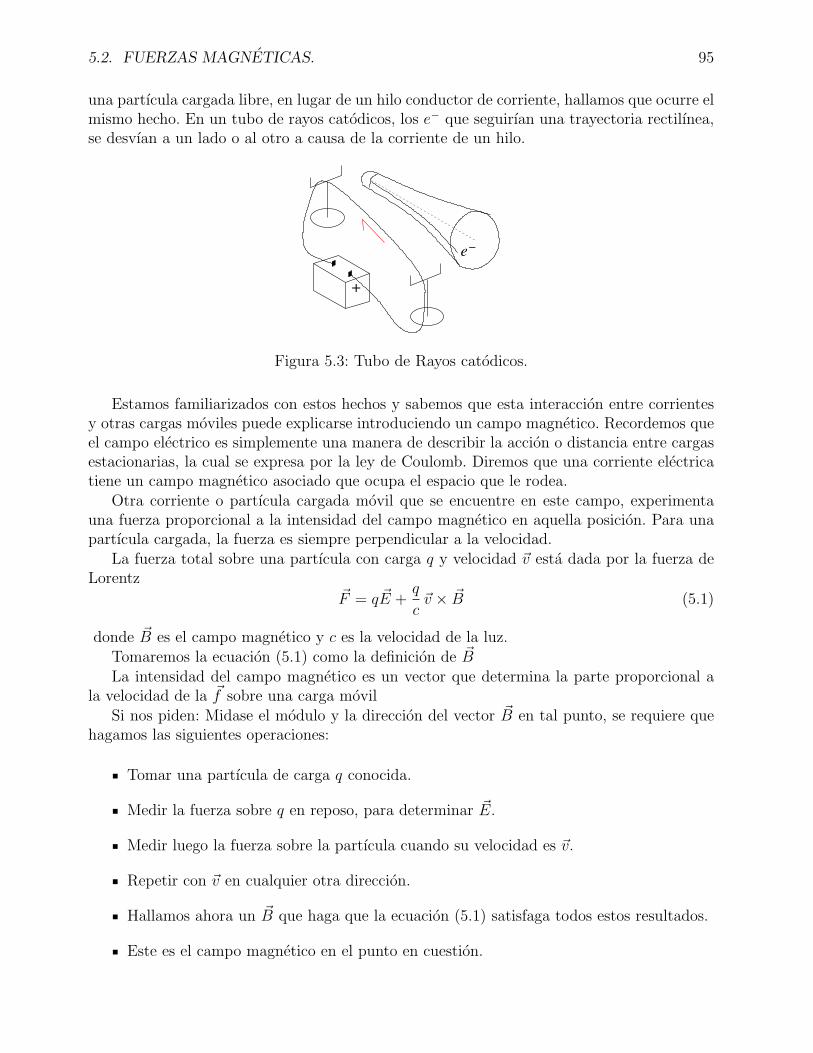
5.2. FUERZAS MAGNETICAS. 95
una partıcula cargada libre, en lugar de un hilo conductor de corriente, hallamos que ocurre elmismo hecho. En un tubo de rayos catodicos, los e− que seguirıan una trayectoria rectilınea,se desvıan a un lado o al otro a causa de la corriente de un hilo.
+
e−
Figura 5.3: Tubo de Rayos catodicos.
Estamos familiarizados con estos hechos y sabemos que esta interaccion entre corrientesy otras cargas moviles puede explicarse introduciendo un campo magnetico. Recordemos queel campo electrico es simplemente una manera de describir la accion o distancia entre cargasestacionarias, la cual se expresa por la ley de Coulomb. Diremos que una corriente electricatiene un campo magnetico asociado que ocupa el espacio que le rodea.
Otra corriente o partıcula cargada movil que se encuentre en este campo, experimentauna fuerza proporcional a la intensidad del campo magnetico en aquella posicion. Para unapartıcula cargada, la fuerza es siempre perpendicular a la velocidad.
La fuerza total sobre una partıcula con carga q y velocidad ~v esta dada por la fuerza deLorentz
~F = q ~E +q
c~v × ~B (5.1)
donde ~B es el campo magnetico y c es la velocidad de la luz.Tomaremos la ecuacion (5.1) como la definicion de ~BLa intensidad del campo magnetico es un vector que determina la parte proporcional a
la velocidad de la ~f sobre una carga movilSi nos piden: Midase el modulo y la direccion del vector ~B en tal punto, se requiere que
hagamos las siguientes operaciones:
Tomar una partıcula de carga q conocida.
Medir la fuerza sobre q en reposo, para determinar ~E.
Medir luego la fuerza sobre la partıcula cuando su velocidad es ~v.
Repetir con ~v en cualquier otra direccion.
Hallamos ahora un ~B que haga que la ecuacion (5.1) satisfaga todos estos resultados.
Este es el campo magnetico en el punto en cuestion.

96 CAPITULO 5. LOS CAMPOS DE CARGAS EN MOVIMIENTO.
Evidentemente esto no explica nada. ¿Por que se cumple la ecuacion? ¿Por que podemoshallar siempre un ~B que satisfaga esta simple relacion para todas las ~v posibles? ¿Por que estafuerza es proporcional a la velocidad? Lo mas notable es que esta fuerza es estrictamenteproporcional a la velocidad y que el efecto del campo electrico no dependa, en absoluto, de~v.
5.2.1. Medida de la carga en reposo.
¿Como vamos a medir la cantidad de carga electrica sobre una partıcula movil? Estodebe ser establecido primero que nada. Una carga solamente solamente por los efectos queproduce. Una carga puntual Q que esta en reposo, puede medirse determinando la fuerza queactua sobre una carga de prueba q separada a cierta distancia
2FrQ= q
Carga en reposo
q
Q
en reposoCarga de prueba
Figura 5.4: Cargas en reposo.
5.3. Medida de carga en movimiento.
Si la carga que deseemos medir, se mueve, estamos en una base incierta. Existe unadireccion particular, la del movimiento. Podrıa ser que la fuerza sobre la carga de prueba qdependiese de la direccion de Q a q, ademas de la distancia entre las dos cargas. En ese casopara diferentes posiciones de la carga de prueba observarıamos diferentes fuerzas
v
F1
2?rQ= q
F2
F3
Q
q
Carga de pruebaen reposo
rr
q
r
q
Figura 5.5: Cargas en movimiento.
Tampoco tenemos la seguridad de que la fuerza estara siempre en la direccion del radiovector ~r. Para admitir esta posibilidad, convengamos en definir Q como promedio en todas

5.4. INVARIANCIA DE LA CARGA. 97
direcciones. Imaginemos un gran numero de cargas de prueba infinitesimales distribuidasuniformemente sobre una esfera. En el instante en que la carga movil pasa por el centro de laesfera, se mide la fuerza sobre cada carga de prueba, y el valor medio de los modulos de estasfuerzas se utilizan para calcular Q. La operacion anterior serıa precisamente la necesaria paradeterminar la integral de superficie del campo electrico sobre la esfera en el instante t. Lascargas de prueba estan aquı en reposo, recordemos: La fuerza sobre q por unidad de carga,por definicion, nos da el campo electrico en este punto. Esto sugiere que mas que la ley deCoulomb, la ley de Gauss brinda la manera natural de definir la cantidad de carga para unapartıcula movil o para un conjunto de cargas moviles.
Podemos componer una definicion como sigue: La cantidad de carga electrica en unaregion se define por la integral de superficie del campo electrico ~E extendida a una superficieS que comprenda la region Esta superficie S esta referida a cierto sistema de coordenadas F .El campo electrico ~E en un punto (x, y, z) en un instante t en F , se mide por la fuerza sobreuna carga de prueba en reposo en F , en aquel instante y lugar. La integral de superficie ha dedeterminarse en un instante t particular. Es decir, los valores del campo que se utilizan sonlos que se han medido simultaneamente por observadores todos desplegados sobre S (Estono presenta dificultad, pues S es estacionaria en el sistema F ).
A la integral de superficie S, en el instante t, la denotamos∫S(t)
~E · d~a (5.2)
Definimos la cantidad de carga en el interior de S como
Q =1
4π
∫S(t)
~E · d~a (5.3)
Nos desconcertarıa el que el valor de Q determinada ası dependiese de la forma y tamanode la superficie S. Para una carga estacionaria esto no ocurre, es la ley de Gauss. Pero, ¿comosabemos que la ley de Gauss se cumple cuando las cargas son moviles? Afortunadamente secumple: Podemos tomarla como un hecho experimental.
Esta propiedad fundamental de ~E de las cargas moviles nos permite definir la cantidadde carga por la ecuacion (5.3). Aparece una pregunta importante: ¿Que ocurre si las mismaspartıculas tienen otras velocidades?.
5.4. Invariancia de la carga.
Existe evidencia experimental concluyente de que la carga total en un sistema, no varıapor el movimiento de los portadores de carga.
Las pruebas: la rigurosa neutralidad electrica de los atomos y moleculas. La neutralidaddel atomo de hidrogeno comparada con la neutralidad del atomo de He en el cual el movi-miento de p+ y e− es muy distinto en ambos casos. Otra evidencia viene del espectro opticode los isotopos del mismo elemento, atomos con distinta masa pero igual carga (nominal-mente). De nuevo se halla una marcada diferencia en el movimiento de los p+, pero no hay
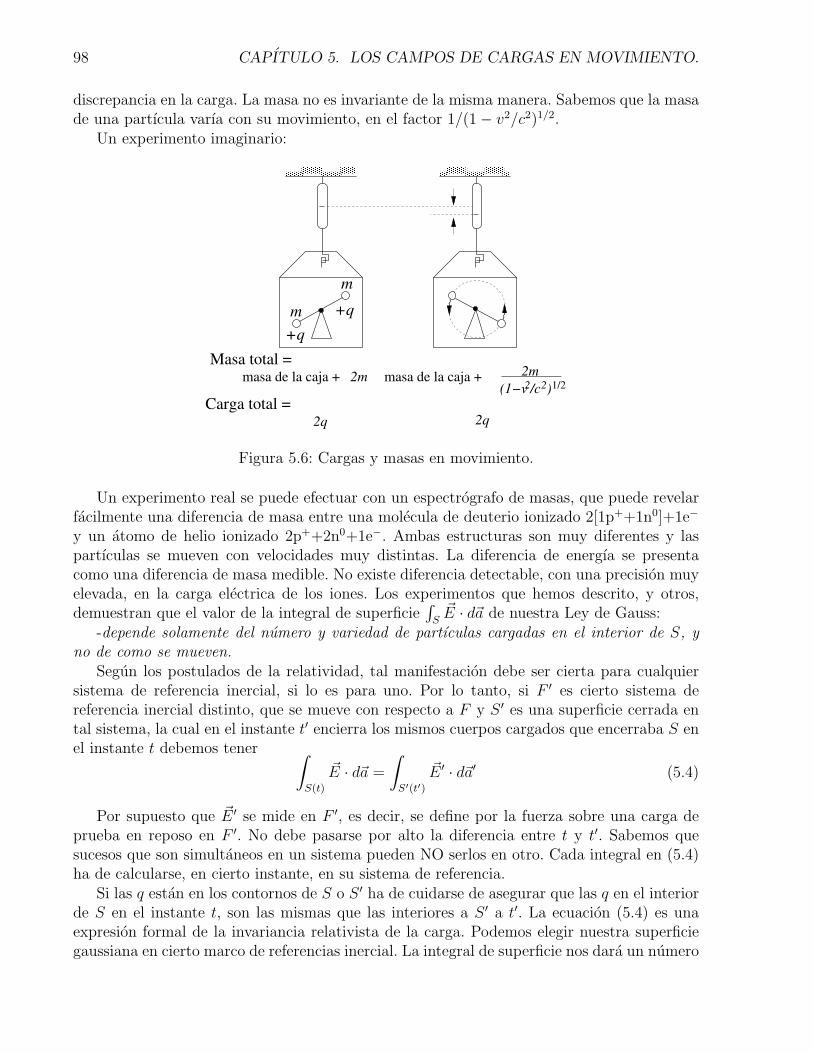
98 CAPITULO 5. LOS CAMPOS DE CARGAS EN MOVIMIENTO.
discrepancia en la carga. La masa no es invariante de la misma manera. Sabemos que la masade una partıcula varıa con su movimiento, en el factor 1/(1− v2/c2)1/2.
Un experimento imaginario:
(1−v2/c2)1/2
2m
+q
+qm
m
masa de la caja + 2m masa de la caja +
2q2q
Carga total =
Masa total =
Figura 5.6: Cargas y masas en movimiento.
Un experimento real se puede efectuar con un espectrografo de masas, que puede revelarfacilmente una diferencia de masa entre una molecula de deuterio ionizado 2[1p++1n0]+1e−
y un atomo de helio ionizado 2p++2n0+1e−. Ambas estructuras son muy diferentes y laspartıculas se mueven con velocidades muy distintas. La diferencia de energıa se presentacomo una diferencia de masa medible. No existe diferencia detectable, con una precision muyelevada, en la carga electrica de los iones. Los experimentos que hemos descrito, y otros,demuestran que el valor de la integral de superficie
∫S~E · d~a de nuestra Ley de Gauss:
-depende solamente del numero y variedad de partıculas cargadas en el interior de S, yno de como se mueven.
Segun los postulados de la relatividad, tal manifestacion debe ser cierta para cualquiersistema de referencia inercial, si lo es para uno. Por lo tanto, si F ′ es cierto sistema dereferencia inercial distinto, que se mueve con respecto a F y S ′ es una superficie cerrada ental sistema, la cual en el instante t′ encierra los mismos cuerpos cargados que encerraba S enel instante t debemos tener ∫
S(t)
~E · d~a =
∫S′(t′)
~E ′ · d~a′ (5.4)
Por supuesto que ~E ′ se mide en F ′, es decir, se define por la fuerza sobre una carga deprueba en reposo en F ′. No debe pasarse por alto la diferencia entre t y t′. Sabemos quesucesos que son simultaneos en un sistema pueden NO serlos en otro. Cada integral en (5.4)ha de calcularse, en cierto instante, en su sistema de referencia.
Si las q estan en los contornos de S o S ′ ha de cuidarse de asegurar que las q en el interiorde S en el instante t, son las mismas que las interiores a S ′ a t′. La ecuacion (5.4) es unaexpresion formal de la invariancia relativista de la carga. Podemos elegir nuestra superficiegaussiana en cierto marco de referencias inercial. La integral de superficie nos dara un numero

5.5. CAMPOS ELECTRICOS MEDIDOS EN DIFERENTES SISTEMAS DE REFERENCIAS.99
independiente del sistema de referencia. Esto NO es lo mismo que la conservacion de la carga,que estudiamos antes y quedo expresada por
~∇ · ~J = −∂ρ∂t
La conservacion de la carga implica que si tomamos una superficie cerrada fija en algunsistema conteniendo materia cargada, y si las partıculas no atraviesan el contorno, entoncesla carga total en el interior de esta superficie es constante.
La invariancia de la carga implica que si consideramos este conjunto de materia desdeotro sistema de referencia mediremos exactamente la misma carga. La energıa se conservapero no es invariante. La carga es un escalar invariante ante transformaciones de Lorentz. Loanterior determina completamente la naturaleza del campo electrico para cargas moviles.
5.5. Campos electricos medidos en diferentes sistemas
de referencias.
Si la carga ha de ser invariante, bajo transformaciones de Lorentz, el campo electrico ~Etiene que transformar de una manera particular.
¿Como transforma ~E? significa responder a una pregunta como la siguiente: Si un obser-vador en un cierto sistema de referencia inercial F mide un campo electrico ~E en un puntoen el espacio y tiempo, ¿que campo sera medido en el mismo punto del espacio tiempo porun observador en un diferente sistema de referencia inercial? Para cierta clase de campospodemos responder la pregunta aplicando la ley de Gauss en ambos sistema.
x
z b
b
F
Figura 5.7: Par de placas paralela.
En el sistema de referencia F , figura anterior, tenemos dos laminas estacionarias de cargacon densidades superficiales +σ y −σ. Son laminas cuadradas de lado b paralelas al planoXY con una separacion que supondremos pequena comparada con su extension. En F elmodulo del campo es | ~E| = 4πσ.
Consideremos F ′ que se mueva hacia la izquierda con respecto a F , con velocidad ~v. Paraun observador en F ′, las laminas cuadradas cargados ya no son cuadradas. Su coordenada x′
se ha contraıdo de
b→ b√
1− β2 , con β =v
c.

100 CAPITULO 5. LOS CAMPOS DE CARGAS EN MOVIMIENTO.
Pero la carga total es invariante, es decir, independiente del sistema de referencia, ası quela densidad de carga medida en F ′ es mayor que σ, su relacion es 1/
√1− β2.
F
F’
v
z
x
σ
b
(a)
1−β2b
F
F’
(b)
σ ’
v
v
z’
x’
Figura 5.8: En los diferentes sistemas.
La figura (5.8 a) es como se ve en F . La figura (5.8 b) es como se ve en F ′
¿ Que podemos decir acerca del campo electrico en F ′ si todo lo que conocemos del ~E decargas moviles esta contenido en la ecuacion de Gauss? Pero una cosa se puede afirmar, ~E esnulo en la parte exterior de las laminas y uniforme entre ellas, al menos en el lımite cuandola extension → ∞. El campo podrıa ser de la forma mostrada en la figura, de hecho no loes.
v
v
(b)
(a)
Figura 5.9: Como NO son los campos.
La figura (5.9 a) podrıa ser el campo de una sola lamina positiva en F ′. La figura (5.9 b)podrıa ser el campo de una sola lamina negativa en F ′.
Aunque el campo fuera de esta forma, al hacer superposicion serıa nulo afuera y perpen-dicular a las placas adentro. Podemos aplicar Gauss a una caja estacionaria en F ′
La carga contenida se determina por σ′. El campo es nulo al exterior de las placas. La ley
de Gauss da E ′z = 4πσ′ =
4πσ√1− β2
, luego
E ′z =
Ez√1− β2
= γEz , γ =1√
1− β2≥ 1 (5.5)
Imaginemos un caso distinto, las laminas cargadas estacionarias en F estan orientadas ⊥al eje x.

5.5. CAMPOS ELECTRICOS MEDIDOS EN DIFERENTES SISTEMAS DE REFERENCIAS.101
σ ’F’
z’
x’F’
v
Caja estacionariaen
Figura 5.10: Aplicando la ley de Gauss en F ′.
x
z
F
Figura 5.11: Otro par de placas paralela.
El observador en F ve Ex = 4πσ. En este caso σ′ (en F ′) es la misma. Las laminas NO sehan contraıdo la distancia entre ellas, pero esta no interviene en la determinacion del campo.Solo se ha contraıdo la distancia entre ellas, pero esta no interviene en la determinacion delcampo.
Usando la ley de Gauss sobre la caja estacionaria en F ′
σ’=
σ
F’
z’
x’F’
v
Caja estacionariaen
Figura 5.12: Aplicando la ley de Gauss.
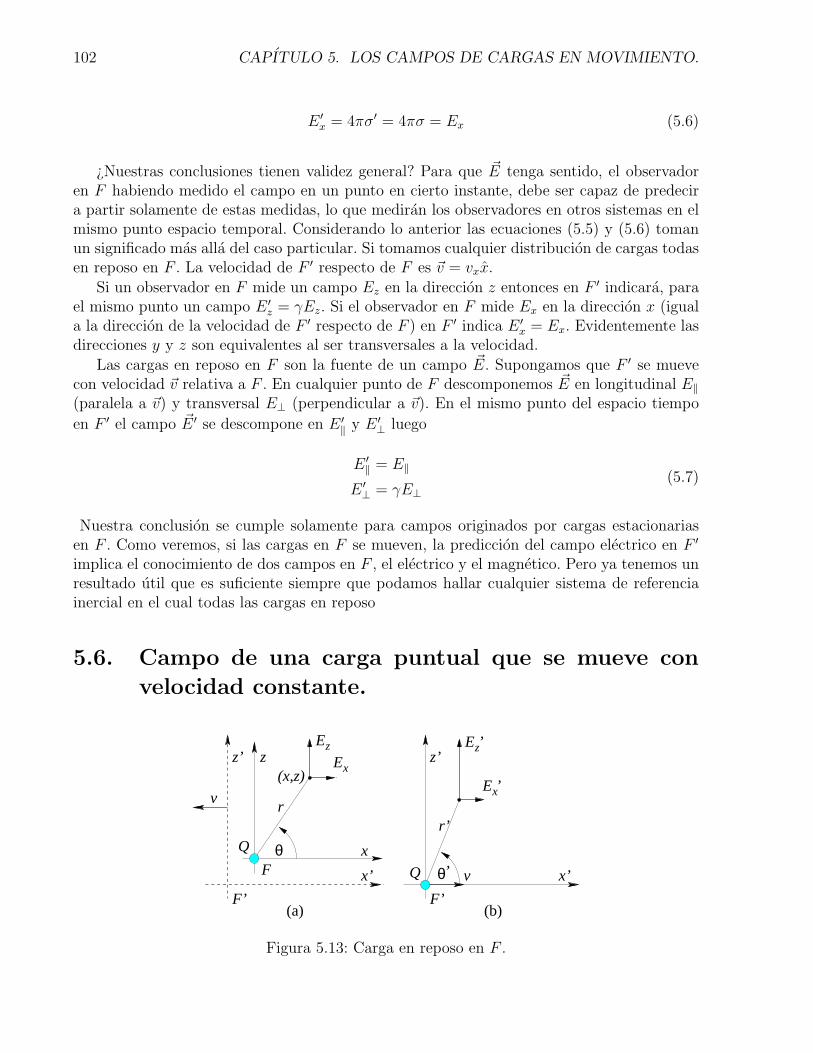
102 CAPITULO 5. LOS CAMPOS DE CARGAS EN MOVIMIENTO.
E ′x = 4πσ′ = 4πσ = Ex (5.6)
¿Nuestras conclusiones tienen validez general? Para que ~E tenga sentido, el observadoren F habiendo medido el campo en un punto en cierto instante, debe ser capaz de predecira partir solamente de estas medidas, lo que mediran los observadores en otros sistemas en elmismo punto espacio temporal. Considerando lo anterior las ecuaciones (5.5) y (5.6) tomanun significado mas alla del caso particular. Si tomamos cualquier distribucion de cargas todasen reposo en F . La velocidad de F ′ respecto de F es ~v = vxx.
Si un observador en F mide un campo Ez en la direccion z entonces en F ′ indicara, parael mismo punto un campo E ′
z = γEz. Si el observador en F mide Ex en la direccion x (iguala la direccion de la velocidad de F ′ respecto de F ) en F ′ indica E ′
x = Ex. Evidentemente lasdirecciones y y z son equivalentes al ser transversales a la velocidad.
Las cargas en reposo en F son la fuente de un campo ~E. Supongamos que F ′ se muevecon velocidad ~v relativa a F . En cualquier punto de F descomponemos ~E en longitudinal E‖(paralela a ~v) y transversal E⊥ (perpendicular a ~v). En el mismo punto del espacio tiempo
en F ′ el campo ~E ′ se descompone en E ′‖ y E ′
⊥ luego
E ′‖ = E‖
E ′⊥ = γE⊥
(5.7)
Nuestra conclusion se cumple solamente para campos originados por cargas estacionariasen F . Como veremos, si las cargas en F se mueven, la prediccion del campo electrico en F ′
implica el conocimiento de dos campos en F , el electrico y el magnetico. Pero ya tenemos unresultado util que es suficiente siempre que podamos hallar cualquier sistema de referenciainercial en el cual todas las cargas en reposo
5.6. Campo de una carga puntual que se mueve con
velocidad constante.
θ’
E ’z
E ’x
Ez
Ex
x’
z’
F’(b)
Q
r’
xF
Q
z
r
(x,z)
θx’
z’
F’
v
(a)
v
Figura 5.13: Carga en reposo en F .

5.6. CAMPO DE UNA CARGA PUNTUAL QUE SE MUEVE CON VELOCIDAD CONSTANTE.103
En F una carga puntual Q esta en reposo en el origen, esta carga pasa por el origen deF ′ cuando t′ = 0. En todo punto ~E tiene por modulo Q/r2 y esta dirigido radialmente haciaafuera,
Las componentes cartesianas en F
Ex =Q
r2cos θ =
Qx
(x2 + z2)3/2
Ez =Q
r2sen θ =
Qz
(x2 + z2)3/2
El sistema F ′ que se mueve en la direccion (−x), con rapidez v respecto a F . Las trans-formaciones de Lorentz:
x = γ(x′ − βct′) , y = y′ , z = z′ , t = γ
(t′ − βx′
c
). (5.8)
Los relojes se habıan colocado a cero cuando x = 0 y x′ = 0 coincidıan.
Segun las ecuaciones (5.5) y (5.6)
E ′z = γEz , E ′
x = Ex .
Usando (5.8) y (5.8) podemos expresar las componentes del campo E ′z y E ′
x en funcion delas coordenadas en F ′. En el instante t′ cuando Q pasa por el origen en F ′ tenemos
E ′x = Ex =
γQx′
((γx′)2 + (z′)2)3/2
E ′z = γEz =
γQz′
((γx′)2 + (z′)2)3/2
Advirtamos que:E ′
z
E ′x
=z′
x′lo cual indica que ~E ′ forma el mismo ^ con x′ que ~r′. Es decir,
~E ′ se dirige radialmente hacia afuera a lo largo de una recta trazada desde el origen a laposicion instantanea de Q
Lo anterior significa que si Q paso por el origen del sistema prima a las 12 AM tiempoprima, un observador estacionado en cualquier punto del sistema prima expresara que ~E ′
en ese punto a las 12 AM estaba dirigido radialmente desde el origen. Lo anterior suenacomo transmision instantanea de informacion. ¿Como puede conocer un observador distanteun kilometro, la posicion de una partıcula en el mismo instante? No puede. Esto no estabasobreentendido.
Esta partıcula se movıa siempre a ~v cte. en un “plan de marcha” que le exigıa pasar porel origen al mediodıa. Es el pasado de la partıcula lo que determina el campo observado.

104 CAPITULO 5. LOS CAMPOS DE CARGAS EN MOVIMIENTO.
Evaluemos la intensidad del campo
E ′2 = E ′2x + E ′2
z =γ2Q2(x′2 + z′2)
[(γx′)2 + (z′)2]3
=Q2(x′2 + z′2)
γ4[(x′)2 + (z′)2 − β2(z′)2]3
=Q2(1− β2)2
(x′2 + z′2)2
(1− β2z′2
x′2 + z′2
)3 (5.9)
Si r′ representa la distancia desde la carga Q, que esta momentaneamente en el origen,entonces r′ =
√x′2 + z′2. Si θ′ es el angulo entre ~r′ y ~v entonces z′ = r sen θ′, luego
E ′ =Q
r′21− β2
(1− β2 sen2 θ′)3/2(5.10)
No hay nada especial acerca del origen de coordenadas, ni acerca del plano X ′Z ′ compa-rado con cualquier otro plano a lo largo del eje x′. Por lo tanto, podemos decir de maneracompletamente general que el campo electrico de una carga en movimiento uniforme, en cier-to instante dado, esta dirigido radialmente desde la posicion instantanea de la carga y sumodulo viene dado por
E ′ =Q
r′21− β2
(1− β2 sen2 θ′)3/2,
siendo θ′ el ^ entre la direccion de movimiento de la carga y ~r′.Para velocidades pequenas el campo E ′ ≈ Q/r′2 y es practicamente el mismo en cada
instante al campo de una carga puntual estacionaria en F ′ en la posicion instantanea de Q.Pero si β2 no es despreciable, el campo es mas intenso en la direccion ⊥ al movimiento queen la direccion del movimiento a igual distancias a la carga. Si indicamos la intensidad decampo por la densidad de lıneas de campo, ellas deberıan concentrarse en el plano ⊥ a ladireccion del movimiento Este es un campo electrico notable. No tiene simetrıa esferica, lo
.25
.35
2.0 1.5 .85.50
x’
y’
z’
β=0.866
Figura 5.14: Densidad de lıneas que atraviesan una esfera unitaria debida a una carga movilen direccion x′ con v/c = 0.866.
cual no nos sorprende porque en esta referencia hay una direccion privilegiada, la direccion delmovimiento de la carga. Tambien es un campo que no puede producir ninguna distribucion

5.7. CAMPO DE UNA CARGA QUE ARRANCA O PARA. 105
v
A
B
CD
Figura 5.15: Integral curvilınea.
estacionaria de cargas, sea cual fuere su forma. Pues la integral curvilınea de E ′ a lo largo deun camino cerrado no es nula.
Los arcos circulares no contribuyen por ser ⊥ a ~E ′. En las secciones radiales ~E ′ es masintenso en BC que en AD. La circulacion de ~E ′ 6= 0. Pero tengamos presente que este NO esun campo electrostatico. En el transcurso del tiempo el campo electrico ~E ′, en cada puntode F ′, varıa al moverse la carga fuente.
5.7. Campo de una carga que arranca o para.
Velocidad uniforme significa un movimiento a rapidez constante, en lınea recta, que siem-pre ha estado en movimiento. ¿Que ocurre si nuestro electron NO ha estado viajando ante-riormente a lo largo del eje negativo de las x? Supongamos que ha estado en reposo en elorigen a t = 0. Inmediatamente antes de t = 0, algo comunica al electron una gran acelera-cion bruscamente, hasta que la rapidez sea v y se mueva a lo largo del eje positivo con estarapidez. Despues su movimiento es el de la figura. . .
−10 [s]Unidad de tiempo 10
vc
=4
5
x
y
P
6 [c
m]
t=0 t=2 t=4
Figura 5.16: Carga a velocidad constante.
Sin embargo, esta figura no representa bien el campo para la historia descrita. Se puedever esto al considerar el punto P en t = 2 =⇒ 2 × 10−10 [s]=⇒ 6 [cm] recorridos por unasenal luminosa. Ya que P esta a mas de 6 [cm] no puede haber recibido la noticia de que elelectron ha empezado ha moverse en t = 0 (a menos que se viole la relatividad). El campoen el punto P en el instante t = 2 y en realidad en todos los puntos exteriores a la esfera de
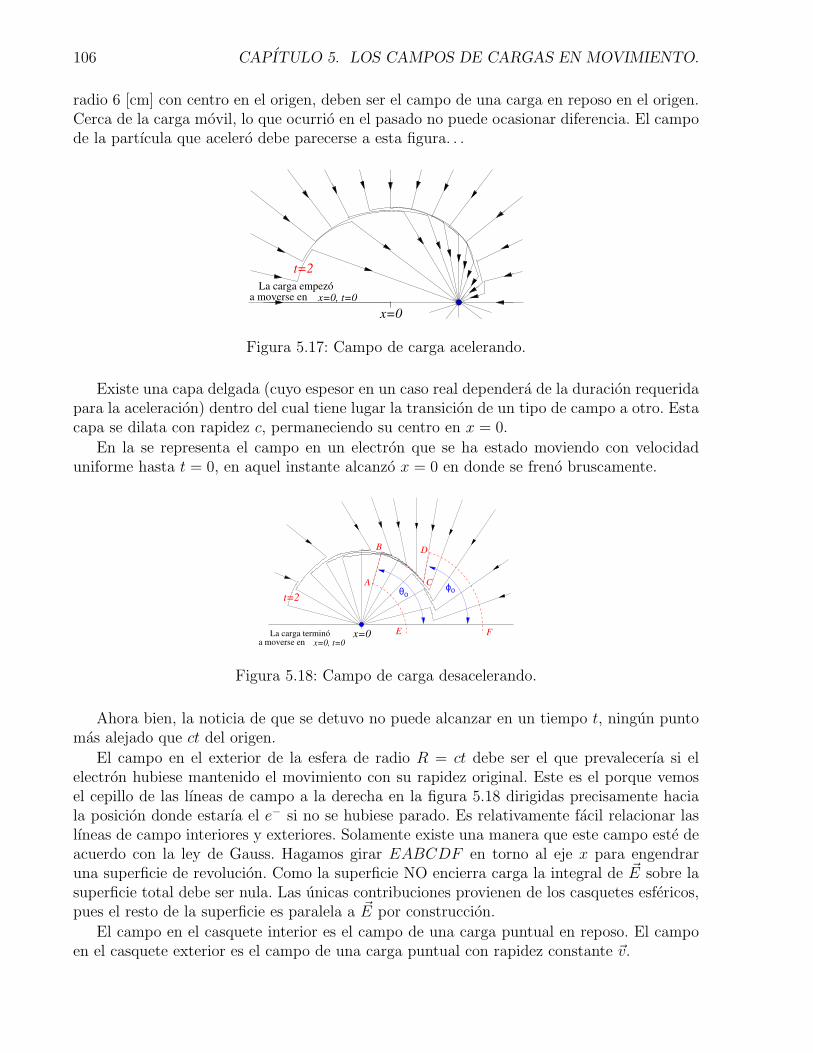
106 CAPITULO 5. LOS CAMPOS DE CARGAS EN MOVIMIENTO.
radio 6 [cm] con centro en el origen, deben ser el campo de una carga en reposo en el origen.Cerca de la carga movil, lo que ocurrio en el pasado no puede ocasionar diferencia. El campode la partıcula que acelero debe parecerse a esta figura. . .
a moverse en x=0, t=0
La carga empezó
x=0
t=2
Figura 5.17: Campo de carga acelerando.
Existe una capa delgada (cuyo espesor en un caso real dependera de la duracion requeridapara la aceleracion) dentro del cual tiene lugar la transicion de un tipo de campo a otro. Estacapa se dilata con rapidez c, permaneciendo su centro en x = 0.
En la se representa el campo en un electron que se ha estado moviendo con velocidaduniforme hasta t = 0, en aquel instante alcanzo x = 0 en donde se freno bruscamente.
θοϕο
a moverse en x=0, t=0
La carga terminó x=0
A
B
C
D
FE
t=2
Figura 5.18: Campo de carga desacelerando.
Ahora bien, la noticia de que se detuvo no puede alcanzar en un tiempo t, ningun puntomas alejado que ct del origen.
El campo en el exterior de la esfera de radio R = ct debe ser el que prevalecerıa si elelectron hubiese mantenido el movimiento con su rapidez original. Este es el porque vemosel cepillo de las lıneas de campo a la derecha en la figura 5.18 dirigidas precisamente haciala posicion donde estarıa el e− si no se hubiese parado. Es relativamente facil relacionar laslıneas de campo interiores y exteriores. Solamente existe una manera que este campo este deacuerdo con la ley de Gauss. Hagamos girar EABCDF en torno al eje x para engendraruna superficie de revolucion. Como la superficie NO encierra carga la integral de ~E sobre lasuperficie total debe ser nula. Las unicas contribuciones provienen de los casquetes esfericos,pues el resto de la superficie es paralela a ~E por construccion.
El campo en el casquete interior es el campo de una carga puntual en reposo. El campoen el casquete exterior es el campo de una carga puntual con rapidez constante ~v.

5.7. CAMPO DE UNA CARGA QUE ARRANCA O PARA. 107
θο
ϕο
r 2 sen ϕ d ϕ2 πr’2sen θ θd2 π
F
D
E
A
r’
θ ϕ
r
Figura 5.19: Superficies en las cuales integrar.
La integral en el interior∫ θ0
0
q
r22πr2 sen θ dθ = 2πq
∫ θ0
0
sen θ dθ (5.11)
La integral de ~E sobre el casquete exterior es:∫ ϕ0
0
q
r2
1− β2
(1− β2 sen2 ϕ)3/22πr2 senϕdϕ
= 2πq
∫ ϕ0
0
1− β2
(1− β2 sen2 ϕ)3/2senϕdϕ (5.12)
La condicion de que el flujo entrante sea igual al saliente nos conduce a∫ θ0
0
sen θ dθ =
∫ ϕ0
0
1− β2
(1− β2 sen2 ϕ)3/2senϕdϕ (5.13)
Haciendo uso de∫ dx
(a2 + x2)3/2=
x
a(a2 + x2)1/2, obtenemos
cos θ0 =ϕ0√
1− β2 sen2 ϕ(5.14)
Una manera equivalente de expresar la relacion entre θ0 y ϕ0
tanϕ0 = γ tan θ0 (5.15)
En las lıneas de campo que conectan el campo proximo a campo remoto deben existircomponentes transversales, es decir no radiales. Hay un campo intenso en la region de tran-sicion, y esta configuracion de campos se dilata con rapidez c en el transcurso del tiempo,vemos que tenemos algo muy parecido a la propagacion de una onda de campo electricotransversal.

108 CAPITULO 5. LOS CAMPOS DE CARGAS EN MOVIMIENTO.
5.8. Fuerza sobre una carga movil
Conocemos la fuerza experimentada por una carga estacionaria en el campo de otra cargase mueve con velocidad cte. Preguntemosnos: ¿Cual es la fuerza que actua sobre una cargamovil, la cual se mueve en el campo de otras cargas? Primero consideremos el caso que semueve en el campo producido por cargas estacionarias. Podrıa ser un electron moviendoseentre las placas cargadas de un osciloscopio, o una partıcula α moviendose en el campocoulombiano cerca del nucleo atomico. Las fuentes del campo estan en reposo en cierto sistemaque llamaremos “Lab”. En cierto lugar y tiempo, en el “Lab” observamos una partıcula concarga q que se mueve con velocidad ~v, en este instante, en el campo electrostatico. ¿Que fuerzaactua sobre q? Sabemos que la fuerza es la derivada temporal del momentum. ¿Cual es lavariacion de momentum de la partıcula d~p/dt en este lugar y tiempo, medida en “Lab”?
La respuesta esta implıcitamente contenida en lo que ya sabemos. Consideremos el sistemadesde un marco de referencia F ′ que se mueve con la partıcula. En este sistema la partıcula,esta en reposo y son las otras cargas las que se mueven ahora. Esto lo conocemos, la fuerzasobre la carga estacionaria q es ~E ′q donde ~E ′ es el campo en F ′. Podemos hallar ~E ′ dado~E, mediante las transformaciones que ya conocemos. Con ~E podemos hallar la variacion delmomentum con respecto al tiempo. Nuestro problema es como transforma la fuerza, es decir,la derivada temporal del momentum, de un sistema inercial a otro.
Consideremos cierto sistema de referencia inercial F ′ que se mueve en la direccion xpositiva, con rapidez v, observada en otro sistema de referencia F . Sea una partıcula cuyamasa en reposo es m, moviendose en la direccion x′ positiva en F ′ con rapidez v′. Sea px lacomponente x del momentum medida en F y sea p′x la componente x del momentum medidaen F ′.
Necesitamos hallar la relacion entre px y p′x
p′x =mv′√1− β′2
= mcβ′γ′ β′ =v′
c, γ′ =
1√1− β′2
. (5.16)
Por otro lado, en el sistema F la velocidad de la partıcula es
v + v′
1− vv′
c2
=c(β + β′)
1− ββ′,
Ası que
px =mc(β + β′)
(1 + ββ′)
[1−
(β+β′
1+ββ′
)2]1/2
=mc(β + β′)
[(1− β2)(1− β′2)]1/2
= mcγγ′(β + β′) (5.17)
Comparando ambas ecuaciones
px = γ(p′x + βγ′mc) = γ
(p′x + β
E ′
c
), (5.18)

5.8. FUERZA SOBRE UNA CARGA MOVIL 109
E ′ es la energıa medida en F ′.Si recordamos como transforma la coordenada x = γ(x′ + βct′) entonces con la anterior
relacion como evidencia podemos decir que (px, py, pz, E/c) se comporta como (x, y, z, ct). Yaque y = y′ en una transformacion de Lorentz con ~v dirigida en x, debemos esperar que
py = p′y . (5.19)
La relacion entre t y t′
t = γ
(t′ + β
x′
c
)(5.20)
Diferenciando
dt = γdt′ + γβ
c
dx′
dt′= γdt′(1 + ββ′) . (5.21)
A partir de la ecuacion (5.19)dpy = dp′y (5.22)
Diferenciando la ecuacion (5.18)
dpx = γp′x + γβmc
(dγ
dp′x
)dp′x , (5.23)
El factor mc(dγ′/dp′x) puede calcularse a partir de la ecuacion (5.16)
p′x = mcγ′β′ = +mc√γ′2 − 1 , (5.24)
Derivamosdp′xdγ′
=mcγ′√γ′2 − 1
=mc
β′(5.25)
Entonces dγ′/dp′x = 1/(dp′x/dγ′) = β′/mc, sustituyendo en (5.23)
dpx = γdp′x(1 + ββ′) . (5.26)
Comparando (5.21) y (5.26) vemos que
dpx
dt=dp′xdt′
(5.27)
Esto se cumple no importa lo grande que sea v′ ya que el factor (1 + ββ′) aparece en ambasecuaciones.
Nos interesa solamente los casos en que v′ es ,muy pequena, es decir, cuando la partıculaesta casi en reposo en F ′.
En este caso ββ′ puede despreciarse y entonces al comparar (5.21) y (5.22), hallamos
dpy
dt=
1
γ
dp′ydt′
(5.28)
Resumiendo

110 CAPITULO 5. LOS CAMPOS DE CARGAS EN MOVIMIENTO.
EE’
E’ = E
dp’
dt’
dp
dt=
= qEdp
dt
Sistema de referencia
"partícula" F’
Sistema de referencia
"Lab" F
EE’
EE’ = γ =dp
dt
dp’
dt’
1γ
= qEdp
dt
q q v
qv
q
Figura 5.20: Resumen.
F ′ es un sistema de referencia inercial en el cual una partıcula esta instantaneamenteen reposo o moviendose muy lentamente.
F es cualquier otro sistema de referencia inercial con respecto al cual F ′ se mueve concierta velocidad. Usando las componentes paralelas y perpendiculares del momentumrespecto a la velocidad relativa entre F y F ′ podemos establecer
dp‖dt
=dp′‖dt′
dp⊥dt
=1
γ
dp′⊥dt′
(5.29)
La ecuacion (5.29) corresponde a la ley de transformacion de la fuerza. La ley de trans-formacion de los campos ya la conocemos: E ′
‖ = E‖ y E ′⊥ = γE⊥. Ahora podemos volver a la
partıcula cargada moviendose a traves del campo electrico ~E.Sea E‖ la componente de ~E paralela a la direccion instantanea del movimiento de nuestra
partıcula. La transformamos a F ′, el campo E ′‖ = E‖, la fuerza
dp′‖dt′
= E ′‖q = E‖q . (5.30)
En F se mide la fuerza longitudinal
dp‖dt
=dp′‖dt′
= E‖q . (5.31)
La partıcula NO permanece en reposo en F ′ en el transcurso del tiempo. Se acelera por elcampo E ′, y v′ aumentara, sin embargo nos interesa la aceleracion instantanea.
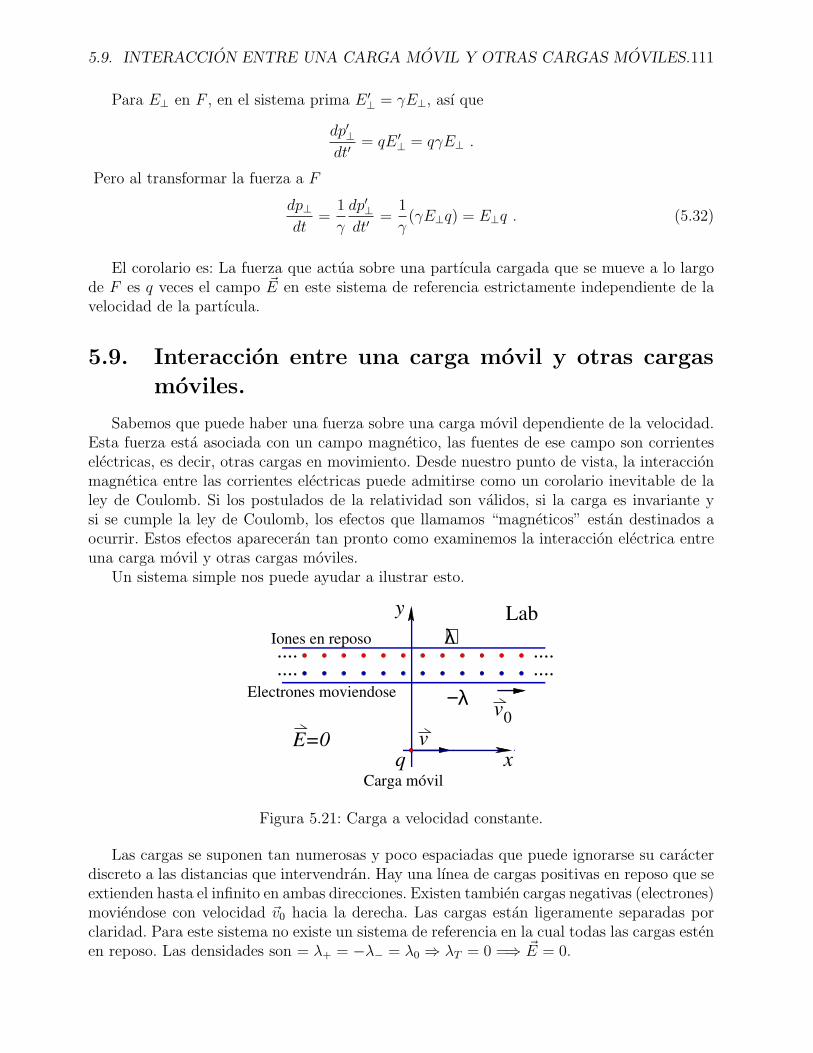
5.9. INTERACCION ENTRE UNA CARGA MOVIL Y OTRAS CARGAS MOVILES.111
Para E⊥ en F , en el sistema prima E ′⊥ = γE⊥, ası que
dp′⊥dt′
= qE ′⊥ = qγE⊥ .
Pero al transformar la fuerza a F
dp⊥dt
=1
γ
dp′⊥dt′
=1
γ(γE⊥q) = E⊥q . (5.32)
El corolario es: La fuerza que actua sobre una partıcula cargada que se mueve a lo largode F es q veces el campo ~E en este sistema de referencia estrictamente independiente de lavelocidad de la partıcula.
5.9. Interaccion entre una carga movil y otras cargas
moviles.
Sabemos que puede haber una fuerza sobre una carga movil dependiente de la velocidad.Esta fuerza esta asociada con un campo magnetico, las fuentes de ese campo son corrienteselectricas, es decir, otras cargas en movimiento. Desde nuestro punto de vista, la interaccionmagnetica entre las corrientes electricas puede admitirse como un corolario inevitable de laley de Coulomb. Si los postulados de la relatividad son validos, si la carga es invariante ysi se cumple la ley de Coulomb, los efectos que llamamos “magneticos” estan destinados aocurrir. Estos efectos apareceran tan pronto como examinemos la interaccion electrica entreuna carga movil y otras cargas moviles.
Un sistema simple nos puede ayudar a ilustrar esto.
v0
vE=0
y
xq
Lab
Carga móvil
−λ
+λ............
....
Electrones moviendose
Iones en reposo
Figura 5.21: Carga a velocidad constante.
Las cargas se suponen tan numerosas y poco espaciadas que puede ignorarse su caracterdiscreto a las distancias que intervendran. Hay una lınea de cargas positivas en reposo que seextienden hasta el infinito en ambas direcciones. Existen tambien cargas negativas (electrones)moviendose con velocidad ~v0 hacia la derecha. Las cargas estan ligeramente separadas porclaridad. Para este sistema no existe un sistema de referencia en la cual todas las cargas estenen reposo. Las densidades son = λ+ = −λ− = λ0 ⇒ λT = 0 =⇒ ~E = 0.

112 CAPITULO 5. LOS CAMPOS DE CARGAS EN MOVIMIENTO.
Una carga de prueba q estacionaria a cierta distancia r del hilo no experimenta fuerzaya que ~E = 0. Ahora nos interesa la fuerza sobre una carga de prueba movil. Supongamosque la carga q se ha puesto en movimiento hacia la derecha con rapidez v en la referenciadel Lab. ¿Que fuerza actua sobre ella, observada en la referencia del Lab? Para responderlo anterior, introducimos un sistema de coordenadas que se mueve con la carga de pruebaq. En este sistema de referencia, que llamaremos de la partıcula, la carga q esta en reposoy la fuerza sobre ella esta determinada solamente por el campo electrico en este sistema dereferencia. ¿Por que existe un campo electrico en la referencia partıcula cuando no lo hay enel Lab? La razon es que los valores de las densidades lineales de carga vistas en la referenciade la partıcula (λ
′+, λ
′−) NO son iguales entre si, el hilo no es neutro, esta cargado. Existe un
exceso de carga por unidad de longitud.¿Que hay de la invariancia de carga?La carga total encerrada dentro de cierto contorno es la misma, no importa en que sistema
de referencia se mida. En este caso ningun contorno puede encerrar a la carga total en el hilo,la cual se extiende hasta el infinito; lo que ocurre en sus extremos aquı no nos interesa. Si nosmovemos a la misma rapidez que la carga de prueba hallaremos una densidad lineal distinta,el hilo aparece cargado. Las carga positiva estaran mas cerca entre ellas y los electrones maslejos. La distancia entre los iones se contraera en la direccion x en el factor (1−v2/c2)1/2 = 1/γ,lo que la harıa mas densa γλ0 que en la referencia del Lab en la cual las cargas positivasestaban en reposo.
Las cargas negativas ya estaban en movimiento en el Lab, luego encontrar su densidad enel sistema de referencia de la carga de prueba sera un poco mas trabajoso. Ya que su densidaden el sistema del Lab es −λ0, en el sistema en que los electrones estan en reposo la densidaddebe ser −λ0/γ0, donde γ0 es el factor de Lorentz para v0. Necesitamos las velocidades de lascargas negativas en el sistema de la partıcula de prueba
v′0 =v0 − v
1− v0v/c2=⇒ β′0 =
β0 − β
1− β0β(5.33)
El correspondiente factor de Lorentz lo obtenemos con un poco de algebra
γ′0 = (1− β′20 )−1/2 = γγ0(1− β0β) . (5.34)
Este es el factor por el cual la densidad lineal de carga negativa en reposo en su propiosistema es modificada cuando es medida en el sistema de la carga de prueba. La densidadlineal de carga en el alambre en el sistema de la carga de prueba λ′, la podemos calcularcomo sigue
λ′ = γλ0 −λ0
γ0
(γγ0(1− β0β)) = γββ0λ0 . (5.35)
El primer termino corresponde al producto del factor de transformacion al sistema dela partıcula por la densidad de carga de los iones en el sistema que ellos estan en reposo.El segundo termino corresponde al producto de al densidad de carga de los electrones ensistema que ellos estan en reposo por el factor de transformacion al sistema de la partıcula.

5.9. INTERACCION ENTRE UNA CARGA MOVIL Y OTRAS CARGAS MOVILES.113
El alambre esta cargado positivo. La ley de Gauss garantiza un campo radial E ′r dado por
nuestra forma familiar de una lınea cargada infinita
E ′r =
2λ′
r′=
2γββ0λ0
r′. (5.36)
En el sistema de la carga de prueba este campo esta en la direccion −y′. La fuerza queexperimentara la carga de prueba
F ′y = qE ′
y = −2qγββ0λ0
r′. (5.37)
Ahora retornemos al sistema de referencia del Lab. ¿Cual es la magnitud de la fuerza sobrela carga q medida en ese sistema? Si su valores qE ′
y en el sistema en que la carga de pruebaesta en reposo, en el sistema del Lab se reportara una fuerza mas pequena en un factor 1/γ.Ya que r = r′, la fuerza sobre nuestra carga en movimiento, medida en el sistema del Lab, es
Fy =F ′
y
γ= −2qββ0λ0
r. (5.38)
La cantidad λv0 es precisamente la corriente I en nuestro hilo en [ues/s]. Expresado porI esta corriente, el valor de la fuerza sobre la carga movil esta dado por
F =2qvxI
rc2=q
cvx
(2I
rc
)(5.39)
Es un hecho notable que la fuerza sobre la carga de prueba movil no dependa separada-mente de la velocidad o de la densidad de los portadores de carga en el hilo, sino solamentede la combinacion que determina el transporte neto de carga. Veamos como esto explica larepulsion mutua de conductores que conducen corriente en sentidos contrarios. Suponemosigual numero de portadores positivos y negativos moviendose en sentido contrario con lamisma velocidad.
Corriente
en reposo
Conductor 1
Conductor 2 Corriente
(a)
Figura 5.22: Dos cables conductores.
En el Lab tenemos (5.22a). Las corriente se deben al movimiento de las cargas negativas(los electrones), las cargas positivas (los iones) estan en reposo. En el sistema de referencia

114 CAPITULO 5. LOS CAMPOS DE CARGAS EN MOVIMIENTO.
que se mueve con las cargas negativas del primer conductor el sistema aparece en la figura(5.23b).
1
2
en reposo
(b)
Figura 5.23: En el sistema de los electrones.
En este sistema el conductor 1 tiene un exceso de carga positiva por unidad de longitudde aquı que se repelen con las cargas positivas en el conductor 2. Analogamente, las negativasen el conductor 1 son repelidas por el exceso de carga negativa en el conductor 2.
Para hallar las fuerzas sobre los restantes portadores de carga, las cargas negativas en elconductor 2, pasamos al sistema de referencia en la que ellas estan en reposo, (5.24c).
2
(c)
1
en reposo
Figura 5.24: En el sistema de los otros electrones.
Aquı el conductor 2 como aparece con un exceso de carga positiva, ası que las cargaspositivas en el conductor 1 deben experimentar una repulsion. De manera similar para lascargas negativas en 2. Ası que cada portador de carga, en su propia referencia en reposo,experimenta una repulsion resultante de los portadores de carga en el otro conductor. Deaquı que, en el Lab, tenemos una repulsion de cada uno de los conductores por el otro.
En este capıtulo hemos visto como el hecho de la invariancia de carga implica la fuerzaentre corrientes electricas. Esto no nos obliga a considerar que un hecho es la causa delotro. Estos son simplemente dos aspectos del electromagnetismo cuyas relaciones ilustranelegantemente la ley mas general: La fısica es la misma en todos los sistemas de referenciainerciales.
Si tuviesemos que analizar cada sistema de cargas moviles, transformando entre variossistemas de coordenadas, nuestro trabajo serıa pesado y desconcertante. Existe un metodo

5.9. INTERACCION ENTRE UNA CARGA MOVIL Y OTRAS CARGAS MOVILES.115
mejor: el efecto completo de una corriente sobre otra, o de una corriente sobre una cargamovil puede describirse completa y concisamente introduciendo un nuevo campo, el campomagnetico.

116 CAPITULO 5. LOS CAMPOS DE CARGAS EN MOVIMIENTO.
Capıtulo 6
El campo magnetico.
En este capıtulo veremos las siguientes secciones.
Definicion de campo magnetico.
Algunas propiedades del campo magnetico.
Potencial Vector.
Campo de cualquier corriente que recorre un hilo. (Ley de Biot-Savart.)
Campos de espiras y bobinas.
Variacion de ~B en una lamina de corriente.
¿Como transforman los campos?
Experimento de Rowland. Efecto Hall.
6.1. Definicion de campo magnetico.
Una carga que se mueve en las cercanıas de un corriente experimenta una fuerza per-pendicular a su propia velocidad. Este comportamiento se describe usualmente diciendo queexiste un campo magnetico en torno a un hilo que conduce corriente y que una carga movilexperimenta una fuerza en un campo magnetico. La fuerza que actua sobre una carga qmoviendose con velocidad uniforme ~v viene dada por
~F = q ~E +q
c~v × ~B . (6.1)
donde ~E y ~B son campos vectoriales que no dependen de la velocidad de la partıcula.Las unidades de B =[dinas/ues]=[Gauss]. Si se cumple la ecuacion (6.1) definimos ~E como
el campo electrico en aquel punto y definimos ~B como el campo magnetico en tal lugar.Si ~B = 0 entonces (6.1) corresponde a la fuerza electrostatica.
~B =2I
rcϕ . (6.2)
117

118 CAPITULO 6. EL CAMPO MAGNETICO.
B
I
r
Figura 6.1: Campo en torno a un hilo conductor.
Hemos demostrado que si q se mueve paralela al conductor siente una fuerza. Si se mueveperpendicular al conductor tambien se puede demostrar que siente una fuerza.
La interaccion magnetica entre corrientes paralelas solamente depende del producto delas corrientes y no de las densidades de los portadores o de las velocidades separadamente.
I1
I2
F
r
Figura 6.2: Fuerza entre hilos conductores.
La fuerza por unidad de largo
Fuerza por cm =2I1I2rc2
(6.3)
ds
B
I
Figura 6.3: Fuerza sobre un conductor.

6.1. DEFINICION DE CAMPO MAGNETICO. 119
Expresada en funcion de un campo magnetico ~B el valor de la fuerza sobre un conductorque conduce una corriente estacionaria I en un campo magnetico B generado por otrascorrientes, a partir de una forma diferencial de la fuerza de Lorentz, es
d~F =dq
c~v × ~B =
dq
cdtdtd~s
dt× ~B =
I
cd~s× ~B . (6.4)
Donde d~s es el elemento de longitud que recorre el conductor, dirigido en el sentido de lacorriente. Si medimos la corriente en Amperes el campo en Gauss
B[Gauss] =2
10
I[A]
r[cm]
Recordemos que 1[A]=3×109 [ues/s] y c = 3× 1010 [cm/s].La intensidad del campo magnetico terrestre cerca de la superficie de la Tierra≈ 0.5 [Gauss].
Un campo entre 10 a 20 [kGauss] lo obtenemos con un electroiman de hierro. Un campo entre60 a 80 [kGauss] lo obtenemos con un electroiman superconductor. La magnitud que hemos
definido ~B en muchos libros la llaman induccion magnetica.La circulacion de un campo magnetico satisface∮
Γ
~B · d~s =4π
c
∫S(Γ)
~J · d~a . (6.5)
Donde S(Γ) es cualquier superficie cuyo contorno sea Γ. El lado derecho corresponde a 4π/cla corriente encerrada por el camino, es decir,∮
Γ
~B · d~s =4π
cIencerrada
El campo de un hilo conductor
r
I
Γ
∮~B · d~s =
4π
cI
B 2πr =4π
cI
B =2I
rc

120 CAPITULO 6. EL CAMPO MAGNETICO.
Sabemos que se cumple el Teorema de Stokes∮Γ
~F · d~s =
∫S(Γ)
(rot ~F ) · d~a (6.6)
Comparando este resultado con la Ley de Ampere tenemos
rot ~B =4π
c~J (6.7)
Esta es la expresion mas simple y mas general entre el campo magnetico y las cargasmoviles que lo originan.
Como NO hay “cargas magneticas” (monopolos) tenemos
div ~B = 0 (6.8)
Las ecuaciones de Maxwell para la electromagnetoestatica
div ~E = 4πρ rot ~E = 0
div ~B = 0 rot ~B =4π
c~J (6.9)
6.2. El potencial vector.
Dada la identidad vectorial div(rot ~F ) = 0 podemos expresar ~B como
~B = rot ~A (6.10)
El campo vectorial ~A es conocido como el potencial vector. ¿Como calcularlo? debemosimponer que
rot(rot ~A) =4π
c~J (6.11)
La componente x
∂
∂y(Bz)−
∂
∂z(By) =
4π
cJx
∂
∂y
(∂Ay
∂x− ∂Ax
∂y
)− ∂
∂z
(∂Ax
∂z− ∂Az
∂x
)=
4π
cJx (6.12)

6.2. EL POTENCIAL VECTOR. 121
−∂2Ax
∂y2− ∂2Ax
∂x2+
∂
∂x
(∂Ay
∂y
)+
∂
∂x
(∂Az
∂z
)=
4π
cJx (6.13)
−∂2Ax
∂x2− ∂2Ax
∂y2− ∂2Ax
∂z2
+∂
∂x
(∂Ax
∂x+∂Ay
∂y+∂Az
∂z
)=
4π
cJx (6.14)
luego
−∇2Ax +∂
∂x(~∇ · ~A) =
4π
cJx
Vectorialmente
−∇2 ~A+ ~∇(~∇ · ~A) =4π
c~J
Elegimos ~∇ · ~A = div ~A = 0, conocido como Gauge de Coulomb,
Nos queda
∇2 ~A = −4π
c~J (6.15)
Esta ecuacion es equivalente, por coordenadas cartesianas, a tres ecuaciones de Poisson,por lo tanto la solucion
~A(~r) =1
c
∫ ~J(~r′)
|~r − ~r′ |d3r′ . (6.16)
6.2.1. Ejemplo de potencial vector.
Campo de un hilo recto conductor.
~B =2I
rcϕ
=2I(− senϕx+ cosϕy)
c√x2 + y2
=2I
c
−yx+ xy
x2 + y2. (6.17)
Debemos encontrar un ~A tal que ~∇× ~A = ~B.
Proponemos:
~A = −z Ic
Log(x2 + y2) . (6.18)

122 CAPITULO 6. EL CAMPO MAGNETICO.
Evaluemos el rotor (~∇× ~A
)x
=∂Az
∂y− ∂Ay
∂z= − 2Iy
c(x2 + y2)= Bx(
~∇× ~A)
y=∂Ax
∂z− ∂Az
∂x= +
2Ix
c(x2 + y2)= By(
~∇× ~A)
z=∂Ay
∂x− ∂Ax
∂y= 0 = Bz (6.19)
Evaluemos la divergencia
~∇ · ~A =∂Ax
∂x+∂Ay
∂y+∂Az
∂z
=∂
∂z
(−Ic
Log(x2 + y2)
)= 0
Vemos que ~A satisface el gauge de Coulomb. Al potencial vector ~A se le puede anadircualquier campo vectorial con rotacional nula. Todo lo anterior se cumple fuera del hilo, enel interior del hilo el campo magnetico ~B es distinto, lo que implica que el potencial vector~A tambien es distinto.
El potencial vector ~A no podrıa encontrarse por integracion directa debido a que el con-ductor es infinito. Analogo al problema para el potencial escalar con la distribucion infinitade carga.
6.3. Campo de cualquier cable conduciendo corriente.
r1
r2 r =12 r1 r2
(x ,y1,z )1 1
J
r12IΓz
x
y
ds
Figura 6.4: Una espira de hilo que conduce una corriente I.
El potencial vector en el punto (x1, y1, z1) viene dado por
~A(~r1) =1
c
∫ ~J(~r2)
|~r1 − ~r2 |d3r2 .

6.3. CAMPO DE CUALQUIER CABLE CONDUCIENDO CORRIENTE. 123
Con J = I/a, donde I es la corriente y a la seccion transversal del conductor. El elemento
de volumen es d3r2 = ads. Luego ~Jd3r2 = Id~s, donde d~s va en el sentido de la corriente.Ası para un hilo delgado podemos escribir la expresion para ~A de la siguiente manera
~A =I
c
∮Γ
d~s
r12. (6.20)
En forma diferencial, i.e. la contribucion al potencial vector de cada elemento diferencialdel circuito
d ~A(~r1) =I
c
d~s
|~r1 − ~r2 |.
Obtenemos ~B tomando el rotor
d ~B(~r1) = ~∇~r1 × d ~A = ~∇~r1 ×I
c
d~s
|~r1 − ~r2 |.
d ~B(~r1) =I
c~∇~r1 ×
(d~s
|~r1 − ~r2 |
). (6.21)
Calculemos una de las componentes del rotor
~R = ~∇~r1 ×(
d~s
|~r1 − ~r2 |
)=
∣∣∣∣∣∣∣∣∣∣x y z
∂
∂x
∂
∂y
∂
∂zdx
r
dy
r
dz
r
∣∣∣∣∣∣∣∣∣∣.
Evaluemos la componente x
Rx = dz∂
∂y
1
r− dy
∂
∂z
1
r
= dz
[~∇(
1
r
)]y
− dy
[~∇(
1
r
)]z
= −[d~s× ~∇
(1
r
)]x
.
Con el resultado anterior en la ecuacion (6.21) tenemos
d ~B(~r1) = −Icd~s× ~∇~r1
(1
|~r1 − ~r2 |
). (6.22)
Calculemos el gradiente
~G = ~∇~r1
(1
|~r1 − ~r2 |
)= −1
2
2(x1 − x2)x+ 2(y1 − y2)y + 2(z1 − z2)z
|~r1 − ~r2 |3
= − ~r1 − ~r2|~r1 − ~r2 |3

124 CAPITULO 6. EL CAMPO MAGNETICO.
Reemplazando el gradiente en la ecuacion (6.22) obtenemos
d ~B(~r1) = −Icd~s×
(− ~r1 − ~r2|~r1 − ~r2 |3
)=I
cd~s× r12
r212
La ecuacion que resulta a continuacion es conocida como la Ley de Biot-Savart:
d ~B =I
c
d~s× r
r2(6.23)
Donde r es el vector entre el elemento d~s y el punto de observacion. El diferencial d~sapunta en la direccion del flujo de corriente.
Para calcular ~B se debe integrar a lo largo de circuito completo, tomando la contribucionde cada elemento dada por la ecuacion (6.23).
6.4. Campo de una espira y bobinas.
ds
dB
I
I x
y
b
θ
θ
z
z
r
Figura 6.5: Una espira de hilo que conduce una corriente I.
Una corriente en forma de espira circular de radio b, podrıa predecirse sin ningun calculo,que el campo magnetico de esa fuente debe ser algo parecido a:
El campo debe tener simetrıa de revolucion en torno al eje z. Las lıneas de campo debense simetricas respecto al plano xy. Cerca del hilo parecera un hilo recto largo.
Calculemoslo usando Biot-Savart
dBz =Ids
cr2cos θ =
Ids
cr2
b
r(6.24)

6.4. CAMPO DE UNA ESPIRA Y BOBINAS. 125
plano xy
Figura 6.6: Forma aproximada del campo.
Integrando a lo largo de la espira∫ds = 2πb luego
Bz =2πb2I
cr3=
2πb2I
c(b2 + z2)3/2. (6.25)
obtenemos el campo en el eje z. En el centro del anillo el modulo del campo es
Bz(0) =2πI
cb(6.26)
θ1
θ2
rdθsen θ
vueltas/cmn
I
I
L
b
z r
θ
dθ
el campo(bobina)Solenoide Para calcular
Figura 6.7: Un solenoide.
Supongamos que el hilo esta uniformemente poco espaciado de manera que el numerode vueltas en el enrrollamiento por centımetro de longitud, a lo largo del cilindro es unaconstante, n.
El camino de la corriente es realmente helicoidal pero si las vueltas son muchas y pocoespaciadas podemos ignorarlo y considerar el solenoide equivalente a una pila de corrientescirculares.

126 CAPITULO 6. EL CAMPO MAGNETICO.
Podemos usar la ecuacion (6.25) como base para calcular el campo en los puntos sobre eleje z.
Tomemos primero la contribucion de la corriente anular incluida entre los rayos que salende z y que forman un angulo θ y θ + dθ con el eje.
La longitud del segmento
dθ
π2 θ
a
θ
θ
r
r
Figura 6.8: Ampliacion.
a cos(π
2− θ)
= rdθ =⇒ a =rdθ
sen θ
Por lo tanto, es equivalente a una espira que conduce una corriente
Inrdθ
sen θ,
donde I es la corriente en cada vuelta, n es el numero de vuelta por centımetro y el factorde la derecha es la longitud del segmento.y ya que
r sen θ = b =⇒ r =b
sen θ,
para la contribucion de este anillo al campo axial
dBz =2πb2
cr3
Inrdθ
sen θ=
2π
cIn sen θ dθ (6.27)
Integrando entre los lımites θ1 y θ2 tenemos
Bz =
∫ θ2
θ1
2πIn
csen θ dθ =
2πIn
c
[− cos θ
∣∣∣∣θ2
θ1
]=
2πIn
c(cos θ1 − cos θ2) (6.28)
Para la bobina infinita θ1 = 0 y θ2 = π
Bz =4πIn
cSolenoide infinitamente largo (6.29)
Bz = 0 fuera

6.4. CAMPO DE UNA ESPIRA Y BOBINAS. 127
L
−4b −2b 0 2b 4b
1.0
0.2
0.4
0.6
0.8
Figura 6.9: La componente z del campo de una espira finita relativa al campo de una infinita.
En el centro de una bobina “4 a 1” (L=4 veces el diametro) el campo tiene aproximada-mente el mismo valor que el de una bobina de longitud infinita y permanece casi constantehasta que nos acercamos a uno de los extremos. En un solenoide finito algunas lıneas penetranlas paredes. La envoltura cilındrica de corriente es una superficie de discontinuidad para elcampo magnetico.
Figura 6.10: Bobina finita.
Es posible construir un solenoide largo con una sola vuelta de un conductor ancho ydelgado como una cinta. El cambio de direccion de una lınea de campo que penetra la paredtiene lugar enteramente dentro de la lamina. Usemos la Ley de Ampere para evaluar el campoen un solenoide infinito con n vueltas por [cm] y por el cual circula una corriente I,
Consideremos la integral curvilınea de ~B a lo largo del camino ABCD sobre la figura
Bzl =4π
cnIl
Bz =4π
cnI (6.30)
Reobtenemos el resultado para el campo interior en un solenoide.

128 CAPITULO 6. EL CAMPO MAGNETICO.
A
B C
D
n vueltas/[cm] con corriente
l
Figura 6.11: Bobina infinita.
6.5. Cambio en ~B en una hoja con corriente.
Consideremos una lamina de corriente ilimitada, en el plano xz. La densidad de corrientesuperficial es J en la direccion x con unidades [ues/s]/cm.
I= Jl
Bz+
Bz
J
1
2
3
4lx y
z
Figura 6.12: Una lamina infinita que conduce corriente.
El campo ~B puede ser el campo de la lamina mas algun campo externo producido porotra fuente. Si el campo externo tuviera una componente perpendicular a la lamina tomamosel camino mas cercano a la lamina.
Apliquemos la ley de Ampere sobre el circuito 1234:∮~B · d~s =
(B+
z −B−z
)` =
4π
cJ `
Vemos que una lamina de corriente de densidad J da lugar a un salto en la componentede ~B paralela a la superficie y perpendicular a J . Si la lamina es la unica fuente de corrienteentonces el campo es simetrico, es decir,
B−z =
−2πJc
y B+z =
2πJc
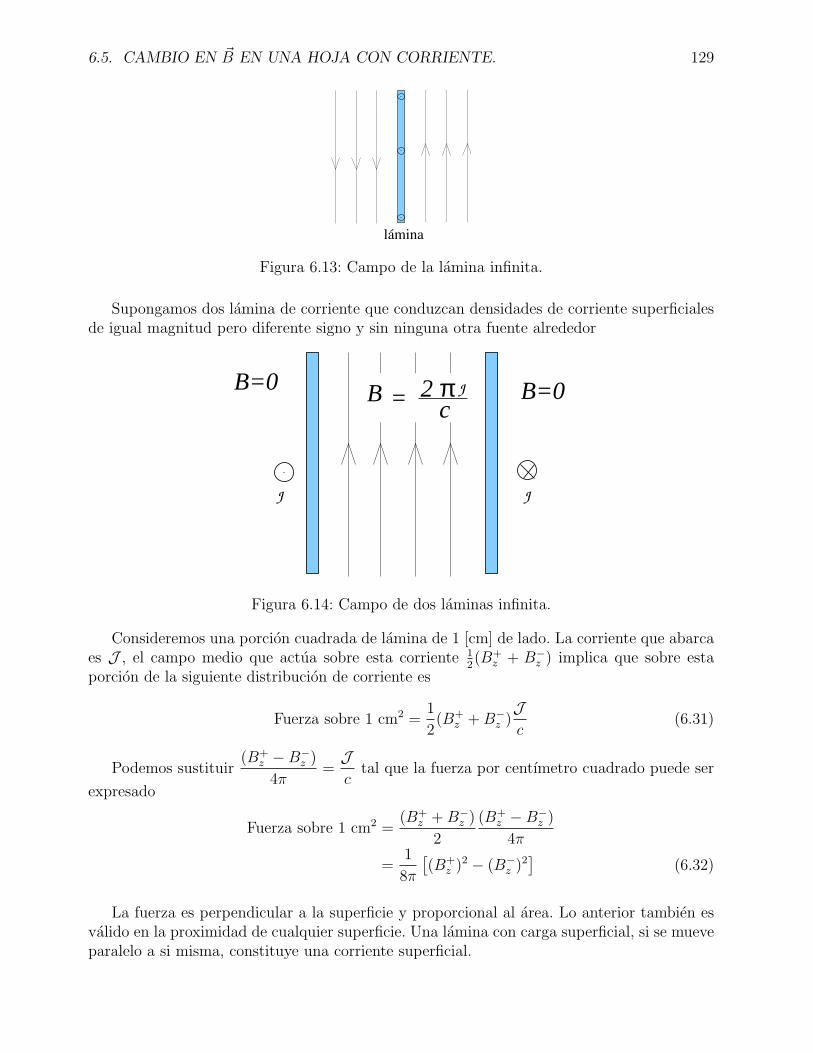
6.5. CAMBIO EN ~B EN UNA HOJA CON CORRIENTE. 129
lámina
Figura 6.13: Campo de la lamina infinita.
Supongamos dos lamina de corriente que conduzcan densidades de corriente superficialesde igual magnitud pero diferente signo y sin ninguna otra fuente alrededor
J J
B=0B=0 2= πJc
B
Figura 6.14: Campo de dos laminas infinita.
Consideremos una porcion cuadrada de lamina de 1 [cm] de lado. La corriente que abarcaes J , el campo medio que actua sobre esta corriente 1
2(B+
z + B−z ) implica que sobre esta
porcion de la siguiente distribucion de corriente es
Fuerza sobre 1 cm2 =1
2(B+
z +B−z )Jc
(6.31)
Podemos sustituir(B+
z −B−z )
4π=Jc
tal que la fuerza por centımetro cuadrado puede ser
expresado
Fuerza sobre 1 cm2 =(B+
z +B−z )
2
(B+z −B−
z )
4π
=1
8π
[(B+
z )2 − (B−z )2]
(6.32)
La fuerza es perpendicular a la superficie y proporcional al area. Lo anterior tambien esvalido en la proximidad de cualquier superficie. Una lamina con carga superficial, si se mueveparalelo a si misma, constituye una corriente superficial.

130 CAPITULO 6. EL CAMPO MAGNETICO.
Si la densidad de carga uniforme es σ con la superficie deslizandose a rapidez v implica unJ = σv. Esta simple idea nos ayuda a ver como las magnitudes de ~E y ~B deben cambiarsecuando pasamos de un sistema de referencia inercial a otro.
E’E
vo
vo
B B’
v’ov’o
x
y
z
F F’
y’
x’
z’v
Figura 6.15: Dos lamina infinita con densidades superficiales σ y −σ en F y en F ′.
Usando Gauss en F obtenemos el campo electrico
Ey = 4πσ . (6.33)
En F ambas laminas se mueven en la direccion +x con v0 lo cual implica Jx = σv0 enuna y Jx = −σv0 en la otra, luego el campo magnetico es
Bz =4πJx
c=
4πσv0
c. (6.34)
F ′ vista de F se mueve con velocidad v en la direccion +x. ¿Que medira un observadoren F ′?. En F ′, la velocidad segun x′ de las laminas es v′0
v′0 =v0 − v(1− v0v
c2
) =c(β0 − β)
(1− β0β)(6.35)
Existe una contraccion de Lorentz de la densidad de carga en esta referencia. La densidaden la referencia en reposo de las cargas es
σ(1− v20
c2)1/2 =
σ
γ0
Lo anterior implica que en F ′
σ′ = σγ′0γ0
, (6.36)

6.5. CAMBIO EN ~B EN UNA HOJA CON CORRIENTE. 131
donde γ′0 = (1− v′20 /c2)−1/2. De la ecuacion (6.35) podemos eliminar γ′0
σ′ = σγ(1− β0β) . (6.37)
La densidad de corriente superficial
J ′ = σ′v′0 = σγ(1− β0β)c(β0 − β)
(1− β0β)= σγ(v0 − v) (6.38)
Los campos en F ′
E ′y = 4πσ′ = γ
[4πσ − 4πσv0
c
v
c
](6.39)
B′z =
4π
cJ ′ = γ
[4πσv0
c− 4πσ
v
c
](6.40)
Si consideramos Ey y Bz de las ecuaciones (6.33) y (6.34)
E ′y = γ (Ey − βBz)
B′z = γ (Bz − βEy) (6.41)
Queda por hallar como varıan las componentes del campo en la direccion del movimiento.En el capıtulo anterior hallamos que ~Elong tiene el mismo valor en ambas referencias. Esto
tambien es cierto para ~Blong (puede probarse).Los resultados encontrados son generales. A continuacion, damos la lista de las transfor-
maciones. Todas las cantidades prima se han medido en la referencia F ′, la cual se mueve enla direccion de +x con velocidad v desde ~F . Las cantidades sin prima son numeros resultados
de la medida en F . Usaremos que β =v
cy γ = (1− β2)−1/2
Las transformaciones por componente son:
E ′x = Ex E
′y = γ(Ey − βBz) E
′z = γ(Ez + βBy)
B′x = Bx B
′y = γ(By + βEz) B
′z = γ(Bz − βEy) (6.42)
Las ecuaciones anteriores son simetricas respecto a ~E y ~B. A pesar de que el mundo denuestro alrededor no es simetrico con respecto a la electricidad y magnetismo. Sin embargo,quitando las fuentes, hallamos que los mismos campos ~E y ~B estan conectados uno a otro demanera muy simetrica.
Parece, ademas, que los campos electrico y magnetico son en cierto sentido componentes,de un ente unico el campo electromagnetico, y considerar (Ex, Ey, Ez, Bx, By, Bz) como seiscomponentes del campo electromagnetico.

132 CAPITULO 6. EL CAMPO MAGNETICO.
El campo visto desde distintas referencias inerciales estara representado por distintosgrupos de valores de estas componentes, algo como un vector esta representado por distintascomponentes en distintos sistemas de coordenadas que se han girado uno con respecto a otro.
Sin embargo, el campo electromagnetico no es un vector si no un tensor. Las ecuaciones(6.5) constituyen las reglas para transformar las componentes de tal tensor cuando cambiamosde una referencia inercial a otra.
Las transformaciones predice una relacion simple en cierto tipo de casos. Supongamosque en una referencia, en la coordenada “sin prima” ~B es nulo en todo punto. Entonces enla otra referencia
E ′x = Ex E ′
y = γEy E ′z = γEz
B′x = 0 B′
y = γβEz B′z= −γβEy (6.43)
Lo anterior lleva consigo una cierta relacion entre ~E y ~B en F ′ a saber
B′x = 0 B′
y = βE ′z , B′
z = −βE ′y . (6.44)
Recordando que en este ejemplo la velocidad de la referencia no prima es un vector enla direccion −x′, vista en la referencia prima podemos expresar la relacion anterior como unproducto vectorial
~B′ =
(~v′
c
)× ~E ′ . (6.45)
Si ~B = 0 en todas partes en una referencia.
Aquı ~v′ significa la velocidad observada desde F ′ de esta referencia F en la cual ~B es nulo.De la misma manera si ~E = 0 en F
~E ′ = −(~v′
c
)× ~B′ (6.46)
Si ~E = 0 en todas partes de la referencia F .
6.6. Experimento de Rowland.
Inicialmente no era obvio que cargas electricas moviendose son fuentes de campo magneti-cos al igual que una corriente.
El primero en demostrar que el movimiento de laminas cargadas produce un campomagnetico fue Henry Rowland.
Uno de sus experimentos mas ingenioso fue la medicion del campo magnetico de discoscargados. El campo detectado fue de 10−5 veces la de la Tierra.
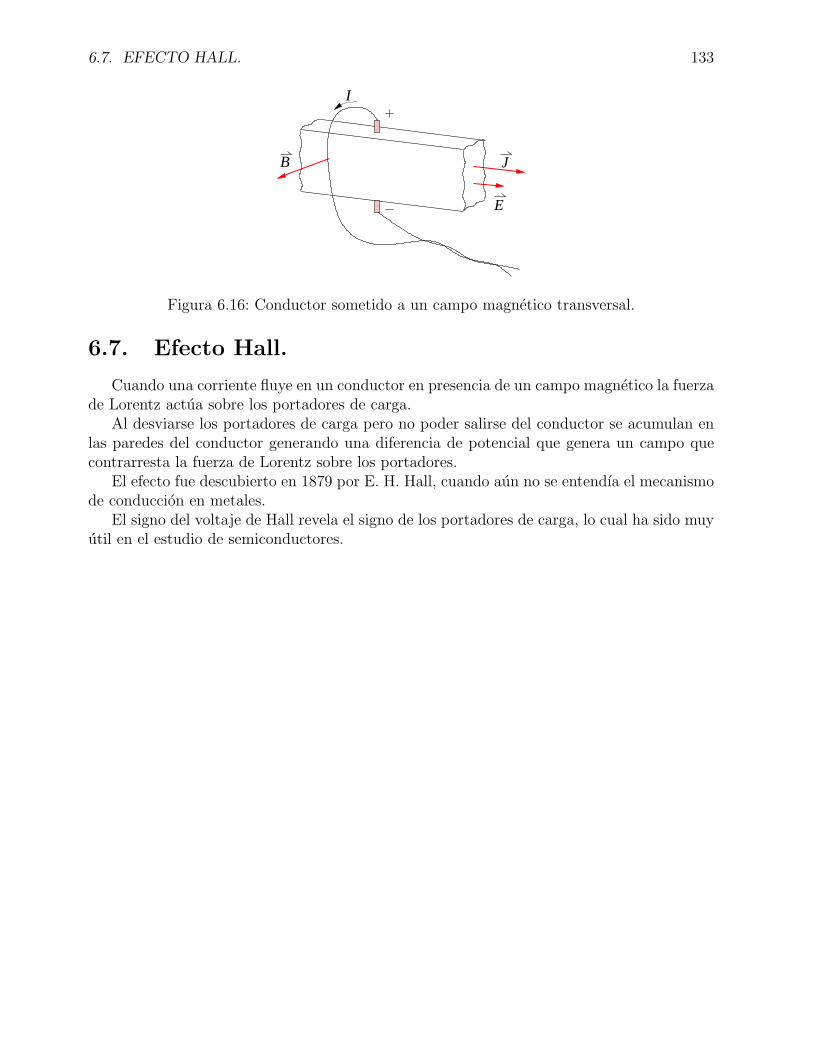
6.7. EFECTO HALL. 133
B J
E
I
Figura 6.16: Conductor sometido a un campo magnetico transversal.
6.7. Efecto Hall.
Cuando una corriente fluye en un conductor en presencia de un campo magnetico la fuerzade Lorentz actua sobre los portadores de carga.
Al desviarse los portadores de carga pero no poder salirse del conductor se acumulan enlas paredes del conductor generando una diferencia de potencial que genera un campo quecontrarresta la fuerza de Lorentz sobre los portadores.
El efecto fue descubierto en 1879 por E. H. Hall, cuando aun no se entendıa el mecanismode conduccion en metales.
El signo del voltaje de Hall revela el signo de los portadores de carga, lo cual ha sido muyutil en el estudio de semiconductores.

134 CAPITULO 6. EL CAMPO MAGNETICO.
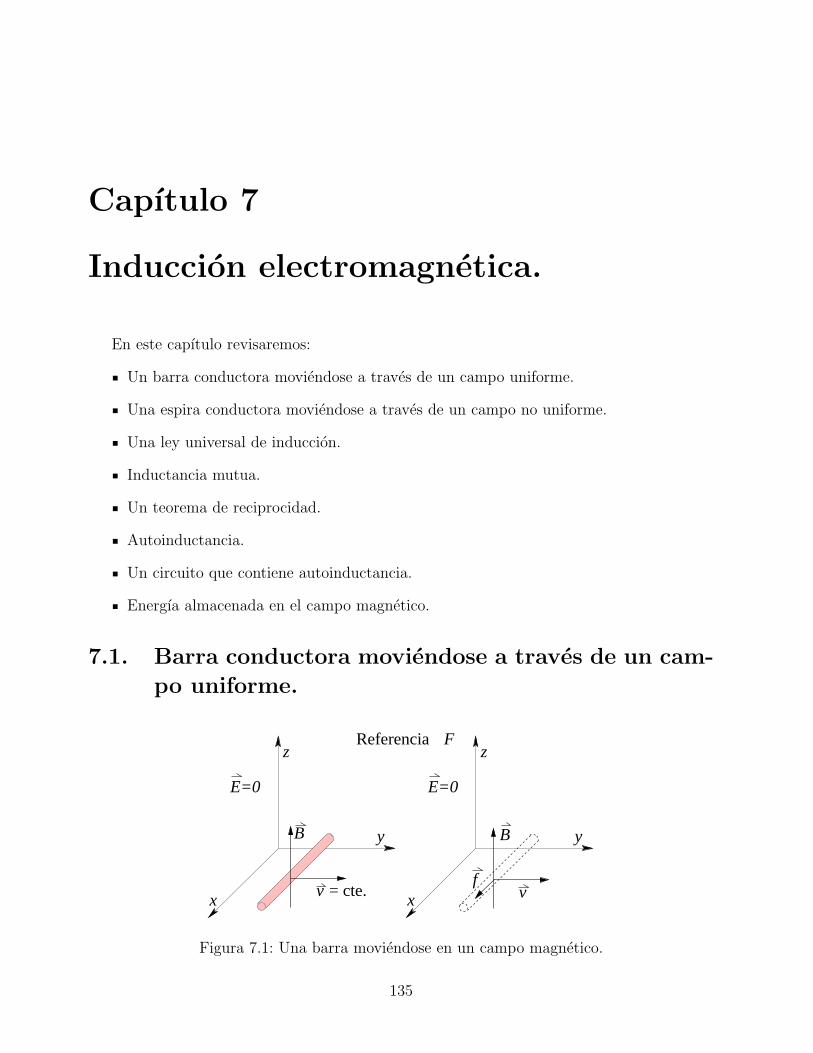
Capıtulo 7
Induccion electromagnetica.
En este capıtulo revisaremos:
Un barra conductora moviendose a traves de un campo uniforme.
Una espira conductora moviendose a traves de un campo no uniforme.
Una ley universal de induccion.
Inductancia mutua.
Un teorema de reciprocidad.
Autoinductancia.
Un circuito que contiene autoinductancia.
Energıa almacenada en el campo magnetico.
7.1. Barra conductora moviendose a traves de un cam-
po uniforme.
Referencia F
x
y
z
E=0
x
y
z
E=0
vv
B B
f= cte.
Figura 7.1: Una barra moviendose en un campo magnetico.
135

136 CAPITULO 7. INDUCCION ELECTROMAGNETICA.
Consideremos una varilla delgada metalica que se mueve a velocidad constante.Existe un campo magnetico uniforme y constante en el tiempo. Ademas, no existe campo
electrico.Siendo la varilla un conductor, los portadores de carga sentiran una fuerza. Cada portador
con carga q sentira~f =
q
c~v × ~B . (7.1)
Cuando la varilla se mueve con velocidad constante se ha llegado a un estado estacionario.La fuerza ~f debe equilibrarse
q ~E = −~f . (7.2)
Aparece un campo ~E debido a la acumulacion de carga y el movimiento cesa.
B’
E’
y’
z’
x’
Figura 7.2: Una barra en el sistema F ′ .
En un sistema F ′ que se mueve con la varilla ~B′ ≈ ~B si ~v es pequena comparada con c yaparece un campo electrico en F ′. Recordemos que si en F no habıa campo electrico ( ~E = 0)en F ′ el campo electrico satisface
~E ′ = −1
c~v′ × ~B′ =
~v × ~B
c(7.3)
Cuando incorporamos la barra a este sistema todo lo que hacemos es colocar una barraconductora estacionaria dentro de un campo uniforme ( ~E ′).
Por lo tanto las cargas se redistribuyen en la superficie del conductor para hacer el campointerior nulo.
7.1.1. Una espira en un campo magnetico.
¿Que ocurre si movemos una espira rectangular de un hilo conductor a velocidad constanteen un campo uniforme? En F los portadores de carga sienten al moverse la fuerza de Lorentzdebido al campo magnetico. Los diferentes signos de la carga se acumularan en los ladosopuestos de la espira. En F ′ hay un campo ~E ′ y un campo magnetico ~B′. El campo electricomueve a las cargas a lados opuestos del rectangulo adquiriendo estos cierta carga.

7.2. UNA ESPIRA CONDUCTORA MOVIENDOSE A TRAVES DE UN CAMPO NO UNIFORME.137
BB’
E’
E=0
FReferencia F’Referencia
y
z
vx vx’
y’
z’
Figura 7.3: Una espira en un campo ~B uniforme.
7.2. Una espira conductora moviendose a traves de un
campo no uniforme.
B1 B2
vω
y
z
x
Figura 7.4: Un loop con ~B no uniforme.
Supongamos que esta vez el campo magnetico ~B no es uniforme en el espacio. En F laespira se mueve con velocidad v. En un instante t el campo magnetico al lado izquierdo es~B1 y al lado derecho es ~B2. Sobre los portadores de carga actua la fuerza de Lorentz. Sinembargo, actua con diferente intensidad en el segmento delantero que en el trasero. Sea ~f lafuerza que actua sobre una carga q que se desplaza por la espira. Esta fuerza es funcion de laposicion. Si calculamos la
∮~f ·d~s a lo largo de todo el circuito vemos que los lados paralelos a
la velocidad no contribuyen ya que la fuerza es perpendicular al d~s. Luego si consideramos loscampos magneticos uniformes sobre los costados de la espira perpendiculares a la velocidad,tenemos ∮
~f · d~s =qv
c(B1 −B2)ω . (7.4)
Si suponemos que una carga se mueve a lo largo de la espira, en un intervalo de tiemposuficientemente corto para que la posicion de la espira no haya cambiado apreciablemente.
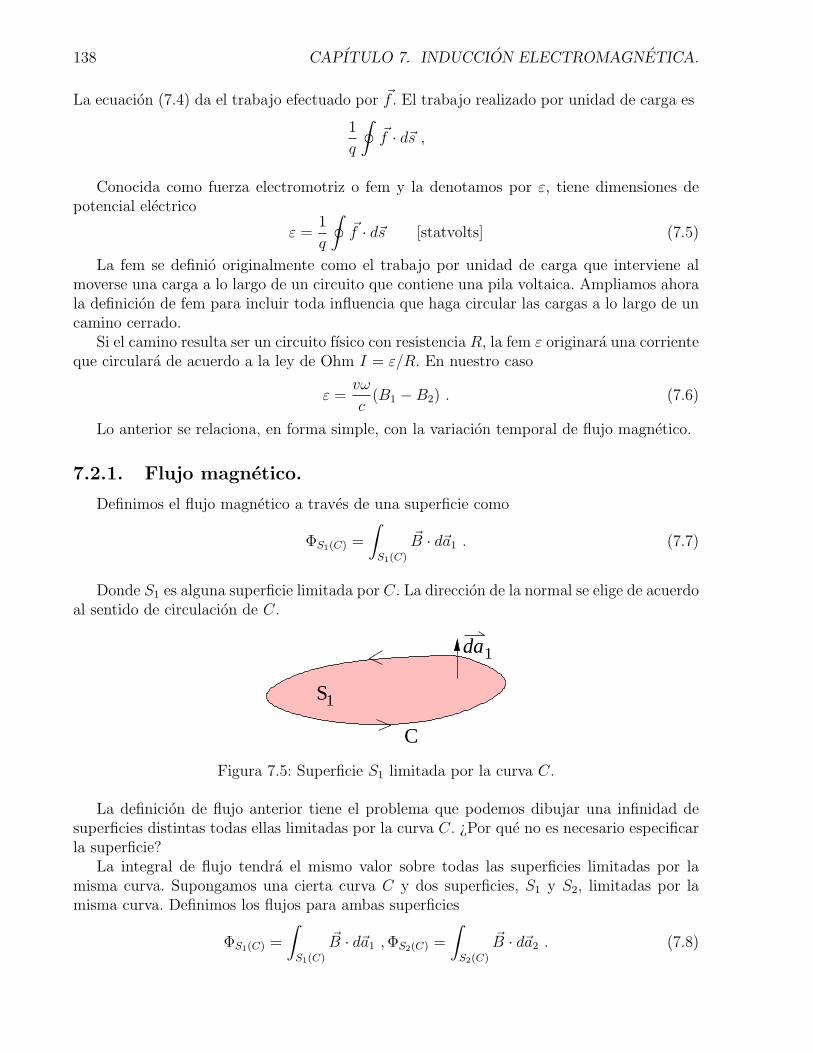
138 CAPITULO 7. INDUCCION ELECTROMAGNETICA.
La ecuacion (7.4) da el trabajo efectuado por ~f . El trabajo realizado por unidad de carga es
1
q
∮~f · d~s ,
Conocida como fuerza electromotriz o fem y la denotamos por ε, tiene dimensiones depotencial electrico
ε =1
q
∮~f · d~s [statvolts] (7.5)
La fem se definio originalmente como el trabajo por unidad de carga que interviene almoverse una carga a lo largo de un circuito que contiene una pila voltaica. Ampliamos ahorala definicion de fem para incluir toda influencia que haga circular las cargas a lo largo de uncamino cerrado.
Si el camino resulta ser un circuito fısico con resistencia R, la fem ε originara una corrienteque circulara de acuerdo a la ley de Ohm I = ε/R. En nuestro caso
ε =vω
c(B1 −B2) . (7.6)
Lo anterior se relaciona, en forma simple, con la variacion temporal de flujo magnetico.
7.2.1. Flujo magnetico.
Definimos el flujo magnetico a traves de una superficie como
ΦS1(C) =
∫S1(C)
~B · d~a1 . (7.7)
Donde S1 es alguna superficie limitada por C. La direccion de la normal se elige de acuerdoal sentido de circulacion de C.
da
C
S1
1
Figura 7.5: Superficie S1 limitada por la curva C.
La definicion de flujo anterior tiene el problema que podemos dibujar una infinidad desuperficies distintas todas ellas limitadas por la curva C. ¿Por que no es necesario especificarla superficie?
La integral de flujo tendra el mismo valor sobre todas las superficies limitadas por lamisma curva. Supongamos una cierta curva C y dos superficies, S1 y S2, limitadas por lamisma curva. Definimos los flujos para ambas superficies
ΦS1(C) =
∫S1(C)
~B · d~a1 ,ΦS2(C) =
∫S2(C)
~B · d~a2 . (7.8)

7.2. UNA ESPIRA CONDUCTORA MOVIENDOSE A TRAVES DE UN CAMPO NO UNIFORME.139
Ambas superficies forman una superficie cerrada S = S1 + S2, ver figura. Apliquemos elteorema de Gauss sobre la superficie S
1S
2S
da1
−da2
C
Figura 7.6: Superficie cerrada S = S1 + S2 limitada por la curva C.
∫S
~B · d~a =
∫V (S)
div ~B dv = 0 . (7.9)
Por lo tanto,
0 =
∫S
~B · d~a =
∫S1(C)
~B · d~a1 +
∫S2(C)
~B · (−d~a2)
obteniendo ∫S1(C)
~B · d~a1 =
∫S2(C)
~B · d~a2 . (7.10)
Lo anterior demuestra que no importa que superficie usemos para calcular el flujo a travesde la curva C.
B1 B2
vdt
ω
Figura 7.7: Flujo ganado y perdido por la espira al moverse.
Flujo que se gana al moverse ωB2vdt. Flujo que se pierde al moverse ωB1vdt
dΦ = −(B1 −B2)ωvdt (7.11)
Comparando
ε = −1
c
dΦ
dt(7.12)
La ecuacion (7.12) se cumple de manera general y es independiente de la forma de la espiray de la manera en que se realiza el movimiento. A continuacion haremos una demostracionmas general de esta ecuacion.

140 CAPITULO 7. INDUCCION ELECTROMAGNETICA.
7.2.2. Demostracion.
Supongamos una espira que se mueve desde en presencia de un campo magnetico desdela posicion C1 a la posicion C2 en el transcurso de un intervalo de tiempo dt.
B
S
C1
C2
ds
vdtda
da
dS
Figura 7.8: Espira moviendose en un campo magnetico.
El flujo a traves de C1
Φ(t) =
∫S
~B · d~a , (7.13)
a traves de C2
Φ(t+ dt) =
∫S+dS
~B · d~a
= Φ(t) +
∫dS
~B · d~a = Φ(t) + dΦ (7.14)
El elemento de area es d~a = ~vdt× d~s, luego
dΦ =
∫dS
~B · d~a =
∫C
~B · [~vdt× d~s] (7.15)
=
∫C
[~B · (~v × d~s)
]dt (7.16)
Usando la identidad vectorial ~a · (~b× ~c) = −(~b× ~a) · ~c obtenemos
dΦ
dt= −
∫C
(~v × ~B
)· d~s . (7.17)
La fuerza sobre la carga q que se mueve a lo largo de la espira es q(~v × ~B)/c ası que la fem
ε =1
q
∫~f · d~s =
1
q
q
c
∫c
(~v × ~B
)· d~s (7.18)

7.3. UNA LEY UNIVERSAL DE LA INDUCCION. 141
Comparando
ε = −1
c
dΦ
dt
7.2.3. Ley de Lenz.
El sentido en que la corriente circulara es el sentido de la fem. Esta corriente debe crearcierto flujo a traves de la espira dirigido a neutralizar la variacion de flujo.
Este es un hecho fısico esencial, es una manifestacion de los sistemas a oponerse al cambio.Este hecho es conocido como Ley de Lenz
7.3. Una ley universal de la induccion.
1 2
Figura 7.9: Experimento de induccion.
Se tendra la misma desviacion en el galvanometro (2) si:
La mesa (2) se mueve con velocidad ~v hacia la derecha.
La mesa (1) se mueve con velocidad ~v hacia la izquierda.
La corriente en (1) varıa de manera que la variacion de ~B sea la misma que en los casosanteriores.
7.3.1. Ley de induccion.
Si C es una curva cerrada, estacionaria en las coordenadas (x, y, z) y si S es una superficie
limitada por C y ~B(x, y, z) es el campo magnetico medido en (x, y, z) en el instante t, entonces
ε =1
q
∫~f · d~s =
∫C
~E · d~s = −1
c
d
dt
∫c
~B · d~a = −1
c
dΦ
dt(7.19)

142 CAPITULO 7. INDUCCION ELECTROMAGNETICA.
es decir ∫C
~E · d~s = −1
c
d
dt
∫c
~B · d~a (7.20)
rot ~E = −1
c
∂ ~B
∂t(7.21)
Se fijan dos circuitos o espiras C1 y C2 en una posicion relativa determinada.
I1
C1
C2
resistenciavariable
Figura 7.10: Induccion entre dos circuitos.
De alguna manera, puede ser una baterıa y una resistencia variable, se hace circular unacorriente controlada I1 en el circuito C1.
7.4. Induccion Mutua.
Sea ~B1(x, y, z) el campo magnetico que existirıa si la corriente en C1 permaneciera cons-
tante en el valor I1, sea ademas, Φ21 el flujo de ~B1 a traves del circuito C2.Ası que
Φ21 =
∫S2
~B · d~a (7.22)
donde S2 es una superficie limitada por C2.Con la forma y posicion de los dos circuitos fijos, Φ21 sera proporcional a I1
Φ21
I1= cte. (7.23)
La fem en C2, si I1 varıa en el tiempo, es
ε21 = −cte.c
dI1dt
(7.24)
ε21 = −M12dI1dt
(7.25)

7.4. INDUCCION MUTUA. 143
A la constante M21 se conoce como coeficiente de induccion mutua o inductancia mutua.Su valor viene determinado por la geometrıa de la disposicion de las espiras. Las unidadesen sistema practico (MKS) corresponden a ε12 en [Volts], la corriente I en [Ampere] y lainductancia mutua M en [Henry].
7.4.1. Ejemplo.
R2
R1
Γ1
Γ2
I 1
Figura 7.11: Induccion entre dos espiras concentricas.
¿Cual es M21 en este caso?En el centro de Γ1, al circular I1 el campo B1 viene dado por
B1 =2πI1cR1
. (7.26)
Supondremos que los radio R2 << R1 para que podamos despreciar la variacion de B1
en el interior del anillo pequeno. Entonces el flujo a traves del anillo pequeno es
Φ12 = (πR22)
(2πI1cR1
)=
2π2I1R22
cR1
(7.27)
La fem
ε12 = −1
c
2π2R22
cR1
dI1dt
. (7.28)
Usando que las unidades de voltaje transforman como 1 [statvolt]=300 [V], las de corrientecomo 1 [esu/s]=3×109 [A] y la velocidad de la luz en el vacıo es 3×1010 [cm/s], podemosexpresar la inductancia mutua en [Henry]
ε21[V] =−1
3× 1010
2π2R22
3× 1010R1
dI1dt
3× 109[A] · 300[V]
= −9× 1011
9× 1020
2π2R22[cm]
R1[cm]
dI1dt
[A]
= −2π2 × 10−9R22[cm]
R1[cm]
dI1dt
[A]

144 CAPITULO 7. INDUCCION ELECTROMAGNETICA.
La inductancia mutua en Henry es:
M21[Henry] =2π2 × 10−9R2
2[cm]
R1[cm]
Si el circuito Γ1 estuviera formado por N1 vueltas de hilo conductor en lugar de un unicoanillo, el campo B1 en el centro serıa N1 veces mas intenso para una corriente I1 dada. Sila espira Γ2 constara de N2 vueltas todas de radio R2 la fem de cada una se sumarıa a lasiguiente haciendo una fem total N2 veces mayor que la de una espira. Ası, para multiplesvueltas en cada bobina tenemos
M21[Henry] =2π2 × 10−9N1N2R
22[cm]
R1[cm](7.29)
El resultado anterior supone que las espiras de cada bobina estan completamente encontacto , siendo la seccion recta del manojo pequena comparada con el radio de la bobina.
a << r
r
a
Figura 7.12: Relacion entre el radio del alambre y el radio de la bobina.
La induccion mutua M21 tiene un significado bien definido para dos circuitos de cualquierforma y disposicion. Es la relacion entre la fem en volts en el circuito 2, debida a la variacionde corriente en el circuito 1 respecto al tiempo.
M21[Henry] = − ε21
dI1dt
[Volts][A
s
] (7.30)
7.5. Un teorema de reciprocidad.
Al considerar los circuitos C1 y C2 podrıamos preguntarnos acerca de la fem inducida enel circuito C1 debido a la variacion de corriente en el circuito C2.
Esto significa otro coeficiente de induccion mutua
M12 = − ε12
dI2dt
, (7.31)
Un hecho notable es que para dos circuitos cualesquiera se tiene
M12 = M21 (7.32)
Esto no es debido a la simetrıa geometrica.

7.5. UN TEOREMA DE RECIPROCIDAD. 145
7.5.1. Demostracion.
Para demostrar el teorema anterior debemos demostrar que el flujo Φ12 a traves de ciertocircuito C1 como resultado de una corriente I en un circuito C2 es igual al flujo Φ21 queatraviesa el circuito 2 cuando circula en el circuito C1 una corriente I igual a la anterior.
Segun Stokes ∫C
~A · d~s =
∫S
(rot ~A
)· d~a . (7.33)
Si ~A es el potencial vector de un campo magnetico ~B, entonces ~B = rot ~A. Luego tenemos∫C
~A · d~s =
∫S
~B · d~a = ΦS . (7.34)
Es decir, la integral de lınea del potencial vector a lo largo de una espira es igual al flujode ~B a traves de una superficie limitada por la espira.
C1
C2
ds1
ds2
r21
Figura 7.13: Dos circuitos.
A partir de la deduccion de Biot–Savart sabemos que
~A21 =I
c
∫C1
d~s1
r21, (7.35)
Es el potencial en (x2, y2, z2) del campo magnetico creado por la corriente I circulandopor el circuito C1; d~s1 es un elemento de la espira C1 y r21 es la distancia de este elementoal punto (x2, y2, z2).
Φ21 =
∫C2
~A21 · d~s2 =I
c
∫C2
(∫C1
d~s1
r21
)d~s2 (7.36)
De manera muy similar el flujo a traves de C1 debido a la corriente I que circula por C2
vendra dada por
Φ12 =
∫C1
~A12 · d~s1 =I
c
∫C1
(∫C2
d~s2
r12
)d~s1 (7.37)

146 CAPITULO 7. INDUCCION ELECTROMAGNETICA.
Sabemos que r21 = r12, la unica diferencia entre las dos expresiones es el orden de inte-gracion, lo cual no debe afectar, luego
Φ12 = Φ21
M12 = M21
Gracias a este teorema no debemos hacer distincion entre M12 y M21. Podemos hablar,de ahora en adelante, de la induccion mutua M entre dos circuitos.
7.6. Autoinduccion
Cuando la corriente I1 varıa, hay una variacion del flujo a traves del propio circuito C1,en consecuencia se induce un fem.
La llamaremos ε11, la ley de induccion se cumple sea cual fuere la fuente del flujo:
ε11 = −1
c
dΦ11
dt, (7.38)
donde Φ11 es el flujo a traves del circuito 1 del campo B1 debido a la corriente I1 en el circuito1. El signo menos expresa el hecho de que la fem esta siempre dirigida de manera tal que seopone a la variacion de corriente en el circuito, la ley de Lenz nuevamente. Puesto que Φ11
sera proporcional a I1 podemos escribir
ε11 = −L1dI1dt
, (7.39)
A la constante L1 se le llama autoinduccion del circuito.
7.6.1. Ejemplo.
Como ejemplo de un circuito en el que se puede calcular L1
2b
N vueltasen total
2a
h
Figura 7.14: Bobina de seccion rectangular en forma toroidal.

7.6. AUTOINDUCCION 147
Consideremos una bobina de seccion rectangular formando un toroide. Encontremos que siun corriente I en [ues/s] circula en la bobina de N vueltas produce un campo, cuya intensidada una distancia r del eje de la bobina
B =2IN
cr
C1C2
2b
2a
C
Figura 7.15: Circuitos para usar la ley de Ampere.
Calculemos el campo usando Ampere
i) r < a ∫C
~B · d~s =4π
c
∫~J · d~a
= 0
=⇒ B = 0
ii) a < r < b ∫C1
~B · d~s =4π
c
∫~J · d~a
B2πr =4π
cIN
B =2IN
rc
iii) r > b ∫C2
~B · d~s =4π
c
∫~J · d~a
B2πr =4π
c(IN − IN) = 0
=⇒ B = 0

148 CAPITULO 7. INDUCCION ELECTROMAGNETICA.
Resumiendo
B =
0 , r < a2IN
cr, a < r < b
0 , r > b
El flujo total a traves de un espira de la bobina es la integral de B extendida sobre laseccion recta de la bobina
Φ(una vuelta) = h
∫ b
a
2NI
crdr =
2NIh
cLog
(b
a
). (7.40)
El flujo que atraviesa el circuito de N vueltas es
Φ =2N2Ih
cLog
(b
a
)(7.41)
La fem
ε = −1
c
dΦ
dt= −2N2h
c2Log
(b
a
)dI
dt. (7.42)
Por lo tanto, L para la bobina toroidal
L =2N2h
c2Log
(b
a
)(7.43)
L[Henry] = 2× 10−9N2h[cm] Log
(b
a
)
7.6.2. Autoinduccion de una espira.
Un anillo hubiera parecido un ejemplo mas sencillo, sin embargo, debemos dar un radiofinito al filamento. Cerca del alambre el campo Bz crece como I/r luego el flujo diverge si elalambre no tiene un ancho finito. Ademas, solo conocemos el campo sobre el eje y no en elplano. El campo en el plano es “complicado”, no estamos en condiciones de calcularlo. Todolo anterior hace imposible para nosotros calcular la autoinduccion en una sola espira en estecurso.
7.7. Un circuito que contiene autoinduccion.
Supondremos : toda la resistencia del circuito (cables, bobinas, Ri de la fuente, etc) laincluimos en R. Toda la autoinductancia del circuito (cables, bobinas) la incluimos en L.
Es decir:
La resistencia no tiene autoinductancia.
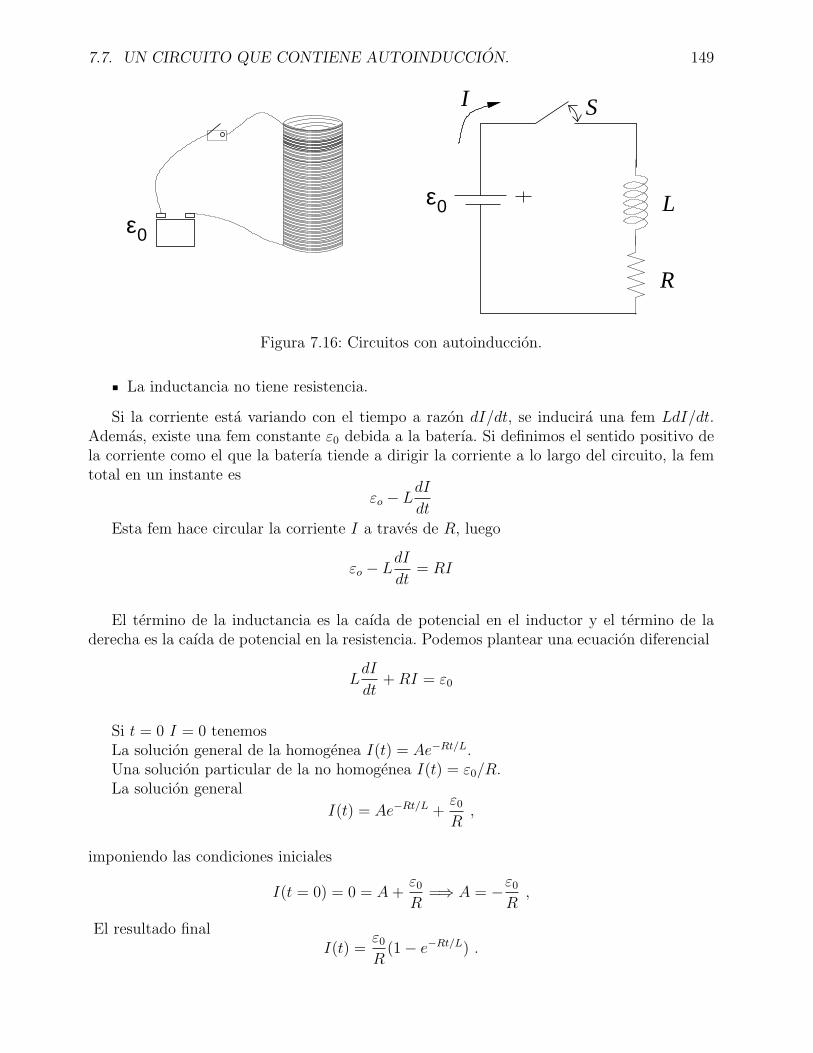
7.7. UN CIRCUITO QUE CONTIENE AUTOINDUCCION. 149
ε0
ε0 L
R
SI
Figura 7.16: Circuitos con autoinduccion.
La inductancia no tiene resistencia.
Si la corriente esta variando con el tiempo a razon dI/dt, se inducira una fem LdI/dt.Ademas, existe una fem constante ε0 debida a la baterıa. Si definimos el sentido positivo dela corriente como el que la baterıa tiende a dirigir la corriente a lo largo del circuito, la femtotal en un instante es
εo − LdI
dt
Esta fem hace circular la corriente I a traves de R, luego
εo − LdI
dt= RI
El termino de la inductancia es la caıda de potencial en el inductor y el termino de laderecha es la caıda de potencial en la resistencia. Podemos plantear una ecuacion diferencial
LdI
dt+RI = ε0
Si t = 0 I = 0 tenemosLa solucion general de la homogenea I(t) = Ae−Rt/L.Una solucion particular de la no homogenea I(t) = ε0/R.La solucion general
I(t) = Ae−Rt/L +ε0
R,
imponiendo las condiciones iniciales
I(t = 0) = 0 = A+ε0
R=⇒ A = −ε0
R,
El resultado finalI(t) =
ε0
R(1− e−Rt/L) .

150 CAPITULO 7. INDUCCION ELECTROMAGNETICA.
I0
t
I(t)
Figura 7.17: Grafico de la corriente en un circuito con autoinduccion.
La inductancia L limita la velocidad de crecimiento de la corrienteLa constante de tiempo del circuito es L/R =[Henry]/[ohm]=[V][s/A][A/v]=[s].
7.7.1. Abriendo un circuito inductivo
¿Que ocurre si abrimos el interruptor despues que se ha establecido la corriente I0 forzandoası a que la corriente caiga bruscamente a cero? LdI/dt se harıa infinitamente negativo.La catastrofe puede ser mas que matematica. Algunas personas han muerto al abrir uninterruptor en circuitos altamente inductivos. Lo que sucede generalmente es que una tensioninducida muy elevada produce una chispa o arco a traves del interruptor abierto de maneraque la corriente continua pasando a pesar de todo.
En vez de desconectar simplemente el circuito hagamos lo siguiente
L
RI
Figura 7.18: Abriendo un circuito con autoinduccion.
LdI
dt+RI = 0
Para I(t = t1) = I0, y para I(t < t1) = I0. La solucion general de la homogenea
I(t) = Ae−Rt/L ,
imponiendo las condiciones iniciales
I(t = t1) = I0 = Ae−Rt1/L
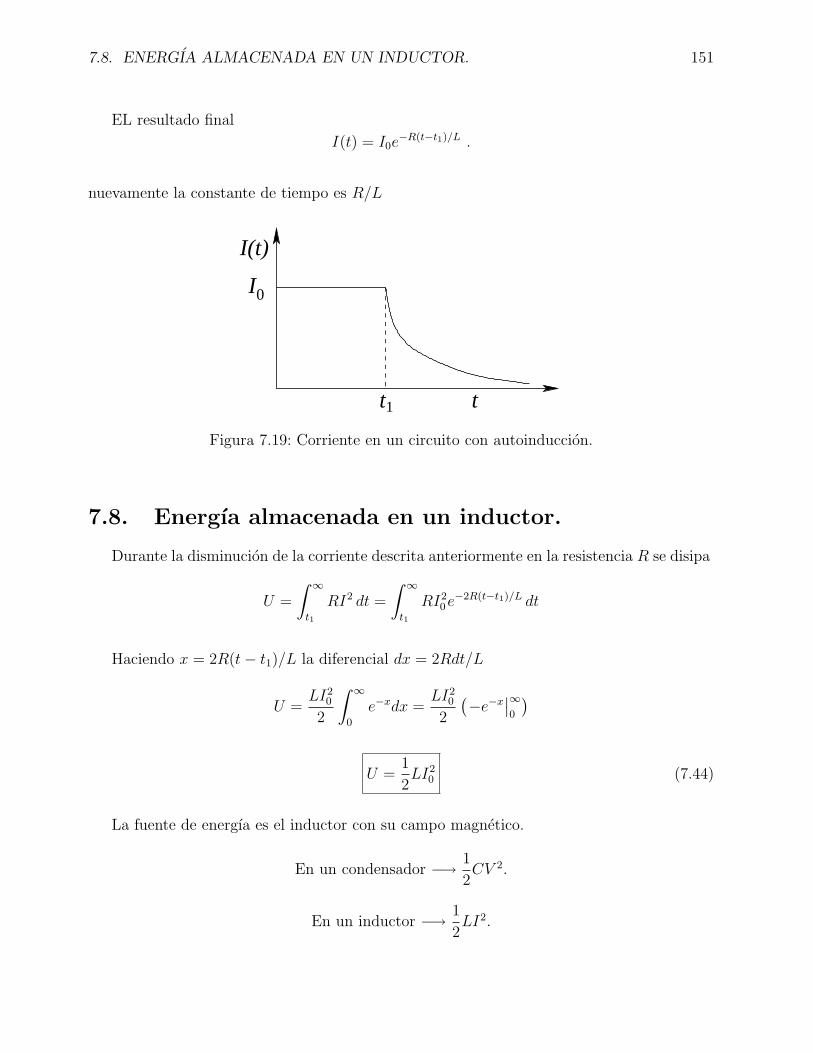
7.8. ENERGIA ALMACENADA EN UN INDUCTOR. 151
EL resultado final
I(t) = I0e−R(t−t1)/L .
nuevamente la constante de tiempo es R/L
I0
t
I(t)
t1
Figura 7.19: Corriente en un circuito con autoinduccion.
7.8. Energıa almacenada en un inductor.
Durante la disminucion de la corriente descrita anteriormente en la resistencia R se disipa
U =
∫ ∞
t1
RI2 dt =
∫ ∞
t1
RI20e
−2R(t−t1)/L dt
Haciendo x = 2R(t− t1)/L la diferencial dx = 2Rdt/L
U =LI2
0
2
∫ ∞
0
e−xdx =LI2
0
2
(−e−x
∣∣∞0
)
U =1
2LI2
0 (7.44)
La fuente de energıa es el inductor con su campo magnetico.
En un condensador −→ 1
2CV 2.
En un inductor −→ 1
2LI2.
152 CAPITULO 7. INDUCCION ELECTROMAGNETICA.
7.8.1. Energıa asociada a un campo magnetico.
La expresion mas general es que la energıa asociada a todo campo magnetico ~B(~r) es
U =1
8π
∫ ∣∣∣ ~B ∣∣∣2 d3r (7.45)
Donde la integral es sobre todo el espacio donde el campo este definido.La expresion equivalente en MKS
U =1
2µ0
∫ ∣∣∣ ~B ∣∣∣2 d3r (7.46)

Capıtulo 8
Circuitos de corriente alterna.
En este capıtulo revisaremos las siguientes secciones
Un circuito resonante.
Corriente alterna.
Redes de corriente alterna.
Admitancia e Impedancia.
Potencia y energıa en circuitos de corriente alterna.
8.1. Un circuito resonante
Para el circuito de la figura (RLC) en serie
L
R
I
C
Figura 8.1: Circuito RLC.
Sea Q la carga en el condensador a tiempo t
I(t) = −dQdt
Q = CV V = LdI
dt+RI (8.1)
153

154 CAPITULO 8. CIRCUITOS DE CORRIENTE ALTERNA.
I(t) = −CdVdt
dI
dt= −Cd
2V
dt2
luego
V = −LCd2V
dt2−RC
dV
dtEntonces
d2V
dt2+R
L
dV
dt+
1
LCV = 0 (8.2)
Una ecuacion diferencial lineal homogenea de segundo orden. Planteamos
V (t) = Ae−αt cosωt (8.3)
dV (t)
dt= Ae−αt[−α cosωt− ω senωt] (8.4)
d2V (t)
dt2= Ae−αt[(α2 − ω2) cosωt− 2αω senωt] (8.5)
Introduciendola en la ecuacion y simplificando
(α2 − ω2) cosωt+ 2αω senωt
−RL
(α cosωt+ ω senωt) +1
LCcosωt = 0
Reordenando [α2 − ω2 − R
Lα+
1
LC
]cosωt
+
[2αω − ωR
L
]senωt = 0 (8.6)
Deben anularse los coeficientes por separado
2αω − ωR
L= 0 =⇒ α =
R
2L(8.7)
la otra
α2 − ω2 − R
Lα+
1
LC= 0 =⇒ ω2 =
1
LC− R2
4L2(8.8)
Si ω ∈ R =⇒ R2
4L2 ≤ 1LC
caso con amortiguamiento ligero. Supondremos que R, L y C son
tales que R < 2√L/C. La solucion mas general
V (t) = e−αt(A cosωt+B senωt) . (8.9)
Las constantes A y B se ajustan para cumplir las condiciones iniciales. El fenomenoesencial es una oscilacion amortiguada
I(t) = −CdVdt
= ACω(senωt+
α
ωcosωt
)e−αt . (8.10)
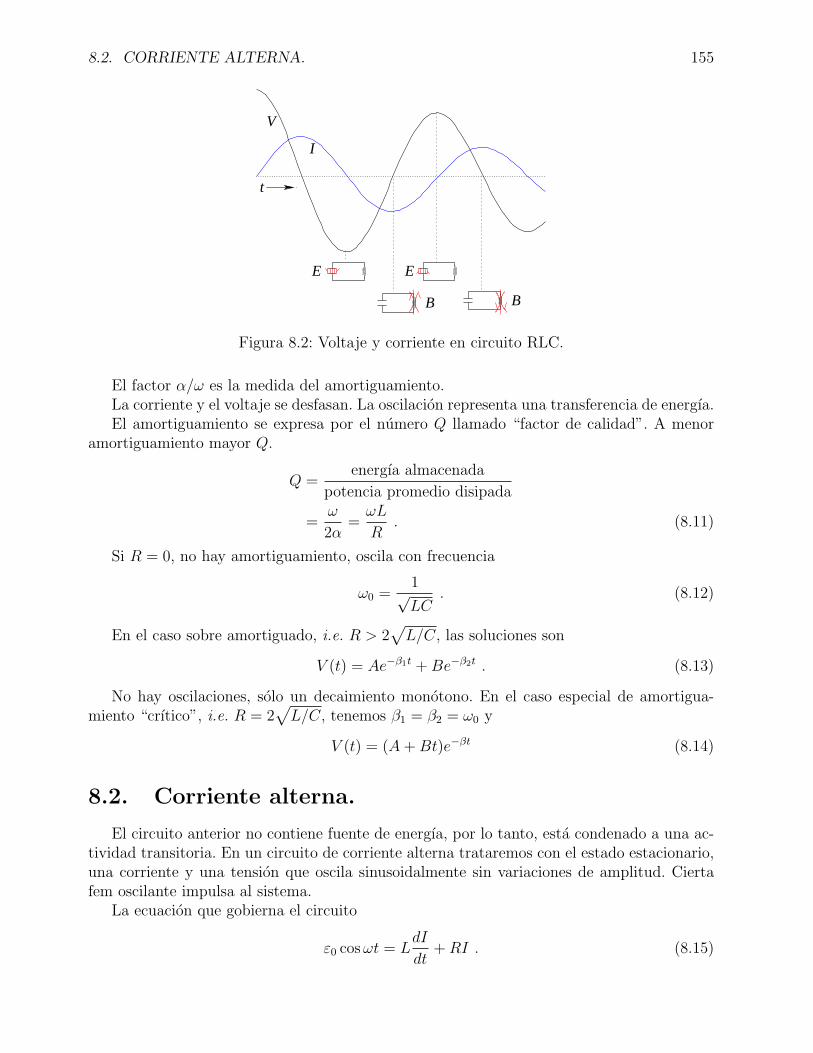
8.2. CORRIENTE ALTERNA. 155
V
I
t
E
B B
E
Figura 8.2: Voltaje y corriente en circuito RLC.
El factor α/ω es la medida del amortiguamiento.La corriente y el voltaje se desfasan. La oscilacion representa una transferencia de energıa.El amortiguamiento se expresa por el numero Q llamado “factor de calidad”. A menor
amortiguamiento mayor Q.
Q =energıa almacenada
potencia promedio disipada
=ω
2α=ωL
R. (8.11)
Si R = 0, no hay amortiguamiento, oscila con frecuencia
ω0 =1√LC
. (8.12)
En el caso sobre amortiguado, i.e. R > 2√L/C, las soluciones son
V (t) = Ae−β1t +Be−β2t . (8.13)
No hay oscilaciones, solo un decaimiento monotono. En el caso especial de amortigua-miento “crıtico”, i.e. R = 2
√L/C, tenemos β1 = β2 = ω0 y
V (t) = (A+Bt)e−βt (8.14)
8.2. Corriente alterna.
El circuito anterior no contiene fuente de energıa, por lo tanto, esta condenado a una ac-tividad transitoria. En un circuito de corriente alterna trataremos con el estado estacionario,una corriente y una tension que oscila sinusoidalmente sin variaciones de amplitud. Ciertafem oscilante impulsa al sistema.
La ecuacion que gobierna el circuito
ε0 cosωt = LdI
dt+RI . (8.15)
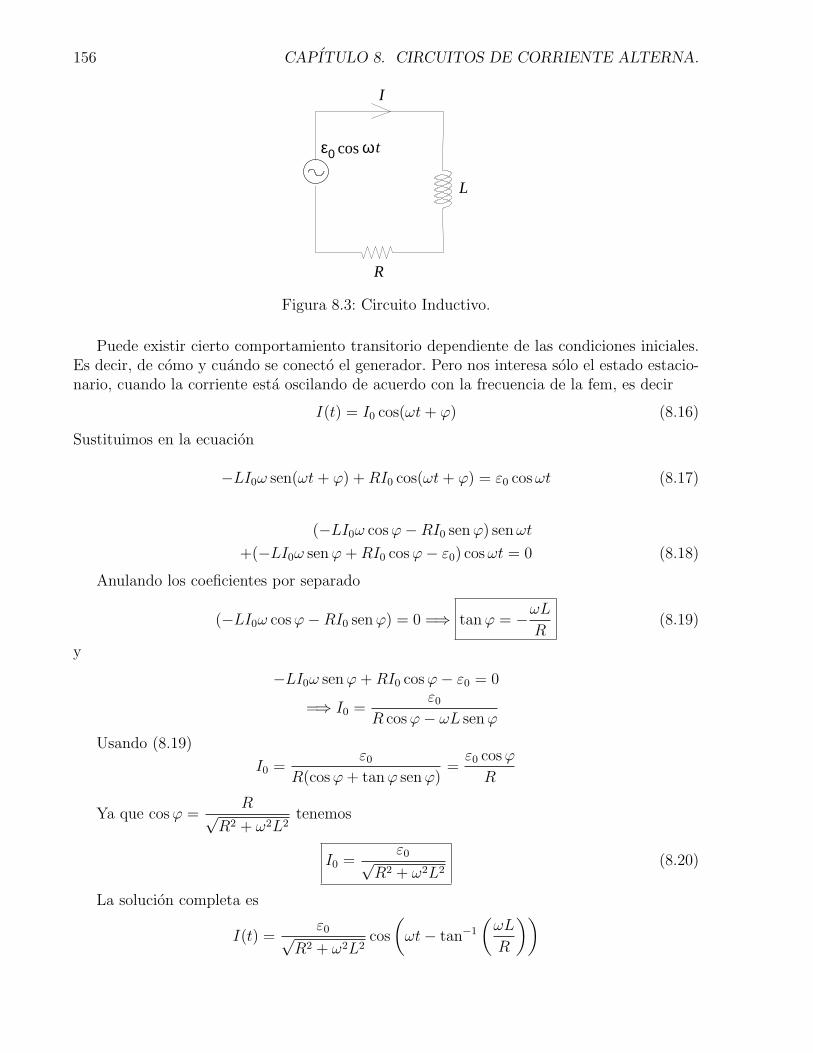
156 CAPITULO 8. CIRCUITOS DE CORRIENTE ALTERNA.
ε0 ωtcos
L
R
I
Figura 8.3: Circuito Inductivo.
Puede existir cierto comportamiento transitorio dependiente de las condiciones iniciales.Es decir, de como y cuando se conecto el generador. Pero nos interesa solo el estado estacio-nario, cuando la corriente esta oscilando de acuerdo con la frecuencia de la fem, es decir
I(t) = I0 cos(ωt+ ϕ) (8.16)
Sustituimos en la ecuacion
−LI0ω sen(ωt+ ϕ) +RI0 cos(ωt+ ϕ) = ε0 cosωt (8.17)
(−LI0ω cosϕ−RI0 senϕ) senωt
+(−LI0ω senϕ+RI0 cosϕ− ε0) cosωt = 0 (8.18)
Anulando los coeficientes por separado
(−LI0ω cosϕ−RI0 senϕ) = 0 =⇒ tanϕ = −ωLR
(8.19)
y
−LI0ω senϕ+RI0 cosϕ− ε0 = 0
=⇒ I0 =ε0
R cosϕ− ωL senϕ
Usando (8.19)
I0 =ε0
R(cosϕ+ tanϕ senϕ)=ε0 cosϕ
R
Ya que cosϕ =R√
R2 + ω2L2tenemos
I0 =ε0√
R2 + ω2L2(8.20)
La solucion completa es
I(t) =ε0√
R2 + ω2L2cos
(ωt− tan−1
(ωL
R
))

8.3. VOLTAJE Y CORRIENTE EN CIRCUITO INDUCTIVO. 157
8.3. Voltaje y corriente en circuito Inductivo.
ε0 cos ω t
R + ω2L
22
−1−tan0ε cos(ω t (ωL
R))
Figura 8.4: Voltaje y corriente en circuito Inductivo.
Se dice que la corriente es un circuito inductivo esta retrasada respecto a la tension. Lareactancia inductiva ωL tiene unidades de resistencia [Ω].
ε0 ωtcos
R
CQ
Figura 8.5: Circuito Capacitivo.
ε0 cosωt = −QC
+RI (8.21)
En el estado estacionarioI(t) = I0 cos(ωt+ ϕ) (8.22)
Ya que I = −dQ/dt tenemos
Q = −∫Idt =
I0ω
sen(ωt+ ϕ)
Sin constante de integracion ya que Q debe oscilar simetricamente en torno a cero parael estado estacionario.
− I0ωC
sen(ωt+ ϕ) +RI0 cos(ωt+ ϕ) = ε0 cosωt (8.23)

158 CAPITULO 8. CIRCUITOS DE CORRIENTE ALTERNA.
De la misma forma
tanϕ =1
RωCI0 =
ε0√R2 + (1/ωC)2
(8.24)
ε0 cos ω t
−1+tan0ε cos(ω t (R + ω−22 −2
CR
))Cω
1
Figura 8.6: Voltaje y corriente en circuito capacitivo.
La fase es positiva, i.e. se adelanta en un circuito capacitivo. La reactancia capacitiva1/ωC tiene unidades de resistencia [Ω].
A todas las soluciones podemos agregarle una solucion de la ecuacion homogenea
LdI
dt+RI = 0 (primer caso.)
La solucion I ∝ e−Rt/L representa el transiente el cual es determinado por las condicionesiniciales.
RL→ I(t) =ε0√
R2 + ω2L2cos
(ωt− tan−1
(ωL
R
))RC → I(t) =
ε0√R2 + 1
ω2C2
cos
(ωt+ tan−1
(1
RωC
))
Sugiere una manera de considerar el inductor y el condensador en serie
Supongamos I = I0 cos(ωt+ ϕ) e I = −dQdt
VL = LdI
dt= −IoωL sen(ωt+ ϕ) (8.25)
Vc =Q
C= − 1
C
∫I(t)dt =
IoCω
sen(ωt+ ϕ) (8.26)

8.3. VOLTAJE Y CORRIENTE EN CIRCUITO INDUCTIVO. 159
VL
VC
L
Figura 8.7: L y C en serie.
V = VL + Vc = −(ωL− 1
ωC
)I0 sen(ωt+ ϕ) (8.27)
Para un ω dado la combinacion es equivalente a un solo elemento, o inductor, o conden-sador, dependiendo del signo de ωL− 1/ωC.
Si ωL > 1/ωC entonces (ωL− 1/ωC) > 0 por lo tanto ωL′ = ωL− 1/ωC.
Si ωL < 1/ωC entonces (ωL− 1/ωC) < 0 por lo tanto 1/ωC ′ = ωL− 1/ωC.
Equivalencia, en este caso, solo significa que la relacion entre la corriente y la tension,para un ω dado, es la misma.
Esto permite sustituir L y C por L′ (por ejemplo, si ωL > 1/ωC) en un circuito a esafrecuencia.
8.3.1. Circuito RLC.
ε0 ωtcos
L
R
C
Figura 8.8: Circuito RLC.
Usemos los resultados del circuito RL reemplazando ωL′ = ωL− 1/ωC.
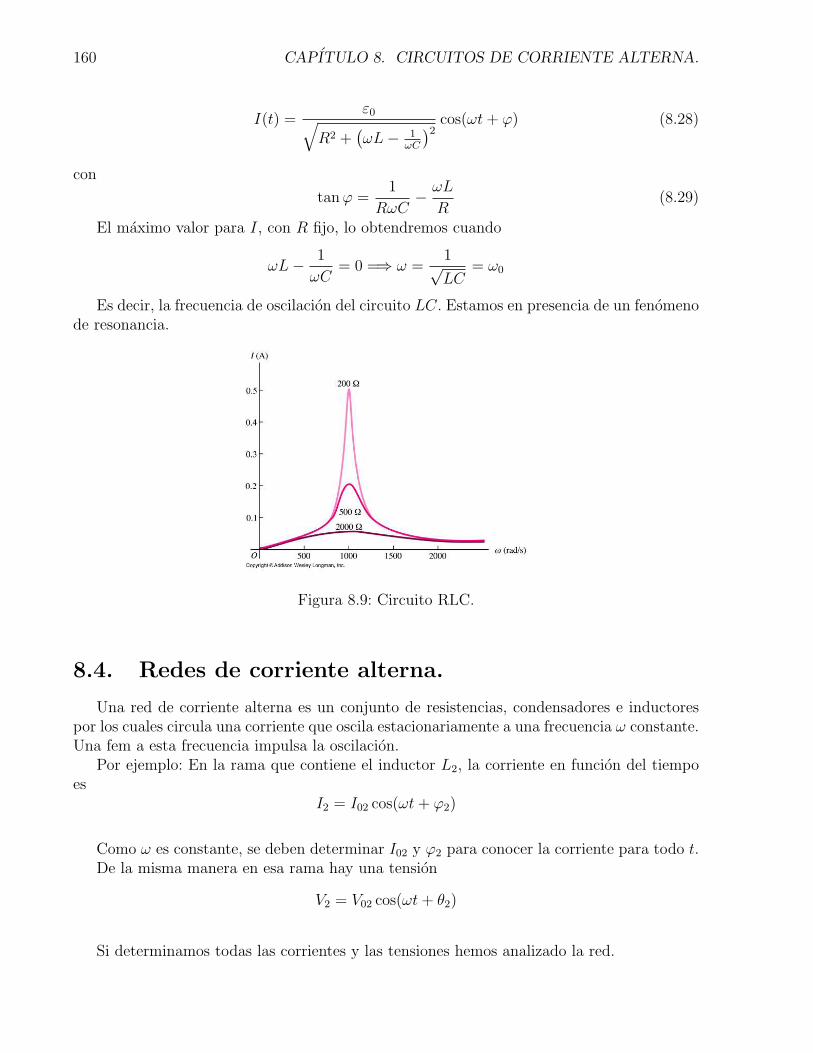
160 CAPITULO 8. CIRCUITOS DE CORRIENTE ALTERNA.
I(t) =ε0√
R2 +(ωL− 1
ωC
)2 cos(ωt+ ϕ) (8.28)
con
tanϕ =1
RωC− ωL
R(8.29)
El maximo valor para I, con R fijo, lo obtendremos cuando
ωL− 1
ωC= 0 =⇒ ω =
1√LC
= ω0
Es decir, la frecuencia de oscilacion del circuito LC. Estamos en presencia de un fenomenode resonancia.
Figura 8.9: Circuito RLC.
8.4. Redes de corriente alterna.
Una red de corriente alterna es un conjunto de resistencias, condensadores e inductorespor los cuales circula una corriente que oscila estacionariamente a una frecuencia ω constante.Una fem a esta frecuencia impulsa la oscilacion.
Por ejemplo: En la rama que contiene el inductor L2, la corriente en funcion del tiempoes
I2 = I02 cos(ωt+ ϕ2)
Como ω es constante, se deben determinar I02 y ϕ2 para conocer la corriente para todo t.De la misma manera en esa rama hay una tension
V2 = V02 cos(ωt+ θ2)
Si determinamos todas las corrientes y las tensiones hemos analizado la red.
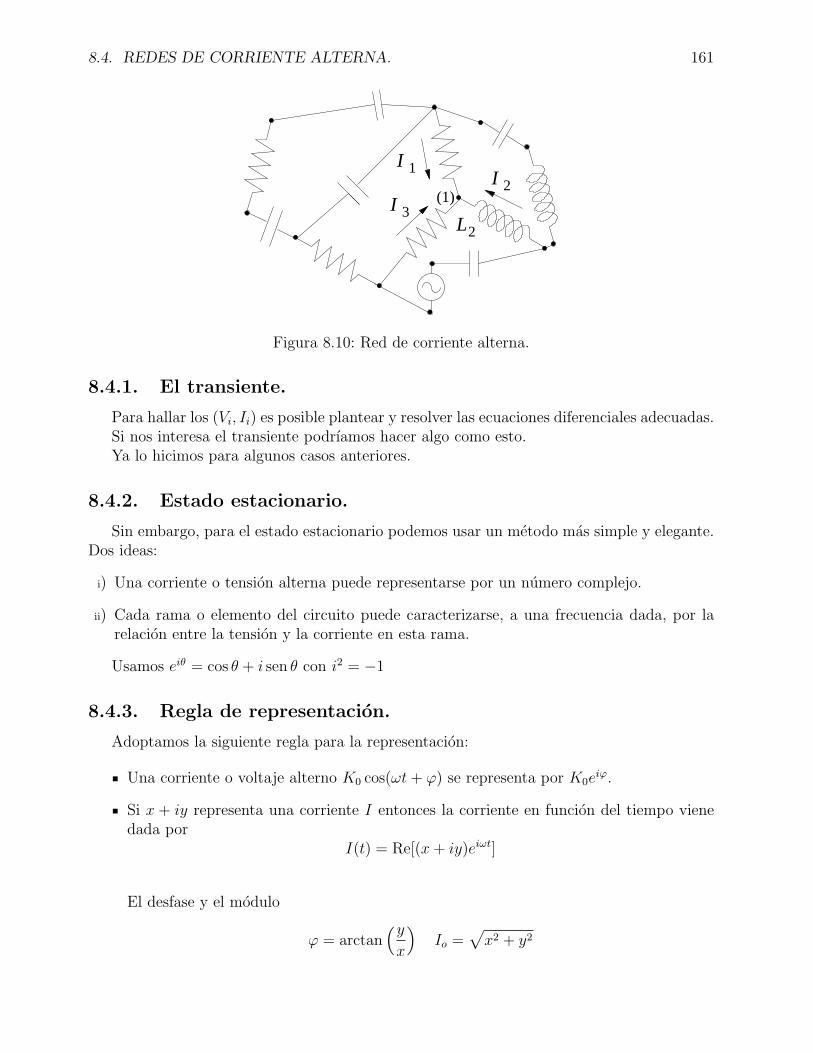
8.4. REDES DE CORRIENTE ALTERNA. 161
L2
I 2
I 1
I 3(1)
Figura 8.10: Red de corriente alterna.
8.4.1. El transiente.
Para hallar los (Vi, Ii) es posible plantear y resolver las ecuaciones diferenciales adecuadas.Si nos interesa el transiente podrıamos hacer algo como esto.Ya lo hicimos para algunos casos anteriores.
8.4.2. Estado estacionario.
Sin embargo, para el estado estacionario podemos usar un metodo mas simple y elegante.Dos ideas:
i) Una corriente o tension alterna puede representarse por un numero complejo.
ii) Cada rama o elemento del circuito puede caracterizarse, a una frecuencia dada, por larelacion entre la tension y la corriente en esta rama.
Usamos eiθ = cos θ + i sen θ con i2 = −1
8.4.3. Regla de representacion.
Adoptamos la siguiente regla para la representacion:
Una corriente o voltaje alterno K0 cos(ωt+ ϕ) se representa por K0eiϕ.
Si x + iy representa una corriente I entonces la corriente en funcion del tiempo vienedada por
I(t) = Re[(x+ iy)eiωt]
El desfase y el modulo
ϕ = arctan(yx
)Io =
√x2 + y2

162 CAPITULO 8. CIRCUITOS DE CORRIENTE ALTERNA.
Lo que hace util todo esto que la representacion de la suma es la suma de las representaciones.Por una parte
I1 + I2 = I01 cos(ωt+ ϕ1) + I02 cos(ωt+ ϕ2)
= (I01 cosϕ1 + I02 cosϕ2) cosωt
− (I01 senϕ1 + I02 senϕ2) senωt
Por la otra parte
I01eiϕ1 + I02e
iϕ2 = I01 cosϕ1 + I02 cosϕ2
+ i(I01 senϕ1 + I02 senϕ2)
Multiplicando por eiωt y tomando parte real, tenemos exactamente el mismo resultadoanterior.
La correspondencia no se extiende al producto de corrientes.Usando estas corrientes y tensiones complejas se deben satisfacer las leyes de Kirchhoff.
En un nodo, en todo instante, el flujo neto de corriente es nulo. En la figura (8.10), en elnodo (1) tenemos
I1 + I2 + I3 = 0
Siendo todas las Ii funciones periodicas del tiempo.La suma de las caıdas de tension, en un instante, a lo largo de una malla de la red, debe
ser igual a la fuerza electromotriz en la malla en ese instante.La relacion entre la corriente y la tension en un elemento del circuito puede expresarse
como relacion entre los numeros complejos que representan la tension y la corriente. Consi-deremos un circuito RL
I(t) = I0 cos(ωt+ ϕ) → Ioeiϕ
I0 =ε0√
R2 + ω2L2
ϕ = arctan(−ωL
R
)V (t) = ε0 cos(ωt) → ε0
8.5. Admitancia e Impedancia.
Definimos un complejo Y tal que
Y ≡ eiϕ
√R2 + ω2L2
ϕ = arctan
(−ωLR
)(8.30)
entonces
I = Y V (8.31)

8.5. ADMITANCIA E IMPEDANCIA. 163
Y se llama la Admitancia. La misma relacion puede expresarse con el recıproco de Y ,denotado Z, que se llama la Impedancia.
V =1
YI = ZI (8.32)
Z se mide en Ohms.Si el circuito fuera solo resistivo Z = R y V = RI la ley de Ohm.
V=ZII=YV
Admitancia Y
1
R
−i
ωL
iω C
Impedancia Z
R
i ω L
−i
ω C
Símbolo
Figura 8.11: Tabla de Impedancias y Admitancias.
R 0R 0
retrasadaen π/2
adelantadaen π/2
R R L R C
Im
Re Re Re
Im ImV V V
I
I
I
Figura 8.12: Circuitos.

164 CAPITULO 8. CIRCUITOS DE CORRIENTE ALTERNA.
Y1 Y2
I2I1
YV
I
Z1
Z2
V2
V1
V1 V2+ Z
I
I=I +I =Y V+Y V1 2 1 2+Y21 )VI=(Y
Y= Y1+Y2
+Z2)IV=(Z1Z= Z1+Z2
1=V +V =Z I+ZV 1 2 2I
Paralelo Serie
Figura 8.13: Combinaciones.
8.5.1. Ejemplo: circuito RLC en paralelo.
ε0 ωtcos
C L R
Figura 8.14: Circuito RLC en paralelo.
La admitancia equivalente
Y =1
R+ iωC − i
ωL(8.33)
La corriente
I = Y V = ε0
[1
R+ i
(ωC − 1
ωL
)](8.34)

8.6. POTENCIA Y ENERGIA. 165
La amplitud de la oscilacion de la corriente es el modulo del complejo I.
I0 = ε0
[(1
R
)2
+
(ωC − 1
ωL
)2]1/2
ϕ = arctan
[RωC − R
ωL
]
Con esta tecnica solo podemos tratar circuitos lineales, elementos en que la corriente esproporcional a la tension.
Los elementos de circuitos cuyo comportamiento es no lineal son dispositivos muy impor-tantes en electronica pero no admiten esta clase simple de analisis.
8.6. Potencia y energıa.
Si V = V0 cosωt en un circuito resistivo, entonces I =V0
Rcosωt.
La potencia instantanea que disipa la resistencia La corriente
P (t) = I2(t)R =V 2
0
R2R cos2 ωt =
V 20
Rcos2 ωt (8.35)
El valor medio en un ciclo
〈cos2 ωt〉 =1
2
La potencia media
〈P 〉 =1
2
V 20
R(8.36)
8.6.1. Valores eficaces.
Se acostumbra a expresar la tension y la corriente en un circuito a.c. dando 1/√
2 vecesla amplitud en vez de la amplitud.
A este valor se le llama el valor cuadratico medio o valor eficaz
〈P 〉 =V 2
rms
R(8.37)
Por ejemplo, si la tension de uso domestico es de 220 [V] le corresponde una amplitud de220
√2 [V], la diferencia de tension en los terminales es, con V en Volts y t es segundos
V (t) = 311 cos 314t Chile
V (t) = 170 cos 377t USA
Un amperımetro de c.a. esta calibrado para leer 1 [A] cuando la amplitud de I es de 1.414 [A].

166 CAPITULO 8. CIRCUITOS DE CORRIENTE ALTERNA.
En general, el valor instantaneo de la energıa liberada por unidad de tiempo en un ele-mento del circuito es
P (t) = V I = ε0 cosωt× I0 cos(ωt+ ϕ)
P (t) = ε0I0 cosωt cos(ωt+ ϕ)
P (t) = ε0I0[cos2 ωt cosϕ− cosωt senωt senϕ]
Promediamos en un ciclo, 〈2 cosωt senωt〉 = 〈sen 2ωt〉 = 0 y 〈cos2 ωt〉 = 1/2, por lo tanto
〈P 〉 = 〈V I〉 =1
2ε0I0 cosϕ (8.38)
Si los valores de la corriente y la tension se expresan en valores eficaces
〈P 〉 = VrmsIrms cosϕ
La cantidad cosϕ se denomina factor de potencia. Lo que muestra la ecuacion
〈P 〉 = VrmsIrms cosϕ ,
es que la potencia entregada por una fuente de corriente alterna a cualquier circuito dependede la fase, este resultado tiene muchas aplicaciones.
Por ejemplo, una fabrica que utiliza grandes motores en las maquinas, generadores otransformadores, tiene una gran carga inductiva (debido a todos los bobinados). Para entregarpotencias mas grandes a tales dispositivos en la fabrica sin hacer uso excesivo de enormesvoltajes, los tecnicos introducen capacitancia en los circuitos para cambiar la fase.
8.6.2. Ejemplo.
I1
V1
V2µ0.2 F
µ0.5 F
kΩ10
C
C
1
2R
Figura 8.15: Circuito de ejemplo.
Los valores R = 10 [kΩ] y 1 [W], C1 = 0.5 [µF], C1 = 0.2 [µF] y la fuente ε = 120 [V] y60 ciclos. Determine si la resistencia se calienta.
La admitancia de C2 es iωC2 = 377× 2× 10−7i es decir Y2 = 0.754× 10−4 [Ω−1].

8.6. POTENCIA Y ENERGIA. 167
La admitancia de R es 1/R = 10−4 [Ω−1]. La admitancia de la resistencia y el condensadoren paralelo 10−4(1 + 0.754i) [Ω−1]. La impedancia de lo mismo (6360− 4800i) [Ω]= Z1.
La impedancia de C1 es −i/ωC = −5300 [Ω]= Z2. La impedancia total es ZT = Z1+Z2 =(6300− 10100i) [Ω].
La corriente
I1 =120
6360− 10100i= (5.37 + 8.53i)× 103 [A]
Donde I01 = 0.010 [A] (rms) y la fase ϕ = −1.01.La potencia media
〈P 〉 = 120× 0.01 cos 1.01 [W] = 0.64 [W]
Las caıdas de voltaje
V1 = I1−iωC
= 45.2− 28.4i [V]
V2 = 120− V1 = 74.8 + 28.4i [V]
El valor eficaz V02 = 80 [V] (rms).Solo se disipa energıa en la resistencia
〈P 〉 =V 2
02
R= 0.64 [W]
No se calienta.

168 CAPITULO 8. CIRCUITOS DE CORRIENTE ALTERNA.
Capıtulo 9
Ecuaciones de Maxwell y ondaselectromagneticas.
En este capıtulo veremos las siguientes secciones:
Algo se ha omitido.
Corriente de desplazamiento.
Ecuaciones de Maxwell.
Ondas electromagneticas.
Otras formas de ondas: Superposicion de ondas.
Transporte de energıa por ondas electromagneticas.
¿Como se ve una onda en un sistema de referencia diferente?
9.1. Algo se ha omitido.
Las ecuaciones que tenıamos
i) div ~E = 4πρ ii) rot ~E = −1
c
∂ ~B
∂t(9.1)
iii) div ~B = 0 iv) rot ~B = +4π
c~J , Si
∂ ~E
∂t= 0
La ecuacion de continuidad
div ~J = −∂ρ∂t
(9.2)
Supongamos que ρ = ρ(t) =⇒ div ~J 6= 0, por otra parte usando la ecuacion iv) , tenemos
div ~J =4π
cdiv(rot ~B) = 0 Siempre! (9.3)
169

170CAPITULO 9. ECUACIONES DE MAXWELL Y ONDAS ELECTROMAGNETICAS.
R
C
sΓ
Figura 9.1: Condensador descargandose a traves de la resistencia R.
Hay una contradiccion, la ecuacion iv) no puede ser correcta.Supongamos el siguiente sistema:La ley de Ampere ∮
Γ
~B · d~s =
∫s(Γ)
rot ~B · d~a (9.4)
usando iv) ∮Γ
~B · d~s =
∫s(Γ)
4π
c~Jd~a =
4π
cI
Tomemos la superficie s′, tambien limitada por la curva Γ, y apliquemos el teorema deStokes
Γ
s
s’
Figura 9.2: Otra superficie limitada por la curva Γ.
A traves de s′ no circula corriente pero rot ~B no puede ser nulo en toda s′ sin violarStokes.
rot ~B debe depender de algo mas que de la densidad de corriente
rot ~B =4π
c~J + (?) (9.5)
Supongamos por analogıa al caso del rotor de ~E un termino de la forma
rot ~B =4π
c~J +
1
c
∂ ~E
∂t(9.6)

9.2. CORRIENTE DE DESPLAZAMIENTO. 171
Calculemos
div(rot ~B) = div
(4π
c~J
)+ div
(1
c
∂ ~E
∂t
)= 0
4π
cdiv ~J +
1
c
∂ div ~E
∂t=
4π
c
[div ~J +
∂ρ
∂t
]= 0
La ultima igualdad debido a la ecuacion de continuidad.El segundo termino de (9.6) resuelve el problema de integrar sobre s′ ya que ~E varıa en
el tiempo al descargarse el condensador.
9.2. Corriente de desplazamiento.
El termino1
c
∂ ~E
∂tse le llama corriente de desplazamiento. El nombre, a pesar de no ser
muy apropiado, a perdurado en el tiempo. Para precisar, podemos definir una “densidad decorriente de desplazamiento” ~Jd, y reescribir
rot ~B =4π
c
(~J + ~Jd
)(9.7)
definiendo ~Jd =1
4π
∂ ~E
∂t. Necesitamos el nuevo termino para que la relacion entre corriente y
campo magnetico, sea compatible con la ecuacion de continuidad.¿Por que no lo descubrio Faraday? No lo buscaba.En todo aparato en el que hayan campos electricos variables en el tiempo estan presentes
al mismo tiempo que las corrientes de conduccion, y a ellas atribuimos los campos magneticosen el entorno del aparato.
De hecho para variaciones lentas del campo electrico el efecto de las corrientes de despla-zamiento es practicamente despreciable.
¿Cuando se hace importante? Cuando los campos varıan en una escala de tiempo delorden de la que emplea la luz para cruzar el sistema. Experimentos de Hertz.
9.3. Ecuaciones de Maxwell.
div ~E = 4πρ rot ~E = −1
c
∂ ~B
∂t
div ~B = 0 rot ~B = +4π
c~J +
1
c
∂ ~E
∂t
James Clerk Maxwell (1831–1879).

172CAPITULO 9. ECUACIONES DE MAXWELL Y ONDAS ELECTROMAGNETICAS.
En el vacıo ρ = 0 y ~J = 0 luego
div ~E = 0 rot ~E = −1
c
∂ ~B
∂t
div ~B = 0 rot ~B = +1
c
∂ ~E
∂t
Ecuaciones de Maxwell en sistema SI.
div ~E =ρ
ε0rot ~E = −∂
~B
∂t
div ~B = 0 rot ~B = +µ0~J + µ0ε0
∂ ~E
∂t
Donde c =1
√µ0ε0
con
µ0 = 4π × 10−7 [Tm/A]ε0 = 8.85418× 10−12 [C2/Nm2]c = 2.99792× 1010 [cm/s].
9.4. Ondas electromagneticas.
Usemos la identidad vectorial
~∇× (~∇×) = ~∇(~∇·)−∇2
Apliquemosla a ~∇× ~B,
~∇× (~∇× ~B) = ~∇(~∇ · ~B)−∇2 ~B = ~∇× 1
c
∂ ~E
∂t
−∇2 ~B =1
c
∂ ~∇× ~E
∂t
−∇2 ~B = − 1
c2∂
∂t
(∂ ~B
∂t
)
Finalmente
∇2 ~B − 1
c2∂2 ~B
∂t2= 0

9.4. ONDAS ELECTROMAGNETICAS. 173
Lo que corresponde a una ecuacion de onda para cada componente de ~B. Ahora para~∇× ~E,
~∇× (~∇× ~E) = ~∇(~∇ · ~E)−∇2 ~E = ~∇×−1
c
∂ ~B
∂t
−∇2 ~E = −1
c
∂ ~∇× ~B
∂t
−∇2 ~E = − 1
c2∂
∂t
(∂ ~E
∂t
)
Finalmente
∇2 ~E − 1
c2∂2 ~E
∂t2= 0
Lo que corresponde a una ecuacion de onda para cada componente de ~E.
B
E
k
Dirección de
propagación
Figura 9.3: Campos ~E y ~B perpendiculares entre si.
~E · ~B = 0 un invariante y ~E · k = ~B · k = 0Solucion de ondas planas
~E(~r, t) = ~E0ei(~k·~r−ωt)
~B(~r, t) = ~B0ei(~k·~r−ωt)
9.4.1. Relacion de dispersion.
El vector de onda ~k =2π
λk, con λ la longitud de onda y ω = 2πν con ν la frecuencia.

174CAPITULO 9. ECUACIONES DE MAXWELL Y ONDAS ELECTROMAGNETICAS.
Usando la forma de onda plana para los campos podemos calcular ambos terminos de la
ecuacion de onda ∇2 ~E = k2 ~E y 1c2
∂2 ~E∂t2
= ω2 ~E tenemos(k2 − 1
c2ω2
)~E = 0 =⇒ c2k2 = ω2
Relacion que es conocida como la relacion de dispersion de ondas electromagneticas en elvacıo.
ω2 = c2k2
~∇× ~E = ~k × ~E = +ω
c~B
~∇× ~B = ~k × ~B = −ωc~E
~∇ · ~E = ~k · ~E = 0
~∇ · ~B = ~k · ~B = 0
Tomando modulo en las dos primeras ecuaciones y usando la relacion de dispersion obte-nemos
kc∣∣∣ ~E ∣∣∣ = ω
∣∣∣ ~B ∣∣∣ =⇒∣∣∣ ~B ∣∣∣ =
∣∣∣ ~E ∣∣∣
9.5. Otras formas de ondas: superposicion de ondas.
No solo una funcion sinusoidal puede representar una onda, cualquier funcion de f(y±vt)tendremos un patron que viaja con velocidad v en la direccion y.
Un ejemplo
~E =5y
1 + (x+ ct)2~B =
−5z
1 + (x+ ct)2
Estos campos electromagneticos satisfacen las ecuaciones de Maxwell. Corresponden a unpulso electromagnetico con una cola larga.
Las ecuaciones para ~E y ~B en el espacio vacıo son lineales.
Luego la suma de dos soluciones es solucion.
El campo electrico en un punto del espacio tiempo es el vector suma de los camposelectricos de las ondas individuales, lo mismo ocurre para el campo magnetico.
Un importante caso de superposicion es el de dos ondas planas viajeras en direccionesopuestas.

9.6. TRANSPORTE DE ENERGIA POR ONDAS ELECTROMAGNETICAS. 175
~E1 = zE0 sen2π
λ(y − ct) ~B1 = xE0 sen
2π
λ(y − ct)
k = y
~E2 = zE0 sen2π
λ(y + ct) ~B2 = −xE0 sen
2π
λ(y + ct)
k = −y
~E = ~E1 + ~E2 = zE0
[sen
2π
λ(y − ct) + sen
2π
λ(y + ct)
]~B = ~B1 + ~B2 = xE0
[sen
2π
λ(y − ct)− sen
2π
λ(y + ct)
]
9.5.1. Ondas estacionarias.
Obtenemos
~E = 2zE0 sen2πy
λcos 2πctλ
~B = −2xE0 cos2πy
λsen 2πctλ
Estos campos describen lo que se llama una onda estacionaria. Notemos que ~E = 0 en elplano y = 0, lo cual podrıa corresponder a un conductor.
9.6. Transporte de energıa por ondas electromagneti-
cas.
Podemos calcular la energıa que transporta una onda, a cada dv le asignamos (E2 +B2)dv/8π cantidad de energıa que se propaga con la velocidad de la luz c. Apliquemos esto a
~E = zE0 sen(y − ct) ~B = xB0 sen(y − ct)
a t = 0E2 = E2
0 sen2 y B2 = B20 sen2 y
Como E = B tenemos para la densidad de energıa
u =1
8π
(E2
0 sen2 y + E20 sen2 y
)=
1
4πE2
0 sen2 y
Si promediamos sobre λ tenemos 〈sen2 y〉 = 1/2 luego

176CAPITULO 9. ECUACIONES DE MAXWELL Y ONDAS ELECTROMAGNETICAS.
u =1
8πE2
0
La razon media a la cual fluye energıa a traves de una ventana de area unitaria perpen-dicular a y es E2
0c/8π.En forma general, el flujo de energıa por unidad de area, la cual es llamada densidad de
potencia S
S =E2c
4π[erg/cm2 s]
Donde E2 es el campo cuadratico medio (E20/2 para una onda sinusoidal.)
9.7. ¿Como se ve una onda en un sistema de referencia
diferente?
Una onda electromagnetica esta viajando en el vacıo.La direccion del viaje con respecto a cierto sistema de referencia F es un vector n. Sean
~E y ~B los campos electricos y magneticos medidos en algun lugar y tiempo en F por unobservador en F .
Supongamos un sistema F ′ moviendose en la direccion x con velocidad v con sus ejesparalelos a F , elegimos n = x
Usando las transformaciones desarrolladas en el capıtulo 6 tenemos
E ′x = Ex E ′
y = γ(Ey − βBz) E ′z = γ(Ez + βBy)
B′x = Bx B′
y = γ(By − βEz) B′z = γ(Bz + βEy)
9.7.1. Los invariantes.
Calculemos ~E ′ · ~B′
~E ′ · ~B′ = E ′xB
′x + E ′
yB′y + E ′
zB′z
= ExBx + γ2(EyBy + βEyEz − βByBz
− β2EzBz) + γ2(EzBz − βEyEz
+ βByBz − β2EyBy)
= ExBx + γ2(1− b2)(EyBy + EzBz)
= ~E · ~B

9.7. ¿COMO SE VE UNA ONDA EN UN SISTEMA DE REFERENCIA DIFERENTE?177
Es decir, ~E · ~B es un invariante. Otro invariante es E2−B2, lo que significa que E ′2−B′2 =E2 −B2 .
Nosotros sabemos que en una onda plana el campo magnetico es perpendicular al campoelectrico y que los modulos de ambos son iguales.
Cada uno de nuestros invariantes es cero, y si es cero en un sistema es cero en todos=⇒ ~E ⊥ ~B y E = B siempre. Una onda de luz se ve como una onda de luz en cualquiersistema inercial.
9.7.2. Un ejemplo.
Sea Ey = E0, Ex = Ez = 0 y Bz = E0, Bx = By = 0, entonces
E ′y = E0
√1− β
1 + βB′
z = E0
√1− β
1 + β
Un observador en F ′ ve que la amplitud se reduce.La velocidad de la onda es c en F ′ y en F .La onda electromagnetica no tiene un sistema en reposo.En el lımite β = 1 E ′
y y B′z en F ′ → 0 la onda desaparece.

178CAPITULO 9. ECUACIONES DE MAXWELL Y ONDAS ELECTROMAGNETICAS.
Capıtulo 10
Campos electricos en la materia.
En este capıtulo veremos las siguientes secciones:
Dielectrico.
Momentos de una distribucion de carga.
Potencial y campo de un dipolo.
Torque y fuerzas sobre un dipolo en un campo externo.
Dipolos atomicos y moleculares; Momentos dipolares inducidos.
Momentos dipolares permanentes.
Campo electrico debido a materia polarizada.
Otra mirada al condensador.
Campo de una esfera polarizada.
Esfera dielectrica en un campo uniforme.
Campo de una carga en un medio dielectrico y ley de Gauss.
Una mirada microscopica al dielectrico.
Polarizacion en campos variables.
Corriente de carga ligada.
Una onda electromagnetica en un dielectrico
179

180 CAPITULO 10. CAMPOS ELECTRICOS EN LA MATERIA.
10.1. Dielectricos.
El condensador del capıtulo 3 estaba constituido por dos conductores aislados sin nadaentre ellos. El sistema esta caracterizado por cierta capacidad C
C =Q
V12
(10.1)
Para el caso del condensador plano, tenemos dos placas paralelas de area A separadasuna distancia t
C =A
4πt(10.2)
Habitualmente los condensadores estan llenos con una capa aislante. A pesar de esto semantiene la proporcionalidad directa entre la carga y la diferencia de potencial.
Sı definimos una capacidad de la forma (10.1) nos resulta mayor que cuando el conden-sador estaba vacıo.
C=A
4πtC>
A
4πt
Aárea Aárea tt
Figura 10.1: Condensador con y sin aislante.
No solamente en los condensadores, sino casi en todas partes los campos ~E y ~B existen enpresencia de materia mas que en le vacıo. Ahora nos preocupara conocer las interacciones delos campos ~E y ~B con la materia Se nos presentan dos caminos distintos: uno macroscopicoy otro microscopico.
En forma macroscopica la ecuacion (10.1) necesita solamente la inclusion de un factor ε(que depende del material) para dar correctamente la capacidad del condensador lleno conese material.
A ε se le llama constante dielectrica de una determinado material y al material se leconoce como dielectrico.
εvacio = 1 εaire = 1.00059 εmateriales > 1.0

10.2. MOMENTOS DE UNA DISTRIBUCION DE CARGA. 181
10.1.1. Vision macroscopica.
Una vez determinada ε somos capaces de predecir el comportamiento de todo el sistemaelectrostatico constituido por los dos conductores y la pieza de dielectrico entre ellos.
Esta teorıa fue lograda sin una representacion de la materia, es decir, sin una teorıaatomica.
Desde este punto de vista, el interior del dielectrico es un espacio sin rasgos caracterısticos,uniforme y cuya unica propiedad electrica distinta del vacıo es una constante dielectricadistinta de la unidad.
Si solo usamos una descripcion macroscopica de un campo en la materia tendremos pro-blemas para contestar ciertas preguntas: ¿Cual es el campo en el interior del dielectrico,cuando hay carga en las placas? No podemos poner una carga de prueba. . .
10.1.2. Vision microscopica.
Afortunadamente podemos optar por una acercamiento microscopico al problema.Sabemos que la materia esta constituida por atomos y moleculas.Nuestro dielectrico sera descrito como una agrupacion de moleculas en el vacıo en vez de
un volumen lleno de materia continua y sin estructura.Si hallamos como actuan las cargas en una molecula cuando esta esta en presencia de un
campo electrico ~E serıamos capaces de establecer el comportamiento de un par de moleculasseparadas en el vacıo una en el campo de la otra. Este es un problema en el vacıo.
Luego hay que extenderlo a 1020 moleculas por centımetro cubico.¿Seremos capaces de decir algo sobre el campo electrico y sobre el campo magnetico en
la materia? Para intentar decir algo sobre estos campos haremos un estudio separado de losefectos de los campos electricos y de los efectos de los campos magneticos.
En este capıtulo estudiaremos los efectos de los campos electricos en la materia y en elproximo estudiaremos los efectos de los campos magneticos.
10.2. Momentos de una distribucion de carga.
Un atomo o molecula consta de ciertas cargas electricas distribuidas en un pequeno volu-men del orden de 10−24 [cm3]. Nos interesa el campo electrico en el exterior de este volumen,debido a esta distribucion mas bien complicada de carga. Nos interesa el campo lejos delas fuente, con lo que indicamos distancias grandes comparadas con el tamano de la propiafuente.
¿Que aspectos de la estructura de la distribucion de carga determinan principalmente elcampo en puntos remotos?
Para contestar lo anterior centremos nuestra atencion en cierta distribucion arbitraria decarga y veamos como podemos emprender el calculo del campo en un punto exterior a ella.
Sea ϕA el potencial en el punto A debido a la distribucion de carga ρ
ϕA =
∫ρ(x′, y′, z′)
Rdv′ (10.3)
R =[r2 + r′2 − 2rr′ cos θ
]1/2(10.4)

182 CAPITULO 10. CAMPOS ELECTRICOS EN LA MATERIA.
r
r’θ
R
x
y
z
A
dv’
(x,y,z)ρFigura 10.2: Densidad de carga de una molecula es negativa en los electrones y positiva enlos nucleos.
Sustituyendo en la integral
ϕA =
∫ρ(x′, y′, z′)
[r2 + r′2 − 2rr′ cos θ
]−1/2dv′ (10.5)
Como A es lejano r′ r para todo punto de la distribucion de carga luego[r2 + r′2 − 2rr′ cos θ
]−1/2=
1
r
[1 +
r′2
r2− 2
r′
rcos θ
]−1/2
(10.6)
Usando la expansion en serie
(1 + δ)−1/2 ≈ 1− 1
2δ +
3
8δ2 + . . .
y reagrupando tenemos [r2 + r′2 − 2rr′ cos θ
]−1/2=
1
r
[1 +
r′
rcos θ
+
(r′
r
)2
(3 cos2 θ − 1) + O
(r′
r
)3] (10.7)
Ahora bien, r es constante en la integracion, ası que escribimos el potencial obtenido enel punto A como sigue
ϕA =1
r
∫ρ(r′)d3r′ +
1
r2
∫r′ cos θρ(r′)d3r′
+1
r3
∫r′2(3 cos2 θ − 1)ρ(r′)d3r′ + . . .
(10.8)

10.2. MOMENTOS DE UNA DISTRIBUCION DE CARGA. 183
Cada una de las integrales anteriores, Ko, K1 y K2, y las sucesivas tienen un valor quedepende solamente de la estructura de la distribucion de carga.
De aquı el potencial puede escribirse
ϕA =Ko
r+K1
r2+K2
r3+ . . . (10.9)
Para acabar el problema deberıamos obtener el potencial en todos los otros puntos parapoder calcular el campo electrico vıa −~∇ϕ. El comportamiento del potencial a grandes dis-tancias de la fuente estara determinado por el primer termino de esta serie cuyo coeficiente nosea nulo. K0 es
∫ρdv′ es decir la carga total. Si tenemos la misma cantidad de carga positiva
que negativa, como en las moleculas neutras, K0 es nulo. Para una molecula simplementeionizada K0 = +e.
Si K0 6= 0 K1 y K2 no interesan. El terminoK0
rprevalecera.
Si tenemos una molecula neutra, i.e.K0 = 0, interesaK1 =∫r′ cos θρdv′. Ya que r′ cos θ =
z′ este termino mide el desplazamiento relativo en la direccion de A de la carga positiva ynegativa.
+2e
−2e
+e
+e
+e+e
+e
−2e−3e
Figura 10.3: En todos los casos mostrados K1 6= 0
Si la distribucion es el valor de K1 es independiente de la posicion del origen. Es decir, sireemplazamos z′ → z′ + zo, desplazando el origen el valor de la integral no varıa.∫
(z′ + z′0)ρdv′ =
∫z′ρdv′ + z′0
∫ρdv′ =
∫z′ρdv′
Si K0 = 0 y K1 6= 0, el potencial a lo largo del eje z variara asintoticamente como 1/r2
luego el campo E ∝ 1/r3.Si K0 y K1 son nulos y K2 6= 0 el potencial se comportara como 1/r3 a grandes distancias
y E ∝ 1/r4.Las cantidadesK0,K1,K2, . . . estan relacionadas con lo que se conocen como momentos de
la distribucion de carga. K0 corresponde a la carga y se conoce como momento monopolar. K1
es una de las componentes del momento dipolar. Tiene unidades de carga por desplazamientoy es un vector K1 corresponde a la componente z. K2 es una de las componentes del momentocuadrupolar (tensor). K3 es una de las componentes del momento octopolar.

184 CAPITULO 10. CAMPOS ELECTRICOS EN LA MATERIA.
+e
+e
−e −e
Figura 10.4: Configuracion con K0 = K1 = 0 y K2 6= 0.
10.3. Potencial y campo de un dipolo.
Podemos escribir el potencial en el punto A como
ϕA =1
r2
∫r · ~r ′ρdv′ = r
r2
∫~r ′ρdv′ (10.10)
Sin referencia a ningun eje. Hemos usado que r′ cos θ = r · ~r′. la integral es el momentodipolar. Designamos al vector momento dipolar por ~p
~p =
∫~r ′ρ(~r ′)d3r′ (10.11)
Podemos reescribir (10.10) como
ϕ(~r) =r · ~pr2
(10.12)
p E
z
rθ
Figura 10.5: Campo de un dipolo.
Partamos del potencial
ϕ(~r) =p cos θ
r2(10.13)

10.4. TORQUE Y FUERZA SOBRE UN DIPOLO EN UN CAMPO EXTERNO. 185
Trabajemos en el plano xz, es decir, cos θ =z√
x2 + z2
ϕ(~r) =pz
(x2 + z2)3/2(10.14)
Las componentes del campo
Ex = −∂ϕ∂x
=3pxz
(x2 + z2)5/2=
3p sen θ cos θ
r3
Ey = −∂ϕ∂z
=3z2
(x2 + z2)5/2− 1
(x2 + z2)3/2
=p(3 cos2 θ − 1)
r3(10.15)
La intensidad del campo decrece como 1/r3 en el eje z que es paralelo a ~p con modulo2p/r3. En el plano ecuatorial el campo esta dirigido en forma antiparalela a ~p y tiene un valor−~p/r3. La distribucion mas simple con momento dipolar son dos cargas ±q separadas unadistancia s lo que implica que p = qs.
Calculemos ahora el campo del dipolo en coordenadas polares. Para ello partamos nue-vamente del potencial
ϕ(~r) =p cos θ
r2
Derivemos para obtener el campo
Er = −∂ϕ∂r
=2p cos θ
r3
Eθ = −1
r
∂ϕ
∂θ=p sen θ
r3(10.16)
10.4. Torque y fuerza sobre un dipolo en un campo
externo.
Supongamos dos cargas q y −q conectadas mecanicamente, s es la distancia entre ellas.El momento dipolar p = qs. Coloquemos el dipolo en un campo externo ~E, es decir en elcampo de otra fuente.
El dipolo experimenta un torque
~N = ~τ = ~r × ~F r =s
2
~N = ~r × ~F+ + (−~r)× ~F− (10.17)

186 CAPITULO 10. CAMPOS ELECTRICOS EN LA MATERIA.
F−=−qE F+=+qE
E
p+q
s
−q
Figura 10.6: La fuerza es nula sobre el dipolo.
F−
F+
p
E
F+
rθ
θ
−q
+q
s/2
Figura 10.7: Torque sobre el dipolo.
El vector vecN es un vector perpendicular a la figura.
N =s
2Eq sen θ +
s
2Eq sen θ = sqE sen θ = pE sen θ (10.18)
Luego
~N = ~p× ~E (10.19)
En presencia de un campo la orientacion del dipolo que tiene la energıa mas baja escuando esta paralelo al campo. Tiene que efectuase trabajo para girar el dipolo a cualquierotra posicion. El trabajo total realizado
W =
∫ θ0
0
Ndθ =
∫ θ0
0
pE sen θdθ = pE(1− cos θ0) (10.20)
Para invertir el dipolo, θ0 = π se requiere W = 2pE.
10.4.1. Fuerza sobre un dipolo en un campo no uniforme.
La fuerza resultante sobre el dipolo en un campo uniforme es nula. En un campo nouniforme las dos fuerzas no se cancelan. Ejemplo simple
F = qQ
r2+ (−q) Q
(r + s)2(10.21)

10.5. DIPOLO ATOMICO Y MOLECULARES; MOMENTOS DIPOLARES INDUCIDOS.187
r
FQ
s
Figura 10.8: Un dipolo en un campo no uniforme.
Para s r
F =Qq
r2
[1− 1
(1 + s/r)2
r2
[1− 1
1 + 2s/r
]≈ 2sQq
r3(10.22)
La fuerza
F =2pQ
r3(10.23)
No es facil deducir una formula general para la fuerza sobre un dipolo en un campoelectrico no uniforme. La fuerza depende esencialmente de los gradientes de las distintascomponentes del campo. En general la fuerza en x sobre un dipolo ~p es
Fx = ~p · ~∇Ex (10.24)
10.5. Dipolo atomico y moleculares; momentos dipola-
res inducidos.
Al describir la distribucion de carga en un atomo o molecula tendremos que usar terminoclasicos para representar un sistema mecanico cuantico. Tambien trataremos como estaticouna estructura en la que las partıculas, en cierto sentido, estan continuamente en movimien-to. Se vera, en los cursos mas avanzados, que la Mecanica Cuantica ratifica este enfoquesimplificado.
Consideremos el atomo mas simple, el atomo de Hidrogeno, que consta del nucleo yun electron. Si imaginamos el electron cargado negativamente, girando en torno del nucleopositivo como un planeta alrededor del Sol – Modelo atomico original de Bohr – Concluiremosque el atomo, en un instante dado posee un momento dipolar electrico. El vector ~p se dirigeparalelo al radio vector electron-proton y su modulo es e veces la distancia electron proton.La direccion de este varıa continua y rapidamente cuando el electron “recorre su orbita”.Sin duda, el valor medio en el tiempo de ~p sera nulo para una orbita circular. Esperarıamosque la variacion periodica de las componentes de ~p originen un campo electrico rapidamenteoscilante y por ende radiacion electromagnetica. La ausencia de tal radiacion en el atomo deHidrogeno fue una de las mas grandes paradojas de la primitiva fısica cuantica.
La Mecanica Cuantica moderna nos dice que es mejor imaginar el atomo de Hidrogenoen su estado de mas baja energıa como una estructura con simetrıa esfericas con la cargadistribuida, en promedio temporal sobre una nube que rodea al nucleo. Nada esta girando ni

188 CAPITULO 10. CAMPOS ELECTRICOS EN LA MATERIA.
oscilado. Si pudieramos tomar una instantanea con un tiempo de exposicion inferior a 10-16 [s],podrıamos un e- situado a cierta distancia del nucleo. Para procesos en los que intervienentiempos muchos mayores, tenemos, en efecto, una distribucion continua de carga negativaque rodea al nucleo y se extiende en todas direcciones con densidad constante decreciente
La carga total en la distribucion es e-. Aproximadamente la mitad de la carga esta enuna esfera de 0.05 [A]. La densidad decrece exponencialmente hacia el exterior, una esfera deradio 2.2 [A] contiene el 99% de la carga.
Una representacion similar es la mejor para adoptar en otros atomos y moleculas. Podemostratar a los nucleos en las moleculas como cargas puntuales, para nuestros propositos sutamano es demasiado pequeno para tenerlo en cuenta. La estructura electronica entera de lamolecula puede representarse como una sola nube de carga de densidad variable. La forma dela distribucion dependera de la molecula en cuestion, pero en los bordes de la nube la densidadsiempre disminuira exponencialmente, ası que tienen “cierto” sentido hablar de forma de ladistribucion.
E
Figura 10.9: A la izquierda atomo de Hidrogeno, con ~p = 0 para cualquier estado fundamentalde cualquier atomo. A la derecha el atomo inmerso en un campo electrico.
El campo ~E distorsiona el atomo. El atomo perturbado tendra un momento dipolar acausa de que “el centro de gravedad” de las cargas positivas y negativas no coinciden
Usemos un modelo provisional del atomo de Hidrogeno para determinar el orden de mag-nitud de la distorsion esperada. Supongamos que en ausencia del campo electrico la cargae- esta distribuida con densidad constante en toda una esfera de radio a y que es nula es elexterior.
a
Figura 10.10: Atomo de Hidrogeno, con densidad en una bola de radio “a”.

10.5. DIPOLO ATOMICO Y MOLECULARES; MOMENTOS DIPOLARES INDUCIDOS.189
Supongamos que cuando se aplica un campo electrico ~E la bola de carga e- mantiene suforma y densidad y solo se desplaza relativamente el nucleo.
Eb
Figura 10.11: Atomo de Hidrogeno, bajo un campo “a”.
El nucleo queda a cierta distancia b del centro de la esfera. En el equilibrio, la ~f = e ~Esobre el nucleo debida al campo ~E que actua hacia arriba, debe estar equilibrada por laatraccion hacia abajo ejercida sobre el nucleo por la nube de carga negativa, que empuja alnucleo hacia su centro.
Para hallar la fuerza el campo solo depende de la carga interior a b, i.e.
E =Q
b2=
e43πa3
4
3πb3
1
b2=eb
a3
Igualando al campo externo
Eext =eb
a3=⇒ b =
a3Eext
e
Si tomamos a = 1 [A] y E = 100 [statvolt/cm] (intenso) entonces b = 2 × 10−13 [cm]. Unadistorsion muy ligera. El ~p es
p = eb = a3Eext , ~p ‖ ~Eext (10.25)
El ~p es directamente proporcional al ~E, podemos esperar que esto se mantenga, al menospara pequenas distorsiones
10.5.1. Polarizacion atomica.
Cualquier atomo puede polarizarse de esta manera. Decimos que el momento dipolar esinducido por el campo electrico ~E. En cada caso hallamos que ~p es proporcional a ~E
~p = α~E (10.26)
α es la polarizabilidad atomica en [cm3]En nuestro modelo del Hidrogeno, α = a3 y tiene dimensiones de volumen. Un calculo
exacto, usando Mecanica Cuantica, da αH = 9a30/2, con a0 el radio de Bohr, a0 = 0.52 ×
10−8 [cm].Los valores experimentales de α para diferentes elementos en unidades de 10−24 [cm3]
H He Li Be C Ne Na Ar Kα 0.66 0.21 12 9.3 1.5 0.4 27 1.6 34
Los alcalinos se deforman facilmente, valores grandes. Los gases nobles son muy rıgidos,valores pequenos.

190 CAPITULO 10. CAMPOS ELECTRICOS EN LA MATERIA.
10.5.2. Polarizacion en moleculas.
Cuando se aplica un campo electrico ~E a una molecula tambien se produce un momentodipolar inducido.
Figura 10.12: Molecula de metano, CH4.
la molecula de metano α = 2.6× 10−24 [cm3]Si sumamos las polarizabilidades de los atomos individuales, el de carbono y de los cua-
tro hidrogenos tenemos 4.1× 10−24 [cm3]. Evidentemente, los enlaces de los atomos en lamolecula ha alterado la estructura electronica.
Las moleculas son, en general menos simetricas que los atomos. Esto origina la posibilidadde que un momento dipolar inducido no sea paralelo al campo que lo induce. Consideremosuna molecula de dioxido de carbono.
x
z
y
O OC
Figura 10.13: Molecula de dioxido de carbono, CO2.
Es diferente la “rigidez” longitudinal y transversal. En general un campo electrico pa-ralelo al eje molecular inducira un valor distinto que el inducido por un campo electricoperpendicular al eje molecular.
En realidad, el α del CO2 es 4.05×10−24 [cm3], para un campo aplicando paralelo al ejey un poco menos que la mitad para un campo transversal. Este tipo de moleculas tiene dosα los cuales podemos designar por α⊥ y α‖. Si el campo esta en otra direccion, se aplicasuperposicion. El ejemplo anterior, demuestra que la polarizabilidad de una molecula no esun simple escalar, sino un conjunto de coeficientes que expresan una dependencia lineal de

10.5. DIPOLO ATOMICO Y MOLECULARES; MOMENTOS DIPOLARES INDUCIDOS.191
E
E
Ep
Figura 10.14: Campo y momento dipolar no paralelos.
los componentes de un vector ~p, de las de otro ~E. Al conjunto de coeficientes se llama tensor,la relacion mas general serıa con 9 coeficientes
px = αxxEx + αxyEy + αxzEz
py = αyxEx + αyyEy + αyzEz
pz = αzxEx + αzyEy + αzzEz
Las nueve α definidas de esta manera constituyen el llamado tensor de polarizabilidad.
En el ejemplo del CO2 tenemos αxx = α‖ y ademas αyy = αzz = α⊥ y los otros seis coefi-cientes nulos. Si elegimos otra direccion para los ejes, por ejemplo, 30 con el eje molecular,un campo ~E en x originarıa ~p en z, es decir, αzx 6= 0. Ası que los elementos del tensor depolarizabilidad dependeran de la orientacion de los ejes coordenados. Bajo una rotacion delos ejes los elementos del tensor deben transformar de tal manera que conserven invariantela relacion de ~E con ~p. Esta relacion solo puede depender de la direccion de ~E con respecto alos ejes fısicos de la molecula y no de como se nos ocurra trazar el eje x. Podemos encontrarlas reglas de transformacion de los coeficientes del tensor como ejercicio.
Se puede demostrar que
αxy = αyx
αxz = αzx
αyz = αzy
Es decir, el tensor (o matriz) es simetrico. La simetrıa del tensor expresa uno de los hechos
fısicos mas notables que merece considerarse. Significa que un campo electrico ~E aplicado enx origina siempre una componente z de ~p igual a la componente x de ~p que originarıa uncampo igual aplicado en la direccion z.
Si lo anterior se cumple incluso para una molecula sin simetrıa, debe estar respaldadopor un teorema tipo reciprocidad y no ser consecuencia de la mera simetrıa geometrica. Uncorolario importante de la simetrıa de α es el hecho de que siempre es posible orientar losejes, relativos al sistema de referencias molecular, de manera tal que el tensor sea diagonal.Lo anterior es cierto incluso para moleculas sin simetrıa.
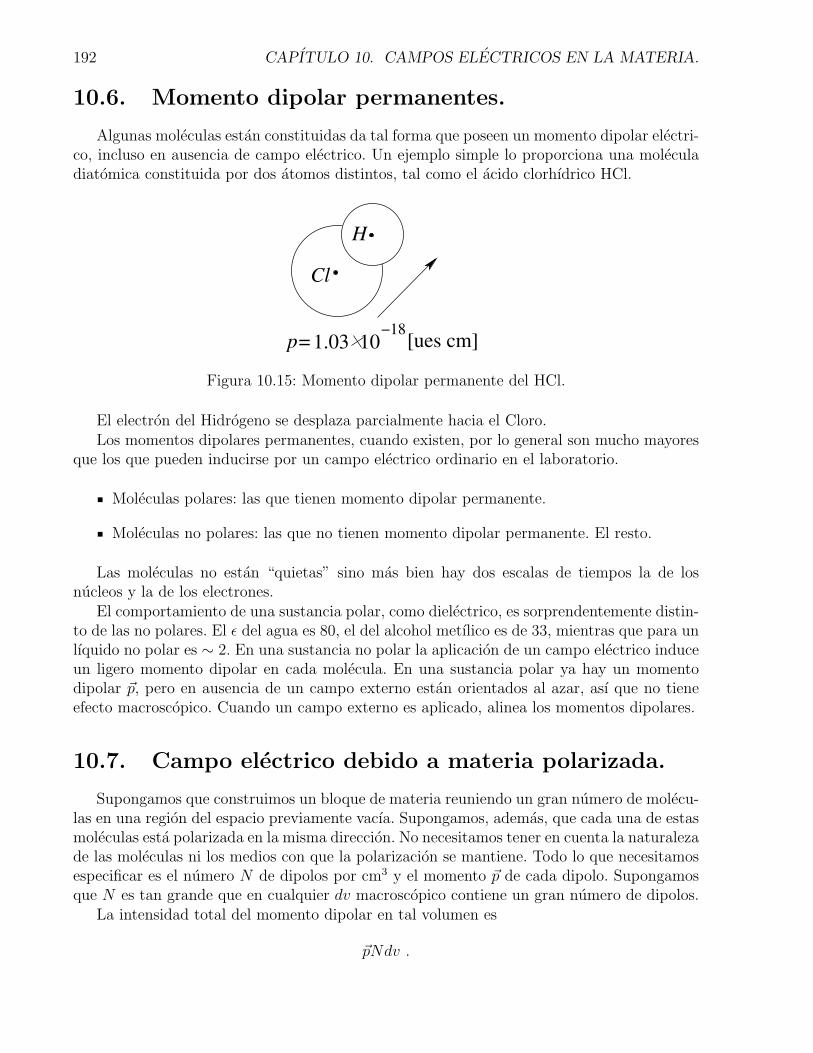
192 CAPITULO 10. CAMPOS ELECTRICOS EN LA MATERIA.
10.6. Momento dipolar permanentes.
Algunas moleculas estan constituidas da tal forma que poseen un momento dipolar electri-co, incluso en ausencia de campo electrico. Un ejemplo simple lo proporciona una moleculadiatomica constituida por dos atomos distintos, tal como el acido clorhıdrico HCl.
p=1.03 10−18
[ues cm]
Cl
H
Figura 10.15: Momento dipolar permanente del HCl.
El electron del Hidrogeno se desplaza parcialmente hacia el Cloro.Los momentos dipolares permanentes, cuando existen, por lo general son mucho mayores
que los que pueden inducirse por un campo electrico ordinario en el laboratorio.
Moleculas polares: las que tienen momento dipolar permanente.
Moleculas no polares: las que no tienen momento dipolar permanente. El resto.
Las moleculas no estan “quietas” sino mas bien hay dos escalas de tiempos la de losnucleos y la de los electrones.
El comportamiento de una sustancia polar, como dielectrico, es sorprendentemente distin-to de las no polares. El ε del agua es 80, el del alcohol metılico es de 33, mientras que para unlıquido no polar es ∼ 2. En una sustancia no polar la aplicacion de un campo electrico induceun ligero momento dipolar en cada molecula. En una sustancia polar ya hay un momentodipolar ~p, pero en ausencia de un campo externo estan orientados al azar, ası que no tieneefecto macroscopico. Cuando un campo externo es aplicado, alinea los momentos dipolares.
10.7. Campo electrico debido a materia polarizada.
Supongamos que construimos un bloque de materia reuniendo un gran numero de molecu-las en una region del espacio previamente vacıa. Supongamos, ademas, que cada una de estasmoleculas esta polarizada en la misma direccion. No necesitamos tener en cuenta la naturalezade las moleculas ni los medios con que la polarizacion se mantiene. Todo lo que necesitamosespecificar es el numero N de dipolos por cm3 y el momento ~p de cada dipolo. Supongamosque N es tan grande que en cualquier dv macroscopico contiene un gran numero de dipolos.
La intensidad total del momento dipolar en tal volumen es
~pNdv .

10.7. CAMPO ELECTRICO DEBIDO A MATERIA POLARIZADA. 193
Figura 10.16: Algunas moleculas polares bien conocidas. La magnitud del momento dipolarpermanente p esta dada en unidades de 10−18 [esu-cm].
En cualquier punto alejado de este dv, en comparacion al tamano del mismo, el ~E de estosdipolos particulares sera practicamente el mismo que si se reemplazasen por un solo dipolode momento ~pNdv. Llamaremos a ~pN densidad de polarizacion y la designaremos por ~P
~P = ~pN[carga
cm2
].
Entonces ~Pdv es el momento dipolar electrico asociado a este pequeno elemento de volu-men dv.
Supongamos ~P es constante en el interior. Un cilindro de altura dz tiene un momentodipolar, Pdv = Pdadz = p. Su contribucion al potencial en el punto A puede escribirseteniendo en cuenta el potencial de un dipolo
ϕ =p cos θ
r2
luego
dϕA =Pdadz cos θ
R2
Potencial de una columna
ϕA = Pda
∫ z2
z1
cos θ
R2dz

194 CAPITULO 10. CAMPOS ELECTRICOS EN LA MATERIA.
z2
z1
R1
R2
p
ρc
ρA
x2+y2ρ2=
θ
x
z
y
A
R
da
zA
Figura 10.17: Columna de materia polarizada.
carga +Pda
carga −Pda
dz
+Pda
−Pda
Figura 10.18: Esquema de la columna polarizada.
Donde zA − z = R cos θ y [(zA − z)2 + (ρA − ρC)2]1/2 = R por lo tanto
ϕA = Pda
∫ z2
z1
(z − zA)dz
[(zA − z)2 + (ρA − ρC)2]3/2
=Pda
[(zA − z)2 + (ρA − ρC)2]1/2
∣∣∣∣z2
z1
Finalmente
ϕA = Pda
[1
R2
− 1
R1
](10.27)
La ecuacion (10.27) precisamente es la misma expresion para el potencial en A debido ados cargas puntiformes; una positiva de valor Pda situada en la parte superior de la columnaa una distancia R2 de A y una negativa del mismo valor en la base de la columna. La fuenteconsistente en una columna de materia uniformemente polarizada es equivalente, al menos en
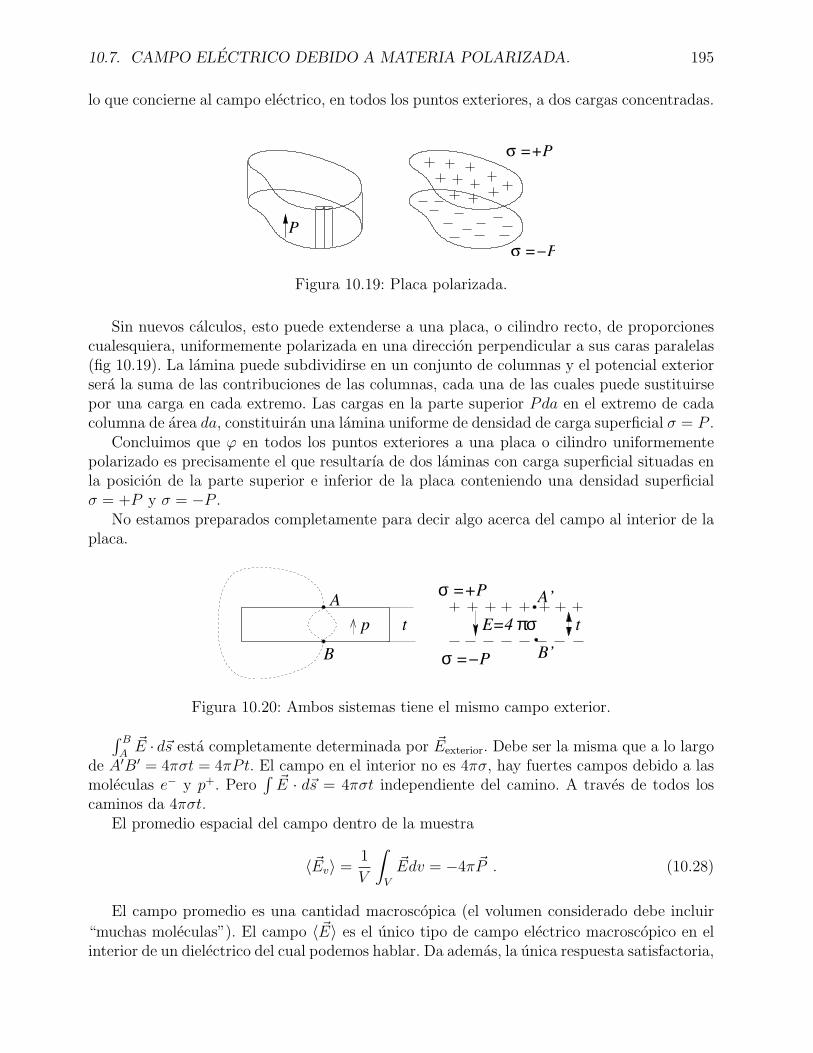
10.7. CAMPO ELECTRICO DEBIDO A MATERIA POLARIZADA. 195
lo que concierne al campo electrico, en todos los puntos exteriores, a dos cargas concentradas.
σ =−P
σ =+P
P
Figura 10.19: Placa polarizada.
Sin nuevos calculos, esto puede extenderse a una placa, o cilindro recto, de proporcionescualesquiera, uniformemente polarizada en una direccion perpendicular a sus caras paralelas(fig 10.19). La lamina puede subdividirse en un conjunto de columnas y el potencial exteriorsera la suma de las contribuciones de las columnas, cada una de las cuales puede sustituirsepor una carga en cada extremo. Las cargas en la parte superior Pda en el extremo de cadacolumna de area da, constituiran una lamina uniforme de densidad de carga superficial σ = P .
Concluimos que ϕ en todos los puntos exteriores a una placa o cilindro uniformementepolarizado es precisamente el que resultarıa de dos laminas con carga superficial situadas enla posicion de la parte superior e inferior de la placa conteniendo una densidad superficialσ = +P y σ = −P .
No estamos preparados completamente para decir algo acerca del campo al interior de laplaca.
σ =+P
σ =−P
E=4 πσtp
A
B
t
B’
A’
Figura 10.20: Ambos sistemas tiene el mismo campo exterior.∫ B
A~E · d~s esta completamente determinada por ~Eexterior. Debe ser la misma que a lo largo
de A′B′ = 4πσt = 4πPt. El campo en el interior no es 4πσ, hay fuertes campos debido a lasmoleculas e− y p+. Pero
∫~E · d~s = 4πσt independiente del camino. A traves de todos los
caminos da 4πσt.El promedio espacial del campo dentro de la muestra
〈 ~Ev〉 =1
V
∫V
~Edv = −4π ~P . (10.28)
El campo promedio es una cantidad macroscopica (el volumen considerado debe incluir
“muchas moleculas”). El campo 〈 ~E〉 es el unico tipo de campo electrico macroscopico en elinterior de un dielectrico del cual podemos hablar. Da ademas, la unica respuesta satisfactoria,

196 CAPITULO 10. CAMPOS ELECTRICOS EN LA MATERIA.
E ds.∫
es el campo total
A
B
Figura 10.21: Integral de camino por dos caminos distintos.
en el contexto de un descripcion macroscopica de la materia, a la pregunta ¿Cual es el campoelectrico dentro de un material dielectrico?
El campo ~E en la ecuacion (10.28) lo podemos llamar microscopico tiene sentido ya que lasleyes del electromagnetismo trabaja a escala de distancia menores que la atomica. Revisemoslas propiedades del campo promedio ∫ B
A
〈 ~E〉 · d~s
Para dos puntos A y B razonablemente distanciados es independiente del camino.
rot〈 ~E〉 = 0 y 〈 ~E〉 = −~∇〈ϕ〉
Donde
〈ϕ〉 =1
V
∫ϕdv
Ademas, ∫〈 ~E〉 · d~a = 4π〈ρ〉 =⇒ div〈 ~E〉 = 4π〈ρ〉
De ahora en adelante, cuando hablemos del campo electrico ~E dentro de un pedazo de materiamayor que una molecula hablamos del campo macroscopico o promedio (ec.10.28) y omitimos〈. . .〉.
10.8. Otra mirada al condensador.
EE
ϕ12 ϕ12
Q0 Q
0Q= ∈
sp s
Q’
Figura 10.22: Condensador.

10.8. OTRA MIRADA AL CONDENSADOR. 197
E = ϕ21/s en ambos casos, ϕ12 lo da la baterıa. Como el campo es el mismo, debe ser lamisma carga
Q0 = Q′ +Q =⇒ Q′ = Q0 −Q = Q0 − εQ0
Luego
Q′ = Q0(1− ε) (10.29)
Podemos pensar el campo como la superposicion de dos campos: el primer campo de uncondensador vacıo con carga εQ y el otro producido por una capa de dielectrico con densidadde polarizacion ~P .
~E = ~E1 + ~E2 y ~E1 = ε ~E ~E2 = −4π ~P
Luego
~E = ε ~E − 4π ~P (10.30)
P πE=−4 PE =
Q0
∈
∈ E1
Q0Q’= (1−∈)
Dieléctrico soloPlacas solas
Figura 10.23: Condensador con y sin dielectrico.
10.8.1. Susceptibilidad electrica.
P
E=ε− 1
4π= χe (10.31)
La constante χe se conoce como la susceptibilidad electrica y solo depende del material.Ademas, podemos reescribir la constante dielectrica en funcion de ella
ε = 1 + 4πχe (10.32)
Si C es la capacidad de un condensador en el vacıo εC es la capacidad del mismo conden-sador en un medio con constante dielectrica ε.
~Emedio =1
ε~Evacio (10.33)
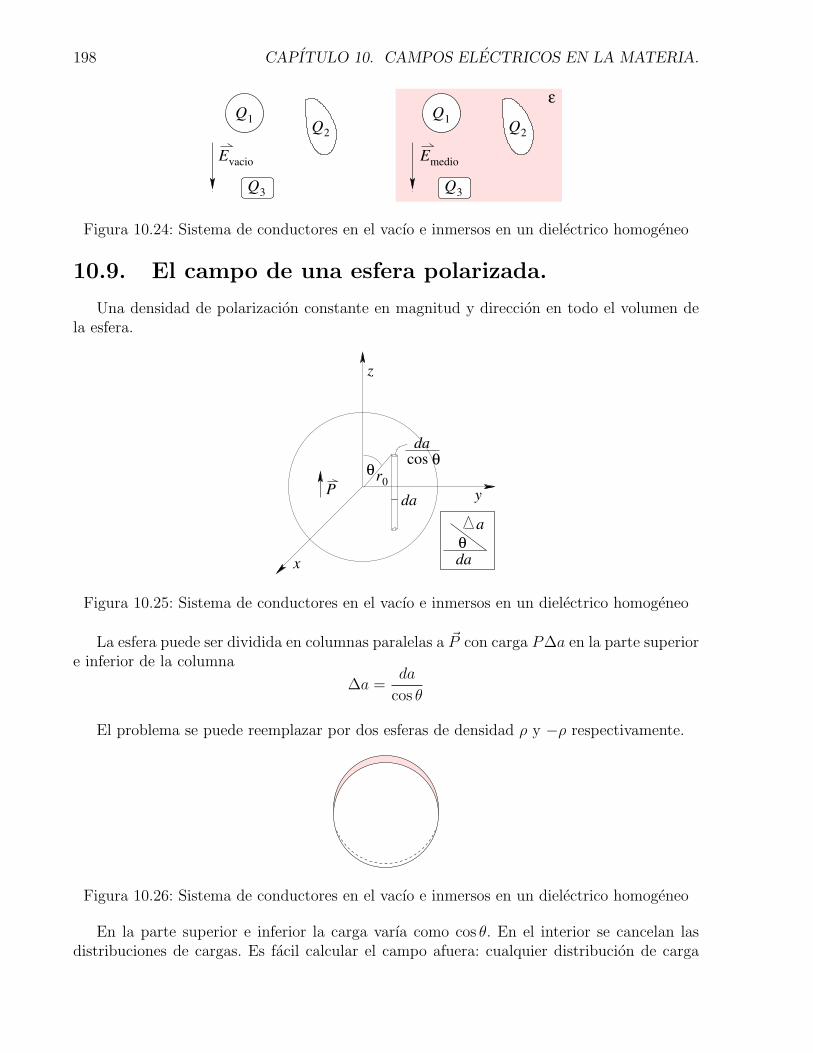
198 CAPITULO 10. CAMPOS ELECTRICOS EN LA MATERIA.
Q1 Q2
Q3
Q1 Q2
Q3
Evacio Emedio
ε
Figura 10.24: Sistema de conductores en el vacıo e inmersos en un dielectrico homogeneo
10.9. El campo de una esfera polarizada.
Una densidad de polarizacion constante en magnitud y direccion en todo el volumen dela esfera.
Pr0
cos θda
θa
da
da
θ
x
y
z
Figura 10.25: Sistema de conductores en el vacıo e inmersos en un dielectrico homogeneo
La esfera puede ser dividida en columnas paralelas a ~P con carga P∆a en la parte superiore inferior de la columna
∆a =da
cos θ
El problema se puede reemplazar por dos esferas de densidad ρ y −ρ respectivamente.
Figura 10.26: Sistema de conductores en el vacıo e inmersos en un dielectrico homogeneo
En la parte superior e inferior la carga varıa como cos θ. En el interior se cancelan lasdistribuciones de cargas. Es facil calcular el campo afuera: cualquier distribucion de carga

10.9. EL CAMPO DE UNA ESFERA POLARIZADA. 199
tiene un campo externo como la carga completa estuviera concentrada en su centro. Ası lasuperposicion de dos esferas de carga totalQ y−Q respectivamente, con sus centros separadospor un pequeno desplazamiento s, produce un campo externo igual al de dos cargas puntualesQ y −Q separadas por una distancia s, es decir, p0 = Qs. El campo no es para grandesdistancias sino desde la superficie en adelante.
p0 = Qs =4π
3r30P .
El campo exterior de la esfera polarizada es el de un dipolo central p0. El campo en elinterior: consideremos el potencial electrico ϕ(x, y, z) lo conocemos en el contorno esferico (esel de un dipolo) y como r0 cos θ = z
ϕb =4π
3Pz
El problema de hallar el campo interior se reduce a un problema de Laplace con ϕb
sobre la esfera =⇒ ϕint = 4πPz/3, que es solucion de la ecuacion de Laplace y satisface lascondiciones de contorno. El campo
Ez = − ∂
∂zϕint = − ∂
∂z
[4π
3Pz
]= −4π
3P . (10.34)
r0
Campo interior
P0
P0
Campo externo
Figura 10.27: Campo exterior e interior.
Como lo unico que determina el eje z es la direccion de ~P , podemos reescribir el resultado
~Ein = −4π
3~P . (10.35)
En el polo “norte” el campo externo
Ez =2p0
r3=
2(4πr30P/3)
r30
=8πP
3
La diferencia entre el campo externo y el interno
Eext − Eint =8πP
3+
4πP
3=
12πP
3= 4πP .

200 CAPITULO 10. CAMPOS ELECTRICOS EN LA MATERIA.
El campo ~E es discontinuo en la frontera de un medio polarizado exactamente como loserıa en una superficie en el vacıo que contuviese una carga superficial σ = Pn, esto es ~Pnormal hacia afuera
~E⊥ cambia en 4πPn en el contorno.
~E‖ no cambia, es continua.
10.10. Esfera dielectrica en un campo uniforme.
Como ejemplo, coloquemos una esfera de material dielectrico caracterizado por una cons-tante dielectrica ε, en un campo homogeneo.
Las fuentes del campo ~E0 no se ven perturbadas por la esfera i.e. a grandes distancias elcampo sera ~E0.
E0
E=?P
Figura 10.28: Esfera dielectrica en campo externo.
Esto es lo que se da a entender al colocar una esfera en un campo uniforme. El campototal ~E no es uniforme en las proximidades de la esfera
~E = ~E0 + ~E ′ . (10.36)
El primer termino corresponde a las fuentes distantes y el segundo al campo debido a lamateria polarizada. El campo ~E ′ depende de la polarizacion ~P del dielectrico que a su vezdepende del campo ~E en el interior de la esfera
~P = χe~E =
ε− 1
4π~E . (10.37)
Si la esfera se polariza uniformemente, (suposicion que necesita justificacion) sabemosque
~E ′int = −4π ~P
3.
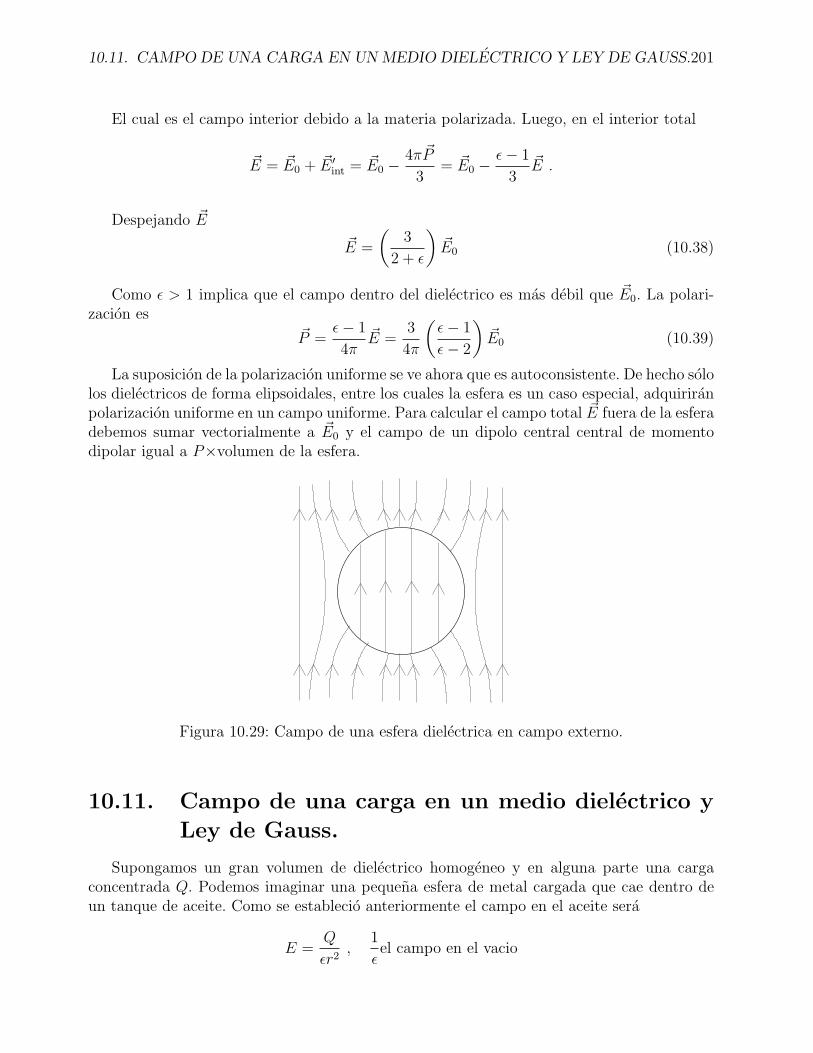
10.11. CAMPO DE UNA CARGA EN UN MEDIO DIELECTRICO Y LEY DE GAUSS.201
El cual es el campo interior debido a la materia polarizada. Luego, en el interior total
~E = ~E0 + ~E ′int = ~E0 −
4π ~P
3= ~E0 −
ε− 1
3~E .
Despejando ~E
~E =
(3
2 + ε
)~E0 (10.38)
Como ε > 1 implica que el campo dentro del dielectrico es mas debil que ~E0. La polari-zacion es
~P =ε− 1
4π~E =
3
4π
(ε− 1
ε− 2
)~E0 (10.39)
La suposicion de la polarizacion uniforme se ve ahora que es autoconsistente. De hecho sololos dielectricos de forma elipsoidales, entre los cuales la esfera es un caso especial, adquiriranpolarizacion uniforme en un campo uniforme. Para calcular el campo total ~E fuera de la esferadebemos sumar vectorialmente a ~E0 y el campo de un dipolo central central de momentodipolar igual a P×volumen de la esfera.
Figura 10.29: Campo de una esfera dielectrica en campo externo.
10.11. Campo de una carga en un medio dielectrico y
Ley de Gauss.
Supongamos un gran volumen de dielectrico homogeneo y en alguna parte una cargaconcentrada Q. Podemos imaginar una pequena esfera de metal cargada que cae dentro deun tanque de aceite. Como se establecio anteriormente el campo en el aceite sera
E =Q
εr2,
1
εel campo en el vacio

202 CAPITULO 10. CAMPOS ELECTRICOS EN LA MATERIA.
Es interesante ver como actua la Ley de Gauss∫~E · d~a = 4π
Q
ε.
¿y por que no 4πQ?, porque no es la unica carga en el interior de la “esfera de Gauss”. Elaceite esta polarizado, a pesar de ser neutro. Su carga negativa es atraıda hacia Q y su cargapositiva es repelida. Se polariza radialmente La carga neta incluyendo Q es menor que Q, esQ/ε. La carga “extrana” (Q) se le conoce como carga libre. La carga integrante del dielectricose le conoce como carga ligada. No son moviles. Puede idearse una magnitud vectorial queeste relacionada solamente con la carga libre por algo parecido a la ley de Gauss.∫
S
ε ~E · d~a = 4π
∫V
ρlibredv
div(ε ~E) = 4πρlibre
Para el campo electrico
div ~E = 4π(ρlibre + ρligada) (10.40)
div ~E = div(ε ~E) + 4π(ρligada)
div(1− ε) ~E = 4πρligada
div(ε− 1) ~E = −4πρligada
~P = χe~E (10.41)
~P =(ε− 1)
4π~E
4π ~P = (ε− 1) ~E
div ~P = −ρligada (10.42)
Se cumple siempre, la ecuacion (10.42) son promedios sobre volumenes suficientemente
grandes para que ~P y ρligada sean continuas
div ~E = 4πρlibre + 4πρligada
div ~E = 4πρlibre − 4π div ~P
div( ~E + 4π ~P ) = 4πρlibre (10.43)
Lo anterior es completamente independiente de toda relacion entre ~E y ~P . No se limita alos materiales dielectricos, en los que ~P es proporcional a ~E. Definamos el vector desplaza-miento electrico ~D por
~D = ~E + 4π ~P (10.44)

10.12. UNA MIRADA MICROSCOPICA DEL DIELECTRICO. 203
En un dielectrico isotropico, ~D = ε ~E pues la relacion
div ~D = 4πρlibre (10.45)
Se cumple en cada caso en que puedan definirse las magnitudes macroscopicas ~P , ~E y ρ.La ecuacion (10.45) puede sugerir que podemos considerar a ~D como un vector campo cuyafuente es la distribucion de carga libre ρlibre, en el mismo sentido que la distribucion de cargatotal ρ es la fuente de ~E. Esto serıa incorrecto. El campo ~E esta determinado unıvocamente(excepto por la adicion de un campo constante) por la distribucion de carga ρ debido a que,
en adicion a div ~E = 4πρ existe rot ~E = 0. En general no es cierto que rot ~D = 0. Ası que ρlibre
no es suficiente para determinar ~D. Se necesitan las condiciones de contorno en las superficiesde los distintos dielectricos. La introduccion de ~D es un artificio que, en general, no es muyutil.
A continuacion reunimos las conclusiones esenciales acerca de los campos electricos en lamateria.
La materia puede polarizarse, esta circunstancia se explica completamente, en lo querespecta al campo macroscopico por una densidad de polarizacion ~P , que es el momentodipolar por unidad de volumen. La contribucion de dicha materia a ~E es la misma que siρligada existiese en el vacıo con densidad ρligada = − div ~P .
En la superficie de una sustancia polarizada, donde hay una discontinuidad de ~P , esta sereduce a una carga superficial de densidad σ = −Pn. Anadamos una ρlibre y el campo electricoes el que producirıa en el vacıo esta distribucion total de carga.
Este es el campo macroscopico ~E dentro y fuera de la materia, entendiendo que dentrode la materia es el promedio espacial del campo microscopico verdadero. Si en un material~P es proporcional a ~E lo llamamos dielectrico.
Definimos la susceptibilidad electrica y la constante dielectrica caracterıstica de este ma-terial
χe =
∣∣∣ ~P ∣∣∣∣∣∣ ~E ∣∣∣ ε = 1 + 4πχe .
Las cargas libres sumergidas en un dielectrico dan lugar a un campo electrico que es 1/εdel que las mismas cargas producirıan en el vacıo.
10.12. Una mirada microscopica del dielectrico.
La polarizacion ~P en el dielectrico es simplemente una manifestacion, a gran escala,de los momentos dipolares electricos de los atomos y moleculas de las cuales el materialesta compuesto. Donde ~P es la densidad de momento dipolar medio, que es igual al vectormomento dipolar total por unidad de volumen promediado sobre una region suficientementegrande como para contener un gran numero de atomos. Si ~E = 0 no hay direccion privilegiada,implica ~P = 0.
Si ~E 6= 0 la polarizacion puede llevarse a cabo de dos maneras:

204 CAPITULO 10. CAMPOS ELECTRICOS EN LA MATERIA.
1. Cada atomo o molecula adquiere un momento dipolar proporcional y en la direccion de~E.
2. Si hay moleculas polares los dipolos se reorientan paralelos al campo.
Ambos efectos contribuyen a la polarizacion en la direccion de ~E, es decir P/E = χe > 0.
10.12.1. Modelo para un gas.
Consideremos el momento atomico inducido en un medio en el cual los atomos estan muyseparados. Un gas ∼ 3 × 1019 [molec/cm3]. Suponemos que el campo que actua sobre unamolecula individual es el campo promedio. Despreciando el campo producido por el dipoloinducido en una molecula cercana. Sean α la polarizabilidad de cada molecula y N el numeromedio de moleculas por cm3. El momento dipolar inducido en cada molecula es αE y lapolarizacion resultante
~P = Nα~E =⇒ χe =
∣∣∣ ~P ∣∣∣∣∣∣ ~E ∣∣∣ = Nα
La constante dielectrica ε
ε = 1 + 4πχe = 1 + 4πNα
Ejemplo: el metano (CH4) tiene un α = 2.6× 10−24 [cm3] y N ≈ 2.8× 1018 [molec/cm3]a 0 C y 1 [atm]. Evaluando ε = 1 + 4πNα = 1.00088 el mismo valor de las tablas. No es tansorprendente, α probablemente fue encontrado en base a un modelo similar.
La constante α tiene unidades de volumen y son del orden de magnitud del volumenatomico, entonces Nα = χe es igual a la fraccion del volumen del medio ocupado por losatomos. La densidad del gas comparada con la densidad de la misma sustancia en estadosolido o lıquido es aprox 1/1000. Luego, en un gas el 99.9% es espacio vacıo. Por otraparte, en un solido o lıquido las moleculas estan practicamente tocandose. La fraccion queocupan es no mucho menor que 1. Para solidos y lıquidos no polares el encontramos valor de(ε − 1)/4π ∈ [0.1, 1]. La teorıa exacta de la susceptibilidad de un solido o un lıquido no esfacil de desarrollar. Cuando los atomos estan tan juntos hasta que casi se tocan, los efectosdel atomo vecino no pueden ser despreciados.
10.12.2. Las moleculas polares.
Las moleculas con momento dipolar electrico permanente, i.e. moleculas polares, respon-den a un campo electrico tratando de alinearse paralelas a el. Si el dipolo no apunta en ladireccion del campo ~E, hay un torque ~p × ~E tendiente a alinear ~p en la direccion de ~E. Eltorque es nulo si ~p es antiparalelo al campo ~E pero el equilibrio es inestable. El torque sobre eldipolo es el torque sobre la molecula. Un estado de menor energıa habrıa sido logrado si todaslas moleculas hubieran rotado sus momentos dipolares en la direccion del campo. Mientrasalcanzan el estado de alineamiento entregaran a traves de “friccion” rotacional, energıa a suentorno.
10.13. POLARIZACION EN CAMPOS VARIABLES. 205
Pero esto no sucede. Ninguna aproximacion a la alineacion completa es intentada para“ningun” campo aplicado. ¿Por que no? La razon es esencialmente la misma de por que lasmoleculas de aire en la habitacion no las encontramos todas sobre el piso, la cual es laconfiguracion de menor energıa. Debemos pensar sobre la temperatura y la energıa termicakBT |ambiente ≈ 4× 10−14 [erg]. La energıa de elevar 5× 10−23 [g] unos metros ∼ 10−17 [erg], esdecir, 1/1000 de kBT , por eso no todas las moleculas estan en el suelo. El orden de magnitudde la fraccion alineada con el campo a una temperatura T dada es:
pE
kBT=⇒ P ≈ Np
(pE
kBT
)=Np2
kBTE
=⇒ χe =P
E=Np2
kBT
Esta estimacion produce para el agua un valor para la susceptibilidad de 3.0 siendo queel valor correcto es 6.3, a temperatura ambiente. Las interacciones con los vecinos complicanla derivacion teorica.
10.13. Polarizacion en campos variables.
Hasta ahora nosotros hemos considerado solo campos electrostaticos. Debemos ver quepasa con campos variables en el tiempo, un condensador usando corriente alterna por ejemplo.¿Los cambios en ~P marcharan con los cambios en ~E? ¿La razon P/E sera la misma, en uninstante, que en el caso estatico? Para variaciones “lentas” no esperamos cambios, que son“lentas” depende del particular proceso fısico. La polarizacion inducida y la orientacion dedipolos permanentes son dos procesos con respuestas de tiempo muy diferentes.
Para la polarizacion inducida, distorsion en la estructura electronica que involucran pe-quenas masas y estructuras muy rıgidas, la frecuencias naturales son muy altas lo que implicaperıodos del orden de 10−16 [s]. Por lo tanto, 10−14 [s] en un atomo es un tiempo largo. Porestas razones para sustancias no polares el comportamiento es practicamente el mismo concorriente continua o alterna, con frecuencias del orden de la de la luz visible. La polarizacionsigue al campo y χe es independiente de ω.
La orientacion de una molecula es un proceso muy diferente de la mera distorsion de lanube electronica. La molecula entera debe rotar y eso involucra escalas de tiempo mayores(10−11 [s] en agua). Los dipolos simplemente no pueden seguir alteraciones rapidas del campo.Para solidos los tiempos son ∼ 10−5 [s]. En este caso la constante dielectrica cae a valorestıpicos de sustancias no polares.
10.14. Corriente de carga ligada.
Si la polarizacion cambia en el tiempo hay una corriente electrica, un genuino movimientode carga. Supongamos N dipolos en un cm3 de dielectrico, y que en un dt cambia de ~p a ~p+d~plo que implica que la densidad de polarizacion ~P cambia de ~P = N~p a ~P + d~P = N(~p+ d~p).Supongamos que el cambio d~p fue consecuencia de mover una carga q un d~s en cada atomo,Lo que implica que d~p = qd~s. Durante el dt tendremos una nube de carga de densidad Nq

206 CAPITULO 10. CAMPOS ELECTRICOS EN LA MATERIA.
moviendose con velocidad ~v = d~s/dt luego ~J sera
~J = ρ~v = Nqd~s
dt= N
d~p
dt=d~P
dt
La conexion entre la razon de cambio de la polarizacion y la densidad de corriente,~J = d~P/dt es independiente del modelo. Un cambio en la polarizacion es una corriente deconduccion. Naturalmente, tal como cualquier corriente, es fuente de un campo magnetico.Si no hay otras corrientes, podrıamos escribir el rotor del campo magnetico como
rotB =1
c
∂ ~E
∂t+
4π
c
∂ ~P
∂t
La unica diferencia con una densidad de corriente “ordinaria” de conduccion y la densidadde corriente ∂ ~P/∂t es que la primera involucra carga libre en movimiento y la otra carga ligadaen movimiento. Hay razones para hacer la distincion: No podemos tener una corriente de cargaligada estacionaria, es decir, que una vez que se establezca no cambie. Usualmente se prefiereconsiderar por separado ambas corrientes, manteniendo el sımbolo ~J para las densidades decorrientes de carga libre solamente. Ası la ecuacion de Maxwell queda
rot ~B =1
c
(∂ ~E
∂t+ 4π
∂ ~P
∂t+ 4π ~J
)El penultimo termino corresponde a la densidad de corriente ligada y el ultimo a la
densidad de corriente libre. En un medio dielectrico ~E+4π ~P = ε ~E, luego podemos compactarla ecuacion
rot ~B =1
c
(ε∂ ~E
∂t+ 4π ~J
)Usualmente se introduce ~D = ~E + 4π ~P , el vector desplazamiento
rot ~B =1
c
(∂ ~D
∂t+ 4π ~J
)
El termino ∂ ~D/∂t se refiere como corrientes de desplazamiento. La parte que involucra
∂ ~P/∂t representa una “honesta” corriente de conduccion, con movimiento real de carga. Launica parte de la densidad de corriente total que no es simplemente carga en movimiento, esla parte ∂ ~E/∂t, la corriente de desplazamiento en el vacıo.
rot ~B =1
c
(∂ ~E
∂t+ 4π
∂ ~P
∂t+ 4π ~J
)El primer termino corresponde a una densidad de corriente de desplazamiento en el vacıo.
El segundo a una densidad de corriente de carga ligada. El tercero a una densidad de corrientede carga libre. La distincion entre carga libre y carga ligada puede no ser una tarea facil.
Este ejemplo muestra en el mundo atomico la distincion entre carga libre y carga ligadaes mas o menos arbitraria, ası tambien la densidad de polarizacion. El momento dipolarmolecular esta bien definido solo cuando las moleculas son identificables y uno puede decireste atomo pertenece a esta molecula o no, en muchos cristales esta distincion no es clara.

10.15. UNA ONDA ELECTROMAGNETICA EN UN DIELECTRICO. 207
P P
carga positiva libre carga negativa libre
carga negativa libre carga positiva libre
Figura 10.30: Dielectrico, identificacion de la carga libre y ligada.
10.15. Una onda electromagnetica en un dielectrico.
Consideremos campos electricos y magneticos en un medio dielectrico ilimitado. El dielectri-co es un aislador perfecto, es decir, no hay corriente libre, ~J = 0. Si no hay carga libre perohay carga ligada implicarıa que la divergencia del campo electrico es distinta de cero. Siacordamos considerar la divergencia nula entonces las densidades de carga tanto libre comoligada seran cero.
Las ecuaciones de Maxwell quedan
rot ~E = −1
c
∂ ~B
∂tdiv ~E = 0 (10.46)
rot ~B = +ε
c
∂ ~E
∂tdiv ~B = 0 (10.47)
Probamos soluciones de la forma
~E = zE0 sen(ky − ωt)
~B = xB0 sen(ky − ωt)
El angulo (ky − ωt) es llamado la fase de la onda. La razon ω/k es la velocidad de fase,en este caso la velocidad de la onda. Si derivamos
rot ~E = +xE0k cos(ky − ωt)∂E
∂t= −zE0ω cos(ky − ωt)
rot ~B = −zB0k cos(ky − ωt)∂B
∂t= −xB0ω cos(ky − ωt)
Sustituyendo encontramos
ω
k=
c√ε
y B0 =√εE0

208 CAPITULO 10. CAMPOS ELECTRICOS EN LA MATERIA.
La velocidad de la onda difiere de la velocidad de la luz en el vacıo por un factor 1/√ε.
Las amplitudes de los campos electrico y magnetico, que son iguales en el vacıo, difieren enun factor
√ε, siendo menor el electrico. ~E ⊥ ~B se mantiene y viajan en direccion ~E× ~B, esto
se mantiene. νvacio = νmedio lo que implica que λmedio < λvacio, ya que λν = v. La luz viajandoen un vidrio, es un ejemplo de lo anteriormente descrito. Definimos el ındice de refraccion ncomo n=c/v, es decir, n =
√ε.

Capıtulo 11
Campo magneticos en la materia.
11.1. Introduccion.
Los contenidos del capıtulo de Campos magneticos en la materia son:
¿Como diferentes sustancias responden a un campo magnetico?
La ausencia de “carga” magnetica.
El campo de un loop de corriente.
La fuerza sobre un dipolo en un campo externo.
Corrientes electricas en los atomos.
Espın electronico y momento magnetico.
Susceptibilidad magnetica.
Campo magnetico causado por materia magnetizada.
Campo de un magneto permanente.
Corrientes libres y el campo ~H.
Ferromagnetismo.
11.2. ¿Como diferentes sustancias responden a un cam-
po magnetico?
Supongamos que construimos un solenoide de 10 [cm] de diametro interior y 40 [cm] delargo. Su diametro externo es de 40 [cm], la mayor parte del espacio esta ocupado por lasvueltas del alambre de Cobre. Veamos un esquema...
209
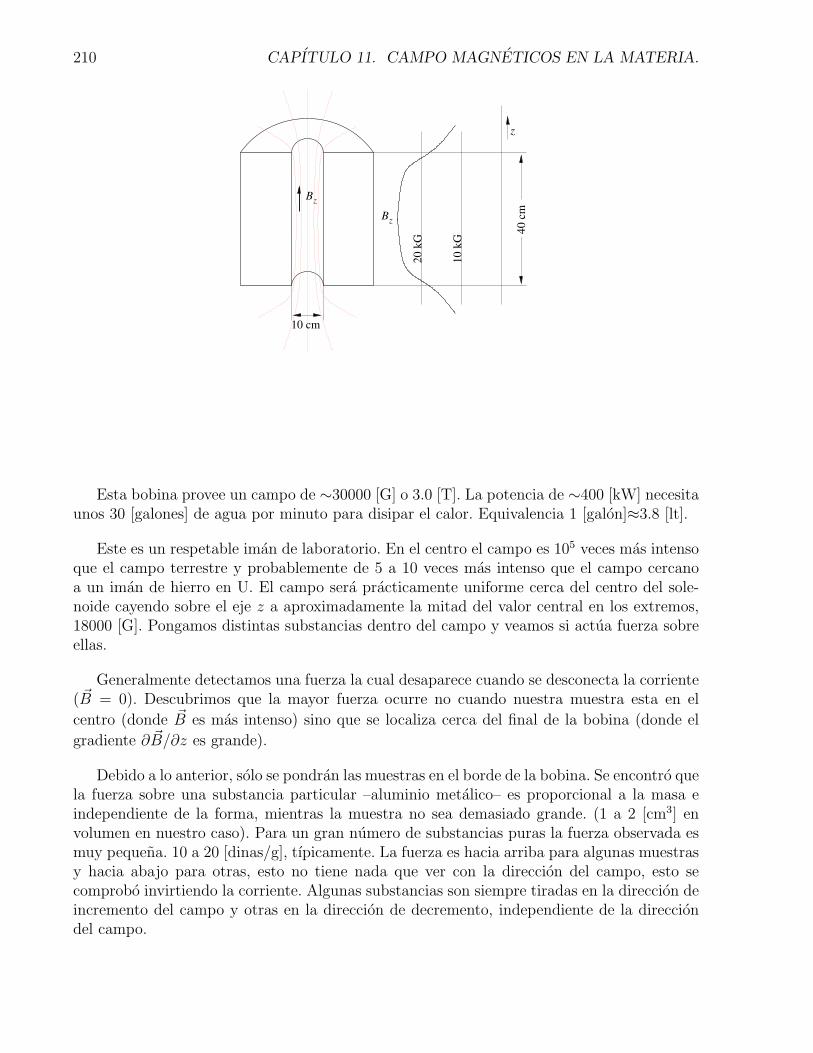
210 CAPITULO 11. CAMPO MAGNETICOS EN LA MATERIA.
Bz
Bz
10 cm
20 k
G
10 k
G
z
40 c
m
Esta bobina provee un campo de ∼30000 [G] o 3.0 [T]. La potencia de ∼400 [kW] necesitaunos 30 [galones] de agua por minuto para disipar el calor. Equivalencia 1 [galon]≈3.8 [lt].
Este es un respetable iman de laboratorio. En el centro el campo es 105 veces mas intensoque el campo terrestre y probablemente de 5 a 10 veces mas intenso que el campo cercanoa un iman de hierro en U. El campo sera practicamente uniforme cerca del centro del sole-noide cayendo sobre el eje z a aproximadamente la mitad del valor central en los extremos,18000 [G]. Pongamos distintas substancias dentro del campo y veamos si actua fuerza sobreellas.
Generalmente detectamos una fuerza la cual desaparece cuando se desconecta la corriente( ~B = 0). Descubrimos que la mayor fuerza ocurre no cuando nuestra muestra esta en el
centro (donde ~B es mas intenso) sino que se localiza cerca del final de la bobina (donde el
gradiente ∂ ~B/∂z es grande).
Debido a lo anterior, solo se pondran las muestras en el borde de la bobina. Se encontro quela fuerza sobre una substancia particular –aluminio metalico– es proporcional a la masa eindependiente de la forma, mientras la muestra no sea demasiado grande. (1 a 2 [cm3] envolumen en nuestro caso). Para un gran numero de substancias puras la fuerza observada esmuy pequena. 10 a 20 [dinas/g], tıpicamente. La fuerza es hacia arriba para algunas muestrasy hacia abajo para otras, esto no tiene nada que ver con la direccion del campo, esto secomprobo invirtiendo la corriente. Algunas substancias son siempre tiradas en la direccion deincremento del campo y otras en la direccion de decremento, independiente de la direcciondel campo.

11.2. ¿COMO DIFERENTES SUSTANCIAS RESPONDEN A UN CAMPO MAGNETICO?211
Substancia Formula Fuerza [dinas]
Agua H2O -22.0Cobre Cu -2.6Cloruro de Sodio NaCl -15.0Azufre S -16.0Diamante C -16.0Grafito C -110.0Nitrogeno lıquido N2 (78 K) -10.0
Substancia Formula Fuerza [dinas]
Sodio Na +20.0Aluminio Al +17.0Cloruro de Cobre CuCl2 +280.0Sulfato de Niquel NiSO2 +830.0Oxıgeno lıquido O2 (90 K) +7500.0
Substancia Formula Fuerza [dinas]
Hierro Fe +400000Magnetita Fe3O4 +120000
El signo positivo en la fuerza indica una fuerza hacia adentro y el negativo una haciaafuera. Sobre 1 [g] a T = 20 C, salvo que se indique.
Hay diferencias esenciales entre el comportamiento de las diferentes substancias, por ejem-plo entre el Hierro y la Magnetita. Si variamos el campo a 1/2 del original, para muestrasno-ferro la fuerza se reduce a 1/4 por lo tanto F ∝ B2, sin embargo, para las substanciasferromagneticas se reduce solo a 1/2 o menos, F ∝ B. La mayorıa de los compuestos inorgani-cos y practicamente todos los compuestos organicos son diamagneticos (H2O, Cu, NaCl, S,C, N2). De hecho el diamagnetismo es una propiedad de cada atomo y molecula. Cuando seobserva un comportamiento contrario es porque el diamagnetismo ha sido superado por unefecto mas fuerte.
La substancias que son atraıdas hacia la region de campo mas fuerte son llamadas para-magneticas. Para algunos metales como el Al, Na y muchos otros, el paramagnetismo es unpoco mayor que el diamagnetismo comun. En otros materiales, NiSO4 y CuCl2 el paramag-netismo es mucho mayor que el diamagnetismo. Las cosas no son del todo simples: El Cu esdiamagnetico, el CuCl2 es paramagnetico, el Na es paramagnetico y el NaCl es diamagnetico.
Finalmente, substancias como el hierro y la magnetita son llamadas ferromagneticas.Algunas aleaciones de Fe y metales como el Co y el Ni tambien presentan ferromagnetismo.
212 CAPITULO 11. CAMPO MAGNETICOS EN LA MATERIA.
Las tareas que se nos presentan para este capıtulo:
Desarrollar un tratamiento a gran escala de los fenomenos que involucran materia mag-netizada, en la cual la materia misma es caracterizada por unos pocos parametros yla relacion entre ellos es determinada experimentalmente. Una teorıa fenomenologica,mas descriptiva que explicativa.
Tratar de entender, al menos en forma general el origen atomico de varios efectosmagneticos.
Los fenomenos magneticos, mas que los dielectricos, una vez entendidos revelan hechosbasicos de la estructura atomica.
11.3. La ausencia de “carga” magnetica.
El campo magnetico de una barra magnetizada se parece mucho al campo externo de unabarra electricamente polarizada. Es decir, una barra que tiene un exceso de carga positivaen un extremo y un exceso de carga negativa en el otro. Se podrıa pensar que el campomagnetico tiene fuentes las cuales se relacionan con el del mismo modo que la carga electricalo hace con el campo electrico.
Entonces un extremo de nuestra barra magnetizada tendrıa un exceso de carga de un tipoy el otro extremo del otro tipo. Podemos llamarla “cargas norte” (+) y “cargas sur” (-) conel campo magnetico dirigiendose de (+) a (-). La idea suena bien, incluso las ecuaciones de
Maxwell quedarıan mas simetricas entre ~B y ~E. Por ejemplo, ~∇ · ~B = 4πη, donde η serıa ladensidad de cargas magneticas.
El problema es que las cosas no son ası. La naturaleza no uso esta posibilidad. El mundoes asimetrico en el sentido que no hay carga magnetica. No existen los monopolos magneticos.Y, por lo tanto, menos se ha observado un exceso de uno de estos tipos de carga magneti-ca. Si tal monopolo magnetico existiese, lo podrıamos detectar. Se acelerarıa en un campouniforme. Uno de estos monopolos viajando producirıa una corriente magnetica y esta de-berıa estar rodeada por un campo electrico de rotor no nulo, de la misma manera que uncampo magnetico rodea una corriente electrica. Con estrategias basadas sobre esta propiedadse han buscado los monopolos en muchos experimentos. La busqueda fue renovada cuandolos desarrollos en Fısica de partıculas sugirieron que el Universo deberıa contener al menosunos pocos monopolos remanentes del Big Bang. Los monopolos no han sido detectados yhay evidencia de que si existiesen serıan excesivamente escasos. Si se prueba la existencia deun monopolo habrıan profundas consecuencias, pero no alterarıa el hecho que en la materia,como la conocemos, la unica fuente del campo magnetico son las corrientes electricas, es decir
div ~B = 0 (En todas partes).
Una alternativa a la carga magnetica son las ideas de Ampere. Tal ideas nos dices que todoel magnetismo en la materia serıa consecuencia de multiples y pequenos anillos de corrientesdistribuidos a traves de la substancia. Comenzaremos estudiando el campo magnetico de unloop en un punto lejano del loop.

11.4. EL CAMPO DE UN LOOP DE CORRIENTE. 213
11.4. El campo de un loop de corriente.
Consideremos un loop de corriente no necesariamente circular que yace sobre el plano xy.Una corriente I fluye a traves de el. Nos interesa el campo creado por esa corriente, pero nocerca, sino el campo distante (en P1). De manera tal que r1 que cualquier distancia delsistema. Para simplificar ubicamos P1 en el plano yz pero luego levantaremos esta restriccion.
P1
A
y1
z1
r’12 r
12
2y
dx2
r1
P2 dx2
2dl
P’22dl’
III
x
y
z
θ
Calculemos el potencial vector ~A en el punto P1, es decir, ~A(0, y, z) y luego tomamos elrotor.
~A(0, y, z) =I
c
∮loop
d~2r12
Considerando la variacion de r12 a lo largo del loop r12 ≈ r1 − y2 sen θ
r12
Pa 1Pa 1
r1
y2senθ
y2
θ
θy
z
Veamos los dl2, dl′2, los dy2 son iguales y opuestos, cancelando su contribucion a la integral
sobre el loop completa.

214 CAPITULO 11. CAMPO MAGNETICOS EN LA MATERIA.
x2
y2
x2dy2 positivo
positivo
x2dy2 negativo
negativo
Lo anterior implica que ~A no tiene componente y en P1, obviamente no tendra unacomponente z, el camino no la tiene, luego
~A(0, y1, z1) = xI
c
∫dx2
r12.
A primer orden
1
r12≈ 1
r1
(1 +
y2 sen θ
r1
),
luego
~A(0, y1, z1) = xI
cr1
∫ (1 +
y2 sen θ
r1
)dx2 ,
r1 y θ son constantes. Obviamente∫dx2 a lo largo del loop desaparece, ahora
∫y2dx2 es justo
el area del loop.
~A(0, y1, z1) = xI sen θ
cr21
× [area del loop] ,
Aquı un punto simple pero crucial, ya que la forma del loop no interesa, nuestra restriccionde P1 en yz no puede hacer una diferencia esencial. Ası el vector ~A de un loop de corrientede cualquier forma a una distancia r del loop la cual es mucho mayor que el tamano del loop,es un vector perpendicular al plano que contiene ~r y la n del plano del loop.Cuya magnitudes
A =Ia sen θ
cr2
donde a es el area de loop.
Este vector potencial es simetrico en torno al eje del loop esto implica que ~B sera simetricotambien respecto al mismo eje. La razon de considerar la region lejana es que el detalle de laforma del loop no tiene relevancia. Todos los loops con el mismo producto corriente por areaproduciran el mismo campo lejano.
Nosotros llamamos al productoIa
cel momento dipolar magnetico del loop de corriente y
lo denotamos por ~m

11.4. EL CAMPO DE UN LOOP DE CORRIENTE. 215
m = aIc
I
I
a
La expresion para el momento dipolar magnetico ~m en terminos de la corriente que circulaI y el area del loop a es:
~m =I
c~a
El sentido es con la regla de la mano derecha respecto al flujo de corriente. Podemos escribir~A en terminos de ~m
~A =~m× r
r2
donde r es el vector unitario en la direccion: desde el loop al punto P . Notemos que ~A tienela direccion de I. Veamos un esquema. . .
x
z
y
x2+y2
m
Ax Ay
A
x y
z
I
rθ
φ
φ
A =m sen θ
r2=m√x2 + y2
r3

216 CAPITULO 11. CAMPO MAGNETICOS EN LA MATERIA.
Por componentes
Ax = A
(−y√x2 + y2
)=−myr3
Ay = A
(x√
x2 + y2
)=mx
r3
Az = 0
Evaluemos ~B para un punto en el plano xy
Bx =(~∇× ~A
)x
=∂Az
∂y− ∂Ay
∂z
= − ∂
∂z
(mx
(x2 + y2 + z2)3/2
)=
3mxz
r5
By =(~∇× ~A
)y
=∂Ax
∂z− ∂Az
∂x
=∂
∂z
(−my
(x2 + y2 + z2)3/2
)=
3myz
r5
Finalmente la componente z
Bz =(~∇× ~A
)z
=∂Ay
∂x− ∂Ax
∂y
= m
(−2x2 + y2 + z2
(x2 + y2 + z2)5/2+
x2 − 2y2 + z2
(x2 + y2 + z2)5/2
)=
3z2 − r2
r5
En el plano xz, y = 0, ademas, sen θ = x/r, cos θ = z/r. Las componentes del campo son:
Bx =3m sen θ cos θ
r3
By = 0
Bz =m(3 cos2 θ − 1)
r3
Este campo es identico al campo ~Exz de un dipolo ~p.
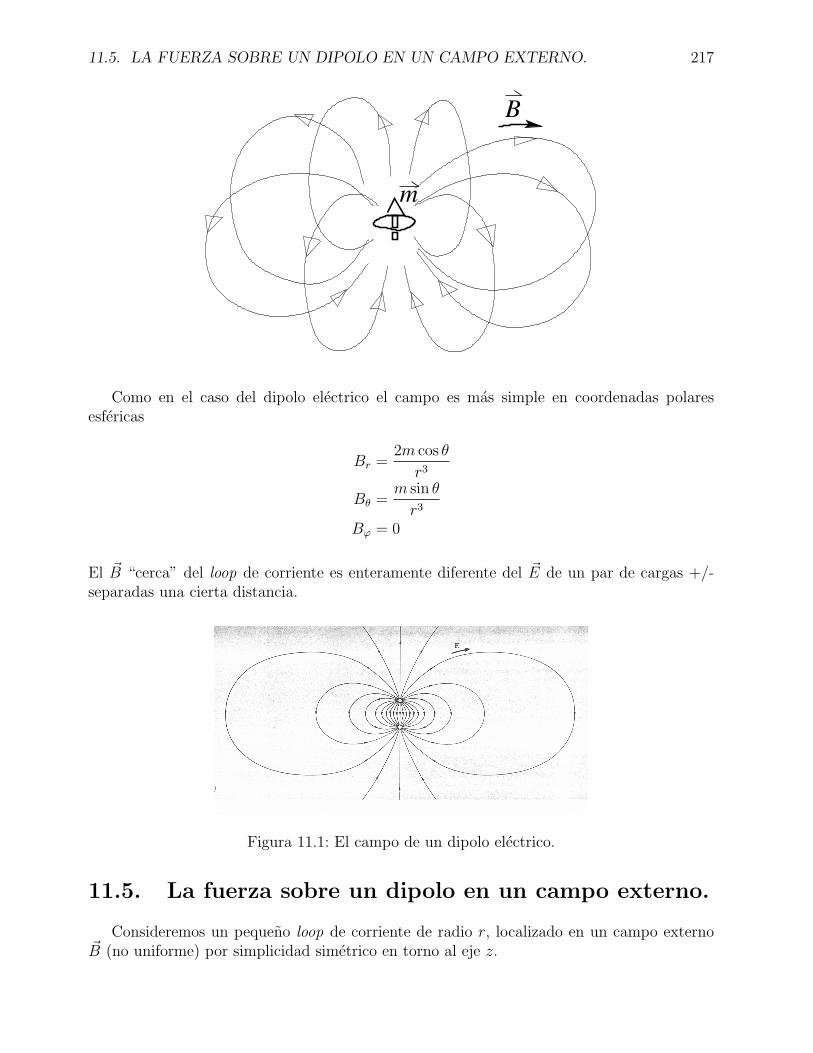
11.5. LA FUERZA SOBRE UN DIPOLO EN UN CAMPO EXTERNO. 217
B
m
Como en el caso del dipolo electrico el campo es mas simple en coordenadas polaresesfericas
Br =2m cos θ
r3
Bθ =m sin θ
r3
Bϕ = 0
El ~B “cerca” del loop de corriente es enteramente diferente del ~E de un par de cargas +/-separadas una cierta distancia.
Figura 11.1: El campo de un dipolo electrico.
11.5. La fuerza sobre un dipolo en un campo externo.
Consideremos un pequeno loop de corriente de radio r, localizado en un campo externo~B (no uniforme) por simplicidad simetrico en torno al eje z.

218 CAPITULO 11. CAMPO MAGNETICOS EN LA MATERIA.
Figura 11.2: El campo de un dipolo magnetico.
Br
Bz Bm
x
y
z
I
r
La fuerza sobre el anillo ( Id~× ~B/c )
F =2πrIBr
c
El flujo a traves de un pequeno cilindro (div ~B = 0)
z+ z∆
r
z
z
El flujoπr2 [−Bz(z) +Bz(z + ∆z)] + 2πrBr∆z = 0
πr2∂Bz
∂z∆z + 2πrBr∆z = 0 =⇒ Br = −r
2
∂Bz
∂z.
Ası que la fuerza (hacia abajo)
F =2πrI
c
r
2
∂Bz
∂z=πr2I
c
∂Bz
∂z= m
∂Bz
∂z.

11.6. CORRIENTES ELECTRICAS EN LOS ATOMOS. 219
Si el momento dipolar es paralelo al campo externo entonces la fuerza actua en la direccionde incremento. Si el momento dipolar es antiparalelo al campo externo entonces la fuerzaactua en la direccion de decrecimiento. Si el campo externo es uniforme entonces no hayfuerza. La situacion mas general es
~F = ~m · ~∇( ~B)
Por componentes
Fx = ~m · ~∇Bx
Fy = ~m · ~∇By
Fz = ~m · ~∇Bz
A la luz de estos resultados podemos interpretar los datos obtenidos en el experimentoinicial.
Para las muestras que eran atraıdas al solenoide ~m es paralelo a ~B.
Para las muestras que eran repelidas del solenoide ~m es antiparalelo a ~B.
Como el momento dipolar resulta proporcional a ~B tenemos B × ∂B/∂z para la fuerzatanto en el caso de los diamagneticos como para los paramagneticos. Los materiales ferro-magneticos deben tener ~m independiente de ~B.
11.6. Corrientes electricas en los atomos.
Usaremos un modelo de Bohr simplificado para el atomo que nos permita explicar eldiamagnetismo.
e−r
v
+
En este caso el momento dipolar electrico instantaneo al promediarse sobre t se anula.Evaluemos la corriente
I =cantidad de carga
tiempo= e
v
2πr
=ev
2πr
La corriente fluye opuesta a la direccion de ~v. El dipolo magnetico
m =πr2I
c=evr
2c.

220 CAPITULO 11. CAMPO MAGNETICOS EN LA MATERIA.
Usando el momento angular L = mevr tenemos
~m =−e
2mec~L
Si hacemos el cocientemomento magnetico
momento angular=
−e2mec
.
La anterior es conocida como razon orbital magnetomecanica.¿Por que no notamos el campo magnetico de todos los e− orbitando en todos los atomos
de cada substancia?Debe haber cancelacion mutua. En un pequeno trozo de materia deben haber tantos
electrones en un sentido como en el otro y no hay un unico eje axial. Podemos visualizar untrozo de materia, en ausencia de campo externo, como conteniendo electrones girando condiversos vectores ~L y ~m (asociados), distribuidos en todas direcciones. Si consideramos lasorbitas aproximadamente paralelas al plano xy, hay ~m ↓= ~m ↑.
¿Que le sucede a una de estas orbitas cuando activamos un campo ~B en la direccion z?Analizaremos el sistema mas que como un atomo como un sistema electromecanico. La
fuerza centrıpeta
F0 =Mv2
0
r(B = 0) .
Creamos un campo ~B en (z) uniforme en el espacio y constante en el tiempo. Mientras
el campo crece a razon d ~B/dt se inducira un campo electrico ~E a lo largo del camino.
F0v0
mv02
0F = r
E E
E
EEE
E
E
r
carga qmasa m
B=0 B=0
Para encontrar la magnituddΦ
dt= πr2dB
dt.
Calculamos la integral cerrada del campo electrico∮~E · ~ds =
πr2
c
dB
dt= 2πrE =⇒ E =
r
2c
dB
dt.

11.6. CORRIENTES ELECTRICAS EN LOS ATOMOS. 221
A pesar de haber ignorado el signo es facil ver que ~E acelerara a la carga, si q es una cargapositiva. Con el radio fijo qr/2Mc es una cte. Denotemos por ∆v el cambio de velocidad enel proceso de conectar el campo de cero a B1.
∆v =
∫ v0+∆v
v0
dv =qr
2Mc
∫ B1
o
dB =qrB1
2Mc. (11.1)
Independiente de la rapidez del cambio.
El incremento de la rapidez de la carga en el estado final significa un incremento (haciaarriba) del momento magnetico ~m. Una carga negativa sera desacelerada, bajo circunstanciassimilares, lo cual traerıa un decremento, hacia abajo, del momento magnetico. En ambos casosla aplicacion de un campo ~B1 origino un cambio en el momento magnetico opuesto al campo.El cambio en el momento magnetico
∆~m = − q2r2
4Mc2~B1 . (11.2)
En el ejemplo anterior, hemos forzado a r a ser constante usando una cuerda de largo fijo.Veamos como ha cambiado la tension en la cuerda. Supondremos que B1 es suficientementepequeno para que ∆v v0. En el estado final
F1 =M(v0 + ∆v)2
r≈ Mv2
0
r+
2Mv0∆v
r,
despreciando terminos proporcionales a (∆v)2.Pero ahora el campo magnetico provee una fuerza hacia el centro, q(v0+∆v)B1/c. Usando
(11.1) para expresar B1 en terminos ∆v luego la fuerza sera (q(v0 + ∆v)/c)((2Mc∆v)/r).Evaluando a primer orden en ∆v/v0 es 2Mv0∆v/r que es justo lo que se necesitara paraevitar cualquier demanda extra de la cuerda. La tension en el cuerda no cambia, este resultado(11.2) es valido para cualquier fuerza no importa como varıe con el radio.
Consideremos un e− en un atomo, donde M = me y q = −e con una orbita de radio r.
∆m
B1
= − e2r2
4mec2[cm3] .
Es equivalente a la polarizabilidad electrica α. La constante e2/mc2 ≈ 2.8 × 10−13 esconocida como el radio clasico del electron. Para r usamos el radio de Bohr ∼ 0.53×10−8 [cm].Luego
∆m
B= 2× 10−30 [cm3] .
Es 5 a 6 ordenes de magnitud menor que una tıpica polarizabilidad electrica. Calculemosel ∆m para nuestro caso con 3× 1023 electrones por gramo y un campo 1.8× 104 [gauss]. Lavariacion de momento magnetico
∆m = (3× 1023)(2× 10−30)(1.8× 104)
= 8.4× 10−3 [cm3-gauss]
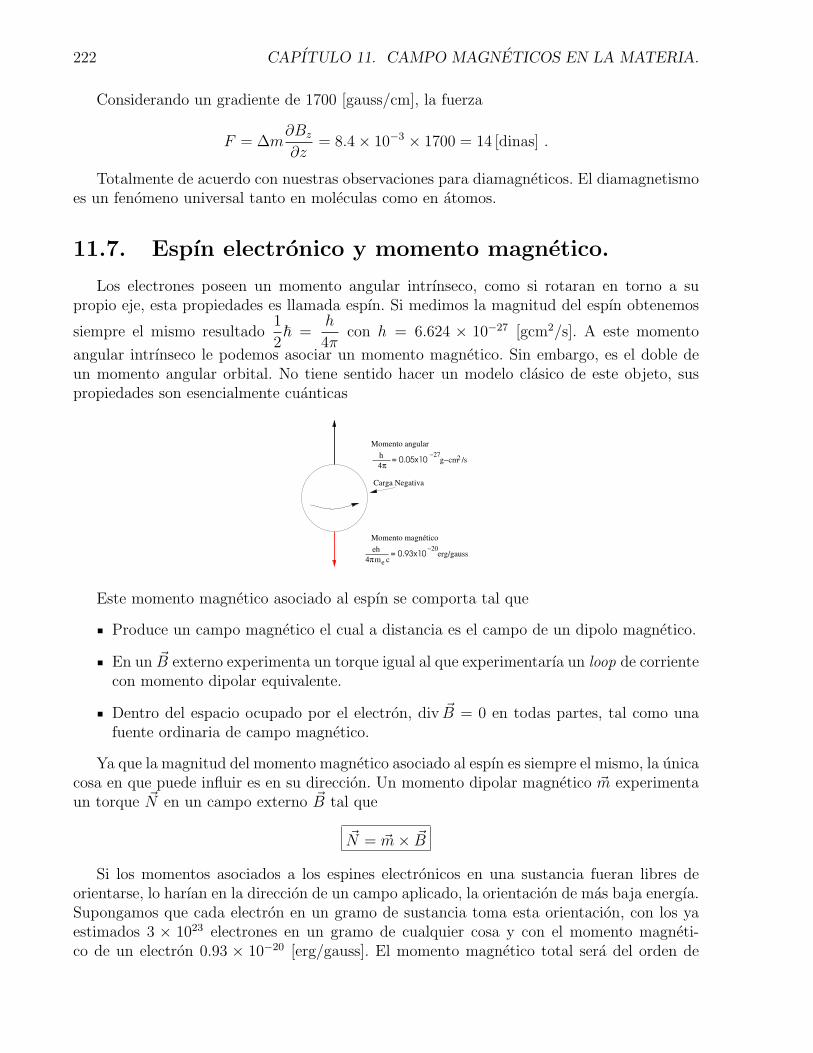
222 CAPITULO 11. CAMPO MAGNETICOS EN LA MATERIA.
Considerando un gradiente de 1700 [gauss/cm], la fuerza
F = ∆m∂Bz
∂z= 8.4× 10−3 × 1700 = 14 [dinas] .
Totalmente de acuerdo con nuestras observaciones para diamagneticos. El diamagnetismoes un fenomeno universal tanto en moleculas como en atomos.
11.7. Espın electronico y momento magnetico.
Los electrones poseen un momento angular intrınseco, como si rotaran en torno a supropio eje, esta propiedades es llamada espın. Si medimos la magnitud del espın obtenemos
siempre el mismo resultado1
2~ =
h
4πcon h = 6.624 × 10−27 [gcm2/s]. A este momento
angular intrınseco le podemos asociar un momento magnetico. Sin embargo, es el doble deun momento angular orbital. No tiene sentido hacer un modelo clasico de este objeto, suspropiedades son esencialmente cuanticas
erg/gauss
g−cm2 /s
em4π c
Momento angular
Carga Negativa
Momento magnético−20
h4π
eh = 0.93x10
= 0.05x10−27
Este momento magnetico asociado al espın se comporta tal que
Produce un campo magnetico el cual a distancia es el campo de un dipolo magnetico.
En un ~B externo experimenta un torque igual al que experimentarıa un loop de corrientecon momento dipolar equivalente.
Dentro del espacio ocupado por el electron, div ~B = 0 en todas partes, tal como unafuente ordinaria de campo magnetico.
Ya que la magnitud del momento magnetico asociado al espın es siempre el mismo, la unicacosa en que puede influir es en su direccion. Un momento dipolar magnetico ~m experimentaun torque ~N en un campo externo ~B tal que
~N = ~m× ~B
Si los momentos asociados a los espines electronicos en una sustancia fueran libres deorientarse, lo harıan en la direccion de un campo aplicado, la orientacion de mas baja energıa.Supongamos que cada electron en un gramo de sustancia toma esta orientacion, con los yaestimados 3 × 1023 electrones en un gramo de cualquier cosa y con el momento magneti-co de un electron 0.93 × 10−20 [erg/gauss]. El momento magnetico total sera del orden de
11.8. SUSCEPTIBILIDAD MAGNETICA. 223
2700 [ergs/gauss]. La fuerza sobre nuestra muestra, en nuestra bobina con un gradiente decampo de 1700 [gauss/cm] deberıa ser 4.6×106 [dinas]. Obviamente esto es mucho mayor quelas fuerzas registradas para cualquiera de las muestras paramagneticas. Nuestras suposicionesfallan en dos aspectos:
Los momentos de los espines no son todos libres de orientarse.
La agitacion termica previene el alineamiento perfecto de los momentos de los espinesque son libres de alinearse.
En la mayorıa de los atomos y moleculas los electrones estan asociados en pares, con losespines apuntados en direcciones opuestas. Lo cual cancela el momento magnetico. La granmayorıa de las moleculas es puramente diamagnetica. Una pocas moleculas contienen unnumero impar de electrones, tal que el momento no se cancela. (oxido nıtrico NO, 15 e− esparamagnetico) La molecula de oxıgeno contiene 16 electrones, pero su estructura electronicaes tal que no permite la cancelacion de los momentos magneticos. En un atomo los electro-nes mas internos estan generalmente apareados y si hay electrones externos desapareados amenudos se aparean con los electrones de los atomos vecinos cuando forman un compuesto ocristal. Ciertos atomos contienen electrones con espines desapareados los cuales se mantienenrelativamente libres para orientarse con un campo a pesar de estar empaquetados con otrosatomos. Un importante ejemplo de este tipo de atomos son el hierro, cobalto y el nıquel.Otro grupo de elementos con esta propiedad son las tierras raras en torno al gadolinio. Com-puestos y aleaciones de estos elementos son generalmente paramagneticos y en algunos casosferromagneticos. El numero de espines electronicos involucrados en el paramagnetismo estıpicamente uno o dos por atomo. La agitacion termica tiende siempre a crear una distribu-cion al azar en las direcciones de los espines. La situacion es similar a la que estudiamos condipolos electricos a una cierta temperatura. La fraccion alineada mB/kBT , luego el momentomagnetico total resultante de aplicar un campo B es (Nm2/kBT )B donde N es el numerode dipolos. Evaluando esto para nuestras condiciones encontramos que la fraccion alineadaes muy pequena, lo que explica las diferencias con lo calculado anteriormente. Solo a bajatemperatura (1 K) la fraccion alineada sera significativa (cercana a la unidad). Realmente elparamagnetismo es mas impresionante e interesante a muy baja temperatura, en contrastecon la polarizacion electrica. Los dipolos electricos a baja temperatura estan completamentecongelados en sus posiciones incapaces de cualquier reorientacion. Los momentos de espınelectronico estan aun notablemente libres.
11.8. Susceptibilidad magnetica.
Hemos visto que tanto las sustancias diamagneticas como paramagneticas desarrollanun momento magnetico proporcional al campo aplicado. Al menos esto es verdadero parala mayorıa de las condiciones. A muy baja temperatura y con campos fuertes el momentoparamagnetico inducido se aproxima a un valor lımite cuando el campo es incrementado.Dejando de lado este efecto de saturacion, la relacion entre momento y campo aplicado eslineal. Tal que podemos caracterizar las propiedades magneticas de una sustancia por la razonde momento inducido y de campo aplicado. Esta razon es llamada susceptibilidad magnetica.

224 CAPITULO 11. CAMPO MAGNETICOS EN LA MATERIA.
Dependiendo de si nosotros elegimos 1 [g] de material o 1 [cm3] de material o 1 [mol],nosotros definimos la susceptibilidad especıfica, de volumen o molar. El momento magneticopor unidad de volumen es llamado polarizacion magnetica o magnetizacion. Usaremos elsımbolo ~M . Ambos campos, ~M y ~B, tienen iguales dimensiones. Si definimos la susceptibilidadmagnetica de volumen, denotada por χm a traves de la relacion
~M = χm~B
La susceptibilidad es un numero adimensional, negativo para las sustancias diamagneticasy positivo para las paramagneticas. Para la contribucion paramagnetica, si hay alguna, a lasusceptibilidad, denotemosla χpm, tenemos una expresion analoga a la del capıtulo pasado
χpm =Nm2
kBT
Por su puesto la susceptibilidad completa χm incluye la siempre presente contribucionparamagnetica, la cual es negativa.
11.9. Campo magnetico causado por materia magneti-
zada.
Un bloque de material que contiene, uniformemente distribuida a traves del volumen,un gran numero de momentos dipolares atomicos todos apuntado en la misma direccion, esdecir, uniformemente magnetizada. El vector magnetizacion ~M es simplemente el productodel numero de dipolos orientados por unidad de volumen y el momento magnetico ~m de cadadipolo. No nos interesa como estos dipolos se mantienen orientados. Lo que nos interesa es elcampo que producen. Consideremos primero una tajada de material con espesor dz rebanadaperpendicular a la direccion de magnetizacion. La tajada puede ser dividida en pequenabaldosas. Cada una de las baldosas con area superficial da conteniendo un momento dipolartotal Mdadz. El campo magnetico que produce esta baldosa en todos los puntos distantes(distantes comparados con el tamano de la baldosa) es exactamente el mismo que producirıacualquier dipolo con el mismo momento magnetico. Podrıamos construir un un dipolo esafuerza doblando una cinta conductora de ancho dz en la forma de la baldosa y haciendocircular a traves de este loop una corriente I = Mcdz. Tal que el momento dipolar del loopes:
m =I
c× area =
Mcdz
cda = Mdadz ,
con la misma forma de la baldosa.
Substituyamos por estos loops de corriente cada baldosa en el tajada. La corriente es lamisma en todos ellos y por tanto en los contornos interiores se cancela. Todos los loops sonequivalentes a una simple cinta por el borde exterior conduciendo una corriente Mcdz.
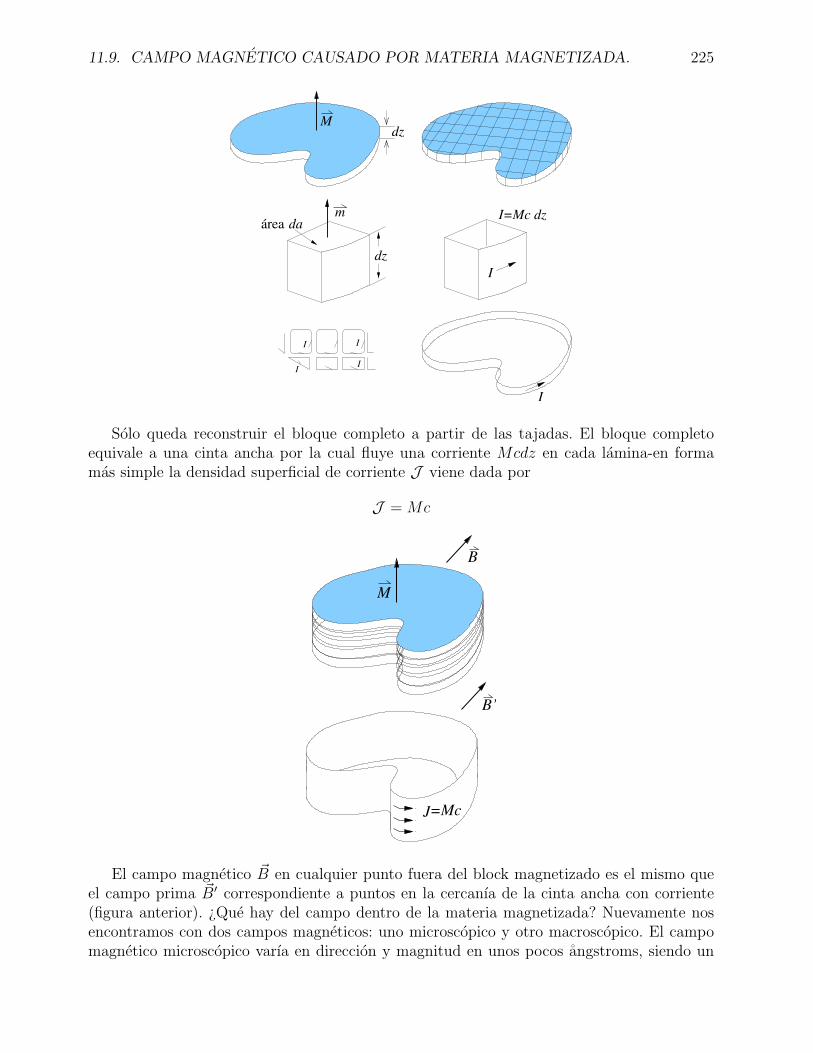
11.9. CAMPO MAGNETICO CAUSADO POR MATERIA MAGNETIZADA. 225
dzM
m
dz
área da
I
II
I
I
I=Mc dz
I
Solo queda reconstruir el bloque completo a partir de las tajadas. El bloque completoequivale a una cinta ancha por la cual fluye una corriente Mcdz en cada lamina-en formamas simple la densidad superficial de corriente J viene dada por
J = Mc
M
B
B’
=McJ
El campo magnetico ~B en cualquier punto fuera del block magnetizado es el mismo queel campo prima ~B′ correspondiente a puntos en la cercanıa de la cinta ancha con corriente(figura anterior). ¿Que hay del campo dentro de la materia magnetizada? Nuevamente nosencontramos con dos campos magneticos: uno microscopico y otro macroscopico. El campomagnetico microscopico varıa en direccion y magnitud en unos pocos angstroms, siendo un
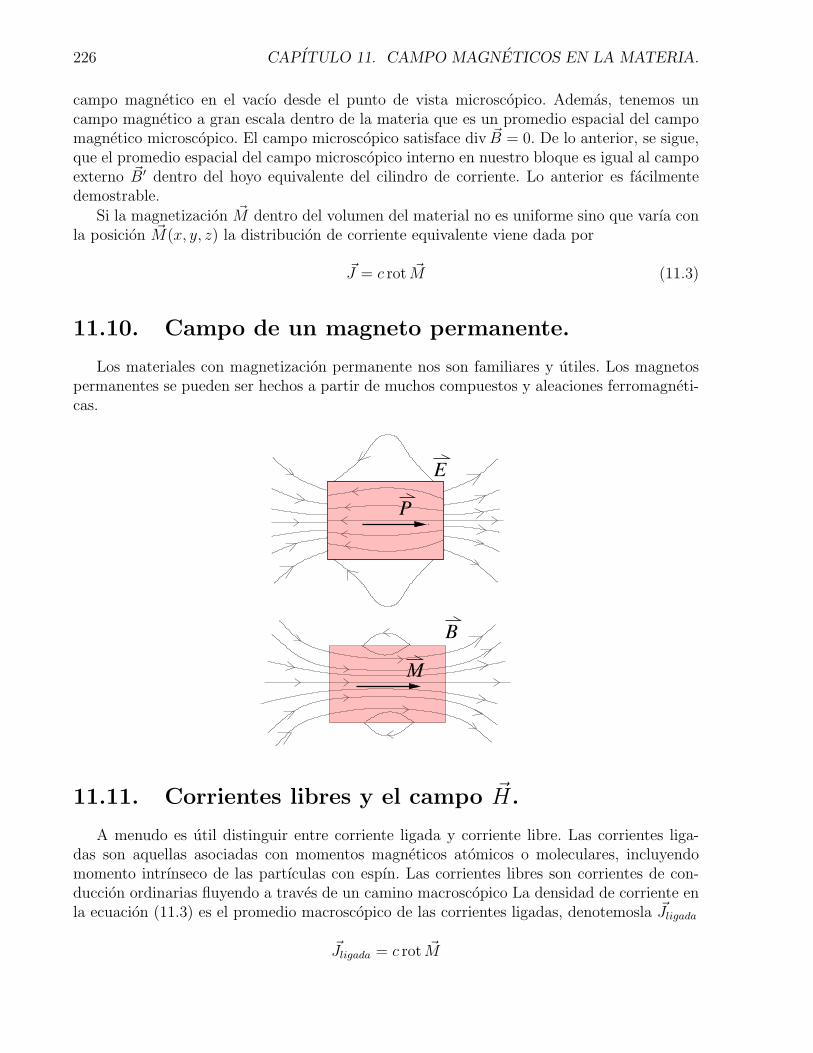
226 CAPITULO 11. CAMPO MAGNETICOS EN LA MATERIA.
campo magnetico en el vacıo desde el punto de vista microscopico. Ademas, tenemos uncampo magnetico a gran escala dentro de la materia que es un promedio espacial del campomagnetico microscopico. El campo microscopico satisface div ~B = 0. De lo anterior, se sigue,que el promedio espacial del campo microscopico interno en nuestro bloque es igual al campoexterno ~B′ dentro del hoyo equivalente del cilindro de corriente. Lo anterior es facilmentedemostrable.
Si la magnetizacion ~M dentro del volumen del material no es uniforme sino que varıa conla posicion ~M(x, y, z) la distribucion de corriente equivalente viene dada por
~J = c rot ~M (11.3)
11.10. Campo de un magneto permanente.
Los materiales con magnetizacion permanente nos son familiares y utiles. Los magnetospermanentes se pueden ser hechos a partir de muchos compuestos y aleaciones ferromagneti-cas.
P
E
B
M
11.11. Corrientes libres y el campo ~H.
A menudo es util distinguir entre corriente ligada y corriente libre. Las corrientes liga-das son aquellas asociadas con momentos magneticos atomicos o moleculares, incluyendomomento intrınseco de las partıculas con espın. Las corrientes libres son corrientes de con-duccion ordinarias fluyendo a traves de un camino macroscopico La densidad de corriente enla ecuacion (11.3) es el promedio macroscopico de las corrientes ligadas, denotemosla ~Jligada
~Jligada = c rot ~M

11.11. CORRIENTES LIBRES Y EL CAMPO ~H. 227
En la superficie donde ~M es discontinuo tal como en el lado del block magnetizado,tenemos una densidad superficial de corriente J la cual representa tambien corriente ligada.Encontramos que ~B afuera y en promedio adentro de la materia esta relacionado con ~Jligada,pero esto es en ausencia de carga libre. Con carga libre
rot ~B =4π
c
(~Jligada + ~Jlibre
)=
4π
c~Jtotal .
Si expresamos ~Jligada en terminos de la magnetizacion
rot ~B =4π
c(c rot ~M) +
4π
c~Jlibre
Reordenando
rot( ~B − 4π ~M) =4π
c~Jlibre .
Si definimos un vector ~H(x, y, z) = ~B−4π ~M en cada punto del espacio, entonces podemosescribir
rot ~H =4π
c~Jlibre
En otras palabras el campo ~H esta relacionada con la corriente libre como el campo ~Blo esta con la corriente total. Si bien div ~B = 0 siempre, no siempre div ~H es nula. El campovectorial ~H es mucho mas util que su analogo electrico ~D y tiene las dimensiones de ~B [gauss]
pero se suele usar otro nombre [oersted]. El campo ~H satisface∮~H · d~s =
4π
c
∫S
~Jlibre · d~a =4π
cIlibre
En texto antiguos se introduce ~H como el campo magnetico y luego ~B = ~H + 4π ~M conel nombre de induccion magnetica. Nosotros proponemos ~B como campo magnetico y ~Hcomo el campo ~H o el campo magnetico ~H. En CGS en el vacıo no hay distincion entre ~By ~H y a menudo las ecuaciones de Maxwell en el vacıo se escriben en funcion de ~E y ~Hmas que en ~E y ~B. En MKS rot ~H = ~Jlibre luego en el espacio vacıo ~H = ~B/µ0. Si ~M es
proporcional a ~B entonces tambien sera proporcional a ~H. De hecho, la definicion tradicionalde la susceptibilidad magnetica de volumen χm no es la que hubieramos elegido logicamentesino
~M = χm~H (11.4)
Para obtener ~H en algun punto dentro de la materia magnetizada, nosotros debemossumar vectorial-mente el campo ~B en ese punto al vector −4π ~M . En un magneto permanenteno hay corrientes libres, luego la integral de lınea de ~H debe ser cero en torno a un caminocerrado. Por lo anterior, La lıneas del campo ~H se veran similares a las del campo ~E.
Para cualquier material en el cual ~M es proporcional a ~H, ecuacion (11.4) y se cumpla~H = ~B − 4π ~M
~B = ~H + 4π ~M = (1 + 4πχm) ~H ,
El campo ~B es proporcional al campo ~H. El factor de proporcionalidad es (1 + 4πχm), elcual es llamado permeabilidad magnetica y es denotado usualmente por µ:
~B = µ ~H

228 CAPITULO 11. CAMPO MAGNETICOS EN LA MATERIA.
11.12. Ferromagnetismo.
El ferromagnetismo a servido e intrigado al hombre por largo tiempo. La piedra imanfue conocida desde la antiguedad (brujula). Solo en los ultimos anos hemos alcanzado unentendimiento fundamental del fenomeno del ferromagnetismo. Ya hemos descrito algunaspropiedades de los ferromagnetos, revisemoslas nuevamente.
En un campo magnetico fuerte la fuerza sobre una sustancia ferromagnetica es la direccionque tira hacia el campo mas fuerte, como en las substancia paramagneticas. Mas que alproducto del campo por el gradiente, la fuerza es proporcional al gradiente mismo. Si el campoes suficientemente fuerte el momento magnetico adquirido por el ferromagneto alcanza unamagnitud lımite. La direccion del vector momento magnetico debe aun estar controlada porel campo. De otra manera la fuerza no podrıa actuar siempre en la direccion de incrementode la intensidad del campo. En magnetos permanentes se observa un momento magneticoaun en ausencia de cualquier campo aplicado externo, ademas, mantienen su magnitud ydireccion aun cuando se le aplican campo externos mientras ellos no sean muy intensos. Elcampo de un magneto permanente esta siempre presente y podrıamos pensar que el mantieneel alineamiento. Notaremos que ~M no es generalmente paralela a ~B o ~H. Esto sugiere quelos momentos dipolares deben estar sujetos en su direccion por algo mas que puras fuerzasmagneticas.
BH
H = B − 4 Mπ
M−4π
Las magnetizaciones observadas en materiales ferromagneticos son mucho mayores quelas de las sustancias paramagneticas. Los magnetos permanentes tienen campos dentro deunos pocos miles de gauss. Una de las cantidades mas caracterıstica es el valor lımite de lamagnetizacion, el momento magnetico por unidad de volumen, el cual el material adquiereen un campo muy fuerte. Es llamada saturacion de magnetizacion.
Una sustancia ferromagnetica dada pierde sus propiedades ferromagneticas abruptamentesi es calentado sobre una cierta temperatura. Si estamos hablando de hierro puro sobre 770 Cactua como una sustancia paramagnetica. En el caso del Nıquel son 358 C. Si es enfriadoinmediatamente recobra las caracterısticas ferromagneticas. Esta temperatura es llamada detemperatura o punto de Curie y es caracterıstica del material.
¿Que es este comportamiento ferromagnetico, que bruscamente distingue al hierro bajo770 C y hierro sobre 770 C?.
Es un alineamiento sin campo externo en una direccion de los momentos magneticosatomicos, lo cual implica el alineamiento de los ejes del espın de ciertos electrones en cadaatomo de hierro. En una region suficientemente grande en el hierro que contiene millonesde atomos, los espines y momento magneticos de aproximadamente todos los atomos estanapuntando en la misma direccion. Bajo el punto de Curie – a temperatura ambiente en elcaso del hierro – el alineamiento es cercano al perfecto. Si pudieramos ver en el interior de un

11.12. FERROMAGNETISMO. 229
cristal de hierro metalico y ver los momentos magneticos elementales como pequenas flechasverıamos algo como. . .
No es muy sorprendente que la alta temperatura destruya este arreglo. La energıa termicaes enemiga del orden. Un cristal, un arreglo ordenado de atomos, cambia a un lıquido, unarreglo mucho menos ordenado, bruscamente a una temperatura definida, el punto de fusion.El punto de fusion tal como el punto de Curie son diferentes para diferentes sustancias.Algunas preguntas que me surgen:
¿Que hace a los espines alinearse y mantener la alineacion?
¿Como, si no hay campo externo presente, pueden los espines elegir una direccion masque otra?
Si los momentos magneticos estan todos alineados ¿por que no todas las piezas de hierroa temperatura ambiente no son un iman fuerte?
Respuesta 1: Por alguna razon conectada con la M.C. de la estructura del atomo dehierro, es energeticamente favorable a los espines de atomos adyacentes de hierro estar para-lelos. Esto no es debido a interaccion magnetica. Es un efecto fuerte que favorece los espinesparalelos tanto ↑↑ como →→. La interaccion dipolar no trabaja ası. Como los atomos en lavecindad tienen una fuerte tendencia a tener la direccion de sus vecinos, esta se hara unanimerapidamente.
Respuesta 2: En forma accidental se determina cual de las varias direcciones equivalenteen el cristal es elegida, si comenzamos de un estado desordenado. El hierro tiene estructuracristalina bcc, es decir, con 8 primeros vecinos. Si enfriamos hierro a traves de su punto deCurie sin campo externo. Hay direcciones mas favorables de magnetizarse y otras no tanto.
Dura
magnetizaciónDirecciones de fácil
Mediana
y
z
x
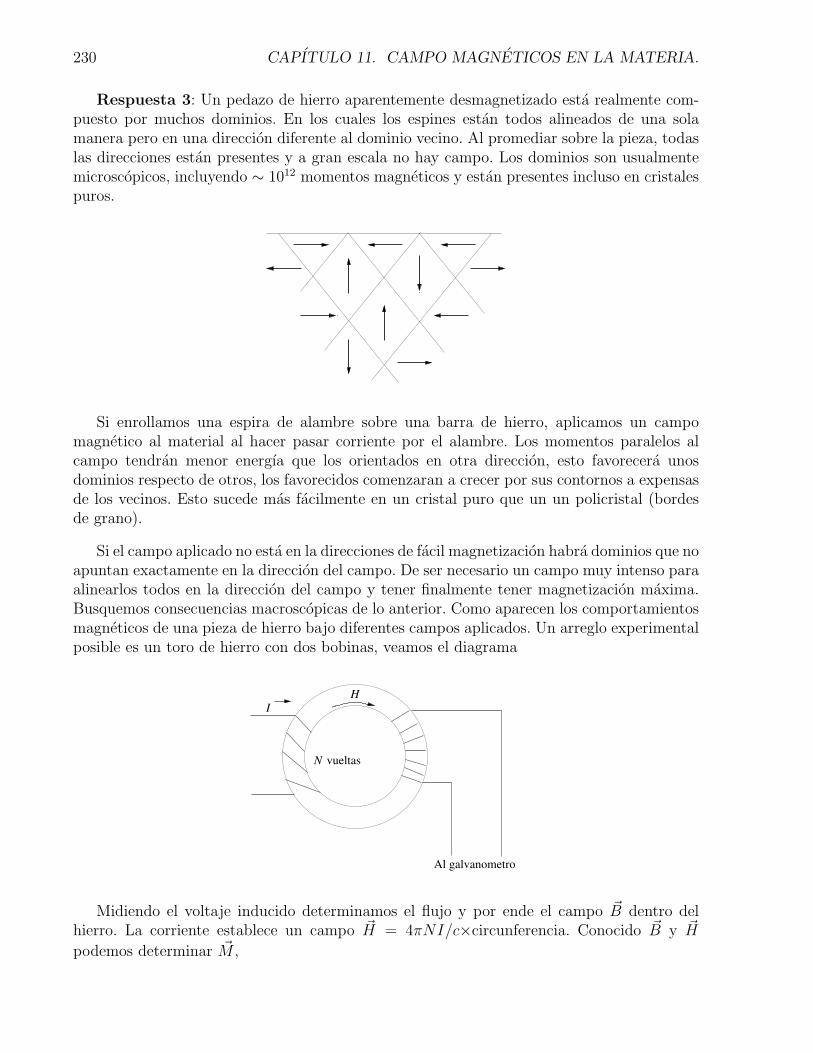
230 CAPITULO 11. CAMPO MAGNETICOS EN LA MATERIA.
Respuesta 3: Un pedazo de hierro aparentemente desmagnetizado esta realmente com-puesto por muchos dominios. En los cuales los espines estan todos alineados de una solamanera pero en una direccion diferente al dominio vecino. Al promediar sobre la pieza, todaslas direcciones estan presentes y a gran escala no hay campo. Los dominios son usualmentemicroscopicos, incluyendo ∼ 1012 momentos magneticos y estan presentes incluso en cristalespuros.
Si enrollamos una espira de alambre sobre una barra de hierro, aplicamos un campomagnetico al material al hacer pasar corriente por el alambre. Los momentos paralelos alcampo tendran menor energıa que los orientados en otra direccion, esto favorecera unosdominios respecto de otros, los favorecidos comenzaran a crecer por sus contornos a expensasde los vecinos. Esto sucede mas facilmente en un cristal puro que un un policristal (bordesde grano).
Si el campo aplicado no esta en la direcciones de facil magnetizacion habra dominios que noapuntan exactamente en la direccion del campo. De ser necesario un campo muy intenso paraalinearlos todos en la direccion del campo y tener finalmente tener magnetizacion maxima.Busquemos consecuencias macroscopicas de lo anterior. Como aparecen los comportamientosmagneticos de una pieza de hierro bajo diferentes campos aplicados. Un arreglo experimentalposible es un toro de hierro con dos bobinas, veamos el diagrama
Al galvanometro
vueltasN
IH
Midiendo el voltaje inducido determinamos el flujo y por ende el campo ~B dentro delhierro. La corriente establece un campo ~H = 4πNI/c×circunferencia. Conocido ~B y ~H
podemos determinar ~M ,
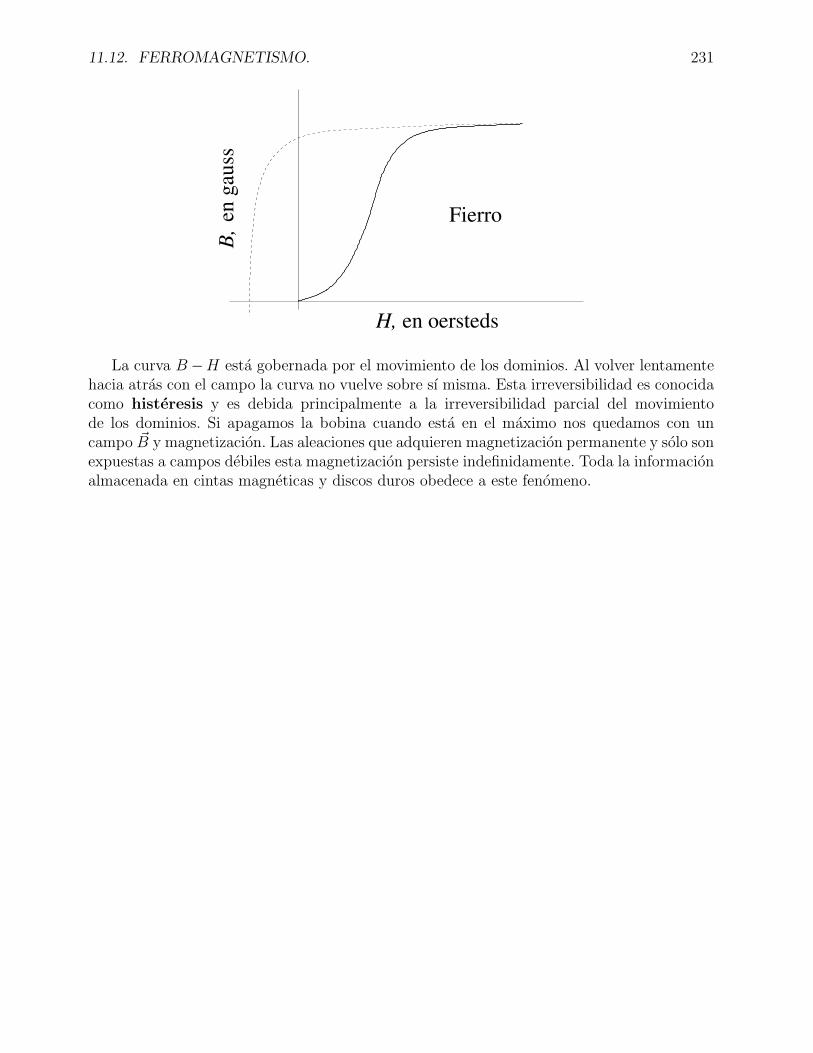
11.12. FERROMAGNETISMO. 231
H, en oersteds
en g
auss
FierroB
,
La curva B−H esta gobernada por el movimiento de los dominios. Al volver lentamentehacia atras con el campo la curva no vuelve sobre sı misma. Esta irreversibilidad es conocidacomo histeresis y es debida principalmente a la irreversibilidad parcial del movimientode los dominios. Si apagamos la bobina cuando esta en el maximo nos quedamos con uncampo ~B y magnetizacion. Las aleaciones que adquieren magnetizacion permanente y solo sonexpuestas a campos debiles esta magnetizacion persiste indefinidamente. Toda la informacionalmacenada en cintas magneticas y discos duros obedece a este fenomeno.


















