Capítulo 2 - Método de Newton-Raphson e barras com não ...
12
Prof. Luiz Antonio Farani de Souza 1 Capítulo 2 - Método de Newton-Raphson e barras com não linearidade Capítulo 2 - Método de Newton-Raphson e barras com não linearidade Sumário Capítulo 2 - Método de Newton-Raphson e barras com não linearidade .................................... 1 2.1 Método de Newton-Raphson com controle de força constante ........................................ 2 2.2 Problemas resolvidos com o programa Scilab (2021) ......................................................... 4 2.2.1 Problema resolvido 1 - Barra com não linearidade física............................................. 4 Algoritmo com o programa Scilab (2021) ......................................................................... 5 Solução do problema ........................................................................................................ 6 2.2.2 Exemplo resolvido 2 - Barra com não linearidade geométrica .................................... 7 Algoritmo com o programa Scilab (2021) ......................................................................... 8 Solução do problema ...................................................................................................... 10 2.3 Exercícios propostos.......................................................................................................... 11 Referências .............................................................................................................................. 12
Transcript of Capítulo 2 - Método de Newton-Raphson e barras com não ...

Prof. Luiz Antonio Farani de Souza
1 Capítulo 2 - Método de Newton-Raphson e barras com não linearidade
Capítulo 2 - Método de Newton-Raphson e barras com não
linearidade
Sumário
Capítulo 2 - Método de Newton-Raphson e barras com não linearidade .................................... 1
2.1 Método de Newton-Raphson com controle de força constante ........................................ 2
2.2 Problemas resolvidos com o programa Scilab (2021) ......................................................... 4
2.2.1 Problema resolvido 1 - Barra com não linearidade física ............................................. 4
Algoritmo com o programa Scilab (2021) ......................................................................... 5
Solução do problema ........................................................................................................ 6
2.2.2 Exemplo resolvido 2 - Barra com não linearidade geométrica .................................... 7
Algoritmo com o programa Scilab (2021) ......................................................................... 8
Solução do problema ...................................................................................................... 10
2.3 Exercícios propostos .......................................................................................................... 11
Referências .............................................................................................................................. 12

Prof. Luiz Antonio Farani de Souza
2 Capítulo 2 - Método de Newton-Raphson e barras com não linearidade
2.1 Método de Newton-Raphson com controle de força constante
Um dos principais objetivos da Engenharia Estrutural é tornar os sistemas estruturais mais
econômicos por meio da redução de seu peso e consumo de materiais sem, contudo, diminuir a
segurança e a durabilidade.
Para se realizar a análise não linear de estruturas com maior precisão, é de extrema
importância que sejam empregados métodos que possam considerar, de maneira apropriada, os
efeitos não lineares.
A solução de um problema estrutural não linear é geralmente obtida por meio de um
procedimento incremental e iterativo. Um dos requisitos para o método de solução é a sua
capacidade de superar os problemas numéricos associados a cada tipo de comportamento.
O Método de Newton-Raphson (NR) é um dos mais utilizados para resolver problemas
não lineares na Engenharia Estrutural. Nesse método é resolvido um sistema linear a cada
iteração, cuja matriz de rigidez é a matriz Jacobiana avaliada na iteração corrente. Uma das
vantagens desse método é a taxa de convergência quadrática (sob condições adequadas) (BATHE,
2006).
A equação que governa o equilíbrio estático de um sistema estrutural com comportamento
não linear é descrita por (MAXIMIANO; SILVA; SILVEIRA, 2014):
𝐠(𝐮) = λ𝐅𝐫 − 𝐅𝐢𝐧𝐭(𝐮) = 𝟎 (1)
na qual g é o vetor de forças desequilibradas, Fr é o vetor de referência que caracteriza a direção
da força externa, é o parâmetro de força e Fint é o vetor de forças internas.
Aplicando o esquema iterativo de Newton-Raphson ao sistema na Equação (1), chega-se
à seguinte expressão (SOUZA et al., 2018):
𝐊(k−1)𝐮(k) = 𝐠(k−1) = λ𝐅𝐫 − 𝐅𝐢𝐧𝐭(𝐮(k−1)) (2)
em que 𝐊 =𝛛𝐠
𝛛𝐮 é a matriz de rigidez representativa do sistema estrutural (matriz Jacobiana) e
𝐮(k) é o subincremento de deslocamentos. O superíndice (k-1) indica a iteração anterior e (k)
indica a iteração corrente. O parâmetro total do vetor de deslocamentos nodais (u) é atualizado
no passo de força t+t e iteração k por:
𝐮(k) = 𝐮(k−1) + 𝛅𝐮(k) (3)
Na estratégia de iteração de carga constante, o parâmetro de carga é mantido constante
no ciclo iterativo de cada passo de carga. No método de Newton-Raphson admite-se que, para
uma dada estimativa inicial para a raiz do sistema dado em Equação (1), a solução é obtida por
meio de uma sequência de correções até que uma solução é obtida com a precisão desejada.
O critério de convergência adotado para cada passo de carga é expressado pela norma da
força residual e da força aplicada:
‖𝐠‖ ≤ tol ‖𝐅𝐫‖ (4)
na qual ‖∙‖ é a norma Euclidiana e tol é a tolerância fornecida pelo usuário.
O método de Newton-Raphson modificado (NRM) é uma alternativa para a técnica
padrão, em que a inclinação da tangente é mantida constante em todas as iterações. Para a análise
estrutural, a matriz de rigidez K permanece constante no ciclo iterativo.
O esquema iterativo do método NRM é dado pelas seguintes equações:
𝐊(0)𝐮(k) = 𝐠(k) = λ𝐅𝐫 − 𝐅𝐢𝐧𝐭(𝐮(k−1)) (5)
𝐮(𝐤) = 𝐮(k−1) + 𝛅𝐮(k) (6)

Prof. Luiz Antonio Farani de Souza
3 Capítulo 2 - Método de Newton-Raphson e barras com não linearidade
O método de Newton-Raphson só fornece a solução de um simples ponto no caminho de
equilíbrio. Para obter outros pontos, combinam-se as iterações de Newton-Raphson padrão com
um procedimento incremental. Esse procedimento incremental-iterativo é ilustrado no algoritmo
na Figura 1. O procedimento de Newton-Raphson Modificado é apresentado na Figura 2.
Os dados de entrada nos algoritmos são: número máximo de iterações em cada passo de
carga (kmáx); tolerância (tol); vetor incremento de carga de referência (Fr); e número máximo de
passos de carga (nmáx). As saídas do algoritmo são: vetor de deslocamentos nodais (u); número
total de iterações acumuladas até a convergência para a solução (ktotal); e número médio de
iterações por passo de carga (kmédio).
ktotal 0
𝐅𝐢𝐧𝐭 𝟎
𝐮 𝟎
Para = 1, 2, ..., nmáx
𝐅𝐞𝐱𝐭 λ𝐅𝐫
k 0
Calcular o vetor de forças desequilibradas: 𝐠(k−1)𝐅𝐞𝐱𝐭 − 𝐅𝐢𝐧𝐭(𝐮(k−1))
Enquanto k kmáx
k k +1
Calcular a matriz de rigidez: 𝐊(𝐮(k−1))
Resolver o sistema de equações lineares: 𝛅𝐮(k) [𝐊(𝐮(k−1))]−1
𝐠(k−1)
Calcular o vetor de deslocamentos: 𝐮(k) 𝐮(k−1) + 𝛅𝐮(k)
Calcular o vetor de forças internas: 𝐅𝐢𝐧𝐭(𝐮(k))
Calcular o vetor de forças desequilibradas: 𝐠(k) 𝐅𝐞𝐱𝐭 − 𝐅𝐢𝐧𝐭(𝐮(k))
Verificar o critério de convergência: ‖𝐠(k)‖ ≤ tol ‖𝐅𝐫‖
Fim-Enquanto
ktotal ktotal +k
Fim-para
kmédio ktotal / nmáx Figura 1: Procedimento incremental e iterativo de Newton-Raphson padrão com controle de força
constante.
ktotal 0
𝐅𝐢𝐧𝐭 𝟎
𝐮 𝟎
Para = 1, 2, ..., nmáx
𝐅𝐞𝐱𝐭 λ𝐅𝐫
k 0
Calcular o vetor de forças desequilibradas: 𝐠(k−1)𝐅𝐞𝐱𝐭 − 𝐅𝐢𝐧𝐭(𝐮(k−1))
Calcular a matriz de rigidez: 𝐊(𝐮(0))
Enquanto k kmáx
k k +1
Resolver o sistema de equações lineares: 𝛅𝐮(k) [𝐊(𝐮(0))]−1
𝐠(k−1)
Calcular o vetor de deslocamentos: 𝐮(k) 𝐮(k−1) + 𝛅𝐮(k)
Calcular o vetor de forças internas: 𝐅𝐢𝐧𝐭(𝐮(k))
Calcular o vetor de forças desequilibradas: 𝐠(k) 𝐅𝐞𝐱𝐭 − 𝐅𝐢𝐧𝐭(𝐮(k))
Verificar o critério de convergência: ‖𝐠(k)‖ ≤ tol ‖𝐅𝐫‖
Fim-Enquanto
ktotal ktotal +k
Fim-para
kmédio ktotal / nmáx Figura 2: Procedimento incremental e iterativo de Newton-Raphson Modificado com controle de força
constante.

Prof. Luiz Antonio Farani de Souza
4 Capítulo 2 - Método de Newton-Raphson e barras com não linearidade
2.2 Problemas resolvidos com o programa Scilab (2021)
2.2.1 Problema resolvido 1 - Barra com não linearidade física
Seja a barra biengastada sujeita a uma força axial P, com área da seção transversal A =
1,0 cm2 e módulo de elasticidade E0 = 1,0 107 N/cm2, conforme ilustra a Figura 3. Este problema
foi estudado por Bathe (2006).
Adota-se o comportamento material elastoplástico com encruamento positivo. Emprega-
se o método de Newton-Raphson padrão com controle de força constante para a solução do
sistema de equações não lineares. Consideram-se dois passos de carga nmáx = 2, número máximo
de iterações por passo de carga kmáx = 150 e incremento de força Fr = 20000 N. Adota-se a
tolerância tol = 1,0 10-8 e a medida de deformação de engenharia (e). O critério de convergência
é dado por |g| tol.
Figura 3: a) Modelo estrutural da barra biengastada; b) relação constitutiva elastoplástica com
encruamento positivo.
Fonte: Adaptada de Bathe (2006)
Formulação do problema:
• Equação não linear a ser resolvida:
𝑔 = 𝐹𝑟 − 𝐹𝑖𝑛𝑡(𝑢) = 0 (7)
𝐾𝑢 = 𝑔 = 𝐹𝑟 − 𝐹𝑖𝑛𝑡 (8)
• Rigidez da barra K:
𝐾 = 𝐾𝑎 + 𝐾𝑏 =𝐸𝑎𝐴
𝐿𝑎0+
𝐸𝑏𝐴
𝐿𝑏0 (9)
Ei = E0i → comportamento elástico da seção, para i = a, b
Ei = Eti → comportamento plástico da seção, para i = a, b
• Força interna Fint:
𝐹𝑖𝑛𝑡 = 𝐹𝑎 + 𝐹𝑏 (10)
Para uma seção com comportamento elástico:
𝐹𝑖 = 𝐸0𝑖𝐴𝜀𝑒𝑖, para i = a, b (11)
Para uma seção com comportamento plástico:
𝐹𝑖 = 𝐴[𝐸𝑡𝑖(𝜀𝑒𝑖 − 𝜀𝑦) + 𝜎𝑦], para i = a, b (12)
Deformação específica de engenharia:
𝜀𝑒𝑎 =𝑢
𝐿0𝑎 (𝑠𝑒çã𝑜 𝑎) (13)
𝜀𝑒𝑏 =𝑢
𝐿0𝑏 (𝑠𝑒çã𝑜 𝑏) (14)

Prof. Luiz Antonio Farani de Souza
5 Capítulo 2 - Método de Newton-Raphson e barras com não linearidade
Algoritmo com o programa Scilab (2021)
//Problema barra com não linearidade física
//Exemplo: Bathe (2006)
clear
clc
//__________________________________
//Dados de entrada (pré-processamento)
A(1)=1; //área da seção a
A(2)=1; //área da seção b
L(1)=10; //comprimento indeformado da seção a
L(2)=5; //comprimento indeformado da seção b
for i=1:2
E0(i)=10^7; //módulo de elasticidade inicial
Et(i)=10^5; //módulo de elasticidade tangente
end
E=E0;
ey=0.002; //deformação de escoamento
Sy=0.002*10^7; //tensão de escoamento
//tol = tolerância
//Fr = incremento de carga
//kmax = número máximo de iterações
//nmax = número de passos de carga
txt = ['tolerância:';'incremento de carga:';'número máximo de iterações:';'número de passos de carga:'];
sig = x_mdialog('Parâmetros método de solução',txt,['10^-8';'20000';'150';'2']);
tol = evstr(sig(1));
Fr = evstr(sig(2));
kmax = evstr(sig(3));
nmax = evstr(sig(4));
//__________________________________
//Processamento
//Inicialização
u=0;
for i=1:2
Fint(i)=0;
end
vu(1)=0;
vf(1)=0;
ktotal=0;
ierro=0;
tic //inicia um cronômetro
winH=waitbar('Processamento ...'); //inicia barra de progresso
realtimeinit(0);
for lambda=1:nmax //passos de carga
Fext=lambda*Fr;
k=0;
realtime(lambda);
g= Fext-(Fint(1)+Fint(2)); //forças desequilibradas
while k<kmax //ciclo iterativo
k=k+1;
//rigidez da barra
for i=1:2
Ke(i)=E(i)*A(i)/L(i);
end
K=Ke(1)+Ke(2);
du=K\g; //solução da equação linear

Prof. Luiz Antonio Farani de Souza
6 Capítulo 2 - Método de Newton-Raphson e barras com não linearidade
u=u+du; //deslocamento u
//Força interna na barra
for i=1:2
e(i)=u/L(i); //deformação específica
if e(i)<ey
Fint(i)=A(i)*E0(i)*e(i); //regime elástico
E(i)=E0(i);
else
Fint(i)=A(i)*(Et(i)*(e(i)-ey)+Sy); //regime elastoplástico (encruamento positivo)
E(i)=Et(i);
end
end
g=Fext-(Fint(1)+Fint(2)); //Forças desequilibradas
if abs(g)<=tol //Critério de convergência
break
end
end
if k==kmax
messagebox('não convergiu!')
ierro=1;
break
end
vu(lambda+1)=u; //armazena os incrementos de deslocamento num vetor
vf(lambda+1)=Fext; //armazena os incrementos de força externa num vetor
ktotal=ktotal+k; //número total de iterações
waitbar(lambda,winH); //barra de progresso
end
close(winH); //fecha a barra de progresso
kmedio=ktotal/nmax; //número médio de iterações por passo
t=toc() //lê o cronômetro
if ierro==0
//__________________________________
//saída de dados (pós-processamento)
//gráfico trajetória de equilíbrio
plot(vu,vf,'s-b');
gca().grid=[1 1 1]; //Linhas de grade
xlabel('Deslocamento u (cm)'); //eixo x
ylabel('Força P (N)'); //eixo y
legend('NR',2);
//resultados numéricos console
disp('Resultados numéricos')
disp('a) Número total de iterações (ktotal):',ktotal)
disp('b) Número médio de iterações por passo (kmédio):',kmedio)
disp('c) Tempo de processamento em segundos (t):',t)
end
Solução do problema
Pré-processamento (entrada de dados)

Prof. Luiz Antonio Farani de Souza
7 Capítulo 2 - Método de Newton-Raphson e barras com não linearidade
Processamento
Pós-processamento (saída de dados)
2.2.2 Problema resolvido 2 - Barra com não linearidade geométrica
A Figura 4 ilustra uma barra com uma mola de rigidez ks sujeita a uma força vertical F,
de tal forma que provoca um deslocamento u. Este problema foi estudado por Lourenço (1999).
Considere EA = 5,0 107 N, z = 25 mm, L0 = 2500 mm, ks = 1,35 N/mm e Fr = -7,0 N. O critério
de convergência é dado por: |g| tol. Para o método de solução, suponha 20 passos de carga nmáx
= 20, número máximo de iterações por passo de carga kmáx = 150 e tolerância tol = 1,0 10-10.

Prof. Luiz Antonio Farani de Souza
8 Capítulo 2 - Método de Newton-Raphson e barras com não linearidade
Figura 4: Barra com mola.
Fonte: Adaptada de Lourenço (1999).
Formulação do problema:
• Equação não linear a resolvida:
𝑔 = 𝐹𝑟 − 𝐹𝑖𝑛𝑡(𝑢) = 0 (15)
𝐾𝑢 = 𝑔 = 𝐹𝑟 − 𝐹𝑖𝑛𝑡 (16)
• Força normal na barra:
𝑁 = 𝐸0𝐴 [𝑧
𝐿0
𝑢
𝐿0+ 0,5 (
𝑢
𝐿0)
2
] (17)
• Rigidez na barra:
𝐾 =𝐸0𝐴
𝐿0(
𝑧
𝐿0)
2
+𝐸0𝐴
𝐿03
(2𝑧𝑢 + 𝑢2)𝑁
𝐿0+ 𝑘𝑠 (18)
• Força interna na barra :
𝐹𝑖𝑛𝑡 = 𝑁𝑧 + 𝑢
𝐿0+ 𝑘𝑠𝑢 (19)
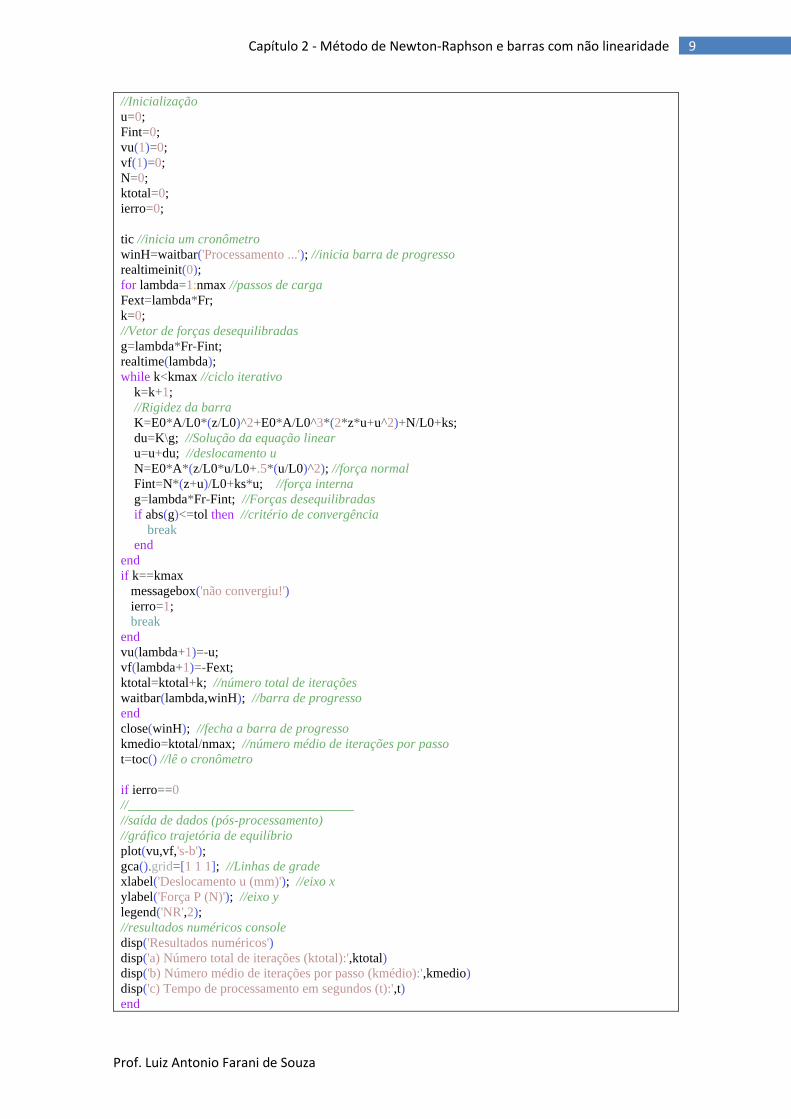
Algoritmo com o programa Scilab (2021)
// Problema: barra com mola - não linearidade geométrica
// Método de Newton-Raphson com controle de força constante
clear
clc
//__________________________________
//Dados de entrada (pré-processamento)
A=1; //área da seção transversal
L0=2500; //comprimento indeformado da barra
z=25; //comprimento z
E0=5*10^7; //módulo de elasticidade
//tol = tolerância
//Fr = incremento de carga
//kmax = número máximo de iterações
//nmax = número de passos de carga
//ks = rigidez da mola
txt = ['tolerância:';'incremento de carga:';'número máximo de iterações:';'número de passos de
carga:';'rididez da mola:'];
sig = x_mdialog('Parâmetros método de solução',txt,['10^-10';'-7';'150';'20';'1.35'])
tol = evstr(sig(1));
Fr = evstr(sig(2));
kmax = evstr(sig(3));
nmax = evstr(sig(4));
ks = evstr(sig(5));
//__________________________________
//Processamento
Prof. Luiz Antonio Farani de Souza
9 Capítulo 2 - Método de Newton-Raphson e barras com não linearidade
//Inicialização
u=0;
Fint=0;
vu(1)=0;
vf(1)=0;
N=0;
ktotal=0;
ierro=0;
tic //inicia um cronômetro
winH=waitbar('Processamento ...'); //inicia barra de progresso
realtimeinit(0);
for lambda=1:nmax //passos de carga
Fext=lambda*Fr;
k=0;
//Vetor de forças desequilibradas
g=lambda*Fr-Fint;
realtime(lambda);
while k<kmax //ciclo iterativo
k=k+1;
//Rigidez da barra
K=E0*A/L0*(z/L0)^2+E0*A/L0^3*(2*z*u+u^2)+N/L0+ks;
du=K\g; //Solução da equação linear
u=u+du; //deslocamento u
N=E0*A*(z/L0*u/L0+.5*(u/L0)^2); //força normal
Fint=N*(z+u)/L0+ks*u; //força interna
g=lambda*Fr-Fint; //Forças desequilibradas
if abs(g)<=tol then //critério de convergência
break
end
end
if k==kmax
messagebox('não convergiu!')
ierro=1;
break
end
vu(lambda+1)=-u;
vf(lambda+1)=-Fext;
ktotal=ktotal+k; //número total de iterações
waitbar(lambda,winH); //barra de progresso
end
close(winH); //fecha a barra de progresso
kmedio=ktotal/nmax; //número médio de iterações por passo
t=toc() //lê o cronômetro
if ierro==0
//__________________________________
//saída de dados (pós-processamento)
//gráfico trajetória de equilíbrio
plot(vu,vf,'s-b');
gca().grid=[1 1 1]; //Linhas de grade
xlabel('Deslocamento u (mm)'); //eixo x
ylabel('Força P (N)'); //eixo y
legend('NR',2);
//resultados numéricos console
disp('Resultados numéricos')
disp('a) Número total de iterações (ktotal):',ktotal)
disp('b) Número médio de iterações por passo (kmédio):',kmedio)
disp('c) Tempo de processamento em segundos (t):',t)
end

Prof. Luiz Antonio Farani de Souza
10 Capítulo 2 - Método de Newton-Raphson e barras com não linearidade
Solução do problema
Pré-processamento (entrada de dados)
Processamento
Pós-processamento (saída de dados)

Prof. Luiz Antonio Farani de Souza
11 Capítulo 2 - Método de Newton-Raphson e barras com não linearidade
2.3 Exercícios propostos
Exercício proposto 1. Resolver o exercício resolvido “1” com 8 passos de carga, isto é, Fext =
10000, com = 1, 2, ..., 8, considerando os métodos de Newton-Raphson padrão e de Newton-
Raphson Modificado. Considere tol = 1,0 10-8 e a medida de deformação de Engenharia.
Comparar os resultados numéricos obtidos por cada método quanto ao número máximo de
iterações (ktotal) e número médio de iterações por passo de carga (kmédio). Obter as trajetórias de
equilíbrio (deslocamento u versus força P).
Exercício proposto 2. Resolver o exercício anterior considerando a relação constitutiva
elastoplástica perfeita (Figura 5). Obter a trajetória de equilíbrio (deslocamento u versus força P).
Figura 5: Relação constitutiva elastoplástica perfeita
Exercício proposto 3. Resolver o exercício resolvido “2” com 20 passos de carga considerando
Fext = Fr, com = 1,2,,20, considerando o método de Newton-Raphson Modificado. Obter a
trajetória de equilíbrio e comparar os resultados numéricos com o método de Newton-Raphson
padrão, quanto ao número máximo de iterações (ktotal) e número médio de iterações por passo de
carga (kmédio).

Prof. Luiz Antonio Farani de Souza
12 Capítulo 2 - Método de Newton-Raphson e barras com não linearidade
Referências
BATHE, K. J. Finite element procedures. Prentice Hall, 2006.
LOURENÇO, P. B. Métodos computacionais na mecânica dos sólidos não linear. Relatório
99-DEC/E-1, Departamento de Engenharia Civil, Universidade do Minho, Portugal, 1999.
MAXIMIANO, D. P.; SILVA, A. R. D.; SILVEIRA, R. A. M. Iterative strategies associated with
the normal flow technique on the nonlinear analysis of structural arches. Rem: Revista Escola
de Minas, v. 67, n. 2, p. 143-150, 2014.
SCILAB, versão 6.1.1. France: ESI Group, 2021.
SOUZA, L. A. F.; CASTELANI, E. V.; SHIRABAYASHI, W. V. I.; ALIANO FILHO, A.;
MACHADO, R. D. Trusses Nonlinear Problems Solution with Numerical Methods of Cubic
Convergence Order. TEMA (São Carlos), v. 19, n. 1, p. 161-179, 2018.