CENTRO FEDERAL DE EDUCAÇÃO TECNOLÓGICA DO...
118
CENTRO FEDERAL DE EDUCAÇÃO TECNOLÓGICA DO PARANÁ DEPARTAMENTO ACADÊMICO DE ELETROTÉCNICA PROJETO FINAL VENTILADOR PULMONAR ARTIFICIAL CARLOS EDUARDO ARAÚJO EDSON JOSÉ PRZYBYLSKI FABIANO KALINOWSKI JACKSON AFONSO KRAINER RODRIGO CORDEIRO JUNQUEIRA
Transcript of CENTRO FEDERAL DE EDUCAÇÃO TECNOLÓGICA DO...
CENTRO FEDERAL DE EDUCAÇÃO TECNOLÓGICA DO PARANÁ
DEPARTAMENTO ACADÊMICO DE ELETROTÉCNICA
PROJETO FINAL
VENTILADOR PULMONAR ARTIFICIAL
CARLOS EDUARDO ARAÚJO
EDSON JOSÉ PRZYBYLSKI
FABIANO KALINOWSKI
JACKSON AFONSO KRAINER
RODRIGO CORDEIRO JUNQUEIRA

CARLOS EDUARDO ARAÚJO
EDSONJOSÉ PRZYBYLSKI
FABIANO KALINOWSKI
JACKSON AFONSO KRAINER
RODRIGO CORDEIRO JUNQUEIRA
VENTILADOR PULMONAR
Trabalho de Graduação apresentado ao Curso
de Engenharia Industrial Elétrica, Departamento
Acadêmico de Eletrotécnica do Centro Federal
de Educação Tecnológica do Paraná.
CURITIBA
2001
SUMÁRIO
1. INTRODUÇÃO .................................................................................................... 7
2. NOÇÕES SOBRE O APARELHO RESPIRATÓRIO – FISIOLOGIA................... 9
2.1. COMO O SER HUMANO RESPIRA ....................................................................... 11
2.2. COMO O SANGUE ENTRA NO PULMÃO ............................................................... 12
2.3. POR QUE O CORPO NECESSITA DE OXIGÊNIO..................................................... 13
2.4. INDICAÇÕES DA VENTILAÇÃO PULMONAR ARTIFICIAL .......................................... 14
2.5. INDICAÇÕES TERAPÊUTICAS ............................................................................ 15
2.6. INDICAÇÕES PROFILÁTICAS ............................................................................. 15
2.7. CONTRA-INDICAÇÕES DE VENTILAÇÃO PULMONAR ARTIFICIAL............................. 16
2.8. ACESSOS AÉREOS ARTIFICIAIS......................................................................... 17
3. VENTILADORES ARTIFICIAIS ......................................................................... 20
3.1. VISÃO GERAL ................................................................................................. 20
3.2. DETERMINANTES DO INÍCIO DA FASE INSPIRATÓRIA ........................................... 22
3.2.1. Ventilação Controlada ........................................................................... 23
3.2.2. Ventilação Assistida .............................................................................. 23
3.3. PARÂMETROS REFERENTES A FASE INSPIRATÓRIA ............................................ 24
3.3.1. Volume inspiratório................................................................................ 24
3.3.2. Fluxo inspiratório ................................................................................... 26
3.3.3. Pressão inspiratória............................................................................... 26
3.3.4. Tempo inspiratório................................................................................. 27
3.3.5. Pausa inspiratória final .......................................................................... 27
3.4. CARACTERÍSTICAS DO GÁS INSPIRADO ............................................................. 28
3.4.1. Fração inspirada de oxigênio (FiO2) ...................................................... 28
3.4.2. Temperatura e umidificação .................................................................. 28
3.5. DETERMINANTES DO TÉRMINO DA FASE INSPIRATÓRIA ....................................... 29
3.5.1. Ventiladores ciclados por pressão......................................................... 30
3.5.2. Ventiladores ciclados por volume.......................................................... 31
3.5.3. Ventiladores ciclados por tempo ........................................................... 32
3.5.4. Ventiladores ciclados por fluxo.............................................................. 32
3.5.5. Ventiladores de ciclagem mista............................................................. 32
3.6. PARÂMETROS REFERENTES A FASE EXPIRATÓRIA ............................................. 33
3.6.1. Volume .................................................................................................. 33
3.6.2. Tempo ................................................................................................... 33
3.6.3. Pressão ................................................................................................. 34
3.6.4. Outros parâmetros................................................................................. 34
3.7. COMPONENTES ESSENCIAIS DOS VENTILADORES PULMONARES ARTIFICIAIS......... 36
3.7.1. Fontes de energia.................................................................................. 36
3.7.2. Sistemas de propulsão.......................................................................... 36
3.7.3. Curvas de fluxo inspiratório ................................................................... 38
3.7.4. Sistemas de controle de ciclagem......................................................... 40
3.7.5. Fornecimento de gás e sistemas de mistura ......................................... 41
3.7.6. Circuitos e válvulas................................................................................ 41
3.7.7. Sistemas de condicionamento do ar Inspirado e de nebulização.......... 42
3.7.8. Sistemas de expirometria ...................................................................... 42
3.7.9. Principais controles, indicadores e alarmes ......................................... 43
4. VENTILADORES CONTROLADOS POR MICROPROCESSADORES............ 45
4.1. VANTAGENS POTENCIAIS DE VENTILADORES CONTROLADOS POR........................ 46
MICROPROCESSADORES ........................................................................................ 46
4.1.1. Versatilidade geral................................................................................. 46
4.1.2. Capacidade de exibição e comunicação ............................................... 47
4.1.3. Reparos e manutenção ......................................................................... 48
4.1.4. Sistemas de alça aberta e fechada ....................................................... 49
4.1.5. Memória de acesso aleatório e memória exclusiva de leitura ............... 52
4.1.6. Algoritmos operacionais ........................................................................ 53
5. AVALIAÇÃO/SEGURANÇA DOS VENTILADORES ......................................... 55
6. O PROJETO VIDATECH................................................................................... 57
6.1. SOFTWARE UTILIZADO PARA A INTERFACE GRÁFICA ........................................... 62
6.1.1. Aplicações ............................................................................................. 63

6.1.2. O Ambiente labview............................................................................... 64
6.1.3. Programa de comunicação serial .......................................................... 66
6.1.4. Diagrama em blocos do programa de comunicação serial.................... 71
6.2. MICROPROCESSADOR .................................................................................... 72
6.2.1. SAB 8051 - Diagrama em blocos .......................................................... 73
6.2.2. Características gerais............................................................................ 74
6.2.3. Organização de memória em dispositivos SAB-51 ............................... 75
6.2.5. RAM interna .......................................................................................... 84
6.2.6. Instruções booleanas ............................................................................ 85
6.2.7. Instruções de jumps .............................................................................. 86
6.2.7.2. Jump condicionais ............................................................................ 88
6.2.8. Ciclo de máquina................................................................................... 89
6.2.9. Estruturas de interrupção ...................................................................... 90
6.2.10. Temporizadores................................................................................... 93
6.2.11. Interface Serial .................................................................................... 94
6.2.12. Principais vantagens do microcontrolador 8051.................................. 95
6.2.13. Atuais tendências ................................................................................ 96
7. MERCADO........................................................................................................ 97
7.1. NICHO DE MERCADO ....................................................................................... 97
7.2. MERCADO EM POTENCIAL................................................................................ 98
7.3. DADOS ESTATÍSTICOS..................................................................................... 99
7.4. CONCORRENTES ............................................................................................ 99
7.5. PLANO DE COMERCIALIZAÇÃO........................................................................ 100
7.6. SEGMENTO DO MERCADO EM QUE A EMPRESA ATUA ........................................ 101
7.7. PRINCIPAIS AMEAÇAS E OPORTUNIDADES DO MERCADO ................................... 101
7.8. FORNECEDORES .......................................................................................... 102
7.9. SUPORTE TÉCNICO ....................................................................................... 103
9. REFERÊNCIAS BIBLIOGRÁFICAS ................................................................ 104
ANEXO 01........................................................................................................... 105
ANEXO 02........................................................................................................... 106
ANEXO 03........................................................................................................... 107
ANEXO 04........................................................................................................... 108
ANEXO 05 – DIAGRAMA DE BLOCOS.............................................................. 109
ANEXO 06 – QUESTIONÁRIO DE PESQUISA .................................................. 112
1. Introdução
A ventilação mecânica pulmonar possui um papel primordial no âmbito da
terapia intensiva moderna, desde pequenos hospitais a grandes centros de
médicos. Por esse motivo, a medicina atual depende cada vez mais de
equipamentos, inovações tecnológicas e um suporte adequado que forneça aos
médicos condições de salvar vidas.
A possibilidade de desenvolver equipamentos com a importância de dar
suporte a vida e o grande mercado existente para esses equipamentos no Brasil,
motivaram o desenvolvimento deste projeto.
A ventilação pulmonar artificial vem sofrendo transformações importantes
no decorrer dos tempos, equipamentos microprocessados, abertos a comunicação
via internet, wap evoluções que motivaram o desenvolvimento de um novo
equipamento que é o resultado deste projeto.
Uma noção básica do aparelho respiratório é mostrada para que o
entendimento da finalidade deste equipamento bem como as técnicas e softwares
utilizados para o seu desenvolvimento, que estão explicitados no decorrer deste
memorial, sejam mais bem entendidas, pois o entendimento do funcionamento do
aparelho respiratório é fundamental para se entender o real aproveitamento de um
servo ventilador.
Os estudos e meios utilizados para mostrar a viabilidade econômica e de
mercado do desenvolvimento de equipamentos para essa finalidade estão
igualmente demonstrados, procurando mostrar a carência existente de

equipamentos de alta tecnologia a preços adequados ao mercado brasileiro, que
tem um sistema de saúde extremamente carente e com recursos limitados.

2. Noções sobre o aparelho respiratório – fisiologia
Ao processo de inspirar e expirar o ar dá-se o nome de respiração. Ela
permite ao corpo absorver o oxigênio necessário para gerar energia e eliminar o
gás carbônico resultante das reações químicas.
Durante a respiração, o ar é tomado dos pulmões e forçado a voltar para
trás. Isto normalmente é feito automática e involuntariamente. Como os pulmões
não podem se mover por eles mesmos, a respiração depende de movimentos do
diafragma e dos músculos do tórax que estão entre as costelas. Quando os
músculos da parede do tórax se contraem, eles alargam a cavidade do tórax,
levando a uma diminuição da pressão do ar. Isto faz os pulmões se expandirem e
empurrarem o ar. Quando os músculos relaxam, o tórax se contrai e o ar é levado
para fora.
Figura 01 – Aparelho respiratório
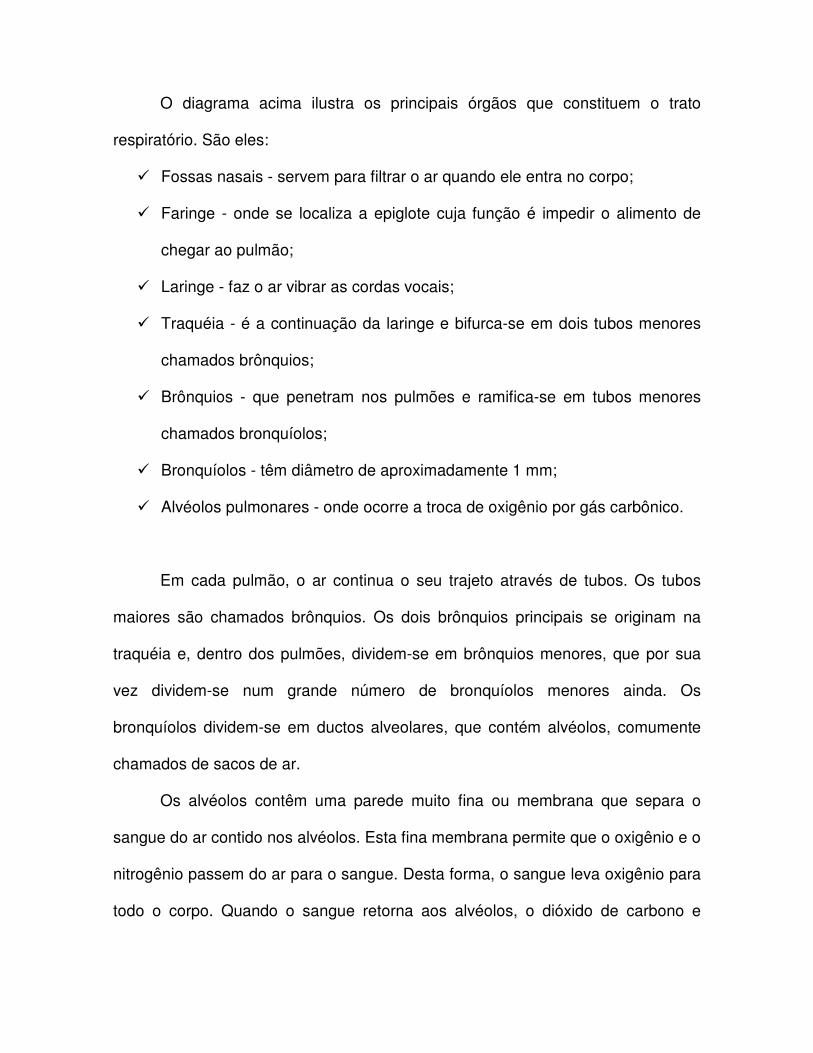
O diagrama acima ilustra os principais órgãos que constituem o trato
respiratório. São eles:
� Fossas nasais - servem para filtrar o ar quando ele entra no corpo;
� Faringe - onde se localiza a epiglote cuja função é impedir o alimento de
chegar ao pulmão;
� Laringe - faz o ar vibrar as cordas vocais;
� Traquéia - é a continuação da laringe e bifurca-se em dois tubos menores
chamados brônquios;
� Brônquios - que penetram nos pulmões e ramifica-se em tubos menores
chamados bronquíolos;
� Bronquíolos - têm diâmetro de aproximadamente 1 mm;
� Alvéolos pulmonares - onde ocorre a troca de oxigênio por gás carbônico.
Em cada pulmão, o ar continua o seu trajeto através de tubos. Os tubos
maiores são chamados brônquios. Os dois brônquios principais se originam na
traquéia e, dentro dos pulmões, dividem-se em brônquios menores, que por sua
vez dividem-se num grande número de bronquíolos menores ainda. Os
bronquíolos dividem-se em ductos alveolares, que contém alvéolos, comumente
chamados de sacos de ar.
Os alvéolos contêm uma parede muito fina ou membrana que separa o
sangue do ar contido nos alvéolos. Esta fina membrana permite que o oxigênio e o
nitrogênio passem do ar para o sangue. Desta forma, o sangue leva oxigênio para
todo o corpo. Quando o sangue retorna aos alvéolos, o dióxido de carbono e

outros gases passam do sangue para os alvéolos. Estes gases são eliminados do
seu corpo com o ar que você expira.
Cada pulmão é envolvido pela pleura, uma fina membrana que se dobra
sobre si formando uma dupla camada ao redor de cada pulmão. Há um espaço
mínimo entre estas membranas preenchido por um fluido que possibilita o
deslizamento das duas durante a respiração. A pleura interna está ligada ao
pulmão; a externa, à caixa torácica. A principal função delas é permitir a contração
e a expansão dos pulmões de forma suave e uniforme. Ao respirar, a caixa
torácica se expande para cima e para fora fazendo com que os pulmões se
expandam e se encham de ar ao mesmo tempo. Quanto mais forte a ação
muscular, maior quantidade de ar penetra nos pulmões.
2.1. Como o ser humano respira
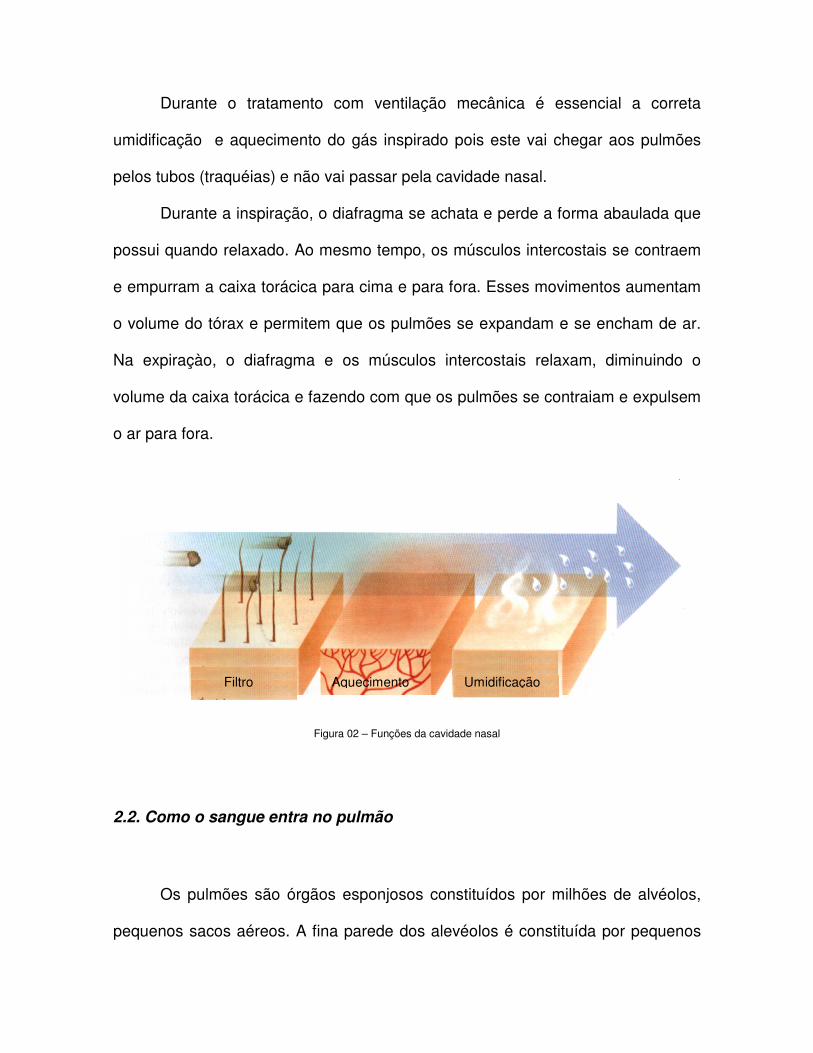
A cavidade nasal tem funções de extrema importância que são filtrar
(limpar), aquecer e umidificar o ar que entra pelas vias aéreas, conforme pode ser
visto na figura 02 abaixo. O interior das narinas contém “ pelos” que retiram as
partículas de sujeira do ar inspirado. Para o aquecimento do ar inspirado, existem
finas paredes que possuem finas veias que circula o sangue responsável pelo
aquecimento através da irradiação de calor. A cavidade nasal é mantida
umedecida pela secreção de glândulas situadas na cavidade nasal, essa secreção
é responsável pela umidificação do ar que entra pelas narinas. Assim, a cavidade
nasal é responsável por deixar o ar nas condições ideais para o aproveitamento
pelo organismo.
Durante o tratamento com ventilação mecânica é essencial a correta
umidificação e aquecimento do gás inspirado pois este vai chegar aos pulmões
pelos tubos (traquéias) e não vai passar pela cavidade nasal.
Durante a inspiração, o diafragma se achata e perde a forma abaulada que
possui quando relaxado. Ao mesmo tempo, os músculos intercostais se contraem
e empurram a caixa torácica para cima e para fora. Esses movimentos aumentam
o volume do tórax e permitem que os pulmões se expandam e se encham de ar.
Na expiraçào, o diafragma e os músculos intercostais relaxam, diminuindo o
volume da caixa torácica e fazendo com que os pulmões se contraiam e expulsem
o ar para fora.
Figura 02 – Funções da cavidade nasal
2.2. Como o sangue entra no pulmão
Os pulmões são órgãos esponjosos constituídos por milhões de alvéolos,
pequenos sacos aéreos. A fina parede dos alevéolos é constituída por pequenos
Filtro Aquecimento Umidificação
vasos sanguíneos e é através delas que ocorrem as trocas vitais de oxigênio e
gás carbônico. Os alvéolos permitem um contato muito estreito entre o sangue e o
ar: o oxigênio passa para a corrente sanguínea e o gás carbônico é expelido na
expiração.
2.3. Por que o corpo necessita de oxigênio
Os seres humanos podem viver por vários dias sem alimento ou água, mas
eles morreriam em poucos minutos na ausência de ar. O oxigênio, um gás
encontrado no ar, é necessário para o metabolismo da célula, o processo crucial
para transformar alimento em energia.
O ar que entra nos pulmões contém mais oxigênio e o ar que deixa os
pulmões contém mais dióxido de carbono, medido em milímetros de mercúrio
(mmHg).
A respiração traz oxigênio ao corpo e envia para fora um outro gás, o
dióxido de carbono, considerado o “lixo” do metabolismo. Esta substituição de gás
é realizada por pequenos sacos alveolares que ocupam a maior parte do espaço
dos pulmões. É através deles que o oxigênio entra na corrente sanguínea e o gás
carbônico pode ser expelido do organismo. Durante o processo, o diafragma, uma
lâmina muscular localizada entre o peito e o abdome, se contrai e se relaxa num
movimento ritmado, fazendo com que as costelas e os pulmões se expandam,
sugando assim o ar, e encolhem, forçando o ar a sair.
2.4. Indicações da ventilação pulmonar artificial
A ventilação pulmonar artificial, apesar de ser um recurso freqüentemente
utilizado em terapia intensiva, é mais propriamente voltada para a manutenção de
condições respiratórias adequadas, na expectativa de que o tratamento tenha
êxito e seja possível o da ventilação espontânea do paciente em condições
satisfatórias.
Assim, os objetivos da assistência ventilatória são:
� Prover ventilação alveolar capaz de permitir trocas gasosas compatíveis
com as necessidades metabólicas, consideradas as condições pulmonares
preexistentes do paciente;
� Manter volumes e características mecânicas pulmonares, prevenindo a
deterioração da função respiratória.
� As indicações de assistência ventilatória em terapia intensiva relacionam-se
primordialmente com os quadros de insuficiência respiratória, que em
resumo, caracteriza-se, do ponto de vista laboratorial, pela redução parcial
de O2 no sangue arterial, variando a pressão parcial de CO2 de acordo com
o acometimento funcional respiratório.
Sistematicamente, as indicações de ventilação pulmonar artificial
classificam-se como terapêuticas ou profiláticas. Estas últimas visam evitar a
progressão do comprometimento pulmonar em situações críticas, quando o
aumento das necessidades metabólicas impõe grandes exigências a um aparelho
respiratório com condições funcionais limitadas.

2.5. Indicações terapêuticas
� Apnéia e hipoventilação:
o Alterações do sistema nervoso central, tanto estruturais
(traumatismos, hemorragias, meningoencefatiles) quanto taráxicas;
o Afecções neuromusculares periféricas;
o Paralisias musculares induzidas farmacologicamente (tétano);
o Anestesia geral;
� Durante manobras de ressucitação cardiopulmonar;
� Hipoxemia:
o Síndrome da angústia respiratória do adulto;
o Síndromes lobares agudas (pneumonias, embolia pulmonar);
o Edema pulmonar hidrostático de difícil tratamento;
� Alterações mecânicas da dinâmica toracopulmonar:
o Traumatismos torácicos graves (lesões);
o Pós-operatório toráxico.
Situações adversas em que o aparelho respiratório mostra-se incapaz de
atender as demandas orgânicas aumentadas.
2.6. Indicações Profiláticas
� Choque prolongado de qualquer etiologia;
� Pós-operatório:
o Cirurgias abdominais em risco de sepse maciça (contaminação fecal
da cavidade peritoneal);
o Cirurgias abdominais em pacientes extremamente obesos.
� Situações em que a redução do esforço respiratório obtida pela ventilação
artificial possa contribuir para limitar o nível de demanda do aparelho
cardiovascular, sobretudo após cirurgias cardíacas de maior risco;
� Broncoaspiração maciça de ácido gástrico;
� Grandes agressões orgânicas em pacientes caquéticos (infecções,
traumatismos, cirurgias);
O grau de liberdade na indicação de assistência ventilatória nas diversas
situações clínicas depende também em grande parte de fatores não estritamente
ligados ao paciente, tais como:
� Condições materiais: disponibilidade de equipamentos, monitores e exames
complementares como gasometria arterial;
� Condições humanas: graus de experiência da equipe médica com as
técnicas de ventilação, nível de treinamento da equipe de enfermagem,
existência de recursos de fisioterapia e outros.
2.7. Contra-Indicações de ventilação pulmonar artificial
Poucas são as indicações reais para assistência ventilatória pulmonar.
Entre elas, destaca-se o pneumotórax hipertensivo, quando a insuflação de gás
sob pressão expande ainda mais o compartimento aerado, resultando
comprometimento importante da função pulmonar contralateral e das condições
hemodinâmicas.
O objetivo desta modalidade de apoio clínico é assegurar condições
respiratórias compatíveis com a manutenção da vida enquanto são instituídas
medidas terapêuticas capazes de reverter o quadro mórbido subjacente. Se não
há possibilidades concretas de recuperação da falência orgânica, não há sentido
real na indicação de ventilação pulmonar artificial.
2.8. Acessos aéreos artificiais
A obtenção e a manutenção de um acesso adequado às vias aéreas do
paciente representam etapas de fundamental importância no âmbito da
assistência à função respiratória.
Nas situações de maior gravidade, é necessário a instalação de acessos
artificiais às vias aéreas do paciente, seja por meio de intubação traqueal, seja por
traqueostomia. Tais recursos possibilitam administrar diretamente misturas
gasosas com maiores concentrações de oxigênio, melhorando assim as trocas
gasosas pulmonares, além de facilitar a mobilização de secreções, pela
umidificação e aspiração mecânica, por outro lado, a insuflação do balonete
terminal das cânulas traqueais assegura o isolamento das vias aéreas inferiores,
colaborando com a prevenção de broncoaspiração do conteúdo oral gástrico.
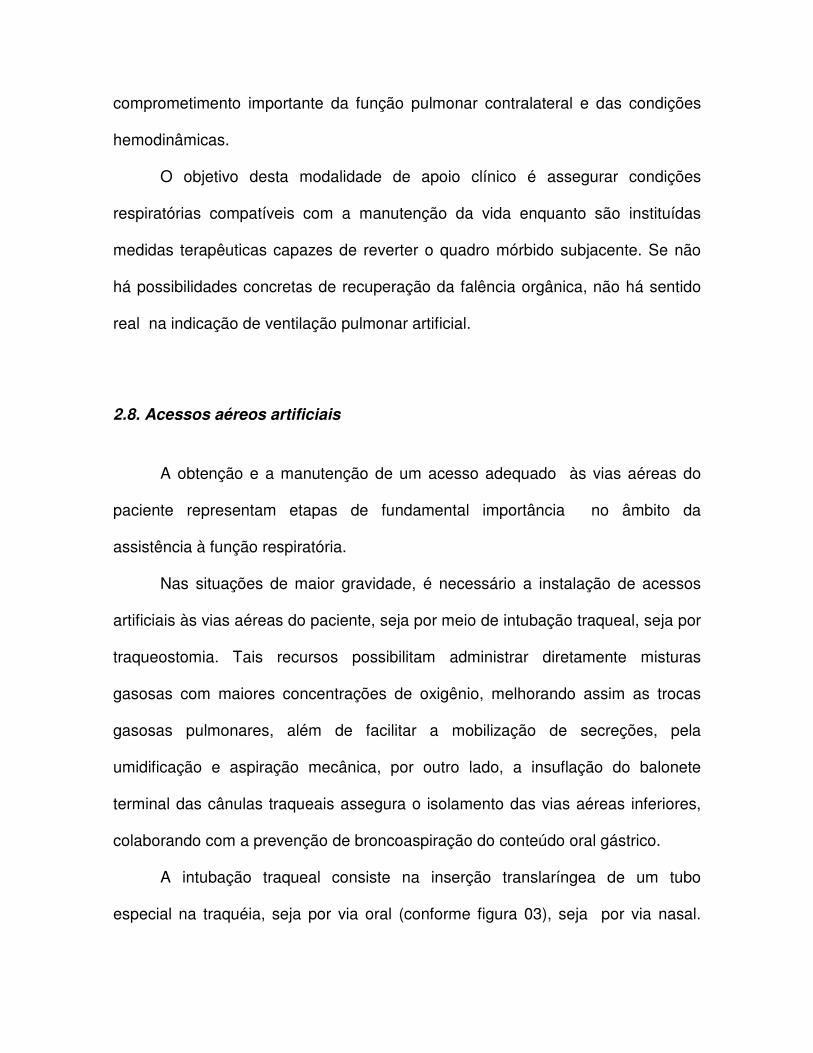
A intubação traqueal consiste na inserção translaríngea de um tubo
especial na traquéia, seja por via oral (conforme figura 03), seja por via nasal.
Quando realizada por pessoas adequadamente treinadas, é um procedimento
relativamente simples, com reduzidos índices de morbidade, sobretudo quando
comparado a traqueostomia.
Nas situações clínicas em que há indicação de acesso artificial as vias
aéreas, o procedimento inicialmente indicado é a intubação oro ou nasotraqueal.
Figura 03 – Paciente Iintubada
Este é um recurso rápido e eficiente de acesso as vias aéreas para prover
ventilação aoveolar, prevenir secreções e prevenir broncoaspiração.
As principais contra-indicações para intubação traqueal incluem:
� Traumatismos raquimedulares (pela necessidade de mobilização cervical);
� Queimaduras faciais graves e fraturas múltiplas de ossos da face;
� Casos especiais de obstrução das vias aéreas superiores.
Nas condições acima o método indicado é a traquostomia.

Figura 04 – Aparelho respiratório, vias aéreas superiores e inferiores
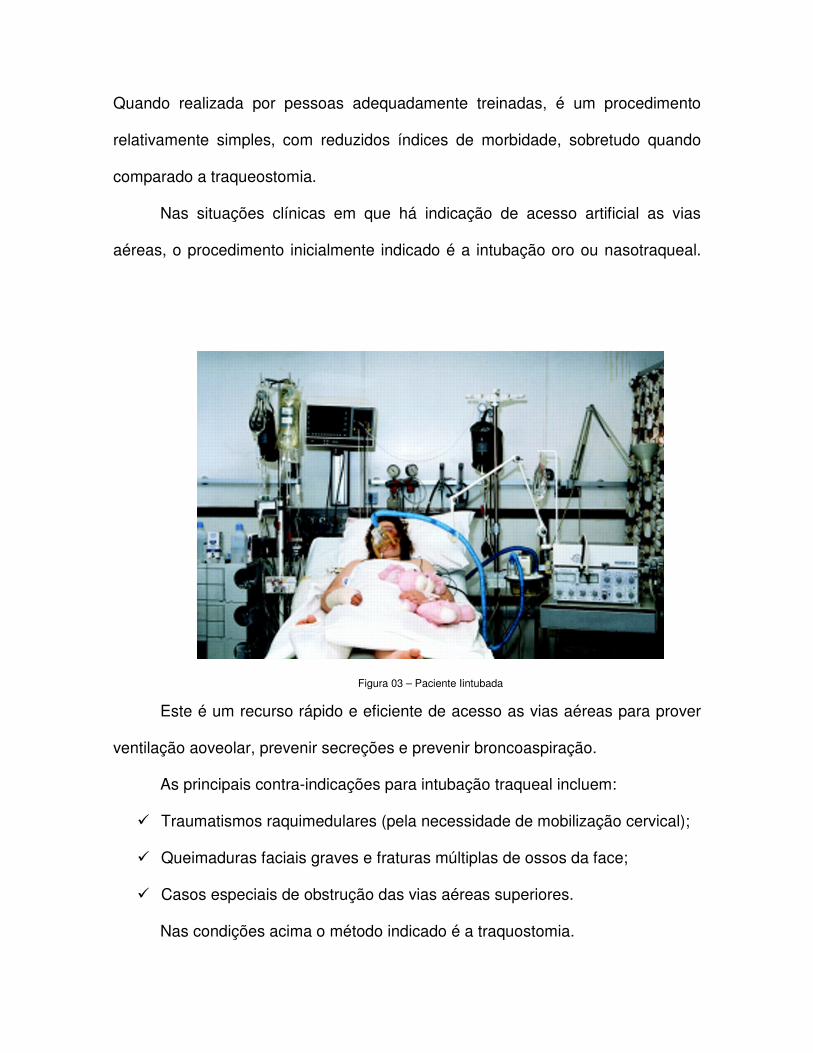
A traqueostomia consiste de um acesso cirúrgico direto as vias aéreas pela
face anterior do pescoço, por meio do qual uma cânua especial é introduzida na
traquéia. O procedimento geralmente é indicado para ventilação, oxigenação e
remoção de secreções quando o tubo oro ou nasotraqueal não está sendo
adequado. As contra-indicações da traqueostomia são raras, devendo ser
avaliadas comparativamente com a a necessidade clínica do procedimento. Entre
elas citam-se os procedimentos infecciosos (celulite) e o efisema de subcutâneo
na região cervical.
Figura 05 – Cânula de traqueostomia
3. Ventiladores artificiais
3.1. Visão geral
Conceituam-se ventiladores pulmonares artificiais como dispositivos
eletromecânicos capazes de insuflar, segundo parâmetros reguláveis, uma mistura
gasosa de composição e características preestabelecidas nas vias respiratórias de
pacientes (fase inspiratória), permitindo a seguir a exalação do conteúdo aéreo
pulmonar (fase expiratória).
Figura 06 – Sucessão de fases do ciclo ventilatório artificial
Os critérios para avaliação dos ventiladores mecânicos dependem
basicamente do tipo e aplicação pretendida. Os ventiladores podem ser
classificados quanto a sua aplicação neonatal/pediátrica ou pediátrica/adulta.
Outra classificação possível é quanto ao uso em UTI, emergência, transporte,
domiciliar ou ainda em anestesia. Obviamente os requisitos em termos de
controles, alarmes e desempenho poderão ser completamente distintos. O projeto
em questão trata especificamente de ventiladores para utilização pediátrica/adulta
em UTI. Estes ventiladores, conhecidos genericamente como volumétricos,
permitem atualmente, devido ao desenvolvimento tecnológico, uma flexibilidade
muito grande no que se refere aos modos de ventilação disponíveis.
A simplicidade do esquema mostrado na figura 05, contrapõem-se a
multiplicidade de parâmetros que devem ser mantidos sob controle no ciclo
ventilatório, classificados em quatro grupos:
Fase expiratória
Fase inspiratória
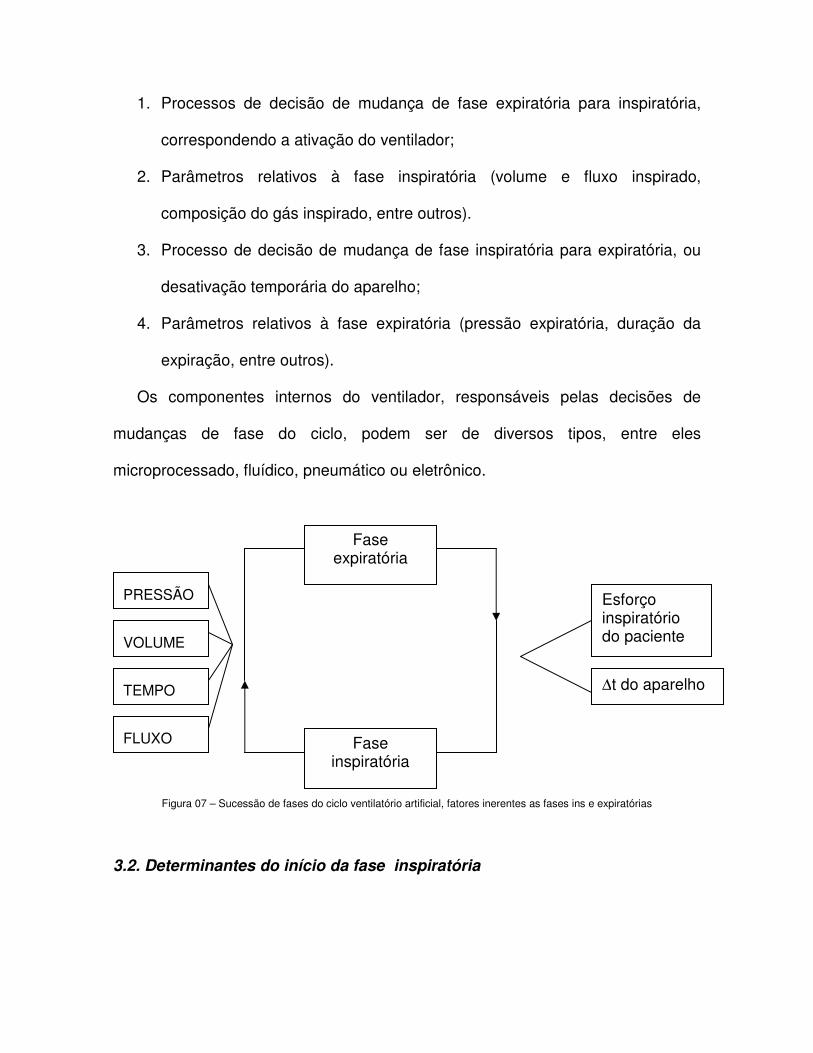
1. Processos de decisão de mudança de fase expiratória para inspiratória,
correspondendo a ativação do ventilador;
2. Parâmetros relativos à fase inspiratória (volume e fluxo inspirado,
composição do gás inspirado, entre outros).
3. Processo de decisão de mudança de fase inspiratória para expiratória, ou
desativação temporária do aparelho;
4. Parâmetros relativos à fase expiratória (pressão expiratória, duração da
expiração, entre outros).
Os componentes internos do ventilador, responsáveis pelas decisões de
mudanças de fase do ciclo, podem ser de diversos tipos, entre eles
microprocessado, fluídico, pneumático ou eletrônico.
Figura 07 – Sucessão de fases do ciclo ventilatório artificial, fatores inerentes as fases ins e expiratórias
3.2. Determinantes do início da fase inspiratória
Fase expiratória
Fase inspiratória
Esforço inspiratório do paciente
∆t do aparelho
PRESSÃO
VOLUME
FLUXO
TEMPO

Em seus primórdios, a ventilação pulmonar artificial era utilizada
essencialmente em pacientes em apnéia, acometidos de patologias do sistema
neuromuscular (poliomelite) ou durante procedimentos anestésicos. Com este
intuito os equipamentos eram projetados para administrar volumes reguláveis de
ar a intervalos fixos de tempo, sem levar em consideração a possibilidade de
existência de uma freqüência respiratória própria do paciente.
Com a evolução dos equipamentos e técnicas, a ventilação artificial
estendeu suas aplicações, complementando a ventilação própria de pacientes
incapazes de gerar condições adequadas às trocas gasosas pulmonares ideais.
Tornando-se, portanto, imprescindível capacitar os ventiladores a acompanhar,
dentro de certos limites, a freqüência respiratória espontânea do paciente.
3.2.1. Ventilação Controlada
É aquela em que um mecanismo automático de tempo ativa o ventilador, na
ausência ou independentemente de esforço inspiratório do paciente; esta
modalidade de ventilação aplica-se portanto, a pacientes em apnéia (própria ou
farmacologicamente induzidos) que requerem uma freqüência respiratória
artificialmente controlada.
3.2.2. Ventilação Assistida
É aquela em que o próprio paciente, ao gerar um esforço inspiratório
inicial, determina o momento da ativação do ventilador, neste caso, um

mecanismo sensor detecta o estímulo do paciente e assiste o restante da
inspiração, administrando a mistura gasosa sob pressão.
3.3. Parâmetros referentes a fase inspiratória
Durante a fase inspiratória, o controle preciso e permanente de uma
série de parâmetros relativos a administração da mistura gasosa, tem por objetivo
adapta as condições de ventilação à situação de cada paciente em particular. A
capacidade de controlar os parâmetros apresentados a seguir, depende do
aprimoramento técnico de cada equipamento.
3.3.1. Volume inspiratório
O volume inspiratório (VI) corresponde àquele programado no ventilador
para ser administrado ao paciente. Pode não corresponder exatamente ao volume
corrente do paciente (VC), devido a vazamentos no circuito e em torno ao
balonete do tubo traqueal, distensibilidade (complacência) do circuito inspiratório
frente à pressão gerada, e ainda por funcionamento inadequado do aparelho. Por
esse motivo, o volume corrente deve ser constantemente aferido por espirometria,
para ajustes na regulagem do volume inspirado do ventilador.
O VI a ser instituído varia de acordo com a idade do paciente, o grau de
complacência pulmonar e a freqüência respiratória, entre outros.
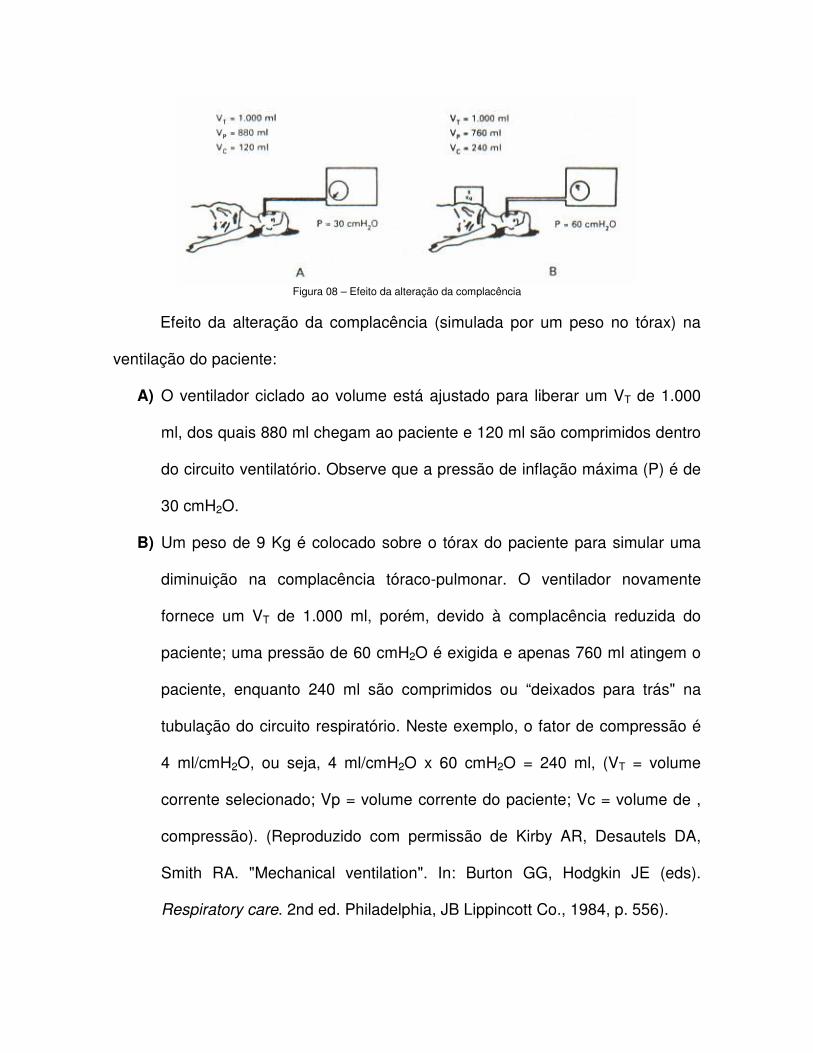
Figura 08 – Efeito da alteração da complacência
Efeito da alteração da complacência (simulada por um peso no tórax) na
ventilação do paciente:
A) O ventilador ciclado ao volume está ajustado para liberar um VT de 1.000
ml, dos quais 880 ml chegam ao paciente e 120 ml são comprimidos dentro
do circuito ventilatório. Observe que a pressão de inflação máxima (P) é de
30 cmH2O.
B) Um peso de 9 Kg é colocado sobre o tórax do paciente para simular uma
diminuição na complacência tóraco-pulmonar. O ventilador novamente
fornece um VT de 1.000 ml, porém, devido à complacência reduzida do
paciente; uma pressão de 60 cmH2O é exigida e apenas 760 ml atingem o
paciente, enquanto 240 ml são comprimidos ou “deixados para trás" na
tubulação do circuito respiratório. Neste exemplo, o fator de compressão é
4 ml/cmH2O, ou seja, 4 ml/cmH2O x 60 cmH2O = 240 ml, (VT = volume
corrente selecionado; Vp = volume corrente do paciente; Vc = volume de ,
compressão). (Reproduzido com permissão de Kirby AR, Desautels DA,
Smith RA. "Mechanical ventilation". In: Burton GG, Hodgkin JE (eds).
Respiratory care. 2nd ed. Philadelphia, JB Lippincott Co., 1984, p. 556).
3.3.2. Fluxo inspiratório
De acordo com a física dos fluidos, considera-se o fluxo num determinado
circuito como o volume transferido em uma determinada unidade de tempo.
Da fórmula F=V/T, observa-se que o fluxo e o tempo variam em razão
inversa, o que aplicado aos parâmetros inspiratórios equivale a afirmar que quanto
maior o fluxo inspiratório, menor será a duração da inspiração e vice-versa. Na
maioria dos ventiladores, a regulagem do fluxo inspiratório representa o principal
recurso determinante da duração da inspiração.
3.3.3. Pressão inspiratória
A pressão gerada na via aérea proximal do paciente durante a fase de
injeção de mistura gasosa é denominada pressão de admissão (Padm), sendo
registrada no ponto de excursão máxima do ponteiro do manômetro do painel do
aparelho.
A Padm varia em função de parâmetros inerentes tanto ao paciente quanto
ao ventilador, entre eles:
� Complacência pulmonar e resistência das vias aéreas: mantido o mesmo
volume inspiratório, quanto maior for a resistência (menor a complacência
pulmonar), maior será a pressão gerada na inspiração;
� Fluxo inspiratório: fluxos elevados, acima de um valor crítico (característico
de cada gás), podem acarretar a transformação do fluxo laminar normal nos
circuitos do ventilador e nas vias aéreas altas em fluxo turbilhonar,
elevando anormalmente a pressão gerada pelo aparelho para injetar o
volume inspiratório. A medida freqüente da Padm é de grande importância,
uma vez que elevações súbitas podem alertar para afecções
potencialmente sérias, como obstruções brônquicas por rolhas de secreção,
pneumotórax e embolia pulmonar.
3.3.4. Tempo inspiratório
A fase inspiratória estende-se do momento em que o ventilador é ativado
(paciente ou automaticamente) até que o parâmetro de ciclagem seja atingido
(volume, pressão, tempo ou fluxo). A duração da fase inspiratória varia em razão
inversa com o fluxo inspiratório. Portanto, mantendo o fluxo constante, quanto
maiores forem a pressão ou o volume programados para a ciclagem, maior será o
tempo necessário para completar a inspiração. Na maior parte dos ventiladores, a
duração da inspiração é regulada exclusivamente pelo ajuste do fluxo inspiratório.
3.3.5. Pausa inspiratória final
A pausa inspiratória é um período regulável de tempo no final da inspiração,
durante o qual o ventilador interrompe a injeção gasosa mantendo, no entanto a
válvula expiratória fechada, retardando momentaneamente o esvaziamento
pulmonar.

Este recurso torna a distribuição dos gases intrapulmonares mais
homogêneas, sobretudo nos locais em que a ventilação se faz com menor
velocidade – pequenas vias aéreas e em regiões em que há algum grau de
obstrução.
3.4. Características do gás inspirado
A crescente utilização da assistência ventilatória em situações de
insuficiência respiratória propriamente dita exige um aprimoramento maior da
qualidade da mistura gasosa administrada, obtido pelo controle das características
seguintes.
3.4.1. Fração inspirada de oxigênio (FiO2)
A concentração de oxigênio no ar ambiente é de 20,9%. A possibilidade de
enriquecer a mistura inspirada administrando frações mais elevadas de oxigênio
depende dos recursos do ventilador utilizado.
Enquanto aparelhos mais simples permitem apenas duas regulagens de
FiO2 (0,4 ou 1), os mais sofisticados possuem dispositivos misturadores (blenders)
capazes de fornecer toda gama de frações de 0,21 a 1.
3.4.2. Temperatura e umidificação

Na ventilação espontânea, as vias aéreas superiores exercem a importante
função de condicionamento do ar inspirado, no que diz respeito à umidificação e
aquecimento. Entretanto, o acesso direto a traquéia, utilizado durante a ventilação
artificial, implica que a mucosa das vias aéreas distais à mesma assuma
parcialmente as funções de saturação hídrica e aquecimento, do que resultam
danos ao epitélio e prejuízo da atividade mucociliar da remoção da secreções e
impurezas.
Para minimizar tais efeitos, procura-se administrar a mistura gasosa nas
condições mais próximas das fisiológicas, com umidade relativa entre 80% e
100% e aquecimento entre 32° e 37°. O ar inspirado deve ser aquecido e
umidificado durante a ventilação artificial e durante todos os casos de intubação
traqueal ou traqueostomia.
Os ventiladores mais aprimorados possuem os sistemas de aquecimento e
umidificação em geral acoplados, que consistem de recipientes nos quais o ar
inspirado borbulha no interior de água aquecida a temperatura constante ou de
câmaras saturadas de vapor, interpostas no circuito. aparelhos mais simples
podem dispor apenas de componentes onde o ar entra em contato com nuvens de
pequenas partículas de água a temperatura ambiente gerados pelo fluxo auxiliar
do circuito.
3.5. Determinantes do término da fase inspiratória

Ao contrário do início da inspiração, que pode ser deflagrado tanto pelo
paciente quanto pelo aparelho ventilador, a decisão do término da fase inspiratória
baseia-se exclusivamente em parâmetros inerentes à própria arquitetura do
ventilador. A transição da fase ins para expiratória ocorre tão logo seja atingido
um nível crítico (preestabelecido na regulagem do aparelho) de um dos seguintes
parâmetros:
� Pressão nas vias aéreas;
� Volume;
� Tempo;
� Fluxo inspiratório.
Esse parâmetro caracteriza o mecanismo de ciclagem do ventilador.
3.5.1. Ventiladores ciclados por pressão
Terminam a fase inspiratória quando um determinado nível de pressão é
atingido. Durante a fase de injeção da mistura gasosa, a pressão intrapulmonar
em elevação progressiva é transmitida retrogradamente ao circuito inspiratório,
sendo detectada por sensores no interior do aparelho, ocorrendo a ciclagem no
nível preestabelecido.
Os ventiladores ciclados por pressão caracterizados pela variabilidade do
volume corrente e da duração da inspiração em função da dinâmica respiratória do
paciente.

Figura 09 -A curva de pressão das vias aéreas na ventilação controlada por pressão (PCV
O ventilador pode ser iniciado ou acionado pelo paciente, ou iniciado por
tempo, o que ocorrer primeiro. O ventilador finaliza o ciclo após um tempo
inspiratório pré-selecionado ter transcorrido. O clínico predetermina o limite
pressórico, o tempo inspiratório e a freqüência mínima do ventilador.
3.5.2. Ventiladores ciclados por volume

Interrompem a fase inspiratória quando um determinado volume
preestabelecido no aparelho for injetado no circuito inspiratório. São também
denominados ventiladores volumétricos. Geralmente são aparelhos com circuito
duplo, consistindo de uma turbina o sistema primário de propulsão e de um fole
cilíndrico o circuito de fornecimento da mistura ao paciente.
3.5.3. Ventiladores ciclados por tempo
Concluem a fase inspiratória após decorrido um intervalo de tempo
preestabelecido, em resposta ao sinal de um temporizador intrínseco do
ventilador.
3.5.4. Ventiladores ciclados por fluxo
Ciclam quando um determinado fluxo inspiratório crítico é atingido. Estes
ventiladores são habitualmente geradores de pressão constante. A medida que
ocorre insuflação pulmonar na inspiração, o gradiente pressórico entre o gerador e
os pulmões diminui. A redução progressiva do fluxo inspiratório determina, abaixo
de um valor crítico determinado, a ciclagem do aparelho, por meio de uma válvula
especial.
3.5.5. Ventiladores de ciclagem mista
São aqueles dotados de mais de um mecanismo de ciclagem, tanto
opcionalmente como por medida de segurança.
No primeiro caso, por exemplo, situam-se os ventiladores que oferecem ao
operador a opção de ciclagem por tempo ou por pressão.
3.6. Parâmetros referentes a fase expiratória
A fase expiratória do ciclo artificial corresponde à exalação passiva dos
gases, uma vez inativado o aparelho. Entretanto, os parâmetros a seguir citados,
devem ser mantidos sob controle durante a fase expiratória.
3.6.1. Volume
O volume expirado indica com maior precisão o volume corrente do
paciente, podendo inclusive diferir do volume inspiratório do aparelho. A correta
avaliação do volume expiratório é de grande importância no controle da ventilação
artificial, juntamente com a monitorização dos parâmetros gasométricos.
Ventiladores mais modernos fornecem leituras espirométricas permanentes, tanto
pelo deslocamento de um fole cilíndrico quanto pela inferência do volume por
sensores de fluxo.
3.6.2. Tempo
O tempo expiratório representa o intervalo de tempo durante o qual o
ventilador permanece desativado, antes do início da fase inspiratória. Pode ser
constante, na ventilação controlada, ou variável na ventilação assistida ou
assisto/controlada.
3.6.3. Pressão
Em condições habituais de ventilação artificial, a expiração se faz contra a
pressão atmosférica. Opõe-se ao fluxo expiratório apenas as resistências
exercidas pelas vias aéreas do paciente, pelo tubo traqueal, pelos circuitos e
válvula expiratória do ventilador e pela inércia dos expirômetros.
3.6.4. Outros parâmetros

3.6.4.1. Freqüência respiratória (FR)
Na ventilação assistida, o próprio paciente determina a FR efetiva,
devendo-se ajustar apenas a duração do tempo inspiratório para que sejam
obtidas relações ins/expiratórias adequadas.
Na ventilação controlada, a FR é um parâmetro mais complexo e depende
de ajustes no aparelho. A maior parte dos aparelhos utiliza tempo expiratório para
regulara FR outros tem dispositivos de ajuste próprios da FR.
3.6.4.2. Relação inspiração / expiração
Durante a ventilação espontânea, observa-se a duração da expiração
supera o da inspiração na razão de aproximadamente ½.. Sendo a expiração um
fenômeno passivo, é importante manter-se uma relação semelhante durante a
ventilação artificial, afim de que o esvaziamento pulmonar adequada. Uma vez
estabelecida a FR, ajusta-se a relação I/E por intermédio do fluxo inspiratório.
3.6.4.3. Alarmes sonoros e visuais
Embora não sejam parâmetros propriamente ditos, os alarmes aão
importantes componentes dos ventiladores artificiais, que, na dependência do grau
de aprimoramento tecnológico do aparelho, incluem uma série de recursos
audiovisuais que alertam o operador sempre que um parâmetro respiratório
extrapola os limites pré-programados.

3.7. Componentes essenciais dos ventiladores pulmonares artificiais
3.7.1. Fontes de energia
Em sua estrutura essencial, os ventiladores pulmonares artificiais
compreendem, além dos sistemas responsáveis pela obtenção da mistura gasosa
com características definidas, dois grupos de componentes:
Aqueles relacionados com a propulsão da mistura aérea para as vias
aéreas do paciente (por meio de circuitos de conexão), objetivando insuflação
pulmonar;
Aqueles relacionados com o controle automático das mudanças de ciclo,
bem como com a definição dos parâmetros ins e expiratórios.
Ambos os componentes dependem do fornecimento contínuo de energia, a
qual pode ser de dois tipos: elétrica ou pneumática (originada pela pressão de
fornecimento de oxigênio e ar comprimido, pela rede ou por cilindros). De acorde
com a modalidade energética, os ventiladores podem ser descritos como:
� Acionados e controlados pneumaticamente;
� Acionados e controlados elétrica/eletronicamente;
� Acionados pneumaticamente e controlados elétrica/eletronicamente.
3.7.2. Sistemas de propulsão
A transferência da mistura aérea do interior do aparelho para as vias
respiratórias do paciente depende da geração de uma pressão positiva, pelos
sistemas de propulsão. A dinâmica ventilatória resultante é estritamente
dependente das características de cada propulsor.
Podem ser de diversos modelos entre eles:
� Geradores de fluxo constante: são sistemas capazes de gerar pressões
inspiratórias elevadas, superando em muito as pressões pulmonares
habituais. Podem ser motores elétricos de elevada potência acionadores
de turbinas ou ventoinhas, pistons impulsionados linearmente ou foles
impulsionados por pesos.
� Geradores de pressão constante: geram pressões moderadas,
permitindo o equilíbrio com a pressão alveolar. Geralmente são motores
elétricos de potência moderada acionadores de turbinas ou ventoinhas,
injetores baseados no efeito venturi ou foles impulsionados por
pequenos pesos.
Geradores de fluxo não constante: impulsionam o ar segundo ondas
sinusiodais de fluxo, permanecendo as curvas de pressão dependentes da
dinâmica pulmonar. Podem ser pistons impulsionados não linearmente ou
ventiladores microprocessados.
Geradores de pressão não constante: são ventiladores de fluxo constante
acrescidos de redutores de pressão, que resultam em curvas pressóricas
sinusoidais, relativamente independentes das condições pulmonares do paciente.
Geradores de pressão e fluxo decrementais: sistemas em que a pressão e
o fluxo sofrem decréscimo progressivo no decorrer da inspiração, sujeitando
ambos os parâmetros a significativas alterações, na dependência da dinâmica
pulmonar.
Ventiladores de circuitos simples e duplo: um ventilador é classificado
como de circuito simples se o gás no interior do sistema propulsor é o mesmo que
vai para as vias aéreas do paciente. Se por outro lado o gás impulsionado é
responsável pela impulsão de um segundo que vai para o interior das vias aéreas
do paciente, o ventilador é um sistema de circuito duplo.
3.7.3. Curvas de fluxo inspiratório
Curvas de fluxo inspiratório constantes, sinusoidais, em desaceleração ou
em aceleração, disponíveis em muitos dos ventiladores mecânicos mais
modernos, controlados por microprocessadores, podem costituir outro método de
classificar os ventiladores mecânicos (Fig. 9) (isto é, os ventiladores podem ser
classificados como geradores de fluxo constante ou não constante). Geradores de
fluxo constante necessitam de uma alta pressão propulsora para manter um
gradiente pressórico elevado entre o ventilador e o paciente. Uma curva de fluxo
inspiratório constante ou quadrada é obtida com este tipo de ventilador (Fig. 9.
coluna I). Idealmente, a curva de fluxo inspiratório e o volume não devem ser
afetados por alterações na CTP e na resistência das vias aéreas.
Um mecanismo excêntrico de discos e pistões (p. ex., IMV Emerson
Ventilator, J.H. Emerson, Co., Cambridge, MA) origina uma taxa de fluxo que varia
de acordo com o tempo inspiratório e é, portanto, um gerador de fluxo não
constante. Uma curva de fluxo inspiratório sinusoidal é obtida com este tipo de
ventilador. A curva de fluxo inspiratório deve permanecer essencialmente a

mesma de uma respiração para outra, conforme ocorram alterações na mecânica
pulmonar. Curvas de fluxos inspiratórios em aceleração e em desaceleração
obviamente representam uma taxa de fluxo não constante; portanto, ventiladores
que apresentam estas curvas podem ser considerados geradores de fluxo não
constante.
Existem dúvidas se um tipo particular de curva de fluxo inspiratório pode
melhorar a distribuição da ventilação, a razão VA/Q, e a troca gasosa. A
discrepância entre alguns relatos relaciona-se a uma enormidade de variáveis
conflitantes. Em alguns estudos, a alteração da curva de fluxo inspiratório pode ter
afetado o tempo inspiratório, a relação tempo inspiratório-expiratório (I/E), a taxa
de fluxo inspiratório máximo, o VT e a ventilação minuto. Alguns investigadores,
usando uma pausa inspiratória final, compararam várias curvas de fluxo
inspiratório e encontraram poucas diferenças na distribuição da ventilação.
Entretanto, a duração do tempo inspiratório é ampliada pela presença de uma
pausa inspiratória final, o que sugere que sua influência sobre a distribuição da
ventilação e sobre a troca gasosa é tão ou mais importante que o tipo de curva de
fluxo utilizada.

Figura 10 – Curvas De Fluxo Inspiratório
A pressão das vias aéreas (Pva), taxa de fluxo (V) e volume corrente (VT)
são representados por curvas de fluxo inspiratório constantes, sinusoidais, em
aceleração e em desaceleração. O tempo inspiratório, o VT, a complacência
pulmonar e a resistência das vias aéreas foram mantidas constantes. A pressão
de inflação máxima foi mais alta com a curva em aceleração e mais baixa com a
curva em desaceleração; entretanto, a pressão média das vias aéreas foi maior
com a última curva de fluxo inspiratório.
3.7.4. Sistemas de controle de ciclagem
As decisões de mudança de fase do ciclo respiratório são realizados por
dispositivos intrínsecos ao ventilador, os quais podem ser:
� Pneumático: a diferença de pressão entre as câmarasdetermina a ciclagem
do aparelho;

� Fluídico: a ciclagem depende da mudança do sentido de fluxos gasosos,
em componentes internos do aparelho;
� Microprocessadores: modalidade mais aprimorada de controle , onde
componentes lógicos determinam a mudança de fase.
3.7.5. Fornecimento de gás e sistemas de mistura
A mistura gasosa administrada ao paciente pelos ventiladores consiste de
uma composição de ar ambiente filtrado e oxigênio, em proporções ajustáveis às
necessidades de enriquecimento do ar alveolar para melhor oxigenação arterial. O
oxigênio é sempre fornecido a partir de sistemas pressurizados.
O ar pode ser captado diretamente do ambiente ou ser fornecido sob
pressão, por compressores elétricos ou cilíndricos. No primeiro caso os
ventiladores possuem um filtro que deve ser freqüentemente limpo ou substituído.
3.7.6. Circuitos e válvulas
A finalidade dos circuitos e válvulas é conectar o ventilador ao acesso às
vias aéreas do paciente (tubo traqueal ou traqueostomia). Geralmente são
constituídos por material plástico com paredes corrugadas, de forma a evitar
obstrução em angulações acentuadas.
Adaptadas aos circuitos, encontram-se as válvulas, que tem por objetivo o
correto direcionamento do fluxo aéreo. Destaca-se a válvula expiratória, a qual, ao
fechar-se na fase inspiratória, oclui a saída do circuito, impedindo o escape do ar e
dirigindo-o para as vias aéreas do paciente.
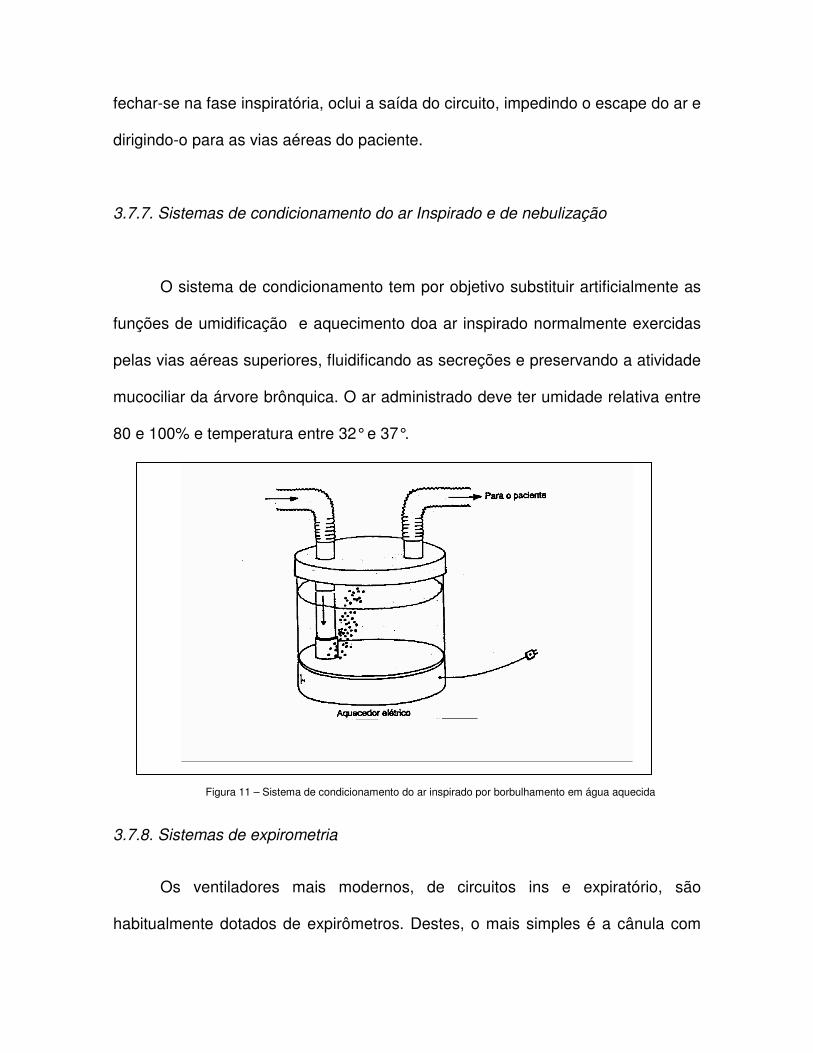
3.7.7. Sistemas de condicionamento do ar Inspirado e de nebulização
O sistema de condicionamento tem por objetivo substituir artificialmente as
funções de umidificação e aquecimento doa ar inspirado normalmente exercidas
pelas vias aéreas superiores, fluidificando as secreções e preservando a atividade
mucociliar da árvore brônquica. O ar administrado deve ter umidade relativa entre
80 e 100% e temperatura entre 32° e 37°.
Figura 11 – Sistema de condicionamento do ar inspirado por borbulhamento em água aquecida
3.7.8. Sistemas de expirometria
Os ventiladores mais modernos, de circuitos ins e expiratório, são
habitualmente dotados de expirômetros. Destes, o mais simples é a cânula com
fole circular, acionado a cada expiração e desativado na inspiração, possibilitando
determinar ciclo a ciclo o volume expiratório.
Existem modelos mais aprimorados de expirômetros, que determinam
continuamente o volume expiratório, por inferência a partir da fluxometria
eletrônica, tendo o resultado exposto digitalmente no painel.
3.7.9. Principais controles, indicadores e alarmes
Além dos indicadores de parâmetros, os ventiladores pulmonares de
acionamento elétrico devem incluir alarmes (visuais e sonoros), indicativos de
alterações na função do aparelho e de parâmetros ventilatórios fora da faixa
preestabelecida.
Os controles dos ventiladores pulmonares são dispositivos responsáveis
pela regulagem de parâmetros ventilatórios nos valores desejados, a seguir são
citados alguns dos principais comandos, alarmes e indicadores.
� Chave geral: acionamento geral do ventilador;
� Alarme de queda de energia: alertar para interrupção do funcionamento do
aparelho por falta de energia elétrica ou desconexão acidental. É acionado
por baterias.
� Manômetro de O2 e ar comprimido: indicador da pressão de fornecimento e
oxigênio e de ar comprimido (quando for o caso);

� Alarme de baixa pressão de oxigênio: indicador da queda de pressão de
fornecimento de O2;
� Indicador de tempo de utilização: registrar, cumulativamente, o número de
horas de funcionamento do ventilador;
� Seletor do tipo de ventilação: estabelecer a modalidade de operação, VMC
ou VMI;
� Seletor do parâmetro de ciclagem: para ventiladores de ciclagem mista;
� Manômetro: indicação da variação das pressões no circuito inspiratório,
durante o ciclo respiratório;
� Limite da pressão inspiratória: nos ventiladores volumétricos, determina a
pressão de admissão máxima que será tolerada, registrada no manometro
do aparelho;
� Alarme do limite máximo da pressão inspiratória: alarta para o caso da
pressão no circuito inspiratório atingir o valor máximo pré-fixado;
� Controle de tempo inspiratório: regular em segundos ou frações, a duração
da pausa no acionamento cíclico, quando ocorre, passivamente, a
expiração;
� Controle da freqüência respiratória: regular diretamente a freqüência
respiratória do aparelho, quando em ventilação controlada.
� Indicador de freqüência respiratória: informar a freqüência efetiva do
aparelho, que no caso de ventilação controlada, corresponde a programada
no painel;
� Alarme de freqüência respiratória: alerta para o caso do paciente ciclar o
ventilador em freqüências acima à estabelecida.
4. Ventiladores controlados por microprocessadores
A tecnologia pneumática foi combinada ao microprocessamento para
produzir uma nova geração de ventiladores mecânicos – os ventiladores
controlados por microprocessadoress. Estes ventiladores (p. ex., Puritan-Bennett
7200a, Puritan-Bennett, Co., Carlsbad, CA; Bird 6400 ST, Bird Products, Co.; Palm
Springs, CA; Hamilton Veolar and Amadeus, Hamilton Medical lnc., Reno, NV;
Bear V, Bear Medical Systems, Riverside, CA; e Ohmeda CPU-l, Ohmeda,
Madison, WI) diferem em vários aspectos dos modelos de ventiladores mais
tradicionais, não microprocessados (p. ex., Puritan-Bennett MA-l). Capazes de
múltiplas modalidades de ventilação e monitorização computadorizada, os
ventiladores controlados por microprocessadores também podem adquirir,
processar, armazenar e recuperar dados.
O microprocessador, também conhecido como unidade de processamento
central (CPU), é o "cérebro" desse tipo de ventilador mecânico, no qual o
processamento e as decisões realmente acontecem. Os microprocessadores são
circuitos de chips integrados, programados para tarefas específicas através da
utilização de um soft-ware adequado. Os circuitos elétricos miniaturizados
incorporados ao microprocessador permitem que ele realize operações aritméticas
(adição, subtração, multiplicação e divisão), relacionais e lógicas, assim como o
controle do processamento e do fluxo de informações. Os microprocessadores são
utilizados em uma variedade de equipamentos que exigem controle extensivo,
como mecanismos de instrumentação complexos e sistemas ventilatórios
mecânicos de suporte à vida. Os microcomputadores pessoais consistem em

microprocessadores, módulos de memória e interfaces de entrada/saída.
Analogamente, os ventiladores mecânicos controlados por microprocessadores
possuem o mesmo hardware, além dos componentes mecânicos fundamentais,
para proporcionar ventilação mecânica. Portanto, os ventiladores controlados por
microprocessadores podem ser vistos como um ventilador mecânico associado ao
poder de cálculo de um microcomputador.
4.1. Vantagens potenciais de ventiladores controlados por
microprocessadores
4.1.1. Versatilidade geral
� Capazes de proporcionar várias modalidades de PPV mecânica e
espontânea;
� Possibilidade de ventilar com várias curvas de fluxo inspiratório;
� Escolha do mecanismo de ciclagem (p. ex., ciclado ao tempo, volume ou
pressão);
� Capacidade de ser facilmente reprogramado e atualizado para evitar
obsolescência prematura;
� Capacidade de ventilar pacientes adultos e pediátricos;
� Capacidade de monitorização;
� Monitorização em tempo real de uma variedade de parâmetros
ventilatórios ;

� Habilidade de calcular e monitorizar: complacência tóraco-pulmonar,
resistência das vias aéreas, ventilação minuto expiratória, pressão
média das vias aéreas, trabalho respiratório etc;
� Cada microprocessador se auto-avalia e cruza os dados para garantir o
funcionamento apropriado das funções computadorizada e pneumática;
� A memória do computador permite o armazenamento e a recuperação
de dados ventilatórios para análises de tendências;
� Capacidade de correção do computador;
� Hipoteticamente, o microprocessador seria capaz de realizar correções
automáticas para manter a taxa e a curva de fluxo inspiratórlo e o VT
quando a pressão de inflação máxima aumenta devido às alterações na
complacência tóraco-pulmonar e na resistência das vias aéreas;
� Volume corrente e volume minuto são corrigidos para BTPS;
� Teoricamente, as perdas de volume no circuito respiratório do ventilador,
decorrentes da compressão, podem ser calculadas e/ou compensadas.
4.1.2. Capacidade de exibição e comunicação
� Monitores controlados pelo computador indicam todos os parâmetros,
alarmes, e limites ventilatórios correntes;
� Possibilidade de comunicação com outros microcomputadores ou com um
computador “mainframe” para a monitorização e o armazenamento de
dados.
4.1.3. Reparos e manutenção
� Quedas do sistema devem ser reduzidas devido à relativa facilidade em
diagnosticar e solucionar problemas nos programas de ventilação e nos
componentes móveis de um ventilador controlado por microprocessador;
� Componentes moduladores facilitam os reparos.
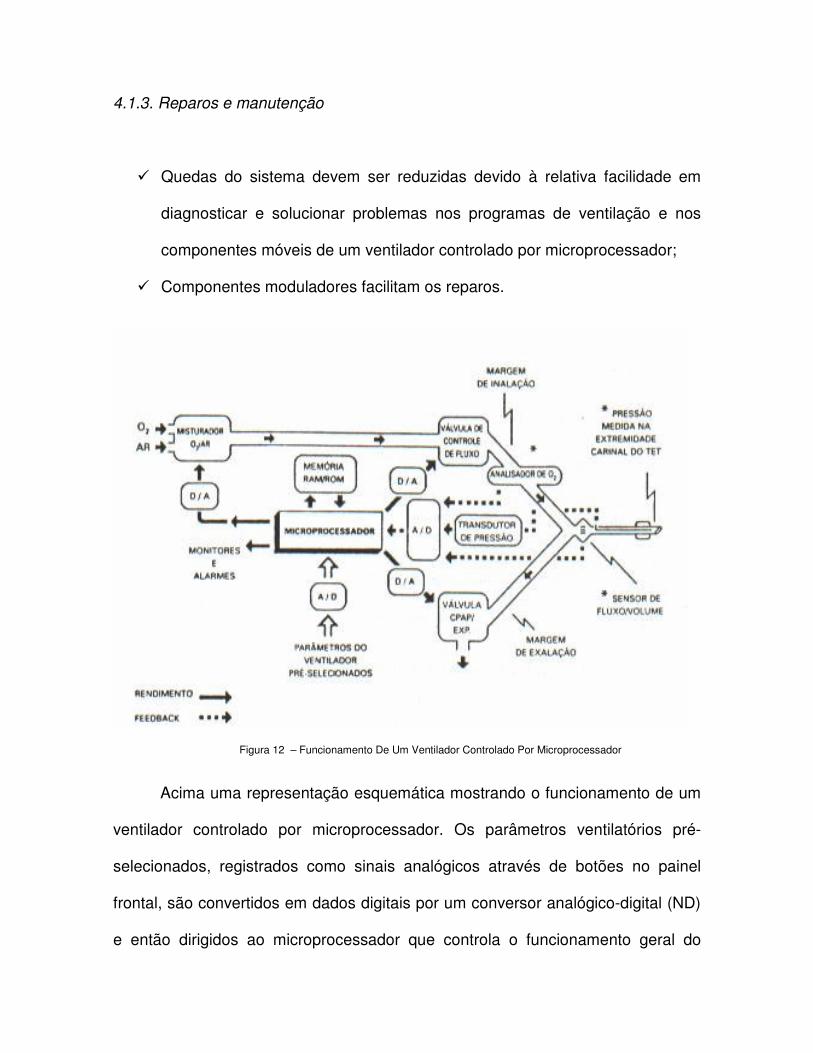
Figura 12 – Funcionamento De Um Ventilador Controlado Por Microprocessador
Acima uma representação esquemática mostrando o funcionamento de um
ventilador controlado por microprocessador. Os parâmetros ventilatórios pré-
selecionados, registrados como sinais analógicos através de botões no painel
frontal, são convertidos em dados digitais por um conversor analógico-digital (ND)
e então dirigidos ao microprocessador que controla o funcionamento geral do
ventilador. Os dados são, por sua vez, encaminhados à memória de acesso
aleatório (RAM). O programa de controle geral do ventilador pode ser armazenado
na memória exclusiva para leitura (ROM). Dados de controle de rendimento (linhas
cheias), através de conversão digital-analógica (D/A) são então enviados do
microprocessador para o sistema misturador de oxigênio/ar, válvula de controle de
fluxo inspiratório e válvula de pressão positiva contínua/expiratória das vias aéreas
(CPAP). Dados de feedback (linhas tracejadas), originados do analisador de
oxigênio, transdutor de pressão das vias aéreas e sensor de fluxo/volume, através
de conversão ND, são devolvidos ao microprocessador. Idealmente, o ventilador
deve funcionar como um sistema de controle de feedback de alça fechada. Na
maioria dos ventiladores os locais de medição de pressão e fluxo/volume estão no
interior do ventilador, na margem de exalação do circuito respiratório ou na peça
Y. Para maior precisão é recomendado medir a pressão das vias aéreas na
extremidade carinal do tubo endotraqueal (TET) e o fluxo/volume na peça Y do
circuito respiratório.
4.1.4. Sistemas de alça aberta e fechada
Os sistemas de controle nos ventiladores mecânicos podem constituir
modelos de alça aberta ou fechada. Um sistema de controle de alça aberta não

utiliza feedback (processo pelo qual o rendimento de um sistema é retransmitido e
usado como dado de informação adicional, para modular o sistema de produção)
em suas operações. Sistemas de controle de alça aberta são típicos de muitos
ventiladores mecânicos não microprocessados. Por exemplo, um sistema de
controle de alça aberra é empregado no ventilador mecânico não microprocessado
Puritan-Bennett MA-l. Com este ventilador, não ocorre feedback da pressão das
vias aéreas, taxa de fluxo ou VT (rendimento do sistema) para controlar o
mecanismo do ventilador.
Em contraste, os sistemas de controle de alça fechada, como os
encontrados em muitos ventiladores mecânicos equipados com
microprocessadores, retroalimentam dados de rendimento para o mecanismo de
controle do microprocessador, para orientar o ventilador (isto é, a diferença [erro]
entre a informação de referência [parâmetros do ventilador pré-selecionado] e o
rendimento medido (parâmetros realmente observados) conduzem o sistema ao
rendimento desejado). Como resultado, alega-se que a taxa de fluxo inspiratório,
por exemplo, possa ser mantida dentro do valor pré-selecionado ou próxima a
este, mesmo que, ocorram alterações na mecânica respiratória. Entretanto,
quando a pressão das vias aéreas, taxa de fluxo e VT característicos dos
ventiladores controlados por microprocessadores foram comparados, observou-se
que, conforme a complacência pulmonar diminuía e a resistência das vias aéreas
aumentava, ocasionando assim um aumento na pressão de inflação máxima,
ocorreram diminuiçöes na taxa de fluxo inspiratório e no VT pré-selecionados.
Estes dados são, no mínimo, desapontadores. Duas explicações possíveis para
estas observações são que o tempo de resposta (tempo para o sistema reagir e

responder a uma informação ou instrução) do sistema de controle alça fechada é
muito lento, ou que a localização dos transdutores de pressão e fluxo das vias
aéreas poderia ser inadequada. Além disso, o desempenho de um sistema de
controle alça fechada depende da exatidão de seus transdutores de feedback.
Transdutores imprecisos ou localizados inadequadamente comprometarão a
eficiência da alça fechada. Recomenda-se que esses transdutores sejam
instalados na abertura das vias aéreas, e não dentro do ventilador ou na margem
expiratória do circuito respiratório.
O sistema de controle de alça fechada de um ventilador controlado por
microprocessador é constituído por diversos componentes organizados em série.
Um microprocessador recebe dados digitais (dados que são codificados na forma
de padrões de dígitos binários ou “bit”) introduzidos por meio de um teclado no
painel de controle do ventilador (isto é, os parâmetros ventilatórios pré-
selecionados). Como os dados digitais de um microprocessador são inexpressivos
para o mundo externo, eles são convertidos em sinais analógicos (um sinal
contínuo que pode ser um número infinito de valores) através de um conversor
digiral-analógico. Estes sinais de voltagem analógica são as instruções que
controlam a operação das válvulas de fluxo durante as fases inspiratória e
expiratória do ventilador. O rendimento da válvula de controle de fluxo é
monitorizado pelos transdutores de fluxo e de pressão. Uma vez que os
microprocessadores trabalham apenas com dados digitais, os sinais analógicos
destes transdutores devem ser transformados nos dados digitais apropriados por
um conversor analógico-digital. Estes dados digitais, por sua vez, são
redirecionados ao microprocessador como dados adicionais de informação,
constituindo assim a alça de feedback descrita.
4.1.5. Memória de acesso aleatório e memória exclusiva de leitura
A memória é essencial para a operação de um ventilador controlado por
microprocessador. Memória de acesso alearório (RAM ou random acess memory)
e memória exclusiva de leirura (ROM, ou random only memory) são dois tipos de
módulos de memória encontrados nos ventiladores controlados por
microprocessadores. Por exemplo, para indicar uma tendência na CTP o ventilador
deve ser capaz de adquirir e então “lembrar” ou armazenar as alterações da CTP
no decorrer do tempo. Nesse exemplo, na RAM é que os dados serão registrados
para posterior recuperação. Uma desvantagem da RAM é que quando a energia
elétrica é interrompida, todos os dados armazenados são perdidos. A memória
RAM, portanto, seria inviável para armazenar um programa de controle do
ventilador, por exemplo. Ao contrário, com a memória permanente ou ROM, os
dados não são perdidos quando a energia elétrica é interrompida.
Conseqüentemente, a ROM é utilizada para armazenar as rotinas ou
algoritmos que controlam o funcionamento do ventilador (ver Fig. 10). O programa
de controle do ventilador é registrado na memória ROM e não pode ser
acidentalmente deletado ou sobrescrito durante o funcionamento do ventilador.

4.1.6. Algoritmos operacionais
O microprocessador, aliado ao software apropriado, executa rotinas ou
a1goritmos específicos para realizar e monitorizar uma variedade de funções
ventilatórias. Os algorítmos são utilizados para verificar a operação da válvula de
controle de fluxo do ventilador na liberação da curva de fluxo inspiratório, taxa de
fluxo inspiratório máximo e VT pré-selecionados, por exemplo. Rotinas pré-
programadas também são usadas para verificar a programação dos parâmetros
ventilatórios pre-selecionados e em seguida monitorizar o rendimento do
ventilador. Outros algoritmos são utilizados para controlar os limites de alarme pré-
selecionados (p. ex.. pressões de inflação máxima e média de vias aéreas).
O diagrama de fluxo abaixo representa um programa de controle geral para
um ventilador controlado por microprocessador. Ele descreve uma rotina pré-
programada que pode ser usada para conferir a programação dos parâmetros
ventilatórios pré-selecionados e em seguida monitorizar o rendimento do
ventilador. (Reproduzido com permissão de Lampotang S. "Microprocessor-
controlled ventilation, systems and concepts". In: Kirby RR, Banner MJ, Downs JB
(eds). Clinical applications of ventilatory support. New York, Churchill Livingstone,
Inc., 1990, p. 107.)

não sim
não
sim
Figura 13 - Diagrama de fluxo
INÍCIO
ATIVAÇÃO
PROGRAMAR PARÂMETROS, p. ex., VT, CPAP, FIO2
etc.
OS PARÂMETROS
SELECIONADOS
SÃO ACEITÁVEIS
MENSAGEM DE
ERRO
EXECUTAR O PROGRAMA DE
VENTILAÇÃO
MONITORIZAR
PARÂMETROS
EXIBIR DADOS
MONITORIZADOS
TODOS OS
PARÂMETROS
VENTILATÓRIOS
MENSAGEM DE
ALARME
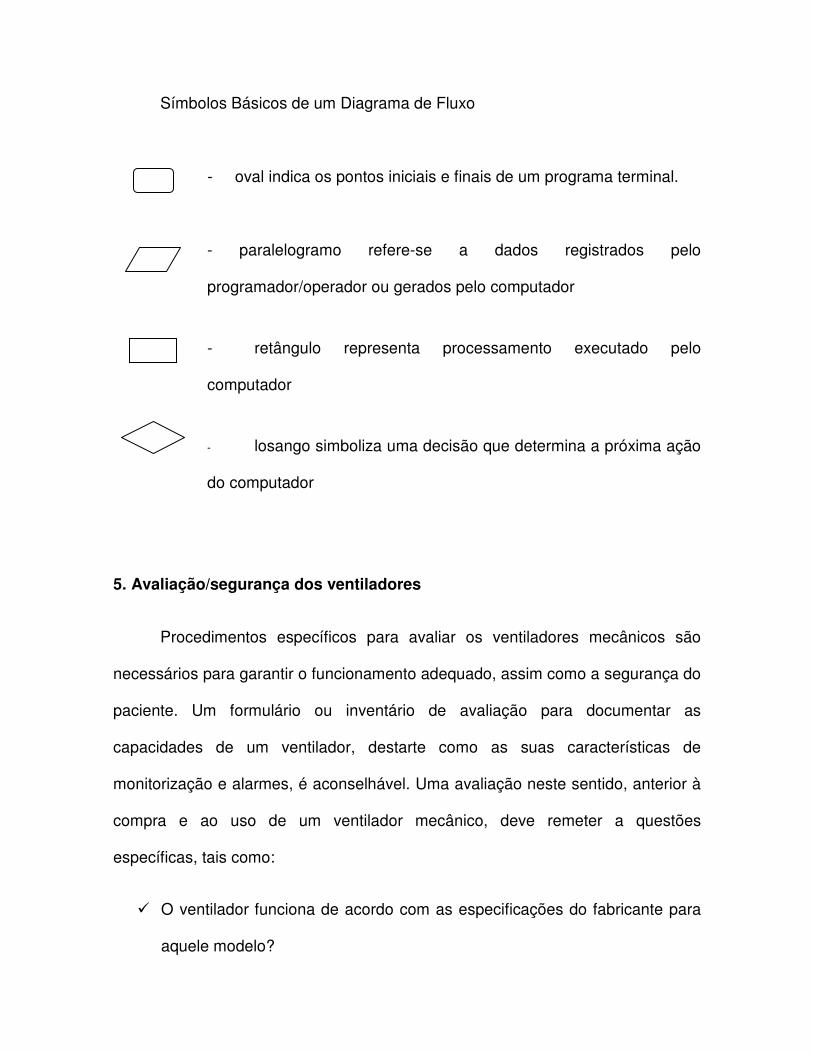
Símbolos Básicos de um Diagrama de Fluxo
- oval indica os pontos iniciais e finais de um programa terminal.
- paralelogramo refere-se a dados registrados pelo
programador/operador ou gerados pelo computador
- retângulo representa processamento executado pelo
computador
- losango simboliza uma decisão que determina a próxima ação
do computador
5. Avaliação/segurança dos ventiladores
Procedimentos específicos para avaliar os ventiladores mecânicos são
necessários para garantir o funcionamento adequado, assim como a segurança do
paciente. Um formulário ou inventário de avaliação para documentar as
capacidades de um ventilador, destarte como as suas características de
monitorização e alarmes, é aconselhável. Uma avaliação neste sentido, anterior à
compra e ao uso de um ventilador mecânico, deve remeter a questões
específicas, tais como:
� O ventilador funciona de acordo com as especificações do fabricante para
aquele modelo?
� O ventilador apresenta características de pressão, taxa de fluxo e volume
ou outras, indicadas para o tipo de paciente existente na minha instituição?
� Trabalho respiratório do paciente é excessivo quando a CPAP é aplicada?
� O ventilador é simples demais ou sofisticado demais para as minhas
necessidades?
� O ventilador é muito difícil de manejar?
� O ventilador possui um sistema compreensível de alarme e monitorização?
� As capacidades de monitorização são tais que dados excessivos ou
insuficientes são exibidos?
� O ventilador pode ser atualizado facilmente conforme ocorram melhorias e
inovações, ou o ventilador ficará obsoleto em pouco tempo?
� Qual é o custo do ventilador?
Finalmente, quanto a alarmes e monitorização, muitos dos ventiladores
mecânicos da nova geração possuem sistemas de monitorização e alarme
instalados na fábrica, que podem ser ajustados às exigências ventilarórias do
paciente. Transdutores de pressão e fluxo são utilizados para monitorizar
pressões das vias aéreas (p. ex., pressão de inflação máxima, pressão média das
vias aéreas), CPAP e taxa de fluxo gasoso (p. ex., taxa de fluxo expiratório, VT e
volume minuto). A partir destes dados são calculados a complacência tóraco-
pulmonar, a resistência das vias aéreas e o trabalho respiratório. Alarmes sonoros
e visuais são empregados para indicar eventos como alterações súbitas na F1O2,
apnéia, perda de CPAP, vazamento no circuito respiratório do ventilador e limite
de pressão de inflação máxima. Utilizados para avaliar a adequação da ventilação,
capnógrafos monitorizam continuamente a tensão de dióxido de carbono
expiratório final (PETCO2). Limites de alarme para PETCO2 são ajustados para
indicar anormalidades ventilatórias.
6. O projeto vidatech
O desenvolvimento refere-se a um “respirador artificial para pacientes com
deficiência respiratória”, ou mais particularmente a um equipamento que comporta
um microprocessador, dotado de uma placa eletrônica de aquisição de dados
fisiológicos, tais como: pressão endotraqueal, fluxo inspirado e expirado, volume
de ar inspirado e expirado, temperatura dos gases, concentração de oxigênio e
ar,tempos de inspiração e expiração, especialmente desenvolvida para este fim,
um modem para comunicação via rede, um programa de computador
especialmente desenvolvido para esta finalidade, gerador de ar comprimido, além
de vários sensores e válvulas eletro-pneumáticas que serão melhor detalhados ao
longo deste relatório descritivo e que, em conjunto, têm a função de manter o
suporte da vida de um paciente através de ciclos respiratórios de modo
automático.
Como é de conhecimento dos técnicos, fisioterapeutas, médicos e
engenheiros desta área, atualmente existem vários tipos de respiradores ou
ventiladores artificiais nacionais e importados sendo notória a baixa qualidade dos
equipamentos nacionais e o alto preço dos importados além do alto custo de
manutenção dos importados em função da falta de técnicos habilitados ou peças
de reposição com garantia, e ainda por não haver a possibilidade de acesso e

controle remoto dos parâmetros e ajustes monitorados pelo equipamento via rede.
O aparelho tornará possível, ainda para um médico, poder, acessar uma tela de
microcomputador em seu consultório ou casa e alterar ou verificar os ajustes e os
parâmetros para tratamento de um ou mais pacientes, em um mesmo hospital ou
em inúmeros hospitais e/ou clínicas em poucos segundos. Este tipo de
procedimento que o "respirador artificial para pacientes com deficiência
respiratória" permite é que o torna inédito e extremamente vantajoso em relação a
outros. Ainda, o equipamento pode contar com o monitoramento via câmera de
vídeo o que auxilia na verificação das conexões de gases e sensores eletrônicos
podendo também visualizar monitores cardíacos, bombas de infusão e outros
aparelhos utilizados em unidades de terapia intensiva, tornando possível a criação
de um grande arquivo de imagens de como ocorreu o tratamento com riqueza de
gráficos dos parâmetros controlados, diagnósticos, prognósticos e anotações.
Portanto, o objetivo do presente desenvolvimento é inovar na aquisição de
dados e controle de variados parâmetros via microcomputador do próprio
equipamento ou de outro computador locado à certa distância do primeiro via rede
telefônica ou similar utilizando-se de hardware e software dedicados para esta
finalidade sendo estes os principais elementos inovadores, além das
particularidades quanto ao uso de sensores de pressão, fluxo e concentração de
oxigênio na mistura dos gases fornecidos ao paciente.
Para melhor entendimento do aparelho, é feita em seguida uma descrição
detalhada do mesmo, fazendo-se referências aos desenhos anexos, onde:
Anexo 1, representa um diagrama de blocos geral com uma visão do
equipamento como um todo;
Anexo 2, ilustra um diagrama de blocos detalhando o bloco "compartimento
de válvulas e placas eletrônicas" visto no diagrama anterior do Anexo 1;
Anexo 3, ilustra outro diagrama de blocos detalhando o bloco "placa de
entradas e saídas de dados" do diagrama anterior do Anexo 1 ;
Anexo 4, ilustra outro diagrama de blocos detalhando o bloco "software
dedicado" do diagrama anterior do Anexo1.
De acordo com estas ilustrações e em seus pormenores, o dispositivo
“respirador artificial parapacientes com deficiência respiratória ”, é do tipo ciclado a
tempo, volume ou pressão mediante a escolha dos operadores, apresentando-se
em base móvel que suporta o compartimento que abriga todos os componentes
do equipamento (anexo 1), e ainda circuitos respiratórios, braço articulado para
suporte do circuitos respiratórios, e demais conexões tradicionalmente usadas em
qualquer respirador artificial. De acordo com o observado no diagrama de blocos
na figura (anexo 2) a entrada de oxigênio se faz por via rede hospitalar ou cilindro
de oxigênio tendo sua pressão regulada por uma válvula reguladora de pressão
tradicionalmente encontrada em grande parte dos equipamentos similares,
enquanto a entrada de ar comprimido segue o mesmo processo por tubulação
própria podendo além, de ser alimentada via rede hospitalar ou cilindro de ar
comprimido contar com um gerador interno (compressor) que encontra-se dentro
ou acima da base móvel do respirador, seguindo as duas saídas das válvulas
reguladoras encontram-se dispositivos de sensoramento eletrônico os quais são
encontrados somente neste aparelho, que enviam dados para o hardware (anexo
3) de aquisição sendo amplificados, convertidos em sinal digital e gravados e
servem de dados para a fórmula do software (anexo 4/4) que realiza a leitura,
compara com os ajustes pré-fixados e se necessário, regula qual deve ser a
abertura de cada gás, ar e oxigênio, de modo que se obtenha a riqueza
necessária para o tratamento, tendo então o valor calculado e transformado em
corrente esta é enviada via hardware (anexo 3), depois de um conversor digital-
analógico, para alimentação das bobinas da válvulamisturadora. Partindo de tal
válvula a tubulação segue e novamente encontra um sensor de oxigênio (só
existente neste aparelho) o qual monitora o verdadeiro valor da mistura enviando
dados para o hardware (anexo 3/4) que amplifica, converte em sinal digital, grava
o dado e calcula possíveis correções da válvula misturadora. Prosseguindo em
(anexo 2), a tubulação irá para a válvula reguladora de fluxo a qual é controlada
por um sensor eletrônico de fluxo que executa os mesmos passos dos demais
sensores, sensor(anexo 2) - hardware (anexo 3) - software (anexo 4) - hardware
(anexo 3) - válvula (anexo 2), regulando desta maneira a saída de fluxo conforme
desejo e necessidade do operador e paciente respectivamente. A partir deste
ponto a tubulação chega a uma válvula reguladora de pressão a qual é monitorada
por um sensor que executa os passos dos demais sensores e que faz com que a
válvula reguladora de pressão abra ou feche corretamente, esta, por sua vez, está
ligada por tubulação ao termo-umidificador , que regula temperatura e umidade
dos gases e envia finalmente , após passar por um sensor de temperatura, a
tubulação para a boca ou possível traqueostomia do paciente.
Da válvula de conexão ao paciente parte uma tubulação ao aparelho
conectando-se à válvula expiratória. Aí mais uma inovação tecnológica, onde um
transdutor especial transforma os dados de pressão em sinais elétricos analógicos
que serão enviados ao dispositivo de amplificação localizado na placa de
aquisição (anexo 3) transformado em sinal digital por um conversor análogo-digital
e gravado por meio de software especial caracterizado pelo fato de realizar
gráficos e manômetros virtuais de alta precisão e apresentar alarmes sonoros e
visuais de extrema qualidade facilitando, desta forma, o acesso dos operadores.
Todos os dados coletados são confrontados com o banco de dados do software
fazendo-se desta forma diagnósticos e prognósticos assim como todos os
parâmetros obtidos via hardware(anexo 3) e software(anexo 4) estão disponíveis
para acesso quer por via painel frontal do aparelho, tela do microcomputador do
aparelho ou por acesso remoto em outro computador via senha apropriada.
Valendo-se de todas as leituras realizadas e gravadas no disco rígido do
computador o mesmo mostra na tela as seguintes controles e indicadores virtuais:
indicadores de tempo de inspiração, tempo de expiração, freqüência respiratória,
relação de tempos inspiratório e expiratório, percentual de oxigênio, temperatura
dos gases, modalidade de respiração: IPPB, ASSIST, SIMV, CPAP, gráfico da
pressão endotraqueal em função do tempo, gráfico do volume consumido em
função do tempo, gráfico de pressão em função de volume, manômetro de
pressão endotraqueal, manômetro de entrada de oxigênio, manômetro de entrada
de ar comprimido, indicador de fluxo de ar, indicador de oxigênio e os controles
para uso dos médicos: pressão máxima, pressão final de respiração, sensibilidade
à pressões negativas, tempo máximo de apnéia, temperatura do aquecedor,
controle de fluxo, controle de concentração de oxigênio além dos alarmes relativos
a todos os valores controlados e indicados se estes últimos não satisfazerem os
limites dos primeiros. Todos estes controles e indicadores se encontram no
aparelho real.
Como se percebe, após o que foi exposto e ilustrado, trata-se de um
aparelho passível de ser utilizado em hospitais, clínicas e unidades de terapia
intensiva, onde a aplicação do conjunto é realizada de maneira segura, contando
com a mais atual tecnologia de controle digital e analógico sendo os sensores
eletrônicos, feitos pela Motorola ou pela Sensym. Esses sensores foram
implementados de maneira à inovar na aquisição e tratamento dos dados
efetuados por um aparelho de respiração artificial tornando-o mais seguro e
confiável sua operação. A placa de aquisição de dados (anexo 3) também é uma
melhoria inovadora tendo em vista que não apenas mostra os dados na tela do
aparelho, mas também, por estar conectada ao barramento de um computador,
permite acesso remoto através de um também inovador programa arquitetado
para esta finalidade realizado em linguagem C++, LabView ou similar (anexo 4).
Portanto, o "respirador artificial para pacientes com deficiência respiratória",
é um aparelho que conta com várias modificações em relação aos seus similares
mantendo logicamente suas finalidades essenciais, mas podendo ser muito
melhor operado pelos médicos devido à maneira como são apresentados os
parâmetros de indicação e controle e otimizando a técnica de suporte respiratório
aos pacientes devido à maneira como foram implementados os sensores (anexo
2), hardware(anexo 3) e software(anexo 4).
6.1. Software utilizado para a interface gráfica

O LabView e uma linguagem de programação gráfica(G) para aplicações de
aquisição, controle e analise e apresentação de dados. Em detrimento as
linguagens de programação baseadas em texto, onde as instruções determinam a
execução do programa, o LabView utiliza programação dirigida por fluxo de dados,
onde os dados determinam sua execução.
Existem varias ferramentas e módulos, tais como controle PID e
gerenciamento de dados, que podem ser adicionados para expandir a
funcionalidade do LabView no desenvolvimento de aplicações especializadas. O
LabView e completamente integrado para comunicação com uma ampla
variedade de interfaces e dispositivos de hardware, como GPIB, VXI, PXI, RS232,
RS485 e, nesse aspecto, sua principal característica que auxilia e agiliza o
trabalho do desenvolvedor e o fato de existirem drivers de software prontos para a
comunicação com uma ampla variedade de dispositivos e instrumentos.
6.1.1. Aplicações
O LabView e usado extensivamente em vários segmentos industriais ao
redor do mundo, tais como telecomunicações, fabricação, automotivo,
semicondutor, biomédico, Aeroespacial e eletrônica. Sua aplicabilidade abrange
todas as fases de desenvolvimento do produto, incluindo pesquisa e
desenvolvimento, engenharia e validação, fabricação, controle de qualidade e
serviços. Por esse motivo, o LabView tornou-se uma ferramenta padrão para a
industria.

6.1.2. O Ambiente labview
No LabView é possível construir uma interface do usuário utilizando um
grupo de ferramentas e objetos. Essa interface do usuário e conhecida como
painel frontal. Códigos são usados para representações gráficas de funções numa
interface conhecida como diagrama de blocos para controlar os objetos do painel
frontal. Se organizado adequadamente, o diagrama de blocos será semelhante a
um fluxograma.
Os programas LabView são chamados instrumentos virtuais, ou VI's,
porque sua aparência e operação assemelha-se a instrumentos físicos, tais como
osciloscópios e multímetros. Todo VI utiliza funções que manipulam entrada de
dados oriunda da interface do usuário ou de outras fontes, e demonstra a
correspondente informação ou move-a para outros arquivos ou computadores na
rede. Podem ser ajustados pontos de parada (breakpoints) e uma execução
passo-a-passo através dos programas para facilitar o seu desenvolvimento e
manutenção. Vejamos a seguir os principais componentes deste ambiente.
� Painel frontal: é a interface do usuário no programa ou VI, e é construída
com controles e indicadores, os quais são os interativos terminais de
entrada e saída, respectivamente. Exemplos de controles são botões e
outros dispositivos de entrada. Indicadores podem ser expressos pelos
gráficos, LED's e outros displays. Os controles simulam os instrumentos
como dispositivos de entrada e fornecem dados para o diagrama de blocos

do VI. Indicadores simulam os instrumentos como dispositivos de saída e
demonstram dados adquiridos ou gerados no diagrama de blocos.
Figura 14 – Tela de operação do software
� Diagrama de blocos: depois de construir o painel frontal são adicionados
códigos usando representações gráficas de funções para controlar os
objetos do painel frontal. O diagrama de blocos contem este código fonte
gráfico e nele os objetos do painel frontal aparecem como terminais no
diagrama de blocos. Todo controle ou indicador no painel frontal tem um
terminal correspondente no diagrama de blocos. A execução dos dados
ocorre através da conexão de fios entre cada no do diagrama de blocos,
incluindo terminais de controle e indicadores, funções e estruturas.
� Paletas: as paletas existentes no ambiente de programação do LabView
contem as opções necessárias para criar e editar o painel frontal e o
diagrama de blocos. As paletas subdividem-se em paletas de ferramentas
(Tools), paletas de controles (Controls) e paletas de funções (Functions). A
paleta de ferramentas serve para operar e modificar o painel frontal e o
diagrama de blocos. Alem disso, toda vez que se seleciona uma
ferramenta, o ícone do mouse muda para o ícone da ferramenta. Já a
paleta de controles esta disponível apenas no painel frontal e contem os
controles e indicadores para criar a interface do usuário. A ultima paleta e a
paleta de funções a qual esta disponível apenas no diagrama de blocos e
contem os objetos necessários para se programar o VI, tais como
operações de dados.
6.1.3. Programa de comunicação serial
O programa mostrado a seguir foi desenvolvido para executar a
comunicação serial entre o instrumento respirador e o microcomputador. Este
programa possibilita a comunicação bidirecional com a porta de comunicação
serial RS232. O programa inicializa a porta, escreve e executa a leitura da porta
com um timeout especifico. A leitura com timeout espera uma requisição de bytes

disponíveis na porta ou ate exceder o limite de tempo especificado, ou o que
ocorrer antes.
A seguir será descrito em detalhes cada função do diagrama em blocos, do
programa de comunicação serial.
6.1.3.1. Bloco 1 - Inicialização da porta serial
Inicializa a porta serial especificada (COM) “setando” os valores de cada
pino de controle : bits de dados, bit de parada, taxa de amostragem, paridade,
tamanho do buffer e controle de fluxo e código de erro para a transmissão
assíncrona.
6.1.3.2. Tabela de diagnósticos de erro

Este bloco e usado principalmente para informar o usuário se um erro existe
e descrever e identificar o erro ocorrido. A informação precisa ser derivada da
entrada e uma tabela de códigos de erro e gerada com a descrição do erro. A
tabela lista todos os códigos de erro que podem ser criados pelo LabView
associados a operação da porta I/O.
6.1.3.3. Negação e OU lógico de entrada.
Tem a função lógica de “setar” os clusters para a integração booleana.
6.1.3.4. Bloco 2 - Escrita de Dados
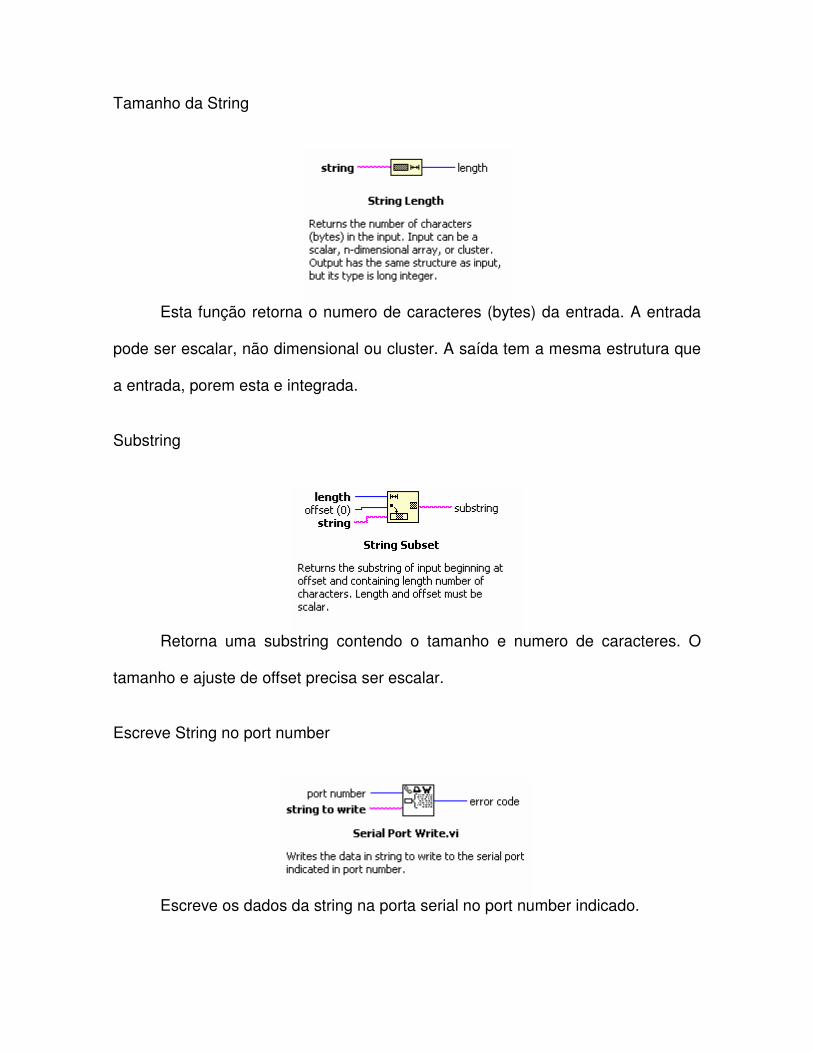
Tamanho da String
Esta função retorna o numero de caracteres (bytes) da entrada. A entrada
pode ser escalar, não dimensional ou cluster. A saída tem a mesma estrutura que
a entrada, porem esta e integrada.
Substring
Retorna uma substring contendo o tamanho e numero de caracteres. O
tamanho e ajuste de offset precisa ser escalar.
Escreve String no port number
Escreve os dados da string na porta serial no port number indicado.

6.1.3.5. Bloco 3 - Leitura da Sring com TimeOut
A serial e lida com um timeout pre-setado quando existirem bytes para
serem adquiridos pelo buffer da porta serial. Se existirem estes bytes os
caracteres sao lidos e retornados imediatamente.
Converção String em byte unsigned
Converte uma string em bytes sem sinal. O byte menos significativo retorna
o valor ASCII do primeiro caracter da string.
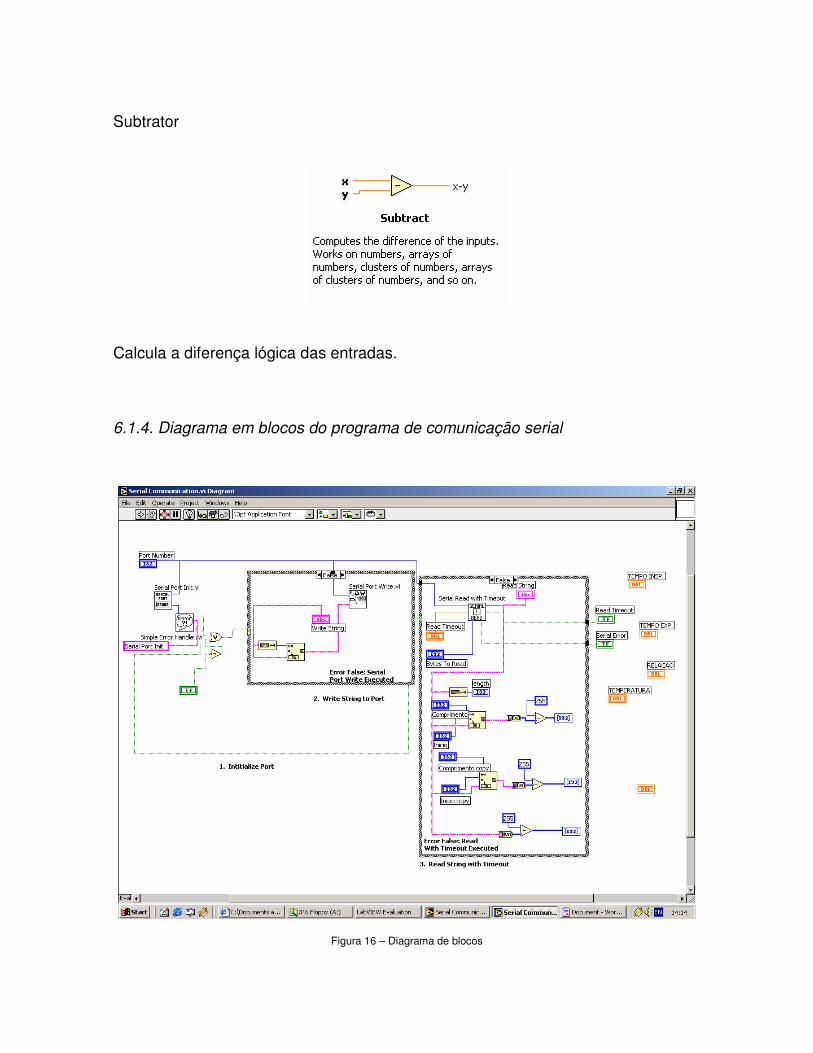
Subtrator
Calcula a diferença lógica das entradas.
6.1.4. Diagrama em blocos do programa de comunicação serial
Figura 16 – Diagrama de blocos

6.2. Microprocessador
Microcontrolador é um dispositivo utilizado para controlar e monitorar
funções durante um processo.
A partir do advento dos circuitos integrados TTL, pode-se delinear três
gerações no que diz respeito à implementação de controladores.
Na primeira geração estão os projetos envolvendo circuitos integrados TTL,
na sua maioria. O alto consumo de energia, a grande quantidade de chips
envolvidos e a dificuldade em se realizar reengenharia tornou a segunda geração
atraente aos projetistas.
O advento dos microprocessadores tornou versátil o projetos de circuitos
destinados ao controle: era a segunda geração dos controladores. Boa parte das
funções antes implementadas por hardware passaram a ser implementadas por
software.
A terceira geração veio para integrar em um único chip boa parte dessa
estrutura. Microcontroladores integram as funções de um microprocessador,
memória de dados e de instruções e ainda, dependendo da complexidade, portas
seriais e paralelas bidirecionais, conversores A/D, timers, watchdog e outros.
6.2.1. Fabricantes de microcontroladores

Motorola
Mitsubish
Siemens
NEC
Hitach
Microchip
Matsushitta
Toshiba
National Semiconductor
Philips
Zilog
Texas Instruments
Sharp
Intel
6.2.1. SAB 8051 - Diagrama em blocos
Figura 17 – Diagrama de blocos 8051
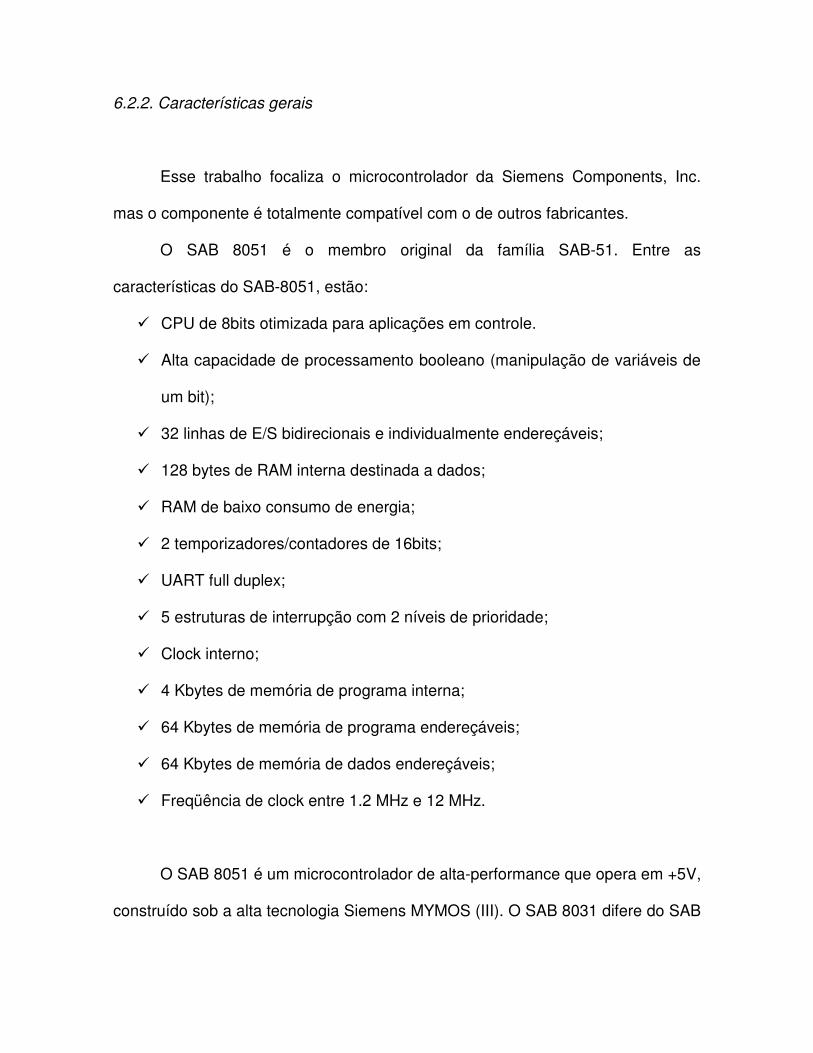
6.2.2. Características gerais
Esse trabalho focaliza o microcontrolador da Siemens Components, Inc.
mas o componente é totalmente compatível com o de outros fabricantes.
O SAB 8051 é o membro original da família SAB-51. Entre as
características do SAB-8051, estão:
� CPU de 8bits otimizada para aplicações em controle.
� Alta capacidade de processamento booleano (manipulação de variáveis de
um bit);
� 32 linhas de E/S bidirecionais e individualmente endereçáveis;
� 128 bytes de RAM interna destinada a dados;
� RAM de baixo consumo de energia;
� 2 temporizadores/contadores de 16bits;
� UART full duplex;
� 5 estruturas de interrupção com 2 níveis de prioridade;
� Clock interno;
� 4 Kbytes de memória de programa interna;
� 64 Kbytes de memória de programa endereçáveis;
� 64 Kbytes de memória de dados endereçáveis;
� Freqüência de clock entre 1.2 MHz e 12 MHz.
O SAB 8051 é um microcontrolador de alta-performance que opera em +5V,
construído sob a alta tecnologia Siemens MYMOS (III). O SAB 8031 difere do SAB
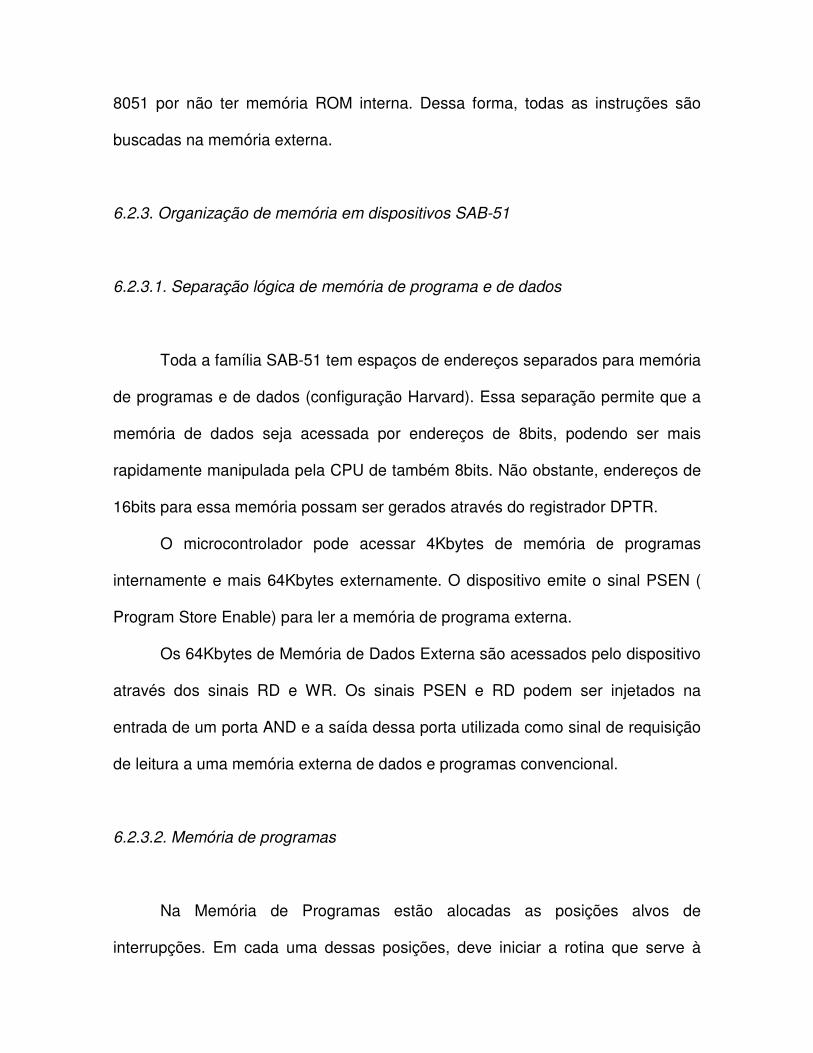
8051 por não ter memória ROM interna. Dessa forma, todas as instruções são
buscadas na memória externa.
6.2.3. Organização de memória em dispositivos SAB-51
6.2.3.1. Separação lógica de memória de programa e de dados
Toda a família SAB-51 tem espaços de endereços separados para memória
de programas e de dados (configuração Harvard). Essa separação permite que a
memória de dados seja acessada por endereços de 8bits, podendo ser mais
rapidamente manipulada pela CPU de também 8bits. Não obstante, endereços de
16bits para essa memória possam ser gerados através do registrador DPTR.
O microcontrolador pode acessar 4Kbytes de memória de programas
internamente e mais 64Kbytes externamente. O dispositivo emite o sinal PSEN (
Program Store Enable) para ler a memória de programa externa.
Os 64Kbytes de Memória de Dados Externa são acessados pelo dispositivo
através dos sinais RD e WR. Os sinais PSEN e RD podem ser injetados na
entrada de um porta AND e a saída dessa porta utilizada como sinal de requisição
de leitura a uma memória externa de dados e programas convencional.
6.2.3.2. Memória de programas
Na Memória de Programas estão alocadas as posições alvos de
interrupções. Em cada uma dessas posições, deve iniciar a rotina que serve à
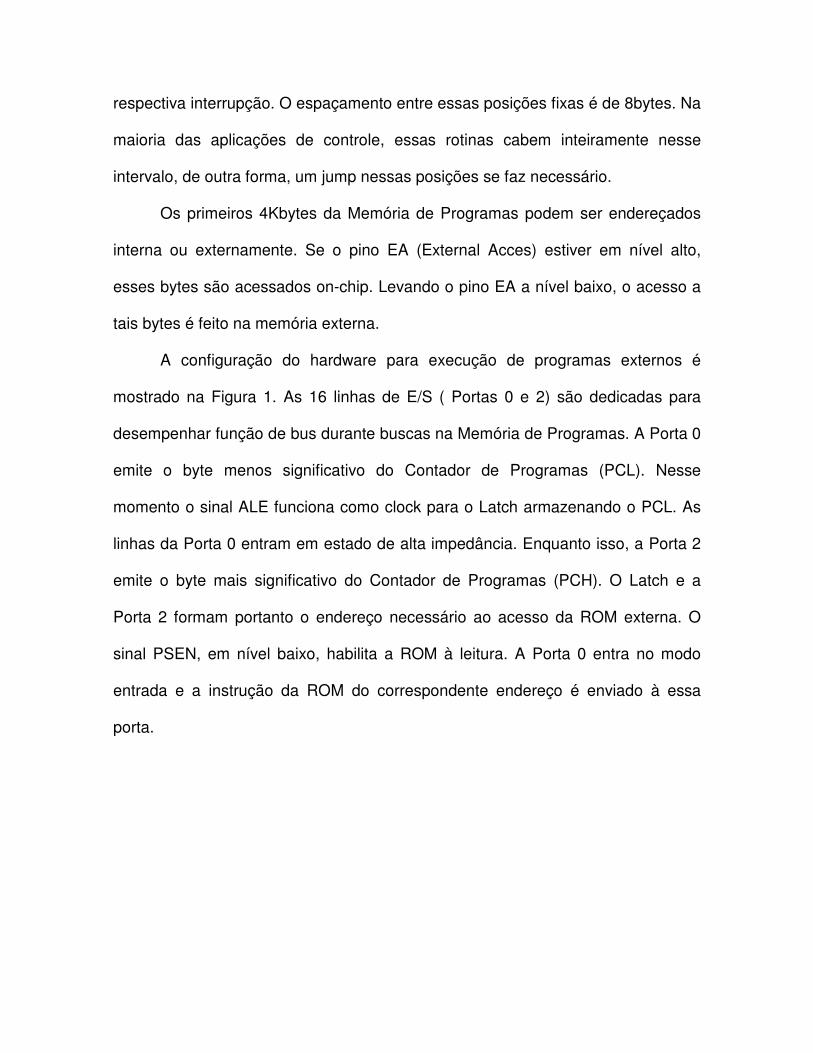
respectiva interrupção. O espaçamento entre essas posições fixas é de 8bytes. Na
maioria das aplicações de controle, essas rotinas cabem inteiramente nesse
intervalo, de outra forma, um jump nessas posições se faz necessário.
Os primeiros 4Kbytes da Memória de Programas podem ser endereçados
interna ou externamente. Se o pino EA (External Acces) estiver em nível alto,
esses bytes são acessados on-chip. Levando o pino EA a nível baixo, o acesso a
tais bytes é feito na memória externa.
A configuração do hardware para execução de programas externos é
mostrado na Figura 1. As 16 linhas de E/S ( Portas 0 e 2) são dedicadas para
desempenhar função de bus durante buscas na Memória de Programas. A Porta 0
emite o byte menos significativo do Contador de Programas (PCL). Nesse
momento o sinal ALE funciona como clock para o Latch armazenando o PCL. As
linhas da Porta 0 entram em estado de alta impedância. Enquanto isso, a Porta 2
emite o byte mais significativo do Contador de Programas (PCH). O Latch e a
Porta 2 formam portanto o endereço necessário ao acesso da ROM externa. O
sinal PSEN, em nível baixo, habilita a ROM à leitura. A Porta 0 entra no modo
entrada e a instrução da ROM do correspondente endereço é enviado à essa
porta.
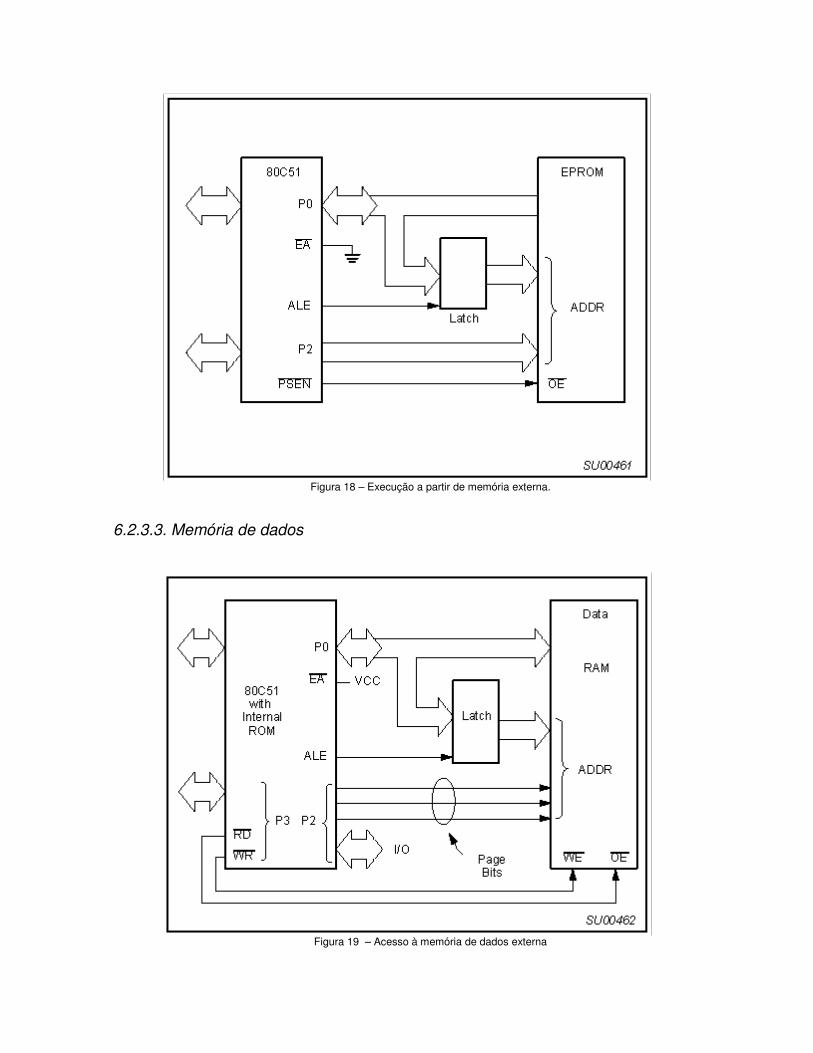
Figura 18 – Execução a partir de memória externa.
6.2.3.3. Memória de dados
Figura 19 – Acesso à memória de dados externa

A figura acima mostra a configuração do hardware para o acesso de
2Kbytes de RAM externa. Neste caso a CPU está executando a partir da ROM
interna. O endereço pode ter largura 1 ou 2bytes. Quando utilizando 1byte, uma
ou mais outras linhas de E/S podem ser utilizadas, como mostrado na figura.
Quando utilizando 2bytes de largura, o byte mais significativo é enviado pela
Porta2.
O mapeamento da memória interno é mostrado figura abaixo. Ela é dividida
em três blocos que são referidos como Lower 128, Upper 128 e SFR. Os
registradores, mapeados em memória, ocupam os primeiros 32bytes do bloco
Lower, agrupados em bancos de 8 (R0 a R7). Dois bits na Palavra de Status de
Programa (PSW-Program Status Word) seleciona um dos bancos. Isto permite
maior eficiência no espaço do código, uma vez que, instruções que referem a
registradores são menores que as instruções de endereçamento direto.
Figura 20 - Memória de dados interna
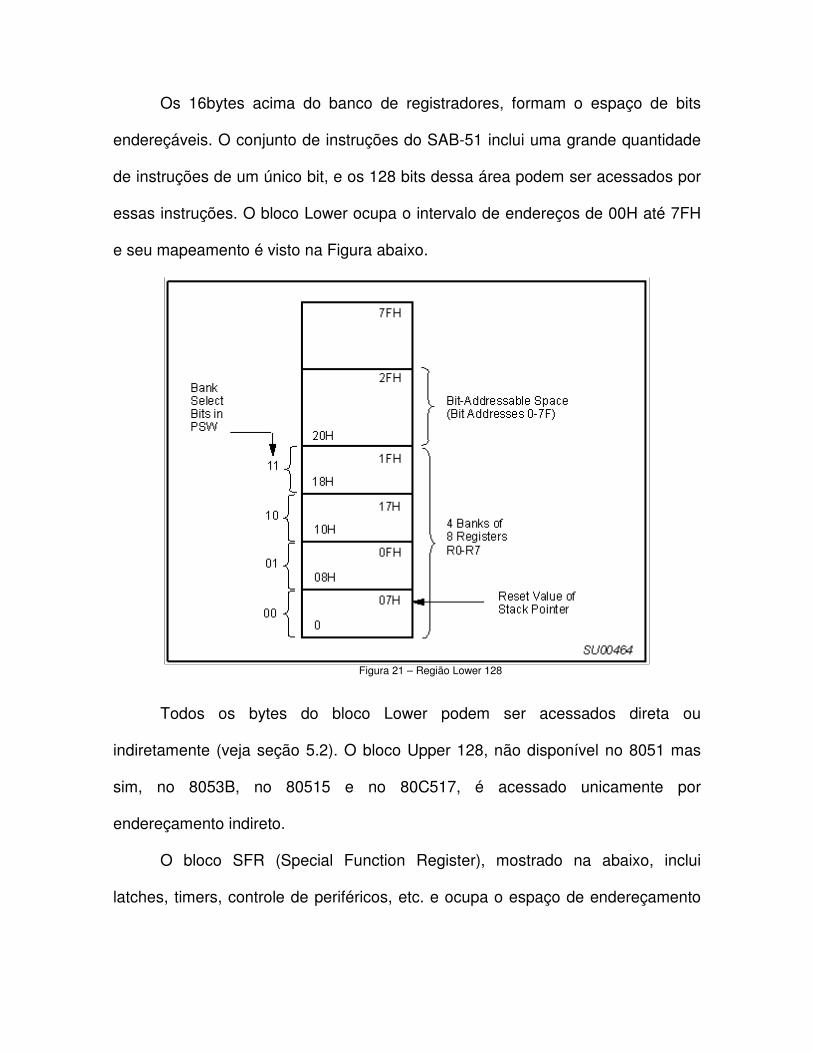
Os 16bytes acima do banco de registradores, formam o espaço de bits
endereçáveis. O conjunto de instruções do SAB-51 inclui uma grande quantidade
de instruções de um único bit, e os 128 bits dessa área podem ser acessados por
essas instruções. O bloco Lower ocupa o intervalo de endereços de 00H até 7FH
e seu mapeamento é visto na Figura abaixo.
Figura 21 – Região Lower 128
Todos os bytes do bloco Lower podem ser acessados direta ou
indiretamente (veja seção 5.2). O bloco Upper 128, não disponível no 8051 mas
sim, no 8053B, no 80515 e no 80C517, é acessado unicamente por
endereçamento indireto.
O bloco SFR (Special Function Register), mostrado na abaixo, inclui
latches, timers, controle de periféricos, etc. e ocupa o espaço de endereçamento
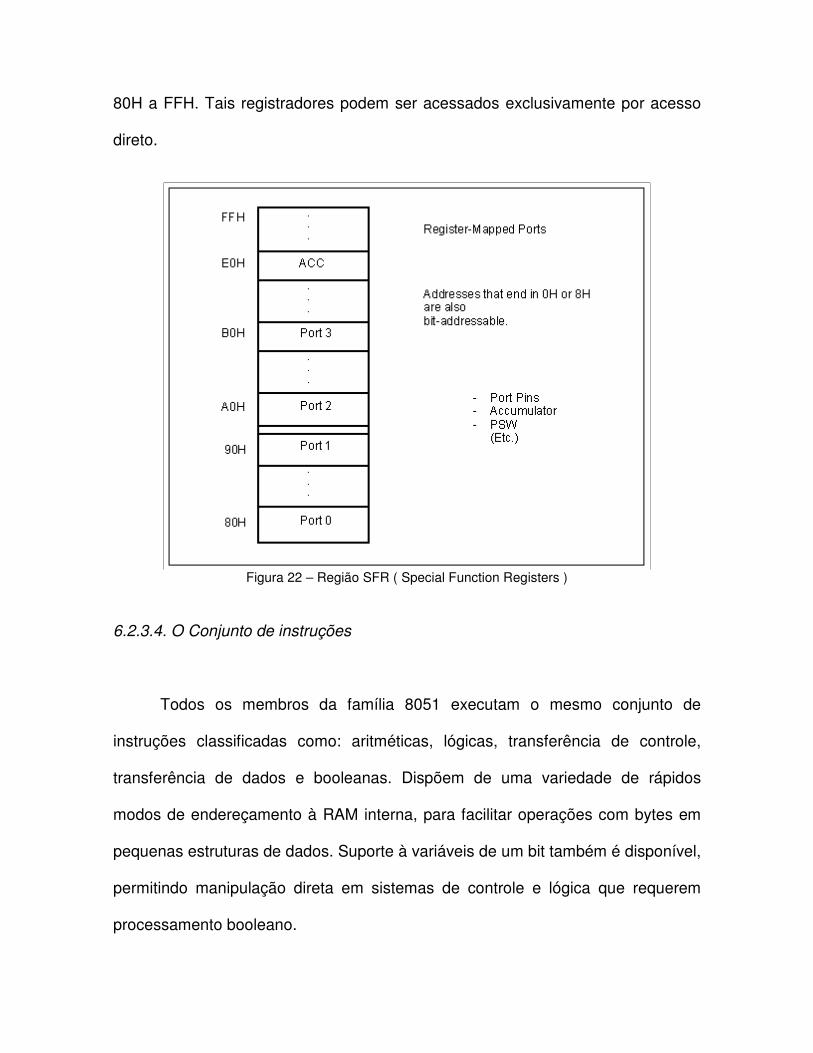
80H a FFH. Tais registradores podem ser acessados exclusivamente por acesso
direto.
Figura 22 – Região SFR ( Special Function Registers )
6.2.3.4. O Conjunto de instruções
Todos os membros da família 8051 executam o mesmo conjunto de
instruções classificadas como: aritméticas, lógicas, transferência de controle,
transferência de dados e booleanas. Dispõem de uma variedade de rápidos
modos de endereçamento à RAM interna, para facilitar operações com bytes em
pequenas estruturas de dados. Suporte à variáveis de um bit também é disponível,
permitindo manipulação direta em sistemas de controle e lógica que requerem
processamento booleano.
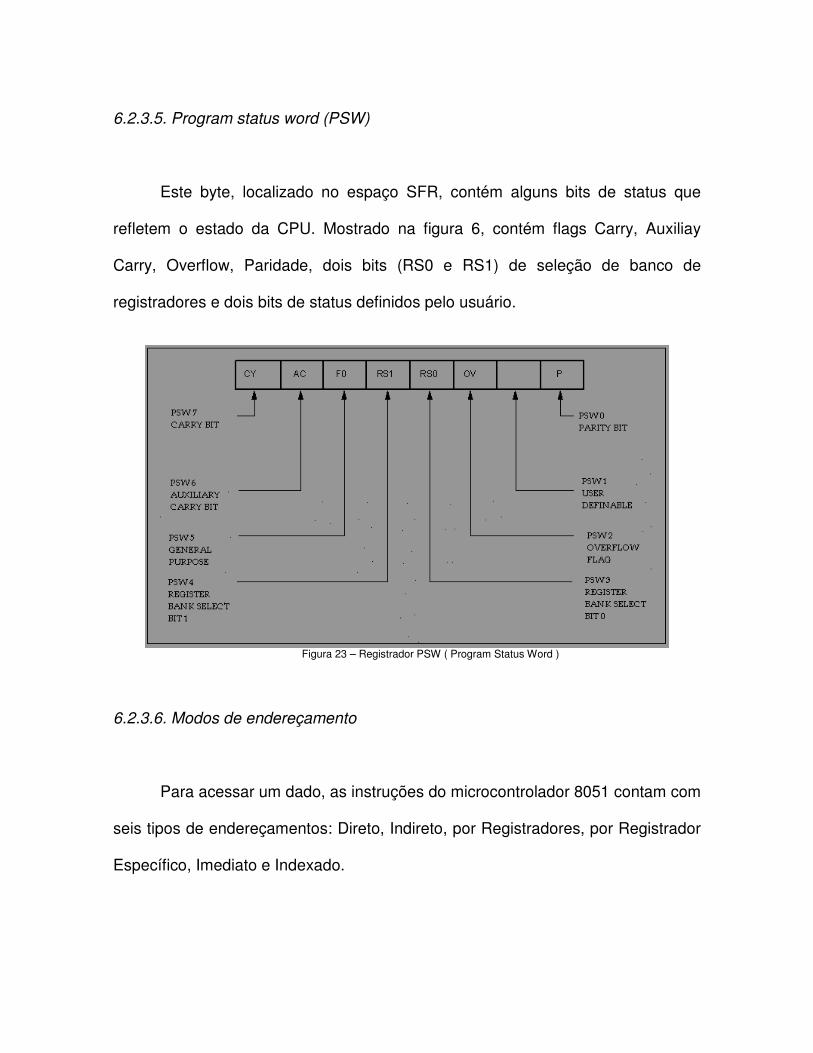
6.2.3.5. Program status word (PSW)
Este byte, localizado no espaço SFR, contém alguns bits de status que
refletem o estado da CPU. Mostrado na figura 6, contém flags Carry, Auxiliay
Carry, Overflow, Paridade, dois bits (RS0 e RS1) de seleção de banco de
registradores e dois bits de status definidos pelo usuário.
Figura 23 – Registrador PSW ( Program Status Word )
6.2.3.6. Modos de endereçamento
Para acessar um dado, as instruções do microcontrolador 8051 contam com
seis tipos de endereçamentos: Direto, Indireto, por Registradores, por Registrador
Específico, Imediato e Indexado.

Endereçamento Direto: nesse modo, o endereço do operando é
especificado por um campo de 8bits na instrução. Somente RAM de dados interna
e a região SFR pode ser diretamente endereçadas.
Endereçamento Indireto: a instrução especifica um registrador que contém
o endereço do operando. Ambas externa e interna RAM’s podem ser
indiretamente acessadas. Se tal endereço possui 8bits, seu valor é armazenado
em R0 ou R1, do respectivo banco selecionado, ou no Stack Pointer. Por outro
lado, se tal endereço possui 16bits, seu valor é armazenado no registrador DPTR.
Endereçamento por Registradores: instruções que suportam um espaço de
três bits em seu opcode podem acessar registradores de R0 a R7 dos bancos de
registradores. Tais instruções são eficientes por eliminarem um byte de endereço.
Quando uma instrução desse tipo é executada, um dos quatro bancos de
registradores é selecionado pelos bits RS0 e RS1 de PSW em tempo de
execução.
Endereçamento por Registrador Específico: algumas instruções são
específicas a certos registradores. Por exemplo, algumas instruções sempre
operam no Acumulador e, para elas, não é necessário um ponteiro. O próprio
opcode é capaz de realizar tal tarefa.
Endereçamento Imediato: quando uma constante segue o opcode.
Endereçamento Indexado: somente a Memória de Programas, cuja única
operação é leitura, pode ser acessada por esse modo. É usado para fazer leituras
em tabelas na Memória de Programas. Um registrador de 16bits (DPTR ou PC)
aponta para o início da tabela enquanto o Acumulador é ajustado para a n-ésima
posição da mesma. O endereço de uma entrada para a tabela é formado pela
soma entre o Acumulador e o registrador de 16bits. Uma outra aplicação desse
tipo de endereçamento é na formação do endereço destino de jumps pela soma
do índice e do valor do Acumulador.
6.2.3.7. Instruções aritméticas
O conjunto de instruções 8051 pode acessar suas variáveis pelos diferentes
modos de endereçamento. Por exemplo, a instrução ADD A, <byte> pode ser
escrita como:
ADD A, 7FH (direto)
ADD A,@R0 (indireto)
ADD A,R7 (registrador)
ADD A,#127 (imediato)
6.2.3.8. Instruções lógicas
Essas instruções realizam operações booleanas ( AND, OR, Exclusive OR
e NOT) bit a bit entre dois bytes. Elas podem endereçar seus operandos por
diversos modos como por exemplo, a instrução ANL A, <byte>:
ANL A,7FH (direto)
ANL A,@R1 (indireto)
ANL A,R6 (por registrador)
ANL A,#53H (imediato)

Todas instruções desse tipo que utilizam o Acumulador como registrador
específico tomam 1� s para serem executadas, enquanto as demais tomam 2� s.
Os modos de endereçamento disponíveis tornam desnecessário carregar qualquer
operando que estiver na Memória de Dados interna para o Acumulador. Não
utilizar o Acumulador, economiza o tempo em empilhar seu conteúdo quando do
atendimento a uma interrupção.
Instruções de rotação deslocam de um bit para direita ou esquerda o
conteúdo do Acumulador. Se for para esquerda, o bit LSB recebe o bit MSB,
enquanto, se for para direita, o bit MSB recebe o bit LSB.
A instrução SWAP permuta os quatro bits menos significativos com os
quatro bits mais significativos do Acumulador.
6.2.3.9. Instruções de transferência de dados
Essas instruções são divididas em três subgrupos conforme a localização
do dado: na RAM interna, na RAM externa ou na Memória de Programas (Lookup
Tables).
6.2.5. RAM interna
Sob um clock de 12MHz, uma operação desse tipo é realizada em 1� s ou
2� s. Esse conjunto de instruções mostrado na tabela 3, conta com a facilidade,
por exemplo, de MOV <dest>,<src> que transfere dados entre duas posições de
RAM interna ou região SFR dispensando qualquer carregamento do Acumulador

(lembre que a região Upper 128 da RAM de dados pode ser acessada somente
por endereçamento indireto e a região SFR somente por endereçamento direto).
PUSH e POP utilizam endereçamento direto para identificar o byte a ser salvo ou
restaurado, mas usa endereçamento indireto para acessar a pilha através do
registrador SP. Isso significa que a pilha (que cresce no mesmo sentido dos
endereços e localizada na região Lower 128) pode avançar sobre a região Upper
128 mas não na região SFR. Em dispositivos que não contam com a região Upper
128 ( 8051A, 80C51 e 80512 e versões ROMless) se a pilha tenta avançar sobre
ela, bytes de PUSH são perdidos e de POP são indeterminados.
Movimentação com 16bits é útil para inicializar DPTR para acesso a Lookup
Tables na Memória de Programas ou acessar Memória de Dados externa.
6.2.6. Instruções booleanas
Os dispositivos da família 8051 contam com um completo conjunto de
operações booleanas ( tabela 6) sob bits únicos. A o espaço Lower 128 da RAM
interna suporta 128 bits endereçáveis e o espaço SFR pode suportar outros 128
bits endereçáveis. Todas as linhas das portas são bit-endereçáveis e cada uma
dessas linhas pode ser tratada como uma porta de um único bit. As instruções que
acessam esses bits não são apenas branches condicionais mas uma completa
lista de move, set, clear, complement, OR e AND. Esse tipo de operações sobre
bits não é facilmente obtido em outras arquiteturas sem uma razoável quantidade
de código.

Todos esses bits são endereçados diretamente. Bit-Endereços entre 00H e
7FH acessam o espaço Lower 128 enquanto entre 80H e FFH acessam o espaço
SFR. Note como é fácil um flag interno ser movido para um pino de uma porta:
MOV C, FLAG
MOV P1.0, C
Onde FLAG é o nome de qualquer Bit-Endereçável em Lower 128 ou SFR.
Nessa seqüência, bit de FLAG é movido para o bit menos significativo da Porta1.
O Carry bit de PSW é utilizado como acumulador para operações Booleanas.
As operações de jump desse conjunto testam um único bit, que possa ser
diretamente endereçável, como condição. Uma vez que todos os bits de PSW são
endereçados diretamente, pois estão no espaço SFR, pode-se utilizá-los como
alguma condição de jump.
Para jumps relativos, o endereço contido no código é somado ao PC em
complemento de dois se o jump é tomado. Portanto, a distância de jump pode
variar na faixa de -128 a +127 bytes a partir do endereço do byte de desvio .
6.2.7. Instruções de jumps
O conjunto de instruções de jumps pode ser dividido em dois subgrupos:
jumps condicionais e jumps incondicionais.
6.2.7.1. Jumps incondicionais

O conjunto de jumps incondicionaispossuem seis instruções em seu
repertório. JMP é apenas um mnemônico genérico utilizado pelo programador que
não precisa saber como ela é realmente interpretada pelo assembler. Na
realidade, JMP corresponde a três instruções: SJMP, LJMP e AJMP. A instrução
SJMP calcula o endereço destino como descrito acima que pode varrer uma
largura de -128 a +127 bytes na Memória de Programas. A instrução LJMP
codifica o endereço destino como uma constante de 16bits que pode ser qualquer
localidade dos 64Kbytes da Memória de Programas. A instrução AJMP codifica o
endereço destino como uma constante de 11bits. A instrução consiste em 2 bytes:
3bits do endereço localizam-se no opcode enquanto os outros 8bits localizam-se
no próximo byte. Os 11bits assim formados simplesmente substituem os 11bits
menos significativos de PC.
Em todos os casos, o programador especifica o endereço destino de duas
maneiras: ou como um label ou como uma constante de 16bits. O assembler se
encarrega de colocar o endereço destino para o correto formato de instrução.
A instrução JMP @A + DPTR implementa a comando CASE. O endereço
destino é computado em tempo de execução como a soma do conteúdo do
Acumulador e o registrador DPTR. Tipicamente, DPTR é carregado com o
endereço de uma tabela de jumps e, ao Acumulador, é dado o valor de um índice
dessa tabela.
Semelhantemente à instrução JMP, a instrução CALL, na realidade, são
duas : LCALL e ACALL que diferem na forma como que o endereço da subrotina é
dado à CPU. LCALL utiliza o endereço destino em 16bits que pode ser qualquer
localidade dos 64Kbytes da Memória de Programas. ACALL utiliza formatos em
11bits o que significa que o endereço destino deve estar no mesmo bloco de
2Kbytes seguintes a instrução. A transparência para o programador em CALL é
semelhante à de JMP.
As instruções RET e RETI são utilizadas em finais de subrotinas. A
diferença entre elas é que RETI informa ao sistema de controle de interrupções
que a interrupção em progresso terminou.
6.2.7.2. Jump condicionais
O conjunto de jumps condicionais só permite endereçamento de destino
relativo o que limita a distância de salto entre -128 e +127 bytes de distância da
instrução jump. Importante notar que o programador especifica o endereço como
um label ou uma constante de 16bits.
Não há flag zero, portanto, JZ e JNZ testam o dado do Acumulador para tal
condição.
A instrução DJNZ (Decrementa e Jump se Não Zero) é utilizada para
controle de loops assim como CJNE (Compara e Jump se Não Igual). Uma
aplicação para esta instrução está em comparações "maior que, menor que". Pelo
valor do Carry bit distingue-se as duas situações. Se o primeiro é menor que o
segundo, Carry bit é setado. Se o primeiro é maior ou igual ao segundo, Carry bit
é zerado.

6.2.8. Ciclo de máquina
Um ciclo de máquina consiste de uma seqüência de 6 estados (S1 a S6).
Cada estado toma 2 períodos de clock e, portanto, um ciclo de máquina toma 12
períodos de clock ou 1 s sob uma freqüência de 12MHz.
A Figura 7 mostra a seqüência de busca/execução para alguns tipos de
instruções. Normalmente dois ciclos de busca são executados em cada ciclo de
máquina mesmo que a instrução sendo executada não o requer, caso em que o
byte buscado é ignorado e o PC não é incrementado.
Figura 24 – Sequência de Estados
Instruções de um ciclo começam em S1, em S4 é gerado uma segunda
busca e, no fim de S6, a instrução está completa. O ciclo busca/execução é o
mesmo se a Memória de Programas é externa ou interna. A Figura 7 mostra os
sinais e as temporizações envolvidas quando a Memória de Programas é externa.
Nesse caso, o sinal PSEN é ativo duas vezes por ciclo de máquina. Se um acesso
à Memória de Dados externa ocorre, como mostrado na Figura 2, dois PSENs são
pulados porque o bus de endereços e o bus de dados estão sendo utilizados para
acesso à Memória de Dados. Note que um ciclo de Memória de Dados externa
toma duas vezes mais tempo que um ciclo de Memória de Programas. A Figura 8
mostra a dinâmica dos endereços sendo enviados às Portas 0 e 2 e dos sinais
ALE e PSEN. O sinal ALE é ativado indiferentemente se a CPU está executando a
partir da Memória de Programas externa ou interna, podendo ser utilizado como
uma saída de clock
6.2.9. Estruturas de interrupção
Os microcontroladores 8051A, 80C51 e suas versões ROMless dispõem de
5 fontes de interrupção: 2 interrupções externas, 2 interrupções de temporizadores
e uma interrupção por porta serial. O 8052B e o 80C52 possuem essas cinco
interrupções e mais uma associada ao terceiro temporizador. Outras interrupções
são disponíveis em membros mais avançados da família.
Cada uma das fontes de interrupção pode ser habilitada ou desabilitada
setando ou limpando um bit do registrador IE localizado na região SFR. Este
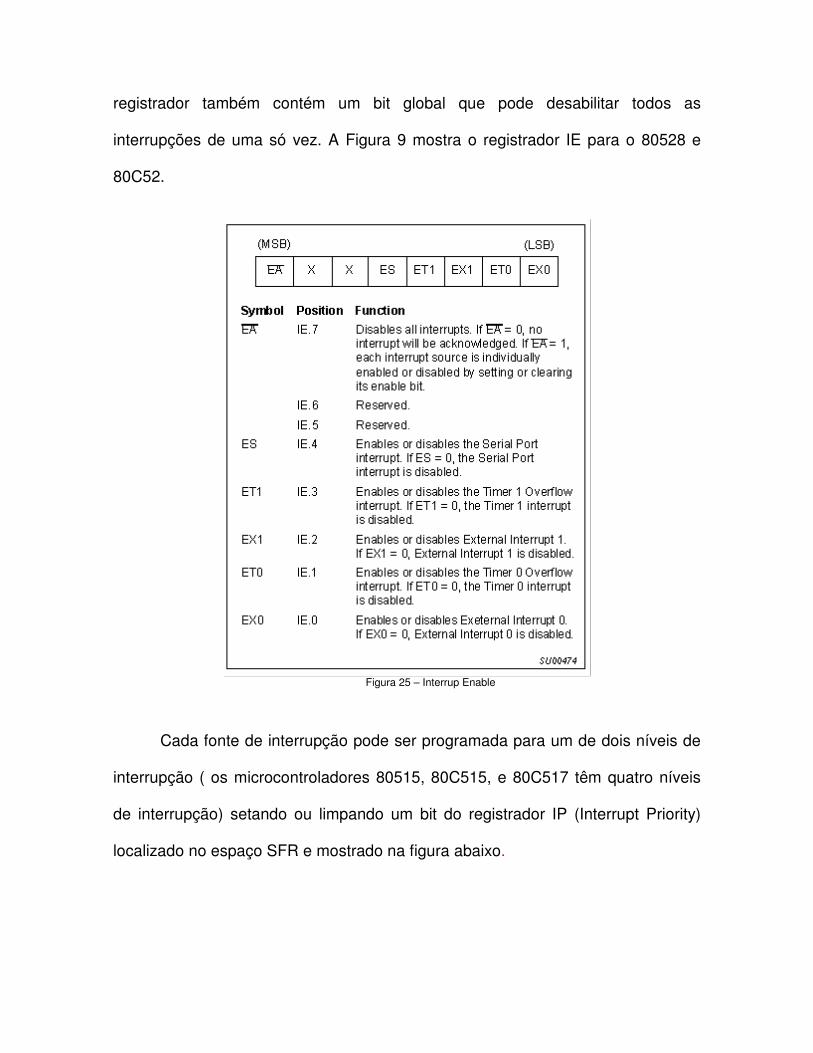
registrador também contém um bit global que pode desabilitar todos as
interrupções de uma só vez. A Figura 9 mostra o registrador IE para o 80528 e
80C52.
Figura 25 – Interrup Enable
Cada fonte de interrupção pode ser programada para um de dois níveis de
interrupção ( os microcontroladores 80515, 80C515, e 80C517 têm quatro níveis
de interrupção) setando ou limpando um bit do registrador IP (Interrupt Priority)
localizado no espaço SFR e mostrado na figura abaixo.

Figura 26 – Interrupt Priority
Se requisições de interrupção de mesma prioridade são recebidas
simultaneamente, uma seqüência de pooling é ativada para determinar qual
interrupção será atendida.
Todos os flags de interrupção são carregados no sistema de controle de
interrupção durante o Estado 5 de todo ciclo de máquina. A análise desses flags é
feita no ciclo seguinte. Se um flag para uma interrupção habilitada é encontrado
setado, o sistema de interrupção gera um LCALL para a correta localização na
Memória de Programas a menos que uma situação de bloqueio de verifique (ex.
interrupção de igual ou maior prioridade sendo atendida). Com LCALL sendo

executado, o conteúdo de PC é salvo na pilha e este registrador recebe o valor do
endereço inicial da rotina de interrupção.
Somente PC é automaticamente salvo na pilha. Isso permite ao
programador decidir quanto tempo deve ser gasto salvando outros registradores.
Como resultado, tem-se uma melhoria no tempo de resposta a uma interrupção.
6.2.10. Temporizadores
O microcontrolador 8051 conta com 2 temporizadores/contadores de 16bits
para uso geral. A configuração dos temporizadores/contadores 0 e 1 é feita no
registrador TMOD localizado na região SFR no endereço 89H. Se o bit C/T desse
registrador é setado, o temporizador/registrador atua como contador e, se zerado,
atua como temporizador.
Quando na função temporizador, o registrador de tempo, localizado na
região SFR é incrementado a cada ciclo de máquina. Logo, podemos pensá-lo
como um contador de ciclos de máquina. Desde que um ciclo de máquina toma 12
ciclos de clock, a resolução de contagem é 1/12 da freqüência de clock.
Quando na função contador, o registrador é incrementado a cada transição
1 para 0 do correspondente sinal externo T0 ou T1 (pino 4 ou pino 5
respectivamente da porta 3). É necessário um ciclo de máquina para detectar a
transição e outro para incrementar o registrador de contagem. Portanto, a
resolução de contagem é 1/24 da freqüência do sinal de entrada. É fortemente
recomendado que o sinal seja aplicado no mínimo durante um ciclo de máquina
completo.
Cada temporizador/contador consiste em 2 registradores de 8bits que
podem ser configurados em um dos 4 possíveis modos.
Modo 0: o registrador é configurado como um registrador de 13bits. Os bits
TF0 (8DH) e TF1 (8FH) são utilizados como flags de overflow associadas às
interrupções INT0 e INT1 respectivamente aos temporizadores/contadores 0 e 1.
Modo 1: semelhante ao modo 0 com a diferença de que o registrador atua
em 16bits.
Modo 2: o registrador é configurado em 8bits com recarregamento
automático, isto é, quando numa situação de overflow de TLO (8bits menos
significativos), tal registrador é recarregado com o conteúdo de TLH (8bits mais
significativos) cujo conteúdo permanece constante.
Modo 3: temporizador/contador 1 é desligado enquanto o
temporizador/contador 0 é utilizado como dois registradores de 8bits. A
interrupção associada a TL0 é INT0 enquanto a interrupção associada a TH0 é
INT1.
6.2.11. Interface Serial
O 8051 possui uma porta serial full-duplex, o significa que ela pode enviar e
transmitir dados simultaneamente. Essa interface pode operar em 4 modos:
Modo 0: (modo síncrono) 8 bits do dado serial entram e saem por RxD0.
TxD0 tem como saída o sinal de clock deslocado em fase. A velocidade de
transmissão é de 1/12 clock.
Modo 1: (modo assíncrono) 10 bits são transmitidos (TxD0) ou recebidos
(RxD0): 8bits de dados, 1 stop bit e 1 start bit. A velodidade de transmissão é
variável.
Modo 2: (modo assíncrono) 11 bits são transmitidos (TxD0) ou recebidos
(RxD0): 1 start bit, 8bits de dados, 1bit programável pelo usuário (por exemplo: bit
de paridade) e um stop bit. A velocidade de transmissão pode ser porgramável
para 1/32 ou 1/64 clock
Modo 3: (modo síncrono) exatamente como no Modo 2, porém, a
velocidade de transmissão é variável.
Em cada um dos modos, a transmissão é iniciada quando da execução de
uma instrução cujo registrador destino é o registrador S0BUF (endereço 99H,
região SFR). A recepção é iniciada no modo 0 pela condição RI0 = 0 (endereço
98H) e REN0 = 1 (endereço 9CH), ambos localizados no registrador S0CON
(endereço 98H, região SFR). Em outros modos, a recepção é iniciada quando
REN0 = 1.
6.2.12. Principais vantagens do microcontrolador 8051
� Popular: prontamente disponível e amplo suporte. Gama completa de
produtos de suporte estão disponíveis de graça e comercialmente;
� Rápido e eficaz: a arquitetura se correlaciona de perto com o problema
sendo solucionado (sistemas de controle). Instruções especializadas
significam que menos bytes precisam ser buscados e menos jumps
condicionais são processados;
� Baixo custo: alto nível de integração do sistema em um único componente.
Poucos componentes são necessários para se criar um sistema que
funcione;
� Ampla gama de produtos: uma única família de microcontroladores cobre
as opções que outros fornecedores só conseguem cobrir com um número
razoável de diferentes e incompatíveis famílias. Desse modo, o 8051
proporciona economia real em termos de custo de ferramentas, treinamento
e suporte para software;
� Compatibilidade: opcodes e código binário são os mesmos para todas as
variações do 8051, diferente de outras famílias de microcontroladores;
� Multi-Sourced: mais de 12 fabricantes, centenas de variedades;
� Aperfeiçoamentos constantes: melhorias na manufatura aumentam a
velocidade e potência anualmente. Há ainda versões de 16 bits vindo de
diversos fabricantes.
6.2.13. Atuais tendências
Recentemente a PHILIPS Semiconductors lançou a versão 16bits do 8051:
o 80C51XA (eXtended Architecture). O conjunto de códigos mais denso não perde
a compatibilidade com códigos escritos para o 8051. O XA foi uma resposta às

três maiores tendências no desenvolvimento de sistemas microcontrolados: a
necessidade de se ter maior processamento por Dólar, o aumento do uso de
linguagens de alto nível e o crescente desenvolvimento de sofisticados sistemas
operacionais multi-tarefas e de tempo real.
Entre outras características, o XA conta com baixo consumo ( 3V com
capacidade de gerência de energia), endereçamento e conjunto de instruções
expandidos. Com um preço de U$ 7.00 e uma razão performance por dólar
superior a qualquer outro microcontrolador de 16bits, o XA resolve problemas de
projeto por um inigualável preço/performance.
Inspirada no sucesso do microcontrolador 8051, a indústria usou a mesma
estratégia lançando a completa família 80C51XA.
7. Mercado
7.1. Nicho de mercado
O nicho de mercado do produto em questão seriam os hospitais públicos e
particulares que possuam as áreas de UTI (adulto e pediátrica), e também clínicas
que trabalhem com o aparelho. Futuramente pode ser estudada a possibilidade da
locação do aparelho para particulares.
7.2. Mercado em potencial
O mercado em potencial e os possíveis clientes seriam os hospitais
públicos e particulares que possuam as áreas citadas acima, inicialmente do
Paraná e Santa Catarina, mas visando uma ampliação do mercado de atuação
nos próximos anos. E também clínicas que necessitam do aparelho para o
desenvolvimento do seu trabalho.Um mercado pouco explorado seria a locação
dos aparelhos para particulares.
Foi realizada uma pesquisa nos principais hospitais de Curitiba, e
constatou-se que os hospitais possuem em média 20 aparelhos respiratórios. E
que a expectativa de troca desses aparelhos é em média de 8 anos, existindo
hospitais que mantém seus aparelhos por mais de 15 anos em funcionamento,
devido ao alto custo que acarreta a substituição do aparelho por um novo.
Foi constatado nesta pesquisa que o Hospital Evangélico de Curitiba está
em processo de substituição dos seus aparelhos de respiração artificial. Também
o Instituto Cruz Vermelha está em processo de ampliação e modernização de sua
rede de pronto atendimento. Podendo ser grandes clientes em potencial.
A perspectiva de crescimento no mercado é positiva, pois os preços finais
oferecidos pelos produtos em questão são significativamente menor aos dos seus
concorrentes, o aparelho VIDDA 100 é de simples manuseio e o custo de
manutenção e reposição de peças é baixo, já o aparelho VIDDA PLUS
apresentará características próprias, inovações tecnológicas, apresentando
grandes diferenciais em relação aos seus similares existentes no mercado.

Nossa pesquisa foi feita apenas em Curitiba, nos seus principais hospitais.
Existe a possibilidade do interesse de outros hospitais do Paraná e Santa Cataria
de estarem substituindo seus aparelhos de respiração artificial, ou até mesmo a
inauguração de novos hospitais.
7.3. Dados estatísticos
Número de Hospitais
Públic. Privad. Univers.
Número de Leitos
de UTI
Número de
Leitos p/
1000 hab
Curitiba 48 25 5 273 3.75
Paraná 113 400 7 645 4.2
Santa
Catarina
21 194 14 351 3.7
*Secretaria Estadual de Saúde do Paraná/Santa Catarina.
7.4. Concorrentes
NACIONAIS INTERNACIONAIS
K.Takaoka Siemens
Intermed Screisht
Engesp Benet
Promédico Draeger
New Port
A situação atual dos concorrentes nacionais perante o mercado deixa a
desejar em relação ao custo/benefício. A marca K.Takaoka peca por não aliar
adequadamente a tecnologia adotada ao preço praticado. Já a Intermed apesar de
ter uma tecnologia significativa, seu preço está acima ao que será oferecido pelo
nosso produto. A Engesp, mesmo possuindo um produto com pouca diferença de
preço em relação ao nosso, os custos com insumos após a utilização chegam a
ser tão elevados que a vantagem da diferença de preço chega a ser irrisória a
longo prazo.
Já os concorrentes internacionais apresentam uma situação privilegiada
quanto à tecnologia empregada, mas um custo impraticável no setor de saúde
nacional. Esses produtos importados possuem uma deficiência quanto à
reposição de peças devido ao tempo e ao custo despendido na importação. Aliado
à essa deficiência, a assistência técnica fornecida e a manutenção é dificultada.
Para determinar o faixa de mercado, em termos de configuração dos
aparelhos, foi desenvolvido um questionário em conjunto com o Professor Dr. Zaki
Akel Sobrinho, da Universidade Federal do Paraná para facilitar a orientação no
desenvolvimento de um equipamento que atenda os anseios dos clientes não
atendidos hoje pelos equipamentos no mercado.
7.5. Plano de comercialização

Os primeiros seis meses de incubação seriam dedicados ao aprimoramento
do aparelho mais compacto, simples e mais barato e após esse tempo ele sairia
para o mercado. Após esses seis meses haverá a continuidade do
desenvolvimento do aparelho a fim de lançar um aparelho mais avançado.
Uma boa oportunidade será a feira hospitalar que ocorre todos os anos em
São Paulo no mês de julho, para o lançamento do aparelho mais avançado.
Para a comercialização do produto será contratado um vendedor que ficará
responsável de atender os pedidos dos clientes.
A publicidade do produto será feita por distribuição de folders para clientes
em potenciais e visitas para a apresentação do aparelho em hospitais.
Há a possibilidade de veiculação do produto na televisão ou canais médicos
e também propaganda através da NET.
O principal fator de limitação de comercialização seria atender agora um
grande número de clientes e em locais distantes de Curitiba (fora de nosso
mercado inicial – PR/SC)
7.6. Segmento do mercado em que a empresa atua
O segmento de mercado que estaria atuando a empresa seria a
manufatura, prestação de serviços e comércio de aparelhos de respiração
artificial.
7.7. Principais ameaças e oportunidades do mercado
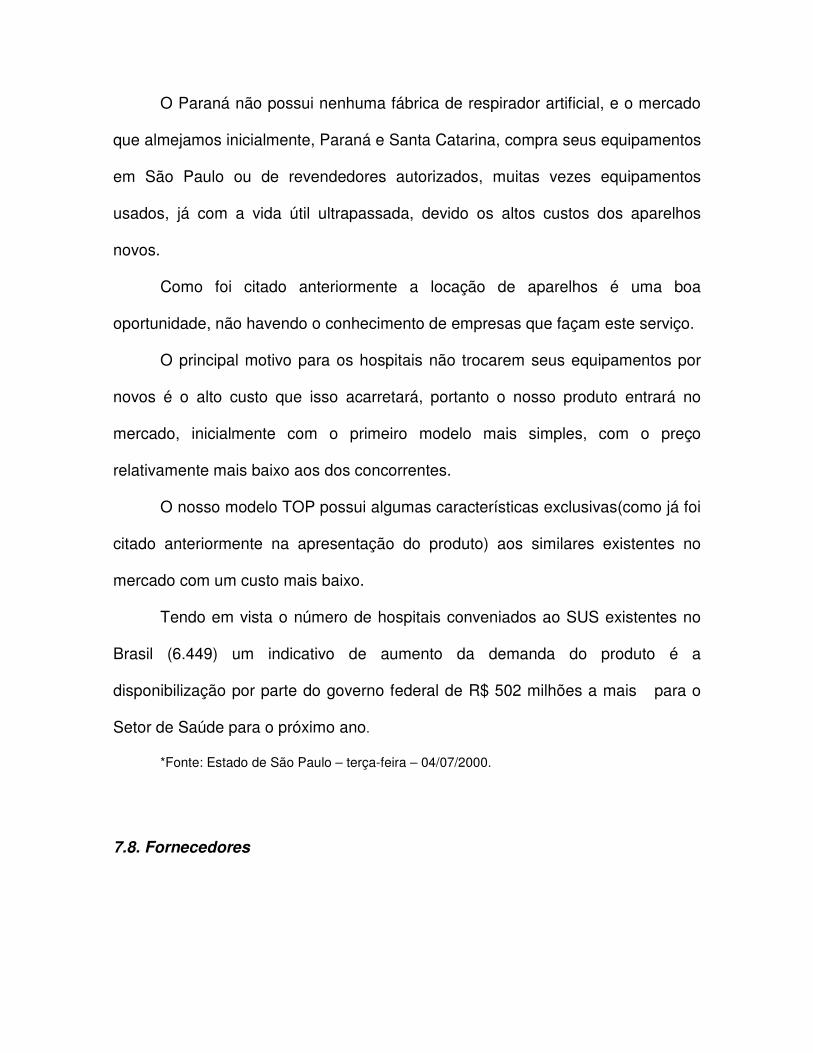
O Paraná não possui nenhuma fábrica de respirador artificial, e o mercado
que almejamos inicialmente, Paraná e Santa Catarina, compra seus equipamentos
em São Paulo ou de revendedores autorizados, muitas vezes equipamentos
usados, já com a vida útil ultrapassada, devido os altos custos dos aparelhos
novos.
Como foi citado anteriormente a locação de aparelhos é uma boa
oportunidade, não havendo o conhecimento de empresas que façam este serviço.
O principal motivo para os hospitais não trocarem seus equipamentos por
novos é o alto custo que isso acarretará, portanto o nosso produto entrará no
mercado, inicialmente com o primeiro modelo mais simples, com o preço
relativamente mais baixo aos dos concorrentes.
O nosso modelo TOP possui algumas características exclusivas(como já foi
citado anteriormente na apresentação do produto) aos similares existentes no
mercado com um custo mais baixo.
Tendo em vista o número de hospitais conveniados ao SUS existentes no
Brasil (6.449) um indicativo de aumento da demanda do produto é a
disponibilização por parte do governo federal de R$ 502 milhões a mais para o
Setor de Saúde para o próximo ano.
*Fonte: Estado de São Paulo – terça-feira – 04/07/2000.
7.8. Fornecedores

FORNECEDORES INSUMOS
Teleradio São Paulo Sensores
Facilmente encontrados Componentes eletrônicos
Facilmente encontrados Metais
Encontrado em São Paulo Mangueiras
7.9. Suporte técnico
A empresa ficará responsável pelo fornecimento da assistência. Após a
instalação do aparelho será oferecida a assistência técnica gratuitamente durante
o período de garantia de seis meses.

9. Referências bibliográficas
1. STOCK, M. Christine; PEREL, Azriel. Handbook of mechanical
ventilatory support. 2. ed. Atlanta: Lippincott Willians & Wilkins, 1999.
2. GEDDES, L. A.; BAKERS, L.E. Principles of biomedical
instrumentation. 3. ed. Ed. New York: Wiley, 1989.
3. SILVA JÚNIOR, Vidal Pereira da. Aplicações práticas do
microprocessador 8051. 5. ed. São Paulo: Erica, 1994.
4. ALLOCCA, Jhon; STUART, Allen. Transducers Theory and Applications.
ed. New York: Reston, 1984.
5. DELMÉE, Gerard Jean. Manual da medição de vazão. 1. ed. São Paulo:
Edgard Blücher, 1982.
6. Sebrae 2000. Programa Brasil empreendedor, orientação para crédito.
7. BAHNS, Ernets. The evolution of ventilation. Dräger Equipaments.
8. MAIA, José A.; EMMERICH, João C. Ventilação pulmonar artificial. 1. ed.
São Paulo: Atheneu, 1990.
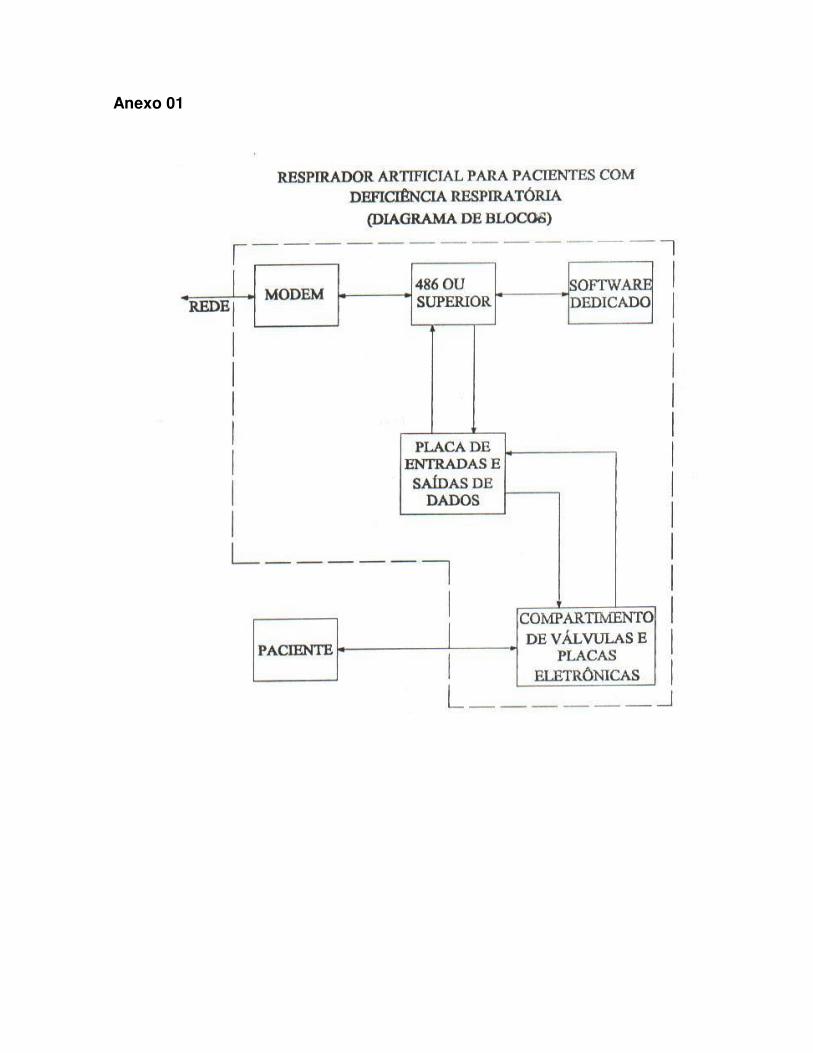
Anexo 01
Anexo 02

Anexo 03

Anexo 04
Anexo 05 – Diagrama de Blocos

(Continuação)

(Continuação)
Anexo 06 – Questionário de Pesquisa