Cinemática rotacional e momento de inércia€¦ · angular variou de ∆#=# f − # i, que é o...
29
Cinemática rotacional e momento de inércia 1
Transcript of Cinemática rotacional e momento de inércia€¦ · angular variou de ∆#=# f − # i, que é o...

Cinemáticarotacionalemomentodeinércia
�1

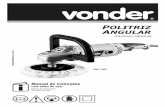
Consideremos uma part ículagirandono sentidoanti-horárioemtornodeumeixofixoperpendicularao plano da página passandoatravésdopontoO.
Comprimento de arco percorridoserá: 𝑠=𝑟𝜃
Essaequaçãonospermiteescrever: 𝜃=𝑠/𝑟
Cinemáticarotacional
�2

Nasexpressõesanterioresoângulo𝜃deveserexpressoemradianos:
• Umradianoéoângulosubtendidoporumcomprimentodearcoigualaoraio.
• Umânguloqemradianoséarazãoentreocomprimentodoarcosedoraior.
• Portanto,umângulode360°corresponde,emradiano,a2𝜋𝑟/𝑟,ouseja,2𝜋rad.
• 1rad=360°/(2𝜋)=57.3°
�3

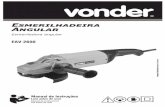
Quandoapartícula semoveudeAparaBnum intervalo de tempo ∆𝑡, sua posiçãoangularvarioude ∆𝜃=𝜃f−𝜃i,queéoseudeslocamentoangular.
Atenção:nem𝜃 e nem∆𝜃 estão restritosaointervaloentre0e2𝜋rad.Porexemplo,se apartículapartiude𝜃i = 0 edeuduasvoltascompletas,∆𝜃=4𝜋rad.
O número de revoluções (voltas) que apartícula realizaemumcerto intervalodetempo pode ser encontrado dividindo ∆𝜃nesseintervalopor2𝜋.
Deslocamentoangular
�4

Definimosavelocidadeangularmédiacomo:
Unidades:rad/s(ou𝑠-1),ouaindarevoluçõesporunidadedetempo(revoluçõesporminuto,porexemplo).
Naturalmente,avelocidadeangularinstantânea𝝎écalculadacomo:
• 𝜔>0se𝜃estiveraumentando(sentidoanti-horário).• 𝜔<0se𝜃estiverdiminuindo(sentidohorário).
Velocidadeangular
�5

Podemostambémdefinirumaaceleraçãoangularmédia:
cujaunidadeérad/s2(ou𝑠-2).Essagrandezapodeserpositiva,negativa(ounula).
Poranalogia,aaceleraçãoangularinstantâneaserá:
• Se𝛼e𝜔possuemomesmosinal,𝜔aumentaránotempo(emmódulo).
• Se𝛼e𝜔possuemsinaisopostos,𝜔diminuiránotempo(emmódulo).
Aceleraçãoangular
�6

Velocidadetangencial
Consideremosumcorpoemrotaçãoemtornodeumeixofixo.Sabemosqueavelocidade𝒗dequalquerpontodocorpoésempretangentea trajetória.Nocontextode rotação,qualquervetor tangentea trajetória será chamadotangencial.
Assim,definimosavelocidadeescalartangencial,como
onde 𝑑𝑠 é a distância percorrida pela partícula ao longo do círculo nointervaloinfinitesimaldt.
�7

Dadefiniçãodecomprimentodearcoteremos:
Portanto,avelocidadetangencialserelacionaavelocidadeangularatravésde:
�8

Aceleraçãotangencial
Definimosaaceleraçãoescalartangencial,como
Lembrandoqueaaceleraçãoangularé
vemosque
�9

Movimentocircularcomaceleraçãoconstante
Usandoumraciocíniosimilaraoutilizadonaauladecinemáticaem1D,éfácildemonstrar que as variáveis angulares obedecem relações análogas àsequaçõeslineares:
�10

Comparação entre o movimento retilíneo e o movimento de rotaçãoComparação entre o movimento retilíneo e o movimento de rotação
Movimento$re7líneo$ Movimento$de$rotação$
Deslocamento*linear*
Deslocamento*angular*
Velocidade*escalar*
Velocidade*angular*
Aceleração**
Aceleração*angular*
Equações*da*aceleração*constante***
Equações*da*aceleração*angular*constante**
xΔ θΔ
dxv
dt=
ddtθ
ω =
2
2dv d x
adt dt
= =2
2d ddt dtω θ
α = =
v = v0 + at
x = x0 + v0t +12at2
v2 = v02 + 2aΔx
ω =ω0 +αt
θ =θ0 +ω0t + 12αt2
ω2 =ω02 + 2αΔθ
�11

Exemplo1
Umarodagiracomumaaceleraçãoangularconstantede3,50rad/s2.Seavelocidadeangulardarodaéde2rad/semt=0:(a)Qualéoângulopercorridopelarodaentret=0et=2s? (b)Qualéavelocidadeangulardarodaemt=2s?
Exemplo$1$
Uma*roda*gira*com*uma*aceleração*angular*constante*de*3,50*rad/s2.*Se*a*velocidade*angular*da*roda*é*de*2*rad/s*em*t&=*0:*(a)*Qual*é*o*ângulo*percorrido*pela*roda*entre*t&=*0*e*t&=*2*s?*(b)*Qual*é*a*velocidade*angular*da*roda*em*t&=*2*s?***
Uma roda gira com uma aceleração angular constante de 3,50 rad/s2. Se a velocidade angular da roda é de 2,00 rad/s em t = 0: (a) Qual é o ângulo percorrido pela roda entre t = 0 e t = 2,00 s? (b) Qual é a velocidade angular da roda em t = 2,00 s?
Exemplo – roda girando
� � � � � � � �� �
Consideremos uma roda rígida, de modo que podemos usar o modelo de corpo rígido.
Assim:
rad/s s rad/s s
rad rad/ rad re revv
212
2212
( )
0 2,00 2,00 3,50 2,00
11,01 1,/ 2
( )
51 0 7,
f i i
f i
a
t t
b
R R X B
Q
X X B
� �
� �
�
� � � � � rad/s rad rad/s s s /22, 00 3,50 2,00 9,00t �
Uma roda gira com uma aceleração angular constante de 3,50 rad/s2. Se a velocidade angular da roda é de 2,00 rad/s em t = 0: (a) Qual é o ângulo percorrido pela roda entre t = 0 e t = 2,00 s? (b) Qual é a velocidade angular da roda em t = 2,00 s?
Exemplo – roda girando
� � � � � � � �� �
Consideremos uma roda rígida, de modo que podemos usar o modelo de corpo rígido.
Assim:
rad/s s rad/s s
rad rad/ rad re revv
212
2212
( )
0 2,00 2,00 3,50 2,00
11,01 1,/ 2
( )
51 0 7,
f i i
f i
a
t t
b
R R X B
Q
X X B
� �
� �
�
� � � � � rad/s rad rad/s s s /22, 00 3,50 2,00 9,00t �
(a)*
(b)*
�12

Umobjetoemrotaçãosobreoalgumeixo com velocidade angular, ω, temenergia cinética rotacional mesmoque não tenha nenhuma energiacinéticadetranslação.
Cadapartículatemenergiacinéticade:
Umavezqueavelocidadetangencialdependedadistância,r,doeixoderotação,nóspodemossubstituir:
Energia$Ciné0ca$Rotacional$$Um(objeto(em$rotação(sobre(o(algum(eixo(com(velocidade(angular,!ω,!tem!energia! ciné.ca! rotacional! mesmo(que( não( tenha( nenhuma( energia(ciné+ca(de(translação.((Cada(parCcula(tem(energia(ciné+ca(de:(
! ! !!((
Uma(vez(que(a(velocidade(tangencial(depende(da(distância,(r,(do(eixo(de(rotação,(nós(podemos(subs+tuir:(
ki =12mivi
2
i iv rω=
Energia Cinetica Rotacional Torque e o produto vetorial O corpo rıgido em equilıbrio
Energia Cinetica Rotacional
Modelamos um conjunto de partıculas com o modelo de corpo rıgido e
supomos que o corpo gire ao redor do eixo z fixo com velocidade
angular !.
Cada partıcula do corpo tem
alguma energia cinetica dada por
Ki =1
2miv
2i
mi - massa da i-esima partıcula
vi - velocidade escalar tangencial
da i-esima partıcula
Ki - energia cinetica da i-esima
partıcula.
U F A B C () 12 de novembro de 2012 2 / 33
Energia$Ciné0ca$Rotacional$$Um(objeto(em$rotação(sobre(o(algum(eixo(com(velocidade(angular,!ω,!tem!energia! ciné.ca! rotacional! mesmo(que( não( tenha( nenhuma( energia(ciné+ca(de(translação.((Cada(parCcula(tem(energia(ciné+ca(de:(
! ! !!((
Uma(vez(que(a(velocidade(tangencial(depende(da(distância,(r,(do(eixo(de(rotação,(nós(podemos(subs+tuir:(
ki =12mivi
2
i iv rω=
Energia Cinetica Rotacional Torque e o produto vetorial O corpo rıgido em equilıbrio
Energia Cinetica Rotacional
Modelamos um conjunto de partıculas com o modelo de corpo rıgido e
supomos que o corpo gire ao redor do eixo z fixo com velocidade
angular !.
Cada partıcula do corpo tem
alguma energia cinetica dada por
Ki =1
2miv
2i
mi - massa da i-esima partıcula
vi - velocidade escalar tangencial
da i-esima partıcula
Ki - energia cinetica da i-esima
partıcula.
U F A B C () 12 de novembro de 2012 2 / 33
�13
EnergiaCiné:caRotacional

Aenergiacinéticarotacionaltotaldeumobjetorígidoéasomadetodasasenergiasdaspartículas
ondeIéchamadodemomentodeinércia.
Existe uma analogia entre energia cinética associada commovimentação linear (K=½mv2) e a energia cinética associadacomamovimentaçãorotacional(KR=½Iω2).
A(energia$ciné0ca$rotacional$total(de(um(objeto(rígido(é(a(soma(de(todas(as(energias(das(parCculas((((((onde(I(é(chamado(de(momento$de$inércia.((Existe( uma( analogia( entre( energia( ciné+ca( associada( com(movimentação( linear( (K=½mv2)( e( a( energia( ciné+ca( associada(com(a(movimentação(rotacional((KR=½Iω2).((
KR = Kii∑ =
12i
∑ miri2ω 2
KR =12
miri2
i∑"
#$
%
&'ω 2 =
12Iω 2
�14

Energiacinéticarotacionalnãoéumtiponovodeenergia;aformaédiferenteporqueéaplicadaaumobjetoemrotação.
AunidadedeenergiacinéticaderotaçãoéJoules(J).
�15

Momentodeinércia
2i i
iI m r=∑
Adefiniçãodemomentodeinérciaé
AdimensãodomomentodeinérciaéML2enoSistemaInternacionaldeunidadesékg.m2
Omomentodeinércianãodependeapenasdamassadocorporígido,mas tambémde como amassa está distribuída ao redor do eixo derotação.
Nomovimentorotacionaleleexerceomesmopapelqueamassanomovimento translacional. O momento de inércia é uma medida daresistênciaàvariaçãonavelocidadeangulardeumsistema.
�16

ConsidereamoléculadiatômicadeoxigênioO2,queestágirandonoplanoxy aoredor do eixo z passando por seu centro, perpendicular ao seu comprimento. Amassadecadaátomodeoxigênioéde2,66x10-26kg,enatemperaturaambiente,aseparaçãomédiaentreosdoisátomosdeoxigênioéded=1,21x10-10m.(a) Calculeomomentodeinérciadamoléculaaoredordoeixoz.(b) Uma velocidade angular típica de uma molécula é 4,60 x 1012 rad/s. Se a
molécula de oxigênio está girando com essa velocidade angular ao redor doeixoz,qualéasuaenergiacinéticarotacional?
Considere(a(molécula(diatômica(de(oxigênio(O2,(que(está(girando(no(plano(xy(ao(redor(do(eixo(z( passando(por( seu(centro,(perpendicular(ao( seu(comprimento.(A(massa( de( cada( átomo( de( oxigênio( é( de( 2,66( x( 10_26( kg,( e( na( temperatura(ambiente,( a( separação(média(entre(os(dois( átomos(de(oxigênio(é(de(d( =(1,21( x(10_10(m.((a) Calcule(o(momento(de(inércia(da(molécula(ao(redor(do(eixo(z.!(b) Uma( velocidade( angular( Cpica( de( uma( molécula( é( 4,60( x( 1012( rad/s.( Se( a(
molécula( de( oxigênio( está( girando( com(essa( velocidade( angular( ao( redor( do(eixo(z,(qual(é(a(sua(energia(ciné+ca(rotacional?(
Exemplo$–$a$molécula$de$oxigênio$
(a)!!A!molécula!é!modelada!como!um!corpo!rígido,!considerando!as!duas!partículas!em!rotação.Como!a!distância!de!cada!partícula!ao!eixo!z !é!d /2,$o$momento$de$inércia$do$redor$do$eixo$é:
I = miri2
i∑ =m d
2!
"#
$
%&2
+m d2!
"#
$
%&2
=md 2
2=2,66×10−26 !kg( ) 1,21×10−21 !m( )
2
2=1,95×10−46 !kg ⋅m2
(b)!KR =12Iω 2 =
121,95×10−46 !kg ⋅m2( ) 4,60×1012 !rad/s( )
2= 2,06×10−21 !J
�17

�18
s

�19

�20

Nocasodepartículaspontuais:
rNocasodeumadistribuiçãocontínuademassa: dm
ondedméumamassainfinitesimal
dm=
λ dl em1dimσ dsem 2dimρ dVem3dim
⎧
⎨⎪
⎩⎪
O
Momentodeinérciadedistribuiçõescontínuasdemassa
No(caso(de(parCculas(pontuais:((
rNo(caso(de(uma(distribuição(conCnua(de(massa:(
dm
onde(dm(é(uma(massa(infinitesimal(
dm =
λ dl em 1dimσ ds em 2dimρ dV em 3dim
!
"#
$#
O
dm =λ dl em 1dimσ ds em 2dimρ dV em 3dim
!
"#
$#
I ≡ miri2
i∑
Momento$de$inércia$de$distribuições$conCnuas$de$massa$$$
10.5 Calculation of Moments of Inertia 301
CALCULATION OF MOMENTS OF INERTIAWe can evaluate the moment of inertia of an extended rigid object by imaginingthe object divided into many small volume elements, each of which has mass !m. We use the definition and take the limit of this sum as !m : 0. In this limit, the sum becomes an integral over the whole object:
(10.17)
It is usually easier to calculate moments of inertia in terms of the volume ofthe elements rather than their mass, and we can easily make that change by usingEquation 1.1, " # m/V, where " is the density of the object and V is its volume. Wewant this expression in its differential form " # dm/dV because the volumes weare dealing with are very small. Solving for dm # " dV and substituting the result
I # lim!mi :0
$i
ri
2 !mi # !r 2 dm
I # $i
r i
2 !mi
10.5
Four Rotating MassesEXAMPLE 10.4Therefore, the rotational kinetic energy about the y axis is
The fact that the two spheres of mass m do not enter into thisresult makes sense because they have no motion about theaxis of rotation; hence, they have no rotational kinetic en-ergy. By similar logic, we expect the moment of inertia aboutthe x axis to be Ix # 2mb2 with a rotational kinetic energyabout that axis of KR # mb2%2.
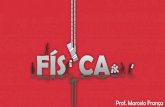
(b) Suppose the system rotates in the xy plane about anaxis through O (the z axis). Calculate the moment of inertiaand rotational kinetic energy about this axis.
Solution Because ri in Equation 10.15 is the perpendiculardistance to the axis of rotation, we obtain
Comparing the results for parts (a) and (b), we concludethat the moment of inertia and therefore the rotational ki-netic energy associated with a given angular speed depend onthe axis of rotation. In part (b), we expect the result to in-clude all four spheres and distances because all four spheresare rotating in the xy plane. Furthermore, the fact that the ro-tational kinetic energy in part (a) is smaller than that in part(b) indicates that it would take less effort (work) to set thesystem into rotation about the y axis than about the z axis.
(Ma2 & mb2)%2 KR # 12Iz%
2 # 12(2Ma2 & 2mb2)% 2 #
2Ma2 & 2mb 2I z # $imi ri
2 # Ma2 & Ma2 & mb2 & mb2 #
Ma2%2KR # 12Iy%
2 # 12(2Ma2)%2 #
Four tiny spheres are fastened to the corners of a frame ofnegligible mass lying in the xy plane (Fig. 10.8). We shall as-sume that the spheres’ radii are small compared with the di-mensions of the frame. (a) If the system rotates about the yaxis with an angular speed %, find the moment of inertia andthe rotational kinetic energy about this axis.
Solution First, note that the two spheres of mass m, whichlie on the y axis, do not contribute to Iy (that is, ri # 0 forthese spheres about this axis). Applying Equation 10.15, weobtain
2Ma2Iy # $i
mi ri2 # Ma2 & Ma2 #
Oa a
b
b
m
m
Mx
y
M
Figure 10.8 The four spheres are at a fixed separation as shown.The moment of inertia of the system depends on the axis aboutwhich it is evaluated.
7.5
No(caso(de(parCculas(pontuais:((
rNo(caso(de(uma(distribuição(conCnua(de(massa:(
dm
onde(dm(é(uma(massa(infinitesimal(
dm =
λ dl em 1dimσ ds em 2dimρ dV em 3dim
!
"#
$#
O
dm =λ dl em 1dimσ ds em 2dimρ dV em 3dim
!
"#
$#
I ≡ miri2
i∑
Momento$de$inércia$de$distribuições$conCnuas$de$massa$$$
10.5 Calculation of Moments of Inertia 301
CALCULATION OF MOMENTS OF INERTIAWe can evaluate the moment of inertia of an extended rigid object by imaginingthe object divided into many small volume elements, each of which has mass !m. We use the definition and take the limit of this sum as !m : 0. In this limit, the sum becomes an integral over the whole object:
(10.17)
It is usually easier to calculate moments of inertia in terms of the volume ofthe elements rather than their mass, and we can easily make that change by usingEquation 1.1, " # m/V, where " is the density of the object and V is its volume. Wewant this expression in its differential form " # dm/dV because the volumes weare dealing with are very small. Solving for dm # " dV and substituting the result
I # lim!mi :0
$i
ri
2 !mi # !r 2 dm
I # $i
r i
2 !mi
10.5
Four Rotating MassesEXAMPLE 10.4Therefore, the rotational kinetic energy about the y axis is
The fact that the two spheres of mass m do not enter into thisresult makes sense because they have no motion about theaxis of rotation; hence, they have no rotational kinetic en-ergy. By similar logic, we expect the moment of inertia aboutthe x axis to be Ix # 2mb2 with a rotational kinetic energyabout that axis of KR # mb2%2.
(b) Suppose the system rotates in the xy plane about anaxis through O (the z axis). Calculate the moment of inertiaand rotational kinetic energy about this axis.
Solution Because ri in Equation 10.15 is the perpendiculardistance to the axis of rotation, we obtain
Comparing the results for parts (a) and (b), we concludethat the moment of inertia and therefore the rotational ki-netic energy associated with a given angular speed depend onthe axis of rotation. In part (b), we expect the result to in-clude all four spheres and distances because all four spheresare rotating in the xy plane. Furthermore, the fact that the ro-tational kinetic energy in part (a) is smaller than that in part(b) indicates that it would take less effort (work) to set thesystem into rotation about the y axis than about the z axis.
(Ma2 & mb2)%2 KR # 12Iz%
2 # 12(2Ma2 & 2mb2)% 2 #
2Ma2 & 2mb 2I z # $imi ri
2 # Ma2 & Ma2 & mb2 & mb2 #
Ma2%2KR # 12Iy%
2 # 12(2Ma2)%2 #
Four tiny spheres are fastened to the corners of a frame ofnegligible mass lying in the xy plane (Fig. 10.8). We shall as-sume that the spheres’ radii are small compared with the di-mensions of the frame. (a) If the system rotates about the yaxis with an angular speed %, find the moment of inertia andthe rotational kinetic energy about this axis.
Solution First, note that the two spheres of mass m, whichlie on the y axis, do not contribute to Iy (that is, ri # 0 forthese spheres about this axis). Applying Equation 10.15, weobtain
2Ma2Iy # $i
mi ri2 # Ma2 & Ma2 #
Oa a
b
b
m
m
Mx
y
M
Figure 10.8 The four spheres are at a fixed separation as shown.The moment of inertia of the system depends on the axis aboutwhich it is evaluated.
7.5
No(caso(de(parCculas(pontuais:((
rNo(caso(de(uma(distribuição(conCnua(de(massa:(
dm
onde(dm(é(uma(massa(infinitesimal(
dm =
λ dl em 1dimσ ds em 2dimρ dV em 3dim
!
"#
$#
O
dm =λ dl em 1dimσ ds em 2dimρ dV em 3dim
!
"#
$#
I ≡ miri2
i∑
Momento$de$inércia$de$distribuições$conCnuas$de$massa$$$
10.5 Calculation of Moments of Inertia 301
CALCULATION OF MOMENTS OF INERTIAWe can evaluate the moment of inertia of an extended rigid object by imaginingthe object divided into many small volume elements, each of which has mass !m. We use the definition and take the limit of this sum as !m : 0. In this limit, the sum becomes an integral over the whole object:
(10.17)
It is usually easier to calculate moments of inertia in terms of the volume ofthe elements rather than their mass, and we can easily make that change by usingEquation 1.1, " # m/V, where " is the density of the object and V is its volume. Wewant this expression in its differential form " # dm/dV because the volumes weare dealing with are very small. Solving for dm # " dV and substituting the result
I # lim!mi :0
$i
ri
2 !mi # !r 2 dm
I # $i
r i
2 !mi
10.5
Four Rotating MassesEXAMPLE 10.4Therefore, the rotational kinetic energy about the y axis is
The fact that the two spheres of mass m do not enter into thisresult makes sense because they have no motion about theaxis of rotation; hence, they have no rotational kinetic en-ergy. By similar logic, we expect the moment of inertia aboutthe x axis to be Ix # 2mb2 with a rotational kinetic energyabout that axis of KR # mb2%2.
(b) Suppose the system rotates in the xy plane about anaxis through O (the z axis). Calculate the moment of inertiaand rotational kinetic energy about this axis.
Solution Because ri in Equation 10.15 is the perpendiculardistance to the axis of rotation, we obtain
Comparing the results for parts (a) and (b), we concludethat the moment of inertia and therefore the rotational ki-netic energy associated with a given angular speed depend onthe axis of rotation. In part (b), we expect the result to in-clude all four spheres and distances because all four spheresare rotating in the xy plane. Furthermore, the fact that the ro-tational kinetic energy in part (a) is smaller than that in part(b) indicates that it would take less effort (work) to set thesystem into rotation about the y axis than about the z axis.
(Ma2 & mb2)%2 KR # 12Iz%
2 # 12(2Ma2 & 2mb2)% 2 #
2Ma2 & 2mb 2I z # $imi ri
2 # Ma2 & Ma2 & mb2 & mb2 #
Ma2%2KR # 12Iy%
2 # 12(2Ma2)%2 #
Four tiny spheres are fastened to the corners of a frame ofnegligible mass lying in the xy plane (Fig. 10.8). We shall as-sume that the spheres’ radii are small compared with the di-mensions of the frame. (a) If the system rotates about the yaxis with an angular speed %, find the moment of inertia andthe rotational kinetic energy about this axis.
Solution First, note that the two spheres of mass m, whichlie on the y axis, do not contribute to Iy (that is, ri # 0 forthese spheres about this axis). Applying Equation 10.15, weobtain
2Ma2Iy # $i
mi ri2 # Ma2 & Ma2 #
Oa a
b
b
m
m
Mx
y
M
Figure 10.8 The four spheres are at a fixed separation as shown.The moment of inertia of the system depends on the axis aboutwhich it is evaluated.
7.5
�21

MomentodeInérciadeumarofinoeuniforme
Umavezqueesteéumarcodelgado,todososelementosdemassaestãoamesmadistânciaapartirdocentro
Momento$de$Inércia$de$um$aro$fino$e$uniforme$$
Uma( vez( que( este( é( um( arco(delgado,( todos( os( elementos( de(massa( estão( a( mesma( distância( a(par+r(do(centro(
I = r2 dm = R2dm∫∫
I =MR2
302 C H A P T E R 1 0 Rotation of a Rigid Object About a Fixed Axis
into Equation 10.17 gives
If the object is homogeneous, then ! is constant and the integral can be evaluatedfor a known geometry. If ! is not constant, then its variation with position must beknown to complete the integration.
The density given by ! " m/V sometimes is referred to as volume density for theobvious reason that it relates to volume. Often we use other ways of expressingdensity. For instance, when dealing with a sheet of uniform thickness t, we can de-fine a surface density # " !t, which signifies mass per unit area. Finally, when mass isdistributed along a uniform rod of cross-sectional area A, we sometimes use lineardensity $ " M/L " !A, which is the mass per unit length.
I " !!r 2 dV
Uniform HoopEXAMPLE 10.5Find the moment of inertia of a uniform hoop of mass M andradius R about an axis perpendicular to the plane of thehoop and passing through its center (Fig. 10.9).
Solution All mass elements dm are the same distance r "R from the axis, and so, applying Equation 10.17, we obtainfor the moment of inertia about the z axis through O:
Note that this moment of inertia is the same as that of a sin-gle particle of mass M located a distance R from the axis ofrotation.
MR 2I z " ! r 2 dm " R 2 ! dm "
y
x
RO
dm
Figure 10.9 The mass elements dm of a uniform hoop are all thesame distance from O.
Uniform Rigid RodEXAMPLE 10.6Substituting this expression for dm into Equation 10.17, withr " x, we obtain
112ML2 "
ML
" x3
3 #L/2
% L/2"
Iy " ! r 2 dm " !L/2
% L/2 x2
ML
dx "ML
!L/2
% L/2 x2 dx
Calculate the moment of inertia of a uniform rigid rod oflength L and mass M (Fig. 10.10) about an axis perpendicu-lar to the rod (the y axis) and passing through its center ofmass.
Solution The shaded length element dx has a mass dmequal to the mass per unit length $ multiplied by dx :
dm " $ dx "ML
dx
(a) Based on what you have learned from Example 10.5, what do you expect to find for themoment of inertia of two particles, each of mass M/2, located anywhere on a circle of ra-dius R around the axis of rotation? (b) How about the moment of inertia of four particles,each of mass M/4, again located a distance R from the rotation axis?
Quick Quiz 10.3
Momento$de$Inércia$de$um$aro$fino$e$uniforme$$
Uma( vez( que( este( é( um( arco(delgado,( todos( os( elementos( de(massa( estão( a( mesma( distância( a(par+r(do(centro(
I = r2 dm = R2dm∫∫
I =MR2
302 C H A P T E R 1 0 Rotation of a Rigid Object About a Fixed Axis
into Equation 10.17 gives
If the object is homogeneous, then ! is constant and the integral can be evaluatedfor a known geometry. If ! is not constant, then its variation with position must beknown to complete the integration.
The density given by ! " m/V sometimes is referred to as volume density for theobvious reason that it relates to volume. Often we use other ways of expressingdensity. For instance, when dealing with a sheet of uniform thickness t, we can de-fine a surface density # " !t, which signifies mass per unit area. Finally, when mass isdistributed along a uniform rod of cross-sectional area A, we sometimes use lineardensity $ " M/L " !A, which is the mass per unit length.
I " !!r 2 dV
Uniform HoopEXAMPLE 10.5Find the moment of inertia of a uniform hoop of mass M andradius R about an axis perpendicular to the plane of thehoop and passing through its center (Fig. 10.9).
Solution All mass elements dm are the same distance r "R from the axis, and so, applying Equation 10.17, we obtainfor the moment of inertia about the z axis through O:
Note that this moment of inertia is the same as that of a sin-gle particle of mass M located a distance R from the axis ofrotation.
MR 2I z " ! r 2 dm " R 2 ! dm "
y
x
RO
dm
Figure 10.9 The mass elements dm of a uniform hoop are all thesame distance from O.
Uniform Rigid RodEXAMPLE 10.6Substituting this expression for dm into Equation 10.17, withr " x, we obtain
112ML2 "
ML
" x3
3 #L/2
% L/2"
Iy " ! r 2 dm " !L/2
% L/2 x2
ML
dx "ML
!L/2
% L/2 x2 dx
Calculate the moment of inertia of a uniform rigid rod oflength L and mass M (Fig. 10.10) about an axis perpendicu-lar to the rod (the y axis) and passing through its center ofmass.
Solution The shaded length element dx has a mass dmequal to the mass per unit length $ multiplied by dx :
dm " $ dx "ML
dx
(a) Based on what you have learned from Example 10.5, what do you expect to find for themoment of inertia of two particles, each of mass M/2, located anywhere on a circle of ra-dius R around the axis of rotation? (b) How about the moment of inertia of four particles,each of mass M/4, again located a distance R from the rotation axis?
Quick Quiz 10.3
�22

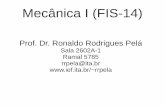
MomentodeInérciadeumbastãorígidoeuniforme
Aáreaemdestaquetemmassa:
dm=λdx
EntãooMomentodeInérciaé:
Momento$de$Inércia$de$um$bastão$rígido$e$uniforme$
A(área(em(destaque(tem(massa:((
dm(=(λ!dx!!
Então(o(Momento(de(Inércia(é:((
I = r2 dm = x2 ML−L/2
L/2∫∫ dx
I = 112ML2
�23

MomentodeInérciadeumcilindrosólidoeuniforme
Dividimosocilindroemcamadasconcêntricas,comraior, larguradrecomprimentoL.Paraumacascacilíndrica,temos
Logo,
�24

Adensidadepodeserescritacomo:
Portanto,
�25

Momentodeinérciadealgunscorposhomogêneos
�26

EXEMPLO
Logo,acascaesféricatemenergiarotacionalmaior.
�27

Consideremosdoiseixosparalelosseparadosporumadistânciah. UmdelespassapelocentrodemassadeumcorpodemassaM.OoutroeixopassaporumpontoOqualquer. Osmomentosdeinérciadocorpoemrelaçãoaesseseixosserelacionampormeiode:
Teoremadoseixosparalelos
Consideremos(dois(eixos(paralelos(separados(por(uma(distância(h.((Um(deles(passa(pelo(centro(de(massa(de(um(corpo(de(massa(M.(O(outro(eixo(passa(por(um(ponto(O(qualquer.((Os(momentos(de(inércia(do(corpo(em(relação(a(esses(eixos(se(relacionam(por(meio(de:(
Teorema$dos$eixos$paralelos$10.5 Calculation of Moments of Inertia 305
and y ! y" # yCM . Therefore,
The first integral is, by definition, the moment of inertia about an axis that is par-allel to the z axis and passes through the center of mass. The second two integralsare zero because, by definition of the center of mass, Thelast integral is simply MD2 because and Therefore,we conclude that
I ! ICM # MD2
D2 ! xCM
2 # yCM
2.! dm ! M! x" dm ! ! y" dm ! 0.
! ! [(x")2 # (y")2] dm # 2xCM ! x" dm # 2yCM ! y" dm # (xCM
2 # yCM
2) ! dm
I ! ! [(x" # xCM)2 # (y" # yCM)2] dm
Applying the Parallel-Axis TheoremEXAMPLE 10.8
So, it is four times more difficult to change the rotation of arod spinning about its end than it is to change the motion ofone spinning about its center.
Exercise Calculate the moment of inertia of the rod abouta perpendicular axis through the point x ! L/4.
Answer I ! 748 ML2.
13 ML2I ! ICM # MD2 ! 1
12 ML2 # M " L2 #
2!
Consider once again the uniform rigid rod of mass M andlength L shown in Figure 10.10. Find the moment of inertiaof the rod about an axis perpendicular to the rod throughone end (the y"axis in Fig. 10.10).
Solution Intuitively, we expect the moment of inertia tobe greater than because it should be more diffi-cult to change the rotational motion of a rod spinning aboutan axis at one end than one that is spinning about its center.Because the distance between the center-of-mass axis and they" axis is D ! L/2, the parallel-axis theorem gives
ICM ! 112ML2
(a)
y
x, ydm
y′
yCM
O
D
r
y
xCM
x
xCM, yCM
x′
x
CM
(b)
AxisthroughCM
x
y
z
Rotationaxis
O CM
Figure 10.12 (a) The parallel-axis theorem: If the moment of inertia about an axis perpendic-ular to the figure through the center of mass is ICM , then the moment of inertia about the z axisis Iz ! ICM # MD 2. (b) Perspective drawing showing the z axis (the axis of rotation) and the par-allel axis through the CM.
I = ICM +Mh2
�28

EXEMPLO:MomentodeInérciadeumaesferamaciçaehomogêneaemrelaçãoaumeixotangenteasuasuperfície
EXEMPLO:barrahomogêneademassaMecomprimentoL.Omomentodeinércia em relação a um eixo perpendicular ao plano da barra e que passapelo centro demassa é I = 1/12M L2. Calcular o momento de inércia emrelaçãoaoeixoquepassapelaextremidadedabarra.
EXEMPLO:$Momento(de(Inércia(de(uma(esfera(maciça(e(homogênea(em(relação(a(um(eixo(tangente(a(sua(superecie(
I = ICM +Md2 =25MR2 +MR2 = 7
5MR2
EXEMPLO:$barra(homogênea(de(massa(M(e(comprimento(L.(O(momento(de(inércia(em( relação(a(um(eixo(perpendicular( ao(plano(da(barra(e(que(passa(pelo( centro( de(massa( é( I( =( 1/12(M( L2.( Calcular( o(momento( de( inércia( em(relação(ao(eixo(que(passa(pela(extremidade(da(barra.(
I = ICM +Mh2 =
112ML2 +M L
2!
"#
$
%&2
=13ML2
EXEMPLO:$Momento(de(Inércia(de(uma(esfera(maciça(e(homogênea(em(relação(a(um(eixo(tangente(a(sua(superecie(
I = ICM +Md2 =25MR2 +MR2 = 7
5MR2
EXEMPLO:$barra(homogênea(de(massa(M(e(comprimento(L.(O(momento(de(inércia(em( relação(a(um(eixo(perpendicular( ao(plano(da(barra(e(que(passa(pelo( centro( de(massa( é( I( =( 1/12(M( L2.( Calcular( o(momento( de( inércia( em(relação(ao(eixo(que(passa(pela(extremidade(da(barra.(
I = ICM +Mh2 =
112ML2 +M L
2!
"#
$
%&2
=13ML2
�29