CLASSIFICAÇÃO ORIENTADA A OBJETO PARA … · do Instituto Militar de Engenharia, como requisito...
151
INSTITUTO MILITAR DE ENGENHARIA 1º Ten ALEXANDRE DANTAS SOARES COUTINHO CLASSIFICAÇÃO ORIENTADA A OBJETO PARA IDENTIFICAÇÃO DE ÁREAS URBANAS PROPÍCIAS A TRANSMISSÃO DA LEPTOSPIROSE Dissertação de Mestrado apresentada ao Curso de Mestrado em Engenharia Cartográfica do Instituto Militar de Engenharia, como requisito parcial para obtenção do título de Mestre em Ciências em Engenharia Cartográfica. Orientador: Prof. Oscar Ricardo Vergara – D.E Rio de Janeiro 2006
-
Upload
truongcong -
Category
Documents
-
view
223 -
download
0
Transcript of CLASSIFICAÇÃO ORIENTADA A OBJETO PARA … · do Instituto Militar de Engenharia, como requisito...
INSTITUTO MILITAR DE ENGENHARIA
1º Ten ALEXANDRE DANTAS SOARES COUTINHO
CLASSIFICAÇÃO ORIENTADA A OBJETO PARA IDENTIFICAÇÃO
DE ÁREAS URBANAS PROPÍCIAS A TRANSMISSÃO DA
LEPTOSPIROSE
Dissertação de Mestrado apresentada ao Curso deMestrado em Engenharia Cartográfica do Instituto Militar de Engenharia, como requisito parcial para obtenção dotítulo de Mestre em Ciências em Engenharia Cartográfica. Orientador: Prof. Oscar Ricardo Vergara – D.E
Rio de Janeiro
2006
c2006
INSTITUTO MILITAR DE ENGENHARIA
Praça General Tibúrcio, 80-Praia Vermelha
Rio de Janeiro-RJ CEP22290-270
Este exemplar é de propriedade do Instituto Militar de Engenharia, que poderá incluí-lo em
base de dados, armazenar em computador, microfilmar ou adotar qualquer forma de
arquivamento.
É permitida a menção, reprodução parcial ou integral e a transmissão entre bibliotecas
deste trabalho, sem modificação de seu texto, em qualquer meio que esteja ou venha a ser
fixado, para a pesquisa acadêmica, comentários e citações, desde que sem finalidade
comercial e que seja feita a referência bibliográfica completa.
Os conceitos expressos neste trabalho são de responsabilidade do(s) autores e do(s)
orientadores.
C871 Coutinho, Alexandre Dantas Soares Classificação Orientada a objeto para identificação de áreas
urbanas propícias a transmissão da leptospirose / Alexandre Dantas Soares Coutinho. – Rio de Janeiro: Instituto Militar de Engenharia, 2006.
151 p.: il., tab Dissertação ( mestrado) – Instituto Militar de Engenharia,
2006. 1. Sensoriamento remoto. 2. Imageamento digital. 3. Classificação de imagens digitais. CDD 621.367.8
2
INSTITUTO MILITAR DE ENGENHARIA
1° TEN ALEXANDRE DANTAS SOARES COUTINHO
CLASSIFICAÇÃO ORIENTADA A OBJETO PARA IDENTIFICAÇÃO DE
ÁREAS URBANAS PROPÍCIAS A TRANSMISSÃO DA LEPTOSPIROSE
Dissertação de Mestrado apresentada ao Curso de Mestrado em Engenharia Cartográfica
do Instituto Militar de Engenharia, como requisito parcial para obtenção do título de Mestre
em Ciências em Engenharia Cartográfica.
Orientador: Prof. Oscar Ricardo Vergara, DE.
Aprovada em 06 de fevereiro de 2006 pela seguinte banca examinadora:
Prof. Oscar Ricardo Vergara - DE do IME - Presidente
Prof. Raul Queiroz Feitosa - D.Ing. da PUC
Prof. Jorge Luís Nunes e Silva Brito - Ph.D. da UERJ
Prof. Luiz Felipe Coutinho Ferreira da Silva - DE do IME
Rio de Janeiro
2006
3

À Rê, aos meus pais e irmãs.
4

AGRADECIMENTOS
Ao Instituto Pereira Passos, subordinado à Prefeitura municipal da cidade do Rio de
Janeiro, na pessoa do Sr. Murilo Santos de Medeiros, pela cessão da base cadastral da cidade,
e pelas ortofotos que serviram de suporte para a avaliação da pesquisa desenvolvida.
Ao Prof. Paulo Chagastelles Sabroza da Escola Nacional de Saúde Pública, e ao Maj
QEMA Nelson Artur Prado Rodrigues da Silveira, pelo conhecimento na área médica
transmitido.
À empresa Space Imaging do Brasil, nas pessoas dos Srs. Nisso Cohen e Vítor de
Oliveira França, pela cessão das imagens IKONOS.
À 5ª Divisão de Levantamento, subordinada à Diretoria de Serviço Geográfico do
Exército, pela cessão do programa eCognition 3.0.
A todos da Seção de Engenharia Cartográfica do Instituto militar de Engenharia, pela
atenção dispensada.
Aos companheiros engenheiros militares, que contribuíram no desenvolvimento desta
dissertação:
- Cap Rafael de Arêa Leão Alves
- Cap Wagner Barreto da Silva
- Cap Carlos Alberto Pires de Castro Filho
Ao meu orientador, Prof. Oscar Ricardo Vergara, pelo conhecimento e experiência
transmitidos.
Um agradecimento especial ao Cap QEM Francisco Roberto da Rocha Gomes e esposa,
pela grande amizade e auxílio durante o período de mestrado.
5
À minha esposa, engenheira cartógrafa Renata Juliana Cristal Coutinho, pelo carinho,
amor e auxílio técnico prestados no desenvolvimento da dissertação.
À minha família, pais e irmãs.
A todos aqueles que direta ou indiretamente contribuíram para o desenvolvimento desta
dissertação.
6

“A ciência e a linguagem são, uma para com a outra,
dois meios recíprocos de cultura, e, associadas na sua
cooperação natural, constituem a educação completa da
nossa mentalidade”.
RUI BARBOSA
7
SUMÁRIO
LISTA DE ILUSTRAÇÕES............................................................................................. 11
LISTA DE TABELAS...................................................................................................... 14
LISTA DE SIGLAS.......................................................................................................... 15
1 INTRODUÇÃO................................................................................................ 18
1.1 Posicionamento do trabalho............................................................................... 18
1.1.1 Técnicas de vigilância de doenças e a leptospirose............................................ 18
1.1.2 Imagens de satélites e técnicas de classificação a serem
utilizadas............................................................................................................. 20
1.2 Justificativa do trabalho..................................................................................... 21
1.3 Objetivo do estudo............................................................................................. 22
2 A LEPTOSPIROSE......................................................................................... 23
2.1 Introdução.......................................................................................................... 23
2.2 Características da leptospirose........................................................................... 24
2.3 Epidemiologia da leptospirose........................................................................... 26
2.4 A leptospirose no Brasil..................................................................................... 27
2.4.1 A vigilância epidemiológica no Brasil............................................................... 27
2.4.2 A distribuição espacial da leptospirose no Brasil............................................... 29
2.4.3 A leptospirose na cidade do Rio de Janeiro....................................................... 29
2.5 Características da área de estudo........................................................................ 30
3 ANÁLISE DE IMAGENS NA CLASSIFICAÇÃO ORIENTADA A
OBJETO............................................................................................................ 32
3.1 Introdução........................................................................................................... 32
3.2 Interpretação de imagens.................................................................................... 33
3.3 Análise de imagens por cognição e semântica................................................... 36
3.4 Segmentação de imagens................................................................................... 40
3.4.1 Segmentação por crescimento de regiões........................................................... 42
3.4.2 Segmentação multiresolução.............................................................................. 46
8

3.5 Descritores de classes......................................................................................... 51
3.5.1 Descritores espectrais......................................................................................... 52
3.5.2 Descritores de forma.......................................................................................... 53
3.5.3 Descritores de textura......................................................................................... 54
3.5.4 Descritores de contexto...................................................................................... 56
3.6 Classificação de imagens................................................................................... 57
3.7 Teoria “fuzzy”..................................................................................................... 58
3.8 Avaliação da classificação................................................................................. 63
4 MATERIAIS E MÉTODOS............................................................................ 69
4.1 Material utilizado............................................................................................... 69
4.2 Metodologia adotada.......................................................................................... 69
4.2.1 Coleta de dados e seleção da área de estudo...................................................... 71
4.2.2 Geração de MDT e mapa de declividade........................................................... 73
4.2.3 Correção geométrica.......................................................................................... 76
4.2.4 Fusão de dados utilizando a transformação IHS................................................ 76
4.2.5 Inserção do atributo temático de declividade..................................................... 78
4.2.6 Segmentação e geração da rotina de classificação das
imagens............................................................................................................... 80
4.2.6.1 Segmentação das imagens.................................................................................. 84
4.2.6.2 Geração da rotina de classificação das imagens................................................. 89
5 RESULTADOS................................................................................................. 99
5.1 Avaliação da classificação................................................................................. 99
5.1.1 Avaliação da ambigüidade da classificação....................................................... 100
5.1.2 Avaliação da acurácia da classificação.............................................................. 104
5.2 Geração de mapas temáticos.............................................................................. 111
6 ANÁLISE DOS RESULTADOS E CONCLUSÕES..................................... 114
7 REFERÊNCIAS BIBLIOGRÁFICAS........................................................... 122
8 APÊNDICES..................................................................................................... 128
8.1 Descritores de classes......................................................................................... 129
9
8.2 Classificações das imagens................................................................................ 145
9 ANEXOS........................................................................................................... 148
9.1 Transformações entre sistemas geodésicos........................................................ 149
10

LISTA DE ILUSTRAÇÕES
FIG.2.1 Roteiro de investigação epidemiológica da Leptospirose – aspecto
ambiental........................................................................................................ 28
FIG.2.2 Imagem IKONOS da Baixada de Jacarepaguá: O retângulo vermelho
corresponde a área da favela de Rio das Pedras............................................. 31
FIG.3.1 Etapas da classificação orientada a objeto...................................................... 32
FIG.3.2 Conceitos de pixels conectados e componentes conexos............................... 41
FIG.3.3 Conceitos de vizinhança de 4, vizinhança diagonal e vizinhança de 8.......... 43
FIG.3.4 Conectividades 4, 8 e mista............................................................................ 44
FIG.3.5 A vizinhança de três pixels considerada pelo algoritmo de crescimento de
regiões, sendo o pixel processado o do canto inferior
direito.............................................................................................................. 45
FIG.3.6 Rede hierárquica de objetos em níveis de segmentação................................. 50
FIG.3.7 Cômputo do comprimento de um objeto baseado em sub-objetos................. 54
FIG.3.8 Direções consideradas pelo eCognition, no cálculo da GLCM...................... 55
FIG.3.9 Conceito de união e interseção de conjuntos “fuzzy”.................................... 60
FIG.3.10 Diversos modelos de funções de associação ................................................. 63
FIG.3.11 Matriz de erros................................................................................................ 65
FIG.4.1 Etapas da Metodologia................................................................................... 70
FIG.4.2 Área principal: favela de Rio das Pedras ...................................................... 72
FIG.4.3 Área de teste: favela Vila Autódromo........................................................... 72
FIG.4.4 Imagem reamostrada, e a imagem original com uma nova matriz de saída... 74
FIG.4.5 MDT gerado a partir da base cartográfica e mapa de declividade
11
correspondente................................................................................................ 75
FIG.4.6 Composições coloridas das bandas multiespectrais RGB 432 originais e
das bandas sintéticas.......................................................................................
78
FIG. 4.7 Classificação entre terreno plano e não-plano................................................ 79
FIG. 4.8 Visitação ao campo......................................................................................... 82
FIG.4.9 Área com predominância de casa de telha...................................................... 83
FIG.4.10 Galpão ou fábrica, com rua asfaltada e rua de barro...................................... 83
FIG.4.11 Área de favela com rio e canal de drenagem.................................................. 84
FIG.4.12 Etapas da segmentação e classificação das imagens...................................... 85
FIG.4.13 Uso da função SCALE PARAMETER ANALISYS para a imagem
segmentada originalmente com fator de escala 15 e parâmetros de cor e
forma utilizados nesta dissertação............................................................................... 86
FIG.4.14 Segmentação resultante em função dos níveis de segmentação adotados da
cena 1. ............................................................................................................ 89
FIG.4.15 Rede de hierarquia: herança de atributos de descrição de
classes............................................................................................................. 91
FIG.4.16 Utilização da função FEATURE VIEW para o descritor índice R/G (432).... 96
FIG.4.17 Função de associação escolhida para o descritor índice R/G (432).............. 96
FIG.4.18 Função relacional borda compartilhada entre rio/canal e mato/capim,
representando: a) imagem; b) feições_lineares (azul); c) mato/capim
(verde)............................................................................................................. 97
FIG.5.1 Variação das ambigüidades para as imagens 1 (esquerda), e 2 (direita)........ 104
FIG.5.2 Localização das amostras nas ortofotos.......................................................... 105
FIG.5.3 Mapa Temático: Cena 1.................................................................................. 112
12
FIG.5.4 Mapa Temático: Cena 2.................................................................................. 113
FIG.6.1 Confusão de classes na imagem 1.................................................................. 116
FIG.6.2 Confusão entre as classes de casas na imagem 1: a) casas_cimento e
prédios_cimento. b) casas_cinza classificada como casas_telha. c) feições
correspondentes na cena aos objetos mostrados no caso
b).................................................................................................................... 117
FIG.6.3 Confusão de classes na imagem 2: a) estacionamento, que não corresponde
a uma feição linear e sombra de prédio, usado para descrever este tipo de
feição; b) rio, com uma largura maior que na cena 1, e casa de telha; c) rio
classificado como mato/capim; d) deslocamento da banda G
(432)............................................................................................................... 119
13

LISTA DE TABELAS
TAB. 3.1 Conjuntos de regras para o algoritmo de segmentação por crescimento de
regiões............................................................................................................. 45
TAB. 3.2 Escala qualitativa para o coeficiente “Kappa”.............................................. 66
TAB.4.1 Parâmetros de escala adotados para os níveis de segmentação...................... 86
TAB. 4.2 Pesos aplicados nas bandas espectrais para a segmentação, composição do
critério de homogeneidade, e bandas usadas no cálculo do brilho................. 87
TAB. 4.3 Atributos de descrição de classes: Nível 4..................................................... 93
TAB. 4.4 Atributos de descrição de classes: Nível 3..................................................... 93
TAB. 4.5 Atributos de descrição de classes: Nível 1....................................................... 93
TAB 4.6 Atributos de descrição de classes: Nível 2.................................................... 94
TAB. 5.1 Escala de ambigüidade................................................................................... 101
TAB. 5.2 Classificação da ambigüidade da imagem 1................................................... 101
TAB.5.3 Classificação da ambigüidade da imagem 2................................................... 101
TAB.5.4 Número de objetos classificados e percentagem de área ocupada pelas
classes para as duas imagens.......................................................................... 106
TAB.5.5 Matriz de erros para a imagem 1.................................................................... 107
TAB.5.6 Matriz de erros para a imagem 2.................................................................... 108
TAB.6.1 Resultados para as classes consideradas fatores de risco............................... 115
14
LISTA DE SIGLAS
AG Acurácia Global
AP Acurácia do Produtor
AU Acurácia do Usuário
EI Erro de Inclusão
EO Erro de Omissão
FNEA “Fractal Net Evolution Approach”
FUNASA Fundação Nacional de Saúde
GLCM “Gray Level Co-ocurrence Matrix”
GLDV “Gray Level Difference Vector”
SINAN Sistema Nacional de Agravos de Notificação
SPA “SCALE PARAMETER ANALYSIS”
15

RESUMO
Epidemias de leptospirose em área urbana , doença cujo contágio se dá pelo contato com água contaminada, ocorrem principalmente em ambientes de baixas condições sanitárias, sujeitas a alagamentos. Para identificar áreas propícias à sua transmissão na região da baixada de Jacarepaguá, localizada na cidade do Rio de Janeiro, Brasil, utilizou-se a técnica de classificação orientada a objeto, baseada em classificação por funções de associação “fuzzy” em duas imagens IKONOS, de alta resolução espacial. Como os aspectos considerados para este estudo (denominados de fatores de risco), correspondem a feições com alto nível de detalhamento no terreno (casas de favelas, ruas não asfaltadas, com cobertura de barro, e rios canalizados), realizou-se uma fusão de dados pelo método de transformação IHS, entre as bandas multiespectrais (de resolução espacial de 4 metros) com a componente pancromática (de resolução espacial de 1 metro). A fusão de dados foi feita após as bandas terem sido corrigidas geometricamente com uma ortorretificação pelo modelo de polinômios racionais. O processo de correção geométrica envolve a confecção de um MDT em formato de imagem, confeccionado a partir da base cartográfica na escala de 1: 10000 da cidade do Rio de Janeiro. Utilizaram-se duas composições coloridas RGB correspondentes às bandas (432 + pancromática) e (321 + pancromática) para a aplicação da técnica de segmentação multiresolução, que antecede a classificação das imagens. A classificação das imagens foi feita considerando um mapa de declividade gerado a partir do MDT proveniente do processo de correção geométrica das imagens, para que se pudesse inserir um atributo temático que permitisse separar objetos que estavam situados em terrenos planos, locais de ocorrência de enchentes. A rotina de classificação foi feita de maneira que se pudessem separar objetos pertencentes às feições que correspondem a fatores de risco. Devido à heterogeneidade da cena correspondente à favela de Rio das Pedras, da qual se elaborou a rotina, por ser a principal região de interesse, 15 classes foram definidas através de atributos espectrais, espaciais de textura e contexto. A avaliação dos resultados obtidos foi feita empregando-se a matriz de confusão e o coeficiente “Kappa”. Os coeficientes “Kappa” globais obtidos foram de 0,45 e 0,48 para as duas imagens e os melhores resultados obtidos foram para os fatores de risco: terrenos baldios e casas com cobertura de cimento. Os resultados indicam que o nível de detalhamento considerado está no limite de separação de feições para imagens IKONOS.
16

ABSTRACT
Epidemics of leptospirosis in urban area, disease whose infection is transmitted by the contact with contaminated water, happen mainly in environments with low sanitary conditions, subject to flood damages. To identify favorable areas of transmission in Baixada de Jacarepaguá, located in the Rio de Janeiro City, Brazil, the object oriented classification technique was used, based on classification by membership functions of fuzzy sets in two IKONOS images, with high spatial resolution. As the aspects considered for this study (denominated risk factors), correspond to features with high resolution level in terrain (houses of shantytowns, non asphalted streets, with mud covering, and pipe-lined rivers), it took place a data merging by the IHS transform, among the multiespectral channels (with 4 meter spatial resolution) with panchromatic component (with 1 meter spatial resolution). The data merging was made after the geometric correction of the bands using an ortorretification by the rational polynomials model. The geometric correction involves the making of a MDT in image format, using the cartographic base in the scale of 1: 10000 of Rio de Janeiro City. Two color composite were used, corresponding to the RGB bands (432 + panchromatic) and (321 + panchromatic) for the application of multiresolution segmentation technique, before the image classification. The images classification was made considering a slope map generated from the MDT, to insert a thematic attribute that would allow separating objects that were placed in plane lands, places of inundation occurrence. The classification routine was made to separate objects belonging to features that correspond to risk factors. Due to the heterogeneity of the corresponding scene the slum of Rio das Pedras shantytown, which the routine was elaborated, 15 classes were defined through spectral, space, texture and context attributes. The evaluation of the results was made using the confusion matrix and the Kappa index. It was obtained global Kappa of 0,45 and 0,48 for the two images and the risk factors: bared soil and houses with white covering were the best results. The results show that the classification level is in the separation limit of features for IKONOS images.
17
1. INTRODUÇÃO
1.1. POSICIONAMENTO DO TRABALHO
Neste capítulo, para descrever o contexto no qual se insere esta pesquisa, serão abordados
os aspectos mais relevantes ligados ao trabalho: o seu posicionamento; a justificativa do tema;
e o objetivo do estudo.
1.1.1. TÉCNICAS DE VIGILÂNCIA DE DOENÇAS E A LEPTOSPIROSE
Nos anos recentes, as mudanças provocadas pelo ser humano no meio ambiente têm
produzido efeitos que prejudicam cada vez mais a natureza. No que diz respeito à
disseminação de doenças, tais efeitos estão associados a mudanças ecológicas, sociais e
econômicas que têm favorecido o surgimento de novas epidemias (surtos de doenças), bem
como a volta de antigas. Tendo em vista tal problema, a Organização Mundial de Saúde
(OMS), incorporou técnicas de vigilância de doenças, em que o controle ambiental entra
como alicerce fundamental no combate à proliferação de epidemias. Entre tais técnicas
destaca-se o sensoriamento remoto orbital, que pode fornecer informações espaciais e
temporais para o mapeamento das condições ambientais que favorecem a proliferação de
parasitas e criadouros de vetores de contaminação (CORREIA, et al. 2004).
No referido artigo foi feita uma revisão bibliográfica sobre o emprego do sensoriamento
remoto como ferramenta de vigilância de doenças endêmicas (doenças que são características
de um ambiente nativo), no Brasil. E afirma-se que sensores orbitais com alta resolução
espacial, como IKONOS e QUICKBIRD, podem ser utilizados no estudo de áreas
densamente povoadas. Assim, para identificação de zonas de transição entre biomas podem
ser usadas bandas espectrais do espectro visível e infravermelho próximo; fatores relativos a
endemias, como variações climáticas na vegetação, crescimento urbano e desmatamento,
requerem acompanhamento multitemporal. Além disso, técnicas de processamento digital de
18
imagens baseadas em respostas espectrais, podem gerar novas informações. Desta forma,
modelos de mistura espectral podem ser usados para criar bandas que representem a
proporção de água, solo e vegetação; operações como o NDVI (Normalized Difference
Vegetation Index) podem criar uma banda de informação de biomassa que indicaria possíveis
habitats de vetores de doença e seus criadouros.
O termo vigilância de doença diz respeito à coleta contínua de dados importantes
relacionados ao controle da manifestação e propagação de uma determinada doença. Por
parasita, entenda-se organismo, geralmente microorganismo, cuja existência se dá à custa de
um hospedeiro; por vetor de contaminação, entenda-se um ser vivo que transporta um agente
causador de uma determinada doença (agente etiológico). Esse vetor pode ser biológico ou
mecânico. No primeiro caso o vetor necessariamente serve de suporte para o desenvolvimento
de alguma etapa da vida do agente etiológico e no segundo caso o vetor é apenas acidental
(MINISTÉRIO DA SAÚDE, 2002).
A Escola Nacional de Saúde Pública (ENSP), que é um órgão subordinado à Fundação
Oswaldo Cruz (FIOCRUZ), do Ministério da Saúde, tem utilizado recentemente sistemas de
informações geográficas no auxílio ao monitoramento de focos de doenças, entre elas, a
leptospirose. Como exemplo, BARCELLOS e SABROZA (2001) utilizaram um SIG para
estabelecer as áreas de risco potencial de transmissão na zona oeste da cidade do Rio de
Janeiro, no bairro de Santa Cruz. Os autores as delimitaram através da inserção de dados
relativos a áreas sujeitas à inundação, de zonas em que há acumulação do lixo doméstico e do
limite do bairro estudado. Calcularam as taxas de incidência da doença pela razão entre o
número de casos e a população total na área de estudo e verificaram que as maiores taxas de
incidência foram encontradas dentro da região sujeita à inundação em torno daquelas de
acumulação de lixo e com condições de saneamento precárias. Outro exemplo de estudo feito
na ENSP foi realizado por TASSINARI et al (2004), que empregando técnicas implementadas
em SIG produziram mapas de distribuição espacial da Leptospirose na cidade do Rio de
Janeiro no período de 1996 a 1999. Segundo ARONOFF (1995), SIG diz respeito a um
sistema baseado em computador que fornece quatro conjuntos de aplicativos para lidar com
dados georreferenciados: entrada de dados, gerenciamento de dados, manipulação e análise e
exibição de resultados.
19
1.1.2. IMAGENS DE SATÉLITES E TÉCNICAS DE CLASSIFICAÇÃO A SEREM
UTILIZADAS
O presente trabalho utiliza a classificação orientada a objeto através do algoritmo
implementado no programa e-Cognition 3.0, apresentado por BAATZ e SCHÄPE (1999). No
trabalho referenciado, o conceito de classificação orientada a objeto foi criado através de uma
junção de três técnicas, a saber:
(a) a interpretação de imagens, considerando a forma subjetiva executada pelo ser
humano, que se baseia no conhecimento prévio de feições a serem extraídas na imagem e seus
relacionamentos;
(b) na maneira em que sistemas computacionais podem auxiliar ao intérprete, através de
rotinas que descrevam tais feições, e que tentam reproduzir como o cérebro as obtém;
(c) na segmentação de imagens, em que uma imagem é processada para obter regiões
homogêneas;
(d) e na classificação de imagens, que rotula tais regiões.
Para relacionar tais técnicas, nessa abordagem, denominada rede de evolução fractal ou
FNEA (do inglês fractal net evolution aproach), são adotados conceitos como objetos
imagens (regiões de características espectrais e de forma homogêneas na imagem) e
orientação a objeto, rede semântica e lógica fuzzy. A denominação desta técnica surge do fato
de que em sensoriamento remoto, as informações em uma imagem tem uma natureza fractal,
ou seja, aparecem em diferentes escalas simultaneamente (BLASCHKE et al, 2000;
BLASCHKE e HAY 2001).
Segundo CORREIA et al (2004), os casos de leptospirose que ocorrem no Brasil em
ambiente urbano acontecem principalmente devido a altas concentrações de ratos, com
epidemias eclodindo após alagamentos provocados por chuvas em localidades em que há
muita água e lama. Deve-se considerar neste caso imagens com alta resolução temporal e
espacial e que sejam adquiridas pelo sensor logo após a ocorrência de chuvas que acarretem
alagamentos. Ainda segundo estes autores, o emprego de imagens com as características
citadas em conjunto com informações de declividade podem delimitar áreas de risco potencial
de transmissão de leptospirose.
SABROZA e SILVEIRA, (2004), definiram alguns aspectos que têm de ser considerados
no estudo da leptospirose em área urbana :
20
- Classes de construções urbanas: casas, edifícios, habitações precárias;
- Tipos de redes viárias;
- Área antrópica (modificada pelo homem);
- Tipos de solo (exposto, úmido);
- Micro bacias hidrográficas;
- Tipos de vegetação.
GONÇALVES et al, (2001), fizeram um estudo do emprego de classificação orientada a
objeto em imagens IKONOS. Estes autores utilizaram esta técnica para extrair informações de
uso do solo, identificando tipos de cobertura do mesmo, de edificações, e áreas pavimentadas.
Os autores afirmam que elementos individuais em áreas urbanas como casas e arruamentos
podem ser identificados utilizando esta técnica, bem como elementos “indesejados”, tais
como, sombras de casas e árvores isoladas. Portanto a classificação orientada a objeto
empregada em imagens de satélites de alta resolução espacial (pixel de 1 a 4 metros) é uma
técnica promissora a ser empregada na identificação de lugares propícios a transmissão de
leptospirose em área urbana .
1.2. JUSTIFICATIVA DO TRABALHO
O estudo dos diversos fatores envolvidos do ponto de vista da saúde pública, permitiria
auxiliar na prevenção da transmissão da leptospirose em área urbana , através da identificação
de lugares propícios a sua transmissão na cidade do Rio de Janeiro (a baixada de
Jacarepaguá). Segundo SABROZA (2004), tal região é uma das mais interessantes
atualmente, na pesquisa deste tipo de patologia, por ter sido no ano de 1996, a região em que
ocorreu uma das maiores epidemias já relatadas desta doença em todo o mundo.
No contexto do Exército Brasileiro, a extração semi-automática de feições em imagens de
alta resolução, que a técnica orientada a objeto pode fornecer, é de potencial interesse para o
auxílio na identificação de alvos que possam ser usados, não apenas em aplicações civis, mas
também militares. Aplicações militares da técnica apresentada neste trabalho podem ser vistas
em operações de segurança interna, como por exemplo, no estudo de Teatros de Operações
Urbanas em cidades como o Rio de Janeiro ou periferias de grandes centros metropolitanos
como em São Paulo e outras áreas metrópolitanas. Apresenta interesse em operações de
21
guerra contra possíveis inimigos externos, permitindo identificar alvos e engodos,
possibilitando concentrar os meios e tropas contra posições onde o seu emprego cause o maior
dano ou desequilibre as formações inimigas. Tal extração de alvos pode ser empregada em
outras imagens que não sejam necessariamente aquelas utilizadas nesta pesquisa através do
uso das rotinas elaboradas na classificação orientada a objeto.
1.3. OBJETIVO DO ESTUDO
Elaborar, aplicar e avaliar uma metodologia para identificação semi-automática de
aspectos propícios à transmissão da leptospirose em área urbana, empregando classificação
orientada a objeto em imagens IKONOS, através de um estudo de caso realizado na região da
baixada de Jacarepaguá, na cidade do Rio de Janeiro.
22
2 A LEPTOSPIROSE
2.1 INTRODUÇÃO
A leptospirose, ou doença de Weil, é transmitida por uma bactéria do gênero Leptospira e
é uma zoonose (doença transmitida ao ser humano por animais), de elevada incidência em
áreas infestadas por roedores, e de precária infra-estrutura sanitária. Sua disseminação é
facilitada pela ocorrência de inundações que proporcionam a persistência do agente causal no
meio ambiente, facilitando a ocorrência de surtos. O interesse recente em seu estudo resulta
de grandes epidemias ocorridas no mundo que receberam significativa publicidade, como por
exemplo no Brasil, Índia, Nicarágua, sudeste da Ásia e EUA. O grande número de casos
ocorridos na América Central e do Sul é atribuído ao fenômeno ambiental El-Niño e a
ocorrência de enchentes relacionadas. A bactéria tem alta capacidade de sobrevivência no
meio ambiente (até 180 dias) e animais como cães e ratos são os reservatórios naturais para a
perpetuação da doença, enquanto que o ser humano é apenas um hospedeiro acidental. O
principal reservatório ou portador da doença é constituído pelos roedores domésticos das
espécies Rattus rattus, Mus musculus e Rattus norvegicus (ratazana ou rato de esgoto), que
carrega uma das variantes mais perigosas da doença; entretanto, eqüinos, bovinos, suínos,
caninos e caprinos também podem carregá-la (LEVETT, 2001 e MINISTÉRIO DA SAÚDE,
2002).
A leptospirose é uma zoonose de distribuição mundial e seus sintomas produzidos no
organismo humano são vastos, chegando até uma severa síndrome de infecção generalizada
com alta mortalidade. Este caso, em que ocorre falência renal e icterícia (a pele assume uma
coloração amarelada) que está presente em 5 a 10% dos infectados, e tem taxa de letalidade
variando entre 5 e 40%, foi descrito pela primeira vez por Adolf Weil, em 1886. Entretanto,
relatos antigos indicam que houve casos de Leptospirose em pessoas que realizavam a
colheita de arroz na China antiga e o termo japonês febre do outono (utilizado para designar a
doença), persiste até hoje em diagnósticos. A sua etiologia foi demonstrada
independentemente em 1915 no Japão e na Alemanha, através de microorganismos e
anticorpos específicos no sangue de mineiros com icterícia infecciosa no caso japonês e
23

soldados no caso alemão. Este fato acarretou uma controvérsia inicial na nomenclatura da
doença. A importância do trabalho como fator de risco foi reconhecida cedo, assim como o
papel do rato na transmissão da doença ao homem, papel este que foi identificado em 1917. A
vertente canina também foi reconhecida prontamente, entretanto a diferença entre os
microorganismos que acarretam as duas variantes (do rato e canina) só ocorreu anos mais
tarde. A Leptospirose no gado foi identificada alguns anos mais tarde (LEVETT, 2001;
HÜTNNER et al, 2002; ICTERÍCIA, 2005).
Após a identificação dos mineiros como grupo de risco, a ocorrência da doença de Weill
em trabalhadores de esgoto foi informada nos anos trinta, tendo sido o sorotipo
icterohaemorrhagiae isolado em pacientes, ratos apanhados em fossas e no lodo de esgoto.
Em Glasgow, na Escócia, a presença de sorotipo em 17% dos trabalhadores de esgoto
provocou a adoção de medidas preventivas, como o uso de roupas protetoras e adoção do
controle da proliferação dos ratos. Tal fato reduziu significantemente a ocorrência da doença
neste grupo de trabalhadores. A presença de água desperdiçada também é considerada ser um
fator determinante no índice de contaminação, pois se imagina que os detergentes despejados
reduzem a sobrevivência da bactéria no esgoto, já que é inibida a baixas concentrações de
detergentes. A contaminação com icterohaemorrhagiae, proveniente da urina de rato, torna os
criadores de peixe um grupo de risco, mesmo tendo sido constatados poucos casos da doença;
pois este sorotipo tem uma alta taxa de mortalidade (LEVETT, 2001)
2.2 CARACTERÍSTICAS DA LEPTOSPIROSE
Além da nomenclatura já mencionada, a Leptospirose atende também pelo nome de
síndrome de Weill, febre dos pântanos, febre dos arrozais, febre outonal, doença dos
porqueiros e tifo canino. É provocada por uma bactéria helicoidal (espiroqueta) aeróbica do
gênero Leptospira, que tem um crescimento ótimo na faixa de 28º a 30º C e que se divide em
duas espécies: L. interrogans e L. biflexa, que são encontradas geralmente em água doce de
superfície. A espécie interrogans contém mais de 200 sorotipos, sendo quatro destes
responsáveis pela maioria dos casos no ser humano: L. icterohaemorrhagiae (transmitida pela
ratazana de esgoto), L. canicola, L. pomona e L. autumnalis. Por sorotipo entenda-se ser a
caracterização de um microorganismo pela identificação de seus antígenos, que são a parte de
24
um agente biológico capaz de estimular a formação de anticorpos (LEVETT, 2001;
HÜTNNER et al, 2002 e MINISTÉRIO DA SAÚDE, 2002).
A incidência da leptospirose é significantemente mais alta em países de clima quente e
úmido que em países temperados, devido à sobrevivência mais longa da bactéria no meio-
ambiente, e ao fato de a maioria dos países tropicais serem também países em
desenvolvimento, no qual a população está mais exposta ao contato com animais infectados.
A doença é sazonal, com picos de incidência no verão, e quedas nos períodos mais frios, no
caso de países temperados e picos em estações chuvosas em países com clima quente e
úmido. A incidência de informações registradas é relacionada com a disponibilidade de
diagnóstico laboratorial, um índice de suspeita clínica, e à própria taxa de incidência da
doença (LEVETT, 2001).
Como características podem-se citar ainda o seu período de incubação que varia de 24
horas a 28 dias, tendo uma média de 7 a 14 dias; A infecção humana pode ocorrer através da
exposição direta ou indireta com a urina dos animais que são reservatórios naturais e a
penetração do microorganismo é provocada principalmente pelo contato com a pele lesada,
boca, narina e olhos da pessoa; pelo contato com o sangue, tecidos e excrementos de animais,
mordidas e ingestão de água contaminada. Pode ocorrer também no contato com a pele
íntegra, desde que após a imersão em período prolongado com a água ou lama contaminada, o
que ilustra a importância do elo hídrico na transmissão da doença ao homem. A transmissão
entre seres humanos é rara, mas pode ocorrer pelo contato com urina, sangue, secreções e
tecidos de pessoas contaminadas. A transmissão pela urina humana é dificultada pelo seu
baixo pH, que torna pouco favorável a sobrevivência da bactéria. Os animais infectados
podem eliminar o Leptospira na urina por meses, anos ou pela vida inteira e um indivíduo ao
ser infectado pode adquirir imunidade para apenas um sorotipo, podendo ser contaminado por
sorotipos diferentes (MINISTÉRIO DA SAÚDE, 2002).
25
2.3 EPIDEMIOLOGIA DA LEPTOSPIROSE
Segundo BARCELLOS et al (2003), a epidemiologia estuda os eventos relacionados ao
processo saúde-doença em uma população. Uma estratégia da epidemiologia é o emprego de
estudos ecológicos (onde se estudam os relacionamentos entre organismos e o meio
ambiente), que são muitas vezes necessários no contexto de doenças infecto-contagiosas, e
tais estudos estão ligados ao conceito de lugar e a coletividade. Segundo LEVETT (2001), um
conhecimento da presença de sorotipos e seus hospedeiros naturais são de fundamental
importância para o entendimento da epidemiologia da leptospirose em qualquer região. As
infecções humanas podem ocorrer em atividades ligadas ao trabalho ou não. O contato direto
com animais infectados ocasiona a maioria das infecções em fazendeiros, veterinários,
inspetores de carne, trabalhadores no controle de roedores e outros. O contato indireto
provoca a infecção de trabalhadores de esgoto, mineiros, soldados, limpadores de fossas
sépticas, criadores de peixe, trabalhadores de canal, trabalhadores de campos de arroz,
colhedores de banana e de cana - de- açúcar.
Três padrões epidemiológicos de Leptospirose são definidos por FAINE, (1994 apud
LEVETT, 2001). O primeiro acontece em climas temperados onde poucos sorotipos ocorrem
e a infecção humana quase sempre acontece por contato direto através da criação de gado e
porcos. Neste caso o controle pela imunização de homens e/ou animais é possível. O segundo
tipo ocorre em áreas tropicais – úmidas. Neste caso a quantidade de sorotipos infectando
humanos é muito maior, bem como a quantidade de reservatórios naturais, que podem ser
roedores, criação de animais e cachorros. Neste padrão ocorrem epidemias conseqüentes de
desastres naturais, como inundações ou furacões. Medidas de prevenção incluem a drenagem
de áreas alagadas, controle de populações de roedores e higienização. O terceiro padrão diz
respeito à infecção provocada por roedores em ambiente urbano, que é raramente visto em
países desenvolvidos, mas ocorre em favelas de países em desenvolvimento e quando a infra-
estrutura urbana é rompida por desastres naturais ou guerra.
26
2.4 A LEPTOSPIROSE NO BRASIL
A Leptospirose é uma doença endêmica no Brasil, mas que se torna epidêmica nos
períodos chuvosos, principalmente em grandes centros urbanos, principalmente devido a
exposição de população de baixa renda a condições de saneamento inadequada e alta
concentração de roedores infectados. A maioria dos casos notificados é composta de
indivíduos do sexo masculino, na faixa etária entre 20 e 35 anos, ainda que não exista uma
predisposição de gênero ou idade para contrair a infecção. No período de 1991 a 2000, foram
confirmados 34.142 casos de leptospirose, com uma média anual de 3.414, variando entre
1.728 em 1993 e 5.579 casos em 1996. Nesse mesmo período foram informados 3.274 óbitos,
numa média de 327 óbitos/ano, variando entre 215 em 1993 e 439 em 1998. A taxa de
letalidade nesse período foi de 10,2%, variando entre 6,6% em 1996 e 13,8% em 1992. O
coeficiente médio de incidência foi de 2,2/100.000 hab., variando de 1,14 em 1993 a 3,55 em
1996 (MINISTÉRIO DA SAÚDE, 2002).
2.4.1 A VIGILÂNCIA EPIDEMIOLÓGICA NO BRASIL
A Fundação Nacional de Saúde (FUNASA), tem como objetivos para a vigilância
epidemiológica da Leptospirose monitorar a ocorrência de casos e surtos da doença,
identificar os sorotipos de cada área e reduzir a letalidade da doença. A FUNASA considera
como antecedentes epidemiológicos sugestivos para um indivíduo considerado suspeito de ter
contraído a doença; os seguintes fatores (MINISTÉRIO DA SAÚDE, 2002):
- exposição a enchentes, lama ou coleções hídricas potencialmente contaminadas;
- exposição a esgoto e fossas;
- atividades que envolvam risco ocupacional como coleta de lixo, limpeza de córregos,
manejo de animais, agricultura em áreas alagadas, dentre outras;
- presença de animais infectados nos locais freqüentados pelo paciente.
A FIG.2.1 mostra o roteiro elaborado pela FUNASA para a investigação epidemiológica
da Leptospirose , em seu aspecto ambiental:
27
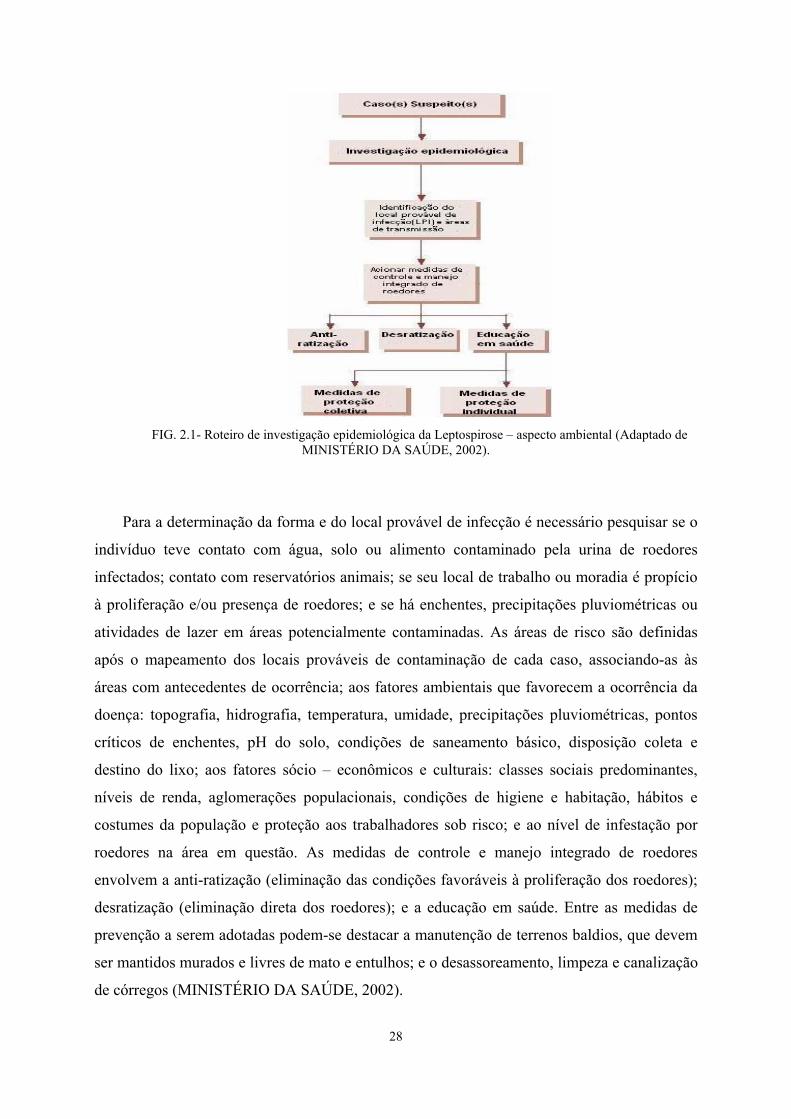
FIG. 2.1- Roteiro de investigação epidemiológica da Leptospirose – aspecto ambiental (Adaptado de
MINISTÉRIO DA SAÚDE, 2002).
Para a determinação da forma e do local provável de infecção é necessário pesquisar se o
indivíduo teve contato com água, solo ou alimento contaminado pela urina de roedores
infectados; contato com reservatórios animais; se seu local de trabalho ou moradia é propício
à proliferação e/ou presença de roedores; e se há enchentes, precipitações pluviométricas ou
atividades de lazer em áreas potencialmente contaminadas. As áreas de risco são definidas
após o mapeamento dos locais prováveis de contaminação de cada caso, associando-as às
áreas com antecedentes de ocorrência; aos fatores ambientais que favorecem a ocorrência da
doença: topografia, hidrografia, temperatura, umidade, precipitações pluviométricas, pontos
críticos de enchentes, pH do solo, condições de saneamento básico, disposição coleta e
destino do lixo; aos fatores sócio – econômicos e culturais: classes sociais predominantes,
níveis de renda, aglomerações populacionais, condições de higiene e habitação, hábitos e
costumes da população e proteção aos trabalhadores sob risco; e ao nível de infestação por
roedores na área em questão. As medidas de controle e manejo integrado de roedores
envolvem a anti-ratização (eliminação das condições favoráveis à proliferação dos roedores);
desratização (eliminação direta dos roedores); e a educação em saúde. Entre as medidas de
prevenção a serem adotadas podem-se destacar a manutenção de terrenos baldios, que devem
ser mantidos murados e livres de mato e entulhos; e o desassoreamento, limpeza e canalização
de córregos (MINISTÉRIO DA SAÚDE, 2002).
28
2.4.2 A DISTRIBUIÇÃO ESPACIAL DA LEPTOSPIROSE NO BRASIL
ARSKY et al (2005) afirmam que no período de 2001 a 2003 foram notificados pelo
sistema nacional de agravos de notificação (SINAN), 34.599 casos de Leptospirose no Brasil
sendo deste total confirmados 7818 casos. Desse total, 48% (3747), foram confirmados por
exames em laboratório e tiveram uma investigação epidemiológica para determinar o seu
local provável de infecção (LPI). Destes casos, 72% (2687) aconteceram em áreas urbanas.
Dos casos ocorridos em áreas urbanas 65% (1746) foram em ambiente domiciliar, 23,2%
(624) em ambiente de trabalho e 11,8% (317) em ambiente de lazer. Dos casos em áreas
rurais 54% ocorreram em ambiente de trabalho, 28% em ambiente domiciliar e 17% em
ambiente de lazer. Neste trabalho concluiu-se que para o período analisado; a doença tem
mais conexão com áreas urbanas e suburbanas, sendo o ambiente domiciliar o principal fator
de ocorrência, o que sugere que a contaminação é relacionada às condições domiciliares de
vida e sanitárias.
Segundo DE PAULA (2005), que analisou os dados de notificação da Leptospirose do
SINAN no Brasil, no período de 1997 a 2001, através do emprego do programa ArcView GIS
3.3, pode-se identificar uma relação entre a incidência da doença e a variação pluviométrica,
pois os períodos de maior incidência de casos para todos os anos analisados correspondem aos
de maiores índices pluviométricos para cada região do país, excetuando-se as regiões de
Belém e Macapá, que apresentam índices elevados o ano inteiro. Esse autor afirma que a
Região Norte, apesar de apresentar altos índices pluviométricos, não foi a que registrou a
maior incidência de casos. O autor afirma que fatores como falta de atendimento médico e
baixa densidade demográfica podem justificar a ausência de casos notificados. Os estados
com um maior número de casos notificados foram os estados de São Paulo, do Rio de Janeiro
e os três estados do Sul.
2.4.3 A LEPTOSPIROSE NA CIDADE DO RIO DE JANEIRO
Segundo TASSINARI et al (2004) e BARCELLOS e SABROZA (2001), o município do
Rio de Janeiro apresentou uma das maiores epidemias urbanas já registradas no ano de 1996;
29
e foram registrados 1792 casos com a ocorrência de 51 óbitos no período de 1996 a 1999.
Segundo esses autores, na epidemia do primeiro semestre de 1996, onde ocorreu a maioria
dos casos notificados (1211), a maior parte foi registrada na favela de Rio das Pedras na
baixada de Jacarepaguá, tendo ocorrido também uma concentração de casos de menor
intensidade no bairro da Tijuca. Os casos registrados em 1996 ocorreram nas semanas
subseqüentes a fortes temporais que provocaram inundações prolongadas em várias áreas da
cidade. As ocorrências concentraram-se principalmente nas terras planas das zonas oeste e sul
da cidade. SMZ (1997, apud BARCELLOS e SABROZA, 2001), afirma que a Leptospirose é
uma doença endêmica na cidade do Rio de Janeiro, tendo uma taxa média de ocorrência de 30
a 50 casos por ano, ou 1 caso por 100000 habitantes. Esporádicas epidemias ocorrem
principalmente após inundações, devido à alta presença de roedores infectados nas favelas da
cidade LACAZ et al, (1972) ; PEREIRA e ANDRADE, (1988 apud BARCELLOS e
SABROZA 2001).
2.5 CARACTERÍSTICAS DA ÁREA DE ESTUDO
A baixada de Jacarepaguá na cidade do Rio de Janeiro foi a escolhida para a presente
pesquisa por ser a região onde ocorreu a maior parte dos casos notificados na epidemia de
1996, a maior já ocorrida na cidade. A favela de Rio das Pedras foi selecionada para o estudo
inicial, por ter sido o local onde houve a predominância dos casos na epidemia de 1996. A
FIG.2.2 mostra a área de estudo, e tem as coordenadas planas, no sistema de projeção UTM,
com DATUM horizontal WGS-84; definidas por:
- Canto superior esquerdo: E – 662327.95 m / N – 7468094.33 m;
- Canto inferior direito: E – 673998.95 m / N – 7453858.33 m.
30

FIG 2.2 – Imagem IKONOS da Baixada de Jacarepaguá: O retângulo vermelho corresponde a área da favela de
Rio das Pedras.
O litoral sul do município do Rio de Janeiro é caracterizado por dois grandes
compartimentos: o da baixada litorânea de Jacarepaguá e o dos maciços costeiros,
representados pelas formações montanhosas da Tijuca e da Pedra Branca; que formam um
grande arco de Rochas que confina a baixada e que se estende desde o pontal da Joatinga, a
leste, até a pedra de Guaratiba, a oeste. A área de influencia direta da macrobacia de
Jacarepaguá, compreende cerca de 300 km2 e duas regiões administrativas da cidade: a Barra
da Tijuca e Jacarepaguá. Uma das características principais da baixada de Jacarepaguá é o seu
sistema de lagoas, que é composto de quatro lagoas principais: Marapendi, próxima ao litoral;
Tijuca, a leste; Jacarepaguá, a oeste; e Camorim, que faz a ligação entre as lagoas de
Jacarepaguá e Tijuca. A qualidade das águas da região é considerada crítica, principalmente
nas lagoas de Jacarepaguá, Tijuca e Camorim, pois estas recebem as águas contaminadas por
dejetos humanos e industriais da maioria dos rios da região. A dragagem de lagoas e
drenagem de áreas de brejo, alterou a distribuição natural de águas e sedimentos. Tal fato,
aliado a impermeabilização dos terrenos, provocada pela ocupação urbana e baixa circulação
de águas; provoca inundações nos rios Arroio, Grande e Anil (SMMA-RJ, 1998).
31
3. ANÁLISE DE IMAGENS NA CLASSIFICAÇÃO ORIENTADA A OBJETO
3.1 INTRODUÇÃO
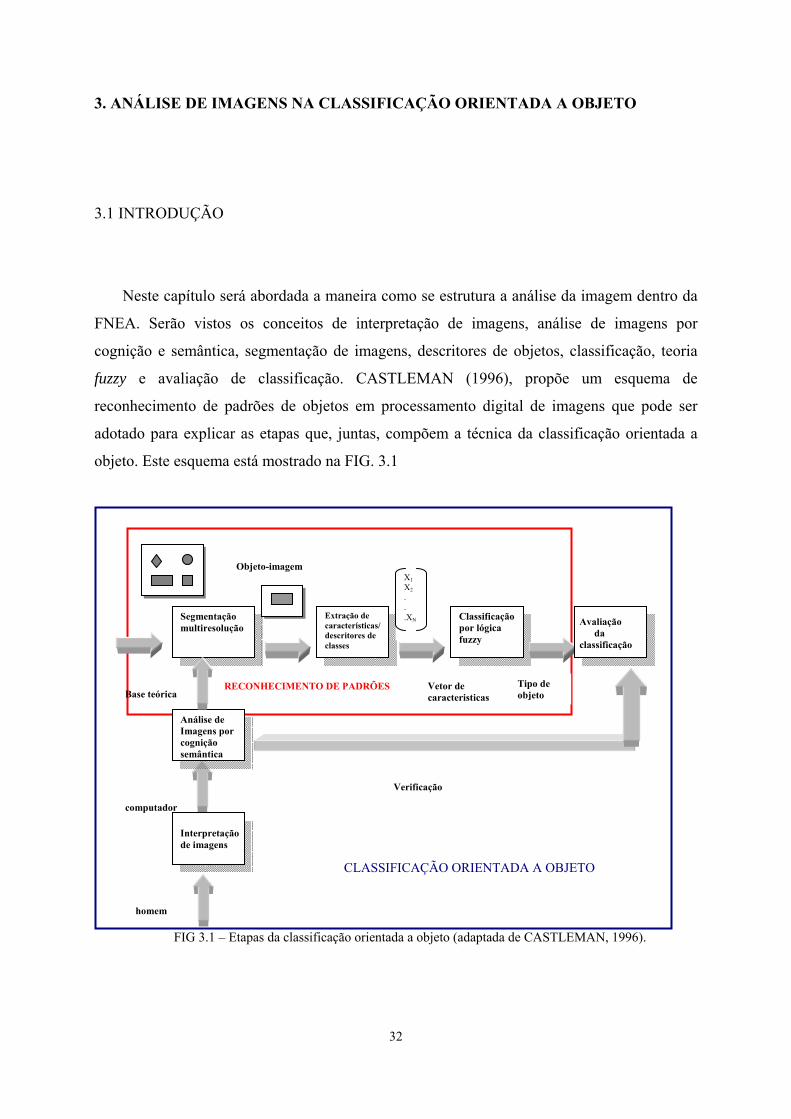
Neste capítulo será abordada a maneira como se estrutura a análise da imagem dentro da
FNEA. Serão vistos os conceitos de interpretação de imagens, análise de imagens por
cognição e semântica, segmentação de imagens, descritores de objetos, classificação, teoria
fuzzy e avaliação de classificação. CASTLEMAN (1996), propõe um esquema de
reconhecimento de padrões de objetos em processamento digital de imagens que pode ser
adotado para explicar as etapas que, juntas, compõem a técnica da classificação orientada a
objeto. Este esquema está mostrado na FIG. 3.1
FIG 3.1 – Etapas da classificação orientada a objeto (adaptada de CASTLEMAN, 1996).
homem
computador
Base teórica
Interpretação de imagens
Análise de Imagens por cognição semântica
Segmentação multiresolução
Extração de características/ descritores de
Objeto-imagem X1X2. .
classes
Classificação por lógica fuzzy
.XN Avaliação da classificação
CLASSIFICAÇÃO ORIENTADA A OBJETO
Verificação
Tipo de objeto
Vetor de caracteristicas
RECONHECIMENTO DE PADRÕES
32

Para o esquema proposto por CASTLEMAN (1996), uma imagem digital é formada de
uma ou mais categorias de objetos imagem (seção 3.3), que correspondem às classes de
padrões. A primeira etapa consiste em segmentar a imagem, gerando objetos, (seção 3.4), que
representem áreas homogêneas na imagem. Após isto, “medem-se” os conjuntos de objetos,
ou seja, extraem-se atributos significativos dos mesmos, que descrevam uma ou mais
propriedades distintas, e que possam servir para diferenciá-los entre si. Em um espaço a n
dimensões, chamado de espaço de atributos ou características, em que cada dimensão
corresponda ao intervalo de variação de um determinado atributo medido, o vetor de
características de um objeto compreende todo o conjunto de medições de atributos
considerados para descrevê-lo. Cada objeto é nomeado para um de vários grupos pré-
estabelecidos (classes) que representam todos os tipos possíveis de objetos que se esperam
existir em uma imagem. Os conjuntos de objetos são então classificados ou rotulados na etapa
de classificação de imagens (seção 3.6).
Para a implementação dessas etapas na classificação orientada a objeto, a segmentação
multiresolução, (seção 3.4.2), foi desenvolvida de forma a buscar simular em um sistema
computacional, a maneira como é feita uma interpretação de imagens por um intérprete
(seções 3.2 e 3.3). A descrição das classes de objetos é feita através de características comuns
que as descrevam, podendo ser estas relativas a propriedades tais como: informações
espectrais, de forma, informações de textura, ou informações relativas ao próprio contexto em
que aqueles estão inseridos na cena (seção 3.5). A classificação dos objetos é feita através da
utilização da teoria “fuzzy” e do modelo de importação de semântica (seção 3.7). A avaliação
da classificação (seção 3.8) corresponde à etapa de verificação (seção 3.3), e tem por objetivo
comparar os resultados obtidos com informações confiáveis sobre os objetos classificados
para quantificar a confiabilidade da classificação.
3.2 INTERPRETAÇÃO DE IMAGENS
Para RICHARDS (1986), existem duas abordagens que podem ser adotadas na extração
de informações de uma imagem digital: A primeira abordagem é quantitativa. Permitindo
considerar os atributos geométricos (tamanho do pixel representado no terreno), espectrais
(faixa do espectro eletromagnético abrangida pelo sensor) e radiométricos dos pixels
33
individualmente. Envolve o uso de um computador que considere os atributos comuns de
pixels e, através de técnicas computacionais seqüenciais (programas), pode fazer estimativas
de área, de cor e de resolução de imagem. A segunda abordagem envolve a análise visual da
imagem por um intérprete que identifica feições. Esta abordagem é chamada de
fotointerpretação ou interpretação de imagens. Nesta abordagem, atributos espaciais como
forma, tamanho, textura e orientação são considerados para as feições. ANDERSON (1982)
apresenta como definição básica de fotointerpretação, o ato de examinar imagens fotográficas
com o fim de identificar objetos e determinar seus significados. Segundo DAINELLI (1990
apud MOREIRA, 2001) o termo fotointerpretação refere-se ao conjunto de todos os processos
envolvendo a análise visual de imagens fotográficas, podendo o produto a ser interpretado
tratar-se de fotografias aéreas, imagens obtidas por satélites, ou qualquer outro produto na
forma fotográfica.
Segundo ANDERSON (1982) os elementos básicos de interpretação são os elementos de
reconhecimento (também chamados de elementos básicos de leitura ou fatores-guia):
1) tonalidade e cor: tonalidade refere-se ao brilho dos objetos que compõem a cena, onde os
tons de cinza estão relacionados às propriedades de refletância dos materiais superficiais e da
faixa do espectro eletromagnético detectado pelo sensor. A cor em imagens digitais é obtida
através de uma composição colorida em que se relacionam as três cores primárias (vermelho,
verde e azul), com diferentes faixas do espectro eletromagnético, chamadas de bandas
espectrais. A resolução espectral de um sensor corresponde ao intervalo de comprimentos de
onda coberto por cada banda espectral dentro do espectro eletromagnético e o número de
bandas espectrais que um sensor pode captar. Desta forma um sensor pode ter de três a
dezenas de bandas espectrais, sendo tanto maior a resolução espectral quanto mais bandas
puderem ser distinguidas dentro de uma faixa mais extensa do espectro. É possível
visualizarem-se várias composições coloridas, sendo aquelas que correspondem às cores
primárias na ordem correta do espectro, chamadas de composições em cores verdadeiras e
aquelas que não correspondem a esta ordem sendo chamadas de falsa cor. O olho humano é
capaz de discernir apenas 30 tons de cinza, enquanto que pode distinguir milhares de cores
diferentes. Composições em falsa cor são usadas para distinguir feições mais detalhadamente
do que em cores reais. (RICHARDS, 1986 e CRÓSTA, 1993).
2) forma: ao olhar-se a forma das feições em uma imagem, pode-se distinguir entre as que
correspondem a aspectos naturais ou não. Por exemplo, formas com traçados retos e
uniformes indicam aspectos humanos (casas, estradas, cercas, etc.);
34
3) padrão ou modelo: caracteriza-se pela união ou extensão das formas. Arranjos de tons e
texturas. Dentro dos padrões principais pode-se destacar o padrão das ruas em áreas urbanas
ou os de uma rede de drenagem formada por rios e córregos;
4) densidade: é a “freqüência”, ou “intensidade” em que se encontram áreas na natureza com
características similares. Deve ser relacionada com a área real correspondente no terreno. Um
exemplo é o número de casas por Km2;
5) declividade: relativa ao ângulo de declive, serve para o reconhecimento de tipos de
vertentes, mergulhos, superfícies e linhas inclinadas;
6) textura: a textura é definida como uma combinação da magnitude e freqüência das
variações de tons em uma imagem; representa as variações de tonalidades que ocorrem em
uma determinada área da imagem. Tais variações correspondem às pequenas feições
representadas pelos pixels na imagem. É intrinsecamente ligada a tonalidade, pois sem
variação de tonalidade não há variação de textura. Representa um conjunto de feições que não
podem ser distinguidas visualmente em suas unidades, mas apenas no conjunto. (CRÓSTA,
1993; OLIVEIRA, 1993; ANDERSON, 1982);
7) tamanho e posição geográfica: o tamanho dos objetos é exclusivamente dependente da
escala de trabalho e o conhecimento da posição geográfica permite um estudo inicial da
região a ser interpretada.
8) sombras e adjacências: as sombras auxiliam na interpretação do relevo, indicando vales e
cumes e as adjacências ou convergência de evidencias, referem-se a relacionamentos que as
feições no terreno têm entre si. Por exemplo, uma concentração de casas próximas a ruas não
asfaltadas e terrenos baldios pode indicar que se trata de moradias de baixa renda.
Para CRÓSTA (1993) as propriedades básicas das superfícies representadas na imagem
são a tonalidade, a textura e o contexto. O contexto se refere a como detalhes de tons, textura
e padrões de arranjos dos mesmos, estão localizados em relação a feições conhecidas do
terreno. Desta forma uma região de vegetação rasteira cercada por uma floresta pode indicar
que se trata de vegetação secundária, e não cobertura original. MOREIRA (2001) apresenta
alguns fatores de contribuição para análise de imagens em nível orbital:
1) época de obtenção das imagens: relativa aos alvos que sofrem variação de resposta
espectral ao longo de um determinado período, como por exemplo, tipos de cultura;
2) tipo de produto e escolha das bandas espectrais: pancromático ou multiespectral, também
depende do alvo a ser estudado. Para estudo de poluição de águas, por exemplo utiliza-se
35
composições coloridas na região do espectro visível; para delimitação de corpos d’água
utiliza-se uma imagem obtida na faixa do infravermelho;
3) escala de trabalho: diz respeito à resolução geométrica do sensor que é a área mínima no
terreno representada por um único sinal na imagem (pixel), e que traduz a resposta da média
espectral resultante de todos os alvos presentes nesta área. É a ampliação ou redução da
imagem sem modificar o conteúdo informativo. Pode-se relacionar o tamanho de um objeto
na tela do computador em termos de quantidade de pixels e de acuidade visual. (OLIVEIRA,
1993), define a acuidade visual humana como sendo a medida da capacidade do olho humano
em separar detalhes na visualização de um objeto. É a recíproca da separação angular mínima,
em minutos de arco, de duas linhas de detalhe que podem ser vistas separadamente.
TAVARES e FAGUNDES (1991), calculam a separação angular mínima das linhas de
detalhe como sendo de 41’’ de arco;
4) uso de imagens multitemporais: o emprego de imagens de satélite coletadas em duas ou
mais datas de passagem pode ser usado, por exemplo, no estudo da expansão de áreas urbanas
ou desmatamento florestal.
3.3 ANÁLISE DE IMAGENS POR COGNIÇÃO E SEMÂNTICA
GONZALEZ e WOODS (1992) dizem que a análise de imagens é um processo de
descobrimento, de identificação e de entendimento de padrões que sejam relevantes a uma
tarefa baseada em imagens, e que uma das principais metas da análise de imagens por
computador é a de aproximar-se da capacidade do ser humano. Neste caso específico, a
capacidade diz respeito à inteligência e à cognição visual humana. Apesar de ser um conceito
vago, especialmente em se tratando de máquinas, aqui representadas por sistemas de análise
de imagens assistidos por computador, a inteligência pode ser relacionada a três aspectos
iniciais:
1) habilidade de extrair informações pertinentes a partir de um fundo de detalhes irrelevantes;
2) capacidade de aprender a partir de exemplos e de generalizar o conhecimento de maneira
que ele possa ser aplicado em circunstâncias novas e diferentes;
3) habilidade de fazer inferências a partir de informação incompleta.
36

Em termos computacionais, NEWELL e SIMON (1975), apud STEFIK (1995), fornecem
uma definição de um sistema formado por “símbolos físicos” como sendo aquele em que
existem meios necessários e suficientes para ação inteligente em geral. De acordo com
STEFIK, (1995), um símbolo é uma marca física ou padrão que possa ser lido, reconhecido e
escrito por um reconhecedor. São os elementos centrais e familiares da linguagem natural,
formalismos lógicos e linguagens de programação, podendo ser arranjados em estruturas
simbólicas ou em simples expressões. Entretanto, um símbolo pode ter mais de um
significado, dependendo da maneira com que é representado e do contexto em que é inserido.
Por exemplo, pode-se citar o símbolo ∞ , que matematicamente representa o infinito.
Graficamente pode ser representado como um símbolo único, ou como a união de dois
símbolos, dependendo do contexto em que está inserido. Para que o símbolo tenha
significado, é necessário que exista um registro, que está relacionado com o reconhecimento
e a identificação da marca que é representada por este símbolo.
Em sistemas computacionais símbolos seguem duas regras distintas: a regra documental e
a regra cognitiva. A regra documental ocorre quando existe o interesse em se realizar algum
tipo de comunicação entre pessoas. Assim, caracterizam-se símbolos como as letras
apresentadas na tela do computador. A regra cognitiva existe quando há interesse em utilizar
os símbolos como representação de uma situação e como esses a modelam. Neste caso,
envolve o conhecimento que o usuário tem desta modelagem, para que haja uma interpretação
por parte do mesmo, pois os símbolos são manipulados pelo computador de uma maneira
automática. Desta forma, os símbolos são utilizados para fazer inferências a respeito da
situação analisada. Inferência significa a capacidade que o ser humano tem de fazer deduções
sobre como determinadas situações se comportarão com base em observações feitas por si
mesmo ou pela experiência de outras pessoas. Para esta dissertação, os símbolos, que seguem
a regra cognitiva, serão considerados sinônimos de objetos imagem ou regiões, pois
representam áreas de características homogêneas, em uma imagem, sendo obtidos após o
processo de segmentação (seção 3.4) e com seu registro ou significado sendo fornecido pela
classificação da imagem (seção 3.6) (RIBEIRO, 1994 e STEFIK, 1995).
O conhecimento é adquirido por um processo de aprendizado onde “coisas” são
representadas através de dois processos: generalização e abstração. Por generalização
entende-se o fenômeno que ocorre quando informações que chegam no cérebro sobre um
determinado fato sejam utilizadas para definir fatos idênticos. Por abstração entende-se o
fenômeno de que, após várias generalizações sobre uma determinada ocorrência, pode-se
37
relacionar uma informação diferente do fato inicial. Como exemplo de generalização, pode-se
citar a descrição de uma casa identificada em uma imagem, que é representada por um
determinado tamanho aparente e por formas regulares. Caso o interpretador identifique outro
objeto na imagem com formas regulares, e tamanho aparente igual ou aproximado, pode
generalizar esta descrição para outros objetos semelhantes na imagem. No caso da abstração,
a casa do exemplo anterior pode ser acompanhada por uma piscina ou não. Se o interpretador
tiver a informação de que a construção de uma piscina é onerosa, pode concluir através de
uma abstração, que casas acompanhadas de piscinas pertencem a uma população de renda
elevada.
A definição de objeto surge das abstrações e generalizações que se faz do mundo real na
forma de procedimentos metodológicos ou individuais que, em conjunto, formam uma
representação simbólica pessoal do mundo. Objetos são os diversos elementos que surgem da
organização do entendimento de um problema na mente do observador, sendo materializados
por símbolos. Uma casa pode representar um objeto para um determinado observador e sua
materialização pode ser feita na forma de um desenho ou escrita. Um outro observador pode
considerar que os objetos são as janelas de uma casa, dependendo do seu plano de referência
e do contexto de estudo, sendo considerado como plano de referência o conjunto de
conhecimentos que se adquire ao longo da vida. O contexto é relativo às inferências que se
faz a um objeto, sendo limitada pelo plano de referência do observador (RIBEIRO, 1994 e
STEFIK, 1995). Desta forma, para exemplificar, um intérprete que estivesse interessado em
um conjunto de propriedades para descrever uma região urbana, atingiria o contexto quando
definisse todas as propriedades possíveis de se identificar nesta região, dentro do conjunto já
pré-estabelecido.
A ciência da cognição é a que reúne o conhecimento sobre o modo de pensar do ser
humano em disciplinas acadêmicas como lingüística, psicologia e ciência da computação
(LAKOFF 1987, apud MAGUIRE et al 1994). A cognição humana pode ser dividida em dois
tipos de atividades: aquelas que são comandadas pelo “lado direito do cérebro” – visuais,
espaciais e relacionais; e as que são comandadas pelo “lado esquerdo do cérebro” – lineares,
lógicas e baseadas em linguagens ou símbolos (HEARSNSHAW e UNWIN, 1994). Um
modelo sobre como é feito o pensamento criativo, e que relaciona cada etapa com o
respectivo lado do cérebro que a comanda é proposto por EDWARDS (1987) apud
HEARSNSHAW e UNWIN (1994):
38
1) percepção inicial (lado direito): é o estágio inicial de exploração de um problema, que
envolve a procura de perguntas produtivas, que surgem baseadas em vasto conhecimento
sobre um assunto. É relacionado à procura de novos problemas ou de problemas já existentes;
2) saturação (lado esquerdo): é o estágio de pesquisa, que envolve a junção, ordenação e
categorização de informações com um objetivo particular em vista;
3) incubação (lado direito): ocorre quando a análise lógica falha após uma linha de
investigação ter sido conduzida. É o estágio em que o pesquisador deixa de pensar sobre
determinado problema, apesar de não abandoná-lo, e dedica-se a outras atividades cognitivas.
O mecanismo que descreve a incubação de um problema é desconhecido, mas pode ser
comandado por decisões heurísticas, ou seja, hipóteses analíticas que numa pesquisa levam
às descobertas científicas (ANTUNES, 2003);
4) iluminação (lado direito) : é o estágio em que uma solução aparece. Pode ser revelado
como uma imagem no cérebro e é frequentemente associado a sensação de alívio;
5) verificação (lado esquerdo): é o estágio em que o pesquisador testa suas soluções com
informações conhecidas.
BLASCHKE et al (2000) afirmam que a análise de imagens em ambiente computacional,
que tenha por objetivo aproximar-se de como é feita pelo ser humano na interpretação de
imagens, deve proceder à divisão da cena em objetos-imagem, pois a percepção humana
sobre o conteúdo de uma imagem é baseada em objetos, e uma vez tendo discernido tais
objetos, estes são relacionados através de uma rede traçada pela experiência e conhecimento
do intérprete. Nesse artigo afirma-se também que a abordagem orientada a objeto para
aplicações ambientais, é coincidente com a percepção humana e a maneira como se extrai
informações de impressões visuais. A divisão da cena visa identificar automaticamente os
objetos de estudo, dentro do plano de referência utilizado. A análise de imagens feita pela
classificação orientada a objeto lida com a semântica desses objetos e da forma como é
manejada. Para STEFIK (1995), o termo “semântica” é usado para descrever tanto a
linguagem natural quanto a linguagem computacional e no entendimento popular, se refere
ao significado de símbolos e expressões em linguagens. Para PIMENTEL (2005), o termo
atualmente designa o estudo da relação existente entre palavras e sentenças de uma
linguagem falada ou escrita e seus significados.
39
3.4 SEGMENTAÇÃO DE IMAGENS
Um passo essencial para a classificação orientada a objeto é a segmentação de imagens,
que divide uma imagem em regiões, que representam um conjunto de pixels contíguos, que
se espalham bidirecionalmente e que apresentam uniformidade (INPE, 2004). A segmentação
tem por objetivo dividir uma imagem em grupos de pixels ou objetos com um determinado
critério de homogeneidade, para que possam ser relacionados a uma feição do terreno, pois
quando um observador vê uma imagem, divide-a em conjuntos de feições ou objetos,
conforme explicado na seção 3.3 (CASTLEMAN,1996 e ANTUNES, 2003).
“A segmentação é um procedimento que particiona uma imagem digital em regiões disjuntas (não sobrepostas). Para este propósito, entende-se uma região como sendo um conjunto de pixels conectados, ou seja, um conjunto em que todos os pixels são adjacentes ou se tocam” (CASTLEMAN, 1996, p. 450).
A definição formal de conectividade é a seguinte: para dois pixels p e q que pertencem a
um subconjunto S de uma imagem, estes são conectados se existe um caminho em S que ligue
p e q, e que seja formado inteiramente de pixels pertencentes a S. Sendo caminho definido
como se segue: um caminho de um pixel p com coordenadas (x,y) a um pixel q de
coordenadas (s,t) é uma seqüência de pixels distintos com coordenadas (x0,y0),(x1,y1),...,(xn,yn)
em que (x0,y0) = (x,y) e (xn,yn)= (s,t) é adjacente a (xi-1,yi-1), l≤ i≤ n, e n é o comprimento do
caminho. Outra definição importante no processo de segmentação é a de componente conexo.
Um componente conexo de um subconjunto S de uma imagem é qualquer conjunto de pixels
conectados a um pixel p que pertence a S. Assim, dois pixels de um componente conexo são
sempre conectados um ao outro, mas componentes conexos diferentes são disjuntos
(GONZALEZ e WOOD, 1992).
A FIG 3.2 ilustra os conceitos de pixels conectados e componentes conexos: seja o
conjunto S formado pelos pixels presentes nas letras T e L. Os pixels p e q são conectados
entre si, mas não o são com o pixel r. Da mesma forma, as letras T e L formam os
componentes conexos do conjunto S.
40

FIG 3.2 – Conceitos de pixels conectados e componentes conexos.
Os algoritmos de segmentação para imagens monocromáticas são baseados normalmente
em duas propriedades básicas relacionadas aos valores de níveis de cinza: descontinuidade e
similaridade. Os algoritmos de descontinuidade particionam a imagem baseada em mudanças
bruscas dos níveis de cinza e servem principalmente para detectar pontos isolados, linhas e
bordas na imagem. Normalmente emprega-se uma máscara, ou seja, uma matriz que faz
operações matemáticas com os valores de níveis de cinza da imagem, denominada janela
Kernel. A janela é constituída de uma matriz, quadrada ou não, que ao ser passada pela
imagem faz um processamento matemático nos pixels vizinhos ao do centro da matriz,
atribuindo-se o valor resultante deste processamento ao pixel central. As principais
abordagens da segunda técnica, a de similaridade, são: limiarização, crescimento de regiões e
divisão e fusão de regiões (RICHARDS, 1986; GONZALEZ e WOOD, 1992).
Na limiarização, os pixels que têm um determinado valor de nível de cinza igual ou maior
que um determinado limiar T no intervalo de níveis de cinza que a imagem pode assumir
(1024 níveis para uma imagem de 11 bits) são rotulados com um valor pré-estabelecido de
nível de cinza (1, por exemplo). Os demais pixels da imagem segmentada são rotulados com o
valor 0, e correspondem ao fundo da imagem. Os algoritmos de limiarização são indicados
quando se quer extrair objetos com pouca variação de níveis de cinza, e que estão situados em
uma vizinhança que tenha níveis de cinza diferentes desses objetos mas com intensidade
uniforme. Na divisão e fusão de regiões a imagem é subdividida em um conjunto de regiões
arbitrárias ou disjuntas tantas vezes quantas forem necessárias para atender a um determinado
critério pré-estabelecido. A partir daí o algoritmo “procura” dentre as regiões adjacentes
aqueles que atendem o mesmo critério, e caso atendam, funde-as para formar a imagem
segmentada (GONZALEZ e WOOD, 1992 e CASTLEMAN,1996).
41

3.4.1 SEGMENTAÇÃO POR CRESCIMENTO DE REGIÕES
O crescimento de regiões é uma técnica de segmentação que agrega pixels ou conjuntos
de pixels (chamados de regiões), em grupos maiores. A estes conjuntos de pixels, a
conectividade espacial é considerada apenas para grupos com características similares que
representem em uma imagem, regiões com propriedades comuns (GONZALEZ e WOODS,
1992 e SCHOWENGERDT, 1997). Isto quer dizer que para o caso da FIG.3.2, os pixels p e q
só poderão ser agregados a uma mesma região se atenderem aos critérios de similaridade pré-
estabelecidos e forem conectados.
No crescimento de regiões, somente aquelas adjacentes espacialmente podem ser
agrupadas. Assim, inicialmente cada região corresponde a um pixel, ou grupos de poucos
pixels. Tipicamente, deve ser realizado com um conjunto de descritores baseados em
intensidade espectral e em propriedades espaciais. Durante o processo as regiões são definidas
através de testes de hipóteses aplicados às médias espectrais e em propriedades espaciais entre
as mesmas que impõem critérios de similaridade pré-estabelecidos que definem os limiares
entre as regiões. Caso tais critérios sejam atendidos, tais regiões são agregadas e o processo é
reiniciado. Este algoritmo é detalhado nesta seção por ser o utilizado na classificação
orientada a objeto (GONZALEZ e WOODS, 1992; CASTLEMAN,1996 e INPE, 2004).
O conjunto de etapas que compõe o processo de segmentação orientada a regiões é
descrito por GONZALEZ e WOOD (1992), e diz respeito às regras que a segmentação de
uma imagem R, para que seja dividida em n regiões R1, R2,..., RN, deve atender:
1) R; ∪n
iiR
1=
=
2) é uma região conexa, sendo i= 1,2,3,....,n; iR3) φ=∩RR ji , para todo i e j, i j; ≠
4) P( ) = VERDADEIRO , para i= 1,2,3,....,n; Ri
5) P( )=FALSO, para i≠ j. RR ji ∪
P( ) é um predicado lógico sobre os pontos do conjunto , sendo predicado lógico
uma expressão matemática envolvendo variáveis que podem assumir os valores lógicos
VERDADEIRO ou FALSO. O símbolo
Ri Ri
φ representa o conjunto vazio (ISTCE, 2003).
42

A condição de número 1) indica que a segmentação deve ser completa, ou seja, cada pixel
deve pertencer a uma região. A condição de número 2) diz que os pixels de uma região devem
ser conexos. A condição de número 3) indica que as regiões devem ser disjuntas. A condição
de número 4) diz respeito às propriedades que devem ser atendidas pelos diversos pixels de
uma determinada região segmentada. A última condição indica que a união de duas regiões
adjacentes quaisquer diferentes não pode atender as condições do predicado explicitado no
número 4).
Segundo SCHOWENGERDT (1997), existem duas maneiras em que um pixel pode estar
conectado a sua vizinhança para formar uma região: a conexão do tipo 4 (N4) e a conexão do
tipo 8 (N8). Para explicitar melhor, introduz-se o conceito de vizinhança. A vizinhança de 4 de
um pixel p, sendo este pixel de coordenadas (x,y), é composta pelos seus quatro pixels
vizinhos de coordenadas (x+1, y), (x-1, y), (x, y+1) e (x, y-1), isto é, os pixels horizontais e
verticais, conhecida como vizinhança N4p. A vizinhança diagonal é representada pelos seus
quatro pixels vizinhos de coordenadas (x-1, y-1), (x-1, y+1), (x+1, y-1) e (x+1, y+1), isto é, os
pixels diagonais, representados por Ndp. A vizinhança de 8 de um pixel p é definida como: N8p
= N4p ∪ Ndp (FILHO e NETO , 1999). A FIG 3.3 exemplifica os conceitos de vizinhanças de
pixels.
FIG 3.3- Conceitos de vizinhança de 4, vizinhança diagonal e vizinhança de 8 (Fonte: FILHO e NETO, 1999).
Com base no exposto, complementando o conceito de conectividade já apresentado,
pode-se ainda definir as seguintes conectividade de pixels vizinhos:
1) conectividade 4: Um pixel q, é conectado a um pixel p se q ∈ N4p.
2) conectividade 8: Um pixel q, é conectado a um pixel p se q ∈ N8p.
3) conectividade m (ou mista): Um pixel q, é conectado a um pixel p se:
- q ∈ N4p ou;
- q ∈ Ndp e N4p ∩ N4q= φ , onde N4q indica os vizinhos 4 do pixel q
43
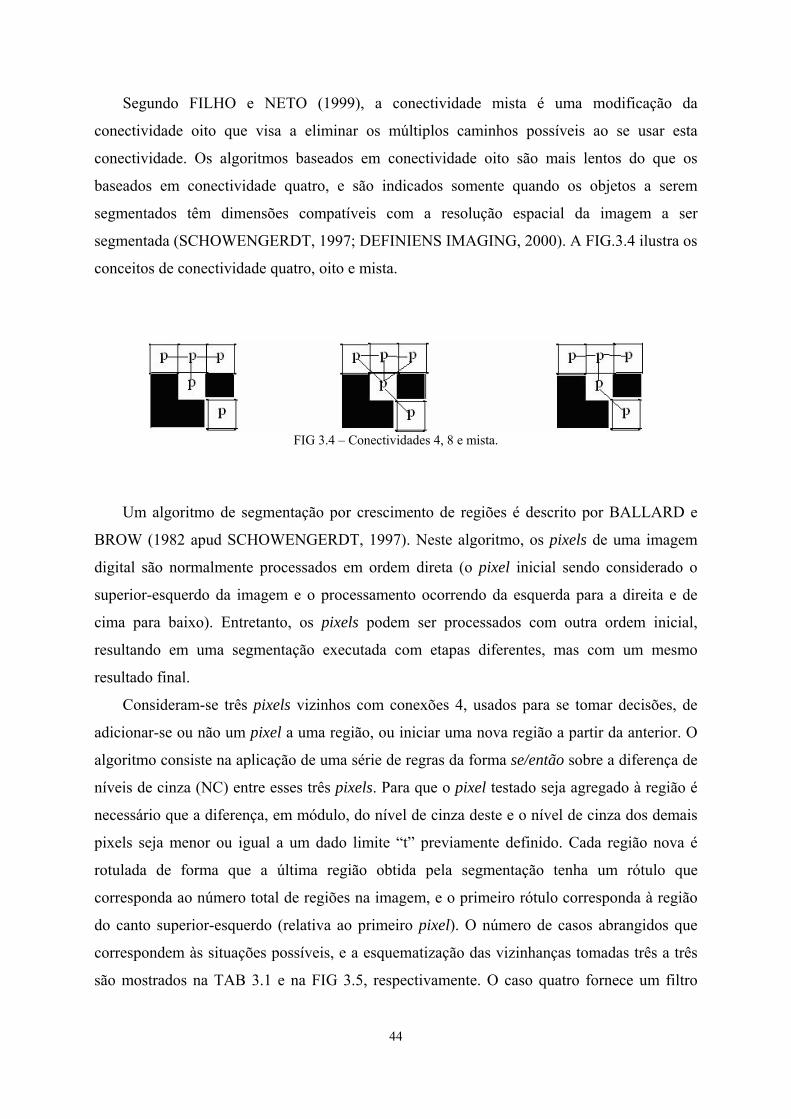
Segundo FILHO e NETO (1999), a conectividade mista é uma modificação da
conectividade oito que visa a eliminar os múltiplos caminhos possíveis ao se usar esta
conectividade. Os algoritmos baseados em conectividade oito são mais lentos do que os
baseados em conectividade quatro, e são indicados somente quando os objetos a serem
segmentados têm dimensões compatíveis com a resolução espacial da imagem a ser
segmentada (SCHOWENGERDT, 1997; DEFINIENS IMAGING, 2000). A FIG.3.4 ilustra os
conceitos de conectividade quatro, oito e mista.
FIG 3.4 – Conectividades 4, 8 e mista.
Um algoritmo de segmentação por crescimento de regiões é descrito por BALLARD e
BROW (1982 apud SCHOWENGERDT, 1997). Neste algoritmo, os pixels de uma imagem
digital são normalmente processados em ordem direta (o pixel inicial sendo considerado o
superior-esquerdo da imagem e o processamento ocorrendo da esquerda para a direita e de
cima para baixo). Entretanto, os pixels podem ser processados com outra ordem inicial,
resultando em uma segmentação executada com etapas diferentes, mas com um mesmo
resultado final.
Consideram-se três pixels vizinhos com conexões 4, usados para se tomar decisões, de
adicionar-se ou não um pixel a uma região, ou iniciar uma nova região a partir da anterior. O
algoritmo consiste na aplicação de uma série de regras da forma se/então sobre a diferença de
níveis de cinza (NC) entre esses três pixels. Para que o pixel testado seja agregado à região é
necessário que a diferença, em módulo, do nível de cinza deste e o nível de cinza dos demais
pixels seja menor ou igual a um dado limite “t” previamente definido. Cada região nova é
rotulada de forma que a última região obtida pela segmentação tenha um rótulo que
corresponda ao número total de regiões na imagem, e o primeiro rótulo corresponda à região
do canto superior-esquerdo (relativa ao primeiro pixel). O número de casos abrangidos que
correspondem às situações possíveis, e a esquematização das vizinhanças tomadas três a três
são mostrados na TAB 3.1 e na FIG 3.5, respectivamente. O caso quatro fornece um filtro
44
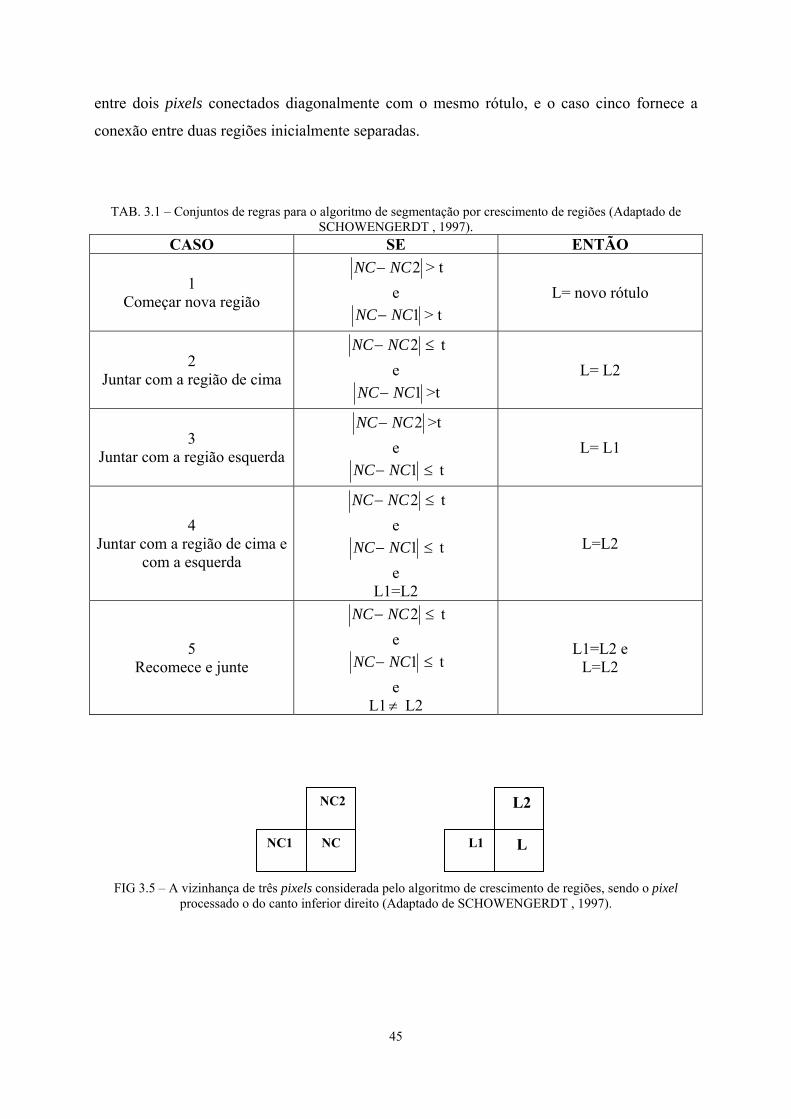
entre dois pixels conectados diagonalmente com o mesmo rótulo, e o caso cinco fornece a
conexão entre duas regiões inicialmente separadas.
TAB. 3.1 – Conjuntos de regras para o algoritmo de segmentação por crescimento de regiões (Adaptado de
SCHOWENGERDT , 1997). CASO SE ENTÃO
1 Começar nova região
2NCNC− > t e
1NCNC− > t L= novo rótulo
2 Juntar com a região de cima
2NCNC− ≤ t e
1NCNC− >t L= L2
3 Juntar com a região esquerda
2NCNC− >t e
1NCNC− ≤ t L= L1
4 Juntar com a região de cima e
com a esquerda
2NCNC− ≤ t e
1NCNC− ≤ t e
L1=L2
L=L2
5 Recomece e junte
2NCNC− ≤ t e
1NCNC− ≤ t e
L1≠ L2
L1=L2 e L=L2
L1 L
L2
NC1 NC
NC2
FIG 3.5 – A vizinhança de três pixels considerada pelo algoritmo de crescimento de regiões, sendo o pixel processado o do canto inferior direito (Adaptado de SCHOWENGERDT , 1997).
45
3.4.2 SEGMENTAÇÃO MULTIRESOLUÇÃO
Nesta segmentação, para definir os objetos, além de serem considerados parâmetros
espectrais, parâmetros de forma são também considerados, e a segmentação é implementada
levando em conta diversos tamanhos de objetos, perfazendo o que BAATZ e SCHÄPE (2000)
chamam de segmentação multiresolução.
Segundo DEFINIENS IMAGING (2000), os métodos mais recentes de segmentação de
imagens são reunidos em dois domínios principais: aqueles aplicados ao conhecimento (de
cima para baixo) e aqueles aplicados aos dados (de baixo para cima). No primeiro caso, o
usuário já sabe o que deseja extrair da imagem, mas não sabe como realizar tal extração.
Formula-se um modelo dos objetos desejados, que implicitamente fornece seus significados.
No segundo caso, os objetos são fornecidos por meio de métodos estatísticos e parâmetros
para o processamento da imagem inteira. Desta forma, os objetos fornecidos inicialmente não
têm significado, cabendo ao usuário determinar qual destes objetos fornecidos é relevante no
mundo real. A diferença básica entre os dois métodos é que, no primeiro caso, a segmentação
é realizada localmente, marcando regiões de pixels que atendam ao modelo. No segundo caso
a segmentação é feita em toda a imagem e os pixels são agrupados de forma que atendam a
critérios de homogeneidade.
Na abordagem orientada a objeto, a obtenção de objetos primitivos como unidade básica
de processamento é precedida de uma segmentação da imagem. Utiliza-se para tal os métodos
de segmentação de baixo para cima e a técnica de crescimento de regiões, inicialmente
considerando-se como região um pixel. Através de uma seqüência de passos, as regiões são
agregadas às adjacentes para atender ao critério da heterogeneidade ponderada mínima; que se
traduz pela fórmula n.h, sendo n o tamanho em pixels definido do objeto e h uma definição
arbitrária de quanto os objetos podem ser heterogêneos (EQ.3.1). O procedimento de
segmentação é realizado de forma iterativa, de maneira que cada um seja agrupado com o
mais próximo que atenda ao critério de heterogeneidade, com o menor crescimento possível.
Caso um determinado parâmetro de escala seja ultrapassado, o procedimento é interrompido.
A variação destes parâmetros tem por objetivo extrair objetos que, numa cena, estejam a um
mesmo nível semântico. A criação de um nível semântico de objetos considera que o tamanho
destes pode ser variável, dependendo de como os pixels vizinhos atendam o parâmetro;
entretanto, esta variação é limitada, de forma que seja possível obterem-se objetos que sejam
46
10 vezes maiores, mas não 1000 vezes maiores que outros, tentando simular a extração de
objetos feita por um intérprete em uma imagem (DEFINIENS IMAGING, 2000; BLASCHKE
e HAY 2001).
As equações matemáticas e a base teórica da segmentação multiresolução são
apresentadas por (BAATZ e SCHÄPE, 2000). Neste artigo, são apontados dois componentes
principais do método:
1) decisões heurísticas: para determinar os objetos-imagem que irão se fundir a cada
passo;
2) definição da homogeneidade dos objetos-imagem: para computar o grau de
ajustamento para um dado par de objetos.
Os componentes mencionados são explicados a seguir.
1) As decisões heurísticas resumem-se nos seguintes passos:
a) melhor ajustamento: significa que um objeto A deve ser fundido a um objeto B
somente se preencher o critério de homogeneidade da melhor forma possível, considerando o
parâmetro de escala, que define o término da segmentação. Isto significa que o grau de
ajustamento resultante da fusão de A com B deve ser melhor do que com qualquer outro
objeto (o que traduz o “melhor” grau de ajustamento);
b) melhor ajustamento local mútuo: para A deve-se achar um objeto B que atenda o
critério a). A partir desse objeto B, deve-se achar um objeto C que atenda ao critério a). Se
isto for verdade, então testa-se o critério a) entre A e C. Caso o critério não seja atendido,
repete-se o procedimento tomando B por A e C por B ;
c) melhor ajustamento global mútuo: este passo diz respeito a juntar cada par de objetos
adjacentes em toda a cena, e que atendam o critério de homogeneidade;
d) ordem de distribuição de tratamento dos objetos-imagem: exceto para o passo c), cada
decisão heurística precisa de um dado objeto-imagem A de partida para procurar o próximo
objeto a ser fundido. Tal passo deve ser realizado de maneira a manter o tamanho/escala dos
objetos-imagem, de forma similar e ao longo de toda a imagem. Para que isto seja efetuado,
escolhe-se aleatoriamente uma série de objetos que servirão como pontos de partida para as
fusões subseqüentes, observando-se as seguintes regras:
I) deve-se executar uma fusão apenas por etapa do procedimento, para cada objeto-imagem e;
II) os objetos de partida devem estar o mais distante possível uns dos outros.
Isto significa que os objetos de partida devem ser escolhidos da maneira mais aleatória
possível, para que não haja aglomerados de objetos provocados por uma concentração prévia
47

de pontos de partida. Como o passo c) não segue o passo d), a ordem em que se processa a
segmentação pode ser dada pela do algoritmo apresentado na tabela 3.1 da seção anterior, por
exemplo (ordem direta), não sendo claramente definida no artigo de BAATZ e SCHÄPE
(2000). Entretanto, o sistema de coordenadas do programa eCognition tem como origem o
canto inferior esquerdo da imagem e é crescente de baixo para cima e da esquerda para a
direita, sugerindo que o pixel inicial de processamento não é o do canto superior esquerdo
como naquele algoritmo, mas o do canto inferior esquerdo.
2) A definição do grau de ajustamento para um dado par é dada pelos seguintes itens:
a) diferença entre objetos adjacentes: para um determinado espaço de feições com d
dimensões, onde tais feições podem ser valores de média espectral ou textura (variância ou
valores espectrais), por exemplo; o grau de ajustamento é dado por:
h = 2
1 2d d
d fd
f fσ
⎛ ⎞−⎜⎜⎝ ⎠
∑ ⎟⎟ EQ.3.1
Onde fdσ é o desvio padrão que todos os objetos da imagem segmentada apresentam para
cada feição considerada como dimensão (BLASCHKE e HAY 2002);
b) mudança de heterogeneidade em uma fusão virtual: com o processo de fusão sendo
iniciado com um pixel, e agrupando-o com o pixel adjacente e assim por diante, de maneira a
formarem-se regiões cada vez maiores; a heterogeneidade espectral (hdif) entre diversos
objetos imagem tende a aumentar. O critério de fusão entre uma determinada região e outra
adjacente é então o seguinte (EQ.3.2):
hdif = wd∑ d (n1 (hmd –h1d) + n2(hmd – h2d) )= mínimo EQ.3.2
onde h1d e h2d são os graus de ajustamento de dois objetos adjacentes em uma determinada
dimensão d ;
n1 e n2 são os tamanhos dos dois objetos;
hmd é o grau de ajustamento obtido com a fusão virtual ao usar-se o critério definido na
EQ.3.1 e;
wd é o peso da dimensão ou banda espectral;
Desta forma, caso a heterogeneidade seja mínima, a fusão é realizada;
c) heterogeneidade da forma: além dos parâmetros de heterogeneidade espectral, podem-se
incluir os conceitos de heterogeneidade de formas compactas e de formas suaves, que são
representadas pelas EQ.3.3 e 3.4, respectivamente;
48

h = ln
EQ.3.3
h = lb
EQ.3.4
onde l é o perímetro do objeto( em pixels);
n é o número de pixels que o compõe e;
b é o perímetro do menor retângulo que o envolva (ANTUNES, 2003);
Segundo DEFINIENS IMAGING (2000), o critério de fusão global é dado pela seguinte
equação:
f = w.hcor + (1-w).hforma EQ.3.5
onde w é o peso atribuído à heterogeneidade da cor e;
hcor e hforma são as heterogeneidades da cor e da forma, respectivamente.
A definição de heterogeneidade da cor na fusão é feita considerando-se como graus de
ajustamento os desvios-padrões dos níveis de cinza pertencentes aos respectivos objetos-
imagem a serem fundidos, usados na EQ.3.2:
Hcor = wd∑ d ( nfusão. dσ - (n1. 1dσ + n2. 2dσ )) EQ.3.6
onde nfusão, dσ representam o tamanho do objeto resultante e seu desvio-padrão, para uma
determinada dimensão ou banda espectral, respectivamente e;
1dσ e 2dσ representam os desvios padrões dos objetos-imagem a serem fundidos.
A definição de heterogeneidade de forma leva em conta os critérios de compacidade e
suavidade, que são mostrados nas EQ.3.7 e 3.8 e que se originam das EQ.3.3 e 3.4,
respectivamente:
11 2
1 2
. . .fusãocompac fusão
fusão
l l lh n n nn n
⎛ ⎞= − +⎜⎜
⎝ ⎠
2
n⎟⎟ EQ.3.7
1 21 2
1 2
. . .fusãosuav fusão
fusão
l l lh n n nb b
⎛ ⎞= − +⎜
⎝ ⎠b ⎟ EQ.3.8
onde (n,l,b)fusão têm definições equivalentes às das EQ.3.3 e 3.4, aplicadas ao objeto resultante
da fusão e;
(n,l,b)1 e 2 são relativos aos objetos a serem fundidos.
Finalmente, define-se a heterogeneidade da forma com base no peso atribuído à
compacidade (wcompac), na EQ.3.9:
49
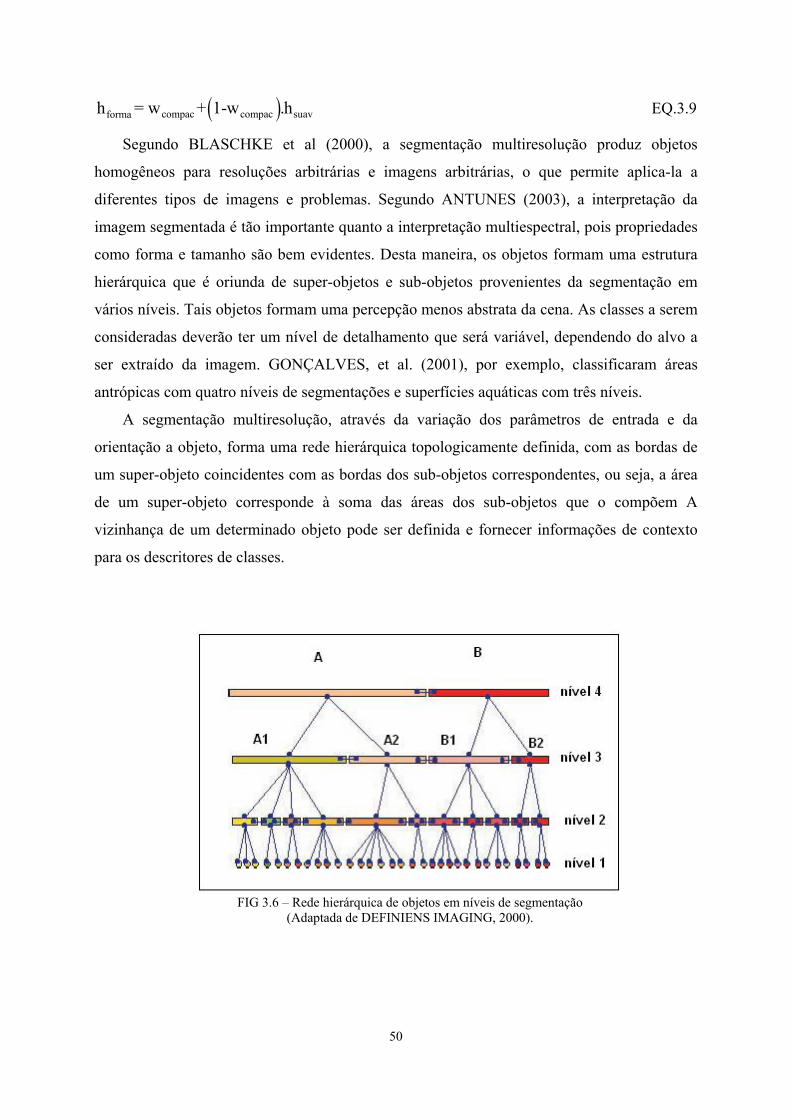
( )compac compac suavformah = w + 1-w .h EQ.3.9
Segundo BLASCHKE et al (2000), a segmentação multiresolução produz objetos
homogêneos para resoluções arbitrárias e imagens arbitrárias, o que permite aplica-la a
diferentes tipos de imagens e problemas. Segundo ANTUNES (2003), a interpretação da
imagem segmentada é tão importante quanto a interpretação multiespectral, pois propriedades
como forma e tamanho são bem evidentes. Desta maneira, os objetos formam uma estrutura
hierárquica que é oriunda de super-objetos e sub-objetos provenientes da segmentação em
vários níveis. Tais objetos formam uma percepção menos abstrata da cena. As classes a serem
consideradas deverão ter um nível de detalhamento que será variável, dependendo do alvo a
ser extraído da imagem. GONÇALVES, et al. (2001), por exemplo, classificaram áreas
antrópicas com quatro níveis de segmentações e superfícies aquáticas com três níveis.
A segmentação multiresolução, através da variação dos parâmetros de entrada e da
orientação a objeto, forma uma rede hierárquica topologicamente definida, com as bordas de
um super-objeto coincidentes com as bordas dos sub-objetos correspondentes, ou seja, a área
de um super-objeto corresponde à soma das áreas dos sub-objetos que o compõem A
vizinhança de um determinado objeto pode ser definida e fornecer informações de contexto
para os descritores de classes.
FIG 3.6 – Rede hierárquica de objetos em níveis de segmentação
(Adaptada de DEFINIENS IMAGING, 2000).
50
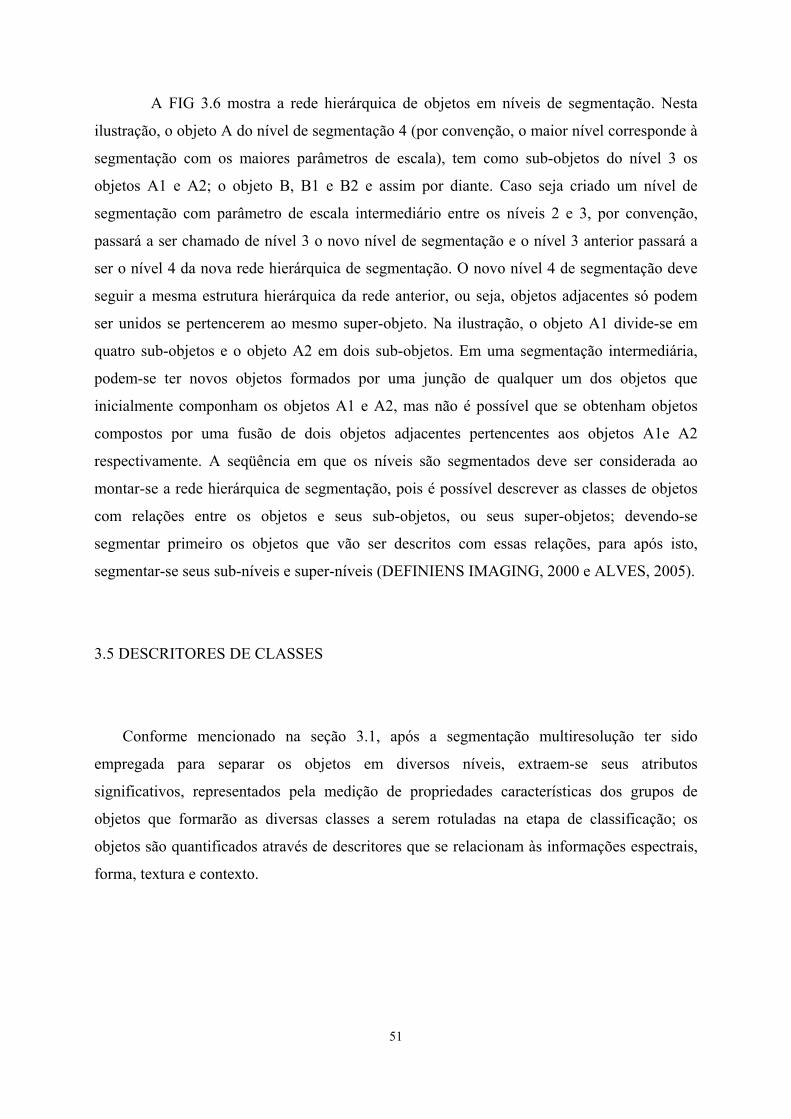
A FIG 3.6 mostra a rede hierárquica de objetos em níveis de segmentação. Nesta
ilustração, o objeto A do nível de segmentação 4 (por convenção, o maior nível corresponde à
segmentação com os maiores parâmetros de escala), tem como sub-objetos do nível 3 os
objetos A1 e A2; o objeto B, B1 e B2 e assim por diante. Caso seja criado um nível de
segmentação com parâmetro de escala intermediário entre os níveis 2 e 3, por convenção,
passará a ser chamado de nível 3 o novo nível de segmentação e o nível 3 anterior passará a
ser o nível 4 da nova rede hierárquica de segmentação. O novo nível 4 de segmentação deve
seguir a mesma estrutura hierárquica da rede anterior, ou seja, objetos adjacentes só podem
ser unidos se pertencerem ao mesmo super-objeto. Na ilustração, o objeto A1 divide-se em
quatro sub-objetos e o objeto A2 em dois sub-objetos. Em uma segmentação intermediária,
podem-se ter novos objetos formados por uma junção de qualquer um dos objetos que
inicialmente componham os objetos A1 e A2, mas não é possível que se obtenham objetos
compostos por uma fusão de dois objetos adjacentes pertencentes aos objetos A1e A2
respectivamente. A seqüência em que os níveis são segmentados deve ser considerada ao
montar-se a rede hierárquica de segmentação, pois é possível descrever as classes de objetos
com relações entre os objetos e seus sub-objetos, ou seus super-objetos; devendo-se
segmentar primeiro os objetos que vão ser descritos com essas relações, para após isto,
segmentar-se seus sub-níveis e super-níveis (DEFINIENS IMAGING, 2000 e ALVES, 2005).
3.5 DESCRITORES DE CLASSES
Conforme mencionado na seção 3.1, após a segmentação multiresolução ter sido
empregada para separar os objetos em diversos níveis, extraem-se seus atributos
significativos, representados pela medição de propriedades características dos grupos de
objetos que formarão as diversas classes a serem rotuladas na etapa de classificação; os
objetos são quantificados através de descritores que se relacionam às informações espectrais,
forma, textura e contexto.
51
3.5.1 DESCRITORES ESPECTRAIS
Os descritores espectrais descrevem as variações tonais médias em várias bandas do
espectro eletromagnético, na sua porção visível ou infravermelha (HARALICK et al, 1973).
Os descritores espectrais empregados nesta dissertação, extraídos de DEFINIENS IMAGING
(2000), são:
1) Média espectral: O valor médio LC calculado dos níveis de cinza para cada banda
espectral ou “layer” ( ) de todos os pixels que formam um objeto-imagem (EQ.3.10). Lic n
L1
1Cn
Lii
cn =
= ∑i EQ.3.10
2) Brilho: O brilho é um descritor que traduz para um objeto-imagem, a soma dos valores
espectrais médios dos “layers” que contenham informação espectral, dividido pela sua
quantidade (EQ.3.11).
1
1 Ln
iiL
bn =
= ∑i C EQ.3.11
onde, b é o valor médio de todas as bandas consideradas para o cálculo;
Ln é o número das bandas consideradas e;
iC é o valor médio da banda i.
3) Razão: Para um objeto qualquer, a razão de uma banda é formada pela divisão do valor
médio desta pela soma dos valores médios de todas as bandas que o formam, descrevendo a
predominância de uma banda sobre as demais (ANTUNES, 2003). Dado pela EQ.3.12.
L
1
CLL n
ii
rC
=
=
∑ EQ.3.12
4) Diferença média para a cena: É dada pela diferença entre o valor médio de uma
determinada banda em um determinado objeto, e o valor médio desta banda para a cena toda.
5) Razão da cena: Dado pela razão entre o valor médio de uma determinada banda em um
determinado objeto, e o valor médio desta banda para a cena toda.
52

3.5.2 DESCRITORES DE FORMA
A forma é uma propriedade que, em interpretação de imagens, permite uma percepção
associativa dos objetos-imagem. Para ser feita uma análise quantitativa destes objetos, são
consideradas suas propriedades geométricas. Os descritores de forma utilizados pelo
eCognition são baseados ou na matriz de variância-covariância dos pixels formadores de um
objeto, que traduz as propriedades estatísticas da distribuição espacial destes pixels; ou no
retângulo envolvente deste objeto, que fornece o grau de preenchimento(f) deste objeto. Tal
grau é dado pela razão entre a área do objeto (A) pela do retângulo ou quadrado (a.b) que o
contenha, ou seja, o retângulo mínimo envolvente (JAHNE, 1997; DEFINIENS IMAGING,
2000; ANTUNES, 2003).
A matriz de variância-covariância S do objeto é dada pela EQ.3.13.
( ) ( )( ) ( )
Var X Cov XYS
Cov XY Var Y⎛
= ⎜⎝ ⎠
⎞⎟ EQ.3.13
onde, X corresponde às x-coordenadas dos pixels que compõem o objeto, e Y corresponde às
y-coordenadas dos pixels que compõe o objeto.
Os descritores de forma adotados nesta dissertação são:
1) Área: É dada pela área que um pixel ocupa no terreno vezes o número de pixels que
compõe o objeto.
2) Comprimento/largura: Determinado pelo menor dos valores obtidos por: a) razão entre o
maior dos autovalores da matriz de variância-covariância pelo menor; ou b) (a2 + ((1-
f).b)2)/A, que deriva do retângulo envolvente do objeto.
3) Densidade: Pode ser expressa pela área coberta pelo objeto-imagem dividida pelo seu raio.
É tanto maior conforme o objeto seja mais próximo de um quadrado. Sendo dada pela
EQ.3.14.
1 ( ) (nd
Var X Var Y=
+ + ) EQ.3.14
onde, n é o número de pixels que formam um objeto e o raio é aproximado usando a matriz de
variância-covariância.
4) Assimetria: Um objeto é aproximado a uma elipse envolvente, que tem seu eixo maior (m)
e seu eixo menor (n) correspondendo ao maior comprimento e a maior largura do objeto,
respectivamente. É dada por 1- (n/m) e é maior para objetos mais alongados.
53
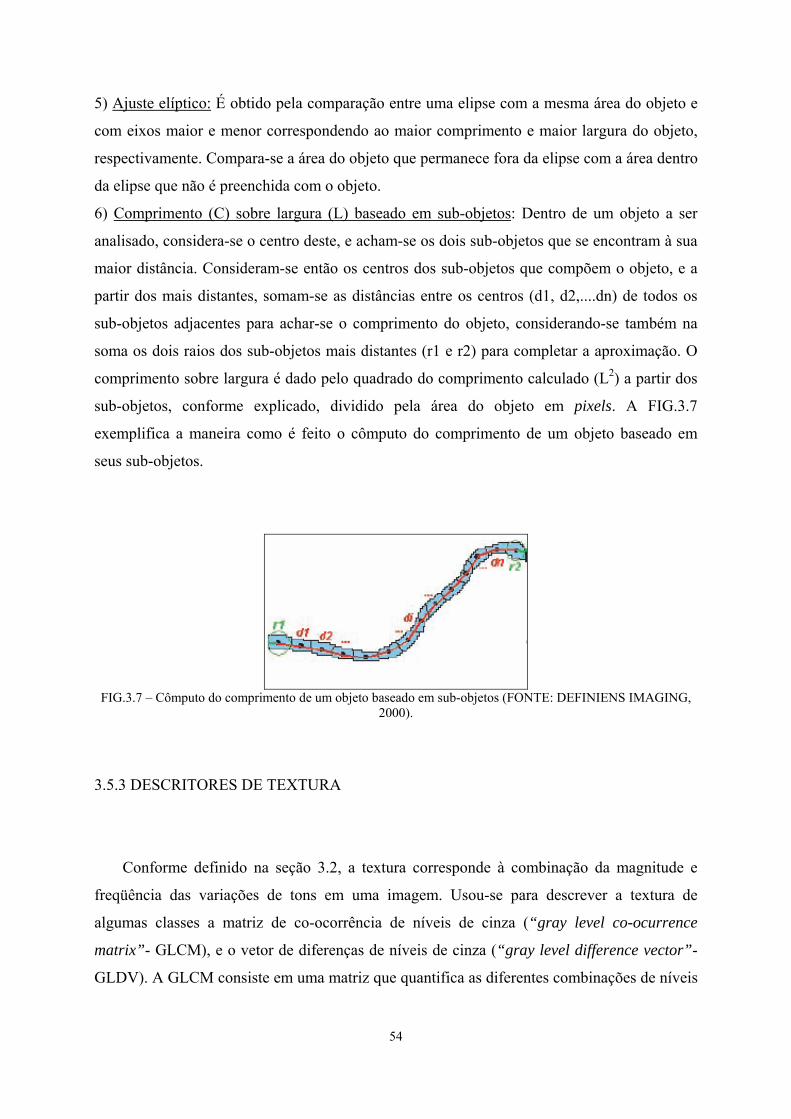
5) Ajuste elíptico: É obtido pela comparação entre uma elipse com a mesma área do objeto e
com eixos maior e menor correspondendo ao maior comprimento e maior largura do objeto,
respectivamente. Compara-se a área do objeto que permanece fora da elipse com a área dentro
da elipse que não é preenchida com o objeto.
6) Comprimento (C) sobre largura (L) baseado em sub-objetos: Dentro de um objeto a ser
analisado, considera-se o centro deste, e acham-se os dois sub-objetos que se encontram à sua
maior distância. Consideram-se então os centros dos sub-objetos que compõem o objeto, e a
partir dos mais distantes, somam-se as distâncias entre os centros (d1, d2,....dn) de todos os
sub-objetos adjacentes para achar-se o comprimento do objeto, considerando-se também na
soma os dois raios dos sub-objetos mais distantes (r1 e r2) para completar a aproximação. O
comprimento sobre largura é dado pelo quadrado do comprimento calculado (L2) a partir dos
sub-objetos, conforme explicado, dividido pela área do objeto em pixels. A FIG.3.7
exemplifica a maneira como é feito o cômputo do comprimento de um objeto baseado em
seus sub-objetos.
FIG.3.7 – Cômputo do comprimento de um objeto baseado em sub-objetos (FONTE: DEFINIENS IMAGING,
2000).
3.5.3 DESCRITORES DE TEXTURA
Conforme definido na seção 3.2, a textura corresponde à combinação da magnitude e
freqüência das variações de tons em uma imagem. Usou-se para descrever a textura de
algumas classes a matriz de co-ocorrência de níveis de cinza (“gray level co-ocurrence
matrix”- GLCM), e o vetor de diferenças de níveis de cinza (“gray level difference vector”-
GLDV). A GLCM consiste em uma matriz que quantifica as diferentes combinações de níveis
54

de cinza que ocorrem em uma imagem, computadas através da distribuição de probabilidades
de características espaciais destas combinações. O GLDV é a soma das diagonais da GLCM
(HARALICK et al 1973; DEFINIENS IMAGING 2000).
Medem-se as distâncias (d) entre dois pixels vizinhos, sendo essa distância determinada
pela relação espacial considerada, que determina também uma direção fixa(θ ) a partir de um
“pixel” de referência a outro. As direções usadas pelo eCognition são mostradas na FIG.3.8,
cada uma determinando uma matriz de ocorrência diferente.
FIG.3.8 – Direções consideradas pelo eCognition, no cálculo da GLCM (FONTE: DEFINIENS IMAGING,
2000).
O cálculo da distância entre dois pixels vizinhos é dado pela EQ.3.15.
d((K,l),(m,n) = max{| k-m|, |l-n|} EQ.3.15
onde, (k,l) e (m,n) são as coordenadas dos dois pixels vizinhos.
A partir daí usam-se equações para a contagem das ocorrências dos pixels nas direções
consideradas. Para a direção de 90º mostrada na FIG 3.7, tem-se a EQ.3.16.
P(i,j,d,90º) = #{((k,l),(m,n)) ∈ f |k-m = 0, | l-n| = d, f (k,l) = i, f(m,n) = j} EQ.3.16
onde, # denota o número de pixels do objeto.
As matrizes resultantes são então normalizadas, e após isto são aplicadas as equações que
medem as características espaciais das combinações dos pixels (MEDEIROS, 2001). Foram
adotadas as seguintes características:
1) GLCM entropia: indica o grau de distribuição dos elementos da matriz , sendo alto se estes
elementos estão distribuídos uniformemente.
55
2) GLCM contraste: indica a variação da heterogeneidade local na imagem. Sua função
matemática tem uma variação exponencial.
3) GLDV entropia: indica o grau de homogeneidade local na imagem.
4) GLDV média: indica a variação da heterogeneidade local na imagem. É equivalente a
característica indicada no item 2), mas sua função matemática tem uma variação linear,
diferentemente do contraste (DEFINIENS IMAGING, 2000).
3.5.4 DESCRITORES DE CONTEXTO
O contexto é o descritor que relaciona objetos-imagem entre si, de acordo com a rede
hierárquica de segmentação, conforme mencionado na seção 3.4.2. Permite relacionar super-
objetos com objetos e objetos com sub-objetos. Os seguintes descritores foram usados para
relacionar os objetos entre si:
1) Existência de super-objetos: indica se o objeto da classe A pertence ao super-objeto da
classe B. Caso o objeto pertença, o descritor resultará em um valor 1 (VERDADEIRO). Caso
não pertença, será retornado o valor 0 (FALSO).
2) Área relativa de sub-objetos: a área do objeto da classe A dividida pela área relativa de sub-
objetos da classe B, dentro deste objeto. Seu intervalo de variação é entre [0,1].
3) Existência de objetos vizinhos a uma distância x: indica se, em um perímetro pré-
determinado de um objeto da classe A, existem objetos pertencentes a uma classe B. Caso
exista, o descritor resultará em um valor 1 (VERDADEIRO). Caso não exista, será retornado
o valor 0 (FALSO).
4) Valor de classificação: fornece um grau de associação (seção 3.7) variável a um objeto para
uma classe A, quando este tiver um grau de associação relativo a outra classe B. Seu intervalo
de variação é entre [0,1].
5) Distância a objetos vizinhos: relativo à distância em pixels do objeto da classe A ao mais
próximo objeto vizinho da classe B. Seu intervalo de variação varia entre 0 e o tamanho da
cena.
6) Classificado como: Para o caso em que se queira criar uma classe B, formada por objetos já
classificados na classe A. Este descritor retorna um valor de 1 (VERDADEIRO), ou 0
(FALSO).
56
3.6 CLASSIFICAÇÃO DE IMAGENS
A classificação automática de imagens diz respeito a associar todos os pixels de uma
cena ou todos os seus objetos-imagem a um “rótulo” descrevendo um tipo (ou classe) de
feição no terreno (vegetação, solo,etc.). O primeiro conceito (associação a pixels) é
denominado de classificação pixel a pixel, e o segundo (associação a objetos-imagem),
classificação orientada a objeto. Pode-se empregar uma combinação dos dois métodos da
seguinte forma: inicialmente é feita uma classificação baseada no pixel, para separar os
objetos uns dos outros e da vizinhança e, após isto, realiza-se uma classificação orientada ao
objeto que refine a classificação inicial e aproveite as propriedades geométricas de cada feição
ou conjuntos de feições (JÄHNE, 1997).
Um dos principais objetivos do sensoriamento remoto é o de distinguir as composições de
diferentes materiais superficiais e identificá-los, sejam eles tipos de vegetação, padrões de uso
do solo, rochas e outros. Tal distinção e identificação tornam-se possíveis devido ao fato dos
materiais superficiais terem comportamentos específicos ao longo do espectro
eletromagnético, comportamentos esses que podem, portanto, ser usados para identificá-los
CRÓSTA (1993).
Dentro das técnicas de classificação pixel a pixel, destacam-se duas formas que podem
ser empregadas: não-supervisionada e supervisionada. No primeiro caso o computador decide,
com base em regras estatísticas, quais as classes que serão separadas e quais os pixels que
pertencem a cada uma. No segundo caso, o usuário identifica alguns dos correspondentes às
classes desejadas e deixa ao computador a tarefa de localizar os demais com base em critérios
estatísticos. A classificação não-supervisionada obtém resultados pouco precisos e
normalmente não é utilizada em separado. Os pixels são reunidos através de algoritmos de
agrupamento, em grupos homogêneos, cujos padrões de refletância são similares. As
classificações que utilizam métodos supervisionados e não supervisionados denominam-se
híbridas e são mais eficientes do a aplicação de um ou outro método somente (IWAI, 2003;
INPE, 2004).
Uma técnica recente que está sendo empregada é a análise orientada a objeto, que parte
do princípio de que a informação semântica necessária para interpretar uma imagem não é
representada em nível do pixel, mas no significado dos objetos da imagem e nas suas relações
mútuas. As razões para a escolha da abordagem orientada a objeto são várias: a classificação
57

orientada a objeto aproxima-se mais dos processos cognitivos humanos que as análises
baseadas no pixel; os usuários de geoprocessamento podem empregar objetos na forma de
polígonos, ou seja, os dados podem ser importados em Sistemas de Informações Geográficas
(SIG); e categorias de difícil identificação na abordagem ao nível do pixel podem ser
identificadas com a análise da forma da feição ou objeto (GONÇALVES, et al., 2001).
Dentro deste contexto, utilizam-se normalmente classificadores que consideram funções
de associação (cuja definição será feita na seção 3.7) que empregam lógica nebulosa ou
“fuzzy”. Inicialmente são feitas várias segmentações na imagem para pré-selecionar os
conjuntos de classes, e entre estas classes são atribuídas funções de associação que variam de
0 à 1 (GONÇALVES, et al., 2001). Uma determinada sub-classe pode pertencer inteiramente
a um nível superior, caso em que se atribui valor 1 ou não ter nenhuma relação de associação,
caso em que se atribui valor 0 . Caso a estimativa seja de que 50 % dos elementos pertençam
a um nível superior, atribui-se o valor 0.5 e assim por diante. Segundo ANTUNES, (2003),
que utilizou a técnica de classificação orientada a objeto em uma imagem IKONOS, para
classificar tipos de cobertura vegetal em ambiente ciliar, e comparou-a com uma classificação
ao nível do pixel, esta última não permite fazer o uso das potencialidades espectrais e
espaciais da imagem de alta resolução espacial.
Segundo SCHOWENGERDT (1997), os algoritmos computacionais que operam a
classificação de imagens, podem ser agrupados em dois tipos: paramétricos ou não-
paramétricos. Os paramétricos seguem uma determinada distribuição estatística (normalmente
a distribuição normal), e requerem a estimativa de parâmetros de distribuição, como vetor de
média espectral e matriz de covariância. Os classificadores não paramétricos não fazem
suposições a respeito da distribuição de probabilidade e normalmente são chamados de
robustos, pois podem trabalhar com uma grande variedade de distribuição de classes, desde
que suas assinaturas espectrais sejam razoavelmente distintas.
3.7 TEORIA “FUZZY”
Um conjunto “fuzzy” é caracterizado por uma função de associação que assinala a cada
objeto um grau de associação variando de zero a um. Alguns objetos não têm um critério
definido de associação, no que diz respeito a pertencerem exatamente a uma determinada
58

classe sem certa ambigüidade embutida. Da mesma forma, algumas classes de conjuntos, que
na matemática usual não são bem definidos, desempenham um papel importante no
pensamento humano, particularmente, no que diz respeito aos domínios do reconhecimento de
feições, comunicação de informação e abstração (ZADEH, 1965).
ZADEH (1965) definiu algumas das principais propriedades dos conjuntos “fuzzy”, que
são listadas a seguir:
1) a função de associação de um conjunto “fuzzy” A em um espaço de objetos X é a função
fa(x) que associa a cada elemento x genérico de X um número real contido no intervalo [0,1].
O valor desta função traduz-se no grau de associação de x em A. Desta forma, quanto mais
próximo de um, maior é seu grau de associação em um dado conjunto;
2) um conjunto “fuzzy” é dito vazio se e somente se todas as suas funções de associação são
idênticas a zero em X;
3) dois conjuntos “fuzzy” A e B são iguais, ou seja, A=B, se e somente se , para todo x ∈ X ,
fa(x) = fb(x); também denotado por fa = fb;
4) o complemento de um conjunto “fuzzy” A, denotado por A’, é definido por fa’=1-fa.;
5) um conjunto “fuzzy” A está contido em outro conjunto “fuzzy” B, se e somente se, fa≤ fb ou
A⊂B f⇔ a≤ fb;
6) a união de dois conjuntos “fuzzy” A e B com funções de associação fa(x) e fb(x),
respectivamente , é definida por C=A∪B, onde sua função de associação fc(x) =Max [fa(x), fb(x)], sendo x ∈X ( diz-se que fc(x) =fa(x)∨ fb(x)). A união segue a propriedade associativa da
teoria dos conjuntos. Uma definição diferente de união é a seguinte: caso C=A B, então, C é
o
∪
menor conjunto “fuzzy” que contém ambos A e B. Isto significa que, se D é qualquer
conjunto “fuzzy” que contém A e B, então D contém a união de A com B;
7) a interseção de dois conjuntos “fuzzy” A e B , A∩B ; cujas funções de associação são
denotadas por fa(x) e fb(x), tem função de associação descrita por: fc(x) =Min [fa(x), fb(x)],
sendo x ∈X ( diz-se que fc(x) =fa(x)∧ fb(x)). Analogamente à definição de união, a interseção
segue a propriedade associativa dos conjuntos e pode ter uma definição alternativa, que diz
que a interseção de dois conjuntos “fuzzy” representa o maior conjunto “fuzzy” que está
contido em ambos . No caso de dois conjuntos disjuntos, sua interseção é vazia. A FIG.3.9
mostra o conceito de união e interseção de dois conjuntos A e B com funções de associação fa
e fb, respectivamente. A união é representada pela linha tracejada e a interseção pela linha
cheia;
59
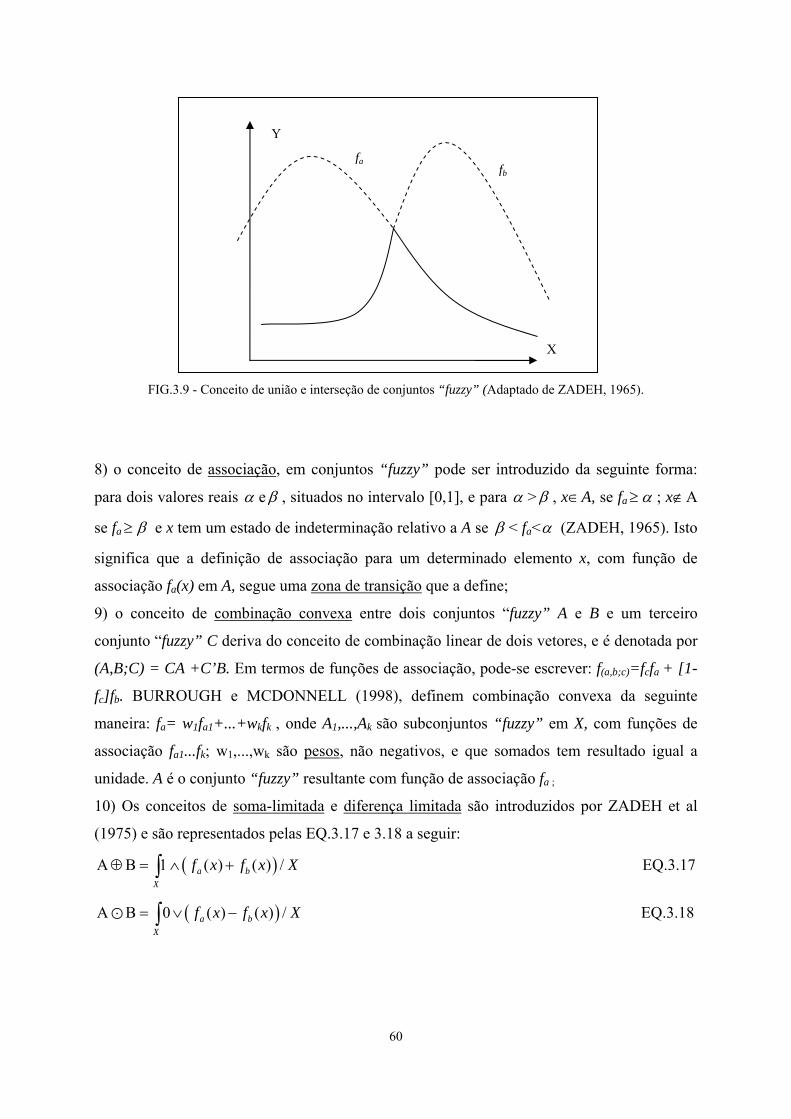
fbfa
X
Y
FIG.3.9 - Conceito de união e interseção de conjuntos “fuzzy” (Adaptado de ZADEH, 1965).
8) o conceito de associação, em conjuntos “fuzzy” pode ser introduzido da seguinte forma:
para dois valores reais α e β , situados no intervalo [0,1], e para α > β , x∈A, se fa≥ α ; x∉A
se fa≥ β e x tem um estado de indeterminação relativo a A se β < fa<α (ZADEH, 1965). Isto
significa que a definição de associação para um determinado elemento x, com função de
associação fa(x) em A, segue uma zona de transição que a define;
9) o conceito de combinação convexa entre dois conjuntos “fuzzy” A e B e um terceiro
conjunto “fuzzy” C deriva do conceito de combinação linear de dois vetores, e é denotada por
(A,B;C) = CA +C’B. Em termos de funções de associação, pode-se escrever: f(a,b;c)=fcfa + [1-
fc]fb. BURROUGH e MCDONNELL (1998), definem combinação convexa da seguinte
maneira: fa= w1fa1+...+wkfk , onde A1,...,Ak são subconjuntos “fuzzy” em X, com funções de
associação fa1...fk; w1,...,wk são pesos, não negativos, e que somados tem resultado igual a
unidade. A é o conjunto “fuzzy” resultante com função de associação fa ;
10) Os conceitos de soma-limitada e diferença limitada são introduzidos por ZADEH et al
(1975) e são representados pelas EQ.3.17 e 3.18 a seguir:
( ( ) ( ) /a bX
)f x f x XΑ⊕Β = 1∧ +∫ EQ.3.17
(0 ( ) ( ) /a bX
)f x f x XΑ Β = ∨ −∫ EQ.3.18
60
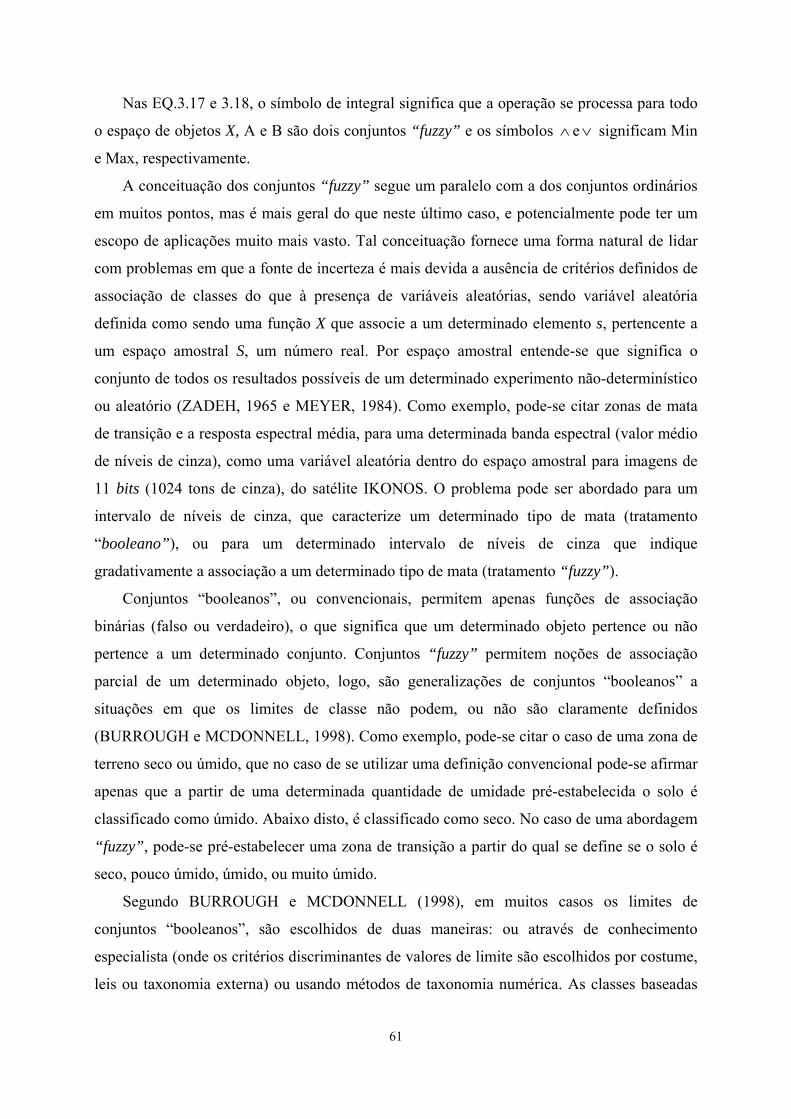
Nas EQ.3.17 e 3.18, o símbolo de integral significa que a operação se processa para todo
o espaço de objetos X, A e B são dois conjuntos “fuzzy” e os símbolos e significam Min
e Max, respectivamente.
∧ ∨
A conceituação dos conjuntos “fuzzy” segue um paralelo com a dos conjuntos ordinários
em muitos pontos, mas é mais geral do que neste último caso, e potencialmente pode ter um
escopo de aplicações muito mais vasto. Tal conceituação fornece uma forma natural de lidar
com problemas em que a fonte de incerteza é mais devida a ausência de critérios definidos de
associação de classes do que à presença de variáveis aleatórias, sendo variável aleatória
definida como sendo uma função X que associe a um determinado elemento s, pertencente a
um espaço amostral S, um número real. Por espaço amostral entende-se que significa o
conjunto de todos os resultados possíveis de um determinado experimento não-determinístico
ou aleatório (ZADEH, 1965 e MEYER, 1984). Como exemplo, pode-se citar zonas de mata
de transição e a resposta espectral média, para uma determinada banda espectral (valor médio
de níveis de cinza), como uma variável aleatória dentro do espaço amostral para imagens de
11 bits (1024 tons de cinza), do satélite IKONOS. O problema pode ser abordado para um
intervalo de níveis de cinza, que caracterize um determinado tipo de mata (tratamento
“booleano”), ou para um determinado intervalo de níveis de cinza que indique
gradativamente a associação a um determinado tipo de mata (tratamento “fuzzy”).
Conjuntos “booleanos”, ou convencionais, permitem apenas funções de associação
binárias (falso ou verdadeiro), o que significa que um determinado objeto pertence ou não
pertence a um determinado conjunto. Conjuntos “fuzzy” permitem noções de associação
parcial de um determinado objeto, logo, são generalizações de conjuntos “booleanos” a
situações em que os limites de classe não podem, ou não são claramente definidos
(BURROUGH e MCDONNELL, 1998). Como exemplo, pode-se citar o caso de uma zona de
terreno seco ou úmido, que no caso de se utilizar uma definição convencional pode-se afirmar
apenas que a partir de uma determinada quantidade de umidade pré-estabelecida o solo é
classificado como úmido. Abaixo disto, é classificado como seco. No caso de uma abordagem
“fuzzy”, pode-se pré-estabelecer uma zona de transição a partir do qual se define se o solo é
seco, pouco úmido, úmido, ou muito úmido.
Segundo BURROUGH e MCDONNELL (1998), em muitos casos os limites de
conjuntos “booleanos”, são escolhidos de duas maneiras: ou através de conhecimento
especialista (onde os critérios discriminantes de valores de limite são escolhidos por costume,
leis ou taxonomia externa) ou usando métodos de taxonomia numérica. As classes baseadas
61

em conhecimento especialista são normalmente impostas ou importadas sem referência direta
ao conjunto de dados locais. Os métodos de taxonomia numérica são principalmente
ferramentas de pesquisa direcionadas aos dados. Ambos os métodos podem ser utilizados em
conjuntos ”fuzzy”. O primeiro método, chamado de abordagem por importação de semântica
(IS), utiliza funções de associação a “priori”, onde os objetos podem ser assinalados a um
grau de associação. O segundo método é equivalente a análise através de algoritmos de
agrupamento e taxonomia numérica, em que o valor de uma função de associação é uma
função do classificador utilizado.
O modelo de importação semântica é útil em situações onde o usuário tem uma boa idéia
qualitativa sobre como agrupar os dados, mas tem dificuldade em associá-los com o padrão de
um conjunto “booleano” (BURROUGH e MCDONNELL , 1998).
A descrição das principais funções de associação utilizadas neste modelo é dada pela
FIG.3.10, e que se traduz da seguinte forma:
a) função “booleana”, ou conjunto crespo: y=1, se b1≤ x≤ b2; y=0, se x< b1 ou x> b2;
b) função linear: formada pelo encontro de duas retas que se cruzam no centro do conjunto
“booleano”. A inclinação das retas fornece a largura da zona de transição. O ponto onde o
grau de associação é igual a 0.5 é chamado de ponto de cruzamento;
c) função Sigmoidal, cuja fórmula é dada pela EQ 3.19:
( )2
11 ( )
ya x c
=+ −
, EQ. 3.19
para 0 x P (período), ≤ ≤
onde: a é o parâmetro que governa a forma da função;c é o ponto onde a função tem grau de
associação igual a um;
d) no caso de se desejar uma região onde se tenha graus de associação igual a um (que é
chamado de núcleo da função), e zonas de transição de graus de associação, pode-se utilizar a
função descrita pelas equações EQ 3.20 e EQ 3.21:
2
1 1
1
1
1
yx b d
d
=⎛ ⎞− −
+ ⎜ ⎟⎝ ⎠
, se x<b1+d1; EQ. 3.20
y = 1, se b1+d1≤ x b≤ 2 - d2 ;
2
2 2
2
1
1
yx b d
d
=⎛ ⎞− +
+ ⎜ ⎟⎝ ⎠
, se x> b2 - d EQ. 3.21
62
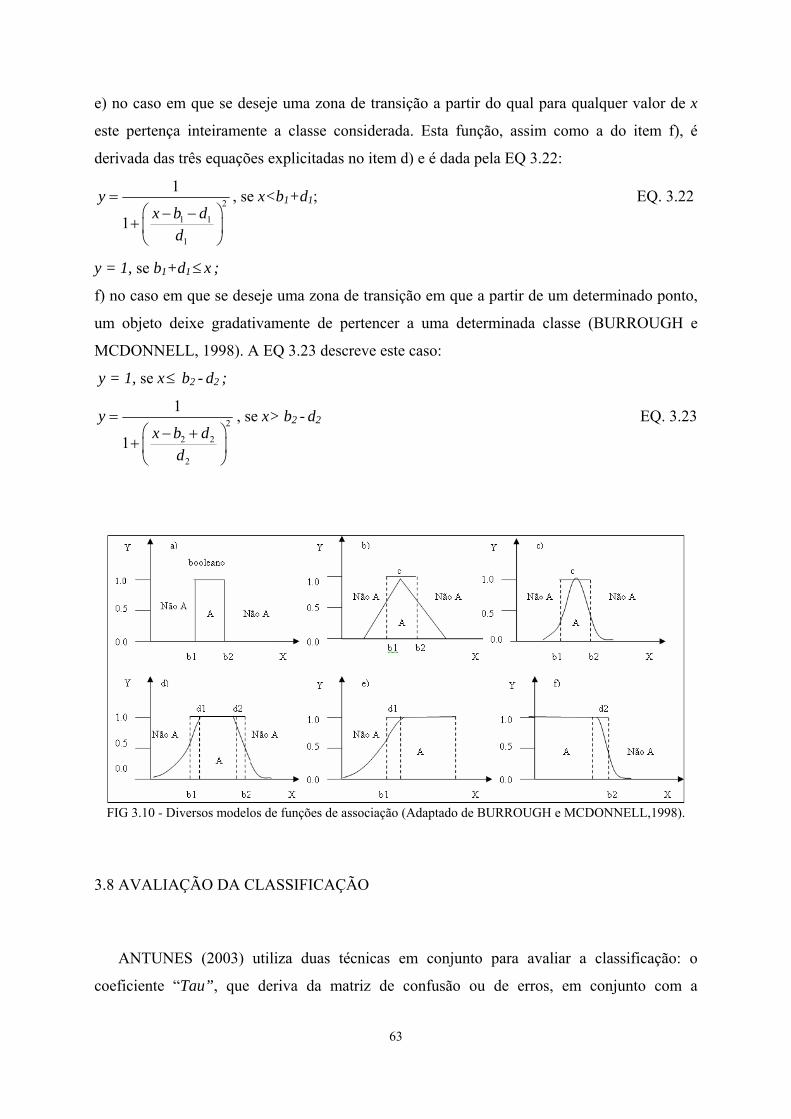
e) no caso em que se deseje uma zona de transição a partir do qual para qualquer valor de x
este pertença inteiramente a classe considerada. Esta função, assim como a do item f), é
derivada das três equações explicitadas no item d) e é dada pela EQ 3.22:
2
1 1
1
1
1
yx b d
d
=⎛ ⎞− −
+ ⎜ ⎟⎝ ⎠
, se x<b1+d1; EQ. 3.22
y = 1, se b1+d1≤ x ;
f) no caso em que se deseje uma zona de transição em que a partir de um determinado ponto,
um objeto deixe gradativamente de pertencer a uma determinada classe (BURROUGH e
MCDONNELL, 1998). A EQ 3.23 descreve este caso:
y = 1, se x b≤ 2 - d2 ;
2
2 2
2
1
1
yx b d
d
=⎛ ⎞− +
+ ⎜ ⎟⎝ ⎠
, se x> b2 - d2 EQ. 3.23
FIG 3.10 - Diversos modelos de funções de associação (Adaptado de BURROUGH e MCDONNELL,1998).
3.8 AVALIAÇÃO DA CLASSIFICAÇÃO
ANTUNES (2003) utiliza duas técnicas em conjunto para avaliar a classificação: o
coeficiente “Tau”, que deriva da matriz de confusão ou de erros, em conjunto com a
63
ambigüidade da classificação a partir do grau de associação. A matriz de confusão ou de erros
é uma matriz quadrada que tem em suas colunas, os dados que servem de referência para o
teste da acurácia e o número de pixels ou amostras que compõem cada classe, e, em suas
linhas, os dados de teste e o número de pixels ou amostras que foram classificados e vão ser
testados (CONGALTON e GREEN, 1999). O coeficiente “Tau” é baseado em uma relação
entre a concordância observada, que se traduz no número total de elementos corretamente
classificados pelo número total de elementos, e a concordância a priori ou esperada (MA e
REDMOND, 1995). O coeficiente “Kappa”, difere do “Tau” apenas por considerar as
probabilidades a posteriori (CONGALTON e GREEN, 1999).
A ambigüidade é apresentada por ANTUNES, (2003), e trabalha com a possibilidade de
uma feição, por ser classificada com regras “fuzzy”, ter diferentes graus de associação para
determinadas classes, ou seja, não pertencer a apenas uma única classe. Na classificação
orientada a objeto, os objetos-imagem são rotulados à classe de maior grau de associação.
Assim, se uma feição apresentar graus de associação próximos, relativos a duas ou mais
classes, isto indicaria uma instabilidade na classificação. A ambigüidade seria então calculada
como sendo a diferença entre o primeiro e o segundo maiores graus de associação sobre o
primeiro maior grau.
O processo de análise de resultados em classificações envolve um conjunto de amostras
locais que são coletadas no campo, sendo então empregadas análises estatísticas da área de
estudo inteira e das classes em separado. A matriz de confusão ou de erros avalia os
resultados da classificação comparando dados de confiabilidade assegurada, chamados de
verdade terrestre (dados de campo, fotografias aéreas, bases cartográficas), com os obtidos
pela classificação. Dispõem-se os dados da classificação nas linhas e os dados de verdade nas
colunas. Os erros em questão são de inclusão e omissão. Os erros de inclusão (EI) são
informações sobre os “pixels” incluídos erroneamente em uma classe e os de omissão (EO)
são informações daqueles que não foram incluídos em suas respectivas classes. Tais erros são
calculados a partir da interseção dos dados obtidos na classificação e os colhidos nas áreas
teste, provenientes da verdade no campo, sendo cada erro uma omissão da correta categoria e
uma comissão para uma categoria incorreta.
A matriz de erros é interpretada com o auxílio dos índices de acurácia global (relativa à
classificação como um todo), do produtor e do usuário (relativos às classes individualmente).
A acurácia global é dada pela soma de todos os elementos da diagonal principal da matriz. As
acurácias do produtor e usuário são dadas pela divisão (para cada classe), entre o número total
64
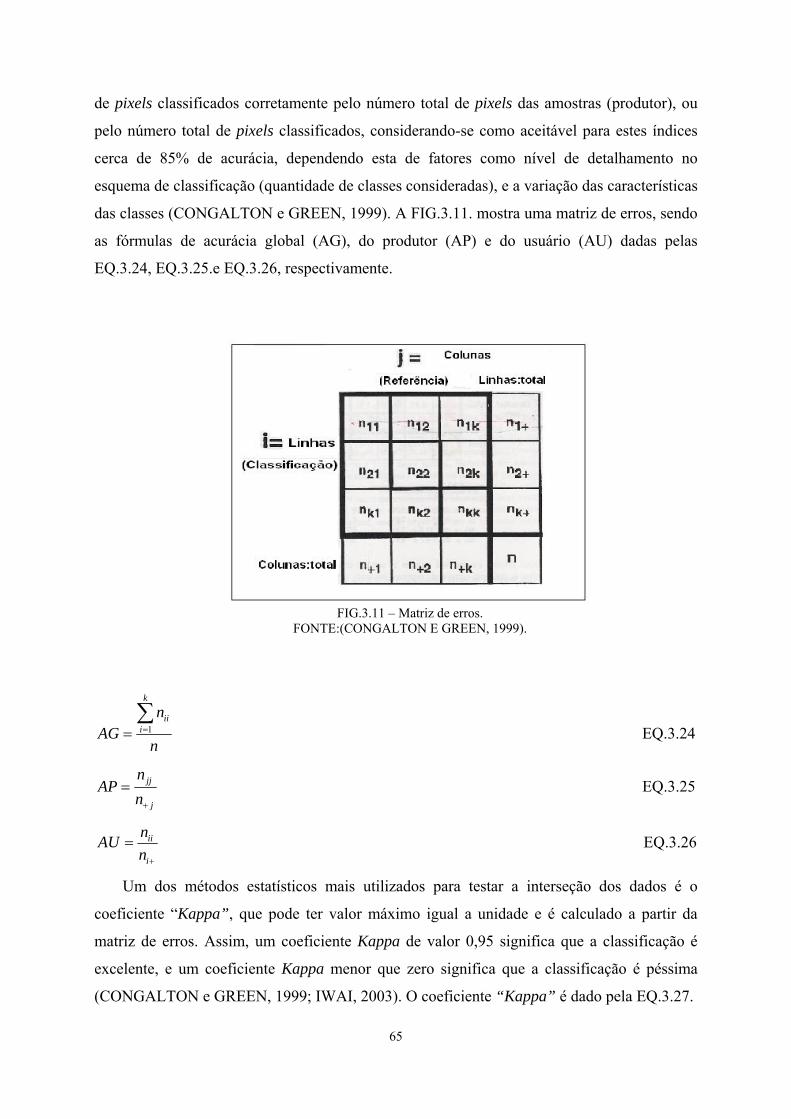
de pixels classificados corretamente pelo número total de pixels das amostras (produtor), ou
pelo número total de pixels classificados, considerando-se como aceitável para estes índices
cerca de 85% de acurácia, dependendo esta de fatores como nível de detalhamento no
esquema de classificação (quantidade de classes consideradas), e a variação das características
das classes (CONGALTON e GREEN, 1999). A FIG.3.11. mostra uma matriz de erros, sendo
as fórmulas de acurácia global (AG), do produtor (AP) e do usuário (AU) dadas pelas
EQ.3.24, EQ.3.25.e EQ.3.26, respectivamente.
FIG.3.11 – Matriz de erros.
FONTE:(CONGALTON E GREEN, 1999).
1
k
iii
nAG
n==∑
EQ.3.24
jj
j
nAP
n+
= EQ.3.25
ii
i
nAUn +
= EQ.3.26
Um dos métodos estatísticos mais utilizados para testar a interseção dos dados é o
coeficiente “Kappa”, que pode ter valor máximo igual a unidade e é calculado a partir da
matriz de erros. Assim, um coeficiente Kappa de valor 0,95 significa que a classificação é
excelente, e um coeficiente Kappa menor que zero significa que a classificação é péssima
(CONGALTON e GREEN, 1999; IWAI, 2003). O coeficiente “Kappa” é dado pela EQ.3.27.
65
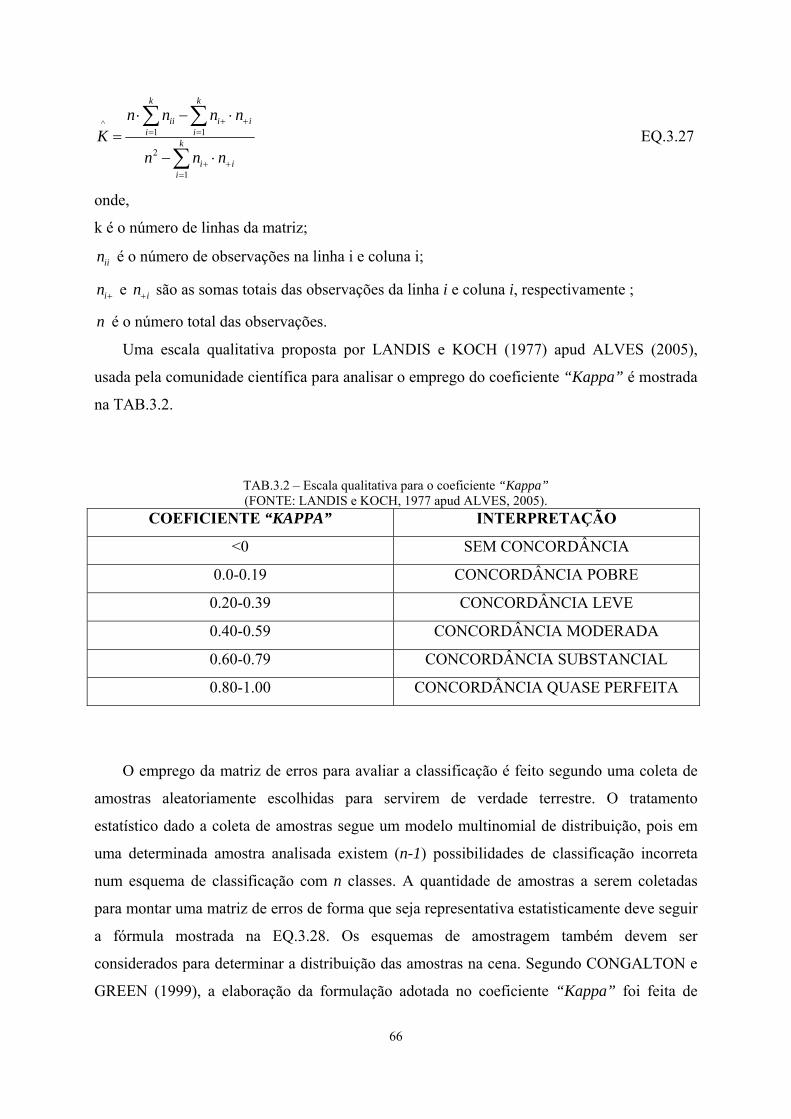
^1 1
2
1
k k
ii i ii i
k
i ii
n n n nK
n n n
+ += =
+ +=
⋅ − ⋅=
− ⋅
∑ ∑
∑ EQ.3.27
onde,
k é o número de linhas da matriz;
iin é o número de observações na linha i e coluna i;
in + e são as somas totais das observações da linha i e coluna i, respectivamente ; in+
n é o número total das observações.
Uma escala qualitativa proposta por LANDIS e KOCH (1977) apud ALVES (2005),
usada pela comunidade científica para analisar o emprego do coeficiente “Kappa” é mostrada
na TAB.3.2.
TAB.3.2 – Escala qualitativa para o coeficiente “Kappa” (FONTE: LANDIS e KOCH, 1977 apud ALVES, 2005).
COEFICIENTE “KAPPA” INTERPRETAÇÃO
<0 SEM CONCORDÂNCIA
0.0-0.19 CONCORDÂNCIA POBRE
0.20-0.39 CONCORDÂNCIA LEVE
0.40-0.59 CONCORDÂNCIA MODERADA
0.60-0.79 CONCORDÂNCIA SUBSTANCIAL
0.80-1.00 CONCORDÂNCIA QUASE PERFEITA
O emprego da matriz de erros para avaliar a classificação é feito segundo uma coleta de
amostras aleatoriamente escolhidas para servirem de verdade terrestre. O tratamento
estatístico dado a coleta de amostras segue um modelo multinomial de distribuição, pois em
uma determinada amostra analisada existem (n-1) possibilidades de classificação incorreta
num esquema de classificação com n classes. A quantidade de amostras a serem coletadas
para montar uma matriz de erros de forma que seja representativa estatisticamente deve seguir
a fórmula mostrada na EQ.3.28. Os esquemas de amostragem também devem ser
considerados para determinar a distribuição das amostras na cena. Segundo CONGALTON e
GREEN (1999), a elaboração da formulação adotada no coeficiente “Kappa” foi feita de
66
maneira a seguir o esquema de amostragem simplesmente aleatório, com as unidades de
amostragem tendo chances iguais de serem escolhidas.
2
(1 )
i
B i in
b⋅ ⋅ −
= ∏ ∏ EQ.3.28
onde,
B é o valor obtido em uma tabela de distribuição Qui quadrado com um grau de liberdade
para 1 / kα− , sendo α igual a [1-(nível de confiança)] e k igual ao número de classes do
esquema de classificação;
iΠ é a percentagem ocupada na cena pela classe de maior área e;
ib é a precisão desejada para cada célula da matriz de erros.
Neste capítulo, foram vistos os principais conceitos que deram suporte teórico para a
metodologia adotada na dissertação. A interpretação de imagens (seção 3.2), foi feita para
selecionar a área de estudo nas imagens IKONOS (seção 4.2.1), identificar as feições a serem
classificadas, determinar a escolha dos parâmetros de escala e quantidade de níveis adotados
na segmentação das imagens (seção 4.2.6.1), a implementação da rede de classificação (seção
4.2.6.2) e avaliar a classificação (seção 5.1). A análise de imagens por cognição e semântica
(seção 3.2) fornece um entendimento do que são objetos-imagem em termos de uma
modelagem orientada a objetos e, de como são estruturados tais objetos em uma rede
semântica que diz respeito à hierarquia de herança de atributos descritores de classes de
objetos (seção 4.2.6.2).
A segmentação de imagens (seção 3.4) é um dos alicerces da classificação orientada a
objeto e sua abordagem na fundamentação teórica deu ênfase ao processo de segmentação por
crescimento de regiões (seção 3.4.1) implementado na FNEA para extrair objetos-imagem em
múltiplas resoluções (seção 3.4.2), com o objetivo de que representem a natureza fractal de
uma imagem de sensoriamento remoto. Serviu para a determinação dos critérios de cor e
forma utilizados nos parâmetros de escala escolhidos para a segmentação e também para a
determinação de quais os níveis que seriam segmentados (seção 4.2.6.1), com um atributo
temático correspondente a declividade do terreno (seção 4.2.2). As classes de objetos foram
descritas através do emprego dos descritores de classes detalhados na seção 3.5, considerando
atributos espectrais, de forma e contexto. Tais descritores são vistos nas TAB.4.3, 4.4, 4.5 e
4.6 da seção 4.2.6.2. A classificação de imagens, que nesta dissertação é relativa aos objetos-
67
imagem, e é orientada ao objeto (seção 3.6), segue o modelo de importação de semântica da
teoria “fuzzy” (seção 3.7). As funções de associação que definem o intervalo e os graus de
associação de uma classe para cada descritor, estruturam-se na rede de classificação com os
operadores lógicos AND (min) e OR (max), conforme visto na seção 4.2.6.2. A avaliação da
classificação (seção 3.8) foi feita nas seções 5.1.1 e 5.1.2 levando em conta a ambigüidade da
classificação e sua acurácia, avaliada pelo emprego do coeficiente “Kappa” em matrizes de
erros.
68

4. MATERIAIS E MÉTODOS
Neste capítulo são abordados os procedimentos utilizados na presente dissertação em
ordem seqüencial. Desta forma, na primeira etapa, é mostrada a listagem do material
utilizado, e após isto, é descrita a metodologia adotada no desenvolvimento do trabalho.
4.1. MATERIAL UTILIZADO
Dados:
- Duas imagens IKONOS II da linha GEO Ortho Kit, com ângulo de elevação do sensor de
72,73º e 76,91º, com datas de aquisição de 13/03/2002 e 02/05/2002, respectivamente,
cedidas pela empresa SPACE IMAGING do Brasil;
- base cartográfica digital na escala 1:10000, da cidade do Rio de Janeiro, cedida pelo
Instituto Pereira Passos (IPP) ao IME, confeccionadas nos anos de 1999;
- ortofotos na escala 1:2000 e 1: 10000 do ano de 1999, também do IPP.
Programas:
- ENVI 4.0, Microstation 95, PCI 9.0, ArcView 3.2, todos da Seção de Engenharia
Cartográfica do Instituto Militar de Engenharia;
- eCognition 3.0, cedido pela 5ª Divisão de Levantamento.
4.2 METODOLOGIA ADOTADA
A metodologia adotada é formada pelas seguintes fases:
1) Seleção da área de estudo e coleta de dados (imagens, bases cartográficas e ortofotos);
2) geração de um modelo digital do terreno (MDT), e de um mapa de declividade com o MDT
gerado;
3) correção geométrica das imagens;
4) fusão de dados;
69
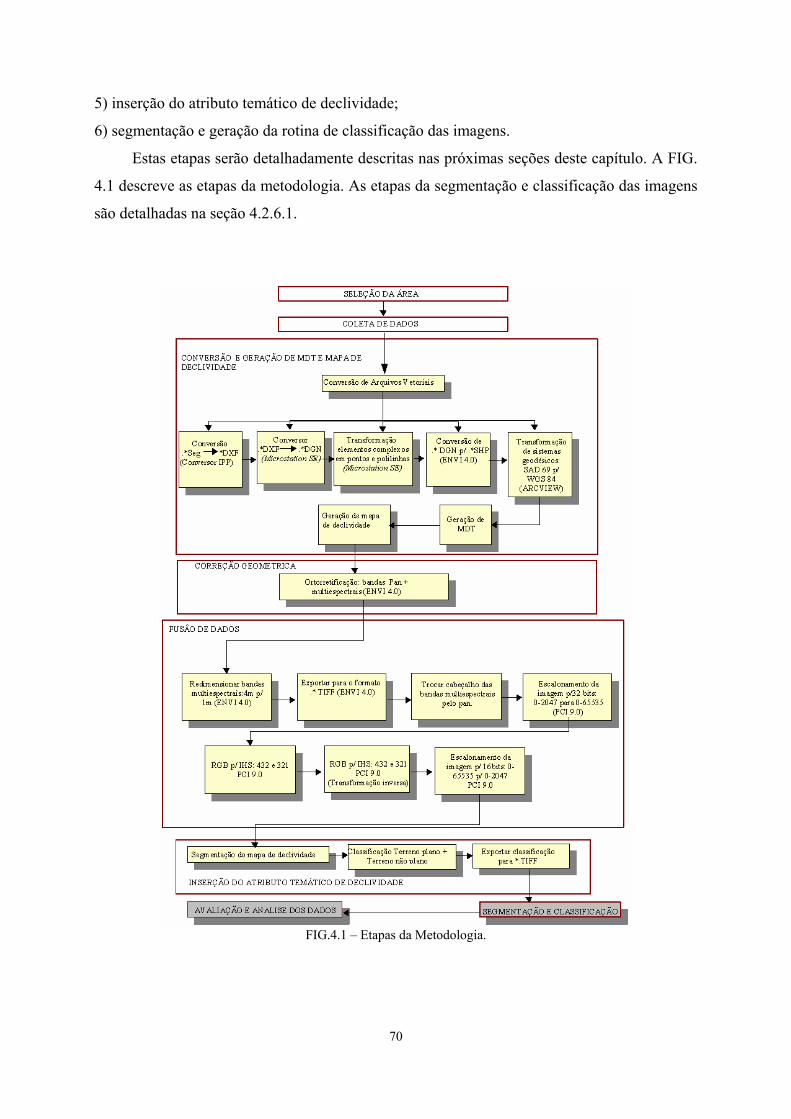
5) inserção do atributo temático de declividade;
6) segmentação e geração da rotina de classificação das imagens.
Estas etapas serão detalhadamente descritas nas próximas seções deste capítulo. A FIG.
4.1 descreve as etapas da metodologia. As etapas da segmentação e classificação das imagens
são detalhadas na seção 4.2.6.1.
FIG.4.1 – Etapas da Metodologia.
70
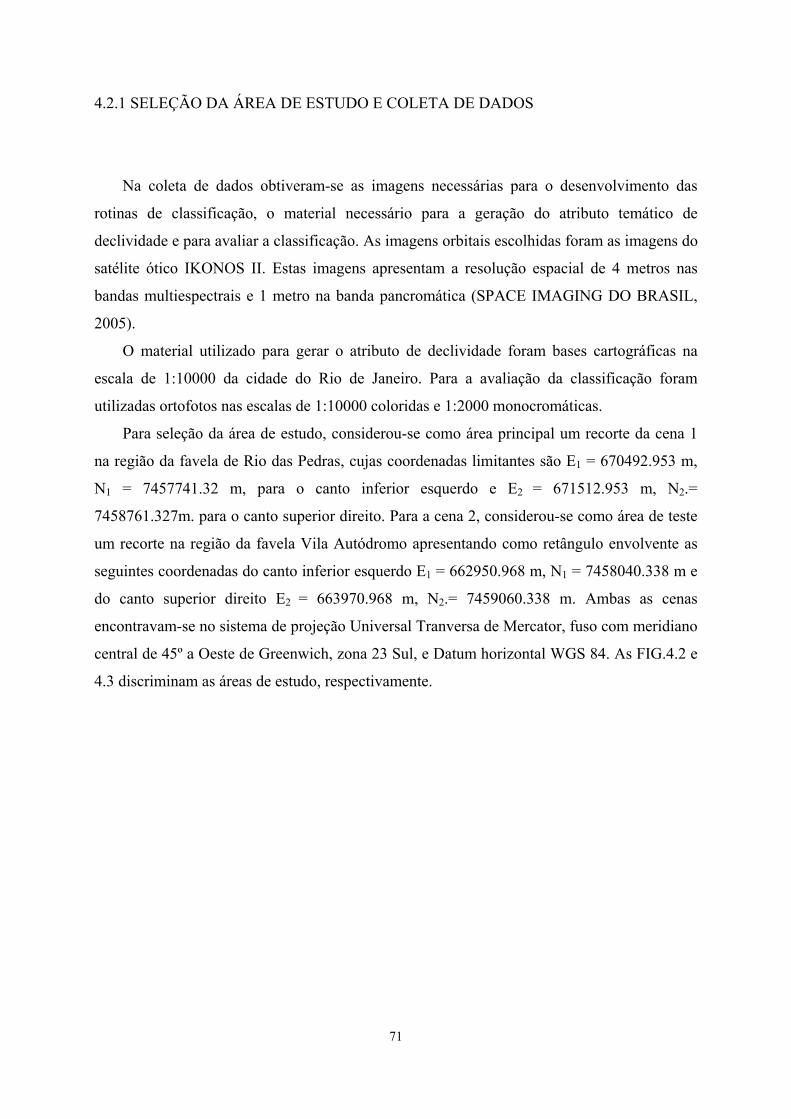
4.2.1 SELEÇÃO DA ÁREA DE ESTUDO E COLETA DE DADOS
Na coleta de dados obtiveram-se as imagens necessárias para o desenvolvimento das
rotinas de classificação, o material necessário para a geração do atributo temático de
declividade e para avaliar a classificação. As imagens orbitais escolhidas foram as imagens do
satélite ótico IKONOS II. Estas imagens apresentam a resolução espacial de 4 metros nas
bandas multiespectrais e 1 metro na banda pancromática (SPACE IMAGING DO BRASIL,
2005).
O material utilizado para gerar o atributo de declividade foram bases cartográficas na
escala de 1:10000 da cidade do Rio de Janeiro. Para a avaliação da classificação foram
utilizadas ortofotos nas escalas de 1:10000 coloridas e 1:2000 monocromáticas.
Para seleção da área de estudo, considerou-se como área principal um recorte da cena 1
na região da favela de Rio das Pedras, cujas coordenadas limitantes são E1 = 670492.953 m,
N1 = 7457741.32 m, para o canto inferior esquerdo e E2 = 671512.953 m, N2.=
7458761.327m. para o canto superior direito. Para a cena 2, considerou-se como área de teste
um recorte na região da favela Vila Autódromo apresentando como retângulo envolvente as
seguintes coordenadas do canto inferior esquerdo E1 = 662950.968 m, N1 = 7458040.338 m e
do canto superior direito E2 = 663970.968 m, N2.= 7459060.338 m. Ambas as cenas
encontravam-se no sistema de projeção Universal Tranversa de Mercator, fuso com meridiano
central de 45º a Oeste de Greenwich, zona 23 Sul, e Datum horizontal WGS 84. As FIG.4.2 e
4.3 discriminam as áreas de estudo, respectivamente.
71
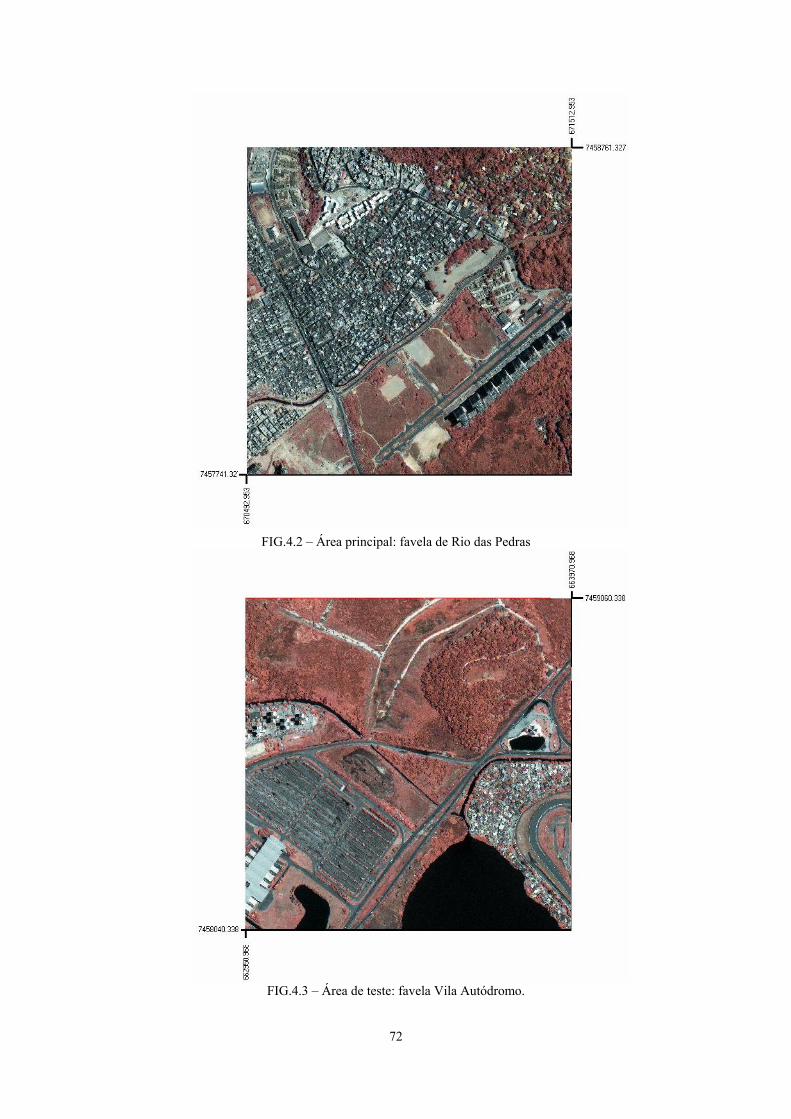
FIG.4.2 – Área principal: favela de Rio das Pedras
FIG.4.3 – Área de teste: favela Vila Autódromo.
72
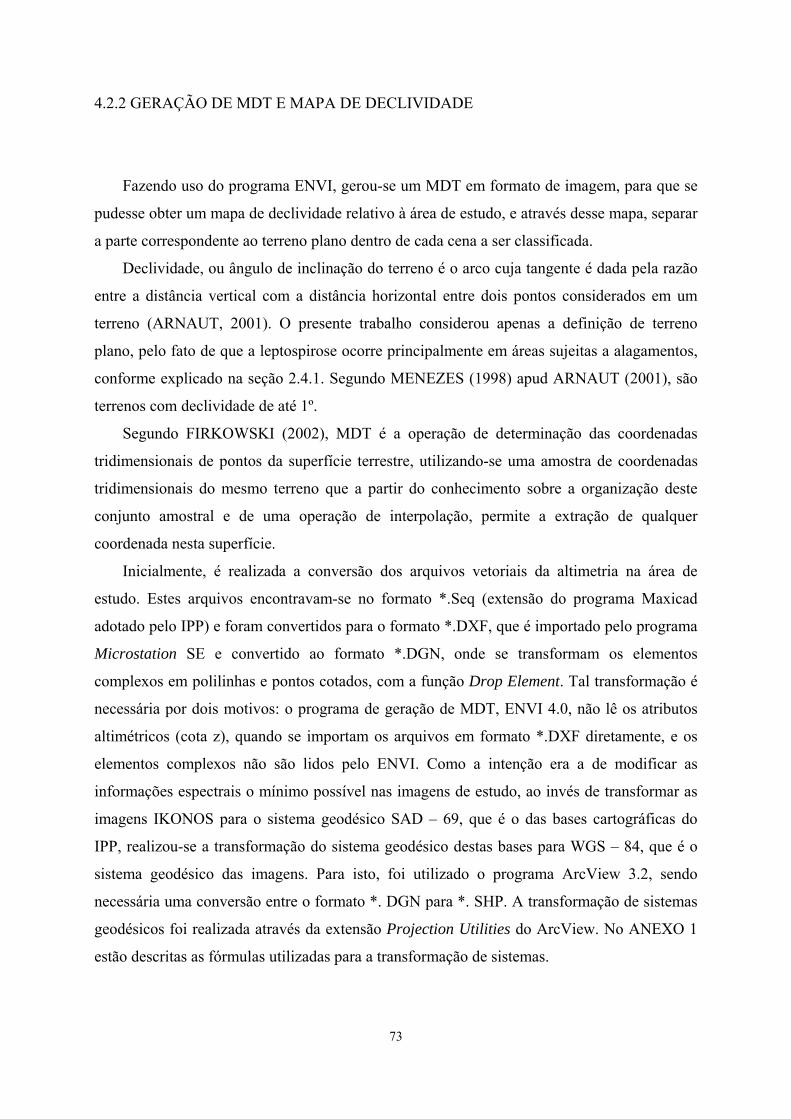
4.2.2 GERAÇÃO DE MDT E MAPA DE DECLIVIDADE
Fazendo uso do programa ENVI, gerou-se um MDT em formato de imagem, para que se
pudesse obter um mapa de declividade relativo à área de estudo, e através desse mapa, separar
a parte correspondente ao terreno plano dentro de cada cena a ser classificada.
Declividade, ou ângulo de inclinação do terreno é o arco cuja tangente é dada pela razão
entre a distância vertical com a distância horizontal entre dois pontos considerados em um
terreno (ARNAUT, 2001). O presente trabalho considerou apenas a definição de terreno
plano, pelo fato de que a leptospirose ocorre principalmente em áreas sujeitas a alagamentos,
conforme explicado na seção 2.4.1. Segundo MENEZES (1998) apud ARNAUT (2001), são
terrenos com declividade de até 1º.
Segundo FIRKOWSKI (2002), MDT é a operação de determinação das coordenadas
tridimensionais de pontos da superfície terrestre, utilizando-se uma amostra de coordenadas
tridimensionais do mesmo terreno que a partir do conhecimento sobre a organização deste
conjunto amostral e de uma operação de interpolação, permite a extração de qualquer
coordenada nesta superfície.
Inicialmente, é realizada a conversão dos arquivos vetoriais da altimetria na área de
estudo. Estes arquivos encontravam-se no formato *.Seq (extensão do programa Maxicad
adotado pelo IPP) e foram convertidos para o formato *.DXF, que é importado pelo programa
Microstation SE e convertido ao formato *.DGN, onde se transformam os elementos
complexos em polilinhas e pontos cotados, com a função Drop Element. Tal transformação é
necessária por dois motivos: o programa de geração de MDT, ENVI 4.0, não lê os atributos
altimétricos (cota z), quando se importam os arquivos em formato *.DXF diretamente, e os
elementos complexos não são lidos pelo ENVI. Como a intenção era a de modificar as
informações espectrais o mínimo possível nas imagens de estudo, ao invés de transformar as
imagens IKONOS para o sistema geodésico SAD – 69, que é o das bases cartográficas do
IPP, realizou-se a transformação do sistema geodésico destas bases para WGS – 84, que é o
sistema geodésico das imagens. Para isto, foi utilizado o programa ArcView 3.2, sendo
necessária uma conversão entre o formato *. DGN para *. SHP. A transformação de sistemas
geodésicos foi realizada através da extensão Projection Utilities do ArcView. No ANEXO 1
estão descritas as fórmulas utilizadas para a transformação de sistemas.
73
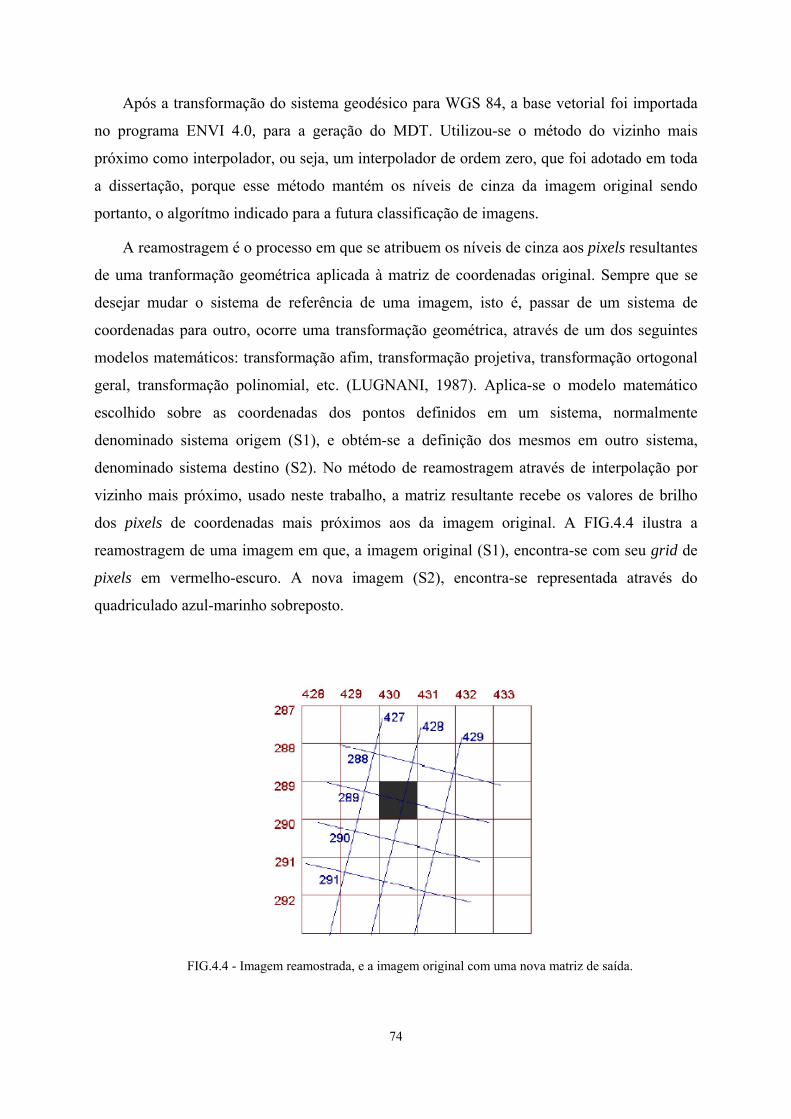
Após a transformação do sistema geodésico para WGS 84, a base vetorial foi importada
no programa ENVI 4.0, para a geração do MDT. Utilizou-se o método do vizinho mais
próximo como interpolador, ou seja, um interpolador de ordem zero, que foi adotado em toda
a dissertação, porque esse método mantém os níveis de cinza da imagem original sendo
portanto, o algorítmo indicado para a futura classificação de imagens.
A reamostragem é o processo em que se atribuem os níveis de cinza aos pixels resultantes
de uma tranformação geométrica aplicada à matriz de coordenadas original. Sempre que se
desejar mudar o sistema de referência de uma imagem, isto é, passar de um sistema de
coordenadas para outro, ocorre uma transformação geométrica, através de um dos seguintes
modelos matemáticos: transformação afim, transformação projetiva, transformação ortogonal
geral, transformação polinomial, etc. (LUGNANI, 1987). Aplica-se o modelo matemático
escolhido sobre as coordenadas dos pontos definidos em um sistema, normalmente
denominado sistema origem (S1), e obtém-se a definição dos mesmos em outro sistema,
denominado sistema destino (S2). No método de reamostragem através de interpolação por
vizinho mais próximo, usado neste trabalho, a matriz resultante recebe os valores de brilho
dos pixels de coordenadas mais próximos aos da imagem original. A FIG.4.4 ilustra a
reamostragem de uma imagem em que, a imagem original (S1), encontra-se com seu grid de
pixels em vermelho-escuro. A nova imagem (S2), encontra-se representada através do
quadriculado azul-marinho sobreposto.
FIG.4.4 - Imagem reamostrada, e a imagem original com uma nova matriz de saída.
74

A distância da grade regular escolhida para a geração do MDT foi de 1 metro, segundo a
metodologia utilizada por Silva (2005). Para a geração do mapa de declividade
redimensionou-se a imagem proveniente do MDT através de um processo de reamostragem,
para uma distância de grade de 4 metros e gerou-se um mapa de declividade com uma janela
Kernel de 30. O redimensionamento da imagem do MDT para 4 metros ocorreu porque com a
janela considerada, inicialmente 1 m, causava um grande esforço computacional, provocando
o travamento do computador. A escolha desta janela ocorreu porque o mapa de declividade
produzido pelo ENVI, resultante de janelas menores produzia uma representação descontínua
do terreno, não calculando-a para todos os pontos e não representando uma transição
uniforme entre os valores de declividade para a área de estudo considerada.
Separou-se o intervalo de declividade correspondente ao terreno plano (i < 1,0º), após a
confecção do mapa de declividade, através do processo de fatiamento de intensidades de
níveis de cinza, onde se atribui uma cor qualquer a um intervalo de valores,. A FIG.4.5 ilustra
o MDT gerado e o correspondente mapa de declividade com o terreno plano visto na cor
vermelha.
FIG 4.5 – MDT gerado a partir da base cartográfica e mapa de declividade correspondente.
75

4.2.3 CORREÇÃO GEOMÉTRICA
As distorções geométricas em imagens de satélites são provenientes de vários fatores,
como rotação da Terra, curvatura da Terra, vasto campo de visão de alguns sensores, entre
outros. Na correção da distorção geométrica devem-se realocar os pixels da imagem de
entrada em um grid de coordenadas já corrigidas. Tal processo compõe-se das seguintes
etapas: seleção de um modelo matemático de distorção, escolha de uma transformação
geométrica entre sistemas de coordenadas e reamostragem dos pixels. Dentre os termos
relacionados às correções geométricas, a ortorretificação é a correção pixel-a-pixel do efeito
topográfico, transformando a imagem em perspectiva ortogonal (RICHARDS, 1986;
SCHOWENGERDT, 1997).
O produto gerado pela ortorretificação pode ser usado como um mapa, pois pode-se
realizar medições de distâncias, ângulos e áreas diretamente. Nesta dissertação utilizou-se o
método de correção geométrica através da ortorretificação com transformação polinomial
racional (SILVA, 2005). Esta etapa foi realizada porque era necessário ajustar a imagem e as
ortofotos utilizadas para a avaliação da classificação obtida., e também as bandas
pancromática e multiespectrais para executar a fusão de dados. Na ortorretificação através de
polinômios racionais, cada banda é ortorretificada separadamente através do uso de um MDT
e a imagem resultante reamostrada, acarretando uma reamostragem para cada banda espectral.
A alteração dos níveis de cinza da imagem original é a mesma que se obtém quando se faz um
georreferenciamento da banda pancromática com a base vetorial, e um registro entre as
bandas multiespectrais e a banda pancromática. Para a correção geométrica foi utilizado o
programa ENVI 4.0.
4.2.4 FUSÃO DE DADOS UTILIZANDO A TRANSFORMAÇÃO IHS
A transformação IHS foi o procedimento de fusão de dados adotado nesta dissertação
para que se pudesse aproveitar a informação espectral das bandas multiespectrais e a
resolução espacial da banda pancromática das imagens IKONOS. No sistema IHS, a
intensidade refere-se ao brilho total de uma cor (dada pelo produto escalar entre o vetor que
76
representa a cor e o vetor diagonal do cubo, também chamado de linha do cinza) o matiz
relaciona-se com o comprimento de onda dominante ou médio e a saturação diz respeito à
pureza da cor em relação ao cinza, ou seja, diz-se que quanto mais distante da linha do cinza,
mais saturada é uma cor. Na fusão através da transformação IHS, realiza-se uma conversão
entre a representação de uma composição de três bandas multiespectrais no sistema de cores
RGB, para a sua representação no sistema IHS, trocando-se após isto, a componente I pela
banda pancromática de maior resolução espacial. A seguir a transformação IHS inversa é
aplicada ao produto híbrido para em seguida transformá-la para o sistema RGB, de forma que
se obtenha uma composição colorida multiespectral com a resolução geométrica da banda
pancromática e a informação espectral original (SCHOWENGERDT, 1997; GALO, 2000).
ALVES (2005), que aplicou a classificação orientada a objeto em imagens IKONOS para
identificação de alvos urbanos, sugere que, para o caso estudado, a avaliação da classificação
produz resultados superiores quando se utilizam imagens cuja resolução espacial foi
melhorada através da fusão de dados por transformação IHS. Como este trabalho tem por
objetivo aplicar a técnica de classificação orientada a objeto em uma área urbana, foi aplicado
tal processo às imagens.
Alguns programas empregados em sensoriamento remoto não mantêm a resolução
radiométrica das imagens de 11 bits, como o SPRING e o ENVI, o provável motivo de não
ser mantida a resolução é o fato do algoritmo interno dos programas trabalharem com
imagens de 8 bits. Portanto testou-se o programa PCI 9.0, que trabalha com imagens em 8, 16
e 32 bits, sendo necessário converter as imagens IKONOS para uma extensão que fosse
suportada pelo PCI. Testes realizados com a extensão em 16 bits não deram resultados, sendo
necessário um estudo da implementação do algoritmo da extensão de 16 bits para avaliar os
motivos da falha. Optou-se então por transformar os arquivos para a extensão de 32 bits, que
funcionou. Como as imagens ortorretificadas estavam no formato do ENVI, não compatível
com o do PCI, exportaram-se essas imagens para o formato *.TIFF. Foram necessárias duas
reamostragens nas bandas multiespectrais e uma reamostragem na banda pancromática devido
às conversões de arquivos decorrentes.
Inicialmente foi feito um redimensionamento das bandas multiespectrais para que seus
pixels tenham a mesma resolução espacial que a banda pancromática e foi realizada a segunda
reamostragem das bandas multiespectrais. Após isto, foi necessário exportar as imagens
ortorretificadas para um formato que seja compatível com o PCI. Escolheu-se, por
praticidade, o formato *.TIFF, e precisou-se trocar o cabeçalho das bandas multiespectrais
77
pelo da banda pancromática, pois o algoritmo de fusão IHS do PCI só funciona corretamente
se os cabeçalhos das bandas multiespectrais forem exatamente os mesmos da banda
pancromática. A conversão para uma extensão compatível com o PCI foi feita logo em
seguida através da função SCALE do PCI. O cubo de cores do algoritmo do PCI tem um
intervalo de 16 bits, ou seja, varia de 0 a 65535 níveis de cinza, portanto escalonaram-se
através de uma função linear os níveis de cinza das imagens ortorretificadas para variarem
nesse intervalo. O formato escolhido para a fusão IHS foi a extensão de 32 bits, pois tal
extensão não apresentava falhas no processo de transformação.
Após isto, procedeu-se à conversão das componentes RGB para IHS e substituição da
componente I resultante, pela banda pancromática. A transformação inversa foi aplicada às
bandas IHS para obter as bandas sintéticas RGB. Quando a fusão de dados estava completa,
usou-se a função SCALE para retornar ao intervalo de variação de 11 bits das imagens
IKONOS, que voltaram a ter os valores de níveis de cinza distribuindo-se entre 0 a 2047,
apesar de estarem convertidas para a extensão de 32 bits. Empregou-se uma composição
colorida RGB 432 e outra com RGB 321. A FIG.4.6 permite comparar a composição colorida
original RGB 432 e as correspondentes bandas sintéticas.
FIG 4.6 – Composições coloridas das bandas multiespectrais RGB 432 originais e das bandas sintéticas.
4.2.5 INSERÇÃO DO ATRIBUTO TEMÁTICO DE DECLIVIDADE
A inserção do atributo temático relativo à declividade é um pré-requisito para a
classificação das áreas propícias a transmissão da leptospirose, por ocorrer à doença
78

principalmente em lugares alagadiços. Para que a declividade pudesse ser inserida como
atributo temático, era necessário que o mapa de declividade fosse importado como “layer”
temático dentro do eCognition, o que só ocorre quando, além do formato da imagem (*.tiff),
há uma tabela de atributos no formato *.txt, *.dbf ou *.csv, que seja lida pelo eCognition.
Para criar a tabela de atributos, optou-se por realizar uma segmentação no mapa de
declividade, de forma que os objetos resultantes correspondessem às áreas planas e não planas
do mapa, classificando-se estes objetos em duas classes: terreno_plano e terreno_não_plano.
Após isto, exportou-se esta classificação no formato de imagem *.tiff obtendo-se com isto,
uma tabela de atributos no formato *.csv.
Para separar as duas classes foram utilizadas funções de associação “booleanas”, e o
descritor “média espectral”, definido na seção 3.5.1. A representação escolhida de terreno
plano tem resposta espectral de (255, 0, 0), no sistema RGB (cor vermelha representando o
terreno_plano, conforme a seção 4.2.2). Para o terreno_não_plano utilizou-se o atributo de
similaridade invertida NOT, explicado na seção 4.2.6.2.
A FIG.4.7 ilustra a classificação entre terreno plano e não-plano.
FIG.4.7 – Classificação entre terreno plano e não-plano.
79

4.2.6 SEGMENTAÇÃO E GERAÇÃO DA ROTINA DE CLASSIFICAÇÃO DAS
IMAGENS
A segmentação e classificação das imagens foram feitas com base na extração dos
aspectos que segundo SABROZA e SILVEIRA (2004), são de interesse para o estudo da
leptospirose em área urbana, discriminadas na seção 1.1.2. Tais aspectos são citados
implicitamente em publicações, como por exemplo lama (MINISTÉRIO DA SAÚDE, 2002),
favelas (FAINE, 1994 apud LEVETT, 2001) e coleções hídricas contaminadas
(MINISTÉRIO DA SAÚDE, 2002). Desta forma, procurou-se verificar quais destes aspectos
seriam possíveis de se identificar na imagem.
Devido às características da leptospirose, de ocorrência após períodos de enchentes, e em
lugares de condições sanitárias precárias, o esquema de classificação foi montado de forma a
classificar as seguintes feições: mato ou capim, árvores, rua de barro, rio canalizado, terrenos
baldios, casas que estivessem em favelas e identificar se estavam ou não situadas em locais
planos, dando enfoque àquelas situadas no plano. Estas feições são consideradas fatores de
risco para a transmissão da leptospirose.
O favorecimento na distribuição de água contaminada em enchentes próximas a rios
canalizados que em suas margens têm a presença de terrenos baldios, indica que os terrenos
baldios são fatores de risco para a transmissão da leptospirose, pois depósitos de lixo
clandestinos são comuns em tais terrenos. Os tipos de vegetação puderam ser separados em
dois: mato ou capim e árvores, sendo o mato presente em terrenos baldios, e próximo a rios e
canais, principalmente, tendo sido considerado como uma classe presente em um ambiente de
proliferação de roedores, pois na área metropolitana da cidade do Rio de Janeiro, é comum
que áreas de mangue se destinem a vazadouros clandestinos de lixo. A classe mato/capim foi
considerada como um fator de risco, portanto. Além disso, ressalta-se que as matas ciliares e
florestas naturais evitam o assoreamento dos rios e minimizam os impactos das enchentes
(SEMADS-RJ , 2005).
Considerou-se que as casas eram os principais tipos de construção a serem identificados
na classificação, para poder diferenciar as habitações presentes em áreas de favela, das
habitações e demais construções que não pertenciam a área de favelas, pois prédios e fábricas
não apresentariam um período de exposição prolongada à bactéria da leptospirose na
ocorrência de enchentes, devido ao fato de que prédios têm a maioria de suas moradias
80

situadas em locais elevados, e fábricas ou balcões não são locais de moradias. Verificou-se
que um padrão de interpretação poderia ser seguido para identificar as construções na região
da favela: havia uma predominância de casas com cobertura de amianto, com cobertura de
cimento, relativa a própria laje da casa, enquanto em uma região não pertencente à favela, na
imagem principal, havia uma predominância de casas com coberturas de telha. Para as
construções que não eram casas, distinguiram-se prédios sem cobertura (na laje), prédios com
cobertura de amianto e galpões ou fábricas com cobertura escura, predominantemente.
Dentre as classes de ruas, puderam-se destacar ruas asfaltadas, ruas não asfaltadas e ruas
de cimento. As ruas cobertas com argila foram consideradas como fator de risco devido a
maior possibilidade de exposição à lama contaminada após enchentes. Ruas pequenas na
região da favela de Rio das Pedras não foram incluídas nas classes de ruas, pois só era
possível identificar as sombras das casas, não permitindo indicar se eram asfaltadas ou não.
Os rios canalizados são considerados fator de risco, pois têm uma absorção de águas de chuva
menor do que rios não canalizados, facilitando assim enchentes nas proximidades de suas
margens. Na imagem estes tinham resposta espectral semelhante à sombra de ruas e prédios, o
que dificultaria a classificação com atributos espectrais somente. Portanto foi necessária, sua
separação das sombras.
Na imagem de teste, verificou-se a existência de alguns tipos de feições que não estavam
presentes na imagem principal: afloramentos rochosos, ruas ou caminhos cobertos de areia
branca e corpos de água foram incluídos no esquema de classificação pois, após uma visita ao
campo, constatou-se que faziam parte do contexto da região da baixada de Jacarepaguá.
Corpos de água pertencentes à Lagoa de Jacarepaguá tinham um conjunto de descritores
idênticos aos de sombras de prédios na imagem de Rio das Pedras; afloramentos rochosos, a
galpões e fábricas e ruas cobertas de areia (caminhos em areais), a ruas de cimento (caminhos
cimentados). Outras feições encontradas foram construções com cobertura de metal (o galpão
do centro de convenções Riocentro), classe que não foi definida no esquema de classificação e
que, portanto, não foi classificada. A favela Vila Autódromo tem uma concentração de casas
com cobertura de telha maior do que a favela de Rio das Pedras. A FIG.4.8 mostra fotografias
da visitação ao campo e identificação das classes de rocha e rua coberta de areia.
81
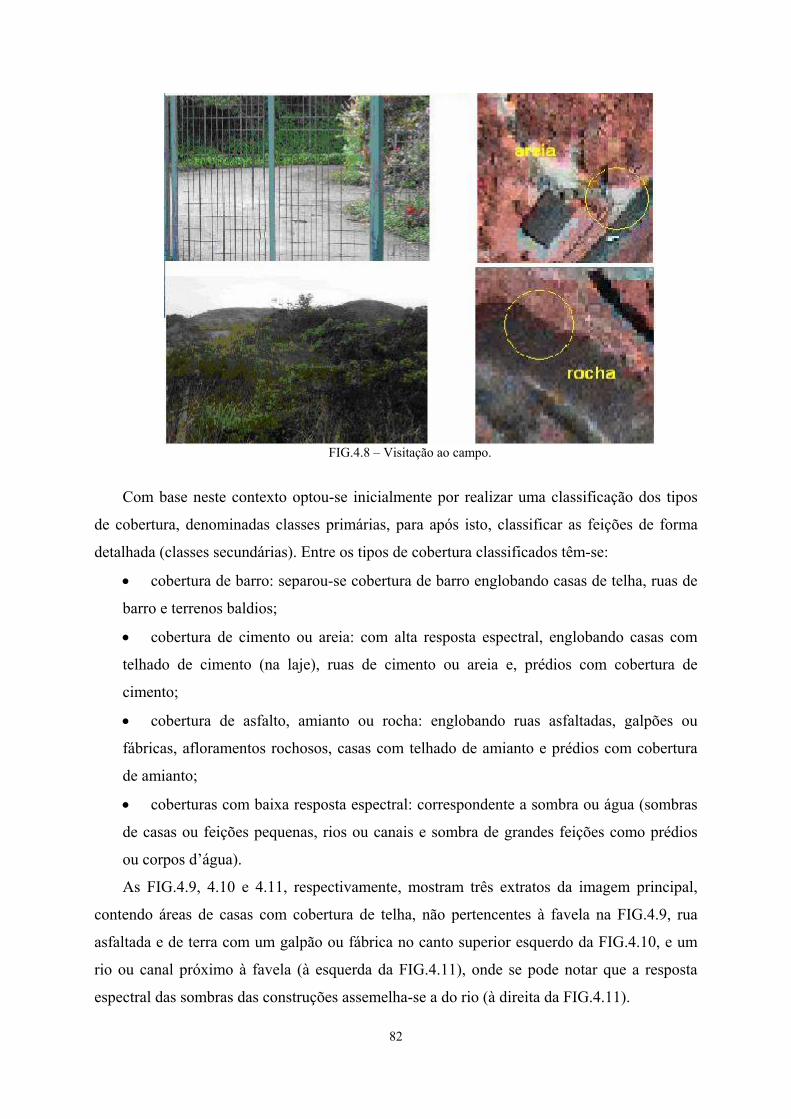
FIG.4.8 – Visitação ao campo.
Com base neste contexto optou-se inicialmente por realizar uma classificação dos tipos
de cobertura, denominadas classes primárias, para após isto, classificar as feições de forma
detalhada (classes secundárias). Entre os tipos de cobertura classificados têm-se:
• cobertura de barro: separou-se cobertura de barro englobando casas de telha, ruas de
barro e terrenos baldios;
• cobertura de cimento ou areia: com alta resposta espectral, englobando casas com
telhado de cimento (na laje), ruas de cimento ou areia e, prédios com cobertura de
cimento;
• cobertura de asfalto, amianto ou rocha: englobando ruas asfaltadas, galpões ou
fábricas, afloramentos rochosos, casas com telhado de amianto e prédios com cobertura
de amianto;
• coberturas com baixa resposta espectral: correspondente a sombra ou água (sombras
de casas ou feições pequenas, rios ou canais e sombra de grandes feições como prédios
ou corpos d’água).
As FIG.4.9, 4.10 e 4.11, respectivamente, mostram três extratos da imagem principal,
contendo áreas de casas com cobertura de telha, não pertencentes à favela na FIG.4.9, rua
asfaltada e de terra com um galpão ou fábrica no canto superior esquerdo da FIG.4.10, e um
rio ou canal próximo à favela (à esquerda da FIG.4.11), onde se pode notar que a resposta
espectral das sombras das construções assemelha-se a do rio (à direita da FIG.4.11).
82
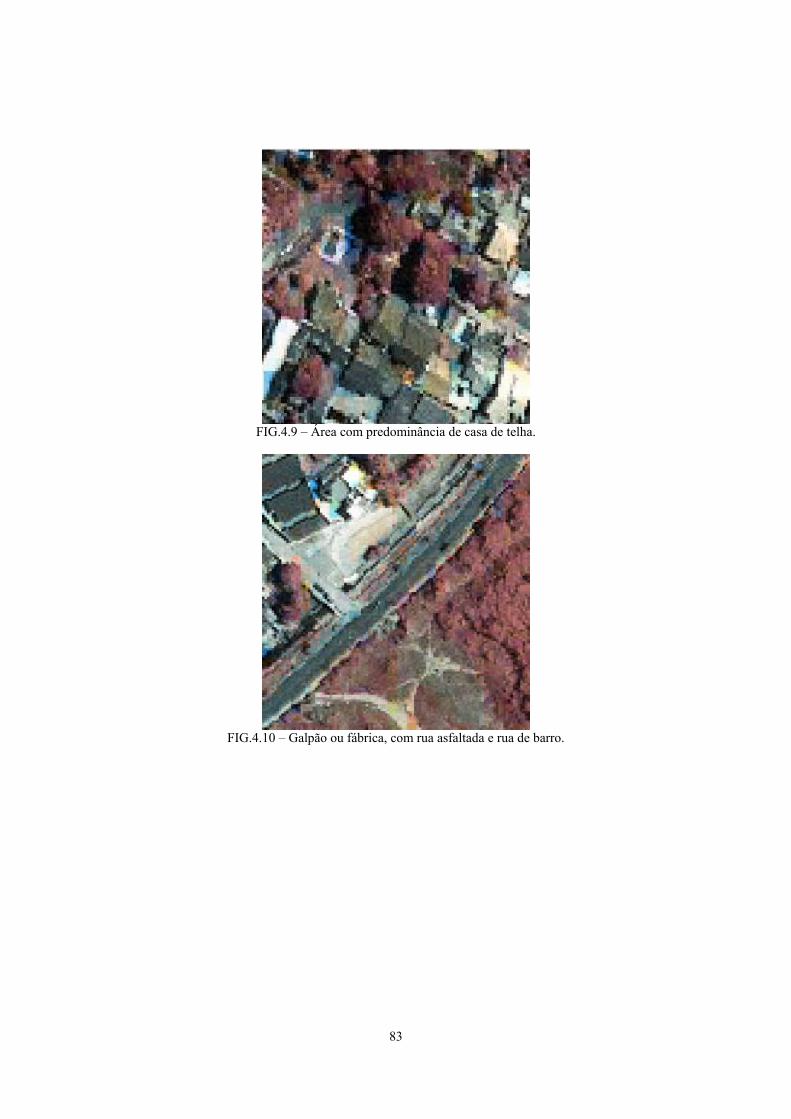
FIG.4.9 – Área com predominância de casa de telha.
FIG.4.10 – Galpão ou fábrica, com rua asfaltada e rua de barro.
83

FIG.4.11– Área de favela com rio e canal de drenagem.
4.2.6.1 SEGMENTAÇÃO DAS IMAGENS
Na segmentação multiresolução, DEFINIENS IMAGING (2000) propõe segmentações
em vários níveis para distinguir objetos que vão desde o tamanho do pixel até atingirem o
contexto da cena analisada. Tal contexto, é o proveniente da análise da cena feita na seção
4.2.6, ou seja, os objetos obtidos pela segmentação devem corresponder às feições necessárias
para atender ao objetivo da classificação. A segmentação das imagens foi feita segundo os
parâmetros discriminados na tabela 4.1, em quatro níveis, que conforme mostrado na
FIG.4.12, que detalha as etapas da segmentação e classificação das imagens, foram suficientes
para discriminar em objetos todas as feições que deveriam ser classificadas.
A escolha do parâmetro de escala para cada um dos quatro níveis foi feita através da
função SCALE PARAMETER ANALYSIS (SPA) do eCognition. Esta função, segundo
DEFINIENS IMAGING (2000), faz uma análise estatística entre os relacionamentos
espectrais de objetos vizinhos e calcula um potencial parâmetro de escala para cada objeto já
segmentado, de forma que esse parâmetro, caso seja usado, crie um novo objeto composto
pelos objetos vizinhos e pelo próprio objeto. Assim, escolhe-se para a segmentação do
próximo nível, um parâmetro pertencente a um intervalo que corresponda a uma freqüência
maior de ocorrência, que atenda ao critério de homogeneidade para um maior número de
84
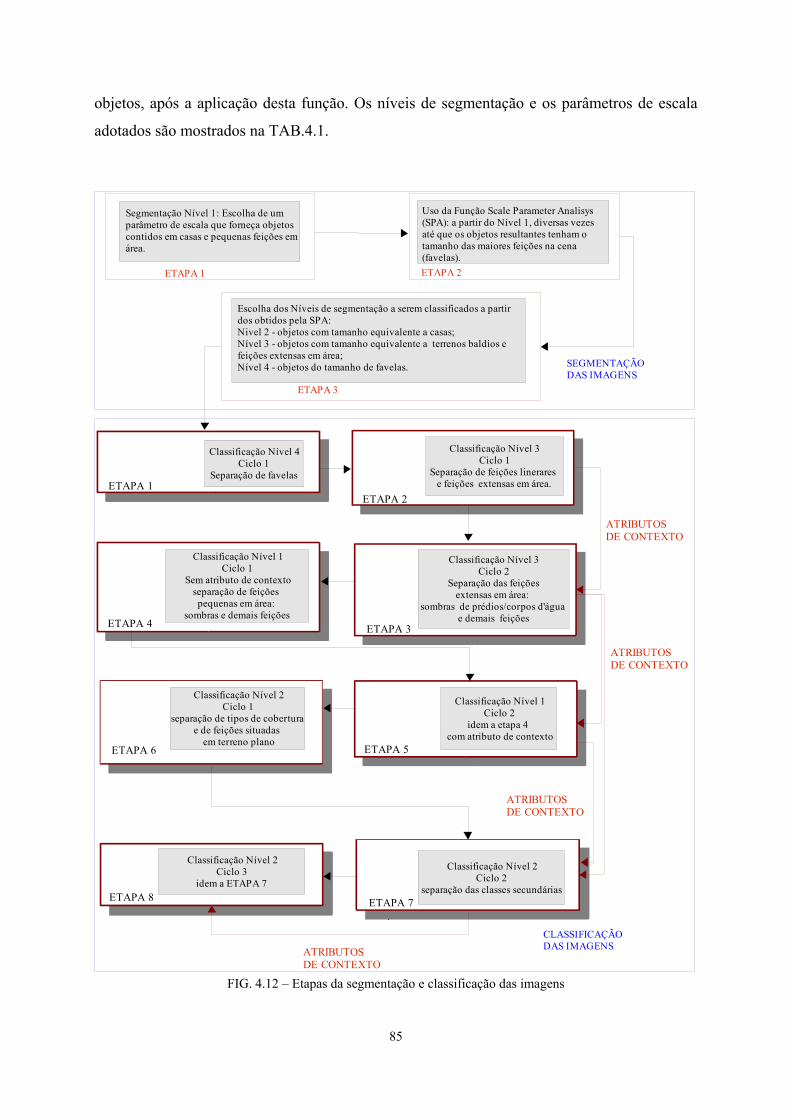
objetos, após a aplicação desta função. Os níveis de segmentação e os parâmetros de escala
adotados são mostrados na TAB.4.1.
Segmentação Nível 1: Escolha de um parâmetro de escala que forneça objetoscontidos em casas e pequenas feições em área.
Uso da Função Scale Parameter Analisys (SPA): a partir do Nível 1, diversas vezes até que os objetos resultantes tenham o tamanho das maiores feições na cena (favelas).
Escolha dos Níveis de segmentação a serem classificados a partir dos obtidos pela SPA:Nivel 2 - objetos com tamanho equivalente a casas; Nível 3 - objetos com tamanho equivalente a terrenos baldios e feições extensas em área; Nível 4 - objetos do tamanho de favelas.
ETAPA 1 ETAPA 2
ETAPA 3
SEGMENTAÇÃODAS IMAGENS
Classificação Nível 4Ciclo 1
Separação de favelasETAPA 1
Classificação Nível 3Ciclo 1
Separação de feições linerares e feições extensas em área.
ETAPA 2
Classificação Nível 3Ciclo 2
Separação das feiçõesextensas em área:
sombras de prédios/corpos d'água e demais feições
ETAPA 3
Classificação Nível 1Ciclo 1
Sem atributo de contextoseparação de feições pequenas em área:
sombras e demais feiçõesETAPA 4
Classificação Nível 1Ciclo 2
idem a etapa 4 com atributo de contexto
ETAPA 5
Classificação Nível 2Ciclo 1
separação de tipos de cobertura e de feições situadas
em terreno planoETAPA 6
ETAPA 8
Classificação Nível 2Ciclo 3
idem a ETAPA 7
ETAPA 7
Classificação Nível 2Ciclo 2
separação das classes secundárias
ATRIBUTOS DE CONTEXTO
ATRIBUTOS DE CONTEXTO
ATRIBUTOS DE CONTEXTO
ATRIBUTOS DE CONTEXTO
CLASSIFICAÇÃODAS IMAGENS
FIG. 4.12 – Etapas da segmentação e classificação das imagens
85
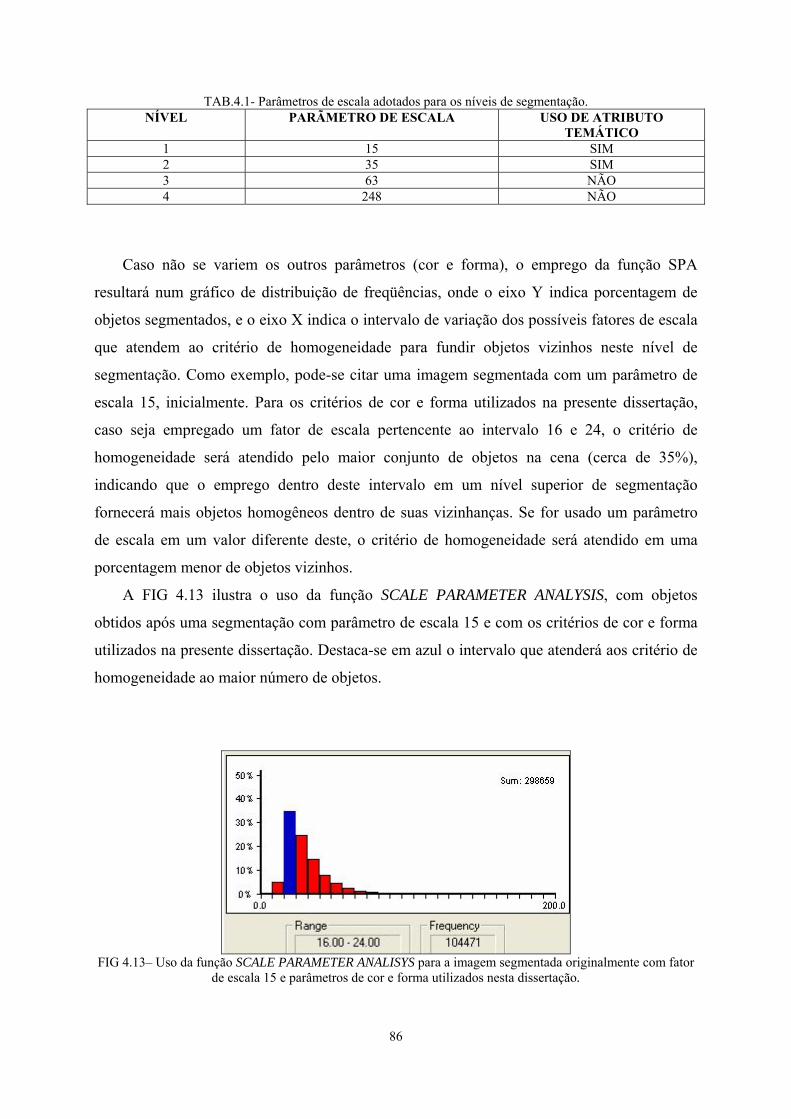
TAB.4.1- Parâmetros de escala adotados para os níveis de segmentação. NÍVEL PARÃMETRO DE ESCALA USO DE ATRIBUTO
TEMÁTICO 1 15 SIM 2 35 SIM 3 63 NÃO 4 248 NÃO
Caso não se variem os outros parâmetros (cor e forma), o emprego da função SPA
resultará num gráfico de distribuição de freqüências, onde o eixo Y indica porcentagem de
objetos segmentados, e o eixo X indica o intervalo de variação dos possíveis fatores de escala
que atendem ao critério de homogeneidade para fundir objetos vizinhos neste nível de
segmentação. Como exemplo, pode-se citar uma imagem segmentada com um parâmetro de
escala 15, inicialmente. Para os critérios de cor e forma utilizados na presente dissertação,
caso seja empregado um fator de escala pertencente ao intervalo 16 e 24, o critério de
homogeneidade será atendido pelo maior conjunto de objetos na cena (cerca de 35%),
indicando que o emprego dentro deste intervalo em um nível superior de segmentação
fornecerá mais objetos homogêneos dentro de suas vizinhanças. Se for usado um parâmetro
de escala em um valor diferente deste, o critério de homogeneidade será atendido em uma
porcentagem menor de objetos vizinhos.
A FIG 4.13 ilustra o uso da função SCALE PARAMETER ANALYSIS, com objetos
obtidos após uma segmentação com parâmetro de escala 15 e com os critérios de cor e forma
utilizados na presente dissertação. Destaca-se em azul o intervalo que atenderá aos critério de
homogeneidade ao maior número de objetos.
FIG 4.13– Uso da função SCALE PARAMETER ANALISYS para a imagem segmentada originalmente com fator
de escala 15 e parâmetros de cor e forma utilizados nesta dissertação.
86
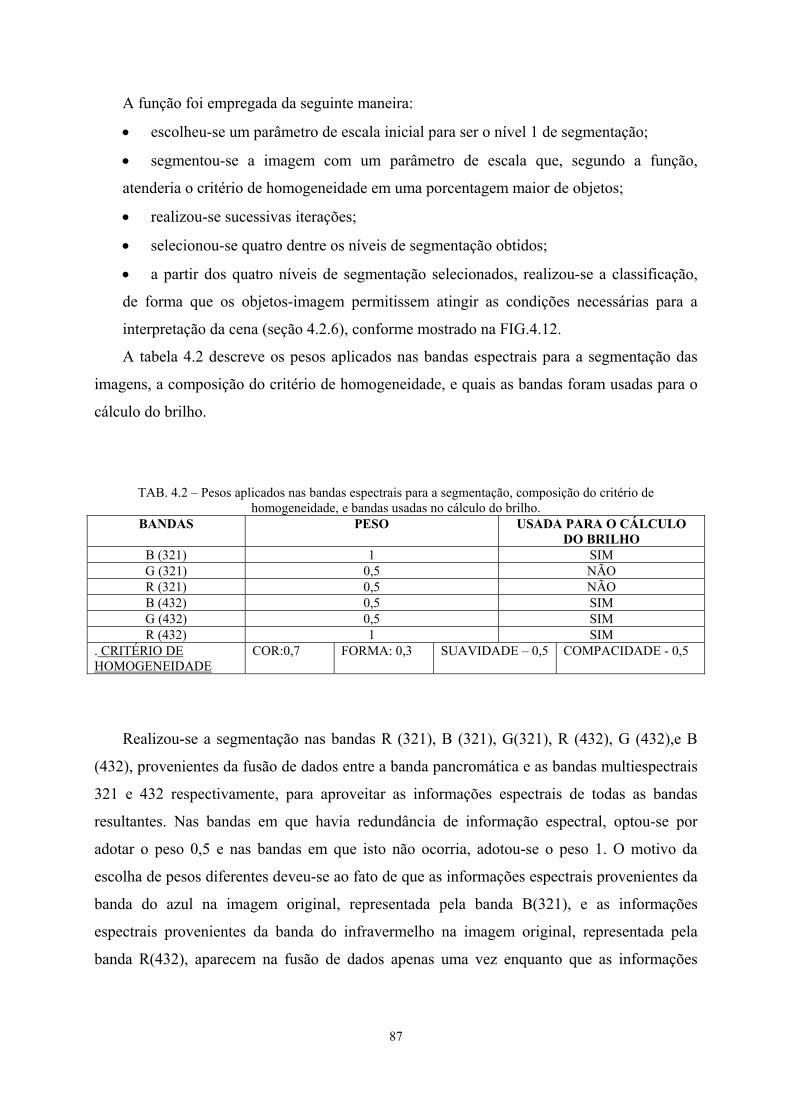
A função foi empregada da seguinte maneira:
• escolheu-se um parâmetro de escala inicial para ser o nível 1 de segmentação;
• segmentou-se a imagem com um parâmetro de escala que, segundo a função,
atenderia o critério de homogeneidade em uma porcentagem maior de objetos;
• realizou-se sucessivas iterações;
• selecionou-se quatro dentre os níveis de segmentação obtidos;
• a partir dos quatro níveis de segmentação selecionados, realizou-se a classificação,
de forma que os objetos-imagem permitissem atingir as condições necessárias para a
interpretação da cena (seção 4.2.6), conforme mostrado na FIG.4.12.
A tabela 4.2 descreve os pesos aplicados nas bandas espectrais para a segmentação das
imagens, a composição do critério de homogeneidade, e quais as bandas foram usadas para o
cálculo do brilho.
TAB. 4.2 – Pesos aplicados nas bandas espectrais para a segmentação, composição do critério de
homogeneidade, e bandas usadas no cálculo do brilho. BANDAS PESO USADA PARA O CÁLCULO
DO BRILHO B (321) 1 SIM G (321) 0,5 NÃO R (321) 0,5 NÃO B (432) 0,5 SIM G (432) 0,5 SIM R (432) 1 SIM
. CRITÉRIO DE HOMOGENEIDADE
COR:0,7 FORMA: 0,3 SUAVIDADE – 0,5 COMPACIDADE - 0,5
Realizou-se a segmentação nas bandas R (321), B (321), G(321), R (432), G (432),e B
(432), provenientes da fusão de dados entre a banda pancromática e as bandas multiespectrais
321 e 432 respectivamente, para aproveitar as informações espectrais de todas as bandas
resultantes. Nas bandas em que havia redundância de informação espectral, optou-se por
adotar o peso 0,5 e nas bandas em que isto não ocorria, adotou-se o peso 1. O motivo da
escolha de pesos diferentes deveu-se ao fato de que as informações espectrais provenientes da
banda do azul na imagem original, representada pela banda B(321), e as informações
espectrais provenientes da banda do infravermelho na imagem original, representada pela
banda R(432), aparecem na fusão de dados apenas uma vez enquanto que as informações
87

espectrais provenientes das bandas do vermelho e do verde na imagem original aparecem duas
vezes.
Na segmentação foi utilizado o atributo temático da declividade obtido na classificação
explicada na seção 4.2.5 para que os atributos terreno_plano e terreno_não_plano servissem
de superobjetos e pudessem separar os objetos segmentados. Como critério de cor adotou-se o
peso 0,7 para todos os níveis de segmentação da imagem e como critério de forma adotou-se o
peso 0,30. Adotou-se o mesmo valor de peso 0,5 para suavidade e compacidade. O critério da
escolha de valor idêntico de peso para a suavidade e compacidade é decorrência da
heterogeneidade da imagem analisada, pois não havia uma predominância de objetos mais
compactos ou mais suaves, conforme a definição de suavidade e compacidade mostrada na
seção 3.4.2.
O brilho é um descritor que traduz para um objeto-imagem, a soma dos valores espectrais
médios dos layers que contenham informação espectral dividido pela sua quantidade,
conforme explicado na seção 3.5.1. Assim, um objeto que apresente um valor de brilho
elevado, tem uma predominância de layers com respostas espectrais médias elevadas
(levando-se em conta aqueles considerados no cálculo do brilho). Esse valor é variável
conforme a escolha do operador, pois pode ser indesejável considerar um determinado layer
para fornecer informação espectral.
Optou-se por escolher para o cálculo do valor de brilho as 3 bandas sintéticas da
composição colorida RGB (432), e apenas a banda B da composição colorida sintética RGB
(321). Verificou-se que o uso dos descritores espectrais considerando-se todas as bandas para
o cálculo do valor de brilho permitia uma separação menor entre algumas feições que tinham
resposta espectral alta para as bandas originais 3 e 2. Um possível motivo para isto seria que a
utilização simultânea das bandas R e G das composições coloridas sintéticas RGB (321) e
RGB (432) acarretariam numa repetição de informações espectrais, que atrapalharia o uso de
alguns dos descritores espectrais (diferentemente da segmentação, não é possível atribuir um
peso a uma determinada banda espectral, para o cálculo do brilho).
O atributo temático foi usado apenas nos níveis 1 e 2 de segmentação porque eles
produzem objetos menores do que nos níveis 3 e 4, evitando-se uma fragmentação indesejada
dos objetos segmentados. O uso dos atributos temáticos inseridos como superobjetos segue a
hierarquia de níveis mostrada na FIG.3.6 da seção 3.4.2, ou seja, induz a uma segmentação
em que os limites dos atributos temáticos são considerados como regiões limites pela
segmentação. Isso provoca a divisão de alguns objetos que estão presentes nos limites entre as
88

regiões temáticas. Quando os objetos pertencem a níveis mais elevados e são portanto
maiores, essa “divisão forçada” produz objetos que não correspondem a regiões homogêneas
segundo os parâmetros de escala e critérios de forma e cor escolhidos. A FIG 4.14 ilustra a
segmentação resultante em função dos níveis de segmentação adotados.
FIG 4.14 – Segmentação resultante em função dos níveis de segmentação adotados da cena 1.
4.2.6.2 GERAÇÃO DA ROTINA DE CLASSIFICAÇÃO DAS IMAGENS
A classificação orientada a objeto foi realizada com base em um conjunto de descritores
dos objetos (forma, textura, valores espectrais, hierarquia, e atributos temáticos) e no contexto
das classes entre si. Empregaram-se funções de associação em conjunto com os operadores
lógicos AND (min), e OR (max). O operador AND (min), dentre uma série de descritores de
89

classes, fornece o menor valor de todas as funções escolhidas, e corresponde à operação de
interseção de conjuntos fuzzy, mostrada na seção 3.7.
O operador OR (max), dentre uma série de descritores de classes, fornece o maior valor
de todas as funções escolhidas, e corresponde à operação de união de conjuntos fuzzy
mostrada na seção 3.7. Inicialmente foi feita uma classificação de tipos de cobertura a partir
de descritores de textura e espectrais, e com condições de similaridade. Tais condições, se
aplicadas a uma classe “A” retornam os atributos utilizados para descrever uma classe “B”
(lê-se “A”, é similar a “B”). Podem-se usar tais condições como similaridade invertida através
do operador NOT (lê-se “A” é não similar a “B”), em que os valores de associação dos
atributos utilizados como descritores da classe “A” retornam, após a operação NOT, os
valores dos complementos (ver seção 3.7) das funções de associação dos descritores de “B”.
Assim, por exemplo, caso se deseje descrever uma classe como sendo rio e todos os objetos
que não atenderem a essa descrição como não rio, aplica-se à classe rio o operador de
similaridade invertida (NOT rio). Com este conceito e através da herança de classes foi
implementada uma rede descritora de classes primárias e secundárias.
Herança é uma técnica da orientação a objeto em que os atributos utilizados para
descrever uma classe de objetos podem ser herdados por outra classe de objetos que, para ser
descrita, necessite de outros atributos além dos atributos herdados. Significa que classes
secundárias podem herdar os descritores e os atributos de classes primárias, facilitando a
descrição de cada classe individualmente e a geração da rotina de classificação, evita-se
assim, uma redundância de informações (DEFINIENS IMAGING, 2000; ANTUNES, 2003).
A herança é representada por uma rede estruturada hierarquicamente, que contém todas as
classes presentes no esquema de classificação. A Rede hierárquica de herança de classes,
relativa a presente dissertação é mostrada na FIG.4.15.
Na FIG.4.15, as classes feições_pequenas(área) e sombra_feições_pequenas, herdam os
atributos da classe denominada nível_1. As classes nível_1, nível_2, nível_3 e nível_4 foram
criadas para se classificarem objetos nos respectivos níveis de segmentação (1, 2, 3 e 4).
Como atributos de descrição têm apenas os denominados “atributos de hierarquia”. Tais
atributos são relativos aos níveis de segmentação, e são usados para a separação das classes
dentro destes níveis. A classe mato/capim, classificada no nível 2, herda os atributos
descritores da classe vegetação e assim por diante, sendo as classes secundárias as que são
classificadas. Assim, por exemplo, no nível 2, serão classificadas mato/capim e árvores,
secundárias de vegetação.
90

FIG.4.15 – Rede de hierarquia: herança de atributos de descrição de classes.
As imagens foram classificadas nos quatro níveis de segmentação adotados, escolhendo-
se o nível 2 como principal e usando-se os outros para inserção de informações de contexto. O
motivo para tal escolha encontra-se no fato de que este nível forneceu objetos com o tamanho
mais próximo ao das casas, principal feição a ser identificada, conforme explicitado na seção
4.2.6. O nível 4 foi usado para definir a classe correspondente à área da favela. Os níveis 1 e 3
foram usados para separar feições lineares e objetos que não são lineares, sendo o nível 1
utilizado para pequenos objetos e o nível 3 utilizado para grandes objetos. Desta forma
puderam-se empregar as feições definidas nos níveis 1 e 3 para fornecerem informações de
contexto para as classes secundárias do nível 2. A classe favela definida no nível 4 forneceu a
informação de contexto para criar-se uma classe explicada mais à frente, nesta seção,
chamada área de exposição à leptospirose, em um perímetro de 50 metros
(área_de_exposição_50_metros), que é derivada do contexto de outras classes secundárias e
que herdou as características da classe primária terreno_plano (nível 2), que teve seu descritor
definido pelo atributo temático de declividade.
91

O emprego da rotina se deu em ciclos de classificação, conforme mostra a FIG.4.12, para
a inserção dos atributos de contexto. Tais atributos são relativos aos relacionamentos que as
classes de objetos têm entre si. Portanto, para que sirvam como descritores de uma
determinada classe “A”, é necessário que a classe “B”, que fornecerá as informações de
contexto, já tenha sido previamente classificada em um outro ciclo. Logo, o ciclo 1 de uma
classificação rotulará apenas aqueles objetos cujos atributos descritores não tenham
informação de contexto com outras classes, e os demais ciclos rotulam classes de objetos que
entre seus atributos descritores tenham tais informações. Por exemplo, rua_barro é definida
por herdar os descritores de barro_argila, e pela existência de super-objetos do nível 3
classificados como feições lineares. Logo, para rua_barro ser classificada, é necessário que
feições_lineares tenha sido classificada no nível 3. Como a rotina é aplicada aos níveis de
segmentação, classificam-se primeiramente os níveis cujas classes não têm descritores
relacionados ao contexto, para após isto aplicar a rotina nos níveis cujas classes têm tais
atributos. E estas classes são definidas após tantos ciclos quantos forem exigidos pelos seus
descritores.
Nesta dissertação a rotina empregou-se primeiro nos níveis 4 e 3, pois não precisaram de
descritores de contexto; logo em seguida foi aplicada no nível 1, pois suas classes dependiam
do contexto do nível 3; por último, foi classificado o nível 2, já que dependia do contexto dos
outros níveis e de feições do próprio nível. A estruturação das classes dentro dos níveis
obedeceu as seguintes regras:
Nível 1:
• foram descritos objetos de pequena área que forneceram o contexto para a descrição
de objetos de pequena área no nível 2.
Nível 2:
• as classes secundárias foram definidas usando atributos de descrição relativos ao
contexto dos super-níveis e dos sub-níveis, para separar principalmente o tamanho dos
objetos.
• a definição de classes de contexto para o nível 2 foi feita sucessivamente, até que
todas pudessem ser separadas no esquema de classificação.
Nível 3:
• foram descritos neste nível objetos grandes, fornecendo informações de contexto
para objetos de grande área no nível 2.
92

• foram separadas feições lineares extensas neste nível, porque a segmentação fornecia
objetos mais próximos ao tamanho das ruas.
Nível 4:
• foram separadas as áreas correspondentes a favelas.
As TAB.4.3, 4.4, 4.5 e 4.6 mostram os descritores utilizados nas classes primárias e
secundárias nos níveis de classificações 4, 3, 1 e 2, respectivamente. O operador lógico
empregado para todos os descritores, com exceção daquelas marcadas com (*), foi o AND
(min). Para os descritores marcados com (*) usou-se o OR (max).
TAB.4.3 – Atributos de descrição de classes: Nível 4.
PRIMÁRIAS DESCRITORES favela GLDV: entropia na direção de 90º da banda B (321)
TAB 4.4 – Atributos de descrição de classes: Nível 3.
PRIMÁRIAS DESCRITORES SECUNDÁRIAS DESCRITORES
feições_lineares
- assimetria - densidade - ajuste elíptico - comprimento/ largura -comprimento/ largura baseado em sub-objetos do nível 1
- -
não_sombra_prédios_grandes- não similar a sombra_prédios_grandes _feiçõesfeições_extensas_área
- área - GLDV: média espectral da banda 3(432) na direção de90º sombra_prédios/grandes_feições - média espectral da
banda R (432)
TAB 4.5 – Atributos de descrição de classes: Nível 1.
PRIMÁRIAS DESCRITORES
sombra_feições_pequenas- média espectral da banda R (432) - não existência de super-objetos classificados como sombra_prédios/grandes_feições
feições_pequenas(área)- área - não existência de super-objetos classificados como não_sombra_prédios_grandes
93
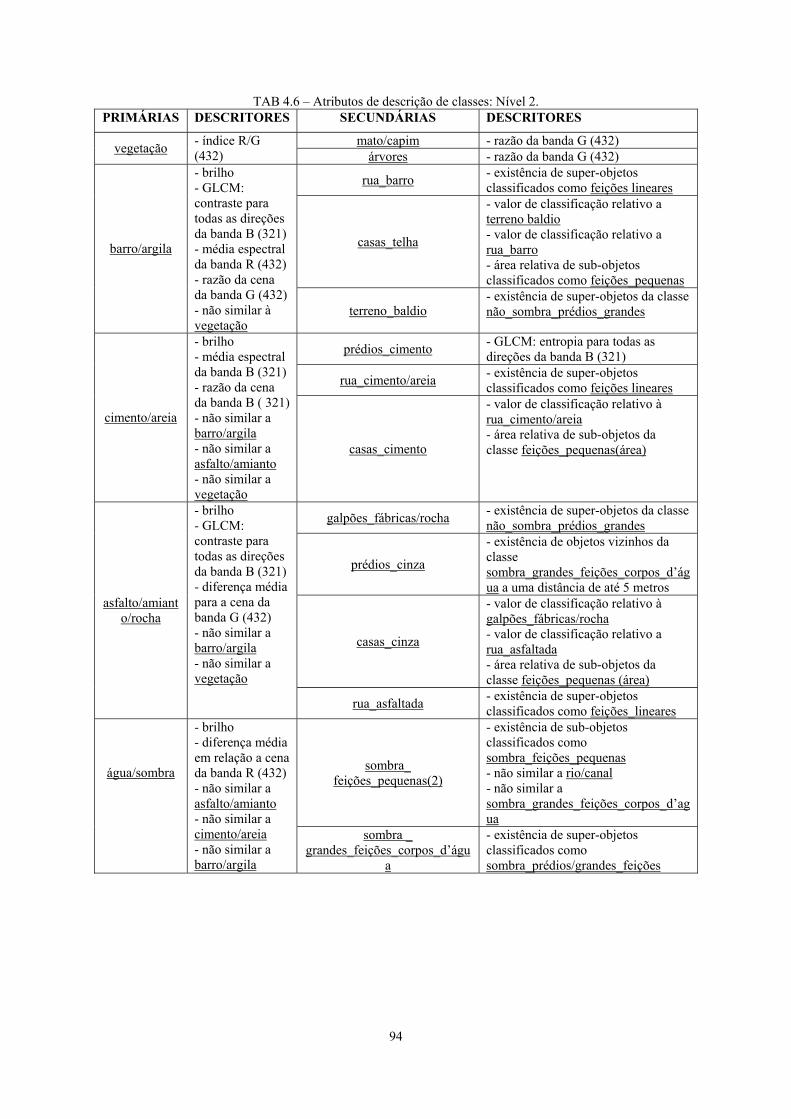
TAB 4.6 – Atributos de descrição de classes: Nível 2. PRIMÁRIAS DESCRITORES SECUNDÁRIAS DESCRITORES
mato/capim - razão da banda G (432) vegetação - índice R/G (432) árvores - razão da banda G (432)
rua_barro - existência de super-objetos classificados como feições lineares
casas_telha
- valor de classificação relativo a terreno baldio- valor de classificação relativo a rua_barro- área relativa de sub-objetos classificados como feições_pequenas
barro/argila
- brilho - GLCM: contraste para todas as direções da banda B (321) - média espectral da banda R (432) - razão da cena da banda G (432) - não similar à vegetação
terreno_baldio- existência de super-objetos da classe não_sombra_prédios_grandes
prédios_cimento - GLCM: entropia para todas as direções da banda B (321)
rua_cimento/areia - existência de super-objetos classificados como feições lineares
cimento/areia
- brilho - média espectral da banda B (321) - razão da cena da banda B ( 321) - não similar a barro/argila- não similar a asfalto/amianto- não similar a vegetação
casas_cimento
- valor de classificação relativo à rua_cimento/areia- área relativa de sub-objetos da classe feições_pequenas(área)
galpões_fábricas/rocha - existência de super-objetos da classe não_sombra_prédios_grandes
prédios_cinza
- existência de objetos vizinhos da classe sombra_grandes_feições_corpos_d’água a uma distância de até 5 metros
casas_cinza
- valor de classificação relativo à galpões_fábricas/rocha- valor de classificação relativo a rua_asfaltada- área relativa de sub-objetos da classe feições_pequenas (área)
asfalto/amianto/rocha
- brilho - GLCM: contraste para todas as direções da banda B (321) - diferença média para a cena da banda G (432) - não similar a barro/argila- não similar a vegetação
rua_asfaltada - existência de super-objetos classificados como feições_lineares
sombra_ feições_pequenas(2)
- existência de sub-objetos classificados como sombra_feições_pequenas- não similar a rio/canal- não similar a sombra_grandes_feições_corpos_d’agua
água/sombra
- brilho - diferença média em relação a cena da banda R (432) - não similar a asfalto/amianto- não similar a cimento/areia- não similar a barro/argila
sombra _ grandes_feições_corpos_d’águ
a
- existência de super-objetos classificados como sombra_prédios/grandes_feições
94

PRIMÁRIAS DESCRITORES SECUNDÁRIAS DESCRITORES
- não similar a vegetação
rio/canal
- existência de super-objetos classificados como feições_lineares- comprimento/largura - borda compartilhada entre rio/canal e árvores (*) - borda compartilhada entre rio/canal e mato/capim (*) - borda compartilhada entre rio/canal e terreno_baldio (*)
terreno_plano
- atributo temático da classe terreno_plano
área_de_exposição_50_metros
- distância a objetos vizinhos classificados como terreno_baldio- distância a objetos vizinhos classificados como rua_barro- distância a objetos vizinhos classificados como rio/canal- distância a objetos vizinhos classificados como mato/capim- existência de super-objetos classificados como favela- classificado como casas_telha (*) - classificado como casas_cimento (*) - classificado como casas_cinza (*)
(*) Uso do operador lógico OR(*).
Para a escolha das funções de associação corretas e do intervalo de descrição, utilizou-se
a função FEATURE VIEW, que atribui um valor de nível de cinza aos intervalos de variações
dos descritores. Como exemplo pode-se citar os atributos descritores da vegetação: o índice
R/G (432), que foi implementado segundo uma função do eCognition que permite realizar
operações aritméticas entre as bandas espectrais. Este índice foi utilizado para separar esta
classe das demais. GONÇALVES (2001) usou um índice semelhante entre as bandas R e G
provenientes de uma fusão de dados entre a composição colorida (432), e a banda
pancromática de uma imagem IKONOS e afirmou que o uso de um índice que relacione a
razão entre as bandas R e G permite uma boa separação entre a vegetação e as demais classes.
Foi testado o emprego deste índice e verificou-se que a vegetação era separável das demais
feições. A FIG.4.16 mostra a utilização da função FEATURE VIEW para o índice R/G (432):
em verde aparecem os maiores valores dentro do intervalo selecionado, em azul aparecem os
menores valores.
A escolha da função de associação também é decorrente desta análise. Pôde-se notar por
exemplo que para um valor deste descritor maior que 1 a cobertura de vegetação destacava-se
das demais. A FIG.4.17 mostra a função de associação fuzzy escolhida para o descritor de
95

vegetação. As funções de associação utilizadas nesta pesquisa e seus respectivos intervalos
estão discriminados no APÊNDICE 1.
FIG 4.16 – Utilização da função FEATURE VIEW para o descritor índice R/G (432).
FIG 4.17 – Função de associação escolhida para o descritor índice R/G (432).
A classe rio/canal foi descrita com uma função relacional, em conjunto com outros
descritores. Esta função relaciona objetos de diferentes níveis com objetos vizinhos, sub-
objetos e super-objetos e serve para criar relações de contexto que não estão previamente
96
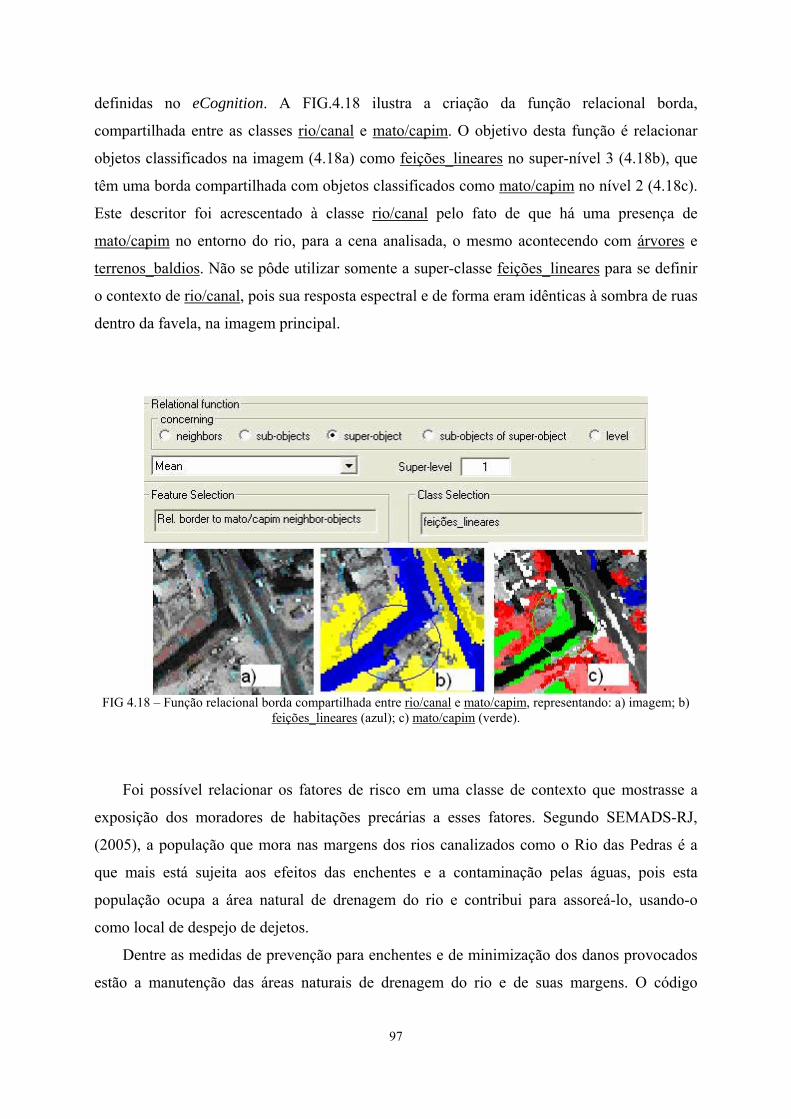
definidas no eCognition. A FIG.4.18 ilustra a criação da função relacional borda,
compartilhada entre as classes rio/canal e mato/capim. O objetivo desta função é relacionar
objetos classificados na imagem (4.18a) como feições_lineares no super-nível 3 (4.18b), que
têm uma borda compartilhada com objetos classificados como mato/capim no nível 2 (4.18c).
Este descritor foi acrescentado à classe rio/canal pelo fato de que há uma presença de
mato/capim no entorno do rio, para a cena analisada, o mesmo acontecendo com árvores e
terrenos_baldios. Não se pôde utilizar somente a super-classe feições_lineares para se definir
o contexto de rio/canal, pois sua resposta espectral e de forma eram idênticas à sombra de ruas
dentro da favela, na imagem principal.
FIG 4.18 – Função relacional borda compartilhada entre rio/canal e mato/capim, representando: a) imagem; b)
feições_lineares (azul); c) mato/capim (verde).
Foi possível relacionar os fatores de risco em uma classe de contexto que mostrasse a
exposição dos moradores de habitações precárias a esses fatores. Segundo SEMADS-RJ,
(2005), a população que mora nas margens dos rios canalizados como o Rio das Pedras é a
que mais está sujeita aos efeitos das enchentes e a contaminação pelas águas, pois esta
população ocupa a área natural de drenagem do rio e contribui para assoreá-lo, usando-o
como local de despejo de dejetos.
Dentre as medidas de prevenção para enchentes e de minimização dos danos provocados
estão a manutenção das áreas naturais de drenagem do rio e de suas margens. O código
97

florestal (Lei Federal nº 4771/65), regula a proteção das margens dos rios e prevê que rios
com largura entre 10 e 50 metros no seu canal principal devem ter sua cobertura vegetal
permanente preservada a uma distância de até 50 metros a contar de suas margens. Como não
há na literatura uma definição formal de qual a região ou habitação que está mais exposta à
transmissão da leptospirose, utilizou-se o código florestal para definir um perímetro a partir
do qual a moradia encontra-se mais exposta à contaminação por águas provenientes de uma
enchente. O canal de Rio das Pedras tem uma largura variando entre 10 e 19 metros, devendo
ter suas margens protegidas a uma distância de 50 metros a contar destas. Julgou-se que as
habitações mais expostas são as que estão próximas às margens do rio, pertencem a favelas e
estão em terreno plano. Além disso, uma presença maior de classes consideradas fatores de
risco, podem ser um indicativo de uma maior exposição à doença. Portanto, a classe área_de
exposição_50_metros foi definida da seguinte maneira:
• se o objeto for classificado como casas_cimento, ou casas_cinza, ou casas_telha, e;
• estiver a uma distância de até 50 metros de um objeto classificado como mato/capim,
rio/canal, rua_barro, e terreno_baldio,e;
• estiver em terreno_plano, e;
• pertencer a um super-objeto que tenha sido classificado como favela, então;
• este objeto faz parte de uma classe de contexto, que indica moradias expostas aos
fatores de risco já mencionados e que estão dentro da área de preservação das margens do
rio.
Para função de associação “fuzzy” escolheu-se uma função de associação que fornecesse
uma zona de transição gradual entre o limite de 50 metros e até uma distância de 100 metros.
Foi escolhida esta função por acreditar-se que as condições que estão relacionadas à
transmissão da leptospirose podem ter uma abordagem mais adequada com um tratamento
“fuzzy” do que “booleano”. Ressalta-se, entretanto, que esta classe é puramente de contexto e
serve para relacionar os fatores de risco em um mapa temático, não sendo entretanto
determinística como indicativo de que está realmente relacionada à transmissão da doença,
sendo necessários maiores estudos para verificar se está ou não. As classificações realizadas
nesta dissertação estão apresentadas no APÊNDICE 2.
98

5 RESULTADOS
Este capítulo apresenta os resultados da metodologia desenvolvida no capitulo 4 aplicada
as imagens do satélite IKONOS na área de estudo selecionada para definir a rotina de
classificação na imagem 1 (cena 1), e na área em que se validou a metodologia na imagem 2
(cena 2). Inicialmente, na seção 5.1 apresenta-se a avaliação da classificação, que inclui a
avaliação da ambigüidade (seção 5.1.1) e acurácia da classificação (seção 5.1.2). Após isto
foram gerados dois mapas temáticos, referentes às duas cenas (seção 5.2), que mostram a
localização da classe área_de_exposição_50_metros.
5.1 AVALIAÇÃO DA CLASSIFICAÇÃO
A avaliação da classificação foi feita de maneira que fosse possível validar os resultados
obtidos. Uma classificação “fuzzy” pode ser avaliada através de uma verificação de sua
estabilidade e do uso de um parâmetro estatístico que forneça a sua acurácia, podendo ser por
exemplo, o coeficiente “Kappa”, através do uso de uma matriz de erros (ANTUNES, 2003;
ALVES, 2005). Como neste trabalho as classes dos níveis 4, 3 e 1 foram definidas somente
para fornecer a informação de contexto para as classes do nível 2, a avaliação da classificação
foi feita apenas para as classes secundárias deste último nível, que são as de interesse nesta
pesquisa.
Foi aplicada uma análise da estabilidade e uma avaliação da acurácia da classificação
através de matrizes de erros e do coeficiente “Kappa”. A classe área de exposição não pôde
ter a sua acurácia avaliada, por se tratar de uma classe de contexto e não ser possível
compará-la com verdades terrestres. Entretanto, essa classe pôde ter a sua estabilidade
avaliada, já que esta avaliação depende apenas de parâmetros presentes na própria
classificação.
Analisando-se a imagem 1, sem se considerar a classe “área de exposição”, foram
classificados 5311 objetos como “casas” (telha, cinza e cimento) e considerando-se a classe
“área de exposição”, foram classificados 533 objetos como pertencentes a esta última e 4778
99
objetos como “casas”. Somando-se 533 + 4778 = 5311, portanto só objetos pertencentes às
classes correspondentes a casas são classificados como área de exposição. O total de objetos
pertencentes a esta classe corresponde a aproximadamente 10% do total de objetos que seriam
classificados como casa se não fosse considerada a classe de contexto. Analogamente, tem-se,
para a imagem 2, um total de 1191 objetos classificados como casas sem se considerar a área
de exposição e 49 objetos classificados como pertencentes à área de exposição, perfazendo,
portanto cerca de 4% do total.
5.1.1 AVALIAÇÃO DA AMBIGÜIDADE DA CLASSIFICAÇÃO
A ambigüidade da classificação (Ia) é definida por DEFINIENS IMAGING (2000) como
a diferença entre o maior grau de associação a uma classe pelo segundo maior grau de
associação a outra classe para um determinado objeto. ANTUNES (2003), propõe uma escala
de ambigüidade que mede a “estabilidade” da classificação, ou seja, o quanto um determinado
conjunto de descritores de classes consegue atribuir graus de associação que não sejam
próximos entre si. Portanto quanto maior é essa diferença, maior é a “estabilidade” da
classificação. Por exemplo, se um conjunto de descritores fornece graus de associação iguais
para um determinado objeto, relativos a duas classes diferentes, estes não permitem uma
perfeita distinção entre uma classe e outra. A escala proposta por ANTUNES (2003) é
mostrada na TAB. 5.1, sendo a sua definição de ambigüidade apresentada na seção 3.7.
ALVES (2005), afirma que esta definição superestima valores baixos de associação de
classes. Por concordar com esta opinião, adotou-se a mesma definição de ambigüidade dada
por ALVES (2005), que é a mesma adotada por DEFINIENS IMAGING (2000), com a escala
lingüística proposta por ANTUNES (2003), como parâmetro qualitativo.
100
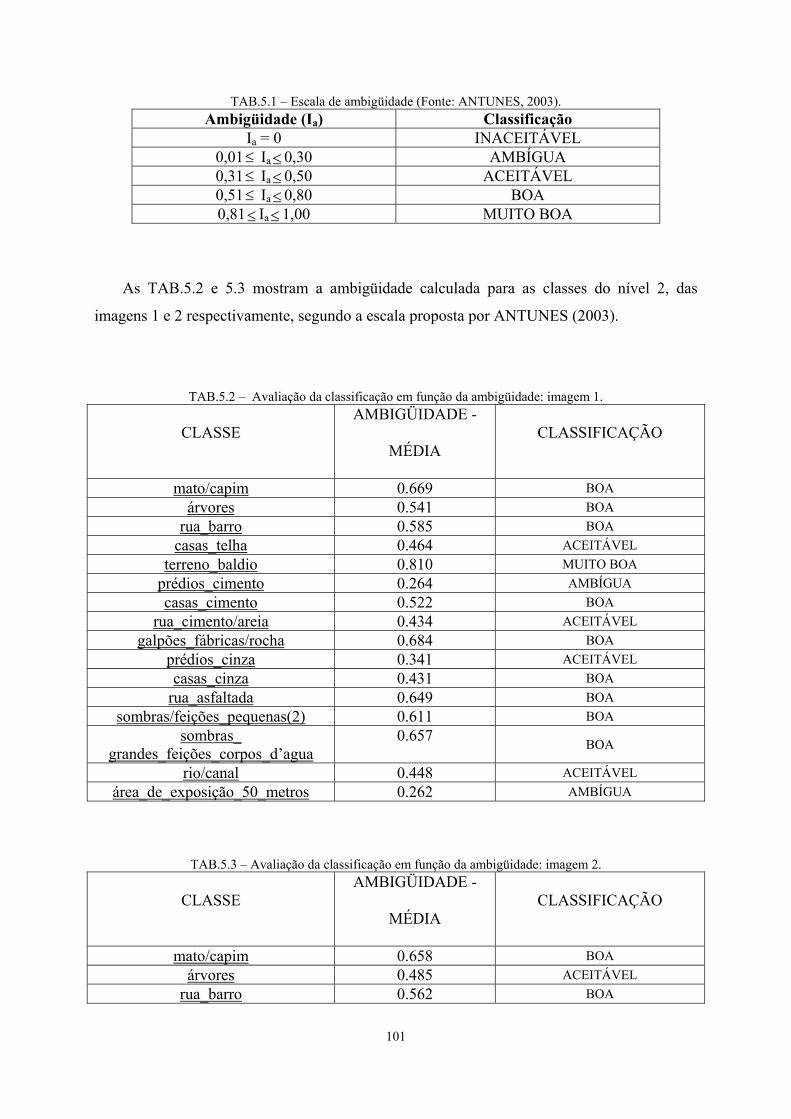
TAB.5.1 – Escala de ambigüidade (Fonte: ANTUNES, 2003). Ambigüidade (Ia) Classificação
Ia = 0 INACEITÁVEL 0,01≤ Ia≤ 0,30 AMBÍGUA 0,31≤ Ia≤ 0,50 ACEITÁVEL 0,51≤ Ia≤ 0,80 BOA 0,81 I≤ a≤ 1,00 MUITO BOA
As TAB.5.2 e 5.3 mostram a ambigüidade calculada para as classes do nível 2, das
imagens 1 e 2 respectivamente, segundo a escala proposta por ANTUNES (2003).
TAB.5.2 – Avaliação da classificação em função da ambigüidade: imagem 1.
CLASSE AMBIGÜIDADE -
MÉDIA CLASSIFICAÇÃO
mato/capim 0.669 BOA árvores 0.541 BOA
rua_barro 0.585 BOA casas_telha 0.464 ACEITÁVEL
terreno_baldio 0.810 MUITO BOA prédios_cimento 0.264 AMBÍGUA casas_cimento 0.522 BOA
rua_cimento/areia 0.434 ACEITÁVEL galpões_fábricas/rocha 0.684 BOA
prédios_cinza 0.341 ACEITÁVEL casas_cinza 0.431 BOA
rua_asfaltada 0.649 BOA sombras/feições_pequenas(2) 0.611 BOA
sombras_ grandes_feições_corpos_d’agua
0.657 BOA
rio/canal 0.448 ACEITÁVEL área_de_exposição_50_metros 0.262 AMBÍGUA
TAB.5.3 – Avaliação da classificação em função da ambigüidade: imagem 2.
CLASSE AMBIGÜIDADE -
MÉDIA CLASSIFICAÇÃO
mato/capim 0.658 BOA árvores 0.485 ACEITÁVEL
rua_barro 0.562 BOA
101

CLASSE AMBIGÜIDADE -
MÉDIA CLASSIFICAÇÃO
casas_telha 0.441 ACEITÁVEL terreno_baldio 0.628 BOA
prédios_cimento 0.404 ACEITÁVEL casas_cimento 0.424 ACEITÁVEL
rua_cimento/areia 0.374 ACEITÁVEL galpões_fábricas/rocha 0.756 BOA
prédios_cinza 0.264 AMBÍGUA casas_cinza 0.379 ACEITÁVEL
rua_asfaltada 0.713 BOA sombras/feições_pequenas(2) 0.611 BOA
sombras_ grandes_feições_corpos_d’agua
0.866 MUITO BOA
rio/canal 0.586 BOA área_de_exposição_50_metros 0.262 AMBÍGUA
Com base nas TAB.5.2 e 5.3 é possível verificar que a classe prédios_cimento na imagem
1 foi considerada ambígua segundo a escala lingüística adotada, e prédios_cinza foi
considerada ambígua na imagem 2. As demais classes são aceitáveis ou boas nas duas
imagens, sendo a classe terreno_baldio designada muito boa na imagem 1. A classe de
contexto área_de_exposição_50_metros foi considerada ambígua nas duas imagens, o que
indica uma instabilidade na sua descrição. Relacionando-se as classes primárias do nível 2,
com suas classes secundárias pode-se afirmar que:
1) Classes de vegetação: A ambigüidade da classe mato/capim é considerada boa nas duas
imagens, e a classe árvores é considerada boa na primeira imagem mas aceitável na segunda.
Entretanto, a diferença de ambigüidades entre as duas imagens para estas feições é pequena,
sendo ligeiramente mais estável na primeira imagem.
2) Classes de barro/argila: A classe rua_barro tem praticamente a mesma ambigüidade para as
duas imagens (0.585 e 0.562), o mesmo ocorrendo com casas_telha. terreno_baldio
entretanto, tem uma diferença maior (0,81 e 0,62, para a imagem 1 e 2 respectivamente).
3) Classes de cimento/areia: prédios_cimento foi considerada ambígua na cena 1 e aceitável
na cena 2. As demais feições, casas_cimento e ruas_cimento/areia tiveram uma variação de
cerca da 0,1 para a primeira e 0,06 para a segunda com um grau de ambigüidade menor para a
primeira imagem, com exceção de prédios_cimento, mais estável na segunda imagem.
102

4) Classes de asfalto/amianto/rocha: prédios_cinza tem uma ambigüidade maior na segunda
imagem, o mesmo ocorrendo com casas_cinza; galpões_fábricas/rocha . Já rua_asfaltada é
mais ambígua na cena 1.
5) Classes de água/sombra: Esta feição tem uma ambigüidade que varia entre muito boa e
aceitável, sendo, mais ambígua na imagem 1. A classe mais ambígua é rio/canal, e a menos
ambígua é sombras_grandes_feições_corpos_d’água.
6) Fatores de risco: Na imagem 1 as feições que representam as casas (telha, cinza e cimento),
as de cobertura de telha são aceitáveis e as demais são consideradas boas. As demais classes
variam entre muito boa (terreno_baldio), e aceitável (rio/canal). Na imagem 2, as casas são
aceitáveis e as demais são boas.
Na imagem 1 certas feições têm alguns objetos cuja estabilidade é considerada
inaceitável, com um mesmo grau de associação para diferentes classes. A classe
prédios_cimento tem um mesmo grau de associação que casas_cimento; rio/canal tem um
mesmo grau de associação que sombras_feições_pequenas(2); casas_cimento com
ruas_cimento/areia e casas_telha; rua_asfaltada com casas_cinza, prédios_cinza e rua_barro;
galpões_fábricas/rocha com prédios_cinza; e a classe área_de_exposição_50_metros, com
casas_cimento e casas_cinza.
Na imagem 2, isto ocorre para casas_cimento com rua_cimento/areia; rua_asfaltada com
prédios_cinza e casas_cinza, galpões_fábricas/rocha com terreno_baldio e prédios_cinza,
casas_telha com rua_barro e casas_cinza. Na FIG.5.1 é possível ver a variação da
ambigüidade para as duas imagens, sendo a cor vermelha indicativo de uma ambigüidade
inaceitável; a cor verde indica nenhuma instabilidade; e as cores laranja e amarelo valores
intermediários de ambigüidade.
103
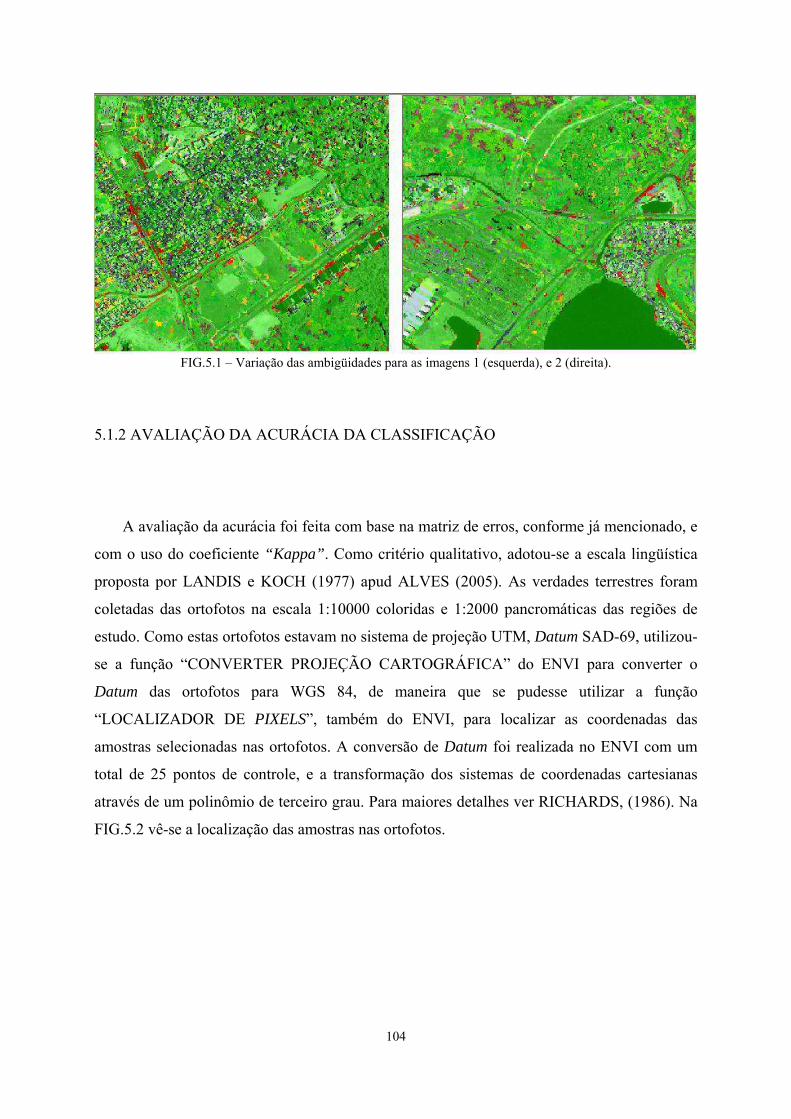
FIG.5.1 – Variação das ambigüidades para as imagens 1 (esquerda), e 2 (direita).
5.1.2 AVALIAÇÃO DA ACURÁCIA DA CLASSIFICAÇÃO
A avaliação da acurácia foi feita com base na matriz de erros, conforme já mencionado, e
com o uso do coeficiente “Kappa”. Como critério qualitativo, adotou-se a escala lingüística
proposta por LANDIS e KOCH (1977) apud ALVES (2005). As verdades terrestres foram
coletadas das ortofotos na escala 1:10000 coloridas e 1:2000 pancromáticas das regiões de
estudo. Como estas ortofotos estavam no sistema de projeção UTM, Datum SAD-69, utilizou-
se a função “CONVERTER PROJEÇÃO CARTOGRÁFICA” do ENVI para converter o
Datum das ortofotos para WGS 84, de maneira que se pudesse utilizar a função
“LOCALIZADOR DE PIXELS”, também do ENVI, para localizar as coordenadas das
amostras selecionadas nas ortofotos. A conversão de Datum foi realizada no ENVI com um
total de 25 pontos de controle, e a transformação dos sistemas de coordenadas cartesianas
através de um polinômio de terceiro grau. Para maiores detalhes ver RICHARDS, (1986). Na
FIG.5.2 vê-se a localização das amostras nas ortofotos.
104

FIG.5.2 – Localização das amostras nas ortofotos.
A forma de amostragem escolhida foi a de amostragem aleatória simples, em que
coordenadas (x,y) da imagem são selecionadas aleatoriamente. O motivo desta escolha foi
que, conforme mencionado na seção 3.8, o desenvolvimento da formulação do coeficiente
Kappa foi feito para este esquema de amostragem. Para se obter as coordenadas das amostras,
um programa gerador de números aleatórios foi usado. A quantidade de amostras coletadas
foi calculada através do emprego da fórmula de estatística multinomial mostrada na seção 3.8,
considerando-se os seguintes parâmetros: nível de confiança de 85%; k = 15 classes do
esquema de classificação; precisão desejada de 5% para cada célula da matriz de erros. A
determinação da classe de maior percentagem de área na classificação foi obtida de acordo
com a TAB.5.4.
105
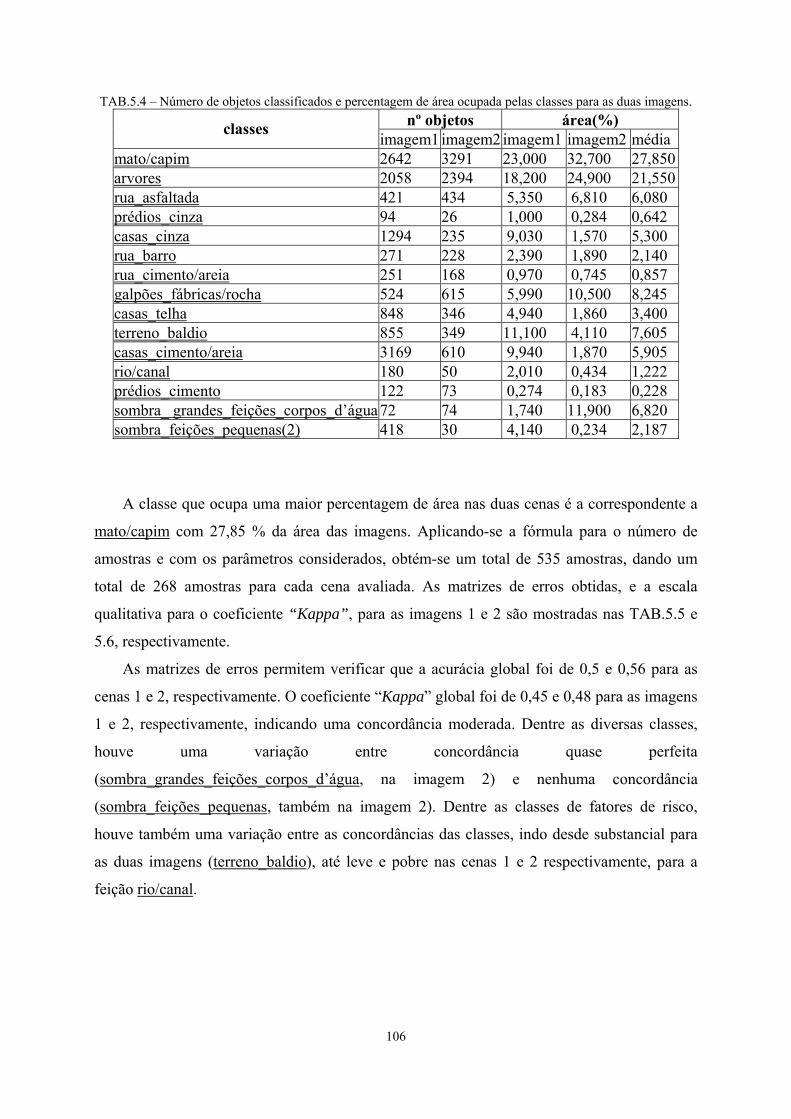
TAB.5.4 – Número de objetos classificados e percentagem de área ocupada pelas classes para as duas imagens. nº objetos área(%) classes imagem1 imagem2 imagem1 imagem2 média
mato/capim 2642 3291 23,000 32,700 27,850arvores 2058 2394 18,200 24,900 21,550rua_asfaltada 421 434 5,350 6,810 6,080 prédios_cinza 94 26 1,000 0,284 0,642 casas_cinza 1294 235 9,030 1,570 5,300 rua_barro 271 228 2,390 1,890 2,140 rua_cimento/areia 251 168 0,970 0,745 0,857 galpões_fábricas/rocha 524 615 5,990 10,500 8,245 casas_telha 848 346 4,940 1,860 3,400 terreno_baldio 855 349 11,100 4,110 7,605 casas_cimento/areia 3169 610 9,940 1,870 5,905 rio/canal 180 50 2,010 0,434 1,222 prédios_cimento 122 73 0,274 0,183 0,228 sombra_ grandes_feições_corpos_d’água 72 74 1,740 11,900 6,820 sombra_feições_pequenas(2) 418 30 4,140 0,234 2,187
A classe que ocupa uma maior percentagem de área nas duas cenas é a correspondente a
mato/capim com 27,85 % da área das imagens. Aplicando-se a fórmula para o número de
amostras e com os parâmetros considerados, obtém-se um total de 535 amostras, dando um
total de 268 amostras para cada cena avaliada. As matrizes de erros obtidas, e a escala
qualitativa para o coeficiente “Kappa”, para as imagens 1 e 2 são mostradas nas TAB.5.5 e
5.6, respectivamente.
As matrizes de erros permitem verificar que a acurácia global foi de 0,5 e 0,56 para as
cenas 1 e 2, respectivamente. O coeficiente “Kappa” global foi de 0,45 e 0,48 para as imagens
1 e 2, respectivamente, indicando uma concordância moderada. Dentre as diversas classes,
houve uma variação entre concordância quase perfeita
(sombra_grandes_feições_corpos_d’água, na imagem 2) e nenhuma concordância
(sombra_feições_pequenas, também na imagem 2). Dentre as classes de fatores de risco,
houve também uma variação entre as concordâncias das classes, indo desde substancial para
as duas imagens (terreno_baldio), até leve e pobre nas cenas 1 e 2 respectivamente, para a
feição rio/canal.
106
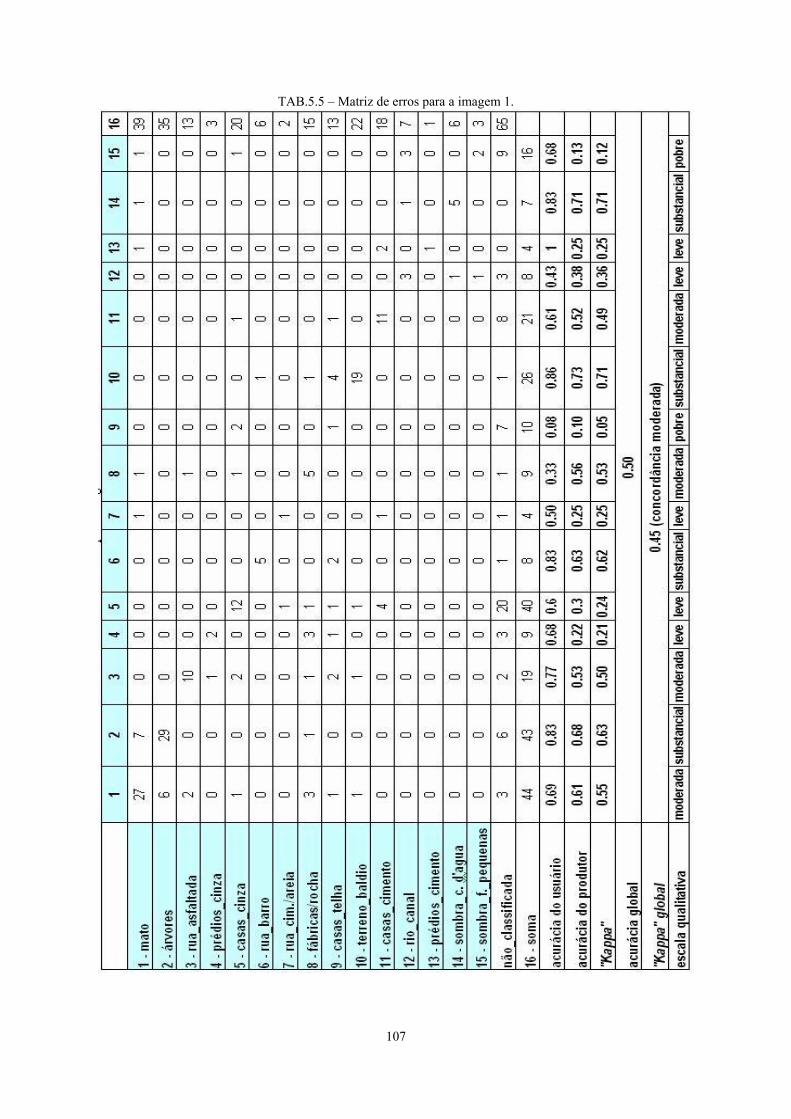
TAB.5.5 – Matriz de erros para a imagem 1.
107

TAB.5.6 – Matriz de erros para a imagem 2.
108
Relacionando-se as classes secundárias (sem incluir os fatores de risco) com as primárias
nas imagens pode-se dizer que:
1) Classe de vegetação:
a) árvores: teve concordância substancial, AP de 0,68, AU de 0,83 na imagem 1. Na imagem
2 teve concordância substancial, AP de 0,72, AU de 0,66. Os EO (colunas da matriz) e EI
(linhas da matriz), correspondem principalmente à classe mato/capim, para as duas cenas.
2) Classes de asfalto/amianto:
a) rua_asfaltada: imagem1: concordância moderada, AP:0,53 e AU: 0,77. EO: casas_cinza e
casas_telha. EI: mato/capim e galpões_fábricas/rocha. Imagem2: concordância leve, AP de
0,35 e AU: 0,88. EO: galpões_fábricas/rocha. EI: mato/capim.
b) prédios_cinza: imagem 1: concordância leve, AP: 0,22 e AU: 0,68. EO:
galpões_fábricas/rocha e objetos sem classificação. EI: rua_asfaltada. Imagem 2:
concordância leve, AP: 0,33 e AU: 1. EO: objetos sem classificação. EI: não teve.
c) galpões_fábricas/rocha: imagem 1: concordância moderada, AP: 0,56 e AU: 0,33. EO: rua_
asfaltada. EI: prédios_cinza e mato/capim. Imagem 2: concordância substancial, AP: 0,75 e
AU: 0.24. EO: mato/capim.EI: rua_asfaltada.
3) Classes de cimento/areia:
a) rua_cimento/areia: imagem 1: concordância leve, AP: 0,25 e AU: 0,5. EO: mato/capim,
casas_cimento e objetos não classificados. EI: casas_cinza. Imagem 2: concordância
moderada, AP: 0,5 e AU: 1. EO: casas_cimento e objetos não classificados. EI: não teve.
b) prédios_cimento: imagem 1: concordância leve, AP: 0,25 e AU: 1. EO: casas_cimento e
mato/capim. EI: não teve. Imagem 2: concordância leve, AP: 0,33 e AU:0,5. EO:
casas_cimento e mato/capim. EI: casas_cimento.
4) Classe água/sombra:
a) sombra_grandes_feições_corpos_d’água: imagem 1: concordância substancial, AP: 0,71 e
AU: 0,83. EO: rio/canal e mato/capim. EI: rio/canal. Imagem 2: concordância quase perfeita,
AP: 1 e AU: 1. EO: não teve. EI: não teve.
b) sombra_feições_pequenas (2): imagem 1: concordância pobre, AP: 0,13 e AU: 0,68. EO:
objetos não classificados e rio/canal. EI: rio/canal. Imagem 2: sem concordância, AP: 0 e AU:
indefinido. EO: objetos não classificados. EI: não teve.
As classes de fatores de risco obtiveram os seguintes resultados:
1) Classe de vegetação:
109
a) mato/capim: teve concordância moderada na imagem 1 e leve e na imagem 2, AP de 0,61, e
AU de 0,69. Os EO foram principalmente relativos a árvores e galpões_fábricas/rocha, na
imagem1 e árvores e terreno_baldio, na imagem 2. Os EI foram devidos a árvores para as
cenas 1 e 2, e rio/canal e rua_asfaltada para a última.
2) Classe de barro/argila:
a) rua_barro: imagem 1: teve concordância substancial, AP: 0,63 e AU: 0,83. EO: casas_telha
e objetos não classificados. EI: terreno_baldio. Imagem 2: concordância leve, AP: 0,3 e AU:
0,75. EO: objetos não classificados e casas_telha. EI: mato/capim.
b) terreno_baldio: imagem 1: teve concordância substancial, AP: 0,73 e AU: 0,86. EO:
casas_telha. EI: casas_cinza e mato/capim. Imagem 2: concordância substancial, AP: 0,71 e
AU: 0,46. EO: mato/capim. EI: mato/capim e rua_barro.
c) casas_telha: imagem 1: teve concordância pobre, AP: 0,1 e AU: 0,08. EO: objetos não
classificados e casas_cinza. EI: terreno_baldio, rua_barro, rua_asfaltada. Imagem 2:
concordância moderada, AP: 0,5 e AU: 0,3. EO: objetos não classificados e casas_cinza. EI:
mato/capim e rua_barro.
3) Classe de água/sombra:
a) rio/canal: imagem 1: concordância leve, AP: 0,38 e AU: 0,43. EO: objetos ñ classificados,
sombra_feições_pequenas(2) e sombra_grandes_feições_corpos_d’água. EI:
sombra_feições_pequenas(2) e sombra_grandes_feições_corpos_d’água. Imagem 2:
concordância pobre, AP: 0,2 e AU: 0,2. EO: mato/capim. EI: não teve.
4) Classe de asfalto/amianto:
a) casas_cinza: imagem 1: teve concordância leve, AP: 0,3 e AU: 0,6. EO: objetos não
classificados. EI: rua_asfaltada e casas_telha. Imagem 2: concordância moderada, AP: 0,44 e
AU: 0,67. EO: objetos não classificados. EI: casas_telha.
5) Classe de cimento/areia:
a) casas_cimento: imagem 1: teve concordância moderada, AP: 0,52 e AU: 0,61. EO: objetos
não classificados. EI: prédios_cinza e prédios_cimento. Imagem 2: concordância substancial,
AP: 0,75 e AU: 0,67. EO: prédios_cimento. EI: rua_cimento/areia.
110

5. 2 GERAÇÃO DE MAPAS TEMÁTICOS
Foram gerados dois mapas temáticos no programa ArcView 3.2 a partir das classificações
realizadas nas duas cenas. Nestes mapas são apresentadas as áreas propícias à transmissão da
leptospirose em ambiente urbano, onde são destacadas as classes relativas a casas (cinza,
cimento e telha) e área_de_exposição_50_metros. A FIG.5.3 mostra o mapa gerado a partir da
cena 1 e a FIG.5.4 mostra o mapa gerado a partir da cena 2, respectivamente.
111

FIG.5.3 – Mapa temático: Cena 1.
112
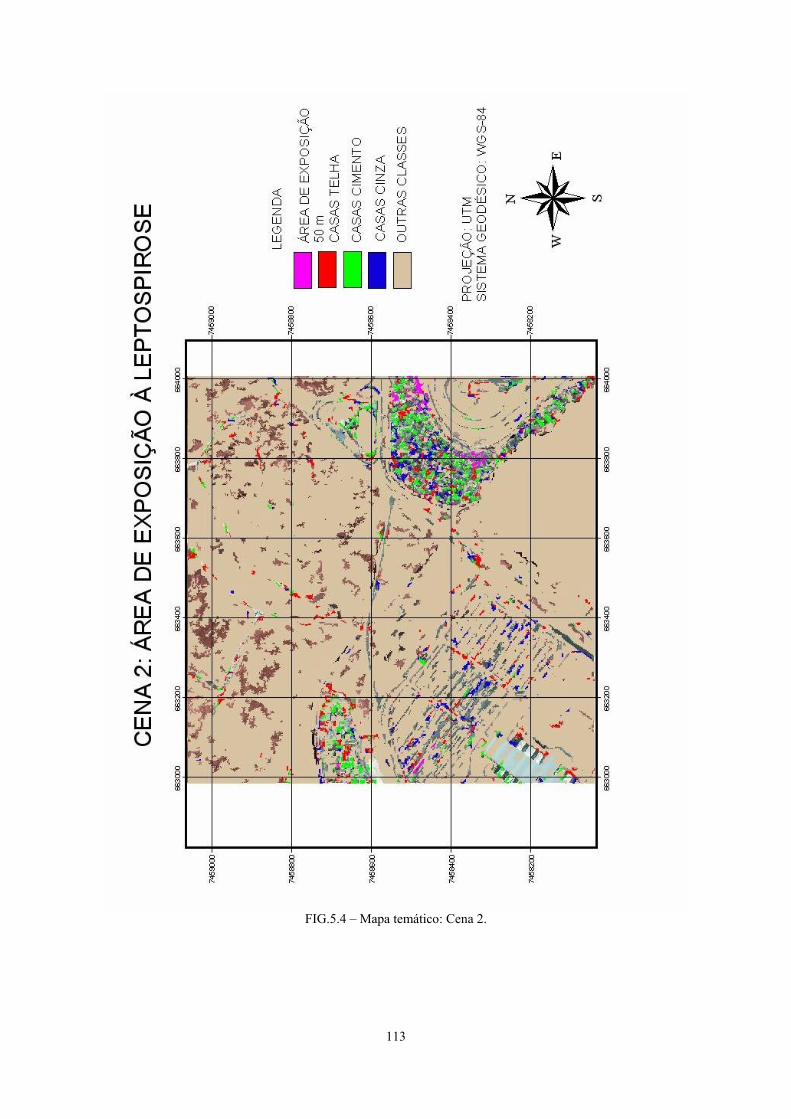
FIG.5.4 – Mapa temático: Cena 2.
113
6 ANÁLISE DOS RESULTADOS E CONCLUSÕES
A análise dos resultados apresentados no Capítulo 5, utilizando-se da metodologia
proposta no Capítulo 4, (FIG.4.1 e 4.12), conduz a algumas conclusões que serão
apresentadas e discutidas a seguir.
A rede descritora de classificação foi elaborada tendo em vista extrair e classificar todas
as feições pré-definidas da imagem analisada (cena 1), procurando identificar as áreas urbanas
propicias à transmissão da leptospirose.
Os mapas temáticos obtidos das duas cenas (FIG.5.3 e 5.4), apresentam as áreas de
exposição identificadas e constituem-se em indicativos para possíveis ações preventivas na
implementação de políticas de saúde pública. A metodologia aplicada em sua obtenção não
está restrita somente aos objetivos propostos neste trabalho, podendo ser utilizada também em
diversos tipos de atividades em que a identificação de características específicas do terreno
sejam importantes. Por exemplo, no campo de planejamento governamental, pode ser
utilizada na identificação de áreas que apresentem riscos (desabamento, incêndios, entre
outras) ou interesse de qualquer natureza, bastando para tal mudar os atributos de descrição
das classes. Do ponto de vista de emprego militar, pode ser utilizada na identificação de alvos
ou de qualquer tipo de objetivos de interesse (tropas camufladas, aeroportos, entre outros).
No decorrer do trabalho foi observado que a classificação das áreas consideradas fatores
de risco para a transmissão da leptospirose, não atingiu para todas as classes os resultados
esperados na cena 1 (concordância superior a moderada) , principalmente no que diz respeito
à rio/canal, que teve concordância leve; casas_cinza, com concordância leve; casas_telha, que
teve concordância pobre. Um motivo provável da ocorrência deste fato é a dificuldade de
obter-se alta correlação entre os objetos e as amostras de verdade terrestre em alvos
heterogêneos, que pode ser atribuída aos descritores insuficientes para defini-los, já que existe
um número limitado de atributos descritores disponíveis no eCognition que podem ser
relacionados às feições. Outros fatores de risco tiveram um grau de concordância que variou
entre moderada e substancial.
A imagem 2 teve resultados diversos da primeira, devido ao fato de que o esquema de
classificação foi elaborado para as características da primeira imagem. Com relação às classes
de rio_canal e casas_telha, houve uma inversão de qualidade, com a primeira feição tendo
114
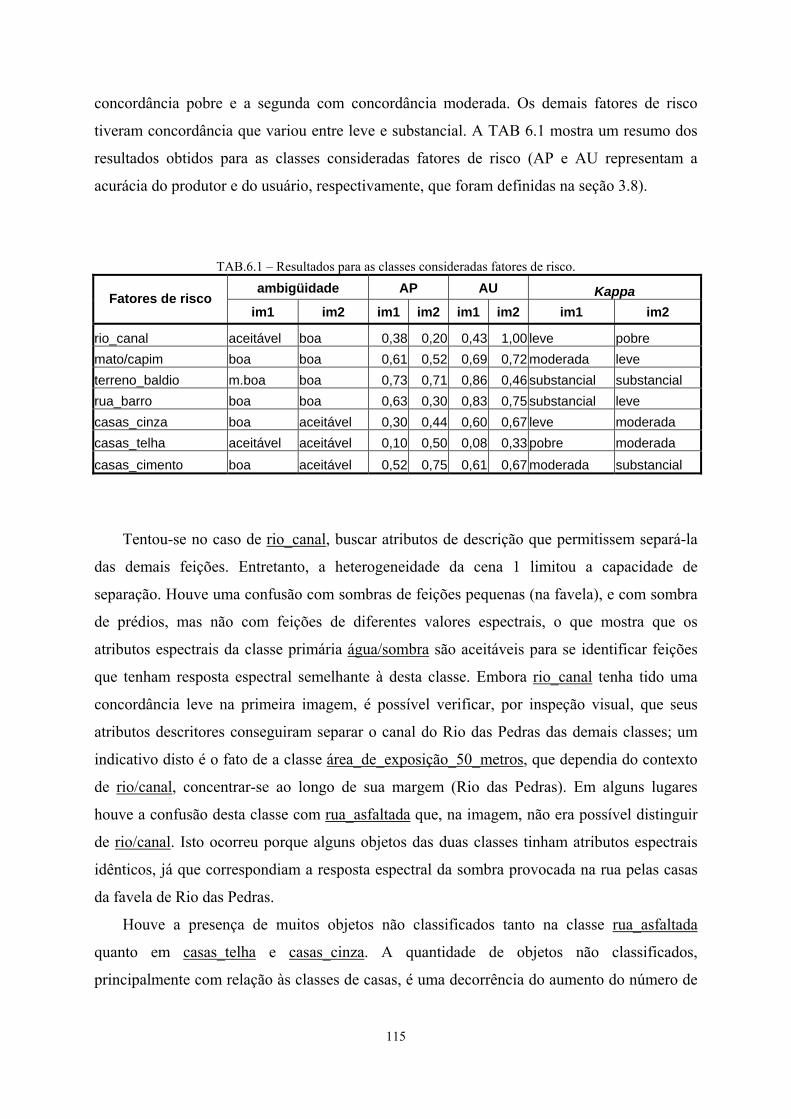
concordância pobre e a segunda com concordância moderada. Os demais fatores de risco
tiveram concordância que variou entre leve e substancial. A TAB 6.1 mostra um resumo dos
resultados obtidos para as classes consideradas fatores de risco (AP e AU representam a
acurácia do produtor e do usuário, respectivamente, que foram definidas na seção 3.8).
TAB.6.1 – Resultados para as classes consideradas fatores de risco.
ambigüidade AP AU Kappa Fatores de risco im1 im2 im1 im2 im1 im2 im1 im2
rio_canal aceitável boa 0,38 0,20 0,43 1,00 leve pobre mato/capim boa boa 0,61 0,52 0,69 0,72 moderada leve terreno_baldio m.boa boa 0,73 0,71 0,86 0,46 substancial substancial rua_barro boa boa 0,63 0,30 0,83 0,75 substancial leve casas_cinza boa aceitável 0,30 0,44 0,60 0,67 leve moderada casas_telha aceitável aceitável 0,10 0,50 0,08 0,33 pobre moderada casas_cimento boa aceitável 0,52 0,75 0,61 0,67 moderada substancial
Tentou-se no caso de rio_canal, buscar atributos de descrição que permitissem separá-la
das demais feições. Entretanto, a heterogeneidade da cena 1 limitou a capacidade de
separação. Houve uma confusão com sombras de feições pequenas (na favela), e com sombra
de prédios, mas não com feições de diferentes valores espectrais, o que mostra que os
atributos espectrais da classe primária água/sombra são aceitáveis para se identificar feições
que tenham resposta espectral semelhante à desta classe. Embora rio_canal tenha tido uma
concordância leve na primeira imagem, é possível verificar, por inspeção visual, que seus
atributos descritores conseguiram separar o canal do Rio das Pedras das demais classes; um
indicativo disto é o fato de a classe área_de_exposição_50_metros, que dependia do contexto
de rio/canal, concentrar-se ao longo de sua margem (Rio das Pedras). Em alguns lugares
houve a confusão desta classe com rua_asfaltada que, na imagem, não era possível distinguir
de rio/canal. Isto ocorreu porque alguns objetos das duas classes tinham atributos espectrais
idênticos, já que correspondiam a resposta espectral da sombra provocada na rua pelas casas
da favela de Rio das Pedras.
Houve a presença de muitos objetos não classificados tanto na classe rua_asfaltada
quanto em casas_telha e casas_cinza. A quantidade de objetos não classificados,
principalmente com relação às classes de casas, é uma decorrência do aumento do número de
115
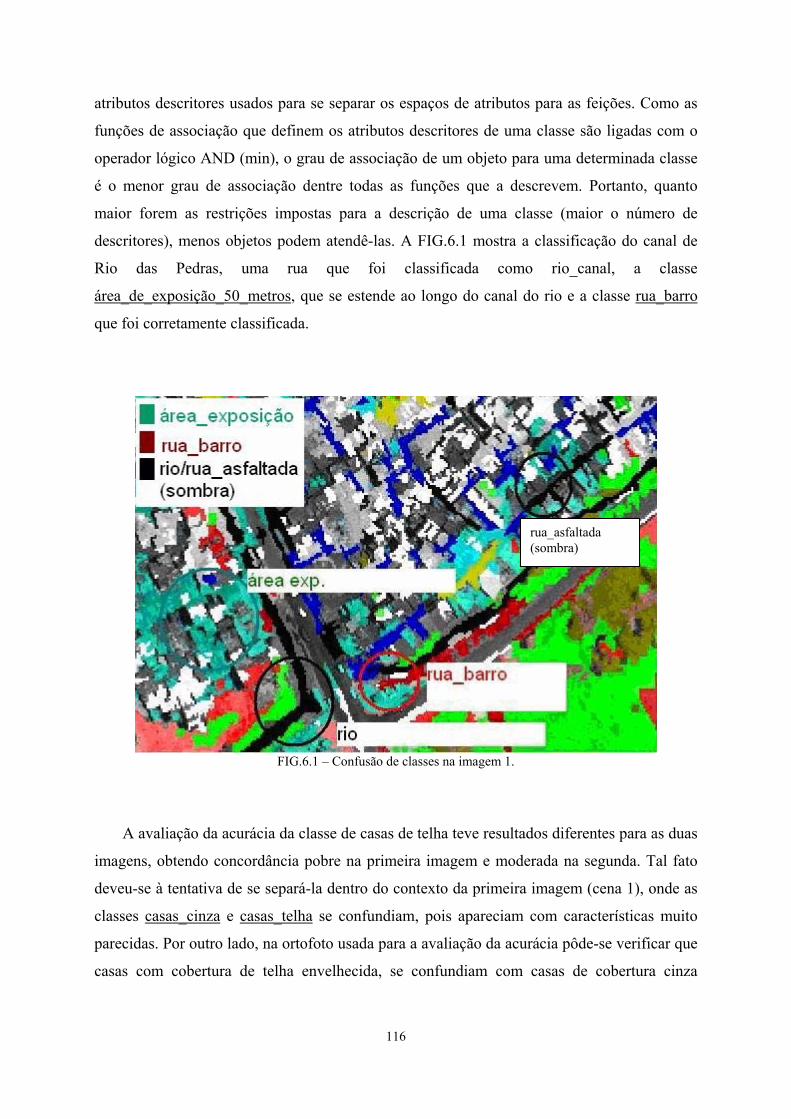
atributos descritores usados para se separar os espaços de atributos para as feições. Como as
funções de associação que definem os atributos descritores de uma classe são ligadas com o
operador lógico AND (min), o grau de associação de um objeto para uma determinada classe
é o menor grau de associação dentre todas as funções que a descrevem. Portanto, quanto
maior forem as restrições impostas para a descrição de uma classe (maior o número de
descritores), menos objetos podem atendê-las. A FIG.6.1 mostra a classificação do canal de
Rio das Pedras, uma rua que foi classificada como rio_canal, a classe
área_de_exposição_50_metros, que se estende ao longo do canal do rio e a classe rua_barro
que foi corretamente classificada.
rua_asfaltada (sombra)
FIG.6.1 – Confusão de classes na imagem 1.
A avaliação da acurácia da classe de casas de telha teve resultados diferentes para as duas
imagens, obtendo concordância pobre na primeira imagem e moderada na segunda. Tal fato
deveu-se à tentativa de se separá-la dentro do contexto da primeira imagem (cena 1), onde as
classes casas_cinza e casas_telha se confundiam, pois apareciam com características muito
parecidas. Por outro lado, na ortofoto usada para a avaliação da acurácia pôde-se verificar que
casas com cobertura de telha envelhecida, se confundiam com casas de cobertura cinza
116

(asfalto/amianto) . Isto dificultou a separação destas classes. Para a imagem de teste (cena 2),
a heterogeneidade dos atributos descritores tanto desta quanto das demais classes de casas era
menor, e houve uma maior concordância na matriz de erros. As casas com cobertura de
cimento tiveram uma boa concordância para as duas imagens, mostrando que os descritores
foram adequados às características desta feição para ambas as imagens. Houve uma confusão
entre a classe casas_cimento e prédios_cimento, devido a pouca diferenciação entre as feições
correspondentes a estas classes. A FIG.6.2 mostra, para a imagem 1, a pouca diferenciação
entre casas_cimento e prédios_cimento na cena (6.2a); mostra a confusão entre casas com
cobertura cinza e telha envelhecida, onde podem ser vistas uma casa com cobertura de telha
classificada corretamente, e uma casa com cobertura de telha envelhecida, classificada como
casa_cinza (6.2b); e as feições correspondentes na cena (6.2c).
FIG.6.2 – Confusão entre as classes de casas na imagem 1: a) casas_cimento e prédios_cimento. b) casas_cinza
classificada como casas_telha. c) feições correspondentes na cena aos objetos mostrados no caso b).
Conforme mencionado, a rede descritora foi definida para classificar a imagem 1 e
testada na imagem 2. Além do que já foi dito, verificou-se a existência de uma confusão entre
as classes de galpões_fábricas/rocha e rua_asfaltada, devido à presença do estacionamento do
centro de convenções do Riocentro, coberto de asfalto, mas que não representa uma feição
linear (conforme visto na FIG.6.3a). Desta forma, o conjunto de descritores utilizados para
extrair rua_asfaltada não o identificou, sendo então classificado como galpões_fábricas/rocha.
Este fato não afetou a concordância desta última, que teve bons resultados tanto na primeira,
quanto na segunda cena (ver TAB.5.5 e 5.6). Houve uma confusão entre as classes rio/canal e
sombra_grandes_feições_corpos_d’água (FIG.6.3b) e entre rio/canal e mato/capim
(FIG.6.3c), que só ocorreu na imagem da favela Vila Autódromo. No primeiro caso (6.3b), foi
117

provocada pela largura maior da feição correspondente aos rios canalizados na segunda
imagem, e no segundo caso (6.3c), deveu-se a existência de um deslocamento entre a banda G
e as bandas B e R (432), ocorrido após a ortorretificação das bandas multiespectrais originais
da imagem 2. Este deslocamento provoca uma coincidência entre os pixels desta banda com a
região onde passa um canal, provocando a confusão das classes (FIG.6.3d).
A classe prédios_cinza, embora tenha tido concordância leve nas duas imagens, teve
resultados semelhantes, pois em ambas o descritor de contexto “existência de objetos vizinhos
classificados como sombras de grandes feições a uma distância de até 5 metros” pode ser
utilizado (FIG.6.3a). Notou-se, entretanto, que objetos dos telhados destes prédios eram muito
heterogêneos, sendo classificados como casas de telha, por exemplo. Portanto o descritor não
obteve os resultados esperados, já que seu contexto dependia que os descritores espectrais
relativos a asfalto/amianto separassem tais objetos. A FIG.6.3 ilustra as causas de confusão de
classes na imagem 2. Esta figura também mostra uma casa de telha, que teve uma
heterogeneidade menor nesta imagem (FIG.6.3b).
A classe sombras_feições_pequenas(2), não teve concordância na imagem 2, havendo
apenas 30 objetos classificados nesta classe para esta cena, conforme mostra a TAB.5.4. Isto
foi devido ao fato de na segunda imagem, o ângulo de elevação do sol ser maior, não
provocando sombras nas casas das favelas como na primeira imagem. Corpos d’água tiveram
concordância perfeita na cena 2, o que indica que esta feição é totalmente separável com os
descritores utilizados.
118

b)
estacionamento
sombras prédios
rio classificado como mato/capim
c)
a)
casa telha
rio
d)
deslocamento banda G (432)
FIG.6.3 – Confusão de classes na imagem 2: a) estacionamento, que não corresponde a uma feição linear e sombra de prédio, usado para descrever este tipo de feição; b) rio, com uma largura maior que na cena 1, e casa
de telha; c) rio classificado como mato/capim; d) deslocamento da banda G (432).
A identificação de terrenos_baldios e de rua_barro teve concordância substancial na
primeira cena, substancial para terrenos_baldios e leve para rua_barro, na segunda, indicando
que terreno baldio foi o fator de risco que melhor foi identificado nas duas imagens.
Com base no exposto é possível se chegar as seguintes conclusões:
• A utilização da classificação orientada a objeto para a identificação de fatores de risco
na transmissão da leptospirose em área urbana em imagens IKONOS produziu os
melhores resultados para identificação dos fatores de risco terreno_baldio e
casas_cimento (concordância superior a moderada), nas duas imagens. Os demais
fatores de risco tiveram uma concordância que variou entre substancial e pobre, nas
duas imagens. Os fatores de risco rio_canal e casas_telha tiveram concordância leve e
pobre, respectivamente, na cena 1. Um motivo provável da ocorrência deste fato é a
119
dificuldade de obter-se alta correlação entre os objetos e as amostras de verdade
terrestre em alvos heterogêneos, que pode ser atribuída aos descritores insuficientes
para defini-los, já que existe um número limitado de atributos descritores disponíveis
no eCognition que podem ser relacionados às feições.
• Mostrou-se porém que o emprego da rotina de classificação em imagens diferentes e
com características parecidas pode produzir resultados de acurácia equivalentes ou
melhores. Para o caso das classes de casas, por exemplo, verificou-se que houve
resultados satisfatórios para a segunda imagem (favela Vila Autódromo),
significativamente melhores do que os obtidos para a primeira imagem. Tal fato deu-
se, pois os descritores utilizados para extrair casas são adequados para regiões de
favelas com menor heterogeneidade em suas feições. Isto se verificou na comparação
da imagem da favela Vila Autódromo (cena 2) com a imagem da favela de Rio das
Pedras (cena 1).
• A acurácia global baixa das matrizes de confusão para as duas imagens classificadas, e
a quantidade de objetos que se confundiram, mesmo após ter-se realizado a fusão de
dados entre as bandas multiespectrais e pancromática, indica que se atingiu o limite de
distinção de classes para imagens IKONOS, para a rede de descritores empregados.
Na rede hierárquica utilizada os descritores foram exaustivamente testados. Talvez,
com o auxilio de um especialista em interpretação de imagens, a rede pudesse ser
otimizada. Uma possível alternativa para a melhora dos resultados seria uma edição
manual dos objetos segmentados e uma posterior classificação.
• Quando diferentes classes de objetos têm características pouco distinguíveis na
imagem a ser classificada, o aumento da complexidade de descrição de uma classe,
através do acréscimo do número de descritores, provoca um aumento do número de
objetos não classificados. Isto aconteceu porque cada objeto passa a depender de
maior número de funções de associação ligadas com operador lógico AND (min).
• Pequenas variações no contexto entre uma cena a ser classificada e outra, afetam a
classificação daquela que não foi a origem da elaboração da rotina de classificação.
No caso da segunda cena, favela Vila Autódromo, com a área de favela menos densa
(casas mais espaçadas) e com um menor percentual de sombra, a classe
sombra_feições_pequenas(2), por ter tido os descritores elaborados, para a imagem da
cena 1 (favela de Rio das Pedras), obteve poucos objetos rotulados nesta classe, o que
levou a não concordância na matriz de confusão. A não existência de descritores
120
específicos para áreas de estacionamentos que não representam feições lineares, caso
do centro de convenções Riocentro, provocou a confusão entre as classes
rua_asfaltada e galpões_fábricas/rocha. Parte da feição correspondente à área de
estacionamento foi classificada como rua_asfaltada, e parte como
galpões_fábricas/rocha. Na acurácia global da classificação das duas imagens, foram
obtidas concordâncias moderadas, com valores próximos.
• A avaliação da classe de área_de_exposição_50_metros, mostra que uma feição
definida pelo contexto de várias outras classes tem uma classificação com baixa
estabilidade.
As seguintes sugestões são propostas para trabalhos futuros:
• Sugere-se que um estudo similar para a identificação de fatores de risco na
transmissão da leptospirose em área urbana seja implementado para fotografias aéreas
coloridas, de resolução espacial cadastral, e em imagens orbitais do sensor
QUICKBIRD, que tem uma resolução espacial superior ao IKONOS, para se verificar
a possibilidade de obter uma classificação mais apurada.
• Sugere-se que a classe área de exposição seja comparada com dados do SINAN, para
se verificar quais são as relações entre os diversos fatores de risco mencionados e que
diversos intervalos de funções de associação “fuzzy” sejam empregados para uma
delimitação mais acurada desta classe.
• Sugere-se a aplicação da metodologia desenvolvida na dissertação na identificação de
alvos ou de qualquer tipo de objetivos de interesse militar (tropas camufladas,
aeroportos, entre outros), com ênfase em zona urbana.
• Sugere-se a aplicação da metodologia desenvolvida na dissertação no estudo e
identificação de áreas que apresentem riscos do tipo desabamento, incêndios, e outros
de interesse governamental.
121
7. REFERÊNCIAS BIBLIOGRÁFICAS
ANDERSON, P.S. Fundamentos para fotointerpretação v1. – Teoria e métodos. Sociedade Brasileira de Cartografia. Rio de Janeiro, 1982. 129p.
ALVES, R.A.L. Identificação de alvos urbanos em imagens IKONOS aplicando
classificação orientada a segmentos. Dissertação de mestrado. IME. Rio de Janeiro, 2005. 126 p.
ANTUNES, A. F. B. Classificação de Ambiente Ciliar Baseada em Orientação a Objeto
em Imagens de Alta Resolução Espacial. Tese de Doutorado. Universidade Federal do Paraná, Curitiba. 2003. 147p.
ARNAUT, A.A. Metodologia para conversão de representação 2D para 3D do relevo.
Dissertação de mestrado. IME. Rio de Janeiro, 2001. 95 p. ARONOFF, S. Geographic information systems: a management perspective. 4ed. WDL
Publications. Canada, 1995. 295 p. ISBN 0- 921804-91-1. ARSKY M. L. S. et al. Probable areas of infection and ambience of occurrence of human
leptospirosis in Brazil (2001-2003). REV CUB MED TROP 57(1). p.59-60, 2005. BAATZ, M. e SCHÄPE, A. Objected oriented and multiscale image analysis in semantic
network. 2nd International Symposium on operational Remote Sensing.ITC. Netherlands. 1999.
BAATZ, M. e SCHÄPE, A. Multiresolution segmentation: an optimization approach for
high quality muti-scale image segmentation. München. 2000. Disponível: http://www.definiens-imaging.com/documents/index.htm [capturado em 10 abr 2005].
122
BARCELLOS, C. et al. Distribuição espacial da leptospirose no Rio Grande do Sul, Brasil: recuperando a ecologia dos estudos ecológicos. Cad. Saúde Pública. set./out. 2003, vol.19, no.5 p.1283-1292. ISSN 0102-311X. Disponível: http://www.scielo.br/scielo.php?script=sci_arttext&pid=S0102-311X2003000500007&lng=pt&nrm=iso [ capturado em 12 ago 2005].
BARCELLOS, C. e SABROZA, P. C. O lugar do caso: leptospirose e riscos associados a condições ambientais durante o surto de 1996 na Zona Oeste do Rio de Janeiro. Cad. Saúde Pública, 2001,vol.17 supl, p.59-67. ISSN 0102-311X.
BLASCKE, T,; HAY, G. Object-oriented image analysis and scale-space: theory and
methods for modeling and evaluating multiscale landscape structure. 2002. Disponível: http//www.definiens.com [capturado em 20 nov 2004].
BLASCHKE, T.; LANG,S.; LORUP,E.; STROBL,J. e ZEIL, P. Objected oriented image
processing in an integrated GIS/remote sensing enviroment and perspectives for enviromental applications. Enviromental information for planning. v.2. Metroplisverlag.2000. Disponível:
http://www.definiens-imaging.com/documents/reference2000.htm. [Capturado em 03 set 2004].
BURROUGH, P. e MCDONNELL, R.A. Principles of geographical information systems.
Oxford University Press. USA,1998. 333p. ISBN 0-19-823366-3. CASTLEMAN, K.R. Digital image processing. Prentice-Hall Inc.1996. USA. 667p. ISBN 0-
13-211467-4. CINTRA, J.P. Sistema UTM. Escola politécnica da USP, São Paulo, 2003. 51 p. CRÓSTA, A. P. Processamento digital de imagens de sensoriamento remoto. ed. rev.
IG/UNICAMP. Campinas, 1993. 170 p. CONGALTON, R.; GREEN, K. Assessing the Accuracy of Remotely Sensed Data:
Principles and Pratictices. Lewis Publishers, USA. 1999.
CORREIA, V. R. M.; CARVALHO, S. M.; SABROZA, P. C.; VASCONCELLOS, C. H. O sensoriamento remoto como ferramenta de vigilância em endemias brasileiras. Cad. Saúde Pública, jul./ago. 2004, vol.20, no.4, p.891-904. ISSN 0102-311X.
123
DE PAULA E. V. Leptospirose humana: uma análise climato-geográfica de sua manifestação no Brasil, Paraná e Curitiba. In: XII SIMPÓSIO BRASILEIRO DE SENSORIAMENTO REMOTO. 2005, Goiânia. P. 2301-2308.
DEFINIENS IMAGING, eCognition User Guide 3. 2000. Disponível: http://www.definiens-
imaging.com/documents/index.htm [capturado em 10 jun 2004]. FILHO, O. M. e NETO, H.V. Processamento digital de imagens. Ed.Brasport. Rio de
Janeiro. 1999. 409 p. ISBN-85-7452-009-8. FIRKOWSKI, H. Generalização cartográfica de grades retangulares baseada na teoria
matemática da comunicação. Tese de doutorado. UFPR, Curitiba2002. 158 p. GALO, M.L.B.T. Notas de aula da disciplina de sensoriamento remoto II. UNESP,
Presidente Prudente, 1º semestre de 2000.140 p. GONÇALVES, L., FONSECA, A. M., CAETANO, M. Exploração de imagens de alta
resolução do satélite IKONOS. In: ESIG2001 - VI Encontro de Utilizadores de Informação Geográfica, novembro de 2001, Oeiras, Portugal, 22 p.
GONZALEZ, R. e WOODS, R. Processamento de imagens digitais. Ed. Edgar Bücher, São
Paulo ,1992. 509 p. HARALICK, R.M.; SHANMUGAM, K.; DINSTEIN; I. Textural features for image
classification. IEEE Transactions on systems, man and cybernetics, vol. SMC-3, novembro de 1973. pp.610-621.
HEARNSHAW, H.M. e UNWIN, D.J. Visualization in geographical information systems.
Jonh Whiley e Sons LTDA. UK, 1994. 243 p. ISBN 0-471-94435-1. HUTTNER, M. D., PEREIRA, H. C. P. e TANAKA, R. M. Pneumonia por leptospirose. J.
Pneumol v.28 n.4, p. 229-232, 2002. ICTERÍCIA. definição médica Disponível:
http://usuarios.cultura.com.br/jmrezende/ictericia.htm. [Capturado 12 ago 2005].
124
INPE, Instituto Nacional de Pesquisas Espaciais. SPRING. Tutorial de geoprocessamento. Classificação. Disponível em: http://www.dpi.inpe.br/spring/teoria/classif/classif.htm . [Capturado em 26 abr 2004.].
ISCTE- Instituto Superior de Ciências do Trabalho e da Empresa. Departamento de
engenharia de telecomunicações e informática. Aula de programação orientada por objectos. Portugual, 2003. Disponível: http://www.iscte.pt/programacao/p2/teoricas/apendiceA.pdf [capturado em 11 mai 2005].
IWAI, O.K. Mapeamento do uso do solo urbano do município de São Bernardo do
Campo, através de imagens de satélite. Dissertação (Mestrado em Engenharia) – Escola Politécnica da Universidade de São Paulo, 2003. 127 p.
JÄHNE, B. Digital image processing: concepts, algorithms and scientific applications. 4
ed. rev. Berlin, Germany, 1997: Ed. Springer-Verlag. 555 p. il. ISBN 3-540-62724-3.
LEVETT, P.N. Leptospirosis. Clin Microbiol Rev 2001; 13:296-326. Disponível:
http://cmr.asm.org/cgi/content/full/14/2/296. [Capturado em 05 jul 2005]. LUGNANI , J.B. Introdução à Fotogrametria. Curitiba. Imprensa Universitária da UFPR. 1987. p. 95-116. MA, Z.; REDMOND, R. Tau coefficient for accuracy assessment of classification of
remote sensing data. In: Photogrammetric Engineering and Remote Sensing, vol. 68. p.435- 439. 1995.
MCGUIRE, D.J. ; GOODCHILD, M.F.; RHIND, D.W. Geographical information systems
– principles and applications v.1 Longman Scientific and Technical UK, 1991. 649 p. ISBN 0-582-05661-6.
MEDEIROS, G.C.F. ; Uso de texturas para o acompanhamento da evolução do
tratamento de úlceras dermatológicas. Dissertação de mestrado. USP, São Carlos.2001.
MEYER, P. L. Probabilidade: Aplicações à Estatística. 2a Ed., Livros Técnicos e
Científicos Editora S.A., Rio de Janeiro, 1984.
125
MISTÉRIO DA SAÚDE, Guia de vigilância epidemiológica. Brasília, FUNASA, 2002. 5.ed. vol 2. p. 541-557. ISBN 85-7346-032-6.
MONICO, J.F.G. Posicionamento pelo NAVSTAR-GPS. Fundação Editora da UNESP, São Paulo, 2000.288p.ISBN 85-7139-328-1.
MOREIRA, M. A. Fundamentos do sensoriamento remoto. 1a Ed. São José dos Campos.
2001. OLIVEIRA, C. Dicionário cartográfico. 4.ed. Rio de Janeiro: IBGE, 1993. 645p. PIMENTEL, E.G. Aula sobre semântica de Programas. UFMG. 2005. Disponível:
http://www.mat.ufmg.br/~elaine/logica_matematica/aula14.pdf [capturado em 11 mai 2005].
RIBEIRO, H.C.S. Análise por objetos: da teoria à prática. Ed. Europa, Rio de Janeiro,
1994. 165 p. ISBN 85-7091-017-7. RICHARDS, J. A. Remote Sensing Digital Image Analysis – An Introduction. Ed.
Springer-Verlag. New York, EUA, 1986. 281 p. ISBN 0-387-16007-8.
SABROZA, P. C. Discussão sobre possíveis lugares de interesse no estudo da detecção de áreas de risco na transmissão de leptospirose na cidade do Rio de Janeiro. ENSP, Rio de Janeiro, 2004. Comunicação pessoal em 05 nov 2004.
SABROZA, P. C. ; SILVEIRA, N. A.P. R. Discussão sobre as possíveis classes a serem
obtidas pela classificação orientada a objeto na detecção de áreas de risco de transmissão da leptospirose. ENSP, Rio de Janeiro, 2004. Comunicação pessoal em 15 nov 2004.
SECRETARIA DE ESTADO DE MEIO AMBIENTE E DESENVOLVIMENTO
SUSTENTÁVEL (SEMADS-RJ). Ambiente das águas no Estado do Rio de Janeiro, v.10, Rio de Janeiro, 2001. Disponível:
http://www.serla.rj.gov.br/planagua.photo.htm [capturado em 15 dez 2005].
126

SECRETARIA MUNICIPAL DO MEIO AMBIENTE – PREFEITURA DO RIO DE JANEIRO (SMMA-RJ). Estudo de impacto ambiental para o projeto de recuperação ambiental da macrobacia de Jacarepaguá – v. 2, Rio de Janeiro1998. Disponível:
http://www.armazemdedados.rio.rj.gov.br/ [capturado em 01 ago 2005]. SCHOWENGERDT, R. A. Remote sensing, models and methods for image processing 2nd
ed. Academic Press. USA. 1997. 520 p. ISBN 0-12-628981-6. SILVA, W.B. Avaliação da geometria de imagens IKONOS ortorretificadas através das
transformações polinomiais racionais. Dissertação de mestrado. IME. Rio de Janeiro, 2005.
STEFIK, M. Introduction to Knowledge Systems. Morgan Kaufmann publishers Inc.USA.
1995. 870 p. ISBN 1-55860-166-X. TAVARES, P. E. M. e FAGUNDES, P. M. Fotogrametria. Rio de Janeiro: Sociedade
Brasileira de Cartografia. 1991. 379p. TASSINARI, W. S. et al. Distribuição espacial da leptospirose no Município do Rio de
Janeiro, Brasil, ao longo dos anos de 1996-1999. Cad. Saúde Pública. [online]. 2004, v.20, n.6, p.1721-1729. ISSN 0102-311X Disponível: http://www.scielo.br/scielo.php?script=sci_arttext&pid=S0102-311X2004000600031&lng=pt&nrm=iso. [capturado em 08 junho 2005].
ZADEH, L. Fuzzy sets. Information and control. Vol.8 pp. 338-353. 1965. ZADEH, L.; FU, K.; TANAKA, K.; SHIMURA, M. Fuzzy sets and their applications to
cognitive and decision processes. Academic Press Inc. USA, 1975. p. 27-39. ISBN 0-12-775260-9.
127

8 APÊNDICES
128
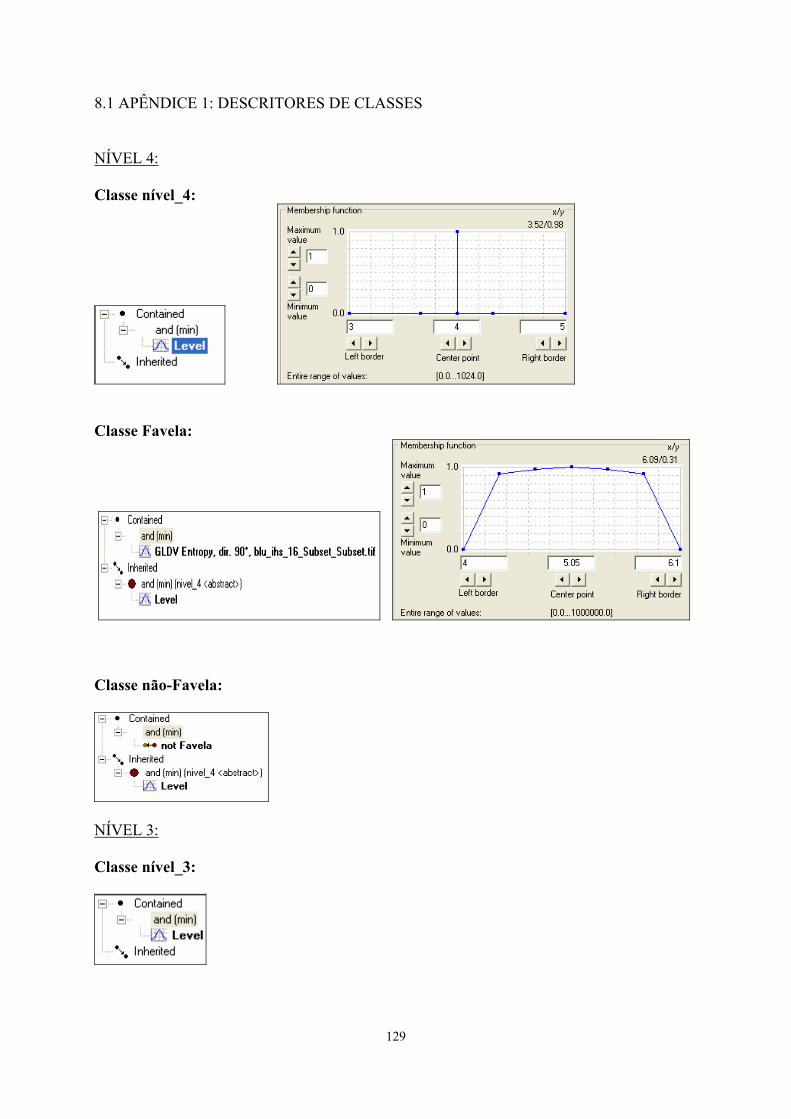
8.1 APÊNDICE 1: DESCRITORES DE CLASSES NÍVEL 4: Classe nível_4:
Classe Favela:
Classe não-Favela:
NÍVEL 3: Classe nível_3:
129
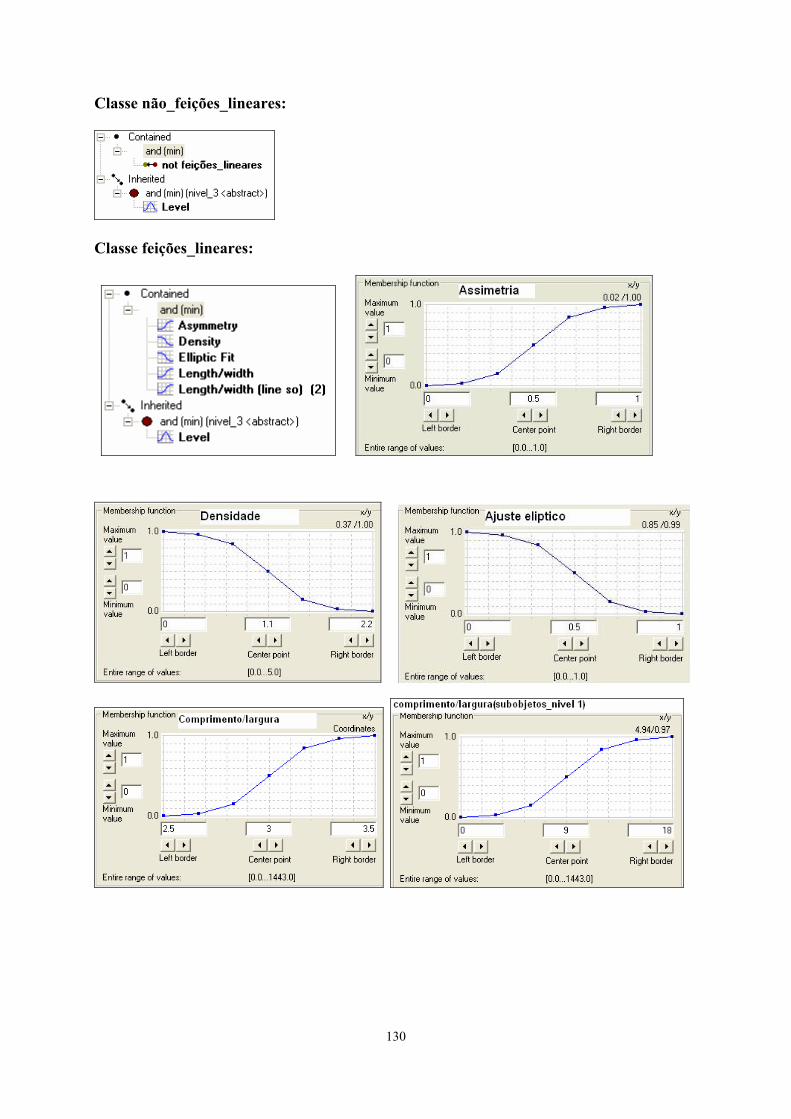
Classe não_feições_lineares:
Classe feições_lineares:
130

Classe Feições_extensas_área:
Classe Sombra_prédios/grandes_feições:
R(432)
Classe não_sombra_prédios_grandes:
131

NÍVEL 1: Classe nível_1:
Classe feições_pequenas (Área):
Classe sombras_feições_pequenas:
R(432)
132

NÍVEL 2: Classe nível_2:
Classes de similaridade invertida:
133
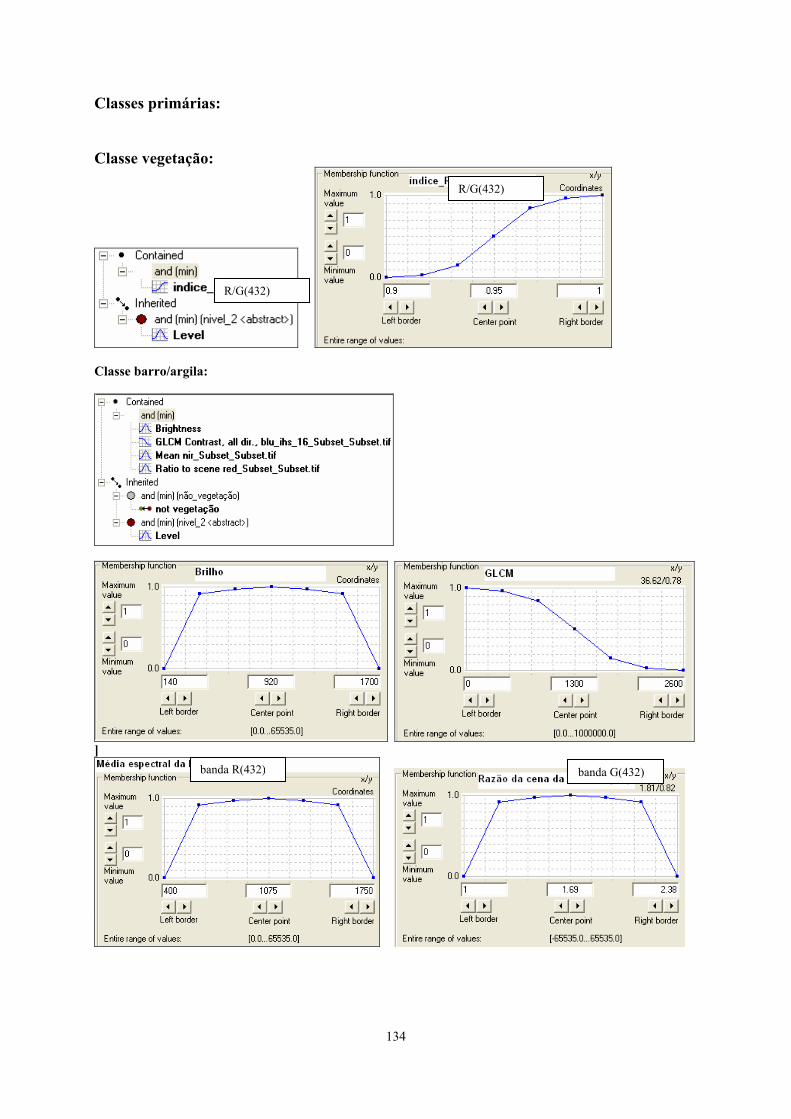
Classes primárias: Classe vegetação:
R/G(432)
R/G(432)
Classe barro/argila:
]
banda R(432) banda G(432)
134
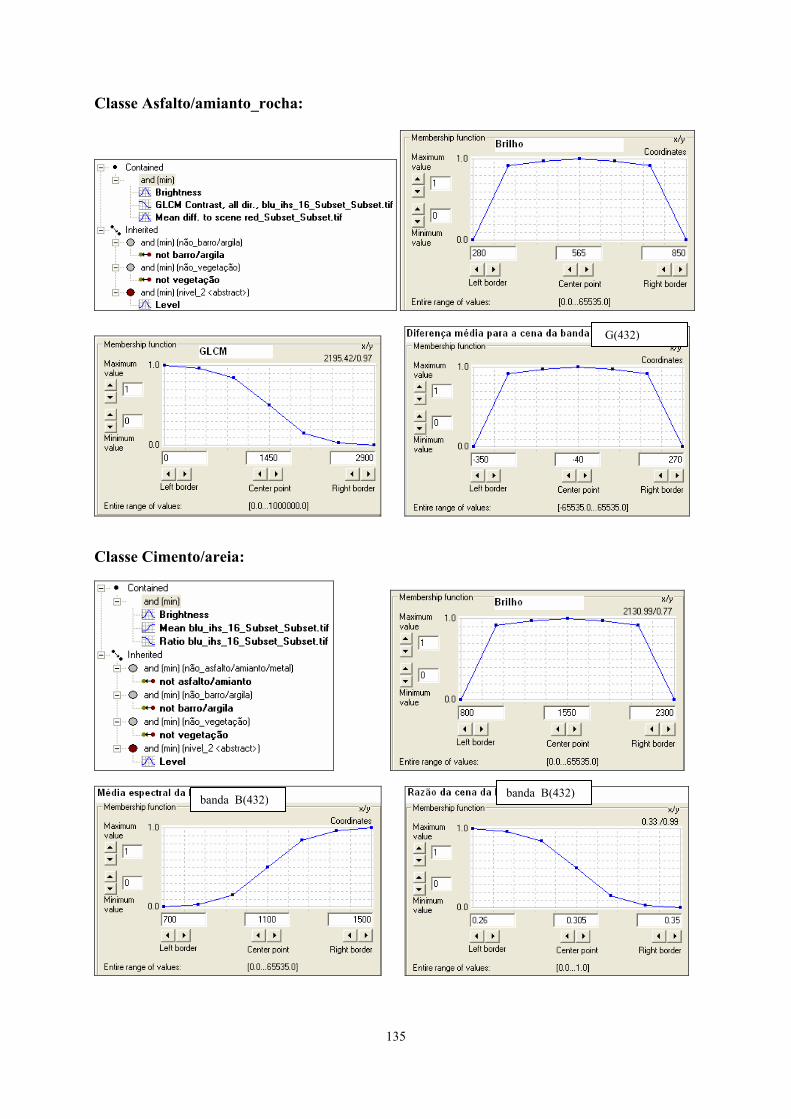
Classe Asfalto/amianto_rocha:
G(432)
Classe Cimento/areia:
banda B(432) banda B(432)
135
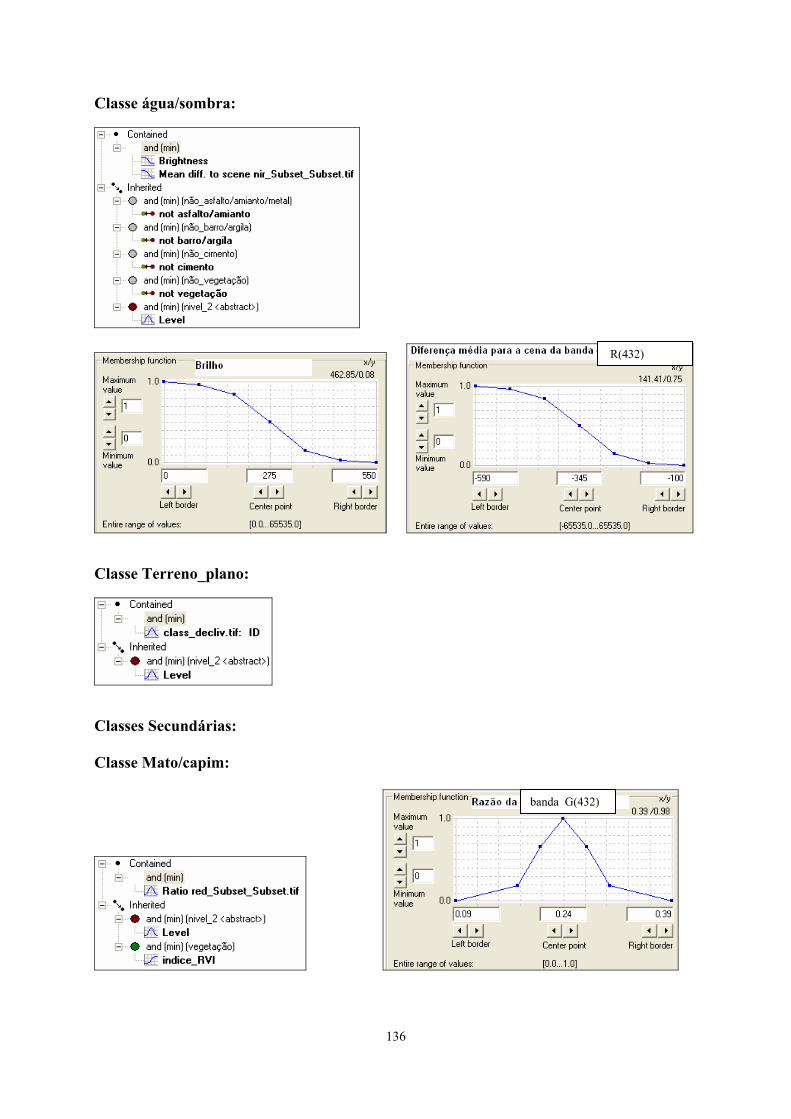
Classe água/sombra:
R(432)
Classe Terreno_plano:
Classes Secundárias: Classe Mato/capim:
banda G(432)
136
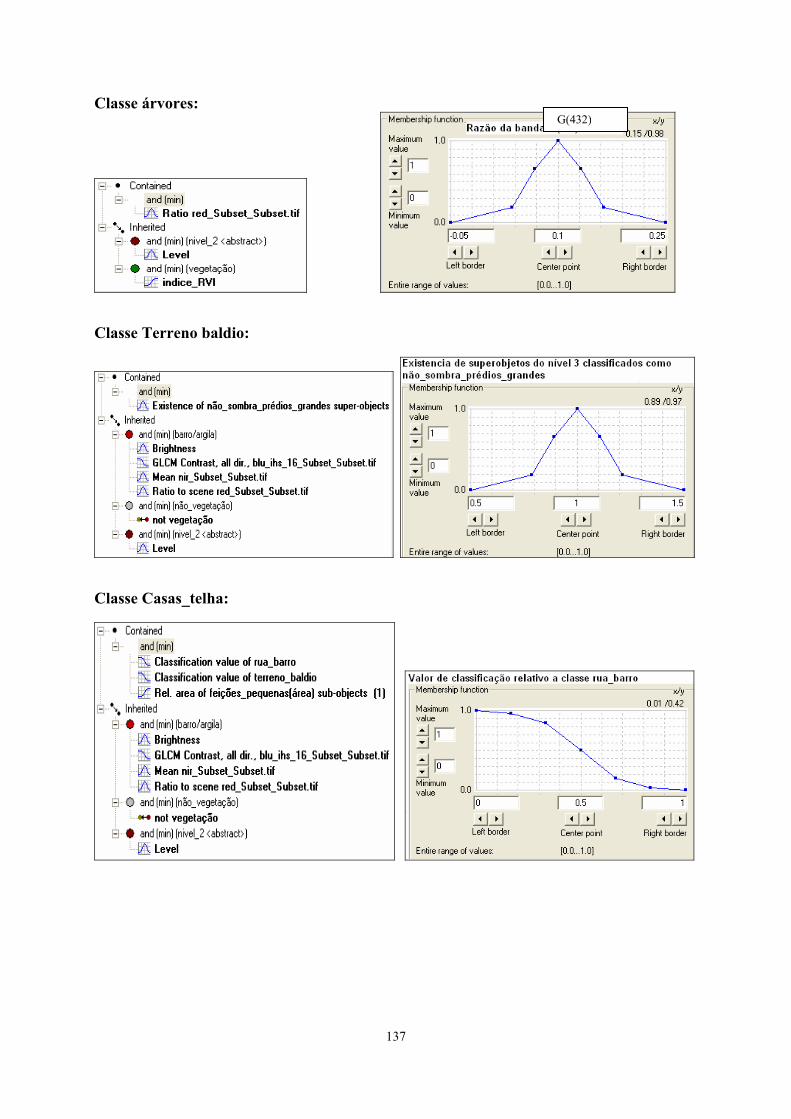
Classe árvores:
G(432)
Classe Terreno baldio:
Classe Casas_telha:
137

Classe Rua_barro:
Classe Rua_asfaltada:
138
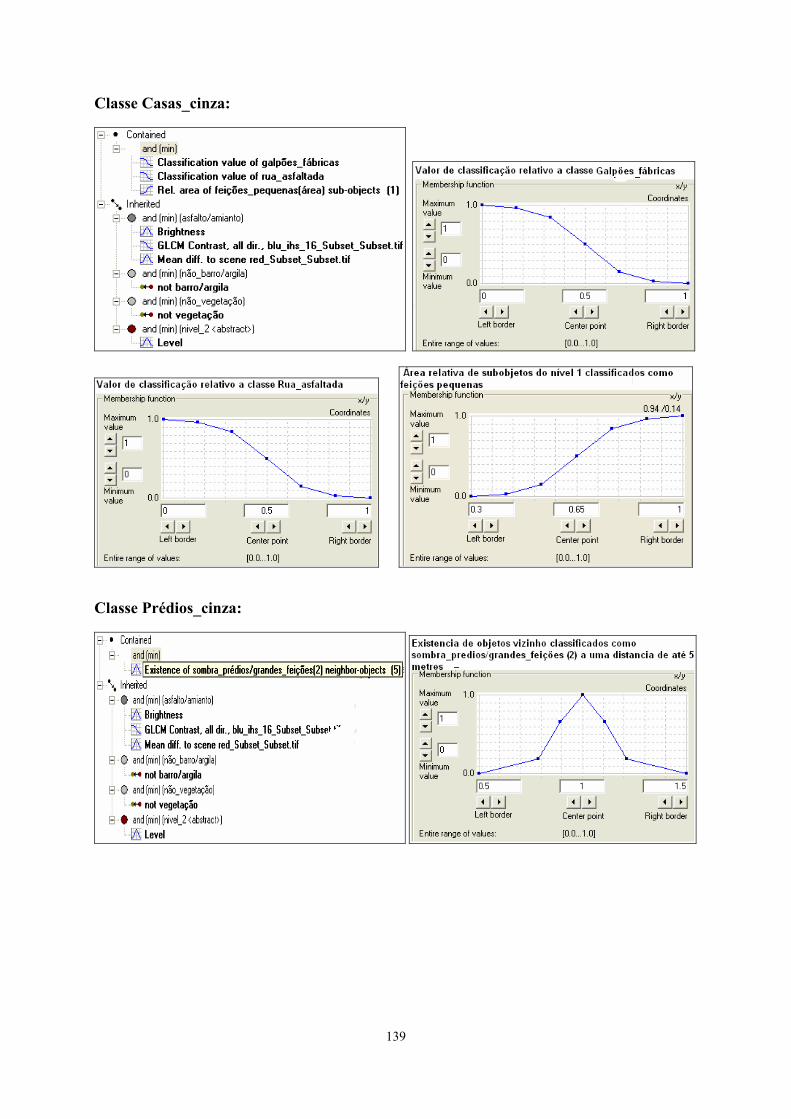
Classe Casas_cinza:
Classe Prédios_cinza:
139

Classe Galpões_fábricas_rocha:
Classe Casas_cimento:
140
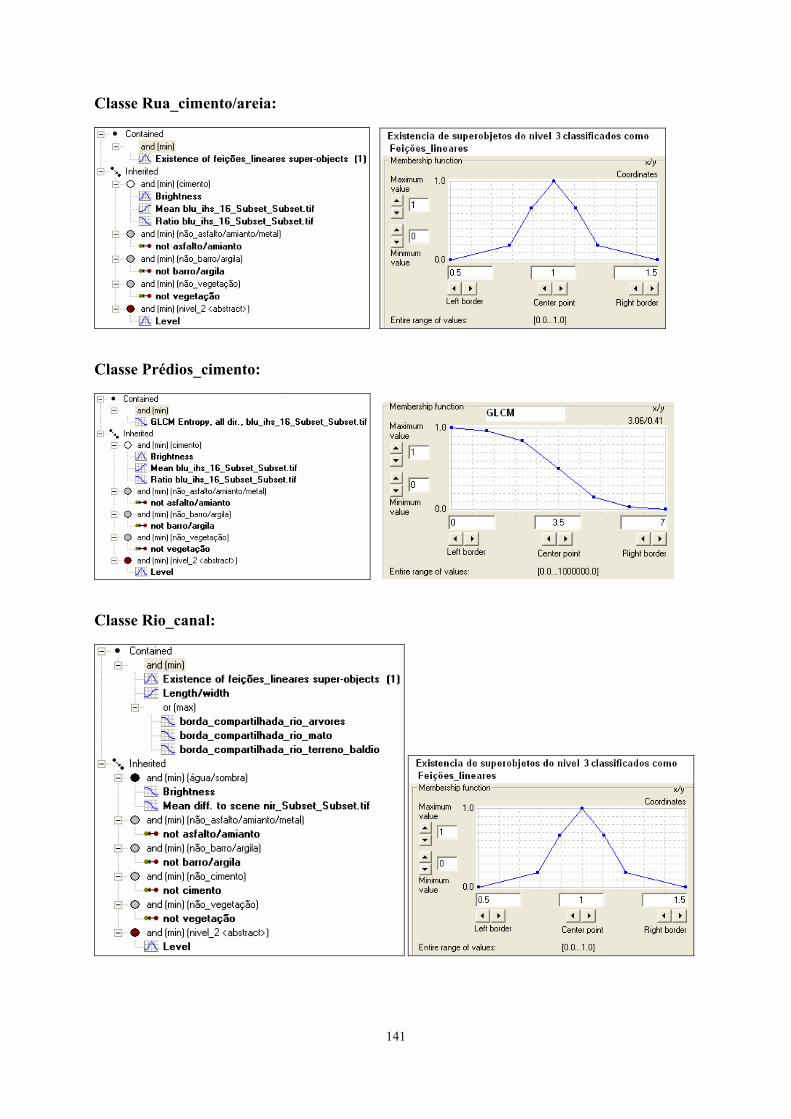
Classe Rua_cimento/areia:
Classe Prédios_cimento:
Classe Rio_canal:
141
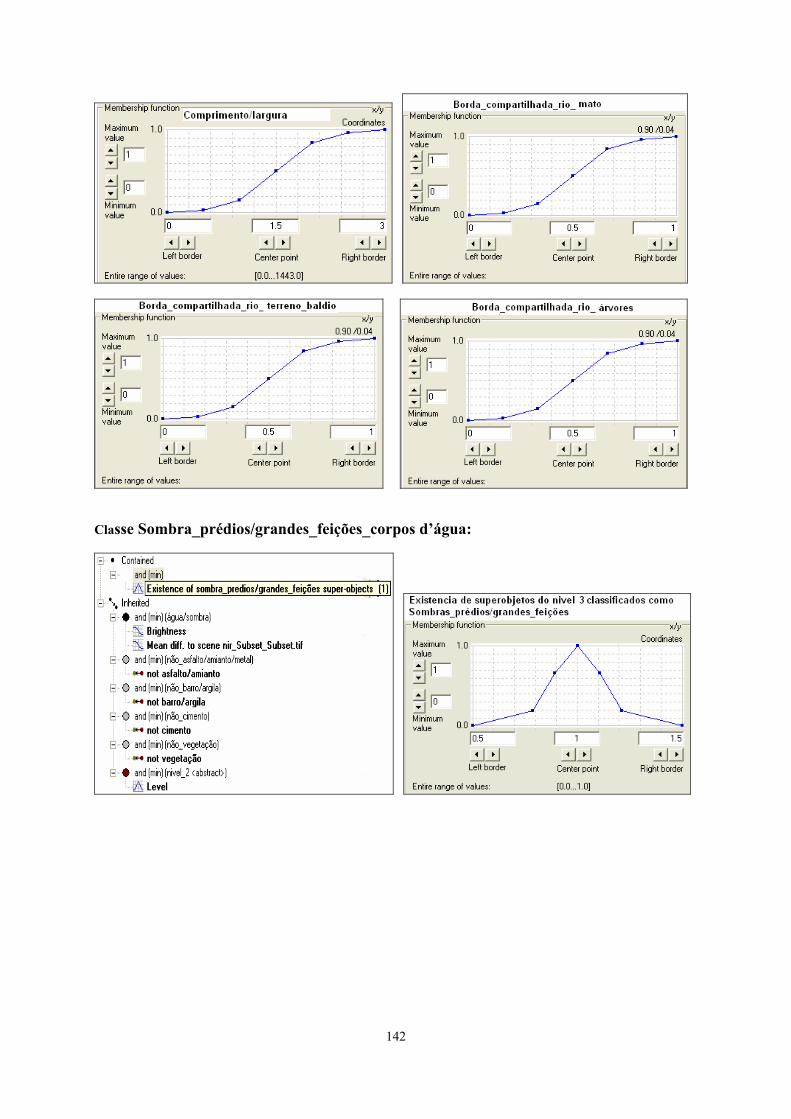
Classe Sombra_prédios/grandes_feições_corpos d’água:
142
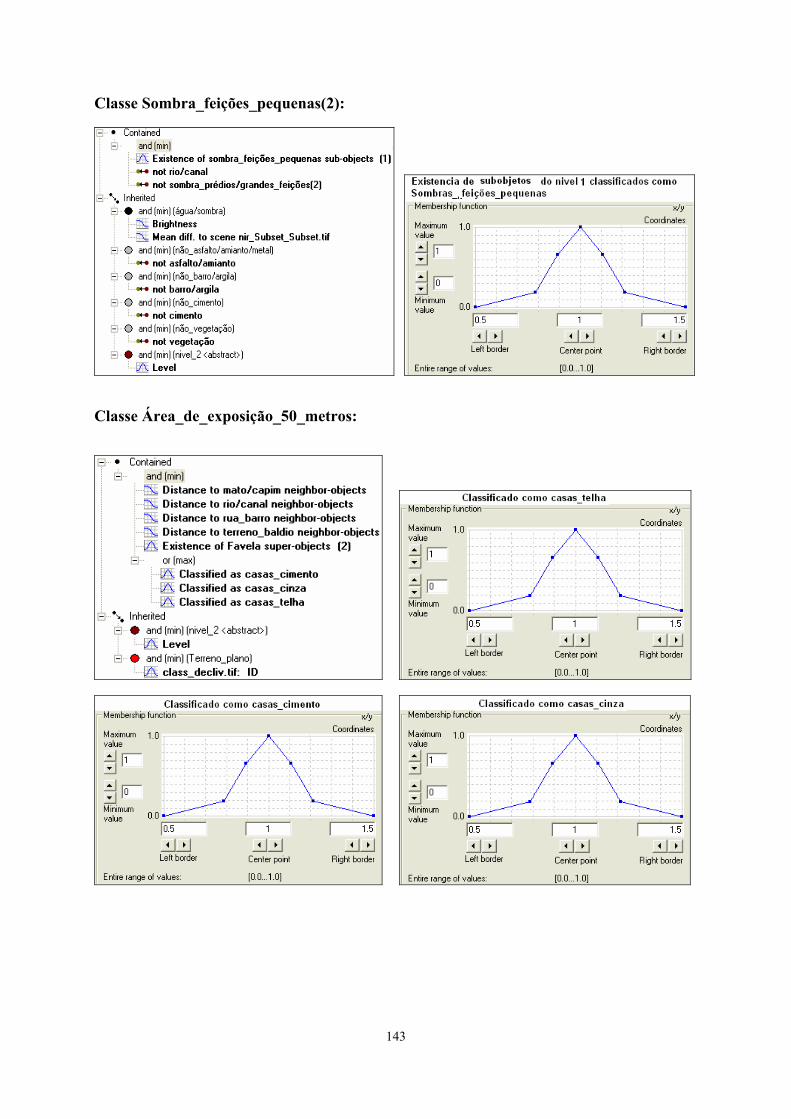
Classe Sombra_feições_pequenas(2):
Classe Área_de_exposição_50_metros:
143
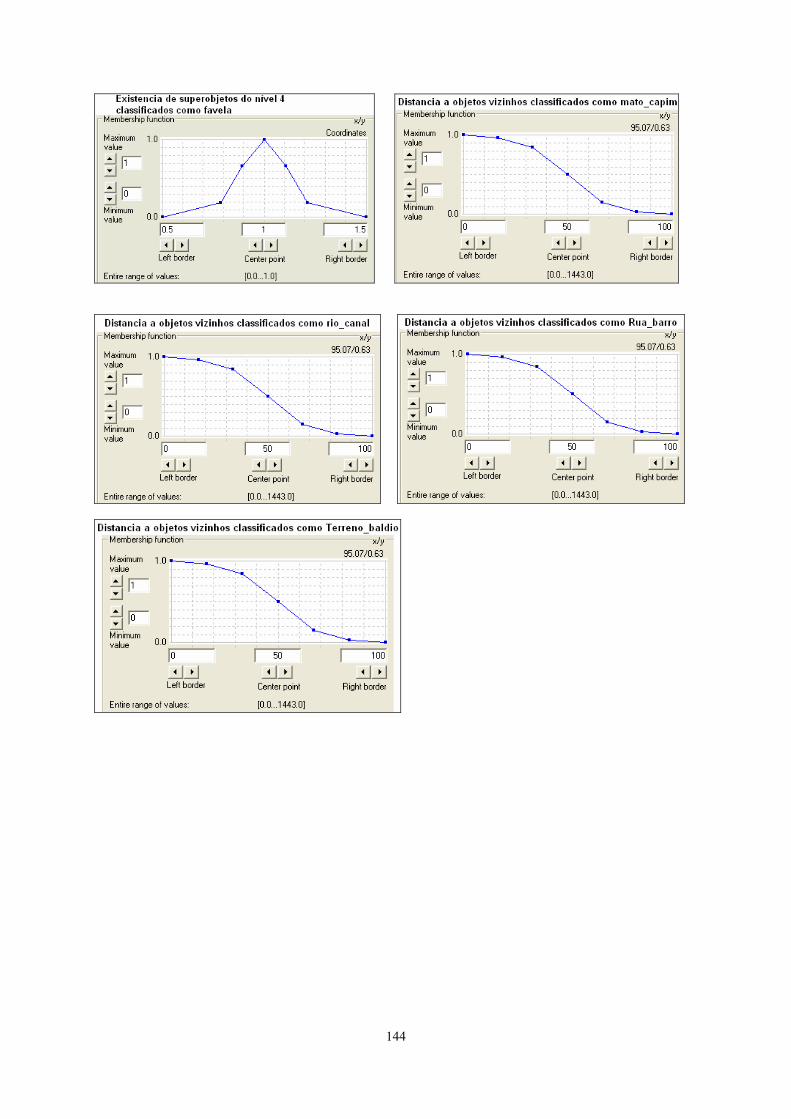
144

8.2 APÊNDICE 2: CLASSIFICAÇÕES DAS IMAGENS
145

146

147
9 ANEXOS
148

9.1 ANEXO 1: TRANSFORMAÇÕES ENTRE SISTEMAS GEODÉSICOS
1) Transformação de coordenadas geodésicas em cartesianas (φ, λ e h ) para (X,Y,Z) em um mesmo datum
( ) λϕ coscoshNX += EQ.9.1 ( ) λϕsenhNY cos+= EQ.9.2 ( ) ϕsen*2 NehNZ −+= EQ.9.3 grande Normal(raio de curvatura da seção primeiro vertical)N =
2 primeira excentricidade numéricae = 2) Transformação entre coordenadas cartesianas
mZYX
ZYX
SADWGS⎥⎥⎥
⎦
⎤
⎢⎢⎢
⎣
⎡
−
−+
⎥⎥⎥
⎦
⎤
⎢⎢⎢
⎣
⎡=
⎥⎥⎥
⎦
⎤
⎢⎢⎢
⎣
⎡
52,3837,4
87,66
6984
EQ.9.4
mZYX
ZYX
WGSSAD⎥⎥⎥
⎦
⎤
⎢⎢⎢
⎣
⎡
−
−−
⎥⎥⎥
⎦
⎤
⎢⎢⎢
⎣
⎡=
⎥⎥⎥
⎦
⎤
⎢⎢⎢
⎣
⎡
52,3837,4
87,66
8469
EQ.9.5
mZYX
ZYX
SADWGS⎥⎥⎥
⎦
⎤
⎢⎢⎢
⎣
⎡
−−−
+⎥⎥⎥
⎦
⎤
⎢⎢⎢
⎣
⎡=
⎥⎥⎥
⎦
⎤
⎢⎢⎢
⎣
⎡
412
60
6984
EQ.9.6
As EQ.9.4 e 9.5 são indicadas por MONICO (2000), e a EQ.9.6 foi a utilizada no
ArcView 3.2. 3) Transformação de coordenadas cartesianas em geodésicas a) Solução Iterativa
22 YXp += EQ.9.7
cosphϕ
= − N EQ.9.8
Ф = ⎪⎭
⎪⎬⎫
⎪⎩
⎪⎨⎧
⎟⎟⎠
⎞⎜⎜⎝
⎛+
−⎟⎠⎞
⎜⎝⎛
−121arctan
hNNe
PZ
EQ.9.9
149

⎟⎠⎞
⎜⎝⎛=
YXarctanλ EQ.9.10
em que:
Ф = Cálculo da latitude aproximada 0
0N = Cálculo de um valor aproximado para a grande Normal, onde:
( )( )21
022
0
sen1 ϕe
aN−
=
EQ.9.11 h = Cálculo da altitude geométrica b) Solução Direta
As fórmulas que proporcionam a solução direta para a transformação entre coordenadas
cartesianas em geodésicas são dadas por:
Ф= ( )( ) ⎟
⎟⎠
⎞⎜⎜⎝
⎛−+
θθ
32
32
cossen'arctan
aepbeZ EQ.9.12
⎟⎠⎞
⎜⎝⎛=
XYarctanλ EQ.9.13
Nph−
=ϕcos
EQ.9.14
⎟⎟⎠
⎞⎜⎜⎝
⎛=
b
a
pZ
arctanθ EQ.9.15
em que, ( )
2
222'
bbae −
= EQ.9.16
4) Transformação de coordenadas geodésicas Dados φ, λ e h em um sistema geodésico, obter φ, λ e h em outro sistema geodésico
84WGSh⎥⎥⎥
⎦
⎤
⎢⎢⎢
⎣
⎡λϕ
69SADh⎥⎥⎥
⎦
⎤
⎢⎢⎢
⎣
⎡λϕ
Para obter as coordenadas geodésicas em diferentes sistemas geodésicos pode-se utilizar
varias transformações, uma delas é pelas Equações Diferenciais de Molodenski
( ){ }π
φφλφφφ 180cossencossen2sen11111111
0 TzTyTxaffaM
+−−∆+∆=∆ EQ.9.17
{ }π
λλφ
λ 180cos2sencos1
11
0 TyTxN
+−=∆ EQ.9.18
150

( ){ }1111111 sensencoscos2sen φλφλφ TzTyTxaaffaN +++∆−∆+∆=∆ EQ.9.19 As coordenadas transformadas são dadas por:
0012 φφφ ∆+=
0012 λλλ ∆+=
em que: 21 aea são o semi-eixo maior da elipsóide nos sistemas S1 e S2;
21eff são o achatamento do elipsóide nos sistemas S1 e S2;
21 φφ e são as latitudes geodésicas nos sistemas S1 e S2;
21 λλ e são as longitudes geodésicas nos sistemas S1 e S2; N∆ é a diferença da ondulação geoidal;
12 aaa −=∆
12 fff −=∆
84WGSh⎥⎥⎥
⎦
⎤
⎢⎢⎢
⎣
⎡λφ
1
69SADh⎥⎥⎥
⎦
⎤
⎢⎢⎢
⎣
⎡λφ
em que, 1)Transformação de coordenadas geodé2)Transformação de coordenadas cartes3)Transformação de coordenadas cartes4)Transformação de coordenadas geodé (Texto adaptado Mônico, 2000). As coordenadas da base cartográfpara se utilizar as fórmulas de transfocoordenadas geodésicas. Para detalhes s
84WGS
ZYX
⎥⎥⎥
⎦
⎤
⎢⎢⎢
⎣
⎡
ZYX
⎢⎢⎢
⎣
⎡
sicas em cartesianas ianas ianas em geodésicas sicos
ica estavam no sistemarmação citadas, deve-seobre esta transformação
151
2
⎤
34
69SAD⎥⎥⎥
⎦
de projeção UTM; portanto, primeiro transformá-las para , ver CINTRA (2003).