Comparação do Comportamento de Elementos Finitos de ... · 7.2.3 Energia de Deformação por...
165
Comparação do Comportamento de Elementos Finitos de Equilíbrio para Lajes de Kirchhoff e para Lajes de Reissner-Mindlin António Pedro Cartaxo Urmal Dissertação para obtenção do Grau de Mestre em Engenharia Civil Orientadores: Professor Doutor Orlando José Barreiros D' Almeida Pereira Professor Doutor José Paulo Baptista Moitinho de Almeida Júri Presidente: Professor Doutor Luís Manuel Coelho Guerreiro Orientador: Professor Doutor Orlando José Barreiros D' Almeida Pereira Vogal: Professor Doutor Manuel da Cunha Ritto Corrêa Julho 2015
Transcript of Comparação do Comportamento de Elementos Finitos de ... · 7.2.3 Energia de Deformação por...

Comparação do Comportamento de Elementos Finitos de
Equilíbrio para Lajes de Kirchhoff e para Lajes de
Reissner-Mindlin
António Pedro Cartaxo Urmal
Dissertação para obtenção do Grau de Mestre em
Engenharia Civil
Orientadores: Professor Doutor Orlando José Barreiros D' Almeida Pereira
Professor Doutor José Paulo Baptista Moitinho de Almeida
Júri
Presidente: Professor Doutor Luís Manuel Coelho Guerreiro
Orientador: Professor Doutor Orlando José Barreiros D' Almeida Pereira
Vogal: Professor Doutor Manuel da Cunha Ritto Corrêa
Julho 2015


iii
RESUMO
Nesta dissertação, aplicam-se modelos de elementos finitos para a análise de lajes de Reissner-Mindlin e lajes de Kirchhoff em regime elástico linear. É aplicada a formulação híbrida de equilíbrio, ou de tensão, a partir da qual é possível obter soluções equilibradas, sendo feita a distinção com a formulação clássica do método dos elementos finitos. Apresentam-se as condições para cada teoria e a definição da formulação em causa.
Foram utilizados programas computacionais já desenvolvidos, que permitiram a avaliação e comparação dos modelos testados, tendo sido posteriormente documentados os resultados obtidos.
Os problemas contidos na dissertação têm como objetivo explorar a interação de diferentes geometrias de laje, condições de fronteira e espessura. Avaliam-se de seguida efeitos como a energia de deformação, convergência da solução com base no refinamento utilizado na laje e efeito de bordo.
É realizado ainda um estudo comparativo dos campos de esforços e deformadas para as diferentes teorias.
PALAVRAS CHAVE
Formulação híbrida de equilíbrio
Lajes de Reissner-Mindlin
Lajes de Kirchhoff
Efeito de Bordo
Energia de deformação
Elasticidade linear

iv

v
ABSTRACT
In this dissertation, finite element hybrid equilibrium formulations, which provide equilibrated solutions, are used for the analysis of linear elastic Reissner-Mindlin and Kirchhoff slabs. The conditions for each theory and formulation are presented as well as the distinction between the classical formulation of the finite element method and its hybrid equilibrium counterpart.
Computer programs that had been previously developed, which allowed for the evaluation and comparison of the tested models, were used, and the results obtained are documented.
The test problems studied in this dissertation aim to explore the interaction of different slab geometries, boundary conditions and thicknesses. Effects such as the strain energy of the solutions, their convergence based on the refinement used and the “boundary layer” effect are evaluated.
A comparative study of the bending and shear stress fields and deformed slab configurations corresponding to the different theories is also presented.
KEYWORDS
Hybrid equilibrium formulation
Reissner-Mindlin slabs
Kirchhoff slabs
Boundary layer effect
Strain Energy
Linear elasticity

vi

vii
AGRADECIMENTOS
Dedico esta dissertação ao meu falecido avô, Américo Valério Cartaxo a quem devo parte do que
sou e de quem me irei tornar.
“Obrigado avô por tudo o que me deste, nunca me irei esquecer de ti.”
Agradeço à minha família e amigos por todo o apoio e paciência, em especial há minha mãe, sem
ela não teria sido capaz, e ela sabe disso melhor que ninguém.
Agradeço ao Prof. Moitinho por tudo o que me ensinou e apoio durante a elaboração da minha
dissertação.
Gostaria de agradecer ao Prof. Orlando Pereira por me ter aceite para elaborar esta dissertação.
Quero deixar ainda uma palavra aos meus colegas de gabinete na qual elaborei a dissertação, Prof.
Mário Arruda e o recentemente formado Doutor João Firmo, obrigado pela força depositada em mim,
ao meu amigo Diogo Carlos e restante malta de Armação de Perâ pelos momentos de diversão que
me deram todos os anos, aos meus “amigos do café” que muito aturaram o meu ego, nem sempre
fácil de lidar e finalmente aos meus amigos de curso pela interajuda ao longo deste curso.

viii

ix
INDÍCE
Conteúdo
RESUMO ............................................................................................................................................III
PALAVRAS CHAVE ..........................................................................................................................III
ABSTRACT ........................................................................................................................................ V
KEYWORDS ...................................................................................................................................... V
AGRADECIMENTOS ....................................................................................................................... VII
INDÍCE .............................................................................................................................................. IX
LISTA DE FIGURAS ....................................................................................................................... XIII
LISTA DE GRÁFICOS ................................................................................................................... XVII
LISTA DE TABELAS ...................................................................................................................... XIX
NOTAÇÃO .................................................................................................................................... XXIII
CAPÍTULO 1. ......................................................................................................................................1
INTRODUÇÃO ....................................................................................................................................1
1.1 ENQUADRAMENTO ................................................................................................................ 1
1.2 OBJETIVO ............................................................................................................................. 2
1.3 ORGANIZAÇÃO ...................................................................................................................... 2
CAPÍTULO 2. ......................................................................................................................................3
TEORIAS DE LAJES ..........................................................................................................................3
2.1 TEORIA DE LAJES DE REISSNER-MINDLIN OU TEORIA DE LAJES ESPESSAS .............................. 3
2.1.1 Introdução ................................................................................................................... 3
2.1.2 Condições de Compatibilidade ................................................................................... 4
2.1.3 Condições de equilíbrio .............................................................................................. 5
2.1.4 Relações Constitutivas ............................................................................................... 6
2.1.5 Condições de Fronteira .............................................................................................. 6
2.2 TEORIA DE LAJES DE KIRCHHOFF OU TEORIA DE LAJES FINAS ................................................. 8
2.2.1 Introdução ................................................................................................................... 8
2.2.2 Condições de Compatibilidade ................................................................................... 9
2.2.3 Condições de equilíbrio .............................................................................................. 9
2.2.4 Relações Constitutivas ............................................................................................. 10
2.2.5 Condições de Fronteira ............................................................................................ 10
CAPÍTULO 3. ................................................................................................................................... 13
FORMULAÇÃO CLÁSSICA DO MÉTODO DOS ELEMENTOS FINITOS ..................................... 13

x
3.1 INTRODUÇÃO ...................................................................................................................... 13
3.2 FORMULAÇÃO CLÁSSICA DE ELEMENTOS FINITOS PARA LAJES DE REISSNER-MINDLIN. .......... 14
3.2.1 Aproximação dos Deslocamentos ............................................................................ 14
3.2.2 Sistema Geral de Equações ..................................................................................... 15
3.2.3 Travamento por Corte .............................................................................................. 17
3.2.4 Efeito de Bordo ......................................................................................................... 18
3.3 FORMULAÇÃO CLÁSSICA DE ELEMENTOS FINITOS PARA LAJES DE KIRCHHOFF ........................ 18
3.3.1 Aproximação do Deslocamento ................................................................................ 18
3.3.2 Matrizes e Vetores elementares ............................................................................... 20
CAPÍTULO 4. ................................................................................................................................... 21
FORMULAÇÃO HÍBRIDA DE EQUILÍBRIO ................................................................................... 21
4.1 FORMULAÇÃO HÍBRIDA DE TENSÕES PARA LAJES DE REISSNER-MINDLIN ............................... 21
4.1.1 Aproximação das Variáveis ...................................................................................... 21
4.1.2 Formulação de Elementos Finitos ............................................................................ 23
4.1.3 Escolha do grau de aproximação dos deslocamentos ............................................. 24
4.2 FORMULAÇÃO HÍBRIDA DE TENSÕES PARA LAJES DE KIRCHHOFF ........................................... 25
4.2.1 Aproximação dos deslocamentos de fronteira ......................................................... 25
4.2.2 Equilíbrio nos lados e nos vértices ........................................................................... 26
4.2.3 Compatibilidade ........................................................................................................ 28
CAPÍTULO 5. ................................................................................................................................... 29
REFINAMENTO ............................................................................................................................... 29
5.1 INTRODUÇÃO ...................................................................................................................... 29
5.2 TÉCNICAS DE REFINAMENTO................................................................................................ 30
5.2.1 Refinamento p .......................................................................................................... 30
5.2.2 Refinamento h .......................................................................................................... 30
CAPÍTULO 6. ................................................................................................................................... 33
ENERGIA DE DEFORMAÇÃO ........................................................................................................ 33
6.1 PRINCÍPIO DO MÍNIMO DA ENERGIA POTENCIAL COMPLEMENTAR........................................... 33
6.2 EXTRAPOLAÇÃO DE RICHARDSON ........................................................................................ 34
CAPÍTULO 7. ................................................................................................................................... 35
ANÁLISE DOS PROBLEMAS DE ESTUDO ................................................................................... 35
7.1 INTRODUÇÃO ...................................................................................................................... 35
7.2 PROBLEMA Nº1 ................................................................................................................... 36
7.2.1 Energia de Deformação ............................................................................................ 38
7.2.2 Convergência da Solução com a Evolução do Refinamento ................................... 40
7.2.3 Energia de Deformação por Corte – Teoria das Lajes de Reissner-Mindlin ............ 43
7.2.4 Energia de Deformação por Flexão – Comparação entre Teorias .......................... 49
7.2.5 Deformadas .............................................................................................................. 50

xi
7.2.6 Campos de Esforços e de Densidade de Energia de Deformação ......................... 51
7.3 PROBLEMA Nº2 ................................................................................................................... 54
7.3.1 Convergência da Solução com a Evolução do Refinamento h ................................ 55
7.3.2 Deformadas .............................................................................................................. 58
7.3.3 Campos de Esforços e de Densidade deEnergia de Deformação .......................... 59
7.4 PROBLEMA Nº3 ................................................................................................................... 63
7.4.1 Comparação de Pilar “Preenchido” e Pilar “Vazio” .................................................. 68
7.4.2 Convergência da Solução com a Evolução do Refinamento ................................... 72
7.4.3 Campo de Esforços e de Densidade de Energia de Deformação ........................... 74
7.4.4 Evolução da Energia de Deformação por Corte (%) com a Espessura ................... 81
7.4.5 Deformadas .............................................................................................................. 83
CAPÍTULO 8. ................................................................................................................................... 85
CONCLUSÕES E TRABALHOS FUTUROS .................................................................................. 85
8.1 CONCLUSÕES ..................................................................................................................... 85
8.2 TRABALHOS FUTUROS ........................................................................................................ 86
BIBLIOGRAFIA................................................................................................................................ 87
ANEXO A. UTILIZAÇÃO DOS PROGRAMAS .......................................................................... 89
ANEXO B. TABELAS PARA O 1º PROBLEMA ....................................................................... 91
ANEXO C. TABELAS PARA O 2º PROBLEMA ..................................................................... 111
ANEXO D. TABELAS PARA O 3º PROBLEMA ..................................................................... 121

xii

xiii
LISTA DE FIGURAS
FIGURA 2.1: ILUSTRAÇÃO DAS HIPÓTESES; TEORIA DE REISSNER-MINDLIN ........................................................................ 4
FIGURA 2.2 - DEFINIÇÃO DAS ROTAÇÕES; TEORIA DE KIRCHHOFF ..................................................................................... 8
FIGURA 3.1 – ELEMENTO T21 ................................................................................................................................ 19
FIGURA 4.1 - FORÇAS EQUIVALENTES ....................................................................................................................... 27
FIGURA 5.1 - REFINAMENTO H DE UM DOMÍNIO COM FRONTEIRAS CURVAS. .................................................................... 31
FIGURA 5.2 - EXEMPLO DE UMA MÁ SOLUÇÃO, PROBLEMA 2, MALHA 1, GRAU DAS FUNÇÕES DE APROXIMAÇÃO 2, 32 ELEMENTOS
– TEORIA DE LAJES REISSNER-MINDLIN ............................................................................................................. 32
FIGURA 7.1 - PROBLEMA Nº1 ................................................................................................................................. 36
FIGURA 7.2 - MALHAS 1, 2 E 3 DO PROBLEMA Nº1 .................................................................................................... 37
FIGURA 7.3 - MALHA 4 PROBLEMA Nº1 .................................................................................................................... 38
FIGURA 7.4 - DENSIDADE DE ENERGIA DE DEFORMAÇÃO DEVIDO AO CORTE NORMALIZADA, ESPESSURA 0.5, MALHA 4, GRAU 6
................................................................................................................................................................. 46
FIGURA 7.5 - DENSIDADE DE ENERGIA DE DEFORMAÇÃO DEVIDO AO CORTE NORMALIZADA, ESPESSURA 0.1, MALHA 4, GRAU 6
................................................................................................................................................................. 47
FIGURA 7.6 - DENSIDADE DE ENERGIA DE DEFORMAÇÃO DEVIDO AO CORTE NORMALIZADA, ESPESSURA 0.01, MALHA 1, GRAU 2
................................................................................................................................................................. 47
FIGURA 7.7 - DENSIDADE DE ENERGIA DE DEFORMAÇÃO DEVIDO AO CORTE NORMALIZADA, ESPESSURA 0.01, MALHA 4, GRAU 6
................................................................................................................................................................. 48
FIGURA 7.8 - DEFORMADA MALHA 1 ESPESSURA 0.01 - GRAU 2 .................................................................................. 50
FIGURA 7.9 - DEFORMADA MALHA 4 ESPESSURA 0.01 - GRAU 6 .................................................................................. 50
FIGURA 7.10 - CAMPOS DE ESFORÇOS E CAMPO DA DENSIDADE DE ENERGIA DE DEFORMAÇÃO NORMALIZADA PARA TEORIA DE
REISSNER-MINDLIN, ESPESSURA 0.1, MALHA 4 E 6º GRAU DE FUNÇÕES DE APROXIMAÇÃO. ........................................ 51
FIGURA 7.11 - DIFERENÇA DOS CAMPOS DE ESFORÇOS E CAMPO DA DENSIDADE DE ENERGIA DE DEFORMAÇÃO NORMALIZADA
ENTRE A TEORIA DE REISSNER-MINDLIN E A TEORIA DE KIRCHHOFF. PARA A ESPESSURA DE 0.5, MALHA 4 COM FUNÇÕES DE
APROXIMAÇÃO DE GRAU 6 ............................................................................................................................. 52
FIGURA 7.12 - DIFERENÇA DOS CAMPOS DE ESFORÇOS E CAMPO DA DENSIDADE DE ENERGIA DE DEFORMAÇÃO NORMALIZADA
ENTRE A TEORIA DE REISSNER-MINDLIN E A TEORIA DE KIRCHHOFF PARA A ESPESSURA 0.01, MALHA 4 COM FUNÇÕES DE
APROXIMAÇÃO DE GRAU 6 ............................................................................................................................. 53
FIGURA 7.13 - PROBLEMA Nº2 ............................................................................................................................... 54
FIGURA 7.14 - MALHAS 1 E 2 DO PROBLEMA 2 ......................................................................................................... 54
FIGURA 7.15 – MALHAS 3, 4 E 5 DO PROBLEMA 2 ..................................................................................................... 55
FIGURA 7.16 - DEFORMADA MALHA 1, ESPESSURA 0.01 ............................................................................................ 58
FIGURA 7.17 - DEFORMADA MALHA 5, ESPESSURA 0.01 ............................................................................................ 58

xiv
FIGURA 7.18 - CAMPOS DE ESFORÇOS E CAMPO DA DENSIDADE DE ENERGIA DE DEFORMAÇÃO NORMALIZADA PARA TEORIA DE
REISSNER-MINDLIN, ESPESSURA 0.1, MALHA 5. .................................................................................................. 59
FIGURA 7.19 - DIFERENÇA DOS CAMPOS DE ESFORÇOS E CAMPO DA DENSIDADE DE ENERGIA DE DEFORMAÇÃO NORMALIZADA
ENTRE A TEORIA DE REISSNER-MINDLIN E A TEORIA DE KIRCHHOFF. PARA A ESPESSURA 0.01, MALHA 5 ....................... 60
FIGURA 7.20 - DIFERENÇA DOS CAMPOS DE ESFORÇOS E CAMPO DA DENSIDADE DE ENERGIA DE DEFORMAÇÃO NORMALIZADA
ENTRE A TEORIA DE REISSNER-MINDLIN E A TEORIA DE KIRCHHOFF. PARA A ESPESSURA 0.5 MALHA 5........................... 61
FIGURA 7.21 - PROBLEMA Nº3 ................................................................................................................................ 63
FIGURA 7.22 – 1º GRUPO DE MALHAS; MODELADO COM PILAR "PREENCHIDO" E "VAZIO " ................................................ 65
FIGURA 7.23 – 2º GRUPO DE MALHAS; MODELADO COM APOIO PONTUAL ..................................................................... 66
FIGURA 7.24 - 3º GRUPO DE MALHAS; MODELO "PILAR PREENCHIDO" ........................................................................... 67
FIGURA 7.25 - 3º GRUPO DE MALHAS; MODELO "PILAR PREENCHIDO"; AMPLIAÇÃO DA ZONA DE APOIO ............................... 68
FIGURA 7.26 - DIFERENÇA DO MODELO DE PILAR "PREENCHIDO" E PILAR "VAZIO” ESP=0.5 - REISSNER-MINDLIN ................... 69
FIGURA 7.27 - DIFERENÇA DO MODELO DE PILAR "PREENCHIDO" E PILAR "VAZIO” ESP=0.01 - REISSNER-MINDLIN ................. 70
FIGURA 7.28 - DIFERENÇA DO MODELO DE PILAR "PREENCHIDO" E PILAR "VAZIO” – KIRCHHOFF.......................................... 71
FIGURA 7.29 - CAMPO DE ESFORÇOS E CAMPO DA DENSIDADE DE ENERGIA DE DEFORMAÇÃO NORMALIZADA PARA O GRUPO Nº1
DE MALHAS, MODELO "PILAR PREENCHIDO", ESPESSURA 0.1, TEORIA DE REISSNER-MINDLIN. ..................................... 74
FIGURA 7.30 - CAMPO DE ESFORÇOS E CAMPO DA DENSIDADE DE ENERGIA DE DEFORMAÇÃO NORMALIZADA PARA O GRUPO Nº2
DE MALHAS, MALHA 4, MODELO APOIO PONTUAL, TEORIA DE KIRCHHOFF. ............................................................... 75
FIGURA 7.31 - DIFERENÇA DO MODELO DE CARGA PONTUAL E MODELO DE PILAR “PREENCHIDO” - KIRCHHOFF ...................... 76
FIGURA 7.32 - DIFERENÇA DO MODELO DE CARGA PONTUAL, TEORIA DE LAJES DE KIRCHHOFF, COM MODELO DE PILAR
“PREENCHIDO”, TEORIA DE LAJES DE REISSNER-MINDLIN – ESPESSURA 0.5............................................................... 77
FIGURA 7.33 - DIFERENÇA DO MODELO DE CARGA PONTUAL, TEORIA DE LAJES DE KIRCHHOFF, COM MODELO DE PILAR
“PREENCHIDO”, TEORIA DE LAJES DE REISSNER-MINDLIN – ESPESSURA 0.01............................................................. 78
FIGURA 7.34 - DIFERENÇA ENTRE O MODELO COM PILAR "PREENCHIDO" NA TEORIA DE LAJE REISSNER-MINDLIN COM O MODELO
COM PILAR "PREENCHIDO" NA TEORIA DE LAJE KIRCHHOFF – ESPESSURA 0.5 ............................................................ 79
FIGURA 7.35 - DIFERENÇA ENTRE O MODELO COM PILAR "PREENCHIDO" NA TEORIA DE LAJE REISSNER-MINDLIN COM O MODELO
COM PILAR "PREENCHIDO" NA TEORIA DE LAJE KIRCHHOFF – ESPESSURA 0.01 .......................................................... 80
FIGURA 7.36 - DIFERENÇA DE CAMPOS DE ESFORÇOS E CAMPO DA DENSIDADE DE ENERGIA DE DEFORMAÇÃO
NORMALIZADAENTRE A ESPESSURA 0.1 E 0.05 – REISSNER-MINDLIN ..................................................................... 82
FIGURA 7.37 - DEFORMADA MALHA 1 – MODELO PILAR “PREENCHIDO” ........................................................................ 83
FIGURA 7.38 - DEFORMADA DA MALHA 4 MODELO PILAR “PREENCHIDO” ...................................................................... 83
FIGURA 7.39 - DEFORMADA MALHA 1 - MODELO PONTUAL......................................................................................... 84
FIGURA 7.40 - DEFORMADA MALHA 4 - MODELO PONTUAL......................................................................................... 84
FIGURA B 1 - CAMPOS DE ESFORÇOS E CAMPO DA DENSIDADE DE ENERGIA DE DEFORMAÇÃO NORMALIZADA, PROBLEMA 1 PARA
TEORIA DE REISSNER-MINDLIN, ESPESSURA 0.1, MALHA 1 E 2º GRAU DE FUNÇÕES DE APROXIMAÇÃO. ........................ 101
FIGURA B 2 - CAMPOS DE ESFORÇOS E CAMPO DA DENSIDADE DE ENERGIA DE DEFORMAÇÃO NORMALIZADA, PROBLEMA 1 PARA
TEORIA DE REISSNER-MINDLIN, ESPESSURA 0.5, MALHA 4 E 6º GRAU DE FUNÇÕES DE APROXIMAÇÃO. ........................ 102

xv
FIGURA B 3 - CAMPOS DE ESFORÇOS E CAMPO DA DENSIDADE DE ENERGIA DE DEFORMAÇÃO NORMALIZADA, PROBLEMA 1 PARA
TEORIA DE REISSNER-MINDLIN, ESPESSURA 0.01, MALHA 4 E 6º GRAU DE FUNÇÕES DE APROXIMAÇÃO. ...................... 103
FIGURA B 4 - CAMPOS DE ESFORÇOS E CAMPO DA DENSIDADE DE ENERGIA DE DEFORMAÇÃO NORMALIZADA, PROBLEMA 1 PARA
TEORIA DE KIRCHHOFF, MALHA 1 E 2º GRAU DE FUNÇÕES DE APROXIMAÇÃO. ......................................................... 104
FIGURA B 5 - CAMPOS DE ESFORÇOS E CAMPO DA DENSIDADE DE ENERGIA DE DEFORMAÇÃO NORMALIZADA, PROBLEMA 1 PARA
TEORIA DE KIRCHHOFF, MALHA 4 E 6º GRAU DE FUNÇÕES DE APROXIMAÇÃO. ......................................................... 105
FIGURA B 6 - CAMPOS DE ESFORÇOS E CAMPO DA DENSIDADE DE ENERGIA DE DEFORMAÇÃO NORMALIZADA, PROBLEMA 1 PARA
TEORIA DE REISSNER-MINDLIN, ESPESSURA 0.1, APOIO HARD, MALHA 4 E 6º GRAU DE FUNÇÕES DE APROXIMAÇÃO. ..... 107
FIGURA B 7 - CAMPOS DE ESFORÇOS E CAMPO DA DENSIDADE DE ENERGIA DE DEFORMAÇÃO NORMALIZADA, PROBLEMA 1 PARA
TEORIA DE REISSNER-MINDLIN, ESPESSURA 0.5, APOIO HARD, MALHA 4 E 6º GRAU DE FUNÇÕES DE APROXIMAÇÃO. ..... 108
FIGURA B 8 - CAMPOS DE ESFORÇOS E CAMPO DA DENSIDADE DE ENERGIA DE DEFORMAÇÃO NORMALIZADA, PROBLEMA 1 PARA
TEORIA DE REISSNER-MINDLIN, ESPESSURA 0.01, APOIO HARD, MALHA 4 E 6º GRAU DE FUNÇÕES DE APROXIMAÇÃO. ... 109
FIGURA C 1 - CAMPOS DE ESFORÇOS E CAMPO DE DENSIDADE DE ENERGIA DE DEFORMAÇÃO NORMALIZADA, PROBLEMA 2 PARA
TEORIA DE REISSNER-MINDLIN, ESPESSURA 0.1, MALHA 1, FUNÇÕES DE APROXIMAÇÃO DE GRAU 2. .......................... 115
FIGURA C 2 - CAMPOS DE ESFORÇOS E CAMPO DE DENSIDADE DE ENERGIA DE DEFORMAÇÃO NORMALIZADA, PROBLEMA 2 PARA
TEORIA DE REISSNER-MINDLIN, ESPESSURA 0.5, MALHA 4. ................................................................................. 116
FIGURA C 3 - CAMPOS DE ESFORÇOS E CAMPO DE DENSIDADE DE ENERGIA DE DEFORMAÇÃO NORMALIZADA, PROBLEMA 2 PARA
TEORIA DE REISSNER-MINDLIN, ESPESSURA 0.01, MALHA 4. ............................................................................... 117
FIGURA C 4 - CAMPOS DE ESFORÇOS E CAMPO DE DENSIDADE DE ENERGIA DE DEFORMAÇÃO NORMALIZADA, PROBLEMA 2 PARA
TEORIA DE KIRCHHOFF, MALHA 1. .................................................................................................................. 118
FIGURA C 5 - CAMPOS DE ESFORÇOS E CAMPO DE DENSIDADE DE ENERGIA DE DEFORMAÇÃO NORMALIZADA, PROBLEMA 2 PARA
TEORIA DE KIRCHHOFF, MALHA 4. .................................................................................................................. 119
FIGURA D 1 - CAMPO DE ESFORÇOS E CAMPO DE DENSIDADE DE ENERGIA DE DEFORMAÇÃO NORMALIZADA, PROBLEMA 3 PARA O
1ºGRUPO DE MALHAS, MALHA 1, MODELO PILAR “PREENCHIDO", ESPESSURA 0.5, TEORIA DE REISSNER-MINDLIN. .... 122
FIGURA D 2 - CAMPO DE ESFORÇOS E CAMPO DE DENSIDADE DE ENERGIA DE DEFORMAÇÃO NORMALIZADA, PROBLEMA 3 PARA O
1ºGRUPO DE MALHAS, MALHA 1, MODELO PILAR “PREENCHIDO", ESPESSURA 0.01, TEORIA DE REISSNER-MINDLIN. .. 123
FIGURA D 3 - CAMPO DE ESFORÇOS E CAMPO DE DENSIDADE DE ENERGIA DE DEFORMAÇÃO NORMALIZADA, PROBLEMA 3 PARA O
1ºGRUPO DE MALHAS, MALHA 1, MODELO PILAR “PREENCHIDO", TEORIA DE KIRCHHOFF ...................................... 124
FIGURA D 4 - CAMPO DE ESFORÇOS E CAMPO DE DENSIDADE DE ENERGIA DE DEFORMAÇÃO NORMALIZADA, PROBLEMA 3 PARA O
1ºGRUPO DE MALHAS, MALHA 1, MODELO PILAR “VAZIO", ESPESSURA 0.5, TEORIA DE REISSNER-MINDLIN. ............. 126
FIGURA D 5 - CAMPO DE ESFORÇOS E CAMPO DE DENSIDADE DE ENERGIA DE DEFORMAÇÃO NORMALIZADA, PROBLEMA 3 PARA O
1ºGRUPO DE MALHAS, MALHA 1, MODELO PILAR “VAZIO", ESPESSURA 0.01, TEORIA DE REISSNER-MINDLIN. ........... 127
FIGURA D 6 - CAMPO DE ESFORÇOS E CAMPO DE DENSIDADE DE ENERGIA DE DEFORMAÇÃO NORMALIZADA, PROBLEMA 3 PARA O
1ºGRUPO DE MALHAS, MALHA 1, MODELO PILAR “VAZIO", TEORIA DE KIRCHHOFF ............................................... 128
FIGURA D 7 - CAMPO DE ESFORÇOS E CAMPO DE DENSIDADE DE ENERGIA DE DEFORMAÇÃO NORMALIZADA, PROBLEMA 3 PARA O
GRUPO Nº2 DE MALHAS, MALHA 1, MODELO APOIO PONTUAL, TEORIA DE KIRCHHOFF. ........................................... 131

xvi
FIGURA D 8 - CAMPO DE ESFORÇOS E CAMPO DE DENSIDADE DE ENERGIA DE DEFORMAÇÃO NORMALIZADA, PROBLEMA 3 PARA O
3ºGRUPO DE MALHAS, MALHA 4, MODELO "PILAR PREENCHIDO", ESPESSURA 0.1, TEORIA DE REISSNER-MINDLIN. ...... 134
FIGURA D 9 - CAMPO DE ESFORÇOS E CAMPO DE DENSIDADE DE ENERGIA DE DEFORMAÇÃO NORMALIZADA, PROBLEMA 3 PARA O
GRUPO Nº3 DE MALHAS, MODELO "PILAR PREENCHIDO", KIRCHHOFF, MALHA MAIS REFINADA. ................................ 137

xvii
LISTA DE GRÁFICOS
GRÁFICO 7.1 – ENERGIA DEFORMAÇÃO NORMALIZADA, ESPESSURA=0.01 ..................................................................... 39
GRÁFICO 7.2 - ERRO RELATIVO DA ENERGIA DE DEFORMAÇÃO PARA A ESPESSURA=0.01 - REISSNER-MINDLIN ...................... 40
GRÁFICO 7.3 - ERRO RELATIVO DA ENERGIA DE DEFORMAÇÃO PARA A ESPESSURA=0.05 - REISSNER-MINDLIN ...................... 40
GRÁFICO 7.4 - ERRO RELATIVO DA ENERGIA DE DEFORMAÇÃO PARA A ESPESSURA=0.1 - REISSNER-MINDLIN ........................ 41
GRÁFICO 7.5 - ERRO RELATIVO DA ENERGIA DE DEFORMAÇÃO PARA A ESPESSURA=0.2 - REISSNER-MINDLIN ........................ 41
GRÁFICO 7.6 - ERRO RELATIVO DA ENERGIA DE DEFORMAÇÃO PARA A ESPESSURA=0.5 –REISSNER-MINDLIN ........................ 42
GRÁFICO 7.7 - ERRO RELATIVO DA ENERGIA DE DEFORMAÇÃO - KIRCHHOFF.................................................................... 42
GRÁFICO 7.8 - ENERGIA DE CORTE POR NÚMERO DE GRAUS DE LIBERDADE DE DESLOCAMENTO .......................................... 44
GRÁFICO 7.9 - PERCENTAGEM DE ENERGIA DE CORTE POR NÚMERO DE GRAUS DE LIBERDADE DE DESLOCAMENTO................. 45
GRÁFICO 7.10 - RELAÇÃO UFLEXÃO RM/UFLEXÃO KT EM FUNÇÃO DA ESPESSURA DA LAJE ............................................... 49
GRÁFICO 7.11 - ERRO RELATIVO DA ENERGIA DE DEFORMAÇÃO - KIRCHHOFF ................................................................. 56
GRÁFICO 7.12 - ERRO RELATIVO DA ENERGIA DE DEFORMAÇÃO - REISSNER-MINDLIN ...................................................... 57
GRÁFICO 7.13 - ENERGIA DE DEFORMAÇÃO POR CORTE (%) ........................................................................................ 62
GRÁFICO 7.14- ERRO RELATIVO DA ENERGIA DE DEFORMAÇÃO - MODELO DE "PILAR PREENCHIDO" E MODELO DE APOIO
PONTUAL – KIRCHHOFF .................................................................................................................................. 72
GRÁFICO 7.15 - ERRO RELATIVO DA ENERGIA DE DEFORMAÇÃO MODELO DE “PILAR PREENCHIDO” - REISSNER-MINDLIN ........ 73
GRÁFICO 7.16 - ENERGIA DE DEFORMAÇÃO POR CORTE (%) EM FUNÇÃO DA ESPESSURA ................................................... 81

xviii

xix
LISTA DE TABELAS
TABELA 2.1 - CONDIÇÕES DE FRONTEIRA PARA LAJES DE REISSNER-MINDLIN ..................................................................... 7
TABELA 2.2 - CONDIÇÕES DE FRONTEIRA PARA AS LAJES DE KIRCHHOFF ........................................................................... 11
TABELA 7.1 - DECLIVES FINAIS DO ERRO RELATIVO DA ENERGIA DE DEFORMAÇÃO ............................................................ 43
TABELA 7.2 - DECLIVE FINAL - KIRCHHOFF ................................................................................................................. 56
TABELA 7.3 - DECLIVES FINAIS - REISSNER-MINDLIN ................................................................................................... 57
TABELA 7.4 – DECLIVES FINAIS - MODELO DE "PILAR PREENCHIDO" E MODELO DE APOIO PONTUAL - KIRCHHOFF ................... 72
TABELA 7.5 - DECLIVES FINAIS MODELO DE "PILAR PREENCHIDO" - REISSNER-MINDLIN ..................................................... 73
TABELA B 1 - ENERGIA DE DEFORMAÇÃO NORMALIZADA - SOLUÇÃO DE REFERÊNCIA ........................................................ 91
TABELA B 2 – DADOS PARA O PROBLEMA 1, P=2, MALHA 1 – REISSNER-MINDLIN ........................................................... 91
TABELA B 3 – RESULTADOS PARA O PROBLEMA 1, P=2, MALHA 1 – REISSNER-MINDLIN ................................................... 91
TABELA B 4 – DADOS PARA O PROBLEMA 1, P=2, MALHA 2 – REISSNER-MINDLIN ........................................................... 91
TABELA B 5 – RESULTADOS PARA O PROBLEMA 1, P=2, MALHA 2 – REISSNER-MINDLIN ................................................... 92
TABELA B 6 – DADOS PARA O PROBLEMA 1, P=2, MALHA 3 – REISSNER-MINDLIN ........................................................... 92
TABELA B 7 – RESULTADOS PARA O PROBLEMA 1, P=2, MALHA 3 – REISSNER-MINDLIN ................................................... 92
TABELA B 8 – DADOS PARA O PROBLEMA 1, P=2, MALHA 4 – REISSNER-MINDLIN ........................................................... 92
TABELA B 9 – RESULTADOS PARA O PROBLEMA 1, P=2, MALHA 4 – REISSNER-MINDLIN ................................................... 92
TABELA B 10 – DADOS PARA O PROBLEMA 1, P=4,, MALHA 1 – REISSNER-MINDLIN ........................................................ 93
TABELA B 11 – RESULTADOS PARA O PROBLEMA 1, P=4, MALHA 1 – REISSNER-MINDLIN ................................................. 93
TABELA B 12 – DADOS PARA O PROBLEMA 1, P=4, MALHA 2 – REISSNER-MINDLIN ......................................................... 93
TABELA B 13 – RESULTADOS PARA O PROBLEMA 1, P=4, MALHA 2 – REISSNER-MINDLIN ................................................. 93
TABELA B 14 – DADOS PARA O PROBLEMA 1, P=4, MALHA 3 – REISSNER-MINDLIN ......................................................... 94
TABELA B 15 – RESULTADOS PARA O PROBLEMA 1, P=4, MALHA 3 – REISSNER-MINDLIN ................................................. 94
TABELA B 16 – DADOS PARA O PROBLEMA 1, P=4, MALHA 4 – REISSNER-MINDLIN ......................................................... 94
TABELA B 17 – RESULTADOS PARA O PROBLEMA 1, P=4, MALHA 4 – REISSNER-MINDLIN ................................................. 94
TABELA B 18 – DADOS PARA O PROBLEMA 1, P=6, MALHA 1 – REISSNER-MINDLIN ......................................................... 94
TABELA B 19 – RESULTADOS PARA O PROBLEMA 1, P=6, MALHA 1 – REISSNER-MINDLIN ................................................. 95
TABELA B 20 – DADOS PARA O PROBLEMA 1, P=6, MALHA 2 – REISSNER-MINDLIN ......................................................... 95
TABELA B 21 – RESULTADOS PARA O PROBLEMA 1, P=6, MALHA 2 – REISSNER-MINDLIN ................................................. 95
TABELA B 22 – DADOS PARA O PROBLEMA 1, P=6, MALHA 3 – REISSNER-MINDLIN ......................................................... 95
TABELA B 23 – RESULTADOS PARA O PROBLEMA 1, P=6, MALHA 3 – REISSNER-MINDLIN ................................................. 95
TABELA B 24 – DADOS PARA O PROBLEMA 1, P=6, MALHA 4 – REISSNER-MINDLIN ......................................................... 96
TABELA B 25 – RESULTADOS PARA O PROBLEMA 1, P=6, MALHA 4 – REISSNER-MINDLIN ................................................. 96
TABELA B 26 – DADOS PARA O PROBLEMA 1, P=2, MALHA 1 – KIRCHHOFF .................................................................... 96
TABELA B 27 – RESULTADOS PARA O PROBLEMA 1, P=2, MALHA 1 – KIRCHHOFF ............................................................ 96

xx
TABELA B 28 – DADOS PARA O PROBLEMA 1, P=2, MALHA 2 – KIRCHHOFF .................................................................... 96
TABELA B 29 – RESULTADOS PARA O PROBLEMA 1, P=2, MALHA 2 – KIRCHHOFF ............................................................. 97
TABELA B 30 – DADOS PARA O PROBLEMA 1, P=2, MALHA 3 – KIRCHHOFF .................................................................... 97
TABELA B 31 – RESULTADOS PARA O PROBLEMA 1, P=2, MALHA 3 – KIRCHHOFF ............................................................. 97
TABELA B 32 – DADOS PARA O PROBLEMA 1, P=2, MALHA 4 – KIRCHHOFF .................................................................... 97
TABELA B 33 – RESULTADOS PARA O PROBLEMA 1, P=2, MALHA 4 – KIRCHHOFF ............................................................. 97
TABELA B 34 – DADOS PARA O PROBLEMA 1, P=4, MALHA 1 – KIRCHHOFF .................................................................... 97
TABELA B 35 – RESULTADOS PARA O PROBLEMA 1, P=4, MALHA 1 – KIRCHHOFF ............................................................. 98
TABELA B 36 – DADOS PARA O PROBLEMA 1, P=4, MALHA 2 – KIRCHHOFF .................................................................... 98
TABELA B 37 – RESULTADOS PARA O PROBLEMA 1, P=4, MALHA 2 – KIRCHHOFF ............................................................. 98
TABELA B 38 – DADOS PARA O PROBLEMA 1, P=4, MALHA 3 – KIRCHHOFF .................................................................... 98
TABELA B 39 – RESULTADOS PARA O PROBLEMA 1, P=4, MALHA 3 – KIRCHHOFF ............................................................. 98
TABELA B 40 – DADOS PARA O PROBLEMA 1, P=4, MALHA 4 – KIRCHHOFF .................................................................... 98
TABELA B 41 – RESULTADOS PARA O PROBLEMA 1, P=4, MALHA 4 – KIRCHHOFF ............................................................. 99
TABELA B 42 – DADOS PARA O PROBLEMA 1, P=6, MALHA 1 – KIRCHHOFF .................................................................... 99
TABELA B 43 – RESULTADOS PARA O PROBLEMA 1, P=6, MALHA 1 – KIRCHHOFF ............................................................. 99
TABELA B 44 – DADOS PARA O PROBLEMA 1, P=6, MALHA 2 – KIRCHHOFF .................................................................... 99
TABELA B 45 – RESULTADOS PARA O PROBLEMA 1, P=6, MALHA 2 – KIRCHHOFF ............................................................. 99
TABELA B 46 – DADOS PARA O PROBLEMA 1, P=6, MALHA 3 – KIRCHHOFF .................................................................... 99
TABELA B 47 – RESULTADOS PARA O PROBLEMA 1, P=6, MALHA 3 – KIRCHHOFF ........................................................... 100
TABELA B 48 – DADOS PARA O PROBLEMA 1, P=6, MALHA 4 – KIRCHHOFF .................................................................. 100
TABELA B 49 – RESULTADOS PARA O PROBLEMA 1, P=6, MALHA 4 – KIRCHHOFF ........................................................... 100
TABELA B 50 – DADOS PARA O PROBLEMA 1, P=6, MALHA 4, APOIO HARD – REISSNER-MINDLIN .................................... 106
TABELA B 51 – RESULTADOS PARA O PROBLEMA 1, P=6, MALHA 4, APOIO HARD – REISSNER-MINDLIN ............................ 106
TABELA C 1 - ENERGIA DE DEFORMAÇÃO NORMALIZADA - SOLUÇÃO DE "REFERÊNCIA" .................................................... 111
TABELA C 2 – DADOS PARA O PROBLEMA 2, MALHA 1 – REISSNER-MINDLIN ................................................................. 111
TABELA C 3 – RESULTADOS PARA O PROBLEMA 2, MALHA 1 – REISSNER-MINDLIN ......................................................... 111
TABELA C 4 – DADOS PARA O PROBLEMA 2, MALHA 2 – REISSNER-MINDLIN ................................................................. 111
TABELA C 5 – RESULTADOS PARA O PROBLEMA 2, MALHA 2 – REISSNER-MINDLIN ......................................................... 111
TABELA C 6 – DADOS PARA O PROBLEMA 2, MALHA 3 – REISSNER-MINDLIN ................................................................. 112
TABELA C 7 – RESULTADOS PARA O PROBLEMA 2, MALHA 3 – REISSNER-MINDLIN ......................................................... 112
TABELA C 8 – DADOS PARA O PROBLEMA 2, MALHA 4 – REISSNER-MINDLIN ................................................................. 112
TABELA C 9 – RESULTADOS PARA O PROBLEMA 2, MALHA 4 – REISSNER-MINDLIN ......................................................... 112
TABELA C 10 – DADOS PARA O PROBLEMA 2, MALHA 5 – REISSNER-MINDLIN ............................................................... 112
TABELA C 11 – RESULTADOS PARA O PROBLEMA 2, MALHA 5 – REISSNER-MINDLIN ....................................................... 113
TABELA C 12 – DADOS PARA O PROBLEMA 2, MALHA 1 – KIRCHHOFF .......................................................................... 113
TABELA C 13 – RESULTADOS PARA O PROBLEMA 2, MALHA 1 – KIRCHHOFF .................................................................. 113

xxi
TABELA C 14 – DADOS PARA O PROBLEMA 2, MALHA 2 – KIRCHHOFF ......................................................................... 113
TABELA C 15 – RESULTADOS PARA O PROBLEMA 2, MALHA 2 – KIRCHHOFF .................................................................. 113
TABELA C 16 – DADOS PARA O PROBLEMA 2, MALHA 3 – KIRCHHOFF ......................................................................... 114
TABELA C 17 – RESULTADOS PARA O PROBLEMA 2, MALHA 3 – KIRCHHOFF .................................................................. 114
TABELA C 18 – DADOS PARA O PROBLEMA 2, MALHA 4 – KIRCHHOFF ......................................................................... 114
TABELA C 19 – RESULTADOS PARA O PROBLEMA 2, MALHA 4 – KIRCHHOFF .................................................................. 114
TABELA C 20 – DADOS PARA O PROBLEMA 2, MALHA 5 – KIRCHHOFF ......................................................................... 114
TABELA C 21 – RESULTADOS PARA O PROBLEMA 2, MALHA 5 – KIRCHHOFF .................................................................. 114
TABELA D 1 - ENERGIA DE DEFORMAÇÃO NORMALIZADA - SOLUÇÃO DE REFERÊNCIA ...................................................... 121
TABELA D 2 – DADOS PARA O PROBLEMA 3, 1ºGRUPO DE MALHAS - MALHA 1, MODELO PILAR “PREENCHIDO” – REISSNER-
MINDLIN .................................................................................................................................................. 121
TABELA D 3 – RESULTADOS PARA O PROBLEMA 3, 1ºGRUPO DE MALHAS - MALHA 1, MODELO PILAR “PREENCHIDO” –
REISSNER-MINDLIN .................................................................................................................................... 121
TABELA D 4 – DADOS PARA O PROBLEMA 3, 1ºGRUPO DE MALHAS - MALHA 1, MODELO PILAR “PREENCHIDO” – KIRCHOFF 121
TABELA D 5 – RESULTADOS PARA O PROBLEMA 3, 1ºGRUPO DE MALHAS - MALHA 1, MODELO PILAR “PREENCHIDO” –
KIRCHHOFF ................................................................................................................................................ 121
TABELA D 6 – DADOS PARA O PROBLEMA 3, 1ºGRUPO DE MALHAS - MALHA 1, MODELO PILAR “VAZIO” – REISSNER-MINDLIN
............................................................................................................................................................... 125
TABELA D 7 – RESULTADOS PARA O PROBLEMA 3, 1ºGRUPO DE MALHAS - MALHA 1, MODELO PILAR “VAZIO” – REISSNER-
MINDLIN .................................................................................................................................................. 125
TABELA D 8 – DADOS PARA O PROBLEMA 3, 1ºGRUPO DE MALHAS - MALHA 1, MODELO PILAR “VAZIO” – KIRCHHOFF ....... 125
TABELA D 9 – RESULTADOS PARA O PROBLEMA 3, 1ºGRUPO DE MALHAS - MALHA 1, MODELO PILAR “VAZIO” – KIRCHHOFF 125
TABELA D 10 – DADOS PARA O PROBLEMA 3, 2ºGRUPO DE MALHAS - MALHA 1, MODELO PONTUAL – KIRCHHOFF ............ 129
TABELA D 11 – RESULTADOS PARA O PROBLEMA 3, 2ºGRUPO DE MALHAS - MALHA 1, MODELO PONTUAL – KIRCHHOFF ..... 129
TABELA D 12 – DADOS PARA O PROBLEMA 3, 2ºGRUPO DE MALHAS - MALHA 2, MODELO PONTUAL – KIRCHHOFF ............ 129
TABELA D 13 – RESULTADOS PARA O PROBLEMA 3, 2ºGRUPO DE MALHAS - MALHA 2, MODELO PONTUAL – KIRCHHOFF ..... 129
TABELA D 14 – DADOS PARA O PROBLEMA 3, 2ºGRUPO DE MALHAS - MALHA 3, MODELO PONTUAL – KIRCHHOFF ............ 129
TABELA D 15 – RESULTADOS PARA O PROBLEMA 3, 2ºGRUPO DE MALHAS - MALHA 3, MODELO PONTUAL – KIRCHHOFF ..... 130
TABELA D 16 – DADOS PARA O PROBLEMA 3, 2ºGRUPO DE MALHAS - MALHA 4, MODELO PONTUAL – KIRCHHOFF ............ 130
TABELA D 17 – RESULTADOS PARA O PROBLEMA 3, 2ºGRUPO DE MALHAS - MALHA 4, MODELO PONTUAL – KIRCHHOFF ..... 130
TABELA D 18 – DADOS PARA O PROBLEMA 3, 3ºGRUPO DE MALHAS - MALHA 1, MODELO PILAR “PREENCHIDO” – REISSNER-
MINDLIN .................................................................................................................................................. 132
TABELA D 19 – RESULTADOS PARA O PROBLEMA 3, 3ºGRUPO DE MALHAS - MALHA 1, MODELO PILAR “PREENCHIDO” –
REISSNER-MINDLIN .................................................................................................................................... 132
TABELA D 20 – DADOS PARA O PROBLEMA 3, 3ºGRUPO DE MALHAS - MALHA 2, MODELO PILAR “PREENCHIDO” – REISSNER-
MINDLIN .................................................................................................................................................. 132

xxii
TABELA D 21 – RESULTADOS PARA O PROBLEMA 3, 3ºGRUPO DE MALHAS - MALHA 2, MODELO PILAR “PREENCHIDO” –
REISSNER-MINDLIN ..................................................................................................................................... 132
TABELA D 22 – DADOS PARA O PROBLEMA 3, 3ºGRUPO DE MALHAS - MALHA 3, MODELO PILAR “PREENCHIDO” – REISSNER-
MINDLIN ................................................................................................................................................... 133
TABELA D 23 – RESULTADOS PARA O PROBLEMA 3, 3ºGRUPO DE MALHAS - MALHA 3, MODELO PILAR “PREENCHIDO” –
REISSNER-MINDLIN ..................................................................................................................................... 133
TABELA D 24 – DADOS PARA O PROBLEMA 3, 3ºGRUPO DE MALHAS - MALHA 4, MODELO PILAR “PREENCHIDO” – REISSNER-
MINDLIN ................................................................................................................................................... 133
TABELA D 25 – RESULTADOS PARA O PROBLEMA 3, 3ºGRUPO DE MALHAS - MALHA 4, MODELO PILAR “PREENCHIDO” –
REISSNER-MINDLIN ..................................................................................................................................... 133
TABELA D 26 – DADOS PARA O PROBLEMA 3, 3ºGRUPO DE MALHAS - MALHA 1, MODELO PILAR “PREENCHIDO” – KIRCHHOFF
............................................................................................................................................................... 135
TABELA D 27 – RESULTADOS PARA O PROBLEMA 3, 3ºGRUPO DE MALHAS - MALHA 1, MODELO PILAR “PREENCHIDO” –
KIRCHHOFF ................................................................................................................................................ 135
TABELA D 28 – DADOS PARA O PROBLEMA 3, 3ºGRUPO DE MALHAS - MALHA 2, MODELO PILAR “PREENCHIDO” – KIRCHHOFF
............................................................................................................................................................... 135
TABELA D 29 – RESULTADOS PARA O PROBLEMA 3, 3ºGRUPO DE MALHAS - MALHA 2, MODELO PILAR “PREENCHIDO” –
KIRCHHOFF ................................................................................................................................................ 135
TABELA D 30 – DADOS PARA O PROBLEMA 3, 3ºGRUPO DE MALHAS - MALHA 3, MODELO PILAR “PREENCHIDO” – KIRCHHOFF
............................................................................................................................................................... 135
TABELA D 31 – RESULTADOS PARA O PROBLEMA 3, 3ºGRUPO DE MALHAS - MALHA 3, MODELO PILAR “PREENCHIDO” –
KIRCHHOFF ................................................................................................................................................ 136
TABELA D 32 – DADOS PARA O PROBLEMA 3, 3ºGRUPO DE MALHAS - MALHA 4, MODELO PILAR “PREENCHIDO” – KIRCHHOFF
............................................................................................................................................................... 136
TABELA D 33 – RESULTADOS PARA O PROBLEMA 3, 3ºGRUPO DE MALHAS - MALHA 4, MODELO PILAR “PREENCHIDO” –
KIRCHHOFF ................................................................................................................................................ 136

xxiii
NOTAÇÃO
() – Forças generalizadas no domínio do elemento (e)
– Operador que transforma momentos em esforços efetivos
– Operador que transforma momentos em esforços efetivos no lado
– Operador que transforma momentos em esforços efetivos no vértice
() – Matriz elementar das curvaturas associadas às funções de aproximação
() – Matriz elementar das deformações por corte associadas às funções de aproximação
- Operador diferencial de compatibilidade
() – Deslocamentos nodais no elemento (e)
∗ - Operador diferencial de equilíbrio
– Grau das cargas aplicadas
– Grau de aproximação dos momentos
(),() – Matriz de equilíbrio associada ao lado j e ao elemento i
- Matriz de equilíbrio no ponto do lado do elemento (e)
– Matriz de equilíbrio no vértice do elemento (e)
– Matriz de rigidez da laje, para a flexão
– Matriz de rigidez da laje, para o corte
E – Módulo de Young
– Matriz de flexibilidade
() – Vetor de forças nodais equivalentes elementar
()Ω - Vetor de forças nodais equivalentes elementar no domínio
() - Vetor de forças nodais equivalentes elementar na fronteira
– Força de Canto
– Força de canto discreta
F – Matriz de Flexibilidade da malha ou do elemento i
ℎ - Espessura da laje
– Matriz Jacobiana de transformação de coordenadas
– Matriz de rigidez

xxiv
() – Matriz de rigidez de flexão do elemento (e)
() – Matriz de rigidez de um elemento de laje
() – Matriz de rigidez de corte do elemento (e)
– Momentos da solução particular no elemento (e)
– Momento fletor na fronteira
– Momento torsor na fronteira
! – Momento segundo x na fronteira
" – Momento segundo y na fronteira
!! – Momento fletor em x
!" – Momento torsor
"" – Momento fletor em y
# - Momento fletor aplicado
$ – Momento fletor discreto
! – Momento em x distribuído por unidade de superfície
" – Momento em y distribuído por unidade de superfície
!" – Momento torsor da solução particular
% - Número de parâmetros de deslocamento num elemento
%! – Componente na direção x do versor da normal exterior
%" – Componente na direção y do versor da normal exterior
& – Operador dos versores normais exteriores à fronteira
&(),() – Matriz de rotação para o lado j e elemento i
N - número de graus de liberdade
' ou ) - Carga efetiva aplicada no domínio
p – grau de funções de aproximação de momentos polinomiais
*!(+) – Primitiva de 2ª ordem na variável x
*"(+) – Primitiva de 2ª ordem na variável y
) – Vetor de forças de massa
) – Carga transversal distribuída que atua segundo a direção perpendicular ao plano médio da laje
, – Vetor de reações correspondentes aos graus de liberdade

xxv
, – Esforço transverso efetivo na fronteira
, – Esforço efetivo discreto
, - Carga efetiva normal num lado
.() ou . – Vetor dos parâmetros de esforços num elemento
/ ou /() – Matriz de funções de aproximação de esforços para um elemento
0 , 0 ou 0 – Tensão imposta na fronteira estática
0() – Vetor da tensão aplicada no lado j
01() – Vetor da tensão aplicada generalizada no lado j
0,(),() – Vetor da tensão generalizada aplicada no lado j devido a 2,() 0 – Tensões discretas da solução particular
0 – Tensões discretas para o ponto do lado na solução particular
0 – Tensões discretas para o vértice na solução particular
3 – Deslocamentos generalizados na fronteira
34 - Deslocamentos discretos na fronteira
3,() – Vetor dos deslocamentos no lado j do elemento
3 – Esforço transverso na fronteira
3 – Deslocamento de um ponto de um lado
3 – Deslocamento de um vértice
3! – Componente na direção x do esforço transverso
3" - Componente na direção y do esforço transverso
3() – Vetor dos deslocamentos impostos no lado j do elemento
34() – Vetor dos parâmetros de deslocamento no lado j do elemento
35 – Parâmetro do deslocamento transversal
36 – Parâmetro da rotação normal
3(),() – Vetor dos deslocamentos generalizados impostos no lado j do elemento i
7 ou 7() – Matriz de aproximação dos deslocamentos na fronteira
V – Volume da laje
75 – Funções de aproximação do deslocamento transversal
76 – Funções de aproximação da rotação normal

xxvi
8() – Vetor de deslocamentos no elemento (e)
8 – Vetor deslocamentos na fronteira
9 - Energia de Deformação
9: – Energia Complementar de Deformação
; – Deslocamento transverso
;$ () – Deslocamentos transversos nodais no elemento (e)
; – Deslocamento transversal de um ponto de um lado
; - Deslocamento transversal de um vértice
<: – Trabalho realizado pelos deslocamentos impostos
=() – Vetor de distorções elementar
=> – Componente i da distorção
? – Fronteira estática
?@ – Fronteira cinemática
A – Matriz do operador diferencial associado à parcela de flexão
A – Matriz do operador diferencial associado à parcela de corte
B – Vetor das deformações generalizadas
B6 – Deformação térmica
C – Rotação normal na fronteira
C! – Rotação em torno de x
C" - Rotação em torno de y
C!() – Rotações nodais em torno de x no elemento (e)
C"() – Rotações nodais em torno de y no elemento (e)
C – Rotação normal
D – Coeficiente de Poisson
E: - Energia potencial complementar
2 – Vetor das tensões generalizadas ou esforços
2,() – Campo de esforços equilibrados no elemento finito i
2,() – Vetor de tensões da solução particular
F – Trações generalizadas na fronteira

xxvii
G - Curvaturas
G() – Vetor de curvaturas elementar
H() – Matriz de funções de aproximação no elemento (e)
Ω - Plano médio da laje


1
CAPÍTULO 1.
INTRODUÇÃO
1.1 ENQUADRAMENTO
As lajes são estruturas laminares, isto porque uma das dimensões é bastante inferior às restantes,
que se podem definir como peças laminares planas sujeitas a diferentes tipos de carregamentos
transversais ao próprio plano, distinguindo-se desta forma das placas que são igualmente estruturas
laminares planas, mas que estão sujeitas a carregamentos no seu plano médio, [1].
Exemplos práticos deste tipo de estrutura serão os pavimentos de edifícios sujeitos às ações do
peso próprio, restantes cargas permanentes e sobrecargas que atuam verticalmente sobre o plano
da estrutura ou ainda uma primeira análise para barreiras acústicas, etc.
Surge desta forma a necessidade de, face ao carregamento aplicado a uma determinada laje, com
uma determinada geometria e condições de apoio, descobrir os esforços/tensões e deslocamentos
causados por este. Existem duas teorias para descrever estes efeitos, são elas a teoria das Lajes
Finas ou teoria das Lajes de Kirchhoff e a teoria das Lajes Espessas ou teoria das Lajes de Reissner-
Mindlin.
A sua validade depende da espessura que a laje apresentar e, apesar da teoria das lajes finas ser
uma simplificação da teoria das lajes espessas, ela permite obter bons resultados para
determinados valores de espessura, sendo a sua principal vantagem, dado o facto de ser uma
simplificação, poder-se reduzir os tempos de análise necessários para a obtenção de resultados
credíveis para um dado problema.
Na presente dissertação, utiliza-se a formulação híbrida de tensão, ou equilíbrio, em detrimento da
formulação clássica do método dos elementos finitos, explorando as vantagens que esta apresenta
sobre a outra.

2
1.2 OBJETIVO
Os objetivos desta dissertação passam pelo estudo da evolução da influência da deformação por
corte, quantificando a sua energia e efeito que possa causar no comportamento da laje e quantificar
a qualidade das soluções através de estudos de convergência.
Tem como objetivo secundário a realização de um estudo comparativo do comportamento dos
modelos através de alguns exemplos, que tem como fim caracterizar os valores da espessura em
que a teoria das lajes finas ou a teoria das lajes espessas melhor se adapta à modelação desses
problemas.
Não sendo um dos principais objetivos, interessa também verificar de que forma as diferentes
condições de apoio se relacionam com os pontos anteriores, ou seja, análise de efeitos que surjam
devido à imposição numérica das teorias, por exemplo, efeito de bordo para espessuras finas para
a teoria de Reissner-Mindlin.
Pretende-se ainda avaliar a formulação híbrida de equilíbrio, em vez da formulação clássica do
método dos elementos finitos, que é a mais utilizada.
Pretende-se também que esta dissertação possa a vir a ser uma ferramenta que auxilie futuros
trabalhos dentro do mesmo tema, com a contribuição explicativa e ilustrativa, não só de conceitos
teóricos, mas também da sua aplicação prática através de exemplos.
1.3 ORGANIZAÇÃO
No capítulo 2, caraterizam-se as teorias de lajes de Reissner-Mindlin e de Kirchhoff, apresentando as variáveis envolvidas e as relações entre elas.
No capítulo 3, descreve-se a aplicação às lajes da formulação clássica do método dos elementos finitos. Caracterizam-se, ainda, alguns aspetos acessórios às formulações propriamente ditas, tal como a geometria dos elementos, a escolha das funções de aproximação e as propriedades das soluções.
No capítulo 4, efetuou-se igualmente a descrição para a formulação híbrida de equilíbrio.
No capítulo 5, documentam-se os vários tipos de refinamento.
O capítulo 6 constitui uma pequena apresentação sobre a energia de deformação e extrapolação de Richardson.
O capítulo 7 corresponde à apresentação de resultados de soluções dos problemas propostos na dissertação, para as diferentes teorias de lajes, espessuras e, em determinados problemas, diferentes condições cinemáticas; avaliação da convergência energética, pela extrapolação de Richardson, quantificação da deformação por corte e evolução dos campos de esforços e campo de energia.
No capítulo 8, realizam-se alguns comentários finais e são sugeridos alguns desenvolvimentos futuros deste trabalho.

3
CAPÍTULO 2.
TEORIAS DE LAJES
2.1 TEORIA DE LAJES DE REISSNER-MINDLIN OU TEORIA DE LAJES
ESPESSAS
2.1.1 Introdução
Se uma das dimensões de um corpo tridimensional for muito menor do que as outras duas, o corpo
aproxima-se de uma peça laminar. Deste modo, define-se uma superfície média, à qual se reduzem
os campos a determinar. Uma laje pode ser considerada como uma peça laminar plana submetida
a ações não contidas no seu plano médio. O seu comportamento é afetado em grande parte pela
sua espessura [2].
A teoria de Reissner-Mindlin recorre à Teoria da Elasticidade, assumindo hipóteses simplificativas
semelhantes às admitidas para outros tipos de elementos estruturais, com o objetivo de determinar
a distribuição dos deslocamentos, deformações e tensões no domínio de um corpo, Ω, quando
conhecidas as forças de massa, as tensões aplicadas na fronteira estática, ? , e os deslocamentos
impostos na sua fronteira cinemática, ?@ [2] [3].
As hipóteses simplificativas adotadas são:
• Linearidade física; • Linearidade geométrica; • Homogeneidade e Isotropia do material estrutural.
A hipótese da linearidade física assume para um dado material um comportamento elástico linear,
que permite simplificar as relações constitutivas, permitindo o estabelecimento de uma relação linear
entre tensões e deformações.
A linearidade geométrica pressupõe a hipótese dos pequenos deslocamentos e das pequenas
deformações, que irá permitir que as condições de equilíbrio possam ser obtidas com base na
configuração indeformada da estrutura e que as equações de compatibilidade sejam lineares.
O domínio de uma laje pode ser descrito na forma
V = (L, M, N) ∈ PQ ∶ N ∈ S− ℎ2 , ℎ2 V , (L, M) ∈ Ω ⊂ P+ (2.1)
onde Ω e ℎ denotam o plano médio e a espessura da laje, respetivamente [1], num referencial
cartesiano (O,x,y,z), para que o plano médio da laje coincida com o plano LM.
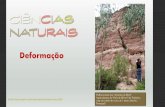
Na teoria de Reissner-Mindlin, admite-se que as fibras rectas inicialmente perpendiculares ao plano
médio da laje permanecem rectas após a deformação do elemento estrutural e são inextensíveis
[3].

4
Considera-se o efeito da deformabilidade por esforço transverso, pelo que fibras inicialmente
perpendiculares ao plano médio da laje não continuam obrigatoriamente a ser ortogonais àquele
mesmo plano, pelo que os campos de rotação têm de ser tratados como deslocamentos
independentes [2] [3].
Estas hipóteses encontram-se ilustradas na Figura 2.1.
2.1.2 Condições de Compatibilidade
Comecemos por considerar o vetor dos deslocamentos generalizados dos pontos do domínio Ω,
8 = Y ;C!C"Z (2.2)
em que ; = ;(L, M) é o campo de deslocamentos transversais ao plano médio da laje e C!(L, M) e C"(L, M) são os campos de rotações, das fibras inicialmente perpendiculares ao plano médio da laje.
As distorções, =>, definem-se pelo dobro da componente do tensor das deformações a que
correspondem, => = 2B>, pelo que
=> = C [ ;\ , (2.3)
com \ = L, M.
Figura 2.1: Ilustração das Hipóteses; Teoria de Reissner-Mindlin

5
O estado de deformação é caracterizado pelo vetor das deformações generalizadas, B, dado por:
B =]_ G!!G""2G!"=!>="> aaa
b
(2.4)
em que G são as curvaturas,
G = 12 dCe [ C\ f, (2.5)
com \ = L, M e e = L, M .
A condição de compatibilidade entre deformações e deslocamentos é dada por:
B = 8, (2.6)
em que é o operador diferencial de compatibilidade,
=]^^_0 hh! 00 0 hh"0 hh" hh!hh! 1 0hh" 0 1 aa
aaaab.
(2.7)
2.1.3 Condições de equilíbrio
O equilíbrio no domínio é dado pela condição:
∗2 [ ) = 0 (2.8)
em que ∗ é o operador diferencial de equilíbrio dado por:
∗ =]^_ 0 0 0 L ML 0 M −1 0
0 M L 0 −1aaaaab. (2.9)
e ) é o vetor das forças que podem atuar no domínio duma laje,
) = Y )!"Z (2.10)

6
em que ) = )(L, M) é a carga transversal distribuída no domínio, ! = !(L, M) e " = "(L, M) são
os momentos distribuídos no domínio, Ω, e 2 é o vetor das tensões generalizadas:
2 =]_!!""!"3!3" aaa
b. (2.11)
2.1.4 Relações Constitutivas
A relação constitutiva é uma lei material que permite relacionar tensões e deformações. Quando
apresentada em termos de flexibilidade, tem a forma:
B = 2 [ B6. (2.12)
Na expressão anteriormente apresentada, representa a matriz de flexibilidade e B6 refere-se a um
estado de deformação térmico, que não tem consequências no estado de tensão, 2. Na matriz de
flexibilidade f considera-se um fator de redução da resistência ao corte de 5/6, definindo-a desta
forma como
= j+kl]^_ jlm − nlm 0 0 0− nlm jlm 0 0 0000
000+(jon)lm00
0(jon)p000(jon)p aaa
aab. (2.13)
O parâmetro E corresponde ao módulo de Young e D corresponde ao coeficiente de Poisson, os
quais permitem considerar o comportamento elástico linear do material.
De forma inversa, se se pretender obter as tensões a partir das deformações, a partir da equação
anteriormente apresentada, pode obter-se [2]:
2 = (B − B6). (2.14)
2.1.5 Condições de Fronteira
Na fronteira cinemática, ?@ , impõem-se os deslocamentos,
8 = 8. (2.15)
Na fronteira estática, ? , impõem-se os esforços,
&2 = 0 , (2.16)

7
em que & é constituída pelas componentes do versor normal exterior à fronteira ? , designadas por %! e %", sendo dada por [2]:
& = q 0 0 0 %! %"%! 0 %" 0 00 %" %! 0 0 r, (2.17)
e
0 = Y 3!"Z. (2.18)
Estão resumidas na Tabela 2.1 estas condições para o caso de bordos encastrados, simplesmente
apoiados e livres [3], utilizando o referencial (%, 0) que será descrito em 2.2.5.
Tabela 2.1 - Condições de Fronteira para lajes de Reissner-Mindlin
Bordo Encastrado Bordo Simplesmente Apoiado Bordo Livre
; = ;#
C = C
C = C
; = ;#
= #
C = C
3 = 3
= #
= #
; = ;#
= #
= #
Quando se têm bordos simplesmente apoiados, há duas formas alternativas para definir as
condições de fronteira. A primeira alternativa é o bordo simplesmente apoiado hard, que passa pela
imposição do valor dos deslocamentos transversais, ;, e das rotações tangenciais, C . É também
especificado o valor do momento fletor, . A segunda alternativa é o bordo simplesmente apoiado
soft, em que apenas se especifica o valor do campo de deslocamentos transversais, permitindo-se
que as rotações C possam tomar valores não-nulos. As duas restantes condições de fronteira no
mesmo bordo envolvem a especificação do valor dos momentos fletor e torsor.
Das duas formas alternativas existentes para tratar os bordos simplesmente apoiados, a que mais
se utiliza é a primeira, uma vez que se encontra mais próximo da perceção física do comportamento
de lajes finas. A segunda alternativa é utilizada sempre que se torna complicado impor a
condição C = C , o que acontece por exemplo quando se estudam lajes circulares simplesmente
apoiadas. É ainda utilizada quando se pretende tornar o modelo numérico mais flexível. De facto,
como se impõem apenas os valores dos deslocamentos transversais há uma quantidade menor de
deslocamentos especificados, o que torna menos rígido o modelo adotado, conduzindo à obtenção
de valores ligeiramente maiores para os diferentes campos de deslocamentos [3].

8
2.2 TEORIA DE LAJES DE KIRCHHOFF OU TEORIA DE LAJES FINAS
2.2.1 Introdução
Também na Teoria de Kirchhoff se recorre às hipóteses da Teoria de Reissner-Mindlin.
Contudo, admite-se agora que as fibras rectas inicialmente perpendiculares ao plano médio da laje,
não só permanecem rectas após a deformação como ficam perpendiculares à deformada do plano
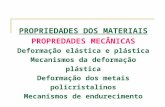
médio [1]. Na Figura 2.2, representa-se a definição das rotações na Teoria de Kirchhoff.
Esta hipótese, que a diferencia da teoria de Reissner-Mindlin, resulta do efeito da deformabilidade
por corte que pode ser desprezada, =!> = 0, ="> = 0, para as lajes finas.
Ao assumir a hipótese anteriormente referida para a teoria de Kirchhoff, obtém-se:
C!(L, M) = − ;(L, M)L (2.19)
C"(L, M) = − ;(L, M)M (2.20)
que nos permite concluir que o campo de rotações, C"(L, M) e C!(L, M) está dependente do campo
de deslocamentos transversais ;(L, M).
Figura 2.2 - Definição das rotações; teoria de Kirchhoff

9
2.2.2 Condições de Compatibilidade
Reformulando a condição de compatibilidade, a partir da equação (2.6), para as lajes de Kirchhoff,
obtém-se que o estado de deformação, B, só contém as curvaturas, devido a ser desprezado o efeito
da deformabilidade de corte:
B = Y G!!G""2G!"Z . (2.21)
O campo de deslocamentos, 8, só estará dependente do deslocamento transversal:
8 = s;(L, M)t . (2.22)
E o operador diferencial de compatibilidade tomará a forma:
=]^_ −+L+−+M+−2 +LMaaa
aab . (2.23)
2.2.3 Condições de equilíbrio
Para se caracterizarem os esforços existentes no elemento de laje pela teoria de Kirchhoff são
necessários dois momentos fletores, !!(L, M) e ""(L, M), e um momento torsor, !"(L, M):
2 = Y!!""!"Z . (2.24)
A partir destes, os campos de esforços transversos podem ser obtidos através das equações:
3!(L, M) = !!(L, M)L [ !"(L, M)M , (2.25)
3"(L, M) = !"(L, M)L [ ""(L, M)M . (2.26)
Na equação de equilíbrio (2.8), as forças de massa são:
) = u)(L, M)v = S) [ #!L [ #"M V, (2.27)
onde )(L, M) denota a carga distribuída que atua segundo a direção perpendicular ao plano médio
da laje e ) a carga efectiva.

10
O operador diferencial de equilíbrio é dado por:
∗w =]^_ +L++M+2 +LMaaa
aab . (2.28)
2.2.4 Relações Constitutivas
Neste caso, as relações constitutivas são escritas pela equação (2.14), mas utilizando a sub-matriz
da matriz de flexibilidade, f, expressa na equação (2.13), que permite relacionar curvaturas com
momentos, visto que as deformações por corte são nulas:
= 12xℎQ Y 1 −D 0−D 1 00 0 2(D [ 1)Z .
(2.29)
2.2.5 Condições de Fronteira
Ao contrário das lajes de Reissner-Mindlin, nas quais se definem três condições de fronteira para
os bordos da laje, para as lajes de Kirchhoff só é possível impor duas condições em cada bordo.
Para o caso de bordos com orientação genérica, é considerado um referencial (%, 0), em que 0 tem
a orientação do bordo e % é ortogonal a 0, definindo desta forma a normal do bordo. A conversão
das coordenadas pode ser caracterizada pelas componentes da normal, %! e %", que se encontram
na Figura 2.3.
Figura 2.3 - Orientação dos eixos genéricos

11
Na Tabela 2.2, encontram-se sumarizadas as condições de fronteira para os diferentes três tipos de
bordo [3].
Bordo Encastrado Bordo Simplesmente Apoiado Bordo Livre
; = ;#
C = C
; = ;#
= #
, = ,
= #
Na Figura 2.4, estão indicados os deslocamentos e rotações num bordo com orientação genérica.
Figura 2.4 - Deslocamentos e rotações num bordo com orientação genérica
Figura 2.5 - Esforços no bordo genérico
Os momentos e presentes na Figura 2.5 e esforço transverso efetivo são obtidos, aplicando
as regras de transformação tensorial, da seguinte forma:
Tabela 2.2 - Condições de fronteira para as lajes de Kirchhoff

12
Momentos [4]:
= !%!+ [ "%"+ [ 2!"%!%"; (2.30)
= z" − !%!%" [ !"z%!+ − %"+ ; (2.31)
Esforço transverso efetivo [4]:
, = |~|! z%L [ %L%M2 [ |~|" z−%L2%M [ ||! z−%L%M2 [ ||" z%M [ %L2%M [ |~|! z%M − %L2%M [ %M3 [|~|" %L − %L%M2 [ %L3.
(2.32)
Surge também uma força de canto igual à soma dos momentos torsores calculados nos extremos
dos dois bordos que para ele convergem.
O equilíbrio nos cantos é garantido se a força de canto igualar a força aplicada, isto é, se a soma
dos momentos torsores calculados nos extremos dos dois bordos que convergem nesse vértice
igualar a carga pontual aplicada no vértice, .
Esta condição pode ser escrita na forma:
[ = 0. (2.33)

13
CAPÍTULO 3.
FORMULAÇÃO CLÁSSICA DO MÉTODO DOS
ELEMENTOS FINITOS
3.1 INTRODUÇÃO
No presente capítulo, começar-se-á por fazer uma abordagem ao Método dos Elementos Finitos
(MEF).
Devido à infinidade de geometrias, condições de fronteira e diferentes carregamentos que podem
existir numa laje, surge a necessidade de obter um método que permita obter os campos de
deslocamentos, de deformações e de tensões, mesmo não sendo estes determináveis de forma
exata, mas que facilmente possa ser adaptável à maioria das situações correntes.
Casos em que existam lajes com geometrias retangulares, trapezoidais ou curvilíneas, conciliado
com diferentes condições de fronteira ao longo dos bordos, com a possibilidade de apoios pontuais
ou até mesmo com aberturas no seu domínio, tornam-se uma tarefa difícil de executar sem o auxílio
de um método apropriado.
Um dos métodos que permite obter, com relativa facilidade, aproximações dos campos de
deslocamentos, de deformações ou de tensões, é o Método dos Elementos Finitos, que por sinal é
o mais utilizado.
O MEF é, em geral, aplicado seguindo uma metodologia que engloba alguns passos fundamentais
[5]. Começa-se por subdividir o domínio em análise num número finito de subdomínios, os
elementos finitos; de seguida definem-se as funções de aproximação do campo de deslocamentos
generalizados de cada elemento. Para garantir que a aproximação é cinematicamente admissível
no sentido forte, as deformações generalizadas são determinadas impondo a condição de
compatibilidade no domínio. Da mesma forma, a aproximação do campo de tensões é determinada
impondo localmente, ou de maneira forte, a relação de elasticidade sobre a aproximação do campo
de deformações generalizadas. A aplicação da ponderação das condições de equilíbrio, no domínio
e na fronteira do elemento, permite determinar as forças nodais equivalentes generalizadas. Depois
de formulado o elemento e estabelecida a equação resolvente do elemento, é feita a assemblagem
do sistema de equações elementares e impõem-se as condições de fronteiras cinemáticas, de
maneira a satisfazer localmente as condições de fronteira cinemáticas do modelo e, ainda, as
condições de continuidade entre elementos.

14
Finalmente, resolvido o sistema geral de equações, determinados os deslocamentos nodais
generalizados em cada elemento através da relação de incidências, são calculados os
deslocamentos, as deformações e as tensões generalizadas em cada elemento recorrendo às
aproximações do campo de deslocamentos e às condições de compatibilidade e elasticidade
impostas localmente.
3.2 FORMULAÇÃO CLÁSSICA DE ELEMENTOS FINITOS PARA LAJES DE
REISSNER-MINDLIN
3.2.1 Aproximação dos Deslocamentos
O campo de deslocamentos é aproximado em cada elemento genérico, (e), usando funções
contínuas, que podem ser descritas na forma matricial através de:
8() = H()(), (3.1)
onde H() é a matriz que armazena as funções de aproximação elementares e () são os respetivos
deslocamentos nodais elementares generalizados definidos por:
H() = YH5() 0 00 H6~() 00 0 H6()Z , () = ;$ ()C!()C"(). (3.2)
Na formulação dos elementos finitos deste tipo de lajes, o campo de deslocamentos apenas tem de
ser contínuo no domínio, não sendo necessário garantir a continuidade das suas derivadas, como
acontece nas lajes de Kirchhoff [5].
A aproximação de cada componente de 8, quer para os elementos triangulares quer para os
quadrilaterais, baseia-se em combinações lineares de funções polinomiais, definidas de modo a
terem valor unitário num nó e nulo nos restantes, para assegurar que os coeficientes da
aproximação, () , representam o valor da função nos nós do elemento.
Como descrito em [5], as funções de aproximação são, em geral, definidas em função de um sistema
de coordenadas locais, ξ.
A condição de continuidade dos deslocamentos no domínio é implicitamente assegurada pelas
funções de aproximação, uma vez que estas são contínuas no domínio de cada elemento. Na
fronteira entre estes, a continuidade fica automaticamente assegurada quando os nós de
elementos adjacentes coincidem.

15
Essas funções de aproximação, ou de interpolação, são também usadas para mapear o elemento
em qualquer zona da malha de elementos finitos: daí a designação alternativa de função de forma.
É possível usar diferentes expressões para as funções de aproximação do campo de deslocamentos
generalizado e de mapeamento do elemento-mestre, sendo o elemento definido como
isoparamétrico quando se usam as mesmas funções para os dois fins, sendo implicitamente
garantida a continuidade dos deslocamentos entre elementos com os mesmos nós nos lados que
partilham.
3.2.2 Sistema Geral de Equações
Na presente secção optou-se por separar as parcelas de flexão e de corte de forma a,
posteriormente, facilitar a compreensão do fenómeno do travamento por corte. Assim, tem-se
B = G= , 2 = 3 , = S 00 V, (3.3)
onde
= xℎQ12(1 − D+) 1 D 0D 1 00 0 (1 − D)2 , = 65 ℎ 1 00 1. (3.4)
Tendo em conta as aproximações do campo de deslocamentos, em cada elemento genérico, dada
pela equação (3.1), as equações de compatibilidade permitem relacionar o vetor de curvaturas
elementar, G(), e o vector de distorções elementar, =(), com os deslocamentos nodais elementares,
através de:
G() = ()(), =() = ()(), (3.5)
onde as matriz () e () são dadas por:
() = AH(), () = AH(), (3.6)
sendo A e A as matrizes dos operadores diferenciais associados às parcelas de flexão e corte,
respetivamente, definidas por:
A = Y0 Aj 00 0 A+0 A+ AjZ , A = SAj 1 0A+ 0 1V . (3.7)
Definindo as grandezas ()e () como sendo, respetivamente, a matriz de rigidez de flexão
elementar e a matriz de rigidez de corte elementar, dadas por:
() = ()wΩ() () ()Ω(), () = ()wΩ() ()()Ω(), (3.8)

16
obtém-se a matriz de um elemento de laje:
() = () [ (). (3.9)
Definindo as grandezas
()Ω = H()w()Ω() Ω(), () = H()w0? (),() (3.10)
obtém-se o vetor de forças nodais equivalentes elementar:
() = ()Ω [ () . (3.11)
Em geral [5], nos elementos quadrilaterais, os integrais de domínio são calculados numericamente,
aplicando-se a regra da quadratura de Gauss-Legendre em cada direção.
Considere-se um elemento no qual ||, o determinante da matriz Jacobiana de transformação de
coordenadas (), que estabelece a relação entre elementos de área no elemento mapeado e no
elemento-mestre, é constante.
Designe-se por integração completa a regra que conduziria à avaliação exata dos integrais
presentes na definição de () recorrendo ao menor número de pontos de integração possível.
Então, chama-se (i) integração seletiva quando a avaliação da parcela () é efetuada através da
redução de um ponto de integração em cada direção em relação à regra de integração completa e
(ii) integração reduzida quando ambas as parcelas da rigidez, () e (), são reduzidas de um
ponto em cada direção [5].
Depois de formulado o elemento, é efetuada a assemblagem do sistema de equações, ou seja, os
termos do vetor e da matriz elementar são adicionados às componentes apropriadas do vetor e da
matriz global.
Após a assemblagem de todas as matrizes elementares, [6], obtém-se o sistema global
= . (3.12)
Este sistema de equações define as condições de equilíbrio das forças nodais equivalentes. Estas
condições são impostas no domínio, na fronteira estática e nas fronteiras entre elementos.
As condições de fronteira cinemática são impostas em seguida. Para tal, cada grau de liberdade é
classificado como livre (free) ou restringido (restrained)
S V = [ 0,, (3.13)
onde , é o vetor de reações correspondentes aos graus de liberdade restringidos.

17
Sendo os deslocamentos conhecidos a priori:
= − . (3.14)
Os graus de liberdade livres, , são obtidos pela resolução do sistema de equações.
3.2.3 Travamento por Corte
Com a teoria de Reissner-Mindlin pretende-se analisar o comportamento de lajes cuja
deformabilidade devido ao esforço transverso possa ser significativa, ou seja, não desprezável; este
efeito é visível nas lajes espessas.
Considera-se que este tipo de laje se caracteriza por uma relação de 0.1 ≤ l ≤ 0.2, [7]. Contudo, as
soluções obtidas na teoria de Reissner-Mindlin devem recuperar os resultados fornecidos pela teoria
de Kirchhoff à medida que a relação l diminui.
Nesta situação, nem todos os elementos convencionais, cuja a formulação se baseia apenas na
aproximação do campo de deslocamentos generalizado, fornecem bons resultados, quando se
recorre à integração completa, devido ao fenómeno de travamento por corte [8], retenção ao corte
ou shear-locking.
Este fenómeno corresponde a uma sobrestimação da rigidez de corte do modelo dos elementos
finitos relativamente à laje real, que por sua vez pode destruir por completo a solução, [3].
Como a rigidez de flexão é proporcional a ℎQ e a rigidez de corte é proporcional a ℎ, quando a
relação h/L diminui, os termos da matriz de rigidez de flexão tornam-se muito pequenos face à matriz
de rigidez de corte. Como resultado dos erros numéricos, os deslocamentos do modelo de
elementos finitos vão depender principalmente da deformabilidade por corte, ao contrário do que
acontece na realidade, em que os deslocamentos de uma laje fina dependem principalmente da
deformabilidade por flexão e onde a distorção tende para zero [9].
Quando a integração da matriz de rigidez é efetuada numericamente, através da regra de Gauss-
Legendre, a sobrestimação da rigidez existente na utilização de elementos convencionais pode ser
evitada reduzindo o número de pontos de integração utilizados. Contudo, a integração reduzida,
além de poder tornar a malha menos rígida do que a laje real, pode tornar a matriz de rigidez global
mal condicionada, causando o aparecimento de deslocamentos espúrios, ou mesmo singular. Para
evitar o mau condicionamento da matriz de rigidez global e minimizar o número de modos espúrios,
a integração deve ser seletiva, subintegrando apenas a parcela de corte, que é a principal
responsável pelo fenómeno do travamento por corte, e integrando exatamente a parcela de flexão
[5].

18
3.2.4 Efeito de Bordo
O efeito de bordo resulta da imposição de condições de fronteira estáticas, que provoca um
gradiente acentuado dos esforços transversos e do momento torsor, na transição do domínio para
os bordos com apoios soft ou livres.
O efeito destas camadas limites faz-se notar com maior intensidade para lajes mais finas e à medida
que a relação espessura/tamanho dos elementos gerados no refinamento h diminui, levando a que
a convergência seja mais demorada.
Sendo este efeito de bordo um fenómeno fortemente ligado à satisfação local de condições de
equilíbrio, as formulações convencionais de elementos finitos têm dificuldade em obter boas
soluções, a não ser que se utilizem malhas extremamente refinadas [11].
3.3 FORMULAÇÃO CLÁSSICA DE ELEMENTOS FINITOS PARA LAJES DE
KIRCHHOFF
3.3.1 Aproximação do Deslocamento
No caso da formulação clássica de elementos finitos para lajes de Kirchhoff, a aproximação para
um elemento genérico, (e), pode também ser descrita na forma matricial
8() = H()(), (3.15)
onde H() é uma matriz que armazena as funções de aproximação elementares e () são os
respetivos deslocamentos nodais elementares.
A equação de compatibilidade (2.6), permite relacionar o vetor de curvaturas elementar, G(), com
os deslocamentos nodais elementares e é dada por:
G() = ()() (3.16)
onde a matriz elementar () condensa a informação relativa às derivadas das funções de
aproximação e é dada através de
() = AH(). (3.17)
A utilização de funções polinomiais simples e a utilização dos deslocamentos nodais como
incógnitas do problema, típica dos elementos finitos clássicos, conduz, regra geral, à obtenção de
elementos em que pelo menos uma das condições de compatibilidade é violada, designados
elementos não-conformes, como o elemento ACM exemplificado em [3].
Torna-se bastante complexa e trabalhosa a obtenção de elementos que permitam verificar por
completo as equações de compatibilidade. Aos elementos em que todas as condições de
compatibilidade são verificadas, é habitual chamar-se elementos conformes.

19
Como exemplo, considerem-se os elementos finitos triangulares compatíveis com vinte e um graus
de liberdade estudados em [10]. Em cada um desses elementos finitos triangulares, os três nós dos
vértices apresentam seis graus de liberdade e os nós a meio de cada uma das três arestas
apresentam, cada um, um grau de liberdade, tal como se observa na Figura 3.1.
Para gerar soluções compatíveis, é necessário satisfazer as condições de compatibilidade no
domínio e na fronteira cinemática, para o que será necessário gerar uma aproximação da classe j.
A aproximação do deslocamento transversal num elemento é gerada por um único polinómio. Como
todas as suas derivadas são contínuas, a aproximação é de classe .
Para satisfazer as condições de compatibilidade na fronteira cinemática, há que impor mais
condições do que quando apenas existem graus de liberdade associados ao deslocamento
transversal e às rotações.
Considerando as condições de fronteira cinemática homogéneas, num bordo simplesmente apoiado
ter-se-á ; = 0, (−;, ) = 0 e (−;, ) = 0. Num bordo com encastramento deslizante deverá
impor-se (−;, ) = 0 e (−;, ) = 0 enquanto que num bordo encastrado ter-se-á ; = 0, (−;, ) = 0, (−;, ) = 0 (−;, ) = 0 e (−;, ) = 0. Em suma, as condições de fronteiras
cinemáticas a impor nestes três tipos de apoio apresentam-se esquematizadas na Figura 3.2.
Figura 3.1 – Elemento T21

20
Figura 3.2 - Condições de Fronteira cinemáticas para bordos paralelos ao eixo Lj [10]
Para satisfazer a compatibilidade na fronteira entre elementos, é necessário garantir a continuidade
da função de aproximação de ; e das suas derivadas ;, e ;, . Em cada um dos nós que constituem
os vértices, têm de ser os mesmos, para ambos os elementos ligados por uma aresta, o
deslocamento, as rotações, a curvatura G e a curvatura G . No nó central da aresta que une os
dois vértices, a derivada ;, tem de ser a mesma para ambos os elementos.
Além de serem pouco intuitivas como graus de liberdade, na presença de variações de rigidez de
flexão da laje no plano médio, a utilização de curvaturas como graus de liberdade elementares impõe
uma excessiva continuidade, nomeadamente na curvatura normal. Este facto pode ser totalmente
resolvido, mas apenas através da utilização de nós duplos [10].
3.3.2 Matrizes e Vetores elementares
A matriz de rigidez elementar é agora:
() = ()w ()()Ω()Ω() , (3.18)
e o vetor de forças elementar:
() = H()w'Ω() [ dH()w, − AH()wA% # f ? ()()Ω() . (3.19)
onde ' é a carga efectiva aplicada no domínio, , é a carga efectiva normal e # é o momento
normal aplicado.

21
CAPÍTULO 4.
FORMULAÇÃO HÍBRIDA DE EQUILÍBRIO
A solução obtida aplicando a formulação clássica do MEF não satisfaz, em geral, as condições de
equilíbrio no domínio e na fronteira dos elementos, devido ao facto destas não serem impostas
localmente mas sim de maneira fraca recorrendo ao conceito de força nodal equivalente, através da
condição de equilíbrio nodal.
As formulações híbridas consideram a aproximação de um dado campo no interior dos elementos
finitos e também, por forma a impor de forma fraca continuidade entre elementos adjacentes, do seu
dual nos lados.
Note-se que da aplicação de uma formulação híbrida pode resultar um sistema algébrico singular.
Tal aspeto constitui uma desvantagem do ponto de vista numérico, pois o algoritmo de resolução
dos sistemas de equações tem que ser concebido de forma a conseguir extrair uma solução nesses
casos e determinar a sua validade [2].
Na formulação híbrida de equilíbrio aproxima-se o campo de tensões no interior dos elementos,
enquanto que os deslocamentos são aproximados de modo independente em cada um dos seus
lados. Como se verá mais adiante consegue-se desta forma obter aproximações para as tensões
que são localmente equilibradas.
Nesta secção apresenta-se a implementação da formulação híbrida de tensões para as lajes de
Reissner-Mindlin e de Kirchhoff.
4.1 FORMULAÇÃO HÍBRIDA DE TENSÕES PARA LAJES DE REISSNER-MINDLIN
4.1.1 Aproximação das Variáveis
O campo de esforços no elemento finito i é aproximado através de:
2,() = /().() [ 2,(). (4.1)
Para garantir o equilíbrio no interior dos elementos, as funções de aproximação são escolhidas de
forma a serem auto-equilibradas, ou seja que
∗/() = (4.2)
e a solução particular é escolhida de modo que
∗2,() [ q = 0. (4.3)
As funções de aproximação de esforços auto-equilibradas podem ser obtidas a partir das funções
geradoras de esforços de Southwell [12]:

22
]^^^_ 0AAL− 12 AAM− 12 A+AM+12 A+ALAM aaa
aaaaab
9, ]^^_ AAM0− 12 AAL12 A+ALAM− 12 A+AL+aaa
aaaaab
7 , (4.4)
em que U e V são funções arbitrárias.
Um procedimento para gerar o conjunto de funções de aproximação de esforços polinomiais
correspondente a momentos de grau ≤ p é o seguinte [13]:
1. Gerar os mopo+ monómios L M, com 1 ≤ i + j ≤ p + 1;
2. Usando estes monómios em (4.4) como cada uma das funções de Southwell, obter '+ [ 5' [ 4
funções de aproximação de esforços;
3. Eliminar um dos campos de momento torsor constante, obtendo '+ [ 5' [ 3 funções de
aproximação de esforços linearmente independentes.
Aplicando este procedimento para ' = 2, obtém-se:
/() =]^_0 0 11 0 0000
−1/200000
⋮02L000
00−L0−1
0 L 0 2MM 0 0 0−L/201/2−M/21/20
−M 0 −1 0 0 0⋮
0 0 03L+ 0 2LM000−3L+/20−3L
−L+/20L
L+ 0 2LM0 M+ 0−LML−M−LM−LM −M+/2M0
0 3M+0 0−3M+/2−3M0000 aaa
b . (4.5)
Note-se que os momentos são de grau p, mas os esforços transversos são de grau ' − 1.

23
Como solução particular para uma carga transversal polinomial, utilizaram-se as seguintes
primitivas:
2() =]^^^_− 12 *!(+)())− 12 *"(+)())0− 12 *!())
− 12 *"()) aaaaaaab . (4.6)
Os deslocamentos são aproximados de forma separada em cada lado j através de:
3,() = 7()34() [ 3(). (4.7)
Nesta equação, se ?() ⊂ ?@ , 3,() = 3() = 8; se ?() ⊄ ?@, 3() = 0.
4.1.2 Formulação de Elementos Finitos
A formulação de elementos finitos híbridos de equilíbrio é exatamente igual à descrita em pormenor
em [2].
O equilíbrio entre elementos no lado j é imposto, utilizando as funções de aproximação de
deslocamentos como funções de peso, através de
( 7()w&(),()/()?( )) .() = 7()w0()?( )
− ( 7()w&(),()2,()?( ))
(4.8)
ou
∑ (),().() = 01() − ∑ 0,(),() . (4.9)
Nesta equação, se ?() ⊂ ? , 0() = 0; se ?() ⊄ ? 0() = 0. Para cada elemento i, a equação de compatibilidade, imposta na forma de resíduos pesados, resulta
em:
− ¢ /w()/()ΩΩ(£)¤ .() [ ( /w()&w(),()7()?)34() =( )
/w()Ω(£)2,()Ω − /w()&w(),()3()?( )
(4.10)

24
ou
−().() [ w (),()34() = ¥,() − 3(),() . (4.11)
O sistema algébrico global é obtido juntando as equações de compatibilidade de todos os elementos
finitos e as equações de equilíbrio de todos os lados que não pertencem à fronteira cinemática.
Juntando as matrizes e vetores dos elementos e dos lados em matrizes e vetores globais, o sistema
algébrico pode ser escrito como
− w 0 .34 = ¦¥ − 301 − 0 §. (4.12)
Ao contrário do que se sucede nos elementos finitos de deslocamento, nos elementos finitos de
equilíbrio o fenómeno de travamento por corte não ocorre. Tal como foi feito no Capítulo 3 para os
elementos finitos convencionais com a rigidez, nos elementos finitos de equilíbrio poderia fazer-
se = :¨ [ ©!ã¨. Então, quando a relação ℎ/« diminui :¨ ≪ ©!ã¨, o que evita o
aparecimento do efeito [14].
4.1.3 Escolha do grau de aproximação dos deslocamentos
As funções de aproximação dos deslocamentos nos lados são também polinomiais.
Admita-se que o grau da carga transversal não excede p-2 e que os lados são rectos e, portanto,
as coordenadas globais são funções lineares da coordenada local ,. Para impor o equilíbrio local de
esforço transverso, o deslocamento transversal é aproximado através dos monómios , , com i ≤ p-
1. Para impor o equilíbrio local de momentos, as rotações são aproximadas através dos monómios ,, com i ≤ p. O número de funções de aproximação de deslocamento em cada lado é assim 3p+2.
Quando o equilíbrio é imposto localmente nos lados, o sistema de equações global pode ser
impossível ou indeterminado. No entanto, quando existir uma solução para o campo de esforços,
ela é única e só os deslocamentos nos lados podem ser afetados por modos cinemáticos espúrios.
A utilização de elementos triangulares minimiza o número de modos espúrios ao nível do elemento.
Para o elemento triangular isolado, o número de modos espúrios é o indicado na Tabela 4.1 [15],
mas a maior parte deles não está presente ao nível da malha.
A ausência de modos espúrios pode ser garantida utilizando superelementos triangulares com ' ≥1, [16].

25
Tabela 4.1. Número de modos espúrios para um elemento triangular de grau p.
p Modos Espúrios
0 1
1 3
2 4
≥ 3 3
4.2 FORMULAÇÃO HÍBRIDA DE TENSÕES PARA LAJES DE KIRCHHOFF
Quando se aplica a formulação híbrida a lajes modeladas pela Teoria de Kirchhoff, há que considerar
as alterações a nível das condições de equilíbrio, que como já referido consideram o momento
normal, o esforço transverso efetivo e as forças de canto; é também necessário considerar as
alterações a nível das condições de compatibilidade, ou seja, que as rotações são dependentes do
deslocamento transversal.
Como a equação de equilíbrio no interior dos elementos é a mesma que para a teoria de Reissner-
Mindlin, a aproximação dos esforços pode ser a mesma, bastando eliminar as duas últimas linhas
da matriz /(). Para qualquer carga transversal polinomial ), a solução particular pode ser obtida, por exemplo,
igualando o momento torsor a zero, !" = 0, e equilibrando metade da carga em cada direção, tal
como (4.6) para a teoria de lajes de Reissner-Mindlin.
Esta simples solução implica que, para uma carga aplicada de grau a solução particular tem de
ter grau [ 2. Isto tem implicações para a admissibilidade estática da solução quando o grau de
aproximação, ., é menos de [ 2. Por exemplo, se = 1, ou seja, quando uma aproximação
linear dos momentos é usada para uma carga uniformemente distribuída, a solução, por norma, vai
violar o equilíbrio nos bordos dos elementos.
4.2.1 Aproximação dos deslocamentos de fronteira
Os deslocamentos de um determinado ponto de um lado são organizados num vetor com duas
componentes, a rotação normal e o deslocamento transversal:
3 = C; = S76 00 75V S346345 V = 734. (4.13)
Neste modelo são usados monómios para construção de uma base para esta aproximação. Tendo
em mente que estas funções são utilizadas sob a forma fraca de equilíbrio, a qual se pretende que

26
implique a forma forte de equilíbrio, é necessário que o grau de aproximação dos deslocamentos
seja, pelo menos, tão alto quanto o grau da projeção no lado da força generalizada. Isto implica que
o grau 76 seja pelo menos igual a e o grau de 75 deve ser pelo menos igual a − 1. O deslocamento num vértice, que se aproxima de forma independente do deslocamento nos lados
que estão ligados ao vértice, é um escalar, logo tem uma só componente:
3 = s;t = s1ts34t = 734 . (4.14)
Para um elemento triangular isolado, a dimensão da aproximação dos deslocamentos resultantes
da soma de 7 e 7, é igual a % = 3 × z( [ 1) [ [ 1 = 6 × ( [ 1).
4.2.2 Equilíbrio nos lados e nos vértices
Na formulação híbrida dos elementos finitos, o equilíbrio dentro de cada elemento é imposto a priori
pela aproximação dos momentos, ao passo que o equilíbrio entre os elementos e a compatibilidade
na fronteira são impostos a posteriori.
Para expressar o equilíbrio de forças discretas generalizadas na fronteira, F, podemos recorrer às
variáveis de aproximação de deslocamentos, 3, obtendo a equação adicional,
34w0 = 3w0 ? = 34w 7wF ? → 0 = 7wF ? = °$ , ,, ±. (4.15)
Nos lados, é necessário integrar para obter a projeção, mas no caso dos vértices, as forças são
diretamente as variáveis duais, como está expresso pela matriz identidade em 7. Substituindo os
momentos pelas suas aproximações, a seguinte equação geral é válida para os lados e vértices:
0 = 7wF ? = 7wF? [ 7w? [ 7w/?. =
0 [ 0 [ . , (4.16)
onde o termo F tem em conta as contribuições de 0, na aplicação direta às fronteiras. Nesta
equação, é o operador que transforma momentos em esforços efetivos (momento fletor, esforço
transverso efetivo e força de canto). As únicas condições não nulas nos somatórios correspondem
aos elementos que são adjacentes a uma dada componente da fronteira. O equilíbrio nas fronteiras
pode então ser escrito como se segue:
0 = 0 [ . = 0 [ .; (4.17)

27
0 = 0 [ . = 0 [ .; (4.18)
com
0 = 7²(, [ ) ? (4.19)
0 = [ (4.20)
e também
= 7²/ ? (4.21)
= / . (4.22)
É de notar que , , e são prescritas na fronteira estática, enquanto na fronteira cinemática
elas representam as reações ainda desconhecidas.
As equações (4.17) e (4.18) constituem uma das principais diferenças desta formulação face à
formulação clássica, com deslocamentos nodais. Estas implicam o equilíbrio em cada uma das
entidades da fronteira, isto é, de lado ou vértice, equilibrando as forças equivalentes
correspondentes ao deslocamento assumido, Figura 4.1.
Figura 4.1 - Forças equivalentes

28
4.2.3 Compatibilidade
A compatibilidade é novamente imposta de forma fraca, sendo as deformações ponderadas pelas
mesmas funções que são usadas para aproximar os momentos. Substituindo os momentos pela sua
aproximação, obtemos a seguinte equação:
/wΩ /Ω. [ /wΩ = − /w;ΩΩ Ω (4.23)
O termo à esquerda da equação corresponde à matriz de flexibilidade, F, e às tensões iniciais, ¥,
introduzidas pela solução particular, note-se que estes termos são os mesmos que para o modelo
de Reissner-Mindlin, só que sem contabilizar a deformação por corte.
O termo à direita na equação corresponde ao principal passo da formulação híbrida de equilíbrio,
que integra por partes o integral do domínio, de forma que ³ /w ; Ω é transformado em ³( w/); Ω, que é zero, mais alguns integrais de fronteira. Assim sendo, a compatibilidade é
imposta de forma fraca, requerendo apenas a aproximação dos deslocamentos na fronteira.
Como é um operador de segunda ordem, a integração na fronteira deve ser decomposta em dois
passos. Os detalhes deste processo podem ser encontrados em [17], conduzindo à expressão:
/w ;Ω Ω = ²34 [ ²34. (4.24)
Quando se juntam as matrizes dos lados e dos vértices com as suas respetivas variáveis:
= (4.25)
3 = 33. (4.26)
O sistema governativo pode ser escrito na mesma forma que é obtida para a teoria de Reissner-
Mindlin, (4.12).
Note-se ainda que a forma triangular dos elementos híbridos de equilíbrio para lajes de Kirchhoff,
diferentemente à maioria dos outros elementos de equilíbrio, tem a propriedade muito especial de
ser cinematicamente estável, isto é, não tem modos espúrios [17].

29
CAPÍTULO 5.
REFINAMENTO
5.1 INTRODUÇÃO
Para reduzir o erro das soluções de elementos finitos, é necessário executar um refinamento da
aproximação utilizada por forma a minimizar o erro de discretização. Para tal, existem duas formas
de refinamento: uma associada à discretização dos campos por um dado conjunto de funções e
outra relativa à discretização do domínio.
Aumentando o número de graus de liberdade do sistema, é possível melhorar a qualidade das
soluções, o que pode ser conseguido com um aumento do número de elementos finitos na malha
ou aumentando o grau das funções que constituem as bases de aproximação dos campos. Estas
duas formas de aumento do número de graus de liberdade do sistema podem ser aplicadas
separadamente ou em simultâneo.
Uma outra forma de melhorar a qualidade da solução sem aumentar a dimensão do sistema
governativo é distribuindo os graus de liberdade de uma forma mais adequada. Uma das aplicações
desta estratégia será quando se verifica uma grande variação do campo de esforços, na vizinhança
de zonas de concentração de tensões. Desta forma, deve-se usar um nível de refinamento maior,
para captar, com maior precisão, o campo de esforços; para as restantes zonas no domínio em que
não se verifique uma grande variação do campo de esforços, não serão necessários níveis de
refinamento tão elevados para garantir a mesma qualidade das soluções.
O procedimento mais eficiente é o aumento do número de graus de liberdade, mas não de uma
forma igual em todo domínio da laje. A vantagem da adaptação do nível de refinamento à estimativa
do erro da solução representa uma economia do ponto de vista computacional, pois, com o mesmo
número de graus de liberdade, é possível obter soluções mais próximas da exata; sendo assim, é
possível obter soluções com igual precisão, utilizando menos graus de liberdade.
Descrevem-se agora os métodos de refinamento que se vão utilizar na presente dissertação.

30
5.2 TÉCNICAS DE REFINAMENTO
5.2.1 Refinamento p
No refinamento p há o aumento dos graus das funções de aproximação, mantendo a mesma malha.
Assim sendo, o numero de graus de liberdade associado à discretização dos campos aumenta,
enquanto que, para este tipo de formulações, o numero de elementos discretizados no domínio é
constante.
Este tipo refinamento pode ser uniforme ou não uniforme.
No refinamento p uniforme, os graus de aproximação são aumentados uniformemente em todos os
elementos finitos, no não uniforme, aumentam-se os graus dessas funções em apenas alguns dos
elementos ou em todos, mas não de um modo idêntico.
Nos lados dos elementos finitos híbridos, são aproximados os campos duais dos campos que se
aproximam no domínio. Sendo assim, para que a soluções mantenham a compatibilidade ou o
equilíbrio, o refinamento p deverá afetar também os graus das funções de aproximação dos campos
nos lados. No caso particular da formulação híbrida de tensão, os graus das funções de aproximação
dos deslocamentos nos lados, 7(), devem ter um grau pelo menos igual ao maior grau das funções
de aproximação do campo e da solução particular de esforços no domínio, /() e 2,(), e ao grau dos
esforços impostos na fronteira estática, 0.
Nesta dissertação não foi considerado o refinamento p não uniforme.
5.2.2 Refinamento h
O refinamento h consiste em subdividir a laje em elementos de menor dimensão, formando uma
malha que não altera o grau das funções de aproximação dos campos.
Ao usar o refinamento h, dever-se-ão colocar os vértices que definem a geometria da fronteira sobre
a fronteira do domínio da laje e não sobre a fronteira da primeira malha.
Quando se realiza um refinamento h, em que o domínio tem fronteiras curvas, sem posicionar os
novos vértices na fronteira do domínio, o que é refinado não é a laje real, mas uma outra laje, cuja
geometria é definida pela primeira malha de elementos finitos; este problema irá originar um erro
total significativo, associado à discretização do domínio.
Para melhorar a qualidade da solução, a malha refinada deve incluir novos elementos finitos com
vértices sobre a verdadeira fronteira da laje. Utilizando este procedimento é possível, manter a
malha regular e sem criar elementos muito distorcidos. O procedimento aconselhável é colocar os
novos vértices, que se gerariam na fronteira da malha inicial, sobre os pontos da fronteira do domínio
que lhes estejam mais próximos.

31
Note-se que, no refinamento h com pontos da fronteira, Γ, ilustrado na Figura 5.1, a nova malha não
é uma subdivisão da malha anterior, isto é, a cada refinamento, a base da malha anterior não está
contida na base da nova malha; por essa razão, não se pode garantir que as energias das soluções
provenientes de cada refinamento convergem monotonicamente para a energia da solução exata.
Figura 5.1 - Refinamento h de um domínio com fronteiras curvas.
Deixando os lados de ser rectos, as funções de aproximação dos campos no domínio, quando
calculadas nesses mesmos lados, não mantêm o grau, nem mesmo o seu tipo polinomial, levando
a que não se possa garantir as características da solução, em termos de compatibilidade e de
equilíbrio.
Na presente dissertação realizou-se um processo de remalhagem, no qual os elementos de uma
malha mais refinada não resultam da subdivisão dos elementos da malha anterior.
A validação das soluções aproximadas pode ser feita a partir de uma avaliação visual, em que se
considera que determinada solução aproximada é razoável ou boa, quando esta, por observação
dos resultados computacionais, não se desenquadra com o que é teoricamente espectável.

32
Na Figura 5.2, encontra-se ilustrado um exemplo de uma má solução, em que se pode observar, à
escala apresentada, a inexistência de compatibilidade entre lados.
Figura 5.2 - Exemplo de uma má solução, Problema 2, Malha 1, grau das funções de aproximação 2, 32
elementos – Teoria de lajes Reissner-Mindlin
Mais à frente, no capítulo 7, Figuras 7.16 e 7.17 podemos observar para a mesma laje, soluções
com um nível de refinamento muito superior, tanto a nível de grau de funções de aproximação, como
nº de graus de liberdade de deslocamento, em que, apesar de não existir compatibilidade entre
elementos, esta não é percetível à escala utilizada.

33
CAPÍTULO 6.
ENERGIA DE DEFORMAÇÃO
6.1 PRINCÍPIO DO MÍNIMO DA ENERGIA POTENCIAL COMPLEMENTAR
A dedução das equações que caracterizam o comportamento dos sistemas mecânicos pode ser
realizada através do cálculo variacional aplicado a funcionais de energia. Para além disso, com base
em princípios energéticos, é possível classificar um sistema em relação à estabilidade. As definições
seguintes permitirão, em capítulos posteriores, caracterizar as soluções provenientes da formulação
híbrida de equilíbrio, em termos de comparação de energias de deformação.
Neste trabalho, utilizou-se uma formulação baseada na aproximação do campo de tensões, a qual
pode ser associada à energia potencial complementar de um sistema mecânico, a qual é dada por:
E: = 9: − <: , (6.1)
em que <: é o trabalho realizado pelos deslocamentos impostos, o qual é escrito da seguinte forma
<: = 0w8 ? (6.2)
e 9: é a energia complementar de deformação, a qual é igual à energia de deformação, definida
como, [18]
9 = 1/2 µ (2!!B!! [ 2""B"" [ 2>>B>> [ 2F!"B!" [ 2F!>B!> [ 2F">B">) 7. (6.3)
Na teoria de lajes de Reissner-Mindlin, não são consideradas as tensões e deformações geradas
na espessura da laje, isto é, 2>>B>> = 0.
Para a teoria de lajes de Kirchhoff, como já foi referido no capítulo 2, não existe deformação por
corte, B!" = 0 e B"> = 0 rescrevendo-se a energia de deformação da seguinte forma
9 = 1/2 µ (2!!B!! [ 2""B"" [ 2F!"B!" ) 7. (6.4)
Para elasticidade linear, a energia de deformação pode ser escrita em função das tensões
generalizadas,
9 = 1/2 2w2 ΩΩ . (6.5)
Para problemas em que apenas existem forças aplicadas, a energia de deformação de uma solução
equilibrada é sempre maior ou igual do que a energia de deformação da solução exata, [2].

34
Um dado importante para o uso da energia de deformação é, ao contrário dos esforços que são um
parâmetro local da laje, ser um parâmetro global que permite a comparação a partir de um único
valor entre as várias lajes, para diferentes espessuras, número de elementos, grau de funções de
aproximação ou número de graus de liberdade.
O fato dos resultados a nível da energia de deformação tenderem a convergir mais rapidamente que
os deslocamentos e estes mais rapidamente que as tensões, também foi levado em consideração
de forma a reduzir os tempos e recursos que o computador teria de necessitar para obter a
convergência das soluções, fazendo uma avaliação global da sua qualidade, sem dar demasiada
importância ao valores obtidos em pontos particulares.
6.2 EXTRAPOLAÇÃO DE RICHARDSON
Para obter uma boa aproximação da energia de deformação da solução “exata”, utiliza-se a
extrapolação de Richardson, a qual permite obter essa aproximação com base num conjunto de três
soluções que se admite que terão convergência monotónica.
Esta extrapolação baseia-se na lei:
9 − 9 = &¶·, (6.6)
em que 9 é a energia de deformação, & é o número de graus de liberdade da malha % e ¸ > 0.
A partir de três malhas diferentes, % − 2, % − 1 e %, e com base na equação (6.6) é possível escrever:
9 − 9 = &¶·; (6.7)
9¶j − 9 = &¶j¶·; (6.8)
9¶+ − 9 = &¶+¶· . (6.9)
A forma como são manipuladas as expressões encontra-se em [2], sendo que a solução de referência é obtida resolvendo numericamente a equação:
9 − 99¶j − 9 = º9¶j − 99¶+ − 9» ¼½¾(¿ÀÁÂ)¶¼½¾(¿À)¼½¾(¿ÀÁm)¶¼½¾(¿ÀÁÂ). (6.10)

35
CAPÍTULO 7.
ANÁLISE DOS PROBLEMAS DE ESTUDO
7.1 INTRODUÇÃO
Este trabalho surge na sequência de estudos anteriores, nos quais se abordou a aplicação da
formulação híbrida de tensões à análise de lajes. Em [2], considerou-se um problema envolvendo a
teoria de Reissner-Mindlin, sem singularidades e usando malhas uniformes; em [19], um problema
envolvendo a teoria de Reissner-Mindlin com singularidades e refinamento adaptativo tendo sido
realizado estudos com base na taxa de convergência.
Foram também concebidos problemas para ilustrar o tipo de soluções obtidas, mostrando resultados
interessantes em termos da convergência da energia de deformação, em que um dos aspetos
importantes desses exemplos era a captação do efeito de bordo na fronteira da laje e da forma como
este afeta a qualidade das soluções.
Nestes documentos, concluiu-se que: a formulação híbrida de tensões, inicialmente desenvolvidas
para a análise de problemas de elasticidade plana, pode ser adaptada para lajes espessas,
determinação de majorantes do erro das soluções de elementos finitos, e que as contribuições para
esse majorante, obtido a partir da análise dual, constituem indicadores de onde e como a malha
pode ser refinada de uma forma eficaz.
Em [17], estudou-se a taxa de convergência para a Teoria de Kirchhoff.
Nesta dissertação, pretende-se continuar o estudo dos documentos anteriores, com base em
diferentes exemplos, de forma a explorar os efeitos já estudados e outros que possam vir a surgir.
Para esta dissertação, foram escolhidos três Problemas com diferentes características geométricas,
de carregamentos e diferentes condições de fronteira, avaliando posteriormente o seu
comportamento face às teorias de Reissner-Mindlin e Kirchhoff.
É importante referir que as unidades que serão utilizadas estão num sistema consistente, não sendo
por isso particularizado nenhum sistema na presente dissertação; pode-se, no entanto, assumir
como exemplo que qualquer comprimento está em metros (m) e que qualquer força está em
Quilonewton (kN), por estas serem as unidades mais convencionais.
As lajes representadas nos problemas seguintes terão as seguintes características:
• Módulo de Young, x = 1;
• Coeficiente de Poisson, D = 0.15;
• Espessura da Laje, ℎ = 0.01; 0.05; 0.1; 0.2 e 0.5.
As escolhas das espessuras foi feita, de forma a obter uma laje que fosse fina, espessura de 0.01,
uma laje espessa, espessura de 0.5, e três outras lajes que se encontrassem na transição de

36
espessa para fina, espessuras 0.05, 0.1 e 0.2, tendo como base os vãos utilizados e a relação «/ℎ =10, apresentada em [3], como referência, para a uma primeira avaliação quanto à espessuras das
lajes.
Os pormenores de utilização dos programas de elementos finitos [20] e de geração de malhas [21]
encontram-se no Anexo A.
7.2 PROBLEMA Nº1
No Problema nº1, consideram-se quase todos os tipos de apoios, encastrado, simples e bordo livre,
permitindo analisar as variações que resultam da sua conjugação. Tem quatro reentrâncias nos
seus cantos e ainda uma abertura centrada de 1x1, como pode ser observado na Figura 7.1.
Figura 7.1 - Problema nº1
É de notar que, aquando da avaliação deste problema pela teoria das Lajes de Reissner-Mindlin, se
podem considerar dois tipos de apoio simples, o apoio soft e o apoio hard, tal como foi referido no
Capítulo 2, tendo sido também avaliado por isso o comportamento da laje nessas duas situações.
Neste problema, fez-se o estudo para o apoio simples soft e para o apoio simples hard, na teoria de
Reissner-Mindlin, sendo que os valores da energia de deformação do modelo para apoio hard se
encontram entre os valores do modelo para o apoio soft e do modelo para a teoria de Kirchhoff.
No entanto, em termos energéticos, o apoio simples quando modelado de forma hard não se
diferencia significativamente do apoio simples modelado de forma soft. Os valores referenciados
podem ser visualizados nas tabelas 50 e 51 em Anexo.
Todos os valores apresentados para a teoria de Reissner-Mindlin terão os apoios simplesmente
modelados como apoio soft, para não alongar excessivamente o texto e por não se considerar que
os resultados obtidos para o apoio simples modelado de forma hard acresçam conclusões
suficientemente relevantes para serem debatidas.

37
A laje será carregada com uma carga uniformemente distribuída ) = 1. Foram geradas quatro
malhas, em que se simulou um refinamento h uniforme. Foi ainda realizado para as diferentes
malhas o refinamento p com funções de aproximação de momentos de grau 2, de grau 4 e de grau
6, de forma a avaliar a evolução da solução com este tipo de refinamento.
Na Figura 7.2, encontram-se representadas as malhas 1, 2 e 3 modeladas e, na Figura 7.3,
encontra-se a malha 4, com o respetivo número de elementos que resultam do refinamento h.
Figura 7.2 - Malhas 1, 2 e 3 do Problema nº1
O número de graus de liberdade, número de graus de liberdade de deslocamento, e os resultados
das energias de deformação normalizada da “solução referência”, total, por flexão e corte estão no
Anexo B.

38
Figura 7.3 - Malha 4 problema nº1
7.2.1 Energia de Deformação
Numa primeira análise, foi considerada a evolução da energia de deformação normalizada, que é a
energia de deformação multiplicada pela espessura ao cubo, por forma a dar valores iguais, para
espessuras diferentes, quando só há flexão, permitindo comparar diretamente soluções obtidas para
lajes com espessuras diferentes.
No caso da teoria de lajes de Kirchhoff, em que só há deformação por flexão, a energia normalizada
é a mesma, qualquer que seja a espessura.
No Gráfico 7.1, estão apresentados os resultados obtidos para uma espessura de 0.01, para a
Teoria das Lajes de Reissner-Mindlin e para a Teoria das Lajes de Kirchhoff, utilizando funções de
aproximação de grau dois, quatro e seis.

39
Gráfico 7.1 – Energia Deformação Normalizada, espessura=0.01
Constata-se, a partir do Gráfico 7.1, que a Energia Normalizada decresce com o aumento do número
de elementos, quando as condições de fronteiras cinemáticas são homogéneos pois, ao contrário
dos elementos finitos compatíveis, os elementos finitos equilibrados são mais flexíveis do que a
solução “exata”, levando desta forma a soluções que convergem pelo lado superior.
É ainda de salientar que a laje e os elementos na Teoria de Reissner-Mindlin são mais flexíveis que
a laje e os elementos na Teoria de Kirchhoff, devido à existência, na primeira teoria, de deformação
por corte, que, como já foi referido no Capítulo 3, não existe na Teoria de Kirchhoff, tornando esta
mais rígida.
20
22
24
26
28
30
32
34
36
38
10 100 1000 10000 100000
Uto
tal
No
rma
liza
da
Nº de Elementos
RM grau 2
RM grau 4
RM grau 6
KT grau 2
KT grau 4
KT grau 6

40
7.2.2 Convergência da Solução com a Evolução do Refinamento
Pretende-se a partir desta avaliação perceber a convergência da solução em termos energéticos, isto é, a
evolução do erro relativo da energia de deformação (öÃ~Ã~ ), para 9! obtida pela extrapolação de Richardson
para as três últimas malhas de grau 6, e com os valores na Tabela 1 em Anexo, com o aumento do nº de
graus de liberdade de deslocamento das malhas concebidas, que correspondem à dimensão mais pequena do
sistema algébrico a resolver, obtidos por eliminação dos graus de liberdade de tensão, e que permitem uma
economia dos recursos utilizados, quando se realiza um refinamento h e um refinamento p, para a teoria de
lajes de Kirchhoff e para a teoria de lajes de Reissner-Mindlin, em que nesta última teoria se determina também
a taxa de convergência para cada espessura. Para tal elaboraram-se os gráficos 7.2, 7.3, 7.4, 7.5 e 7.6,
referentes à teoria de Reissner-Mindlin e o gráfico 7.7, referente à teoria de Kirchhoff.
Gráfico 7.2 - Erro Relativo da Energia de Deformação para a espessura=0.01 - Reissner-Mindlin
Gráfico 7.3 - Erro Relativo da Energia de Deformação para a espessura=0.05 - Reissner-Mindlin
0,001
0,01
0,1
1
100 1000 10000 100000 1000000
Err
o R
ela
tiv
o d
a E
ne
rgia
de
De
form
açã
o
Nº de Graus de Liberdade
grau 2 esp=0.01
grau 4 esp=0.01
grau 6 esp=0.01
0,001
0,01
0,1
1
100 1000 10000 100000 1000000
Err
o R
ela
tiv
o d
a E
ne
rgia
de
De
form
açã
o
Nº de Graus de Liberdade
grau 2 esp=0.05
grau 4 esp=0.05
grau 6 esp=0.05

41
Gráfico 7.4 - Erro Relativo da Energia de Deformação para a espessura=0.1 - Reissner-Mindlin
Gráfico 7.5 - Erro Relativo da Energia de Deformação para a espessura=0.2 - Reissner-Mindlin
0,001
0,01
0,1
1
100 1000 10000 100000 1000000
Err
o R
ela
tiv
o d
a E
ne
rgia
de
De
form
açã
o
Nº de Graus de Liberdade
grau 2 esp=0.1
grau 4 esp=0.1
grau 6 esp=0.1
0,001
0,01
0,1
1
100 1000 10000 100000 1000000
Err
o R
ela
tiv
o d
a E
ne
rgia
de
De
form
açã
o
Nº de Graus de Liberdade
grau 2 esp=0.2
grau 4 esp=0.2
grau 6 esp=0.2

42
Gráfico 7.6 - Erro Relativo da Energia de Deformação para a espessura=0.5 –Reissner-Mindlin
Para a Teoria de Lajes de Reissner-Mindlin, existe uma espessura para a qual a taxa de
convergência é máxima; a taxa de convergência foi máxima para h=0.05, isto porque existe um
menor efeito da deformação por corte, exceto na transição de 0.05 para 0.01, em que se dá uma
diminuição da taxa de convergência devido ao aparecimento do efeito de bordo.
Gráfico 7.7 - Erro Relativo da Energia de Deformação - Kirchhoff
Pela visualização da Tabela 7.1, é possível verificar que, para a teoria das lajes de Kirchhoff, a taxa
de convergência é a menor, ou seja, a convergência dá-se mais lentamente com a evolução do
número de graus de liberdade do que com qualquer espessura para a teoria das lajes de Reissner-
Mindlin, porque as singularidades têm um maior efeito.
Caso se tivesse analisado uma espessura mais pequena para a teoria de Reissner-Mindlin era de
esperar que esta se aproximasse ainda mais da teoria de Kirchhoff.
0,001
0,01
0,1
1
100 1000 10000 100000 1000000
Err
o R
ela
tiv
o d
a E
ne
rgia
de
De
form
açã
o
Nº de Graus de Liberdade
grau 2 esp=0.5
grau 4 esp=0.5
grau 6 esp=0.5
0,001
0,01
0,1
1
100 1000 10000 100000 1000000
Err
o R
ela
tiv
o d
a E
ne
rgia
de
De
form
açã
o
Nº de Graus de Liberdade
grau 2
grau 4
grau 6

43
Tabela 7.1 - Declives finais do Erro Relativo da Energia de Deformação
É de referir que, devido à existência de singularidades resultantes da conjugação dos diferentes
apoios nos bordos da laje nas teorias de Reissner-Mindlin e Kirchhoff, que podem ser observados
nas Figuras 7.4 a 7.7 e também na Figura 7.12, a taxa de convergência para o refinamento h
uniforme não varia com o grau da função de aproximação e a taxa de convergência para o
refinamento p uniforme é aproximadamente quádrupla do refinamento h, tal como sucede para
elementos compatíveis e para os elementos de equilíbrio em elasticidade plana e tridimensional.
7.2.3 Energia de Deformação por Corte – Teoria das Lajes de Reissner-
Mindlin
Na teoria de Reissner-Mindlin, existe deformação por corte, como já foi referido no Capítulo 2, sendo
desta forma importante a sua análise.
Nos gráficos 7.8 e 7.9 estão representadas a energia de corte em função do número de graus de
liberdade de deslocamento e a energia de corte em percentagem de 9, também em função do
número de graus de liberdade de deslocamento.
A parcela da densidade de energia de deformação devido ao corte é igual a z3!+ [ 3"+ × j+(jon)pkl ,
em que a constante envolvida resulta da relação esforço transverso – distorção, de acordo com
(2.13). Nas Figuras 7.4 a 7.7, representa-se apenas a parcela z3!+ [ 3"+, que é independente da
espessura e do material, tornando mais fácil o seu entendimento.
Reissner-Mindlin
0.01
Reissner-Mindlin
0.05
Reissner-Mindlin
0.1
Reissner-Mindlin
0.2
Reissner-Mindlin
0.5Kirchhoff
Grau 2 0,498 0,630 0,545 0,450 0,386 0,322
Grau 4 0,527 0,589 0,490 0,437 0,393 0,300
Grau 6 0,472 0,609 0,550 0,506 0,435 0,279

44
Gráfico 7.8 - Energia de Corte por Número de Graus de Liberdade de deslocamento
100,00
1 000,00
10 000,00
100 000,00
1 000 000,00
500 5000 50000 500000
Ener
gia
de
Co
rte
(Uco
rte)
Nº de Graus de Liberdade de deslocamentos
0,5 grau 2 0,5 grau 4 0,5 grau 6
0,2 grau 2 0,2 grau 4 0,2 grau 6
0,1 grau 2 0,1 grau 4 0,1 grau 6
0,05 grau 2 0,05 grau 4 0,05 grau 6
0,01 grau 2 0,01 grau 4 0,01 grau 6

45
Gráfico 7.9 - Percentagem de Energia de Corte por Número de Graus de Liberdade de deslocamento
Com o aumento do número de graus de liberdade, como se pode visualizar a partir dos Gráficos
7.8. e 7.9., a dispersão das energias de corte em valor real e em percentagem diminui; isto porque,
com o aumento do número de elementos inerentes ao refinamento das malhas e também pelo
aumento do grau das funções de aproximação, existe uma melhor captação do efeito de deformação
por corte, levando à sua convergência para o valor “exato”. Note-se que, em ambos os gráficos, as
energias estão a convergir, para o número de graus de liberdade testados, exceto para a espessura
de 0.01, para a qual seria necessário analisar, pelo menos, ou uma malha mais refinada ou aumentar
0,01%
0,10%
1,00%
10,00%
100,00%
500 5000 50000 500000
Ener
gia
de
Co
rte
Uco
rte
(%)
Nº de Graus de Liberdade de deslocamentos
0,5 grau 2 0,5 grau 4 0,5 grau 6
0,2 grau 2 0,2 grau 4 0,2 grau 6
0,1 grau 2 0,1 grau 4 0,1 grau 6
0,05 grau 2 0,05 grau 4 0,05 grau 6
0,01 grau 2 0,01 grau 4 0,01 grau 6

46
o grau das funções de aproximação. O efeito que faz com que a convergência se dê de forma mais
lenta é o efeito de bordo que surge nos bordos livres e bordos com apoio simplesmente apoiados.
Este efeito é visível nas Figuras 7.5 e 7.6 para uma espessura 0.01 e 0.1, para a malha mais refinada
testada, e não está presente para uma espessura 0.5, também para a malha mais refinada testada,
Figura 7.4. Note-se ainda que, dado o facto de na Figura 7.7 ter sido usada uma malha pouco
refinada e funções de aproximação de grau 2, praticamente não se capta a influência do efeito de
bordo e singularidades.
Outra ilação de interesse é o facto de a energia de corte aumentar com a diminuição da espessura,
devido ao aumento de deformabilidade da laje.
No entanto, a percentagem de energia de corte diminui, esta ocorrência dá-se porque a energia de
deformação por flexão aumenta na proporção inversa de ℎQ, enquanto a energia de deformação por
corte aumenta na proporção inversa de ℎ.
Devido a estes fatores, para ℎ = 0.5, 9:¨ diminui com o numero de graus de liberdade, tal como 9 e para ℎ = 0.05 ou 0.01 9:¨ aumenta com o numero de graus de liberdade, ao contrário de 9.
Figura 7.4 - Densidade de Energia de Deformação devido ao Corte Normalizada, Espessura 0.5, Malha 4,
grau 6

47
Figura 7.5 - Densidade de Energia de Deformação devido ao Corte Normalizada, Espessura 0.1, Malha 4,
grau 6
Figura 7.6 - Densidade de Energia de Deformação devido ao Corte Normalizada, Espessura 0.01, Malha 1, grau 2

48
Figura 7.7 - Densidade de Energia de Deformação devido ao Corte Normalizada, Espessura 0.01, Malha 4,
grau 6
Uma conclusão ainda a retirar sobre os Gráficos 7.8 e 7.9 é que a espessura 0.5 corresponde
realmente a uma laje “espessa”, pois 9:¨ diminui com o número de graus de liberdade e a
espessura 0.01 é fina, pois, como se observa pela Figura 7.6, surge o efeito de bordo, que de resto
é um efeito característico de uma laje fina na teoria de lajes de Reissner-Mindlin. Observa-se ainda
que a diferença que se encontra no gráfico 7.9, quanto à percentagem de energia de deformação
ao corte, para espessura 0.01 nas malhas 1 e 4, está relacionada com a capacidade de as malhas
representarem o efeito de bordo e singularidades, como pode ser observado nas figuras 7.6 e 7.7.

49
7.2.4 Energia de Deformação por Flexão – Comparação entre Teorias
A energia de deformação por flexão existe em ambas as teorias, tendo sido por isso avaliada a
evolução deste efeito. No Gráfico 7.10, é apresentada a relação da Energia de Flexão obtida pela
teoria de Reissner-Mindlin (Uflexão RM) com a Energia de Flexão pela teoria de Kirchhoff (Uflexão
KT), ambas em função da espessura.
Gráfico 7.10 - Relação Uflexão RM/Uflexão KT em função da Espessura da Laje
Identicamente ao que sucede à energia de deformação por corte, também na energia de deformação
por flexão, ao aumentar o número de graus de liberdade ou o número de elementos por malha,
rapidamente diminui a dispersão nos resultados obtidos, pelo que não se apresentam os resultados
da energia de flexão para todas as malhas e graus.
O Gráfico 7.10 permite constatar que, para espessuras na ordem dos 0.1 e inferiores, a teoria de
lajes de Kirchhoff obtém valores de energia de deformação por flexão muito aproximados dos da
teoria de lajes de Reissner-Mindlin, com uma diferença inferior a 10%, isto para malhas com um
nível de refinamento não muito baixo.
1
1,1
1,2
1,3
1,4
1,5
1,6
1,7
0,01 0,1 1
Ufl
exã
o R
M/U
fle
xão
KT
Espessura da Laje
Malha 1 grau 2
Malha 1 grau 4
Malha 1 grau 6
Malha 2 grau 2
Malha 2 grau 4
Malha 4 grau 2
Malha 4 grau 6

50
7.2.5 Deformadas
Na Figura 7.8 apresenta-se a deformada dos lados dos elementos para teoria de Reissner-Mindlin,
para a malha menos refinada e com função de aproximação de grau 2, onde é possível verificar as
descontinuidades nos vértices dos elementos finitos.
Figura 7.8 - Deformada Malha 1 Espessura 0.01 - Grau 2
Na Figura 7.9, exibe-se a deformada da laje com a malha mais refinada e com funções de
aproximação de grau 6, para a teoria de Reissner-Mindlin. Com o refinamento apresentado, não são
visíveis, apesar de existirem, as descontinuidades entre elementos, para a escala apresentada.
Figura 7.9 - Deformada Malha 4 Espessura 0.01 - Grau 6

51
Nas figuras anteriores só se exibem as deformadas para a teoria de Reissner-Mindlin, por serem
visualmente iguais às que se obteveram a partir da teoria de Kirchhoff.
7.2.6 Campos de Esforços e de Densidade de Energia de Deformação
Nesta secção, começa-se por apresentar os valores característicos dos campos de esforços e o
campo da densidade de energia de deformação normalizada.
Optou-se por considerar, para este efeito, a laje para a teoria de Reissner-Mindlin, espessura 0.1,
melhor malha e de grau de funções de aproximação 6.
Figura 7.10 - Campos de Esforços e Campo da densidade de Energia de Deformação Normalizada para
teoria de Reissner-Mindlin, espessura 0.1, malha 4 e 6º grau de funções de aproximação.

52
Apresenta-se em seguida a diferença entre as a teoria das lajes de Reissner-Mindlin e a teoria das
lajes de Kirchhoff, para as melhores soluções obtidas, para as espessuras mais grossa e mais fina,
sendo estas aquelas em que se obtém maiores diferenças e semelhanças, respetivamente, em
termos dos campos de esforços e campo da densidade de energia de deformação normalizada,
conforme apresentados nas Figura 7.11 e 7.12.
Figura 7.11 - Diferença dos Campos de Esforços e Campo da densidade de Energia de Deformação
Normalizada entre a teoria de Reissner-Mindlin e a Teoria de Kirchhoff. para a Espessura de 0.5, Malha 4 com Funções de Aproximação de Grau 6

53
Figura 7.12 - Diferença dos Campos de Esforços e Campo da densidade de Energia de Deformação
Normalizada entre a teoria de Reissner-Mindlin e a Teoria de Kirchhoff para a Espessura 0.01, Malha 4 com Funções de Aproximação de Grau 6

54
7.3 PROBLEMA Nº2
O problema em questão tem como objetivo de estudo, a particularidade de ter uma carga unitária
aplicada em “faca” desde as coordenadas (L, M) = (8/3 , 0), até às coordenadas (L, M) = (8/3 , 3), e
um apoio simples, modelado de forma soft, reentrante no domínio da laje desde as coordenadas (L, M) = (4/3 , 2), até às coordenadas (L, M) = (4 , 2). Os bordos da laje estão modelados com
apoios de encastramento e apoios simples soft, como se ilustra na Figura 7.13.
Figura 7.13 - Problema nº2
Neste problema, só se realizou o estudo da solução para funções de aproximação de grau 6, por os
resultados não apresentarem ilações significativamente diferentes das que se obtiveram pelo
problema 1.
As malhas consideradas para o desenvolvimento do problema encontram-se na Figura 7.14 e 7.15
Figura 7.14 - Malhas 1 e 2 do Problema 2

55
Figura 7.15 – Malhas 3, 4 e 5 do Problema 2
7.3.1 Convergência da Solução com a Evolução do Refinamento h
É apresentada nos Gráficos 7.11 e 7.12, a evolução do erro relativo da energia de deformação
(öÃ~Ã~ ), para 9! obtida pela extrapolação de Richardson para as três últimas malhas, e com os
valores na Tabela 1 em Anexo, sendo mais uma vez de interesse, em termos energéticos, ter a
perceção da taxa de convergência dos resultados obtidos face à solução “exata”, quando uma laje
é submetida a um carregamento de faca e/ou um apoio reentrante no seu domínio.

56
Gráfico 7.11 - Erro Relativo da Energia de Deformação - Kirchhoff
Na Tabela 7.2 encontra-se o declive final do erro relativo da energia de deformação para a teoria de
lajes de Kirchhoff.
Tabela 7.2 - Declive final - Kirchhoff
1E-08
0,0000001
0,000001
0,00001
0,0001
100 1000 10000 100000 1000000
Err
o R
ela
tiv
o d
a E
ne
rgia
de
De
form
açã
o
Nº de Graus de Liberdade de deslocamento
Kirchhoff
Kirchhoff
declive 0,75

57
Gráfico 7.12 - Erro Relativo da Energia de Deformação - Reissner-Mindlin
Tabela 7.3 - Declives finais - Reissner-Mindlin
Com os resultados obtidos podemos concluir que, exceto para a espessura 0.01, a taxa de
convergência de elementos de Reissner-Mindlin é superior à das de Kirchhoff. Como esperado, a
espessura 0.01 é a que se mais aproxima da solução da teoria de Kirchhoff.
Um dado análogo aos resultados do problema nº1 é a taxa de convergência para a teoria de lajes
de Reissner-Mindlin para a espessura 0.1 ser a maior, dado ser uma espessura de transição, poder-
se-á dar o caso de não ser afetada nem pela deformação por corte, como para as espessuras
maiores, nem pelo efeito de bordo, como para as espessuras menores, resultando desta forma uma
convergência mais rápida para a solução “exata”.
1E-08
0,0000001
0,000001
0,00001
0,0001
0,001
0,01
1000 10000 100000 1000000
Err
o R
ela
tiv
o d
a E
ne
rgia
de
De
form
açã
o
Nº de Graus de Liberdade de deslocamento
Reissner-Mindlin 0.01
Reissner-Mindlin 0.05
Reissner-Mindlin 0.1
Reissner-Mindlin 0.2
Reissner-Mindlin 0.5
Reissner-Mindlin
0.01
Reissner-Mindlin
0.05
Reissner-Mindlin
0.1
Reissner-Mindlin
0.2
Reissner-Mindlin
0.5
declives 0,58 1,74 2,58 1,73 1,76

58
7.3.2 Deformadas
Nas Figuras 7.16 e 7.17 estão ilustradas as deformadas da teoria de Reissner-Mindlin, para a
malha menos refinada (1) e para a malha mais refinada (5), espessura 0.01.
Figura 7.16 - Deformada Malha 1, Espessura 0.01
Figura 7.17 - Deformada Malha 5, Espessura 0.01
Mais uma vez, só se exibe a deformada da teoria de Reissner-Mindlin, dado ao fato das deformadas
resultantes da teoria de Kirchhoff não apresentarem diferenças visualmente percetíveis à escala
apresentada.

59
7.3.3 Campos de Esforços e de Densidade de Energia de Deformação
Mais uma vez, começa-se por apresentar os valores característicos do campo de esforços e campo
de densidade de energia de deformação, para a malha mais refinada, espessura 0.1, teoria de
Reissner-Mindlin, a partir da Figura 7.18.
Figura 7.18 - Campos de Esforços e Campo da densidade de Energia de Deformação Normalizada para
teoria de Reissner-Mindlin, espessura 0.1, malha 5.
Nas Figura 7.19 e 7.20 ilustra-se a diferença entre os campos de esforços e de densidade de energia
de deformação, da teoria de lajes de Reissner-Mindlin com a teoria de lajes de Kirchhoff, para a
espessura 0.01 e para 0.5, que foram as espessuras mais fina e mais espessa consideradas na
dissertação.

60
Figura 7.19 - Diferença dos Campos de Esforços e Campo da densidade de Energia de Deformação
Normalizada entre a teoria de Reissner-Mindlin e a Teoria de Kirchhoff. para a Espessura 0.01, Malha 5

61
Figura 7.20 - Diferença dos Campos de Esforços e Campo da densidade de Energia de Deformação
Normalizada entre a teoria de Reissner-Mindlin e a Teoria de Kirchhoff. para a Espessura 0.5 Malha 5
Com base nas figuras anteriormente apresentadas, verifica-se que a teoria de lajes de Reissner-
Mindlin obtém resultados idênticos aos obtidos pela teoria de lajes de Kirchhoff para a espessura
fina de 0.01, como seria de esperar. As diferenças de maior relevo surgem nos bordos simplesmente
apoiados devido ao efeito de bordo.
A espessura 0.5 apresenta diferenças de maior ordem, devido à existência de deformação por corte,
o que já foi documentado na secção 7.2. No gráfico 7.13 mostra-se a evolução da percentagem de
energia de corte com a espessura, justificando os resultados obtidos nas Figuras 7.19 e 7.20.

62
Gráfico 7.13 - Energia de Deformação por Corte (%)
A clara diferença na percentagem de energia de deformação por corte demonstra os valores
observados nos campos de esforços e na energia de deformação.

63
7.4 PROBLEMA Nº3
No problema nº3, pretende-se estudar o efeito da implementação de um apoio pontual e de uma
carga pontual nas teorias de lajes, Figura 7.21.
A laje é por isso carregada com uma força concentrada de 1 &, nas coordenadas (L, M) = (3 , 3),
ou com uma carga distribuída estaticamente equivalente.
Figura 7.21 - Problema nº3
Não sendo possível implementar apoios ou cargas pontuais na teoria de lajes de Reissner-Mindlin,
recorreu-se à implementação de apoios simples, modelados na forma soft, com uma geometria
quadrada, e com uma dimensão quatrocentas vezes inferior aos lados da laje, do tipo “pilar”.
O “pilar” foi modelado de duas formas, com e sem abertura, isto é, estando o “pilar” com laje no seu
interior e o “pilar” com vazio no interior, com o objetivo de analisar as diferenças que uma possível
modelação possa vir a causar. Em ambas as modelações foi efetuado um carregamento com uma
carga distribuída estaticamente equivalente a 1 & nos bordos do quadrado formulado para
representar a carga pontual.
Por forma a examinar em maior detalhe as disparidades que a implementação de apoios e cargas
pode causar no modelo, também se criaram os modelos de pilares e carregamento quadrados para
a teoria de lajes de Kirchhoff.

64
Neste problema, optou-se por apresentar três grupos de malhas diferentes, todas de elementos de
grau seis:
• 1º Grupo - Uma malha com um nível de refinamento que garante a qualidade das soluções
estudadas, às escalas apresentadas, para os modelos de “pilar preenchido” e “pilar vazio”,
tendo sido utilizada para a comparação de campos de esforços, campo de deformação de
energia e deformadas obtidas;
• 2º Grupo – Quatro malhas para a avaliação do modelo de carga e apoio pontual;
• 3º Grupo – Quatro malhas para avaliar a convergência da solução do modelo de “pilar
preenchido”, de forma a que a convergência esteja em regime assintótico.
Nas Figuras 7.22, 7.23, 7.24 e 7.25, ilustram-se os três grupos de malhas estudadas para o
problema 3.
A criação de malhas no programa Gmsh envolve alguma aleatoriedade, não tendo sido controlado
com rigor o número de elementos gerados, quando se implementou um refinamento h.
Quando modelada a laje com “pilar” vazio, com 6532 elementos e “pilar” preenchido, com 6524
elementos, a diferença entre as malhas em relação ao número de elementos é pouco significativa.
Na Figura 7.22 só se apresenta a malha para o modelo de pilar “preenchido”.
A discrepância entre os modelos de “pilar” e o modelo de apoio pontual, resulta da utilização do
programa Gmsh, que refina de uma forma diferente para o modelo de pilar e para o modelo de apoio
pontual. Devido a esta situação, o refinamento para o apoio pontual envolveu maior número de
elementos do que o necessário. Apesar de não ser a forma mais correta de comparar as duas
soluções, por as malhas não terem o melhor refinamento possível, considera-se que estas têm uma
qualidade suficientemente boa para fazer uma avaliação das suas diferenças.

65
Figura 7.22 – 1º Grupo de Malhas; Modelado com Pilar "preenchido" e "vazio "

66
Figura 7.23 – 2º Grupo de Malhas; Modelado com apoio pontual

67
Figura 7.24 - 3º Grupo de Malhas; Modelo "pilar preenchido"

68
Figura 7.25 - 3º Grupo de Malhas; Modelo "pilar preenchido"; ampliação da zona de apoio
7.4.1 Comparação de Pilar “Preenchido” e Pilar “Vazio”
Como seria de esperar as diferenças entre as duas lajes, com a modelação de pilar “preenchido” e
pilar “vazio” não tem diferenças muito significativas dadas as dimensões do pilar.
Nas Figuras 7.26 e 7.27, ilustram-se as diferenças dos dois modelos, para a teoria de lajes de
Reissner-Mindlin, e na Figura 7.28 as diferenças para a teoria de lajes de Kirchhoff, com recurso ao
1º Grupo de Malhas.

69
Figura 7.26 - Diferença do Modelo de pilar "preenchido" e pilar "vazio” esp=0.5 - Reissner-Mindlin

70
Figura 7.27 - Diferença do Modelo de pilar "preenchido" e pilar "vazio” esp=0.01 - Reissner-Mindlin
Com base nas Figuras 7.26 e 7.27 observamos que não existem diferenças significativas, à escala
indicada, para a espessura 0.5. No entanto, para a espessura 0.01, é visível a diferença nos campos
de esforços transversos e no campo de densidade de energia de deformação, podendo esta
discrepância ser causada pelo aumento de rigidez que o pilar “preenchido” tem, em relação ao pilar
“vazio”, que desta forma provoca a diminuição da energia de deformação por corte e o consequente
aumento dos valores dos campos de esforço transverso.
O aumento de rigidez do pilar “preenchido” terá ainda como efeito o aumento da rigidez da própria
laje, explicando desta forma a diferença existente, no efeito de bordo, entre os dois modelos.

71
Figura 7.28 - Diferença do Modelo de pilar "preenchido" e pilar "vazio” – Kirchhoff
Devido à teoria de lajes de Kirchhoff não considerar a deformação por corte, as diferenças dos
modelos são mínimas, resultando unicamente do efeito de canto e singularidades que esvanecem
com o refinamento, como se pode observar na Figura 7.28.

72
7.4.2 Convergência da Solução com a Evolução do Refinamento
A convergência da solução, mais uma vez, permitirá retirar importantes ilações sobre os modelos
usados, nomeadamente os que se aproximam mais rapidamente da solução exata consumindo
menos recursos, por exemplo tempo de processamento de resultados.
Com base no erro relativo da energia de deformação (öÃ~Ã~ ), para 9! obtida pela extrapolação de
Richardson para as três últimas malhas, e com os valores na Tabela 1 em Anexo, realizou-se mais
uma vez o estudo da convergência das soluções geradas.
Começa-se por comparar, para a teoria de lajes de Kirchhoff, o modelo de “pilar preenchido” e o
modelo de apoio pontual tendo sido obtido os seguintes resultados que se ilustram no Gráfico 7.14
e na Tabela 7.4.
Gráfico 7.14- Erro Relativo da Energia de Deformação - Modelo de "pilar preenchido" e Modelo de apoio
pontual – Kirchhoff
Tabela 7.4 – Declives finais - Modelo de "pilar preenchido" e Modelo de apoio pontual - Kirchhoff
Por observação dos dados anteriormente apresentados, podemos constatar que, para além do
modelo de apoio pontual ter uma taxa de convergência superior à taxa de convergência do modelo
de “pilar preenchido”, também para o mesmo número de graus de liberdade de deslocamento
concluímos que a solução do modelo de apoio pontual está mais perto da sua solução “exata” que
o modelo de “pilar preenchido”.
1E-09
1E-08
0,0000001
0,000001
0,00001
0,0001
0,001
0,01
10000 100000 1000000
Err
o R
ela
tiv
o d
a E
ne
rgia
de
De
form
açã
o
Nº de Graus de Liberdade de deslocamento
Modelo de "pilar preenchido"
Modelo de apoio pontual
Modelo de
"pilar preenchido"
Modelo de apoio
pontual
declives 0,26 2,08

73
Estes resultados podem ser explicados pelo simples fato de no modelo de “pilar preenchido”
existirem singularidades causadas pelo efeito de canto, resultado da modelação do apoio quadrado,
que leva desta forma a que a convergência se dê de forma mais lenta.
Em seguida faz-se a mesma avaliação, pelo erro relativo da energia de deformação, para a
comparação das espessuras de estudo para a teoria de Reissner-Mindlin, com o modelo de “pilar
preenchido”. Esta comparação está apresentada no Gráfico 7.15 e Tabela 7.5.
Gráfico 7.15 - Erro Relativo da Energia de Deformação Modelo de “pilar preenchido” - Reissner-Mindlin
Tabela 7.5 - Declives finais Modelo de "pilar preenchido" - Reissner-Mindlin
A taxa de convergência é semelhante em ambas as espessuras, à exceção da espessura 0.01, que
provavelmente devido ao efeito de bordo levará a que esta se dê mais lentamente.
Outro dado importante a referir é que a convergência se dá mais rapidamente pela teoria de
Kirchhoff do que pela teoria de Reissner-Mindlin, resultado este que pode surgir pela ausência da
influência de deformação por corte.
0,000001
0,00001
0,0001
0,001
0,01
10000 100000 1000000
Err
o R
ela
tiv
o d
a E
ne
rgia
de
De
form
açã
o
Nº de Graus de Liberdade de deslocamentos
Reissner-Mindlin 0.01
Reissner-Mindlin 0.05
Reissner-Mindlin 0.1
Reissner-Mindlin 0.2
Reissner-Mindlin 0.5
Reissner-Mindlin
0.01
Reissner-Mindlin
0.05
Reissner-Mindlin
0.1
Reissner-Mindlin
0.2
Reissner-Mindlin
0.5
declives 0,24 1,01 0,98 0,94 1,04

74
7.4.3 Campo de Esforços e de Densidade de Energia de Deformação
Apresentam-se em seguida os valores característicos do campo de esforços e campo da densidade
de energia de deformação normalizada, para espessura 0.1, malhas mais refinadas, o modelo de
pilar “preenchido” para teoria de Reissner-Mindlin na Figura 7.29, e modelo de apoio pontual para a
teoria de Kirchhoff na Figura 7.30.
Figura 7.29 - Campo de Esforços e Campo da densidade de Energia de Deformação Normalizada para o
Grupo nº1 de malhas, Modelo "pilar preenchido", espessura 0.1, teoria de Reissner-Mindlin.

75
Figura 7.30 - Campo de Esforços e Campo da densidade de Energia de Deformação Normalizada para o
Grupo nº2 de malhas, malha 4, Modelo apoio pontual, teoria de Kirchhoff.
Na Figura 7.31, apresenta-se a diferença entre a teoria de lajes de Kirchhoff, modelado com apoio
e carregamento pontual, e a teoria de lajes de Kirchhoff, modelado com pilar “preenchido” e
carregamento quadrado, a partir do 2º Grupo de malhas e 1º Grupo de malhas, respetivamente.

76
Figura 7.31 - Diferença do Modelo de carga pontual e Modelo de pilar “preenchido” - Kirchhoff
O efeito de canto e o aumento de rigidez existente com o pilar “preenchido” mais uma vez poderão
ter como consequência as desigualdades que se encontram ilustradas na figura anterior.
Compara-se em seguida a teoria de lajes de Kirchhoff, modelada com apoio pontual e a teoria de
lajes de Reissner-Mindlin, modelado com um pilar “preenchido”, para a espessura 0.5, Figura 7.32,
e para a espessura 0.01, Figura 7.33, novamente a partir do 2º Grupo de malhas e 1º Grupo de
malhas, respectivamente.

77
Figura 7.32 - Diferença do Modelo de carga pontual, teoria de lajes de Kirchhoff, com Modelo de pilar
“preenchido”, teoria de lajes de Reissner-Mindlin – espessura 0.5

78
Figura 7.33 - Diferença do Modelo de carga pontual, teoria de lajes de Kirchhoff, com Modelo de pilar
“preenchido”, teoria de lajes de Reissner-Mindlin – espessura 0.01
As desigualdades apresentadas na Figura 7.32, com espessura de 0.5, para os dois modelos,
resulta do efeito de bordo, em que os valores não “picam”, como para a espessura 0.01, devido às
tensões tangenciais serem inferiores e se poderem distribuir por uma maior área. Na Figura 7.33,
para além do efeito de bordo, ainda existe o efeito de canto que se verifica no modelo de pilar
“preenchido” e não se verifica no modelo de apoio pontual.

79
Por fim, avalia-se as disparidades que surgem entre a diferença dos modelos, ambos com pilar
“preenchido”, para as teorias de lajes de Reissner-Mindlin e Kirchhoff, Figuras 7.34 e 7.35, a partir
do 1º Grupo de malhas.
Figura 7.34 - Diferença entre o Modelo com pilar "preenchido" na teoria de laje Reissner-Mindlin com o
Modelo com pilar "preenchido" na teoria de laje Kirchhoff – Espessura 0.5
As discrepâncias existentes devem-se à existência, mais uma vez, de deformação por corte na
teoria de laje de Reissner-Mindlin e da sua inexistência na teoria de laje de Kirchhoff.

80
Figura 7.35 - Diferença entre o Modelo com pilar "preenchido" na teoria de laje Reissner-Mindlin com o
Modelo com pilar "preenchido" na teoria de laje Kirchhoff – Espessura 0.01
Dado a deformação por corte reduzir com a diminuição da espessura, as diferenças verificadas na
Figura 7.35 resultam essencialmente do efeito de bordo da teoria de laje de Reissner-Mindlin e
devido às singularidades na teoria de laje de Kirchhoff.

81
7.4.4 Evolução da Energia de Deformação por Corte (%) com a
Espessura
A evolução da percentagem de energia de deformação por corte com a espessura da laje, encontra-
se apresentada no Gráfico 7.12.
Gráfico 7.16 - Energia de Deformação por Corte (%) em função da espessura
É possível observar pelo gráfico que a percentagem de energia de deformação por corte diminui da
espessura de 0.5 para 0.1, transição essa que se considera a laje espessa, e em que ocorre a
evolução espectável, contudo, na transição 0.1 a 0.05 dá se um aumento da percentagem de energia
de deformação por corte, que neste caso não seria de esperar, este efeito pode ocorrer devido ao
efeito de bordo, voltando a descer da espessura 0.05 para 0.01, ou seja, voltando a ter a evolução
espectável.
0,00%
2,00%
4,00%
6,00%
8,00%
10,00%
12,00%
14,00%
0 0,1 0,2 0,3 0,4 0,5
Ener
gia
de
Def
orm
ação
de
Co
rte
(%)
Espessura
Malha 1
Malha 2
Malha 3
Malha 4

82
A Figura 7.36 ilustra a diferença entre os campos de esforços e o campo da densidade de energia
de deformação normalizadaentre a transição 0.1 para 0.05, permitindo visualizar a sua diferença.
Figura 7.36 - Diferença de Campos de Esforços e Campo da densidade de Energia de Deformação
Normalizadaentre a espessura 0.1 e 0.05 – Reissner-Mindlin

83
7.4.5 Deformadas
As deformadas obtidas para a teoria de laje Reissner-Mindlin, para a laje modelada com pilar
“preenchido”, são ilustradas nas Figuras 7.37 e 7.38, para uma espessura de 0.01.
Figura 7.37 - Deformada Malha 1 – Modelo Pilar “preenchido”
Figura 7.38 - Deformada da Malha 4 Modelo Pilar “preenchido”
A alteração da espessura ou alteração da teoria de laje, para a de Kirchhoff, não altera as Figuras
a nível visual, no entanto, os valores dos deslocamentos sofrem alterações.

84
As deformadas dos modelos com apoio e carregamento pontual, da teoria de lajes de Kirchhoff,
para a malha menos refinada e mais refinada, encontram-se ilustradas nas Figuras 7.39 e 7.40.
Figura 7.39 - Deformada Malha 1 - Modelo Pontual
Figura 7.40 - Deformada Malha 4 - Modelo Pontual
A diferença de valores na deformada dos dois modelos pode-se justificar pela maior rigidez que o apoio do tipo “pilar preenchido” tem em relação ao modelo de apoio pontual.

85
CAPÍTULO 8.
CONCLUSÕES E TRABALHOS FUTUROS
8.1 CONCLUSÕES
Nesta dissertação, apresentaram-se as variáveis e as condições que caracterizam o comportamento
das lajes de Reissner-Mindlin e lajes de Kirchhoff, em regime elástico linear.
A utilização da formulação híbrida de equilíbrio tem a vantagem sobre a formulação clássica do
método dos elementos finitos de obter resultados do lado da segurança e de não ter a influência do
efeito de travamento por corte, apesar dos tempos de processamento serem maiores, em teoria, do
que os da formulação clássica.
Um dos fatores que condiciona a convergência da solução, quando esta é avaliada pelo erro relativo
da energia de deformação, são as singularidades provocas pela interação das condições de
fronteira, no caso da teoria de Reissner-Mindlin, o efeito de bordo e energia de deformação por corte
com a variação da espessura influencia a taxa de convergência.
Para o caso do 1º Problema, podemos também concluir que da utilização de apoio simples soft ou
hard, não se obtém diferenças suficientemente relevantes quanto à apreciação energética, campos
de deformação ou deformada da laje.
Quanto ao 2º Problema, que continha um apoio simples reentrante no domínio e um carregamento
em “faca”, nenhuma das avaliações efetuadas obteve resultados de grande relevância.
No 3º Problema, a modelação do pilar “preenchido”, comparativamente com a modelação do pilar
“vazio” não apresentou grandes diferenças tanto a nível de campos de esforços, energia de
deformação ou ainda da deformada da laje. Já na modelação de apoio pontual para a teoria de lajes
de Kirchhoff, comparativamente com a modelação de pilar “preenchido” para a teoria de laje de
Reissner-Mindlin, para além das esperadas diferenças resultantes da energia de deformação,
causadas pela rigidificação que esta modelação provoca, também surge o efeito de canto na
modelação de pilar “preenchido”, que justifica as diferenças apresentadas por ambos nos campos
de esforços e energia de deformação.

86
A partir da dissertação é possível ainda concluir que o refinamento usado condiciona
significativamente a solução obtida, tanto a nível de convergência como a nível de precisão de
resultados obtida.
8.2 TRABALHOS FUTUROS
Para trabalhos futuros, seria conveniente a avaliação da qualidade de malhas menos refinadas do que apresentadas nesta dissertação e também malhas mais refinadas, de forma a aprofundar os macro e micro efeitos que são obtidos pelas diferentes teorias.
Será também conveniente realizar um estudo numérico e eventualmente teórico por forma a quantificar as singularidades e também efeito de bordo que surgem nos problemas estudados nesta dissertação.
Realizar os mesmos estudos para problemas com fronteiras curvas, de forma a avaliar as suas condicionantes.
Outro trabalho futuro será também realizar um estudo particular quanto à espessura de transição entre a laje fina e espessa, de forma a avaliar qual a teoria que melhor se adapta para problemas deste género.

87
BIBLIOGRAFIA
[1] Castro, L. M. S. S., e Leitão, V. M. A., Apontamentos sobre análise elástica linear de lajes,
Instituto Superior Técnico, 2005.
[2] Duarte, M. J. R., Análise dual de lajes através de elementos finitos híbridos, Dissertação de
Mestrado, Instituto Superior Técnico, 2008.
[3] Castro, L. M. S. S., Elementos Finitos para a Análise Elástica de Lajes, Instituto Superior Técnico,
2001.
[4] Passos, O., Análise Plástica de Lajes. Cálculo de minorantes e majorantes da carga de colapso,
Dissertação de Mestrado, Instituto Superior Técnico,2011.
[5] Araújo, R., Elementos finitos convencionais versus MITC na análise estrutural de lajes
moderadamente espessas, Dissertação de Mestrado, Instituto Superior Técnico, 2013.
[6] Zienkiewicz, O. C., R. L. Taylor e J. Z. Zhu, Finite Element Method: Its Basis and Fundamentals,
volume 1. Elsevier Butterworth–Heinemann, sexta edição, 2005
[7] Szilard, R., Theories and applications of plate analysis: classical numerical and engineering
methods. John Wiley & Sons, 2004.
[8] Castro, L. M. S. S., Método dos Elementos Finitos: Análise de Pórticos Planos, Instituto Superior
Técnico, 2009.
[9] Pereira, O. J. B. A., Integração numérica e locking, Instituto Superior Técnico, 2003.
[10] Sanches, P., Elementos finitos triangulares compatíveis na análise estrutural de lajes finas,
Dissertação de Mestrado, Instituto Superior Técnico, 2011.
[11] Pereira, E., Almeida, J. P. M., Determinação do efeito de bordo em lajes de Reissner-Mindlin
utilizando elementos finitos híbridos-mistos, VII Congresso de Mecânica Aplicada e
Computacional, Universidade de Évora, 2003.
[12] Southwell, R. V. On the analogues relating flexure and extension of flat plates. Quarterly Journal
of Mechanics and Applied Mathematics 3, 257-270, 1950.
[13] Pereira, O. J. B. A., Almeida, J. P. M., e Duarte, M. J. R., Implementação de um modelo
híbrido de equilíbrio para lajes, CMNE/CILAMCE, APMTAC/FEUP, Porto, 2007.
[14] Arruda, M., Análise dinâmica de estruturas com elementos finitos híbridos mistos de tensão,
Dissertação de Mestrado, Instituto Superior Técnico, 2008.
[15] Maunder, E. A. W. e Almeida, J. P. M, A triangular hybrid equilibrium plate element of general
degree. International Journal for Numerical Methods in Engineering, 63, 315-350, 2005.
[16] Maunder, E. A. W., e Almeida, J. P. M., "The stability of stars of triangular equilibrium plate
elements." International Journal for Numerical Methods in Engineering 77, no. 7, 922-968, 2009.

88
[17] Almeida, J. P. M., e Maunder, E. A. W., "A general degree hybrid equilibrium finite element for
Kirchhoff plates." International Journal for Numerical Methods in Engineering 94, no. 4, 331-354,
2013.
[18] Corrêa M. R., O princípio dos trabalhos virtuais e a teoria das peças lineares, Instituto Superior
Técnico, 2014.
[19] Almeida, J. P. M, Pereira, O. J. B. A., Duarte, M. J. R., Error bounds and adaptive refinament
or Reissner-Mindlin plates, International Conference on Adaptive Modeling and Simulation, 2007.
[20] MATLAB, Simulink, Handle Graphics, and Real-Time Workshop are registered trademarks and
Stateflow and Target Language Compiler are trademarks of The MathWorks, Inc.
[21] Geuzaine, C., e Remacle. J. F., "Gmsh: A 3‐D finite element mesh generator with built‐in pre‐and post‐processing facilities." International Journal for Numerical Methods in Engineering 79, no.
11, 1309-1331, 2009.

89
ANEXO A. UTILIZAÇÃO DOS PROGRAMAS
Os programas utilizados foram desenvolvidos na linguagem Matlab [20].
Os dados necessários para os executar são fornecidos a partir de dois ficheiros.
Para o primeiro, contendo a definição da malha, é utilizada a extensão “msh” e é gerado
automaticamente pelo programa Gmsh. Os detalhes de sua sintaxe são apresentados no manual
respetivo [21].
Para a definição do problema é utilizado um ficheiro com a extensão “prob”, no qual são definidas
as propriedades de laje, a sua carga e condições de fronteira. Este ficheiro tem de ser preparado
pelo utilizador através de um editor de texto.
Este ficheiro pode ter até três partes, onde se definem as propriedades de “Faces”, “Edges” e “Verts”,
que correspondem, respetivamente, aos elementos propriamente ditos, aos lados e aos vértices
definidos nas malhas.
Para cada “Faces” são introduzidos seis valores:
• O número de referência do tipo face;
• O módulo de Elasticidade do material;
• O coeficiente de Poisson;
• A espessura da laje;
• A espessura a utilizar nos desenhos;
• A carga aplicada, a qual tem de ser um vetor com três componentes para Reissner-Mindlin,
e uma componente para Kirchhoff.
Para cada “Edge” são introduzidos cinco ou quatro valores:
• O número de referência;
• As condições de apoios (três para Reissner-Mindlin, duas para Kirchhoff), em que o valor
zero (0) indica que é imposto o deslocamento, enquanto o valor um (1) indica que é imposto
a força:
• O valor imposto através de um vetor com três ou duas componentes, tal como as condições
anteriores.
Para cada “Verts”, unicamente no caso de Kirchhoff, são introduzidos três valores:
• O número de referência do tipo vértice;
• As condições de apoios nos vértices (zero (0) ou um (1) como para “Edges”);
• O valor imposto.

90
Para cada problema analisado o programa cria ficheiros de dados no formato utilizado pelo
programa “Gmsh”, a partir das quais são traçados os gráficos com as distribuições de esforços e as
deformadas.
Além disso é também indicado o valor das parcelas de energia de deformação de cada solução,
bem como o valor dos esforços e dos deslocamentos em pontos selecionados.

91
ANEXO B. TABELAS PARA O 1º PROBLEMA
Tabela B 1 - Energia de Deformação Normalizada - Solução de Referência
Teoria de Reissner-Mindlin
Grau de Funções de Aproximação 2 (' = 2)
Malha 1
Tabela B 2 – Dados para o Problema 1, p=2, Malha 1 – Reissner-Mindlin
Tabela B 3 – Resultados para o Problema 1, p=2, Malha 1 – Reissner-Mindlin
Malha 2
Tabela B 4 – Dados para o Problema 1, p=2, Malha 2 – Reissner-Mindlin
Teoria / Espessura RM 0,5 RM 0,2 RM 0,1 RM 0,05 RM 0,01 KT
Energia de Deformação Normalizada
Solução de "Referência"40,55299 27,24600 24,18051 22,78793 21,36738 20,73781
Problema 1
Problema 1 Malha 1
Grau das Funções de Aproximação 2
Nº de Elementos 56
Comprimento Médio dos Elementos 0,925813
Nº de Graus de Liberdade 1816
Nº de Graus de Liberdade de Deslocamentos 864
Espessura 0,5 0,2 0,1 0,05 0,01
Energia de Deformação por Flexão Normalizada 38,811325 37,409424 37,302230 37,292688 37,291970
Energia de Deformação por Corte Normalizada 15,599525 2,961606 0,785394 0,200229 0,008065
Energia de Deformação por Corte (%) 28,67% 7,34% 2,06% 0,53% 0,02%
Energia de Deformação Total Normalizada 54,410850 40,371032 38,087630 37,492913 37,300040
Problema 1 Malha 1
Problema 1 Malha 2
Grau das Funções de Aproximação 2
Nº de Elementos 866
Comprimento Médio dos Elementos 0,234531
Nº de Graus de Liberdade 26845
Nº de Graus de Liberdade de Deslocamentos 12123

92
Tabela B 5 – Resultados para o Problema 1, p=2, Malha 2 – Reissner-Mindlin
Malha 3
Tabela B 6 – Dados para o Problema 1, p=2, Malha 3 – Reissner-Mindlin
Tabela B 7 – Resultados para o Problema 1, p=2, Malha 3 – Reissner-Mindlin
Malha 4
Tabela B 8 – Dados para o Problema 1, p=2, Malha 4 – Reissner-Mindlin
Tabela B 9 – Resultados para o Problema 1, p=2, Malha 4 – Reissner-Mindlin
Espessura 0,5 0,2 0,1 0,05 0,01
Energia de Deformação por Flexão Normalizada 29,196000 26,235848 25,520380 25,334125 25,303800
Energia de Deformação por Corte Normalizada 14,908250 3,533136 1,222527 0,389127 0,018156
Energia de Deformação por Corte (%) 33,80% 11,87% 4,57% 1,51% 0,07%
Energia de Deformação Total Normalizada 44,104250 29,768984 26,742910 25,723250 25,321960
Problema 1 Malha 2
Problema 1 Malha 3
Grau das Funções de Aproximação 2
Nº de Elementos 3388
Comprimento Médio dos Elementos 0,118634
Nº de Graus de Liberdade 104198
Nº de Graus de Liberdade de Deslocamentos 46602
Espessura 0,5 0,2 0,1 0,05 0,01
Energia de Deformação por Flexão Normalizada 28,026450 24,958792 24,008660 23,654863 23,556000
Energia de Deformação por Corte Normalizada 14,550275 3,550415 1,354010 0,505496 0,030010
Energia de Deformação por Corte (%) 34,17% 12,45% 5,34% 2,09% 0,13%
Energia de Deformação Total Normalizada 42,576725 28,509208 25,362670 24,160350 23,586010
Problema 1 Malha 3
Problema 1 Malha 4
Grau das Funções de Aproximação 2
Nº de Elementos 21138
Comprimento Médio dos Elementos 0,047403
Nº de Graus de Liberdade 646869
Nº de Graus de Liberdade de Deslocamentos 287523
Espessura 0,5 0,2 0,1 0,05 0,01
Energia de Deformação por Flexão Normalizada 27,334388 24,299776 23,169990 22,552538 22,184880
Energia de Deformação por Corte Normalizada 14,221875 3,502879 1,448879 0,671309 0,079100
Energia de Deformação por Corte (%) 34,22% 12,60% 5,89% 2,89% 0,36%
Energia de Deformação Total Normalizada 41,556263 27,802656 24,618870 23,223838 22,263980
Problema 1 Malha 4

93
Grau de Funções de Aproximação grau 4 (' = 4)
Malha 1
Tabela B 10 – Dados para o Problema 1, p=4,, Malha 1 – Reissner-Mindlin
Tabela B 11 – Resultados para o Problema 1, p=4, Malha 1 – Reissner-Mindlin
Malha 2
Tabela B 12 – Dados para o Problema 1, p=4, Malha 2 – Reissner-Mindlin
Tabela B 13 – Resultados para o Problema 1, p=4, Malha 2 – Reissner-Mindlin
Problema 1 Malha 1
Grau das Funções de Aproximação 4
Nº de Elementos 56
Comprimento Médio dos Elementos 0,925813
Nº de Graus de Liberdade 3624
Nº de Graus de Liberdade de Deslocamentos 1440
Espessura 0,5 0,2 0,1 0,05 0,01
Energia de Deformação por Flexão Normalizada 30,021525 27,570624 27,190470 27,134100 27,128520
Energia de Deformação por Corte Normalizada 14,906338 3,287850 0,991744 0,271706 0,011314
Energia de Deformação por Corte (%) 33,18% 10,65% 3,52% 0,99% 0,04%
Energia de Deformação Total Normalizada 44,927863 30,858472 28,182210 27,405813 27,139830
Problema 1 Malha 1
Problema 1 Malha 2
Grau das Funções de Aproximação 4
Nº de Elementos 866
Comprimento Médio dos Elementos 0,234531
Nº de Graus de Liberdade 53979
Nº de Graus de Liberdade de Deslocamentos 20205
Espessura 0,5 0,2 0,1 0,05 0,01
Energia de Deformação por Flexão Normalizada 27,680338 24,624768 23,574080 23,128800 22,989810
Energia de Deformação por Corte Normalizada 14,337250 3,524035 1,404799 0,564038 0,036860
Energia de Deformação por Corte (%) 34,12% 12,52% 5,62% 2,38% 0,16%
Energia de Deformação Total Normalizada 42,017575 28,148808 24,978880 23,692838 23,026670
Problema 1 Malha 2

94
Malha 3
Tabela B 14 – Dados para o Problema 1, p=4, Malha 3 – Reissner-Mindlin
Tabela B 15 – Resultados para o Problema 1, p=4, Malha 3 – Reissner-Mindlin
Malha 4
Tabela B 16 – Dados para o Problema 1, p=4, Malha 4 – Reissner-Mindlin
Tabela B 17 – Resultados para o Problema 1, p=4, Malha 4 – Reissner-Mindlin
Grau de Funções de Aproximação grau 6 (' = 6)
Malha 1
Tabela B 18 – Dados para o Problema 1, p=6, Malha 1 – Reissner-Mindlin
Problema 1 Malha 3
Grau das Funções de Aproximação 4
Nº de Elementos 3388
Comprimento Médio dos Elementos 0,118634
Nº de Graus de Liberdade 209802
Nº de Graus de Liberdade de Deslocamentos 77670
Espessura 0,5 0,2 0,1 0,05 0,01
Energia de Deformação por Flexão Normalizada 27,239263 24,244352 23,127520 22,523275 22,208650
Energia de Deformação por Corte Normalizada 14,155000 3,476061 1,435729 0,660120 0,066961
Energia de Deformação por Corte (%) 34,20% 12,54% 5,85% 2,85% 0,30%
Energia de Deformação Total Normalizada 41,394263 27,720416 24,563250 23,183400 22,275610
Problema 1 Malha 3
Problema 1 Malha 4
Grau das Funções de Aproximação 4
Nº de Elementos 21138
Comprimento Médio dos Elementos 0,047403
Nº de Graus de Liberdade 1303587
Nº de Graus de Liberdade de Deslocamentos 479205
Espessura 0,5 0,2 0,1 0,05 0,01
Energia de Deformação por Flexão Normalizada 26,963475 24,032392 22,903520 22,209013 21,568030
Energia de Deformação por Corte Normalizada 14,001325 3,427787 1,433898 0,714235 0,147534
Energia de Deformação por Corte (%) 34,18% 12,48% 5,89% 3,12% 0,68%
Energia de Deformação Total Normalizada 40,964800 27,460176 24,337420 22,923238 21,715560
Problema 1 Malha 4
Problema 1 Malha 1
Grau das Funções de Aproximação 6
Nº de Elementos 56
Comprimento Médio dos Elementos 0,925813
Nº de Graus de Liberdade 5880
Nº de Graus de Liberdade de Deslocamentos 2016

95
Tabela B 19 – Resultados para o Problema 1, p=6, Malha 1 – Reissner-Mindlin
Malha 2
Tabela B 20 – Dados para o Problema 1, p=6, Malha 2 – Reissner-Mindlin
Tabela B 21 – Resultados para o Problema 1, p=6, Malha 2 – Reissner-Mindlin
Malha 3
Tabela B 22 – Dados para o Problema 1, p=6, Malha 3 – Reissner-Mindlin
Tabela B 23 – Resultados para o Problema 1, p=6, Malha 3 – Reissner-Mindlin
Espessura 0,5 0,2 0,1 0,05 0,01
Energia de Deformação por Flexão Normalizada 28,349863 25,451296 24,746990 24,582025 24,557910
Energia de Deformação por Corte Normalizada 14,575450 3,462178 1,197113 0,372118 0,016926
Energia de Deformação por Corte (%) 33,96% 11,97% 4,61% 1,49% 0,07%
Energia de Deformação Total Normalizada 42,925313 28,913480 25,944100 24,954138 24,574830
Problema 1 Malha 1
Problema 1 Malha 2
Grau das Funções de Aproximação 6
Nº de Elementos 866
Comprimento Médio dos Elementos 0,234531
Nº de Graus de Liberdade 88041
Nº de Graus de Liberdade de Deslocamentos 28287
Espessura 0,5 0,2 0,1 0,05 0,01
Energia de Deformação por Flexão Normalizada 27,268850 24,274344 23,145970 22,526525 22,211070
Energia de Deformação por Corte Normalizada 14,136300 3,474198 1,442021 0,669678 0,066079
Energia de Deformação por Corte (%) 34,14% 12,52% 5,86% 2,89% 0,30%
Energia de Deformação Total Normalizada 41,405150 27,748544 24,587990 23,196213 22,277150
Problema 1 Malha 2
Problema 1 Malha 3
Grau das Funções de Aproximação 6
Nº de Elementos 3388
Comprimento Médio dos Elementos 0,118634
Nº de Graus de Liberdade 342510
Nº de Graus de Liberdade de Deslocamentos 108738
Espessura 0,5 0,2 0,1 0,05 0,01
Energia de Deformação por Flexão Normalizada 27,003663 24,067088 22,942220 22,263638 21,737030
Energia de Deformação por Corte Normalizada 14,023925 3,433117 1,432588 0,704178 0,112313
Energia de Deformação por Corte (%) 34,18% 12,48% 5,88% 3,07% 0,51%
Energia de Deformação Total Normalizada 41,027588 27,500208 24,374810 22,967813 21,849340
Problema 1 Malha 3

96
Malha 4
Tabela B 24 – Dados para o Problema 1, p=6, Malha 4 – Reissner-Mindlin
Tabela B 25 – Resultados para o Problema 1, p=6, Malha 4 – Reissner-Mindlin
Tabelas para o 1º Problema
Teoria de Kirchhoff
Grau de Funções de Aproximação grau 2 (' = 2)
Malha 1
Tabela B 26 – Dados para o Problema 1, p=2, Malha 1 – Kirchhoff
Tabela B 27 – Resultados para o Problema 1, p=2, Malha 1 – Kirchhoff
Malha 2
Tabela B 28 – Dados para o Problema 1, p=2, Malha 2 – Kirchhoff
Problema 1 Malha 4
Grau das Funções de Aproximação 6
Nº de Elementos 21138
Comprimento Médio dos Elementos 0,047403
Nº de Graus de Liberdade 2129409
Nº de Graus de Liberdade de Deslocamentos 670887
Espessura 0,5 0,2 0,1 0,05 0,01
Energia de Deformação por Flexão Normalizada 26,963475 24,032392 22,903520 22,209013 21,568030
Energia de Deformação por Corte Normalizada 13,930000 3,399940 1,420995 0,713473 0,189946
Energia de Deformação por Corte (%) 34,17% 12,43% 5,86% 3,12% 0,88%
Energia de Deformação Total Normalizada 40,768175 27,347208 24,251930 22,847350 21,571620
Problema 1 Malha 4
Problema 1 Malha 1
Grau das Funções de Aproximação 2
Nº de Elementos 56
Comprimento Médio dos Elementos 0,925813
Nº de Graus de Liberdade 1568
Nº de Graus de Liberdade de Deslocamentos 616
Espessura
Energia de Deformação Total Normalizada
Qualquer
24,006388
Problema 1 Malha 1
Problema 1 Malha 2
Grau das Funções de Aproximação 2
Nº de Elementos 866
Comprimento Médio dos Elementos 0,234531
Nº de Graus de Liberdade 23285
Nº de Graus de Liberdade de Deslocamentos 8563

97
Tabela B 29 – Resultados para o Problema 1, p=2, Malha 2 – Kirchhoff
Malha 3
Tabela B 30 – Dados para o Problema 1, p=2, Malha 3 – Kirchhoff
Tabela B 31 – Resultados para o Problema 1, p=2, Malha 3 – Kirchhoff
Malha 4
Tabela B 32 – Dados para o Problema 1, p=2, Malha 4 – Kirchhoff
Tabela B 33 – Resultados para o Problema 1, p=2, Malha 4 – Kirchhoff
Grau de Funções de Aproximação grau 4 (' = 4)
Malha 1
Tabela B 34 – Dados para o Problema 1, p=4, Malha 1 – Kirchhoff
Espessura
Energia de Deformação Total Normalizada 22,130575
Problema 1 Malha 2
Qualquer
Problema 1 Malha 3
Grau das Funções de Aproximação 2
Nº de Elementos 3388
Comprimento Médio dos Elementos 0,118634
Nº de Graus de Liberdade 90454
Nº de Graus de Liberdade de Deslocamentos 32858
Espessura
Energia de Deformação Total Normalizada
Problema 1 Malha 3
Qualquer
21,660838
Problema 1 Malha 4
Grau das Funções de Aproximação 2
Nº de Elementos 21138
Comprimento Médio dos Elementos 0,047403
Nº de Graus de Liberdade 561837
Nº de Graus de Liberdade de Deslocamentos 202491
Espessura
Energia de Deformação Total Normalizada
Problema 1 Malha 4
Qualquer
21,251888
Problema 1 Malha 1
Grau das Funções de Aproximação 4
Nº de Elementos 56
Comprimento Médio dos Elementos 0,925813
Nº de Graus de Liberdade 3184
Nº de Graus de Liberdade de Deslocamentos 1000

98
Tabela B 35 – Resultados para o Problema 1, p=4, Malha 1 – Kirchhoff
Malha 2
Tabela B 36 – Dados para o Problema 1, p=4, Malha 2 – Kirchhoff
Tabela B 37 – Resultados para o Problema 1, p=4, Malha 2 – Kirchhoff
Malha 3
Tabela B 38 – Dados para o Problema 1, p=4, Malha 3 – Kirchhoff
Tabela B 39 – Resultados para o Problema 1, p=4, Malha 3 – Kirchhoff
Malha 4
Tabela B 40 – Dados para o Problema 1, p=4, Malha 4 – Kirchhoff
Espessura
Energia de Deformação Total Normalizada
Problema 1 Malha 1
Qualquer
22,546463
Problema 1 Malha 2
Grau das Funções de Aproximação 4
Nº de Elementos 866
Comprimento Médio dos Elementos 0,234531
Nº de Graus de Liberdade 47725
Nº de Graus de Liberdade de Deslocamentos 13951
Espessura
Energia de Deformação Total Normalizada
Problema 1 Malha 2
Qualquer
21,534000
Problema 1 Malha 3
Grau das Funções de Aproximação 4
Nº de Elementos 3388
Comprimento Médio dos Elementos 0,118634
Nº de Graus de Liberdade 185702
Nº de Graus de Liberdade de Deslocamentos 53570
Espessura
Energia de Deformação Total Normalizada
Problema 1 Malha 3
Qualquer
21,275075
Problema 1 Malha 4
Grau das Funções de Aproximação 4
Nº de Elementos 21138
Comprimento Médio dos Elementos 0,047403
Nº de Graus de Liberdade 1154661
Nº de Graus de Liberdade de Deslocamentos 330279

99
Tabela B 41 – Resultados para o Problema 1, p=4, Malha 4 – Kirchhoff
Grau de Funções de Aproximação grau 6 (' = 6)
Malha 1
Tabela B 42 – Dados para o Problema 1, p=6, Malha 1 – Kirchhoff
Tabela B 43 – Resultados para o Problema 1, p=6, Malha 1 – Kirchhoff
Malha 2
Tabela B 44 – Dados para o Problema 1, p=6, Malha 2 – Kirchhoff
Tabela B 45 – Resultados para o Problema 1, p=6, Malha 2 – Kirchhoff
Malha 3
Tabela B 46 – Dados para o Problema 1, p=6, Malha 3 – Kirchhoff
Espessura
Energia de Deformação Total Normalizada
Problema 1 Malha 4
Qualquer
21,251888
Problema 1 Malha 1
Grau das Funções de Aproximação 6
Nº de Elementos 56
Comprimento Médio dos Elementos 0,925813
Nº de Graus de Liberdade 5248
Nº de Graus de Liberdade de Deslocamentos 1384
Espessura
Energia de Deformação Total Normalizada 21,959325
Problema 1 Malha 1
Qualquer
Problema 1 Malha 2
Grau das Funções de Aproximação 6
Nº de Elementos 866
Comprimento Médio dos Elementos 0,234531
Nº de Graus de Liberdade 79093
Nº de Graus de Liberdade de Deslocamentos 19339
Espessura
Energia de Deformação Total Normalizada
Problema 1 Malha 2
Qualquer
21,288625
Problema 1 Malha 3
Grau das Funções de Aproximação 6
Nº de Elementos 3388
Comprimento Médio dos Elementos 0,118634
Nº de Graus de Liberdade 308054
Nº de Graus de Liberdade de Deslocamentos 74282

100
Tabela B 47 – Resultados para o Problema 1, p=6, Malha 3 – Kirchhoff
Malha 4
Tabela B 48 – Dados para o Problema 1, p=6, Malha 4 – Kirchhoff
Tabela B 49 – Resultados para o Problema 1, p=6, Malha 4 – Kirchhoff
Espessura
Energia de Deformação Total Normalizada
Problema 1 Malha 3
Qualquer
21,116188
Problema 1 Malha 4
Grau das Funções de Aproximação 6
Nº de Elementos 21138
Comprimento Médio dos Elementos 0,047403
Nº de Graus de Liberdade 1916589
Nº de Graus de Liberdade de Deslocamentos 458067
Espessura
Energia de Deformação Total Normalizada
Problema 1 Malha 4
Qualquer
20,965575

101
Figura B 1 - Campos de Esforços e Campo da densidade de Energia de Deformação Normalizada, Problema 1 para teoria de Reissner-Mindlin, espessura 0.1, malha 1 e 2º grau de funções de aproximação.

102
Figura B 2 - Campos de Esforços e Campo da densidade de Energia de Deformação Normalizada, Problema 1 para teoria de Reissner-Mindlin, espessura 0.5, malha 4 e 6º grau de funções de aproximação.

103
Figura B 3 - Campos de Esforços e Campo da densidade de Energia de Deformação Normalizada, Problema 1 para teoria de Reissner-Mindlin, espessura 0.01, malha 4 e 6º grau de funções de aproximação.

104
Figura B 4 - Campos de Esforços e Campo da densidade de Energia de Deformação Normalizada, Problema 1 para teoria de Kirchhoff, malha 1 e 2º grau de funções de aproximação.

105
Figura B 5 - Campos de Esforços e Campo da densidade de Energia de Deformação Normalizada, Problema 1 para teoria de Kirchhoff, malha 4 e 6º grau de funções de aproximação.

106
Tabelas para o 1º Problema - Reissner-Mindlin
Grau de Funções de Aproximação grau 6 apoio Hard
Malha 4
Tabela B 50 – Dados para o Problema 1, p=6, Malha 4, Apoio Hard – Reissner-Mindlin
Tabela B 51 – Resultados para o Problema 1, p=6, Malha 4, Apoio Hard – Reissner-Mindlin
Problema 1 Malha 4 apoio Hard
Grau das Funções de Aproximação 6
Nº de Elementos 21138
Comprimento Médio dos Elementos 0,047403
Nº de Graus de Liberdade 2129409
Nº de Graus de Liberdade de Deslocamentos 670887
Espessura 0,5 0,2 0,1 0,05 0,01
Energia de Deformação por Flexão Normalizada 26,358559 23,628539 22,598327 21,972649 21,308158
Energia de Deformação por Corte Normalizada 13,675394 3,289016 1,347699 0,657484 0,169805
Energia de Deformação por Corte (%) 34,16% 12,22% 5,86% 2,91% 0,79%
Energia de Deformação Total Normalizada 40,033950 26,917552 23,946030 22,630138 21,477960
Problema 1 Malha 4 apoio Hard

107
Figura B 6 - Campos de Esforços e Campo da densidade de Energia de Deformação Normalizada, Problema 1 para teoria de Reissner-Mindlin, espessura 0.1, apoio Hard, malha 4 e 6º grau de funções de aproximação.

108
Figura B 7 - Campos de Esforços e Campo da densidade de Energia de Deformação Normalizada, Problema 1 para teoria de Reissner-Mindlin, espessura 0.5, apoio Hard, malha 4 e 6º grau de funções de aproximação.

109
Figura B 8 - Campos de Esforços e Campo da densidade de Energia de Deformação Normalizada, Problema
1 para teoria de Reissner-Mindlin, espessura 0.01, apoio Hard, malha 4 e 6º grau de funções de aproximação.

110

111
ANEXO C. TABELAS PARA O 2º PROBLEMA
Tabela C 1 - Energia de Deformação Normalizada - Solução de "Referência"
Teoria de Reissner-Mindlin
Malha 1
Tabela C 2 – Dados para o Problema 2, Malha 1 – Reissner-Mindlin
Tabela C 3 – Resultados para o Problema 2, Malha 1 – Reissner-Mindlin
Malha 2
Tabela C 4 – Dados para o Problema 2, Malha 2 – Reissner-Mindlin
Tabela C 5 – Resultados para o Problema 2, Malha 2 – Reissner-Mindlin
Teoria / Espessura RM 0,5 RM 0,2 RM 0,1 RM 0,05 RM 0,01 KT
Energia de Deformação Normalizada
Solução de "Referência"44,73957 40,00016 39,29848 39,1176 39,05467 39,05143
Problema 2
Problema 2 Malha 1
Grau das Funções de Aproximação 6
Nº de Elementos 32
Comprimento Médio dos Elementos 3,306967
Nº de Graus de Liberdade 3342
Nº de Graus de Liberdade de Deslocamentos 1134
Espessura 0,5 0,2 0,1 0,05 0,01
Energia de Deformação por Flexão Normalizada 39,202988 39,095744 39,089530 39,089013 39,088970
Energia de Deformação por Corte Normalizada 5,552398 0,921915 0,233064 0,058479 0,002342
Energia de Deformação por Corte (%) 12,41% 2,30% 0,59% 0,15% 0,01%
Energia de Deformação Total Normalizada 44,755375 40,017656 39,322600 39,147488 39,091310
Problema 2 Malha 1
Problema 2 Malha 2
Grau das Funções de Aproximação 6
Nº de Elementos 370
Comprimento Médio dos Elementos 0,969817
Nº de Graus de Liberdade 37689
Nº de Graus de Liberdade de Deslocamentos 12159
Espessura 0,5 0,2 0,1 0,05 0,01
Energia de Deformação por Flexão Normalizada 39,191600 39,074488 39,062680 39,060500 39,060210
Energia de Deformação por Corte Normalizada 5,548573 0,925927 0,236825 0,060159 0,002430
Energia de Deformação por Corte (%) 12,40% 2,31% 0,60% 0,15% 0,01%
Energia de Deformação Total Normalizada 44,740175 40,000416 39,299510 39,120663 39,062640
Problema 2 Malha 2

112
Malha 3
Tabela C 6 – Dados para o Problema 2, Malha 3 – Reissner-Mindlin
Tabela C 7 – Resultados para o Problema 2, Malha 3 – Reissner-Mindlin
Malha 4
Tabela C 8 – Dados para o Problema 2, Malha 4 – Reissner-Mindlin
Tabela C 9 – Resultados para o Problema 2, Malha 4 – Reissner-Mindlin
Malha 5
Tabela C 10 – Dados para o Problema 2, Malha 5 – Reissner-Mindlin
Problema 2 Malha 3
Grau das Funções de Aproximação 6
Nº de Elementos 1516
Comprimento Médio dos Elementos 0,476249
Nº de Graus de Liberdade 153366
Nº de Graus de Liberdade de Deslocamentos 48762
Espessura 0,5 0,2 0,1 0,05 0,01
Energia de Deformação por Flexão Normalizada 39,191563 39,074112 39,060810 39,056925 39,056010
Energia de Deformação por Corte Normalizada 5,548136 0,926078 0,237751 0,061243 0,002536
Energia de Deformação por Corte (%) 12,40% 2,32% 0,60% 0,16% 0,01%
Energia de Deformação Total Normalizada 44,739700 40,000192 39,298560 39,118175 39,058550
Problema 2 Malha 3
Problema 2 Malha 4
Grau das Funções de Aproximação 6
Nº de Elementos 2718
Comprimento Médio dos Elementos 0,354977
Nº de Graus de Liberdade 274524
Nº de Graus de Liberdade de Deslocamentos 86982
Espessura 0,5 0,2 0,1 0,05 0,01
Energia de Deformação por Flexão Normalizada 39,191550 39,074096 39,060650 39,056238 39,054830
Energia de Deformação por Corte Normalizada 5,548061 0,926074 0,237849 0,061568 0,002608
Energia de Deformação por Corte (%) 12,40% 2,32% 0,61% 0,16% 0,01%
Energia de Deformação Total Normalizada 44,739613 40,000176 39,298500 39,117813 39,057440
Problema 2 Malha 4
Problema 2 Malha 5
Grau das Funções de Aproximação 6
Nº de Elementos 6076
Comprimento Médio dos Elementos 0,237466
Nº de Graus de Liberdade 612654
Nº de Graus de Liberdade de Deslocamentos 193410

113
Tabela C 11 – Resultados para o Problema 2, Malha 5 – Reissner-Mindlin
Tabelas para o 2º Problema
Teoria de Kirchhoff
Malha 1
Tabela C 12 – Dados para o Problema 2, Malha 1 – Kirchhoff
Tabela C 13 – Resultados para o Problema 2, Malha 1 – Kirchhoff
Malha 2
Tabela C 14 – Dados para o Problema 2, Malha 2 – Kirchhoff
Tabela C 15 – Resultados para o Problema 2, Malha 2 – Kirchhoff
Espessura 0,5 0,2 0,1 0,05 0,01
Energia de Deformação por Flexão Normalizada 39,191550 39,074096 39,060610 39,055875 39,053670
Energia de Deformação por Corte Normalizada 5,548030 0,926070 0,237875 0,061778 0,002742
Energia de Deformação por Corte (%) 12,40% 2,32% 0,61% 0,16% 0,01%
Energia de Deformação Total Normalizada 44,739588 40,000168 39,298480 39,117650 39,056410
Problema 2 Malha 5
Problema 2 Malha 1
Grau das Funções de Aproximação 6
Nº de Elementos 32
Comprimento Médio dos Elementos 3,306967
Nº de Graus de Liberdade 2987
Nº de Graus de Liberdade de Deslocamentos 779
Espessura
Energia de Deformação Total Normalizada
Problema 2 Malha 1
Qualquer
39,054738
Problema 2 Malha 2
Grau das Funções de Aproximação 6
Nº de Elementos 370
Comprimento Médio dos Elementos 0,969817
Nº de Graus de Liberdade 33846
Nº de Graus de Liberdade de Deslocamentos 8316
Espessura
Energia de Deformação Total Normalizada
Problema 2 Malha 2
Qualquer
39,051463

114
Malha 3
Tabela C 16 – Dados para o Problema 2, Malha 3 – Kirchhoff
Tabela C 17 – Resultados para o Problema 2, Malha 3 – Kirchhoff
Malha 4
Tabela C 18 – Dados para o Problema 2, Malha 4 – Kirchhoff
Tabela C 19 – Resultados para o Problema 2, Malha 4 – Kirchhoff
Malha 5
Tabela C 20 – Dados para o Problema 2, Malha 5 – Kirchhoff
Tabela C 21 – Resultados para o Problema 2, Malha 5 – Kirchhoff
Problema 2 Malha 3
Grau das Funções de Aproximação 6
Nº de Elementos 1516
Comprimento Médio dos Elementos 0,476249
Nº de Graus de Liberdade 137919
Nº de Graus de Liberdade de Deslocamentos 33315
Espessura
Energia de Deformação Total Normalizada
Problema 2 Malha 3
Qualquer
39,051438
Problema 2 Malha 4
Grau das Funções de Aproximação 6
Nº de Elementos 2718
Comprimento Médio dos Elementos 0,354977
Nº de Graus de Liberdade 246955
Nº de Graus de Liberdade de Deslocamentos 59413
Espessura
Energia de Deformação Total Normalizada 39,051438
Problema 2 Malha 4
Qualquer
Problema 2 Malha 5
Grau das Funções de Aproximação 6
Nº de Elementos 6076
Comprimento Médio dos Elementos 0,237466
Nº de Graus de Liberdade 551319
Nº de Graus de Liberdade de Deslocamentos 132075
Espessura
Energia de Deformação Total Normalizada
Problema 2 Malha 5
Qualquer
39,051425

115
Figura C 1 - Campos de Esforços e Campo de Densidade de Energia de Deformação Normalizada, Problema
2 para teoria de Reissner-Mindlin, espessura 0.1, malha 1, funções de aproximação de grau 2.

116
Figura C 2 - Campos de Esforços e Campo de Densidade de Energia de Deformação Normalizada, Problema
2 para teoria de Reissner-Mindlin, espessura 0.5, malha 4.

117
Figura C 3 - Campos de Esforços e Campo de Densidade de Energia de Deformação Normalizada, Problema
2 para teoria de Reissner-Mindlin, espessura 0.01, malha 4.

118
Figura C 4 - Campos de Esforços e Campo de Densidade de Energia de Deformação Normalizada, Problema
2 para teoria de Kirchhoff, malha 1.

119
Figura C 5 - Campos de Esforços e Campo de Densidade de Energia de Deformação Normalizada, Problema
2 para teoria de Kirchhoff, malha 4.

120

121
ANEXO D. TABELAS PARA O 3º PROBLEMA
Tabela D 1 - Energia de Deformação Normalizada - Solução de Referência
Teoria de Reissner-Mindlin
1ºGrupo de Malhas
Modelo Pilar “Preenchido” Malha 1
Tabela D 2 – Dados para o Problema 3, 1ºGrupo de Malhas - Malha 1, Modelo Pilar “Preenchido” – Reissner-Mindlin
Tabela D 3 – Resultados para o Problema 3, 1ºGrupo de Malhas - Malha 1, Modelo Pilar “Preenchido” –
Reissner-Mindlin
Tabelas para o 3º Problema – Teoria de Kirchhoff
1ºGrupo de Malhas
Modelo Pilar “preenchido” Malha 1
Tabela D 4 – Dados para o Problema 3, 1ºGrupo de Malhas - Malha 1, Modelo Pilar “Preenchido” – Kirchoff
Tabela D 5 – Resultados para o Problema 3, 1ºGrupo de Malhas - Malha 1, Modelo Pilar “Preenchido” –
Kirchhoff
Teoria / Espessura RM 0,5 RM 0,2 RM 0,1 RM 0,05 RM 0,01 KT pilar KT pontual
Energia de Deformação Normalizada
Solução de "Referência"13,90949 12,3503 11,91021 11,29614 9,023134 8,53204 12,009888
Problema 3
Problema 3 Malha 1
Grau das Funções de Aproximação 6
Nº de Elementos 6532
Comprimento Médio dos Elementos 0,052431
Nº de Graus de Liberdade 657138
Nº de Graus de Liberdade de Deslocamentos 206430
Espessura 0,5 0,2 0,1 0,05 0,01
Energia de Deformação por Flexão Normalizada 12,231729 11,958960 11,595610 10,682458 8,658411
Energia de Deformação por Corte Normalizada 1,678015 0,391668 0,315634 0,616611 0,374565
Energia de Deformação por Corte (%) 12,06% 3,17% 2,65% 5,46% 4,15%
Energia de Deformação Total Normalizada 13,909738 12,350632 11,911240 11,299068 9,032976
Problema 3 Malha 1
Problema 3 Malha 1
Grau das Funções de Aproximação 6
Nº de Elementos 6532
Comprimento Médio dos Elementos 0,052431
Nº de Graus de Liberdade 591627
Nº de Graus de Liberdade de Deslocamentos 140919
Espessura
Energia de Deformação Total Normalizada
Problema 3 Malha 1
Qualquer
8,532119

122
Figura D 1 - Campo de Esforços e Campo de Densidade de Energia de Deformação Normalizada, Problema 3 para o 1ºGrupo de Malhas, Malha 1, Modelo Pilar “Preenchido", espessura 0.5, teoria de Reissner-Mindlin.

123
Figura D 2 - Campo de Esforços e Campo de Densidade de Energia de Deformação Normalizada, Problema
3 para o 1ºGrupo de Malhas, Malha 1, Modelo Pilar “Preenchido", espessura 0.01, teoria de Reissner-Mindlin.

124
Figura D 3 - Campo de Esforços e Campo de Densidade de Energia de Deformação Normalizada, Problema
3 para o 1ºGrupo de Malhas, Malha 1, Modelo Pilar “Preenchido", teoria de Kirchhoff

125
Tabelas para o 3º Problema - Teoria de Reissner-Mindlin
1ºGrupo de Malhas
Modelo Pilar “vazio” Malha 1
Tabela D 6 – Dados para o Problema 3, 1ºGrupo de Malhas - Malha 1, Modelo Pilar “Vazio” – Reissner-Mindlin
Tabela D 7 – Resultados para o Problema 3, 1ºGrupo de Malhas - Malha 1, Modelo Pilar “Vazio” – Reissner-
Mindlin
Tabelas para o 3º Problema – Teoria de Kirchhoff
1ºGrupo de Malhas
Modelo Pilar “Vazio” Malha 1
Tabela D 8 – Dados para o Problema 3, 1ºGrupo de Malhas - Malha 1, Modelo Pilar “Vazio” – Kirchhoff
Tabela D 9 – Resultados para o Problema 3, 1ºGrupo de Malhas - Malha 1, Modelo Pilar “Vazio” – Kirchhoff
Problema 3 Malha 1
Grau das Funções de Aproximação 6
Nº de Elementos 6524
Comprimento Médio dos Elementos 0,025581
Nº de Graus de Liberdade 656418
Nº de Graus de Liberdade de Deslocamentos 206262
Espessura 0,5 0,2 0,1 0,05 0,01
Energia de Deformação por Flexão Normalizada 12,244358 12,016328 11,792010 11,220683 9,096977
Energia de Deformação por Corte Normalizada 1,674224 0,365344 0,223988 0,397194 0,515412
Energia de Deformação por Corte (%) 12,03% 2,95% 1,86% 3,42% 5,36%
Energia de Deformação Total Normalizada 13,918575 12,381672 12,015990 11,617876 9,612389
Problema 3 Malha 1
Problema 3 Malha 1
Grau das Funções de Aproximação 6
Nº de Elementos 6524
Comprimento Médio dos Elementos 0,025581
Nº de Graus de Liberdade 590961
Nº de Graus de Liberdade de Deslocamentos 140805
Espessura
Energia de Deformação Total Normalizada
Problema 3 Malha 1
Qualquer
8,620621

126
Figura D 4 - Campo de Esforços e Campo de Densidade de Energia de Deformação Normalizada, Problema
3 para o 1ºGrupo de Malhas, Malha 1, Modelo Pilar “Vazio", espessura 0.5, teoria de Reissner-Mindlin.

127
Figura D 5 - Campo de Esforços e Campo de Densidade de Energia de Deformação Normalizada, Problema
3 para o 1ºGrupo de Malhas, Malha 1, Modelo Pilar “Vazio", espessura 0.01, teoria de Reissner-Mindlin.

128
Figura D 6 - Campo de Esforços e Campo de Densidade de Energia de Deformação Normalizada, Problema
3 para o 1ºGrupo de Malhas, Malha 1, Modelo Pilar “Vazio", teoria de Kirchhoff

129
Tabelas para o 3º Problema – Teoria de Kirchhoff
2ºGrupo de Malhas
Modelo Pontual Malha 1
Tabela D 10 – Dados para o Problema 3, 2ºGrupo de Malhas - Malha 1, Modelo Pontual – Kirchhoff
Tabela D 11 – Resultados para o Problema 3, 2ºGrupo de Malhas - Malha 1, Modelo Pontual – Kirchhoff
Malha 2
Tabela D 12 – Dados para o Problema 3, 2ºGrupo de Malhas - Malha 2, Modelo Pontual – Kirchhoff
Tabela D 13 – Resultados para o Problema 3, 2ºGrupo de Malhas - Malha 2, Modelo Pontual – Kirchhoff
Malha 3
Tabela D 14 – Dados para o Problema 3, 2ºGrupo de Malhas - Malha 3, Modelo Pontual – Kirchhoff
Problema 3 Malha 1
Grau das Funções de Aproximação 6
Nº de Elementos 608
Comprimento Médio dos Elementos 0,224345
Nº de Graus de Liberdade 55265
Nº de Graus de Liberdade de Deslocamentos 13313
Espessura
Energia de Deformação Total Normalizada
Problema 3 Malha 1
Qualquer
12,009926
Problema 3 Malha 2
Grau das Funções de Aproximação 6
Nº de Elementos 1638
Comprimento Médio dos Elementos 0,142523
Nº de Graus de Liberdade 148720
Nº de Graus de Liberdade de Deslocamentos 35698
Espessura
Energia de Deformação Total Normalizada
Problema 3 Malha 2
Qualquer
12,009903
Problema 3 Malha 3
Grau das Funções de Aproximação 6
Nº de Elementos 4642
Comprimento Médio dos Elementos 0,088182
Nº de Graus de Liberdade 421062
Nº de Graus de Liberdade de Deslocamentos 100764

130
Tabela D 15 – Resultados para o Problema 3, 2ºGrupo de Malhas - Malha 3, Modelo Pontual – Kirchhoff
Malha 4
Tabela D 16 – Dados para o Problema 3, 2ºGrupo de Malhas - Malha 4, Modelo Pontual – Kirchhoff
Tabela D 17 – Resultados para o Problema 3, 2ºGrupo de Malhas - Malha 4, Modelo Pontual – Kirchhoff
Espessura
Energia de Deformação Total Normalizada
Problema 3 Malha 3
Qualquer
12,009891
Problema 3 Malha 4
Grau das Funções de Aproximação 6
Nº de Elementos 17096
Comprimento Médio dos Elementos 0,047102
Nº de Graus de Liberdade 1549589
Nº de Graus de Liberdade de Deslocamentos 369965
Espessura
Energia de Deformação Total Normalizada
Problema 3 Malha 4
Qualquer
12,009889

131
Figura D 7 - Campo de Esforços e Campo de Densidade de Energia de Deformação Normalizada, Problema
3 para o Grupo nº2 de Malhas, malha 1, Modelo apoio pontual, teoria de Kirchhoff.

132
Tabelas para o 3º Problema – Teoria de Reissner-Mindlin
3ºGrupo de Malhas
Modelo Pilar “Preenchido” Malha 1
Tabela D 18 – Dados para o Problema 3, 3ºGrupo de Malhas - Malha 1, Modelo Pilar “Preenchido” – Reissner-Mindlin
Tabela D 19 – Resultados para o Problema 3, 3ºGrupo de Malhas - Malha 1, Modelo Pilar “Preenchido” –
Reissner-Mindlin
Malha 2
Tabela D 20 – Dados para o Problema 3, 3ºGrupo de Malhas - Malha 2, Modelo Pilar “Preenchido” – Reissner-Mindlin
Tabela D 21 – Resultados para o Problema 3, 3ºGrupo de Malhas - Malha 2, Modelo Pilar “Preenchido” –
Reissner-Mindlin
Problema 1 Malha 1
Grau das Funções de Aproximação 6
Nº de Elementos 720
Comprimento Médio dos Elementos 0,181515
Nº de Graus de Liberdade 73095
Nº de Graus de Liberdade de Deslocamentos 23415
Espessura 0,5 0,2 0,1 0,05 0,01
Energia de Deformação por Flexão Normalizada 12,231784 11,959248 11,596790 10,686369 8,661836
Energia de Deformação por Corte Normalizada 1,678099 0,391545 0,315043 0,614888 0,375064
Energia de Deformação por Corte (%) 12,06% 3,17% 2,64% 5,44% 4,15%
Energia de Deformação Total Normalizada 13,909888 12,350792 11,911830 11,301258 9,036900
Problema 1 Malha 1
Problema 1 Malha 2
Grau das Funções de Aproximação 6
Nº de Elementos 2177
Comprimento Médio dos Elementos 0,103145
Nº de Graus de Liberdade 220038
Nº de Graus de Liberdade de Deslocamentos 69825
Espessura 0,5 0,2 0,1 0,05 0,01
Energia de Deformação por Flexão Normalizada 12,231643 11,958584 11,594370 10,679475 8,656414
Energia de Deformação por Corte Normalizada 1,677923 0,391821 0,316197 0,617713 0,374134
Energia de Deformação por Corte (%) 12,06% 3,17% 2,65% 5,47% 4,14%
Energia de Deformação Total Normalizada 13,909563 12,350408 11,910570 11,297189 9,030547
Problema 1 Malha 2

133
Malha 3
Tabela D 22 – Dados para o Problema 3, 3ºGrupo de Malhas - Malha 3, Modelo Pilar “Preenchido” – Reissner-Mindlin
Tabela D 23 – Resultados para o Problema 3, 3ºGrupo de Malhas - Malha 3, Modelo Pilar “Preenchido” –
Reissner-Mindlin
Malha 4
Tabela D 24 – Dados para o Problema 3, 3ºGrupo de Malhas - Malha 4, Modelo Pilar “Preenchido” – Reissner-Mindlin
Tabela D 25 – Resultados para o Problema 3, 3ºGrupo de Malhas - Malha 4, Modelo Pilar “Preenchido” –
Reissner-Mindlin
Problema 1 Malha 3
Grau das Funções de Aproximação 6
Nº de Elementos 3885
Comprimento Médio dos Elementos 0,078106
Nº de Graus de Liberdade 392154
Nº de Graus de Liberdade de Deslocamentos 124089
Espessura 0,5 0,2 0,1 0,05 0,01
Energia de Deformação por Flexão Normalizada 12,231629 11,958504 11,594080 10,678701 8,655470
Energia de Deformação por Corte Normalizada 1,677903 0,391857 0,316331 0,618025 0,374128
Energia de Deformação por Corte (%) 12,06% 3,17% 2,66% 5,47% 4,14%
Energia de Deformação Total Normalizada 13,909538 12,350360 11,910410 11,296726 9,029598
Problema 1 Malha 3
Problema 3 Malha 4
Grau das Funções de Aproximação 6
Nº de Elementos 7523
Comprimento Médio dos Elementos 0,056447
Nº de Graus de Liberdade 758487
Nº de Graus de Liberdade de Deslocamentos 239400
Espessura 0,5 0,2 0,1 0,05 0,01
Energia de Deformação por Flexão Normalizada 12,231783 11,959250 11,596789 10,686369 8,661836
Energia de Deformação por Corte Normalizada 1,678099 0,391545 0,315043 0,614888 0,375064
Energia de Deformação por Corte (%) 12,06% 3,17% 2,66% 5,47% 4,14%
Energia de Deformação Total Normalizada 13,909513 12,350328 11,910320 11,296441 9,028660
Problema 3 Malha 4

134
Figura D 8 - Campo de Esforços e Campo de Densidade de Energia de Deformação Normalizada, Problema 3 para o 3ºGrupo de Malhas, Malha 4, Modelo "pilar preenchido", espessura 0.1, teoria de Reissner-Mindlin.

135
Tabelas para o 3º Problema – Teoria de Kirchhoff
3ºGrupo de Malhas
Modelo Pilar “preenchido” Malha 1
Tabela D 26 – Dados para o Problema 3, 3ºGrupo de Malhas - Malha 1, Modelo Pilar “Preenchido” – Kirchhoff
Tabela D 27 – Resultados para o Problema 3, 3ºGrupo de Malhas - Malha 1, Modelo Pilar “Preenchido” –
Kirchhoff
Malha 2
Tabela D 28 – Dados para o Problema 3, 3ºGrupo de Malhas - Malha 2, Modelo Pilar “Preenchido” – Kirchhoff
Tabela D 29 – Resultados para o Problema 3, 3ºGrupo de Malhas - Malha 2, Modelo Pilar “Preenchido” –
Kirchhoff
Malha 3
Tabela D 30 – Dados para o Problema 3, 3ºGrupo de Malhas - Malha 3, Modelo Pilar “Preenchido” – Kirchhoff
Problema 3 Malha 1
Grau das Funções de Aproximação 6
Nº de Elementos 720
Comprimento Médio dos Elementos 0,181515
Nº de Graus de Liberdade 65686
Nº de Graus de Liberdade de Deslocamentos 16006
Espessura
Energia de Deformação Total Normalizada 8,534361
Problema 3 Malha 1
Qualquer
Problema 3 Malha 2
Grau das Funções de Aproximação 6
Nº de Elementos 2177
Comprimento Médio dos Elementos 0,103145
Nº de Graus de Liberdade 197912
Nº de Graus de Liberdade de Deslocamentos 47699
Espessura
Energia de Deformação Total Normalizada
Problema 3 Malha 2
Qualquer
8,527664
Problema 3 Malha 3
Grau das Funções de Aproximação 6
Nº de Elementos 3885
Comprimento Médio dos Elementos 0,078106
Nº de Graus de Liberdade 352816
Nº de Graus de Liberdade de Deslocamentos 84751

136
Tabela D 31 – Resultados para o Problema 3, 3ºGrupo de Malhas - Malha 3, Modelo Pilar “Preenchido” – Kirchhoff
Malha 4
Tabela D 32 – Dados para o Problema 3, 3ºGrupo de Malhas - Malha 4, Modelo Pilar “Preenchido” – Kirchhoff
Tabela D 33 – Resultados para o Problema 3, 3ºGrupo de Malhas - Malha 4, Modelo Pilar “Preenchido” –
Kirchhoff
Espessura
Energia de Deformação Total Normalizada
Problema 3 Malha 3
Qualquer
8,526246
Problema 3 Malha 4
Grau das Funções de Aproximação 6
Nº de Elementos 7523
Comprimento Médio dos Elementos 0,056447
Nº de Graus de Liberdade 682565
Nº de Graus de Liberdade de Deslocamentos 163478
Espessura
Energia de Deformação Total Normalizada
Problema 3 Malha 4
Qualquer
8,524927

137
Figura D 9 - Campo de Esforços e Campo de Densidade de Energia de Deformação Normalizada, Problema
3 para o Grupo nº3 de malhas, Modelo "Pilar Preenchido", Kirchhoff, malha mais refinada.

![¾Tipos de deformação viscosa viscoelástica - feis.unesp.br · Deformação nos materiais cristalinos [9] 1> ¾Deformação s.f. alteração, modificação da forma, desvio da](https://static.fdocumentos.com/doc/165x107/5bd7ca0109d3f2404d8b512c/tipos-de-deformacao-viscosa-viscoelastica-feisunespbr-deformacao.jpg)