CONCEPCIÓN Y REALIZACIÓN DE CIRCUITOS RF PARA LA …
55
CONCEPCIÓN Y REALIZACIÓN DE CIRCUITOS RF PARA LA REALIZACIÓN Y VALIDACIÓN DE UN SISTEMA DE RADIO CHRISTIAN DAVID SANABRIA von WALTER UNIVERSIDAD DE LOS ANDES FACULTAD DE INGENIERIA DEPARTAMENTO DE INGENIERIA ELECTRONICA BOGOTA D.C. 2004
Transcript of CONCEPCIÓN Y REALIZACIÓN DE CIRCUITOS RF PARA LA …

CONCEPCIÓN Y REALIZACIÓN DE CIRCUITOS RF PARA LA REALIZACIÓN Y VALIDACIÓN DE UN SISTEMA DE RADIO
CHRISTIAN DAVID SANABRIA von WALTER
UNIVERSIDAD DE LOS ANDES FACULTAD DE INGENIERIA
DEPARTAMENTO DE INGENIERIA ELECTRONICA BOGOTA D.C.
2004

CONCEPCION Y REALIZACION DE CIRCUITOS RF PARA LA REALIZACION Y VALIDACION DE UN SISTEMA DE RADIO
CHRISTIAN DAVID SANABRIA von WALTER
Proyecto de grado para optar al título de Ingeniero Electrónico
Asesores DANIEL BOURREAU
Ingeniero electrónico, Phd (ENST Bretagne) NESTOR MISAEL PEÑA TRANSLAVIÑA
Ingeniero eléctrico, Phd (Universidad de los Andes)
UNIVERSIDAD DE LOS ANDES FACULTAD DE INGENIERIA
DEPARTAMENTO DE INGENIERIA ELECTRONICA BOGOTA D.C.
2004
AGRADECIMIENTOS
Primero, quisiera agradecer a Daniel Bourreau, mi director en este proyecto en la ENST Bretagne, por haberme guiado a lo largo de estos 4 meses, y durante los cuales encontré una persona amable e inteligente, un amigo que me motivó y fue una ayuda clave para el desarrollo de este proyecto. Quisiera también, agradecer a todo el personal del laboratorio de microondas de la ENST Bretagne, especialmente a los técnicos Serge Pinel y Bernard Della, por su colaboración y apoyo, del cual goce en todo momento. Igualmente, doy mi gratitud al profesor Nestor Misael Peña T. de la Universidad de los Andes, por haber hecho posible el intercambio efectuado con esta escuela de ingeniería, y sin quien nada de esto habría sido posible. Finalmente, mi agradecimiento más profundo es para mis padres, Julio y Elsa, mis hermanos, Pablo y Gabriela, para los demás miembros de mi familia y para Adriana López y su familia, quienes, con su amor apoyo y paciencia, siempre estuvieron a mi lado y siempre creyeron en mí.
Christian David Sanabria von Walter
IEL2 – 03 – II – 42
INDICE
1. INTRODUCCION...………………………………………..…………….5
2. DEFINICION DEL PROBLEMA…...………………………..………….6
3. ACTIVIDADES REALIZADAS...……………………………..………...8
4. COMPONENTES..…………………………………………….………...9 a. Amplificadores……………………………………………...………..9 b. Filtros………………………………………………………………..12 c. Desfasador……………………………………………………...…..16 d. Atenuador………………………………………………………..….21 e. Mezcladores……………………………………………………..….22 f. Condensadores, inductancias y resistencias…………………...23
5. AMPLIFICADOR DE BAJO RUIDO (LNA) a 5 GHz………………..24
a. Primera versión………………………………………………….....24 b. Segunda versión…………………………………………………...31 c. Tercera versión…………………………………………………….35 d. Caracterización del factor de ruido…………………………...….37
6. CIRCUITOS RF EMISOR Y RECEPTOR...…………………………40
a. Emisor……………………………………………………………….40 b. Receptor…………………………………………………………….41 c. Resultados experimentales del emisor…………………….……44 d. Resultados experimentales del receptor……………………..….50
7. CONCLUSIONES…………………………………………..………….54
8. BIBLIOGRAFIA………………………………………………...………55

IEL2 – 03 – II – 42
5
1. INTRODUCCION
Actualmente, la creciente necesidad de satisfacer grandes flujos de información con un alto desempeño en sistemas de radiocomunicaciones, ha llevado al rápido desarrollo de campos importantes de la ingeniería de telecomunicaciones, tales como el área de ingeniería de microondas en los últimos dos tercios del siglo pasado. La humanidad se ha beneficiado en gran proporción por este desarrollo. Las comunicaciones mundiales a través de enlaces microondas, tanto terrestres como satelitales, son comunes hoy en día y tecnologías que comenzaron como costosas aplicaciones militares y comerciales han pasado a un plano mucho mas común en forma de componentes asequibles para el consumidor individual, comenzando por elementos tan comunes en la vida diaria actual como lo son el teléfono celular. Lo anterior hace referencia a las aplicaciones, y por el lado del diseño, las habilidades para modelar, diseñar, construir, y probar de forma práctica hardware de microondas, han avanzado de forma increíble igualmente, comenzando por cartas de Smith dibujadas a mano hasta diseños asistidos por computador. Es tal el avance, que también se esta logrando el progreso en el espectro frecuencial, llegando a la utilización de frecuencias cada vez mas altas. Diseñadores en el mundo digital ahora necesitan de la ingeniería de microondas a medida que las frecuencias de sus relojes siguen aumentando. Se han venido desarrollando nuevos sistemas de radiocomunicaciones que cumplan con las características y necesidades mencionadas anteriormente. Es así como se ha llegado a la nueva generación de sistemas de telecomunicaciones, de la cual hace parte el proyecto MIMO (Multiple Input Multiple Output). Este proyecto, para satisfacer las necesidades de capacidad y desempeño de sistemas de radiocomunicaciones, trata sobre la nueva posibilidad ofrecida para alcanzar esta meta, al integrar todos lo avances realizados en los campos de procesamiento de señales, radiocomunicaciones y electrónica digital. El sistema MIMO, permite la transmisión en un medio radioeléctrico que presenta múltiples trayectorias, al tener varios módulos de transmisión y recepción que cooperan entre si, para lograr el beneficio de conceptos como la diversidad espacial y temporal.
IEL2 – 03 – II – 42
6
2. DEFINICION DEL PROBLEMA
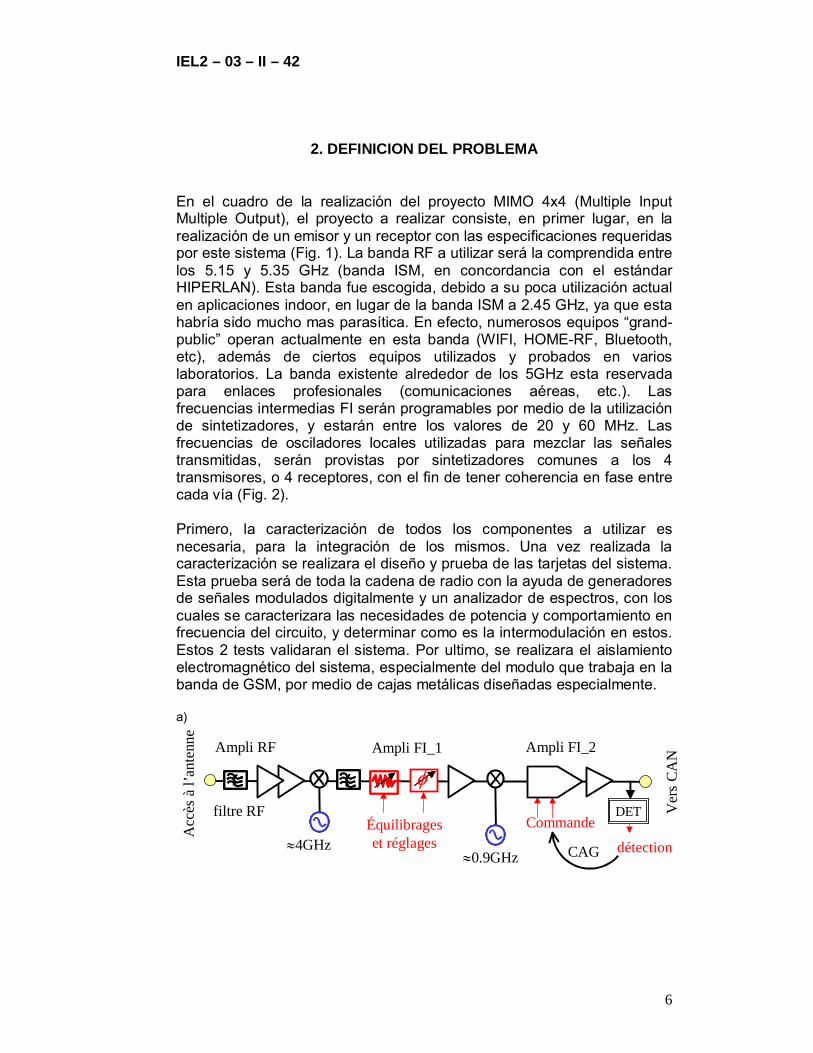
En el cuadro de la realización del proyecto MIMO 4x4 (Multiple Input Multiple Output), el proyecto a realizar consiste, en primer lugar, en la realización de un emisor y un receptor con las especificaciones requeridas por este sistema (Fig. 1). La banda RF a utilizar será la comprendida entre los 5.15 y 5.35 GHz (banda ISM, en concordancia con el estándar HIPERLAN). Esta banda fue escogida, debido a su poca utilización actual en aplicaciones indoor, en lugar de la banda ISM a 2.45 GHz, ya que esta habría sido mucho mas parasítica. En efecto, numerosos equipos “grand-public” operan actualmente en esta banda (WIFI, HOME-RF, Bluetooth, etc), además de ciertos equipos utilizados y probados en varios laboratorios. La banda existente alrededor de los 5GHz esta reservada para enlaces profesionales (comunicaciones aéreas, etc.). Las frecuencias intermedias FI serán programables por medio de la utilización de sintetizadores, y estarán entre los valores de 20 y 60 MHz. Las frecuencias de osciladores locales utilizadas para mezclar las señales transmitidas, serán provistas por sintetizadores comunes a los 4 transmisores, o 4 receptores, con el fin de tener coherencia en fase entre cada vía (Fig. 2). Primero, la caracterización de todos los componentes a utilizar es necesaria, para la integración de los mismos. Una vez realizada la caracterización se realizara el diseño y prueba de las tarjetas del sistema. Esta prueba será de toda la cadena de radio con la ayuda de generadores de señales modulados digitalmente y un analizador de espectros, con los cuales se caracterizara las necesidades de potencia y comportamiento en frecuencia del circuito, y determinar como es la intermodulación en estos. Estos 2 tests validaran el sistema. Por ultimo, se realizara el aislamiento electromagnético del sistema, especialmente del modulo que trabaja en la banda de GSM, por medio de cajas metálicas diseñadas especialmente. a)
Équilibrageset réglages
CommandeDET
détection
φfiltre RF
CAG≈4GHz≈0.9GHz
Acc
ès à
l’an
tenn
e
Ampli RF Ampli FI_1 Ampli FI_2
Ver
s C
AN
IEL2 – 03 – II – 42
7
b)
φ
Équilibrageset réglages
CommandeDe niveau
Acc
ès à
l’an
tenn
e
Ver
s CA
N RFFI_1FI_2
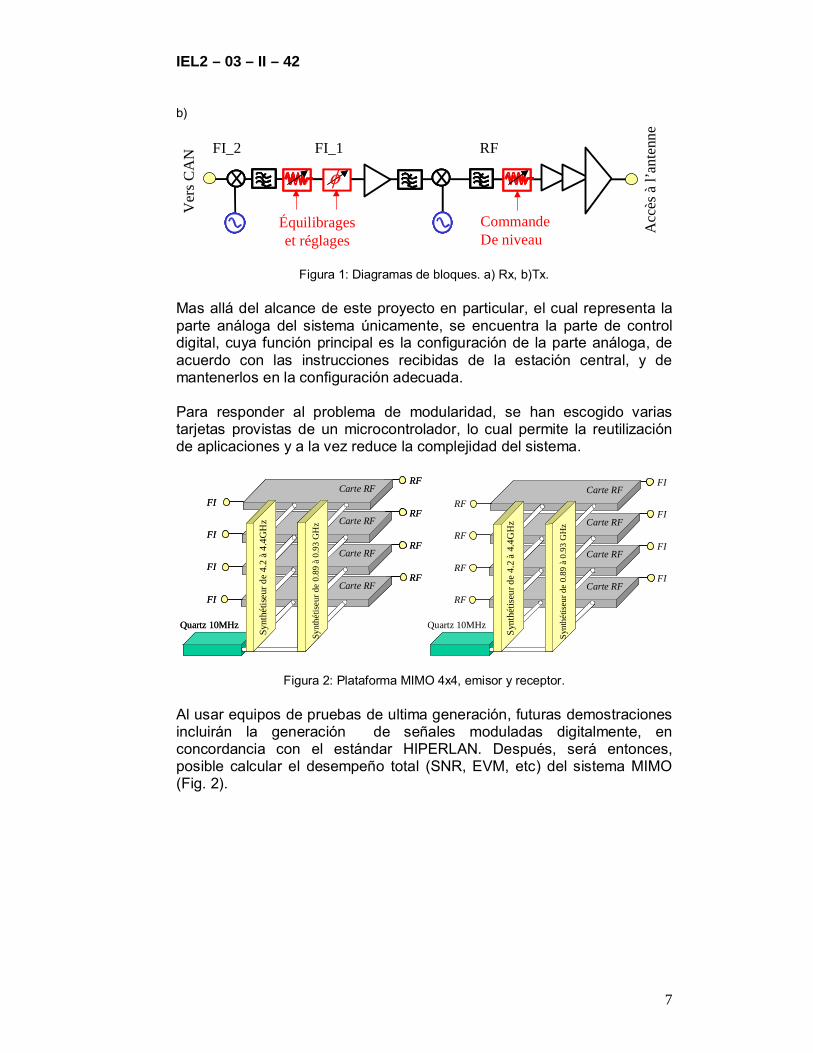
Figura 1: Diagramas de bloques. a) Rx, b)Tx. Mas allá del alcance de este proyecto en particular, el cual representa la parte análoga del sistema únicamente, se encuentra la parte de control digital, cuya función principal es la configuración de la parte análoga, de acuerdo con las instrucciones recibidas de la estación central, y de mantenerlos en la configuración adecuada. Para responder al problema de modularidad, se han escogido varias tarjetas provistas de un microcontrolador, lo cual permite la reutilización de aplicaciones y a la vez reduce la complejidad del sistema.
RF
RF
RF
RF
Quartz 10MHz
Synt
hétis
eurd
e 4.
2 à
4.4G
Hz
Synt
hétis
eur d
e 0.
89 à
0.9
3 G
Hz
Carte RF
Carte RF
Carte RF
Carte RF
FI
FI
FI
FI
RF
RF
RF
RF
Quartz 10MHz
Synt
hétis
eurd
e 4.
2 à
4.4G
Hz
Synt
hétis
eur d
e 0.
89 à
0.9
3 G
Hz
Carte RF
Carte RF
Carte RF
Carte RF
FI
FI
FI
FI
FI
FI
FI
FI
Quartz 10MHz
Synt
hétis
eurd
e 4.
2 à
4.4G
Hz
Synt
hétis
eur d
e 0.
89 à
0.9
3 G
Hz
Carte RF
Carte RF
Carte RF
Carte RF
RF
RF
RF
RF
Figura 2: Plataforma MIMO 4x4, emisor y receptor. Al usar equipos de pruebas de ultima generación, futuras demostraciones incluirán la generación de señales moduladas digitalmente, en concordancia con el estándar HIPERLAN. Después, será entonces, posible calcular el desempeño total (SNR, EVM, etc) del sistema MIMO (Fig. 2).
IEL2 – 03 – II – 42
8
3. ACTIVIDADES REALIZADAS
Este proyecto tuvo varias fases. La primera de ellas consistió en la selección y análisis de los componentes que hacen parte de los dispositivos a diseñar. Estos componentes fueron seleccionados teniendo en cuenta el diagrama mostrado anteriormente, y el cual detalla la disposición de cada uno de estos. Es así como durante el desarrollo del proyecto, se diseñaron y probaron circuitos para el desfasador, el filtro a 942.5 MHz, los mezcladores y amplificadores. El atenuador utilizado fue usado en proyectos anteriores, por lo cual no fue necesario su caracterización ya que el comportamiento que presenta es el buscado para este proyecto. Además de los componentes mencionados, durante las actividades realizadas se trabajo en paralelo en el diseño de un amplificador de bajo ruido (LNA) a 5 GHz, para las etapas de preamplificación en el receptor, y de amplificación en el emisor, para que la señal tenga la potencia adecuada para una comunicación exitosa. La fase siguiente consistió en el diseño de los circuitos impresos o tarjetas en las cuales se integraron todos los componentes. Este diseño, auque puede parecer sencillo, requiere de consideraciones importantes como la distancia entre componentes, para no obtener efectos indeseados en el procesamiento de la señal, al igual que el tamaño final del impreso, el cual no puede exceder ciertas dimensiones, mas adelante se explicara el porque. Una vez se tuvieron terminados los impresos se hicieron las pruebas pertinentes para la validación del sistema. En la última fase, se llevo a cabo el aislamiento electromagnético, al igual que las pruebas para determinar el funcionamiento del sistema totalmente terminado.
IEL2 – 03 – II – 42
9
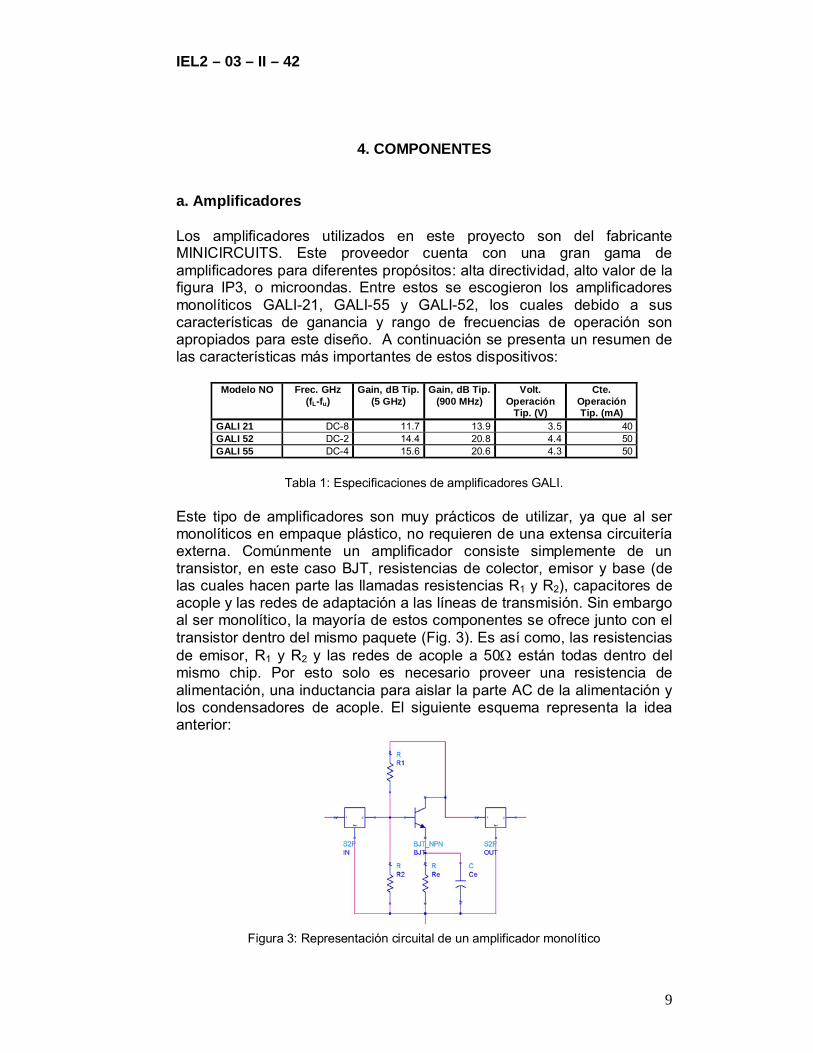
4. COMPONENTES a. Amplificadores Los amplificadores utilizados en este proyecto son del fabricante MINICIRCUITS. Este proveedor cuenta con una gran gama de amplificadores para diferentes propósitos: alta directividad, alto valor de la figura IP3, o microondas. Entre estos se escogieron los amplificadores monolíticos GALI-21, GALI-55 y GALI-52, los cuales debido a sus características de ganancia y rango de frecuencias de operación son apropiados para este diseño. A continuación se presenta un resumen de las características más importantes de estos dispositivos:
Modelo NO Frec. GHz (fL-fu)
Gain, dB Tip. (5 GHz)
Gain, dB Tip.(900 MHz)
Volt. Operación
Tip. (V)
Cte. Operación Tip. (mA)
GALI 21 DC-8 11.7 13.9 3.5 40 GALI 52 DC-2 14.4 20.8 4.4 50 GALI 55 DC-4 15.6 20.6 4.3 50
Tabla 1: Especificaciones de amplificadores GALI.
Este tipo de amplificadores son muy prácticos de utilizar, ya que al ser monolíticos en empaque plástico, no requieren de una extensa circuitería externa. Comúnmente un amplificador consiste simplemente de un transistor, en este caso BJT, resistencias de colector, emisor y base (de las cuales hacen parte las llamadas resistencias R1 y R2), capacitores de acople y las redes de adaptación a las líneas de transmisión. Sin embargo al ser monolítico, la mayoría de estos componentes se ofrece junto con el transistor dentro del mismo paquete (Fig. 3). Es así como, las resistencias de emisor, R1 y R2 y las redes de acople a 50Ω están todas dentro del mismo chip. Por esto solo es necesario proveer una resistencia de alimentación, una inductancia para aislar la parte AC de la alimentación y los condensadores de acople. El siguiente esquema representa la idea anterior:
Figura 3: Representación circuital de un amplificador monolítico

IEL2 – 03 – II – 42
10
El diagrama de funcionamiento se encuentra a continuación (Fig. 4). Este dispositivo, funciona con una corriente de polarización determinada por la resistencia Rbias y el voltaje de polarización Vcc. Para el diseño del LNA a 5GHz no se utilizaran RFCs ya que las redes de polarización serán diseñadas utilizando líneas de transmisión, debido a las limitaciones de las inductancias a altas frecuencias, sin embargo para el circuito a 942.5 MHz el montaje será igual al mostrado en la figura. Los valores de resistencias y capacitores de bypass y acople se podrán diseñar teniendo en cuenta la alimentación, y la corriente consumida por cada dispositivo además de las frecuencias de corte. Sin embargo la respectiva hoja de especificaciones ofrece valores de condensadores y resistencias sugeridas para diferentes valores de polarización.
Figura 4: Diagrama de polarización, amplificadores GALI Las limitaciones en frecuencia de la inductancia se deben a que estas, como bien se sabe son los componentes menos ideales de todos. Al realizar el circuito equivalente de una inductancia (Fig. 5) se puede ver que aparecen todo tipo de componentes parasíticos.
Figura 5: Circuito equivalente de una inductancia
Todos estos componentes hacen que la inductancia no tenga un buen comportamiento a altas frecuencias, y que tenga una frecuencia de

IEL2 – 03 – II – 42
11
resonancia propia a su empaque y valor, que limita su banda de utilización. Por supuesto, este valor depende del coeficiente de calidad de la inductancia, y también del valor de la misma. Es así como, al aumentar el valor de la inductancia la frecuencia de corte se reduce, esto según mediciones EXPERIMENTALES, en donde se ha encontrado que un aumento en la inductancia al doble, provoca una división de la frecuencia de corte entre 3. A pesar de esto, se han encontrado soluciones para la implementación de inductancias a altas frecuencias. En el caso de las redes de polarización se implementan por una configuración de adaptadores de λ/4 los cuales permiten tener impedancias similares a la de una inductancia. Existe otro tipo de implementación (Fig. 6), que consiste en la realización del componente directamente sobre el impreso.
Figura 6: Inductancia implementada directamente sobre impreso. Este tipo de inductancia se comporta bien a altas frecuencias, pero el cable que conecta el centro de la inductancia con el resto del circuito debe estar contenido.

IEL2 – 03 – II – 42
12
b. Filtros Los filtros Murata® SAFCC942MAM0T00 fueron escogidos y utilizados para este proyecto. Este filtro es un filtro tipo SAW (Surface Accoustic Wave), los cuales son reconocidos cada vez mas por sus buenas características y desempeño. Se han venido usando en aplicaciones en el campo de las comunicaciones, televisión por cable, control remoto inalámbrico, receptores satelitales, campos de transmisión de radio y video, etc. Este circuito no requiere de redes de adaptación de impedancia, por lo cual ofrece características frecuenciales estables, además de que ofrece perdidas por inserción muy pequeñas, del orden de 3 dB típicamente, y su frecuencia central nominal (fc) es de 942.5 MHz. Su principio de funcionamiento se basa en una fina capa metálica en forma de peinilla, llamada IDT (InterDigital Transducers), entrelazada con otra similar sobre un substrato de cristal piezoeléctrico (Fig. 7), que funciona como un filtro pasa banda, con la banda pasante deseada que depende del patrón formado por las laminas metálicas, a medida que la onda se propaga a través de la superficie del substrato, cuya amplitud decae exponencialmente con la profundidad del mismo. La frecuencia de una onda SAW se puede encontrar fácilmente con la formula:
λVf =
Donde λ es el periodo de los IDT (espacio entre un borde y el mismo borde del diente siguiente de la peinilla), y V es la velocidad de la onda en el substrato, la cual varía dependiendo del substrato. Este tipo de filtros sigue siendo un filtro pasivo, debido a sus excelentes características y respuesta, son frecuentemente utilizados.
Figura 7: Filtro SAW
Este tipo de filtros no necesitan de circuitos de adaptación, ya que su impedancia de entrada es inmediatamente la impedancia característica de las líneas utilizadas (50Ω), debido a redes de adaptación de impedancia

IEL2 – 03 – II – 42
13
implementadas en su interior. Si este no es el caso, se deberán interconectar elementos reactivos. La prueba de este circuito fue la más sencilla de todas, ya que no requería de ningún diseño complicado (Fig. 8), simplemente 2 líneas de transmisión de 50Ω.
Figura 8: Impreso para pruebas de un filtro SAW Las líneas de transmisión implementadas para todos los circuitos diseñados en este proyecto fueron del tipo Guía de Onda Coplanar con plano Masa (CPWG). Las razones para esto se presentaran en la explicación del diseño del LNA donde será evidente el porque de su utilización. Los orificios ubicados a lado y lado de las líneas, son conexiones físicas entre el plano de masa, que se encuentra debajo del impreso, y el coplanar, y su función es hacer que el plano coplanar muestre a la guía el mismo potencial de masa. Se implementaron 2 circuitos con un espesor de conductor de 20 µm en sobre substratos de constante dieléctrica 3.5 y diferente espesor (508 µm y 780 µm).
IEL2 – 03 – II – 42
14
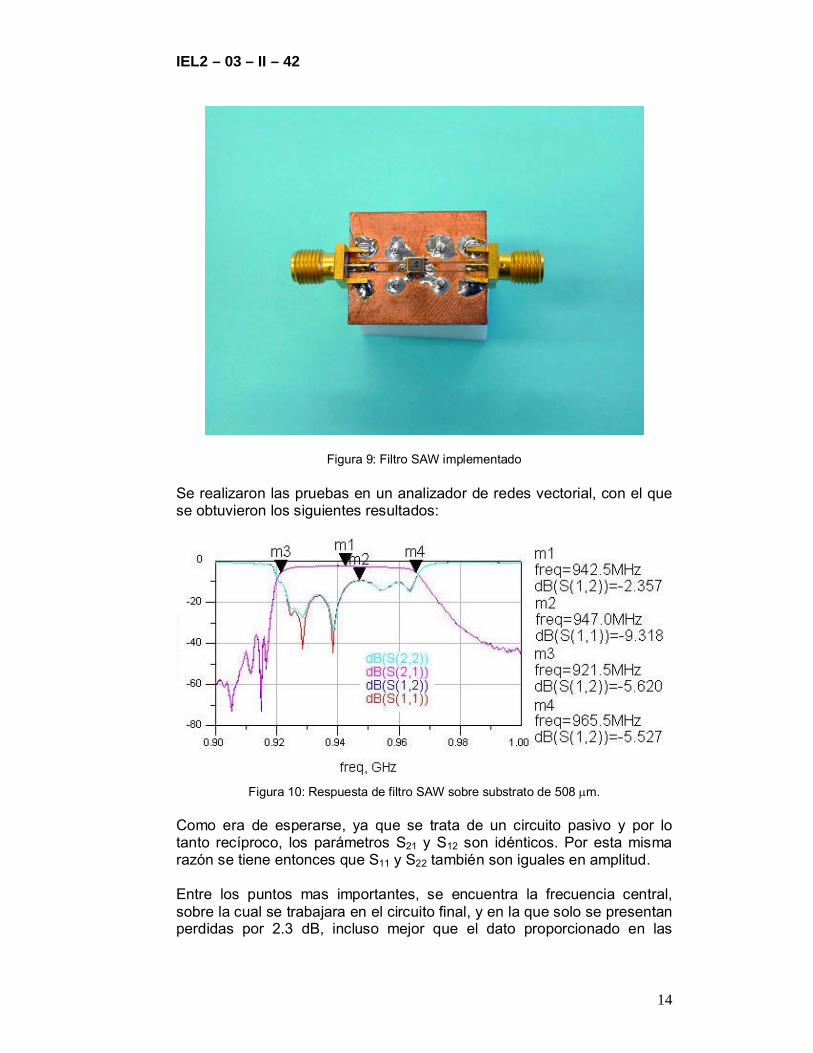
Figura 9: Filtro SAW implementado Se realizaron las pruebas en un analizador de redes vectorial, con el que se obtuvieron los siguientes resultados:
Figura 10: Respuesta de filtro SAW sobre substrato de 508 µm.
Como era de esperarse, ya que se trata de un circuito pasivo y por lo tanto recíproco, los parámetros S21 y S12 son idénticos. Por esta misma razón se tiene entonces que S11 y S22 también son iguales en amplitud. Entre los puntos mas importantes, se encuentra la frecuencia central, sobre la cual se trabajara en el circuito final, y en la que solo se presentan perdidas por 2.3 dB, incluso mejor que el dato proporcionado en las
IEL2 – 03 – II – 42
15
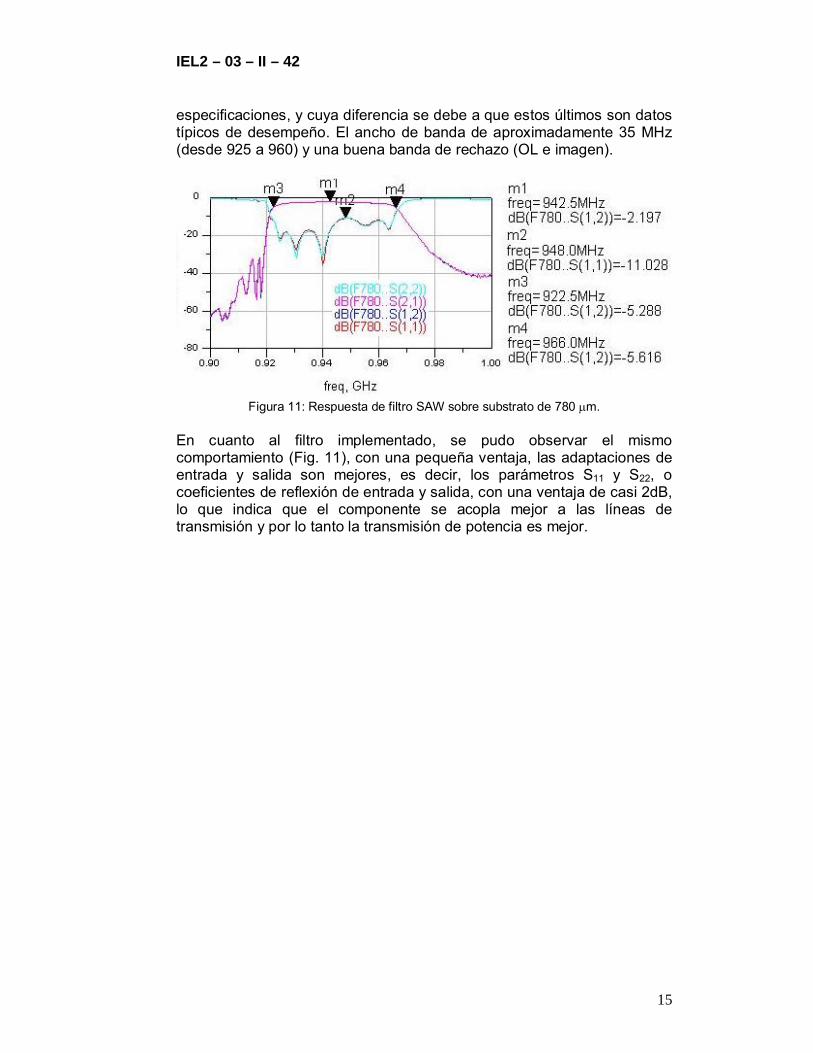
especificaciones, y cuya diferencia se debe a que estos últimos son datos típicos de desempeño. El ancho de banda de aproximadamente 35 MHz (desde 925 a 960) y una buena banda de rechazo (OL e imagen).
Figura 11: Respuesta de filtro SAW sobre substrato de 780 µm.
En cuanto al filtro implementado, se pudo observar el mismo comportamiento (Fig. 11), con una pequeña ventaja, las adaptaciones de entrada y salida son mejores, es decir, los parámetros S11 y S22, o coeficientes de reflexión de entrada y salida, con una ventaja de casi 2dB, lo que indica que el componente se acopla mejor a las líneas de transmisión y por lo tanto la transmisión de potencia es mejor.

IEL2 – 03 – II – 42
16
c. Desfasador El circuito desfasador utilizado fue el JSPHS-1000 de Minicircuits®. Este circuito permite hacer variar la fase de una señal de entrada, en una gama de frecuencia entre 850 y 1000 MHz, en mas de 160° por medio de una señal de control de 0 a 15V. Se caracteriza también por su consumo de corriente extremadamente bajo (máximo 10 mA a 15 V: valor medido), al igual que por sus perdidas por inserción las cuales también son bastante bajas (1.2 dB típicamente), aunque estas dependen del voltaje de control, pero no con una variación muy débil. Este es un circuito adaptado a 50Ω, como la mayoría de los que se utilizaron en este proyecto, no tiene distinción entre entrada y salida, y tiene 2 terminales para el voltaje DC de control. El siguiente paso fue montar el componente sobre un impreso, verificar sus características, pero también caracterizar la intermodulación del dispositivo, es decir, como es el comportamiento de la señal de salida cuando tiene 2 señales diferentes a la entrada. El circuito realizado fue el siguiente: a)
IEL2 – 03 – II – 42
17
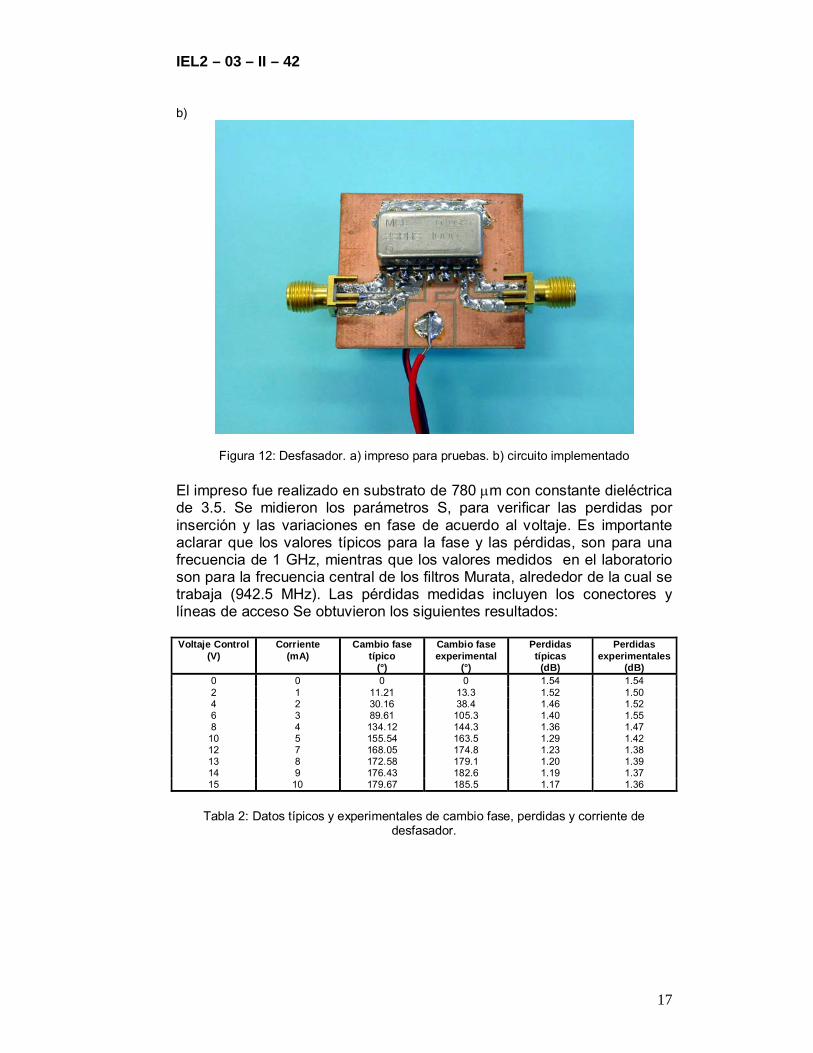
b)
Figura 12: Desfasador. a) impreso para pruebas. b) circuito implementado El impreso fue realizado en substrato de 780 µm con constante dieléctrica de 3.5. Se midieron los parámetros S, para verificar las perdidas por inserción y las variaciones en fase de acuerdo al voltaje. Es importante aclarar que los valores típicos para la fase y las pérdidas, son para una frecuencia de 1 GHz, mientras que los valores medidos en el laboratorio son para la frecuencia central de los filtros Murata, alrededor de la cual se trabaja (942.5 MHz). Las pérdidas medidas incluyen los conectores y líneas de acceso Se obtuvieron los siguientes resultados: Voltaje Control
(V) Corriente
(mA) Cambio fase
típico (°)
Cambio fase experimental
(°)
Perdidas típicas
(dB)
Perdidas experimentales
(dB) 0 0 0 0 1.54 1.54 2 1 11.21 13.3 1.52 1.50 4 2 30.16 38.4 1.46 1.52 6 3 89.61 105.3 1.40 1.55 8 4 134.12 144.3 1.36 1.47
10 5 155.54 163.5 1.29 1.42 12 7 168.05 174.8 1.23 1.38 13 8 172.58 179.1 1.20 1.39 14 9 176.43 182.6 1.19 1.37 15 10 179.67 185.5 1.17 1.36
Tabla 2: Datos típicos y experimentales de cambio fase, perdidas y corriente de
desfasador.

IEL2 – 03 – II – 42
18
Perdidas
1
1,1
1,2
1,3
1,4
1,5
1,6
0 1 2 3 4 5 6 7 8 9 10 12 13 14 15
Voltaje(V)
Perd
idas
(dB
)
Perdidas tipicas Perdidas experimentales
Figura 13: Grafica de pérdidas típicas y experimentales del desfasador. Las perdidas por inserción (Fig. 13), son similares a los datos típicos proporcionados por el fabricante. El error no supera los 0.3 dB a 15V donde la diferencia alcanza su máximo valor: La variación es de 0.18 dBm como máximo para el caso experimental, y de 0.4 dBm en el caso típico, y así en toda la gama de variación de tensión.
Fase
0
20
40
60
80
100
120
140
160
180
200
0 1 2 3 4 5 6 7 8 9 10 12 13 14 15
Voltaje(V)
Fase
(°)
Fase tipica Fase experimental
Figura 14: Grafica de cambio de fase típico y experimental del desfasador. Para el caso de la fase (Fig. 14), los resultados no podrían ser más alentadores. El error entre el caso experimental y el típico tiene lugar cuando el voltaje de control es de 6V, en donde la diferencia entre las 2 curvas toma un valor de 16° aproximadamente. Después de la calibración, será posible su control por medio de la tensión de control proveniente de microcontroladores y una configuración de amplificador de tensión como será explicado después (Salida del CDA 0-2.5V).
Exp.
Typ.
Exp. Typ.
IEL2 – 03 – II – 42
19
Corriente
0
2
4
6
8
10
12
0 1 2 3 4 5 6 7 8 9 10 12 13 14 15
Voltaje(V)
Cor
rient
e(m
A)
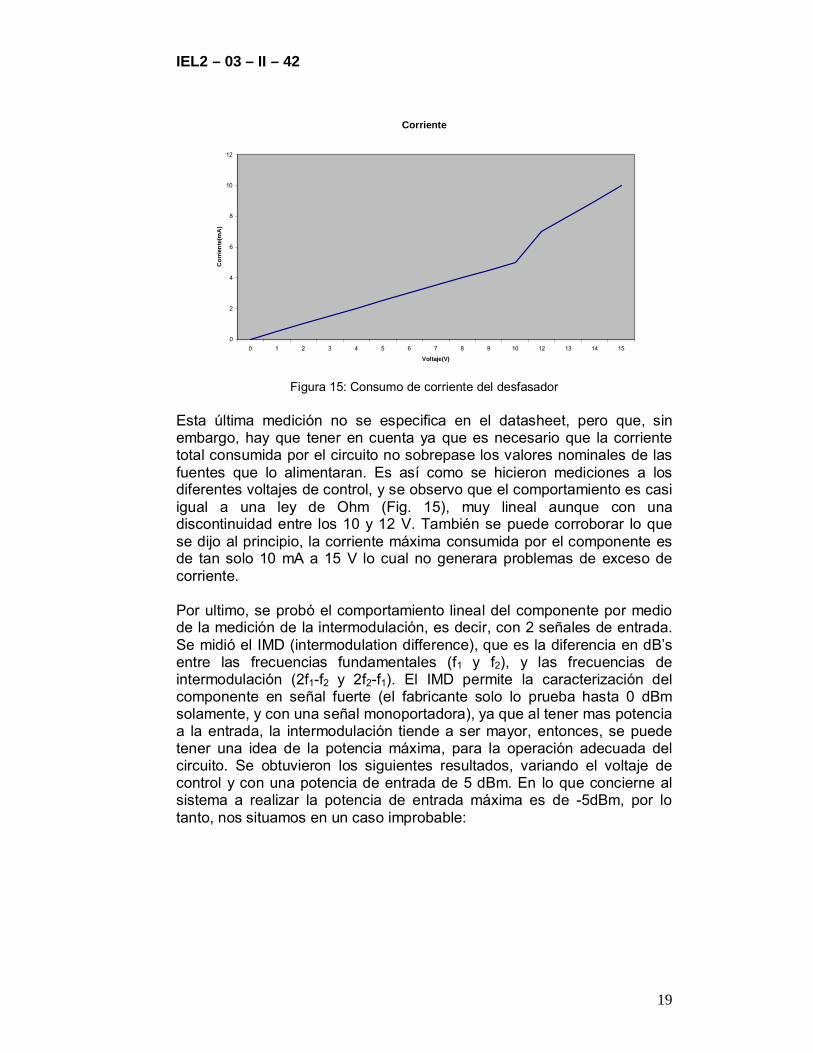
Figura 15: Consumo de corriente del desfasador
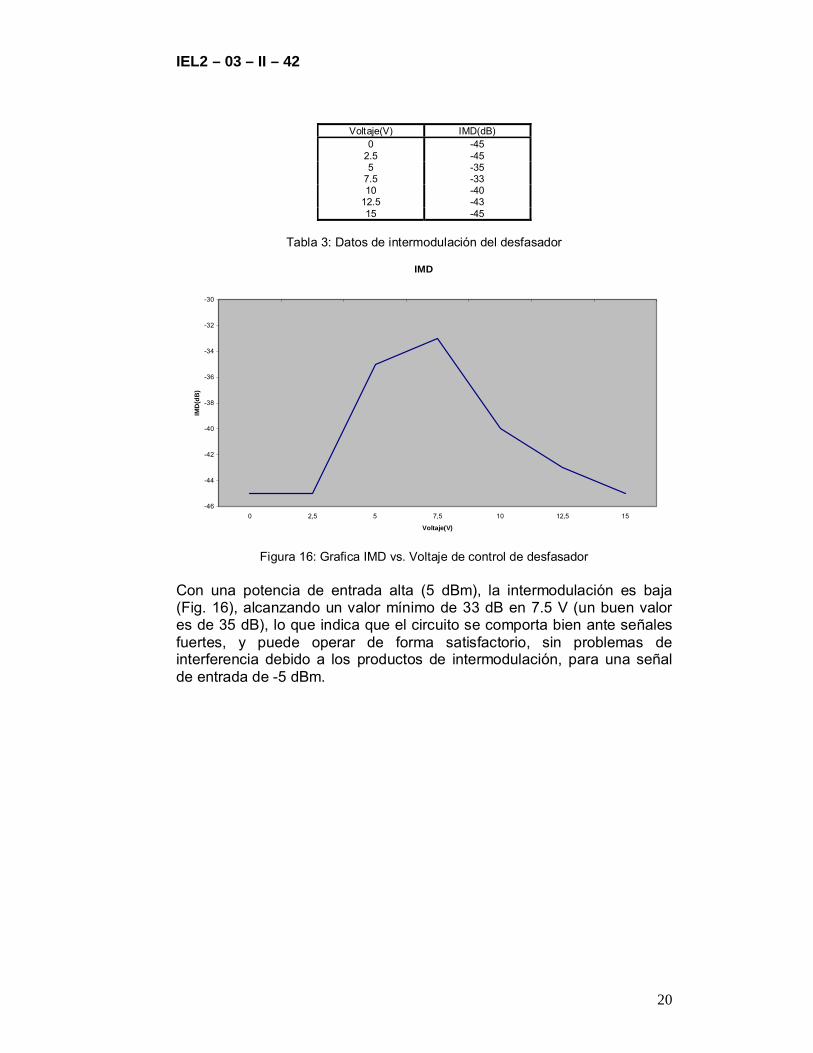
Esta última medición no se especifica en el datasheet, pero que, sin embargo, hay que tener en cuenta ya que es necesario que la corriente total consumida por el circuito no sobrepase los valores nominales de las fuentes que lo alimentaran. Es así como se hicieron mediciones a los diferentes voltajes de control, y se observo que el comportamiento es casi igual a una ley de Ohm (Fig. 15), muy lineal aunque con una discontinuidad entre los 10 y 12 V. También se puede corroborar lo que se dijo al principio, la corriente máxima consumida por el componente es de tan solo 10 mA a 15 V lo cual no generara problemas de exceso de corriente. Por ultimo, se probó el comportamiento lineal del componente por medio de la medición de la intermodulación, es decir, con 2 señales de entrada. Se midió el IMD (intermodulation difference), que es la diferencia en dB’s entre las frecuencias fundamentales (f1 y f2), y las frecuencias de intermodulación (2f1-f2 y 2f2-f1). El IMD permite la caracterización del componente en señal fuerte (el fabricante solo lo prueba hasta 0 dBm solamente, y con una señal monoportadora), ya que al tener mas potencia a la entrada, la intermodulación tiende a ser mayor, entonces, se puede tener una idea de la potencia máxima, para la operación adecuada del circuito. Se obtuvieron los siguientes resultados, variando el voltaje de control y con una potencia de entrada de 5 dBm. En lo que concierne al sistema a realizar la potencia de entrada máxima es de -5dBm, por lo tanto, nos situamos en un caso improbable:
IEL2 – 03 – II – 42
20
Voltaje(V) IMD(dB)
0 -45 2.5 -45 5 -35
7.5 -33 10 -40
12.5 -43 15 -45
Tabla 3: Datos de intermodulación del desfasador
IMD
-46
-44
-42
-40
-38
-36
-34
-32
-30
0 2,5 5 7,5 10 12,5 15
Voltaje(V)
IMD
(dB
)
Figura 16: Grafica IMD vs. Voltaje de control de desfasador
Con una potencia de entrada alta (5 dBm), la intermodulación es baja (Fig. 16), alcanzando un valor mínimo de 33 dB en 7.5 V (un buen valor es de 35 dB), lo que indica que el circuito se comporta bien ante señales fuertes, y puede operar de forma satisfactorio, sin problemas de interferencia debido a los productos de intermodulación, para una señal de entrada de -5 dBm.
IEL2 – 03 – II – 42
21
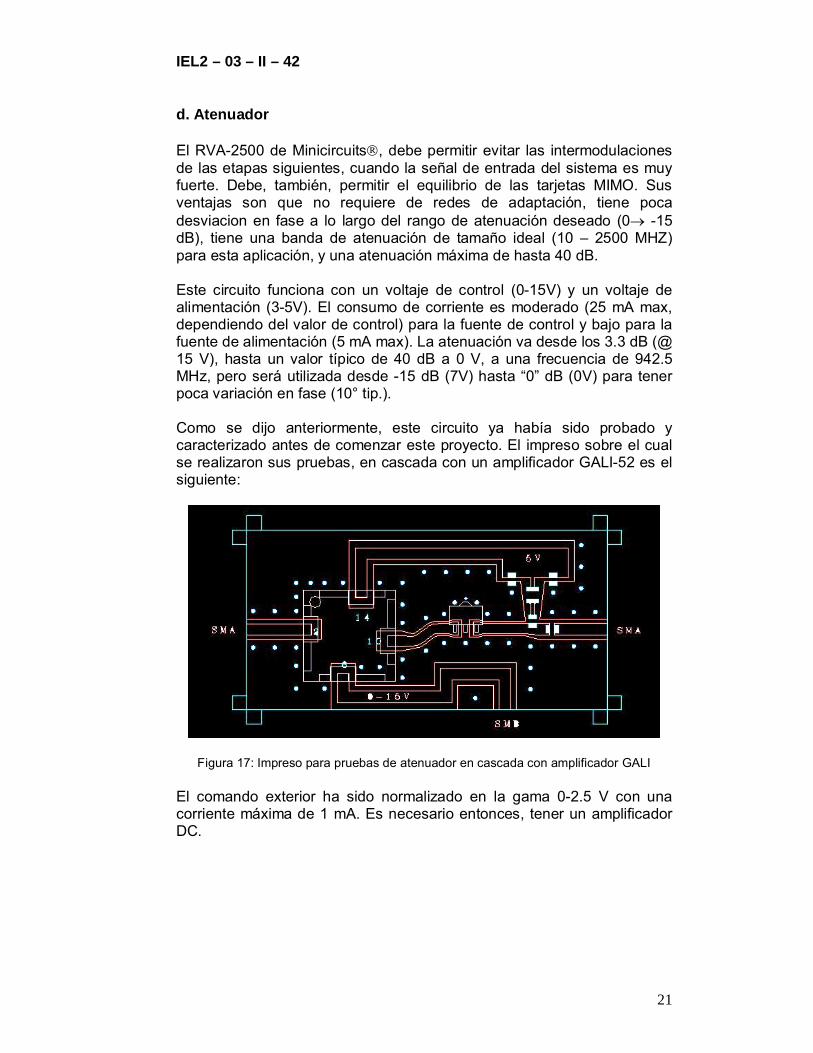
d. Atenuador El RVA-2500 de Minicircuits®, debe permitir evitar las intermodulaciones de las etapas siguientes, cuando la señal de entrada del sistema es muy fuerte. Debe, también, permitir el equilibrio de las tarjetas MIMO. Sus ventajas son que no requiere de redes de adaptación, tiene poca desviacion en fase a lo largo del rango de atenuación deseado (0→ -15 dB), tiene una banda de atenuación de tamaño ideal (10 – 2500 MHZ) para esta aplicación, y una atenuación máxima de hasta 40 dB. Este circuito funciona con un voltaje de control (0-15V) y un voltaje de alimentación (3-5V). El consumo de corriente es moderado (25 mA max, dependiendo del valor de control) para la fuente de control y bajo para la fuente de alimentación (5 mA max). La atenuación va desde los 3.3 dB (@ 15 V), hasta un valor típico de 40 dB a 0 V, a una frecuencia de 942.5 MHz, pero será utilizada desde -15 dB (7V) hasta “0” dB (0V) para tener poca variación en fase (10° tip.). Como se dijo anteriormente, este circuito ya había sido probado y caracterizado antes de comenzar este proyecto. El impreso sobre el cual se realizaron sus pruebas, en cascada con un amplificador GALI-52 es el siguiente:
Figura 17: Impreso para pruebas de atenuador en cascada con amplificador GALI El comando exterior ha sido normalizado en la gama 0-2.5 V con una corriente máxima de 1 mA. Es necesario entonces, tener un amplificador DC.
IEL2 – 03 – II – 42
22
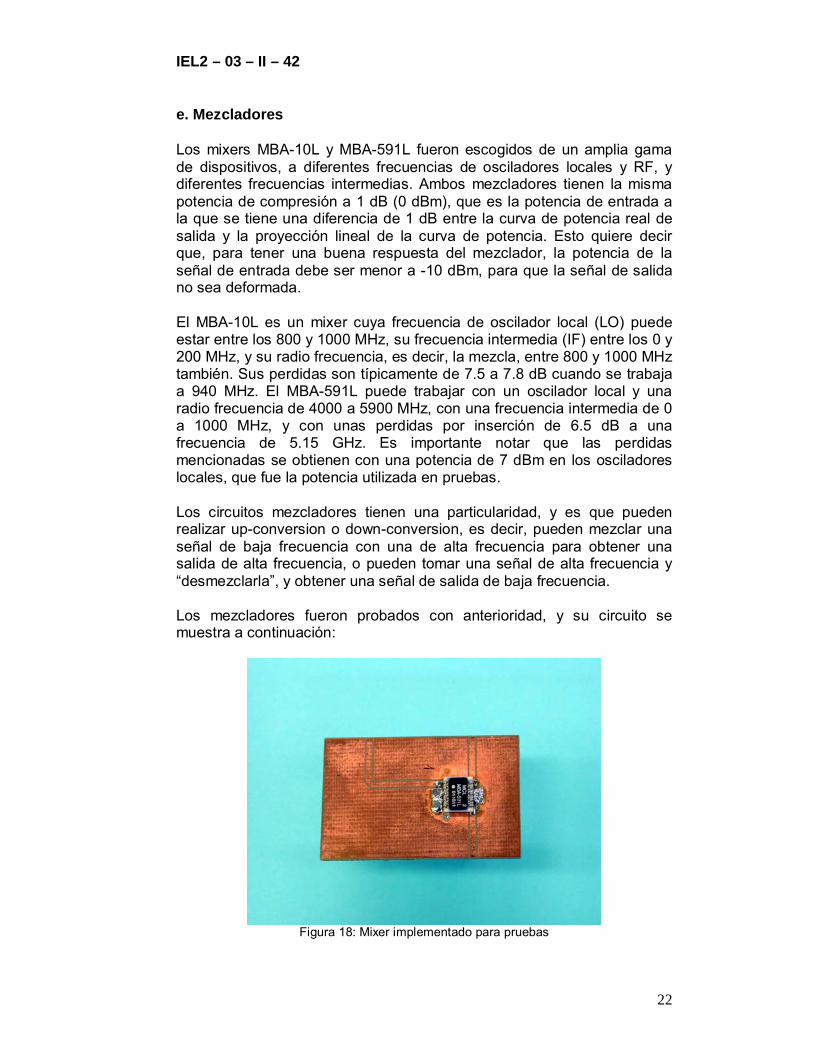
e. Mezcladores Los mixers MBA-10L y MBA-591L fueron escogidos de un amplia gama de dispositivos, a diferentes frecuencias de osciladores locales y RF, y diferentes frecuencias intermedias. Ambos mezcladores tienen la misma potencia de compresión a 1 dB (0 dBm), que es la potencia de entrada a la que se tiene una diferencia de 1 dB entre la curva de potencia real de salida y la proyección lineal de la curva de potencia. Esto quiere decir que, para tener una buena respuesta del mezclador, la potencia de la señal de entrada debe ser menor a -10 dBm, para que la señal de salida no sea deformada. El MBA-10L es un mixer cuya frecuencia de oscilador local (LO) puede estar entre los 800 y 1000 MHz, su frecuencia intermedia (IF) entre los 0 y 200 MHz, y su radio frecuencia, es decir, la mezcla, entre 800 y 1000 MHz también. Sus perdidas son típicamente de 7.5 a 7.8 dB cuando se trabaja a 940 MHz. El MBA-591L puede trabajar con un oscilador local y una radio frecuencia de 4000 a 5900 MHz, con una frecuencia intermedia de 0 a 1000 MHz, y con unas perdidas por inserción de 6.5 dB a una frecuencia de 5.15 GHz. Es importante notar que las perdidas mencionadas se obtienen con una potencia de 7 dBm en los osciladores locales, que fue la potencia utilizada en pruebas. Los circuitos mezcladores tienen una particularidad, y es que pueden realizar up-conversion o down-conversion, es decir, pueden mezclar una señal de baja frecuencia con una de alta frecuencia para obtener una salida de alta frecuencia, o pueden tomar una señal de alta frecuencia y “desmezclarla”, y obtener una señal de salida de baja frecuencia. Los mezcladores fueron probados con anterioridad, y su circuito se muestra a continuación:
Figura 18: Mixer implementado para pruebas
IEL2 – 03 – II – 42
23
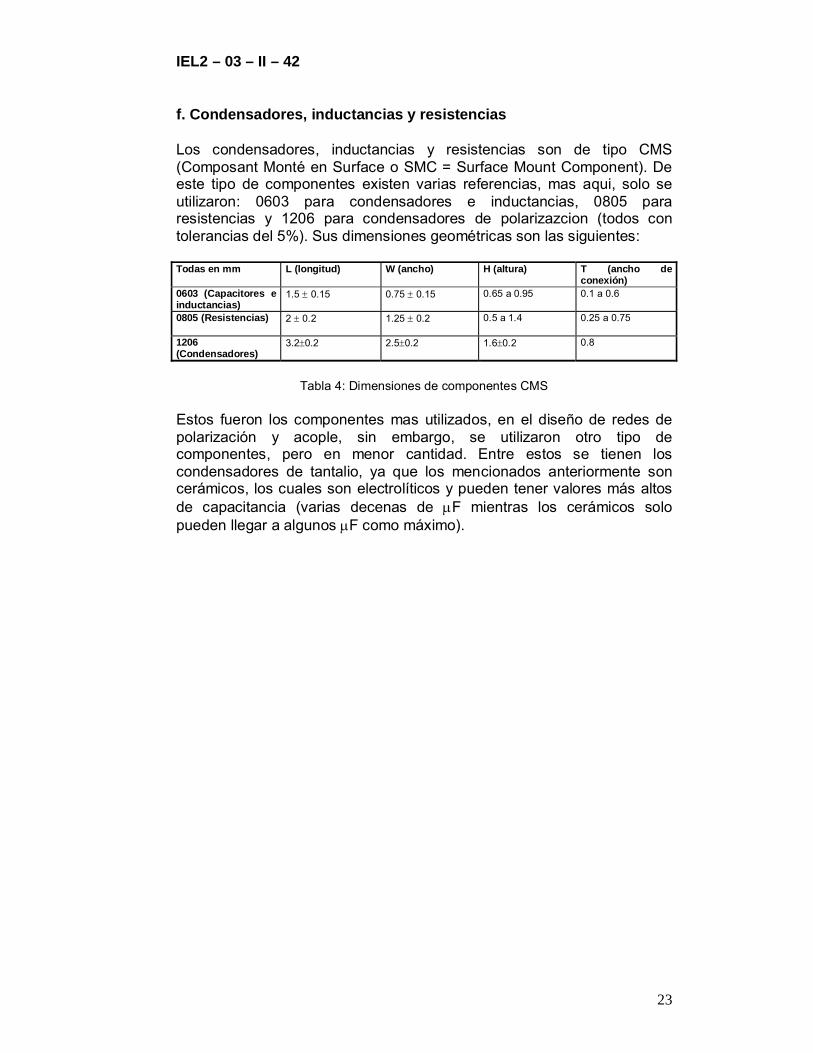
f. Condensadores, inductancias y resistencias Los condensadores, inductancias y resistencias son de tipo CMS (Composant Monté en Surface o SMC = Surface Mount Component). De este tipo de componentes existen varias referencias, mas aqui, solo se utilizaron: 0603 para condensadores e inductancias, 0805 para resistencias y 1206 para condensadores de polarizazcion (todos con tolerancias del 5%). Sus dimensiones geométricas son las siguientes: Todas en mm L (longitud) W (ancho) H (altura) T (ancho de
conexión) 0603 (Capacitores e inductancias)
1.5 ± 0.15 0.75 ± 0.15 0.65 a 0.95 0.1 a 0.6
0805 (Resistencias) 2 ± 0.2 1.25 ± 0.2 0.5 a 1.4 0.25 a 0.75
1206 (Condensadores)
3.2±0.2 2.5±0.2 1.6±0.2 0.8
Tabla 4: Dimensiones de componentes CMS
Estos fueron los componentes mas utilizados, en el diseño de redes de polarización y acople, sin embargo, se utilizaron otro tipo de componentes, pero en menor cantidad. Entre estos se tienen los condensadores de tantalio, ya que los mencionados anteriormente son cerámicos, los cuales son electrolíticos y pueden tener valores más altos de capacitancia (varias decenas de µF mientras los cerámicos solo pueden llegar a algunos µF como máximo).
IEL2 – 03 – II – 42
24
5. AMPLIFICADOR DE BAJO RUIDO (LNA) A 5 GHz
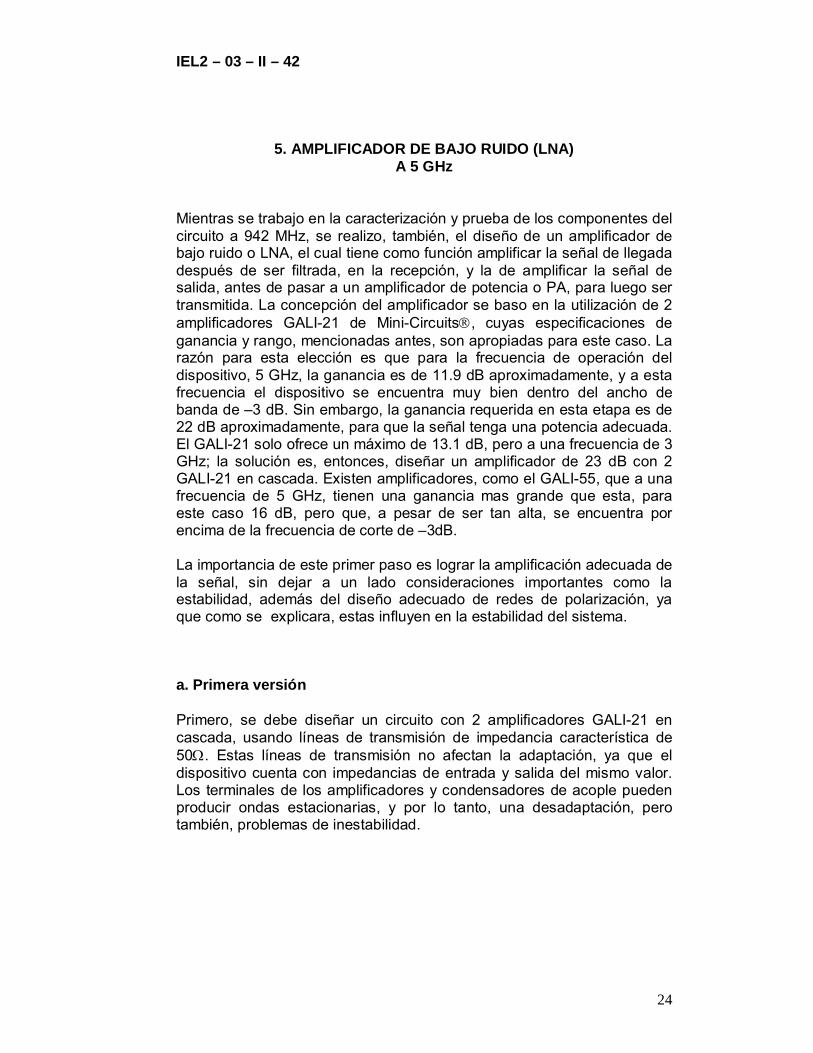
Mientras se trabajo en la caracterización y prueba de los componentes del circuito a 942 MHz, se realizo, también, el diseño de un amplificador de bajo ruido o LNA, el cual tiene como función amplificar la señal de llegada después de ser filtrada, en la recepción, y la de amplificar la señal de salida, antes de pasar a un amplificador de potencia o PA, para luego ser transmitida. La concepción del amplificador se baso en la utilización de 2 amplificadores GALI-21 de Mini-Circuits®, cuyas especificaciones de ganancia y rango, mencionadas antes, son apropiadas para este caso. La razón para esta elección es que para la frecuencia de operación del dispositivo, 5 GHz, la ganancia es de 11.9 dB aproximadamente, y a esta frecuencia el dispositivo se encuentra muy bien dentro del ancho de banda de –3 dB. Sin embargo, la ganancia requerida en esta etapa es de 22 dB aproximadamente, para que la señal tenga una potencia adecuada. El GALI-21 solo ofrece un máximo de 13.1 dB, pero a una frecuencia de 3 GHz; la solución es, entonces, diseñar un amplificador de 23 dB con 2 GALI-21 en cascada. Existen amplificadores, como el GALI-55, que a una frecuencia de 5 GHz, tienen una ganancia mas grande que esta, para este caso 16 dB, pero que, a pesar de ser tan alta, se encuentra por encima de la frecuencia de corte de –3dB. La importancia de este primer paso es lograr la amplificación adecuada de la señal, sin dejar a un lado consideraciones importantes como la estabilidad, además del diseño adecuado de redes de polarización, ya que como se explicara, estas influyen en la estabilidad del sistema. a. Primera versión Primero, se debe diseñar un circuito con 2 amplificadores GALI-21 en cascada, usando líneas de transmisión de impedancia característica de 50Ω. Estas líneas de transmisión no afectan la adaptación, ya que el dispositivo cuenta con impedancias de entrada y salida del mismo valor. Los terminales de los amplificadores y condensadores de acople pueden producir ondas estacionarias, y por lo tanto, una desadaptación, pero también, problemas de inestabilidad.
IEL2 – 03 – II – 42
25
Figura 19: Diagrama de bloques básico.
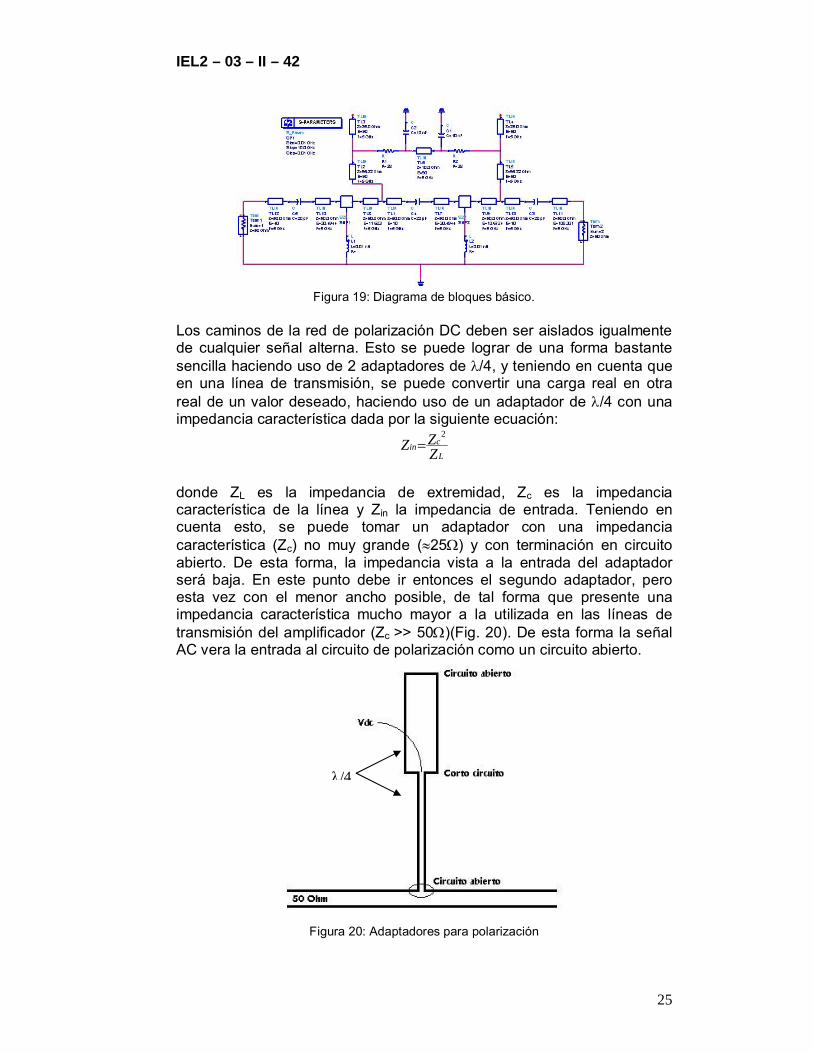
Los caminos de la red de polarización DC deben ser aislados igualmente de cualquier señal alterna. Esto se puede lograr de una forma bastante sencilla haciendo uso de 2 adaptadores de λ/4, y teniendo en cuenta que en una línea de transmisión, se puede convertir una carga real en otra real de un valor deseado, haciendo uso de un adaptador de λ/4 con una impedancia característica dada por la siguiente ecuación:
L
cin ZZZ
2=
donde ZL es la impedancia de extremidad, Zc es la impedancia característica de la línea y Zin la impedancia de entrada. Teniendo en cuenta esto, se puede tomar un adaptador con una impedancia característica (Zc) no muy grande (≈25Ω) y con terminación en circuito abierto. De esta forma, la impedancia vista a la entrada del adaptador será baja. En este punto debe ir entonces el segundo adaptador, pero esta vez con el menor ancho posible, de tal forma que presente una impedancia característica mucho mayor a la utilizada en las líneas de transmisión del amplificador (Zc >> 50Ω)(Fig. 20). De esta forma la señal AC vera la entrada al circuito de polarización como un circuito abierto.
Figura 20: Adaptadores para polarización
λ/4
IEL2 – 03 – II – 42
26
La alimentación prevista es de 5V. El circuito de polarización se diseña teniendo en cuenta el diagrama de alimentación mostrado para el GALI-21. Para el voltaje de polarización (3-5V), y la corriente típica requerida por el circuito (40mA), según especificaciones, podemos utilizar resistencias cercanas a 38Ω, para obtener un voltaje de polarización de cada amplificador de 3.5V. Además los capacitores de bypass y acople, cuya función es filtrar el ruido proveniente de la fuente de 5V, para obtener una señal lo mas constante posible, y basándose en una regla de diseño de pérdidas de hasta 0.1 dB por capacitor, lo cual es un valor aceptable para este problema. Los condensadores de acople son de 22 pF, a una frecuencia de corte inferior de 500 MHz, y 10 nF para condensadores de bypass. Los valores de estos últimos son diferentes a los sugeridos por la herramienta de cálculo APPCAD, la cual proponía un valor de 1.5 nF, ya que se creía que se podía poner en peligro la estabilidad, aunque después se observo que funcionaban de igual manera con cualquiera de los 2. Para los condensadores de acople, la impedancia presentada por estos, a esta frecuencia es adecuada, según su función de transferencia característica.
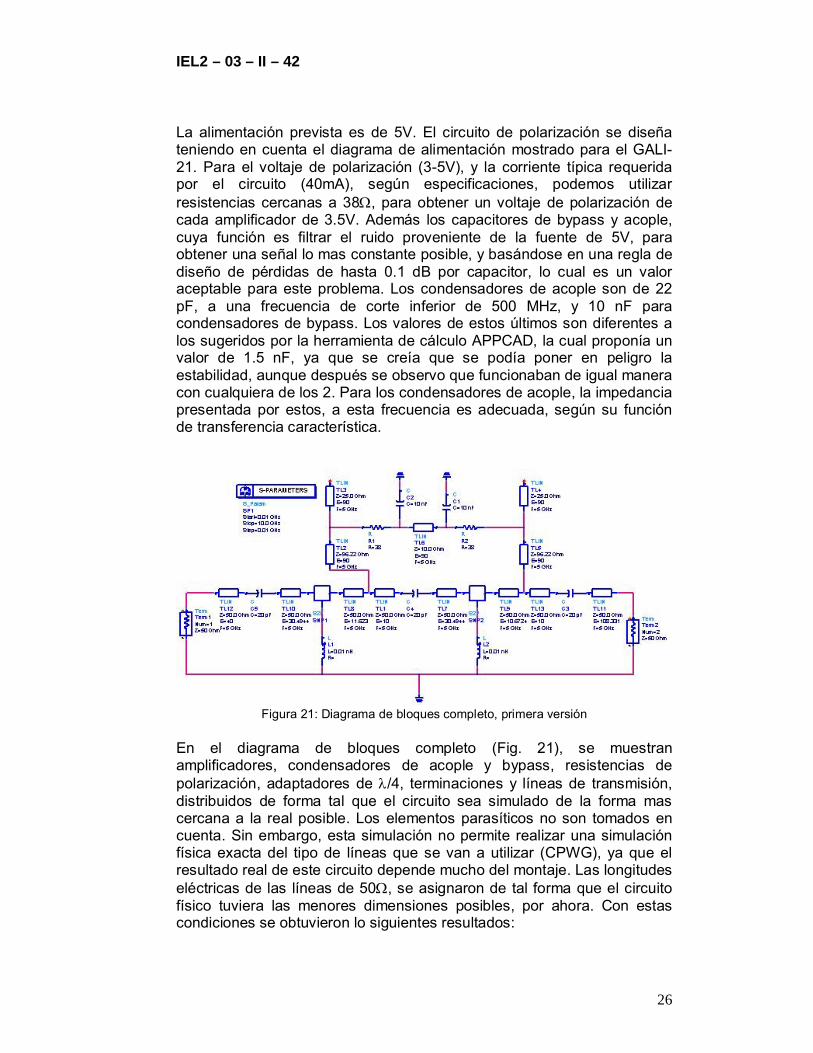
Figura 21: Diagrama de bloques completo, primera versión
En el diagrama de bloques completo (Fig. 21), se muestran amplificadores, condensadores de acople y bypass, resistencias de polarización, adaptadores de λ/4, terminaciones y líneas de transmisión, distribuidos de forma tal que el circuito sea simulado de la forma mas cercana a la real posible. Los elementos parasíticos no son tomados en cuenta. Sin embargo, esta simulación no permite realizar una simulación física exacta del tipo de líneas que se van a utilizar (CPWG), ya que el resultado real de este circuito depende mucho del montaje. Las longitudes eléctricas de las líneas de 50Ω, se asignaron de tal forma que el circuito físico tuviera las menores dimensiones posibles, por ahora. Con estas condiciones se obtuvieron lo siguientes resultados:
IEL2 – 03 – II – 42
27
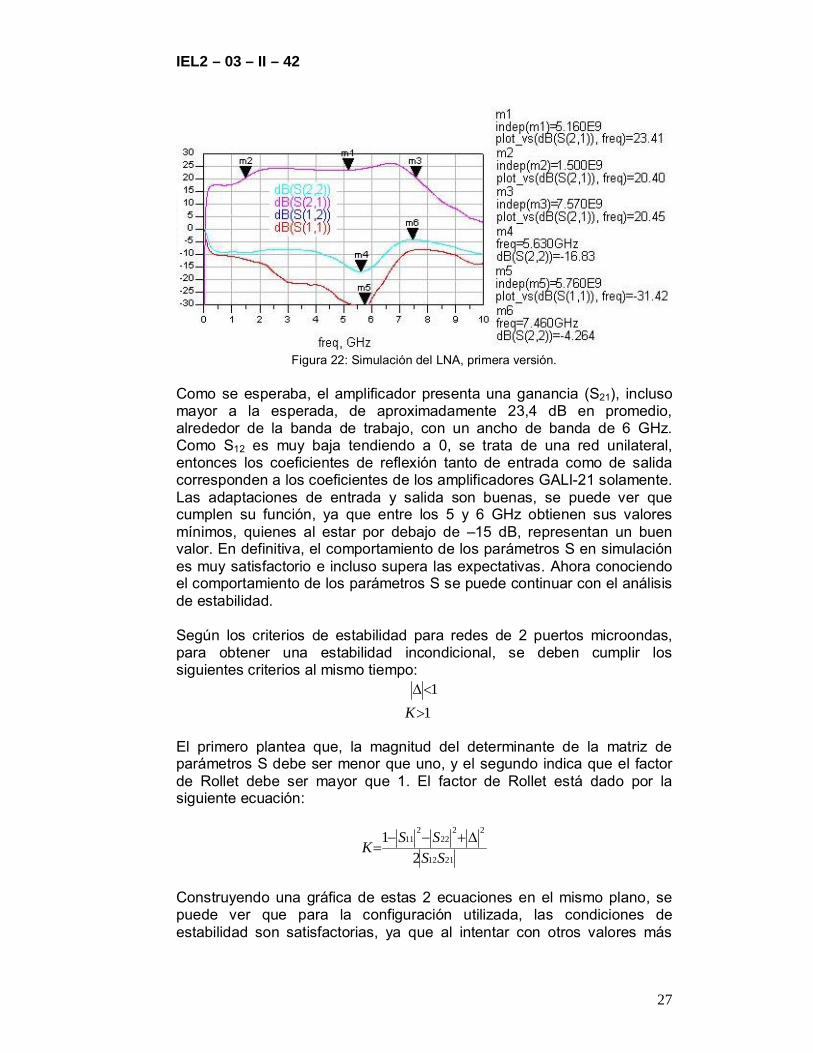
Figura 22: Simulación del LNA, primera versión.
Como se esperaba, el amplificador presenta una ganancia (S21), incluso mayor a la esperada, de aproximadamente 23,4 dB en promedio, alrededor de la banda de trabajo, con un ancho de banda de 6 GHz. Como S12 es muy baja tendiendo a 0, se trata de una red unilateral, entonces los coeficientes de reflexión tanto de entrada como de salida corresponden a los coeficientes de los amplificadores GALI-21 solamente. Las adaptaciones de entrada y salida son buenas, se puede ver que cumplen su función, ya que entre los 5 y 6 GHz obtienen sus valores mínimos, quienes al estar por debajo de –15 dB, representan un buen valor. En definitiva, el comportamiento de los parámetros S en simulación es muy satisfactorio e incluso supera las expectativas. Ahora conociendo el comportamiento de los parámetros S se puede continuar con el análisis de estabilidad. Según los criterios de estabilidad para redes de 2 puertos microondas, para obtener una estabilidad incondicional, se deben cumplir los siguientes criterios al mismo tiempo:
1<∆ 1>K
El primero plantea que, la magnitud del determinante de la matriz de parámetros S debe ser menor que uno, y el segundo indica que el factor de Rollet debe ser mayor que 1. El factor de Rollet está dado por la siguiente ecuación:
2112
2222
211
21
SSSS
K∆+−−
=
Construyendo una gráfica de estas 2 ecuaciones en el mismo plano, se puede ver que para la configuración utilizada, las condiciones de estabilidad son satisfactorias, ya que al intentar con otros valores más

IEL2 – 03 – II – 42
28
pequeños de condensadores de bypass y de inductancias de polarizacion, se presentaban diseños potencialmente inestables a bajas frecuencias (entre 200 y 280 MHz), sin embargo, esto se pudo solucionar siguiendo los pasos de diseño descritos anteriormente. La simulación obtenida fue la siguiente:
Figura 23: Estabilidad simulada del LNA, primera versión
El punto más cercano a un dispositivo potencialmente inestable, se da cuando el determinante toma un valor de 0.988 a una frecuencia de 10 MHz, sin embargo, esto se debe al bucle o loop existente en el circuito de alimentación, el cual genera una retroalimentación a bajas frecuencias (10-100 MHz). Su efecto se puede minimizar escogiendo los condensadores de bypass que mejor se adapten al sistema. Este paso es importante, ya que del comportamiento apropiado de este bucle, depende gran parte de la estabilidad a altas frecuencias. El comportamiento extraño y quebrado presentado por la gráfica de K, es debido a la interpolación, ya que los parámetros S de los amplificadores son archivos con un cierto número de puntos a diferentes frecuencias. Por último, el diseño de la mascara para su realización y prueba fue realizada utilizando guías de onda coplanares, con un plano de masa inferior (CPWG). Para el cálculo y diseño de este circuito se utilizó el software ADS de Agilent Technologies, el cual permite calcular las dimensiones físicas de líneas de transmisión conociendo la longitud eléctrica, impedancia característica, constante dieléctrica, espesor del dieléctrico y viceversa, es decir, permite calcular a partir de los parámetros eléctricos y físicos, las dimensiones de la línea correspondiente. También se pueden tener en cuenta parámetros tales como el espesor del conductor y la tangente de pérdida del material (Tan δ).

IEL2 – 03 – II – 42
29
Figura 24: Modos TEM. a) Microstrip, b)CPW, c)CPWG. Las líneas de transmisión CPWG fueron escogidas, en vez de las Microstrip, debido a que el plano coplanar es una solución practica para la polarización de todos los componentes, haciendo mas fácil el trabajo de diseño de los impresos, eliminando la necesidad de crear líneas de transmisión extra para la masa, y además descartando la posibilidad de acoplaje indeseado, que se pueda presentar entre estas y las demás líneas del circuito. Según esto, la solución adecuada seria las líneas de transmisión coplanares sin plano de masa inferior (CPW), sin embargo, si se tiene el plano de masa coplanar solamente, este genera resonancia y por tanto oscilaciones haciendo inestable el sistema. Esto es debido a la presencia de 2 modos electromagnéticos, en lugar de solo uno que se presenta en las líneas Microstrip (Fig. 24), ya que el conductor no ve un solo plano de masa, sino 2 separados, uno a cada lado. Para eliminar este problema, se recurre al uso del plano de masa inferior, dando origen a las CPWG, el cual permite que los 2 planos de masa se vean como uno solo, con la ayuda de conexiones a través del substrato y el plano de masa inferior, haciendo que los 2 modos TEM, que antes eran distintos, ahora sean el mismo aunque sigan siendo 2. Sin embargo, al utilizar el plano de masa inferior, se genera un tercer modo electromagnético, aunque el desempeño general es mucho mejor que el del tipo CPW y sin problemas de estabilidad realmente importantes hasta 6 GHz. Teniendo en cuenta todo lo anterior se diseño la máscara, para luego soldar los componentes y realizar las pruebas correspondientes del circuito finalizado (Fig.25).
Figura 25: LNA, primera versión
IEL2 – 03 – II – 42
30
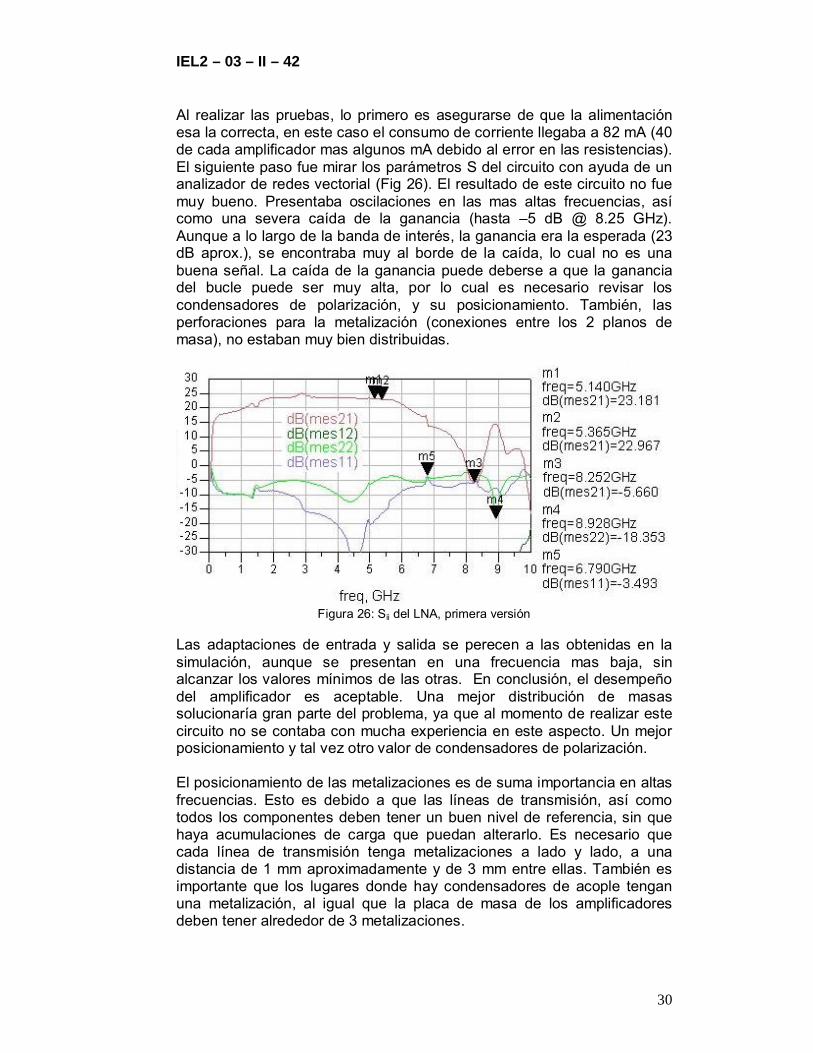
Al realizar las pruebas, lo primero es asegurarse de que la alimentación esa la correcta, en este caso el consumo de corriente llegaba a 82 mA (40 de cada amplificador mas algunos mA debido al error en las resistencias). El siguiente paso fue mirar los parámetros S del circuito con ayuda de un analizador de redes vectorial (Fig 26). El resultado de este circuito no fue muy bueno. Presentaba oscilaciones en las mas altas frecuencias, así como una severa caída de la ganancia (hasta –5 dB @ 8.25 GHz). Aunque a lo largo de la banda de interés, la ganancia era la esperada (23 dB aprox.), se encontraba muy al borde de la caída, lo cual no es una buena señal. La caída de la ganancia puede deberse a que la ganancia del bucle puede ser muy alta, por lo cual es necesario revisar los condensadores de polarización, y su posicionamiento. También, las perforaciones para la metalización (conexiones entre los 2 planos de masa), no estaban muy bien distribuidas.
Figura 26: Sii del LNA, primera versión
Las adaptaciones de entrada y salida se perecen a las obtenidas en la simulación, aunque se presentan en una frecuencia mas baja, sin alcanzar los valores mínimos de las otras. En conclusión, el desempeño del amplificador es aceptable. Una mejor distribución de masas solucionaría gran parte del problema, ya que al momento de realizar este circuito no se contaba con mucha experiencia en este aspecto. Un mejor posicionamiento y tal vez otro valor de condensadores de polarización. El posicionamiento de las metalizaciones es de suma importancia en altas frecuencias. Esto es debido a que las líneas de transmisión, así como todos los componentes deben tener un buen nivel de referencia, sin que haya acumulaciones de carga que puedan alterarlo. Es necesario que cada línea de transmisión tenga metalizaciones a lado y lado, a una distancia de 1 mm aproximadamente y de 3 mm entre ellas. También es importante que los lugares donde hay condensadores de acople tengan una metalización, al igual que la placa de masa de los amplificadores deben tener alrededor de 3 metalizaciones.
IEL2 – 03 – II – 42
31
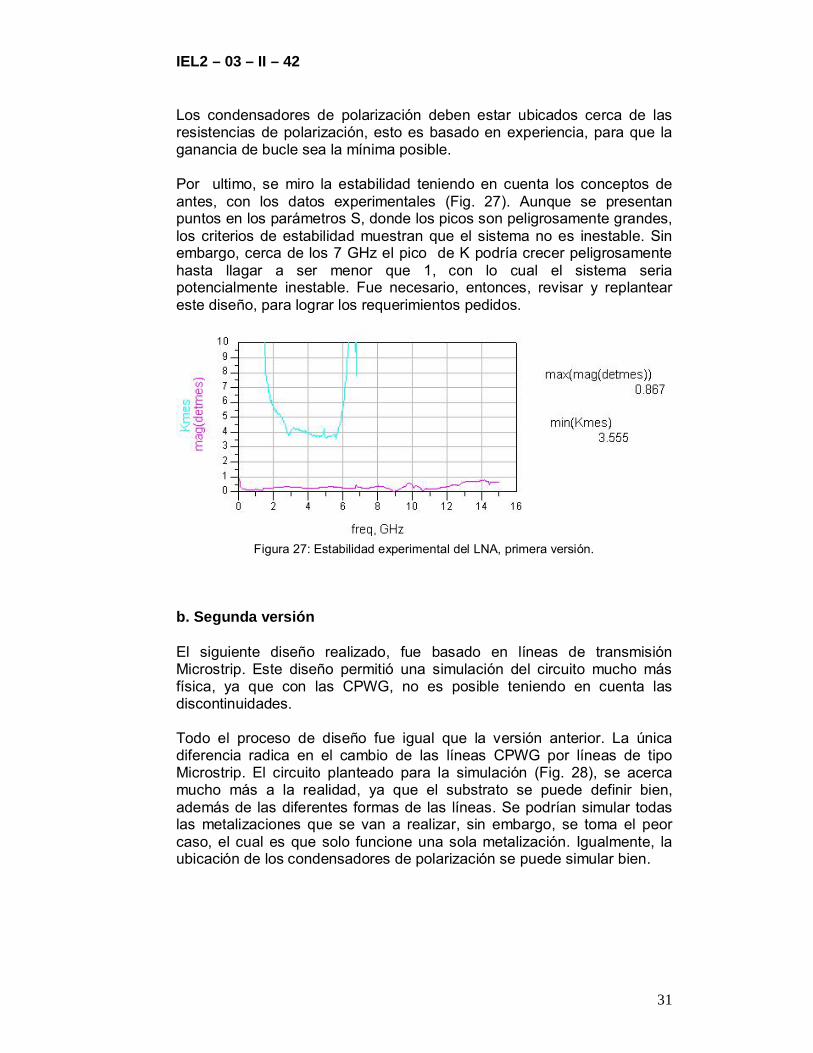
Los condensadores de polarización deben estar ubicados cerca de las resistencias de polarización, esto es basado en experiencia, para que la ganancia de bucle sea la mínima posible. Por ultimo, se miro la estabilidad teniendo en cuenta los conceptos de antes, con los datos experimentales (Fig. 27). Aunque se presentan puntos en los parámetros S, donde los picos son peligrosamente grandes, los criterios de estabilidad muestran que el sistema no es inestable. Sin embargo, cerca de los 7 GHz el pico de K podría crecer peligrosamente hasta llagar a ser menor que 1, con lo cual el sistema seria potencialmente inestable. Fue necesario, entonces, revisar y replantear este diseño, para lograr los requerimientos pedidos.
Figura 27: Estabilidad experimental del LNA, primera versión.
b. Segunda versión El siguiente diseño realizado, fue basado en líneas de transmisión Microstrip. Este diseño permitió una simulación del circuito mucho más física, ya que con las CPWG, no es posible teniendo en cuenta las discontinuidades. Todo el proceso de diseño fue igual que la versión anterior. La única diferencia radica en el cambio de las líneas CPWG por líneas de tipo Microstrip. El circuito planteado para la simulación (Fig. 28), se acerca mucho más a la realidad, ya que el substrato se puede definir bien, además de las diferentes formas de las líneas. Se podrían simular todas las metalizaciones que se van a realizar, sin embargo, se toma el peor caso, el cual es que solo funcione una sola metalización. Igualmente, la ubicación de los condensadores de polarización se puede simular bien.
IEL2 – 03 – II – 42
32
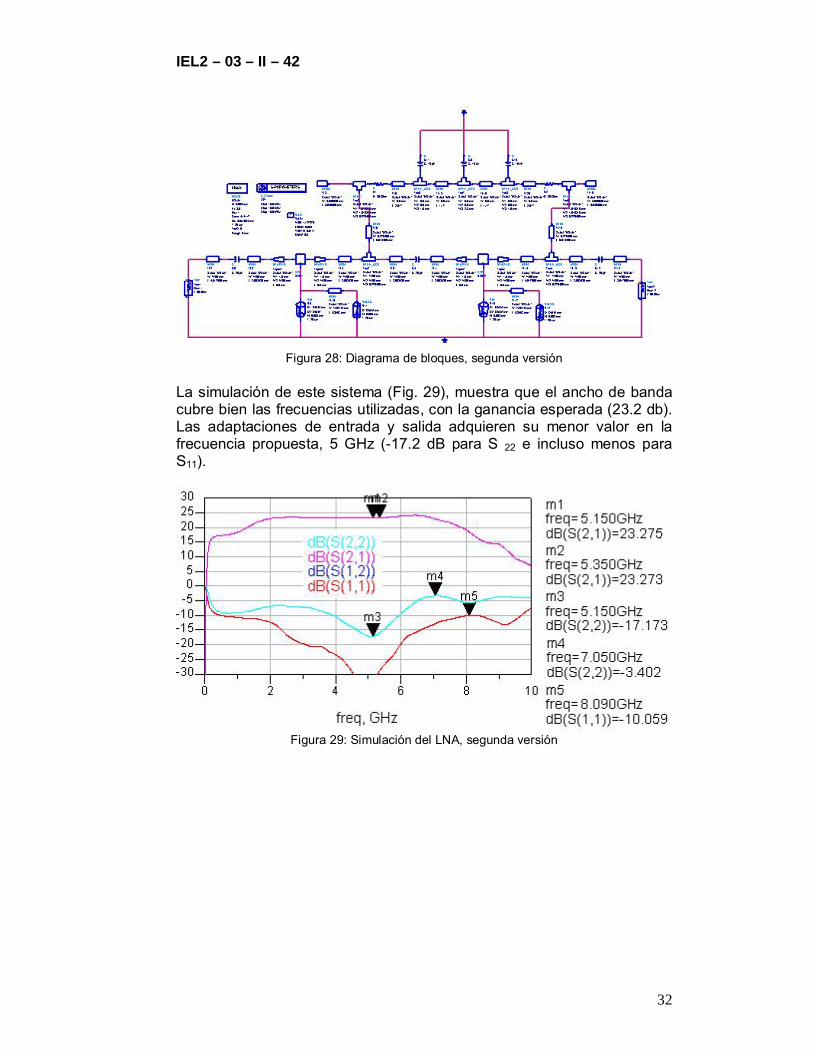
Figura 28: Diagrama de bloques, segunda versión
La simulación de este sistema (Fig. 29), muestra que el ancho de banda cubre bien las frecuencias utilizadas, con la ganancia esperada (23.2 db). Las adaptaciones de entrada y salida adquieren su menor valor en la frecuencia propuesta, 5 GHz (-17.2 dB para S 22 e incluso menos para S11).
Figura 29: Simulación del LNA, segunda versión

IEL2 – 03 – II – 42
33
Figura 30: Estabilidad simulada del LNA, segunda versión.
La estabilidad de esta versión es buena. Aun así, esta curva nunca alcanza valores menores a 5. Además, la curva del determinante solo alcanza un valor de 0.992 a bajas frecuencias, lo que quiere decir que es debido al bucle de polarización, mientras que en el resto del espectro el desempeño es alentador. Con estos resultados, se pudo hacer la mascara del circuito (Fig. 31). Esta vez, aunque se utilizaron líneas tipo Microstrip, se presto especial atención a la polarización de los amplificadores, de tal forma que la masa estuviera bien distribuida en los pequeños planos, utilizados para la polarización de los amplificadores, teniendo cuidado de que no estuvieran demasiado cerca de otras líneas, para evitar acoplajes indeseados.
Fig 31: Mascara LNA, segunda versión. Una vez implementada, la segunda versión del circuito mostró mejoras en algunos aspectos, aunque sigue siendo débil en otros. Los datos,
IEL2 – 03 – II – 42
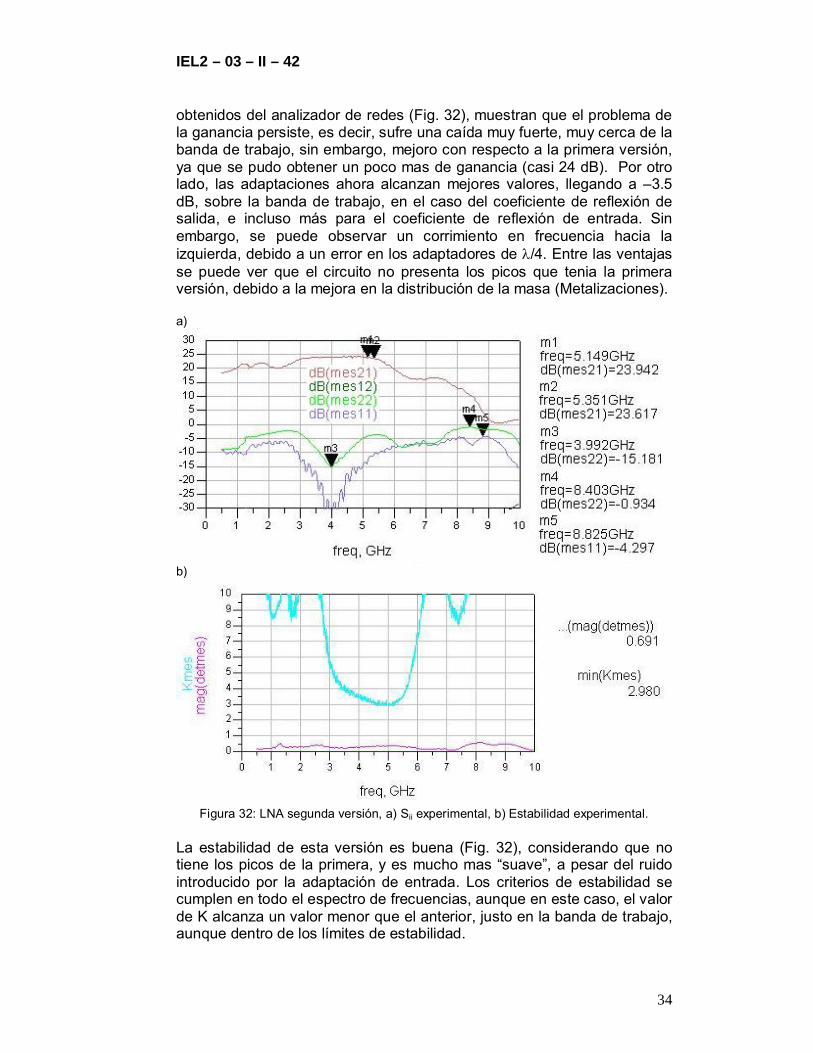
34
obtenidos del analizador de redes (Fig. 32), muestran que el problema de la ganancia persiste, es decir, sufre una caída muy fuerte, muy cerca de la banda de trabajo, sin embargo, mejoro con respecto a la primera versión, ya que se pudo obtener un poco mas de ganancia (casi 24 dB). Por otro lado, las adaptaciones ahora alcanzan mejores valores, llegando a –3.5 dB, sobre la banda de trabajo, en el caso del coeficiente de reflexión de salida, e incluso más para el coeficiente de reflexión de entrada. Sin embargo, se puede observar un corrimiento en frecuencia hacia la izquierda, debido a un error en los adaptadores de λ/4. Entre las ventajas se puede ver que el circuito no presenta los picos que tenia la primera versión, debido a la mejora en la distribución de la masa (Metalizaciones). a)
b)
Figura 32: LNA segunda versión, a) Sii experimental, b) Estabilidad experimental.
La estabilidad de esta versión es buena (Fig. 32), considerando que no tiene los picos de la primera, y es mucho mas “suave”, a pesar del ruido introducido por la adaptación de entrada. Los criterios de estabilidad se cumplen en todo el espectro de frecuencias, aunque en este caso, el valor de K alcanza un valor menor que el anterior, justo en la banda de trabajo, aunque dentro de los límites de estabilidad.
IEL2 – 03 – II – 42
35
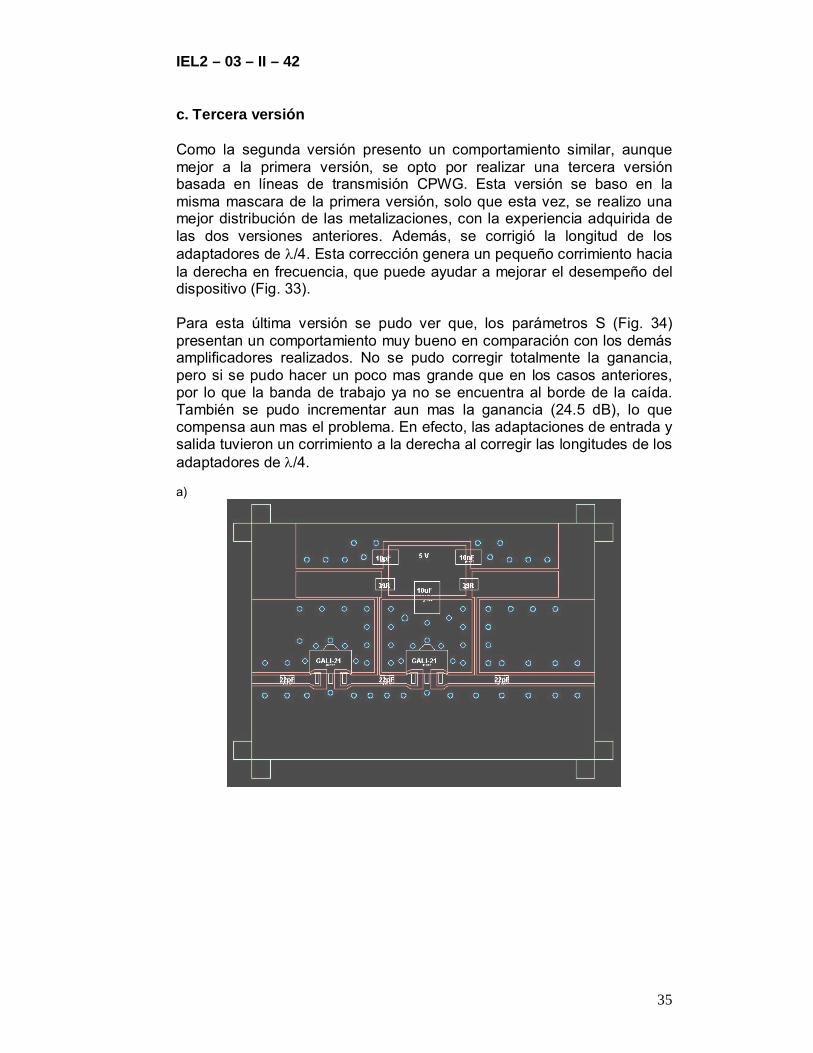
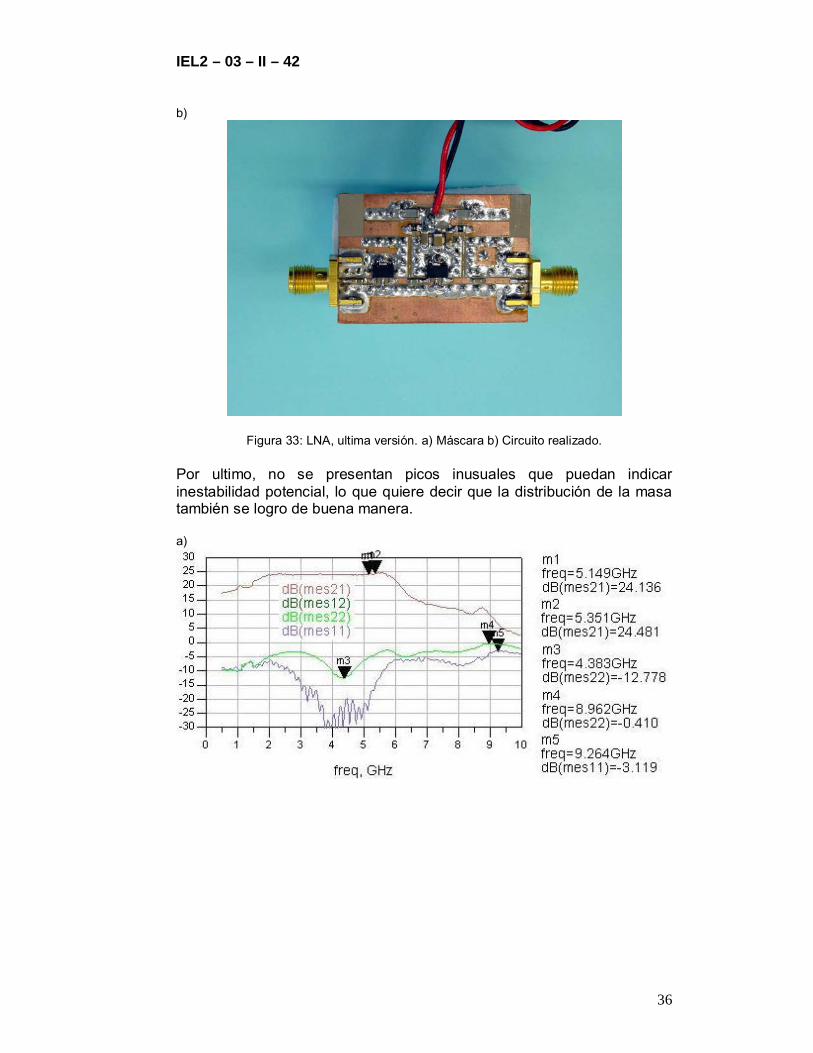
c. Tercera versión Como la segunda versión presento un comportamiento similar, aunque mejor a la primera versión, se opto por realizar una tercera versión basada en líneas de transmisión CPWG. Esta versión se baso en la misma mascara de la primera versión, solo que esta vez, se realizo una mejor distribución de las metalizaciones, con la experiencia adquirida de las dos versiones anteriores. Además, se corrigió la longitud de los adaptadores de λ/4. Esta corrección genera un pequeño corrimiento hacia la derecha en frecuencia, que puede ayudar a mejorar el desempeño del dispositivo (Fig. 33). Para esta última versión se pudo ver que, los parámetros S (Fig. 34) presentan un comportamiento muy bueno en comparación con los demás amplificadores realizados. No se pudo corregir totalmente la ganancia, pero si se pudo hacer un poco mas grande que en los casos anteriores, por lo que la banda de trabajo ya no se encuentra al borde de la caída. También se pudo incrementar aun mas la ganancia (24.5 dB), lo que compensa aun mas el problema. En efecto, las adaptaciones de entrada y salida tuvieron un corrimiento a la derecha al corregir las longitudes de los adaptadores de λ/4. a)
IEL2 – 03 – II – 42
36
b)
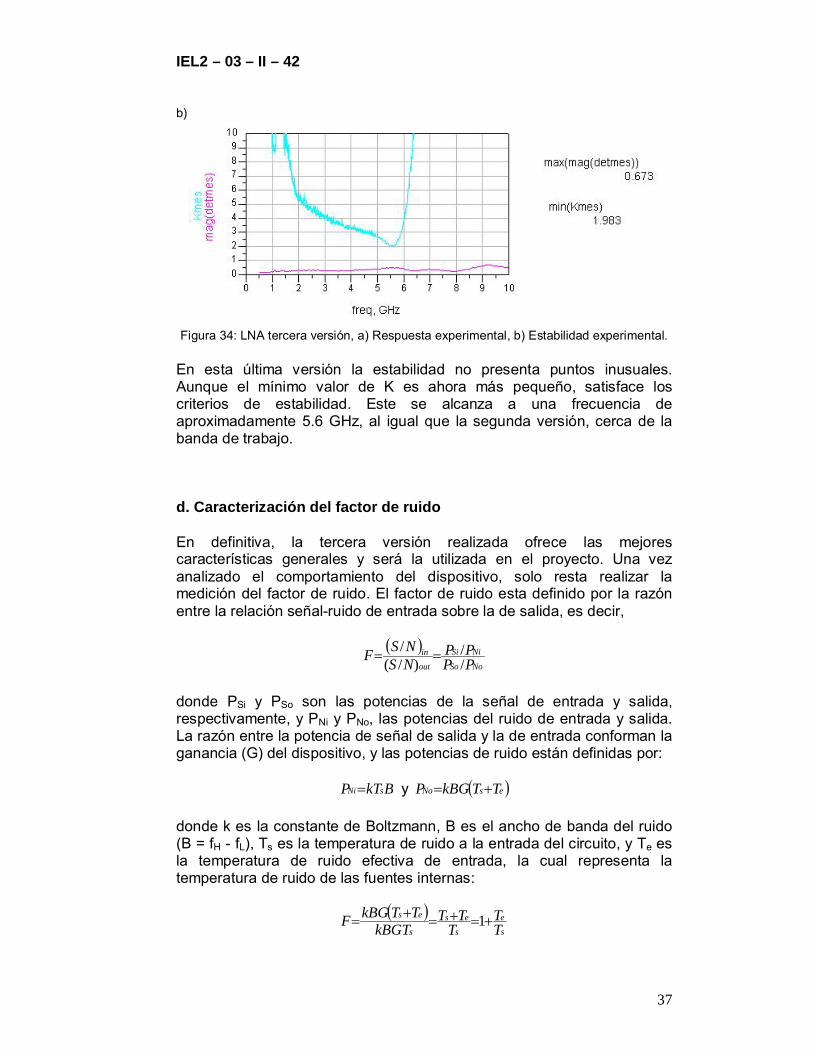
Figura 33: LNA, ultima versión. a) Máscara b) Circuito realizado. Por ultimo, no se presentan picos inusuales que puedan indicar inestabilidad potencial, lo que quiere decir que la distribución de la masa también se logro de buena manera. a)
IEL2 – 03 – II – 42
37
b)
Figura 34: LNA tercera versión, a) Respuesta experimental, b) Estabilidad experimental. En esta última versión la estabilidad no presenta puntos inusuales. Aunque el mínimo valor de K es ahora más pequeño, satisface los criterios de estabilidad. Este se alcanza a una frecuencia de aproximadamente 5.6 GHz, al igual que la segunda versión, cerca de la banda de trabajo. d. Caracterización del factor de ruido En definitiva, la tercera versión realizada ofrece las mejores características generales y será la utilizada en el proyecto. Una vez analizado el comportamiento del dispositivo, solo resta realizar la medición del factor de ruido. El factor de ruido esta definido por la razón entre la relación señal-ruido de entrada sobre la de salida, es decir,
( )NoSo
NiSi
out
in
PPPP
NSNSF /
/)/(
/ ==
donde PSi y PSo son las potencias de la señal de entrada y salida, respectivamente, y PNi y PNo, las potencias del ruido de entrada y salida. La razón entre la potencia de señal de salida y la de entrada conforman la ganancia (G) del dispositivo, y las potencias de ruido están definidas por:
BkTP sNi= y ( )esNo TTkBGP +=
donde k es la constante de Boltzmann, B es el ancho de banda del ruido (B = fH - fL), Ts es la temperatura de ruido a la entrada del circuito, y Te es la temperatura de ruido efectiva de entrada, la cual representa la temperatura de ruido de las fuentes internas:
( )se
ses
s
es
TT
TTT
kBGTTTkBGF +=+=+= 1

IEL2 – 03 – II – 42
38
El valor de Ts, o temperatura de referencia de la fuente, es tomado como la temperatura estándar To=290°K, sin embargo, la temperatura de ruido efectiva es un dato que no se puede obtener fácilmente, ya que es debido al ruido térmico del dispositivo causado por el movimiento aleatorio de electrones agitados térmicamente, además de otros tipos de ruido, como el Shot Noise que se debe a la naturaleza discreta de los portadores de carga, y el Flicker Noise (también conocido como ruido 1/f) que es un fenómeno a bajas frecuencias. Para poder solucionar este problema, se utiliza una técnica conocida como medición de la potencia de ruido caliente (PBhot), y la potencia de ruido frío (PBcold). Esta técnica consiste en hacer mediciones de la potencia de ruido a la salida de un dispositivo utilizando 2 temperaturas diferentes, Th y TC. Las potencias de ruido están definidas por:
)( cecold TTkBGPB += y )( hehot TTkBGPB +=
y su razón esta definida como y. Teniendo en cuenta esto y tomando el valor de Tc igual a To, se tiene
1///
++
=++
==oe
oeoh
oe
he
cold
hot
TTTTTT
TTTT
PBPB
y
de donde se puede despejar Te y obtener la siguiente ecuación:
11/
−−
=yTT
T ohe
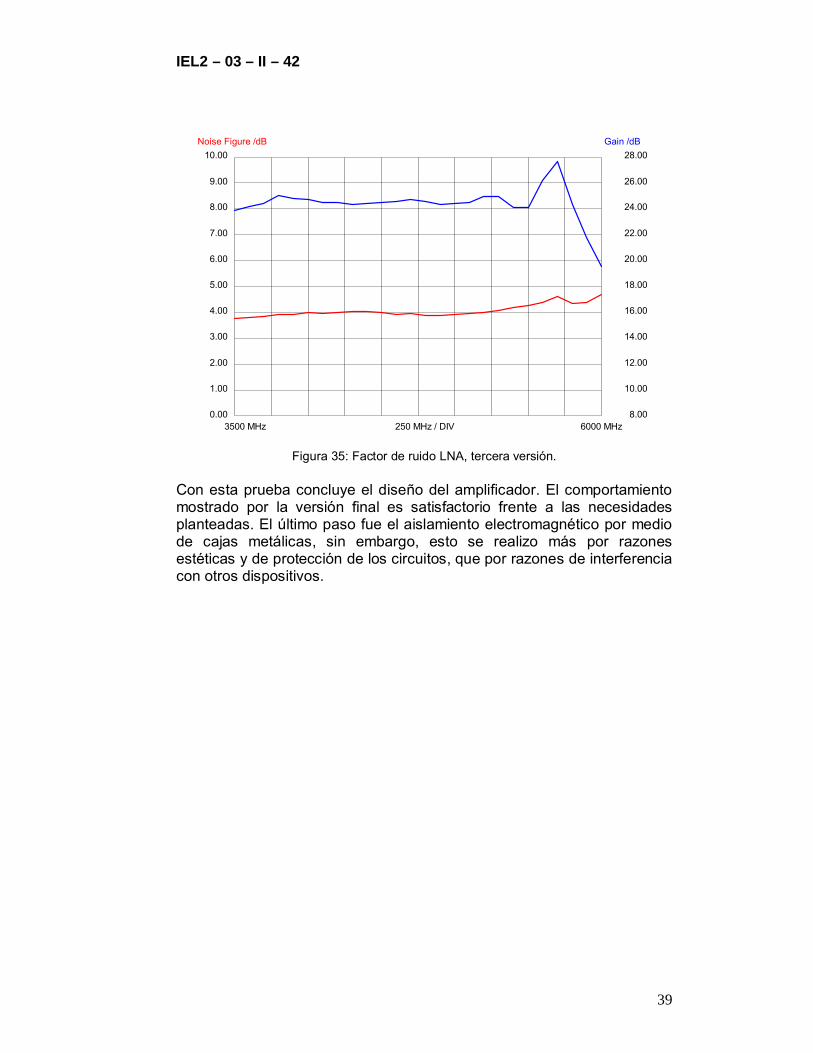
de donde se conocen todos los valores. Se ha medido una razón de 2 potencias para tener un máximo de posición. Este proceso es automatizado. Ahora, como se conoce el significado del factor de ruido y su significado se puede analizar el factor obtenido para el amplificador realizado. El factor de ruido (Fig. 35), en este caso, tiene un valor promedio de 4 dB, lo cual es muy bueno considerando que se esperaba un factor cercano a 5 dB, de acuerdo a las especificaciones del componente, y además recordando que se tiene una ganancia de 24 dB en promedio. En definitiva, el amplificador presenta un buen desempeño frente al ruido en la banda requerida.
IEL2 – 03 – II – 42
39
0.00
1.00
2.00
3.00
4.00
5.00
6.00
7.00
8.00
9.00
10.00
8.00
10.00
12.00
14.00
16.00
18.00
20.00
22.00
24.00
26.00
28.00
3500 MHz 6000 MHz 250 MHz / DIV
Noise Figure /dB Gain /dB
Figura 35: Factor de ruido LNA, tercera versión.
Con esta prueba concluye el diseño del amplificador. El comportamiento mostrado por la versión final es satisfactorio frente a las necesidades planteadas. El último paso fue el aislamiento electromagnético por medio de cajas metálicas, sin embargo, esto se realizo más por razones estéticas y de protección de los circuitos, que por razones de interferencia con otros dispositivos.
IEL2 – 03 – II – 42
40
6. CIRCUITOS RF EMISOR Y RECEPTOR
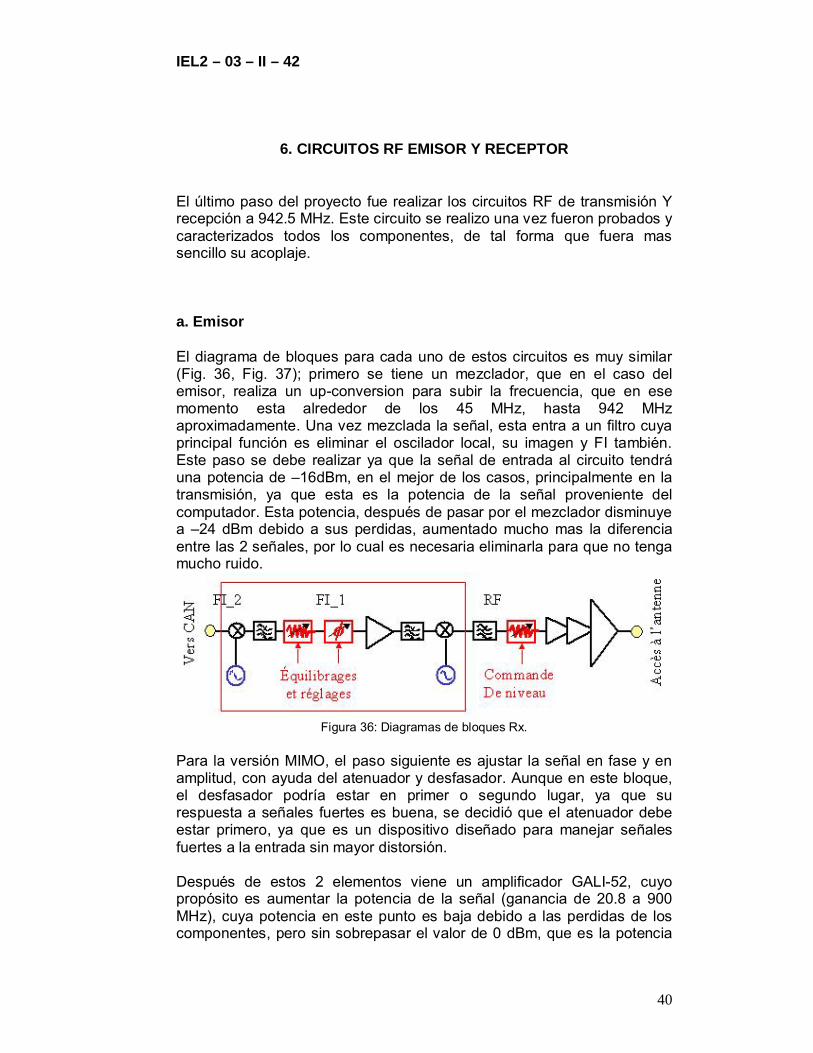
El último paso del proyecto fue realizar los circuitos RF de transmisión Y recepción a 942.5 MHz. Este circuito se realizo una vez fueron probados y caracterizados todos los componentes, de tal forma que fuera mas sencillo su acoplaje. a. Emisor El diagrama de bloques para cada uno de estos circuitos es muy similar (Fig. 36, Fig. 37); primero se tiene un mezclador, que en el caso del emisor, realiza un up-conversion para subir la frecuencia, que en ese momento esta alrededor de los 45 MHz, hasta 942 MHz aproximadamente. Una vez mezclada la señal, esta entra a un filtro cuya principal función es eliminar el oscilador local, su imagen y FI también. Este paso se debe realizar ya que la señal de entrada al circuito tendrá una potencia de –16dBm, en el mejor de los casos, principalmente en la transmisión, ya que esta es la potencia de la señal proveniente del computador. Esta potencia, después de pasar por el mezclador disminuye a –24 dBm debido a sus perdidas, aumentado mucho mas la diferencia entre las 2 señales, por lo cual es necesaria eliminarla para que no tenga mucho ruido.
Figura 36: Diagramas de bloques Rx.
Para la versión MIMO, el paso siguiente es ajustar la señal en fase y en amplitud, con ayuda del atenuador y desfasador. Aunque en este bloque, el desfasador podría estar en primer o segundo lugar, ya que su respuesta a señales fuertes es buena, se decidió que el atenuador debe estar primero, ya que es un dispositivo diseñado para manejar señales fuertes a la entrada sin mayor distorsión. Después de estos 2 elementos viene un amplificador GALI-52, cuyo propósito es aumentar la potencia de la señal (ganancia de 20.8 a 900 MHz), cuya potencia en este punto es baja debido a las perdidas de los componentes, pero sin sobrepasar el valor de 0 dBm, que es la potencia
IEL2 – 03 – II – 42
41
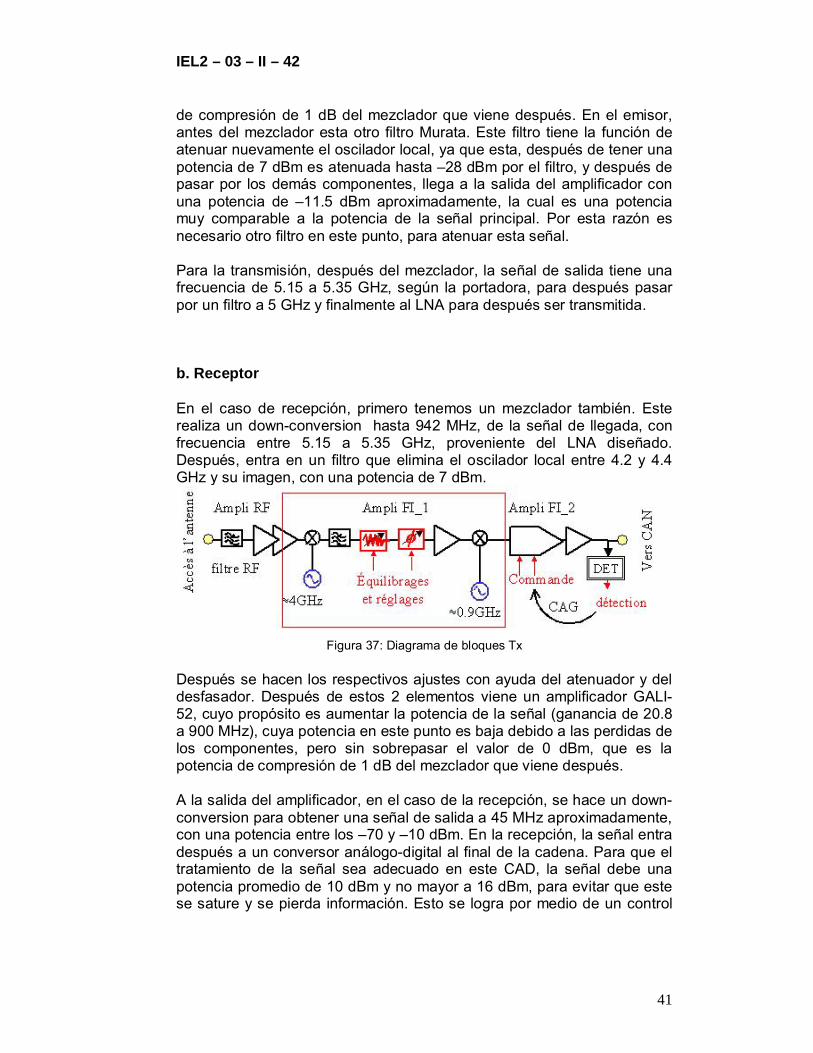
de compresión de 1 dB del mezclador que viene después. En el emisor, antes del mezclador esta otro filtro Murata. Este filtro tiene la función de atenuar nuevamente el oscilador local, ya que esta, después de tener una potencia de 7 dBm es atenuada hasta –28 dBm por el filtro, y después de pasar por los demás componentes, llega a la salida del amplificador con una potencia de –11.5 dBm aproximadamente, la cual es una potencia muy comparable a la potencia de la señal principal. Por esta razón es necesario otro filtro en este punto, para atenuar esta señal. Para la transmisión, después del mezclador, la señal de salida tiene una frecuencia de 5.15 a 5.35 GHz, según la portadora, para después pasar por un filtro a 5 GHz y finalmente al LNA para después ser transmitida. b. Receptor En el caso de recepción, primero tenemos un mezclador también. Este realiza un down-conversion hasta 942 MHz, de la señal de llegada, con frecuencia entre 5.15 a 5.35 GHz, proveniente del LNA diseñado. Después, entra en un filtro que elimina el oscilador local entre 4.2 y 4.4 GHz y su imagen, con una potencia de 7 dBm.
Figura 37: Diagrama de bloques Tx
Después se hacen los respectivos ajustes con ayuda del atenuador y del desfasador. Después de estos 2 elementos viene un amplificador GALI-52, cuyo propósito es aumentar la potencia de la señal (ganancia de 20.8 a 900 MHz), cuya potencia en este punto es baja debido a las perdidas de los componentes, pero sin sobrepasar el valor de 0 dBm, que es la potencia de compresión de 1 dB del mezclador que viene después. A la salida del amplificador, en el caso de la recepción, se hace un down-conversion para obtener una señal de salida a 45 MHz aproximadamente, con una potencia entre los –70 y –10 dBm. En la recepción, la señal entra después a un conversor análogo-digital al final de la cadena. Para que el tratamiento de la señal sea adecuado en este CAD, la señal debe una potencia promedio de 10 dBm y no mayor a 16 dBm, para evitar que este se sature y se pierda información. Esto se logra por medio de un control
IEL2 – 03 – II – 42
42
automático de ganancia (AGC). Este último bloque hace parte del proyecto, pero fue desarrollado por otra persona en paralelo. Los circuitos se realizaron teniendo en cuenta todo lo anterior (Fig. 38). Además de los componentes mencionados anteriormente, se tiene en el centro de cada circuito, en la parte inferior, los circuitos de control para el atenuador y el desfasador. Estos consisten simplemente en 2 amplificadores operacionales en configuración no inversora, con una ganancia de 6 de tal forma que las señales de control de entrada, que van desde 0 hasta 2.5 V, son transformadas en señales que van desde 0 hasta 15 V. Los amplificadores utilizados para este propósito son los AD8614 de Analog Devices. Fueron escogidos debido a su bajo voltaje de offset (1mV), al igual que su alta salida de corriente (60 mA) y la posibilidad de alimentarlo hasta con 18 V sin ningún problema.
Figura 39: Circuitos implementados

IEL2 – 03 – II – 42
43
a)
b)
Figura 39: Mascaras, a)Rx, b)Tx.
IEL2 – 03 – II – 42
44
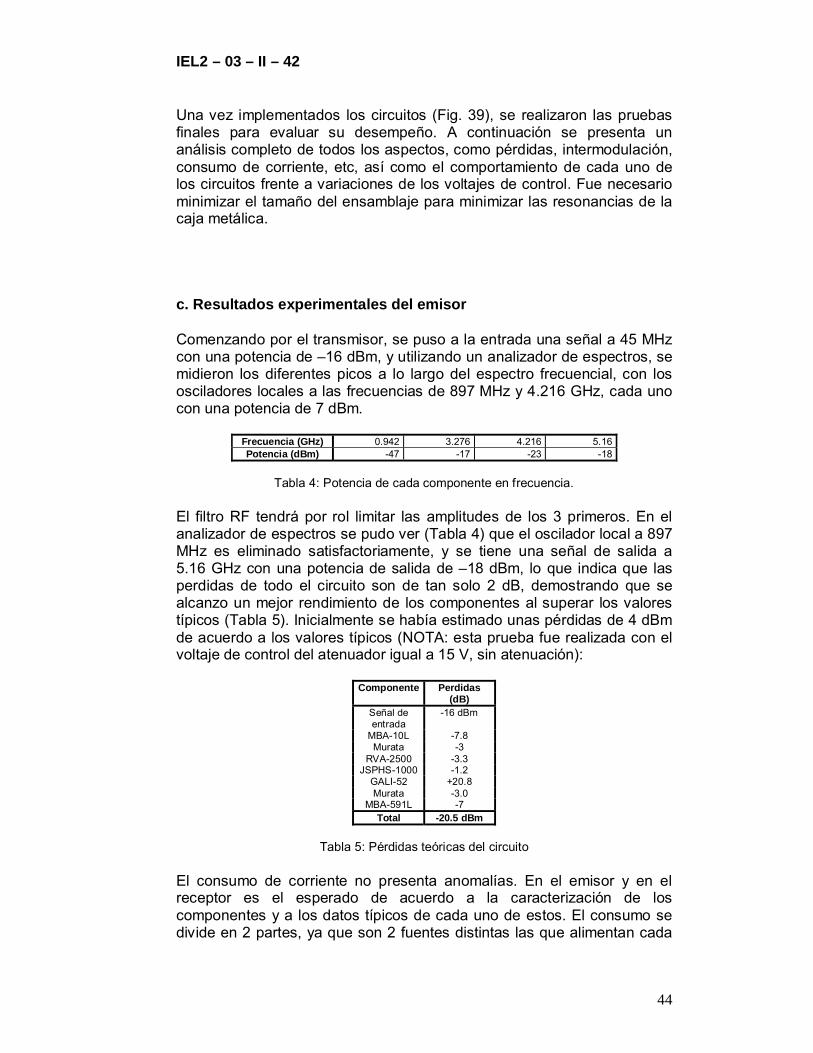
Una vez implementados los circuitos (Fig. 39), se realizaron las pruebas finales para evaluar su desempeño. A continuación se presenta un análisis completo de todos los aspectos, como pérdidas, intermodulación, consumo de corriente, etc, así como el comportamiento de cada uno de los circuitos frente a variaciones de los voltajes de control. Fue necesario minimizar el tamaño del ensamblaje para minimizar las resonancias de la caja metálica. c. Resultados experimentales del emisor Comenzando por el transmisor, se puso a la entrada una señal a 45 MHz con una potencia de –16 dBm, y utilizando un analizador de espectros, se midieron los diferentes picos a lo largo del espectro frecuencial, con los osciladores locales a las frecuencias de 897 MHz y 4.216 GHz, cada uno con una potencia de 7 dBm.
Frecuencia (GHz) 0.942 3.276 4.216 5.16 Potencia (dBm) -47 -17 -23 -18
Tabla 4: Potencia de cada componente en frecuencia.
El filtro RF tendrá por rol limitar las amplitudes de los 3 primeros. En el analizador de espectros se pudo ver (Tabla 4) que el oscilador local a 897 MHz es eliminado satisfactoriamente, y se tiene una señal de salida a 5.16 GHz con una potencia de salida de –18 dBm, lo que indica que las perdidas de todo el circuito son de tan solo 2 dB, demostrando que se alcanzo un mejor rendimiento de los componentes al superar los valores típicos (Tabla 5). Inicialmente se había estimado unas pérdidas de 4 dBm de acuerdo a los valores típicos (NOTA: esta prueba fue realizada con el voltaje de control del atenuador igual a 15 V, sin atenuación):
Componente Perdidas (dB)
Señal de entrada
-16 dBm
MBA-10L -7.8 Murata -3
RVA-2500 -3.3 JSPHS-1000 -1.2
GALI-52 +20.8 Murata -3.0
MBA-591L -7 Total -20.5 dBm
Tabla 5: Pérdidas teóricas del circuito
El consumo de corriente no presenta anomalías. En el emisor y en el receptor es el esperado de acuerdo a la caracterización de los componentes y a los datos típicos de cada uno de estos. El consumo se divide en 2 partes, ya que son 2 fuentes distintas las que alimentan cada
IEL2 – 03 – II – 42
45
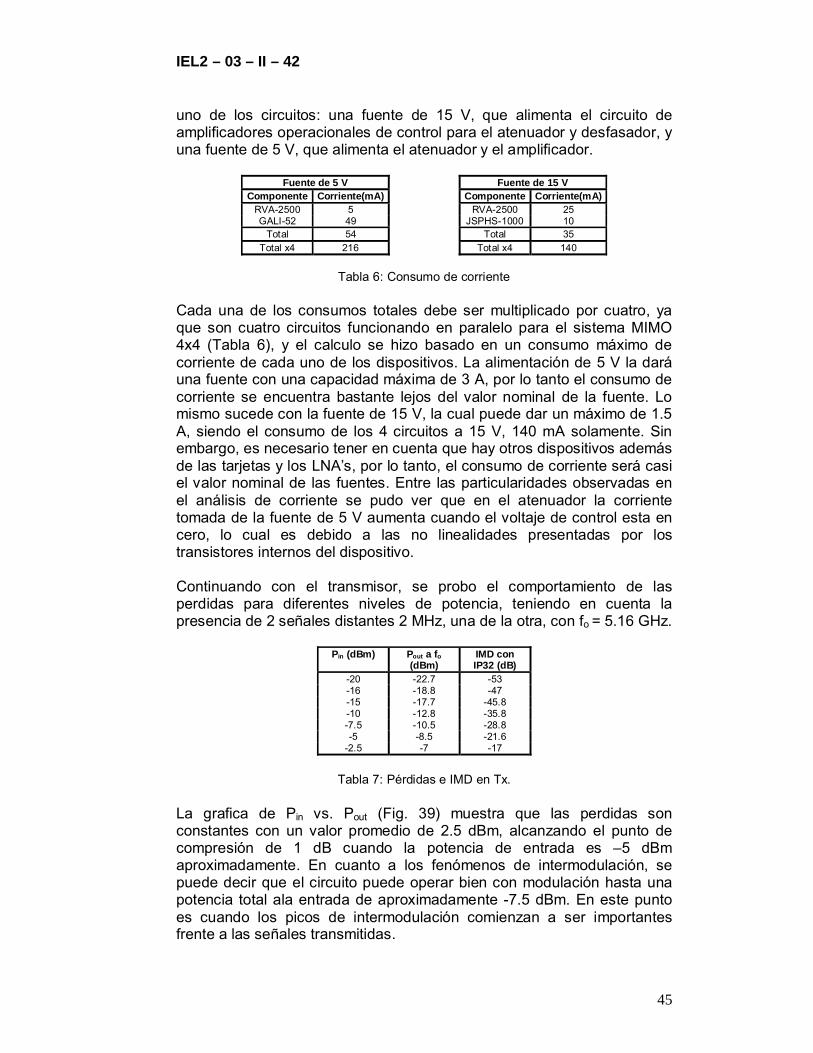
uno de los circuitos: una fuente de 15 V, que alimenta el circuito de amplificadores operacionales de control para el atenuador y desfasador, y una fuente de 5 V, que alimenta el atenuador y el amplificador.
Fuente de 5 V Fuente de 15 V Componente Corriente(mA) Componente Corriente(mA)
RVA-2500 5 RVA-2500 25 GALI-52 49 JSPHS-1000 10
Total 54 Total 35 Total x4 216 Total x4 140
Tabla 6: Consumo de corriente
Cada una de los consumos totales debe ser multiplicado por cuatro, ya que son cuatro circuitos funcionando en paralelo para el sistema MIMO 4x4 (Tabla 6), y el calculo se hizo basado en un consumo máximo de corriente de cada uno de los dispositivos. La alimentación de 5 V la dará una fuente con una capacidad máxima de 3 A, por lo tanto el consumo de corriente se encuentra bastante lejos del valor nominal de la fuente. Lo mismo sucede con la fuente de 15 V, la cual puede dar un máximo de 1.5 A, siendo el consumo de los 4 circuitos a 15 V, 140 mA solamente. Sin embargo, es necesario tener en cuenta que hay otros dispositivos además de las tarjetas y los LNA’s, por lo tanto, el consumo de corriente será casi el valor nominal de las fuentes. Entre las particularidades observadas en el análisis de corriente se pudo ver que en el atenuador la corriente tomada de la fuente de 5 V aumenta cuando el voltaje de control esta en cero, lo cual es debido a las no linealidades presentadas por los transistores internos del dispositivo. Continuando con el transmisor, se probo el comportamiento de las perdidas para diferentes niveles de potencia, teniendo en cuenta la presencia de 2 señales distantes 2 MHz, una de la otra, con fo = 5.16 GHz.
Pin (dBm) Pout a fo (dBm)
IMD con IP32 (dB)
-20 -22.7 -53 -16 -18.8 -47 -15 -17.7 -45.8 -10 -12.8 -35.8 -7.5 -10.5 -28.8 -5 -8.5 -21.6
-2.5 -7 -17
Tabla 7: Pérdidas e IMD en Tx.
La grafica de Pin vs. Pout (Fig. 39) muestra que las perdidas son constantes con un valor promedio de 2.5 dBm, alcanzando el punto de compresión de 1 dB cuando la potencia de entrada es –5 dBm aproximadamente. En cuanto a los fenómenos de intermodulación, se puede decir que el circuito puede operar bien con modulación hasta una potencia total ala entrada de aproximadamente -7.5 dBm. En este punto es cuando los picos de intermodulación comienzan a ser importantes frente a las señales transmitidas.

IEL2 – 03 – II – 42
46
a)
Pout a fo (dBm)
-25
-20
-15
-10
-5
0
-20 -17,5 -15 -12,5 -10 -7,5 -5 -2,5
Pin (dBm)
Pout
(dB
m)
b)
IMD con IP32 (dB)
-60
-50
-40
-30
-20
-10
0
-20 -17,5 -15 -12,5 -10 -7,5 -5 -2,5
Pin (dBm)
IMD
(dB
)
Figura 39: a) Pout vs. Pin, b) IMD
Una vez hecho esto, se observo el comportamiento ante variaciones en los voltajes de control del atenuador y del desfasador, con una potencia de entrada de –16 dBm. En el desfasador se observo que al variar el voltaje, la potencia de salida no se ve afectada, al igual que el desfasador. En cuanto al atenuador, se pudieron recolectar los siguientes datos:

IEL2 – 03 – II – 42
47
Atenuador
(V) Pout a fo (dBm)
IMD con IP32 (dB)
15 -18.5 -47.5 12.5 -18.8 -47.7 10 -19.6 -48 7.5 -22.4 -48.8 5 -25.8 -49
2.5 -33.5 -48 0 -59 -
Tabla 8: Variaciones en potencia de salida e IMD según variaciones en el atenuador.
De aquí se puede concluir que la intermodulación no cambia con variaciones en el atenuador, ya que los picos de intermodulación son débiles. Esta IMD es, entonces, debida a los mezcladores de entrada. La curva 39b es entonces representativa de este componente. La variación del atenuador servirá a una base de datos del microcontrolador piloto para equilibrar las vías de MIMO 4x4. Esto es cierto también para el desfasador, aunque actualmente no se dispone de mediciones de fase con cambio de frecuencia.
Pout a fo (dBm)
-70
-60
-50
-40
-30
-20
-10
0
0 2,5 5 7,5 10 12,5 15
Atenuador (V)
Pout
(dB
m)
Figura 40: Pout vs. Voltaje sobre atenuador
A continuación se muestra una grafica obtenida del analizador de señales (Fig. 41), sobre la cual se prueba la intermodulación. Los demás picos que se pueden ver y que parecen aleatorios, son las señales GSM que hacen interferencia en la etapa de 942 MHz y luego son amplificadas y cambiadas de frecuencia hasta la banda ISM. El último paso, después de la caracterización de todos los aspectos del circuito, fue poner una señal de entrada con modulación QPSK para comprobar que la constelación sea correcta. Esta modulación es de “envolvente constante”, y la constelación será débilmente deformada, igual que con una señal próxima de la compresión y de la saturación.

IEL2 – 03 – II – 42
48
Ref -20 dBm Att 5 dB
1 RMAVG
A
*
*
2 MHz/Center 5.16 GHz Span 20 MHz
* RBW 100 kHz
VBW 1 MHz
SWT 20 ms
PRN
-120
-110
-100
-90
-80
-70
-60
-50
-40
-30
-20
SWP 20 of 20
1Marker 1 [T1 ]
-21.80 dBm
5.159006410 GHz
2
Delta 2 [T1 ]
-0.09 dB
2.019230769 MHz
3
Delta 3 [T1 ]
-47.62 dB
4.006410256 MHz
4
Delta 4 [T1 ]
-48.21 dB
-1.987179487 MHz
Figura 41: Señales transmitidas
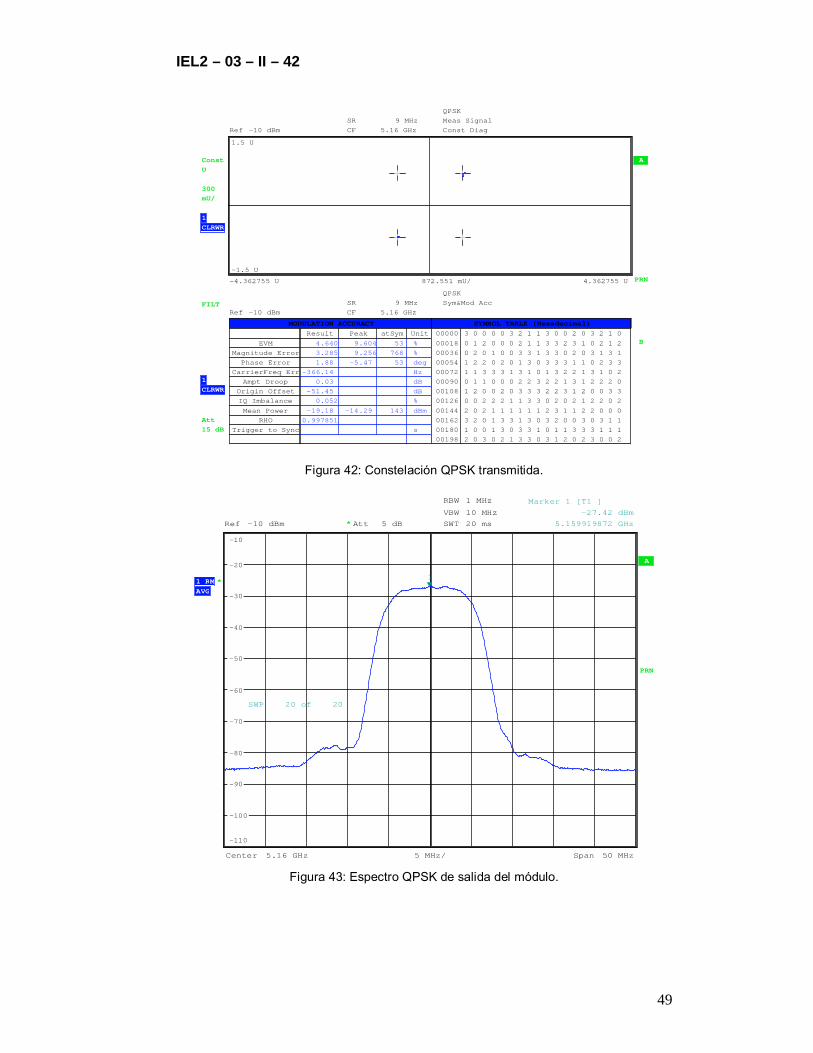
Se pudo verificar que el montaje no produce deformaciones de la constelación, con una potencia de entrada de –16 dBm (Fig. 42), ya que el IMD tiene un valor promedio adecuado (35 dB). En el espectro se puede ver un poco de ACPR (Fig. 43), pero como se esperaba, es lo suficientemente pequeño como para no afectar la transmisión de la señal. El EVM fue medido (≤5%), pero deberá ser calificado con los sintetizadores realizado en otro proyecto.
IEL2 – 03 – II – 42
49
Ref -10 dBmSR 9 MHzCF 5.16 GHz
QPSKMeas SignalConst Diag
-4.362755 U 4.362755 U872.551 mU/
U
300mU/
1CLRWR
A Const
FILT
Att15 dB
Ref -10 dBmSR 9 MHzCF 5.16 GHz
QPSKSym&Mod Acc
1CLRWR
B
-1.5 U
1.5 U
PRN
MODULATION ACCURACYResult Peak atSym Unit
EVM 4.640 9.604 53 % Magnitude Error 3.285 9.256 768 % Phase Error 1.88 -5.47 53 deg
CarrierFreq Err -366.14 Hz Ampt Droop 0.03 dB
Origin Offset -51.45 dB IQ Imbalance 0.052 %
Mean Power -19.18 -14.29 143 dBmRHO 0.997851
Trigger to Sync s
SYMBOL TABLE (Hexadecimal)00000 3 0 0 0 0 3 2 1 1 3 0 0 2 0 3 2 1 0
00018 0 1 2 0 0 0 2 1 1 3 3 2 3 1 0 2 1 200036 0 2 0 1 0 0 3 3 1 3 3 0 2 0 3 1 3 100054 1 2 2 0 2 0 1 3 0 3 3 3 1 1 0 2 3 300072 1 1 3 3 3 1 3 1 0 1 3 2 2 1 3 1 0 200090 0 1 1 0 0 0 2 2 3 2 2 1 3 1 2 2 2 000108 1 2 0 0 2 0 3 3 3 2 2 3 1 2 0 0 3 300126 0 0 2 2 2 1 1 3 3 0 2 0 2 1 2 2 0 2
00144 2 0 2 1 1 1 1 1 1 2 3 1 1 2 2 0 0 000162 3 2 0 1 3 3 1 3 0 3 2 0 0 3 0 3 1 100180 1 0 0 1 3 0 3 3 1 0 1 1 3 3 3 1 1 100198 2 0 3 0 2 1 3 3 0 3 1 2 0 2 3 0 0 2
Figura 42: Constelación QPSK transmitida.
Ref -10 dBm Att 5 dB
A
*
*1 RMAVG
5 MHz/Center 5.16 GHz Span 50 MHz
RBW 1 MHz
VBW 10 MHz
SWT 20 ms
PRN
-110
-100
-90
-80
-70
-60
-50
-40
-30
-20
-10
SWP 20 of 20
1
Marker 1 [T1 ]
-27.42 dBm
5.159919872 GHz
Figura 43: Espectro QPSK de salida del módulo.
IEL2 – 03 – II – 42
50
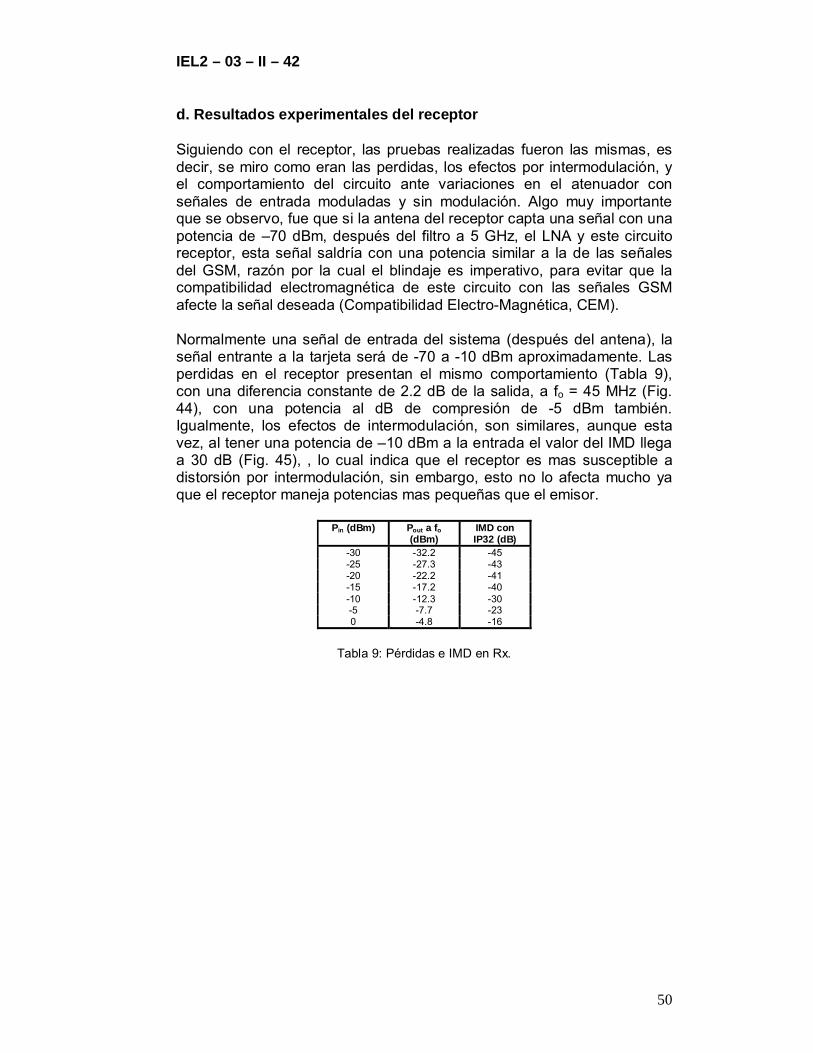
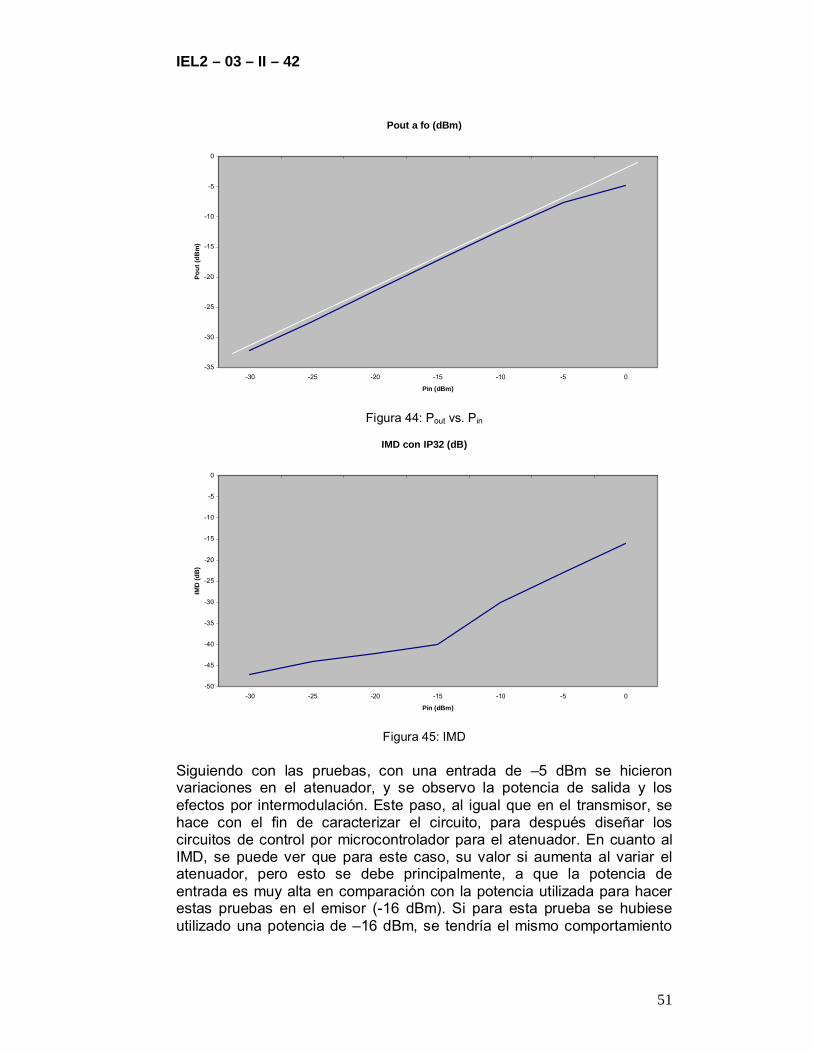
d. Resultados experimentales del receptor Siguiendo con el receptor, las pruebas realizadas fueron las mismas, es decir, se miro como eran las perdidas, los efectos por intermodulación, y el comportamiento del circuito ante variaciones en el atenuador con señales de entrada moduladas y sin modulación. Algo muy importante que se observo, fue que si la antena del receptor capta una señal con una potencia de –70 dBm, después del filtro a 5 GHz, el LNA y este circuito receptor, esta señal saldría con una potencia similar a la de las señales del GSM, razón por la cual el blindaje es imperativo, para evitar que la compatibilidad electromagnética de este circuito con las señales GSM afecte la señal deseada (Compatibilidad Electro-Magnética, CEM). Normalmente una señal de entrada del sistema (después del antena), la señal entrante a la tarjeta será de -70 a -10 dBm aproximadamente. Las perdidas en el receptor presentan el mismo comportamiento (Tabla 9), con una diferencia constante de 2.2 dB de la salida, a fo = 45 MHz (Fig. 44), con una potencia al dB de compresión de -5 dBm también. Igualmente, los efectos de intermodulación, son similares, aunque esta vez, al tener una potencia de –10 dBm a la entrada el valor del IMD llega a 30 dB (Fig. 45), , lo cual indica que el receptor es mas susceptible a distorsión por intermodulación, sin embargo, esto no lo afecta mucho ya que el receptor maneja potencias mas pequeñas que el emisor.
Pin (dBm) Pout a fo (dBm)
IMD con IP32 (dB)
-30 -32.2 -45 -25 -27.3 -43 -20 -22.2 -41 -15 -17.2 -40 -10 -12.3 -30 -5 -7.7 -23 0 -4.8 -16
Tabla 9: Pérdidas e IMD en Rx.
IEL2 – 03 – II – 42
51
Pout a fo (dBm)
-35
-30
-25
-20
-15
-10
-5
0
-30 -25 -20 -15 -10 -5 0
Pin (dBm)
Pout
(dB
m)
Figura 44: Pout vs. Pin
IMD con IP32 (dB)
-50
-45
-40
-35
-30
-25
-20
-15
-10
-5
0
-30 -25 -20 -15 -10 -5 0
Pin (dBm)
IMD
(dB
)
Figura 45: IMD
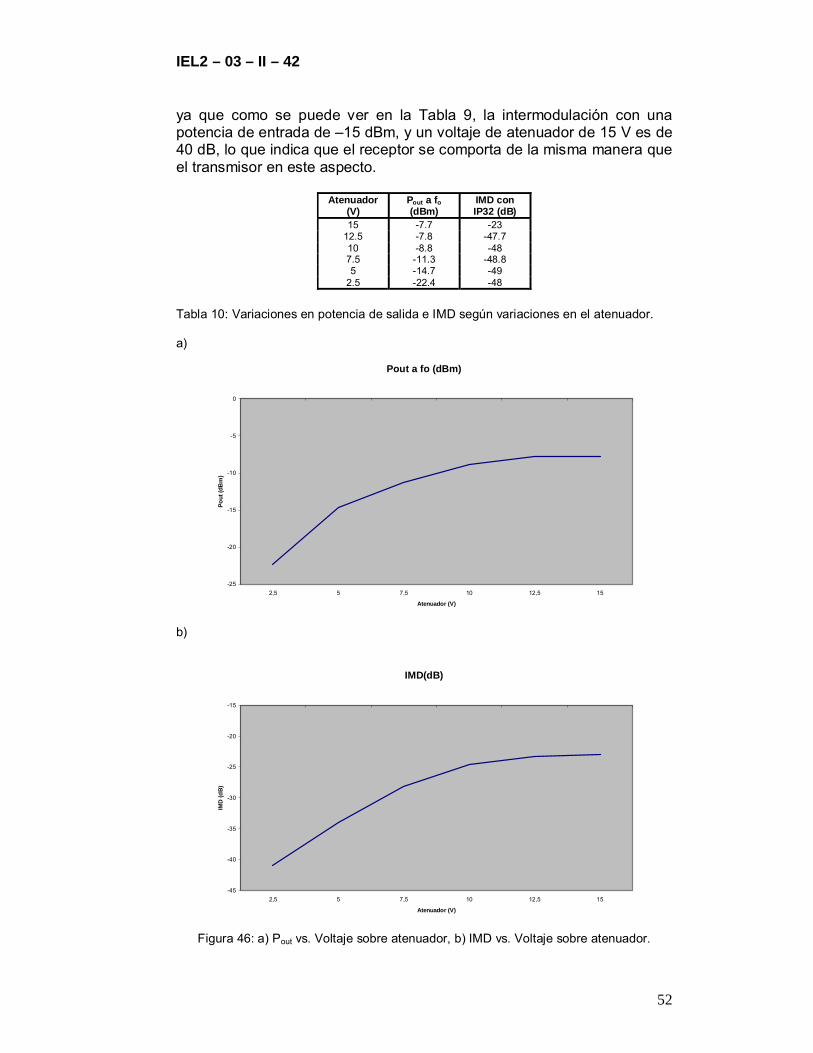
Siguiendo con las pruebas, con una entrada de –5 dBm se hicieron variaciones en el atenuador, y se observo la potencia de salida y los efectos por intermodulación. Este paso, al igual que en el transmisor, se hace con el fin de caracterizar el circuito, para después diseñar los circuitos de control por microcontrolador para el atenuador. En cuanto al IMD, se puede ver que para este caso, su valor si aumenta al variar el atenuador, pero esto se debe principalmente, a que la potencia de entrada es muy alta en comparación con la potencia utilizada para hacer estas pruebas en el emisor (-16 dBm). Si para esta prueba se hubiese utilizado una potencia de –16 dBm, se tendría el mismo comportamiento
IEL2 – 03 – II – 42
52
ya que como se puede ver en la Tabla 9, la intermodulación con una potencia de entrada de –15 dBm, y un voltaje de atenuador de 15 V es de 40 dB, lo que indica que el receptor se comporta de la misma manera que el transmisor en este aspecto.
Atenuador (V)
Pout a fo (dBm)
IMD con IP32 (dB)
15 -7.7 -23 12.5 -7.8 -47.7 10 -8.8 -48 7.5 -11.3 -48.8 5 -14.7 -49
2.5 -22.4 -48
Tabla 10: Variaciones en potencia de salida e IMD según variaciones en el atenuador. a)
Pout a fo (dBm)
-25
-20
-15
-10
-5
0
2,5 5 7,5 10 12,5 15
Atenuador (V)
Pout
(dB
m)
b)
IMD(dB)
-45
-40
-35
-30
-25
-20
-15
2,5 5 7,5 10 12,5 15
Atenuador (V)
IMD
(dB)
Figura 46: a) Pout vs. Voltaje sobre atenuador, b) IMD vs. Voltaje sobre atenuador.
IEL2 – 03 – II – 42
53
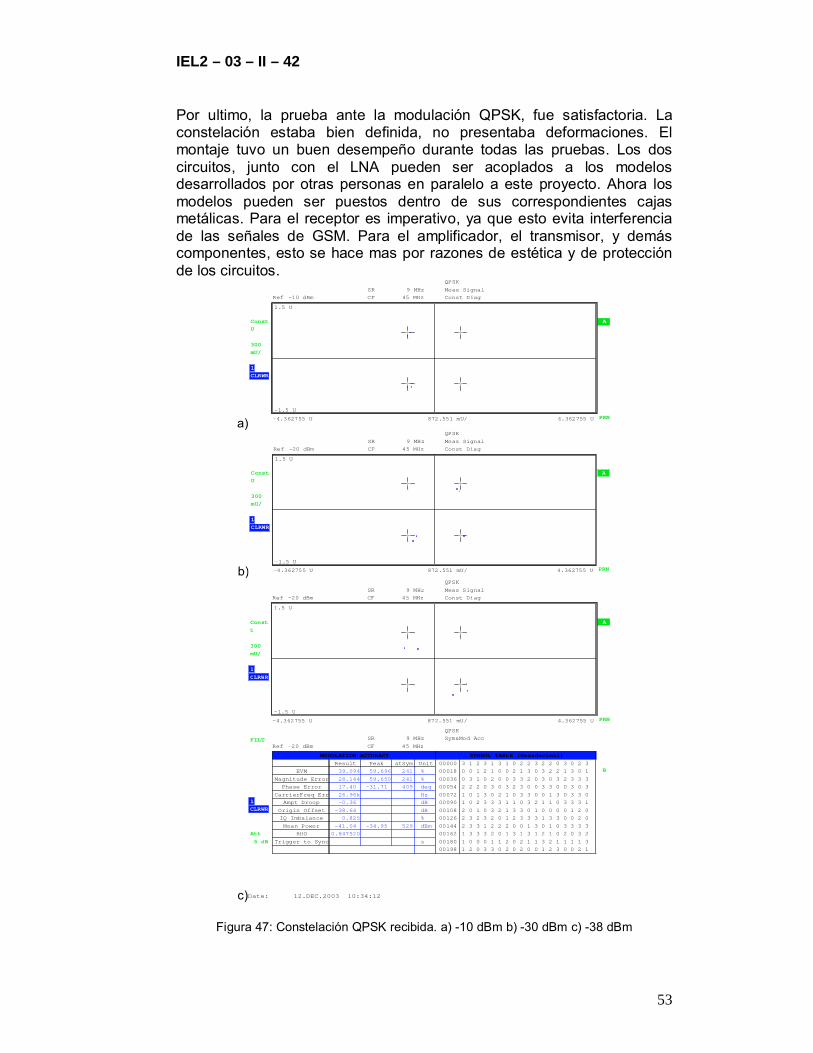
Por ultimo, la prueba ante la modulación QPSK, fue satisfactoria. La constelación estaba bien definida, no presentaba deformaciones. El montaje tuvo un buen desempeño durante todas las pruebas. Los dos circuitos, junto con el LNA pueden ser acoplados a los modelos desarrollados por otras personas en paralelo a este proyecto. Ahora los modelos pueden ser puestos dentro de sus correspondientes cajas metálicas. Para el receptor es imperativo, ya que esto evita interferencia de las señales de GSM. Para el amplificador, el transmisor, y demás componentes, esto se hace mas por razones de estética y de protección de los circuitos.
a)
Ref -10 dBmSR 9 MHzCF 45 MHz
QPSK
Meas SignalConst Diag
-4.362755 U 4.362755 U872.551 mU/
U
300mU/
1CLRWR
A Const
Q S
-1.5 U
1.5 U
PRN
b)
Ref -20 dBmSR 9 MHzCF 45 MHz
Meas SignalConst Diag
U
1CLRWR
A Const
QPSK
-4.362755 U 4.362755 U872.551 mU/
300mU/
-1.5 U
1.5 U
PRN
c)
Ref -20 dBm CF 45 MHzMeas SignalConst Diag
U A Const
Att 5 dB
Ref -20 dBm CF 45 MHzSym&Mod Acc
1CLRWR
B
SR 9 MHz
SR 9 MHz
QPSK
-4.362755 U 4.362755 U872.551 mU/
300mU/
FILT
QPSK
-1.5 U
1.5 U
1CLRWR
PRN
MODULATION ACCURACYResult Peak atSym Unit
EVM 39.094 59.696 241 % Magnitude Error 28.144 59.650 241 %
Phase Error 17.40 -31.71 409 degCarrierFreq Err 26.96k Hz
Ampt Droop -0.36 dB Origin Offset -38.64 dB IQ Imbalance 0.825 % Mean Power -41.04 -34.95 529 dBm
RHO 0.847520 Trigger to Sync s
SYMBOL TABLE (Hexadecimal)00000 3 1 2 3 1 3 1 0 2 2 3 2 2 0 3 0 2 300018 0 0 1 2 1 0 0 2 1 3 0 3 2 2 1 3 0 100036 0 3 1 0 2 0 0 3 3 2 0 3 0 3 2 3 3 300054 2 2 2 0 3 0 3 2 3 0 0 3 3 0 0 3 0 300072 1 0 1 3 0 2 1 0 3 3 0 0 1 3 0 3 3 000090 1 0 2 3 3 3 1 1 0 3 2 1 1 0 3 3 3 100108 2 0 1 0 3 2 1 3 3 0 1 0 0 0 0 1 2 000126 2 3 2 3 2 0 1 2 3 3 3 1 3 3 0 0 2 000144 2 3 3 1 2 2 2 0 0 1 3 0 1 0 3 3 3 300162 1 3 3 3 2 0 1 3 1 3 1 2 1 0 2 0 3 200180 1 0 0 0 1 1 2 0 2 1 1 3 2 1 1 1 1 300198 1 2 0 3 3 0 2 0 2 0 0 1 2 3 0 0 2 1
Date: 12.DEC.2003 10:34:12
Figura 47: Constelación QPSK recibida. a) -10 dBm b) -30 dBm c) -38 dBm
IEL2 – 03 – II – 42
54
7. CONCLUSIONES
• Se logro la caracterización de todos los elementos de forma satisfactoria. Cada uno de los componentes propuestos para la realización de este proyecto se logro acoplar a las necesidades planteadas, y a los demás componentes, de tal manera que un buen funcionamiento de los circuitos.
• Durante el diseño del amplificador e bajo ruido, se aprendieron
diversos conceptos y técnicas de implementación a 5 GHz para componentes activos que son de suma importancia a la hora de diseñar un dispositivo con unas características como las del LNA, en donde tareas tan simples como el diseño de una red de polarización, la correcta distribución de la masa, o la adecuada selección de los condensadores de acople pueden determinar si el amplificador funciona correctamente, si tiene el ancho de banda adecuado, si su estabilidad es satisfactoria, entre otros.
• Durante la realización del proyecto, se aprendió el manejo de los
equipos utilizados, con ayuda del personal técnico del laboratorio, el cual fue muy colaborador en todo momento, agilizando y facilitando el trabajo, teniendo en cuenta que este proyecto fue muy técnico y que su éxito dependía mucho de la autonomía de quien lo realizara, de tal forma que las pruebas finales de cada circuito se pudieron realizar sin inconvenientes y exitosamente, en menos tiempo que el pronosticado.
• Los circuitos realizados para la transmisión y recepción
presentaron un excelente funcionamiento durante las pruebas finales de desempeño frente a ruido, intermodulación, consumo de corriente, perdidas, entre otros, superando las expectativas en muchos aspectos, y logrando el acople con los demás componentes realizados en proyectos paralelos, junto con el amplificador a 5 GHz.
• Esta plataforma permitirá la aplicación de diferentes conceptos que
permitirán una investigación aplicada a las redes de comunicaciones, como lo son la diversidad espacial, la diversidad temporal, las antenas multireceptoras y el principio de multiflujo, gracias a que se basa en el principio de múltiples entradas y múltiples salidas (MIMO), además de que permitirá implementar sistemas de comunicación de muy alta capacidad, progresando aun mas en frecuencia en la tecnología de redes de WLAN.
IEL2 – 03 – II – 42
55
8. BIBLIOGRAFIA
• GONZALEZ, Guillermo Microwave Transistor Amplifier: Design and analysis Second edition Prentice Hall 1996
• BOURREAU, Daniel Les sous-ensembles analogique (SP2) de la plate-forme PALMYRE 2003
• PEDEN, Alain
Amplificateurs à l’état solide : Gains-Stabilité-Adaptation 2003
• PHONON CORPORATION General SAW 1996
• TOYOCOM® Technical Notes for TOYOCOM SAW Filters 2000
• MINI-CIRCUITS®
Surface Mount Monolithic amplifiers GAL-SERIES
• MINI-CIRCUITS®
Surface Mount Voltage Variable Attenuator RVA-2500
• MINI-CIRCUITS®
Surface Mount Phase Shifter JSPHS-1000
• BLUE-CELL™
Surface Mount Frequency Mixers
• MURATA® Dual SAW filters for EGSM and DCS 2003