Conteúdo - AEMS · Paulo: MAKRON Books, 1987. Winterle, .P etoresV e Geometria Analítica , São...
26
Transcript of Conteúdo - AEMS · Paulo: MAKRON Books, 1987. Winterle, .P etoresV e Geometria Analítica , São...

Conteúdo
1 O PLANO 31.1 Equação Geral do Plano . . . . . . . . . . . . . . . . . . . . . . . . . . . . 31.2 Determinação de um Plano . . . . . . . . . . . . . . . . . . . . . . . . . . . 71.3 Equação Paramétrica do Plano . . . . . . . . . . . . . . . . . . . . . . . . 111.4 Ângulo de Dois Planos . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 13
1.4.1 Planos Perpendiculares . . . . . . . . . . . . . . . . . . . . . . . . . 141.4.2 Plano Paralelos . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 16
1.5 Paralelismo e Perpendicularismo entre Reta e Plano . . . . . . . . . . . . . 171.6 Reta contida em Plano . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 181.7 Interseção de Dois Plano . . . . . . . . . . . . . . . . . . . . . . . . . . . . 191.8 Interseção de Reta com Plano . . . . . . . . . . . . . . . . . . . . . . . . . 20
2 DISTÂNCIAS 212.1 Distância entre dois pontos . . . . . . . . . . . . . . . . . . . . . . . . . . . 212.2 Distância de um Ponto a uma Reta . . . . . . . . . . . . . . . . . . . . . . 212.3 Distância de Ponto a Plano . . . . . . . . . . . . . . . . . . . . . . . . . . 222.4 Distância entre Duas Retas . . . . . . . . . . . . . . . . . . . . . . . . . . 22
2.4.1 Retas Concorrentes . . . . . . . . . . . . . . . . . . . . . . . . . . . 222.4.2 Retas Paralelas . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 23
3 COORDENADAS POLARES 243.1 Mudança de Coordenadas . . . . . . . . . . . . . . . . . . . . . . . . . . . 24
3.1.1 Mudança de Coordenadas Cartesianas para Polares . . . . . . . . . 243.1.2 Mudança de Coordenadas Polares para Cartesianas . . . . . . . . . 26
1

GEOMETRIA ANALÍTICA II
Ementa: O plano. Distâncias. Coordenadas polares. Cônicas. Superfícies Quádricas.
Bibliogra�a Básica:Boulos, P. Camargo, I. Geometria Analítica - Um Tratamento Vetorial, São
Paulo: MAKRON Books, 1987.Winterle, P. Vetores e Geometria Analítica, São Paulo, MAKRON Books, 2000.Caroli, A. Callioli, C.A. Matrizes, Vetores e Geometria Analítica: Teoria e
Exercícios, Nobel, São Paulo,1984.
Bibliogra�a Complementar:
Murdoch, David C. Geometria Analítica. Editora LTC, Rio de Janeiro, 1980.Kletenik, D. Problemas de Geometria Analítica. Editora Mir Moscu, Belo Hori-
zonte, 1967.Machado, A. S.Álgebra Linear e Geometria Analítica. Editora Atual, São Paulo,
1982.Riguetto, A. Vetores e Geometria Analítica. Editora IBLC. São Paulo, 1988.
Professor Ms. Renan Fernandes Capellette
2

Capítulo 1
O PLANO
1.1 Equação Geral do Plano
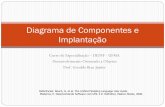
Seja um vetor formado pelos pontos A (x1, y1, z1) e P (x, y, z) pertencentes a um plano πe um vetor
→n= (a, b, c) normal (ortogonal) ao plano, como ilustra a �gura abaixo:
Qualquer vetor→AP representado em π (ou seja A e P ∈ π) é ortogonal a →n, então:
→n ×
→AP = 0
→n × (P − A) = 0
(a, b, c)× (x− x1, y − y1, z − z1) = 0
ax+ by + cz − ax1 − by1 − cz1 = 0
Assim, a equação geral do plano π é:
ax+ by + cz + d = 0
onde d = −ax1 − by1 − cz1
Observações:
3

• (i) Assim, como→n é um vetor normal, qualquer vetor k
→n, k 6= 0, é normal ao plano.
• (ii) Considere a equação geral do plano π : 3x+ 2y − z + 1 = 0 os componentes dovetor normal
→n ao plano π é (3, 2,−1).
• (iii) Para obter pontos de um plano dado por uma equação geral do plano, bastaatribuir valores aleatórios a duas variáveis e calcular. Tome o exemplo anterior efaça x = 4 e y = −2, tem-se
3(4) + 2(−2)− z + 1 = 0
z = 9
portanto, o ponto A(4,−2, 9) pertence a este plano
Exercícios Resolvidos:
1 - Obter um equação geral do plano π que passa pelos ponto A(2,−1, 3) e tem→n= (3, 2,−4) como vetor normal.
Solução:
Como→n é normal ao plano tem-se
3x+ 2y − 4z + d = 0
Como A é um ponto do plano, suas coordenadas devem satisfazer a equação:
3x+ 2y − 4z + d = 0
3(2) + 2(−1)− 4(3) + d = 0
6− 2− 12 + d = 0
−8 + d = 0
d = 8
Logo, uma equação geral do plano π é:
π : 3x+ 2y − 4z + 8 = 0
É possível calcular a equação do plano utilizando a seguinte equação:
4

→n ×
→AP= a(x− x1) + b(y − y1) + c(z − z1) = 0
Substituindo as coordenadas do ponto A(2,−1, 3) e →n= (3, 2,−4), tem-se
a(x− x1) + b(y − y1) + c(z − z1) = 0
3(x− 2) + 2(y − (−1)) + (−4)(z − 3) = 0
3x− 6 + 2y + 2− 4z + 12 = 0
3x+ 2y − 4z + 8 = 0
com isso a equação do plano é: π : 3x+ 2y − 4z + 8 = 0
2 - Escreva uma equação geral do plano π que passa pelo ponto A(2, 1, 3) e é paraleloao plano:
α : 3x− 4y − 2z + 5 = 0
Solução: Como os planos são paralelos, o vetor nomal→n do plano α também é normal
ao plano π, assim, a equação geral do plano π é da forma:
3x− 4y − 2z + d = 0
Como A pertence ao plano π, suas coordenadas devem veri�car a equação:
3x− 4y − 2z + d = 0
3(2)− 4(1)− 2(3) + d = 0
6− 4− 6 + d = 0
d = 4
Dessa forma uma equação de π é
π : 3x− 4y − 2z + 4 = 0
5

3 - A reta
r :
{x = 5 + 3ty = −4 + 2tz = 1 + t
é ortogonal ao plano π que passa pelo ponto A(2, 1,−2). Determinar uma equaçãogeral de π e representá-lo gra�camente.
Solução: Como r⊥π, qualquer vetor diretor de r é um vetor normal ao plano. Sendo→n= (3, 2, 1) um destes vetores, uma equação de π é da forma:
3x+ 2y + z + d = 0
Como A pertence ao plano π, deve-se veri�car:
3x+ 2y + z + d = 0
3(2) + 2(1) + (−2) + d = 0
6 + 2− 2 + d = 0
d = −6
Porntanto, uma equação de π é
π : 3x+ 2y + z − 6 = 0
Em resumo, para determinar a equação geral de um plano é necessário umponto do plano e um vetor normal a ele.
Exercício 1: Determinar a equação geral do plano que é paralelo ao plano π : 2x −3y − z + 5 = 0 e que contenha o ponto A(4,−2, 1).
Resposta: π1 : 2x− 3y − z − 13 = 0
Exercício 2: Determine a equação geral do plano π sabendo que ele é perpendicular areta:
r :
{x = 2 + 2ty = 1− 3tz = 4t
e que contenha o ponto A(−1, 2, 3)
Resposta: π : 2x− 3y + 4z − 4 = 0.
6

1.2 Determinação de um Plano
Anteriormente viu-se que a equação geral de um plano pode ser determinada por um ponto∈ ao plano π e um vetor normal a ele, porém, exitem outras maneiras de se determinarum plano, pois, existe apenas um plano que:
(i) Passa por um ponto A e é paralelo a dois vetores→v1 e
→v2 não colineares.
Neste caso:→n=
→v1 ×
→v2
Exemplo Resolvido: Determinar a equação geral do plano que passa pelo pontoA(1,−3, 4) e é paralelo aos vetores v1 = (3, 1,−2) e v2 = (1,−1, 1).
Solução: Um vetor normal ao plano obtido a partir dos vetores-base→v1 e
→v2 é:
→n=
→v1 ×
→v2=
∣∣∣∣∣∣∣→i
→j
→k
3 2 −11 −1 1
∣∣∣∣∣∣∣ = (−1,−5,−4)
Assim, um vetor normal ao plano é:→n= (−1,−5,−4)
A equação do plano é dada pela seguinte equação: −x − 5y − 4z + d = 0, e paraencontrar o valor de d, tem-se:
−x− 5y − 4z + d = 0
−(1)− 5(−3)− 4(4) + d = 0
−1 + 15− 16 + d = 0
d = 2
Assim, a equação do plano é: −x− 5y − 4z + 2 = 0 ou x+ 5y + 4z − 2 = 0
(ii) Passa por dois pontos A e B e é paralelo a um vetor→v não colinear ao vetor
→AB
Colinear: pertencem a mesma reta e/ou são paralelos.
Neste caso:→n=
→v ×
→AB.
Exemplo Resolvido: Determinar a equação geral do plano que passa pelos pontosA(1,−3, 4) e B = (3, 1,−2) e é paralelo ao vetor v = (1,−1, 1).
Solução: Um vetor normal ao plano obtido a partir dos vetores-base→AB= (2, 4,−6) e
→v é:
7

→n=
→v ×
→AB=
∣∣∣∣∣∣∣→i
→j
→k
2 4 −61 −1 1
∣∣∣∣∣∣∣ = (−2,−8,−6)
Assim, um vetor normal ao plano é:→n= (−2,−8,−6)
A equação do plano é dada pela seguinte equação: −2x − 8y − 6z + d = 0, e paraencontrar o valor de d, tem-se:
−x− 5y − 4z + d = 0
−2(1)− 8(−3)− 6(4) + d = 0
−1 + 15− 16 + d = 0
d = 2
Assim, a equação do plano é: −2x− 8y − 6z + 2 = 0 ou 2x+ 8y + 6z − 2 = 0
(iii) Passa por três pontos A B e C que não pertencem a mesma reta (não colineares).
Nesta caso:→n=
→AB ×
→AC.
Exemplo resolvido: Estabelecer a equação geral do plano determinado pelo pontosA(2, 1,−1), B(0,−1, 1) e C(1, 2, 1).
Solução: Os vetores base do plano são:→AB= (−2,−2, 2) e
→AC= (−1, 1, 2) e, portanto,
um vetor,normal do plano é:
→n=
→v1 ×
→v2=
∣∣∣∣∣∣∣→i
→j
→k
−2 −2 2−1 1 2
∣∣∣∣∣∣∣ = (−6, 2,−4)
Assim, o vetor normal ao plano é:→n= (−6, 2,−4)
A equação do plano é dada pela seguinte equação: −6x + 2y − 4z + d = 0, e paraencontrar o valor de d, tem-se:
−6x+ 2y − 4z + d = 0
−6(2) + 2(1)− 4(−1) + d = 0
−12 + 2 + 4 + d = 0
d = 6
8

Então a equação do plano é: −6x+ 2y − 4z + 6 = 0 ou 3x− y + 2z − 3 = 0
(iv) Contém duas retas concorrentes r1 e r2 (concorrentes: que se cruzam).
Neste caso os vetores diretores das retas r1 e r2 são v1 e v2 e vale→n=
→v1 ×
→v2 (vetor
normal ao plano).
Vetores diretores da reta: Tem a mesma direção e determinam o sentido da reta
(v) Contém duas retas paralelas r1 e r2. Neste caso tem-se que o vetor normal é:
→n=
→v1 ×
→A1A2
Assim v1 é um vetor diretor de r1 (ou r2) e A1 ∈ r1 e A2 ∈ r2.
Exemplo resolvido: Determinar a equação geral do plano que contém as retas
r1 :{y = 2x+ 1z = −3x− 2
e r2 :
{x = −1 + 2ty = 4tz = 3− 6t
Solução: Primeiramente deve-se determinar os vetores diretores das retas r1 e r2.
Vetor diretor de r1Dois pontos pertencentes a reta r1 são os pontos A1(0, 1,−2) e B1(1, 3,−5). Utilizando
o ponto A1, obtem-se as equações paramétricas de r1:
r1 :
{x = 0 + tay = 1 + tbz = −2 + tc
o vetor diretor da reta r1 é→v1= (a, b, c), cuja coordenadas são encontradas fazendo
t = 1 e utilizando as coordanas do ponto B.
a = x = 1
b = y − 1 = 3− 1 = 2
c = z + 2 = −5 + 2 = −3
Assim o vetor diretor de r1 é→v1= (1, 2,−3)
9

O vetor diretor da reta r2 é→v2= (2, 4,−6)
Observe que as retas são paralelas, pois→v2= 2
→v1
Um ponto pertencente a reta r2 é A2(−1, 0, 3).
Então:→
A1A2= (−1,−1, 5)
pode-se determinar o vetor normal→n ao plano em questão:
→n=
∣∣∣∣∣∣∣→i
→j
→k
1 2 −3−1 −1 5
∣∣∣∣∣∣∣ = (7,−2, 1)
Após alguns cálculos tem-se que a equação geral do plano é: 7x− 2y + z + 4 = 0
(vi) É determinado por uma reta r e um ponto B 6∈ r (não pertence a reta).
O vetor normal a este plano é determinado pela expressão:→n=
→v ×
→AB.
onde→v é um vetor diretor de r e A ∈ r.
Exemplo resolvido: Determine a equação do plano que contém a reta
r :
{x = 4y = 3
e o ponto B(−3, 2, 1)
Solução: Primeiramente deve-se encontrar o ponto A ∈ r e o vetor diretor→v .
Como não aparece a variável z o plano é paralelo a este eixo, assim, pode-se escolherqualquer valor real para representar z, neste caso, por conveniencia escolhe-se z = 0,assim, o ponto A(4, 3, 0) ∈ r .
O vetor diretor é:→v= (0, 0, 1)
→AB= (−7,−1, 1).
Cálculo do vetor normal.
→n=
→v1 ×
→v2=
∣∣∣∣∣∣∣→i
→j
→k
0 0 1−7 −1 1
∣∣∣∣∣∣∣ = (1,−7, 0)
Assim, um vetor normal ao plano é:→n= (1,−7, 0)
A equação do plano é dada pela seguinte equação: x−7y−0z+d = 0, e para encontraro valor de d, tem-se:
10

x− 7y + d = 0
4− 7(3) + d = 0
4− 21 + d = 0
d = 17
Assim, a equação do plano é: x− 7y + 17 = 0
Outra forma de obter a equação geral de um plano é utilizando a de�nição de vetorescoplanares, ou seja, o produto misto entre eles é nulo.
Considere o exemplo do item (iv), neste problema temos um ponto A(1,−3, 4) que éparalelo aos vetores v1 = (3, 1,−2) e v2 = (1,−1, 1). Assim, tome um ponto P (x, y, z) ∈ao plano, dessa forma os vetores
→AP,
→v1,→v2 são coplanares, ou seja, o produto misto entre
eles é igual a zero.
(→AP,
→v1,→v2) = 0
Ou seja: ∣∣∣∣∣∣x− 1 y + 3 z − 43 1 −21 −1 1
∣∣∣∣∣∣ = −x− 5y − 4z + 2
Dessa forma, a equação geral do plano é x+ 5y + 4z − 2 = 0
Este método é aplicável a todos os outros exemplos.
Exercício: Encontre a equação geral do plano dos exemplos anteriores embasando-sena de�nição de vetores coplanares.
1.3 Equação Paramétrica do Plano
Dado um ponto A(x0, y0, z0) petencente ao plano π e→u= (a1, b1, c1) e
→v= (a2, b2, c2) não
paralelos, porém, paralelos ao plano. Qualquer que seja o ponto P ∈ π, ou vetores→AP,
→u
e→v são coplanares.O ponto P (x, y, x) pertence ao plano se, e somente se existem números reais tais que:
11

P − A = h→u +t
→v
P = A+ h→u +t
→v
(x, y, z) = (x0, y0, z0) + h(a1, b1, c1) + t(a2, b2, c2)
onde h, t ∈ R, e os vetores u e v são vetores diretores do plano π.Dessa maneira a Equação Paramétrica do plano é:
(x, y, z) = (x0, y0, z0) + h(a1, b1, c1) + t(a2, b2, c2)
podendo ser escrita como: {x = x0 + a1h+ a2ty = y0 + b1h+ b2tz = z0 + c1h+ c2t
Exemplo: Seja o plano π que passa pelo ponto A(2, 2,−1) e é paralelo aos vetores→u= (2,−3, 1) e →v= (−1, 5,−3). Obter uma equação vetorial, um sistema de equaçõesparamétricas e uma equação geral de π.
Solução:
Equação vetorial: (x, y, z) = (2, 2,−1) + t(2,−3, 1) + v(−1, 5,−3)
Equações paramétricas {x = 2 = 2t− vy = 2− 3t+ 5vz = −1 + t− 3v
Para obter a equação geral do plano é necessário calcular o vetor normal ao plano ouutilizar a idéia de vetores coplanares, ou seja, o produto misto entre os vetores é igualzero.
Considere o ponto P (x, y, z) ∈ π, assim o vetor→AP= (P − A) = (x− 2, y − 2, z + 1)∣∣∣∣∣∣
x− 2 y − 2 z + 12 −3 1−1 5 −3
∣∣∣∣∣∣ = 0
9x− 5x− y + 6y + 10z − 3z − 6− 5 = 0
Assim a equação geral de π é: 4x+ 5y + 7z − 11 = 0.
Exercício 1: Dado um plano π determinado pelos pontos A(1,−1, 2), B(2, 1,−3) eC(−1,−2, 6) não alinhados.
Encontre um sistema de equações paramétricas e uma equação geral do plano π.
12

Dica: Encontrar os vetores diretores de π. Os pontos A, B e C ∈ π e não estãoalinhados, dessa maneira, de�ne-se os dois vetores diretores como segue:
→u=
→AB= (1, 2,−5) e
→v=
→AC= (−2,−1, 4).
os vetores acima são vetores diretores de π.
Resposta:
Equações paramétricas:
{x = 1 + h− 2ty = −1 + 2h− tz = 2− 5h+ 4t
Equação geral do plano: π : 3x+ 6y + 3z − 3 = 0 ou π : x+ 2y + z − 1 = 0.
Exercício 2: Dado o plano π de equação 2x − y − z + 4 = 0, determinar um sistemade equações paramétricas de π.
Dica: Encontrar três pontos distintos A,B e C não alinhados e encontrar os vetoresdiretores.
A(0, 0, 4), B(1, 0, 6) e C(0, 1, 3)
Equações paramétricas:
{x = hy = tz = 4 + 2h− t
1.4 Ângulo de Dois Planos
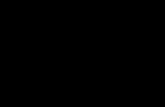
Dados dois planos π1 e π2 e n1 = (a1, b1, c1) e n2 = (a2, b2, c2) vetores normais aos planosπ1 e π2 respectivamente, como ilustra a �gura abaixo:
O Ângulo entre esses dois planos é o menor ângulo formado entre os seus respectivosvetores normais. Denominando este ângulo de θ, tem-se:
13

cos(θ) =
∣∣∣→n1 ×→n2
∣∣∣∣∣∣→n1
∣∣∣ ∣∣∣→n2
∣∣∣com 0 ≤ θ ≤ π
2
Exemplo: Determine o ângulo entre os planos:
π1 : 2x+ y − z + 3 = 0 e π2 : x+ y − 4 = 0
Solução:n1 = (2, 1,−1) e n2 = (1, 1, 0)
cos(θ) =|(2, 1,−1)× (1, 1, 0)||(2, 1,−1)| × |(1, 1, 0)|
cos(θ) =|2 + 1 + 0|√
(22 + 1 + (−1)2)×√
(12 + 12 + 02)
cos(θ) =|3|√
12×√
(12 + 12 + 02)
cos(θ) =
√3
2
θ = arccos
(√3
2
)θ =
π
6
1.4.1 Planos Perpendiculares
Dois planos são perpendiculares se, e somente se o ângulo formado entre seus respectivosvetores diretores for igual a noventa graus (θ = 90◦), ou seja,
π1⊥π2 ⇔→n1 ⊥
→n2⇔
→n1 ×
→n2= 0
14

Exemplo: Veri�que se os planos
π1 : 3x+ y − 4z + 2 = 0 e π2 : 2x+ 6y + 3z = 0
ou
π1 : x+ y − 4 e π2 :
{x = 2− h+ 2ty = h+ tz = t
são perpendiculares.
Solução:
(i) π1 : 3x+ y − 4z + 2 = 0 e π2 : 2x+ 6y + 3z = 0
→n1= (3, 1,−4) e →n2= (2, 6, 3) são vetores normais aos planos π1 e π2 respectivamente.
→n1 ×
→n2 = (3, 1,−4)× (2, 6, 3)
→n1 ×
→n2 = 3.2 + 1.6 + (−4).3
→n1 ×
→n2 = 0
Portanto os planos π1 e π2 são perpendiculares.
(ii) π1 : x+ y − 4 e π2 :
{x = 2− h+ 2ty = h+ tz = t
Em π1 tem-se o vetor normal→n1= (1, 1, 0) .
Porém em π2 tem-se os vetores diretores:→u= (−1, 1, 0) e
→v= (2, 1, 1), através do
produto misto entre eles determina-se o vetor normal ao plano π2.
→n2=
→u × →v=
∣∣∣∣∣∣∣→i
→j
→k
−1 1 02 1 1
∣∣∣∣∣∣∣ = (1, 1,−3)
15

Assim:
→n1 ×
→n2 = (1, 1, 0)× (1, 1,−3)
→n1 ×
→n2 = 1.1 + 1.1 + 0.(−3)
→n1 ×
→n2 = 2 6= 0
portanto os planos π1 e π2 não são perpendiculares.
1.4.2 Plano Paralelos
Considere os planos π1 e π2, estes planos serão paralelos se, e somente se, seus respectivosvetores normais forem paralelos:
π1//π2 ⇔→n1 //
→n2 portanto
a1a2
=b1b2
=c1c2.
Dois planos são coincidentes se:
a1a2
=b1b2
=c1c2
=d1d2.
Porém, se a1 = a2, b1 = b2, c1 = c2 e d1 6= d2, os planos também são paralelos.
Exemplo: Calcule os valores de m e n para que o plano:
π1 : (2m− 1)x− 2y + nz − 3 = 0
seja paralelo ao plano
π2 : 4x+ 4y − z = 0
Solução:
Os vetores normais são:→n1= (2m− 1,−2, n) e →n2= (4, 4,−1).
2m− 1
4=−24
=n
−1,
isto é:
2m− 1
4= −1
2
m = −1
2
16

e
−n = −1
2
n =1
2
Assim os planos π1 : −2x− 2y +1
2z − 3 = 0 e π2 : 4x+ 4y − z = 0 são paralelos.
Note que:→n1= −
1
2
→n2
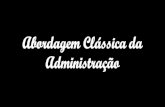
1.5 Paralelismo e Perpendicularismo entre Reta e Plano
Considere uma reta r na direção de um vetor→v e um plano π, seja
→n o vetor normal ao
plano, como ilustram as �guras abaixo:
(i) Se r//π ⇔→v ⊥ →n⇒→v × →n= 0
(ii) Se r⊥π ⇔→v // →n⇒→v= α→n
Exemplo: A reta r :
{x = 1 + 2ty = −3tz = t
é paralela ao plano π : 5x+ 2y − 4z − 1 = 0?
Se a reta é paralela ao plano, implica que o vetor diretor da reta r,→v= (2,−3, 1) é
ortogonal ao vetor normal→n= (5, 2,−4) veja:
(2,−3, 1)× (5, 2,−4) = 0.
17

Porém, esta mesma reta é perpendicular ao plano π1 : 4x − 6y + 2z − 5 = 0, pois ovetor diretor
→v= (2,−3, 1) de r é paralelo ao vetor nomal
→n1= (4,−6, 2) de π, veja:
→v=
1
2
→n1
para isso basta dividir as componente de→v e
→n1:
(2
4=−3−6
=1
2
)=
(1
2=
1
2=
1
2
).
1.6 Reta contida em Plano
Uma reta r esta contida em uma plano π se:
(i) Dois pontos A e B da reta r pertencerem ao plano π, ou
(ii) Dado vetor diretor→v da reta r e o vetor normal
→n do plano π satisfazer a seguinte
igualdade:
→v × →n= 0
ou seja, se r está contida em π o vetor diretor de r é normal ao vetor normal de π.
Exemplo: Determinar os valores de m e n para que a reta:
r :
{x = 3 + ty = −1− tz = −2− t
esteja contida no plano π : 2x+my + nz − 5 = 0
Solução:Fazendo t = 0 e t = 1 e substituindo na equação paramétrica de r obtem-se os pontos
A(3,−1,−2) e B(4,−2,−3), e substituindo na equação do plano tem-se o seguinte sistemalinear: {
2(3) +m(−1) + n(−2)− 5 = 02(4) +m(−2) + n(−3)− 5 = 0
donde m = 3 n = −1.
Observação: Se a reta esta contida no plano, então os pontos da reta pertencem aoplano, portanto eles devem satisfazem a igualdade da equação geral do plano.
18

1.7 Interseção de Dois Plano
A interseção de dois planos não paralelos é uma reta r cuja equações reduzidas ou para-métricas deve-se determinar.
Para determinar uma reta é necessário conhecer dois de seus pontos, ou um ponto eum vetor diretor de r.
Exemplo: Consideremos os planos não paralelos
π1 : 5x− y + z − 5 = 0 e π2 : x+ y + 2z − 7 = 0
Um ponto da reta determinada pela intereseção entre os dois planos, é o ponto cujacoordenadas satisfazem o sistema{
5x− 2y + z + 7 = 03x− 3y + z + 4 = 0
Resolvendo o sistema, tem-se in�nitas soluções em função de x.{y = −2x− 3z = −9x− 13
ou seja, a solução acima são as equações reduzidas da reta obtida pela intersecçãodos planos π1 e π2. Seus pontos são:
(x, y, z) = (x,−2x− 3,−9x− 13)
Para determinar as equações paramétricas da reta r atribui-se dois valores distintospara x de modo a determinar os pontos A e B, assim se x = 0 e x = 1, tem-se respecti-vamente A(0,−3,−13) e B(1,−5,−22), com isso é possível determinar o vetor diretor dareta r:
→v=
→AB= B − A = (1,−2,−9)
As equações paramétricas de r utilizando o ponto A e o vetor diretor são:
r :
{x = ty = −3− 2tz = −13− 9t
19

1.8 Interseção de Reta com Plano
Neste caso deseja-se encontrar um ponto da reta r em comum com o plano π.
Exemplo 1: Determinar o ponto de interseção da reta r com o plano π, onde:
{x = −1 + 2ty = −1 + 3tz = 4− 2t
e π : 2x− y + 3z − 4 = 0
Solução:
Qualquer ponto de r é da forma: (x, y, z) = (−1 + 2t, 5 + 3t, 3− t), estas coordenadasdeve satisfazer a equação do plano, assim, este ponto será a interseção entre r e π:
2x− y + 3z − 4 = 0
2(2t− 1)− (5 + 3t) + 3(3− t)− 4 = 0
donde resulta t = −1.
Substituindo esses valores nas equações paramétricas de r tem-se as coordenadas dainterseção de r com π.
r ∩ π = (−3, 2, 4)
Exemplo 2: Determinar a interseção da reta r com o plano π onde:
r :
{x− 2y − 2z + 2 = 02x+ y − z = 0
e π : x+ 3y + 2z − 5 = 0
Nesse caso deve-se solucionar o sistema:{x− 2y − 2z + 2 = 02x+ y − z = 0x+ 3y + 2z − 5 = 0
obtendo-se x = 2, y = −1 e z = 3.
Logo a interseção (I) é I(2,−1, 3).
20

Capítulo 2
DISTÂNCIAS
2.1 Distância entre dois pontos
A distância d entre dois pontos P1(x1, y1, z1) e P2(x2, y2, z2) é dada pela expressão:
∣∣∣ →P1P2
∣∣∣ = P2 − P1 = (x2 − x1, y2 − y1, z2 − z1)
d(P1, P2) =
√(x2 − x1)2 + (y2 − y1)2 + (z2 − z1)2
Exemplo: Calcular a distância entre P1(2,−1, 3) e P2(1, 1, 5).
d(P1, P2) =
√(1− 2)2 + (1− (−1))2 + (5− 3)2 =
√9 = 3
2.2 Distância de um Ponto a uma Reta
Para calcular a distância de um ponto P a uma reta r utiliza-se a expressão:
d(P, r) =
∣∣∣→v × →AP∣∣∣∣∣∣→v ∣∣∣
onde→v é o vetor diretor da reta r e A e um ponto petencente a reta.
Exemplo: Calcular a distância do ponto P (2, 1, 4) à reta
21

r :
{x = −1 + 2ty = 2− tz = 3− 2t
Soluçao: A reta r passa pelo ponto A(−1, 2, 3) e tem direção do vetor→v= (2,−1,−2).
O vetor→AP é (3,−1, 1).
→v ×
→AP=
∣∣∣∣∣∣∣→i
→j
→k
2 −1 −23 −1 1
∣∣∣∣∣∣∣ = (−3,−8, 1)
Assim:
d(P, r) =|(−3,−8, 1)||(2,−1,−2)|
=
√(−3)2 + (−8)2 + 12√22 + (−1)2 + (−2)2
=
√74
3u.c.
2.3 Distância de Ponto a Plano
A distância de um ponto P0 a um plano π, ou seja d(P0, π) é dado pela expressão:
d(P0, π) =|ax0 + by0 + cz0 + d|√
a2 + b2 + c2
onde (a, b, c) são as coordenadas do vetor normal→n.
Exemplo: Calcular a distância do ponto P0(4, 2,−3) ao planoπ : 2x+3y− 6z+3 = 0
Solução:
d(P0, π) =|2(4) + 3(2)− 6(−3) + 3|√
22 + 32 + (−6)2= 5
2.4 Distância entre Duas Retas
2.4.1 Retas Concorrentes
A distância d entre duas retas r e s concorrentesé nula, por de�nição.
22

2.4.2 Retas Paralelas
A distância entre duas retas paralelas se reduz ao cálculo da distância de um ponto a umareta.
A fórmula apresentada anteriormente é:
d(r, s) =
∣∣∣→v × →AP∣∣∣∣∣∣→v ∣∣∣
onde→v é o vetor diretor da reta e A e um ponto desta mesma reta, P é um ponto
pertencente a outra reta.
Exemplo: Calcular a distância entre as retas:
r :{y = −2x+ 3z = 2x
e s :
{x = −1− 2ty = 1 = 4tz = −3− 4t
Solução: O vetor diretor da reta s é→v2= (−2, 4,−4) e A(3, 2,−1) um ponto pertencente
a esta reta. P (0, 3, 0) é um ponto ∈ r, então→AP= (1, 2, 3).
→v ×
→AP=
∣∣∣∣∣∣∣→i→j
→k
1 2 32 4 −4
∣∣∣∣∣∣∣ = (−20,−2, 8)
d(r, s) =
√(−20)2 + (−2)2 + 82√(−2)2 + 42 + (−4)2
d(r, s) =
√400 + 4 + 64√4 + 16 + 16
d(r, s) =
√468
36
d(r, s) =6√13
6
d(r, s) =√13u.c.
23

Capítulo 3
COORDENADAS POLARES
3.1 Mudança de Coordenadas
3.1.1 Mudança de Coordenadas Cartesianas para Polares
Vimos anteriormente que dado um ponto P no plano, utilizando as coordenadascartesianas, ou retangulares é possível descrever sua localização no plano P (x, y), porémtambém representar este mesmo ponto a partir da distância da origem 0 do sistemacartesiano até o ponto P e o ângulo formado pelo eixo x, denotado P (r, θ), onde r é adistância da origem do plano até o ponto P e θ é o ângulo formado com o eixo x.
A partir das propriedades aplicadas no triângulo retângulo e o teorema de Pitágoras,tem-se:
r =√x2 + y2
θ = arctang(yx
)Exemplo 1: Transforme as coordenadas cartesianas em coordenadas polares os seguin-
tes pontos:
24

(a) P
(5√3
2
5
2
)(b) Q(1,−1).
Solução. (a)
r =
√√√√(5√3
2
)2
+
(5
2
)
r =
√25 · 34
+25
4
r =
√100
4r = 5
θ = arcTg
5√3
25
2
θ = arcTg
(5√3
2· 25
)θ = arcTg
(√3)= 60
Assim, P (5, 60◦)
Solução (b): De maneira análoga ao anterior, tem-se: Q(√2,−45◦)
Exemplo 2: A circunferência de centro na origem e raio 3 tem equação cartesianax2 + y2 = 9, encontre a equação polar:
Solução:Sabe-se:
x = rcos(θ)
y = rsen(θ)
assim,
(rcos(θ))2 + (rsen(θ))2 = 9
r2(cos2(θ) + sen2(θ)
)= 9
r2 = 9
r = 3
25

ou seja, a equação polar dessa circunferência é r = 3.
3.1.2 Mudança de Coordenadas Polares para Cartesianas
Seja P um ponto com coordenadas polares (r, θ). Considerando inicialmente 0 < θ <π
2do triângulo retangulo OPX , obtem-se as seguintes relações:
x = rcos(θ)
y = rsen(θ)
Se θ = 0 tem-se P no eixo das abscissas, portanto P tem coordenadas cartesianas(x, 0), para os casos em que θ =
π
2, tem-se P no eixo das ordenadas, portanto P tem
coordenadas cartesianas (0, y).
Exemplo: Se P tem coordenadas polares(−2, π
3
), então:
x = −2cos(π3) = −1
y = −2sen(−π3) = −
√3
logo P tem coordenadas cartesianas (−1,−√3).
26