
Controle por Modo Deslizante e suas Aplicaçõesjpaulo/Palestras/2016/Slides-Palestra-SMC-UFF... ·...
40
Controle por Modo Deslizante e suas Aplicações Jos ´ e Paulo V. S. da Cunha ⋆ 1 Departamento de Eletr ˆ onica e Telecomunicac ¸ ˜ oes Faculdade de Engenharia Universidade do Estado do Rio de Janeiro UFF, Niter ´ oi, RJ, 8 de dezembro de 2016
-
Upload
trinhtuong -
Category
Documents
-
view
212 -
download
0
Transcript of Controle por Modo Deslizante e suas Aplicaçõesjpaulo/Palestras/2016/Slides-Palestra-SMC-UFF... ·...

Controle por Modo Deslizantee suas Aplicações
Jose Paulo V. S. da Cunha ⋆
1Departamento de Eletronica e Telecomunicacoes
Faculdade de Engenharia
Universidade do Estado do Rio de Janeiro
UFF, Niteroi, RJ, 8 de dezembro de 2016

Organização
1. Introdução
2. Exemplo motivador:
(a) Controle linear
(b) Controle a estrutura variável
3. Fenômeno chattering
4. SMC baseado em observador
5. SMC para sistemas com atraso
6. Aplicações
7. Conclusão
Cunha, J. P. V. S. – Palestra na UFF – 2016 – p.1/39

Introdução
◮ Aplicações do controle automático:
⊲ aeroespaciais;
⊲ robótica;
⊲ eletrodomésticos;
⊲ processos industriais;
⊲ sistemas elétricos;
⊲ sistemas biomédicos;
⊲ etc.
◮ Benefícios do controle automático:
⊲ melhor desempenho transitório;
⊲ melhor desempenho em regime permanente;
⊲ reduz efeitos de incertezas e perturbações.
Cunha, J. P. V. S. – Palestra na UFF – 2016 – p.2/39

Introdução
◮ Algumas estratégias de controle:
⊲ lineares: PIDs, realimentação de estado, etc;
⊲ lineares robustos: H∞
, QFT, etc;
⊲ adaptativo;
⊲ neural;
⊲ nebuloso;
⊲ controle por aprendizado;
⊲ controle por modo deslizante, sliding mode control, SMCou
⊲ controle a estrutura variável, variable structure control,VSC e ...
⊲ vudu.
Cunha, J. P. V. S. – Palestra na UFF – 2016 – p.3/39
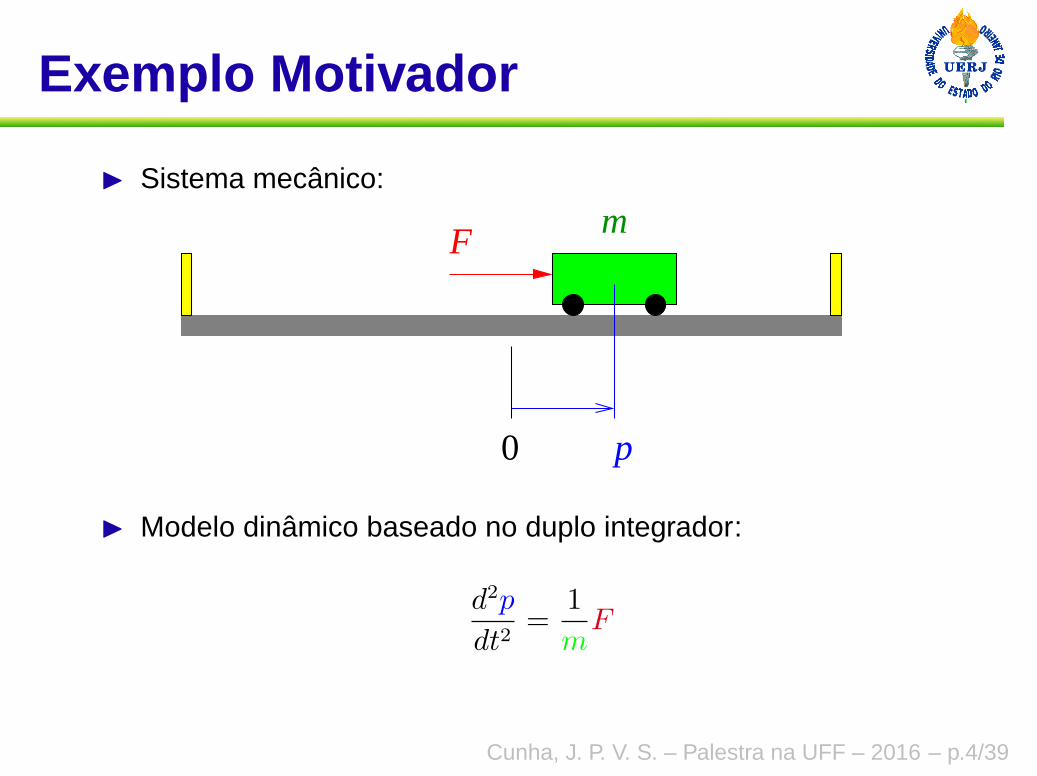
Exemplo Motivador
◮ Sistema mecânico:
0
mF
p
◮ Modelo dinâmico baseado no duplo integrador:
d2p
dt2=
1
mF
Cunha, J. P. V. S. – Palestra na UFF – 2016 – p.4/39

Exemplo Motivador
◮ Modelo no espaço de estado:
x =
[
0 1
0 0
]
x +
[
01m
]
F ,
y =[
1 0]
x ,
no qual:
⊲ Estado: x :=
[
p
p
]
,
⊲ Entrada: u :=[
F
]
,
⊲ Saída: y :=[
p
]
.
Cunha, J. P. V. S. – Palestra na UFF – 2016 – p.5/39

Exemplo Motivador
◮ Controle linear:
⊲ proporcional: sem amortecimento;
⊲ proporcional + derivativo (PD): amortece oscilações;
⊲ proporcional + integral + derivativo (PID): eliminaperturbações.
◮ Controle PD equivale à realimentação de estado:
u(t) = Kppref (t) − Kx(t) ,
com matriz de ganhos K :=[
Kp Kd
]
.
Cunha, J. P. V. S. – Palestra na UFF – 2016 – p.6/39
Exemplo Motivador
◮ Controle a estrutura variável:
⊲ usa realimentação de estado;
⊲ amortece oscilações;
⊲ rejeita perturbações;
⊲ imune a incertezas paramétricas.
◮ Leis de controle:
u =
{
u+(x, t) , se σ(x) > 0 ,
u−(x, t) , se σ(x) < 0 ,
ouu = −ρ(x, t) sgn(σ(x)) .
Cunha, J. P. V. S. – Palestra na UFF – 2016 – p.7/39

Exemplo Motivador
◮ Superfície de deslizamento:
σ(x) = Sx = 0 .
◮ Neste caso:σ(x) = p + λp .
◮ Quando σ(x) = 0 ,∀t ≥ t1 ≥ 0 , então trajetória obedece a
equação diferencial que independente dos parâmetros doobjeto controlado:
p(t) = e−λ(t−t1)p(t1) , ∀t ≥ t1 ≥ 0 ,
◮ Isto é invariância!
Cunha, J. P. V. S. – Palestra na UFF – 2016 – p.8/39

Exemplo Motivador
◮ Plano de fase:
u = −sgn(σ(x)) , σ(x) = x1 +1
3x2 .
−0,8 −0,6 −0,4 −0,2 0 0,2 0,4 0,6 0,8−1
−0,8
−0,6
−0,4
−0,2
0
0,2
0,4
0,6
0,8
1
x1(m)
x 2(m/s
)
t1
Cunha, J. P. V. S. – Palestra na UFF – 2016 – p.9/39

Fenômeno Chattering
◮ Modo deslizante ideal: chaveamento em frequência infinita.
◮ Chattering:
⊲ Chaveamento em frequência finita se deve a imperfeições:
⋆ atrasos;⋆ histerese;⋆ etc.
⊲ Pode causar:
⋆ perda de energia;⋆ desgaste de atuadores;⋆ ruído;⋆ erro de rastreamento;⋆ outras perdas de desempenho.
◮ Há remédios: (Utkin, Guldner & Shi 2009).
Cunha, J. P. V. S. – Palestra na UFF – 2016 – p.10/39

SMC Baseado em Observador
◮ Observador de estado para evitar chattering em VSC (Utkinet al. 2009)
◮ SMC por realimentação de saída:
⊲ Variable structure model-reference adaptive control(VS-MRAC) (Hsu, Araújo & Costa 1994);
⊲ Observador de alto ganho (HGO) robusto a incertezaspara VSC por realimentação de saída (Cunha, Costa,Lizarralde & Hsu 2009);
⊲ Diferenciadores exatos (Shtessel, Edwards, Fridman &Levant 2014, Hsu, Nunes, Oliveira, Peixoto, Cunha, Costa& Lizarralde 2011) ...
◮ SMC para sistemas com atraso longo: observadores emcascata (Coutinho, Oliveira & Cunha 2014).
Cunha, J. P. V. S. – Palestra na UFF – 2016 – p.11/39

SMC Baseado em Observador
+
−
+
+
+
++
−d(t)unom e
e = CM ζ
e
ζ
S(ε)
r
ρ
u
U σ
y
yM
G(s)
WM (s)
Observador
Modelo
Planta
Laço do modo deslizante ideal
−ρ sgn(σ)
Cunha, J. P. V. S. – Palestra na UFF – 2016 – p.12/39

SMC para Sistemas com Atraso
σsgn( )−ρ
ρ
d/m
d/md/m
d/md/m
d
xm^=x
Sξ^
xTξ( )σ
−+
−
−
+
+
u y
Atraso fracionário
Atraso
Observador
#m−1
#m
#1Observador
Observador
Planta
Laço do modo deslizante ideal
Cunha, J. P. V. S. – Palestra na UFF – 2016 – p.13/39

Aplicações
1. Experimentos com VSC + HGO
2. Controle de impedância/admitância:
◮ Exemplo: controle de admitância
3. Controle de sistemas navais:
◮ Controle de um USV
Cunha, J. P. V. S. – Palestra na UFF – 2016 – p.14/39

Experimentos com VSC + HGO
Sistema
de aquisição
de dados
Amplificador depotência
de sinaisCondicionador
ep =10,7y
u
Tensão do potenciômetro
o motorTensão para
Cremalheira
Carro
Trilho
A/D D/A
0 y
Cunha, J. P. V. S. – Palestra na UFF – 2016 – p.15/39

Experimentos com VSC + HGOm
0 1 2 3 4−20
−15
−10
−5
0
5
10
15
20
0 2 3 4−20
−15
−10
−5
0
5
10
15
20
t (s)
y, y
(
mm
)
1
Linearm
0 1 2 3 4−20
−15
−10
−5
0
5
10
15
20
0 1 2 3 4−20
−15
−10
−5
0
5
10
15
20
t (s)
y, y
(
mm
)
HGO + VSC
Cunha, J. P. V. S. – Palestra na UFF – 2016 – p.16/39

Experimentos com VSC + HGO
0 1 2 3 4−1,0
−0,5
0,0
0,5
1,0
t (s)
u (
V)
Linear
0 1 2 3 4−8
−5
0
5
8
t (s)
u (
V)
HGO + VSC
Cunha, J. P. V. S. – Palestra na UFF – 2016 – p.17/39

Controle de Impedância/Admitância
◮ Controle de impedância/admitância de carga ativa (Cunha &Costa 2016)
◮ Especificada por modelo de referência
◮ Admite-se polos instáveis e zeros de fase não-mínima
vl
il
YsZ
pi
si = k uc ci
iYs
+
−
Carga ativa Fonte
Controle de imped ancia:
Zl(s) = vl(s)
il(s)
il
vscv
v = k uc
vl
Yp sZv
Zs
Carga ativa Fonte
−
+
+
−
Controle de admit ancia:
Yl(s) = il(s)
vl(s)
Cunha, J. P. V. S. – Palestra na UFF – 2016 – p.18/39

Controle de Impedância/Admitância
◮ Controle por modelo de referência: Gm(s) = Gm1(s)Gm2(s)
ym
G (s)p
m2G (s)
m1G (s)
G (s)s
Controlador
r1
uc
kc
us
r1
ys
yr e−
+
y er u
+
−
+
+
Modelo de referência
Cunha, J. P. V. S. – Palestra na UFF – 2016 – p.19/39

Controle de Impedância/Admitância
◮ Controle adaptativo por modelo de referência (MRAC):
u(t) = θT (t)ω(t)
θ(t) = Γe(t)ω(t)
◮ Controle a estrutura variável por modelo de referência(VS-MRAC):
u = −ρ(t) sgn(e)
Cunha, J. P. V. S. – Palestra na UFF – 2016 – p.20/39
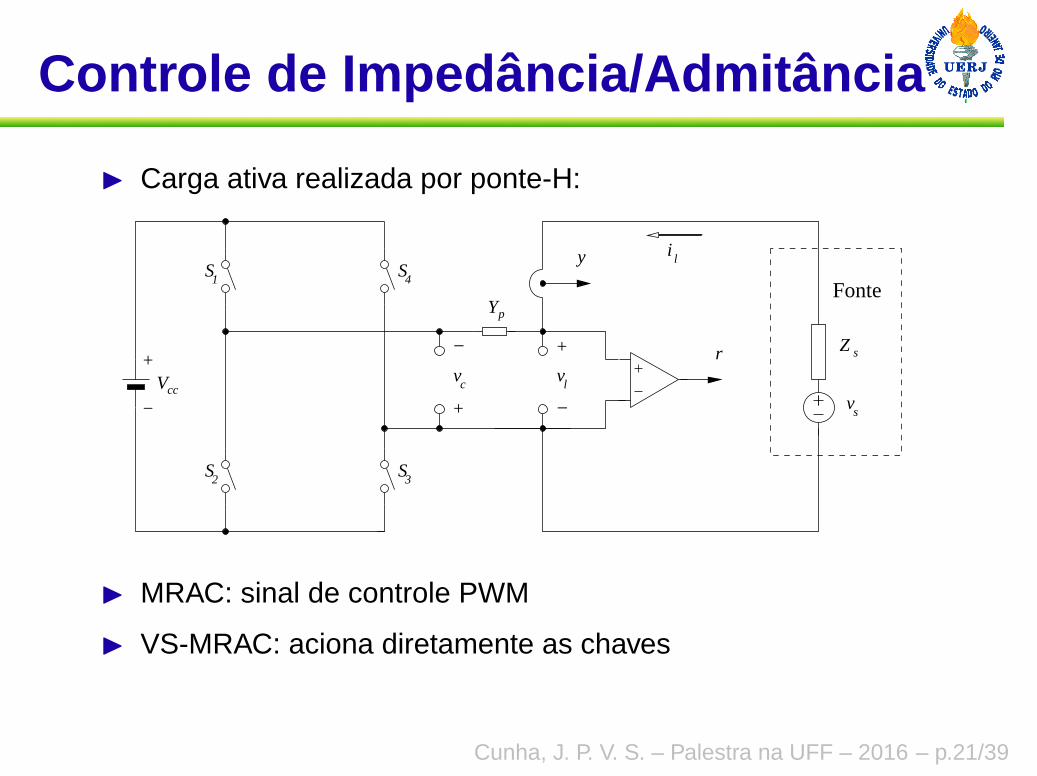
Controle de Impedância/Admitância
◮ Carga ativa realizada por ponte-H:
S1
S4
S3
S2
Vccv
c
Yp
vl
y
vs
sZ
il
+
−
−
+
r+
−
Fonte
◮ MRAC: sinal de controle PWM
◮ VS-MRAC: aciona diretamente as chaves
Cunha, J. P. V. S. – Palestra na UFF – 2016 – p.21/39

Exemplo: Controle de Admitância
◮ Carga passiva:
R1
R2
SL1
L1
L2
◮ Modelo de referência:
Gm2(s) = km
s2(s + 2πfc)
[s2 + 2ζ(2πfr) s + (2πfr)2]2
Gm1(s) =1
s + 2πfc
⊲ ζ = 0.2 , fr = 60 Hz , km = 2 kS rad2s2
⊲ fc = 300 HzCunha, J. P. V. S. – Palestra na UFF – 2016 – p.22/39

Exemplo: Controle de Admitância
0 0.10.02 0.04 0.06 0.080.01 0.03 0.05 0.07 0.09
0
−100
100
−50
50
time (s)
0 0.10.02 0.04 0.06 0.080.01 0.03 0.05 0.07 0.09
0
−100
100
0 0.10.02 0.04 0.06 0.080.01 0.03 0.05 0.07 0.09
0
−400
−200
200
400
0 0.10.02 0.04 0.06 0.080.01 0.03 0.05 0.07 0.09
0
−10
10
−5
5
Transit orio dos sinais do MRAC
9.9 9.92 9.94 9.96 9.989.91 9.93 9.95 9.97 9.99
0
−100
100
−50
50
time (s)
9.9 9.92 9.94 9.96 9.989.91 9.93 9.95 9.97 9.99
0
−100
100
9.9 9.92 9.94 9.96 9.989.91 9.93 9.95 9.97 9.99
0
−400
−200
200
400
9.9 9.92 9.94 9.96 9.989.91 9.93 9.95 9.97 9.99
0
−10
10
−5
5
Sinais do MRAC em regime
Cunha, J. P. V. S. – Palestra na UFF – 2016 – p.23/39

Exemplo: Controle de Admitância
0 0.10.02 0.04 0.06 0.080.01 0.03 0.05 0.07 0.09
0
−2
−1
−1.5
−0.5
time (s)
0 0.10.02 0.04 0.06 0.080.01 0.03 0.05 0.07 0.09
0
−0.006
−0.004
−0.002
0.002
0.004
0.006
0 0.10.02 0.04 0.06 0.080.01 0.03 0.05 0.07 0.09
0
−0.4
−0.2
0.2
−0.3
−0.1
0.1
0.3
Parametros do MRAC
Cunha, J. P. V. S. – Palestra na UFF – 2016 – p.24/39
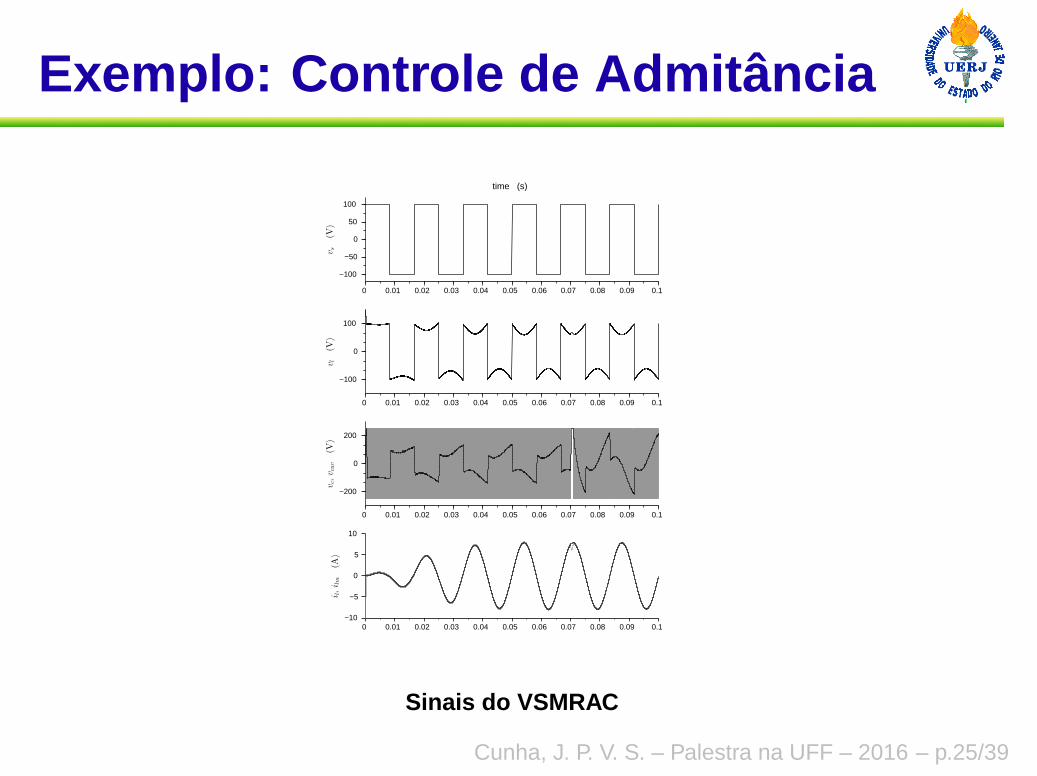
Exemplo: Controle de Admitância
0 0.10.02 0.04 0.06 0.080.01 0.03 0.05 0.07 0.09
0
−100
100
−50
50
time (s)
0 0.10.02 0.04 0.06 0.080.01 0.03 0.05 0.07 0.09
0
−100
100
0 0.10.02 0.04 0.06 0.080.01 0.03 0.05 0.07 0.09
0
−200
200
0 0.10.02 0.04 0.06 0.080.01 0.03 0.05 0.07 0.09
0
−10
10
−5
5
Sinais do VSMRAC
Cunha, J. P. V. S. – Palestra na UFF – 2016 – p.25/39

Controle de Sistemas Navais
◮ Características dos sistemas navais:
⊲ Modelo hidrodinâmico muito incerto;
⊲ Grandes variações de parâmetros (ex.: carga);
⊲ Perturbações ambientais: correntezas, ondas, ventos.
◮ SMC bastante vantajoso!
◮ Aplicações:
⊲ VS-MRAC para robôs submarinos (ROVs) (Cunha, Costa& Hsu 1995)
⊲ VSC para rumo (Arruda 2012)
⊲ VSC para rastreamento de trajetória de veículos desuperfície não tripulados (USVs) (Rosario & Cunha 2016)
Cunha, J. P. V. S. – Palestra na UFF – 2016 – p.26/39

Controle de um USV
Cunha, J. P. V. S. – Palestra na UFF – 2016 – p.27/39

Controle de um USV
◮ Barco:
⊲ Velocidade máxima: 0, 26 m/s ;
⊲ Comprimento: 0, 48 m ;
⊲ Massa: 1, 3 kg .
Cunha, J. P. V. S. – Palestra na UFF – 2016 – p.28/39

Controle de um USV
◮ Posição medida pelo sistema Vicon MX:
⊲ Quatro câmeras;
⊲ Frequência de amostragem até 1 kHz e precisão de 1 mm;
⊲ Unidade de processamento é ligada ao computador viaEthernet;
⊲ Software Vicon Tracker processa as imagens;
⊲ Usa LEDs praticamente infravermelhos, luz é refletida emmarcadores esféricos fixados no barco;
⊲ Kit de desenvolvimento integrado ao MATLAB.
◮ Microcontrolador Arduino aciona motores do barco;
◮ Comunicação sem fio ZigBee;
◮ Taxa de amostragem limitada a 30 Hz pelo ZigBee.
Cunha, J. P. V. S. – Palestra na UFF – 2016 – p.29/39

Controle de um USV
Cunha, J. P. V. S. – Palestra na UFF – 2016 – p.30/39

Experimentos com USV
0.2 0.4 0.6 0.8 1 1.2 1.4x (m)
-0.2
0
0.2
0.4
0.6
0.8
1
y (m
)
(a)
ReferênciaTrajetória
0 10 20 30t (s)
0
50
100
150
ψ (
grau
s)
(b)
ReferênciaÂngulo de rumo
Cunha, J. P. V. S. – Palestra na UFF – 2016 – p.31/39

Conclusão
◮ Controle por modo deslizante adequado a:
⊲ sistemas com parâmetros incertos;
⊲ sistemas sujeitos a perturbações;
⊲ invariância garante bom desempenho.
◮ Controle a estrutura variável:
⊲ adequado a atuadores chaveados (ex.: válvulassolenóides, eletrônica de potência);
⊲ simplicidade de implementação.
◮ Problemas:
⊲ chaveamentos em alta frequência;
⊲ chattering;
⊲ muito sensível a ruído de medição.
Cunha, J. P. V. S. – Palestra na UFF – 2016 – p.32/39

Bibliografia Sugerida
◮ Livro clássico: (Utkin 1978).
◮ Referências mais atuais: (Utkin 1992), (Edwards &Spurgeon 1998) e (Utkin et al. 2009).
◮ Livro com técnicas mais recentes: (Shtessel et al. 2014).
Cunha, J. P. V. S. – Palestra na UFF – 2016 – p.33/39

Refer encias
Arruda, J. W. O. (2012), ‘Controle automático de rumo de umaembarcação de superfície não tripulada’, Projeto deGraduação em Engenharia Eletrônica — UERJ, Rio deJaneiro. Disponível emhttp://www.lee.uerj.br/˜jpaulo/trabalhos-orientados.html.
Coutinho, C. L., Oliveira, T. R. & Cunha, J. P. V. S. (2014),‘Output-feedback sliding-mode control via cascade observersfor global stabilisation of a class of nonlinear systems withoutput time delay’, Int. J. Contr. 87(11), 2327–2337.
Cunha, J. P. V. S. – Palestra na UFF – 2016 – p.34/39

Refer encias
Cunha, J. P. V. S. & Costa, R. R. (2016), ‘Model-referenceimpedance and admittance control of linear systems’, Int. J.Adaptive Contr. Signal Process. 30(8–10), 1317–1332.
Cunha, J. P. V. S., Costa, R. R. & Hsu, L. (1995), ‘Design of a highperformance variable structure position control of ROV’s’, IEEEJ. Oceanic Eng. 20(1), 42–55.
Cunha, J. P. V. S., Costa, R. R., Lizarralde, F. & Hsu, L. (2009),‘Peaking free variable structure control of uncertain linearsystems based on a high-gain observer’, Automatica45(5), 1156–1164.
Cunha, J. P. V. S. – Palestra na UFF – 2016 – p.35/39

Refer encias
Edwards, C. & Spurgeon, S. K. (1998), Sliding Mode Control:Theory and Applications, Taylor & Francis Ltd., London.
Hsu, L., Araújo, A. D. & Costa, R. R. (1994), ‘Analysis and design ofI/O based variable structure adaptive control’, IEEE Trans. Aut.Contr. 39(1), 4–21.
Hsu, L., Nunes, E. V. L., Oliveira, T. R., Peixoto, A. J., Cunha, J. P.V. S., Costa, R. R. & Lizarralde, F. (2011), Output feedbacksliding mode control approaches using observers and/ordifferentiators, in L. Fridman, J. Moreno & R. Iriarte, eds,‘Sliding Modes after their First Decade of the 21st Century:State of the Art’, Springer-Verlag, pp. 269–292.
Cunha, J. P. V. S. – Palestra na UFF – 2016 – p.36/39

Refer encias
Rosario, R. V. C. & Cunha, J. P. V. S. (2016), Experimentos derastreamento de trajetória de uma embarcação de superfícieutilizando linearização por realimentação e controle aestrutura variável, in ‘Anais do XXI Congresso Brasileiro deAutomática’, Vitória – ES.
Shtessel, Y., Edwards, C., Fridman, L. & Levant, A. (2014), SlidingMode Control and Observation, Springer, New York.
Utkin, V., Guldner, J. & Shi, J. (2009), Sliding Mode Control inElectro-Mechanical Systems, 2nd edn, CRC Press, BocaRaton.
Cunha, J. P. V. S. – Palestra na UFF – 2016 – p.37/39

Refer encias
Utkin, V. I. (1978), Sliding Modes and Their Application in VariableStructure Systems, MIR Publishers, Moscow.
Utkin, V. I. (1992), Sliding Modes in Control and Optimization,Springer-Verlag.
Cunha, J. P. V. S. – Palestra na UFF – 2016 – p.38/39

Contato
◮ Homepage: http://www.lee.uerj.br/˜jpaulo
◮ E-mail: [email protected]
◮ Telefone: 0xx–21-2334-0027
Cunha, J. P. V. S. – Palestra na UFF – 2016 – p.39/39


















