
Corpo de Relatório - ltodi.est.ips.ptltodi.est.ips.pt/aabreu/WattimetroDigitalRelatorio.pdf · o...
62
RELATÓRIO DE PROJECTO FINAL 2006/2007 Realizado Por: Filipe Pereira/Francisco Cordeiro Página 1 1. Introdução A ideia genérica deste projecto é não só reunir todos os conhecimentos adquiridos com as matérias leccionadas, mas também usar esse conhecimento para desenvolver algo novo no mundo da engenharia. Com base nos problemas relacionados em torno da redução do consumo de potência eléctrica, desenvolvemos um projecto que permite a qualquer pessoa controlar o consumo de potência de um dispositivo, de forma electrónica. Criamos um Wattímetro digital com capacidade de armazenar a potência consumida numa tomada, independentemente do número de dispositivos ligados à tomada, permitindo ao utilizador deste equipamento controlar o consumo, verificar a existência de falhas eléctricas quer por avaria da tomada, ou mesmo por uma falha da rede eléctrica, informando a hora e dia da ocorrência dessa mesma falha. A ideia surgiu numa aula de laboratório, onde nos foi apresentada a ideia de construir algo dentro deste tipo de equipamento e de imediato decidimos avançar com este projecto. Na altura não tínhamos qualquer tipo de informação de integrados que pudessem ter tecnologia para medir potência, até descobrirmos o ADE7751 que funcionava como um medidor de potência electrónico, o qual é aprofundado mais à frente. No decorrer deste relatório são descritos todos os dispositivos que possibilitaram o desenvolvimento do Wattímetro digital, os motivos porque foram escolhidos e quais as suas funções para ajudar a desenvolver este projecto.
Transcript of Corpo de Relatório - ltodi.est.ips.ptltodi.est.ips.pt/aabreu/WattimetroDigitalRelatorio.pdf · o...

RELATÓRIO DE PROJECTO FINAL 2006/2007
Realizado Por: Filipe Pereira/Francisco Cordeiro Página 1
1. Introdução
A ideia genérica deste projecto é não só reunir todos os conhecimentos adquiridos com as matérias leccionadas, mas também usar esse conhecimento para desenvolver algo novo no mundo da engenharia.
Com base nos problemas relacionados em torno da redução do consumo de potência eléctrica, desenvolvemos um projecto que permite a qualquer pessoa controlar o consumo de potência de um dispositivo, de forma electrónica. Criamos um Wattímetro digital com capacidade de armazenar a potência consumida numa tomada, independentemente do número de dispositivos ligados à tomada, permitindo ao utilizador deste equipamento controlar o consumo, verificar a existência de falhas eléctricas quer por avaria da tomada, ou mesmo por uma falha da rede eléctrica, informando a hora e dia da ocorrência dessa mesma falha.
A ideia surgiu numa aula de laboratório, onde nos foi apresentada a ideia de construir algo dentro deste tipo de equipamento e de imediato decidimos avançar com este projecto. Na altura não tínhamos qualquer tipo de informação de integrados que pudessem ter tecnologia para medir potência, até descobrirmos o ADE7751 que funcionava como um medidor de potência electrónico, o qual é aprofundado mais à frente.
No decorrer deste relatório são descritos todos os dispositivos que possibilitaram o desenvolvimento do Wattímetro digital, os motivos porque foram escolhidos e quais as suas funções para ajudar a desenvolver este projecto.
RELATÓRIO DE PROJECTO FINAL 2006/2007
Realizado Por: Filipe Pereira/Francisco Cordeiro Página 2
2. Estrutura do Projecto 2.1. Introdução
Pretende-se desenvolver o circuito que opera o integrado ADE7751, a interface com um microcontrolador e a visualização de diversos parâmetros num Liquid Cristal Display (LCD). Os parâmetros a apresentar no LCD são:
• Potência instantânea; • Potência diária consumida; • Potência mensal consumida; • Potência máxima instantânea diária; • Potência mínima instantânea diária; • Potência diária consumida no plano bi-horário; • Número de falhas ocorridas na rede (dia e hora da sua ocorrência).
Para satisfazer todos estes pontos, tivemos de recorrer a diversos tipos de integrados que comunicam directamente com o microcontrolador, visto que o ADE7751 converte o sinal de potência para o domínio da frequência, sem registar hora, sem capacidade de armazenamento de dados e com comunicação de uma saída lógica com o sinal já convertido.
2.2. Implementação
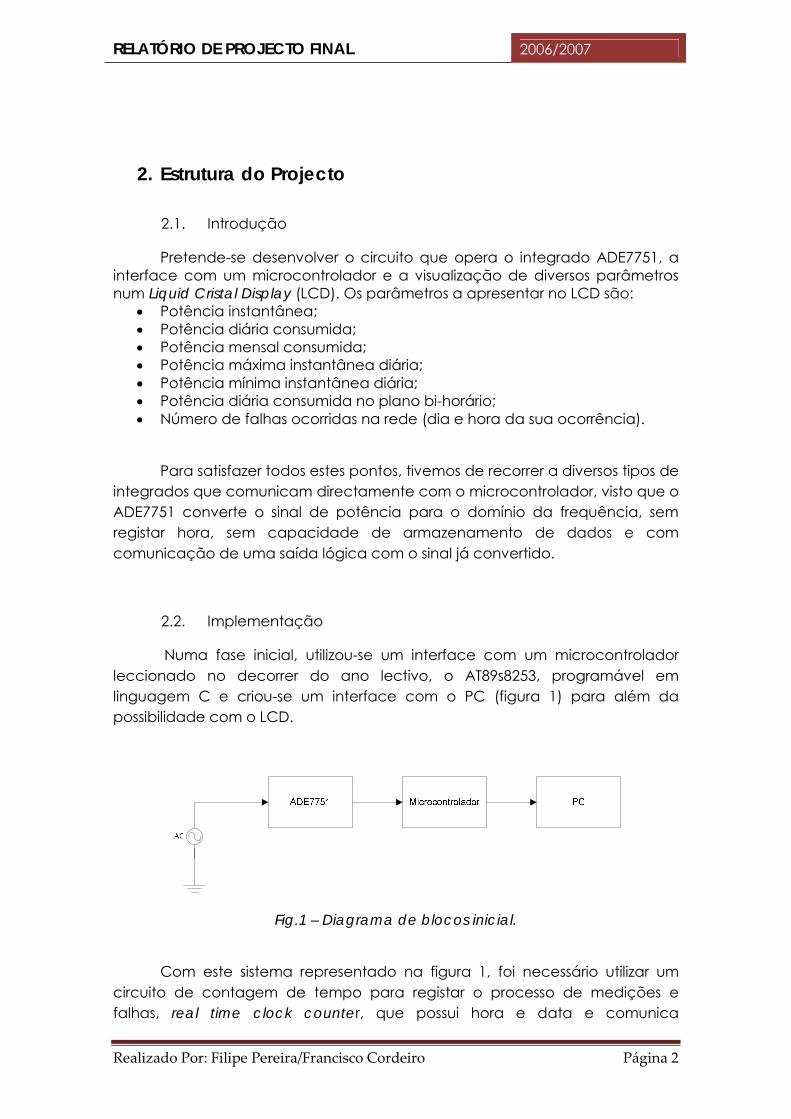
Numa fase inicial, utilizou-se um interface com um microcontrolador leccionado no decorrer do ano lectivo, o AT89s8253, programável em linguagem C e criou-se um interface com o PC (figura 1) para além da possibilidade com o LCD.
Fig.1 – Diagrama de blocos inicial.
Com este sistema representado na figura 1, foi necessário utilizar um circuito de contagem de tempo para registar o processo de medições e falhas, real time clock counter, que possui hora e data e comunica
RELATÓRIO DE PROJECTO FINAL 2006/2007
Realizado Por: Filipe Pereira/Francisco Cordeiro Página 3
directamente com o microcontrolador. Com este sistema, o Wattímetro regista a potência de minuto a minuto, com uma leitura por cada minuto que demora cerca de 6 segundos a executar. Após medir a potência, o valor é guardado em memória EEPROM para posteriormente ser consultado ou enviado para o PC.
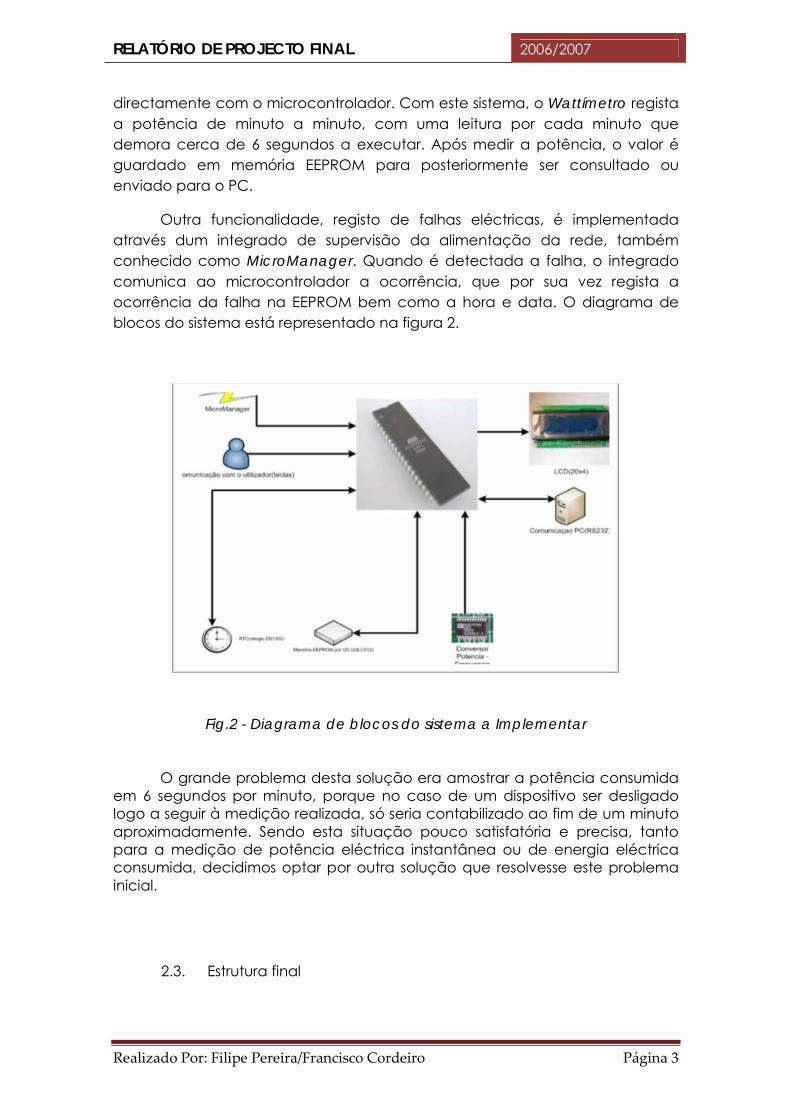
Outra funcionalidade, registo de falhas eléctricas, é implementada através dum integrado de supervisão da alimentação da rede, também conhecido como MicroManager. Quando é detectada a falha, o integrado comunica ao microcontrolador a ocorrência, que por sua vez regista a ocorrência da falha na EEPROM bem como a hora e data. O diagrama de blocos do sistema está representado na figura 2.
Fig.2 - Diagrama de blocos do sistema a Implementar
O grande problema desta solução era amostrar a potência consumida em 6 segundos por minuto, porque no caso de um dispositivo ser desligado logo a seguir à medição realizada, só seria contabilizado ao fim de um minuto aproximadamente. Sendo esta situação pouco satisfatória e precisa, tanto para a medição de potência eléctrica instantânea ou de energia eléctrica consumida, decidimos optar por outra solução que resolvesse este problema inicial.
2.3. Estrutura final

RELATÓRIO DE PROJECTO FINAL 2006/2007
Realizado Por: Filipe Pereira/Francisco Cordeiro Página 4
Com o problema da falha na medição, optamos por realizar o registo de potência de segundo a segundo, para conseguir minimizar ao máximo o erro no controlo de medição, obter uma avaliação mais precisa na medição e um controlo sistemático de valores medidos. Mas ta tarefa exigia implementação do projecto com outro microcontrolador, mais avançado que o AT89s8253. A escolha incidiu nos microcontroladores PIC, mais concretamente o PIC18F4550 (PIC), que possuí um modo de captura de frequência gerado por interrupções, e tal como o AT89s8253, programável na linguagem C e preparado com interface USB, para uma possível comunicação com um PC.
Decidimos por sugestões dos nossos orientadores de projecto, inserir várias funcionalidades ao sistema, como por exemplo, visualização da temperatura de operação do Wattímetro, possibilitar ao utilizador desligar automaticamente a tomada a uma certa hora, dia e mês, verificar com base num valor fixo de potência, que é explicado no modo de teste mais adiante, se as medições estão a ser coerentes e precisas. O diagrama final de todo o projecto está na figura 3.
Comunicação com o utilizador(teclas)
Comunicaçao PC(RS232)
RTC(relogio DS1302)
Memória EEPROM por I2C (24LC512) Conversor Potencia -Frequencia
LCD(20x4)
MicroManager
Termómetro(DS1631)
Modo de Auto Teste (relé)
Circuito de Corte
Fig.3 - Diagrama de blocos do projecto.

RELATÓRIO DE PROJECTO FINAL 2006/2007
Realizado Por: Filipe Pereira/Francisco Cordeiro Página 5
Os blocos principais são: o supervisor de alimentação de backup (MicroManager), o circuito de controlo ou corte, o circuito de teste (ou modo auto-teste), LCD, real time clock counter (RTCC), armazenamento de dados (memória EEPROM), medidor de potência ADE7751 (conversor potência-frequência), termómetro e a comunicação com o PC.
As funcionalidades destes blocos são explicadas mais adiante, individualmente para o leitor entender o seu papel no projecto proposto.
3. Descrição de Blocos
3.1. Circuito de Controlo
3.1.1. Introdução Este circuito (fig. 4 e 5) surge, na necessidade de o utilizador por algum motivo pretender controlar (ligar/desligar) os dispositivos acoplados ao medidor no tempo. Assim, o utilizador, através de uma interface com teclas pode configurar o dia, mês e ano ou quando pretende que o circuito ligue ou desligue. Ambos os métodos para controlo dos dispositivos ligados ao contador são simples e fáceis de utilizar por qualquer utilizador sem ser necessária qualquer aprendizagem ou qualquer nível de conhecimento na área da electrónica. Existem, como foi referido dois métodos de controlar a saída da tomada eléctrica, um manualmente, bastando para isso pressionar a tecla correspondente (permitir passagem da corrente eléctrica / cortar passagem da corrente eléctrica). Outra forma é programar o ligar/desligar, a um determinado dia ou um determinado mês. Este modo pode poupar muito ao fim do mês em potência consumida, se pensarmos por exemplo num andar de uma empresa onde podemos garantir que determinado piso de escritórios deixa de funcionar a partir de uma certa hora, garantindo o não consumo de
energia durante um período de nocturno onde não é
necessário todos os equipamentos
permanecerem ligados.

RELATÓRIO DE PROJECTO FINAL 2006/2007
Realizado Por: Filipe Pereira/Francisco Cordeiro Página 6
Fig.4 e 5 – PCB do circuito de controlo (vista inferior do PCB,
vista superior do PCB).
Este circuito permite também, em caso de suspeita de um consumo excessivo de determinada tomada o corte da alimentação, para posterior inspecção dos dispositivos ligados ao medidor.
Por questões de segurança, o corte da alimentação pode também ser efectuado de maneira totalmente automática, caso a temperatura no cabo de alimentação e/ou a temperatura do dispositivos seja excessivamente alta (50 °C). Neste caso, todos os dispositivos ligados ao contador são cortados da sua alimentação até que a temperatura volte a um nível aceitável (inferior a 50 °C, ver capítulo do termómetro) para um bom funcionamento do dispositivo. Com esta medida de segurança, previne-se a utilização do medidor para grandes cargas que possam provocar problemas de sobreaquecimento e possível incêndio. Se a temperatura ambiente não estiver dentro de um valor aceitável para o bom funcionamento dos dispositivos electrónicos consumidores e do medidor, ambos serão cortados e é impedido o seu funcionamento enquanto a temperatura elevada se mantiver. Este comportamento é totalmente automático, o utilizador não tem qualquer controlo sobre o modo de operação para temperaturas elevadas.
3.1.2. Princípio de Funcionamento
O sinal de comando que é enviado pelo PIC é um sinal TTL que varia de 0V a 5V, e com 5 V o circuito mantém a tomada ligada e o circuito de controlo fechado. Se comutar para 0V, o PIC está informar que o circuito deve abrir e cortar a alimentação do dispositivo que está a ser medido, controlando assim um sinal de alta tensão (220V, AC). Para isso, é necessário garantir um bom isolamento entre as diferentes tensões, com esse fim foi utilizado um opto-acoplador (ver Fig.6), o MOC3021, que permite um isolamento máximo de 700V (RMS).
RELATÓRIO DE PROJECTO FINAL 2006/2007
Realizado Por: Filipe Pereira/Francisco Cordeiro Página 7
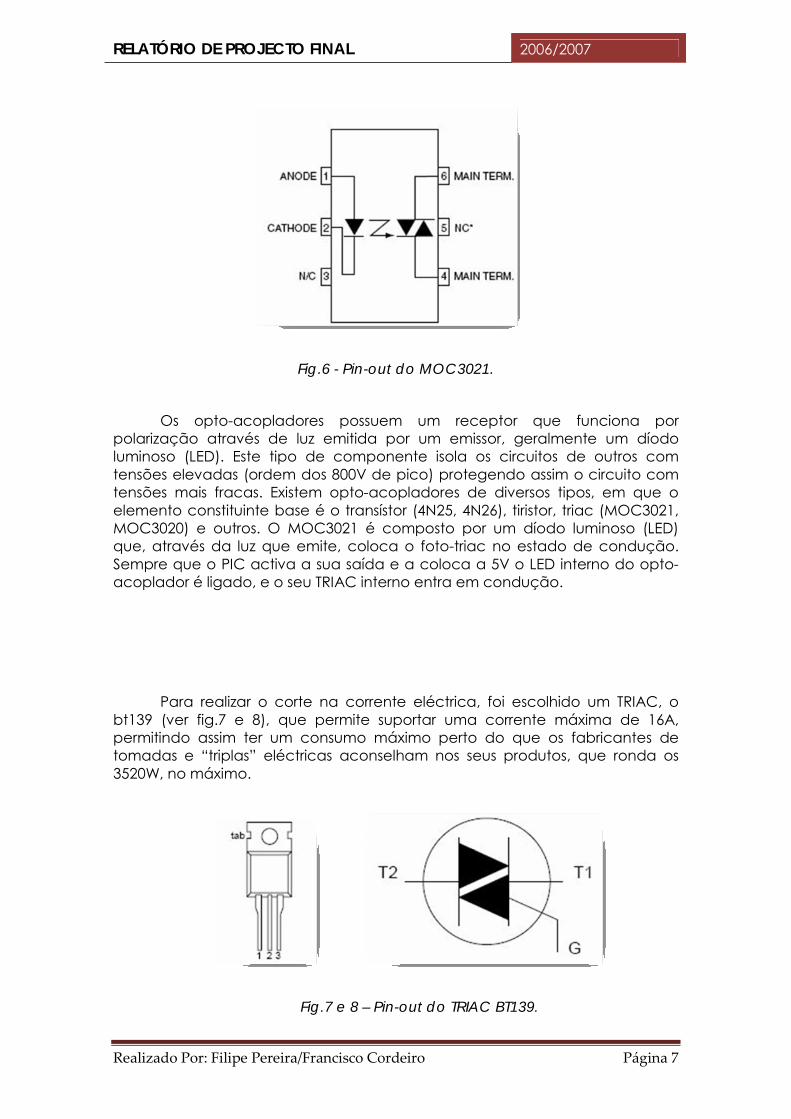
Fig.6 - Pin-out do MOC3021.
Os opto-acopladores possuem um receptor que funciona por polarização através de luz emitida por um emissor, geralmente um díodo luminoso (LED). Este tipo de componente isola os circuitos de outros com tensões elevadas (ordem dos 800V de pico) protegendo assim o circuito com tensões mais fracas. Existem opto-acopladores de diversos tipos, em que o elemento constituinte base é o transístor (4N25, 4N26), tiristor, triac (MOC3021, MOC3020) e outros. O MOC3021 é composto por um díodo luminoso (LED) que, através da luz que emite, coloca o foto-triac no estado de condução. Sempre que o PIC activa a sua saída e a coloca a 5V o LED interno do opto-acoplador é ligado, e o seu TRIAC interno entra em condução.
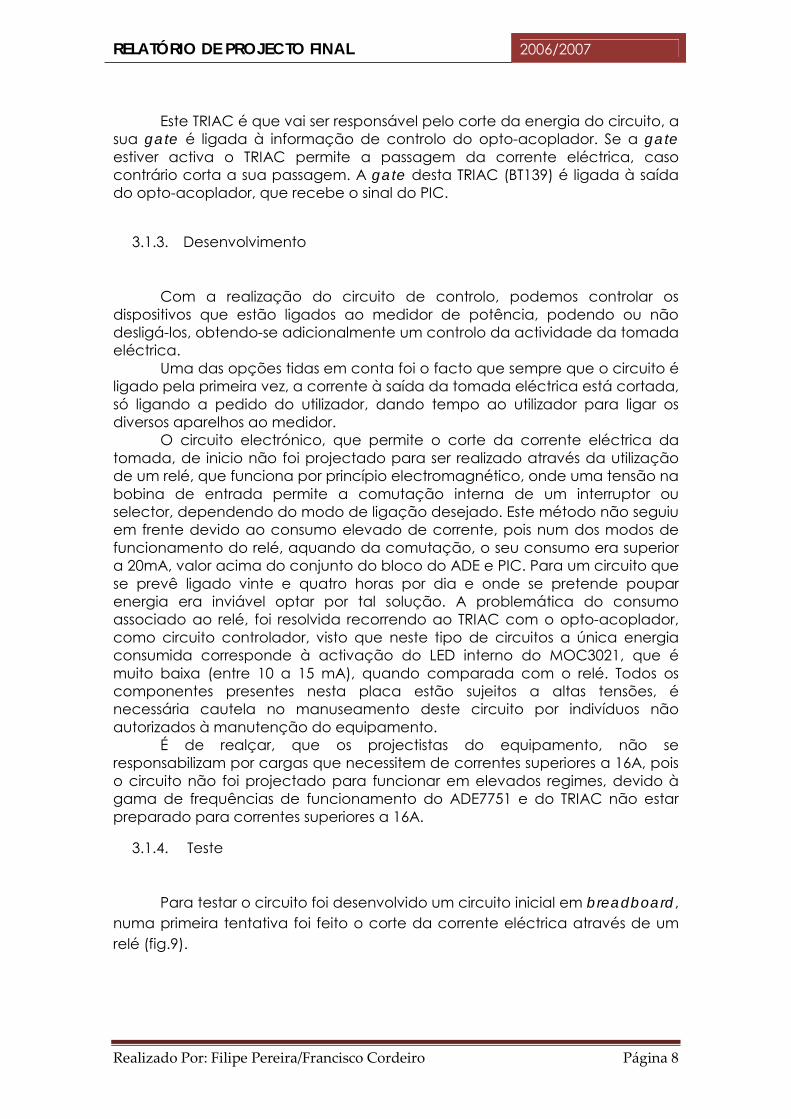
Para realizar o corte na corrente eléctrica, foi escolhido um TRIAC, o bt139 (ver fig.7 e 8), que permite suportar uma corrente máxima de 16A, permitindo assim ter um consumo máximo perto do que os fabricantes de tomadas e “triplas” eléctricas aconselham nos seus produtos, que ronda os 3520W, no máximo.
Fig.7 e 8 – Pin-out do TRIAC BT139.
RELATÓRIO DE PROJECTO FINAL 2006/2007
Realizado Por: Filipe Pereira/Francisco Cordeiro Página 8
Este TRIAC é que vai ser responsável pelo corte da energia do circuito, a
sua gate é ligada à informação de controlo do opto-acoplador. Se a gate estiver activa o TRIAC permite a passagem da corrente eléctrica, caso contrário corta a sua passagem. A gate desta TRIAC (BT139) é ligada à saída do opto-acoplador, que recebe o sinal do PIC.
3.1.3. Desenvolvimento
Com a realização do circuito de controlo, podemos controlar os dispositivos que estão ligados ao medidor de potência, podendo ou não desligá-los, obtendo-se adicionalmente um controlo da actividade da tomada eléctrica. Uma das opções tidas em conta foi o facto que sempre que o circuito é ligado pela primeira vez, a corrente à saída da tomada eléctrica está cortada, só ligando a pedido do utilizador, dando tempo ao utilizador para ligar os diversos aparelhos ao medidor. O circuito electrónico, que permite o corte da corrente eléctrica da tomada, de inicio não foi projectado para ser realizado através da utilização de um relé, que funciona por princípio electromagnético, onde uma tensão na bobina de entrada permite a comutação interna de um interruptor ou selector, dependendo do modo de ligação desejado. Este método não seguiu em frente devido ao consumo elevado de corrente, pois num dos modos de funcionamento do relé, aquando da comutação, o seu consumo era superior a 20mA, valor acima do conjunto do bloco do ADE e PIC. Para um circuito que se prevê ligado vinte e quatro horas por dia e onde se pretende poupar energia era inviável optar por tal solução. A problemática do consumo associado ao relé, foi resolvida recorrendo ao TRIAC com o opto-acoplador, como circuito controlador, visto que neste tipo de circuitos a única energia consumida corresponde à activação do LED interno do MOC3021, que é muito baixa (entre 10 a 15 mA), quando comparada com o relé. Todos os componentes presentes nesta placa estão sujeitos a altas tensões, é necessária cautela no manuseamento deste circuito por indivíduos não autorizados à manutenção do equipamento. É de realçar, que os projectistas do equipamento, não se responsabilizam por cargas que necessitem de correntes superiores a 16A, pois o circuito não foi projectado para funcionar em elevados regimes, devido à gama de frequências de funcionamento do ADE7751 e do TRIAC não estar preparado para correntes superiores a 16A.
3.1.4. Teste
Para testar o circuito foi desenvolvido um circuito inicial em breadboard, numa primeira tentativa foi feito o corte da corrente eléctrica através de um relé (fig.9).

RELATÓRIO DE PROJECTO FINAL 2006/2007
Realizado Por: Filipe Pereira/Francisco Cordeiro Página 9
Fig.9 – Circuito em breadboard.
Esta primeira montagem foi abandonada devido aos elevados consumos aquando da comutação de estado do relé. A segunda montagem para testes em breadboard (Fig.10), corresponde ao circuito implementado no projecto, com corte da alimentação através de TRIAC (ver esquemático em ANEXO: circuito de comando).
Fig.10 – Circuito Final em BreadBoard.
Foi verificado, que na saída é necessário a utilização de uma resistência de 220Ω em série com um condensador de 33nF, para que não exista ruído provocado pelas cargas indutivas, devido à força electromotriz que os componentes indutivos geram nos circuitos.
3.1.5. Conclusões

RELATÓRIO DE PROJECTO FINAL 2006/2007
Realizado Por: Filipe Pereira/Francisco Cordeiro Página 10
Com a realização do circuito de comando concluímos que a solução adoptada com o TRIAC para efectuar o corte é a melhor visto consumir menos, não existindo qualquer ruído quando o circuito é activado, situações que com o relé não se verificam. O relé consome mais do dobro quando comuta de estado.
3.2. Circuito de teste
RELATÓRIO DE PROJECTO FINAL 2006/2007
Realizado Por: Filipe Pereira/Francisco Cordeiro Página 11
3.2.1. Introdução
Este circuito permite que o medidor realiza um auto-teste interno, (sem necessitar de remover o aparelho), avaliando se o valor das leituras é fidedigno ou não. Assim da consola de testes, basta premir a tecla de auto-teste, para conhecer o estado do medidor e informando se o equipamento necessita de ser calibrado ou não por um técnico. Apenas, em caso, de mau funcionamento, isto é, caso o modo de auto-teste indique que é necessária uma calibração do equipamento, o utilizador deve solicitar a presença de um técnico especializado, para efectuar nova calibragem do equipamento. O modo de auto-teste, dura cerca de 10 segundos até estar concluído, qualquer alteração na duração deste teste, pode indicar um mal funcionamento do dispositivo. Este teste garante se o dispositivo está a medir correctamente, ao apontar para um valor fixo de consumo de potência de 10 Watt. Ao verificar esta potência, conclui-se que o medidor está a medir correctamente.
3.2.2. Modo de Funcionamento
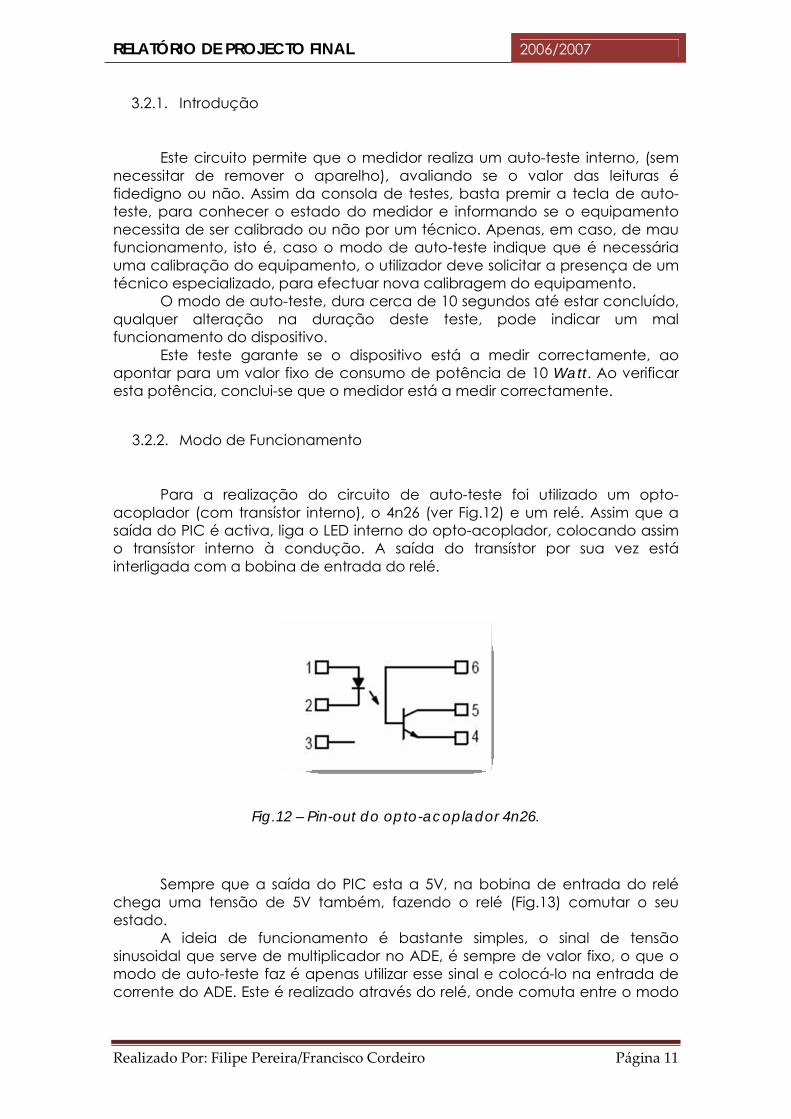
Para a realização do circuito de auto-teste foi utilizado um opto-acoplador (com transístor interno), o 4n26 (ver Fig.12) e um relé. Assim que a saída do PIC é activa, liga o LED interno do opto-acoplador, colocando assim o transístor interno à condução. A saída do transístor por sua vez está interligada com a bobina de entrada do relé.
Fig.12 – Pin-out do opto-acoplador 4n26.
Sempre que a saída do PIC esta a 5V, na bobina de entrada do relé chega uma tensão de 5V também, fazendo o relé (Fig.13) comutar o seu estado. A ideia de funcionamento é bastante simples, o sinal de tensão sinusoidal que serve de multiplicador no ADE, é sempre de valor fixo, o que o modo de auto-teste faz é apenas utilizar esse sinal e colocá-lo na entrada de corrente do ADE. Este é realizado através do relé, onde comuta entre o modo

RELATÓRIO DE PROJECTO FINAL 2006/2007
Realizado Por: Filipe Pereira/Francisco Cordeiro Página 12
de funcionamento normal, para o modo de auto-teste. O relé neste caso, actua apenas como comutador. Assim que o modo de auto teste termina, o relé volta a comutar e o medidor volta para o modo de funcionamento normal.
Fig.13 – Relé utilizado.
3.2.3. Desenvolvimento
O circuito de teste é de grande importância, pois se o teste após a conclusão for conseguido com sucesso podemos garantir que as leituras são fidedignas e que o aparelho não necessita ser calibrado. Este método acaba por oferecer maior segurança aos seus utilizadores. O valor de comparação para o teste é fixo e guardado no PIC. Neste caso, o valor do consumo do relé quando comuta não é significativo visto que o teste dura cerca de 10 segundos, o que é relativamente pouco. É de notar que enquanto o circuito está a realizar o teste, não está a medir, perdendo assim leituras (kW/h). Por este motivo é pedido que o auto-teste, não seja utilizado exaustivamente, mas sim quando o utilizador achar necessário.
3.2.4. Teste
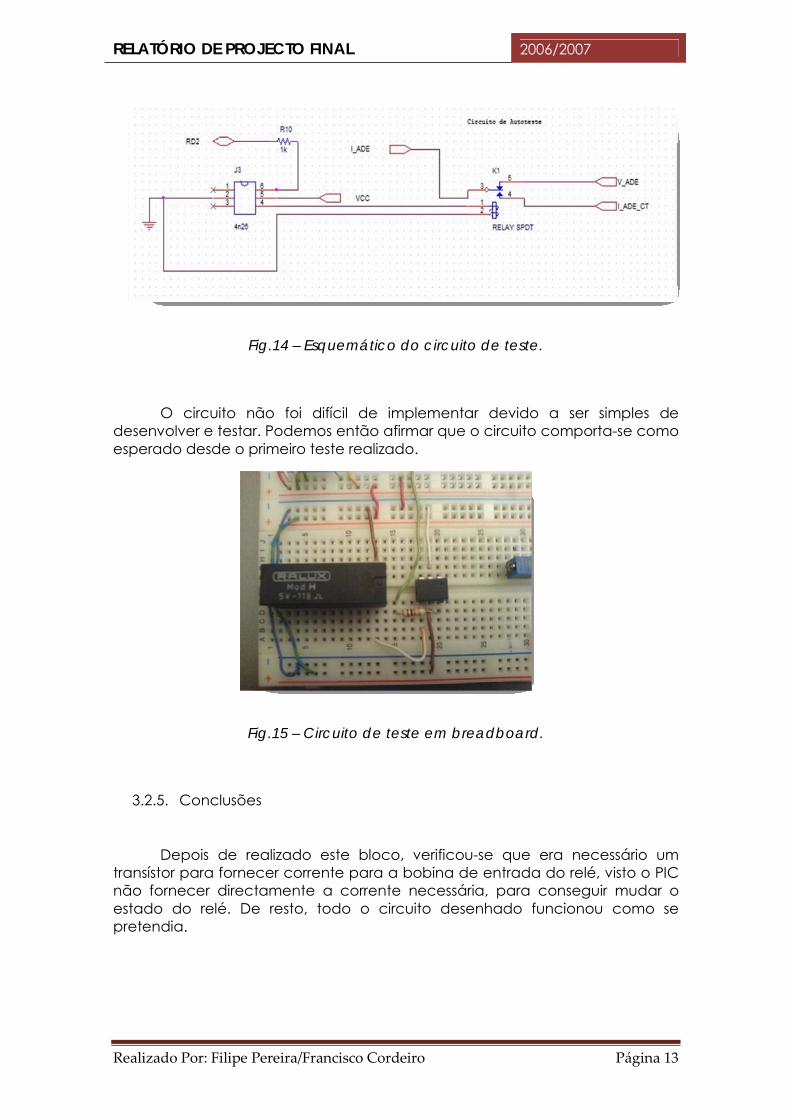
O circuito (Fig.14) utilizado foi implementado e testado em breadboard (Fig.15), onde se verificou que o relé faz algum barulho e que o seu consumo aumenta sempre que comuta de estado.
RELATÓRIO DE PROJECTO FINAL 2006/2007
Realizado Por: Filipe Pereira/Francisco Cordeiro Página 13
Fig.14 – Esquemático do circuito de teste.
O circuito não foi difícil de implementar devido a ser simples de desenvolver e testar. Podemos então afirmar que o circuito comporta-se como esperado desde o primeiro teste realizado.
Fig.15 – Circuito de teste em breadboard.
3.2.5. Conclusões
Depois de realizado este bloco, verificou-se que era necessário um transístor para fornecer corrente para a bobina de entrada do relé, visto o PIC não fornecer directamente a corrente necessária, para conseguir mudar o estado do relé. De resto, todo o circuito desenhado funcionou como se pretendia.
RELATÓRIO DE PROJECTO FINAL 2006/2007
Realizado Por: Filipe Pereira/Francisco Cordeiro Página 14
3.3. Supervisor de alimentação com Backup
3.3.1. Introdução
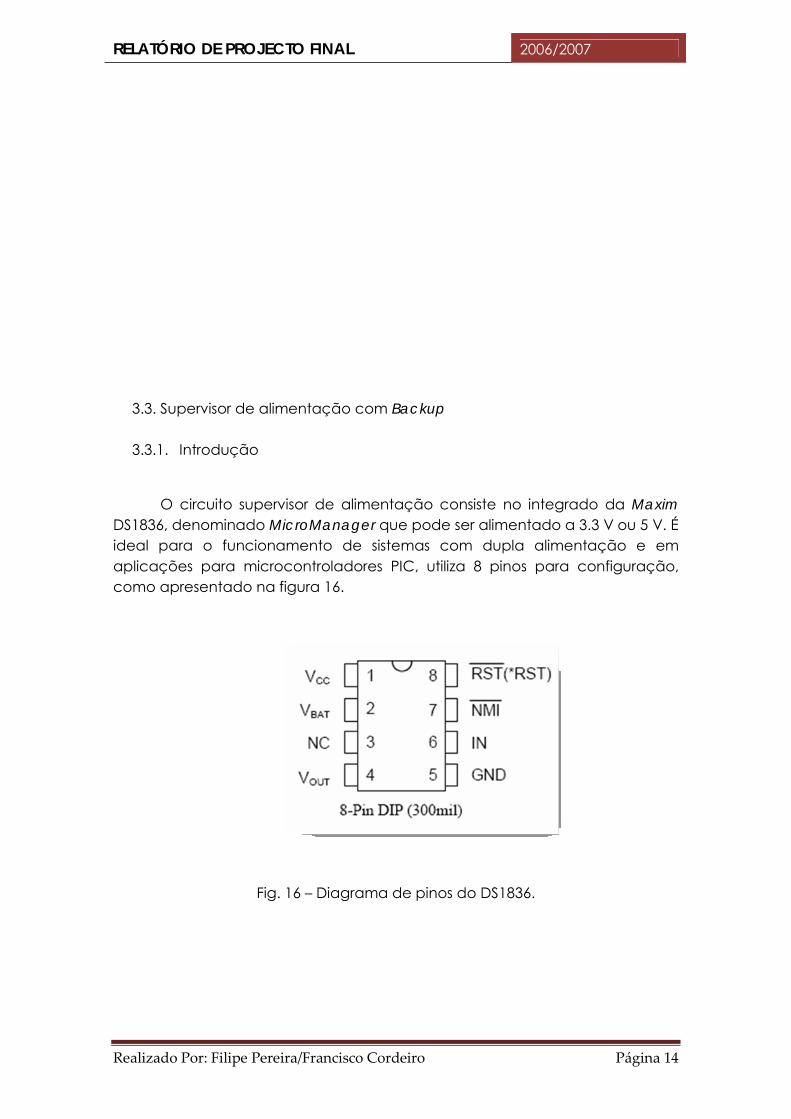
O circuito supervisor de alimentação consiste no integrado da Maxim DS1836, denominado MicroManager que pode ser alimentado a 3.3 V ou 5 V. É ideal para o funcionamento de sistemas com dupla alimentação e em aplicações para microcontroladores PIC, utiliza 8 pinos para configuração, como apresentado na figura 16.
Fig. 16 – Diagrama de pinos do DS1836.

RELATÓRIO DE PROJECTO FINAL 2006/2007
Realizado Por: Filipe Pereira/Francisco Cordeiro Página 15
3.3.2. Teoria de funcionamento
O MicroManager é sensível à temperatura, podendo influenciar o seu desempenho. Caso esta situação seja detectada, o circuito controla a tensão em VCC, e quando é detectada uma situação não tolerável, é gerada uma falha interna provocando um reset forçado. Se a tensão em VCC continuar a diminuir, o dispositivo comuta para alimentação da bateria perante uma tensão inferior de 3.8 V (caso alimentado por 5 V). Se VCC exceder 3.9 V, VOUT torna a ser alimentado por VCC.
3.3.2.1. Controlo de alimentação O DS1836 controla a alimentação de 5V (não esquecer que pode também ser alimentado por 3.3 V), actuando no caso de existir a perda dessa alimentação, ou seja, uma falha de alimentação ou uma redução dos 5V abaixo do limite de 3.8V. Sempre que é detectada esta situação, o reset fica activo, permanecendo neste estado durante 350 ms após a alimentação ser restaurada, permitindo ao sistema estabilizar após uma falha de alimentação.
3.3.2.2. Comutação de alimentação Inicialmente, VCC retira corrente da entrada Vbat até VCC exceder 3.9 V, e quando atinge este valor, VOUT comuta de Vbat para VCC e só volta a comutar novamente caso VCC seja inferior a 3.8 V. Nesta situação, VOUT é alimentado pela tensão de maior valor contínuo: VCC ou Vbat.

RELATÓRIO DE PROJECTO FINAL 2006/2007
Realizado Por: Filipe Pereira/Francisco Cordeiro Página 16
3.3.3. Desenvolvimento
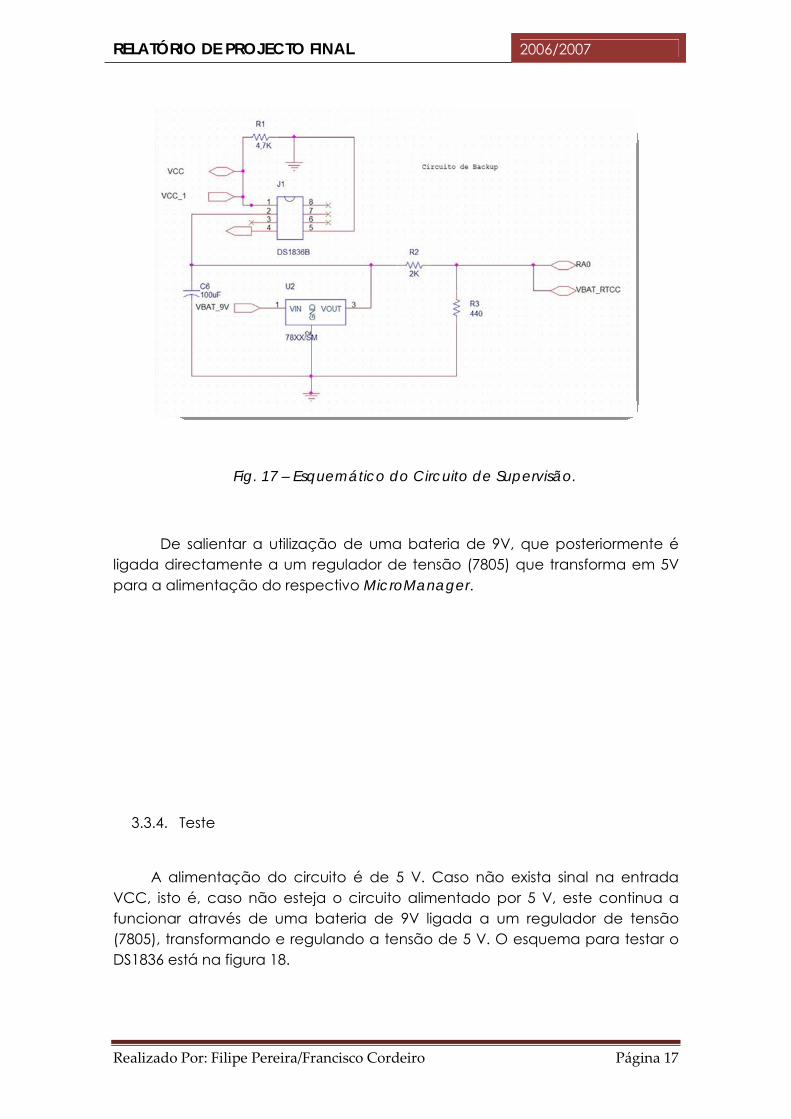
A característica deste componente ao poder comutar entre duas alimentações distintas quando o circuito, ao detectar uma falha eléctrica na rede, fica sem a alimentação principal e comuta para uma tensão alternativa através de uma pilha, permitindo ao microcontrolador guardar a data e hora a que ocorreu a falha, e também guardar valores anteriormente medidos pelo medidor de potência antes da falha ter ocorrido. Sem este circuito de controlo, ao perder a alimentação principal perdemos informação relevante ao controlo de potência que o projecto exige. O esquemático desenvolvido para o circuito de supervisão é o da figura 17.
RELATÓRIO DE PROJECTO FINAL 2006/2007
Realizado Por: Filipe Pereira/Francisco Cordeiro Página 17
Fig. 17 – Esquemático do Circuito de Supervisão.
De salientar a utilização de uma bateria de 9V, que posteriormente é ligada directamente a um regulador de tensão (7805) que transforma em 5V para a alimentação do respectivo MicroManager.
3.3.4. Teste
A alimentação do circuito é de 5 V. Caso não exista sinal na entrada VCC, isto é, caso não esteja o circuito alimentado por 5 V, este continua a funcionar através de uma bateria de 9V ligada a um regulador de tensão (7805), transformando e regulando a tensão de 5 V. O esquema para testar o DS1836 está na figura 18.
RELATÓRIO DE PROJECTO FINAL 2006/2007
Realizado Por: Filipe Pereira/Francisco Cordeiro Página 18
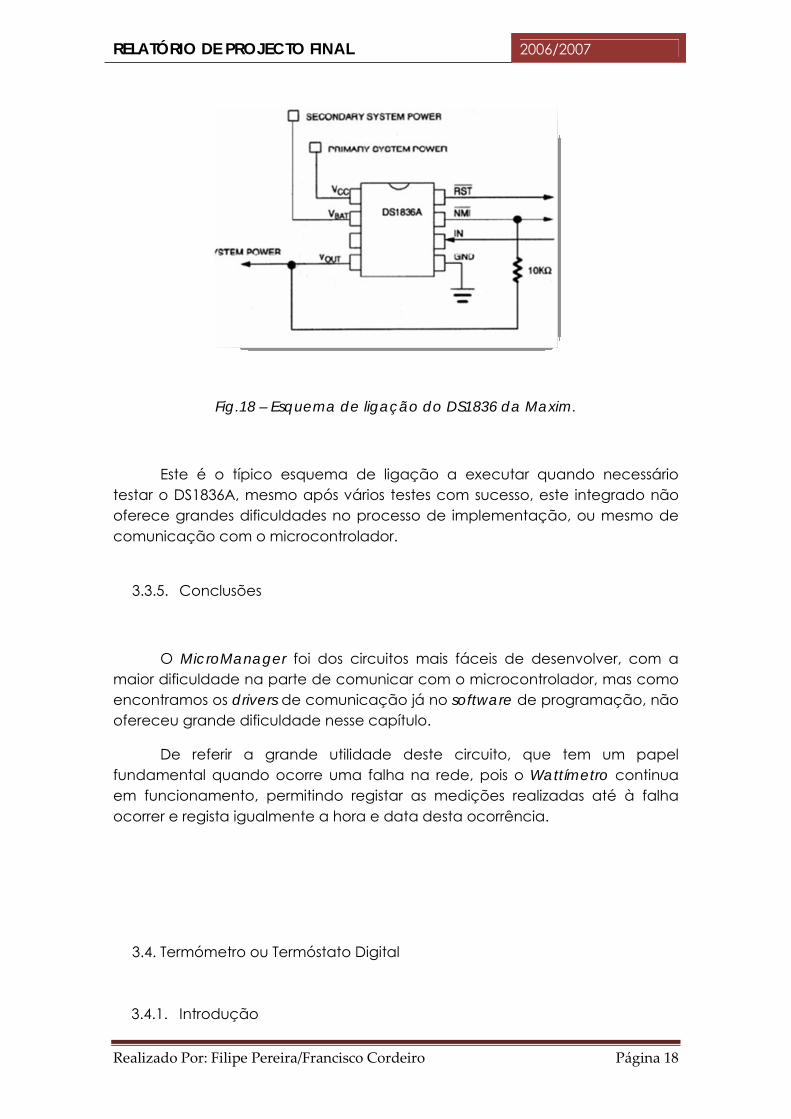
Fig.18 – Esquema de ligação do DS1836 da Maxim.
Este é o típico esquema de ligação a executar quando necessário testar o DS1836A, mesmo após vários testes com sucesso, este integrado não oferece grandes dificuldades no processo de implementação, ou mesmo de comunicação com o microcontrolador.
3.3.5. Conclusões
O MicroManager foi dos circuitos mais fáceis de desenvolver, com a maior dificuldade na parte de comunicar com o microcontrolador, mas como encontramos os drivers de comunicação já no software de programação, não ofereceu grande dificuldade nesse capítulo.
De referir a grande utilidade deste circuito, que tem um papel fundamental quando ocorre uma falha na rede, pois o Wattímetro continua em funcionamento, permitindo registar as medições realizadas até à falha ocorrer e regista igualmente a hora e data desta ocorrência.
3.4. Termómetro ou Termóstato Digital
3.4.1. Introdução
RELATÓRIO DE PROJECTO FINAL 2006/2007
Realizado Por: Filipe Pereira/Francisco Cordeiro Página 19
Para podermos ter uma leitura da temperatura emitida pelo projecto no seu funcionamento, foi escolhido o circuito integrado da Maxim DS1631 que possui leituras de temperatura na ordem dos 0 °C aos +70 °C com margem de erro na ordem de ±0.5 °C. Este valor para nós é satisfatório visto que o projecto aquece normalmente com valores perto dos 30 °C, e o valor que consideramos máximo para desligar todo o sistema é de 50 °C.
No modo de operação normal entre -55°C aos +125°C, o DS1631 não necessita de componentes externos para efectuar a medição da temperatura. O tempo de conversão do valor analógico de temperatura para sinal digital é de 750 ms (valor máximo). Este tipo de integrados é usado normalmente em espaços fechados mais sensíveis a temperatura, como por exemplo, Routers e Switches ou produtos portáteis.
3.4.2. Noções Teóricas
A conversão do sinal analógico de temperatura para digital tem resoluções de 9, 10, 11 ou de 12 bits seleccionáveis pelo utilizador. Após alimentado, o circuito sensor-conversor inicia automaticamente as leituras, operando numa gama de +2.7V a +5.5V.
3.4.2.1. Termómetro
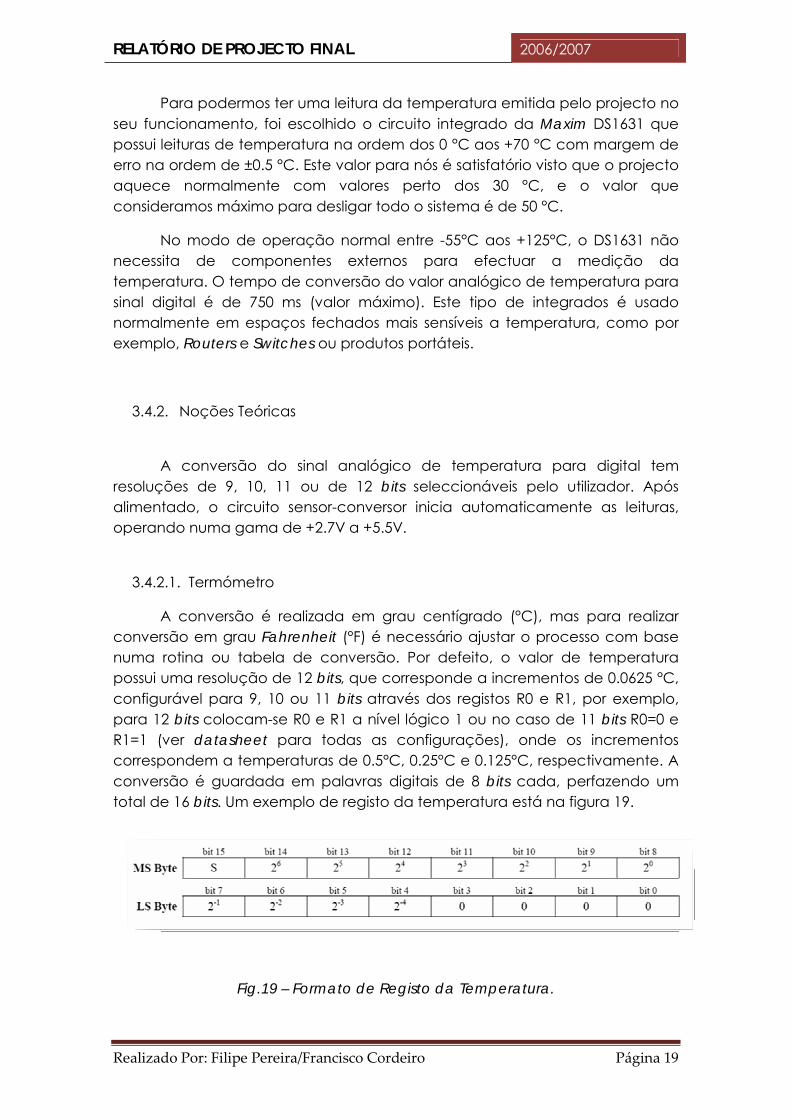
A conversão é realizada em grau centígrado (°C), mas para realizar conversão em grau Fahrenheit (°F) é necessário ajustar o processo com base numa rotina ou tabela de conversão. Por defeito, o valor de temperatura possui uma resolução de 12 bits, que corresponde a incrementos de 0.0625 °C, configurável para 9, 10 ou 11 bits através dos registos R0 e R1, por exemplo, para 12 bits colocam-se R0 e R1 a nível lógico 1 ou no caso de 11 bits R0=0 e R1=1 (ver datasheet para todas as configurações), onde os incrementos correspondem a temperaturas de 0.5°C, 0.25°C e 0.125°C, respectivamente. A conversão é guardada em palavras digitais de 8 bits cada, perfazendo um total de 16 bits. Um exemplo de registo da temperatura está na figura 19.
Fig.19 – Formato de Registo da Temperatura.
RELATÓRIO DE PROJECTO FINAL 2006/2007
Realizado Por: Filipe Pereira/Francisco Cordeiro Página 20
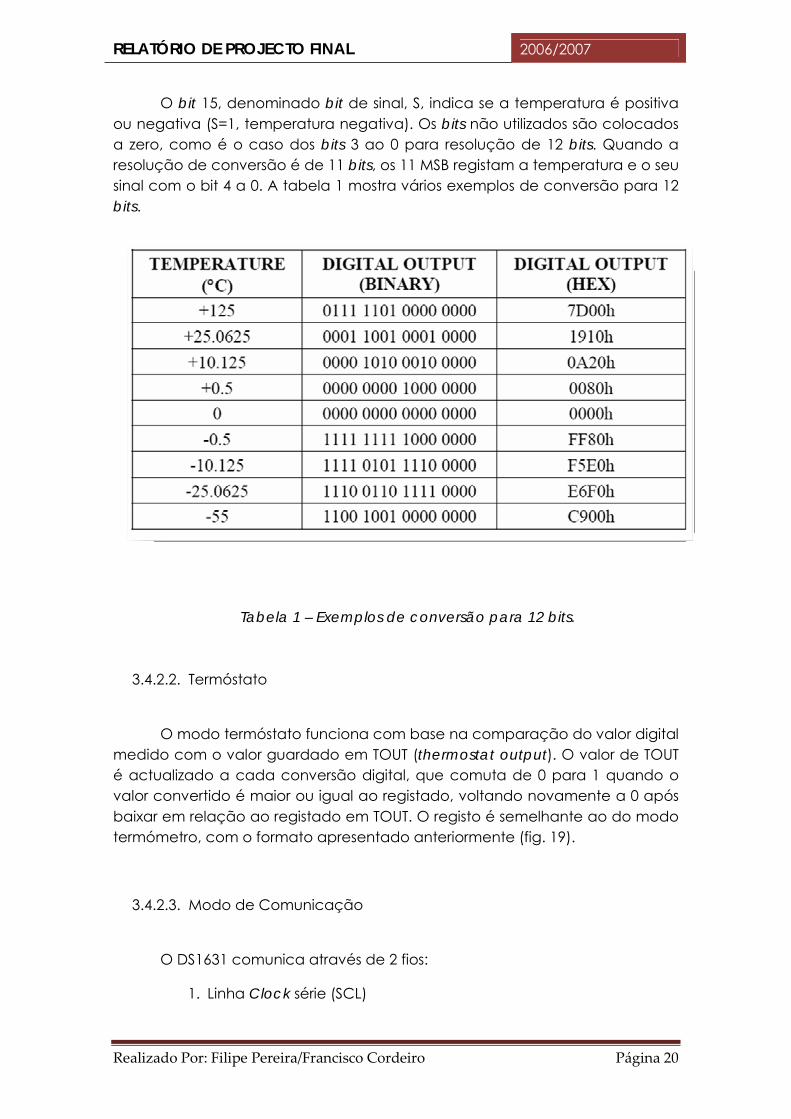
O bit 15, denominado bit de sinal, S, indica se a temperatura é positiva ou negativa (S=1, temperatura negativa). Os bits não utilizados são colocados a zero, como é o caso dos bits 3 ao 0 para resolução de 12 bits. Quando a resolução de conversão é de 11 bits, os 11 MSB registam a temperatura e o seu sinal com o bit 4 a 0. A tabela 1 mostra vários exemplos de conversão para 12 bits.
Tabela 1 – Exemplos de conversão para 12 bits.
3.4.2.2. Termóstato
O modo termóstato funciona com base na comparação do valor digital medido com o valor guardado em TOUT (thermostat output). O valor de TOUT é actualizado a cada conversão digital, que comuta de 0 para 1 quando o valor convertido é maior ou igual ao registado, voltando novamente a 0 após baixar em relação ao registado em TOUT. O registo é semelhante ao do modo termómetro, com o formato apresentado anteriormente (fig. 19).
3.4.2.3. Modo de Comunicação
O DS1631 comunica através de 2 fios:
1. Linha Clock série (SCL)
RELATÓRIO DE PROJECTO FINAL 2006/2007
Realizado Por: Filipe Pereira/Francisco Cordeiro Página 21
2. Linha data série bidireccional (SDA).
Em comunicação com um microcontrolador, o DS1631 actua sempre como escravo (SLAVE) no bus, deixando o papel de mestre (MASTER) atribuído ao microcontrolador. Para mais detalhes sobre este modo de comunicação, consultar o devido datasheet.
De uma forma genérica, toda a informação é transmitida enviando primeiro o MSB para a linha SDA, sendo cada bit transmitido em cada clock do SCL. É necessário colocar uma resistência de pull-up (uma resistência que garante um nível lógico num pino, pull-up para 1, pull-down para 0) na linha de SDA quando o bus está em espera, pois tal como o SCL, ambos têm que permanecer a um nível lógico alto.
Qualquer comunicação começa com uma condição START (ver datasheet) e termina com um STOP. Após a recepção da comunicação, o receptor deve responder com um ACK (ver datasheet), o que demora um período de SCL, perfazendo um total de nove impulsos para se efectuar uma transmissão.
3.4.3. Desenvolvimento
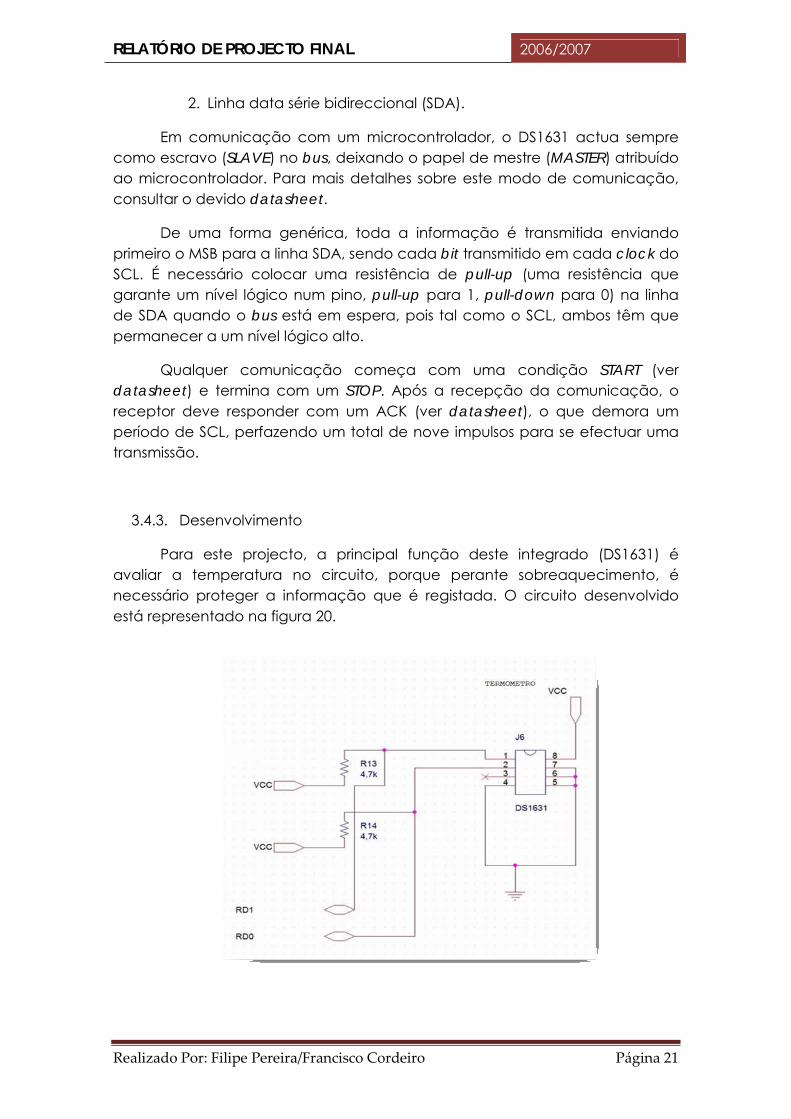
Para este projecto, a principal função deste integrado (DS1631) é avaliar a temperatura no circuito, porque perante sobreaquecimento, é necessário proteger a informação que é registada. O circuito desenvolvido está representado na figura 20.
RELATÓRIO DE PROJECTO FINAL 2006/2007
Realizado Por: Filipe Pereira/Francisco Cordeiro Página 22
Fig.20 – Circuito do Termómetro.
O controlo do DS1631 é feito através do microcontrolador, e as leituras realizadas são apresentadas em °C e °F. Com base em cada medição, optou-se por comunicar via I2C (Inter-Intergrated Circuit - é um barramento série para computadores. Este protocolo especifica dois sinais de comunicação, o sinal de clock e o sinal de dados, bidireccional), visto que o DS1631 tem o modo de comunicação série com 2 fios ocupando apenas 2 portos do PIC.
3.4.4. Teste
Não foi muito difícil por em funcionamento este circuito, visto apenas possuir a particularidade de necessitar de duas resistências de pull-up nos terminais de comunicação que posteriormente são ligados ao microcontrolador, tornando assim o circuito mais fácil de implementar no projecto.
3.4.5. Conclusões
Este circuito foi provavelmente o mais fácil e mais rápido de implementar de todo o projecto, visto que também a sua única utilidade é de medir a temperatura e o microcontrolador fica encarregue dos procedimentos a executar quando os valores de temperatura não correspondem aos pretendidos.
RELATÓRIO DE PROJECTO FINAL 2006/2007
Realizado Por: Filipe Pereira/Francisco Cordeiro Página 23
3.5. Real Time Clock Counter (RTCC)
3.5.1. Introdução
Para registar a hora e data, recorremos a um circuito para que o sistema esteja sincronizado à hora corrente. Para tal, foi escolhido o DS1302 da Dallas, que consiste num típico real time clock counter, ou seja, o circuito que contabiliza segundos, horas, dia do mês, dia da semana, mês e ano com capacidade para contabilizar até ao ano 2100. Está programado para distinguir meses com menos de 31 dias, como também as correcções necessárias para anos bissextos. O formato da hora também pode ser apresentado no modo 24 horas ou no formato AM/PM.
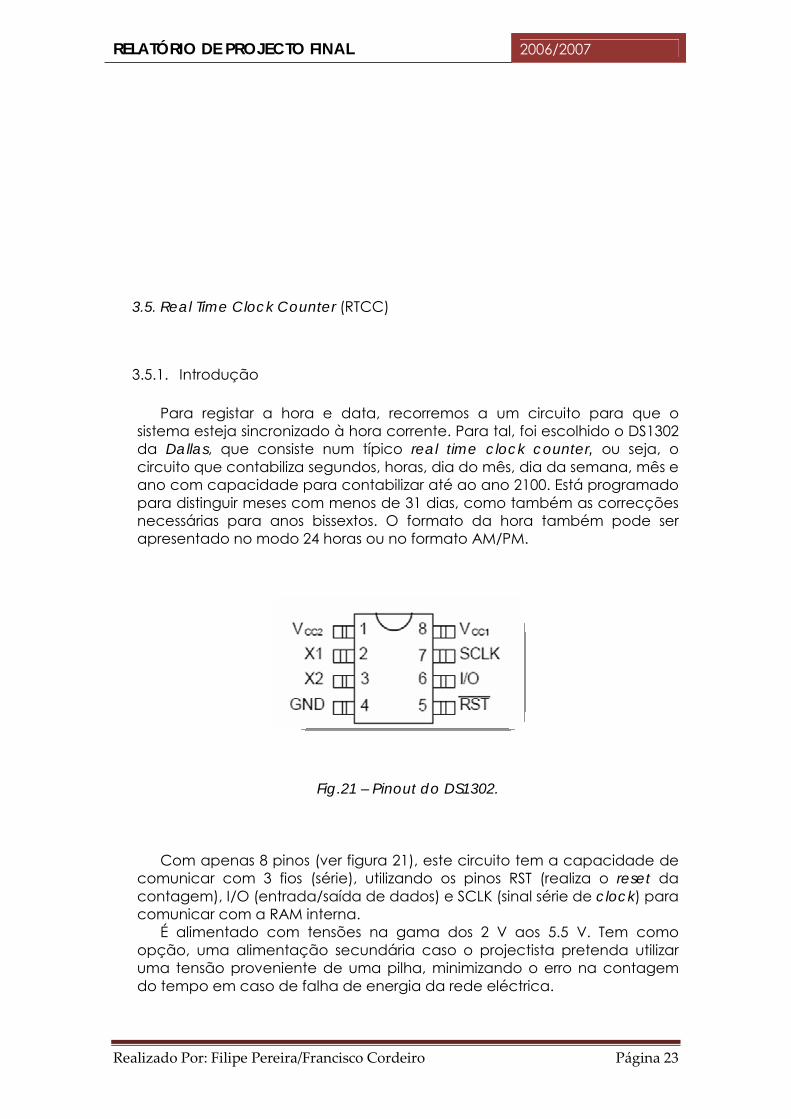
Fig.21 – Pinout do DS1302.
Com apenas 8 pinos (ver figura 21), este circuito tem a capacidade de comunicar com 3 fios (série), utilizando os pinos RST (realiza o reset da contagem), I/O (entrada/saída de dados) e SCLK (sinal série de clock) para comunicar com a RAM interna.
É alimentado com tensões na gama dos 2 V aos 5.5 V. Tem como opção, uma alimentação secundária caso o projectista pretenda utilizar uma tensão proveniente de uma pilha, minimizando o erro na contagem do tempo em caso de falha de energia da rede eléctrica.

RELATÓRIO DE PROJECTO FINAL 2006/2007
Realizado Por: Filipe Pereira/Francisco Cordeiro Página 24
3.5.2. Princípio de Funcionamento
Os elementos principais do relógio ligado por interface série estão apresentados na figura 22. É composto pelo Shift register, control logic, oscilador, real time clock e a memória RAM. Para iniciar o processo de transferência de dados, RST é colocado a nível alto (nível lógico 1, pois o pino é activo a zero lógico) e envia os 8 bits para o shif register disponibilizando o endereço e informações de comando. Os dados são introduzidos em modo série no flanco ascendente de SCLK, em que os primeiros 8 bits especificam qual dos 40 bytes serão acedidos, quer em escrita ou leitura, quer no caso de transferência de byte ou burst mode que irá ocorrer. Depois de carregar os 8 clocks no shift register, clocks adicionais são determinados para escrever dados ou enviar dados. O número de clocks é de 8+8 para o byte mode ou 8 + até 248 para o burst mode.
RELATÓRIO DE PROJECTO FINAL 2006/2007
Realizado Por: Filipe Pereira/Francisco Cordeiro Página 25
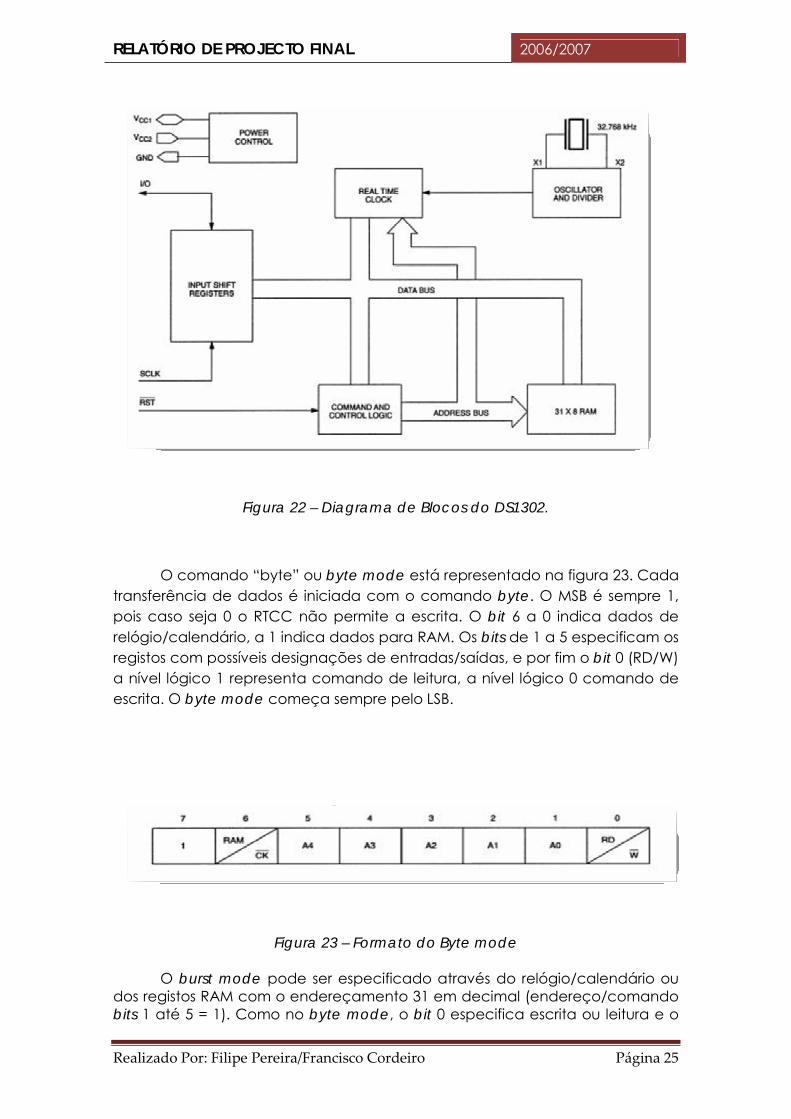
Figura 22 – Diagrama de Blocos do DS1302.
O comando “byte” ou byte mode está representado na figura 23. Cada transferência de dados é iniciada com o comando byte. O MSB é sempre 1, pois caso seja 0 o RTCC não permite a escrita. O bit 6 a 0 indica dados de relógio/calendário, a 1 indica dados para RAM. Os bits de 1 a 5 especificam os registos com possíveis designações de entradas/saídas, e por fim o bit 0 (RD/W) a nível lógico 1 representa comando de leitura, a nível lógico 0 comando de escrita. O byte mode começa sempre pelo LSB.
Figura 23 – Formato do Byte mode O burst mode pode ser especificado através do relógio/calendário ou dos registos RAM com o endereçamento 31 em decimal (endereço/comando bits 1 até 5 = 1). Como no byte mode, o bit 0 especifica escrita ou leitura e o

RELATÓRIO DE PROJECTO FINAL 2006/2007
Realizado Por: Filipe Pereira/Francisco Cordeiro Página 26
bit 6 clock ou RAM. Não existe capacidade de armazenamento de dados nos registos 9 até 31 do relógio/calendário ou no registo 31 da RAM. Escritas ou leituras começam com o bit 0 do endereço 0.
3.5.3. Desenvolvimento
Era necessário utilizar um circuito que controlasse o registo de tempo para a medição da potência, para esse feito utilizamos o circuito integrado DS1302 para a contagem de tempo. Durante o decorrer do projecto, foi necessário apresentar a hora e dia em que ocorreu uma falha eléctrica ou mesmo apenas para controlar o registo dos valores medidos ao longo do tempo, e embora o microcontrolador pudesse contar esse tempo, é mais prático usar um circuito dedicado ao processo de registo temporal.
3.5.4. Teste Para testar o RTCC, desenvolveu-se o esquema apresentado na figura
24, utilizando como alimentação auxiliar, uma bateria de 3V. Possui uma comunicação simples com o uso de apenas 3 fios (comunicação série), ocupando apenas três portos de entrada/saída do
microcontrolador.
Fig.24 – Esquema de ligação do RTCC.
Na figura anterior, visualizamos a ligação do RTCC com o microcontrolador, onde o CE (chip enable), I/O e o SCLK (sinal de clock) são utilizados para a comunicação com o microcontrolador.
RELATÓRIO DE PROJECTO FINAL 2006/2007
Realizado Por: Filipe Pereira/Francisco Cordeiro Página 27
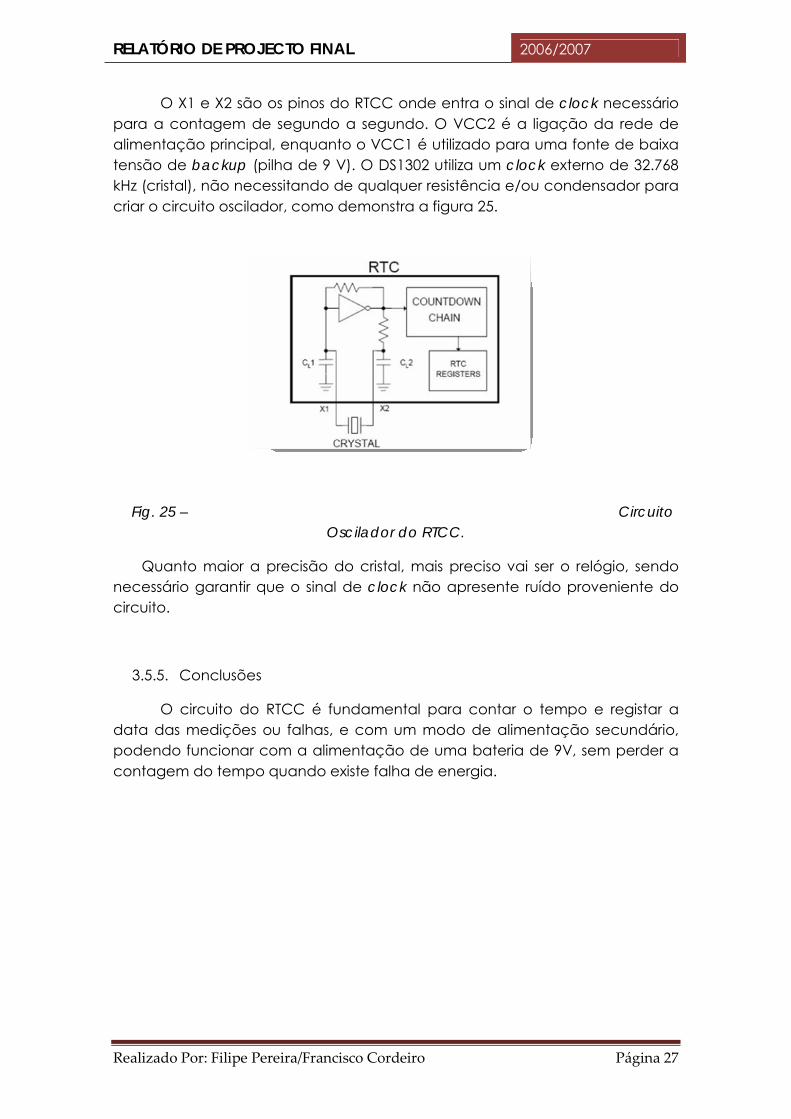
O X1 e X2 são os pinos do RTCC onde entra o sinal de clock necessário para a contagem de segundo a segundo. O VCC2 é a ligação da rede de alimentação principal, enquanto o VCC1 é utilizado para uma fonte de baixa tensão de backup (pilha de 9 V). O DS1302 utiliza um clock externo de 32.768 kHz (cristal), não necessitando de qualquer resistência e/ou condensador para criar o circuito oscilador, como demonstra a figura 25.
Fig. 25 – Circuito Oscilador do RTCC.
Quanto maior a precisão do cristal, mais preciso vai ser o relógio, sendo necessário garantir que o sinal de clock não apresente ruído proveniente do circuito.
3.5.5. Conclusões
O circuito do RTCC é fundamental para contar o tempo e registar a data das medições ou falhas, e com um modo de alimentação secundário, podendo funcionar com a alimentação de uma bateria de 9V, sem perder a contagem do tempo quando existe falha de energia.
RELATÓRIO DE PROJECTO FINAL 2006/2007
Realizado Por: Filipe Pereira/Francisco Cordeiro Página 28
3.6. Armazenamento de Dados
3.6.1. Introdução
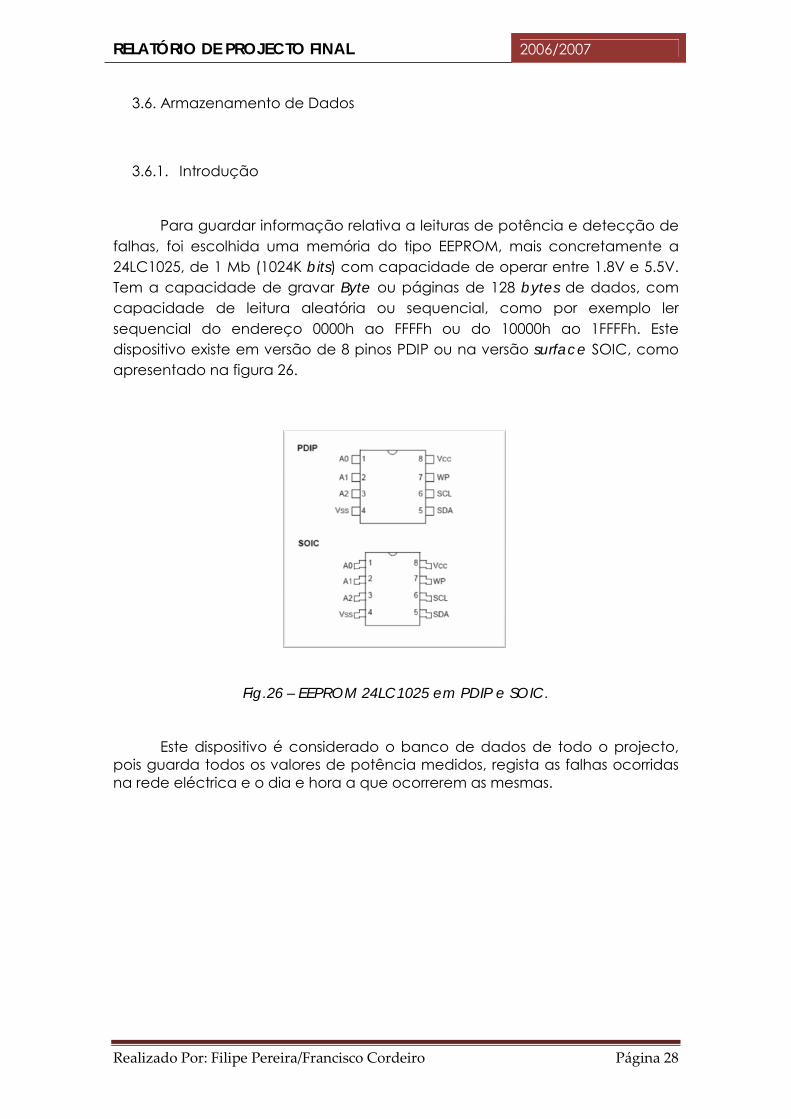
Para guardar informação relativa a leituras de potência e detecção de falhas, foi escolhida uma memória do tipo EEPROM, mais concretamente a 24LC1025, de 1 Mb (1024K bits) com capacidade de operar entre 1.8V e 5.5V. Tem a capacidade de gravar Byte ou páginas de 128 bytes de dados, com capacidade de leitura aleatória ou sequencial, como por exemplo ler sequencial do endereço 0000h ao FFFFh ou do 10000h ao 1FFFFh. Este dispositivo existe em versão de 8 pinos PDIP ou na versão surface SOIC, como apresentado na figura 26.
Fig.26 – EEPROM 24LC1025 em PDIP e SOIC.
Este dispositivo é considerado o banco de dados de todo o projecto, pois guarda todos os valores de potência medidos, regista as falhas ocorridas na rede eléctrica e o dia e hora a que ocorrerem as mesmas.
RELATÓRIO DE PROJECTO FINAL 2006/2007
Realizado Por: Filipe Pereira/Francisco Cordeiro Página 29
3.6.2. Modos de Endereçamento
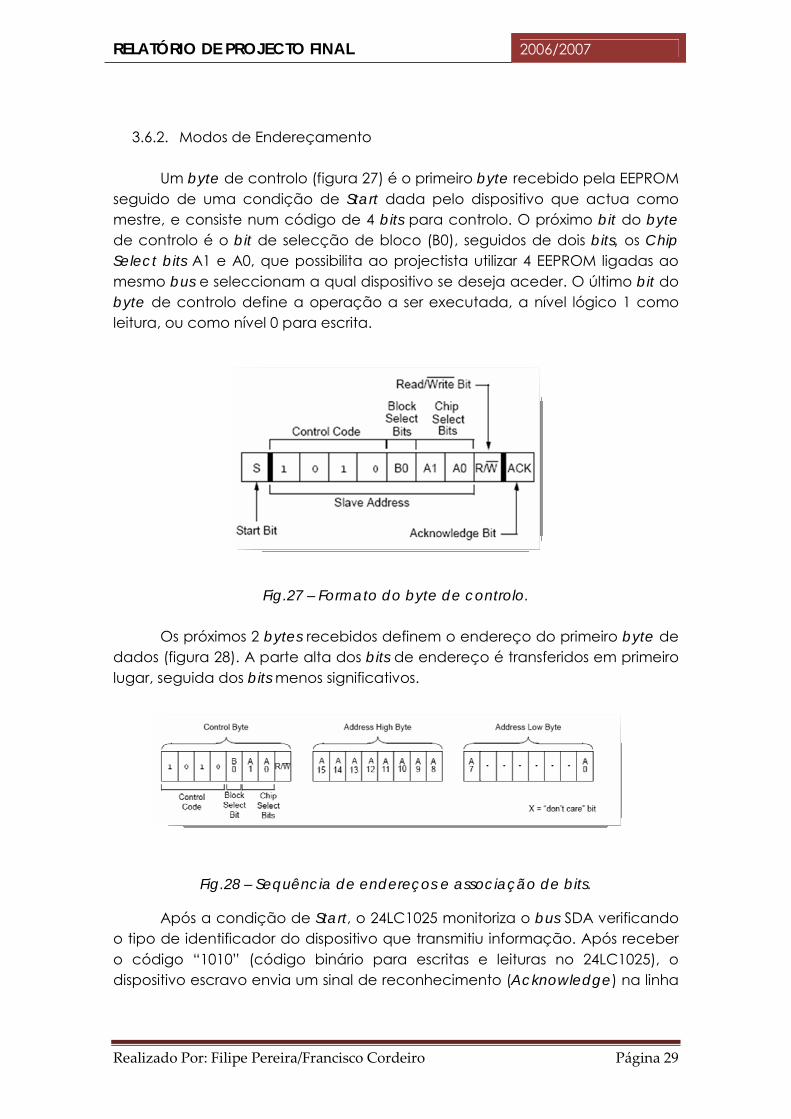
Um byte de controlo (figura 27) é o primeiro byte recebido pela EEPROM seguido de uma condição de Start dada pelo dispositivo que actua como mestre, e consiste num código de 4 bits para controlo. O próximo bit do byte de controlo é o bit de selecção de bloco (B0), seguidos de dois bits, os Chip Select bits A1 e A0, que possibilita ao projectista utilizar 4 EEPROM ligadas ao mesmo bus e seleccionam a qual dispositivo se deseja aceder. O último bit do byte de controlo define a operação a ser executada, a nível lógico 1 como leitura, ou como nível 0 para escrita.
Fig.27 – Formato do byte de controlo.
Os próximos 2 bytes recebidos definem o endereço do primeiro byte de dados (figura 28). A parte alta dos bits de endereço é transferidos em primeiro lugar, seguida dos bits menos significativos.
Fig.28 – Sequência de endereços e associação de bits.
Após a condição de Start, o 24LC1025 monitoriza o bus SDA verificando o tipo de identificador do dispositivo que transmitiu informação. Após receber o código “1010” (código binário para escritas e leituras no 24LC1025), o dispositivo escravo envia um sinal de reconhecimento (Acknowledge) na linha

RELATÓRIO DE PROJECTO FINAL 2006/2007
Realizado Por: Filipe Pereira/Francisco Cordeiro Página 30
de SDA e dependendo do estado do bit de escrita/leitura, o 24LC1025 escolhe a operação pretendida.
3.6.3. Descrição Funcional
O 24LC1025 suporta um bus bidireccional de 2 fios e um protocolo de transmissão de dados. O dispositivo que envia os dados para o bus está definido como transmissor, e o dispositivo responsável pela recepção é o receptor. O bus tem que ser controlado por um dispositivo mestre (MASTER) que irá gerar o clock série (SCL), controlar o acesso ao bus, e gerar as condições de Start e Stop enquanto o 24LC1025 actua como escravo (SLAVE). Ambos podem operar como transmissor ou receptor, mas é o dispositivo MASTER que determina qual o modo que está activo.
3.6.3.1. Modo de Escrita
O dispositivo tem dois modos de escrita: byte write e page write. O byte write, como o nome indica, trata da escrita de um byte. O processo consiste após a condição de Start do MASTER, o código de controlo (4 bits), a selecção do bloco (1 bit), o Chip Select (2 bits) e o bit de escrita/leitura (R/W) como 0 lógico é iniciado no bus pelo transmissor. O receptor recebe primeiro a parte alta do endereço do byte após gerar o bit de Acknowledge no 9º clock. De seguida, é transmitido o byte para o ponteiro do 24LC1025 (o ponteiro indica o endereço actual a ser lido ou escrito na EEPROM), seguido do byte menos significativo com o respectivo acknowledge como no caso da parte mais significativa. Desta forma o dispositivo mestre transmite o byte a ser escrito no ponteiro anteriormente definido pelo escravo, ou seja, no endereço correspondente ao ponteiro. A figura 29 mostra o formato do byte write.
Fig.29 – Byte Write.
Após a escrita, é gerado um 3º bit de acknowledge final e o dispositivo mestre gera uma condição de Stop, iniciando a escrita na memória do 24LC1025 enquanto o byte de controlo que iniciou a operação de escrita for igual ao que está a ser executado. Caso seja feito um novo pedido para

RELATÓRIO DE PROJECTO FINAL 2006/2007
Realizado Por: Filipe Pereira/Francisco Cordeiro Página 31
escrita, o dispositivo vai esperar que inicie um novo processo no próximo ciclo, escrevendo depois no endereço seguinte ao anteriormente definido.
Para o modo de Page write, o processo inicia como o do byte write, mas em vez de ser gerada uma condição de Stop, o dispositivo mestre transmite até 127 bytes adicionais, que são temporariamente guardados num buffer interno, sendo escritos após o mestre transmitir a condição de Stop. Após receber cada palavra, os 7 LSB do apontador de endereços são internamente incrementados, e caso sejam enviados mais de 128 bits para escrita, o endereço volta ao início começando a escrever por cima dos já escritos anteriormente. Tal como no byte write, mal se verifique a condição de Stop, um ciclo de escrita interna inicia (figura 30).
Fig.30 – Page Write.
Se existir uma nova tentativa de escrita, o processo decorre tal como no byte write. Para protecção contra escrita, o pino WP permite ao projectista proteger a escrita na memória, quando estiver a nível lógico 1. Caso contrário, a protecção contra escrita fica sem efeito.
3.6.3.2. Modo de Leitura
As operações de leitura são iniciadas de modo idêntico à de escrita, com a excepção do bit R/W do byte de controlo, que fica a nível lógico 1. Existem 3 tipos de operação de leitura: Leitura de endereço actual, leitura aleatória e leitura sequencial.
a) Leitura de endereço actual
O 24LC1025 contém um contador de endereço que mantém o endereço da última palavra acedida, internamente incrementa uma vez. Portanto, se a leitura anterior estiver no endereço ‘n’, a próxima leitura corresponderá ao endereço ‘n+1’. Após receber o byte de controlo, o 24LC1025 responde com o acknowledge e transmite a palavra de 8 bits. O mestre não reconhece a transferência mas gera a condição de Stop e o 24LC1025 pára a transmissão (figura 31).
RELATÓRIO DE PROJECTO FINAL 2006/2007
Realizado Por: Filipe Pereira/Francisco Cordeiro Página 32
Fig.31 – Leitura de endereço actual.
b) Leitura Aleatória
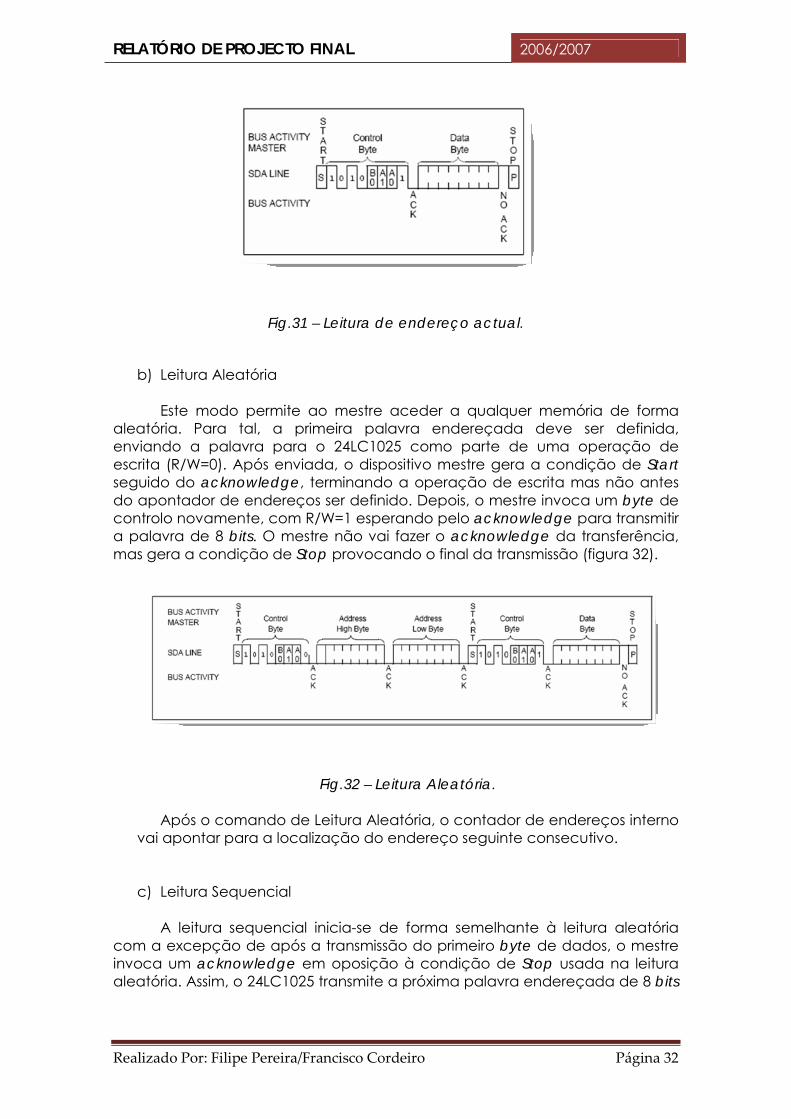
Este modo permite ao mestre aceder a qualquer memória de forma aleatória. Para tal, a primeira palavra endereçada deve ser definida, enviando a palavra para o 24LC1025 como parte de uma operação de escrita (R/W=0). Após enviada, o dispositivo mestre gera a condição de Start seguido do acknowledge, terminando a operação de escrita mas não antes do apontador de endereços ser definido. Depois, o mestre invoca um byte de controlo novamente, com R/W=1 esperando pelo acknowledge para transmitir a palavra de 8 bits. O mestre não vai fazer o acknowledge da transferência, mas gera a condição de Stop provocando o final da transmissão (figura 32).
Fig.32 – Leitura Aleatória. Após o comando de Leitura Aleatória, o contador de endereços interno vai apontar para a localização do endereço seguinte consecutivo. c) Leitura Sequencial
A leitura sequencial inicia-se de forma semelhante à leitura aleatória com a excepção de após a transmissão do primeiro byte de dados, o mestre invoca um acknowledge em oposição à condição de Stop usada na leitura aleatória. Assim, o 24LC1025 transmite a próxima palavra endereçada de 8 bits
RELATÓRIO DE PROJECTO FINAL 2006/2007
Realizado Por: Filipe Pereira/Francisco Cordeiro Página 33
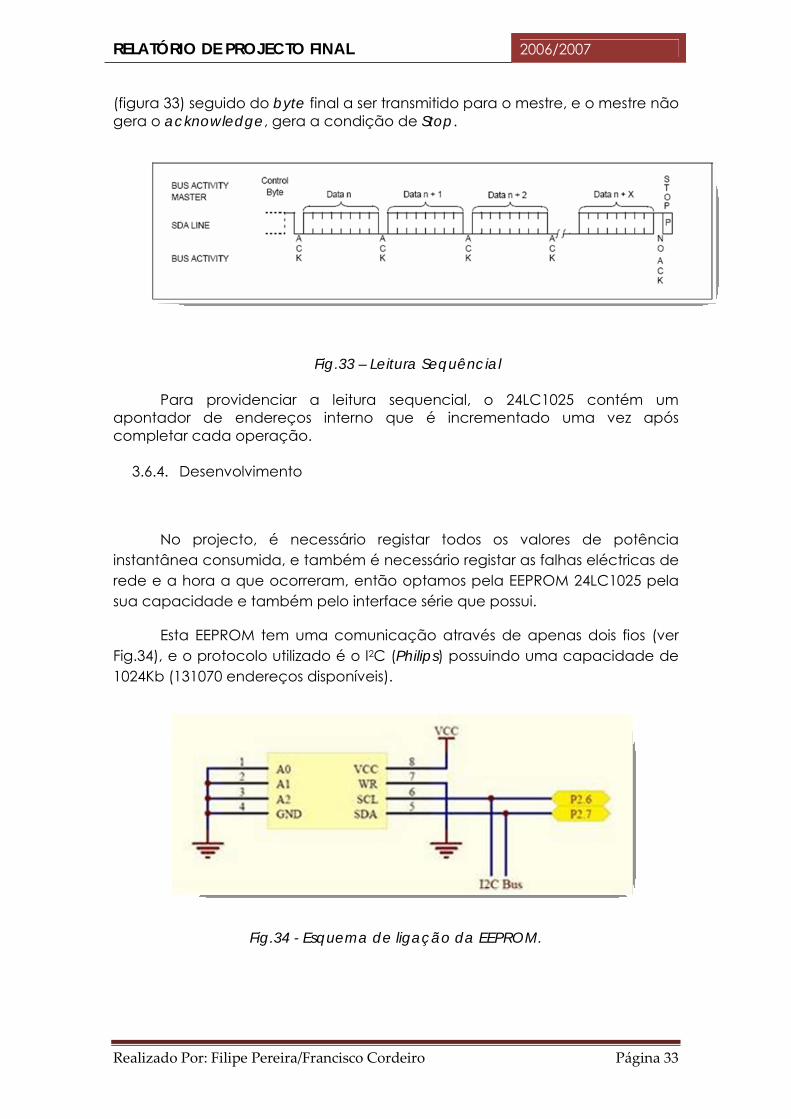
(figura 33) seguido do byte final a ser transmitido para o mestre, e o mestre não gera o acknowledge, gera a condição de Stop.
Fig.33 – Leitura Sequêncial
Para providenciar a leitura sequencial, o 24LC1025 contém um apontador de endereços interno que é incrementado uma vez após completar cada operação.
3.6.4. Desenvolvimento
No projecto, é necessário registar todos os valores de potência instantânea consumida, e também é necessário registar as falhas eléctricas de rede e a hora a que ocorreram, então optamos pela EEPROM 24LC1025 pela sua capacidade e também pelo interface série que possui.
Esta EEPROM tem uma comunicação através de apenas dois fios (ver Fig.34), e o protocolo utilizado é o I2C (Philips) possuindo uma capacidade de 1024Kb (131070 endereços disponíveis).
Fig.34 - Esquema de ligação da EEPROM.
RELATÓRIO DE PROJECTO FINAL 2006/2007
Realizado Por: Filipe Pereira/Francisco Cordeiro Página 34
3.6.4.1. Mapeamento da EEPROM
Foram criados dois ponteiros para endereçamento. O primeiro ponteiro percorre a EEPROM de 0x0000 até 0x18000 (Fig.35), endereços utilizados para armazenar os valores de potência. O segundo ponteiro começa em 0x18001 (inclusivé) até 0xFFFFF e está reservado para guardar valores e detalhes sobre falhas eléctricas que ocorreram na rede.

RELATÓRIO DE PROJECTO FINAL 2006/2007
Realizado Por: Filipe Pereira/Francisco Cordeiro Página 35
Fig.35 - Mapeamento da EEPROM.
3.6.4.2. Algoritmo para gravação de dados na EEPROM Foi criado um algoritmo para escrever na EEPROM:
• Para valores de potência instantânea - O primeiro endereço guarda os dois dígitos à esquerda da vírgula, o segundo endereço os dígitos mais à esquerda. Por último, o terceiro endereço guarda os dois dígitos das casas decimais.
RELATÓRIO DE PROJECTO FINAL 2006/2007
Realizado Por: Filipe Pereira/Francisco Cordeiro Página 36
• Para valores de Watt/hora – o quarto endereço guarda os dois dígitos
à esquerda da vírgula, e desta vez os únicos pois a medição em Watt/hora é bastante mais pequena que a da potência instantânea:
Para um valor superior, vejamos o exemplo de 600 watt/hora:
Como a informação é guardada de 5 em 5 minutos na EEPROM, dificilmente se vão somar valores de potência com mais de duas casas à esquerda da vírgula, mas é mais importante os valores à direita da vírgula, logo guardamos os dois dígitos à direita no quinto endereço e o 3º e 4º dígito no sexto endereço.
• Informação temporal – do 7º endereço ao 11º endereço é guardado dia, mês, ano, hora, e minuto de quando foi medido e registado os valores da potência medida.
• Para valores de falhas de rede - Os seis 1ºs endereços guardam o dia, mês, ano, hora, minuto e segundo a que ocorreu a falha.
Esta memória tem a capacidade de registar valores sequenciais até aproximadamente 40 dias, sendo recomendado que se faça uma cópia de segurança antes deste período pois podem ocorrer sempre falhas eléctricas durante esse mesmo período e limitam a capacidade. Recomendamos uma descarga de valores de mês a mês.
3.6.5. Teste
Todos os testes realizados com a EEPROM foram bem sucedidos. Este componente não apresentou grandes dificuldades de ligação, numa primeira
RELATÓRIO DE PROJECTO FINAL 2006/2007
Realizado Por: Filipe Pereira/Francisco Cordeiro Página 37
fase na versão PDIP em breadboard, ou mesmo na fase final com a versão SOIC em PCB, que pode ser consultada em Anexo (II. PCB’s).
A comunicação por I2C facilita muito o registo de valores, pois quando se comunica com um dispositivo mestre como o PIC18F4550 que mesmo possui 40 portos, apenas liberta 2 pinos para armazenamento de dados.
3.6.6. Conclusões
Este bloco não foi muito complicado de elaborar, sendo a única dificuldade a criação dos algoritmos descritos, e já no modo de ligação com a versão SOIC salientamos a dificuldade de soldar o componente na PCB, devido ao seu tamanho.
A escolha de uma memória de 1 Mb foi a forma mais económica e eficiente, pois se pensarmos numa memória de 512K bits teríamos metade dos endereços disponíveis, o que implicava descarregar a EEPROM duas vezes por mês para que esta não excede-se a sua capacidade. Em reunião com os nossos orientadores decidimos que este componente, face á capacidade que apresenta para registo de valores, foi uma boa opção.
3.7. Medidor de Potência ADE7751
RELATÓRIO DE PROJECTO FINAL 2006/2007
Realizado Por: Filipe Pereira/Francisco Cordeiro Página 38
3.7.1. Introdução
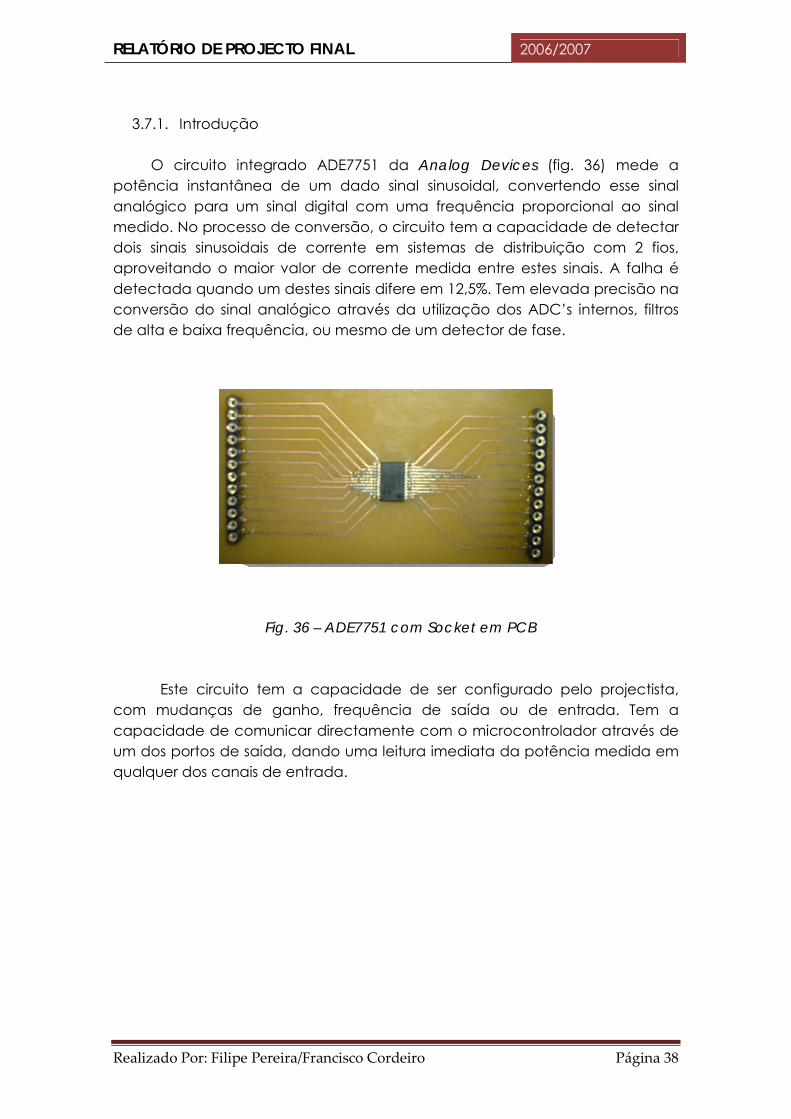
O circuito integrado ADE7751 da Analog Devices (fig. 36) mede a
potência instantânea de um dado sinal sinusoidal, convertendo esse sinal analógico para um sinal digital com uma frequência proporcional ao sinal medido. No processo de conversão, o circuito tem a capacidade de detectar dois sinais sinusoidais de corrente em sistemas de distribuição com 2 fios, aproveitando o maior valor de corrente medida entre estes sinais. A falha é detectada quando um destes sinais difere em 12,5%. Tem elevada precisão na conversão do sinal analógico através da utilização dos ADC’s internos, filtros de alta e baixa frequência, ou mesmo de um detector de fase.
Fig. 36 – ADE7751 com Socket em PCB Este circuito tem a capacidade de ser configurado pelo projectista, com mudanças de ganho, frequência de saída ou de entrada. Tem a capacidade de comunicar directamente com o microcontrolador através de um dos portos de saída, dando uma leitura imediata da potência medida em qualquer dos canais de entrada.
RELATÓRIO DE PROJECTO FINAL 2006/2007
Realizado Por: Filipe Pereira/Francisco Cordeiro Página 39
3.7.2. Estrutura Interna (Diagrama de Blocos)
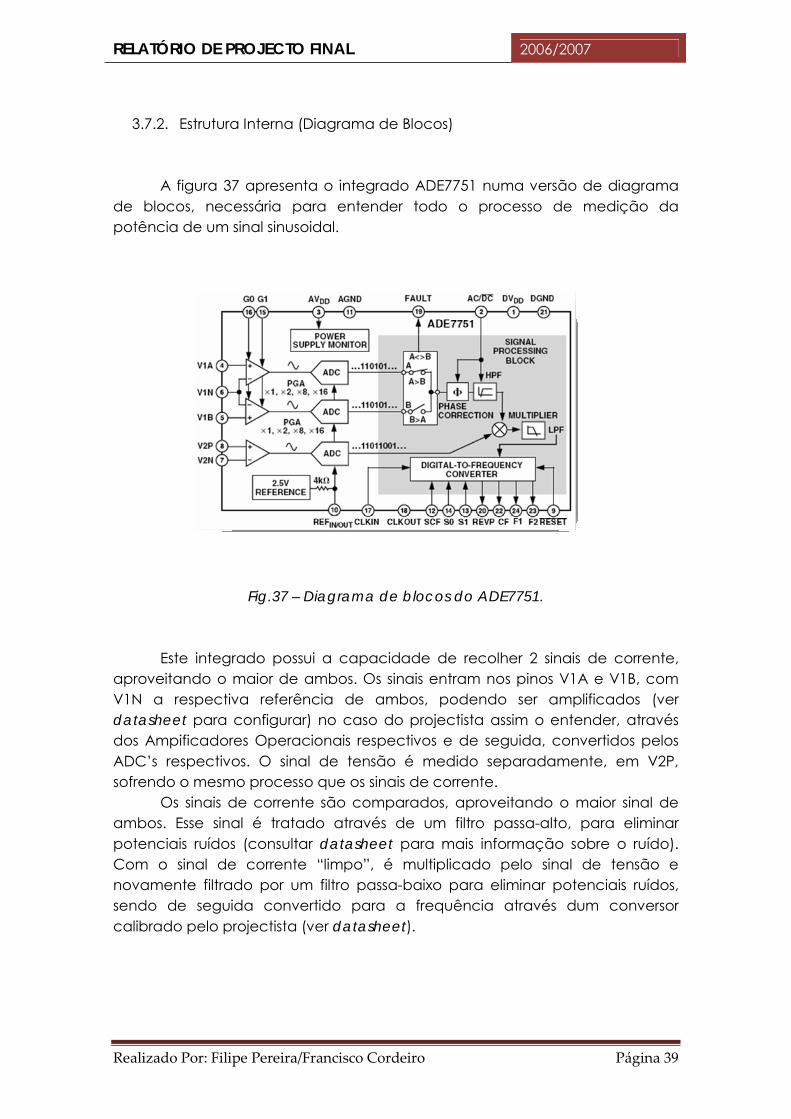
A figura 37 apresenta o integrado ADE7751 numa versão de diagrama de blocos, necessária para entender todo o processo de medição da potência de um sinal sinusoidal.
Fig.37 – Diagrama de blocos do ADE7751. Este integrado possui a capacidade de recolher 2 sinais de corrente, aproveitando o maior de ambos. Os sinais entram nos pinos V1A e V1B, com V1N a respectiva referência de ambos, podendo ser amplificados (ver datasheet para configurar) no caso do projectista assim o entender, através dos Ampificadores Operacionais respectivos e de seguida, convertidos pelos ADC’s respectivos. O sinal de tensão é medido separadamente, em V2P, sofrendo o mesmo processo que os sinais de corrente. Os sinais de corrente são comparados, aproveitando o maior sinal de ambos. Esse sinal é tratado através de um filtro passa-alto, para eliminar potenciais ruídos (consultar datasheet para mais informação sobre o ruído). Com o sinal de corrente “limpo”, é multiplicado pelo sinal de tensão e novamente filtrado por um filtro passa-baixo para eliminar potenciais ruídos, sendo de seguida convertido para a frequência através dum conversor calibrado pelo projectista (ver datasheet).
RELATÓRIO DE PROJECTO FINAL 2006/2007
Realizado Por: Filipe Pereira/Francisco Cordeiro Página 40
3.7.3. Descrição e funções dos pinos
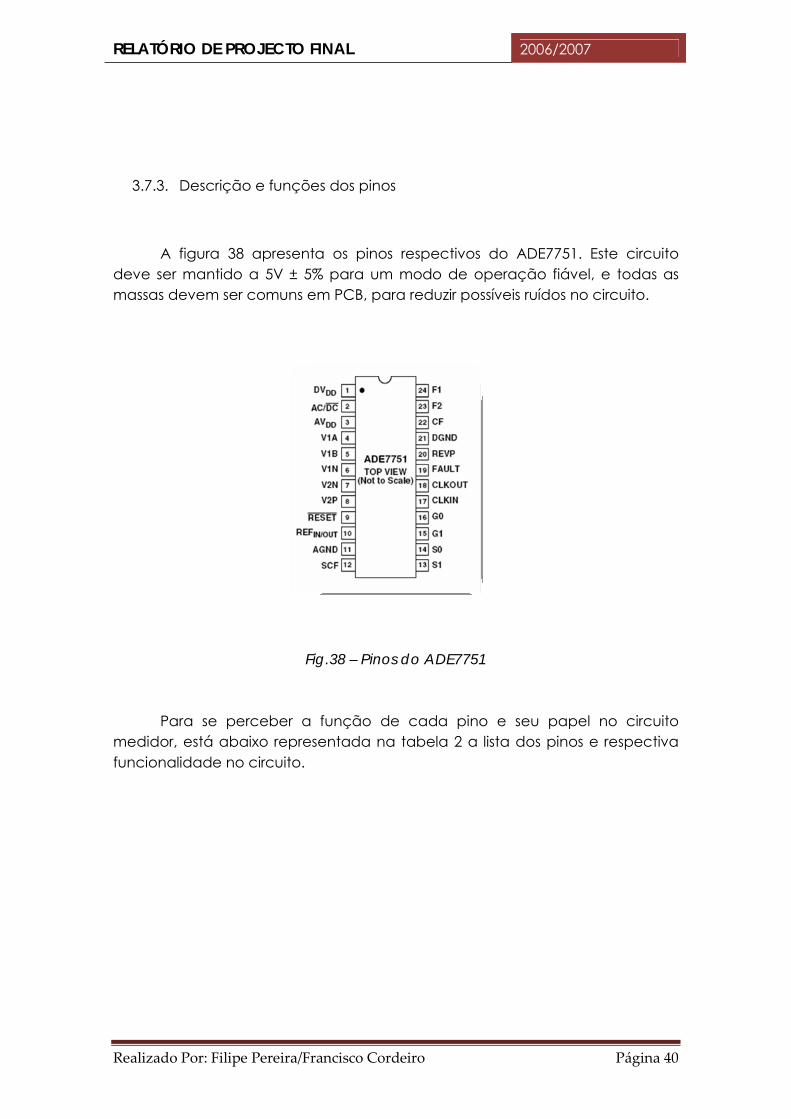
A figura 38 apresenta os pinos respectivos do ADE7751. Este circuito deve ser mantido a 5V ± 5% para um modo de operação fiável, e todas as massas devem ser comuns em PCB, para reduzir possíveis ruídos no circuito.
Fig.38 – Pinos do ADE7751
Para se perceber a função de cada pino e seu papel no circuito medidor, está abaixo representada na tabela 2 a lista dos pinos e respectiva funcionalidade no circuito.

RELATÓRIO DE PROJECTO FINAL 2006/2007
Realizado Por: Filipe Pereira/Francisco Cordeiro Página 41
Pino Nome Descrição
1
DVDD Alimentação digital. Este pino disponibiliza a tensão digital para o circuito. Deve ser alimentado e mantido a 5 V ± 5% para correcta operação. Deve ser ligado um condensador de 10 µF em paralelo com um condensador cerâmico de 100nF para reduzir o ruído.
2 AC/DC Liga o filtro passa-alto. Com nível lógico 1, activa o filtro passa-alto (HPF) e a correcção de fase deste filtro é compensada numa frequência dos 45 Hz até 1 kHz.
3 AVDD Alimentação Analógica. Este pino alimenta a tensão analógica do circuito. Deve ser alimentado e mantido a 5 V ± 5% para correcta operação. Deve ser ligado um condensador de 10 µF em paralelo com um condensador cerâmico de 100nF para reduzir o ruído.
4,5 V1A,V1B Entradas analógicas para o canal 1 (canal de corrente). Estas entradas são completamente diferenciais em termos de tensão com o máximo de ±660 mV em relação ao pino V1N. O sinal máximo de tensão nestes pinos é de ±1 V em relação ao pino AGND.
6 V1N Entrada negativa de tensão diferencial em relação a V1A e V1B. O sinal máximo de tensão nestes pinos é de ±1 V em relação a AGND. Deve ser ligada uma resistência de burden a esta entrada e fixado um determinado potencial, ou seja, AGND.
7,8 V2N,V2P Entradas Negativa e Positiva do canal 2 (canal de tensão). Estas entradas são completamente diferenciais em termos de tensão com o máximo de ±660 mV em relação ao pino V1N. O sinal máximo de tensão nestes pinos é de ±1 V em relação a AGND.
9 RESET Pino de Reset do ADE7751. Um nível lógico 0 leva a todos os circuitos digitais e ADC’s a uma condição de reset e limpa todos os registos internos do ADE7751.
10 REFIN/OUT Proporciona acesso à tensão de referência do integrado. A referência normal do integrado é de 2.5 V ±8% e a temperatura típica tem um coeficiente de 30 ppm/°C. Uma referência externa pode ser também conectada a este pino. Em qualquer dos casos, este pino deve ser ligado em paralelo com um condensador de 1 µF em paralelo com um condensador cerâmico de 100nF.
11 AGND Indica a referência à massa analógica do circuito, ou seja, ADC’s e referências. Este pino deve ser ligado a massa analógica no caso
RELATÓRIO DE PROJECTO FINAL 2006/2007
Realizado Por: Filipe Pereira/Francisco Cordeiro Página 42
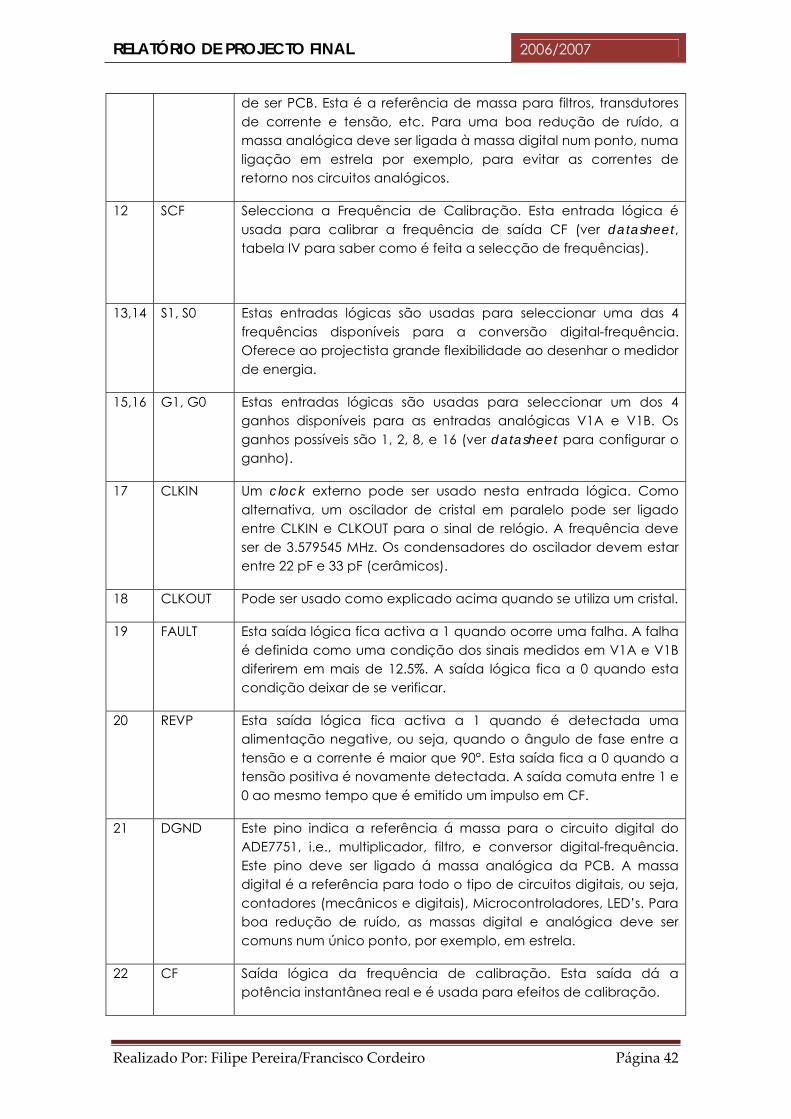
de ser PCB. Esta é a referência de massa para filtros, transdutores de corrente e tensão, etc. Para uma boa redução de ruído, a massa analógica deve ser ligada à massa digital num ponto, numa ligação em estrela por exemplo, para evitar as correntes de retorno nos circuitos analógicos.
12 SCF Selecciona a Frequência de Calibração. Esta entrada lógica é usada para calibrar a frequência de saída CF (ver datasheet, tabela IV para saber como é feita a selecção de frequências).
13,14 S1, S0 Estas entradas lógicas são usadas para seleccionar uma das 4 frequências disponíveis para a conversão digital-frequência. Oferece ao projectista grande flexibilidade ao desenhar o medidor de energia.
15,16 G1, G0 Estas entradas lógicas são usadas para seleccionar um dos 4 ganhos disponíveis para as entradas analógicas V1A e V1B. Os ganhos possíveis são 1, 2, 8, e 16 (ver datasheet para configurar o ganho).
17 CLKIN Um clock externo pode ser usado nesta entrada lógica. Como alternativa, um oscilador de cristal em paralelo pode ser ligado entre CLKIN e CLKOUT para o sinal de relógio. A frequência deve ser de 3.579545 MHz. Os condensadores do oscilador devem estar entre 22 pF e 33 pF (cerâmicos).
18 CLKOUT Pode ser usado como explicado acima quando se utiliza um cristal.
19 FAULT Esta saída lógica fica activa a 1 quando ocorre uma falha. A falha é definida como uma condição dos sinais medidos em V1A e V1B diferirem em mais de 12.5%. A saída lógica fica a 0 quando esta condição deixar de se verificar.
20 REVP Esta saída lógica fica activa a 1 quando é detectada uma alimentação negative, ou seja, quando o ângulo de fase entre a tensão e a corrente é maior que 90°. Esta saída fica a 0 quando a tensão positiva é novamente detectada. A saída comuta entre 1 e 0 ao mesmo tempo que é emitido um impulso em CF.
21 DGND Este pino indica a referência á massa para o circuito digital do ADE7751, i.e., multiplicador, filtro, e conversor digital-frequência. Este pino deve ser ligado á massa analógica da PCB. A massa digital é a referência para todo o tipo de circuitos digitais, ou seja, contadores (mecânicos e digitais), Microcontroladores, LED’s. Para boa redução de ruído, as massas digital e analógica deve ser comuns num único ponto, por exemplo, em estrela.
22 CF Saída lógica da frequência de calibração. Esta saída dá a potência instantânea real e é usada para efeitos de calibração.

RELATÓRIO DE PROJECTO FINAL 2006/2007
Realizado Por: Filipe Pereira/Francisco Cordeiro Página 43
23,24 F2, F1 Saídas lógicas de baixa frequência. F1 e F2 fornecem potência média real. As saídas lógicas podem ser usadas directamente em contadores electromecânicos e motores passo-a-passo.
Tabela 2 – Descrição dos pinos do ADE7751.
3.7.4. Teoria de funcionamento
Os dois ADC’s digitalizam os sinais de tensão e de corrente. Estes ADC’s correspondem a conversores de 16-bit, amostrando os sinais com uma taxa de 900 kHz. A programação de ganhos no canal de corrente facilita a conversão nos ADC’s. O filtro passa-alto no canal de corrente remove qualquer componente DC no sinal de corrente, eliminando efeitos de ruído no cálculo da potência mais adiante. O cálculo da potência é derivado do sinal instantâneo de potência, que é gerado pela multiplicação directa dos sinais de corrente e de tensão. Para extrair o sinal de potência real, ou seja, a componente DC, o sinal multiplicado é filtrado através de um filtro passa-baixo, como anteriormente descrito. Todos os sinais processados são no domínio digital para uma melhor estabilidade na temperatura e no tempo. A figura 39 resume o processo de conversão.
RELATÓRIO DE PROJECTO FINAL 2006/2007
Realizado Por: Filipe Pereira/Francisco Cordeiro Página 44
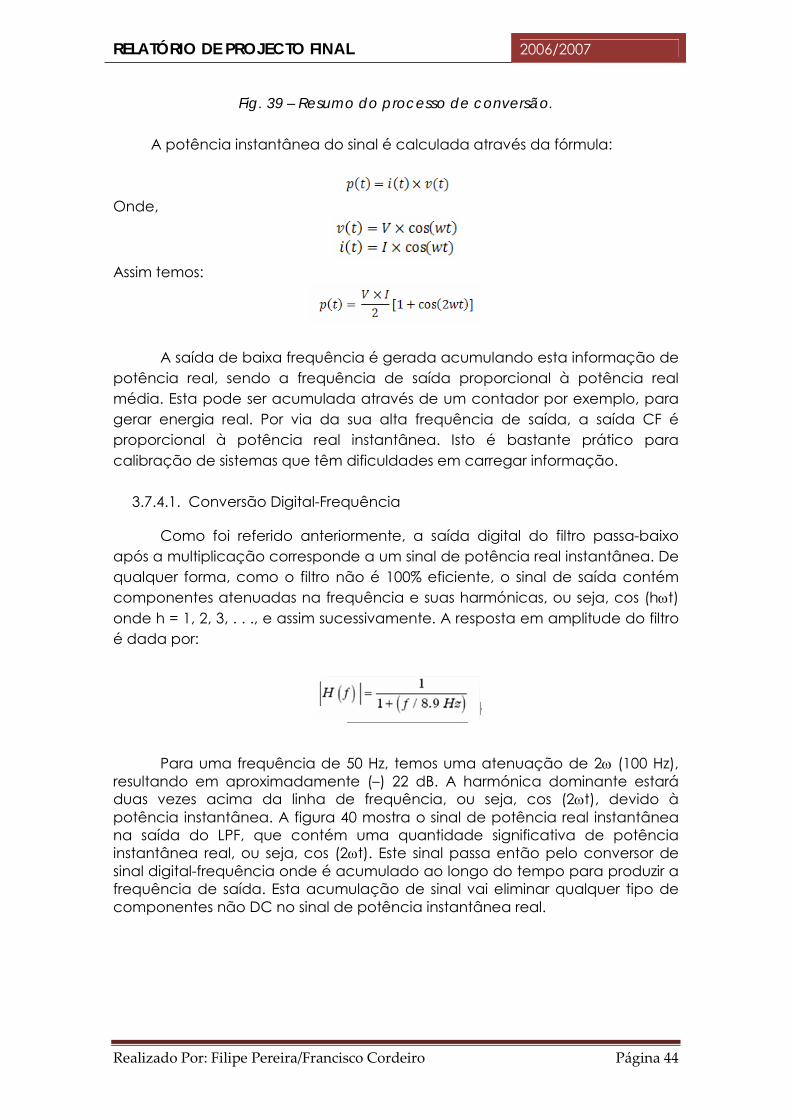
Fig. 39 – Resumo do processo de conversão.
A potência instantânea do sinal é calculada através da fórmula:
Onde,
Assim temos:
A saída de baixa frequência é gerada acumulando esta informação de potência real, sendo a frequência de saída proporcional à potência real média. Esta pode ser acumulada através de um contador por exemplo, para gerar energia real. Por via da sua alta frequência de saída, a saída CF é proporcional à potência real instantânea. Isto é bastante prático para calibração de sistemas que têm dificuldades em carregar informação.
3.7.4.1. Conversão Digital-Frequência
Como foi referido anteriormente, a saída digital do filtro passa-baixo após a multiplicação corresponde a um sinal de potência real instantânea. De qualquer forma, como o filtro não é 100% eficiente, o sinal de saída contém componentes atenuadas na frequência e suas harmónicas, ou seja, cos (hωt) onde h = 1, 2, 3, . . ., e assim sucessivamente. A resposta em amplitude do filtro é dada por:
Para uma frequência de 50 Hz, temos uma atenuação de 2ω (100 Hz), resultando em aproximadamente (–) 22 dB. A harmónica dominante estará duas vezes acima da linha de frequência, ou seja, cos (2ωt), devido à potência instantânea. A figura 40 mostra o sinal de potência real instantânea na saída do LPF, que contém uma quantidade significativa de potência instantânea real, ou seja, cos (2ωt). Este sinal passa então pelo conversor de sinal digital-frequência onde é acumulado ao longo do tempo para produzir a frequência de saída. Esta acumulação de sinal vai eliminar qualquer tipo de componentes não DC no sinal de potência instantânea real.

RELATÓRIO DE PROJECTO FINAL 2006/2007
Realizado Por: Filipe Pereira/Francisco Cordeiro Página 45
Fig.40 – Conversão real de potência-frequência
O valor médio de um sinal sinusoidal é zero. Como tal, a frequência gerada pelo ADE7751 é proporcional á potencia média real. A frequência de saída CF varia no tempo, mesmo em condições de fraca estabilidade de sinal. Esta variação de frequência é devida ao valor da componente cos (2wt) no sinal de potência instantâneo. A frequência em CF pode ser 128 vezes superior aos sinais presentes em F1 e F2. Esta frequência de saída mais elevada é gerada pela acumulação de potência instantânea em intervalos de tempo de menor duração enquanto é feita a conversão para a frequência. Esta rápida acumulação significa menor ocorrência da componente cos (2wt). Como consequência, parte da potência instantânea passa através da conversão digital-frequência, mas não provoca um problema na aplicação. No caso do sinal CF ser usado para propósitos de calibração, a frequência está relacionada com uma média calculada pelo contador de frequência, o que vai remover o ripple. Se CF for usado para medir energia, por exemplo, usar um microprocessador como dispositivo que processa esse sinal enviado por CF, a saída CF deve ser uma média para ser calculada convenientemente a potência. Em todo o caso, se estiver a ser realizada uma medição de energia contando impulsos, não será necessário calcular com base numa média de valores. Por causa das saídas F1 e F2 operarem a uma frequência muito baixa, uma média maior de potência é transportada para a saída.
3.7.4.2. Frequência de Calibração (CF)
A saída de impulsos em CF (frequência de calibração) é usada para efeitos de calibração. A taxa de impulsos em CF pode ser pelo menos de 128 vezes a taxa de impulsos em F1 e F2. Quanto menor for a frequência F1–4
RELATÓRIO DE PROJECTO FINAL 2006/2007
Realizado Por: Filipe Pereira/Francisco Cordeiro Página 46
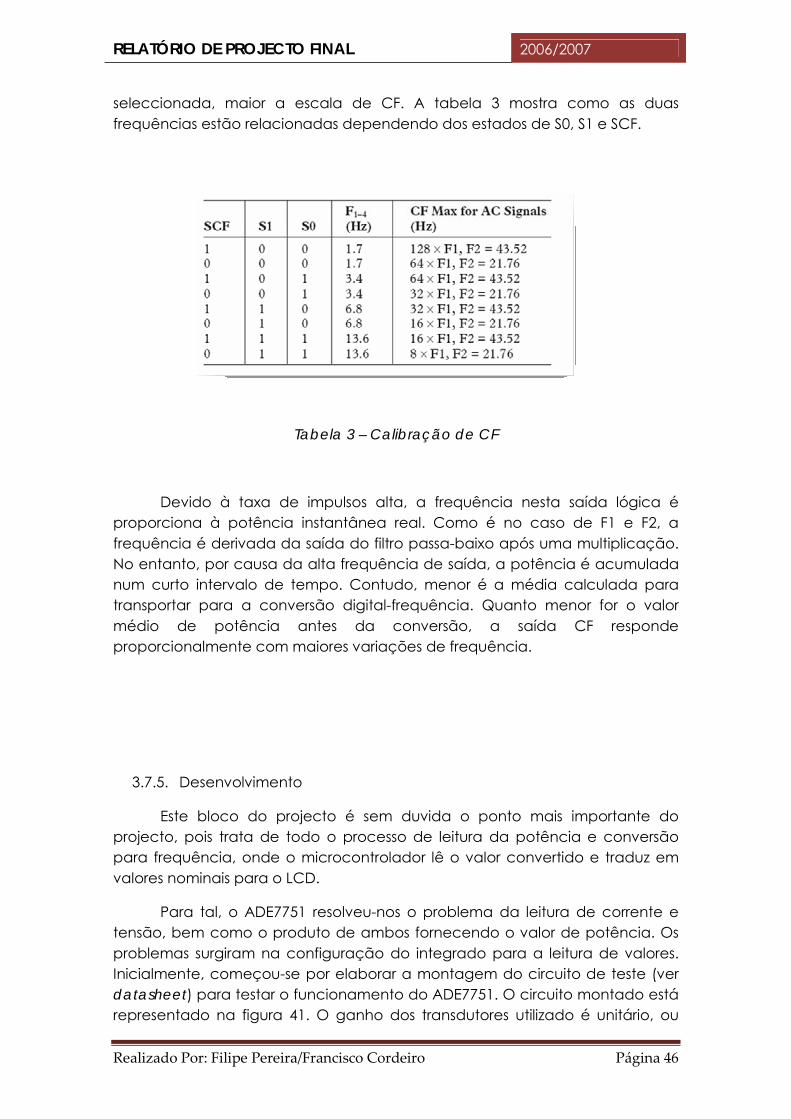
seleccionada, maior a escala de CF. A tabela 3 mostra como as duas frequências estão relacionadas dependendo dos estados de S0, S1 e SCF.
Tabela 3 – Calibração de CF
Devido à taxa de impulsos alta, a frequência nesta saída lógica é proporciona à potência instantânea real. Como é no caso de F1 e F2, a frequência é derivada da saída do filtro passa-baixo após uma multiplicação. No entanto, por causa da alta frequência de saída, a potência é acumulada num curto intervalo de tempo. Contudo, menor é a média calculada para transportar para a conversão digital-frequência. Quanto menor for o valor médio de potência antes da conversão, a saída CF responde proporcionalmente com maiores variações de frequência.
3.7.5. Desenvolvimento
Este bloco do projecto é sem duvida o ponto mais importante do projecto, pois trata de todo o processo de leitura da potência e conversão para frequência, onde o microcontrolador lê o valor convertido e traduz em valores nominais para o LCD.
Para tal, o ADE7751 resolveu-nos o problema da leitura de corrente e tensão, bem como o produto de ambos fornecendo o valor de potência. Os problemas surgiram na configuração do integrado para a leitura de valores. Inicialmente, começou-se por elaborar a montagem do circuito de teste (ver datasheet) para testar o funcionamento do ADE7751. O circuito montado está representado na figura 41. O ganho dos transdutores utilizado é unitário, ou

RELATÓRIO DE PROJECTO FINAL 2006/2007
Realizado Por: Filipe Pereira/Francisco Cordeiro Página 47
seja, não possui amplificação de sinal, e a frequência de calibração configurada foi a mais alta possível.
Fig.41 – 1º Circuito de teste
Como era necessário utilizar um microcontrolador para processar a informação recolhida do circuito, usamos a saída CF pois esta não necessita de um circuito contador na saída, e o sinal de frequência resultante pode ser lido directamente para um microcontrolador. Inicialmente foram feitos testes usando fontes de alimentação reguladas, não necessitando de usar os transformadores de tensão e corrente. O cristal usado foi de 3.2 MHz, mantendo o resto dos componentes.
Para calibrar o circuito, foram necessários inserir 2 transformadores: um de tensão e outro de corrente. Na medição da tensão de entrada, ligamos um transformador acoplado num divisor de tensão para converter os 220 V em 0.22 V. A figura 42 mostra como está ligado o circuito nesse porto de entrada do ADE7751.
RELATÓRIO DE PROJECTO FINAL 2006/2007
Realizado Por: Filipe Pereira/Francisco Cordeiro Página 48
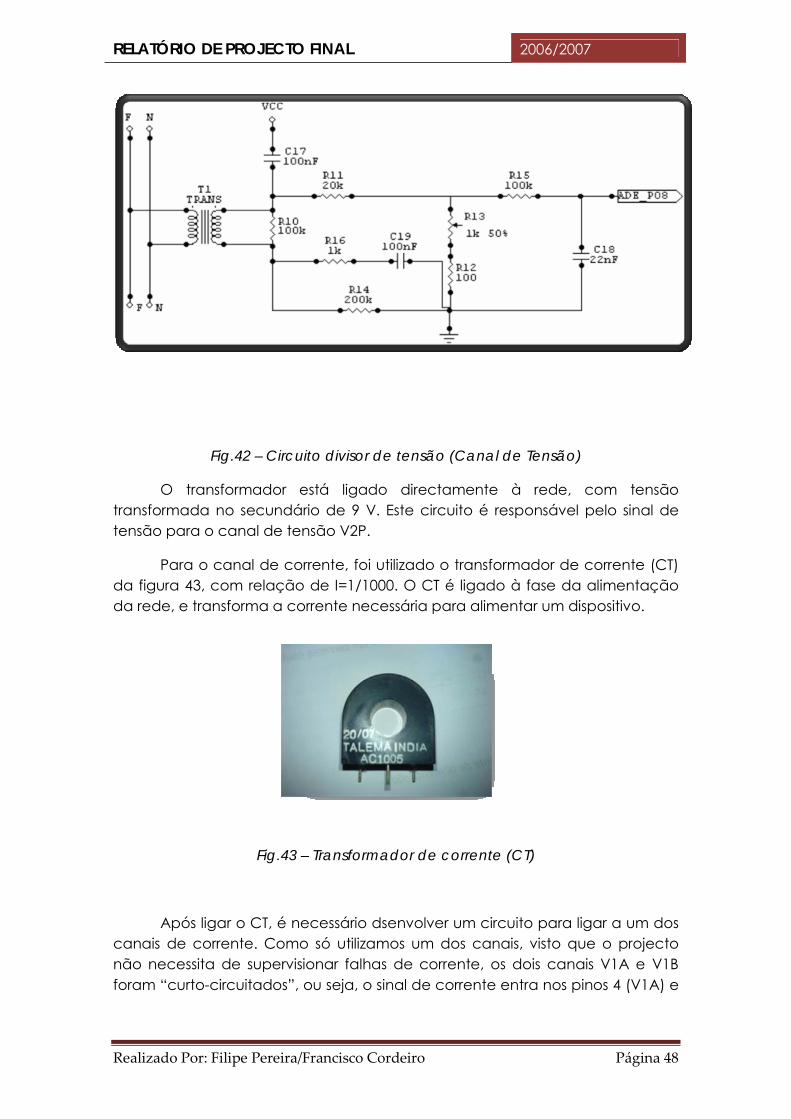
Fig.42 – Circuito divisor de tensão (Canal de Tensão)
O transformador está ligado directamente à rede, com tensão transformada no secundário de 9 V. Este circuito é responsável pelo sinal de tensão para o canal de tensão V2P.
Para o canal de corrente, foi utilizado o transformador de corrente (CT) da figura 43, com relação de I=1/1000. O CT é ligado à fase da alimentação da rede, e transforma a corrente necessária para alimentar um dispositivo.
Fig.43 – Transformador de corrente (CT)
Após ligar o CT, é necessário dsenvolver um circuito para ligar a um dos canais de corrente. Como só utilizamos um dos canais, visto que o projecto não necessita de supervisionar falhas de corrente, os dois canais V1A e V1B foram “curto-circuitados”, ou seja, o sinal de corrente entra nos pinos 4 (V1A) e
RELATÓRIO DE PROJECTO FINAL 2006/2007
Realizado Por: Filipe Pereira/Francisco Cordeiro Página 49
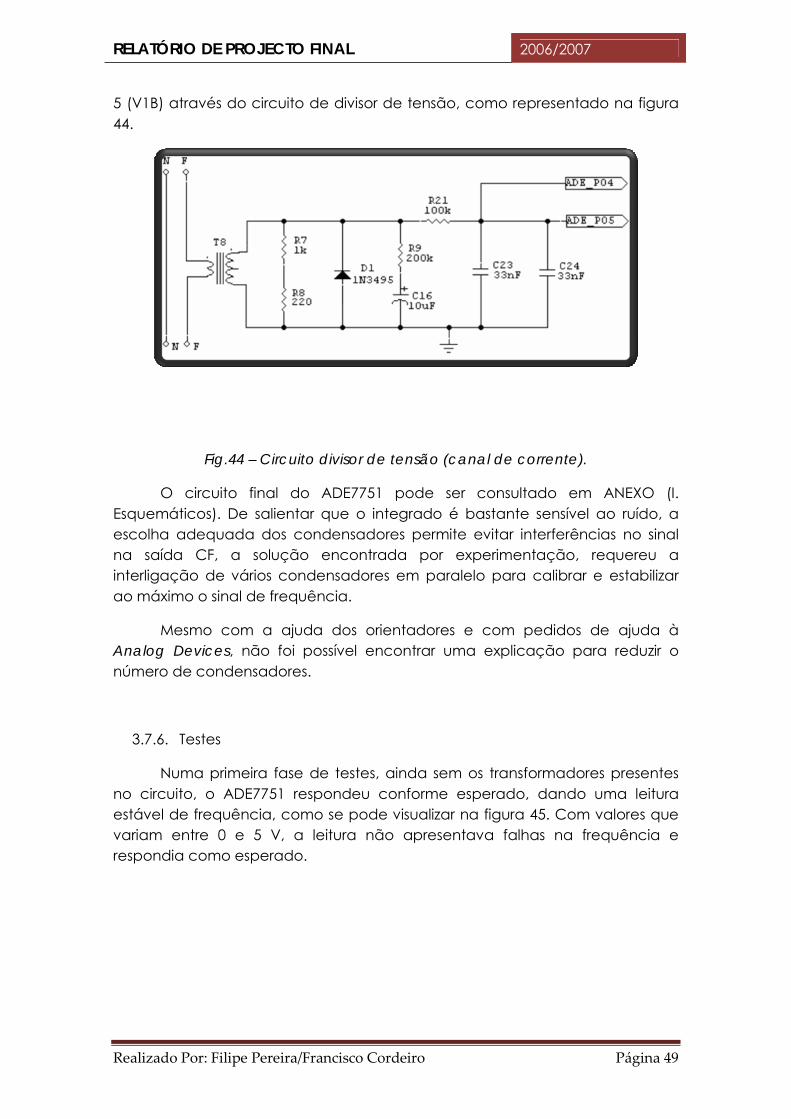
5 (V1B) através do circuito de divisor de tensão, como representado na figura 44.
Fig.44 – Circuito divisor de tensão (canal de corrente).
O circuito final do ADE7751 pode ser consultado em ANEXO (I. Esquemáticos). De salientar que o integrado é bastante sensível ao ruído, a escolha adequada dos condensadores permite evitar interferências no sinal na saída CF, a solução encontrada por experimentação, requereu a interligação de vários condensadores em paralelo para calibrar e estabilizar ao máximo o sinal de frequência.
Mesmo com a ajuda dos orientadores e com pedidos de ajuda à Analog Devices, não foi possível encontrar uma explicação para reduzir o número de condensadores.
3.7.6. Testes
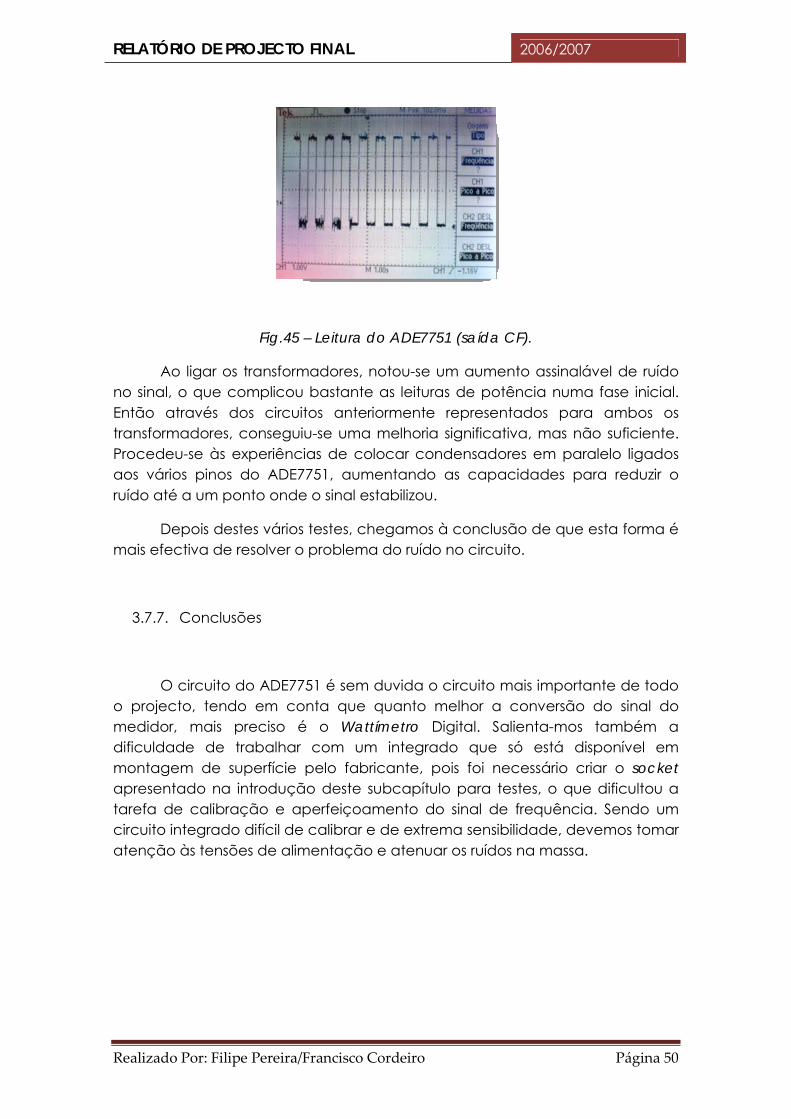
Numa primeira fase de testes, ainda sem os transformadores presentes no circuito, o ADE7751 respondeu conforme esperado, dando uma leitura estável de frequência, como se pode visualizar na figura 45. Com valores que variam entre 0 e 5 V, a leitura não apresentava falhas na frequência e respondia como esperado.
RELATÓRIO DE PROJECTO FINAL 2006/2007
Realizado Por: Filipe Pereira/Francisco Cordeiro Página 50
Fig.45 – Leitura do ADE7751 (saída CF).
Ao ligar os transformadores, notou-se um aumento assinalável de ruído no sinal, o que complicou bastante as leituras de potência numa fase inicial. Então através dos circuitos anteriormente representados para ambos os transformadores, conseguiu-se uma melhoria significativa, mas não suficiente. Procedeu-se às experiências de colocar condensadores em paralelo ligados aos vários pinos do ADE7751, aumentando as capacidades para reduzir o ruído até a um ponto onde o sinal estabilizou.
Depois destes vários testes, chegamos à conclusão de que esta forma é mais efectiva de resolver o problema do ruído no circuito.
3.7.7. Conclusões
O circuito do ADE7751 é sem duvida o circuito mais importante de todo o projecto, tendo em conta que quanto melhor a conversão do sinal do medidor, mais preciso é o Wattímetro Digital. Salienta-mos também a dificuldade de trabalhar com um integrado que só está disponível em montagem de superfície pelo fabricante, pois foi necessário criar o socket apresentado na introdução deste subcapítulo para testes, o que dificultou a tarefa de calibração e aperfeiçoamento do sinal de frequência. Sendo um circuito integrado difícil de calibrar e de extrema sensibilidade, devemos tomar atenção às tensões de alimentação e atenuar os ruídos na massa.

RELATÓRIO DE PROJECTO FINAL 2006/2007
Realizado Por: Filipe Pereira/Francisco Cordeiro Página 51
3.8. Microcontrolador PIC18F4550
3.8.1. Introdução O microcontrolador é o bloco de junção de todo o projecto. Tem como funções analisar, comunicar, medir e actuar consoante a necessidade do projectista. Do ponto de vista de um projectista, os microcontroladores são uma autêntica revolução no mundo da electrónica, pois cada vez são mais evoluídos e cada vez mais oferecem novas opções aos seus utilizadores, desde ligações USB de alta velocidade até ADC’s internos com 12 bits. Decidimos para a elaboração deste projecto utilizar a família PIC pois são cada vez mais utilizados em circuitos no dia-a-dia, pois têm evoluído a um ritmo elevado, oferecendo hoje em dia muitas vantagens para quem sabe trabalhar com este tipo de produtos. A decisão mais difícil recaiu em qual dos PIC escolher, mas após analisadas todas as necessidades, a escolha recaiu no 18F4550 (ver fig.46), com USB 2.0, ADC interno e com 16K bits para memória de programa. Este PIC tem uma arquitectura RISC (Reduced Instruction Set Computer - é uma linha de arquitectura de computadores que favorece um conjunto simples e pequeno de instruções que levam aproximadamente a mesma quantidade de tempo para serem executadas), e comparando com o microcontrolador usado no inicio do projecto, possui menos instruções que o 8053, que utilizava uma arquitectura CISC (Complex Instruction Set Computer - é um processador capaz de executar centenas de instruções complexas diferentes sendo, assim, extremamente versátil), tornando assim a sua programação mais simplificada que a família 8053. O PIC, tal como o 8053, é programável via ISP (in system programming) e para isso necessita de apenas 3 pinos (PGC, PGD e MCLR).

RELATÓRIO DE PROJECTO FINAL 2006/2007
Realizado Por: Filipe Pereira/Francisco Cordeiro Página 52
Fig.46 – PIC18F4550 versão PDIP (40PIN) e TQFP (44PIN)
O software utilizado para trabalhar foi o MPLAB da Microchip, com suporte directo do próprio fabricante. A linguagem de programação é C. Quanto ao compilador foram testados o C18, o Hi-Tech C lite e o CCS. De todos o que apresentou melhor interface, apesar de menor optimização de código, foi o CCS. Este compilador, permite numa linha de comando iniciar vários drivers para comunicação SPI ou I2C, sem dificuldade, e tem vários fóruns oficiais na Internet que auxiliam qualquer projectista que apresente as suas dúvidas.
O programador utilizado foi o ICD2 (ver Fig.47) também da Microchip,
este dispositivo permite programar o microcontrolador directamente no circuito sem ser preciso removê-lo, permitindo assim actualizações de firmware mesmo depois do projecto estar terminado.
Fig.47 – Programador ICD2.
O ICD2, permite também o debug por hardware, isto é, permite executar instruções passo a passo para depurar o programa desenvolvido. O MPLAB possui comunicação directa com o ICD2, para simplificar a interface
RELATÓRIO DE PROJECTO FINAL 2006/2007
Realizado Por: Filipe Pereira/Francisco Cordeiro Página 53
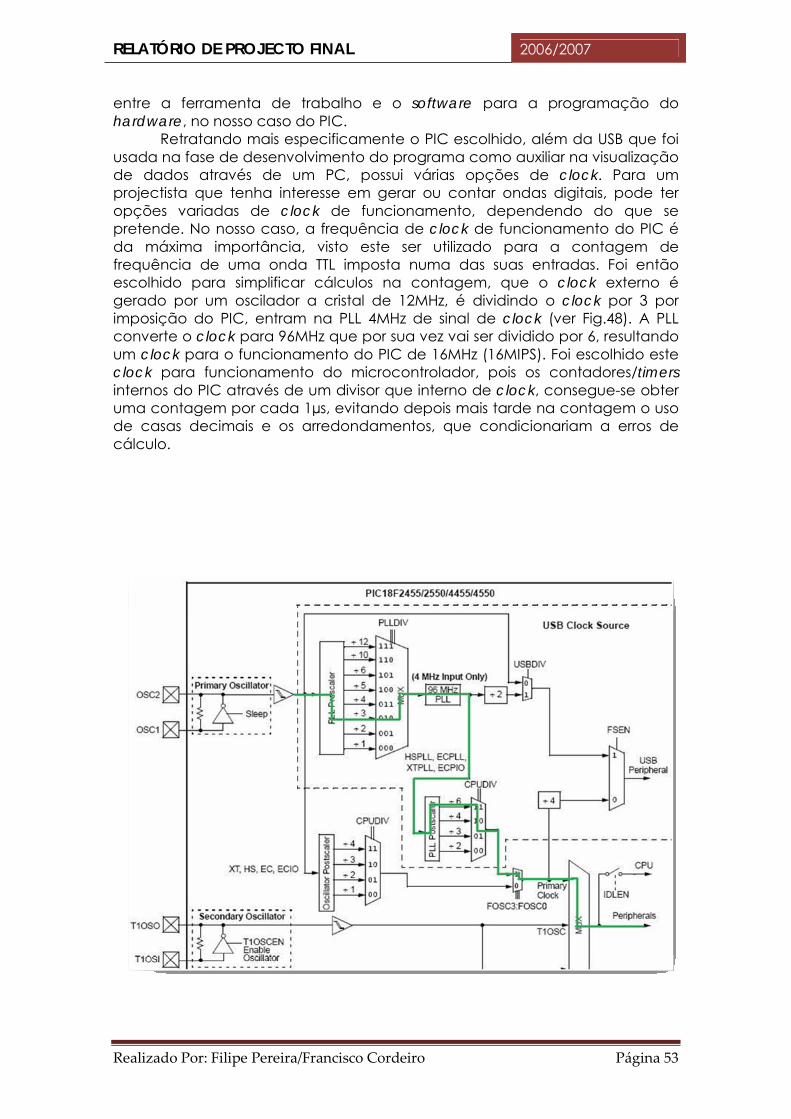
entre a ferramenta de trabalho e o software para a programação do hardware, no nosso caso do PIC. Retratando mais especificamente o PIC escolhido, além da USB que foi usada na fase de desenvolvimento do programa como auxiliar na visualização de dados através de um PC, possui várias opções de clock. Para um projectista que tenha interesse em gerar ou contar ondas digitais, pode ter opções variadas de clock de funcionamento, dependendo do que se pretende. No nosso caso, a frequência de clock de funcionamento do PIC é da máxima importância, visto este ser utilizado para a contagem de frequência de uma onda TTL imposta numa das suas entradas. Foi então escolhido para simplificar cálculos na contagem, que o clock externo é gerado por um oscilador a cristal de 12MHz, é dividindo o clock por 3 por imposição do PIC, entram na PLL 4MHz de sinal de clock (ver Fig.48). A PLL converte o clock para 96MHz que por sua vez vai ser dividido por 6, resultando um clock para o funcionamento do PIC de 16MHz (16MIPS). Foi escolhido este clock para funcionamento do microcontrolador, pois os contadores/timers internos do PIC através de um divisor que interno de clock, consegue-se obter uma contagem por cada 1µs, evitando depois mais tarde na contagem o uso de casas decimais e os arredondamentos, que condicionariam a erros de cálculo.
RELATÓRIO DE PROJECTO FINAL 2006/2007
Realizado Por: Filipe Pereira/Francisco Cordeiro Página 54
Fig.48 – Caminho interno escolhido para clock do PIC.
Outra das grandes vantagens de usar um PIC da família 18F4550 é o facto de esta família ter um modo de captura e cálculo da frequência de uma onda TTL na entrada de um porto I/O específico do PIC (modo CCP). Este método activa automaticamente uma interrupção interna do PIC, sempre que existir um flanco ascendente de sinal na entrada deste porto I/O, este modo é de 16 bits, com uma resolução máxima de 5.2ns. Este 18F4550, está optimizado para ser utilizado com linguagem C, permite quase 100000 ciclos de escrita e retêm os dados na FLASH EEPROM mais de 40 anos. Permite ainda, trabalhar com uma grande variedade de tensões que vão desde os 2V até ao máximo de 5.5V, sendo fácil a sua adaptação a qualquer projecto.
3.8.2. Princípio de Funcionamento Do PIC foram utilizados grande parte das suas funcionalidades neste projecto, desde comunicação I2C a SPI. Para medir o valor da frequência da onda de entrada proveniente do ADE7751, foi utilizado o modo de captura do PIC (modo CCP1), em que cada vez que existe um flanco ascendente no porto I/O de CCP1, é activa uma interrupção interna, que faz a diferença do valor armazenado no timer1 com o actual, conseguindo assim determinar o tempo que passou entre um flanco ascendente anterior e o flanco ascendente actual. Ao saber o tempo que demorou a ocorrer os flancos ( Período – T), consegue-se saber o valor da frequência (f=1/T). Como foi referido acima, o clock de funcionamento do PIC encontra-se nos 16MHz, isto é 16MIPS, o que permite facilmente o PIC executar todas as instruções necessárias sem ocorrência de problemas de lentidão ou de acumulação de tarefas.
3.8.3. Desenvolvimento O PIC é sem sombra de dúvida o bloco central neste projecto, permitindo analisar, medir e controlar. É utilizado para guardar menus de navegação do projecto, comunicar com todos os blocos de modo a poder apresentar a informação ao utilizador para poder comandar através de teclas, dando ao utilizador a possibilidade de intervir para alterar datas, consulta de medições, etc.. É um dispositivo que tem um baixo consumo de
RELATÓRIO DE PROJECTO FINAL 2006/2007
Realizado Por: Filipe Pereira/Francisco Cordeiro Página 55
energia podendo estar ligado 24 horas por dia sem qualquer problema tanto monetário como de sobreaquecimento. O projecto tem 4 pinos dedicados para possíveis actualizações de firmware, que possam surgir mais tarde, de modo a corrigir certos problemas que sejam identificados pelos utilizadores do medidor.
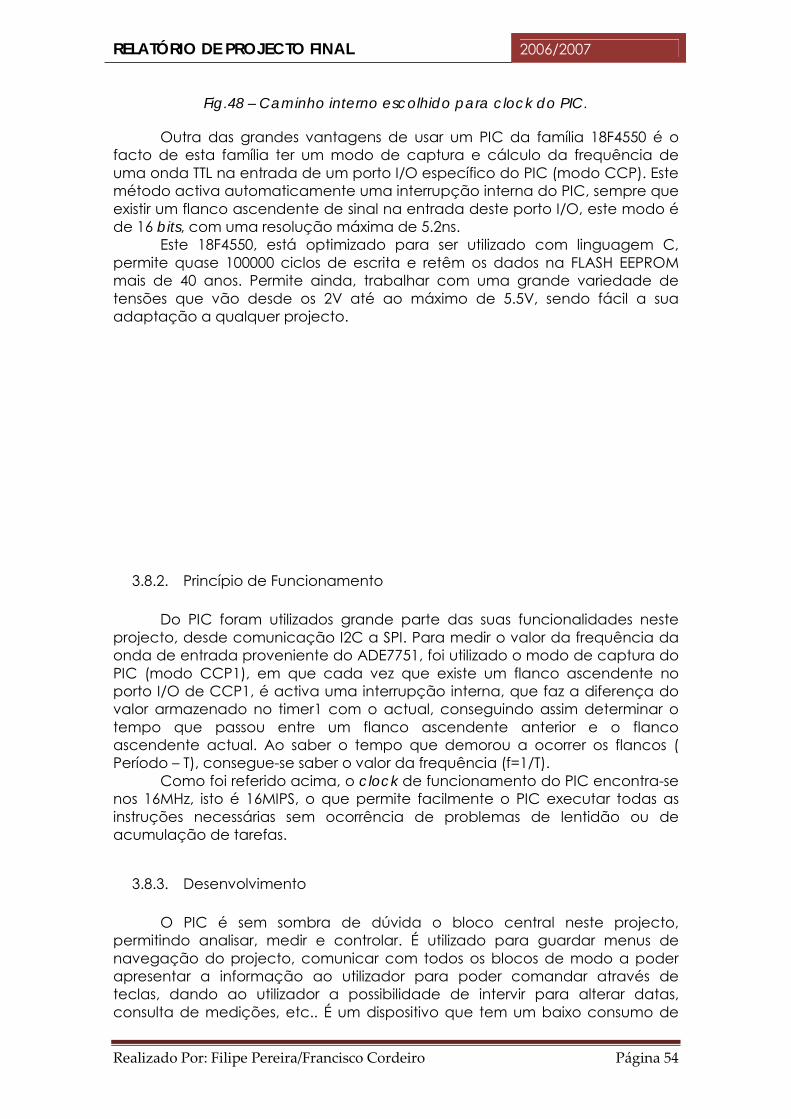
3.8.4. Teste De início, e em breadboard, o PIC utilizado foi a versão PDIP de 40 pinos
(ver Fig.49). Durante o desenvolvimento do projecto, escolhemos a versão TQFP (fig. 50).
Fig.49 – PIC18F4550 ligado em BreadBoard.
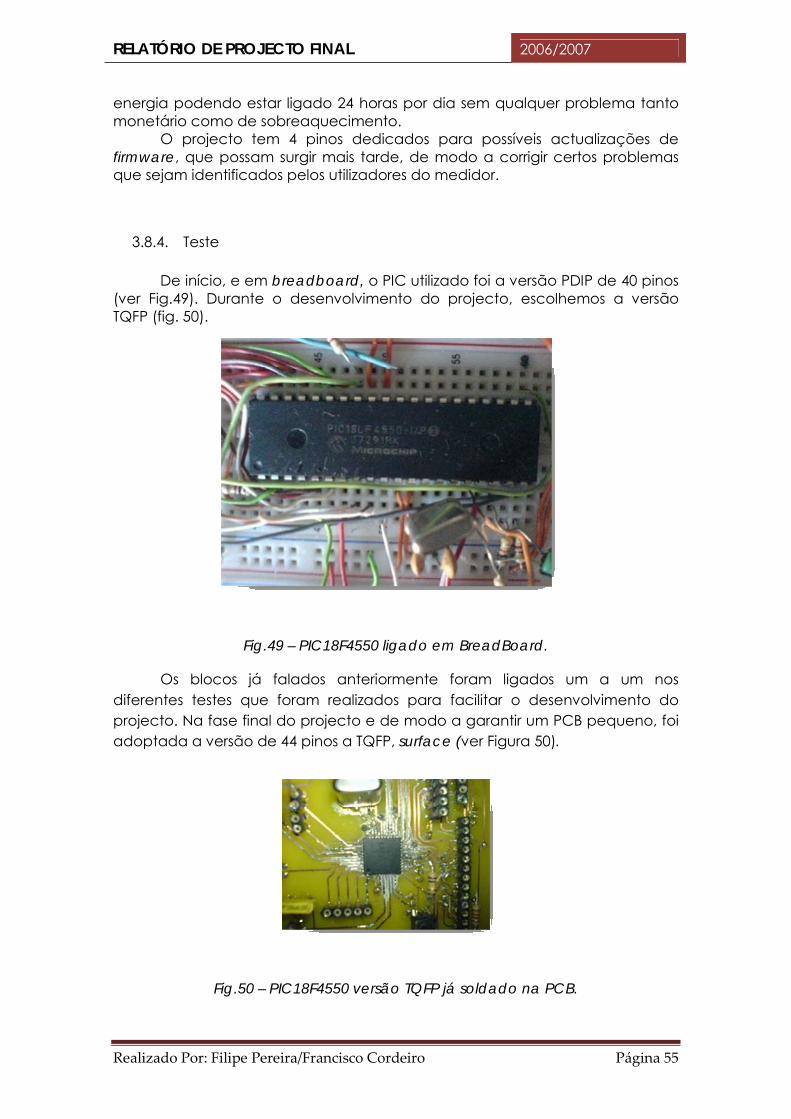
Os blocos já falados anteriormente foram ligados um a um nos diferentes testes que foram realizados para facilitar o desenvolvimento do projecto. Na fase final do projecto e de modo a garantir um PCB pequeno, foi adoptada a versão de 44 pinos a TQFP, surface (ver Figura 50).
Fig.50 – PIC18F4550 versão TQFP já soldado na PCB.
RELATÓRIO DE PROJECTO FINAL 2006/2007
Realizado Por: Filipe Pereira/Francisco Cordeiro Página 56
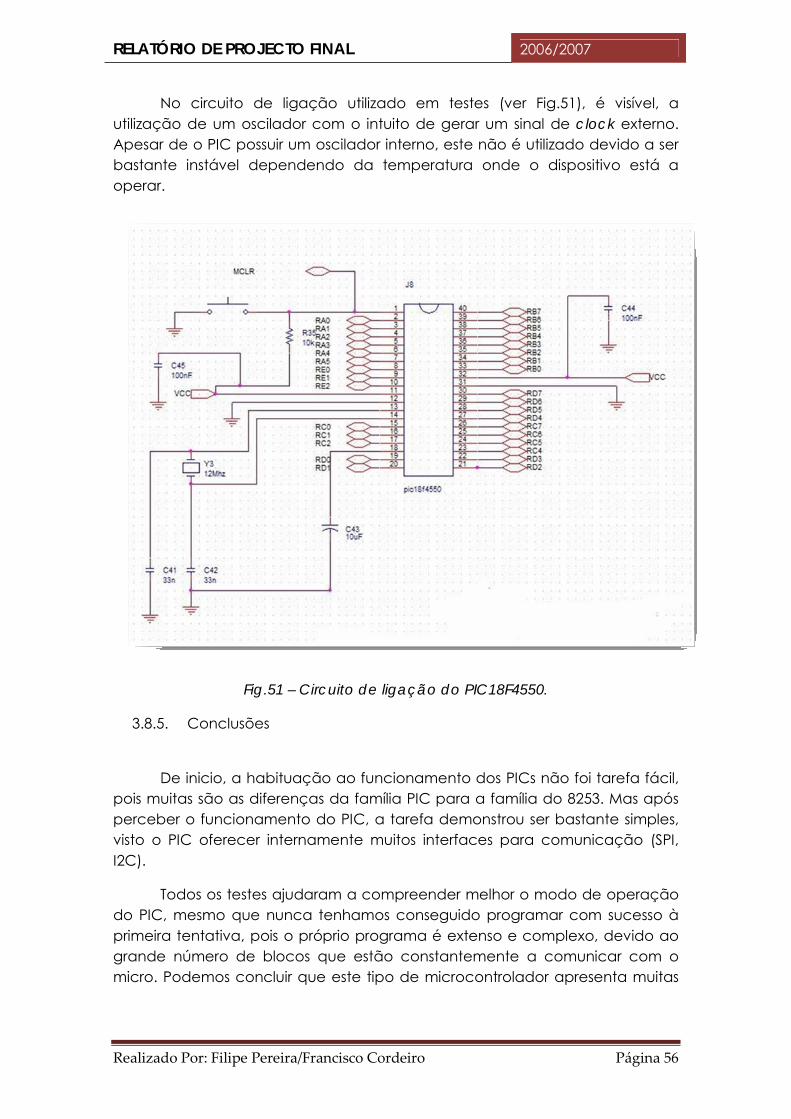
No circuito de ligação utilizado em testes (ver Fig.51), é visível, a utilização de um oscilador com o intuito de gerar um sinal de clock externo. Apesar de o PIC possuir um oscilador interno, este não é utilizado devido a ser bastante instável dependendo da temperatura onde o dispositivo está a operar.
Fig.51 – Circuito de ligação do PIC18F4550.
3.8.5. Conclusões
De inicio, a habituação ao funcionamento dos PICs não foi tarefa fácil, pois muitas são as diferenças da família PIC para a família do 8253. Mas após perceber o funcionamento do PIC, a tarefa demonstrou ser bastante simples, visto o PIC oferecer internamente muitos interfaces para comunicação (SPI, I2C).
Todos os testes ajudaram a compreender melhor o modo de operação do PIC, mesmo que nunca tenhamos conseguido programar com sucesso à primeira tentativa, pois o próprio programa é extenso e complexo, devido ao grande número de blocos que estão constantemente a comunicar com o micro. Podemos concluir que este tipo de microcontrolador apresenta muitas

RELATÓRIO DE PROJECTO FINAL 2006/2007
Realizado Por: Filipe Pereira/Francisco Cordeiro Página 57
funções importantes para o nosso projecto, e ajudou bastante em muitas situações de comunicação com os blocos com que comunica.
4. Testes finais Todos os blocos foram ligados e testados em breadboard, bem como a interligação entre os diferentes circuitos. Após a montagem e a interligação de todos os blocos, verificamos que existia ruído na alimentação VCC. Para resolver este problema foram necessários colocar condensadores electrolíticos e cerâmicos para filtrar e atenuar o ruído que estava presente no sinal. Assim o VCC de praticamente todos os integrados estão ligados a um condensador de 100nF. O acoplamento VCC do ADE7751 também foi filtrado por condensadores electrolíticos de 1uF e cerâmicos de 100nF, para conseguir uma tensão de referência o mais estável possível, e o medidor obtenha um ponto de
RELATÓRIO DE PROJECTO FINAL 2006/2007
Realizado Por: Filipe Pereira/Francisco Cordeiro Página 58
referência de tensão o mais estável possível, independentemente da instalação eléctrica ou tomada onde este for ligado. Existiram alguns problemas quanto ao facto de a segunda casa decimal do valor da potencia não ser fixa, problema esse que quando comparado com um aparelho (fig. 52) que é comercializado no mercado, mostrou que é uma situação normal, pois a tensão de entrada no ADE7751 nem sempre é fixa.
Fig.52 – Wattímetro ligado a uma lâmpada incandescente. Outro ponto que merece destaque é o facto de o aparelho ter sido testado com varias potências e marcas diferentes de lâmpadas incandescentes, sendo o valor de potência presenciado tanto pelo nosso dispositivo quanto pelo dispositivo que já existe no mercado, bem diferente do dito pelo fabricante (ver fig. 53 e fig. 54). Verificou-se também, que dependendo das horas de uso e da temperatura local assim varia a potencia consumida de uma lâmpada incandescente. Este facto esta relacionado com o material com que é feito o filamento, que apresenta uma resistência que varia com o número de horas de uso da lâmpada e a temperatura.
RELATÓRIO DE PROJECTO FINAL 2006/2007
Realizado Por: Filipe Pereira/Francisco Cordeiro Página 59
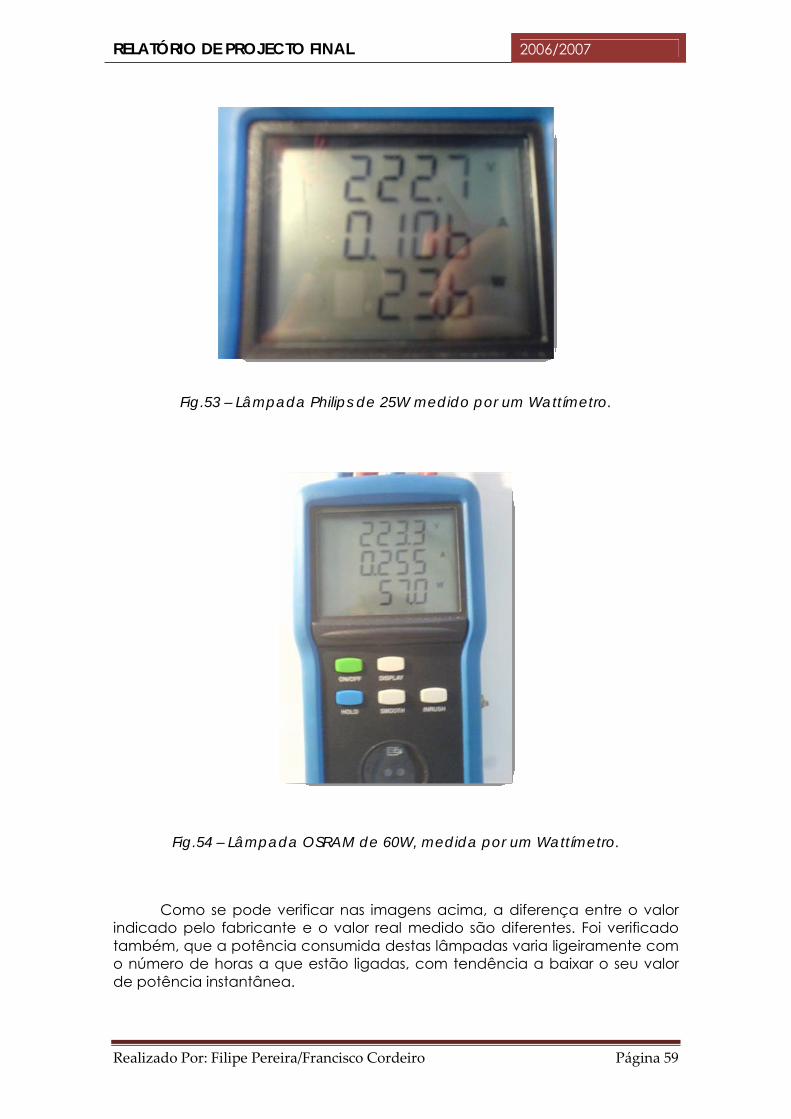
Fig.53 – Lâmpada Philips de 25W medido por um Wattímetro.
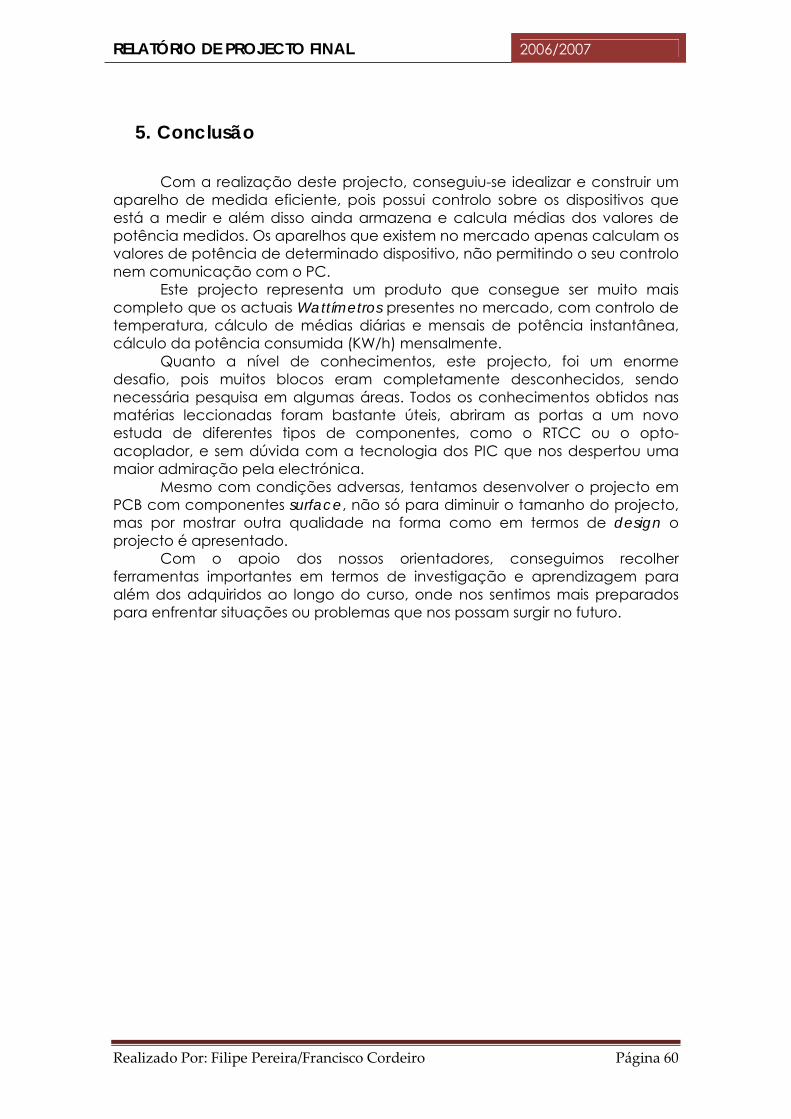
Fig.54 – Lâmpada OSRAM de 60W, medida por um Wattímetro.
Como se pode verificar nas imagens acima, a diferença entre o valor indicado pelo fabricante e o valor real medido são diferentes. Foi verificado também, que a potência consumida destas lâmpadas varia ligeiramente com o número de horas a que estão ligadas, com tendência a baixar o seu valor de potência instantânea.
RELATÓRIO DE PROJECTO FINAL 2006/2007
Realizado Por: Filipe Pereira/Francisco Cordeiro Página 60
5. Conclusão
Com a realização deste projecto, conseguiu-se idealizar e construir um aparelho de medida eficiente, pois possui controlo sobre os dispositivos que está a medir e além disso ainda armazena e calcula médias dos valores de potência medidos. Os aparelhos que existem no mercado apenas calculam os valores de potência de determinado dispositivo, não permitindo o seu controlo nem comunicação com o PC. Este projecto representa um produto que consegue ser muito mais completo que os actuais Wattímetros presentes no mercado, com controlo de temperatura, cálculo de médias diárias e mensais de potência instantânea, cálculo da potência consumida (KW/h) mensalmente.
Quanto a nível de conhecimentos, este projecto, foi um enorme desafio, pois muitos blocos eram completamente desconhecidos, sendo necessária pesquisa em algumas áreas. Todos os conhecimentos obtidos nas matérias leccionadas foram bastante úteis, abriram as portas a um novo estuda de diferentes tipos de componentes, como o RTCC ou o opto-acoplador, e sem dúvida com a tecnologia dos PIC que nos despertou uma maior admiração pela electrónica.
Mesmo com condições adversas, tentamos desenvolver o projecto em PCB com componentes surface, não só para diminuir o tamanho do projecto, mas por mostrar outra qualidade na forma como em termos de design o projecto é apresentado.
Com o apoio dos nossos orientadores, conseguimos recolher ferramentas importantes em termos de investigação e aprendizagem para além dos adquiridos ao longo do curso, onde nos sentimos mais preparados para enfrentar situações ou problemas que nos possam surgir no futuro.
RELATÓRIO DE PROJECTO FINAL 2006/2007
Realizado Por: Filipe Pereira/Francisco Cordeiro Página 61
6. Futuras Aplicações Este é um projecto que pode ter em vista múltiplas funcionalidades, pois é um aparelho de medida que fornece o valor da potência, podendo ser depois acoplado a diversos dispositivos que possam aproveitar estes valores consoante o que o utilizador pretenda. Numa casa podemos criar uma rede de medidores interligados entre si, através de Rádio Frequência por exemplo, em que cada um dos medidores está ligado a uma tomada eléctrica da casa, comunicando com uma estação central de interface com o PC. O PC armazena, gera estimativas e realiza médias dos consumos dispendidos mensalmente, podendo estes dados ser mais tarde armazenados numa base de dados, permitindo assim uma consulta mais eficaz ao utilizador dos dados registados. Em casas ainda em construção, quando é projectada a instalação eléctrica, este tipo de dispositivos podem ser incorporados, fornecendo uma instalação sem ligações á vista e uma fácil conectividade de todos os equipamentos. Como futura aplicação, este dispositivo pode ser transformado num protector de aparelhos que não podem ficar ligados durante muito tempo, por exemplo aquecedores a óleo, por questões de segurança e de grandes consumos de potência ou por questões de sobreaquecimento. Assim, sempre que for detectada uma potência muito elevada durante um tempo máximo escolhido pelo utilizador, o Wattímetro digital corta automaticamente a alimentação desses dispositivos até ordem em contrário.
RELATÓRIO DE PROJECTO FINAL 2006/2007
Realizado Por: Filipe Pereira/Francisco Cordeiro Página 62
7. Referencias Bibliográficas Sedra/Smith “Microeletrônica”, Makron Books, 4ª edição, 2000. Página da cadeira de Microcontroladores: http://ltodi.est.ips.pt/microcont/ Datasheets Utilizados: 24LC1025 (EEPROM) http://pdf1.alldatasheet.com/datasheet-pdf/view/195320/MICROCHIP/24LC1025-E/P.html ADE7751 (Medidor de Potência) http://pdf1.alldatasheet.com/datasheet-pdf/view/83643/AD/ADE7751.html DS1302 (Real Time Clock Counter) http://pdf1.alldatasheet.com/datasheet-pdf/view/58478/DALLAS/DS1302.html DS1631 (Termómetro) http://www.alldatasheet.com/datasheet-pdf/pdf/90003/DALLAS/DS1631.html DS1836 (MicroManager) http://www.alldatasheet.com/datasheet-pdf/pdf/152857/DALLAS/DS1836.html MOC3041 (Opto-acoplador) http://www.alldatasheet.com/datasheet-pdf/pdf/5039/MOTOROLA/MOC3041.html PIC18F4550 (Microcontrolador) http://www.alldatasheet.com/datasheet-pdf/pdf/93911/MICROCHIP/PIC18F4550.html


















