![Aplicação de Indentação Instrumentada na ... · A dureza e o módulo de elasticidade ... polímeros por indentação instrumentada é um teste simples, ... [4], as propriedades](https://static.fdocumentos.com/doc/165x107/5bf0f7f009d3f2ec148cc199/aplicacao-de-indentacao-instrumentada-na-a-dureza-e-o-modulo-de-elasticidade.jpg)
de · Sensor de prrxim idade ... é instrumentada um sensor de proximidade que ... Sã o SP, 08-10...
6
40. SBAI- Simpósio Brasileiro de Automação Inteligente, São Paulo, SP, 08-10 de Setembro de 1999 AMORTECEDORES ATIVOS DE VIBRAÇÕES BASEADOS EM . CONTROLADORES FUZZV Gustavo Luiz C. M. de Abreu e José Francisco Ribeiro Depto de Engenharia Mecânica - Universidade Federal de Uberlândia Av. João Naves de Ávila, 2160 - Bloco M - Sala 212 CEP 38400-902 - Uberlândia - MO Resumo. O . grande avanço experimentado pela teoria dos controladores fuzzy nos últimos anos tem aberto novas possibilidades de aplicação prática de tais controladores. Este trabalho investiga as potencialidades dos controladores fuzzy no controle de vibrações em sistemas flexíveis. Propõe-se uma metodologia de projeto de amortecedores dinâmicos de vibrações ativos, construídos a partir da lógica fuzzy e tendo como atuadores bobinas magnéticas. O comportamento não linear dos atuadores magnéticos associado à variações ou incertezas no modelo da planta são características que colaboram em tese com o uso dos controladores fuzzy. Para a validação da metodologia, foi construído e instrumentado um sistema vibratório com um grau de liberdade, um atuador magnético, um sistema digital de controle implementado num PC e um "driver" de corrente. Alguns resultados experimentais utilizando controladores PIO e fuzzy são mostrados e confrontados com os resultados teóricos esperados. Palavras Chaves: Controle Ativo, Lógica Fuzzy, Atuadores Magnéticos, Amortecedores Dinâmicos de Vibrações. Abstract: The great progress tried by the theory of the fuzzy controllers in the last years has been opening new possibilities of practical application for these controllers. This work investigates the potentialities of the fuzzy controllers in the control of vibrations in flexible systems. A methodology of project of active dynamic damping of vibrations that uses magnetic coils as actuators is presented. The non-linear behavior of the magnetic actuators associated to variations or uncertainties in the model of the plant collaborate, in thesis, to the use of the fuzzy controllers. For the validation of the methodology, it was built a one degree of freedom vibratory system, a magnetic bearing, a digital system of control implemented in a PC and a "current driver". The experimental resu1ts using the PID and fuzzy controllers are shown and confrontcd with the theoretical results. Keywords: Active control, Fuzzy Logic, Magnetic Bearings, dynamic damping of vibrations. 1 INTRODUÇÃO Os problemas associados ao controle de vibrações nos sistemas mecânicos tem merecido grande destaque na literatura 376 especializada nos últimos anos. O desenvolvimento dos sistemas de controle e a sua importância na estabilidade de sistemas mecânicos (ex.: suspensão ativa, controle de movimento de estruturas flexíveis) motivaram o estudo de eficientes técnicas de controle para o problema. O controle de sistemas físicos utilizando a lógica Fuzzy é uma área que tem despertado grandes interesses em universidades e centros de pesquisas na última década. Yester et al. 1992 empregaram a lógica fuzzy um sistema de suspensão automotiva que incorporava elementos ativos. Hampo et al., 1992, desenvolveram um controlador baseado em redes neurais artificiais (ANN) para o controle de sistemas de suspensão ativa que apresentava comportamento não linear e Huang, et al., 1996 propuseram uma nova metodologia de controle que combinava lógica fuzzy com redes neurais artificiais para o controle ativo de vibrações em um sistema massa-mola de 2 graus de liberdade que deslizava em um pilar de guia cuja atuação foi feita por servo motores que suprimiam a amplitude de vibração. A utilização dos sistemas Fuzzy (sistemas nebulosos) no controle moderno foi introduzido a partir do trabalho de Lotfi Zadeh, 1965, e se aplica em áreas onde decisões objetivas precisam ser tomadas a partir de um conjunto de informações muitas vezes vagas, imprecisas e não adequadamente quantificadas. As razões para tanto interesse se concentram em algumas características básicas desta tecnologia, quais sejam: (í) é natural e intuitiva na sua formulação pois tenta imitar o comportamento consciente ou a estratégia de controle de um operador humano; (il) não prescinde do conhecimento detalhado dos modelos 'dos elementos do processo a ser controlado (planta, sensores, atuadores, etc.) ; (Ui) se aplica a sistemas lineares e não lineares; (iv) é de implementação fácil e de baixo custo e (v) apresenta características boas de robustez à incertezas ou variações paramétricas. Um grande apelo da tecnologia fuzzy em controle é a possibilidade de se operar com "meias verdades ou meias mentiras", ou seja, pode-se admitir uma incerteza na definição das variáveis de entrada e de saída ou seja pode-se admitir uma incerteza na definição das variáveis de entrada e de saída. Na lógica Booleana um determinado elemento pertence ou não a um conjunto específico, ou formalmente, seja U uma coleção de objetos, chamado universo de discurso, U um elemento particular deste universo e A um dado conjunto contido em U, então, ou U E A ou U lê A. Para cada elemento do universo de . discurso pode-se, portanto, determinar sem ambigüidades
Transcript of de · Sensor de prrxim idade ... é instrumentada um sensor de proximidade que ... Sã o SP, 08-10...

40. SBAI- Simpósio Brasileiro de Automação Inteligente, São Paulo, SP, 08-10 de Setembro de 1999
AMORTECEDORES ATIVOS DE VIBRAÇÕES BASEADOS EM. CONTROLADORES FUZZV
Gustavo Luiz C. M. de Abreu e José Francisco RibeiroDepto de EngenhariaMecânica - Universidade Federal de Uberlândia
Av. João Naves de Ávila, 2160 - Bloco M - Sala 212CEP 38400-902 - Uberlândia - MO
Resumo. O . grande avanço experimentado pela teoria doscontroladores fuzzy nos últimos anos tem aberto novaspossibilidades de aplicação prática de tais controladores. Estetrabalho investiga as potencialidades dos controladores fuzzyno controle de vibrações em sistemas flexíveis. Propõe-se umametodologia de projeto de amortecedores dinâmicos devibrações ativos, construídos a partir da lógica fuzzy e tendocomo atuadores bobinas magnéticas. O comportamento nãolinear dos atuadores magnéticos associado à variações ouincertezas no modelo da planta são características quecolaboram em tese com o uso dos controladores fuzzy. Para avalidação da metodologia, foi construído e instrumentado umsistema vibratório com um grau de liberdade, um atuadormagnético, um sistema digital de controle implementado numPC e um "driver" de corrente. Alguns resultados experimentaisutilizando controladores PIO e fuzzy são mostrados econfrontados com os resultados teóricos esperados.
Palavras Chaves: Controle Ativo, Lógica Fuzzy, AtuadoresMagnéticos, Amortecedores Dinâmicos de Vibrações.
Abstract: The great progress tried by the theory of the fuzzycontrollers in the last years has been opening new possibilitiesof practical application for these controllers. This workinvestigates the potentialities of the fuzzy controllers in thecontrol of vibrations in flexible systems. A methodology ofproject of active dynamic damping of vibrations that usesmagnetic coils as actuators is presented. The non-linearbehavior of the magnetic actuators associated to variations oruncertainties in the model of the plant collaborate, in thesis, tothe use of the fuzzy controllers. For the validation of themethodology, it was built a one degree of freedom vibratorysystem, a magnetic bearing, a digital system of controlimplemented in a PC and a "current driver". The experimentalresu1ts using the PID and fuzzy controllers are shown andconfrontcd with the theoretical results.
Keywords: Active control, Fuzzy Logic, Magnetic Bearings,dynamic damping of vibrations.
1 INTRODUÇÃOOs problemas associados ao controle de vibrações nos sistemasmecânicos tem merecido grande destaque na literatura
376
especializada nos últimos anos. O desenvolvimento dossistemas de controle e a sua importância na estabilidade desistemas mecânicos (ex.: suspensão ativa, controle demovimento de estruturas flexíveis) motivaram o estudo deeficientes técnicas de controle para o problema. O controle desistemas físicos utilizando a lógica Fuzzy é uma área que temdespertado grandes interesses em universidades e centros depesquisas na última década. Yester et al. 1992 empregaram alógica fuzzy um sistema de suspensão automotiva queincorporava elementos ativos. Hampo et al., 1992,desenvolveram um controlador baseado em redes neuraisartificiais (ANN) para o controle de sistemas de suspensãoativa que apresentava comportamento não linear e Huang, etal., 1996 propuseram uma nova metodologia de controle quecombinava lógica fuzzy com redes neurais artificiais para ocontrole ativo de vibrações em um sistema massa-mola de 2graus de liberdade que deslizava em um pilar de guia cujaatuação foi feita por servo motores que suprimiam a amplitudede vibração.A utilização dos sistemas Fuzzy (sistemas nebulosos) nocontrole moderno foi introduzido a partir do trabalho de LotfiZadeh, 1965, e se aplica em áreas onde decisões objetivasprecisam ser tomadas a partir de um conjunto de informaçõesmuitas vezes vagas, imprecisas e não adequadamentequantificadas. As razões para tanto interesse se concentram emalgumas características básicas desta tecnologia, quais sejam:(í) é natural e intuitiva na sua formulação pois tenta imitar ocomportamento consciente ou a estratégia de controle de umoperador humano; (il) não prescinde do conhecimentodetalhado dos modelos 'dos elementos do processo a sercontrolado (planta, sensores, atuadores, etc.) ; (Ui) se aplica asistemas lineares e não lineares; (iv) é de implementação fácil ede baixo custo e (v) apresenta características boas de robustez àincertezas ou variações paramétricas.Um grande apelo da tecnologia fuzzy em controle é apossibilidade de se operar com "meias verdades ou meiasmentiras", ou seja, pode-se admitir uma incerteza na definiçãodas variáveis de entrada e de saída ou seja pode-se admitir umaincerteza na definição das variáveis de entrada e de saída. Nalógica Booleana um determinado elemento pertence ou não aum conjunto específico, ou formalmente, seja U uma coleçãode objetos, chamado universo de discurso, U um elementoparticular deste universo e A um dado conjunto contido em U,então, ou U E A ou U lê A . Para cada elemento do universo de. discurso pode-se, portanto, determinar sem ambigüidades
40. SBAI - Simpósio Brasileiro de Automação Inteligente, São Paulo, SP, 08-10 de Setembro de 1999
2 FORMULAÇÃO DO PROBLEMA DECONTROLE
Sensor de prrximidade
-Lâmina flexivel
Mesa
r-------------------------------------------II II JJ JI IJ JJ JI JJ J
Etapa 04: Uma vez definidas as regras, derivadas a partir deurna linguagem simbólica e com significado bem intuitivo parao projetista, passa-se à fase dá tradução matemática dalinguagem simbólica construída. Isto é conduzido através dautilização de operadores lógicos definidos pela teoria dosconjuntos fuzzy. Esta tarefa se divide na verdade em trêssubetapas: A primeira transforma os valores reais das variáveisde entrada em graus de pertinência a um determinado conjunto(fase de "fuziificação"), a segunda opera com as regras, osrótulos e o resultado fase de "fuzzificação" e gera um conjuntode variáveis fuzzy através de um mecanismo de inferência aterceira e última subetapa transforma os resultados dainferência em uma saída numérica ("fase de defuzzificaçãoív. AFigura 1 ilustra esta etapa.
J
I II II JJ J
! Mecanismo de II Inferência I •J JJ JJ JJ JL J
Figura 1 - Sistema de inferência difuso.
Após esta breve revisão dos principais conceitos da l6gicafuzzy apresenta-se a seguir o problema do controle de umsistema de vibração de segunda ordem com um grau deliberdade.
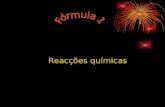
O · problema que se pretende resolver é controlar osdeslocamentos laterais presentes em um sistema vibratório comum grau de liberdade utilizando-se das metodologias dossistemas fuzzy implementadas em microcomputador.O sistema .vibratório, mostrado na Fig. 2, constitui-se de umamesa com um grau de liberdade e atuadores magnéticosinstalados de modo a produzirem forças de atração queamortecem os movimentos oscilatórios da mesa.
Figura 2 - Sistema Vibratório.
A mesa é instrumentada com um sensor de proximidade quedetecta seus movimentos laterais que por sua vez sãotraduzidos por uma tensão de saída que alimenta o sistemadigitaI de controle, o qual, gera uma tensão para o driver decorrente alimentando finalmente os solen6ides do atuadormagnético por uma corrente de controle.
quando pertence ou não a um conjunto. Na teoria dos conjuntosFuzzy faz-se uma generalização desta teoria cl ãssíca, Aextensão está na possibilidade de um determinado elementopoder pertencer a um conjunto com um valor chamado grau depertinência (Zadeh, 1965). Assim, um elemento nãosimplesmente pertence ou não pertence aum conjunto, comona teoria clássica, mas poderá pertencer a um conjunto comgrau de pertinência que varia no intervalo [O)], onde o valor Oindica uma completa exclusão (não - membro), o valor 1representa completa pertinência (totalmente membro) e. osvalores deste intervalo representam graus intermediários depertinência do objeto com relação ao conjunto. A função quedefine os graus de pertinência dos elementos é chamada funçãode pertinência e é uma generalização da função característicada teoria clássica, uma vez que associa para todo elemento douniverso de discurso um valor do intervalo [0,1] ao invés doconjunto de apenas dois elementos tJ,1}.As abordagens dos controladores convencionais maisutilizados procuram tratar as não linearidades dos sistemasfísicos através de aproximações. Ou os sistemas sãoconsiderados simplesmente lineares, lineares por partes, ou sãodescritos por extensas tabelas de buscas ("lookup tables"), queprocuram mapear as entradas e saídas do processo.Classicamente a escolha entre um procedimento ou outrodepende dos custos envolvidos, da complexidade deimplementação e do desempenho desejado. Os controladoresfuzzy por sua vez não ignoram as não linearidade dosprocessos, pelo contrário incorporam-nas na sua metodologiade projeto. Tal metodologia envolve a construção de regras,operadores lógicos e funções de pertinência, que mapeam,através de um processode inferência, as variáveis de entradaem variáveis de saída. Qualquer função, linear ou não, que façaeste mapeamento pode ser .aproximada por uma funçãoconstruída a partir da lógica fuzzy.Outra característica importante dos controladores fuzzy é arobustez das soluções alcançadas, que proporcionam bomdesempenho mesmo diante de variações nos parâmetros dossistemas físicos. Esta característica está na origem daformulação da teoria de controle fuzzy , que utilizando de umconjunto de regras naturais, intuitivas e próprias do sensocomum procura aproximar o comportamento do controlador docomportamento humano no mundo real.O problema de controle usando a l6gica fuzzy envolve asuperação de algumas etapas bem definidas :Etapa 01: caracterização do intervalo de valores que asvariáveis de entradas e de saída podem assumir. Esta etapa nãoapresenta nenhuma dificuldade de ser vencida.Etapa 02 : definição de um conjunto de funções, denominadasfunções de inferência, que mapeam as variáveis de entrada esaída no universo [0,1]. A Figura I exemplifica a definiçãodestas funções. Estas funções recebem nomes (r6tulos) queprocuram traduzir verbalmente algum significado para ofenômeno físico modelado. A definição do número de funçõese a forma das mesmas é um campo aberto à investigações.Etapa 03: Definição de um conjunto de regras, usandooperadores lógicos, que buscam estabelecer uma relação entrevalores da entrada e da saída. O estabelecimento das regras, ouseja a natureza e o número das mesmas é uma variável deprojeto que não dispensa naturalmente o uso da experiência edo bom senso. Um número elevado de regras não significanecessariamente um melhor desempenho. A relação custobenefício entre .a demanda adicional de mem ória, o tempo deprocessamento e a melhoria no desempenho do controladorprecisa ser criteriosamente avaliada quanto da construção doconjunto de regras.
377

40. SBAI - Simpós io Brasileiro de Automação Inteligente, São Paulo, SP, 08-10 de Setembro de 1999
o sistema completo com os seus vários componentes émostrado na Fig. 3.
3 SELEÇÃO DOS PARÂMETROS DALÓGICA FUZZY
Figura 3 - Componentes do sistema mesa-controlador.A mesa é modelada como um sistema de segunda ordemdescrito pela função de transfe rência :
i! r (s)
I
f(,) %(5)
O sinal do sensor foi adquirido por uma placa de aquisiçãocomandada pelo microcomputador a uma taxa de 200 Hz,aproximadamente 15 vezes superior a freqüência naturalamortecida da mesa . A partir do sinal do sensor calculou-se osinal de erro de posição da mesa vibratória. Definiu -se comovariáveis de entrada para o controlador Fuzzy o erro e aderivada do erro. A saída (vc) é um sinal digital que passa poruma placa DIA que alimenta o "driver" de corrente. Cadavariável de entrada e saída foi dividida em 7 regiões Fuzzy(N3,...,NI,Z,P I, ...,P3) igualmente espaçadas. Funções depertinência gaussianas foram atribuídas para cada variável (Fig.4) e uma tabela composta de regras baseadas em informaçõeslingüísticas e numéricas foi formada conforme mostrada naTabela I.
0.5
1.0
.0 .050 -<l.02S 0.000 0.025 0.050 0.07.5Eu"
( I)
onde X(s) é a transformada de Laplace da saída (deslocamento)e F(s) é a transformada de Laplace da entrada (Força), CllI é afreqüência natural e ça razão de amortecimento.Um dos grandes problemas, em se tratando de controladoresbaseados em atuadores magnéticos, é a característica altamentenão linear dos mesmos. No sentido de superar esta dificuldadefoi usado no experimento uma configuração de enrolamentosproposta por Schweitzer et a1., 1976, que procura minimizar talcaracterístic a. Na verdade o atuador apresenta duas bobinasuma onde se injeta a corrente de controle e outra que épercorrida por uma corrente constante. Em (Ribeiro et a1.,1997), é discutida em detalhe as propriedades do atuador. Emtorno da condição nominal de operação, onde os deslocamento ssão pequenos , a força gerada pelo atuador é dada por:
onde i é a razão entre a corrente de controle e a corrente depolarização; y é a razão entre o deslocamento observado e odeslocamento da mesa e o tamanho do entreferro do atuador eF" uma constante que depende dos parâmetros físicos doatuador .O driver de corrente , apresentando características lineares embaixas freqüências (Oa 100 Hz), foi modelado como :
onde i/(s) é a corrente de saída , Vc(s) a tensão de entrada eKdriver é uma constante de proporcionalidade.O sensor utilizado nos ensaios é do tipo DYMAC que nãoapresenta contato entre as partes . Tem a função de monitorar asposições da mesa e seu sinal de saída é proporcional à distâncialida pelo mesmo, na faixa de freqüência de operação da mesa,ou seja,
vs (s)x(s) =K sensor'
(2)
(3) v.
onde x(s) é o deslocamento da mesa, vs (s) é a tensão de saídado senscr e K sensor é o ganho do sensor obtido de formaexperimental.
Figura 4 - Funções de pertinência e intervalos Fuzzy.
378
40. SBAI- Simpósio Brasileiro de Automação Inteligente, São Paulo, SP, 08-10 de Setembro de 1999
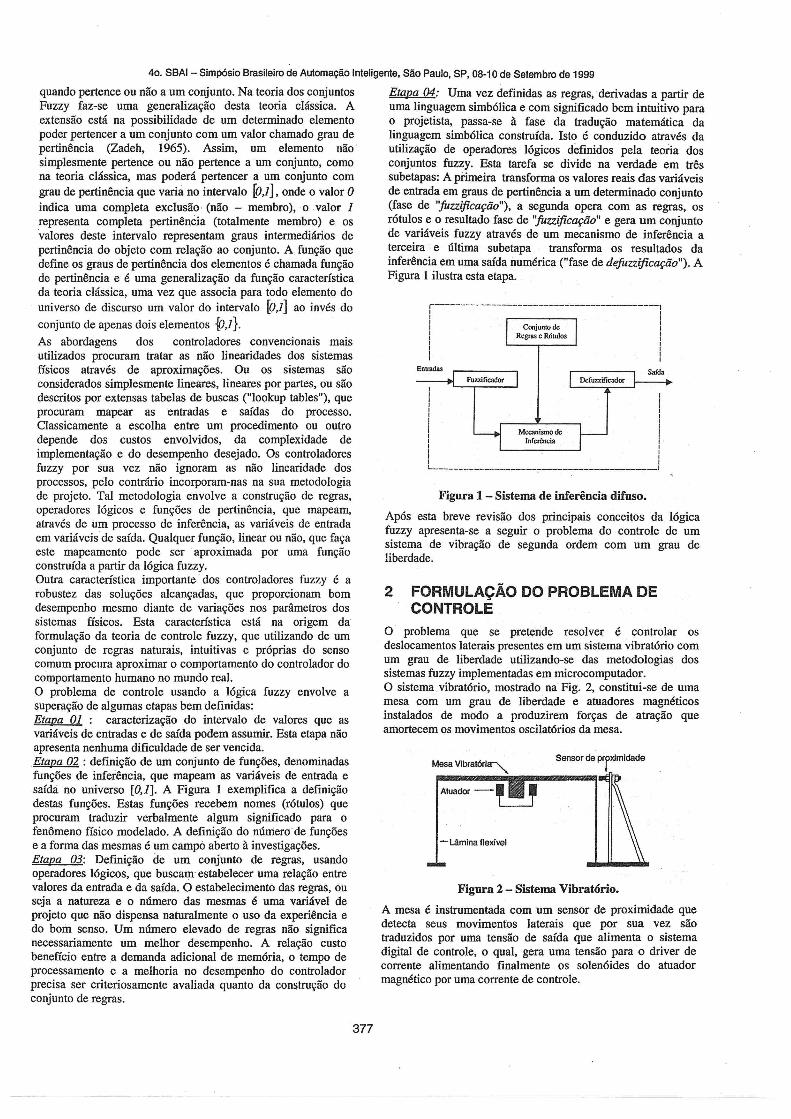
4 RESULTADOS NUMÉRICOS EEXPERIMENTAIS
o sistema vibratório utilizado nos testes experimentais estámostrado na Figura 5.
x(l )Con lmluJOf rUI I'j \'. (lir------,
Para a verificação da eficiência do controlador fuzzy propostosão apresentados a seguir a simulação e teste experimentalrealizados para o sistema sem controle e controlado . Asimulação numérica do sistema completo foi implementadautilizando um software de simulação (Matlab®) que forneceudois tipos de resposta para o sistema: a) sistema livre e b)sistema excitado por força de impacto. As Figuras 6 e 7mostram o diagrama de blocos do sistema em malha fechadacom o controlador fuzzy e PID respectivamente utilizados nasimulação numérica.
Figura 7 - Sistema de controle de deslocamento lateralutilizando o controlador PID.
Figura 6 - Sistema de controle de deslocamento lateralutilizando o controlador fuzzy.
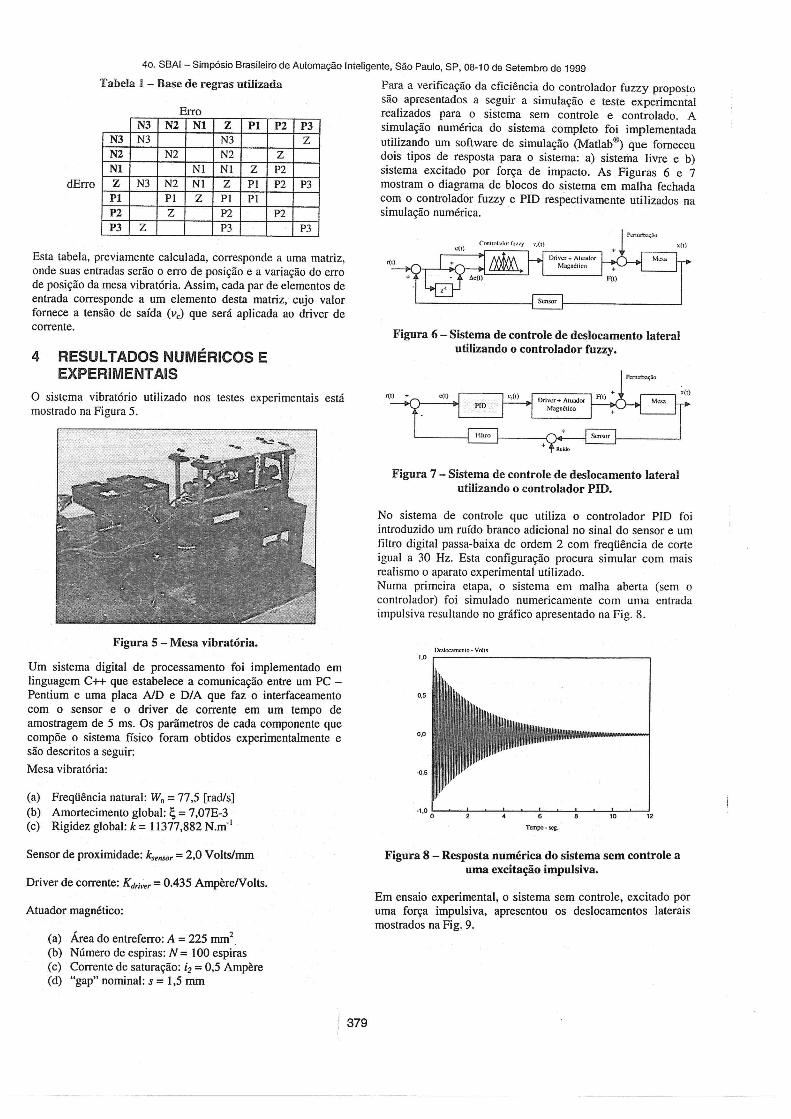
No sistema de controle que utiliza o controlador PIO foiintroduzido um ruído branco adicional no sinal do sensor e umfiltro digital passa-baixa de ordem 2 com freqüência de corteigual a 30 Hz. Esta configuração procura simular com maisrealismo o aparato experimental utilizado.Numa primeira etapa, o sistema em malha aberta (sem ocontrolador) foi simulado numericamente com uma entradaimpulsiva resultando no gráfico apresentado na Fig. 8.
ErroN3 N2 NI Z PI P2 P3
N3 N3 N3 ZN2 N2 N2 ZNI NI NI Z P2Z N3 N2 NI Z PI P2 P3PI PI Z PI PIP2 Z P2 P2P3 Z P3 P3
Tabela 1 - Base de regras utilizada
dErro
Esta tabela, previamente calculada, corresponde a uma matriz,onde suas entradas serão o erro de posição e a variação do errode posição da mesa vibratória. Assim, cada par de elementos deentrada corresponde a um elemento desta matriz, cujo valorfornece a tensão de saída (vc) que será aplicada ao driver decorrente.
Dc qocamento-1,0 ,.--------------------,
Figura 5 - Mesa vibratória.
Um sistema digital de processamento foi implementado emlinguagem c++ que estabelece a comunicação entre um PC -Pentium e uma placa ND e D/A que faz o interfaceamentocom o sensor e o driver de corrente em um tempo deamostragem de 5 ms. Os parãmetros de cada componente quecompõe o sistema físico foram obtidos experimentalmente esão descritos a seguir:Mesa vibratória:
(a) Freqüência natural: Wn=77,5 [rad/s](b) Amortecimento global: ç=7,07E-3(c) Rigidez global: k = 11377,882 Nrn"
0,5
0,0
-0,5
Tanpo - scg.
10 12
Sensor de proximidade: k sen.ror=2,0 Volts/mmDriver de corrente: =0.435 Ampêre/Volts.Atuador magnético:
(a) Área do entreferro: A = 225 mm"(b) Número de espiras:N =100 espiras(c) Corrente de saturação: i2 = 0,5 Arnpêre(d) "gap" nominal: s=1,5 mrn
Figura 8 - Resposta numérica do sistema sem controle auma excitação impulsiva.
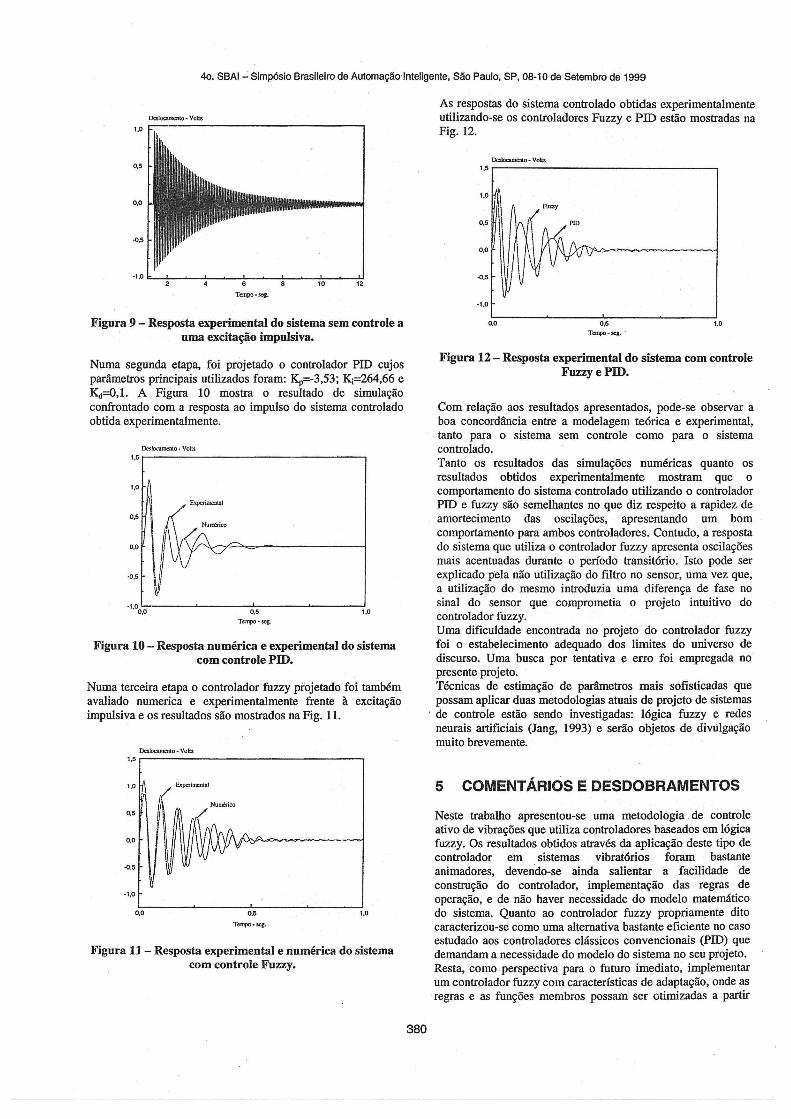
Em ensaio experimental, o sistema sem controle, excitado poruma força impulsiva, apresentou os deslocamentos lateraismostrados na Fig. 9.
379
40. SBAI-: Simpósio Brasileiro de Automação Inteligente, São Paulo, SP, 08-10 de Setembro de 1999
1.0
0 ,5
0,0
"',5
Dcslocamalto - Volts
6
Tonpo -q.10 12
As respostas do sistema controlado obtidas experimentalmenteutilizando-se os controladores Fuzzy e PID estão mostradas naFig.12.
1,5r------------------,
1,0
·1 ,0
Figura 9 - Resposta experimental do sistema sem controle auma excitação impulsiva.
0,0 0,5Tempo. seg, '
1,0
Deslocamento - Vom
t,O
Figura 12 - Resposta experimental do sistema com controleFuzzye PID.
Com relação aos resultados apresentados, pode-se observar aboa concordância entre a modelagem teórica e experimental,tanto para o sistema sem controle como para o sistemacontrolado.Tanto os resultados das simulações numéricas quanto osresultados obtidos experimentalmente mostram que ocomportamento do sistema controlado utilizando o controladorPID e fuzzy são semelhantes no que diz respeito a rapidez deamortecimento das oscilações, apresentando um bomcomportamento para ambos controladores. Contudo, a respostado sistema que utiliza o controlador fuzzy apresenta oscilaçõesmais acentuadas durante o período transitório. Isto pode serexplicado pela não utilização do filtro no sensor, uma vez que,a utilização do mesmo introduzia uma diferença de fase nosinal do sensor que comprometia o projeto intuitivo docontrolador fuzzy.Uma dificuldade encontrada no projeto do controlador fuzzyfoi o estabelecimento adequado dos limites do universo dediscurso. Uma busca por tentativa e erro foi empregada no'presente projeto.Técnicas de estimação de parâmetros mais sofisticadas quepossam aplicar duas metodologias atuais de projeto de sistemas, de controle estão sendo investigadas: lógica fuzzy e redesneurais artificiais (Jang, 1993) e serão objetos de divulgaçãomuito brevemente.
1,00,5Tempo- scg.
0,5
DcsMmento. vclu,,5,..-------------------,
0,0
Figura 10 - Resposta numérica e experimental do sistemacom controle PID.
Numa segunda etapa, foi projetado o controlador PID cujosparâmetros principais utilizados foram: Kp=-3,53; Ki=264,66 eK.i=O,1. AFigura 10 mostra o resultado de simulaçãoconfrontado com a resposta ao impulso do sistema controladoobtida experimentalmente.
Numa terceira etapa o controlador fuzzy projetado foi tambémavaliado numerica e experimentalmente frente à excitaçãoimpulsiva e os resultados são mostrados na Fig. 11.
,,5,..-------------------,1,0 Experimental
Nunér ico0,5
1\0,0
"',5
-1,0
0,0 0,5 1,0Tempo. sego
Figura 11 - Resposta experimental e numérica do sistemacom controle Fuzzy.
5 COMENTÁRIOS E DESDOBRAMENTOS
Neste trabalho apresentou-se -uma metodologia ,de controleativo de vibrações que utiliza controladores baseados em lógicafuzzy. Os resultados obtidos através da aplicação deste tipo decontrolador em sistemas vibratórios foram bastanteanimadores, devendo-se ainda salientar a facilidade deconstrução' do controlador, implementação das regras deoperação, e de não haver necessidade do modelo matemáticodo sistema. Quanto ao controlador fuzzy propriamente ditocaracterizou-se como urna alternativa bastante eficiente no casoestudado aos controladores clássicos convencionais (PID) quedemandam a necessidade do modelo do sistema no .seu projeto.Resta, corno,perspectiva para o futuro imediato: implementarum controlador fuzzy com características de adaptação, onde asregras e as funções membros possam ser otimizadas a partir
380
40. SBAI - Simpósio Brasileiro de Automação Inteligente, São Paulo, SP, 08-10 de Setembro de 1999
dos dados experimentais e do comportamento esperado para osistema. A técnica Neuro-Fuzzy (Jang, 1993) representa umbom estimador dos parâmetros das funções membro e precisaser investigada para o problema de modelagem do controladorfuzzy através de dados experimentais. Testes de robustezdevem ainda ser executados de forma a avaliar ocomportamento deste sistema diante de incertezas ou devariações abruptas nos parâmetros da planta.
REFERÊNCIA BIBLIOGRÁFICA
Rampa, R. and Marko, K. (1992). Neural Networkarchitectures for active suspension control, Proceedingsof fJCNN - International Joint Conference on NeuralNetwork, pp. 765-770.
Huang, S. J. and Lian, R. J. (1996). A Combínation of fuzzylogic and neural network a1gorithrns for active vibrationcontrol. Proc. Instn Mech Engrs - Part I - Joumal ofSystems and Control Engineering, VoI. 210, No. 3,pp.153-167.
Jang, R. (1993) . ANFIS: Adaptive-Network-Based FuzzyInferencc System. IEEE Transactions on Systems, Manand Cybernetics, Vo1.23, No. 3, pp. 665-685.
Ribeiro , J. F., Lépore, F. P. e Ribeiro, P. E. (1996). O uso deAtuadores Magnéticos no Controle Ativo de Vibraçõesde Sistemas Mecânicos . IV CEM-NNE, pp. 439-444.
Shweitzer , . G. and Lange , R. (1976). Characteristics of amagnetic rotor bearing for active vibration controI. FirstInternat . Conf. on Vibration in Rotatinlf. "Machinery,Cambridge, paper N° C239n6, September.
Yester, J. L. and McFall , R. H. (1992) . Fuzzy Logic ControlJerfor active suspension. Proceedings of Society ofAutomotive Enginee rs, paper P-260, pp. 259-270."
Zadeh, L. A. (1965). Fuzzy Sets, Information and Control, VoI.8, pp. 338-353.
AGRADECIMENTOS
Os autores agradecem ao suporte financeiro fornecido a estetrabalho pela CAPES.
381