ECHAR20C - HA Engenharia - xmobots.comxmobots.com/pdf/echar20c/RT_HA_Echar20C_v0.pdf · erro...
20
Relatório: RT-HA-Echar20C-01 Revisão A Página: 1 de 20 Informação proprietária da XMOBOTS. – PRELIMINAR. EMITIDO POR: XMOBOTS 09/11/2016 Programa: ECHAR20C - HA Setor: Engenharia Área: Pós-Processamento Título: Avaliação PRELIMINAR de Acurácia de Tecnologia HA As informações contidas neste documento incluem segredos tecnológico, industriais e comerciais da XMOBOTS, e é privilegiada e confidencial. Esta informação não pode ser copiada ou usada em qualquer forma, exceto como expressamente autorizado por escrito pela XMOBOTS.
Transcript of ECHAR20C - HA Engenharia - xmobots.comxmobots.com/pdf/echar20c/RT_HA_Echar20C_v0.pdf · erro...

Relatório: RT-HA-Echar20C-01 Revisão A
Página: 1 de 20
Informação proprietária da XMOBOTS. – PRELIMINAR.
EMITIDO POR: XMOBOTS 09/11/2016
Programa: ECHAR20C - HA
Setor: Engenharia
Área: Pós-Processamento
Título: Avaliação PRELIMINAR de Acurácia de Tecnologia HA
As informações contidas neste documento incluem segredos tecnológico, industriais e comerciais da XMOBOTS, e é privilegiada e confidencial. Esta informação não pode ser copiada ou usada em qualquer forma, exceto como expressamente autorizado por escrito pela XMOBOTS.

Relatório: RT-HA-Echar20C-01 Revisão A
Página: 2 de 20
Informação proprietária da XMOBOTS. – PRELIMINAR.
FOLHA DE APROVAÇÃO
Preparado por / Data:
Eng. M. Sc. Roberto Ferraz de Campos Filho – Diretor de engenharia
Revisado por / Data:
PostDoc Michelle Horta – Processamento de Sinais
Eng. Juliano Felix Abreu – Engenheiro de Hardware
Eng. Fabiano D`Accunti – Engenheiro de Software Embarcado
Rodrigo Salvador Lima – Engenheiro de Software de Missao
M.Sc. Francisco de Souza Jr. – Engenheiro de Software de Voo
Henrique Dantas – Gerente de Operações
Thatiana Miloso – Diretora Comercial
Aprovado por / Data:
Eng. M. Sc. Giovani Amianti – CEO

Relatório: RT-HA-Echar20C-01 Revisão A
Página: 3 de 20
Informação proprietária da XMOBOTS. – PRELIMINAR.
FOLHA DE REVISÃO
REVISÃO: A DATA: 09/11/2016
DESCRIÇÃO
Emissão Original.
VERSÃO PRELIMINAR.
REVISÃO: B DATA: XXXX
DESCRIÇÃO
Em edição.

Relatório: RT-HA-Echar20C-01 Revisão A
Página: 4 de 20
Informação proprietária da XMOBOTS. – PRELIMINAR.
SUMÁRIO
FOLHA DE REVISÃO .......................................................................................................................................... 3
1. INTRODUÇÃO ............................................................................................................................................... 7
2. METODOLOGIA ...........................................................................................................................................11
3. RESULTADOS DOS VOOS .............................................................................................................................13
3.1. VOO 1 .......................................................................................................................................................... 13 3.2. VOO 2 .......................................................................................................................................................... 14 3.3. VOO 3 .......................................................................................................................................................... 15
4. CONCLUSÃO ................................................................................................................................................16
5. TESTES EM EXECUÇÃO PARA EMISSÃO VERSÃO FINAL ................................................................................17
APÊNDICE .......................................................................................................................................................18

Relatório: RT-HA-Echar20C-01 Revisão A
Página: 5 de 20
Informação proprietária da XMOBOTS. – PRELIMINAR.
LISTA DE TABELAS
TABELA 1. CARACTERÍSTICAS DE CÂMERA. .................................................................................................................................... 8 TABELA 2. ERRO AEROTRIANGULAÇÃO DE VOO 1. ESPECIFICAÇÃO PLANIMÉTRICA HA 1-3 VEZES O GSD, ASSIM NESTE VOO DE 3CM A 9CM DE
ERRO RMS. ESPECIFICAÇÃO ALTIMÉTRICA HA 1-5 VEZES O GSD, ASSIM NESTE VOO DE 6CM A 15CM DE ERRO RMS. ...................... 13 TABELA 3. ERRO ORTOMOSAICO E MDT DE VOO 1. ESPECIFICAÇÃO PLANIMÉTRICA HA 1-3 VEZES O GSD, ASSIM NESTE VOO DE 3CM A 9CM
DE ERRO RMS. ESPECIFICAÇÃO ALTIMÉTRICA HA 1-5 VEZES O GSD, ASSIM NESTE VOO DE 6CM A 15CM DE ERRO RMS. .................. 13 TABELA 4. ERRO AEROTRIANGULAÇÃO DE VOO 2. ESPECIFICAÇÃO PLANIMÉTRICA HA 1-3 VEZES O GSD, ASSIM NESTE VOO DE 3CM A 9CM DE
ERRO RMS. ESPECIFICAÇÃO ALTIMÉTRICA HA 1-5 VEZES O GSD, ASSIM NESTE VOO DE 6CM A 15CM DE ERRO RMS. ...................... 14 TABELA 5. ERRO ORTOMOSAICO E MDT DE VOO 2. ESPECIFICAÇÃO PLANIMÉTRICA HA 1-3 VEZES O GSD, ASSIM NESTE VOO DE 3CM A 9CM
DE ERRO RMS. ESPECIFICAÇÃO ALTIMÉTRICA HA 1-5 VEZES O GSD, ASSIM NESTE VOO DE 6CM A 15CM DE ERRO RMS. .................. 14 TABELA 6. ERRO AEROTRIANGULAÇÃO DE VOO 3. ESPECIFICAÇÃO PLANIMÉTRICA HA 1-3 VEZES O GSD, ASSIM NESTE VOO DE 3CM A 9CM DE
ERRO RMS. ESPECIFICAÇÃO ALTIMÉTRICA HA 1-5 VEZES O GSD, ASSIM NESTE VOO DE 6CM A 15CM DE ERRO RMS. ...................... 15 TABELA 7. ERRO ORTOMOSAICO E MDT DE VOO 3. ESPECIFICAÇÃO PLANIMÉTRICA HA 1-3 VEZES O GSD, ASSIM NESTE VOO DE 3CM A 9CM
DE ERRO RMS. ESPECIFICAÇÃO ALTIMÉTRICA HA 1-5 VEZES O GSD, ASSIM NESTE VOO DE 6CM A 15CM DE ERRO RMS. .................. 15 TABELA 8. ERROS DE PONTOS DE CHECAGEM EXTRAÍDOS DA AEROTRIANGULAÇÃO DO VOO 1. .............................................................. 18 TABELA 9. ERROS DE PONTOS DE CHECAGEM EXTRAÍDOS DE ORTOMOSAICO E MDT DO VOO 1. ............................................................ 18 TABELA 10. ERROS DE PONTOS DE CHECAGEM EXTRAÍDOS DA AEROTRIANGULAÇÃO DO VOO 2. ............................................................ 19 TABELA 11. ERROS DE PONTOS DE CHECAGEM EXTRAÍDOS DE ORTOMOSAICO E MDT DO VOO 2. .......................................................... 19 TABELA 12. ERROS DE PONTOS DE CHECAGEM EXTRAÍDOS DA AEROTRIANGULAÇÃO DO VOO 3. ............................................................ 20 TABELA 13. ERROS DE PONTOS DE CHECAGEM EXTRAÍDOS DE ORTOMOSAICO E MDT DO VOO 3. .......................................................... 20

Relatório: RT-HA-Echar20C-01 Revisão A
Página: 6 de 20
Informação proprietária da XMOBOTS. – PRELIMINAR.
LISTA DE FIGURAS
FIGURA 1. XPLANNER – SELEÇÃO DE ESPECIFICAÇÕES DO PROJETO. ................................................................................................... 7 FIGURA 2. XPLANNER – PERFIL DE VOO PROJETADO CONFORME A ESPECIFICAÇÃO DO PROJETO. .............................................................. 7 FIGURA 3. REPRESENTAÇÃO DO SISTEMA HA. ............................................................................................................................... 8 FIGURA 4. COMPUTADOR DE BORDO DO ECHAR 20C...................................................................................................................... 9 FIGURA 5. INTERFACE DO XMAPPER E CURVAS DE NÍVEL. ................................................................................................................ 9 FIGURA 6. XMAPPER – DETALHE DOS PASSOS DE PROCESSAMENTO. ................................................................................................ 10 FIGURA 7. DISTRIBUIÇÃO DE PONTOS DE CHECAGEM .................................................................................................................... 11 FIGURA 8. TRAJETÓRIA DE VOO 1. ............................................................................................................................................ 13 FIGURA 9. TRAJETÓRIA DE VOO 2. ............................................................................................................................................ 14 FIGURA 10. TRAJETÓRIA DE VOO 3. .......................................................................................................................................... 15

Relatório: RT-HA-Echar20C-01 Revisão A
Página: 7 de 20
Informação proprietária da XMOBOTS. – PRELIMINAR.
1. INTRODUÇÃO
O objetivo deste trabalho é avaliar a acurácia de produtos gerados a partir de voos que utilizam a Tecnologia HA (High Accuracy), desenvolvido pela XMobots.
Para isto, o RPAS Echar 20C foi equipado com a tecnologia HA abaixo descrita:
O XPlanner, software de planejamento de vôo desenvolvido pela XMobots, a partir da área de interesse e a partir do objetivo de acurácia, gera o plano de vôo já com os parâmetros necessários para garantir a acurácia do produto final (ortofoto e MDS) definida no início do projeto.
Figura 1. XPlanner – Seleção de especificações do projeto.
Figura 2. XPlanner – Perfil de voo projetado conforme a especificação do projeto.

Relatório: RT-HA-Echar20C-01 Revisão A
Página: 8 de 20
Informação proprietária da XMOBOTS. – PRELIMINAR.
Para operação do sistema HA, é necessário que um receptor GNSS configurado como Base RTK (Real Time Kinematic) envie correções RTCM V3 para o RPA Echar 20C. Esta técnica realiza a correção em tempo real da coordenada do RPA Echar 20C atingindo acurácia de posicionamento do RPA de até 2cm sem a necessidade de realizar pós-processamento das coordenadas do RPA.
Para atingir esta acurácia, a coordenada de instalação do receptor GNSS Base RTK deve ser conhecida e possuir erro inferior ao desejado nos produtos finais. Esta coordenada pode ser obtida utilizando tecnologias: -RTX/ATLAS; -transporte de base a partir de outro ponto conhecido; -pós-processamento do ponto preciso, -NTRIP RTK/GSM, entre outros métodos.
O sistema HA é compatível com as principais bases do mercado. Bases testadas das marcas: Trimble, Topcom, Javad, Hemisphere, Spectra. O requisito é que a base tenha capacidade de envio de correções no protocolo RTCM V3 via porta serial. Basta configurar o GNSS base para envio de RTCM V3 na porta serial a 115200bps e conectá-lo ao GCS-S10A do Echar 20C HA que em poucos minutos a solução do RPA converge para FIXA.
Para maior robustez da solução, o GNSS do RPA opera em GPS e Glonass L1 e L2 a 20Hz.
Figura 3. Representação do sistema HA.
O Echar 20C , embarca uma câmera full frame de 36 Mpixels de excelente qualidade geométrica, o que garante a geração de nuvens de pontos e ortomosaicos superiores aos obtidos por câmeras de formato menor.
Modelo de Câmera Sony α7R
Lente 30mm
Tamanho de Sensor 35.9 X 24 mm
Tabela 1. Características de câmera.

Relatório: RT-HA-Echar20C-01 Revisão A
Página: 9 de 20
Informação proprietária da XMOBOTS. – PRELIMINAR.
O avançado computador de bordo desenvolvido pela XMobots utiliza tecnologias aeronáuticas de MDD (Model Driven Development) e sistemas de tempo real crítico (QNX). Ele processa em tempo real todos os sinais do originados pela Camera Full Frame, pelo GNSS BASE e pelo GNSS ROVER do RPA, resultando em dados de alta precisão utilizadas pelo XPlanner e XMapper para gerar produtos finais de acordo com a acurácia especificada.
Figura 4. Computador de bordo do Echar 20C.
A geração dos produtos finais é obtida pelo XMapper, software de processamento de imagens desenvolvido pela XMobots em parceria com a italiana Menci. O XMapper recebe os dados do XPlanner e os processa facilmente e de forma mais rápida em relação aos outros softwares de mercado. Como resultado, modelos digitais de superfície, modelos digitais de terreno, curvas de nível, ortofotos e outros produtos de imageamento são gerados com acurácia planimétrica de 1 a 3 vezes o GSD (GroundSampleDistance) e altimétrica de 2 a 5 vezes o GSD.
Figura 5. Interface do XMapper e Curvas de nível.

Relatório: RT-HA-Echar20C-01 Revisão A
Página: 10 de 20
Informação proprietária da XMOBOTS. – PRELIMINAR.
O XMapper foi desenvolvido pela MENCI com base nos requisitos da XMobots e da tecnologia HA. Os principais diferenciais são acurácia, desempenho e robustez e facilidade de uso:
-Acurácia compatível com as especificações da tecnologia HA;
-Desempenho superior pois processa até 2X mais rápido que os softwares de mercado1;
-Robustez, pois com a integração de Camera, RPA, XPlanner e XMapper garantem resultados que operam melhor no software de processamento do que dados não controlados, reduzindo a possibilidade de perda de processamento por “travamento do software” em processamento com número elevado de fotos Full Frame.
-Facilidade no uso, pois o XMapper, pois assim como toda a linha de softwares “X” (XPlanner, XMapper, XFarming) basta seguir a sequência do menu lateral de forma intuitiva, podendo facilmente realizar operações mais complexas em outros softwares como filtragem MDT, curvas de nível e linhas de corte.
Figura 6. XMapper – Detalhe dos passos de processamento.
Assim, a integração de todo o sistema garante a segurança da operação e a confiabilidade dos resultados de acurácia da tecnologia HA.
1 Conforme teste realizado em processador i7-3720QM 2.6GHz e memória de 8GB.
Images 77 in jpg
Images Overlap 70%
Strip Sidelap 70%
Sensor Sony
Pixel 3.9 um
Flying H. above the ground
200 m
GSD 4 cm
Point Cloud density high
DSM density 20 cm
DTM filtering 2.5 m
Orthophoto GSD 20 cm
Mosaic GSD 10 cm
Contour lines step 2 m
Operations APS CPU/GPU P.Scan CPU/GPU Data Preparation/Inputs 5 min. --- 5 min.
Alignment - Optimize Incl. --- 20 min. CPU 100% GPU 6 %
Feature Matching Incl. CPU 20% GPU 80% Incl. ---
Bundle Adjustment 10 min. CPU 30% GPU 00%
Incl.
Measuring GCP 10 min. 10 min.
PointCloud Coarse Incl. --- 10 min.
AOI - Color Balancing 5 min. --- ---
Mix Operations / Mesh --- --- 5 min.
Point Cloud Dense 1.11 hs CPU 40 % GPU 00 %
2.0 hs CPU 100% GPU 95%
DTM Filtering 1 min. --- 15 min
Seamlines 5 min. --- ---
OrtoMosaic 2 min. --- Incl.
Exporting data 2 min --- 15 min.
Processing Time ≈1.45 hs ≈3.20 hs

Relatório: RT-HA-Echar20C-01 Revisão A
Página: 11 de 20
Informação proprietária da XMOBOTS. – PRELIMINAR.
2. METODOLOGIA
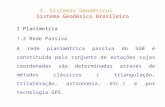
A área selecionada para realizar a avaliação de acurácia possui algumas construções que foram utilizadas como marcadores naturais. Foram selecionados 10 pontos para checagem de erro dos produtos finais. A Figura 7 mostra a distribuição dos pontos em uma área de aproximadamente 45 ha selecionada para realizar os voos.
Foram realizados 3 voos com 2 RPAS Echar 20C, sendo distribuídos da seguinte forma:
Voo 1: RPAS Echar 20C 1 realizando linhas não perpendiculares.
Voo 2: RPAS Echar 20C 1 realizando linhas perpendiculares.
Voo 3: RPAS Echar 20C 2 realizando linhas perpendiculares.
Todos os voos foram feitos com resolução de 3cm (GSD – Ground Sample Distance), sobreposição lateral de 60% e frontal de 80%.
Figura 7. Distribuição de Pontos de Checagem
Desta forma, foram feitas 2 comparações:
Voo 1 X Voo 2: Influência do padrão de voo. A utilização do mesmo RPAS Echar 20C nos dois voos tem o objetivo de garantir a avaliação somente do padrão de voo na acurácia dos produtos finais, ou seja, eliminar qualquer variação que poderia ser gerada por características construtivas de dois equipamentos diferentes.
Voo 2 X Voo 3: RPAS Echar 20C diferentes realizando o mesmo padrão de voo. O objetivo é verificar a repetitividade de acurácia dos produtos finais em RPAS Echar 20C diferentes. A maior influência nesta comparação é o uso de câmeras e lentes de mesmo modelo, porém com parâmetros intrínsecos diferentes (distância focal, centro de câmera e distorção de lente).

Relatório: RT-HA-Echar20C-01 Revisão A
Página: 12 de 20
Informação proprietária da XMOBOTS. – PRELIMINAR.
Para cada voo, foram extraídos 2 conjuntos de erros de pontos de checagem, sendo um obtido pela aerotriangulação, posicionando-se os pontos em cada imagem em que aparece, e o outro através de ortomosaicos e MDTs (Modelos Digitais de Terreno). Normalmente, o primeiro possui acurácia superior, pois é resultado de cálculos da aerotriangulação enquanto os produtos finais passam por processo de filtragem de MDS (Modelos Digitais de Superfície) e ortoretificação das imagens.

Relatório: RT-HA-Echar20C-01 Revisão A
Página: 13 de 20
Informação proprietária da XMOBOTS. – PRELIMINAR.
3. RESULTADOS DOS VOOS
3.1. Voo 1
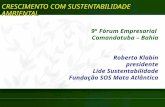
A Figura 8 mostra a trajetória do Voo 1 com a disposição dos pontos de checagens. Este voo foi executado com o RPAS Echar 20C 1 e sem a inserção de linhas perpendiculares. A Tabela 2 mostra os erros médios, desvios padrão e erro RMS extraídos do passo de aerotriangulação durante o processamento. A Tabela 3 mostra os mesmos erros, porém extraídos do ortomosaico e MDT.
Figura 8. Trajetória de Voo 1.
Tabela 2. Erro Aerotriangulação de Voo 1. Especificação planimétrica HA 1-3 vezes o GSD, assim neste voo de 3cm a 9cm de erro RMS. Especificação altimétrica HA 1-5 vezes o GSD, assim neste voo de 6cm a 15cm de erro RMS.
Tabela 3. Erro Ortomosaico e MDT de Voo 1. Especificação planimétrica HA 1-3 vezes o GSD, assim neste voo de 3cm a 9cm de erro RMS. Especificação altimétrica HA 1-5 vezes o GSD, assim neste voo de 6cm a 15cm de erro RMS.
X (cm) Y (cm) Z (cm)
Erro médio 2.02 -8.26 12.88
Desvio padrão 2.82 2.72 3.81
RMS 3.69 8.87 13.60
RMS XY 9.61
X (cm) Y (cm) Z (cm)
Erro médio 2.10 -7.02 11.05
Desvio padrão 3.65 2.21 6.64
RMS 4.62 7.49 14.23
RMS XY 8.80

Relatório: RT-HA-Echar20C-01 Revisão A
Página: 14 de 20
Informação proprietária da XMOBOTS. – PRELIMINAR.
3.2. Voo 2
O Voo 2 foi realizado com o RPAS Echar 20C 1 e com a adição de linhas perpendiculares. A Figura 9 mostra a trajetória executada. Os erros extraídos da aerotriangulação e de ortomosaico e MDT estão na Tabela 4 e Tabela 5, respectivamente.
Figura 9. Trajetória de Voo 2.
Tabela 4. Erro aerotriangulação de Voo 2. Especificação planimétrica HA 1-3 vezes o GSD, assim neste voo de 3cm a 9cm de erro RMS. Especificação altimétrica HA 1-5 vezes o GSD, assim neste voo de 6cm a 15cm de erro RMS.
Tabela 5. Erro Ortomosaico e MDT de Voo 2. Especificação planimétrica HA 1-3 vezes o GSD, assim neste voo de 3cm a 9cm de erro RMS. Especificação altimétrica HA 1-5 vezes o GSD, assim neste voo de 6cm a 15cm de erro RMS.
X (cm) Y (cm) Z (cm)
Erro médio -2.33 -3.03 3.41
Desvio padrão 2.53 2.01 3.65
RMS 4.02 3.87 5.36
RMS XY 5.58
X (cm) Y (cm) Z (cm)
Erro médio -0.80 -2.72 0.26
Desvio padrão 2.87 2.76 3.74
RMS 4.11 4.23 5.70
RMS XY 5.90

Relatório: RT-HA-Echar20C-01 Revisão A
Página: 15 de 20
Informação proprietária da XMOBOTS. – PRELIMINAR.
3.3. Voo 3
O Voo 3 foi realizado com o RPAS Echar 20C 2 e também foi executado com linhas perpendiculares. A Figura 10 mostra a trajetória com os pontos de checagem e a Tabela 6 e Tabela 7 mostram os erros.
Figura 10. Trajetória de Voo 3.
Tabela 6. Erro Aerotriangulação de Voo 3. Especificação planimétrica HA 1-3 vezes o GSD, assim neste voo de 3cm a 9cm de erro RMS. Especificação altimétrica HA 1-5 vezes o GSD, assim neste voo de 6cm a 15cm de erro RMS.
Tabela 7. Erro Ortomosaico e MDT de Voo 3. Especificação planimétrica HA 1-3 vezes o GSD, assim neste voo de 3cm a 9cm de erro RMS. Especificação altimétrica HA 1-5 vezes o GSD, assim neste voo de 6cm a 15cm de erro RMS.
X (cm) Y (cm) Z (cm)
Erro médio 1.22 1.09 10.52
Desvio padrão 1.50 1.75 1.98
RMS 2.28 2.66 10.87
RMS XY 3.51
X (cm) Y (cm) Z (cm)
Erro médio 1.68 0.97 10.10
Desvio padrão 2.23 1.98 3.72
RMS 2.94 2.99 11.22
RMS XY 4.19

Relatório: RT-HA-Echar20C-01 Revisão A
Página: 16 de 20
Informação proprietária da XMOBOTS. – PRELIMINAR.
4. CONCLUSÃO
Comparando-se os Voos 1 e 2 observa-se uma melhoria significativa de acurácia ao inserir as linhas perpendiculares (Cruzadas). A acurácia planimétrica foi de 8,8cm para 5,9cm e a altimétrica de 14,23cm para 5,7cm. Isto ocorre devido ao aumento da quantidade de imagens por área, resultando em sobreposição lateral efetiva de 60% para 80%, ou seja, as imagens ficam melhor amarradas através dos tie points reduzindo o erro de posicionamento na aerotriangulação de forma mais eficiente.
Assim observa-se que pode ser utilizado perfis de voo simples com 80% longitudinal e 60% lateral desde que os requisitos de acurácia sejam de planimétrica de 2 - 3 vezes o GSD e altimetrica de 3 – 5 vezes o GSD. Por outro lado observa-se que deve ser utilizado perfis de voo cruzado com 80% longitudinal e 60% lateral desde que os requisitos de acurácia sejam de planimétrica de 1 - 2 vezes o GSD e altimetrica de 1 – 3 vezes o GSD
Os Voos 2 e 3 utilizam dois RPAS Echar 20Cs diferentes e executam o mesmo padrão de voo de linhas perpendiculares. A acurácia planimétrica variou 1,71cm (5,9cm para 4,19cm), já a altimétrica variou de (5,7cm para 11,22cm).
A acurácia esperada em processos de aerofotogrametria normalmente estão na ordem de 3 vezes o GSD na planimetria e 5 vezes o GSD na altimetria. Como todos estes voos foram feitos com um GSD de 3cm, os erros máximos esperados seriam de 9cm e 15cm na planimetria e na altimetria, respectivamente. Desta maneira, todos os voos atendem a especificação da tecnologia HÁ, mesmo o Voo 1 que foi feito sem a utilização de linhas perpendiculares e teve o maior erro, está dentro desta faixa de erros esperados de 2e 5 vezes o GSD altimetrico.

Relatório: RT-HA-Echar20C-01 Revisão A
Página: 17 de 20
Informação proprietária da XMOBOTS. – PRELIMINAR.
5. TESTES EM EXECUÇÃO PARA EMISSÃO VERSÃO FINAL
-Testes com mesmo equipamento nos horários de 7:00, 9:30, 12:00, 14:30 e 17:00, para avaliar os efeitos da
direção de iluminação;
-Testes com mesmo equipamento em dia ensolarado 12:00 e nublado 12:00 para avaliar os efeitos de iluminação
direcional e iluminação difusa;
-Testes com mesmo equipamento com vento inferior a 5m/s e outro com vento superior a 10m/s e inferior a
12m/s para avaliar o efeito do vento;
-Testes avaliando a perda de sinal de correção da base para o rover no meio do voo, durante 1minuto, 5minutos,
10minutos e até o fim do voo, para avaliar a capacidade de manutenção da solução fixa e o efeito de solução flutuante
e diferencial na acurácia final do produto;
-Teste de stress da acurácia realizando voos cruzados em 1cm, 1.5cm, 2cm, 5cm e 10cm, para avaliar até que
ponto justifica reduzir o GSD a até que ponto justifica aumentar o GSD. Aproveitando-se o mesmo voo, apagar as fotos
de uma direção de cruzamento e realizar o mesmo teste de stress da acurácia em 1cm, 1.5cm, 2cm, 5cm e 10cm, para
avaliar até que GSD justifica manter o voo cruzado para manter a especificação de acurácia.

Relatório: RT-HA-Echar20C-01 Revisão A
Página: 18 de 20
Informação proprietária da XMOBOTS. – PRELIMINAR.
APÊNDICE
Tabela 8. Erros de pontos de checagem extraídos da aerotriangulação do Voo 1.
Tabela 9. Erros de pontos de checagem extraídos de ortomosaico e MDT do Voo 1.
Ponto Erro X (cm) Erro Y (cm) Erro Z (cm)
p1 2.64 -4.32 15.28
p2 -1.36 -7.50 14.31
p3 3.46 -5.77 16.17
p4 6.48 -8.82 17.89
p5 0.01 -12.48 4.56
p6 5.88 -10.54 7.18
p7 5.71 -14.80 16.31
p9 0.17 -5.14 7.88
p10 -0.31 -5.72 14.26
p11 -2.51 -7.52 14.99
Erro médio 2.02 -8.26 12.88
Desvio padrão 2.82 2.72 3.81
RMS 3.69 8.87 13.60
RMS XY 9.61
Ponto Erro X (cm) Erro Y (cm) Erro Z (cm)
p1 0.22 -4.15 11.34
p2 -2.51 -12.02 20.36
p3 -0.87 -9.51 23.05
p4 3.72 -9.40 20.32
p5 8.30 -7.98 -6.92
p6 5.46 -5.46 10.76
p7 9.18 -7.21 -1.38
p9 -3.06 -3.06 10.23
p10 0.11 -4.92 13.36
p11 0.44 -6.45 9.36
Erro médio 2.10 -7.02 11.05
Desvio padrão 3.65 2.21 6.64
RMS 4.62 7.49 14.23
RMS XY 8.80

Relatório: RT-HA-Echar20C-01 Revisão A
Página: 19 de 20
Informação proprietária da XMOBOTS. – PRELIMINAR.
Tabela 10. Erros de pontos de checagem extraídos da aerotriangulação do Voo 2.
Tabela 11. Erros de pontos de checagem extraídos de ortomosaico e MDT do Voo 2.
Ponto Erro X (cm) Erro Y (cm) Erro Z (cm)
p1 2.64 -1.90 3.98
p2 -7.57 -0.73 0.54
p3 -0.48 -0.91 -0.87
p4 -3.31 -4.10 -1.00
p5 -2.29 -8.07 8.19
p6 -1.37 -4.83 4.72
p7 2.52 -4.95 4.75
p9 -3.02 0.51 -3.29
p10 -3.06 -2.08 7.89
p11 -7.34 -3.23 9.18
Erro médio -2.33 -3.03 3.41
Desvio padrão 2.53 2.01 3.65
RMS 4.02 3.87 5.36
RMS XY 5.58
Ponto Erro X (cm) Erro Y (cm) Erro Z (cm)
p1 -1.22 0.70 0.01
p2 -3.78 0.18 -0.36
p3 2.52 -5.23 6.40
p4 -0.72 -2.70 2.20
p5 0.27 -8.29 -14.62
p6 0.00 -7.75 5.19
p7 8.29 0.18 0.09
p9 -1.80 0.72 -1.22
p10 -3.78 -1.62 5.94
p11 -7.75 -3.42 -1.05
Erro médio -0.80 -2.72 0.26
Desvio padrão 2.87 2.76 3.74
RMS 4.11 4.23 5.70
RMS XY 5.90

Relatório: RT-HA-Echar20C-01 Revisão A
Página: 20 de 20
Informação proprietária da XMOBOTS. – PRELIMINAR.
Tabela 12. Erros de pontos de checagem extraídos da aerotriangulação do Voo 3.
Tabela 13. Erros de pontos de checagem extraídos de ortomosaico e MDT do Voo 3.
Ponto Erro X (cm) Erro Y (cm) Erro Z (cm)
p1 2.80 5.88 4.23
p2 2.76 1.61 11.79
p3 0.90 0.86 10.75
p4 1.29 2.54 9.78
p5 1.42 -3.80 12.22
p6 2.68 -0.69 7.64
p7 2.47 1.02 10.58
p9 2.63 3.11 13.36
p10 -1.76 0.85 10.67
p11 -2.99 -0.42 14.19
Erro médio 1.22 1.09 10.52
Desvio padrão 1.50 1.75 1.98
RMS 2.28 2.66 10.87
RMS XY 3.51
Ponto Erro X (cm) Erro Y (cm) Erro Z (cm)
p1 5.17 2.07 1.68
p2 0.91 -0.55 11.97
p3 3.46 2.01 15.56
p4 -2.01 0.91 13.60
p5 3.65 -5.10 -0.08
p6 3.28 1.28 10.70
p7 4.01 2.19 10.52
p9 -0.36 6.56 13.65
p10 0.36 1.64 12.04
p11 -1.64 -1.28 11.35
Erro médio 1.68 0.97 10.10
Desvio padrão 2.23 1.98 3.72
RMS 2.94 2.99 11.22
RMS XY 4.19