
ESP_SOB
244
Teori a das Distribui¸ c˜ oes e Equa c˜ oes Diferenciais Parciais Jaime E. Mu˜ noz Rivera Coordena¸ c˜ ao de Matem´ atica Aplicada e Computacional Laborat´ orio Nacional de Computa¸ c˜ ao Ci ent´ ıfica Petr´ opolis, Rio de Janeiro - Brasil Instituto de Matem´ atica Universidade Federal de Rio de Janeiro S´ erie de T extos de P´os gradua¸ c˜ ao Rio de Janeiro, Petr´ opolis 2004.
-
Upload
marco-fernandes -
Category
Documents
-
view
304 -
download
0
Transcript of ESP_SOB

5/14/2018 ESP_SOB - slidepdf.com
http://slidepdf.com/reader/full/espsob 1/244
Teoria das Distribuicoese Equacoes Diferenciais
Parciais
Jaime E. Munoz Rivera
Coordenac˜ ao de Matem´ atica Aplicada e Computacional Laborat´ orio Nacional de Computac˜ ao Cientıfica Petr´ opolis, Rio de Janeiro - Brasil Instituto de Matem´ atica Universidade Federal de Rio de Janeiro
Serie de Textos de Pos graduacao
Rio de Janeiro, Petropolis 2004.

5/14/2018 ESP_SOB - slidepdf.com
http://slidepdf.com/reader/full/espsob 2/244
Laboratorio Nacional de Computacao Cientıfica
Textos de Pos Graduacao
Coordenacao EditorialJaime E. Munoz Rivera (Coordenador)Marcio MuradGustavo Perla MenzalaGilson Antonio GiraldiMarcelo Fragoso
Ficha catalografica elaborada pela Area de Biblioteca e Documentacao do LNCC.
Munoz Rivera, Jaime EdilbertoM967t Teoria das Distribuicoes e Equacoes
Diferenciais Parciais / Jaime E. Munoz Rivera.- Petropolis,RJ.:/Laboratorio Nacional de Computacao Cientıfica, 2004.
242p. : il. 24 cm. (Textos de pos graduacao)
ISBN 85-99961-06-3
1. Matematica Aplicada. 2. Equacoes Diferenciais Parciais.I. Tıtulo. II.Serie.
CDD 519
ISBN 85-99961-06-3
LNCC - 2004 - 1a edicaoRua Getulio Vargas, 333Quitandinha - Petropolis - Rio de Janeiro25651-070BrasilFax : 55-24-2231-5603
Deposito Legal na Biblioteca NacionalImpresso no Brasil

5/14/2018 ESP_SOB - slidepdf.com
http://slidepdf.com/reader/full/espsob 3/244
Prologo
Nestas notas desenvolvemos os topicos de Teoria da Distribuicoes e Espacos de Sobolev,que sao lecionados no curso de Doutorado do Instituto de Matematica da UniversidadeFederal do Rio de Janeiro e do Laboratorio Nacional de Computacao Cientıfica. Oobjetivo e facilitar aos alunos do curso o estudo dos topicos da ementa da disciplina.
Introduzindo novas demostracoes a teoremas classicos do Analise Funcional, ou simpli-ficacoes de demostracoes ja existentes na literatura.
Este texto esta dividido em seis capıtulos. O primeiro esta dedicado a demonstracaode desigualdades basicas, onde a convexidade joga um papel importante. A convexi-dade e um conceito chave no analise funcional. Como veremos no segundo capıtuloeste conceito esta presente nas relacoes entre a topologia fraca e forte, nas aplicacoesdo Teorema de Hanh Banach e suas consequencias. Para mostrar a importancia daconvexidade, no final do segundo capıtulo introduzimos os espacos L p para 0 < p < 1,
dotamos a este espaco de sua metrica natural e mostramos que ele e um espaco vetorialcompleto. estes espacos tem a propriedade que as bolas abertas ou fechadas nao saoconjuntos convexos. Isto tem uma implicacao curiosa: O dual topologico de L p se reduza zero o que mostra como os espacos L p sao diferentes no caso em que 0 < p < 1 e p > 1, e a principal diferenca entre ambos e a convexidade.
No segundo Capıtulo estudamos os espacos L p. O ob jetivo central e caraterizar ostipos de convergencia que estao definidos neste espaco, e encontrar as condicoes para
calcular limites do tipolim
ν→∞ f (uν ) = f (u)
quando a sequencia (uν )ν∈N esta limitada em L p para p > 1.
No tercer Capıtulo fazemos uma breve introducao aos espacos de Banach, ondetenos selecionado alguns dos principais resultados que utilizaremos neste texto.
No quarto Capıtulo fazemos um estudo das distribuicoes, dando uma rapida in-troducao aos espacos vectoriais topologicos. Introduzimos as topologias que fazem doespaco de distribuicoes um espaco de Frechet. Terminamos este capıtulo estudandoas distribuicoes temperadas e fazendo uma aplicacao para a equacao do calor. Noquinto Capıtulo, introduzimos os espacos de Sobolev, estudamos suas principais pro-priedades, como dualidade, aproximacao por funcoes suaves, operadores de prolonga-mento e as princiapais desigualdades e teoremas de imersao. Damos tambem uma

5/14/2018 ESP_SOB - slidepdf.com
http://slidepdf.com/reader/full/espsob 4/244
iv
introducao as distribuicoes vetoriais e estudamos teoremas de compacidade sobre os
espacos W 1,p
(a, b; X ).No Capıtulo sexto, fazemos aplicacoes dos resultados dos capıtulos 4 e 5 para os
problemas de equilibrio assim como tambem o problema de Signorini. No Capıtulo 7,estudamos o teorema do traco nos espacos W m,p(Ω). Finalmente, o capıtulo 8 estaodedicados ao estudo da compacidade compensada, onde o principal resultado e o Teo-rema do Divergente - Rotacional. Finalmente, no Capıtulo capıtulo 9 fazemos aplicacoesao problemas termo e viscoelasticos.
Termino este prologo agradecendo ao Laboratorio Nacional de Computacao Cientıficapela reproducao parcial destas notas.
Finalmente, aceito a completa responsabilidade pelos erros ou possıveis pontos ob-scuros na exposicao destas notas e sao bem vindos comentarios ou correcoes por partesdos leitores.
O Autor

5/14/2018 ESP_SOB - slidepdf.com
http://slidepdf.com/reader/full/espsob 5/244
Conteudo
1 Desigualdades Basicas 51.1 Funcoes convexas . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 51.2 Desigualdade de Jensen . . . . . . . . . . . . . . . . . . . . . . . . . . . 91.3 Desigualdade de Holder . . . . . . . . . . . . . . . . . . . . . . . . . . . 111.4 Desigualdade de Clarkson . . . . . . . . . . . . . . . . . . . . . . . . . . 121.5 Desigualdades tipo Gronwall . . . . . . . . . . . . . . . . . . . . . . . . 131.6 Exercıcios . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 16
2 Espacos de Banach 192.1 Espacos metricos . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 192.2 Espacos normados . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 22
2.3 Minimizacao em dimensao finita . . . . . . . . . . . . . . . . . . . . . . 242.4 Minimizacao em dimensao infinita . . . . . . . . . . . . . . . . . . . . . 252.5 Teorema de Hanh-Banach . . . . . . . . . . . . . . . . . . . . . . . . . . 292.6 Convergencia fraca . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 322.7 Topologıa fraca estrela . . . . . . . . . . . . . . . . . . . . . . . . . . . . 342.8 Espacos reflexivos . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 36
3 Os Espacos L p 39
3.1 Desigualdades de Holder . . . . . . . . . . . . . . . . . . . . . . . . . . . 403.2 Desigualdade de Minkowski . . . . . . . . . . . . . . . . . . . . . . . . . 423.3 Desigualdade de Young . . . . . . . . . . . . . . . . . . . . . . . . . . . 433.4 Convexidade e topologia fraca . . . . . . . . . . . . . . . . . . . . . . . . 463.5 Lema de Mazur . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 503.6 Teorema da representacao de Riesz para L p . . . . . . . . . . . . . . . . 513.7 Convergencia fraca em L p . . . . . . . . . . . . . . . . . . . . . . . . . . 533.8 Convergencia fraca em L1 . . . . . . . . . . . . . . . . . . . . . . . . . . 553.9 Convergencia forte em L p . . . . . . . . . . . . . . . . . . . . . . . . . . 573.10 Conjuntos compactos em L p . . . . . . . . . . . . . . . . . . . . . . . . . 583.11 Convexidade e semicontinuidade inferior . . . . . . . . . . . . . . . . . . 613.12 Os Espacos L p com 0 < p < 1 . . . . . . . . . . . . . . . . . . . . . . . . 663.13 E xercıcios . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 68
5/14/2018 ESP_SOB - slidepdf.com
http://slidepdf.com/reader/full/espsob 6/244
2 Conteudo
4 Distribuicoes 71
4.1 Introducao . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 714.2 Espacos vetoriais topologicos . . . . . . . . . . . . . . . . . . . . . . . . 734.3 Espacos das funcoes testes . . . . . . . . . . . . . . . . . . . . . . . . . . 754.4 Funcoes de decrescimento rapido . . . . . . . . . . . . . . . . . . . . . . 814.5 Transformada de Fourier . . . . . . . . . . . . . . . . . . . . . . . . . . . 834.6 Transformada de Fourier em L2 . . . . . . . . . . . . . . . . . . . . . . . 884.7 Aplicacao a equacao do calor . . . . . . . . . . . . . . . . . . . . . . . . 91
4.7.1 Deducao Fısica do Modelo . . . . . . . . . . . . . . . . . . . . . . 914.8 Solucao da equacao do calor no RN . . . . . . . . . . . . . . . . . . . . . 93
4.9 Exercıcios . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 94
5 Espacos de Sobolev 975.1 Os espacos W m,p . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 975.2 Os espacos W −m,p . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 1035.3 Particao da unidade . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 1055.4 Aproximacoes por funcoes suaves . . . . . . . . . . . . . . . . . . . . . . 1065.5 Operadores de prolongamento . . . . . . . . . . . . . . . . . . . . . . . . 1165.6 Desigualdade de Poincare . . . . . . . . . . . . . . . . . . . . . . . . . . 121
5.7 Desigualdades de Sobolev . . . . . . . . . . . . . . . . . . . . . . . . . . 1245.8 Teorema de Morrey . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 1295.9 Teorema das derivadas intermediarias . . . . . . . . . . . . . . . . . . . 1355.10 Desigualdades de interpolacao . . . . . . . . . . . . . . . . . . . . . . . . 1425.11 Distribuicoes vetoriais . . . . . . . . . . . . . . . . . . . . . . . . . . . . 1495.12 Teoremas de compacidade . . . . . . . . . . . . . . . . . . . . . . . . . . 1525.13 Exercıcios . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 155
6 Problemas de Equilibrio 159
6.1 Principio de Bernoulli . . . . . . . . . . . . . . . . . . . . . . . . . . . . 1596.2 Aplicacoes as equacoes elıticas . . . . . . . . . . . . . . . . . . . . . . . . 162
6.2.1 Problema de Dirichlet . . . . . . . . . . . . . . . . . . . . . . . . 1636.2.2 Equacao geral de segunda ordem . . . . . . . . . . . . . . . . . . 1636.2.3 Problema de Neumann . . . . . . . . . . . . . . . . . . . . . . . . 1646.2.4 Equacao geral de Neumann de segunda ordem . . . . . . . . . . 1656.2.5 Compatibilidade do problema de Neumann . . . . . . . . . . . . 166
6.3 Aplicacoes as desigualdades variacionais . . . . . . . . . . . . . . . . . . 168
6.4 O problema penalizado . . . . . . . . . . . . . . . . . . . . . . . . . . . . 1707 Teorema do Traco 173
7.1 Os espacos H s(Ω) . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 1737.2 Os espacos H s(Γ) . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 1747.3 Teorema do traco em H m(Rn−1) . . . . . . . . . . . . . . . . . . . . . . 1747.4 Um caso simple em W m,p(Ω) . . . . . . . . . . . . . . . . . . . . . . . . 1807.5 Espacos intermediarios . . . . . . . . . . . . . . . . . . . . . . . . . . . . 181

5/14/2018 ESP_SOB - slidepdf.com
http://slidepdf.com/reader/full/espsob 7/244
Conteudo 3
7.6 Os espacos W s,p . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 1927.7 Teorema do traco . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 1937.8 Espacos W s,p(Γ) . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 1957.9 Teorema do traco em W m,p(Ω) . . . . . . . . . . . . . . . . . . . . . . . 1967.10 E xercıcios . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 199
8 Extensao de Funcionais Convexos 2018.1 Funcoes A-quase convexas . . . . . . . . . . . . . . . . . . . . . . . . . . 201
8.2 Funcionais A-quase convexos . . . . . . . . . . . . . . . . . . . . . . . . 2048.3 Exercicios . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 2078.4 Condicao pontual . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 2088.5 Propriedades . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 2098.6 Teorema do divergente - rotacional . . . . . . . . . . . . . . . . . . . . . 2138.7 Exercicios . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 216
9 Aplicacoes 217
9.1 Desigualdades variacionais . . . . . . . . . . . . . . . . . . . . . . . . . . 2179.2 Problema de Signorini em elasticidade . . . . . . . . . . . . . . . . . . . 2179.3 Existencia de solucoes fracas . . . . . . . . . . . . . . . . . . . . . . . . 217
A Decomposicao de campos vetoriais 227

5/14/2018 ESP_SOB - slidepdf.com
http://slidepdf.com/reader/full/espsob 8/244
4 Conteudo

5/14/2018 ESP_SOB - slidepdf.com
http://slidepdf.com/reader/full/espsob 9/244
Capıtulo 1
Desigualdades Basicas
Todo conhecimento e uma resposta a uma quest˜ ao
G. Bachelard
Neste capıtulo estudaremos algumas desigualdades que serao de utilidade ao longodeste texto. Estas desigualdades estao baseadas em propriedades de funcoes convexasque estudaremos a seguir. A importancia da convexidade na estrutura topologica dosespacos vetoriais sera visto no Capıtulo 2.
1.1 Funcoes convexasDefinicao 1.1.1 Seja V um espaco normado e denotemos por F a func˜ ao
F : V → R.
Diremos que F e uma func˜ ao convexa se satisfaz a seguinte desigualdade
F (θu + (1−
θ)v)≤
θF (u) + (1−
θ)F (v),∀
u, v∈
V,∀
θ∈
[0, 1]
Diremos que F e estritamente convexa se a igualdade acima se verifica apenas no casoem que u = v.
Exemplo 1.1.1 Seja V = R, F (x) = x2. ´ E simples verificar que F e uma func˜ aoconvexa. De fato, seja θ ∈ [0, 1] tomemos x, y ∈ R ent˜ ao
F (θx + (1
−θ)y) = (θx + (1
−θ)y)2
= θ2x2 + 2θ(1 − θ)xy + (1 − θ)2y2
= θx2 + (1 − θ)y2
+(θ2 − θ)x2 + 2θ(1 − θ)xy + [(1 − θ)2 − (1 − θ)]y2
= θx2 + (1 − θ)y2 − (1 − θ)θ(x − y)2

5/14/2018 ESP_SOB - slidepdf.com
http://slidepdf.com/reader/full/espsob 10/244
6 Capıtulo 1. Desigualdades Basicas
De onde segue que
F (θx + (1 − θ)y) ≤ θF (x) + (1 − θ)F (y)
Portanto F e convexa.
Exemplo 1.1.2 Consideremos V = R2 e F (x, y) = x2 + y2. Verifiquemos que F euma func˜ ao convexa. De fato, denotemos por u = (a1, b1), v = (a2, b2).
F (θu + (1 − θ)v) = F (θ(a1, b1) + (1 − θ)(a2, b2))
= F (θa1 + (1 − θ)a2, θb1 + (1 − θ)b2)
= (θa1 + (1 − θ)a2)
2
+ (θb1 + (1 − θ)b2)
2
Usando o fato que a func˜ ao quadr´ atica e convexa, teremos que
(θa1 + (1 − θ)a2)2 ≤ θa21 + (1 − θ)a22
(θb1 + (1 − θ)b2)2 ≤ θb21 + (1 − θ)b22
Utilizando estas desigualdades encontramos que
F (θu + (1
−θ)v)
≤θa21 + (1
−θ)a22 + θb21 + (1
−θ)b22
= θ(a21 + b21) + (1 − θ)(a22 + b22)
= θF (u) + (1 − θ)F (v)
Portanto F e convexa.
Exemplo 1.1.3 Considere o espaco V = L1(a, b), seja F (v) = b
a|v(x)|2 dx. Nestas
condic˜ oes teremos que a func˜ ao F e convexa. De fato, consideremos
F (θu + (1
−θ)v) =
b
a |θu(x) + (1
−θ)v(x)
|2 dx
Usando o fato que a func˜ ao quadr´ atica e convexa, encontramos que
F (θu + (1 − θ)v) =
b
a
|θu(x) + (1 − θ)v(x)|2 dx
≤ b
a
θ|u(x)|2 + (1 − θ)|v(x)|2 dx
≤ θF (u) + (1 − θ)F (v)
Observacao 1.1.1 O conceito de func˜ oes convexas pode ser estendido a func˜ oes definidassobre conjuntos e n˜ ao sobre espacos normados. Por exemplo podemos definir a convex-idade de uma func˜ ao
F : Ω → Rmas para isto devemos de verificar que para qualquer par de termos x e y a func˜ ao estebem definida no ponto θx + (1 − θ)y. Isto e que θx + (1 − θ)y ∈ Ω. Os conjuntos com esta propriedade s˜ ao chamados de Conjuntos Convexos.
5/14/2018 ESP_SOB - slidepdf.com
http://slidepdf.com/reader/full/espsob 11/244
1.1. Func˜ oes convexas 7
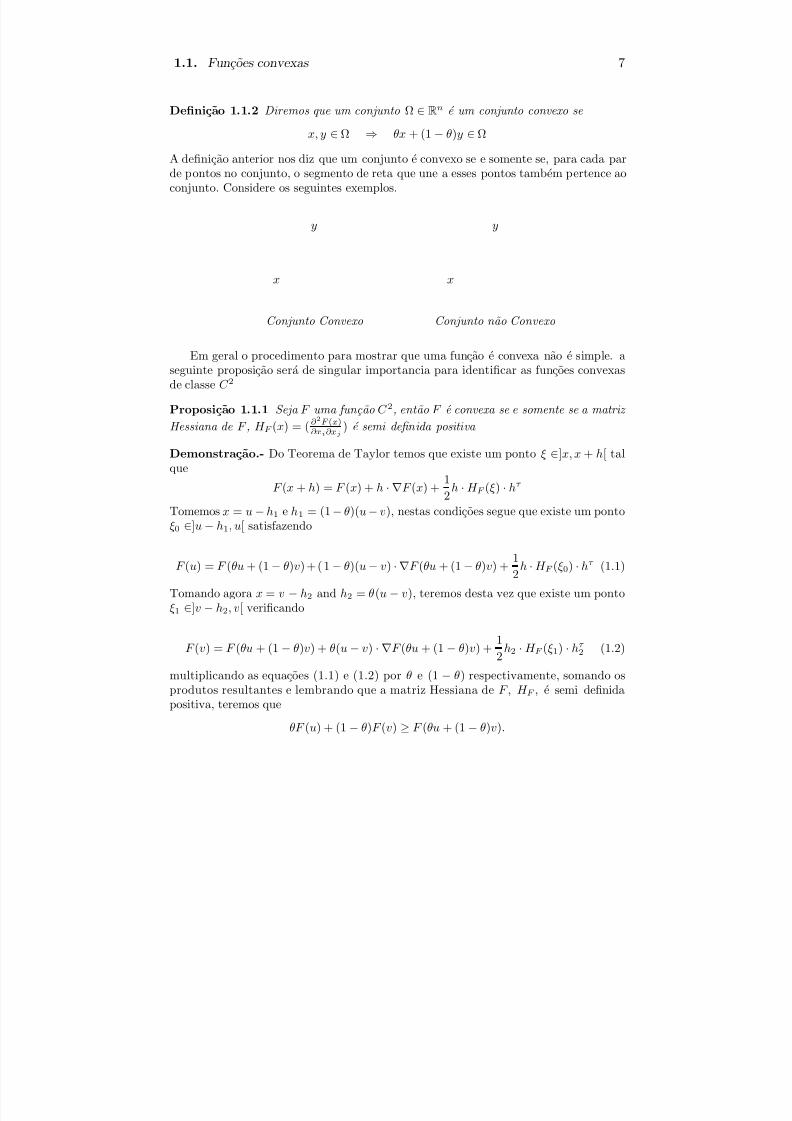
Definicao 1.1.2 Diremos que um conjunto Ω ∈ Rn
e um conjunto convexo se
x, y ∈ Ω ⇒ θx + (1 − θ)y ∈ Ω
A definicao anterior nos diz que um conjunto e convexo se e somente se, para cada parde pontos no conjunto, o segmento de reta que une a esses pontos tambem pertence aoconjunto. Considere os seguintes exemplos.
x
y
Conjunto Convexo
x
y
Conjunto n˜ ao Convexo
Em geral o procedimento para mostrar que uma funcao e convexa nao e simple. aseguinte proposicao sera de singular importancia para identificar as funcoes convexasde classe C 2
Proposicao 1.1.1 Seja F uma func˜ ao C 2, ent˜ ao F e convexa se e somente se a matriz
Hessiana de F , H F (x) = ( ∂ 2F (x)∂xi∂xj
) e semi definida positiva
Demonstracao.- Do Teorema de Taylor temos que existe um ponto ξ ∈]x, x + h[ talque
F (x + h) = F (x) + h · F (x) +1
2h · H F (ξ) · hτ
Tomemos x = u − h1 e h1 = (1 − θ)(u − v), nestas condicoes segue que existe um pontoξ0 ∈]u − h1, u[ satisfazendo
F (u) = F (θu + (1 − θ)v) + ( 1 − θ)(u − v) · F (θu + (1 − θ)v) + 12
h · H F (ξ0) · hτ (1.1)
Tomando agora x = v − h2 and h2 = θ(u − v), teremos desta vez que existe um pontoξ1 ∈]v − h2, v[ verificando
F (v) = F (θu + (1 − θ)v) + θ(u − v) · F (θu + (1 − θ)v) +1
2h2 · H F (ξ1) · hτ
2 (1.2)
multiplicando as equacoes (1.1) e (1.2) por θ e (1 − θ) respectivamente, somando osprodutos resultantes e lembrando que a matriz Hessiana de F , H F , e semi definidapositiva, teremos que
θF (u) + (1 − θ)F (v) ≥ F (θu + (1 − θ)v).

5/14/2018 ESP_SOB - slidepdf.com
http://slidepdf.com/reader/full/espsob 12/244
8 Capıtulo 1. Desigualdades Basicas
O que mostra que F e uma funcao convexa. Recıprocamente, suponhamos que F seja
convexa e de classe C 2
, entao teremos que
F (v + θ(u − v)) ≤ F (v) + θ(F (u) − F (v)).
De onde chegamos a
F (v + θ(u − v)) − F (v)
θ≤ F (u) − F (v).
Fazendo θ
→0 chegamos a
F (v) · (u − v) ≤ F (u) − F (v).
Intercambiando as variavel u e v segue que
F (u) · (v − u) ≤ F (v) − F (u).
Somando as duas desigualdades acima segue que
(F (u) − F (v)) · (u − v) ≥ 0.
Tomando u = x + h e v = x para h = τ ξ, onde τ ∈ R e ξ ∈ Rn, teremos
τ (F (x + τ ξ) − F (x)) · ξ ≥ 0,
que implica queF (x + τ ξ) − F (x)
τ · ξ ≥ 0.
Fazendo τ → 0 obtemosξtH F ξ ≥ 0.
De onde segue que a matriz Hessiana de F e semidefinida positiva. O que completa ademonstracao
Proposicao 1.1.2 Toda func˜ ao convexa F satisfaz
F (
mi=1
θiui) ≤m
i=1θiF (ui) ∀θi ≥ 0 e
mi=1
θi = 1.
Demonstracao.- Raciocinemos por inducao sobre m. Suponhamos que a desigualdade
F (
ki=1
θiui) ≤k
i=1
θiF (ui)

5/14/2018 ESP_SOB - slidepdf.com
http://slidepdf.com/reader/full/espsob 13/244
1.2. Desigualdade de Jensen 9
e valida para m = k. Provaremos que a identidade acima tambem e valida para m =k + 1. De fato, note que
F (k+1i=1
θiui) = F (θ1u1 +k+1i=2
θiui) = F (θ1u1 + (1 − θ1)k+1i=2
θi
1 − θ1ui).
Da convexidade de F segue que
F (k+1i=1
θiui) ≤ θ1F (u1) + (1 − θ1)F (k+1i=2
θi
1 − θ1ui).
Comok+1i=2
θi
1 − θ1= 1.
Usando a hipotese indutiva, chegamos ao nosso resultado
1.2 Desigualdade de Jensen
Como uma aplicacao da propriedades das funcoes convexas provaremos a desigualdadede Jensen.
Teorema 1.2.1 Seja Ω um hipercubo unit´ ario, ent˜ ao para toda func˜ ao convexa F etoda func˜ ao integr´ avel g ∈ L1(Ω), teremos
F (
Ω
g(x) dx) ≤ Ω
F (g(x)) dx
Demonstracao.- Denotemos por R uma particao de Ω e por ∆xi o i-esimo retanguloda particao. Como Ω dx = 1, teremos que ∆xi = 1. Como a funcao F e convexateremos que
F (m
i=1
g(xi)∆xi) ≤m
i=1
F (g(xi))∆xi
Tomando limite quando ∆xi → 0 segue nossa conclusao.
Observacao 1.2.1 Usando as mesmas ideias da demonstrac˜ ao anterior, e possivel
mostrar para um conjunto Ω ⊂ Rn
qualquer que
F (
Ω
g(x)h(x) dx) ≤ Ω
F (g(x))h(x) dx
onde h ≥ 0 e uma func˜ ao integravel com Ω h dx = 1

5/14/2018 ESP_SOB - slidepdf.com
http://slidepdf.com/reader/full/espsob 14/244
10 Capıtulo 1. Desigualdades Basicas
Demonstracao.- De fato, denotando por
θi =h(ξi)∆xim
j=1 h(ξj )∆xj⇒
mi=1
θi = 1.
Usando a convexidade de F teremos que
F
mi=1 g(ξi)h(ξi)∆xi
mj=1 h(ξj )∆xj
≤
mi=1
F (g(ξi)) h(ξi)∆xi
mj=1 h(ξj)∆xj
.
Tomando limites quando ∆xi → 0 teremos que
F
Ω
g(x)h(x) dx Ω h(x) dx
≤ Ω
F (g(x))h(x) dx Ω h(x) dx
.
De onde segue o resultado.
Observacao 1.2.2 Utilizando a densidade das funcoes contınuas em L1, podemos ex-tender o resultado anterior para toda funcao integravel a Lebesgue, pois sobre as funcoes
contınuas a integral de Lebesgue e a integral de Riemann coincidem.
Observacao 1.2.3 Tomemos µ ∈ Rn, seja F uma funcao convexa e Ω um hipercuboentao da desigualdade de Jensen 1.2.1 aplicada a h = 1
med Ω, g = µ + ξ(x) obtemos
Ω
F (µ + ξ(x)) dx ≥ F (µ)med (Ω); ∀ξ tal que
Ω
ξ(x) dx = 0 (1.3)
A continuacao provaremos que o recıproco da propriedade anterior tambem e verdadera.
Teorema 1.2.2 Seja f uma func˜ ao contınua satisfazendo (1.3) para toda func˜ ao ξ ∈[L∞]n e todo Ω ⊂ RN . Ent˜ ao f e uma func˜ ao convexa.
Demonstracao.- Como toda funcao h pode ser escrita como
h =1
med (Ω)
Ω
h(x) dx
=µ
+
h − 1
med (Ω)
Ω
h(x) dx
=ξ
,
a relacao (1.3) e equivalente a Ω
f (h(x)) dx ≥ f
1
med (Ω)
Ω
h(x) dx
med (Ω); ∀h ∈ L∞(Ω). (1.4)
Provaremos quef (λu + (1 − λ)v) ≤ λf (u) + (1 − λ)f (v),

5/14/2018 ESP_SOB - slidepdf.com
http://slidepdf.com/reader/full/espsob 15/244
1.3. Desigualdade de Holder 11
para toda u, v ∈ RN
e 0 < λ < 1, o que mostrara que f e uma funcao convexa. Comefeito, denotemos por χ0 a funcao caraterıstica sobre Ω0 ⊂ Ω e tomemos λ tal que
λ :=med (Ω0)
med (Ω),
denotando por w a funcao
w(x) := χ0(x)u + (1 − χ0(x))v,
e simples verificar que
f (w) = χ0(x)f (u) + (1 − χ0(x))f (v).
Integrando sobre Ω e multiplicando o resultado por 1
med Ωtemos
λf (u) + (1 − λ)f (v) = 1med (Ω)
Ω
χ0(x)f (u) + (1 − χ0(x))f (v) dx
=1
med (Ω)
Ω
f (χ0(x)u + (1 − χ0(x))v) dx
≥ med (Ω)
med (Ω)f
1
med Ω
Ω
χ0(x)u + (1 − χ0(x))vdx
= f (λu + (1
−λ)v),
de onde segue nossa conclusao.
1.3 Desigualdade de Holder
Teorema 1.3.1 (Desigualdade de Holder). Denotemos por ai n´ umeros reais e po-
sitivos e suponhamos que pi s˜ ao reais satisfazendo pi ≥ 1 e
mi=1
1
pi= 1.
Ent˜ ao teremos que
mi=1
ai ≤m
i=1
1 pia pi
Demonstracao.- E simples verificar que a funcao t → −ln(t) e convexa. Portantoteremos que

5/14/2018 ESP_SOB - slidepdf.com
http://slidepdf.com/reader/full/espsob 16/244
12 Capıtulo 1. Desigualdades Basicas
ln(m
i=1
ai) =m
i=1
ln(ai)
=m
i=1
1
piln(a pi )
≤ ln(m
i=1
1
pia pi
i ).
Tomando a funcao exponencial a cada membro da desigualdade, segue o resultado
1.4 Desigualdade de Clarkson
Outra desigualdade importante e a chamada Desigualdade de Clarkson, para mostrarela precisaremos do seguinte Lema.
Lema 1.4.1 Seja ai para i = 1, · · · m n´ umeros positivos. Denotemos por
R( p) :=
m
i=1
a pi
1p
.
Ent˜ ao a func˜ ao p → R( p) e decrescente.
Demonstracao.- Suponhamos que q≤
p. Como
ai
R(q)≤ 1 ⇒
ai
R(q)
p
≤
ai
R(q)
q
Tomando sumatorio de i = 1 a i = m teremos
mi=1
ai
R(q)
p
≤m
i=1
ai
R(q)
q
= 1,
e portantom
i=1
a pi ≤ (R(q)) p ⇒ R( p) ≤ R(q),
que completa a prova.
Agora estamos em condicoes de mostrar as desigualdades de Clarkson.

5/14/2018 ESP_SOB - slidepdf.com
http://slidepdf.com/reader/full/espsob 17/244
1.5. Desigualdades tipo Gronwall 13
Teorema 1.4.1 Suponhamos que a, b s˜ ao n´ umeros reais e que p e um n umero real satisfazendo, 1 < p < 2 ent˜ ao teremos quea + b
2
p +
a − b
2
p ≥ 1
2|a| p +
1
2|b| p,
se p ≥ 2 ent˜ ao segue que
a + b
2 p
+ a − b
2 p
≤1
2 |a| p +
1
2 |b| p.
Demonstracao.- Para obter a primeira desigualdade tomemos
m = 2; a1 =a + b
2; a2 =
a − b
2; e 1 < p < 2
no Lema 1.4.1. Segue que R(2)
≤R( p) ou equivalentemente
(a21 + a22)12 ≤ (a p
1 + a p2)
1p
isto e
a + b
2
p
+
a − b
2
p 1p
≥
a + b
2
2
+
a − b
2
2 1
2
=
1
2|a|2 +
1
2|b|2 1
2
.
Como a funcao s → −|s| p/2 e convexa para p/2 < 1, entao teremos quea + b
2
p +
a − b
2
p ≥
1
2|a|2 +
1
2|b|2p
2
≥ 1
2|a| p +
1
2|b| p.
De onde segue a primeira desigualdade deste Teorema. Supponhamos agora que p > 2.Nestas condicoes, aplicando o Lema 1.4.1 para
m = 2; a1 =a + b
2 ; a2 =a
−b
2 ; p > 2,
segue a desigualdade. A prova esta completa.
1.5 Desigualdades tipo Gronwall
Lema 1.5.1 Seja f uma func˜ ao real positiva de classe C 1, satisfazendo
f (t) ≤ −c0f (t) + c1e−γt
onde c0, c1, γ s˜ ao constantes positivas. Ent˜ ao, existem constantes positivas c, γ 0, taisque
f (t) ≤ ce−γ0t.

5/14/2018 ESP_SOB - slidepdf.com
http://slidepdf.com/reader/full/espsob 18/244
14 Capıtulo 1. Desigualdades Basicas
Demonstracao.- Seja
F (t) = f (t) +2c1
γ e−γt
.
Derivando a funcao obtemos
F (t) = f (t) − 2c1e−γt ≤ −c0 f (t) − c1e−γt ≤ −γ 0F (t),
onde γ 0 = min
c0, γ2
. Finalmente, integrando de 0 a t, temos
F (t) ≤ F (0) e−γ0t ⇒ f (t) ≤ c2 e−γ0t,
onde c2 = f (0) + 2c1γ . Isto completa a demonstracao.
Lema 1.5.2 Seja f uma func˜ ao real positiva de classe C 1, satisfazendo
f (t) ≤ −k0 [f (t)]1+ 1
p +k1
(1 + t) p+1,
em que p > 1, k0, k1 > 0. Ent˜ ao, existe uma constante k2 > 0, tal que
f (t) ≤ k2 pf (0) + 2k
1(1 + t) p .
Demonstracao.- Tomemos h(t) = 2k1 p(1+t)p e g(t) = f (t) + h(t). Nestas condicoes
teremos
g(t) = f (t) − 2k1(1 + t) p+1
≤ −k0
[f (t)]1+
1p +
k1k0(1 + t) p+1
≤ −k0[f (t)]1+ 1
p
+ p
21+1p 1
k0k1p
1[h(t)]
1+ 1p .
Seja a0 = min
1,
p2
1+ 1p 1
k0k1p1
. Assim,
g(t) ≤ −k0a0
[f (t)]1+
1p + [h(t)]1+
1p
.
Como existe uma constante positiva a1, tal que
[f (t) + h(t)]1+1p ≤ a1
[f (t)]1+
1p + [h(t)]1+
1p
,
concluimos que
g(t) ≤ −k0a0a1
[g(t)]1+1p , ⇒ g(t)
[g(t)]1+1p
≤ −k0a0a1
.

5/14/2018 ESP_SOB - slidepdf.com
http://slidepdf.com/reader/full/espsob 19/244
1.5. Desigualdades tipo Gronwall 15
Integrando de 0 a t, temos
g(t) ≤ p pg(0) p + k0a0
a1[g(0)]
1p t p ≤ p p−1[ pf (0) + 2k1]
a p2(1 + t) p
,
em que a2 = min
p, k0a0a1
[g(0)]1p
. Tomando k2 = 1
a2
p
a2
p−1, segue-se o nosso
resultado.
Terminamos este capıtulo enunciando uma variante do Lema de Gronwall
Lema 1.5.3 Suponhamos que m, g, e ϕ s˜ ao func˜ oes positivas satisfazendo:
ϕ(t) ≤ g(t) +
t
0
m(s)ϕ(s) ds, ∀t ∈ [0, T ].
Ent˜ ao teremos que
ϕ(t) ≤ g(t) +
t
0
m(s)g(s)eR
ts
m(τ ) dτ .
Demonstracao.- Introduzamos o funcional
ψ(t) =
t
0
m(s)ϕ(s) ds.
Nestas condicoes teremos que
ψ(t) = m(t)ϕ(t) ≤ m(t)ψ(t) + m(t)g(t).
Fazendo
F (t) = e−R
t0
m(τ ) dτ ψ(t),
obtemos
F (t) = −m(t)e−R
t0
m(τ ) dτ ψ(t) + e−R
t0
m(τ ) dτ ψ(t)
= e−R
t0
m dτ [−mψ + ψ]
portanto
F (t) ≤ m(t)g(t)e− R t
0m(τ ) dτ
Integrando a desigualdade anterior encontramos que
F (t) ≤ t
0
m(τ )g(τ )e−R
τ0
m(s) ds dτ.

5/14/2018 ESP_SOB - slidepdf.com
http://slidepdf.com/reader/full/espsob 20/244
16 Capıtulo 1. Desigualdades Basicas
Finalmente, lembrando a definicao de F teremos que
ψ(t) ≤ t
0
m(τ )g(τ )eR t
τm(s) ds dτ e como ϕ(t) − g(t) ≤ ψ(t).
segue nossa conclusao.
Corolario 1.5.1 Com as mesmas hip´ oteses do Lema 1.5.3, assumindo que g e uma func˜ ao crescente, teremos que
ϕ(t) ≤ g(t)eR
t0
m(τ ) dτ
Demonstracao.- De fato, do Lema 1.5.3 segue que
ϕ(t) ≤ g(t) +
t
0
m(s)g(s)eR
ts
m(τ ) dτ ds
Fazendo uma integracao por partes e usando o fato que g e crescente, teremos que
ϕ(t) ≤ g(t)1 + t
0
m(s)eR
ts
m(τ ) dτ dsDe onde segue a conclusao.
1.6 Exercıcios
1. Mostre que toda funcao convexa definida sobre a reta, e uma funcao contınua emRN . Pode-se extender este resultado a funcoes do RN ?. Justifique sua resposta.
2. Mostre que toda funcao convexa F : RN
→R possui um ponto de mınimo na
bola Br(0).
3. Mostre que se f : RN → R e uma funcao convexa tal que |x| → ∞ ⇒ f (x) → ∞entao f tem um ponto de mınimo em RN . Que pode afirmar sobre a unicidade.
4. Mostre que o conjunto de todos os pontos de mınimos de uma funcao convexa,forma um conjunto convexo e fechado.
5. Mostre que toda funcao estritamente convexa, possui um unico ponto de mınimo.(Uma funcao e estritamente convexa, quando
f (θu + (1 − θ)v) = θf (u) + (1 − θ)f (v) ⇒ u = v)
6. Mostre que a matriz Hessiana de uma funcao estritamente convexa de classe C 2, edefinida positiva. Recıprocamente, se a matriz hessiana de uma funcao e definidapositiva, entao a funcao deve ser estritamente convexa.

5/14/2018 ESP_SOB - slidepdf.com
http://slidepdf.com/reader/full/espsob 21/244
1.6. Exercıcios 17
7. Mostre que a media aritmetica e maior ou igual que a media Geometrica. Isto e
n
ni=1
gi ≤ 1
n
ni=1
gi.
8. Sejam b e c funcoes de classe C 1, positivas e decrescentes em [0, ∞[. Seja f uma funcao que decai para zero exponencialmente, (f (t) ≤ ce−γt para C, γ > 0).Mostre que a solucao geral de
y(t) + b(t)y(t) + c(t)y(t) = f (t)
decai exponencialmente para zero.
9. No exercıcio anterior suponha que f decai polinomialmente, isto e, existe umaconstante positiva C e um numero real p tais que
f (t)≤
C
(1 + t) p
.
Mostre que a solucao y da equacao ordinaria deve decaer tambem polinomial-mente com taxa igual a f . Que pode afirmar da solucao do exercico 8 quando f apenas satisfaz:
limt→∞ f (t) = 0
10. Sejam a e b numeros reais. Encontre uma condicao necessaria e suficiente paraque a solucao geral da equacao
y(t) + ay(t) + by(t) = 0
decaiga exponencialmente. Que relacao deve satisfazer a e b.
11. Encontre o conjunto dos dados iniciais y0 e y1, de tal forma que a solucao daequacao diferencial ordinaria
y(t) + 2ay(t) − 2a
2
y(t) = 0y(0) = y0, y(0) = y1
decaiga exponencialmente.
12. Sejam b e c funcoes de classe C 1, positivas e decrescentes em [0, ∞[. Mostre quea solucao geral de
y(t) + b(t)
|y(t)
| py(t) + c(t)y(t) = f (t)
satisfaz:|y(t)| ≤ c
(1 + t) p+1.
Para alguma constante c > 0.

5/14/2018 ESP_SOB - slidepdf.com
http://slidepdf.com/reader/full/espsob 22/244
18 Capıtulo 1. Desigualdades Basicas
5/14/2018 ESP_SOB - slidepdf.com
http://slidepdf.com/reader/full/espsob 23/244
Capıtulo 2
Espacos de Banach
Faremos aqui uma introducao aos espacos de Banach e as diferentes topologıas que se
podem definir nelas.
2.1 Espacos metricos
O conceito de espaco metrico e um dos conceitos mais basicos do analise funcional.Para que um conjunto nao vazio seja um espaco metrico apenas e suficiente ter definidosobre ele uma aplicacao que sera chamada de metrica. Mais precissamente
Definicao 2.1.1 Diremos que um conjunto n˜ ao vazio X e um espaco metrico, se sobreele est´ a definida uma func˜ ao
d : X × X → Rsatisfazendo as seguintes propriedades
• d(x, y) = 0 se e somente se x = y.
• A func˜ ao d e simetrica, isto e d(x, y) = d(y, x)• d(x, z) ≤ d(x, y) + d(y, z) (desigualdade triangular)
A func˜ ao d e chamada de metrica.
Um espaco metrico esta definido desta forma pelo par ordenado (X, d). Note quenao precissamos ter definida nenhuma operacao sobre X . Vejamos alguns exemplos.
Exemplo 2.1.1 Tomemos o conjunto de pontos P = x1, x2, · · · , xn. Definimos sobreeste conjunto a func˜ aod : P × P → R
da seguinte forma d(xi, xj ) = 1 − δij

5/14/2018 ESP_SOB - slidepdf.com
http://slidepdf.com/reader/full/espsob 24/244
20 Capıtulo 2. Espacos de Banach
onde δij e o delta de Kronoeker, definida como
δij = 0, se i = j, δii = 1.
Exemplo 2.1.2 Denotemos por X =
x ∈ R3; x ≤ 1
. Sobre este conjunto defini-mos a func˜ ao
d : X × X → Rda seguinte forma
d(x, y) = x − yclaramente esta func˜ ao d satisfaz as condic˜ oes de metrica, portanto o par (X, d) e um
espaco metrico.
Exemplo 2.1.3 Denotemos por X = C 1(a, b) o conjunto de todas as func˜ oes contınuasdefinidas sobre o conjunto fechado [a, b] com derivadas contınuas. Sobre este conjuntodefinimos a func˜ ao
d(f, g) = supx∈[a,b]
|f (x) − g(x)| + supx∈[a,b]
|f (x) − g(x)|
e simples verificar que este e um espaco metrico.
Exemplo 2.1.4 Seja X =
f ∈ C 1(a, b); |f (x)| ≤ 1, ∀x ∈ [a, b]
Se definimos sobreeste espaco a metrica
d(f, g) = supx∈[a,b]
|f (x) − g(x)|
Concluimos que este (x, d) e um espaco metrico.
Definicao 2.1.2 Seja (X, d) um espaco metrico. Diremos que (xµ)µ∈N e uma seq uencia
de Cauchy no espaco metrico X se xµ ∈ X para todo µ ∈ N e ainda verifica que para todo > 0 existe N > 0 tal que
µ, ν ≥ N ⇒ d(xµ, xν ) <
Quando toda seq¨ uencia de Cauchy e convergente, diremos que o espaco metrico e com-pleto.
Exemplo 2.1.5 O conjunto dos n´ umeros reais com a metrica dada pelo valor absoluto
e um espaco completo. Fato, suponhamos que (xµ)µ∈N) seja uma seq¨ uencia de Cauchy,ent˜ ao teremos que ela e limitada. Dado > 0 existe N > 0 tal que
µ, µ0 > N ⇒ |xµ − xµ0| < .
Fixemos agora o ponto µ0. Da desigualdade triangular teremos que
|xµ| < |xµ − xµ0| + |xµ0
| < + |xµ0 |.

5/14/2018 ESP_SOB - slidepdf.com
http://slidepdf.com/reader/full/espsob 25/244
2.1. Espacos metricos 21
Tomando como C 0 = + |xµ0 | encontramos que
|xµ| < C 0, ∀µ ≥ N.
Tomando C comoC = max x1, · · · xµ0 , C 0 ,
encontramos que
|xµ
|< C,
∀µ
∈N
Como a seq¨ uencia e limitada, do teorema de Heine Borel, segue que existe uma sub-seq¨ uencia de (xµ)µ∈N que a denotaremos por (xµk
)k∈N e um n´ umero real x tal que
xµk→ x
Finalmente, mostraremos que toda a seq¨ uencia converge para x. Tomemos > 0, ent˜ aoexistir´ a N > 0 tal que
µ, µk > N ⇒ |xµ − xµ0 | <
2
Portanto temos que
µ > N ⇒ |xµ − x| < |xµ − xµ0 | + |xµ0 − x| <
2+
2=
Exemplo 2.1.6 O espaco metrico dado por X = C (a, b) o conjunto das func˜ oes contınuassobre o intervalo [a, b] com a metrica
d(f, g) = supx∈[a,b]
|f (x) − g(x)|
e um espaco metrico completo. De fato. Seja f µ uma seq¨ uencia de Cauchy, ent˜ aoteremos que para todo > 0 existe N > 0 tal que
µ, ν ≥ N ⇒ d(f µ, f ν ) <
isto eµ, ν ≥ N ⇒ sup
x∈[a,b]|f µ(x) − f ν (x)| <
Como em R toda seq¨ uencia de Cauchy e convergente teremos que para cada x, (f µ(x))µ∈Ne convergente. Isto e
f µ(x) → f (x)
Denotemos por f (x) este limite. Para mostrar que C (a, b) e completo, bastar´ a mostrar que f e uma func˜ ao contınua. De fato, seja > 0 pela convergencia existem N 1 e N 2tais que
µ ≥ N 1 ⇒ |f µ(x) − f (x)| <
3

5/14/2018 ESP_SOB - slidepdf.com
http://slidepdf.com/reader/full/espsob 26/244
22 Capıtulo 2. Espacos de Banach
µ ≥ N 2 ⇒ |f µ(y) − f (y)| <
3
Denotemos por N = max N 1, N 2. Por outro lado, pela continuidade de f µ teremosque existe δ > 0 tal que
|x − y| < δ ⇒ |f µ(x) − f µ(y)| <
3
Da desigualdade triangular obtemos que
|f (x) − f (y)| ≤ |f (x) − f µ(x)| + |f µ(x) − f µ(y)| + |f µ(y) − f (y)|Tomando µ > N e
|x
−y
|< δ concluimos que
|f (x) − f (y)| ≤
3+
3+
3=
De onde segue a continuidade da f . Portanto f ∈ C (a, b). Logo o espaco e completo.
2.2 Espacos normados
A estrutura de espaco metrico e uma estrutura basica onde isolamos o conceito de
metrica, para definir sobre ela uma convergencia de seus elementos. Os espacos nor-mados sao estruturas mais ricas, isto e sao conjuntos nao vazios que possuem duasoperacoes fechadas definidas sobre ele. Uma delas e a soma de vetores, e a outra oproduto por um escalar, isto e um espaco normado e um espaco vetorial. Mais precis-samente
Definicao 2.2.1 Diremos que um espaco vetorial e um espaco normado, se existe uma func˜ ao N : E → R satisfazendo as seguintes propriedades
•N (x)
≥0 para todo x
∈E e se N (x) = 0
⇒x = 0
• N (x + y) ≤ N (x) + N (y) para todo x, y ∈ E
• N (αx) = |α|N (x)
Note que a definicao de espaco normado exige que E seja um espaco vetorial. Emparticular todo espaco normado e um espaco metrico, para ver isto basta definir ametrica d(x, y) = N (x − y). Um espaco Normado e chamado de espaco de Banach seele e completo, isto e toda sequencia de Cauchy e convergente em E .
Exemplo 2.2.1 Denotemos por L1
(a, b) o espaco de todas as func˜ oes definidas sobre[a, b] integr´ aveis a Lebesgue. ´ E simples verificar que este espaco munido da norma
f 1 =
b
a
|f (x)| dx
e um espaco normado. Utilizando os resultados de teorıa da medida mostra-se que toda seq¨ uencia de Cauchy e convergente.
5/14/2018 ESP_SOB - slidepdf.com
http://slidepdf.com/reader/full/espsob 27/244
2.2. Espacos normados 23
Exemplo 2.2.2 Denotemos por C ([a, b]) o conjunto de todas as func˜ oes contınuas nointervalo [a, b]. Isto e
C ([a, b]) = f : [a, b] → R; f e contınua Este e um espaco vetorial, pois soma de func˜ oes contınuas e contınua, e o produto deuma constante por uma func˜ ao contınua e tambem uma func˜ ao contınua. Este espacovetorial tem estrutura de espaco normado se sobre ele definimos a norma
f ∞ = sup |f (x)|; x ∈ [a, b]´ E simples verificar que · ∞ e uma norma. De fato,
f ∞ = 0 ⇒ f = 0.
Por outro lado temos quef + g∞ ≤ f ∞ + g∞
E Finalmente, que λf ∞ = |λ|f ∞Exemplo 2.2.3 Consideremos o mesmos espaco do exemplo 2.2.2, C ([a, b]) o conjuntode todas as func˜ oes contınuas Como vimos e um espaco vetorial. Podemos tambem dar a este espaco, estrutura de espaco normado, introduzindo a norma
f 1
= b
a |f (x)
|dx
´ E simples verificar que · ∞ e uma norma. De fato, b
a
|f (x)| dx = 0 ⇒ f = 0.
Por outro lado temos que
b
a
|f (x) + g(x)| dx ≤ b
a
|f (x)| dx + b
a
|g(x)| dx
Apesar que algebricamente o espaco C (a, b) e igual ao do exemplo 2.2.2, eles possuim caraterısticas muito diferentes. O espaco C (a, b) munido da norma · 1 n˜ ao e um espaco completo. Para isto basta considerar a seq¨ uencia de func˜ oes
f n : [0, 1]
→R, f n(x) = xn.
´ E simples verificar
f n(x) → f (x), onde f (x) =
0, 0 ≤ x < 11, x = 1.

5/14/2018 ESP_SOB - slidepdf.com
http://slidepdf.com/reader/full/espsob 28/244
24 Capıtulo 2. Espacos de Banach
Por outro lado temos que
10
|f n(x) − f (x)| dx = 10
xn dx = 1n + 1
→ 0
De onde f n converge para f na norma · 1. Mais f nao e uma funcao contınua. LogoC ([0, 1]) nao e um espaco completo.
2.3 Minimizacao em dimensao finita
Como vimos na secao anterior, para encontrar uma solucao de um problema de equilibrioe necessario mostrar que o funcional que define a energıa potencial do sistema pode serminimizado. Isto e que existe uma funcao u satisfazendo
J (u) ≤ J (v), ∀v ∈ U ad
Onde J e um funcional definido sobre um espaco normado E e U ad ⊂ E o conjunto dasfuncoes admissiveis.
Problemas semelhantes aparecem em problemas de analise real onde muitas vezes enecessario minimizar funcionais definidos sobreRN . Por exemplo uma funcao quadratica
da forma
q(x) = xAxt + a · x
Onde x = (x1, · · · , xn) e a ∈ RN . Em geral existem restricoes, da forma
F (x) ≤ 0
Onde F : RN → R. Portanto o problema se resume em encontrar um ponto x0 de talforma que F (x0)
≤0 e
q(x0) ≤ q(x), ∀x ∈ R, F (x) ≤ 0
Mostrar que este ponto existe nao e tarefa dificil quando se tem as hipoteses necessarias.Por exemplo que a matriz A seja definida positiva e F seja uma funcao convexa. A ideiada demostracao e a seguinte. Denotemos por U ad = x ∈ Rn; F (x) ≤ 0. Queremosencontrar x0 ∈ U ad tal que
q(x0) ≤ q(x), ∀x ∈ U ad
Primeiro note que como A e definida positiva, existe uma constante α > 0 tal que
xAxt ≥ αx2, ∀x ∈ Rn
Somando a · x a ambos termos da desigualdade anterior teremos que
q(x) = xAxt + a · x ≥ αx2 + a · x ≥ αx2 − a2
2α− α
2x2

5/14/2018 ESP_SOB - slidepdf.com
http://slidepdf.com/reader/full/espsob 29/244
2.4. Minimizac˜ ao em dimens˜ ao infinita 25
De onde segue que
q(x) ≥ αx2 − a2
2α≥ − a2
2α(2.1)
Portanto q(x) e limitado inferiormente em RN e em particular sobre U ad. Sabemos quetoda funcao limitada possui um infimo. Da definicao de infimo, existe uma sequenciaem xµ de elementos de U ad tais que
q(xµ)
→inf
q(x); x
∈U ad
:= I
Note que aqui nao podemos aplicar compacidade diretamente porque o conjunto sobreo qual minimizamos nao e limitado. Usando a primeira desigualdade em (2.1) encon-tramos que
xµ2 ≤ 1
α
q(xµ) +
a2
2α
Como o segundo membro da desigualdade acima e limitado concluimos que a sequencia
(xµ)µ∈Rn
e limitada. Portanto pelo Teorema de Heine Borel, existe um ponto x0 e umasubsequencia convergente tal quexµk
→ x0
Como xµk∈ U ad para todo k e o conjunto U ad e fechado, teremos que x0 ∈ U ad. Da
continuidade de q obtemos que
I = limk→∞
q(xµk) = q(x0)
portanto x0 e o ponto que minimiza o problema.
2.4 Minimizacao em dimensao infinita
O metodo de resolucao do problema anterior e bastante geral e pode ser estendido acasos mais gerais. Infelizmente nao pode ser estendido dessa forma para problemas deminimizacao em dimensao infinita. Isto porque em pontos cruciais da demonstracao
utilizamos o fato que toda sequencia limitada possui uma subsequencia convergente,isto e a compacidade. O problema deste resultado e que somente e valido em espacosde dimensao finita.
Teorema 2.4.1 Uma seq¨ uencia limitada de elementos de um espaco de Banach E possui uma subseq¨ uencia convergente se e somente se E tem dimens˜ ao finita.
Este teorema acaba com a posibilidade de aplicar o mesma ideia para minimizacao
de funcionais em Espacos de Banach. Examinando mais de perto este problema, con-cluimos que o problema nao radica no fato da dimensao ser finita ou nao e sim naconvergencia. Pois observe que nao e necessario que
limk→∞
q(xµk) = q(x0)
26 C t l 2 E d B h

5/14/2018 ESP_SOB - slidepdf.com
http://slidepdf.com/reader/full/espsob 30/244
26 Capıtulo 2. Espacos de Banach
basta apenas mostrar quelim
k→∞q(xµk
)
≥q(x0)
Esta desigualdade nos da a posibilidade de enfraquecer nosso conceito de convergencia.Observe que ate agora temos tratado de convergencia no sentido da norma. Isto e ondeos conjuntos abertos estao definidos a partir de bolas abertas do tipo
Br(x0) = x ∈ E ; x − x0E < r
Com estes conjuntos em espacos de dimensao infinita o conceito de compacidade e maisexigente. Veja por exemplo o teorema de Compacidade para conjuntos de L p ou o
teorema de Arsela Ascoli que carateriza conjuntos compactos no espaco das funcoescontınuas. A questao agora e saber que tipo de topologıa podemos definir de tal formaque conjuntos limitados sejam precompactos em espacos de dimensao infinita.
Lembremos que uma funcao e contınua se e somente se a preimagem de conjuntosabertos sao tambem conjuntos abertos aberto. A ideia aqui e enfraquecer o conceitode convergencia restringindo o conceito de continuidade. Assim a ideia e considerar oconjunto de todas as funcoes lineares e contınuas. Assim diremos que uma sequencia(xµ)µ∈N converge fraco para x se e somente se para toda funcao f linear e contınua severifica que
f (xµ) → f (x).
O conceito de convergencia agora e mais amplo que aquele que conhecemos do calculodiferencial e este novo conceito nos permitira desenvolver uma nova teoria que e chamadade Analise funcional.
Vejamos como os espacos de dimensao finita difierem nos espacos de dimensaoinfinita.
Exemplo 2.4.1 Seja (xn)n
∈N uma seq¨ uencia de vetores em Rm. Suponhamos que ela
seja limitada. Isto e que exista uma constante C > 0 tal que
xn =
|x1n|2 + |x2
n|2 + · · · + |xmn |2 ≤ C
Pelo Teorema de Heine-Borel existe uma subseq¨ uencia de xn, denotada por xnkque e
convergente em Rm. Por outro lado. Esta propriedade n˜ ao e v alida para espacos dedimens˜ ao infinita. Por exemplo considere o espaco E = C 1(0, 1) com a norma f ∞dada por
f
∞ = sup
x∈[0,2π] |f (x)
|Considere por exemplo a seq¨ uencia:
yn = sen (nx)
Claramente e uma seq¨ uencia limitada em E . Mas n˜ ao possui nenhuma subseq¨ uencia convergente.

5/14/2018 ESP_SOB - slidepdf.com
http://slidepdf.com/reader/full/espsob 31/244
2.4. Minimizac˜ ao em dimens˜ ao infinita 27
Para resolver problemas de minimizacao em espacos de dimensao infinita, devemosextender o conceito de convergencia.
Lembremos o conceito de continuidade para funcoes de uma variavel. Seja f :[a, b] → R uma funcao contınua no ponto x0, para todo > 0 existe δ > 0 tal que
|x − x0| < δ ⇒ |f (x) − f (x0)| <
Esta definicao de continuidade e equivalente a seguinte: f e uma funcao contınua see somente se a preimagem de conjuntos abertos de R e um aberto de [a, b]. Maisprecissamente temos o seguinte teorema.
Teorema 2.4.2 Uma func˜ ao f : [a, b] → R e contınua se e somente se para todo abertoV de R, f −1(V ) e um aberto de [a, b]
Demonstracao.- Se f e uma funcao contınua o resultado e simple de verificar. Mos-traremos que quando a preimagem de abertos de R e um aberto de [a, b] entao f deve
ser contınua. De fato, lembremos que para toda funcao f e para todo conjunto V ⊂ Re validof (f −1(V )) ⊂ V (2.2)
Tomemos agora uma vizinhanca de f (x0), isto e
B(f (x0)) = y ∈ R; |y − f (x0)| < Como f −1(B(f (x0))) e um conjunto aberto e
x0 ∈ f −1(B(f (x0)))
entao teremos que existe δ > 0 talque
Bδ(x0) ⊂ f −1(B(f (x0)))
Usando a propriedade (2.2) concluimos que
f (Bδ(x0)) ⊂ f (f −1(B(f (x0)))) ⊂ B(f (x0)))
que significa que se
x ∈ Bδ(x0) ⇒ f (x) ∈ f (Bδ(x0)) ⊂ B(f (x0)))
Ou equivalentemente, teremos que dado > 0 existe δ > 0 tal que
|x − x0| < δ ⇒ |f (x) − f (x0)| <
que mostra a continuidade de f .
O mesmo resultado e valido sobre os espacos de Banach. Isto e
28 Capıtulo 2 Espacos de Banach

5/14/2018 ESP_SOB - slidepdf.com
http://slidepdf.com/reader/full/espsob 32/244
28 Capıtulo 2. Espacos de Banach
Teorema 2.4.3 Seja E um espaco de Banach e denotemos por F uma func˜ ao da forma
F : E → REnt˜ ao F e uma func˜ ao contınua se e somente se para todo aberto V de R, F −1(V ) eum aberto de E .
A demonstracao segue os mesmos passos que o correspondente teorema para funcoesreais.
Note que a norma de E e sempre uma funcao contınua, portanto as bolas
Br(x0) = x ∈ E ; x − x0 < rsao sempre conjuntos abertos, pois
Br(x0) = F −1(]0, r[)
onde F (x) = x − x0.
Extensao do conceito de convergenciaExtenderemos o conceito de convergencia a partir da seguinte propriedade propriedadedas funcoes contınuas. Se a seq¨ uencia (xν )ν∈N e convergente ent˜ ao para toda func˜ aocontınua F teremos que F (xν )ν∈N e tambem convergente. Definiremos uma condicaomais fraca que a anterior se exigimos que a convergencia seja valida apenas para asfuncoes lineares e contınuas. Diremos entao que uma sequencia xn converge fracamentepara x, se f (xn) converge para f (x), para todas as funcoes lineares e contınuas. Paraformalizar esta definicao introduziremos o espaco dual.
Definicao 2.4.1 Denotemos por E ∗ o conjunto das func˜ oes f : E → R lineares econtınuas, isto e
E ∗ = f : E → R; f e linear e contınuaO conjunto E ∗ e chamado de espaco dual de E
Da definicao concluimos que E ∗ e um espaco vectorial. Mais ainda, E e um espaconormado com a norma dada por
f E∗ = supxE≤1 |f (x)|O seguinte resultado nos diz que o espaco dual de um espaco normado qualquer ecompleto.
Teorema 2.4.4 Seja E um espaco normado, e denotemos por E ∗ o espaco dual de E .Ent˜ ao E ∗ e um espaco completo.

5/14/2018 ESP_SOB - slidepdf.com
http://slidepdf.com/reader/full/espsob 33/244
2.5. Teorema de Hanh-Banach 29
Demonstracao.- Seja (f m)m∈N uma sequencia de Cauchy em E ∗, entao teremos que
para todo > 0 existe N > 0 tal que
m,n > N ⇒ f m − f nE∗ < .
Em particular teremos que
f m(x) − f n(x) ≤ xEf m − f nE∗
Portanto, a sequencia (f m(x))m∈N e de Cauchy em R. Pela completitude dos numerosreais teremos que existe f (x) tal que
f m(x) → f (x).
Mostraremos a seguir que f ∈ E ∗. Note que
f m(αx + βy) = αf m(x) + βf m(y)
→αf (x) + βf (y).
De onde segue que a funcao e linear. Mostraremos agora que f e contınua, para istobastara mostrar que e limitada.
|f (x)| = limn→∞ |f n(x)| ≤ lim
n→∞ f nE∗ ≤ C
Pois toda sequencia de Cauchy e limitada. Portanto f ∈ E ∗. Finalmente, mostraremosque (f m(x))m
∈N converge para f . Da definicao de supremo, temos que para > 0
existira um elemento x0 ∈ E tal que
f m − f E∗ = supxE≤1
|f m(x) − f (x)| < |f m(x0) − f (x0)| +
3
Tomando m tal que
|f m(x0) − f (x0)| <1
3
Segue o resultado.
2.5 Teorema de Hanh-Banach
O Teorema de Hanh-Banach e a pedra fundamental do analise funcional. Uma dasconsequencias deste Teorema e que podemos caraterizar a convergencia fraca de umaforma relativamente simples. O Teorema nos diz que toda aplicacao linear e contınua
definido sobre um subespaco de E pode ser estendida continuamente a todo o espaco.Mais precissamente
Teorema 2.5.1 Seja E um espaco vetorial e denotemos por p uma seminorma definida sobre E . Isto e
30 Capıtulo 2. Espacos de Banach

5/14/2018 ESP_SOB - slidepdf.com
http://slidepdf.com/reader/full/espsob 34/244
p p ¸
• p(λx) = λp(x), ∀x ∈ E, ∀λ > 0
• p(x + y) ≤ p(x) + p(y), ∀x, y ∈ E Denotemos por G um subespaco de E e g : G → R uma aplicac˜ ao linear tal que
g(x) ≤ p(x), ∀x ∈ G
Ent˜ ao existe uma forma linear f : E → R satisfazendo
g(x) = f (x), ∀x ∈ G
e ainda f (x) ≤ p(x) ∀x ∈ E
Demonstracao.- Seja E um espaco normado e G um subespaco de E . Se G = E ,entao existe um elemento x0 ∈ E e x0 /∈ G. Definimos assim o espaco G1 = G + Rx0.Mostraremos que f pode ser estendido a G1 satisfazendo
f (x) ≤ p(x), ∀x ∈ G1 (2.3)
Denotemos por f 1 a extensao de f dada por
f 1(x + tx0) = f (x) + tα
Onde α sera escolhida posteriormente de tal forma que verifique a desigualdade 2.3.Isto e que se verifique que
f 1(x + tx0) ≤ p(x + tx0)
Ou equivalentemente, para t > 0
f 1( xt
+ x0) ≤ p( xt
+ x0), ou f 1( xt
− x0) ≤ p( xt
− x0)
Isto e equivalente a mostrar que
f 1(y + x0) ≤ p(y + x0), f 1(y − x0) ≤ p(y − x0) ∀y ∈ G
De onde obtemos que
f (y) + α
≤p(y + x0), f (y)
−α
≤p(y
−x0)
∀y
∈G
Por outro lado, para x, y ∈ G e da desigualdade triangular temos
f (x + y) ≤ p(x + y) ≤ p(x + x0) + p(y − x0).
De onde segue quef (y) − p(y − x0) ≤ p(x + x0) − f (x)
2 5 Teorema de Hanh Banach 31

5/14/2018 ESP_SOB - slidepdf.com
http://slidepdf.com/reader/full/espsob 35/244
2.5. Teorema de Hanh-Banach 31
Tomando supremo no primeiro membro da desigualdade acima e depois infimo no se-gundo membro obtemos que
supy∈G
f (y) − p(y − x0) ≤ inf x∈G
p(x + x0) − f (x)
Tomamos α tal que
supy∈G
f (y) − p(y − x0) ≤ α ≤ inf x∈G
p(x + x0) − f (x)
Encontramos que
f (y) + α ≤ p(y + x0), f (y) − α ≤ p(y − x0) ∀y ∈ G
De onde segue quef 1(x + tx0) ≤ p(x + tx0)
Isto e,
f 1(x) ≤ p(x), ∀x ∈ G1.Continuando com este mesmo reaciocinio encontramos uma cadeia de subespacos de E verificando
G1 ⊂ G2 ⊂ · · · ⊂ E.
e uma sequencias de funcoes f 1, f 2, · · · , f n, onde f n esta definido em Gn e f n extendef n−1. Podemos construir uma relacao de ordem da seguinte forma: Diremos que(Gi, f i)
(Gj , f j ) se Gi
⊂Gj e f j extende a f i. Claramente este conjunto tem um
maiorante, e portanto pelo Lema de Zorn possui um elemento maximal, que e (E, f ),Logo existe f satisfazendo as condicoes do Teorema.
Observacao 2.5.1 Para o caso dos espacos de Dimens˜ ao finita o Teorema de Hanh Banach e bastante simple. Seja E = RN e denotemos por G ⊂ RN um subespaco de E .Denotemos por g : G → R uma func˜ ao linear satisfazendo
g(x) =
x
,
∀x
∈G
Ent˜ ao construiremos uma func˜ ao f satisfazendo as condic˜ oes do Teorema de Hanh Ba-nach. De fato, denotemos por e1, · · · , er a base ortonormal de G. Esta base pode ser estendida ortonormalmente a uma base do RN , denotemos por B = e1, · · · , er, er+1, · · · enesta base. Tomemos x = c1e1 + · · · + cnen e f de tal forma que
f (er+1) = 0, · · · , f (en) = 0, f (c1e1 + · · · + crer) = g(x)
A func˜ ao f assim definida satisfaz
f (x) = f (c1e1 + · · · + cnen)
= f (c1e1 + · · · crer) + f (cr+1er+1 + · · · + cnen)
= g(x) ≤ x ≤ x
32 Capıtulo 2. Espacos de Banach

5/14/2018 ESP_SOB - slidepdf.com
http://slidepdf.com/reader/full/espsob 36/244
Corolario 2.5.1 Para todo x ∈ E existe f 0 ∈ E ∗ tal que
f 0 = x0, f (x0) = x02
Demonstracao.- Seja G = Rx0, e definamos por g ao funcional definido sobre G daseguinte forma
g(x) = g(tx0) = tx02 ⇒ g = x0Tomemos p(x) = x0x. Do Teorema de Hanh-Banach existe uma funcao f 0 definidasobre todo E que verifica
f 0(x) = g(x),
∀x
∈G,
|f 0(x)
| ≤p(x) =
x0
x
Portanto f 0 verifica as condicoes to Corolario.
Corolario 2.5.2 Para todo elemento x ∈ E temos que
xE = supf ∈E∗;f ∗≤1
f (x)
Demonstracao.- Do teorema de Hanh Banach, existe uma aplicacao f 0 tal que
f 0∗
=
x
, f 0
(x) =
x2
Tomando f 1 = f 0x concluimos que
x = f 1(x) ≤ supf ∈E∗;f ∗≤1
f (x)
Comosup
f ∈E∗;f ∗≤1f (x) ≤ sup
f ∈E∗;f ∗≤1f x ≤ x
segue a nossa conclusao.
2.6 Convergencia fraca
Na secao anterior vimos como pode ser estendido o conceito de convergencia de numerosreais para espacos de Banach. Esta convergencia e chamada de forte porque vem danorma. Se (xn)n∈N e uma sequencia que converge forte, entao para toda funcao contınuateremos que
f (xn
)→
f (x)
A seguir definiremos o conceito de convergencia fraca.
Definicao 2.6.1 Diremos que uma seq¨ uencia (xn)n∈N de elementos de um espaco deBanach E , converge fraco para x ∈ E , se e somente se
f (xn) → f (x), ∀f ∈ E ∗
2.6. Convergencia fraca 33

5/14/2018 ESP_SOB - slidepdf.com
http://slidepdf.com/reader/full/espsob 37/244
2.6. Convergencia fraca 33
Da definicao concluimos que se uma sequencia convergencia forte, entao ela convergefraco. De fato, se xn converge forte, entao para toda funcao contınua f teremos quef (xn) → f (x), em particular para as funcoes f ∈ E . O recıproco nao e verdade emgeral. A excecao e quando E tem dimensao finita. Isto e, a convergencia fraca e fortesao equivalentes nos espacos de dimensao finita. De fato, considere por exemplo o casounidimensional. Toda funcao linear e contınua f : R → R e da forma f (x) = αx, paraα ∈ R. Tomando f tal que α = 0 encontramos que
f (xn
)→
f (x)⇒
αxn →
αx⇒
xn →
x
No caso do RN a situacao e semelhante. Note que todo funcional contınuo f : RN → Re da forma f (x) = A · x onde A ∈ Rn. Tomando A = (0, · · · , 0, 1, 0 · · · , 0) encontramosque
f (x) = xi.
Portanto a condicao de convergencia fraca implica que
xni → xi, ∀i = 1, · · · n.
De onde temos que a sequencia xn converge forte. Nos casos de dimensao infinita esteresultado nao e valido, pois por uma lado nao podemos caraterizar todos os funcionaislineares e contınuos de uma forma tao simples. E por outro lado x nao e necessaria-mente uma combinacao linear finita de termos de uma base. A convergencia fraca estaestreitamente viculada a semicontinuidade inferior que definimos a seguir.
Definicao 2.6.2 Diremos que um funcional J : E → R definido sobre um espaco nor-mado E e semicontınua inferiormente (SCI) se para toda seq¨ uencia (uν )ν∈N convergindopara u temos que
liminf ν→∞ J (uν ) ≥ J (u).
Para funcoes f : R → R, toda funcao contınua num ponto x sera semicontınuainferiormente nesse ponto. Para funcoes f com discontinuidade de primeira especie isto
e quando existem os limites laterais, porem sao diferentes, a funcao deve verificar nospontos de discontinuidade as seguintes relacoes
f (x−) ≥ f (x), f (x+) ≥ f (x).
Func˜ ao S.C.I. N˜ ao e S.C.I.
34 Capıtulo 2. Espacos de Banach

5/14/2018 ESP_SOB - slidepdf.com
http://slidepdf.com/reader/full/espsob 38/244
Como uma consequencia do Teorema de Hahn Banach, temos que a norma e sempreuma funcao semicontınua inferiormente com respeito a topologıa fraca.
Teorema 2.6.1 Seja E um espaco normado, e seja xν uma seq¨ uencia de elementosem E convirgindo fraco para x, ent˜ ao temos que
liminf ν→∞
xν ≥ x
Demonstracao.- De fato como a xν converge fraco, entao temos que
f (xν ) → f (x), ∀f ∈ E ∗
Por outro lado
f (xν ) ≤ f xν ⇒ f (x) = liminf ν→∞
f (xν ) ≤ f liminf ν→∞
xν
Do Corolario 2.5.1, encontramos que existe um funcional f satisfazendo
f ≤ 1, f (x) = x.
Usando este funcional na desigualdade acima, segue o resultado.
2.7 Topologıa fraca estrela
Dado um espaco normado E , podemos construir seu espaco dual E ∗ como sendo o espacoformado por todos os funcionais lineares e contınuos definido sobre E . Este espaco duale por sua vez um espaco normado. Portanto neste espaco podemos definir tanto aconvergencia forte como a convergencia fraca. Um ponto importante dos espacos duais,e que sobre eles podemos definir uma terceira convergencia, a chamada de convergenciafraca estrela. Diremos que uma sequencia de funcoes (f n)n
∈N converge fraco estrela em
E ∗ sef n(x) → f (x), ∀x ∈ E.
Observacao 2.7.1 Os conjuntos abertos em E ∗
O dual de E , denotado por E ∗ e um espaco normado, com a norma dada por
f ∗ = supx∈B1(0)
f (x).
Portanto podemos definir os conjuntos abertos de E ∗ a partir das bolas abertas. Isto e,
a bola aberta centrada no zero e raio e dada por
V (0) = f ∈ E ∗; f ∗ <
=
f ∈ E ∗; sup
x∈B1(0)f (x) <
= f ∈ E ∗; |f (x)| < , ∀x ∈ B1(0)
2.7. Topologıa fraca estrela 35

5/14/2018 ESP_SOB - slidepdf.com
http://slidepdf.com/reader/full/espsob 39/244
p g
Em geral podemos afirmar que uma vizinhanca qualquer de zero e dada por
V = f ∈ E ∗; |f (x)| < , x ∈ Bonde B e um conjunto limitado qualquer. Portanto se f n converge forte para f , e porque
f n − f ∗ → 0 ⇐⇒ supx∈B1(0)
|f n(x) − f (x)| → 0
Por outro lado, Na convergencia fraca estrela teremos que
f n f ⇐⇒ f n(x) → f (x), ∀x ∈ E.
Onde a convergencia n˜ ao e uniforme em x.Em particular se Tomamos B apenas um conjunto finito, teremos assim uma classe
de vizinhancas de zero, e esta topologıa e chamada de topologıa fraca estrela.
Definicao 2.7.1 Diremos que um espaco normado E e separ avel, se existe um subcon- junto numer´ avel e denso em E
O conceito de separabilidade e importante, pois nos diz que todo elemento x de E podeser escrito como limite de uma subsequencia do conjunto numeravel e denso.
Teorema 2.7.1 Toda seq¨ uencia limitada de funcionais lineares e contınuas definidossobre um espaco normado separ´ avel, possui uma subseq¨ uencia que converge fraco estrela
Demonstracao.- Seja x1, x2, · · · , xn, · · · um conjunto numeravel e denso. Seja (f n)n∈Numa sequencia limitada, entao a sequencia de numeros reais dados por
f 1(x1), f 2(x1), f 3(x1), · · · f n(x1), · · ·e limitada, portanto podemos extraer um subsequencia convergente, denotemos ela por
f (1)1 (x1), f
(1)2 (x1), f
(1)3 (x1), · · · f (1)n (x1), · · ·
que por nossa escolha e convergente. Consideremos agora a subsequencia de (f n)n∈Ndada por (f
(1)n )n
∈N. Repetindo o mesmo raciocinio anterior concluimos que a sequencia
f (1)1 (x2), f
(1)2 (x2), f
(1)3 (x2), · · · f (1)n (x2), · · ·
e limitada, portanto existe uma subsequencia convergente. De onde existe
f (2)1 (x2), f
(2)2 (x2), f
(2)3 (x2), · · · f (2)n (x2), · · ·
e tambem uma sequencia convergente. Assim temos encontrado um sistema de sequenciastais que
f (1)1 , f (1)2 · · · f (1)n · · · ,
f (2)1 , f
(2)2 · · · f
(2)n · · · ,
f (3)1 , f
(3)2 · · · f
(3)n · · · ,
· · · · · · · · · · · · · · ·
36 Capıtulo 2. Espacos de Banach

5/14/2018 ESP_SOB - slidepdf.com
http://slidepdf.com/reader/full/espsob 40/244
Onde cada sequencia e uma subsequencia da anterior. Tomando agora a sequencia
diagonal (f (n)n )n
∈N teremos pela construcao que a sequencia (f
(n)n (xi))n
∈N converge
para todo i ∈ N. Como o conjunto x1, x2, · · · , xn, · · · e denso teremos que a sequencia(f
(n)n (x))n∈N convirge para todo x ∈ E . Isto quer dizer que para cada x ∈ E existe um
numero f (x) De tal forma quef (n)
n (x) → f (x)
Note que f e linear pois cada termo f n e linear. Por outro lado
f (x) = limn→∞
f (n)n (x) ≤ lim
n→∞f (n)
n (x) ≤ cx, ∀x ≤ 1
pois a sequencia (f n)n∈N e limitada. Portanto f tambem e limitado. O que completa ademonstracao. Por outro lado, se E e um espaco separavel, temos que a bola unitariaem E ∗ e metrizavel. Mais precissamente temos
Teorema 2.7.2 Denotemos por E um espaco normado separ´ avel. A topologıa fraca estrela induzida na bola B ⊂ E ∗
E = f ∈ E ∗; f ∗ ≤ 1
e metriz avel e sua metrica e dada por
d(f, g) =∞
n=0
2−n|f − g , xn|
onde (xn)n∈N e o conjunto numer´ avel e denso da bola B.
A demonstracao e simple
2.8 Espacos reflexivos
Assim como construimos o espaco dual de um espaco vetorial, tambem podemos con-struir o espaco dual do dual. Isto e
E ∗∗ = f : E ∗ → R; f e linear e contınua
Este espaco E ∗∗ e tambem um espaco normado e completo. A norma do espaco bidual
esta dada por f ∗∗ = supg∈E∗,g∗≤1
f (g)
Em geral dado um espaco vetorial E qualquer, podemos definir os espacos dual e bidual.Inclusive podemos relacionar o espaco E com o bidual E ∗∗ atraves da seguinte aplicacao
J : E → E ∗∗, x → J (x) ∈ E ∗∗
2.8. Espacos reflexivos 37

5/14/2018 ESP_SOB - slidepdf.com
http://slidepdf.com/reader/full/espsob 41/244
Onde
J (x) : E ∗ → RDefinindo de forma natural
J (x) , f = f (x)
Para todo f ∈ E ∗. Note que J e uma isometrıa entre os espacos E e E ∗∗. De fato,
J (x)∗∗ = supf ∈E∗,f ∗≤1
J (x); f = supf ∈E∗,f ∗≤1
f, x = x
De onde obtemos uma aplicacao injetora entre os espacos E e E ∗∗. A aplicacao J echamada de projecao canonica. Nao e verdade em geral que J definida acima, sejasobrejetora. Os espacos nos quais J seja sobrejetora sao chamados de Reflexivos.
Definicao 2.8.1 Seja E um espaco de Banach, diremos que E e um espaco reflexivoquando a aplicac˜ ao J definida acima e sobrejetora.
Observacao 2.8.1 Como uma conseq¨ uencia imediata, temos que RN e um espaco re-
flexivo. Em geral podemos afirmar que todo espaco normado e completo de dimens˜ ao finita e reflexivo.
Propriedades dos espacos duais
• E e um espaco reflexivo se e somente se E ∗ e reflexivo
•Se E ∗ e um espaco separavel entao E e separavel.
• E e um espaco reflexivo e separavel se e somente se E ∗ e um espaco reflexivo eseparavel.
Teorema 2.8.1 Se E e um espaco reflexivo e separ´ avel, ent˜ ao a bola unit´ aria e fechada de E e um conjunto compacto com respeito a topologıa fraca.
Demonstracao.- Seja xn uma sequencia limitada em E . Por ser E reflexivo teremosque
J : E → E
e uma bijecao. Logo teremos que J (xn) e limitada em E . Portanto existe uma sub-sequencia de xn tal que
J (xnk) F fraco estrela em E
Onde F ∈ E . Pela reflexividade, existe x ∈ E tal que J (x) = F . Da convergencia
fraca estrela temos J (xnk), f → J (x), f ∀f ∈ E .
De onde, pela definicao de J temos
f, xnk → f, x ∀f ∈ E .
38 Capıtulo 2. Espacos de Banach

5/14/2018 ESP_SOB - slidepdf.com
http://slidepdf.com/reader/full/espsob 42/244
O que significa que xnkconverge fraco em E .
Por ser E numeravel entao a topologıa inducida sobre a bola e metrizavel. Logo
a bola e um espaco metrico onde toda sequencia limitada possui uma subsequenciaconvergente. Portanto, concluimos que a bola e um conjunto relativamente compacto.
Em geral temos
Teorema 2.8.2 E e um espaco reflexivo se e somente se toda seq¨ uencia limitada possui uma subseq¨ uencia convergindo fraco.
5/14/2018 ESP_SOB - slidepdf.com
http://slidepdf.com/reader/full/espsob 43/244
Capıtulo 3
Os Espacos L p
O espıritu s o usa sua facultade criadora quando a experiencia lhe imp˜ oe tal necessidade
H. Poincare
Neste capıtulo estudaremos as principais propriedades dos espacos L p tais como oteorema da Representacao de Riesz, reflexividade, separabilidade e a convexidade uni-forme. Para isto utilizaremos essencialmente as desigualdades estudadas no capıtuloanterior. As propriedades mais importantes dos espacos L p estao estreitamente vincu-ladas com a convexidade da norma, consideraremos o caso L p com 0 < p < 1. Comoveremos ao final deste capıtulo estes conjuntos sao espacos vetoriais metricos, com a
propriedade que as bolas abertas ou fechadas em L
p
nao sao convexas. Este fato implica,surprendentemente, que os espacos duais se reduzem ao conjunto nulo.Comecaremos este Capıtulo lembraremos alguns resultados importante da Teria de
integracao
Lema 3.0.1 Seja (f ν ) uma seq¨ uencia n ao negativa de func˜ oes, f ν ≥ 0 e suponhamosque
supν
∈N RN
f ν dx < ∞ent˜ ao a func˜ ao definida como
f (x) = lim inf ν∈N
f ν (x)
satisfaz,
f ∈ L1(RN ),
RN
f dx ≤ liminf ν∈N
RN
f ν dx
Teorema 3.0.3 (Teorema de Lusin) Seja Ω⊂Rn um conjunto mensur´ avel e de
medida finita. Seja f uma func˜ ao mensur´ avel satisfazendo f (x) = 0 para x ∈ Rn \ Ω.Ent˜ ao para todo > 0 existe uma func˜ ao g ∈ C 0(Ω) satisfazendo
supx∈Rn
|g(x)| ≤ supx∈Rn
|f (x)|, e med x ∈ Rn; f (x) = g(x) < .
40 Capıtulo 3. Os Espacos L p

5/14/2018 ESP_SOB - slidepdf.com
http://slidepdf.com/reader/full/espsob 44/244
Teorema 3.0.4 (Teorema da Convergencia Dominada) Seja Ω ⊂ Rn um con- junto mensur´ avel e seja f µ uma seq¨ uencia de func˜ oes mensur´ aveis convergindo quasi
sempre para uma func˜ ao f em Ω. Se existe uma func˜ ao g ∈ L1(Ω) verificando |f µ(x)| ≤|g(x)|, para todo µ ∈ N e quase sempre em Ω ent˜ ao
limµ→∞
Ω
f µ(x) dx =
Ω
f (x) dx
Teorema 3.0.5 Para todo conjunto aberto Ω ⊂ Rn temos que o conjunto de func˜ oescontınuas e com soporte compacto C 0(Ω) e denso em L p(Ω)
Observacao 3.0.2 Este Teorema nos diz que para qualquer func˜ ao f ∈ L p
(Ω), existeuma seq¨ uencia de func˜ oes f µ ∈ C 0(Ω), de func˜ oes contınuas e com suporte compactoque converge forte em L p(Ω), isto e
f µ → f forte em L p(Ω)
Observacao 3.0.3 O Teorema 3.0.5 e muito ´ util para mostrar desigualdades para func˜ oes integr´ aveis, pois o teorema anterior nos diz que basta mostrar que a desigual-dade e v alida para func˜ oes contınuas com suporte compacto, que pela densidade ela pode
ser extendida para func˜ oes integr´ aveis.
3.1 Desigualdades de Holder
Teorema 3.1.1 Suponhamos que pi ≥ 1 i = 1, · · · , m s˜ ao tais que
m
i=11
pi= 1.
If f i ∈ L pi (Ω) for i = 1, · · · , n ent˜ ao temos quem
i=1 f i ∈ L1(Ω) e ainda Ω
|m
i=1
f i| dx ≤m
i=1
Ω
|f i(x)| pi dx
1pi
.
Demonstracao.- Denotemos por
ai := |f i(x)
| Ω
|f i(x)| pi dx 1pi .
Aplicando a desigualdade de Holder e integrando sobre Ω segue nossa conclusao
Como consequencia das desigualdades de Holder enunciamos os seguintes corolarios.
3.1. Desigualdades de Holder 41

5/14/2018 ESP_SOB - slidepdf.com
http://slidepdf.com/reader/full/espsob 45/244
Corolario 3.1.1 Tomemos 0 < p < 1 e q tal que 1/p + 1/q = 1. Sejam f e g func˜ oes
tais que |f | p ∈ L1(Ω), g ∈ Lq(Ω), |g|q ∈ L1(Ω). Nestas condic˜ oes teremos que Ω
|f (x)g(x)| dx ≥
Ω
|f (x)| p dx
1p
Ω
|g(x)|q dx
1q
Demonstracao.- Aplicando as desigualdades de Holder as funcoes F (x) := 1/g(x) andG(x) := g(x)f (x), teremos que
Ω
|f (x)| p dx = Ω
|F (x)G(x)| p dx
≤
Ω
| 1
g(x)| p1−p dx
1− p Ω
|g(x)f (x)| dx
p
≤
Ω
| 1
g(x)|−q dx
1− p Ω
|g(x)f (x)| dx
p
De onde segue o resultado
Como consequencia da desigualdade de Holder, obtemos as conhecidas desigualdadesde interpolacao.
Corolario 3.1.2 Suponhamos que f ∈ L p(RN )∩Lq(RN ), ent˜ ao temos que f ∈ Lr(RN )para todo r ∈ [ p,q]. Alem disso temos que
f Lr(RN ) ≤ f θLp(RN)f 1−θLr(RN)
onde 1r = θ
p + 1−θq
Demonstracao.- Note que
1
r=
1 pθ
+1q
1−
θ
⇒ 1 =1 prθ
+1q
r(1−
θ)
Por hipotese temos que |f |θr ∈ Lp
rθ , |f |(1−θ)r ∈ Lq
r(1−θ) . Portanto o produto|f |θr |f |(1−θ)r = |f |r ∈ L1(RN )
RN
|f |r dx =
RN
|f |θr |f |(1−θ)r dx
Aplicando a desigualdade de Holder para as potencias temos que
RN
|f |r dx = RN
|f |θr |f |(1−θ)r dx ≤
RN
|f | p dx rθ
p
RN
|f |q dx r(1−θ)
p
De onde segue a desigualdade.
42 Capıtulo 3. Os Espacos L p

5/14/2018 ESP_SOB - slidepdf.com
http://slidepdf.com/reader/full/espsob 46/244
3.2 Desigualdade de Minkowski
Usando as desigualdades de Holder mostraremos a desigualdade de Minkowski que provaque o funcional
f →
Ω
|f | p dx
1/p
,
e uma norma em L p(Ω).
Teorema 3.2.1 (Desigualdade de Minkowski). Suponhamos que as func˜ oes f, g ∈L p(Ω) e que p
≥1, ent˜ ao segue que
Ω
|f (x) + g(x)| p dx
1p
≤
Ω
|f (x)| p dx
1p
+
Ω
|g(x)| p dx
1p
Por outro lado, se p < 1 teremos a desigualdade inversa de Minkowski Ω
|f (x) + g(x)| p dx
1p
≥
Ω
|f (x)| p dx
1p
+
Ω
|g(x)| p dx
1p
Demonstracao.- Note que Ω
|f (x) + g(x)| p dx =
Ω
|f (x) + g(x)||f (x) + g(x)| p−1 dx
≤ Ω
|f (x)||f (x) + g(x)| p−1 dx +
Ω
|g(x)||f (x) + g(x)| p−1 dx
Como |f + g| p−1 ∈ Lq(Ω), a desigualdade de Holders implica que
Ω
|f (x) + g(x)| p dx ≤ Ω
|f (x)| p dx
1p
+
Ω
|g(x)| p dx
1p
Ω
|f (x) + g(x)| p dx
1−1/p
De onde segue a primeira desigualdade. Usando a desigualdade inversa de Holder con-cluimos que
Ω |f (x) + g(x)| p dx ≥ Ω
|f (x)| p dx
1p
+
Ω
|g(x)| p dx
1p
Ω
|f (x) + g(x)| p dx
1−1/p
De onde segue a nossa conclusao.
Agora estamos em condicoes de mostrar as desigualdades L p–Clarkson
3.3. Desigualdade de Young 43

5/14/2018 ESP_SOB - slidepdf.com
http://slidepdf.com/reader/full/espsob 47/244
Teorema 3.2.2 Suponhamos que 1 < p < 2 ent˜ ao toda func˜ ao u, v
∈L p teremos
Ω
u − v
2
p dx
qp
+
Ω
u + v
2
p dx
qp
≤
1
2
Ω
|u| p + |v| p dx
qp
,
onde q e tal que 1/p + 1/q = 1. Se p ≥ 2 ent˜ ao teremos que
Ω u − v
2 p
dx + Ω u + v
2 p
dx
≤1
2 Ω |u
| p +
|v
| p dx.
Demonstracao.- Consideremos o caso 1 ≤ p < 2. Note primeiro que
(
Ω
|f | p dx)qp = (
Ω
(|f | pq )q dx)
qp = |f |q
Lpq
.
Usando a desigualdade inversa de Minkowski teremos que
|f |q L
pq
+ |g|q L
pq
≤ |f |q + |g|q L
pq
Tomando f = (u + v)/2 e g = (u − v)/2 e como q > 2 temos
Ω u
−v
2 p
dxqp
+ Ω u + v
2 p
dxqp
≤ Ωu
−v
2 q
+ u + v
2 q
pq
dxqp
≤ 1
2
Ω
(|u|q + |v|q)pq dx
qp
≤ 1
2
Ω
|u| p + |v| p dx
qp
Onde temos usado que
(|u|q + |v|q)1q ≤ (|u| p + |v| p)
1p , ∀ p ≤ q.
A outra desigualdade segue diretamente do Teorema 1.4.1. A prova esta completa
3.3 Desigualdade de Young
Nesta secao estudaremos a Desigualdade de Young para convolucoes. As condicoessobre as quais esta desigualdade e valida estao resumidas no seguinte Teorema.
44 Capıtulo 3. Os Espacos L p

5/14/2018 ESP_SOB - slidepdf.com
http://slidepdf.com/reader/full/espsob 48/244
Teorema 3.3.1 Suponhamos que f ∈ L1(RN ) e que g ∈ L p(RN ), ent˜ ao se verifica que
f ∗
g∈
L p(RN )
e ainda temos quef ∗ gLp(RN ) ≤ f L1(RN )gLp(RN ).
Por outro lado, se f ∈ Lq(RN ) e g ∈ L p(RN ), ent˜ ao a convoluc˜ ao satisfaz
f ∗ g ∈ Ls(RN ), onde1
s=
1
p+
1
q− 1
e ainda temos que
f ∗ gLs(RN ) ≤ f Lq(RN )gLp(RN ).
Demonstracao.- Assumiremos primeiro que f e g sao funcoes contınuas e com suportecompacto. Nosso resultado seguira usando argumentos de densidade. Para demostrara primeira parte do Teorema utilizaremos a desigualdade de Holder. Note que
RN
|f ∗ g| p dx =
RN
RN
f (x − s)g(s) ds
p
dx
≤ RN RN
|f (x − s)|1
p |f (x − s)|1−1
p |g(s)| ds p dx
≤ f p
pL1(RN )
RN
RN
|f (x − s)||g(s)| p ds dx
= f p
pL1(RN )
RN
RN
|f (x − s)| dx|g(s)| p ds
= f 1+p
pL1(RN )
g pLp(RN )
De onde segue a primeira parte do Teorema. Para mostrar a segunda parte utilizaremosa desigualdade que acabamos de mostrar.
RN
|f ∗ g|s dx =
RN
RN
f (x − s)g(s) ds
s dx
≤ RN
RN
|f (x − s)|a|f (x − s)|1−a|g(s)| ds
s
dx
≤ RN |f |ap dx
sp
RN RN |f (x − s)|(1−a) p|g(s)| p dssp
:=I
dx
Note que I e o producto de convolucao das funcoes |f (x − s)|(1−a) p com |g(s)| p. Esteultimo termo pertence a L1(RN ), portanto para aplicar a primeira parte deste Teorema,devemos escolher a de tal forma que
3.3. Desigualdade de Young 45

5/14/2018 ESP_SOB - slidepdf.com
http://slidepdf.com/reader/full/espsob 49/244
|f |(1−a) p ∈ Ls
p (RN )
Isto e verdade quando a seja tal que [(1 − a) p]s/p = q isto e
(1 − a)s = q ⇔ a = 1 − q
s
Por outro lado a tambem deve satisfazer,
ap = q ⇔ a =
p
−1
p q
Das duas identidades acima obtemos que
1
s=
1
p+
1
q− 1
De onde segue
|f |(1−a) p
∗ |g| p
∈L
sp (RN )
e ainda temos que RN
|f |(1−a) p ∗ |g| p
sp
dx ≤ RN
|f |q dx
RN
|g| p dx
sp
.
Portanto
RN |f
∗g
|s dx
≤ RN |f
|q dx
sq
RN |g
| p dx
sq
.
Tomemos agora f e g, em Lq(RN ) e L p(RN ), respectivamente. Entao existem sequenciasf ν e gν de funcoes contınuas e com suporte compacto satisfazendo:
f ν → f forte em Lq(RN )
gν → g forte em L p(RN )
Como consequencia das convergencias temos que as sequencias f ν e gν possuem sub-
sequencias que convergem quase sempre em RN . Denotando da mesma forma essassubsequencias e simples verificar que
|f ν ∗ gν (x)|s → |f ∗ g(x)|s quase sempre em RN
Usando o Lema de Fatou e as desigualdades mostradas acima teremos que
RN
|f ∗ g|s dx ≤ liminf ν∈N RN
|f ν ∗ gν |s dx
≤ limν→∞
RN
|f ν |q dx s
q
RN
|gν| p dx s
p
De onde segue o resultado
46 Capıtulo 3. Os Espacos L p
C id d l i f

5/14/2018 ESP_SOB - slidepdf.com
http://slidepdf.com/reader/full/espsob 50/244
3.4 Convexidade e topologia fraca
Convergencia fraca e convexidade sao conceitos que estao interligados. Por este motivocomecaremos nosso estudo de convergencia fraca analizando de perto algumas pro-priedades dos conjuntos convexos. No seguinte Teorema mostraremos que todo con- junto convexo e aberto, pode ser caraterizado atravez de uma funcao convexa, que seradenominada Funcional de Minkowski.
Teorema 3.4.1 Seja C um conjunto aberto e convexo C de um espaco de Banach E .Denotemos por
p(x) := inf α > 0; α−1x ∈ C .
Ent˜ ao p e uma seminorma satisfazendo
(i)0 ≤ p(x) ≤ c0x.
(ii) Mais ainda, C pode ser escrito como
C = x ∈ E ; p(x) < 1 .
Demonstracao.- Sem perda de generalidade podemos supor que 0 ∈ C e portanto queexiste um raio ρ > 0 tal que a bola
B(0, ρ) ⊂ C,
desta forma temos que para todo x ∈ E
ρx
x =
xρ
−1x ∈ C,
de onde segue que para todo x ∈ E e valida a desigualdade
p(x) ≤ xρ
.
Portanto (i) e valido c0 = 1ρ . Provaremos agora que o funcional p e uma seminorma.
Para isto tomemos x e y em E , e simples ver que
x
p(x) + ,
y
p(y) + ∈ C.
Como C e convexo, teremos
p(x) +
p(x) + p(y) + 2
x
p(x) +
+
p(y) +
p(x) + p(y) + 2
y
p(y) +
=
x + y
p(x) + p(y) + 2∈ C.
3.4. Convexidade e topologia fraca 47

5/14/2018 ESP_SOB - slidepdf.com
http://slidepdf.com/reader/full/espsob 51/244
De onde segue que
p(x + y) ≤ p(x) + p(y) + 2
para todo > 0. Mostraremos finalmente (ii). Para isto se x ∈ C e como C e aberto,
entao teremos que ( x+x )x ∈ C , de onde segue que p(x) ≤ 1. Recıprocamente,
tomemos x ∈ E tal que p(x) < 1 e θ satisfazendo 0 < p(x) < θ < 1, como 0 ∈ C temos que θ−1x ∈ C , segue entao que
x = θ(θ−1)x + (1−
θ)0∈
C.
Isto prova o resultado.
Num espaco de Banach E a topologia definida pela norma e chamada de Topologiaforte. Nesta secao introduziremos uma outra topologia que a chamaremos de Topologiafraca e a denotaremos por τ f .
Definicao 3.4.1 Chamaremos de topologia fraca a la topologia menos fina que faz contınua a todos os funcionais limitados de espaco dual E ∗ de E .
E simples verificar que uma base para esta topologia e dado pela famılia de conjuntos
V αf = x ∈ E ; f (x) < α; ;
onde α ∈ R e f ∈ E ∗. Uma primeira pregunta neste ponto, e saber quais sao asdiferencas e semelhancas entre a Topologia fraca e a topologia forte. Por exemplo nosespacos de dimensao finita estas topologias coincidem. Mas isto nao e verdade no casogeral. Pela definicao da Topologia fraca, podemos verificar que todo aberto pode serexpressado como a uniao de preimagenes de elementos de E ∗ de abertos de R, que saoabertos na topologia fraca. Portanto, todo aberto fraco, e um aberto forte. Mas orecıproco nao e verdadero. Equivalentemente, podemos afirmar que todo fechado fracoe um fechado forte. O recıproco e falso. Mas se a isto acrescentamos a convexidade,
entao teriamos que todo convexo fechado na topologia forte, e tambem um fechado natopologia fraca. Resumimos esta discussao no seguinte Teorema.
Teorema 3.4.2 Seja C e um conjunto convexo de E , ent˜ ao C e fechado na topologia forte se e somente se C e fechado na topologia fraca.
Demonstracao.- Suponhamos que C e fechado na topologia forte. Sem perda de
generalidade podemos supor que 0 ∈ C , (se este nao for o caso, podemos tomar C :=C − y0, para y0 ∈ C ). Provaremos que o conjunto complementario C c e um abertofraco. De fato, tomemos x0 ∈ C c e denotemos por
C := C + y ∈ E ; y < .
48 Capıtulo 3. Os Espacos L p
E i l ifi C ´ b t ( t l i f t ) fi i t
5/14/2018 ESP_SOB - slidepdf.com
http://slidepdf.com/reader/full/espsob 52/244
E simples verificar que C e um convexo aberto (na topologia forte) e para suficiente-mente pequenho x0 /∈ C . De fato se x0 ∈ C para todo > 0 teriamos que x0 = y + z,
onde y ∈ C and z ≤ . De onde concluimso que x − y = z < para todo .Fazendo → 0 concluimos que y → x0, forte. Como C e fechado, entao x0 ∈ C , que euma contradicao.
Denotemos por p o funcional de Minkowski associado a C . Pelo Teorema 3.4.1temos que
p(x) < 1 se e somente se x ∈ C .
Definamos o funcional f da seguinte forma
g(tx0) = t.
Como x0 ∈ C c temos que
g(x0) := 1 ≤ p(x0) ⇒ g(tx0) := t ≤ p(tx0) ∀t ≥ 0.
Se t e negativo, como p ≥ 0, segue entao que
g(tx0) := t
≤0
≤p(tx0),
para todo t ∈ R. Portanto, teremos que
g(x) ≤ p(x), ∀x ∈ Rx0.
Do Teorema de Hahn-Banach concluimos que existe um funcional f definido sobre todoo espaco E que extende g tal que
f (x) ≤ p(x) ∀x ∈ E.
Consideremos o conjunto aberto
V = x ∈ E ; f (x) > 1 .
Claramente V e um aberto na topologia fraca. Como C ⊂ x ∈ E ; p(x) < 1 e f (x) < p(x) < 1 entao
V ∩ C = ∅;
isto significa que V ⊂ C c
. De onde segue nossa conclusao.
Teorema 3.4.3 Suponhamos que
uν → u fraco em E
ent˜ ao existe uma seq¨ uencia de combinac˜ oes convexas que convergem forte para u.
3.4. Convexidade e topologia fraca 49

5/14/2018 ESP_SOB - slidepdf.com
http://slidepdf.com/reader/full/espsob 53/244
Demonstracao.- Denotemos por C o fecho da capsula convexa do conjunto
uν ; ν ∈ N. E simples verificar que C e convexo e que u e um ponto de acumulacao deC . Portanto existe uma sequencia vµ de combinacoes convexas de uν , que convergemforte para u. A prova agora esta completa
Lema 3.4.1 Seja V um subespaco vetorial de Rm, e seja x0 ∈ Rm tal que x0 ∈ V ,ent˜ ao existe uma func˜ ao linear f : Rm → R tal que
f (x) = 0,
∀x
∈V, e f (x0) = 1
Demonstracao.- Como x0 ∈ V , temos que dim(V )< m. Denotemos por
w1, · · · , wjuma base de V . Como x0 ∈ V , denotando por wj+1 = x0 temos que o conjunto
w1, · · · , wj , wj+1
e linearmente independente em Rm. Portanto podemos extender o conjunto acima ateformar uma base do Rm. Assim teremos que
w1, · · · , wj, wj+1, · · · , wme base de Rm. Portanto todo x ∈ Rm pode ser escrito como
x =m
i=1 αiw
i
Definamos agora o funcional f tal que para j fixo tenhamos
f (wi) = 0, ∀i = j, f (wj ) = 1
Extendendo f linearmente para todo x ∈ Rm. E simples verificar que f assim definida,satisfaz as condicoes do Lema.
Lema 3.4.2 Seja E um espaco vetorial e denotemos por ϕ, ϕ1, · · · , ϕm, funcionaisdefinidos sobre E , isto e
ϕ, ϕ1, · · · , ϕm : E → Rsatisfazendo a seguinte propriedade:
ϕi(x) = 0, ∀ 1 ≤ i ≤ m, ⇒ ϕ(x) = 0.
Ent˜ ao existem n´ umeros reais λ1, · · · λn tais que
ϕ =m
i=1
λiϕi
50 Capıtulo 3. Os Espacos L p
Demonstracao - Denotemos por F o funcional
5/14/2018 ESP_SOB - slidepdf.com
http://slidepdf.com/reader/full/espsob 54/244
Demonstracao.- Denotemos por F o funcional
F (x) = [ϕ(x), ϕ1
(x),· · ·
, ϕm
(x)]
Claramente temos queF : E → Rm+1.
Denotemos por S = F (E ) ⊂ Rm+1 a imagem de F , entao S e um subespaco de Rm+1 e
x0 = [1, 0, · · · , 0] ∈ S.
Pelo Lema 3.4.1, existe uma funcao linear e contınua g definida sobre Rm+1 tal que
g(x) = 0 ∀x ∈ S, g(x0) = 1.
De onde segue que
g([ϕ(x), ϕ1(x), · · · , ϕm(x)]) = 0 ∀x ∈ E.
Note que
[ϕ(x), ϕ1(x), · · · , ϕm(x)] = ϕ(x)e1 +m
i=1ϕi(x)ei+1
Onde por ei estamos denotando a base canonica do Rm+1 e e1 = (1, 0, · · · , 0) = x0. Dalinearidade de g teremos que
g([ϕ(x), ϕ1(x), · · · , ϕm(x)]) = ϕ(x) g(e1) =1
+m
i=1
ϕi(x) g(ei+1) :=λ1
= 0
De onde segue o resultado
3.5 Lema de Mazur
Teorema 3.5.1 (Lema de Mazur) Suponhamos que uν e uma seq uencia satisfazendo
uν → u fraco em L p(Ω)
ent˜ ao para todo > 0 existe N = N () tal que para cada k > N teremos
u(x) −m
k=l
θkuνk (x) < a.e. in Ω (3.1)
onde θk satisfaz m
k=l
θk = 1
3.6. Teorema da representac˜ ao de Riesz para L p 51

5/14/2018 ESP_SOB - slidepdf.com
http://slidepdf.com/reader/full/espsob 55/244
Demonstracao.- Do Teorema 3.4.3 existe uma sequencia (vµ) de combinacoes convexas
da sequencia uν que convergem forte para u. Portanto, existe um subsequencia de (vµ)que a denotaremos da mesma forma que converge quase sempre em Ω. Isto significaque dado > 0 existe N tal que
|vN (x) − u(x)| < .
Como vµ e uma conbinacao convexa de elementos de (uν)ν∈N segue a relacao (3.1). Aprova esta completa.
3.6 Teorema da representacao de Riesz para L p
Apresentaremos aqui uma demonstracao simple do Teorema da representacao de Rieszpara os espacos L p. Este teorema sera de muita utilidade para encontrar uma condicaonecessaria e suficiente para que uma sequencia tenha convergencia fraca nos espacos L p.
Lema 3.6.1 Suponhamos que T e um funcional linear e contınuo definido em L p.Ent˜ ao existe uma func˜ ao u em L p(Ω) satisfazendo
Ω
|u| p dx = 1; T (u) = T ∗
Demonstracao.- Pela definicao de norma de um funcional linear limitado, teremosque
T ∗ = sup
T (v); Ω
|v| p dx = 1
.
Denotemos por (uν )ν∈IN a sequencia satisfazendo
T (uν ) → T ∗;
Ω
|uν | p dx = 1;
Para mostrar o resultado, e suficiente mostrar que (uν )ν∈
IN e uma sequencia de Cauchy.Dividiremos a prova em duas partes. Primeiro, suponhamos que 1 < p < 2. DoTeorema 3.2.2 temos que
Ω
uν − uµ
2
p dx
qp
+
Ω
uν + uµ
2
p dx
qp
≤
1
2
Ω
|uν | p + |uµ| p dx
qp
De onde segue que
Ω
uν − uµ
2 p dx q
p ≤ − Ω
uν + uµ
2 p dx q
p
+12 Ω
|uν | p + |uµ| p dx q
p
≤ −T −q∗
1
2T (uν + uµ)
q
+ 1 → 0
52 Capıtulo 3. Os Espacos L p
quando ν, µ → ∞. Portanto, a sequencia (uν )ν∈N e de Cauchy.

5/14/2018 ESP_SOB - slidepdf.com
http://slidepdf.com/reader/full/espsob 56/244
q , µ , q ( ν )ν∈N yProvaremos agora o caso quando p ≥ 2. Raciocinando como acima podemos mostrar
que Ω
uν − uµ
2
p dx ≤ 1 − Ω
uν + uµ
2
p dx
≤ −T −q∗
1
2T (uν + uµ)
q
+ 1 → 0
quando ν, µ → ∞. de onde concluimos que (uν )ν∈N e uma sequencia de Cauchy. A
prova esta agora completa
Teorema 3.6.1 (Teorema da Representacao de Riesz) Seja Ω um aberto do RN
e denotemos por T um operador linear e limitado definido sobre L p(Ω). Ent˜ ao existeuma func˜ ao w em Lq(Ω), 1/p + 1/q = 1, satisfazendo
T (v) =
Ω
w(x)v(x) dx ∀v ∈ L p(Ω)
Demonstracao.- Sem perda de generalidade, podemos supor que T ∗ = 1. DoLema 3.6.1 existe uma funcao u tal que
Ω
|u| p dx = T (u) = T ∗ = 1.
Das desigualdades de Clarkson para 1 < p < 2 teremos
1 + t p Ω
|v| p dx = Ωu + tv
2 +u
−tv
2 p dx + Ωu + tv
2 −u
−tv
2 p dx
≥ 1
2
Ω
|u + tv| p dx +1
2
Ω
|u − tv| p dx
≥ 1
2
1 + T (v)t
p+
1
2
Ω
|u − tv| p dx,
a ultima desigualdade e valida porque T ∗ = 1. De onte obtemos que
t p−1 Ω
|v| p dx ≥ 12t(|1 + tT (v)| p − 1) + (
Ω|u − tv| p dx − 1) .
Fazendo t → 0+ teremos que
0 ≥ T (v) − Ω
|u| p−2uv dx ∀v ∈ L p(Ω),
3.7. Convergencia fraca em L p 53
5/14/2018 ESP_SOB - slidepdf.com
http://slidepdf.com/reader/full/espsob 57/244
Portanto
T (v) = Ω
|u| p−2uv dx ∀v ∈ L p(Ω).
O caso p ≥ 2 e similar. Tomando w = |u| p−2u, prova esta completa
Note que se u ∈ L p(Ω) entao teremos que |u| p−2u ∈ Lq(Ω) onde p e q sao tais que1/p + 1/q = 1. Mais ainda, a aplicacao
u → |u| p−2u
define uma bijecao entre os espacos L p(Ω) e Lq(Ω).
3.7 Convergencia fraca em L p
Toda funcao linear e contınua T sobre L p(Ω) pode ser escrita como
T (w) =
Ω
vw dx
para uma funcao v ∈ Lq com 1/p + 1/q = 1. A sequencia uµ e fracamente convergentepara u em L p(Ω) se e somente se
Ω uµv dx → Ω uv dx ∀v ∈ Lq
(Ω)
No seguinte Teorema, mostraremos que a bola unitaria e um compacto em L p comesta topologia.
Teorema 3.7.1 Toda seq¨ uencia limitada em L p(Ω) com p > 1, possui uma subseq¨ uencia que converge fraco em L p(Ω)
Demonstracao.- Seja (uν )ν∈N uma sequecia limitada em L p e denotemos por (ϕµ)µ∈Na um subconjunto denso em L p(Ω). Para todo µ ∈ N existe uma constante positiva cµ
tal que Ω
uν ϕµ dx ≤ cµ,
Existe entao um subsequencia de (uν )ν∈N que denotaremos por uνµ satisfazendo
limk→∞
Ω
uνµk
ϕµ dx = T µ.
Repetindo o procedimento anterior, obtemos as seguintes convergencias
54 Capıtulo 3. Os Espacos L p

5/14/2018 ESP_SOB - slidepdf.com
http://slidepdf.com/reader/full/espsob 58/244
limk→∞ Ω uν1k ϕ1 dx = T 1,
limν→∞
Ω
uν2k
ϕ2 dx = T 2,
limν→∞
Ω
uνmk
ϕm dx = T m.
A subsequencia (uνkk
) e uma subsequencia de todas as sequencias anteriores de (uνmk
),de onde segue que
limk→∞
Ω
uνkk
ϕk dx = T k.
Denotemos por V o espaco generado pela sequencia (ϕµ). E simples verificar que paratodo v ∈ V teremos
limk→∞
Ω
uνkk
v dx = T v, (3.2)
onde
v =l
i=1
ciϕµi, T v =
li=1
ciT µi.
Definamos o funcional linear
T (v) := T v
Note que T e continuo em V . De fato
T (v) = limk→∞
Ω
uνkk
ϕk dx ≤ uνkk pvq
Da densidade de V em Lq(Ω), podemos extender T para todo o espaco Lq(Ω) e peloTeorema da Representacao de Riesz, existe uma funcao u ∈ L p satisfazendo
T (v) =
Ω
uv dx.
Da identidade (3.2) teremos
limk→∞
Ω
uνkk
v dx =
Ω
uv dx, ∀v ∈ Lq(Ω)
o que completa a demonstracao
3.8. Convergencia fraca em L1 55
3 8 C ˆ i f L1

5/14/2018 ESP_SOB - slidepdf.com
http://slidepdf.com/reader/full/espsob 59/244
3.8 Convergencia fraca em L1
Pelo Teorema 3.7.1 sabemos que toda sequencia de funcoes limitadas em L p, possui umsubsequencia que converge fraco tambem em L p para p > 1. Infelizmente este resultadonao e valido para sequencias limitadas em L1 pois L1 nao e reflexivo. Isto e, a limitacaoem L1 nao e suficiente para garantir a existencia de uma subsequencia convergente. Noproximo teorema mostraremos uma condicao suficiente para obter uma convergenciafraca em L1. Para isto utilizaremos o Teorema de Radon-Nikodim que enunciamos aseguir.
Teorema 3.8.1 (Radon-Nikodim) Seja µ uma medida complexa definida sobre a σ-algebra Σ de subconjuntos do RN mesur´ aveis a Lebesgue. Denotemos por ν a medida de Lebesgue. Ent˜ ao se
ν (A) = 0 ⇒ µ(A) = 0 ∀A ∈ Σ,
ent˜ ao existe uma ´ unica func˜ ao f
∈L1(RN ) (unicidade exceto um conjunto de medida
nula) tal que
µ(A) =
A
f (x) dx
Teorema 3.8.2 Seja Ω um aberto limitado de RN e suponhamos que (uν )ν∈N e uma seq¨ uencia limitada em L1(Ω) tal que para todo > 0 exista δ > 0 satisfazendo
med (E ) < δ ⇒ E |uν(x)| dx < .
Para todo conjunto E mensur´ avel. Ent˜ ao existe uma subseq¨ uencia (uνk)ν∈N de (uν )ν∈N
e uma func˜ ao u ∈ L1(Ω) tal que
uνj u fraco em L1(Ω)
Demonstracao.- Seja v
∈L∞(Ω). Mostraremos que existe uma subsequencia uνk
satisfazendo
| Ω
uνkv dx −
Ω
uv dx| < . (3.3)
Como uν e limitado em L1(Ω) ⊂ M(Ω) com a imersao contınua, concluimos que uν euma medida limitada. Portanto existe uma subsequencia, que a continuaremos deno-tando da mesma forma, e uma medida µ tal que
Ω
uνϕ dx → Ω
ϕ dµ.
E simples verificar que µ e absolutamente contınua com respeito a medida de Lebesgue.De fato, suponhamos que E ⊂ Ω e tal que
56 Capıtulo 3. Os Espacos L p
d 0

5/14/2018 ESP_SOB - slidepdf.com
http://slidepdf.com/reader/full/espsob 60/244
E dx = 0,
como para todo > 0 existe δ > 0 satisfazendo
med (E ) ≤ δ ⇒
E
|uν | dx < ,
segue entao que|µ(E )| ≤ ,
portanto µ(E ) = 0. Do Teorema de Radon Nikodim existe uma funcao u ∈ L1(Ω) talque
µ(ϕ) = Ω
uϕ dx.
Seja v ∈ L∞(Ω). Como L∞(Ω) ⊂ L p(Ω), existe uma sequencia de funcoes φl ∈ C ∞0 (Ω)para os quais teremos
φl v forte em L p(Ω),
que implica que existe uma subsequencia, que a denotaremos da mesma forma, tal que
φl → v a.e. Ω.
Do Teorema de Egorov, segue que para todo > 0 existe um conjunto mensuravel E tal que med(E ) < δ e ainda satisfaz
φl → v uniforme Ω \ E.
De onde segue
Ω
uνkv dx −
Ω
uv dx =
Ω
uνk(v − φl) dx +
Ω
(uνk− u)φl dx −
Ω
u(v − φl) dx
Como Ω
uνk(v − φl) dx =
E
uνk(v − φl) dx +
Ω−E
uνk(v − φl) dx
≤ |v − φl|L∞
E
|uνk| dx +
Ω−E
|uνk| dx;
como u − φl ≤ C e como med(E ) < δ teremos entao que
E
|uν | dx < , obtemos que
| Ω
uνk(v − φl) dx| ≤ C,
que implica Ω
(uνk− u)φl dx ≤ ,
De onde segue nosso resultado
3.9. Convergencia forte em L p 57
3 9 Convergencia forte em L p

5/14/2018 ESP_SOB - slidepdf.com
http://slidepdf.com/reader/full/espsob 61/244
3.9 Convergencia forte em L
Nesta secao estabeleceremos condicoes que uma sequencia deve satisfazer para que elaconvirja forte em L p. Comecaremos com o seguinte teorema.
Teorema 3.9.1 Suponhamos que (uν )ν∈N converge forte para u em L p e (vν )ν∈N con-verge fraco para v em Lq com 1/p + 1/q = 1. Ent˜ ao teremos que
lim
ν→∞ Ω uν vν dx = Ω uv dx
Demonstracao.- Como Ω
uν vν − uv dx
≤ Ω
|(uν − u)vν | dx +
Ω
u(v − vν ) dx
Das hipoteses sobre as sequencias, temos que para todo > 0 existe N > 0 tal que
Ω
|uν − u| dx < , | Ω
u(v − vν ) dx| < ∀ν ≥ N
Das desigualdades acima segue a conclusao
Teorema 3.9.2 Seja Ω um aberto limitado. Suponhamos que f seja uma func˜ aocontınua e uν uma seq¨ uencia satisfazendo
uν → u q.s. em Ωf (uν ) limitado em L p(Ω),
para p > 1. Ent˜ ao existe uma subseq¨ uencia de uν satisfazendo
f (uν ) → f (u) fraco em L p(Ω)
Demonstracao.- Pelo Teorema de Egorov existe um subconjunto Ωδ de Ω satisfazendo
uν → u uniforme em Ωδ,
f (uν ) → f (u) uniforme em Ωδ,
med (Ω − Ω) ≤ q
onde 1/p + 1/q = 1. Assim temos que
f (uν )φ
→f (u)φ forte em L p(Ωδ),
para cada φ ∈ C ∞0 (Ω). Isto implica que para todo δ > 0 existe N > 0 tal que Ωδ
|f (uν ) − f (u)| |φ| dx ≤ ∀ν ≥ N
58 Capıtulo 3. Os Espacos L p
Por outro lado

5/14/2018 ESP_SOB - slidepdf.com
http://slidepdf.com/reader/full/espsob 62/244
Ω f (uν ) − f (u) φ dx = Ω\Ωδ f (uν ) − f (u) φ dx + Ωδ f (uν ) − f (u) φ dx
≤ C
Ω\Ωδ
|φ|q dx
1q
Ω\Ωδ
|f (uν ) − f (u)| p dx
1p
+
≤ C φL∞ + ∀ν ≥ N
Usando a densidade das funcoes teste em Lq podemos escrever
Ω f (uν ) − f (u) v dx = Ω f (uν ) − f (u) (v − φ) dx + Ω f (uν ) − f (u) φ dx≤ C v − φLq(Ω) + ≤ c
De onde segue nossa conclusao.
Como consequencia dos Teoremas anteriores temos
Corolario 3.9.1 Seja Ω ⊂ Rn um aberto limitado. Suponhamos que uν e uma seq uencia limitada em L p que converge quase sempre para u em Ω. Ent˜ ao se verifica que
uν → u forte em Lr(Ω)
para todo 1 < r < p.
Demonstracao.- Como uν e limitado em L p(Ω) entao a sequencia uν − u tambeme limitada em L p(Ω). Entao para todo > 0, a sequencia |uν − u| p− e limitada em
Lp
p− (Ω). Do Teorema 3.9.2 temos que
|uν
−u| p− 0 fraco em L
pp− (Ω).
Como Ω e limitado, entao teremos que Ω
|uν − u| p− · 1 dx → 0.
De onde segue a nossa conclusao
Do Corolario anterior concluimos que convergencia fraca em L p e munida a convergencia
quase sempre implicam convergencia forte em L
r
para todo 1 < r < p.
3.10 Conjuntos compactos em L p
Nesta secao daremos uma condicao necessaria e suficiente para que um conjunto limitadode L p(Ω) seja um conjunto compacto.
3.10. Conjuntos compactos em L p 59
Teorema 3.10.1 Um conjunto limitado K do L p(Ω), e relativamente compacto em

5/14/2018 ESP_SOB - slidepdf.com
http://slidepdf.com/reader/full/espsob 63/244
Teorema 3.10.1 Um conjunto limitado K do L (Ω), e relativamente compacto em
L p
(Ω) se e somente se para todo > 0 existe δ > 0 e um conjunto G limitado tais que
(i) Ω\G
|u| p dx < p
(ii) |h| < δ ⇒ Ω
|u(x + h) − u| p dx <
Para todo u ∈ K e para todo h tal que |h| < δ. Por
u estamos denotanto a extens˜ ao
nula de u fora de Ω.
Demonstracao.- Sem perda de generalizade podemos supor que Ω = RN , caso con-trario podemos considerar o conjunto K = u, u ∈ K . Suponhamos que K seja umcompacto de L p, entao dado > 0 existe um numero finito de funcoes φi satisfazendo:
K ⊂ ∪mi=1B(φi)
onde B(φi) = w ∈ L p; w − φiLp < . Pela densidade das funcoes C ∞0 (RN ) emL p(RN ), podemos supor que φi
∈C ∞0 (RN ). Denotemos por
Br =
x ∈ RN ; x < r
.
Tomemos r > 0 suficientemente grande, de tal forma que
Supp (φi) ⊂ Br ∀i = 1, · · · m.
Logo o conjunto G = Br satisfaz a condicao (ii). De fato, RN\G
|u| p dx = RN\G
|u − φi| p dx ≤ RN
|u − φi| p dx < .
Tomando |h| < 1 e simples verificar que
φi(x + h) − φi(x) = 0 ∀x ∈ Br+1.
Denotando por T h o operador translacao T h(u) = u(x + h) temos que
T h(u) − uLp ≤ T h(u) − T h(φi)Lp ≤/3
+T h(φi) − φiLp + φi − uLp ≤/3
Como φi e contınua e possui suporte compacto, podemos encontrar δ > 0 tal que
|h
|< δ
⇒ T h(ψi)
−φi
Lp <
3
.
De onde segue que
T h(u) − uLp ≤ .
60 Capıtulo 3. Os Espacos L p
Portanto (i) e valida. Suponhamos agora que K e um conjunto limitado, satisfazendo(i) e (ii). Tomemos G e tais que

5/14/2018 ESP_SOB - slidepdf.com
http://slidepdf.com/reader/full/espsob 64/244
∀u ∈ K ⇒ RN\G
|u| p dx ≤ 3
(3.4)
Note que
|ρδ ∗ u(x) − u(x)| p =
RN
ρδ(y) u(x − y) − u(x) dy
p=
RN
ρ1− 1
p
δ (y)ρ1p
δ (y) u(x − y) − u(x) dy
p
≤
RN
ρδ dx 1
q RN
ρδ(y)| u(x − y) − u(x) | p dy
≤
Bδ(0)
ρδ(y)| u(x − y) − u(x) | p dy
Integrando sobre RN teremos
RN
|ρδ ∗ u(x) − u(x)| p dx ≤ sup
|h|≤δ
T hu − u pLp <
Da condicao (i) segue que
limδ→0
RN
|ρδ ∗ u(x) − u(x)| p dx = 0.
Mostraremos que o conjunto S = ρδu; u ∈ K e um conjunto compacto sobre C (G).Para isto utilizaremos o Teorema de Arsela - Ascoli, portanto bastara mostrar que S euma famılia de funcoes equicontınua e equilimitada. De fato, note que se verificam as
seguintes desigualdades|ρδ ∗ u(x)| ≤ sup
|h|≤δρδ(h)1/puLp .
|ρδ ∗ u(x + h) − ρδ ∗ u(x)| ≤ sup|h|≤δ
ρδ(h)1/pT h(u) − uLp <
Que mostra que S e relativamente compacto em C (G). Portanto existe um conjuntofinito de funcoes contınuas ψi sobre G tais que
S ⊂ ∪M i=1B(ψi)
Denotemos por ψi a extensao nula de ψi fora de G. Assim lembrando a desigualdade(3.4) teremos que para toda u ∈ K se verifica
RN
|u(x) − ψi(x)| p dx =
RN\G
|u(x)| p dx +
G
|u(x) − ψi(x)| p dx
3.11. Convexidade e semicontinuidade inferior 61
+ 2 p ρδ u(x) u(x) p dx

5/14/2018 ESP_SOB - slidepdf.com
http://slidepdf.com/reader/full/espsob 65/244
≤+ G |
ρδ
∗( )
−( )
|+2 p
G
|ρδ ∗ u(x) − ψi(x)| p dx
≤ (1 + 2 p+1)
De onde segue o resultado.
3.11 Convexidade e semicontinuidade inferiorNesta secao caraterizaremos o conjunto das funcoes contınuas com respeito a topologıafraca. Isto e encontraremos uma condicao nescessaria e suficiente para que uma funcaoseja contınua com respeito a esta topologıa. Nosso primeiro passo e caraterizar a classede funcionais semicontınuos inferiormente respecto a topologıa fraca. Mostraremos queesta classe e formada pelas funcoes convexas.
Lema 3.11.1 Suponhamos que f ∈ L ploc(RN ) seja uma func˜ ao perıodica sobre RN , com perıodo igual a T , ent˜ ao teremos que
f ν := f (νx) 1
meas(D)
D
f (x) dx em L p(Ω)
onde D e um hipercubo de lado T . Se p = ∞ ent˜ ao teremos
f (νx)
1
meas(D) D f (x) dx em L∞(Ω).
Demonstracao.- Nos restringiremos ao caso unidimensional, no intervalo [0, 1]. Aprova para o caso do RN e analoga. Note que
f νL∞ = f L∞ .
Mostraremos que
f ν
f = 10
f (x) dx
Isto e para toda ϕ ∈ Lq 10
f ν (x)ϕ(x) dx → 10
f (x) dx
10
ϕ(x) dx.
Pela densidade das funcoes simples, bastara mostrar que para toda funcao caraterısticaχ[a,b] se verifica 10
χ[a,b]f ν (x) dx → (b − a)
10
f (x) dx.
62 Capıtulo 3. Os Espacos L p
Como
1 b a

5/14/2018 ESP_SOB - slidepdf.com
http://slidepdf.com/reader/full/espsob 66/244
0
χ[a,b]f ν (x) dx = 0
f (x) dx − 0
f (x) dx,
sera suficiente mostrar que α
0
f ν (x) dx → α
10
f (x) dx,
para toda 0 ≤ α ≤ 1. Note que
α
0f ν (x) dx = α
0f (νx) dx = 1ν να
0f (x) dx.
Como f e uma funcao perıodica α
0
f ν (x) dx =[να]
ν
10
f (x) dx +1
ν
να
[να]
f (x) dx
Note que
αν − 1 ≤ [αν ] ≤ αν ⇒ α −1
ν ≤[αν ]
ν ≤ αe como
αν
[αν]
f dx
≤ [αν]+1
[αν]
|f | dx =
10
|f | dx
Fazendo ν → ∞ segue a nossa conclusaoComo consequencia deste resultado obtemos o bem conhecido Lema de Riemann
Lebesgue , isto e
Lema 3.11.2 (Rieman Lebesgue) Seja f : [a, b] → R uma func˜ ao contınua, ent˜ aotemos que
limk→∞
b
a
f (x)sen (kx) dx = 0,
limk→∞
b
a
f (x)cos(kx) dx = 0.
Demonstracao.- Basta observar que tanto o seno e o cosseno sao funcoes perıodicasde perıodo T = 2π. Como 2π
0
sen (x) dx = 0,
2π
0
cos(x) dx = 0.
Segue o resultado.
3.11. Convexidade e semicontinuidade inferior 63
Exemplo 3.11.1 Seja f : [0, 2] → R a func˜ ao dada por

5/14/2018 ESP_SOB - slidepdf.com
http://slidepdf.com/reader/full/espsob 67/244
f (x) = x se 0 ≤ x ≤ 1,
2 − x se 1 ≤ x ≤ 2,
Denotemos por F sua extens˜ ao perıodica sobre R, nestas condic˜ oes encontramos que
E'
T
c1
1
y = f (x)
E'
T
c2 4 6−2−4−6
y = F (x)
1
20
f (x) dx = 1.
De onde concluimos que
limk→∞
20
F (kx)g(x) dx =1
2, ∀g ∈ L∞(0, 2).
Estamos agora em condicoes de caraterizar todos os funcionais que sao semicontınuosinferiormente respecto a topologıa fraca
Teorema 3.11.1 Seja F uma func˜ ao contınua e denotemos por J ao funcional
J (u) =
Ω
F (u) dx.
Ent˜ ao J e um funcional semicontınuo inferiormente se e somente se F e uma func˜ aoconvexa.
Demonstracao.- Suponhamos que J seja um funcional semicontınuo inferiormente etomemos uν tal que
uν → u fraco estrela em L∞(Ω),
64 Capıtulo 3. Os Espacos L p
entao da hipotese segue que

5/14/2018 ESP_SOB - slidepdf.com
http://slidepdf.com/reader/full/espsob 68/244
liminf Ω F (uν ) dx ≥ Ω F (u) dx.
Denotemos por D um hipercubo unitario e por D1 um subconjunto de D satisfazendo
θ := meas(D1) ≤ 1.
Denotemos por χ1 a funcao caraterıstica sobre D1,
χ1(x) = 1 if x ∈ D1
0 if x ∈ D \ D1,
e por χ sua extensao perıodica sobre todo o espaco RN . Portanto a sequencia χν (x) =χ(νx) satisfaz
χν
meas(D1) = θ fraco estrela em L∞(Ω).
Definamos a sequenciauν := χν v + (1 − χν )w.
Nestas condicoes, e simples verificar que
uν
θu + (1 − θ)w fraco estrela em L∞(R)
e ainda
F (uν ) = χν F (v) + (1 − χν )F (w)
θF (u) + (1 − θ)F (w) em L∞(R);
Das hipoteses sobre F e como meas(D) = 1 teremos
liminf Ω
F (uν ) dx = θJ (u) + (1 − θ)J (w)
≥ Ω
F (θv + (1 − θ)w) dx = J (θv + (1 − θ)w).
De onde segue a primeira parte do resultado. Mostraremos agora que se F e convexa,entao e semicontınua inferiormente respecto a topologıa fraca. De fato seja F umafuncao convexa e denotemos por uν uma sequencia satisfazendo
uν
u em L∞(Ω).
Sem perda de generalidade, podemos supor que
L = liminf
Ω
F (uν ) dx = lim
Ω
F (uν ) dx.
3.11. Convexidade e semicontinuidade inferior 65
Caso contrario podemos escolher uma subsequencia com a propriedade acima. Como Ω

5/14/2018 ESP_SOB - slidepdf.com
http://slidepdf.com/reader/full/espsob 69/244
e um conjunto limitado concluimos queuν u fraco em L p(Ω)
para todo p > 1. Como todo conjunto fechado e convexo na topologıa forte e tambemum conjunto fechado na topologıa fraca, segue que existe uma sequencia formada decombinacoes convexas tal que para todo > 0, existe N () > 0 satisfazendo
m
k=j
αkuνk − u < q.s. em Ω,
para j grande suficiente onde os coeficientes αk satisfazem
αk ≥ 0,m
k=j
αk = 1;
Como F e um funcional convexo e da convergencia fraca estrela em L∞ segue que Ω
F (u) dx ≤ Ω
F (m
k=j
αkuνk) dx +
Ω
F (m
k=j
αkuνk) dx ≤
m
k=j
αk
Ω
F (uνk) dx.
Assim para j suficientemente grande teremos que
limm→∞
mk=j
αk
Ω
F (uνk) dx = L = liminf
Ω
F (uν) dx.
De onde segue que
Ω F (u) dx
≤liminf Ω F (uν ) dx + 2
Como e um numero positivo qualquer segue nosso resultado
O Teorema anterior carateriza todo funcional semicontınuo inferiormente. Isto e ofuncional
J (u) :=
Ω
F (u) dx
e semicontınuo inferiormente se e somente se F e uma funcao convexa. Em particular,
para que um funcional J seja contınuo, isto e J e −J seja semicontıcontınuo inferi-ormente, ele deve ser um funcional linear. Portanto os unicos funcionais contınuosrespecto a topologıa fraca sao os funcionais lineares. Isto e temos mostrado o seguinteresultado.
66 Capıtulo 3. Os Espacos L p
Teorema 3.11.2 Um funcional J da forma J (u) = Ω F (u) dx e contınuo com respeito
a topologıa fraca, se e somente se F e uma func˜ ao linear.

5/14/2018 ESP_SOB - slidepdf.com
http://slidepdf.com/reader/full/espsob 70/244
3.12 Os Espacos L p com 0 < p < 1
Os espacos L p para p ≥ 1 sao bastante ricos em propriedades, entre outras coisasdevido a desigualdade de Minkowski, que faz com que L p seja um espaco normado. Adesigualdade de Miskowski, nao e valida para 0 < p < 1, mas mesmo assim podemosdar uma estrutura de espaco metrico para os espacos L p com p ∈]0, 1[.
Proposicao 3.12.1 O espaco L p e um espaco vetorial completo.
Demonstracao.- De fato, denotemos por µ(f ) o seguinte funcional
µ(f ) =
Ω
|f | p dx
Pelo Lema 1.4.1 sabemos que para 0 < p < 1 e valido
(a + b) ≤ p√
a p + b p
portanto teremos queµ(f + g) ≤ µ(f ) + µ(g)
De onde segue que L p e fechado com respeito a soma. E simples verificar que o produtopor um escalar tambem e uma operacao fechada em L p, de onde segue que L p e umespaco vetorial. Para verificar que L p e um espaco completo, introduzamos a metricad(·, ·) definida atravez do funcional µ,
d(f, g) = µ(f − g)
Com o auxilio do Lema 1.4.1 podemos verificar que de fato d(
·,
·) e uma metrica e de
forma analoga ao caso p > 1 podemos mostrar que L p e completo. (Veja exercıcios).A deficiencia destes espacos e que sua topologia e bastante pobre. A seguinte
proposicao ilustra este fato
Proposicao 3.12.2 Os ´ unicos convexo abertos de L p s˜ ao ∅ e o proprio L p.
Demonstracao.- De fato, raciocinemos pelo absurdo. Suponhamos que V seja umconjunto convexo e aberto. Sem perda de generalidade, podemos supor que 0 ∈ V .Entao existe r > 0 tal que a bola
Br(0) = v ∈ L p; µ(v) < r ⊂ V .Tomemos f ∈ L p. Mostraremos que f ∈ V , o que mostrar a proposicao. Como p < 1existe um numero inteiro positivo M suficientemente grande tal que
M p−1µ(f ) < r.
3.12. Os Espacos L p com 0 < p < 1 67
Por simplicidade trataremos o caso unidimensional: Ω =]a, b[. Com as mesmas ideias

5/14/2018 ESP_SOB - slidepdf.com
http://slidepdf.com/reader/full/espsob 71/244
pode-se mostrar o caso n-dimensional. Denotemos por P a uma particao de ]a, b[,P = a = x0 < x1 · · · < xM = bsatisfazendo: xi
xi−1|f (x)| p dx =
1
M µ(f ) (3.5)
Definamos agora para cada i a funcao gi como
gi(t) = Mf (t) para xi−1
< t < xi0 Em outro caso.
Lembrando da identidade (3.5) teremos que
µ(gi) =
xi
xi−1|Mf (x)| p dx = M p
xi
xi−1|f (x)| p dx = M p−1µ(f ) < r
De onde segue que gi ∈ V para todo i = 1, · · · , M . Como V e convexo e lembrando adefinicao de gi segue que
f (t) =M
i=1
1
M gi(t) ∈ V
Portanto V = L p
Este resultado traz como consequencia um resultado curioso que resumimos na seguinteproposicao
Proposicao 3.12.3 O dual do espaco L p para 0 < p < 1 e 0.
Demonstracao.- Seja T ∈ (L p)∗, isto e T e un funcional linear e contınou. Por-tanto preimagenes de abertos convexos de R, devem ser convexos abertos de L p (vejaexercıcio). Pela Proposicao 3.12.2 teremos que
T (L p) ⊂]a, b[ ∀]a, b[⊂ R
em particular
T (L p) ⊂] − , [ ∀ > 0
De onde concluimos que T = 0. O que mostra a proposicao
A Proposicao anterior mostra a tremenda diferenca entre os espacos L p quando p ∈]0, 1[ e p ≥ 1. A proposicao anterior e tambem um importante exemplo de como aconvexidade joga um papel fundamental nesta teorıa. Note que para 0 < p < 1 as bolasnao sao convexas.
68 Capıtulo 3. Os Espacos L p
3.13 Exercıcios
1. Denotemos por
| | p e
| |as normas

5/14/2018 ESP_SOB - slidepdf.com
http://slidepdf.com/reader/full/espsob 72/244
| · | | · |∞
|x| p := p
ni=1
x pi |x|∞ := max |xi|; i = 1 · · · n ,
do RN . Mostre quelim
p→∞|x| p = |x|∞
2. Sejam X e E dois espacos metricos. Seja F uma funcao
F : X → E
Mostre que se F e contınua, entao para todo convexo C de E o conjunto F −1(C )e um convexo de X . O resultado contınua valido se eliminamos a continuidadede F ?. Justifique.
3. Denotemos por · p a norma de L p(Ω), e por · ∞ a norma de L∞(Ω) com Ωum aberto limitado. Suponhamos que u ∈ L p(Ω), para todo p ≥ 1 e que existeuma constante positiva C tal que
u p ≤ C ∀ p ≥ 1
entao teremos que u ∈ L∞(Ω) mais ainda
lim p→∞
u p = u∞
4. Suponhamos que uν converge forte em L p(Ω), entao mostre que existe uma sub-sequencia que converge quase sempre em Ω
5. Mostre o Teorema da Representacao Riesz para L1(Ω).
6. Mostre que L p e reflexivo para 1 < p < ∞.
7. Mostre que L p e um espaco uniformemente convexo, para 1 < p < ∞8. Se E e um espaco uniformente convexo, mostra que toda sequencia limitada
possui uma subsequencia convergente fraco em E .
9. Suponhamos que E e um espaco uniformente convexo e que (uν )ν∈N satisfaz
uν u fraco em E.
e aindalim sup
ν→∞uνE ≤ uE .
Mostre que uν converge forte para u em E .
3.13. Exercıcios 69
10. Mostre que os espacos L p(Ω), para 0 < p < 1 e Ω um aberto do RN e um espaco
d B h

5/14/2018 ESP_SOB - slidepdf.com
http://slidepdf.com/reader/full/espsob 73/244
de Banach.11. Seja Ω ⊂ Rn, mostre que em L p(Ω) onde os unicos conjuntos convexos e abertos
sao ∅ e o proprio L p(Ω).
70 Capıtulo 3. Os Espacos L p

5/14/2018 ESP_SOB - slidepdf.com
http://slidepdf.com/reader/full/espsob 74/244

5/14/2018 ESP_SOB - slidepdf.com
http://slidepdf.com/reader/full/espsob 75/244
Capıtulo 4
Distribuicoes
´ E bem mais belo saber alguma coisa de tudodo que saber tudo de alguma coisa
B. Pascal
4.1 Introducao
Faremos aqui uma rapida introducao das funcoes δ de Dirac. No estudo de resistencia
de Materiais, ou equilibrio de corpos muitas vezes as funcoes estao definidas por unidadede comprimento, unidades de area ou unidades de volume. Por exemplo, quando con-sideramos o problema de equilibrio de uma corda presa no seus extremos, vemos quea corda se deforma pela acao de seu proprio peso, que varia de acordo com o compri-mento dela. Isto e, se a corda e homogenea, o peso e considerado uma forca constanteuniformemente distribuida ao longo dela.
Na figura acima o peso da corda pode ser considerada uma for ca distribuida con-stante a cada centrımetro quadrado. A forca resultante sobre a corda sera igual a area
do grafico, isto e ρL, atuando sobre o centro de masa da corda de comprimento L. Emgeral se a funcao nao e homogenea entao a funcao ρ nao sera constante, portanto a forcaresultante por cada unidade de comprimento dx sera igual a f (x)dx, somando cada uma
destas unidades, encontramos que a resultante estara dada pela integral L0 f (x) dx.
72 Capıtulo 4. Distribuic˜ oes

5/14/2018 ESP_SOB - slidepdf.com
http://slidepdf.com/reader/full/espsob 76/244
Considere agora uma forca distribuida apenas numa parte de uma barra de compri-mento L, considere o comprimento da barra despresıvel em comparacao de uma outramassa colocada acima da barra.
Observe que para cada uma das figuras acima, a forca resultande aplicada sobre abarra e igual a ρ. De fato, tomando nosso sistema de referencia sobre o extremo inicialda barra teremos que a forca resultande agindo sobre ela e dada por
f L0(x) =
ρ/L0 se x ∈ [(L − L0)/2, (L + L0)/2]0 se x /∈ [(L − L0)/2, (L + L0)/2]
A resultante desta forca e dada por
F L0=
L
0
f L0(x) dx =
L+L0/2
L−L0/2
ρ
L0dx = ρ.
A unica diferenca e que ela esta aplicada sobre regioes de menores em amplitude sobrea barra. Uma forca pontual sobre a barra sera o limite quando L0 → 0. O que significaque a forca distribuida ou a densidade de forca estara dada por
f 0(x) =
∞ se x = L/20 se x = L/2
4.2. Espacos vetoriais topologicos 73
Porem deacordo com o desenvolvido acima teremos que
FL
f ( ) d liL+L0/2 ρ
d
5/14/2018 ESP_SOB - slidepdf.com
http://slidepdf.com/reader/full/espsob 77/244
F =0
f 0(x) dx = limL0→0
L−L0/2
ρ
L0dx = ρ.
Uma funcao F satisfazendo as duas propriedades acima nao e uma funcao usual. Poremas propriedades de uma forca pontual agindo sobre uma barra de comprimento L estaradada pelo limite da funcao f L0
como definida acima. Esta funcao e chamada de delta deDirac. Precisamos entao extender nosso conceito de funcoes, para as chamadas funcoes
generalizadas, ou distribuicoes de Schwartz.Antes de definir os espacos de Distribuicoes faremos uma breve introducao aosEspacos vetoriais topologicos.
4.2 Espacos vetoriais topologicos
Definicao 4.2.1 Diremos que (X, τ ) e um espaco topol´ ogico, se X e um conjunto n aovazio e τ e uma colec˜ ao de subconjuntos de X chamados de abertos satisfazendo asseguintes propriedades:
(i) X e ∅ pertencem a τ
(ii) A intersec˜ ao finita de abertos e aberta e a uni˜ ao arbitraria de abertos e aberta.
A colec˜ ao τ e chamada de topologia de X .
A seguir enumeraremos os conceitos mais utilizados nos espacos topologicos:
• Diremos que um conjunto e Fechado se seu complemento e um aberto.
• O Fecho E de E e a intersecao de todos os fechados que contem a E
• Chama-se Interior E 0 de um conjunto E a uniao de todos os abertos que saosubconjuntos de E .
• Uma Vizinhanca de x e todo aberto que contem x
• O espaco (X, τ ) e chamado espaco de Hausdorff , se τ e uma topologia de Haus-dorff. Isto e se pontos diferentes de X possuem vizinhancas disjuntas.
• Um subconjunto K de X e chamado de Compacto se todo cobertura aberto deK possui uma subcobertura finita.
• Uma subcolecao G ⊂ τ e chamada de base de uma topologia se todo membro deτ pode ser expressado como uniao dos elementos de G.
• Uma colecao γ de vizinhancas de um ponto p e chamada de Base local em p, setoda vizinhanca de p contem um membro de γ .
• Um conjunto A e chamado de Absorvente se para todo x ∈ E existe um t > 0tal que tx ∈ A.
74 Capıtulo 4. Distribuic˜ oes
• Um conjunto B e chamado de Balanceado se tB ⊂ B, para todo |t| < 1.
Definicao 4.2.2 Diremos que E munido da topologia τ e um Espaco Vetorial Topol´ o-
gico se todo ponto de E e um conjunto fechado e as operac˜ oes, soma e produto por um

5/14/2018 ESP_SOB - slidepdf.com
http://slidepdf.com/reader/full/espsob 78/244
escalar, s˜ ao contınuas com respeito a topologia τ .
Definamos os operadores T a e M λ como
T a(x) = x + a, M λ(x) = λx
Os operadores T a : E → E e M λ : E → E , sao bijecoes lineares e contınuas, portantosao homeomorfismos topologicos de E sobre E . Como consequencia, toda topologia
τ de um espaco vetorial topologico e invariante por translacoes. Isto e S ⊂ E e umaberto se e somente se a + S e um aberto. Portanto τ esta completamente definida porqualquer base local.
A seguir definiremos o conceito de conjunto limitados em espacos topologicos, ondenao necessariamente existe definida uma metrica.
Definicao 4.2.3 Diremos que um subconjunto B e um conjunto limitado de um espacovetorial topol´ ogico X , se para toda vizinhanca V de 0 em X existe s > 0 tal que
B ⊂ tV, ∀t > s
Faremos agora uma lista dos diferentes espacos topologicos que aparecem com maisfrequencia.
• Um EVT e chamado de Localmente Convexo se existe uma base local cujosmembros sao convexos.
• Diremos que um EVT e Localmente Limitado, se 0 possui uma vizinhancalimitada no sentido da Definicao 4.2.3.
• Diremos que um EVT e Localmente Compacto, se 0 possui uma vizinhancacujo fecho e compacto.
• Um EVT e Metrizavel se sua topologia e inducida por uma metrica.
• Diremos que um EVT e um espaco de Frechet ou F -espaco se e um espaco local-mente convexo cuja topologia e inducida por uma metrica invariante (invariantepor traslacoes)
•Um EVT possui a propriedade de Heine-Borel se todo fechado e limitado eum compacto.
Definicao 4.2.4 Seja E um espaco vetorial e p uma func˜ ao a valores reais. Diremosque p e uma seminorma se satisfaz as seguintes propriedades
(i) p(x + y) ≤ p(x) + p(y)
4.3. Espacos das func˜ oes testes 75
(ii) p(αx) = |α| p(x)
Se alem das propriedades acima tambem temos que

5/14/2018 ESP_SOB - slidepdf.com
http://slidepdf.com/reader/full/espsob 79/244
p(x) = 0 ⇒ x = 0
ent˜ ao diremos que p e uma norma.
Da definicao acima segue que p e nao negativo. Para verificar isto, veja que do
item (ii) segue que p(0) = 0. Assim aplicando a condicao (i) para y = −x teremosque 0 = p(0) ≤ p(x) + p(−x). Aplicando a condicao (ii) concluimos que p(x) ≥ 0.Outra propriedade imediata de verificar e que o conjunto x; p(x) = 0 e um subespacovetorial de E , e que o conjunto B = x ∈ E ; p(x) < 1 e convexo e absorvente. (VejaExercıcios)
4.3 Espacos das funcoes testes
Para facilitar a analise introduzimos as seguintes notacoes, α = (α1,...,αn) ∈ Nn,x = (x1,...,xn) ∈ Rn e por
|α| =n
i=1
αi; xα = xα11 xα2
2 · · · xαnn , Dα = (
∂
∂x1)α1 · · · (
∂
∂xn)αn .
Seja Ω a um conjunto aberto doRN
. Antes de considerar os espacos de funcoesinfinitamente diferenciaves, estudaremos os espacos de funcoes definidas sobre Ω com kderivadas contınuas
O conjunto C k(Ω)
Denotaremos por C k(Ω) o espaco dado por
C k(Ω) = f ∈ C (Ω); Dαf ∈ C (Ω) ∀α ∈ Nn, |α| ≤ k .
O problema que se nos apresenta e encontrar uma metrica que faca de C k(Ω) umespaco completo. A norma do supremo aqui nao serve, porque as funcoes podem sernao limitadas. Por exemplo a funcao ln x definida no intervalo Ω =]0, 1[ e uma funcao in-finitamente diferenciavel em ]0, 1[ que nao e limitada. Queremos construir uma metricaque faca do espaco C k(Ω) um espaco completo.
Por outro lado, se K um conjunto compacto, entao o espaco das funcoes contınuassobre K , C (K ) e um espaco completo com a norma · ∞
f ∞ = supx∈K
|f (x)|,
76 Capıtulo 4. Distribuic˜ oes
Analogamente, seja O um conjunto aberto e limitado de RN , tomando K = O o fechodo conjunto O, podemos definir o conjunto C k(K ) de funcoes k vezes diferenciaveis.Neste caso, a norma
· ∞ fk ∞ = sup |Dαf (x)|

5/14/2018 ESP_SOB - slidepdf.com
http://slidepdf.com/reader/full/espsob 80/244
f k,∞ supx∈K,|α|≤k
|D f (x)|,
Faz com que o espaco C k(K ) seja completo. A ideia e utilizar estas normas paradefinir uma metrica onde C k(Ω) seja completo quando Ω aberto do RN . Para istodecomporemos Ω em componentes compactas. Isto e tomemos K i uma sequencia deconjuntos compactos satisfazendo
K i⊂
K 0
i+1
(interior de K i+1), Ω =∪
i∈NK i
Dai consideramos a famılia de seminormas dadas por
pi(ϕ) = max |Dαϕ(x)|; x ∈ K i, |α| ≤ kA famılia P = pi; i ∈ N de seminormas define uma topologia, localmente convexasobre C ∞. Uma base local para esta topologia e dada pela famılia de conjuntos
V i = ϕ
∈C ∞(Ω); pi(ϕ) <
1
iE simples verificar que V i e um conjunto convexo. Esta topologia e metrizavel, paraisto basta considerar a metrica
d(f, g) =∞
i=1
2−i pi(f − g)
1 + pi(f − g),
que e invariante por translacoes. O espaco C ∞(Ω) munido da esta metrica e completo,como e simples verificar. Portanto C ∞(Ω) e um espaco de Frechet. Note que cadaespaco C k(K i) pode ser identificado com um subespaco fechado de C ∞(Ω).
Funcoes Infinitamente diferenciaves
Denotaremos por C ∞(Ω) ao conjunto de funcoes infinitamente diferenciais sobre Ω, emsimbolos:
C ∞(Ω) = f ∈ C (Ω); Dαf ∈ C (Ω) ∀α ∈ Nn .
De forma analoga ao caso de funcoes k vezes diferenciaveis podemos definir uma topolo-gia, e uma metrica, que faz de C ∞(Ω) um espaco de Frechet, com a propriedade de HeineBorel, isto e, todo fechado e limitado de C ∞(Ω) e um compacto. Para isto, tomemosuma colecao de compactos K i, tais que
K i ⊂ K 0i+1(interior de K i+1), Ω = ∪i∈NK i
4.3. Espacos das func˜ oes testes 77
Para cada n ∈ N introduzimos a seminorma
ρn(ϕ) = max |Dαϕ(x)|; x ∈ K n, |α| ≤ n

5/14/2018 ESP_SOB - slidepdf.com
http://slidepdf.com/reader/full/espsob 81/244
A famılia P = ρn; n ∈ N de seminormas define uma topologia, localmente convexasobre C ∞. Uma base local para esta topologia e dada pela famılia de conjuntos
V n =
ϕ ∈ C ∞(Ω); ρn(ϕ) <
1
n
E simples verificar que V n e um conjunto convexo. Esta topologia e metrizavel, paraisto basta considerar a metrica
d(f, g) =∞
i=1
2−iρi(f − g)
1 + ρi(f − g).
d(·, ·) definida acima e uma metrica invariante por translacoes, que faz que o espacoC ∞(Ω) seja completo. Portanto C ∞(Ω) e um espaco de Frechet. Note que cada espacoC ∞(K ) e um subespaco fechado de C ∞(Ω).
O espaco C ∞0 (Ω)
As funcoes polinomicas, exponenciais, trigonometricas sao exemplos de funcoes infinita-mente diferenciais. Mais funcoes que sejam infinitamente diferenciaves e que se anulemfora de um conjunto compacto nao sao funcoes elementares. Considere por exemplo a
funcao
f (x) =
e− 1
1−|x|2 se |x| < 10 se |x| ≥ 1
E simples verificar que f e infinitamente differenciavel em todo R e se anula fora dointervalo [0, 1]. E conveniente introduzir o conceito de suporte de uma funcao.
Definicao 4.3.1 Seja f : Ω → R uma func˜ ao contınua. Chamaremos de soporte de f ao conjunto que denotaremos por Supp( f ) e definiremos como
Supp f = x ∈ Ω; f (x) = 0.
Usando convolucoes encontramos uma variedade maior de funcoes infinitamente difer-enciaveis com suporte compacto.
Exemplo 4.3.1 Denotemos por Ω = R, e consideremos f : R→ R ent˜ ao temos que
• Se f (x) = ex ent˜ ao Supp f = R
• Se f (x) = anxn + an−1xn−1 + · · · + a0 ent˜ ao Supp f = R
78 Capıtulo 4. Distribuic˜ oes
• Se f (x) = cos(x) ent˜ ao Supp f = R
Posteriormente extenderemos o conceito de suporte para funcoes mais gerais que as
contınuas.

5/14/2018 ESP_SOB - slidepdf.com
http://slidepdf.com/reader/full/espsob 82/244
Seja K um compacto de Ω, denotaremos por
DK = f ∈ C ∞(Ω); Supp f ⊂⊂ K
Como na secao anterior fazemos Ω = ∪n∈NK n e definimos a famılia de seminormasdefinidas na secao anterior.
ρn(ϕ) = ϕn = max |Dα
ϕ(x)|; x ∈ K n, |α| ≤ n .
Denotemos por DKno espaco munido com a norma (sobre K n) pn. e um espaco normado
completo. Definimos agora o espaco das funcoes testes
D(Ω) = ∪n∈NDKn
E simples verificar que D(Ω) e um espaco vetorial topologico. Seja K um compactoqualquer de Ω. Como K n ⊂ K n+1 entao existe n0 ∈ N tal que K ⊂ K n para todo
n ≥ n0. Assim DK , para qualquer compacto K , pode ser considerado um subespaco deDKn0com a topologıa inducida por DKn0
. Uma base local para a topologia de DK edada por
V n =
ϕ ∈ DK ; ϕn <
1
n
A topologia definida acima e localmente convexa e metrizable, embora apresente adeficiencia de nao ser completa. De fato consideremos Ω = R e a sequencia
ψm = φ(x−
1) +1
2φ(x
−2) +
1
3φ(x
−3) +
· · ·+
1
mφ(x
−m).
Onde φ ∈ C ∞0 (R), Supp(φ)= [0, 1] e φ ≥ 0. Pode-se mostrar que ψm e uma sequencia deCauchy, mais o limite dela nao tem suporte compacto, portanto o limite nao pertencea D(R)
Definicao 4.3.2 Toda aplicac˜ ao linear e contınua sobre D(Ω) com respeito a topologia anterior e chamada de Distribuic˜ ao. O conjunto de todas distribuic˜ oes e chamado deespaco de distribuic˜ oes e e denotado por D.
A topologıa anterior induce o seguinte conceito de convergencia. Uma sequencia defuncoes ϕν de elementos C ∞0 (Ω) e dito que converge para ϕ ∈ C ∞0 (Ω) quando
(i) Existe K ⊂⊂ Ω tal que suppϕν − ϕ ⊂ K , e
(ii) limν→∞ Dαϕν = Dαϕ uniforme sobre K e para todo multiindice α.
4.3. Espacos das func˜ oes testes 79
O espaco D(Ω) e dotado da topologia fraca estrela como dual de D(Ω), e e umespaco topologico localmente convexo. Isto e, diremos que uma sequencia de dis-tribuicoes T m converge para a distribuicao T se e somente se

5/14/2018 ESP_SOB - slidepdf.com
http://slidepdf.com/reader/full/espsob 83/244
T m(ϕ) → T (ϕ) em I C
para toda funcao ϕ ∈ D(Ω)
Definicao 4.3.3 Deja T uma distribuic˜ ao, ent˜ ao definimos derivada de ordem α de T ao operador denotado como DαT e definido como
DαT , ϕ = (−1)|α|T , Dαϕ
E simples verificar que a derivada de uma distribuicao e tambem uma distribuicao.
Definicao 4.3.4 Diremos que uma distribuic˜ ao tem ordem m se m e o menor n umeroque satisfaz
|T (φ)| ≤ C KφC m , ∀φ ∈ D(K )
para todo K ⊂⊂ Ω, onde C K > 0. Se n˜ ao existe um ´ unico m para todo K , diremos queT tem ordem infinito.
Exemplo 4.3.2 Seja v uma func˜ ao localmente integr´ avel em Ω. Ent˜ ao a distribuic˜ aoT v definida como
T v , ϕ = Ω vϕ dx
e um distribuic˜ ao de ordem zero.
Exemplo 4.3.3 Seja v uma func˜ ao localmente integr´ avel L1loc(Ω) que n˜ ao seja contınua
em Ω. Ent˜ ao a distribuic˜ ao DαT v e um distribuic˜ ao de ordem |α|.
Exemplo 4.3.4 A func˜ ao Delta de Dirac, e uma distribuic˜ ao de ordem zero. A derivada de primeira ordem da func˜ ao Delta de Dirac, e uma distribuic˜ ao de primeira ordem.
Exemplo 4.3.5 Definamos a aplicac˜ ao T : D(R) → R da seguinte forma
T v , ϕ =∞
i=1
di
dxiϕ(i)
´ E simples verificar que T e uma distribuic˜ ao que tem infinito ordem.
Definicao 4.3.5 Diremos que uma distribuic˜ ao se anula num aberto O se para toda φ ∈ C ∞0 (Ω) tal que Supp φ ⊂ O teremos que T (φ) = 0. Denotemos por Ω0 o maior aberto onde a distribuic˜ ao T se anula. O conjunto fechado Ω\Ω0 e chamado de suporteda convoluc˜ ao e e denotado por Supp(T )
80 Capıtulo 4. Distribuic˜ oes
Da definicao anterior concluimos que se existe um fechado F tal que T se anula emΩ \ F , entao
Supp T
⊂F
Exemplo 4.3.6 Seja v uma func˜ ao localmente integr avel. Ent˜ ao o suporte da dis-

5/14/2018 ESP_SOB - slidepdf.com
http://slidepdf.com/reader/full/espsob 84/244
tribuic˜ ao T v definida como
T v , ϕ =
Ω
vϕ dx
coincide com o suporte de v.
Teorema 4.3.1 Seja que T ∈ D(Ω). Suponhamos que Supp( T )⊂ x0, para x0 ∈ Ω eque T seja de ordem N . Ent˜ ao existem constantes cα tais que
T =|α|≤N
cαDαδx0
Onde δx0 e a func˜ ao de Dirac, dada por
δx0 , φ = φ(x0)
Demonstracao.- A condicao Supp(T )⊂ x0, significa que a distribuicao T se anulasobre o conjunto Ω
\ x0
. Sem perda de generalidade podemos supor que x0 = 0
∈Ω.
Faremos a demonstracao no caso unidimensional Ω =] − 1, 1[ e quando a ordem N = 3.Seja φ ∈ D(] − 1, 1[)
φ(0) = 0, φ(0) = 0, φ(0) = 0 (4.1)
implica queT (φ) = 0.
De fato, pela continuidade dado > 0 existe uma vizinhanca ] − , [ tal que
|φ(x)| ≤ , ∀ |x| ≤ .
Usando o Teorema de Taylor
φ(x) = φ(0) + φ(0)x +1
2φ(0)x2 +
1
6φ(ξ)x3
e lembrando as hipoteses sobre φ e aplicando as formulas de Taylor para φ, φ e φ,encontramos
|φ(x)| ≤ c|x|3
, |φ(x)| ≤ c|x|2
, |φ(x)| ≤ c|x| ∀ |x| ≤ . (4.2)
Seja ψ uma funcao de C ∞0 (]−1, 1[) com suporte contido em ]−1/2, 1/2[ e tal que ψ = 1em ]-1/4,1/4[. Definamos agora
ψr(x) = ψ(x
r), r > 0, x ∈] − 1, 1[.
4.4. Func˜ oes de decrescimento rapido 81
Tomando r = 2 teremos que
Supp ψr ⊂ B( 2
, 0) ⊂ B(, 0)

5/14/2018 ESP_SOB - slidepdf.com
http://slidepdf.com/reader/full/espsob 85/244
Usando as formulas de Leibniz’s teremos que
(ψrφ)(3)(x) = ψr φ + 3ψr φ + 3ψrφ + ψrφ
=1
r3ψr (
x
r)φ(x) + 3
1
r2ψr (
x
r)φ(x) + 3
1
rψr(
x
r)φ(x) + ψr(
x
r)φ(x)
Usando a desigualdade (4.2) temos que(ψrφ)(3)(x) ≤ 8
3C|x|3 + 3
4
2C|x|2 + 5
1
C|x| + C
≤ C 0.
Onde C = ψC 3 . Assim temos
ψrφC 3 ≤ φC 3 (4.3)
Como T e de ordem N = 3, existe uma constante C > 0 tal que |T (ψ)| ≤ C ψC 3 , paratodo ψ ∈ D(K ). Como ψr = 1 em ] − /8, /8[ segue que
|T (φ)| = |T (ψrφ)| ≤ C ψrφC 3 ≤ C φC 3
Como e arbitrario segue que T (φ) = 0. Em outras palabras temos que
φ(0) = 0, φ(0) = 0, φ(0) = 0 ⇒ T (φ) = 0.
Pelo Lema 3.4.2 segue o resultado, isto e existem constantes ci tais que
T (φ) =3
i=1
cidi
dxiδ(x).
4.4 Funcoes de decrescimento rapido
Nesta secao estudaremos as principais propriedades da transformada de Fourier. De-notemos por S (RN ) o espaco das funcoes rapidamente decrescentes, isto e funcoes in-finitamente diferenciaveis satisfazendo
sup
|α|≤
N
supx∈Rn
(1 + |x|2)m|(Dαf )(x)| < ∞, ∀m ∈ N, ∀N ∈ N
E simples verificar quelim
|x|→∞P (x)Dαf (x) = 0
82 Capıtulo 4. Distribuic˜ oes
e queC ∞0 (RN ) ⊂ S
Sobre o conjunto
S podemos definir uma metrica d, da seguinte forma:
d(u, v) = ρm(u − v)
2m(1 + ρ (u − v))

5/14/2018 ESP_SOB - slidepdf.com
http://slidepdf.com/reader/full/espsob 86/244
m∈N 2 (1 + ρm(u v))
onde por ρm(v) estamos denotando
ρm(v) = sup|α|≤m
supx∈Rn
(1 + |x|2)m|(Dαf )(x)|
Com esta metrica o espaco das funcoes rapidamente decrescentes e completo. Noteque d(
·,
·) nao e uma norma devido a que nao e homogeneo. (pela mesma razao nao e
seminorma).
Definicao 4.4.1 O conjunto de todas as aplicac˜ oes lineares e contınuas com respeitoa topologia induzida pela metrica d, e denotado por S (RN ) e e chamado de espaco dasDistribuic˜ oes Temperadas.
Note que um funcional T e linear e contınuo com respeito a topologia induzida pord(·, ·) se e somente se existe uma constante positiva C e m ∈ N tal que
|T (φ)| ≤ C sup
|α|≤m
sup
x∈Rn (1 + |x|2)m|(Dαφ)(x)|
De fato, se φν e uma sequencia de funcoes convergindo para zero em S (RN ), entaoteremos que
(1 + |x|2)m|(Dαφν )(x)| → 0, uniforme em RN
De onde segue queT (φν ) → 0
Toda distribuicao temperada e uma distribuicao, isto e S (RN ) ⊂ D(RN ). O recıproco
e falso. Veja o seguinte exemplo.Exemplo 4.4.1 D(RN ) ⊂ S (RN ). De fato, para simplificar, consideraremos o casounidimensional. Tomemos a funcao f (x) = ex. E simples verificar que f ∈ D(R), poisela e localmente integravel. Mais f ∈ S (R). Para mostrar isto tomemos ϕ ∈ S (R)nao negativa. Consideremos a sequencia ϕn(x) = e−n/2ϕ(x/n). E simples verificar quepara cada m ∈ N temos que
ρm(ϕn) = e−n/2 supi≤m
supx∈R
(1 + |x|2)mn−i|ϕ(i)(x/n)|
≤ n−me−n/2 supi≤m
supσ∈R
(1 + n2|σ|2)m|ϕ(i)(σ)|≤ nme−n/2 sup
i≤msupσ∈R
(1 + |σ|2)m|ϕ(i)(σ)|
≤ cmnme−n/2 → 0
4.5. Transformada de Fourier 83
Para m ∈ N. De onde concluimos que
ϕn → 0 em S (R).
5/14/2018 ESP_SOB - slidepdf.com
http://slidepdf.com/reader/full/espsob 87/244
Por outro lado
T f (ϕn) =
RN
exϕn(x) dx
≥ x≥n
exϕn(x) dx
≥ en/2
x≥n
ϕ(x/n) dx
≥ nen/2
x≥1
ϕ(σ) dσ → ∞
portanto f ∈ S (R)
4.5 Transformada de Fourier
Nesta secao introduziremos a transformada de Fourier para funcoes de decrescimentorapido e extenderemos esta transformada para as distribuicoes temperadas.
Definicao 4.5.1 Seja f ∈ S (RN ), ent˜ ao denotaremos por F f a Transformada deFourier de f dada por
F f (y) =
1√2π
n RN
f (x)e−ixy dx.
Proposicao 4.5.1 A transformada de Fourier satisfaz as seguintes propriedades:
(i) F ( ∂u∂xi
) = iξiF u
(ii) F (f ∗ g) = (√2π)2nF (f )F (g)
(iii) RN F (f )g dx =
RN f F (g) dx
Demonstracao.- A propriedade (i) obtem-se fazendo integracao por partes. Demos-traremos a identidade (ii). Para isto utilizaremos o Teorema de Fubini. De fato,
RN
f ∗ geixξdξ = RN
RN
f (ξ − y)g(y) dye−ixξ dξ
=
RN
RN
f (ξ − y)g(y)e−ixξ dξdy
84 Capıtulo 4. Distribuic˜ oes
=
RN
RN
f (ξ − y
:=σ
)e−ixξ dξg(y)dy
fazendo mudanca de variavel
= RN
RN
f (σ)e−ix(σ+y) dσg(y)dy

5/14/2018 ESP_SOB - slidepdf.com
http://slidepdf.com/reader/full/espsob 88/244
=
RN
RN
f (σ)e−ixσ dσ
e−ixyg(y)dy
= (√
2π)2nF (f )F (g)
De onde segue a demonstracao. De forma analoga se mostra (iii).
Observacao 4.5.1 A transformada de Fourier est´ a bem definida para func˜ oes f ∈L1(RN ) e ainda temos que
F (f )L∞ ≤ f L1
Em geral se f e uma func˜ ao integr´ avel, ent˜ ao sua transformada de Fourier e tambem uma func˜ ao contınua. De fato, seja xm uma seq¨ uencia convirgindo para x, provaremosque
F (f )(xm) → F (f )(x).
Pela definic˜ ao temos
F (f )(xm) =
1√2π
n RN
f (y)e−iyxm :=gm(x)
dy
Note que|gm(y)| ≤ |f (y)|, gm(y) → g(y) = f (y)e−iyx
Do teorema da convergencia dominada, encontramos que1√2π
n RN
f (y)e−iyxm dy →
1√2π
n RN
f (y)e−iyx dy
Isto eF (f )(xm) → F (f )(x)
De onde segue a continuidade. Em resumo temos que
F : L1(RN )
→C (RN )
∩L∞(RN )
Proposicao 4.5.2 A transformada de Fourier de uma func˜ ao r´ apidamente decrescentee tambem uma func˜ ao r´ apidamente decrescente. Isto e
F : S (RN ) → S (RN )
4.5. Transformada de Fourier 85
Demonstracao.- Temos que provar que
(1 + |ξ|2)m|F (φ)(ξ)| ≤ C m, ∀ξ ∈ Rn
P l ti id d ´ fi i t t d i ld d ´ ´lid |ξ| ≥ M

5/14/2018 ESP_SOB - slidepdf.com
http://slidepdf.com/reader/full/espsob 89/244
Pela continuidade e suficiente mostrar que a desigualdade e valida para |ξ| ≥ M comM > 0. Consideremos o caso unidimensional. Fazendo integracao por partes temos
R
φ(y)e−iyξ dy = − 1
iξ
R
φ(y)e−iyξ dy
de onde segue que R
φ(y)e−iyξ dy
≤ 1
|ξ| φL1 ∀|ξ| ≥ M > 0.
Repetindo este proceso, podemos mostrar que
R φ(y)e−iyξ dy ≤1
|ξ|2 φ
L1
∀|ξ
| ≥M > 0.
Em geral teremos R
φ(y)e−iyξ dy
≤ 1
|ξ|mφ(m)L1 ∀|ξ| ≥ M > 0.
Usando esta desigualdade, encontramos
(1 + |ξ|2)m|F (φ)(ξ)| = (1 + |ξ|2)
1√2π
n R
φ(y)e−iyξ dy
≤ (1 + |ξ|2)m
|ξ|mφ(2m)L1
≤ C φ(2m)L1 ∀|ξ| ≥ M > 0.
Portanto, F (φ) ∈ S .
Lema 4.5.1 A transformada de Fourier da func˜ ao x → e−ax2 e dada por
F (e−ax2)(ξ) =
π
ae−ξ2/4a.
Demonstracao.- Denotemos por f (ξ) = F (e−ax2
)(ξ), e simples verificar que a derivadada funcao
f (ξ) =1√2π
R
e−ay2e−iξy dy
86 Capıtulo 4. Distribuic˜ oes
satisfaz
f (ξ) = − i√2π
R
ye−ay2e−iξy dy.
Integrando por partes teremos
f (ξ) = − ξ√
e−ay2e−iξy dy.

5/14/2018 ESP_SOB - slidepdf.com
http://slidepdf.com/reader/full/espsob 90/244
f (ξ)2a
√2π
R
y
De onde segue que
f (ξ) = − ξ
2af (ξ) ⇒ f (ξ) = f (0)e−ξ2/4a.
Lembrando que
f (0) = R
e−ay2 dy = π
a
segue o resultado.
Outra relacao importante e dada no seguinte Lema
Lema 4.5.2
∞
0
sen x
x
dx =π
2Demonstracao.- Este valor pode ser calculado usando a funcao
F (t) =
∞0
e−xt sen x
xdx
De fato, note que o valor que desejamos calcular e dado por F (0). Por outro lado esimples verificar que
limt
→∞
F (t) = 0. (4.4)
Derivando a funcao F teremos que
F (t) = − ∞0
e−xt sen x dx
Integrando por partes a expressao anterior, encontramos que
(1 +1
t2)F (t) = − 1
t2, ⇒ F (t) = − 1
1 + t2
De onde segue queF (t) = −arctag t + c
Aplicando a identidade (4.4) concluimos que
c = arctag ∞ =π
2
4.5. Transformada de Fourier 87
De onde segue o resultado.
Introduzamos o funcional
1n
i

5/14/2018 ESP_SOB - slidepdf.com
http://slidepdf.com/reader/full/espsob 91/244
F f =
1√2π
RN
f (x)eixy dx
Mostraremos que F e a transformada inversa de Fourier de F . Isto e
F (
F (φ)) = (
√2π)nφ,
∀φ
∈ S (RN )
Para isto precisaremos da seguinte identidade
Lema 4.5.3 Sejam u e v func˜ oes em S (RN ). Ent˜ ao e v alido RN
v(y)F (u)eixy dy =
RN
u(σ + x)F (v) dξ
Demonstracao.- De fato, consideremos RN
v(y)F (u)eixy dy =√
2π−n
RN
RN
v(y)u(ξ)e−iξy eixy dξ dy
=√
2π−n
RN
u(ξ)
RN
v(y)e−i(ξ−x)y dy dξ
= RN
u(ξ)F v(ξ − x) dξ
Fazendo mudanca de variavel
=
RN
u(σ + x)F v(σ) dσ
De onde segue a identidade
Proposicao 4.5.3 Para toda func˜ ao φ ∈ S (RN ) temos que
F (F φ) =√
2πn
φ
Demonstracao.- Do Lema 4.5.3 temos que RN
v(y)F (φ)eixy dy =
RN
φ(σ + x)F (v) dξ.
Sejav(x) = e−|x|
2/2
Denotemos por v(x) = v(x), nestas condicoes lembrando o Lema 4.5.1 teremos que
88 Capıtulo 4. Distribuic˜ oes
RN
v(y)F (φ)(y)eixy dy = √
2πn
−n
RN
φ(σ + x)e−ξ2/22 dξ
Fazendo mudanca de variavel
=√
2πn
φ(x + y)e−ξ2/2 dy

5/14/2018 ESP_SOB - slidepdf.com
http://slidepdf.com/reader/full/espsob 92/244
RN
Fazendo → 0 teremos que RN
F (φ)eixy dy =√
2πn
φ
RN
e−ξ2/2 dy = (2π)nφ
De onde segue o resultado
Teorema 4.5.1 (Identidade de Plancherel) Para toda func˜ ao φ ∈ S (RN ) temosque
RN
|φ|2 dx =√
2π−n
RN
|F (φ)|2 dx
Demonstracao.- De fato, considere
RN
|φ|2 dx = RN
φφ dx
=√
2π−n
RN
F (F (φ))φ dx
=√
2π−n
RN
F (φ) F (φ) dx
=
√
2π
−n
RN
F (φ)F (φ) dx
De onde segue o resultado
4.6 Transformada de Fourier em L2
Para funcoes em L2, o produto com e−ixy nao e em geral uma funcao L1. Portanto aintegral
RN
f (x)e−iξx dx
nao esta definida neste espaco. Utilizando a identidade de Plancherel definiremos atransformada de Fourier no espaco L2(RN ) por densidade. De fato, seja u uma funcaode L2(RN ), entao existe uma sequencia de funcoes φν em S (RN ) tais que
φν → u forte em L2(RN )
4.6. Transformada de Fourier em L2 89
Utilizando a Identidade de Plancherel teremos que
F (φν ) − F (φµ)L2(RN ) = √2πn φν − φµL2(RN )
De onde concluimos que a transformada de Fourier da sequencia φν e tambem uma

5/14/2018 ESP_SOB - slidepdf.com
http://slidepdf.com/reader/full/espsob 93/244
sequencia de Cauchy em L2(RN ), portanto existe uma funcao u ∈ L2(RN ) tal que
F (φν ) → u forte em L2(RN )
O Limite u e tomado como a transformada de Fourier de u.
Definiremos a seguir a transformada de Fourier de uma Distribuicao temperada.Isto e feito por transposicao na seguinte definicao.
Definicao 4.6.1 A transformada de Fourier de uma distribuic˜ ao temperada T , e definida como a distribuic˜ ao T satisfazendo
T (φ) = T (φ)
Antes de considerar alguns exemplos provaremos um conhecido Lema,
Lema 4.6.1 Seja F uma func˜ ao contınua, e com derivadas laterais. Ent˜ ao e v alido
limk→0
b
a
F (x)sen k(x − x0)
x − x0dx = F (x0)π
Demonstracao.- Consideremos a seguinte identidade
b
a
F (x) sen k(x − x0)x − x0
dx = b
a
F (x) − F (x0)x − x0
sen k(x − x0) dx (4.5)
+F (x0)
b
a
sen k(x − x0)
x − x0dx
Fazendo a mudanca de variavel σ = k(x − x0) temos que
b
a
sen k(x − x0)x − x0
dx = k(b−x0)
k(a−x0)
sen σσ
dx
=
0k(a−x0)
sen σ
σdx +
k(b−x0)
0
sen σ
σdx
Usando o Lema 4.5.2 temos que
limk→∞
b
a
sen k(x − x0)
x − x0dx = π
Do Lema de Riemann Lebesgue e da identidade 4.5 segue o resultado.
90 Capıtulo 4. Distribuic˜ oes
Exemplo 4.6.1 E simples verificar que todas as funcoes constantes sao distribuicoestemperadas. Portanto todas elas possuim Tranformada de Fourier no sentido das dis-tribuicoes temperadas. Utilizaremos o Lema anterior para calcular a transformada de 1.
Consideraremos o caso unidimensional. Seja T 1 sua correspondente distribuicao. Peladefinicao teremos que
T 1(φ) = T 1(φ)

5/14/2018 ESP_SOB - slidepdf.com
http://slidepdf.com/reader/full/espsob 94/244
Note que a transformada de T 1 pode ser aproximada por
T 1 =1√2π
limβ→∞
β
−β
e−ixy dy
=1
−ix
e−ixy
|y=βy=
−β
= 2sen βx
x
De onde segue Pelo Lema 4.5 que
T (φ) =1√2π
limβ→∞
R
sen βx
xφ dx = 2πφ(0)
Portanto temos que
1 = √2πδ0
Outra forma mais direta de calcular o valor da transformada de 1, e utilizando a tran-formada inversa, isto e
T 1(φ) = T 1(φ) =
R
φ dx =√
2π F (φ)(0) =√
2πφ(0) =√
2πδ0(φ)
Portanto, T 1 =√
2πδ0.
Exemplo 4.6.2 Calcularemos agora a Transformada de Fourier da funcao sen(x).Porcedendo como no exemplo anterior termos que calcular a transformada da dis-tribuicao T sen que pode ser aproximada da seguinte forma
T sen =1√2π
limβ→∞
β
−β
sen ye−ixy dy
=1√2π
limβ
→∞ β
−β
eiy − e−iy
2ie−ixy dy
=1√2π
limβ→∞
1
2i
β
−β
e−i(x−1)y dy − 1
2i
β
−β
e−i(x+1)y dy
=
1√2π
limβ→∞
− isen (β (1 − x)
1 − x− isen (β (1 + x)
1 + x
4.7. Aplicac˜ ao a equac˜ ao do calor 91
De onde segue que
T sen = −i π2
δ1 − i π2
δ−1

5/14/2018 ESP_SOB - slidepdf.com
http://slidepdf.com/reader/full/espsob 95/244
4.7 Aplicacao a equacao do calor
Faremos nesta secao uma aplicacao a equacao do calor. Isto e, a equacao que modela ofluxo do calor num corpo configurado sobre um conjunto Ω ⊂ R3.
4.7.1 Deducao Fısica do Modelo
A equacao do Calor e uma consequencia de
• O princıpio da conservacao da energia.
• A lei de diferencabilidade termica dos corpos solidos, conocida como Lei deFourier, que estabelece que o fluxo de calor atraves de uma superfıcie S e propor-cional a derivada normal da temperatura sobre a superfıcie. A constante de pro-porcionalidade que denotaremos por k e chamada de condutividade termica.Se denotamos por q a quantidade de calor que flui por unidade de tempo e por ya temperatura, temos:
q = −k∂y
∂ν = −ku · ν. (4.6)
Por ν estamos denotando a normal a superfıcie S .
• A Lei de Newton estabelece que a quantidade de calor que flui durante umaunidade de tempo atraves da area σ da superfıcie do corpo ao meio ambiente eproporcional a diferenca da temperatura do corpo com o meio ambiente. Isto e,
q = −σα(y − y0), (4.7)
onde σ e a area da superfıcie, α e o coeficiente de intercambio de calor.
Outro coeficiente termico e a Capacidade termica c0, que se define como quantidadede calor necessaria para elevar uma unidade de volume a uma unidade de temperatura.Temos assim definido o aumento da temperatura de um corpo e a capacidade termica domaterial, podemos conhecer entao a quantidade de calor que foi introduzida ao material.Assumiremos neste texto que todos os coeficientes de proporcionalidade descritos acimasao constantes.
Para obter a equacao diferencial que a temperatura y satisfaz, consideremos primero
uma pequena regiao R do solido configurado sobre Ω, cuja superfıcie denotaremos porS . Suponhamos que o fluxo de calor durante o intervalo de tempo [t, t + h] incrementouem y(x, t + h) − y(x, t) a temperatura, entao usando a definicao da capacidade termicaconcluımos que a quantidade de calor consumida neste processo e
92 Capıtulo 4. Distribuic˜ oes
Q = c0(y(x, t + h) − y(x, t))dV,
onde por dV estamos denotando o diferencial de volume. Portanto, a quantidade de
calor em toda a regiao R e de
QTotal =
R
c0(y(x, t + h) − y(x, t))dV.

5/14/2018 ESP_SOB - slidepdf.com
http://slidepdf.com/reader/full/espsob 96/244
R
Aplicando o teorema do valor medio obtemos:
QTotal = h
R
c0∂y
∂t(x, ξ) dV ξ ∈]t, t + h[.
Como S e a superfıcie da regao R. Da lei de Fourier temos que a quantidade de calor
QTotal introduzida a regiao R e igual:
QTotal = −
S
k∂y
∂ν (x, t)h dS.
De onde temos: R
c0∂y
∂t(x, ξ0) dV = −
S
k∂y
∂ν dS.
Fazendo h → 0 obtemos:
R
c0 ∂y∂t (x, t) dV = −k S
∂y∂ν (x, t) dS
Das formulas de Green segue R
c0∂y
∂t(x, t) dV = k
R
∆y(x, t) dV.
Sendo R uma regiao qualquer do material, concluımos que:
c0yt = k∆y, em Ω
×]0, T [.
Por outro lado, a temperatura inicial do material deve ser uma funcao y0 conhecida,isto e,
y(x, 0) = y0(x) em Ω.
Devemos ter tambem informacao da solucao na fronteira de Ω. Por exemplo, o valor datemperatura, isto e,
y(x, t)|∂ Ω = g(x, t).
onde g e uma funcao conhecida. Esta condicao de contorno e chamada de Condicao deDirichlet.
Outra condicao de contorno caso nao seja conhecido o valor de y no bordo de Ω ea seguinte
k∂y
∂ν (x, t)|∂ Ω = q(x, t).
Esta condicao e chamada de condicao de Neumann.
4.8. Soluc˜ ao da equac˜ ao do calor no RN 93
4.8 Solucao da equacao do calor no RN
Como vimos na secao anterior, a equacao do calor e dada por
yt − ∆y = 0 em Rn×]0, ∞[

5/14/2018 ESP_SOB - slidepdf.com
http://slidepdf.com/reader/full/espsob 97/244
y(x, 0) = y0(x) em Rn
onde y0 e uma funcao dada. Note que neste caso nao temos condicao de contorno,porque nao temos bordo. Suponhamos que y0 ∈ L2(RN ). Procuremos uma solucao
utilizando a Transformada de Fourier. Assim depois de tomar transformada de Fourierna equacao do Calor teremosyt + |ξ|2y = 0
y(ξ, 0) = y0
Agora a equacao em derivadas parciais se transformou numa equacao diferencial ordi-naria de primeira ordem, cuja solucao esta dada por
y = e−|ξ|2
ty0(ξ).
Pela parte (ii) da proposicao 4.5.1 teremos que
y =
1√2π
n
F ( F (e−|ξ|2t) ∗ F (y0))
= 1
√2πn
F ((
1
√t
)ne−|x|24t
∗y0)).
Depois de tomar transformada inversa, segue que
y = (1√2πt
)n
RN
e−|x−ξ|2
4t y0(σ) dξ. (4.8)
Onde y representa a solucao da equacao do calor. Em virtude da formula (4.8) podemos
obter as seguintes conclucoes.
Proposicao 4.8.1 Seja y0 ∈ L2(RN ), ent˜ ao existe uma ´ unica soluc˜ ao da equac˜ ao docalor, satisfazendo:
(i) O problema est´ a bem colocado e a soluc˜ ao depende contınuamente do dado inicial y0, isto e
y(
·, t)
L2(RN)
≤ y0
L2(RN )
Em geral temos que se y0 ∈ L p(RN ), pela desigualdade de Young segue que
y(·, t) ∈ L p(RN )
94 Capıtulo 4. Distribuic˜ oes
pois n´ ucleo da convoluc˜ ao,
S (x, t) := (1√2πt
)ne−|x|24t
e uma func˜ ao que pertence a L1(RN ), e ainda satisfaz:
(1
)n
e−
|x|24t dx 1

5/14/2018 ESP_SOB - slidepdf.com
http://slidepdf.com/reader/full/espsob 98/244
(√2πt
)
RN
e 4t dx = 1
(ii) Se m ≤ y0(x) ≤ M ent˜ ao a soluc˜ ao da equac˜ ao do calor satisfaz: m ≤ y(x, t) ≤ M para todo t > 0. Esta propriedade e conhecida como Principio do m´ aximo da equac˜ ao do calor.
(iii) A norma de y em L2(RN ), y(·, t)L2(RN ) decai uniformente quando t → ∞, istoe
y(·, t)L2(RN ) ≤ C √ty0L2(RN )
o que define o Comportamento Asint´ otico da soluc˜ ao.
(iv) Como a func˜ ao S (x, t) e uma func˜ ao infinitamente diferenci´ avel para x ∈ RN et > 0 a convoluc˜ ao y = S ∗ y0 e tambem uma func˜ ao infinitamente diferenci´ avel para t > 0. Note que esta propriedade n˜ ao depende do dado inicial. Isto e o dadoinicial y0 pode ser irregular que a soluc˜ ao y ser´ a infinitamente diferenci´ avel para t > 0. Esta propriedade e conhecida como Efeito Regularizante
4.9 Exercıcios
1. Mostre que a funcao x → cos x e uma distribuicao temperada e calcule suatransformada de Fourier
2. Mostre que x → ex2
nao e uma distribuicao temperada, mais e uma distribuicaode D(RN )
3. Seja φ ∈ D(RN ) e T ∈ D(RN ). Alguma das relacoes
φT = 0, T (φ) = 0
implica a outra
4. Seja u ∈ D(R), mostre que
u − τ xux
→ Du, em D(R)
5. Mostre que a funcao x → excos (ex) e uma distribuicao temperada.
6. Mostre que C ∞0 (RN ) e denso em S (RN )
4.9. Exercıcios 95
7. Seja f ∈ L1(RN ), f = 0. Seja λ um numero complexo tal que F (f ) = λf . Quepode dizer sobre λ?
8. Suponhamos que exista uma constante C > 0 independente de φ tal que uφ dx ≤ CφLp(RN ), ∀φ ∈ C∞
0 (RN )

5/14/2018 ESP_SOB - slidepdf.com
http://slidepdf.com/reader/full/espsob 99/244
RN
uφ dx ≤ C φLp(RN ), ∀φ ∈ C 0 (R )
entao u ∈ L p(RN ).
9. Calcular a transformada de Fourier da funcao x
→cos x, x
→sen (x
−x0)
10. Mostre que a funcao x → tg x e uma distribuicao temperada.
11. Seja p uma seminorma. Mostre que o conjunto V = x ∈ E ; p(x) = 0 e umespaco vetorial e que o conjunto C = x ∈ E ; p(x) < 1 e um conjunto convexo.
12. Se ϕ ∈ S (RN ) mostre que
lim
|x
|→∞
q(x)ϕ(x) = 0 ∀q polinomio
13. Seja p uma seminorma. Mostre que o conjunto x; p(x) = 0 e um subespacovetorial de E , e que o conjunto B = x ∈ E ; p(x) < 1 e convexo e absorvente.(Veja Exercıcios)
14. Seja Ω ⊂ Rn. Considere o espaco L p(Ω) com 0 < p < 1. Mostre que as bolas
Br(0) = f ∈ L
p
(Ω); Ω |f | p
dx < rforman uma base para a topologia induzida pela metrica definida na secao 3.12.Verifique que os conjuntos Br nao sao convexos.
15. Seja f (x) = e1/x2 mostre que ela nao e uma distribuicao em sobre Ω = R \ 016. Mostre que a aplicacao T : D(Ω) → R dada por
T , ϕ = |α|≤m
Dαϕ(x0)
com x0 ∈ Ω e uma distribuicao.
17. Mostre que a funcao f (x) = eax nao e uma distribuicao temperada para todoa = 0.
96 Capıtulo 4. Distribuic˜ oes

5/14/2018 ESP_SOB - slidepdf.com
http://slidepdf.com/reader/full/espsob 100/244
5/14/2018 ESP_SOB - slidepdf.com
http://slidepdf.com/reader/full/espsob 101/244
Capıtulo 5
Espacos de SobolevQuando puder avaliar o que est´ a falando
e exprimirlo por n´ umeros, voce sabe algoa respeito disso; mas quando n˜ ao conseguir avaliar,
nem exprimir por n´ umeros, seu conhecimento e medıocree n˜ ao pode lhe dar satisfac˜ ao
Sir W. Thomson
5.1 Os espacos W m,p
Nesta secao introduziremos os espacos W m,p e mostraremos algumas de suas principaispropriedades.
Diremos que uma funcao u tem derivadas fracas em L p(Ω), se existe uma funcao vi
tal que Ω
u∂ϕ
∂xidx = −
Ω
viϕ dx
Seja m um numero nao negativo e p satisfazendo 1 ≤ p ≤ ∞. Denotaremos por · m,p,a expressao
um,p =
0≤|α|≤m
Ω
|Dαu| p dx
1/p
, quando 1 ≤ p < ∞
um,∞ = max0≤|α|≤m
Dαu∞
O espaco W m,p e definido como
W m,p
(Ω) = v ∈ L p
(Ω); Dα
v ∈ L p
(Ω) ∀|α| ≤ m, no sentido distribucionalUsando o fato que os espacos L p sao completos podemos mostrar que os espacos W m,p
tambem sao espacos completos.
98 Capıtulo 5. Espacos de Sobolev
Teorema 5.1.1 Os espacos W m,p s˜ ao espacos completos
Demonstracao.- (Exercıcio)
Teorema 5.1.2 Os espacos W m,p s˜ ao separ´ aveis, reflexivos e uniformemente convexospara 1 < p < ∞.
Demonstracao.- (Veja Exercıcios)

5/14/2018 ESP_SOB - slidepdf.com
http://slidepdf.com/reader/full/espsob 102/244
¸ ( j )Para demostrar o teorema acima basta lembrar do conhecido resultado de An alise
Funcional:
Teorema 5.1.3 Seja E um espaco de Banach e V um subespaco fechado de E com
respeito a topologia da norma de E . Ent˜ ao V e um espaco de Banach com a norma deE , e ainda temos:
• V e separ avel se E e separ avel
• V e reflexivo se E e reflexivo
• V e uniformemente convexo se E e uniformemente convexo
Um espaco importante, e o espaco que denotaremos por
H m,p(Ω) = u ∈ C m(Ω); uW m,p < ∞·W m,p
.
Uma conjetura que ficou em aberto por muitos anos foi se a igualdade
H m,p(Ω) = W m,p(Ω)
era verdadera. Este resultado foi mostrado por Meyers e Serrin [28] em 1964.Como consequencia de que o espaco W m,p(Ω) e completo temos a seguinte inclusao:
W m,p(Ω) ⊂ H m,p(Ω)
Denotemos agora por W m,p0 (Ω) o fecho do espaco C ∞0 (Ω) com respeito a norma de
W m,p(Ω). O dual deste espaco e denotado por W −m,p(Ω).Uma das propriedades de W m,p
0 (Ω) esta resumida no seguinte teorema.
Teorema 5.1.4 Se v ∈ W m,p0 (Ω)∩C m(Ω) ent˜ ao teremos que Dαv(x) = 0 para x ∈ ∂ Ω
e para todo |α| ≤ m − 1.
Demonstracao.- Como v ∈ W m,p
0 (Ω) teremos que existe uma sequencia de funcoesvν ∈ C ∞0 (Ω) satisfazendo
vν → v, forte em W m,p(Ω)
Usando as formulas de Gauss encontramos que
5.1. Os espacos W m,p 99
Ω∂v ν
∂xi
ϕ dx =
− Ω vν ∂ϕ
∂xi
dx
∀ϕ
∈C 1(Ω)
Aplicando a convergencia de vν segue que ∂v
ϕ dx = −
v∂ϕ
dx =
∂v
ϕ dx −
vϕνi dΓ.

5/14/2018 ESP_SOB - slidepdf.com
http://slidepdf.com/reader/full/espsob 103/244
Ω ∂xi
ϕ dx
Ω
v∂xi
dx
Ω ∂xi
ϕ dx
Γ
vϕν i dΓ.
De onde concluimos que
Γvϕν i dΓ = 0 ∀ϕ ∈ C 1(Ω)
Em particular tomando ϕ = vν i teremos que Γ
|v|2 dΓ = 0
De onde segue o resultado para m = 1. Para mostrar o caso para m > 1 repetimoso mesmo processo para Dαv no lugar de v, assim teremos que Dαv = 0 para todo|α| ≤ m − 1. O que completa a demonstracao.
Proposicao 5.1.1 u ∈ W m,p(Ω) se e somente se existe uma constante C tal que Ω
uDαφ dx
≤ C φLp (Ω) ∀ϕ ∈ C ∞0 (Ω), ∀|α| ≤ m.
Demonstracao.- Fixemos α ∈ Nn tal que |α| ≤ m. Se u e uma funcao de W m,p(Ω),entao existe uma funcao v em L p(Ω) tal que
Ω
uDαφ dx = (−1)|α| Ω
vφ dx
De onde segue que Ω
uDαφ dx
≤ Ω
|v| p dx
1/p
=C
φLp (Ω)
Que mostra que a condicao e necessaria. Para mostrar que esta condicao e suficienteDefinimos o operador
T (φ) := φ → Ω
uDαφ dx
Da hipotese temos que T e um operador linear e continuo definido sobre L p(Ω), portantopelo teorema da Representacao de Riez, existe uma funcao v satisfazendo:
Ω vφ dx = T (φ) = Ω uDαφ dx
De onde segue que u possui derivadas fracas ate o ordem m. Portanto u ∈ W m,p(Ω).O seguinte Lema e bastante util para caraterizar funcoes que tem media zero.
100 Capıtulo 5. Espacos de Sobolev
Lema 5.1.1 Seja B =]a1, b1[×]a2, b2[× · · ·×]an, bn[ um hipercubo do RN . Seja φ ∈C ∞0 (B) tal que
B φ dx = 0.
Ent˜ ao existem func˜ oes φj ∈ C ∞0 (B) tais que bj
aj
φj(x) dx = 0

5/14/2018 ESP_SOB - slidepdf.com
http://slidepdf.com/reader/full/espsob 104/244
aj
e ainda
φ(x) =n
j=1
φj (x)
Demonstracao.- Consideremos primeiro o caso n = 3. Definamos
ψ2(x2, x3) =
b1
a1
φ(t1, x2, x3) dt1, ψ3(x3) =
b1
a1
b2
a2
φ(t1, t2, x3) dt1dt2.
Tomemos agora uj ∈ C ∞0 (aj, bj ) e bj
ajuj dx = 1. Definamos
ω2 = u1ψ2, ω3 = u1u2ψ3.
Logo φ1 = φ − ω2, φ2 = ω3 − ω2, φ3 = ω3.
Satisfaz as condicoes do teorema. Cosideremos o caso geral. Para j ∈ N tomemos uj
satisfazendo uj ∈ C ∞0 (aj , bj ) e bj
ajuj dx = 1. Denotemos por Bj e ψj o conjunto e a
funcao dadas porBj =]aj, bj [×]aj+1, bj+1[× · · ·×]an, bn[
ψj(xj, · · · , xn) = b1
a1 b2
a2· · · bj−1
aj−1φ(t1, · · · , tj−1, xj , · · · , xn) dt1 · · · dtj−1
respectivamente. Tomemos
ωj (x) = u1(x1) · · · uj−1(xj−1)ψj (xj, · · · , xn).
Note que ψj ∈ C ∞0 (Bj ) e ωj ∈ C ∞0 (B). Alem disso teremos que
Bj
ψj(xj, · · · , xn) dxj · · · dxn =
Bφ(x) dx = 0
As funcoes φj estao definidas por
φ1(x) = φ − ω2, φn(x) = ωn, φj (x) = ωj − ωj+1, para 2 ≤ j ≤ n − 1
E simples verficar que as funcoes φj satisfazem as condicoes requeridas.
5.1. Os espacos W m,p 101
Lema 5.1.2 Seja Ω um aberto conexo do RN . Tomemos T ∈ D(Ω) tal que ∂T ∂xj
= 0
para todo 1
≤j
≤n, ent˜ ao existe uma constante k tal que T = k.
Demonstracao.- Verifiquemos primeiro a seguinte propriedade φ dx = 0 ⇒ T (φ) = 0 (5.1)

5/14/2018 ESP_SOB - slidepdf.com
http://slidepdf.com/reader/full/espsob 105/244
B
φ ⇒ (φ) ( )
De fato, do Lema 5.1.1 teremos que existem φj ∈ C ∞0 (B) tais que
φ =n
j=1
φj.
Denotemos por
θj (x) =
xj
aj
φj(x1, · · · , xj−1, t , xj+1, · · · , xn) dt
e simples verificar que θj
∈C ∞0 (B), de onde segue que
T (φ) =n
j=1
T (φj) =n
j=1
T (∂θj
∂xj) =
∂T
∂xj(θj) = 0
Que mostra (5.1). Suponhamos agora que T = 0, entao existe uma funcao φ0 tal queT (φ0) = k1 = 0 satisfazendo
Ω φ0 dx
= 0.
Caso contrario pelo discutido acima teriamos que T = 0. Denotemos agora por k1 e k2os valores,
T (φ0) = k1,
Ω
φ0 dx = k2
Assim teremos que
T (φ0) = k1 =k1
k2 :=k
Ω φ0 dx.
Tomemos φ ∈ C ∞0 (B) arbitraria. E simples verificar que B
φ(x) −
B
φ(x) dx
k2φ0(x)
dx = 0.
Da relacao (5.1) teremos que
T
φ(x) −
B
φ(x) dx
k2φ0(x)
= 0
102 Capıtulo 5. Espacos de Sobolev
De onde segue que
T (φ) =
B
φ dx
k2T (φ0) = k
B
φ dx
Portanto T = k, o que completa a demonstracao.
Teorema 5.1.5 Seja Ω um aberto do RN , ent˜ ao u, a extens˜ ao nula de u ∈ W m,p0 (Ω)
fora de Ω pertence a W m,p(RN )
Demonstracao.- Tomemos u ∈ W m,p0 (Ω), entao existe uma sequencia de funcoes ϕν ∈

5/14/2018 ESP_SOB - slidepdf.com
http://slidepdf.com/reader/full/espsob 106/244
¸ ∈ 0 ( ), q ¸ ϕν ∈C ∞0 (Ω) tais que
ϕν → u forte em W m,p(Ω)
Como para todo ν ∈ N temos que ϕν ∈ C ∞0 (Ω) concluimos que a extensao nula de ϕν
satisfaz ϕν ∈ C ∞0 (RN
) e ainda formam uma sequencia de Cauchy em W m,p
(RN
) queverifica
ϕν → u forte em W m,p(RN )
Portanto, u pertence a W m,p(RN ).A seguinte proposicao nos da uma condicao necessaria e suficiente para que uma
funcao de L p(Ω) pertenca a W 1,p(Ω)
Proposicao 5.1.2 Seja u ∈ L p(Ω), ent˜ ao u ∈ W 1,p(Ω) se e somente se para todo
ω ⊂⊂ Ω se verifica |h| < dist (ω, Ωc) ⇒ T hu − uLp(Ω) ≤ c|h|. (5.2)
Demonstracao.- Da densidade de C 10 (Ω) em L p(Ω) podemos supor que u ∈ C 10 (Ω).Denotando por v(t) = u(x + th), teremos que
u(x + h) − u(x) =
10
d
dtv(t) dt
= 10 h · u(x + th) dt.
Aplicando a desigualdade de Holder e elevando a potencia p temos
|u(x + h) − u(x)| p ≤ |h| p 10
|u(x + th)| p dt.
Integrando sobre ω ⊂⊂ Ω obtemos
ω |T hu
−u
| p dx
≤ |h
| p
ω 1
0 |u(x + th)
|dt dx
= |h| p 10
ω
|u(x + th)| dx dt
= |h| p 10
ω+th
|u(y)| dydt
5.2. Os espacos W −m,p 103
Tomando h pequeno temos que
T hu − uLp(ω) ≤ |h|uLp(Ω)
Portanto a condicao e necessaria. Suponhamos agora que a propriedade 5.2 seja valida.Tomemos uma funcao ϕ ∈ C 10(Ω). Entao existe ω ⊂⊂ Ω tal que Supp ϕ ⊂ ω, assim

5/14/2018 ESP_SOB - slidepdf.com
http://slidepdf.com/reader/full/espsob 107/244
ω
u(x + h) − u(x) ϕ(x) dx ≤ T hu − uLp(Ω)ϕLp(Ω)
≤ c|h|ϕLp (Ω)
para todo h tal que h < dist(ω, Ωc). Fazendo uma mudanca de variavel, obtemos Ω
u(x + h) − u(x) ϕ dx =
Ω
u(x) ϕ(x + h) − ϕ(x) dx,
de onde segue que
Ω uϕ(x − h) − ϕ(x)
h dx
≤c
ϕ
Lp (Ω).
Tomando h = |h|ei e fazendo h → 0 na desigualdade anterior, segue que
− Ω
u∂ϕ
∂xidx ≤ cϕLp (Ω)
Para todo ϕ ∈ C 10 (Ω). O resultado segue da Proposicao 5.1.1.
5.2 Os espacos W −m,p
Nesta secao caraterizaremos os espacos W −m,p(Ω). Denotemos por M o numero demulti indices α satisfazendo |α| ≤ m. Os espacos W m,p(Ω) podem ser considerados umsubespaco fechado de [L p(Ω)]M utilizando a seguinte injecao
i : W m,p(Ω) → [L p(Ω)]M
v → i(v) = (Dαv)|α|≤m
E simple verificar que o operador i e uma isometria entre W m,p(Ω) e i(W m,p(Ω)).A seguir mostratemos que toda distribuicao de W −m,p(Ω) e a soma de derivadas defuncoes de L p(Ω). Para isto utilizaremos o seguinte Lema.
Lema 5.2.1 Tomemos 1 ≤ p < ∞. Ent˜ ao para todo elemento T ∈ (W m,p(Ω))∗ dual do espaco W m,p(Ω), existe um elemento v
∈[L p(Ω)]M , da forma v = (vα)|α|≤N tal que
T (v) =|α|≤N
Ω
Dαu vα dx
104 Capıtulo 5. Espacos de Sobolev
Demonstracao.- Denotemos por W a imagem do espaco W m,p(Ω) pela aplicacao i.Definamos um operador T ∗ sobre W como sendo
T ∗(i(u)) = T (u),
∀u
∈W m,p(Ω)
Como i e um isomorfismo isometrico teremos que T ∗ = T . Pelo Teorema de Hanh
Banach existe uma extensao T de T ∗ a todo o espaco [L p(Ω)]M . Pelo Teorema darepresentacao de Riesz para os espacos L p, teremos que existe um elemento
v = (vα)|α|≤N ∈ [L p(Ω)]M ,

5/14/2018 ESP_SOB - slidepdf.com
http://slidepdf.com/reader/full/espsob 108/244
( α)|α|≤N [ ( )] ,
tal que para todo elemento
u = (uα)|α|≤N ∈ [L p(Ω)]M ,
se verifica T (u) =|α|≤N
Ω
uαvα dx.
Portanto se u ∈ W m,p(Ω) entao teremos que
T (u) = T (u) =|α|≤N
Ω
Dαuvα dx
Mais ainda, teremos queT (W m,p(Ω))∗ = vLp (Ω)
De onde segue o resultado
Teorema 5.2.1 Tomemos 1 ≤ p < ∞. Ent˜ ao para todo elemento T ∈ W −m,p(Ω) dual do espaco W m,p
0 (Ω), existem func˜ oes vα tais que
T =|α|≤N
(−1)|α|DαT vα
Demonstracao.- Do Lema 5.2.1 podemos supor, usando o Teorema de Hanh Banachse for necessario, que
T (u) =|α|≤N
Ω
Dαuvα dx
para vα ∈ L p(Ω). Tomemos um elemento φ ∈ C ∞0 (Ω), nestas condicoes teremos que
T (φ) = |α|≤N Ω Dαφvα dx
=|α|≤N
(−1)|α| Ω
φDαvα dx
Aplicando densidade, obtemos o resultado
5.3. Partic˜ ao da unidade 105
Observacao 5.2.1 O resultado anterior nos diz que todo elemento de W −m,p e soma de derivadas de ate ordem m de elementos func˜ oes em L p
5.3 Particao da unidade
Lema 5.3.1 Seja Φ uma colec˜ ao de abertos do RN tais que

5/14/2018 ESP_SOB - slidepdf.com
http://slidepdf.com/reader/full/espsob 109/244
Ω = ∪O∈ΦO
Ent˜ ao existem func˜ oes ϕi ∈ D
(Ω), ϕ≥
0 tais que
(i) ∀ϕi, ∃ O ∈ Φ, tal que Supp ϕi ⊂ O(ii)
∞i=1 ϕi(x) = 1, ∀x ∈ Ω
(iii) ∀ Compacto K ⊂ Ω ∃m ∈ N e um conjunto W aberto, K ⊂ W tal que
ϕ1(x) + ϕ2(x) + · · · + ϕm(x) = 1, ∀x ∈ W
Demonstracao.- Seja S um subconjunto denso e numeravel de Ω. Denotemos porB1, B2, B3, · · · a famila de bolas fechadas com centro em pi ∈ S e tais que Bi ⊂ Opara algum O de Φ. Denotemos por V i a bola aberta com centro em pi e raio ri
2 . Esimples verificar que Ω = ∪∞i=1V i. Denotemos por ψi ∈ C ∞0 (RN ) tal que ψi ≥ 0, ψi = 1em V i, e ψi = 0 fora de Bi. Definamos por
ϕ1 = ψi, ϕi+1 = (1 − ψ1) · · · (1 − ψi)ψi+1, i ≥ 1.
Note que ϕj = 0 fora de Bj, o que prova a parte (i). Por outro lado, para toda i severifica a identidade
ϕ1 + ϕ2 + · · · + ϕm = 1 − (1 − ψ1) · · · (1 − ψi−1)ψi
De fato, para n = 1 a identidade acima e valida. Para verificar que esta identidadetambem e valida para i + 1 no lugar de i, basta somar as duas identidades anteriorespara obter
ϕ1 + ϕ2 + · · · + ϕi+1 = 1 − (1 − ψ1) · · · (1 − ψi)ψi+1
Portanto a identidade e valida para todo i ∈ N. Como ψ = 1 em V i segue que
ϕ1(x) + ϕ2(x) + · · · + ϕm(x) = 1, ∀x ∈ ∪mi=1V i
De onde segue (ii). Finalmente, se K e um compacto, existe um numero j tal que
K ⊂ ∪
j
i=1V i
=W
De onde segue a demonstracao.
106 Capıtulo 5. Espacos de Sobolev
5.4 Aproximacoes por funcoes suaves
Denotemos por ρ ≥ 0 uma funcao C ∞0 (Ω) com as seguintes propriedades:
• ρ(x) = 0 se |x| ≥ 1, e
• RN ρ(x) dx = 1.
Por exemplo considere a funcao

5/14/2018 ESP_SOB - slidepdf.com
http://slidepdf.com/reader/full/espsob 110/244
ρ(x) =
κe− 1
1−|x|2 se |x| < 10 se |x| ≥ 1
Onde κ e tomado de tal forma que RN ρ(x) dx = 1. Definamos por ρ a sequencia
ρ(x) = −nρ(x
).
Esta sequencia e chamada de sequencia regularizante. As propriedades desta sequenciaestao resumidas nos seguintes Lemas.
Exemplo 5.4.1 Como uma aplicac˜ ao da seq¨ uencia regularizante podemos construir
uma func˜ ao f ∈ C ∞0 (R
) satisfazendo as seguinte propriedades:
f (x) = 1, ∀|x| ≤ 1; f (x) = 0, ∀|x| ≥ 2
Para isto definamos
h(x) =
1 x ∈ ] − 32 , 32 [
0 x ∈ ] − 32 , 32 [
Fasendo f (x) = ρ
∗h(x), para < 1
2
, se verificam as condic˜ oes.
Lema 5.4.1 Seja u ∈ L p(Ω), ent˜ ao se verifica que
lim→0
ρ ∗ u − uLp(Ω) = 0.
Demonstracao.- Mostraremos que para todo η > 0 existe δ > 0 tal que
< δ
⇒ ρ
∗u
−u
Lp(Ω) < η.
Para isto usaremos o fato que as funcoes contınuas com suporte compacto sao densasem L p(Ω). Assim dado η existe ϕ ∈ C 0(Ω) tal que
ϕ − uLp(Ω) <η
3
5.4. Aproximac˜ oes por func˜ oes suaves 107
Aplicando a desigualdade de Young (Teorema 3.3.1) teremos que
ρ ∗ u − ρ ∗ ϕLp(Ω) <
η
3 .
Finalmente, note que
|ρ ∗ ϕ(x) − ϕ(x)| = | RN
ρ(x − y)(ϕ(y) − ϕ(x)) dy|

5/14/2018 ESP_SOB - slidepdf.com
http://slidepdf.com/reader/full/espsob 111/244
R
≤ sup|x−y|<
|ϕ(y) − ϕ(x)|
Tomando suficientemente pequeno e lembrando que ϕ possui suporte compacto, pode-mos escreverρ ∗ ϕ − ϕLp(Ω) <
η
3.
Das desigualdades acima teremos que
ρ ∗ u − uLp(Ω) ≤ ρ ∗ u − ρ ∗ ϕLp(Ω) + ρ ∗ ϕ − ϕLp(Ω) + ϕ − uLp(Ω).
De onde segue que
ρ ∗ u − uLp(Ω) ≤ η.
Que mostra o resultado.
O Lema anterior nao implica que ρ ∗u converge para u em W m,p(Ω). O problema eque para valores de x proximos de ∂ Ω e valores de y variando na bolaB(x,
|x
−y
|), a diferencia x
−y nao necesariamente esta em Ω. Isto e a convolucao
nao esta bem definida,
Dαρ ∗ u = ρ ∗ Dαu =
Ω
ρ(y)Dαu(x − y) dy.
O procedimento padrao nestes casos e extender a funcao nula fora de Ω, mais isto criaproblemas com as derivadas. Por enquanto somente mostraremos o seguinte resultado.
Lema 5.4.2 Seja Ω
⊂⊂Ω, nestas condic˜ oes teremos que
ρ ∗ u → u em W m,p(Ω)
Demonstracao.- Tomemos < dist(Ω, ∂ Ω). A derivada no sentido das distribuicoesde ρ ∗ u e dada por
Ωρ ∗ uDαϕ(x) dx =
RN
RN
u(x − y)ρ(y)Dαϕ(x) dxdy
= (−1)|α|
RN RN Dαu(x − y)ρ(y)ϕ(x) dxdy
= (−1)|α| Ω
ρ ∗ Dαuϕ(x) dxdy
108 Capıtulo 5. Espacos de Sobolev
De onde segue queDαρ ∗ u = ρ ∗ Dαu
Aplicando o Lema 5.4.1, obtemos o resultado.
Observacao 5.4.1 Seja Ω =] − 1, 1[\ 0 e simples verificar que a funcao
sinal(x) =
−1 se x < 01 se x > 0
∈ C ∞(Ω)
isso porque o unico ponto de discontinuidade e o zero, que nao pertence ao conjunto. Nof ( ) f (Ω) S

5/14/2018 ESP_SOB - slidepdf.com
http://slidepdf.com/reader/full/espsob 112/244
sentido fraco sinal(x) e um funcao que pertence a W m,p(Ω). Similarmente em dimensaodois. Denotemos por Ω o conjunto
Ω =]0, 1[×]0, 1[\(x, y); x =
1
2 , y ∈]0, 1[Nessas condicoes teremos que
f (x, y) =
−1 se 0 < x < 12
1 se 12 < x < 1
∈ C ∞(Ω)
Para verificar que tanto x → sinal(x) como f sao funcoes em W 1,p(Ω), mostraremos queelas tem derivadas fracas em L p(Ω). De fato, tomemos uma ϕ ∈ C ∞0 (Ω), satisfazendoSupp ϕ
⊂⊂Ω.
Ω =]0, 12
[∪] 12
, 1[×]0, 1[
1
2
1
1
Integrando temos, Ω
sinal(x)ϕ(x) dx = − 0−1
ϕ(x) dx +
01
ϕ(x) dx = 0 ∀ϕ ∈ C ∞0 (Ω)
De onde segue que ddx sinal(x) = 0 e portanto x → sinal(x) ∈ W 1,p(Ω). De forma
analoga mostramos que f ∈ W 1,p(Ω). Como a derivada e nula em ambos casos, teremosque
x → sinal(x) ∈ C ∞(Ω), f ∈ C ∞(Ω).
Portanto o espaco C ∞(Ω) nao esta formado apenas por funcoes suaves para qualqueraberto Ω ⊂ Rn. Nosso seguinte paso e mostrar que C ∞(Ω) e um conjunto denso emW m,p(Ω)
5.4. Aproximac˜ oes por func˜ oes suaves 109
Teorema 5.4.1 Seja Ω um aberto do RN , ent˜ ao teremos que
C ∞(Ω)·W m,p(Ω)
= W m,p
(Ω).
Demonstracao.- Seja u ∈ W m,p(Ω), mostraremos que dado > 0 existe uma funcaoφ ∈ C ∞(Ω) tal que
u − φW m,p(Ω) < .

5/14/2018 ESP_SOB - slidepdf.com
http://slidepdf.com/reader/full/espsob 113/244
Para isto utilizaremos a particao da unidade. Denotemos por Ωk o conjunto
Ωk = x ∈ Ω; |x| < k, e dist(x, ∂ Ω) >
1
kDenotemos por Ω0 = Ω−1 = ∅. Definamos por O a famılia de abertos,
O = U k; U k = Ωk+1 ∩ (Ωk−1)
c, k = 1, 2 · · ·
Esta famılia de conjuntos e um cobertura aberto de Ω. Denotemos por Ψ a particao daunidade associada a
O, isto e
Supp ϕi ⊂ U i, e∞
i=1
ϕ(x) = 1, ∀x ∈ Ω.
Tomemos 0 < < 1(k+1)(k+2) entao teremos que
Supp(ρ ∗ (ϕku)) ⊂ V k := Ωk+2 ∩ (Ωk−2)c.
Note que ϕku ∈ W m,p(Ω), podemos entao escolher 0 < k tal que
ρk∗ (ϕku) − ϕkuW m,p(Ω) = ρk
∗ (ϕku) − ϕkuW m,p(V k) <
2k.
Por outro lado, para todo Ωk ⊂⊂ Ω temos que
ψ(x) =∞
k=1 ρk
∗(ϕku)
e uma soma finita, portanto ψ ∈ C ∞0 (Ω) e ainda temos que
u =k+2j=1
ϕju.
De onde segue que
u − ψW m,p(Ωk) ≤k+1j=1
ρj∗ (ϕju) − ϕj uW m,p(Ω) <
110 Capıtulo 5. Espacos de Sobolev
Usando o teorema de convergencia monotona, segue o resultado.
Na observacao 5.4.1 mostramos um aberto Ω ⊂ Rn para o qual se verifica que sinal(x)pertence a W m,p(Ω). Veremos porteriormente que a convergencia em W m,p para m >n/p implica em convergencia uniforme, portanto existem funcoes em W m,p(Ω) que naopodem ser aproximadas por funcoes em C ∞0 (RN ). Portanto e falso que as funcoes suavesdo RN sejam densas em W m,p(Ω) para todo aberto Ω. Definiremos a seguir uma classede abertos Ω onde as restricoes de funcoes C ∞0 (RN ) sao densas em W m,p(Ω).
Definicao 5 4 1 (Propriedade do Segmento) Diremos que um aberto Ω possui a
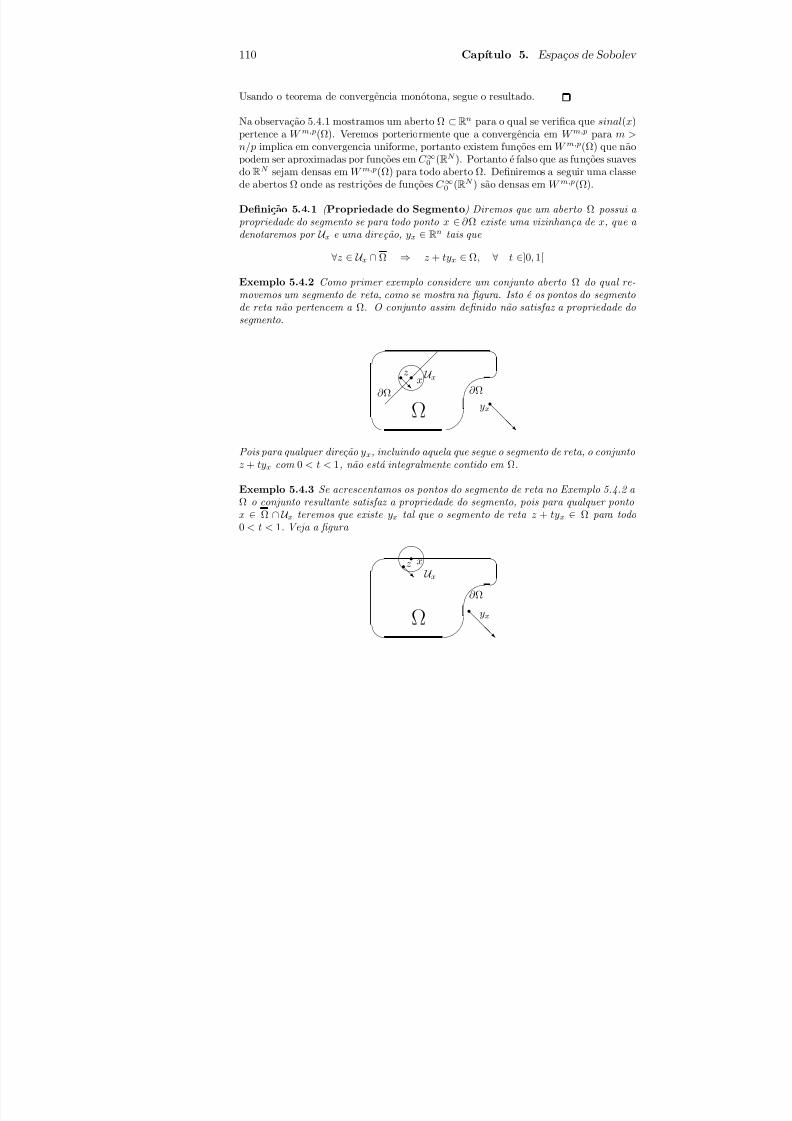
5/14/2018 ESP_SOB - slidepdf.com
http://slidepdf.com/reader/full/espsob 114/244
Definicao 5.4.1 ( Propriedade do Segmento) Diremos que um aberto Ω possui a propriedade do segmento se para todo ponto x ∈ ∂ Ω existe uma vizinhanca de x, que a denotaremos por U x e uma direc˜ ao, yx ∈ Rn tais que
∀z ∈ U x ∩ Ω ⇒ z + tyx ∈ Ω, ∀ t ∈]0, 1[
Exemplo 5.4.2 Como primer exemplo considere um conjunto aberto Ω do qual re-movemos um segmento de reta, como se mostra na figura. Isto e os pontos do segmentode reta n˜ ao pertencem a Ω. O conjunto assim definido n˜ ao satisfaz a propriedade dosegmento.
#"
¨ ©9 7
"!#x∂ Ω ∂ Ω
U x rz
d d d
ryx
r d
Ω
Pois para qualquer direc˜ ao yx, incluindo aquela que segue o segmento de reta, o conjuntoz + tyx com 0 < t < 1, n˜ ao est´ a integralmente contido em Ω.
Exemplo 5.4.3 Se acrescentamos os pontos do segmento de reta no Exemplo 5.4.2 a Ω o conjunto resultante satisfaz a propriedade do segmento, pois para qualquer pontox ∈ Ω ∩ U x teremos que existe yx tal que o segmento de reta z + tyx ∈ Ω para todo0 < t < 1. Veja a figura
#
"
¨ ©9
7"!
#x
∂ Ω U
x
rz
d d d
ryx
r d
Ω
5.4. Aproximac˜ oes por func˜ oes suaves 111
Agora estamos em condicoes de mostrar que as funcoes suaves com suporte compactodefinidas sobre todo o espaco RN sao densas nos espacos W m,p(Ω) quando Ω possui a
propriedade do segmento. A principal diferenca deste resultado respeito ao Teorema5.4.1, e que neste caso precissamos definir a funcao suave sobre todo RN .
Teorema 5.4.2 Suponhamos que Ω possui a propriedade do segmento, ent˜ ao o as res-tric˜ oes a Ω das func˜ oes C ∞0 (RN ) s˜ ao densas em W m,p(Ω).
Demonstracao A demonstracao sera feita em tres etapas A primera consiste em

5/14/2018 ESP_SOB - slidepdf.com
http://slidepdf.com/reader/full/espsob 115/244
Demonstracao.- A demonstracao sera feita em tres etapas. A primera consiste emmostrar que toda funcao de W m,p(Ω) pode ser aproximada por uma funcao com suportelimitado que denotaremos por K . Na segunda etapa, explorando o fato que Ω possui
a Propriedade do Segmento, construiremos uma famılia de abertos que cobrem ao con- junto K . Associada a esse cobrimento utilizaremos as funcoes da particao da unidadepara definir as funcoes sobre cada um dos abertos que cobrem K . O problema centrale mostrar que existe uma funcao de C ∞0 (RN ) que aproximem estas componentes.
Seja f ∈ C ∞0 (RN ), satisfazendo
f (x) = 1 se |x| ≤ 1
f (x) = 0 se|x| ≥
2
|Dαf (x)| ≤ M ∀0 ≤ |α| ≤ m
Definamos a sequencia f (x) = f (x) para todo > 0. E simples verificar que f satisfazas seguintes propriedades
f (x) = 1 se |x| ≤ 1
, |Dαf (x)| ≤ M|α| ≤ M, para < 1
Definamos a funcao u = f u, note que usando as formulas de diferenciacao, teremosque u ∈ W m,p(Ω). Alem disso, o suporte de u e limitado em Ω (nao necessariamenteum compacto de Ω), isto e Supp(u) ∩ ∂ Ω = ∅. Denotemos por
Ω =
x ∈ Ω; |x| ≥ 1
Lembrando a definicao de u obtemos que
u − uW m,p
(Ω) = u − uW m,p
(Ω)≤ uW m,p(Ω) + uW m,p(Ω)
≤ C uW m,p(Ω) → 0
quando → 0. Portanto, toda funcao u ∈ W m,p(Ω) pode ser aproximada por umafuncao com suporte limitado em Ω. Seja K = supp(u). Da definicao de u K elimitado. Denotemos por U x a colecao de conjuntos abertos dados pela definicao dapropriedade do segmento. Entao teremos que o conjunto
F = K \ (∪x∈∂ Ω U x)
e um compacto contido em Ω.
112 Capıtulo 5. Espacos de Sobolev
T
1 (f
f f
f f
g g g g g
g
Y
Ω
U 0K

5/14/2018 ESP_SOB - slidepdf.com
http://slidepdf.com/reader/full/espsob 116/244
q E'
c
0 ) f f g
g X
Como F e compacto contido em Ω, existe um aberto U 0 tal que
F ⊂⊂ U 0 ⊂⊂ Ω.
com a propriedade queK ⊂ ∪k
j=0 U j .
Mais ainda, podemos encontrar abertos
U j satisfazendo
U j ⊂⊂ U j, e K ⊂ ∪kj=1
U j .
Denotemos por Φ a particao C ∞ da unidade subordinada aos abertos U 0, U 1, · · · , U k
e por uj = ψj u para ψj ∈ Φ. Mostraremos que para cada ψj temos
uj − ψjW m,p(Ω) ≤
k + 1, (5.3)
fazendo ψ = kj=0 ψj teriamos
u − ψW m,p(Ω) ≤k
j=0
uj − ψjW m,p(Ω) ≤
De onde segue a demonstracao deste teorema. Portanto nosso objetivo sera mostrarque a desigualdade (5.3) e valida para todo j. Como Supp(u0) ⊂ U 0 ⊂⊂ Ω, peloLema 5.4.2 existe uma funcao ψ0 satisfazendo a desigualdade (5.3). Resta portantoencontrar funcoes ψj satisfazendo (5.3) para j = 1, · · · , k. Para cada j estendamos uj
sendo zero fora de Ω. Portanto teremos que uj ∈
W m,p(RN
\Γ), onde Γ = U j ∩
∂ Ω. Sejay o vetor nao nulo associado ao conjunto U j na definicao da propriedade do segmento.Denotemos por Γt = Γ − ty, onde t e tomado tal que
0 < t < min
1,dist( U j ,RN \ U j)/|y|
5.4. Aproximac˜ oes por func˜ oes suaves 113
U j
UΓt
Γ Ω
y
5/14/2018 ESP_SOB - slidepdf.com
http://slidepdf.com/reader/full/espsob 117/244
U j
Entao, pela propriedade do Segmento, Γt ⊂ U j e ainda temos que Γt ∩ Ω = ∅.Definamos a funcao uj,t = uj(x+ty), entao e simples verificar que uj,t ∈ W m,p(RN \Γt).Como as translacoes sao contınuas em L p entao teremos que
Dαuj,t → Dαuj em L p(Ω)
quando t → 0+. Portanto e suficiente mostrar que existe uma ψj ∈ C ∞0 (RN ) tal que
uj,t − ψjW m,p(Ω) ≤ .
Como o conjunto Ω ∩ U j ⊂⊂ Rn \ Γt pelo Lema 5.4.2, podemos tomar ψj = ρδ ∗ uj,t
para δ suficientemente pequenho. Isto prova o resultado.Como consequencia do resultado anterior teremos
Corolario 5.4.1 W m,p0 (RN ) = W m,p(RN )
Uma pergunta natural neste ponto, e se existem outros conjuntos abertos Ω paraos quais se verifica
W m,p0 (Ω) = W m,p(Ω) (5.4)
Observacao 5.4.2 Uma condicao necessaria para que a indentidade (5.4) seja valida
e que o complemento Ωc de Ω tenha medida nula. De fato, suponhamos que o com-plemento Ωc de Ω tenha medida positiva e que (5.4) seja valido. Entao existirıa umaberto limitado B que interseta Ω e Ωc em conjuntos de medida positiva. Denotemospor φ ∈ C ∞0 (RN ) tal que φ(x) = 1 se x ∈ Ω ∩ B, entao a restricao de φ a Ω, pertencea W m,p(Ω) e portanto φ ∈ W m,p
0 (Ω). Portanto podemos extender φ a todo o RN como
sendo nula fora de Ω. Neste caso
φ ∈ W m,p(RN ). Mas ∂ eφ
∂xje nula em sobre B, de onde
φ deve asumir valores constantes em B, Como φ = 1 em B
∩Ω e φ = 0 em B
∩Ωc,
temos a contradicao procurada.
Introduzamos agora os conjuntos (m,p’) polar
114 Capıtulo 5. Espacos de Sobolev
Definicao 5.4.2 Diremos que um conjunto fechado F e (m-p’) polar se para toda distribuic˜ ao T ∈ W −m,p(RN ) e v alido
Supp(T )
⊂F
⇒T = 0
Observacao 5.4.3 Todo conjunto (m,p’) polar deve ter medida nula. De fato, seMed(F ) e positiva, denotemos por K um compacto K ⊂⊂ F tal que Med(K ) sejapositiva. Assim definimos T K como sendo a distribuicao associada a χK em L1
loc(RN ),onde por χK estamos denotando a funcao caraterıstica sobre K . Logo teriamos que
Supp(T ) ⊂ F

5/14/2018 ESP_SOB - slidepdf.com
http://slidepdf.com/reader/full/espsob 118/244
Supp(T K ) ⊂ F
mas T K nao e nula.
Observacao 5.4.4 Os conjuntos (m,p’) polares dependen da dimensao, de m e p. Porexemplo, consideremos W m,p(RN ) tal que mp < n. Entao todo ponto x0 e um conjunto(m,p’) polar. De fato, se
Supp(T ) ⊂ x0Pelo Teorema 4.3.1 teremos que T deve ser o Delta de Dirac ou uma combinacao lineardas derivadas dele. Veremos mais adiante que quando mp < n
W m,p(RN )
⊂C (RN ),
isto e δx0 ∈ W −m,p(RN ). Mais ainda Dαδx0 ∈ W −m,p(RN ) para todo multi indice α.Logo a unica distribuicao em W m,p(Ω) com suporte em x0 e T = 0.
No caso em que mp > n, Teremos que
W m,p(RN ) ⊂ C (RN ).
Logo δx0 ∈ W −m,p(RN ), entao teriamos que o conjunto x0, nao pode ser um conjunto(m,p’) polar. Neste caso o unico conjunto (m,p’) polar e o conjunto vazio.
O seguinte resultado e bastante ilustrativo.
Teorema 5.4.3 O conjunto C ∞0 (Ω) e denso em W m,p(RN ) se e somente se o comple-mento Ωc e (m,p’) polar.
Demonstracao.- Suponhamos que C ∞0 (Ω) e denso em W m,p(RN ). Tomemos umadistribuicao T talque seu suporte esteja contido em Ωc isto e
Supp T ⊂
Ωc
Provaremos que T e nula. De fato, tomemos u ∈ W m,p(RN ), pela hipotese segue queexiste uma sequencia de funcoes ϕν em C ∞0 (Ω) tal que
ϕν → u em W m,p(RN ).
5.4. Aproximac˜ oes por func˜ oes suaves 115
Note que Supp(ϕν )⊂ Ω. Como o suporte de T esta contido no complemento de Ωteremos que
T (u) = limν→∞T (ϕν ) = 0, ∀u ∈ W m,p
(R
N
)
De onde segue que T = 0. Portanto Ωc e (m,p’) polar.Recıprocamente, suponhamos que C ∞0 (Ω) nao seja denso em W m,p(RN ). Lem-
brando que as extencoes nulas fora de Ω de funcoes em W m,p0 (Ω) sao elementos de
W m,p(RN ), podemos identificar W m,p0 (Ω) como um subconjunto de W m,p(RN ). Logo
i t l t d W m p(RN ) ˜ t W m,p(Ω) P l t d

5/14/2018 ESP_SOB - slidepdf.com
http://slidepdf.com/reader/full/espsob 119/244
existe um elemento v de W m,p(RN ) que nao pertence a W m,p0 (Ω). Pelo teorema de
Hahn-Banach existe uma aplicacao linear, contınua e nao nula T sobre W m,p(RN ), isto
e T ∈ W −m,p
(RN
) tal que T = 0 em W m,p
0 (Ω) e T (v) = 0. Como T se anula emW m,p
0 (Ω) o suporte deve estar contido em Ωc, mais como T e nao nula, entao Ωc naopode ser (m,p’) polar.
Teorema 5.4.4 • Se W m,p(Ω) = W m,p0 (Ω) ent˜ ao Ωc e (m,p’) polar.
• Se o complemento de Ω, Ωc e simultaneamente (m,p’) polar e (1,p) polar, ent˜ aoteremos que W m,p(Ω) = W m,p
0 (Ω)
Demonstracao.- Suponhamos que W m,p(Ω) = W m,p0 (Ω). Pelo Exemplo 5.4.2, temosque Ωc tem medida nula. Tomemos uma funcao v ∈ W m,p(RN ) e denotemos por u suarestricao ao conjunto Ω, portanto como
u ∈ W m,p(Ω) = W m,p0 (Ω).
Denotemos por
u a extensao de u ao RN nula fora de Ω. Por ser zero em Ωc podemos
aproximar
u por funcoes de C ∞0 (Ω). Mas v =
u quase sempre em RN . Portanto,
suas derivadas distribucionais coincidem em W m,p
(RN
). Logo, C ∞0 (Ω) e denso emW m,p(RN ). Pelo Teorema 5.4.3 segue que Ωc deve ser (m,p’) polar.
Para demostrar a segunda parte do teorema, suponhamos que Ωc seja simultane-amente (m,p’) polar e (1,p) polar. Tomemos u ∈ W m,p(Ω). Mostraremos que u ∈W m,p
0 (Ω). Denotemos por u a extensao de u nula fora de Ω, entao teremos queu ∈ L p(RN ). Denotemos por T Djeu, a distribuicao associada a Dju. Claramente temosque
T Dj
eu
∈W −1,p(RN ).
Por outro lado, como (Dju) ∈ L p(RN ) ⊂ W −1,p(RN ), portanto temos que
T gDj u∈ W −1,p(RN )
Logo segue que
T Djeu−gDj u
∈ W −1,p(RN ).
Como Dju − Dju e nula em Ω, entao temos que
Supp T Djeu−gDj u
⊂ Ωc
116 Capıtulo 5. Espacos de Sobolev
Sendo Ωc (1,p) polar, teremos que
Dj
u =
Dju
no sentido das distribuicoes. Raciocinando da mesma forma podemos mostrar que
Dαu = Dαu
no sentido das distribuicoes. Mas a identidade acima implica queu ∈ W m,p(RN ).
Finalmente, como Ωc e (m,p’) polar segue que as funcoes C ∞0 (Ω) sao densas em W m,p(RN ),

5/14/2018 ESP_SOB - slidepdf.com
http://slidepdf.com/reader/full/espsob 120/244
portanto existe uma sequencia de funcoes em C ∞0 (Ω) convergindo para
u que implica
em particular que u ∈ W m,p0 (Ω). O que completa a demonstracao.
5.5 Operadores de prolongamento
Nesta secao estudaremos algumas das condicoes que deve satisfazer um aberto Ω paraque exista um operador que possa extender funcoes de W m,p(Ω) para W m,p(RN ).
Definicao 5.5.1 Diremos que um operador P e de prolongamento se satisfaz as seguintespropriedades:
•P : W m,p(Ω)
→W m,p(RN ).
• P u(x) = u(x), quase sempre em Ω
• P uW m,p(RN ) ≤ C uW m,p(Ω)
Estes operadores sao importantes porque permitem extender as propriedades que temos espacos W m,p(RN ) aos espacos W m,p(Ω). Por exemplo, se a imersao W m,p(RN ) ⊂Lq(RN ) e conhecida, entao usando as propriedades de operador prolongamento podemosextender os resultados para abertos limitados W m,p(Ω) ⊂ Lq(Ω). De fato, tomemosu ∈ D(Ω)
uLq(Ω) ≤ cP uLq(RN ) ≤ cK P uW m,p(RN ) ≤ c2uW m,p(Ω)
Como D(Ω) e denso em W m,p(Ω) segue o resultado. Para mostrar a existencia destesoperadores, introduziremos as seguintes notacoes.
Se x ∈ RN , escreveremos x = (x, xn) o vetor tal que x ∈ Rn−1 e x = (x1, · · · , xn−1).Introduzimos tambem os seguintes conjuntos:
RN + = x = (x, xn); xn > 0Q = x = (x, xn); |x| < 1, |xn| < 1
Q+ = Q ∩ Rn+
Q0 = x = (x, xn); |x| < 1, xn = 0
5.5. Operadores de prolongamento 117
q E'
T
X
Y
Q+
Q0Q−
Q

5/14/2018 ESP_SOB - slidepdf.com
http://slidepdf.com/reader/full/espsob 121/244
c
No grafico acima temos que Q = Q+ ∪ Q− ∪ Q0. Nesta secao nos limitaremos aestudar a existencia dos operadores Prolongamento para dominios de classe C m, quedefinimos a seguir.
Definicao 5.5.2 Diz-se que um aberto Ω e de classe C m, se para todo x ∈ ∂ Ω, existeum entorno de x que denotaremos por V x e uma aplicac˜ ao bijetiva
H : Q → V x,
satisfazendo as seguintes propriedades,
H ∈ C m(Q), H −1 ∈ C m(V x), H (Q+) = V x ∩ Ω, H (Q0) = V x ∩ ∂ Ω,
No seguinte Lema construiremos um operador que extende as funcoes W m,p(Q+) paraW m,p(Q+
∪Q− ∪
Q0). Graficamente teremosPara construir um operador prolongamento que seja contınuo, teremos que extender
as funcoes por simetria ou por reflexoes, veja os graficos.
Grafico obtido por simetrıa
q E'
T
c
979
68 6
y = f (x)
y = f (−x)
X
Y
Grafico obtido por reflexao
q E'
T
c
X
Y
535 35
3
y = f (x)
118 Capıtulo 5. Espacos de Sobolev
Lema 5.5.1 Existe um operador p : W m,p(Q+) → W m,p(Q), com as seguintes pro-priedades:
• pu(x) = u(x) para todo x ∈ Q+
• puW m,p(Q) ≤ uW m,p(Q+)
Demonstracao.- Denotemos por D(Q+) o espaco de todas as restricoes de funcoes deC ∞0 (RN ) ao conjunto Q+. Pelo teorema de densidade, D(Q+) e denso em W m,p(Q+).Definamos p da seguinte forma:
pu(x, xn) =
u(x, xn) se 0 < xn < 1n
( 1 ) 1 < < 0

5/14/2018 ESP_SOB - slidepdf.com
http://slidepdf.com/reader/full/espsob 122/244
p ( , n)
k=1 αku(x, − 1
k xn) se −1 < xn < 0
Onde os valores αk sao escolhidos tais que
mk=1
(−1)j k−j αk = 1 ∀ j 0 ≤ j ≤ m − 1.
E simples verificar que toda funcao φ ∈ D(Q+) satisfaz
pφ ∈ C m−1(Q+),∂ mP φ
∂xmn
∈ L p(Q+).
Portanto para φ
∈ D(Q+) temos que
p(φ) ∈ W m,p(Q).
fazendo uma mudanca de variavel verificamos a desigualdade
pφW m,p(Q) ≤ C φW m,p(Q+). (5.5)
Pela densidade das funcoes D(Q+) em W m,p(Q+) podemos extender de forma unica ooperador P ao espaco
p : W m,p(Q+) → W m,p(Q).
O operador P verifica as propriedades do Lema. De fato, seja u ∈ W m,p(Q+). Entaoexiste uma sequencia de funcoes testes φν convergindo forte para u. Se x ∈ Q+, teremosque
pu(x) = limν→∞
P φν (x) = limν→∞
φν (x) = u(x), quase sempre em Q+.
Finalmente, por densidade podemos extender a desigualdade (5.5) para toda funcaoW m,p(Q). De onde segue o resultado.
Teorema 5.5.1 Suponhamos que Ω seja um aberto de classe C m
com fronteira limi-tada. (Ou Ω = RN + ). Ent˜ ao existe um operador prolongamento
P : W m,p(Ω) → W m,p(RN )
linear, tal que para todo u ∈ W m,p(Ω) satisfaz
5.5. Operadores de prolongamento 119
• P u(x) = u(x), para quase todo x ∈ Ω
• P u
W m,p(RN )
≤C
u
W m,p(Ω)
Onde C e uma constante que somente depende de m, p e Ω.
Demonstracao.- Usando as cartas locais podemos retificar o dominio Ω. Pelas hipotesesexistem abertos U 1, U 2, · · · U m e aplicacoes bijetivas H i : Q → U i, tais que
H ∈ C m(Q), H −1 ∈ C m(U x), H (Q+) = U x ∩ Ω, H (Q0) = U x ∩ ∂ Ω,

5/14/2018 ESP_SOB - slidepdf.com
http://slidepdf.com/reader/full/espsob 123/244
(Q), ( x), (Q+) x , (Q0) x ,
Denotemos por U 0 um aberto tal que U 0 ⊂⊂ Ω tal queΩ ⊂ ∪m
j=0U j
Sejam ψj as funcoes de particao da unidade associada ao cobertura de Ω acima. Tomemosu ∈ W m,p(Ω), e denotemos por uj = uψj. Assim teremos que
u =m
j=0 uψj =m
j=0 uj.
Nosso ob jetivo e extender cada uma das funcoes uj para j = 1, · · · , m. Como Supp(u0)⊂⊂Ω, entao teremos que a extensao nula de u0 fora de Ω satisfaz
u0 ∈ W m,p(RN )
e ainda temos que
u0W m,p
(RN
) ≤ u0W m,p
(Ω).O nosso proximo paso e extender as funcoes ui para i = 1, · · · , m. Para este propositoutilizaremos as aplicacoes H i. Definamos o operador Ri como
Ri(ui) = ui(H i(y)) ∀y ∈ Q+
Pelas hipoteses temos que Ri(ui) ∈ W m,p(Q+). Usando o Lema anterior, existe umoperador prolongamento pi que extende a funcao Ri(ui) para todo o quadrado Q e
ainda satisfaz, pi(Ri(ui)) = Ri(ui) ∀x ∈ Q+
pi(Ri(ui))W m,p(Q) ≤ C Ri(ui)W m,p(Q+) ≤ C uiW m,p(Ω∩U i) (5.6)
Voltaremos agora ao dominio inicial usando a funcao H −1i definindo
Ri(wi)(x) = wi(H −1i (x)), para x ∈ U i.
Assim teremos que o operador Ro pioRi satisfaz
Ro pioRi(ui)(x) = ui(x) ∀x ∈ U i ∩ Ω.
120 Capıtulo 5. Espacos de Sobolev
Agora o operador que extende a funcao ui de U i ao Rn estara dado por
E i(ui) =
ψi(x)
Ro pioRi(ui)(x) se x ∈ U i
0 se x /
∈RN
\U i
Note que se x ∈ U i ∩ Ω, entao teremos que
E i(ui)(x) = ui(x)φi(x)
E ainda que
E i(ui)W m,p(RN ) ≤ C ≤ C uiW m,p(U i∩Ω)

5/14/2018 ESP_SOB - slidepdf.com
http://slidepdf.com/reader/full/espsob 124/244
( ) ( i )
Finalmente, o operador Prolongamento de u esta dado por
P u = u0 +m
i=1
E i(ui)
O que completa o resultadoSe Ω e um hipercubo, entao com aplicacoes sucesivas do Lema 5.5.1 podemos con-
struir um operador prolongamento, sem necesidade de introduzir cartas locais nem aparticao da unidade. De fato, usando o Lema 5.5.1, existe um operador p1 que extendeΩ para Ω1, onde
Ω1 = Ω ∪ R1 ∪ (Ω ∩ R1)
Veja a figura.
q E'Ω
R1
R2
R3
R4
T
c
De forma analoga podemos definir um operador prolongamento de Ω1 para Ω2 onde
Ω2 = Ω1 ∪ R2 ∪ (Ω1 ∩ R2).
Seguidamente prolongamos de Ω2 ate Ω3 onde
Ω3 = Ω2 ∪ R3 ∪ (Ω2 ∩ R3)
5.6. Desigualdade de Poincare 121
Indutivamente podemos prolongar de Ωi−1 para Ωi, onde
Ωi
= Ωi−1 ∪
Ri ∪
(Ωi−1 ∩
Ri)
ate a 2n-eixo. Finalmente, tomamos uma funcao ϕ ∈ C ∞0 (RN ) tal que ϕ = 1 em Ω,logo o operador
P = ϕp2no p2n−1o · · · o p1(u)
e um operador prolongamento.
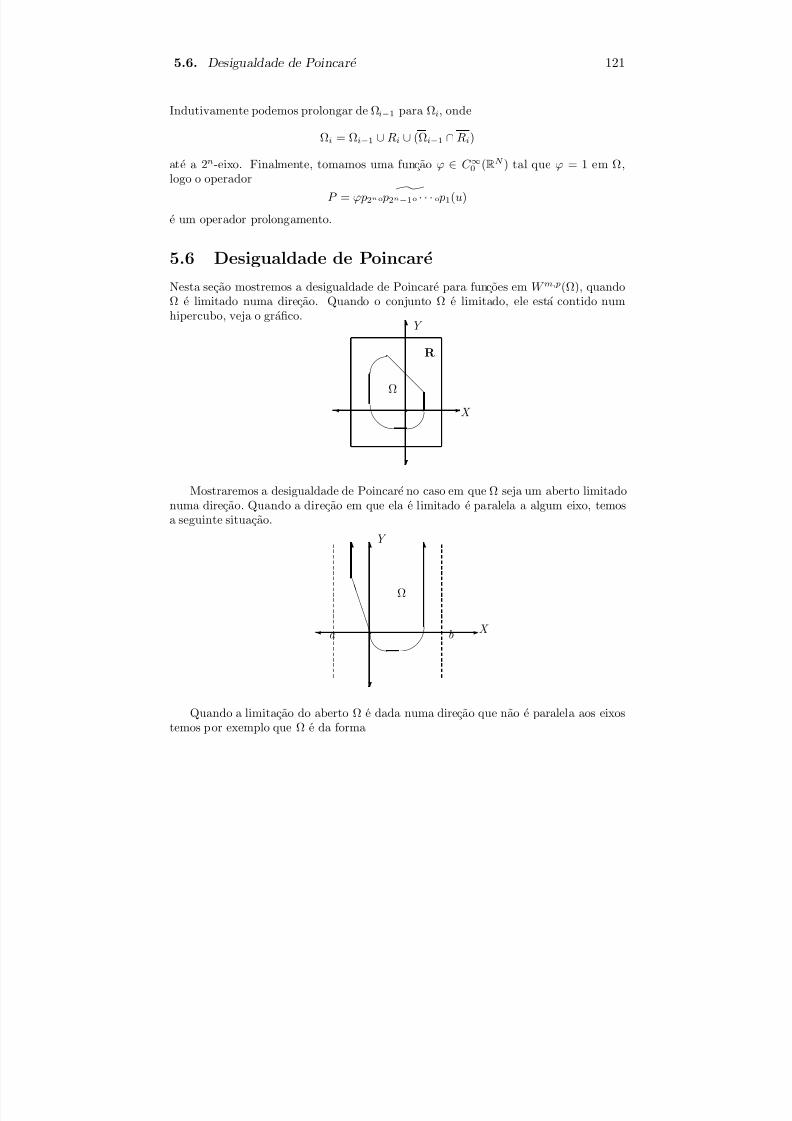
5/14/2018 ESP_SOB - slidepdf.com
http://slidepdf.com/reader/full/espsob 125/244
5.6 Desigualdade de Poincare
Nesta secao mostremos a desigualdade de Poincare para funcoes em W m,p(Ω), quandoΩ e limitado numa direcao. Quando o conjunto Ω e limitado, ele esta contido numhipercubo, veja o grafico.
q E'
T
c
R
%8' d d
d Ω
X
Y
Mostraremos a desigualdade de Poincare no caso em que Ω seja um aberto limitadonuma direcao. Quando a direcao em que ela e limitado e paralela a algum eixo, temosa seguinte situacao.
q E'
T
c
& 7
T
f f
f f f
TY
X a b
Ω
Quando a limitacao do aberto Ω e dada numa direcao que nao e paralela aos eixostemos por exemplo que Ω e da forma
122 Capıtulo 5. Espacos de Sobolev
q E'
T
c
8
Ω
Y
X

5/14/2018 ESP_SOB - slidepdf.com
http://slidepdf.com/reader/full/espsob 126/244
Teorema 5.6.1 Seja Ω ⊂ Rn um aberto limitado numa direc˜ ao. Ent˜ ao, existe uma
constante positiva C = C (Ω, p), tal que
||u||W 1,p0 (Ω) ≤ C ||u||Lp(Ω), ∀u ∈ W 1,p
0 (Ω).
Demonstracao.- Primeiro assumiremos que Ω e um conjunto limitado numa direcaoparalela aos eixos coordenados. Portanto, sem perda de generalidade podemos suporque
Ω ⊂ x ∈ Rn; x = (x, xn); a < xn < b := C
Denotemos por ϕ a uma funcao de C ∞0 (Ω), entao teremos que ϕ, a extensao de ϕ nula
fora de Ω, pertence a C ∞0 (RN ), mais ainda a restricao de ϕ ao conjunto C pertence aC ∞0 (C ). Por outro lado, e simples verificar que
ϕ(x1, · · · , xn−1, y) =
y
a
∂ ϕ∂xn
(x1, · · · , xn−1, s) ds, ∀x ∈ C.
Usando a desigualdade de Holder teremos que
|ϕ(x1,· · ·
, xn−1, y)
| ≤(b
−a)
1q
b
a |∂ ϕ∂xn
(x1,· · ·
, xn−1, s)
| p ds
1p
.
Elevando a potencia p e integrando novamente sobre [a, b] teremos que
b
a
|ϕ(x1, · · · , xn−1, s)| p ds ≤ (b − a)1+1q
b
a
| ∂ ϕ∂xn
(x1, · · · , xn−1, s)| p ds.
Integrando com respeito as variaveis (x1, · · · , xn−1) teremos que
C
|ϕ| p dx ≤ (b − a)1+1q
C
| ∂ ϕ∂xn
| p dx.
Aplicando a densidade das funcoes C ∞0 (Ω) em W 1,p0 (Ω) segue que a desigualdade ante-
rior e valida para todo u ∈ W 1,p0 (Ω), isto e
5.6. Desigualdade de Poincare 123
C
|u| p dx ≤ (b − a)1+1q
C
| ∂
u
∂xn| p dx
De onde segue o resultado. No caso em que a dire cao v = (a1, · · · , an) nao seja paralelaa algum eixo fazemos uma rotacao de forma que o novo sistema coordenado tenha umeixo que seja paralelo ao vetor v. Aplicando o resultado anterior a este caso obtemos
Ω
|w| p dx ≤ c
Ω
| ∂ w∂xn
| p dx

5/14/2018 ESP_SOB - slidepdf.com
http://slidepdf.com/reader/full/espsob 127/244
Tomando u(x) = w(b1x1,
· · ·, bnxn) aplicando mudanca de variaves obtemos o resultado.
A desigualdade de Poincare e valida tambem para funcoes que se anulam (no sentidode traco) em apenas uma parte da fronteira ∂ Ω e tambem para as funcoes que tem medianula, isto e 1
med(Ω)
Ω u dx = 0.
Teorema 5.6.2 Seja Ω ⊂ Rn um aberto limitado e seja u ∈ W 1,p(Ω) com media nula,ent˜ ao, existe uma constante positiva C = C (Ω, p), tal que
||u||W 1,p(Ω) ≤ C ||u||Lp(Ω), ∀u ∈ W 1,p(Ω) tal que Ω
u(x) dx = 0
Demonstracao.- Este resultado vale para qualquer aberto limitado regular, faremosaqui a prova no caso em que Ω e um hiperparalelepıpedo. Suporemos primeiro que ue uma funcao C 1(Ω) nosso resultado seguira por densidade. Suporemos que n = 3, ocaso geral segue de forma semelhante. Do teorema fundamental do calculo teremos
u(x1, x2, x3) − u(y1, x2, x3) = x1
y1
∂u∂x1
(x, x2, x3) dx
De forma analoga teremos
u(y1, x2, x3) − u(y1, y2, x3) =
x2
y2
∂u
∂x2(y1, w , x3) dw
Finalmente,
u(y1, y2, x3) − u(y1, y2, y3) = x3
y3
∂u∂x3
(y1, y2, w) dw
Somando estas tres ultimas identidades, obtemos
u(x1, x2, x3) − u(y1, y2, y3) =
x1
y1
∂u
∂x1(x, x2, x3) dx
+ x2
y2
∂u
∂x2
(y1, w , x3) dw
+
x3
y3
∂u
∂x3(y1, y2, w) dw
124 Capıtulo 5. Espacos de Sobolev
Integrando com relacao a y = (y1, y2, y3) (note que x = (x1, x2, x3) e constante comrelacao a y) e aplicando o fato que u tem media nula, obtemos
med(Ω) u(x1, x2, x3) = Ω x1
y1
∂u
∂x1
(x, x2, x3) dx dy
+
Ω
x2
y2
∂u
∂x2(y1, w , x3) dw dy
+
Ω
x3
y3
∂u
∂x3(y1, y2, w) dw dy
Tomando valor absoluto, aplicando a desigualdade de Holder e usando o fato que Ω eli i d b

5/14/2018 ESP_SOB - slidepdf.com
http://slidepdf.com/reader/full/espsob 128/244
limitado, obtemos
med(Ω) |u(x1, x2, x3)| ≤ C
Ω
|u| p dy1/p
Onde C e uma constante que depende de Ω. Elevando a potencia p a desigualdadeanterior e integrando novamente com relacao a Ω obtemos
Ω
|u(x1, x2, x3)| p dx ≤ med(Ω)1− pC p Ω
|u| p dy
De onde segue o resultado.
5.7 Desigualdades de Sobolev
Teorema 5.7.1 (Sobolev, Gagliardo, Niremberg) Seja 1 ≤ p < N e denotando por p∗
ao n´ umero tal que 1 p∗ = 1
p− 1
N , temos que
W 1,p(RN ) ⊂ L p∗(RN )
e ainda temos que existe uma constante C > 0 tal que
uLp∗ ≤ C uLp , ∀u ∈ W 1,p(RN )
Demonstracao.- Para mostrar este teorema utilizaremos o seguinte Lema
Lema 5.7.1 Tomemos N ≥ 2 e denotemos por f 1, f 2, · · · , f N ∈ LN −1(RN −1). Para cada x = (x1, x2, · · · , xN ) ∈ RN e para cada subındice 1 ≤ i ≤ N escrevemos
xi = (x1, x2, · · · , xi−1, xi+1, · · · , xN ) ∈ RN −1.
Ent˜ ao a func˜ ao definida por
f (x) = f 1(x1)f 2(x2) · · · f N (xN )
5.7. Desigualdades de Sobolev 125
pertence a L1(RN ) e ainda temos:
f L1(RN) ≤N
i=1f iLN−1(RN−1)
Demonstracao.- O caso N = 2 e trivial. Consideremos o caso N = 3. R
|f (x)| dx3 = |f 3(x1, x2)| R
|f 1(x2, x3)||f 2(x1, x3)| dx3
1/2 1/2

5/14/2018 ESP_SOB - slidepdf.com
http://slidepdf.com/reader/full/espsob 129/244
≤ |f 3(x1, x2)
| R |f 1(x2, x3)
|2 dx3
/
R |f 2(x1, x3)
|2 dx3
/
Integrando com respeito a x2 obtemos e aplicando a desigualdade de Holder obtemos R
R
|f (x)| dx3dx2 ≤
R|f 3(x1, x2)| dx2|
12
R|f 1(x2, x3)|2 dx3dx2
1/2
R|f 2(x1, x3)|2 dx3
1/2
Finalmente, integrando com respeito a x3 e repetindo o argumento anterior obtemos R3
|f (x)| dx ≤ f 1L2(R2)f 2L2(R2)f 3L2(R2).
Onde dx = dx1 · · · dxN . Suponhamos que o Lema seja valido para N , mostraremos queele tambem sera valido para N + 1. De fato, fixemos xN +1. Da desigualdade de Holdertemos para p = N , q = N
N −1 que
RN
|f (x)| dx1 · · · dxN ≤ RN
|f 1f 2 · · · f N ||f N +1| dx
≤ f N +1LN(RN)
RN
|f 1f 2 · · · f N | NN−1 dx1 · · · dxN
N−1N
Aplicando as hipotese indutivas para |f 1| NN−1 , |f 2| N
N−1 , · · · |f N | NN−1 resulta que
RN
|f 1f 2 · · · f N | NN−1 dx1 · · · dxN ≤
N i=1
RN−1
|f i|N dx 1
N−1
=N
i=1
f iN
N−1LN(RN−1).
Das duas desigualdades acima obtemos RN
|f | dx1 · · · dxN ≤ f N +1LN (RN )
N i=1
f iLN(RN−1)
126 Capıtulo 5. Espacos de Sobolev
Como cada uma das funcoes xN +1 → f iLN (RN−1) pertence a LN (R) para1 ≤ i ≤ N , integrando a expressao acima sobre R concluimos que o produto per-tence a L1(R) e utilizando a desigualdade de Holder obtemos
f L1(RN+1) ≤N +1i=1
f iLN (RN )
De onde segue o resultado.
Demostracao do Teorema 5.7.1 Comensemos com o caso p = 1, e u ∈ C 10 (RN )assim e simples verificar que
x1 ∂u +∞ ∂u

5/14/2018 ESP_SOB - slidepdf.com
http://slidepdf.com/reader/full/espsob 130/244
|u(x1, x2,
· · ·, xN )
|= −∞
∂u
∂x1
(t, x2,
· · ·, xN ) dt ≤ −∞
∂u
∂x1
(t, x2,
· · ·, xN ) dt
De forma analoga teremos que
|u(x1, x2, · · · , xN )| ≤ +∞−∞
∂u
∂xi(x1, x2, · · · , xi−1, t , xi+1, · · · , xN )
dt := f i(xi)
Para i = 2, · · · , N . De onde
|u(x)
|N
≤
N
i=1 f i(xi)⇒ |
u(x)|
NN−1
≤
N
i=1 f i(xi)1
N−1
Do Lema 8.6.1 RN
|u(x)| NN−1 dx ≤
N i=1
f i1
N−1L1(RN−1) =
N i=1
∂u
∂xi
1N−1
L1(RN )
,
de onde segue que
uLN
N−1 (RN ) ≤N
i=1 ∂u
∂xi
1N
L1(RN )≤ uL1(RN ).
Que mostra o resultado para p = 1. Consideremos t ≥ 1 e tomemos na desigualdadeanterior |u|t−1u no lugar de u. Dai segue que
ut
LtN
N−1 (RN )≤ t
N i=1
|u|t−1 ∂u
∂xi
1N
L1(RN )
≤ t ut−1Lp(t−1)(RN )
N i=1
∂u
∂xi
1N
Lp(RN )
Tomando t de tal forma que N t = (N − 1) p(t − 1), temos t =
N
−1
N p∗. Assim obtemosque
utLp∗ (RN ) ≤ t
N i=1
|u|t−1 ∂u
∂xi
1N
L1(RN )
≤ t ut−1Lp∗ (RN )
N i=1
∂u
∂xi
1N
Lp(RN )
(5.7)
5.7. Desigualdades de Sobolev 127
De onde segue que existe uma constante positiva tal que
u
Lp∗
≤C
u
Lp ,
∀u
∈C 10 (RN )
Nosso resultado segue aplicando a densidade e o Lema de Fatou
Observacao 5.7.1 Note que de (5.7) segue que
uLp∗ (RN ) ≤ tΠmi=1
∂u
∂xi 1
N
Lp(RN)
≤ N − 1p∗Πm ∂u 1
N

5/14/2018 ESP_SOB - slidepdf.com
http://slidepdf.com/reader/full/espsob 131/244
≤N
p Πi=1∂xi
Lp(RN)
≤ N − 1
N − p pΠm
i=1∂u
∂xi 1
N
Lp(RN )
Observacao 5.7.2 No caso unidimensional segue imediatamente que
W 1,p(R) ⊂ L∞(R)
Com a imers˜ ao contınua. De fato, tomemos u ∈ W 1,p(R), sem perda de generalidade
podemos supor que u ∈ C ∞0 (R
). Tomemos agora x ∈R
. ComoR
= ∪i∈N ] − i, −i +1]∪]i, i + 1] teremos que x ∈]a, a + 1] portanto podemos escrever
u(x) − u(y) =
y
x
du
dsds, para x, y ∈]a, a + 1]. (5.8)
Integrando a desigualdade anterior sobre ]a, a + 1] com respeito a y e usando o teorema do valor intermediario teremos
u(x) = a+1
a
u(y) dy + y0
x
duds
ds, x, y ∈]a, a + 1].
Usando a desigualdade de H¨ older, teremos
|u(x)| ≤ a+1
a
|u(y)| p dy
1p
+
a+1
a
|du
ds| p ds
1p
.
De onde concluimos que
uL∞(a,a+1) ≤ uW 1,p(R)
Sendo a um inteiro qualquer teremos que
uL∞(R) ≤ uW 1,p(R)
De onde segue o resultado.Da identidade (5.8) segue que
|u(x) − u(y)| ≤ |x − y|1−1
p du
ds Lp(R)
Portanto as func˜ oes de W 1,p(R) s˜ ao contınuas.
128 Capıtulo 5. Espacos de Sobolev
Observacao 5.7.3 Como consequencia do resultado anterior, temos que se u ∈ W m,p(RN )possui uma derivada parcial nula em L p(RN ), entao u = 0.
Corolario 5.7.1 Seja u ∈ W 1,p(RN ) para 1 ≤ p < N , ent˜ ao teremos que para todo
q ∈ [ p,p∗] e valido uLq(RN ) ≤ C uαLp(RN )u1−α
W 1,p(RN )
em particular temos que
W 1,p(RN ) ⊂ Lq(RN ), ∀q ∈ [ p,p∗],
com a imers˜ ao contınua
Demonstracao Para todo q [p p∗] e valido
5/14/2018 ESP_SOB - slidepdf.com
http://slidepdf.com/reader/full/espsob 132/244
Demonstracao.- Para todo q
∈[ p,p ] e valido
1
q=
α
p+
1 − α
p∗, 0 ≤ α ≤ 1
Portanto se u ∈ W 1,p(RN ) ⊂ L p(RN ). Do Teorema anterior temos u ∈ L p∗(RN ), deonde por interpolacao nos espacos L p segue que
W 1,p(RN ) ⊂ Lq(RN ), ∀q ∈ [ p,p∗]
Para ver que a imersao e contınua ponhamos
uLq ≤ uαLpu1−α
Lp∗ ≤ uLp + uLp∗
Finalmente, do Teorema obtemos que uLp∗ ≤ C uW 1,p De onde segue o resultado.
Corolario 5.7.2 Para p = N se verifica:
W 1,N (RN ) ⊂ Lq(RN ), ∀q ∈ [N, ∞[
com imers˜ ao contınua.
Demonstracao.- Podemos supor que u ∈ C 10 (RN ). Usando a desigualdade encontradana demonstracao do Teorema 5.7.1,
ut
LtN
N−1 (RN )≤ t
N i=1
|u|t−1 ∂u
∂xi
1N
L1(RN )
≤ t ut−1Lp(t−1)(RN )
N i=1
∂u
∂xi
1N
Lp(RN )
para p = N teremos
utLtN/(N−1) ≤ tu
t−1
L(t−1)N/(N−1)uLN , ∀t ≥ 1
De onde segue que
uLtN/(N−1) ≤ t√
tu1− 1t
L(t−1)N/(N−1)u 1t
LN , ∀t ≥ 1
5.8. Teorema de Morrey 129
Da desigualdade de Young obtemos:
u
LtN/(N−1)
≤C (
u
L(t−1)N/(N−1) +
u
LN ) (5.9)
Tomando t = N encontramos
uLN2/(N−1) ≤ C uW 1,N
Das desigualdades de interpolacao resulta que
u Lq C u W1 N N qN 2

5/14/2018 ESP_SOB - slidepdf.com
http://slidepdf.com/reader/full/espsob 133/244
u
Lq
≤C
u
W 1,N ,
∀N
≤q
≤ N − 1Tomando t = N + 1, N + 2 · · · em (5.9) encontramos que
uLq ≤ C uW 1,N , ∀N ≤ q ≤ ∞Onde C e uma constante que depende de N . O que completa a demonstracao
Observacao 5.7.4 A imers˜ ao acima e estrita para N > 1. De fato, para isto basta
considerar a func˜ ao f (x, y) = ln (x2
+ y2
), e simples verificar que f ∈ W 1,1
(B1(0)),onde B1(0) e a bola do R2 centrada no zero e de raio unit´ ario e que f n˜ ao e limitada na bola. Podemos tambem construir um exemplo em W 1,1(R2), utilizando o operador prolongamento P . De fato, P (f ) ∈ W 1,1(R2) e P (f ) n˜ ao e limitada.
5.8 Teorema de Morrey
Teorema 5.8.1 Seja p > N ent˜ ao temos que
W 1,p(RN ) ⊂ L∞(RN ) ∩ C (RN )
com imers˜ ao contınua. Alem disso se verifica que
|u(x) − u(y)| ≤ C |x − y|αuLp (5.10)
onde α = 1
−n p e C e uma constante positiva.
Demonstracao.- Como antes suporemos que u ∈ C 10 (RN ). Denotemos por Q um cuboaberto de lado r que comtem ao 0, e tomemos x ∈ Q. Assim teremos que
u(x) − u(0) =
10
d
dtu(tx) dt
entao e simples verificar que
|u(x) − u(0)| ≤ 10
N i=1
|xi| ∂u
∂xi(tx)
dt.
130 Capıtulo 5. Espacos de Sobolev
Denotemos por u = 1|Q|
Q u(x) dx. Integrando a desigualdade anterior e multiplicando
por 1/|Q| temos:
|u − u(0)| ≤ r
|Q
| Q 1
0
N
i=1 ∂u
∂xi
(tx) dtdx.
Mudando a ordem de integracao temos
|u − u(0)| ≤ 1
rN −1
10
Q
N i=1
∂u
∂xi(tx)
dxdt
≤ 1
rN −1
10
1
tN
tQ
N i=1
∂u
∂xi(x)
dxdt.

5/14/2018 ESP_SOB - slidepdf.com
http://slidepdf.com/reader/full/espsob 134/244
Da desigualdade de Holder se verifica tQ
∂u
∂xi(y)
dy ≤
Q
∂u
∂xi(y)
p dy
1p
|tQ| 1p ,
pois tQ ⊂ Q para 0 ≤ t ≤ 1. De onde obtemos
|u − u(0)| ≤ r1+N ( 1
p−1) uLp(Q) 1
0
tN/p
tN dt =
r1−N/p
1
−N/p
uLp(Q)
Por translacao a desigualdade acima e valida para todo cubo de lado r e de aristasparalelas aos eixos coordenados. De onde segue:
|u − u(x)| ≤ r1−N/p
1 − N/puLp(Q) (5.11)
Inserindo o termo u(y) e aplicando a desigualdade triangular obtemos
|u(y) − u(x)| ≤2r1−N/p
1 − N/p uLp(Q)
Finalmente, para dois pontos quaisquer x, y do RN , existe um cubo de arista r = |x−y|que contem eles. Do onde segue a desigualdade (5.10). Para mostrar que a imersao econtınua usamos a desigualdade (5.11) para obter:
|u(x)| ≤ |u| + C uLp(Q) ≤ C uW 1,p(Q) ≤ C uW 1,p(RN ), ∀x ∈ Rn
De onde segue o resultado
Da imersao acima e da densidade das funcoes C ∞0 (RN
) em W 1,p
(RN
) segue quelimx→∞ u(x) = 0, para toda funcao u ∈ W 1,p(RN ) para N < p < ∞.
Os teoremas anteriores facilmente podem ser estentidos para os espa cos W m,p como semostra no seguinte Corolario.
5.8. Teorema de Morrey 131
Corolario 5.8.1 Seja m um inteiro m ≥ 1 e 1 ≤ p < ∞, ent˜ ao se verifica.
1
p −m
N > 0 ⇒ W m,p
(RN
) ⊂ Lq
(RN
) onde
1
q =
1
p −m
N 1
p− m
N = 0 ⇒ W m,p(RN ) ⊂ Lq(RN ) ∀q ∈ [ p, ∞[
1
p− m
N < 0 ⇒ W m,p(RN ) ⊂ L∞(RN ) ∩ C (RN ),
Com as imers˜ oes contınuas. Alem disso se m − n p > 0 n˜ ao e um n´ umero inteiro,

5/14/2018 ESP_SOB - slidepdf.com
http://slidepdf.com/reader/full/espsob 135/244
denotamos por
k =
m − N
p
e θ = m − N
p− k, 0 < θ < 1.
Verificamos que para toda u ∈ W m,p(RN ) e v alido
DαuL∞ ≤ uW m,p ∀α, |α| ≤ k
e ainda temos|Dαu(x) − Dαu(y)| ≤ C |x − y|θ uW m,p .
Em particular temos que W m,p(RN ) ⊂ C k(RN ).
Demonstracao.- A demonstracao e baseada na seguinte formula de recorrencia.
p∗0
= p,1
p∗i=
1
p∗i−1 −1
N .
para i = 1, · · · , m. Fazendo q = p∗m obtemos que
1
q=
1
p∗m−1− 1
n=
1
p∗m−2− 2
N = · · · =
1
p∗0− m
N =
1
p− m
N .
Aplicando o Teorema 5.7.1 temos
uLq ≤ C uL
p∗m−1 ≤ C 2u
Lp∗
m−2 ≤ C 3uL
p∗m−3 ≤ · · · ≤ C mu
Lp∗0
.
Suponhamos agora que
1
p− m
N = 0 ⇒ 1
p− m − 1
N > 0
Da primeira parte deste Teorema encontramos que
u,∂u
∂xi∈ W m−1,p(RN ) ⊂ L p∗(RN ) onde
1
p∗ =1
p− m − 1
N =
1
N
132 Capıtulo 5. Espacos de Sobolev
A ainda
uLp∗(RN ) ≤ C uW m−1,p(RN ), ∂u
∂xiLp∗(RN ) ≤ C uW m,p(RN )
De onde segue que u ∈ W 1,N (RN ), pois p∗ = N . Pelo Corolario 5.8.1 concluimos que
uLq(RN ) ≤ C uW 1,p∗(RN ) ≤ C uW m,p(RN ), ∀q ∈ [ p, ∞[.
Finalmente, consideremos1
p− m
N < 0.
Sem perda de generalidade podemos supor que m e o menor numero para o qual everdadera a desigualdade acima. Caso que m = 1 o resultado segue imediatamente.

5/14/2018 ESP_SOB - slidepdf.com
http://slidepdf.com/reader/full/espsob 136/244
g q g
Suponhamos que m ≥ 2, entao temos que
1
p∗ =1
p− m − 1
N > 0.
Da primeira parte deste Teorema segue que
u,∂u
∂xi∈ W m−1,p(RN ) ⊂ L p∗(RN )
De onde segue que u ∈ W 1,p∗(RN ), e ainda
uW 1,p∗(RN ) ≤ C uW m,p(RN ).
como1
p∗ − 1
N =
1
p− m
N < 0.
Pelo Teorema 5.8.1 segue que W 1,p∗(RN ) ⊂ L∞(RN ) com imerssao contınua. De ondesegue o resultado
Corolario 5.8.2 Seja Ω um aberto limitado de fronteira de classe C 1, ou tambem Ω = RN
+ . Seja 1 ≤ p < ∞, ent˜ ao se verifica.
p < N ⇒ W 1,p(Ω) ⊂ Lq(Ω) onde1
q=
1
p− 1
n
p = N ⇒ W 1,p(Ω) ⊂ Lq(Ω) ∀q ∈ [ p, ∞[
p > N ⇒ W 1,p(Ω) ⊂ L∞(Ω) ∩ C (Ω),
Com as imers˜ oes contınuas. Alem disso se m − N p > 0 n˜ ao e um n´ umero inteiro,denotamos por
k =
m − N
p
e θ = m − N
p− k, 0 < θ < 1.
5.8. Teorema de Morrey 133
Verificamos que para toda u ∈ W m,p(Ω) e v alido
Dαu
L∞ ≤
u
W m,p
∀α,
|α
| ≤k
e ainda temos
|Dαu(x) − Dαu(y)| ≤ C |x − y|θ uW m,p .
Em particular W m,p(Ω) ⊂ C k(Ω).
Demonstracao.- A demonstracao faz uso dos operadores de Prolongamento. (Ex-ercıcio)

5/14/2018 ESP_SOB - slidepdf.com
http://slidepdf.com/reader/full/espsob 137/244
)
Teorema 5.8.2 (Rellich-Kondrachov) Suponhamos que Ω seja um conjunto limitadode classe C 1, nestas condic˜ oes teremos:
p < N ⇒ W 1,p(Ω) ⊂ Lq(Ω) ∀q ∈ [1, p∗[ onde1
p∗=
1
p− 1
n
p = N ⇒ W 1,p(Ω) ⊂ Lq(Ω) ∀q ∈ [1, ∞[
p > N ⇒ W 1,p(Ω) ⊂ C (Ω),
Com as imers˜ oes compactas.
Demonstracao.- No caso p > n aplicamos o Teorema 5.8.1 e o Teorema de Arsela-Ascoli. Nos casos restantes se aplica o criterio de compacidade em L p. Denotemos porB a bola unitaria de W 1,p. Seja 1 ≤ q ≤ p∗, pode-se escrever
1q
= α1
+ 1 − α p∗
Sejam ω ⊂⊂ Ω, u ∈ B, e h < dist(ω, Ωc). Das desigualdades de interpolacao teremos
τ hu − uLq(ω) ≤ τ hu − uαL1(ω)τ hu − u1−α
Lp∗(ω).
Portanto
τ hu − uLq(ω) ≤ C |h|uαL1(Ω))u1−α
Lp∗(Ω) ≤ C |h|.De onde segue que
τ hu − uLq(ω) ≤
para h suficientemente pequeno. Finalmente, das desigualdades de Holder se tem:
u
Lq(Ω\ω)
≤ u
Lp∗(Ω\ω)
|Ω
\ω
|1− q
p∗ <
Para ω escolhido convenientemente. De onde pelo Teorema 3.10.1 segue que B e com-pacto em W 1,p .
134 Capıtulo 5. Espacos de Sobolev
Corolario 5.8.3 Seja Ω um aberto limitado do RN ent˜ ao a imers˜ ao
W m,p(Ω) ⊂ W j,p(Ω)
e compacta pata m > j.
Demonstracao.- Seja ϕν uma sequencia limitada em W m,p(Ω), entao teremos queexiste uma subsequencia dela, que a denotaremos da mesma forma, tal que
ϕν → ϕ forte em L p(Ω)
Da mesma forma concluimos que para j < m que
Dαϕν Dαϕ forte em L p(Ω)

5/14/2018 ESP_SOB - slidepdf.com
http://slidepdf.com/reader/full/espsob 138/244
→para |α| ≤ j. O que significa que ϕν converge forte em W j,p(Ω).
Observacao 5.8.1 As imers˜ oes compactas indicadas nos teoremas 5.8.2 somente s˜ aov´ alidas em domınios limitados. De fato, mostraremos que o espaco W 1,p(]0, ∞[) n˜ aoesta imerso compactamente em L p(]0, ∞[). Para esto tomemos uma func˜ ao ϕ ∈ C 10 (R)n˜ ao nula com suporte contido em ]0, ∞[. Definimos a seq¨ uencia ϕν (x) = ϕ(x − ν )de elementos de W 1,p(]0, ∞[). Note que ϕν tem suporte compacto contido em ]0, ∞[,portanto teremos que
limν→∞ϕν (x) = 0 (5.12)
Por outro lado, esta seq¨ uencia e limitada em W 1,p(]0, ∞[), pois
ϕν pW 1,p =
∞0
|ϕ(x − ν )| p dx +
∞0
|ϕx(x − ν )| p dx =
∞0
|ϕ| p dx +
∞0
|ϕx| p dx
Para todo ν ∈ N, pois o suporte da func˜ ao ϕ est´ a sontido em ]0, ∞[. Se a imers˜ ao fossecompacta em L p(]0, ∞[), existirıa uma subseq¨ uencia ϕνk
que converge forte para uma
func˜ ao χ. ϕνk→ χ forte L p(]0, ∞[)
Esta ´ ultima convergencia implica existe uma subseq¨ uencia (que a denotaremos da mesma forma) que converge quasi sempre em ]0, ∞[, isto e
ϕνk(x) → χ(x) q.s. ]0, ∞[
Da convergencia em (5.12) concluimos que χ = 0. Mais isto e contradict´ orio, pois pela convergencia forte teremos que ∞
0
|ϕ(x)| p dx = limν→∞
∞0
|ϕ(x − ν k)| p dx = 0
Que e contraria a nossa escolha de ϕ.
5.9. Teorema das derivadas intermediarias 135
5.9 Teorema das derivadas intermediarias
Nesta secao estudaremos o Teorema das derivadas intermediarias para abertos Ω do
RN satisfazendo a propriedade do cone. Para facilitar a exposicao comecaremos con-siderando o caso unidimensional.
Teorema 5.9.1 Seja a e b n´ umeros reais tais que −∞ ≤ a < b ≤ ∞. Tomemos1 ≤ p < ∞ e 0 < 0 < ∞. Ent˜ ao existe uma contante K = K (0, p , b − a) tal que para todo 0 < ≤ 0 e para toda f ∈ W 2,p(a, b) se verifica
b b b

5/14/2018 ESP_SOB - slidepdf.com
http://slidepdf.com/reader/full/espsob 139/244
a
|f (t)| p dt ≤ K a
|f (t)| p dt + K−1 a
|f (t)| p dt
A desigualdade acima e v´ alida para todo > 0 quando b − a = ∞
Demonstracao.- Usando argumentos de densidade, e suficiente mostrar a desigualdadeacima para funcoes de classe C 2. Sem perda de generalidade podemos supor que 0 = 1.Comecaremos analizando o caso a = 0 e b = 1. Tomemos uma funcao g definida sobre[0, 1]. Do teorema fundamental do calculo teremos que
g(x) = g(λ) +
x
λ
g(σ) dσ :=G(x)
.
Integrando com respeito a λ sobre [α, β ] ⊂ [0, 1] e aplicando o teorema de valor mediopara integrais teremos que existe x0 ∈ [a, b] tal que
(β − α)g(x) = g(β ) − g(α) + (β − α)G(x0).
Integrando a expressao acima com respeito a β sobre [0, 1] teremos
(1
2− α)g(x) =
10
g(β ) dβ − g(α) + (1
2− α)G(x0).
Finalmente, integrando com respeito a α no intervalo [0, 1
2] teremos que
(1
4− 1
8)g(x) =
1
2
10
g(β ) dβ − 1
2
12
0
g(α) dα + (1
4− 1
8)G(x0).
Tomando valor absoluto, podemos escrever a identidade acima como
1
8|g(x)| ≤
1
0
|g(β )| dβ +1
8 1
0
|g(s)| ds
Aplicando a desigualdade de Holder, e elevando a potencia p a desigualdade resultante,teremos
136 Capıtulo 5. Espacos de Sobolev
|g(x)| p ≤ K p
10
|g(s)| p ds + K p
10
|g(s)| p ds,
de onde segue que 10
|g(s)| p ds ≤ K p
10
|g(s)| p ds + K p
10
|g(s)| p ds.
Onde K p e uma constante dependendo somente de p. Note que toda funcao f definidasobre o intervalo [α, β ] pode ser escrita como
f (x) = g(x − α
β − α),

5/14/2018 ESP_SOB - slidepdf.com
http://slidepdf.com/reader/full/espsob 140/244
para alguma funcao g definida em [0, 1]. Assim teremos que
f
x
=1
β − αg(
x − α
β − α), f
x
=1
(β − α)2g(
x − α
β − α).
Fazendo a mudanca de variavel s = (β − α)x + α e levando em consideracao que
β
α |f (s)
| p ds = (β
−α)
1
0 |g(x)
| p dx, β
α
|f (s)| p ds = (β − α) 10
|g(x)| p(β − α) p
dx, β
α
|f (s)| p ds = (β − α)
10
|g(x)| p(β − α)2 p
dx.
teremos que
β
α |f (s)| p
ds ≤ K p(β − α)− p
β
α |f (s)| p
ds + K p(β − α) p
β
α |f (s)| p
ds.
Note que para todo > 0 existe n ∈ N tal que
1
21p ≤ b − a
n≤
1p . (5.13)
' E
a=α1 b = α8α2 α3 α4 α5 α6 α7
5.9. Teorema das derivadas intermediarias 137
Para mostrar a desigualdade, subdividiremos o intervalo [a, b] em subintervalos de
amplitude menor ou igual a . Para isto, ponhamos αj = a + (b−a)jn para
j = 0, 1, · · · n. Note que αj − αj−1 =
b
−a
n , a chave da demonstracao e tomar n grandede tal forma que se verifique a desigualdade (5.13). Assim podemos escrever:
b
a
|f (s)| p ds =n
j=1
βj
αj
|f (s)| p ds
n
1
K pb − a
p βj
j |f (s)
| p ds +
n
b
p βj
j |f (s)
| p ds

5/14/2018 ESP_SOB - slidepdf.com
http://slidepdf.com/reader/full/espsob 141/244
≤ j=1 n αj | | b − a αj | | ≤ K 1
b
a
|f (s)| p ds +1
b
a
|f (s)| p ds
Onde K 1 = max (b − a) p, 2 p(b − a)− p. O que mostra o resultado no caso em que b−aseja finito. Caso em que b − a seja infinito, subdividimos o intervalo, na seguinte forma
]a, b[ = ∪i∈N]a + (i − 1), a + i], se a < ∞ e b = ∞]a, b[ = ∪i∈N]b − (i − 1), b − i], se a = −∞ e b < ∞]a, b[ = ∪i∈N (] − i − 1, −i]∪]i − 2, i − 1]) , se a = −∞ e b = ∞
e a cada uns dos subintervalos aplicamos o resultado obtido no caso finito. Neste caso aamplitude de cada subintervalo pode ser arbitraria, logo neste caso e valido o Teoremapara todo > 0. Isto completa a demonstracao.
Corolario 5.9.1 Seja ]a, b[ um intervalo n˜ ao limitado. Ent ao existe uma constantepositiva K tal que
f Lp(a,b) ≤ K f 12
Lp(a,b)f 12
Lp(a,b)
Demonstracao.- Do Teorema 5.9.1 segue que para todo > 0 b
a
|f (t)| p dt ≤ K
b
a
|f (t)| p dt + K−1 b
a
|f (t)| p dt
Tomando = f Lp(a,b)
f Lp(a,b)
p/2
, segue o resultado.
Observacao 5.9.1 Denotemos por |||f ||| p2,p = f pLp(a,b)+f p
Lp(a,b). Do Teorema 5.9.1
obtemos que
f Lp(a,b) ≤ K
|||f |||2,p +
1
f Lp(a,b)
138 Capıtulo 5. Espacos de Sobolev
Tomando = 0f Lp(a,b)
|||f |||2,p, e substituindo na expressao acima teremos que existe uma
constante positiva, tal que
f
Lp(a,b)
≤ K
|||f
|||
122,p
f
12
Lp(a,b)
Como consequencia do Teorema 5.9.1 temos o seguinte resultado.
Corolario 5.9.2 Suponhamos que f ∈ L p(a, b) e f (m) ∈ L p(a, b) ent˜ ao existe um 0 >0 tal que para todo ≤ 0 se verifica
f (j)Lp(a,b) ≤ K
m−jf (m)Lp(a,b) +
1
jf Lp(a,b)
P j 1 S b d l ´ l

5/14/2018 ESP_SOB - slidepdf.com
http://slidepdf.com/reader/full/espsob 142/244
Para j = 1, · · · , m. Se b − a = ∞ pode ser qualquer n umero real.
Demonstracao.- Por densidade podemos supor que f ∈ C ∞0 ([a, b]). Do Teorema 5.9.1temos
f pLp(a,b) ≤ K
ηf p
Lp(a,b) +1
ηf Lp(a,b)
, ∀0 ≤ η ≤ 0. (5.14)
para f ∈ W m,p(a, b) no lugar de f temos
f pLp(a,b) ≤ K f pLp(a,b) +1
f Lp(a,b)Podemos supor que K > 1. Do Teorema 5.9.1, usando (5.14) temos
f pLp(a,b)
≤ Kf pLp(a,b) +
K 2η
f Lp(a,b) +
K 2
ηf Lp(a,b)
Tomando η = 2K2 < 0 teremos
12f p
Lp(a,b) ≤ K 1 f pLp(a,b) + 1
2f Lp(a,b)
Sustituindo a desigualdade na expressao (5.14) segue que
f pLp(a,b) ≤ K 2
2f p
Lp(a,b) +1
f Lp(a,b)
De onde e valida nossa afirmacao para m = 3. Usando inducao sobre m segue oresultado.
Observacao 5.9.2 O Corolario anterior estima as derivadas intermediarias em termosda funcao e da ultima derivada. Isto e equivalente a afirmar que se u ∈ L p(a, b) edm
dtm u ∈ L p(a, b) entao teremos que dj
dtj u ∈ L p(a, b) para j = 1, · · · , m.
5.9. Teorema das derivadas intermediarias 139
Observacao 5.9.3 O Teorema das derivadas intermediarias a podemos apresentar naforma de interpolacao da seguinte forma,
f (j)Lp(a,b) ≤ C f j/mLp(a,b)f 1−j/mW m,p(a,b)
Ou em termos das normas dos espacos W m,p
f W j,p(a,b) ≤ C f j/mLp(a,b)f 1−j/m
W m,p(a,b)
Pode-se mostrar tambem que estas desigualdades sao tambem validas para espacosfracionarios, isto e quando 0
≤j
≤m sao numeros reais.

5/14/2018 ESP_SOB - slidepdf.com
http://slidepdf.com/reader/full/espsob 143/244
≤ ≤A seguir mostraremos que a desigualdade das derivadas intermediarias vale para
todo domınio Ω do RN com a propriedade Uniforme do Cone que definimos a seguir.Comecaremos definindo a propriedade do cone.
Definicao 5.9.1 (Propriedade do Cone) Diremos que um aberto Ω ⊂ Rn possui a propriedade do Cone, se existe um cone C tal que todo ponto x do bordo e o verticede um cone C x contido em Ω e congruente a C . Isto e C x e igual a C depois de um movimento rıgido.
Conjunto com a propriedade do Cone
ConesC x
Ω
Cone
C
Conjunto sem a propriedade do Cone
Ω
Definiremos a seguir a propriedade Uniforme do Cone.Definicao 5.9.2 Diremos que um conjunto Ω possui a Propriedade Uniforme doCone se existe um cobertura aberta U j; j ∈ N de ∂ Ω e um conjunto de conesC j; j ∈ N, todos eles congruentes a um ´ unico cone C tais que
(i) Exista M tal que diam ( U j) < M .
(ii) Exista δ > 0 tal que Ωδ = x ∈ Ω; dist (x, ∂ Ω) < δ ⊂ ∪j∈N U j(iii) Para todo j ∈ N, ∪x∈Ω∩U j (x + C j ) := Qj ⊂ Ω
(iv)Toda intersec˜ ao de R + 1 Qj e vazia.
140 Capıtulo 5. Espacos de Sobolev
Teorema 5.9.2 Seja Ω ⊂ Rn um aberto com a propriedade Uniforme do Cone. Ent˜ aoexiste 0 > 0, uma constante K (0,m,p, Ω) tais que para todo 0 < < 0 e todo0 < j < m se verifica
j
uLp(Ω) ≤ K m−
j
m
uLp(Ω) + j
uLp(Ω) .Por jLp(Ω) estamos denotando a norma em L p de todas as derivadas de ordem j.
Demonstracao.- Repetindo os mesmos argumentos que aqueles utilizados na demons-tracao do caso unidimensional, sera suficiente mostrar a desigualdade acima para o casom = 2 e j = 1. Pela definicao de abertos com a propriedade uniforme do cone, existeum cobertura aberta de ∂ Ω tal que
∂Ω ⊂ ∪∞i=1Ui

5/14/2018 ESP_SOB - slidepdf.com
http://slidepdf.com/reader/full/espsob 144/244
∂ Ω ⊂ ∪ U e tambem existe δ > 0 verificando
Ωδ = x ∈ Ω; dist(x, ∂ Ω) ⊂ ∪∞i=1 U i,
∪x∈Ω∩U j (x + C j ) := Qj ⊂ Ω
e ainda a intersecao de R + 1 Qj e vazia. Para cada λ
∈Zn, denotemos por
H λ =
x ∈ Rn; λkδ
2√
n≤ xk ≤ (λk + 1)
δ
2√
n, para k = 1, · · · , n
E simples verificar que
RN = ∪λ∈ZH λ
H λ
t
t
t
t
δ2√2
(λ1, λ2) δ2√2
(λ1, λ2)
δ2√2
(λ1, λ2) δ2√2
(λ1, λ2)
δ
2√2
δ2√2
δ2√2
λ1 ≤ x ≤ δ2√2
(λ1 + 1)
δ2√2
λ2 ≤ y ≤ δ2√2
(λ2 + 1)
5.9. Teorema das derivadas intermediarias 141
Denotemos por Ω0 o conjunto
Ω0 =
∪H λ⊂ΩH λ
e tomemos δ > 0 tal queΩ \ Ωδ ⊂ Ω0 ⊂ Ω
Mostraremos que se verifica
uLp(Ω0) ≤ K
2uLp(Ω0) +
1
uLp(Ω0)
e para cada j ∈ N que

5/14/2018 ESP_SOB - slidepdf.com
http://slidepdf.com/reader/full/espsob 145/244
e para cada j ∈ N que
uLp(Ω∩U j) ≤ K
2uLp(Ω∩U j) +
1
uLp(Ω∩U j)
Tomando somatorio teremos
u
Lp(Ω)
≤
∞
j=1 u
Lp(Ω∩U j) +
u
Lp(Ω0).
Como os conjuntos Qj somente tem intersecao no maximo de R + 1 termos, entaoteremos que
uLp(Ω) ≤ K (R + 1)
2uLp(Ω) +
1
uLp(Ω)
.
De onde segue o resultado. Provaremos primeiro o teorema para Ω0. Aplicando o
Teorema 5.9.1, teremos que δ2√
n(λk+1)
δ2√
nλk
|Dku| p dxk ≤ K
p
δ2√
n(λk+1)
δ2√
nλk
|D2ku| p dxk +
1
p
δ2√
n(λk+1)
δ2√
nλk
|u| p dxk
Integrando na direcao ortogonal de ek teremos
H λ
|Dku| p
dxk ≤ K p
H λ|D
2ku|
p
dxk +1
p H λ
|u| p
dxkComo as intersecoes de H λ e vazio ou tem medida nula, teremos que
Ω0
|Dku| p dxk ≤
λ∈Zn
H λ
|Dku| p dxk ≤ K
p
Ω0
|D2ku| p dxk +
1
p
Ω0
|u| p dxk
Provaremos agora que a desigualdade tambem e valida sobre Qj. Denotemos por
Ωjv = y + tv; y ∈ Ω ∩ U j , v uma direcao do cone
142 Capıtulo 5. Espacos de Sobolev
Claramente teremos que
Ω ∩ U j ⊂ Ωjv ⊂ Qj
Cada reta paralela a v ou tem intersecao vazia ou tem intersecao com Ωjv com uma
amplitude igual a ρ, onde ρ satisfaz
h ≤ ρ ≤ h + diam U j ≤ h + M
onde h e a altura do cone. Usando novamente o Teorema 5.9.1 na direcao de v para
f (t) = u(x + tv),
teremos que
x+ρv
|f |p dt ≤ K p x+ρv
|f |p dt1 x+ρv
|f |p dt

5/14/2018 ESP_SOB - slidepdf.com
http://slidepdf.com/reader/full/espsob 146/244
x
|f | p dt ≤ K
p x
|f | p dt + p
x
|f | p dt
.
De onde segue que x+ρv
x
|Dvu| p dt ≤ K
p
x+ρv
x
|2u| p dt +1
p
x+ρv
x
|f | p dt
.
Integrando na direccao ortogonal a v teremos que
Ω∩U j
|Dvu| p dt ≤ K
p
Ω∩U j
|2u| p dt +1
p
Ω∩U j
|f | p dt
.
Tomemos uma base do RN de vetores unitarios v1, v2, · · · vn com direcoes no cone.Nestas condicoes teremos que
∂u
∂xj
=n
i=1 aiDviu.
De onde segue que Ω∩U j
|u| p dx ≤ K
p
Ω∩U j
|2u| p dx +1
p
Ω∩U j
|u| p dx
O que completa a demonstracao.
5.10 Desigualdades de interpolacao
Comecaremos estudando a versao unidimensional do Terema de Interpolacao
5.10. Desigualdades de interpolac˜ ao 143
Teorema 5.10.1 (Desigualdade de Gagliardo-Nirenberg). Seja 1 ≤ q ≤ p ≤ ∞e tomemos r > 1, ent˜ ao teremos que
uLp(a,b) ≤ u1−αLq(a,b)uαLr(a,b)
se o intervalo b − a = ∞. Quando b − a e finito teremos,
uLp(a,b) ≤ u1−αLq(a,b)uα
W 1,r(a,b)
onde
α =
1q − 1
p
1q + 1 − 1r

5/14/2018 ESP_SOB - slidepdf.com
http://slidepdf.com/reader/full/espsob 147/244
q
Demonstracao.- Pela densidade de D([a, b]) podemos supor que u ∈ C ∞0 (R). Portantopodemos escrever
u(x) = u(y) +
y
x
u(ξ) dξ
Integrando com respeito a y sobre [α, β ] teremos
(β − α)u(x) =
β
α
u(y) dy + (β − α)
x
y0
u(ξ) dξ
Na identidade acima temos usado o teorema do valor medio para integrais. Aplicandoa desigualdade de Holder teremos
(β − α)|u(x)| ≤ (β − α)q
q−1 β
α|u(y)|q dy
1q
+ (β − α)1+r
−1
r β
α|u|r dx
1r
Elevando a potencia p e integrando com respeito a x teremos que
(β − α) p
β
α
|u(x)| p ≤ 2 p(β − α)p(q−1)
q+1
β
α
|u(y)|q dy
pq
+2 p(β − α)1+ p+ p(r−1)r
β
α
|u|r dx p
r
(5.15)
Onde temos usado(A + B) p ≤ 2 p(A p + B p)
No caso em que b − a seja finito, tomemos > 0 tal que 0 < < b−am−1 . Decompomos o
intervalo [a, b] da seguinte forma
[a, b] = ∪mi=1[αi, αi+1], onde αi = a +
(b − a)i
m
144 Capıtulo 5. Espacos de Sobolev
No caso em que b − a = ∞, podemos supor que b = ∞, (as outras posibilidades semostram da mesma maneira), podemos decompor o intervalo [a, b] da seguinte forma
[a, b] = ∪∞i=1[αi, αi+1], onde αi = a + i
Da expressao 5.15 teremos que
(αi+1 − αi) p
αi+1
αi
|u(x)| p ≤ 2 p(αi+1 − αi)p(q−1)
q+1
αi+1
αi
|u(y)|q dy
pq
+2 p(αi+1 − αi)1+ p+ p(r−1)r
αi+1
αi
|u|r dx
pr
De onde obtemos
p p

5/14/2018 ESP_SOB - slidepdf.com
http://slidepdf.com/reader/full/espsob 148/244
αi+1
αi
|u(x)| p ≤ 2 pp(q−1)
q+1− p
αi+1
αi
|u(y)|q dy
pq
+ 2 p1+p(r−1)
r
αi+1
αi
|u|r dx
pr
tomando somatorio teremos
b
a
|u(x)| p dx ≤ 2 pp(q−1)
q+1− p
m
i=1 αi+1
αi
|u(y)|q dy
pq
+2 p1+p(r−1)
r
mi=1
αi+1
αi
|u|r dx
pr
Usando o Lema 1.4.1 para pq
≥ 1 e pr
≥ 1 segue que
b
a
|u(x)| p dx ≤ 2 pp(q−1)
q +1− p
b
a
|u(y)|q dy
pq
+ 2 p1+p(r−1)
r
b
a
|u|r dx
pr
Que implica
uLp(a,b) ≤ K
1p− 1
q uLq(a,b) + 1p+
r−1r uLr(a,b)
(5.16)
No caso em que b − a = ∞, podemos tomar
=
uLq(a,b)
u
Lr(a,b)
σ
substituindo na desigualdade (5.16) teremos
uLp(a,b) ≤ K
uσ( 1p− 1
q )+1
Lq(a,b) uσ(− 1p+
1q )
Lr(a,b) + uσ( 1p+r−1
r )
Lq(a,b) u1−σ( 1p+r−1
r )
Lr(a,b)
5.10. Desigualdades de interpolac˜ ao 145
Igualando as potencias teremos
σ1
p −1
q+ 1 = σ1
p+
r − 1
r De onde obtemos
σ =1
1q + 1 − 1
r
Tomando
α =
1q − 1
p1
q+ 1
−1
r
teremos

5/14/2018 ESP_SOB - slidepdf.com
http://slidepdf.com/reader/full/espsob 149/244
teremosuLp(a,b) ≤ 2K
u1−α
Lq(a,b)uαLr(a,b)
De onde segue a primeira desigualdade. No caso em que b − a seja finito a substituicaode e valida somente para valores menores do que 0 < 1. Tomando neste caso
= 0uLq(a,b)
uW 1,r(a,b)e fazendo o mesmo raciocioneo, segue o resultado. A prova esta completa.
Teorema 5.10.2 (Desigualdade de Gagliardo-Nirenberg).Seja Ω ⊂ RN um conjunto aberto, com a propriedade uniforme do cone. Sejam
1 ≤ q ≤ p ≤ ∞ e r > n, p ≥ r. Ent˜ ao, existe uma constante C > 0, tal que
||u||Lp(Ω) ≤ C ||u||1
−α
Lq(Ω)||u||α
W 1,r(Ω), ∀u ∈ W 1,r
(Ω)
com α satisfazendo α1q + 1
n − 1r
= 1
q − 1 p .
Demonstracao.- Pela densidade de C ∞(Ω) podemos supor que u ∈ C ∞(Ω). Assimteremos que
u(x) = u(y) + 10
d
dt u(tx + (1 − t)y) dt
= u(y) +
10
u(tx + (1 − t)y) · (x − y) dt
Integrando com respecto a y1 no intervalo [α1, β 1] obtemos
(β 1−
α1)u(x) = β1
α1
u(y) dy1 + β1
α1 1
0 u(tx + (1
−t)y)
·(x
−y) dtdy1
Tomando modulo e aplicando a desigualdade de Cauchy-Schwards, obtemos,
146 Capıtulo 5. Espacos de Sobolev
(β 1 − α1)|u(x)| ≤ (β 1 − α1)q−1
q
β1
α1
|u(y)|q dy1
1q
+(β 1 − α1)r−1
r
10
β1
α1
|u(tx + (1 − t)y)|r|x − y|r dy1
1r
dt
Tomando x e y no paralelepıpedo ω :=n
i=1[αi, β i] temos que
|x − y| ≤ max β i − αi, i = 1 · · · n := L,
obtemos β
1

5/14/2018 ESP_SOB - slidepdf.com
http://slidepdf.com/reader/full/espsob 150/244
(β 1 − α1)|u(x)| ≤ (β 1 − α1)q−1
q
β1
α1
|u(y)|q dy1
q
+(β 1 − α1)r−1
r L
10
β1
α1
|u(tx + (1 − t)y)|r dy1
1r
dt
Note que β1
α1
|u(tx + (1 − t)y)|r dy1 =
β1
α1
|u(tx1 + (1 − t)y1, · · · , txn + (1 − t)yn)|r dy1
Fazendo uma mudanca de variavel obtemos β1
α1
|u(tx + (1 − t)y)|r dy1 =1
1 − t
tx1+(1−t)β1
tx1+(1−t)α1
|u(σ, · · · , txn + (1 − t)yn)|r dσ1
Lembrando que α1 < x1 ≤ β 1 concluimos que β1
α1
|u(tx + (1 − t)y)|r dy1 ≤ 1
1 − t
β1
α1
|u(σ1, · · · , txn + (1 − t)yn)|r dσ1.
De onde obtemos
(β 1 −
α1
)|u(x)
| ≤(β
1 −α1
)q−1
q β1
α1 |u(y)
|q dy
11q
+(β 1 − α1)r−1
r L
10
1
(1 − t)1r
β1
α1
|u(σ1, · · · , txn + (1 − t)yn)|r dσ1
1r
dt
5.10. Desigualdades de interpolac˜ ao 147
Integrando sobre [α2, β 2] com respecto a y2 e repetindo os mesmos argumentos, encon-tramos que
2i=1
(β i − αi)|u(x)| ≤ (2
i=1
(β i − αi))q−1
q β1
α1
β2
α2
|u(y)|q dy1dy2 1
q
+(2
i=1
(β i − αi))r−1
r L
10
1
(1 − t)2r
β2
α2
β1
α1
|u(σ1, σ2, · · · , wn)|r dσ1dσ2
1r
dt
onde wn = txn + (1 − t)yn. Repetindo este processo desde i = 3 · · · n encontramos que1

5/14/2018 ESP_SOB - slidepdf.com
http://slidepdf.com/reader/full/espsob 151/244
ni=1
(β i − αi)|u(x)| ≤ (n
i=1
(β i − αi))q−1
q
ω
|u(y)|q dy1dy2
1q
+(n
i=1(β i − αi))
r−1r L
10
1
(1 − t)nr
ω
|u(σ1, σ2, · · · , σn)|r dσ
1r
dt,
com ω := ni=1[αi, β i]. Ou equivalentemente
|u(x)| ≤ (n
i=1
(β i − αi))q−1
q −1
ω
|u(y)|q dy1dy2
1q
+(n
i=1(β i−
αi))r−1
r −1L 1
0
1
(1 − t)n
r ω |u(σ1, σ2,
· · ·, σn)
|r dσ
1r
dt,
Como 10
dt
(1 − t)nr
=r
r − n
Tomando αi e β i de tal forma que
β i−
αi =
encontramos que
|u(x)| ≤ −nq
ω
|u(y)|q dy
1q
+r−
nr +1
r − n
ω
|u|r dσ
1r
dt.
De onde segue que
|u(x)| p ≤ −pn
q
ω
|u(y)|q dy p
q
+r−
npr + p
r − n
ω
|u|r dσ p
r
,
148 Capıtulo 5. Espacos de Sobolev
Integrando sobre ω con respecto a x, encontramos que ω
|u(x)| p ≤ n− pnq
ω
|u(y)|q dy
pq
+r−
npr+ p+n
r − n
ω
|u|r dσ
pr
Como Ω = mj=1 ωj , tomando somatorio e aplicando o Lema 1.4.1 obtemos que
Ω
|u(x)| p ≤ n− pnq
Ω
|u(y)|q dy
pq
+r−
npr+ p+n
r − n
Ω
|u|r dσ
pr
Para p > n. Finalmente, tomando
=
uLq(Ω)
u
Lr(Ω)
σ
De onde encontramos que

5/14/2018 ESP_SOB - slidepdf.com
http://slidepdf.com/reader/full/espsob 152/244
Ω
|u(x)| p ≤ uLq(Ω)
uLr(Ω)
σ(n− pnq)
Ω
|u(y)|q dy
pq
+
uLq(Ω)
uLr(Ω)
σ(−npr+ p+n)
r p
(r − n) p
Ω
|u|r dσ
pr
,
Ou equivalentemente
Ω
|u(x)| p ≤ uσ(− pnq+n)+ p
Lq(Ω) uσ( pnq−n)
Lr(Ω)
+r p
(r − n) puσ(−np
r + p+n)
Lq(Ω) uσ(npr − p−n)+ p
Lr(Ω) .
Nosso seguinte passo e encontrar σ de tal forma que as potencias fiquem uniformes.Com este proposito igualamos as potencias na norma de u,
σ(− pnq
+ n) + p = σ(−npr
+ p + n), ⇒ p = σ( pnq
− npr
+ p)
De onde
σ =1
nq − n
r + 1
Note que
σ(
−
pn
q
+ n) + p = p + p
1 p − 1
q1
q −1
r +
1
n
Tomando
α =
1q
− 1 p
1q − 1
r + 1n
5.11. Distribuic˜ oes vetoriais 149
Encontramos que
σ(
−
pn
q
+ n) + p = p
− pα, σ(
pn
q −n) = pα
Sustituindo estes valores encontramos Ω
|u(x)| p ≤ (1 +r p
(r − n) p)u p−αp
Lq(Ω)u pαLr(Ω).
De onde segue o resultado.
5.11 Distribuicoes vetoriais

5/14/2018 ESP_SOB - slidepdf.com
http://slidepdf.com/reader/full/espsob 153/244
Nesta secao introduziremos brevemente o conceito de Distribuicoes vetoriais. Seja X um espaco de Banach, com norma · X . Seja f um funcao definida a valores em X .
Definicao 5.11.1 Diremos que f
f : [a, b] → X
e uma func˜ ao simple se a imagem de f e constituıda por um n umero finito x1, · · · , xmde vetores de X . Diremos que uma func˜ ao simples f e mensur avel se para todo x ∈ X f −1(x) e um conjunto mensur´ avel de ]a, b[. Finalmente, diremos que uma func˜ ao
g : [a, b] → X
e uma func˜ ao mensur´ avel se existe uma seq¨ uencia de func˜ oes simples f ν tal que
f ν (s) → g(s) q.s. em ]a, b[.
Uma caraterizacao das funcoes mensuraveis e dada pelo seguinte Proposicao.
Proposicao 5.11.1 Uma func˜ ao F :]a, b[→ X e mensur avel se, e somente se verificam as seguintes propriedades:
(i) A imagem de ]a, b[ por F e separ avel quase sempre. Isto e existe um conjunto S de medida nula tal que F (]a, b[\S ) e separ avel.
(ii) F e fracamente mensur´ avel. Isto e para todo w ∈ X ∗ a func˜ ao s → F (s) , w emesur´ avel
Definicao 5.11.2 Diremos que uma func˜ ao F :]a, b[→ X e integr avel se F e men-sur´ avel e b
a
F (s)X ds < ∞
150 Capıtulo 5. Espacos de Sobolev
A definicao anterior tambem e chamada de Teorema de Bochner.A seguir enunciaremos teoremas classicos que sao extensoes dos Teoremas sobre RN .
Teorema 5.11.1 (Teorema da Convergencia Dominada) Seja f uma seq¨ uencia
de func˜ oes integr´ aveis tal que
f ν (s) → f (s) q.s. em ]a, b[
e que exista uma func˜ ao integr´ avel ϕ :]a, b[→ R satisfazendo
f ν (s)X ≤ ϕ(s) ∀ν ∈ N.
Ent˜ ao, f e integr avel e ainda temos
limν→∞
b
a
f ν (s) − f (s)X ds = 0.
5/14/2018 ESP_SOB - slidepdf.com
http://slidepdf.com/reader/full/espsob 154/244
Lema 5.11.1 (Lema de Fatou) Seja f ν uma seq¨ uencia de func˜ oes integr´ aveis tal que
f ν (s) → f (s) fracamente q.s. em ]a, b[
Isto e f ν (s) , w → f ν (s) , w quase sempre em ]a, b[ para todo w ∈ X ∗. Suponhamosque exista uma constante C , tal que b
a
f ν (s)X ds ≤ C, ∀ν ∈ N.
Ent˜ ao f e integr avel e ainda temos que b
a
f (s)X ds ≤ liminf ν→∞
b
a
f ν (s)X ds.
Denotaremos por L p
(a, b; X ), o conjunto
L p(a, b; X ) = f mensuravel; s → f (s)X ∈ L p(a, b)
O espaco acima, munido da norma
f Lp(a,b;X) =
b
a
f (s) p ds
1p
e um espaco de Banach. Quando X e um espaco reflexivo, entao o espaco L p(a, b; X )tambem sera um espaco reflexivo para p > 1 e seu dual e identificado por L p(a, b; X ∗),onde 1/p + 1/p = 1. Se X e um espaco de Hilbert, e simple verificar que L2(a, b; X ) etambem um espaco de Hilbert.
5.11. Distribuic˜ oes vetoriais 151
Definicao 5.11.3 Seja P uma partic˜ ao de ]a, b[, isto e, P = a = a1 < · · · < an = b.Diremos que uma func˜ ao f :]a, b[→ X e de variac˜ ao limitada, se
supP ∈P
mk=1
f (ak) − f (ak−1)X < ∞.
Onde por P estamos denotando o conjunto de todas as partic˜ oes sobre ]a, b[. Denotare-mos por Var (f, [a, b]) ao valor
Var (f, [a, b]) = supP ∈P
m
k=1 f (ak)
−f (ak
−1)
X
Var(f [a b]) e chamado variacao total de f Denotaremos por V B(a b; X) o conjunto de

5/14/2018 ESP_SOB - slidepdf.com
http://slidepdf.com/reader/full/espsob 155/244
Var (f, [a, b]) e chamado variac ao total de f . Denotaremos por V B(a, b; X ) o conjunto detodas as func˜ oes de variac˜ ao limitada sobre X . Por simplicidade escreveremos V f (s) =Var (f, [a, s]).
Proposicao 5.11.2 Seja X um espaco reflexivo e seja f uma func˜ ao de variac˜ ao lim-itada f
∈V B(a, b; X ). Ent˜ ao f e derivavel quase sempre,
df
ds∈ L1(a, b; X )
e ainda temos que b
a
df
dt(s) ds ≤ V ar(f ; [a, b]),
df dt
(s) ≤ dds
V f (s), q.s. ]a, b[.
Definicao 5.11.4 Diremos que uma func˜ ao f :]a, b[→ X e absolutamente contınua sobre X se para todo > 0 existe um δ > 0 tal que para toda seq¨ uencia de subintervalos]ai, bi[ disjuntos dois a dois se verifica
m
i=1 |ai − bi| < δ ⇒m
i=1 |f (ai) − f (bi)| < .
Mostra-se como no caso escalar que toda funcao f absolutamente integravel e devariacao limitada. Alem do mais a aplicacao s → V f (s) e absolutamente contınua eainda temos que
V f (s) =
s
a
d
dtV f (τ ) dτ.
Denotaremos por D(]a, b[; X ) o espaco da funcoes infinitamente diferenciaiveis comsuporte compacto contido ]a, b[ e a valores em X .
152 Capıtulo 5. Espacos de Sobolev
Diremos que uma funcao f ∈ L p(a, b; X ) possui uma derivada fraca em L p(a, b; X )se existe uma funcao v ∈ L p(a, b; X ) satisfazendo
b
a
f (s)α(s) ds =
− b
a
v(s)α(s) ds,
∀α
∈ D(a, b).
Assim definimos o espacoW 1,p(a, b; X ) =
f ∈ L p(a, b; X ); tal que f tenha derivada fraca em L p(a, b; X )Este espaco munido da norma
f pW = f p
Lp(a,b;X) + f pLp(a,b;X),
e um espaco de Banach.
P i ˜ 5 11 3 S j X fl i E t˜ i t i d d ˜

5/14/2018 ESP_SOB - slidepdf.com
http://slidepdf.com/reader/full/espsob 156/244
Proposicao 5.11.3 Seja X um espaco reflexivo. Ent ao as seguintes propriedades s aoequivalentes.
(i) f ∈ W 1,1(a, b; X )
(ii) b−h
af (s + h) − f (s)X ds ≤ Ch ∀h ∈]a, b[.
(ii)| b−h
a f (s), dϕ
ds
(s)| ≤
C
ϕ
L∞(a,b;X)
∀ϕ
∈ D(a, b; X ∗).
Proposicao 5.11.4 As propriedades seguintes s˜ ao equivalentes
(i) f ∈ W 1,p(a, b; X ).
(ii) Existe v ∈ L p(a, b; X ) tal que
limh→0
b−h
a
f (s + h) − f (s)
h− v(s) ds = 0.
(iii) Existe k ∈ L p(a, b; X ) tal que
f (s) = f (a) +
s
a
k(τ ) dτ.
5.12 Teoremas de compacidade
Nesta secao mostraremos resultados de compacidade para espacos de distribuicoes ve-
toriais. Denotemos por B0, B e B1 espacos de Banach onde B0 e B1 sao espacosreflexivos satisfazendo:
B0 ⊂ B ⊂ B1, A imersao de B0 em B compacta. (5.17)
5.12. Teoremas de compacidade 153
Definamos o espaco
W = v; v ∈ L p0(0, T ; B0), vt ∈ L p1(0, T ; B1) ,
com T finito e 1 < pi < ∞, i = 0, 1. E simples verificar que W munido da norma
vW = vLp0(0,T ;B0)) + vtLp1(0,T ;B1),
e um espaco de Banach.
Lema 5.12.1 Suponhamos que (5.17) seja v´ alida, ent˜ ao para todo η > 0 existe
uma constante C (η) > 0 tal que
v ≤ ηv + C(η)v

5/14/2018 ESP_SOB - slidepdf.com
http://slidepdf.com/reader/full/espsob 157/244
vB ≤ ηvB0+ C (η)vB1
Demonstracao.- Caso contrario existe uma subsequencia de funcoes (uνk), e um
numero η0 > 0 que verifica
uνkB ≥ η0uνkB0 + cηkuνkB1 (5.18)
Podemos tomar cηk≥ k de onde teremos que
uνkB ≥ η0uνk
B0+ kuνk
B1.
Denotando por wk = uνk/uνk
B obtemos
1 ≥ η0wkB0 + kwkB1 . (5.19)De onde segue que
wkB = 1, wkB1≤ 1
k, ∀k, (5.20)
Portanto, teremos
wk
→0 em B1, wk 0 fraco em B0
Da imersao compacta de B0 em B segue que
wk → 0 forte em B.
De onde temos que1 = lim
k→∞wkB = 0.
Esta contradicao mostra o resultado
Nestas condicoes temos o seguinte teorema devido a Lions.
154 Capıtulo 5. Espacos de Sobolev
Teorema 5.12.1 Sejam 1 < p0, p1 < ∞ e suponhamos que (5.17) seja v´ alida.Ent˜ ao a imers˜ ao de W sobre L p0(0, T ; B) e compacta.
Demonstracao.- Seja uν uma sequencia de funcoes limitadas em W . Mostraremosque existe uma subsequencia, que a denotaremos da mesma forma, que converge forteem L p0(0, T ; B). Da reflexividade de W existe uma subsequencia de uν e uma funcaou ∈ W tal que
uν → u fraco em W ,sem perda de generalidade podemos supor que u = 0, caso contrario, considere asequencia uν = uν − u no lugar de uν . Do Lema 5.12.1 segue que para todo η > 0existe uma constante cη > 0 para o qual temos:
uνLp0 (0,T ;B) ≤ ηuνLp0 (0,T ;B0) + cηuνLp0 (0,T ;B1). (5.21)
( ) A

5/14/2018 ESP_SOB - slidepdf.com
http://slidepdf.com/reader/full/espsob 158/244
Note que uν esta limitado em L p0(0, T ; B0). Assim podemos tomar η tal que
uνLp0 (0,T ;B) ≤
2+ cηuνLp0 (0,T ;B1).
Finalmente, para provar que uν converge forte para zero, bastara mostrar que uν con-verge forte para zero em L p0(0, T ; B1). E simples verificar que uν pode ser identificadapor uma funcao contınua em C (0, T ; B1), portanto limitada em [0, T ]. Do teorema deLebesgue, falta apenas verificar que uν converge pontualmente. Integrando por partestemos a identidade s+h
s
(s + h − τ )uν dτ = (s + h − τ )uν (τ )|s+hs +
s+h
s
uν dτ.
De onde segue
uν (s) =1
h s+h
s
uν (τ ) dτ −
1
h s+h
s
(s + h−
τ )uν (τ ) dτ.
E simples verificar que 1
h
s+h
s
(s + h − τ )uν (τ ) dτ
≤ s+h
s
uν (τ )B1dτ ≤
2.
Para h pequeno. Da compacidade segue
1
h s+h
s uν (τ ) dτ → 0 fraco em B0, ⇒1
h s+h
s uν (τ ) dτ → 0 forte em B1,
concluımos assim queuν (s) → 0, ∀s ∈ [0, T ]
5.13. Exercıcios 155
O que completa a demonstracao
Finalmente, estudaremos uma melhora do Teorema anterior devido a J.U. Kim [?].
Teorema 5.12.2 Seja uν uma seq¨ uencia de func˜ oes tal que
uν → u fraco * em L∞(0, T ; H β (Ω))
uν → u fraco em L∞(0, T ; H α(Ω))
Para −1 ≤ α < β ≤ 1. Ent˜ ao teremos que
uν → u forte em C (0, T ; H r(Ω))
para todo r ≤ β .
Demonstracao.- Sem perda de generalidade podemos supor que α e β sao diferentes

5/14/2018 ESP_SOB - slidepdf.com
http://slidepdf.com/reader/full/espsob 159/244
de 1/2. Denotemos por r = θα + (1 − θ)β . Entao usando interpolacao teremos paraquase todo par de pontos t1 e t2 que
uν(t2) − uν (t1)H r(Ω) ≤ C θuν (t2) − uν (t1)θH α(Ω)uν (t2) − uν (t1)1−θ
H β(Ω)
≤ C θ t2
t1 uν (t)H α(Ω) dtθ
≤ C θ|t1 − t2| θ2
Consequentemente uν esta em C ([0, T ]; H r(Ω)) e como a imersao de H s(Ω) e compactaem H r(Ω) para s > r, podemos usar o teorema de Ascoli para concluir nosso resultado.A prova esta completa
5.13 Exercıcios
1. Mostrar que existem conjuntos Ω que nao satisfazem a propriedade do segmentoe numeros m e p tais que D(Ω) e denso em W m,p(Ω).
2. Encontre os menores numeros m para os quais a k−esima derivada de δx pertencaa W −m,p(Ω)
3. Suponhamos que m
−n p > 0 nao e um numero inteiro, denotamos por
k =
m − n
p
e θ = m − n
p− k, 0 < θ < 1.
Mostre que para toda u ∈ W m,p(RN ) e valido
DαuL∞ ≤ uW m,p ∀α, |α| ≤ k
e ainda que
|Dαu(x) − Dαu(y)| ≤ C |x − y|θ uW m,p .
Finalmente, que W m,p(RN ) ⊂ C k(RN ).
156 Capıtulo 5. Espacos de Sobolev
4. Mostre que o espaco W m,p(Ω) e completo, reflexivo e uniformemente convexo.
5. Seja Ω = RN \ 0. Em que casos teremos que C ∞0 (Ω) e denso em W m,p(Ω).
6. Mostre atraves de um exemplo que a propriedade do cone nao implica a pro-priedade do segmento.
7. Mostre que se Ω e um aberto de classe C m entao Ω possui a propriedade dosegmento e a propriedade uniforme do cone.
8. Mostre que os espacos W definido na secao 5.11 sao espacos completos.
9. Na demonstracao do Teorema 5.12.1 pode ser trocada a hipothese (5.17) porB = B1?. Justifique sua resposta.
10. Escreva uma funcao satisfazendo |u| ∈ L1(Ω) e u ∈ L1(Ω)
11. Mostre que L p(a, b; L2(]a, b[)) = L p(]a, b[×]a, b[)
12. Mostre que se

5/14/2018 ESP_SOB - slidepdf.com
http://slidepdf.com/reader/full/espsob 160/244
u ∈ L p(a, b; Ls(Ω)) ∩ Lq(a, b; Lr(Ω)).
Entao teremos queu ∈ L p(a, b; Lq(Ω))
onde1
p =
θ
p +
1
−θ
q ,
1
q =
θ
s +
1
−θ
r
para todo θ ∈ [0, 1].
13. Seja u uma funcao satisfazendo
u ∈ L p(a, b; H s(Ω)) ∩ Lq(a, b; H r(Ω))
entao teremos queu
∈L p(a, b; H θs+(1−θ)r(Ω))
onde1
p=
θ
p+
1 − θ
q
14. Caraterize como um espaco de Sobolev o fecho de C ∞0 (RN ) com respeito a normaϕLp(RN )
15. Seja Ω um aberto limitado de classe C 2. Caraterize o fecho de C ∞0 (Ω) comrespeito a norma
ϕ
Lp(Ω)
16. Mostre que em H 2(RN ) sua norma usual e equivalente a u2∆ = u2L2(RN ) +
∆u2L2(RN ) que pode afirmar sobre a norma u2∆ = u2L2(Ω) +∆u2L2(Ω) sobre
o espaco H 2(Ω).
5.13. Exercıcios 157
17. Considere o espaco: H =
ϕ ∈ L2(Ω); ∆ϕ ∈ L2(Ω)
munido da norma ϕ2∆ =ϕ2L2(Ω) + ∆ϕ2L2(Ω) O espaco H e completo?. Justifique sua resposta.
18. Encontre o menor numero m para que a k-esima derivada da distribuicao δ0(Delta de Dirac) pertenca a W −m,p(Ω)
19. Mostre que uma funcao w pertence a W 1,p(Ω), com p > 1 se e somente se existeuma constante C > 0 verificando
T hw − wLp(Ω) ≤ C |h| ∀Ω ⊂⊂ Ω
e |h| < dist(Ω, Ωc)
20. Mostre atraves de um exemplo que a imerssao W
m,p
(Ω) ⊂ L
p
(Ω) nao e compacta,quando Ω =
(x1, · · · , xn) ∈ Rn;
n−1i=1 |xi| ≤ 1
21 E i t t d d i d i t di´ i idi i l

5/14/2018 ESP_SOB - slidepdf.com
http://slidepdf.com/reader/full/espsob 161/244
21. Enuncie e mostre o teorema das derivadas intermediarias no caso unidimensional
22. Seja u ∈ C 2(a, b). Mostre que para todo > 0 existe um C tal que
ux(x) ≤ C b
a
|ux|2 dx
12
+
b
a
|uxx|2 dx
12
.
23. Mostre que sobre W m,p(a, b) as normas
w pW m,p(a,b) =
mi=0
b
a
|w(i)| p dx
w pW =
b
a
|w| p dx +
b
a
|w(m)| p dx
sao equivalentes. Por w(j) estamos denotando a j-esima derivada de w.
24. Seja u uma funcao tal que sua m-esima derivada u(m) ∈ L p(R). Em que espacose encuentra a propria funcao u?. Que pode afirmar sobre suas derivadas inter-mediarias?.
25. Seja u ∈ W m,p(RN ). Mostre que se uma derivada parcial de u e nula entao u = 0.
26. Considere o conjunto L p(a, b) para 0 < p < 1. Mostre que L p(a, b) e um espaco
vetorial e que o funcional
d(f, g) =
b
a
|f − g| p dx
Define uma metrica sobre L p(a, b) que faz o espaco completo. Verifique que abola
B(0) = f ∈
L p(a, b), b
a |f | p dx < 1
nao e convexa.
158 Capıtulo 5. Espacos de Sobolev
27. Defina os espacos W 1,p(a, b) com 0 < p < 1. Mostre que e um espaco vetorial,um espaco metrico completo e que a bola unitaria
B(0) = f ∈ W 1,p(a, b), b
a
|f | p + |f | p dx < 1nao e convexa.
28. Seja Ω um hipercubo. Mostre que se u ∈ W 1,p(Ω) e tal que Ω u dx = 0. Entao
e validauLp(Ω) ≤ uLp(Ω)
29. Mostre que a funcao f (x) = ex e uma distribuicao, mas nao e uma distribuicaotemperada.
30. Mostre que os espacos W m,p sao uniformente convexos.
31. De um exemplo de um aberto bidimensional que nao tenha a propriedade uni-f d

5/14/2018 ESP_SOB - slidepdf.com
http://slidepdf.com/reader/full/espsob 162/244
forme do cone
32. Seja H = v ∈ L p(0, ∞); v ∈ L p(0, ∞). Verifique que o funcional
µ(f ) =
∞0
|f | p dx
1p
e uma norma sobre H. O espaco H e fechado?. Caraterize o espaco H como umespaco de Sobolev.
33. Mostre que si uma distribuicao T tem ordem 0 e e tal que SuppT ⊂ x0 entaoT = δx0
Capıtulo 6
Problemas de Equilibrio

5/14/2018 ESP_SOB - slidepdf.com
http://slidepdf.com/reader/full/espsob 163/244
Neste capıtulo estudaremos alguns problemas de equilibrio. Comecaremos fazendo umadeducao fısica do problema utilizando o princıpio Bernoulli, tambem conhecido comoprincıpio de trabalho virtual ou pequenhos deslocamentos.
6.1 Principio de Bernoulli
O princıpio de Bernoulli ou princıpio de trabalho virtual, estabelece que a posic˜ ao deequilibrio de um corpo e aquela que minimiza sua energia potencial . Isto e para calculara posicao de equilibrio de um corpo, sera necessario primeiro calcular a energia potencialassociada a cada posicao admissivel do material.
Por exemplo, suponhamos que temos uma membrana inicialmente posicionada sobre
o plano XY. Sobre ela se encontra atuando uma forca externa f e a acao de seu propriopeso. Denotemos por u(x) a funcao que define a posicao de equilibrio. Suponhamosque a tensao da membrana e conhecida e igual a k e que o coeficiente de elasticidade edefinido pela funcao a(x). Denotemos por Γ o bordo da membrana e suponhamos queela esta presa isto e
u(x) = 0, em Γ.
Esta condicao e chamada de Condicao de Dirichlet. Suponhamos que a resistencia
elastica ao desplacamento vertical, segue a lei de Hooke, portanto esta forca pode sercalculada como o produto −a(x)u(x), logo o trabalho que ela realiza para desplazaro ponto x da posicao de reposo ate a posicao de equilibrio sera igual a −1
2a(x)u2(x).Assim teremos que o trabalho realizado pela forca externa f e pela resistencia elasticado material para mover a membrana da posicao inicial a posicao de equilibrio e igual a
T 1 =
Ω
f (x)u(x) − a(x)
2u2(x) dx
A membrana tambem e acionada pela acao das forcas internas. Portanto a tensao krealizara trabalho na direcao da deformacao. Se denotamos por ∆S a area da superficie
160 Capıtulo 6. Problemas de Equilibrio
deformada e por ∆x o valor da superfıcie inicial, teremos que o trabalho realizado sobre∆x sera igual a
−k(∆S − ∆x).
No caso unidimensional (∆S
−∆x) representa o incremento da deformacao de uma
corda. O trabalho e negativo, porque a forca se opone a deformacao. Sabemos que
∆S =
1 + |u|2∆x.
Portanto o trabalho total da tensao k realizado sobre toda a membrana sera igual a
− Ω
k(∆S − ∆x) = − Ω
k(x)
1 + |u|2 − 1
dx.
Assim teremos que a energıa potencial e dada por
J (u) =
k(x)
1 + |u|2 − 1
dx +
a
2u2(x) − f (x)u(x) dx

5/14/2018 ESP_SOB - slidepdf.com
http://slidepdf.com/reader/full/espsob 164/244
( )
Ω
( )
| |
2( ) ( ) ( )
Para simplificar a expressao anterior, suporemos que o gradiente de u, u e pequenho.De fato, sabemos pelos desenvolvimentos por series de Taylor que
√1 + x pode ser
escrita como
√1 + x = 1 + x2
− 18
x2 + 112
ξ3
onde ξ ∈]0, x[. Assumindo que |u| seja pequeno, entao podemos despreciar os termos|u|4 e |u|6. Assim teremos que
1 + |u|2 − 1 ≈ 1
2|u|2.
Podemos entao, aproximar J pela expressao
J (u) =
Ω
1
2k(x)|u|2 dx +
a
2|u(x)|2 − f (x)u(x) dx.
Portanto a posicao de equilibrio da membrana sera aquela que seja um ponto crıticopara o funcional J (u) sobre o conjunto de todas as funcoes admissiveis. Neste caso oconjunto das funcoes admissiveis e o espaco:
K = H 10 (Ω).
Neste capıtulo estudaremos alguns teoremas de convergencias sobre os espacos L p
e suas aplicacoes as Equacoes Diferenciais Parciais. Comecaremos com o seguinte re-sultado de minimizacao
6.1. Principio de Bernoulli 161
Teorema 6.1.1 Seja J um funcional semicontinuo inferiormemte definido sobre V ,um espaco reflexivo com norma · . E seja K um conjunto convexo e fechado de V .Suponhamos que J satisfaz
J (v) ≥ α para todo v ∈ V
Onde α > 0. Suporemos ainda que J e um operador coercivo, isto e
v → ∞ ⇒ J (v) → ∞. (6.1)
Nestas condic˜ oes teremos que existe u ∈ K tal que
J (u) ≤ J (v) ∀v ∈ K
Demonstracao.- Denotemos por

5/14/2018 ESP_SOB - slidepdf.com
http://slidepdf.com/reader/full/espsob 165/244
I = inf J (v); v ∈ K Das hipoteses sobre J concluimos que I ∈ R. Denotemos por vν a sequencia de vetoresem V satisfazendo
J (vν ) → I, (6.2)
da condicao (6.1) concluimos que existe uma constante positiva C tal que
vν ≤ C ∀ν ∈ IN.
Como V e um espaco reflexivo, concluimos que existe um vetor u ∈ V e uma sub-sequencia de (vν ) ∈ K , que a denotaremos da mesma forma, satisfazendo
vν → u fraco em V.
Como K e um convexo fechado, teremos que u ∈ K . Da semicontinuidade inferior deJ teremos
I = limν→∞J (vν ) ≥ J (u) ≥ I.
De onde concluimos que J (u) = I . Finalmente, da relacao (6.2) segue nossa conclusao
Teorema 6.1.2 (Teorema de Lions Stampachia) Seja V um espaco de Hilbert com norma · V e denotemos por K um conjunto convexo de V . Seja a(·, ·) uma aplicac˜ aobilinear simetrica satisfazendo:
a(v, v) ≥ α0v2V , a(v, w) ≤ α1vV wV .
Finalmente, seja f
∈V ∗. Ent˜ ao existe uma ´ unica soluc˜ ao do problema
a(u, v − u) ≥ f, v − u, ∀v ∈ K.
162 Capıtulo 6. Problemas de Equilibrio
Demonstracao.- A domonstracao e baseada no Teorema 6.1.1. Para isto definimos
J (v) =1
2a(v, v) − f, v.
Verificamos que J satisfaz todas as hipotese do Teorema 6.1.1, portanto existe um unico
elemento u ∈ K tal queJ (u) ≤ J (v), ∀v ∈ K.
Passaremos agora a caraterizar este elemento. Para isto definimos a funcao ϕ(θ) como
ϕ(θ) = J (u + θ(v − u))
Note que esta funcao esta bem definida no intervalo [0, 1] e tem seu mınimo no pontoθ = 0. Isto significa que ϕ(0) ≥ 0. Caso contrario ϕ nao pode atingir o mınimo emθ = 0. Note que
ϕ(θ) =1
2a(u + θ(v − u), u + θ(v − u)) − f, u + θ(v − u)
=1
2
a(u, u) + 2θa(u, v − u) + θ2a(v − u, v − u)
− f, u − θf, v − u

5/14/2018 ESP_SOB - slidepdf.com
http://slidepdf.com/reader/full/espsob 166/244
2
( , ) + ( , ) + ( , )
f, f,
Derivando com relacao a θ encontramos
ϕ(θ) = a(u, v − u) + θa(v − u, v − u) − f, v − uDe onde temos que
ϕ(0) ≥ 0 ⇒ a(u, v − u) − f, v − u ≥ 0 ∀v ∈ K.
De onde segue o resultado.
Como uma aplicacao direta do Teorema de Lions-Stampachia temos
Teorema 6.1.3 (Lema de Lax-Milgram) Seja V um espaco de Hilbert com norma · V e donotemos por a(·, ·) uma aplicac˜ ao bilinear simetrica satisfazendo:
a(v, v) ≥ α0v2V , a(v, w) ≤ α1vV wV .
Finalmente, seja f ∈ V ∗. Ent˜ ao existe uma ´ unica soluc˜ ao do problema
a(u, v) = f, v, ∀v ∈ V.
Demonstracao.- Basta considerar K = V no teorema 6.1.2.
6.2 Aplicacoes as equacoes elıticas
Nesta secao estudaremos algumas aplicacoes dos resultados obtidos na secao anteriorpara problemas elıticos. Comecaremos com uma aplicacao do Teorema 6.1.1. Deno-taremos por Ω um aberto limitado do RN .
6.2. Aplicac˜ oes as equac˜ oes elıticas 163
6.2.1 Problema de Dirichlet
Seja f uma funcao de L2(Ω). Mostraremos que existe uma unica solucao para a equacao
−µ∆u + γu = f em Ω (6.3)
u = 0 em ∂ Ω.
Neste caso tomamos V = H 10 (Ω), K = V e definimos a bilineal a(·, ·) da seguinte forma
a(v, w) = µ
Ωvw dx + γ
Ωvw dx.
Identificando L2(Ω) com seu dual, teremos que
H 10 (Ω) ⊂ L2(Ω) ⊂ H −1(Ω).

5/14/2018 ESP_SOB - slidepdf.com
http://slidepdf.com/reader/full/espsob 167/244
Portanto f ∈ L2(Ω) implica que f ∈ H −1(Ω). Mais ainda
f, v =
Ω
fv dx.
Usando o Lema de Lax-Milgram encontramos que existe uma unica u ∈ V tal que
µ
Ω
uv dx + γ
Ω
uv dx =
Ω
fv dx ∀v ∈ V.
Tomando v ∈ C ∞0 (Ω), concluimos que
Ω−µ∆u + γu − f v dx = 0 ∀v ∈ C ∞0 (Ω).
Note que nao aparecem integrais de superfıcie porque v ∈ C ∞0 (Ω). Portanto no sentidodas distribuicoes temos que
−µ∆u + γu − f = 0.
Como u ∈ H 10 (Ω) entao ela verifica a condicao de contorno.
6.2.2 Equacao geral de segunda ordem
Denotemos por V = H 10 (Ω), com Ω ⊂ Rn. Definamos por a(·, ·) a bilineal
a(u, v) =n
i,j=1
Ω
aij∂u
∂xi
∂v
∂xjdx
Suponhamos que a matriz A = (aij) seja simetrica e definida positiva, isto e que existauma constante positiva a0 > 0 satisfazendo
ni,j=1
ηiηjaij ≥ α0η2
164 Capıtulo 6. Problemas de Equilibrio
onde cada um dos termos aij ∈ L∞(RN ) Nestas condicoes usando o teorema 6.1.3encontramos que para todo f ∈ L2(Ω) existe uma unica solucao do problema
a(u, ϕ) =
Ω
fϕ dx, ∀ϕ ∈ V
Usando integracao por partes concluimos que a solucao do problema acima verifica aequacao
−n
i,j=1
∂
∂xi
aij
∂u
∂xj
= f em Ω
u(x) = 0, em ∂ Ω
6.2.3 Problema de Neumann
Seja f uma funcao de L2(Ω). Mostraremos que existe uma unica solucao para a equacao
−µ∆u + γu = f em Ω (6.4)

5/14/2018 ESP_SOB - slidepdf.com
http://slidepdf.com/reader/full/espsob 168/244
∂u
∂ν = 0 em ∂ Ω.
Neste caso tomamos V = H 1(Ω), K = V e definimos a bilinear a(·, ·) da seguinte forma
a(v, w) = µ Ω vw dx + γ Ω vw dx.
E simples verificar que a(·, ·) e contınua e coerciva em H 1(Ω). Portanto usando o Lemade Lax Milgram 6.1.3 concluimos que para toda funcao f ∈ V ∗ existe uma unica funcaou satisfazendo:
a(u, v) = f, vIsto e
µ Ω uw dx + γ Ω uw dx = Ω fw dx ∀w ∈ C ∞0 (Ω). (6.5)
De onde temos que Ω
−µ∆u + γu − f w dx = 0 ∀w ∈ C ∞0 (Ω).
Portanto no sentido das distribuicoes a funcao u satisfaz
−µ∆u + γu − f = 0.
Finalmente, voltando a equacao (6.5) para w ∈ H 1
(Ω), e usando a igualdade anteriorobtemos
µ
Γ
∂u
∂ν w dΓ = 0 ∀w ∈ H 1(Ω) ⇒ ∂u
∂ν = 0.
6.2. Aplicac˜ oes as equac˜ oes elıticas 165
Observacao 6.2.1 No problema de Neumann, a condic˜ ao de contorno e uma con-seq¨ uencia da formulac˜ ao variacional.
6.2.4 Equacao geral de Neumann de segunda ordem
Seja Ω ⊂ Rn um aberto limitado com fronteira ∂ Ω e com normal exterior denotada porν = (ν 1, · · · , ν n). Denotemos por V = H 1(Ω), com Ω ⊂ Rn. Definamos por a(·, ·) abilineal
a(u, v) =n
i,j=1
Ω
aij∂u
∂xi
∂v
∂xjdx + γ
Ω
uv dx
Suponhamos que γ > 0 e que a matriz A = (aij) seja simetrica e definida positiva, istoe que exista uma constante positiva a0 > 0 satisfazendo
nηiηjaij ≥ α0η2

5/14/2018 ESP_SOB - slidepdf.com
http://slidepdf.com/reader/full/espsob 169/244
i,j=1
ηiηj ij ≥ 0η
onde cada um dos termos aij ∈ L∞(RN ). E simples verificar que a(·, ·) e uma aplicacaobilinear, contınua, simetrica e coerciva. Nestas condicoes usando o teorema 6.1.3 en-
contramos que para todo f ∈ L2
(Ω) existe uma unica solucao do problema
a(u, ϕ) =
Ω
f ϕ dx, ∀ϕ ∈ V (6.6)
Usando integracao por partes concluimos que a solucao do problema acima verifica aequacao
−n
i,j=1
∂
∂xi aij
∂u
∂xj+ γu = f em Ω
No sentido das distribuicoes. Por outro lado usando esta identidade em (6.8) encon-tramos que
−n
i,j=1
∂ Ω
aij
∂u
∂xj
ν iw dΓ = 0 ∀w ∈ H 1(Ω)
De onde concluimos quen
i,j=1aij
∂u
∂xj ν i = 0
Denotando por
∂u
∂ν A=
ni,j=1
aij
∂u
∂xj
ν i
Concluimos que existe uma unica solucao do problema
−n
i,j=1
∂ ∂xi
aij ∂u∂xj
+ γu = f em Ω
166 Capıtulo 6. Problemas de Equilibrio
∂u
∂ν A= 0, em ∂ Ω
Observacao 6.2.2 A coercividade e uma propriedade necess´ aria para que exista soluc˜ aodo problema. Por exemplo, considere o problema de Newmann dada por
uxx = 1, em ]0, L[, ux(0) = ux(L) = 0.
Com L > 0. ´ E simples verificar que este problema n˜ ao possui soluc˜ ao. De fato ra-zonemos pelo absurdo. Suponhamos que exista uma soluc˜ ao do problema. Integrando a primeira equac˜ ao acima no intervalo [0, L] encontramos que
ux(L) − ux(0) = L
Por otro lado, aplicando a condic˜ ao de contorno, obtemos que
ux(L) − ux(0) = 0, ⇒ L = 0
O que e uma contradic˜ ao.

5/14/2018 ESP_SOB - slidepdf.com
http://slidepdf.com/reader/full/espsob 170/244
A contradicao no exemplo anterior e devido a que na formulacao variacional asso-ciada ao problema acima, devemos ter que
a(u, v) = L
0 uxvx dx
e o espaco onde esta bilinear esta definida deve ser V = H 1(0, L), note que esta bilinearnao e coerciva em H 1, pois nao existe nenhuma constante α0 > 0 tal que
a(u, u) ≥ α0u2H 1 u ∈ H 1(0, l)
Dado que as funcoes constantes pertencem a H 1(0, L) e nao verificam a desigualdadeacima, pois neste caso a(u, u) = 0.
6.2.5 Compatibilidade do problema de Neumann
De acordo com a observacao 6.2.2, a nao existencia de solucoes e devido a falta decoercividade do operador a(·, ·). Consideremos o problema
uxx = f, em ]0, L[, ux(0) = ux(L) = 0. (6.7)
Onde f
∈L2(0, L). Lembremos que a contradicao vem depois de integrar e aplicar as
condicoes de contorno. Se repetimos este procedimento obtemos
0 = ux(L) − ux(0) =
L
0
f (x) dx
6.2. Aplicac˜ oes as equac˜ oes elıticas 167
A contradicao vem do fato de escolher uma funcao que nao tem integral nula. Naoexistirıa contradicao se a integral de f fosse nula. A pergunta que nos podemos formularneste caso e se neste caso existe solucao. Para isto temos que verificar se a bilinear e
coerciva no espaco das funcoes que tem media nula. Isto e denotemos por
V =
w ∈ H 1(0, L);
L
0
w(x) dx = 0
E simples verificar neste caso que
a(u, v) = L
0
uxvx dx
e uma bilinear contınua, simetrica e coerciva em V , isto e existe uma constante α0 > 0tal que
a(u, u) ≥ α0u2H1 u ∈ H1(0, l)

5/14/2018 ESP_SOB - slidepdf.com
http://slidepdf.com/reader/full/espsob 171/244
( , ) ≥ 0 H 1 ∈ ( , )
veja Teorema 5.6.2. Portanto do Lema de Lax Milgram Teorema 6.1.3 segue que existeuma unica solucao do problema
a(u, v) = L
0fv dx, ∀f ∈ L2(0, L), L
0f (x) dx = 0.
Ou equivalentemente, existe uma unica solucao do problema 6.7 para toda funcao f demedia nula.
Este problema pode ser generalizado na seguinte. Seja Ω ⊂ Rn um aberto limitadocom fronteira ∂ Ω e com normal exterior denotada por ν = (ν 1, · · · , ν n). Denotemos por
V = v∈
H 1(Ω); Ω v dx = 0com Ω ⊂ Rn. Definamos por a(·, ·) a bilineal
a(u, v) =n
i,j=1
Ω
aij∂u
∂xi
∂v
∂xjdx
Suponhamos que a matriz A = (aij) seja simetrica e definida positiva, isto e que exista
uma constante positiva a0 > 0 satisfazendon
i,j=1
ηiηjaij ≥ α0η2
onde cada um dos termos aij ∈ L∞(RN ). E simples verificar que a(·, ·) e uma aplicacaobilinear, contınua, simetrica e coerciva. Nestas condicoes usando o teorema 6.1.3 en-contramos que para todo f ∈ L2(Ω) existe uma unica solucao do problema
a(u, ϕ) = Ω
f ϕ dx, ∀ϕ ∈ V (6.8)
168 Capıtulo 6. Problemas de Equilibrio
Usando integracao por partes concluimos que a solucao do problema acima verifica aequacao
−n
i,j=1
∂
∂xi
aij
∂u
∂xj
= f em Ω
No sentido das distribuicoes. Por outro lado usando esta identidade em (6.8) encon-tramos que
−n
i,j=1
∂ Ω
aij
∂u
∂xj
ν iw dΓ = 0 ∀w ∈ H 1(Ω)
De onde concluimos quen
i,j=1
aij
∂u
∂xj
ν i = 0
Denotando por∂u
∂ν A=
ni,j=1
aij
∂u
∂xj
ν i
Concluimos que existe uma unica solucao do problema
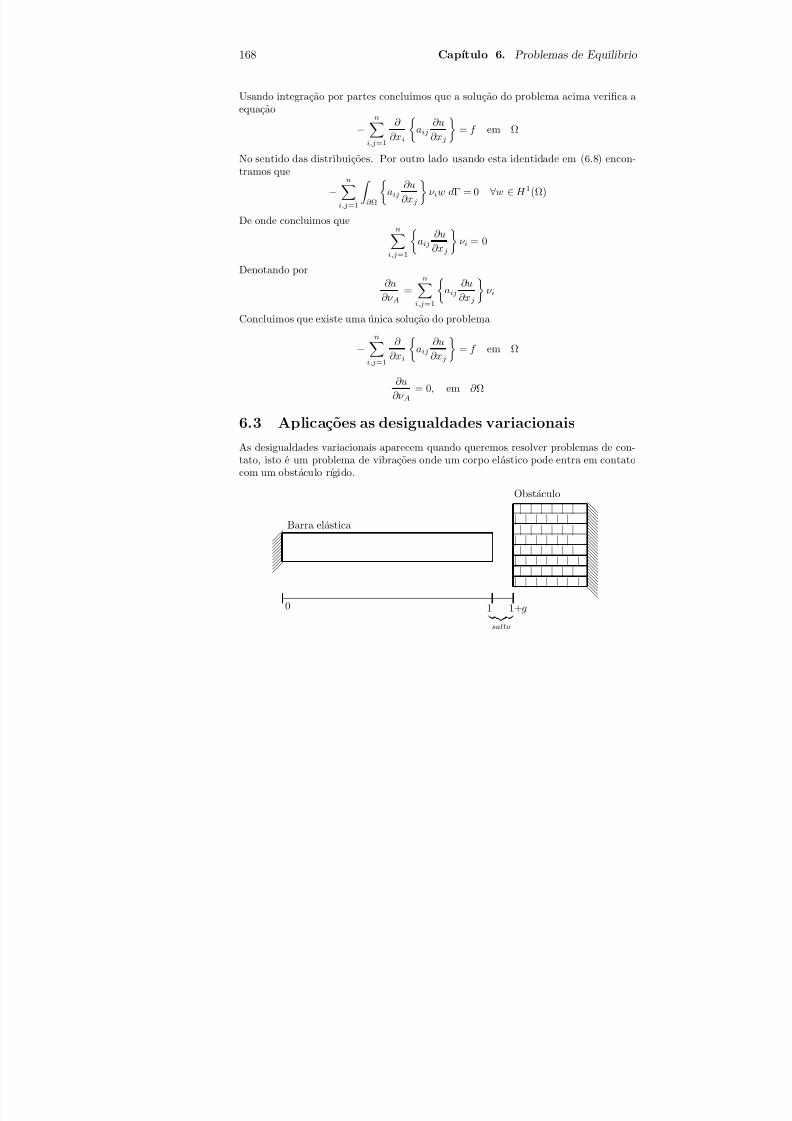
5/14/2018 ESP_SOB - slidepdf.com
http://slidepdf.com/reader/full/espsob 172/244
Concluimos que existe uma unica solucao do problema
−n
i,j=1
∂
∂xi
aij
∂u
∂xj
= f em Ω
∂u∂ν A
= 0, em ∂ Ω
6.3 Aplicacoes as desigualdades variacionais
As desigualdades variacionais aparecem quando queremos resolver problemas de con-tato, isto e um problema de vibracoes onde um corpo elastico pode entra em contatocom um obstaculo rıgido.
| | | | | | || | | | | | || | | | | | || | | | | | |
| | | | | || | | | | || | | | | || | | | | |
d d d d d d d d d d d d d d d d d d d d d d d d d d d d
Obstaculo
Barra elastica
0 1+g salto
1
6.3. Aplicac˜ oes as desigualdades variacionais 169
Seja Ω um aberto limitado do RN , com fronteira Γ dividida em duas partes. Aparte Γ0 do bordo e onde o material esta assegurado, enquanto que Γ1 e a parte domaterial que pode entrar em contato com um obstaculo rıgido.
Γ := Γ0 ∪ Γ1.
Corpo El´ astico
g(x)
Γ0

5/14/2018 ESP_SOB - slidepdf.com
http://slidepdf.com/reader/full/espsob 173/244
Obst´ aculo rıgido
A equacao que modelam o problema e dado por
−µ∆u + γu = f em Ω (6.9)
u = 0 em Γ0 u ≤ g;∂u
∂ν ≤ 0; (u − g)
∂u
∂ν = 0. (6.10)
O problema acima e chamado de problema de Signorini ou problema de contacto.
Neste caso estamos considerando que o obstaculo e rıgido, isto e nao existe penetracao.Introduzimos as seguintes notacoes:
V =
w ∈ H 1(Ω); w|Γ0 = 0
K =
w ∈ V ; w|Γ0 = 0, w(x) ≤ g(x) em Γ1
a(v, w) = µ Ω
v
w dx + γ Ω vw dx.
Usando o Teorema de Lions Stampachia encontramos que existe uma unica u ∈ V talque
µ
Ω
u(v − u) dx + γ
Ω
u(v − u) dx ≥ Ω
f (v − u) dx ∀v ∈ V. (6.11)
Tomando v = u + ϕ, com ϕ
∈C ∞0 (Ω), segue que u deve satisfazer
−µ∆u + γu = f em Ω (6.12)
170 Capıtulo 6. Problemas de Equilibrio
No sentido das distribuicoes De fato, usando as formulas de Green teremos
− Ω
µ∆uφ dx +
Ω
γuφ dx ≥ Ω
fφ dx, ∀φ ∈ C ∞0 (Ω),
de onde segue que Ω
[−µ∆u + γu − f ]φ dx = 0, ∀φ ∈ C ∞0 (Ω).
Logo concluimos que u satisfaz (6.12). Voltando a (6.11) e usando as formulas de Greendesta ves para v ∈ K , teremos
Γ
∂u
∂ν (v − u) dΓ ≥ 0 ∀v ∈ K. (6.13)
Tomando v = w + u com w(x) ≤ 0 em Γ1, e simple de verificar que v ∈ K . Alem dissoteremos que
Γ
∂u
∂ν w dΓ ≥ 0 ∀w ≤ 0,
i li ∂ /∂ ≤ 0 Fi l t ∈ K t d ∈ H1(Ω) (6 13)

5/14/2018 ESP_SOB - slidepdf.com
http://slidepdf.com/reader/full/espsob 174/244
que implica que ∂u/∂ν ≤ 0. Finalmente, como u ∈ K e tomando v ∈ H 1(Ω) em (6.13),tal que v = 0 em Γ0 e v = g em Γ1, teremos
− Γ∂u
∂ν (g − u) dΓ ≥ 0.
De forma analoga, tomando v ∈ H 1(Ω) em (6.13), tal que v = 0 em Γ0 e v = 2u − g emΓ1 teremos
Γ
∂u
∂ν (g − u) dΓ ≥ 0 ⇒ ∂u
∂ν (u − g) = 0.
Em conclusao, se u e uma solucao regular do problema de contato, entao ela devesatisfazer
−µ∆u + γu = f em Ω
u = 0 em Γ0 u ≤ g;∂u
∂ν ≤ 0; (u − g)
∂u
∂ν = 0. (6.14)
6.4 O problema penalizado
Um metodo alternativo que nos permite aproximar a solucao de forma direta e o
chamado de metodo de Penalizacao. Este metodo consiste em minimizar o funcional J sobre todo o espaco. Como consequencia disso teremos como resultado uma equacaodiferencial e nao uma desigualdade variacional, como foi obtida no caso do problema deobstaculo.
6.4. O problema penalizado 171
A ideia consiste em perturbar o funcional a minimizar, da seguinte forma
J (v) = J (v) +1
Γ1 |(v − g)−|2 dΓ
Note que quando → 0 teremos que o peso sobre a integral a direita da igualdade ante-rior aumenta indeterminadamente. Portanto se funcional J fosse limitado, deveriamoster que
Γ1
|(v − g)+|2 dΓ → 0
o que significa que v ≤ g. Assim quando → 0 o ponto de mınimo de J convirge para
a solucao do problema de contato. Faremos isto com detalhe a seguir. Denotemos porH 1Γ0(Ω) o espaco
H 1Γ0(Ω) =
v ∈ H 1(Ω); v = 0 sobre Γ0
.
Utilizando o Teorema 6.1.1 mostramos que existe u ∈ H 1(Ω) solucao de

5/14/2018 ESP_SOB - slidepdf.com
http://slidepdf.com/reader/full/espsob 175/244
J (u) = inf
v ∈ H 1(Ω)
(6.15)
e com os mesmos argumentos utilizados na secao anterior, podemos verificar que a
solucao do problema acima e caraterizada como
−µ∆u + γu = f em Ω (6.16)
u = 0;∂u
∂ν = −1
[u − g]+ on Γ0.
Onde [λ]+ = max 0, λ. Nestas condicoes teremos
Lema 6.4.1 Com as notac˜ oes anteriores a soluc˜ ao u do problema (6.15), convirgepara u soluc˜ ao do problema de contato.
Demonstracao.- Note que K ⊂ H 1(Ω) portanto teremos que
inf
J (v); v ∈ H 1Γ0 ≤ inf J (v); v ∈ K
Como sobre K os funcionais J e J coincidem, da desigualdade anterior desprende-se
que
J (u) ≤ J (u) (6.17)
Onde u e a solucao do problema de contato. Como o funcional J e coercivo, concluimosque a sequencia u e limitada em H 1(Ω). Portanto existe uma subsequencia de u, quepor comodidade a continuaremos denotando da mesma forma, e uma funcao u tal que
u
→ u fraco em H
1
(Ω)Da compacidade de H 1−δ(Ω) em H 1(Ω), podemos supor que u satisfaz
172 Capıtulo 6. Problemas de Equilibrio
u → u Forte em H 1−δ(Ω)
Usando a desigualdade (6.17) concluimos que
Γ1 |(u
− g)+
|2
dΓ1 ≤ J (u)
Tomando δ < 12 , da convergencia forte em H 1−δ e pelo teorema do Traco, da desigual-
dade anterior concluimos que Γ1
|(u − g)+|2 dΓ1 = 0.
De onde segue que u ≤ g, protanto u ∈ K . Finalmente, da semicontinuidade inferior
de J e como J (v) ≤ J (v), teremos que
liminf →0
J (u) ≤ liminf →0
J (u) ≤ J (u)
De onde segue queJ(˜) ≤ J( )

5/14/2018 ESP_SOB - slidepdf.com
http://slidepdf.com/reader/full/espsob 176/244
J (u) ≤ J (u)
Como u ∈ K entao teremos que u = u, pois J e um funcional estritamente convexo(Veja exercicio 5). De onde segue o resultado
O resultado anterior nos fornece uma forma de calcular uma solu cao aproximadapara o problema de contato, utilizando os metodos de Equacoes Diferenciais Parciais,via elementos finitos por exemplo.
Capıtulo 7
Teorema do Traco
Nesta secao mostraremos o Teorema do Traco para funcoes em W m,p(Ω). Comecaremos

5/14/2018 ESP_SOB - slidepdf.com
http://slidepdf.com/reader/full/espsob 177/244
Nesta secao mostraremos o Teorema do Traco para funcoes em W (Ω). Comecaremoscom o caso simples p = 2.
7.1 Os espacos H s(Ω)Um dos problemas do centrais do teorema de traco e definir o espaco otimo onde ostracos de funcoes em W m,p(Ω) pertencam. Estes espacos sao espacos fracionarios daforma W m−1/2,p(∂ Ω) . No caso de p = 2 podemos definir estes espacos de forma simplesusando as transformadas de Fourier. E simples verificar que o espaco
W m,2(RN ) = u
∈L2(RN ); (1 +
|ξ
|2)
m2 u
∈L2(RN )
onde por u estamos denotando a transformada de Fourier de u. No que segue deno-taremos por H m(RN ) = W m,2(RN ). Note que pela identidade de Parseval, teremosque
u2H m(RN) =
RN
(1 + |ξ|2)m|u(ξ)|2 dξ
Assim, para todo numero real s > 0 definimos o espaco H s(RN ) como sendo
H s(RN ) = u ∈ L2(RN ); (1 + |ξ|2)s2 u ∈ L2(RN )
Claramente este espaco coincide com os espacos H m(RN ) quando s e o numero inteirom. De forma analoga ao caso W m,p(Ω) podemos mostrar que as funcoes C ∞0 (RN ) saodensas em H s(RN ) para todo s ∈ Rn. Definimos H s(RN ) para valores negativos de scomo sendo o espaco dual de H −s(RN ).
No caso em que Ω seja um aberto de classe C m podemos definir para s < m os
espacos fracionariosH s(Ω) =
v|Ω; v ∈ H s(RN )
174 Capıtulo 7. Teorema do Traco
Se munimos estes espacos com a norma
uH s(Ω) = inf vH s(RN ), v = u em Ω
,
podemos mostrar que H s(Ω) e um espaco de Hilbert. (Veja exercıcio)
7.2 Os espacos H s(Γ)
Denotando por Γ a fronteira de Ω, utilizando as cartas locais podemos definir os espa cosH s(Γ) para s < m da seguinte forma: Sejam (hi, V i), i = 1, · · · , ν a famılia de cartaslocais de Γ, e denotemos por αi a particao da unidade associada a V i ∩ Γ (Ver Definicao5.5.2). Toda funcao sobre Γ pode ser escrita como
u =
ν
i=1
(αiu)
Note que a funcao h∗v(x) = v(h(x)) esta definida sobre o quadrado Q e para valoresem Γ, h∗j v = v(h(x)) toma valores sobre Q0. Assim teremos que a funcao h∗j (αj u) esta
definida sobre Rn−1 se a tomamos como sendo 0 fora de Q0, isto e

5/14/2018 ESP_SOB - slidepdf.com
http://slidepdf.com/reader/full/espsob 178/244
Q0,
h∗j v(x) =
v(hj (x)) se x ∈ Q0
0 se x ∈ Q0
Agora definimos o espaco H s(Γ)
H s(Γ) =
u ; h∗j (αj u) ∈ H s(Rn−1), ∀ j = 1 · · · , ν
Munindo ao espaco acima a norma do grafo, isto e
uH s(Γ)) =ν
j=1
h∗j (αju)H s(Rn−1)
O espaco H s
(Γ) e um espaco de Hilbert.Com estas definicoes a versao do teorema do Traco para conjuntos abertos de fron-
teira limitada e consequencia imediata do Teorema de traco para funcoes em H m(RN + )
que estudamos na seguinte secao.
7.3 Teorema do traco em H m(Rn−1)
A dificuldade principal na demonstracao do Teorema do Traco, e a definicao dos espacos
fracionarios W
s,p
(RN
). A definicao destes espacos e simples no caso de p = 2, devidoa que podemos usar a transformada de Fourier. Isto nao e possıvel no caso geral dosespacos W s,p(Ω), p = 2. O que nos obriga a utilizar um metodo mais complexo chamadometodo de interpolacao real. Portanto de forma introdutoria, contruiremos primeiro os
7.3. Teorema do traco em H m(Rn−1) 175
espacos fracionarios para H s(RN ). Estes espacos serao a chave para definir os espacosH s(Ω) e H s(Γ), para Ω um aberto do RN com fronteira Γ que assumiremos de classeC m.
Comecamos estudando o caso Ω =RN
+ . Depois consideraremos o caso de abertosregulares de classe C m fazendo uso das cartas locais. No que segue usaremos a seguintenotacao
(x, xn) ∈ Rn+, com x ∈ Rn−1
Teorema 7.3.1 A Aplicac˜ ao γ definida por
γ : H m(RN + ) →
m−1
j=0
H m−j− 12 (Rn−1)
γ (u) =
u(j)(x, 0); 0 ≤ j ≤ m − 1

5/14/2018 ESP_SOB - slidepdf.com
http://slidepdf.com/reader/full/espsob 179/244
e uma aplicac˜ ao linear contınua e sobrejetiva.
Demonstracao.- Provaremos primeiro que a aplicacao γ e contınua. Sem perda degeneralidade podemos supor que u ∈ D(RN + ). Denotemos por ϕ ∈ C ∞0 (R) uma funcao
satisfazendo
ϕ(0) = 1, ϕ(t) = 0, para t >1
2
Nestas condicoes teremos que
|u(x, 0)
|2 =
t
0
d
dσ ϕ
|u(x, σ)
|2 dσ, t >
1
2
=
t
0
dϕ
dσ|u(x, σ)|2 dσ + 2
t
0
ϕu(x, σ)du(x, σ)
dσdσ
Tomando transformada de Fourier com respeito a variavel x teremos
|u(ξ, 0)|2 =
t
0
dϕ
dσ|u(ξ, σ)|2 dσ + 2
t
0
ϕu(ξ, σ)du(ξ, σ)
dσdσ
Multiplicando por (1 + |ξ|2)m− 12 teremos
(1 + |ξ|2)m− 12 |u(ξ, 0)|2 = (1 + |ξ|2)m− 1
2
t
0
dϕ
dσ|u(ξ, σ)|2 dσ
+2(1 + |ξ|2)m− 12
t
0
ϕu(ξ, σ)du(ξ, σ)
dσdσ
Integrando sobre Rn−1 teremos que
176 Capıtulo 7. Teorema do Traco
u2H m− 1
2 (Rn−1)≤ C
t
0
u(·, σ)2H m(Rn−1) dσ
+C t
0 u(
·, σ)
H m
(Rn
−1
)u
σ(·, σ)
H m
−1
(Rn
−1
)dσ
≤ C
t
0
u(·, σ)2H m(Rn−1) + uσ(·, σ)2H m−1(Rn−1) dσ
≤ C u2H m(Rn
+).
De forma analoga teremos que
|u(j)
(ξ, 0)|2
= ∞0
dϕ
dσ (σ)|u(j)
(ξ, σ)|2
dσ + 2 ∞0
ϕ(σ)u(j+1)
(ξ, σ)u(j)
(ξ, σ) dσ
Multiplicando por (1 + |ξ|2)m−j− 12 obtemos
(1 + |ξ|2)m−j− 12 |u(j)(ξ, 0)|2 =
t dϕ
d(1 + |ξ|2)m−j− 1
2 |u(j)(ξ, σ)|2 dσ

5/14/2018 ESP_SOB - slidepdf.com
http://slidepdf.com/reader/full/espsob 180/244
( + |ξ| ) | (ξ, )|0 dσ
( + |ξ| ) | (ξ, )|
+2
t
0
ϕ(1 + |ξ|2)m−j− 12 u(j+1)(ξ, σ)u(j)(ξ, σ) dσ
Integrando sobre Rn−1 teremos
u(j)(·, 0)2H m−j− 1
2≤
t
0
u(j)(·, σ)2H m−j− 1
2dσ
+C
t
0
u(j)(·, σ)H m−j u(j+1)(·, σ)H m−j−1 dσ
≤ t
0 u(j)
(·, σ)2
H m−j + u(j+1)
(·, σ)2
H m−j−1 dσ
≤ C u2H m(RN+ )
De onde segue a continuidade. Para mostrar qua a aplicacao e sobre tomemos umafuncao
a = (a1, · · · , am) ∈m−1
j=0H m−j− 1
2 (Rn−1).
Mostraremos que existe uma funcao u ∈ H m(RN + ) tal que
γ (u) = a.
7.3. Teorema do traco em H m(Rn−1) 177
De fato, tomemos uma ϕj ∈ D([0, ∞)) tal que
ϕ(j)j (0) = 1.
Denotemos por wj (ξ, t) a funcao cuja transformada de Fourier e
wj(ξ, t) =
1
1 + |ξ|2j/2
aj(ξ)ϕj
(1 + |ξ|2)
12 t
.
Note que
w(j)j (ξ, 0) = aj(ξ).
Por outro lado e simples verificar que wj
assim definido satisfaz:
wj ∈ H m(RN + )
De fato, t |wj(ξ t)|2 dξdt ≤
∞|ϕj |2 dσaj2 1

5/14/2018 ESP_SOB - slidepdf.com
http://slidepdf.com/reader/full/espsob 181/244
0
RN+
|wj(ξ, t)| dξdt ≤0
|ϕj | dσa H m−j− 1
2 (Rn−1),
t
0 RN+
|w(m)j (ξ, t)|2 dξdt =
=
t
0
Rn−1
(1 + |ξ|2)m−j |aj (ξ)|2|ϕ(m)j
(1 + |ξ|2)
12 t
|2 dξdt
=
Rn−1
(1 + |ξ|2)m−j |aj (ξ)|2 t
0
|ϕ(m)j
(1 + |ξ|2)
12 t
|2 dtdξ
= Rn−1(1 + |ξ|2)m−j−
1
2 |aj (ξ)|2 dξ t
0|ϕ
(m)j (1 + |ξ|2)
1
2 t |2 dt
≤ aj2H m−j− 1
2 (Rn−1).
Finalmente, denotemos por u a funcao
u(x, xn) =m−1
j=0m
r=1crj wj(x,rxn)
onde os coeficientes crj sao tomados de forma que
mr=1
rkcrj =
0 se k = j, 0 ≤ k ≤ m − 1.1 se k = j.
Assim teremos que
u(k)(x, 0) =m
r=1
rkcrj w(k)(x, 0) = w(k)k (x, 0) = ak(x).
178 Capıtulo 7. Teorema do Traco
De onde segue a demonstracao.
Como uma aplicacao do Teorema do Traco temos o seguinte resultado
Corolario 7.3.1 Seja f uma func˜ ao satisfazendo:
f ∈ L2(0, ∞; H 1(RN )), f ∈ L2(0, ∞; L2(RN ))
Ent˜ ao teremos que
f ∈ C (0, ∞; H 12 (RN )) ∩ L∞(0, ∞; H
12 (RN ))
Demonstracao.- Do Teorema de Fubini e a definicao dos espacos H s(RN ) segue que
H 1(Rn+1+ ) =
f ; f ∈ L2(0, ∞; H 1(RN )), f ∈ L2(0, ∞; L2(RN ))
Do Teorema do Traco segue que
f (0)2H 1/2(RN ) ≤ cf 2L2(0,∞;H 1(RN )) + f 2L2(0,∞;L2(RN ))
Usando traslacoes podemos obter que
5/14/2018 ESP_SOB - slidepdf.com
http://slidepdf.com/reader/full/espsob 182/244
f (s)2H 1/2(RN ) ≤ cf 2L2(0,∞;H 1(RN )) + f 2L2(0,∞;L2(RN ))
, ∀s > 0.
Da densidade das funcoes D(Rn+1+ ) podemos aproximar f por uma sequencia de funcoescontınuas convergindo forte na norma de L∞(0, ∞; H
12 (RN )), de onde segue nossa con-
clusao.De forma geral temos
Corolario 7.3.2 Seja f uma func˜ ao satisfazendo:
f ∈ L2(0, ∞; H m(RN )), f ∈ L2(0, ∞; H r(RN ))
para m > r, ent˜ ao teremos que
f ∈ C (0, ∞; H m+r2 (RN )) ∩ L∞(0, ∞; H
m+r2 (RN ))
Demonstracao.- Tomemos a ∈]0, ∞[. Denotemos por ϕ ∈ C ∞0 (R) uma funcao satis-fazendo
ϕ(a) = 1, ϕ(t) = 0, para t > a +1
2
|u(x, a)|2
= t
a
d
dσ ϕ|u(x, σ)|2 dσ, t > a +
1
2
=
t
a
dϕ
dσ|u(x, σ)|2 dσ + 2
t
a
ϕu(x, σ)du(x, σ)
dσdσ
7.3. Teorema do traco em H m(Rn−1) 179
Tomando transformada de Fourier com respeito a variavel x teremos
|u(ξ, a)|2 = t
a
dϕ
dσ|u(ξ, σ)|2 dσ + 2
t
a
ϕu(ξ, σ)du(ξ, σ)
dσdσ
Multiplicando por (1 + |ξ|2)m+r2 teremos
(1 + |ξ|2)m+r2 |u(ξ, a)|2 = (1 + |ξ|2)
m+r2
t
0
dϕ
dσ|u(ξ, σ)|2 dσ
+2(1 + |ξ|2)m+r2
t
a
ϕu(ξ, σ)du(ξ, σ)
dσdσ
Integrando sobre RN e lembrando que r < (m + r)/2 < m teremos que
u(·, a)2H
m+r2 (RN )
≤ C
t
0
u(·, σ)2H m(RN) dσ

5/14/2018 ESP_SOB - slidepdf.com
http://slidepdf.com/reader/full/espsob 183/244
+C
t
0
u(·, σ)H m(RN )uσ(·, σ)H r(RN) dσ
≤ C t
0
u(·, σ)2H m(RN) + uσ(·, σ)2H r(RN) dσ≤ C
u2L2(0,∞;H m(RN)) + ut2L2(0,∞;H r(RN ))
Da arbitrariedade de a segue que
u2L∞(0,∞;H
m+r2 (RN))
≤ C
u2L2(0,∞;H m(RN)) + ut2L2(0,∞;H r(RN ))
O resultado segue por densidade.
Utilizando a desigualdade de Holder obtemos o seguinte resultado de interpolacao.
Corolario 7.3.3 Seja f uma func˜ ao satisfazendo:
f ∈ L p(a, b; H s(RN )) ∩ Lq(a, b; H r(RN ))
Ent˜ ao teremos que
f ∈ Ll(a, b; H σ(RN ))onde
1
l=
θ
p+
1 − θ
q, σ = θs + (1 − θ)r, ∀θ ∈ [0, 1]
e ainda que
b
au
lH σ(RN ) dτ
1/l
≤ b
au
pH s(RN) dτ
θp b
au
qH r(RN) dτ
1−θq
180 Capıtulo 7. Teorema do Traco
Note que para σ = θs + (1 − θ)r temos
uH σ(RN ) =
RN
(1 + ξ2)σu2 dξ
= RN (1 + ξ2
)θs+(1
−θ)r
u2
dξ
=
RN
(1 + ξ2)su2θ
(1 + ξ2)su21−θdξ
=
RN
(1 + ξ2)su2 dξ
θ RN
(1 + ξ2)su2 dξ
1−θ
dξ
De onde segue queuH σ(RN ) ≤ uθ
H s(RN )u1−θH r(RN )
Finalmente, aplicando a desigualdade de Holder teremos b
a
ulH σ(RN ) dτ ≤
b
a
ulθH s(RN )ul(1−θ)
H r(RN )dτ b
p d
θlp b
q d
(1−θ)lq

5/14/2018 ESP_SOB - slidepdf.com
http://slidepdf.com/reader/full/espsob 184/244
≤
a
u pH s(RN )
dτ
a
uqH r(RN )
dτ
De onde segue o resultado.
7.4 Um caso simple em W m,p(Ω)
Estudaremos uma versao simples do Teorema de traco nos espacos W 1,p. Este se re-sumira no seguinte teorema.
Teorema 7.4.1 Seja Ω = RN + , ent˜ ao existe uma constante positiva tal que
RN−1 |u(x, 0)| p
dx1p
≤ C uW 1,p
(Ω) ∀u ∈ C
1
0 (RN
)
Demonstracao.- Tomemos uma funcao u ∈ C 10 (RN ) e definamos g(t) = |t| p−1t. Nestascondicoes teremos:
g(u(x, 0)) = − +∞0
∂g(u(x, xN ))
∂xN dxN = −
+∞0
g(u(x, xN ))∂u(x, xN )
∂xN dxN .
Aplicando a desigualdade de Holder obtemos
|u(x, 0)| p
≤ p +∞
0 |u(x, xN )| p
−1 ∂u(x, xN )
∂xN dxN
≤ C
+∞0
|u(x, xN )| p +
∂u(x, xN )
∂xN
p dxN
.
7.5. Espacos intermediarios 181
Integrando sobre a variavel x segue o resultado
7.5 Espacos intermediarios
Nesta secao introduzimos os espacos fracionarios, que serao utilizados na demonstracaodo Teorema do Traco. O metodo de construcao que utilizaremos e chamado de Inter-polacao Real. Denotemos por B1 e B2 dois espacos de Banach, contidos num espacoX . Denotemos por S o espaco soma de B1 e B2 isto e:
S = B1 + B2.
Note que S e um espaco completo, se munido da norma:
uS = inf a1B1+ a2B2
; b1 + b2 = u, b1 ∈ B1, b2 ∈ B2 .
Fixados os espacos de Banach B1 e B2 denotemos por
p ν [ [ ν p( ) ν p( )

5/14/2018 ESP_SOB - slidepdf.com
http://slidepdf.com/reader/full/espsob 185/244
W p,ν = f : [0, ∞[→ B1; tν f ∈ L p(0, ∞; B1), tν f ∈ L p(0, ∞; B2) .
Este espaco e um espaco de Banach quando munido da norma
uWp,ν = maxtν f Lp(0,∞;B1), tν f Lp(0,∞;B2)
O seguinte Lema nos fornece os valores que deve tomar ν para que as funcoes do espacoW p,ν possuam traco em t = 0.
Lema 7.5.1 Denotemos por θ = 1 p + ν . Se 0 < θ < 1, ent˜ ao teremos que para todo
f
∈ W p,ν existe o limite
limt→0
f (t) = b, em S
Demonstracao.- Se f e uma funcao de W p,ν, ela satisfaz
f ∈ L1loc(0, ∞; B1), f ∈ L1
loc(0, ∞; B2)
Portanto ela sera uma funcao contınua a valores em S para todo valor de t > 0. Maisainda podemos escrever
f (t) = b +
t
1
f (τ ) dτ, ∀t ∈]0, ∞[ (7.1)
Para mostrar o Lema, devemos verificar que f e limitado numa vizinhanca de t = 0.Note que isto nao e imediato porque o peso tν definido na norma de W p,ν, pode criarsingularidades em f no ponto t = 0. Mostraremos que isto nao pode acontecer. Esimples verificar que
f (t) − f (s) = t
s
f (τ ) dτ (7.2)
182 Capıtulo 7. Teorema do Traco
Note que
t
s
f (τ ) dτ B2≤
t
s
f (τ )B2dτ
= t
s
τ ν
f (τ )
B2
τ −ν dτ
≤ t
s
τ ν f (τ ) pB2
dτ
1p t
s
τ −νp
p−1 dτ
p−1p
≤ cτ ν f pLp(0,∞;B2)
Onde temos usado a hipotese
1
p
+ ν < 1
⇒νp
p − 1
< 1
que implica que a integral t
s
τ −νp
p−1 dτ < ∞.
Portanto a integral e limitada numa vizinhanca de t = 0, logo o segundo membro daidentidade (7 2) e limitada quando s < t → 0 Portanto tomando limite quando t → 0

5/14/2018 ESP_SOB - slidepdf.com
http://slidepdf.com/reader/full/espsob 186/244
identidade (7.2) e limitada quando s < t → 0. Portanto tomando limite quando t → 0em (7.1) segue a nossa conclusao.
O Lema anterior nos permite introduzir um novo espaco. Um espaco de tracos, que
o denotaremos por T ν,p e o definiremos como
T ν,p = f (0); f ∈ W ν,p .
E simples verificar que este espaco munido da norma
uT ν,p = inf f Wν,p ; u = f (0), f ∈ W ν,pe um espaco completo.
De forma analoga a feita no capıtulo anterior podemos mostrar que as funcoes
infinitamente diferenciaveis sao densas em W ν,p. Isto esta resumido no seguinte Lema.
Lema 7.5.2 O conjunto
C ∞([0, ∞[; B1) =
ϕ : [0, ∞[→ B1; ϕ(m) ∈ C ([0, ∞[; B1), ∀m ∈ N
e denso em W ν,p.
Os espacos T ν,p definidos acima sao espacos intermediarios entre B2 e B1. Isto podeser apreciado no seguinte Lema.
7.5. Espacos intermediarios 183
Lema 7.5.3 Seja θ = 1 p
+ ν satisfazendo 0 < θ < 1. Nestas condic˜ oes teremos que
(i) uT ν,p = inf
tν f 1−θ
Lp(0,∞;B1)tν f θ
Lp(0,∞;B2); u = f (0), f ∈ W ν,p
(ii)Se u ∈ B1 ∩ B2 ent˜ ao existe K > 0 tal que
uT ν,p ≤ K u1−θB1
uθB2
.
Demonstracao.- Seja u ∈ T ν,p, entao dado > 0 existe f ∈ W p,ν tal que
f Wν,p ≤ uT ν,p + .
Denotemos por f λ(t) = f (λt). E simples verificar que
f λ ∈ W ν,p, f λ(0) = u.
Da desigualdade anterior teremos que
f Wν,p ≤ uT ν,p + ≤ inf f λWν,p ; λ > 0 + . (7.3)

5/14/2018 ESP_SOB - slidepdf.com
http://slidepdf.com/reader/full/espsob 187/244
fW ≤ T + ≤ fλW ; + ( )
A seguir estimaremos o valor de inf f λWν,p ; λ > 0. Note que
tνf λLp(0,∞;B1)p = ∞0
τ νpf λ(τ )B1dτ
=
∞0
τ νpf ( λτ =σ
)B1dτ
= λ−1−νp
∞0
σνpf (σ)B1dσ
= λ−1−
νp
σν
f Lp(0,∞;B1)p
De onde segue que
tν f λLp(0,∞;B1) = λ−θσν f Lp(0,∞;B1).
De forma analoga teremos que
tν f λ
Lp(0,
∞;B2) = λ1−θ
σν f
Lp(0,
∞;B2)
Assim da relacao (7.3) teremos que
f Wν,p ≤ uT ν,p + ≤ inf f λWν,p ; λ > 0 +
≤ inf λ>0
max
λ−θτ ν f Lp(0,∞;B1), λ1−θτ νf Lp(0,∞;B2)
+ .
Tomando
λ = τ ν
f Lp(0,∞;B1)
τ ν f Lp(0,∞;B2)
184 Capıtulo 7. Teorema do Traco
obtemos que
max
λ−θτ ν f Lp(0,∞;B1), λ1−θτ ν f Lp(0,∞;B2)
= τ ν f 1−θ
Lp(0,∞;B1)τ ν f θ
Lp(0,∞;B2)
Note que
τ ν f 1−θLp(0,∞;B1)
τ ν f θLp(0,∞;B2)
≤ f Wν,p
De onde segue que
f Wν,p ≤ uT ν,p + ≤ inf f λWν,p ; λ > 0 +
≤ τ ν f 1−θLp(0,∞;B1)
τ ν f θLp(0,∞;B2)
+ .
≤ f Wν,p + .
Pela arbitrariedade de segue a primeira parte deste Lema. Para mostrar a segundaparte tomemos u ∈ B1 ∩ B2 e seja ϕ ∈ C 1([0, ∞[) uma funcao tal que ϕ(0) = 1,ϕ(t) = 0 para t ≥ 1. Aplicando a parte (i) a funcao f (t) = ϕ(t)u segue o resultado. Oque completa a demonstracao.
Uma outra propriedade importante e que os espacos T ν,p sao espacos reflexivos para

5/14/2018 ESP_SOB - slidepdf.com
http://slidepdf.com/reader/full/espsob 188/244
Uma outra propriedade importante e que os espacos T sao espacos reflexivos para1 < p < ∞ e ainda verifica que
[T ν,p
(B1, B2)]∗ = T −ν,p
(B∗2 , B∗1 )
Para a demonstracao veja [22].No seguinte teorema mostramos atraves de um exemplo, como os espacos T ν,p se
realizam como espacos de interpolacao. Este resultado tambem sera importante paraobter resultados de imersoes dos espacos W s,p(Ω) sobre os espacos Lr(Ω).
Teorema 7.5.1 Denotemos por θ = 1 p + ν , e suponhamos que p,q,θ satisfazem
1 ≤ p ≤ q ≤ ∞, 0 < θ < 1Ent˜ ao teremos que
T ν,p(Lq(Ω), L p(Ω)) ⊂ Lr(Ω)
onde1
r=
1 − θ
q+
θ
p
Demonstracao.- Tomemos um elemento f ∈ W ν,p. Utilizando argumentos de densi-
dade podemos supor que f ∈ C ∞([0, ∞[; Lq
(Ω)), assim teremos
f (x, 0) = f (x, t) − t
0
f (x, τ ) dτ
7.5. Espacos intermediarios 185
de onde segue que:
|f (x, 0)| ≤ 1
0
|f (x, t)| dt + 1
0
|f (x, t)| dt
≤ 1
0
τ νp|f (x, t)| p dt
1p
+
10
|f (x, t)| p dt
1p 1
0
t−pν
p−1 dt
1− 1p
≤ C
10
τ νp|f (x, t)| p dt
1p
+
10
|f (x, t)| p dt
1p
.
A ultima desigualdade e verdadera pelas hipoteses sobre θ. Denotemos por f λ
(t) =f (λt). Substituindo f λ por f na desigualdade acima obtemos
|f (x, 0)| ≤ C
10
τ νp |f λ(x, τ )| p dτ
1p
+
10
τ νp|f λ(x, τ )| p dτ
1p
i l

5/14/2018 ESP_SOB - slidepdf.com
http://slidepdf.com/reader/full/espsob 189/244
ou equivalentemente
|f (x, 0)| ≤ C
10
τ νp|f (x,λτ )| p dτ
1p
+
10
τ νp|f (x,λτ )| p dτ
1p
Aplicando a mudaca de Variaveis σ = λt teremos que
|f (x, 0)| ≤ C λ−θ 10
σνp|f (x, σ)| p dσ 1p
+ λ1−θ 10
σνp |f (x, σ)| p dt 1p
Tomando
λ =
10
σνp |f (x, σ)| p dσ 1
p
1
0σνp|f (x, σ)| p dt
1p
Obtemos que
|f (x, 0)| ≤ 2C
10
σνp|f (x, σ)| p dσ
θp 1
0
σνp |f (x, σ)| p dt
(1−θ)p
.
De onde segue que
|f (x, 0)|r ≤ 2C 10
σνp |f (x, σ)| p dσ rθp 1
0
σνp|f (x, σ)| p dt r(1−θ)p
186 Capıtulo 7. Teorema do Traco
Integrando sobre Ω teremos que Ω
|f (x, 0)|r dx
≤ 2C Ω 1
0 σνp
|f (x, σ)| p
dσrθp
1
0 σνp
|f (x, σ)| p
dtr(1−θ)
p
dx
Aplicando a desigualdade de Holder teremos que Ω
|f (x, 0)|r dx ≤
K
Ω
∞
0
tνp |f (t)| p dt
sθr
p
dx
1s Ω
∞
0
tνp |f (t)| p dt
s(1−θ)r
p
dx
1s
Tomando s tal que(1 − θ)sr = q
teremos da definicao de r que
1
s=
(1 − θ)r
q⇒ 1 − 1
s=
1
r− θ
p
r = 1 − θr
p⇒ θrs = p.

5/14/2018 ESP_SOB - slidepdf.com
http://slidepdf.com/reader/full/espsob 190/244
s q s
r p
p
De onde segue que
Ω
|f (x, 0)|r dx
≤ K
Ω
∞0
tνp |f (t)| p dtdx
1s
Ω
∞0
tνp |f (t)| p dt
qp
1s
Como1
s =θr
p .
Portanto teremos que
f (·, 0)Lr(Ω) ≤ K τ ν f θLp(0,∞;Lp(Ω))τ νp f 1−θ
Lp(0,∞;Lq(Ω))
De onde segue o resultadoO seguinte Lema sera util para caraterizar os espacos de traco T ν,p
Lema 7.5.4 Seja f uma func˜ ao integr´ avel definida quase sempre sobre [0,∞
[. Denote-mos por g a func˜ ao
g(t) =1
t
t
0
f (ξ) dξ.
7.5. Espacos intermediarios 187
Ent˜ ao para 1 ≤ p < ∞ e θ = 1 p
+ ν < 1 e v alido
∞
0
tνp
|g(t)
| p dt
≤
1
(1 − θ)
p ∞
0
tνp
|f (t)
| p dt
Demonstracao.- Fazendo a mudanca de variavel
t = eτ ; f (eτ ) = f (τ ) ξ = eσ, g(eτ ) = g(τ )
e equivalente mostrar
∞−∞
eνpτ |g(τ ) peτ dτ ≤ 1(1 − θ) p ∞−∞ tνp|f (τ )| p dτ
onde
g(τ ) = e−τ
eτ
f (ξ) dξ

5/14/2018 ESP_SOB - slidepdf.com
http://slidepdf.com/reader/full/espsob 191/244
0
= e−τ
τ
0
˜f (σ)e
σ
dσ.
Denotemos por
E (τ ) = eθτ , F (τ ) =
e(θ−1)τ t > 00 t < 0.
Note que
E.g(τ ) = eθτ e−τ τ
−∞f (σ)eσ dσ
=
τ
−∞f (σ)e(θ−1)τ +σ dσ
=
τ
−∞e(θ−1)(τ −σ)f (σ)eθσ dσ
= F ∗
E f (τ )
Da desigualdade de Young teremos
E · gLp ≤ ∞
−∞F (t) dt
∞−∞
|E f | p dt
=
1
1
−θ
∞−∞
|E f | p dt
De onde segue a demonstracao
188 Capıtulo 7. Teorema do Traco
A seguir vamos caraterizar os espacos T ν,p. Por simplicidade tomaremos B1 =W 1,p(R) e B2 = L p(R). Um procedimento analogo e feito para o caso do RN . Denote-mos por T o espaco
T = v ∈ L p(R); ∞
0
t(ν−1) pT tv − v pLp(R) dt < ∞
onde por T tv estamos denotando o operador traslacao dado por
T tv(x) = v(x + t)
O espaco T munido da norma
w pT = v p
Lp(R) +
∞0
t(ν−1) pT tv − v pLp(R) dt
e um espaco de Banach.
Observacao 7.5.1 O espaco T e um espaco intermediario entre W 1,p(R) e L p(R).Isto e
W 1,p(R) ⊂ T ⊂ L p(R).
De fato, Pela definic˜ ao a segunda inclus˜ ao acima e imediata. Mostraremos a primeira.P i t t ∈ W 1 p(R) l P i ˜ 5 1 2 t

5/14/2018 ESP_SOB - slidepdf.com
http://slidepdf.com/reader/full/espsob 192/244
Para isto tomemos w ∈ W 1,p(R), pela Proposic ao 5.1.2 teremos que
T tv − v pLp(R) ≤ ∂v
∂x pLp(R)t p
De onde segue que
v pT = v p
Lp(R) +
10
t(ν−1) pT tv − v pLp(R)dt +
∞1
t(ν−1) pT tv − v pLp(R)dt
≤ v pLp(R) + ∂v
∂x p
Lp(R)
10
t(ν) p dt + 2
∞1
t(ν−1) p dtv pLp(R)
≤ C v p
W 1,p(R)
De onde segue que v ∈ T .
Fixemos agora os espacos B1 = W 1,p(R) e B2 = L p(R). Portanto de aqui em diantepor T ν,p estaremos denotando ao espaco
T ν,p = T ν,p(W 1,p(R), L p(R))
Nosso seguinte objetivo sera mostrar que no caso acima
T = T ν,p. Este fato munido da
observacao anterior nos diz que o espaco T ν,p e um espaco intermediario entre W 1,p(R)e L p(R). Esta propriedade nos abre as portas para a definicao dos espacos fracionarios.Resumimos isto no seguinte teorema
7.5. Espacos intermediarios 189
Teorema 7.5.2 Seja 0 < ν + 1 p
< 1. Ent˜ ao e v alida a identidade:
T = T ν,p
e ainda as correspondentes normas s˜ ao equivalentes.
Demonstracao.- Seja u ∈ T ν,p. Mostraremos que u ∈ T . De fato, denotemos porf ∈ W ν,p uma funcao tal que
f (0) = u
e simples verificar que
f (x, t) = f (x + t, 0) + t
0∂ ∂τ f (x + t − τ, τ ) dτ
= f (x + t, 0) − t
0
∂
∂xf (x + t − τ, τ ) dτ +
t
0
∂
∂τ f (x + t − τ, τ ) dτ
= f (x + t, 0) − t
0
h(x + t − τ, τ ) dτ

5/14/2018 ESP_SOB - slidepdf.com
http://slidepdf.com/reader/full/espsob 193/244
0
onde
h(x, t) = − ∂ ∂x
f (x, t) + ∂ ∂t
f (x, t)
De onde segue que
f (x + t, 0) − f (x, t) = − t
0
h(x + t − τ, τ ) dτ
f (x + t, 0) − f (x, 0) = t
0
∂f
∂τ dτ − t
0 h(x + t − τ, τ ) dτ.
Dividindo por t e tomando norma em L p(R) teremos
T tu − u
tLp(R) ≤ 1
t
t
0
f (·, τ )Lp(R) dτ +1
t
t
0
T t−hh(·, τ )Lp(R) dτ
≤
1
t t
0 f (
·, τ )
Lp(R) dτ +
1
t t
0 h(
·, τ )
Lp(R) dτ.
Elevando a potencia p a desigualdade acima, multiplicando por tνp e integrando sobre[0, ∞[, teremos
∞0
t(ν−1) pT tu − u pLp(R) ≤ 2 p
∞0
tνp
1
t
t
0
f (·, τ )Lp(R)
p
dτ
+2 p ∞0
tνp 1t t
0
h(·, τ )Lp(R) p
dτ
190 Capıtulo 7. Teorema do Traco
Aplicando o Lema 7.5.4 teremos que
∞0
t(ν−1) pT tu − u pLp(R) ≤ 2 p
(1 − θ) p
∞0
tνpf (·, τ ) pLp(R) dτ
+ 2
p
(1 − θ) p ∞0
tνph(·, τ ) pLp(R) dτ
Lembrando que h(x, t) = − ∂f ∂x (x, t) + ∂f
∂x (x, t) obtemos
∞0
t(ν−1) pT tu − u pLp(R) ≤ 2 p+1
(1 − θ) p
∞0
tνpf (·, τ ) pLp(R) dτ
+2 p
(1 − θ) p ∞
0
tνp
∂f
∂x(·, τ )
p
Lp
(R)dτ
≤ 2 p+1
(1 − θ) pf p
Wν,p
Tomando o infimo obtemos ∞t(ν−1) pT tu − u p
Lp(R) ≤ 2 p+1
(1 θ)pu p
T ν,p

5/14/2018 ESP_SOB - slidepdf.com
http://slidepdf.com/reader/full/espsob 194/244
0
Lp(R) (1 − θ) p T ,p
De onde segue que uT < ∞ e portanto u ∈ T . Recıprocamente, suponhamos queu ∈ T , tomemos ϕ ∈ C ∞([0, ∞[) satisfazendo ϕ(0) = 1, ϕ(t) = 0 para t > 1, edenotemos por
f (t) = ϕ(t)g(t)
onde
g(x, t) =1
t
t
0
u(x + τ ) dτ
Note que
∂
∂xg(x, t) =
1
t
∂
∂x
t
0
u(x + τ ) dτ
=1
t
t
0
∂
∂xu(x + τ ) dτ
=1
t
t
0
∂
∂τ u(x + τ ) dτ
= 1t u(x + t) − u(x)
De onde segue que
7.5. Espacos intermediarios 191
1
0
tνpg(·, t) pW 1,p(R) dt =
1
0
tνp
g(·, t)Lp(R) + ∂
∂xg(·, t)Lp(R)
p
dt
lembrando a definicao de g obtemos 10
tνpg(·, t) pW 1,p(R) dt ≤ 2 p
10
tνp dtu pLp(R)
+ 2 p
10
t(ν−1) pT tu − u pLp(R) dt
De onde obtemos que
10
tνpg(·, t) pW 1,p(R) dt ≤ C u p
T
Finalmente, estimemos a norma de g em L p. Note primeiro que
g(x, t) = − 1
t2
t
0
u(x + τ ) dτ +1
tu(x + t)

5/14/2018 ESP_SOB - slidepdf.com
http://slidepdf.com/reader/full/espsob 195/244
= −1
t2 t
0 u(x + τ ) − u(x) dτ :=I 1
+
1
t u(x + t) − u(x) :=I 2
Pela definicao da norma em T temos que o termo I 1 pode ser estimado da seguinteforma
10
tνpT tu
−u
t pLp(R) dt ≤ 10
t(ν−1) pT tu − u pLp(R) dt
= u pT
Para estimar I 2 utilizamos o Lema 7.5.4, assim teremos que
1
0
tνp 1
t p t
0
T τ u − u dτ pLp(R)
dt ≤ 1
(2
−θ) p
∞
0
t(ν−1) pT tu − uLp(R) dt
= u pT .
De onde segue que 10
tνpg(·, τ ) pLp(R) dτ ≤ u p
T
Tomando infimo teremos que
u
pT ν,p
≤C
u
p
T De onde segue o resultado
192 Capıtulo 7. Teorema do Traco
Observacao 7.5.2 O resultado anterior pode ser estendido de forma simple para ocaso n-dimensional. Neste caso o espaco T estar´ a definido da seguinte forma
T =
u ∈ L p(RN );
n
i=1 ∞0
t(ν−1) pT it u − u pLp(RN )
dt < ∞
ondeT it u(x) = u(x1, · · · , xi−1, xi + t, xi+1, · · · , xn)
Assim como no caso unidimensional, o espaco T munido da norma
u pT = u p
Lp(RN )+
ni=1
∞0
t(ν−1) pT it u − u pLp(RN )
dt
e um espaco de Banach. Usando os mesmos argumentos que no Teorema anterior
podemos mostrar queT = T ν,p(W 1,p(RN ), L p(RN ))
O que implica que os espacos T ν,p s˜ ao espacos intermediarios entre W 1,p(RN ) e L p(RN )esto e
W 1,p(RN ) ⊂ T ν,p ⊂ L p(RN ).
Agora estamos em condicoes de definir os espacos W s,p(RN ) para s um numero real.

5/14/2018 ESP_SOB - slidepdf.com
http://slidepdf.com/reader/full/espsob 196/244
g ¸ p ¸ ( ) pIsto sera realizado na seguinte secao.
7.6 Os espacos W s,p
Nesta secao utilizaremos os conceitos de espacos intermediarios discutidos na secaoanterior para introduzir os espacos fracionarios de Sobolev, isto e W s,p(RN ) quandos ∈ R.
Definicao 7.6.1 Seja s um n´ umero real. Denotaremos por W s,p(RN ) ao espaco
W s,p(RN ) = W m,p(RN ), se m = s ∈ NSe s = m + σ onde 0 < σ < 1, ent˜ ao teremos
W s,p(RN ) =
u ∈ W m,p(RN ); Dαu ∈ T 1−σ− 1p ,p, |α| = m
O espaco W s,p(RN ) munido da norma
u
p
W s,p =
u
p
W m,p + |α|=m
DαuT
1−
σ−1
p,p
e um espaco de Banach.
7.7. Teorema do traco 193
Pode-se mostrar que o espaco T 1−σ− 1p ,p e um espaco reflexivo para 1 < p < ∞.
Portanto utilizando o isomorfismo
P u = (u, (Dαu)|α|=m)
entre os espacos
W s,p(RN ) → W m,p(RN ) ×|α|=m
T 1−σ− 1p ,p
Segue que os espacos fracionarios W s,p(RN ) sao tambem reflexivos para todo s ∈ R+.Para s < 0, definimos W s,p(RN ) como sendo o dual topologigo do espaco W −s,p(RN ).Finalmente, podemos afirmar que para todo s
∈R os espacos W s,p(RN ) sao reflexivos.
7.7 Teorema do traco
Nesta secao mostraremos o Teorema do Traco para funcoes em W m,p(RN ). Para istointroduziremos os espacos intermediarios de ordem superior. Denotaremos por
(0)

5/14/2018 ESP_SOB - slidepdf.com
http://slidepdf.com/reader/full/espsob 197/244
(0)
T = T 1−σ− 1p ,p
Note que
(0)
T =
w ∈ L p(RN );
ni=1
∞0
t(ν−1) pT it w − wLp(RN) dt < ∞
(k)T = w ∈ W k,p(RN );
|α|=k
ni=1
∞0
t(ν−1) pT it Dαw − DαwLp(RN) dt < ∞Finalmente, denotaremos por
(k)
W =
f : [0, ∞[→ L p(RN ); tν f (i) ∈ L p(0, ∞; W m−i,p(RN )), i = 1, ·, k
Este espaco munido da norma
f (k)
W= max
0≤k≤mtν f (k)Lp(0,∞;W m−k,p(RN))
e um espaco de Banach. Nesta condicoes teremos
Teorema 7.7.1 Sobre as condic˜ oes anteriores existe uma constante C > 0 tal que
m−1
k=0 f
(k)
(·, 0)(m−k−1)T ≤ C f (m)W
194 Capıtulo 7. Teorema do Traco
Demonstracao.- Tomemos f ∈(m)
W e |α| < m − k − 1, entao teremos que
tν Dαf (k) ∈ L p(0, ∞; W 1,p(RN ); tν Dαf (k+1) ∈ L p(0, ∞; L p(RN );
de onde segue que
Dα
f (k)
(·, 0) ∈ T ν,p
.
Portanto aplicando a definicao de norma teremos que
Dαf (k)(·, 0)T ν,p ≤ C f (m)
W
De onde concluimos que
f (k)(·, 0) ∈(m−k−1)
T
e ainda verificamos quef (k)(·, 0)|(m−k−1)
T ≤ C f (m)
W
De onde segue quem−1k=0
f (k)(·, 0)|(m−k−1)T
≤ mC f (m)
W
De onde segue o resultado

5/14/2018 ESP_SOB - slidepdf.com
http://slidepdf.com/reader/full/espsob 198/244
De onde segue o resultado
Nosso seguinte ob jetivo e aplicar o Teorema anterior para funcoes W
m,p
(Ω) Isto serafeito como no caso dos espacos de Hilbert H m(Ω). Isto e, primeiro no caso Ω = Rn+1+
e depois extenderemos o resultado para o caso de dominios regulares de classe C m
utilizando para isto as cartas locais. Observe primeiro que no caso em que ν = 0, esimples verificar que
W m,p(Rn+1+ ) =
(m)
W =
f : [0, ∞[→ L p(RN ); f (k) ∈ L p(0, ∞; W m−k,p(RN )) k = 0, · · · , m
.
Por outro lado, note que da definicao dos espacos fracionarios teremos que
T 0,p =
w ∈ L p(RN );
ni=1
∞0
t− pT tw − w pLp(RN )
dt < ∞
= W σ,p(RN )
Onde 1 − σ = ν
=0
+1 p de onde segue que σ = 1 − 1
p . Portanto e valida a identidade
T 0,p = W 1− 1p ,p(RN )
De forma analoga e lembrando a definicao de W s,p(RN ) teremos
7.8. Espacos W s,p(Γ) 195
(k)
T =
w ∈ W k,p(RN );
n
i=1,|α|≤k ∞
0
t− pT tDαw − DαwLp(RN) dt < ∞
= W k+σ,p(RN ).
Lembrando que 1 − σ = 1 p , teremos que σ = 1 − 1
p . Assim obtemos que
(k)
T = W k+1−1p ,p(RN )
Utilizando o Teorema 7.7.1 obtemos que
m−1k=0
w(k)(·, 0)W
m−k− 1p
,p(RN )
≤ C wW m,p(Rn+1+ ) (7.4)
Portanto temos mostrado o teorema:
T 7 7 2 S j li ˜

5/14/2018 ESP_SOB - slidepdf.com
http://slidepdf.com/reader/full/espsob 199/244
Teorema 7.7.2 Seja γ a aplicac ao
γ : D(Rn+1+ ) →
m−1k=0
D(RN )
definida comoγ (ϕ) = (ϕ(·, 0), ϕ(·, 0), · · · , ϕ(m−1)(·, 0))
Pode ser estendida continuinamente aos espacos
γ : W m,p(Rn+1+ ) →
m−1k=0
W m−k− 1p ,p(RN )
Isto e, existe uma constante C > 0 que verifica a desigualdade (7.4) para toda func˜ aoem W m,p(RN
+ )
7.8 Espacos W s,p(Γ)
Denotando por Γ a fronteira de Ω, utilizando as cartas locais podemos definir os espacosW s,p(Γ) para s < m da seguinte forma: Sejam (hi, V i), i = 1, · · · , ν a famılia de cartaslocais de Γ, e denotemos por αi a particao da unidade associada a V i ∩ Γ (Ver Definicao5.5.2). Toda funcao sobre Γ pode ser escrita como
u =
νi=1
(αiu)
196 Capıtulo 7. Teorema do Traco
Note que a funcao h∗v(x) = v(h(x)) esta definida sobre o quadrado Q e para valoresem Γ, h∗j v = v(h(x)) toma valores sobre Q0. Assim teremos que a funcao h∗j (αj u) esta
definida sobre Rn−1 se a tomamos como sendo 0 fora de Q0, isto e
h∗j v(x) = v(hj (x)) se x ∈ Q0
0 se x∈
Q0
Agora definimos o espaco W s,p(Γ)
W s,p(Γ) =
u ; h∗j (αj u) ∈ W s,p(Rn−1), ∀ j = 1 · · · , ν
Munindo ao espaco acima a norma do grafo, isto e
uW s,p(Γ)) =ν
j=1
h∗j (αju)W s,p(Rn−1)
O espaco W s,p(Γ) e um espaco de Banach.Com estas definicoes a versao do teorema do Traco para conjuntos abertos de fron-
teira limitada e consequencia imediata do Teorema de traco para funcoes em W m,p(RN + )
que estudamos na secao anterior.Seja Ω um aberto de classe C m. Definimos como W s,p(Ω) o espaco:
W s,p(Ω) =
w|Ω; w ∈ W s,p(RN )

5/14/2018 ESP_SOB - slidepdf.com
http://slidepdf.com/reader/full/espsob 200/244
Este espaco munido da norma
wW s,p(Ω) = inf wW s,p(RN ); v ∈ W s,p(RN ), v = w em Ω
E um espaco de Banach.
A seguir deixamos aos cuidados do leitor a demonstracao dos seguintes teoremas:
Teorema 7.8.1 C ∞0 (RN ) e denso em W s,p(RN )
Teorema 7.8.2 Seja s = m + σ com m inteiro e 0 < σ < 1. Seja Ω de classe C m+1,
ent˜ ao D(Ω) e denso em W s,p(Ω).
7.9 Teorema do traco em W m,p(Ω)
Nesta secao utilizaremos as mesmas notacoes que na secao anterior. Isto e, suporemosque Ω e de classe C m, assim teremos
Teorema 7.9.1 Seja γ a aplicac˜ ao
γ : D(Ω) →m−1k=0
D(Ω)
7.9. Teorema do traco em W m,p(Ω) 197
definida como
γ (ϕ) = (γ 0(ϕ), γ 1(ϕ), · · · , γ m−1ϕ) = (ϕ|Ω,∂ϕ
∂ν |Ω, · · · ,
∂ (m−1)ϕ
∂ν (m−1) |Ω).
Ent˜ ao γ pode ser estendida continuamente aos espacos
γ : W m,p(Ω) →m−1k=0
W m−k− 1p ,p(Γ)
Isto e, existe uma constante C > 0 que verifica a desigualdade
m−1
k=0
γ k(w)W
m−k− 1p
,p(Γ)
≤ C wW m,p(Ω)
para toda func˜ ao em W m,p(Ω)
Demonstracao.- Seja α a particao da unidade de Ω associada a V j entao teremos que
h∗j (αu) ∈ W s,p(RN + )

5/14/2018 ESP_SOB - slidepdf.com
http://slidepdf.com/reader/full/espsob 201/244
hj (αu) ∈ W (R+ )
Aplicando a Teorema 7.7.2 teremos que
∂
∂xnh∗j (αu)(x, 0)
W m−k− 1
p,p(Γ)
≤ ch∗j (αu)W m(Q+)
≤ cuW m(Ω)
De onde segue o resultado.
Como uma aplicacao do Teorema do Traco temos o seguinte resultado
Corolario 7.9.1 Seja f uma func˜ ao satisfazendo:
f ∈ L p(0, ∞; W 1,p(RN )), f ∈ L p(0, ∞; L p(RN ))
Ent˜ ao teremos que
f ∈ C (0, ∞; W 1− 1p ,p(RN )) ∩ L∞(0, ∞; W 1− 1p ,p(RN ))
Demonstracao.- Do Teorema de Fubini e a definicao dos espacos W s,p(RN ) segue que
W 1,p(Rn+1+ ) =
f ; f ∈ L p(0, ∞; W 1,p(RN )), f ∈ L p(0, ∞; L p(RN ))
Do Teorema do Traco segue que
f (0) p
W 1− 1
p,p(RN )
≤ cf pLp(0,∞;W 1,p(RN )) + f 2Lp(0,∞;Lp(RN))
198 Capıtulo 7. Teorema do Traco
Usando traslacoes podemos obter que
f (s) p
W 1− 1
p,p(RN )
≤ cf p
Lp(0,∞;W 1,p(RN ))+ f 2Lp(0,∞;Lp(RN ))
, ∀s > 0.
Da densidade das funcoes
D(Rn+1
+ ) podemos aproximar f por uma sequencia de funcoes
contınuas convergindo forte na norma de L∞(0, ∞; W 1−1p ,p(RN )), de onde segue nossa
conclusao.Utilizando a desigualdade de Holder obtemos o seguinte resultado de interpolacao.
Corolario 7.9.2 Seja f uma func˜ ao satisfazendo:
f ∈ Lr(a, b; W 1,p(RN )) ∩ Ls(a, b; L p(RN ))
Ent˜ ao teremos quef ∈ Ll(a, b; W θ,p(RN ))
onde 1
l=
θ
r+
1 − θ
s, ∀θ ∈]0, 1[
e ainda que
b
a
f lW θ,r(RN ) dτ
1/l
≤ C
b
a
f rW 1,p(RN ) dτ
θr b
a
f sLp(RN ) dτ
1−θs

5/14/2018 ESP_SOB - slidepdf.com
http://slidepdf.com/reader/full/espsob 202/244
Notemos que pela definicao dos espacos fracionarios teremos queW θ,p(RN ) =
u ∈ L p(RN ); u ∈ T 1−θ− 1
p ,p(W 1,p(RN ), L p(RN ))
onde ν = 1 − θ − 1 p . Do Lema 7.5.3 temos que
f T 1−θ− 1
p,p ≤ cf 1−
1p−ν
W 1,p(RN )f
1p+ν
Lp(RN )
= cf θW 1,p(RN )f 1−θ
Lp(RN )
De onde obtemos
f T 1−θ− 1
p,p ≤ cf θ
W 1,p(RN )f 1−θLp(RN ).
Finalmente, aplicando a desigualdade de Holder teremos
b
a
f lW θ,p dτ ≤
b
a
f lθW 1,p(RN )f l(1−θ)
Lp(RN )dτ
≤ b
af
rW 1,p(RN ) dτ
θlr b
af
sLp(RN ) dτ
(1−θ)ls
De onde segue o resultado.
7.10. Exercıcios 199
7.10 Exercıcios
1. Mostre que a norma uH s(Ω) satisfaz a lei do paralelogramo, portanto faz deH s(Ω) um espaco de Hilbert.
2. Qual e o mınimo valor de s ∈ R para que uma funcao em W s,p(Ω), tenha bemdefinido seu traco. Justifique sua resposta
3. Considere o problema de Dirichlet
−∆u = 0 em Ω
u = g em Γ = ∂ ΩQual e o maior espaco que deve ser tomado g para que o problema tenha umasolucao em H m(Ω). Justifique sua resposta.
4. Mostre que se Ω e um aberto limitado de classe C 3 entao a aplicacao traco estabem definida nos seguintes espacos:
γ : W 2,p(Ω) W 2− 1p ,p(∂Ω) W 1− 1
p ,p(∂Ω)

5/14/2018 ESP_SOB - slidepdf.com
http://slidepdf.com/reader/full/espsob 203/244
γ : W ,p(Ω)→
W p ,p(∂ Ω)×
W p ,p(∂ Ω)
f → (f |∂ Ω,∂f
∂ν |∂ Ω)
5. Seja Ω de classe C m+1, mostre que a aplicacao
γ : H m(Ω)
→
m−1
k=0 H m−k− 12 (∂ Ω)
f → f |∂ Ω
e linear e contınua.
6. Seja Ω um hipercubo do RN , mostre que
uLp(Ω) ≤ C u1
−α
Lq(Ω)uα
W 1,r(Ω)
onde 1 ≤ q ≤ p, r ≥ n e α e dado por
α =
1q − 1
p1q + 1
n − 1r
7. Mostre que se f ∈ L
p
(a, b; L
q
(Ω)) e f ∈ L
p
(a, b; L
q
(Ω)) entao f e uma funcaocontınua a valores em Lq(Ω).
200 Capıtulo 7. Teorema do Traco
8. Mostre que se f ∈ L2(a, b; H 1(Ω)) e f ∈ L2(a, b; L2(Ω)) entao f satisfaz:
f ∈ C ([a, b]; H 1/2(Ω))
(Sugestao, utilize a mesmas ideias que a demonstracao do teorema de traco parat = s onde s
∈[a, b], assim mostre que
f (s)2H 1/2(Ω) ≤ b
a
f (τ )2H 1(Ω) + f (τ )2L2(Ω) dτ
Usando a densidade de C ∞(a, b; H 1(RN )) conclua o resultado)
9. Mostre que se f ∈ L p(a, b; W 1,p(RN )) e f ∈ L p(a, b; L p(RN )) entao f satisfaz:
f ∈ C ([a, b]; W 1−1p (RN ))
10. Mostre que existe uma solucao fraca da equacao
utt − uxx + u3 = 0 em ]0, L[×]0, ∞[
u(x, 0) = u0, u(x, 0) = u0, em ]0, L[
u(0, t) = u(L, t) = 0 para t > 0
11. Mostre que se u ∈ L p(a, b; Ls(RN )) ∩ Lq(a, b; Lr(RN )) entao teremos que

5/14/2018 ESP_SOB - slidepdf.com
http://slidepdf.com/reader/full/espsob 204/244
u ∈ L p
(a, b; Ls
(RN
))
onde1
p=
θ
p+
1 − θ
q,
1
s=
θ
s+
1 − θ
r
12. Mostre que se u ∈ L p(a, b; H s(RN )) ∩ Lq(a, b; H r(RN )) entao se verifica que
u ∈ L p(a, b; H θs+(1−θ)r(RN ))
onde 1
p=
θ
p+
1 − θ
q.
13. Mostre queT ν,p(W 1,p(RN ); L p(RN ))
=
f ∈ L p(RN );
ni=1
∞0
t(ν−1) pT it w − w pLp(RN ) dt < ∞
ondeT it w = w(x1, · · · , x1+t, · · · xn)
Capıtulo 8
Extensao de Funcionais
Convexos
O Proposito deste capıtulo e introduzir o conceito de funcionais quase convexos e A-quase convexos e encontrar condicoes sobre as quais estes funcionais sao sequencialmente
5/14/2018 ESP_SOB - slidepdf.com
http://slidepdf.com/reader/full/espsob 205/244
q ¸ q q
contınuos, respecto a convergencia fraca, onde a sequencia possui restricoes nas derivadas.
8.1 Funcoes A-quase convexas
extenderemos o conceito de convexidad, a partir da seguinte propriedade que caraterizaas funcoes convexas. Isto e, usando Teorema 1.2.1 e a observacao 1.2.3 concluimos quef e uma funcao convexa se e somente se verifica a seguinte propriedade
Ω
f (µ + ξ(x)) dx ≥ f (µ)meas(Ω) ∀ξ ∈ L∞(D);
onde
Dξ(x) dx = 0. Ao longo destas notas suporemos que ξ satisfaz
Aξ :=m
j,k=1
ai,j,k∂uj
∂xk= 0.
Nestas condicoes teremos
Definicao 8.1.1 Diremos que um funcional J e A-quase convexo, quando se verifica Ω
f (µ + ξ(x)) dx ≥ f (µ)meas(Ω),
para todo ξ ∈ L∞(D) tal que D
ξ(x) dx = 0 e Aξ = 0.
202 Capıtulo 8. Extens˜ ao de Funcionais Convexos
Denotaremos por
L(D) =
ξ ∈ L∞(D);
D
ξ(x) dx = 0, e Aξ = 0
.
Consideremos alguns exemplos.
Exemplo 8.1.1 Seja A o operador diferencial definido como
A(ξ1, ξ2) = (ξ1 − ξ2),
e denotemos por L(D) o espaco
L(D) := ξ = (ξ1, ξ2) ∈ L∞(D) × L∞(D); D ξ dx = 0; Aξ = 0 .
Como D e um cubo, a condicao Aξ = 0 implica que
ξ1 − ξ2 = c,
para alguma constante c. Como
Dξ dx = 0 teremos
D
ξ1(x) dx =D
ξ2(x) dx = 0.

5/14/2018 ESP_SOB - slidepdf.com
http://slidepdf.com/reader/full/espsob 206/244
D DDe onde segue que c = 0. Portanto, todo ξ ∈ L(D) pode ser escrito como
L(D) := ξ ∈ L∞(D) × L∞(D); ξ1 = ξ2 . (8.1)
Por outro lado, e simples mostrar que a funcao f (x, y) = xy nao e uma funcao convexa,pois sua matriz Hessiana nao e definida positiva nem negativa. Mas f e A−quaseconvexa. De fato, tomemos ξ ∈ L(D) entao e simples verificar que
D
f (µ + ξ) dx = D
f (µ1 + ξ1, µ2 + ξ2) dx
= f (µ)meas(D) +
D
ξ1ξ2 dx;
de (8.1) obtemos que
Df (µ + ξ) dx ≥
Df (µ1 + ξ1, µ2 + ξ2) dx = f (µ)meas(D).
Portanto, temos construido uma funcao contınua que nao e convexa mas e A−quaseconvexa
8.1. Func˜ oes A-quase convexas 203
Exemplo 8.1.2 Consideremos o mesmo operador do exemplo (8.1.1), e denotemos porf a funcao
f (x, y) = x2 − y2.
Claramente f nao e uma funcao convexa, muito menos uma funcao linear. Mas ela euma funcao A−quase linear. De fato,
f (µ1 + ξ1, µ2 + ξ2) = f (µ1, µ2) + 2µ1ξ1 − 2µ2ξ2 + f (ξ1, ξ2)
Como ξ ∈ L(D) teremos
f (µ1 + ξ1, µ2 + ξ2) = f (µ1, µ2) + 2µ1ξ1 − 2µ2ξ2
Integrando sobre D e aplicando o fato que ξ ∈ L(D) concluimos que D
f (µ + ξ) dx = f (µ)meas(D).
Finalmente, como −f e f sao A-quase convexos, concluimos que f e A-quase linear.Portanto, temos um exemplo de uma funcao nao linear que e uma funcao A-quase linear.
Exemplo 8.1.3 Consideraremos o mesmo operador A que no exemplo 8.1.1 e de-

5/14/2018 ESP_SOB - slidepdf.com
http://slidepdf.com/reader/full/espsob 207/244
notemos por f uma funcao quadratica de duas variaveis. Sem perda de generalidadepodemos supor que f e da forma
f (x, y) := ax2 + bxy + cy2;
Queremos determinar quais sao as relacoes que deven satisfazer os coeficientes a, b, e cpara que f seja un funcional A-quase convexo e A-quase linear. Para isto consideremos
f (µ + ξ) = a(µ1 + ξ1)2
+ b(µ1 + ξ1)(µ2 + ξ2) + c(µ2 + ξ2)2
= f (µ1, µ2) + 2aµ1ξ1 + bξ1µ2 + bµ1ξ2 + 2cµ2ξ2 + f (ξ1, ξ2)
Integrando sobre D e aplicando as condicoes sobre ξ teremos D
f (µ + ξ(x)) dx = f (µ1, µ2)meas(D) +
D
f (ξ1(x), ξ2(x)) dx. (8.2)
Portanto, f e uma funcao A-quase convexa se
f (ξ1, ξ1) ≥ 0 isto e (a + b + c)ξ21 ≥ 0.
Assim todo funcional quadratico f e A-quase convexa se a soma dos coeficientes dostermos quadraticos e nao negativa. Usando 8.2 concluimos que f e A-quase linear se
f (ξ1, ξ1) = 0 isto e (a + b + c)ξ21 = 0.
Portanto todo funcional quadratico e A-quase linear se a soma dos coeficientes quadraticose zero.
204 Capıtulo 8. Extens˜ ao de Funcionais Convexos
Exemplo 8.1.4 Denotemos por
A(ξ1, ξ2 =u
, ξ3, ξ4 =v
) = ((ξ1 − αξ3), (ξ2 − αξ4)) .
Onde α e um numero real. A seguir caraterizemos o espaco L(D). Primero notemos
queA(ξ1, ξ2, ξ3, ξ4) = 0,
implica que existe um vetor constante C := (c1, c2) ∈ R2 tal que
u − αv = C.
Como
Du dx =
D
v dx = 0, entao teremos que
u + αv = 0.
Portanto, podemos reescrever L(D) como
L(D) =
(u, v) ∈ [L∞(D)]2 × [L∞(D)]2;
D
u dx =
D
v dx = 0, u = −αv
.
Consideremos a funcao determinante
det (uτ , vτ )
τ τ

5/14/2018 ESP_SOB - slidepdf.com
http://slidepdf.com/reader/full/espsob 208/244
E simples verificar que a funcao (u, v) → det (u , v ) e nao linear, mas e uma funcaoA-quase linear.
8.2 Funcionais A-quase convexos
O proposito desta secao e mostrar um resultado similar ao Teorema 3.11.1 para funcionaisA-quase convexos. Infelizmente nao e possivel obter uma condicao necessaria e suficientecom este grau de generalidade. Em compensacao mostraremos uma condicao necessaria
e logo outra suficiente. Comecaremos mostrando uma condicao necessaria para que umafuncao f seja semicontınua inferiormente.
Teorema 8.2.1 Suponhamos que para toda seq¨ uencia uν satisfazendo
uν
u fraco estrela em L∞(D)
Auν limitado em [L2(D)]m
teremos que
liminf ν→∞ D
f (uν ) dx ≥ D
f (u) dx.
Ent˜ ao f e uma func˜ ao A-quase convexa.
8.2. Funcionais A-quase convexos 205
Demonstracao.- Tomemos ξ ∈ L(D), denotemos da mesma forma sua extensaoperıodica ao RN . Ponhamos
ξν (x) := ξ(νx) ∀x ∈ RN ,
entao teremos queξν
0 fraco estrela em L∞(D).
Por outro lado D
f (µ + ξν (x)) dx =
D
f (µ + ξ(νx)) dx =1
ν n
νD
f (µ + ξ(x)) dx
= D f (µ + ξ(x)) dx;
aplicando as hipoteses concluimos que
f (µ)meas(D) ≤ liminf
D
f (µ + ξν (x)) dx =
D
f (µ + ξ(x)) dx;
De onde segue nosso resultado

5/14/2018 ESP_SOB - slidepdf.com
http://slidepdf.com/reader/full/espsob 209/244
Mostraremos agora uma condicao suficiente. Para isto suporemos que a sequenciasatisfaz
A(u − uν ) = 0 (8.3)
Teorema 8.2.2 Sob as hip´ oteses do Teorema 8.2.1 junto com a relac˜ ao (8.3) teremosque
liminf D f (uν ) dx ≥ D f (u) dx;
para toda func˜ ao A-quase convexa.
Demonstracao.- Denotemos por f l a sequencia de funcoes dado por
f l(x) =
f (x) if −l ≤ x ≤ l
f (l) if x≤
l
f (−l) if −l ≤ x.
E simples verificar que para todo l ∈ N a funcao f l e limitada. Denotemos uma vk asequencia de funcoes simples satisfazendo
vk
→u forte em L2(Ω)
vk(x) → u(x) q.s. em Ω.
206 Capıtulo 8. Extens˜ ao de Funcionais Convexos
Nestas condicoes teremos
f l(uν ) − f l(u) = f l(u + (uν − u)) − f l(vk + (uν − u))
+f l(vk + (uν − u)) − f l(vk) + f l(vk) − f l(u)
Da continuidade de f , da convergencia forte de vk e do Teorema de Lebesgue seque quepara > 0 existe N tal que
Ω
|f l(u + (uν − u)) − f l(vk + (uν − u))| dx <
Ω
|f l(vk) − f l(u)| dx < .
De onde seque que Ω
f l(uν ) − f l(u) dx + ≥ Ω
f l(vk + (uν − u) ξν
) − f l(vk) dx.
Denotando por
ην = ξν − 1
meas(Ω)
Ω
ξν dx,
teremos

5/14/2018 ESP_SOB - slidepdf.com
http://slidepdf.com/reader/full/espsob 210/244
ην 0 em L∞(Ω),
Aην = 0,
|ην − ξν | → 0.
Usando a convergencia anterior e tomando ν ≥ N para N suficientemente grande obte-mos
Ω f l(vk + ξν ) − f l(vk) dx = Ω f l(vk + ξν ) − f l(vk + ην ) dx
+
Ω
f l(vk + ην ) − f l(vk) dx
≥ Ω
f l(vk + ην ) − f l(vk) dx −
Como vk e uma funcao simple, podemos obter uma decomposicao em subretangulostais que
Ω
f l(vk + ην ) − f l(vk) dx =
Li=1
Di
f l(vk + ην ) − f l(vk) dx, (8.4)
8.3. Exercicios 207
onde vk e constante em cada Di. Como f e A-quase convexa, o lado direito da identidadeanterior e positiva. Das relacoes (8.3)–(8.4) teremos
Ω f l(uν ) dx
− Ω f l(u) dx + 2
≥0.
Portanto teremos que,
liminf ν→∞
Ω
f l(uν ) dx ≥ Ω
f l(u) dx − 2.
Por outro lado, para todo > 0 segue que
liminf Ω f l(uν ) dx≥ Ω f l(u) dx.
Finalmente, como uν e limitado em L∞, da definicao da sequencia f l existe um numeropositivo M tal que
f M (uν ) = f (uν )
Se onde segue a nossa conclusao
8 3 E i i

5/14/2018 ESP_SOB - slidepdf.com
http://slidepdf.com/reader/full/espsob 211/244
8.3 Exercicios1. Seja g uma funcao convexa g : R→ R. Mostre que g e uma funcao contınua.
2. Se (xν )ν∈N e uma sequencia de numeros reais convirgindo para x. Mostre que asequencia
vN :=1
N
N
ν=1xν → x
3. Seja f : R → R uma funcao perıodica de periodo T . Encontre o limite fraco dasequencia f ν (x) := f (νx).
4. Seja φi uma funcao A-quase linear para i = 1 · · · s. Mostre que para toda funcaog : Rs → R a funcao f definida como
f (x) = g(φ1, · · · , φs),
e A-quase convexa.
5. Encontre a maior clase de funcoes cubicas que sejam A-quase convexa e A-quaselineares para o operador A dado por
Aξ = (ξ1 − ξ2)
6. Suponhamos que ξ : R3 → R3. Encontre a maior classe de funcoes quadraticasque sejam A-quase convexas e A-quase lineares para o operador A dado por
Aξ = curl ξ;
208 Capıtulo 8. Extens˜ ao de Funcionais Convexos
8.4 Condicao pontual
Nesta secao encontraremos uma condicao necessaria e suficiente para que um funcionalquadratico f seja semicontınuo inferiormente (ou continuou) com respecto a topologıafraca. E claro que para evitar os casos de funcionais convexos (ou lineares) considerar-mos aqui hipoteses adicionais sobre a convergencia da sequencia. Faremos referencia a
estas hipoteses com a letra H.
(H )
uν
u em [L∞(Ω)]m
Auν =m
j=1
nk=1 aijk
∂ujν
∂xkBounded in L2(Ω)
f (uν )
l em L∞(Ω).
Queremos encontrar a maior classe de funcoes quadraticas que sejam sequencialmentecontınuas respecto convergencia fraca munida a condicao da hipotese H .
Como vimos na secao 3.11 uma funcao f e semicontınuo inferiormente respectoa topologıa fraca estrela se f e uma funcao convexa, e e contınua respecto a mesmatopologıa se e somente se f e linear. Nesta secao extenderemos a classe de funcoes con-vexas para obter resultados similares aos obtidos naquela secao. Vejamos os seguintesexemplos.
Exemplo 8.4.1 Denotemos por f : R2 → R. Suponhamos que a sequencia uν , vν saolimitados em L∞ e que
∂uν ∂vν sao limitados em L2

5/14/2018 ESP_SOB - slidepdf.com
http://slidepdf.com/reader/full/espsob 212/244
∂uν∂x ∂vν
∂y sao limitados em L2.
Nestas condicoes teremos que
uν
u in [L∞(Ω)]m
vν
v in [L∞(Ω)]m
f (uν , vν )
l in L∞(Ω).
As condicoes que impomos sobre as derivadas de uν e vν nao sao suficientes para obterl = f (u, v), para toda funcao contınua. Nosso proposito e encontrar a maior classethe funcoes contınuas f para as quais seja valido f (u, v) = l?. Para isto tomemostransformada de Fourier, assim obtemos
ξ1uν e ξ2vν sao limitados em L2.
Portanto, existe uma subsequencia da que converge fortemente em H −1, que implica
que a subsequenciaξ21
1 + |ξ|2 |uν |2 +ξ22
1 + |ξ|2 |vν |2
8.5. Propriedades 209
converge forte em L2. A questao aqui e como usar esta convergencia. Para que tiposde funcoes teremos que f (u, v) = l?. Como as tecnicas que utilizaremos sao baseadasna transformada de Fourier teremos que restringirnos a funcionais quadraticos.
Nosso primeiro ponto e estabelecer uma condicao necessaria pontual que uma funcaof deve satisfazer para ter f (u, v) = l. Para isto introduziremos um novo conceito deconvexidade
Definicao 8.4.1 Diremos que uma func˜ ao f e convexa na direc˜ ao de Λ se para todox, y ∈ Rm tais que x − y ∈ Λ temos
f (θx + (1 − θ)y) ≤ θf (x) + (1 − θ)f (y)
Assim como a A-quase convexidade, a convexidade na direcao de Λ tambem extende anocao usual de convexidade. Isto e toda funcao convexa e convexa em qualquer direcao.Analizemos as seguintes propriedades.
8.5 Propriedades
•Para funcoes f : R
→R, temos apenas uma direcao, portanto funcoes na direcao
de Λ ⊂ R e convexidade em R sao equivalentes Para evitar casos triviais consid

5/14/2018 ESP_SOB - slidepdf.com
http://slidepdf.com/reader/full/espsob 213/244
• →de Λ ⊂ R e convexidade em R sao equivalentes. Para evitar casos triviais consid-eraremos funcoes de pelo menos duas variaveis.
• Uma funcao f e convexa na direcao de Λ se e somente se a funcao φ(t) := f (x+tλ)e convexa em R, para toda x ∈ RN e para toda λ ∈ Λ. De fato, denotemos por αe β dois numeros reais tais que α − β = λ ∈ Λ. Portanto lembrando a definicaode convexidade na direcao de Λ teremos
f (θα + (1 − θ)β ) ≤ θf (α) + (1 − θ)f (β ). (8.5)
Tomemos y ∈ Rm tal que
α = y + λ
β = y − θ
1 − θλ.
para λ
∈Λ. Substituindo α e β em (8.5) obtemos
f (y) ≤ θf ( y + λ :=x+tλ
) + (1 − θ)f (y − θ
1 − θλ
:=x+sλ
). (8.6)
Para x ∈ R escolhido apropriadamente. Nestas condicoes teremos
y = x + tλ − λ
y = x + sλ + θ1 − θ λ
210 Capıtulo 8. Extens˜ ao de Funcionais Convexos
Multiplicando a primeira identidade acima por θ e a segunda por 1 − θ somandoos produtos resultantes teremos
y = x + θtλ + (1 − θ)sλ
Sustituindo y em (8.6) obtemos a desigualdade desejada.
• Se f e uma funcao de classe C 2 convexa na direcao de Λ uma caraterizacao utile a seguinte
∂ 2f
∂xi∂xjλiλj ≥ 0 para todo λ ∈ Λ.
Esto segue do fato que a funcao g(t) := t → f (x + tλ) e uma funcao convexade classe C 2, portanto teremos que g(t) ≥ 0. Usando a regra da cadeia, seguenossa conclusao
• Notemos que quanto menor seja o conjunto Λ, menores serao as restricoes sobre aconvexidade na direcao de Λ. Por exemplo, se Λ = 0 entao toda funcao contınuasera convexa na direcao de Λ. Enquanto que se Λ = RN , entao convexidade nadirecao de Λ e convexidade usual serao equivalentes.
As propriedades anteriores mostran a facilidade em conferir se uma funcao e a naoconvexa na direcao de Λ. No caso se funcoes A-quase convexas a verificacao era maiscomplicada. Para explourar a convexidade na direcoa de Λ introduziremos o seguinte
funcional associado ao operador A. Denotemos por B o operador

5/14/2018 ESP_SOB - slidepdf.com
http://slidepdf.com/reader/full/espsob 214/244
funcional associado ao operador A. Denotemos por B o operador
B(λ, ξ) :=
mj=1
nk=1
a1jk λiξk, · · · ,m
j=1
nk=1
aqjk λiξk
Denotemos por V o espaco vetorial cujas primeiras componentes sao ortogonais comrespecto a aplicacao bilinear B, isto e
V := (λ, ξ) ∈ Rm ×Rn; B(λ, ξ) = 0) ⊂ Rm ×Rn
Notemos que a projecao de V sobre Rm e ortogonal com respecto as derivadas. Portantopara encontrar funcoes sequencialmente contınuas respecto a topologıa H devemos deter que f seja nula sobre esta projecao. Introduzimos entao o seguinte conjunto
Λ := λ ∈ Rm; ∃ξ ∈ Rn − 0 tal que (λ, ξ) ∈ V
Isto e Λ tem a direcao que e ortogonal respecto as direcao onde as derivadas sao limi-
tadas. Nosso proximo ob jetivo e mostrar que toda forma quadratica nula sobre Λ e umafuncao sequencialemente contınua respecto a convergencia definida em H. Para atingireste objetivo o seguinte Lema sera muito importante
8.5. Propriedades 211
Lema 8.5.1 Suponhamos que g seja um funcional quadr´ atico da forma xMxt tal queg(λ) ≥ 0∀λ ∈ Λ, ent˜ ao para todo α > 0 existe uma constante positiva cα tal que
Re g(λ) ≥ −α|λ|2 − cα qi=1
j,kaijk λjηk
2
para todo λ ∈ C m e η ∈ Rm tal que |η| = 1
Demonstracao.- Raciocinemos por reducao ao absurdo. Suponhamos que existe α0
tal que para todo ν ∈ N tenhamos
Re g(λν ) ≤ −α0|λν |2 − ν
qi=1
j,k
aijkλνj ηνk 2
(8.7)
para todo λ ∈ C m, η ∈ Rm tal que |λν | = 1 e |ην| = 1. Portanto existe uma subsequenciade (λν) e (ην ), que a continuaremos denotando da mesma forma, tal que
λν → λ∞; ην → η∞.
Da desigualdade (8.7) concluimos
2 2

5/14/2018 ESP_SOB - slidepdf.com
http://slidepdf.com/reader/full/espsob 215/244
qi=1
j,k
aijk λνj ην
k
2
→q
i=1
j,k
aijkλ∞j η∞k
2
= 0,
que implica que λ∞ ∈ Λ + iΛ. Das hipoteses sobre g concluimos que
Re g(λ∞) ≥ 0.
Por outro lado da desigualdade (8.7) e lembrando que |λ∞| = 1 segue queg(λ∞) ≤ −α0 < 0,
que e uma contradicao, portanto segue nossa afirmacao.
Teorema 8.5.1 Suponhamos que seja uma func˜ ao quadr´ atica da forma f (x) = xMxt,onde M e uma matriz simetrica. Suponhamos ainda que
(H )u
ν
∗
→u in [L
∞(Ω)]m
Auν = mj=1
nk=1 aijk
∂ujν
∂xkcompact in H −1loc (Ω)
f (uν )∗→ l in D(Ω).
Ent˜ ao teremos que
f (λ) ≥ 0 ∀λ ∈ Λ ⇒ l ≥ f (u).
f (λ) = 0 ∀λ ∈ Λ ⇒ l = f (u).
212 Capıtulo 8. Extens˜ ao de Funcionais Convexos
Demonstracao.- Sem perda de generalidade podemos supor que u = 0. A ideia eaplicar Transformada de Fourier. Para isto introduzimos a sequencia wν = φuν , ondeφ ∈ C ∞0 (Ω), que consideraremos definida em todo o espaco RN sendo zero fora de Ω. esimples verificar que
wν
∗
→0 in [L∞(Ω)]m
Awν = mj=1n
k=1 aijk∂wjν
∂xk→0 strong in H −1loc (Ω)
wν possui suporte compacto e fixo .
Nestas condicoes mostraremos que
liminf ν→∞
RN
f (wν ) dx ≥ 0.
Denotemos por wν a transformada de Fourier de wν . Como wν possui suporte
compacto sobre K , entao facilmente concluimos que
wν → 0 q.s. em RN
|wν (ξ)| ≤ C
Usando o Teorema de Lebesgue concluimos que
wν → 0 Forte em L2loc(RN )
Mais ainda, das hipoteses sobre as derivadas de wν teremos

5/14/2018 ESP_SOB - slidepdf.com
http://slidepdf.com/reader/full/espsob 216/244
1
1 + |ξ|j,k
aijk wjν (ξ)ξk → 0 in [L2(RN )]q (8.8)
Como estamos tratando com numeros complexos podemos extender a funcao f do Rm
para C m da seguinte forma
f (w) = wM wt
Das hipoteses comcluimos que
Re f (λ) ≥ 0 ∀λ ∈ Λ + iΛ
Usando a identidade de Plancherel teremos RN
f (wν ) dx =
RN
f (wν ) dξ =
RN
Re f (wν ) dξ
Para mostrar o Teorema falta apenas verificar que
liminf ν→∞
RN
Re f (wν ) dξ ≥ 0
8.6. Teorema do divergente - rotacional 213
Como RN
f (wν ) dξ =
|ξ|≤1
f (wν ) dξ +
|ξ|≥1
f (wν ) dξ,
e |ξ|≤1
f (wν ) dξ → 0
Resta apenas verificar o caso quando |ξ| ≥ 1. Do Lema 8.7 concluimos que para todoα > 0 existe cα para os quais teremos
Re f (wν (ξ)) ≥ −α|wν (ξ)|2 − cα
q
i=1j,k
aijk wνj
ξk
|ξ
|
2
Apois integrar sobre RN teremos
RN
f (wν(ξ)) dξ ≥ −α
RN
|wν (ξ)|2 dξ − cα
RN
qi=1
j,k
aijk wνj
ξk
|ξ|
2
dξ.
Usando (8.8) segue que

5/14/2018 ESP_SOB - slidepdf.com
http://slidepdf.com/reader/full/espsob 217/244
lim inf
RN
f (wν (ξ)) dξ ≥ −α limsup
RN
|wν (ξ)|2 dξ.
Como α e arbitrario e wν e limitado em L2 teremos
liminf ν→∞ RN
f (wν (ξ)) dξ
≥0.
Que e a desigualdade desejada
8.6 Teorema do divergente - rotacional
Examinemos de perto algumas aplicacoes do Teorema anterior
Exemplo 8.6.1 Encontrar a maior classe de func˜ oes quadr´ aticas contınuas respectoseguinte convergencia
• Sejam uν , vν : Ω ⊂ R2 → R tais que
(uν , vν ) (u, v) fraco em L2(Ω) × L2(Ω)
∂uν
∂x , ∂vν
∂y limitado em L2(Ω)
•
214 Capıtulo 8. Extens˜ ao de Funcionais Convexos
Primero caraterizaremos o espaco Λ, depois encontraremos todas as funcoes quadraticasque se anulam em Λ. We first construct the Para isto denotemos por B ao operador
B(λ, ξ) := (λ1ξ1, λ2ξ2).
Lembrando a definicao de Λ teremos
Λ := λ ∈ R2; ∃ξ ∈ R2, tal que B(λ, ξ) := 0 .
Tomemos λ ∈ Λ, entao existe ξ = 0 tal que
λ1ξ1 = λ2ξ2 = 0. (8.9)
Como ξ1 = 0 ou ξ2 = 0, entao λ1 = 0 ou λ2 = 0. Portanto uma das componentes de λdeve ser nula. Reciprocamente, se uma das componentes de λ e zero, por exemplo λ1,entao existe ξ = (1, 0) satisfazendo (8.9), entao λ
∈Λ. Portanto, podemos escrever Λ
comoΛ =
λ = (λ1, λ2) ∈ R2; tal que λ1 = 0, or λ2 = 0
.
Portanto a maoir classe de funcoes que se anulam em Λ e todo multiplo escalar dafuncao
f (x, y) = xy.
Com isto, temos provado o seguinte Corolario
Corolario 8.6.1 Denotemos por uν , vν seq¨ uencias satisfazendo

5/14/2018 ESP_SOB - slidepdf.com
http://slidepdf.com/reader/full/espsob 218/244
uν , vν : Ω ⊂ R2 → R
(uν , vν ) (u, v) fraco em L2(Ω) × L2(Ω)
∂uν
∂x,
∂vν
∂ylimitado em L2(Ω)
ent˜ ao teremos que
uν vν uv em D(Ω)
Exemplo 8.6.2 Encontrar a maoir classe de func˜ oes quadr´ aticas que sejam contınuasrespecto a seguinte convergencia
•uν , vν : Ω
⊂Rn
→Rn tais que
(uν , vν ) (u, v) fraco em [L2(Ω)]n × [L2(Ω)]n
8.6. Teorema do divergente - rotacional 215
•( div uν , curl vν ) limitado em L2(Ω) × [L2(Ω)]n
Como no exemplo 8.6.1 para encontrar o conjunto Λ, denotamos por B a seguinte formabilinear
B(λ,µ,ξ) :=
nk=1
ξkλk , ξiµj − ξjµi n componentes
Tomemos λ ∈ Λ, entao existe ξ = 0 tal que
nk=1
ξkλk = 0, ξiλj − ξjµi = 0,
isto e equivalente a
λ ⊥ ξ eξi
µi=
ξj
µj⇔ µ ξ
Portanto (λ, µ) ∈ Λ se e somente se λ ⊥ µ isto e

5/14/2018 ESP_SOB - slidepdf.com
http://slidepdf.com/reader/full/espsob 219/244
Λ = (λ, µ) ∈ Rn × Rn; tal que λ ⊥ µ
Finalmente, a maior classe de funcoes que se anulam sobre Λ sao multiplos escalares dafuncao
f (x1 · · · xn, y1 · · · yn) =
ni=1
xiyi
Portanto temos mostrado o Lema do Divergente Rotacional
Corolario 8.6.2 Div-curl Lema.- Denotemos por uν , vν : Ω ⊂ Rn → Rn tal que
(uν , vν ) (u, v) fraco em [L2(Ω)]n × [L2(Ω)]n
(div uν , curl vν ) limitado em L2(Ω) × [L2(Ω)]n
ent˜ ao teremos que
uν · vν u · v em D(Ω)
216 Capıtulo 8. Extens˜ ao de Funcionais Convexos
8.7 Exercicios
1. Construa um funcional A-quase convexo que nao seja convexo na direcao de Λ
2. Sejam v, w : R2 → R e denotemos por A ao operador dado por
A(v, w) = a
∂v
∂x + b
∂w
∂y , a
∂v
∂x − b
∂w
∂y Encontre Λ
3. Com as mesmas hipoteses que no exercicio 2, construa uma funcao quadraticaque seja linear na direcao de Λ pero que nao seja uma funcao linear.
4. Suponhamos que a sequencia de funcoes uν satisfaz
uνt e uν
x limitadas L2(Ω),
uνtt − uν
xx = f ν ;
onde f ν e limitada em L2(Ω). Entao mostre que
limν→∞
Ω
|uνt |2 − |uν
x|2 dxdt =
Ω
|ut|2 − |ux|2 dxdt
5. Suponhamos que para toda funcao f tal que |f (x)| ≤ c + |x| p, e toda sequenciauν satisfazendo
uν → u fraco em L p(Ω)2

5/14/2018 ESP_SOB - slidepdf.com
http://slidepdf.com/reader/full/espsob 220/244
Auν limitado em L2(Ω)m
tenhamos que
lim inf
D
f (uν ) dx ≥
D
f (u) dx
Entao f e uma funcao A-quase convexa.
6. Faca uma generalizacao do Corolario 8.6.1 para o caso n-dimensional.
7. Mostre que o funcional
||v||2∗ :=
Ω
curl v2 dx +
Ω
|div v|2 dx
e uma norma em [H 10 (Ω)]3 equivalente a sua norma natural
Capıtulo 9
Aplicacoes
9.1 Desigualdades variacionais
Compacidade compensada aplicada as desigualdades variacionais Neste capıtulo faremosuso do metodo de compacidade compensada para mostrar existencia de solucoes para
diferentes desigualdades variacionais de evolucao

5/14/2018 ESP_SOB - slidepdf.com
http://slidepdf.com/reader/full/espsob 221/244
9.2 Problema de Signorini em elasticidade
Estudaremos nesta secao o problema de obstaculo em elasticidade unidimensional. Aequacao que modela este problema e dado por
utt −
uxx
= f, em (0, 1)×
(0, T ). (9.1)
Com as seguintes condicoes de contorno
u(0, t) = 0, (9.2)
u(1, t) ≤ g, ux(1, t) ≤ 0, (u(1, t) − g)ux(1, t) = 0, (9.3)
e a condicao de valor inicial
u(x, 0) = u0(x), ut(x, 0) = u1(x). (9.4)
9.3 Existencia de solucoes fracas
Para mostrar a existencia de solucoes fracas introduzimos os seguintes conjuntos
V = η ∈ H 1(0, 1); η(0) = 0 (9.5)
218 Capıtulo 9. Aplicac˜ oes
e
K = η ∈ V ; η(1) ≤ g. (9.6)
Assumiremos que os dados iniciais satisfazem
(u0, u1) ∈ K × L2(0, 1); f ∈ H 1(0, T ; L2(0, 1)) (9.7)
A formulacao variacional do sistema anterior e equivalente a encontrar uma funcao usatisfazendo
u ∈ W 1,∞(0, T ; L2(0, 1)) ∩ L∞(0, T ; K )
10
utt(v − u) dx +
10
ux(vx − ux) dx ≥ 10
f (v − u) dx,
para toda v ∈ H 1
((0, T ) × (0, 1)) tal que v(., t) ∈ K .
Para mostrar a existencia de solucoes usaremos o metodo chamado de Penalizac˜ ao,isto e para todo ε > 0, encontraremos uma solucao u satisfazendo
u ∈ W 2,∞(0, T ; L2(0, 1)) ∩ L∞(0, T ; K )
uxt, uxx ∈ L∞(0, T ; L2(0, L)) (9.8)
e tambem

5/14/2018 ESP_SOB - slidepdf.com
http://slidepdf.com/reader/full/espsob 222/244
10
uttv + uxvx dx =
10
fvdx − 1
ε(u(1, t) − g)+v(1, t)
−εut(1, t)v(1, t); (9.9)
para todo v ∈ H 1((0, T )×(0, 1)), com v(0, t) = 0. Para mostrar a existencia de solucoesutilizaremos os seguintes Lemas.
Lema 9.3.1 Suponhamos que uk∞k=1 e uma seq uencia de func˜ oes tais que
uk∗
u em L∞(0, T ; H β (0, 1)
∂ tuk ∂ tu em L2(0, T ; H α(0, 1))
onde −1 ≤ α < β ≤ 1. Ent˜ ao teremos que
uk → u em C ([0, T ]; H
r
(0, 1))
para r < β .
9.3. Existencia de soluc˜ oes fracas 219
Lema 9.3.2 Suponhamos que
(u0, u1) ∈ [H 2(0, 1) ∩ K ] × H 10 (0, 1). (9.10)
and f satisfazendo (9.7). Ent˜ ao existe uma soluc˜ ao de (9.9), satisfazendo (9.8).
Demonstracao.- Denotemos por U
U = u − u0(x) − tu1(x), (9.11)
eF = f + u0,xx + tu1,xx (9.12)
Portanto a equacao (9.9) e equivalente a
10
U ttv + U xvx dx = 10
F v d x − 1
ε(U (1, t) − g)+v(1, t)
−εU t(1, t)v(1, t), (9.13)
para toda v ∈ H 1((0, T )× (0, 1)), com v(0, t) = 0. Para mostrar a existencia de solucoespara a equacao (9.9) utilizaremos o metodo de Galerkin.
Seja zj∞j=1 ⊂ C ∞([0, 1]) uma base ortonormal de V e denotemos por V m =
[z1, . . . , zm] o espaco generado pelos primeiros m vectores da base. Tomemos U m
talque para todo t ≥ 0,m

5/14/2018 ESP_SOB - slidepdf.com
http://slidepdf.com/reader/full/espsob 223/244
U m =j=1
cj(t)zj(x) ∈ V m (9.14)
O problema aproximado e dado por
1
0
U mtt zj dx + 1
0
U mx zj,x dx = (9.15)
=
10
F zj dx − 1
ε(U m(1, t) − g)+zj(1) − εU mt (1, t)zj (1)
Com as seguintes condicoes iniciais
U m(x, 0) = 0, U mt (x, 0) = 0, 0 < x < 1, (9.16)
E bem conhecido que existe somente uma solucao U m de (9.15) dado por (9.14) definidosobre (0, T m) para algum T m > 0. Multiplicando a equacao (9.15) por cj(t) e somandode j = 1, . . . , m teremos
1
2
d
dt L
0
|U mt |2 + |U mx |2 dx +1
ε|(U m(1, t) − g)+|2 + ε|U mt (1, t)|2
= L
0 F U mt dx. (9.17)
220 Capıtulo 9. Aplicac˜ oes
Usando a desigualdade de Gronwall segue que L
0
|U mt (., t)|2 + |U mx (., t)|2 dx ≤ C, ∀ t ≥ 0, (9.18)
|(U m(1, t) − g)+|2 ≤ Cε, ∀ t ≥ 0, (9.19)
onde C e uma constante independente de m e ε. Podemos portanto extraer uma sub-sequencia de U m, a qual denotaremos da mesma forma, tal que
U m∗
U em W 1,∞(0, T ; L2(0, 1))
Derivando a equacao (9.15) com respecto a t, e repetindo o mesmo razonamento anteriorteremos
1
2
d
dt
L
0
|U mtt |2 + |U mxt |2 dx + ε|U mtt (1, t)|2 (9.20)
+1
ε[(U m(1, t) − g)+]tU mtt (1, t) = (F t, U mtt ).
Tomando t = 0 em (9.15), multiplicando por cj (0) e somando sobre j, teremos
10
|U mtt (x, 0)|2 dx =
10
F (x, 0)U mtt (x, 0) dx
esta ultima identidade implica que, U mtt (x, 0) e limitado em L2(0, 1). Por outro lado, de(9.19) segue que

5/14/2018 ESP_SOB - slidepdf.com
http://slidepdf.com/reader/full/espsob 224/244
U m(1, t) − g+t ≤ c|U mt (1, t)|.
Usando a desigualdade de Gronwall segue que
1
0
|U mtt |2 + |U mxt |2 dx +
T
0
ε|U mtt (1, t)|2 dt ≤ C ε. (9.21)
onde C ε e uma constante positiva dependendo apenas de ε. Por tanto existe uma sub-sequencia de U m, Θm, as quais a seguiremos denotando da mesma forma, que convirgemfraco estrela.
Estamos agora em condicoes de estabelecer o resultado de existencia e regularidadedo problema penalizado (9.9). De (9.15) temos que
T
0 1
0
U mtt v dx dt +
T
0 1
0
U mx vx dx dt (9.22)
= T
0
10
Fv dx dt − 1
ε
T
0
(U m(1, t) − g)+v(1, t) dt − ε T
0
U mt (1, t)v(1, t) dt.
9.3. Existencia de soluc˜ oes fracas 221
Fazendo m → +∞ para ε fixo, temos T
0
10
U ttv dx dt +
T
0
10
U xvx dx dt (9.23)
= T
0
10
Fv dx dt − 1
ε
T
0
(U (1, t) − g)+v(1, t) dt − ε T
0
U t(1, t)v(1, t) dt.
para todo v ∈ V m0 , w ∈ W m0 , m0 < +∞, w(x, T ) = 0. Como zj∞j=1 e uma base de
V , a relacao (9.23) e valida para todo v ∈ H 1((0, T ) × (0, 1)) tal que v(0, t) = 0. De(9.21) e do Lema 9.3.1 teremos
U m → U em C ([0, T ]; H r(0, 1)), ∀r < 1.
Como r > 12 implica que H r(0, 1) ⊂ C ([0, 1]) teremos
U m(1, t) → U (1, t) in C ([0, T ]),
que implica(U m(1, t)
−g)+
→(U (1, t)
−g)+ in C ([0, T ]).
De onde segue a nossa conclusaoEstamos agora em condicoes de mostrar a existencia de solucoes do problema de

5/14/2018 ESP_SOB - slidepdf.com
http://slidepdf.com/reader/full/espsob 225/244
g ¸ ¸ pobstaculo. Suponhamos que u0 ∈ V , u1 ∈ L2(0, 1) e θ0 ∈ L2(0, 1). Primero definiremoso que entenderemos por solucao do problema (9.1)–(9.4).
Definicao 9.3.1 Diremos que u e uma soluc˜ ao fraca de (9.1) se
u ∈ W 1,∞(0, T ; L
2
(0, 1)) ∩ L∞(0, T ; K ), (9.24)u(x, 0) = u0(x), ut(x, 0) = u1(x). (9.25)
− T
0
10
ut(vt − ut) dx dt +
T
0
10
ux(vx − ux) dx dt (9.26)
− < ut(·, T ), v(·, T ) − u(·, T ) > + < u1, v(·, 0) − u0 >≥ T
0 10
f (v − u) dx dt
para todo v ∈ H 1((0, T ) × (0, 1)) tal que v(·, t) ∈ K , para todo t > 0.
Denotemos por uε0 , uε
1 os dados iniciais satisfazendo (9.10) tais que
(uε0, uε
1) → (u0, u1) in V × L2(0, 1).
entao teremos que uε satisfaz
222 Capıtulo 9. Aplicac˜ oes
− T
0
10
uεt (vt − uε
t ) dx dt +
T
0
10
uεx(vx − uε
x) dx dt (9.27)
< uεt (·, T ), v(·, T ) − uε(·, T ) > − < uε
1, v(·, 0) − uε0 >
= T
0 1
0
f (v
−uε) dx dt
− T
0
[1
ε
(uε(1, t)
−g)+ + εuε
t (1, t)](v(1, t)
−uε(1, t)) dt,
para todo v ∈ L2(0, T ; K )∩H 1((0, T )×(0, 1)). Antes de mostrar o teorema de existenciaenunciaremos o seguinte Lema
Lema 9.3.3 Seja uε uma seq¨ uencia de func˜ oes em H 1((0, T ) × (0, 1)) satisfazendo asseguintes propriedades
uε u em H 1 fracamente ε → 0, (9.28)
T
0
10
|uεtt − uε
xx|2 dxdt ≤ C, ∀ε ≥ 0, (9.29)
10
|uεt (·, t)|2 + |uε
x(·, t)|2 dx ≤ C, ∀t ∈ [0, T ], ∀ε ≥ 0, (9.30)
ent˜ ao teremos
limε→0
T
0 L
0 |uε
t
|2
− |uε
x
|2
dxdt =
T
0 L
0 |ut
|2
− |ux
|2
dxdt (9.31)
Demonstracao.- Tomemos 0 < δ0 < 12 fixo, e denotemos por p(x) a uma funcao

5/14/2018 ESP_SOB - slidepdf.com
http://slidepdf.com/reader/full/espsob 226/244
2
suave nao decrescente igual a −1 para x ∈ [0, δ) e 1 para x ∈ (1 − δ, 1]. Como uεtt ∈
L2(0, T ; L2(0, 1)) de (9.29) segue que uεxx ∈ L2. Portanto para todo δ < δ0, teremos
− T
0
1−σ
σ
uεxx puε
x dx dt = −1
2
T
0
(uεx(1 − σ, t))2 + (uε
x(σ, t))2 dt (9.32)
+ T
0
1−σ
σ
12
p|uεx|2 dx dt
e
T
0
1−σ
σ
uεtt puε
x dx dt =
1−σ
σ
uεt (x, T ) p(x)uε
x(x, T ) − uεt (x, 0) p(x)uε
x(x, 0) dx
−1
2
T
0
(uεt (1 − σ, t))2 + (uε
t (σ, t))2dt + T
0
1−σ
σ
1
2 p|uε
t |2dxdt (9.33)
9.3. Existencia de soluc˜ oes fracas 223
somando as identidades (9.32) e (9.33) temos
1
2
T
0
[(uεt (1 − σ, t))2 + (uε
t (σ, t))2 + (uεx(1 − σ, t))2 + (uε
x(σ, t))2] dt
= T
0
1−σ
σ
(uεtt − uε
xx) puεx dx dt
+
T
0
1−σ
σ
1
2 p(uε
t )2 + (uεx)2 dx dt
+ 1−σ
σ
uεt (x, T ) p(x)uε
x(x, T ) − uεt (x, 0) p(x)uε
x(x, 0) dx,
De (9.29)–(9.30) segue que
1
2
T
0
[(uεt (1 − σ, t))2 + (uε
t (σ, t))2 + (uεx(1 − σ, t))2 + (uε
x(σ, t))2] dt ≤ C,
onde C e uma constante independente de δ. Integrando com respecto a σ sobre [0, δ)
com δ < 12 temos T

5/14/2018 ESP_SOB - slidepdf.com
http://slidepdf.com/reader/full/espsob 227/244
T
0
(0,δ)∪(1−δ,1)
|uεx|2 + |uε
t |2 dx dt ≤ Cδ. (9.34)
denotemos por
U ε = (uεt , −uε
x), W ε = (uεt , uε
x)
Comodiv U ε = uε
tt − uεxx e limitado em L2((0, 1) × (0, T ))
curl W ε = 0
Do Lema de Divergente Rotacional segue que
|uεt |2 − |uε
x|2 → |ut|2 − |ux|2 in D((0, 1) × (0, T )) (9.35)
agora escolhemos η ∈ C ∞0 ((0, 1) × (0, T )), 0 ≤ η ≤ 1, η ≡ 1 em (δ, 1 − δ) × (δ, T − δ)entao teremos
T
0
10
|uεt |2 − |uε
x|2 dxdt − T
0
10
|ut|2 − |ux|2 dxdt
≤
T
0 1
0 |uε
t |2
− |uε
x|2
(1 − η) dxdt+ T
0 1
0 |ut|2
− |ux|2
(1 − η) dxdt
224 Capıtulo 9. Aplicac˜ oes
+
T
0
10
|uεt |2 − |uε
x|2ηdxdt − T
0
10
|ut|2 − |ux|2ηdxdt
de (9.30) e (9.34) segue que
T
0 1
0 |uε
t
|2 +
|uε
x
|2
(1
−η) dxdt ≤ Cδ
portanto obtemos
lim→0
T
0
10
|uεt |2 − |uε
x|2 dxdt − T
0
10
|ut|2 − |ux|2 dxdt
≤ Cδ
De onde segue o resultado
Agora estamos em condicoes de mostrar o terorema de existencia de solucoes para oproblema de obstaculo.
Teorema 9.3.1 Seja u0 ∈ V , u1 ∈ L2(0, 1) e f, ∈ H 1(0, T , L2(0, 1)) ent˜ ao existe uma soluc˜ ao fraca de (9.1).
Demonstracao.- Mostraremos que as desigualdades (9.18) permanecen validas quandocolocamos ε no lugar de m, para dados iniciais uε
0, uε1, limitados em V e L2(0, 1)
respectivamente. Note que uε, satisfaz a equacao (9.1) com as seguintes condicoes decontorno
1 +

5/14/2018 ESP_SOB - slidepdf.com
http://slidepdf.com/reader/full/espsob 228/244
uεx(1, t) = −1
ε(uε(1, t) − g)+ − εuε
t (1, t), (9.36)
uε(0, t) = 0. (9.37)
De (9.9) temos
10
uεttv + uεxvx dx = 10
f v dx −1
ε (uε(1, t) − g)+v(1, t) − εuεt (1, t)v(1, t); (9.38)
para todo v ∈ H 1((0, T ) × (0, 1)). Tomando v = uεt em (9.38) temos
1
2
d
dt
10
|uεt |2 + |uε
x|2 dx +1
ε|(uε(1, t) − g)+|2
+ ε|uε
t (1, t)|2 = (f, uεt ), (9.39)
Usando a desigualdade de Gronwall, podemos ver que existe uma subsequencia de uε
satisfazendo
9.3. Existencia de soluc˜ oes fracas 225
uε ∗ u em L∞(0, T ; H 1(0, 1)),
uεt
∗ ut em L∞(0, T ; L2(0, 1)).
De (9.38) concluimos queuε
tt − uεxx = f. (9.40)
Usando (9.40) e como f ∈ L2(0, T ; L2(0, 1)) das convergencias anteriores concluimosque
uεtt utt in L2(0, T ; H −1(0, 1))). (9.41)
Do Lema 9.3.1 temos
uεt → ut em C ([0, T ]; H −r(0, 1))) (9.42)
onde r > 0. Tambem temos
uε → u in C ([0, T ]; H α(0, 1))
onde α < 1
2. Tomando α = r < 1
2segue que
uεt (·, T ) → ut(·, T ) em H −r(0, 1),

5/14/2018 ESP_SOB - slidepdf.com
http://slidepdf.com/reader/full/espsob 229/244
uε(·, T ) → u(·, T ) em H r(0, 1),
portanto temos que
< uεt (·, T ), v(·, T ) − uε(·, T ) >H −r×H r → < ut(·, T ), v(·, T ) − u(·, T ) >H −r×H r (9.43)
e ainda< uε
1(·), v(·, 0) − uε0(·) >→< u1(·), v(·, 0) − u0(·) > . (9.44)
Para mostrar a solucao do problema de obstaculo, deacordo com a equacao (9.27)temos que pasar ao limite na seguinte expressao
I 1 := T
0 1
0 | u
ε
t |2
− |uε
x|2
dx dtI 2 := β (uε(1, t))
I 3 :=1
ε(uε(1, t) − g)+(v(1, t) − uε(1, t))
Os outros termos sao simples. Do Lema 9.3.3 temos que
limε→0 I 1 = T
0 10 | ut|2
− |ux|2
dx dt
226 Capıtulo 9. Aplicac˜ oes
Respeito ao termo I 2, temos que uε converge fraco em H 1((0, T ) × (0, 1)) queu implicauε → u forte em C ([0, T ]; H α(0, 1)), α < 1. Para α > 1
2 temos que H α(0, 1) ⊂C ([0, 1]) com imersao compacta, portanto teremos
uε(1, .) → u(1, .) forte em C ([0, T ])
Para o termo I 3
temos
I 3 =1
ε
T
0
(uε(1, t) − g)+uε(1, t) dt − 1
ε
T
0
(uε(1, t) − g)+v(1, t) dt
=1
ε
T
0
[(uε(1, t) − g)+]2 dt − 1
ε
T
0
(uε(1, t) − g)+(v(1, t) − g) dt
≥ 0
como v(1, t) ≤ g, v(·, t) ∈ K e −1ε (u
ε
(1, t) − g)+
(v(1, t) − g) ≥ 0. De onde obtemos oresultado

5/14/2018 ESP_SOB - slidepdf.com
http://slidepdf.com/reader/full/espsob 230/244
Apendice A
Decomposicao de campos
vetoriais
Provaremos aqui que o vetor deslocamento pode ser decomposto em duas partes: se-lenoidal e irrotacional, cujas correspondentes energias decaem para zero com taxas que
dependem da regularidade dos dados inicias. A seguir estabeleceremos as condicoes paraas quais esta decomposicao e valida. Denotemos por α = (α1,...,αn) ∈ Nn, x = (x1,...,xn) ∈Rn e por

5/14/2018 ESP_SOB - slidepdf.com
http://slidepdf.com/reader/full/espsob 231/244
|α| =n
i=1
αi; xα = xα11 xα2
2 · · · xαnn ; ∂ α = (
∂
∂x1)α1 · · · (
∂
∂xn)αn
Definamos por U (x) a funcao
U (x) =
12π ln |x| se n = 2
1(n−2)σn|x|n−2 se n > 2
onde σn representa a area da bola unitaria do Rn. E bem conhecido que a solucao daequacao
∆u = f em Rn (A.1)
e dado por
u(x) =
RN
U (x − ξ)f (ξ)dξ
Sempre que f seja uma funcao contınua.
Observacao A.0.1 Se F
∈L1(Rn)
∩Ls(Rn) e φ, ψ pertence a Ls(Rn) e L1(Rn) re-
spectivamente ent˜ ao temos que
228 Apendice A. Decomposic˜ ao de campos vetoriais
φ ∗ F ∈ Ls(Rn) e ψ ∗ F ∈ Ls(Rn)
mais ainda, a desigualdade Young estabelece
RN
|φ ∗ F |sdξ
1/s
≤ RN
|φ|sdξ
1/s
RN
|F |dξ
RN
|ψ ∗ F |sdξ
1/s
≤
RN
|ψ|dξ
RN
|F |sdξ
1/s
em particular,
φ + ψ ∗ F ∈ Ls(Rn)
e ainda,
RN |φ + ψ ∗ F |
s
dξ1/s
≤ RN
|φ|sdξ
1/s RN
|F |dξ
+
RN
|ψ|dξ
RN
|F |sdξ
1/s
Lema A.0.4 Suponhamos que v seja uma func˜ ao contınua satisfazendo ∂ αv ∈ L p(R2)para |α| = 1, ent˜ ao as seguintes desigualdades s˜ ao v´ alidas
|v(x)| ≤ |v(0)| + 8p
p − 2|x|1−2/p
( R2
|v| pdξ)1/p

5/14/2018 ESP_SOB - slidepdf.com
http://slidepdf.com/reader/full/espsob 232/244
Demonstracao.- Consideremos a identidade
v(ξ) − v(x) =
10
v(tξ + (1 − t)x).[ξ − x]dt
integrando sobre a bola B de centro x de raio 12 |x − y| e fazendo a mudanca de variavel
y = t(ξ − x) + x obtemos B
v(ξ)dξ − π
4|x − y|2v(x)
≤
B
10
|v(tξ + (1 − t)x).[ξ − x]|dt dξ
≤ |x − y|
B
10
|v(t(ξ − x) + x)|dt dξ.
≤ |x
−y
| 1
0
t−2 tD |v(ξ)
|dξdt (A.2)
Onde D e o disco de centro no origem e raio t|x − y|. Como t ≤ 1 e tD ⊆ D, segue que
229
tD
|v(ξ)|dξ ≤ π1/p |x − y|2/pt2/p(
D
|v(ξ)| pdξ)1/p
que junto com (A.2) nos levam a B
v(ξ)dξ − π
4|x − y|2v(x)
≤ π1/p p
p − 2|x − y|1+2/p(
D
|v(ξ)| pdξ)1/p
intercambiando os papeis de x e y e aplicando a desigualdade do triangulo obtemos
π
4|x − y|2|v(x) − v(y)| ≤
B
v(ξ)dξ − π4|x − y|2v(x)+
Bv(ξ)dξ − π
4|x − y|2v(y)
de onde segue
|v(x) − v(y)| ≤ 8p
p − 2|x − y|1−2/p(
D
|v(ξ)| pdξ)1/p (A.3)
Tomando y = 0 e usando novamente a desigualdade do triangulo segue nosso resultado.
Nos seguintes lemas estabeleceremos resultados de regularidade para a solucao da

5/14/2018 ESP_SOB - slidepdf.com
http://slidepdf.com/reader/full/espsob 233/244
equacao (A.1).
Lema A.0.5 Seja f uma func˜ ao satisfazendo
f ∈
C (R2), o(f ) = o(|x|−θ) quando
|x| →
+∞
; θ > 2, para n = 2
ent˜ ao existe uma func˜ ao contınua u com ∂ αu ∈ H 1(R2) para |α| = 1, satisfazendo(A.1). Finalmente, se
f ∈ L1(Rn) ∩ L p(Rn) para n ≥ 3
onde p ∈ maxq, q,q > n/n − 2 e 1q + 1
q = 1. Ent˜ ao existe uma soluc˜ ao u de (A.1)
satisfazendo u
∈Lq(Rn); ∂ αu
∈H 1(Rn),para
|α
|= 1.
Demonstracao.- Denotemos por f ν a convolucao em Rn, f ν = ρν ∗ f , onde ρν e afuncao regularizante satisfazendo
ρν (−x) = ρν (x),
RN
ρν (ξ)dξ = 1 e ρν(x) = 0 se |x| ≥ 1
ν .
E bem conhecido que f ν converge para f em Lr para todo r
≥1, para f
∈Lr. Note
que a sequencia (uν )ν∈N definida como
230 Apendice A. Decomposic˜ ao de campos vetoriais
uν (x) =
RN
U (x − ξ)f ν (ξ)dξ,
satisfaz a equacao
∆uν = f ν . (A.4)
De onde facilmente segue RN
|uν (x)|2dx ≤ RN
|uν ||f ν (x)|dx (A.5) RN
|∆uν (x) − ∆uµ(x)|2dx ≤ RN
|f ν (x) − f µ(x)|2dx (A.6)
Das hipoteses sobre f temos que (f ν )ν
∈N e uma sequencia de Cauchy em L2(Rn) e
portanto tambem (∆uν )ν∈N. Em consequencia para provar que ∂ αu ∈ H 1(Rn) para|α| = 1, temos apenas que mostrar que ∂ αu ∈ L2(Rn). Para isto e suficiente mostrarque o lado direito de (A.5) e limitado. Primero consideraremos o caso n = 2, para oqual a derivada da funcao uν satisfaz
| ∂
∂x iuν (x) − ∂
∂x iuµ(x)| ≤ 1
2π
RN
|x − ξ|−1|f ν (ξ) − f µ(ξ)|dξ
As hipoteses sobre f implicam que f ∈ Lr(R2), ∀r ≥ 1. Como θ > 2, existe p > 2 tal
que θ − (1 −2
p ) > 2. Aplicando a observacao A.0.1 para ψ = χ|ξ|−1
, φ = χc|ξ|−1
, F =f ν − f µ e s = p, onde χ e χc denotam as funcoes caracteristicas sobre a bola B(0, 1) eseu complemento respectivamente, temos que
5/14/2018 ESP_SOB - slidepdf.com
http://slidepdf.com/reader/full/espsob 234/244
x → RN
|x − ξ|−1|f ν (ξ) − f µ(ξ)|dξ ∈ L p(R2)
portanto
∂
∂x iuν (x) ∈ L p
(R2
) ∀ν ∈ Ne
R2
| ∂
∂x iuν (x) − ∂
∂x iuµ(x)| pdx
1/p
≤
1
2π
R2
χ|ξ|−1dx
R2
|f ν − f µ| pdx
1/p
+
1
2π
R2
χc|ξ|− pdx
1/p
R2
|f ν − f µ|dx
consequentemente (∂uν /∂xi)ν∈N e uma sequencia de Cauchy em L p(Rn), portanto lim-itada. Aplicando o lema A.0.4 a uν (x) − uµ(x) obtemos
231
|uν (x) − uµ(x)| ≤ |uν (0) − uµ(0)| + C |x|a
R2
|uν (ξ) − uµ(ξ)| pdξ
1/p
onde a = 1 −2
p . Para provar que (uν )ν∈N e uma sequencia de Cauchy em C (RN )somente necesitamos provar que a sequencia numerica (uν (0))ν∈N e convergente, peroisto segue imediato da definicao de uν e das hipoteses sobre f , portanto existe umafuncao contınua u tal que
uν → u uniforme em conjuntos limitado de R2,
∂ α
uν → ∂ α
u forte em L p
(R
2
) para p > 2, |α| = 1.O Lema A.0.4 implica que
|uν (x)| ≤ |uν (0)| +8 p|x|1−2/p
p − 2(
R2
|uν (ξ)| pdξ)1/p.
Como o(f ) = o(|x|−θ) entao o(f ν ) = o(|x|−θ). De fato, considere a identidade
f ν (x) = |ξ|≤ 1ν
ρν (ξ)f (x − ξ)dξ
e aplique as hipoteses sobre f . Portanto temos

5/14/2018 ESP_SOB - slidepdf.com
http://slidepdf.com/reader/full/espsob 235/244
o(f ν uν ) = o(|x|−θ+a) quando x → ∞,
logo f ν uν e limitado em L1(R2) para todo ν ∈ N. Portanto o lado direito de (A.5) elimitado. De onde segue nosso resultado. Consideremos o caso n > 2. Provaremos que
(∂ α
uν )ν∈N e limitado em H 1
(Rn
) para |α| = 1. De fato, como χU e χcU pertencem aL1(Rn) e Lq(Rn) onde q > n/n − 2, aplicando a observacao A.0.1 para ψ = χU,φ =χcU, s = q e F = f ν nos levam a
[
RN
|uν (x) − uµ(x)|qdx]1/q ≤
C
RN
|χcU |dx[
RN
|f ν − f µ|qdx]1/q + C [
RN
|χcU |qdx]
R Rn
|f ν − f µ|dx.
Portanto (uν )ν∈N e uma sequencia de Cauchy em Lq(Rn) entao temos que existe u emLq tal que
uν → u forte em Lq(Rn)
Como f ν converge para f em Lq(Rn) concluımos que o produto f ν uν converge para f uem L1(Rn), entao de (A.5) segue
∂ αuν → ∂ αu forte em L2(Rn), |α| = 1.
232 Apendice A. Decomposic˜ ao de campos vetoriais
A demonstracao esta completa
Lema A.0.6 Seja F um campo vetorial em [H k(Rn)]n tal que o divergente de F ,( div F = f ) satisfaz as condic˜ oes do Lema A.0.4. Ent˜ ao podemos decompor F em duaspartes, ambas em [H k(Rn)]n, uma delas um gradiente e a outra uma func˜ ao selenoidal (isto e, com divergente nulo).
Demonstracao.- Do lema A.0.5 existe uma funcao p tal que ∂ α p ∈ H 1(Rn) para|α| = 1, satisfazendo
∆ p = div F em Rn
Como ∆ p = div F ∈ H k−1(Rn) entao temos que ∂ α p ∈ H k(Rn) para todo |α| = 1, eda identidade
F = p + (F − p)
obtemos a decomposicao desejada
5/14/2018 ESP_SOB - slidepdf.com
http://slidepdf.com/reader/full/espsob 236/244
Indice
Aberto de classe C m, 117Absorvente, 73
Base, 73
Local, 73
Canonica, Projecao, 37Capacidade termica, 91centro de masa, 71Coercivo, 161Compacidade, 152Comportamento Asintotico, 94Condicao
de Dirichlet, 92de Neumann, 92Condicao de Dirichlet, 159Condicao de Signorini, 169Condicao Pontual 211
Delta de Dirac, 71Densidade das funcoes C 0, 40Derivadas intermediarias, 135Desigualdade
Lp–Clarkson, 42de Clarkson, 12de Holder, 11, 40de Interpolacao, 41de Minkowski, 42de Poincare, 121de Young, 43inversa de Holder, 40de Gagliardo-Nirenberg, 145de Gronwall, 13de Interpolacao, 145de Jensen, 9de Sobolev, 124de Sobolev, Gagliardo, Niremberg, 124
5/14/2018 ESP_SOB - slidepdf.com
http://slidepdf.com/reader/full/espsob 237/244
Condicao Pontual, 211Condicao pontual, 208Condutividade termica, 91Conjunto
limitado, 74Absorvente, 73
Balanceado, 74compacto, 73Convexo, 6Fechado, 73
Conjuntos(m,p’) polar, 113compactos em Lp, 58
Continuidade Absoluta, 55Convergencia Fraca em L1, 55Convergencia Fraca em Lp, 53Convexa, Estritamente, 16Convexidade e Topologia Fraca, 46
DecaimentoExponencial, 17Polinomial, 17
Decomposicao de campos vetoriais , 227Decomposicao: rotacional e selenoidal, 227Definida negativa, 202
Definida positiva, 202
, g , g,Gagliardo-Nirenberg unidimensional, 142Inversa de Minkowski, 42
Desigualdades variacionais elıticas, 168Dirac
Delta, 71
Distribuicao, 78de ordem infinita, 79Temperada, 82Vetorial, 152
Efeito Regularizante, 94Equacao de ondas, 217Equacao do Calor, 91Equacoes Elıticas, 162
EspacoH s(Γ), 174W s,p(Γ), 196Hausdorff, 73metrico e completo, 20Reflexivo, 37Vetorial Topologico, 73
Espaco das funcoes testes, 78Espaco Dual, 28Espaco reflexivo, 37
Espaco Topologico, 73
234 Indice
Espacos Lp com 0 < p < 1, 66Espacos de Sobolev, 97Espacos localmente convexos, 79Espacos reflexivos, 36Espacos Vetoriais Topologicos, 73
FatouLema, 150
Fecho, 73Frechet, 74Funcao
Convexa, 5Convexa, Estrictamente, 5Estrictamente Convexa, 5Integravel, 149mensuravel, 149simple, 149
Funcao estritamente convexa, 16Funcoes A-quase convexas, 201
Funcoes infinitamente diferenciaveis, 75Funcional de Minkowski, 46
Gagliardo-NirenbergDesigualdade, 142, 145
Gauss, 98Gronwall, 13
Hausdorff, 73Heine-Borel, 74
Identidade de Plancherel, 88Interior, 73Interpolacao real, 174Irrotacional, 227
MatrizHessiana, 7
Metrizavel, 74Meyers, 98Minkowski, 66
Normas, 74
Ordem de Uma distribuicao, 79Ordem infinita de uma Distribuicao, 79
Pequenhos deslocamentos, 159Plancherel, 88Principio de Bernoulli, 159Principio de trabalho virtual, 159Principio do Maximo, 94Problema de contato, 169Problema de Signorini, 169, 217Problemas de Obstaculos, 217Projecao Canonica, 37Propriedade de Heine-Borel, 74Propriedade do Cone, 139Propriedade do Segmento, 110Propriedade do segmento, 111Propriedade Uniforme do Cone , 140Propriedade Uniforme do Cone, 139Propriedade Uniforme do cone, 139
Quadratic Function, 203
Radon-Nikodim, 55Reflexivo, 37Reflexivos
Espacos, 36Regularidade

5/14/2018 ESP_SOB - slidepdf.com
http://slidepdf.com/reader/full/espsob 238/244
J.U. Kim, 155Jensen
Desigualdade de, 9
Lei de Fourier, 91Lei de Newton, 91
Leibniz, 81LemaMazur, 51de Fatou, 127de Gronwall, 15
Lema de Fatou, 150Lema de Rieman Lebesgue, 62Limitada
Variacao, 151Localmente compacto, 74Localmente Convexo, 74
Localmente Limitado, 74
Metrica, 19
Regularidaderotacional e selenoidal, 227
Selenoidal, 227Semicontinuidade Inferior, 33, 161Seminormas, 74
Semipositiva Definida, 7Serrin, 98
TeoremaConvergencia Dominada, 150da Representacao de Riesz, 52da representacao de Riesz para Lp, 51de Egorov, 56de Lions Stampachia, 161de Morrey, 129de Rellich-Kondrachov, 133
do Traco em H
m
(Rn−1
), 174do Traco em Lp(Rn−1), 180Bochner, 150
Indice 235
de Hanh Banach, 31de Sobolev, Gagliardo, Niremberg, 124Lions, 152Meyers-Serrin, 98Radon-Nikodim, 55
Teorema da Convergencia Dominada, 40
Teorema de Lusin, 39Topologia
Forte, 47Fraca, 47
Topologia Fraca, 47Topologia fraca estrela, 79Traco de funcoes em W 1,p, 180Transformada de Fourier, 83Transformada de um distribuicao, 89
Transformada Inversa de Fourier, 87
VariacaoLimitada, 151Total, 151
Vizinhanca, 73

5/14/2018 ESP_SOB - slidepdf.com
http://slidepdf.com/reader/full/espsob 239/244
236 Indice

5/14/2018 ESP_SOB - slidepdf.com
http://slidepdf.com/reader/full/espsob 240/244
Bibliografia
[1] R.A. Adams; Sobolev Spaces Academic Press, New York 1975
[2] J. Bergh and L. Lofstrom; Interpolation spaces Springer-Verlag N. York/Berlin 1970
[3] H. Brezis Analisis Funcional teorıa e aplicaciones Alianza Editorial, Madrid 1984.
[4] Carlson D.E.; Linear thermoelasticity. In Handbuch del Physic Bd. VIa/2, edited by C. Truesdell. Berlin, Springer, 1972
[5] P.G. Ciarlet; Mathematical Elasticity, Volume II - Theory of Plates North-Holland Publishing Co. Amsterdam, xiv+497 pp (1997)
[6] M.I.M. Copetti and C. M. Elliott - A one-dimensional quasi-static contact problemin linear thermoelaticity Eur J Appl Math 4 151 174(1993)

5/14/2018 ESP_SOB - slidepdf.com
http://slidepdf.com/reader/full/espsob 241/244
in linear thermoelaticity. Eur. J. Appl. Math. 4, 151-174(1993).
[7] C. M. Dafermos. On the existence and the asymptotic stability of solution to theequation of linear thermoelasticity. Arch. Rational Mech. Anal., vol 29 (1968), pp241-271.
[8] B. Dacorogna; Weak continuity and weak lower semicontinuity of nonlinear func-tionals Lec. Notes in Math., No 992, Springer-Verlag
[9] G. Duvaut and J.L. Lions; Les inequations en mecanique et en physique Dunod,Paris, 1972
[10] L.C. Evans; Weak convergence methods for nonlinear partial differential equations
CBMS (AMS) Regional Conference Series in Math. 74 (1988)[11] R.P. Gilbert, P. Shi and M. Shillor; A quasistatic contact problem in linear ther-
moelasticity. Rendiconti di Mat. Vol 10, (1) pp 785 808 (1990).
[12] D. Huet; Decomposition spectrale et operateurs Presses Universitaires de France(1977).
[13] R. Iorio & V. Magalhaes Iorio; Equacoes Diferenciais Parciais: Uma introducao
Projeto Euclides 372 pp. (1988)
238 Bibliografia
[14] Kim J. U.; A boundary thin obstacle problem for a wave equation . Comm. PartialDiff. Equations, 14(8&9), 1011-1026 (1989).
[15] A.N. Komolgorov & S.V. Fomin; Elemento de la Teoria de Funciones y del AnalisisFuncional Editorial Mir, Moscu 1972
[16] V. Komornik; Exact controllability and stabilization (The multiplier Method) Re-search in appl. Math. Ser. Eds. P.G. Ciarlet J.L. Lions, Masson 1994
[17] O. A. Ladyzhenskaya; The boundary value problems of mathematical PhisicsSpringer-Verlag, (Appl. Math. Sc. v 49) New York (1985)
[18] O.A. Ladyzhenskaya; Linear and Quasilinear Elliptic Equations Academic Press,NY-London, 495 pages (1968)
[19] J.E. Lagnese and J. L. Lions; Modelling analysis of thin plates Collection Recherches en Math. Appl. 6. Masson, Paris 1989.
[20] J.E. Lagnese and J. L. Lions; Modelling analysis and control of thin plates Masson-Springer-Verlag RMA 6 (1989), 175 pages
[21] P. Linz; Analytical and numerical methods for Volterra equation SIAM Studies in Appl. Math. 7 (1985)
[22] J.L. Lions; Sur les espaces d’interpolation; dualite. Math. Scand. 9 (1961) pp 147-177 .
[23] J.L. Lions; Quelques methodes de resolution de problemes aux limites non linearesDunod Gauthiers Villars, Paris 1969
[24] J.L. Lions and E. Magenes; Non-Homogeneous boundary value problems and ap-plications Springer-Verlag, New York 1972, Vol I.
[25] J.L. Lions, R. Dautray; Mathematical Analysis and Numerical Methods for Scienceand Technology Spectral Theory and Applications Vol 3 Springer Verlag (1985)

5/14/2018 ESP_SOB - slidepdf.com
http://slidepdf.com/reader/full/espsob 242/244
and Technology Spectral Theory and Applications Vol.3, Springer Verlag (1985).
[26] J.L. Lions; Controlabilite exacte, perturbations et stabilisation de systemes dis-tribues Masson Paris, 1988 (RMA 8)
[27] J.L. Lions; Controlabilite exacte perturbations et stabilisation de systemes dis-
tribues, Tome 2 Masson Paris (1988) RMA 9 272 pages
[28] M. Meyers and J. Serrin; H=W Proc. Nat. Acad. Sci. USA. Vol. 51, pp 1055-1056 (1964)
[29] J.E. Munoz Rivera; Energy decay rates in linear thermoelasticity Funkcialaj Etva-cioj 35, No1 pp 19-30 (1992)
[30] J.E. Munoz Rivera; Introducao as Equacoes Diferenciais Parciais. LNCC,Petr´ opolis 2004.
[31] J.E. Munoz Rivera; Decomposition of the displacement vector field and decay ratesin linear thermoelasticity SIAM J. Math. Anal. 24, No 2, pp 390-406 (1993)
Bibliografia 239
[32] J.E. Munoz Rivera; Asymptotic Behaviour in Linear Viscoelasticity. Quarterly of Applied Mathematics, III, 4. pp 629-648 (1994)
[33] J.E. Munoz Rivera and R. Racke; Large solution and smoothing properties fornonlinear thermoelastic systems Journal of Differential Equations 127, No 2 pp
454-483 (1996)[34] J.E. Munoz Rivera and E. Cabanillas; Decay rates of solutions of an anisotropic
inhomogeneous n-dimensional viscoelastic equation with polynomial decaying ker-nels Comm. in Math. Physics 177 pp 583-602 (1996)
[35] J.E. Munoz Rivera; Global solution and regularizing properties on a class of non-linear evolution equations Journal of Differential Equations 128, No 1, pp 103-124(1996)
[36] J.E. Munoz Rivera and Y. Shibata; A Linear Thermoelastic Plate Equation withDirichlet Boundary Condition Math. Met. Appl. Sc. Vol. 20 No. 11, pp 915-932 (1997)
[37] J.E. Munoz Rivera and G. P. Menzala; Decay rates of solutions of von Karmanequations for Viscoelastic plates with memory Quarterly of Applied MathematicsVol. LVII, No 1, pp 181-200 (1999)
[38] A. Pazy; Semigroup of linear operators and applications to partial diferential equa-tions Springer-Verlag. New York 1983.
[39] M. Renardy, W. J. Hrusa and J. A. Nohel; Mathematical problems in Viscoelas-ticity Pitman monograph in Pure and Applied Mathematics 35 (1987)

5/14/2018 ESP_SOB - slidepdf.com
http://slidepdf.com/reader/full/espsob 243/244
ticity Pitman monograph in Pure and Applied Mathematics 35 (1987)
[40] S. Riesz and B.Nagy; Functional Analysis Frederic Ungar, New York (1955).
[41] W. Rudin; Functinal Analysis MacGraw-Hill Book Company,388 pp. New York
1973
[42] L. Schwartz; Theorie des distributions Hermann, Paris 1966, 418 pp
[43] M. E. Schonbek; Convergence of solutions to nonlinear dispersive equations Comm.in Partial Differential Equations, 7(8), 959-1000 (1982)
[44] Shi P. & Shillor M.; Existence of a solution to the n dimensional problem of thermoelastic contact . Commun. in Partial Diff. Equations, 17(9&10), 1597-1618
(1992).
[45] Shi, P. & Shillor, M.; Uniqueness and stability of the solution to a thermoelasticcontact problem . Euro. J. Appl. Math. 1 (1990) 371-387.
[46] Shi, P. & Shillor, M.; A quasistatic contact problem in thermoelasticity with a radiation condition for the temperature. to appear in J. Math. Anal. Appl.
[47] Shi, P. & Shillor, M.; & Zou, X. L.; Numerical solution to the one dimensional
problems of thermoelastic contact. Comput. Math. Appl. 22 (10) (1991) 65-78.
240 Bibliografia
[48] J. Simon; Caraterization d’um espace fonctionnal intervvenant en controle optimalAnnales de la faculte des Sciences de Touluse. Vol V pp 149-169 (1983)
[49] J. Simon; Compact sets in the space L p(0, T ; B) Annali di Matematica Pura ed Applicata (IV). Vol CXLVI, pp 65-96 (1987)
[50] K. Yosida; Functional Analysis, Springer-Verlag, Berlin 1965.

5/14/2018 ESP_SOB - slidepdf.com
http://slidepdf.com/reader/full/espsob 244/244


















