ESTABILIDADE E SÍNTESE DE CONTROLADORES PARA … · “Um livro é um mudo que fala, um ... A...
89
DEPARTAMENTO DE ENGENHARIA ELÉTRICA - DEE PROGRAMA DE PÓS-GRADUAÇÃO EM ENGENHARIA ELÉTRICA UNIVERSIDADE ESTADUAL PAULISTA "JÚLIO DE MESQUITA FILHO" FACULDADE DE ENGENHARIA DE ILHA SOLTEIRA ESTABILIDADE E SÍNTESE DE CONTROLADORES PARA SISTEMAS LINEARES INCERTOS Dissertação apresentada à Faculdade de Engenharia de Ilha Solteira da Universidade Estadual Paulista -UNESP, como parte dos requisitos necessários para obtenção do título de Mestre em Engenharia Elétrica. Eden Jair Rampazzo Junior Engenheiro Eletricista – UFU/ Uberlândia Orientador: Prof. Dr. Edvaldo Assunção – FEIS / UNESP Co-orientador: Prof. Dr. Marcelo Carvalho Minhoto Teixeira – FEIS / UNESP Ilha Solteira, Abril de 2004.
Transcript of ESTABILIDADE E SÍNTESE DE CONTROLADORES PARA … · “Um livro é um mudo que fala, um ... A...

DEPARTAMENTO DE ENGENHARIA ELÉTRICA - DEE
PROGRAMA DE PÓS-GRADUAÇÃO EM ENGENHARIA ELÉTRICA
UNIVERSIDADE ESTADUAL PAULISTA "JÚLIO DE MESQUITA FILHO"
FACULDADE DE ENGENHARIA DE ILHA SOLTEIRA
ESTABILIDADE E SÍNTESE DE CONTROLADORES PARA
SISTEMAS LINEARES INCERTOS
Dissertação apresentada à Faculdade de
Engenharia de Ilha Solteira da Universidade
Estadual Paulista -UNESP, como parte dos
requisitos necessários para obtenção do
título de Mestre em Engenharia Elétrica.
Eden Jair Rampazzo Junior Engenheiro Eletricista – UFU/ Uberlândia
Orientador: Prof. Dr. Edvaldo Assunção – FEIS / UNESP
Co-orientador: Prof. Dr. Marcelo Carvalho Minhoto Teixeira – FEIS / UNESP
Ilha Solteira, Abril de 2004.

i
Aos meus pais e irmãos que sempre
me apoiaram em todas as etapas da
minha vida e à minha namorada
Miriam: alegria de viver.

ii
AGRADECIMENTOS
Presto-me os sinceros agradecimentos:
_ Ao programa de pós-graduação em Engenharia Elétrica da Universidade
Estadual Paulista (UNESP) por proporcionar-me a realização e conclusão de
mais um objetivo de minha vida;
_ À CAPES pelo apoio financeiro, indispensável para tranqüilidade financeira e a
realização de um bom trabalho de pesquisa;
_ Aos professores que sempre me auxiliaram nos momentos de dúvidas;
_ Às pessoas que no decorrer dessa jornada tornaram-se amigas, companheiras e
me apoiaram nas horas difíceis;
_ Ao Prof. Dr. Edvaldo Assunção sou especialmente grato, pela orientação que
conduziu me à realização e conclusão deste trabalho, sempre com paciência,
dedicação e amizade;
_ Ao Prof. Dr. Marcelo Carvalho Minhoto Teixeira, em sua imensa bondade,
agradeço pelas importantes contribuições oferecidas como amigo e co-
orientador e finalmente, agradeço todas as pessoas que direta ou indiretamente
contribuíram para a realização deste trabalho.

iii
“Um livro é um mudo que fala, um
surdo que responde, um cego que
guia, um morto que vive”.
(Padre Antônio Vieira)

iv
RESUMO
Neste trabalho uma nova caracterização da estabilidade projetiva é desenvolvida,
cuja metodologia é inédita e envolve um processo que torna a matriz simétrica X e o
controlador K mais relaxados. A matriz X, positiva definida, é relaxada, utilizando o conceito
de politopo convexo, não apenas em relação às incertezas da planta do sistema, mas também
em relação ao politopo das condições iniciais. Já o controlador K, é um politopo convexo
somente em relação ao politopo das condições iniciais.
A análise da estabilidade e a síntese de controladores para sistemas dinâmicos
incertos são equacionadas utilizando-se desigualdades matriciais lineares, permitindo neste
trabalho calcular o valor máximo da amplitude do sinal de saída e determinar a região de
factibilidade em função das incertezas do sistema.
O número de regiões factíveis e os valores da amplitude dos sinais de saída
calculados para o critério de estabilidade projetiva, proposto por Apkarian et al., (2001)
relaxando a matriz X(α) para X(α,β) e o controlador K para K(β), pode chegar ao acréscimo
de aproximadamente 23% na área factível e reduzir até 8% a amplitude do sinal de saída. Tais
valores são calculados em relação ao critério de estabilidade quadrática, baseado na teoria de
estabilidade de Lyapunov.

v
ABSTRACT
In this work a new characterization of the projective stability is developed, whose
methodology is original and it involves a process that allows the symmetric matrix X and the
controller K to be more relaxed. The matrix X, positive defined, is relaxed using the concept
of convex polytope, not only in relation to the uncertainties of the plant of the system, but also
in relation to the polytope of the initial conditions. Already controller K, is only a convex
polytope in relation to the initial condition.
The analysis of the stability and the design of controllers for uncertain dynamic
systems are put in the form of equations using the linear matrix inequalities, allowing in this
work to calculate the maximum value of the output sign and to determine the feasible area as
function of the uncertainties of the system.
The number of feasible areas and the values of the output signal calculated for the
stability projective criterion, proposed by Apkarian et al., (2001) relaxing the matrix X(α) for
X(α, β) and the controller K for K(β), it can arrive to the increase of approximately 23% in
the feasible area and to reduce until 8% the output signal. Such values are calculated in
relation to the quadratic stability criterion, based on the theory of stability of Lyapunov.

vi
LISTA DE FIGURAS
Figura 2.1: Politopo cúbico da condição inicial. ................................................................... 10
Figura 2.2: Politopo cúbico, Figura 2.1, circunscrito pelo elipsóide invariante, equação
(2.26). ............................................................................................................... 10
Figura 2.3: Flexibilização de matriz X com relação às incertezas dos politopos A(α) e
x0(β).................................................................................................................. 18
Figura 2.4: Comparações entre as áreas factíveis utilizando as restrições de estabilidade
quadrática (Ai, X) e projetiva (Ai, Xi).................................................................. 26
Figura 2.5: Comparações entre as áreas factíveis utilizando as restrições de estabilidade
quadrática (Ai, X), projetiva (Ai, Xi) e condição inicial. ...................................... 27
Figura 2.6: Comparações entre as áreas factíveis utilizando as restrições de estabilidade
quadrática (Ai, X), projetiva (Ai, Xij) e condição inicial....................................... 27
Figura 2.7: Comparações entre as áreas factíveis utilizando as restrições de estabilidade
quadrática (Ai, X), projetiva (Ai, Xi), condição inicial e otimização de ξ0............ 28
Figura 2.8: Comparações entre as áreas factíveis utilizando as restrições de estabilidade
quadrática (Ai, X), projetiva (Ai, Xij), condição inicial e otimização de ξ0. .......... 28
Figura 4.1: C.E.Q ( A1 e x1(0) )............................................................................................. 57
Figura 4.2: C.E.P ( A1 e x1(0) ). ............................................................................................ 57
Figura 4.3: C.E.Q ( A1 e x2(0) )............................................................................................. 57
Figura 4.4: C.E.P ( A1 e x2(0) ). ............................................................................................ 57
Figura 4.5: C.E.Q ( A1 e x3(0) )............................................................................................. 57
Figura 4.6: C.E.P ( A1 e x3(0) ). ............................................................................................ 57
Figura 4.7: C.E.Q ( A1 e x4(0) )............................................................................................. 58
Figura 4.8: C.E.P ( A1 e x4(0) ). ............................................................................................ 58
Figura 4.9: C.E.Q ( A2 e x1(0) )............................................................................................. 58
Figura 4.10: C.E.P ( A2 e x1(0) )............................................................................................ 58
Figura 4.11: C.E.Q ( A2 e x2(0) ). .......................................................................................... 58
Figura 4.12: C.E.P ( A2 e x2(0) )............................................................................................ 58
Figura 4.13: C.E.Q ( A2 e x3(0) ). .......................................................................................... 59
Figura 4.14: C.E.P ( A2 e x3(0) )............................................................................................ 59
Figura 4.15: C.E.Q ( A2 e x4(0) ). .......................................................................................... 59
Figura 4.16: C.E.P ( A2 e x4(0) )............................................................................................ 59
vii
Figura 4.17: C.E.Q ( A3 e x1(0) ). .......................................................................................... 59
Figura 4.18: C.E.P ( A3 e x1(0) )............................................................................................ 59
Figura 4.19: C.E.Q ( A3 e x2(0) ). .......................................................................................... 60
Figura 4.20: C.E.P ( A3 e x2(0) )............................................................................................ 60
Figura 4.21: C.E.Q ( A3 e x3(0) ). .......................................................................................... 60
Figura 4.22: C.E.P ( A3 e x3(0) )............................................................................................ 60
Figura 4.23: C.E.Q ( A3 e x4(0) ). .......................................................................................... 60
Figura 4.24: C.E.P ( A3 e x4(0) )............................................................................................ 60
Figura 4.25: C.E.Q ( A4 e x1(0) ). .......................................................................................... 61
Figura 4.26: C.E.P ( A4 e x1(0) )............................................................................................ 61
Figura 4.27: C.E.Q ( A4 e x2(0) ). .......................................................................................... 61
Figura 4.28: C.E.P ( A4 e x2(0) )............................................................................................ 61
Figura 4.29: C.E.Q ( A4 e x3(0) ). .......................................................................................... 61
Figura 4.30: C.E.P ( A4 e x3(0) )............................................................................................ 61
Figura 4.31: C.E.Q ( A4 e x4(0) ). .......................................................................................... 62
Figura 4.32: C.E.P ( A4 e x4(0) )............................................................................................ 62
viii
LISTA DE TABELAS
Tabela 2.1: Valores máximos de ξ0 para o C.E.Q com as matrizes Ai e X. ........................... 29
Tabela 2.2: Valores máximos de ξ0 para o C.E.P com as matrizes Ai e Xi. ........................... 29
Tabela 2.3: Diferenças percentuais entre os valores de ξ0 dados na Tabela 2.2 (C.E.P com
Ai e Xi) e na Tabela 2.1 (C.E.Q com Ai e X). ...................................................... 29
Tabela 2.4: Valores máximos de ξ0 para C.E.Q com as matrizes Ai e X. ............................... 29
Tabela 2.5: Valores máximos de ξ0 para o C.E.P com as matrizes Ai e Xij. ........................... 29
Tabela 2.6: Diferenças percentuais entre os valores de ξ0 dados na Tabela 2.5 (C.E.P com
Ai e Xij) e na Tabela 2.4 (C.E.Q com Ai e X). ..................................................... 30
Tabela 2.7: Diferenças entre os valores percentuais dados na Tabela 2.3 e na Tabela 2.6...... 30
Tabela 3.1: Valores ótimos de ξ0 para o C.E.Q usando as matrizes Ai, X e K......................... 39
Tabela 3.2: Valores ótimos de ξ0 para o C.E.P usando as matrizes Ai, Xi e K. ....................... 40
Tabela 3.3: Valores ótimos de ξ0 para o C.E.P usando as matrizes Ai, Xij e K........................ 40
Tabela 3.4: Diferenças percentuais entre os valores de ξ0 dados na Tabela 3.2 (C.E.P com
Ai, Xi e K) e na Tabela 3.1 (C.E.Q com Ai, X e K). ............................................. 41
Tabela 3.5: Diferenças percentuais entre os valores de ξ0 dados na Tabela 3.3 (C.E.P com
Ai, Xij e K) e na Tabela 3.1 (C.E.Q com Ai, X e K). ............................................ 41
Tabela 3.6: Valores projetados para o controlador K............................................................. 42
Tabela 4.1: Valores ótimos de ξ0 para o C.E.Q usando as matrizes Ai, X e Kj. ....................... 52
Tabela 4.2: Valores ótimos de ξ0 para o C.E.P usando as matrizes Ai, Xj e Kj........................ 52
Tabela 4.3: Valores ótimos de ξ0 para o C.E.P usando as matrizes Ai, Xij e Kj. ...................... 52
Tabela 4.4: Diferenças percentuais entre os valores de ξ0 dados na Tabela 4.2 (C.E.P com
Ai, Xi e Kj) e na Tabela 4.1 (C.E.Q com Ai, X e Kj)............................................. 53
Tabela 4.5: Diferenças percentuais entre os valores de ξ0 dados na Tabelas 4.3 (C.E.P
com Ai, Xij e Kj) e na Tabela 4.1 (C.E.Q com Ai, X e Kj). ................................... 53
Tabela 4.6: Diferenças percentuais entre os valores de ξ0 dados na Tabela 4.1 (C.E.Q com
Ai, X e Kj) e na Tabela 3.1 (C.E.Q com Ai, X e K). ............................................. 54
Tabela 4.7: Diferenças percentuais entre os valores de ξ0 dados na Tabela 4.2 (C.E.P com
Ai, Xi e Kj) e na Tabela 3.2 (C.E.P com Ai, Xi e K). ............................................ 54
Tabela 4.8: Diferenças percentuais entre os valores de ξ0 dados na Tabela 4.3 (C.E.P com
Ai, Xij e Kj) e na Tabela 3.3 (C.E.P com Ai, Xij e K). ........................................... 55

ix
Tabela 4.9: Região de factibilidade referente à Tabela 3.1 .................................................... 56
Tabela 4.10: Região de factibilidade referente à Tabela 4.3 .................................................. 56

x
LISTA DE QUADROS
Quadro 2.1: Composição das restrições para análise de estabilidade utilizadas no C.E.Q e
C.E.P. ............................................................................................................... 23
Quadro 3.1: Composição das restrições e síntese do controlador K para a análise de
estabilidade e otimização de ξ0 no C.E.Q. ......................................................... 39
Quadro 3.2: Composição das restrições e síntese do controlador K para a análise de
estabilidade e otimização de ξ0 no C.E.P. .......................................................... 39
Quadro 4.1: Composição das restrições e síntese do controlador K(β) para a análise de
estabilidade e otimização de ξ0 no C.E.Q. ......................................................... 51
Quadro 4.2: Composição das restrições e síntese do controlador K(β) para a análise de
estabilidade e otimização de ξ0 no C.E.P. .......................................................... 52
Quadro 4.3: Classificação dos critérios segundo a flexibilização da matriz X e do
controlador K. ................................................................................................... 55

xi
NOTAÇÕES E ABREVIATURAS
�� e indicam desigualdades matriciais;
ℜ denota o conjunto dos números reais;
nℜ é o espaço euclidiano real;
nxnℜ é o espaço real das matrizes reais;
n representa o número de estados do sistema;
η é o número de parâmetros incertos da matriz A, usado também para denotar o número
de parâmetros incertos do vetor x(0);
M matriz genérica;
A matriz que representa a planta do sistema;
x(0) condições iniciais do vetor de estados;
r é o número de incertezas da matriz A;
s é o número de incertezas de x(0);
0ξ maior amplitude possível para o nível do sinal de saída )(ty ;
0μ é o valor ao quadrado de 0ξ ;
maxλ denota máximo autovalor;
Re iλ parte real do i-éssimo autovalor;
A(α) denota o politopo convexo da matriz A;
α parâmetro que indica politopo convexo em relação às incertezas da matriz A;
x0(β) denota o politopo convexo da condição inicial x(0);
β parâmetro que indica politopo convexo em relação às incertezas do vetor x(0);
i índice do vértice do politopo A(α);
j índice do vértice do politopo x0(β);
αi constante escalar definida entre: 10 ≤≤ iα ;
βj constante escalar definida entre: 10 ≤≤ iβ ;
σk constante escalar definida entre: 10 ≤≤ kσ ;
TA denota a matriz transposta de A;
1−X denota a matriz inversa de X;
X denota a forma diagonal de Jordan da matriz X;
I é a matriz identidade de dimensões (n x n);

xii
x(t) é o vetor de estados de dimensão (n x 1);
)(tx•
representa da derivada temporal do vetor de estados )(tx ;
iA denota o i-éssimo vértice do politopo das incertezas da matriz A;
X(α) denota o politopo convexo da matriz X;
X(α,β) denota o politopo convexo da matriz X(α);
Xi i-éssimo vértice do politopo X(α);
Xij j-éssimo vértice do i-éssimo vértice do politopo X(α,β);
)0(jx denota o j-éssimo vértice do politopo x0(β);
K vetor através do qual se faz a realimentação de estados (controlador);
K(β) denota o politopo convexo do vetor K;
Kj j-éssimo vértice do politopo K(β);
LMIs Desigualdades matriciais lineares (do inglês: Linear Matrix Inequalities);
C.E.Q Critério de Estabilidade Quadrática;
C.E.P Critério de Estabilidade Projetiva;
R.P.X denota a restrição de positividade da matriz X;
R.P.Xi denota a restrição de positividade da matriz Xi;
R.P.Xij denota a restrição de positividade da matriz Xij;
R.E denota a restrição de estabilidade;
R.C.I denota a restrição na condição inicial;
R.A.S denota a restrição na amplitude do sinal de saída.

xiii
SUMÁRIO
CAPÍTULO 1 1
INTRODUÇÃO 1
CAPÍTULO 2 3
CRITÉRIOS DE ESTABILIDADE PARA SISTEMAS AUTÔNOMOS 3
2.1 CRITÉRIO DE ESTABILIDADE QUADRÁTICA 3
2.1.1 Restrição de Estabilidade 3
2.1.2 Restrição na Condição Inicial 6
2.1.3 Restrição na Amplitude do Sinal de Saída 10
2.2 CRITÉRIO DE ESTABILIDADE PROJETIVA 12
2.2.1 Restrição de Estabilidade 12
2.2.2 Restrição na Condição Inicial 19
2.2.3 Restrição na Amplitude do Sinal de Saída 20
2.3 COMPOSIÇÃO COMPLETA DOS CRITÉRIOS 21
2.3.1 Critério de Estabilidade Quadrática 22
2.3.2 Critério de Estabilidade Projetiva 22
2.4 RESULTADOS 23
2.4.1 Restrição de Estabilidade. 26
2.4.2 Restrição de Estabilidade e Condição Inicial. 26
2.4.3 Restrição de Estabilidade, Condição Inicial e Sinal de Saída. 27
CAPÍTULO 3 31
PROJETO: CONTROLADOR K; ÚNICO 31
3.1 CRITÉRIO DE ESTABILIDADE QUADRÁTICA 32
3.1.1 Restrição de Estabilidade 32
3.1.2 Restrição na Condição Inicial 34

xiv
3.1.3 Restrição na Amplitude do Sinal de Saída 34
3.2 CRITÉRIO DE ESTABILIDADE PROJETIVA 34
3.2.1 Restrição de Estabilidade 35
3.2.2 Restrição na Condição Inicial 37
3.2.3 Restrição na Amplitude do Sinal de Saída 37
3.3 COMPOSIÇÃO COMPLETA DOS CRITÉRIOS 37
3.3.1 Critério de Estabilidade Quadrática 37
3.3.2 Critério de Estabilidade Projetiva 38
3.4 RESULTADOS 39
CAPÍTULO 4 43
PROJETO: CONTROLADOR K(β); POLITÓPICO 43
4.1 CONTROLADOR K(β) 43
4.2 CRITÉRIO DE ESTABILIDADE QUADRÁTICA 43
4.2.1 Restrição de Estabilidade Quadrática 44
4.2.1.1 Cálculo do Controlador K(β) 45
4.2.2 Restrição na Condição Inicial 45
4.2.3 Restrição na Amplitude do Sinal de Saída 45
4.3 CRITÉRIO DE ESTABILIDADE PROJETIVA 45
4.3.1 Restrição de Estabilidade Projetiva 45
4.3.1.1 Cálculo do controlador K(β) 47
4.3.2 Restrição na Condição Inicial 47
4.3.3 Restrição na Amplitude do Sinal de Saída 47
4.4 CÁLCULO DAS CONSTANTES β J 47
4.5 COMPOSIÇÃO COMPLETA DOS CRITÉRIOS 50
4.5.1 Critério de Estabilidade Quadrática 50

xv
4.5.2 Critério de Estabilidade Projetiva 51
4.6 RESULTADOS 51
4.6.1 Resultados Obtidos com LMIs 51
4.6.2 Resultados Obtidos com Simulações no Tempo 55
CAPÍTULO 5 63
CONCLUSÕES E PERSPECTIVAS 63
5.1 CONCLUSÕES 63
5.2 PERSPECTIVAS 64
REFERÊNCIAS 65
APÊNDICE A - ESTABILIDADE PROJETIVA A-1
APÊNDICE B - LEMA DA PROJEÇÃO B-1
APÊNDICE C - COMPLEMENTO DE SCHUR C-1
1
Capítulo 1
1 INTRODUÇÃO
O problema de estabilidade e controle de sistemas lineares, realimentados e
incertos, é objeto de muita atenção atualmente. Numerosos critérios, baseados na teoria de
estabilidade de Lyapunov (Ogata, 1997), têm sido desenvolvidos para caracterizar as
incertezas, constantes ou variantes no tempo, tal que a estabilidade do sistema seja garantida
se o critério for satisfeito. Porém, estes critérios são geralmente bastante conservativos, e
alguns impõem suposições muito restritivas. Em Barmish (1983), o problema de estabilidade
de sistemas lineares incertos é considerado de tal modo que os parâmetros incertos são dados
por um vetor q(t), variante no tempo, onde a planta é A(q(t)). Barmish (1985), descreveu a
condição necessária e suficiente para estabilidade de uma classe abrangente de incertezas.
Porém, a condição de estabilidade proposta ainda é muito difícil de ser verificada. Gu et al.
(1989), supõem, em sua análise de estabilidade, que as incertezas da planta A do sistema
pertencem a um conjunto restrito e são dadas pela variação ΔA(t). Outros autores como
Kokame et al. (1990), Gahinet et al. (1994b) e Trofino (1999) propõem, através da função de
estabilidade quadrática de Lyapunov, uma análise politópica para as incertezas da planta do
sistema cujas soluções são baseadas em desigualdades matriciais lineares (Linear Matrix
Inequalities; LMIs), ferramenta que tem sido no momento, essencial para a análise e síntese
de sistemas de controle especialmente na área de controle robusto. Jadbabaie et al. (1998) faz
uma análise robusta da estabilidade quadrática e otimiza o índice de desempenho quadrático,
onde a planta e o controlador são incertos.
O objetivo deste trabalho é aplicar, em sistemas lineares incertos, alguns conceitos
desenvolvidos para a teoria de estabilidade quadrática de Lyapunov à teoria de estabilidade
projetiva, proposta por Apkarian et al. (2001) para tempo contínuo e cuja estrutura foi

2
inicialmente desenvolvida por Oliveira et al. (1999) para tempo discreto. A estabilidade
projetiva (Apêndice A), desenvolvida apartir do Lema da Projeção e da Projeção Recíproca,
Apêndice B (Gahinet, 1994a citado por Apkarian et al., 2001), introduz graus de liberdade à
LMI de estabilidade projetiva, tornando-a assim, mais relaxada em relação à LMI de
estabilidade quadrática. Tal fato é devido à adição da incógnita W e a flexibilização da matriz
X.
Inicialmente, no Capítulo 1, será feita uma análise de estabilidade para sistemas
autônomos, lineares, invariantes no tempo e incertos, sujeitos a um conjunto de restrições,
formuladas na forma de LMIs, e cujas incertezas são do tipo politópica. Os resultados são
comparativos e envolvem o critério de estabilidade quadrática e o critério de estabilidade
projetiva. Nesta análise são dois os parâmetros observados: a região de factibilidade e a
amplitude do sinal de saída. A região factível é representada por áreas elementares,
correspondentes às incertezas da planta. A novidade introduzida neste caso e nos casos
tratados no Capítulo 3 e no Capítulo 4, é a flexibilização da matriz X, não somente em relação
às incertezas da planta (Apkarian et al., 2001), X(α), mas também em relação às incertezas da
condição inicial, X(α,β).
A síntese do controlador politópico K(β) e a relaxação da matriz X(α) para
X(α,β), aplicadas ao critério de estabilidade projetiva, são as principais contribuições
propostas por este trabalho e os bons resultados apresentados, são confirmados pelas
simulações dadas pelas Figuras 4.1 a 4.32; de forma comparativa.
3
Capítulo 2
2 CRITÉRIOS DE ESTABILIDADE PARA SISTEMAS AUTÔNOMOS
Toda a análise apresentada neste capítulo tem por objetivo final comparar os
resultados obtidos usando-se o critério de estabilidade quadrática e o critério de estabilidade
projetiva, para o caso de sistemas autônomos. Os resultados apresentados aqui foram
publicados em Rampazzo et al. (2003).
2.1 CRITÉRIO DE ESTABILIDADE QUADRÁTICA
2.1.1 Restrição de Estabilidade
Considere o sistema autônomo, linear, incerto e invariante no tempo dado por:
),()()( txAtx α=•
(2.1)
sendo ntx ℜ∈)( o vetor de n estados e nxnA ℜ∈)(α a matriz que representa a dinâmica da
planta do sistema incerta e do tipo politópica, dada pela combinação convexa em (2.2) (Boyd
et al., 1994):
∑=
=r
iii AA
1
.)( αα
(2.2)
O índice i varia entre os valores de 1 a r, sendo r dado pela relação η2=r e η é o
número de parâmetros incertos da planta A. Como trata-se de uma combinação convexa, tem-
se:
.0,11
≥=∑=
i
r
ii αα
(2.3)
4
A equação (2.3) representa a somatória das constantes iα positivas ou nulas
(Oliveira et al., 1999).
Dada a função candidata de Lyapunov (Ogata, 1997), V(x(t)) em (2.4), quadrática,
positiva definida ( V (x(t)) >0 para ∀x(t)≠0 e V(0)=0 ) com sua derivada em relação ao tempo,
dada em (2.5), negativa definida ( 0))(( <•
txV para 0)( ≠∀ tx e 0)0( =•
V ), então,
substituindo (2.1) em (2.5) e sendo A(α) incerta, como em (2.2), tem-se (2.6).
.0)()())(( >= txPtxtxV T
(2.4)
.0)()()()())(( <+=•••
txPtxtxPtxtxV TT
(2.5)
.0)())()(()()),(( <+=•
txPAPAtxtxV TT ααα
(2.6)
Para a estabilidade assintótica de (2.1) é suficiente, no ponto de equilíbrio
0)( =tx , que exista uma nxnP ℜ∈ simétrica e positiva definida, )0( �P , que atenda a
desigualdade escalar (2.6), ou seja, que satisfaça a desigualdade matricial linear (LMI):
,0)()( �αα PAPA T +
(2.7)
onde os símbolos ‘� ’ e ‘� ’ são símbolos de desigualdades matriciais indicando, matrizes
negativas definidas ( 0�M ) e positivas definidas ( 0�M ).
O Lema 2.1 a seguir, objetiva através do principio da dualidade, padronizar a
restrição de estabilidade quadrática em relação às outras restrições que serão discutidas nas
próximas seções. Tal princípio possibilita mudar a matriz P por sua inversa X sem alterar,
essencialmente, a negatividade da restrição de estabilidade quadrática.
Lema 2.1:
O sistema dinâmico (2.1), com incertezas politópicas descritas em (2.2), é
quadraticamente estável (Barmish, 1985), se e somente se, as seguintes LMIs forem satisfeitas
simultaneamente:

5
.0)(
,0)(
,0)( 11
�
�
�
�
�
Trr
Tii
T
XAXA
XAXA
XAXA
+
+
+
Prova: Se PX =−1 , então, a desigualdade matricial (2.7) pode ser representada
pela sua dual em X, (2.9), substituindo P por 1−X e multiplicando ambos os lados de cada
termo por X. A desigualdade (2.8) mostra este procedimento.
.0)()( 11�XAXXXXXA T αα −− +
(2.8)
Simplificando (2.8) obtém-se (2.9) e assim pode-se afirmar que )),(( αtxV•
, em
(2.6), é negativa definida se a desigualdade (2.9) for satisfeita.
.0)()( �XAXA T αα +
(2.9)
Da desigualdade matricial (2.9) e relação (2.2) tem-se, por simples substituição, a
expressão abaixo:
,0)...()...( 1111 ���T
rrT
iiT
rrii AAAXXAAA αααααα +++++++++
e manipulando os termos, tem-se (2.10).
.0)()()( 111 ���T
rrrT
iiiT XAXAXAXAXAXA +++++++ ααα
(2.10)
A condição suficiente para solução de desigualdade (2.10) é que exista uma matriz
X positiva definida e simétrica, 0�X , que satisfaça, simultaneamente, todas as desigualdades
matriciais lineares (LMIs) em (2.11).
.0)(
,0)(
,0)( 11
�
�
�
�
�
Trr
Tii
T
XAXA
XAXA
XAXA
+
+
+
(2.11)
6
Se as LMIs dadas em (2.11) forem factíveis, então, o sistema é assintoticamente
estável. Neste caso, é necessário que as LMIs sejam factíveis em conjunto.
A condição necessária para solução de (2.10) é que nos vértices do politopo, nos
quais iAA =)(α com 1=iα e 0=kα para ik ≠ , a desigualdade (2.12) seja factível para i e k
variando de 1 a r.
.0�Tii XAXA +
(2.12)
A LMI (2.12) representa a restrição de estabilidade quadrática baseada na função
de Lyapunov V(x(t)).
2.1.2 Restrição na Condição Inicial
Assim como a restrição de estabilidade quadrática possibilita determinar regiões
factíveis referentes às incertezas da planta, a restrição na condição inicial, associada à
restrição de estabilidade, também possibilita determinar a factibilidade destas regiões, porém
agora, sujeito às incertezas do vetor condição inicial. Portanto, a LMI que representa a
restrição na condição inicial é desenvolvida pelo conceito de elipsóide invariante (Boyd et al.,
1994).
Considere um politopo }{CoP Svvv ,,, 21 �= , descrito por seus vértices νj. O
elipsóide ξ contém o politopo P se e somente se existe uma matriz 1−Q que satisfaz:
.,,1;11 sjvQv jTj �=≤−
(2.13)
A condição de menor e igual ( ≤ ) da desigualdade (2.13) será substituída pela
condição de menor ( < ) da desigualdade (2.14) sem perda de generalidade, pois, é possível
arbitrar um vetor genérico v, pertencente ao elipsóide ξ , de maneira que vQvT 1− esteja tão
próximo da unidade quanto se queira. Isto garante aos vértices do politopo uma localização

7
interna e tão próxima do elipsóide quanto possível, porém nunca sobre sua superfície. Assim
sendo, neste trabalho a desigualdade (2.13) será substituída por (2.14), resultando em (2.15).
.11 <−j
Tj vQv
(2.14)
.01 1 >− −j
Tj vQv
(2.15)
Aplicando o complemento de Schur (Apêndice C) em (2.15), cuja idéia básica
decorre de que inequações não-lineares podem ser representadas por desigualdades matriciais
lineares, obtém-se a LMI (2.16) em Q.
.01
�⎥⎦
⎤⎢⎣
⎡Qvv
j
Tj
(2.16)
Seja X ( nxnX ℜ∈ ) uma matriz positiva definida, simétrica e x(0) ( nx ℜ∈)0( ) uma
condição inicial pertencente ao elipsóide invariante similarmente a (2.15), tem-se:
.0)0()0(1 1 >− − xXxT
(2.17)
Aplicando o complemento de Schur em (2.17), tem-se (2.18).
.0)0(
)0(1�⎥⎦
⎤⎢⎣⎡
Xxx T
(2.18)
Suponha que o vetor condição inicial, )()0( 0 βxx = , seja dado pela combinação
convexa do seus vértices )0(jx :
∑=
=s
jjj xx
10 ),0()( ββ
(2.19)
sendo que o índice j varia entre os valores de 1 a s, s dado pela relação η2=s e η, neste caso,
o número de parâmetros incertos do vetor condição inicial x(0), e as constantes jβ são
positivas ou nulas e 11
=∑=
s
jjβ .
Substituindo (2.19) em (2.18), tem-se:

8
.0)0(
))0((1
1
1�
⎥⎥⎥⎥
⎦
⎤
⎢⎢⎢⎢
⎣
⎡
∑
∑
=
=
Xx
x
s
jjj
Ts
jjj
β
β
Como 11
=∑=
s
jjβ , pode-se colocar a desigualdade acima na forma:
.0)()0(
))0((1)(
11
11�
⎥⎥⎥⎥
⎦
⎤
⎢⎢⎢⎢
⎣
⎡
∑∑
∑∑
==
==
Xx
x
s
jj
s
jjj
Ts
jjj
s
jj
ββ
ββ
Colocando-se em evidência:
.0))0(
)0(1(
1
�⎥⎦
⎤⎢⎣
⎡∑= Xx
x
j
Tj
s
jjβ
(2.20)
Se para todos os vértices )0(jx do politopo existir uma X, tal que a desigualdade
matricial linear (2.21) seja verdadeira, a somatória (2.20) também será, pois os jβ são sempre
positivos ou nulos.
.0)0(
)0(1�⎥
⎦
⎤⎢⎣
⎡Xx
x
j
Tj
(2.21)
Portanto, (2.21) representa a restrição na condição inicial para todo j variando de 1
a s, de acordo com Boyd et al. (1994) e Tanaka et al. (1999).
Note que da LMI (2.21), por implicação direta do complemento de Schur, tem-se
a relação (2.22), semelhante à relação (2.14).
.1)0()0( 1 <−j
Tj xXx
(2.22)
Para visualizar como o conceito de elipsóide invariante é importante para o
tratamento de incertezas politópicas na condição inicial de um sistema suponha, como
exemplo, 1−X uma matriz positiva definida, simétrica satisfazendo (2.22);

9
,'''
'''
'''
1
⎥⎥
⎦
⎤
⎢⎢
⎣
⎡=−
cfefbdeda
X
(2.23)
equivalente à forma diagonal de Jordan
.
00
00
001
⎥⎥⎥
⎦
⎤
⎢⎢⎢
⎣
⎡=−
c
b
a
X
(2.24)
Sejam )0(jx , em (2.25), vértices genéricos do politopo x0(β) e )0(1 jx , )0(2 jx e
)0(3 jx suas coordenadas. Neste caso, as coordenadas citadas são consideradas como os
estados do sistema indexados pelo índice j.
.)]0()0()0([)0( 321T
jjjj xxxx =
(2.25)
Substituindo (2.24) e (2.25) em (2.22) obtém-se:
.1)0()0()0( 23
22
21 <++ jjj xcxbxa
(2.26)
Analisando apenas os vértices )0(jx , note que a relação (2.26) sugere a idéia de
que quanto maior for a norma dos vetores )0(jx , maiores serão os elipsóides que os contém,
para uma única 1−
X . Entretanto, 1−
X deverá ser calculado, pelo menos, no limite da
igualdade da relação (2.22), substituindo 1−X por 1−
X , e para a maior norma dos vetores
)0(jx entre todos os vértices. Assim sendo, qualquer outra 1−
X gerará um elipsóide tão
grande quanto as outras restrições associadas permitirem, como por exemplo: restrição de
estabilidade, limite na amplitude do sinal de saída, taxa de decaimento, etc.
A Figura 2.2 mostra como o elipsóide definido por uma matriz 1−
X , calculada
no limite da igualdade da relação (2.22) e por um vetor entre os vetores )0(jx , sendo sua
norma a maior norma possível, circunscreve todos os outros vértices do politopo )(0 βx . O
fato é que as incertezas dentro do politopo, definida pelo domínio cúbico da Figura 2.2, são
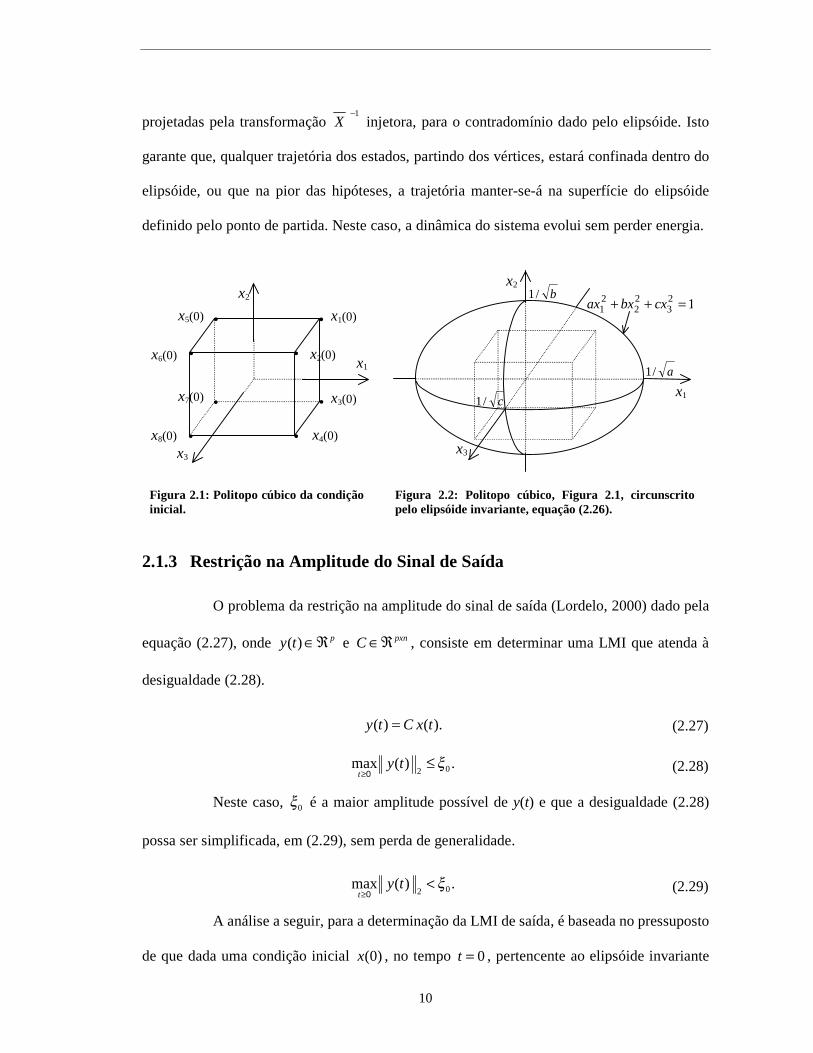
10
projetadas pela transformação 1−
X injetora, para o contradomínio dado pelo elipsóide. Isto
garante que, qualquer trajetória dos estados, partindo dos vértices, estará confinada dentro do
elipsóide, ou que na pior das hipóteses, a trajetória manter-se-á na superfície do elipsóide
definido pelo ponto de partida. Neste caso, a dinâmica do sistema evolui sem perder energia.
Figura 2.1: Politopo cúbico da condição inicial.
Figura 2.2: Politopo cúbico, Figura 2.1, circunscrito pelo elipsóide invariante, equação (2.26).
2.1.3 Restrição na Amplitude do Sinal de Saída
O problema da restrição na amplitude do sinal de saída (Lordelo, 2000) dado pela
equação (2.27), onde pty ℜ∈)( e pxnC ℜ∈ , consiste em determinar uma LMI que atenda à
desigualdade (2.28).
).()( txCty =
(2.27)
.)(max 02ξ≤
≥ty
t 0
(2.28)
Neste caso, 0ξ é a maior amplitude possível de y(t) e que a desigualdade (2.28)
possa ser simplificada, em (2.29), sem perda de generalidade.
.)(max 02ξ<
≥ty
t 0
(2.29)
A análise a seguir, para a determinação da LMI de saída, é baseada no pressuposto
de que dada uma condição inicial )0(x , no tempo 0=t , pertencente ao elipsóide invariante
•
•
•
•
•
•
•
•
x1(0)
x8(0)
x2(0)
x3(0)
x4(0)
x5(0)
x6(0)
x7(0)
x2
x1
x3
x2
x1
x3
a/1
c/1
b/1 12
322
21 =++ cxbxax

11
em (2.17), qualquer estado subseqüente, x(t) em 0>t , pertencerá também ao elipsóide, desde
que o sistema seja estável. Sendo assim, tem-se (2.30) para qualquer estado x(t) em 0>t .
.0)(
)(10)()(1 1�⎥⎦
⎤⎢⎣⎡⇔>− −
XtxtxtxXtx
TT
(2.30)
Seja z(t) um vetor, adequadamente escolhido, e considere que a relação (2.31) seja
satisfeita.
.1)()()()( 1 <= − txXtxtztz TT
(2.31)
Manipulando (2.31) obtém-se o vetor z(t) em (2.32).
),()()()( 2
1
2
1
txXXtxtztz TT−−
=
).()( 2
1
txXtz−
=
(2.32)
Isolando x(t) na relação (2.32), obtém-se x(t) como função do vetor z(t) em
(2.33).
).()( 2
1
tzXtx =
(2.33)
A relação (2.34) resulta da substituição de (2.27) em (2.29) e (2.35) da
substituição de (2.33) em (2.34).
.)(max)(max 022ξ<=
≥≥txCty
tt 00
(2.34)
.)(max)(max 0
2
2
1
2ξ<=
≥≥tzXCty
tt 00
(2.35)
Elevando ao quadrado todos os termos da relação (2.35), obtém-se (2.36).
.)()(max)(max 20
2
1
2
12
2ξ<⎥
⎦
⎤⎢⎣
⎡=
≥≥tzXCCXtzty TT
t 0t0
(2.36)

12
Portanto, se por suposição, o maior autovalor, maxλ , da matriz 2
1
2
1
XCCX T for
menor do que 20ξ , a amplitude do sinal de saída será menor do que o valor de 0ξ em (2.37),
pois )()( tztz T , em (2.31), é sempre menor do que a unidade.
.)()()()(max 02
1
2
1
max2ξλ <⎥
⎦
⎤⎢⎣
⎡≤ tztzXCCXty TT
(2.37)
Deste fato, decorre a condição de desigualdade (2.38).
.20
2
1
2
1
IXCCX T ξ�
(2.38)
Multiplicando por 2
1
X , os termos de (2.38) em ambos os lados, obtém-se (2.39).
,)( 20 XICXXCT ξ�
.0)( 20 �CXIXCX T −− ξ
(2.39)
Aplicando o complemento de Schur em (2.39), chega-se à LMI (2.40) em X, onde
200 ξμ = . Tal LMI associada à LMI (2.21) define a restrição na amplitude do sinal de saída
dada em (2.41).
.00
�⎥⎦⎤
⎢⎣⎡
ICXXCX T
μ
(2.40)
e0)0(
)0(1�
⎥⎥⎦
⎤
⎢⎢⎣
⎡Xx
x
j
Tj .0
0�⎥⎦
⎤⎢⎣⎡
ICXXCX T
μ
(2.41)
2.2 CRITÉRIO DE ESTABILIDADE PROJETIVA
2.2.1 Restrição de Estabilidade
Nesta seção é apresentada a metodologia matemática proposta por Apkarian et al.
(2001) na forma de teorema com o objetivo de introduzir uma nova caracterização da teoria
de estabilidade fundamental de Lyapunov para sistemas lineares. A prova deste teorema foi

13
baseada no Lema da Projeção e no Lema da Projeção Recíproca (Gahinet e Apkarian, 1994a
citado por Apkarian et al., 2001; Apêndice B).
Teorema 2.1 (Estabilidade Projetiva): A condição i) e as condições das LMIs de
ii) a v), envolvendo matrizes simétricas variáveis P e X e matrizes gerais V e W , são
equivalentes:
i) A é Hurwitz, portanto 0)(Re <Aiλ ;
ii) P∃ tal que: 00
0�⎥
⎦
⎤⎢⎣
⎡−
+P
PAPAT
;
iii) WX ,∃ tais que: 0)(
�⎥⎦
⎤⎢⎣
⎡−+
++−XWXA
WAXWWXT
TT
;
iv) VP,∃ tais que: 0
0
0
)(
�
⎥⎥⎥
⎦
⎤
⎢⎢⎢
⎣
⎡
−−+
++−
PV
PPVA
VPAVVVT
TTT
;
v) VP,∃ tais que: 0
0
0
)(
�
⎥⎥⎥
⎦
⎤
⎢⎢⎢
⎣
⎡
−−+
++−
PV
PPAV
VPAVVV TTTT
.
De acordo com a prova do Teorema 2.1, Apêndice A, observa-se que a LMI em
iv) é o resultado da manipulação da LMI em iii), onde há a presença das matrizes P e V. Isto
impossibilita o uso desta restrição da forma apresentada. Tal restrição deve conter as matrizes
X e W, sendo estas, respectivamente, inversas de P e V. Neste caso, é necessário utilizar a dual
de iv), padronizando assim todas as restrições como foi apresentada na Seção 2.1.
Entretanto, para se obter a dual da LMI em iv), é necessário determinar a dual da
LMI em iii). Utilizando o Lema da Projeção e o Lema da Projeção Recíproca, obtém-se a
LMI (2.42) dual da LMI em iii).
.0)(�⎥⎦
⎤⎢⎣⎡
−+++−PVPA
VPAVVP TTT
(2.42)
Nota-se que a desigualdade (2.43) é resultado da transformação de congruência
sobre a desigualdade (2.42) e que (2.44) resulta da substituição de P por 1−X em (2.43).

14
=⎥⎦
⎤⎢⎣
⎡⎥⎦
⎤⎢⎣
⎡−+
++−⎥⎦
⎤⎢⎣
⎡X
W
PVPA
VPAVVP
X
W TTTT
0
0)(
0
0
.0)(
)()]([�⎥⎦
⎤⎢⎣⎡
−+++−
XPXWVPAXXVPAWWVVPW TTTTT
(2.43)
,0)(1
�⎥⎦⎤
⎢⎣⎡
−+++−−
XXAWXAWWWWXW TTTT
,0000)( 1
�⎥⎦⎤
⎢⎣⎡+⎥⎦
⎤⎢⎣⎡
−+++− − WXW
XXAWXAWWW TTTT
[ ][ ] .000)( 1
�WXWXXAW
XAWWW TTTT−
⎥⎦⎤
⎢⎣⎡+⎥⎦
⎤⎢⎣⎡
−+++−
(2.44)
Aplicando o complemento de Schur em (2.44), chega-se à restrição de
estabilidade projetiva dada em (2.45). Esta LMI é semelhante à desigualdade apresentada em
v), porém com a matriz X em sua estrutura. Tal condição é necessária para padronizar a
restrição de estabilidade projetiva em relação à restrição de estabilidade quadrática e também
em relação a todas as outras restrições envolvidas. A Seção 2.3 mostra este fato.
.00
0)(
�⎥⎥
⎦
⎤
⎢⎢
⎣
⎡
−−+
++−
XWXXAW
WXAWWW TTTT
(2.45)
A presença da matriz W e a possibilidade de se flexibilizar a matriz X, aumenta o
grau de liberdade da LMI (2.45) dando ao sistema, condições de estabilidade em uma região
maior de incertezas da matriz A. Entretanto, se a matriz X não for flexibilizada (politópica), o
aumento do grau de liberdade em (2.45) não proporciona vantagens adicionais se comparada
com a restrição de estabilidade quadrática.
Considerando, portanto, a planta do sistema incerta, da forma apresentada em
(2.2), e X dependente das mesmas incertezas da planta A, ou seja, se é possível achar uma
matriz )(αA pertencente a um conjunto convexo limitado pelos vértices Ai, formando um
politopo, então usando a mesma idéia, é possível achar uma matriz )(αX pertencente a um
conjunto convexo limitado pelos vértices Xi (variáveis) e ponderados pelas constantes iα do

15
conjunto convexo )(αA . Assim a matriz X, atrelada à convexidade do conjunto de matrizes
)(αA , não estará propriamente livre para assumir qualquer valor que atenda a LMI (2.45) e
sim as matrizes Xi em (2.50). A equação (2.46) mostra o politopo convexo de X em relação às
incertezas de A.
1e0,)(11
=>== ∑∑==
r
iii
r
iii XXX αααα
(2.46)
Portanto, a robustez do critério de estabilidade projetiva, verificada em (2.50), é
dada pela substituição de (2.2) e (2.46) em (2.45) da seguinte forma:
,0)(0
0)()()()()()(
�⎥⎥
⎦
⎤
⎢⎢
⎣
⎡
−−+
++−
αααα
αα
XWXXWA
WXAWWW TTTT
ou ainda,
.0
)(0
0)()()(
)()()(
1
111
11
�
⎥⎥⎥⎥⎥⎥⎥
⎦
⎤
⎢⎢⎢⎢⎢⎢⎢
⎣
⎡
−
−+
++−
∑
∑∑∑
∑∑
=
===
==
r
iii
r
iii
r
iii
r
iii
Tr
iii
Tr
iii
TT
XW
XXWA
WXAWWW
α
ααα
αα
(2.47)
Multiplicando por 11
=∑=
r
iiα cada elemento da LMI (2.47) que não dependem das
constantes iα :
,0
)(0)(
0)()()(
)()()())((
11
111
1111
�
⎥⎥⎥⎥⎥⎥⎥
⎦
⎤
⎢⎢⎢⎢⎢⎢⎢
⎣
⎡
−
−+
++−
∑∑
∑∑∑
∑∑∑∑
==
===
====
r
iii
r
ii
r
iii
r
iii
r
iii
Tr
ii
r
iii
Tr
iii
TTr
ii
XW
XXWA
WXAWWW
αα
ααα
αααα
(2.48)
e juntando todos os termos em iα da LMI (2.48), obtém-se a somatória (2.49).
.0)0
0)(
(1
�
⎥⎥⎥
⎦
⎤
⎢⎢⎢
⎣
⎡
−−+
++−∑
=i
iii
Ti
Ti
TTr
ii
XWXXWA
WXAWWWα
(2.49)

16
Sendo as constantes iα positivas ou nulas e o índice i variando entre os valores de
1 a r, então é suficiente que a desigualdade em (2.49) seja verdadeira. Entretanto, para isto, é
necessário que individualmente nos vértices do politopo, na qual iAA =)(α com 1=iα , a
desigualdade (2.50) seja factível para Xi positiva definida. Portanto, a necessidade em (2.50)
garante a suficiência em (2.49).
.00
0)(
�
⎥⎥⎥
⎦
⎤
⎢⎢⎢
⎣
⎡
−−+
++−
i
iii
Ti
Ti
TT
XWXXWA
WXAWWW
(2.50)
Note que a LMI (2.50) foi obtida da LMI (2.42) e que por sua vez, da função de
Lyapunov )()()(),( txPtxxV T αα = (Apkarian et al., 2001).
Caso a matriz X não fosse tratada como politopo dependente das incertezas da
matriz A, a LMI (2.50) seria simplesmente a LMI (2.51).
.00
0)(
�
⎥⎥⎥
⎦
⎤
⎢⎢⎢
⎣
⎡
−−+
++−
XWXXWA
WXAWWW
i
TTi
TT
(2.51)
Entretanto, genericamente, a matriz X pode depender de vários politopos
diferentes ao mesmo tempo. Assim, se )(αXX = é uma combinação convexa dos vértices Xi
ponderados pelos pesos iα , então, cada )(βii XX = poderá ser combinação convexa de
vértices Xij, ponderados por pesos jβ , e assim sucessivamente. Neste caso j varia de 1 a s,
sendo s o número de vértices do segundo politopo. A equação (2.52) sintetiza este fato.
.10,)(11
=>= ∑∑==
s
jjj
s
jjiji eXX ββββ
(2.52)
Substituindo (2.52) em (2.46), obtém-se (2.53).
,)(1 1
∑ ∑= =
=r
i
s
jjiji XX βα

17
.),(1 1
ji
r
i
s
jji XX ∑∑
= =
= βαβα
(2.53)
A restrição de estabilidade, considerando ),( βαXX = , é dada em (2.54).
.0),(0
0),(),()(),()()(
�⎥⎥
⎦
⎤
⎢⎢
⎣
⎡
−−+
++−
βαβαβαα
βαα
XWXXWA
WXAWWW TTTT
(2.54)
Lembrando que 11
=∑=
r
iiα e 1
1
=∑=
s
jjβ para iα e jβ positivos ou nulos, obtém-se
a somatória (2.55) substituindo as relações de 1 a 6 em (2.54).
1. );())(()()(1 111
Tr
i
s
jji
Ts
jj
r
ii
T WWWWWW +=+=+ ∑∑∑∑= ===
βαβα
2. ;))(()(1 111
WAWAWA i
r
i
s
jji
r
iii
s
jj ∑∑∑∑
= ===
== βααβα
3. ;),(1 1
ji
r
i
s
jji XX ∑∑
= =
= βαβα
4. ;))(()(1 111
Ti
Tr
i
s
jji
Tr
iii
s
jj
TTT AWAWAW ∑∑∑∑= ===
== βααβα
5. ;)()(1 111
WWWr
i
s
jji
s
jj
r
ii ∑∑∑∑
= ===
== βαβα
6. .)()(1 111
Tr
i
s
jji
Ts
jj
r
ii
T WWW ∑∑∑∑= ===
== βαβα
.0)0
0)(
(1 1
�∑∑= = ⎥
⎥⎥
⎦
⎤
⎢⎢⎢
⎣
⎡
−−+
++−r
i
s
jji
jijii
Tji
Ti
TT
ji
XWXXWA
WXAWWWβα
(2.55)
Se em cada vértice Xij a LMI (2.56) for verdadeira (condição necessária), então a
somatória (2.55) também será (condição suficiente).
.00
0)(
�
⎥⎥⎥
⎦
⎤
⎢⎢⎢
⎣
⎡
−−+
++−
ji
jijii
Tji
Ti
TT
XWXXWA
WXAWWW
(2.56)

18
O critério de estabilidade projetiva, quando se analisa a restrição (2.50), mostra
que é possível achar matrizes Xi atendendo individualmente as incertezas Ai da planta,
tornando assim os intervalos dos parâmetros incertos a e b de A os mais amplos possíveis em
relação a uma única X. Neste caso, todos os vértices do politopo da planta A, em (2.51),
devem ser satisfeitos em conjunto.
A Figura 2.3 ilustra o processo de flexibilização da matriz X(α,β), possível para a
restrição de estabilidade projetiva, em relação à única X para a restrição de estabilidade
quadrática. Como exemplo, seja a matriz X dependente das incertezas da planta (politopo com
4 vértices: 422 = ) e incertezas da condição inicial ( politopo com 8 vértices: 823 = ).
Figura 2.3: Flexibilização de matriz X com relação às incertezas dos politopos A(α) e x0(β).
Note que as restrições de estabilidade projetiva, dadas pelas equações (2.50) e
(2.56), são implicações diretas da restrição de estabilidade quadrática, Seção 2.1.1, equação
(2.12), ou seja, se a LMI dada pela equação (2.12) for factível para uma determinada X
positiva definida, então a LMI (2.50) e a LMI (2.56) também serão factíveis.
Esta afirmação pode ser verificada fazendo, em (2.50) ou em (2.56), XW = ,
XX i = ou XX ij = , respectivamente, e multiplicado-as pela matriz [ ]III à esquerda e
[ ]TIII à direita, sendo que TXX = e I é a matriz identidade, tal que, nxnI ℜ∈ . Nestes
X 1 (β).
X 4 (β).
. X 2(β)
. X 3(β)
. X (α,β)
X 11.
X 12.
. X 18
.
.
. .
. X 21.
. X 28
.
.
. .
. .
X 31.
. X 38
.
.
. .
. .
X 41.
. X 48
.
.
. .
. .
X 1.
X 4.
. X 2
. X 3
X. . X (α)
19
casos, chega-se à LMI (2.12) pelas substituições propostas e descritas acima e mostradas em
(2.57).
[ ] .00
0)(
�
⎥⎥⎦
⎤
⎢⎢⎣
⎡
⎥⎥⎥
⎦
⎤
⎢⎢⎢
⎣
⎡
−−+
++−
III
XXXXXA
XXAXXXIII i
TTi
TT
(2.57)
Fazendo-se as multiplicações possíveis entre os blocos de matrizes da
desigualdade matricial (2.57), obtém-se o seguinte resultado:
.0)()())(( �IXXIIXXAXIIXXXAXXI TTi
Ti
T −+−++++++−
(2.58)
Simplificando (2.58), chega-se à restrição de estabilidade quadrática (2.59)
idêntica à dada pela equação (2.12).
.0�Tii XAXA +
(2.59)
De acordo com a Figura 2.3, nota-se que as matrizes Xi e X são casos particulares
das matrizes Xij e Xi, respectivamente, então se a LMI (2.50) for factível, a LMI (2.56)
também será, bastando tomar iij XX = . Neste caso, Xi pertence a um vértice qualquer do
politopo X(α,β), dado pelos seus vértices Xij, ou que todos os vértices Xij são coincidentes.
2.2.2 Restrição na Condição Inicial
Seja (2.60) a LMI resultante da substituição de (2.46) em (2.18) e a matriz X só
dependente das incertezas da planta )(αA .
.0)()()(1
0
0 �⎥⎦⎤
⎢⎣⎡
αββ
Xxx T
(2.60)
Manipulando a LMI (2.60), chega-se à desigualdade (2.61) da seguinte forma:
,0)0(
))0((1
11
1�
⎥⎥⎥⎥
⎦
⎤
⎢⎢⎢⎢
⎣
⎡
∑∑
∑
==
=r
iii
s
jjj
Ts
jjj
Xx
x
αβ
β

20
ou ainda,
,0))(())0()((
))0()(())((
1111
1111�
⎥⎥⎥⎥
⎦
⎤
⎢⎢⎢⎢
⎣
⎡
∑∑∑∑
∑∑∑∑
====
====r
iii
s
jj
s
jjj
r
ii
Ts
jjj
r
ii
s
jj
r
ii
Xx
x
αββα
βαβα
.0))0(
)0(1(
1 1
�⎥⎦
⎤⎢⎣
⎡∑∑= = ij
Tj
r
i
s
jji Xx
xβα
(2.61)
Para garantir que a somatória (2.61) seja verdadeira, basta que para todos os
vértices )0(jx , com j variando de 1 a s, exista uma única Xi satisfazendo a LMI (2.62).
.0)0(
)0(1�⎥
⎦
⎤⎢⎣
⎡ij
Tj
Xxx
(2.62)
Portanto, se (2.62) é a restrição na condição inicial associada à restrição de
estabilidade (2.50), então, utilizando os mesmos procedimentos anteriores, a restrição (2.63)
está associada à restrição de estabilidade (2.56).
.0)0(
)0(1�⎥
⎦
⎤⎢⎣
⎡jij
Tj
Xxx
(2.63)
2.2.3 Restrição na Amplitude do Sinal de Saída
A Seção 2.1.3 mostra o procedimento matemático utilizado para obter a LMI
(2.40). Naquele caso, a matriz X é única e não depende de nenhuma incerteza.
Se X for do tipo X(α), com 11
=∑=
r
iiα e 0>iα , a LMI de saída (2.40) será aquela
indicada na desigualdade (2.65) pelas seguintes manipulações:
,0)(
)()(0
�⎥⎦⎤
⎢⎣⎡
ICXCXX T
μααα

21
,0)()(
)()(
011
11 �
⎥⎥⎥⎥
⎦
⎤
⎢⎢⎢⎢
⎣
⎡
∑∑
∑∑
==
==
IXC
CXX
r
ii
r
iii
Tr
iii
r
iii
μαα
αα
.0)(01
�⎥⎦
⎤⎢⎣
⎡∑
= ICX
CXX
i
Tii
r
ii μ
α
(2.64)
.00
�⎥⎦
⎤⎢⎣
⎡ICX
CXX
i
Tii
μ
(2.65)
Note que, sendo a LMI (2.65) positiva definida para todo i variando de 1 a r, a
somatória (2.64) também será, garantindo assim, a condição necessária e suficiente. Portanto,
a restrição de amplitude do sinal de saída é dada por (2.66).
e0)0(
)0(1�
⎥⎥⎦
⎤
⎢⎢⎣
⎡
ij
Tj
Xx
x.0
0
�⎥⎦
⎤⎢⎣
⎡ICX
CXX
i
Tii
μ
(2.66)
Considerando a matriz X do tipo X(α,β), então, da mesma forma que em (2.66), a
restrição de amplitude do sinal de saída, associada à restrição de estabilidade (2.56), será dada
em (2.67).
e0)0(
)0(1�
⎥⎥⎦
⎤
⎢⎢⎣
⎡
jij
Tj
Xx
x.0
0
�⎥⎥⎦
⎤
⎢⎢⎣
⎡ICX
CXX
ji
Tjiji
μ
(2.67)
2.3 COMPOSIÇÃO COMPLETA DOS CRITÉRIOS
Nesta seção são relacionadas todas as LMIs que serão utilizadas no estudo de
regiões de factibilidade. Portanto, para a comparação dos resultados obtidos em cada critério
de estabilidade, Seção 2.4, é necessário compor as LMIs adequadamente. Diz-se critério de
estabilidade quando as restrições de estabilidade e positividade da matriz X estão ou não
associadas a outras restrições. As Seções 2.3.1 e 2.3.2 mostram um resumo das LMIs em cada
critério.

22
2.3.1 Critério de Estabilidade Quadrática
a) Restrição de Positividade da matriz X (R.P.X):
0�X .
b) Restrição de Estabilidade (R.E):
0)( �T
ii XAXA + .
c) Restrição na Condição Inicial (R.C.I):
0)0(
)0(1�
⎥⎥⎦
⎤
⎢⎢⎣
⎡Xx
x
j
Tj .
d) Restrição na Amplitude do Sinal de Saída (R.A.S):
0)0(
)0(1�
⎥⎥⎦
⎤
⎢⎢⎣
⎡Xx
x
j
Tj e 0
20
�⎥⎦
⎤⎢⎣
⎡ICX
XCX T
ξ.
2.3.2 Critério de Estabilidade Projetiva
a) Restrição de Positividade das matrizes Xi ou Xij (R.P.Xi ou R.P.Xij):
0�iX ou 0�jiX .
b) Restrição de Estabilidade com Xi ou Xij (R.E):
0
0
0
)(
�
⎥⎥⎥
⎦
⎤
⎢⎢⎢
⎣
⎡
−−+
++−
i
iii
Ti
Ti
TT
XW
XXWA
WXAWWW
ou 0
0
0
)(
�
⎥⎥⎥
⎦
⎤
⎢⎢⎢
⎣
⎡
−−+
++−
ji
jijii
Tji
Ti
TT
XW
XXWA
WXAWWW
.
c) Restrição na Condição Inicial com Xi ou Xij (R.C.I):
0)0(
)0(1�
⎥⎥⎦
⎤
⎢⎢⎣
⎡
ij
Tj
Xx
x ou .0
)0(
)0(1�
⎥⎥⎦
⎤
⎢⎢⎣
⎡
jij
Tj
Xx
x
d) Restrição na Amplitude do Sinal de Saída com Xi ou Xij (R.A.S):
( 0)0(
)0(1�
⎥⎥⎦
⎤
⎢⎢⎣
⎡
ij
Tj
Xx
x ou 0
)0(
)0(1�
⎥⎥⎦
⎤
⎢⎢⎣
⎡
jij
Tj
Xx
x) e

23
( 00
�⎥⎦
⎤⎢⎣
⎡ICX
CXX
i
Tii
μ ou 0
0
�⎥⎥⎦
⎤
⎢⎢⎣
⎡ICX
CXX
ji
Tjiji
μ).
2.4 RESULTADOS
Considere o sistema autônomo não realimentado:
).()(
),()()(
txCty
txAtx
==
•α
(2.68)
O primeiro passo na análise dos resultados será comparar, em ambos os critérios,
as regiões factíveis obtidas pelo uso apenas das restrições de estabilidade e positividade da
matriz X. O próximo passo será acrescentar a restrição na condição inicial e verificar qual é a
sua influência na região factível. E, finalmente, comparar os resultados da amplitude máxima
do sinal de saída 0ξ , obtidos pela minimização de 200 ξμ = na restrição de saída.
Os resultados das seções seguintes são baseados no Exemplo 2.1 e no Quadro 2.1.
As restrições assinaladas com ‘x’ são as restrições utilizadas nas rotinas de cálculos e os
resultados mostrados nas figuras indicadas no Quadro 2.1 e em suas respectivas seções.
Quadro 2.1: Composição das restrições para análise de estabilidade utilizadas no C.E.Q e C.E.P.
R.P.X R.E R.C.I R.A.S Tabela Figura R.P. Xi R.P.Xij R.E R.C.I R.A.S Tabela Figura
2.4.1 x x 2.4 x x 2.42.5 x x x 2.52.6 x x x 2.6
2.1 2.7 x x x x 2.2 2.72.4 2.8 x x x x 2.5 2.8
x2.4.3 x x x
SeçãoCritério de Estabilidade Quadrática Critério de Estabilidade Projetiva
2.4.2 x x x
Para facilitar o entendimento do Quadro 2.1, tome como exemplo, a interseção da
primeira coluna, identificada com o nome “Seção”, e a quarta linha. Tal interseção identifica a
Seção 2.4.3 no quadro. Para o Critério de Estabilidade Quadrática, segunda coluna do quadro,
são relacionadas, nas sub-colunas, as restrições de positividade da matriz X ( R.P.X),

24
estabilidade (R.E), condição inicial (R.C.I) e amplitude do sinal de saída (R.A.S). Portanto, os
resultados obtidos na Seção 2.4.3, com a utilização das restrições assinaladas por “x”, quarta
linha do quadro, são mostrados nas sub-colunas identificadas por Tabela e Figura. A Figura
2.7 e a Figura 2.8 são equivalentes bem como a Tabela 2.1 e a Tabela 2.4. Para o Critério de
Estabilidade Projetiva, terceira coluna do quadro, adiciona-se apenas as restrições de
positividade das matrizes Xi e Xij no lugar da restrição de positividade da matriz X do caso
quadrático.
Exemplo 2.1:
Considere o sistema descrito em variáveis de estado (2.68), cuja planta incerta é
dada em (2.69) e a matriz ganho de saída em (2.70).
.
1
110
011
⎥⎥⎥
⎦
⎤
⎢⎢⎢
⎣
⎡
−−
−=
ba
A
(2.69)
[ ].111=C
(2.70)
Os parâmetros a e b da planta são incertos e definidos no intervalo dado por (2.71)
e (2.72), respectivamente.
.si aaa ≤≤
(2.71)
.si bbb ≤≤
(2.72)
Substituindo em (2.69) as possíveis combinações dos parâmetros a e b, obtém-se
os vértices do politopo A(α) em (2.73). O número de vértices r do politopo é dado pela
relação η2=r , onde η é o número de parâmetros incertos da planta. Note que 2=η e 4=r .
;
1
110
011
1
⎥⎥⎥
⎦
⎤
⎢⎢⎢
⎣
⎡
−−
−=
ss ba
A
;
1
110
011
2
⎥⎥⎥
⎦
⎤
⎢⎢⎢
⎣
⎡
−−
−=
is ba
A
;
1
110
011
3
⎥⎥⎥
⎦
⎤
⎢⎢⎢
⎣
⎡
−−
−=
si ba
A
.
1
110
011
4
⎥⎥⎥
⎦
⎤
⎢⎢⎢
⎣
⎡
−−
−=
ii ba
A
(2.73)

25
A restrição na condição inicial é supostamente arbitrária, porém, sempre
pertencente ao politopo limitado pelos seus vértices. Seja )0(x , dado em (2.74), o vetor
condição inicial com incertezas em cada um de seus estados.
.][)0( Tedcx =
(2.74)
Neste caso, c, d e e são as incertezas relativas aos estados x1, x2 e x3
respectivamente. Supondo, por exemplo, c, d e e variando entre os limites dados pelas
seguintes relações:
,si ccc ≤≤
,si ddd ≤≤
.si eee ≤≤
Portanto, o politopo definido em (2.75), é resultado das combinações dos limites
das incertezas de c, d e e. Para este caso, 3=η e 8=s ( η2=s ).
.][)0(;][)0(;][)0(;][)0(
;][)0(;][)0(;][)0(;][)0(
8765
4321
Tiii
Tsii
Tisi
Tssi
Tiis
Tsis
Tiss
Tsss
edcxedcxedcxedcx
edcxedcxedcxedcx
====
====
(2.75)
Definindo valores arbitrários para cada vértice, tem-se (2.76).
.][)0(;][)0(;][)0(;][)0(
;][)0(;][)0(;][)0(;][
321321321321
321321321321)0(
8765
4321
TTTT
TTTT
xxxx
xxxx
−−−+−−−+−++−
−−++−+−+++++
====
====
(2.76)
Nas figuras das próximas seções, as regiões factíveis para o critério de
estabilidade quadrática são representadas pelo símbolo ‘� ’; e ‘ • ’ para as regiões factíveis do
critério de estabilidade projetiva. Regiões infactíveis não são assinaladas.
Os símbolos marcados nas regiões factíveis representam o centro geométrico dos
vértices do politopo elementar dados pelo incremento de ‘a’ e ‘b’, onde 4,37 ≤≤− a e
36,0 ≤≤− b , em passos de 0.8 e 0.4 respectivamente.

26
O limite de busca por regiões elementares factíveis foi convenientemente
escolhido. Assim sendo, foi possível mostrar, na mesma figura, regiões factíveis e infactíveis
e comparar os diferentes resultados obtidos em ambos os critérios.
Toda programação foi realizada no software MatLab 5.3, através do LMI Control
Toolbox (Gahinet 1995). Pode-se utilizar também o software LMISol (Oliveira 1997).
2.4.1 Restrição de Estabilidade.
Figura 2.4: Comparações entre as áreas factíveis utilizando as restrições de estabilidade quadrática (Ai, X) e projetiva (Ai, Xi).
A Figura 2.4 mostra como a utilização do critério de estabilidade projetiva
proporciona, com a flexibilização da matriz X, um aumento considerável na região factível,
em torno de 23%, em relação a critério de estabilidade quadrática. O cálculo de 23% foi
obtido como base a quantidade de células e não a área, o que proporcionaria o mesmo valor
pois todas as células têm a mesma área.
2.4.2 Restrição de Estabilidade e Condição Inicial.
27
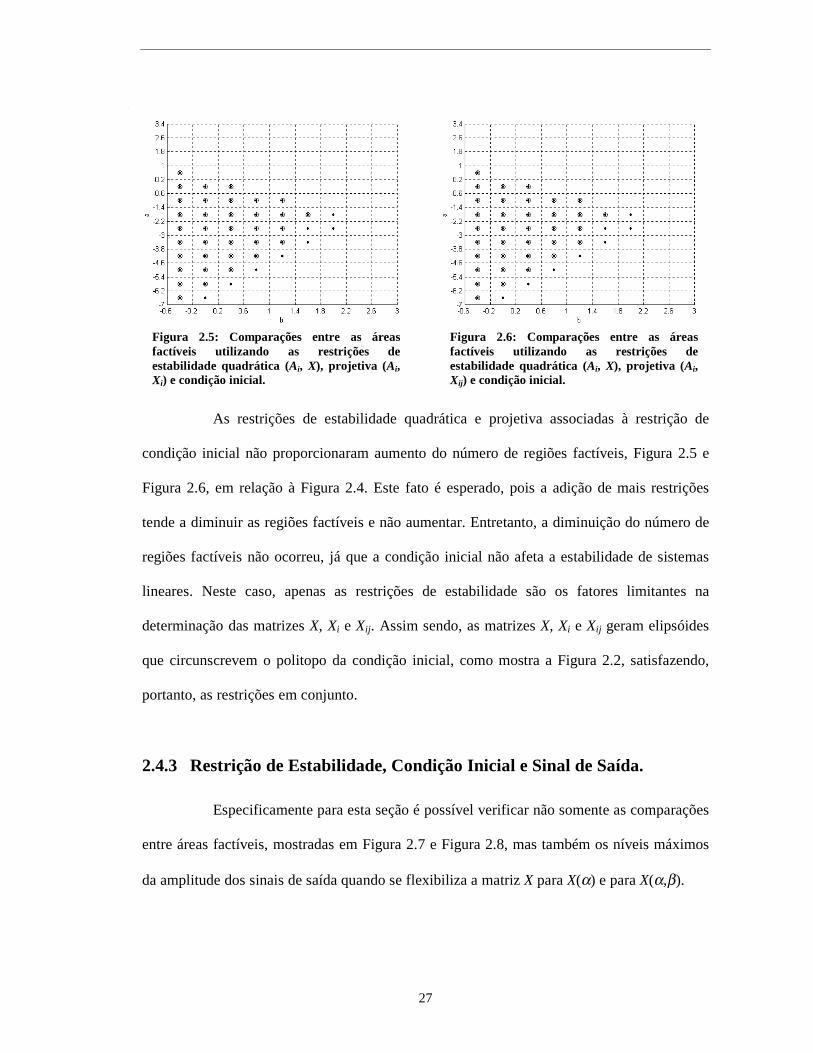
Figura 2.5: Comparações entre as áreas factíveis utilizando as restrições de estabilidade quadrática (Ai, X), projetiva (Ai, Xi) e condição inicial.
Figura 2.6: Comparações entre as áreas factíveis utilizando as restrições de estabilidade quadrática (Ai, X), projetiva (Ai, Xij) e condição inicial.
As restrições de estabilidade quadrática e projetiva associadas à restrição de
condição inicial não proporcionaram aumento do número de regiões factíveis, Figura 2.5 e
Figura 2.6, em relação à Figura 2.4. Este fato é esperado, pois a adição de mais restrições
tende a diminuir as regiões factíveis e não aumentar. Entretanto, a diminuição do número de
regiões factíveis não ocorreu, já que a condição inicial não afeta a estabilidade de sistemas
lineares. Neste caso, apenas as restrições de estabilidade são os fatores limitantes na
determinação das matrizes X, Xi e Xij. Assim sendo, as matrizes X, Xi e Xij geram elipsóides
que circunscrevem o politopo da condição inicial, como mostra a Figura 2.2, satisfazendo,
portanto, as restrições em conjunto.
2.4.3 Restrição de Estabilidade, Condição Inicial e Sinal de Saída.
Especificamente para esta seção é possível verificar não somente as comparações
entre áreas factíveis, mostradas em Figura 2.7 e Figura 2.8, mas também os níveis máximos
da amplitude dos sinais de saída quando se flexibiliza a matriz X para X(α) e para X(α,β).

28
Figura 2.7: Comparações entre as áreas factíveis utilizando as restrições de estabilidade quadrática (Ai, X), projetiva (Ai, Xi), condição inicial e otimização de ξ0.
Figura 2.8: Comparações entre as áreas factíveis utilizando as restrições de estabilidade quadrática (Ai, X), projetiva (Ai, Xij), condição inicial e otimização de ξ0.
Os resultados nas Tabela 2.1 e Tabela 2.2 representam os valores ótimos de 0ξ em
cada região factível elementar da Figura 2.7. A Tabela 2.3 mostra as diferenças percentuais,
nas regiões factíveis possíveis, entre 0ξ do critério de estabilidade projetiva (C.E.P) e 0ξ do
critério de estabilidade quadrática (C.E.Q) usando-se o C.E.Q como referência.
Sejam, por exemplo, 9642,90 =ξ , dado na Tabela 2.1, e 7776,90 =ξ , dado na
Tabela 2.2, os valores destacados em negrito correspondendo às mesmas células elementares
para os diferentes critérios. O valor percentual de –1,8727 em negrito, Tabela 2.3, é dado por
((9,7776 – 9,9642) / 9,9642)*100.
Os resultados de 0ξ na Tabela 2.4 e na Tabela 2.5 foram calculados nas regiões
elementares da Figura 2.8 e a Tabela 2.6, mostra as diferenças percentuais entre elas. Valores
negativos na Tabela 2.3 e na Tabela 2.6 indicam níveis de saída mais favoráveis para o
critério de estabilidade projetiva.

29
6,0000
6,0000 6,0000 6,2174
6,0000 6,0000 6,0000 6,4978 9,5620
6,0000 6,0000 6,0000 6,1251 7,4288 9,9642
6,0000 6,0000 6,0000 6,0961 7,0600
6,0236 6,0155 6,0097 6,1743 7,1043
6,1484 6,1341 6,1247 6,4260
6,3388 6,3276 6,3307
6,5715 6,5756
6,8422
6,0000
6,0000 6,0000 6,2119
6,0000 6,0000 6,0000 6,4898 9,5620
6,0000 6,0000 6,0000 6,0700 7,4005 9,7776 16,18346,0000 6,0000 6,0000 6,0337 6,9609 8,3563 10,57016,0230 6,0144 6,0077 6,1041 6,8286 7,88176,1445 6,1265 6,1105 6,2046 6,93026,3266 6,3062 6,2911 6,53496,5446 6,5289 6,53416,7892 6,7957
Tabela 2.1: Valores máximos de ξ0 para o C.E.Q com as matrizes Ai e X.
Tabela 2.2: Valores máximos de ξ0 para o C.E.P com as matrizes Ai e Xi.
0,0000
0,0000 0,0000 -0,0885
0,0000 0,0000 0,0000 -0,1231 0,0000
0,0000 0,0000 0,0000 -0,8996 -0,3809 -1,8727
0,0000 0,0000 0,0000 -1,0236 -1,4037
-0,0100 -0,0183 -0,0333 -1,1370 -3,8807
-0,0634 -0,1239 -0,2318 -3,4454
-0,1925 -0,3382 -0,6255
-0,4093 -0,7102
-0,7746
Tabela 2.3: Diferenças percentuais entre os valores de ξ0 dados na Tabela 2.2 (C.E.P com Ai e Xi) e na Tabela 2.1 (C.E.Q com Ai e X).
6,0000
6,0000 6,0000 6,2174
6,0000 6,0000 6,0000 6,4978 9,5620
6,0000 6,0000 6,0000 6,1251 7,4288 9,9642
6,0000 6,0000 6,0000 6,0961 7,0600
6,0236 6,0155 6,0097 6,1743 7,1043
6,1484 6,1341 6,1247 6,4260
6,3388 6,3276 6,3307
6,5715 6,5756
6,8422
6,0000
6,0000 6,0000 6,1922
6,0000 6,0000 6,0000 6,4898 9,5620
6,0000 6,0000 6,0000 6,0698 7,4005 9,7776 16,18346,0000 6,0000 6,0000 6,0308 6,9609 8,3563 10,57016,0230 6,0144 6,0077 6,1041 6,8282 7,88176,1445 6,1265 6,1096 6,2020 6,92886,3264 6,3046 6,2839 6,53336,5421 6,5193 6,50046,7772 6,7617
Tabela 2.4: Valores máximos de ξ0 para C.E.Q com as matrizes Ai e X.
Tabela 2.5: Valores máximos de ξ0 para o C.E.P com as matrizes Ai e Xij.
30
0,0000
0,0000 0,0000 -0,4053
0,0000 0,0000 0,0000 -0,1231 0,0000
0,0000 0,0000 0,0000 -0,9028 -0,3809 -1,8727
0,0000 0,0000 0,0000 -1,0712 -1,4037
-0,0100 -0,0183 -0,0333 -1,1370 -3,8864
-0,0634 -0,1239 -0,2465 -3,4858
-0,1956 -0,3635 -0,7393
-0,4474 -0,8562
-0,9500
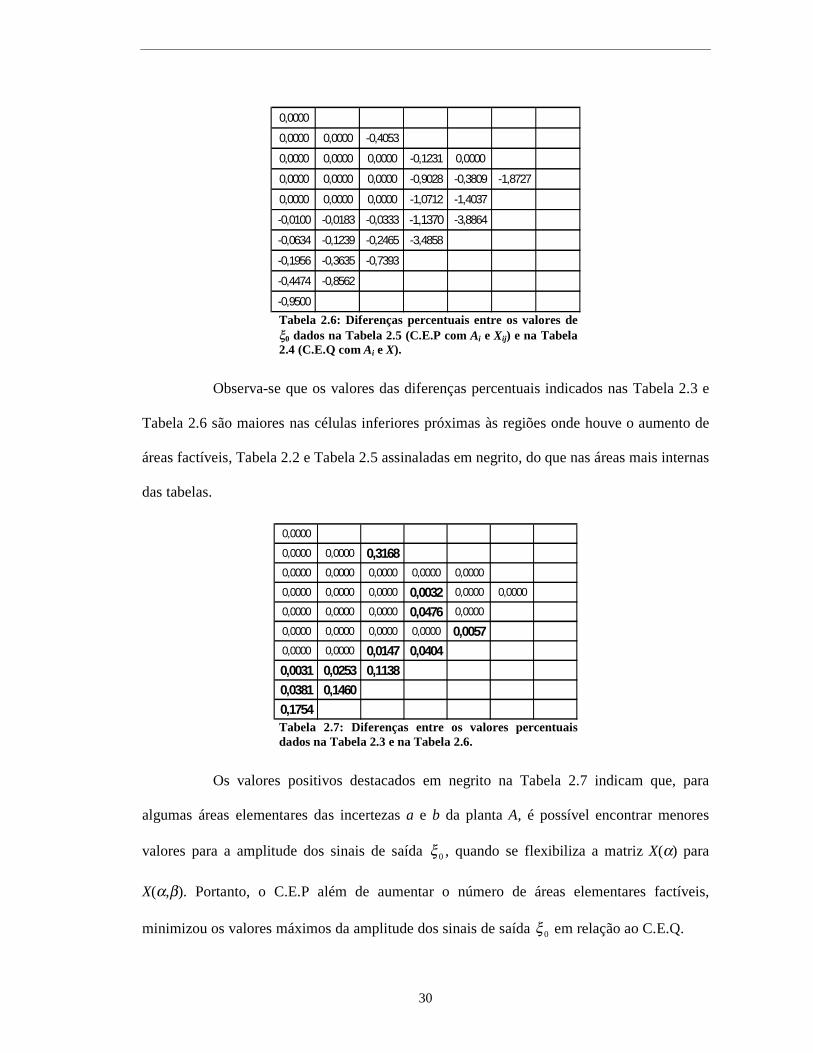
Tabela 2.6: Diferenças percentuais entre os valores de ξ0 dados na Tabela 2.5 (C.E.P com Ai e Xij) e na Tabela 2.4 (C.E.Q com Ai e X).
Observa-se que os valores das diferenças percentuais indicados nas Tabela 2.3 e
Tabela 2.6 são maiores nas células inferiores próximas às regiões onde houve o aumento de
áreas factíveis, Tabela 2.2 e Tabela 2.5 assinaladas em negrito, do que nas áreas mais internas
das tabelas.
0,0000
0,0000 0,0000 0,31680,0000 0,0000 0,0000 0,0000 0,0000
0,0000 0,0000 0,0000 0,0032 0,0000 0,0000
0,0000 0,0000 0,0000 0,0476 0,0000
0,0000 0,0000 0,0000 0,0000 0,00570,0000 0,0000 0,0147 0,04040,0031 0,0253 0,11380,0381 0,14600,1754 Tabela 2.7: Diferenças entre os valores percentuais dados na Tabela 2.3 e na Tabela 2.6.
Os valores positivos destacados em negrito na Tabela 2.7 indicam que, para
algumas áreas elementares das incertezas a e b da planta A, é possível encontrar menores
valores para a amplitude dos sinais de saída 0ξ , quando se flexibiliza a matriz X(α) para
X(α,β). Portanto, o C.E.P além de aumentar o número de áreas elementares factíveis,
minimizou os valores máximos da amplitude dos sinais de saída 0ξ em relação ao C.E.Q.

31
Capítulo 3
3 PROJETO: CONTROLADOR K; ÚNICO
Dado um sistema linear invariante no tempo em malha fechada, Diagrama 3.1,
cujas equações de estados são dadas em (3.1) e (3.2). Sejam também, ntx ℜ∈)( , nxnA ℜ∈)(α ,
nB ℜ∈ , nC ℜ∈ e ℜ∈)(tu .
Diagrama 3.1: Diagrama de blocos em malha fechada de um sistema linear invariante no tempo.
).()()()( tButxAtx +=•
α
(3.1)
).()( tCxty =
(3.2)
Seja a entrada )(tu , definida em (3.3) pelo laço de realimentação de estados
mostrado no Diagrama 3.1.
).()( tKxtu −=
(3.3)
Substituindo em (3.1) a relação (3.3), obtém-se a relação (3.4).
).())(()( txBKAtx −=•
α
(3.4)
As seções seguintes mostrarão a robustez dos critérios de estabilidade quadrática
(Boyd et al., 1994) e projetiva (Apkarian et al., 2001) e as LMIs necessárias para a obtenção
dos resultados em sistemas lineares incertos em malha fechada.

32
3.1 CRITÉRIO DE ESTABILIDADE QUADRÁTICA
Todas as restrições discutidas na Seção 2.1 serão tratadas nesta seção objetivando
a formulação e a composição do problema de realimentação dos estados utilizando LMIs e a
possibilidade, também, de minimizar a máxima amplitude do sinal de saída 0ξ do sistema
descrito por LMIs e sujeito às restrições de estabilidade e condição inicial.
3.1.1 Restrição de Estabilidade
Considere A uma nova planta dada pela equação matricial (3.5). Substituindo
(3.5) em (3.4) obtém-se a equação de estado (3.6) semelhante à equação de estado do sistema
autônomo em (2.1).
).)(( BKAA −= α
(3.5)
).()( txAtx =•
(3.6)
Substituindo agora )(αA pela i
r
ii A∑
=1
α em (3.5), obtém-se A em (3.7).
.1
BKAA i
r
ii −= ∑
=α
(3.7)
Como 11
=∑=
r
iiα , chega-se, utilizando-se a equação (3.7), à equação (3.8).
.11
BKAAr
iii
r
ii ∑∑
==
−= αα
(3.8)
Simplificando a equação (3.8), obtém-se )(αA em (3.9), onde BKAA ii −= .
).()(1
BKAA i
r
ii −= ∑
=
αα
(3.9)
Se o segundo método de estabilidade de Lyapunov for satisfeito para uma função
candidata quadrática, ou seja, se as desigualdades (2.4) e (2.5) forem verdadeiras, então, assim

33
como em (2.7), existirá uma nxnP ℜ∈ simétrica, positiva definida e que atenda a desigualdade
(3.10), quando a planta for )(αA .
.0)()( �αα APPA T +
(3.10)
De acordo com o Lema 2.1, obtém-se a desigualdade (3.11) em X ( PX =−1 ).
.0)()( �XAAX T αα +
(3.11)
Substituindo (3.9) em (3.11) e fazendo o produto não-linear de variáveis KX
igual a F ( FKX = ) linear, tem-se a desigualdade (3.12) pelos passos a seguir:
,0)]([)]([11
�XBKABKAX i
r
ii
Ti
r
ii −+− ∑∑
==
αα
,0)()(11
�XBKABKAX i
r
ii
TTTi
r
ii −+− ∑∑
==αα
,0])()([1
�XBKABKAX iTTT
i
r
ii −+−∑
=
α
,0)]([1
�BKXBXKXAXA TTi
Ti
r
ii +−+∑
=α
.0)]([1
�TTT
ii
r
ii BFBFXAXA +−+∑
=
α
(3.12)
A condição suficiente para solução de desigualdade (3.12) é que exista uma matriz
X positiva definida e uma matriz nF ℜ∈ , tais que, todas as desigualdades matriciais lineares
(LMIs) em (3.13) sejam satisfeitas simultaneamente ( iα positivos ou nulos).
.0)(
,0)(
,0)(11
�
�
�
�
�
TTTrr
TTTii
TTT
BFBFXAXA
BFBFXAXA
BFBFXAXA
+−+
+−+
+−+
(3.13)
Entretanto, a condição necessária para solução de (3.12) nos vértices do politopo,
nos quais iAA =)(α com 1=iα e 0=kα para ik ≠ , é que a desigualdade (3.14) seja

34
verdadeira para X e F incógnita do problema e os índices i e k variando de 1 a r. Neste caso,
(3.14) é a LMI de estabilidade quadrática e o controlador K é calculado pela relação (3.15).
.0)( �TTT
ii BFBFXAXA +−+
(3.14)
.1−= FXK
(3.15)
Observando as Seções 2.1.2 e 2.1.3, nota-se que as LMIs que definem a restrição
na condição inicial e na amplitude do sinal de saída não dependem diretamente da derivada
dos estados )(tx•
, mas apenas dos estados )(tx do sistema, então o laço de realimentação dos
estados do Diagrama 3.1 não interfere nestas LMIs. Portanto, as LMIs das Seções 3.1.2 e
3.1.3 são, respectivamente, as mesmas das mostradas nas Seções 2.1.2 e 2.1.3.
3.1.2 Restrição na Condição Inicial
.0)0(
)0(1�
⎥⎥⎦
⎤
⎢⎢⎣
⎡Xx
x
j
Tj
(3.16)
3.1.3 Restrição na Amplitude do Sinal de Saída
e0)0(
)0(1�
⎥⎥⎦
⎤
⎢⎢⎣
⎡Xx
x
j
Tj .0
0
�⎥⎦
⎤⎢⎣
⎡ICX
XCX T
μ
(3.17)
3.2 CRITÉRIO DE ESTABILIDADE PROJETIVA
Assim como no critério de estabilidade quadrática, no critério de estabilidade
projetiva só a LMI da restrição de estabilidade será modificada pela realimentação dos
estados, as demais restrições apresentadas nas Seções 3.2.2 e 3.2.3 são as mesmas das Seções
2.2.2 e 2.2.3 e não dependem da derivada dos estados.

35
3.2.1 Restrição de Estabilidade
Seja a matriz de estabilidade projetiva para sistemas autônomos, (2.45),
reproduzida em (3.18).
.0
0
0
)(
�
⎥⎥⎥
⎦
⎤
⎢⎢⎢
⎣
⎡
−−+
++−
XW
XXAW
WXAWWW TTTT
(3.18)
Substituindo (3.5) em (3.18), obtém-se a LMI (3.20) fazendo RKW = em (3.19).
,0
0
0)(
)()(
�
⎥⎥⎥
⎦
⎤
⎢⎢⎢
⎣
⎡
−−+−
+−+−
XW
XXWBKA
WXBKAWWW TTTT
.0
0
0
)(
�
⎥⎥⎥
⎦
⎤
⎢⎢⎢
⎣
⎡
−−+−
+−+−
XW
XXBKWAW
WXBKWAWWW TTTTTTT
(3.19)
.0
0
0
)(
�
⎥⎥⎥
⎦
⎤
⎢⎢⎢
⎣
⎡
−−−+
−++−
XW
XBRXAW
WBRXAWWW TTTTTT
(3.20)
Para o caso da matriz X depender somente das incertezas da matriz A, )(αXX = ,
tem-se a LMI (3.21).
.0
0
0
)(
�
⎥⎥⎥
⎦
⎤
⎢⎢⎢
⎣
⎡
−−−+
−++−
i
iii
TTTi
Ti
TT
XW
XBRXWA
WBRXAWWW
(3.21)
Entretanto, se ),( βαXX = , onde β significa que a matriz X depende também das
incertezas da condição inicial, então a LMI para este caso é a descrita em (3.22).
.0
0
0
)(
�
⎥⎥⎥
⎦
⎤
⎢⎢⎢
⎣
⎡
−−−+
−++−
ji
jijii
TTTji
Ti
TT
XW
XBRXWA
WBRXAWWW
(3.22)

36
Obviamente, se a matriz B, ganho de entrada, depender das incertezas de A, as
LMIs (3.21) e (3.22), fazendo ∑=
==r
iii BBB
1
)( αα , serão as LMIs indicadas em (3.23) e
(3.24), respectivamente. Para efeito comparativo entre os critérios, a matriz B será
determinística e não dependerá, neste trabalho, das incertezas da planta A do sistema.
.0
0
0
)(
�
⎥⎥⎥
⎦
⎤
⎢⎢⎢
⎣
⎡
−−−+
−++−
i
iiii
TTi
Ti
Ti
TT
XW
XRBXWA
WBRXAWWW
(3.23)
.0
0
0
)(
�
⎥⎥⎥
⎦
⎤
⎢⎢⎢
⎣
⎡
−−−+
−++−
ji
jiijii
TTi
Tji
Ti
TT
XW
XRBXWA
WBRXAWWW
(3.24)
Note que se a restrição de estabilidade quadrática para sistema com realimentação
de estados, dada pela LMI (3.14), for factível para X e F incógnita do problema, então as LMI
(3.21) e (3.22), representando as restrições de estabilidade projetiva, também serão pois, basta
tomar XW = , XX i = ou XX ij = e multiplicá-las pelas matrizes [ ]III à esquerda e
[ ]TIII à direita. Este procedimento é mostrado na equação (3.25) substituindo KWR =
por KXF = ( XW = ).
[ ] .0
0
0
)(
�
⎥⎥⎥
⎦
⎤
⎢⎢⎢
⎣
⎡
⎥⎥⎥
⎦
⎤
⎢⎢⎢
⎣
⎡
−−−+
−++−
I
I
I
XX
XBFXXA
XBFXAXXX
III i
TTTTi
TT
(3.25)
Multiplicações os blocos de matrizes da desigualdade matricial (3.25), obtém-se o
seguinte resultado:
.0)()())(( �IXXIIXBFXAXIIXBFXXAXXI TTTTi
Ti
T −+−−+++−+++−
(3.26)
Simplificando (3.26), chega-se à restrição de estabilidade quadrática (3.27)
idêntica à dada pela equação (3.14).

37
.0)( �TTT
ii BFBFXAXA +−+
(3.27)
Ainda, se a LMI (3.21) for factível, a LMI (3.22) também será, bastando tomar
iij XX = .
3.2.2 Restrição na Condição Inicial
.0)0(
)0(1�
⎥⎥⎦
⎤
⎢⎢⎣
⎡
ij
Tj
Xx
x
(3.28)
.0)0(
)0(1�
⎥⎥⎦
⎤
⎢⎢⎣
⎡
jij
Tj
Xx
x
(3.29)
3.2.3 Restrição na Amplitude do Sinal de Saída
e0)0(
)0(1�
⎥⎥⎦
⎤
⎢⎢⎣
⎡
ij
Tj
Xx
x.0
0
�⎥⎦
⎤⎢⎣
⎡ICX
CXX
i
Tii
μ
(3.30)
e0)0(
)0(1�
⎥⎥⎦
⎤
⎢⎢⎣
⎡
jij
Tj
Xx
x.0
0
�⎥⎥⎦
⎤
⎢⎢⎣
⎡ICX
CXX
ji
Tjiji
μ
(3.31)
3.3 COMPOSIÇÃO COMPLETA DOS CRITÉRIOS
Nesta seção, são reunidas todas as restrições desenvolvidas na seção anterior e o
Quadro 3.1 e Quadro 3.2 mostram as diferentes composições das LMIs para as simulações
realizadas.
3.3.1 Critério de Estabilidade Quadrática
a) Restrição de Positividade da matriz X (R.P.X):
0�X .
b) Restrição de Estabilidade (R.E):

38
0)( �TTT
ii BFBFXAXA +−+ .
c) Restrição na Condição Inicial (R.C.I):
0)0(
)0(1�
⎥⎥⎦
⎤
⎢⎢⎣
⎡Xx
x
j
Tj .
d) Restrição na Amplitude do Sinal de Saída (R.A.S):
0)0(
)0(1�
⎥⎥⎦
⎤
⎢⎢⎣
⎡Xx
x
j
Tj e 0
20
�⎥⎦
⎤⎢⎣
⎡ICX
XCX T
ξ.
3.3.2 Critério de Estabilidade Projetiva
a) Restrição de Positividade das matrizes Xi ou Xij (R.P. Xi ou R.P. Xij):
0�iX ou 0�jiX .
b) Restrição de Estabilidade para Xi ou Xij (R.E):
0
0
0
)(
�
⎥⎥⎥
⎦
⎤
⎢⎢⎢
⎣
⎡
−−−+
−++−
i
iii
TTTi
Ti
TT
XW
XBRXWA
WBRXAWWW
ou
0
0
0
)(
�
⎥⎥⎥
⎦
⎤
⎢⎢⎢
⎣
⎡
−−−+
−++−
ji
jiijii
TTi
Tji
Ti
TT
XW
XRBXWA
WBRXAWWW
.
c) Restrição na Condição Inicial para Xi ou Xij (R.C.I):
0)0(
)0(1�
⎥⎥⎦
⎤
⎢⎢⎣
⎡
ij
Tj
Xx
x ou 0
)0(
)0(1�
⎥⎥⎦
⎤
⎢⎢⎣
⎡
jij
Tj
Xx
x.
d) Restrição na Amplitude do Sinal de Saída para Xi ou Xij (R.A.S):
( 0)0(
)0(1�
⎥⎥⎦
⎤
⎢⎢⎣
⎡
ij
Tj
Xx
x ou 0
)0(
)0(1�
⎥⎥⎦
⎤
⎢⎢⎣
⎡
jij
Tj
Xx
x) e
( 00
�⎥⎦
⎤⎢⎣
⎡ICX
CXX
i
Tii
μ ou 0
0
�⎥⎥⎦
⎤
⎢⎢⎣
⎡ICX
CXX
ji
Tjiji
μ).

39
3.4 RESULTADOS
Os resultados de 0ξ apresentados nas tabelas desta seção são baseados no
Exemplo 2.1 da Seção 2.4 e no Diagrama 3.1. Note que cada valor individual de 0ξ das
tabelas corresponde a uma região elementar factível, da mesma forma que os valores de 0ξ da
Tabela 2.1 e da Tabela 2.2 correspondem às regiões elementares factíveis da Figura 2.7. Os
resultados da Tabela 3.1, Tabela 3.2 e Tabela 3.3 mostram a otimização dos valores da
amplitude dos sinais de saída 0ξ , sujeitos a todas as restrições assinaladas no Quadro 3.1 e
Quadro 3.2.
Quadro 3.1: Composição das restrições e síntese do controlador K para a análise de estabilidade e otimização de ξ0 no C.E.Q.
R.P.X R.E R.C.I R.A.S K Tabelax x x x x 3.1
Critério de Estabilidade Quadrática
6,0000 6,0000 6,0000 6,0000 6,0000 6,0000 6,0000 6,0000 6,00006,0000 6,0000 6,0000 6,0000 6,0000 6,0000 6,0000 6,0000 6,00006,0000 6,0000 6,0000 6,0000 6,0000 6,0000 6,0000 6,0000 6,00006,0000 6,0000 6,0000 6,0000 6,0000 6,0000 6,0000 6,0000 6,00006,0000 6,0000 6,0000 6,0000 6,0000 6,0000 6,0000 6,0000 6,00006,0000 6,0000 6,0000 6,0000 6,0000 6,0000 6,0000 6,0000 6,00006,0000 6,0000 6,0000 6,0000 6,0000 6,0000 6,0000 6,00006,0000 6,0000 6,0000 6,0000 6,0001 6,0244 6,1389 6,6185 10,00016,0000 6,0000 6,0020 6,0221 6,0762 6,1979 6,4838 7,3694 10,00006,0016 6,0151 6,0472 6,1080 6,2178 6,4222 6,8497 8,0105 10,00006,0292 6,0659 6,1262 6,2231 6,3816 6,6580 7,2076 8,4081 10,00006,0793 6,1367 6,2222 6,3513 6,5535 6,8941 7,5521 8,6696 10,00006,1426 6,2187 6,3272 6,4856 6,7276 7,1266 7,8646 8,8552 10,0000
Tabela 3.1: Valores ótimos de ξ0 para o C.E.Q usando as matrizes Ai, X e K.
Quadro 3.2: Composição das restrições e síntese do controlador K para a análise de estabilidade e otimização de ξ0 no C.E.P.
R.P. Xi R.P.Xij R.E R.C.I R.A.S K Tabela
x x x x x 3.2x x x x x 3.3
Critério de Estabilidade Projetiva

40
6,0000 6,0000 6,0000 6,0000 6,0000 6,0000 6,0000 6,0000 6,00006,0000 6,0000 6,0000 6,0000 6,0000 6,0000 6,0000 6,0000 6,00006,0000 6,0000 6,0000 6,0000 6,0000 6,0000 6,0000 6,0000 6,00006,0000 6,0000 6,0000 6,0000 6,0000 6,0000 6,0000 6,0000 6,00006,0000 6,0000 6,0000 6,0000 6,0000 6,0000 6,0000 6,0000 6,00006,0000 6,0000 6,0000 6,0000 6,0000 6,0000 6,0000 6,0000 6,00006,0000 6,0000 6,0000 6,0000 6,0000 6,0000 6,0000 6,00006,0000 6,0000 6,0000 6,0000 6,0001 6,0241 6,1382 6,6173 10,00006,0000 6,0000 6,0020 6,0219 6,0759 6,1973 6,4830 7,3688 10,00006,0016 6,0150 6,0470 6,1078 6,2174 6,4217 6,8490 8,0105 10,00006,0292 6,0658 6,1261 6,2228 6,3813 6,6575 7,2072 8,4081 10,00006,0792 6,1366 6,2220 6,3510 6,5532 6,8937 7,5519 8,6696 10,00006,1425 6,2186 6,3270 6,4854 6,7273 7,1263 7,8646 8,8552 10,0000
Tabela 3.2: Valores ótimos de ξ0 para o C.E.P usando as matrizes Ai, Xi e K.
6,0000 6,0000 6,0000 6,0000 6,0000 6,0000 6,0000 6,0000 6,00006,0000 6,0000 6,0000 6,0000 6,0000 6,0000 6,0000 6,0000 6,00006,0000 6,0000 6,0000 6,0000 6,0000 6,0000 6,0000 6,0000 6,00006,0000 6,0000 6,0000 6,0000 6,0000 6,0000 6,0000 6,0000 6,00006,0000 6,0000 6,0000 6,0000 6,0000 6,0000 6,0000 6,0000 6,00006,0000 6,0000 6,0000 6,0000 6,0000 6,0000 6,0000 6,0000 6,00006,0000 6,0000 6,0000 6,0000 6,0000 6,0000 6,0000 6,00006,0000 6,0000 6,0000 6,0000 6,0000 6,0000 6,0000 6,3566 10,00006,0000 6,0000 6,0000 6,0000 6,0000 6,0000 6,1313 7,3295 10,00006,0000 6,0000 6,0000 6,0000 6,0000 6,0453 6,5658 8,0105 10,00006,0000 6,0000 6,0000 6,0000 6,0100 6,2805 7,1144 8,4081 10,00006,0000 6,0000 6,0000 6,0001 6,1435 6,6175 7,5478 8,6696 10,00006,0000 6,0000 6,0000 6,0715 6,3636 6,9982 7,8646 8,8552 10,0000
Tabela 3.3: Valores ótimos de ξ0 para o C.E.P usando as matrizes Ai, Xij e K.
Observando as tabelas anteriores, nota-se que houve um aumento significativo no
número de regiões factíveis em relação à Seção 2.4.3, com a realimentação de estados através
do controlador K. Estas regiões são as mesmas para ambos os critérios, mesmo com a
flexibilização da matriz X para X(α) e X(α,β) no caso projetivo. A Tabela 3.2 e a Tabela 3.3
mostram a redução do valor ótimo de 0ξ , em relação à Tabela 3.1, podendo chegar ao valor
de 6,38%, Tabela 3.5. Já a Tabela 3.4 e a Tabela 3.5 mostram, em negrito, as diferenças
percentuais entre o critério de estabilidade projetiva (C.E.P) e o critério de estabilidade
quadrática (C.E.Q), usando-se o C.E.Q como referência. Note que o uso das matrizes Xij,
Tabela 3.3, fazem os níveis de saída serem mais favoráveis e dependentes, em um número
maior de áreas elementares, apenas da maior norma do vetor condição inicial, ou seja, para o
Exemplo 2.1, o valor da saída, )0()( Cxty = , é igual ao valor numérico 6,0000 em uma região

41
maior da Tabela 3.3 do que na Tabela 3.1 e na Tabela 3.2. Isto indica que, ao longo do tempo,
os valores máximos da amplitude dos sinais de saída do sistema, para cada célula, não
superam os valores indicados nas tabelas. Esta constatação será verificada na Seção 4.6.2,
Figura 4.1 à Figura 4.32, através de simulações no tempo.
0,0000 0,0000 0,0000 0,0000 0,0000 0,0000 0,0000 0,0000 0,00000,0000 0,0000 0,0000 0,0000 0,0000 0,0000 0,0000 0,0000 0,00000,0000 0,0000 0,0000 0,0000 0,0000 0,0000 0,0000 0,0000 0,00000,0000 0,0000 0,0000 0,0000 0,0000 0,0000 0,0000 0,0000 0,00000,0000 0,0000 0,0000 0,0000 0,0000 0,0000 0,0000 0,0000 0,00000,0000 0,0000 0,0000 0,0000 0,0000 0,0000 0,0000 0,0000 0,00000,0000 0,0000 0,0000 0,0000 0,0000 0,0000 0,0000 0,00000,0000 0,0000 0,0000 0,0000 0,0000 -0,0050 -0,0114 -0,0181 -0,00100,0000 0,0000 0,0000 -0,0033 -0,0049 -0,0097 -0,0123 -0,0081 0,0000
0,0000 -0,0017 -0,0033 -0,0033 -0,0064 -0,0078 -0,0102 0,0000 0,00000,0000 -0,0016 -0,0016 -0,0048 -0,0047 -0,0075 -0,0055 0,0000 0,0000
-0,0016 -0,0016 -0,0032 -0,0047 -0,0046 -0,0058 -0,0026 0,0000 0,0000
-0,0016 -0,0016 -0,0032 -0,0031 -0,0045 -0,0042 0,0000 0,0000 0,0000 Tabela 3.4: Diferenças percentuais entre os valores de ξ0 dados na Tabela 3.2 (C.E.P com Ai, Xi e K) e na Tabela 3.1 (C.E.Q com Ai, X e K).
0,0000 0,0000 0,0000 0,0000 0,0000 0,0000 0,0000 0,0000 0,00000,0000 0,0000 0,0000 0,0000 0,0000 0,0000 0,0000 0,0000 0,00000,0000 0,0000 0,0000 0,0000 0,0000 0,0000 0,0000 0,0000 0,00000,0000 0,0000 0,0000 0,0000 0,0000 0,0000 0,0000 0,0000 0,00000,0000 0,0000 0,0000 0,0000 0,0000 0,0000 0,0000 0,0000 0,00000,0000 0,0000 0,0000 0,0000 0,0000 0,0000 0,0000 0,0000 0,00000,0000 0,0000 0,0000 0,0000 0,0000 0,0000 0,0000 0,00000,0000 0,0000 0,0000 0,0000 -0,0017 -0,4050 -2,2626 -3,9571 -0,00100,0000 0,0000 -0,0333 -0,3670 -1,2541 -3,1930 -5,4366 -0,5414 0,0000
-0,0267 -0,2510 -0,7805 -1,7682 -3,5028 -5,8687 -4,1447 0,0000 0,0000
-0,4843 -1,0864 -2,0600 -3,5850 -5,8230 -5,6699 -1,2931 0,0000 0,0000
-1,3044 -2,2276 -3,5711 -5,5296 -6,2562 -4,0121 -0,0569 0,0000 0,0000
-2,3215 -3,5168 -5,1713 -6,3849 -5,4105 -1,8017 0,0000 0,0000 0,0000 Tabela 3.5: Diferenças percentuais entre os valores de ξ0 dados na Tabela 3.3 (C.E.P com Ai, Xij e K) e na Tabela 3.1 (C.E.Q com Ai, X e K).
Os valores projetados para o controlador K no C.E.P são numericamente mais
fáceis de serem implementados, na grande maioria das células, do que quando calculados pelo
C.E.Q. A Tabela 3.6 mostra como os valores das componentes do controlador K,
correspondente à primeira coluna da Tabela 3.2 e Tabela 3.3, são mais favoráveis
numericamente em relação aos valores das componentes do controlador K, correspondente à
primeira coluna da Tabela 3.1.

42
C.E.Q com Ai, X e K C.E.P com Ai, Xi e K C.E.P com Ai, Xij e K
K(1) K(2) K(3) K(1) K(2) K(3) K(1) K(2) K(3)
2,63 x 10 3 4,73 x 10
2 2,71 x 10 2 6,62 x 10
0 2,49 x 10 0 1,47 x 10
-1 6,62 x 10 0 2,49 x 10
0 1,47 x 10 -1
4,49 x 10 1 1,07 x 10
1 5,17 x 10 0 6,15 x 10
0 2,55 x 10 0 2,60 x 10
-1 6,15 x 10 0 2,55 x 10
0 2,60 x 10 -1
8,51 x 10 3 2,31 x 10
3 1,31 x 10 3 5,52 x 10
0 2,58 x 10 0 3,86 x 10
-1 5,52 x 10 0 2,58 x 10
0 3,86 x 10 -1
1,30 x 10 5 4,34 x 10
4 2,58 x 10 4 5,02 x 10
0 2,68 x 10 0 5,92 x 10
-1 5,02 x 10 0 2,68 x 10
0 5,92 x 10 -1
3,61 x 10 5 1,49 x 10
5 9,67 x 10 4 2,10 x 10
0 1,56 x 10 0 2,98 x 10
-1 2,10 x 10 0 1,56 x 10
0 2,98 x 10 -1
1,90 x 10 6 9,87 x 10
5 7,29 x 10 5 6,60 x 10
-1 9,41 x 10 -1 3,53 x 10
-1 6,60 x 10 -1 9,41 x 10
-1 3,53 x 10 -1
2,47 x 10 5 1,64 x 10
5 1,46 x 10 5 -3,51x 10
-1 3,56 x 10 -1 3,61 x 10
-1 -3,51x 10 -1 3,56 x 10
-1 3,61 x 10 -1
1,93 x 10 2 4,66 x 10
2 5,82 x 10 2 -2,98 x 10
-1 2,22 x 10 -1 3,38 x 10
-1 -2,98 x 10 -1 2,22 x 10
-1 3,38 x 10 -1
4,07 x 10 2 1,08 x 10
3 1,38 x 10 3 -3,96 x 10
-2 2,18 x 10 -1 3,38 x 10
-1 -3,96 x 10 -2 2,18 x 10
-1 3,38 x 10 -1
6,18 x 10 3 5,69 x 10
3 6,65 x 10 3 2,20 x 10
-1 2,13 x 10 -1 3,36 x 10
-1 2,20 x 10 -1 2,13 x 10
-1 3,36 x 10 -1
1,27 x 10 3 4,03 x 10
2 8,22 x 10 2 4,85 x 10
-1 2,12 x 10 -1 3,35 x 10
-1 4,85 x 10 -1 2,12 x 10
-1 3,35 x 10 -1
7,93 x 10 6 3,73 x 10
6 4,37 x 10 6 7,50 x 10
-1 2,10 x 10 -1 3,35 x 10
-1 7,50 x 10 -1 2,10 x 10
-1 3,35 x 10 -1
1,75 x 10 3 3,41 x 10
1 4,21 x 10 2 1,02 x 10
0 2,09 x 10 -1 3,35 x 10
-1 1,02 x 10 0 2,09 x 10
-1 3,35 x 10 -1
Tabela 3.6: Valores projetados para o controlador K.
Para o sistema em malha fechada indicado no Diagrama 3.1 e Exemplo 2.1, o
número de áreas elementares factíveis são os mesmo tanto para o C.E.Q quanto para o C.E.P,
entretanto, os valores máximos da amplitude dos sinais de saída 0ξ são mais favoráveis no
C.E.P, principalmente quando se flexibiliza a matriz X(α) para X(α,β).
No próximo capítulo será abordado o projeto do controlador K(β) com o objetivo
de verificar o valor da amplitude do sinal de saída 0ξ em relação ao controlador K projetado
neste capítulo.
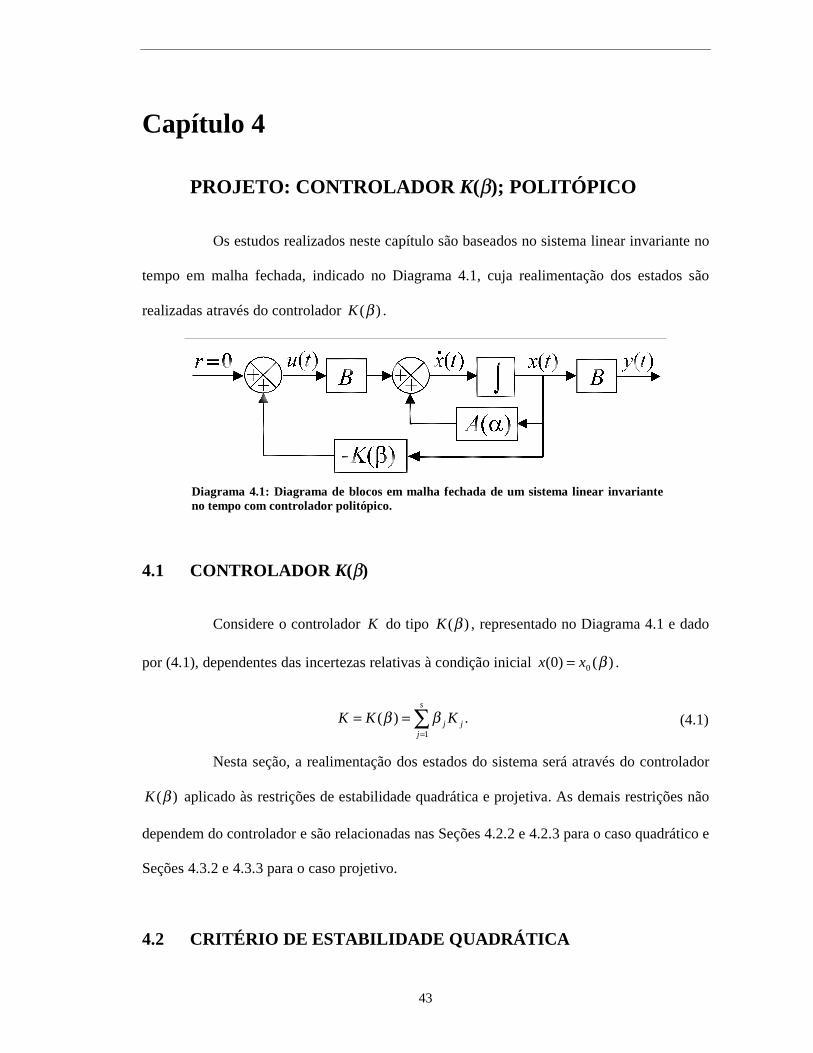
43
Capítulo 4
4 PROJETO: CONTROLADOR K(β); POLITÓPICO
Os estudos realizados neste capítulo são baseados no sistema linear invariante no
tempo em malha fechada, indicado no Diagrama 4.1, cuja realimentação dos estados são
realizadas através do controlador )(βK .
Diagrama 4.1: Diagrama de blocos em malha fechada de um sistema linear invariante no tempo com controlador politópico.
4.1 CONTROLADOR K(β)
Considere o controlador K do tipo )(βK , representado no Diagrama 4.1 e dado
por (4.1), dependentes das incertezas relativas à condição inicial )()0( 0 βxx = .
.)(1
∑=
==s
jjj KKK ββ
(4.1)
Nesta seção, a realimentação dos estados do sistema será através do controlador
)(βK aplicado às restrições de estabilidade quadrática e projetiva. As demais restrições não
dependem do controlador e são relacionadas nas Seções 4.2.2 e 4.2.3 para o caso quadrático e
Seções 4.3.2 e 4.3.3 para o caso projetivo.
4.2 CRITÉRIO DE ESTABILIDADE QUADRÁTICA

44
4.2.1 Restrição de Estabilidade Quadrática
Seja (4.2) a restrição de estabilidade quadrática com realimentação de estados.
.0)()()( �TTT BFBFXAXA +−+ αα
(4.2)
Se KXF = e )(βKK = , então F em (4.3) também dependerá desta incerteza.
.)()( XKFF ββ ==
(4.3)
Manipulando (4.3) obtém-se (4.4) da seguinte forma:
,)()(1
XKFs
jjj∑
=
= ββ
,)(1
XKFs
jjj∑
=
= ββ
.)(1
∑=
=s
jjj FF ββ
(4.4)
O índice j varia de 1 a s, XKF jj = e 11
=∑=
s
jjβ , sendo jβ positivos ou nulos.
Substituindo F por )(βF em (4.2), tem-se (4.5) pelos seguintes passos:
,0])()([)()( �TTT BFBFXAXA ββαα +−+
,0]))(()()[()()())((11111111
�TT
s
jjj
r
ii
s
jjj
r
ii
Tr
iii
s
jj
r
iii
s
jj BFFBAXXA ∑∑∑∑∑∑∑∑
========
+−+ βαβααβαβ
,0]()[()()(1 11 11 11 1
�∑∑∑∑∑∑∑∑= == == == =
+−+r
i
TTjj
s
ji
r
ijj
s
ji
r
i
Tij
s
ji
r
iij
s
ji BFBFXAXA βαβαβαβα
.0)]()([1 1
�TT
jjTii
r
ij
s
ji BFBFXAXA +−+∑∑
= =
βα
(4.5)
Se cada matriz )()( TTjj
Tii BFBFXAXA +−+ de (4.5) for negativa definida para
todo i variando de 1 a r e j variando de 1 a s, então a somatória (4.5) também será. Portanto, a
LMI que representa a restrição de estabilidade quadrática, para o controlador )(βK , é descrita
pela desigualdade (4.6).

45
.,,2,1,,2,1,0)()( sjriBFBFXAXA TTjj
Tii ��� ==+−+ e
(4.6)
4.2.1.1 Cálculo do Controlador K(β)
Seja X e jF a solução da LMI (4.6) satisfazendo, também, o conjunto com as
demais restrições. Se XKF jj = para todo j, então jK é dado em (4.7).
.1−= XFK jj
(4.7)
Sendo o controlador )(βK politópico, substituindo (4.7) em (4.1), tem-se (4.8).
.)(1
1∑=
−=s
jjj XFK ββ
(4.8)
Note que não é necessário calcular o controlador )(βK para determinar a região
de factibilidade para as incertezas da planta A, basta portanto que exista uma matriz simétrica
X que satisfaça todas as restrições e uma jF que satisfaça a restrição de estabilidade
quadrática em (4.6).
4.2.2 Restrição na Condição Inicial
.0)0(
)0(1�
⎥⎥⎦
⎤
⎢⎢⎣
⎡Xx
x
j
Tj
(4.9)
4.2.3 Restrição na Amplitude do Sinal de Saída
e0)0(
)0(1�
⎥⎥⎦
⎤
⎢⎢⎣
⎡Xx
x
j
Tj .0
0
�⎥⎦
⎤⎢⎣
⎡ICX
XCX T
μ
(4.10)
4.3 CRITÉRIO DE ESTABILIDADE PROJETIVA
4.3.1 Restrição de Estabilidade Projetiva

46
Analisando a LMI (3.22), reproduzida em (4.11), nota-se que antes de se
flexibilizar o controlador K em relação ao politopo )(0 βx , a matriz X deverá ser politópica
em relação às incertezas de )(αA e )(0 βx . Portanto, não faz sentido aumentar o grau de
liberdade do controlador K, )(βKK = ¸ sem antes aumentar o grau de liberdade de X da
mesma forma, ),( βαXX = .
.0
0
0
)(
�
⎥⎥⎥
⎦
⎤
⎢⎢⎢
⎣
⎡
−−−+
−++−
ji
jijii
TTTji
Ti
TT
XW
XBRXWA
WBRXAWWW
(4.11)
Seja (4.12), resultado da substituição de ∑=
=s
jjj KK
1
)( ββ em WKR )()( ββ = ,
então, de (4.12), WKR jj = . Substituindo jR em (4.11) chega-se à LMI (4.13) pelos mesmos
procedimentos adotados nas seções anteriores.
.)(1
WKRs
jjj∑
=
= ββ
(4.12)
.0
0
0
)(
�
⎥⎥⎥
⎦
⎤
⎢⎢⎢
⎣
⎡
−−−+
−++−
ji
jijjii
TTTjji
Ti
TT
XW
XBRXWA
WBRXAWWW
(4.13)
Assim como foi verificado na Seções 2.2.1 e 3.2.1, basta fazer XW = , XX ij = e
multiplicar a LMI (4.13) pelas matrizes [ ]III à esquerda e [ ]TIII à direita, como
mostra a equação (4.14). Substituindo WKR jj = por XKF jj = , já que XW = , obtém-se,
de (4.14), a restrição de estabilidade quadrática, em (4.16), idêntica à LMI (4.6).
[ ] .0
0
0
)(
�
⎥⎥⎥
⎦
⎤
⎢⎢⎢
⎣
⎡
⎥⎥⎥
⎦
⎤
⎢⎢⎢
⎣
⎡
−−−+
−++−
I
I
I
XX
XBFXXA
XBFXAXXX
III ji
TTTj
Ti
TT
(4.14)
.0)()())(( �IXXIIXBFXAXIIXBFXXAXXI TTTj
Ti
Tji
T −+−−+++−+++−
(4.15)

47
.0)( �TT
jjT
ii BFBFXAXA +−+
(4.16)
4.3.1.1 Cálculo do controlador K(β)
Sejam Xij, Rj e W a solução da LMI (4.13) e Xij satisfazendo o conjunto com as
demais restrições. Se WKR jj = para todo j, então jK é dado em (4.17).
.1−= WRK jj
(4.17)
Substituindo (4.17) em (4.1), tem-se (4.18).
.)(1
1∑=
−=s
jjj WRK ββ
(4.18)
Assim como no caso quadrático, não é necessário calcular o controlador )(βK ,
basta que existam matrizes Xij simétricas, positivas definidas e as matrizes W e Rj, incógnitas
do problema, satisfazendo a restrição de estabilidade projetiva em conjunto com as demais
restrições.
4.3.2 Restrição na Condição Inicial
.0)0(
)0(1�
⎥⎥⎦
⎤
⎢⎢⎣
⎡
ijj
Tj
Xx
x
(4.19)
4.3.3 Restrição na Amplitude do Sinal de Saída
e0)0(
)0(1�
⎥⎥⎦
⎤
⎢⎢⎣
⎡
ijj
Tj
Xx
x.0
0
�⎥⎥⎦
⎤
⎢⎢⎣
⎡ICX
CXX
ij
Tijij
μ
(4.20)
4.4 CÁLCULO DAS CONSTANTES β j

48
Para a determinação do jβ , é necessário definir uma posição inicial para o vetor
)0(x e os vetores limites mínimos e máximos para cada estado.
Suponha que a condição inicial, de três estados, possa ser representada por um
politopo da forma descrita em (4.21), onde os vértices de )(0 βx são dados pelos vetores
)0(jx .
.)0()()0(1
0 ∑=
==s
jjj xxx ββ
(4.21)
Decompondo )(0 βx em vetores ortogonais )(01 βx , )(02 βx e )(03 βx , em (4.22),
sobre os eixos do espaço de estado e representando-os pelas combinações convexas dos seus
vetores limites mínimos e máximos, em (4.23), obtém-se (4.24), sendo kσ constantes
positivas ou nulas com k variando de 1 a p e np 2= ( 3=n ). Neste caso, 121 =+ σσ ,
143 =+ σσ e 165 =+ σσ .
).()()()( 0302010 ββββ xxxx ++=
(4.22)
.)(
)(
,)(
363503
,242302
121101
MAXMIN
MAXMIN
MAXMIN
xxx
xxx
xxx
σσβσσβσσβ
+=+=+=
(4.23)
).)()(()(
),)()(()(
),)()(()(
3635432103
2423652102
1211654301
MAXMIN
MAXMIN
MAXMIN
xxx
xxx
xxx
σσσσσσβσσσσσσβσσσσσσβ
+++=+++=+++=
(4.24)
Desenvolvendo as relações em (4.24), obtém-se (4.25), (4.26) e (4.27).
),()(
)()()(
1642164116321631
154215411532153101
MAXMINMAXMIN
MAXMINMAXMIN
xxxx
xxxxx
σσσσσσσσσσσσσσσσσσσσσσσσβ
++++++++=
(4.25)
),()(
)()()(
2642263226412631
254225322541253102
MAXMINMAXMIN
MAXMINMAXMIN
xxxx
xxxxx
σσσσσσσσσσσσσσσσσσσσσσσσβ
++++++++=
(4.26)
).()(
)()()(
3642354236413541
363235323631353103
MAXMINMAXMIN
MAXMINMAXMIN
xxxx
xxxxx
σσσσσσσσσσσσσσσσσσσσσσσσβ
++++++++=
(4.27)

49
Substituindo (4.25), (4.26) e (4.27) em (4.22) e simplificando, tem-se (4.28)
equivalente à somatória (4.21).
As relações entre as constantes βj com as constantes σk e as relações entre os
vetores xj(0) com os vetores limites mínimos e máximos de cada estado, são dadas em (4.29) e
(4.30).
).()(
)()(
)()(
)()()(
321642321542
321632321532
321641321541
3216313215310
MAXMAXMAXMINMAXMAX
MAXMINMAXMINMINMAX
MAXMAXMINMINMAXMIN
MAXMINMINMINMINMIN
xxxxxx
xxxxxx
xxxxxx
xxxxxxx
+++++++++++++++++++++++=
σσσσσσσσσσσσσσσσσσσσσσσσβ
(4.28)
.,
,,
,,
,,
86427542
66325532
46413541
26311531
βσσσβσσσβσσσβσσσβσσσβσσσβσσσβσσσ
========
(4.29)
).0()(),0()(
),0()(),0()(
),0()(),0()(
),0()(),0()(
83217321
63215321
43213321
23211321
xxxxxxxx
xxxxxxxx
xxxxxxxx
xxxxxxxx
MAXMAXMAXMINMAXMAX
MAXMINMAXMINMINMAX
MAXMAXMINMINMAXMIN
MAXMINMINMINMINMIN
=++=++
=++=++
=++=++
=++=++
(4.30)
No entanto, sendo 8811)( KKK βββ ++= � , pode-se determinar os valores de kσ
com k variando de 1 a 6, de modo que, sendo o vetor )(0 βx determinístico, sua decomposição
em vetores ortogonais )(01 βx , )(02 βx e )(03 βx , (4.23), possam ser representados por vetores
intermediários INTx01 , INTx02 e INTx03 entre os vetores mínimos e máximos de cada estado, ou
seja:
.],0,0[)(
,]0,,0[)(
,]0,0,[)(
030303
020202
010101
TINTINT
TINTINT
TINTINT
xx
xx
xx
x
x
x
==
==
==
βββ
(4.31)
Substituindo, respectivamente, as relações dadas em (4.31) nas relações mostradas
em (4.23), obtém-se (4.32) fazendo: 12 1 σσ −= , 34 1 σσ −= e 56 1 σσ −= .

50
,]0,0,)[1(]0,0,[]0,0,[ 111101T
MAXT
MINT
INT xxx σσ −+= ,]0,,0)[1(]0,,0[]0,,0[ 232302
TMAX
TMIN
TINT xxx σσ −+=
.],0,0)[1(],0,0[],0,0[ 353503T
MAXT
MINT
INT xxx σσ −+=
(4.32)
Isolando 1σ , 3σ e 5σ em cada relação de (4.32), tem-se (4.33).
),()( 111011 MAXMINMAXINT xxxx −−=σ ),()( 222023 MAXMINMAXINT xxxx −−=σ ).()( 333035 MAXMINMAXINT xxxx −−=σ
(4.33)
Portanto, as constantes βj são completamente calculadas pela substituição, em
(4.29), das constantes σk. Assim, para cada vetor condição inicial )0(x , determinístico e
pertencente ao politopo dado em (4.21), é possível calcular um controlador )(βK , específico,
utilizando as equações (4.8) e (4.23) para o critério de estabilidade quadrática e as equações
(4.18) e (4.23) para o critério de estabilidade projetiva.
4.5 COMPOSIÇÃO COMPLETA DOS CRITÉRIOS
4.5.1 Critério de Estabilidade Quadrática
a) Restrição de Positividade da matriz X (R.P.X):
0�X .
b) Restrição de Estabilidade (R.E):
0)()( �TT
jjTii BFBFXAXA +−+ .
c) Restrição na Condição Inicial (R.C.I):
0)0(
)0(1�
⎥⎥⎦
⎤
⎢⎢⎣
⎡Xx
x
j
Tj .
d) Restrição na Amplitude do Sinal de Saída (R.A.S):
0)0(
)0(1�
⎥⎥⎦
⎤
⎢⎢⎣
⎡Xx
x
j
Tj e 0
20
�⎥⎦
⎤⎢⎣
⎡ICX
XCX T
ξ.

51
4.5.2 Critério de Estabilidade Projetiva
a) Restrição de Positividade das matrizes Xij (R.P.Xij ):
0�jiX .
b) Restrição de Estabilidade para Xij (R.E):
0
0
0
)(
�
⎥⎥⎥
⎦
⎤
⎢⎢⎢
⎣
⎡
−−−+
−++−
ji
jijjii
TTTjji
Ti
TT
XW
XBRXWA
WBRXAWWW
.
c) Restrição na Condição Inicial para Xij (R.C.I):
0)0(
)0(1�
⎥⎥⎦
⎤
⎢⎢⎣
⎡
jij
Tj
Xx
x.
d) Restrição na Amplitude do Sinal de Saída para Xij (R.A.S):
0)0(
)0(1�
⎥⎥⎦
⎤
⎢⎢⎣
⎡
jij
Tj
Xx
x e 0
0
�⎥⎥⎦
⎤
⎢⎢⎣
⎡ICX
CXX
ji
Tjiji
μ.
4.6 RESULTADOS
4.6.1 Resultados Obtidos com LMIs
Assim como na Seção 3.4, os resultados ótimos de 0ξ são analisados diretamente
na Tabela 4.1 e na Tabela 4.3 e estão sujeitos às restrições assinaladas no Quadro 4.1 e no
Quadro 4.2, respectivamente.
Quadro 4.1: Composição das restrições e síntese do controlador K(β) para a análise de estabilidade e otimização de ξ0 no C.E.Q.
R.P.X R.E R.C.I R.A.S Kj Tabelax x x x x 4.1
Critério de Estabilidade Quadrática
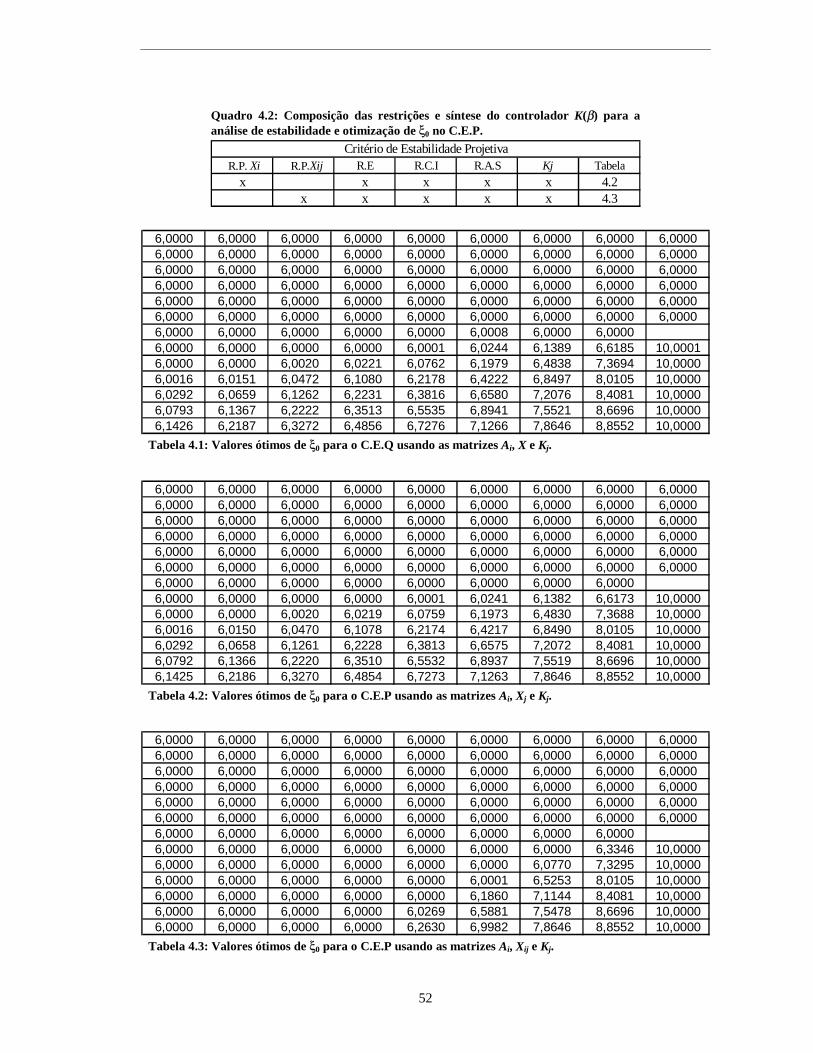
52
Quadro 4.2: Composição das restrições e síntese do controlador K(β) para a análise de estabilidade e otimização de ξ0 no C.E.P.
R.P. Xi R.P.Xij R.E R.C.I R.A.S Kj Tabela
x x x x x 4.2x x x x x 4.3
Critério de Estabilidade Projetiva
6,0000 6,0000 6,0000 6,0000 6,0000 6,0000 6,0000 6,0000 6,00006,0000 6,0000 6,0000 6,0000 6,0000 6,0000 6,0000 6,0000 6,00006,0000 6,0000 6,0000 6,0000 6,0000 6,0000 6,0000 6,0000 6,00006,0000 6,0000 6,0000 6,0000 6,0000 6,0000 6,0000 6,0000 6,00006,0000 6,0000 6,0000 6,0000 6,0000 6,0000 6,0000 6,0000 6,00006,0000 6,0000 6,0000 6,0000 6,0000 6,0000 6,0000 6,0000 6,00006,0000 6,0000 6,0000 6,0000 6,0000 6,0008 6,0000 6,00006,0000 6,0000 6,0000 6,0000 6,0001 6,0244 6,1389 6,6185 10,00016,0000 6,0000 6,0020 6,0221 6,0762 6,1979 6,4838 7,3694 10,00006,0016 6,0151 6,0472 6,1080 6,2178 6,4222 6,8497 8,0105 10,00006,0292 6,0659 6,1262 6,2231 6,3816 6,6580 7,2076 8,4081 10,00006,0793 6,1367 6,2222 6,3513 6,5535 6,8941 7,5521 8,6696 10,00006,1426 6,2187 6,3272 6,4856 6,7276 7,1266 7,8646 8,8552 10,0000
Tabela 4.1: Valores ótimos de ξ0 para o C.E.Q usando as matrizes Ai, X e Kj.
6,0000 6,0000 6,0000 6,0000 6,0000 6,0000 6,0000 6,0000 6,00006,0000 6,0000 6,0000 6,0000 6,0000 6,0000 6,0000 6,0000 6,00006,0000 6,0000 6,0000 6,0000 6,0000 6,0000 6,0000 6,0000 6,00006,0000 6,0000 6,0000 6,0000 6,0000 6,0000 6,0000 6,0000 6,00006,0000 6,0000 6,0000 6,0000 6,0000 6,0000 6,0000 6,0000 6,00006,0000 6,0000 6,0000 6,0000 6,0000 6,0000 6,0000 6,0000 6,00006,0000 6,0000 6,0000 6,0000 6,0000 6,0000 6,0000 6,00006,0000 6,0000 6,0000 6,0000 6,0001 6,0241 6,1382 6,6173 10,00006,0000 6,0000 6,0020 6,0219 6,0759 6,1973 6,4830 7,3688 10,00006,0016 6,0150 6,0470 6,1078 6,2174 6,4217 6,8490 8,0105 10,00006,0292 6,0658 6,1261 6,2228 6,3813 6,6575 7,2072 8,4081 10,00006,0792 6,1366 6,2220 6,3510 6,5532 6,8937 7,5519 8,6696 10,00006,1425 6,2186 6,3270 6,4854 6,7273 7,1263 7,8646 8,8552 10,0000
Tabela 4.2: Valores ótimos de ξ0 para o C.E.P usando as matrizes Ai, Xj e Kj.
6,0000 6,0000 6,0000 6,0000 6,0000 6,0000 6,0000 6,0000 6,00006,0000 6,0000 6,0000 6,0000 6,0000 6,0000 6,0000 6,0000 6,00006,0000 6,0000 6,0000 6,0000 6,0000 6,0000 6,0000 6,0000 6,00006,0000 6,0000 6,0000 6,0000 6,0000 6,0000 6,0000 6,0000 6,00006,0000 6,0000 6,0000 6,0000 6,0000 6,0000 6,0000 6,0000 6,00006,0000 6,0000 6,0000 6,0000 6,0000 6,0000 6,0000 6,0000 6,00006,0000 6,0000 6,0000 6,0000 6,0000 6,0000 6,0000 6,00006,0000 6,0000 6,0000 6,0000 6,0000 6,0000 6,0000 6,3346 10,00006,0000 6,0000 6,0000 6,0000 6,0000 6,0000 6,0770 7,3295 10,00006,0000 6,0000 6,0000 6,0000 6,0000 6,0001 6,5253 8,0105 10,00006,0000 6,0000 6,0000 6,0000 6,0000 6,1860 7,1144 8,4081 10,00006,0000 6,0000 6,0000 6,0000 6,0269 6,5881 7,5478 8,6696 10,00006,0000 6,0000 6,0000 6,0000 6,2630 6,9982 7,8646 8,8552 10,0000
Tabela 4.3: Valores ótimos de ξ0 para o C.E.P usando as matrizes Ai, Xij e Kj.

53
Dispensando comentários sobre as regiões factíveis das tabelas anteriores, já que
são as mesmas tratadas na Seção 3.4, observa-se um aumento nas diferenças percentuais a
favor do C.E.P, assinaladas em negrito na Tabela 4.4 e Tabela 4.5, com o uso do controlador
K(β). Entretanto, quando se compara os resultados das tabelas da Seção 3.4 com os resultados
das tabelas apresentadas até agora nesta seção, comparações estas dadas na Tabela 4.6, Tabela
4.7 e Tabela 4.8, nota-se a pouca vantagem de se flexibilizar o controlador K para K(β) sem
antes ter flexibilizado a matriz X. Este fato é verificado pelas diferenças percentuais relativas
apresentadas na Tabela 4.7, cuja análise justifica os comentários realizados na Seção 4.3.1 e a
exclusão, na Seção 4.5.2, de todas as LMIs que relacionam as matrizes Ai e Xi com Kj (Rj).
0,0000 0,0000 0,0000 0,0000 0,0000 0,0000 0,0000 0,0000 0,00000,0000 0,0000 0,0000 0,0000 0,0000 0,0000 0,0000 0,0000 0,00000,0000 0,0000 0,0000 0,0000 0,0000 0,0000 0,0000 0,0000 0,00000,0000 0,0000 0,0000 0,0000 0,0000 0,0000 0,0000 0,0000 0,00000,0000 0,0000 0,0000 0,0000 0,0000 0,0000 0,0000 0,0000 0,00000,0000 0,0000 0,0000 0,0000 0,0000 0,0000 0,0000 0,0000 0,00000,0000 0,0000 0,0000 0,0000 0,0000 -0,0133 0,0000 0,00000,0000 0,0000 0,0000 0,0000 0,0000 -0,0050 -0,0114 -0,0181 -0,00100,0000 0,0000 0,0000 -0,0033 -0,0049 -0,0097 -0,0123 -0,0081 0,0000
0,0000 -0,0017 -0,0033 -0,0033 -0,0064 -0,0078 -0,0102 0,0000 0,00000,0000 -0,0016 -0,0016 -0,0048 -0,0047 -0,0075 -0,0055 0,0000 0,0000
-0,0016 -0,0016 -0,0032 -0,0047 -0,0046 -0,0058 -0,0026 0,0000 0,0000
-0,0016 -0,0016 -0,0032 -0,0031 -0,0045 -0,0042 0,0000 0,0000 0,0000 Tabela 4.4: Diferenças percentuais entre os valores de ξ0 dados na Tabela 4.2 (C.E.P com Ai, Xi e Kj) e na Tabela 4.1 (C.E.Q com Ai, X e Kj).
0,0000 0,0000 0,0000 0,0000 0,0000 0,0000 0,0000 0,0000 0,00000,0000 0,0000 0,0000 0,0000 0,0000 0,0000 0,0000 0,0000 0,00000,0000 0,0000 0,0000 0,0000 0,0000 0,0000 0,0000 0,0000 0,00000,0000 0,0000 0,0000 0,0000 0,0000 0,0000 0,0000 0,0000 0,00000,0000 0,0000 0,0000 0,0000 0,0000 0,0000 0,0000 0,0000 0,00000,0000 0,0000 0,0000 0,0000 0,0000 0,0000 0,0000 0,0000 0,00000,0000 0,0000 0,0000 0,0000 0,0000 -0,0133 0,0000 0,00000,0000 0,0000 0,0000 0,0000 -0,0017 -0,4050 -2,2626 -4,2895 -0,00100,0000 0,0000 -0,0333 -0,3670 -1,2541 -3,1930 -6,2741 -0,5414 0,0000
-0,0267 -0,2510 -0,7805 -1,7682 -3,5028 -6,5725 -4,7360 0,0000 0,0000
-0,4843 -1,0864 -2,0600 -3,5850 -5,9797 -7,0892 -1,2931 0,0000 0,0000
-1,3044 -2,2276 -3,5711 -5,5312 -8,0354 -4,4386 -0,0569 0,0000 0,0000
-2,3215 -3,5168 -5,1713 -7,4874 -6,9059 -1,8017 0,0000 0,0000 0,0000 Tabela 4.5: Diferenças percentuais entre os valores de ξ0 dados na Tabelas 4.3 (C.E.P com Ai, Xij e Kj) e na Tabela 4.1 (C.E.Q com Ai, X e Kj).

54
A Tabela 4.6 mostra que, para o C.E.Q, o uso do controlador K(β) na LMI de
estabilidade não mudam os resultados apresentados em relação à LMI com o controlador K. A
exceção é uma única área cujo valor está assinalado em negrito na Tabela 4.6. Tal valor
calculado e diferente de zero, é devido a um erro numérico causado pelo processo iterativo
executado pela rotina de cálculo. Limitando a rotina para cálculo de 0ξ apenas na célula em
questão, o valor do erro percentual relativo zera, confirmando assim erro numérico.
0,0000 0,0000 0,0000 0,0000 0,0000 0,0000 0,0000 0,0000 0,00000,0000 0,0000 0,0000 0,0000 0,0000 0,0000 0,0000 0,0000 0,00000,0000 0,0000 0,0000 0,0000 0,0000 0,0000 0,0000 0,0000 0,00000,0000 0,0000 0,0000 0,0000 0,0000 0,0000 0,0000 0,0000 0,00000,0000 0,0000 0,0000 0,0000 0,0000 0,0000 0,0000 0,0000 0,00000,0000 0,0000 0,0000 0,0000 0,0000 0,0000 0,0000 0,0000 0,00000,0000 0,0000 0,0000 0,0000 0,0000 0,0133 0,0000 0,00000,0000 0,0000 0,0000 0,0000 0,0000 0,0000 0,0000 0,0000 0,00000,0000 0,0000 0,0000 0,0000 0,0000 0,0000 0,0000 0,0000 0,00000,0000 0,0000 0,0000 0,0000 0,0000 0,0000 0,0000 0,0000 0,00000,0000 0,0000 0,0000 0,0000 0,0000 0,0000 0,0000 0,0000 0,00000,0000 0,0000 0,0000 0,0000 0,0000 0,0000 0,0000 0,0000 0,00000,0000 0,0000 0,0000 0,0000 0,0000 0,0000 0,0000 0,0000 0,0000
Tabela 4.6: Diferenças percentuais entre os valores de ξ0 dados na Tabela 4.1 (C.E.Q com Ai, X e Kj) e na Tabela 3.1 (C.E.Q com Ai, X e K).
0,0000 0,0000 0,0000 0,0000 0,0000 0,0000 0,0000 0,0000 0,00000,0000 0,0000 0,0000 0,0000 0,0000 0,0000 0,0000 0,0000 0,00000,0000 0,0000 0,0000 0,0000 0,0000 0,0000 0,0000 0,0000 0,00000,0000 0,0000 0,0000 0,0000 0,0000 0,0000 0,0000 0,0000 0,00000,0000 0,0000 0,0000 0,0000 0,0000 0,0000 0,0000 0,0000 0,00000,0000 0,0000 0,0000 0,0000 0,0000 0,0000 0,0000 0,0000 0,00000,0000 0,0000 0,0000 0,0000 0,0000 0,0000 0,0000 0,00000,0000 0,0000 0,0000 0,0000 0,0000 0,0000 0,0000 0,0000 0,00000,0000 0,0000 0,0000 0,0000 0,0000 0,0000 0,0000 0,0000 0,00000,0000 0,0000 0,0000 0,0000 0,0000 0,0000 0,0000 0,0000 0,00000,0000 0,0000 0,0000 0,0000 0,0000 0,0000 0,0000 0,0000 0,00000,0000 0,0000 0,0000 0,0000 0,0000 0,0000 0,0000 0,0000 0,00000,0000 0,0000 0,0000 0,0000 0,0000 0,0000 0,0000 0,0000 0,0000
Tabela 4.7: Diferenças percentuais entre os valores de ξ0 dados na Tabela 4.2 (C.E.P com Ai, Xi e Kj) e na Tabela 3.2 (C.E.P com Ai, Xi e K).

55
0,0000 0,0000 0,0000 0,0000 0,0000 0,0000 0,0000 0,0000 0,00000,0000 0,0000 0,0000 0,0000 0,0000 0,0000 0,0000 0,0000 0,00000,0000 0,0000 0,0000 0,0000 0,0000 0,0000 0,0000 0,0000 0,00000,0000 0,0000 0,0000 0,0000 0,0000 0,0000 0,0000 0,0000 0,00000,0000 0,0000 0,0000 0,0000 0,0000 0,0000 0,0000 0,0000 0,00000,0000 0,0000 0,0000 0,0000 0,0000 0,0000 0,0000 0,0000 0,00000,0000 0,0000 0,0000 0,0000 0,0000 0,0000 0,0000 0,00000,0000 0,0000 0,0000 0,0000 0,0000 0,0000 0,0000 -0,3461 0,0000
0,0000 0,0000 0,0000 0,0000 0,0000 0,0000 -0,8856 0,0000 0,0000
0,0000 0,0000 0,0000 0,0000 0,0000 -0,7477 -0,6168 0,0000 0,00000,0000 0,0000 0,0000 0,0000 -0,1664 -1,5047 0,0000 0,0000 0,0000
0,0000 0,0000 0,0000 -0,0017 -1,8979 -0,4443 0,0000 0,0000 0,0000
0,0000 0,0000 0,0000 -1,1776 -1,5809 0,0000 0,0000 0,0000 0,0000 Tabela 4.8: Diferenças percentuais entre os valores de ξ0 dados na Tabela 4.3 (C.E.P com Ai, Xij e Kj) e na Tabela 3.3 (C.E.P com Ai, Xij e K).
Os valores apresentados na Tabela 4.8 confirmam, realmente, a contribuição que a
flexibilização do controlador K para K(β) proporciona quando associado à matriz X(α,β) nas
restrições.
Para ilustrar, de forma comparativa os resultados apresentados na Seção 3.4 e
Seção 4.6 com todas as variações das matrizes X e K para cada critério, o Quadro 4.3 mostra a
classificação dos melhores resultados baseados na maior redução percentual da amplitude do
sinal de saída, encontrada na região factível, para cada caso estudado.
Quadro 4.3: Classificação dos critérios segundo a flexibilização da matriz X e do controlador K.
4.6.2 Resultados Obtidos com Simulações no Tempo
Para confirmar os resultados dos níveis máximos da amplitude do sinal de saída
obtidos com as minimizações de ξ0, apresentados até o momento, foram realizadas simulações
no sistema, Diagrama 4.1 com o controlador K(β), correspondendo a uma mesma região
Classificação Critério Planta A Matriz X Controlador K Redução Amp.(%)
1ª C.E.P Ai Xij Kj 8,032ª C.E.P Ai Xij K 6,38
C.E.P Ai Xi Kj * 0,018C.E.P Ai Xi K 0,018C.E.Q Ai X Kj * 0C.E.Q Ai X K Referência
3ª
4ª
* : Flexibilização de K para Kj não contribui no resultado da amplitude do sinal de saída

56
equivalente da Tabela 3.1 e Tabela 4.3 dada, respectivamente, na Tabela 4.9 e Tabela 4.10.
Esta região, maior, equivale à região composta por dezesseis células elementares
compreendida entres as incertezas a e b da matriz A, onde 8,37 −≤≤− a e 4,12,0 ≤≤− b . Os
valores de ξ0 para o C.E.Q e C.E.P nesta região são, respectivamente, 6,7291 e 6,2633
determinados pelas rotinas desenvolvidas. Estes valores, comparados com o valores da Tabela
4.9 e Tabela 4.10, mostram como os níveis de saída, para uma região mais abrangente, ficam
limitados ao maior valor, em negrito, entre as células elementares contidas nesta região e
indicam também, a vantagem do C.E.P sobre o C.E.Q.
6,0151 6,0472 6,1080 6,21786,0659 6,1262 6,2231 6,38166,1367 6,2222 6,3513 6,55356,2187 6,3272 6,4856 6,7276
6,0000 6,0000 6,0000 6,00006,0000 6,0000 6,0000 6,00006,0000 6,0000 6,0000 6,02696,0000 6,0000 6,0000 6,2630
Tabela 4.9: Região de factibilidade referente à Tabela 3.1
Tabela 4.10: Região de factibilidade referente à Tabela 4.3
As próximas figuras comprovam que a amplitude do sinal de saída, ao longo do
tempo, nunca supera o valor de 0ξ minimizado no projeto do controlador e sujeito às
restrições impostas. Foram testadas todas as possíveis combinações entre os quatro vértices do
politopo da matriz A e os quatro vértices da condição inicial x(0), não diagonalmente opostos
entre si e indicados pelos vértices x1(0), x2(0), x3(0) e x4(0) do politopo cúbico da Figura 2.1,
num total de dezesseis figuras para cada critério. Os vértices Ai e xj(0), utilizados nos testes
são dados respectivamente, pelas relações (2.73) e (2.76) e identificados por índices nas
Figuras 4.1 a 4.32. As incertezas dos parâmetros a e b da matriz A, variam entre os
valores: 8,37 −≤≤− a e 4,12,0 +≤≤− b correspondendo a um conjunto de dezesseis células
elementares indicadas na Tabela 4.9 e na Tabela 4.10. Os gráficos das figuras correspondentes
ao C.E.Q, mostram gráficos mais internos em zoom. Este zoom destaca o valor de saída y(t)
para 0=t ( )0()0( xCy = ).
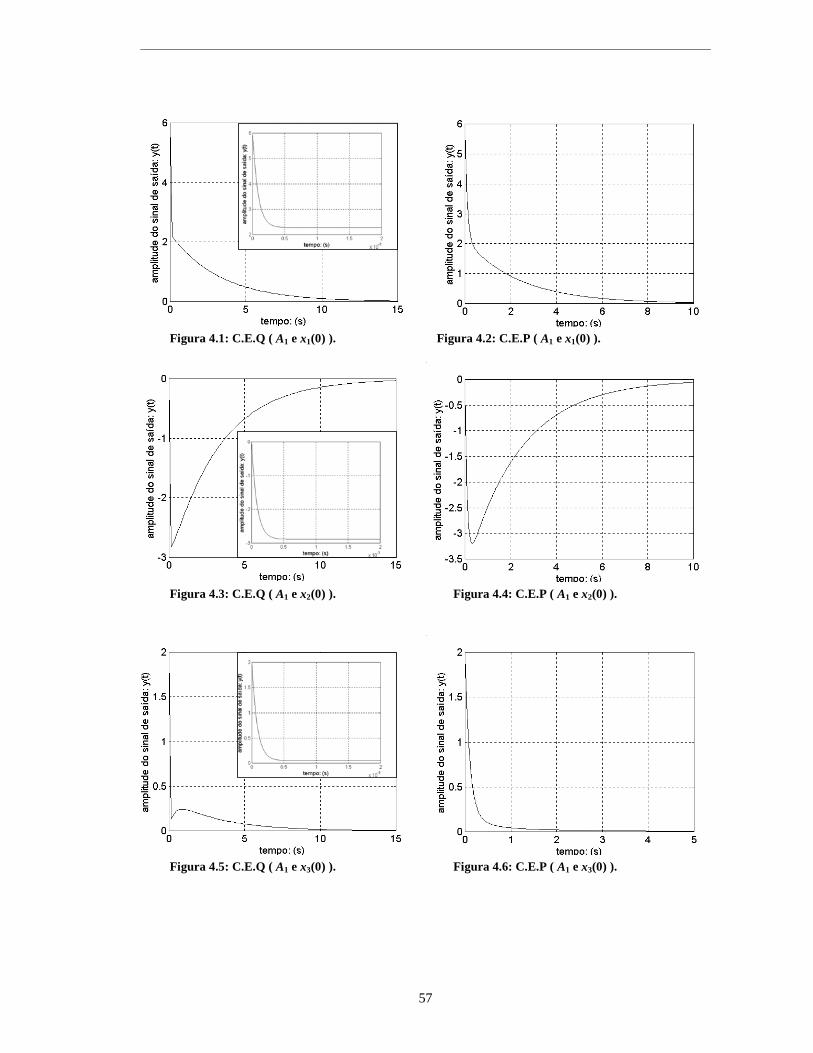
57
Figura 4.1: C.E.Q ( A1 e x1(0) ). Figura 4.2: C.E.P ( A1 e x1(0) ).
Figura 4.3: C.E.Q ( A1 e x2(0) ). Figura 4.4: C.E.P ( A1 e x2(0) ).
Figura 4.5: C.E.Q ( A1 e x3(0) ). Figura 4.6: C.E.P ( A1 e x3(0) ).

58
Figura 4.7: C.E.Q ( A1 e x4(0) ). Figura 4.8: C.E.P ( A1 e x4(0) ).
Figura 4.9: C.E.Q ( A2 e x1(0) ). Figura 4.10: C.E.P ( A2 e x1(0) ).
Figura 4.11: C.E.Q ( A2 e x2(0) ). Figura 4.12: C.E.P ( A2 e x2(0) ).

59
Figura 4.13: C.E.Q ( A2 e x3(0) ). Figura 4.14: C.E.P ( A2 e x3(0) ).
Figura 4.15: C.E.Q ( A2 e x4(0) ). Figura 4.16: C.E.P ( A2 e x4(0) ).
Figura 4.17: C.E.Q ( A3 e x1(0) ). Figura 4.18: C.E.P ( A3 e x1(0) ).

60
Figura 4.19: C.E.Q ( A3 e x2(0) ). Figura 4.20: C.E.P ( A3 e x2(0) ).
Figura 4.21: C.E.Q ( A3 e x3(0) ). Figura 4.22: C.E.P ( A3 e x3(0) ).
Figura 4.23: C.E.Q ( A3 e x4(0) ). Figura 4.24: C.E.P ( A3 e x4(0) ).

61
Figura 4.25: C.E.Q ( A4 e x1(0) ). Figura 4.26: C.E.P ( A4 e x1(0) ).
Figura 4.27: C.E.Q ( A4 e x2(0) ). Figura 4.28: C.E.P ( A4 e x2(0) ).
Figura 4.29: C.E.Q ( A4 e x3(0) ). Figura 4.30: C.E.P ( A4 e x3(0) ).

62
Figura 4.31: C.E.Q ( A4 e x4(0) ). Figura 4.32: C.E.P ( A4 e x4(0) ).
Com isto verifica-se que o valor máximo do sinal de saída para o critério de
estabilidade quadrática que é ξ0 = 6,7291, e para o critério de estabilidade projetiva que é ξ0 =
6,2633, nunca foram ultrapassados pelos valores máximos da saída y(t), Figuras de 4.1 a 4.32,
usando-se os controladores projetados em cada uma das possíveis combinações entre os
vértices Ai e os vértices xj(0), onde i e j variam de 1 a 4.
A análise dos valores de ξ0 apresentados neste capítulo, mostram que o C.E.P
proporcionou resultados mais favoráveis e significativos do que o C.E.Q, Quadro 4.3.
Portanto, conhecendo-se o vetor condição incial, é preferível projetar do controlador
)(βKK = , utilizando o C.E.P, associado à matriz ),( βαXX = , do que utilizar qualquer uma
das opções possíveis para o C.E.Q.

63
Capítulo 5
5 CONCLUSÕES E PERSPECTIVAS
5.1 CONCLUSÕES
A análise comparativa dos resultados realizada neste trabalho teve por objetivo
verificar a possibilidade de se utilizar a LMI de estabilidade projetiva (Apkarian et al., 2001)
substituindo a LMI de estabilidade quadrática (Barmish, 1985 e Ogata, 1997), ambas para
sistemas lineares, invariantes no tempo e com incertezas do tipo politópicas.
Sendo X, incógnita do problema, a matriz que realmente influencia nos resultados
analisados neste trabalho, não faz sentido, como se verificou nos resultados apresentados
especificamente pela Tabela 4.6 e Tabela 4.7, flexibilizar outras matrizes, como por exemplo
o controlador K, sem antes ter flexibilizado X da mesma forma.
Nota-se que o aumento da ordem da matriz A associada a um grande número de
incertezas, tanto de A como do vetor condição inicial x(0), pode gerar um número muito
grande de combinações Xij e com isto, um esforço computacional excessivo. Entretanto, este
fato não limita o projeto do controlador K, único ou politópico, já que não há a necessidade do
cálculo do controlador ser feito em tempo real. Porém, se o controlador for escolhido
politópico, haverá a necessidade de se calcular um controlador K(β) diferente para cada
condição inicial distinta. Neste caso, com todos os vértices Kj previamente calculados, o
tempo computacional gasto é insignificante, mas existirá para cada condição inicial distinta
aplicada ao sistema.
Entretanto, a flexibilização da matriz X(α) para X(α,β) bem como a flexibilização
do controlador K para K(β), propostas deste trabalho, adicionaram ao critério de estabilidade
projetiva mais liberdade no sentido de atender o conjunto de todas as restrições impostas ao

64
sistema. Com isto, os níveis do sinal de saída ξ0, para o critério de estabilidade projetiva,
foram reduzidos, chegando a valores de até 8%, em relação ao critério de estabilidade
quadrática, como mostra o Quadro 4.3 da Seção 4.6.1.
Note que, se o critério de estabilidade quadrática for satisfeito, o critério de
estabilidade projetiva também será. Para isto, basta que se faça, na restrição de estabilidade
projetiva, as substituições das matrizes variáveis W por X e Xi ou Xij por X, com foi verificado
nas Seções 2.2.1, 3.2.1 e 4.3.1. Portanto, se há solução para o critério de estabilidade
quadrática, haverá também solução para o critério de estabilidade projetiva.
5.2 PERSPECTIVAS
Neste trabalho foram comparados os níveis de amplitude dos sinais de saída e as
áreas de factibilidade obtidos por critérios distintos, sendo eles: Critério de Estabilidade
Quadrática e Critério de Estabilidade Projetiva, com o objetivo de verificar qual o mais
eficiente. Bons resultados foram constatados a favor do critério de estabilidade projetiva com
a flexibilização da matriz X e do controlador K. Todo o estudo envolvendo as restrições, em
forma de LMIs, foi realizado para um sistema linear invariante no tempo, com incertezas
politópicas na planta e na condição inicial e baseado na função de Lyapunov para o caso
contínuo. Portanto, como perspectivas futuras, tem-se além da adição de novas restrições,
como por exemplo, restrição de taxa de decaimento, restrição de amplitude do sinal de
entrada, restrição de índice de desempenho baseada na norma ∞H e as soluções dos
problemas que envolvem as aplicações destas restrições, especificamente para o caso do
critério de estabilidade projetiva, a possibilidade também do desenvolvimento do estudo para
o caso discreto.

65
REFERÊNCIAS
APKARIAN, P.; TUAN, H. D. E BERNUSSOU, J., “Continuous-Time Analysis, Eigenstructure
Assignment, and H2 Synthesis with Enhanced Linear Matrix Inequalities(LMI)
Characterization”, IEEE Transactions on Automatic Control, v. 46, n. 12, pp. 1941-1946,
2001.
ASSUNÇÃO, E. E TEIXEIRA, M. C. M., “Projeto de Sistemas de Controle Via LMIs Usando o
MatLab”, Aplicações em Dinâmica e Controle – APLICON, pp. 350-367, 2001.
BARMISH, B. R., “Stabilization of Uncertain System Via Linear Control”, IEEE Transaction
on Automatic Control, v. 28, n. 8, pp. 399-408, 1983.
BARMISH, B. R., “Necessary and Sufficient Conditions for Quadratic Stabilizability of an
Uncertain System”, Journal of Optimization Theory and Application, v. 46, n. 4, pp. 399-408,
1985.
BOYD, S.; EL GHAOUI, L.; FERON, E. E BALAKRISHNAM, V., “Linear Matrix Inequalities in
Systems and Control Theory”, Studies in Applied Mathematic - SIAM, Philadelphia - PA -
USA, 1994.
GAHINET, P. E APKARIAN, P., “A Linear Matrix Inequality Approach to ∞H Control”,
International Journal of Robust Nonlinear Control, Lake Buena Vista - Fl, pp. 2026-2031,
1994a.
GAHINET, P.; APKARIAN, P. E CHILALI, M., “Affine Parameter – Dependent Lyapunov
Functions for Real Parametric Uncertainty”, IEEE Proceedings of 33rd Conference on
Decision and Control, v. 4, pp. 421-448, 1994b.
GAHINET, P.; NEMIROVSKI, A.; LAUB, A. J. E CHILALI, M., “LMI Control Toolbox User’s
Guide”, The Mathworks Inc., Natick – MA – USA, 1995.
GU, K.; ZOHDY, M. A. E LOH, N. K., “Necessary and Sufficient Condition of Quadratic
Stability of Uncertain Linear Systems”, IEEE Proceedings of the 28th Conference on
Decision and Control, Tampa – Florida - USA, pp. 464-468, 1989.

66
JADBABAIE, A.; ABDALLAH, C. T.; FAMULARO, D. E DORATO, P., “Robust, Non-Fragile and
Optimal Controller Design Via Linear Matrix Inequalities”, AACC, Proceedings of the
American Control Conference, Philadelphia – Pennsylvania - USA, pp. 2842-2846, 1990.
KOKAME, H.; KIDA, H. E MORI, T., “A Polytopic Quadratic Lyapunov Function Approach to
Stability of a Matrix Polytope”, IEEE Proceedings of the 29th Conference on Decision and
Control, Honolulu - Hawai, pp. 3500-3505, 1990.
LORDELO, A. D. S., “Controle Automático com Estrutura Variável Utilizando Sistemas ERP e
LMI”, Dissertação de Mestrado, Universidade Estadual Paulista, UNESP, Ilha Solteira - SP -
Brasil, pp. 92-96, 2000.
OGATA, K., “Modern Control Engineering”, Prentice Hall - New Jersey - USA, 1997.
DE OLIVEIRA, M. O.; BERNUSSOU, J. E GEROMEL, J.C., “A New Descrete-Time Robust
Stability Condition”, Systems & Control Letters, v. 37, pp. 261-265, 1999.
DE OLIVEIRA, M. O.; FARIAS, D. P. E GEROMEL, J.C., “LMISol, User’s Guide”, UNICAMP,
Campinas - SP - Brasil, 1997.
RAMPAZZO J., E. J.; ASSUNÇÃO, E.; TEIXEIRA, M. C. M E ANDREA, C. Q., “Condições mais
Relaxadas, Baseadas em LMI, para o Problema de Restrições na Amplitude de Saída de
Sistemas Incertos”, DINCON 2003 - SBMAC, (anais em mídia eletrônica, CD Série
Arquimedes), CTA, São José dos Campos - SP - Brasil, 2003.
TANAKA, K.; TANIGUCHI, T. E WANG, H. O., “Robust and Optimal Fuzzy Control: A Linear
Matrix Inequality Approach”, 14th Triennial World Congress of IFAC, Beijing - P.R. - China,
pp. 213-218, 1999.
TROFINO N., A., “Parameter Dependente Lyapunov Function for a Class of Uncertain Linear
Systems: an LMI Approach”, IEEE Proceedings of the 38th Conference on Decision e
Control, Phoenix - Arizona - USA, pp. 2341-2346, 1999.

67
VANANTWERP, J. G. E BRAATZ, R. D., “A Tutorial on Linear and Bilinear Matriz
Inequalities”, Journal of Process Control, v. 10, n. 22, pp. 363-385, 2000.

A-1
APÊNDICE A - ESTABILIDADE PROJETIVA
Teorema A.1 (Estabilidade Projetiva (Apkarian et al., 2001)): A condição i) e as
condições das LMIs de ii) a v), envolvendo matrizes simétricas variáveis P e X e matrizes
gerais V e W , são equivalentes:
i) A é Hurwitz, portanto 0)(Re <Aiλ ; (A.1)
ii) P∃ tal que: 00
0�⎥
⎦
⎤⎢⎣
⎡−
+P
PAPAT
; (A.2)
iii) WX ,∃ tais que: 0)(
�⎥⎦
⎤⎢⎣
⎡−+
++−XWXA
WAXWWXT
TT
; (A.3)
iv) VP,∃ tais que: 0
0
0
)(
�
⎥⎥⎥
⎦
⎤
⎢⎢⎢
⎣
⎡
−−+
++−
PV
PPVA
VPAVVVT
TTT
; (A.4)
v) VP,∃ tais que: 0
0
0
)(
�
⎥⎥⎥
⎦
⎤
⎢⎢⎢
⎣
⎡
−−+
++−
PV
PPAV
VPAVVV TTTT
. (A.5)
Prova (Apkarian et al., 2001): Note que a equivalência entre i) e ii) é o teorema
fundamental de Lyapunov para sistemas lineares em tempo contínuo. A equivalência entre iii)
e iv) é obtida, em (A.8), fazendo 1−= WV , 1−= XP e executando a transformação de
congruência (A.6) sobre (A.3).
.0
0⎥⎦
⎤⎢⎣
⎡P
V
(A.6)
,00
0)(
0
0�⎥
⎦
⎤⎢⎣
⎡⎥⎦
⎤⎢⎣
⎡−+
++−⎥⎦
⎤⎢⎣
⎡P
V
XWXA
WAXWWX
P
VT
TTT
,0)(
)()]([�⎥
⎦
⎤⎢⎣
⎡−+
++−PXPVWXAP
PWAXVVWWXVT
TTTT
(A.7)

A-2
.0)(1
�⎥⎦
⎤⎢⎣
⎡−+
++−−
PPVA
PAVVVVPVT
TTT
(A.8)
Logo, uma operação por complemento de Schur com respeito ao termo VPV T 1−
conduz a (A.4). Assim, só será provado que iv) e v) reduz-se de ii). Uma pequena prova da
equivalência entre ii) e iv) pode ser obtida pela utilização do lema da projeção recíproca,
Apêndice B. Realmente, a desigualdade de Lyapunov ii) é equivalente a:
,0�TXAAX +
(A.9)
com 1−= PX .
O uso do lema da projeção recíproca com 0=Ψ e AXS = produz:
,0)(
�⎥⎦
⎤⎢⎣
⎡−+++−YWXA
WAXWWYT
TT
(A.10)
ou, equivalentemente em (A.13), com 1−= XP e a transformação de congruência em (A.11).
,00
0)(
0
0�⎥
⎦
⎤⎢⎣
⎡⎥⎦
⎤⎢⎣
⎡−+++−
⎥⎦
⎤⎢⎣
⎡P
I
YWXA
WAXWWY
P
IT
TT
(A.11)
,0)(
)()(�⎥
⎦
⎤⎢⎣
⎡−+
++−PYPIWXAP
PWAXWWYT
TT
(A.12)
.0)(
�⎥⎦
⎤⎢⎣
⎡−+++−PYPPWA
PWAWWYT
TT
(A.13)
Para a transformação de congruência, em (A.14), sobre (A.13), obtém-se (A.15)
com 1−= WV .
,00
0)(
0
0�⎥
⎦
⎤⎢⎣
⎡⎥⎦
⎤⎢⎣
⎡−+++−
⎥⎦
⎤⎢⎣
⎡I
V
PYPPWA
PWAWWY
I
VT
TTT
(A.14)
.0)(
�⎥⎦
⎤⎢⎣
⎡−+
++−YPVA
PAVVVYVVT
TTT
(A.15)
Aplicando complemento de Schur com respeito ao termo YVV T , a desigualdade
(A.13) torna-se:

A-3
,0
0
0
)(
1
�
⎥⎥⎥
⎦
⎤
⎢⎢⎢
⎣
⎡
−−+
++−
−YV
PYPPVA
VPAVVVT
TTT
(A.16)
o qual é semelhante a (A.4) com a escolha especial de 1−= PY .
Finalmente, v) é dual de iv) pela transformação TAA → e pode se mostrar ser
equivalente a ii) pelos mesmos argumentos.

B-1
APÊNDICE B - LEMA DA PROJEÇÃO
Lema B.1 (Lema da Projeção (Apkarian et al., 2001)): Dada uma matriz simétrica
nxnℜ∈Ψ e duas matrizes Y, Q de dimensões n e existe uma P tal que a seguinte LMI seja
verdadeira:
,0�YPQQPY TTT ++Ψ
(B.1)
se e somente se a projeção das seguintes desigualdades com respeito a P são satisfeitas,
,0,0 <ΨΝΝ<ΨΝΝ QTQY
TY
(B.2)
onde YΝ e QΝ representam bases arbitrárias do espaço nulo de Y e Q, respectivamente.
Lema B.2 (Lema da Projeção Recíproca (Apkarian et al., 2001)): Seja Y uma dada
matriz positiva definida. As seguintes declarações são equivalentes:
;0i) �TSS ++Ψ
(B.3)
.0)(
ii) �⎥⎦
⎤⎢⎣
⎡−+++−+Ψ
PWS
WSWWP TTT
(B.4)
se a LMI (B.4) é factível com respeito a W.
Prova (Apkarian et al., 2001): É suficiente calcular a condição de projeção
conforme o Lema B.1 com respeito à matriz geral e variável W.

C-1
APÊNDICE C - COMPLEMENTO DE SCHUR
A idéia básica do complemento de Schur (VanAntwerp e Braatz, 2000) diz que a
LMI:
,0)()(
)()(�⎥
⎦
⎤⎢⎣
⎡xRxS
xSxQT
sendo que TT xRxRxQxQ )()(,)()( == e )(xS têm uma dependência afim de x e é
equivalente a:
.0)()()()(e0)( 1��
TxSxRxSxQxR −−
)(⇒ Suponha que a desigualdade matricial (C.1) seja verdadeira.
.0)()(
)()(�⎥
⎦
⎤⎢⎣
⎡xRxS
xSxQT
(C.1)
Seja definida ),( vuF segundo a igualdade (C.2).
.)()(
)()(),( ⎥
⎦
⎤⎢⎣
⎡⎥⎦
⎤⎢⎣
⎡⎥⎦
⎤⎢⎣
⎡=
v
u
xRxS
xSxQ
v
uvuF T
T
(C.2)
Então têm-se que:
.0],[,0),( ≠∀> vuvuF
(C.3)
Considere, inicialmente 0=u , então em (C.2) obtém-se (C.4).
.0)(0,0)(),0( �xRvvxRvvF T ⇒≠∀>=
(C.4)
Adote agora v como sendo:
.)()( 1 uxSxRv T−−=
com 0≠u . Seja F(u,v) dado da seguinte forma:
,0,0)]()()()([),( 1 ≠∀>−= − uuxSxRxSxQuvuF T

C-2
.0)()()()( 1�
TxSxRxSxQ −−⇒
)(⇒ Suponha que:
.0)(,0)()()()( 1�� xRxSxRxSxQ −−
(C.5)
Fixando u e otimizando em termos de vF(u,v) definido em (C.2), obtém-se:
.0)(2)(2 =+=∇ uxSvxRF TTV
(C.6)
Desde que 0)( >xR , de (C.6), segue que:
.)()( 1 uxSxRv T−−=
(C.7)
Substituindo (C.7) em (C.2), então:
.])()()()([)( 1 uxSxRxSxQuuF TT −−=
Desde que 0)](,0)()()()([ 1�� xRxSxRxSxQ −− , o mínimo de )(uF ocorre para
0=u , que também implica que 0=v . Então, o mínimo de ),( vuF ocorre em (0,0) e é igual a
zero. Portanto, 0],[,0),( ≠∀> vuvuF , isto é:
.0)()(
)()(�⎥
⎦
⎤⎢⎣
⎡xRxS
xSxQT