
Estabilidade no Domínio da Freqüência -...
21
1 Prof. José Renes Pinheiro, Dr.Eng Estabilidade no Domínio da Freqüência Introdução; Mapeamento de Contornos no Plano s; Critério de Nyquist; Estabilidade Relativa; Critério de Desempenho no Domínio do Tempo Especificado no Domínio da Freqüência; Banda Passante de Sistema; Estabilidade de Sistemas com Atrasos; Controlador PID no Domínio da Freqüência; Estabilidade no Domínio da Freqüência usando MATLAB.
Transcript of Estabilidade no Domínio da Freqüência -...
1Prof. José Renes Pinheiro, Dr.Eng
Estabilidade no Domínio da Freqüência
Introdução;Mapeamento de Contornos no Plano s;Critério de Nyquist;Estabilidade Relativa;Critério de Desempenho no Domínio do Tempo Especificado no Domínio da Freqüência;Banda Passante de Sistema;Estabilidade de Sistemas com Atrasos;Controlador PID no Domínio da Freqüência;Estabilidade no Domínio da Freqüência usando MATLAB.
2Prof. José Renes Pinheiro, Dr.Eng
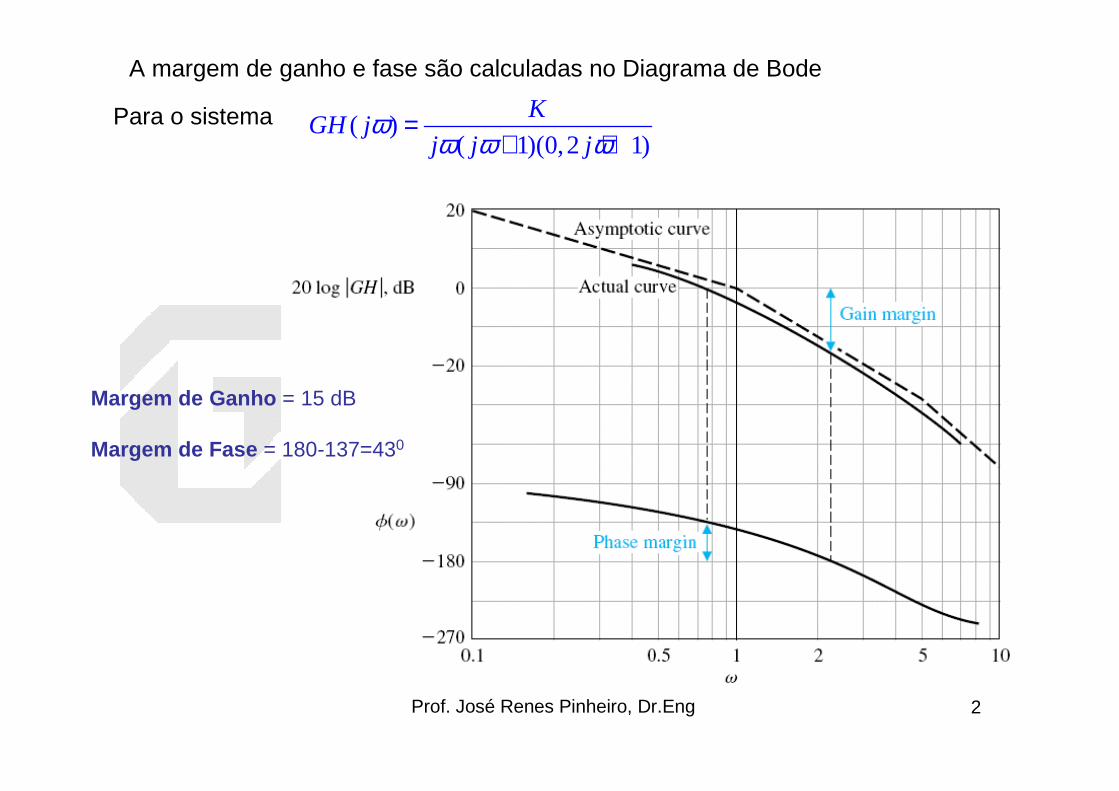
( )( 1)(0,2 1)
KGH j
j j jω
ω ω ω=
+ +
A margem de ganho e fase são calculadas no Diagrama de Bode
Para o sistema
Margem de Ganho = 15 dB
Margem de Fase = 180-137=430
3Prof. José Renes Pinheiro, Dr.Eng
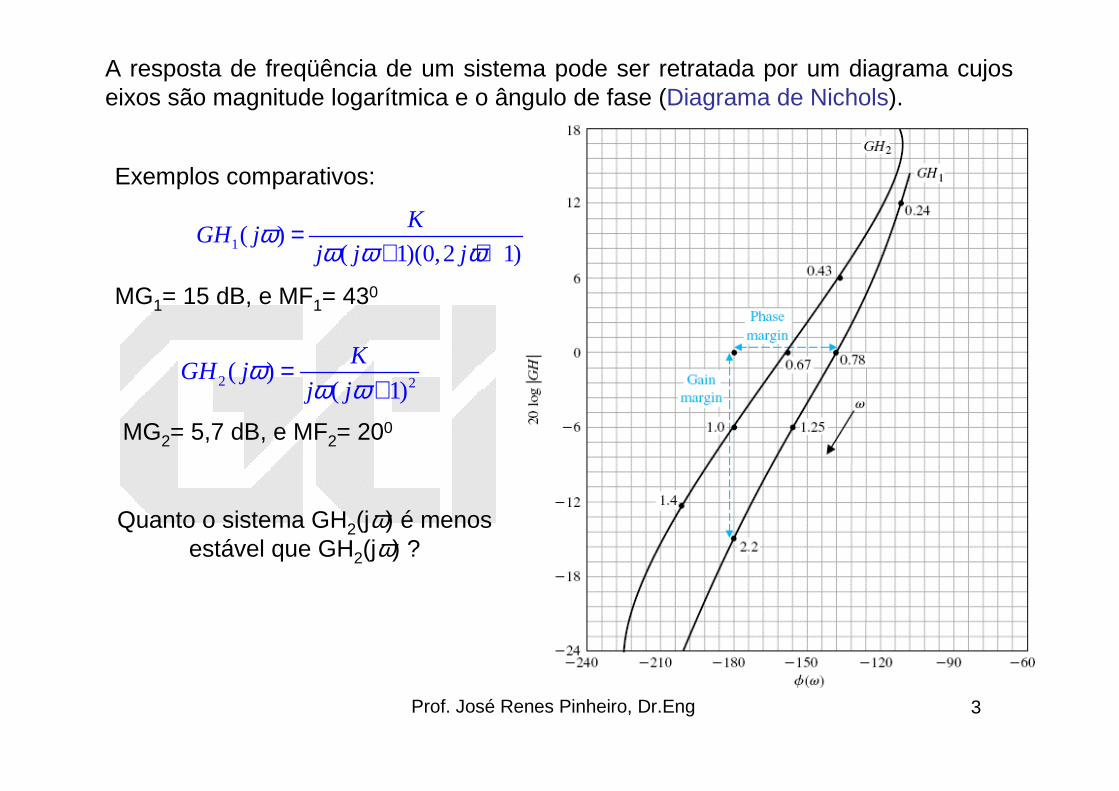
1( )( 1)(0,2 1)
KGH j
j j jω
ω ω ω=
+ +
2 2( )
( 1)
KGH j
j jω
ω ω=
+
A resposta de freqüência de um sistema pode ser retratada por um diagrama cujos eixos são magnitude logarítmica e o ângulo de fase (Diagrama de Nichols).
Exemplos comparativos:
MG1= 15 dB, e MF1= 430
MG2= 5,7 dB, e MF2= 200
Quanto o sistema GH2(jω) é menos estável que GH2(jω) ?
4Prof. José Renes Pinheiro, Dr.Eng
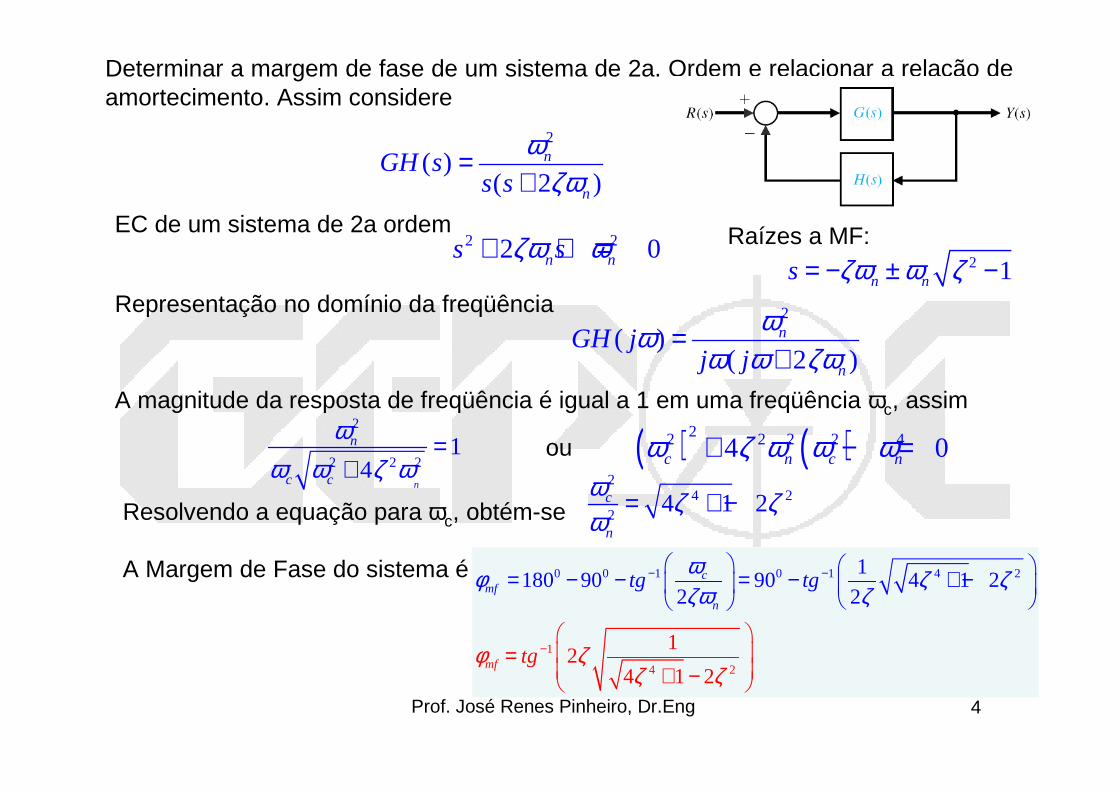
2 1n ns ζω ω ζ= − ± −
2
( )( 2 )
n
n
GH ss s
ωζω
=+
2 22 0n ns sζω ω+ + =
2
( )( 2 )
n
n
GH jj j
ωωω ω ζω
=+
2
2 2 21
4n
n
c c
ωω ω ζ ω
=+
Determinar a margem de fase de um sistema de 2a. Ordem e relacionar a relação de amortecimento. Assim considere
EC de um sistema de 2a ordem Raízes a MF:
Representação no domínio da freqüência
A magnitude da resposta de freqüência é igual a 1 em uma freqüência ωc, assim
ou ( ) ( )22 2 2 2 44 0c n c nω ζ ω ω ω+ − =
Resolvendo a equação para ωc, obtém-se
A Margem de Fase do sistema é
24 2
24 1 2c
n
ω ζ ζω
= + −
0 0 1 0 1 4 2
1
4 2
1
1180 90 90
24 1
1
2
4 22 2
cmf
n
mf t
tg
g
tgωφ ζ
φ ζζ
ζω ζ
ζ
ζ− −
−
= − − = − + −
= −
+
5Prof. José Renes Pinheiro, Dr.Eng
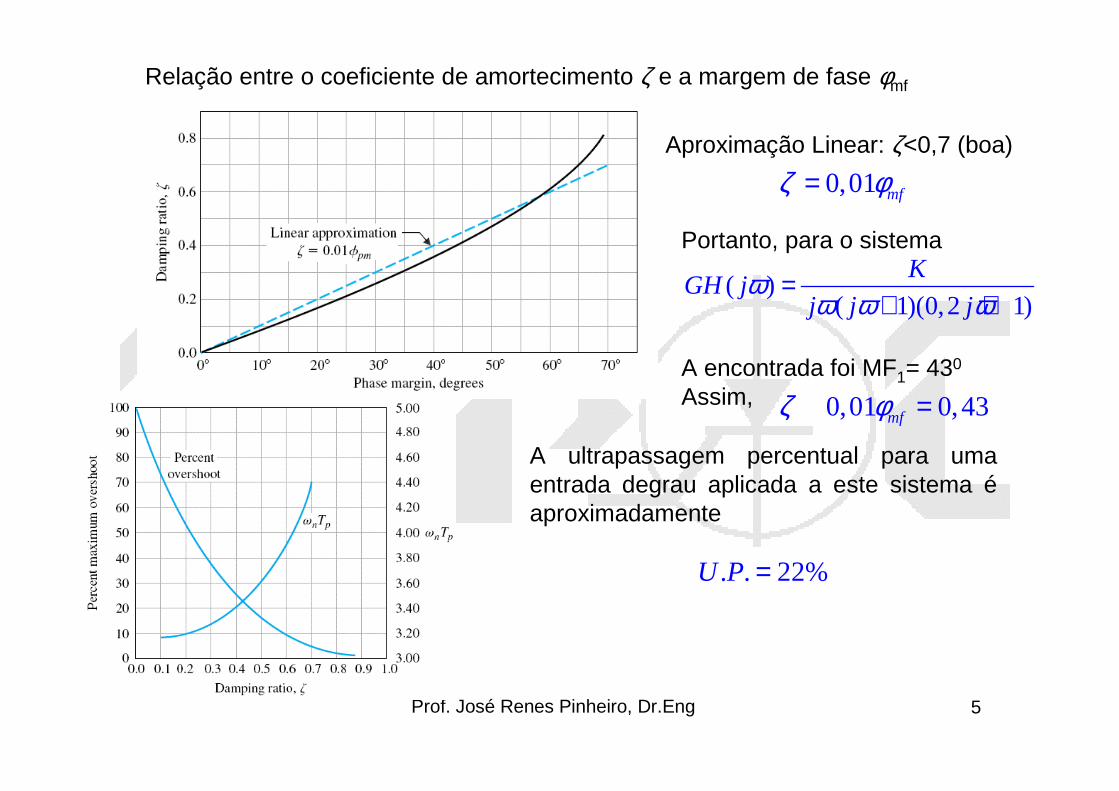
0,01 mfζ φ=
( )( 1)(0,2 1)
KGH j
j j jω
ω ω ω=
+ +
0,01 0,43mfζ φ =;
. . 22%U P =
Relação entre o coeficiente de amortecimento ζ e a margem de fase φmf
Aproximação Linear: ζ<0,7 (boa)
Portanto, para o sistema
A encontrada foi MF1= 430
Assim,
A ultrapassagem percentual para uma entrada degrau aplicada a este sistema é aproximadamente
6Prof. José Renes Pinheiro, Dr.Eng
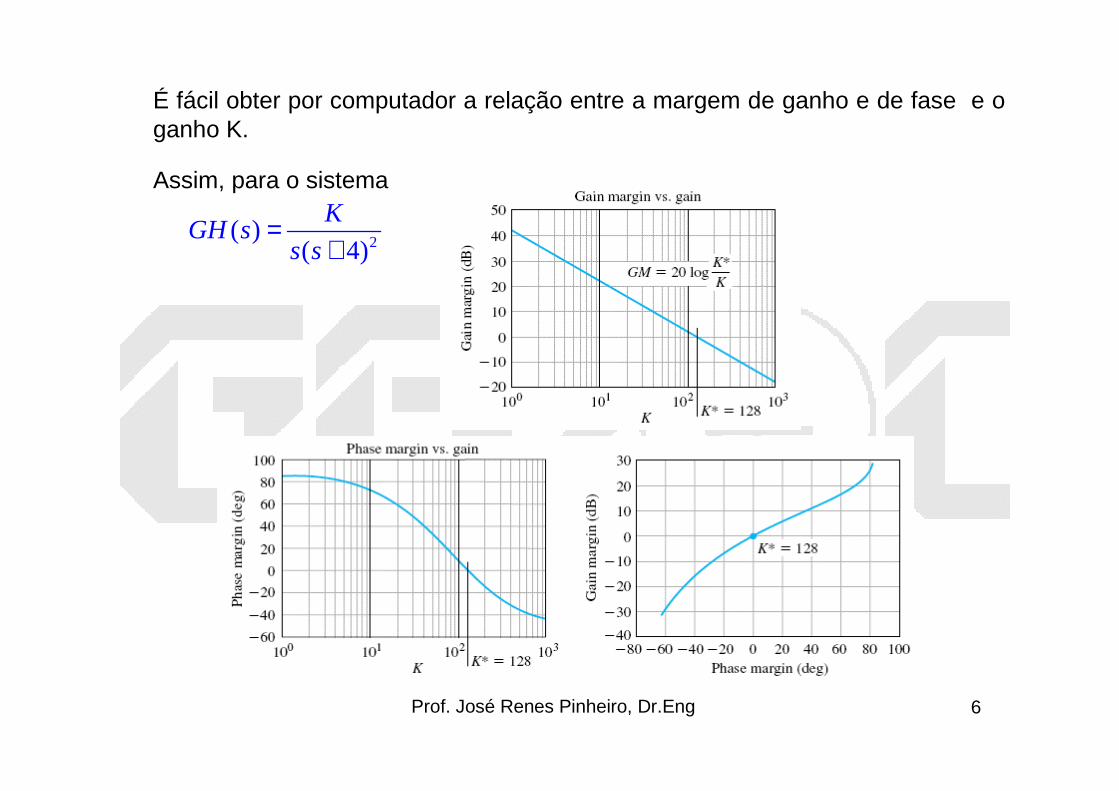
É fácil obter por computador a relação entre a margem de ganho e de fase e o ganho K.
2( )
( 4)
KGH s
s s=
+
Assim, para o sistema
7Prof. José Renes Pinheiro, Dr.Eng
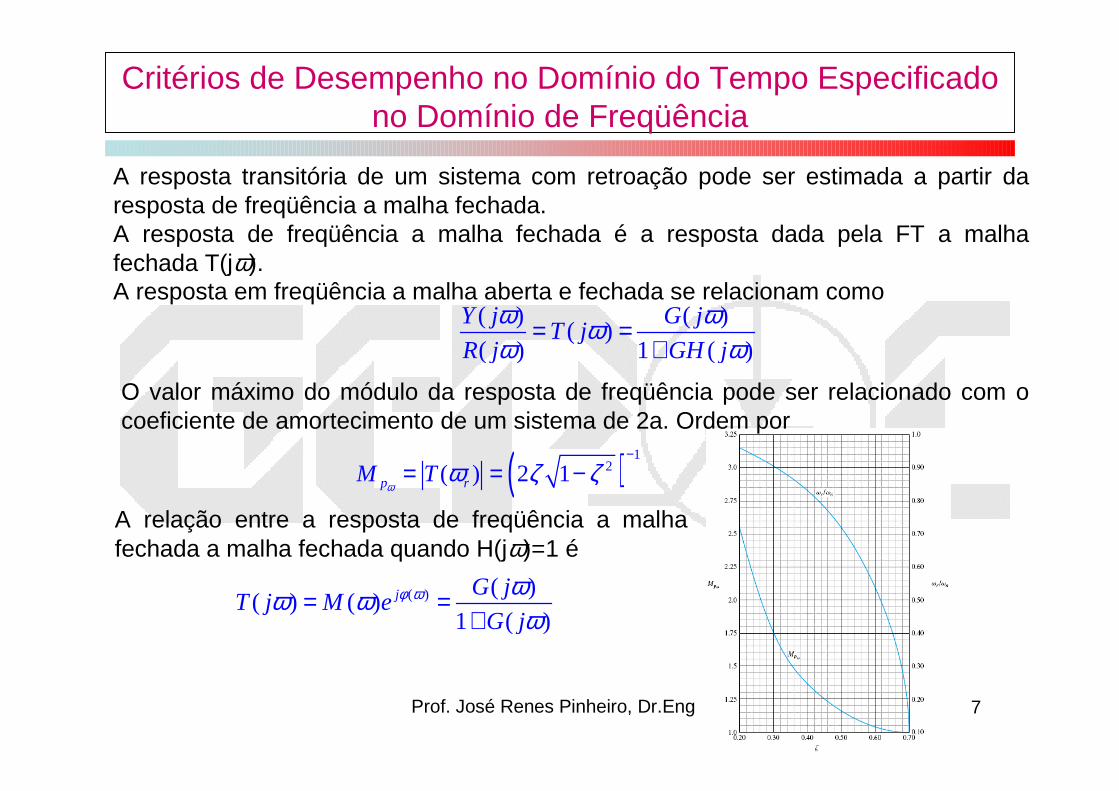
Critérios de Desempenho no Domínio do Tempo Especificado no Domínio de Freqüência
( ) ( )( )
( ) 1 ( )
Y j G jT j
R j GH j
ω ωωω ω
= =+
( ) 12( ) 2 1p rM T
ωω ζ ζ
−
= = −
( ) ( )( ) ( )
1 ( )j G j
T j M eG j
φ ω ωω ωω
= =+
A resposta transitória de um sistema com retroação pode ser estimada a partir da resposta de freqüência a malha fechada.A resposta de freqüência a malha fechada é a resposta dada pela FT a malha fechada T(jω).A resposta em freqüência a malha aberta e fechada se relacionam como
O valor máximo do módulo da resposta de freqüência pode ser relacionado com o coeficiente de amortecimento de um sistema de 2a. Ordem por
A relação entre a resposta de freqüência a malha fechada a malha fechada quando H(jω)=1 é
8Prof. José Renes Pinheiro, Dr.Eng
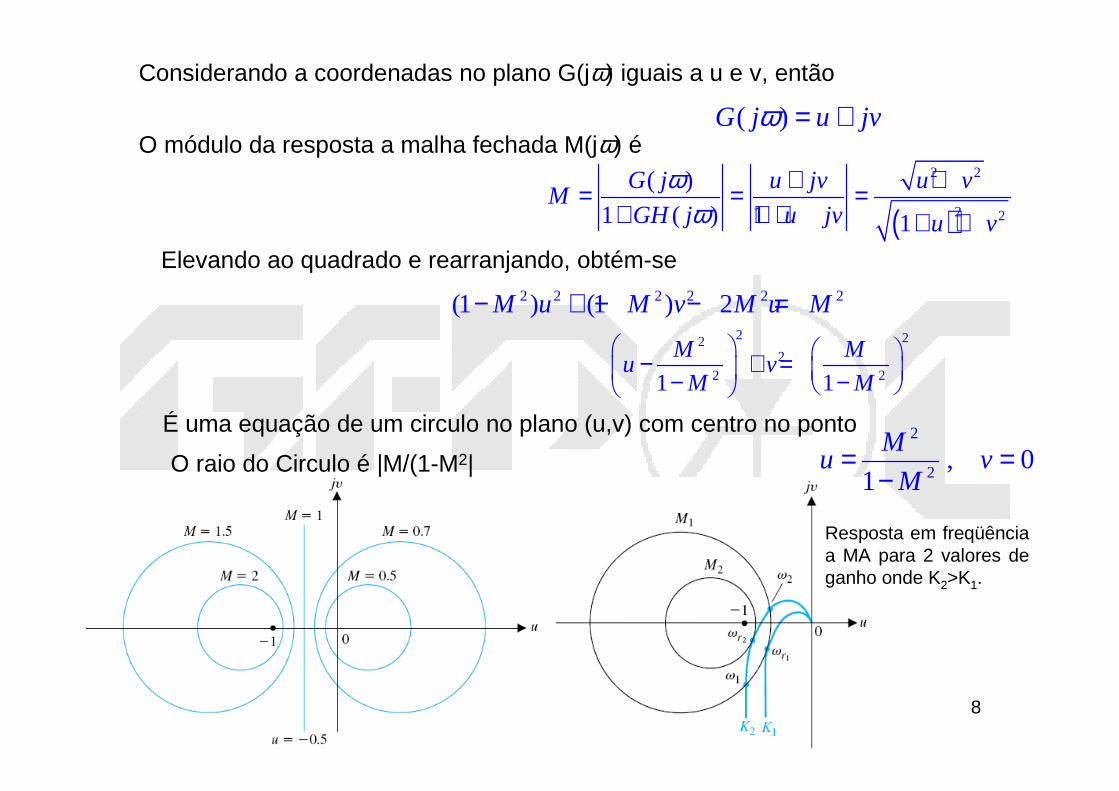
( )G j u jvω = +
( )
2 2
2 2
( )
1 ( ) 1 1
G j u jv u vM
GH j u jv u v
ωω
+ += = =+ + + + +
Considerando a coordenadas no plano G(jω) iguais a u e v, então
O módulo da resposta a malha fechada M(jω) é
Elevando ao quadrado e rearranjando, obtém-se2 2 2 2 2 2(1 ) (1 ) 2M u M v M u M− + − − =
2 222
2 21 1
M Mu v
M M
− + = − −
2
2, 0
1
Mu v
M= =
−
É uma equação de um circulo no plano (u,v) com centro no ponto
O raio do Circulo é |M/(1-M2|
Resposta em freqüência a MA para 2 valores de ganho onde K2>K1.
9Prof. José Renes Pinheiro, Dr.Eng
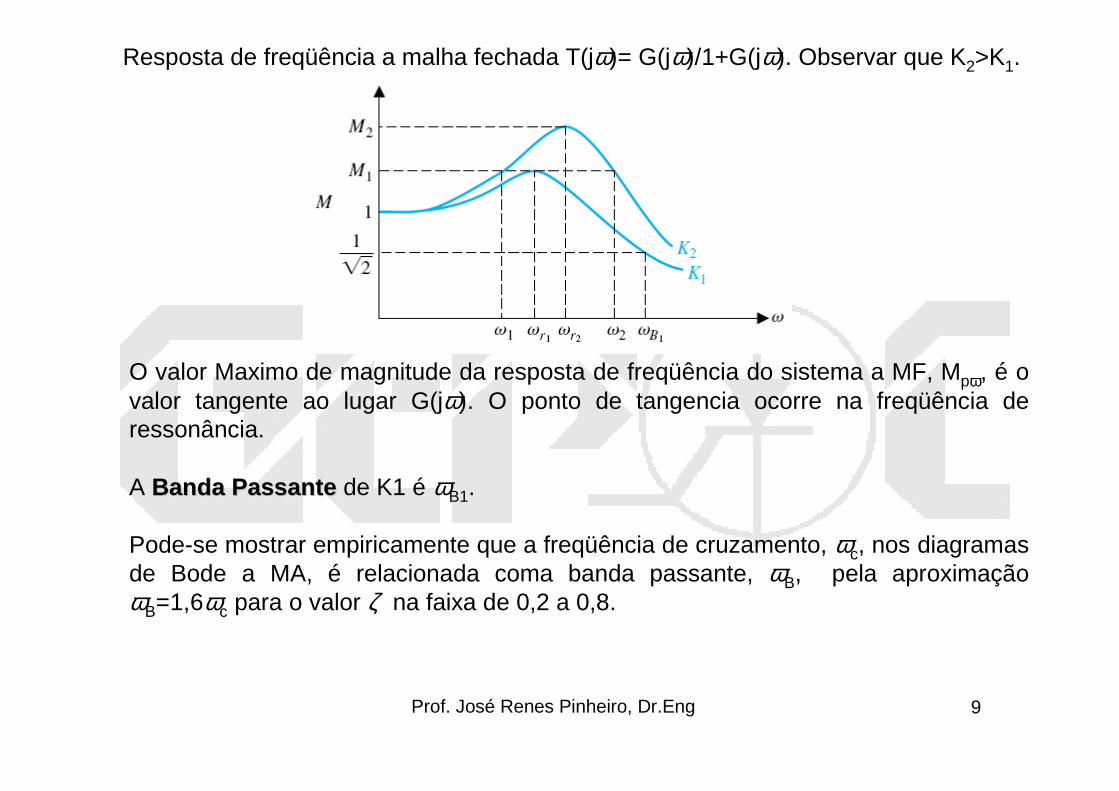
Resposta de freqüência a malha fechada T(jω)= G(jω)/1+G(jω). Observar que K2>K1.
O valor Maximo de magnitude da resposta de freqüência do sistema a MF, Mpω, é o valor tangente ao lugar G(jω). O ponto de tangencia ocorre na freqüência de ressonância.
A Banda PassanteBanda Passante de K1 é ωB1.
Pode-se mostrar empiricamente que a freqüência de cruzamento, ωc, nos diagramas de Bode a MA, é relacionada coma banda passante, ωB, pela aproximação ωB=1,6ωc para o valor ζ na faixa de 0,2 a 0,8.
10Prof. José Renes Pinheiro, Dr.Eng
De modo semelhante podem ser obtidos círculos com ângulos de fase a malha fechada constante. Assim, a relação do ângulo de fase é
1 1( ) ( ) /(1 )1
v vT j u jv u jv tg tg
u uφ ω − − = = + + + = − +
2 2 0v
u v uN
+ + − =
22
2
1 1 1( 0,5) 1
2 4u v
N N + + − = +
Tomando a tangente de ambos os membros e rearrumando os termos, tem-se
Onde N=tgφ=constante. Adicionando-se o termo ¼[1+(1/N2)] a ambos os membros da equação e simplificando, obtém-se
Que é a equação de um circulo com centro u=-0,5 e v=+(1/2N). O raio é igual a ½[1+(1/N2)].
N.B. Nichols transformou os círculos M e N constantes em um diagrama com o logaritmo da magnitude e com o ângulo de fase, o qual se chama de carta de carta de NIcholsNIchols..
11Prof. José Renes Pinheiro, Dr.Eng
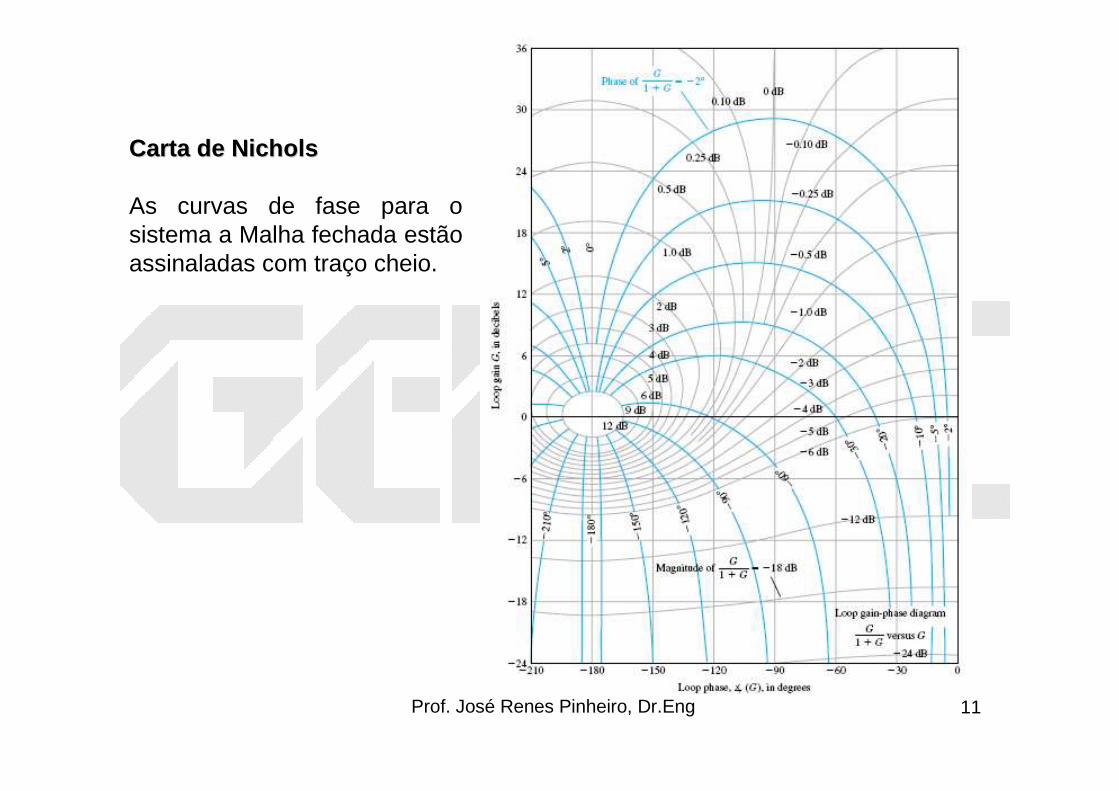
Carta de Carta de NicholsNichols
As curvas de fase para o sistema a Malha fechada estão assinaladas com traço cheio.
12Prof. José Renes Pinheiro, Dr.Eng
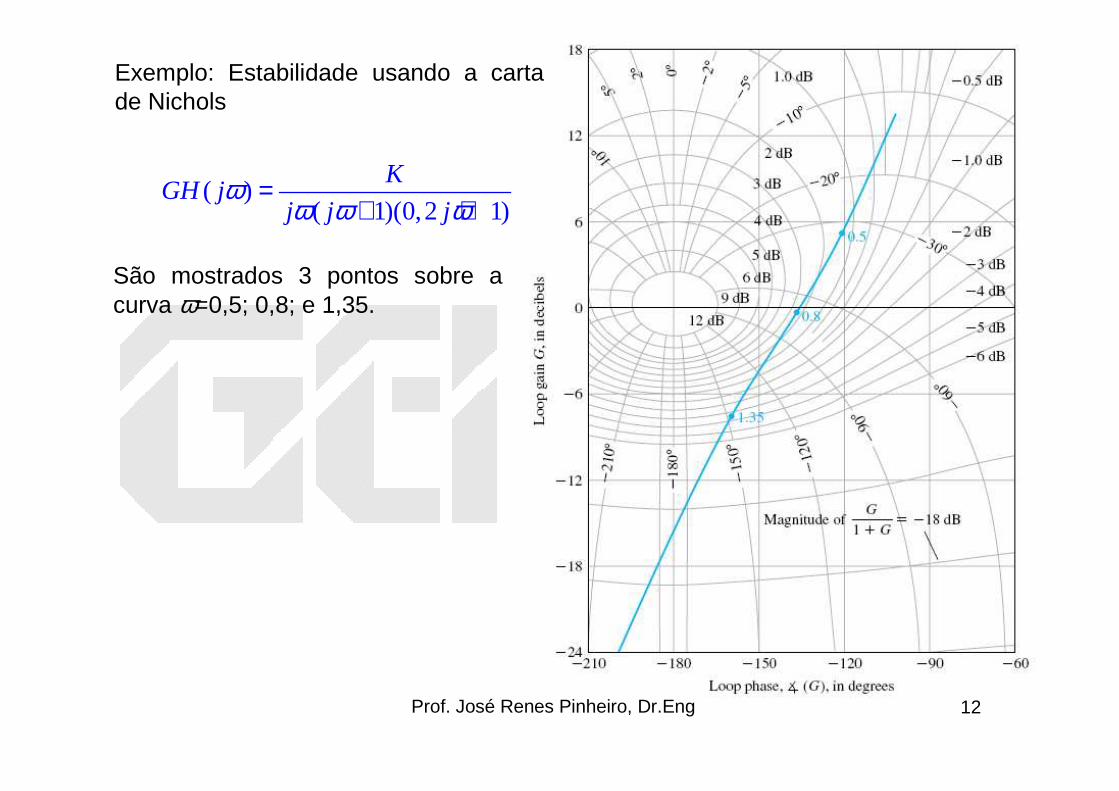
Exemplo: Estabilidade usando a carta de Nichols
( )( 1)(0,2 1)
KGH j
j j jω
ω ω ω=
+ +
São mostrados 3 pontos sobre a curva ω=0,5; 0,8; e 1,35.
13Prof. José Renes Pinheiro, Dr.Eng
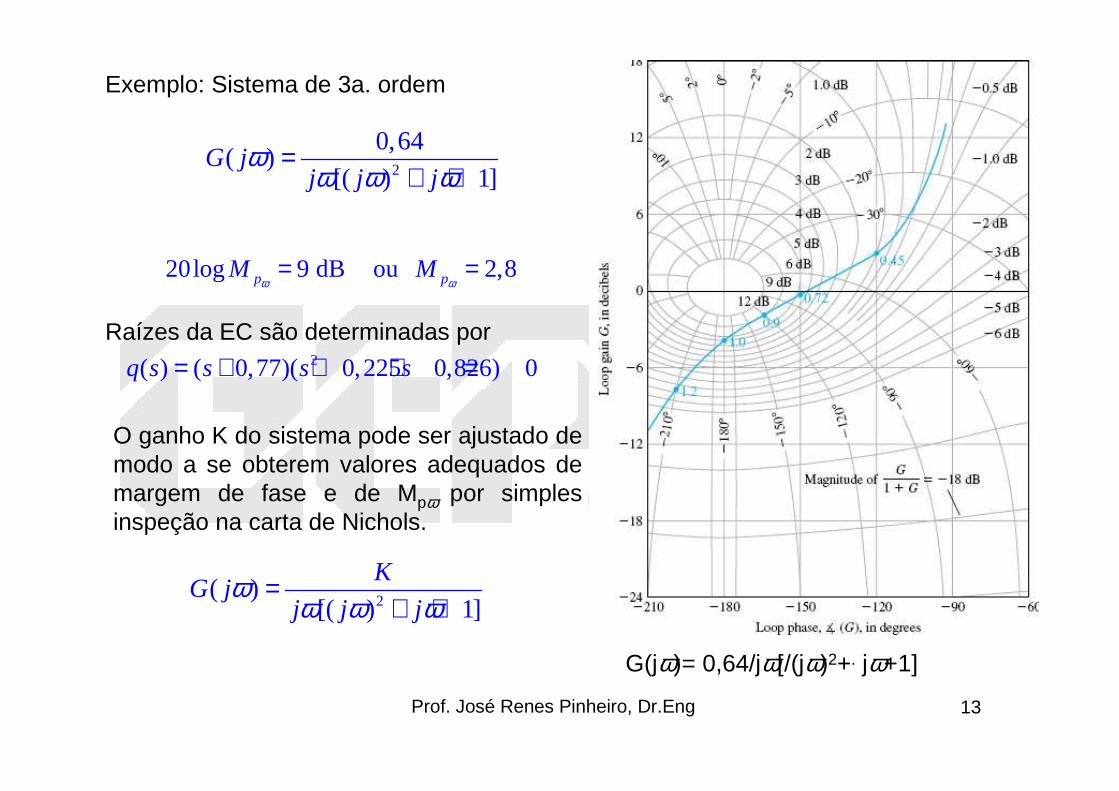
2
0,64( )
[( ) 1]G j
j j jω
ω ω ω=
+ +
20log 9 dB ou 2,8p pM Mω ω
= =
2( ) ( 0,77)( 0,225 0,826) 0q s s s s= + + + =
2( )
[( ) 1]
KG j
j j jω
ω ω ω=
+ +
Exemplo: Sistema de 3a. ordem
Raízes da EC são determinadas por
O ganho K do sistema pode ser ajustado de modo a se obterem valores adequados de margem de fase e de Mpω por simples inspeção na carta de Nichols.
G(jω)= 0,64/jω[/(jω)2+. jω+1]
14Prof. José Renes Pinheiro, Dr.Eng
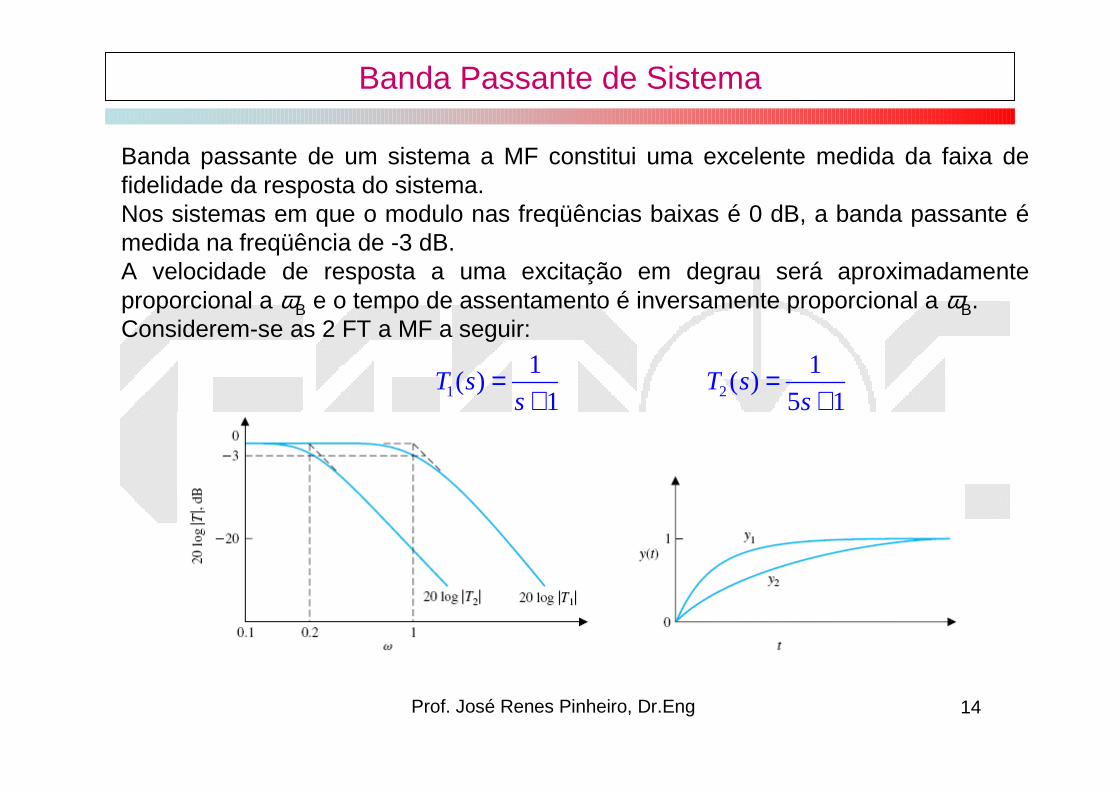
Banda Passante de Sistema
1
1( )
1T s
s=
+ 2
1( )
5 1T s
s=
+
Banda passante de um sistema a MF constitui uma excelente medida da faixa de fidelidade da resposta do sistema.Nos sistemas em que o modulo nas freqüências baixas é 0 dB, a banda passante é medida na freqüência de -3 dB.A velocidade de resposta a uma excitação em degrau será aproximadamente proporcional a ωB e o tempo de assentamento é inversamente proporcional a ωB.Considerem-se as 2 FT a MF a seguir:
15Prof. José Renes Pinheiro, Dr.Eng
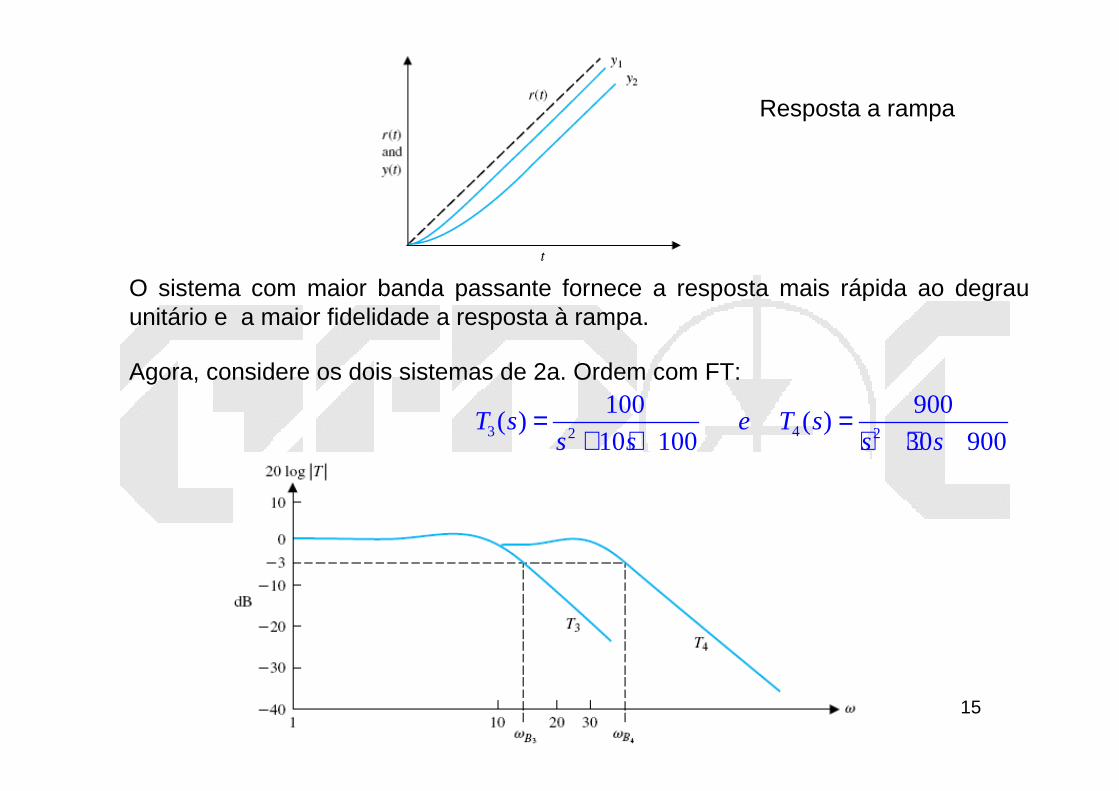
Resposta a rampa
O sistema com maior banda passante fornece a resposta mais rápida ao degrau unitário e a maior fidelidade a resposta à rampa.
3 42 2
100 900( ) ( )
10 100 30 900T s e T s
s s s s= =
+ + + +
Agora, considere os dois sistemas de 2a. Ordem com FT:
16Prof. José Renes Pinheiro, Dr.Eng
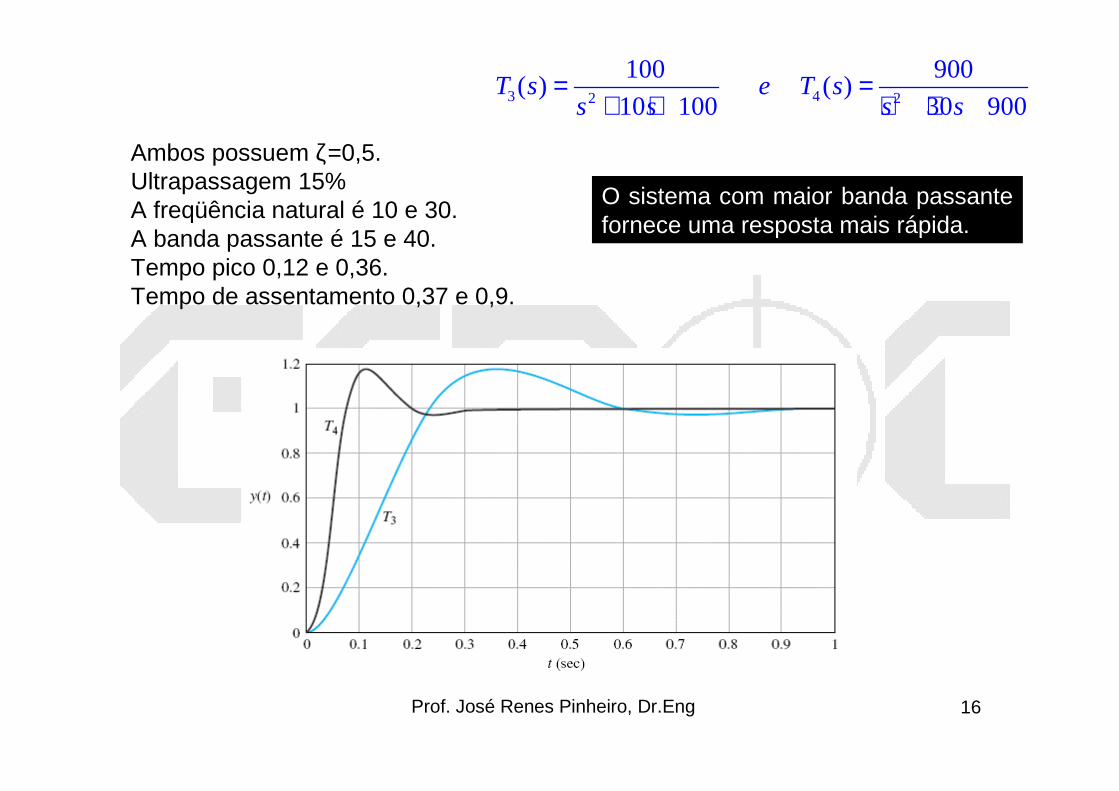
Ambos possuem ζ=0,5.Ultrapassagem 15% A freqüência natural é 10 e 30. A banda passante é 15 e 40.Tempo pico 0,12 e 0,36.Tempo de assentamento 0,37 e 0,9.
3 42 2
100 900( ) ( )
10 100 30 900T s e T s
s s s s= =
+ + + +
O sistema com maior banda passante fornece uma resposta mais rápida.
17Prof. José Renes Pinheiro, Dr.Eng
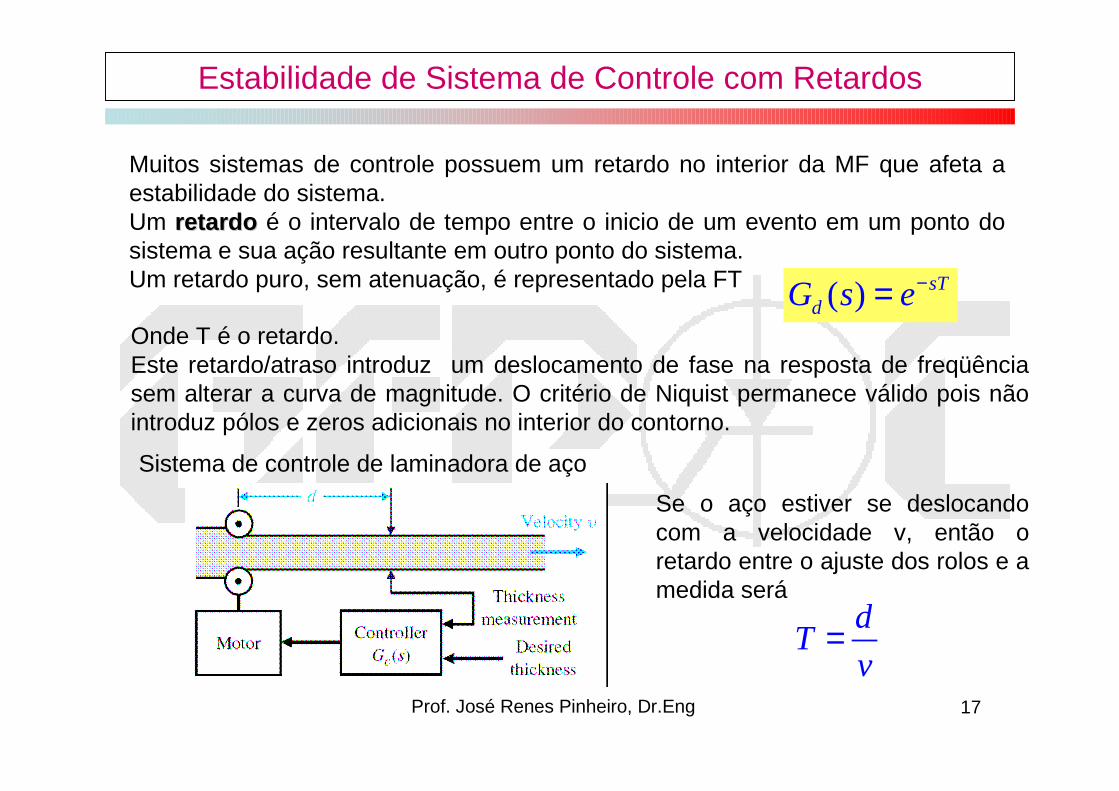
Estabilidade de Sistema de Controle com Retardos
Muitos sistemas de controle possuem um retardo no interior da MF que afeta a estabilidade do sistema.Um retardoretardo é o intervalo de tempo entre o inicio de um evento em um ponto do sistema e sua ação resultante em outro ponto do sistema.Um retardo puro, sem atenuação, é representado pela FT ( ) sT
dG s e−=Onde T é o retardo.Este retardo/atraso introduz um deslocamento de fase na resposta de freqüência sem alterar a curva de magnitude. O critério de Niquist permanece válido pois não introduz pólos e zeros adicionais no interior do contorno.
Sistema de controle de laminadora de aço
dT
v=
Se o aço estiver se deslocando com a velocidade v, então o retardo entre o ajuste dos rolos e a medida será
18Prof. José Renes Pinheiro, Dr.Eng
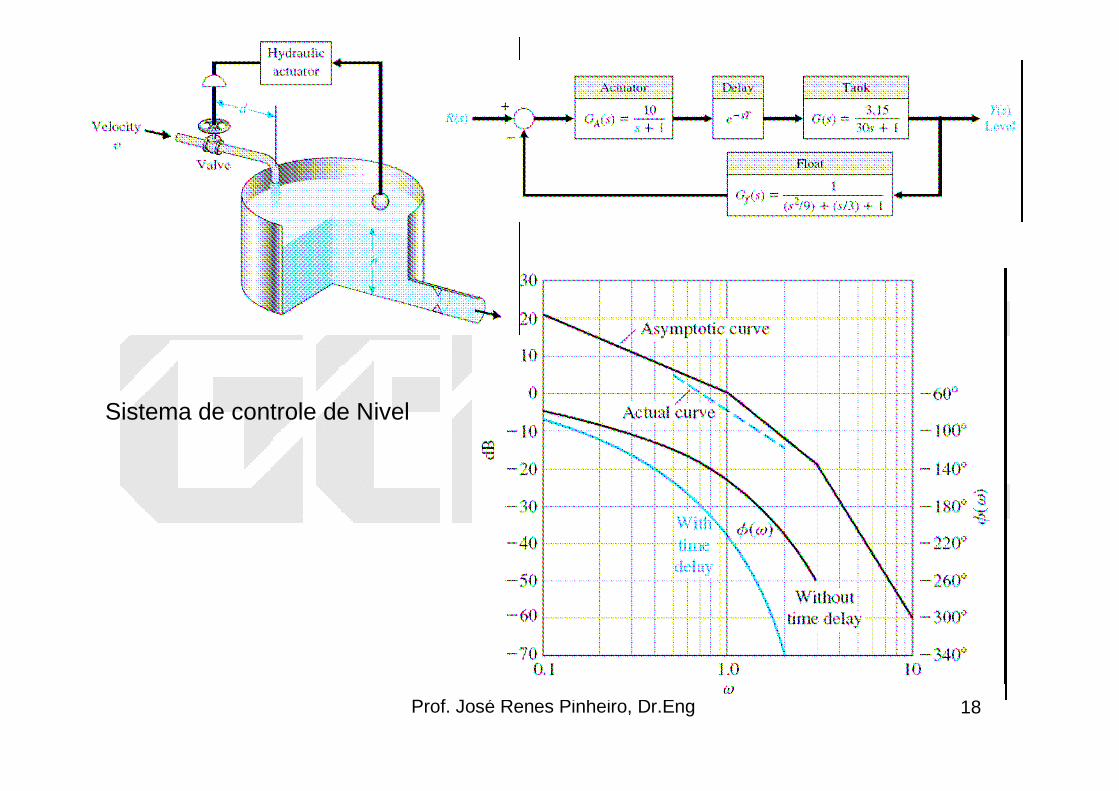
Sistema de controle de Nivel
19Prof. José Renes Pinheiro, Dr.Eng
Controladores PID no Domínio de Frequencia
O contrlador PID fornece um termo proporcional, um integral e um derivativo,assim, a FT do controlador será
21 3( )c
KG s K K s
s= + +
Fazendo K3=0, tem-se o controlador PI
Este controladores PID são particularmente úteis para reduzir o erro de estado estacionário e melhorar o desempenho da resposta trasitória quando G(s) possui um ou dois pólos (ou pode ser aproximado por um processo de 2a. Ordem)
21( )c
KG s K
s= +
1 3( )cG s K K s= +Fazendo K2=0, tem-se o controlador PD
20Prof. José Renes Pinheiro, Dr.Eng
( )23 12 2
2 2
1 1 1( )c
K KK s s K s s
K KG s
s s
ττα
+ + + + = =
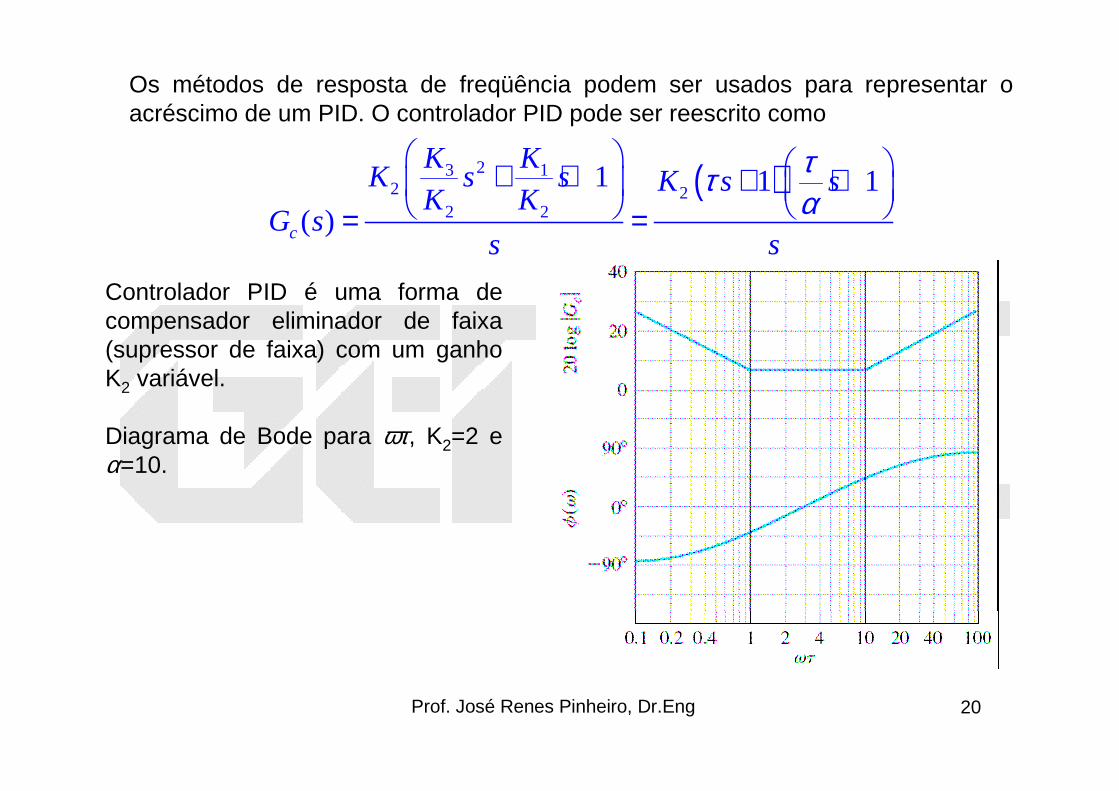
Os métodos de resposta de freqüência podem ser usados para representar o acréscimo de um PID. O controlador PID pode ser reescrito como
Controlador PID é uma forma de compensador eliminador de faixa (supressor de faixa) com um ganho K2 variável.
Diagrama de Bode para ωτ, K2=2 e α=10.
21Prof. José Renes Pinheiro, Dr.Eng
Obrigado pela presença e atenção!
Datas das provas serão divulgadas no Site:
http://www.ufsm.br/gepoc/renes


















