ESTUDO COMPARATIVO EM MODELAGEM S´ISMICA ENTRE … · M.Sc. Michelaˆngelo Gomes da Silva Data da...
50
UNIVERSIDADE FEDERAL DA BAHIA INSTITUTO DE GEOCI ˆ ENCIAS CURSO DE GRADUAC ¸ ˜ AO EM GEOF ´ ISICA GEO213 – TRABALHO DE GRADUAC ¸ ˜ AO ESTUDO COMPARATIVO EM MODELAGEM S ´ ISMICA ENTRE TRAC ¸AMENTO DE RAIOS E PROPAGAC ¸ ˜ AO DE ONDAS TIAGO FILGUEIRAS PEREIRA SALVADOR – BAHIA Dezembro – 2010
Transcript of ESTUDO COMPARATIVO EM MODELAGEM S´ISMICA ENTRE … · M.Sc. Michelaˆngelo Gomes da Silva Data da...

UNIVERSIDADE FEDERAL DA BAHIA
INSTITUTO DE GEOCIENCIAS
CURSO DE GRADUACAO EM GEOFISICA
GEO213 – TRABALHO DE GRADUACAO
ESTUDO COMPARATIVO EM MODELAGEM
SISMICA ENTRE TRACAMENTO DE RAIOS E
PROPAGACAO DE ONDAS
TIAGO FILGUEIRAS PEREIRA
SALVADOR – BAHIA
Dezembro – 2010

Estudo Comparativo em Modelagem Sısmica entre Tracamento de Raios e
Propagacao de Ondas
por
Tiago Filgueiras Pereira
GEO213 – TRABALHO DE GRADUACAO
Departamento de Geologia e Geofısica Aplicada
do
Instituto de Geociencias
da
Universidade Federal da Bahia
Comissao Examinadora
Dr. Wilson Mouzer Figueiro - Orientador
Dr. Eduardo Telmo Fonseca Santos
M.Sc. Michelangelo Gomes da Silva
Data da aprovacao: 21/12/2010

Dedico este trabalho a minha
famılia,
minha namorada e meus amigos.

RESUMO
Faz-se modelagens sısmicas acusticas para seis modelos bidimensionais de campos de veloci-
dades compressionais utilizando-se o programa de modelagem de campo de onda sısmica
TESSERAL. Os mesmo modelos sao, tambem, parametrizados por funcoes polinomiais,
realizando-se ajuste pelo metodo dos mınimos quadrados atraves de programa MATLAB.
Implementa-se uma tecnica de tracamento de raios nesses modelos polinomialmente parame-
trizados, obtendo-se os tracados dos raios e as curvas de tempos de transito que sao, entao,
comparadas aos sismogramas sinteticos gerados pelo programa de modelagem de campo de
onda sısmica.
iii

ABSTRACT
An acoustic seismic modeling is done on six bidimensional compressional velocity field models
using the seismic wave field modeling software TESSERAL. The same models are parame-
terized by polynomial functions using the least squares method contained in the MATLAB
program. Ray paths and traveltime curves are obtained by means of a ray tracing technique
that is implemented on these polynomially parameterized models. The traveltime curves are
then compared to the synthetic seismograms generated by the seismic wave field modeling
software.
iv

INDICE
RESUMO . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . iii
ABSTRACT . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . iv
INDICE . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . v
INDICE DE FIGURAS . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . vii
INTRODUCAO . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 1
CAPITULO 1 Fundamentos Teoricos . . . . . . . . . . . . . . . . . . . . . 2
1.1 Tracamento de Raios em sua Teoria . . . . . . . . . . . . . . . . . . . . . . . 2
1.1.1 Equacoes do Raio . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 3
1.2 Equacao da Onda Acustica . . . . . . . . . . . . . . . . . . . . . . . . . . . 4
CAPITULO 2 Experimentos Numericos . . . . . . . . . . . . . . . . . . . 5
2.1 Comentarios Gerais sobre o Funcionamento Interno do Programa de Modela-
gem de Campo de Onda Sısmica . . . . . . . . . . . . . . . . . . . . . . . . . 5
2.2 Parametrizacao Polinomial dos modelos . . . . . . . . . . . . . . . . . . . . . 6
2.3 Tracamento de Raios . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 6
2.3.1 Fluxograma do Algoritmo de Tracamento de Raios . . . . . . . . . . 8
CAPITULO 3 Modelos e suas Parametrizacoes . . . . . . . . . . . . . . . 9
3.1 Modelo M1 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 9
3.1.1 Modelo M1 Parametrizado por Polinomio . . . . . . . . . . . . . . . . 9
3.2 Modelo M2 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 11
3.2.1 Modelo M2 Parametrizado por Polinomio . . . . . . . . . . . . . . . . 11
3.3 Modelo M3 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 11
3.3.1 Modelo M3 Parametrizado por Polinomio . . . . . . . . . . . . . . . . 11
3.4 Modelo M4 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 12
3.4.1 Modelo M4 Parametrizado por Polinomio . . . . . . . . . . . . . . . . 14
3.5 Modelo M5 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 15
3.5.1 Modelo M5 Parametrizado por Polinomio . . . . . . . . . . . . . . . . 15
3.6 Modelo M6 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 16
3.6.1 Modelo M6 Parametrizado por Polinomio . . . . . . . . . . . . . . . . 16
v

CAPITULO 4 Resultados obtidos pelo Tracamento de Raios . . . . . . . 18
4.1 Tracamento de Raios nos Modelos . . . . . . . . . . . . . . . . . . . . . . . . 18
4.1.1 Raios Tracados em M1 . . . . . . . . . . . . . . . . . . . . . . . . . . 18
4.1.2 Curva de Tempos de Transito de M1 . . . . . . . . . . . . . . . . . . 19
4.1.3 Raios Tracados em M2 . . . . . . . . . . . . . . . . . . . . . . . . . . 19
4.1.4 Curva de Tempos de Transito de M2 . . . . . . . . . . . . . . . . . . 19
4.1.5 Raios Tracados em M3 . . . . . . . . . . . . . . . . . . . . . . . . . . 20
4.1.6 Curva de Tempos de Transito de M3 . . . . . . . . . . . . . . . . . . 21
4.1.7 Raios Tracados em M4 . . . . . . . . . . . . . . . . . . . . . . . . . . 22
4.1.8 Curva de Tempos de Transito de M4 . . . . . . . . . . . . . . . . . . 22
4.1.9 Raios Tracados em M5 . . . . . . . . . . . . . . . . . . . . . . . . . . 22
4.1.10 Curva de Tempos de Transito de M5 . . . . . . . . . . . . . . . . . . 22
4.1.11 Raios Tracados em M6 . . . . . . . . . . . . . . . . . . . . . . . . . . 23
4.1.12 Curva de Tempos de Transito de M6 . . . . . . . . . . . . . . . . . . 25
CAPITULO 5 Sismogramas Gerados . . . . . . . . . . . . . . . . . . . . . 26
5.1 Sismograma para M1 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 26
5.2 Sismograma para M2 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 27
5.3 Sismograma para M3 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 27
5.4 Sismograma para M4 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 27
5.5 Sismograma para M5 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 28
5.6 Sismograma para M6 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 29
CAPITULO 6 Comparacoes dos Resultados e Interpretacoes . . . . . . . 30
6.1 Modelo M1 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 30
6.2 Modelo M2 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 31
6.3 Modelo M3 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 31
6.4 Modelo M4 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 32
6.5 Modelo M5 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 33
6.6 Modelo M6 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 33
CAPITULO 7 Conclusoes . . . . . . . . . . . . . . . . . . . . . . . . . . . . 35
Agradecimentos . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 37
APENDICE A Ajuste Polinomial . . . . . . . . . . . . . . . . . . . . . . . . 38
Referencias Bibliograficas . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 40
ANEXO I Valores dos coeficientes dos polinomios para M2, M3, M4,
M5 e M6 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 41
vi

INDICE DE FIGURAS
2.1 Fluxograma do Algoritmo de Tracamento de Raios . . . . . . . . . . . . . . 8
3.1 Modelo M1 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 10
3.2 Modelo M1 Parametrizado por Polinomio . . . . . . . . . . . . . . . . . . . . 10
3.3 Modelo M2 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 12
3.4 Modelo M2 Parametrizado por Polinomio . . . . . . . . . . . . . . . . . . . . 12
3.5 Modelo M3 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 13
3.6 Modelo M3 Parametrizado por Polinomio . . . . . . . . . . . . . . . . . . . . 13
3.7 Modelo M4 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 14
3.8 Modelo M4 Parametrizado por Polinomio . . . . . . . . . . . . . . . . . . . . 14
3.9 Modelo M5 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 15
3.10 Modelo M5 Parametrizado por Polinomio . . . . . . . . . . . . . . . . . . . . 16
3.11 Modelo M6 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 17
3.12 Modelo M6 Parametrizado por Polinomio . . . . . . . . . . . . . . . . . . . . 17
4.1 Raios Tracados em M1 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 18
4.2 Curva de Tempos de M1 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 19
4.3 Raios Tracados em M2 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 20
4.4 Curva de Tempos de M2 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 20
4.5 Raios Tracados em M3 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 21
4.6 Curva de Tempo de M3 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 21
4.7 Raios Tracados em M4 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 22
4.8 Curva de Tempos de M4 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 23
4.9 Raios Tracados em M5 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 23
4.10 Curva de Tempos de M5 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 24
4.11 Raios Tracados em M6 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 24
4.12 Curva de Tempos de M6 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 25
5.1 Sismograma do Modelo M1 . . . . . . . . . . . . . . . . . . . . . . . . . . . . 26
5.2 Sismograma do Modelo M2 . . . . . . . . . . . . . . . . . . . . . . . . . . . . 27
5.3 Sismograma do Modelo M3 . . . . . . . . . . . . . . . . . . . . . . . . . . . . 28
5.4 Sismograma do Modelo M4 . . . . . . . . . . . . . . . . . . . . . . . . . . . . 28
5.5 Sismograma do Modelo M5 . . . . . . . . . . . . . . . . . . . . . . . . . . . . 29
5.6 Sismograma do Modelo M6 . . . . . . . . . . . . . . . . . . . . . . . . . . . . 29
vii

6.1 Sismograma e Curva de Tempos do Modelo M1 . . . . . . . . . . . . . . . . 30
6.2 Sismograma e Curva de Tempos do Modelo M2 . . . . . . . . . . . . . . . . 31
6.3 Sismograma e Curva de Tempos do Modelo M3 . . . . . . . . . . . . . . . . 32
6.4 Sismograma e Curva de Tempos do Modelo M4 . . . . . . . . . . . . . . . . 32
6.5 Sismograma e Curva de Tempos do Modelo M5 . . . . . . . . . . . . . . . . 33
6.6 Sismograma e Curva de Tempos do Modelo M6 . . . . . . . . . . . . . . . . 34
viii

INTRODUCAO
O problema direto em sısmica consiste em, de posse do modelo sısmico (campo de velo-
cidades), encontrar a resposta sısmica. A chamada modelagem sısmica tem fundamental
importancia como ferramenta auxiliar na resolucao do problema principal, que e o problema
inverso. A ideia e comparar o dado sintetico gerado para um modelo sısmico com o dado
real que se quer inverter, ajustando o modelo ate que se atinja uma precisao aceitavel para
que este seja tomado como o que melhor representa a subsuperfıcie.
O princıpio da modelagem e a simulacao computacional da propagacao da energia sısmica no
meio geologico. Este princıpio e utilizado, tambem, em etapas da propria inversao sısmica,
como por exemplo na migracao pre-empilhamento em profundidade, onde a solucao da
equacao da onda e necessaria para depropagacao do campo de onda registrado e na geracao
das matrizes de tempo de transito. A equacao elastodinamica, que descreve a propagacao
da onda sısmica, nao tem solucao analıtica para meios complexos (Cerveny, 1987). As abor-
dagens mais comuns para a investigacao dos campos de ondas sısmicas em tais meios sao:
(a) Metodos baseados na solucao numerica direta da equacao elastodinamica, como dife-
rencas finitas e elementos finitos , e (b) Metodos baseados na aproximacao assintotica de
alta frequencia da equacao elastodinamica, como o Metodo do Raio.
Ambas abordagens apresentam suas vantagens e desvantagens. Enquanto a primeira pode
ser tida como mais completa, a segunda exige menor capacidade computacional e tem im-
plementacao mais facil. E ainda, a variedade de metodos dentro de uma mesma abordagem
e muito grande, os quais tambem apresentam suas particularidades.
Assim, conhecer que tipos de resultados serao obtidos com a aplicacao de um dado metodo
de modelagem, desenvolvido atraves de uma determinada tecnica, e essencial para se fazer a
escolha apropriada tendo em vista os objetivos que se pretende alcancar. Uma comparacao
entre os resultados da modelagem feita num software cujos resultados ja sao confiaveis e
uma modelagem implementada no ambito academico e uma maneira de se verificar quais
resultados estao, de fato, sendo obtidos com essa tecnica implementada e apontar os pontos
nos quais deve ser aprimorada.
1

CAPITULO 1
Fundamentos Teoricos
Neste capıtulo sao apresentados os aspectos teoricos que serviram de base para o tracamento
de raios desenvolvido no trabalho. Tambem e apresentada a equacao acustica da onda, cuja
solucao numerica direta e obtida na modelagem de propagacao acustica de onda utilizando-se
o programa TESSERAL.
1.1 Tracamento de Raios em sua Teoria
A modelagem atraves do tracamento de raios sısmicos pode ser dividida em duas partes:
cinematica e dinamica. A parte cinematica consiste no computo dos raios sısmicos, frentes
de onda e tempos de transito. A dinamica refere-se aos valores vetoriais complexos das
amplitudes do vetor deslocamento, permitindo a geracao de sismogramas sinteticos.
A unica abordagem rigorosa para os sistemas de tracamento de raios, englobando tanto a
parte cinematica quanto dinamica, e a baseada na solucao assintotica para altas frequencias
da equacao elastodinamica. Um tıpico representante dessa abordagem e o Metodo do Raio
(Babich, 1956; e Karal e Keller, 1959), tambem chamado Teoria Assintotica do Raio ou
Metodo de Serie do Raio. Este metodo pode ser usado para investigar ondas compressi-
onais, cisalhantes e convertidas, contemplando as ondas transmitida e refletidas em meios
isotropicos ou anisotropicos, homogeneos ou heterogeneos. Existem ate extensoes a teoria
basica que descrevem efeitos de difracoes.
No presente trabalho, no entanto, interessa-nos apenas a parte cinematica do tracamento de
raios em meios isotropicos e heterogeneos. O problema pode ser atacado, portanto, com abor-
dagens mais simples, como o Princıpio de Fermat e a Lei de Snell, desde que as frequencias
sejam relativamente altas (comprimento de onda pequeno comparado com a escala das he-
terogeneidades), e o meio suficientemente suave (baixos gradientes de velocidades sısmicas).
Para tais condicoes, as abordagens citadas (Princıpio de Fermat e Lei de Snell) derivam re-
sultados coincidentes com os derivados da Teoria Assintotica do Raio (Cerveny, 1987). Nao
e do escopo deste trabalho mostrar as derivacoes, apenas apresentar os resultados, pois estes
foram utilizados para a realizacao do tracamento de raios.
2

3
1.1.1 Equacoes do Raio
Para modelos isotropicos bidimensionais de velocidades acusticas, V (x, z), os resultados men-
cionados correspondem ao sistema de equacoes do raio (Cerveny, 1987) dado por:{d ~X(τ)dτ
= ~P (τ)d~P (τ)dτ
= 12~5[
1V 2
],
(1.1)
onde ~X(τ) = (x(τ), z(τ)) e o vetor posicao dos pontos da trajetoria do raio; ~P (τ) e o vetor
tangente a trajetoria no ponto (x(τ), z(τ)), denominado vetor vagorosidade por ser o inverso
da velocidade; V = V (x, z) e a velocidade de propagacao da onda compressional no ponto
(x, z) do modelo e τ e um parametro do caminho seguido pelo raio. Este parametro, τ , nao
tem uma significacao fısica direta, sendo apenas um artifıcio matematico usado para facilitar
o caculo das derivadas, tem dimensao L2T−1 no sistema internacional e e definido por:
τ =
∫ t
0
V 2dt, (1.2)
onde t e o tempo de transito. Atraves de expansoes em serie de Taylor, considerando-se
apenas os dois primeiros termos, o sistema de equacoes (1.1) pode ser escrito da seguinte
forma: ~X(τ + δτ) = ~X(τ) + d ~X(τ)dτ· δτ = ~X(τ) + ~P (τ) · δτ
~P (τ + δτ) = ~P (τ) + d~P (τ)dτ· δτ = ~P (τ) + 1
2~5[
1V 2(x,z)
]· δτ.
(1.3)
Essas sao as equacoes usadas para calcular numericamente cada passo da trajetoria do raio,
e, ao final de cada passo, o vetor vagarosidade deve sofrer a seguinte atualizacao a fim de
satisfazer a equacao eiconal: ∥∥∥~P∥∥∥2
=√P 2x + P 2
z =1
V (x, z). (1.4)
O tempo gasto pelo raio para realizar a viagem ao longo da trajetoria desde a fonte, S, ate
um ponto (xN+1, zN+1) na superfıcie e calculado numericamente por:
T (xN+1, zN+1) =N∑i=0
1
Vi·∥∥∥ ~Xi+1 − ~Xi
∥∥∥2, (1.5)
onde Vi e a velocidade no ponto ~Xi.

4
1.2 Equacao da Onda Acustica
Uma equacao que relaciona a pressao com sua velocidade de propagacao em meios acusticos
e a chamada equacao da onda de pressao e e dada por:
52p− 1
c2∂2p
∂t2= ~5ln(ρ)~5p, (1.6)
onde p = p(~x, t) e a pressao, ~x e o vetor posicao, t e o tempo, c e a velocidade de propagacao da
onda de pressao em (~x, t), ρ e a densidade em (~x, t), 52 o laplaciano relativo as dimensoes
espaciais, ~5 o operador gradiente, e ln o logaritmo neperiano. Quando ρ e constante, a
equacao (1.6) se reduz a:
52p− 1
c2∂2p
∂t2= 0. (1.7)
Esta e a chamada equacao da onda escalar acustica. A relacao pressao-deslocamento e dada
por:
p(~x, t) = −k5 ·~u(~x, t), (1.8)
onde ~x = (x, z), k e o modulo de compressao volumetrica, e ~u(~x, t) = (u1(~x, t), u2(~x, t)) e o
vetor deslocamento do ponto material situado em ~x no instante t.

CAPITULO 2
Experimentos Numericos
Visando-se a comparacao entre os tempos obtidos pelo tracamento de raios e os obtidos pela
modelagem da propagacao acustica de onda, as seguintes etapas foram realizadas: criacao de
seis modelos de velocidades sısmicas, obtencao dos sismogramas atraves de um programa de
modelagem de campo de onda sısmica, ajuste polinomial dos modelos, tracamento de raios
nos modelos ajustados e obtencao das curvas dos tempos calculados pelo tracamento.
Os modelos propostos nesse trabalho, que serao apresentados no proximo capıtulo, sao bidi-
mensionais, com as dimensoes de 32, 0 km no eixo horizontal x por 4, 0 km de profundidade
z. Estes modelos foram primeiro desenhados no programa de modelagem de campo de onda,
depois parametrizados para que o tracamento de raios pudesse ser feito.
2.1 Comentarios Gerais sobre o Funcionamento Interno do Pro-
grama de Modelagem de Campo de Onda Sısmica
Utilizando-se uma versao gratuita de demonstracao do programa Tesseral, os sismogramas
sinteticos foram obtidos atraves da opcao de mogelagem acustica com: as ondas superficiais
suprimidas, 107 receptores epacados de 300 m e apenas um tiro com a fonte localizada na su-
perfıcie em x = 16, 0 km. O programa utiliza diferencas finitas para calcular numericamente
a solucao da equacao acustica da onda, apresentada no capıtulo anterior e assim simular sua
propagacao.
O metodo das diferencas finitas consiste em substituir uma equacao diferencial por uma
equacao que envolva somente diferencas finitas. Assim, atraves de operadores de diferencas
finitas, calcula-se o valor de derivadas parciais de um campo, em um dado ponto, a partir de
medias ponderadas dos valores do campo em pontos vizinhos na malha (derivadas espaciais)
e em instantes consecutivos no tempo (derivadas temporais). Uma malha de pontos (grid) e
utilizada para a discretizacao do meio e do campo de onda. Tal metodo de solucao numerica
permite o calculo da onda em cada instante, possibilitando a visualizacao do instantaneo
(snapshot) da perturbacao que se propaga no meio, o que e de grande valia para modelagem
sısmica.
5

6
Outra grande vantagem do metodo e a possibilidade de se utilizar modelos com qualquer tipo
de geometria complexa e, alem disso, os resultados obtidos podem ter a precisao desejada,
contemplam todos os eventos sısmicos e dao as amplitudes corretas, gerando sismogramas
sinteticos completos. Entretanto, deve-se levar em consideracao a elevada demanda compu-
tacional, em termos de memoria e tempo de processamento.
2.2 Parametrizacao Polinomial dos modelos
A parametrizacao polinomial foi escolhida, pois essa suaviza o campo de velocidades e o torna
facilmente e infinitamente derivavel e integravel, o que convem para a tecnica de tracamento
de raios aplicada. Para parametriza-los, lancou-se sobre os modelos uma malha de 65 linhas
verticais e 21 linhas horizontais, espacadas de 0, 5 km. A partir dos valores da velocidade nos
nos dessa malha, fez-se o ajuste de uma funcao polinomial atraves da resolucao de sistemas
lineares de equacoes utilizando-se um programa MATLAB. Os modelos foram ajustados por
polinomios da forma:
V (x, z) = C0,0 + C1,0 · x+ C0,1 · z + C2,0 · x2 + C1,1 · xz + . . .+ Cm,n · xmzn (2.1)
ou seja,
V (x, z) =N∑
i+j=0
Ci,j · xizj (2.2)
Os polinomios tiveram 18 termos, correspondendo ao grau 5. Polinomios com mais termos
(maior grau) poderiam melhorar o ajuste, no entanto tentativas nesse sentido mostraram que
o alto grau originava artefatos matematicos indesejados no tracamento. Apenas o primeiro
modelo foi ajustado por um polinomio de grau 1 e unidimensional, devido a simplicidade
deste, como sera visto no capıtulo seguinte. O calculo dos coeficientes foi feito atraves do
Metodo dos Mınimos Quadrados (Menke, 1989), como explicado no Apendice A. Os coefici-
entes achados definirao, entao, os campos de velocidades usados no algoritmo de tracamento
de raios.
2.3 Tracamento de Raios
Existem duas classes principais de metodos para o tracamento: o bending method (metodo
do encurvamento) que calcula a trajetoria do raio atraves do seu encurvamento, mantendo-se
as posicoes da fonte e do receptor fixas (Figueiro e Madariaga, 1999) e o shooting method
(metodo do tiro), que mantem fixa apenas a posicao da fonte, na qual varia-se o angulo de
saıda do raio visando fazer com que este chegue no receptor de interesse. Neste trabalho uti-
lizamos este ultimo metodo e foram obtidos, entao, os tempos que os raios levam para atingir

7
a superfıcie, como se houvessem receptores cobrindo toda ela. O algoritmo de tracamento
de raios foi implementado em FORTRAN.
A posicao da fonte foi colocada na superfıcie de observacao numa posicao central, ~S =
(x0, z0), com x0 = 16, 0 km e z0 = 0, 0 km. O tempo e o parametro τ tem seu valor inicial
nulo e o valor do passo, δτ , e arbitrado em 0, 015 km2/s. A direcao inicial do raio e definida
pelo angulo θ que o vetor vagarosidade ~P faz com a orientacao positiva do eixo horizontal
x. E este angulo foi feito variar de 0 a 180 graus, com passo de 0, 0001 grau. Assim o vetor
vagarosidade pode ser decomposto nas seguintes componentes:
Px =∣∣∣~P ∣∣∣ cos(θ) (2.3)
e
Pz =∣∣∣~P ∣∣∣ sen(θ). (2.4)
A partir das condicoes iniciais pode-se resolver o problema do tracamento de raios, utilizando-
se o sistema de equacoes (1.1), que fica:{~X(δτ) = ~X(0) + ~P (0) · δτ
~P (δτ) = ~P (0) + 12~5(
1V 2(x,z)
)τ=0· δτ,
(2.5)
onde pela equacao eiconal pode-se calcular ~P (0) = 1/V (x0, z0), daı em diante a posicao e o
vetor vagarosidade sao atualizados por:~X((n+ 1) · δτ) = ~X(n · δτ) + ~P (n · δτ) · δτ
~P (n · δτ) = ~P ((n− 1) · δτ) + 12~5(
1V 2(x,z)
)τ=(n−1)·δτ
· δτ. (2.6)
Lembrando que cada novo vetor vagarosidade calculado deve ter sua magnitude atualizada
de forma a atender a equacao eiconal, assim:
Px =Px
V (x, z) ·√P 2x + P 2
z
(2.7)
e
Pz =Pz
V (x, z) ·√P 2x + P 2
z
. (2.8)
O tempo e calculado atraves de:
T (xN+1, zN+1) = T (xN , zN) +1
VN
√(xN+1 − xN)2 + (zN+1 − zN)2, (2.9)
onde VN e a velocidade em (xN , zN).

8
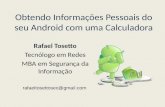
2.3.1 Fluxograma do Algoritmo de Tracamento de Raios
Figura 2.1: Fluxograma do Algoritmo de Tracamento de Raios

CAPITULO 3
Modelos e suas Parametrizacoes
Todos os modelos, aqui considerados, representam campos bidimensionais de velocidades
sısmicas acusticas e sao isotropicos e heterogeneos. Estes, como ja dito no capıtulo anterior,
foram originalmente desenhados no programa de modelagem de campo de onda sısmica, por
isso, neste trabalho, nos referimos a tais modelos como os originais para distingui-los dos
parametrizados. Neste capıtulo apresentamos os modelos originais e os resultados de suas
parametrizacoes polinomiais. Os coeficientes do polinomio que parametriza o modelo M1
aparecem neste capıtulo, os dos polinomios relativos aos demais modelos no Anexo I.
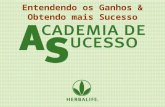
3.1 Modelo M1
O primeiro modelo (Figura 3.1) foi escolhido para ter apenas camadas horizontais, para per-
mitir uma melhor visualizacao da suavizacao que a parametrizacao polinomial proporciona,
bem como facilitar as analises comparativas entre os resultados do tracamento de raios e o
sismograma gerado pela modelagem baseada na propagacao da onda. Este modelo, que foi
denominado M1, e o mais simples dentre os usados neste trabalho, apresentando variacao
apenas na direcao z, podendo ser interpretado geologicamente como constituıdo por 20 ca-
madas sedimentares de igual espessura, 200 m, e com velocidades que aumentam de 1, 5 ate
6, 5 km/s, sendo constantes dentro de cada camada.
3.1.1 Modelo M1 Parametrizado por Polinomio
A parametrizacao deste modelo (Figura 3.2) foi a mais simples, bastando um polinomio
unidimensional de dois termos. O ajuste polinomial foi muito bom devido a simplicidade do
modelo. A diferenca entre o modelo parametrizado para o original desenhado no Tesseral e
que este ultimo apresenta interfaces bem definidas a cada 200 metros, as descontinuidades de
velocidade separando as camadas. O modelo ajustado, e claro, nao apresenta tais interfaces
e sim uma variacao gradual na velocidade acustica de acordo com o polinomio:
V (x, z) = 1, 5 + 1, 25 · z. (3.1)
9

10
Figura 3.1: Modelo M1
Figura 3.2: Modelo M1 Parametrizado por Polinomio

11
3.2 Modelo M2
O modelo M2 (Figura 3.3) representa camadas que apresentam espessuras que variam la-
teralmente, podendo ser interpretado geoloicamente como correspondente a dobras suaves
originadas devido a esforcos tectonicos compressivos. As velocidades sısmicas variam de 1, 5
a 4, 5 km/s.
3.2.1 Modelo M2 Parametrizado por Polinomio
O resultado da parametrizacao polinomial deste modelo (Figura 3.4) apresentou uma distri-
buicao de velocidades proxima a do modelo original (Figura 3.3), no entanto, nas profundi-
dades mais rasas, especialmente proximo aos limites laterais do modelo, ocorrem velocidades
inferiores a 1, 5 km/s que e menor do que a velocidade mınima do modelo original.
3.3 Modelo M3
Este modelo (Figura 3.5) e constituıdo tambem por quatro camadas, com velocidades que vao
de 2,0 a 4,5 km/s. As duas primeiras interfaces apresentam curvas suaves que de forma geral
se acompanham, o que, geologicamente, pode-se interpretar como uma origem comum para
as curvaturas, seja esta de origem tectonica ou de cunho isostatico. Ja a terceira interface
difere significante das outras. A terceira camada, que apresenta uma velocidade tıpica de
folhelhos (3,6 km/s), se torna bem mais espessa na regiao central do modelo, alcancando
uma espessura maxima de mais de 2, 5 km em x = 12, 0 km.
3.3.1 Modelo M3 Parametrizado por Polinomio
A parametrizacao polinomial obtida para o modelo M3 (Figura 3.6) obteve razoavel cor-
respondencia com o modelo original. As diferencas existentes se referem a uma velocidade
mınima de 1, 5 km/s que aparece no topo do modelo parametrizado, enquanto o original
tinha 2, 0 km/s como a menor velocidade, e a espessura da segunda camada que permanece
mais uniforme no modelo parametrizado do que no original. Outra grande diferenca foi a sig-
nificativa variacao de velocidades que ocorre na regiao que corresponderia a terceira camada
do modelo original.

12
Figura 3.3: Modelo M2
Figura 3.4: Modelo M2 Parametrizado por Polinomio
3.4 Modelo M4
O modelo M4 (Figura 3.7) pode ser interpretado como um canal escavado no arenito preen-
chido com folhelho. Este e um modelo simples, de apenas duas velocidades diferentes, uma

13
Figura 3.5: Modelo M3
Figura 3.6: Modelo M3 Parametrizado por Polinomio
que pode ser relacionada ao folhelho (3, 5 km/s) e outra ao arenito (4, 5 km/s). E um modelo
razoavelmente simetrico e que apresenta uma espessura maior na primeira camada na regiao
central, que chega a cerca de 2, 2 km.

14
Figura 3.7: Modelo M4
Figura 3.8: Modelo M4 Parametrizado por Polinomio
3.4.1 Modelo M4 Parametrizado por Polinomio
A parametrizacao deste modelo (Figura 3.8) resultou em um campo com diferencas consi-
deraveis em relacao ao original. O ajuste polinomial criou curvaturas inexistentes original-
mente entre as camadas nas regioes proximas aos limites laterais do modelo, e houve grande

15
variacao nas velocidades dentro das camadas, que no modelo original tem velocidades cons-
tantes. A velocidade mınima, que no modelo original e 3, 0 km/s, chega a 2, 5 km/s no
modelo parametrizado.
3.5 Modelo M5
O modelo M5 (Figura 3.9) representa, esquematicamente, camadas sedimentares com uma
flexura no meio. Sao quatro camadas paralelas horizontais que mudam pra uma atitude de
inclinacao de cerca 30 graus por mais de 2 km para em seguida voltarem a horizontalidade.
As velocidades variam de 1, 5 a 5, 0 km/s e o modelo apresenta quinas nas mudancas de
atitude das camadas.
Figura 3.9: Modelo M5
3.5.1 Modelo M5 Parametrizado por Polinomio
O modelo parametrizado (Figura 3.10) nao apresenta quinas, evidenciando que a parame-
trizacao suaviza nao so as descontinuidades das velocidades, como tambem a geometria,
deixando as camadas mais curvas. O intervalo de velocidades ficou bastante proximo do
original.

16
Figura 3.10: Modelo M5 Parametrizado por Polinomio
3.6 Modelo M6
O modelo M6 (Figura 3.11) pode ser interpretado geologicamente como um domo salino de
grandes dimensoes, que desloca as camadas sobrepostas e cria armadilhas de hidrocarbonetos
nos flancos do domo. O modelo apresenta grandes contrastes laterais devido a intrusao do
domo de sal (4, 8 km/s) que entra em contato lateral com arenito (4, 1 km/s) e com o folhelho
(3, 3 km/s). Uma cobertura sedimentar mais lenta (2, 8 km/s) sobrepoe o modelo.
3.6.1 Modelo M6 Parametrizado por Polinomio
Este foi o modelo de mais difıcil ajuste devido a sua complexidade (Figura 3.12). Em todo
caso, e possıvel identificar ainda o diapirismo salino, embora com pouca delimitacao. Este
resultado torna evidente a dificuldade de se representar modelos que apresentam contraste
nas duas direcoes (x e z) com a parametrizacao polinomial.

17
Figura 3.11: Modelo M6
Figura 3.12: Modelo M6 Parametrizado por Polinomio

CAPITULO 4
Resultados obtidos pelo Tracamento de Raios
4.1 Tracamento de Raios nos Modelos
Neste capıtulo apresentamos os raios tracados para cada modelo e as respectivas curvas de
tempo de transito obtidas.
4.1.1 Raios Tracados em M1
O modelo M1 proporcionou um otimo resultado no tracamento de raios (Figura 4.1), como
ja esperado devido a simplicidade da funcao polinomial que o representa. O modelo sendo
completamente simetrico originou tracados simetricos, que iluminaram quase toda a sua
profundidade, condizendo com o grande numero de camadas que o modelo original tem. No
entanto, antes de x = 6, 0 km e depois de x = 26, 0 km nao ha retorno dos raios, restringindo
a iluminacao horizontal a regiao central do modelo.
Figura 4.1: Raios Tracados em M1
18

19
4.1.2 Curva de Tempos de Transito de M1
A simetria da curva de tempos de transito (Figura 4.2) tambem condiz com a simetria
do modelo. Observa-se, no entanto, que nao ha tempos duplos, muito menos triplos ou
multiplos como poderia se esperar. Para cada posicao x ha apenas um registro temporal.
A curva restringe-se a mesma regiao onde foi observado ocorrer a iluminacao horizontal no
tracamento, mostrando a coerencia do resultado.
Figura 4.2: Curva de Tempos de M1
4.1.3 Raios Tracados em M2
No tracamento de raios deste modelo (Figura 4.3) ocorreu um comportamento anomalo dos
raios na regiao proxima a superfıcie, entre x = 6, 0 km e x = 15, 0 km. A explicacao mais
coerente para tal comportamento e que a velocidade da regiao pode ter alcancado valores
menores que 1 km/s. Assim, como no sistema de equacoes (1.3) que e usado para tracar
o raio, aparece o termo 5(1/V 2) cujo argumento assume valores altos para velocidades
menores que a unidade, e, portanto, sua variacao produz mudancas repentinas na direcao do
raio nesta regiao. Fora este artefato matematico, que sem duvida prejudicou o tracamento, o
resultado mostra corretamente a assimetria do modelo e as curvaturas dos raios se mostram
tambem em bom acordo com o modelo.
4.1.4 Curva de Tempos de Transito de M2
As instabilidades observadas no tracamento se refletem na curva de tempos (Figura 4.4).
Existe uma zona de sombra depois de x = 12, 0 km ate depois de x = 15, 0 km, bem como

20
Figura 4.3: Raios Tracados em M2
tempos duplos em x = 6, 0 km e em x entre 11, 0 e 12, 0 km devido a regiao de baixa
velocidade ja citada.
Figura 4.4: Curva de Tempos de M2
4.1.5 Raios Tracados em M3
O modelo M3 apresenta maior simetria do que o M2, o que ocasionou um tracamento tambem
mais simetrico (Figura 4.5). Observa-se uma boa iluminacao neste modelo.

21
Figura 4.5: Raios Tracados em M3
4.1.6 Curva de Tempos de Transito de M3
A curva de tempos (Figura 4.6) mostra que os raios retornam cobrindo toda a superfıcie. A
curva e mais simetrica do que a de M2, como esperado, com a pequena assimetria evidenciada
na diferenca de tempo em x = 32 km e x proximo a 0 km. Esta ultima observacao esta
condizente com o modelo que tem a ultima interface mais rasa no lado direito.
Figura 4.6: Curva de Tempo de M3

22
4.1.7 Raios Tracados em M4
Este modelo nao e rigorosamente simetrico e, portanto, apresenta pequenas assimetrias.
Os tracados dos raios (Figura 4.7), coerentemente, apresentam pouca assimetria. Os raios
retornam ao longo de toda a superfıcie do modelo, mostrando boa iluminacao.
Figura 4.7: Raios Tracados em M4
4.1.8 Curva de Tempos de Transito de M4
Esta curva (Figura 4.8) e, de forma geral, simetrica, refletindo o grau de simetria do modelo
e do tracamento. Mostra boa iluminacao, indo de x = 0, 0 km a x = 32, 0 km, como previsto
pela observacao dos raios que retornam a superfıcie no tracamento.
4.1.9 Raios Tracados em M5
Observa-se total coerencia do tracado dos raios (Figura 4.9) com a elevacao das camadas na
parte direita do modelo. Os raios retornam mais cedo na regiao direita e mostram iluminacao
um pouco melhor nessa area.
4.1.10 Curva de Tempos de Transito de M5
A assimetria da curva de tempo deste modelo (Figura 4.10) e a esperada pelo fato das cama-
das estarem mais rasas na parte direita, e esta de acordo com a observacao feita visualizando-
se o tracado dos raios. A curva mostra a melhor iluminacao na parte direita, tambem como

23
Figura 4.8: Curva de Tempos de M4
Figura 4.9: Raios Tracados em M5
esperado. Uma zona de sombra acontece em valores de x menores que 4, 0 km.
4.1.11 Raios Tracados em M6
No tracamento deste modelo (Figura 4.11), que como ja dito e o mais complexo, pode-se
observar um cruzamento de raios na profundidade de cerca de 3, 0 km, em x entre 3, 0 e
4, 0 km. Isso evidencia uma regiao caustica, ou seja, onde os raios se afunilam, cruzando-se
eventualmente. Tal fenomeno pode ser indesejavel no tracamento, principalmente na parte

24
Figura 4.10: Curva de Tempos de M5
dinamica devido as amplitudes infinitas que aparecem em tais regioes. Como no presente
trabalho restringimos-nos a parte cinematica, e os raios que passam por essa zona caustica
nao retornam a superfıcie, tal zona nao acarretou problemas ao tracamento realizado.
Figura 4.11: Raios Tracados em M6

25
4.1.12 Curva de Tempos de Transito de M6
A curva de tempo (Figura 4.12) nao reflete a complexidade do modelo, e razoavelmente
simetrica e ha zona de sombra apenas a partir de pouco antes de x = 31, 0 km. Como
esperado, a regiao de cruzamento de raios identificada no tracamento nao causou problemas
nos tempos obtidos.
Figura 4.12: Curva de Tempos de M6

CAPITULO 5
Sismogramas Gerados
Neste capıtulo apresenta-se uma possıvel interpretacao para cada sismograma gerado, que
sao analisados juntamente com os snapshots obtidos na modelagem, os quais nao sao aqui
mostrados para nao sobrecarregar o trabalho.
5.1 Sismograma para M1
No sismograma gerado para o modelo M1 (Figura 5.1), pode-se observar pelo menos 9
hiperboles indicativas de interfaces planas, das 19 que o modelo possui. As demais pro-
vavelmente nao tiveram amplitudes altas o suficiente para a identificacao devido ao baixo
contraste de impedancia e a perda de energia nas reflexoes anteriores. Nota-se ainda que as
hiperboles ultrapassam a onda direta, como era esperado, ja que o modelo tem velocidades
crescentes com a profundidade e uma grande dimensao horizontal.
Figura 5.1: Sismograma do Modelo M1
26

27
5.2 Sismograma para M2
Observa-se neste sismograma (Figura 5.2) que primeiramente aparece a onda direta e, mais
abaixo desta e sem ultrapassa-la, a reflexao referente a primeira interface. Depois as reflexoes
das outra duas interfaces aparecem, ultrapassando a onda direta. Ha tambem o aparecimento
de multiplas para fora dos limites da onda direta.
Figura 5.2: Sismograma do Modelo M2
5.3 Sismograma para M3
Neste sismograma (Figura 5.3) pode-se notar que a reflexao causada pela primeira interface
nao ultrapassa a onda direta, mas fica cada vez mais proxima dela com o aumento do offset.
Ja a segunda reflexao ultrapassa a primeira reflexao e a onda direta a partir de 1,5 segundos.
A ultima reflexao tambem a ultrapassa, apresentando uma curva mais aberta que as demais
devido a maior velocidade da ultima camada. Percebe-se, tambem, a presenca de multiplas
abaixo das reflexoes.
5.4 Sismograma para M4
O sismograma gerado para o modelo M4 (Figura 5.4) mostra a onda direta, uma reflexao
abaixo desta na parte central com difracoes nas laterais. Os eventos que ultrapassam a onda
direta foram interpretados como devido a refracao, ja que nesse caso, a onda caminha na
interface com a velocidade da segunda camada que e maior que a da primeira.

28
Figura 5.3: Sismograma do Modelo M3
Figura 5.4: Sismograma do Modelo M4
5.5 Sismograma para M5
O sismograma referente ao modelo M5 (Figura 5.5), apresenta, abaixo da onda direta, uma
hiperbole originada por uma reflexao plana ate x = 17, 0 km, para valores maiores de x
aparecem difracoes devido a quina onde as camadas assumem uma inclinacao, a partir daı
ha reflexoes da parte inclinada seguida de outras difracoes provocadas por uma nova quina
onde as camadas voltam a ser planas e se encontram mais rasas. Multiplas e reflexoes
primarias originadas nas duas interfaces mais profundas ultrapassam a onda direta.

29
Figura 5.5: Sismograma do Modelo M5
5.6 Sismograma para M6
O sismograma de M6 (Figura 5.6) mostra uma sombra na reflexao da terceira camada devido
ao domo, o que pode ser evidenciado pelas difracoes que ocorrem indicando a presenca deste.
Pode-se observar tambem que entre x igual a 4, 0 km e x igual a 12, 0 km os primeiro eventos
obtidos sao devido a refracao da onda na cabeca do domo. Ha tambem a presenca de
multiplas e de reflexoes provindas das paredes do domo de sal.
Figura 5.6: Sismograma do Modelo M6

CAPITULO 6
Comparacoes dos Resultados e Interpretacoes
Apresentamos aqui os resultados das superposicoes das curvas de tempos de transito
obtidas pelo tracamento de raios (que aparecem em verde nas figuras) e os sismogramas para
cada modelo. Assim, foi possıvel analisar qualitativamente, ao comparar as curvas com os
registros dos sismogramas, quais provaveis eventos sısmicos formaram essas curvas de tempos
obtidas.
6.1 Modelo M1
O resultado (Figura 6.1) para o primeiro modelo, M1, mostra que os tempos obtidos pelo
tracamento de raios correspondem aos primeiros eventos registrados no sismograma em cada
receptor, nao aparecendo nenhum dos eventos que vem depois. A curva de tempos de transito
comeca, entao, pela onda direta e, a medida que esta ultima e ultrapassada pelas reflexoes - o
que acontece nos tempos maiores que 1,5 segundos - a curva passa a representar as reflexoes.
Figura 6.1: Sismograma e Curva de Tempos do Modelo M1
30

31
6.2 Modelo M2
Na comparacao deste modelo (Figura 6.2), observa-se que, apesar da zona de sombra ja
devidamente explicada, a curva de tempos de transito obtida esta em bom acordo como o
sismograma. Esta curva permanece apenas um pouco abaixo dos primeiros eventos regis-
trados no sismograma. Os tempos duplos em x = 6, 0 km e em x entre 11, 0 e 12, 0 km,
coincidentemente sobrepoem eventos sısmicos do sismograma, no entanto, como ja explicado
no capıtulo 4, tratam-se apenas de artefatos matematicos.
Figura 6.2: Sismograma e Curva de Tempos do Modelo M2
6.3 Modelo M3
A curva de tempos de transito obtida para este modelo sobrepoe a onda direta inicialmente e
depois passa a sobrepor a reflexao referente a segunda interface, passando, a partir do tempo
de cerca de 4 segundos, a acompanhar a reflexao da terceira interface (Figura 6.3). A super-
posicao nao e perfeita, a curva permanece um pouco acima desses eventos, principalmente a
partir de 3 segundos.

32
Figura 6.3: Sismograma e Curva de Tempos do Modelo M3
6.4 Modelo M4
Neste modelo, temos o resultado (Figura 6.4) mostrando uma curva de tempos de transito
que, como nos modelos anteriores, comeca sobrepondo a onda direta, mas logo nos primeiros
tempos, fica um pouco abaixo desta, mostrando uma leve concavidade para cima. A partir
de cerca de 2,5 segundos, a curva passa a sobrepor as refracoes que ultrapassam a onda direta
em ambos os lados.
Figura 6.4: Sismograma e Curva de Tempos do Modelo M4

33
6.5 Modelo M5
Para o modelo M5, observa-se que, como nos demais modelos, ha uma boa superposicao
entre a curva de tempos de transito e os primeiros eventos do sismograma (Figura 6.5). A
curva acompanha a assimetria do sismograma, comecando com uma superposicao da onda
direta, que logo nos tempos iniciais, cerca de 0,5 segundos, fica um pouco abaixo desta, como
se apresentasse uma transicao ate passar a acompanhar as reflexoes, o que acontece a partir
de 2,5 segundos no lado direito e a partir de cerca de 3,5 segundos no lado esquerdo.
Figura 6.5: Sismograma e Curva de Tempos do Modelo M5
6.6 Modelo M6
Este modelo, mesmo sendo o mais complexo, apresenta uma otima concordancia com os
primeiros registros do sismograma (Figura 6.6). Como observado para o demais modelos, a
curva acompanha inicialmente a onda direta, depois passa a acompanhar os eventos que a
ultrapassam. No lado direito, esses eventos compreendem reflexoes por volta de x = 23, 0
km e no lado esquerdo refracoes , que para valores de x menores que 11, 0 km e maiores que
8, 0 km foram interpretadas como originadas na cabecas do domo, e reflexoes para tempos
maiores que 3,5 segundos.
Observa-se que a curva permanece um pouco abaixo dos eventos interpretados como refracoes
do domo. No entanto, os indicadores da presenca de um domo salino, como a interrupcao
na reflexao da terceira camada e as difracoes nao apareceram na curva.

34
Figura 6.6: Sismograma e Curva de Tempos do Modelo M6

CAPITULO 7
Conclusoes
Os resultados comparativos apresentados no ultimo capıtulo mostraram, desde o primeiro
modelo, que as curvas de tempo de transito obtidas pelo tracamento de raios feito corres-
pondem, basicamente, aos primeiros registros do sismograma em cada receptor. Nao houve
a multiplicidade de tempos esperada e observou-se que a curva de tempos, de modo geral,
constitui-se inicialmente pela onda direta e depois por partes de eventos distintos. Nota-se
ainda que, na maior parte dos modelos, enquanto ainda acompanha a onda direta, a curva
comeca a ficar um pouco mais abaixo desta a medida que o tempo aumenta, isso se deve
ao fato de o tracado do raio passar a ser curvo diferenciando-se do trajeto reto que a onda
direta faz.
A superposicao entre a curva de tempos de transito e esses primeiros registros dos sismogra-
mas nao foi perfeita. Mas o sucesso obtido foi surpreendente, tendo em vista que os modelos
parametrizados apresentam muitas diferencas em relacao aos modelos desenhados no Tesse-
ral. As diferencas apareceram nao so pelas dificuldades do ajuste polinomial para modelos
mais complexos, mas como da propria natureza da parametrizacao feita, que substitui um
modelo de camadas com velocidade constante dentro delas e descontinuidades nas interfaces,
por um modelo onde as velocidades variam suavemente.
As curvas de tempos de transito nao contemplam as difracoes. As refracoes aparecem apenas
em casos especıficos. Na verdade, no tracamento feito, nao ha nem reflexoes propriamente
ditas, pois o modelo parametrizado nao apresenta interfaces, no sentido de superfıcies (curvas,
no caso 2D) de descontinuidade das velocidades, assim os raios apenas sao curvados de acordo
com a variacao da velocidade em cada posicao, dada pela funcao polinomial que a representa.
Os raios que atingem um ponto de retorno e voltam a superfıcie e que representam as ondas
refletidas e, em alguns casos, podem representar as ondas refratadas.
Portanto, a conformidade das curvas de tempo de transito com os sismogramas, feitas
as ressalvas, evidencia a coerencia e correcao do tracamento de raios sısmicos aqui feito.
Constituindo-se num metodo de modelagem rapido e eficiente, porem limitado por nao con-
templar todos os eventos sısmicos.
Assim, o presente estudo proporcionou o conhecimento de quais resultados podem, de fato,
ser obtidos usando as tecnicas de parametrizacao e tracamento empregadas. Estudos futuros
35

36
de mesma natureza comparativa podem ser feitos usando outras tecnicas de parametrizacao,
que tambem permitam o tracamento de raios, como a parametrizacao trigonometrica, na
tentativa de contemplar mais eventos, permitindo uma modelagem mais completa.

Agradecimentos
Agradeco a todas as pessoas que amo pelo suporte e por me transmitirem confianca so
pelo fato de existirem. Aos meus pais por todo o amor que me concederam. A minha irma,
minha namorada e amigos, pela paciencia que tiveram durante essa fase de dedicacao a este
trabalho.
A Wilson M. Figueiro, meu orientador, pela disposicao, disponibilidade e paciencia que
teve ao indicar os melhores caminhos a seguir para alcancar meu objetivo. Ao professor
Max Argolo, com quem trabalhei durante um ano do curso. A todos os professores do curso
de Geofısica da UFBa pelos ensinamentos. A ex-coordenadora Jacira pelo carinho e ajuda
sempre concedida. Ao tambem ex-coordenador, Amin Bassrei, pelos valiosos conselhos, e ao
atual coordenador, Alberto Brum, pela boa vontade mostrada para a solucao de problemas
dos alunos.
E aos colegas pela importante ajuda que me deram, sem a qual receio que nao seria
possıvel essa realizacao.
37

APENDICE A
Ajuste Polinomial
Para a parametrizacao polinomial dos modelos de velocidades sısmicas compressionais, utiliza-
se as informacoes das velocidades dos nos de uma malha regular, discretizando o modelo.
Assim podemos representar a informacao extraıda como uma matriz M :
MT =
x1 x1 . . . x1 x2 x2 . . . x2 . . . xn xn . . . xn
z1 z2 . . . zm z1 z2 . . . zm . . . z1 z2 . . . zm
v1,1 v1,2 . . . v1,m v2,1 v2,2 . . . v2,m . . . vn,1 vn,2 . . . vn,m
(A.1) onde vk,l e a velocidade no ponto (xk, zl). Procura-se ajustar um polinomio, atraves
dos pontos da matriz M, que tem a forma:
v(x, z) =N∑
i+j=0
ci,j · xizj. (A.2)
Combinando as equacoes (A.1) e (A.2), produz-se o sistema de equacoes:
N∑i+j=0
ci,j · xikzjl = vk,l (A.3)
onde temos que k ∈ {1, 2, 3, . . . , n} e l ∈ {1, 2, 3, . . . , n}. Matricialmente a equacao (A.3)
pode ser expressa como:
Ac = v, (A.4)
38

39
onte temos:
A =
1 x1 z1 x21 x1 · z1 z21 x31 x21 · z1 x1 · z21 z31 . . . zN1...
......
......
......
......
......
...
1 x1 zm x21 x1 · zm z2m x31 x21 · zm x1 · Z2m z3m . . . zNm
. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
1 xk z1 x2k xk · z1 z21 x3k x2k · z1 xk · z21 z31 . . . zN1...
......
......
......
......
......
...
1 xk zm x2k xk · zm z2m x3k x2k · zm xk · z2m z3m . . . zNm. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
1 xn z1 x2n xn · z1 z21 x3n x2n · z1 xn · Z21 z31 . . . zN1
......
......
......
......
......
......
1 xn zm x2n xn · zm z2m x3n x2n · zm xn · z2m z3m . . . zNm
(A.5),
que e a matriz que contem a forma polinomial,
cT = (c0,0 c1,0 c0,1 c2,0 c1,1 c0,2 c3,0 c2,1 c1,2 c0,3 · · · c0,N) (A.6)
e o vetor dos coeficientes e
vT = (v1,1 · · · v1,m · · · vk,1 · · · vk,m · · · vn,1 · · · vn,m) (A.7)
e o vetor das velocidades nos nos da discretizacao.
A solucao para a equacao (A.4) e dada pelo metodo de mınimos quadrados (Menke, 1989):
c = (ATA)−1ATv, (A.8)

Referencias Bibliograficas
BABICH, V.M., 1956. Ray Method of Computing the Intensity of Wave Fronts. Dokl. Akad.
Nauk USSR.
CERVENY , V.; 1987. Ray Method for Three-Dimensional Seismic Modeling. Petroleum
Industry Course, The Norwegian Institute of Technology.
FIGUEIRO, W. M. AND MADARIAGA, R. I.; 1999. Three-dimensional two-point ray
tracing problem in the presence of caustics. In: 6th International Congress of the Brazilian
Geophysical Society, Rio de Janeiro.
KARAL, F. AND J. KELLER, 1959, Elastic Wave Propagation in Homogeneous media.
J.Acoust.Soc. Am. 31, 694-705.
MENKE, W.; 1989. Geophysical Data Analysis: Discrete Inverse Theory. International
Geophysics Series, Academic Press, Volume 45.
40

ANEXO I
Valores dos coeficientes dos polinomios para
M2, M3, M4, M5 e M6
Tabela I.1: CoeficientesM2 M3 M4 M5 M6
C0,0 0,7495513304 1,1523785443 2,6666306594 1,2798386660 3,1187724157
C1,0 0,4032230189 -0,0754451742 0,3143881025 0,2714733018 -0,3758945677
C0,1 1,5775562387 2,9644072153 1,8257154881 -0,3955789227 -0,2327699172
C2,0 -0,0641211422 0,0216144282 -0,0516464360 -0,0530135719 0,0716735928
C1,1 -0,3756516388 0,0016695280 -0,1660778134 -0,1461164743 0,1814534164
C0,2 0,2824782588 -1,1765752341 -0,5705552156 0,6924982391 0,5980583831
C3,0 0,0042580036 -0,0014216669 0,0025698840 0,0037130218 -0,0051828536
C2,1 0,0225668074 -0,0079704486 0,0143834918 0,0192222105 -0,0129581230
C1,2 0,1038240866 0,0139353550 0,0306214719 0,0184483410 -0,0362668503
C0,3 -0,1932561484 0,2110174587 0,0657821840 0,0182359236 -0,2222506117
C4,0 -0,0001268765 0,0000314862 -0,0000390846 -0,0001072926 0,0001597012
C3,1 -0,0002591426 0,0005480499 -0,0005807719 -0,0005054706 0,0002533532
C2,2 -0,0066550967 -0,0003690781 -0,0007683800 -0,0041603946 0,0031262604
C1,3 -0,0015678465 -0,0018931190 -0,0041317714 0,0043027555 -0,0026140064
C0,4 0,0188345103 -0,0110343533 -0,0000000101 -0,0285900973 0,0309036658
C5,0 0,0000013967 -0,0000001723 -0,0000000101 0,0000010889 -0,0000017638
C4,1 -0,0000039859 -0,0000101690 0,0000090167 0,0000036255 -0,0000011800
C3,2 0,0001242613 0,0000097525 -0,0000023581 0,0000782534 -0,0000497025
41