ESTUDO DA DINÂMICA DE UM ATUADOR … · O motor de corrente contínua sem escovas ... Master...
4
ESTUDO DA DINÂMICA DE UM ATUADOR ELETROMECÂNICO DA BOMBA DE SANGUE CENTRÍFUGA IMPLANTÁVEL Tarcísio Fernandes Leão 1 , Eduardo Bock 1,2 , Jeison Fonseca 2 , Aron Andrade 2 , Alexandre Brincalepe Campo 1 1 Instituto Federal de Educação, Ciência e Tecnologia de São Paulo - IFSP, São Paulo, Brasil, [email protected] 2 Instituto Dante Pazzanese de Cardiologia - IDPC, São Paulo, Brasil, [email protected] Resumo: O motor elétrico de corrente contínua sem escovas é utilizado como atuador dos Dispositivos de Assistência Ventricular (DAV). No estudo da dinâmica do atuador foi utilizado o programa MATLAB/SIMULINK. Os resultados obtidos nas simulações são compatíveis com os dados do motor e permitem evoluções no modelo e no controle. Palavras-Chave: Aplicações de Engenharia, Bomba Centrífuga Implantável e Modelo Dinâmico. 1. INTRODUÇÃO O motor de corrente contínua sem escovas (BLDC, do inglês “Brushless Direct Current”), tem sido o principal componente de propulsão no desenvolvimento dos Dispositivos de Assistência Ventricular (DAV). Dentre as características que o faz ser utilizado em bomba implantáveis destaca-se a ausência de escovas, o que permite descartar o desgaste inevitável das escovas observado em outros motores e intolerável neste tipo de dispositivo. A operação em altas velocidades, quando comparado com outras opções de motores, e o tamanho reduzido também são fatores compatíveis com essa utilização [1, 2]. O motor elétrico trifásico de corrente contínua sem escova é um motor síncrono de ímãs permanentes localizados no rotor e bobinas localizadas no estator, geralmente, conectadas em estrela com controle por inversor do tipo ponte H [2, 3]. A operação de um BLDC é realizada através da comutação estratégica das bobinas, assim como ocorre em um motor de passo. A comutação é realizada por um circuito que fornece corrente às bobinas do motor em função da posição do rotor. A corrente de fase de um BLDC, normalmente é retangular e sincronizada com a FCEM (força contra-eletromotriz, ou BEMF do inglês “Back Electromotive Force”) para produzir torque e velocidade constante, apresentando forma trapezoidal, geralmente. Sendo esta a principal característica de controle [4, 5]. A técnica escolhida para o controle da posição do rotor foi a “sensorless”, sem sensores, por dispensar o uso de sensores de posicionamento, que são focos de falhas, o que deve ser evitado em dispositivos implantáveis. A não utilização de sensores também reduz a quantidade de fios para controle do motor, fato que contribui para a prática cirúrgica e reduz complicações pós-operatórias [6 – 8]. Uma bomba centrífuga implantável está sendo estuda no Instituto “Dante Pazzanese” de Cardiologia – IDPC como DAV para auxiliar pacientes com doenças cardiovasculares. Este dispositivo pode ser dividido em: bomba de sangue de fluxo contínuo centrífugo, um motor elétrico BLDC, um controlador para acionar o motor e um sistema de baterias. As bombas centrífugas representam a maioria das pesquisas desenvolvidas atualmente, a qual permite operar em rotações mais baixas que as bombas de fluxo contínuo axiais; obter menores taxas de hemólise, ou seja, menores danos aos elementos do sangue; ter dimensões compatíveis com a implantabilidade total e alcançar vida estimada do conjunto, em assistência, de 2 anos [9 – 11]. Os motores utilizados em bombas sangüíneas centrífugas com acoplamento magnético requerem potência para a movimentação do rotor do motor e para o acoplamento com a bomba, Figura 1 [1, 9, 11, 12]. Nos casos onde o acoplamento é feito diretamente com a bomba é necessário prover potência adicional em função do maior “air gap” (distância entre os magnetos e as bobinas). E quando há um circuito eletromagnético separado do acoplamento, o motor pode assumir maiores dimensões [13]. O objetivo desse trabalho é obter um modelo dinâmico do atuador eletromecânico da bomba centrífuga, com auxílio do programa Matlab / Simulink, onde parâmetros mecânicos e eletromagnéticos foram propostos para as simulações. O programa Matlab/Simulink foi escolhido como ambiente virtual de simulações e modelagem por permitir a integração dos dados de simulações com outros programas, especialmente o programa Comsol Multiphysics, o qual está sendo utilizado para modelar a bomba centrífuga. Figura 1. Bomba de Sangue Centrífuga Implantável e atuador 1)acoplamento magnético do rotor da bomba; 2)rotor da bomba; 3)atuador (motor BLDC); 4)raspadores para movimentar o sangue; 5)mancal superior; 6)mancal inferior; 7)acoplamento magnético do motor BLDC [12]. Entrada Saída 23 http://dx.doi.org/10.5540/DINCON.2011.001.1.0007
Transcript of ESTUDO DA DINÂMICA DE UM ATUADOR … · O motor de corrente contínua sem escovas ... Master...
ESTUDO DA DINÂMICA DE UM ATUADOR ELETROMECÂNICO DA BOMBA DE
SANGUE CENTRÍFUGA IMPLANTÁVEL
Tarcísio Fernandes Leão 1, Eduardo Bock
1,2, Jeison Fonseca
2, Aron Andrade
2, Alexandre Brincalepe Campo
1
1 Instituto Federal de Educação, Ciência e Tecnologia de São Paulo - IFSP, São Paulo, Brasil, [email protected]
2 Instituto Dante Pazzanese de Cardiologia - IDPC, São Paulo, Brasil, [email protected]
Resumo: O motor elétrico de corrente contínua sem escovas é utilizado como atuador dos Dispositivos de Assistência Ventricular (DAV). No estudo da dinâmica do atuador foi utilizado o programa MATLAB/SIMULINK. Os resultados obtidos nas simulações são compatíveis com os dados do motor e permitem evoluções no modelo e no controle. Palavras-Chave: Aplicações de Engenharia, Bomba Centrífuga Implantável e Modelo Dinâmico.
1. INTRODUÇÃO
O motor de corrente contínua sem escovas (BLDC, do inglês “Brushless Direct Current”), tem sido o principal componente de propulsão no desenvolvimento dos Dispositivos de Assistência Ventricular (DAV). Dentre as características que o faz ser utilizado em bomba implantáveis destaca-se a ausência de escovas, o que permite descartar o desgaste inevitável das escovas observado em outros motores e intolerável neste tipo de dispositivo. A operação em altas velocidades, quando comparado com outras opções de motores, e o tamanho reduzido também são fatores compatíveis com essa utilização [1, 2].
O motor elétrico trifásico de corrente contínua sem escova é um motor síncrono de ímãs permanentes localizados no rotor e bobinas localizadas no estator, geralmente, conectadas em estrela com controle por inversor do tipo ponte H [2, 3]. A operação de um BLDC é realizada através da comutação estratégica das bobinas, assim como ocorre em um motor de passo. A comutação é realizada por um circuito que fornece corrente às bobinas do motor em função da posição do rotor. A corrente de fase de um BLDC, normalmente é retangular e sincronizada com a FCEM (força contra-eletromotriz, ou BEMF do inglês “Back Electromotive Force”) para produzir torque e velocidade constante, apresentando forma trapezoidal, geralmente. Sendo esta a principal característica de controle [4, 5].
A técnica escolhida para o controle da posição do rotor foi a “sensorless”, sem sensores, por dispensar o uso de sensores de posicionamento, que são focos de falhas, o que deve ser evitado em dispositivos implantáveis. A não utilização de sensores também reduz a quantidade de fios para controle do motor, fato que contribui para a prática cirúrgica e reduz complicações pós-operatórias [6 – 8].
Uma bomba centrífuga implantável está sendo estuda no Instituto “Dante Pazzanese” de Cardiologia – IDPC como
DAV para auxiliar pacientes com doenças cardiovasculares. Este dispositivo pode ser dividido em: bomba de sangue de fluxo contínuo centrífugo, um motor elétrico BLDC, um controlador para acionar o motor e um sistema de baterias. As bombas centrífugas representam a maioria das pesquisas desenvolvidas atualmente, a qual permite operar em rotações mais baixas que as bombas de fluxo contínuo axiais; obter menores taxas de hemólise, ou seja, menores danos aos elementos do sangue; ter dimensões compatíveis com a implantabilidade total e alcançar vida estimada do conjunto, em assistência, de 2 anos [9 – 11].
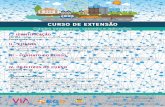
Os motores utilizados em bombas sangüíneas centrífugas com acoplamento magnético requerem potência para a movimentação do rotor do motor e para o acoplamento com a bomba, Figura 1 [1, 9, 11, 12]. Nos casos onde o acoplamento é feito diretamente com a bomba é necessário prover potência adicional em função do maior “air gap” (distância entre os magnetos e as bobinas). E quando há um circuito eletromagnético separado do acoplamento, o motor pode assumir maiores dimensões [13].
O objetivo desse trabalho é obter um modelo dinâmico do atuador eletromecânico da bomba centrífuga, com auxílio do programa Matlab / Simulink, onde parâmetros mecânicos e eletromagnéticos foram propostos para as simulações. O programa Matlab/Simulink foi escolhido como ambiente virtual de simulações e modelagem por permitir a integração dos dados de simulações com outros programas, especialmente o programa Comsol Multiphysics, o qual está sendo utilizado para modelar a bomba centrífuga.
Figura 1. Bomba de Sangue Centrífuga Implantável e atuador 1)acoplamento magnético do rotor da bomba; 2)rotor da bomba;
3)atuador (motor BLDC); 4)raspadores para movimentar o sangue; 5)mancal superior; 6)mancal inferior; 7)acoplamento magnético do
motor BLDC [12].
Entrada
Saída
23
http://dx.doi.org/10.5540/DINCON.2011.001.1.0007
ESTUDO DA DINÂMICA DE UM ATUADOR ELETROMECÂNICO DA BOMBA DE SANGUE CENTRÍFUGA IMPLANTÁVEL Tarcísio Fernandes Leão 1, Eduardo Bock 1,2, Jeison Fonseca 2, Aron Andrade 2, Alexandre Brincalepe Campo 1
2. SISTEMAS DE EQUAÇÕES DO BLDC
Este modelo está baseado nas considerações de que a corrente induzida no rotor devido às harmônicas do campo do estator e as perdas no núcleo foram desconsideradas [14].
De acordo com Krishnan [14 – 16], as equações relevantes do circuito para as bobinas do estator conectadas em estrela (Y), Figura 2, combinando-as em termos elétricos, magnéticos e mecânicos do motor e representado na forma de espaço de estados temos,
X’ = Ax + Bu (1) Onde, x= [ Ia Ib Ic ω θ ]T (2)
(3) .
(4)
e u=[ Va Vb Vc Tl ]
T (5) onde, L1 : L-M; L: indutância da bobina por fase M: Mútua indutância por fase Va ,Vb ,Vc tensão nas bobinas por fase. Ia Ib Ic : corrente por fase ω: velocidade angular θ: ângulo de posição do rotor Rs: resistência por fase J: inércia do rotor B: coeficiente de atrito λ: total linhas de fluxo magnético por fase ƒ(θ): função trapezoidal da FCEM
Figura 2. Circuito equivalente para as bobinas do estator conectadas em estrela (Y) [2].
3. ESTIMADOR DE POSIÇÃO – SEM SENSORES
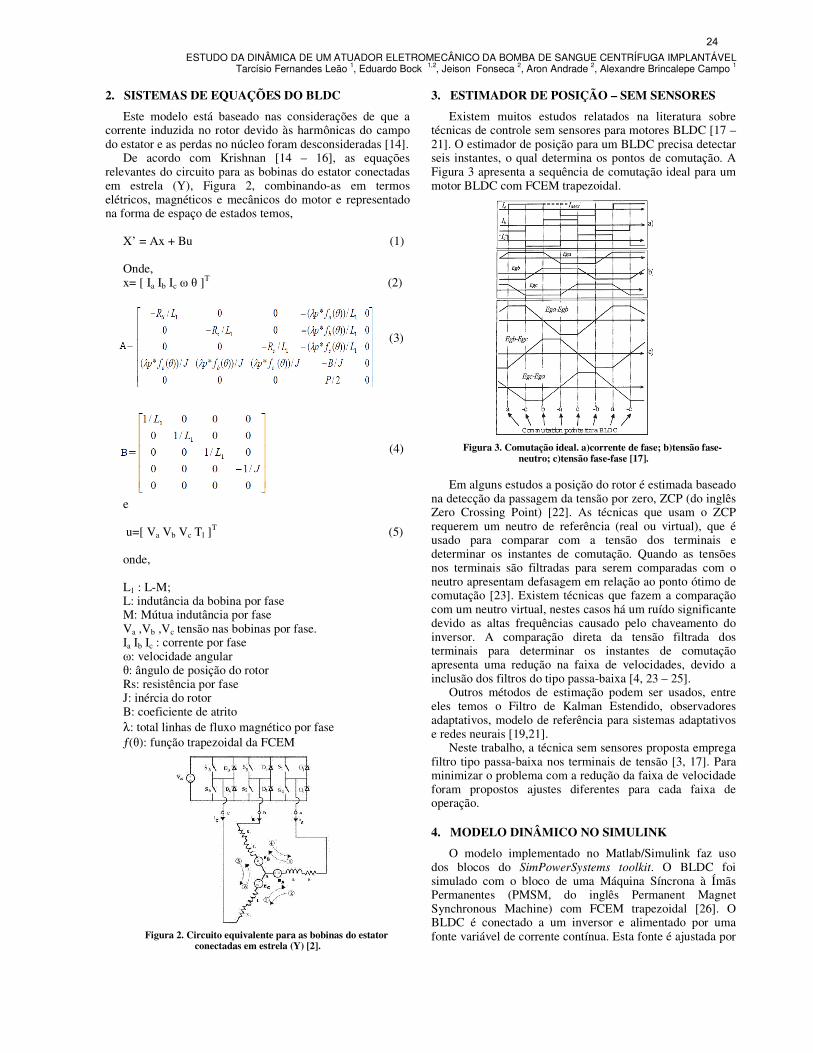
Existem muitos estudos relatados na literatura sobre técnicas de controle sem sensores para motores BLDC [17 – 21]. O estimador de posição para um BLDC precisa detectar seis instantes, o qual determina os pontos de comutação. A Figura 3 apresenta a sequência de comutação ideal para um motor BLDC com FCEM trapezoidal.
Figura 3. Comutação ideal. a)corrente de fase; b)tensão fase-neutro; c)tensão fase-fase [17].
Em alguns estudos a posição do rotor é estimada baseado
na detecção da passagem da tensão por zero, ZCP (do inglês Zero Crossing Point) [22]. As técnicas que usam o ZCP requerem um neutro de referência (real ou virtual), que é usado para comparar com a tensão dos terminais e determinar os instantes de comutação. Quando as tensões nos terminais são filtradas para serem comparadas com o neutro apresentam defasagem em relação ao ponto ótimo de comutação [23]. Existem técnicas que fazem a comparação com um neutro virtual, nestes casos há um ruído significante devido as altas frequências causado pelo chaveamento do inversor. A comparação direta da tensão filtrada dos terminais para determinar os instantes de comutação apresenta uma redução na faixa de velocidades, devido a inclusão dos filtros do tipo passa-baixa [4, 23 – 25].
Outros métodos de estimação podem ser usados, entre eles temos o Filtro de Kalman Estendido, observadores adaptativos, modelo de referência para sistemas adaptativos e redes neurais [19,21].
Neste trabalho, a técnica sem sensores proposta emprega filtro tipo passa-baixa nos terminais de tensão [3, 17]. Para minimizar o problema com a redução da faixa de velocidade foram propostos ajustes diferentes para cada faixa de operação.
4. MODELO DINÂMICO NO SIMULINK
O modelo implementado no Matlab/Simulink faz uso dos blocos do SimPowerSystems toolkit. O BLDC foi simulado com o bloco de uma Máquina Síncrona à Ímãs Permanentes (PMSM, do inglês Permanent Magnet Synchronous Machine) com FCEM trapezoidal [26]. O BLDC é conectado a um inversor e alimentado por uma fonte variável de corrente contínua. Esta fonte é ajustada por
24

um controlador PI (proporcional e integral) com realimentação da velocidade.
A informação da posição do rotor é alternada entre os sensores hall do modelo do PMSM e o estimador de posição proposto com 0,5 s do tempo de simulação.
A Figura 4 apresenta o diagrama de blocos para o estudo da dinâmica do atuador eletromecânico. A Figura 5 apresenta o diagrama de blocos do estimador de posição do rotor que utiliza filtros do tipo passa-baixa para determinar os instantes de comutação.
Figura 4. Diagrama de blocos do BLDC
Figura 5. Diagrama de blocos do estimador de posição – sem sensor
5. RESULTADOS
Nesta seção verificamos a simulação da do diagrama de blocos apresentado. Parâmetros eletromagnéticos e mecânicos foram propostos de acordo com a Tabela 1 [29]. Os parâmetros de torque da carga foram obtidos de testes realizados previamente [11, 27, 28]. As rotações utilizadas nas simulações são rotações típicas para um DAV que usa bomba de sangue centrífuga, assim possibilitando prover pressão e vazão adequada para assistência ventricular em pacientes [1, 11, 27, 28].
Tabela 1. Parâmetros do motor
Nas figuras abaixo, Figuras 6 e 7, são apresentados os
gráficos das simulações do modelo proposto, onde são apresentados resultados das características mecânicas e eletromagnéticas.
Figura 6. Gráfico de velocidade: 2000 rpm.
Figura 7. A) Gráfico da corrente no estator e B)FCEM à 2000 rpm.
(A)
(B)
25

ESTUDO DA DINÂMICA DE UM ATUADOR ELETROMECÂNICO DA BOMBA DE SANGUE CENTRÍFUGA IMPLANTÁVEL Tarcísio Fernandes Leão 1, Eduardo Bock 1,2, Jeison Fonseca 2, Aron Andrade 2, Alexandre Brincalepe Campo 1
A Figura 8 apresenta o gráfico da potência elétrica por torque da carga da bomba centrífuga.
Figura 8. Gráfico de Potência elétrica por torque.
6. DISCUSSÃO
Os resultados obtidos de velocidade com o controlador PI são satisfatórios, a variação da velocidade em regime é da ordem de ±5% para as velocidades simuladas de 1500 e 2000 rpm. Quando o modelo utiliza o estimador de posição, após 0,5 s de simulação, a velocidade se mantém controlada apresentando uma pequena variação na transição para o estimador. A curva de corrente e FCEM no estator apresentaram as mesmas formas de onda encontradas na literatura [14]. Os valores de corrente estão de acordo com o catálogo do fabricante.
Os valores de potência observados para as rotações e torques simulados estão de acordo com a potência estimada para dispositivos de assistência ventricular, em torno de 10 W [11].
7. CONCLUSÃO
Os parâmetros eletromagnéticos e mecânicos do motor BLDC apresentaram resultados de simulação que estão de acordo com a literatura. Os valores de corrente são consistentes com os valores apresentados pelo fabricante. Quando submetido a cargas reais o modelo apresentou valores compatíveis com a assistência ventricular.
O modelo proposto se mostrou adequado para o estudo da dinâmica do atuador eletromecânico.
A validação do modelo está em processo de conclusão, onde os resultados de simulação serão comparados com os resultados de testes “In Vitro” (assistência ventricular) e testes de bancada em dinamômetro.
Em futuros trabalhos, os dados obtidos serão utilizados para refinar o modelo proposto para esta aplicação. Bem como poderão ser propostos novos controladores, novas técnicas sem sensores, algorítmos de segurança em DAV e integrações com outros programas de simulação.
AGRADECIMENTOS
Ao Programa de Pós-Graduação do IFSP e ao IDPC pela viabilização dos estudos e ensaios.
REFERÊNCIAS
[1]DOI Bock, E. et al. New Centrifugal Blood Pump With Dual Impeller and Double Pivot Bearing System: Wear Evaluation in Bearing System, Performance
Tests, and Preliminary Hemolysis Tests. Artificial Organs 32(4):329–333, 2008.
[2] Fonseca, J.W.G., Técnica “Sensorless” para o Acionamento de Motores “Brushless DC” Aplicados em Circulação Artificial, Master Thesis, ITA, 2003.
[3] Hsieh, M. and Liao, H. A Wide Speed Range Sensorless Control Technique of Brushless DC Motors for Eletric Propulsors. Journal of Marine Science and Technology, Vol. 18, No. 5, pp. 735-745, 2010.
[4] Shao, J., Direct Back EMF Detection Method for Sensorless Brushless DC (BLDC) Motor Drives, Master Thesis, Virginia Polytechnic Institute, 2003.
[5]DOI Shao, J., Nolan, D., Teissier, M., Swanson, D., “A novel microcontroller-based sensorless brushless DC (BLDC) motor drive for automotive fuel pumps,” Transactions on Industrial Applications, Vol. 39, No. 6, pp. 1734-1740, 2003.
[6]DOI Andrade, A., Biscegli, J., Souza, J. .: Flow visualization studies to improve the spiral pump design. Artif Organs 21, 680—685, 1997.
[7] Andrade, A.; et al. Introdução ao Projeto Temático. 1º Encontro sobre Sistemas Propulsores Eletromagnéticos Implantáveis para Dispositivos de Assistência Circulatória Sanguínea Uni e Biventricular ou Coração Artificial. São Paulo, 2010.
[8] Andrade, A.; Leme, J.; Fonseca, J.; Bock, E.; Legendre, D.; Nicolosy, D.; Biscegli, J.; Dinkhuysen, J. Últimos Avanços nos Dispositivos de Assistência Ventricular Brasileiros. 5° COLAOB Congresso Latino Americano de Orgãos Artificiais e Biomateriais, 2008.
[9]DOI Nosé Y. Design and Development Strategy for the Rotary Blood Pump. Artif Organs 22:438-446, 1998.
[10] Nose, Y.; et al. Development of a Totally Implantable Biventricular Bypass Centrifugal Blood Pump System. Ann Thorac Surg, 68:775-9, 1999.
[11] Bock, E.G.P., Projeto, Construção e Testes de Desempenho “In Vitro” de uma Bomba de Sangue Centrífuga Implantável, Dissertação de Mestrado. UNICAMP, 2007.
[12]DOI Bock, E., . Introductory tests to in vivo evaluation: Magnetic coupling influence in motor controller. ASAIO Journal 56 (2):128, mar./abr. 2010
[13]DOI Schima H, l., An Implantable Seal-less Centrifugal Pump with Integrated Double-Disk Motor, Artifial Organs, 1995.
[14] Krishnan, R., 2002, “Electric motor drives- modeling, analysis and control”, Prentice Hall of India Private Limited. [15]DOI Zabalawi, S., Nasiri, A. State Space Modeling and Simulation of
Sensorless Control of Brushless DC Motors Using Instantaneous Rotor Position Tracking. 0-7803-9761-4/07/ IEEE, 2007.
[16] Muruganantham, N., State Space Modeling and Simulation of Sensorless Permanent Magnet BLDC Motor, International Journal of Engineering Science and Technology, Vol. 2(10), ISSN: 0975-5462, 2010.
[17]DOI Dixon, J., Rodriguez, M. Huerta, R..Position Estimator and Simplified Current Control Strategy for Brushless-DC Motors, Using DSP Technology. 0-7803-7474-6/02 IEEE, 2002.
[18] Singh, B. and Singh, S. State of the Art on Permanent Magnet Brushless DC Motor Drives. Journal of Power Electronics, Vol. 9, No. 1, 2009.
[19]DOI Gamazo-Real, J.C., Vázquez-Sánchez, E., Gómez-Gil, J. Position and Speed Control of Brushless DC Motors Using Sensorless Techniques and Application Trends. Journal Sensor 2010, ISSN 1424-8220, doi:10.3390/s100706901, 2010.
[20] Kim, T-S, Park, B-G, et al. A New Approach to Sensorless Control Method for Brushless DC Motors. International Journal of Control, Automation, and Systems, vol. 6, no. 4, pp. 477-487, 2008.
[21]DOI Jonhson, J.P., Ehsani, M., Guzelgunler, Y. Review of Sensorless Methods for Brushless DC, 0-7803-5589-X/99 IEEE, 1999.
[22]DOI Somanatham, R., Prasad, P. V. N., Rajkumar, A. D.. Modeling and Simulation of Sensorless Control of PMBLDC Motor Using Zero-Crossing Back E.M.F Detection. SPEEDAM 2006, International Symposium on Power Electronics, Electrical Drives, Automation and Motion, 2006.
[23] DOI Iizuka, K., Uzuhashi, H., Kano, M., Endo, T., Mohri, K., “Microcomputer control for sensorless brushless motor,” IEEE Transactions on Industrial Applications, Vol. 21, No. 4, pp. 595-601, 1985.
[24]DOI Chen, C.-H., Tai, W.-C., Cheng, M.-Y., “A cost effective sensorless control method for permanent magnet synchronous motors based on average terminal voltage,” Proceedings of the International Power Electronicsand Motion Control Conference, Shanghai, 2006.
[25] DOI Chen, C.-H. Cheng, M.-Y., “A new sensorless control scheme for brushless DC motors without phase shift circuit,” Proceedings of IEEE Power Electronics and Drive System Conference, Vol. 2, pp. 1084-1089, 2005.
[26] Matworks, Matlab 2010b. 2010. [27] Leão, T.F., Fonseca, J.W.G., Andrade, A.J.P., Bock, E.G.P., 2009,
“Desempenho “In Vitro” do atuador eletromecânico da bomba de sangue centrífuga implantável”, Proceedings of 2th Encontro Nacional de Engenharia Biomecânica, Santa Catarina, Brazil.
[28] Leão, T.F., Antunes, P., Chabu, I., Fonseca, J., Andrade, A., Campo, A., Bock, E., 2010, “Desenvolvimento do controlador e da lógica de controle do motor da bomba de sangue centrífuga implantável”, 1th Encontro sobre sistemas propulsores eletromagnéticos implantáveis para Dispositivos de Assistência Circulatória sanguínea uni e biventricular ou Coração Artificial – Projeto Temático FAPESP, EPUSP, São Paulo, Brazil.
[29] Maxxon, Data motor EC45 flat, p. 202. 2008.
26


![InfoVisII 2010.ppt [Modo de Compatibilidade]wiki.icmc.usp.br/images/4/41/Scc252-5836(03)InfoVisII_2010.pdf · –From Visualization to Visual Data Mining: A Survey. IEEE Transactions](https://static.fdocumentos.com/doc/165x107/5f0b7cd97e708231d430c390/infovisii-2010ppt-modo-de-compatibilidadewikiicmcuspbrimages441scc252-583603infovisii2010pdf.jpg)