
ESTUDO DE HÉLICE PARA PROPULSOR DE ROBÔ...
53
FUNDAÇÃO EDSON QUEIROZ UNIVERSIDADE DE FORTALEZA ENSINANDO E APRENDENDO ESTUDO DE HÉLICE PARA PROPULSOR DE ROBÔ SUBAQUÁTICO TIPO ROV YAGO DE LIMA VIEIRA Junho - 2015
-
Upload
nguyenngoc -
Category
Documents
-
view
216 -
download
0
Transcript of ESTUDO DE HÉLICE PARA PROPULSOR DE ROBÔ...

FUNDAÇÃO EDSON QUEIROZ
UNIVERSIDADE DE FORTALEZA ENSINANDO E APRENDENDO
ESTUDO DE HÉLICE PARA PROPULSOR DE ROBÔ
SUBAQUÁTICO TIPO ROV
YAGO DE LIMA VIEIRA
Junho - 2015
YAGO DE LIMA VIEIRA
ESTUDO DE HÉLICE PARA PROPULSOR DE ROBÔ
SUBAQUÁTICO TIPO ROV
Trabalho de Conclusão de Curso
apresentado ao curso de Tecnologia de
Petróleo e Gás como requisito para
obtenção de título de Tecnólogo em
Petróleo e Gás pela Universidade de
Fortaleza.
Orientador: Prof. Dr. João Batista Furlan Duarte
Coordenador do Curso: Antônio Roberto Menescal de Macêdo
Fortaleza – 2015

VIEIRA, Yago L.
ESTUDO DE HÉLICE PARA PROPULSOR DE ROBÔ SUBMARINO
TIPO ROV
Trabalho de conclusão de curso (Graduação em Tecnologia
em Petróleo e Gás) – Curso de Tecnologia em Petróleo e Gás.
Universidade de Fortaleza, 2015.
1. Estudo, hélice, ROV, propulsão, geometria, robô
subaquático, mecânica dos fluidos, máquinas de fluxo,
Universidade de Fortaleza, UNIFOR


À minha família, fonte de educação e
inspiração.
À Milton Barbosa Batista Junior (in
memoriam).
AGRADECIMENTOS
Agradeço ao Prof. Dr. João Batista Furlan Duarte pela orientação e apoio.
Admiro sua carreira e me é uma fonte de inspiração.
Agradeço à minha família, que acreditou na minha capacidade e me deu total
apoio principalmente nos momentos em que mais precisei.
Agradeço à Jéssica Taynnar Barbosa Lira pela revisão deste trabalho,
incentivo e ajuda prestados, pelo seu companheirismo que me foi de grande inspiração.
Agradeço de coração.
Agradeço à Universidade de Fortaleza e Agência Nacional do Petróleo, Gás
Natural e Biocombustíveis pela bolsa de pesquisa concedida a mim através do Programa
de Recursos Humanos 53 (PRH-53 ANP) e por acreditarem no meu potencial.
Agradeço a toda equipe de coordenação do meu curso de graduação, em
especial Prof. e Coord. Antônio Roberto Menescal de Macêdo.
Agradeço aos excelentes Professores que estiveram presentes na minha
graduação e me deram apoio, em especial Prof. Ms. Francisco Cavalcante Júnior.
Agradeço a Ricardo Pessoa, amigo de graduação pelo apoio e pelas inúmeras
impressões de trabalho e conteúdo doados a mim.
Agradeço a meu Professor de Inglês, Daniel Ferreira da Silva, pela ajuda
prestada.
Agradeço aos amigos e colegas por terem contribuídos com seus incentivos,
em especial Sávio Monteiro, Deivid Silva e Carolina Braga.
Agradeço a todos que, de alguma forma, contribuíram para a realização deste
trabalho.

“Muita gente desperdiça a vida esperando
realizar seus grandes planos”.
George Jung

RESUMO
Esta pesquisa aborda o estudo de hélice – elemento rotativo – para sistema
de propulsão empregados em robôs subaquáticos conhecidos como veículos
remotamente operados (ROV). O estudo é composto pela análise dos fenômenos físicos
que envolvem o hélice, quando esse está submerso em operação ou não, com a mecânica
dos fluidos. Além disso, é estudado máquinas de fluxo para que se possa distinguir o
tipo de máquina em que o hélice se enquadra e a maneira como ele funciona, com vista
em análises teóricas. Na caracterização do hélice em questão é necessário entender os
principais parâmetros geométricos que o compõe, bem como compreender a definição
de séries sistemáticas e os seus objetivos relacionados ao funcionamento desse hélice e
suas vantagens. O objetivo principal desta pesquisa é incentivar e contribuir como
estudo norteador de futuras pesquisas para projetos de hélice otimizada para ROV.

ABSTRACT
This research regards propeller study – rotative element – for propulsion
system employed in underwater robots known as remotely operated vehicle (ROV). The
study comprises the analysis of physical phenomena involving the propeller when it is
submerged, in and out of operation, through fluid mechanics. The theoretical analyses
also embed the study of flow machines in order to distinguish the type of machine in
which the propeller fits and the way it works. For the characterization of the propeller
studied it is necessary to understand first the geometric parameters that compose it, the
definition of systematic series and its objectives related to the operation of the propeller
and advantages. The main objective of this research is to encourage and contribute to
further studies and future research in designing optimized propellers for ROV.

SUMÁRIO
1 INTRODUÇÃO .................................................................................................... 13
1.1 Justificativa ...................................................................................................... 15
1.2 Objetivos .......................................................................................................... 16
1.2.1 Objetivo Geral ........................................................................................... 16
1.2.2 Objetivos Específicos ................................................................................ 16
2 REVISÃO BIBLIOGRÁFICA ............................................................................ 17
2.1 MECÂNICA DOS FLUIDOS ......................................................................... 17
2.1.1 Pressão em um Ponto ................................................................................ 18
2.1.2 Distribuição de Pressão num Fluido em Repouso .................................... 19
2.1.3 Fluidos Compressíveis .............................................................................. 20
2.1.4 Fluidos Incompressíveis ............................................................................ 20
2.1.5 Escoamento Laminar, Transiente e Turbulento ........................................ 20
2.1.6 Hidrostática em Superfície Plana .............................................................. 22
2.1.7 Empuxo ..................................................................................................... 23
2.2 MÁQUINAS DE FLUXO ............................................................................... 23
2.2.1 Elementos Construtivos ............................................................................ 24
2.2.2 Classificação das Máquinas de Fluxo ....................................................... 26
2.2.2.1 Conforme à Direção da Conversão de Energia ..................................... 27
2.2.2.2 Conforme à Forma dos Canais entre Pás do Rotor ................................ 29
2.2.2.3 Conforme à Trajetória do Fluido no Rotor ............................................ 31
2.3 HÉLICE ........................................................................................................... 32
2.3.1 Sistemas de Coordenadas .......................................................................... 33
2.3.2 Parâmetros Geométricos do Hélice ........................................................... 34
2.3.3 Diâmetro .................................................................................................... 34
2.3.4 Passo .......................................................................................................... 35

2.3.5 Deslocamento Axial (Rake) ...................................................................... 37
2.3.6 Ângulo de Enviesamento (Skew) .............................................................. 38
2.3.7 Número de Pás .......................................................................................... 40
2.3.8 Área da Pá ................................................................................................. 41
2.3.9 Perfil da Pá ................................................................................................ 42
2.3.10 Séries Sistemáticas .................................................................................... 44
2.3.10.1 Hélices Kaplan e B-Troost ..................................................................... 44
3 MATERIAL E MÉTODOS ................................................................................. 46
4 RESULTADOS ..................................................................................................... 47
5 CONCLUSÃO ...................................................................................................... 48
REFERÊNCIAS BIBLIOGRÁFICAS ...................................................................... 50
LISTA DE FIGURAS
Figura 1 – Experimento de reynolds para ilustrar o tipo de escoamento ..................... 21
Figura 2 – Pressão e força hidrostática exercidas no fundo horizontal e nas paredes
verticais de um reservatório aberto........................................................................ 23
Figura 3 – Rotor de bomba ........................................................................................... 25
Figura 4 – Sistema diretor em forma de caixa espiral de uma bomba centrífuga ........ 25
Figura 5 – Sistema diretor de turbina hidráulica do tipo pelton ................................... 26
Figura 6 – Microturbina hidráulica tipo pelton ............................................................ 27
Figura 7 – Turbina de vapor ......................................................................................... 28
Figura 8 – Ventilador axial tubular .............................................................................. 28
Figura 9 – Bomba centrífuga ........................................................................................ 29
Figura 10 – Turbina a vapor do tipo curtis ................................................................... 30
Figura 11 – Turbina hidráulica do tipo francis ............................................................. 31
Figura 12 – Sistema de coordenadas cartesiano do hélice ........................................... 33
Figura 13 – Diâmetro do hélice .................................................................................... 35
Figura 14 – Passo do hélice .......................................................................................... 36
Figura 15 – Ilustração do conceito trigonométrico da equação ................................... 37
Figura 16 – Tipos de deslocamento .............................................................................. 38
Figura 17 – Ilustração do ângulo de enviesamento ...................................................... 39
Figura 18 – Entidades do perfil aerodinâmico ............................................................. 43
Figura 19 – Eficiência ideal e das séries sistemáticas kaplan e b-troost em função do
coeficiente de carregamento .................................................................................. 45

13
1 INTRODUÇÃO
Em 1812, o engenheiro florestal Josef Ludvík František Ressel iniciou uma
pesquisa visando revolucionar a navegação marítima com sua invenção do hélice
parafuso – que partia do princípio do parafuso de Arquimedes. Em 1826, Ressel aplicou
a patente austríaca para o que chamou de um parafuso sem fim que pode ser usado para
guiar navios no mar e rios, recebendo sua licença em fevereiro de 1827. Anos depois o
inventor se envolveu em experiências de hélice nas quais tentava estabelecer uma linha
regular para transporte de passageiros em navios. No ano de 1829, Ressel tornou-se a
primeira pessoa no mundo a usar uma hélice em navegação. A partir de então, mais
pesquisas sobre hélices foram sendo desenvolvidas e aperfeiçoadas, e até o presente
momento continua a busca por melhorias (ISTRIA, 2014).
No contexto atual da sociedade, onde a tecnologia avança quase sem
limitações, existe uma crescente procura na efetuação de tarefas de modo seguro, rápido,
eficiente e preciso. A tecnologia está intrinsecamente ligada à melhoria da qualidade de
serviços que lida com o conhecimento tecnológico. No meio científico e tecnológico, é
de costume o cumprimento desses serviços, os quais muitas vezes expõe o homem a
situações de risco. Como exemplo dessas tarefas, tem-se: explorações marítimas em
água profundas, espaciais entre outras. A fim de realizá-las, se faz indispensável a
existência de dispositivos com capacidades de executar tais funções exonerando a
presença humana. Entre muitos dispositivos há os robôs movíveis de campo, que
efetuam essas tarefas com eficiência, precisão e confiabilidade, indo além dos limites
do próprio ser humano. O conhecimento tecnológico que enfoca no desenvolvimento de
tais dispositivos chama-se robótica. (BOAS, 2006; SOUZA, 2010).
Na literatura, esses robôs movíveis de campo são classificados por diversos
aspectos, o mais importante refere-se ao tipo de operação que pode ser autônomo ou
operado remotamente (ROV). (BOAS, 2006).
A movimentação desses robôs é feita através de sistema de propulsão que é
composto por um motor elétrico e um hélice projetada de forma a se obter um melhor
14
deslocamento do robô. Para entender melhor o funcionamento desses hélices, dois
pontos são importantes conhecermos, são eles: dinâmica dos fluidos e máquinas de
fluxo.
O fluido é uma substância na forma líquida ou gasosa que sofre deformação
continua quando é submetido a uma determinada tensão de cisalhamento,
independentemente da quantidade aplicada. Na mecânica dos fluidos, é estudado o
comportamento dos fluidos em repouso e movimento, certamente, quando estamos
falando de mecanismos como compressores, turbinas, sistemas de propulsão entre
outros, estamos motivados em compreender o escoamento de fluidos por meio desses
mecanismos (FOX, 2006; MUNSON, 2004).
Na movimentação de robôs subaquáticos, bem como nos aviões, a mecânica
dos fluidos está intrinsecamente ligada à propulsão dessas máquinas, pois sempre
procuram obter melhorias nesses projetos, em muitos casos melhorando a aerodinâmica
das estruturas para se ter um menor consumo de energia (MUNSON, 2004).
Desde o século XIX, as máquinas de fluxo ficaram ultrapassadas, em termos
de desenvolvimento, com a produção de novos materiais e recursos computacionais
mais aprimorados como por exemplo a turbina a gás, cujo desenvolvimento se deu em
paralelo a Segunda Guerra Mundial, tendo uso na propulsão de aviões e na produção de
geração de energia elétrica. Relaciona-se então os hélices de propulsão submarina com
as máquinas de fluido, seguindo a definição dessas máquinas que são equipamentos os
quais transferem energia de um dado sistema mecânico a um fluido, fazendo a
transformação de energia mecânica em energia de fluido e vice-versa. Devido aos efeitos
dinâmicos nas máquinas de fluido do tipo dinâmica, o fluido -presente no sistema- está
em estado confinado e permanece em fluxo constante, como por exemplo os
ventiladores centrífugos e turbinas hidráulicas (HENN, 2006).
Tendo como base a mecânica dos fluidos e máquinas de fluxo, o próximo
passo é entender o sistema de propulsão utilizado por um ROV. Nos arranjos do sistema
de propulsão os hélices são empregados para promover o deslocamento do robô e de

15
preferência que esse permita um melhor aproveitamento da potência das máquinas de
propulsão. Essas máquinas são responsáveis em proporcionar torque e rotação aos
hélices do ROV, provindos dos motores de tal maneira que se produza empuxo e cause
o movimento esperado (PINTO, 2014). Um aspecto muito importante a ser considerado
em projetos que envolvem sistema de propulsão é o fenômeno da cavitação, proveniente
da alta velocidade do movimento das pás do hélice dentro d’água (TRINDADE, 2012).
Seguindo uma ordem cronológica de estudos, os próximos passos serão
assuntos abordados especificamente para o estudo dos hélices, como por exemplo
parâmetros geométricos do hélice e séries sistemáticas.
Existem vários parâmetros que estabelecem a geometria dos hélices e são
definidos dependendo das especificações do projeto. Na maioria dos casos a geometria
do hélice é escolhida a partir de séries sistemáticas (BOAS, 2006).
Uma série sistemática é um conjunto de estudos de hélices obtidos por
variação de parâmetros geométricos (TRINDADE, 2012). O principal objetivo é realizar
ensaios sistemáticos de hélices e criar uma base de dados que permita ajudar o projetista
a entender os principais fatores atuantes no desempenho do hélice, bem como a
ocorrência de cavitação em várias condições de funcionamento.
1.1 Justificativa
O desenvolvimento de hélice para propulsores de robôs subaquáticos é de
importância imensurável, pois esse hélice será o responsável em fazer o deslocamento
do robô quando este estiver submerso. Apesar de existir diversos estudos em andamento
sobre o tema, esse desenvolvimento ainda se trata de um processo que visa estabelecer
constantes melhorias nos hélices para as diversas aplicações deles em robores
remotamente operados (ROVs), haja vista serem um dos principais componentes dos
sistemas de propulsão utilizados em ROVs. O presente trabalho tem como base
16
incentivar a busca e pesquisa mais aprofundada sobre o tema em questão, uma vez que
os ROVs vêm se desenvolvendo com novos projetos, os hélices também precisam de
mais projetos que envolvam melhorias em paralelos com a evolução dos robôs.
1.2 Objetivos
1.2.1 Objetivo Geral
O presente trabalho tem como objetivo geral incentivar e auxiliar projetos de
pesquisas que sejam focados em hélices para propulsor de robô subaquático tipo ROV;
Definir o tipo de máquina em que os hélices se classificam; Definir os fenômenos
físicos, de acordo com a mecânica dos fluidos, envolvidos nos hélices quando estes
estiverem submersos e em operação.
1.2.2 Objetivos Específicos
Estudar Mecânica dos Fluidos para entender o meio e os fenômenos físicos
em que os hélices estarão submetidos;
Estudar Máquinas de Fluxo para compreender e caracterizar o tipo de
máquina de fluxo em que se adequa o hélice de propulsão de ROV.
Abordar os parâmetros que determinam as características geométricas do
hélice.

17
2 REVISÃO BIBLIOGRÁFICA
2.1 MECÂNICA DOS FLUIDOS
Os fluidos tendem a escoar quando se interagi com eles, por exemplo, quando
se agita um suco dentro de um copo, sólidos tendem a se deformar ou dobrar; outro
exemplo é quando um carro em movimento passa por um buraco em que as molas da
suspensão comprimem-se e voltam ao estado no qual elas tendem a ficar. No ponto de
vista da engenharia e cientifico, é preciso ir mais além do que exemplos facilmente
descritivos, necessitando de uma definição mais formal e precisa de um fluido. Assim
pode-se definir um fluido como uma substância que sofre deformação continua sob a
aplicação de uma tensão de cisalhamento, não importando a quantidade aplicada. Dessa
forma, podemos descrever tal tensão cisalhante nos fluidos como uma solicitação- carga
externa- de uma força atuante na posição tangencial a sua superfície (FOX, 2006;
MUNSON, 2004).
Os fluidos são caracterizados pelas fases líquida e gasosa- ou vapor- das
formas físicas nas quais a matéria pode ser encontrada. No que diz respeito à
diferenciação entre um fluido e o estado sólido da matéria, é simplesmente notada
quando se é comparada os seus comportamentos e estruturas moleculares (FOX, 2006)
Apesar de considerar importante a estrutura molecular dos fluidos para
diferenciar um fluido de outro, não se pode especificar o seu comportamento, em
equilíbrio ou em movimento, pela dinâmica individual das moléculas que o contém. Por
conta disso, podemos caracterizar o comportamento dos fluidos observando os valores
médios ou macroscópicos das quantidades de interesse. Essa média é avaliada em um
volume pequeno que contenha um grande número de moléculas. Assim, quando
ratificamos que a velocidade num ponto no qual sofre deformação constante vale um
certo valor, na realidade, estamos indicando a velocidade média das moléculas as quais
ocupam uma pequena relação de volume no ponto em que é avaliado (MUNSON, 2004).

18
O estudo da Mecânica dos Fluidos é subdividido em estática dos fluidos, na
qual o fluido está em repouso, e dinâmica dos fluidos, na qual o fluido se encontra em
movimento. É inquestionável que fluidos de diferentes tipos possam apresentar
características muito distintas umas das outras. Toma-se como exemplo clássico os
gases, que por sua vez são leves e compressíveis ao mesmo tempo em que os líquidos
são mais pesados e relativamente incompressíveis. Para tornar mais didático o
entendimento anterior, analisa-se que o escoamento de um fluido viscoso, semelhante
ao mel de abelha, encontrado em um reservatório, ocorre de maneira vagarosa. Em
contrapartida o escoamento de um outro fluido com características semelhantes da água,
encontrado dentro de um mesmo reservatório, ocorre de maneia mais acelerada. Assim,
faz-se necessário determinar certas propriedades para identificar essas diferenças
(MUNSON, 2004).
Este capítulo aborda a definição geral da Mecânica dos Fluidos, bem como
algumas características relevantes ao tema desta pesquisa, na qual pode-se entender de
forma simples e prática o meio em que os hélices de propulsão de um ROV estão
submetidos a fim de compreender, também, os seus funcionamentos nesses ambientes.
2.1.1 Pressão em um Ponto
A pressão é dada por uma determinada força normal por unidade de área,
atuando em um determinado plano. O desenvolver da pressão em fluidos estáticos é
considerado como um fenômeno importantíssimo em diversas situações práticas, como
por exemplo a importância de ser estudado a pressão em que um hélice de propulsor de
ROV poderá estar submetido, dependendo da profundidade e das características do
fluido em que o hélice estará submerso (MUNSON, 2004).
Pode-se considerar a lei de Pascal a qual diz que toda pressão atuante sobre
a superfície da massa líquida será transmitida no seu interior, igualmente em todas as
direções (GOMES, 2010). Essa lei é muito conhecida no campo da hidrostática,

19
contribuindo para calcular forças atuantes em objetos submersos, deduzir propriedades
dos oceanos, atmosfera etc (MUNSON, 2004).
2.1.2 Distribuição de Pressão num Fluido em Repouso
A grandeza da pressão é bastante parecida com a grandeza da tensão de
cisalhamento (𝑃𝑎). Porém elas têm o sentido distinto da força que exercem sobre uma
superfície. Enquanto na primeira a força se dá no sentido perpendicular à superfície, na
segunda a força é aplicada paralelamente à superfície (VILANOVA, 2011).
É preciso considerar um pequeno elemento de forma cúbica submerso num
fluido para avaliar a pressão exercida num determinado ponto dessa massa em repouso.
Para facilitar o entendimento, considere cada superfície desse elemento fluido
determinando em um índice de 1 a 6, equivalentes às faces do cubo, sendo
respectivamente:
Superfícies inferior e superior, índices 1 e 2;
Superfícies laterais esquerda e direita, índices 3 e 4;
Superfícies frontal e posterior, índices 5 e 6.
As medidas das arestas do cubo são x, y e z e são tão pequenas em relação às
grandezas físicas do sistema. O peso 𝑊, em N, do elemento fluido é caracterizado pelo
produto do peso específico 𝑔, em N/m3, pelo volume do elemento 𝑉, em m3. O volume
é representado pelo produto dos eixos x, y e z do plano cartesiano. Então temos que:
𝑊 = 𝑔 . 𝑥 . 𝑦 . 𝑧 .
As forças atuantes em cada uma das seis superfícies do elemento são dadas
pelo produto da pressão sobre a superfície, pela área da superfície. Logo, para cada face,
temos: 𝐹𝑎 = 𝑝𝑎 . 𝐴 . Sendo a o índice que indica a superfície; 𝐹𝑎 é a força atuante na
superfície; 𝑝𝑎 é a pressão sobre a superfície; 𝐴 é a área da superfície. O fluido- quando

20
está em repouso- deverá ter o resultado nulo do somatório de todas as forças atuantes no
elemento fluido no sentido de cada eixo (VILANOVA 2011).
2.1.3 Fluidos Compressíveis
Normalmente os gases oxigênio e nitrogênio são tidos como fluidos
compreensíveis, pois suas massas específicas mudam de maneira significativa de acordo
com as alterações de pressão e temperatura. Seguindo esse exemplo, pode-se definir o
que são fluidos compressíveis desta forma: fluidos compreensíveis são aqueles que
variam seu volume de acordo com a mudança de pressão e temperatura a que são
submetidos (MUNSON, 2004).
2.1.4 Fluidos Incompressíveis
Podemos definir os fluidos incompressíveis, por exemplo a água, como
aqueles que não sofrem alteração do seu volume quando submetidos a determinada
pressão e temperatura.
Para que ocorra a variação do peso específico de um fluido, é necessário que
seja provocada uma mudança de sua massa específica e da aceleração da gravidade.
Sendo assim, sua propriedade é semelhante ao produto da massa específica do fluido
pela aceleração da gravidade ( = . 𝑔) (MUNSON, 2004).
2.1.5 Escoamento Laminar, Transiente e Turbulento
O escoamento de fluidos foi estudado por Osborne Reynolds, cientista
britânico, em um experimento muito simples, utilizando tubos. Num tubo transparente,
Reynolds adaptou uma sonda de corante de forma a introduzir um contraste no
escoamento para verificar suas condições. Nesse experimento o cientista constatou que
o contraste de corante se comportava de maneira diferente de acordo com as
21
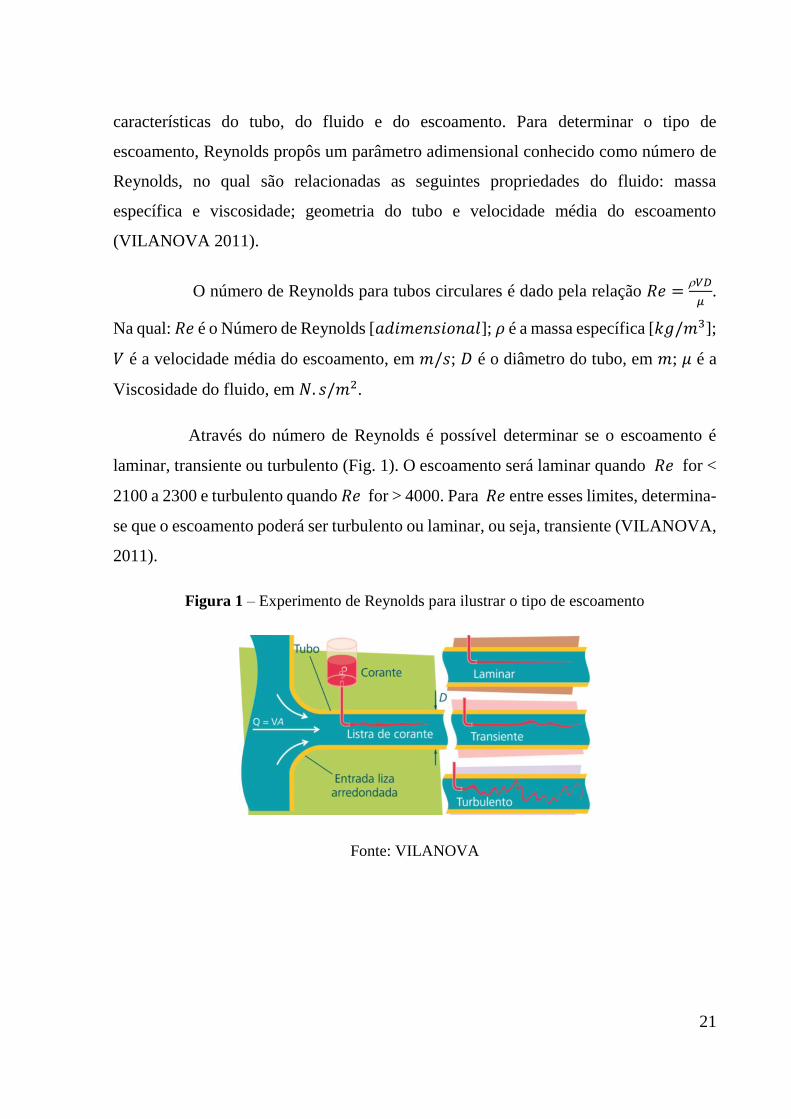
características do tubo, do fluido e do escoamento. Para determinar o tipo de
escoamento, Reynolds propôs um parâmetro adimensional conhecido como número de
Reynolds, no qual são relacionadas as seguintes propriedades do fluido: massa
específica e viscosidade; geometria do tubo e velocidade média do escoamento
(VILANOVA 2011).
O número de Reynolds para tubos circulares é dado pela relação 𝑅𝑒 =𝑉𝐷
𝜇.
Na qual: 𝑅𝑒 é o Número de Reynolds [𝑎𝑑𝑖𝑚𝑒𝑛𝑠𝑖𝑜𝑛𝑎𝑙]; 𝜌 é a massa específica [𝑘𝑔/𝑚3];
𝑉 é a velocidade média do escoamento, em 𝑚/𝑠; 𝐷 é o diâmetro do tubo, em 𝑚; 𝜇 é a
Viscosidade do fluido, em 𝑁. 𝑠/𝑚2.
Através do número de Reynolds é possível determinar se o escoamento é
laminar, transiente ou turbulento (Fig. 1). O escoamento será laminar quando 𝑅𝑒 for <
2100 a 2300 e turbulento quando 𝑅𝑒 for > 4000. Para 𝑅𝑒 entre esses limites, determina-
se que o escoamento poderá ser turbulento ou laminar, ou seja, transiente (VILANOVA,
2011).
Figura 1 – Experimento de Reynolds para ilustrar o tipo de escoamento
Fonte: VILANOVA
22
2.1.6 Hidrostática em Superfície Plana
Para todos os corpos submersos em fluidos, sempre existirão a presença de
forças atuando nas suas superfícies. Os estudos dessas forças são muito importantes em
diversos projetos de estruturas hidráulica (MUNSON, 2004).
Os fluidos exercem uma força perpendicular nas superfícies dos corpos
submersos, quando se encontram em repouso, pois tensões de cisalhamento não existem
nessa situação e a pressão muda gradativamente com a profundidade quando o fluido se
comporta de maneira incompressível. Dessa forma, na análise em superfície horizontal,
como por exemplo a superfície inferior de um tanque de líquido qualquer, o módulo da
força que resulta na superfície é 𝐹𝑟 = 𝑝𝐴 , sendo 𝑝 a pressão na superfície inferior e 𝐴
a área dessa superfície. Nota-se que para esse caso- tanque aberto- 𝑝 = 𝛾 ℎ. Se a pressão
atmosférica atuar na superfície livre do fluido e na superfície inferior do tanque, a força
resultante na superfície inferior será devida apenas ao líquido contido no tanque. A força
resultante atua no centróide da área da superfície inferior, ou seja, a força hidrostática
age no centro geométrico da superfície, pois a pressão é constante e está distribuída
uniformemente nessa superfície (MUNSON, 2004; VILANOVA, 2011).
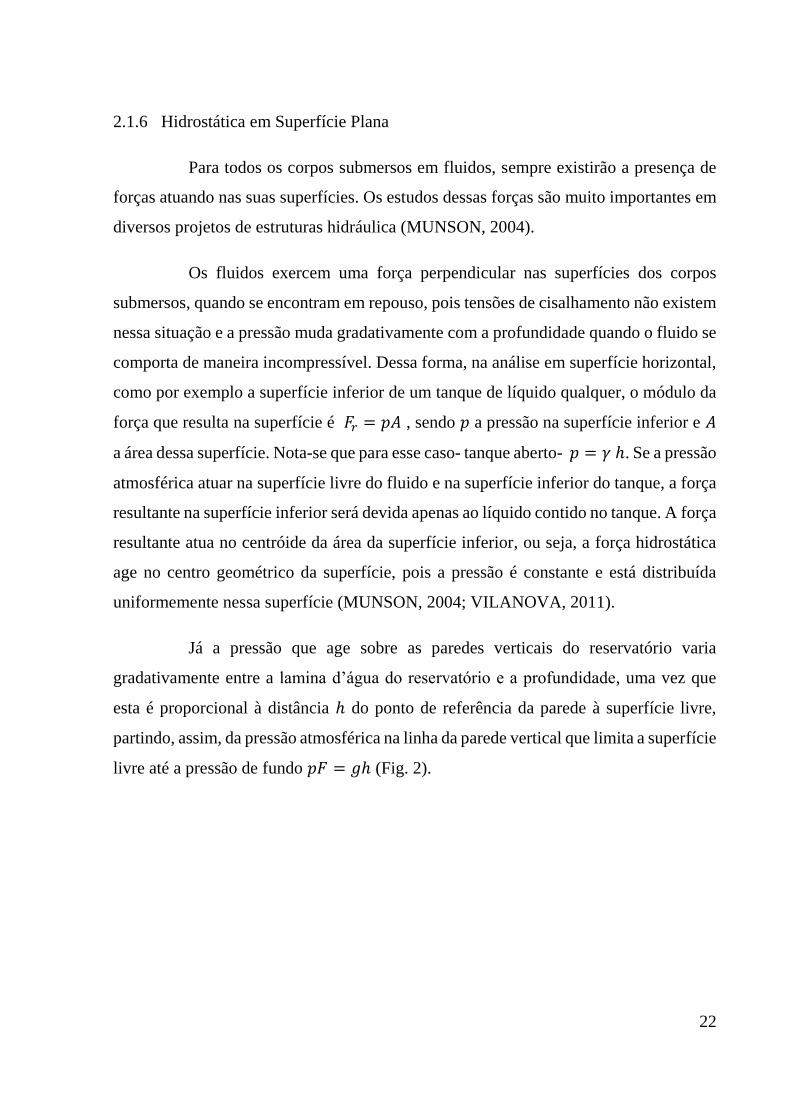
Já a pressão que age sobre as paredes verticais do reservatório varia
gradativamente entre a lamina d’água do reservatório e a profundidade, uma vez que
esta é proporcional à distância ℎ do ponto de referência da parede à superfície livre,
partindo, assim, da pressão atmosférica na linha da parede vertical que limita a superfície
livre até a pressão de fundo 𝑝𝐹 = 𝑔ℎ (Fig. 2).
23
Figura 2 – Pressão e força hidrostática exercidas no fundo horizontal e nas paredes verticais
de um reservatório aberto
Fonte: VILANOVA
2.1.7 Empuxo
O empuxo se dá pelo princípio de Arquimedes, definido como: todo corpo
total ou parcialmente imerso em um fluido em equilíbrio recebe uma força vertical para
cima denominada empuxo, de intensidade igual, mas de sentido contrário ao peso da
porção deslocada de fluido e aplicada no ponto onde estava localizado o centro de massa
dessa porção. Essa força denominada empuxo será tanto maior quanto mais denso for o
líquido, e sua origem estará relacionada com o fato da pressão no líquido aumentar com
a profundidade (GOMES, 2010).
2.2 MÁQUINAS DE FLUXO
Máquina de Fluxo (Fluido), também chamada de turbomachine, pode ser
descrita como um conversor de energia, sendo o trabalho mecânico uma das formas de
energia na qual a operação é feita em meio fluido que, na passagem pela máquina,
interage com uma hélice, elemento rotativo, ficando ou não de qualquer maneira
confinado (HENN, 2006).

24
Na literatura (HENN, 2006), as características de construção dos diversos
tipos de máquinas de fluido variam de um fluido para outro, analisando as propriedades
deles, como por exemplo: volume específico e viscosidade.
Para exemplificar as máquinas de fluxo, temos:
Ventiladores (fans);
Bombas centrífugas (centrifugal pumps);
Turbinas hidráulicas (hydraulic turbines);
Turbocompressores;
Turbinas a gás (gas turbines);
Turbinas a vapor (steam turbines).
Este capítulo apresenta a definição; seguido dos elementos construtivos
primordiais das máquinas de fluxo; além de fornecer critérios de classificação dessas
máquinas, visando estabelecer uma linguagem comum para a caracterização do tipo de
máquina de fluxo em que se adequa o hélice de propulsão de ROV, a sua abordagem e
propiciar meios de identificação dos diferentes tipos de máquinas de fluido.
2.2.1 Elementos Construtivos
Com relação a elementos construtivos, o presente trabalho tem a intenção de
fazer suas caracterizações fundamentais, onde acontecem os fenômenos
fluidodinâmicos das Máquinas de Fluido essenciais para a operação da máquina: o rotor
(impeller ou runner) e o sistema diretor (stationary guide).
A transformação de energia mecânica em energia de fluido ou vice-versa
acontece no rotor, onde esta faz o papel de elemento principal de uma máquina de fluido
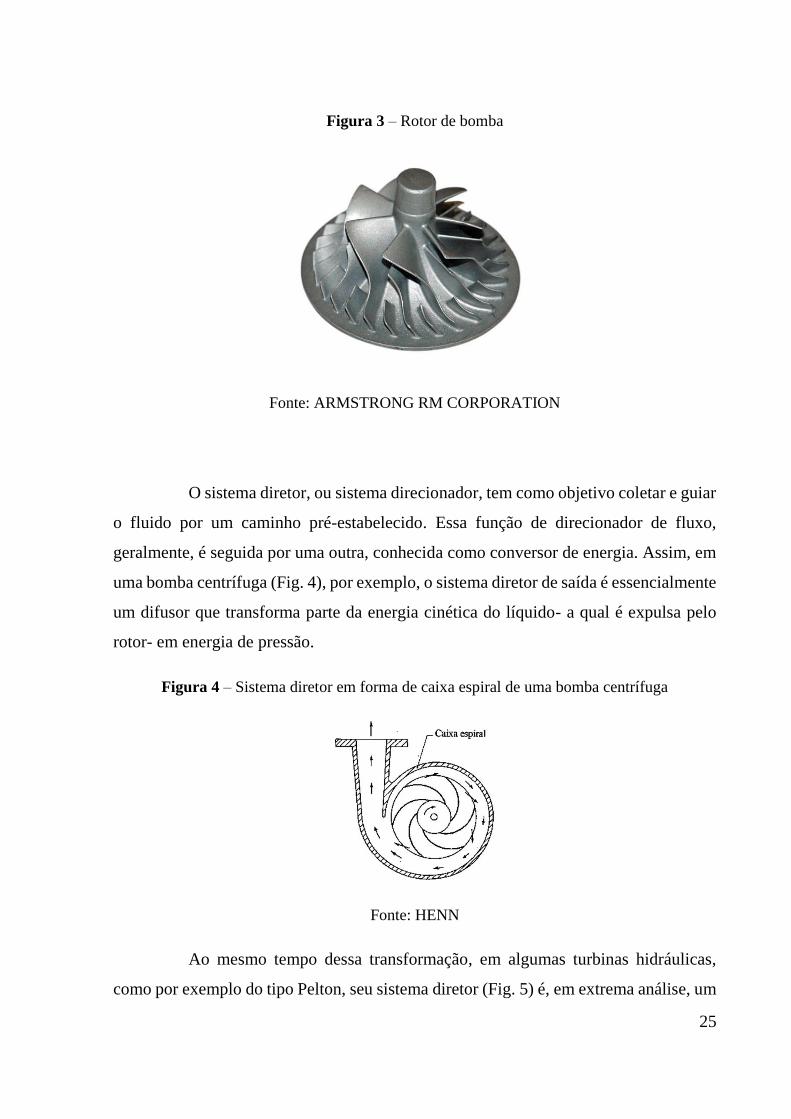
(HENN, 2006). O rotor (Fig. 3) é composto por um determinado número de pás
giratórias, também conhecidas em inglês como runner blades, e dividem o espaço
ocupado em canais, por onde o fluido de trabalho tem espaço para circular.
25
Figura 3 – Rotor de bomba
Fonte: ARMSTRONG RM CORPORATION
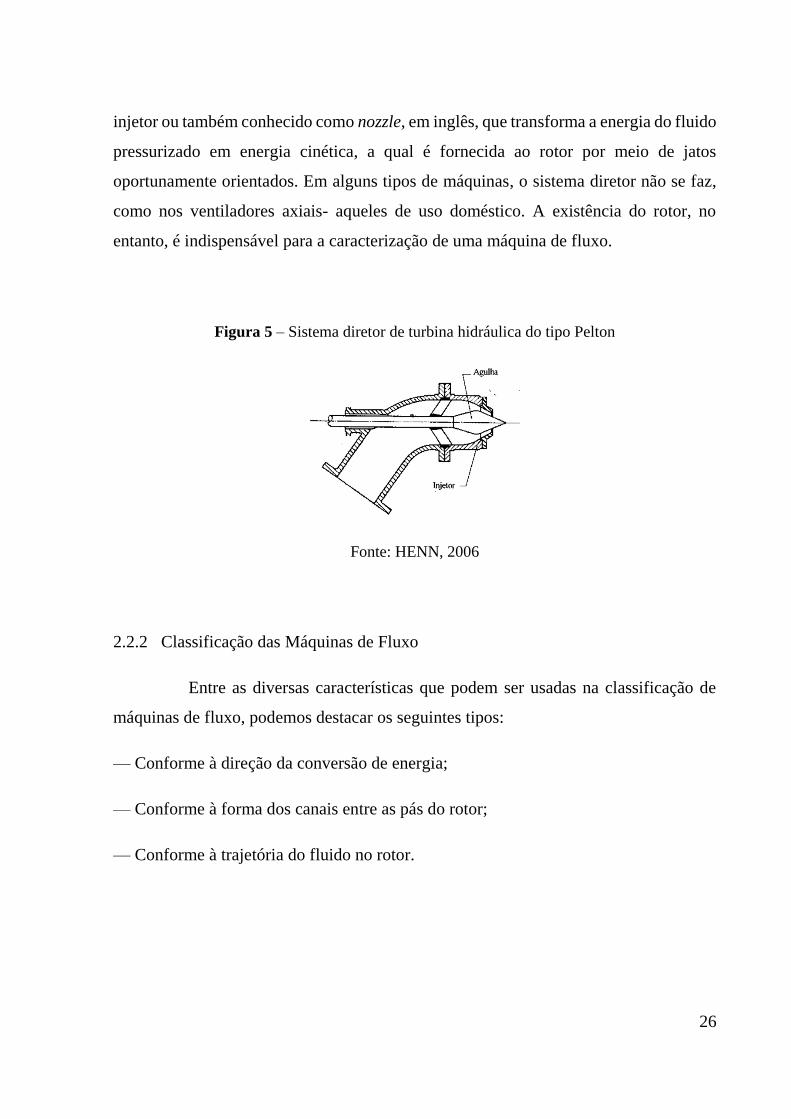
O sistema diretor, ou sistema direcionador, tem como objetivo coletar e guiar
o fluido por um caminho pré-estabelecido. Essa função de direcionador de fluxo,
geralmente, é seguida por uma outra, conhecida como conversor de energia. Assim, em
uma bomba centrífuga (Fig. 4), por exemplo, o sistema diretor de saída é essencialmente
um difusor que transforma parte da energia cinética do líquido- a qual é expulsa pelo
rotor- em energia de pressão.
Figura 4 – Sistema diretor em forma de caixa espiral de uma bomba centrífuga
Fonte: HENN
Ao mesmo tempo dessa transformação, em algumas turbinas hidráulicas,
como por exemplo do tipo Pelton, seu sistema diretor (Fig. 5) é, em extrema análise, um
26
injetor ou também conhecido como nozzle, em inglês, que transforma a energia do fluido
pressurizado em energia cinética, a qual é fornecida ao rotor por meio de jatos
oportunamente orientados. Em alguns tipos de máquinas, o sistema diretor não se faz,
como nos ventiladores axiais- aqueles de uso doméstico. A existência do rotor, no
entanto, é indispensável para a caracterização de uma máquina de fluxo.
Figura 5 – Sistema diretor de turbina hidráulica do tipo Pelton
Fonte: HENN, 2006
2.2.2 Classificação das Máquinas de Fluxo
Entre as diversas características que podem ser usadas na classificação de
máquinas de fluxo, podemos destacar os seguintes tipos:
— Conforme à direção da conversão de energia;
— Conforme à forma dos canais entre as pás do rotor;
— Conforme à trajetória do fluido no rotor.
27
2.2.2.1 Conforme à Direção da Conversão de Energia
As máquinas de fluidos são classificadas em motoras e geradoras de acordo
com a direção da conversão de energia (HENN, 2006).
Máquina de fluxo motora transforma a energia de fluido em trabalho
mecânico, ao mesmo tempo que máquina de fluxo geradora recebe trabalho mecânico
transformando em energia de fluido.
Nas máquinas de fluido motoras, a energia do fluido é reduzida quando passa
pela máquina. Já nas geradoras a energia do fluido é aumentada.
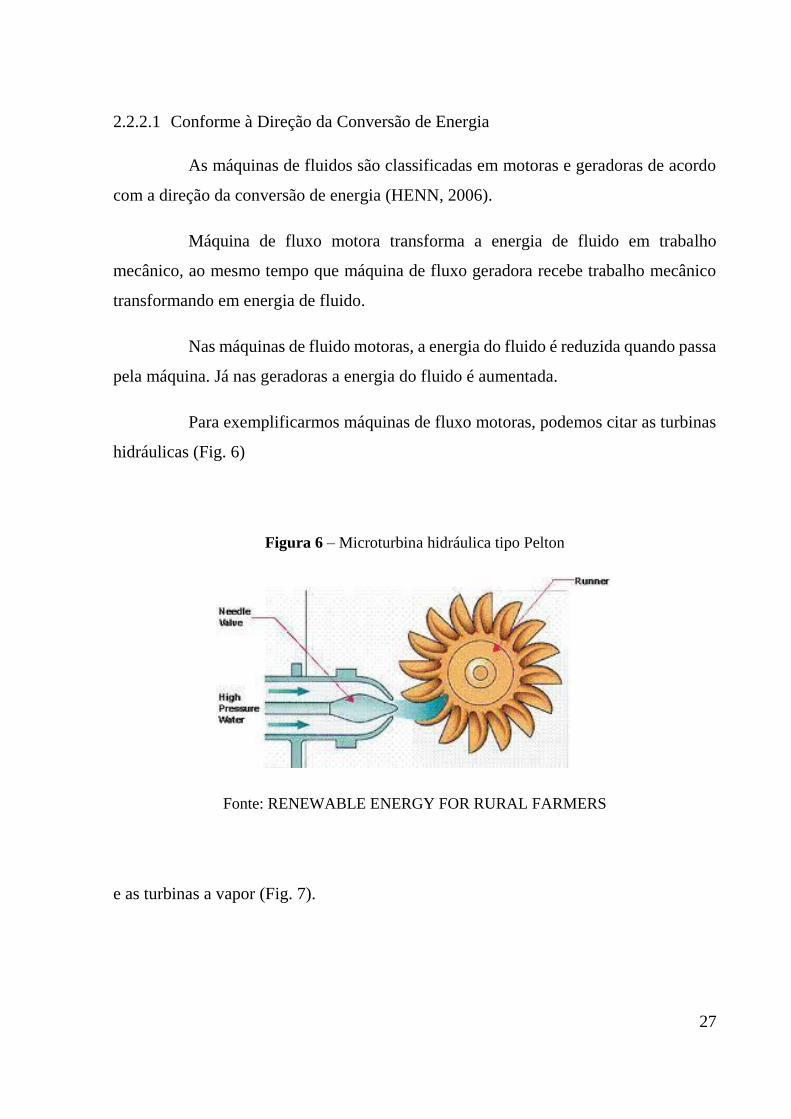
Para exemplificarmos máquinas de fluxo motoras, podemos citar as turbinas
hidráulicas (Fig. 6)
Figura 6 – Microturbina hidráulica tipo Pelton
Fonte: RENEWABLE ENERGY FOR RURAL FARMERS
e as turbinas a vapor (Fig. 7).

28
Figura 7 – Turbina de vapor
Fonte: JUNTA DE ANDALUCIA
Encontramos as máquinas de fluxo geradoras em dois tipos: os ventiladores
(Fig. 8) e as bombas centrífugas (Fig. 9).
Figura 8 – Ventilador axial tubular
Fonte: METEC

29
Figura 9 – Bomba centrífuga
Fonte: DIRECT INDUSTRY
Existem, também, máquinas que podem ter seu funcionamento tanto motores
quanto geradores de fluxo, tomamos como exemplo as bombas-turbinas reversíveis
(reversible pump-turbines) que, dependendo do sentido do fluxo pelo rotor, funcionam
como bombas ou como turbinas, girando num sentido ou no sentido inverso.
Comumente encontramos sistemas de máquinas em que a de fluxo motora
(turbina a gás) aciona uma outra de fluxo geradora (turbocompressor), posicionadas em
um mesmo eixo, como acontece nas turbinas de aviação e nos turboalimentadores
(turbochargers) de motores de combustão interna a pistão.
2.2.2.2 Conforme à Forma dos Canais entre Pás do Rotor
Com relação à forma dos canais entre as pás do rotor, as máquinas de fluido
se classificam como máquinas de ação ou como máquinas de reação (HENN, 2006).
Em máquinas de ação, ou impulse turbomachines, os canais do rotor são
formados por simples redirecionadores de fluxo, nos quais não há aumento ou
diminuição da pressão do fluido que passa pelo rotor.
30
Em máquinas de fluxo de reação (reaction turbomachines), os canais
compostos pelas pás móveis do rotor seguem a forma de injetores, se assemelhando com
as turbinas, como a do tipo Pelton mencionada em tópicos anteriores, havendo a
diminuição da pressão do fluido. As máquinas de fluxo de reação podem seguir a forma
de difusores, parecido com as bombas e os ventiladores, ocorrendo o aumento da pressão
do fluido que passa através do rotor.
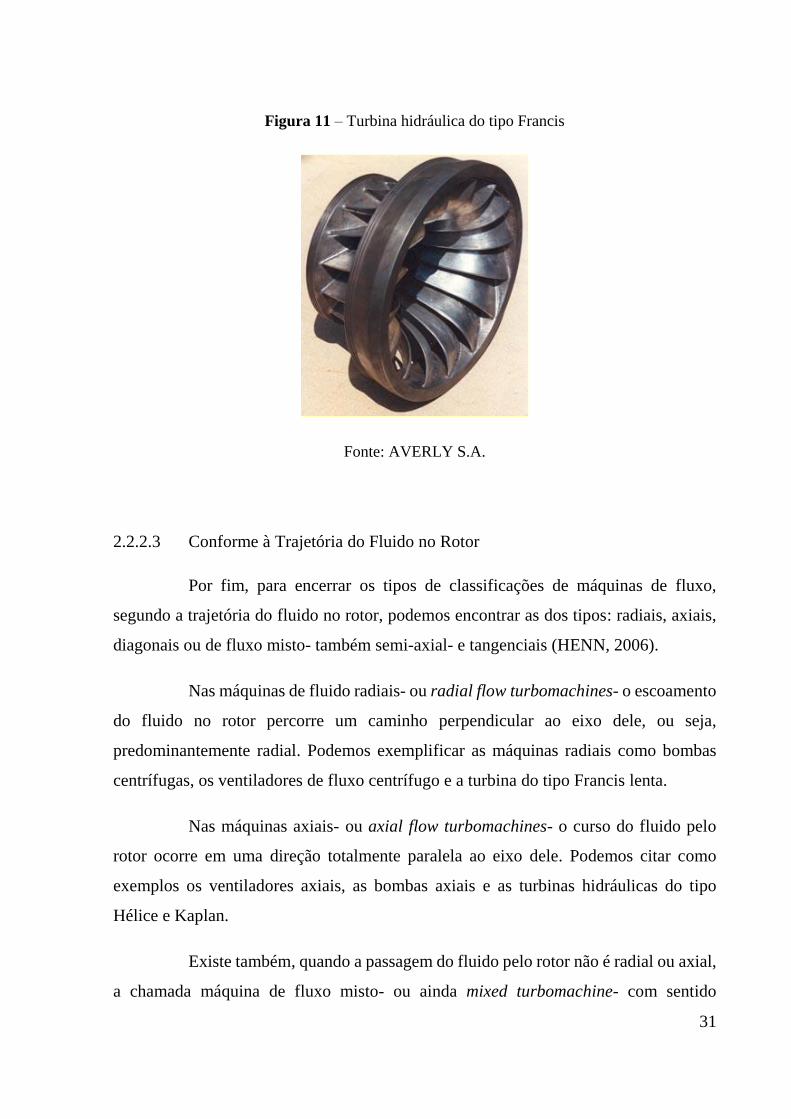
Podemos exemplificar as máquinas de fluxo de ação como: a turbina
hidráulica do tipo Pelton e a turbina a vapor do tipo Curtis (Fig. 10). Para máquinas de
fluxo de reação podemos citar: as bombas centrífugas, os ventiladores e as turbinas
hidráulicas do tipo Francis (Fig. 11).
Figura 10 – Turbina a vapor do tipo Curtis
Fonte: GENTSIDE DÉCOUVERTE
31
Figura 11 – Turbina hidráulica do tipo Francis
Fonte: AVERLY S.A.
2.2.2.3 Conforme à Trajetória do Fluido no Rotor
Por fim, para encerrar os tipos de classificações de máquinas de fluxo,
segundo a trajetória do fluido no rotor, podemos encontrar as dos tipos: radiais, axiais,
diagonais ou de fluxo misto- também semi-axial- e tangenciais (HENN, 2006).
Nas máquinas de fluido radiais- ou radial flow turbomachines- o escoamento
do fluido no rotor percorre um caminho perpendicular ao eixo dele, ou seja,
predominantemente radial. Podemos exemplificar as máquinas radiais como bombas
centrífugas, os ventiladores de fluxo centrífugo e a turbina do tipo Francis lenta.
Nas máquinas axiais- ou axial flow turbomachines- o curso do fluido pelo
rotor ocorre em uma direção totalmente paralela ao eixo dele. Podemos citar como
exemplos os ventiladores axiais, as bombas axiais e as turbinas hidráulicas do tipo
Hélice e Kaplan.
Existe também, quando a passagem do fluido pelo rotor não é radial ou axial,
a chamada máquina de fluxo misto- ou ainda mixed turbomachine- com sentido
32
diagonal, ou semi-axial, com o fluido percorrendo o rotor em uma trajetória localizada
sobre uma superfície semelhantemente cônica. Entre as máquinas de fluxo misto- ou
comumente chamada de máquina diagonal- encontram-se as bombas semi-axiais, a
turbina Francis rápida e a turbina hidráulica Dériaz.
Numa máquina de fluxo tangencial, também conhecida como tangencial flow
turbo-machine, o líquido provindo do injetor colide de forma tangencial sobre o rotor.
A turbina hidráulica do tipo Pelton é o melhor exemplo citado para máquina de fluxo do
tipo tangencial.
2.3 HÉLICE
Desde o surgimento da navegação e a criação do hélice para a propulsão dos
navios, o homem vem buscando e aperfeiçoando métodos para propelir embarcações. O
método mais utilizado até os dias atuais é a propulsão por hélice. Mesmo o hélice sendo
o mais utilizado, ele possui uma forma geométrica muito especifica e complexa. Esse
assunto inspira vários projetos e temas de pesquisa, relacionados a melhorias no
desempenho do hélice. Por consequência, pode haver mudanças em suas formas
geométricas e também em seus processos de fabricação (BOAS, 2006).
O hélice compõe o sistema de propulsão, por isso o entendemos como sendo
um elemento propulsivo. Esse elemento pode ser classificado em famílias, cada uma
com sua geometria característica. A geometria de cada família é definida por um
conjunto de tabelas, conhecidas como séries sistemáticas- tópico posterior desta
pesquisa.
Neste capítulo, serão abordados tópicos sobre os parâmetros que determinam
as características geométricas do hélice.
33
2.3.1 Sistemas de Coordenadas
Na definição da geometria de qualquer objeto e seu movimento no espaço,
torna-se essencial a utilização de um sistema de coordenadas adequadas. Atualmente, o
sistema de coordenadas, utilizado para a resolução de problemas que envolvem os
hélices, é o mesmo estabelecido durante a décima International Towing Tank
Conference (ITTC), de forma a atender as necessidades para análises tanto geométricas
como hidrodinâmicas (CARLTON, 1994).
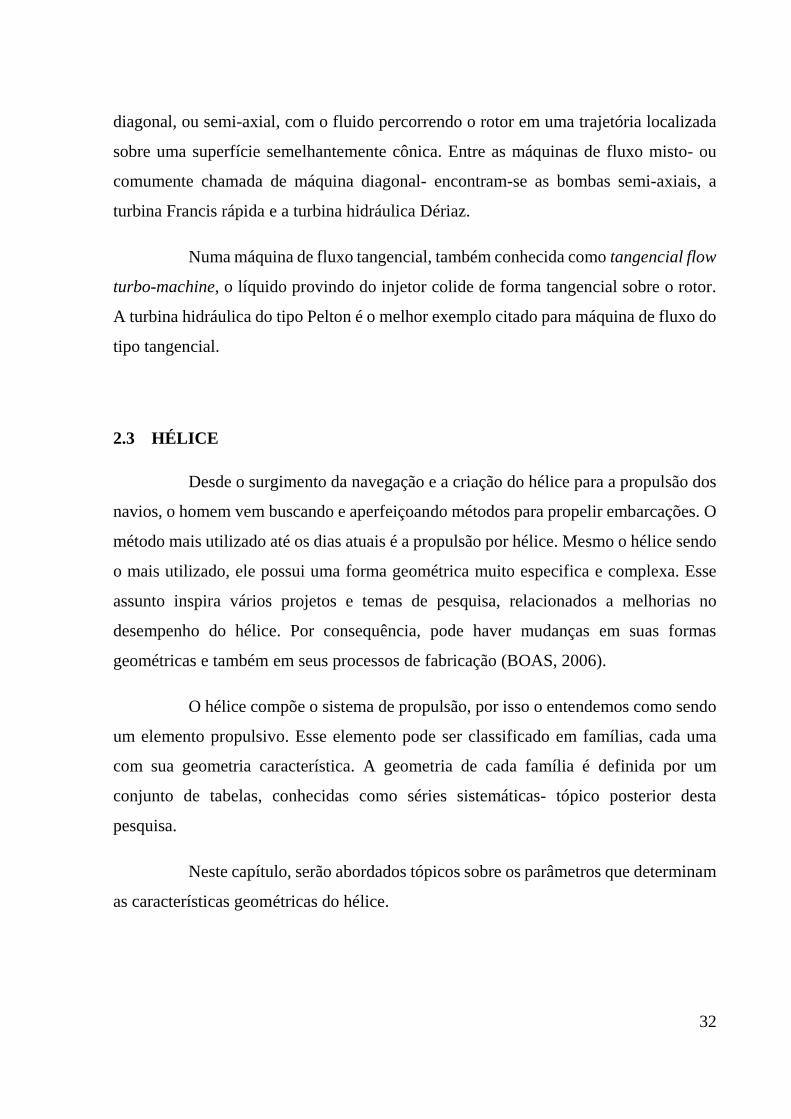
O sistema de coordenadas proposto refere-se aos três eixos X, Y e Z. O eixo
X é coincidente com o eixo de avanço do hélice, o eixo Y denominado “linha de
referência do hélice” ou “diretriz” é perpendicular ao eixo de avanço, enquanto o eixo
Z é estabelecido de forma a obter um sistema dextrogiro, ou seja, os eixos positivos
obedecem a regra da mão direita (Fig. 12). Os eixos Y e Z, por sua vez, definem um
plano denominado por plano do hélice.
Figura 12 – Sistema de coordenadas cartesiano do hélice
Fonte: BOAS
34
2.3.2 Parâmetros Geométricos do Hélice
São muitos os parâmetros existentes para que seja definida a geometria de
um hélice. A maior parte deles são obtidos pelas séries sistemáticas, para determiná-los,
basta citar a família cujo hélice pertence. Os restantes dos hélices são caracterizados de
acordo com as especificações de cada projeto (BOAS, 2006).
A composição de um hélice é feita por um cubo central, conhecido como
bosso, em que o eixo de transmissão de movimento é fixado. Em volta do bosso estão
fixadas as pás. Elas possuem duas superfícies: a superior é denominada de superfície de
sucção, já a inferior é denominada de superfície de pressão, referenciando-nos pelo eixo
Z. Duas arestas são formadas pelo encontro das superfícies e são conhecidas por: bordo
de ataque e bordo de fuga. Levando em consideração o sentido da rotação do hélice, o
bordo de ataque precede o bordo de fuga (BOAS, 2006).
Nas seções das pás, são encontrados perfis semelhantes aos das asas dos
aviões, devido a essa característica recebem o nome de perfil alar. Para o comprimento
linear de perfil é dado o nome de corda (BOAS, 2006).
Nos próximos tópicos serão abordados todos os parâmetros necessários para
a descrição geométrica completa do hélice.
2.3.3 Diâmetro
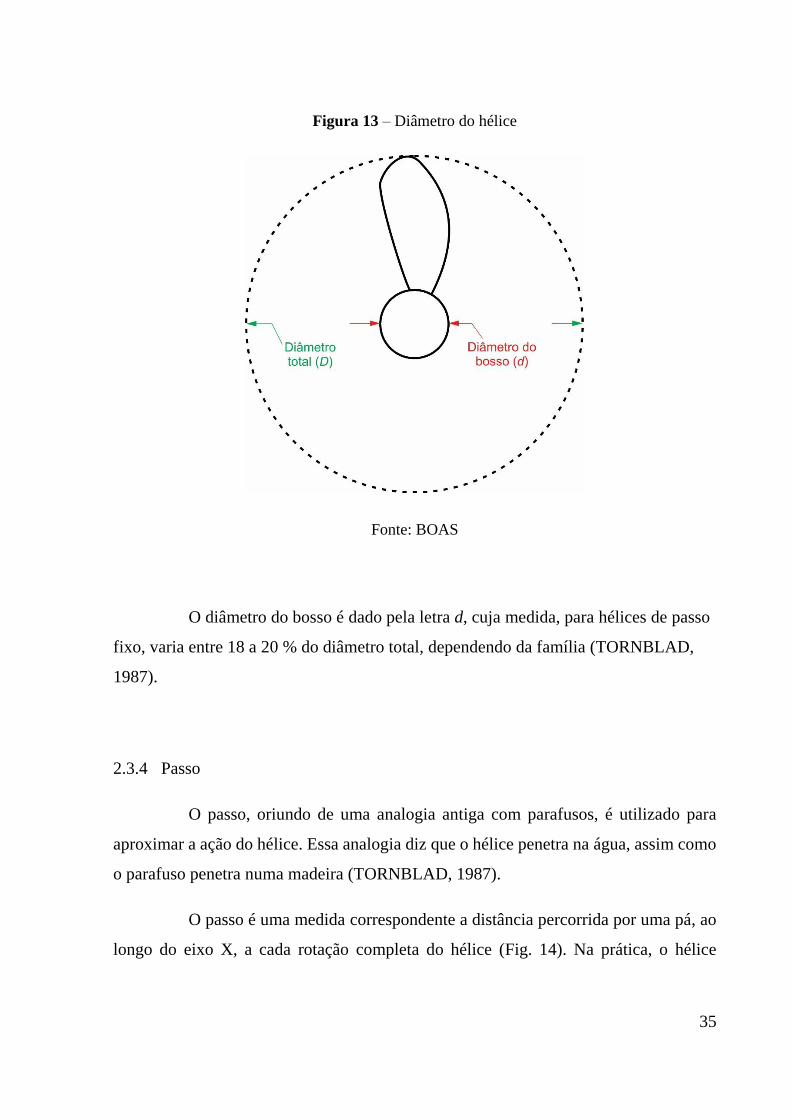
O diâmetro total do hélice, dado pela letra D (Fig. 13), corresponde ao
diâmetro do círculo formado pela projeção da trajetória da ponta da pá do hélice no
plano YZ. Essa medida é essencial na definição da geometria do hélice, pois é através
dela que se é tirada a medida do raio, utilizado no dimensionamento dos demais
parâmetros.
35
Figura 13 – Diâmetro do hélice
Fonte: BOAS
O diâmetro do bosso é dado pela letra d, cuja medida, para hélices de passo
fixo, varia entre 18 a 20 % do diâmetro total, dependendo da família (TORNBLAD,
1987).
2.3.4 Passo
O passo, oriundo de uma analogia antiga com parafusos, é utilizado para
aproximar a ação do hélice. Essa analogia diz que o hélice penetra na água, assim como
o parafuso penetra numa madeira (TORNBLAD, 1987).
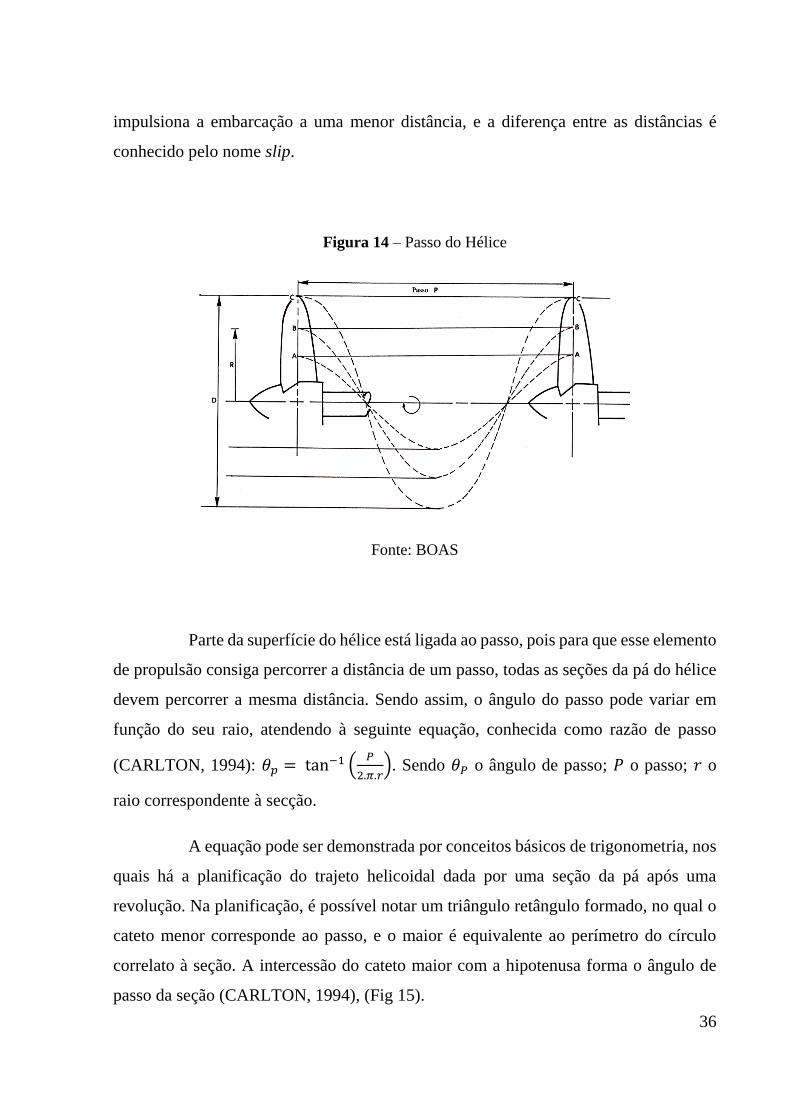
O passo é uma medida correspondente a distância percorrida por uma pá, ao
longo do eixo X, a cada rotação completa do hélice (Fig. 14). Na prática, o hélice
36
impulsiona a embarcação a uma menor distância, e a diferença entre as distâncias é
conhecido pelo nome slip.
Figura 14 – Passo do Hélice
Fonte: BOAS
Parte da superfície do hélice está ligada ao passo, pois para que esse elemento
de propulsão consiga percorrer a distância de um passo, todas as seções da pá do hélice
devem percorrer a mesma distância. Sendo assim, o ângulo do passo pode variar em
função do seu raio, atendendo à seguinte equação, conhecida como razão de passo
(CARLTON, 1994): 𝜃𝑝 = tan−1 (𝑃
2.𝜋.𝑟). Sendo 𝜃𝑃 o ângulo de passo; 𝑃 o passo; 𝑟 o
raio correspondente à secção.
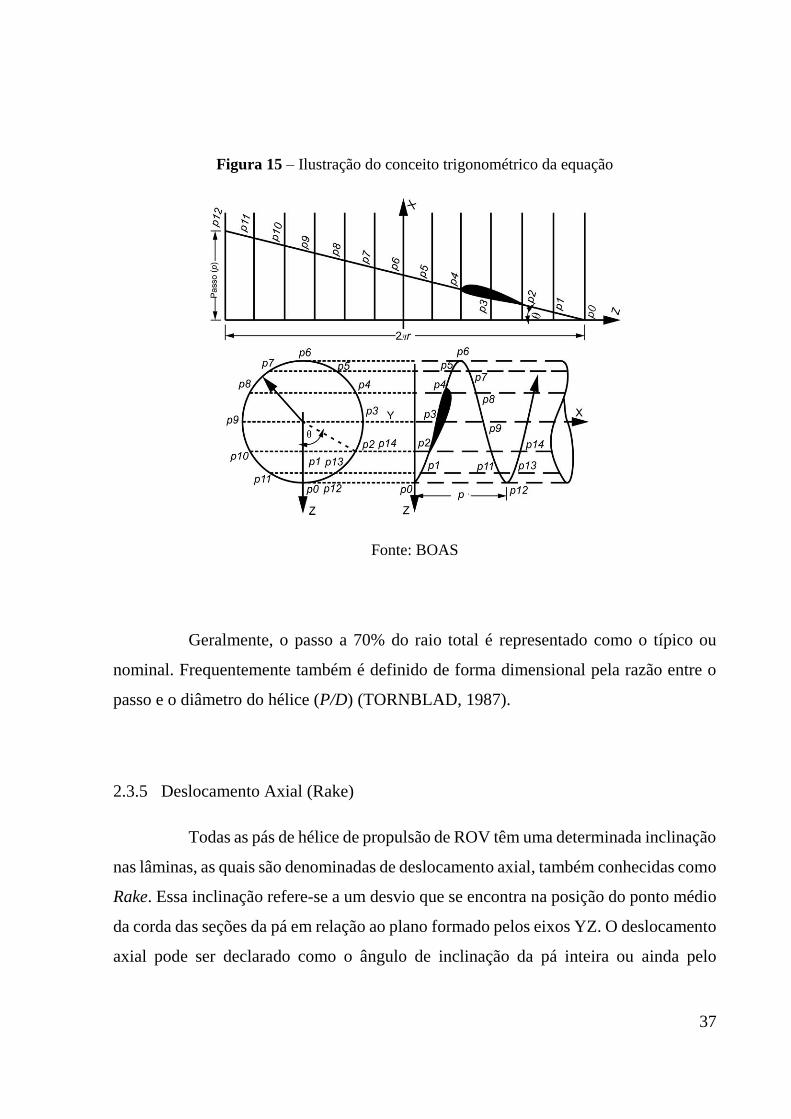
A equação pode ser demonstrada por conceitos básicos de trigonometria, nos
quais há a planificação do trajeto helicoidal dada por uma seção da pá após uma
revolução. Na planificação, é possível notar um triângulo retângulo formado, no qual o
cateto menor corresponde ao passo, e o maior é equivalente ao perímetro do círculo
correlato à seção. A intercessão do cateto maior com a hipotenusa forma o ângulo de
passo da seção (CARLTON, 1994), (Fig 15).
37
Figura 15 – Ilustração do conceito trigonométrico da equação
Fonte: BOAS
Geralmente, o passo a 70% do raio total é representado como o típico ou
nominal. Frequentemente também é definido de forma dimensional pela razão entre o
passo e o diâmetro do hélice (P/D) (TORNBLAD, 1987).
2.3.5 Deslocamento Axial (Rake)
Todas as pás de hélice de propulsão de ROV têm uma determinada inclinação
nas lâminas, as quais são denominadas de deslocamento axial, também conhecidas como
Rake. Essa inclinação refere-se a um desvio que se encontra na posição do ponto médio
da corda das seções da pá em relação ao plano formado pelos eixos YZ. O deslocamento
axial pode ser declarado como o ângulo de inclinação da pá inteira ou ainda pelo

38
deslocamento local de cada seção em função do seu raio. Esse deslocamento pode ser
positivo ou negativo (BOAS, 2006), (Fig 16).
Figura 16 – Tipos de deslocamento
Fonte: BOAS
Existe uma grande vantagem em se utilizar o deslocamento axial nas pás de
hélices de propulsor de ROV e está relacionada com o aumento da área da pá, por
consequência há o aumento do empuxo gerado para deslocar uma quantidade de fluido
maior do que uma hélice com pá sem utilizar Rake. Para obter essa vantagem não é
necessário aumentar o diâmetro do hélice (BOAS, 2006).
2.3.6 Ângulo de Enviesamento (Skew)
O ângulo de enviesamento- mais conhecido como Skew- é o ângulo
responsável por gerar um afastamento do ponto médio das cordas dos perfis das várias
seções da pá, em relação a linha de referência do hélice (Fig. 17). O afastamento é
proporcional, dependendo do produto, entre o raio da seção em questão pelo ângulo de
enviesamento (TORNBLAD, 1987).

39
Figura 17 – Ilustração do ângulo de enviesamento
Fonte: BOAS
Esse parâmetro pode ser expresso de duas maneiras: como o ângulo que é
formado entre a linha de referência da pá e a linha de referência do hélice ou, ainda, pelo
deslocamento do ponto médio da corda como mencionado anteriormente.
O ângulo de enviesamento também é utilizado nos hélices de propulsão com
a finalidade de reduzir a amplitude dos pulsos de vibração gerados pelas pás, pois, dessa
forma as pás dos hélices poderão ter suavidade na hora de cortar a água, reduzindo,
assim, a força da tensão superficial da água (BOAS, 2006).
Na maioria dos casos, os hélices que trabalham com velocidade moderada
possuem valores de ângulo de enviesamento muito baixos, em alguns casos pode até ser
nulo. Já os hélices que operam em velocidades medianas e altas possuem valores mais
40
altos, pois, dessa forma apresentam uma maior tendência a sofrer com uma maior
amplitude de vibração gerada na pá (TORNBLAD, 1987).
2.3.7 Número de Pás
A quantidade de pás existentes nos hélices de propulsão subaquática é muito
relativa aos tipos de embarcações em que serão usados, por isso não existe um número
ideal de pás. Em grande parte dos casos, os números variam de 2 a 7 pás por hélice. Os
hélices que possuem o número de pás acima de 7 são muito particulares, como por
exemplo o caso do hélice de 8 pás que é demasiadamente utilizado em submarinos
nucleares (TORNBLAD, 1987).
O acréscimo do número de pás pode parecer vantajoso, pois o mesmo
empuxo que será gerado por elas, também, poderá ser produzido por um outro hélice,
sendo este de menor diâmetro. Não obstante, tal acréscimo de pás ocasionará um
aumento na interferência do fluxo entre as pás e dessa forma reduzirá a eficiência delas.
Um outro ponto significativo com relação ao aumento no número de pás é a
elevação da frequência dos pulsos de vibração induzidos, fazendo com que a amplitude
desses pulsos seja reduzida.
Geralmente, esse parâmetro é definido conforme os requisitos do projeto a
ser dimensionado. Isso não implica que sirva como regra geral, porém hélices de duas
pás são comumente empregados nas pequenas embarcações em motores de popa e
veleiros. Os hélices de três pás frequentemente são empregados em pequenos navios
pesqueiros, navios costeiros e navios de patrulhas. Os hélices com quatro pás são
utilizados na maioria dos navios cargueiros e de passageiros. Já os hélices com cinco ou
mais pás são utilizados nos casos em que há uma necessidade de se obter uma grande
quantidade de empuxo, porém a vibração gerada também é um fator crucial no
funcionamento desses hélices, como é o caso dos superpetroleiros, navios de contêiner
(TORNBLAD, 1987).

41
Para propulsão dos veículos subaquáticos não tripulados do tipo ROV, como
é o caso dos hélices relacionado ao presente tema de pesquisa, são geralmente
empregados hélices que vão de 3 ou 4 pás, podendo chegar até 5, dependendo da
profundidade em que o ROV pode operar. Outros tipos de veículos subaquáticos
robotizados e não tripulados que utilizam de propulsão o hélice são os subaquáticos
autônomos (AUVs – Autonomous Underwater Vehicles), esses utilizam hélices que
podem variar a quantidade de pás entre 3 até 5 (BOAS, 2006).
2.3.8 Área da Pá
As pás possuem uma forma geométrica complexa, devido a isso a medida
que define a sua área não é simples de ser obtida de maneira direta. Duas medidas de
áreas são utilizadas. O primeiro caso é da área projetada (Ap) da pá, que pode ser
expressa pelo somatório das áreas das sombras de todas as pás projetadas num plano,
gerada por uma fonte de luz colimada- partículas luminosas paralelas para se obter uma
maior precisão- incidindo diretamente sobre a pá que será analisada. A outra medida
utilizada é conhecida como área real (Ad = developed blade area) e pode ser definida
como o somatório das áreas reais de uma das superfícies de cada uma das pás
(TORNBLAD, 1987).
Em vista disso a área projetada sempre será menor que a área real, porém
essa diferença é mínima e pode ser desprezada (GERR, 1989).
Comumente, o valor da área projetada pode ser indicado de forma
adimensional, como na razão de área da pá, obtido pela divisão entre a área expandida
(AE), pela área do disco (AO), também conhecida como razão de área expandida,
caracterizada pela sigla EAR (Expanded Area Ratio). Essa medida é a mais empregada
durante a etapa de projeto (TORNBLAD, 1987; GERR, 1989).
A razão de área expandida da pá do hélice está diretamente associada à
eficiência do hélice, pois quanto maior for essa medida, maior será o arrasto gerado pela

42
pá, ou seja, menos eficiente o hélice se tornará. Já valores pequenos podem resultar em
cavitação.
Com intuito de se obter um valor apropriado para a EAR, a título de se evitar
o fenômeno da cavitação, Keller propôs uma fórmula, na qual valores como pressão de
vapor d’água são levados em consideração. Essa formulação é expressa pela seguinte
equação (KUIPPER, 1992):
𝐸𝐴𝑅 = ((1,3 . 0,3 . 𝑍). 𝑇
(𝑝𝑎 − 𝑝𝑣). 𝐷2) + 𝐾
Sendo: 𝐸𝐴𝑅 a razão de área expandida; 𝑍 o número de pás; 𝑇 o empuxo do
hélice; 𝑝𝑎 a Pressão sobre o hélice; 𝑝𝑉a pressão de vapor d’água; 𝐷 o diâmetro; 𝐾o fator
de correção.
Segundo Kuipper, o fator de correção 𝐾 assume apenas dois valores: zero
para cascos mais esbeltos, assim como nas embarcações militares; 0,2 para o restante
das embarcações, incluindo ROV (KUIPPER, 1992).
2.3.9 Perfil da Pá
A obtenção dos perfis da pá do hélice é feita pela interseção de uma superfície
cilíndrica com a pá (BOAS, 2006).
Para fins aerodinâmicos, atualmente, os tipos de perfil são variados. De todos
os que existem, alguns são mais apropriados para uso em hélices. Comumente, os mais
adequados são aqueles que têm uma distribuição de pressão constante ao longo de sua
corda, causando uma grande força de sustentação e com baixo risco de cavitação
(TORNBLAD, 1987).

43
Desses poucos perfis apropriados para hélice, os mais utilizados pelos
fabricantes são os perfis desenvolvidos pela NACA (National Advisory Committee for
Aeronautics), atual NASA (KUIPPER, 1992).
A NACA- pela sua grande experiência e pelo seu histórico em pesquisas,
desde a década de trinta, com perfis- desenvolveu alguns métodos os quais combinam
duas das entidades que definem um perfil aerodinâmico, a distribuição de espessura e a
linha de curvatura (CARLTON, 1994).
Em um perfil aerodinâmico (Fig. 18), duas entidades são consideradas: o
bordo de ataque e o de fuga. Nesse perfil a definição é igualmente a da pá do hélice,
assim a corda que definimos como uma reta, associa o bordo de ataque ao bordo de fuga;
a linha média, também conhecida como linha de curvatura do perfil, é definida como a
linha equidistante entre a superfície de sucção e a de pressão; a máxima distância entre
a corda e a linha média é definida como a curvatura; a espessura, por sua vez, é definida
como a maior distância, perpendicular à linha média, entre a superfície de pressão e a
de sucção (ABBOTT, 1949).
Figura 18 – Entidades do perfil aerodinâmico
Fonte: BOAS

44
A curvatura e a espessura são valores dimensionados em função da corda e
suas relativas posições (ABBOTT, 1949).
2.3.10 Séries Sistemáticas
Uma série sistemática de hélices é um conjunto de hélices obtidos por
variação sistemática de parâmetros geométricos. O principal objetivo é realizar ensaios
sistemáticos de hélices e criar uma base de dados que permita ajudar o projetista a
entender os principais fatores atuantes no desempenho do hélice, bem como a ocorrência
de cavitação em várias condições de funcionamento (TRINDADE, 2012). Os ensaios
são feitos em Tanque de Prova ou em Túnel de Cavitação (PADOVEZI, 1997).
Com o passar dos tempos, convencionou-se a utilização de dois tipos de
séries sistemáticas na indústria naval e robótica submarina, são eles: Kaplan e B-Troost.
2.3.10.1 Hélices Kaplan e B-Troost
Nos estudos e projetos dos hélices de embarcações fluviais de cargas e na
robótica subaquática, destacam-se duas séries sistemáticas: a Kaplan- especial para
operação em dutos ou tubos Kort- e a B-Troost- de MARIN (Netherlands Maritime
Research Institute, de Wageningen). Esses dois tipos de séries sistemáticas apresentam
as seguintes vantagens:
Alta variedade de parâmetros geométricos disponíveis, inclusive com previsões
de cavitação;
Muito eficientes;
Forma geométrica relativamente simples, tendo uma construção facilitada;
Cobertura de toda a faixa de utilização das embarcações fluviais de cargas e
robótica subaquática;

45
Série Kaplan com simetria entre o bordo ataque e o bordo de fuga das pás,
proporcionando boa eficiência para a ré;
Série B-Troost com grande possibilidade de adaptação geométrica, incluindo a
eliminação do Ângulo de Enviesamento (Skew).
A seguir, na Fig. 19, há um quadro comparativo quanto a eficiência ideal dos
hélices para estruturas subaquáticas, com as series Kaplan e B-Troost.
Figura 19 – Eficiência ideal e das Séries Sistemáticas Kaplan e B-Troost em função do
Coeficiente de Carregamento
Fonte: PADOVEZI
46
3 MATERIAL E MÉTODOS
De acordo com os propósitos pretendidos, foi utilizada- quanto ao tipo-
pesquisa bibliográfica para explicar todo o embasamento necessário ao
desenvolvimento deste trabalho a partir de referências teóricas. Baseia-se na análise da
literatura já publicada em forma de livros, revistas, publicações avulsas e até
disponibilizada na internet; o ato de ler, selecionar, fichar, organizar e arquivar tópicos
de interesse também compõem os métodos para a pesquisa em pauta.
Por ter como finalidade aumentar o conhecimento do pesquisador para uma
nova tomada de posição; incentivar os leitores deste trabalho a se interessarem pela área
da pesquisa- uma vez que faz parte de um dos objetivos desta; e não implicar em
transformação da realidade- conhecer somente por conhecer- o uso deste trabalho será
de proveito pessoal.
Quanto à abordagem, será qualitativa, pois há uma maior preocupação com
o tipo de abordagem do conteúdo aqui descrito para uma melhor compreensão dos
assuntos citados em cada tópico.

47
4 RESULTADOS
Para atender aos objetivos propostos, foram obtidos como resultados iniciais
o entendimento da mecânica dos fluidos e das máquinas de fluxo relacionados ao hélice,
cujos fenômenos físicos aqui descritos definem o que ocorre quando ele está submergido
num meio fluido. Foram utilizados exemplos simples para o melhor entendimento e
aproveitamento das informações e definições.
No primeiro estudo, caracterizou-se os tipos de forças e pressões resultantes
nos hélices. No segundo, ficou entendido os tipos de máquinas as quais possuem hélice
em seu rotor e informações suficientes que contribuíram para diferenciar o hélice aqui
estudado das demais máquinas de fluido.
Também, com as definições dos elementos construtivos dos hélices e séries
sistemáticas, resultou-se no conhecimento mais específico do hélice, sobre o qual pode-
se ter o entendimento maior das características através de sua geometria, dessa forma
dando um norte a pesquisas futuras.
48
5 CONCLUSÃO
Com base em tudo que foi exposto, as análises deste trabalho possibilitam o
campo de estudo das áreas de Ciência, Tecnologia, Engenharia e Robótica Subaquática.
Além de servir como estudo para futuras pesquisas de hélice propulsora de robô
subaquático tipo ROV, assim podendo promover a melhoria ou o desenvolvimento de
novos hélices, trazendo benefícios para as indústrias- que utilizam desses robôs- e a
sociedade como um todo.
Além disso, esta pesquisa poderá contribuir na construção de hélices, fonte
propulsora para deslocamento desses robôs subaquáticos, fazendo com que eles
gradativamente adentrem em profundidades mais inexploradas pelo humano no meio
subsea e de forma mais eficiente. Contribuição essa, na qual poderão ser feitos
aperfeiçoamentos de parâmetros geométricos em projetos de hélices, utilizando de
estudos de séries sistemáticas aqui escritas e em cima de estudos já desenvolvidos.
Com relação à Mecânica dos Fluidos, conclui-se que um fluido, seja ele qual
tipo for, sofrerá deformações constantes e afetará todos os tipos de corpos que estiverem
submersos nele, através de forças e pressões resultantes que agem nas superfícies do
corpo, verticalmente e horizontalmente, de baixo para cima- denominadas empuxo- e de
um lado para o outro- definidas como pressão hidrostática. Sobre as Máquinas de Fluxo
definidas, concluiu-se que o hélice está enquadrado no tipo de máquina de fluido
geradora, pois converte a energia mecânica, provinda do torque produzido pelo motor
elétrico do sistema de propulsão, em energia de fluido, possibilitando a propulsão do
robô subaquático e podendo ser assemelhado com os ventiladores axiais tubulares por
suas características
Concluiu-se, também, que na maioria dos hélices hoje fabricados, são
utilizadas as séries sistemáticas, pois essas possuem características pré-definidas de
parâmetros geométricos de hélice que já preveem problemas como a cavitação que
ocorrem nos hélices quando estão em operação. Por se tratarem de parâmetros
49
geométricos pré-descritos, duas famílias de séries são muito utilizadas nos projetos que
envolvem hélice de ROV, Kaplan e B-Troost, trazem benefícios que aumentam a vida
útil dos hélices.
Por fim, é esperado que novas pesquisas mais aprofundadas se concretizem,
as quais, através deste trabalho, formarão uma boa base a respeito de hélice para
propulsão de robô subaquático tipo ROV.
50
REFERÊNCIAS BIBLIOGRÁFICAS
ABBOTT, Ira; DOENHOFF, Albete E. V.. Theory of Wing Sections. New York: Dover
Publications, 1949.
ARMSTRONG RM CORPORATION (Nova York). Rotor de bomba. Disponível em:
<http://www.armstrongmold.com/pages/photo-gallery/impeller.html>. Acesso em: 12
abr. 2015.
AVERLY S.A. (Espanha). Turbina hidráulica do tipo francis. Disponível em:
<http://www.averly.es/turbinas.html/>. Acesso em: 15 abr. 2015.
BOAS, Fábio Villas. Desenvolvimento de uma ferramenta de cad aplicada ao projeto
de hélices para veículos aquáticos não tripulados. 2006. 123 f. Dissertação (Mestrado)
- Curso de Engenharia, Escola Politécnica da Universidade de São Paulo, São Paulo,
2006.
CARLTON, .J.S. Marine propellers and propulsion. Toronto: Butterworth Heinemann,
2007.
DIRECT INDUSTRY. Bomba centrífuga. Disponível em:
<http://www.directindustry.es/prod/robuschi/bomba-centrifuga-procesos-quimicos-
23555-374493.html>. Acesso em: 15 abr. 2015.
FOX, Robert W.; MCDONALD, Alan T.; PRITCHARD, Philip J.. Introdução à
mecânica dos fluidos. 6. ed. Rio de Janeiro: Ltc, 2006. 800 p.
GERR, Dave. Propeller Handbook. USA: International Marine Publishing Company
Camden Marine, 1989.

51
GENTSIDE DÉCOUVERTE (França). Turbina a vapor do tipo curtis. Disponível em:
<http://www.maxisciences.com/>. Acesso em: 15 abr. 2015.
GOMES, Maria H. R.. Mecânica dos fluidos. Universidade Federal de Juiz de fora. Juiz
de fora, 2010.
HENN, Érico Antônio Lopes. Máquinas de fluido. 2. ed. Santa Maria: Ed. da Ufsm,
2006.
INDUSTRIAL, I. N. P.. Disponível em: <http://www.inpi.gov.br/portal/>. Acesso em
28 de dez. 2014.
ISTRIA. Josef ressel’s biography. Disponível em:
<http://istrianet.org/istria/illustri/non-istrian/ressel/index.htm>. Acesso em 28 de dez.
2014.
JIMENEZ, T. S. (2004). Contribution na la commande d'un robot sous-marin autonome
de type torpille, 21/12/2004, UNIVERSITE MONTPELLIER II, T HESE.
JUNTA DE ANDALUCIA. Turbina de vapor. Disponível em:
<http://www.juntadeandalucia.es/averroes/iescmc/departamentos/tecnologia/web/Web
Maquinas/html2/turbinadevapor.html>. Acesso em: 14 abr. 2015.
KUIPPER, G.. The wageningen propeller series. USA: Marin, 1992.
METEC (Lisboa). Ventilador axial tubular. Disponível em:
<http://www.metec.pt/c_ventiladores_tubulares_axiais.php>. Acesso em: 14 abr. 2015.

52
MUNSON, Bruce R.; YOUNG, Donald F.; OKIISHI, Theodore H.. Fundamentos da
mecânica dos fluidos. 4. ed. São Paulo: Edgar Blucher Ltda, 2004. Tradução da quarta
edição americana: Euryale de Jesus Zerbini. 572p.
NICOLET, A., NICOLET, R. e BRODBECK, J. Manual del modelista – trazado y
realización de modelos para la fundición, ed. Gustavo Gili S.A., Barcelona, 1955.
PADOVEZI, Carlos Daher. Aplicação de resultados de escala real no projeto de hélices
de embarcações fluviais. 1997, 87p. Dissertação (mestrado) – Escola Politécnica,
Universidade de São Paulo. São Paulo, 1997.
PINTO, Fernando Teixeira; PELLANDA, Paulo César. Análise e controle do sistema
de propulsão de um navio de guerra. Revista Militar de Ciência e Tecnologia, Rio de
Janeiro, v. , n. 2316-4522, p.3-72, abr. 2014. 2º Trimestre. Disponível em:
<http://rmct.ime.eb.br/arquivos/revistas/RMCT_2_tri_2014.pdf>. Acesso em: 20 mar.
2015.
RENEWABLE ENERGY FOR RURAL FARMERS. Microturbina hidráulica tipo
pelton. Disponível em: <https://albertcampi.wordpress.com/2013/10/31/microturbinas-
hidraulicas-3-preguntas>. Acesso em: 14 abr. 2015.
SOUZA, Wagner L.. Sistema de propulsores para um rov – subaquático. São João da
Boa Vista, 2010.
TORNBLAD, JAN. Marine propellers and propulsion of ships. Kristinehamn Sweden,
1987.
TRINDADE, Jorge. Hidrodinâmica e propulsão. 2012. Disponível em:
<http://www.enautica.pt/publico/professores/jorgetrindade/HidroProp/Docs/HidroProp
ulsao.pdf>. Acesso em: 23 mar. 2015.

53
VILANOVA, Luciano Caldeira Mecânica dos fluidos/Luciano Caldeira Vilanova. – 3.
ed. – Santa Maria, RS: Colégio Técnico Industrial de Santa Maria, Curso em
Automação Industrial, 2011. 82 p.: il


















