étodos uméricos - ufsj.edu.br · eliminação de Gauss. a) Se duas linhas quaisquer de uma matriz...
61
Prof. Erivelton Geraldo Nepomuceno 2016 SISTEMAS DE EQUAÇÕES LINEARES (Continuação) PROGRAMA DE PÓS-GRADUAÇÃO EM ENGENHARIA ELÉTRICA UNIVERSIDADE DE JOÃO DEL-REI PRÓ-REITORIA DE PESQUISA CENTRO FEDERAL DE EDUCAÇÃO TECNOLÓGICA DE MINAS GERAIS DIRETORIA DE PESQUISA E PÓS-GRADUAÇÃO étodos uméricos
Transcript of étodos uméricos - ufsj.edu.br · eliminação de Gauss. a) Se duas linhas quaisquer de uma matriz...
Prof. Erivelton Geraldo Nepomuceno
2016
SISTEMAS DE EQUAÇÕES LINEARES(Continuação)
PROGRAMA DE PÓS-GRADUAÇÃO EM ENGENHARIA ELÉTRICA
UNIVERSIDADE DE JOÃO DEL-REI
PRÓ-REITORIA DE PESQUISA
CENTRO FEDERAL DE EDUCAÇÃO
TECNOLÓGICA DE MINAS GERAIS
DIRETORIA DE PESQUISA E PÓS-GRADUAÇÃO
étodos
uméricos
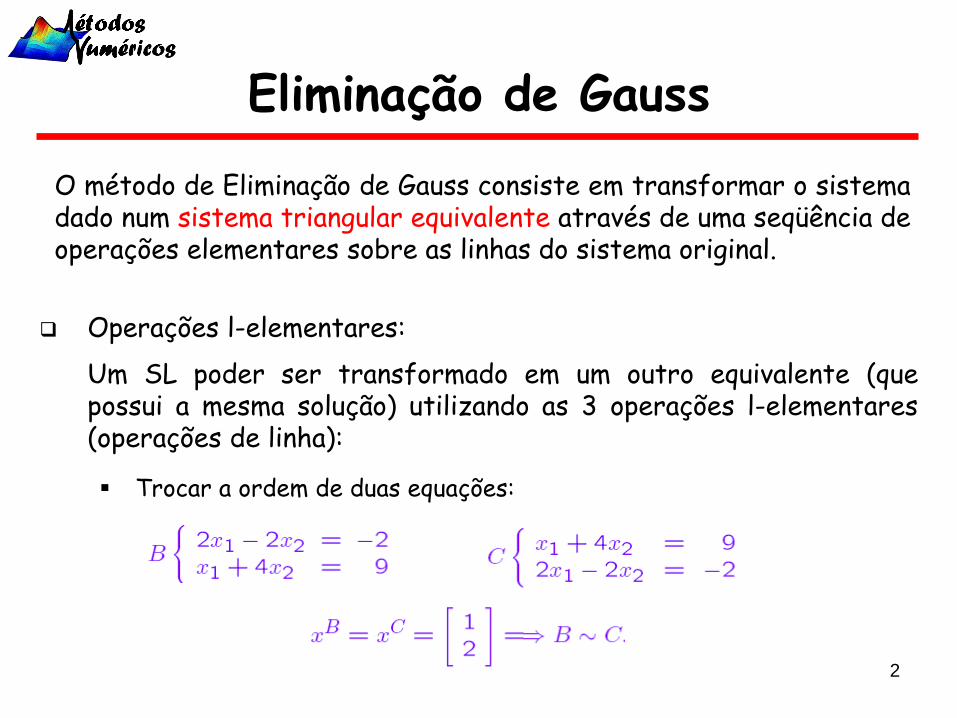
Eliminação de Gauss
Operações l-elementares:
Um SL poder ser transformado em um outro equivalente (quepossui a mesma solução) utilizando as 3 operações l-elementares(operações de linha):
▪ Trocar a ordem de duas equações:
O método de Eliminação de Gauss consiste em transformar o sistemadado num sistema triangular equivalente através de uma seqüência deoperações elementares sobre as linhas do sistema original.
2
Eliminação de Gauss
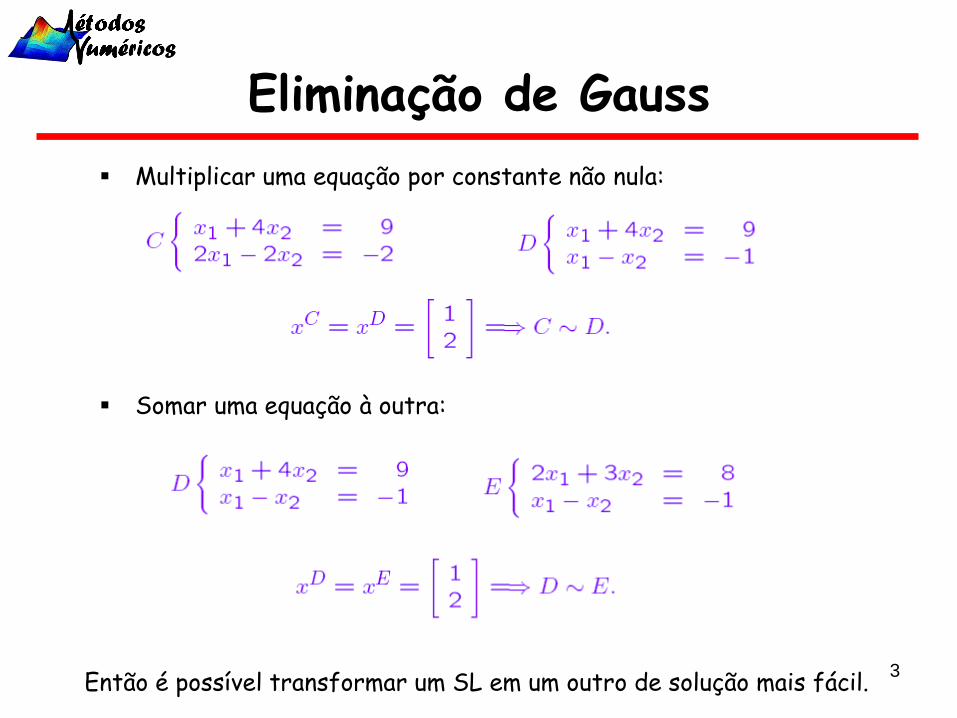
▪ Somar uma equação à outra:
Então é possível transformar um SL em um outro de solução mais fácil.
▪ Multiplicar uma equação por constante não nula:
3

Eliminação de Gauss Sistema triangular equivalente:
O método de eliminação de Gauss consiste em transformar um SLem um sistema triangular superior equivalente por meio dasoperações l-elementares.
4
Eliminação de Gauss
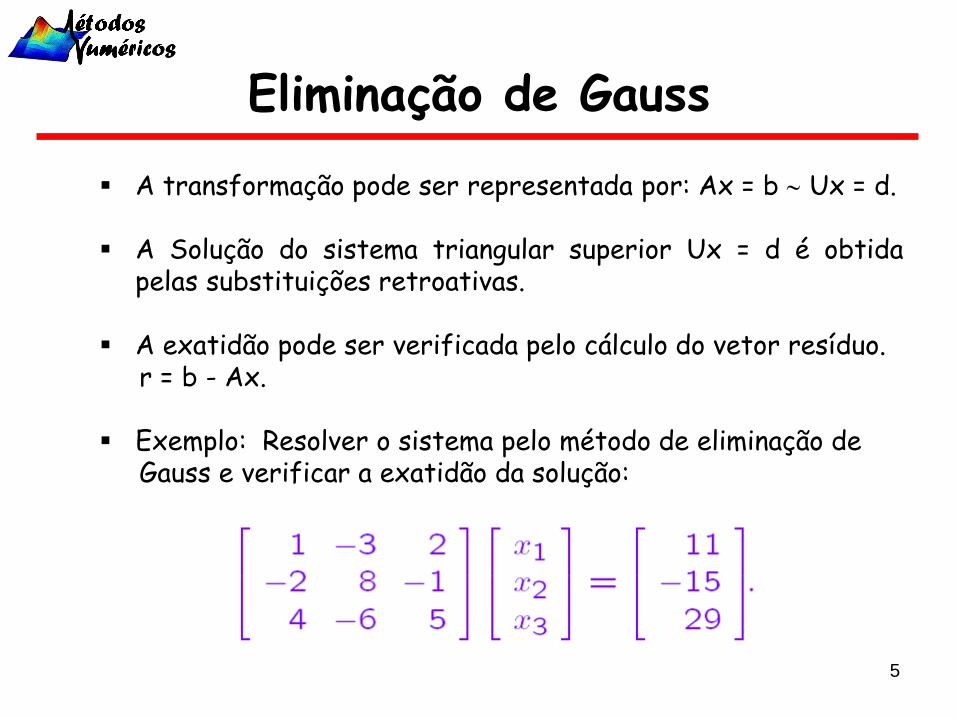
▪ A transformação pode ser representada por: Ax = b Ux = d.
▪ A Solução do sistema triangular superior Ux = d é obtidapelas substituições retroativas.
▪ A exatidão pode ser verificada pelo cálculo do vetor resíduo.r = b - Ax.
▪ Exemplo: Resolver o sistema pelo método de eliminação deGauss e verificar a exatidão da solução:
5
Eliminação de Gauss
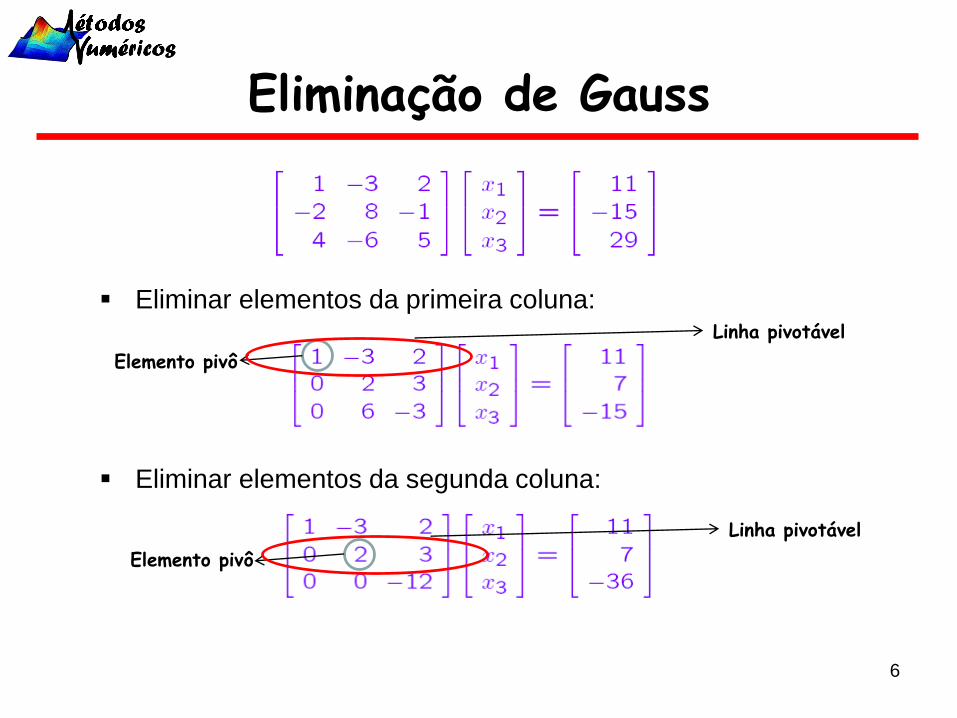
▪ Eliminar elementos da primeira coluna:
Elemento pivô
Linha pivotável
▪ Eliminar elementos da segunda coluna:
Elemento pivô
Linha pivotável
6
Eliminação de Gauss
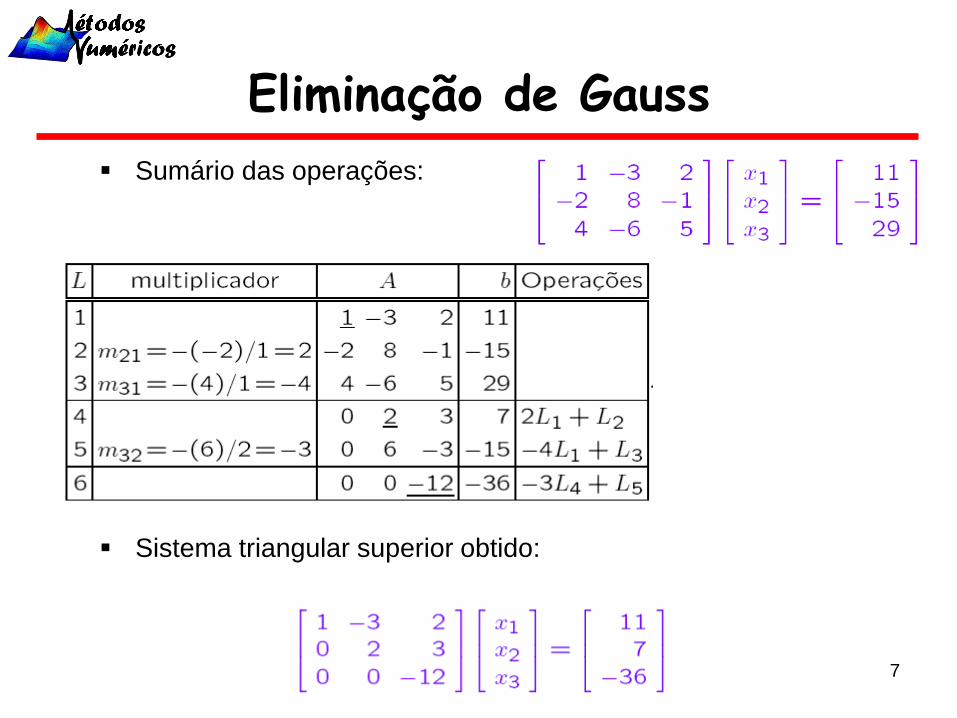
▪ Sumário das operações:
▪ Sistema triangular superior obtido:
7
Eliminação de Gauss
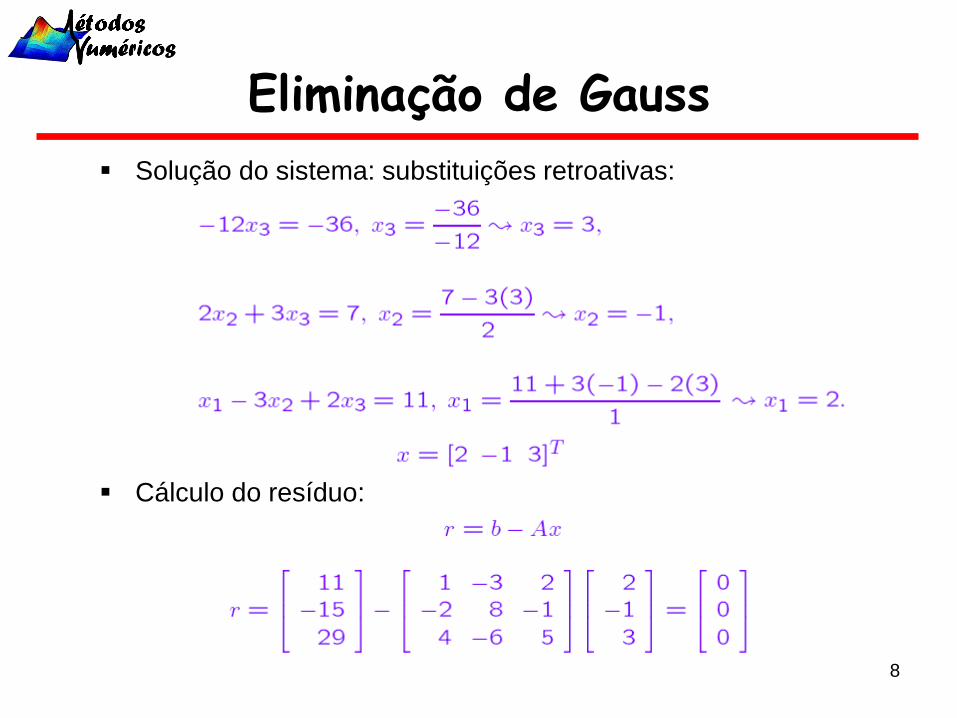
▪ Solução do sistema: substituições retroativas:
▪ Cálculo do resíduo:
8
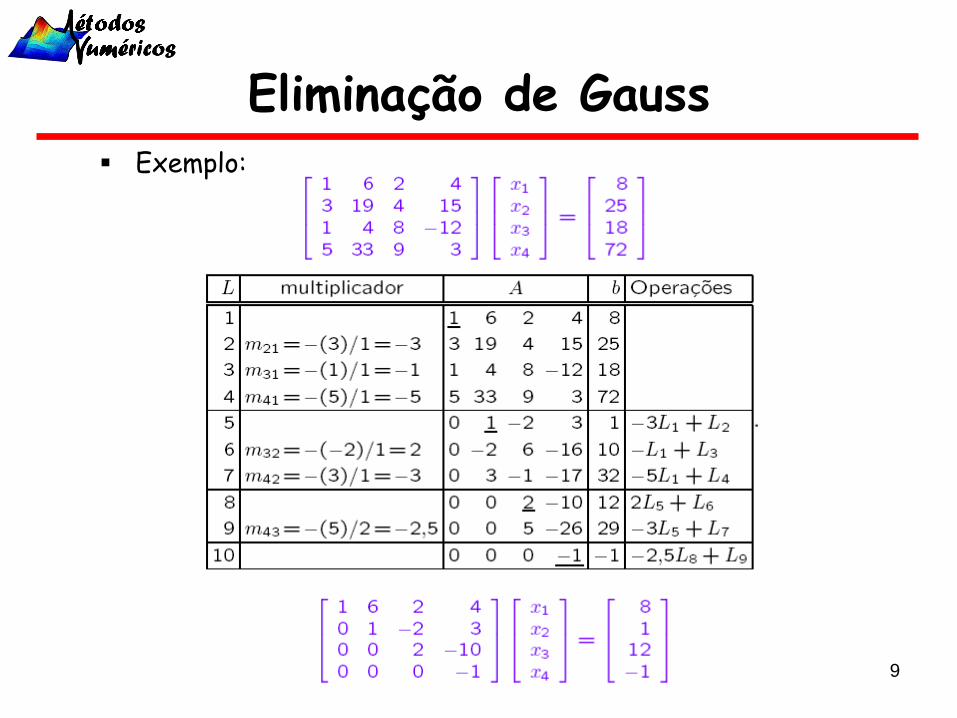
Eliminação de Gauss▪ Exemplo:
9
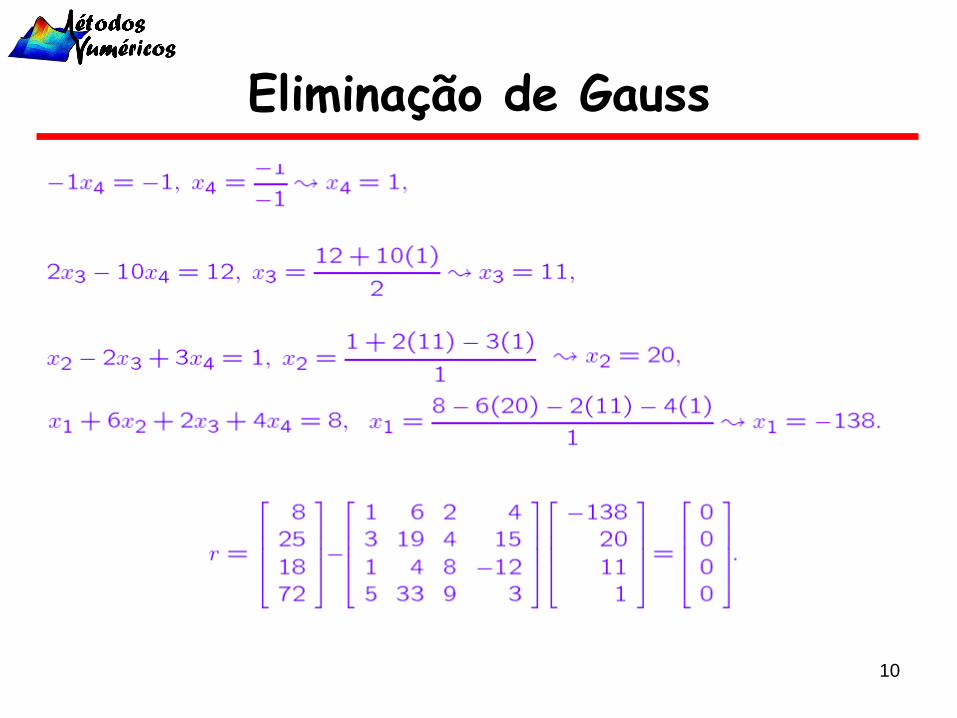
Eliminação de Gauss
10
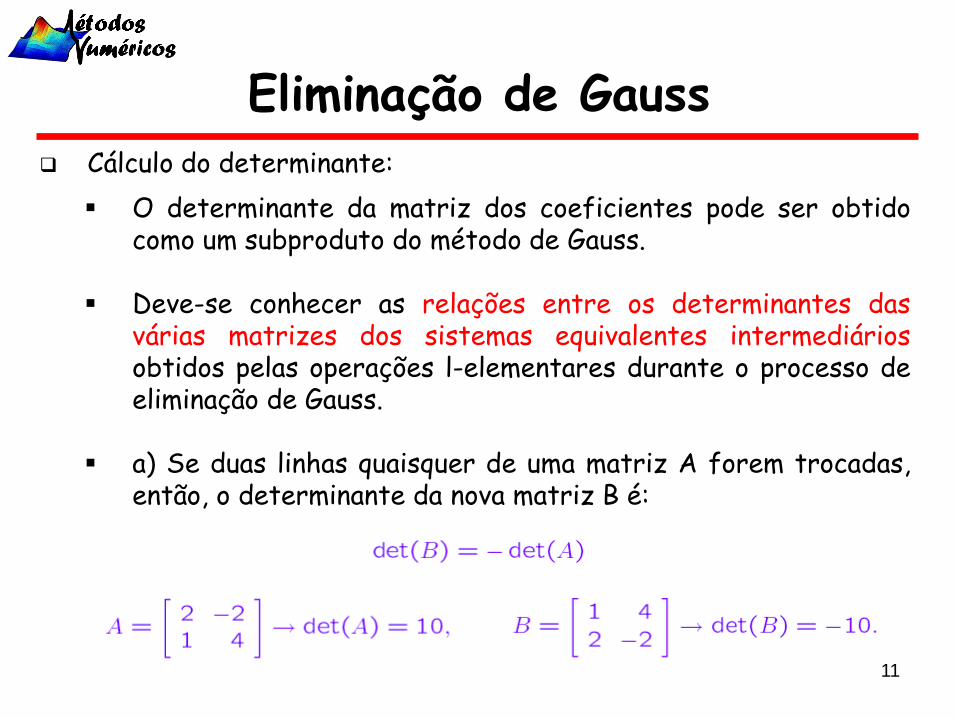
Eliminação de Gauss Cálculo do determinante:
▪ O determinante da matriz dos coeficientes pode ser obtidocomo um subproduto do método de Gauss.
▪ Deve-se conhecer as relações entre os determinantes dasvárias matrizes dos sistemas equivalentes intermediáriosobtidos pelas operações l-elementares durante o processo deeliminação de Gauss.
▪ a) Se duas linhas quaisquer de uma matriz A forem trocadas,então, o determinante da nova matriz B é:
11
Eliminação de Gauss
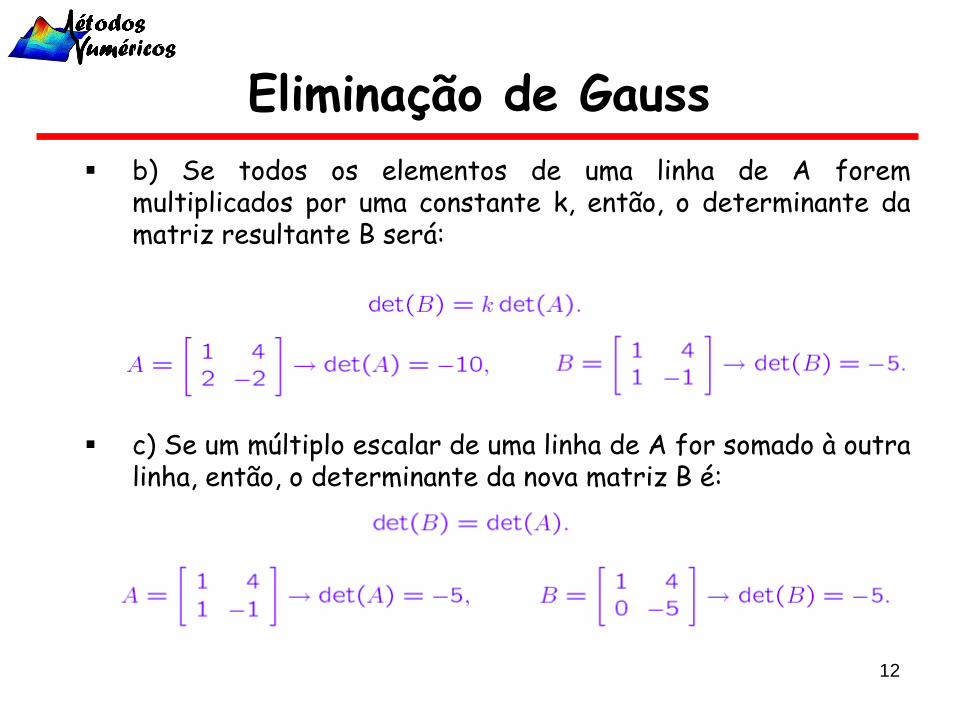
▪ b) Se todos os elementos de uma linha de A foremmultiplicados por uma constante k, então, o determinante damatriz resultante B será:
▪ c) Se um múltiplo escalar de uma linha de A for somado à outralinha, então, o determinante da nova matriz B é:
12
Eliminação de Gauss
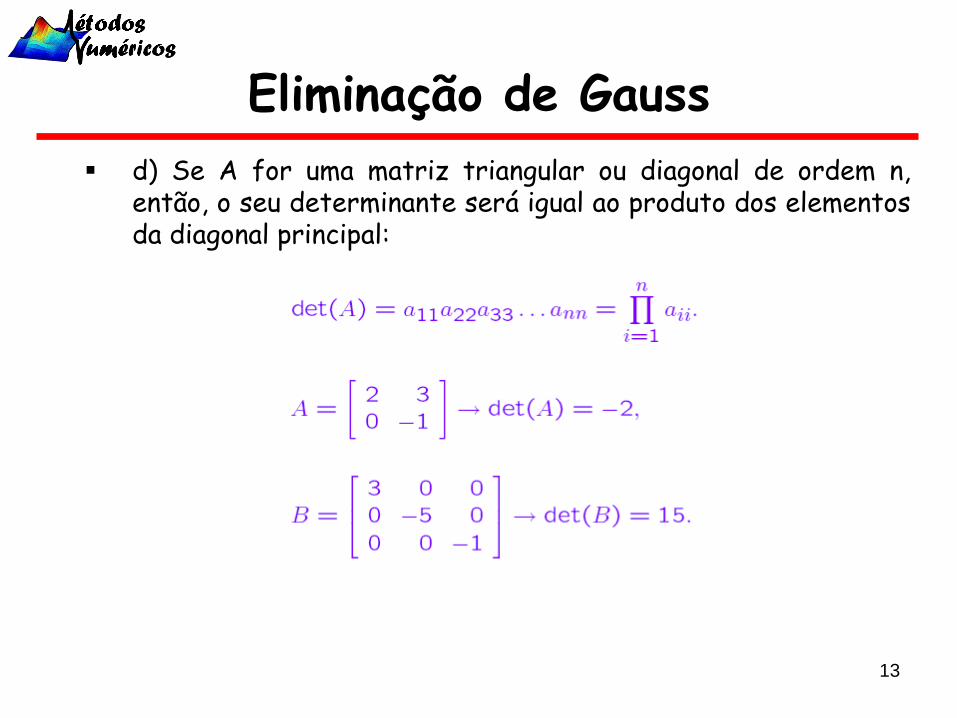
▪ d) Se A for uma matriz triangular ou diagonal de ordem n,então, o seu determinante será igual ao produto dos elementosda diagonal principal:
13
Eliminação de Gauss
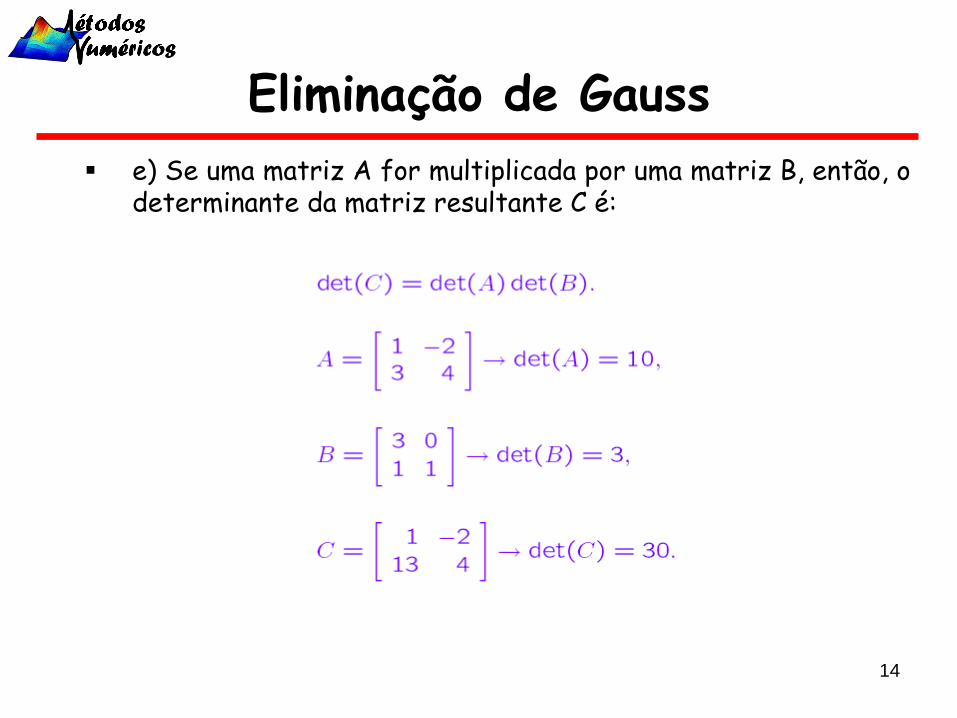
▪ e) Se uma matriz A for multiplicada por uma matriz B, então, odeterminante da matriz resultante C é:
14
Eliminação de Gauss
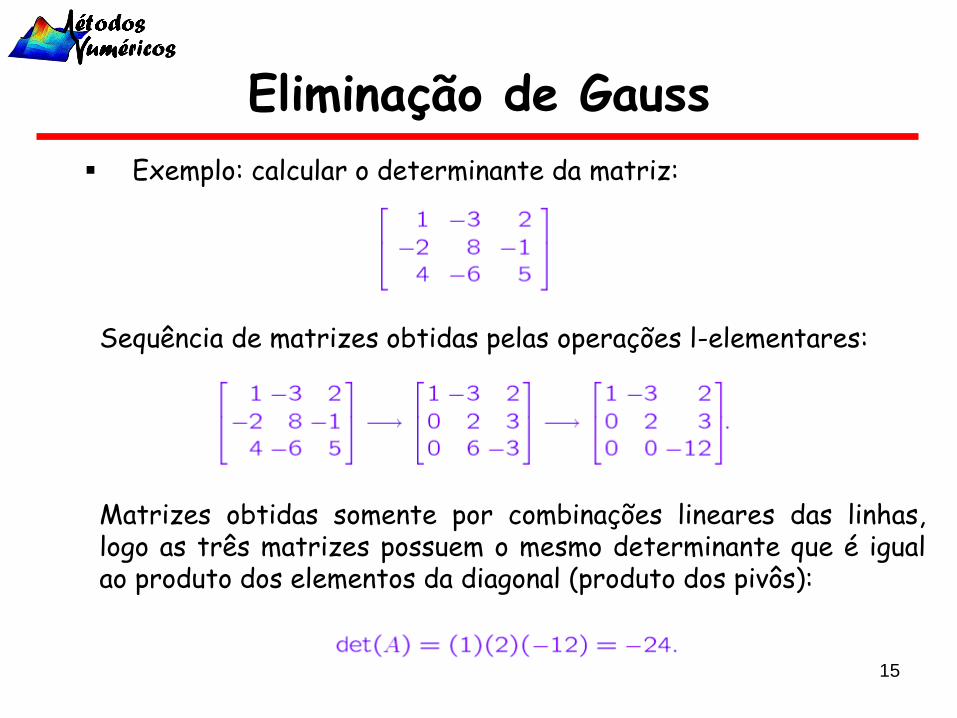
▪ Exemplo: calcular o determinante da matriz:
Sequência de matrizes obtidas pelas operações l-elementares:
Matrizes obtidas somente por combinações lineares das linhas,logo as três matrizes possuem o mesmo determinante que é igualao produto dos elementos da diagonal (produto dos pivôs):
15
Eliminação de Gauss
▪ O método de Gauss falha quando o pivô é nulo (ou 0 ).
▪ O método de Gauss intensifica a propagação dos erros detruncamento do computador (Multiplicadores grandes),principalmente em sistemas grandes.
▪ Estes problemas podem ser evitados utilizando pivotaçãoparcial, que consiste em escolher como pivô o maior elementoem módulo da coluna, cujos elementos serão eliminados.
▪ A estratégia de pivotamento parcial é baseada na operaçãoelementar: Troca de duas equações.
▪ Todos os multiplicadores satisfazem -1 mij 1.
Pivotação Parcial:
16
Eliminação de Gauss
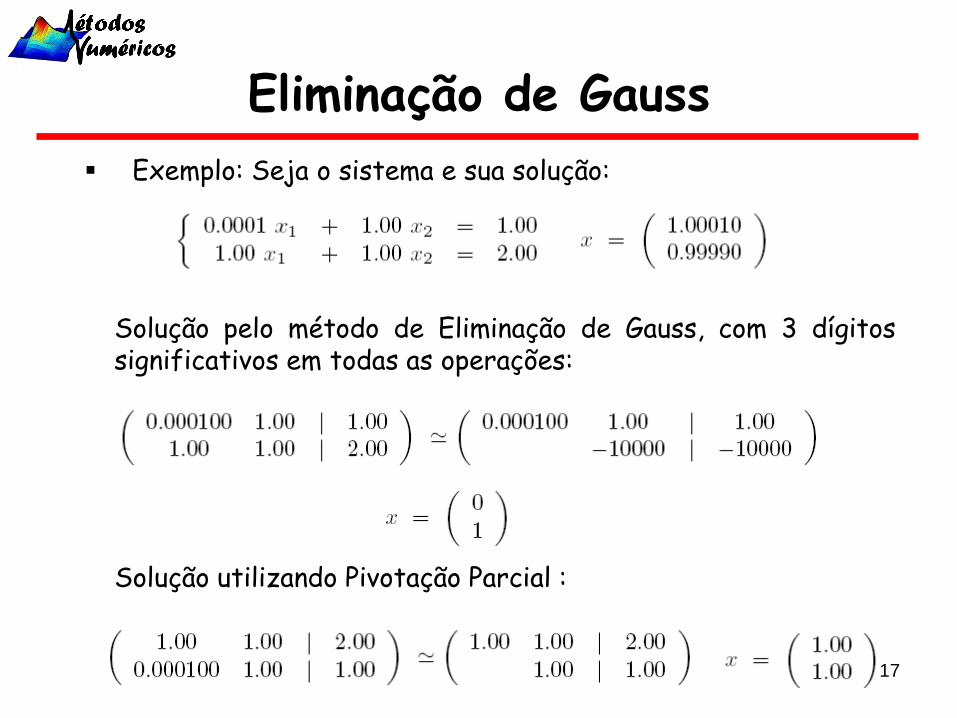
▪ Exemplo: Seja o sistema e sua solução:
Solução pelo método de Eliminação de Gauss, com 3 dígitossignificativos em todas as operações:
Solução utilizando Pivotação Parcial :
17

Eliminação de Gauss
▪ Exemplo: Resolver o sistema pelo método de Gauss compivotação parcial.
18

Eliminação de Gauss
19

Decomposição LU
Uma matriz quadrada qualquer pode ser escrita como o produto deduas matrizes:
▪ A matriz A é fatorada tal que A = LU.
▪ L: matriz triangular inferior unitária.
▪ U: matriz triangular superior.
▪ Para resolver o sistema Ax = b, tem-se:
20
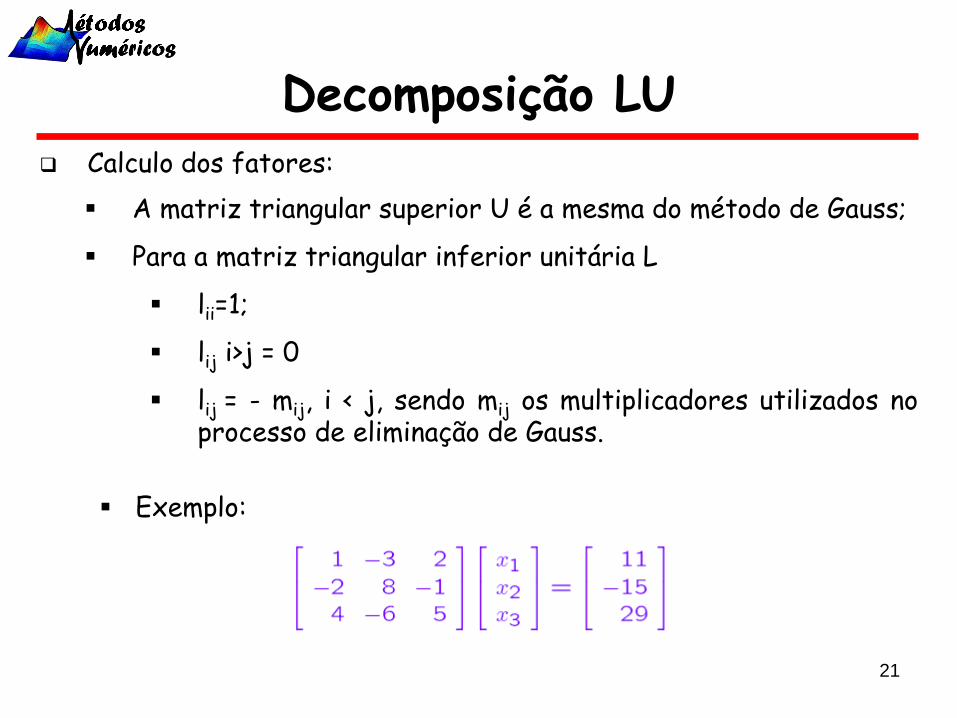
Decomposição LU Calculo dos fatores:
▪ A matriz triangular superior U é a mesma do método de Gauss;
▪ Para a matriz triangular inferior unitária L
▪ lii=1;
▪ lij i>j = 0
▪ lij = - mij, i < j, sendo mij os multiplicadores utilizados noprocesso de eliminação de Gauss.
▪ Exemplo:
21

Decomposição LUEliminação de Gauss:
Matrizes L e U:
22
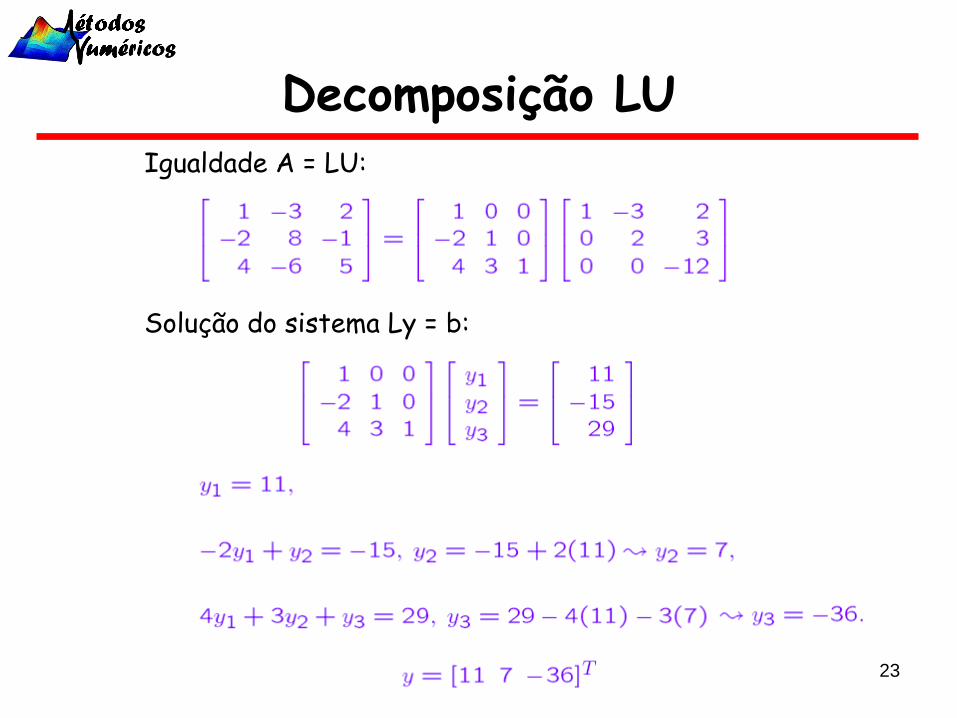
Decomposição LUIgualdade A = LU:
Solução do sistema Ly = b:
23
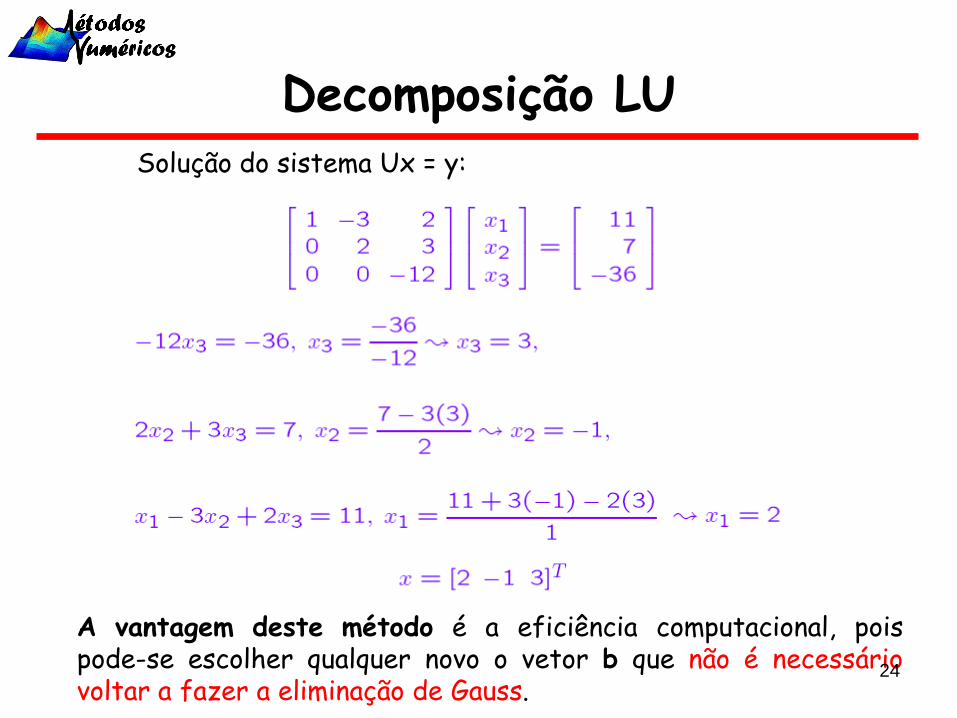
Decomposição LUSolução do sistema Ux = y:
A vantagem deste método é a eficiência computacional, poispode-se escolher qualquer novo o vetor b que não é necessáriovoltar a fazer a eliminação de Gauss.
24
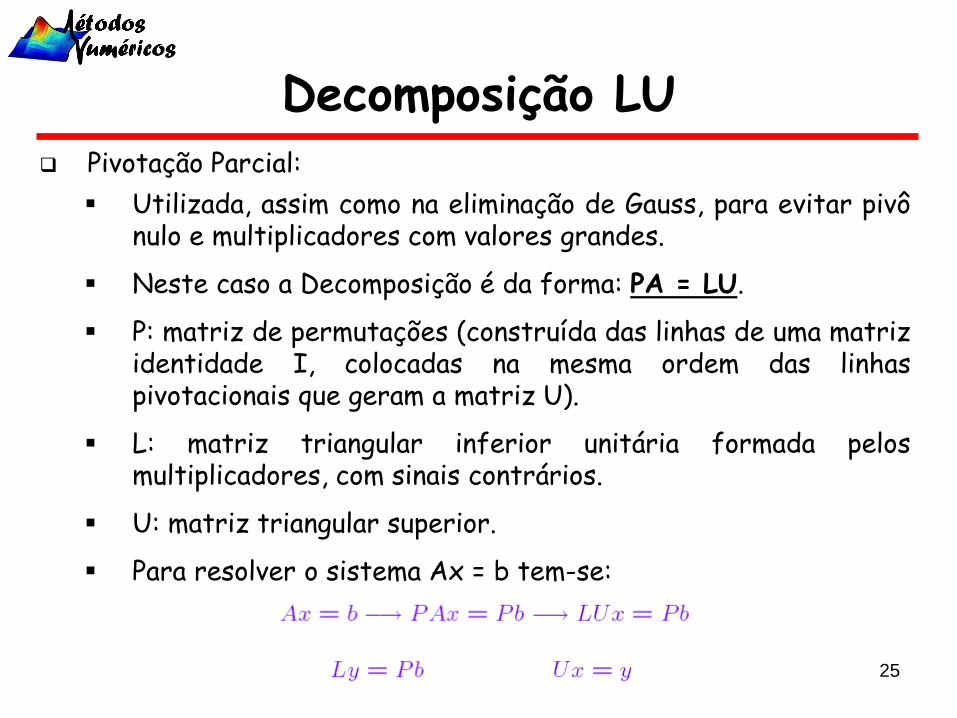
Decomposição LU Pivotação Parcial:
▪ Utilizada, assim como na eliminação de Gauss, para evitar pivônulo e multiplicadores com valores grandes.
▪ Neste caso a Decomposição é da forma: PA = LU.
▪ P: matriz de permutações (construída das linhas de uma matrizidentidade I, colocadas na mesma ordem das linhaspivotacionais que geram a matriz U).
▪ L: matriz triangular inferior unitária formada pelosmultiplicadores, com sinais contrários.
▪ U: matriz triangular superior.
▪ Para resolver o sistema Ax = b tem-se:
25

Decomposição LU
▪ Exemplo:
Eliminação de Gauss:
26

Decomposição LU
Solução do sistema Ly = Pb:
27
Decomposição LU
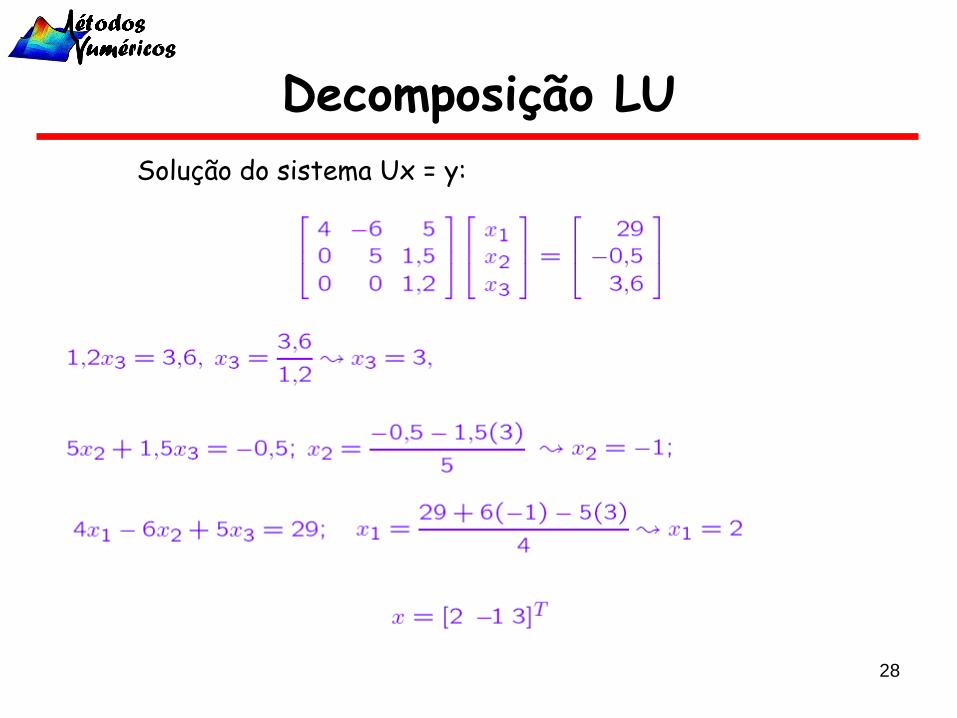
Solução do sistema Ux = y:
28

Decomposição LU Cálculo do determinante:
Pelas propriedades dos determinantes:
(Propriedade e)
(Propriedade d)
(Propriedade a)
p: numero de trocas de linhas necessárias para transformar a matrizde permutações em identidade. Logo:
29

Decomposição LU
▪ Exemplo: Calcular o determinante de:
Matrizes U e P:
Valor de p:
determinante:
30
Decomposição LU
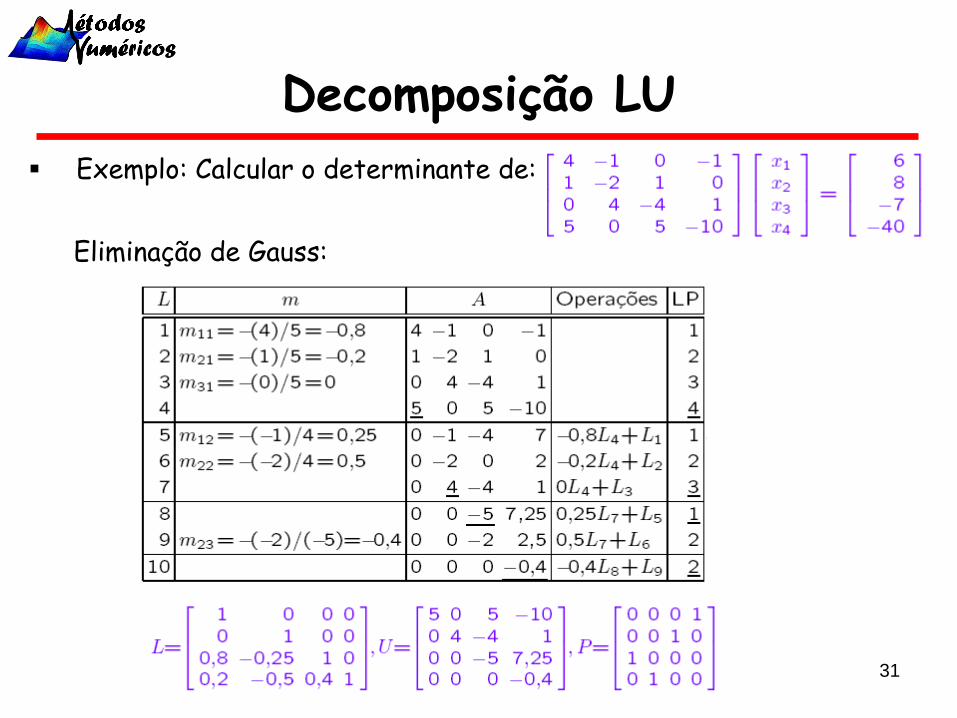
▪ Exemplo: Calcular o determinante de:
Eliminação de Gauss:
31
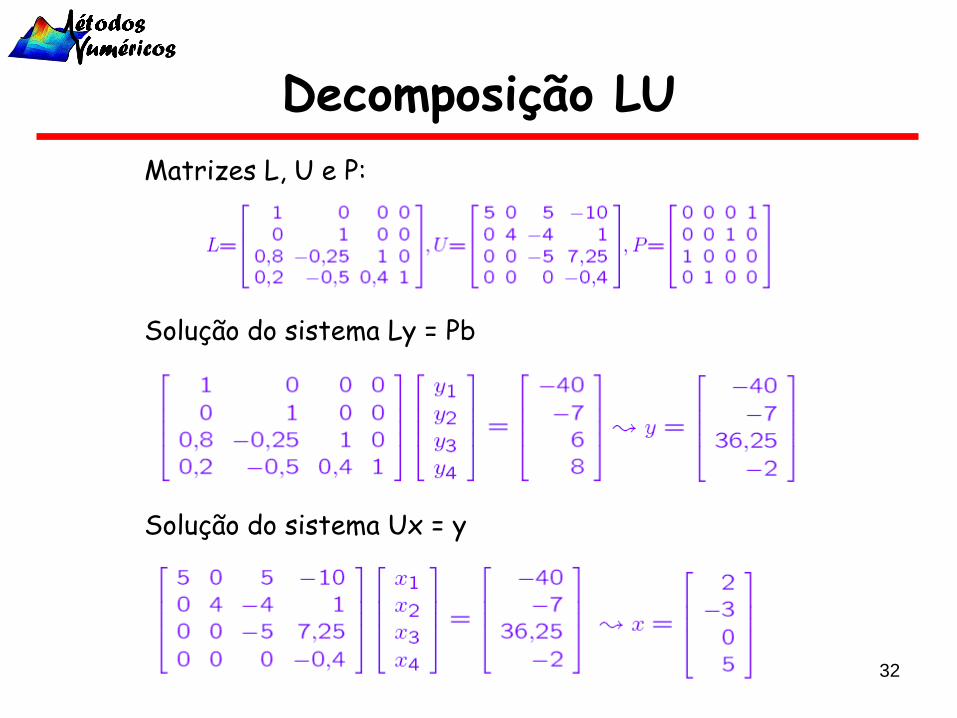
Decomposição LU
Solução do sistema Ly = Pb
Matrizes L, U e P:
Solução do sistema Ux = y
32

Decomposição LU
Unicidade da solução:
Exatidão:
33
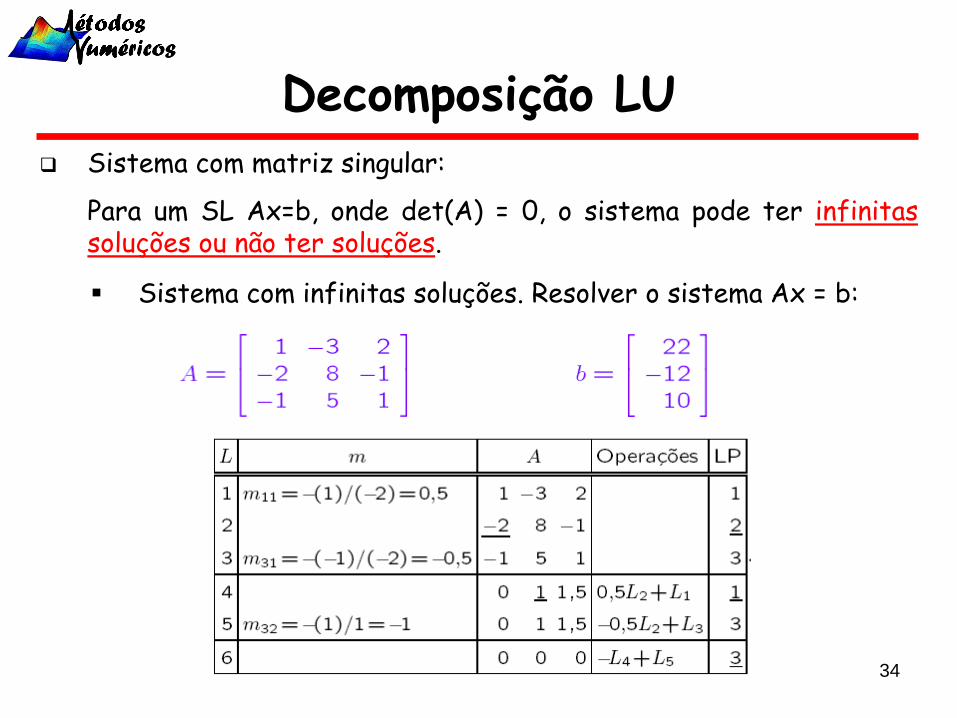
Decomposição LU Sistema com matriz singular:
Para um SL Ax=b, onde det(A) = 0, o sistema pode ter infinitassoluções ou não ter soluções.
▪ Sistema com infinitas soluções. Resolver o sistema Ax = b:
34
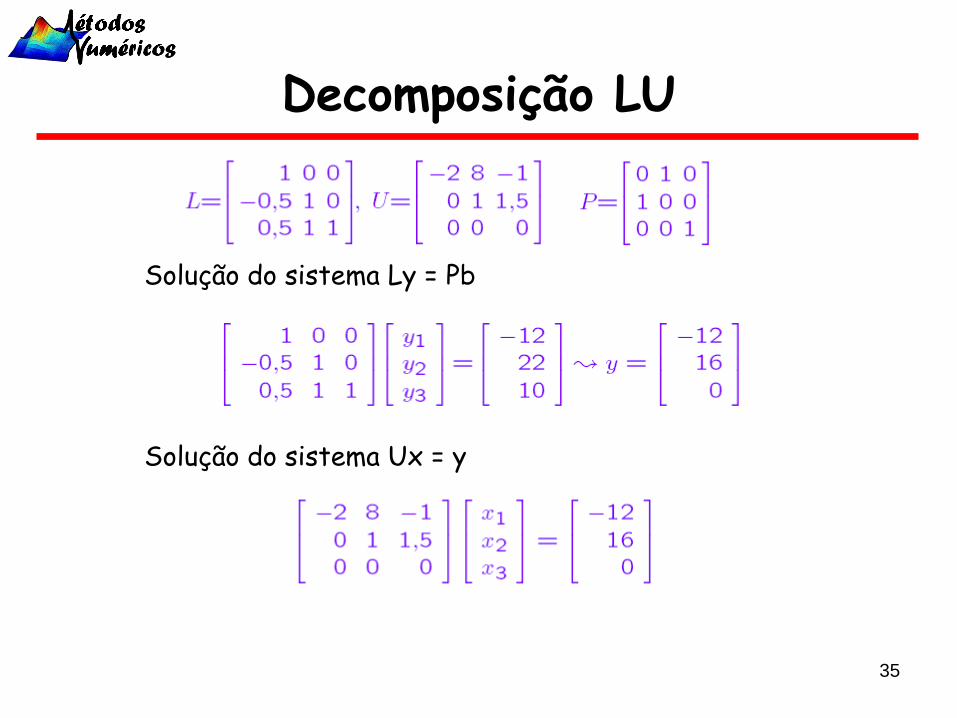
Decomposição LU
Solução do sistema Ly = Pb
Solução do sistema Ux = y
35

Decomposição LU
36
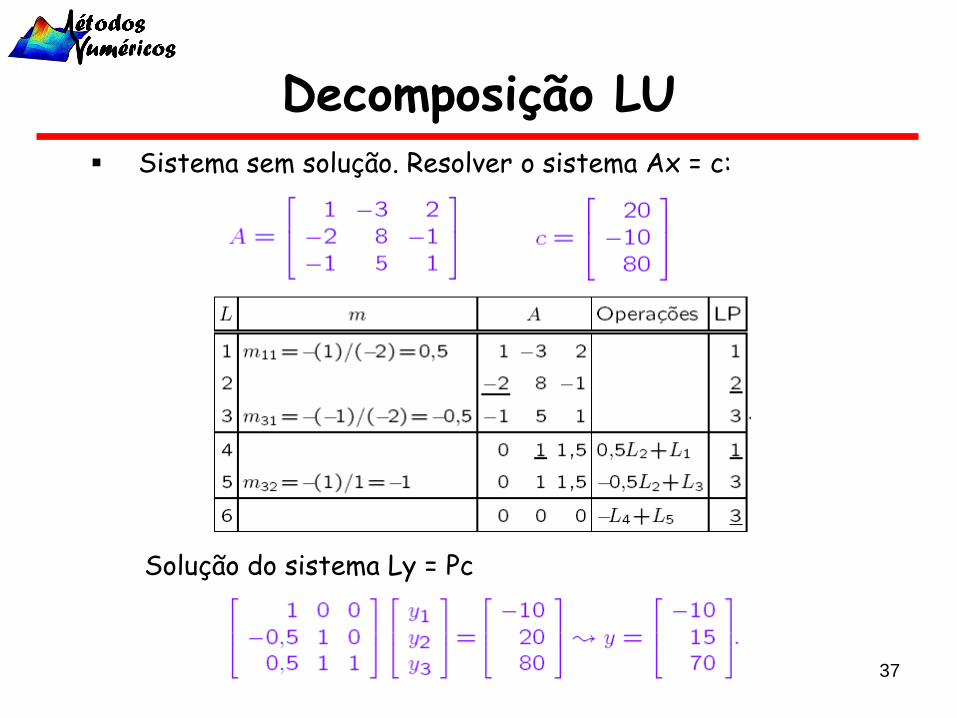
Decomposição LU▪ Sistema sem solução. Resolver o sistema Ax = c:
Solução do sistema Ly = Pc
37

Decomposição LU
Solução do sistema Ux = y
38
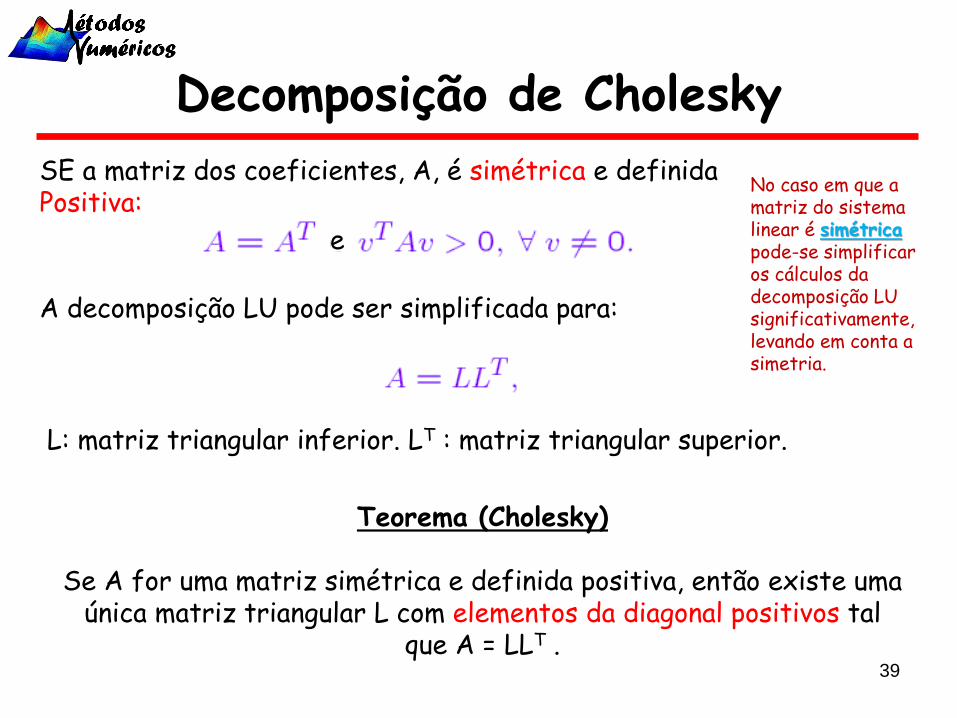
Decomposição de Cholesky
SE a matriz dos coeficientes, A, é simétrica e definidaPositiva:
A decomposição LU pode ser simplificada para:
e
L: matriz triangular inferior. LT : matriz triangular superior.
Teorema (Cholesky)
Se A for uma matriz simétrica e definida positiva, então existe uma única matriz triangular L com elementos da diagonal positivos tal
que A = LLT .
No caso em que a matriz do sistema linear é simétricapode-se simplificar os cálculos da decomposição LU significativamente, levando em conta a simetria.
39
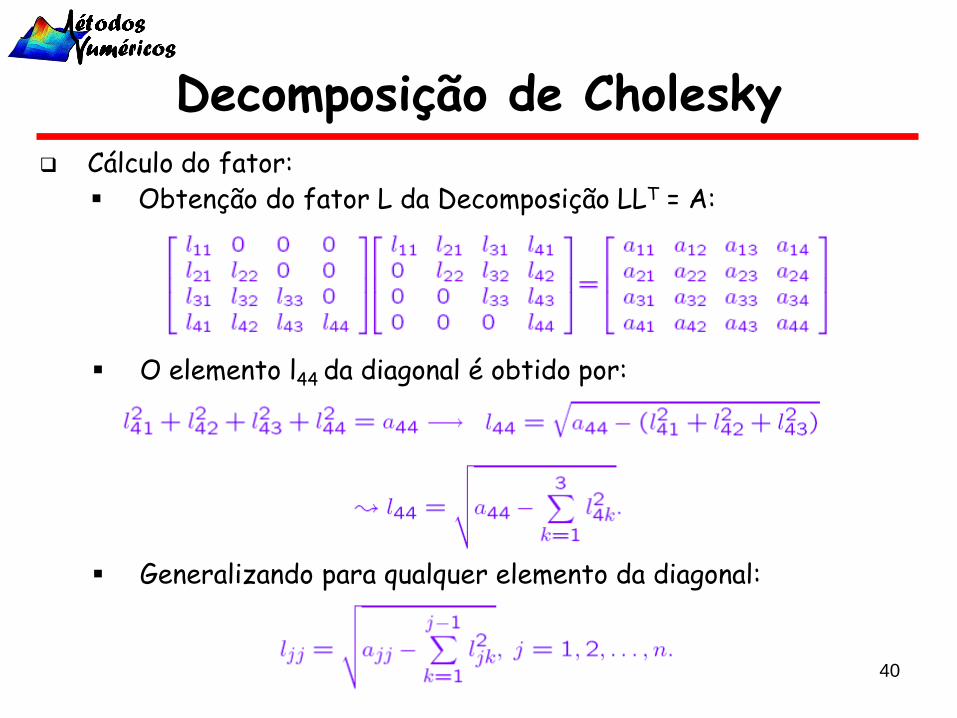
Decomposição de Cholesky Cálculo do fator:
▪ Obtenção do fator L da Decomposição LLT = A:
▪ O elemento l44 da diagonal é obtido por:
▪ Generalizando para qualquer elemento da diagonal:
40
Decomposição de Cholesky
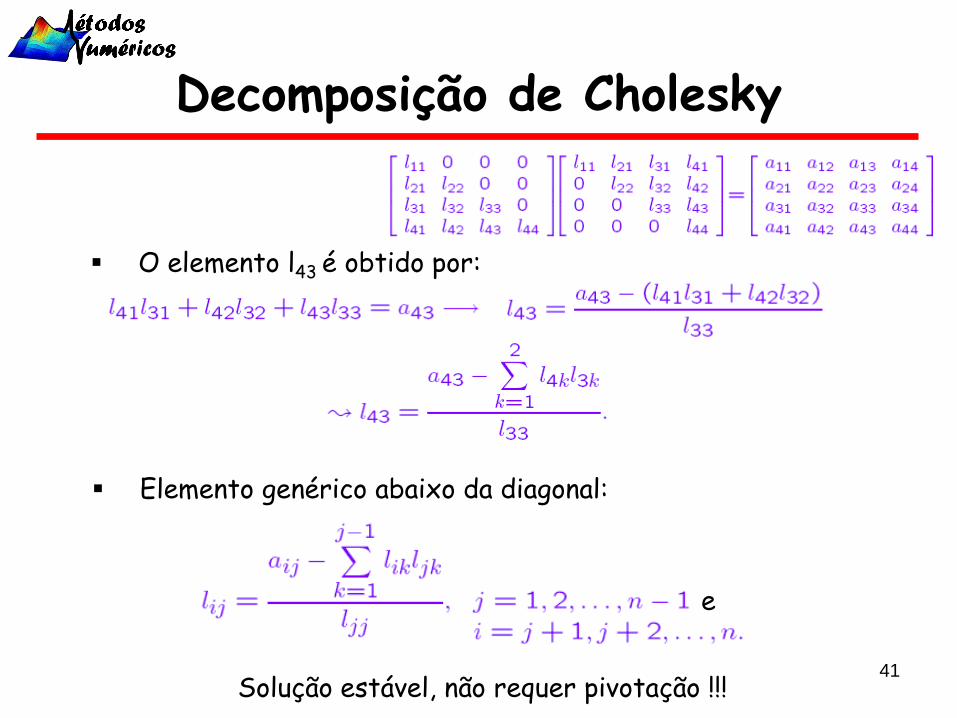
▪ O elemento l43 é obtido por:
▪ Elemento genérico abaixo da diagonal:
e
41Solução estável, não requer pivotação !!!
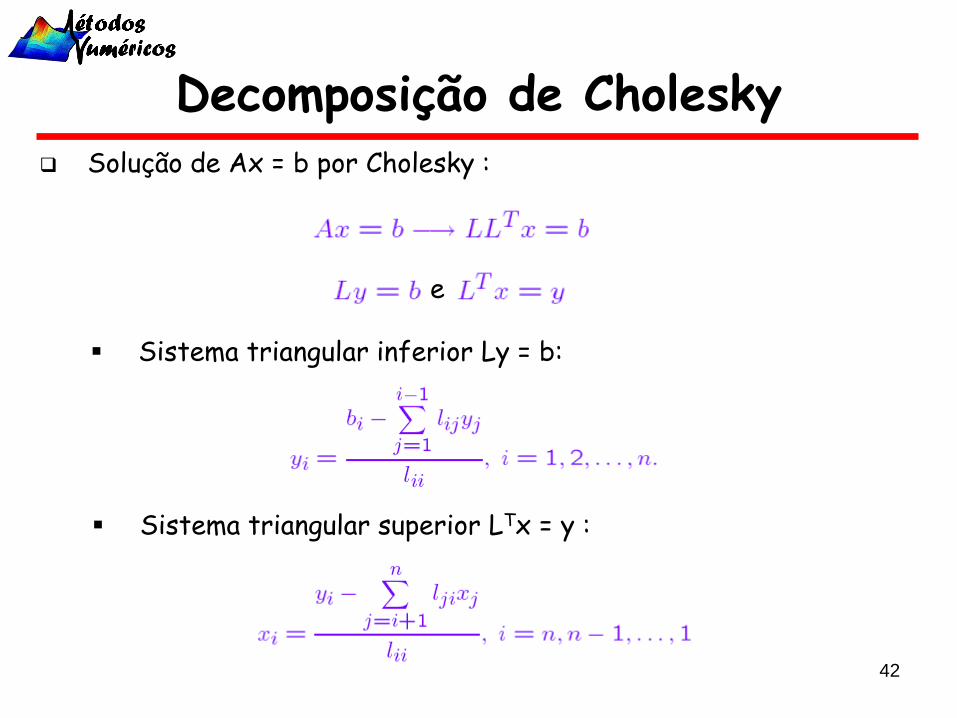
Decomposição de Cholesky Solução de Ax = b por Cholesky :
e
▪ Sistema triangular inferior Ly = b:
▪ Sistema triangular superior LTx = y :
42
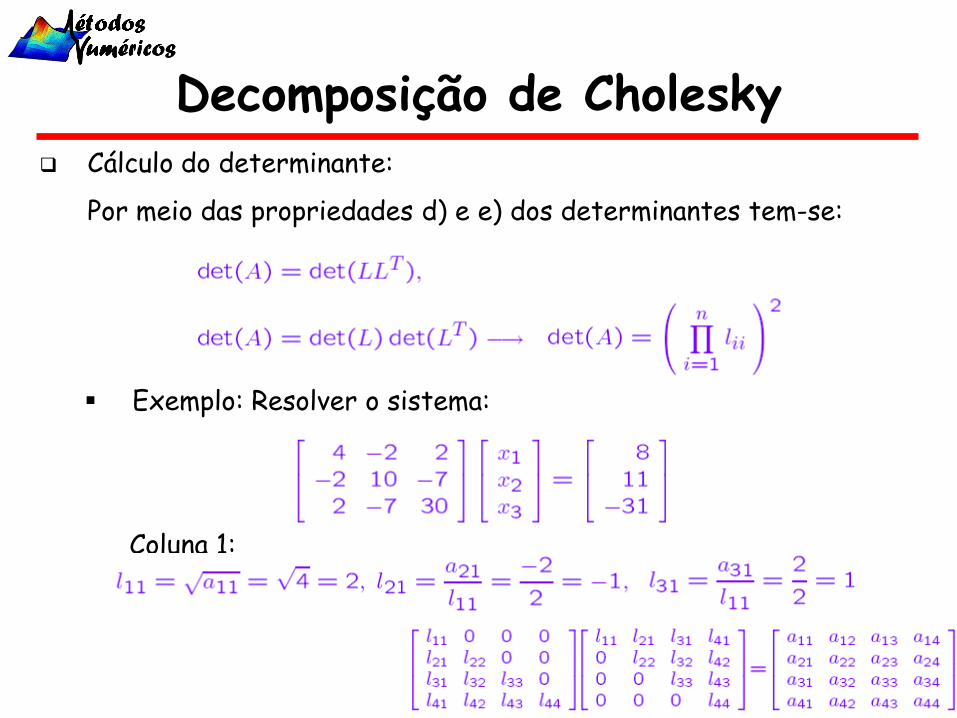
Decomposição de Cholesky Cálculo do determinante:
Por meio das propriedades d) e e) dos determinantes tem-se:
▪ Exemplo: Resolver o sistema:
Coluna 1:
43
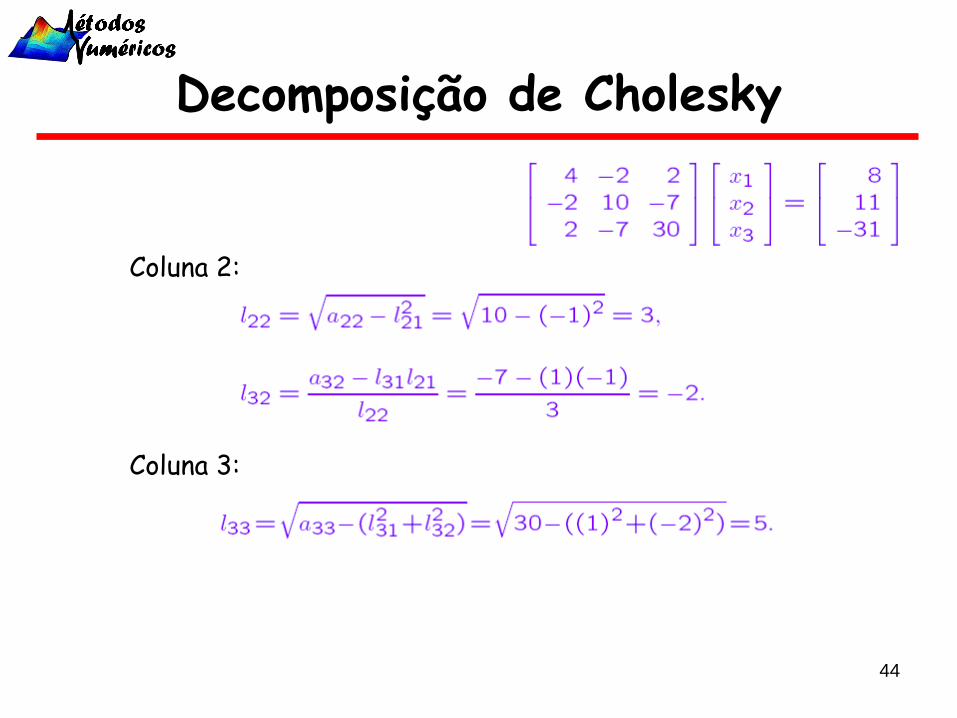
Decomposição de Cholesky
Coluna 2:
Coluna 3:
44
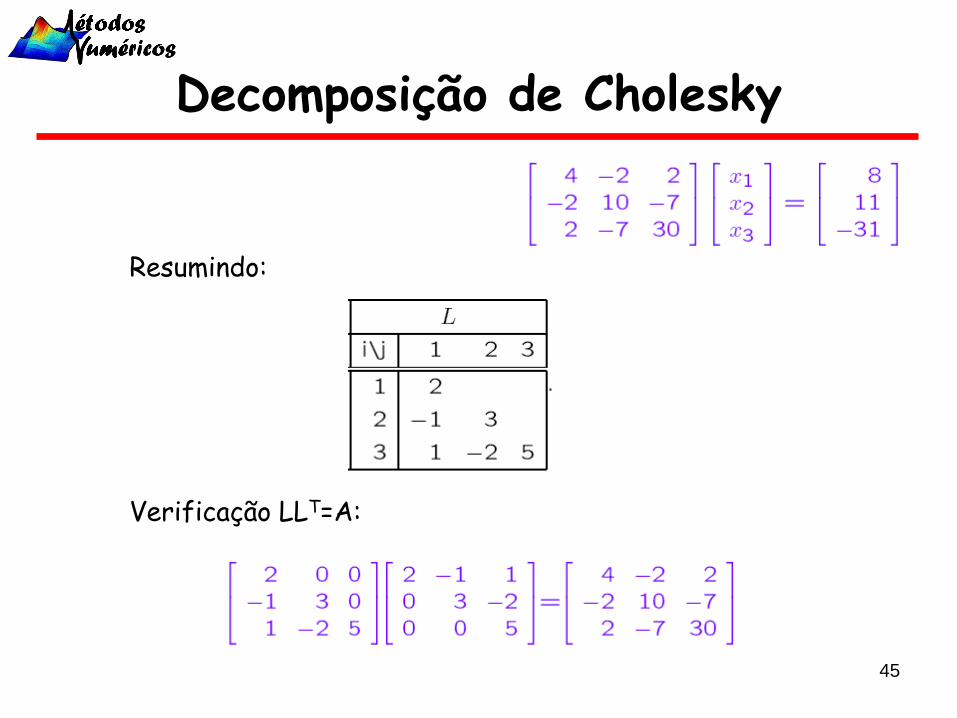
Decomposição de Cholesky
Resumindo:
Verificação LLT=A:
45
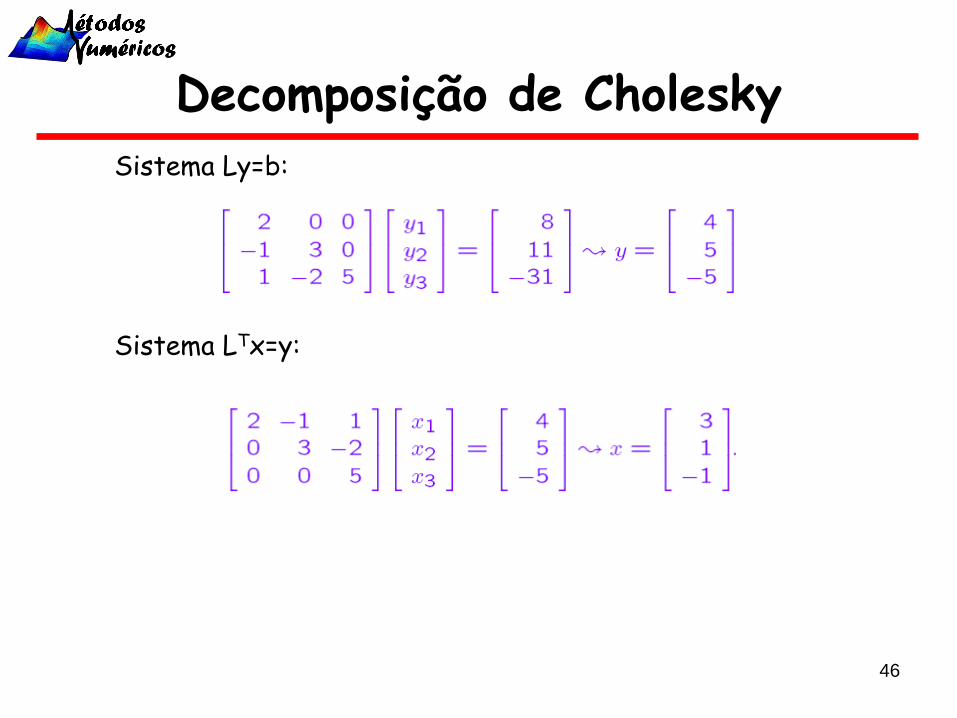
Decomposição de Cholesky
Sistema Ly=b:
Sistema LTx=y:
46

Decomposição de Cholesky
Exatidão:
Solução exata
Unicidade:
Solução única
47
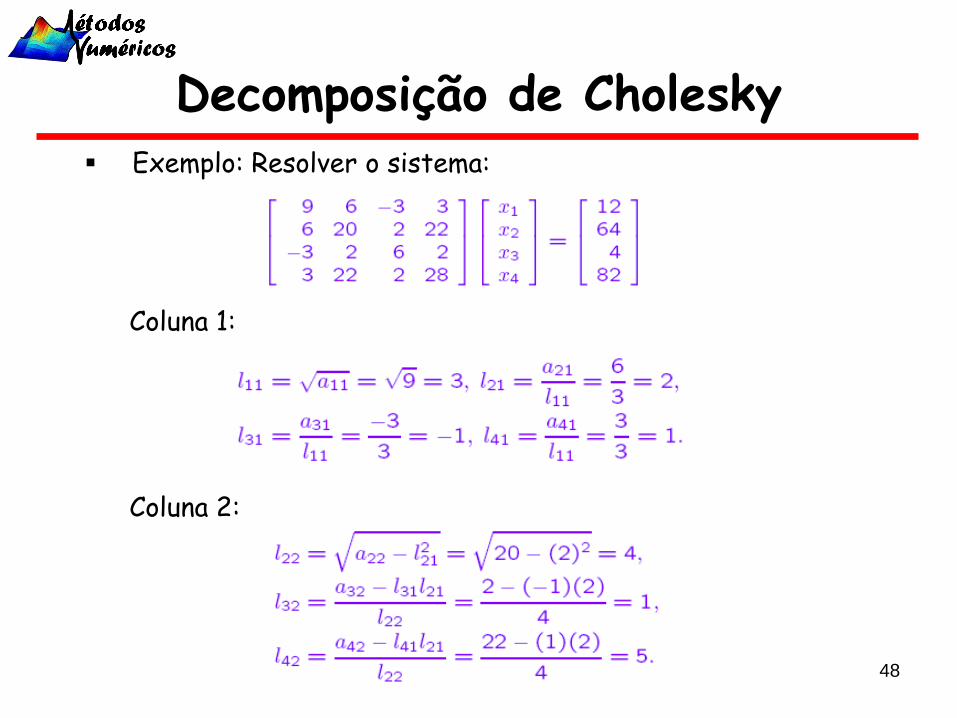
Decomposição de Cholesky▪ Exemplo: Resolver o sistema:
Coluna 1:
Coluna 2:
48

Decomposição de CholeskyColuna 3:
Coluna 4:
Resumo:
49
Decomposição de Cholesky
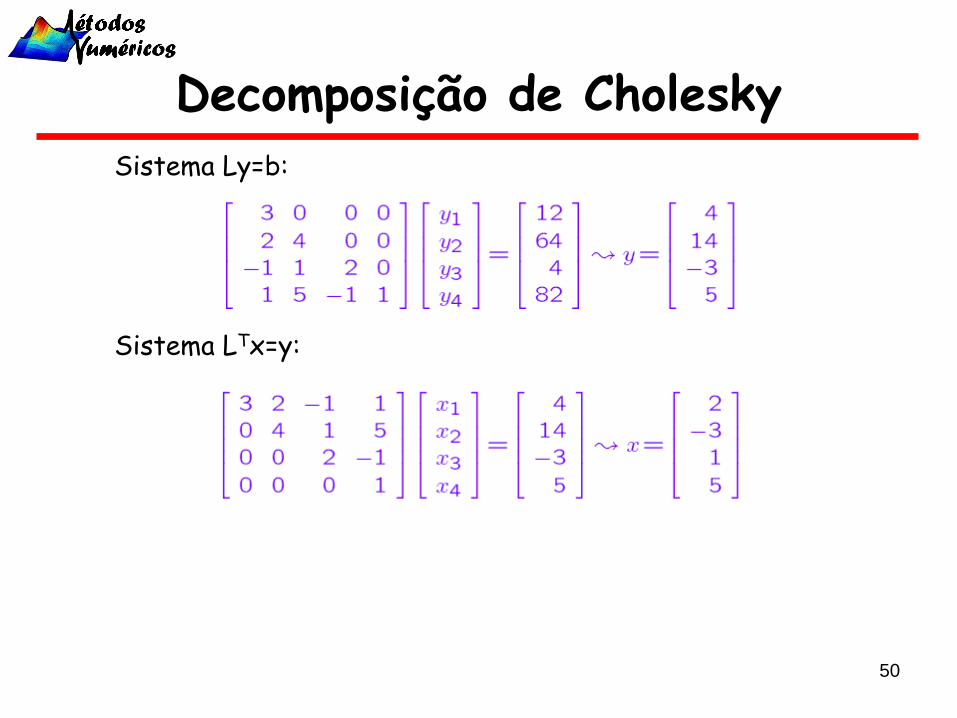
Sistema Ly=b:
Sistema LTx=y:
50

Decomposição de CholeskyExatidão:
Unicidade:
Solução única
Solução exata
Matriz L:
51
Decomposição de Espectral
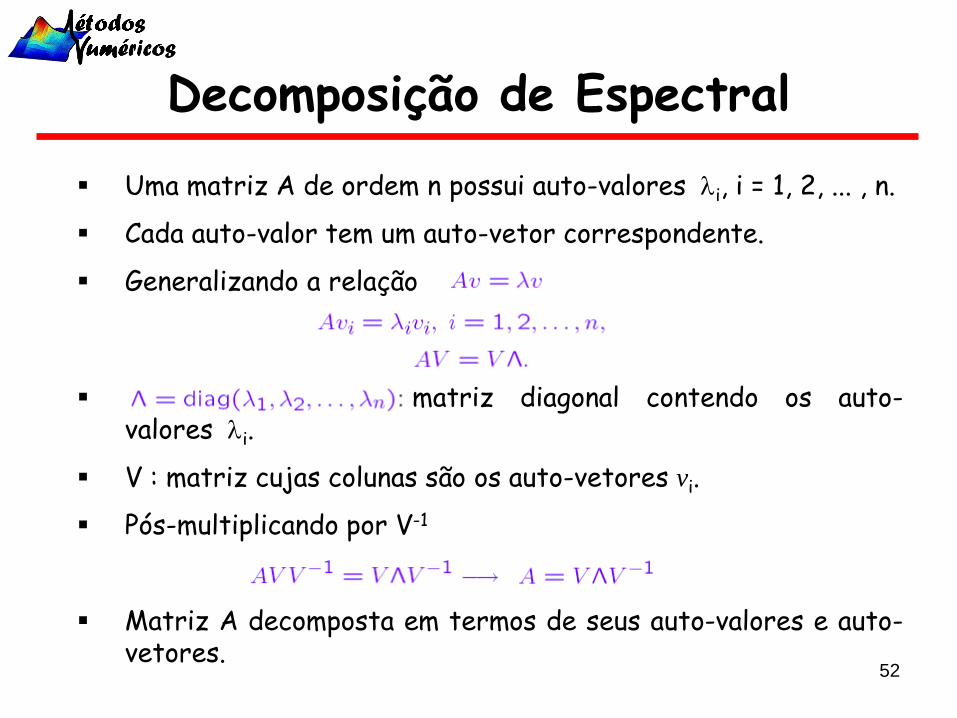
▪ Uma matriz A de ordem n possui auto-valores i, i = 1, 2, ... , n.
▪ Cada auto-valor tem um auto-vetor correspondente.
▪ Generalizando a relação
▪ matriz diagonal contendo os auto-valores i.
▪ V : matriz cujas colunas são os auto-vetores vi.
▪ Pós-multiplicando por V-1
▪ Matriz A decomposta em termos de seus auto-valores e auto-vetores.
52
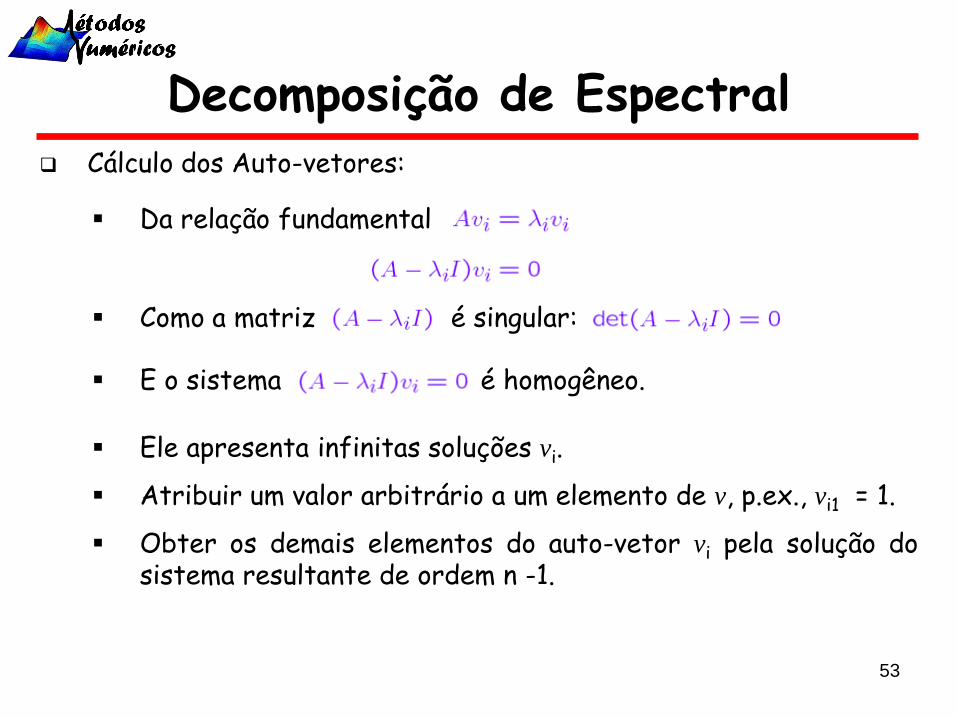
Decomposição de Espectral Cálculo dos Auto-vetores:
▪ Da relação fundamental
▪ Como a matriz é singular:
▪ E o sistema é homogêneo.
▪ Ele apresenta infinitas soluções vi.
▪ Atribuir um valor arbitrário a um elemento de v, p.ex., vi1 = 1.
▪ Obter os demais elementos do auto-vetor vi pela solução dosistema resultante de ordem n -1.
53
Decomposição de Espectral
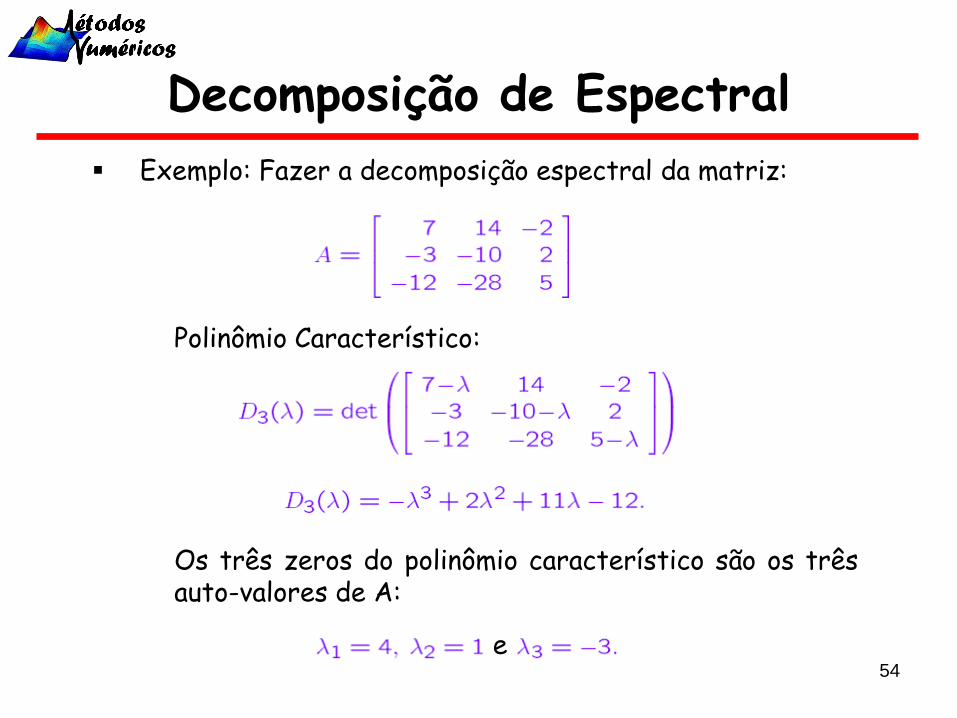
▪ Exemplo: Fazer a decomposição espectral da matriz:
Polinômio Característico:
Os três zeros do polinômio característico são os trêsauto-valores de A:
e54

Decomposição de EspectralMatriz contendo os auto-valores:
Sistema homogêneo:
Auto-vetor v correspondente a 1 = 4
Eq. 1 e 2 são redundantes. Elimina-se a 2ª e faz-se v11 = 1
55
Decomposição de Espectral
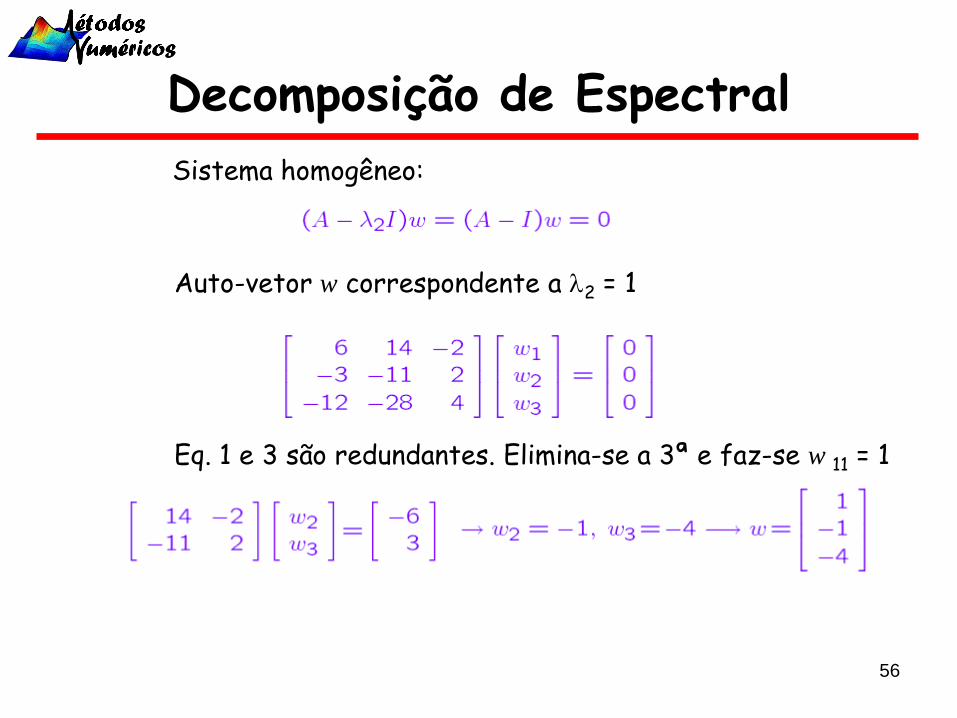
Sistema homogêneo:
Auto-vetor w correspondente a 2 = 1
Eq. 1 e 3 são redundantes. Elimina-se a 3ª e faz-se w 11 = 1
56

Decomposição de Espectral
Sistema homogêneo:
Auto-vetor z correspondente a 3 = -3
Eq. 2 e 3 são redundantes. Elimina-se a 3ª e faz-se z11 = 1
57
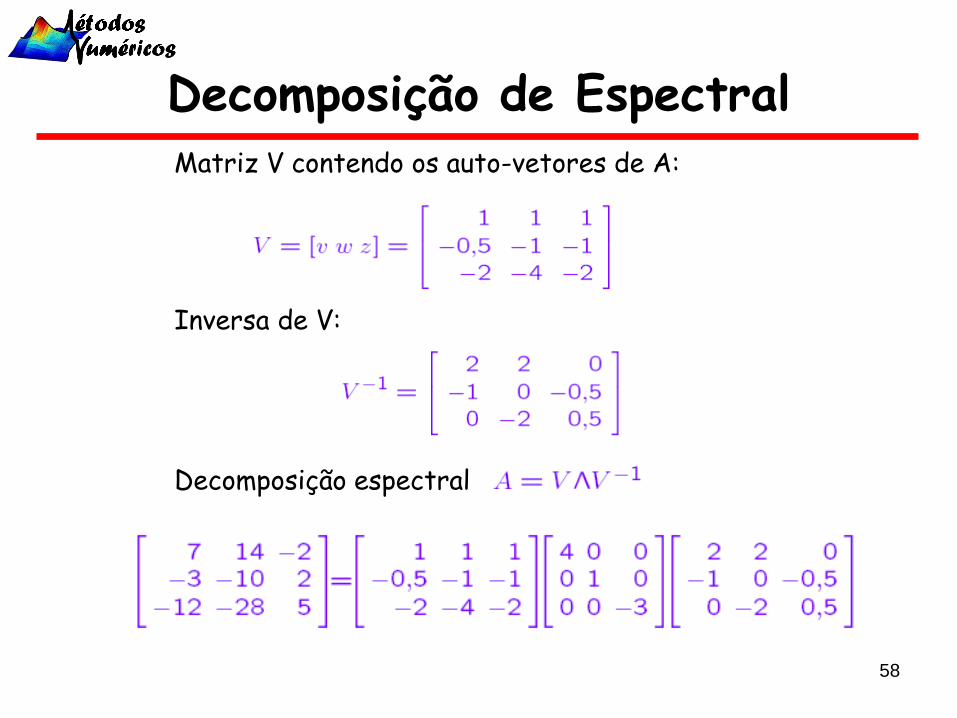
Decomposição de EspectralMatriz V contendo os auto-vetores de A:
Inversa de V:
Decomposição espectral
58

Decomposição de Espectral Solução de sistema:
▪ Solução de Ax = b obtida por x = A-1b.
▪ Vetor solução x depende de i-1
▪ No caso de quase singularidade da matriz A (pelo menos umauto-valor com valor próximo de zero).
▪ Solução x tem elementos muito grandes.
59

Decomposição de Espectral▪ Exemplo: Calcular a solução do sistema:
Sabendo que:
Solução exata:
Grande custo computacional. Normalmente, não é utilizada para a solução de SL.
60

1. Aderito Luis Martins Araujo , Analise Numérica Engenharias Mecânica e de Materiais.
2. Frederico Ferreira Campos Filho, Algoritmos Numéricos.
Referencias Bibliográficas
61