Experiencia 2 v 2013
31
Experiência 2 – Resposta Temporal de Sistemas em Tempo Discreto e Identificação de Sistemas ____________________________________________________________________________________ ____________________________________________________________________________________ 1 de 31 PMR2400 – CONTROLE E AUTOMAÇÃO II EXPERIÊNCIA 2 RESPOSTA TEMPORAL DE SISTEMAS EM TEMPO DISCRETO E IDENTIFICAÇÃO DE SISTEMAS 1. INTRODUÇÃO Os objetivos desta experiência são observar a resposta temporal de sistemas em tempo discreto e realizar a identificação dos parâmetros de um motor elétrico de corrente contínua. Nessa experiência você irá identificar a função de transferência de um Motor de Corrente Contínua. Deseja-se identificar os parâmetros das funções de transferência entre a tensão de entrada do motor e a velocidade angular e entre a tensão de entrada e a posição angular. Nesta identificação serão utilizados métodos em tempo contínuo, de forma a obter um função de transferência em tempo contínuo, e métodos em tempo discreto, de forma a obter uma função de transferência em tempo discreto. A Seção 2 desta apostila apresenta o motor de corrente contínua utilizado nessa experiência, a Seção 3 apresenta uma breve introdução teórica sobre resposta temporal de sistemas contínuos e discretos de primeira ordem e a Seção 4 apresenta os fundamentos teóricos sobre identificação de sistemas em tempo contínuo e discreto. Finalmente a Seção 5 apresenta a parte experimental, ou seja, o que você deve fazer nesta experiência.
-
Upload
diego-soares -
Category
Documents
-
view
22 -
download
1
description
Experiência
Transcript of Experiencia 2 v 2013

Experiência 2 – Resposta Temporal de Sistemas em Tempo Discreto e Identificação de Sistemas ____________________________________________________________________________________
____________________________________________________________________________________
1 de 31
PMR2400 – CONTROLE E AUTOMAÇÃO II
EXPERIÊNCIA 2
RESPOSTA TEMPORAL DE SISTEMAS EM TEMPO DISCRETO E
IDENTIFICAÇÃO DE SISTEMAS
1. INTRODUÇÃO
Os objetivos desta experiência são observar a resposta temporal de sistemas em tempo
discreto e realizar a identificação dos parâmetros de um motor elétrico de corrente contínua. Nessa experiência você irá identificar a função de transferência de um Motor de Corrente
Contínua. Deseja-se identificar os parâmetros das funções de transferência entre a tensão de entrada do motor e a velocidade angular e entre a tensão de entrada e a posição angular. Nesta identificação serão utilizados métodos em tempo contínuo, de forma a obter um função de transferência em tempo contínuo, e métodos em tempo discreto, de forma a obter uma função de transferência em tempo discreto.
A Seção 2 desta apostila apresenta o motor de corrente contínua utilizado nessa
experiência, a Seção 3 apresenta uma breve introdução teórica sobre resposta temporal de sistemas contínuos e discretos de primeira ordem e a Seção 4 apresenta os fundamentos teóricos sobre identificação de sistemas em tempo contínuo e discreto. Finalmente a Seção 5 apresenta a parte experimental, ou seja, o que você deve fazer nesta experiência.

Experiência 2 – Resposta Temporal de Sistemas em Tempo Discreto e Identificação de Sistemas ____________________________________________________________________________________
____________________________________________________________________________________
2 de 31
2. O MÓDULO DE MOTOR DE CORRENTE CONTÍNUA
2.1. Descrição geral
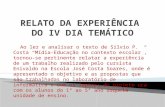
O Módulo de Motor de Corrente Contínua MS15 (Figura 1) possibilita ao usuário a realização de controle em malha fechada de velocidade ou posição. A velocidade e a direção de rotação do motor pode ser controlada ou por um sinal analógico ou por uma modulação de largura de pulso.
Figura 1: Módulo do motor CC MS15.
As informações de velocidade de rotação e posição para realimentação estão disponíveis tanto na forma analógica quanto na forma digital, portanto o módulo pode ser controlado utilizando um sistema analógico ou digital.
O módulo consiste dos seguintes elementos:
• Motor CC: o motor é capaz de manter rotações de 2.500rpm em ambas as direções. A saída do motor é reduzida através de engrenagens com uma relação 9:1 até o eixo de saída onde existe um disco indicador da posição angular. O módulo possui a possibilidade de ser comandado através de uma entrada analógica, VIN, ou entrada digital p.w.m. PW;
• Tacogerador: um segundo motor CC impulsionado pelo primeiro motor que fornece uma tensão analógica proporcional à velocidade e direção de rotação. Uma carga

Experiência 2 – Resposta Temporal de Sistemas em Tempo Discreto e Identificação de Sistemas ____________________________________________________________________________________
____________________________________________________________________________________
3 de 31
variável pode ser aplicada a um motor CC ativando o circuito Generator Load (Gerador de Carga). Neste caso a saída do tacogerador, VOUT, não está disponível;
• Potenciômetro: este potenciômetro é impulsionado pelo eixo de saída e fornece um sinal analógico proporcional à posição angular do eixo de saída;
• Disco com Código Gray: um disco de Código Gray com 4 bits impulsionado pelo motor CC fornece informações da posição angular do eixo de saída;
• Slotted Disc: impulsionado diretamente pelo eixo do motor fornece um pulso de saída a cada revolução do eixo de saída;
• Tacômetro digital: um tacômetro digital fornece, num painel de 3 dígitos, a velocidade angular do eixo de saída. A velocidade é derivada da informação fornecida pelo disco com Código de Gray;
• Freio Magnético (eddy current brake): um freio magnético de duas posições permite a inserção de diferentes carregamentos ao motor.
2.2. Modos de operação • Alimentação: Os requisitos de alimentação para o Módulo são os seguintes:
o +5V em aproximadamente 400mA; o +12V em aproximadamente 0.5 a 0.9A (1.5A com o motor travado); o +12V em aproximadamente 0.5 a 0.9A (1.5A com o motor travado).
OBS: Deve ser garantido que as fontes de alimentação devem ter um Neutro (0V) comum.
• Chave do Acionamento do Motor:
o Posição VIN: seleciona a entrada do acionamento analógico VIN; o Posição PWM: seleciona a entrada do p.w.m. digital PW.
• Chave do tacogerador:
o Posição VOUT: habilita a saída do tacogerador; o Posição LOAD: habilita a carga variável a ser aplicada ao motor por meio do circuito Gerador de Carga.
• Controle do Gerador de Carga: utilizado para variar a carga aplicado ao motor CC quando a chave do tacogerador está na posição LOAD.
• Entrada para o Acionamento do Motor (VIN): a entrada para o acionamento do motor no intervalo –5V a +5V, o nível de tensão determina a velocidade e a polaridade determina a direção de rotação: o +5V - Velocidade máxima, sentido horário; o 0V – Estacionário; o –5V – Velocidade máxima, sentido anti-horário.
• Habilita a Entrada (E): um sinal 0 habilita a entrada VIN ou PWM, para controlar o motor.

Experiência 2 – Resposta Temporal de Sistemas em Tempo Discreto e Identificação de Sistemas ____________________________________________________________________________________
____________________________________________________________________________________
4 de 31
• Entrada PWM (PW): entrada para o sinal digital com modulação de largura de pulso. Formato: um sinal TTL positivo com duração de 1-2ms é requerido e deve ser repetido a cada 20ms.
Largura de Pulso Velocidade e Direção
1.0ms Velocidade máxima, sentido anti-horário 1.5ms Estacionário 2.0ms Velocidade máxima sentido horário
Figura 2: Sinal de entrada PWM.
• Saída do Disco com Código GRAY (D0 a D3): Fornece um sinal TTL de 4 bits dependente da posição do eixo do motor. Uma redução com um relação de 9:1 fornece uma resolução de 2.5o. Portanto o código se repete a cada 40o de rotação. Com 0o marcado no indicador do disco a saída do Disco é 0000 e o indicador irá como indicado na tabela abaixo no sentido horário:
Marcador (Graus) Código Gray 0/360 0000 2.5 0001 5.0 0011 7.5 0010 10.0 0110 12.5 0111 15.0 0101 17.5 0100 20.0 1100 22.5 1101 25.0 1111 27.5 1110 30.0 1010 32.5 1011 35.0 1001 37.5 1000 40.0 0000

Experiência 2 – Resposta Temporal de Sistemas em Tempo Discreto e Identificação de Sistemas ____________________________________________________________________________________
____________________________________________________________________________________
5 de 31
• Tacogerador: sinal no intervalo de –5V a +5V indicando a velocidade e a direção de rotação como indicado na Tabela abaixo:
Velocidade e Direção Tensão de Saída
Velocidade máxima, sentido anti-horário +5V approx. Estacionário 0V Velocidade máxima sentido horário -5V approx.
• Saída do Potenciômetro (VOUT): sinal de tensão analógica variando entre –5V a +5V para uma volta completa do eixo de saída. A saída do potenciômetro é mantida artificialmente em 5V por aproximadamente 20o onde o potenciômetro é descontinuo.
• Slotted Disc (P0): normalmente em nível lógico ‘1’ com um único pulso t.t.l. de lógica ‘0’ gerado a cada revolução completa do eixo de saída.
2.3. Modelagem do sistema
O sistema a ser modelado pode ser representado pela Figura 3 abaixo.
Figura 3: Diagrama esquemático do sistema a ser modelado.
O sistema consiste de um amplificador de tensão, um motor C.C. com um sistema de engrenagens e carga associada, um tacogerador e um potenciômetro. O objetivo da modelagem é estabelecer a função de transferência entre a tensão de entrada ev(t) e a velocidade angular fornecida pelo tacômetro ωT(t), e a função de transferência entre a tensão de entrada ev(t) e a posição angular fornecida pelo potenciômetro θP(t).
As funções de transferência do amplificador, do tacômetro e do potenciômetro são dadas respectivamente por:

Experiência 2 – Resposta Temporal de Sistemas em Tempo Discreto e Identificação de Sistemas ____________________________________________________________________________________
____________________________________________________________________________________
6 de 31
1)( KsG
AMP= ; (1)
TTACKsG =)( ; (2)
PPOTKsG =)( . (3)
Para um motor de corrente de campo constante, o torque desenvolvido pelo motor é dado
por:
aiKT
2= , (4)
onde K2 é a constante de torque do motor e ia é a corrente de armadura. Se o sinal da corrente ia é revertido, o sinal do torque T também será revertido, o que resultará na reversão da direção de rotação do motor.
Quando a armadura está em rotação, uma tensão proporcional ao produto do fluxo pela velocidade angular ω é induzido na armadura. Para um fluxo constante, a tensão induzida eb é diretamente proporcional à velocidade angular dθ/dt:
ωθ
33K
dt
dKe
b== , (5)
onde eb é tensão induzida, também chamada de força contra-eletromotriz, e K3 é constante de força contra-eletromotriz do motor, e θ é o deslocamento angular do eixo de saída do motor.
A velocidade do motor de corrente contínua controlada por armadura é controlada pela tensão de armadura, ea. A equação diferencial do circuito de armadura é dada por:
abaa
a
aeeiR
dt
diL =++ , (6)
onde La é a indutância da armadura e Ra é a resistência da armadura.
A equação de equilíbrio de torque no eixo do motor é dada por:
aiKT
dt
db
dt
dJ
202
2
0==+
θθ, (7a)
ou
aiKTb
dt
dJ
200==+ ω
ω
, (7b)
onde J0 é a inércia combinada do motor, carga e engrenagens referida ao eixo do motor e b0 é o atrito viscoso combinado do motor, carga, e engrenagens referida ao eixo do motor.

Experiência 2 – Resposta Temporal de Sistemas em Tempo Discreto e Identificação de Sistemas ____________________________________________________________________________________
____________________________________________________________________________________
7 de 31
Utilizando as Equações (1), (2), (5), (6) e (7b), pode-se determinar a função de
transferência entre a saída proporcional à velocidade angular fornecida pelo tacogerador ωT e a tensão de entrada ev:
3200
21
))(()(
)()(
KKbsJRsL
KKK
sE
ssG
aa
T
V
T
+++=
Ω=
ω, (8)
onde ΩT(s)=L[ωT(t)], EV(s)=L[ev(t)] e L representa a Transformada de Laplace.
Utilizando-se as Equações (1), (3), (5), (6) e (7a), pode-se determinar a função de transferência entre a saída proporcional à posição angular fornecida pelo potenciômetro θP e a tensão de entrada ev:
[ ]3200
21
))(()(
)()(
KKbsJRsLs
KKK
sE
ssG
aa
P
V
P
+++=
Θ=
θ. (9)
onde ΘP(s)=L[θP(t)].
A Figura 4 apresenta um diagrama de blocos do sistema.
Figura 4: Diagrama de blocos do sistema.
Usualmente, a indutância de armadura La é bastante pequena e pode ser desconsiderada e as funções de transferência Gω(s) e Gθ(s) podem ser representadas da seguinte forma:
3200
21
)()(
)()(
KKbsJR
KKK
sE
ssG
a
T
V
T
++=
Ω=
ω, (10)
- aa
RsL
K
+
2
00
1
bsJ + s
1 PK
TK
3K
1K
+ )(sEV
ΘP(s)
ΩT(s)
Tm(s)
Motor C.C. Potenciômetro
Tacômetro
Amplificador

Experiência 2 – Resposta Temporal de Sistemas em Tempo Discreto e Identificação de Sistemas ____________________________________________________________________________________
____________________________________________________________________________________
8 de 31
[ ]3200
21
)()(
)()(
KKbsJRs
KKK
sE
ssG
a
P
V
P
++=
Θ=
θ. (11)
As equações acima podem ser rearranjadas da seguinte forma:
1)(
)()(
+=
Ω=
Ts
K
sE
ssG
w
V
T
ω (12)
onde:
320
2
KKbR
KKK
a
T
w
+
= , (13)
e,
320
0
KKbR
JRT
a
a
+
= . (14)
Para a função de trasferência Gθ(s) tem-se:
)1()(
)()(
+=
Θ=
Tss
K
sE
ssG
V
P θ
θ, (15)
onde:
320
2
KKbR
KKK
a
P
+
=θ
. (16)
Dessa forma, em resumo, para o motor CC tem-se as seguintes funções de transferência:
1)(
)()(
+=
Ω=
Ts
K
sE
ssG
w
V
T
ω (17)
)1()(
)()(
+=
Θ=
Tss
K
sE
ssG
V
P θ
θ (18)
2.4. Distúrbios de torque
Usualmente, o sistema sofre a ação de distúrbios de torque. Esses distúrbios de torque, devem ser considerados para o projeto de um sistema de controle eficiente. A representação do distúrbio de torque Td é feita conforme mostra a Figura 5.

Experiência 2 – Resposta Temporal de Sistemas em Tempo Discreto e Identificação de Sistemas ____________________________________________________________________________________
____________________________________________________________________________________
9 de 31
O Módulo de Motor de Corrente Contínua MS15 possui um freio magnético (eddy
current brake) com duas posições. Este freio magnético provoca um torque oposto ao motor CC proporcional à velocidade angular:
)(tKTddω= . (19)
Obviamente, este distúrbio provoca alterações nos parâmetros do sistema.
Figura 5: Diagrama de blocos com a representação de distúrbios de torque.
- aa
RsL
K
+
2
00
1
bsJ + s
1 PK
TK
3K
1K
+ )(sEa ΘP(s)
ΩT(s)
Tm(s)
Motor C.C. Potenciômetro
Tacômetro
Amplificador
-
Td(s)
TL(s)

Experiência 2 – Resposta Temporal de Sistemas em Tempo Discreto e Identificação de Sistemas ____________________________________________________________________________________
____________________________________________________________________________________
10 de 31
3. RESPOSTA TEMPORAL DE SISTEMAS DE 1
A
ORDEM
3.1. Sistemas em tempo contínuo
Somente como recordação, um sistema de primeira ordem pode ser descrito pela seguinte função de transferência:
as
bsG
sU
sY
−
== )()(
)(, (20)
onde, Y(s) é a saída do sistema, U(s) é a entrada do sistema, e a e b são coeficientes constantes. O pólo deste sistema está localizado em a no plano s. Para um sistema de 1a ordem é conveniente definir uma constante de tempo e um ganho. A constante de tempo e o ganho do sistema estão relacionados com os coeficientes a e b, sendo que a constante de tempo é dada por −1/a e o ganho por −b/a. É fácil de observar que os coeficientes a e b, ou o ganho e a constante de tempo do sistema bastam para se determinar este sistema de forma única.
Em termos da constante de tempo, T, e ganho, K, a função de transferência do sistema é dada por:
1)(
)(
)(
+
==
Ts
ksG
sU
sY, (21)
A equação diferencial equivalente à função de transferência da equação (20) é dada por:
)()()(
tbutaydt
tdy+= . (22)
A resposta temporal deste sistema à uma entrada conhecida u(t) com uma condição inicial
y0 é dada pela seguinte expressão:
τττ dtbueeyty
t
aat
)()(0
0 ∫ −+= . (23)
Nesta expressão, o primeiro termo do lado direito é a resposta do sistema devido à condição inicial diferente de zero (resposta homogênea) e o segundo termo do lado esquerdo é a resposta forçada do sistema, ou seja, devido à entrada.
É conhecido e também fácil de ser observado pela equação (23) que a estabilidade do sistema está relacionada com o coeficiente a, ou seja:

Experiência 2 – Resposta Temporal de Sistemas em Tempo Discreto e Identificação de Sistemas ____________________________________________________________________________________
____________________________________________________________________________________
11 de 31
>
=
<
instável. sistema ,0
estável; ntemarginalme sistema 0
estável; sistema ,0
a
,a
a
Se a condição inicial for igual a zero e a entrada for uma degrau unitário, ou seja,
U(s) = 1/s, a resposta temporal deste sistema será dada por:
)1()( −=ate
a
bty . (24)
A Figura 6 apresenta a resposta de um sistema de 1a ordem à uma entrada na forma de
degrau unitário.
-1 -0.5 0 0.5 1 1.5 2 2.5 3 3.5 4 4.5 50
0.5
1
1.5
2
2.5
tempo (s)
Figura 6: Resposta temporal de um sistema de 1
a
ordem devido à uma entrada na forma de
degrau.
Na Figura 6 pode-se observar o efeito do ganho do sistema e da constante de tempo na resposta à uma entrada na forma de degrau unitário.
0.632K
T 4T
0.982K
K

Experiência 2 – Resposta Temporal de Sistemas em Tempo Discreto e Identificação de Sistemas ____________________________________________________________________________________
____________________________________________________________________________________
12 de 31
3.2. Sistemas em tempo discreto
Praticamente todos os processos controlados em malha fechada são em tempo contínuo e atualmente os controladores são implementados via computador. A Figura 7 apresenta uma malha de controle implementada via computador.
Figura 7: Esquema de uma malha de controle implementada via computador.
Como pode ser visto, parte da malha de controle da Figura 7 trabalha em tempo contínuo e parte em tempo discreto. A existência dos dois domínios em uma mesma malha dificulta a análise do sistema. Assim, é necessário transformar todas as variáveis, ou para tempo contínuo, ou para tempo discreto. Contudo, na medida em que é desejado projetar um controlador digital e tal controlador enxerga um sistema de tempo contínuo como se fosse de tempo discreto, a forma mais conveniente é transformar todas as variáveis para tempo discreto. Assim, para o projeto de controladores digitais (controlador implementado via computador) é interessante trabalhar como se os processos fossem todos em tempo discreto. A Figura 8 apresenta uma malha de controle em tempo discreto, onde o processo foi transformado de tempo continuo para discreto.
Figura 8: Esquema de uma malha de controle em tempo discreto.
-
Controlador Gc(z) D/A
Processo Gp(s)
+
Computador Mundo real
A/D
y(t)
y(kTa)
r(kTa) e(kTa) u(kTa) u(t)
-
Controlador Gc(z)
Processo Gp(z)
+ y(kTa) r(kTa) e(kTa) u(kTa)

Experiência 2 – Resposta Temporal de Sistemas em Tempo Discreto e Identificação de Sistemas ____________________________________________________________________________________
____________________________________________________________________________________
13 de 31
Na transformação do processo de tempo contínuo para tempo discreto incorporou-se ao
processo a dinâmica dos conversores D/A e A/D como mostra a Figura 9.
Figura 9: Discretização de um processo de tempo contínuo.
De acordo com o esquema da Figura 9, a função de transferência do processo em tempo discreto pode ser calculada através da seguinte expressão:
[ ] )()()( 1sGsHzG pROZp
−
= LZ , (25)
onde Z representa a transformada Z, L representa a transformada de Laplace e HROZ(s) é a função de transferência do conversor D/A (retentor de ordem zero), dada por:
s
esH
asT
ROZ
−
−
=
1)( . (26)
Substituindo a equação (26) na equação (25), obtém-se:
−=
−
−
s
esGzG
asT
pp
1)()( 1
LZ . (27)
Como a
sTe− representa em tempo contínuo um atraso de um período de amostragem, em tempo
discreto é igual z-1, portanto, este termo pode ser retirado das transformadas e a função de transferência do processo em tempo discreto fica sendo dada por:
−= −−
s
sGzzG
p
p
)(1()(
11 L)Z . (28)
Observe que a função de transferência de um sistema em tempo discreto, Gp(z), não é
igual à Transformada Z da resposta a impulso da função de transferência em tempo contínuo, Gp(s), ou seja,
D/A Retentor de ordem zero
ProcessoGp(s)
y(kTa) y(t) u(kTa) u(t)
Gp(z)
Ta

Experiência 2 – Resposta Temporal de Sistemas em Tempo Discreto e Identificação de Sistemas ____________________________________________________________________________________
____________________________________________________________________________________
14 de 31
[ ] )()( 1
sGzGpp
−
≠ LZ . (29)
Equação de diferenças:
A função de transferência de um sistema em tempo discreto de ordem n genérico é dada por uma função racional na variável complexa z, de acordo com a seguinte expressão:
Y z
U zG z
b z b z b z b
z a z a z a
m
m
m
m
n
n
n
( )
( )( )= =
+ + + +
+ + + +
−
−
−
−
1
1
1 0
1
1
1 0
K
K
, (30)
onde m ≤ n.
No domínio do tempo contínuo o equivalente no tempo à uma função de transferência na variável s, é uma equação diferencial. No domínio do tempo discreto o equivalente no tempo à uma função de transferência na variável z, é uma equação de diferenças.
Para obter a equação de diferenças a partir da função de transferência em tempo discreto, o primeiro passo é colocar a função G(z) em função de potências negativas de z. Assim, dividindo-se a equação (30) em cima e em baixo por z−n, tem-se:
Y z
U zG z
b z b z b z b z
a z a z a z
m
m n
m
m n n n
n
n n
( )
( )( )
( )= =
+ + + +
+ + + +
−
−
− − − −
−
− − − −
1
1
1
1
0
1
1
1
1
01
K
K
. (31)
Multiplicando-se Y(z) pelo denominador de G(z) e U(z) pelo numerador de G(z), obtém-se:
Y z a z Y z a z Y z a z Y z b z U z
b z U z b z U z b z U z
n
n n
m
n m
m
n m n n
( ) ( ) ( ) ( ) ( )
( ) ( ) ( ).
( ) ( )
( ) ( )
+ + + + = +
+ + +
−
− − − − − −
−
− + − − − −
1
1
1
1
0
1
1
1
1
0
K
K (32)
Analogamente ao fato de que no plano s (domínio de tempo contínuo) a variável sn
multiplicando Y(s), significa no tempo a n-ésima derivada de y(t), tem-se que no plano z (domínio de tempo discreto) a variável z−n multiplicando Y(z), significa no tempo a variável y(kTa) atrasada de nTa segundos, onde Ta é o tempo de amostragem. Assim, calculando a Transformada Z Inversa da equação (32) obtém-se a seguinte equação de diferenças:
y kT a y kT T a y kT n T a y kT nT
b u kT n m T b u kT n m T
b u kT n T b u kT nT
a n a a a a a a
m a a m a a
a a a a
( ) ( ) ( ( ) ) ( )
( ( ) ) ( ( ) )
( ( ) ) ( ),
= − − − − − − − − +
− − + − + − + +
− − + −
−
−
1 1 0
1
1 0
1
1
1
K
K
(33)
onde, kTa representa o tempo corrido. Esta equação representa uma fórmula de recorrência, onde conhecendo-se os valores passados de y(kTa) e os valores da entrada u(kTa) pode-se avançar no

Experiência 2 – Resposta Temporal de Sistemas em Tempo Discreto e Identificação de Sistemas ____________________________________________________________________________________
____________________________________________________________________________________
15 de 31
tempo com um processo marchante. Note que são necessárias n condições iniciais para a variável y(kTa), ou seja, y(0), y(Ta), y(2Ta), …, y((n-1)Ta), para se iniciar o processo de marcha no tempo. Sistemas de 1a ordem em tempo discreto:
Um sistema em tempo discreto de 1a ordem pode ser representado pela seguinte função de transferência:
az
bzG
zU
zY
−
== )()(
)(, (34)
onde a é o pólo do sistema no plano z e b é um coeficiente constante.
A equação de diferenças equivalente à esta função de transferência é dada por:
)()()(aaaaa
TkTbuTkTaykTy −+−= . (35)
Assumindo a condição inicial y(0) = y0 e conhecendo-se u(kTa) para todo kTa, pode-se
calcular y(kTa) para todo kTa, como se segue:
).()(
);2()()0()2()2()3(
);()0()()()2(
);0()(
1
0
1
0
2
0
3
0
2
0
a
k
j
jkk
a
aaaaa
aaaa
a
jTbuayakTy
TbuTbaubuayaTbuTayTy
TbuabuyaTbuTayTy
buayTy
∑−
=
−−
+=
+++=+=
++=+=
+=
M
(36)
Nesta última equação, o primeiro termo do lado esquerdo representa a resposta do sistema devido à condição inicial diferente de zero (resposta homogênea) e o segundo termo corresponde à resposta forçada devido à entrada do sistema.
Analisando-se somente o comportamento da resposta do sistema à condição inicial em função de vários valores de a, tem-se as seguintes possibilidades: Caso 1: 0<a<1:
Neste caso o termo aK tende a zero quando k tende a infinito, assim a saída tende a zero ⇒ o sistema é estável.
Caso 2: –1<a<0:
Neste caso o termo ak também tende a zero quando k tende a infinito, mas como a<0, dependendo se k é par ou impar a resposta será negativa ou positiva, portanto a saída do

Experiência 2 – Resposta Temporal de Sistemas em Tempo Discreto e Identificação de Sistemas ____________________________________________________________________________________
____________________________________________________________________________________
16 de 31
sistema tenderá a zero mas de uma forma oscilatória ⇒ o sistema é estável mas oscilatório.
Caso 3: a=1:
Neste caso o termo aK é sempre igual 1, assim a resposta do sistema será igual a y0 para qualquer instante de tempo ⇒ o sistema é marginalmente estável.
Caso 4: a>1:
Neste caso o termo aK tende para infinito quando k tende a infinito e consequentemente a saída do sistema tende a infinito ⇒ o sistema instável.
Caso 5: a<–1:
Neste caso o termo ak também tende a infinito quando k tende a infinito, mas como a<0, dependendo se k é par ou impar a resposta será negativa ou positiva, portanto a saída do sistema tenderá para infinito mas de uma forma oscilatória ⇒ o sistema é instável e
oscilatório. Caso 6: a=0:
Neste caso o termo ak é sempre igual a zero não importa o instante de tempo, assim, a saída do sistema salta do instante inicial do valor y0 para 0 no instante Ta, ou seja, o sistema atinge o equilíbrio em apenas um período de amostragem.
É interessante realizar uma comparação entre o comportamento temporal de um sistema
em tempo contínuo e de um sistema em tempo discreto. Para realizar esta comparação deve-se lembrar a relação entre os pólos de um sistema em tempo contínuo (plano s) e o seu equivalente em tempo discreto (plano z), dada por:
asT
ez = , (37) ou,
zT
s
a
ln1= (38)
A partir da comparação do comportamento temporal de um sistema em tempo contínuo e
o seu equivalente em tempo discreto chega-se às seguintes conclusões: 1) A estabilidade de um sistema no domínio de tempo contínuo s está associada a posição dos seus pólos no lado esquerdo do plano complexo s, enquanto que a estabilidade de um sistema no domínio de tempo discreto está associada à localização dos seus pólos no plano z dentro do círculo unitário. A Figura 10 mostra esquematicamente a região de estabilidade para os pólos de um sistema em tempo discreto no plano z.

Experiência 2 – Resposta Temporal de Sistemas em Tempo Discreto e Identificação de Sistemas ____________________________________________________________________________________
____________________________________________________________________________________
17 de 31
Figura 10: Região de estabilidade para os pólos de sistemas em tempo discreto. 2) Existem sistemas em tempo discreto que não tem equivalente em tempo contínuo. Nesta condição tem-se os casos 2 e 5, ou seja, sistemas em tempo discreto com pólos no eixo real negativo não possuem correspondente em tempo contínuo. Isto é fácil de ser observado através da equação (38), que para um número real menor do que zero a função ln não é definida.
3) Um sistema em tempo discreto com pólo na origem (z = 0) equivale, segundo a equação (38), à um sistema em tempo contínuo com pólo em –∞, ou seja, um sistema que responde instantaneamente à mudanças na entrada ou à uma condição inicial diferente de zero, o que na realidade não existe.
PLANO Z
Círculo unitário
Região instável
Re(z)
Im(z)
r=1
Região estável

Experiência 2 – Resposta Temporal de Sistemas em Tempo Discreto e Identificação de Sistemas ____________________________________________________________________________________
____________________________________________________________________________________
18 de 31
4. IDENTIFICAÇÃO DE SISTEMAS
O processo de identificação de sistemas consiste na abordagem experimental da
modelagem de sistemas. O processo de identificação de sistemas incluiu as seguintes etapas:
• Planejamento experimental; • Seleção da estrutura do modelo; • Estimativa dos parâmetros; • Validação.
Nesta experiência você estará identificando o modelo do motor CC descrito na Seção 2 de
duas formas diferentes: 1) Utilizando a resposta temporal do sistema em tempo contínuo, a partir do conhecimento do sistema obtido na modelagem do mesmo (Seção 2) é possível calcular as constantes da função de transferência do sistema em tempo contínuo;
2) Utilizando a resposta temporal do sistema amostrado, a partir de uma estrutura do modelo obtida pelo conhecimento do mesmo, ajusta-se um modelo a esta resposta e assim calcula-se os coeficientes da função de transferência em tempo discreto do sistema.
Cada uma destas abordagens tem as suas vantagens e desvantagens. A abordagem em
tempo contínuo exige um conhecimento detalhado do sistema e entradas de forma bem específicas. Contudo, os parâmetros identificados tem um significado físico bem definido, permitindo assim uma fácil avaliação do modelo obtido. Além disso, a utilização do modelo pode ser estendida para condições diferentes das utilizadas para a identificação. A abordagem em tempo discreto exige apenas que se conheça a ordem do modelo e tem a grande vantagem de não necessitar de entradas com formas bem definidas. Contudo o significado físico dos parâmetros do modelo obtido é difícil de ser determinado, dificultando, assim, uma avaliação precisa do modelo e exigindo uma validação extensiva do modelo para permitir a sua aplicação em condições diferentes das quais o modelo foi obtido. 4.1. Identificação dos parâmetros do motor em tempo contínuo
Como visto na Seção 2, a função de transferência entre a tensão de entrada no motor e a velocidade angular do Motor CC pode ser descrita pela seguinte expressão de 1a ordem:
1)(
)()(
+=
Ω=
Ts
K
sE
ssG
w
V
T
ω. (39)
Os valores de Kw e T podem ser obtidos obtidos experimentalmente através da análise da
resposta a um degrau de amplitude A, cuja Transformada de Laplace é dada por:

Experiência 2 – Resposta Temporal de Sistemas em Tempo Discreto e Identificação de Sistemas ____________________________________________________________________________________
____________________________________________________________________________________
19 de 31
s
AsE
V=)( , (40)
Assim,
s
A
Ts
Ks
T.
1)(
+=Ω
ω . (41)
A resposta no tempo para ωT(t) é dada por:
−−=T
tAKt
wTexp1)(ω . (42)
Calculando o valor de ωT(T), ωT(2T), ωT(3T) e ωT(4T) obtém-se:
ωT(T)=0,632AKω , ωT(2T)=0,865AKω,, ωT(3T)=0,950AKω e ωT(4T)=0,982AKω.
Com um degrau de amplitude A na entrada do sistema, o valor final da saída é igual ao
produto AKω. A constante de tempo T pode ser determinada através da relação ωT(T)=0,632AKω ou pode-se também determinar o valor de T através do valor de ωT(t) calculado para múltiplos de T, como por exemplo: ωT(4T)=0,982AKω. A Figura 11 ilustra como obter os parâmetros do motor CC.
Como visto na Seção 2, a função de transferência entre a tensão de entrada e a posição angular do motor CC pode ser dada pela seguinte expressão de 2a ordem:
)1()(
)()(
+=
Θ=
Tss
K
sE
ssG
V
P θ
θ. (43)
Os valores de Kp e T podem ser obtidos experimentalmente através da análise da resposta
do sistema a um degrau com amplitude A, ou seja:
s
A
Tss
Ks
P
P.)1(
)(+
=Θ . (44)
A resposta no tempo para θP(t) é dada por:
−+−=
T
tTTtAKt
PPexp)(θ . (45)
Para t→+∞ (ou seja, em regime estacionário) a resposta no tempo pode ser dada por:
[ ]TtAKtPP−=)(θ . (46)

Experiência 2 – Resposta Temporal de Sistemas em Tempo Discreto e Identificação de Sistemas ____________________________________________________________________________________
____________________________________________________________________________________
20 de 31
-1 -0.5 0 0.5 1 1.5 2 2.5 3 3.5 4 4.5 5 −1.5
−1.0
−0.5
0.5
1.0
1.5
tempo (s)
A AKw
0.632AKw
T
Figura 11: Obtenção dos parâmetros da função de transferência de 1a ordem do motor CC.
Para se determinar a constante de tempo T, é necessário calcular para o regime estacionário qual a distância no eixo de tempo, para um mesmo valor de ordenada, entre a função θP(t) e uma função do tipo dada por:
tAKtgP
=)( . (47)
Note que a função g(t) e θP(t) são paralelas para t → ∞, como mostra a Figura 12. Comparando as Equações (46) e (47) nota-se que:
)()( Ttgt −=θ , (48) ou seja, para t → ∞ e para um mesmo valor de ordenada as duas funções estão separadas por um tempo equivalente a T.
Para se determinar o valor de KP pode-se calcular para um determinado instante de tempo, t, após o transitório atingir o regime estacionário:

Experiência 2 – Resposta Temporal de Sistemas em Tempo Discreto e Identificação de Sistemas ____________________________________________________________________________________
____________________________________________________________________________________
21 de 31
TAKTtAKtAKttgPPP
=−−=− ][)()( θ . (49)
A derivada da curva pode então ser calculada como:
P
PAK
T
TAK==α . (50)
Figura 12: Obtenção dos parâmetros da função de transferência de 2
a
ordem do motor CC. 4.2. Identificação de sistemas em tempo discreto
A maioria dos métodos clássicos de identificação de sistemas em tempo contínuo depende basicamente da forma do sinal de entrada no sistema. Em geral é difícil e caro realizar experimentos em processos industriais e mais difícil ainda gerar sinais de entrada de uma forma precisa. Portanto é desejável ter-se métodos de identificação de sistemas que não requerem sinais de entrada especiais. O processo de identificação de sistemas em tempo discreto não exige nenhum sinal de entrada especial, o único requisito é que o sinal de entrada “excite” todos os “modos” de interesse do processo que se deseja identificar. Uma forma de conseguir tal sinal é somar ao sinal de entrada do sistema, que pode estar operando normalmente, um ruído “branco”. Ruído branco é um sinal aleatório cujo espectro de freqüência é uma reta horizontal, ou seja, contém igualmente todas as freqüências.
g(t)
θ(t)
AKPT
T

Experiência 2 – Resposta Temporal de Sistemas em Tempo Discreto e Identificação de Sistemas ____________________________________________________________________________________
____________________________________________________________________________________
22 de 31
A estrutura do modelo deve ser obtida através de conhecimento prévio do sistema e das
perturbações envolvidas. Em geral sistemas lineares são utilizados para descrever a dinâmica do sistema em uma determinada condição de operação. Um exemplo de uma estrutura de modelo a ser identificado é a seguinte:
∑∑==
−+−=
m
j
aj
n
i
aiaTjkubTikyakTy
01
))(())(()( , (51)
onde, y é a saída do sistema, u pode representar a entrada do sistema e/ou as perturbações, Ta é o período de amostragem, kTa é o tempo presente, ai e bj são coeficientes constantes, n é um número inteiro que representa a ordem do sistema (por exemplo se n = 2 o sistema é de 2a ordem) e m é um número inteiro que m representa o atraso existente entre a entrada (ou perturbações) e a saída do sistema. Neste modelo os coeficientes ai e bj são considerados parâmetros desconhecidos e portanto a serem identificados.
Após a obtenção do modelo, que no exemplo anterior consiste no cálculo dos parâmetros ai e bj, é necessário e mandatório verificar o modelo. Esta verificação em geral é realizada através de simulações do modelo a partir de diversos tipos de sinais de entrada. Cálculo dos parâmetros do modelo:
O método mais simples que pode ser utilizado para o cálculo dos coeficientes do modelo é o Métodos dos Mínimos Quadrados. A única exigência para a utilização deste método é que o modelo seja linear nos parâmetros. Nota-se que um modelo linear nos parâmetros não significa necessariamente um modelo linear, pois mesmo um modelo não linear pode ser transformado em um modelo linear nos parâmetros desconhecidos que devem ser calculados.
A equação (51) consiste de uma equação de recorrência para um sistema de ordem n, que pode ser utilizada para calcular (estimar) a nova saída do sistema conhecendo-se n saídas passadas, a entrada presente e m entradas passadas, ou seja:
).)(())1((
)())(())2(())1(()(
1
021
ama
aanaaa
TmkubTkub
kTubTnkyaTkyaTkyakTy
−+−
++−++−+−=
L
L
(52)
onde )(
akTy é uma estimativa da saída presente calculada pelo modelo do sistema.
Para exemplificar o método de cálculo será utilizado um sistema de 2a ordem sem atraso
na entrada. Assim, aplicando-se a equação anterior, iniciando-se no instante 2Ta e avançando no tempo até o tempo NTa, obtém-se (N – 2) equações da seguinte forma:

Experiência 2 – Resposta Temporal de Sistemas em Tempo Discreto e Identificação de Sistemas ____________________________________________________________________________________
____________________________________________________________________________________
23 de 31
).)2(())1(( )(())2(())1(()(
);3()4( )5()3()4()5(
(53) );2()3( )4()2()3()4(
);()2( )3()()2()3(
);0()( )2()0()()2(
21021
21021
21021
21021
21021
aaaaaa
aaaaaa
aaaaaa
aaaaaa
aaaa
TNubTNubNTubTNyaTNyaNTy
TubTubTubTyaTyaTy
TubTubTubTyaTyaTy
TubTubTubTyaTyaTy
ubTubTubyaTyaTy
−+−++−+−=
++++=
++++=
++++=
++++=
M
Nestas equações todas as saídas e as entradas do sistema são conhecidas e os coeficientes do modelo, ou seja, a1, a2, b0, b1 e b2 são desconhecidos. Portanto, estas equações formam um sistema de N–2 equações e 5 incógnitas, que pode ser resolvido pelo método dos mínimos quadrados. Se a dinâmica do sistema apresentasse um atraso na entrada, este atraso seria facilmente introduzido pela utilização de entradas em outros instantes de tempo.
Define-se os seguintes vetores e matrizes:
152
1
0
2
1
x
b
b
b
a
a
p
=r
;
1)2()(
)5(
)4(
)3(
)2(
xNa
a
a
a
a
NTy
Ty
Ty
Ty
Ty
y
−
=
M
v;
(54)
5)2())2(())1(()())1(()(
)3()4()5()3()4(
)2()3()4()2()3(
)()2()3()()2(
)0()()2()0()(
xNaaaaa
aaaaa
aaaaa
aaaaa
aaa
TNuTNuNTuTNyNTy
TuTuTuTyTy
TuTuTuTyTy
TuTuTuTyTy
uTuTuyTy
A
−
−−−
= ;
onde y
r
é o vetor com as saídas presentes, pr
é o vetor de parâmetros do modelo e A é uma matriz que contém as saídas passadas e as entradas do sistema.
Com estas definições, a equação (53) pode ser escrita matricialmente da seguinte forma:
pAyvv
= . (55)
Os parâmetros do sistema podem ser calculados invertendo-se a matriz A e multiplicando o resultado pelo vetor y
r
. Contudo, observa-se que a matriz A em geral não é uma matriz

Experiência 2 – Resposta Temporal de Sistemas em Tempo Discreto e Identificação de Sistemas ____________________________________________________________________________________
____________________________________________________________________________________
24 de 31
quadrada e portanto não tem inversa. Portanto, no lugar da inversa da matriz A utiliza-se a sua pseudo-inversa, que neste caso é dada pela seguinte expressão:
tt
AAAA1#
)(−
= . (56) Nota-se que a dimensão da matriz A é (N –2)x5 e a dimensão da sua pseudo-inversa é 5x(N–2). A pseudo-inversa de uma matriz dada pela equação (56) sempre existirá se as sua colunas forem linearmente independentes, que é o caso da matriz A para modelos de qualquer ordem.
Assim, os parâmetros do modelo (vetor pr
) pode ser calculado, da seguinte forma:
yAAAyAptt rrr 1#
)(−
== . (57)
Observa-se que ao calcular os parâmetros do modelo segundo a equação anterior, está-se minimizando o quadrado do erro entre as saídas do sistema estimadas pelo modelo, segundo a equação (52), e as saídas reais do sistema obtidas no processo de amostragem, ou seja, minimiza-se a função custo )( pJ
r
, dada por:
[ ]∑=
−=
N
k
aakTykTypJ
1
2
)()(2
1)(r
. (58)
Finalmente observa-se que existem muitos outros métodos para se identificar modelos de
sistemas em tempo discreto, sendo que a maioria destes métodos é mais eficiente do que o método dos mínimos quadrados. Alguns métodos comumente utilizados são os seguintes: Mínimos Quadrados Estendido, Mínimos Quadrados Generalizados e Máxima Probabilidade. Cada método de identificação de sistemas tem a sua aplicação, por exemplo, alguns métodos são adequados para identificação de sistemas não lineares nos parâmetros, como o Método do Filtro de Kalman. Maiores informações sobre este assunto podem ser obtidas em textos da área, pois detalhes sobre métodos avançados de identificação de sistemas não é escopo desta experiência.

Experiência 2 – Resposta Temporal de Sistemas em Tempo Discreto e Identificação de Sistemas ____________________________________________________________________________________
____________________________________________________________________________________
25 de 31
5. PARTE EXPERIMENTAL 5.1. PARTE 1: Identificação do modelo do motor CC no domínio do tempo
contínuo
Nesta parte da experiência, o objetivo será levantar os parâmetros Kω, Kθ e T, que definem os modelos em tempo contínuo adotados para aproximação do motor CC, ou seja:
1)(
)()(
+=
Ω=
Ts
K
sE
ssG
V
T ω
ω
)1()(
)()(
+=
Θ=
Tss
K
sE
ssG
V
P θ
θ
Montagem do aparato experimental:
O motor CC e os equipamentos necessários, tais como fonte, gerador de funções e
computador, deve ser montado conforme mostra a Figura 13:
Figura 13: Esquema das conexões elétricas para o experimento.
5V GND GND
+25V -25V
12.0
5V +12V -12V 0V
Motor Drive
Input
Tacômetro
Potenciômetro
VIN
E 0V
0V
Vout
Vout
0V
Canal 0
Canal 1
Canal 2
FONTE
GERADOR DE
FUNÇÕES
PAINEL DO MOTOR CC
PLACA DE AQUISIÇÃO +
COMPUTADOR
BORNEIRA

Experiência 2 – Resposta Temporal de Sistemas em Tempo Discreto e Identificação de Sistemas ____________________________________________________________________________________
____________________________________________________________________________________
26 de 31
Como visto, os equipamentos que devem ser utilizados são os seguintes:
1) Microcomputador; 2) Sistema de Aquisição de Dados; 3) Gerador de Funções; 4) Fonte; 5) Módulo de Motor CC.
OBS: todos os equipamentos já devem estar montados. Caso não estejam solicite a ajuda do professor. Software:
Você deve utilizar o software aquisicao3canais.m similar ao utilizado na experiência 1. Canais utilizados:
Será necessário a utilização de três canais de aquisição:
• CANAL 0: sinal de entrada da planta (saída do gerador de funções). • CANAL 1: saída do sinal do tacogerador; • CANAL 2: saída do potenciômetro;
Os dados são armazenados na variável data (matriz de 3 colunas). Coluna 1 = Canal 0 Coluna 2 = Canal 1 Coluna 3 = Canal 2 OBS: No Matlab matrizes não possuem linha 0 ou coluna 0. Ensaio sem freio magnético:
Neste item você deve realizar experimentos para determinar os parâmetros Kω, Kθ e T
injetando uma onda quadrada no motor. Para isso, é muito importante a escolha de dois parâmetros:
• A freqüência de amostragem; • A freqüência ou período da onda quadrada a ser gerada pelo gerador de funções.
Qual o valor que deve ser escolhido ? Obviamente, a freqüência da onda quadrada deve
ser tal que o tempo equivalente ao meio período seja suficientemente grande para que a resposta do motor ao degrau atinja o regime estático. A freqüência de amostragem deve ser o suficientemente grande para que os pontos adquiridos possam produzir um gráfico adequado. Você pode estabelecer a freqüência de amostragem baseado no número de pontos que você deseja para período da onda quadrada.

Experiência 2 – Resposta Temporal de Sistemas em Tempo Discreto e Identificação de Sistemas ____________________________________________________________________________________
____________________________________________________________________________________
27 de 31
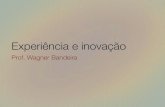
O sinal produzido pelo tacogerador é bastante consistente de tal forma que os parâmetros
Kω, e T podem ser obtidos a partir do gráfico da velocidade angular fornecida pelo tacômetro de maneira bastante simples. Já o sinal produzido pelo potenciômetro não é totalmente consistente como pode ser observado na Figura 15 onde um exemplo de aquisição de dados do Motor CC é mostrado. Pode-se observar que a constante de tempo T e o ganho da malha de posição Kθ não podem ser determinados de maneira simples através do gráfico do sinal de posição fornecido pelo potenciômetro rotativo. O valor de tensão do potenciômetro rotativo retorna ao valor inicial a cada 360 graus. Desta forma, torna-se necessário realizar uma montagem dos diversos segmentos de reta durante um degrau de entrada para se tornarem um único segmento de reta. Note que o degrau negativo é mais coerente com uma resposta equivalente a um polinômio de 2º. Grau.
Figura 15: Exemplo de sinais adquiridos do motor CC.
Lembre-se que o método para calcular os ganhos das funções de transferência da velocidade e da posição Kω , Kθ foi desenvolvido na Seção 4.1 utilizando a hipótese de que o sistema é submetido a um degrau de amplitude A.

Experiência 2 – Resposta Temporal de Sistemas em Tempo Discreto e Identificação de Sistemas ____________________________________________________________________________________
____________________________________________________________________________________
28 de 31
Simulação
Após a identificação do modelo você deve realizar simulações para verificar o seu
desempenho, ou seja, verificar se o modelo é capaz de fornecer resultados satisfatórios. Esta simulação será realizada com a mesma tensão de entrada utilizada para gerar os
transitórios no sistema real. Assim, utilizando a tensão de entrada no motor amostrada, que deve estar em uma das colunas da matriz de dados data, simule o modelo em tempo contínuo para obter a estimativa da velocidade angular. Após isso, faça um gráfico com a velocidade angular calculada pelo modelo e a velocidade angular real amostrada. Para isso você pode usar os seguintes comandos do MATLAB: % Parametros Kw=1; % Ganho do sistema T=0.5; % Constante de tempo fa=100; % Frequencia de amostragem % Ta=1/fa; % Intervalo de amostragem num=[Kw]; % Coeficientes do polinomio do numerador em ordem descrescente den=[T 1]; % Coeficientes do polinomio do denominador sys=tf(num,den) % Definicao da funcao de transferencia % Omega(s)/E(s) = Kw/(Ts+1) % % data(:,1) - vetor de tensao de entrada (Onda quadrada) % data(:,2) - vetor de velocidade angular medido % data(:,3) - vetor de posicao angular n=length(data); % devolve a maior dimensao da matrix data t=0:Ta:(n-1)*Ta; % cria uma base de tempo comecando do tempo 0 omegat=lsim(sys,data(:,1),t); % vetor de velocidade angular estimado % simulacao do sistema considerando o sistema sys1, o vetor de entradas % data(:,1) - onda quadrada e a base de tempo dada por t
% grafico da velocidade angular medida e a estimada plot(t,data(:,2),t,omegat,'o');grid xlabel('Tempo (s)'); ylabel('Velocidade angular (rad/s)'); legend('Dados experimentais','Resultados do modelo');

Experiência 2 – Resposta Temporal de Sistemas em Tempo Discreto e Identificação de Sistemas ____________________________________________________________________________________
____________________________________________________________________________________
29 de 31
Apresente em um mesmo gráfico as curvas simuladas e amostradas da velocidade do motor. Comente e analise as diferenças entre os resultados da simulação e os dados experimentais. 5.2. PARTE 2: Identificação do modelo do motor CC no domínio do tempo discreto
Nesta parte da experiência, o objetivo é identificar o modelo do motor em tempo discreto. Somente o modelo da velocidade angular em função da tensão de entrada do motor será identificado em tempo discreto. Para realizar isso você deve seguir os seguintes passos: 1) Obter a função de transferência entre a tensão de entrada e a velocidade angular do motor
em tempo discreto:
Para obter a função de transferência entre a tensão de entrada e a velocidade angular do motor em tempo discreto, você deve utilizar a equação (28), que fornece a fórmula para obter a função de transferência em tempo discreto de um sistema em tempo contínuo, e a equação (39) que fornece a função de transferência do motor em tempo contínuo. Assim, tem-se:
+−= −−
)1(1()( 11
Tss
KzzG
wL)Zω
.
Observa-se que a equação anterior deve ser calculada algebricamente e não numericamente. Resolvendo esta equação, você irá obter uma função de transferência em tempo discreto da seguinte forma:
1
1
1
1
1)(
−
−
−
=
za
zbzG
ω.
2) Obter a equação de diferenças equivalente à Gω(z): Para obter a equação de diferenças equivalente à Gω(z) siga os passos da equação (33). Ao fazer isso, você encontrará uma expressão do seguinte tipo:
).)1(())1(()(11 avaa
TkebTkakT −+−= ωω
Esta equação de diferenças servirá como a estrutura do modelo a ser identificado. A identificação deste modelo consiste no cálculo numérico dos coeficientes a1 e b1.
3) Calcular os coeficientes da equação de diferenças:
Para calcular os coeficientes da equação de diferenças, você deve utilizar dados da tensão de entrada e da velocidade angular do motor adquiridos com uma freqüência de amostragem

Experiência 2 – Resposta Temporal de Sistemas em Tempo Discreto e Identificação de Sistemas ____________________________________________________________________________________
____________________________________________________________________________________
30 de 31
mais baixa que a utilizada no item anterior (5.1). Essa freqüência deve ser da ordem de 10Hz a 50Hz. Estes dados devem estar em uma matriz como no caso do item 5.1. Com estes dados monte a matriz A e o vetor de saídas y
r
conforme descrito a equação (54) apresentada na Seção 3.2. A matriz A e o vetor y
r
podem ser facilmente montados com os seguintes comandos do MATLAB:
n=length(data);
A=[data(1:n-1,2) data(1:n-1,1)];
Y=[data(2:n,2)];
Nestes comandos Y [y(k)] é o vetor de saídas e A [y(k-1) u(k-1)] é a matriz A. Os coeficientes do modelo são calculados segundo a equação (57), que com comandos do MATLAB é implementada da seguinte forma:
p=pinv(A)*Y;
onde pinv é o comando do MATLAB utilizado para calcular a pseudo inversa de uma matriz e p é o vetor que contém os coeficientes da equação de diferenças do modelo, da seguinte forma: p=[a1 b1]
t. O MATLAB possui um comando que faz automaticamente todos os passos que você fez neste item. Este comando se chama ARMAX, de um help neste comando e verifique como utilizá-lo. Se tiver tempo calcule também os coeficientes do modelo com o comando ARMAX e compare os resultados com o que você calculou passo a passo.
4) Simulação do modelo em tempo discreto: Como no item anterior, após a identificação do modelo você deve realizar simulações para verificar o seu desempenho, ou seja, verificar se o modelo é capaz de fornecer resultados satisfatórios. Novamente, essa simulação deve ser realizada com a mesma tensão de entrada utilizada para gerar os transitórios no sistema real. Assim, utilizando a tensão de entrada no motor amostrada, que deve estar na matriz de dados data, simule o modelo em tempo discreto para obter a estimativa da velocidade angular. Após isso, faça um gráfico com a velocidade angular calculada pelo modelo e a velocidade angular real amostrada. Para isso você pode usar os seguintes comandos do MATLAB:

Experiência 2 – Resposta Temporal de Sistemas em Tempo Discreto e Identificação de Sistemas ____________________________________________________________________________________
____________________________________________________________________________________
31 de 31
num=[0 b1];
den=[1 -a1];
omegatd=dlsim(num,den,data(:,1));
n=length(omegatd);
t=[0:n-1]*Ta;
plot(t,data(:,2),t,omegatd,'o');grid
xlabel('Tempo segundos)');
ylabel('Velocidade angular');
legend('Dados experimentais','Resultados do modelo');
Apresente em um mesmo gráfico as curvas simuladas e amostradas da velocidade do motor. Compare a resposta do modelo com os resultados experimentais e analise os resultados obtidos.
5) Verificação do pólo e do ganho do sistema identificado: Como você conhece o pólo e o ganho da função de transferência entre a tensão de entrada e a velocidade do sistema em tempo contínuo, você pode utilizar estes dados para verificar os modelo em tempo discreto identificado. Para isso, calcule o pólo e o ganho do sistema em tempo discreto. O pólo é dado diretamente pelo coeficiente a1 e o ganho é dado pela relação entre b1/a1. Observa-se que o ganho é calculado através do teorema do valor final para uma entrada na forma de degrau, que em tempo discreto para um sistema de 1a ordem é dado por:
1
1
1
1
1
1
1
1
1 11)()1( limlim
a
b
za
zbzYz
zz −
=
−
=−−
−
→
−
→
.
Utilizando a equação (37), calcule o pólo do sistema em tempo contínuo equivalente ao pólo em tempo discreto que você achou. Compare o ganho do modelo em tempo discreto com o ganho do modelo em tempo contínuo que você obteve na parte 2. Analise os resultados. Compare o pólo do sistema identificado em tempo discreto (transformado para tempo contínuo) com o pólo (−1/T) que você obteve na parte 2. Analise os resultados.