FIS 26 Mecânica II · 1 – Beer et al- Vector Mechanics Engineers Statics Dynamics 9ª Ed. McGraw...
21
FIS 26 Mecânica II Aula 2: Corpo rígido - cinemática. Exercícios.
Transcript of FIS 26 Mecânica II · 1 – Beer et al- Vector Mechanics Engineers Statics Dynamics 9ª Ed. McGraw...
FIS 26
Mecânica II
Aula 2: Corpo rígido - cinemática.
Exercícios.

Corpo rígidoMovimentos do corpo rígidoTranslação:
– trajetória de translação retilínea¹
– trajetória de translação curvilínea¹.
Rotação:
– rotação em torno de um eixo¹
– rotação em torno de um ponto fixo²
1 – Hibbeler, R.C., Mecânica para Engenheiros, Vols 1 e 2, Pearson Education, 12ª.ed.
2 – Beer et al- Vector Mechanics Engineers Statics Dynamics 9ª Ed. McGraw Hill
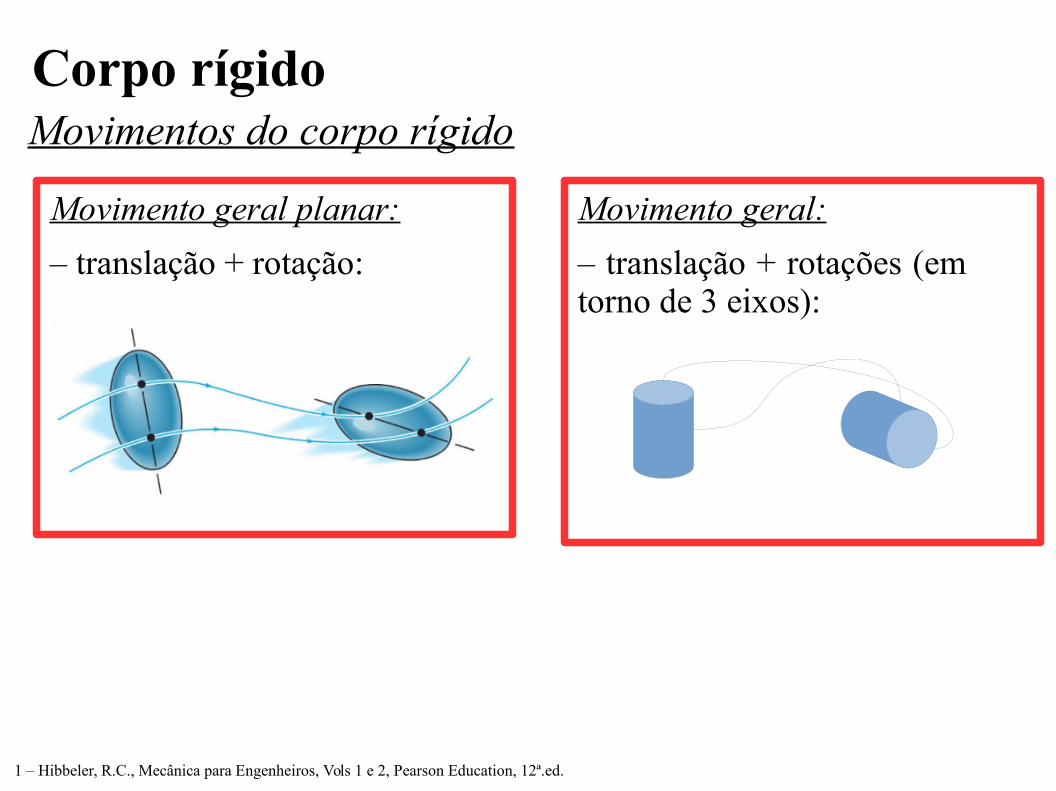
Corpo rígidoMovimentos do corpo rígido
1 – Hibbeler, R.C., Mecânica para Engenheiros, Vols 1 e 2, Pearson Education, 12ª.ed.
Movimento geral planar:
– translação + rotação:
Movimento geral:
– translação + rotações (em torno de 3 eixos):
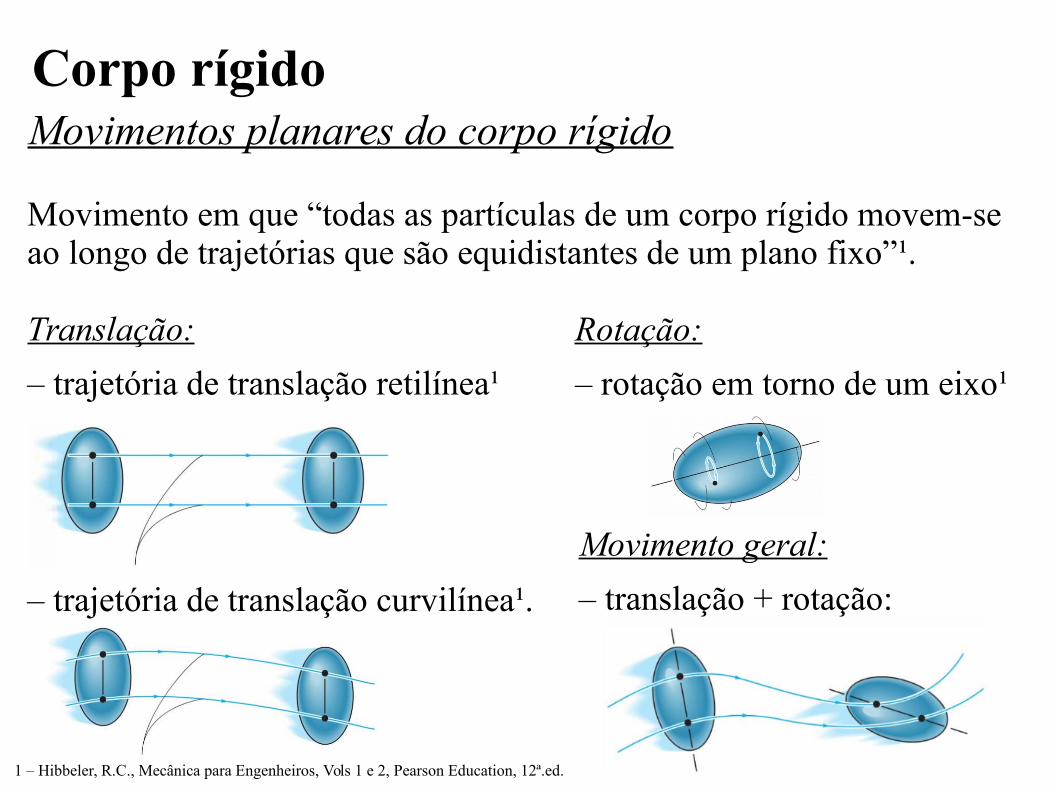
Corpo rígidoMovimentos planares do corpo rígido
Movimento em que “todas as partículas de um corpo rígido movem-se ao longo de trajetórias que são equidistantes de um plano fixo”¹.
Translação:
– trajetória de translação retilínea¹
– trajetória de translação curvilínea¹.
1 – Hibbeler, R.C., Mecânica para Engenheiros, Vols 1 e 2, Pearson Education, 12ª.ed.
Rotação:
– rotação em torno de um eixo¹
Movimento geral:
– translação + rotação:
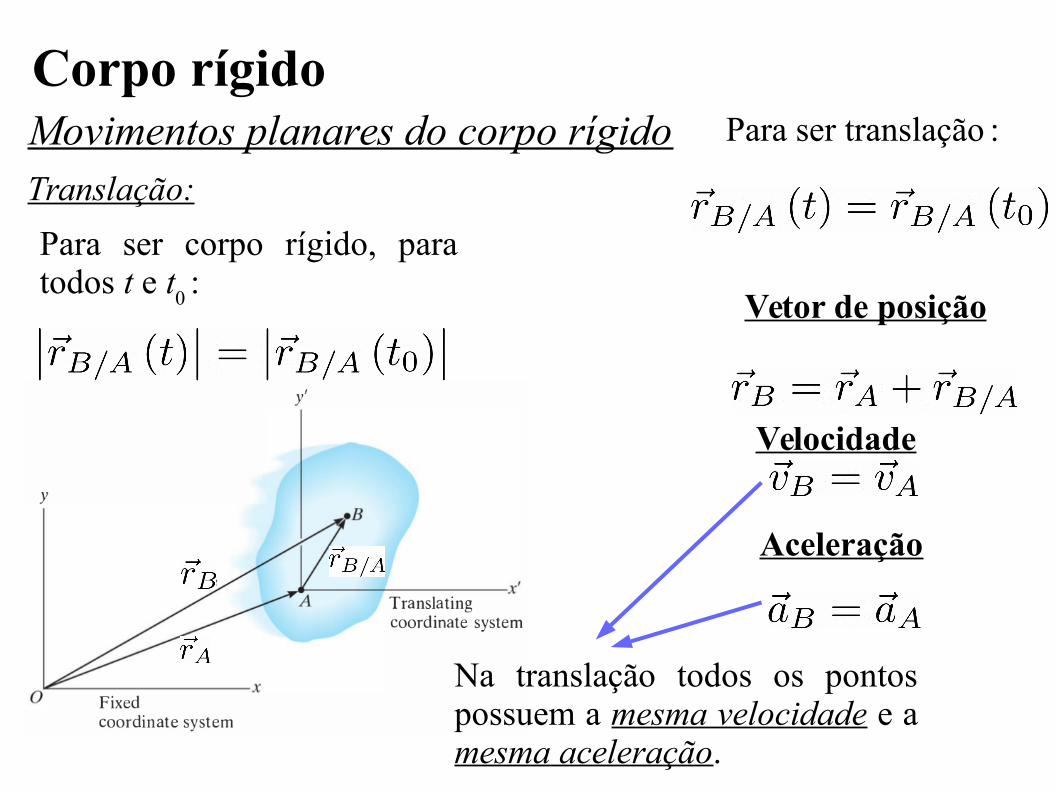
Corpo rígido
Translação:
Para ser translação :
Para ser corpo rígido, para todos t e t
0 :
Vetor de posição
Movimentos planares do corpo rígido
Velocidade
Aceleração
Na translação todos os pontos possuem a mesma velocidade e a mesma aceleração.
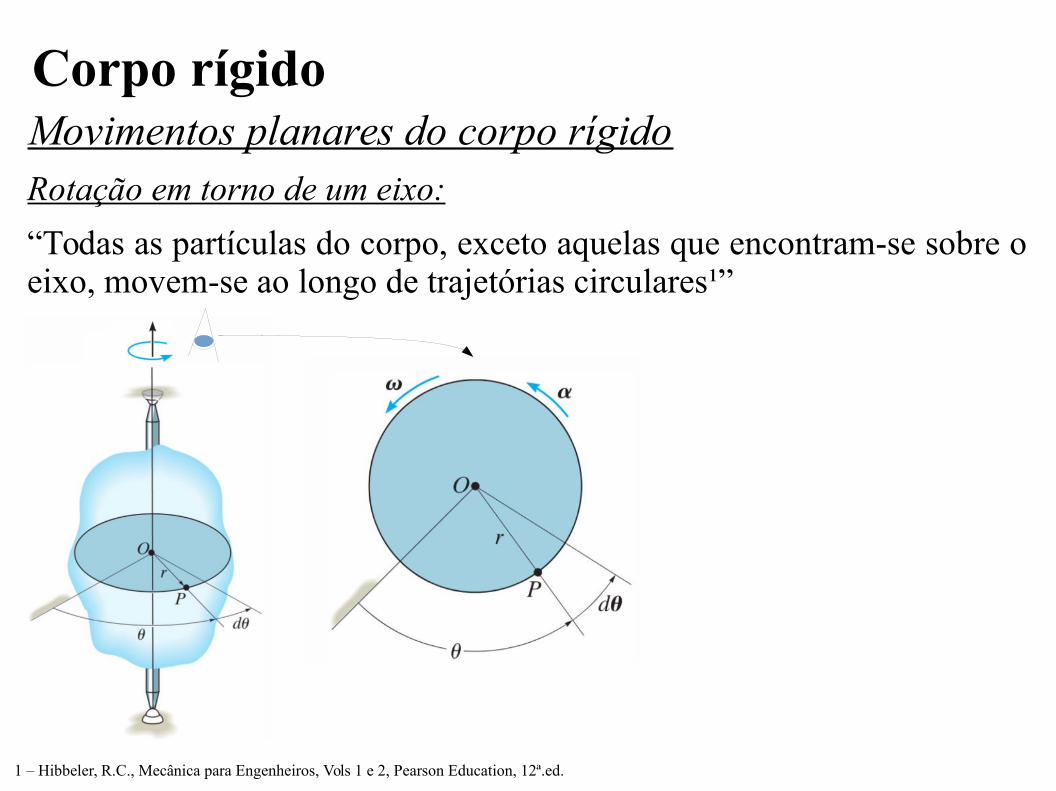
Corpo rígido
Rotação em torno de um eixo:
“Todas as partículas do corpo, exceto aquelas que encontram-se sobre o eixo, movem-se ao longo de trajetórias circulares¹”
Movimentos planares do corpo rígido
1 – Hibbeler, R.C., Mecânica para Engenheiros, Vols 1 e 2, Pearson Education, 12ª.ed.

Corpo rígidoMovimentos planares do corpo rígido
1 – Hibbeler, R.C., Mecânica para Engenheiros, Vols 1 e 2, Pearson Education, 12ª.ed.
Aceleração
Rotação em torno de um eixo:
“Todas as partículas do corpo, exceto aquelas que encontram-se sobre o eixo, movem-se ao longo de trajetórias circulares¹”
Aceleração angular
VelocidadeVelocidade angular

Rotação em torno de um eixo:
Exercício: Mostre que a aceleração se decompõe em componentes normal e tangencial à trajetória e obtenha os valores de seus módulos.
Movimentos planares do corpo rígido
1 – Hibbeler, R.C., Mecânica para Engenheiros, Vols 1 e 2, Pearson Education, 12ª.ed.
Corpo rígido
Corpo rígido
Movimento geral planar:
O movimento geral planar pode ser entendido como a superposição de um movimento de translação com um movimento de rotação ao redor de um eixo.
Movimentos planares do corpo rígido
1 – Hibbeler, R.C., Mecânica para Engenheiros, Vols 1 e 2, Pearson Education, 12ª.ed.
Corpo rígido
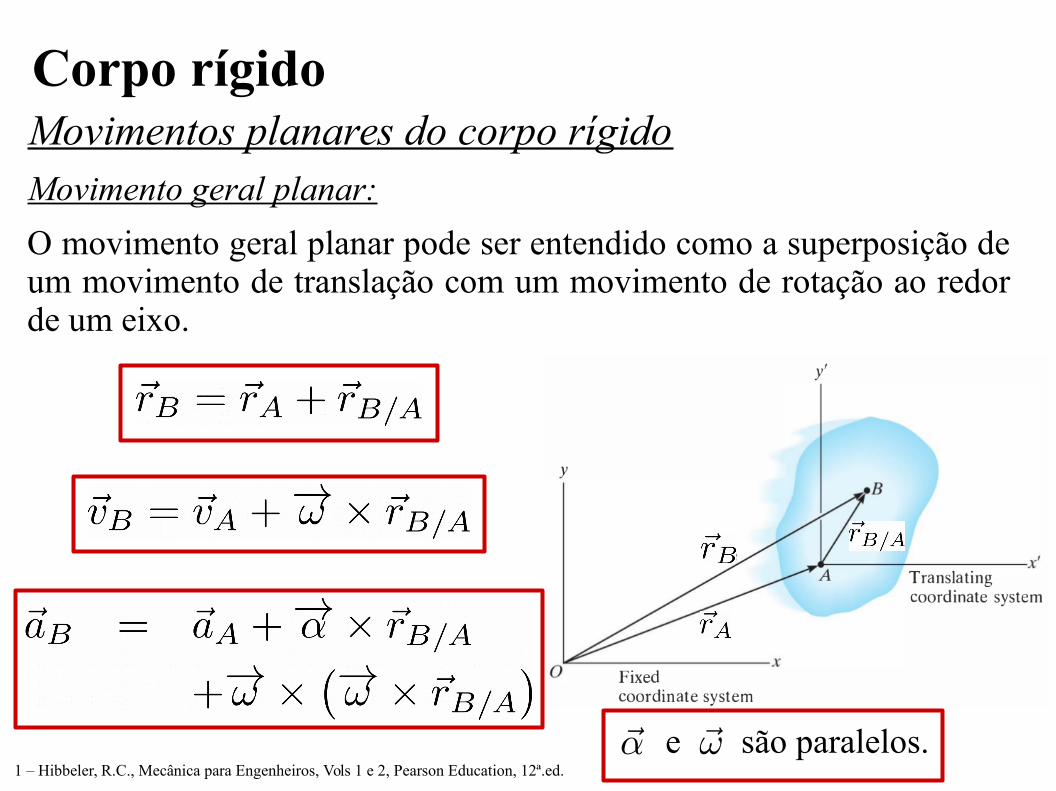
Movimento geral planar:
O movimento geral planar pode ser entendido como a superposição de um movimento de translação com um movimento de rotação ao redor de um eixo.
Movimentos planares do corpo rígido
1 – Hibbeler, R.C., Mecânica para Engenheiros, Vols 1 e 2, Pearson Education, 12ª.ed.
e são paralelos.

Corpo rígido
Movimento geral planar:
Exercício: A haste AB está confinada a mover-se ao longo dos planos em A e B. Se o ponto A tem uma aceleração de 3 m/s² e velocidade de 2 m/s, conforme figura, determine a aceleração angular neste instante.
Movimentos planares do corpo rígido
1 – Hibbeler, R.C., Mecânica para Engenheiros, Vols 1 e 2, Pearson Education, 12ª.ed.

Corpo rígido
Movimento geral:
Os vetores de posição, velocidade e aceleração de um ponto B do corpo rígido são:
Movimentos tridimensional do corpo rígido
1 – Hibbeler, R.C., Mecânica para Engenheiros, Vols 1 e 2, Pearson Education, 12ª.ed.
e NÃO são paralelos.

Corpo rígidoMovimento tridimensional do corpo rígido
Rotação em torno de um ponto fixo:
Exercício: O guindaste mostrado gira com uma velocidade angular constante ω
1 = 0,30 rad/s. Simultaneamente, a lança é elevada com uma
velocidade angular constante ω
2=0,50rad/s em relação à cabine.
Sabendo que o comprimento da lança OP é L=12 m, determine
(a) a velocidade angular ω da lança,
(b) a aceleração angular α da lança,
(c) a velocidade v da ponta da lança,
(d) a aceleração a da ponta da lança.
1 – Beer et al- Vector Mechanics Engineers Statics Dynamics 9ª Ed. McGraw Hill.

Corpo rígidoMovimento tridimensional do corpo rígido
1 – Beer et al- Vector Mechanics Engineers Statics Dynamics 9ª Ed. McGraw Hill.
Rotação em torno de um ponto fixo: eixos em rotação.
Seja uma base {i, j, k} do R³ com coordenadas x, y, z. Um vetor Q qualquer possui coordenadas dadas por
Corpo rígidoMovimento tridimensional do corpo rígido
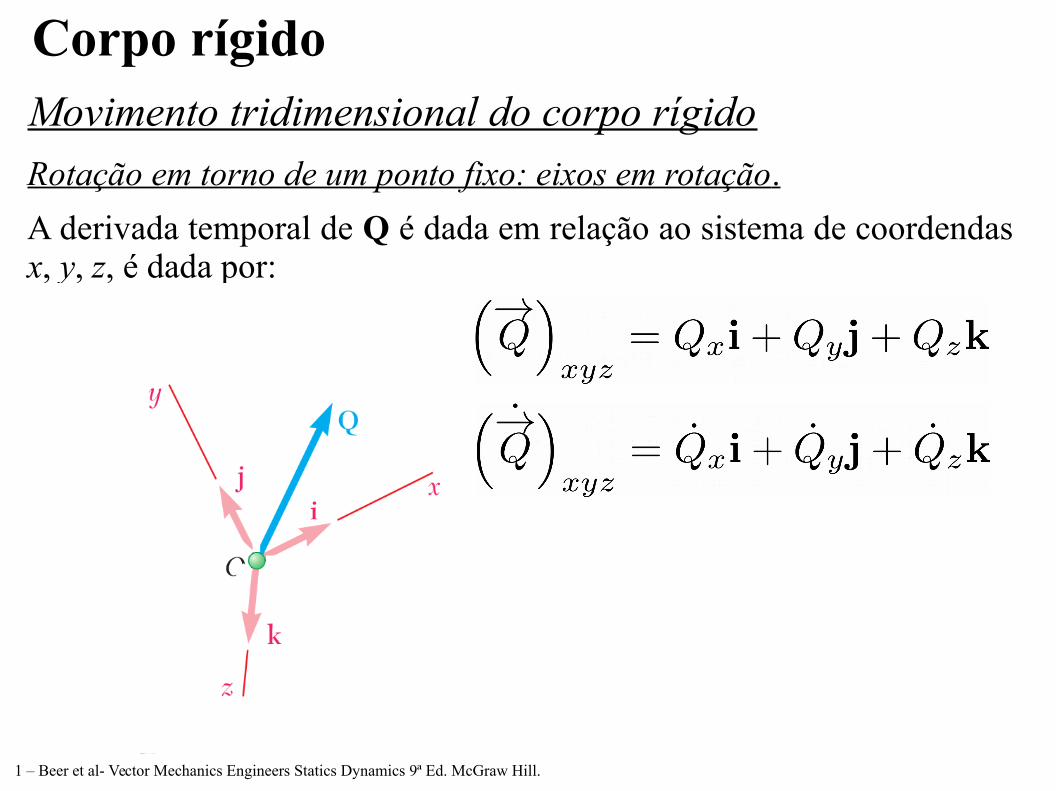
Rotação em torno de um ponto fixo: eixos em rotação.
A derivada temporal de Q é dada em relação ao sistema de coordendas x, y, z, é dada por:
1 – Beer et al- Vector Mechanics Engineers Statics Dynamics 9ª Ed. McGraw Hill.

Corpo rígidoMovimento tridimensional do corpo rígido
Rotação em torno de um ponto fixo: eixos em rotação.
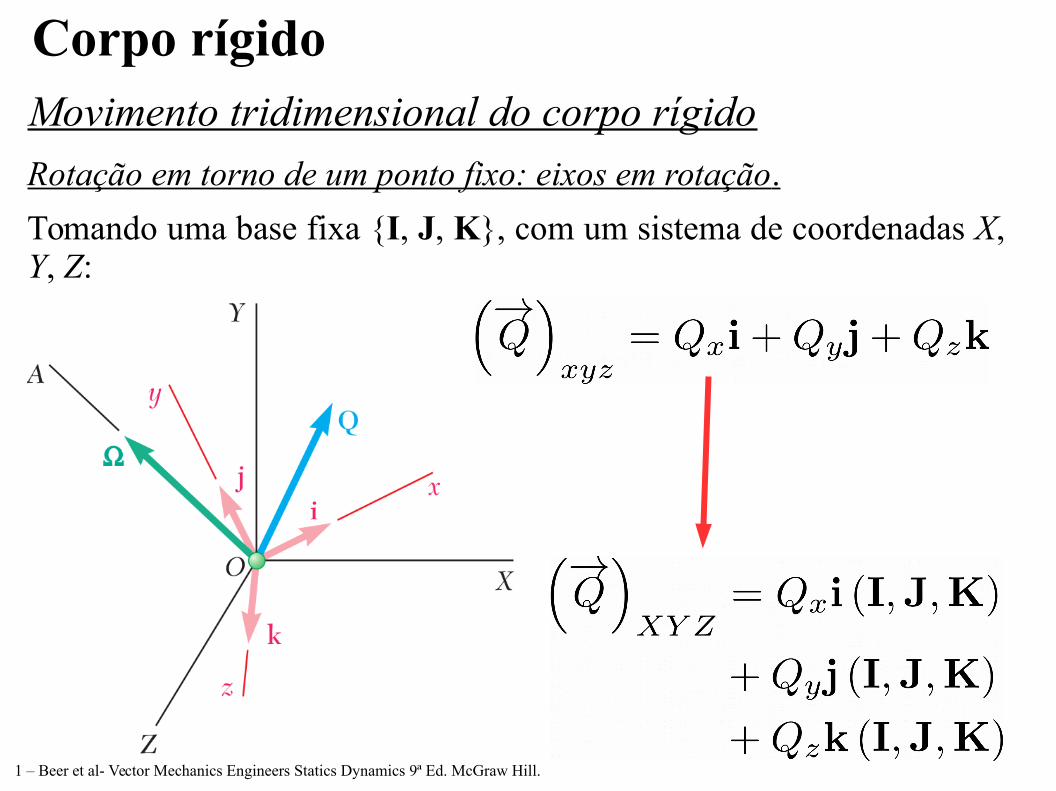
Considere que esta base faça uma rotação de um eixo A fixo, com velocidade angular Ω.
1 – Beer et al- Vector Mechanics Engineers Statics Dynamics 9ª Ed. McGraw Hill.

Corpo rígidoMovimento tridimensional do corpo rígido
Rotação em torno de um ponto fixo: eixos em rotação.
Tomando uma base fixa {I, J, K}, com um sistema de coordenadas X, Y, Z:
1 – Beer et al- Vector Mechanics Engineers Statics Dynamics 9ª Ed. McGraw Hill.
Corpo rígidoMovimento tridimensional do corpo rígido
1 – Beer et al- Vector Mechanics Engineers Statics Dynamics 9ª Ed. McGraw Hill.
Rotação em torno de um ponto fixo: eixos em rotação.
Tomando uma base fixa {I, J, K}, com um sistema de coordenadas X, Y, Z:

Corpo rígidoMovimento tridimensional do corpo rígido
1 – Beer et al- Vector Mechanics Engineers Statics Dynamics 9ª Ed. McGraw Hill.
Rotação em torno de um ponto fixo: eixos em rotação.
Tomando uma base fixa {I, J, K}, com um sistema de coordenadas X, Y, Z:

Corpo rígidoMovimento tridimensional do corpo rígido
1 – Beer et al- Vector Mechanics Engineers Statics Dynamics 9ª Ed. McGraw Hill.
???
Rotação em torno de um ponto fixo: eixos em rotação.
Tomando uma base fixa {I, J, K}, com um sistema de coordenadas X, Y, Z:

Movimento tridimensional do corpo rígido
Rotação em torno de um ponto fixo: eixos em rotação.
Exercício: Mostre que
1 – Beer et al- Vector Mechanics Engineers Statics Dynamics 9ª Ed. McGraw Hill.
Corpo rígido