Formulação Analítica Mecanismos de 4 Barras Utiliza formulação vetorial para a representação...
113
Formulação Analítica Mecanismos de 4 Barras • Utiliza formulação vetorial para a representação dos deslocamentos, das velocidades e das acelerações. • A juntas e uniões são representadas através de equações de restrição. • O uso de número complexos para representar os vetores também é possível, porém pode resultar em um esforço computacional
-
Upload
adelina-palma-capistrano -
Category
Documents
-
view
255 -
download
1
Transcript of Formulação Analítica Mecanismos de 4 Barras Utiliza formulação vetorial para a representação...

Formulação Analítica Mecanismos de 4 Barras
• Utiliza formulação vetorial para a representação dos deslocamentos, das velocidades e das acelerações.
• A juntas e uniões são representadas através de equações de restrição.
• O uso de número complexos para representar os vetores também é possível, porém pode resultar em um esforço computacional maior.
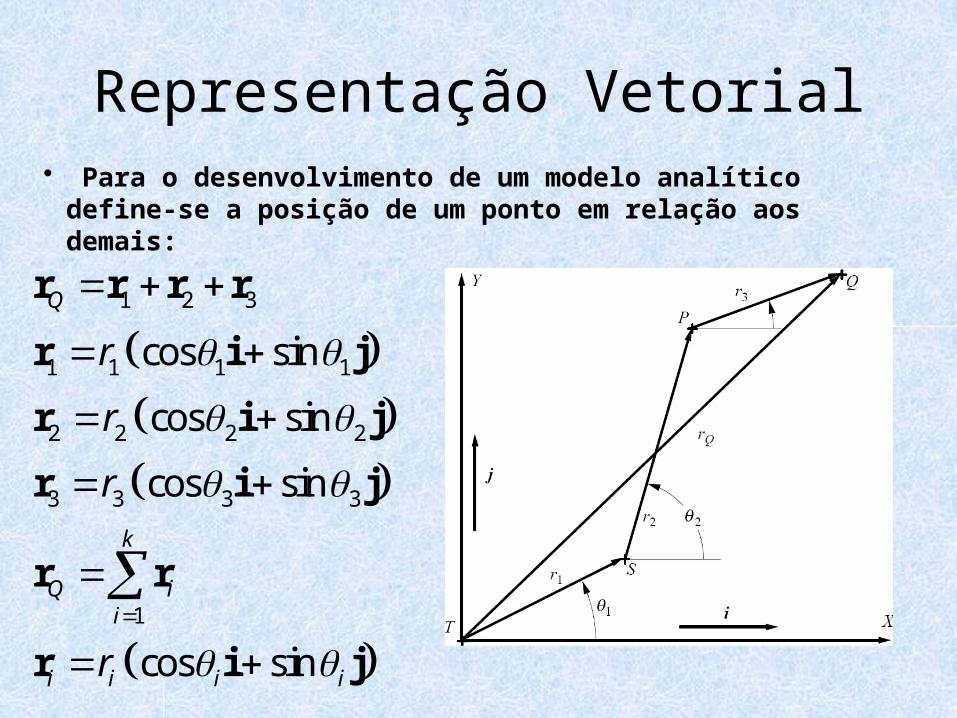
Representação Vetorial
1 2 3
1 1 1 1
2 2 2 2
3 3 3 3
1
cos sin
cos sin
cos sin
cos sin
Q
k
Q ii
i i i i
r
r
r
r
r r r r
r i j
r i j
r i j
r r
r i j
• Para o desenvolvimento de um modelo analítico define-se a posição de um ponto em relação aos demais:

Representação Vetorial
1 2 3
1 1 1 1
2 2 2 2
3 3 3 3
1
cos sin
cos sin
cos sin
cos sin
Q
k
Q ii
i i i i
r
r
r
r
r r r r
r i j
r i j
r i j
r r
r i j
• Para o desenvolvimento de um modelo analítico define-se a posição de um ponto em relação aos demais:
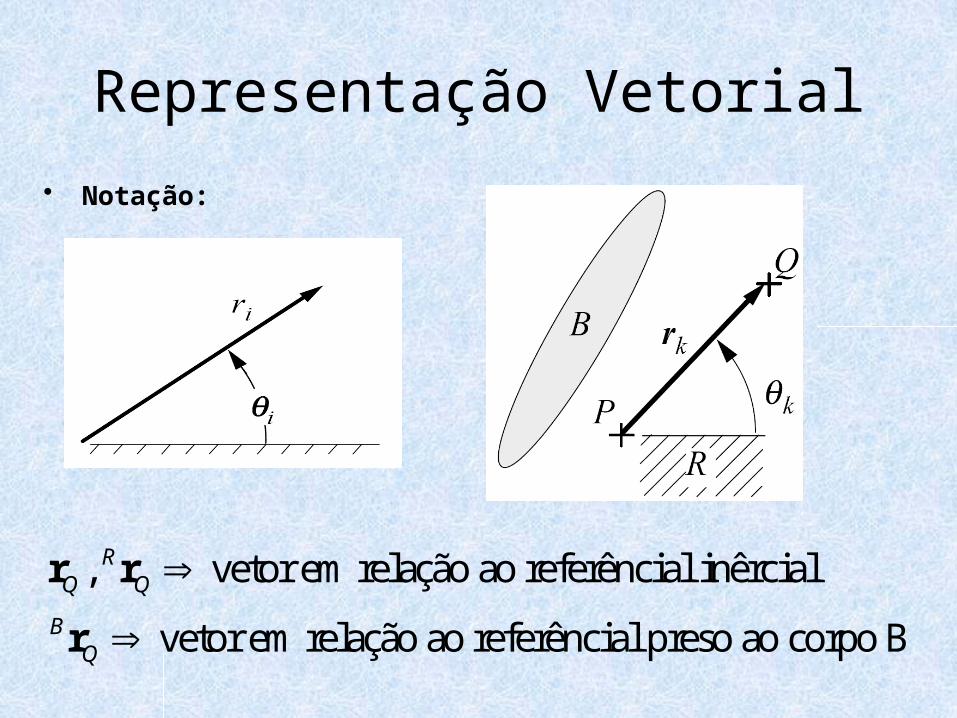
Representação Vetorial• Notação:
, vetor em relação ao referêncial inêrcial
vetor em relação ao referêncial preso ao corpo B
RQ Q
BQ
r r
r
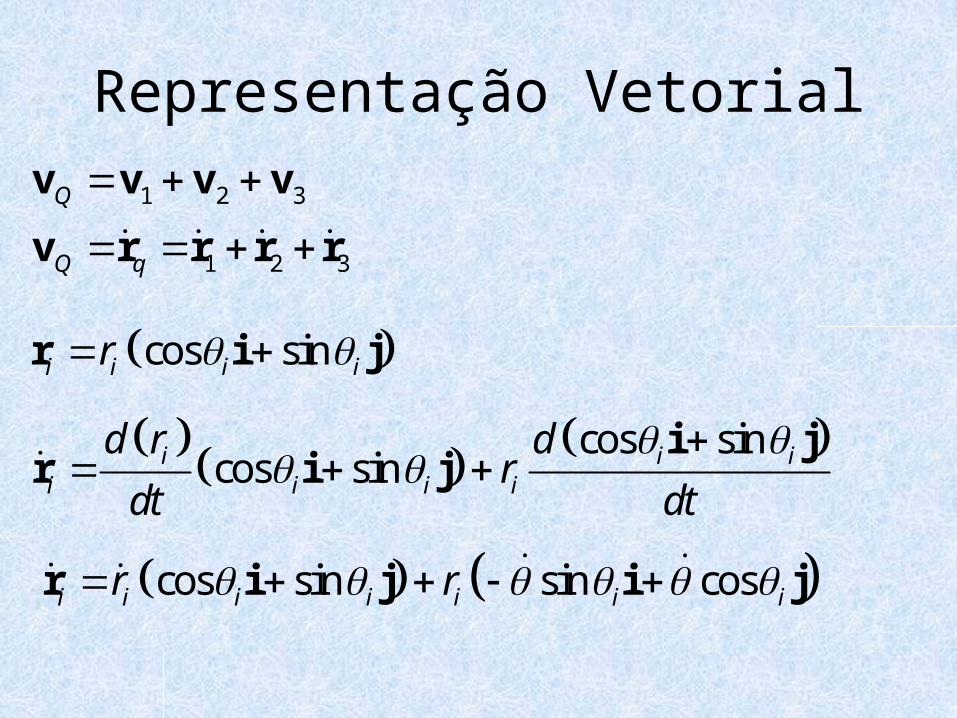
Representação Vetorial
1 2 3
1 2 3
Q
Q q
v v v v
v r r r r
cos sini i i ir r i j
cos sincos sini i i
i i i i
d r dr
dt dt
i j
r i j
cos sin sin cosi i i i i i ir r r i j i j

Representação Vetorial
1
cos sin sin cosk
Q i i i i i i i ii
r r r r
v i j
2
/ / / /2 2B R R R R Bii Q P B Q P B B Q P B Q Pddt
rr a α r ω ω r ω v
1 2 3
2
2
Q Q
Qi
ddt
a r a a a
rr

Representação Vetorial
/
/
2/
/
cos sin
sin cos
cos sin
2 2 sin cos
BQ P i i i
RB Q P i i i i
R RB B Q P i i i i
R BB Q P i i i i
r
r
r
r
a i j
α r i j
ω ω r i j
ω v i j
2
/ / / /2 2B R R R R Bii Q P B Q P B B Q P B Q Pddt
rr a α r ω ω r ω v

Análise de Mecanismos de Quatro Barras
2 3 1 4
2 2 2 3 3 3
1 1 1 4 4 4
2 2 3 3 1 1 4 4
2 2 3 3 1 1 4 4
cos sin cos sin
cos sin cos sin
Na coordenada cos cos cos cos
Na coordenada sin sin sin sin
P
r r
r r
r r r r
r r r r
r r r r ri j i j
i j i ji
j

Análise de Mecanismos de Quatro Barras
3 3 1 1 4 4 2 2
3 3 1 1 4 4 2 2
2 2 23 3 3 3 3
2 2 2 23 1 2 4 1 4 1 4 1 4
1 2 1 2 1 2
2 4 2 4 2 4
cos cos cos cossin sin sin sin
cos sin
2 cos cos sin sin
2 cos cos sin sin
2 cos cos sin sin
r r r rr r r r
r r r
r r r r r r
r r
r r
Acionamento pela BARRA 02
Isolando o ângulo 03 têm-se:
Equação transcendental que relaciona os ângulos 2 e 4.

Análise de Mecanismos de Quatro Barras
4 4
1 4 1 2 4 2
1 4 1 2 4 2
2 2 2 21 2 4 3 1 2 1 2 1 2
cos sin 02 cos 2 cos2 sin 2 sin
2 cos cos sin sin
A B CA r r r rB r r r r
C r r r r r r
Acionamento pela BARRA 02
Substituindo-se a equação abaixo na equação de r3 têm-se:
O que conduz a:
44 2
4
24
4 24
4
2 tan 2sin
1 tan 2
1 tan 2cos
1 tan 2
tan 2t

Análise de Mecanismos de Quatro Barras
2
2
2
14
2 0
2 4 42
2 tan
C A t Bt A C
B B C A C At
C A
B B C A C At
C At
Após substituição têm-se:
O que conduz a:
1 1 1 4 4 2 23
1 1 4 4 2 2
1
4
sin sin sintancos cos cos
1
2 tan 2
r r rr r r
t
Acionamento pela BARRA 02
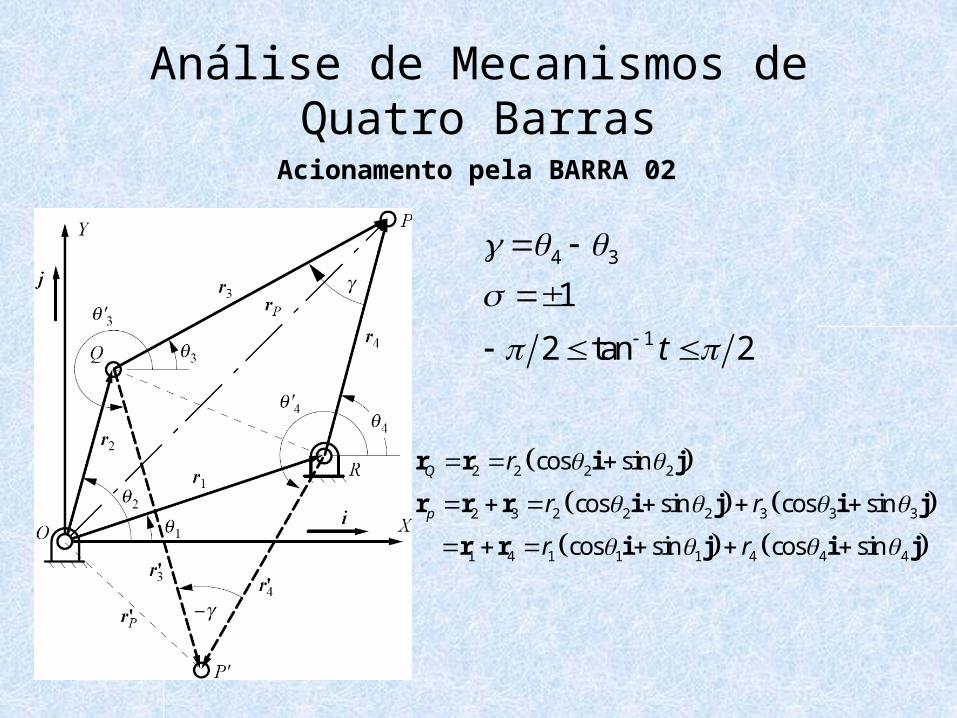
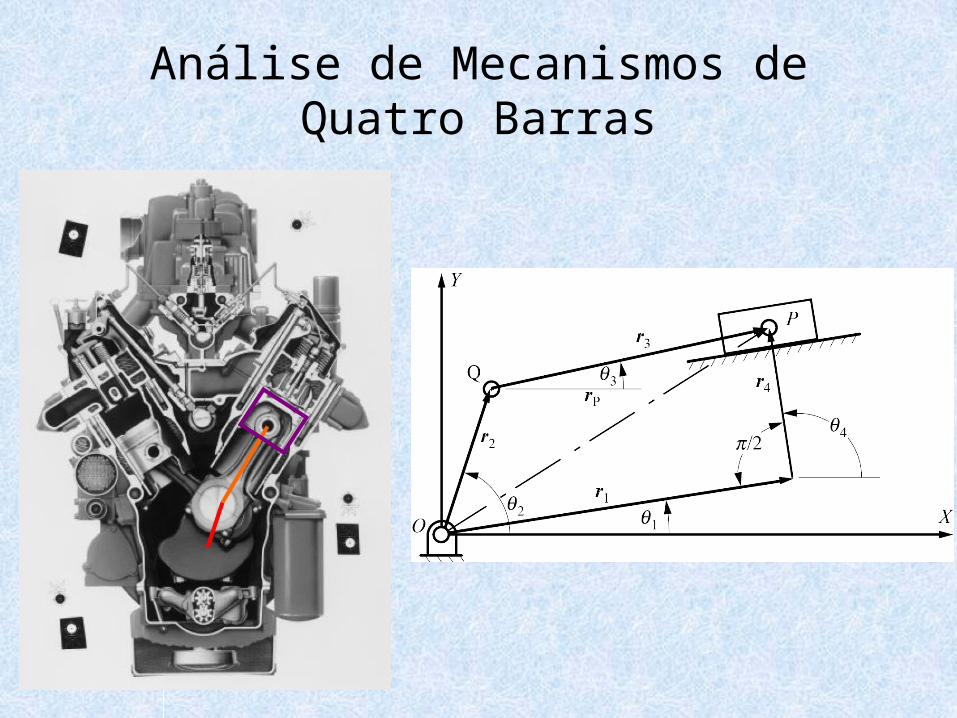
Análise de Mecanismos de Quatro Barras
2 2 2 2
2 3 2 2 2 3 3 3
1 4 1 1 1 4 4 4
cos sin
cos sin cos sin
cos sin cos sin
Q
p
r
r r
r r
r r i j
r r r i j i j
r r i j i j
4 3
1
1
2 tan 2t
Acionamento pela BARRA 02

Análise de Mecanismos de Quatro Barras
2 3 1 4p r r r r r
2 2 2 3 3 3 4 4 4
2 2 2 3 3 3 4 4 4
sin sin sin
cos cos cos
r r r
r r r
2r 3r 4r
4 4
4 4 4
sin sin sincos cos cos
J J J M M M
J J M M M
r r rr r r
J DesconhecidoM Acionamento
Acionamento pela BARRA 02
Análise de Mecanismos de Quatro Barras
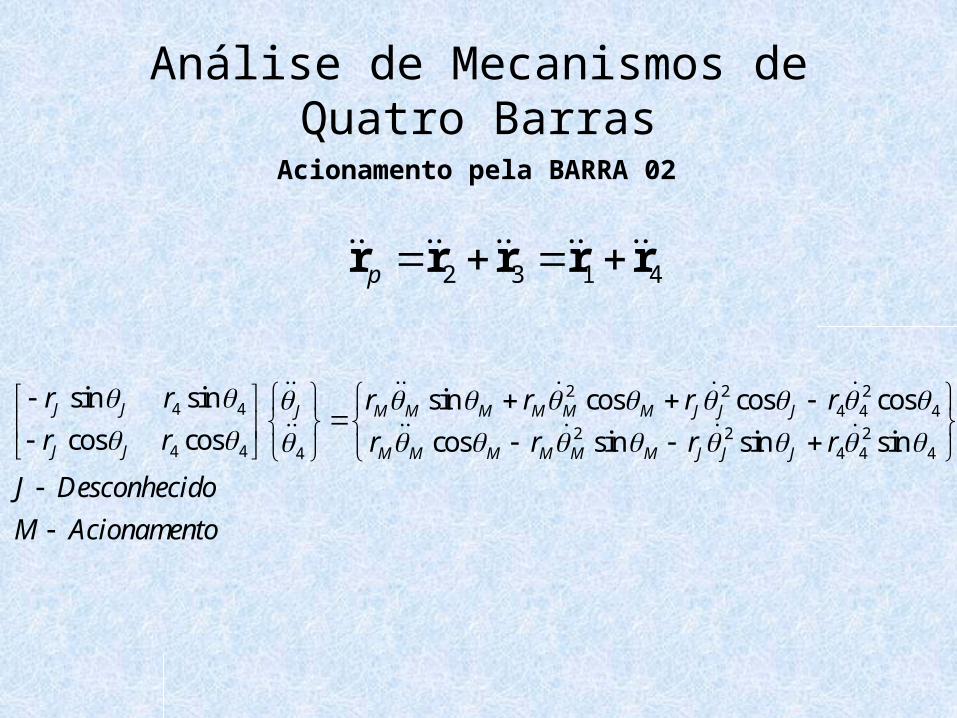
2 3 1 4p r r r r r
2 2 24 4 4 4 4
2 2 24 4 4 4 44
sin sin sin cos cos coscos cos cos sin sin sin
J J M M M M M M J J JJ
J J M M M M M M J J J
r r r r r rr r r r r r
J DesconhecidoM Acionamento
Acionamento pela BARRA 02
Análise de Mecanismos de Quatro Barras

Análise de Mecanismos de Quatro Barras
3 3 1 1 4 4 2 2
3 3 1 1 4 4 2 2
cos cos cos cossin sin sin sinr r r rr r r r
1
1
ângulo conhecidocomprimento variávelr
O vetor r1 deve ser sempre paralelo ao deslocamento do cursor.
O vetor r1 deve ser sempre perpendicular ao vetor r4.

Análise de Mecanismos de Quatro Barras
2 2 2 23 1 2 4 1 4 1 4 1 4
1 2 1 2 1 2
2 4 2 4 2 4
2 cos cos sin sin
2 cos cos sin sin
2 cos cos sin sin
r r r r r r
r r
r r
21 1 0r Ar B
4 1 4 1 4 2 1 2 1 2
2 2 22 4 3 2 4 2 4 2 4
2 cos cos sin sin 2 cos cos sin sin
2 cos cos sin sin
A r r
B r r r r r

Análise de Mecanismos de Quatro Barras
1 Linha cheia1 Linha pontilhada
21 1 0r Ar B
2
14
21
A A Br

Análise de Mecanismos de Quatro Barras
1 1 1 4 4 2 23
1 1 4 4 2 2
sin sin sintancos cos cosr r rr r r
Se ocorrer uma solução para r1 complexa o mecanismo assume uma das seguintes formas:
2 2 2 2
2 3 2 2 2 3 3 3
cos sin
cos sin cos sinQ
p
r
r r
r r i j
r r r i j i j

Análise de Mecanismos de Quatro Barras
2
2
2
12
2 0
2 4 42
2 tan
C A t Bt A C
B B C A C At
C A
B B C A C At
C At
Quando se conhece r1 :
2 2
1 2 1 2 4 4
1 2 1 2 4 4
2 2 2 21 2 4 3 1 4 1 4 1 4
cos sin 02 cos 2 cos2 sin 2 sin
2 cos cos sin sin
A B CA r r r rB r r r r
C r r r r r r
1 Linha cheia1 Linha pontilhada

Análise de Mecanismos de Quatro Barras
Se t for um número complexo o mecanismo não monta

Análise de Mecanismos de Quatro Barras
2 3 1 4p r r r r r
1 1
1
cos sin sinsin cos cos
Barra Acionada Barra Acionadora
J J M M M
J J J M M M
r r rr r
JM
Quando uma das barras é responsável pelo acionamento
2 2 3 3 1 12
2 2 3 3 1 13
sin sin coscos cos sinr r rr r r
Quando o cursor é responsável pelo acionamento

Análise de Mecanismos de Quatro Barras
2 21 1
2 21
cos sin sin cos cossin cos cos sin sin
Barra Acionada Barra Acionadora
J J M M M M M M J J J
J J J M M M M M M J J J
r r r r rr r r r
JM
Quando uma das barras é responsável pelo acionamento
2 3 1 4p r r r r r

Análise de Mecanismos de Quatro Barras
2 22 2 3 3 2 2 2 2 3 3 3 1 1
2 22 2 3 3 3 2 2 2 3 3 3 1 1
sin sin cos cos coscos cos sin sin sinr r r r rr r r r r
Quando o cursor é responsável pelo acionamento
2 3 1 4p r r r r r

Sistemas ArticuladosMecanismos de 4 Barras (quadrilátero articulado)

Algumas características do mecanismo
Bastante simples e com grande utilidade Constituição• Peça 1: Suporte => Geralmente estacionário.
• Peça 2: Manivela: - Geralmente é a peça acionadora => Pode girar ou oscilar; - Se ela gira => Transforma movimento de rotação em oscilação; - Se ela oscila => Multiplica o movimento de oscilação.
• Peça 3: Biela => Transmite movimento.
• Peça 4: Geralmente é a peça acionada => Gira ou oscila.
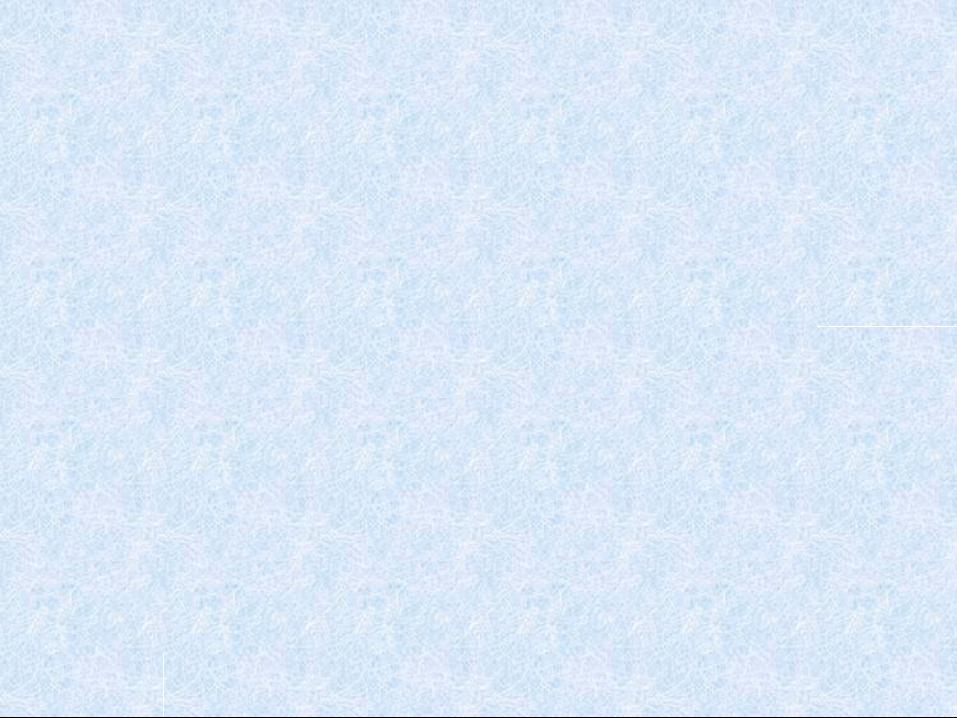
Considerações a respeito do travamento do mecanismo

Considerações a respeito do travamento do mecanismo• Se a peça 2 gira completamente => Não ocorre travamento;• Se a peça 2 oscila: - Existe a possibilidade de travamento nas posições extremas; - Necessidade de estudo do comprimento das peças => Evitar os
pontos mortos;• Ponto Morto => Ocorre quando a linha de ação da força coincide
com a direção da peça acionada;

• Considere que a peça 2 oscila e seja a acionadora;• Consequências: - Ocorrerão 2 pontos mortos nos extremos do movimento; - Uso de inércia para prevenir o travamento do mecanismo =>
Volantes; -Ex: Pedal de máquinas de costura.

Lei dos Cossenos

Ângulo de transmissão• Definido como ângulo entre a peça de ligação e a peça
acionada=>γ

De volta ao nosso caso:
mas
• Igualando (1) e (2) e isolando cos(γ)

Recomendações práticas com relação ao ângulo de transmissão:
• Máximo=140º
• Mínimo =40º
• Importante para a transmissão de forças grandes: - Atrito elevado nas articulações; - Previne o travamento pela tendência ao alinhamento.

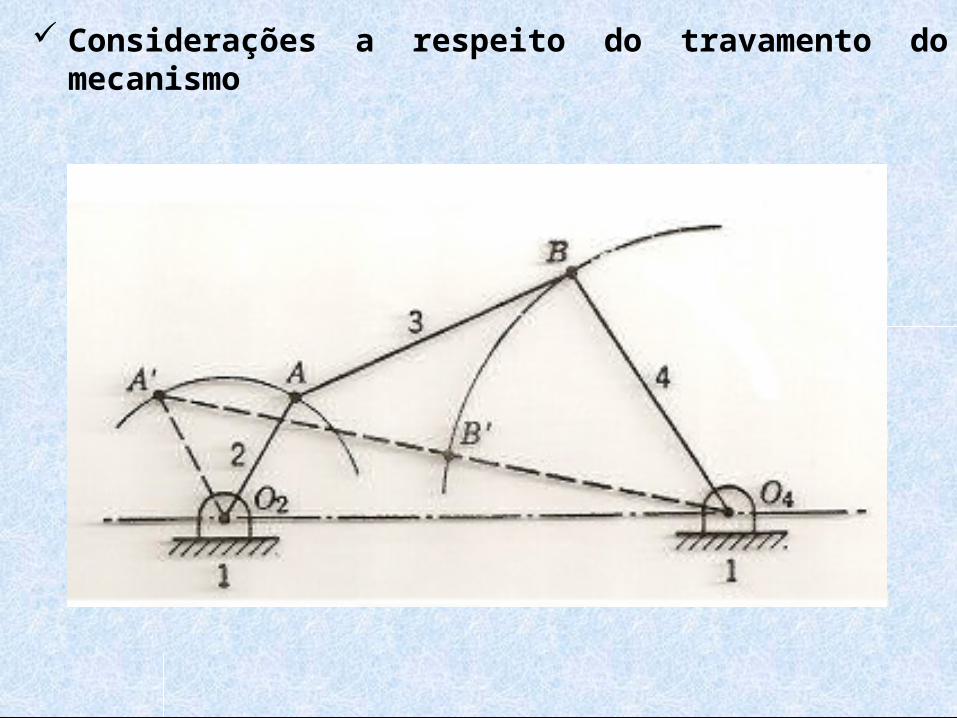
Variantes do mecanismo de 4 barras• Mecanismo cruzado=> Peças 2 e 4 giram em sentido contrário
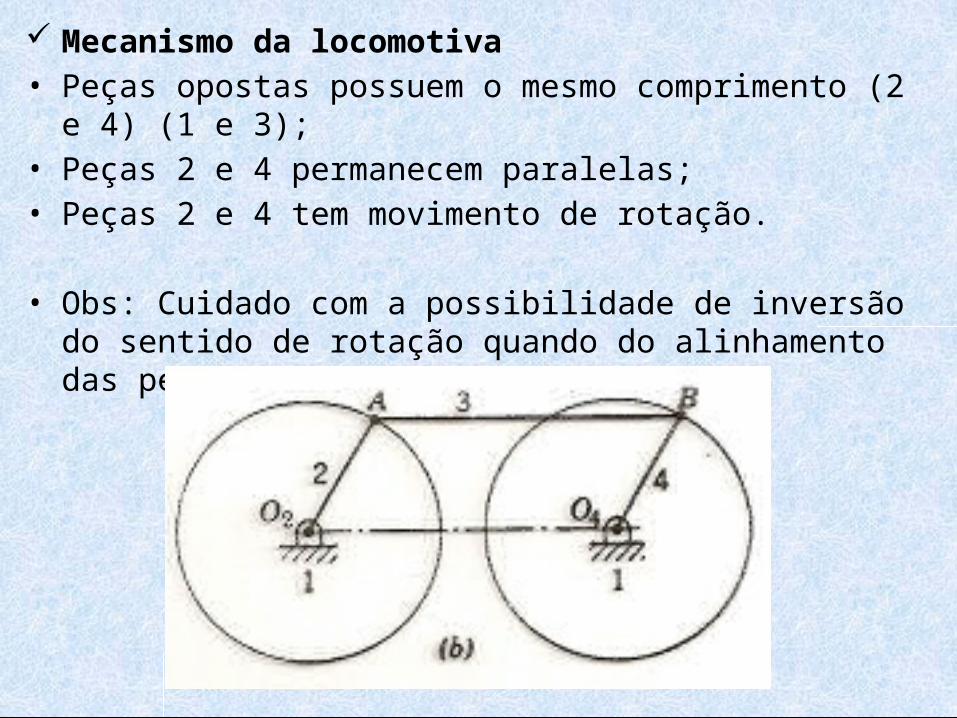
Mecanismo da locomotiva• Peças opostas possuem o mesmo comprimento (2 e 4) (1 e 3);• Peças 2 e 4 permanecem paralelas; • Peças 2 e 4 tem movimento de rotação.
• Obs: Cuidado com a possibilidade de inversão do sentido de rotação quando do alinhamento das peças => Uso da inércia.
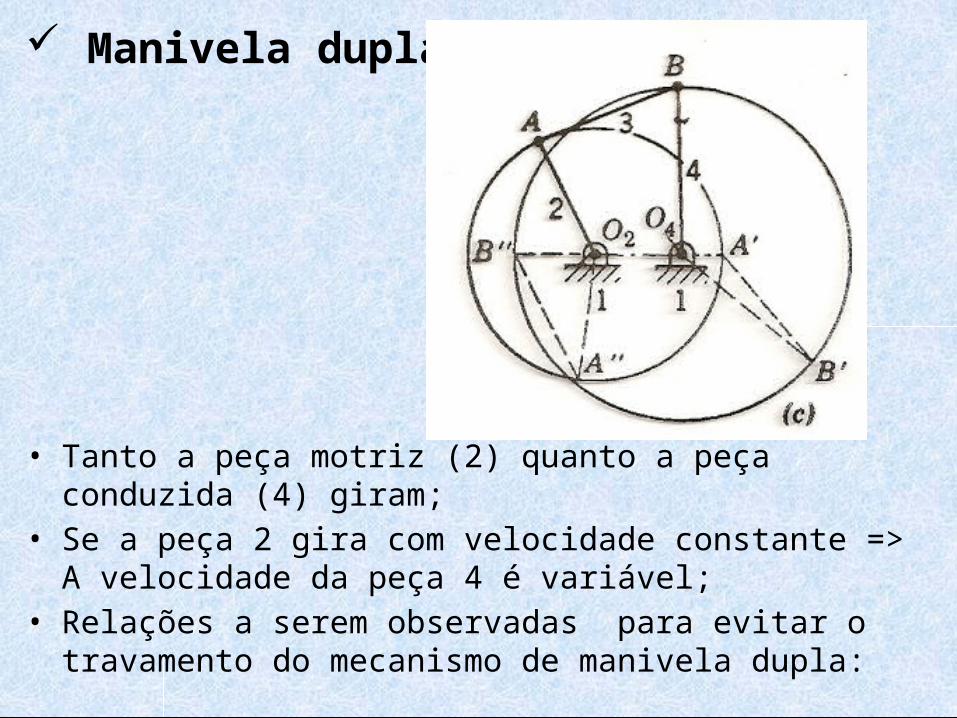
Manivela dupla
• Tanto a peça motriz (2) quanto a peça conduzida (4) giram;• Se a peça 2 gira com velocidade constante => A velocidade da peça
4 é variável;• Relações a serem observadas para evitar o travamento do
mecanismo de manivela dupla:


Bloco deslizante => Alternativa construtiva para o balancim

Classificação dos mecanismos de 4 barras• Manivela – balancim => A peça 2 gira e a peça 4 oscila• Manivela dupla=> As peças 2 e 4 giram• Balancim duplo => As peças 2 e 4 oscilam
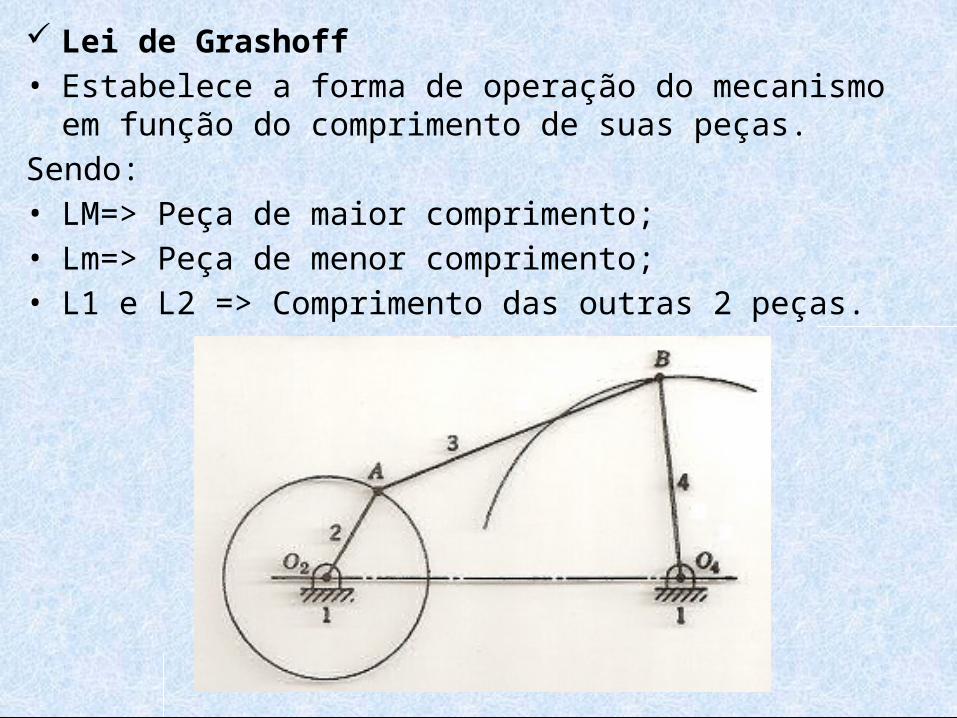
Lei de Grashoff• Estabelece a forma de operação do mecanismo em função do
comprimento de suas peças.Sendo:• LM=> Peça de maior comprimento;• Lm=> Peça de menor comprimento;• L1 e L2 => Comprimento das outras 2 peças.

Caso 1=> LM + Lm ≤ L1 + L2
• Se: Lm= Manivela; Peça fixa = Peça adjacente à manivela; Classificação => Manivela balancim (2 mecanismos diferentes). • Se: Lm= Peça fixa; Classificação => Manivela dupla.
• Se: Peça oposta à menor for a fixa; Classificação => Balancim duplo.

Caso 2=> LM + Lm > L1 +L2• Será sempre balancim duplo.
Inversões do mecanismo cursor-manivela• Fixação da manivela: -Motores antigos de avião; - Alta inércia rotativa; - Efeito giroscópico.

Fixação da biela => Aplicação em algumas plainas limadoras
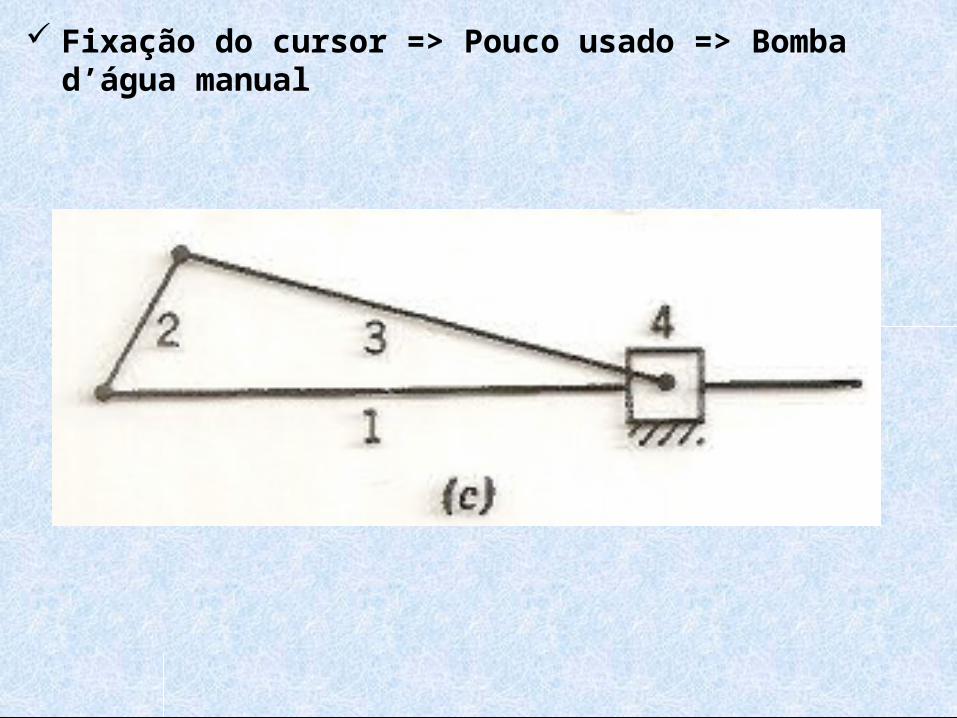
Fixação do cursor => Pouco usado => Bomba d’água manual
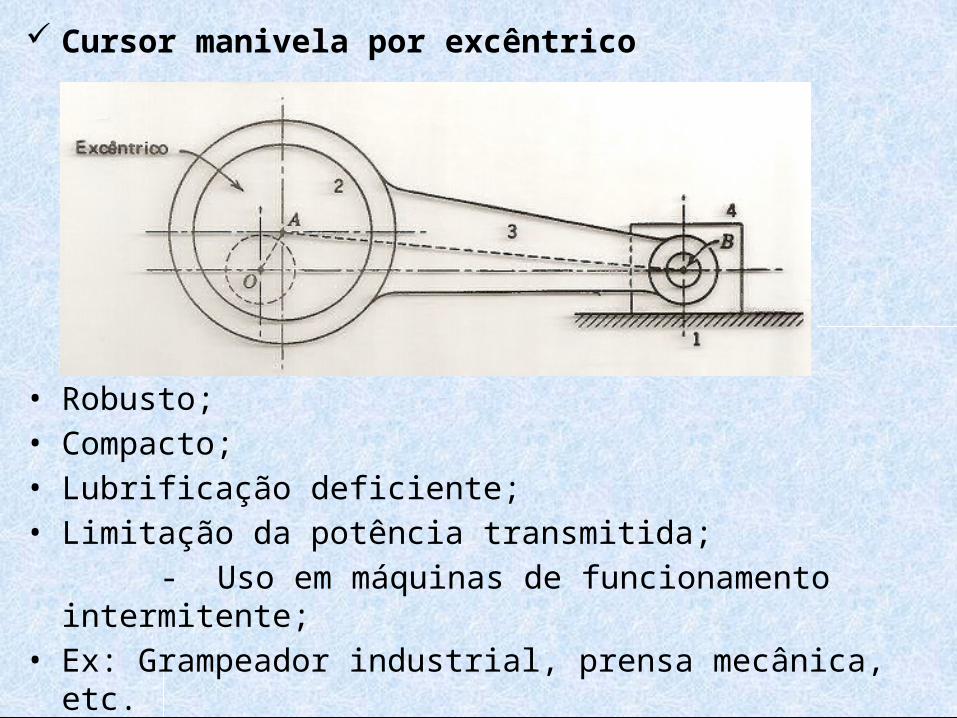
Cursor manivela por excêntrico
• Robusto;• Compacto;• Lubrificação deficiente;• Limitação da potência transmitida; - Uso em máquinas de funcionamento intermitente;• Ex: Grampeador industrial, prensa mecânica, etc.

• Obs: - Uso do volante de inércia; - Atua como armazenador de energia; - Permite a instalação de motores com menor potência nominal.

2.2- Mecanismo Cursor-Manivela Generalidades• Muito utilizado: - Motor de combustão interna; - Compressor de ar.• Peças
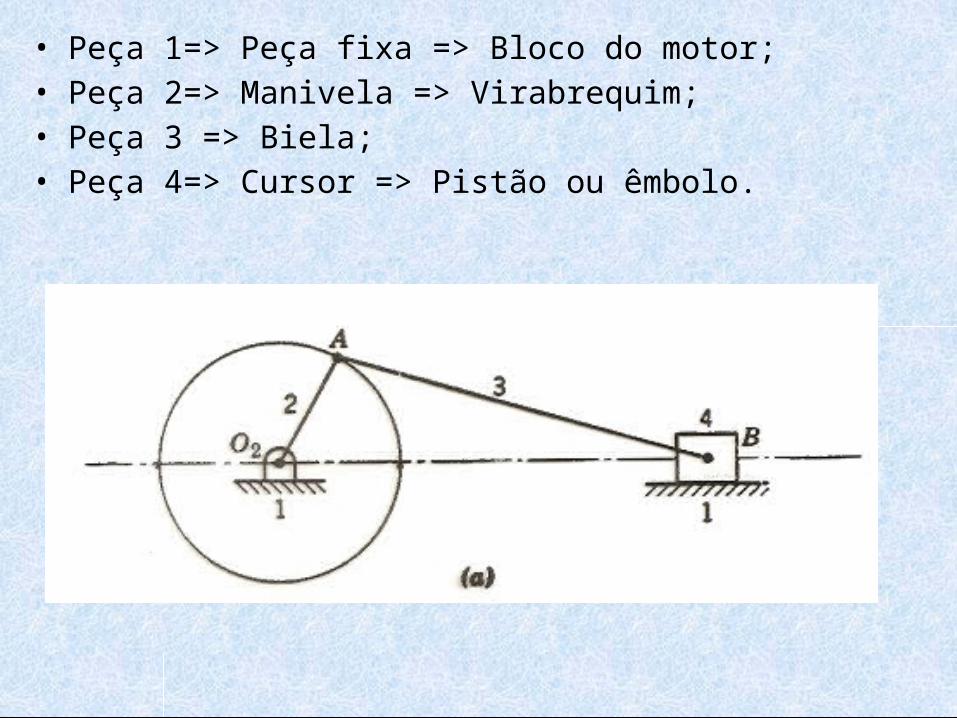
• Peça 1=> Peça fixa => Bloco do motor;• Peça 2=> Manivela => Virabrequim;• Peça 3 => Biela;• Peça 4=> Cursor => Pistão ou êmbolo.

• Equacionamento => Deslocamento, velocidade e aceleração do êmbolo

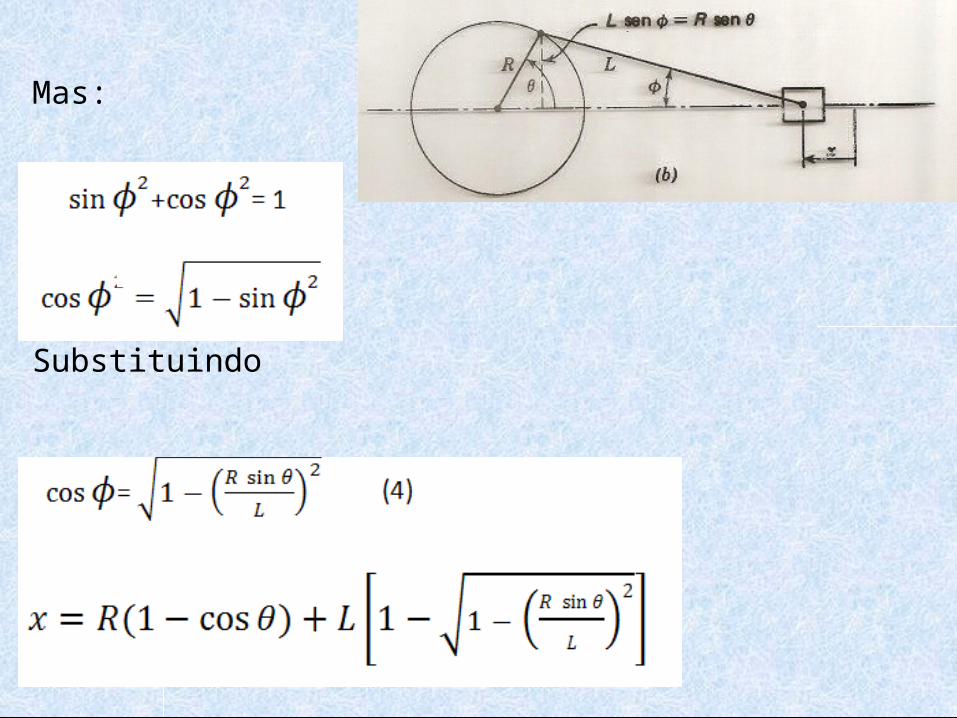
Mas:
Substituindo

Desenvolvendo o termo:
Por meio de uma série binominal :
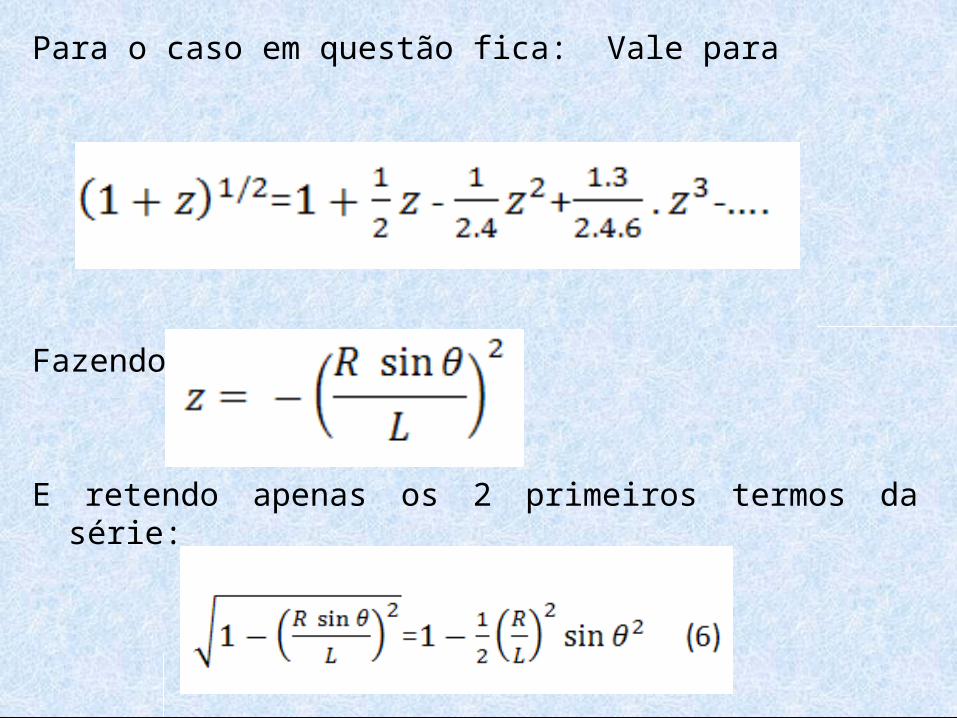
Para o caso em questão fica: Vale para
Fazendo:
E retendo apenas os 2 primeiros termos da série:

Substituindo (6) em (5), tomando cuidado com o sinal:
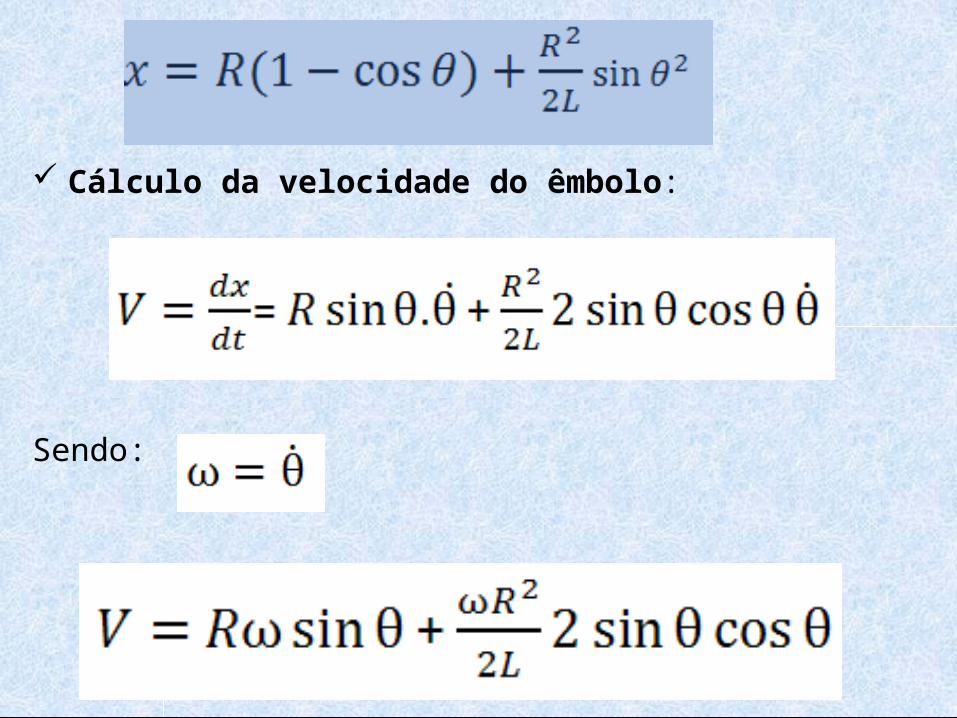
Cálculo da velocidade do êmbolo:
Sendo:

Mas da relação trigonométrica, sabemos que:
Então:

Cálculo da aceleração do êmbolo:

Funcionamento
• Motor - A pressão dos gases atua na peça 4;
- A força é transmitida à manivela 2 pela biela 3;
- A abertura e fechamento sincronizado das válvulas controla o funcionamento;
- Haverá 2 pontos mortos nas posições extremas do êmbolo => Peça acionadora;
- Necessidade de colocação de um volante de inércia.
Compressor
• A manivela 2 é acionada por um motor externo;
• A força é transmitida ao êmbolo pela biela 3;
• A abertura e fechamento sincronizado das válvulas controla o funcionamento.

2.3- Garfo Escocês
Generalidades • Gera movimento harmônico simples => Analogia com o círculo
trigonométrico;• Utilização: - Excitadores mecânicos; - Mecanismo de cálculo; - Equacionamento do movimento harmônico.

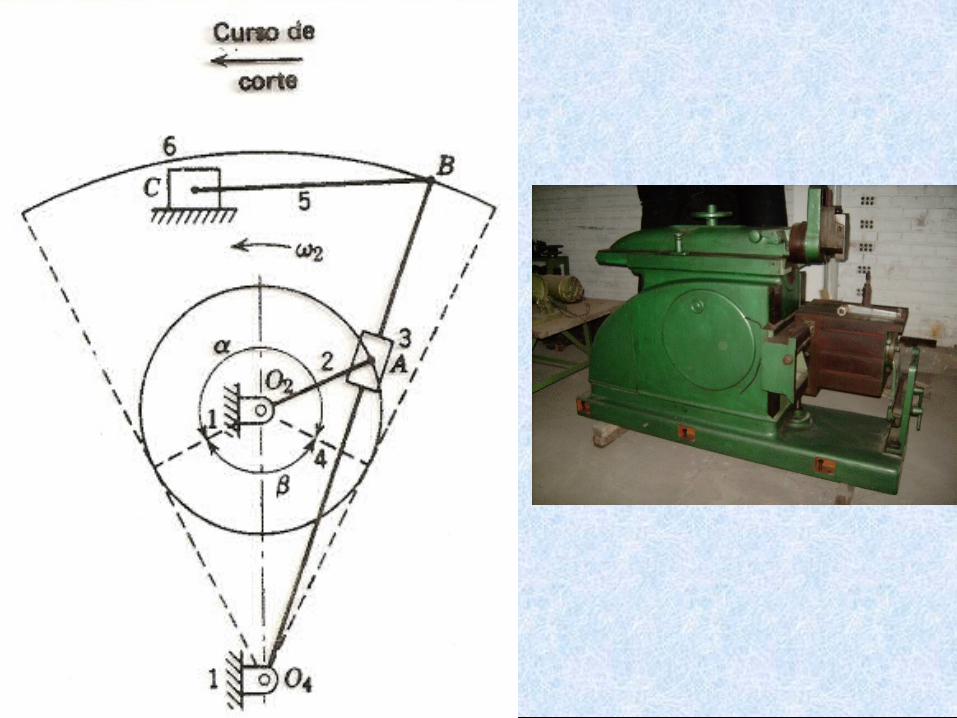
2.4- Mecanismo de Retorno Rápido Generalidades• Usado em máquinas operatrizes;• Lógica de funcionamento: - Curso de trabalho lento; - Curso de retorno rápido => Ausência de esforço => Menor
perda de tempo;• Aplicável com velocidade de acionamento constante => Ex:
Acionamento por motor elétrico;• Razão de tempos => R= α/β• α => Ângulo descrito pela manivela durante o curso útil;• β => Ângulo descrito pela manivela durante o curso de retorno.• Obs: R deve ser maior que 1 => O maior possível.

Tipos de mecanismo de retorno rápido => Baseados em 4 barras e cursor manivela
Mecanismo da plaina limadora - Variação do raio => Variação do curso; - Se O2O4 diminui => R (razão de tempos) aumenta; - Baseado em uma inversão do mecanismo cursor manivela.

Mecanismo de manivela dupla e cursor
• Derivado do mecanismo de 4 barras;• Peça 2 gira com velocidade constante;• Peça 4 gira com velocidade não uniforme;• Aproveita a não uniformidade do movimento; - Parte rápida => Executa trabalho; - Parte lenta=> Faz o retorno.

Mecanismo de Whitworth
• Baseado em uma inversão do mecanismo cursor manivela;• Peças 2 e 4 fazem voltas completas.


Manivela deslocada • Efeito de retorno rápido muito pequeno;• Uso em aplicações com limitação de espaço.

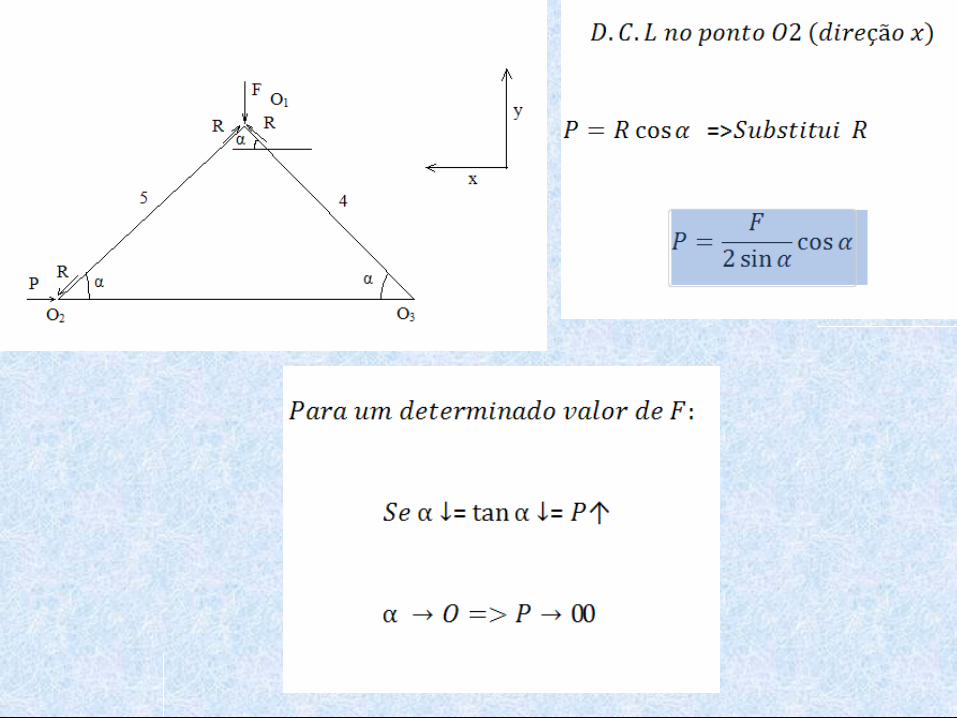
2.5- Alavanca Articulada

Objetivo do mecanismo => Vencer uma grande resistência com uma pequena força motriz;
• Aplicações: - Britadores; - Fixação de peças => Rebitadeiras;

Obs: Peças 4 e 5 tem o mesmo comprimento

2.6-Junta de Oldham • Composta de 3 peças ranhuradas deslizantes;• Usada para fazer o acoplamento de eixos paralelos desalinhados.

2.7- Mecanismos Traçadores de Retas Um ponto de suas peças se move em linha reta => Resultado
aproximado ou exato; Mecanismo de Watt• Resultado aproximado;• AP e BP são inversamente proporcionais a O2A e O4B.



Mecanismo de Peaucellier => Resultado exato• Baseado em semelhança de triângulos :• O2O4 = O2A• (3=4) e (5 = 6 =7 = 8)• Exemplos de uso: - Acionamento de disjuntores; - Indicadores lineares.
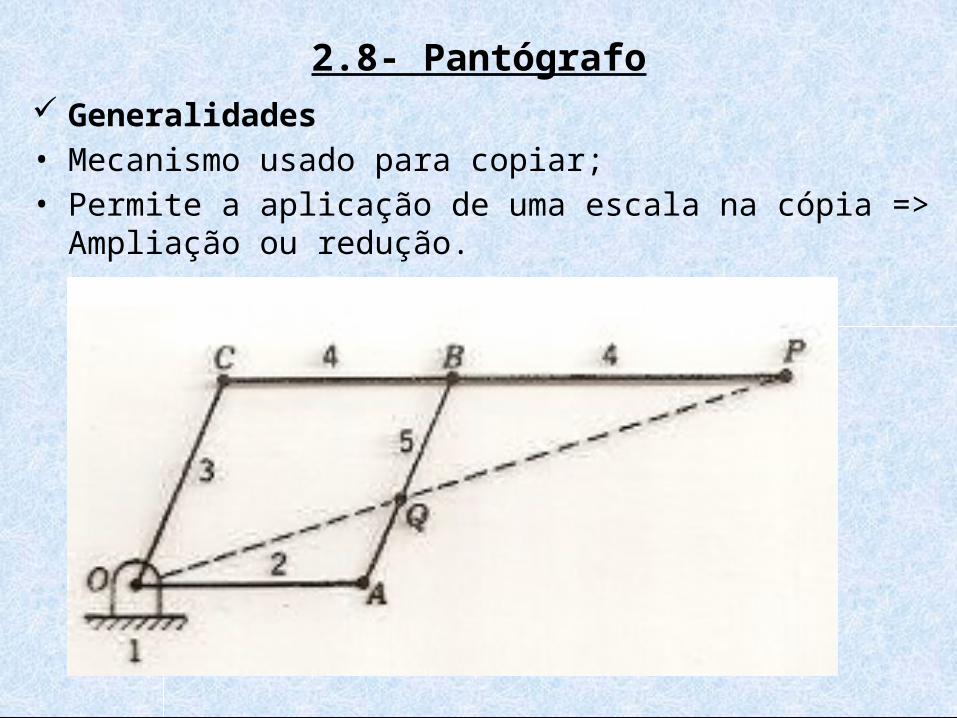
2.8- Pantógrafo Generalidades• Mecanismo usado para copiar; • Permite a aplicação de uma escala na cópia => Ampliação ou
redução.

Constituição e funcionamento
• Peças 2, 3, 4 e 5 são iguais => Paralelogramo;
• P está situado numa extensão da peça 4;
• Q está na peça 5 na interseção com a linha OP;
• Semelhança de triângulos: - Ângulo em B = Ângulo em C; - A proporção PC/PB é mantida.
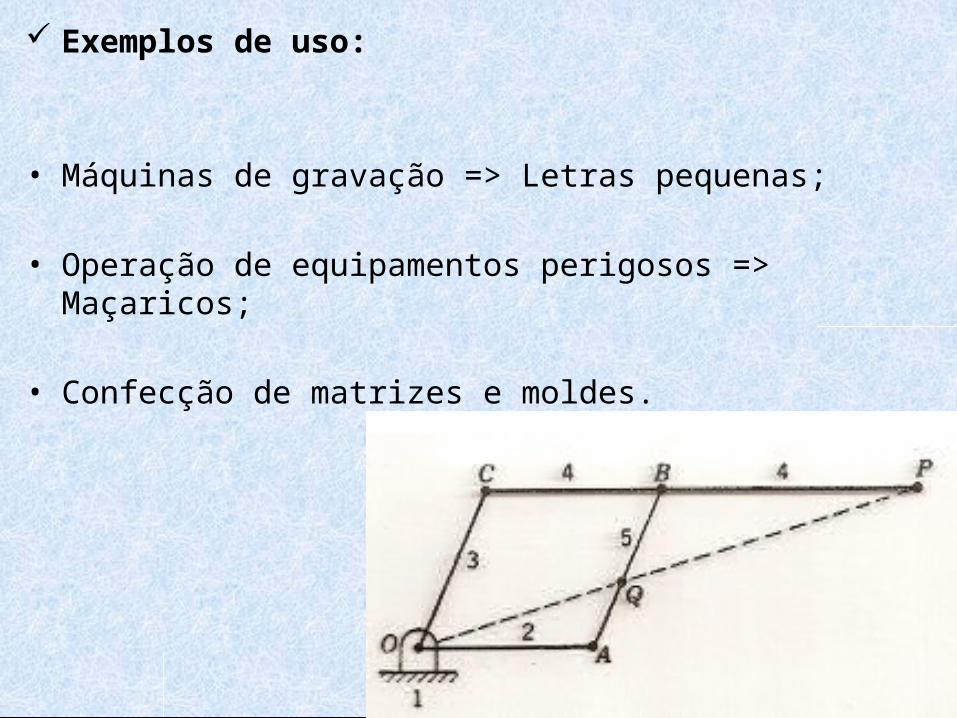
Exemplos de uso:
• Máquinas de gravação => Letras pequenas;
• Operação de equipamentos perigosos => Maçaricos;
• Confecção de matrizes e moldes.

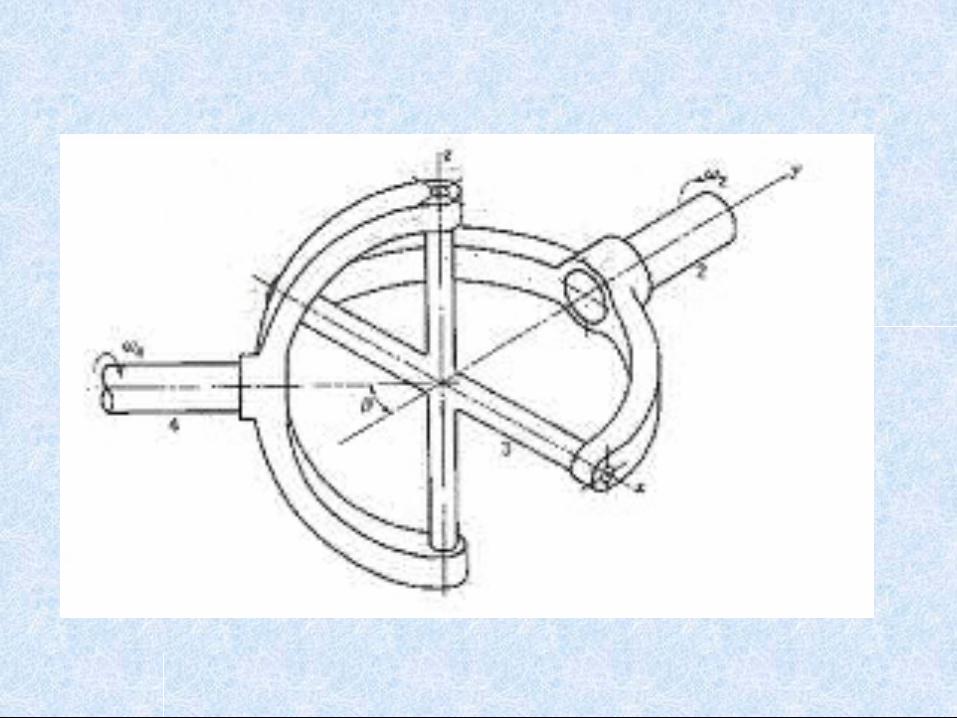
2.9-Junta Universal ou Junta de Hook (cruzeta) Usada para interligar eixos que se cruzam• Exemplos: - Semi –eixos de automóveis, eixo cardan;
- Barra de direção de automóveis;- Acionamento de máquinas;- Eixos articulados de ferramentas.
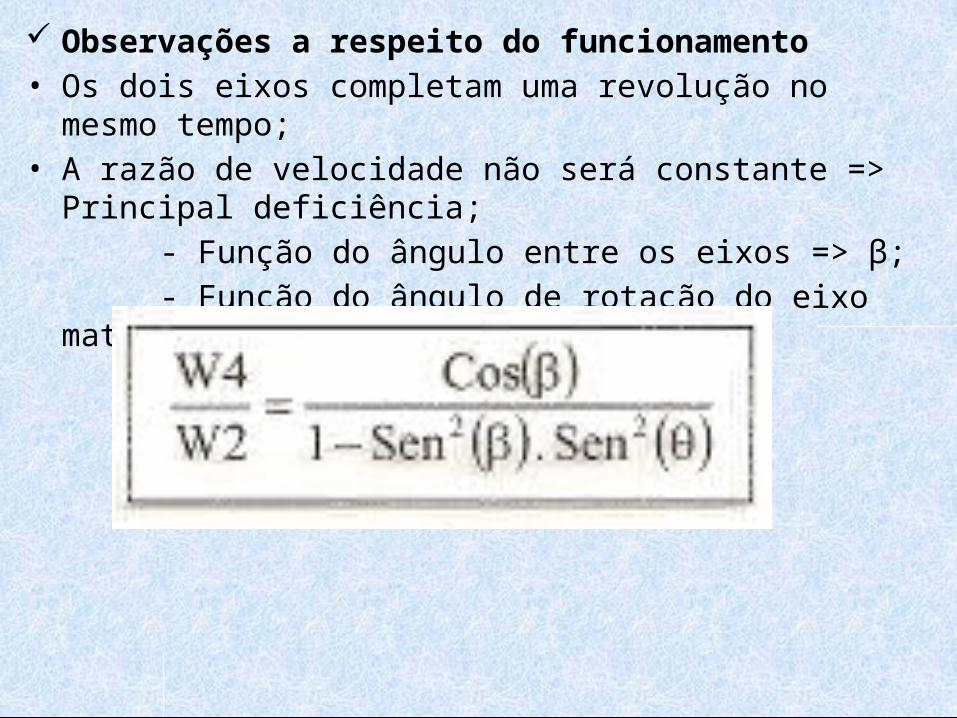
Observações a respeito do funcionamento• Os dois eixos completam uma revolução no mesmo tempo;• A razão de velocidade não será constante => Principal deficiência; - Função do ângulo entre os eixos => β; - Função do ângulo de rotação do eixo matriz.

Representação gráfica da equação

Inconveniente => Acionamento a velocidade constante => Eixo acionado com velocidade variável.
• Exemplo: Transmissão de um veículo
- Eixo acionado com velocidade variável;
- Inércia do veículo resiste à variação da velocidade;
- Sobrecarga dos componentes mecânicos => Deslizamento dos pneus;
- Vida útil reduzida => Quebra mais frequentes.
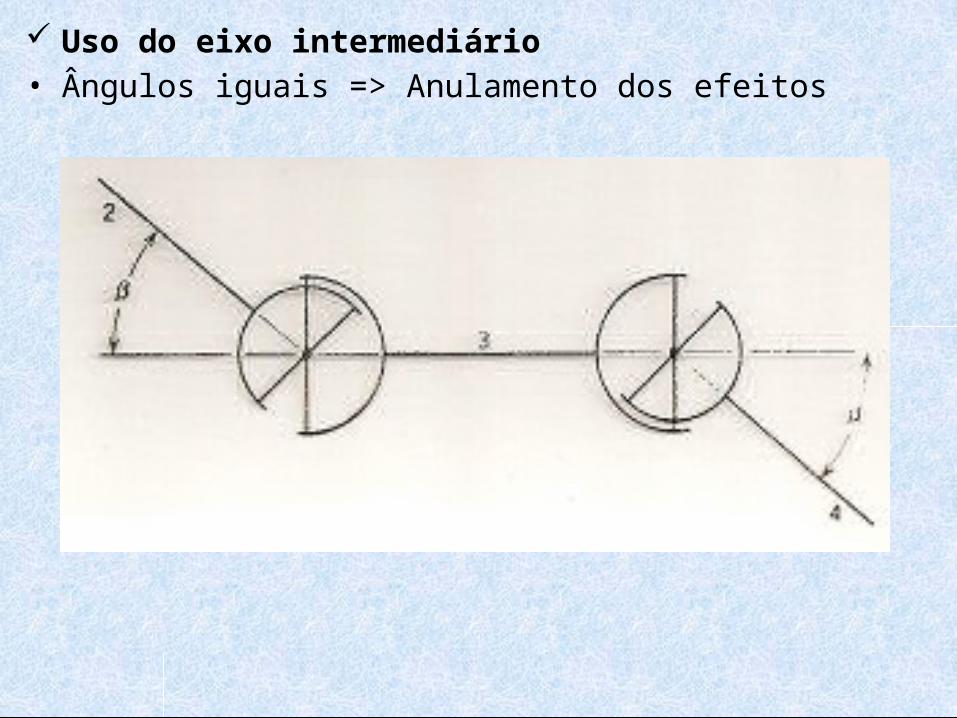
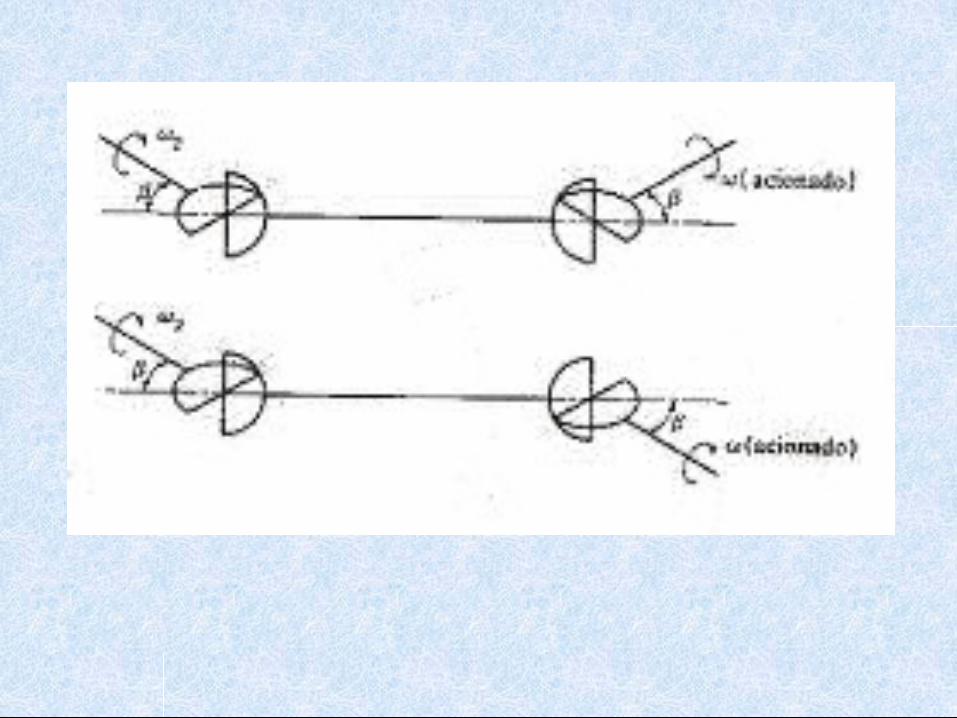
Uso do eixo intermediário• Ângulos iguais => Anulamento dos efeitos
• Exemplo:
- Eixo cardan de veículos com tração traseira;
- Semi-eixos de veículos com tração traseira;
• Inadequação ao uso em veículos com tração dianteira.

2.10-Juntas Homocinéticas
Motivação=> Veículos com tração dianteira => Melhor utilização do espaço.
Objetivo => Transmitir movimento de rotação com razão de velocidade constante.
Principais tipos:


Rzepa
- Mais utilizada;- Semelhante a um rolamento autocompensador travado.

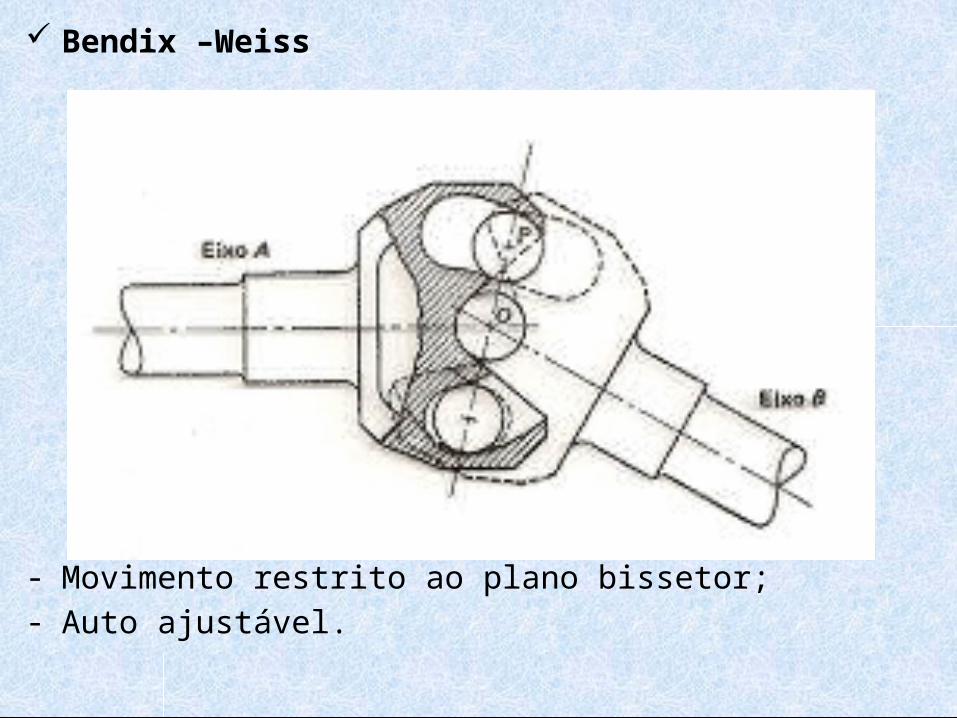
Bendix –Weiss
- Movimento restrito ao plano bissetor;- Auto ajustável.

Tracta

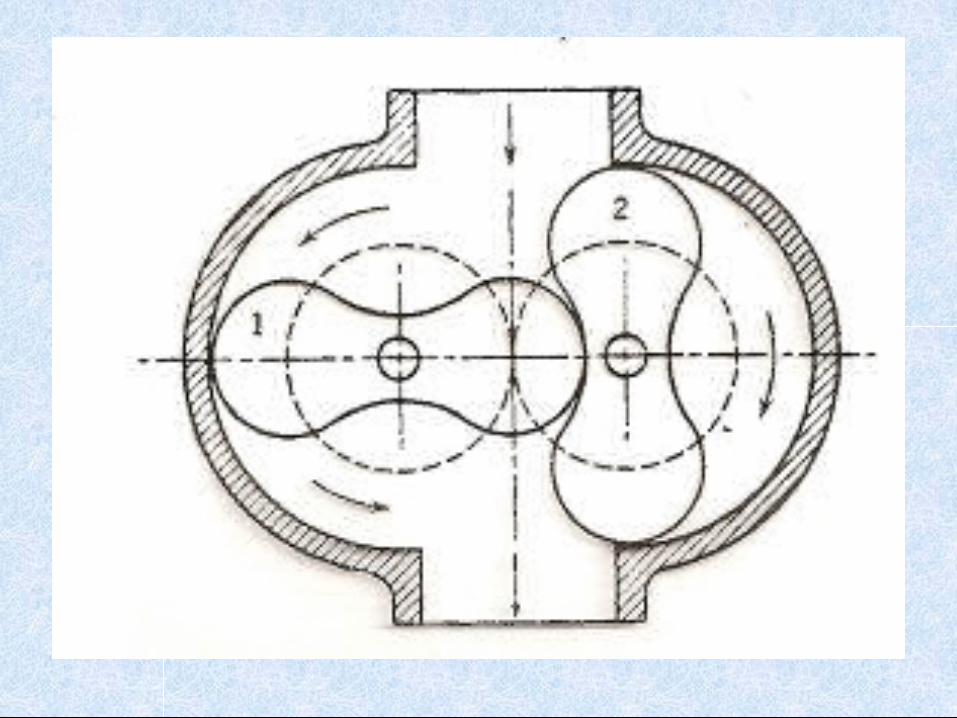
2.11- Rotores de Câmara Mecanismos diversos caracterizados por:
• Uma câmara que serve de fronteira para o movimento;• Um ou mais rotores girando dentro da câmara.
Exemplos
• Soprador Roots; - Rotores cicloidais; - Grande volume deslocado a uma baixa pressão.
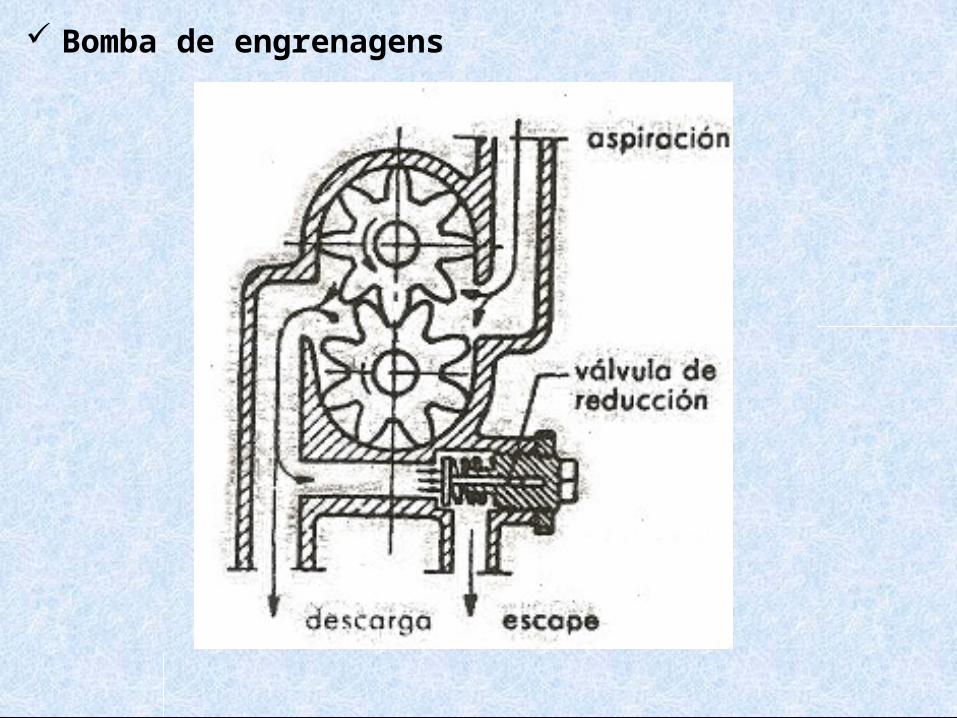
Bomba de engrenagens

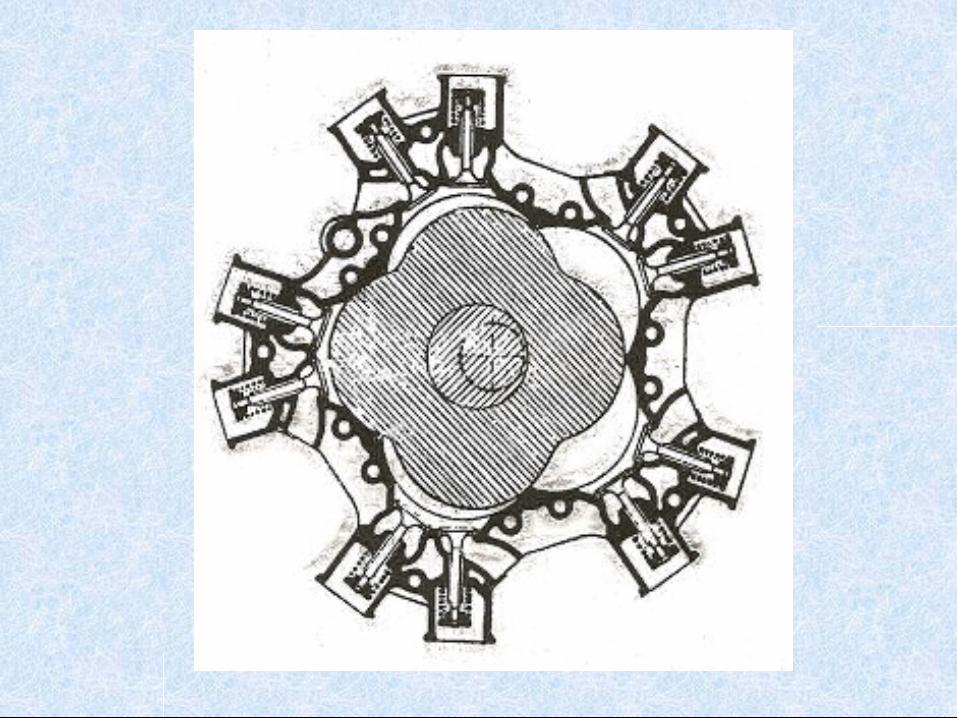
Rotor de palhetas


Motor Wankel

Formas construtivas alternativas


2.12- Mecanismo de movimento intermitente Finalidade básica => Transformar um movimento contínuo em
intermitente. Roda de Genebra - Gera movimento intermitente => Usada em dispositivo de
posicionamento; - Diminui o choque de acoplamento => Geometria.
Constituição• Peça acionadora =>1
• Peça conduzida => 2
• Pino acionador => P


• Sulco tangente à trajetória do ponto P no acoplamento e na separação;
• Ângulo O1PO2 será sempre reto;
• Ângulo descrito em cada operação = 2β ;
• Necessidade de um dispositivo de retenção => (Disco convexo) x (Roda côncava).

Mecanismo de catraca• Gera movimento circular intermitente a partir de uma oscilação ou
movimento alternativo.• Aplicação: - Contadores - Esticadores - Guinchos

Mecanismo de engrenamento intermitente• Aplicações onde o choque no acoplamento for admissível;• Peça acionadora (1 dente) => Peça acionada (vários vãos de
dentes);• Necessidade de um dispositivo de retenção => Formato côncavo/
convexo.