FUNÇÕES DE TRANSFERÊNCIA - fenix. · PDF file2 FUNÇÕES...
25
CAPÍTULO 1 Moisés Piedade, IST, Março de 2002 1 1. FUNÇÕES DE TRANSFERÊNCIA INTRODUÇÃO Os filtros contínuos processam sinais definidos em qualquer instante de tempo e que têm qualquer amplitude possível. Os filtros contínuos podem ser realizados com diferentes tecnologias e dispositivos. Pode, por exemplo, filtrar-se um sinal à custa de vários tipos de ressonadores: mecânicos, piezoeléctricos, magnetoestritivos, etc., ou à custa de circuitos RLC, de linhas de transmissão, de circuitos activos RC, etc. Em qualquer destas possíveis realizações é necessário, previamente, determinar uma função de transferência para o filtro, que corresponda às exigências de pretendidas para o sistema. 1.1. FUNÇÃO DE TRANSFERÊNCIA A função de transferência directa de um sistema linear e invariante no tempo, define-se como sendo o cociente entre as transformadas de Laplace, Y(s), do sinal de saída, y(t) e a transformada, X(s), do sinal de entrada, x(t), ver Fig. 1.1. No estudo dos filtros, por vezes, é mais conveniente usar o conceito de
Transcript of FUNÇÕES DE TRANSFERÊNCIA - fenix. · PDF file2 FUNÇÕES...
CAPÍTULO 1
Moisés Piedade, IST, Março de 2002 1
1.
FUNÇÕES DE TRANSFERÊNCIA
INTRODUÇÃO
Os filtros contínuos processam sinais definidos em qualquer instante de tempo e que têm qualquer
amplitude possível. Os filtros contínuos podem ser realizados com diferentes tecnologias e dispositivos.
Pode, por exemplo, filtrar-se um sinal à custa de vários tipos de ressonadores: mecânicos, piezoeléctricos,
magnetoestritivos, etc., ou à custa de circuitos RLC, de linhas de transmissão, de circuitos activos RC,
etc. Em qualquer destas possíveis realizações é necessário, previamente, determinar uma função de
transferência para o filtro, que corresponda às exigências de pretendidas para o sistema.
1.1. FUNÇÃO DE TRANSFERÊNCIA
A função de transferência directa de um sistema linear e invariante no tempo, define-se como sendo
o cociente entre as transformadas de Laplace, Y(s), do sinal de saída, y(t) e a transformada, X(s), do sinal
de entrada, x(t), ver Fig. 1.1. No estudo dos filtros, por vezes, é mais conveniente usar o conceito de

2 FUNÇÕES BIQUADRÁTICAS
Moisés Piedade, IST, Março de 2002
função de transferência inversa1, H(s), definida como o cociente entre as transformadas de Laplace
das varáveis de entrada e de saída do filtro. Tem-se, assim:
)(
)()(
sXsY
sT = e 1)()(
)()( −== sT
sYsX
sH ,
( 1.1)
Quando o sistema é excitado por um sinal sinusoidal, que corresponde a analisar a função de
transferência em s = jω, obtém-se, para a resposta em frequência do sistema, uma função complexa da
frequência, com parte real, R[T(jω)] e parte imaginária, I[T(jω)] que pode ser separada no módulo |T(jω)|
= eα(ω ), e na fase φ(ω),
)()()(.)())(())(()( ωφωαωφωωωω jj eejTjTjjTjT +==ℑ+ℜ= ,
( 1.2)
em que o módulo |T(jω)|, também se pode representar pela exponencial da atenuação α(ω), por
)(e)j(T ωα=ω , vindo
)(j)(e)j(T ωφ+ωα=ω .
A resposta do filtro ao regime forçado sinusoidal costuma ser representada pelo conhecimento das
seguintes funções da frequência:
ωωφ
ωτ
ωφ
ωω
ωαωω
ωω
dd
GA
jTG
jTjT
)()(
arctan)(
)()(
)(.686,8)(log.20)(
))(())((
10
−=
=
−=
==
ℜℑ .
( 1.3)
1 - A razão é simples. O projecto de filtros passa quase sempre por obter um filtro passa-baixo de referência, para a partir deste, se obterem outros tipos de filtros. Os filtros passa-baixo mais comuns só têm pólos, ou seja, a função de transferência tem um numerador constante e, por isso, é mais cómodo trabalhar com a função inversa pois esta só tem numerador.
x(t) y(t)
X(s) Y(s)
T(s) = Y(s)/X(s)
Fig. 1.1- Entrada e saída num sistema linear e invariante no tempo.

FUNÇÃO DE TRANSFERÊNCIA 3
Moisés Piedade, IST, Março de 2002
em que G (ω) é o ganho, A (ω) é a atenuação, e τ (ω) é o atraso de grupo do sistema. Para um
sistema real, o módulo |T(jω)| é uma função par da frequência e φ(ω) é uma função ímpar.
Exercício 1.1- Cálculo da resposta de um sistema
Considere um sistema com H(s) = s. Calcule o ganho, a atenuação, a fase e o atraso de grupo para a frequência ω = 0 e ω
= 1000 rads-1.
Resolução:
O sistema é um integrador. T(jω) = 1/(jω) = (1/ω).e -jπ/2 para ω > 0; e T(jω) = 1/(jω) = (1/ω).e +jπ/2 para ω < 0, pois a fase
é impar de ω, vindo φ(ω) = (1- u(ω)).π/2, em que u(ω) é a função degrau. τ(ω) = δ(ω).π/2. Para ω = 0: G(0) = ∞ , A(0) = -∞ ,
φ(0-) = π/2 e φ(0+) = -π/2; τ(0) = ∞. Para ω = 1000 rads-1: G(1000) = -60 dB , A(1000) = 60 dB, φ(1000) = -π/2, τ(1000) = 0.
1.1.1. RESPOSTA DE UM SISTEMA IDEAL
Um sistema ideal, quando for excitado na sua entrada, com um sinal x(t), deve originar na sua saída
um sinal y(t) que é igual ao sinal de entrada. Tal sistema não existe, pois teria de ter T(jω) = 1 para todas
as frequências, o que não é fisicamente realizável, dado que todos os sistemas físicos têm uma largura de
banda de frequências finita e, no seu funcionamento, todos introduzem um atraso temporal da resposta
relativamente à entrada. Admitindo, contudo, que o sinal de saída é igual ao de entrada, a menos de um
atraso de tempo, τ, isto é:
τ
τsesXsY
txty−=
−=
).()(
)()(,
a resposta será
τωωφ
τωτωφωω ωττ =−===⇒=⇒= −−
dd
jTejTesT gjs )(
,-)( ;1)()()( .
Assim, o sistema ideal deveria ter atenuação nula para todas as frequências e ter, também, uma
característica de fase linear com a frequência, ou seja, devia ter atraso de grupo constante, igual ao atraso
temporal τ = τg. Todavia, um filtro destina-se a atenuar ou a aumentar a amplitude de certas componentes
espectrais de um sinal, pelo que, na prática, se tolera a deformação dos sinais resultante de não ser |T(jω)|
= 1, ou de não ser τg(ω) = constante. O filtro ideal, numa certa banda de frequências, seria aquele que
nessa banda tivesse |T(jω)| = 1, e τg(ω) = constante. Tal filtro não existe, mas pode pensar-se em vários
modelos teóricos que têm um comportamento ideal numa certa banda de frequências, como os que se
ilustram na Fig. 1.2. Por exemplo, o filtro passa-baixo ideal, Fig. 1.2a), não introduz atenuação nos sinais
numa certa banda de frequências designada por banda de passagem que vai desde ω = 0 até a uma
certa frequência máxima, designada por frequência de corte , ωC, a partir da qual a atenuação é infinita e
4 FUNÇÕES BIQUADRÁTICAS
Moisés Piedade, IST, Março de 2002
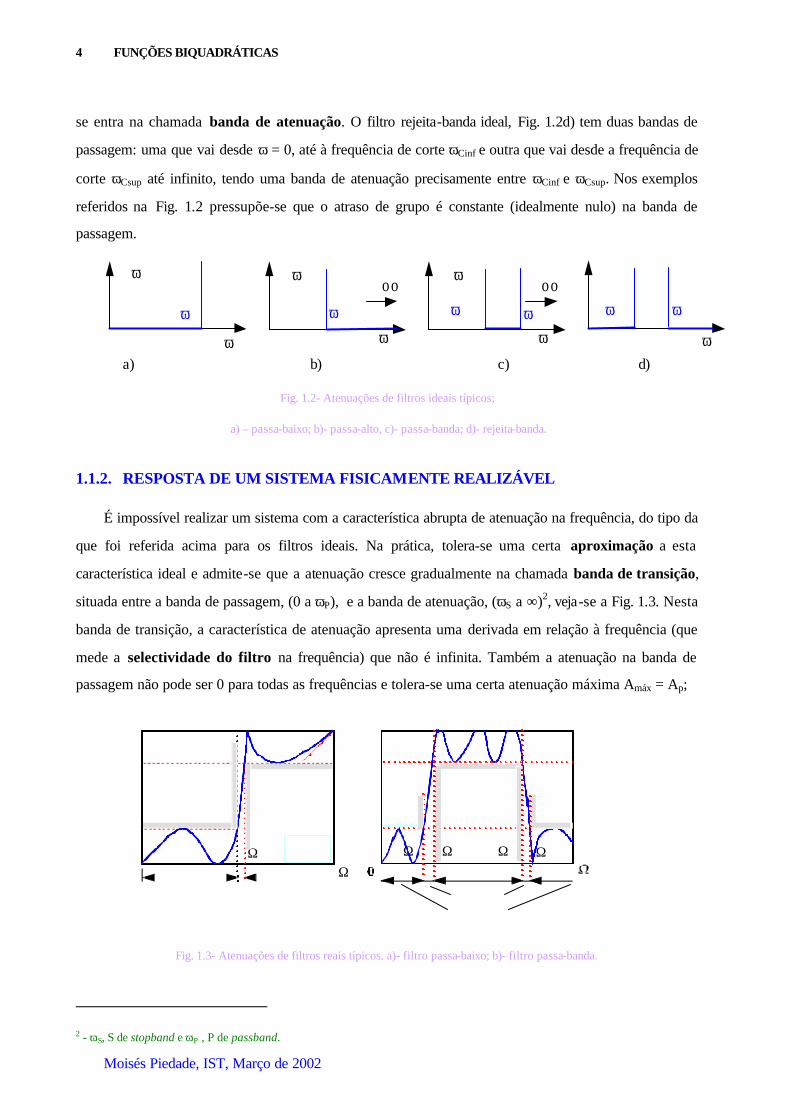
se entra na chamada banda de atenuação. O filtro rejeita-banda ideal, Fig. 1.2d) tem duas bandas de
passagem: uma que vai desde ω = 0, até à frequência de corte ωCinf e outra que vai desde a frequência de
corte ωCsup até infinito, tendo uma banda de atenuação precisamente entre ωCinf e ωCsup. Nos exemplos
referidos na Fig. 1.2 pressupõe-se que o atraso de grupo é constante (idealmente nulo) na banda de
passagem.
ω
ω
ω
ω
ωω
οο ω
ωω
οοω ω ω
ω a) b) c) d)
Fig. 1.2- Atenuações de filtros ideais típicos;
a) – passa-baixo; b)- passa-alto, c)- passa-banda; d)- rejeita-banda.
1.1.2. RESPOSTA DE UM SISTEMA FISICAMENTE REALIZÁVEL
É impossível realizar um sistema com a característica abrupta de atenuação na frequência, do tipo da
que foi referida acima para os filtros ideais. Na prática, tolera-se uma certa aproximação a esta
característica ideal e admite-se que a atenuação cresce gradualmente na chamada banda de transição,
situada entre a banda de passagem, (0 a ωP), e a banda de atenuação, (ωS a ∞)2, veja-se a Fig. 1.3. Nesta
banda de transição, a característica de atenuação apresenta uma derivada em relação à frequência (que
mede a selectividade do filtro na frequência) que não é infinita. Também a atenuação na banda de
passagem não pode ser 0 para todas as frequências e tolera-se uma certa atenuação máxima Amáx = Ap;
ΩΩ Ω Ω ΩΩ
Fig. 1.3- Atenuações de filtros reais típicos. a)- filtro passa-baixo; b)- filtro passa-banda.
2 - ωS, S de stopband e ωP , P de passband.
FUNÇÃO DE TRANSFERÊNCIA 5
Moisés Piedade, IST, Março de 2002
na banda de atenuação também se tolera uma atenuação que não é infinita mas pode impor-se que seja
sempre maior que um certo valor mínimo Amin = AS, veja-se a Fig. 1.3.
1.1.3. EFEITO DOS ERROS DE FASE E DE AMPLITUDE
A deformação de um sinal, provocada por um filtro, manifesta-se tanto na alteração da amplitude como da
relação de fase entre as diferentes componentes do sinal. A importância destes defeitos introduzidos
depende da aplicação que se tem em vista, como veremos de seguida.
O ouvido humano não é sensível à desfasagem das diferentes componentes de um mesmo sinal, pelo
que a degradação da fase e do atraso de grupo não é sentida. Assim, os filtros para sinais de áudio podem
ser projectados sem cuidados especiais com a característica de fase. O sistema visual humano é sensível
ao atraso de grupo3 e também à amplitude, e, por isso, nos filtros para imagem ou vídeo deve-se
especificar as duas características de amplitude e de fase da resposta dos filtros, de modo a serem o mais
parecidas com a característica do filtro ideal. Nos sistemas de telecomunicações utilizam-se sinais digitais
e impulsos para transmitir informação, sinais esses que são processados por circuitos electrónicos que
muitas vezes são sensíveis ao valor instantâneo do sinal, pelo que tanto a característica de resposta de
frequência como a de fase são muito importantes.
-4
-2
0
2
4
0 2 4 6
ωωt
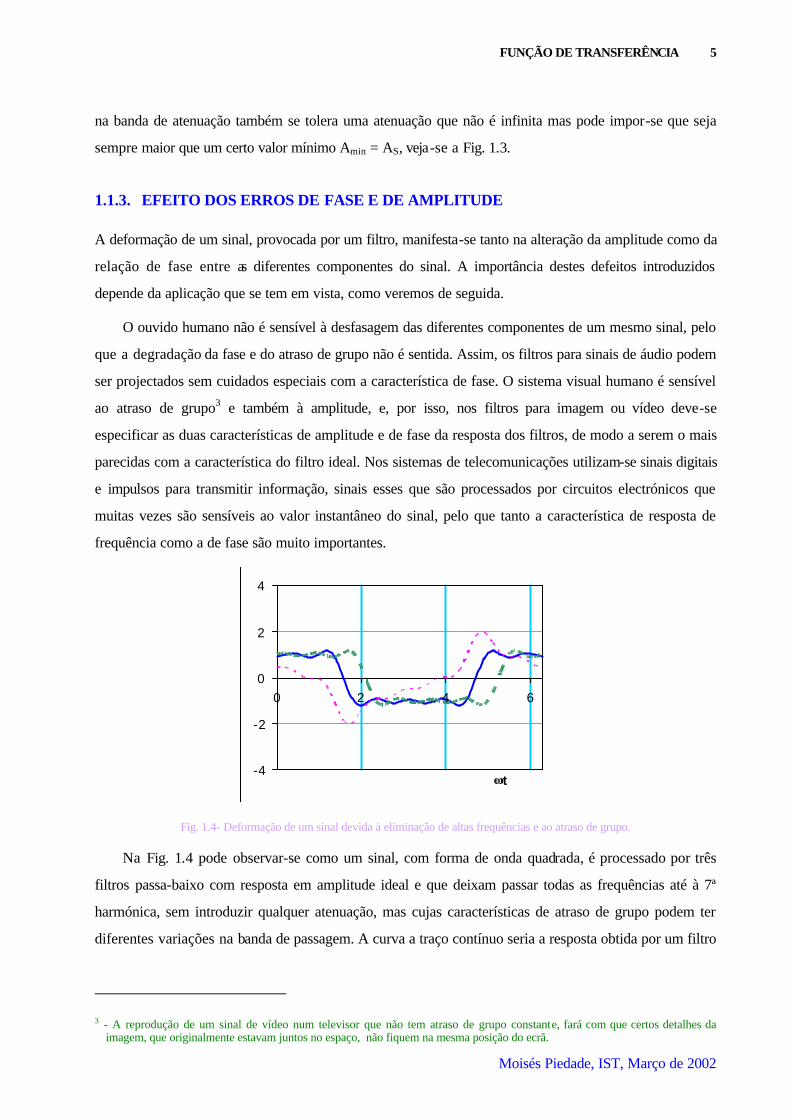
Fig. 1.4- Deformação de um sinal devida à eliminação de altas frequências e ao atraso de grupo.
Na Fig. 1.4 pode observar-se como um sinal, com forma de onda quadrada, é processado por três
filtros passa-baixo com resposta em amplitude ideal e que deixam passar todas as frequências até à 7ª
harmónica, sem introduzir qualquer atenuação, mas cujas características de atraso de grupo podem ter
diferentes variações na banda de passagem. A curva a traço contínuo seria a resposta obtida por um filtro
3 - A reprodução de um sinal de vídeo num televisor que não tem atraso de grupo constante, fará com que certos detalhes da imagem, que originalmente estavam juntos no espaço, não fiquem na mesma posição do ecrã.

6 FUNÇÕES BIQUADRÁTICAS
Moisés Piedade, IST, Março de 2002
passa-baixo ideal sem atraso de grupo4, notando-se apenas a deformação introduzida pela eliminação das
frequências harmónicas superiores à 7ª ordem; a curva a traço interrompido, deslocada para a direita,
corresponde à resposta do mesmo filtro ideal mas que tem um atraso de grupo constante, ou seja com uma
característica de fase linear com a frequência, enquanto que a 3ª curva descontínua representa a
resposta do mesmo filtro ideal com atraso de grupo variável com a frequência (fase não linear com a
frequência)5. Em qualquer dos casos, a potência do sinal é a mesma (cada uma das frequências
harmónicas do sinal tem a mesma amplitude; a única diferença está na relação de fase entre as diferentes
harmónicas).
O sistema auditivo humano ouviria os sinais da mesma forma, mas o sistema visual humano já os
distinguiria, tal como o faria um circuito eléctrico que fosse sensível à amplitude do sinal, como é, por
exemplo, um osciloscópio.
1.1.4. PÓLOS E ZEROS DE UM SISTEMA REAL
A função de transferência de um sistema realizado com componentes de parâmetros concentrados6
pode ser sempre expressa pelo cociente de dois polinómios7, na seguinte forma,
∑
∑
∑
∑
=
=
=
= ==++++++++== N
i
ii
M
i
ii
N
MN
i
ii
M
i
ii
NN
MM
sb
sa
s
s
ssssss
sDsN
sT
0
0
0
02
210
2210 .
......
)()(
)(βα
β
α
ββββαααα
,
( 1.4)
em que ai = αi/αM e bi = βi/βM. A menos de uma constante αM/βN, a função de transferência pode ser
representada apenas pelo cociente entre os dois somatórios do último termo de ( 1.4) em que aM = bN = 1.
Num sistema fisicamente realizável, para s = ∞, a função de transferência do sistema deve ser finita
e, por isso, tem de ser M ≤ N. Como qualquer polinómio pode ser expresso em função das suas raízes ou
zeros, a partir de um produto de monómios da forma (s - sz), obtém-se:
4 - O sinal foi degradado através da supressão das harmónicas superiores à 7ª. 5 - Esta resposta foi obtida pela adição de um ângulo constante de 45 º em cada uma das harmónicas, o que dá uma característica
não linear de fase. 6 - Sistema em que os elementos armazenadores de energia estão concentrados, por exemplo num condensador ou numa bobina, em
vez de estarem distribuídos , como acontece, por exemplo, num cabo telefónico que tenha 100 Ω / km, 2 nF/ km e 100 µh/ km. 7 - No caso do sistema ser de parâmetros distribuídos, como é, por exemplo, o caso de uma linha de transmissão, a função de
transferência já não é uma função racional de s.

FUNÇÃO DE TRANSFERÊNCIA 7
Moisés Piedade, IST, Março de 2002
∏
∏
∑
∑
=
=
=
=
−
−=== N
ipi
M
izi
N
MN
i
ii
M
i
ii
ss
ss
s
s
sDsN
sT
0
0
0
0
)(
)(.
)()(
)(βα
β
α.
( 1.5)
As raízes do denominador são os pólos e as raízes do denominador são os zeros de T(s). É costume, na
prática, associar as raízes aos pares, pois, na maior parte dos casos, as raízes são complexas conjugadas.
Pode desenvolver-se o produto de dois monómios da equação anterior, numa função quadrática da
frequência, do seguinte modo:
2000
221 ...2))(( ωωξ ++=−− ssssss zz , com
( 1.6)
.2
)( e .
0
21021
20 ω
ξω zzzz
ssss
+−== ,
em que ω0 é o módulo da frequência dos zeros, das raízes (pólos ou zeros), e ϕ0 é o factor de
amortecimento dos zeros, dessas raízes, que está relacionado com o factor de qualidade , q0, por:
.2
1
00 q
=ξ .
( 1.7)
Na Fig. 1.5 podem ver-se 3 localizações possíveis de um par de pólos /zeros.
Exercício 1.2- Factor de qualidade dos pólos.
Calcule o factor de qualidade e o módulo da frequência do par de pólos (s1 = -10 e s2 = -7), e do par (s3 = 1 + 2j e s4 = 1
–2j).
Resolução:
De ( 1.6) e ( 1.7), vem: ω0 = (sz1.sz2)-1/2 e q0 = - ω0.(sz1+sz2)
-1 e, o que dá para o primeiro par de pólos: ω0 = 8,37 e q0 =
0,49 e; e ω0 = 51/2 e q0 = -1,12, para o segundo par de pólos. Os pólos reais e negativos têm q0 < 0,5, positivo, enquanto que
os pólos complexos conjugados têm q0 > 0,5 ; se estiverem no semi-plano complexo direito q0 será negativo.
sp1
sp2
σ
jω
ξ0 < 1q0 > 0,5
σp =ξ.ωp
ωp
sp1 sp2 σ
jω
ξ0 > 1q0 < 0,5
sp1
sp2
σ
jω
ξ0 = 0q0 = οο
Fig. 1.5- Par de pólos (zeros).

8 FUNÇÕES BIQUADRÁTICAS
Moisés Piedade, IST, Março de 2002
A função de transferência, em função das funções quadráticas da frequência, será, para o caso de
numerador e denominador de ordem ímpar,
∏
∏
∏
∏
∑
∑−
=
−
=
=
=
=
=
++−
++−=
−
−===
2/)1(
0
221
2/)1(
0
221
0
0
0
0
)...2().(
)...2().(.
)(
)(.
)(
)()( N
ipipipip
M
iziziziz
N
MN
ipi
M
izi
N
MN
i
ii
M
i
ii
ssss
ssss
ss
ss
s
s
sDsN
sTωωξ
ωωξ
βα
βα
β
α,
( 1.8)
em que os monómios de 1ª ordem não existem, no caso de M ou N serem pares. Em ( 1.8) pode
identificar-se o cociente de duas funções quadráticas da frequência expresso pela seguinte função
biquadrática da frequência
22
22
...2...2
)(pipipi
zizizii ss
sssT
ωωξωωξ
++++= .
( 1.9)
A função de transferência T(s) pode obter-se a partir de um produto de funções biquadráticas da
frequência, Ti(s), o que significa que o sistema pode ser realizado pela associação em cadeia de circuitos
que realizam estas funções elementares de 2ª ordem, que podem representar até dois pólos e dois zeros, e
que são vulgarmente designadas por secções biquadráticas , cujo comportamento será analisado mais
adiante.
A resposta de um sistema é obtida pelo produto de funções de transferência de 1ª ordem e/ou de
funções de transferência biquadráticas (de 2ª ordem), pelo que é interessante conhecer o comportamento
destas funções elementares. A função de transferência de uma secção biquadrática é completamente
determinada por uma constante de ganho k, por dois pólos e dois zeros, com módulos, ωp e ωz, e factores
de amortecimento ξp e ξz, respectivamente.
Resposta em Frequência
Para uma excitação sinusoidal (s = jω), de ( 1.8) obter-se-á:
)(
)(.)(
ωω
ωjDjN
kjT =
( 1.10)
onde se pode salientar o ganho G(ω), expresso em dB, a fase φ(ω) e o atraso de grupo τ(ω),
)()()(
)()()(
)(log.20)(log.20log.20)( 101010
ωτωτωτωφωφωφ
ωωω
DN
DN
jDjNkG
−=−=
−+=
.

FUNÇÃO DE TRANSFERÊNCIA 9
Moisés Piedade, IST, Março de 2002
( 1.11)
As curvas de resposta em frequência G(ω), φ(ω) e τ(ω), são representadas nos chamados diagramas de
Bode. Por vezes, basta conhecer o valor dos pólos e dos zeros para se construírem diagramas assintóticos
em que as curvas descritas por ( 1.11) são aproximadas por funções lineares (rectas). A resposta de um
sistema com zeros e com pólos, obtém-se pela adição das curvas parciais obtidas considerando os zeros e
os pólos isoladamente e tendo em conta que o efeito dos pólos é simétrico do dos zeros.
1.2. FUNÇÕES DE 1ª ORDEM
A função de transferência de um sistema de 1ª ordem pode sempre pôr-se na forma de cociente de
dois polinómios de s, de primeira ordem,
ss
sDsN
sT10
10
)(
)()(
ββαα
++==
( 1.12)
ou em termos das raízes sz e sp do numerador e do denominador, denominadas zeros e pólos da função de
transferência, respectivamente, obtém-se:
e )(
)(
)(
)()(
1
0
1
0
1
1
ββ
αα
βα
−=−=−−
== pzp
z ssssss
sDsN
sT .
A função de transferência pode ainda ser expressa na forma
e )1.(
)1.(
)(
)()(
1
0
1
0
1
1
ββ
ωαα
ω
ωβ
ωα
=−==−=+
+== ppzz
p
z sss
s
sDsN
sT
( 1.13)
) o).(f.pbaix .(f.pbaixo)s(
.)s(
.T(s) 1-zp
0
0
z
z
p
p
0
0 ωωβα
=ω
ω+ω+
ωβα
=
( 1.14)
com
)s(
) (f.pbaixop
p
p ω+ω
=ω .
( 1.15)

10 FUNÇÕES BIQUADRÁTICAS
Moisés Piedade, IST, Março de 2002
-25
-20
-15
-10
-5
0
0,1 1 10
3 dB
0 dB/dec
-20 dB/dec
G(Ω) dB
Ω
-90
-45
0
0,1 1 10
φ(Ω) º
-45 º/dec-66 º/dec
Ω
0
0,2
0,4
0,6
0,8
1
0,1 1 10Ω
τ(Ω) /τ(0)º
φ(Ω) º
Isto é, a resposta de um sistema pode ser sempre expressa em funções do tipo passa-baixo e do tipo
passa-alto (inversa da resposta do tipo passa-baixo), pelo que basta estudar o comportamento dos filtros
do tipo passa-baixo, em função da frequência, para conhecer todas as respostas.
1.2.1. FUNÇÃO PASSA-BAIXO DE 1ª ORDEM
A partir de ( 1.15) e definindo a frequência normalizada8, S, por:
p
sS
ω= ,
( 1.16)
obtém-se:
SSF
+=
11
)( .
( 1.17)
A resposta a uma excitação sinusoidal, S = jΩ, origina:
)(.)(1
1)( Ω−Ω=
Ω+=Ω jjejF
jjF ϕ com
Ω=ΩΩ+
=Ω arctan)( e 1
1)(
2ϕjF .
( 1.18)
Diagrama de Bode da função de transferência com um pólo
É usual representar o ganho do filtro numa escala
logarítmica, com dB nas ordenadas e décadas, ou oitavas,
de frequência nas abcissas. Na escala de frequências, a
separação entre duas frequências ω1 e ω2, medida em
décadas ou em oitavas é, respectivamente,
)/(log 1210 ωω=sepdec e ( 1.19)
)/(log 122 ωω=sepoit ( 1.20)
Fig. 1.6- Resposta em frequência de um sistema com um pólo.
Exercício 1.3- Separação de frequências.
8 - A frequência normalizada permite representar os resultados independentemente do valor das frequências pois o comportamento do sistema passa a ser referido em termos de proporcionalidade à frequência de normalização.

FUNÇÕES DE 1ª ORDEM 11
Moisés Piedade, IST, Março de 2002
Calcule a separação em décadas e oitavas das seguintes frequências: 1000 Hz e 18 350 Hz.
Resolução:
Sepdec = 1,26; como log2(x) = log10(x)/log10(2), sepoit = sepdec / log10(2) = 4,19 oitavas.
O ganho em dB é dado por:
( )1para log20 ;1para 01log20
1log10)(log20)(
1010
2
>>≅<<=⇒
Ω+−=Ω=Ω
Ù Ù Ù
jFG
( 1.21)
A curva da representação do módulo da função de transferência, num gráfico logarítmico, pode ser
aproximada por duas rectas assíntotas, que se cruzam na frequência de corte Ω = 1, com a inclinação de
0 dB/dec. e de – 6dB/dec., como se pode observar na Fig. 1.6. O erro máximo entre os valores dados
pelas rectas assíntotas e a curva real do ganho é de 3 dB, na frequência do pólo, Ω = 1.
A curva de fase também pode ser aproximada por 3 rectas assíntotas à curva real, com os declives
de 0º/dec., -45º/dec. e 0º/dec. De facto tem-se:
1para 90 ;1para -45º ;1para 0
arctan)(arg
>>−≅=Ω=<<≅⇒
Ω−=Ω
Ù Ù
jFoo
( 1.22)
a derivada de φ(Ω) com a frequência, numa escala logarítmica , tem um declive máximo, em Ω = 1, de
, mas verdadeira curva de fase pode ser aproximada por uma recta com
declive de –45º/dec. no intervalo de frequências compreendido entre Ω =
0,1 e Ω = 10, sendo o erro cometido inferior a 6º em toda a escala de frequências.
Exercício 1.4- Diagramas de Bode de dois filtros de 1ª ordem em cadeia.
Desenhe as características de Bode de amplitude e de fase, para um filtro obtido por associação em cadeia de dois filtros
de 1ª ordem com a função de transferência T(s) = 20/(s+10).
Resolução:
A associação em cadeia pressupõe que as funções de transferência se multiplicam, obtendo-se: T(jω) = 4[10/(jω+10)]2.
Virá a amplitude |T(jω)| = 4/[(1+(ω/10)2]. A fase será: φ(ω) = -2.arctan (ω/10). Usando as curvas normalizadas da Fig. 1.6, por
desnormalização para ωc = 10, pode obter-se as curvas da Fig. 1.7. O ganho estático é de 12 dB. O módulo da resposta em
frequência tem um declive assintótico para altas frequências, de –40 dB/dec. A característica de fase atinge a fase máxima de –
180º (trata-se de um filtro de 2ª ordem).
Atraso de grupo da função de transferência com um pólo
Derivando a função fase, obtém-se
66110
dec/º)(logd
)(d−=
ΩΩ
=Ω
ϕ

12 FUNÇÕES BIQUADRÁTICAS
Moisés Piedade, IST, Março de 2002
( 1.23)
o atraso para ω = 0 é 1/ωp, pelo que normalizando ao atraso a este
valor, obtém-se:
)(1
1
)0(
)(
2
pωωτ
ωτ
+= .
( 1.24)
Não representamos a curva de atraso de grupo porque ela pode obter-se da curva de atraso de grupo
de um filtro passa-baixo de 2ª ordem, T(s), com ξ = 1, (estudo que será feito na secção seguinte). De
facto, T(s) é igual ao produto de duas funções de primeira ordem
p
p
p
p
p
p
ppp
p
ssssssT
ωω
ωω
ωω
ωωξω
ξ++
=
+
=++
==
....2
)(
2
1
22
2
,
e sendo o atraso uma função aditiva, o atraso do filtro de primeira ordem é metade do de segunda ordem,
com ξ = 1.
1.2.2. FUNÇÃO PASSA-ALTO DE 1ª ORDEM
O ganho e a atenuação, em dB, de uma função passa-alto de 1ª ordem, com um zero e um pólo, são
funções simétricas das correspondentes funções passa-baixo ( 1.18) e ( 1.22). A fase e o atraso de grupo
da função passa-alto são ligeiramente diferentes. A fase tem um avanço adicional de π/2, vindo:
[ ]1)(.2.2
)(
0 )arctan(2
)(
0 )arctan(-2
)(
.)()(
com
;11)(
)(
−Ω=Ω
−=Ω
<ΩΩ+−=Ω
>ΩΩ+=Ω
Ω=Ω
=
+=+=
Ω−
δπφτ
πφ
πφ
ω
ω
ϕ
dd
ejFjF
sS
Ss
sF
jj
z
z
Ω=ΩΩ+
=Ω arctan)( e 1
1)(
2ϕjF .
( 1.25)
1
. )(1
1)(
2 p
p
ωωω
ωτ+
=
FUNÇÕES DE 1ª ORDEM 13
Moisés Piedade, IST, Março de 2002
-50
-40
-30
-20
-10
0
10
0,1 1 10 100Ω rads-1
G(Ω) dB
-90
-45
0
0,1 1 10 100
φ(Ω) º
Ω rads-1
0 º/dec45 º/dec -45 º/dec
-20 dB/dec
0 dB/dec
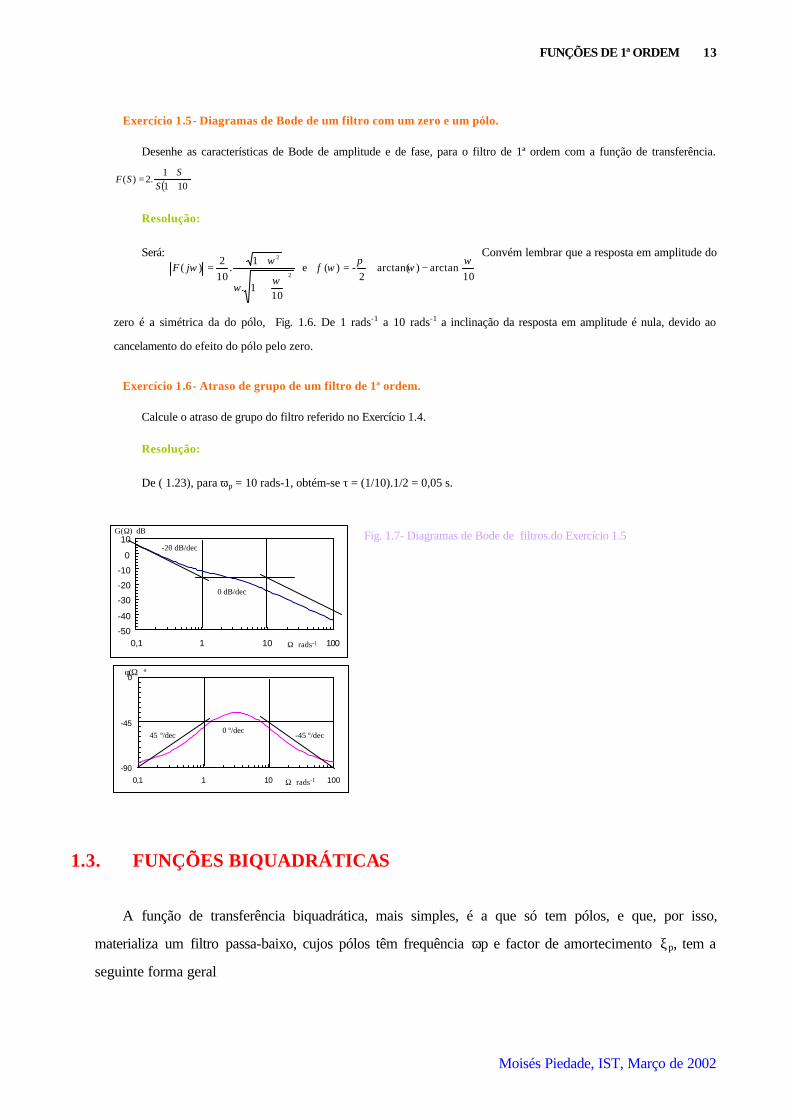
Exercício 1.5- Diagramas de Bode de um filtro com um zero e um pólo.
Desenhe as características de Bode de amplitude e de fase, para o filtro de 1ª ordem com a função de transferência.
( )1011
.2)(++
=S
SSF
Resolução:
Será:
−+=
+
+=
10arctan)arctan(
2-)( e
101.
1.
10
2)(
2
2 ωω
πωφ
ωω
ωωjF
Convém lembrar que a resposta em amplitude do
zero é a simétrica da do pólo, Fig. 1.6. De 1 rads-1 a 10 rads-1 a inclinação da resposta em amplitude é nula, devido ao
cancelamento do efeito do pólo pelo zero.
Exercício 1.6- Atraso de grupo de um filtro de 1ª ordem.
Calcule o atraso de grupo do filtro referido no Exercício 1.4.
Resolução:
De ( 1.23), para ωp = 10 rads-1, obtém-se τ = (1/10).1/2 = 0,05 s.
Fig. 1.7- Diagramas de Bode de filtros.do Exercício 1.5
1.3. FUNÇÕES BIQUADRÁTICAS
A função de transferência biquadrática, mais simples, é a que só tem pólos, e que, por isso,
materializa um filtro passa-baixo, cujos pólos têm frequência ωp e factor de amortecimento ξp, tem a
seguinte forma geral
14 FUNÇÕES BIQUADRÁTICAS
Moisés Piedade, IST, Março de 2002
1..2
1
..2.)( 222
2
++=
++=
SSk
sskST
ppp
p
ξωξ
ω
.
( 1.26)
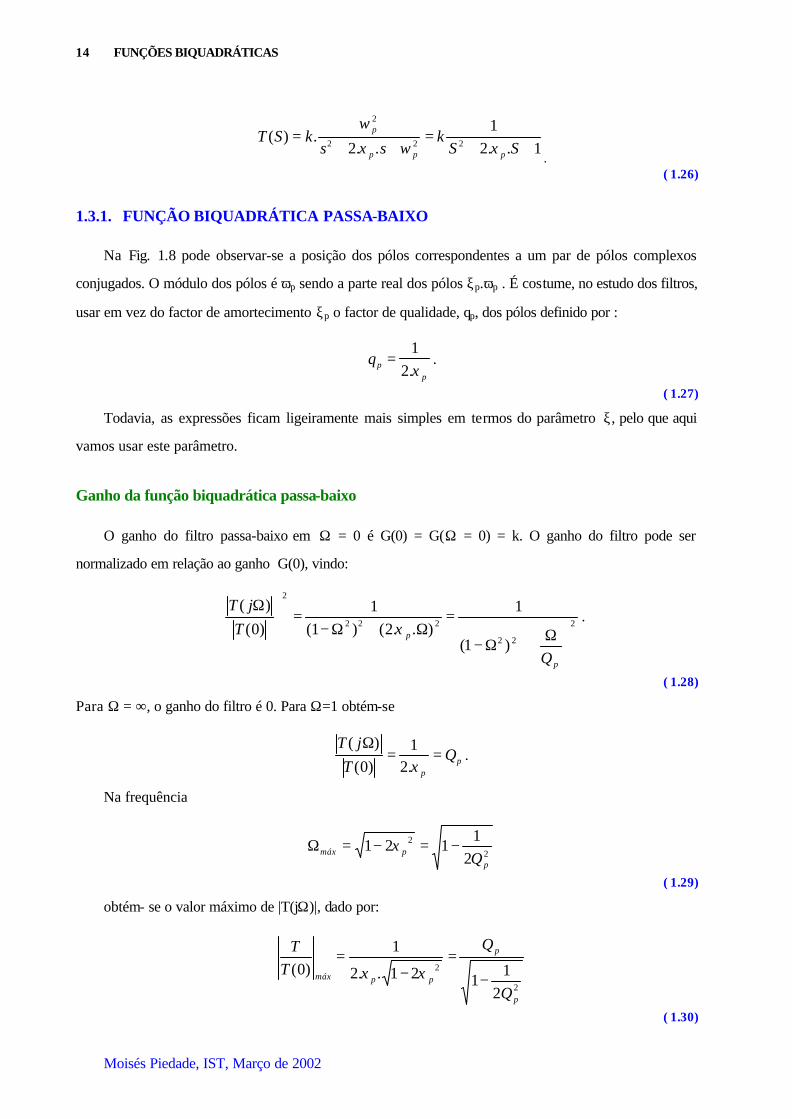
1.3.1. FUNÇÃO BIQUADRÁTICA PASSA-BAIXO
Na Fig. 1.8 pode observar-se a posição dos pólos correspondentes a um par de pólos complexos
conjugados. O módulo dos pólos é ωp sendo a parte real dos pólos ξp.ωp . É costume, no estudo dos filtros,
usar em vez do factor de amortecimento ξp o factor de qualidade, qp, dos pólos definido por :
ppq
ξ.2
1= .
( 1.27)
Todavia, as expressões ficam ligeiramente mais simples em termos do parâmetro ξ, pelo que aqui
vamos usar este parâmetro.
Ganho da função biquadrática passa-baixo
O ganho do filtro passa-baixo em Ω = 0 é G(0) = G(Ω = 0) = k. O ganho do filtro pode ser
normalizado em relação ao ganho G(0), vindo:
2
22
222
2
)1(
1
)..2()1(
1
)0(
)(
Ω+Ω−
=Ω+Ω−
=
Ω
p
p
Q
T
jT
ξ.
( 1.28)
Para Ω = ∞, o ganho do filtro é 0. Para Ω=1 obtém-se
pp
QT
jT==
Ωξ.21
)0(
)(.
Na frequência
2
2
2
1121
ppmáx Q
−=−=Ω ξ
( 1.29)
obtém- se o valor máximo de |T(jΩ)|, dado por:
2
2
2
1121..2
1
)0(
p
p
ppmáx
Q
Q
TT
−=
−=
ξξ
( 1.30)

FUNÇÕES BIQUADRÁTICAS 15
Moisés Piedade, IST, Março de 2002
As frequências notáveis da resposta do filtro passa-baixo dependem do valor de ou de Qp, como
se observa na Fig. 1.8. Os valores notáveis do ganho para diversas frequências encontram-se
representados na Tab. 1.1.
Fase da função biquadrática passa-
baixo
A fase da resposta do filtro passa-baixo
de 2ª ordem é dada por :
Ω−
Ω−=Ω 21
..2arctan)( pξ
φ
( 1.31)
Para Ω = 0 a fase vale 0º. Para Ω = 1
obtém-se uma fase de –90º, enquanto que
para Ω = ∞ se obtém –180º. As frequências
que originam uma fase de –45º ou de –135ª,
são as que conduzem a:
11
..2º135;º45 2 ±=
Ω−
Ω⇒Ω−=−= pξ
φφ
que originam
pp ξξφφ m2
º135º45 .1+=Ω
−=−=
( 1.32)
Atraso de grupo da função biquadrática
passa-baixo
Mais importante do que a curva da fase
é a curva de atraso de grupo, pois o filtro
ideal fisicamente realizável deve ter atraso de
grupo constante para todas as frequências.
222
2
)..2()1(
)1.(.2)()(
Ω+Ω−Ω+
=ΩΩ
−=Ωp
p
dd
ξ
ξφτ
( 1.33)
σ
ω
ξ0 < 10 > 0,5
σ ξ.ω
ω
σ
ω
ξ0 > 10 < 0,5
σ
ω
ξ0 = 00 = οο
-40
-20
0
20
0,1 1 10ΩΩ
dB
Q=0,1
Q=10
2
-180
-135
-90
-45
0
0,1 1 10ΩΩ
φ(Ω)φ(Ω)
Q=0,1
2 Q=10
0,01
0,1
1
10
100
1000
0,1 1 10ΩΩ
τ(Ω)/τ(0)τ(Ω)/τ(0)
Q=10
Q=0,1
2
Fig. 1.8- Pólos, ganho e fase de um filtro passa-baixo de 2ª
ordem.
16 FUNÇÕES BIQUADRÁTICAS
Moisés Piedade, IST, Março de 2002
O atraso em Ω = 0 é de τ(0) = 2.ξp, depois, quando Ω aumenta, cresce muito atingindo um valor
máximo, decrescendo depois para 0 quando Ω = ∞. O atraso de grupo deve ser expresso em função do
valor do atraso para Ω = 0, obtendo-se o atraso normalizado
222
2
)..2()1()1(
)0()(
Ω+Ω−Ω+=Ω
pξττ
.
( 1.34)
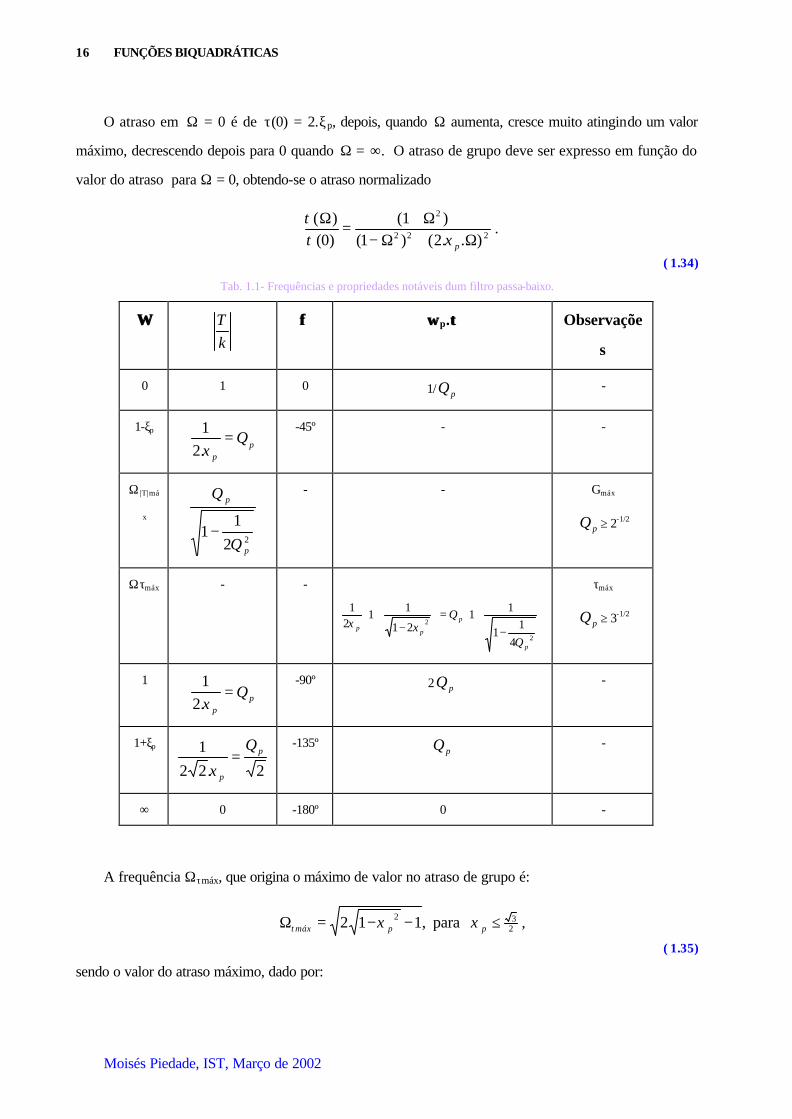
Tab. 1.1- Frequências e propriedades notáveis dum filtro passa-baixo.
ΩΩ kT
φφ ωω p.ττ Observaçõe
s
0 1 0 1/ pQ -
1-ξp p
p
Q=ξ.2
1
-45º - -
Ω |T|má
x
22
11
p
p
Q
Q
−
- - Gmáx
pQ ≥ 2-1/2
Ωτmáx - -
−+=
−+
2
2
4
11
11
21
11
21
p
p
pp
Q
Qξξ
τmáx
pQ ≥ 3-1/2
1 p
p
Q=ξ.2
1
-90º 2 pQ -
1+ξp
2.22
1 p
p
Q=
ξ
-135º pQ -
∞ 0 -180º 0 -
A frequência Ωτmáx, que origina o máximo de valor no atraso de grupo é:
232 para ,112 ≤−−=Ω ppmáx ξξτ ,
( 1.35)
sendo o valor do atraso máximo, dado por:

FUNÇÕES BIQUADRÁTICAS 17
Moisés Piedade, IST, Março de 2002
−+=
221
11
.4
1
)0(pp
máx
ξξττ
( 1.36)
Para Ω = 0 tem-se τ(Ω = 0) = 2.ξp . Na Fig. 1.8 podem observar-se as curvas do atraso de grupo
para diferentes parâmetros ξp ou Qp de uma função biquadrática passa-baixo.
1.3.2. FUNÇÃO BIQUADRÁTICA PASSA-ALTO
A função biquadrática passa-alto tem numerador do tipo s2 e apresenta, portanto, além dos dois pólos,
dois zeros em s = 0, ver Fig. 1.9. O ganho do filtro para s = ∞ é k. A função de transferência pode ser
descrita em termos da frequência s ou da frequência normalizada à frequência dos pólos, S = s/ωp.
1..2..2.)( 2
2
22
2
++=
++=
SSS
kss
skST
pppp ξωωξ
( 1.37)
Repare-se que a função de transferência do filtro passa-alto pode obter-se a partir da função de
transferência do filtro passa-baixo correspondente, fazendo a seguinte transformação de frequência
ba S
S1= .
( 1.38)
De facto, tem-se:
1..2
.1..2
1)( 2
2
12 ++
=++
== apa
a
SSbpb
aSS
Sk
SSkST
ab
ξξ.
( 1.39)
A função T(Sa), tem dois pólos com frequências inversas das dos pólos do filtro passa-baixo
correspondente, e mais dois zeros em Sa = 0.
A transformação de frequência Sa = 1/Sb garante, para a excitação sinusoidal no filtro passa-baixo, a
frequência Sb = jΩb, a correspondência de resposta em Sb = -j/Ωa; isto é, o filtro passa-baixo terá na
frequência Ωb a mesma resposta à excitação sinusoidal que o filtro passa-alto terá na frequência Ωa =
1/Ωb.

18 FUNÇÕES BIQUADRÁTICAS
Moisés Piedade, IST, Março de 2002
Ganho da função biquadrática passa-alto
Em face da transformação de frequência anterior ( 1.38), o ganho do filtro passa-alto em Ω = 0 é 0 e
o ganho para Ω = ∞ é k. A função de transferência do filtro pode ser normalizada em relação ao seu
valor em Ω = ∞, T(∞), vindo:
222
2
)..2()1()(
)(
Ω+Ω−
Ω=∞Ω
pT
jT
ξ.
( 1.40)
Assim, o ganho em dB pode obter-se pela soma do ganho do filtro passa-baixo correspondente com o
ganho do numerador, isto é:
21010 log.20)(log.20)( Ω+Ω=Ω
pbaixojTG ,
( 1.41)
pelo que as curvas de ganho se podem obter a partir das do filtro passa-baixo, representadas
na Fig. 1.8, pela adição de uma recta a +40 dB/dec., correspondente ao 2º termo da equação
anterior. Os valores notáveis de frequência, representados na Atraso de grupo da função
biquadrática passa-baixo
Mais importante do que a curva da fase é a curva de atraso de grupo, pois o filtro ideal fisicamente
realizável deve ter atraso de grupo constante para todas as frequências.
222
2
)..2()1(
)1.(.2)()(
Ω+Ω−Ω+
=ΩΩ
−=Ωp
p
dd
ξ
ξφτ
( 1.33)
O atraso em Ω = 0 é de τ(0) = 2.ξp, depois, quando Ω aumenta, cresce muito atingindo um valor
máximo, decrescendo depois para 0 quando Ω = ∞. O atraso de grupo deve ser expresso em função do
valor do atraso para Ω = 0, obtendo-se o atraso normalizado
222
2
)..2()1()1(
)0()(
Ω+Ω−Ω+=Ω
pξττ
.
( 1.34)
Tab. 1.1, são igualmente aplicáveis, mas agora são observados nas frequências inversas Ω = 1/Ω, como
se pode ver na Fig. 1.9.
FUNÇÕES BIQUADRÁTICAS 19
Moisés Piedade, IST, Março de 2002
Fase e atraso de grupo da função biquadrática passa-alto
A fase do filtro passa-alto é igual à do filtro passa-baixo com os mesmos pólos, somada com -180º,
para Ω > 0. A fase vale -180º para Ω = 0+. Lembre-se que a fase de um sistema linear é uma função
ímpar da frequência e que, por isso, a fase para Ω = 0- é de +180º. Para Ω > 0 a fase é representada por
uma curva crescente desde –180º em Ω = 0 até 0º em Ω = ∞.
( )1)(.2º.180)()( −Ω+Ω=Ω uba
φφ ,
( 1.42)
em que u(Ω) é a função degrau que vale 0 para Ω < 0 e vale 1 para Ω > 0.
O atraso de grupo, sendo obtido pela derivação da fase, na frequência, terá um andamento
semelhante ao do atraso de grupo do filtro passa-baixo, mas conterá um termo resultante da
descontinuidade de fase observável em Ω = 0, como acima foi referido, isto é:
)(..2)()(
)( Ω−Ω=ΩΩ
−=Ω δπτφ
τb
aa d
d,
( 1.43)
em que δ(Ω) é a função de Dirac.
Na
Fig. 1.9 pode observar-se a curva de fase e de atraso de grupo do filtro passa-alto.
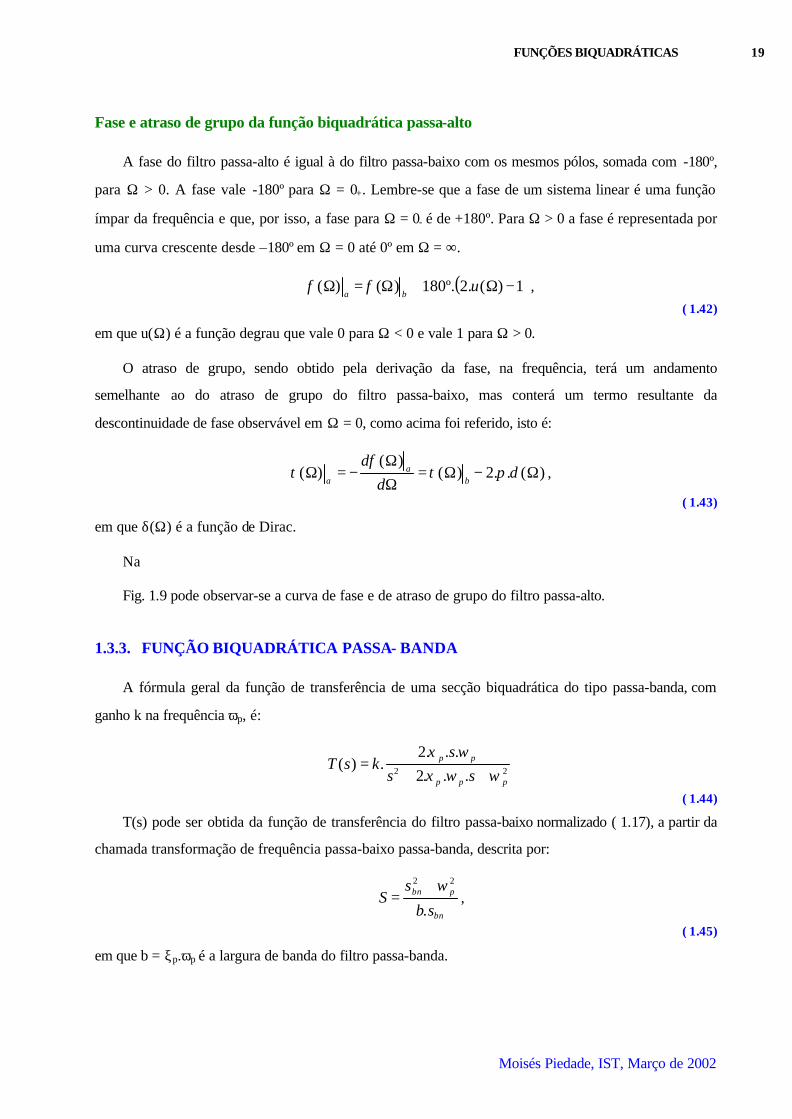
1.3.3. FUNÇÃO BIQUADRÁTICA PASSA- BANDA
A fórmula geral da função de transferência de uma secção biquadrática do tipo passa-banda, com
ganho k na frequência ωp, é:
22 ...2
...2.)(
ppp
pp
ss
sksT
ωωξωξ
++=
( 1.44)
T(s) pode ser obtida da função de transferência do filtro passa-baixo normalizado ( 1.17), a partir da
chamada transformação de frequência passa-baixo passa-banda, descrita por:
bn
pbn
sb
sS
.
22 ω+= ,
( 1.45)
em que b = ξp.ωp é a largura de banda do filtro passa-banda.
20 FUNÇÕES BIQUADRÁTICAS
Moisés Piedade, IST, Março de 2002
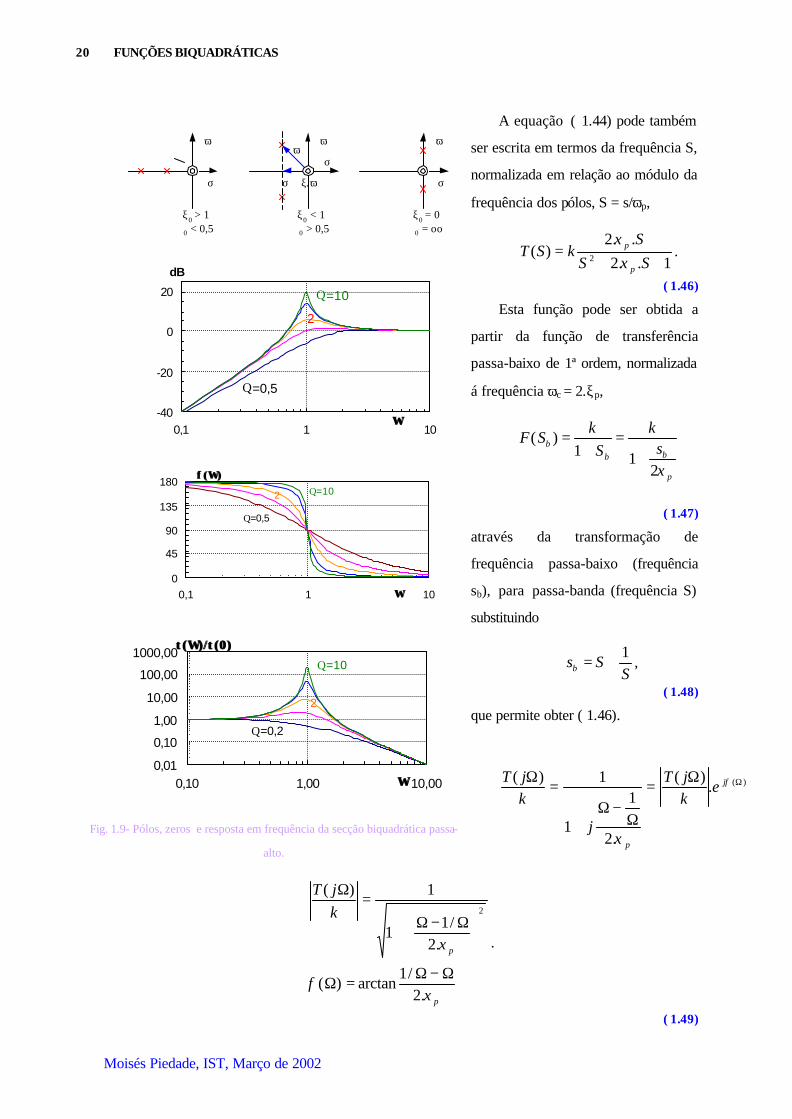
A equação ( 1.44) pode também
ser escrita em termos da frequência S,
normalizada em relação ao módulo da
frequência dos pólos, S = s/ωp,
1..2
..2)( 2 ++
=SS
SkST
p
p
ξξ
.
( 1.46)
Esta função pode ser obtida a
partir da função de transferência
passa-baixo de 1ª ordem, normalizada
á frequência ωc = 2.ξp,
p
bbb s
kS
kSF
ξ211
)(+
=+
=
( 1.47)
através da transformação de
frequência passa-baixo (frequência
sb), para passa-banda (frequência S)
substituindo
S
Ssb
1+= ,
( 1.48)
que permite obter ( 1.46).
)(.)(
.2
1
1
1)( ΩΩ=
Ω−Ω
+
=Ω φ
ξ
j
p
ekjT
j
kjT
p
p
kjT
ξφ
ξ
.2/1
arctan)(
.2/1
1
1)(2
Ω−Ω=Ω
Ω−Ω+
=Ω
.
( 1.49)
σ
ω
ξ0 < 10 > 0,5
σ ξ. ω
ω
σ
ω
ξ0 > 10 < 0,5
σ
ω
ξ0 = 00 = οο
-40
-20
0
20
0,1 1 10ΩΩ
dB
Q=0,5
Q=10
2
0
45
90
135
180
0,1 1 10ΩΩ
φ(Ω)φ(Ω)
Q=0,5
2 Q=10
0,01
0,10
1,00
10,00
100,00
1000,00
0,10 1,00 10,00ΩΩ
τ(Ω)/τ(0)τ(Ω)/τ(0)
Q=10
Q=0,2
2
Fig. 1.9- Pólos, zeros e resposta em frequência da secção biquadrática passa-
alto.

FUNÇÕES BIQUADRÁTICAS 21
Moisés Piedade, IST, Março de 2002
Quer o módulo, quer a fase, da função de transferencia têm simetria geométrica na frequência 9, em
torno de Ω = 1, como se pode obter analisando as fórmulas. O ganho máximo ocorre para Ω = 1 e a
inclinação assintótica é de +20dB/dec., para Ω << 1 e de –20 dB/dec., para Ω >> 1. As frequências ΩB
para as quais o ganho cai a 3dB, relativamente ao valor do ganho máximo, isto é, |T(jΩ)|/|k| =2-1/2 são:
ξξ ±+=Ω 12
2,1 pB
( 1.50)
a diferença entre as duas frequências é a largura de banda, B, normalizada a ωp
ppBB Q
B1
212
==Ω−Ω= ξ
( 1.51)
Ganho do filtro passa-banda
O ganho do filtro passa-banda pode obter-se a partir do ganho do filtro passa-baixo, por
)..2(log.20)(log.20)( 1010 Ω+Ω=Ω ppbaixojTG ξ
( 1.52)
obtendo-se as curvas representadas na Fig. 1.11.
Fase e atraso de grupo do filtro passa-banda
A fase è igual à do filtro passa-baixo somada com +90º para Ω > 0 e –90º para Ω < 0 ,isto è:
( )1)(.2º.90)()( −Ω+Ω=Ω ubbn
φφ
( 1.53)
O atraso de grupo é análogo ao do filtro passa-baixo.
)(.)()(
)( Ω−Ω=Ω
Ω−=Ω δπτ
φτ
bbn
bn d
d
( 1.54)
Na Fig. 1.11 podem observar-se as curvas de ganho normalizado, de fase e de atraso de grupo de
filtros passa-banda de 2ª ordem para diferentes factores de qualidade.
9 - As frequências ω1 e ω2 geometricamente separadas da frequência ω0, satisfazem a condição: ω1*ω2=ω02.
22 FUNÇÕES BIQUADRÁTICAS
Moisés Piedade, IST, Março de 2002
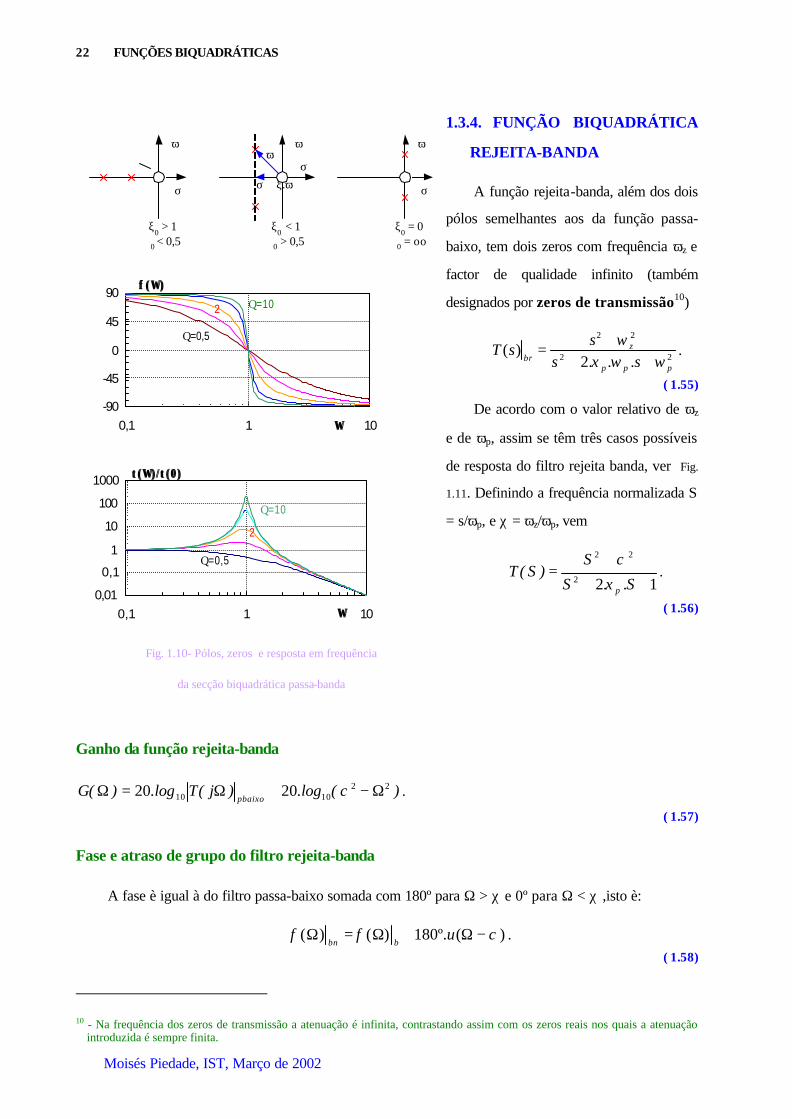
1.3.4. FUNÇÃO BIQUADRÁTICA
REJEITA-BANDA
A função rejeita-banda, além dos dois
pólos semelhantes aos da função passa-
baixo, tem dois zeros com frequência ωz e
factor de qualidade infinito (também
designados por zeros de transmissão10)
22
22
...2)(
ppp
zbr ss
ssT
ωωξω
+++= .
( 1.55)
De acordo com o valor relativo de ωz
e de ωp, assim se têm três casos possíveis
de resposta do filtro rejeita banda, ver Fig.
1.11. Definindo a frequência normalizada S
= s/ωp, e χ = ωz/ωp, vem
122
22
+++
=S..S
S)S(T
pξ
χ.
( 1.56)
Ganho da função rejeita-banda
)(log.)j(Tlog.)(Gpbaixo
221010 2020 Ω−+Ω=Ω χ .
( 1.57)
Fase e atraso de grupo do filtro rejeita-banda
A fase è igual à do filtro passa-baixo somada com 180º para Ω > χ e 0º para Ω < χ ,isto è:
)(º.180)()( χφφ −Ω+Ω=Ω ubbn
.
( 1.58)
10 - Na frequência dos zeros de transmissão a atenuação é infinita, contrastando assim com os zeros reais nos quais a atenuação introduzida é sempre finita.
σ
ω
ξ0 < 1
0 > 0,5
σ ξ.ω
ω
σ
ω
ξ0 > 1
0 < 0,5
σ
ω
ξ0 = 0
0 = οο
-90
-45
0
45
90
0,1 1 10ΩΩ
φ ( Ω )φ ( Ω )
Q=0,5
2 Q=10
0,01
0,1
1
10
100
1000
0,1 1 10ΩΩ
τ ( Ω ) / τ ( 0 )τ ( Ω ) / τ ( 0 )
Q=10
Q=0,5
2
Fig. 1.10- Pólos, zeros e resposta em frequência
da secção biquadrática passa-banda
FUNÇÕES BIQUADRÁTICAS 23
Moisés Piedade, IST, Março de 2002
O atraso de grupo é análogo ao do filtro passa-baixo.
)(.)(d
)(d)(
bbn
bnχδπτ
φτ −Ω−Ω=
Ω
Ω−=Ω .
( 1.59)
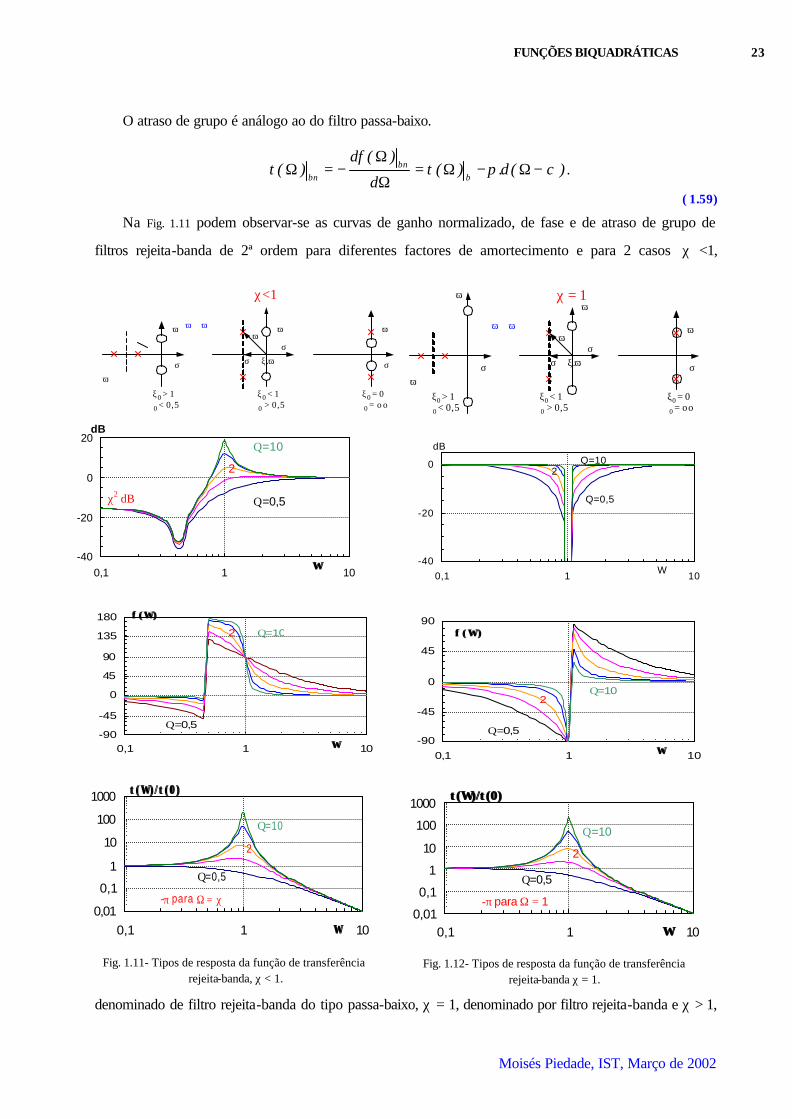
Na Fig. 1.11 podem observar-se as curvas de ganho normalizado, de fase e de atraso de grupo de
filtros rejeita-banda de 2ª ordem para diferentes factores de amortecimento e para 2 casos χ <1,
denominado de filtro rejeita-banda do tipo passa-baixo, χ = 1, denominado por filtro rejeita-banda e χ > 1,
σ
ω
ξ0 < 10 > 0,5
σ ξ.ω
ω
σ
ω
ξ0 > 10 < 0,5
σ
ω
ξ0 = 00 = οο
ω ω
χ<1
ω
-40
-20
0
20
0,1 1 10ΩΩ
dB
Q=0,5
Q=10
2
χ2 dB
-90
-45
0
45
90
135
180
0,1 1 10ΩΩ
φ ( Ω )φ ( Ω )
Q=0,5
2 Q=10
0,01
0,1
1
10
100
1000
0,1 1 10ΩΩ
τ ( Ω ) / τ ( 0 )τ ( Ω ) / τ ( 0 )
Q=10
Q=0,5
2
-π para Ω = χ
Fig. 1.11- Tipos de resposta da função de transferência rejeita-banda, χ < 1.
σ
ω
ξ0 < 10 > 0,5
σ ξ.ω
ω
σ
ω
ξ0 > 10 < 0,5
σ
ω
ξ0 = 00 = οο
ω ω
χ = 1
ω
-40
-20
0
0,1 1 10W
dB
Q=0,5
Q=102
-90
-45
0
45
90
0,1 1 10ΩΩ
φ ( Ω )φ ( Ω )
Q=0,5
2Q=10
0,01
0,1
1
10
100
1000
0,1 1 10ΩΩ
τ(Ω)/τ(0)τ(Ω)/τ(0)
Q=10
Q=0,5
2
-π para Ω = 1
Fig. 1.12- Tipos de resposta da função de transferência rejeita-banda χ = 1.
24 FUNÇÕES BIQUADRÁTICAS
Moisés Piedade, IST, Março de 2002
denominado por filtro rejeita-banda do tipo passa-alto, não se representa porque é similar ao de χ <1, com
o eixo das frequências invertido.
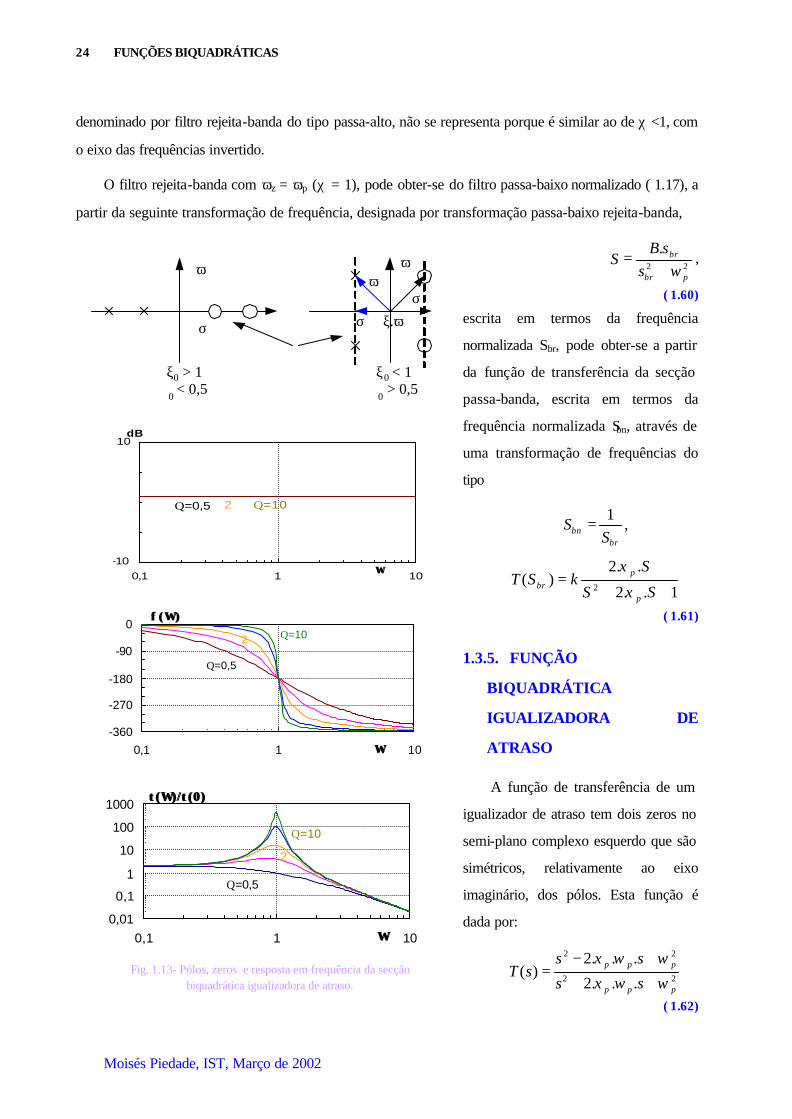
O filtro rejeita-banda com ωz = ωp (χ = 1), pode obter-se do filtro passa-baixo normalizado ( 1.17), a
partir da seguinte transformação de frequência, designada por transformação passa-baixo rejeita-banda,
22pbr
br
ss.B
Sω+
= ,
( 1.60)
escrita em termos da frequência
normalizada Sbr, pode obter-se a partir
da função de transferência da secção
passa-banda, escrita em termos da
frequência normalizada Sbn, através de
uma transformação de frequências do
tipo
brbn S
S1= ,
1..2
..2)(
2 ++=
SS
SkST
p
pbr ξ
ξ
( 1.61)
1.3.5. FUNÇÃO
BIQUADRÁTICA
IGUALIZADORA DE
ATRASO
A função de transferência de um
igualizador de atraso tem dois zeros no
semi-plano complexo esquerdo que são
simétricos, relativamente ao eixo
imaginário, dos pólos. Esta função é
dada por:
22
22
...2
...2)(
ppp
ppp
ss
sssT
ωωξ
ωωξ
+++−
=
( 1.62)
σ
ω
ξ0 < 10 > 0,5
σ ξ.ω
ω
σ
ω
ξ0 > 10 < 0,5
-10
10
0,1 1 10ΩΩ
dB
Q=0,5 Q=102
-360
-270
-180
-90
0
0,1 1 10ΩΩ
φ ( Ω )φ ( Ω )
Q=0,5
2 Q=10
0,01
0,1
1
10
100
1000
0,1 1 10ΩΩ
τ(Ω)/τ(0)τ(Ω)/τ(0)
Q=10
Q=0,5
2
Fig. 1.13- Pólos, zeros e resposta em frequência da secção biquadrática igualizadora de atraso.
FUNÇÕES BIQUADRÁTICAS 25
Moisés Piedade, IST, Março de 2002
Ganho, fase e atraso de grupo da função igualizadora de atraso
É fácil ver que |T(jΩ)| é unitário e a fase, bem como o atraso de grupo, são duplos dos correspondentes
valores de um filtro passa-baixo com pólos ωp, como se pode ver na Fig. 1.13.
bia)(.2)( Ω=Ω φφ
( 1.63)
bbn
bn d
d)(.2
)()( Ω=
ΩΩ
−=Ω τφ
τ
O igualizador de atraso tem a particularidade de não alterar a resposta de amplitude dos sistemas,
mas acrescenta atraso que se concentra em determinadas frequências, ver figura anterior, de modo que é
possível transformar um sistema que não tinha atraso de grupo constante num sistema que tem este atraso
constante; por isso estas secções biquadráticas se designam por igualizadoras.