INEQUAÇÕES VARIACIONAIS E ALGORITMO DO … · quatro ópticas principais: concorrência perfeita,...
13
INEQUAÇÕES VARIACIONAIS E ALGORITMO DO EXTRAGRADIENTE: UMA APLICAÇÃO AO EQUILÍBRIO ESPACIAL DE PREÇOS COURNOT- NASH Rogério Malta Branco (FURG / UFSC) [email protected] Dayse Regina Batistus (UTFPR / UFS) [email protected] Sérgio Fernando Mayerle (UFSC) [email protected] Antônio Sérgio Coelho (UFSC) [email protected] O presente trabalho versa sobre a aplicação de inequações variacionais nos problemas de equilíbrio em redes e no uso do algoritmo do extragradiente como forma eficiente e rápida de sua solução. Como os problemas de inequações variacionais ttratam de uma formulação geral para problemas que abrangem a programação matemática, tomá-los em conjunto ao intuito de estudar sua potencialidade no suporte administrativo de sistemas na cadeia logística, parte-se por focar, no âmbito da economia industrial, no equilíbrio espacial de preços de mercado Cournot-Nash. O objetivo da aplicação destas técnicas de formulação e também do método de busca de solução pelo método do extragradiente é promover uma aplicação no cálculo do excedente dos grupos produtores por meio das utilidades L de Nash. Um exemplo numérico é proposto e implementado em código Matlab, calculando o lucro de grupos produtores no regime de mercado supracitado. Palavras-chaves: Inequações variacionais; equilibrio em redes; método do extragradiente. XXIX ENCONTRO NACIONAL DE ENGENHARIA DE PRODUÇÃO A Engenharia de Produção e o Desenvolvimento Sustentável: Integrando Tecnologia e Gestão. Salvador, BA, Brasil, 06 a 09 de outubro de 2009
Transcript of INEQUAÇÕES VARIACIONAIS E ALGORITMO DO … · quatro ópticas principais: concorrência perfeita,...
INEQUAÇÕES VARIACIONAIS E
ALGORITMO DO EXTRAGRADIENTE:
UMA APLICAÇÃO AO EQUILÍBRIO
ESPACIAL DE PREÇOS COURNOT-
NASH
Rogério Malta Branco (FURG / UFSC)
Dayse Regina Batistus (UTFPR / UFS)
Sérgio Fernando Mayerle (UFSC)
Antônio Sérgio Coelho (UFSC)
O presente trabalho versa sobre a aplicação de inequações
variacionais nos problemas de equilíbrio em redes e no uso do
algoritmo do extragradiente como forma eficiente e rápida de sua
solução. Como os problemas de inequações variacionais ttratam de
uma formulação geral para problemas que abrangem a programação
matemática, tomá-los em conjunto ao intuito de estudar sua
potencialidade no suporte administrativo de sistemas na cadeia
logística, parte-se por focar, no âmbito da economia industrial, no
equilíbrio espacial de preços de mercado Cournot-Nash. O objetivo da
aplicação destas técnicas de formulação e também do método de busca
de solução pelo método do extragradiente é promover uma aplicação
no cálculo do excedente dos grupos produtores por meio das utilidades
L de Nash. Um exemplo numérico é proposto e implementado em
código Matlab, calculando o lucro de grupos produtores no regime de
mercado supracitado.
Palavras-chaves: Inequações variacionais; equilibrio em redes;
método do extragradiente.
XXIX ENCONTRO NACIONAL DE ENGENHARIA DE PRODUÇÃO A Engenharia de Produção e o Desenvolvimento Sustentável: Integrando Tecnologia e Gestão.
Salvador, BA, Brasil, 06 a 09 de outubro de 2009
XXIX ENCONTRO NACIONAL DE ENGENHARIA DE PRODUCAO A Engenharia de Produção e o Desenvolvimento Sustentável: Integrando Tecnologia e Gestão
Salvador, BA, Brasil, 06 a 09 de outubro de 2009
2
1. Introdução
O sistema mercadológico apresenta modelos conhecidos na literatura como estruturas de
mercado. Cada uma dessas estruturas procura destacar aspectos essenciais da interação entre
oferta e demanda, baseando-se em características observadas nos mercados existentes. A
classificação efetiva dessas estruturas, de acordo com Rossetti (2003), pode ser vista sob
quatro ópticas principais: concorrência perfeita, monopólio puro, concorrência monopolística
e oligopólio, sucintamente descritas a seguir.
O monopólio e a concorrência perfeita constituem as estruturas clássicas básicas e
representam, respectivamente, os extremos de concentração da produção e atomização.
Enquanto na primeira as empresas possuem poder de mercado por serem as únicas provedoras
de determinado produto, na segunda, a dimensão de cada empresa é desprezível em relação às
demais, fazendo com que se configurem como meras tomadoras de preços. (PINHO, 1998).
Outra estrutura clássica importante é a concorrência monopolística, a qual se caracteriza por
apresentar um elevado número de empresas, como a concorrência perfeita, mas que produzem
produtos diferenciados, embora com substitutos próximos.
A quarta estrutura definida por Rosseti (2003), o oligopólio, caracteriza-se pela existência de
um reduzido número de produtores e vendedores, produzindo produtos que são substitutos
próximos entre si.
Independente da estrutura de mercado, as alterações nas quantidades das mercadorias
transacionadas interferem diretamente nas curvas de oferta e demanda, ocasionando uma
perturbação nos preços. Caso haja aumento significativo na oferta de determinado produto, o
excesso deste no mercado fará com que seus preços baixem e, conseqüentemente, torne sua
produção menos atrativa. Antagonicamente, se a oferta do produto for insuficiente para
corresponder à demanda, a escassez do produto no mercado ocasionará uma elevação nos
preços e a respectiva entrada de novos produtores no mercado em decorrência deste fator.
Dessa forma, à medida que este processo vai se desenvolvendo, a tendência é que a
quantidade de produto ofertada se enquadre à quantidade de produto demandada, fazendo com
que o preço se ajuste ao contexto do mercado em que o produto encontra-se inserido. Esse
comportamento continua até que o preço e a quantidade atinjam, de forma natural, um nível
de equilíbrio. A dinamicidade desse processo faz com que os agentes envolvidos, em situação
de equilíbrio, assumam uma posição na qual uma mudança de comportamento é algo
desfavorável para qualquer uma das partes.
2. Equilíbrio espacial de preços
Equilíbrio é um conceito central para análise do fenômeno economia. Metodologias que têm
sido aplicadas para a formulação, análise qualitativa e a computação de equilíbrio econômico,
têm incluído Sistemas de Equações, Teoria de Otimização, Teoria da Complementaridade,
bem como Teoria do Ponto Fixo. (NAGURNEY, 1999).
Em sua publicação, Anna Nagurney estabelece a fundamentação da Teoria de Inequações
Variacionais (variational inequations – VI) e a relação desta metodologia para outras análises
de equilíbrio existentes (identificadas anteriormente). A teoria de VI é utilizada por Nagurney
em sua obra como metodologia fundamental em operações de modelos de rede de equilíbrio
econômico.
XXIX ENCONTRO NACIONAL DE ENGENHARIA DE PRODUCAO A Engenharia de Produção e o Desenvolvimento Sustentável: Integrando Tecnologia e Gestão
Salvador, BA, Brasil, 06 a 09 de outubro de 2009
3
3. O problema de inequações variacionais
Originalmente desenvolvidos como ferramenta para o estudo de certas classes de equações
diferenciais parciais, como as aplicadas em mecânica e definidas em espaços dimensionais
infinitos, o problema de inequações variacionais trata de uma formulação geral para
problemas que abrangem a programação matemática, incluindo, dentre outros, equações não-
lineares, problemas de otimização e de complementaridade.
3.1 Inequações variacionais
O problema de VI dimensional-finito, tratado por Nagurney (1999), denotado por VI(F,K), é
determinar o vetor x* K R
n, de modo que:
F(x*)
T, x-x
* ≥ 0, x K, Eq. 1
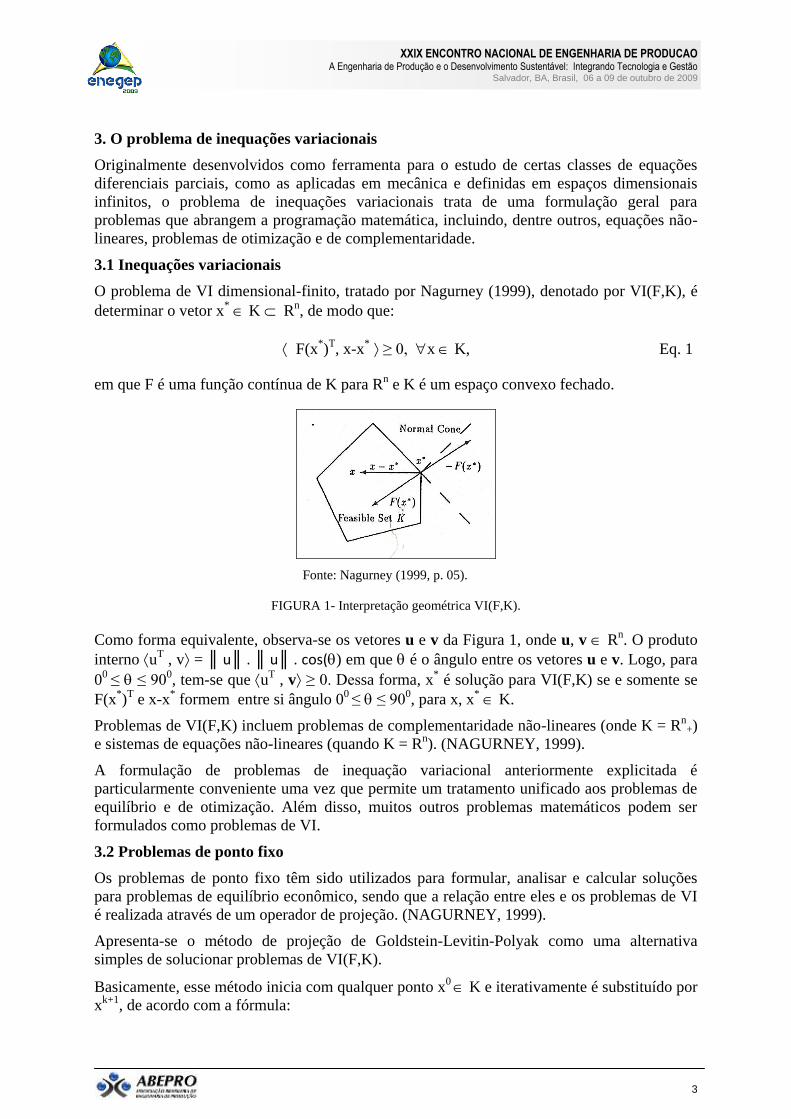
em que F é uma função contínua de K para Rn e K é um espaço convexo fechado.
Fonte: Nagurney (1999, p. 05).
FIGURA 1- Interpretação geométrica VI(F,K).
Como forma equivalente, observa-se os vetores u e v da Figura 1, onde u, v Rn. O produto
interno uT , v = ║ u║ . ║ u║ . cos() em que é o ângulo entre os vetores u e v. Logo, para
00
≤ ≤ 900, tem-se que u
T , v ≥ 0. Dessa forma, x
* é solução para VI(F,K) se e somente se
F(x*)
T e x-x
* formem entre si ângulo 0
0 ≤ ≤ 90
0, para x, x
* K.
Problemas de VI(F,K) incluem problemas de complementaridade não-lineares (onde K = Rn
+)
e sistemas de equações não-lineares (quando K = Rn). (NAGURNEY, 1999).
A formulação de problemas de inequação variacional anteriormente explicitada é
particularmente conveniente uma vez que permite um tratamento unificado aos problemas de
equilíbrio e de otimização. Além disso, muitos outros problemas matemáticos podem ser
formulados como problemas de VI.
3.2 Problemas de ponto fixo
Os problemas de ponto fixo têm sido utilizados para formular, analisar e calcular soluções
para problemas de equilíbrio econômico, sendo que a relação entre eles e os problemas de VI
é realizada através de um operador de projeção. (NAGURNEY, 1999).
Apresenta-se o método de projeção de Goldstein-Levitin-Polyak como uma alternativa
simples de solucionar problemas de VI(F,K).
Basicamente, esse método inicia com qualquer ponto x0 K e iterativamente é substituído por
xk+1
, de acordo com a fórmula:

XXIX ENCONTRO NACIONAL DE ENGENHARIA DE PRODUCAO A Engenharia de Produção e o Desenvolvimento Sustentável: Integrando Tecnologia e Gestão
Salvador, BA, Brasil, 06 a 09 de outubro de 2009
4
xk+1
= PK [xk
- K.F(xk)], Eq. 2
em que K é o passo positivo escolhido e PK denota a projeção de um vetor em K. O método
de projeção de Goldstein-Levitin-Polyak é considerado um método explícito, pois xk+1
ocorre
apenas de um lado da equação (Eq.2).
Fonte: Nagurney (1999, p. 05)
FIGURA 2 - Projeção y de x no conjunto K.
Esse método de projeção é global e linearmente convergente. Entretanto, a eficiência do
método depende de alguns parâmetros, como a constante L e o módulo de .
3.3 Método do extragradiente
O método disposto na seção anterior apresenta grande simplicidade de implementação na
busca de soluções para o problema de ponto fixo; entretanto, sua dependência em estimar a
constante L e o módulo o tornam bastante custoso.
O método do Extragradiente (EG) é considerados um método de projeção simples e é
empregado na solução de problemas de inequações variacionais, contudo mais versátil que o
anterior, por não ter no módulo de a necessidade de atender somente a funções de elevada
monotonicidade.
Definindo-se que o método extragradiente, para um dado x K, seja:
( )def
p P x F x , Eq. 3
e assumindo-se que:
( ) ( ) , v (0,1)F x F p v x p , Eq. 4
o método Extragradiente toma p como preditor, gerando uma nova etapa de iteração:
( )EGx P x F p
. Eq. 5
Dessa forma, o método a ser aplicado na busca de soluções para problemas de VI(F,K)
finitos-definidos, vinculados aos problemas de equilíbrio de mercado, serão doravante tecidos
sobre o método EG.

XXIX ENCONTRO NACIONAL DE ENGENHARIA DE PRODUCAO A Engenharia de Produção e o Desenvolvimento Sustentável: Integrando Tecnologia e Gestão
Salvador, BA, Brasil, 06 a 09 de outubro de 2009
5
3.4 A aplicação do método
O método clássico consiste na aplicação do “algoritmo do ponto próximo”, que inicia com
qualquer vetor x0
K, e iterativamente atualiza para xk +1
, satisfazendo os seguintes
requisitos:
1 10 ( ) ( )k k k
kx x F x . Eq. 6
Em outras palavras, para um dado xk K, uma nova iteração x
k+1 é obtida ao encontrar:
, ' (( ( )) 0, 'T k
kx K x x x x F x x K . Eq. 7
Isso significa que xk+1
é solução para:
( )k
K kx P x x x F x
, Eq. 8
e que:
(Algoritmo do Ponto Próximo) 1 1( )k k k
K kx P x F x . Eq. 9
Uma vez que xk+1
ocorre de ambos os lados da igualdade da Eq. 9, o algoritmo do ponto
próximo é visto como um método implícito.
A predição pode ser realizada pela aplicação do método da projeção simples:
( )Kp P x F x , Eq. 10
e posteriormente aplicando o método do ponto próximo para realizar a correção:
( )K Kx P x F p , Eq. 11
o resultado é a fórmula do método extragradiente:
( )EG K Kx P x F p . Eq. 12
A fim de facilitar esta e futuras análises, algumas igualdades serão definidas na sequência. De
posse da Eq. 10, tem-se ainda que:
( , )e x x p , Eq. 13
( , ) ( )g x F p , Eq. 14
XXIX ENCONTRO NACIONAL DE ENGENHARIA DE PRODUCAO A Engenharia de Produção e o Desenvolvimento Sustentável: Integrando Tecnologia e Gestão
Salvador, BA, Brasil, 06 a 09 de outubro de 2009
6
( , ) ( ) ( ) ( )d x x p F x F p . Eq. 15
Dessa forma, pode-se reescrever a equação do método extragradiente geral:
( , )EG Kx P x g x . Eq. 16
A proposta desta seção é viabilizar a aplicação dos métodos tratados na seção anterior em
problemas de inequações variacionais. Com o propósito de encontrar a condição de equilíbrio
de Nash em mercados oligopólicos, como os tratados por Cournot, será utilizado o método
Extragradiente Modificado na busca de solução do problema de VI estabelecido para um
exemplo deste tipo de equilíbrio de mercado.
O problema consiste de produtores e de mercados consumidores. Em linhas gerais, no
mercado estudado por Cournot, o produtor leva o produto ao mercado consumidor, que paga o
valor econômico adequado. As quantidades produzidas e demandadas por cada produtor e
mercado consumidor são estabelecidas quando ocorrer o equilíbrio do mercado.
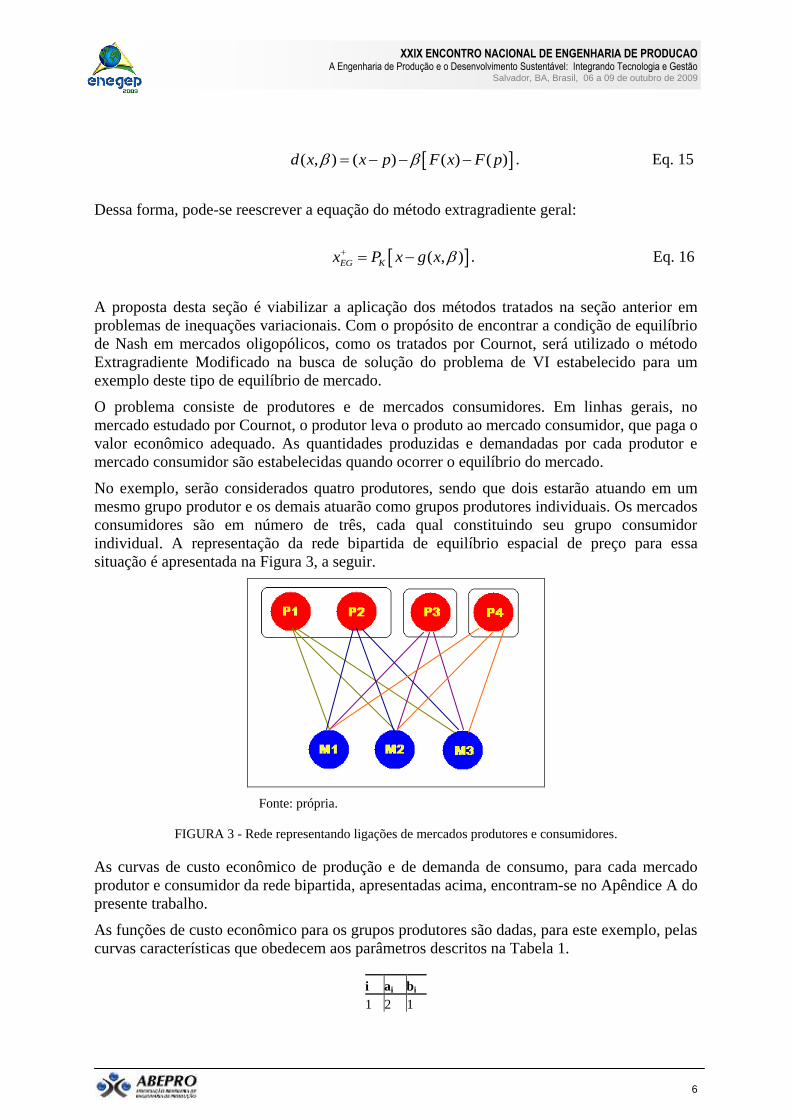
No exemplo, serão considerados quatro produtores, sendo que dois estarão atuando em um
mesmo grupo produtor e os demais atuarão como grupos produtores individuais. Os mercados
consumidores são em número de três, cada qual constituindo seu grupo consumidor
individual. A representação da rede bipartida de equilíbrio espacial de preço para essa
situação é apresentada na Figura 3, a seguir.
Fonte: própria.
FIGURA 3 - Rede representando ligações de mercados produtores e consumidores.
As curvas de custo econômico de produção e de demanda de consumo, para cada mercado
produtor e consumidor da rede bipartida, apresentadas acima, encontram-se no Apêndice A do
presente trabalho.
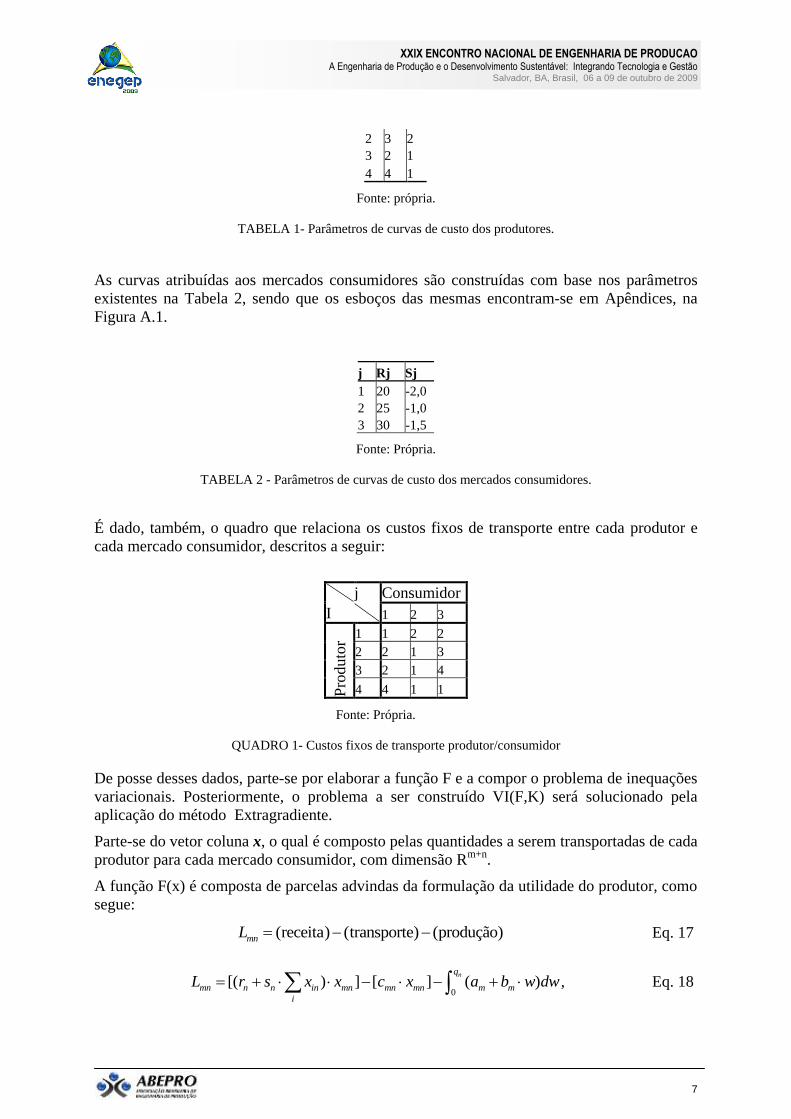
As funções de custo econômico para os grupos produtores são dadas, para este exemplo, pelas
curvas características que obedecem aos parâmetros descritos na Tabela 1.
i ai bi
1 2 1
XXIX ENCONTRO NACIONAL DE ENGENHARIA DE PRODUCAO A Engenharia de Produção e o Desenvolvimento Sustentável: Integrando Tecnologia e Gestão
Salvador, BA, Brasil, 06 a 09 de outubro de 2009
7
2 3 2
3 2 1
4 4 1
Fonte: própria.
TABELA 1- Parâmetros de curvas de custo dos produtores.
As curvas atribuídas aos mercados consumidores são construídas com base nos parâmetros
existentes na Tabela 2, sendo que os esboços das mesmas encontram-se em Apêndices, na
Figura A.1.
j Rj Sj
1 20 -2,0
2 25 -1,0
3 30 -1,5
Fonte: Própria.
TABELA 2 - Parâmetros de curvas de custo dos mercados consumidores.
É dado, também, o quadro que relaciona os custos fixos de transporte entre cada produtor e
cada mercado consumidor, descritos a seguir:
j Consumidor
I 1 2 3
Pro
duto
r
1 1 2 2
2 2 1 3
3 2 1 4
4 4 1 1
Fonte: Própria.
QUADRO 1- Custos fixos de transporte produtor/consumidor
De posse desses dados, parte-se por elaborar a função F e a compor o problema de inequações
variacionais. Posteriormente, o problema a ser construído VI(F,K) será solucionado pela
aplicação do método Extragradiente.
Parte-se do vetor coluna x, o qual é composto pelas quantidades a serem transportadas de cada
produtor para cada mercado consumidor, com dimensão Rm+n
.
A função F(x) é composta de parcelas advindas da formulação da utilidade do produtor, como
segue:
(receita) (transporte) (produção)mnL Eq. 17
0
[( ) ] [ ] ( )nq
mn n n in mn mn mn m m
i
L r s x x c x a b w dw , Eq. 18

XXIX ENCONTRO NACIONAL DE ENGENHARIA DE PRODUCAO A Engenharia de Produção e o Desenvolvimento Sustentável: Integrando Tecnologia e Gestão
Salvador, BA, Brasil, 06 a 09 de outubro de 2009
8
2
( )2
mmn n n in mn mn mn m
i
b wL r s x x c x a w
, Eq. 19
Em que mj
j
w x
2
1
( )2
k
m mjcj
k n n in mn mn mn m mj
m G n i j
b x
L r s x x c x a x
. Eq. 20
Observa-se que aos custos de produção é aplicada a integral, uma vez que se necessita
considerar tudo o que é produzido, por cada um dos produtores.
Dando prosseguimento, pode-se apresentar que o lucro do grupo produtor k, ou seja, a
utilidade do grupo k, pode ser dada pela fórmula:
2
1
( )2
k
cm
k n n in mn mn mn m mj mj
m G n i j j
bL r s x x c x a x x
Eq. 21
Do teorema apresentado por Nagurney (1999, p.212-213), que trata da formulação do
equilíbrio de Nash por Inequação Variacional, tem-se que:
* *( ), 0, ,F x x x x K em que
1 1( ) ( ),..., ( )m mF x x L x x L x , considerando que
1
( ) ( )( ) ,...,k k
k k
k kn
L x L xx L x
x x
, então
1k
ck
n n n in mn m m mj
m G n i jmn
Lr s s x c a b x
x
. Eq. 22
Dessa forma, F(x) deverá seguir:
1
( )
( )k
k
mn
c
n n n in mn m m mj
m G n i j
LF x
x
F x r s s x c a b x
1
( )k
c
m m mj mn n n n in
m G n j i
F x a b x c r s s x
. Eq. 23
Assim, o vetor F(x) fará uso dos seguintes sub-cálculos:

XXIX ENCONTRO NACIONAL DE ENGENHARIA DE PRODUCAO A Engenharia de Produção e o Desenvolvimento Sustentável: Integrando Tecnologia e Gestão
Salvador, BA, Brasil, 06 a 09 de outubro de 2009
9
3
1
4
1
i ij
j
i i i i
j ij
i
j j j j
Q x
CMg a b Q
D x
P r s D
Subseqüentemente, são mostrados os cálculos para cada um dos valores do vetor x. Observa-
se que os produtores i=1 e i=2 constituem um mesmo grupo produtor, logo há a interação do
que for transportado por ambos.
1, 1 1, 1, 2,
2, 2 2, 1, 2,
3, 3 3, 3,
4, 4 4, 4,
j j j j j j
j j j j j j
j j j j j
j j j j j
x CMg CTrans s x x P
x CMg CTrans s x x P
x CMg CTrans s x P
x CMg CTrans s x P
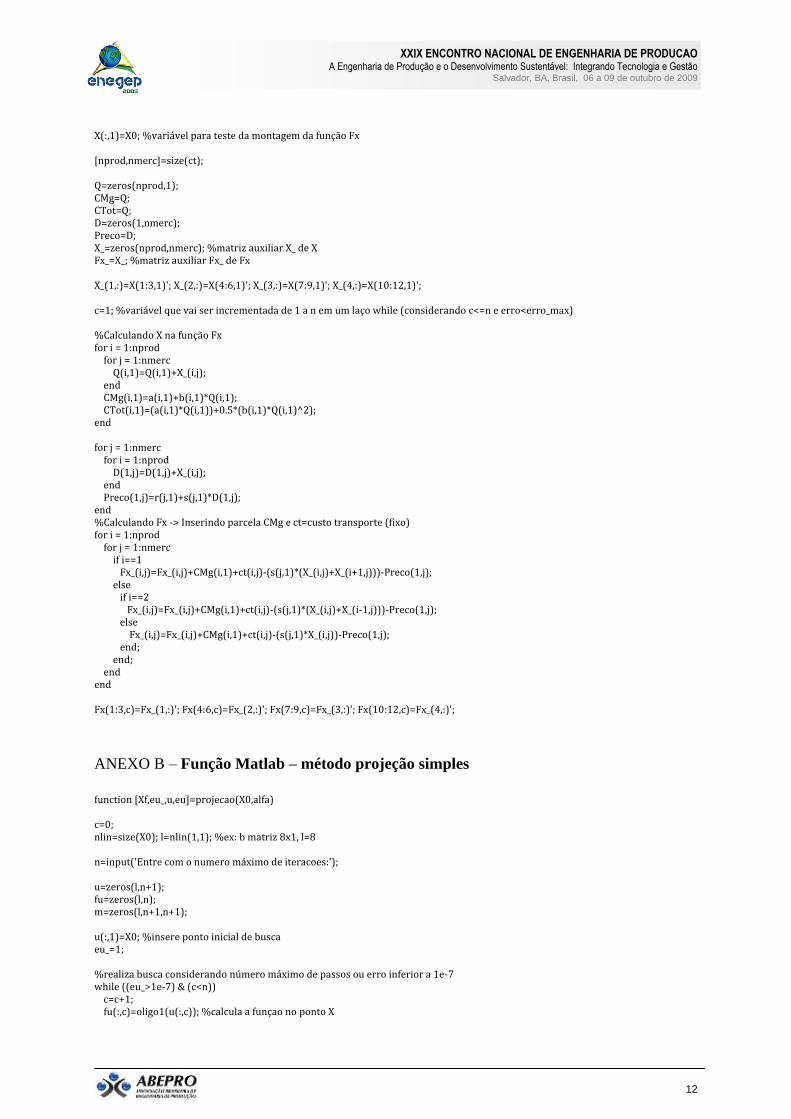
No Apêndice A, tem-se o código Matlab que compõe tal função. São utilizadas as matrizes
geradas das Tabelas 1, 2 e Quadro 1. O vetor x é a variável de entrada que se deseja aplicar à
função. Como resultado, a função retorna outro vetor, de mesma dimensão de x.
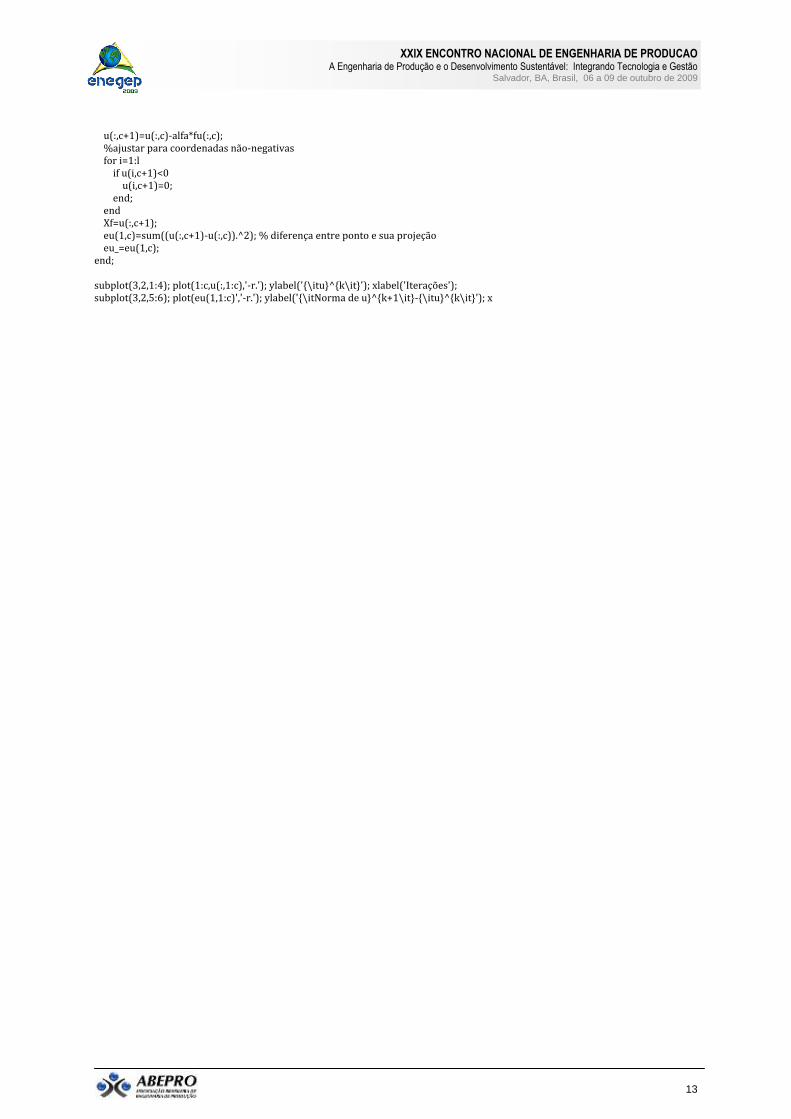
No Apêndice B, tem-se o código da função responsável por aplicar o método de projeção
simples, já discutido no capítulo 2.
O critério de parada para o algoritmo pode ser definido: pode-se considerar um número
máximo de iterações ou que o erro quadrático máximo entre o ponto obtido na iteração K e o
anterior (K-1) seja inferior a um parâmetro estipulado (tipicamente 10-7
).
No capítulo seguinte, serão tratados os resultados obtidos com a aplicação do método
apresentado.
5. RESULTADOS E DISCUSSÕES
Neste capítulo, serão abordados os resultados encontrados com a aplicação do método do
extragradiente proposto no artigo.
O método da Projeção Simples necessita encontrar um valor preditivo a fim de permitir sua
convergência. Já quanto aos preços, tendo-se as quantidades a serem transportadas de cada
mercado produtor para cada um dos mercados consumidores, pode-se calcular os preços finais
a serem praticados em cada mercado. Isto pode ser facilmente obtido pela substituição dos
valores de x nas fórmulas específicas para este fim.
Os resultados para o problema podem ser observados a seguir, considerando-se um erro
máximo de 0,000001%:
=0.1
2,04969

XXIX ENCONTRO NACIONAL DE ENGENHARIA DE PRODUCAO A Engenharia de Produção e o Desenvolvimento Sustentável: Integrando Tecnologia e Gestão
Salvador, BA, Brasil, 06 a 09 de outubro de 2009
10
0,55430
3,85188
0,00000
3,22632
0,00000
1,17246
4,02263
2,01597
0,00000
2,96243
3,30905
Fonte: Própria.
TABELA 3 - Resultados obtidos pela aplicação dos métodos EG e projeção simples.
Assim, os valores encontrados para os preços a serem praticados baseiam-se novamente na
utilidade de Nash, Lk. Tais formulações foram vistas no capítulo anterior, culminando na Eq.
20, a qual denota a utilidade para o grupo produtor. A aplicação destas formulações irá
resultar nos cálculos sintetizados nos quadros que seguem:
j ij ijP CTrans x 3
1
j ij ij
j
P CTrans x
j (merc. consumidor) Receita
Do produtor i 1 2 3
i (p
roduto
r)
1 25,735 6,781 54,830 87,347
2 0,000 42,698 0,000 42,698
3 13,549 53,237 24,665 91,450
4 0,000 39,206 50,412 89,618
Fonte: Própria.
QUADRO 2 - Cálculo da parcela da receita de cada produtor, da utilidade L (Eq. 20).
2
0( )
2
nqi
i i i ij ij
j j
ba b w dw a x x
Custo total
i (p
roduto
r)
1 33,751
2 20,088
3 40,422
4 44,752
Fonte: Própria.
QUADRO 3 - Cálculo da parcela do custo total, da utilidade L (Eq.20).
Receita:
Custo total
Lucro Líquido
Final (produtor i)

XXIX ENCONTRO NACIONAL DE ENGENHARIA DE PRODUCAO A Engenharia de Produção e o Desenvolvimento Sustentável: Integrando Tecnologia e Gestão
Salvador, BA, Brasil, 06 a 09 de outubro de 2009
11
Lucro Líquido
i (p
roduto
r)
1 51,418 76,206
2 23,683
3 49,328 51,028
4 43,694 44,866
Fonte: Própria.
QUADRO 4 - Cálculo do lucro líquido de cada grupo produtor (utilidade L: Eq.20).
6.CONCLUSÕES
O presente artigo, que estabeleceu como objetivo principal viabilizar a aplicação do método
extragradiente em problemas de inequações variacionais, como é o caso dos equilíbrios
espaciais de preços em mercados, exemplificado neste trabalho, permitiu a verificação de que
o mesmo é bastante eficiente na busca de soluções. Também, para demais problemas de
variáveis contínua envolvendo equilíbrio em redes, o método mostra-se bastante adequado e
com boa convergência.
Novos estudos estão sendo conduzidos para aprimorar a convergência do algoritmo, que se
mostrou bastante sensível para valores de . Contudo, embora as dimensões do problema-
exemplo não sejam grandes, acredita-se que, para problemas de maior porte, o método revela
bom potencial na busca de resultados, como por exemplo, em problemas de definição de
preços envolvendo cadeias de suprimento, transporte e logística.
Referências
KUPFER, D.; HASSENCLEVER, L. Economia Industrial – fundamentos teóricos e práticas no Brasil. 2. Ed.
São Paulo: Editora Campus, 2002.
NAGURNEY, A. Network economics – a variational inequality approach. Revised Second Edition. Boston:
Kluwer Academic Publishers, 1999.
PINHO, D. B.; VASCONCELOS, M. A. S. (Org.). Manual de economia – Equipe de professores da USP. 3. ed.
Ver. amp. São Paulo: Saraiva, 1998.
ROSSETTI, J. Introdução à economia. 20. ed. São Paulo: Atlas, 2003.
ANEXO A – Função Matlab para cálculo de F(x)
function [Fx]=oligo1(X0) %fprintf('Calculo de Fx, considerando X: \n'); %clc a=[2 3 2 4]'; b=[1 2 1 1]'; r=[20 25 30]'; s=[-2 -1 -1.5]'; ct=[1 2 2;2 1 3;2 1 4;4 1 1]; n=1; X=zeros(12,n); Fx=zeros(12,n);
XXIX ENCONTRO NACIONAL DE ENGENHARIA DE PRODUCAO A Engenharia de Produção e o Desenvolvimento Sustentável: Integrando Tecnologia e Gestão
Salvador, BA, Brasil, 06 a 09 de outubro de 2009
12
X(:,1)=X0; %variável para teste da montagem da função Fx [nprod,nmerc]=size(ct); Q=zeros(nprod,1); CMg=Q; CTot=Q; D=zeros(1,nmerc); Preco=D; X_=zeros(nprod,nmerc); %matriz auxiliar X_ de X Fx_=X_; %matriz auxiliar Fx_ de Fx X_(1,:)=X(1:3,1)'; X_(2,:)=X(4:6,1)'; X_(3,:)=X(7:9,1)'; X_(4,:)=X(10:12,1)'; c=1; %variável que vai ser incrementada de 1 a n em um laço while (considerando c<=n e erro<erro_max) %Calculando X na função Fx for i = 1:nprod for j = 1:nmerc Q(i,1)=Q(i,1)+X_(i,j); end CMg(i,1)=a(i,1)+b(i,1)*Q(i,1); CTot(i,1)=(a(i,1)*Q(i,1))+0.5*(b(i,1)*Q(i,1)^2); end for j = 1:nmerc for i = 1:nprod D(1,j)=D(1,j)+X_(i,j); end Preco(1,j)=r(j,1)+s(j,1)*D(1,j); end %Calculando Fx -> Inserindo parcela CMg e ct=custo transporte (fixo) for i = 1:nprod for j = 1:nmerc if i==1 Fx_(i,j)=Fx_(i,j)+CMg(i,1)+ct(i,j)-(s(j,1)*(X_(i,j)+X_(i+1,j)))-Preco(1,j); else if i==2 Fx_(i,j)=Fx_(i,j)+CMg(i,1)+ct(i,j)-(s(j,1)*(X_(i,j)+X_(i-1,j)))-Preco(1,j); else Fx_(i,j)=Fx_(i,j)+CMg(i,1)+ct(i,j)-(s(j,1)*X_(i,j))-Preco(1,j); end; end; end end Fx(1:3,c)=Fx_(1,:)'; Fx(4:6,c)=Fx_(2,:)'; Fx(7:9,c)=Fx_(3,:)'; Fx(10:12,c)=Fx_(4,:)';
ANEXO B – Função Matlab – método projeção simples
function [Xf,eu_,u,eu]=projecao(X0,alfa) c=0; nlin=size(X0); l=nlin(1,1); %ex: b matriz 8x1, l=8 n=input('Entre com o numero máximo de iteracoes:'); u=zeros(l,n+1); fu=zeros(l,n); m=zeros(l,n+1,n+1); u(:,1)=X0; %insere ponto inicial de busca eu_=1; %realiza busca considerando número máximo de passos ou erro inferior a 1e-7 while ((eu_>1e-7) & (c<n)) c=c+1; fu(:,c)=oligo1(u(:,c)); %calcula a funçao no ponto X
XXIX ENCONTRO NACIONAL DE ENGENHARIA DE PRODUCAO A Engenharia de Produção e o Desenvolvimento Sustentável: Integrando Tecnologia e Gestão
Salvador, BA, Brasil, 06 a 09 de outubro de 2009
13
u(:,c+1)=u(:,c)-alfa*fu(:,c); %ajustar para coordenadas não-negativas for i=1:l if u(i,c+1)<0 u(i,c+1)=0; end; end Xf=u(:,c+1); eu(1,c)=sum((u(:,c+1)-u(:,c)).^2); % diferença entre ponto e sua projeção eu_=eu(1,c); end; subplot(3,2,1:4); plot(1:c,u(:,1:c),'-r.'); ylabel('{\itu}^{k\it}'); xlabel('Iterações'); subplot(3,2,5:6); plot(eu(1,1:c)','-r.'); ylabel('{\itNorma de u}^{k+1\it}-{\itu}^{k\it}'); x