Julio C esar Silva de Almeida Waslley Peres Oliveira ... · GPS Global Positioning System ID...
79
Universidade Federal Fluminense Escola de Engenharia Curso de Gradua¸ c ˜ ao em Engenharia de Telecomunica¸ c ˜ oes Julio C´ esar Silva de Almeida Waslley Peres Oliveira Radiolocaliza¸c˜ao Niter´ oi – RJ Dezembro 2017
Transcript of Julio C esar Silva de Almeida Waslley Peres Oliveira ... · GPS Global Positioning System ID...
Universidade Federal Fluminense
Escola de Engenharia
Curso de Graduacao em Engenharia de
Telecomunicacoes
Julio Cesar Silva de Almeida
Waslley Peres Oliveira
Radiolocalizacao
Niteroi – RJ
Dezembro 2017

ii
Julio Cesar Silva de Almeida
Waslley Peres Oliveira
Radiolocalizacao
Trabalho de Conclusao de Curso apresentado ao
Curso de Graduacao em Engenharia de Teleco-
municacoes da Universidade Federal Fluminense,
como requisito parcial para obtencao do Grau de
Engenheiro de Telecomunicacoes.
Orientador: Prof. Tadeu Nagashima Ferreira
Niteroi – RJ
Dezembro 2017
iii
.
iv
.
Julio Cesar Silva de Almeida
Waslley Peres Oliveira
Radiolocalizacao
Trabalho de Conclusao de Curso apresentado ao
Curso de Graduacao em Engenharia de Teleco-
municacoes da Universidade Federal Fluminense,
como requisito parcial para obtencao do Grau de
Engenheiro de Telecomunicacoess.
Aprovada em 13 de Dezembro de 2017.
BANCA EXAMINADORA
Prof. Tadeu Nagashima Ferreira - Orientador
Universidade Federal Fluminense - UFF
Prof a. Jacqueline Silva Pereira
Universidade Federal Fluminense - UFF
Prof a. Leni Joaquim de Matos
Universidade Federal Fluminense - UFF
Niteroi – RJ
Dezembro 2017
v
Resumo
O objetivo deste trabalho e descrever de uma maneira geral o princıpio da radio-
localizacao. Serao estudadas as principais tecnicas utilizadas nas redes de telefonia movel
e suas determinadas aplicacoes para ambientes externos e internos. Sera mostrado que
em ambientes externos ja existe uma tecnologia muito bem difundida e aceita em nıvel
global que sao as tecnologias baseadas em satelites, denominado sistema GPS. Entretanto
ainda nao existe uma tecnologia convergente para ambientes internos. Com base nisso,
serao analisadas as principais tecnologias para esse tipo de ambientes e as tendencias de
mercado. E por fim sera feito um estudo de caso sobre uma das principais competicoes
mundial de tecnologias para localizacao em ambientes indoor, realizada pela Microsoft,
no qual sera feita uma analise minuciosa com os dois melhores sistemas dessa competicao.
Palavras-chave: Radiolocalizacao, GPS, RSSI, Localizacao Indoor, Wi-Fi, ZigBee.

vi
Abstract
The objective of this work is to describe in a general way the principle of radiolo-
cation, the main techniques used in mobile telephone networks will be studied and their
certain applications for external and internal environments. It will be shown that in out-
door environments there is already a very well-known technology and accepted at a global
level that are the technologies based on satellites, called GPS system. However, there is
still no convergence technology for indoor environments. Based on this, we will analyze
the main technologies for this type of environments and the market trends. And finally a
case study will be done on one of the main competitions in the world of technologies for
localization in indoor environments, conducted by Microsoft, in which a thorough analysis
will be done with the two best systems of this competition.
Keywords: Radiolocation, GPS, RSSI, Indoor Location, Wi-Fi, ZigBee.

vii
Aos nossos familiares e amigos.
viii
Agradecimentos
Gostaria de agradecer primeiramente ao meu pai, Arlei, grande responsavel pela
formacao do meu carater e o meu maior exemplo a quem eu me espelho todos os dias.
Muito obrigado pelo amor e apoio incondicional, sem voce eu nao teria conseguido. Agra-
deco a minha mae, Sueli, que infelizmente nao esta mais aqui para assistir minha grande
conquista, mas foi fundamental para que ela acontecesse, era a minha maior incentivadora
nos estudos. Ao lado do meu pai foram os dois grandes responsaveis pela minha forma-
cao. Nao posso deixar de agradecer a minha namorada, Juliana, que sempre me apoiou e
por ser sempre minha fiel companheira para tudo na vida, muito obrigado por tudo meu
amor. Agradeco a minha irma Marcelle, e ao meu sobrinho Marcello, por sempre estarem
comigo em todos os momentos. Por fim, agradeco ao meu parceiro de TCC Waslley que
esteve comigo durante todo esse trabalho e ao professor Tadeu, que nos orientou de forma
ımpar para que pudessemos atingir esse objetivo.
Julio Cesar
Gostaria de agradecer primeiramente ao meu pai Gilberto e minha mae Zeni por serem
os grandes responsaveis e exemplos para realizar essa conquista em minha vida iniciando
uma nova etapa. Agradecer a minha madrinha Ruth e minha avo Rosemari por serem
minhas grandes incentivadoras e apoiadoras para chegar a esse momento feliz. Agradecer
a minha namorada Graciane que foi minha companheira e amiga nesses seis anos de
faculdade. Agradecer a minha irma, amiga Andrezza que sempre esteve do meu lado
me incentivando a conseguir esse objetivo. Por ultimo quero agradecer meu amigo e
companheiro de TCC Julio Cesar que num momento meu de desanimo nao deixou eu
desistir de realizar esse trabalho e ao meu professor Tadeu que aceitou o nosso convite,
nos orientando da melhor maneira possıvel.
Waslley Peres
Lista de Siglas
AoA Angle of Arrival
AP Access Point
AS Anti-Spoofing
BLE Bluetooth Low Energy
CDMA Code Division Multiple Access
DoA Direction of Arrival
DoD Departamento de Defesa dos Estados Unidos
E911 Wireless Enhanced 911
ERB Estacoes Radio Bases
FCC Federal Communications Commission
GNSS Global Navigation Satellite System
GPS Global Positioning System
ID Identity
IEEE Institute of Electrical and Electronics Engineers
IPSN International Conference on Information Processing in Sensor Networks
ISM Industrial,Scientific Medical
NLOS Non-Line of Sight
PPS Precise Positioning Service
ix
x
PRN Pseudo Random Noise Codes
RF Radiofrequencia
RFID Radio-Frequency IDentification
RSSI Received Signal Strength Indicator
SA Selective Availability
SPS Standard Positioning Service
SSID Service Set IDentifier
TDMA Time Division Multiple Access
TDoA Differencial Time of Arrival
ToA Time of Arrival
UMTS Universal Mobile Telecommunication System
WCDMA Wide-Band Code-Division Multiple Access
Wi-Fi Wireless Fidelity
WLAN Wireless Local Area Network
Lista de Figuras
2.1 Segmentos que compoem o Sistema GPS. [4] . . . . . . . . . . . . . . . . . 6
2.2 Figura Ilustrativa do Segmento Espacial composto dos 24 satelites GPS nos
planos orbitais da Terra. [5] . . . . . . . . . . . . . . . . . . . . . . . . . . 7
2.3 Ilustracao com apenas 2 satelites. [7] . . . . . . . . . . . . . . . . . . . . . 9
2.4 Ilustracao com os 3 satelites. [7] . . . . . . . . . . . . . . . . . . . . . . . . 9
2.5 Sinais de Satelite GPS. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 11
3.1 Distribuicao das tecnicas de radiolocalizacao. [10] . . . . . . . . . . . . . . 13
3.2 Tecnica de radiolocalizacao baseada em medida de potencia. [2] . . . . . . 14
3.3 Tecnica de radiolocalizacao baseada em angulo de recepcao. [2] . . . . . . 16
3.4 Tecnica de radiolocalizacao baseada em tempo de recepcao. [2] . . . . . . . 17
3.5 Representacao do primeiro modelo explicado. [11] . . . . . . . . . . . . . . 19
3.6 Modelo hiperbolico. [11] . . . . . . . . . . . . . . . . . . . . . . . . . . . . 20
4.1 Representacao do modelos de 2 raios. [11] . . . . . . . . . . . . . . . . . . 25
4.2 Representacao do fenomeno difracao mostrada pela Ericsson nos anos 2000.
[12] . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 25
4.3 Canais de comunicacao do espectro da Banda ISM 2,4 GHz no Brasil. [19] 31
4.4 Canais Ortogonais do espectro da Banda ISM 2,4 GHz no Brasil. [17] . . . 31
4.5 Processo de impressao de localizacao divididos em duas fases, off-line e
on-line. [20] . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 34
4.6 Mapa de radio: Os pontos pretos sao as referencias, ou seja, as impressoes
digitais. [21] . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 34
4.7 Relacao do ZigBee com as camadas do modelo TCP/IP. [23] . . . . . . . . 37
4.8 Sensor Micaz. [25] . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 38
4.9 Sistema basico da tecnologia RFID. [26] . . . . . . . . . . . . . . . . . . . 39
xi
xii
4.10 Alguns modelos de Tags RFID. [27] . . . . . . . . . . . . . . . . . . . . . 40
4.11 Beacons de alguns fabricantes. [29] . . . . . . . . . . . . . . . . . . . . . . 42
4.12 Arquitetura de um sistema de localizacao utilizando beacons. [10] . . . . . 42
5.1 Planta da area onde foi realizado a Microsoft Indoor Localization Compe-
tition – IPSN 2014. [32] . . . . . . . . . . . . . . . . . . . . . . . . . . . . 47
5.2 Imagem das salas onde foi realizada a competicao. [32] . . . . . . . . . . . 48
5.3 Foto tirada durante a realizacao da Microsoft Indoor Localization Compe-
tition – IPSN 2014. [33] . . . . . . . . . . . . . . . . . . . . . . . . . . . . 48
5.4 Grafico de resultados de todos os 22 sistemas que competiram na IPSN2014.
[32] . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 49
5.5 Dispositivos usados na IPSN2014 pela equipe Bestmann et aL. [34] . . . . 50
5.6 Area da competicao com a marcacao dos 6 AP’s e as 20 posicoes de avali-
acao. [33] . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 51
5.7 Na foto da esquerda os 6 AP’s easypoint e os 20 pontos utilizados para
avaliacao, e na foto da direita a medicao para cada ponto de avaliacao e
seus respectivos desvios.[33] . . . . . . . . . . . . . . . . . . . . . . . . . . 52
5.8 No lado esquerda mostra a triangulacao feita em torno da posicao 1 e no
lado direito o cırculo ao redor da posicao 1 que e um metodo para avaliar
a precisao.[33] . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 52
5.9 No lado esquerdo representa a estimativa na posicao 2, ja no lado direito a
estimativa na posicao 4. [33] . . . . . . . . . . . . . . . . . . . . . . . . . . 53
5.10 O Futuro da tecnologia easyPoint : Integracao em Chip. [33] . . . . . . . . 53
5.11 Estrutura do sistema MapUme. [35] . . . . . . . . . . . . . . . . . . . . . . 54
5.12 E mostrado a implementacao desse filtro bayesiano discreto que e realizada
a partir do metodo sequencial de Monte Carlo, mais conhecido como Filtro
de Partıculas. [37] . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 56
5.13 Distribuicao Cumulativa Empırica em funcao do erro medio de localizacao
para os dois sistemas. Adaptado somente para os dois sistemas analisados [32]. 57
xiii
Lista de Tabelas
3.1 Comparacao entre as tecnicas. [10] . . . . . . . . . . . . . . . . . . . . . . 22
4.1 Perdas associadas aos especıficos obstaculos para o sinal operando em 2,4
GHz. [15] . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 27
4.2 Divisao do Espectro da Banda ISM 2,4 GHz pelos diversos paıses. [17] . . 30
4.3 Parametros da Banda ISM utilizados pelo ZigBee. [24] . . . . . . . . . . . 37
4.4 Tabela de classes de alcance do Bluetooth - Adaptado. [28] . . . . . . . . . 41
4.5 Comparacao entre as tecnologias. [10] . . . . . . . . . . . . . . . . . . . . . 43
5.1 Equipes que participaram da Microsoft Indoor Localization Competition -
IPSN 2014. [32] . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 46
5.2 Resultado dos erros medios de localizacao de cada um dos sistemas. Adap-
tado [32]. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 58
A.1 Caracterısticas tecnicas do sensor Micaz [25] . . . . . . . . . . . . . . . . . 61
Sumario
Resumo v
Abstract vi
Agradecimentos viii
Lista de Siglas ix
Lista de Figuras xii
Lista de Tabelas xiii
1 Introducao 1
1.1 Historico e Motivacao . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 1
1.2 Objetivo . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 3
1.3 Estrutura do Projeto . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 4
2 Global Positioning System - GPS 5
2.1 Introducao ao GPS . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 5
2.2 O Sitema GPS . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 5
2.2.1 Segmento Espacial . . . . . . . . . . . . . . . . . . . . . . . . . . . 6
2.2.2 Segmento de Controle . . . . . . . . . . . . . . . . . . . . . . . . . 7
2.2.3 Segmento de Utilizacao ou do Usuario . . . . . . . . . . . . . . . . 8
2.2.4 Estrutura dos Sinais GPS . . . . . . . . . . . . . . . . . . . . . . . 10
3 Tecnicas Aplicadas a Radiolocalizacao 13
3.1 Tecnica Baseada em Medida de Potencia . . . . . . . . . . . . . . . . . . . 14
3.2 Tecnica Baseada em Angulo de Recepcao (AoA) . . . . . . . . . . . . . . . 15
xiv
xv
3.3 Tecnica Baseada em Tempo de Recepcao . . . . . . . . . . . . . . . . . . . 17
3.3.1 Tecnica Baseada em Tempo Diferenciado de Recepcao . . . . . . . 18
3.4 Comparacao entre as tecnicas . . . . . . . . . . . . . . . . . . . . . . . . . 22
4 Problemas e Tendencias na Radiolocalizacao de Terminais Moveis 23
4.1 Problemas da radiolocalizacao . . . . . . . . . . . . . . . . . . . . . . . . . 23
4.1.1 Ambientes Outdoors . . . . . . . . . . . . . . . . . . . . . . . . . . 23
4.1.2 Ambientes Indoor . . . . . . . . . . . . . . . . . . . . . . . . . . . . 26
4.2 Tendencias para os sistemas de radiolocalizacao em ambientes indoor . . . 28
4.3 Principais Tecnologias para Localizacao em ambientes indoor . . . . . . . . 29
4.3.1 Wi-Fi . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 29
4.3.2 Zigbee . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 36
4.3.3 RFID . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 39
4.3.4 BLE . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 40
5 Estudo e Analise dos Sistemas Apresentados na Microsoft Indoor Loca-
lization Competition 44
5.1 Caso 1 - O Sistema easyPoint . . . . . . . . . . . . . . . . . . . . . . . . . 50
5.2 Caso 2 - O SistemaMapUme . . . . . . . . . . . . . . . . . . . . . . . . . . 54
5.3 Sistema easyPoint X Sistema MapUme . . . . . . . . . . . . . . . . . . . . 57
6 Conclusao 59
A Especificacoes tecnicas do Sensor Micaz MPR2400CA 61
Referencias Bibliograficas 62
Capıtulo 1
Introducao
1.1 Historico e Motivacao
O estudo sobre a radiolocalizacao atraves de dispositivos moveis vem desde a de-
cada de 1970, no entanto, comecou a ganhar intensidade e despertar grande interesse nessa
tecnologia a partir da decada de 90, mais precisamente no ano de 1996, principalmente
no ramo industrial e academico. Nesse ano, a FCC (Federal Communications Commis-
sion) que e a comissao responsavel pela regulamentacao das telecomunicacoes nos Estados
Unidos,[1] publicou uma serie de regras relativas a localizacao de usuarios de servicos de
emergencia em terminais de comunicacao movel. Esta regulamentacao estava prevista
para entrar em vigor em outubro de 2001 e exigia que qualquer operadora nos Estados
Unidos de sistemas celulares, ou sistemas sem fio especializados, deveria ser capaz de
localizar o usuario e prover informacoes para os servicos de emergencia 911.[2]
Com essa necessidade imposta pelo governo americano, a regulamentacao foi deno-
minada E911 sendo responsavel por exigir um maior esforco entre as agencias de seguranca
publica, operadoras, empresas de tecnologia e fabricantes de equipamentos para comuni-
cacoes sem fio, todos trabalhando a fim de tornar solido este projeto.
A necessidade da regulamentacao foi justificada na epoca pela grande quantidade
de chamadas de emergencia serem originadas de terminais moveis. Naquele momento
ja crescia exponencialmente o conceito de mobilidade. A informacao de posicao para
estas chamadas sem fio permite rapida resposta em situacoes que os usuarios de terminais
moveis poderiam estar desorientados ou incapacitados de falar ao telefone por conta de
algum acidente ou algo do tipo.
2
Com o objetivo de tornar o projeto menos complexo e alcancar a real necessidade ao
final dos cinco anos que haviam estipulado, a FCC fez algumas exigencias, dentre elas, que
inicialmente a localizacao deveria ser realizada atraves de tecnologias baseadas somente
na rede (network-based), sem exigir modificacoes a nıvel tanto de hardware quanto de
software dos terminais ja utilizados na epoca.
Com a publicacao do E911, ficou evidente que essa tecnologia poderia ser atra-
ente e gerar muito mercado e dinheiro nas mais diversas areas. Foi entao que comecou a
desencadear um grande interesse em pesquisas para desenvolver tecnologias de radioloca-
lizacao. Empresas responsaveis pelo ramo das comunicacoes de todos os portes passaram
a disputar melhores solucoes para implementacao dos sistemas moveis de 2a e 3a geracoes.
Ja na area academica surgiram varias publicacoes referentes ao assunto e a criacao de
congressos especıficos com o objetivo de discutir melhorias e alternativas para o tipo de
servico.
A radiolocalizacao, num primeiro momento, foi incentivada para atender as de-
terminacoes da FCC. Apos esse perıodo de surgimento da radiolocalizacao as empresas
perceberam que saber a localizacao do usuario e estrategicamente vantajosa na hora de
fornecer um servico especıfico para atender cada perfil de cliente. Neste quesito aparece
a area comercial, seguranca publica, turismo e entretenimento. [1]
Alem disso, pode ser utilizada tambem para gerencia e controle da rede de telefonia
movel. Abaixo serao apresentadas algumas aplicacoes responsaveis pela gerencia e controle
da rede:
1) Tarifacao e melhorias de servico em funcao da posicao: As tarifas
poderiam ser cobradas de acordo com a posicao do telefone movel, permitindo que as
operadoras oferecessem planos de tarifacao de acordo com o perfil de cada cliente e tambem
prover novos servicos, tendo em vista sempre um melhor desempenho e qualidade da sua
rede.
2) Controle de frota: Importante no gerenciamento e controle de uma frota de
veıculos tanto para empresas privadas quanto orgaos publicos. Atraves de uma dada area
de cobertura do sistema de comunicacoes verificar a seguranca contra roubos de carga
(problema grave enfrentado no estado do Rio de Janeiro), no transporte e seguranca de
autoridades. Por isso e importante um monitoramento dessas frotas em tempo real sendo
viavel pelo sistema de radiolocalizacao.
3
3) Seguranca Publica: Talvez seja uma das aplicacoes mais importantes. Com
os avancos e a popularidade da telefonia celular, o sistema de radiolocalizacao pode ser
uma ferramenta muito util para encontrar pessoas sob sequestro, por exemplo, tendo
seu trajeto rastreado ate a localizacao de seu cativeiro devido ao uso de telefone movel
pelos criminosos. E importante na coordenacao de determinadas operacoes policiais para
realizar a cobertura do sistema de comunicacoes.
4) Paginas amarelas movel: O conhecimento sobre a radiolocalizacao pode
ser de fundamental utilidade aos usarios. Auxilia na localizacao de estabelecimentos
comerciais, identificacao de uma melhor rota durante uma viagem, sendo importante nas
tarefas do dia-a-dia.
5) Gerenciamento e Planejamento da rede: O gerenciamento e planejamento
da rede e de fundamental importancia para o seu funcionamento da rede, sendo a infor-
macao da posicao do usuario imprescindıvel para essas tarefas. As aplicacoes feitas nessa
direcao sao o planejamento, handover e gerenciamento de mobilidade auxiliados por lo-
calizacao. Estas tecnicas permitirao que o gerenciamento de rede se adapte temporal
e espacialmente a demanda de trafego consequentemente aumentando a capacidade do
sistema.
1.2 Objetivo
O objetivo geral deste trabalho e analisar as tecnicas de radiolocalizacao ja utili-
zadas em redes de telefonia movel, suas determinadas aplicacoes e escolha de frequencia
em ambientes internos e externos e como elas estao diversificadas no mercado. Sera apre-
sentado como a Microsoft Indoor Localization Competition procura vencer os desafios de
se obter a localizacao em ambientes indoor.
4
1.3 Estrutura do Projeto
No capıtulo 1 pode ser vista toda a origem da radiolocalizacao e a motivacao, a
qual nos fez escolher esse assunto para nosso projeto final de curso, alem do objetivo geral
do projeto.
Ja no capitulo 2 e apresentado o conceito e o modo de operacao do sistema GPS,
o sistema mais tradicional e respeitado do mundo sobre radiolocalizacao.
No capıtulo 3 contem as tecnicas aplicadas a radiolocalizacao e seus funcionamen-
tos.
No capıtulo 4 serao mostrados os principais problemas dessas tecnologias, que sera
dada uma enfase nos ambientes indoor pelo fato de ser nesses tipos de ambientes os maiores
problemas e ainda sem solucao convergente. Tambem serao mostrados nesse capıtulo as
tecnologias existentes e as tendencias para solucao desses problemas.
O capitulo 5 sera o estudo de caso, o qual sera apresentada uma das maiores
competicoes do mundo que possui o objetivo de descobrir novas tecnologias sobre ra-
diolocalizacao em ambientes indoor, a Microsoft Indoor Localization Competition. Sera
feito uma analise detalhada das duas principais tecnologias dessa competicao realizada
em 2014, alem de mostrar como o mundo academico, empresas e startups ou qualquer
centro de pesquisa de ponta vem se preparando para quem sabe um dia desenvolver um
sistema unico como existe o sistema GPS para ambientes outdoor.
O capitulo 6 e destinado a conclusao do trabalho.
Capıtulo 2
Global Positioning System - GPS
2.1 Introducao ao GPS
O Sistema de Posicionamento Global, popularmente conhecido como GPS, ou ainda
NAVSTAR-GPS (NAVigation Satellite with Time And Ranging), e o sistema mais famoso
quando pensamos em realizar a localizacao de um dispositivo movel. O GPS foi idealizado
e projetado na decada de 70 [3]. Consiste em um sistema de navegacao baseado na
utilizacao de satelites e terminais moveis. Foi desenvolvido pelo Departamento de Defesa
dos Estados Unidos (DoD) para fins militares. Posteriormente visto o tamanho da sua
utilidade para qualquer que seja a area, foi disponibilizado para o uso civil.[2]
O princıpio basico e que basta ter um dispositivo que possua um receptor GPS,
muito comum nos tempos atuais, que sua localizacao pode ser feita em qualquer lugar da
terra, de forma continua e em tempo real.
2.2 O Sitema GPS
Para atingir seu objetivo, o sistema GPS foi estruturado e subdividido em tres
segmentos bases, sao eles: segmento espacial, segmento de controle e o segmento de utili-
zacao ou de usuario [3]. A figura 2.1 representa uma ilustracao desses tres segmentos do
sistema GPS.
5
6
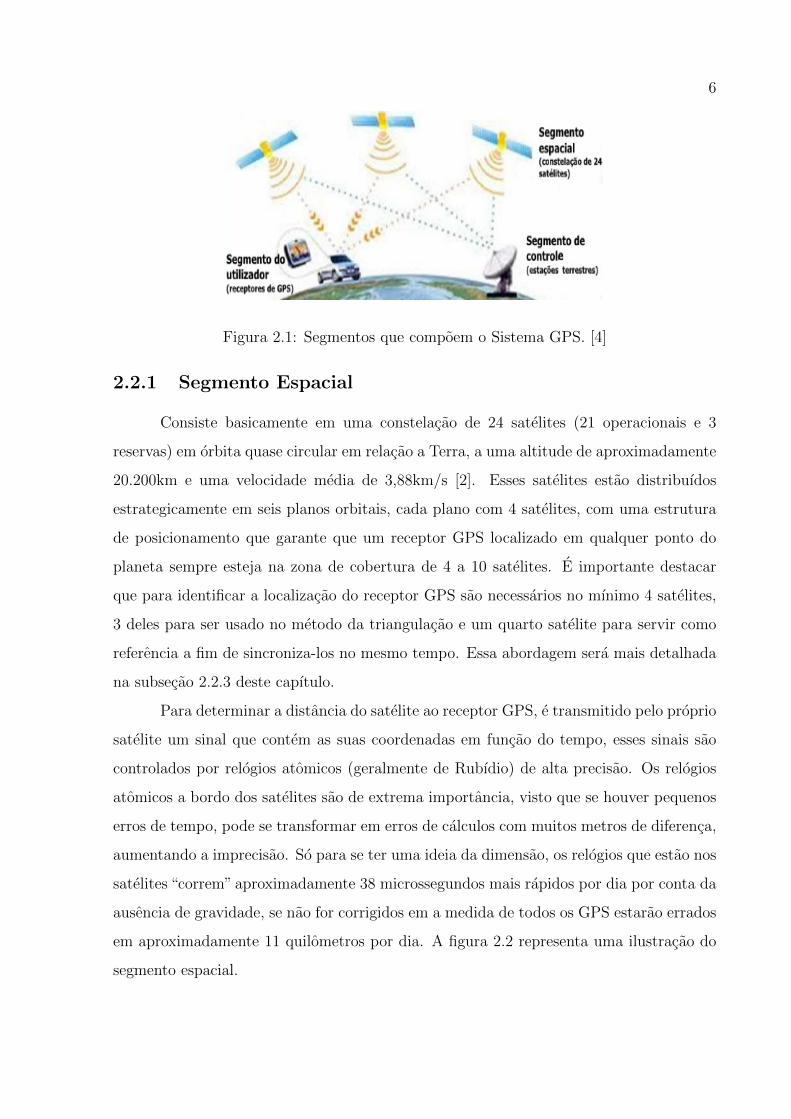
Figura 2.1: Segmentos que compoem o Sistema GPS. [4]
2.2.1 Segmento Espacial
Consiste basicamente em uma constelacao de 24 satelites (21 operacionais e 3
reservas) em orbita quase circular em relacao a Terra, a uma altitude de aproximadamente
20.200km e uma velocidade media de 3,88km/s [2]. Esses satelites estao distribuıdos
estrategicamente em seis planos orbitais, cada plano com 4 satelites, com uma estrutura
de posicionamento que garante que um receptor GPS localizado em qualquer ponto do
planeta sempre esteja na zona de cobertura de 4 a 10 satelites. E importante destacar
que para identificar a localizacao do receptor GPS sao necessarios no mınimo 4 satelites,
3 deles para ser usado no metodo da triangulacao e um quarto satelite para servir como
referencia a fim de sincroniza-los no mesmo tempo. Essa abordagem sera mais detalhada
na subsecao 2.2.3 deste capıtulo.
Para determinar a distancia do satelite ao receptor GPS, e transmitido pelo proprio
satelite um sinal que contem as suas coordenadas em funcao do tempo, esses sinais sao
controlados por relogios atomicos (geralmente de Rubıdio) de alta precisao. Os relogios
atomicos a bordo dos satelites sao de extrema importancia, visto que se houver pequenos
erros de tempo, pode se transformar em erros de calculos com muitos metros de diferenca,
aumentando a imprecisao. So para se ter uma ideia da dimensao, os relogios que estao nos
satelites “correm” aproximadamente 38 microssegundos mais rapidos por dia por conta da
ausencia de gravidade, se nao for corrigidos em a medida de todos os GPS estarao errados
em aproximadamente 11 quilometros por dia. A figura 2.2 representa uma ilustracao do
segmento espacial.
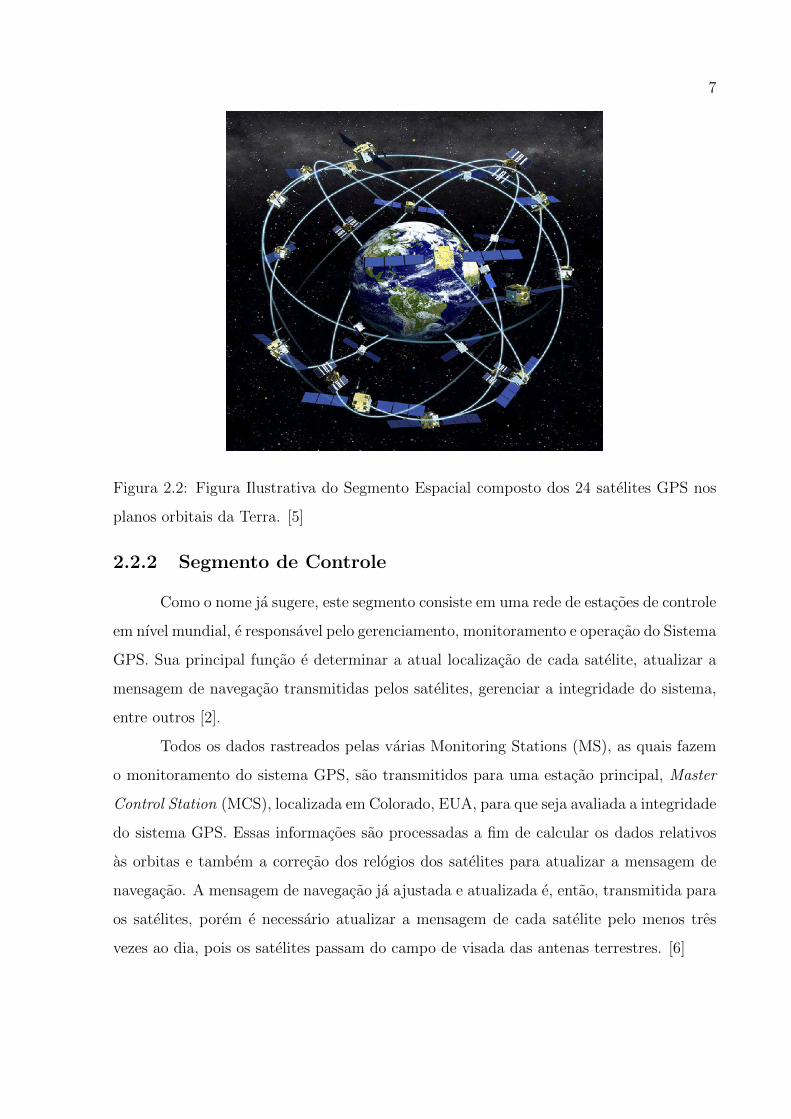
7
Figura 2.2: Figura Ilustrativa do Segmento Espacial composto dos 24 satelites GPS nos
planos orbitais da Terra. [5]
2.2.2 Segmento de Controle
Como o nome ja sugere, este segmento consiste em uma rede de estacoes de controle
em nıvel mundial, e responsavel pelo gerenciamento, monitoramento e operacao do Sistema
GPS. Sua principal funcao e determinar a atual localizacao de cada satelite, atualizar a
mensagem de navegacao transmitidas pelos satelites, gerenciar a integridade do sistema,
entre outros [2].
Todos os dados rastreados pelas varias Monitoring Stations (MS), as quais fazem
o monitoramento do sistema GPS, sao transmitidos para uma estacao principal, Master
Control Station (MCS), localizada em Colorado, EUA, para que seja avaliada a integridade
do sistema GPS. Essas informacoes sao processadas a fim de calcular os dados relativos
as orbitas e tambem a correcao dos relogios dos satelites para atualizar a mensagem de
navegacao. A mensagem de navegacao ja ajustada e atualizada e, entao, transmitida para
os satelites, porem e necessario atualizar a mensagem de cada satelite pelo menos tres
vezes ao dia, pois os satelites passam do campo de visada das antenas terrestres. [6]
8
2.2.3 Segmento de Utilizacao ou do Usuario
Este segmento esta ligado diretamente com o dispositivo movel do usuario (tipo
do receptor, softwares, algoritmos, etc). Geralmente esse segmento possui duas vertentes
basicas de uso: militar e civil [8].
Os militares usam os receptores GPS para estimar suas localizacoes em combates ou
ate mesmo na navegacao de seus mısseis. Por exemplo, um fato muito noticiado por toda
imprensa da epoca, foi a guerra do Golfo em 1991, quando foram usados muitos receptores
GPS para auxılio no deslocamento nas regioes deserticas, ja que nessas regioes os mapas
tradicionais sao totalmente inviaveis. Ja para o uso civil existe um grande numero de tipos
de receptores no mercado atual, o crescimento da utilizacao de aplicacoes envolvendo GPS
e exponencial e limitado somente a imaginacao dos usuarios.
Como ja mencionado na subsecao 2.2.1, para fazer essa localizacao do terminal
movel, o sistema GPS utiliza 3 dos seus 24 satelites para realizar o metodo de triangulacao.
Esse metodo funciona da seguinte forma. Cada satelite envia um sinal para o receptor, que
e captado pela antena GPS, esse sinal recebido chega com algumas informacoes, entre elas,
a informacao exata do tempo em que o sinal foi enviado pelo satelite. Como o receptor
conhece o instante exato que recebeu o sinal, fica facil calcular o intervalo de tempo que
a informacao durou da sua origem ao seu destino, basta fazer a diferenca desses dois
instantes de tempo. A velocidade de propagacao do sinal e igual a velocidade da luz,
isto e, 3 × 108 m/s, por ser uma onda eletromagnetica, entao ja se conhece o tempo e a
velocidade, basta multiplicar essas duas grandezas ja conhecidas que se tem a distancia
entre o satelite e o dispositivo movel em questao.
Metodo de triangulacao nos receptores GPS
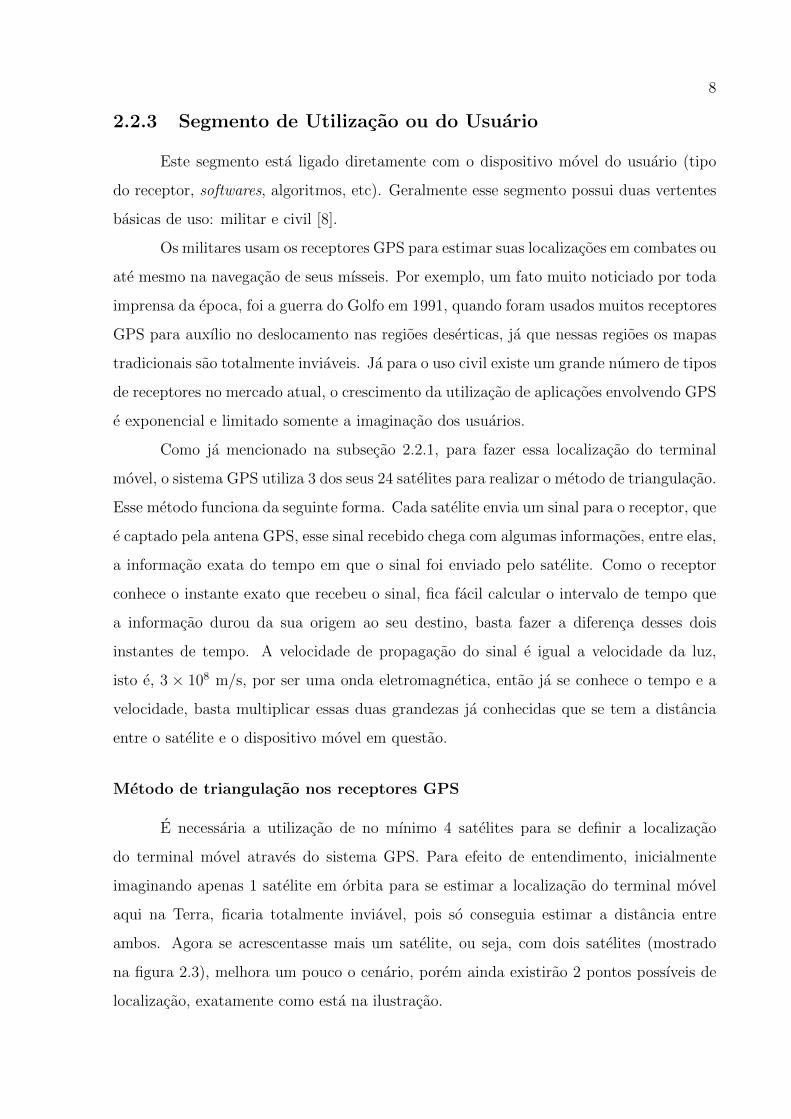
E necessaria a utilizacao de no mınimo 4 satelites para se definir a localizacao
do terminal movel atraves do sistema GPS. Para efeito de entendimento, inicialmente
imaginando apenas 1 satelite em orbita para se estimar a localizacao do terminal movel
aqui na Terra, ficaria totalmente inviavel, pois so conseguia estimar a distancia entre
ambos. Agora se acrescentasse mais um satelite, ou seja, com dois satelites (mostrado
na figura 2.3), melhora um pouco o cenario, porem ainda existirao 2 pontos possıveis de
localizacao, exatamente como esta na ilustracao.
9
Figura 2.3: Ilustracao com apenas 2 satelites. [7]
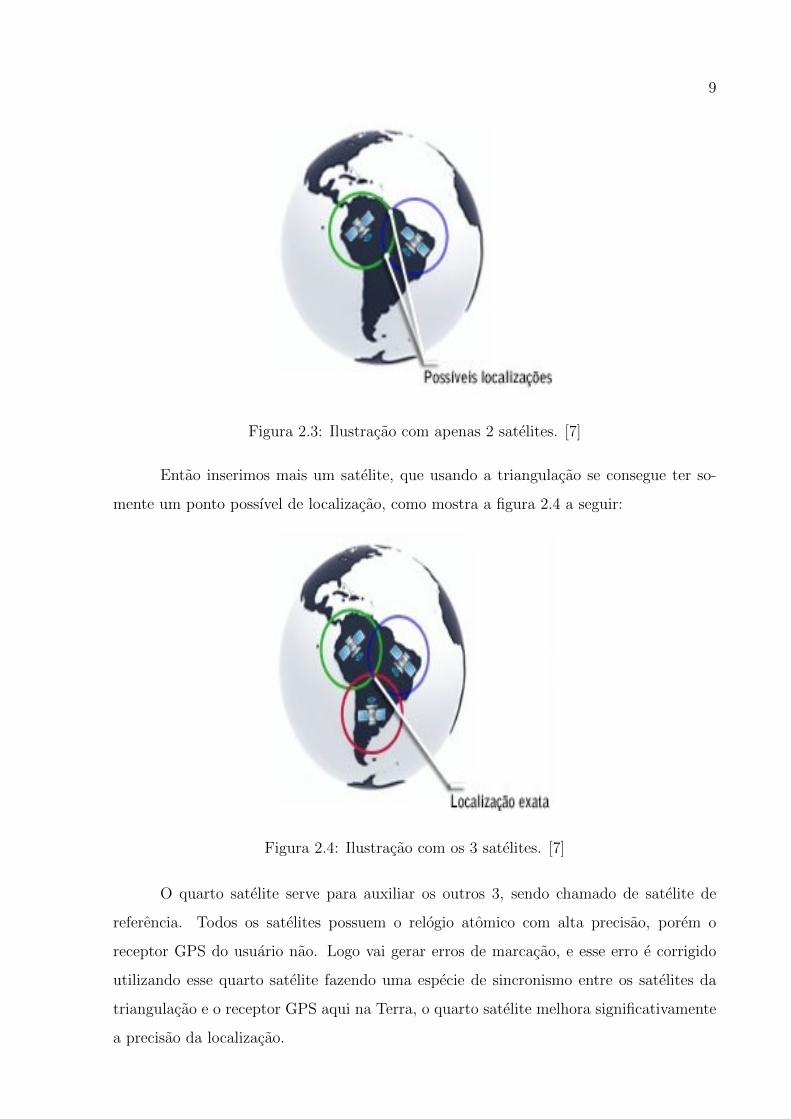
Entao inserimos mais um satelite, que usando a triangulacao se consegue ter so-
mente um ponto possıvel de localizacao, como mostra a figura 2.4 a seguir:
Figura 2.4: Ilustracao com os 3 satelites. [7]
O quarto satelite serve para auxiliar os outros 3, sendo chamado de satelite de
referencia. Todos os satelites possuem o relogio atomico com alta precisao, porem o
receptor GPS do usuario nao. Logo vai gerar erros de marcacao, e esse erro e corrigido
utilizando esse quarto satelite fazendo uma especie de sincronismo entre os satelites da
triangulacao e o receptor GPS aqui na Terra, o quarto satelite melhora significativamente
a precisao da localizacao.
10
2.2.4 Estrutura dos Sinais GPS
Quando os satelites transmitem os sinais contendo as informacoes para o receptor,
essas informacoes sao transmitidas em forma de duas ondas portadoras geradas simultane-
amente: L1 e L2. Essas frequencias sao formadas atraves de uma frequencia fundamental
(f0 = 10, 23MHz) multiplicada por 154 e 120 respectivamente [2]. A seguir as frequencias
das ondas portadoras e os comprimentos das ondas.
L1 = 10, 23 × 154 = 1575, 42MHz ; λ = c/f => λ = 19.0425cm
L2 = 10, 23 × 120 = 1227, 60MHz ; λ = c/f => λ = 24.4379cm
O objetivo de ter no sinal gerado pelo satelite duas ondas portadoras com frequen-
cias diferentes e para servir de correcao de erros que sao causados pela refracao ionosferica,
pois quando um sinal de radiofrequencia percorre a ionosfera, o sinal sofre atrasos, e como
sinais de frequencias diferentes sofrem atrasos diferentes, e possıvel identificar o inter-
valo de tempo exato desse atraso causado pela Ionosfera. Vale ressaltar que os satelites
transmitem as mesmas frequencias L1 e L2, apesar de possuırem codigos de modulacao
diferentes, isso minimiza as interferencias do sinal. Essas portadoras sao de extrema
importancia, pois alem de trazer a identificacao do satelite, elas tambem carregam na
mensagem dados para correcao do relogios, posicao e orbita dos satelites. Todos esses
dados sao denominados de Almanaque, o segmento de controle trabalha esse almanaque
gerado e os devolve atualizados para os satelites.[3], [8], [9]
Os satelites GPS transmitem os sinais nos codigos PRN (Pseudo Random Noise
Codes), os quais consistem de uma sequencia binaria de 0 e 1 ou +1 e -1 com caracte-
rısticas pseudoaleatorios modulados em fase sobre essas duas portadoras L1 e L2. Sao
gerados dois codigos, o C/A (Coarse Acquisition) e P (Precision Code), isso faz com que
o sinal transmitido nao gere ambiguidade e o sinal seja identificado de acordo com cada
satelite. Portanto, todos os satelites transmitem na mesma frequencia, mas podem ser
identificado pelo codigo exclusivo de cada satelite atraves da tecnica denominada CDMA
(Code Division Multiple Access), valida tanto para o codigo C/A como para o codigo P
[3]. Pontos importantes sobre esses codigos sao que possuem frequencias geradas a partir
da frequencia fundamental (Cod. C/A = f0/10 = 1,023 MHz e Cod. P = f0 = 10,23
MHz) e que somente o codigo P e modulado sobre as duas portadoras L1 e L2, o codigo
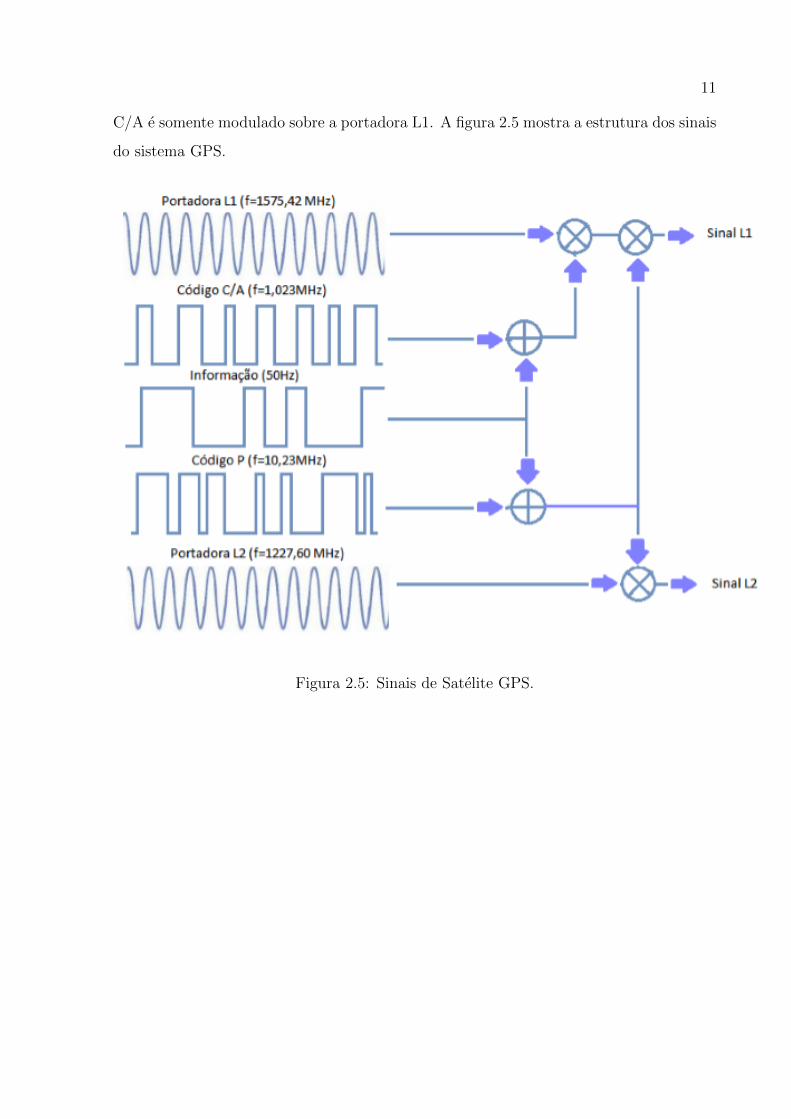
11
C/A e somente modulado sobre a portadora L1. A figura 2.5 mostra a estrutura dos sinais
do sistema GPS.
Figura 2.5: Sinais de Satelite GPS.
12
Por motivo de seguranca, o sistema GPS foi dividido em dois tipos de servicos,
o SPS (Standard Positioning Service) e o PPS (Precise Positioning Service). O SPS e
o servico que a maioria das pessoas conhecem por ser destinada ao uso civil, disponıvel
gratuitamente a qualquer pessoa do mundo e que gera um nıvel de confianca de 95%.
Porem usando apenas o codigo C/A tem sua precisao afetada pela tecnica SA (Selective
Availability) que tem a finalidade de degradar a precisao por motivos de seguranca. Ja o
PPS foi destinado apenas para o uso militar ou entidades devidamente autorizadas. Alem
de possuir melhores resultados, este ja utiliza o codigo P, que e criptografado se tornando
codigo Y, entao ativando a tecnica AS (Anti-Spoofing) impede o acesso a usuarios nao
autorizados, pois um receptor de GPS comum nao e capaz de decodificar os codigos P,
que estao presentes em ambas as portadoras.
O NAVSTAR-GPS ainda e o mais usado no mundo, com alta precisao e com
cobertura em nıvel global, mas ainda possui seus pontos negativos e talvez o principal e a
indisponibilidade do sistema em ambientes indoor. Para contornar esse problema e usada
uma rede de referencia que auxilia o sistema GPS gerando dados que sao enviados para
os celulares com receptores GPS.
Quando pensamos em GNSS (Global Navigation Satellite System) para se trabalhar
com radiolocalizacao em dispositivos moveis aqui na Terra quase sempre nos referimos ao
NAVSTAR-GPS. Mas vale ressaltar que existem outros sistemas GPS em operacao que
tentam disputar espaco com o sistema GPS Americano, como o Glonass que e Russo,
o Galileo que e da Uniao Europeia e o Compass ou BeiDou que e Chines, esses dois
ultimos ainda nao estao implementado em nıvel global, e ainda surgiu recentemente o
GPS Japones que ainda nao esta operando, mas promete reduzir a margem de erro para
cerca de 10 cm. Todos esses sistemas dependem de uma serie de fatores que implicam
para um bom funcionamento do sistema como um todo, entretanto o que todos ja sabem,
e que um sistema GPS de alta precisao e confiabilidade traz benefıcios significativos para
todas as areas, tornando-as mais eficazes, seja ela bancaria, financeira, telecomunicacoes,
distribuicao de energia, seguranca e qualquer outra que se possa imaginar.
Capıtulo 3
Tecnicas Aplicadas a
Radiolocalizacao
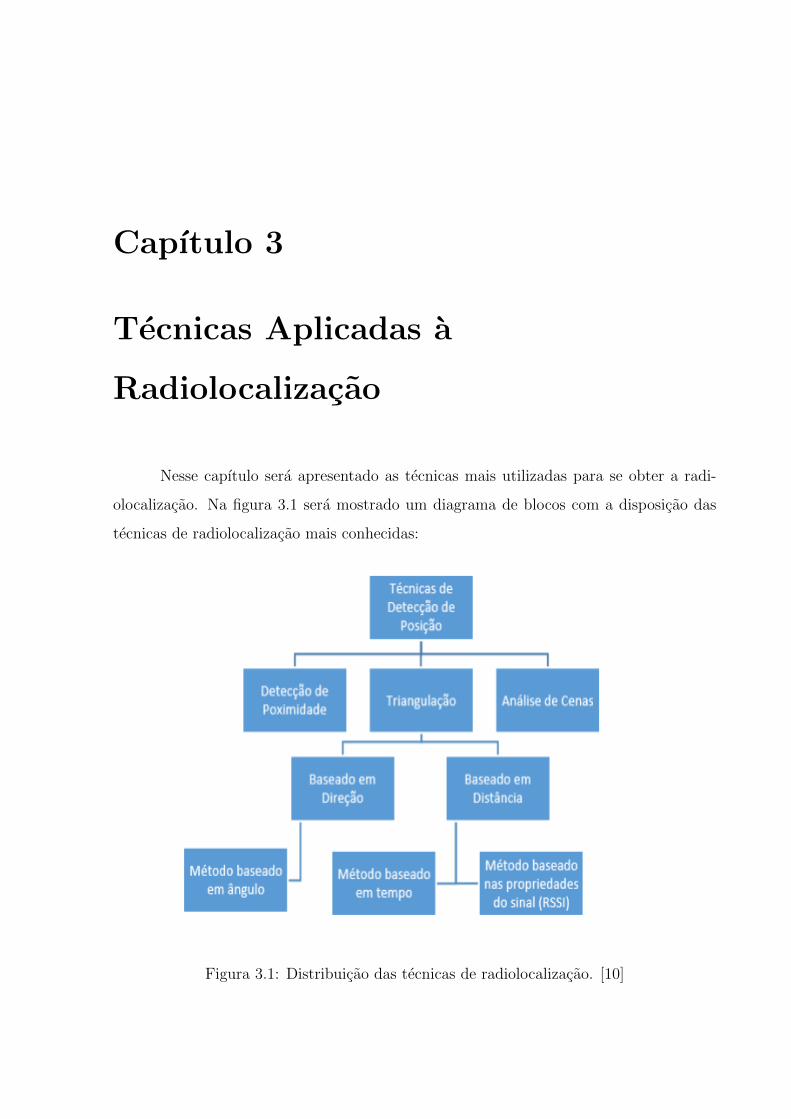
Nesse capıtulo sera apresentado as tecnicas mais utilizadas para se obter a radi-
olocalizacao. Na figura 3.1 sera mostrado um diagrama de blocos com a disposicao das
tecnicas de radiolocalizacao mais conhecidas:
Figura 3.1: Distribuicao das tecnicas de radiolocalizacao. [10]
14
Entre as tecnicas mostradas na figura 3.1 sera detalhada as tecnicas baseadas em
propriedades de sinal (RSSI), em angulo de recepcao e tempo de recepcao nas proximas
secoes.
3.1 Tecnica Baseada em Medida de Potencia
A medida em que um usuario com o seu telefone celular se afasta da ERB, a
intensidade do sinal transmitido diminui. Isso se deve a RSSI (Received Signal Strength
Indicator) variar ao longo do tempo para a mesma posicao provocando desvanecimentos no
sinal. Esse desvanecimento provoca uma interferencia destrutiva na recepcao ocasionado
por essas variacoes de RSSIs, onde a potencia do sinal e reduzida ao longo do meio de
propagacao denominada atenuacao. [11]
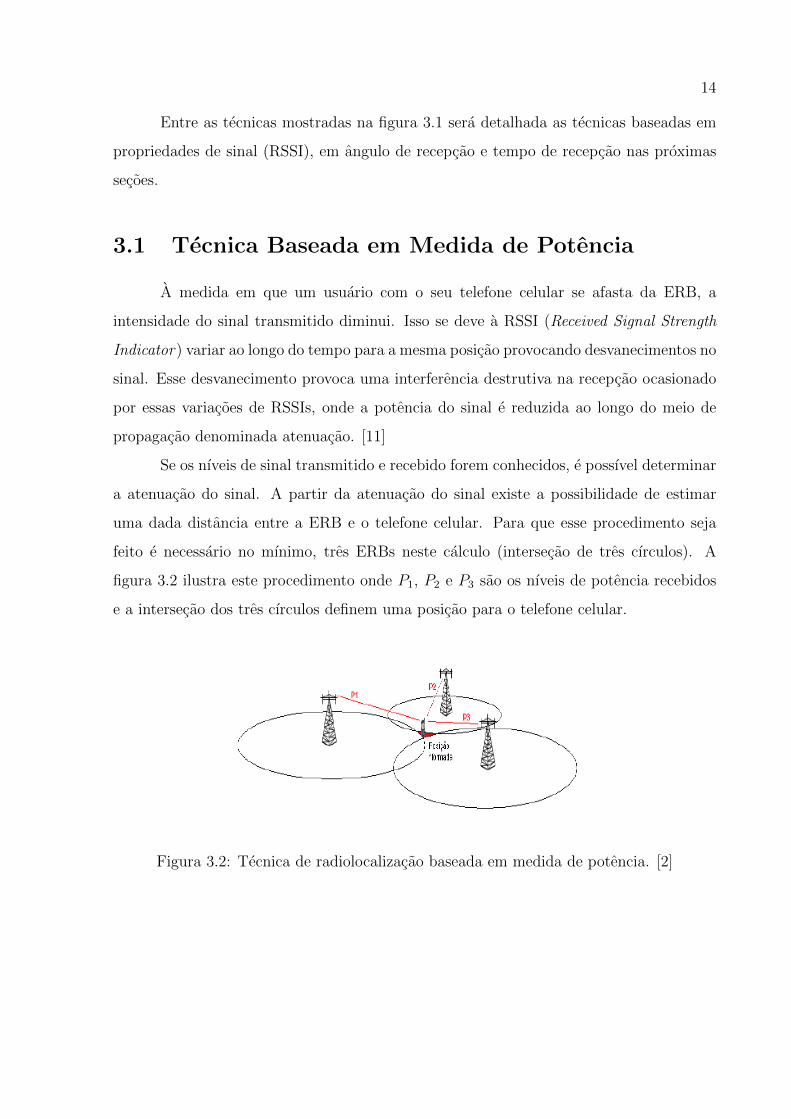
Se os nıveis de sinal transmitido e recebido forem conhecidos, e possıvel determinar
a atenuacao do sinal. A partir da atenuacao do sinal existe a possibilidade de estimar
uma dada distancia entre a ERB e o telefone celular. Para que esse procedimento seja
feito e necessario no mınimo, tres ERBs neste calculo (intersecao de tres cırculos). A
figura 3.2 ilustra este procedimento onde P1, P2 e P3 sao os nıveis de potencia recebidos
e a intersecao dos tres cırculos definem uma posicao para o telefone celular.
Figura 3.2: Tecnica de radiolocalizacao baseada em medida de potencia. [2]
15
Uma parte significativa da reducao na intensidade do sinal e provocada pelo mul-
tipercurso da onda eletromagnetica responsavel pelo transporte do sinal nos ambientes
indoors e outdoors. Outro problema relacionado a essa tecnica e que os sistemas mo-
veis a partir da 2a geracao utilizam mecanismos de controle de potencia que mascaram a
atenuacao sofrida pelo sinal durante o percurso.
No sistema CDMA (Code Division Multiple Access) a potencia de recepcao e con-
trolada para combater o efeito perto-distante, pois estes sistemas foram projetados para
que a separacao dos sinais dos diversos telefones celulares em uma ERB sejam recebidos,
idealmente no mesmo nıvel de potencia. No caso dos sistemas TDMA este controle de
potencia e utilizado para a otimizacao do uso da bateria do telefone celular e reduzir o
nıvel de interferencia na area de cobertura. Esta tecnica nao e recomendada para ambi-
entes com muitos anteparos, como interior de um escritorio, lugares perto de mares ou
rios como a Baıa de Guanabara.[2]
3.2 Tecnica Baseada em Angulo de Recepcao (AoA)
A tecnica de radiolocalizacao AoA (Angle of Arrival) ou DoA (Direction of Arri-
val), consiste em estimar a posicao do telefone celular atraves da medicao do angulo de
recepcao do sinal utilizando um sistema de antenas inteligentes. Este sistema de antenas
inteligentes detectam o sinal que foi transmitido pelas ERBs produzindo varias versoes
deste sinal, responsaveis por determinar a direcao da onda eletromagnetica na recepcao.
[11]
Para estimar a posicao do telefone celular e necessario verificar a intersecao das
linhas de posicao de, pelo menos, duas ERBs. Estas linhas de posicoes sao definidas pela
distancia entre a ERB e pelo angulo de recepcao do sinal do telefone celular na ERB
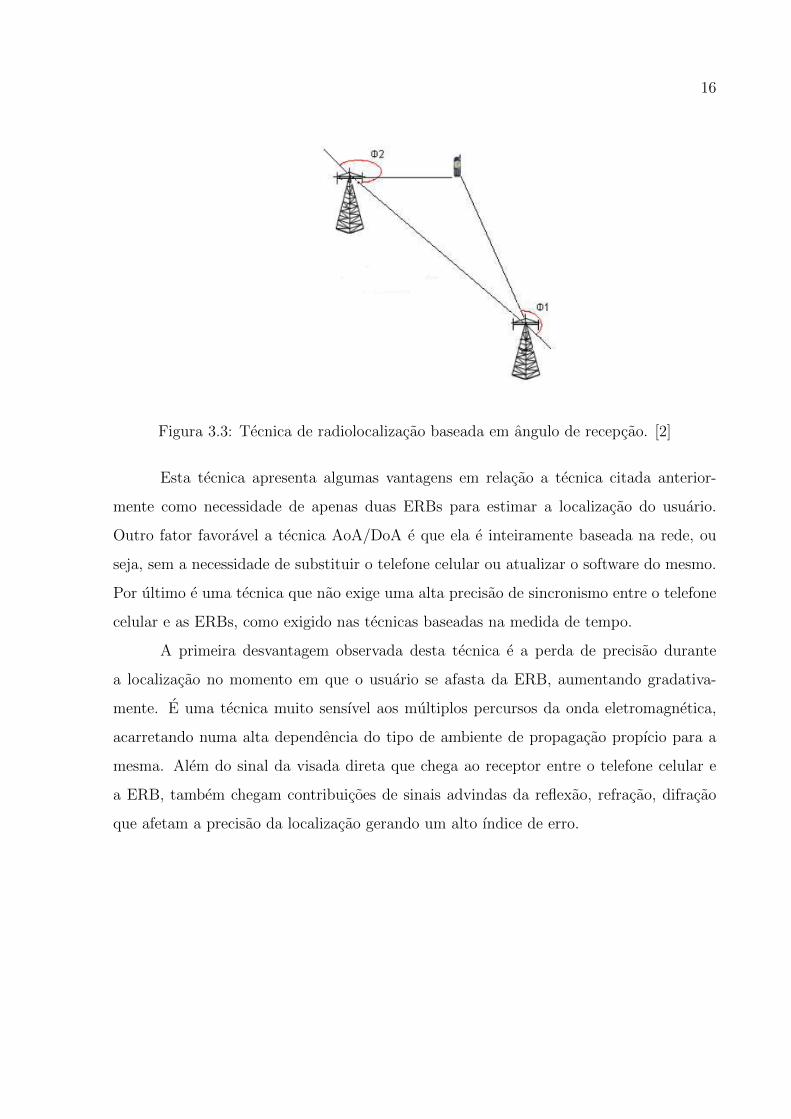
(baseado numa triangulacao entre tais componentes). Na figura 3.3 e mostrado como foi
feito esse tipo de tecnica num sistema simples entre duas ERBs e um telefone celular.
16
Figura 3.3: Tecnica de radiolocalizacao baseada em angulo de recepcao. [2]
Esta tecnica apresenta algumas vantagens em relacao a tecnica citada anterior-
mente como necessidade de apenas duas ERBs para estimar a localizacao do usuario.
Outro fator favoravel a tecnica AoA/DoA e que ela e inteiramente baseada na rede, ou
seja, sem a necessidade de substituir o telefone celular ou atualizar o software do mesmo.
Por ultimo e uma tecnica que nao exige uma alta precisao de sincronismo entre o telefone
celular e as ERBs, como exigido nas tecnicas baseadas na medida de tempo.
A primeira desvantagem observada desta tecnica e a perda de precisao durante
a localizacao no momento em que o usuario se afasta da ERB, aumentando gradativa-
mente. E uma tecnica muito sensıvel aos multiplos percursos da onda eletromagnetica,
acarretando numa alta dependencia do tipo de ambiente de propagacao propıcio para a
mesma. Alem do sinal da visada direta que chega ao receptor entre o telefone celular e
a ERB, tambem chegam contribuicoes de sinais advindas da reflexao, refracao, difracao
que afetam a precisao da localizacao gerando um alto ındice de erro.
17
3.3 Tecnica Baseada em Tempo de Recepcao
E uma tecnica de radiolocalizacao e baseada no tempo de recepcao, ToA (Time of
Arrival), sendo a distancia entre o telefone celular e a ERB estimada atraves do tempo
de propagacao entre elas [11]. Os parametros necessarios para a estimar a localizacao
do telefone celular sao o tempo de recepcao e a velocidade que o sinal trafega. Uma
vez conhecido tais parametros e possıvel a aplicacao desta tecnica. A localizacao e entao
determinada algebricamente pela equacao 3.1:
∆d = c× ∆t (3.1)
Onde:
∆d - Distancia entre a ERB e o telefone celular expressada em metros (m).
c - Velocidade da luz no vacuo (= 3 × 108 m/s)
∆t - Tempo de propagacao do sinal eletromagnetico no espaco livre expressado em
segundos (s)
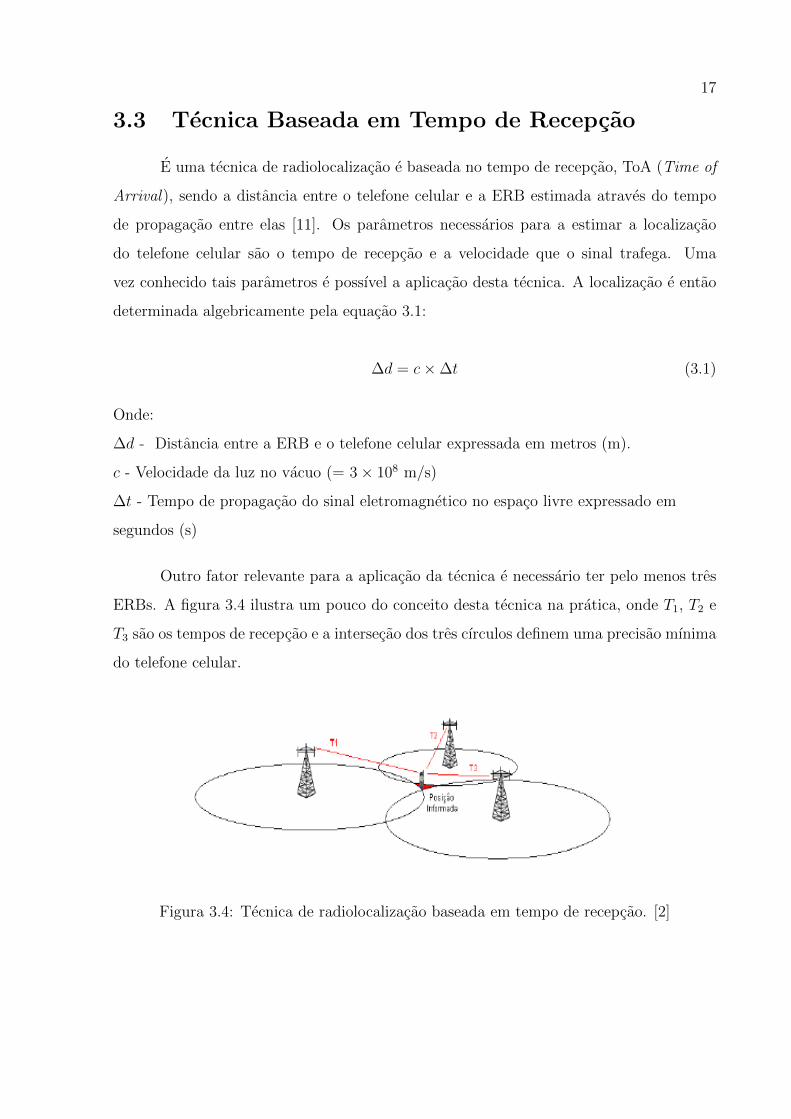
Outro fator relevante para a aplicacao da tecnica e necessario ter pelo menos tres
ERBs. A figura 3.4 ilustra um pouco do conceito desta tecnica na pratica, onde T1, T2 e
T3 sao os tempos de recepcao e a intersecao dos tres cırculos definem uma precisao mınima
do telefone celular.
Figura 3.4: Tecnica de radiolocalizacao baseada em tempo de recepcao. [2]
18
Esta tecnica necessita de uma grande precisao no sincronismo entre os relogios das
ERBs e o telefone celular. Isso so e possıvel atraves de ferramentas que nos fornecem
tempo padroes como relogios de rubıdio ou cesio, ou atraves dos sistemas de satelites
baseados no GPS, como no IS-95(CDMA). A vantagem desta tecnica e que a precisao da
localizacao nao diminui com o afastamento entre o usuario e as ERBs e nao e necessaria a
instalacao de um novo conjunto de antenas em cada estacao. A alta precisao nessa tecnica
depende da propagacao da onda eletromagnetica em visada direta (LOS) [2].
3.3.1 Tecnica Baseada em Tempo Diferenciado de Recepcao
E uma variacao da tecnica citada na secao anterior denominada TDoA (Time
Difference of Arrival) que consiste numa analise da diferenca temporal na recepcao dos
terminais moveis de um ou varios sinais [11]. Dois tipos de modelos sao utilizados para
explicar tal tecnica e realizar as analises necessarias em questao, o primeiro baseado em
sinais que se propagam com diferentes velocidades e o segundo na variacao temporal du-
rante a recepcao de um sinal num terminal movel [11]. Estes dois modelos sao explicitados
abaixo:
• Modelo baseado em sinais que se propagam com diferentes velocidades
E um modelo que explica a radiolocalizacao a partir da TDoA atraves do uso de
diversos sinais com diferentes velocidades. De maneira simples a analise pode ser feita
atraves de, no mınimo dois sinais facilitando a compreensao de tal modelo. O transmissor
envia dois sinais, onde o terminal movel recebe o primeiro sinal num instante t1 e aguarda
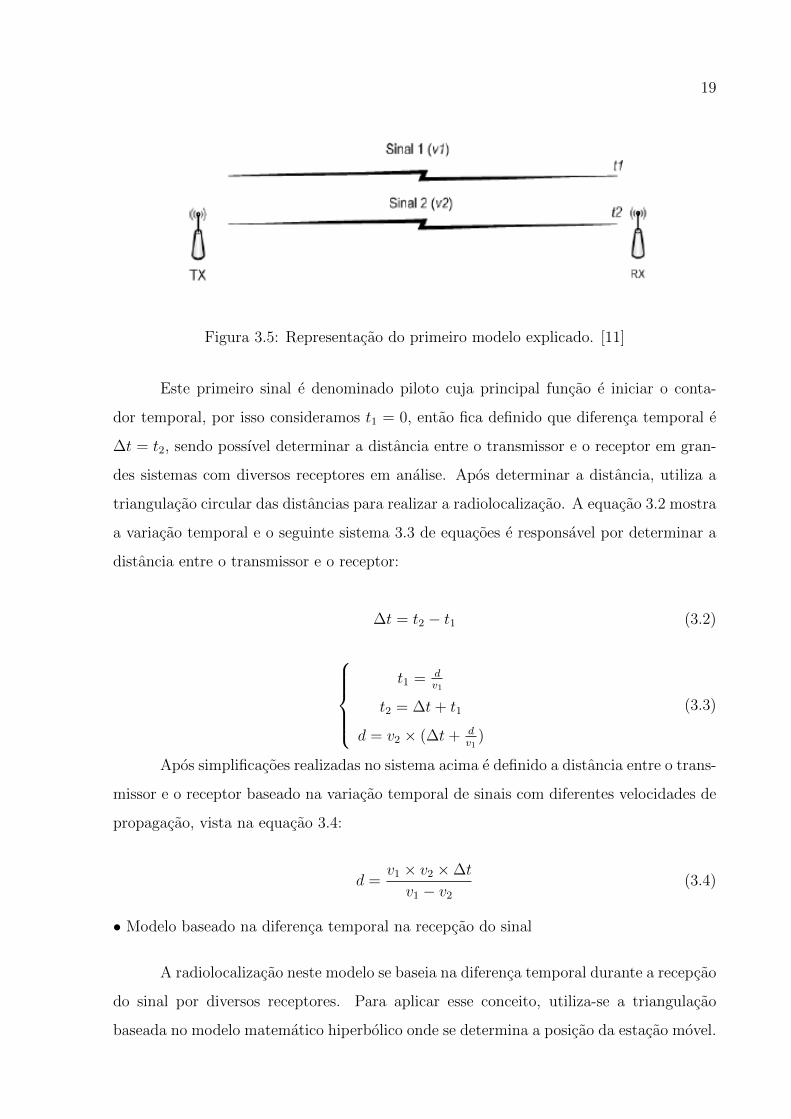
a recepcao de um sinal mais lento num instante t2. A figura 3.5 ilustra tal raciocınio para
a tecnica:
19
Figura 3.5: Representacao do primeiro modelo explicado. [11]
Este primeiro sinal e denominado piloto cuja principal funcao e iniciar o conta-
dor temporal, por isso consideramos t1 = 0, entao fica definido que diferenca temporal e
∆t = t2, sendo possıvel determinar a distancia entre o transmissor e o receptor em gran-
des sistemas com diversos receptores em analise. Apos determinar a distancia, utiliza a
triangulacao circular das distancias para realizar a radiolocalizacao. A equacao 3.2 mostra
a variacao temporal e o seguinte sistema 3.3 de equacoes e responsavel por determinar a
distancia entre o transmissor e o receptor:
∆t = t2 − t1 (3.2)
t1 = d
v1
t2 = ∆t+ t1
d = v2 × (∆t+ dv1
)
(3.3)
Apos simplificacoes realizadas no sistema acima e definido a distancia entre o trans-
missor e o receptor baseado na variacao temporal de sinais com diferentes velocidades de
propagacao, vista na equacao 3.4:
d =v1 × v2 × ∆t
v1 − v2(3.4)
• Modelo baseado na diferenca temporal na recepcao do sinal
A radiolocalizacao neste modelo se baseia na diferenca temporal durante a recepcao
do sinal por diversos receptores. Para aplicar esse conceito, utiliza-se a triangulacao
baseada no modelo matematico hiperbolico onde se determina a posicao da estacao movel.

20
A figura 3.6 ilustra a determinacao da posicao atraves da diferenca temporal aonde se
encontra dois receptores na regiao de cobertura e a estacao movel compondo um ponto
da hiperbole:
Figura 3.6: Modelo hiperbolico. [11]
A equacao utilizada e a propria equacao da hiperbole, como vista na equacao 3.5:
x2
a2− y2
b2= 1 (3.5)
Atraves do sinal transmitido, o receptor 1 recebe o sinal no instante t1 e o receptor
2 recebe o sinal no instante t2, assim mostrando a diferenca temporal por este modelo. A
equacao da diferenca temporal pode ser vista pela equacao 3.6:
∆t = t1 − t2 (3.6)
Devido ao uso do modelo hiperbolico a diferenca temporal encontrada acima sera
associada a uma diferenca de distancias entre estacao movel e os dois receptores que foram
utilizados para exemplificacao de tal modelo. Esta equacao pode ser vista pela equacao
3.7:
∆d = d1 − d2 (3.7)
Associando a diferenca temporal a diferenca de de distancias, temos a equacao 3.8:
∆d = v × (t1 − t2) (3.8)

21
Entao e definido o sistema de equacoes 3.9 para encontrar a posicao da estacao
movel vista abaixo:
d21 = y2 + (x+ D2
)2
d22 = y2 + (D2− x)2
(3.9)
Atraves de simplificacoes, chegamos a equacao final da radiolocalizacao da estacao
movel, vista equacao 3.10:
x2
(v × (t1−t2)2
)2− y2
(D2
)2 − (c× (t1−t2)2
)2= 1 (3.10)
Este modelo proposto tem a necessidade de mais um receptor de referencia e uma
de suas grandes desvantagens e que necessita de sincronizacao entre todas as estacoes
referencias, devido a ordem de grandeza associada aos parametros utilizados em questao.
22
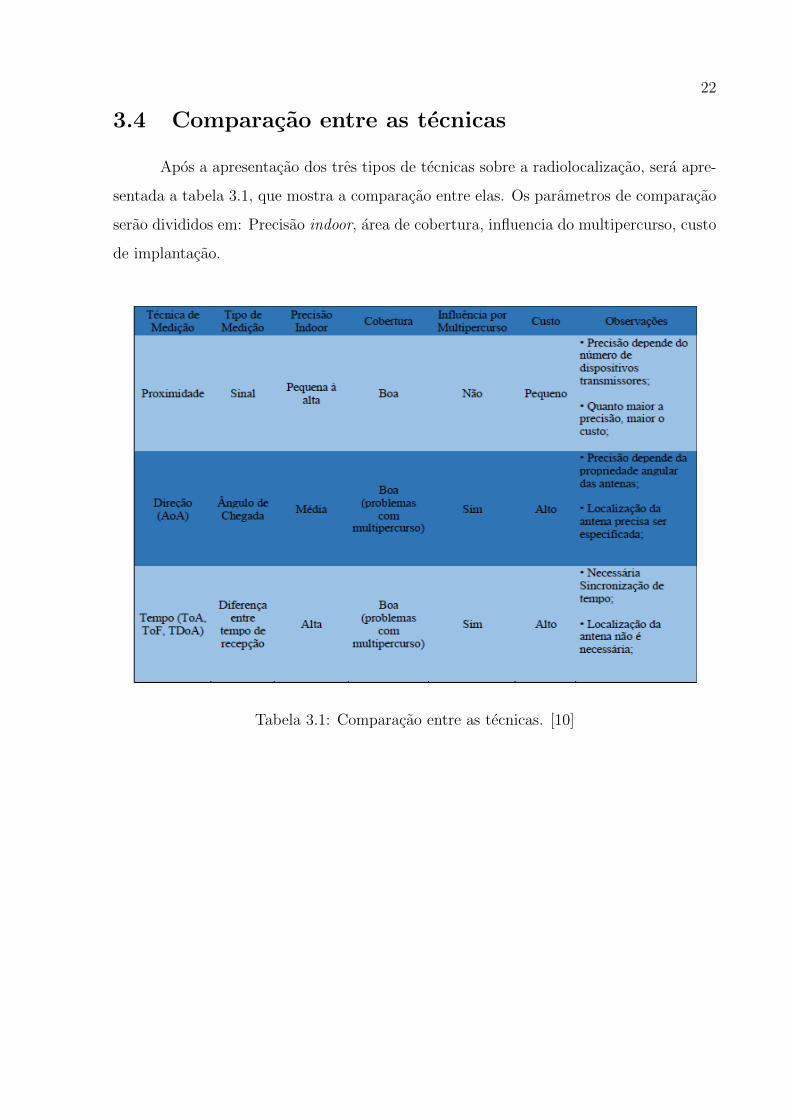
3.4 Comparacao entre as tecnicas
Apos a apresentacao dos tres tipos de tecnicas sobre a radiolocalizacao, sera apre-
sentada a tabela 3.1, que mostra a comparacao entre elas. Os parametros de comparacao
serao divididos em: Precisao indoor, area de cobertura, influencia do multipercurso, custo
de implantacao.
Tabela 3.1: Comparacao entre as tecnicas. [10]
Capıtulo 4
Problemas e Tendencias na
Radiolocalizacao de Terminais
Moveis
4.1 Problemas da radiolocalizacao
Antes de citar os problemas da radiolocalizacao e como ocorrem e necessario en-
tender como funciona esse sistema. Ao realizar uma comunicacao atraves de um celular,
a mensagem ou informacao e codificada na forma de onda eletromagnetica. Portanto e
preciso analisar a banda de frequencia utilizada para tal servico, o tipo de ambiente que a
onda se propaga podendo ser indoor ou outdoor e por ultimo as condicoes climaticas da
regiao em analise.
4.1.1 Ambientes Outdoors
Nestes tipos de ambientes a realizacao da radiolocalizacao torna-se um pouco mais
facil em relacao aos ambientes indoors devido a ocorrencia de visada direta entre as ERBs
e estacao movel serem mais frequente. A princıpio a primeira deducao de problemas
neste ambiente e devido a atenuacao do sinal devido ao percurso feito pela frente de
onda ate a estacao movel. Essa atenuacao do sinal ocorre devido ao espalhamento do
sinal durante a trajetoria do mesmo no meio de propagacao. E uma estimativa inicial de
atenuacao do sinal explicada de maneira matematica atraves da formula de Friis, levando
em consideracao alguns parametros que sao: frequencia de operacao (em MHz), a distancia
24
entre as estacoes (em quilometros). Na equacao 4.1 e mostrado a expressao da formula
de Friis [12]:
L = 32, 5 + 20log(d) + 20log(f) (4.1)
Onde:
L - perda no espaco livre expressa em dB;
d - Distancia entre o transmissor e receptor expressa em km;
f - Frequencia de operacao expressa em MHz;
Numa situacao ideal, na recepcao haveria apenas sinal oriundo da visada direta,
mas infelizmente nao e o que ocorre na realidade. A recepcao do sinal tem sua contribui-
cao principal a partir da visada direta entre a ERB e a estacao movel, mas pode receber
tambem de outras direcoes. Esse problema e denominado multipercurso do sinal dificul-
tando a precisao do sistema de radiolocalizacao e ate degradando a qualidade do sinal
[13].
A perda de percurso pode ser causada pelos fenomenos da reflexao, refracao, di-
fracao e dispersao.O primeiro fenomeno citado neste trabalho sera o da reflexao, onde
a frente de onda ao entrar em contato com uma superfıcie considerada lisa (sendo esta
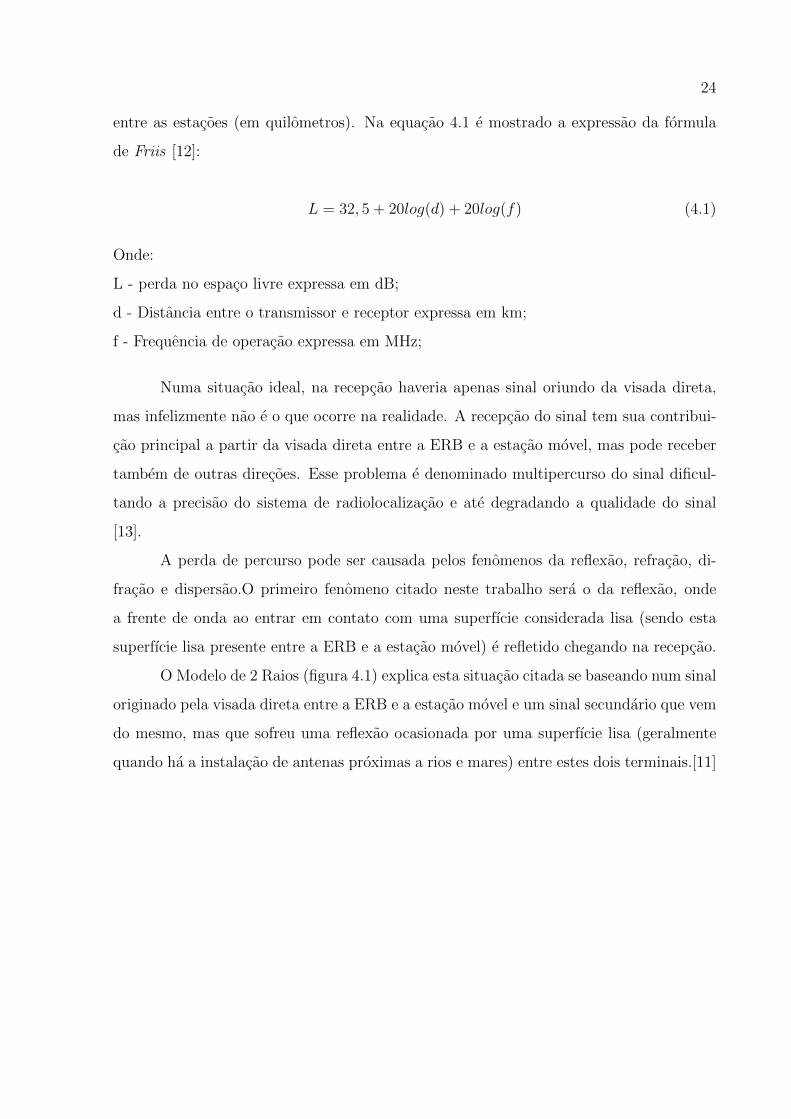
superfıcie lisa presente entre a ERB e a estacao movel) e refletido chegando na recepcao.
O Modelo de 2 Raios (figura 4.1) explica esta situacao citada se baseando num sinal
originado pela visada direta entre a ERB e a estacao movel e um sinal secundario que vem
do mesmo, mas que sofreu uma reflexao ocasionada por uma superfıcie lisa (geralmente
quando ha a instalacao de antenas proximas a rios e mares) entre estes dois terminais.[11]
25
Figura 4.1: Representacao do modelos de 2 raios. [11]
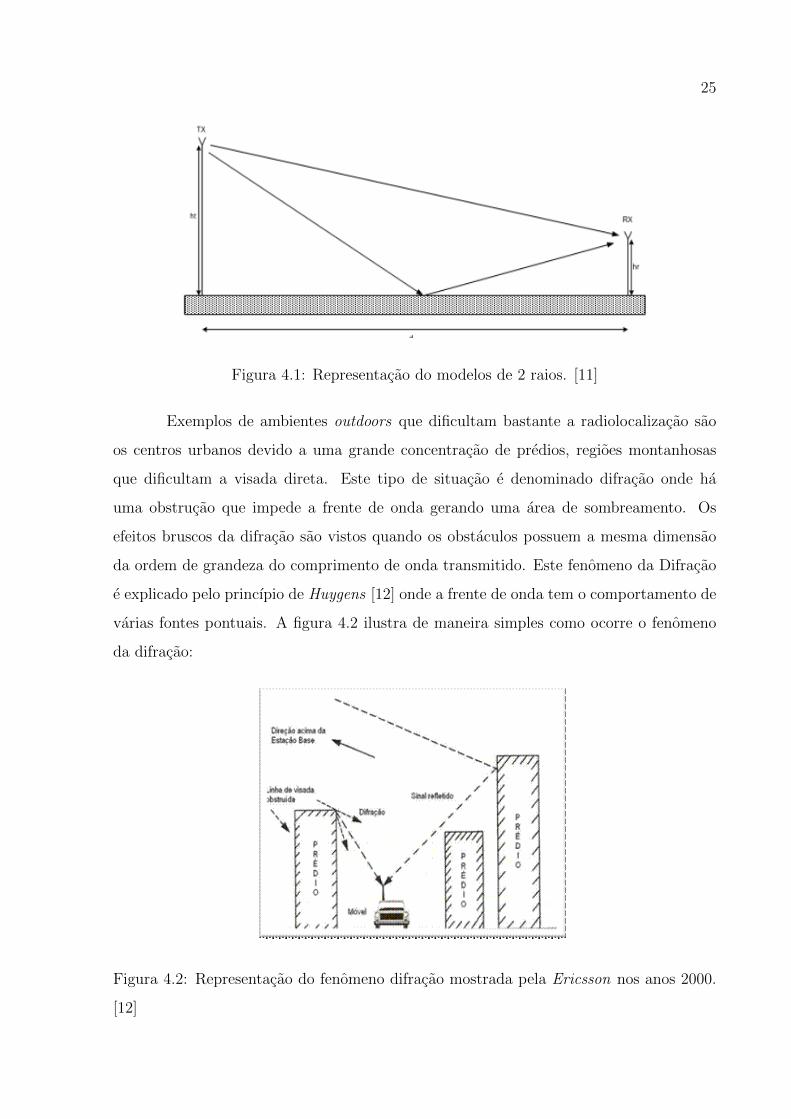
Exemplos de ambientes outdoors que dificultam bastante a radiolocalizacao sao
os centros urbanos devido a uma grande concentracao de predios, regioes montanhosas
que dificultam a visada direta. Este tipo de situacao e denominado difracao onde ha
uma obstrucao que impede a frente de onda gerando uma area de sombreamento. Os
efeitos bruscos da difracao sao vistos quando os obstaculos possuem a mesma dimensao
da ordem de grandeza do comprimento de onda transmitido. Este fenomeno da Difracao
e explicado pelo princıpio de Huygens [12] onde a frente de onda tem o comportamento de
varias fontes pontuais. A figura 4.2 ilustra de maneira simples como ocorre o fenomeno
da difracao:
Figura 4.2: Representacao do fenomeno difracao mostrada pela Ericsson nos anos 2000.
[12]
26
A difracao e baseada nos tipos de obstaculos citados abaixos:
Difracao Knife-Edge (Gume de Faca): Considera que o sinal transmitido tangen-
cia um unico obstaculo (tangencia a primeira zona de Fresnel) ocorrendo uma area de
sombreamento dificultando a recepcao do sinal). Este fenomeno pode ocorrer na presenca
de multiplos obstaculos gumes de faca, onde a componente resultante sera o somatorio
destas multiplas obstrucoes [13]. Em algumas situacoes o sinal na recepcao pode ser mais
forte que as contribuicoes originadas pelos fenomenos da reflexao e difracao. Essa situacao
ocorre em geral quando a frente de onda se choca com uma superfıcie aspera, onde sua
energia e espalhada. Este fenomeno conhecido como dispersao.
Os efeitos da dispersao so podem ser considerados quando a frente de onda se choca
com uma superfıcie aspera [14]. A relacao 4.2 mostra a condicao para uma determinada
superfıcie seja aspera de acordo com um angulo Θi de incidencia do sinal durante a
recepcao:
∆h >λ
8 · sin Θi
(4.2)
Onde os termos da formula mostrada acima indicam:
∆h - diferenca entre a protuberancia mınima e maxima dos obstaculos em que o sinal
sofreu dispersao;
λ - Comprimento de onda utilizado pelo sinal;
Θi - Angulo de incidencia do sinal na superfıcie;
4.1.2 Ambientes Indoor
Nestes tipos de ambientes, a realizacao da radiolocalizacao torna-se mais difıcil,
devido a principal contribuicao na estacao movel nao vir da visada direta de uma ERB,
dependendo principalmente da reflexao, difracao, refracao do sinal e em pequenos casos
da dispersao do sinal. Esses fenomenos podem causar o desvanecimento do sinal acarre-
tando numa degradacao do mesmo. O bloqueio direto do sinal nestes tipos de ambientes
sao causados pelas paredes das construcoes, que funcionam como barreiras atenuando o
sinal. O orgao European COST 231 apresentou uma tabela de perdas para esta situacao
citada anteriormente, onde mostra os mais diversos tipos de obstaculos associados as suas
respectivas perdas, sendo utilizados no modelo COST 231 Keenan e Motley e no modelo
27
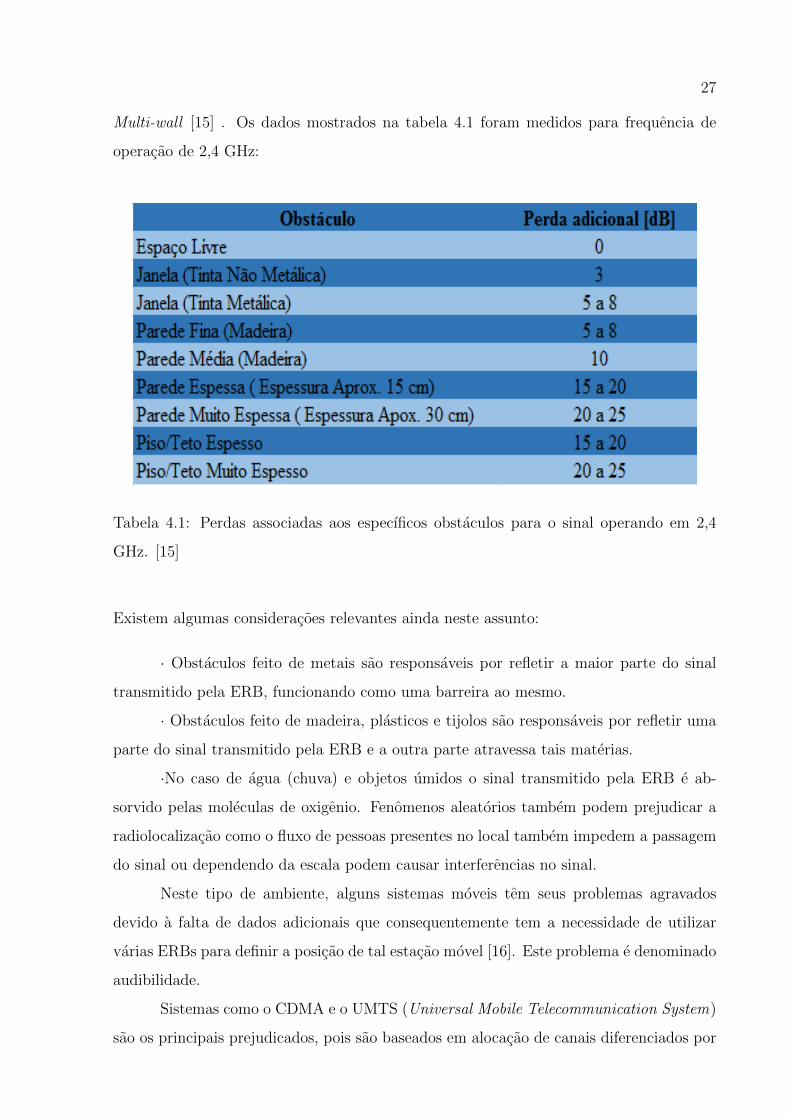
Multi-wall [15] . Os dados mostrados na tabela 4.1 foram medidos para frequencia de
operacao de 2,4 GHz:
Tabela 4.1: Perdas associadas aos especıficos obstaculos para o sinal operando em 2,4
GHz. [15]
Existem algumas consideracoes relevantes ainda neste assunto:
· Obstaculos feito de metais sao responsaveis por refletir a maior parte do sinal
transmitido pela ERB, funcionando como uma barreira ao mesmo.
· Obstaculos feito de madeira, plasticos e tijolos sao responsaveis por refletir uma
parte do sinal transmitido pela ERB e a outra parte atravessa tais materias.
·No caso de agua (chuva) e objetos umidos o sinal transmitido pela ERB e ab-
sorvido pelas moleculas de oxigenio. Fenomenos aleatorios tambem podem prejudicar a
radiolocalizacao como o fluxo de pessoas presentes no local tambem impedem a passagem
do sinal ou dependendo da escala podem causar interferencias no sinal.
Neste tipo de ambiente, alguns sistemas moveis tem seus problemas agravados
devido a falta de dados adicionais que consequentemente tem a necessidade de utilizar
varias ERBs para definir a posicao de tal estacao movel [16]. Este problema e denominado
audibilidade.
Sistemas como o CDMA e o UMTS (Universal Mobile Telecommunication System)
sao os principais prejudicados, pois sao baseados em alocacao de canais diferenciados por
28
codigos ortogonais e todas as ERBs para realizar o servico de radiolocalizacao transmitem
seus sinais na mesma frequencia de portadora sendo altamente nocivo a audibilidade
[16]. Para esses sistemas serem operados de maneira eficiente e necessario realizar um
rıgido controle de potencia que e utilizado para combater o efeito perto-longe, evitando
a interferencia co-canal entre a estacao movel e a ERB, mas dificultando a comunicacao
entre a estacao movel com outras ERBs (onde e fundamental realizar esta comunicacao
para a radiolocalizacao de dispositivos baseados em CDMA e WCDMA), exceto a base
de servico.
No capıtulo 3 foi feita uma introducao sobre as tecnicas AoA, ToA e TDoA que
sao as mais indicadas para a realizacao da radiolocalizacao neste tipo de ambiente.
Problemas da radiolocalizacao podem ser agravados em locais onde a incidencia de
chuvas sao muito altas como no caso do Brasil e paıses tropicais. Em centros urbanos em
que existem uma grande concentracao de predios, as paredes dos predios ficam molhadas
ao chover, permanecendo uma boa parte do tempo umidas aumentando a perda por
obstrucao do sinal em 10% se comparado a parede seca do predio (para ser feita esta
constatacao e importante introduzir uma perda adicional ao modelo de propagacao) por
causa do aumento da reflexao do sinal.
4.2 Tendencias para os sistemas de radiolocalizacao
em ambientes indoor
Fazer a localizacao de um receptor GPS em qualquer lugar do planeta ja nao e mais
um problema para humanidade, com o grande “boom” dos smartphones nos ultimos anos
e de forma mais acessıvel para as pessoas chegando a incrıvel marca de mais aparelhos do
que pessoas no mundo, a radiolocalizacao atraves do GNSS ganhou ainda mais destaque
atraves dos sistemas operacionais (Android, iOS e Windows Phone) para qualquer que
seja o aplicativo e a finalidade, seja de forma mais comum como ajudar os motoristas em
suas rotas ou ate de forma mais inusitada como aplicativos de encontros para namoro.
Ou seja, o uso de tecnologias envolvendo radiolocalizacao esta cada vez mais presente na
vida das pessoas, as vezes mesmo sem perceber.
Todavia, nem tudo esta resolvido e funcionando perfeitamente bem, ainda existem
problemas, e talvez o mais tradicional e ainda sem solucao confiavel e a radiolocalizacao
29
em ambientes indoor, pois ainda nao existe uma tecnologia bem difundida que possa
fornecer esse posicionamento interno.
Seria de grande utilidade estar em um shopping e saber exatamente a localizacao
da loja a qual voce esta procurando, ou estar em um grande edifıcio e poder usar alguma
aplicacao que te ajude em sua localizacao ou localizar seu destino no nıvel de sala, estar
em um aeroporto e saber exatamente o local de embarque ou ate mesmo em um grande
armazem e saber localizar os produtos os quais procuram. E para isso ser possıvel e preciso
usar outras tecnologias para se conseguir o melhor resultado em ambientes indoors.
4.3 Principais Tecnologias para Localizacao em am-
bientes indoor
Atualmente, entre as tecnologias implementadas mais comuns para o posiciona-
mento nesses ambientes internos, se encontram as baseadas na intensidade dos sinais
de radiofrequencia. Dentre as tecnologias implementadas mais comuns para determinar
o posicionamento indoor sao elas: o Wi-Fi, RFID, ZigBee e nos ultimos anos o BLE-
Beacons vem se destacando podendo tambem ser inserido nessa lista. Nesta secao sera
apresentada cada uma dessas quatro principais tecnologias citadas, porem enfatizando a
tecnologia dominante no mercado atual, que e a tecnologia baseada em Wi-Fi.
4.3.1 Wi-Fi
O Wi-Fi refere-se as redes que obedecem as especificacoes do padrao IEEE 802.11
para redes locais sem fio, WLAN, operando nas faixas de 2,4 GHz ou 5 GHz. Usar esta tec-
nologia para localizacao em ambientes indoor e sempre uma boa saıda, embora a WLAN
nao tenha sido projetada para essa finalidade. Para utilizar esse tipo de tecnica, os sinais
de radiofrequencia sao transmitidos pelos AP’s (Dispositivos que por um lado conectam-
se a rede cabeada, distribuindo o sinal para rede sem fio) e captados pelos dispositivos
moveis. Existem tres condicoes que podemos analisar para se obter o posicionamento
interno, sao elas: O tempo em que o sinal leva do AP ate o dispositivo movel em questao,
o angulo de incidencia e tambem a RSSI. [10]
Entretanto e importante considerar alguns aspectos sobre esses ambientes indoor,
qualquer sistema de localizacao possui o mesmo princıpio basico, antes mesmo de surgir

30
qualquer tecnologia envolvendo radiofrequencia. Uma pessoa caminhando na rua ja conse-
guia se localizar atraves de pontos de referencias em que a mesma observava atraves de sua
retina e fazia assim uma estimativa da sua distancia e consequentemente sua localizacao,
mas se essa pessoa caminha por uma rua super movimentada de uma grande cidade e so
consegue ver pessoas e obstaculos ao seu redor, obviamente fica mais difıcil de conseguir
atraves de sua retina assimilar pontos de referencias para estimar seu posicionamento.
Podemos pensar de forma analoga em uma rede Wi-Fi, onde o dispositivo movel (que
correspondem aos olhos da pessoa) tenta captar informacoes dos pontos de referencias
do ambiente (no caso os AP’s que estao ligados a rede), porem geralmente em ambientes
indoor temos muitos obstaculos como pessoas, paredes, moveis, ou seja, possuem carac-
terısticas de propagacao chamada de multiplos percursos, segue um modelo denominado
NLOS (Non-Line of Sight), tornando-se mais difıcil a utilizacao das condicoes de angulo
de incidencia do sinal transmitido e o do tempo que o sinal leva para chegar do transmissor
ao receptor, considerando somente a informacao da potencia do sinal recebido (RSS).
Tambem vale ressaltar que ha muitos outros problemas causadores de interferencia
nesses ambientes que sao “invisıveis” e difıcil de ser controlados, como um simples forno
micro-ondas ou outros emissores de radiofrequencia proximos ao local. Essa interferencia
com o forno micro-ondas e devido a estes sistemas operarem na faixa de frequencias da
banda ISM (Industrial,Scientific Medical), que e uma banda de frequencia nao licenciada,
ou seja, de livre uso. Primeiramente precisamos entender como se utiliza essa banda nos
diversos lugares pelo mundo. Na tabela 4.2 e mostrado como os paıses dividem esse
espectro no seu respectivo territorio.
Tabela 4.2: Divisao do Espectro da Banda ISM 2,4 GHz pelos diversos paıses. [17]
A Banda ISM operando na faixa de 2,4 GHz para as redes Wi-Fi e dividido em 14
canais de largura de banda aproximadamente de 20 MHz ( No Brasil utiliza apenas 11
canais com largura de banda de 22 MHz ) [17]. Como as frequencias de cada canal sao
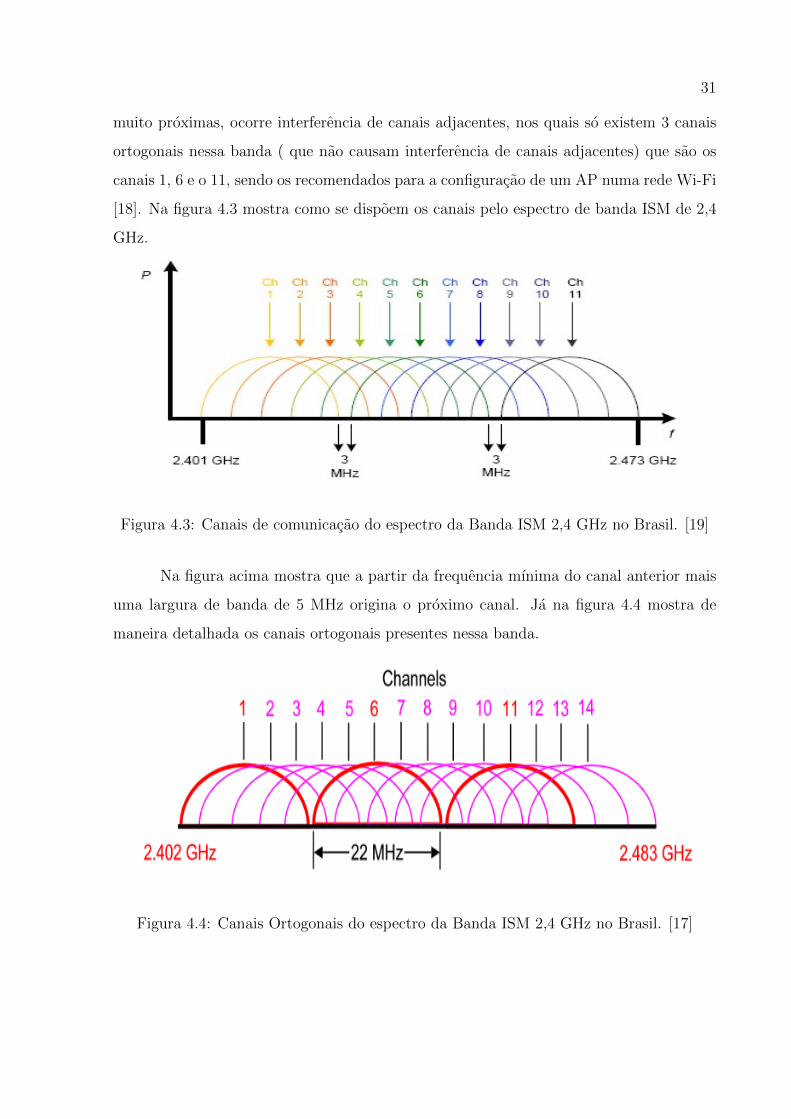
31
muito proximas, ocorre interferencia de canais adjacentes, nos quais so existem 3 canais
ortogonais nessa banda ( que nao causam interferencia de canais adjacentes) que sao os
canais 1, 6 e o 11, sendo os recomendados para a configuracao de um AP numa rede Wi-Fi
[18]. Na figura 4.3 mostra como se dispoem os canais pelo espectro de banda ISM de 2,4
GHz.
Figura 4.3: Canais de comunicacao do espectro da Banda ISM 2,4 GHz no Brasil. [19]
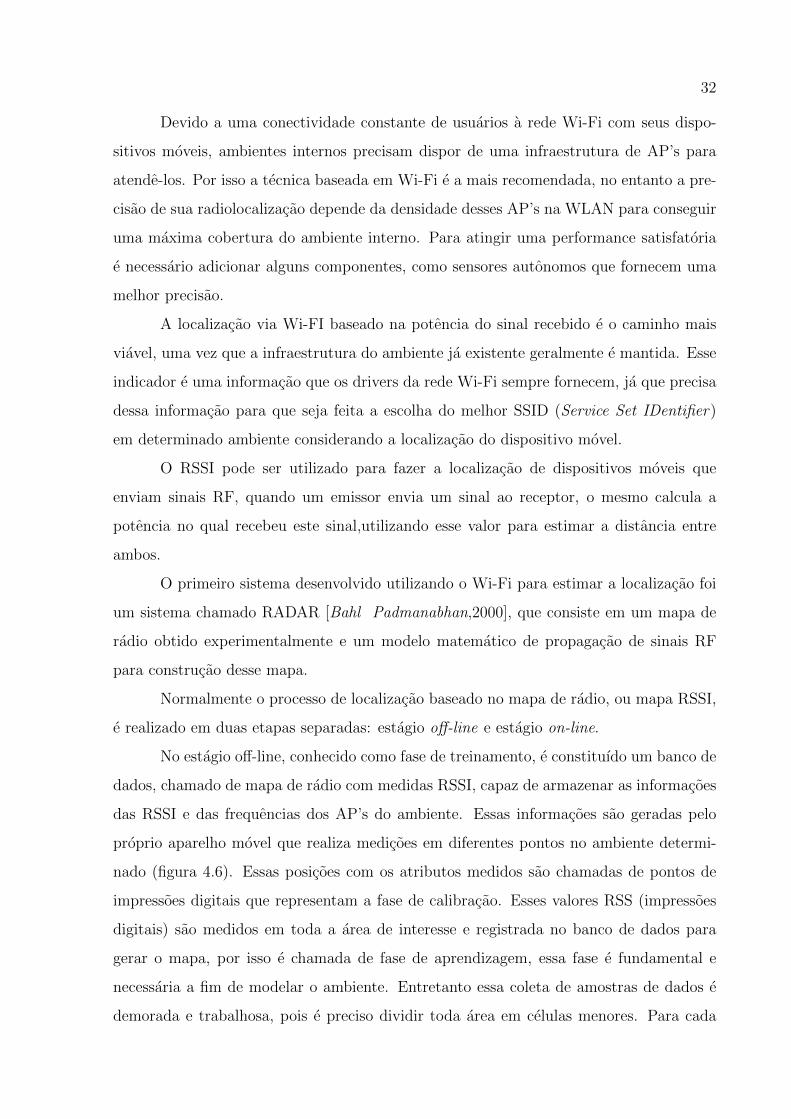
Na figura acima mostra que a partir da frequencia mınima do canal anterior mais
uma largura de banda de 5 MHz origina o proximo canal. Ja na figura 4.4 mostra de
maneira detalhada os canais ortogonais presentes nessa banda.
Figura 4.4: Canais Ortogonais do espectro da Banda ISM 2,4 GHz no Brasil. [17]
32
Devido a uma conectividade constante de usuarios a rede Wi-Fi com seus dispo-
sitivos moveis, ambientes internos precisam dispor de uma infraestrutura de AP’s para
atende-los. Por isso a tecnica baseada em Wi-Fi e a mais recomendada, no entanto a pre-
cisao de sua radiolocalizacao depende da densidade desses AP’s na WLAN para conseguir
uma maxima cobertura do ambiente interno. Para atingir uma performance satisfatoria
e necessario adicionar alguns componentes, como sensores autonomos que fornecem uma
melhor precisao.
A localizacao via Wi-FI baseado na potencia do sinal recebido e o caminho mais
viavel, uma vez que a infraestrutura do ambiente ja existente geralmente e mantida. Esse
indicador e uma informacao que os drivers da rede Wi-Fi sempre fornecem, ja que precisa
dessa informacao para que seja feita a escolha do melhor SSID (Service Set IDentifier)
em determinado ambiente considerando a localizacao do dispositivo movel.
O RSSI pode ser utilizado para fazer a localizacao de dispositivos moveis que
enviam sinais RF, quando um emissor envia um sinal ao receptor, o mesmo calcula a
potencia no qual recebeu este sinal,utilizando esse valor para estimar a distancia entre
ambos.
O primeiro sistema desenvolvido utilizando o Wi-Fi para estimar a localizacao foi
um sistema chamado RADAR [Bahl Padmanabhan,2000], que consiste em um mapa de
radio obtido experimentalmente e um modelo matematico de propagacao de sinais RF
para construcao desse mapa.
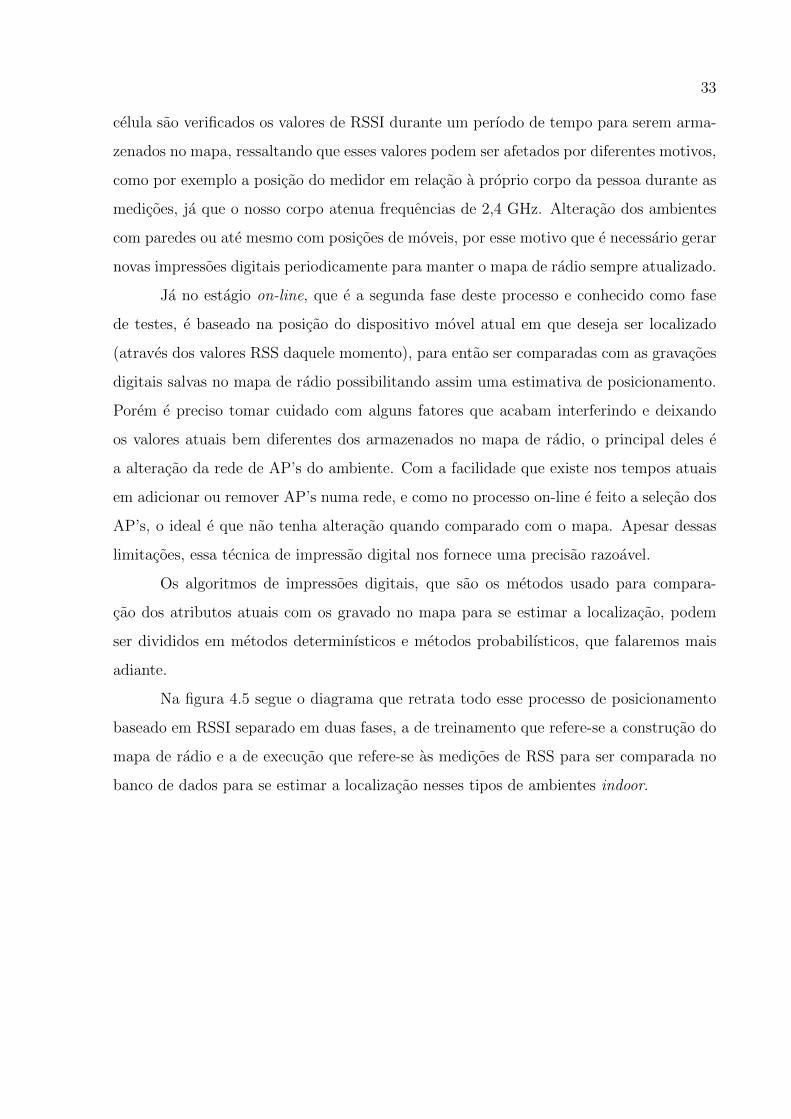
Normalmente o processo de localizacao baseado no mapa de radio, ou mapa RSSI,
e realizado em duas etapas separadas: estagio off-line e estagio on-line.
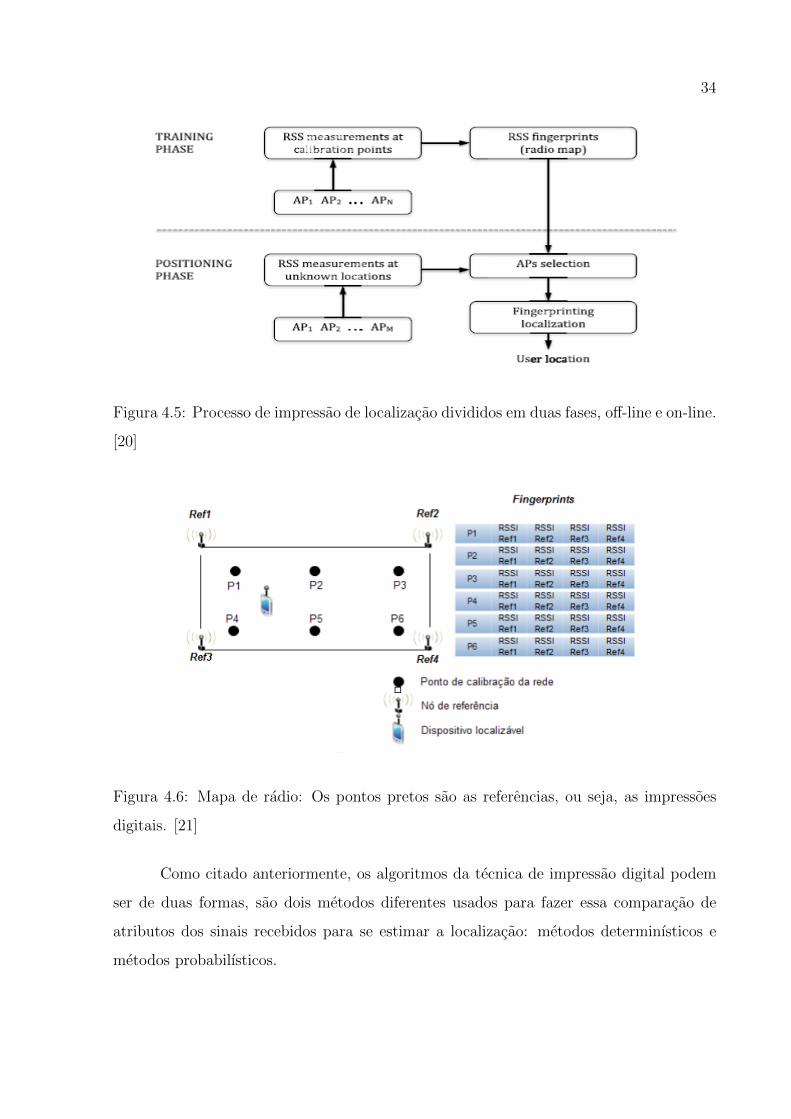
No estagio off-line, conhecido como fase de treinamento, e constituıdo um banco de
dados, chamado de mapa de radio com medidas RSSI, capaz de armazenar as informacoes
das RSSI e das frequencias dos AP’s do ambiente. Essas informacoes sao geradas pelo
proprio aparelho movel que realiza medicoes em diferentes pontos no ambiente determi-
nado (figura 4.6). Essas posicoes com os atributos medidos sao chamadas de pontos de
impressoes digitais que representam a fase de calibracao. Esses valores RSS (impressoes
digitais) sao medidos em toda a area de interesse e registrada no banco de dados para
gerar o mapa, por isso e chamada de fase de aprendizagem, essa fase e fundamental e
necessaria a fim de modelar o ambiente. Entretanto essa coleta de amostras de dados e
demorada e trabalhosa, pois e preciso dividir toda area em celulas menores. Para cada
33
celula sao verificados os valores de RSSI durante um perıodo de tempo para serem arma-
zenados no mapa, ressaltando que esses valores podem ser afetados por diferentes motivos,
como por exemplo a posicao do medidor em relacao a proprio corpo da pessoa durante as
medicoes, ja que o nosso corpo atenua frequencias de 2,4 GHz. Alteracao dos ambientes
com paredes ou ate mesmo com posicoes de moveis, por esse motivo que e necessario gerar
novas impressoes digitais periodicamente para manter o mapa de radio sempre atualizado.
Ja no estagio on-line, que e a segunda fase deste processo e conhecido como fase
de testes, e baseado na posicao do dispositivo movel atual em que deseja ser localizado
(atraves dos valores RSS daquele momento), para entao ser comparadas com as gravacoes
digitais salvas no mapa de radio possibilitando assim uma estimativa de posicionamento.
Porem e preciso tomar cuidado com alguns fatores que acabam interferindo e deixando
os valores atuais bem diferentes dos armazenados no mapa de radio, o principal deles e
a alteracao da rede de AP’s do ambiente. Com a facilidade que existe nos tempos atuais
em adicionar ou remover AP’s numa rede, e como no processo on-line e feito a selecao dos
AP’s, o ideal e que nao tenha alteracao quando comparado com o mapa. Apesar dessas
limitacoes, essa tecnica de impressao digital nos fornece uma precisao razoavel.
Os algoritmos de impressoes digitais, que sao os metodos usado para compara-
cao dos atributos atuais com os gravado no mapa para se estimar a localizacao, podem
ser divididos em metodos determinısticos e metodos probabilısticos, que falaremos mais
adiante.
Na figura 4.5 segue o diagrama que retrata todo esse processo de posicionamento
baseado em RSSI separado em duas fases, a de treinamento que refere-se a construcao do
mapa de radio e a de execucao que refere-se as medicoes de RSS para ser comparada no
banco de dados para se estimar a localizacao nesses tipos de ambientes indoor.
34
Figura 4.5: Processo de impressao de localizacao divididos em duas fases, off-line e on-line.
[20]
Figura 4.6: Mapa de radio: Os pontos pretos sao as referencias, ou seja, as impressoes
digitais. [21]
Como citado anteriormente, os algoritmos da tecnica de impressao digital podem
ser de duas formas, sao dois metodos diferentes usados para fazer essa comparacao de
atributos dos sinais recebidos para se estimar a localizacao: metodos determinısticos e
metodos probabilısticos.
35
Metodos Determinısticos
Como o nome ja sugere, este metodo trabalha com algoritmos de variaveis de-
terminısticas. O primeiro metodo utilizado para localizacao via Wi-Fi (BAHL; PAD-
MANBHAM,2000) era determinıstico e muito simples. Os valores de RSSI que o dis-
positivo movel, o qual deveria ser localizado, recebia dos AP’s que se encontravam no
ambiente formavam um “vetor de atributos”, esse vetor era gerado atraves das medias de
varias medidas naquela posicao. No mapa RSSI cada posicao e representada por um vetor
semelhante a esse. Entao calculam-se as distancias euclidianas entre o“vetor de atributos”
e cada um dos outros vetores das que formam o mapa de RSSI. A estimativa do sistema
e a posicao cuja distancia calculada tenha sido menor, este metodo ficou conhecido como
NNSS (Nearest Neighbour in Signal Space).[22]
Existem outros metodos determinısticos, ate mesmo a extensao deste metodo que
foi citado acima, tambem apresentado por BAHL e PADMANBHAM, no qual o localizador
determina em cada iteracao, um conjunto das K posicoes em que os vetores de atributos
sao os mais proximos do “vetor de atributo”observado. Assim a media das coordenadas
dessas posicoes sera o valor estimado para a localizacao do movel, este metodo ficou
conhecido como K-NNSS.[22]
Os metodos determinısticos sao de mais simples implementacao e ate mesmo de
compreensao, entretanto nao consideram informacoes importantes, como as estatısticas
das variacoes de RSSI.
Metodos Probabilısticos
Os metodos probabilısticos trabalham com variaveis aleatorias e distribuicao de
probabilidade. Essa caracterıstica aleatoria dos RSSI que sao observadas pelo movel a ser
localizado em uma rede Wi-Fi, por parecer mais com a realidade, traduz que esse metodo
deve constituir o melhor tipo de ferramenta indicado para se estimar a localizacao em
ambientes indoor.[22]
Apesar de existirem varios outros, um dos metodos mais conhecidos pela sua sim-
plicidade comparado aos demais, e um metodo que baseia-se no conceito de probabilidade
condicional de Bayes (BAYES,1763), representado pela seguinte equacao 4.2:
36
P (e
O) =
(P (Oe) × P (e))
P (O)(4.3)
Aonde cada termo da equacao e citado abaixo:
P ( eO
) – Probabilidade do estado de localizacao “e” dado que se observou O;
P (Oe) – Probabilidade de se observar O dado que se esta no estado “e”;
P(e) – Probabilidade do estado “e”;
P(O) – Probabilidade de se observar O;
Essa distribuicao e responsavel por considerar o universo de estados de localizacao
P(e) . Por isso a estimativa depende apenas da comparacao do vetor observado com os
vetores que compoem o mapa de RSSI comparacao representada pelo fator P (Oe).
Fazendo uma comparacao rapida sobre esses dois metodos citados, apesar de a
escolha depender de cada projeto e da necessidade em questao, os metodos probabilısticos
quase sempre levam vantagem em relacao aos metodos determinısticos. Vale destacar que
os metodos probabilısticos tambem consideram a forma da distribuicao de probabilidade
dos valores de RSSI medidos em cada posicao verificada, diferentemente do determinıstico
que considera apenas a media. Consequentemente possuem mais informacoes sobre cada
ponto do sistema, apresentando melhores resultados.
4.3.2 Zigbee
ZigBee e uma tecnologia definida pelo orgao IEEE (Institute of Electrical and Elec-
tronics Engineers) pela pilha de protocolos do padrao 802.15.4 presente entre a camada
fısica e a camada de enlace (endereco fisıco MAC) [10]. Essa tecnologia e apropriada para
dispositivos que realizam comunicacao sem fio com capacidades de baixa transmissao de
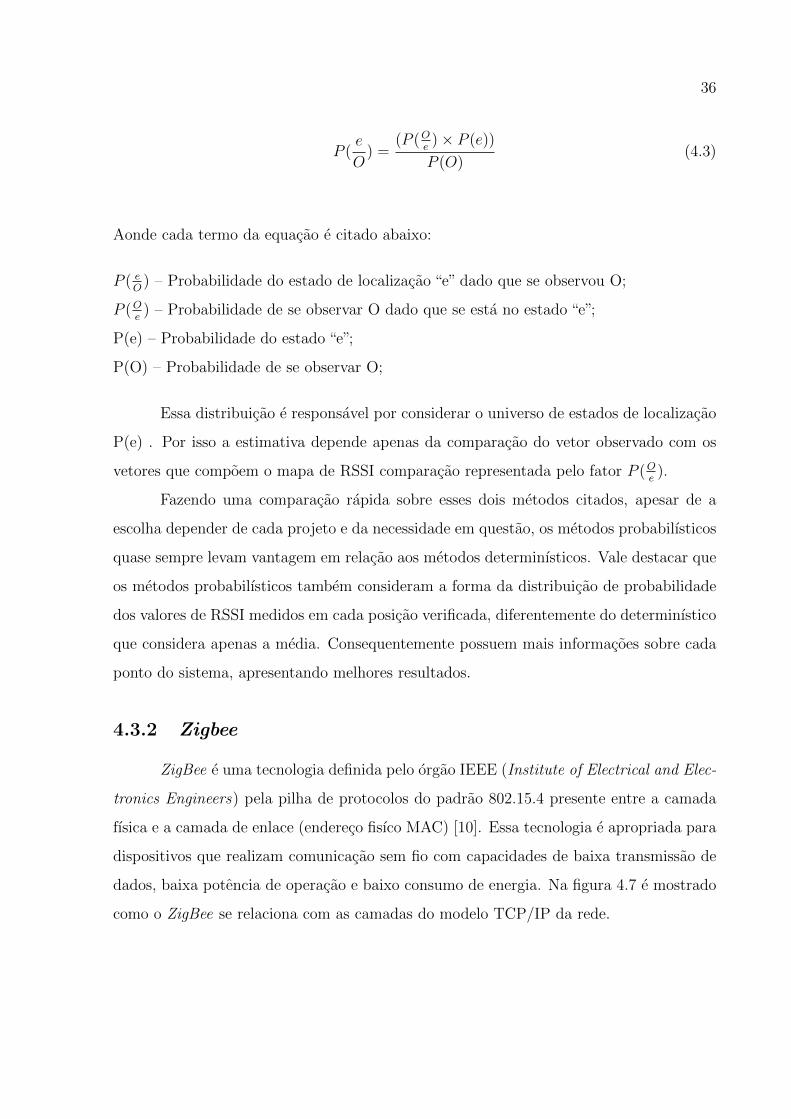
dados, baixa potencia de operacao e baixo consumo de energia. Na figura 4.7 e mostrado
como o ZigBee se relaciona com as camadas do modelo TCP/IP da rede.
37
Figura 4.7: Relacao do ZigBee com as camadas do modelo TCP/IP. [23]
Essa tecnologia, como o padrao 802.11, utiliza a banda ISM de 2,4 GHz, portanto
e projetada para dispositivos com o objetivo de interligar pequenas unidades de comuni-
cacao [10], geralmente uma rede interna bem pequena. Na tabela 4.3 e mostrado como
o mundo utiliza a banda ISM na faixa de frequencia de 2,4 GHz para a tecnologia Zig-
Bee, mostrando parametros como a faixa de frequencia utilizada, taxa de transmissao dos
dados e a quantidade de canais:
Tabela 4.3: Parametros da Banda ISM utilizados pelo ZigBee. [24]
38
Como a banda utilizada e a mesma do 802.11, e uma faixa de frequencia suscetıveis
a interferencias como a de canal adjacentes ja citada na subsecao 4.3.1 sobre o padrao
802.11. Isso prejudica o envio de pacotes pelos quadros de beacons causando degradacao
do sinal [23], sendo o grande empecilho dessas tecnologias no uso da radiolocalizacao.
Para realizar a radiolocalizacao em ambientes indoors atraves dessa tecnologia,
o princıpio e o mesmo do padrao 802.11. A tecnica utilizada e a impressao digital ja
introduzida na subsecao 4.3.1.
A radiolocalizacao realizada com essa tecnologia e auxiliada por dispositivos sen-
soriais. Um dispositivo bastante utilizado e encontrado comercialmente e o Micaz [25] que
e compatıvel com o ZigBee habilitando baixa potencia no uso da rede [10]. A instrucao
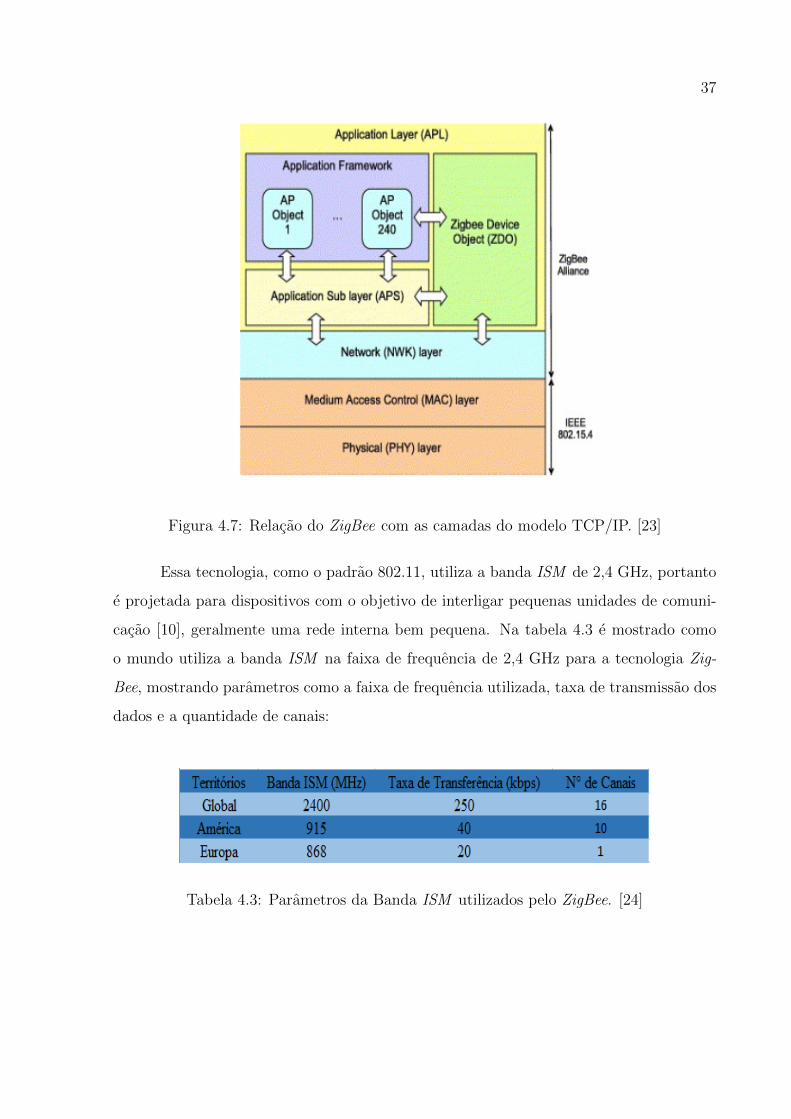
tecnica do Micaz esta presente no apendice A, e na figura 4.8 mostra o Micaz a nıvel de
hardware e um diagrama de blocos explicando o seu funcionamento:
Figura 4.8: Sensor Micaz. [25]
39
4.3.3 RFID
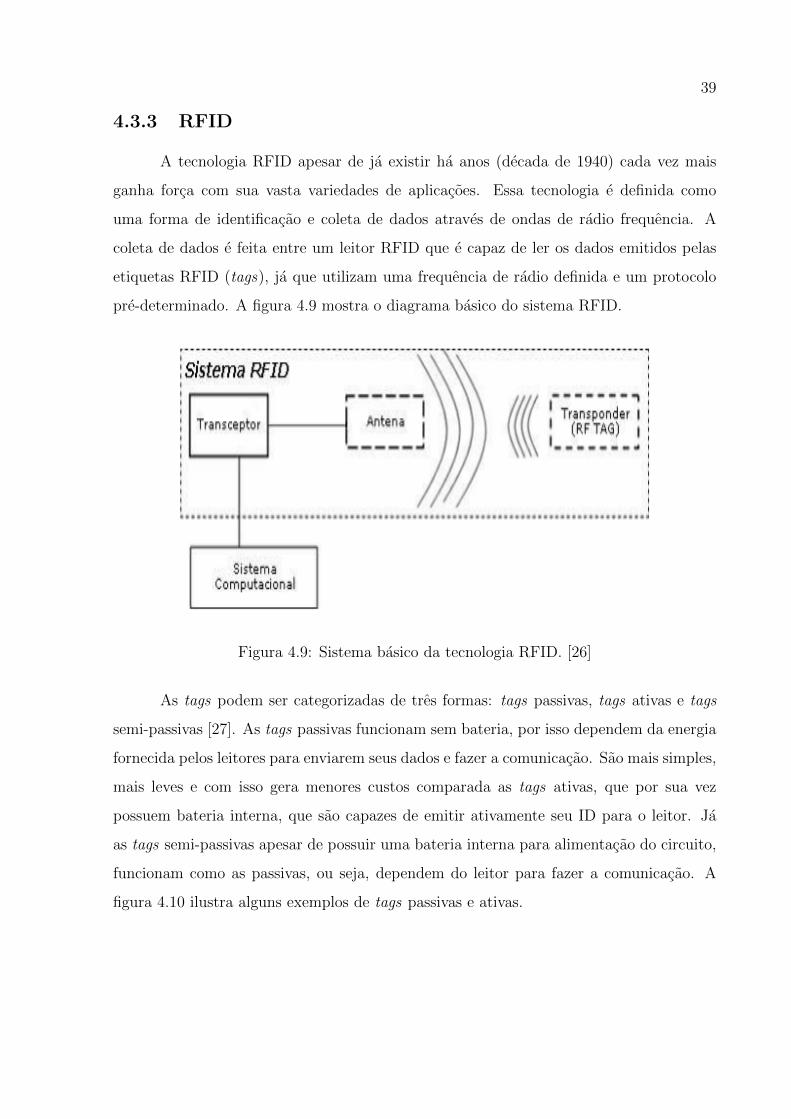
A tecnologia RFID apesar de ja existir ha anos (decada de 1940) cada vez mais
ganha forca com sua vasta variedades de aplicacoes. Essa tecnologia e definida como
uma forma de identificacao e coleta de dados atraves de ondas de radio frequencia. A
coleta de dados e feita entre um leitor RFID que e capaz de ler os dados emitidos pelas
etiquetas RFID (tags), ja que utilizam uma frequencia de radio definida e um protocolo
pre-determinado. A figura 4.9 mostra o diagrama basico do sistema RFID.
Figura 4.9: Sistema basico da tecnologia RFID. [26]
As tags podem ser categorizadas de tres formas: tags passivas, tags ativas e tags
semi-passivas [27]. As tags passivas funcionam sem bateria, por isso dependem da energia
fornecida pelos leitores para enviarem seus dados e fazer a comunicacao. Sao mais simples,
mais leves e com isso gera menores custos comparada as tags ativas, que por sua vez
possuem bateria interna, que sao capazes de emitir ativamente seu ID para o leitor. Ja
as tags semi-passivas apesar de possuir uma bateria interna para alimentacao do circuito,
funcionam como as passivas, ou seja, dependem do leitor para fazer a comunicacao. A
figura 4.10 ilustra alguns exemplos de tags passivas e ativas.
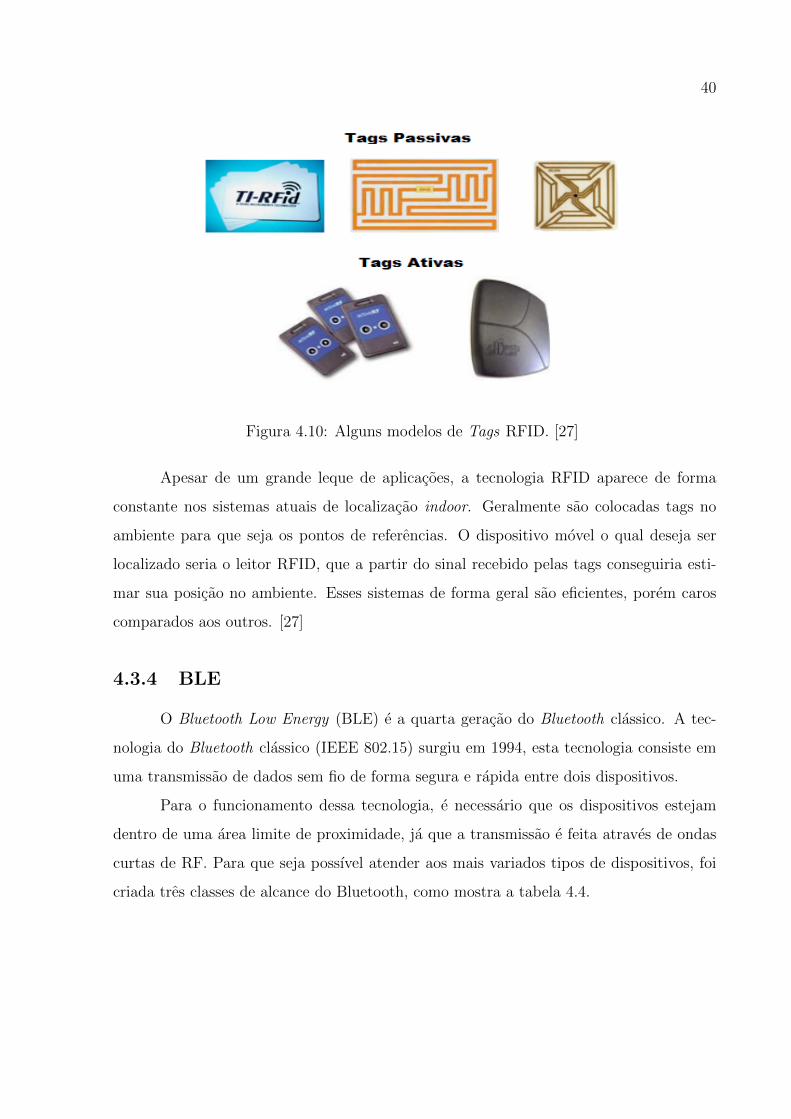
40
Figura 4.10: Alguns modelos de Tags RFID. [27]
Apesar de um grande leque de aplicacoes, a tecnologia RFID aparece de forma
constante nos sistemas atuais de localizacao indoor. Geralmente sao colocadas tags no
ambiente para que seja os pontos de referencias. O dispositivo movel o qual deseja ser
localizado seria o leitor RFID, que a partir do sinal recebido pelas tags conseguiria esti-
mar sua posicao no ambiente. Esses sistemas de forma geral sao eficientes, porem caros
comparados aos outros. [27]
4.3.4 BLE
O Bluetooth Low Energy (BLE) e a quarta geracao do Bluetooth classico. A tec-
nologia do Bluetooth classico (IEEE 802.15) surgiu em 1994, esta tecnologia consiste em
uma transmissao de dados sem fio de forma segura e rapida entre dois dispositivos.
Para o funcionamento dessa tecnologia, e necessario que os dispositivos estejam
dentro de uma area limite de proximidade, ja que a transmissao e feita atraves de ondas
curtas de RF. Para que seja possıvel atender aos mais variados tipos de dispositivos, foi
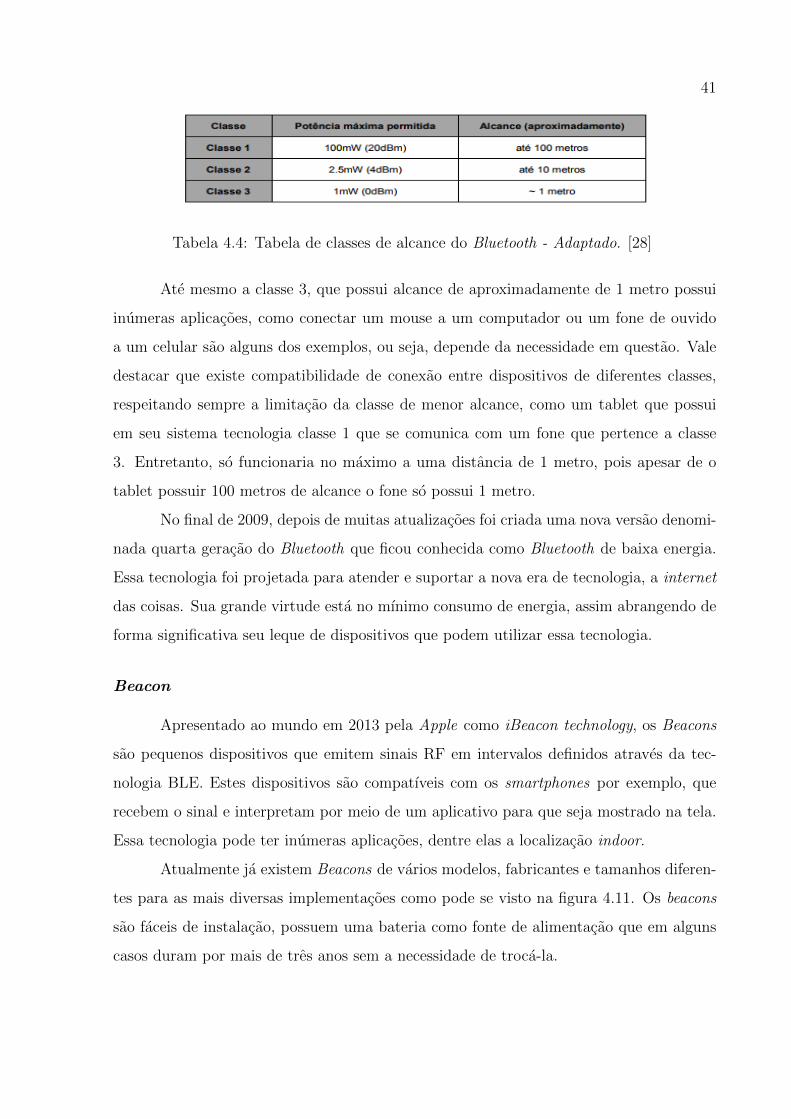
criada tres classes de alcance do Bluetooth, como mostra a tabela 4.4.
41
Tabela 4.4: Tabela de classes de alcance do Bluetooth - Adaptado. [28]
Ate mesmo a classe 3, que possui alcance de aproximadamente de 1 metro possui
inumeras aplicacoes, como conectar um mouse a um computador ou um fone de ouvido
a um celular sao alguns dos exemplos, ou seja, depende da necessidade em questao. Vale
destacar que existe compatibilidade de conexao entre dispositivos de diferentes classes,
respeitando sempre a limitacao da classe de menor alcance, como um tablet que possui
em seu sistema tecnologia classe 1 que se comunica com um fone que pertence a classe
3. Entretanto, so funcionaria no maximo a uma distancia de 1 metro, pois apesar de o
tablet possuir 100 metros de alcance o fone so possui 1 metro.
No final de 2009, depois de muitas atualizacoes foi criada uma nova versao denomi-
nada quarta geracao do Bluetooth que ficou conhecida como Bluetooth de baixa energia.
Essa tecnologia foi projetada para atender e suportar a nova era de tecnologia, a internet
das coisas. Sua grande virtude esta no mınimo consumo de energia, assim abrangendo de
forma significativa seu leque de dispositivos que podem utilizar essa tecnologia.
Beacon
Apresentado ao mundo em 2013 pela Apple como iBeacon technology, os Beacons
sao pequenos dispositivos que emitem sinais RF em intervalos definidos atraves da tec-
nologia BLE. Estes dispositivos sao compatıveis com os smartphones por exemplo, que
recebem o sinal e interpretam por meio de um aplicativo para que seja mostrado na tela.
Essa tecnologia pode ter inumeras aplicacoes, dentre elas a localizacao indoor.
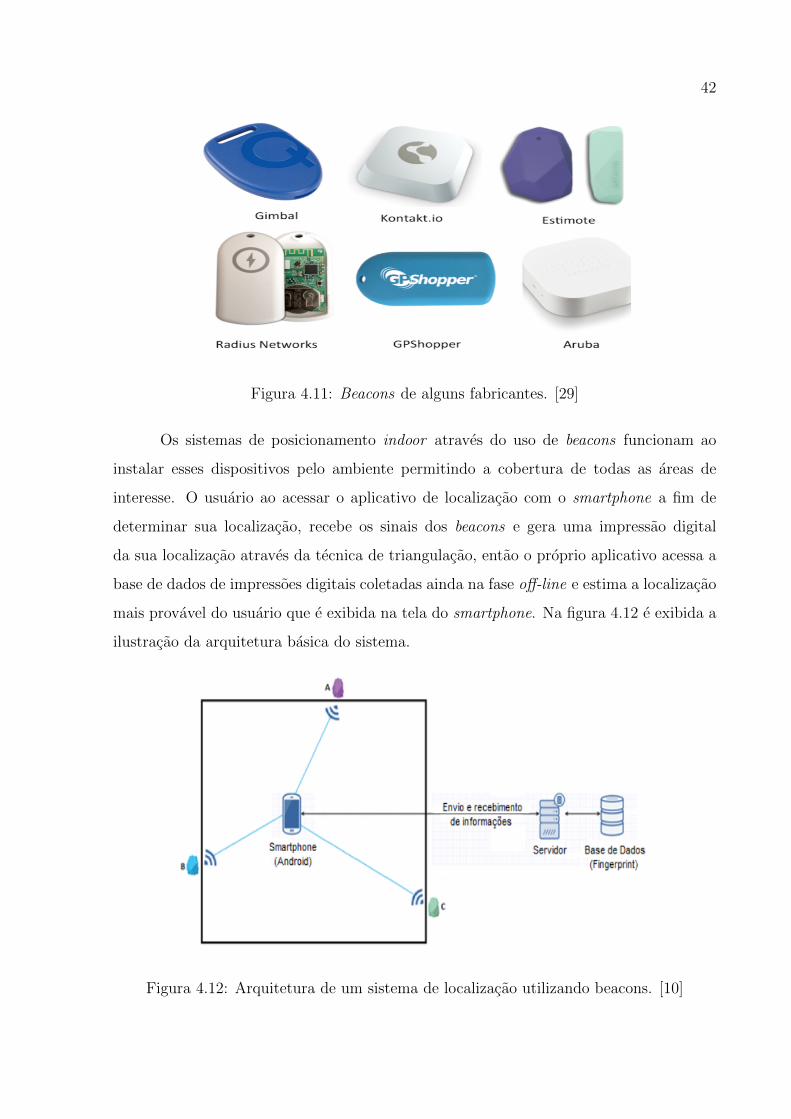
Atualmente ja existem Beacons de varios modelos, fabricantes e tamanhos diferen-
tes para as mais diversas implementacoes como pode se visto na figura 4.11. Os beacons
sao faceis de instalacao, possuem uma bateria como fonte de alimentacao que em alguns
casos duram por mais de tres anos sem a necessidade de troca-la.
42
Figura 4.11: Beacons de alguns fabricantes. [29]
Os sistemas de posicionamento indoor atraves do uso de beacons funcionam ao
instalar esses dispositivos pelo ambiente permitindo a cobertura de todas as areas de
interesse. O usuario ao acessar o aplicativo de localizacao com o smartphone a fim de
determinar sua localizacao, recebe os sinais dos beacons e gera uma impressao digital
da sua localizacao atraves da tecnica de triangulacao, entao o proprio aplicativo acessa a
base de dados de impressoes digitais coletadas ainda na fase off-line e estima a localizacao
mais provavel do usuario que e exibida na tela do smartphone. Na figura 4.12 e exibida a
ilustracao da arquitetura basica do sistema.
Figura 4.12: Arquitetura de um sistema de localizacao utilizando beacons. [10]
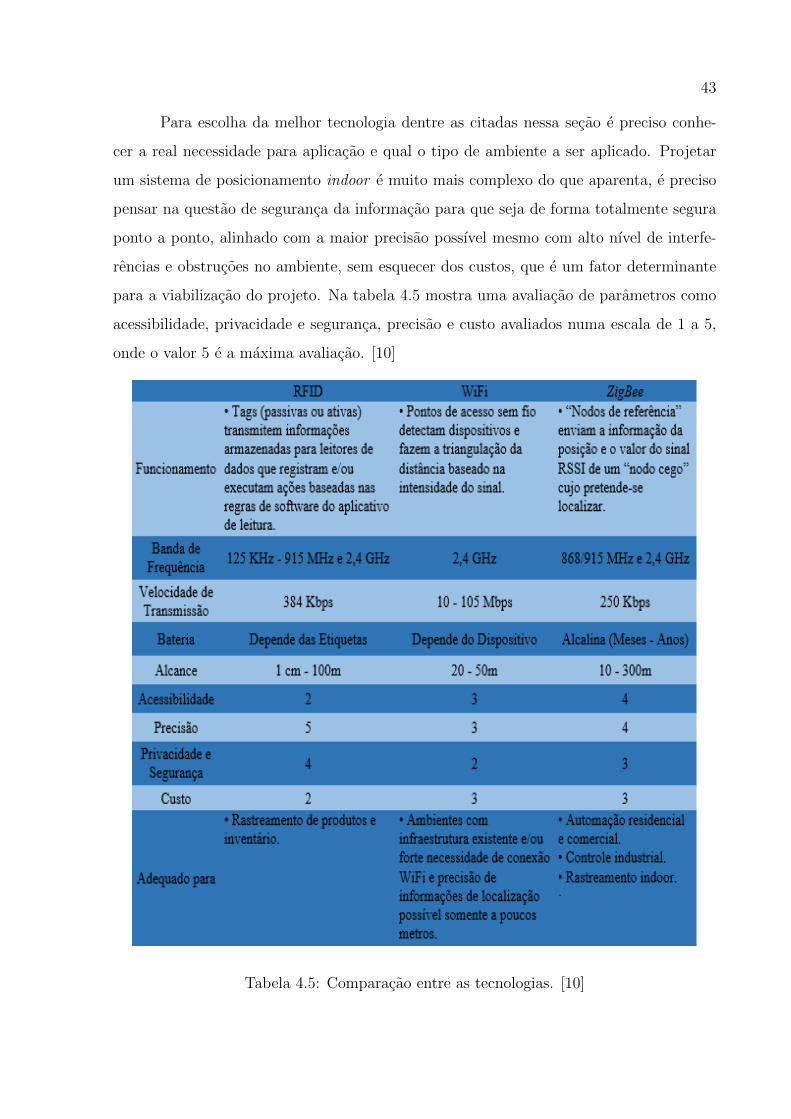
43
Para escolha da melhor tecnologia dentre as citadas nessa secao e preciso conhe-
cer a real necessidade para aplicacao e qual o tipo de ambiente a ser aplicado. Projetar
um sistema de posicionamento indoor e muito mais complexo do que aparenta, e preciso
pensar na questao de seguranca da informacao para que seja de forma totalmente segura
ponto a ponto, alinhado com a maior precisao possıvel mesmo com alto nıvel de interfe-
rencias e obstrucoes no ambiente, sem esquecer dos custos, que e um fator determinante
para a viabilizacao do projeto. Na tabela 4.5 mostra uma avaliacao de parametros como
acessibilidade, privacidade e seguranca, precisao e custo avaliados numa escala de 1 a 5,
onde o valor 5 e a maxima avaliacao. [10]
Tabela 4.5: Comparacao entre as tecnologias. [10]
Capıtulo 5
Estudo e Analise dos Sistemas
Apresentados na Microsoft Indoor
Localization Competition
Ate o presente momento vimos que a radiolocalizacao de terminais moveis funciona
muito bem em ambientes outdoor usando sempre a tecnologia do sistema GNSS, ou seja,
o GPS. Entretanto em ambientes indoor nao consegue-se ter o mesmo exito conforme
explicado no capıtulo 4.
Nesse capıtulo 5 serao apresentadas algumas das principais tecnologias e ferramen-
tas ja existente de radiolocalizacao em ambientes indoor, sem o uso do GPS. Algumas
ja estao difundidas no mercado ou apenas presentes em estudos dentro de universidades
para poderem ser analisadas e comparadas.
Sera mostrado como esse assunto ainda e desafiador para as maiores empresas do
mundo de tecnologia e para todo o ambito academico. Sera feita tambem uma analise de
uma das principais competicoes internacional de tecnologias inovadoras para o posiciona-
mento em ambientes indoor.
Apesar de ja existirem centenas de abordagens diferentes na literatura, o problema
da localizacao indoor ainda persiste sem solucao. Ainda nao existe uma linha de pesquisa
convergente para uma unica solucao amplamente aceita que possa alcancar a precisao e o
custo desejado.
Diante deste fato, desde 2014 a Microsoft organiza uma competicao anual de tec-
nologias de posicionamento interno, a Microsoft Indoor Localization Competition, que
45
faz parte da conferencia internacional sobre Processamento de Informacao em Sensor
Networks, a IPSN 2014 [30]. Essa competicao tem como finalidade reunir os principais
nomes do meio academico, das industrias e das startups para que sejam apresentadas e
avaliadas as mais recentes tecnologias de posicionamento em ambientes indoor. A princi-
pal meta e encontrar tecnologias que atendam tao bem como o GPS atende em ambientes
outdoor.
A competicao funciona da seguinte forma, depois de todo processo de inscricao
que cada equipe que deseja participar da competicao envia um resumo da sua proposta
para comissao organizadora do evento, as equipes selecionadas sao convidadas para a
competicao que a cada ano costuma ser em um paıs diferente. A competicao e um evento
de 2 dias, durante o primeiro dia as equipes sao livres para configurar e calibrarem seus
sistemas, ja no segundo dia cada equipe e avaliada em um intervalo de tempo pre-definido.
O evento tem o objetivo de reunir as principais pesquisas de tecnologia de localizacao
indoor quase em tempo real e considerando a aplicacao no mesmo ambiente para todas
as equipes.
Este estudo de caso sera baseado nos sistemas apresentados na Microsoft Indoor
Localization Competition – IPSN 2014, o primeiro ano dessa competicao realizado entre
os dias 13 a 15 de abril de 2014 em Berlin. Ja nessa primeira edicao do evento foram
21 equipes de toda parte do mundo e 22 sistemas de diferentes princıpios, porem com a
mesma finalidade [31].
A tabela 5.1 apresenta todas as 21 equipes e suas abordagens tecnicas, alem de
apresentar o ranking final da competicao entre outras informacoes. A MSR Asia foi a
unica equipe a competir com 2 solucoes diferentes.
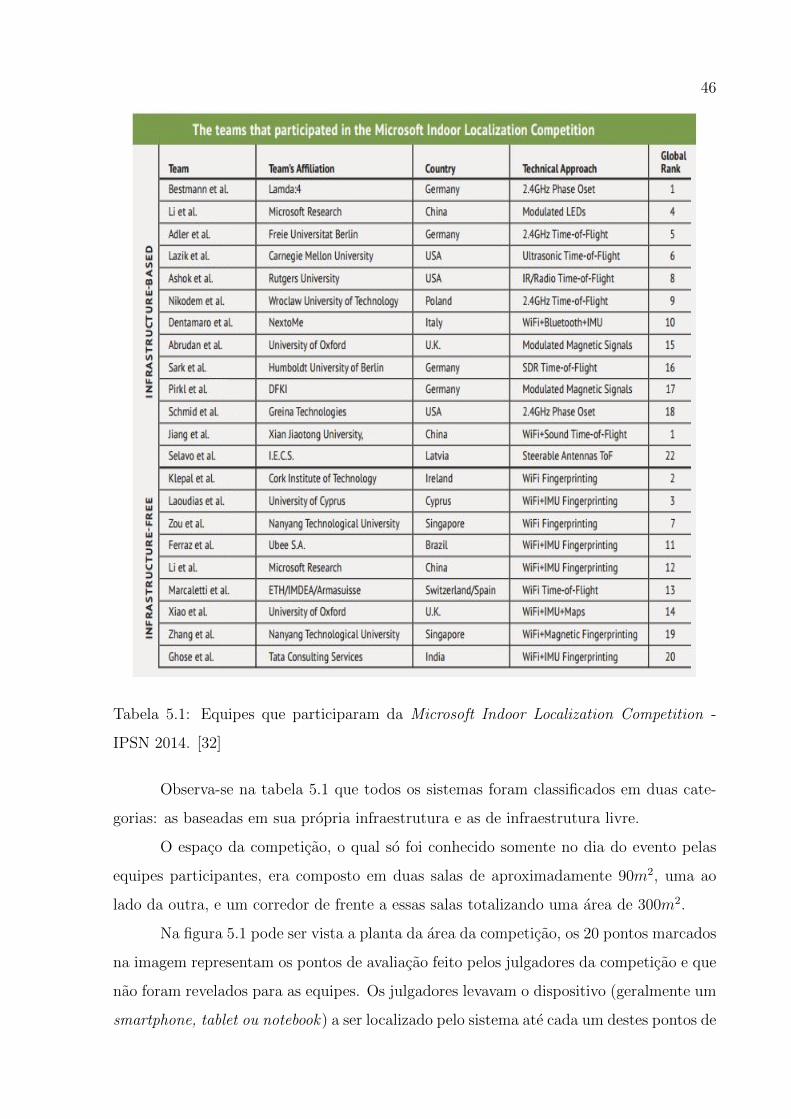
46
Tabela 5.1: Equipes que participaram da Microsoft Indoor Localization Competition -
IPSN 2014. [32]
Observa-se na tabela 5.1 que todos os sistemas foram classificados em duas cate-
gorias: as baseadas em sua propria infraestrutura e as de infraestrutura livre.
O espaco da competicao, o qual so foi conhecido somente no dia do evento pelas
equipes participantes, era composto em duas salas de aproximadamente 90m2, uma ao
lado da outra, e um corredor de frente a essas salas totalizando uma area de 300m2.
Na figura 5.1 pode ser vista a planta da area da competicao, os 20 pontos marcados
na imagem representam os pontos de avaliacao feito pelos julgadores da competicao e que
nao foram revelados para as equipes. Os julgadores levavam o dispositivo (geralmente um
smartphone, tablet ou notebook) a ser localizado pelo sistema ate cada um destes pontos de
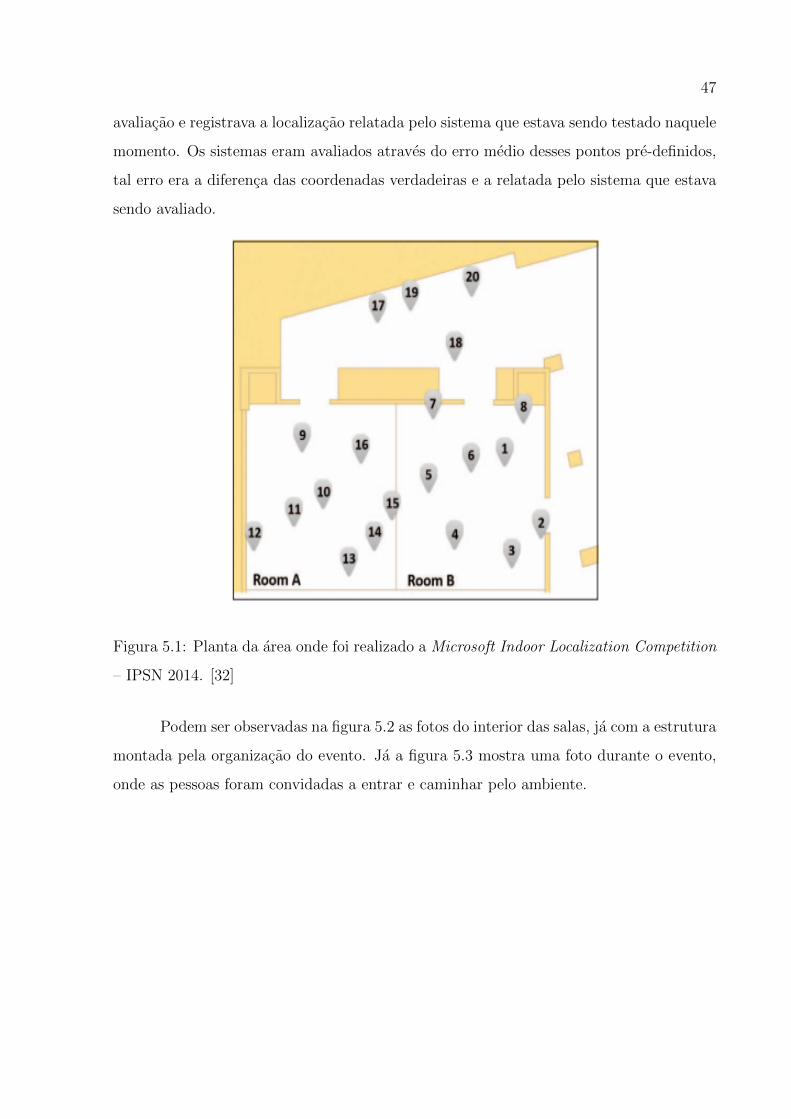
47
avaliacao e registrava a localizacao relatada pelo sistema que estava sendo testado naquele
momento. Os sistemas eram avaliados atraves do erro medio desses pontos pre-definidos,
tal erro era a diferenca das coordenadas verdadeiras e a relatada pelo sistema que estava
sendo avaliado.
Figura 5.1: Planta da area onde foi realizado a Microsoft Indoor Localization Competition
– IPSN 2014. [32]
Podem ser observadas na figura 5.2 as fotos do interior das salas, ja com a estrutura
montada pela organizacao do evento. Ja a figura 5.3 mostra uma foto durante o evento,
onde as pessoas foram convidadas a entrar e caminhar pelo ambiente.
48
Figura 5.2: Imagem das salas onde foi realizada a competicao. [32]
Figura 5.3: Foto tirada durante a realizacao da Microsoft Indoor Localization Competition
– IPSN 2014. [33]
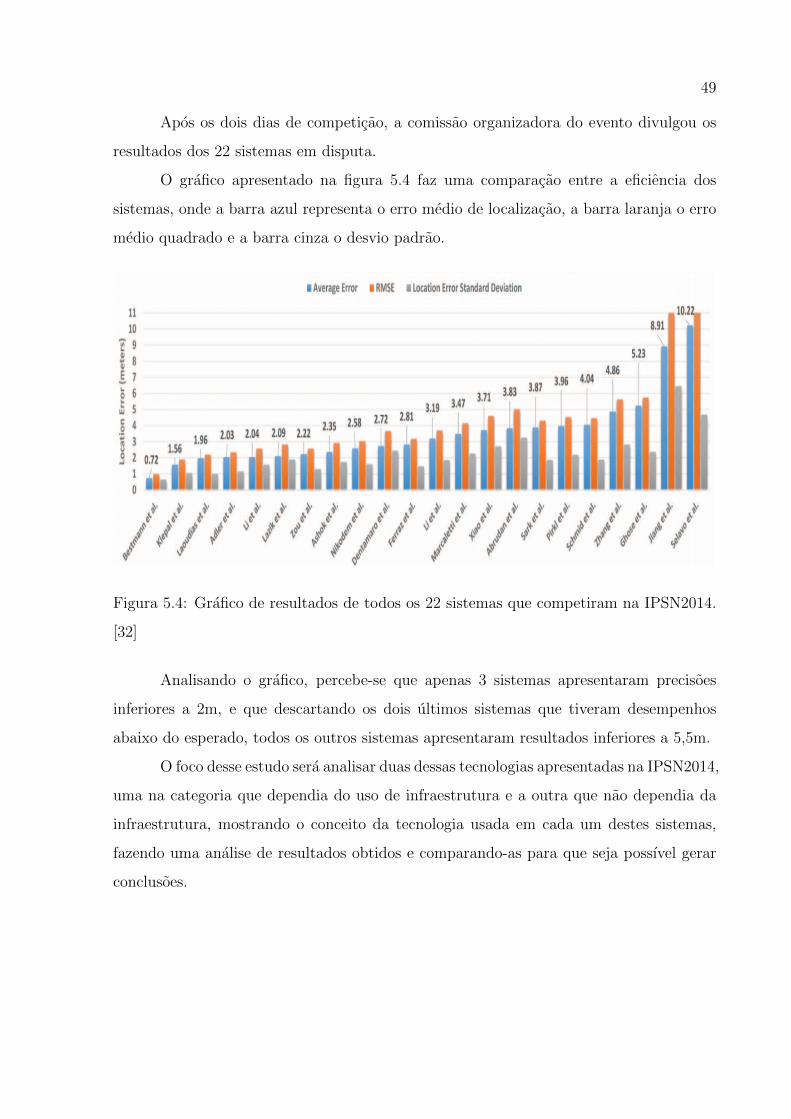
49
Apos os dois dias de competicao, a comissao organizadora do evento divulgou os
resultados dos 22 sistemas em disputa.
O grafico apresentado na figura 5.4 faz uma comparacao entre a eficiencia dos
sistemas, onde a barra azul representa o erro medio de localizacao, a barra laranja o erro
medio quadrado e a barra cinza o desvio padrao.
Figura 5.4: Grafico de resultados de todos os 22 sistemas que competiram na IPSN2014.
[32]
Analisando o grafico, percebe-se que apenas 3 sistemas apresentaram precisoes
inferiores a 2m, e que descartando os dois ultimos sistemas que tiveram desempenhos
abaixo do esperado, todos os outros sistemas apresentaram resultados inferiores a 5,5m.
O foco desse estudo sera analisar duas dessas tecnologias apresentadas na IPSN2014,
uma na categoria que dependia do uso de infraestrutura e a outra que nao dependia da
infraestrutura, mostrando o conceito da tecnologia usada em cada um destes sistemas,
fazendo uma analise de resultados obtidos e comparando-as para que seja possıvel gerar
conclusoes.
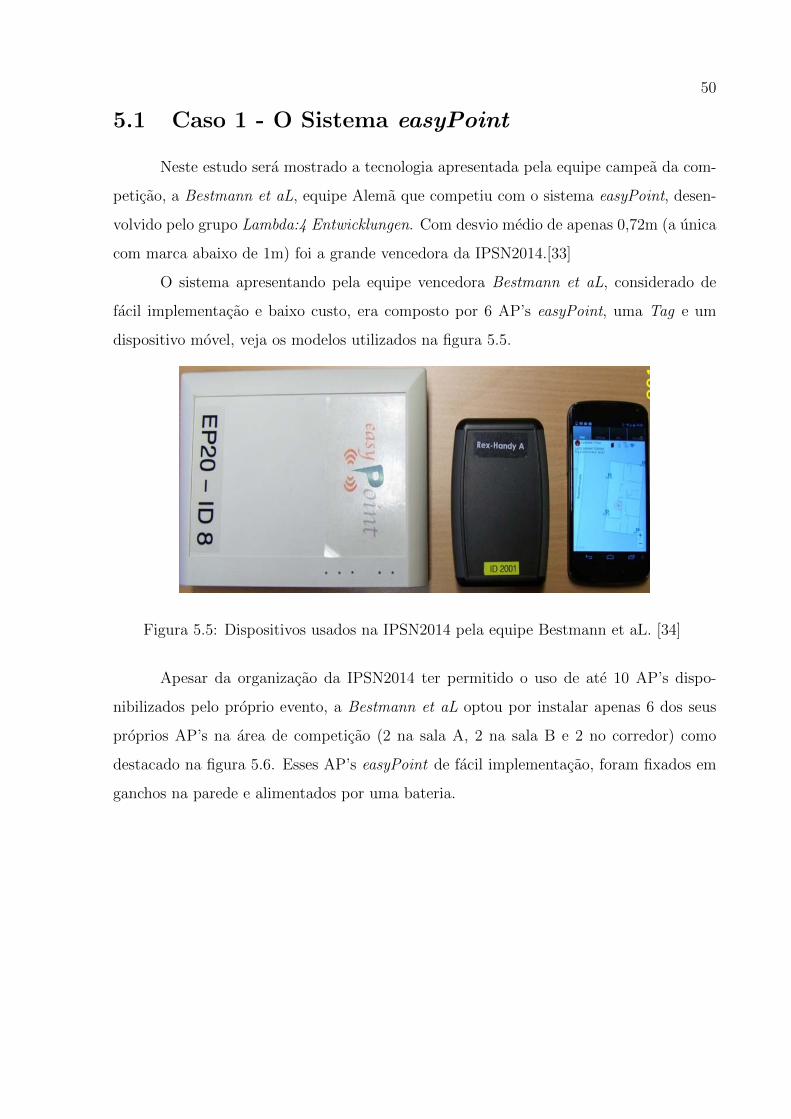
50
5.1 Caso 1 - O Sistema easyPoint
Neste estudo sera mostrado a tecnologia apresentada pela equipe campea da com-
peticao, a Bestmann et aL, equipe Alema que competiu com o sistema easyPoint, desen-
volvido pelo grupo Lambda:4 Entwicklungen. Com desvio medio de apenas 0,72m (a unica
com marca abaixo de 1m) foi a grande vencedora da IPSN2014.[33]
O sistema apresentando pela equipe vencedora Bestmann et aL, considerado de
facil implementacao e baixo custo, era composto por 6 AP’s easyPoint, uma Tag e um
dispositivo movel, veja os modelos utilizados na figura 5.5.
Figura 5.5: Dispositivos usados na IPSN2014 pela equipe Bestmann et aL. [34]
Apesar da organizacao da IPSN2014 ter permitido o uso de ate 10 AP’s dispo-
nibilizados pelo proprio evento, a Bestmann et aL optou por instalar apenas 6 dos seus
proprios AP’s na area de competicao (2 na sala A, 2 na sala B e 2 no corredor) como
destacado na figura 5.6. Esses AP’s easyPoint de facil implementacao, foram fixados em
ganchos na parede e alimentados por uma bateria.
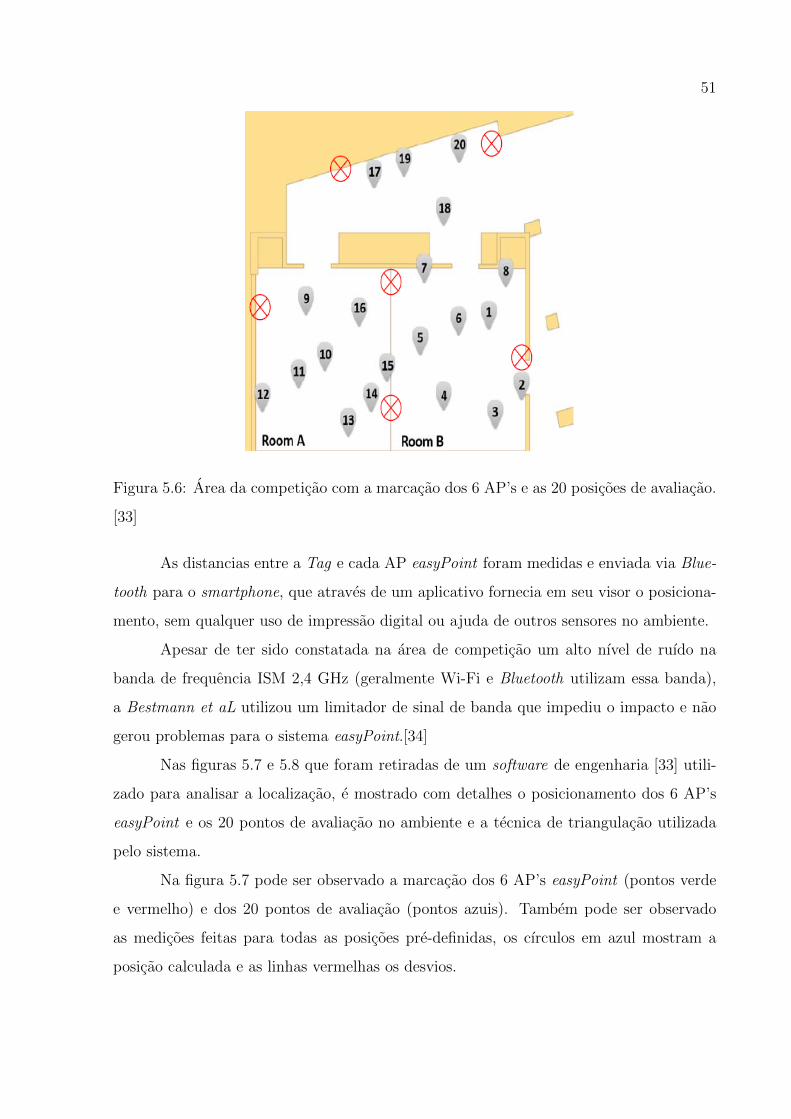
51
Figura 5.6: Area da competicao com a marcacao dos 6 AP’s e as 20 posicoes de avaliacao.
[33]
As distancias entre a Tag e cada AP easyPoint foram medidas e enviada via Blue-
tooth para o smartphone, que atraves de um aplicativo fornecia em seu visor o posiciona-
mento, sem qualquer uso de impressao digital ou ajuda de outros sensores no ambiente.
Apesar de ter sido constatada na area de competicao um alto nıvel de ruıdo na
banda de frequencia ISM 2,4 GHz (geralmente Wi-Fi e Bluetooth utilizam essa banda),
a Bestmann et aL utilizou um limitador de sinal de banda que impediu o impacto e nao
gerou problemas para o sistema easyPoint.[34]
Nas figuras 5.7 e 5.8 que foram retiradas de um software de engenharia [33] utili-
zado para analisar a localizacao, e mostrado com detalhes o posicionamento dos 6 AP’s
easyPoint e os 20 pontos de avaliacao no ambiente e a tecnica de triangulacao utilizada
pelo sistema.
Na figura 5.7 pode ser observado a marcacao dos 6 AP’s easyPoint (pontos verde
e vermelho) e dos 20 pontos de avaliacao (pontos azuis). Tambem pode ser observado
as medicoes feitas para todas as posicoes pre-definidas, os cırculos em azul mostram a
posicao calculada e as linhas vermelhas os desvios.
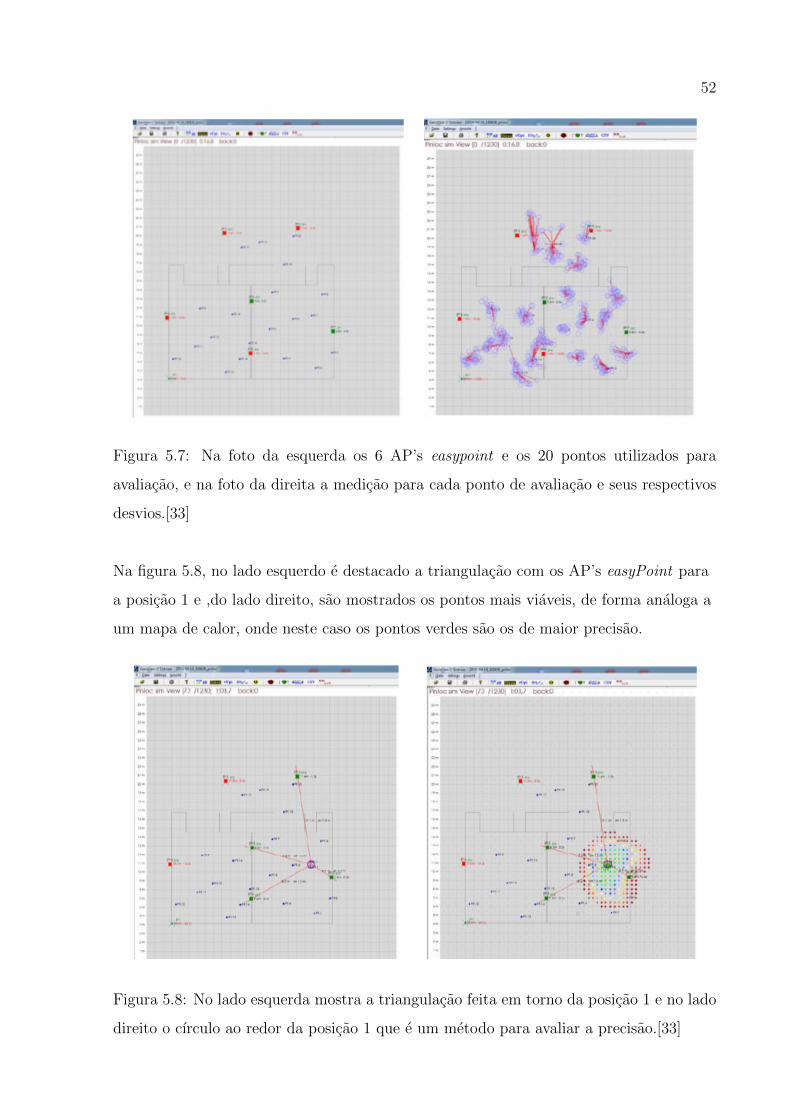
52
Figura 5.7: Na foto da esquerda os 6 AP’s easypoint e os 20 pontos utilizados para
avaliacao, e na foto da direita a medicao para cada ponto de avaliacao e seus respectivos
desvios.[33]
Na figura 5.8, no lado esquerdo e destacado a triangulacao com os AP’s easyPoint para
a posicao 1 e ,do lado direito, sao mostrados os pontos mais viaveis, de forma analoga a
um mapa de calor, onde neste caso os pontos verdes sao os de maior precisao.
Figura 5.8: No lado esquerda mostra a triangulacao feita em torno da posicao 1 e no lado
direito o cırculo ao redor da posicao 1 que e um metodo para avaliar a precisao.[33]
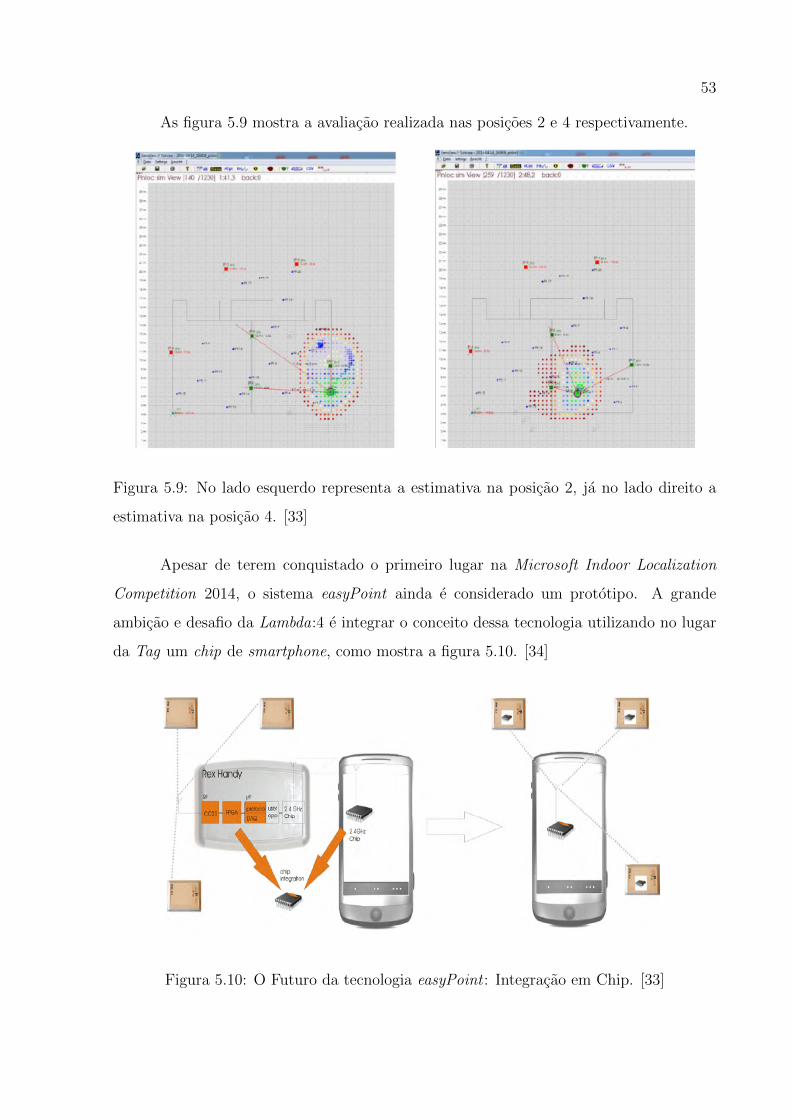
53
As figura 5.9 mostra a avaliacao realizada nas posicoes 2 e 4 respectivamente.
Figura 5.9: No lado esquerdo representa a estimativa na posicao 2, ja no lado direito a
estimativa na posicao 4. [33]
Apesar de terem conquistado o primeiro lugar na Microsoft Indoor Localization
Competition 2014, o sistema easyPoint ainda e considerado um prototipo. A grande
ambicao e desafio da Lambda:4 e integrar o conceito dessa tecnologia utilizando no lugar
da Tag um chip de smartphone, como mostra a figura 5.10. [34]
Figura 5.10: O Futuro da tecnologia easyPoint : Integracao em Chip. [33]
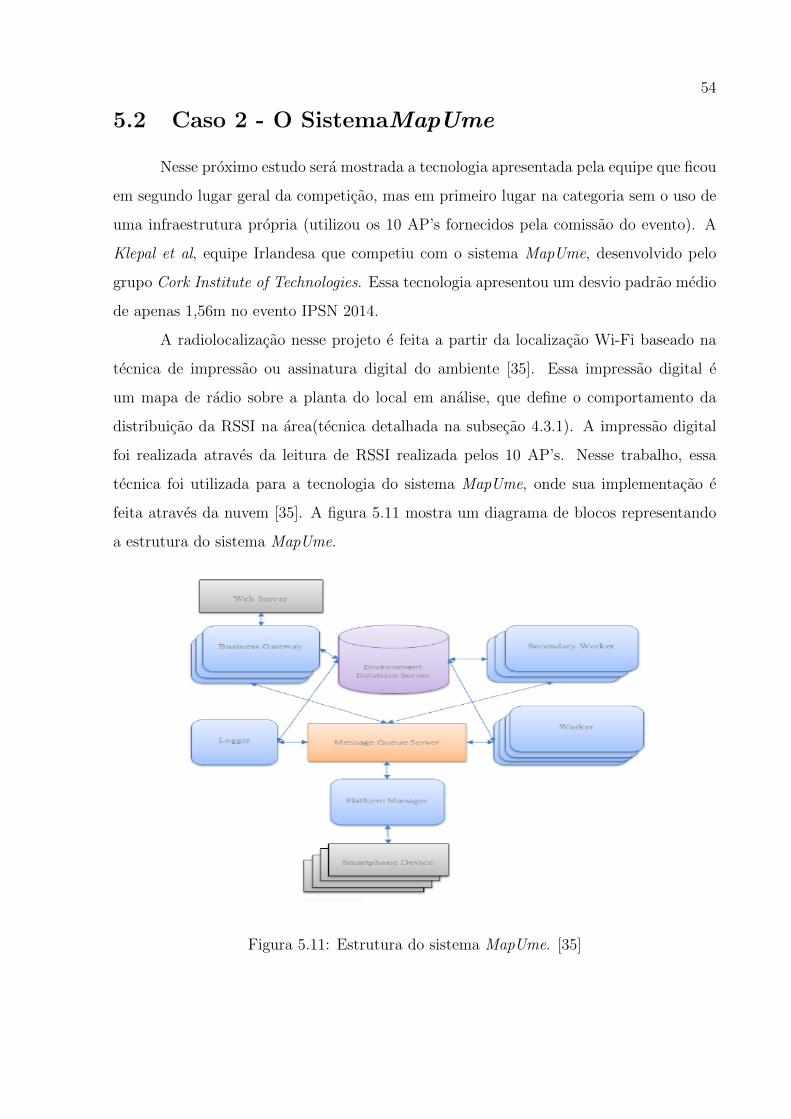
54
5.2 Caso 2 - O SistemaMapUme
Nesse proximo estudo sera mostrada a tecnologia apresentada pela equipe que ficou
em segundo lugar geral da competicao, mas em primeiro lugar na categoria sem o uso de
uma infraestrutura propria (utilizou os 10 AP’s fornecidos pela comissao do evento). A
Klepal et al, equipe Irlandesa que competiu com o sistema MapUme, desenvolvido pelo
grupo Cork Institute of Technologies. Essa tecnologia apresentou um desvio padrao medio
de apenas 1,56m no evento IPSN 2014.
A radiolocalizacao nesse projeto e feita a partir da localizacao Wi-Fi baseado na
tecnica de impressao ou assinatura digital do ambiente [35]. Essa impressao digital e
um mapa de radio sobre a planta do local em analise, que define o comportamento da
distribuicao da RSSI na area(tecnica detalhada na subsecao 4.3.1). A impressao digital
foi realizada atraves da leitura de RSSI realizada pelos 10 AP’s. Nesse trabalho, essa
tecnica foi utilizada para a tecnologia do sistema MapUme, onde sua implementacao e
feita atraves da nuvem [35]. A figura 5.11 mostra um diagrama de blocos representando
a estrutura do sistema MapUme.
Figura 5.11: Estrutura do sistema MapUme. [35]
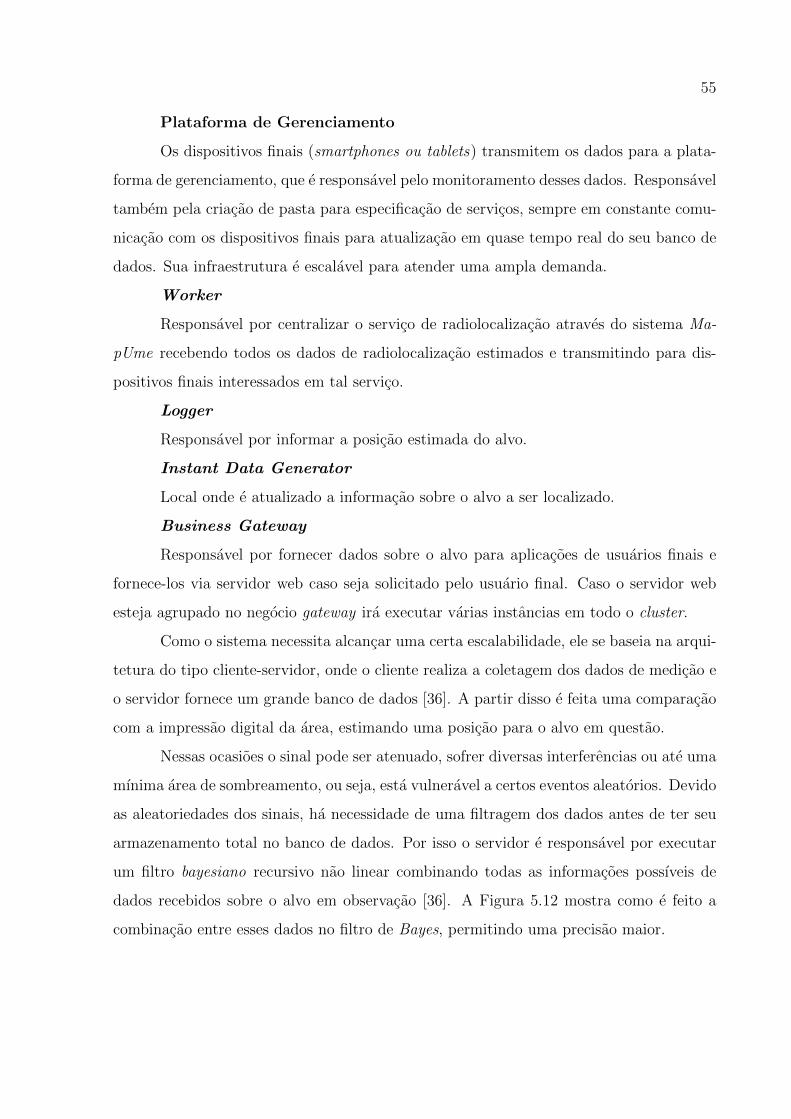
55
Plataforma de Gerenciamento
Os dispositivos finais (smartphones ou tablets) transmitem os dados para a plata-
forma de gerenciamento, que e responsavel pelo monitoramento desses dados. Responsavel
tambem pela criacao de pasta para especificacao de servicos, sempre em constante comu-
nicacao com os dispositivos finais para atualizacao em quase tempo real do seu banco de
dados. Sua infraestrutura e escalavel para atender uma ampla demanda.
Worker
Responsavel por centralizar o servico de radiolocalizacao atraves do sistema Ma-
pUme recebendo todos os dados de radiolocalizacao estimados e transmitindo para dis-
positivos finais interessados em tal servico.
Logger
Responsavel por informar a posicao estimada do alvo.
Instant Data Generator
Local onde e atualizado a informacao sobre o alvo a ser localizado.
Business Gateway
Responsavel por fornecer dados sobre o alvo para aplicacoes de usuarios finais e
fornece-los via servidor web caso seja solicitado pelo usuario final. Caso o servidor web
esteja agrupado no negocio gateway ira executar varias instancias em todo o cluster.
Como o sistema necessita alcancar uma certa escalabilidade, ele se baseia na arqui-
tetura do tipo cliente-servidor, onde o cliente realiza a coletagem dos dados de medicao e
o servidor fornece um grande banco de dados [36]. A partir disso e feita uma comparacao
com a impressao digital da area, estimando uma posicao para o alvo em questao.
Nessas ocasioes o sinal pode ser atenuado, sofrer diversas interferencias ou ate uma
mınima area de sombreamento, ou seja, esta vulneravel a certos eventos aleatorios. Devido
as aleatoriedades dos sinais, ha necessidade de uma filtragem dos dados antes de ter seu
armazenamento total no banco de dados. Por isso o servidor e responsavel por executar
um filtro bayesiano recursivo nao linear combinando todas as informacoes possıveis de
dados recebidos sobre o alvo em observacao [36]. A Figura 5.12 mostra como e feito a
combinacao entre esses dados no filtro de Bayes, permitindo uma precisao maior.
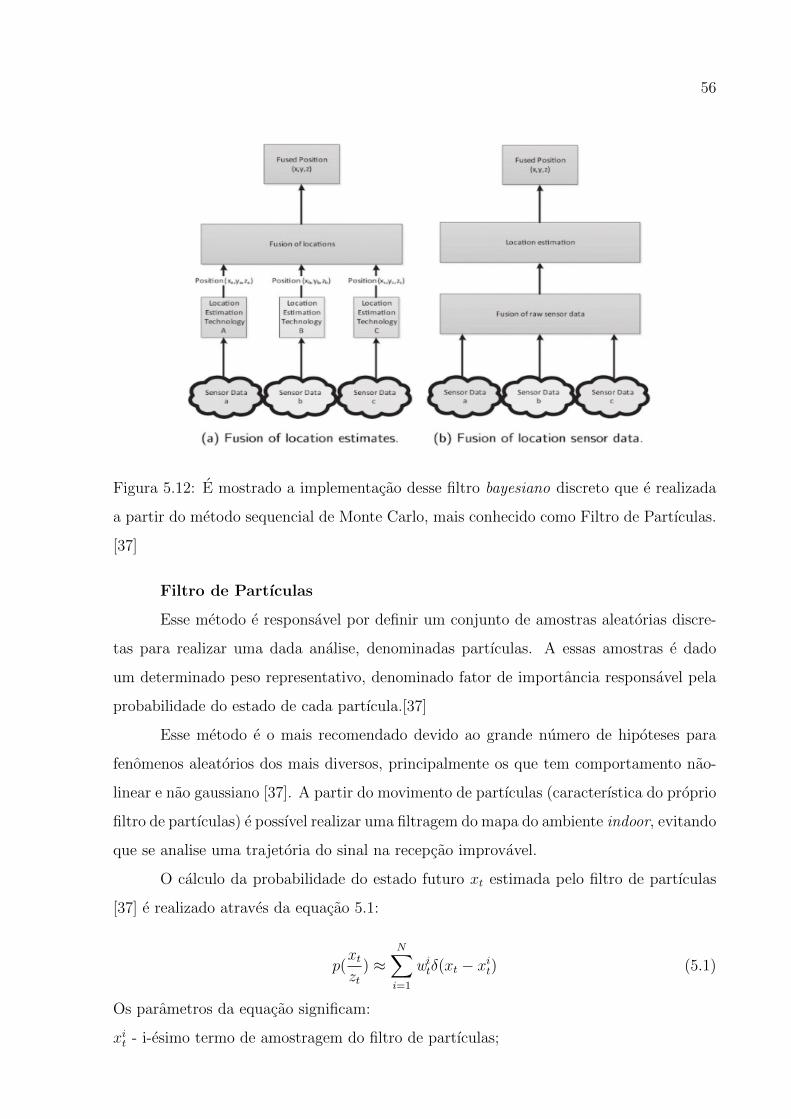
56
Figura 5.12: E mostrado a implementacao desse filtro bayesiano discreto que e realizada
a partir do metodo sequencial de Monte Carlo, mais conhecido como Filtro de Partıculas.
[37]
Filtro de Partıculas
Esse metodo e responsavel por definir um conjunto de amostras aleatorias discre-
tas para realizar uma dada analise, denominadas partıculas. A essas amostras e dado
um determinado peso representativo, denominado fator de importancia responsavel pela
probabilidade do estado de cada partıcula.[37]
Esse metodo e o mais recomendado devido ao grande numero de hipoteses para
fenomenos aleatorios dos mais diversos, principalmente os que tem comportamento nao-
linear e nao gaussiano [37]. A partir do movimento de partıculas (caracterıstica do proprio
filtro de partıculas) e possıvel realizar uma filtragem do mapa do ambiente indoor, evitando
que se analise uma trajetoria do sinal na recepcao improvavel.
O calculo da probabilidade do estado futuro xt estimada pelo filtro de partıculas
[37] e realizado atraves da equacao 5.1:
p(xtzt
) ≈N∑i=1
witδ(xt − xit) (5.1)
Os parametros da equacao significam:
xit - i-esimo termo de amostragem do filtro de partıculas;

57
N - Numero total de amostragem;
wit - peso da partıcula;
δ - medida delta de Dirac
zt - Representa a medida da posicao do alvo em localizacao;
5.3 Sistema easyPoint X Sistema MapUme
Nessa secao serao apresentados os resultados obtidos pelos dois sistemas abordados
nesse capıtulo, os quais alcancaram as melhores performances entre todos os 22 sistemas
da IPSN2014.
No grafico da figura 5.13 pode ser visto o comportamento aleatorio das medidas
realizadas no dia do evento por esses dois sistemas.
Figura 5.13: Distribuicao Cumulativa Empırica em funcao do erro medio de localizacao
para os dois sistemas. Adaptado somente para os dois sistemas analisados [32].
58
Como base nessas amostras presentes no grafico, foi feito o erro medio de localizacao
para cada um dos sistemas. Como observado na tabela 5.2.
Tabela 5.2: Resultado dos erros medios de localizacao de cada um dos sistemas. Adaptado
[32].
Capıtulo 6
Conclusao
Esse trabalho apresentou um estudo sobre a radiolocalizacao em terminais moveis.
Foi visto que para ambientes outdoor existe o sistema GPS, muito difundido em todo o
mundo e que apresenta excelente precisao na informacao da localizacao. Entretanto esse
sistema nao atende com a mesma performance em ambientes indoor.
Conseguir um posicionamento eficiente em ambientes indoor ainda e considerado
um desafio pela tamanha complexidade e variacoes no sistema. Com base nisso, foi dada
enfase nas pesquisas e tecnologias desenvolvidas para esses tipos de ambientes indoor.
Com o surgimento de novas aplicacoes para servicos nas areas de saude, comercio,
seguranca entre outros, e exigido um sistema de localizacao indoor com estimativas de
alta precisao. Nesse trabalho foram analisadas diversas tecnicas e tecnologias para esse
tipo de ambiente, como RFID, ZigBee e Wi-Fi.
Atualmente a tecnologia mais utilizada no mercado para estimar um posiciona-
mento indoor e o Wi-Fi, pois na maioria dos casos ja existe uma infraestrutura de AP’s ja
implantada no ambiente. Entretanto ha uma desvantagem na fase off-line, pois demanda
um certo tempo e precisa ser atualizada constantemente.
Uma nova tecnologia desenvolvida nos ultimos anos de grande potencial de locali-
zacao e o BLE que devido ao baixıssimo consumo de energia, esta sendo uma tendencia e
consequentemente cada vez mais aumentando o numero de aparelhos compatıveis a essa
tecnologia. Compatıvel com os beacons e projetada para suportar a nova era da IoT,
gerando uma grande esperanca que possam surgir sistemas para localizacao em ambientes
indoor totalmente eficientes e sem qualquer uso do sistema GPS.
59
60
O estudo de caso desse projeto foi direcionado a uma conceituada competicao que
se propoe a descobrir as mais novas tecnologias que ainda estao em fase de prototipo, a
Microsoft Indoor Localization Competition 2014. Apos serem apresentados os 21 siste-
mas que estiveram em disputa, foi feita uma analise detalhada com base nos resultados
fornecidos pela organizacao do evento dos dois sistemas que mais se destacaram na com-
peticao com grande grau de precisao, o sistema easyPoint (campeao) e o sistema MapUme
(vice-campeao).
Foi constatado que embora os dois sistemas obtiveram bons desempenho e resul-
tados consideraveis, eles pertenciam a categorias e abordagem tecnicas diferentes. Isso
evidencia que ainda nao ha uma convergencia de ideias para a solucao desse problema e
que nao existe no mundo uma tecnologia para ambientes indoor convergentes e no mesmo
nıvel global de aceitacao como existe o sistema GPS para os ambientes outdoor.
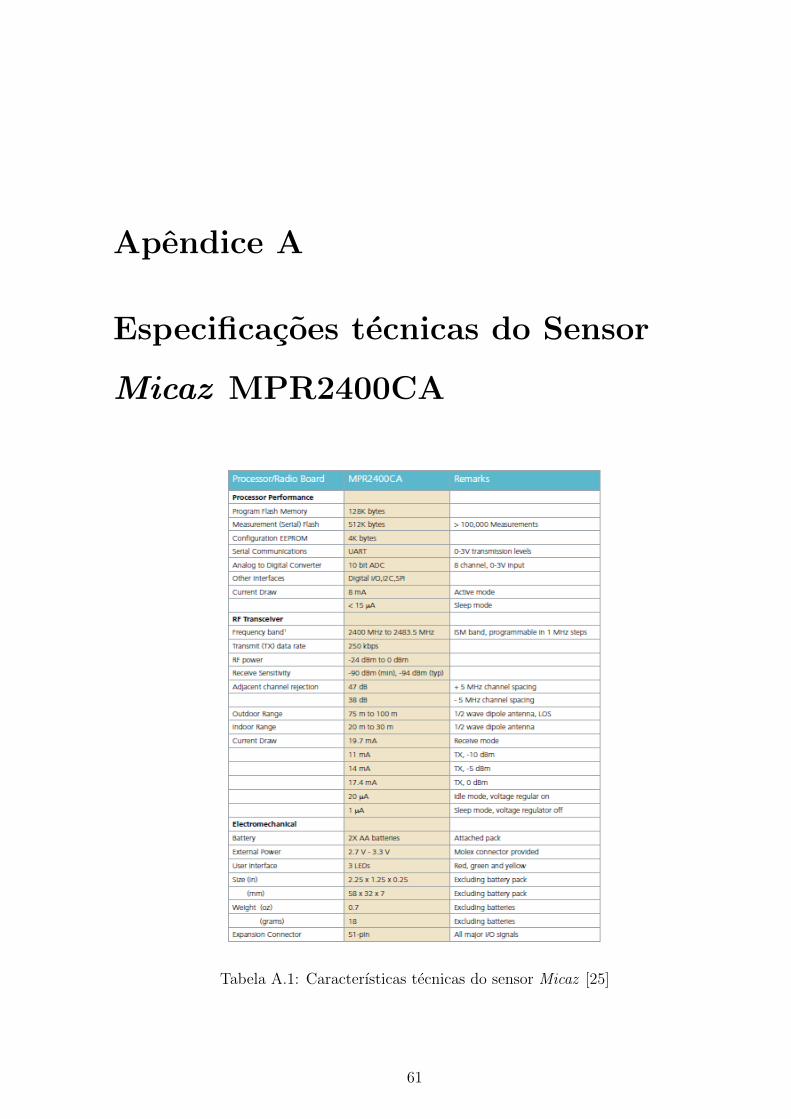
Apendice A
Especificacoes tecnicas do Sensor
Micaz MPR2400CA
Tabela A.1: Caracterısticas tecnicas do sensor Micaz [25]
61
62
Referencias Bibliograficas
[1] Radiolocalizacao de Terminais de Comunicacoes Moveis. Disponıvel
em:<www.inatel.br/revista/busca/193-radiolocalizacao-de-terminais-de-
comunicacoes-moveis>. Acesso em: 5 de Setembro de 2017
[2] ARAUJO, Domenico Savio Gomes de. Analise da eficiencia dos metodos de radio-
localizacao implementados em sistemas celulares.
[3] MONICO, Joao Francisco Galera. Posicionamento pelo Navstar-GPS. Unesp, 2000
[4] GPS. Disponıvel em:<www.slideshare.net/search/slideshow?searchfrom=headerq=gps>.
Acesso em: 10 de Setembro de 2017
[5] NATARIO, Jose. O GPS e a Teoria da Relatividade
[6] CAPELARI, Natalia Santa Barbara et al. Telemetria aeronautica com envio de dados
meteorologicos e informacoes para correcao diferencial de sistemas de radiolocaliza-
cao. 2012. Tese de Doutorado. UNIVERSIDADE DE SAO PAULO.
[7] Como funciona o GPS. Disponıvel em:<www.tecmundo.com.br/gps/2562-como-
funciona-o-gps-.html>. Acesso em: 10 de Setembro de 2017
[8] TIMBO, M.A. Levantamentos atraves do sistema GPS. Minas Gerais: UFMG, 2000
[9] BARLEZE, Alessandro. Fusao de dados em esquemas hıbridos envolvendo AGPS para
localizacao de posicionamento. Universidade Catolica do Parana. Curitiba, 2003
[10] RECK, Marcelo Sala. Beacons BLE-Bluetooth Low Energy-design e analise de um
sistema de localizacao indoor.
[11] NEVES, Bernardino Pinto. Desenvolvimento de um sistema de radio localizacao na
banda dos 433 MHz para ambientes exteriores.
63
[12] Perda no espaco livre. Disponıvel em:<www.teleco.com.br>. Acesso em: 01 de Ou-
tubro de 2017
[13] LIMA, Bruno Wallacy Martins et al. Analise de propagacao de ondas eletromagneticas
em ambiente indoor: modelo do caminho dominante versus tracado de raios e FDTD.
[14] T.S Rappaport , Comunicacoes sem o, Pearson, 2a edicao.Sistemas M.
[15] DA SILVA MELLO, Luiz Alencar Reis. Redes de Acesso em Banda Larga Utilizando
Sistemas VSAT e WiFi
[16] FORCELLINI, Sergio. Localizacao de usuarios usando o sistema celular.
[17] O espectro de frequencia ISM 2,4 GHz. Disponıvel em:<www.teleco.com.br>. Acesso
em: 05 de Outubro de 2017
[18] Redes WLAN de Alta Velocidade I: Caracterısticas. Disponıvel
em:<www.teleco.com.br>. Acesso em: 15 de Outubro de 2017
[19] IEEE 802.11 - Wi-Fi. Disponıvel em:<slideplayer.com.br/slide/352400>. Acesso em:
15 de Outubro de 2017
[20] DAVIDSON, Pavel; PICHE, Robert. A Survey of Selected Indoor Positioning
Methods for Smartphones. IEEE Communications Surveys Tutorials, 2016.
[21] BRAS, Luıs Pedro Marques. Desenvolvimento de sistema de localizacao indoor de
baixo consumo. 2009. Dissertacao de Mestrado. Universidade de Aveiro.
[22] MOURA, Andre Iasi. WBLS: um sistema de localizacao de dispositivos moveis em
redes Wi-Fi. 2007. Tese de Doutorado. Universidade de Sao Paulo.
[23] RODRIGUES, Moises Lisboa. Localizacao em ambientes internos utilizando multiplas
tecnologias sem fio.
[24] ZigBee ou IEEE 802.15.4 – Conheca a tecnologia a fundo. Disponı-
vel em:<desmontacia.wordpress.com/2011/02/22/zigbee-ou-ieee-802-15-4-conhea-a-
tecnologia-a-fundo>. Acesso em: 04 de Novembro de 2017
[25] Micaz Wireless Measurement System. Disponıvel em:<www.memsic.com>. Acesso
em: 20 de Novembro de 2017
64
[26] MARTINS, Vergılio Antonio. RFID (Identificacao por Radiofrequencia). 2005.
[27] GOMES, Hugo Miguel Cravo. Construcao de um sistema de RFID com fins de loca-
lizacao especiais. 2007. Dissertacao de Mestrado. Universidade de Aveiro..
[28] Bluetooth. Disponıvel em:<pt.wikipedia.org/wiki/Bluetooth>. Acesso em 20 de No-
vembro de 2017
[29] Medium. Disponıvel em:<medium.com>. Acesso em 22 de Novembro de 2017
[30] A performance guaranteed indoor positioning system using con-
formal prediction and the WiFi signal strength. Disponıvel
em:<www.tandfonline.com/doi/pdf/10.1080/24751839.2017.1295659>. Acesso
em: 23 de Novembro de 2017
[31] microsoft indoor localization competition ipsn 2017. Disponıvel
em:<www.microsoft.com/en-us/research/event/microsoft-indoor-localization-
competition-ipsn-2017>. Acesso em: 23 de Novembro de 2017
[32] LYMBEROPOULOS, Dimitrios et al. Microsoft indoor localization competition: Ex-
periences and lessons learned. GetMobile: Mobile Computing and Communications.
[33] easyPoint. Disponıvel em:<www.lambda4.com/easyPoint>. Acesso em: 23 de No-
vembro de 2017
[34] BESTMANN, Arne; REIMANN, Ronne. EasyPoint–Indoor Localization and Navi-
gation Low cost, reliable and accurate.
[35] MCGIBNEY, Alan; BEDER, Christian; KLEPAL, Martin. MapUme: Smartphone
Localisation as a Service.
[36] KLEPAL, Martin; BEDER, Christian. Mapume–wifi based localization system.
[37] WEYN, Maarten. Opportunstic Seamless Localization.