MAT0354/MAT5751 - Geometria diferencial Lista de exercíciosgomes/listagd.pdf · polinômios de...
18
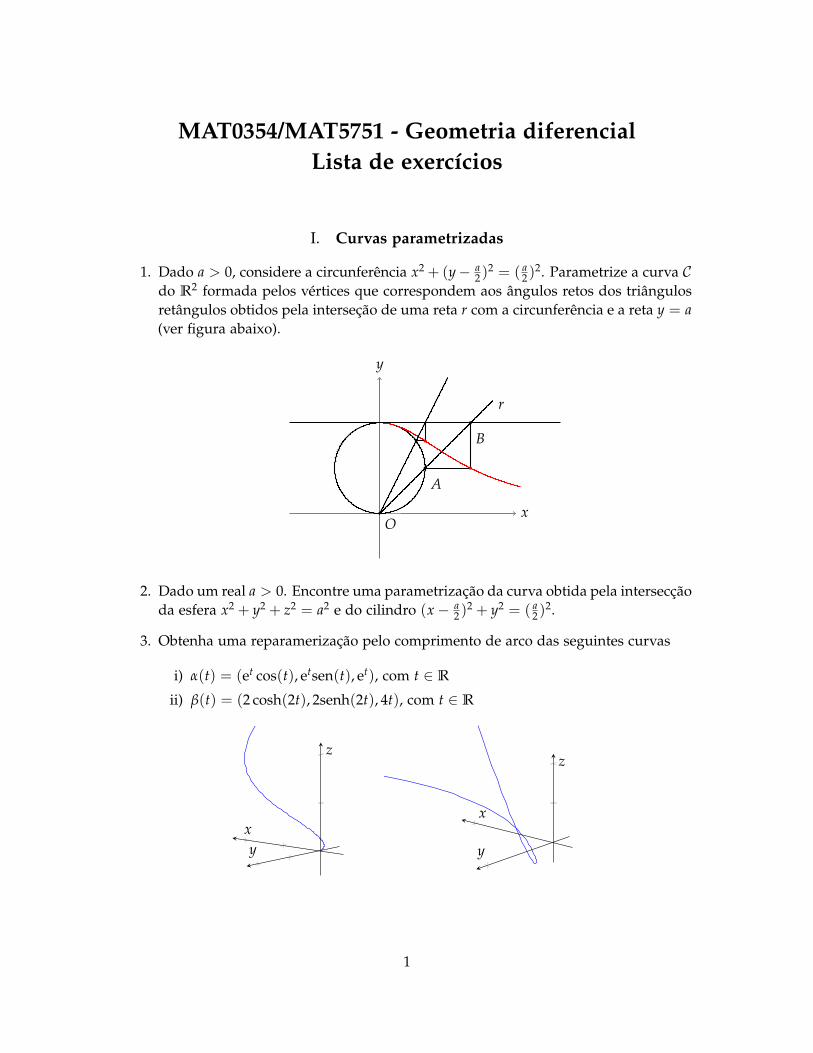
MAT0354/MAT5751 - Geometria diferencial Lista de exercícios I. Curvas parametrizadas 1. Dado a > 0, considere a circunferência x 2 +(y − a 2 ) 2 =( a 2 ) 2 . Parametrize a curva C do R 2 formada pelos vértices que correspondem aos ângulos retos dos triângulos retângulos obtidos pela interseção de uma reta r com a circunferência e a reta y = a (ver figura abaixo). x y O A B r 2. Dado um real a > 0. Encontre uma parametrização da curva obtida pela intersecção da esfera x 2 + y 2 + z 2 = a 2 e do cilindro ( x − a 2 ) 2 + y 2 =( a 2 ) 2 . 3. Obtenha uma reparamerização pelo comprimento de arco das seguintes curvas i) α(t)=(e t cos(t),e t sen(t),e t ), com t ∈ R ii) β(t)=(2 cosh(2t), 2senh(2t),4t), com t ∈ R x y z x y z 1
Transcript of MAT0354/MAT5751 - Geometria diferencial Lista de exercíciosgomes/listagd.pdf · polinômios de...
MAT0354/MAT5751 - Geometria diferencial
Lista de exercícios
I. Curvas parametrizadas
1. Dado a > 0, considere a circunferência x2 + (y − a2 )
2 = ( a2)
2. Parametrize a curva Cdo R
2 formada pelos vértices que correspondem aos ângulos retos dos triângulos
retângulos obtidos pela interseção de uma reta r com a circunferência e a reta y = a
(ver figura abaixo).
x
y
O
A
B
r
2. Dado um real a > 0. Encontre uma parametrização da curva obtida pela intersecção
da esfera x2 + y2 + z2 = a2 e do cilindro (x − a2 )
2 + y2 = ( a2 )
2.
3. Obtenha uma reparamerização pelo comprimento de arco das seguintes curvas
i) α(t) = (et cos(t), etsen(t), et), com t ∈ R
ii) β(t) = (2 cosh(2t), 2senh(2t), 4t), com t ∈ R
x
y
z
x
y
z
1

Geometria diferencial - lista de exercícios
4. Suponha que β1 e β2 são reparametrizações pelo comprimento de arco de uma
mesma curva α. Mostre que existe uma constante c0 tal que β2(s) = β1(±s + c0)
para todo s no domínio de β2.
5. Considere a curva parametrizada β :]− 1, 1[−→ R3 dada pela seguinte expressão
β(s) =
(
1
3(1 + s)3/2,
1
3(1 − s)3/2,
s√2
)
Mostre que β está parametrizada pelo comprimento de arco, determine então o seu
referencial de Frenet, sua curvatura e sua torção.
6. Considere a seguinte curva parametrizada β : R −→ R3 dada por
β(s) =
(
4
5cos(s), 1 − sen(s),−3
5cos(s)
)
Mostre que β está parametrizada pelo comprimento de arco e verifique ainda que
a imagem de β é uma circunferência.
7. Dada uma curva parametrizada α : I ⊂ R −→ R3, considere o segmento [a, b] ⊂ I
e a restrição β = α|[a,b]. Faça então p = β(a), q = β(b) e defina o vetor unitário
~u = (q − p)/ ‖q − p‖.
i) Se σ : [0, 1] −→ R3 é o segmento de reta σ(t) = (1 − t)p + tq, mostre que
L(σ) = ‖q − p‖
ii) Use o fato de que ‖β′(t)‖ ≥ |β′(t) · ~u| (∀t ∈ [a, b]) e mostre que L(β) ≥ L(σ)iii) Mostre que se L(β) = L(σ), então β é uma reparametrização de σ.
8. Seja γ : I ⊂ R −→ R3 uma curva parametrizada pelo comprimento de arco com
κ(s) > 0 e τ(s) 6= 0 para todo s no intervalo aberto I. Mostre que:
i) Se a imagem de γ está contida em uma esfera de centro c e raio r, então
γ − c = −ρN − ρ′σB
onde N e B são o normal e o binormal de γ e, por definição, ρ = 1/κ e
σ = 1/τ.
ii) Recíprocamente, mostre que se ρ2 + (ρ′σ)2 possui um valor constante r2 e
ρ′ 6= 0 em I, então a imagem de γ está contida em uma esfera de raio r.
9. Seja β : I ⊂ R −→ R3 uma curva parametrizada pelo comprimento de arco. Se
toda reta tangente a β passa por um ponto fixo p ∈ R3, mostre que a imagem de β
é uma reta.
2

Geometria diferencial - lista de exercícios
10. Uma parametrização pelo comprimento de arco de uma circunferência de centro c
e raio r > 0 pode ser dada pela seguinte expressão
γ(s) = c + r cos( s
r
)
e1 + r sen( s
r
)
e2, (onde ei · ej = δij)
Mostre que se β é uma curva parametrizada pelo comprimento de arco e com
κ(0) > 0, então existe uma, e só uma, circunferência γ com a seguinte propriedade
γ(0) = β(0), γ′(0) = β′(0) e γ′′(0) = β′′(0)
Mostre que γ está no plano osculador de β, determine o seu centro c e o seu raio r.
11. Suponha que β : I ⊂ R −→ R3 é uma curva parametrizada pelo comprimento de
arco. Definimos a imagem esférica de β como sendo a curva σ : I ⊂ R −→ R3 dada
por σ(s) = Ts, onde Ts é a tangente de β. Mostre que a curvatura e a torção de σ
são dadas pelas seguintes expressões
κσ =
√
1 + (τ
κ)2, τσ =
dds (
τκ )
κ(
1 +(
τκ
)2)
onde κ e τ representam a curvatura e a torção de β.
12. Mostre que toda curva regular do R3, cujas funções coordenadas são dadas por
polinômios de grau menor ou igual a 2, é uma curva plana.
13. Mostre que é plana a seguinte curva α :]0,+∞[−→ R3 dada por
α(t) =
(
t,1 + t
t,
1 − t2
t
)
14. Calcule a curvatura e a torção das seguintes curvas definidas em R
i) α(t) = (t, t2, t3)
ii) β(t) = (cos(t), sen(t), et)
iii) γ(t) = (t, cosh(t), senh(t))
x y
z
xy
z
x
y
z
3

Geometria diferencial - lista de exercícios
15. Sejam f , g : I ⊂ R −→ R3 funções diferenciáveis com f (t) > 0 para todo t ∈ I.
Fixe a ∈ I e considere então a seguinte curva α : I ⊂ R −→ R3 dada por
α(t) =
(
∫ t
af (u)sen(u)du,
∫ t
af (u) cos(u)du,
∫ t
af (u)g(u)du
)
Mostre que a curvatura κα e a torção τα de α são dadas por
κα =1
f
√
1 + g2 + (g′)2
(1 + g2)3, τα = − g + g′′
f (1 + g2 + (g′)2)
16. Considere a cúbica geral α : R −→ R3 dada por α(t) = (at, bt2, ct3), onde a, b, c ∈ R
são tais que abc 6= 0.
i) Mostre que o quociente τ/κ é dado por
τ
κ=
3ac
2b2
(
9c2t4 + 4b2t2 + a2
9c2t4 + 9(a2c2/b2)t2 + a2
)3/2
Deduza então que α é uma hélice cilíndrica se, e só se, 3ac = ±2b2.
ii) No caso em que 3ac = 2b2, encontre o vetor ~u e o ângulo ϑ da hélice.
17. Seja β :] − ǫ, ǫ[−→ R3 uma hélice cilíndrica parametrizada pelo comprimento de
arco. Seja ~u o correspondente vetor do R3 tal que Ts · ~u = cos(ϑ) para s ∈]− ǫ, ǫ[.
A curva β é dita uma hélice circular se a sua imagem está contida em um cilindro
circular reto.
i) Defina h(s) = (β(s)− β(0)) · ~u, com s ∈]− ǫ, ǫ[. Mostre que h(s) = s cos(ϑ).
ii) Seja γ :]− ǫ, ǫ[−→ R3 dada por γ(s) = β(s)− h(s)~u. Mostre que
κγ =κβ
sen2(ϑ)
onde κβ > 0 é a curvatura de β.
iii) Deduza que β é uma hélice circular se, e só se, κβ é constante e τβ é constante.
18. Seja α : I ⊂ R −→ R3 uma curva regular com κ(t) > 0 para todo t ∈ I. Mostre que
i) Um ponto p ∈ R3 está no plano osculador de α em α(t0) se, e só se,
(p − α(t0)) · Bt0 = 0
onde Bt é o binormal de α.
ii) Se todos os planos osculadores de α possuem um ponto em comum, então α
é uma curva plana.
4

Geometria diferencial - lista de exercícios
19. Sejam f e g funções reais diferenciáveis definidas em um intervalo aberto I que
contém 0. Suponha que f 2 + g2 = 1 em I e que θ0 é um número com f (0) = cos(θ0)
e g(0) = sen(θ0). Definimos então a função
θ(t) = θ0 +∫ t
0( f (u)g′(u)− g(u) f ′(u))du, t ∈ I
Mostre que f (t) = cos(θ(t)) e g(t) = sen(θ(t)) para todo t ∈ I. Sugestão: mostre
que a seguinte função é identicamente nula
F(t) = [ f (t)− cos(θ(t))]2 + [g(t)− sen(θ(t))]2
20. Seja α : I ⊂ R −→ R2 dada por α(s) = (x(s), y(s)) uma curva parametrizada pelo
comprimento de arco. O referencial de Frenet de α é então definido por
Ts = (x′(s), y′(s))
Ns = (−y′(s), x′(s))
Mostre que T′s = κ(s)Ns onde κ(s) = T′
s · Ns. Mostre ainda que N′s = −κ(s)Ts. A
função κ(s) é chamada de curvatura de α. Mostre também que κ(s) = θ′(s), onde
θ(s) é o ângulo que a tangente Ts faz com o eixo das abscissas. Suponha agora que
β : I ⊂ R −→ R2, dada por β(t) = (x(t), y(t)), é uma curva regular. Denotamos o
referencial de Frenet de β por {Tt, Nt} e o definimos por
Tt = Ts(t)
Nt = Ns(t)
onde{
Ts, Ns
}
é o referencial de Frenet da reparametrização de β pelo comprimento
de arco feita através da função s(t). A curvatura de β é definida por κ(t) = κ(s(t)).
Mostre que T′t = κ(t)s′(t)Nt e que N′
t = −κ(t)s′(t)Tt. Determine as expressões de
Tt e de Nt (em função de x(t) e y(t)) e mostre ainda que
κ(t) =−x′′(t)y′(t) + x′(t)y′′(t)
(x′(t)2 + y′(t)2)3/2
21. Mostre que o comprimento de uma curva dada em coordenadas polares r = r(θ) é
L =∫ θ1
θ0
√
r2 + (r′)2dθ
Mostre ainda que a curvatura dessa curva é dada por
κ =2(r′)2 − rr′′ + r2
(r2 + (r′)2)3/2
5

Geometria diferencial - lista de exercícios
22. Suponha que β : I ⊂ R −→ R2 é uma curva regular com κ(t) 6= 0 para todo t ∈ I.
A evoluta de β é a curva (cujas tangentes são ortogonais à curva β) dada por
c(t) = β(t) +1
κ(t)Nt
Determine as evolutas de: β1(t) = (2 cos(t), sen(t)) e de β2(t) = (t, t2).
x
y
x
y
23. Dada uma função diferenciável κ : I −→ R, definida no intervalo aberto I ⊂ R,
mostre que existe uma curva parametrizada pelo comprimento de arco
α : I −→ R2
tal que κα = κ. Esboce uma curva com κ(s) = 2s (espiral de Euler1). Sugestão:
i) Defina θ(s) =∫ s
0κ(t)dt, onde supomos 0 ∈ I.
ii) Defina α(s) =
(
∫ s
0cos(θ(t))dt,
∫ s
0sen(θ(t))dt
)
24. Mostre que são congruentes as curvas α, β : R −→ R3 abaixo
α(t) = (2 cos(t), 2 sen(t), 2t)
β(t) = (t +√
3 sen(t), 2 cos(t),√
3t − sen(t))1Tem comprimento infinito: está parametrizada pelo comprimento de arco e está definida em toda a reta.
6
Geometria diferencial - lista de exercícios
II. Superfícies parametrizadas
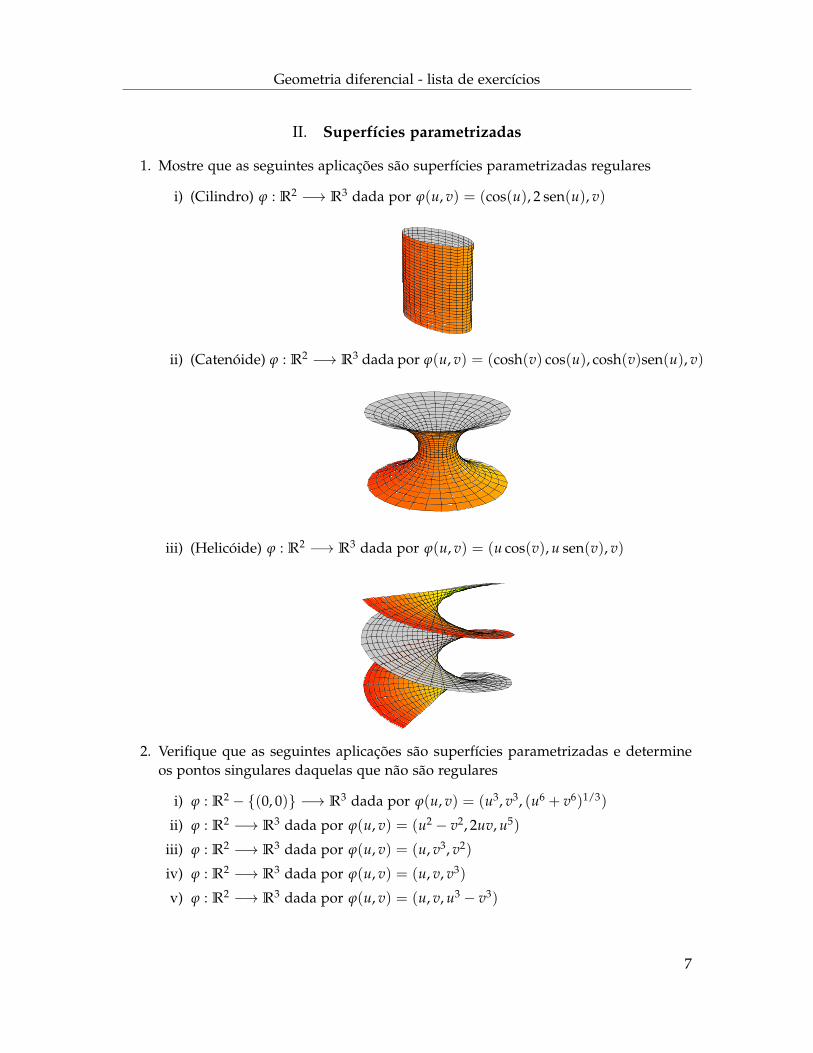
1. Mostre que as seguintes aplicações são superfícies parametrizadas regulares
i) (Cilindro) ϕ : R2 −→ R
3 dada por ϕ(u, v) = (cos(u), 2 sen(u), v)
ii) (Catenóide) ϕ : R2 −→ R
3 dada por ϕ(u, v) = (cosh(v) cos(u), cosh(v)sen(u), v)
iii) (Helicóide) ϕ : R2 −→ R
3 dada por ϕ(u, v) = (u cos(v), u sen(v), v)
2. Verifique que as seguintes aplicações são superfícies parametrizadas e determine
os pontos singulares daquelas que não são regulares
i) ϕ : R2 − {(0, 0)} −→ R
3 dada por ϕ(u, v) = (u3, v3, (u6 + v6)1/3)
ii) ϕ : R2 −→ R
3 dada por ϕ(u, v) = (u2 − v2, 2uv, u5)
iii) ϕ : R2 −→ R
3 dada por ϕ(u, v) = (u, v3, v2)
iv) ϕ : R2 −→ R
3 dada por ϕ(u, v) = (u, v, v3)
v) ϕ : R2 −→ R
3 dada por ϕ(u, v) = (u, v, u3 − v3)
7

Geometria diferencial - lista de exercícios
3. Em cada caso, mostre que o conjunto f−1(0) define uma subvariedade mergulhada:
i) f (x, y, z) = x2 + y2 + z2 − 1, com (x, y, z) ∈ R3
ii) f (x, y, z) = x2/a2 + y2/b2 + z2/c2 − 1, com (x, y, z) ∈ R3, a > 0, b > 0 e c > 0
iii) f (x, y, z) = x2 + y2 − z2 − 1, com (x, y, z) ∈ R3
iv) f (x, y, z) = −x2 − y2 + z2 − 1, com (x, y, z) ∈ R3
4. Mostre que a esfera x2 + y2 + z2 = 1 e o elipsóide x2/a2 + y2/b2 + z2/c2 = 1 são
difeomorfos utilizando a aplicação F : R3 −→ R
3 dada por
F(x, y, z) = (ax, by, cz)
5. Mostre que se ϕ : U ⊂ R2 −→ R
3 é uma superfície parametrizada regular e se
(u0, v0) ∈ U, então existe uma vizinhança V de (u0, v0) em U tal que ϕ(V) ⊂ R3 é
uma subvariedade mergulhada. Sugestão: escreva ϕ(u, v) = (x(u, v), y(u, v), z(u, v))
e defina a aplicação F : U × R −→ R3 por
F(u, v, t) = (x(u, v), y(u, v), z(u, v) + t)
e use o teorema da função inversa.
6. Para cada uma das seguintes subvariedades mergulhadas do R3, descreva então a
imagem da respectiva aplicação normal de Gauss
i) x2 + y2 = a2 (cilindro) iv) z = x2 + y2 (parabolóide)
ii) z =√
x2 + y2 (cone sem o vértice) v) x2 + y2 − z2 = 1 (hiperbolóide)
iii) x + y + z = 0 (plano) vi) x2 + y2 = (cosh(z))2 (catenóide)
7. Sejam α, β : I ⊂ R −→ R3 curvas parametrizadas e suponha que β(t) 6= 0 para
todo t ∈ I. Defina ϕ : I × R −→ R3 por
ϕ(t, v) = α(t) + vβ(t)
Mostre que ϕ é uma superfície parametrizada (que é chamada de superfície regrada).
Mostre também que o hiperbolóide x2 + y2 − z2 = 1, a sela z = xy, o helicóide e
um cilindro construído sobre uma curva plana, são todos exemplos de superfícies
regradas. Mostre ainda que a curvatura gaussiana dessa superfície (nos pontos não
singulares) é dada por
K(t, v) = − (α′(t) · β(t)× β′(t))2
‖α′(t)× β(t) + vβ′(t)× β(t)‖4
No caso particular em que α é uma curva regular, com κ(t) 6= 0 para todo t ∈ I e a
curva β é dada por β = α′, então a superfície regrada correspondente é regular e é
chamada de superfície tangente. Mostre que, nesse caso, K = 0.
8

Geometria diferencial - lista de exercícios
8. Considere uma circunferência com centro (R, 0, 0) ∈ R3, de raio r > 0 (com r < R)
e situada num plano ortogonal ao plano xy. A rotação dessa circunferência ao
redor do eixo z forma uma superfície parametrizada conhecida como Toro.
y
z
x
z
v
u
Verifique que a aplicação diferenciável ϕ : R2 −→ R
3 dada por
ϕ(u, v) = ((R + r cos(u)) cos(v), (R + r cos(u)) sen(v), r sen(u))
parametriza o Toro. Mostre que o Toro é uma superfície parametrizada regular.
Mostre então que os coeficientes da primeira forma fundamental do Toro são
E = r2, F = 0 e G = (R + r cos(u))2
Mostre ainda que os coeficientes da segunda forma fundamental do Toro são
e = r, f = 0 e g = (R + r cos(u)) cos(u)
e que suas curvaturas principais são dadas por
κ1 = 1/r e κ2 =cos(u)
R + r cos(u)
Conclua que a curvatura gaussiana do Toro é dada por
K =cos(u)
r(R + r cos(u))
9

Geometria diferencial - lista de exercícios
9. Seja α(u) = (h(u), 0, l(u)) uma curva parametrizada do R3, definida num intervalo
aberto I ⊂ R e cuja imagem está contida no plano xz. A rotação dessa curva
ao redor do eixo dos z forma uma superfície S chamada de superfície de revolução.
Mostre que a aplicação ϕ : I × R −→ R3 dada por (assuma h > 0)
ϕ(u, v) = (h(u) cos(v), h(u) sin(v), l(u))
parametriza a superfície de revolução S . Mostre ainda que se α é uma curva regular,
então S é uma superfície parametrizada regular.
Mostre também que os coeficientes da primeira e da segunda forma de S são
E = (h′)2 + (l′)2, F = f = 0, G = h2, e =−l′h′′ + h′l′′√
(h′)2 + (l′)2, g =
l′h√
(h′)2 + (l′)2
Conclua que a curvatura gaussiana de S é dada por
K =−l′(l′h′′ − l′′h′)h((h′)2 + (l′)2)2
10. Considere a superfície de revolução dada pelas seguintes relações
x = r cos(θ)
y = r sen(θ)
z = f (r)
onde r =√
x2 + y2 > 0 e f (r) é uma função diferenciável. Mostre que as curvas
dessa superfície que formam um ângulo constante α com cada paralelo admitem
uma parametrização dada por
β(r) = (r cos(θ(r)), r sen(θ(r)), f (r))
onde θ é dada pela seguinte expressão
θ =∫
1
rcot(α)
√
1 + ( f ′(r))2 dr
10

Geometria diferencial - lista de exercícios
11. Prove que se uma subvariedade mergulhada S ⊂ R3 é tangente a um plano ao
longo de uma curva, então os pontos dessa curva são parabólicos ou planares.
12. Seja S ⊂ R3 uma superfície de revolução. Mostre que os meridianos e os paralelos
são linhas de curvatura de S .
13. Mostre que não existem pontos umbílicos sobre uma dada superfície parametrizada
regular que possui K < 0. Mostre ainda que se K ≤ 0, então os pontos umbílicos
são pontos planares.
14. Dada uma superfície parametrizada regular ϕ : U ⊂ R2 −→ R
3 e também um
vetor tangente ~v = v1 ϕu + v2 ϕv. Mostre que ~v é um vetor principal se, e sómente
se, a seguinte matriz tem determinante zero
v22 −v1v2 v2
1
E F G
e f g
Mostre ainda que um ponto ϕ(u, v) é umbílico se, e só se, e = κE, f = κF e
g = κG no ponto (u, v). Mostre também que, nesse último caso, κ = κ1 = κ2 são
as curvaturas principais. Finalmente, mostre que o vetor ~v é assintótico (ou seja, ~v
anula a segunda forma fundamental) se, e só se,
ev21 + 2 f v1v2 + gv2
2 = 0
15. Mostre que uma subvariedade mergulhada e compacta do R3 tem, pelo menos, um
ponto elíptico.
16. Prove que não existem subvariedades mergulhadas do R3 que, além de mínimas
(i.e. com H = 0 em todos os pontos), são também compactas.
17. Seja f : U ⊂ R2 −→ R diferenciável e defina a seguinte subvariedade mergulhada
S ={
(u, v, f (u, v)) ∈ R3; (u, v) ∈ U
}
Mostre que valem as seguintes igualdades
E = 1 + f 2u , F = fu fv, G = 1 + f 2
v
e =fuu
√
1 + f 2u + f 2
v
, f =fuv
√
1 + f 2u + f 2
v
, g =fvv
√
1 + f 2u + f 2
v
Mostre também que temos as seguintes equivalências
K = 0 ⇔ fuu fvv − f 2uv = 0
H = 0 ⇔ (1 + f 2u) fvv + (1 + f 2
v ) fuu − 2 fu fv fuv = 0
11

Geometria diferencial - lista de exercícios
18. (Superfície de Scherk) Com as notações e definições do exercício anterior, faça
f (x, y) = ln
(
cos(y)
cos(x)
)
com domínio igual a U =] − π/2, π/2[×] − π/2, π/2[. Determine as curvaturas
gaussiana e média da respectiva subvariedade mergulhada.
19. (Superfície de Enneper) Seja a superfície parametrizada ϕ : R2 −→ R
3 dada por
ϕ(u, v) =
(
u − u3
3+ uv2, v − v3
3+ vu2, u2 − v2
)
Verifique que ϕ é uma superfície parametrizada regular e mostre que:
i) E = G = (1 + u2 + v2)2 e F = 0
ii) e = 2, f = 0 e g = −2
iii) As curvaturas principais são κ1 = 2(1 + u2 + v2)−2 e κ2 = −2(1 + u2 + v2)−2
iv) As linhas de curvatura são as curvas coordenadas
v) As linhas assintóticas são dadas por u + v = cte. e u − v = cte.
20. Seja S ⊂ R3 uma subvariedade mergulhada e α :]− ǫ, ǫ[−→ S uma curva regular.
Se α(0) = p e Kp > 0, mostre que a curvatura κ(0) de α em p satisfaz
κ(0) ≥ min {|κ1(p)| , |κ2(p)|}
onde κ1(p) e κ2(p) são as curvaturas principais de S em p.
12

Geometria diferencial - lista de exercícios
21. Mostre que sobre uma superfície parametrizada regular sempre temos
i) H2 − K ≥ 0
ii) Hp =1
π
∫ π
0κn(θ)dθ, onde κn(θ) é a curvatura normal numa direção θ de TpS .
22. (Pseudoesfera) Considere a superfície de rotação ϕ :]− ∞, 0[×R −→ R3 dada por
ϕ(u, v) =
(
eu cos(v), eusen(v),∫ u
0
√
1 − e2sds
)
i) Mostre que ϕ possui curvatura gaussiana constante K = −1
ii) Determine as linhas de curvatura de ϕ
iii) Determine as linhas assintóticas de ϕ
23. Mostre que se uma superfície de revolução é mínima, então ela está contida em um
plano ou em um catenóide.
24. Mostre as seguintes afirmações relativas a uma subvariedade mergulhada S ⊂ R3:
i) Se uma curva regular de S é uma linha de curvatura e uma geodésica, então
essa curva é plana.
ii) Se uma geodésica (não retilínea) é uma curva plana de S , então ela é uma
linha de curvatura.
iii) Uma curva regular de S é uma curva assintótica e uma geodésica se, e só se,
ela é uma reta.
25. Mostre que se todas as geodésicas de uma subvariedade mergulhada conexa S do
R3 são curvas planas, então S está contida em um plano ou em uma esfera.
13

Geometria diferencial - lista de exercícios
III. Formas diferenciais
1. Considere as seguintes 1-formas definidas no R3
i) ω = y2dx
ii) η = zdy − ydz
iii) σ = (z2 − 1)dx − dy + x2dz
Calcule ωp(~v), ηp(~v) e σp(~v) onde ~v = (1, 2,−3) ∈ TpR3 com p = (0,−2, 1).
2. Dadas funções f , g : R3 −→ R e campos de vetores V, W ∈ X(R3), mostre que
i) ω( f V + gW) = f ω(V) + gω(W)
ii) ( f ω + gη)(V) = f ω(V) + gη(V)
para todas 1-formas ω, η definidas no R3.
3. Dadas funções diferenciáveis f , g : R3 −→ R, verifique que
i) d( f + g) = d f + dg
ii) d( f g) = gd f + f dg
utilizando a definição d f = ∂ f∂x dx + ∂ f
∂y dy + ∂ f∂z dz.
4. Sejam ω, σ 1-formas definidas no R3 e dadas pelas seguintes expressões:
ω = xdx − ydy, σ = ydx − xyzdy + x2dz
Calcule ω ∧ σ.
5. Considere a 1-forma ω definida em R2 − {(0, 0)} e dada pela seguinte expressão
ω = − y
x2 + y2dx +
x
x2 + y2dy
Seja agora f : U :={
(r, θ) ∈ R2 : r > 0 e 0 < θ < 2π
}
−−−−−−→ R2 dada por
f (r, θ) = (r cos(θ), r sin(θ))
Calcule f ∗(ω).
Solução: Dado p ∈ U e ~v = (v1, v2) ∈ TpR2, temos
f ∗(ω)p(~v) = ω f (p)(d fp(~v))
=−r sin(θ)
r2(v1 cos(θ)− r sin(θ)v2) +
r cos(θ)
r2(v1 sin(θ) + r cos(θ)v2)
= −v1 sin(θ) cos(θ)
r+ sin2(θ)v2 +
v1 sin(θ) cos(θ)
r+ cos2(θ)v2
= v2 = dθ(~v)
Assim f ∗(ω) = dθ
14

Geometria diferencial - lista de exercícios
6. Sejam p = (2, 1, 0) ∈ R3, ~v = (−1, 0, 2) ∈ TpR
3 e ainda o campo de vetores
X = x2e1 + yze3 ∈ X(R3). Calcule ∇~vX.
7. Sejam X, Y ∈ X(R3) campos de vetores dados pelas seguintes expressões:
X = (y − x)e1 + (xy)e3
Y = (x2)e1 + (yz)e3
Calcule ∇XY.
8. Seja {E1, E2, E3} o referencial ortonormal cilíndrico definido em R3 − {eixo z}
E1(r, θ, z) = (cos(θ), sin(θ), 0)
E2(r, θ, z) = (− sin(θ), cos(θ), 0)
E3(r, θ, z) = (0, 0, 1)
onde x = r cos(θ), y = r sin(θ) e z = z. Mostre que as 1-formas de conexão são
ω12 = dθ, ω21 = −dθ e ωij = 0 (nos outros casos)
Mostre também que as 1-formas duais são dadas pelas expressões
ω1 = dr
ω2 = rdθ
ω3 = dz
Mostre que E1[r] = 1, E2[θ] = 1/r, E3[z] = 1 e que todas as outras alternativas dão
zero. Verifique a validade das equações de estrutura.
9. Seja {E1, E2, E3} o referencial ortonormal esférico definido em R3 − {eixo z}
E1(r, θ, ϕ) = (cos(ϕ) cos(θ), cos(ϕ) sin(θ), sin(ϕ))
E2(r, θ, ϕ) = (− sin(θ), cos(θ), 0)
E3(r, θ, ϕ) = (− sin(ϕ) cos(θ),− sin(ϕ) sin(θ), cos(ϕ))
onde x = r cos(ϕ) cos(θ), y = r cos(ϕ) sin(θ) e z = r sin(ϕ). Mostre que
ω12 = cos(ϕ)dθ, ω13 = dϕ, ω23 = sin(ϕ)dθ
Mostre também que as 1-formas duais são dadas pelas seguintes expressões
ω1 = dr
ω2 = r cos(ϕ)dθ
ω3 = rdϕ
Verifique ainda a validade das equações de estrutura.
15

Geometria diferencial - lista de exercícios
10. Seja S uma subvariedade mergulhada no R3 e ainda {E1, E2, E3} um referencial
ortonormal adaptado sobre S . Denote por (ωij) as 1-formas de conexão e (ωi) as
1-formas duais associadas. Mostre que valem as seguintes igualdades
ω13 ∧ ω23 = Kω1 ∧ ω2
dω12 = −Kω1 ∧ ω2
2Hω1 ∧ ω2 = ω13 ∧ ω2 + ω1 ∧ ω23
K = E2[ω12(E1)]− E1[ω12(E2)]− ω12(E1)2 − ω12(E2)
2
onde K e H representam, respectivamente, as curvaturas Gaussiana e Média de S .
11. Com as mesmas notações do exercício anterior, suponha ainda que o referencial
{E1, E2, E3} é principal, ou seja, E1 e E2 são direções principais em cada ponto de S .
Mostre que valem as seguintes igualdades
E2[κ1] = (κ1 − κ2)ω12(E1)
E1[κ2] = (κ1 − κ2)ω12(E2)
onde κ1 e κ2 são as curvaturas principais de S .
12. Seja S ⊂ R3 uma subvariedade mergulhada umbílica. Mostre que S tem curvatura
Gaussiana constante não negativa. Mostre ainda que se K = 0, então S está contida
em um plano e se K > 0, então S está contida em uma esfera de raio 1/√
K.
13. Mostre que se F : S −→ S é uma isometria entre duas subvariedades mergulhadas,
dS (p, q) = dS (F(p), F(q))
14. Seja F : S −→ S uma isometria entre duas subvariedades mergulhadas. Tome
agora um referencial ortonormal {E1, E2} de S e o referencial correspondente de S{
E1, E2
}
, Ei = dF(Ei), i = 1, 2
Mostre que se ω1, ω2 e ω12 indicam os duais e a 1-forma de conexão de S , então
ω1 = F∗(ω1), ω2 = F∗(ω2), ω12 = F∗(ω12)
15. Seja F : S −→ S uma isometria entre duas subvariedades mergulhadas. Mostre:
K(p) = K(F(p))
para todo p ∈ S , onde K e K representam as curvaturas gaussianas de S e S ,
respectivamente.
16

Geometria diferencial - lista de exercícios
16. Seja S uma subvariedade mergulhada do R3. Sejam X e Y campos de vetores
tangentes a S . Denotando por ∇ a derivada usual do R3 e por ∇ a derivada
covariante de S , mostre que vale a relação
∇XY = ∇XY + (A(X) · Y)N
onde A é o operador de Weingarten segundo uma normal unitária N de S .
17. Seja S uma subvariedade mergulhada do R3 e ϕ : U ⊂ R
2 −→ S uma carta de S .
Suponha que ϕ é ortogonal, isto é, F = ϕu · ϕv = 0. Mostre que
i) Os campos abaixo formam um referencial ortonormal em ϕ(U)
E1 =ϕu√
EE2 =
ϕv√G
ii) As 1-formas duais correspondentes são dadas por
ω1 =√
Edu ω2 =√
Gdv
iii) A 1-forma de conexão correspondente é dada pela expressão
ω12 = − (√
E)v√G
du +(√
G)u√E
dv
18. Seja S uma subvariedade mergulhada do R3. Mostre que se p ∈ S e ~v ∈ TpS ,
existe uma (única) geodésica maximal γ : I ⊂ R −→ S tal que
{
γ(0) = p
γ′(0) = ~v
Denote ainda por γ~v essa geodésica maximal definida em ]− ǫ, ǫ[. Mostre que
γa~v(t) = γ~v(at), ∀t ∈]− ǫ/a, ǫ/a[
onde a > 0 é uma constante.
19. Sejam S uma subvariedade mergulhada do R3 e p ∈ S . Seja (e1, e2) uma base
ortonormal de TpS e denote por γ~v a (única) geodésica de S com γ~v(0) = p e
γ′~v(0) = ~v ∈ TpS . Seja ainda Sǫ =]0, ǫ[×]− π, π[. Defina a aplicação ϕ : Sǫ −→ S
ϕ(u, v) = γcos(v)e1+sin(v)e2(u)
Mostre que, para um certo ǫ > 0, ϕ é uma carta de S com E = 1, F = 0, G > 0 e:
i) γ(u) = ϕ(u, v0) minimiza o comprimento de arco entre p e q = ϕ(u0, v0).
ii) Se α é uma curva em S unindo p e q e ainda L(γ) = L(α), então
α(u) = ϕ(a1(u), v0) = γ(a1(u))
17
Geometria diferencial - lista de exercícios
20. Seja S uma subvariedade mergulhada do R3 e d a distância intrínseca de S . Mostre
que (S , d) é um espaço métrico.
21. Seja S ⊂ R3 uma subvariedade mergulhada conexa. Tome p ∈ S e {e1, e2} um
referencial ortonormal de TpS . Considere ainda duas isometrias F, G : S −→ Stais que F(p) = G(p) e dFp(ei) = dGp(ei) para todo i = 1, 2. Mostre que F = G.
22. Se S é uma subvariedade mergulhada do R3 compacta, conexa, orientável e com
K > 0, mostre que S é homeomorfa à esfera.
23. Se S é uma subvariedade mergulhada do R3 compacta, conexa, orientável e de
gênero g = 1, mostre que existe p ∈ S tal que Kp = 0. Se, por outro lado, o gênero
de S satisfaz g ≥ 2, mostre que existe p ∈ S tal que Kp < 0.
24. Seja S uma subvariedade mergulhada do R3 compacta, conexa, orientável. Mostre
que são equivalentes:
i) Existe X ∈ X(S) unitário;
ii) χ(S) = 0;
iii) S é difeomorfa ao toro.
25. Se uma subvariedade mergulhada S ⊂ R3 é compacta, conexa e orientável com
K = 0, mostre que S é difeomorfa ao toro.
· · ·
g =2 − χ(S)
2
IME-USP
18