Modelagem e Simulação de Sistemas de Comunicação Acústica...
81
Transcript of Modelagem e Simulação de Sistemas de Comunicação Acústica...

MODELAGEM E SIMULAÇÃO DE SISTEMAS DE COMUNICAÇÃO
ACÚSTICA SUBAQUÁTICOS
Rafael da Silva Chaves
Projeto de Graduação apresentado ao Curso
de Engenharia Eletrônica e de Computação
da Escola Politécnica, Universidade Federal
do Rio de Janeiro, como parte dos requisitos
necessários à obtenção do título de Engenheiro.
Orientadores: Wallace Alves Martins
Paulo Sergio Ramirez Diniz
Rio de Janeiro
Setembro de 2016

MODELAGEM E SIMULAÇÃO DE SISTEMAS DE COMUNICAÇÃO
ACÚSTICA SUBAQUÁTICOS
Rafael da Silva Chaves
PROJETO DE GRADUAÇÃO SUBMETIDO AO CORPO DOCENTE DO
CURSO DE ENGENHARIA ELETRÔNICA E DE COMPUTAÇÃO DA ESCOLA
POLITÉCNICA DA UNIVERSIDADE FEDERAL DO RIO DE JANEIRO COMO
PARTE DOS REQUISITOS NECESSÁRIOS PARA A OBTENÇÃO DO GRAU
DE ENGENHEIRO ELETRÔNICO E DE COMPUTAÇÃO.
Examinado por:
Prof. Wallace Alves Martins, D.Sc.
Prof. Marcello Luiz Rodrigues de Campos, Ph.D.
Prof. Markus Vinícius Santos Lima, D.Sc.
RIO DE JANEIRO, RJ � BRASIL
SETEMBRO DE 2016

da Silva Chaves, Rafael
Modelagem e Simulação de Sistemas de Comunicação
Acústica Subaquáticos/Rafael da Silva Chaves. � Rio de
Janeiro: UFRJ/ Escola Politécnica, 2016.
XII, 69 p.: il.; 29,7cm.Orientadores: Wallace Alves Martins
Paulo Sergio Ramirez Diniz
Projeto de Graduação � UFRJ/ Escola Politécnica/
Curso de Engenharia Eletrônica e de Computação, 2016.
Referências Bibliográ�cas: p. 64 � 69.
1. OFDM. 2. Canal Acústico Subaquático. 3. Efeito
Doppler. I. Alves Martins, Wallace et al. II. Universidade
Federal do Rio de Janeiro, Escola Politécnica, Curso de
Engenharia Eletrônica e de Computação. III. Título.
iii

A dona Rosa e ao seu Ideny.
iv

Agradecimentos
Agradeço à minha mãe Rosa e ao meu pai Ideny, por todo carinho, apoio e incentivo
que me deram ao longo dos 5 anos do curso de engenharia. Sem vocês eu nunca
conseguiria chegar tão longe.
Agradeço ao meu irmão e melhor amigo Gabriel, por sempre estar ao meu lado
em todos os momentos. Seu papel foi crucial nesta jornada.
Agradeço aos meus orientadores Wallace Martins e Paulo Diniz, pelas oportuni-
dades e por todo conhecimento que conseguiram me passar. Obrigado pela con�ança
que depositaram em mim ao longo da confecção deste trabalho. Vocês me ajudaram
a evoluir como pro�ssional e como pessoa, sou muito grato por tudo.
Agradeço a todos os professores do Departamento de Engenharia Eletrônica, por
contribuírem com a minha formação. Agradeço especialmente ao professor Marcello
Campos, pessoa que considero como um terceiro orientador.
Agradeço a todos os meus amigos que me ajudaram direta ou indiretamente
na realização deste trabalho. Em especial, agradeço àqueles que acompanharam a
minha jornada de perto: Matheus, Felipe, Roberto, Igor, Vinicius, Rebeca, Renata,
Tadeu e Marcelo.
Agradeço aos professores Markus Lima e Marcello Campos, por aceitarem o
convite para compor a banca avaliadora deste trabalho.
v

Resumo do Projeto de Graduação apresentado à Escola Politécnica/ UFRJ como
parte dos requisitos necessários para a obtenção do grau de Engenheiro Eletrônico
e de Computação.
Modelagem e Simulação de Sistemas de Comunicação Acústica Subaquáticos
Rafael da Silva Chaves
Setembro/2016
Orientadores: Wallace Alves Martins
Paulo Sergio Ramirez Diniz
Curso: Engenharia Eletrônica e de Computação
Este trabalho apresenta um estudo detalhado de diversos modelos para a relação
entrada-saída de canais acústicos subaquáticos, mais especi�camente analisando a
contribuição do efeito Doppler em tais relações. São apresentadas uma modelagem
discreta para as relações entrada-saída dos canais estudados e uma metodologia de
como gerar os parâmetros do modelo de canal. O trabalho também estuda o com-
portamento de sistemas OFDM (do termo em inglês orthogonal frequency-division
multiplexing) em canais acústicos subaquáticos. Tais sistemas são analisados em dois
tipos diferentes de transmissões: a que considera um modelo de canal invariante no
tempo e outra que considera um modelo de canal variante no tempo. O impacto do
efeito Doppler nesses sistemas é analisado detalhadamente, e uma simples estratégia
de compensação é apresentada. Simulações são realizadas para avaliar o desempe-
nho dos sistemas OFDM em canais invariantes e variantes no tempo. As simulações
avaliam a BER (do termo em inglês bit error-rate) e a sensibilidade dos sistemas
OFDM ao efeito Doppler. Os resultados obtidos são satisfatórios e compravam que
os sistemas OFDM estudados são adequados em alguns cenários especí�cos.
Palavras-chave: OFDM, Canal Acústico Subaquático, Efeito Doppler.
vi

Abstract of Undergraduate Project presented to POLI/UFRJ as a partial ful�llment
of the requirements for the degree of Engineer.
MODELING AND SIMULATION OF UNDERWATER ACOUSTIC
COMMUNICATION SYSTEMS
Rafael da Silva Chaves
September/2016
Advisors: Wallace Alves Martins
Paulo Sergio Ramirez Diniz
Course: Electronic Engineering
This work presents a detailed study of some models for the underwater acoustic
channels' input-output relationship, detailing the Doppler e�ect on such relation-
ships. Both a discrete model for the channel input-output relationship as well as a
methodology to generate the channel model parameters are presented. This work
also studies the behavior of orthogonal frequency-division multiplexing (OFDM) sys-
tems in underwater acoustic channels. Such systems are analyzed in two di�erent
types of channels: a linear time-invariant channel model and a linear time-varying
channel model. The impact of Doppler e�ect on these systems are thoroughly an-
alyzed, and a simple compensation strategy is described. Some simulations are
performed to evaluate the OFDM performance for time-invariant and time-variant
channels. The simulations evaluate the bit error-rate (BER) and the sensibility of
OFDM systems to Doppler e�ects. The results are satisfactory and prove that the
OFDM systems are suitable in some speci�c scenarios.
Keywords: OFDM, Underwater Acoustic Channel, Doppler E�ect.
vii
Sumário
Lista de Figuras x
Lista de Tabelas xii
1 Introdução 1
1.1 Motivação . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 1
1.2 Divisão do Trabalho . . . . . . . . . . . . . . . . . . . . . . . . . . . 3
2 Características do Canal Acústico Submarino 4
2.1 Introdução . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 4
2.2 Velocidade de Propagação do Som . . . . . . . . . . . . . . . . . . . . 4
2.3 Multipercurso Variante no Tempo . . . . . . . . . . . . . . . . . . . . 7
2.4 Efeito Doppler . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 7
2.5 Modelos de Propagação Acústica . . . . . . . . . . . . . . . . . . . . 9
2.5.1 Teoria dos Raios . . . . . . . . . . . . . . . . . . . . . . . . . 10
2.5.2 Soluções de Modo Normal . . . . . . . . . . . . . . . . . . . . 11
2.5.3 Aproximação Parabólica . . . . . . . . . . . . . . . . . . . . . 11
2.5.4 Integração do Número de Onda . . . . . . . . . . . . . . . . . 11
2.6 Perda de Energia por Propagação . . . . . . . . . . . . . . . . . . . . 12
2.6.1 Perda por Absorção . . . . . . . . . . . . . . . . . . . . . . . . 12
2.6.2 Perda por Espalhamento Geométrico . . . . . . . . . . . . . . 13
2.6.3 Perda por Espalhamento . . . . . . . . . . . . . . . . . . . . . 14
2.6.4 Parametrização da Perda de Energia por Propagação . . . . . 14
2.7 Ruído Ambiente e Interferência Externa . . . . . . . . . . . . . . . . 15
3 Relação Entrada-Saída do Canal Acústico Submarino 16
3.1 Introdução . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 16
3.2 Canal Variante no Tempo . . . . . . . . . . . . . . . . . . . . . . . . 17
3.2.1 Escalamento Doppler Não-Uniforme . . . . . . . . . . . . . . . 17
3.2.2 Escalamento Doppler Uniforme . . . . . . . . . . . . . . . . . 19
3.2.3 Variações de Amplitude e de Atraso . . . . . . . . . . . . . . . 20
3.2.4 Dispersão e Atenuação na Frequência . . . . . . . . . . . . . . 21
viii
3.3 Canal Invariante no Tempo . . . . . . . . . . . . . . . . . . . . . . . 22
3.4 Implementação Digital . . . . . . . . . . . . . . . . . . . . . . . . . . 23
3.4.1 Canal Invariante no Tempo . . . . . . . . . . . . . . . . . . . 23
3.4.2 Canal Variante no Tempo com Escalamento Doppler Não-
Uniforme . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 25
3.4.3 Canal Variante no Tempo com Escalamento Doppler Uniforme 26
3.5 Características Estatísticas do Canal Acústico Submarino . . . . . . . 26
3.5.1 Número de Percursos . . . . . . . . . . . . . . . . . . . . . . . 27
3.5.2 Atraso . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 27
3.5.3 Ganho . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 27
3.5.4 Escalamento Doppler . . . . . . . . . . . . . . . . . . . . . . . 28
4 Sistemas Multiportadora 30
4.1 Introdução . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 30
4.2 ZP-OFDM . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 31
4.2.1 Processamento do Transmissor . . . . . . . . . . . . . . . . . . 31
4.2.2 Processamento do Receptor . . . . . . . . . . . . . . . . . . . 34
4.2.3 Equalização dos Sistemas ZP-OFDM . . . . . . . . . . . . . . 38
4.3 Transmissão ZP-OFDM em Canal Variante no Tempo com Escala-
mento Doppler Uniforme . . . . . . . . . . . . . . . . . . . . . . . . . 40
4.3.1 Compensação Grosseira do Fator de Escalamento Doppler . . 40
4.3.2 Ajuste Fino do Fator de Escalamento Doppler . . . . . . . . . 43
4.3.3 Equalização . . . . . . . . . . . . . . . . . . . . . . . . . . . . 45
5 Simulações e Análise de Resultados 47
5.1 Introdução . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 47
5.2 Gerador de Respostas ao Impulso . . . . . . . . . . . . . . . . . . . . 47
5.3 Desempenho do ZP-OFDM no Canal Acústico Submarino . . . . . . . 49
5.3.1 Parâmetros da Simulação . . . . . . . . . . . . . . . . . . . . . 50
5.3.2 Canal Invariante no Tempo . . . . . . . . . . . . . . . . . . . 53
5.3.3 Canal Variante no Tempo com Escalamento Doppler Uniforme 56
6 Conclusão e Trabalhos Futuros 61
6.1 Conclusão . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 61
6.2 Trabalhos Futuros . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 62
Referências Bibliográ�cas 64
ix

Lista de Figuras
2.1 Variações dos parâmetros do ambiente em função da profundidade. . 5
2.2 Per�l de velocidade do som na água. . . . . . . . . . . . . . . . . . . 5
2.3 In�uência do per�l de velocidade da onda acústica na propagação. . . 6
2.4 Exemplo de transmissão quando há velocidade relativa entre o trans-
missor e o receptor. . . . . . . . . . . . . . . . . . . . . . . . . . . . . 8
2.5 Feixe de abertura do receptor. . . . . . . . . . . . . . . . . . . . . . . 9
3.1 Front-end analógico de um sistema de comunicação acústico submarino. 16
3.2 Exemplo de respostas ao impulso de um canal acústico submarino. . . 18
3.3 Exemplo de respostas ao impulso de um canal acústico submarino
com dispersão. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 22
3.4 Amostragem do canal invariante no tempo. . . . . . . . . . . . . . . . 24
3.5 Implementação digital de um canal variante no tempo com escala-
mento de Doppler não-uniforme. . . . . . . . . . . . . . . . . . . . . . 26
3.6 Exemplo de como gerar os atrasos τl da resposta ao impulso h(τ). . . 28
4.1 Representação do b-ésimo bloco ZP-OFDM. . . . . . . . . . . . . . . 31
4.2 Diagrama de blocos do transmissor OFDM, com gk(t) = ej2π kTtg(t),
∀k ∈ K. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 32
4.3 Diagrama de blocos para a implementação digital do transmissor
OFDM. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 32
4.4 Diagrama de blocos do receptor OFDM, onde F{·} é o operador trans-formada de Fourier. . . . . . . . . . . . . . . . . . . . . . . . . . . . . 37
4.5 Diagrama de blocos para a implementação digital do receptor OFDM. 37
4.6 Diagrama de blocos do receptor com compensação do fator de esca-
lamento Doppler. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 45
4.7 Diagrama de blocos para implementação digital do receptor com com-
pensação do fator de escalamento Doppler. . . . . . . . . . . . . . . . 45
5.1 Respostas ao impulso geradas pelo método descrito na Seção 3.5. . . . 48
5.2 Respostas ao impulso amostradas geradas pelo método descrito na
Seção 3.4. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 49
x

5.3 Respostas ao impulso de canais com escalamento de Doppler uniforme
para diferentes valores v. . . . . . . . . . . . . . . . . . . . . . . . . . 50
5.4 Grá�cos da variação de τl em função de v. . . . . . . . . . . . . . . . 50
5.5 Resposta em frequência do �ltro passa-baixas da Figura 4.5. . . . . . 51
5.6 Resposta em frequência do sinal em banda base na taxa Td = 0,1 ms. 52
5.7 Respostas em frequência do sinal transmitido com período de amos-
tragem Ta. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 53
5.8 Curva de BER por SNR para um canal invariante no tempo. . . . . . 54
5.9 Curva de BER versus SNR. . . . . . . . . . . . . . . . . . . . . . . . 55
5.10 BER vs. SNR utilizando equalizador ZF e ε ∈ E1, para canais com
L = 3. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 57
5.11 BER vs. SNR utilizando equalizador ZF e ε ∈ E1, para canais com
L = 7. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 57
5.12 BER vs. SNR para ε ∈ E1 com ajuste �no e estimando o canal a cada
127 blocos. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 58
5.13 Curva de BER vs. SNR utilizando equalizador ZF e ε ∈ E2, para
canais com L = 3. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 59
5.14 Curva de BER vs. SNR utilizando equalizador ZF e ε ∈ E2, para
canais com L = 7. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 59
5.15 BER vs. SNR para ε ∈ E1 com ajuste �no e estimando o canal a cada
127 blocos. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 60
xi

Lista de Tabelas
5.1 Número de canais . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 55
xii

Capítulo 1
Introdução
1.1 Motivação
Atualmente, muitos sistemas de comunicação por rádio frequência (RF, do termo
em inglês radio frequency) têm sido desenvolvidos e aprimorados buscando atender à
crescente demanda mundial por taxas mais altas de transmissão de dados. Tal aper-
feiçoamento deve-se à escassez do espectro de frequências que é usado para realizar
a transmissão de dados, exigindo novas tecnologias que visam a otimizar o uso das
bandas de frequências disponíveis. Devido a esse fato, sistemas OFDM (do termo
em inglês orthogonal frequency-division multiplexing) e SC-FD (do termo em inglês
single carrier with frequency-domain equalization) se tornaram bastante populares,
pois conseguem usar de maneira e�ciente toda a banda de transmissão, eliminando
a interferência entre blocos (IBI, do termo em inglês interblock interference) e facili-
tando o combate à interferência entre símbolos (ISI, do termo em inglês intersymbol
interference) [1].
Um outro tipo de comunicação que tem se tornado bastante popular nos últi-
mos anos é a comunicação submarina. É esperado que esses sistemas tenham um
papel importante na investigação de possíveis mudanças climáticas, monitoramento
de atividades sísmicas e mudanças biológicas que ocorrem no oceano [2, 3]. Os
sistemas de comunicação subaquático também podem ser utilizados para realizar
exploração marítima remota [4�6]. Algumas aplicações de monitoramento e explo-
1

ração marítima precisam realizar transmissão de vídeo, necessitando de sistemas de
comunicações com taxas de transmissão elevadas [7].
Na aplicações listadas anteriormente, o uso de sinais eletromagnéticos se torna
restrito a alguns cenários especiais uma vez que a atenuação na água, especialmente a
salgada, é muito maior que no ar, o que leva à utilização de sinais de outra natureza,
como os acústicos. Os sinais acústicos são ondas mecânicas de mais baixa frequência
e que sofrem uma menor atenuação quando propagam-se em ambiente subaquático.
Por outro lado, usar esses sinais é uma tarefa desa�adora, já que o ruído acústico
submarino estará presente de forma acentuada [8�10], o canal acústico submarino é
variante no tempo [11] e, principalmente, a comunicação acústica sofre bastante com
o efeito Doppler [12] devido à baixa velocidade de propagação das ondas sonoras e
o movimento relativo entre o transmissor e o receptor. Além disso, um sistema de
comunicação acústico submarino usualmente tem uma taxa de transmissão reduzida
devido à baixa frequência do sinal transmitido, o que prejudica determinados tipos
de aplicações [13].
Para tentar contornar a baixa taxa de transmissão, alguns trabalhos na literatura
estão propondo o uso de transmissão por blocos usando sistemas OFDM [14�18].
Porém, ainda não existe um consenso na literatura sobre qual é o modelo mais
adequado a ser adotado para o canal [19�21]. Este trabalho se propõe a estudar di-
ferentes modelos de canais presentes na literatura [20�22] e mostrar como encontrar
o modelo discreto da resposta ao impulso de alguns deles. O trabalho também irá es-
tudar o comportamento dos sistemas de comunicação multiportadora, quando estes
são usados para realizar uma transmissão através de um canal acústico subaquá-
tico. O impacto do efeito Doppler nesses tipos de sistemas bem como a e�cácia de
uma estratégia simples de compensação em dois estágios são também apresentados
e discutidos. Para realizar tais estudos e análises será desenvolvida uma plataforma
de testes em software que emule o canal acústico submarino e que possibilite a
simulação das técnicas abordadas.
2

1.2 Divisão do Trabalho
O trabalho está dividido da seguinte maneira: no Capítulo 2, é feita uma revisão
bibliográ�ca de acústica submarina, resumindo as principais características da pro-
pagação da onda acústica em ambiente subaquático, como por exemplo o per�l de
velocidade e o multipercurso variante no tempo. No Capítulo 3, são apresentados os
principais modelos de canais acústicos submarinos e como eles afetam o sinal trans-
mitido por esse canal. Uma grande atenção é dada aos canais variantes no tempo
e em como o fator de escalamento gerado pelo efeito Doppler in�uencia em suas
respostas ao impulso. Também é mostrado como gerar uma resposta ao impulso
dos principais modelos e como encontrar suas versões discretas. No Capítulo 4, é
apresentado todo o desenvolvimento matemático dos sistemas OFDM com su�xo
zero e como eles se comportam quando são usados para realizar uma transmissão
por um canal variante no tempo. Esse estudo analisa em detalhes o impacto do
fator de escalamento Doppler nesses sistemas e apresenta uma simples estratégia
de compensação em duas etapas. No Capítulo 5 são apresentados os resultados de
uma série de simulações realizadas para avaliar o desempenho dos modelos descritos
no Capítulo 4. Essas simulações avaliam a taxa de erro de bit (BER, do termo em
inglês bit error-rate) em canais invariantes no tempo e avaliam a sensibilidade da
BER em função do erro de estimação do fator de escalamento Doppler. Por último,
o Capítulo 6 apresenta a conclusão do trabalho e também alguns possíveis caminhos
para sua continuação.
3
Capítulo 2
Características do Canal Acústico
Submarino
2.1 Introdução
Dada a complexidade do meio acústico submarino e a baixa velocidade de propa-
gação do som na água, o canal acústico submarino é tido por muitos como um dos
canais mais desa�adores para comunicações sem �o. Nesse capítulo serão apresenta-
das várias características do canal acústico submarino, desde o per�l de velocidade
de propagação da onda acústica na água até o ruído no meio acústico submarino.
2.2 Velocidade de Propagação do Som
A baixa velocidade de propagação do som na água salgada é um importante fator que
diferencia da propagação das ondas eletromagnéticas no ar. Essa baixa velocidade
faz com que a banda de transmissão do sistema acústico submarino seja pequena,
e que a latência na transmissão seja muito grande. A velocidade do som na água
depende das propriedades da água em questão, tais como temperatura, pressão e
salinidade, e cada uma dessas propriedades varia de acordo com a profundidade.
Na Figura 2.1 é possível observar a variação da temperatura e salinidade de acordo
com a profundidade. Os grá�cos na Figura 2.1 foram gerados a partir de dados
4

experimentais obtidos na Enseada dos Anjos em Arraial do Cabo.
35 35,2 35,4 35,6 35,8 36
0
10
20
30
40
50
Salinidade (em PSU)
Prof
undi
dade
(em
m)
(a) Salinidade em função da profundidade.
14 16 18 20 22
0
10
20
30
40
50
Temperatura (em oC)
Prof
undi
dade
(em
m)
(b) Temperatura em função da profundidade.
Figura 2.1: Variações dos parâmetros do ambiente em função da profundidade.
A velocidade de propagação do som na água normalmente varia em torno de
1510 m/s, que é cerca de 4 vezes maior do que a velocidade de propagação do som
no ar, mas é 5 ordens de grandeza menor do que a velocidade de propagação de uma
onda eletromagnética no ar. A velocidade do som na água pode ser calculada de
diversas maneiras, uma delas é a fórmula experimental de Mackenzie, que depende
da temperatura, salinidade e profundidade [23]. Uma fórmula mais completa para
o cálculo da velocidade do som na água pode ser encontrada em [8]. Na Figura 2.2
pode-se ver um grá�co da velocidade do som em função da profundidade, calculado
a partir dos dados da Figura 2.1 e utilizando a fórmula de Mackenzie.
1500 1505 1510 1515 1520 1525
0
10
20
30
40
50
Velocidade (em m/s)
Prof
undi
dade
(em
m)
Figura 2.2: Per�l de velocidade do som na água.
5

Os múltiplos percursos que ocorrem na transmissão de uma onda sonora estão di-
retamente relacionados com o per�l de velocidade do som. Na Figura 2.3a é possível
observar que no caso de uma transmissão em águas rasas1 o per�l de velocidade varia
pouco com a profundidade, ou seja, a velocidade mantém-se praticamente constante.
Devido a esse fato os raios de propagação são retas e esse caso de múltiplos percursos
se assemelha à transmissão sem �o pelo ar. Já na Figura 2.3b é possível ver que,
como a velocidade de propagação varia muito com a profundidade, os raios não per-
correm caminhos retos e sim curvados, sendo esse tipo de canal conhecido como DSC
(do termo em inglês deep sound channel) e a propagação conhecida como SOFAR
(do termo em inglês sound �xing and ranging). Nesse tipo de propagação ocorre
um fenômeno interessante: o raio que percorreu o maior caminho pode chegar no
receptor antes de um raio que percorreu um caminho menor; isso ocorre por causa da
velocidade que começa a aumentar a partir de uma determinada profundidade [22].
Velocidade
Profundidade
Projetor
Hidrofone
(a) Múltiplos percursos para uma transmissão acústica em águas rasas.Velocidade
Profundidade
Projetor
Hidrofone
(b) Múltiplos percursos para uma transmissão acústica em águas profundas.
Figura 2.3: In�uência do per�l de velocidade da onda acústica na propagação.
Neste trabalho o per�l de velocidade considerado foi o apresentado na Fi-
gura 2.3a, de forma que todos os modelos matemáticos utilizados nos próximos
capítulos consideraram a velocidade do som aproximadamente constante. Todos
1A literatura da área não é consensual em relação à de�nição de águas rasas. A de�nição deáguas rasas usada neste trabalho é a mesma que é utilizada em [24], que considera rasas as águasque vão do �nal da zona de arrebentação até o �nal da plataforma continental. Toda região depoisda plataforma continental é classi�cada como águas profundas.
6

os múltiplos percursos considerados serão gerados a partir de re�exões no fundo e
na superfície. É importante ressaltar que os próprios multipercursos podem even-
tualmente sofrer variações temporais ocasionadas, por exemplo, por mudanças no
ambiente subaquático ou pelo deslocamento relativo entre o transmissor e o receptor.
A próxima seção trata desse assunto.
2.3 Multipercurso Variante no Tempo
Uma transmissão de onda acústica pode alcançar um determinado ponto através de
múltiplos caminhos. Para transmissões em águas rasas, onde a distância é muito
maior que a profundidade, as re�exões da onda no fundo e na superfície geram cópias
atrasadas do sinal transmitido. Já para transmissões em águas profundas, as re�e-
xões no fundo e na superfície podem ser desconsideradas, mas, como foi apresentado
na Seção 2.2, variações no per�l de velocidade do som também produzem múltiplos
percursos. Além disso, os múltiplos percursos podem variar com o tempo. Os dois
principais fatores que causam essas variações são: mudanças no ambiente e o efeito
Doppler. Na próxima seção o efeito Doppler será analisado com mais detalhes.
2.4 Efeito Doppler
A variação temporal dos multipercursos é um problema desa�ador quando se está
trabalhando com o canal acústico submarino e o efeito Doppler é sua principal
causa no ambiente subaquático. Para exempli�car tal efeito, considere o esquema
apresentado na Figura 2.4: o transmissor Tx envia uma onda acústica cossenoidal
com frequência ω para o receptor Rx, dada por
x(t) = Acos(ωt− βζ), (2.1)
onde β = 2π/λ é o número de onda, com λ sendo o comprimento de onda, e ζ é a
distância percorrida pela frente de onda.
7

Tx
Rx
onda 1
onda 2v2
v1
θ1
θ2
Figura 2.4: Exemplo de transmissão quando há velocidade relativa entre o trans-missor e o receptor.
Devido aos múltiplos percursos, o receptor irá receber duas versões do sinal x(t).
Quando a velocidade relativa entre o receptor e o transmissor v = v2 − v1 é nula, o
sinal recebido por Rx é dado por
y(t) = A1cos(ωt− βζ1) + A2cos(ωt− βζ2)
= A1cos(ωt− ωζ1
c
)+ A2cos
(ωt− ωζ2
c
)
= A1cos(ω(t− τ1)) + A2cos(ω(t− τ2)), (2.2)
onde foi utilizada a identidade β = ω/c, em que c é a velocidade de propagação da
onda acústica, e τl = ζl/c é o atraso da l-ésima onda. Quando a velocidade relativa
v é diferente de zero, o sinal recebido por Rx é dado por
y(t) = A1cos(ωt− β(ζ1 − vcos(θ1)t)) + A2cos(ωt− β(ζ2 − vcos(θ2)t))
= A1cos(ωt− ω
(ζ1
c− vcos(θ1)t
c
))+ A2cos
(ωt− ω
(ζ2
c− vcos(θ2)t
c
))
= A1cos (ωt− ω (τ1 − a1t)) + A2cos (ωt− ω (τ2 − a2t))
= A1cos(ω(1 + a1)t− ωτ1) + A2cos(ω(1 + a2)t− ωτ2), (2.3)
onde al = vcos(θl)/c é chamado de fator de escalamento Doppler (em inglês, Doppler
scaling factor), e θl é o ângulo de incidência no receptor da frente de onda da l-ésima
onda. Quando a distância entre o transmissor e o receptor é aproximadamente
1 km o ângulo do feixe de abertura do receptor apresentado na Figura 2.5 é de
aproximadamente 20◦ [25]. De fato, quanto maior a distância entre o transmissor e
o receptor, tem-se a expectativa de que o ângulo do feixe de abertura seja menor,
8

o que tende a diminuir a variação relativa entre os fatores de escalamento al. Em
outras palavras, é concebível um modelo em que al = a para todo l, desde que a
distância entre o transmissor e receptor seja su�cientemente grande.
RxΘ
Θ
Feixe de Abertura
Figura 2.5: Feixe de abertura do receptor.
Resumindo, o efeito Doppler causa um escalamento temporal no sinal enviado.
Esse efeito é muito danoso ao sistema de comunicações e pode degradar completa-
mente a mensagem enviada. Nos Capítulos 3 e 4, o fator de escalamento Doppler
será analisado com mais detalhes.
Até agora, três importantes conceitos foram apresentados: o per�l de velocidade
do som na água na Seção 2.2, o multipercurso variante no tempo na Seção 2.3 e o
efeito Doppler na Seção 2.4. Todos esses conceitos podem ser utilizados em conjunto
para determinar o caminho exato que uma onda acústica percorre de um ponto a
outro. Essa informação é bem útil para a acústica submarina, quando é preciso fazer
uma análise da propagação em uma determinada região. Na próxima seção alguns
modelos de propagação serão apresentados, bem como suas possíveis aplicações.
2.5 Modelos de Propagação Acústica
O modelo de propagação tridimensional da onda acústica em meio submarino pode
ser caracterizado pela equação de onda [22]
∇2xp(x,t) =
1
c2(x)
∂2p(x,t)
∂t2, (2.4)
9

onde x ∈ R3×1 representa as coordenadas de um ponto na água, p(x,t) ∈ R é
a pressão do som em uma dada posição x e para um instante de tempo t ∈ R,
c(x) ∈ R é a velocidade de propagação do som na água e ∇2x representa o operador
Laplaciano2. Para uma onda senoidal de frequência f0, a equação (2.4) pode ser
escrita como a equação de Helmholtz [8, 22]
∇2xp(x) + k2(x)p(x) = 0, (2.6)
onde p(x) é o fasor da pressão e k(x) = 2πf0/c(x) é o número de onda.
Apesar da simplicidade da equação (2.6), pode ser inviável encontrar uma solu-
ção analítica para a mesma [8, 22]. Assim, dependendo da aplicação em questão,
existem diferentes soluções numéricas para caracterizar a propagação da onda acús-
tica em ambiente submarino, dentre elas: teoria dos raios, soluções de modo normal,
aproximação parabólica e integração do número de onda.
2.5.1 Teoria dos Raios
Assumindo que a fase da onda acústica varia muito mais rápido do que sua ampli-
tude, o método da teoria dos raios usa a pressão como o produto de uma função
da amplitude da onda com uma função da fase da onda; essas duas funções são
independentes e por isso cada uma das funções pode ser tratada separadamente.
Devido à hipótese acima, a teoria dos raios é adequada apenas para sistemas de
faixa estreita (do termo em inglês narrowband), onde a independência da amplitude
e da fase é garantida. Os programas mais comuns que usam a teria dos raios para
calcular a propagação da onda acústica são o Bellhop [26] e o cTraceo [27].
2O operador Laplaciano é de�nido como
∇2x(·) =
3∑
i=1
∂2(·)∂x2
i
(2.5)
10

2.5.2 Soluções de Modo Normal
Esse método fornece uma solução exata da equação da onda, mas é restrito a um
canal em que a velocidade só varia com a profundidade e o fundo é plano e horizontal.
Por isso, a solução não depende da distância, o que restringe o seu uso a poucas
aplicações. Um programa que usa a solução de modo normal é o KRAKEN [28].
2.5.3 Aproximação Parabólica
Esse método aproxima a equação (2.6) por uma equação parabólica3 (PE, do termo
em inglês parabolic equation), cuja a solução pode ser calculada numericamente. Um
exemplo de programa que resolve equações parabólicas é o modelo MMPE (do termo
em inglês monterey-miami parabolic equation) [29].
2.5.4 Integração do Número de Onda
Esse método também é conhecido como FFP (do termo em inglês fast �eld program)
e é similar à solução de modo normal, mas nesse caso o FFP calcula o campo acústico
usando integração no número de onda. Usando a transformada rápida de Fourier
(FFT, do termo em inglês fast Fourier transform) o FFP pode avaliar diretamente a
solução da integral para obter uma solução numérica da equação da onda. Embora
esse método forneça uma solução muito acurada, ele falha na hora de fornecer uma
interpretação do campo acústico, impossibilitando o seu uso em algumas aplicações.
Um exemplo de FFP é o OASES (do termo em inglês ocean acoustic and seismic
exploration synthesis) [30].
Do ponto de vista de comunicações e processamento de sinais, estes métodos
não são muito úteis por serem determinísticos e, portanto, �carem dependentes da
escolha adequada de parâmetros, os quais podem não representar bem uma situação
3Uma equação parabólica é uma equação diferencial do tipo
A∂2u
∂x2+ 2B
∂2u
∂x∂y+ C
∂2u
∂y2+D
∂u
∂x+ E
∂u
∂y+ F = 0, (2.7)
onde B2 −AC = 0.
11

prática real. Em vez de utilizar tais métodos, o presente trabalho empregará modelos
estatísticos de canais, os quais serão apresentados no Capítulo 3. Tais modelos
buscam caracterizar o comportamento médio dos canais subaquáticos, modelando
diversos aspectos da transmissão, incluindo as perdas de energia por propagação,
assunto da próxima seção.
2.6 Perda de Energia por Propagação
Existem três tipos de perda de energia por propagação para ondas acústicas na água:
• perda por absorção;
• perda por espalhamento geométrico (do termo em inglês geometric spreading);
• perda por espalhamento (do termo em inglês scattering loss).
2.6.1 Perda por Absorção
Durante a propagação, a energia da onda pode ser convertida em outros tipos de
energia e absorvida pelo meio. A perda por absorção é diretamente controlada pelas
imperfeições do material (ou meio). Para ondas eletromagnéticas, a imperfeição é
modelada pela condutividade elétrica da água. Para as ondas acústicas, a imperfei-
ção é modelada pela inelasticidade, que converte a energia da onda em calor.
A perda de energia por absorção para propagação de ondas acústicas é depen-
dente da frequência, e pode ser expressa por [22]
Pf(f) = e−α(f)d, (2.8)
onde d ∈ R+ é a distância de propagação e α(f) é o coe�ciente de absorção na
frequência f . Para água salgada, o coe�ciente de absorção na frequência f em kHz
pode ser modelado pelo efeito de uma soma de processos de relaxações químicos e
12

a absorção da água pura, sendo esse coe�ciente dado por [22]
α(f) =A1P1f1f
2
f 21 + f 2
+A2P2f2f
2
f 22 + f 2
+ A3P3f2, (2.9)
onde o primeiro termo é uma contribuição do ácido bórico, o segundo termo é uma
contribuição do sulfato de magnésio e o terceiro termo é uma contribuição da água
pura. A1, A2, A3 ∈ R são constantes, P1, P2, P3 ∈ R são dependentes da pressão,
f1, f2 ∈ R+ são as frequências do processo de relaxação do ácido bórico e sulfato de
magnésio, respectivamente.
Para comunicação acústica submarina, a fórmula de Thorp [31] é uma boa apro-
ximação da equação (2.9) para frequências menores que 50 kHz, sendo dada por
α(f) =0,11f 2
1 + f 2+
44f 2
4100 + f 2+ 2,75× 10−4f 2 + 0,003, (2.10)
onde f é a frequência em kHz.
2.6.2 Perda por Espalhamento Geométrico
A perda de energia por espalhamento geométrico (do termo em inglês geometric
spreading loss) é uma perda local de potência que ocorre na propagação das ondas
acústicas devido à conservação de energia. Quando uma onda acústica impulsiva é
transmitida, à medida que a distância percorrida pela onda aumenta, sua frente de
onda também aumenta proporcionalmente, e a consequência disso é que a potência
por unidade de área na frente de onda �ca cada vez menor. Para uma onda acús-
tica esférica gerada por uma fonte pontual, a perda de potência por espalhamento
geométrico é proporcional ao quadrado da distância. Para uma onda acústica cilín-
drica gerada por um arranjo de projetores, a perda de potência por espalhamento
geométrico é proporcional a distância. Em comunicações acústica submarina o espa-
lhamento geométrico é uma composição do espalhamento esférico e cilíndrico, nesse
13
caso a perda por espalhamento geométrico pode ser escrita como [22]
Pg = dβ, (2.11)
onde β = 1 para o caso cilíndrico e β = 2 para o caso esférico. Em casos práticos
é muito complicado classi�car a perda por espalhamento geométrico como esférico
ou cilíndrico, então um bom valor prático para o expoente é β = 1,5 [22]. Um fato
importante a ser notado aqui é que a perda por espalhamento geométrico independe
da frequência.
2.6.3 Perda por Espalhamento
O espalhamento (do termo em inglês scattering) é um processo físico em que a onda
incidente é re�etida por uma superfície irregular em diferentes direções. O espa-
lhamento do som em ambiente submarino pode ser atribuído às não-uniformidades
na coluna de água e às interações das ondas acústicas com as superfícies irregulares
do fundo e da superfície do mar. Esses obstáculos na coluna de água incluem alvos
pontuais como peixe e plânctons. A perda de energia por espalhamento depende
do comprimento de onda da onda acústica e do tamanho do alvo. Em particular, a
perda por espalhamento aumenta à medida que o comprimento de onda diminui. A
perda de energia por espalhamento pode ser modelada por [8]
Ps =r2
[(f0/f)2 − 1]2 + δ2, (2.12)
onde f é a frequência em Hz, f0 é a frequência de ressonância do alvo, r é o raio do
alvo e δ é o fator de amortecimento.
2.6.4 Parametrização da Perda de Energia por Propagação
A perda de propagação total é uma composição dos três tipos de perda que foram
citadas anteriormente. Para um sinal acústico com frequência f , a atenuação após
14

percorrer uma distância d pode ser escrita como [22]
Pp(f,d) =r2
[(f0/f)2 − 1]2 + δ2dβe−α(f)d. (2.13)
2.7 Ruído Ambiente e Interferência Externa
Ruído é um termo usado para denotar um sinal indesejado que distorce o sinal
transmitido. No caso dos sistemas de comunicação acústica submarina, o ruído
pode ser dividido em duas categorias: o ruído ambiente e a interferência externa.
Ruído ambiente é um tipo de ruído de fundo que pode ser produzido por um
conjunto grande de fontes. As fontes de ruído mais comuns no meio submarino
são as atividades sísmicas e vulcânicas, atividades industrias (como por exemplo
exploração de petróleo), processos climáticos e ruído térmico. Devido às múltiplas
fontes, o ruído ambiente pode ser aproximado como gaussiano, embora não seja
razoável modelá-lo como branco.
Interferência externa é um sinal interferidor que pode ser claramente reconhecido
no sinal recebido pelo receptor. As fontes de interferências externa mais comuns são
os animais marinhos, o deslocamento de icebergs e outros sistemas acústicos funcio-
nando na mesma região. Por exemplo, o ruído produzido pelos camarões em águas
quentes e o deslocamento dos icebergs nas regiões polares produzem interferências
impulsivas. Neste trabalho será assumido que o ruído é AWGN (do termo em in-
glês additive white Gaussian noise). Apesar dessa hipótese não ser razoável, ela é o
ponto de partida de diversos outros trabalhos da literatura.
Como foi visto ao longo deste capítulo, o canal acústico subaquático depende
de diferentes parâmetros que podem variar ao longo do tempo, como por exemplo
o multipercurso apresentado na Seção 2.3. No Capítulo 3 será apresentada uma
modelagem matemática que utiliza o conceito de multipercursos variante no tempo
e do efeito Doppler para gerar respostas ao impulso do canal acústico subaquático.
A intenção dessa modelagem é criar uma alternativa aos modelos de propagação
apresentados na Seção 2.5.
15

Capítulo 3
Relação Entrada-Saída do Canal
Acústico Submarino
3.1 Introdução
O front-end analógico de um sistema de comunicação acústica subaquática pode
ser visto na Figura 3.1. No transmissor o sinal x(t) é ampli�cado e passa por um
circuito de casamento de impedância para que a potência do sinal transmitido seja
a máxima possível. No receptor o sinal captado pelo hidrofone é pré-ampli�cado e
depois é �ltrado por um �ltro passa-faixa para eliminar todas as interferências fora
da faixa do sinal. Do ponto de vista de processamento de sinais, o canal equivalente
leva em conta todas as imperfeições entre o sinal x(t) e y(t), de forma que para esse
sistema o canal de comunicação é a conexão de todos os blocos entre x(t) e y(t) [22].
Amplificadorde
Potencia
Casamentode
Impedancia
PreAmplificador
FiltroPassa Faixa
Projetor Hidrofone
x(t) y(t)Canal Fısico
Figura 3.1: Front-end analógico de um sistema de comunicação acústico submarino.
Em alguns tipos de transmissão, a resposta ao impulso do canal pode ser consi-
derada linear e invariante no tempo (LTI, do termo em inglês linear time-invariant)
para um determinado intervalo de tempo [32, 33], mas no caso da transmissão acús-
16

tica submarina será mostrado que, devido ao efeito Doppler, na maior parte dos
casos o canal acústico subaquático será variante no tempo. Nesse capítulo serão
apresentados alguns modelos de canal acústico submarino bem como a forma de
simular esses modelos de canal.
3.2 Canal Variante no Tempo
3.2.1 Escalamento Doppler Não-Uniforme
O canal acústico submarino pode ser modelado como um sistema linear variante no
tempo com respostas ao impulso [22]:
h(t,τ) =L∑
l=1
Al(t)δ(τ − τl(t)), (3.1)
onde L ∈ N é o número de raios que ocorrem durante a transmissão de um sinal
por esse canal, Al(t) ∈ R+ é a atenuação do l-ésimo raio, τl(t) ∈ R+ é o atraso
correspondente ao l-ésimo raio e δ(t) é a função delta de Dirac, a qual é nula para
todo t 6= 0 e satisfaz a relação
∫ ∞
−∞δ(τ)dτ = 1. (3.2)
É muito importante ressaltar o signi�cado da equação (3.1): nela, a variável τ é
um atraso que está diretamente relacionado com a distância do caminho percorrido
pela onda entre o projetor e o hidrofone; a variável t é o tempo absoluto e, para cada
valor de t, tem-se um canal linear invariante no tempo diferente, descrito em função
da variável τ . Na Figura 3.2 é apresentado um exemplo de um possível h(t,τ).
Para um curto intervalo de tempo Tbl, pode-se assumir que Al(t) e τl(t) variam
lentamente, de forma que as seguintes hipóteses sejam razoáveis:
(i) A amplitude é constante dentro de um bloco de duração Tbl, logo
Al(t) = Al, t ∈ [0, Tbl). (3.3)
17

τ
t
h(t, τ)
t0
t1
tn
Figura 3.2: Exemplo de respostas ao impulso de um canal acústico submarino.
(ii) O atraso varia pouco dentro de um bloco de duração Tbl e pode ser aproximado
por um polinômio de primeira ordem dado por1
τl(t) = τl − alt, t ∈ [0, Tbl), (3.4)
onde τl ∈ R+ é o atraso caso não houvesse movimento relativo entre o trans-
missor e receptor, e −al ∈ R é a primeira derivada de τl(t).
O parâmetro al é o fator de escalamento Doppler apresentado na Seção 2.4. Com
base nas hipóteses descritas anteriormente, as respostas ao impulso do canal, h(t,τ),
podem, ser escritas como
h(t,τ) =L∑
l=1
Alδ(τ − (τl − alt)), t ∈ [0, Tbl). (3.5)
A resposta y(t) do canal à uma entrada x(t) ∈ R é dada pela seguinte integral
1Por conveniência, a aproximação de primeira ordem do atraso apresentada na equação (3.4)utilizou o negativo da derivada do atraso, ao invés dela própria.
18

de convolução [34]
y(t) =
∫ ∞
−∞h(t,τ)x(t− τ)dτ
=
∫ ∞
−∞
L∑
l=1
Alδ(τ − (τl − alt))x(t− τ)dτ. (3.6)
Usando a propriedade amostradora do impulso na equação (3.6), pode-se escrever
y(t) =L∑
l=1
Alx((1 + al)t− τl), t ∈ [0, Tbl). (3.7)
Note que a equação (3.7) mostra que o fator de escalamento Doppler produz
um escalamento temporal no sinal gerado da convolução de x(t) com h(t,τ). Como
foi visto na Seção 2.4, o fator de escalamento Doppler pode ser assumido constante
dentro de alguns cenários especí�cos. Na próxima seção esse caso será analisado.
3.2.2 Escalamento Doppler Uniforme
O canal variante no tempo com escalamento Doppler uniforme é um caso particular
do canal apresentado na Seção 3.2.1, no qual o parâmetro al = a é constante. Para o
caso de um escalamento de Doppler uniforme para todos os caminhos, a equação (3.7)
pode ser reescrita como
y(t) =L∑
l=1
Alx((1 + a)(t− τl/(1 + a))), (3.8)
voltando um passo atrás e escrevendo y(t) como
y(t) =L∑
l=1
Alx((1 + a)(t− τl/(1 + a)))
∫ ∞
−∞δ(τ − τl/(1 + a))dτ
=
∫ ∞
−∞
L∑
l=1
Alδ(τ − τl/(1 + a))x((1 + a)(t− τ))dτ
=
∫ ∞
−∞h(τ)x((1 + a)(t− τ))dτ, t ∈ [0, Tbl), (3.9)
19

onde
h(τ) =L∑
l=1
Alδ(τ − τ l) (3.10)
representa a resposta ao impulso de um canal linear invariante no tempo e τ l =
τl/(1 +a) é o novo atraso relacionado ao l-ésimo raio. Note que agora, como o canal
é linear e invariante no tempo, as variáveis t e τ têm o mesmo signi�cado � as duas
variáveis representam o mesmo tempo.
Como pode-se observar, a equação (3.9) tem uma interpretação física bem simples
e interessante: a transmissão de um sinal x(t) através de um canal com respostas
ao impulso h(t,τ) com fator de escalamento de Doppler uniforme para todos os
percursos, é igual a transmissão de um sinal x((1 + a)t) através de um canal com
resposta ao impulso h(τ) LTI dado pela equação (3.10).
Todos os modelos analisados até agora não assumem variações temporais para o
ganho. Na próxima seção um modelo com variações na amplitude e nos atrasos será
analisado.
3.2.3 Variações de Amplitude e de Atraso
Um modelo mais geral de um canal acústico submarino é o que considera variações
temporais de amplitude e atraso [20], enquadrando-se no modelo geral expresso na
equação (3.1).
Para desenvolver a equação (3.1) com mais detalhes, é preciso fazer duas hipó-
teses que se veri�cam na prática para um intervalo de tempo Tbl [20, 22]:
(i) A amplitude Al(t) pode ser expandida em série de Taylor e aproximada por
um polinômio de ordem2 Namp:
Al(t) ≈ A(0)l − A
(1)l t+
1
2A
(2)l t2 + · · ·+ (−1)Namp
Namp!A
(Namp)l t(Namp)
≈Namp∑
n=0
(−1)n
n!A
(n)l tn t ∈ [0, Tbl), (3.11)
2Por conveniência, a aproximação polinomial do ganho apresentada na equação (3.11) utilizouo negativo da derivada do atraso, ao invés dela própria.
20

onde A(n)l é a derivada de ordem n de Al(t).
(ii) O atraso τl(t) pode ser expandido em série de Taylor e aproximado por um
polinômio de ordem3 Natr:
τl(t) ≈ τ(0)l − τ
(1)l t+
1
2τ
(2)l t2 + · · ·+ (−1)Natr
Natr!τ
(Natr)l t(Natr)
≈Natr∑
n=0
(−1)n
n!τ
(n)l tn t ∈ [0, Tbl), (3.12)
onde τ (n)l é a derivada de ordem n de τl(t).
Agora, um modelo mais geral de h(t,τ), quando comparado à equação (3.5) é
dado por
h(t,τ) =L∑
l=1
(Namp∑
n=0
(−1)n
n!A
(n)l tn
)δ
(τ −
Natr∑
n=0
(−1)n
n!τ
(n)l tn
), t ∈ [0, Tbl). (3.13)
O modelo de respostas ao impulso do canal apresentado na equação (3.13) é
genérico e, com valores apropriados de Namp e Natr, pode-se encontrar diferentes
tipos de respostas ao impulso; por exemplo, escolhendo Namp = 0 e Natr = 1, tem-se
h(t,τ) da equação (3.13) igual ao da equação (3.5).
3.2.4 Dispersão e Atenuação na Frequência
Conforme explicado na Seção 2.6 algumas vezes pode ocorrer dispersão no sinal
enviado, o que causa um espalhamento espacial no sinal recebido [21]. Em todos
os modelos apresentados no presente capítulo foi considerado que o sinal acústico
transmitido não sofre dispersão, mas nem sempre esse tipo de representação é a mais
adequada. Considerando a dispersão da onda acústica, as resposta ao impulso do
canal, h(t,τ), podem ser escritas como
h(t,τ) =L∑
l=1
Al(t)γl(τ − τl(t)), (3.14)
3Por conveniência, a aproximação polinomial do atraso apresentada na equação (3.12) utilizouo negativo da derivada do atraso.
21

onde γl(t) representa a dispersão do sinal acústico no l-ésimo percurso.
Assumindo as mesmas hipóteses consideradas na Seção 3.2.3, a equação (3.14)
pode ser reescrita como
h(t,τ) =L∑
l=1
(Namp∑
n=0
(−1)n
n!A
(n)l tn
)γl
(τ −
Natr∑
n=0
(−1)n
n!τ
(n)l tn
). (3.15)
Uma possível função γ(τ) a ser utilizado aqui é a função que possui resposta em
frequência igual à apresentada na equação (2.13).
Na Figura 3.3 é possível observar um exemplo de h(t,τ) para esse tipo de canal.
τ
t
h(t, τ)
t0
t1
tn
Figura 3.3: Exemplo de respostas ao impulso de um canal acústico submarino comdispersão.
3.3 Canal Invariante no Tempo
No modelo de canal acústico submarino invariante no tempo não existem variações
nas amplitudes e nem nos atrasos. Sendo assim a resposta ao impulso do canal, que
antes era uma função de t e τ , agora pode ser simpli�cada para uma função apenas
22

de τ e pode ser escrita como
h(τ) =L∑
l=1
Alδ(τ − τl). (3.16)
Muitas vezes esse tipo de modelo não é adequado para o caso acústico subma-
rino, pois não leva em consideração alguns efeitos sofridos pelo sinal transmitido,
como, por exemplo, o efeito Doppler (vide Seção 2.4). Em geral, é inconveniente
modelar uma transmissão de modo que o efeito Doppler seja completamente igno-
rado. De fato, mesmo que o movimento relativo entre o transmissor e o receptor
seja minimizado, o menor resquício de movimento pode causar severas distorções no
sinal recebido [12].
3.4 Implementação Digital
A formulação matemática apresentada nas seções anteriores descreve o fenômeno
de propagação do sinal, sendo portanto muito útil para um estudo analítico do
problema. Porém, para avaliação de desempenho do sistema de comunicação, faz-
se necessária a realização de uma série de simulações, e para isso é necessário um
modelo discreto (ou digital) do canal. Simulações do sistema de comunicação são
importantes para veri�car o comportamento do mesmo em alguns cenários práticos,
evitando possíveis gastos �nanceiros desnecessários.
3.4.1 Canal Invariante no Tempo
Para gerar um modelo discreto do canal invariante no tempo é preciso amostrar a
resposta ao impulso apresentada na equação (3.16) com um período de amostragem
Ta. No modelo discreto, cada τl será transformado em um nl ∈ Z dado por
nl =
⌈τlTa
⌉, ∀ l ∈ L = {1, 2, · · · , L}, (3.17)
23

onde d(·)e é o primeiro inteiro maior que (·). A equação (3.16) pode ser reescrita
como
h[n] =L∑
l=1
Alδ[n− nl], (3.18)
onde δ[n] é a função delta de Kronecker, de�nido como
δ[n] =
1, n = 0
0, n 6= 0
. (3.19)
A equação (3.18) pode ser facilmente implementada digitalmente, pois ela equi-
vale a um �ltro FIR (do termo em inglês �nite-duration impulse response) de com-
primento nL + 1. A Figura 3.4 ilustra a operação de amostragem de um modelo de
canal LTI.
h(τ)
τ
h[n]
n
τ1 τ2 τ3 τ4 n1 n2 n3 n4
Figura 3.4: Amostragem do canal invariante no tempo.
A escolha do período de amostragem Ta é muito importante, sendo necessário
que Ta seja su�cientemente pequeno para que consiga diferenciar dois atrasos con-
secutivos. O período de amostragem tem que satisfazer
Ta < minl∈L{∆τl}, (3.20)
onde ∆τl é de�nido como
∆τl =
τ1, l = 1
τl − τl−1, l ∈ {2, 3, · · · , L}. (3.21)
24

3.4.2 Canal Variante no Tempo com Escalamento Doppler
Não-Uniforme
Para gerar um modelo discreto do canal variante no tempo com escalamento de
Doppler não-uniforme é preciso utilizar a equação (3.7). Tal equação mostra que
o sinal y(t) é a soma de x(t) escalado pelos fatores 1 + al e deslocado por τl/(1 +
al). Para discretizar o sinal apresentado na equação (3.7), primeiramente é preciso
amostrar o sinal x(t) com um período de amostragem Ta:
x[n] = x(nTa), (3.22)
e, após essa operação, é preciso fazer uma reamostragem de x[n] pelo maior fator
1 + al. Note que só é necessário reamostrar pelo maior fator 1 + al, pois no domínio
discreto essa operação irá englobar todas as taxas relacionadas aos outros fatores
1 + al.
A operação de reamostragem deve ser realizada em duas etapas: primeiro uma
interpolação por um fatorM , depois uma decimação por um fator Q, onde a relação
entre M e Q é dada por4
1 + amax =Q
M, (3.23)
onde amax é o maior fator de escalamento Doppler. O último passo é �ltrar o sinal
reamostrado x[Qn/M ] por um �ltro FIR h[n] dado por
h[n] =L∑
l=1
Alδ[n− nl], (3.24)
onde
nl =
⌈τl
(1 + al)Ta
⌉, ∀ l ∈ L. (3.25)
A Figura 3.5 exibe um diagrama de blocos que ilustra as operações comentadas
acima. O único componente não comentado ainda é o �ltro passa-baixas T (z), o
4Aqui um número real foi escrito como um número racional. Em termos matemáticos isso nemsempre é verdade, mas, como essa operação será realizada em um computador, pode-se considerarque o computador sempre terá precisão �nita e essa operação sempre poderá ser realizada.
25

qual é necessário para evitar o aliasing na operação de reamostragem [35].
H(z)↑ M ↓ QT (z)x[n] y[n]
Figura 3.5: Implementação digital de um canal variante no tempo com escalamentode Doppler não-uniforme.
3.4.3 Canal Variante no Tempo com Escalamento Doppler
Uniforme
O modelo discreto da equação (3.9) é um caso especí�co da equação (3.7), em que é
necessário reamostrar o sinal x[n] por um fator 1 + a = Q/M e processá-lo usando
um �ltro FIR h[n] dado por
h[n] =L∑
l=1
Alδ[n− nl], (3.26)
onde
nl =
⌈τl
(1 + a)Ta
⌉, ∀ l ∈ L. (3.27)
A única diferença entre os modelos apresentados nas Seções 3.4.2 e 3.4.3 está
na construção do �ltro h[n]. A estrutura apresentada na Figura 3.5 pode ser usada
para implementar o modelo descrito nesta seção.
3.5 Características Estatísticas do Canal Acústico
Submarino
Nas seções anteriores foram de�nidos modelos matemáticos para o canal multiper-
curso. Nas simulações, além de encontrar um modelo digital equivalente é necessário
escolher valores adequados para L, Al, τl e al. Normalmente esses parâmetros estão
distribuídos de acordo com algum tipo de função densidade de probabilidade (PDF,
do termo em inglês probability density function).
26

3.5.1 Número de Percursos
O parâmetro L está diretamente associado à distância entre o projetor e o hidrofone,
e também pelo per�l batimétrico da região [24]. No caso de transmissão em águas
rasas o número máximo de raios é dado por [24]
Lmax = 2d
H, (3.28)
onde d ∈ R+ é a distância entre o transmissor e o receptor e H ∈ R+ é a profun-
didade. O parâmetro L pode ser gerado a partir de uma distribuição uniforme ou
�xado em algum valor especí�co pré-determinado.
3.5.2 Atraso
O parâmetro τl é gerado a partir das diferenças de atrasos entre cada percurso
∆τl. Esse parâmetro ∆τl está distribuído de acordo com uma PDF exponencial com
média ∆τm e cada atraso τl é dado por [22]
τl =l∑
i=1
∆τi. (3.29)
Então, para gerar um canal com 4 percursos como o mostrado na Figura 3.6,
é preciso sortear 4 ∆τl diferentes e depois usar a equação (3.29) para calcular os
respectivos valores de τl.
3.5.3 Ganho
O parâmetro Al também está distribuído de acordo com uma PDF, assim como o
parâmetro ∆τl na Seção 3.5.2. O grande problema com o parâmetro Al é qual PDF
escolher para gerar os ganhos Al. Alguns trabalhos na literatura mostram que não
existe uma única PDF adequada, podendo variar de acordo com o per�l batimétrico
da região. Algumas possíveis distribuições são Rayleigh [36], Rice [37, 38], log-
normal [39], distribuição-K [40], Nakagami e Beta [41].
27

∆τ1 ∆τ2 ∆τ3 ∆τ4
τ
h(τ)
Figura 3.6: Exemplo de como gerar os atrasos τl da resposta ao impulso h(τ).
Geralmente a potência do ganho gerado a partir dessas distribuições decai ex-
ponencialmente com o atraso, ou seja, pode-se considerar que a variância dessas
distribuições decai exponencialmente com os atrasos. Essa consideração é uma he-
rança dos modelos de canais sem �o de RF no ar, onde o mesmo resultado é assumido
para os ganhos [42]. Para gerar o ganho Al associado ao atraso τl é preciso de�nir
uma atenuação ∆P em dB durante um intervalo de tempo TP e cada ganho será
sorteado a partir de uma PDF [22]:
Al ∼ A(µA,σ2(τl, ∆P, TP )), (3.30)
onde A é uma PDF genérica, µA é a média da distribuição A,
σ2(τl, ∆P, TP ) = e−α(∆P, TP )τl (3.31)
e
α(∆P, TP ) = − 1
TPln(
10∆P10
). (3.32)
3.5.4 Escalamento Doppler
O parâmetro al pode ser �xado em algum valor pré-determinado, caso seja preciso
simular o efeito Doppler para uma velocidade relativa especí�ca. Ou ainda, ele pode
28

ser escolhido a partir de uma distribuição uniforme dada por
U(a0,σa) = u(a− a0 +
√3σa
)− u
(a− a0 −
√3σa
), (3.33)
onde a0 = v0/c, σa = σv/c e u(a) sendo a função degrau unitário.
Esse capítulo apresentou diversos modelos para o canal acústico subaquático e
as características estatísticas de seus parâmetros importantes. Também mostrou
como criar respostas ao impulso discretas a partir de suas versões contínuas. No
Capítulo 4, o comportamento de um sistema multiportadora sobre o efeito de canais
invariantes e variantes no tempo será estudado. No caso variante no tempo, o
impacto do efeito Doppler em tais sistemas será analisado em detalhe.
29

Capítulo 4
Sistemas Multiportadora
4.1 Introdução
Quando é necessário fazer uma transmissão por um canal que é muito seletivo em
frequência os sistemas OFDM (do termo em inglês orthogonal frequency-division
multiplexing) podem ser úteis, já que eles conseguem eliminar completamente a
interferência entre blocos (IBI, do termo em inglês interblock interference) e facilitar
a compensação da interferência entre símbolos (ISI, do termo em inglês intersymbol
interference) [1].
Neste capítulo serão apresentados os conceitos básicos dos sistemas ZP-OFDM
(do termo em inglês zero padded-OFDM ) quando são usados para uma transmissão
por um canal invariante no tempo com resposta ao impulso h(τ) e por um canal
variante no tempo com respostas ao impulso h(t,τ) com escalamento de Doppler
uniforme. Nos dois casos, será considerado que virtualmente toda a energia do
canal está concentrada no intervalo [0, Tca).
30

4.2 ZP-OFDM
4.2.1 Processamento do Transmissor
Seja T ∈ R+ o período de um símbolo ZP-OFDM e K ∈ N o número total de
subportadoras [1]. Na banda base as frequências das subportadoras são dadas por
fk =k
T, k ∈ K = {−K/2, · · · , K/2− 1} ⊂ Z. (4.1)
Esse símbolo será transmitido por um canal com resposta ao impulso LTI dada por:
h(τ) =L∑
l=1
Alδ(τ − τl), τ ∈ [0, Tca). (4.2)
Seja Tg ∈ R+ o período de guarda do símbolo ZP-OFDM e Tbl = T + Tg o
tempo total do bloco transmitido, incluindo a operação de janelamento e o intervalo
de guarda, conforme ilustrado na Figura 4.1. A escolha do Tg é muito importante
para garantir o perfeito funcionamento do sistema ZP-OFDM. O período de guarda
deve satisfazer Tg ≥ Tca, pois essa escolha garante o cancelamento da IBI e ainda
garantirá a ortogonalidade das subportadoras [1].
T Tg
Tblt
x(t)
b b+ 1
Figura 4.1: Representação do b-ésimo bloco ZP-OFDM.
Seja Sb[k] ∈ C ⊂ C o símbolo de uma constelação C a ser transmitido na k-ésima
subportadora do b-ésimo bloco de dados. Então um símbolo ZP-OFDM em banda
31

base pode ser expresso por
xb(t) =
K/2−1∑
k=−K/2
Sb[k]ej2πfktg(t), t ∈ [bTbl, (b+ 1)Tbl], (4.3)
onde g(t) é a resposta ao impulso do �ltro formatador de pulso [32, 33, 43] e b ∈ N.
Após a passagem para a banda passante, o novo sinal a ser transmitido x(t) é dado
por
xb(t) = 2<{xb(t)e
j2πfct}
= xb(t)ej2πfct + x∗b(t)e
−j2πfct, t ∈ [bTbl, (b+ 1)Tbl], (4.4)
onde fc ∈ R+ é a frequência da portadora.
Na Figura 4.2 é possível ver o diagrama de blocos do transmissor descrito nesta
seção, mas para implementação em computadores ou em processadores digitais uma
alternativa é a estrutura apresentada na Figura 4.3.
2ℜ{·}
Sb
[−K
2
]
Sb
[−K
2 + 1]
Sb
[K2 − 1
]
g−K2(t)
g−K2 +1(t)
gK2 −1(t)
xb(t)
ej2πfct
xb(t)... ...
· · ·
Figura 4.2: Diagrama de blocos do transmissor OFDM, com gk(t) = ej2π kTtg(t),
∀k ∈ K.
g[n] 2<f·g
Sb
[
� K2
]
Sb
[
� K2+ 1
]
Sb
[
K2� 1
]
xb[n]
ej2πfcnTa
~xb[n]IFFT " P.
.
.
.
.
.
Azp PSf·g.
.
.
Figura 4.3: Diagrama de blocos para a implementação digital do transmissor OFDM.
Na estrutura da Figura 4.3 os símbolos Sb[k] passam por uma IFFT (do termo
em inglês, inverse fast Fourier transform) de comprimento K e, após essa operação,
32

ocorre a adição do su�xo com zeros. Essas operações são dadas por
x[b] =
IK
0Lzp×K
︸ ︷︷ ︸Azp∈C(K+Lzp)×K
WHKs[b], (4.5)
onde WK ∈ CK×K é a matriz da transformada discreta de Fourier (DFT, do termo
em inglês discrete Fourier transform) e Lzp ∈ N é o tamanho do su�xo com zeros.
O tamanho do su�xo com zeros tem que atender a seguinte condição
Lzp ≥⌈TcaTd
⌉, (4.6)
onde Td ∈ R+ é taxa de amostragem dos elementos de x[b].
O sinal, incluindo o su�xo, é convertido para uma forma serial, dada por
xb[i] = PS {x[b]} , (4.7)
onde PS é o operador que faz a conversão paralelo-serial. O sinal resultante xb[i] é
interpolado por um fator P , sendo a seguir �ltrado por um �ltro g[n] para gerar o
sinal xb[n]. Essa operação é descrita matematicamente como
xb[n] =∞∑
i=−∞
xb[i]g[n− iP ]. (4.8)
E, por último, o sinal xb[n] é obtido através da operação
xb[n] = 2<{xb[n]ej2πfcnTa
}, (4.9)
onde Ta = Td/P é o mesmo da Seção 3.4.1. Mas agora, além de Ta ter que satisfazer
as condições da Seção 3.4.1, seu valor tem que ser su�cientemente pequeno para
representar o sinal xb[n] sem que ocorra aliasing.
33

Para que o sinal xb(t) consiga ser amostrado corretamente é preciso que
1
2Ta
> fc +B
2
Ta <1
2fc +B, (4.10)
onde B concentra 90% da energia de xb(t). Então Ta deve ser escolhido de modo
que satisfaça as equações (3.20) e (4.10), logo
Ta < min
{min∀l∈L{∆τl},
1
2fc +B
}. (4.11)
Note que a restrição sobre Ta é feita pensando em sistemas acústicos, pois para
tais sistemas fc é da faixa de dezenas de kHz. No caso de sistemas RF, a amostragem
do sinal em banda passante é impraticável, pois necessitaria de um conversor A/D
com período de amostragem da ordem de nanosegundos.
4.2.2 Processamento do Receptor
Quando o canal tem resposta ao impulso LTI, o sinal recebido yb(t) é dado por:
yb(t) =
∫ Tca
0
h(τ)xb(t− τ)dτ + vb(t)
=L∑
l=1
Alxb(t− τl) + vb(t), (4.12)
onde vb(t) é o ruído aditivo na banda passante.
O primeiro estágio de processamento a ser realizado no receptor é fazer a con-
versão do sinal recebido para banda base. O sinal recebido na banda base yb(t) é
dado por:
yb(t) = LPF{yb(t)e
−j2πfct}
= LPF
{L∑
l=1
Alxb(t− τl)e−j2πfct
}+ vb(t), (4.13)
34

onde LPF{·} é um �ltro passa-baixas ideal com frequência de corte igual à metade
da banda de xb(t), e vb(t) é o ruído aditivo na banda base.
Substituindo a equação (4.4) na equação (4.13) é possível escrever yb(t) como
yb(t) = LPF
{L∑
l=1
Ale−j2πfcτlxb(t− τl)
}+LPF
{L∑
l=1
Alej2πfcτlx∗b(t− τl)e−j4πfct
}+vb(t),
(4.14)
como LPF{·} é um �ltro passa-baixas ideal, e por isso não irá alterar a primeira
parte da equação (4.14) e irá eliminar completamente a segunda parte. Então a
equação (4.14) se reduz a
yb(t) =L∑
l=1
Ale−j2πfcτlxb(t− τl) + vb(t). (4.15)
No domínio da frequência yb(t) pode ser escrito como
Yb(f) =
∫ ∞
−∞yb(t)e
−j2πftdt, (4.16)
mas como o sinal yb(t) está limitado ao intervalo [bTbl, (b+1)Tbl], a sua transformada
de Fourier pode ser escrita como
Yb(f) =
∫ (b+1)Tbl
bTbl
yb(t)e−j2πftdt
=L∑
l=1
Ale−j2π(f+fc)τlXb(f) + Vb(f)
=
K/2−1∑
k=−K/2
Sb[k]L∑
l=1
Ale−j2π(f+fc)τlG(f − fk) + Vb(f), (4.17)
onde G(f) é a transformada de Fourier de g(t) e Vb(f) é a transformada de Fourier
do ruído na banda base. Amostrando Yb(f) na frequência fm, é possível obter
Yb(fm)︸ ︷︷ ︸Yb[m]
=
K/2−1∑
k=−K/2
Sb[k]L∑
l=1
Ale−j2π(fm+fc)τlG(fm − fk)
︸ ︷︷ ︸Λ[m,k]
+Vb(fm)︸ ︷︷ ︸Vb[m]
. (4.18)
35

A ortogonalidade das subportadoras dos sistemas OFDM, exige que a transfor-
mada de Fourier de g(t) tenha uma propriedade muito especial dada por
G(f) =
1, f = 0
0, f = iT, i ∈ Z \ {0}
qualquer coisa, demais casos
. (4.19)
Nesse caso será utilizado um pulso retangular dado por
g(t) =
1/T, t ∈ [0,T ]
0, caso contrário, (4.20)
com transformada de Fourier dada por
G(f) =sen(πfT )
πfTe−jπfT . (4.21)
Com isso a equação (4.18) se torna
Yb[m] = Λ[m,m]Sb[m] +∑
k∈K\{m}
Sb[k]L∑
l=1
Ale−j2π(fm+fc)τlG(fm − fk)
︸ ︷︷ ︸=0
+Vb[m]
= Λ[m]Sb[m] + Vb[m], ∀m ∈ K, (4.22)
expressão essa que pode ser reescrita como uma equação matricial dada por
y[b] = Λs[b] + v[b], (4.23)
onde y[b] = [Yb[−K/2] · · · Yb[K/2− 1]]T , Λ = diag{[Λ[−K/2] · · · Λ[K/2− 1]]T}1,
s[b] = [Sb[−K/2] · · · Sb[K/2 − 1]]T e v[b] = [Vb[−K/2] · · · Vb[K/2 − 1]]T . As
equações (4.22) e (4.23) mostram que os símbolos transmitidos chegam no receptor
desacoplados no domínio da frequência.
1diag{v} é uma matriz diagonal com todos os elementos de v.
36

Na Figura 4.4 é possível ver o diagrama de blocos do receptor descrito nesta seção
e a Figura 4.5 apresenta o modelo utilizado em implementações digitais e�cientes.
LPFAmostrador
emfm
Yb
[−K
2
]
Yb
[−K
2 + 1]
Yb
[K2 − 1
]...
e−j2πfct
yb(t)yb(t) Yb(f)F{·}
Figura 4.4: Diagrama de blocos do receptor OFDM, onde F{·} é o operador trans-formada de Fourier.
LPF
e−j2πfcnTa
yb[n]yb[n] ↓ P RzpSP{·} ... FFT... ...
Yb
[−K
2
]
Yb
[−K
2 + 1]
Yb
[K2 − 1
]
Figura 4.5: Diagrama de blocos para a implementação digital do receptor OFDM.
Na estrutura da Figura 4.5 o sinal recebido yb(t) é amostrado em uma taxa Ta
para gerar o sinal yb[n]. O sinal yb[n] na banda base é dado por
yb[n] = LPF{yb[n]e−j2πfcnTa
}. (4.24)
O sinal yb[n] é decimado por uma fator P e convertido para a forma paralela
yp[b] = SP {yb[nP ]} . (4.25)
Por �m, o su�xo com zeros é removido do sinal yp[b], e o sinal resultante passa por
uma FFT para gerar sua resposta em frequência
y[b] = WK
IK
ILzp
0K−Lzp×Lzp
︸ ︷︷ ︸Rzp∈CK×(K+Lzp)
yp[b]. (4.26)
37

4.2.3 Equalização dos Sistemas ZP-OFDM
A equalização é responsável por inverter o efeito do canal e encontrar uma estimativa
dos símbolos enviados em cada uma das subportadoras. A estimativa feita por um
equalizador genérico E é dada por
s(b) = EΛs(b) + Ev(b). (4.27)
Os modelos mais comuns de equalizadores usados em sistemas OFDM são os equa-
lizadores zero-forcing (ZF) e minimum mean squared error (MMSE) [1].
Equalizador ZF
O equalizador ZF tenta desfazer as distorções impostas pelo canal em cada uma das
subportadoras. Assumindo que a matriz Λ é uma boa estimativa da matriz de canal
Λ e pode ser invertida, o equalizador ZF, EZF, é de�nido como
EZF = Λ−1, (4.28)
e o vetor de símbolos estimado é dado por
s(b) = Λ−1
Λs(b) + Λ−1
v(b). (4.29)
No caso em que Λ = Λ e não existe a presença de ruído, é fácil observar que
s = s. Porém, na presença de ruído, o equalizador ZF pode ampli�car o ruído e
corromper a estimativa do sinal, o que ocorre quando algum Λ[m] é próximo de zero.
Equalizador MMSE
Para evitar o ganho de ruído, o equalizador MMSE é encontrado através da mi-
nimização do erro quadrático médio entre o sinal enviado e o sinal estimado pelo
38

equalizador. Em termos matemáticos é possível escrever
EMMSE = arg min∀E∈CK×K
J(E), (4.30)
onde
J(E) = E[‖s− s‖2
2
], (4.31)
e E[·] é o operador valor esperado.
O equalizador EMMSE é o resultado de um problema de otimização, mas nesse caso
é possível encontrar uma solução analítica para a equação (4.30). Desenvolvendo a
equação (4.31), é possível obter
J(E) = E[‖s− E(Λs + v)‖2
2
]
= E[(s− E(Λs + v))H(s− E(Λs + v))
]
= tr{E[(s− E(Λs + v))(s− E(Λs + v))H
]}
= tr{E[ssH]− E
[ssH]ΛHEH − E
[svH
]EH − EΛE
[ssH]
+ EΛE[ssH]ΛHEH
+EΛE[svH
]EH − EE
[vsH
]+ EE
[vsH
]ΛHEH + EE
[vvH
]EH}, (4.32)
onde tr{·} é o operador traço. Assumindo que v é ruído branco com média zero e
variância σ2v e descorrelacionado com s, é possível escrever a equação (4.32) como
J(E) = tr{σ2sIK − σ2
sΛHEH − σ2
sEΛ + σ2sEΛΛHEH + σ2
vEEH}, (4.33)
onde IK é a matriz identidade K ×K.
Para encontrar o E que minimize a equação (4.33), é preciso fazer
∂J(EMMSE)/∂E∗ = 0; logo
∂J(EMMSE)
∂E∗= σ2
sEMMSEΛΛH − σ2sΛ
H + σ2vEMMSE = 0, (4.34)
39

de forma que
EMMSE = ΛH
(ΛΛH +
σ2v
σ2s
IK
)−1
. (4.35)
Na prática não se tem acesso à matriz de canal Λ, mas apenas a uma estimativa
da matriz de canal Λ. Um outro fato importante é a relação entre os equalizadores
MMSE e ZF: note que quando não tem ruído, ou seja, σ2v → 0, a equação (4.35) se
torna
EMMSE = Λ−1, (4.36)
ou seja, o equalizador ZF pode ser escrito como
EZF = limσ2v→0
EMMSE(σ2v). (4.37)
4.3 Transmissão ZP-OFDM em Canal Variante no
Tempo com Escalamento Doppler Uniforme
Na Seção 4.2 foram apresentados os conceitos básicos sobre o sistema ZP-OFDM
transmitindo através de um canal LTI. Nesta seção os mesmos conceitos serão de�-
nidos para uma transmissão por um canal variante no tempo.
4.3.1 Compensação Grosseira do Fator de Escalamento Dop-
pler
Em uma transmissão ZP-OFDM com canal variante no tempo com escalamento
Doppler uniforme, o sinal na banda passante recebido pelo receptor é dado por
yb(t) =L∑
l=1
Alxb((1 + a)t− τl) + vb(t). (4.38)
No receptor o primeiro estágio de processamento é a compensação grosseira do
fator de escalamento Doppler [22]. Assumindo que a é uma boa estimativa do fator
40

de escalamento Doppler2, a compensação grosseira é realizada como um escalamento
no argumento do sinal yb(t) por um fator 1/(1 + a), essa operação pode ser descrita
matematicamente como
yrb(t) = yb
(t
1 + a
)=
L∑
l=1
Alxb
(1 + a
1 + at− τl
)+ vb
(1
1 + at
). (4.39)
O segundo estágio de processamento é a conversão do sinal em banda passante
para banda base, que é dado por
yrb(t) = LPF{yrb(t)e
−j2πfct}
= LPF
{L∑
l=1
Alxb
(1 + a
1 + at− τl
)e−j2πfct + vb
(1
1 + at
)e−j2πfct
}
= LPF
{L∑
l=1
Alxb
(1 + a
1 + at− τl
)e−j2πfct
}+ vb
(1
1 + at
)
︸ ︷︷ ︸νb(t)
, (4.40)
onde νb(t) é o sinal de ruído em banda base. Substituindo a equação (4.4) na
equação (4.40), é possível escrever yrb(t) como
yrb(t) = LPF
{L∑
l=1
Alxb
(1 + a
1 + at− τl
)ej2πfc( 1+a
1+at−τl)e−j2πfct
}+
+ LPF
{L∑
l=1
Alx∗b
(1 + a
1 + at− τl
)e−j2πfc( 1+a
1+at−τl)e−j2πfct
}+ νb(t). (4.41)
Como o �ltro LPF{·} é ideal, então a primeira parte de yrb(t) não será modi�cada e
a segunda parte de yrb(t) será completamente eliminada. Logo yrb(t) pode ser escrito
de forma simpli�cada como
yrb(t) =L∑
l=1
Alxb
(1 + a
1 + at− τl
)ej2πfc(a−a1+a
t)e−j2πτlfc + νb(t). (4.42)
2Em [22] é possível encontrar algumas maneiras de estimação do fator de escalamento Doppler.
41

De�nindo
ε =
(a− a1 + a
)
︸ ︷︷ ︸α
fc, (4.43)
a equação (4.42) pode ser escrita como
yrb(t) = ej2πεt
L∑
l=1
Alxb((1 + α)t− τl)e−j2πτlfc + νb(t)
= ej2πεt
L∑
l=1
Al
K/2−1∑
k=−K/2
Sb[k]ej2πfk((1+α)t−τl)g ((1 + α)t− τl) e−j2πfcτl + νb(t)
= ej2πεt
K/2−1∑
k=−K/2
Sb[k]ej2π(1+α)fkt
L∑
l=1
Ale−j2π(fc+fk)τlg((1 + α)t− τl) + νb(t).
(4.44)
A equação (4.44) mostra que a compensação grosseira do escalamento Doppler
gera uma frequência residual ε indesejável. Essa frequência residual é nula, somente
se a = a, mas na prática é muito difícil conseguir uma estimativa perfeita desse
fator.
Para veri�car o efeito de ε nas subportadoras do sinal recebido, é preciso exami-
nar a transformada de Fourier da equação (4.44) que é dada por
Yrb(f) =
∫ (b+1)Tbl
bTbl
yrb(t)e−j2πftdt
=
∫ (b+1)Tbl
bTbl
ej2πεt
K/2−1∑
k=−K/2
Sb[k]ej2π(1+α)fkt
L∑
l=1
Ale−j2π(fc+fk)τlg((1 + α)t− τl)e−j2πftdt
+ Vb(f)
=
K/2−1∑
k=−K/2
Sb[k]L∑
l=1
Ale−j2π(fc+fk)τl
∫ (b+1)Tbl
bTbl
g((1 + α)t− τl)e−j2π(f−(1+α)fk−ε)tdt
+ Vb(f), (4.45)
42

onde Vb(f) é a transformada de Fourier de νb(t). Fazendo a substituição
t =t′ + τl1 + α
dt =dt′
1 + α
é possível reescrever a equação (4.45) como
Yrb(f) =
K/2−1∑
k=−K/2
Sb[k]L∑
l=1
Ale−j2π(fc+fk)τl
∫ ∞
−∞g(t′)e−j2π(f−(1+α)fk−ε)
t′+τl1+α
dt′
1 + α+ Vb(f)
=
K/2−1∑
k=−K/2
Sb[k]L∑
l=1
Al1 + α
e−j2π( f1+α
+fc− ε1+α)τl
∫ ∞
−∞g(t′)e−j2π( f
1+α−fk− ε
1+α)t′dt′
︸ ︷︷ ︸G( f−ε1+α
−fk)
+Vb(f)
=
K/2−1∑
k=−K/2
Sb[k]L∑
l=1
Al1 + α
e−j2π(f+fc)τl
1+αG
(f − ε1 + α
− fk)
+ Vb(f). (4.46)
Comparando as equações (4.17) e (4.46) é possível observar que o processo de
compensação grosseira do escalamento Doppler modi�ca a resposta em frequência
do sinal em banda base. Agora existe interferência entre as portadoras (ICI, do
termo em inglês intercarrier interference), já que o argumento de G(f) possui um
o�set de −ε/(1 + α) e um escalamento de 1/(1 + α), diferente do que aconteceu no
caso do canal invariante no tempo.
4.3.2 Ajuste Fino do Fator de Escalamento Doppler
O terceiro estágio do processamento do receptor é o ajuste �no do fator de escala-
mento Doppler [22]. Assumindo que ε é uma boa estimativa da frequência gerada
pela compensação grosseira do fator de escalamento Doppler, o sinal com a compen-
sação de fase zb(t) é dado por
zb(t) = yrb(t)e−j2πεt. (4.47)
43

A transformada de Fourier de zb(t) é dada por
Zb(f) =
∫ (b+1)Tbl
bTbl
zb(t)e−j2πftdt
=
∫ (b+1)Tbl
bTbl
yrb(t)e−j2π(f+ε)tdt
= Yrb(f + ε), (4.48)
então Zb(f) pode ser escrito como
Zb(f) =
K/2−1∑
k=−K/2
Sb[k]L∑
l=1
Al1 + α
e−j2π(f+fc+ε)τl
1+αG
(f + ε− ε
1 + α− fk
)+ Vb(f). (4.49)
Amostrando Zb(f) na frequência fm, é possível obter
Zb(fm)︸ ︷︷ ︸Zb[m]
=
K/2−1∑
k=−K/2
Sb[k]L∑
l=1
Al1 + α
e−j2π(fm+fc+ε)τl
1+αG
(fm + ε− ε
1 + α− fk
)
︸ ︷︷ ︸Λ[m,k]
+Vb(fm)︸ ︷︷ ︸Vb[m]
.
(4.50)
Então o sinal recebido em cada subportadora é dado por
Zb[m] =
K/2−1∑
k=−K/2
Λ[m,k]Sb[k] + Vb[m], ∀m ∈ K, (4.51)
que em forma matricial pode ser expresso por
Zb[−K
2
]
...
Zb[K2− 1]
=
Λ[−K
2,−K
2
]· · · Λ
[−K
2, K
2− 1]
.... . .
...
Λ[K2− 1,−K
2
]· · · Λ
[K2− 1, K
2− 1]
Sb[−K
2
]
...
Sb[K2− 1]
+
Vb[−K
2
]
...
Vb[K2− 1]
,
ou de forma mais compacta
z[b] = Λs[b] + v[b]. (4.52)
Na Figura 4.6 é possível ver o diagrama de blocos do receptor descrito nesta
44

seção e a Figura 4.7 apresenta o modelo para implementações digitais e�cientes.
~yb
(
t1+a
)
LPFAmostrador
emfm
Zb
[
−
K2
]
Zb
[
−
K2+ 1
]
Zb
[
K2− 1
]
.
.
.
e−j2πfct
yb(t) Zb(f)Ff·g
e−j2π"t
~yrb(t) zb(t)~yb (t)
Figura 4.6: Diagrama de blocos do receptor com compensação do fator de escala-mento Doppler.
LPF
e−j2πfcnTa
yb[n]yb[n] ↓ P RzpSP{·} ... FFT... ...
Zb
[−K
2
]
Zb
[−K
2 + 1]
Zb
[K2 − 1
]
e−j2πεnTa
↑ Q ↓ MU(z)
Figura 4.7: Diagrama de blocos para implementação digital do receptor com com-pensação do fator de escalamento Doppler.
4.3.3 Equalização
A equalização para um canal variante no tempo com fator de escalamento Doppler
uniforme, não é mais tão simples como no caso do canal invariante no tempo. Agora a
matriz Λ possui todos os seus elementos, o que aumenta a complexidade do processo
de equalização. Existem algumas maneiras de abordar este problema; a mais simples,
a qual será usada ao longo deste trabalho, é a abordagem do equalizador ignorante
ao ICI (do termo em inglês ICI-ignorant).
O equalizador ignorante ao ICI considera um novo modelo diferente do apresen-
tado na equação (4.52), que é dado por
z[b] = (Λeq + Λr)s[b] + v[b]
= Λeqs[b] + Λrs[b] + v[b]︸ ︷︷ ︸w[b]
, (4.53)
onde Λeq = diag{[
Λ[−K
2,−K
2
]· · · Λ
[K2− 1, K
2− 1]]T}
e Λr = Λ−Λeq.
Para fazer a estimação dos símbolos a partir da equação (4.53) pode-se usar
qualquer um dos dois equalizadores apresentados na Seção 4.2.3, em que a matriz
45

de canal é uma estimativa da matriz Λeq. Note que se o equalizador MMSE da equa-
ção (4.35) for usado nesse caso, ele não será mais o minimizador do erro quadrático
médio, pois, agora, o ruído w[b] não é mais branco.
Ao decorrer deste capítulo um extenso desenvolvimento matemático foi apresen-
tado para mostrar o funcionamento dos sistemas ZP-OFDM. O impacto do efeito
Doppler foi analisado e devidamente compensado. Mas em comunicações um im-
portante fator é o desempenho do sistema quando transmitido por um determinado
canal com um determinado nível de ruído. Analiticamente não é possível avaliar
esse desempenho e, para, uma análise quantitativa, é preciso realizar uma série de
simulações. No Capítulo 5 os resultados das simulações serão apresentados e discu-
tidos.
46

Capítulo 5
Simulações e Análise de Resultados
5.1 Introdução
O Capítulo 3 mostrou como gerar as respostas ao impulso de canais acústicos su-
baquáticos a partir das estatísticas de alguns parâmetros. No Capítulo 3 também foi
visto como gerar a versão discreta dessas respostas para esse tipo de canal. O Ca-
pítulo 4 apresentou o modelo matemático de uma transmissão ZP-OFDM por dois
tipos de canais acústicos subaquáticos. O presente capítulo contém os resultados de
simulações de todos os modelos apresentados nos Capítulos 3 e 4.
5.2 Gerador de Respostas ao Impulso
Para simular os modelos de respostas ao impulso descritos nas Seções 3.4 e 3.5
foi criado um programa em MATLABTM para gerar tais respostas considerando
canais invariantes no tempo e canais variantes no tempo com escalamento Doppler
uniforme.
Esse programa necessita, como parâmetro de entrada, de um período de amos-
tragem Ta que atenda à condição da equação (4.11); também precisa do parâmetro
número de raios L de�nido na Seção 3.5.1, do parâmetro média da distribuição ex-
ponencial ∆τm de�nido na Seção 3.5.2, da distribuição geradora dos ganhos A e
dos parâmetros Am, ∆P e TP relacionados com a média e a variância da distribui-
47

ção A de�nidos na Seção 3.5.3 e de um conjunto de velocidades relativas entre o
transmissor e o receptor pré-determinadas, como discutido na Seção 3.5.4.
Os valores escolhidos para cada um dos parâmetros foram adaptados de [22], e
estão listados abaixo:
• Ta = 0,25 µs;
• L ∈ {3, 7};
• ∆τm = 1 ms;
• A é uma distribuição Rayleigh;
• ∆P = 20 dB;
• TP = 24,6 ms;
• v ∈ { 0, 15, 30, 45, 60, 75, 90, 105, 120, 135, 150} m/s.
Aqui não foi preciso especi�car um valor paraAm, poisA é uma distribuição Rayleigh
e sua média pode ser calculada através da variância.
0 0,5 1 1,5 2τ (em ms)
0
0,2
0,4
0,6
0,8
1
h(τ)
(a) L = 3.
0 1 2 30
0,5
1
1,5
2
τ (em ms)
h(τ)
(b) L = 7.
Figura 5.1: Respostas ao impulso geradas pelo método descrito na Seção 3.5.
A Figura 5.1 é um exemplo de dois tipos de respostas ao impulso geradas pelo
programa para o caso de um canal invariante no tempo. As respostas ao impulso
amostradas são apresentadas na Figura 5.2. Note que na Figura 5.2 os valores dos
48

0 20 40 60 800
0,2
0,4
0,6
0,8
n (em amostra)
h[n]
(a) L = 3.
0 50 1000
0,2
0,4
0,6
0,8
n (em amostra)
h[n]
(b) L = 7.
Figura 5.2: Respostas ao impulso amostradas geradas pelo método descrito na Se-ção 3.4.
ganhos estão diferentes dos ganhos da Figura 5.1; isso acontece porque o canal h[n]
é normalizado de forma a ter norma euclidiana unitária.
No caso variante no tempo, o programa retorna um h(τ) para cada uma das
velocidades escolhidas. Na Figura 5.3 é possível observar os canais h(τ) em função
da velocidade relativa v. Nesta �gura a compressão pelo fator 1 + a prevista na
Seção 3.2.2 quase não pode ser notada. A Figura 5.4 apresenta uma vista de cima
dos dois grá�cos apresentados na Figura 5.3. Com essa �gura é possível ver a
compressão dos atrasos e que, quanto maior o valor dos atrasos, mais reduzidos eles
�cam com o aumento da velocidade. Por exemplo na Figura 5.4b, τ6 = 2,225 ms
para uma velocidade v = 15 m/s e, quando a velocidade aumenta para v = 30 m/s,
o sexto atraso vai para τ6 = 2,2 ms.
5.3 Desempenho do ZP-OFDM no Canal Acústico
Submarino
Nesta seção serão apresentados os resultados de uma transmissão ZP-OFDM utili-
zando a estrutura das Figuras 4.3, 4.5 e 4.7. O sinal transmitido passará por um
canal acústico submarino invariante no tempo e por um canal acústico submarino
com escalamento Doppler uniforme. O desempenho será avaliado através da �gura
49

0
50
100
150
1
20
0,5
1
v (em m/s)τ (em ms)
h(τ)
(a) L = 3.
0
50
100
150
0
2
0
1
2
v (em m/s)τ (em ms)
h(τ)
(b) L = 7.
Figura 5.3: Respostas ao impulso de canais com escalamento de Doppler uniformepara diferentes valores v.
0 50 100 150
0,5
1
1,5
2
v (em m/s)
τ(em
ms)
τ1τ2τ3
(a) L = 3.
0 50 100 1500
1
2
3
v (em m/s)
τ(em
ms)
τ1τ2τ3τ4τ5τ6τ7
(b) L = 7.
Figura 5.4: Grá�cos da variação de τl em função de v.
de mérito taxa de erro de bit (BER, do termo em inglês bit-error rate) em função
da razão sinal-ruído (SNR, do termo em inglês signal-to-noise ratio).
5.3.1 Parâmetros da Simulação
Na simulação foi escolhido um sinal com banda B = 10 kHz, para que a taxa de
transmissão estivesse na mesma ordem dos experimentos apresentados em [44, 45].
Foram transmitidos 1000 blocos com K = 32 símbolos de uma constelação 4-QAM
gerados aleatoriamente. O codi�cador de canal usado nessas simulações foi um
código convolucional com taxa de código rc = 0,5, constraint length 7, polinômios
geradores g0 = [133] e g1 = [165], ambos na representação octal, além de um
50

embaralhador aleatório (do termo em inglês random interleaver). Essa con�guração
é uma adaptação das especi�cações do LTE (do termo em inglês long-term evolution)
retirada de [1]. O decodi�cador de canal utilizado foi um decodi�cador de Viterbi
com decisão hard. O primeiro bloco de dados transmitido será considerado o bloco
piloto, ou seja, seu conhecimento será assumido no receptor para efeito de estimação
de canal.
O fator de interpolação e decimação é determinado pela relação P = 1/BTa. Os
resultados foram obtidos com P = 4. O sinal foi modulado por uma portadora com
frequência fc = 10 kHz, para que a transmissão tivesse uma banda ultralarga [21]
(UWB, do termo em inglês ultrawide band). O sinal na banda passante foi trans-
mitido por dois canais invariantes no tempo com L ∈ {3, 7} coe�cientes não-nulos
e por dois canais variantes no tempo com L ∈ {3, 7} coe�cientes não-nulos. Para
a avaliação da BER foi utilizado um processo de Monte-Carlo com 10000 canais
diferentes. Os valores de SNR escolhidos foram SNR ∈ {0, 5, 10, 15, 20, 25, 30} dB.
A de�nição de SNR usada neste trabalho é dada por
SNR = 10 log10
(Ps
Pn
), (5.1)
onde Ps ∈ R+ é a potência do sinal no transmissor, e Pn ∈ R+ é a potência do ruído.
−20 −10 0 10 20−200
−150
−100
−50
0
50
Frequência (em kHz)
Mag
nitu
de (
em d
B)
Figura 5.5: Resposta em frequência do �ltro passa-baixas da Figura 4.5.
51

O �ltro passa-baixas utilizado na estrutura da Figura 4.5 foi projetado pelo
método de janela [35]. Os parâmetros utilizados no projeto estão listados abaixo:
• Janela utilizada: Hamming ;
• Ordem do �ltro: Nord = 1000;
• Frequência de corte: fcorte =B
2;
• Frequência de amostragem: fs =1
Ta
.
A ordem do �ltro foi escolhida de maneira que sua resposta em frequência fosse bem
bem próxima da resposta de um �ltro ideal na faixa de passagem. A magnitude da
resposta em frequência do �ltro projetado é apresentada na Figura 5.5.
Devido ao fato do �ltro passa-baixas apresentado na Figura 5.5 não ser ideal,
as subportadoras das extremidades da banda do sinal x[i] foram zeradas para que
as distorções nas bordas do �ltro não prejudicassem os dados enviados em tais
subportadoras. Na Figura 5.6 é possível ver a resposta em frequência do sinal em
banda base x[i].
−5 0 50
10
20
30
40
50
Frequência (em kHz)
Mag
nitu
de (
em d
B)
Figura 5.6: Resposta em frequência do sinal em banda base na taxa Td = 0,1 ms.
A resposta em frequência do sinal superamostrado x[n] é apresentada na Fi-
gura 5.7a. Note que agora a resposta em frequência de x[n] não é mais plana na
frequência, pois o sinal foi �ltrado pelo �ltro g[n], cuja resposta em frequência é uma
52

função sinc, como mostrado na equação (4.21). A Figura 5.7b ilustra a resposta em
frequência do sinal em banda passante x[n]; a partir dela é possível ver que a es-
colha de Ta = 0,25 µs como período de amostragem do sinal na taxa analógica foi
adequada.
−20 −10 0 10 200
5
10
15
20
25
30
35
40
Frequência (em kHz)
Mag
nitu
de (
em d
B)
(a) Resposta em banda base.
−20 −10 0 10 200
5
10
15
20
25
30
35
40
Frequência (em kHz)M
agni
tude
(em
dB
)
(b) Resposta em banda passante.
Figura 5.7: Respostas em frequência do sinal transmitido com período de amostra-gem Ta.
5.3.2 Canal Invariante no Tempo
No caso do canal invariante no tempo, foi gerada através de simulação a BER em
função da SNR. Foram utilizados canais com L ∈ {3, 7}. A estimativa da matriz de
canal Λ foi realizada através de uma estimativa MMSE utilizando o bloco piloto. O
equalizador utilizado foi um equalizador MMSE.
Na Figura 5.8 é possível ver que os sistemas transmitindo por canais com L = 7
conseguem atingir um desempenho melhor do que quando transmitidos por canais
com L = 3.
As duas curvas da Figura 5.8 conseguiram atingir taxas de erros relativamente
baixas, mas o decaimento das curvas de BER para valores altos de SNR não é o
esperado para esse tipo de transmissão. Para analisar o comportamento incomum
das curvas, cada um dos resultados das simulações de Monte-Carlo foi classi�cado
como resultado �bom� e resultado �ruim�. A separação entre resultados bons e ruins
53

0 10 20 3010
−6
10−4
10−2
100
SNR (em dB)
BE
R
L = 3L = 7
Figura 5.8: Curva de BER por SNR para um canal invariante no tempo.
é de�nida como
Resultado �bom�,BER(20 dB) + BER(25 dB) + BER(30 dB)
3≤ γ
Resultado �ruim� , caso contrário, (5.2)
onde γ ∈ R+ é um limiar. Após a separação entre resultados bons e ruins, os canais
que geraram resultados ruins foram analisados separadamente.
Para fazer a avaliação dos resultados foi escolhido γ = 10−6. O número de canais
�bons� e �ruins� é apresentado na Tabela 5.1. A partir da tabela é possível ver que
18,92% dos canais com L = 3 geraram resultados ruins e, para canais com L = 7, o
resultado é de 14,73%. Foi observado que a maior parte desses canais possuem zeros
sobre o círculo unitário. A matriz de canal Λ equivale à resposta em frequência do
canal efetivo. Quando o canal tem alguns zeros sobre o círculo unitário equivale a
dizer que Λ pode possuir alguns zeros em sua diagonal principal, ou alguns elementos
próximos de zero. Então alguns símbolos podem ser completamente mascarados
pelo ruído, impossibilitando a recuperação do mesmo, e assim degradando o sinal
recebido.
No caso dos canais com L = 3, 1869 canais possuem zeros sobre o círculo unitário,
o que equivale a 98,78% dos canais �ruins� com L = 3. Para os canais com L = 7,
54

Tabela 5.1: Número de canais
Canais �bons� Canais �ruins�L = 3 8108 1892L = 7 8527 1473
1473 canais possuem zeros sobre o círculo unitário, o que equivale a 100% dos canais
�ruins� com L = 7.
A Figura 5.9 apresenta os resultados levando em consideração apenas os canais
classi�cados como �bons� e como �ruins�. Na Figura 5.9a é possível ver que a BER
para os canais �bons� tem valor zero a partir de 15 dB. Na Figura 5.9b é possível
ver que a BER para os canais �ruins� continua com o mesmo padrão das curvas
da Figura 5.8, ou seja, um platô aparece quando a SNR é elevada. Isso ocorre
pois, para valores baixos de SNR, os danos provocados pelo ruído são dominantes,
fazendo com que o efeito dos zeros sobre (ou próximo) do círculo unitário seja pouco
percebido. Quando a SNR aumenta, o nível de ruído decresce e o efeito dos zeros
sobre a circunferência unitária torna-se dominante.
0 5 10 1510
−4
10−2
100
SNR (em dB)
BE
R
L = 3L = 7
(a) Canais �bons�.
0 10 20 3010
−5
100
SNR (em dB)
BE
R
L = 3L = 7
(b) Canais �ruins�.
Figura 5.9: Curva de BER versus SNR.
Toda discussão promovida nesta seção deu-se em torno do formato da curva de
BER apresentada na Figura 5.8. O mesmo padrão de curva é encontrado em [46]
quando o sistema OFDM é usado para uma transmissão por um canal veicular.
Em [46] nenhum cometário foi feito em relação ao formato das curvas de BER
encontradas. Esses resultados mostram que apesar das diferenças entre os canais
55

físicos, os resultados obtidos aqui são próximos dos resultados obtidos para técnicas
modernas de transmissão pelo ar.
5.3.3 Canal Variante no Tempo com Escalamento Doppler
Uniforme
No caso do canal variante no tempo, foi simulada a sensibilidade da BER em função
do erro de estimação do fator de escalamento Doppler a. Foram analisados dois
cenários diferentes: o primeiro só faz a compensação grosseira do escalamento Dop-
pler (vide Seção 4.3.1), enquanto o segundo cenário faz a compensação grosseira
bem como o ajuste �no do fator de escalamento (vide Seção 4.3.2). A estimativa do
fator de escalamento usada foi
a = (1− ε)a, (5.3)
onde ε ∈ E é o erro de estimativa do fator de escalamento. A estimativa da frequência
residual ε será assumida perfeita, ou seja, ε = ε = αfc. Foram considerados dois
diferentes conjuntos E , de�nidos como
E1 ={
0, 2× 10−5, 4× 10−5, 6× 10−5, 8× 10−5, 10× 10−5}
(5.4)
E2 ={
0, 2× 10−4, 4× 10−4}. (5.5)
Os conjuntos E1 e E2 foram de�nidos de forma que a ICI não degradasse completa-
mente a estimativa dos símbolos feita pelo equalizador.
Foram usados canais com L ∈ {3, 7}, e todos os canais utilizados tinham fator
de escalamento Doppler a = 0,01. A estimativa da matriz de canal Λ foi realizada
através de uma estimativa MMSE utilizando o bloco piloto no início da recepção
dos dados.
Nas Figuras 5.10 e 5.11 estão os resultados da simulação quando ε ∈ E1 e sendo
utilizado o equalizador ZF. Os resultados para o equalizador MMSE foram omiti-
56

0 10 20 3010
−4
10−2
100
SNR (em dB)
BE
R
ǫ = 0ǫ = 2× 10
−5
ǫ = 4× 10−5
ǫ = 6× 10−5
ǫ = 8× 10−5
ǫ = 10× 10−5
(a) Compensação grosseira.
0 10 20 3010
−4
10−2
100
SNR (em dB)
BE
R
ǫ = 0
ǫ = 2× 10−5
ǫ = 4× 10−5
ǫ = 6× 10−5
ǫ = 8× 10−5
ǫ = 10× 10−5
(b) Compensação grosseira e ajuste �no.
Figura 5.10: BER vs. SNR utilizando equalizador ZF e ε ∈ E1, para canais comL = 3.
dos, pois tal equalizador obteve o mesmo desempenho que o equalizador ZF. Esse
comportamento do equalizador MMSE era esperado, pois a constelação utilizada
foi 4-QAM, então a diferença entre o equalizador ZF e MMSE é apenas um fator
de escalamento. As Figuras 5.10a e 5.11a apresentam os grá�cos das curvas de
BER versus SNR quando não existe o ajuste �no da frequência ε apresentado na
Seção 4.3.2. Nessas �guras é possível ver que a frequência residual ε não tem in-
�uência signi�cativa nas curvas de BER. Esse resultado é esperado, porque para um
erro de estimação nessa ordem de grandeza praticamente não existe ICI.
0 10 20 3010
−5
100
SNR (em dB)
BE
R
ǫ = 0ǫ = 2× 10
−5
ǫ = 4× 10−5
ǫ = 6× 10−5
ǫ = 8× 10−5
ǫ = 10× 10−5
(a) Compensação grosseira.
0 10 20 3010
−5
100
SNR (em dB)
BE
R
ǫ = 0
ǫ = 2× 10−5
ǫ = 4× 10−5
ǫ = 6× 10−5
ǫ = 8× 10−5
ǫ = 10× 10−5
(b) Compensação grosseira e ajuste �no.
Figura 5.11: BER vs. SNR utilizando equalizador ZF e ε ∈ E1, para canais comL = 7.
As Figuras 5.10b e 5.11b mostram os grá�cos das curvas de BER versus SNR
57
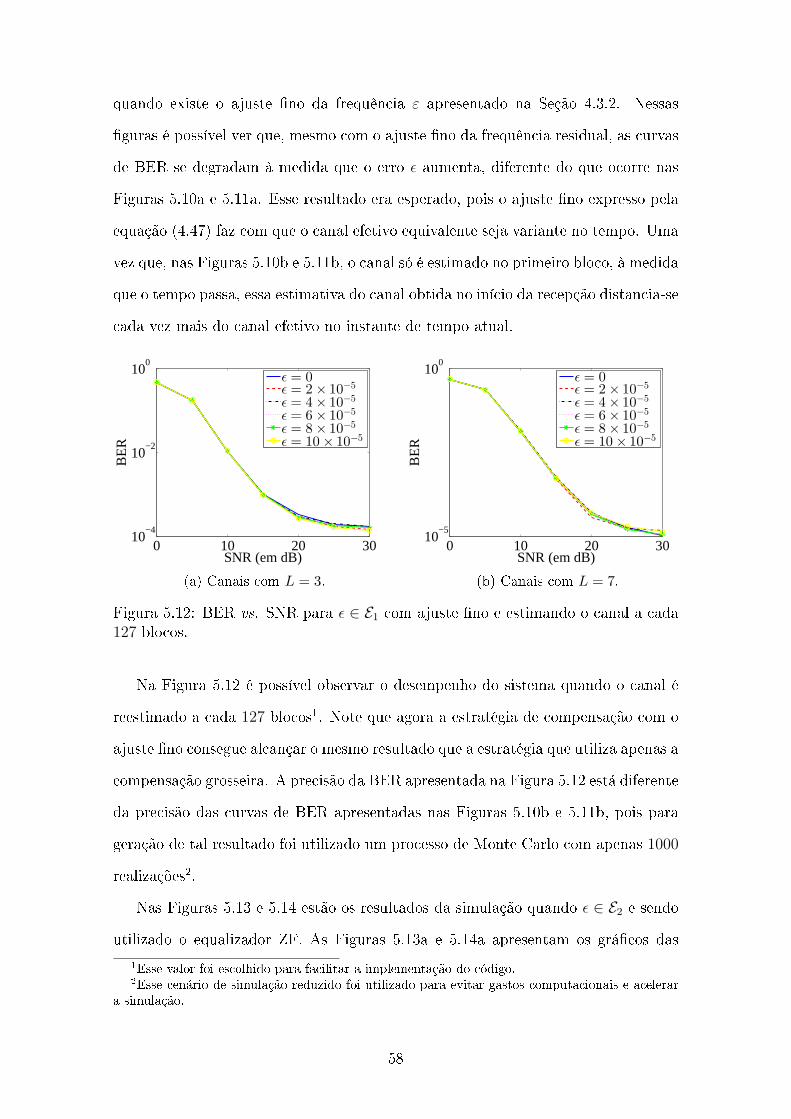
quando existe o ajuste �no da frequência ε apresentado na Seção 4.3.2. Nessas
�guras é possível ver que, mesmo com o ajuste �no da frequência residual, as curvas
de BER se degradam à medida que o erro ε aumenta, diferente do que ocorre nas
Figuras 5.10a e 5.11a. Esse resultado era esperado, pois o ajuste �no expresso pela
equação (4.47) faz com que o canal efetivo equivalente seja variante no tempo. Uma
vez que, nas Figuras 5.10b e 5.11b, o canal só é estimado no primeiro bloco, à medida
que o tempo passa, essa estimativa do canal obtida no início da recepção distancia-se
cada vez mais do canal efetivo no instante de tempo atual.
0 10 20 3010
−4
10−2
100
SNR (em dB)
BE
R
ǫ = 0ǫ = 2× 10
−5
ǫ = 4× 10−5
ǫ = 6× 10−5
ǫ = 8× 10−5
ǫ = 10× 10−5
(a) Canais com L = 3.
0 10 20 3010
−5
100
SNR (em dB)
BE
R
ǫ = 0ǫ = 2× 10
−5
ǫ = 4× 10−5
ǫ = 6× 10−5
ǫ = 8× 10−5
ǫ = 10× 10−5
(b) Canais com L = 7.
Figura 5.12: BER vs. SNR para ε ∈ E1 com ajuste �no e estimando o canal a cada127 blocos.
Na Figura 5.12 é possível observar o desempenho do sistema quando o canal é
reestimado a cada 127 blocos1. Note que agora a estratégia de compensação com o
ajuste �no consegue alcançar o mesmo resultado que a estratégia que utiliza apenas a
compensação grosseira. A precisão da BER apresentada na Figura 5.12 está diferente
da precisão das curvas de BER apresentadas nas Figuras 5.10b e 5.11b, pois para
geração de tal resultado foi utilizado um processo de Monte Carlo com apenas 1000
realizações2.
Nas Figuras 5.13 e 5.14 estão os resultados da simulação quando ε ∈ E2 e sendo
utilizado o equalizador ZF. As Figuras 5.13a e 5.14a apresentam os grá�cos das
1Esse valor foi escolhido para facilitar a implementação do código.2Esse cenário de simulação reduzido foi utilizado para evitar gastos computacionais e acelerar
a simulação.
58
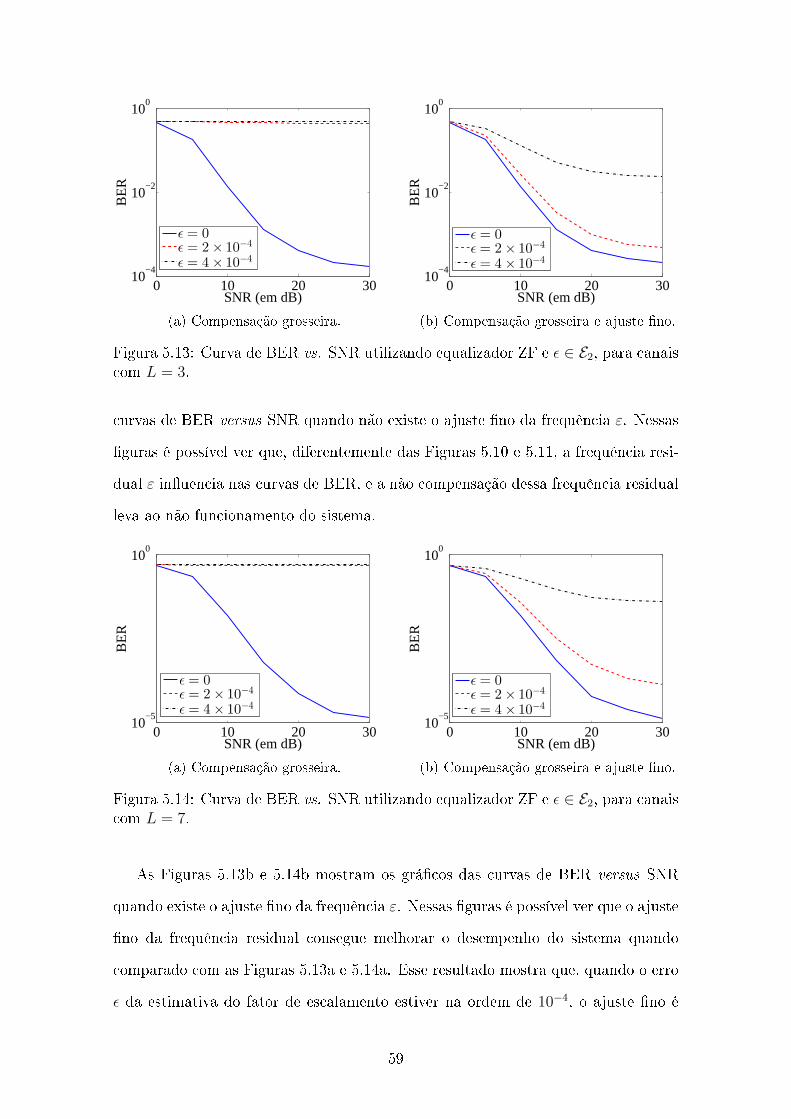
0 10 20 3010
−4
10−2
100
SNR (em dB)
BE
R
ǫ = 0
ǫ = 2× 10−4
ǫ = 4× 10−4
(a) Compensação grosseira.
0 10 20 3010
−4
10−2
100
SNR (em dB)
BE
R
ǫ = 0
ǫ = 2× 10−4
ǫ = 4× 10−4
(b) Compensação grosseira e ajuste �no.
Figura 5.13: Curva de BER vs. SNR utilizando equalizador ZF e ε ∈ E2, para canaiscom L = 3.
curvas de BER versus SNR quando não existe o ajuste �no da frequência ε. Nessas
�guras é possível ver que, diferentemente das Figuras 5.10 e 5.11, a frequência resi-
dual ε in�uencia nas curvas de BER, e a não compensação dessa frequência residual
leva ao não funcionamento do sistema.
0 10 20 3010
−5
100
SNR (em dB)
BE
R
ǫ = 0
ǫ = 2× 10−4
ǫ = 4× 10−4
(a) Compensação grosseira.
0 10 20 3010
−5
100
SNR (em dB)
BE
R
ǫ = 0
ǫ = 2× 10−4
ǫ = 4× 10−4
(b) Compensação grosseira e ajuste �no.
Figura 5.14: Curva de BER vs. SNR utilizando equalizador ZF e ε ∈ E2, para canaiscom L = 7.
As Figuras 5.13b e 5.14b mostram os grá�cos das curvas de BER versus SNR
quando existe o ajuste �no da frequência ε. Nessas �guras é possível ver que o ajuste
�no da frequência residual consegue melhorar o desempenho do sistema quando
comparado com as Figuras 5.13a e 5.14a. Esse resultado mostra que, quando o erro
ε da estimativa do fator de escalamento estiver na ordem de 10−4, o ajuste �no é
59

necessário para que o sistema continue operando com alguma e�ciência. Isso ocorre
pois agora a ICI não pode mais ser desprezada como foi feito para a análise dos
resultados do primeiro cenário. O ajuste �no se mostrou necessário por conseguir
atenuar o efeito da ICI.
0 10 20 3010
−5
100
SNR (em dB)
BE
R
ǫ = 0ǫ = 2× 10
−4
ǫ = 4× 10−4
(a) Canais com L = 3.
0 10 20 3010
−6
10−4
10−2
100
SNR (em dB)B
ER
ǫ = 0ǫ = 2× 10
−4
ǫ = 4× 10−4
(b) Canais com L = 7.
Figura 5.15: BER vs. SNR para ε ∈ E1 com ajuste �no e estimando o canal a cada127 blocos.
A Figura 5.15 apresenta o desempenho do sistema quando o canal é estimado
a cada 127 blocos. Neste caso, o desempenho do sistema melhora muito quando
comparado ao resultado apresentado nas Figuras 5.13b e 5.14b. Para os resultados
apresentados na Figura 5.15 foi utilizado um um processo de Monte Carlo com 1000
realizações.
Cabe ressaltar o desempenho relativo inesperado entre os vários possíveis valores
do erro ε. Aqui, valores maiores do erro levaram a desempenhos melhores em SNRs
altas. Embora este ponto precise ser cuidadosamente estudado em trabalhos futuros,
pode-se vislumbrar como possível explicação o fato de que o ajuste �no para ε maior
induz uma diversidade temporal maior o que poderia traduzir-se em canais efetivos
mais bem condicionados.
60

Capítulo 6
Conclusão e Trabalhos Futuros
6.1 Conclusão
O presente trabalho apresentou um estudo detalhado de diversos modelos para a
relação entrada-saída de canais acústicos subaquáticos. Dentro deste estudo foi
veri�cado como o efeito Doppler age nos canais acústicos submarinos e in�uenciam
nas repostas ao impulso de tais canais � em geral o efeito Doppler aparece como um
escalamento temporal no sinal enviado. No caso dos canais variantes no tempo com
escalamento Doppler uniforme, foi mostrado que esses canais podem ser simpli�cados
por um escalamento no tempo mais uma �ltragem por um canal invariante no tempo.
Além disso, foi apresentada uma metodologia para gerar versões discretas de tais
repostas e os seus respectivos parâmetros.
O trabalho também apresentou um estudo de um sistema ZP-OFDM, quando
o mesmo é utilizado para realizar uma transmissão através de um canal acústico
subaquático. Foram considerados dois modelos de canais diferentes: um canal linear
invariante no tempo e um canal linear variante no tempo. Para os canais variantes
no tempo, o impacto do efeito Doppler foi analisado detalhadamente e o seu efeito
em transmissões OFDM foi ressaltado. Para compensar as adversidades causadas
pelo efeito Doppler, foi apresentado um método de compensação em dois estágios
que utiliza uma estimativa do fator de escalamento Doppler.
Para avaliar o desempenho do sistema ZP-OFDM estudado, primeiramente foi
61

construído um gerador de respostas ao impulso. Esse gerador utilizou os modelos de
respostas ao impulso apresentados no Capítulo 3 para produzir as respostas utiliza-
das na simulação de uma transmissão de um sistema ZP-OFDM. O desempenho dos
sistemas foi medido através da �gura de mérito BER. No caso variante no tempo foi
analisada a sensibilidade da BER pelos erros de estimativa do fator de escalamento
Doppler.
As simulações mostraram que o sistema ZP-OFDM estudado conseguiu alcan-
çar um desempenho satisfatório em canais invariantes no tempo, apesar das curvas
de BER atingirem um platô para valores altos de SNR. A análise da sensibilidade
se mostrou bem instável com o aumento do erro de estimação do fator de escala-
mento Doppler. Para valores baixos do erro da estimativa do fator de escalamento
Doppler, a compensação grosseira é su�ciente para garantir o funcionamento do sis-
tema. Quando o erro é intermediário, a compensação grosseira mais o ajuste �no
fazem com que ocorra uma melhora nos resultados e quando o erro da estimativa
é muito grande a compensação do efeito Doppler sozinha não consegue melhorar
o desempenho do sistema. Mas, quando o canal efetivo é considerado variante no
tempo e sua estimação é realizada frequentemente, o ajuste �no consegue melhorar
consideravelmente o desempenho do sistema.
6.2 Trabalhos Futuros
As próximas etapas a serem realizadas nessa linha de trabalho são listadas a seguir:
• Fazer a avaliação do desempenho dos sistemas ZP-OFDM quando usados para
transmissões por canais variantes no tempo com fator de escalamento Doppler
não-uniforme;
• Implementar sistemas monoportadora que realizem equalização turbo [47�52]
e veri�car se a equalização turbo é uma boa solução para a transmissão por
canais variantes no tempo;
• Implementar sistemas multiportadora que realizem equalização turbo [53�55]
62

e comparar com o desempenho dos sistemas monoportadoras com equalização
turbo;
• Estudar o comportamento inesperado do ajuste �no quando o erro de estima-
ção do fator de escalamento Doppler é grande;
• Propor novos métodos para a compensação grosseira do fator de escalamento
Doppler, como por exemplo fazer a compensação na banda base.
63

Referências Bibliográ�cas
[1] DINIZ, P. S. R., MARTINS, W. A., LIMA, M. V. S., Block Transceivers: OFDM
and Beyond, v. 5. Colorado Springs, CO, Morgan&Claypool, 2012.
[2] DU, X., LIU, X., SU, Y., �Underwater Acoustic Networks Testbed for Ecological
Monitoring of Qinghai Lake�. In: OCEANS 2016 - Shanghai, pp. 1�4,
Shanghai, CHN, Abril 2016.
[3] ARIMA, M., TAKEUCHI, A., �Development of an Autonomous Surface Station
for Underwater Passive Acoustic Observation of Marine Mammals�. In:
OCEANS 2016 - Shanghai, pp. 1�4, Shanghai, CHN, Abril 2016.
[4] HEIDEMANN, J., Wei Ye, WILLS, J., et al., �Research Challenges and Ap-
plications for Underwater Sensor Networking�. In: IEEE Wireless Com-
munications and Networking Conference, 2006. WCNC 2006., v. 1, pp.
228�235, Las Vegas, NV, Abril 2006.
[5] CUI, J.-H., KONG, J., GERLA, M., et al., �The Challenges of Building Scalable
Mobile Underwater Wireless Sensor Networks for Aquatic Applications�,
IEEE Network, v. 20, n. 3, pp. 12�18, Maio 2006.
[6] JIN, J., ZHANG, J., SHAO, F., et al., �Active and Passive Underwater Acoustic
Applications Using an Unmanned Surface Vehicle�. In: OCEANS 2016 -
Shanghai, pp. 1�6, Shanghai, CHN, Abril 2016.
[7] PELEKANAKIS, C., STOJANOVIC, M., FREITAG, L., �High Rate Acoustic
Link for Underwater Video Transmission�. In: Oceans 2003. Celebrating
the Past ... Teaming Toward the Future (IEEE Cat. No.03CH37492), v. 2,
pp. 1091�1097 Vol.2, San Diego, CA, Setembro 2003.
[8] LURTON, X., An Introduction to Underwater Acoustics: Principles and Appli-
cations. 2 ed. Chichester, UK, Springer, 2010.
[9] HOVEM, J. M., VAGSHOLM, R., SORHEIM, H., et al., �Measurements and
Analysis of Underwater Acoustic Noise of Fishing Vessels�. In: OCEANS
2015 - Genova, pp. 1�6, Genova, IT, Maio 2015.
64
[10] TRAVERSO, F., GAGGERO, T., RIZZUTO, E., et al., �Spectral Analysis of
the Underwater Acoustic Noise Radiated by Ships with Controllable Pitch
Propellers�. In: OCEANS 2015 - Genova, pp. 1�6, Genova, IT, Maio 2015.
[11] LIU, C., ZAKHAROV, Y. V., CHEN, T., �Doubly Selective Underwater Acous-
tic Channel Model for a Moving Transmitter/Receiver�, IEEE Transacti-
ons on Vehicular Technology, v. 61, n. 3, pp. 938�950, Março 2012.
[12] STOJANOVIC, D., DJUROVIC, I., DJUKANOVIC, S., �The E�ects of Dop-
pler Scaling in Underwater Acoustic OFDM Communication�. In: Medi-
terranean Conference on Embedded Computing (MECO), n. 3, Bar, MNE,
Junho 2012.
[13] SONG, H.-C., �How Best to Utilize Bandwidth in Underwater Acoustic Com-
munication?� In: 2013 MTS/IEEE OCEANS - Bergen, pp. 1�4, Bergen,
NO, Junho 2013.
[14] LI, B., ZHOU, S., STOJANOVIC, M., et al., �Multicarrier Communication
Over Underwater Acoustic Channels With Nonuniform Doppler Shifts�,
IEEE Journal of Oceanic Engineering, v. 33, n. 2, pp. 198�209, Abril
2008.
[15] LI, B., HUENG, J., ZHOU, S., et al., �MIMO-OFDM for High-Rate Underwater
Acoustic Communications�, IEEE Journal of Oceanic Engineering, v. 34,
n. 4, pp. 634�644, Outubro 2009.
[16] STOJANOVIC, M., �Low Complexity OFDM Detector for Underwater Acous-
tic Channels�. In: OCEANS 2006, pp. 1�6, Singapore, SG, Setembro 2006.
[17] BERGER, C., ZHOU, S., PREISIG, J., et al., �Sparse Channel Estimation
for Multicarrier Underwater Acoustic Communication: From Subspace
Methods to Compressed Sensing�, IEEE Transactions on Signal Proces-
sing, v. 58, n. 3, pp. 1708�1721, Março 2010.
[18] KANG, T., ILTIS, R., �Iterative Carrier Frequency O�set and Channel Estima-
tion for Underwater Acoustic OFDM Systems�, IEEE Journal on Selected
Areas in Communications, v. 26, n. 9, pp. 1650�1661, Dezembro 2008.
[19] QARABAQI, P., STOJANOVIC, M., �Statistical Characterization and Com-
putationally E�cient Modeling of a Class of Underwater Acoustic Com-
munication Channels�, IEEE Journal of Oceanic Engineering, v. 38, n. 4,
pp. 701�717, Outubro 2013.
65

[20] XU, X., WANG, Z., ZHOU, S., et al., �Parameterizing Both Path Amplitude
and Delay Variations of Underwater Acoustic Channels for Block Deco-
ding of Orthogonal Frequency Division Multiplexing�, The Journal of the
Acoustical Society of America, v. 131, n. 6, pp. 4672, Junho 2012.
[21] VANWALREE, P. A., OTNES, R., �Ultrawideband Underwater Acoustic Com-
munication Channels�, IEEE Journal of Oceanic Engineering, v. 38, n. 4,
pp. 678�688, Outubro 2013.
[22] ZHOU, S., WANG, Z., OFDM for Underwater Acoustic Communications. Chi-
chester, UK, John Wiley & Sons, Ltd, Maio 2014.
[23] MACKENZIE, K. V., �Nine-Term Equation for Sound Speed in the Oceans�,
The Journal of the Acoustical Society of America, v. 70, n. 3, pp. 807,
Setembro 1981.
[24] KATSNELSON, B., PETNIKOV, V., LYNCH, J., Fundamentals of Shallow
Water Acoustics, v. 21. Boston, MA, Springer US, 2012.
[25] GUARINO, A. G. L. G., Comunicações Acústicas Submarinas Utilizando Di-
versidade Espacial a Partir da Construção de um Arranjo Linear de Oito
Sensore Hidroacústicos. Dissertação de mestrado, Universidade Federal do
Rio de Janeiro, Rio de Janeiro, RJ, 2014.
[26] PORTER, M. B., LIU, Y.-C., �Finite-Element Ray Tracing�, Theoretical and
Computational Acoustics, v. 2, pp. 947�956, Janeiro 1994.
[27] EY, E., RODRÍGUEZ, O. C., SiPLAB Internal Report, Report, Centro de In-
vestigação Tecnológica do Algarve, Universidade do Algarve, Faro, POR,
2012.
[28] PORTER, M. B., The KRAKEN Normal Mode Program, Report, Ocean Acous-
tics Branch, Acoustics Division, Washington, DC, 1992.
[29] SMITH, K., �Convergence, Stability, and Variability of Shallow Water Acoustic
Predictions Using a Split-Step Fourier Parabolic Equation Model�, Jour-
nal of Computational Acoustics, v. 9, n. 1, pp. 243�285, Março 2001.
[30] SCHMIDT, H., OASES Version 3.1 User Guide and Reference Manual, Report,
Department of Ocean Engineering, Massachusetts Institute of Technology,
Cambridge, MA, 2004.
[31] THORP, W. H., �Analytic Description of the Low-Frequency Attenuation Co-
e�cient�, The Journal of the Acoustical Society of America, v. 42, n. 1,
pp. 270, Julho 1967.
66

[32] PROAKIS, J. G., Digital Communications. 4 ed. New York, NY, McGraw-Hill,
2001.
[33] JOHNSON, C. R. J., SETHARES, W. A., KLEIN, A. G., Software Receiver
Design. Cambridge, Cambridge University Press, 2011.
[34] BELLO, P., �Characterization of Randomly Time-Variant Linear Channels�,
IEEE Transactions on Communications, v. 11, n. 4, pp. 360�393, Dezem-
bro 1963.
[35] DINIZ, P. S. R., DA SILVA, E. A. B., NETTO, S. L., Processamento Digital
de Sinais: Projeto e Análise de Sistemas. 2 ed. São Paulo, SP, Bookman,
2014.
[36] CHITRE, M., �A High-Frequency Warm Shallow Water Acoustic Communica-
tions Channel Model and Measurements�, The Journal of the Acoustical
Society of America, v. 122, n. 5, pp. 2580, Agosto 2007.
[37] RADOSEVIC, A., PROAKIS, J. G., STOJANOVIC, M., �Statistical Characte-
rization and Capacity of Shallow Water Acoustic Channels�. In: OCEANS
2009-EUROPE, pp. 1�8, Bremen, DE, Maio 2009.
[38] BAHRAMI, N., KHAMIS, N. H. H., BAHAROM, A. B., �Study of Underwater
Channel Estimation Based on Di�erent Node Placement in Shallow Wa-
ter�, IEEE Sensors Journal, v. 16, n. 4, pp. 1095�1102, Fevereiro 2016.
[39] TOMASI, B., CASARI, P., BADIA, L., et al., �A Study of Incremental Redun-
dancy Hybrid ARQ over Markov Channel Models Derived from Experi-
mental Data�. In: Proceedings of the Fifth ACM International Workshop
on UnderWater Networks - WUWNet '10, pp. 1�8, New York, NY, Se-
tembro 2010.
[40] YANG, W.-B., YANG, T. C., �High-Frequency Channel Characterization for
M-ary Frequency-Shift-Keying Underwater Acoustic Communications�,
The Journal of the Acoustical Society of America, v. 120, n. 5, pp. 2615,
Novembro 2006.
[41] KULHANDJIAN, H., MELODIA, T., �Modeling Underwater Acoustic Chan-
nels in Short-Range Shallow Water Environments�. In: Proceedings of the
International Conference on Underwater Networks Systems - WUWNET
'14, pp. 1�5, New York, NY, Novembro 2014.
67

[42] TRANTER, W. H., SHANMUGAN, K. S., RAPPAPORT, T. S., et al., Prin-
ciples of Communication Systems Simulation with Wirelles Applications.
Upper Saddle River, NJ, Prentice Hall, 2004.
[43] HAYKIN, S., Communication Systems. 4 ed. New York, NY, John Wiley &
Sons, Inc., 2001.
[44] SHI, Y., CAO, Z., WEI, H., et al., �DSP Implementation of OFDM-Based
Underwater Acoustic Communication Transceiver�. In: 2014 Sixth Inter-
national Conference on Wireless Communications and Signal Processing
(WCSP), pp. 1�6, Hefei, CHN, Outubro 2014.
[45] YOUNCE, J., SINGER, A., RIEDL, T., et al., �Experimental Results with
HF Underwater Acoustic Modem for High Bandwidth Applications�. In:
2015 49th Asilomar Conference on Signals, Systems and Computers, pp.
248�252, Paci�c Grove, CA, Novembro 2015.
[46] LI, J., BALA, E., YANG, R., �Resource Block Filtered-OFDM for Future Spec-
trally Agile and Power E�cient Systems�, Physical Communication, v. 11,
pp. 36�55, Junho 2014.
[47] TUCHLER, M., SINGER, A., KOETTER, R., �Minimum Mean Squared Error
Equalization Using A Priori Information�, IEEE Transactions on Signal
Processing, v. 50, n. 3, pp. 673�683, Março 2002.
[48] TÜCHLER, M., KOETTER, R., SINGER, A. C., �Turbo Equalization: Prin-
ciples and New Results�, IEEE Transactions on Communications, v. 50,
n. 5, pp. 754�767, Maio 2002.
[49] KOETTER, R., SINGER, A., TUCHLER, M., �Turbo Equalization�, IEEE
Signal Processing Magazine, v. 21, n. 1, pp. 67�80, Janeiro 2004.
[50] TUCHLER, M., SINGER, A. C., �Turbo Equalization: An Overview�, IEEE
Transactions on Information Theory, v. 57, n. 2, pp. 920�952, Fevereiro
2011.
[51] BARHUMI, I., MOONEN, M., �MLSE and MAP Equalization for Transmis-
sion Over Doubly Selective Channels�, IEEE Transactions on Vehicular
Technology, v. 58, n. 8, pp. 4120�4128, Outubro 2009.
[52] CHOI, J. W., RIEDL, T. J., KIM, K., et al., �Adaptive Linear Turbo Equali-
zation Over Doubly Selective Channels�, IEEE Journal of Oceanic Engi-
neering, v. 36, n. 4, pp. 473�489, Outubro 2011.
68

[53] AHMED, S., RATNARAJAH, T., SELLATHURAI, M., et al., �Iterative Re-
ceivers for MIMO-OFDM and Their Convergence Behavior�, IEEE Tran-
sactions on Vehicular Technology, v. 58, n. 1, pp. 461�468, Janeiro 2009.
[54] FANG, K., RUGINI, L., LEUS, G., �Iterative Channel Estimation and Turbo
Equalization for Time-Varying OFDM Systems�. In: 2008 IEEE Interna-
tional Conference on Acoustics, Speech and Signal Processing, pp. 2909�
2912, Las Vegas, NV, Março 2008.
[55] SCHNITER, P., �Low-Complexity Equalization of OFDM in Doubly Selective
Channels�, IEEE Transactions on Signal Processing, v. 52, n. 4, pp. 1002�
1011, Abril 2004.
69