Modelos dos Processos Fisiológicos no Homem · Então a taxa de mudança da população, ou a taxa...
23
Dinâmicas Populacionais com Caos 1 FACULDADE DE CIÊNCIAS E TECNOLOGIA UNIVERSIDADE DE COIMBRA Modelos dos Processos Fisiológicos no Homem Dinâmicas Populacionais com Caos Emeline Gonçalves Hugo Tavares [email protected] Ricardo Couceiro Samuel Pereira Coimbra, Junho de 2005
Transcript of Modelos dos Processos Fisiológicos no Homem · Então a taxa de mudança da população, ou a taxa...
Dinâmicas Populacionais com Caos
1
FACULDADE DE CIÊNCIAS E TECNOLOGIA
UNIVERSIDADE DE COIMBRA
Modelos dos Processos Fisiológicos no Homem
Dinâmicas Populacionais com Caos
Emeline Gonçalves Hugo Tavares
[email protected] Ricardo Couceiro Samuel Pereira
Coimbra, Junho de 2005
Dinâmicas Populacionais com Caos
2
Introdução
A Dinâmica de Populações é uma importante síntese matemática que permite
identificar e estudar diversas teorias da Biologia Teórica, desde o nível molecular em
Processos Fisico-Químicos, passando pelo nível celular em Fisiologia, e chegando até à
Epidemiologia e a Sociobiologia de organismos superiores, o que inclui naturalmente as
sociedades humanas.
O objectivo da Dinâmica de Populações é a descrição do número de indivíduos de
uma população ao longo do tempo, o qual é uma variável que pode ser representada
discreta ou continuamente.
Neste trabalho vamos abordar modelos de sistemas lineares e não lineares, dando
maior importância aos sistemas não lineares com caos.

Dinâmicas Populacionais com Caos
3
Modelos de sistemas lineares
Existem vários modelos de sistemas lineares entre os quais se destingue o modelo
de Malthus, o modelo de Fibonnaci.
Modelo de Malthus
A ideia de Malthus deve ser vista como um modelo matemático, para isso vamos
formulá-la na linguagem de equações diferenciais. A premissa básica do nosso modelo
será "a taxa na qual uma população cresce é directamente proporcional ao seu
tamanho". Para criar esse modelo, serão utilizadas várias variáveis:
• T – tempo decorrido desde o início da experiência.
T=0 representaria algum tempo de referência, como o ano do primeiro censo.
• P – tamanho da população no tempo T, isto é, P é uma variável dependente de T.
Então a taxa de mudança da população, ou a taxa de crescimento, seria
representada pela quantidade dP/dT ou P& . Introduzidas estas quantidades, a ideia de
Malthus é:
Onde k é a diferença entre a taxa de natalidade e a taxa de mortalidade. Se k > 0, a
população apresenta-se crescente, se k < 0 a população decai de acordo com o tempo,
porém se k = 0, ou seja se a taxa de natalidade for exactamente igual à taxa de
mortalidade, a população permanecerá constante no tempo.
Este modelo é suficientemente simples e válido, se o crescimento da população
está sujeito apenas às taxas de natalidade e de mortalidade, se não ocorre migração, e se
podermos considerar a diferença entre as taxas de natalidade e de mortalidade constante.
Se assim for, teremos que o valor de k é uma constante e assim podemos modelar a
população de acordo com o tempo pela fórmula:
Dinâmicas Populacionais com Caos
4
Esta fórmula é obtida através da análise do modelo matemático obtido. Para
chegarmos a esta solução específica, usamos uma condição inicial, como um valor
conhecido do início da experiência. Então, quandoT=0 a população é 0P . Assim, a
condição inicial é P(0)= 0P . Colocando isso junto com a equação diferencial original,
obtemos um problema de valor inicial para o modelo de Malthus.
A equação diferencial é resolvida por uma separação de variáveis:
A condição inicial é substituída neste resultado na integração da equação
diferencial:
Obtendo-se assim:
Então,
Consideramos que k representa uma diferença entre as taxas de natalidade e
mortalidade da população em estudo, sendo k considerado um valor constante com o
tempo na resolução deste problema.
Assumimos taxas de natalidade e mortalidade constantes (não fazemos nenhuma
consideração a respeito de limites de crescimento), o que simplificou ainda mais o
modelo. Mas as taxas de natalidade e mortalidade não deveriam ser necessariamente
constantes, e de facto, no mundo real, não o são. Portanto a função P(T) que obtemos é
uma aproximação contínua da população, a qual aumenta por números inteiros.

Dinâmicas Populacionais com Caos
5
O modelo Malthusiano, devido à curva exponencial de P(T), pode ser denominado
como modelo de crescimento exponencial ou de forma J, onde a letra J representa
justamente o formato da curva exponencial.
Considerando B(T) como o número de nascimentos e D(T), o número de mortes
desde o início da população, então a taxa de natalidade Beta e a taxa de mortalidade
Delta desta população são definidas como:
Então:
e assim podemos dizer que:
e assim, em analogia com o modelo inicial:
As taxas de mortalidade e de natalidade podem ser dependentes do tempo T,
tomando-se assim:
Dinâmicas Populacionais com Caos
6
Ou ainda, as taxas de natalidade e mortalidade podem ser dependentes da própria
função P.
Este último modelo é mais realístico, pois, na verdade, k é raramente uma
constante, já que pode depender de vários factores, como a fertilidade, saúde da
população, nutrientes disponíveis, etc., os quais têm relação directa com as taxas de
natalidade e de mortalidade.
O maior valor possível para k (assumindo condições ideais) é chamado potencial
biótico das espécies. Em geral, pequenos organismos têm altos valores de k (pois se
reproduzem em curtos períodos de tempo), enquanto grandes organismos com longas
gerações têm k pequeno.
O modelo Malthusiano descreve com razoável aproximação o crescimento da
espécie humana, que armazena cada vez mais recursos da natureza. Contudo, estudos de
crescimento populacional em laboratório e na natureza mostram que as populações
podem crescer exponencialmente durante um curto intervalo de tempo até um
determinado limite, inerente às circunstâncias da natureza.
FIGURA: Dinâmica de Crescimento Exponencial
Tempo
Dinâmicas Populacionais com Caos
7
Modelos de sistemas não lineares
Entre os sistemas não lineares estão o modelo de Verhulst, o modelo de logística
e o modelo de Ricker. Estes dois últimos já introduzem o conceito de caos e por isso
serão abordados posteriormente.
Modelo de Verhulst
Para obtermos este modelo começamos com uma reprodução geral do modelo de
Malthus com a forma
( ) nnn BBrB =+1
onde a taxa de crescimento intrinseca representada por r(Bn) pode variar com as
varições da população.
Vamos considerar uma estirpe de bactérias que depende de histidina (por
exemplo) para se reproduzir. Admitamos que esta bactéria em condições favoráveis de
meio, em histidina suficiente, ela duplica a cada 40 minutos. Se considerarmos que cada
ciclo é de 40 em 40 minutos, temos
nn BB 21 =+
Mas nem sempre as condições são ideais. Considerando uma grande população, os
ciclos de reprodução já não estão coordenados de 40 em 40 minutos (as bactérias
demoram mais tempo a reproduzir-se). Para isso vamos considerar um modelo em que
( )
+
=
KB
Brn
n
1
2 , ou seja

Dinâmicas Populacionais com Caos
8
nn
n B
KB
B
+
=+
1
21
Nesta equação, K e uma constante de saturação, que é muitas vezes tomado como
o nível de substrato, neste caso histidina, abaixo do qual as bactérias não o conseguem
identificar.
Note-se que se B for igual a K a reprodução e apenas metade da reprodução
máxima.
As soluções deste modelo podem ser achadas através de diferentes maneiras entre
as quais estão as iterações analíticas, iterações geométricas e métodos de simulação
computacional.
• Iterações analíticas
Neste método transformamos o modelo de Verhulst numa equacao onde se
implementa sucessivas alterações.
Seja nR o inverso de nB
n
n BR 1
= então,
K
RR n
n 21
21 +=+
Através de sucessivas substituições recursivas chegamos a equação
1 01
1 1 11 ...
2 2 2n n nR RK+ +
= + + +
Analisando esta equação podemos concluir que
1
1lim nnR
K+→∞= logo,
1lim nnB K+→∞
=
de onde podemos concluir que K representa o valor para o qual a população tende.
Dinâmicas Populacionais com Caos
9
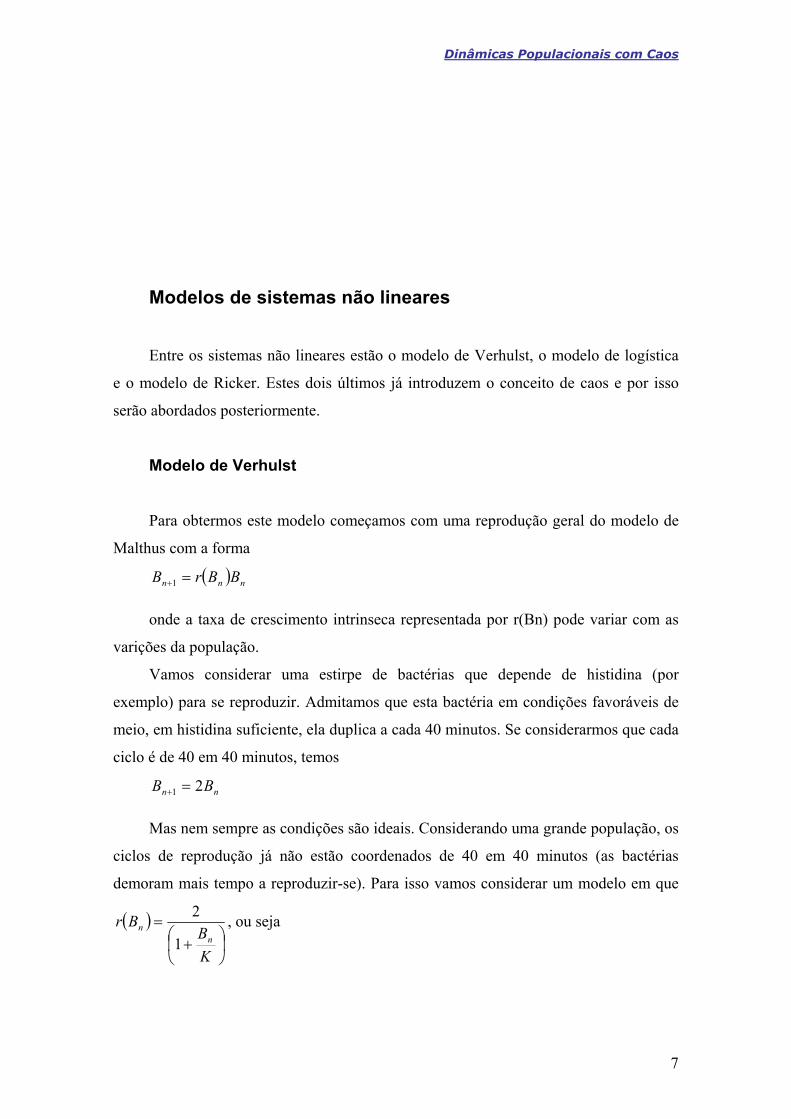
• Iterações geométricas
Neste método começamos por representar o gráfico da função reprodução (Figura
1).
2( ) ( )
1 BK
BF B r B B= =
+
para B K≠ e para B=K.
Figura 1.
A partir destas duas funcoes conseguimos achar B1,B2,…,Bn, traçando uma recta
vertical na geração 1 ate interceptar F(B), seguindo com uma recta horizontal passando
pelo o ponto de intersecção anterior ate interceptar F(K) onde vamos achar o ponto onde
vai passar a próxima recta vertical para achar B2 e assim sucessivamente.
Este método e conhecido como método de Piccard e fornece-nos uma maneira
fácil para traçar uma dinâmica populacional, mas tem algumas limitações. Primeiro, por
vezes pode ser difícil traçar funcao repoducao e segundo, por vezes há gráficos
parecidos com este onde é muito difícil traçar os rectângulos (a teia).
Predação no modelo de Verhulst
Esta variante do modelo de Verhulst dá-se devido ao facto de ser implementado
um predador no sistema, ou seja, temos um sistema presa e predador onde não existe
apenas uma variacao de condicoes do meio. Seja, 2
2( )1 ( )BK
rBF B =
+
O modelo resultante será,

Dinâmicas Populacionais com Caos
10
( )2
1 21 n
nn
BK
rBB + =
+
Figura 2.
Neste caso, não podemos achar a solução através das substituições recursivas e
teríamos que utilizar o método de piccard para os vários valores de r e de K.
Para analisar este gráfico (Figura 2) vamos considerar três raízes: A origem, a
primeira e a segunda intersecções das duas funções. Sejam T a segunda raiz e P a
terceira. Quando a população começa com valores abaixo de T a população nunca se
reproduzirá em valores auto-suficientes e extinguir-se-á e quando começa com valores
acima de T a população vai satisfazer as necessidades dos predadores e possivelmente
vai estabilizar.
Para alem destes modelos, Verhulst também criou o modelo de logística onde esta
implícito o caos. Este modelo e o de Ricker serão aprofundados seguidamente.
Modelo logístico
As equações diferenciais descrevem processos que se alteram suavemente com o
tempo, mas cuja computação apresenta certas dificuldades. As equações de diferençais
mais simples, podem ser usadas para processos que transitam de um estado para outro.
O modelo Malthusiano de crescimento populacional sugere uma função linear que
traduz o aumento da população a cada ano:
nn rBB =+1
Procedendo a alterações neste modelo chegou-se ao seguinte modelo:

Dinâmicas Populacionais com Caos
11
( ) ( )21 1n n n n nB AB B A B B+ = − = −
Trata-se de uma equação de diferenças, chamada por modelo logístico, em que nB
representa o tamanho da população na n-ésima geração e A a taxa de fecundidade, que
depende dos factores ambientais (abundância/escassez de alimento, predação, clima,
etc…). O termo nB−1 limita o crescimento, no sentido em que quando Bn aumenta
significativamente nB−1 contraria drasticamente esse aumento. Neste modelo, a
“população” está normalizada à unidade, ou seja, é um valor situado entre zero e um.
Sendo assim, zero representa a extinção da população e um representa o maior valor de
população possível.
Implementamos agora um modelo em Simulink (Figura 3) correspondente a
equação acima descrita, assumindo diferentes taxas de fecundidade e uma condição
inicial B0=0,5.
popula
To Workspace
Scope
u2
Quadrado
Memory
A
A
Figura 3. Modelo em Simulink da equação logística.
Pode-se agora proceder a análise da evolução temporal da população.

Dinâmicas Populacionais com Caos
12
A=2,8 A=3
A=3,3 A=3,5
A=3,55 A=3,6
0 1000 2000 3000 4000 5000 6000 7000 8000 9000 100000.3
0.4
0.5
0.6
0.7
0.8
0.9
1
Geração
Pop
ulaç
ão
0 2 4 6 8 10 12 14 16 18 200.3
0.4
0.5
0.6
0.7
0.8
0.9
1
Geração
Pop
ulaç
ão
0 2 4 6 8 10 12 14 16 18 200.3
0.4
0.5
0.6
0.7
0.8
0.9
1
Geração
Pop
ulaç
ão
0 2 4 6 8 10 12 14 16 18 20
0.4
0.5
0.6
0.7
0.8
0.9
1
Geração
Pop
ulaç
ão
0 2 4 6 8 10 12 14 16 18 20
0.4
0.5
0.6
0.7
0.8
0.9
1
Geração
Pop
ulaç
ão
0 2 4 6 8 10 12 14 16 18 20
0.4
0.5
0.6
0.7
0.8
0.9
1
Geração
Pop
ulaç
ão
Dinâmicas Populacionais com Caos
13
Nos dois primeiros gráficos podemos observar que o nosso sistema tende para um
regime final: para A=2,8 tende para 0.64286 e para A=3 tende para 0,666
(aproximadamente).
Nas três simulações seguintes, observa-se uma oscilação periódica: quando A =3,3
o tamanho da população varia sucessivamente entre 0,47943 e 0,8236, dizemos assim
que a função tem período 2. Para A=3,5, verificamos no gráfico uma oscilação de
período 4 e temos { }0,3828;0,5009;0,8269;0,8750B∈ . Para A=3.55, a oscilação
apresenta período 8 e
{ }0,3548;0,81265;0,54049;0,88168;0,37034;0,82781;0,50601;0,88737B∈ .
Quando A=3,6 verificamos um comportamento irregular. Notar que à medida que o
tempo passa, a população assume valores totalmente distintos a cada iteração. A esse
comportamento chamamos de regime caótico em que não há repetição de padrões. No
entanto, a sequência não é aleatória pois os valores observados no gráfico são
decorrentes de um procedimento matemático específico. Os fenómenos caóticos são
imprevisíveis tendo-se desenvolvido técnicas especiais com uso de computador e imagens
gráficas capazes de evidenciar a estrutura da complexidade do referido modelo.
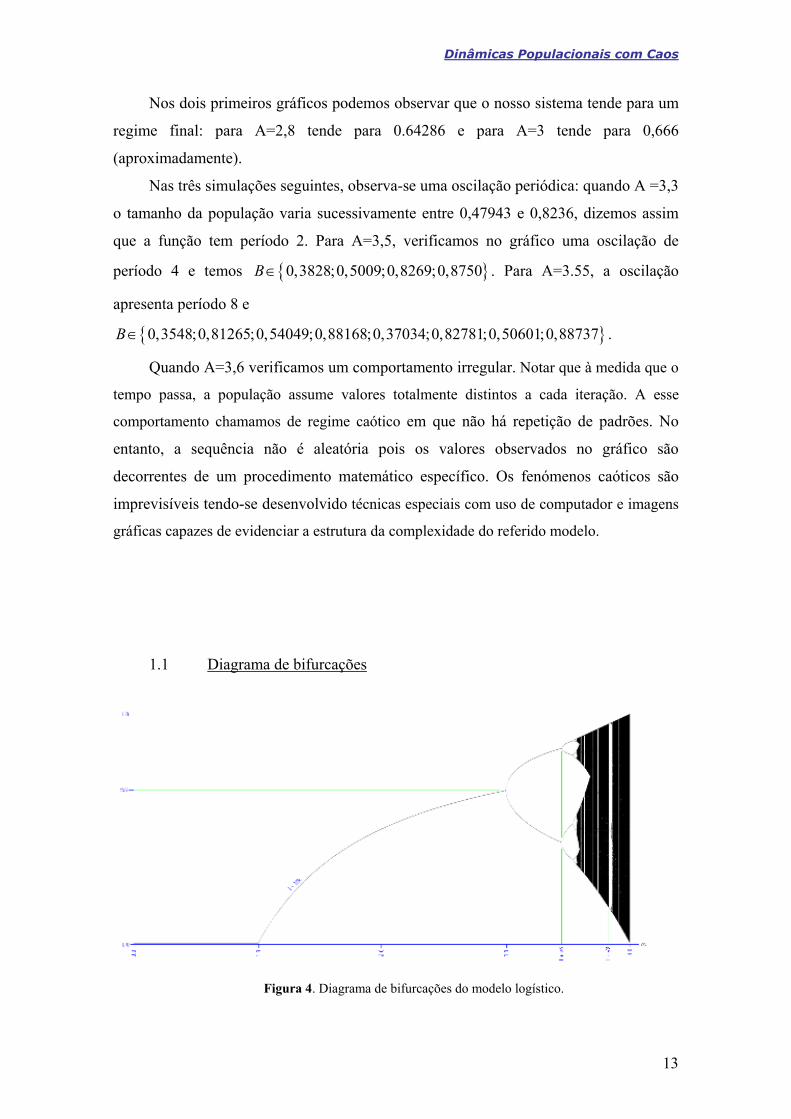
1.1 Diagrama de bifurcações
Figura 4. Diagrama de bifurcações do modelo logístico.

Dinâmicas Populacionais com Caos
14
Ampliando a parte final do diagrama:
Figura 5. Diagrama de bifurcações ampliado.
A figura 4 mostra o chamado diagrama de bifurcações ou mapa logístico - que
ilustra a aproximação do caos através de uma duplicação de períodos da equação
logística.
Através da ampliação podemos observar que os padrões da figura original se
repetem (Figura 5). Uma nova ampliação revelaria novamente os mesmos padrões e
assim sucessivamente.
Note que, a partir de A=3, observa-se uma oscilação entre dois valores (que
aparece no mapa logístico como a primeira bifurcação no gráfico). A partir de 3,4495 há
oscilação entre 4 valores e depois 8 valores a partir de 3,54408. A partir de determinado
valor, começa-se a observar um comportamento caótico.
O diagrama de bifurcações mostra (na vertical) os valores obtidos para os vários A
considerados, de 0 até 4 (na horizontal).
Sumariamente:

Dinâmicas Populacionais com Caos
15
• Se A<1: a população extingue-se;
• Se 1<A<3: a série tende para um valor fixo. O modo como esse valor é
alcançado não é relevante mas geralmente consiste numa oscilação em torno do
ponto.
• Se A>3: o sistema é periódico. A séria alterna entre dois ou mais valores
consoante o período do sistema. É de denotar que o sistema alterna entre os
vários estados sem passar pelos valores intermédios. O número de estados vai
aumentando num processo de duplicação de período à medida que A aumenta.
• Sistema caótico: o sistema pode encontra-se em qualquer estado sem haver
qualquer padrão de repetição
O nível do parâmetro A deve ser plotado horizontalmente, aumentando da
esquerda para a direita. A população deve ser representada verticalmente. Para cada
valor de A plota-se um ponto representando o resultado final, após o sistema alcançar o
equilíbrio. À esquerda, para A<3, esse resultado será somente um ponto, assim
parâmetros diferentes produzem uma linha que aumenta suavemente à medida que vai
aumentando o valor do parâmetro A.
Quando a taxa de fecundidade passa do primeiro ponto crítico (A=3), nota-se que
aparecem duas populações: chega-se ao primeiro ponto de bifurcação e
consequentemente deixa de estar assegurada a estabilidade do regime estacionário.
Continuando a aumentar o valor do parâmetro A, o número de pontos dobra novamente
e assim por diante.
Para além do ponto de acumulação, a periodicidade deixa lugar ao caos,
observando-se flutuações que nunca se repetem.
Note-se que embora o modelo considerado seja muito simples, com uma equação
algébrica não linear, ele produz um comportamento dinâmico considerado complexo.
Isso mostra que mesmo os sistemas mais simples, desde que apresentem não
linearidade, podem produzir comportamentos complexos. Como conhecemos a equação
matemática que rege tal sistema, este pode ser considerado determinístico e o caos
obtido na região considerada pode ser chamado de caos determinístico.
Dinâmicas Populacionais com Caos
16
A constante de Feigenbaum
Se chamarmos nA ao valor de n para o qual o período de n2 se torna instável e
determinarmos o limite, quando n tende para infinito, de ( )( )12
1
++
+
−−
nn
nn
AAAA
obteremos um
valor de 4,6692016091029906718532038... Ou seja, à medida que nos aproximamos do
caos, cada região periódica é menor do que a anterior por um factor de
aproximadamente 4,669.
Este valor limite é sempre o mesmo para todas as funções que se aproximam do
caos através de uma duplicação do seu período. De facto, esse valor é uma das
constantes universais - a constante de Feigenbaum - aproximadamente igual a 4,669.
Modelo de Ricker
O modelo que foi apresentado anteriormente (logístico) tinha em conta os factores
ambientais na limitação do crescimento populacional. Existem, no entanto, interacções
complexas que surgem no seio de uma população. Nos grandes aglomerados
populacionais poderá ocorrer uma diminuição da reprodução devido ao aumento do
stress ou redução na nutrição (diminuição de nutrientes essenciais). Assim, à medida
que a população aumenta, a sua taxa de crescimento poderá vir a diminuir.
Neste contexto, o modelo de Ricker surge como uma interessante função de
reprodução. Por exemplo, em algumas espécies, os adultos alimentam-se das suas crias,
desta forma, em populações de adultos demasiado grandes poderão surgir alterações no
tamanho populacional.
Este fenómeno é ilustrado pelo modelo de Ricker:
1
nBK
n nB re B−
+ =
Dinâmicas Populacionais com Caos
17
Onde r corresponde à taxa de crescimento geométrico populacional, quando a
população é pequena ( exp( / ) 1B K− ≈ quando / 0B K ≈ ). K é a constante de saturação
da população.
No nosso modelo em Simulink vamos fixar o valor de K e assumir diferentes
valores para r . Veremos que estas alterações irão produzir resultados distintos, um
pouco à semelhança do modelo logístico.
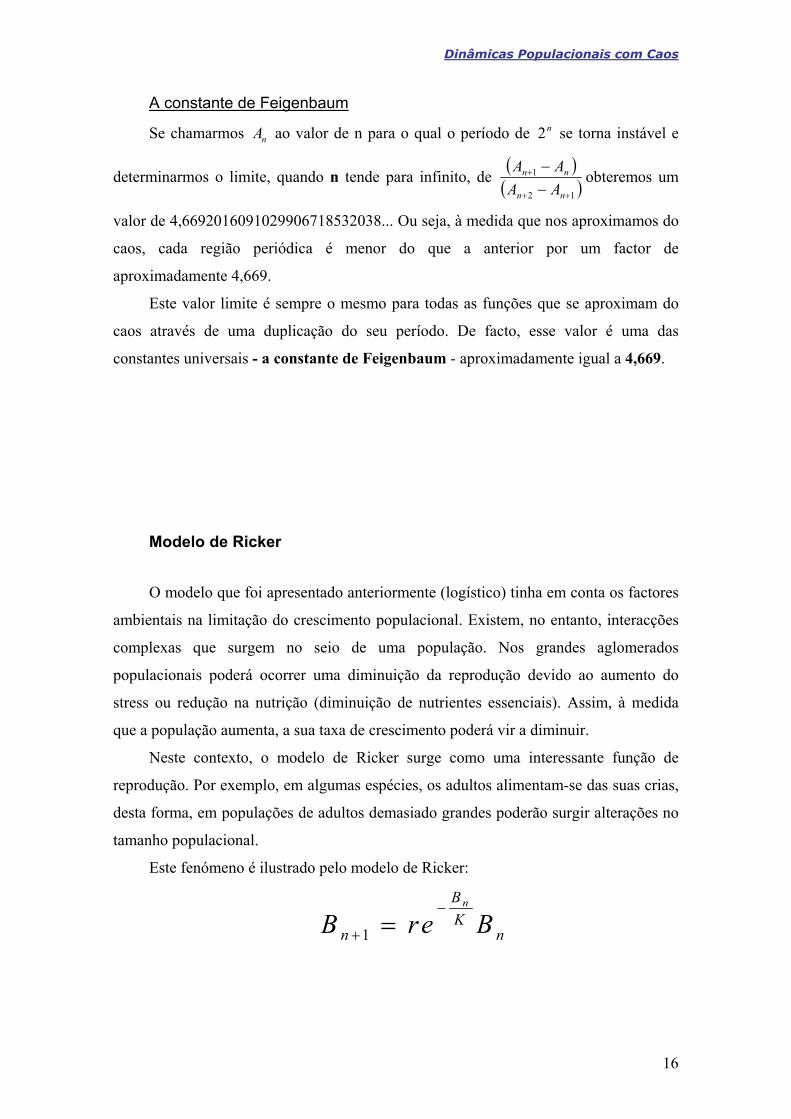
Consideremos, então, o diagrama em Simulink do nosso modelo:
r
r
z
1
Unit Delay
rickers
To Workspace
Scope
Product
eu
MathFunction
-2
-1/K
Figura 6.
Assumimos que 0,5K =
A condição inicial é 0 0,5B = que corresponde ao número de indivíduos da
população no instante inicial. Estes valores são multiplicados por 410 .
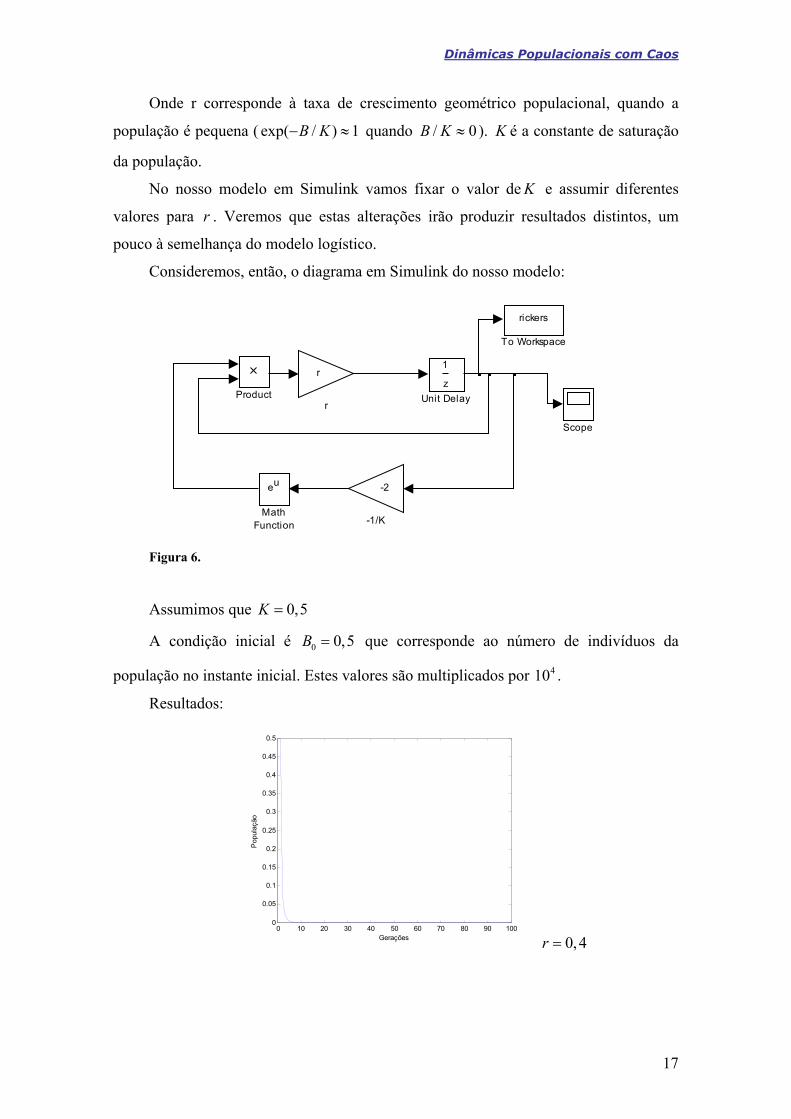
Resultados:
0 10 20 30 40 50 60 70 80 90 1000
0.05
0.1
0.15
0.2
0.25
0.3
0.35
0.4
0.45
0.5
Gerações
Pop
ulaç
ão
0,4r =

Dinâmicas Populacionais com Caos
18
0 10 20 30 40 50 60 70 80 90 1000.3
0.32
0.34
0.36
0.38
0.4
0.42
0.44
0.46
0.48
0.5
Gerações
Pop
ulaç
ão
2,0r =
0 10 20 30 40 50 60 70 80 90 1000
0.2
0.4
0.6
0.8
1
1.2
1.4
1.6
1.8
2
Gerações
Pop
ulaç
ão
10,0r =
0 2 4 6 8 10 12 14 16 18 200
0.5
1
1.5
2
2.5
Gerações
Pop
ulaç
ão
13,0r =
Dinâmicas Populacionais com Caos
19
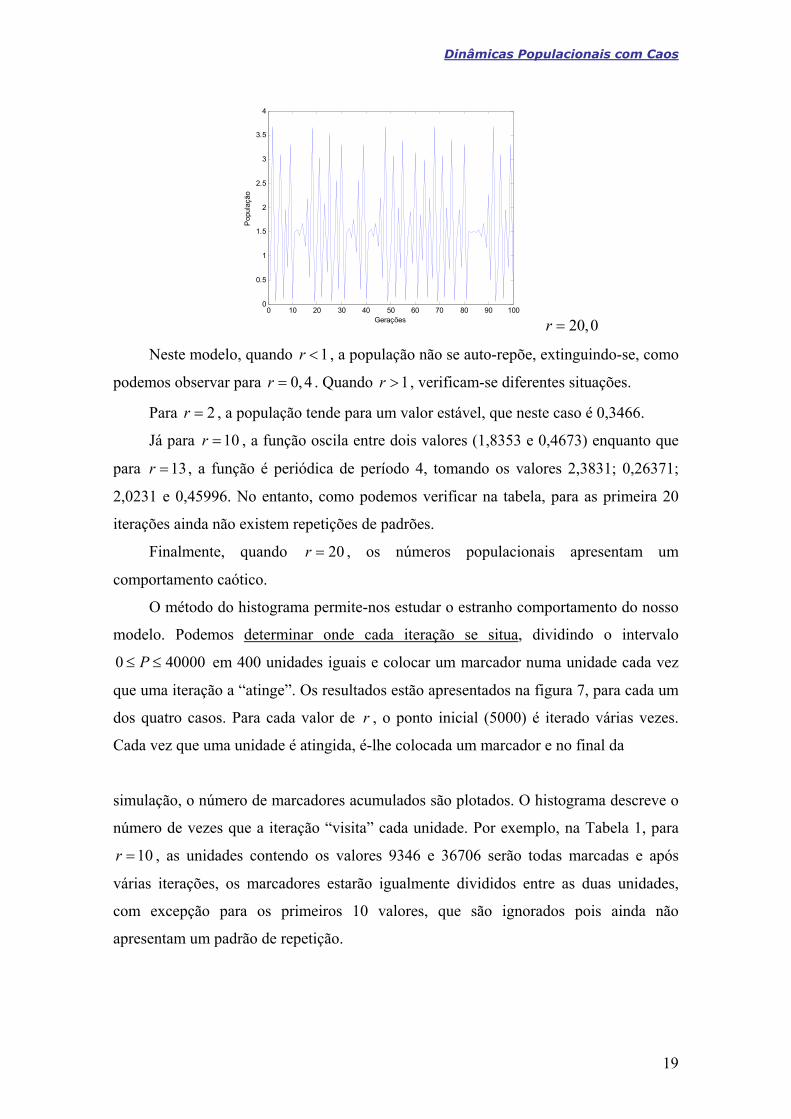
0 10 20 30 40 50 60 70 80 90 1000
0.5
1
1.5
2
2.5
3
3.5
4
Gerações
Pop
ulaç
ão
20,0r =
Neste modelo, quando 1r < , a população não se auto-repõe, extinguindo-se, como
podemos observar para 0,4r = . Quando 1r > , verificam-se diferentes situações.
Para 2r = , a população tende para um valor estável, que neste caso é 0,3466.
Já para 10r = , a função oscila entre dois valores (1,8353 e 0,4673) enquanto que
para 13r = , a função é periódica de período 4, tomando os valores 2,3831; 0,26371;
2,0231 e 0,45996. No entanto, como podemos verificar na tabela, para as primeira 20
iterações ainda não existem repetições de padrões.
Finalmente, quando 20r = , os números populacionais apresentam um
comportamento caótico.
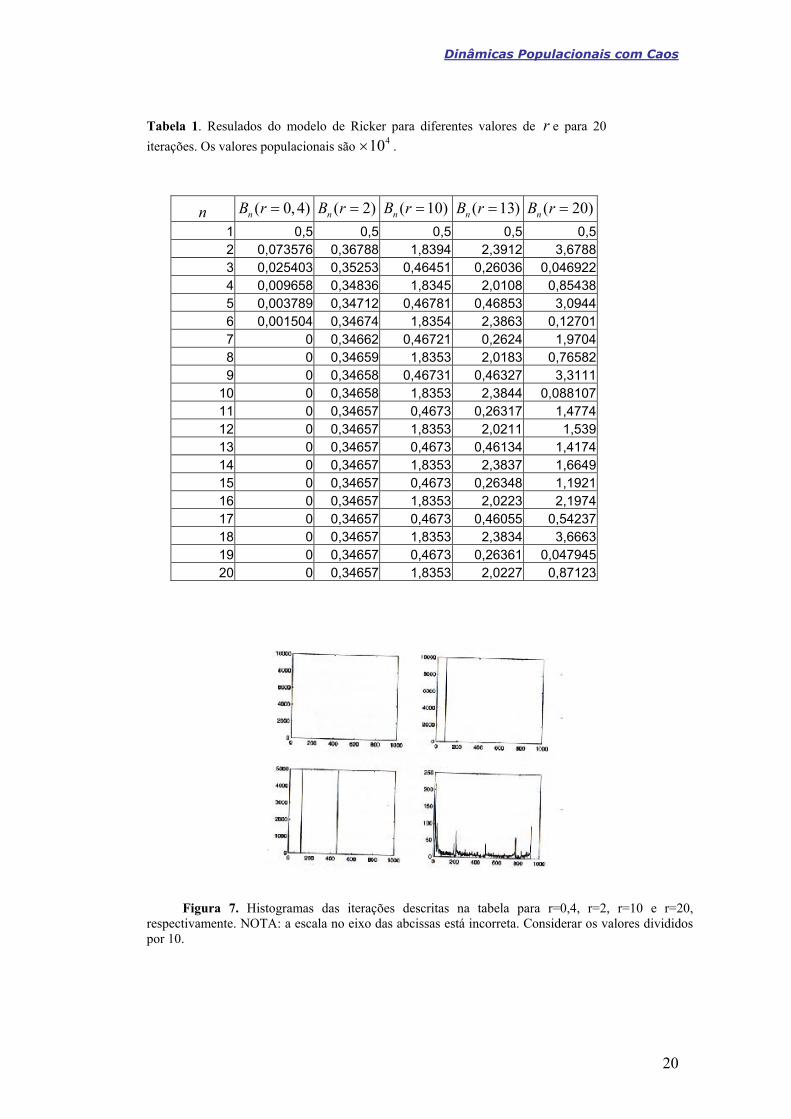
O método do histograma permite-nos estudar o estranho comportamento do nosso
modelo. Podemos determinar onde cada iteração se situa, dividindo o intervalo
0 40000P≤ ≤ em 400 unidades iguais e colocar um marcador numa unidade cada vez
que uma iteração a “atinge”. Os resultados estão apresentados na figura 7, para cada um
dos quatro casos. Para cada valor de r , o ponto inicial (5000) é iterado várias vezes.
Cada vez que uma unidade é atingida, é-lhe colocada um marcador e no final da
simulação, o número de marcadores acumulados são plotados. O histograma descreve o
número de vezes que a iteração “visita” cada unidade. Por exemplo, na Tabela 1, para
10r = , as unidades contendo os valores 9346 e 36706 serão todas marcadas e após
várias iterações, os marcadores estarão igualmente divididos entre as duas unidades,
com excepção para os primeiros 10 valores, que são ignorados pois ainda não
apresentam um padrão de repetição.
Dinâmicas Populacionais com Caos
20
n ( 0,4)nB r = ( 2)nB r = ( 10)nB r = ( 13)nB r = ( 20)nB r =
1 0,5 0,5 0,5 0,5 0,5 2 0,073576 0,36788 1,8394 2,3912 3,6788 3 0,025403 0,35253 0,46451 0,26036 0,046922 4 0,009658 0,34836 1,8345 2,0108 0,85438 5 0,003789 0,34712 0,46781 0,46853 3,0944 6 0,001504 0,34674 1,8354 2,3863 0,12701 7 0 0,34662 0,46721 0,2624 1,9704 8 0 0,34659 1,8353 2,0183 0,76582 9 0 0,34658 0,46731 0,46327 3,3111
10 0 0,34658 1,8353 2,3844 0,088107 11 0 0,34657 0,4673 0,26317 1,4774 12 0 0,34657 1,8353 2,0211 1,539 13 0 0,34657 0,4673 0,46134 1,4174 14 0 0,34657 1,8353 2,3837 1,6649 15 0 0,34657 0,4673 0,26348 1,1921 16 0 0,34657 1,8353 2,0223 2,1974 17 0 0,34657 0,4673 0,46055 0,54237 18 0 0,34657 1,8353 2,3834 3,6663 19 0 0,34657 0,4673 0,26361 0,047945 20 0 0,34657 1,8353 2,0227 0,87123
Tabela 1. Resulados do modelo de Ricker para diferentes valores de r e para 20 iterações. Os valores populacionais são 410× .
Figura 7. Histogramas das iterações descritas na tabela para r=0,4, r=2, r=10 e r=20, respectivamente. NOTA: a escala no eixo das abcissas está incorreta. Considerar os valores divididos por 10.

Dinâmicas Populacionais com Caos
21
A simulação deste modelo, para todos os valores de r é-nos apresentada na figura
8. Os resultados são plotados como uma superfície onde cada corte transversal para um
valor fixo de r dá-nos a informação para um histograma. Estes resultados mostram-nos
como as iterações no modelo de Ricker dependem de r . Este diagrama mostra que à
medida que r aumenta, o comportamento das iterações torna-se cada vez mais
complicado. Por exemplo, para um valor próximo de 75, o estado de equilíbrio passa a
ser uma oscilação de período 2. Em 125 passamos a ter uma oscilação de período 4 e
assim sucessivamente.
No ponto em que ocorrem estas duplicações de períodos dá-mos o nome de
bifurcações, como já vimos anteriormente. O diagrama de bifurcações mostra-nos o
quão caótico é o sistema à medida que r aumenta.
Figura 8. Diagrama de bifurcação do modelo de Ricker. A escala do lado esquerdo toma valores 20 r× .
A escala do lado direito é 200× (dá-nos os valores de B, para cada r ).

Dinâmicas Populacionais com Caos
22
Conclusão
Verificou-se através deste trabalho a utilidade da implementação em Simulink de
modelos matemáticos que descrevem situações reais.
O modelo de Malthus mostra-nos a evolução exponencial do crescimento
populacional em que não se consideram factores limitantes, tornando-se assim um
modelo simples. No entanto, sabemos que os meios biológicos são de elevada
complexidade, sendo inúmeras as variáveis que influenciam as dinâmicas
populacionais.
Nos modelos seguintes que implementámos (que derivam do primeiro), já entram
em conta com algumas dessas limitações, não deixando, no entanto, de se revelarem
aproximações à realidade. Nos modelos não lineares (logístico e de Ricker) analisámos
a influência de um factor de crescimento na evolução populacional e concluímos que a
partir de determinado valor acontecem fenómenos caóticos. Na verdade, este tipo de
fenómeno é o que geralmente acontece na Natureza pois as populações tendem a oscilar
ao longo do tempo, de forma mais ou menos imprevisível.

Dinâmicas Populacionais com Caos
23
Bibliografia
• Hoppensteadt, Frank C., Charles S. Peskin, Modeling and Simulation in Medicine and the Life Sciences, Springer Verlag, 2000, Capítulo 7.
• Diversos recursos da WWW.