Montagem Squarebot

of 35
-
Upload
luiz-carlos-rosa -
Category
Documents
-
view
231 -
download
0
Transcript of Montagem Squarebot
-
7/27/2019 Montagem Squarebot
1/35
Squarebot 2.0 1 Carnegie Mellon Robotics Academy / For use with VEX Robotics Systems
Squarebot 2.0 Building Instructions(cont.)
materials qty
bearingat 12
panel 1
chassis rail 4
chassisbumper 2
partiallythreadedbeams,2" 4
kepsnut 38
8-32hexscrew," 26
8-32hexscrew," 19
8-32hexscrew,3/4 1 motor 2
2.75"removabletire 4
1.895"detachablehub 4
36-toothgear 4
60-toothgear 2
collarw/threadedsetscrew 10
squarebar,2" 2
squarebar,3" 4
6-32hexscrew," 4
Squarebot 2.0 Building Instructions
1 Collect and identify the parts from the list of materials below:
-
7/27/2019 Montagem Squarebot
2/35
Squarebot 2.0 2 Carnegie Mellon Robotics Academy / For use with VEX Robotics Systems
Squarebot 2.0 Building Instructions(cont.)
keps nut x 38
8-32 hex screw, "x 20
chassis rail x 4
chassis bumper x 2
2" partially threaded beam x 4 8-32 hex screw, "x 26
6-32 hex screw, "x 48-32 hex screw, 3/4 x1
-
7/27/2019 Montagem Squarebot
3/35
Squarebot 2.0 3 Carnegie Mellon Robotics Academy / For use with VEX Robotics Systems
Squarebot 2.0 Building Instructions(cont.)
panel x 1 motor x 2
2.75" removable tire x 4
1.895" detachable hub x 4
-
7/27/2019 Montagem Squarebot
4/35
Squarebot 2.0 4 Carnegie Mellon Robotics Academy / For use with VEX Robotics Systems
Squarebot 2.0 Building Instructions(cont.)
36 tooth gear x 4
60 tooth gear x 2
square bar, 3" x 4
bearing fat x 12
square bar, 2" x 2
collar w/threaded set screw x 10
.5"
-
7/27/2019 Montagem Squarebot
5/35
Squarebot 2.0 5 Carnegie Mellon Robotics Academy / For use with VEX Robotics Systems
Squarebot 2.0 Building Instructions(cont.)
2
Parts needed in this step:
x 2
Parts needed in this step:
x 4
Inner chassis railsYouwillneedtwochassisrails,onefortherightsideandonefortheleftside.Orientthemasshown,sothatthenarrowfaceispointingupandtheopensidesarefacingeachother.
Addfourbearingatstothechassisrails(twoperrail,ontheoutward-facingsides).Besuretopositionthebearingatssuchthatthecentralholeofeachbearingatisalignedwiththefourthholefromtherespectiveendofthechassisrail,asshown.
-
7/27/2019 Montagem Squarebot
6/35
Squarebot 2.0 6 Carnegie Mellon Robotics Academy / For use with VEX Robotics Systems
Squarebot 2.0 Building Instructions(cont.)
Inner chassis rails (cont.)Securethebearingatstothechassisrailsusingtwo"8-32screwsandtwokepsnutsperbearingat,asshown.
Parts needed in this step:
" x 8 x 8
2
Yourcompletedinnerchassisrailsshouldlooklikethiswhenyouredone:
-
7/27/2019 Montagem Squarebot
7/35
Squarebot 2.0 7 Carnegie Mellon Robotics Academy / For use with VEX Robotics Systems
Squarebot 2.0 Building Instructions(cont.)
Outer chassis railsPositiontwomorechassisrailsasshown,justasyoudidfortheinnerchassisrails.
Parts needed in this step:
x 2
Addbearingatstotheinnerfacesofthetwochassisrails.Thecenterholeofthebearingatshouldbealignedwiththeeighthholefromthefrontendofthechassisrail,inthemiddlerowofholes.
Parts needed in this step:
x 2
3
-
7/27/2019 Montagem Squarebot
8/35
Squarebot 2.0 8 Carnegie Mellon Robotics Academy / For use with VEX Robotics Systems
Squarebot 2.0 Building Instructions(cont.)
Parts needed in this step:
" x 4 x 4
Outer chassis rails (cont.)Secureeachbearingatwithtwo"8-32screwsandtwokepsnuts.
3
-
7/27/2019 Montagem Squarebot
9/35
Squarebot 2.0 9 Carnegie Mellon Robotics Academy / For use with VEX Robotics Systems
Squarebot 2.0 Building Instructions(cont.)
Outer chassis rails (cont.)Yourouterchassisrailsshouldnowlooklikethis:
Parts needed in this step:
x 4
3
Nowaddtwobearingatstotheoutersurfaceofeachchassisrail,sothecenter
holeofeachbearingatisoverthefourthholefromtherespectiveendofthechassisrail,asshown.Thesearethesamepositionsasthebearingatsyouputontheinnerchassisrailsearlier.
-
7/27/2019 Montagem Squarebot
10/35
Squarebot 2.0 10 Carnegie Mellon Robotics Academy / For use with VEX Robotics Systems
Squarebot 2.0 Building Instructions(cont.)
Outer chassis rails (cont.)Securethebearingatstothechassisrailsusingtwo"8-32screwsandtwokepsnutsperbearingat.
Parts needed in this step:
"x 8
3
Yourouterchassisrailsshouldnowlooklikethis:
x 8
-
7/27/2019 Montagem Squarebot
11/35
Squarebot 2.0 11 Carnegie Mellon Robotics Academy / For use with VEX Robotics Systems
Squarebot 2.0 Building Instructions(cont.)
Motor SubassemblyBeforestartingonthemotorsubassembly,makesurethattheclutchisinstalledinthemotor,asshown.
Parts needed in this step:
2"x 2
Parts needed in this step:
x 2
4
Inserta2"squarebeamintoeachclutch,makingsurethattheyseatrmly.Thesquarebarwillactasthemotorsdriveshaft.
-
7/27/2019 Montagem Squarebot
12/35
Squarebot 2.0 12 Carnegie Mellon Robotics Academy / For use with VEX Robotics Systems
Squarebot 2.0 Building Instructions(cont.)
Motor Subassembly (cont.)Slidethepre-assembledinnerchassisrailsontothesquarebarmotorshafts,sothattheshaftsgothroughthemiddleholeinthemiddlerowofeachrail.
Parts needed in this step:
x 2
4
Installonebearingatontheoutward-facingsideofeachchassisrail,withthefrontholeofthebearingatslidingontothemotorshaftasshown.
-
7/27/2019 Montagem Squarebot
13/35
Squarebot 2.0 13 Carnegie Mellon Robotics Academy / For use with VEX Robotics Systems
Squarebot 2.0 Building Instructions(cont.)
Parts needed in this step:
"x 4
4 Motor Subassembly (cont.)Yourassemblyshouldnowlooklikethis:
Securethebearingattotheinnerchassisrailandmotorusingtwo"6-32screwspermotor.Notethatthesearethethinnerscrews,nottheusual8-32ones.
Yourassemblyshouldnowlooklikethis:
-
7/27/2019 Montagem Squarebot
14/35
Squarebot 2.0 14 Carnegie Mellon Robotics Academy / For use with VEX Robotics Systems
Squarebot 2.0 Building Instructions(cont.)
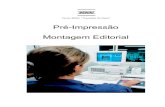
Chassis SubassemblyInserta3"squarebarthroughthecenterholeofeachunoccupiedbearingat,asshown.Donotpushthemallthewaythrough.Pushtheendofthebarabout"throughtherail.
Parts needed in this step:
3"x 4
5
-
7/27/2019 Montagem Squarebot
15/35
Squarebot 2.0 15 Carnegie Mellon Robotics Academy / For use with VEX Robotics Systems
Squarebot 2.0 Building Instructions(cont.)
Chassis Subassembly (cont.)Slidemetalcollars(withthreadedscrews)ontoeachofthe2"and3"squarebars,mountingthemushwiththesurfaceofthebearingatagainstwhichtheywillsit.Besurethesquarebarsdontgetpushedfurtherinwhileyouputthecollarson.
Parts needed in this step:
x 6
5
Oncethecollarsandbarsareinposition,tightenthethreadedscrewswiththethinnerallenwrenchtokeepthecollarsfromslidingoutofplace.
-
7/27/2019 Montagem Squarebot
16/35
Squarebot 2.0 16 Carnegie Mellon Robotics Academy / For use with VEX Robotics Systems
Squarebot 2.0 Building Instructions(cont.)
Chassis Subassembly (cont.)Slidea60-toothgearontothedriveaxleofeachmotor,pushingitushagainstthecollarthatyouaddedinthepreviousstep.
Parts needed in this step:
60-toothx 2
5
-
7/27/2019 Montagem Squarebot
17/35
Squarebot 2.0 17 Carnegie Mellon Robotics Academy / For use with VEX Robotics Systems
Squarebot 2.0 Building Instructions(cont.)
Chassis Subassembly (cont.)Slidea36-toothgearontoeachoftheremainingsquarebars,pushingthemushagainstthecollars.
Parts needed in this step:
36-toothx 4
Addanothercollartotheendofthe2shafts(theonesdirectlyconnectedtothemotor).Slidethemdownsothattheyareushwiththelargergear.Makesuretheyaretightened.
x 2
Parts needed in this step:
5
-
7/27/2019 Montagem Squarebot
18/35
Squarebot 2.0 18 Carnegie Mellon Robotics Academy / For use with VEX Robotics Systems
Squarebot 2.0 Building Instructions(cont.)
Chassis Subassembly (cont.)Tightenthethreadedscrewswiththethinnerallenwrench.
Parts needed in this step:
x 4
Yourkitincludestwodifferentlysizedblackspacers.Slideoneofeachontotheshaftswiththesmallergears(thosenotdirectlyconnectedtothemotors),asshown.
x 4
5
-
7/27/2019 Montagem Squarebot
19/35
Squarebot 2.0 19 Carnegie Mellon Robotics Academy / For use with VEX Robotics Systems
Squarebot 2.0 Building Instructions(cont.)
Chassis Subassembly (cont.)Installthepre-assembledouterchassisrailsontothecurrentassembly.Allthreeofthesquarebarsstickingoutoftheinnerrailshouldgothroughbearingatsontheouterrail.
5
Note:Ifyoundthatyourgearsareslidingontheaxles,youcaninsertthe0.182"and0.318"plasticspacersincludedinthekittoblockthemintoplace.
-
7/27/2019 Montagem Squarebot
20/35
Squarebot 2.0 20 Carnegie Mellon Robotics Academy / For use with VEX Robotics Systems
Squarebot 2.0 Building Instructions(cont.)
Chassis Subassembly (cont.)Placechassisbumpersonthefrontandrearofthechassisrails,asshown.
Parts needed in this step:
x 2
5
-
7/27/2019 Montagem Squarebot
21/35
Squarebot 2.0 21 Carnegie Mellon Robotics Academy / For use with VEX Robotics Systems
Squarebot 2.0 Building Instructions(cont.)
Chassis Subassembly (cont.)Securetheverticalfacesofthechassisbumperstotheendofthechassisrailsusingfour"8-32screwsandkepsnutsinthefront,andfourintheback.
Parts needed in this step:
"x 8 x 8
5
-
7/27/2019 Montagem Squarebot
22/35
Squarebot 2.0 22 Carnegie Mellon Robotics Academy / For use with VEX Robotics Systems
Squarebot 2.0 Building Instructions(cont.)
Chassis Subassembly (cont.)Connectfour2standoffsusingfour8-32screws.Placethemasshownandbesuretonotethattwoofthemareontheedgeandtwoareonespaceawayfromtheedge.Connectthepartsusingthethickerallenwrenchwhileholdingthestandoffinplace.
Parts needed in this step:
"x 4 x 4
5
-
7/27/2019 Montagem Squarebot
23/35
Squarebot 2.0 23 Carnegie Mellon Robotics Academy / For use with VEX Robotics Systems
Squarebot 2.0 Building Instructions(cont.)
Chassis Subassembly (cont.)Securethehorizontalfacesofthechassisbumperstothetopofthechassisrailsusingfour"8-32screwsandfourkepsnuts,twointhefrontandtwointheback.
Parts needed in this step:
x 4 x 4
5
-
7/27/2019 Montagem Squarebot
24/35
Squarebot 2.0 24 Carnegie Mellon Robotics Academy / For use with VEX Robotics Systems
Squarebot 2.0 Building Instructions(cont.)
Chassis Subassembly (cont.)Installthesmallgreentires(2.75"RemovableTireand1.895"Hub)onthe3"squarebeams,asshown.Slidethemdownsotheyareushwiththebearingats.
Parts needed in this step:
x 4
5
-
7/27/2019 Montagem Squarebot
25/35
Squarebot 2.0 25 Carnegie Mellon Robotics Academy / For use with VEX Robotics Systems
Squarebot 2.0 Building Instructions(cont.)
Chassis Subassembly (cont.)Slidethecollarsontotheshaftssuchthattheyareushagainstthewheels.Tightenthecollarsinplacewiththethinnerallenwrench.
Parts needed in this step:
x 4
5
-
7/27/2019 Montagem Squarebot
26/35
Squarebot 2.0 26 Carnegie Mellon Robotics Academy / For use with VEX Robotics Systems
Squarebot 2.0 Building Instructions(cont.)
Chassis Subassembly (cont.)Positionthemicrocontrolleronyourrobotasshown.
Parts needed in this step:
x 1
Parts needed in this step:
x 4 x 4
5
Attachthemicrocontrollertothechassisusingfour8-32screwsandkepsnuts,asshown.Insertthescrewsintothesmallholesinthemicrocontrollertoholditinpositionproperly.
-
7/27/2019 Montagem Squarebot
27/35
Squarebot 2.0 27 Carnegie Mellon Robotics Academy / For use with VEX Robotics Systems
Squarebot 2.0 Building Instructions(cont.)
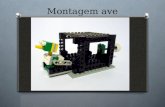
Canopy AssemblyYouwillneedapunchedpaneltobeginconstructingthecanopy.
Youareconstructingaseperatepartinthissegment,whichwilllaterbeattachedtoSquarebot.
Parts needed in this step:
x 1
Parts needed in this step:
x 1
x 4 x 4
6
Attachthereceivertothepunchedpanelusingfour8-32screwsandfourkepsnutsasshown.Besuretoleaveoneemptyrowofholesontheleftofthereceiver.
-
7/27/2019 Montagem Squarebot
28/35
Squarebot 2.0 28 Carnegie Mellon Robotics Academy / For use with VEX Robotics Systems
Squarebot 2.0 Building Instructions(cont.)
Canopy Assembly (cont.)
Attachtheantennaholderusinga3/48-32screwandkepsnut,securingthescrewthroughthemiddleholeontheleftedgeofthecanopy.Then,slidetheyellowantennawirefromthereceiverinsidetheantennasleeveandplaceitintotheantennaholder.
Parts needed in this step:
x 1 x 1
3/4x 1 x 1
6
-
7/27/2019 Montagem Squarebot
29/35
Squarebot 2.0 29 Carnegie Mellon Robotics Academy / For use with VEX Robotics Systems
Squarebot 2.0 Building Instructions(cont.)
Canopy Assembly (cont.)IfyouareusingaVEXrechargablebatterypack,attachthebatterystrapalongthebackrowofthepunchedpannelusingtwo8-32screws.Besureitisorientedproperly.
Parts needed in this step:
x 1 x 2
6
x 2
-
7/27/2019 Montagem Squarebot
30/35
Squarebot 2.0 30 Carnegie Mellon Robotics Academy / For use with VEX Robotics Systems
Squarebot 2.0 Building Instructions(cont.)
Parts needed in this step:
x 1
6
Lockthebatteryintoplaceusingthebatterystrip.
Canopy Assembly (cont.)TakethebluerechargableVexbatteryandorientitasshown.IfyouareusingtheblueVEXAAbatteryholder,simplyattachittothecanopyinplaceofthebatterypack.
-
7/27/2019 Montagem Squarebot
31/35
Squarebot 2.0 31 Carnegie Mellon Robotics Academy / For use with VEX Robotics Systems
Squarebot 2.0 Building Instructions(cont.)
Canopy Assembly (cont.)Attachthecanopytotherobot.Todothis,securethecanopyontothefouroffsetsyouattachedearlierusingfour8-32screws.
Youwillhavetooffsetthecanopybyoneholeeitertotheleftortheright.
Parts needed in this step:
x 4
6
-
7/27/2019 Montagem Squarebot
32/35
Squarebot 2.0 32 Carnegie Mellon Robotics Academy / For use with VEX Robotics Systems
Squarebot 2.0 Building Instructions(cont.)
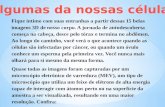
Wire AssemblyPlugthewirecomingfromtherobotsrightmotorintoMOTORSport2.ThesideofthecontrollerwiththeLEDsisthefront.
Besuretopluginthewirecorrectlyandgently.Thewiresshouldslideineasily
whenproperlyoriented.
7
-
7/27/2019 Montagem Squarebot
33/35
Squarebot 2.0 33 Carnegie Mellon Robotics Academy / For use with VEX Robotics Systems
Squarebot 2.0 Building Instructions(cont.)
Wire Assembly (cont.)PlugthewirethatisattachedtotheleftmotorintoMOTORSport3onthemicrocontroller.
7
-
7/27/2019 Montagem Squarebot
34/35
Squarebot 2.0 34 Carnegie Mellon Robotics Academy / For use with VEX Robotics Systems
Squarebot 2.0 Building Instructions(cont.)
Wire Assembly (cont.)Plugthebatteryintothebackofthemicrocontroller.
7
-
7/27/2019 Montagem Squarebot
35/35
Squarebot 2.0 Building Instructions(cont.)
Wire Assembly (cont.)Takethe9RJ-10wire(theyellowwirethatlookslikeaphonecable)andplugoneendintothebackofthereceivermodule.PlugtheotherendintotheportmarkedRx1onthebackofthemicrocontroller.
Parts needed in this step:
x 1
7