Motor de Passo-Aula3
15
Transcript of Motor de Passo-Aula3

5/9/2018 Motor de Passo-Aula3 - slidepdf.com
http://slidepdf.com/reader/full/motor-de-passo-aula3 1/15
5/9/2018 Motor de Passo-Aula3 - slidepdf.com
http://slidepdf.com/reader/full/motor-de-passo-aula3 2/15
Introdução
Os motores de passo preenchem um nicho único no mundo dos motores
controlados. Estes motores são usualmente empregados em aplicações de medição e de
. ,
com controle numérico (CNC) e bombas volumétricas. Há várias características comum a estes
motores que os tornam ideais para estes tipos de aplicações. Estas características são asseguintes:
1. Inexistência de escovas – os motores de passo não possuem escovas. Os
comutadores e escovas dos motores convencionais são os componentes que apresentam a
maioria das falhas e ainda podem criar arcos que são indesejáveis e perigosos em alguns
.
2. Independência da carga – os motores de passo giram com um uma dada
velocidade independentemente da carga, desde que a carga não exceda o torque do motor.
3. Posicionamento em malha aberta – Os motores de passo se movem com
incrementos ou passos que podem ser quantificados. Desde que o motor funcione com o torque
especificado, a posição do eixo é conhecida a todo tempo sem necessidade de um mecanismo.
4. Torque Estacionário – Os motores de passo são capazes de manter o eixo
estacionário, desde que o seu torque seja respeitado.
5. Excelente resposta a partida, parada e a reversão de movimento.
Nas seções seguintes serão discutidos os tipos mais comuns de motores de passo,
qual o circuito necessário para acionamento destes motores e como pode ser feito o controle domotor de passo por intermédio de um microcontrolador.
5/9/2018 Motor de Passo-Aula3 - slidepdf.com
http://slidepdf.com/reader/full/motor-de-passo-aula3 3/15
Há três tipos básicos de motores de passo: imã permanente, relutância variável e
. .
Os motores de imã permanente possuem um rotor magnetizado, enquanto os
motores de relutância variável tem o rotor na forma de dentes feitos de materiais
ferromagnéticos. Os motores de passo híbridos combinam aspectos dos motores de imã
permanente e dos motores com relutância variável.
O estator, ou a parte estacionário do motor de passo possui várias bobinas. O
arranjo destas bobinas é o fator que distingue os diferentes tipos de motores de passo do
. ,
relutância variável são diferentes dos outros tipos. O motores de imã permanente e oshíbridos podem ser confeccionados usando bobina unipolar, bipolar ou bifilar. Cada uma
destas bobinas serão descritas nas seções posteriores.
5/9/2018 Motor de Passo-Aula3 - slidepdf.com
http://slidepdf.com/reader/full/motor-de-passo-aula3 4/15
Motor de Relutância Variável
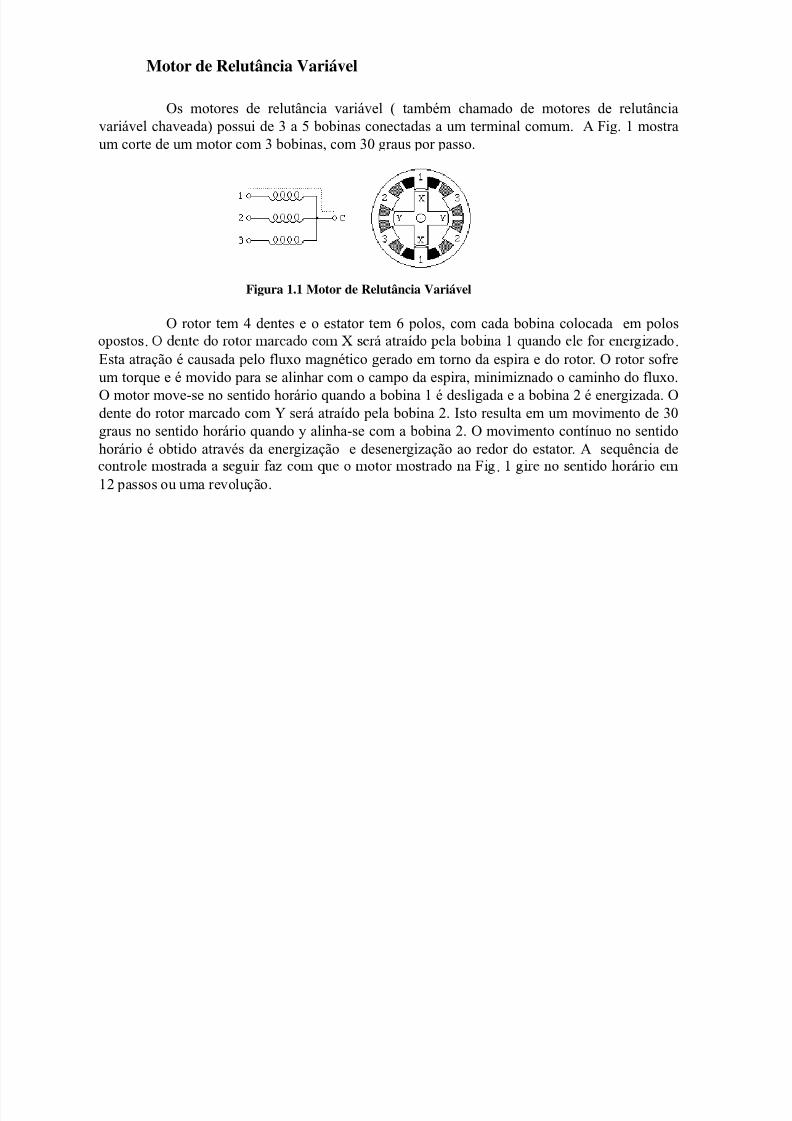
Os motores de relutância variável ( também chamado de motores de relutância
variável chaveada) possui de 3 a 5 bobinas conectadas a um terminal comum. A Fig. 1 mostra
um corte de um motor com 3 bobinas, com 30 graus por passo.
O rotor tem 4 dentes e o estator tem 6 polos, com cada bobina colocada em polos
Figura 1.1 Motor de Relutância Variável
. .
Esta atração é causada pelo fluxo magnético gerado em torno da espira e do rotor. O rotor sofre
um torque e é movido para se alinhar com o campo da espira, minimiznado o caminho do fluxo.
O motor move-se no sentido horário quando a bobina 1 é desligada e a bobina 2 é energizada. Odente do rotor marcado com Y será atraído pela bobina 2. Isto resulta em um movimento de 30
graus no sentido horário quando y alinha-se com a bobina 2. O movimento contínuo no sentido
horário é obtido através da energização e desenergização ao redor do estator. A sequência de
.
12 passos ou uma revolução.
5/9/2018 Motor de Passo-Aula3 - slidepdf.com
http://slidepdf.com/reader/full/motor-de-passo-aula3 5/15
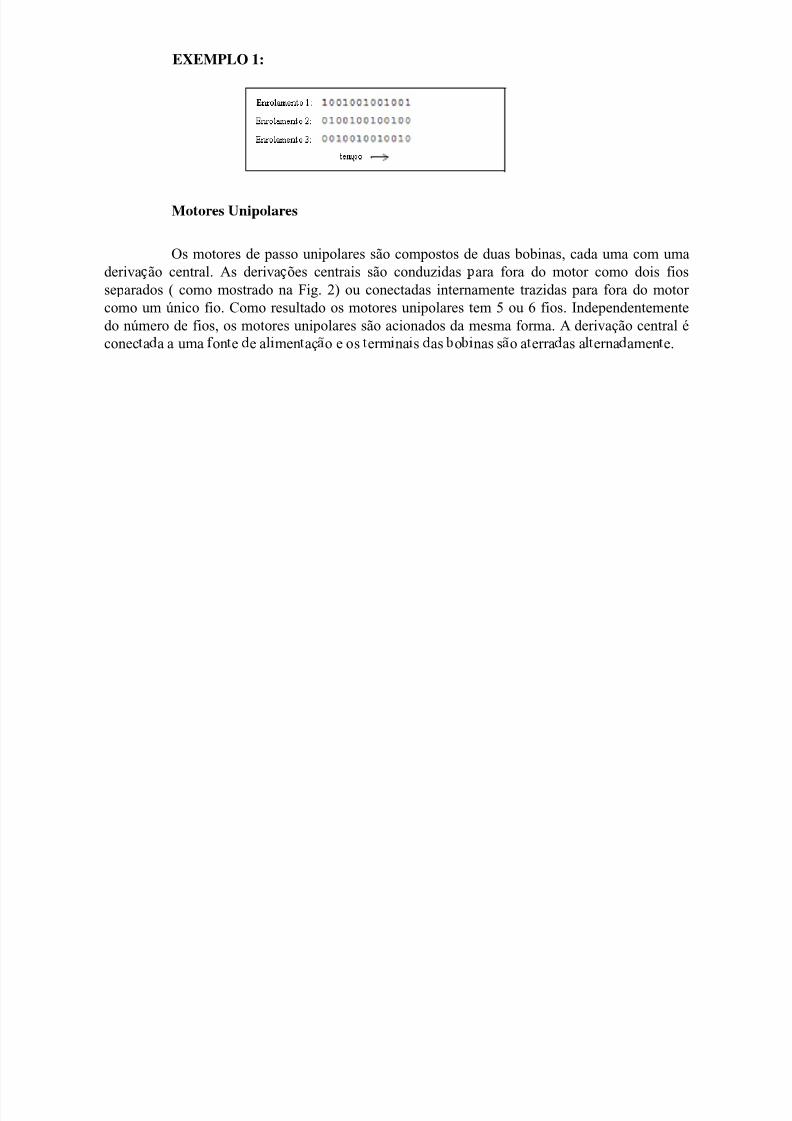
EXEMPLO 1:
Os motores de passo unipolares são compostos de duas bobinas, cada uma com uma
deriva ão central. As deriva ões centrais são conduzidas ara fora do motor como dois fios
separados ( como mostrado na Fig. 2) ou conectadas internamente trazidas para fora do motorcomo um único fio. Como resultado os motores unipolares tem 5 ou 6 fios. Independentemente
do número de fios, os motores unipolares são acionados da mesma forma. A derivação central é
conec a a a uma on e e a men aç o e os erm na s as o nas s o a erra as a erna amen e.
5/9/2018 Motor de Passo-Aula3 - slidepdf.com
http://slidepdf.com/reader/full/motor-de-passo-aula3 6/15
Os motores de passo unipolares, como os de imã permanente e os motores híbridos,
.
minimização do comprimento do caminho do fluxo entre os polos do estator e os dentes do
rotor, onde a direção da corrente do fluxo através da bobina do estator é irrelevante, estes
motores operam pela atração dos polos norte ou sul do rotores permanentemente magnetizados
aos polos do estator. Assim, nestes motores, a direção da corrente através da bobina do estator
determina qual polo do rotor será atraído por qual polo do estator. A direção da corrente nos
motores unipolares é dependente de qual metade da bobina é energizada. Fisicamente, as. ,
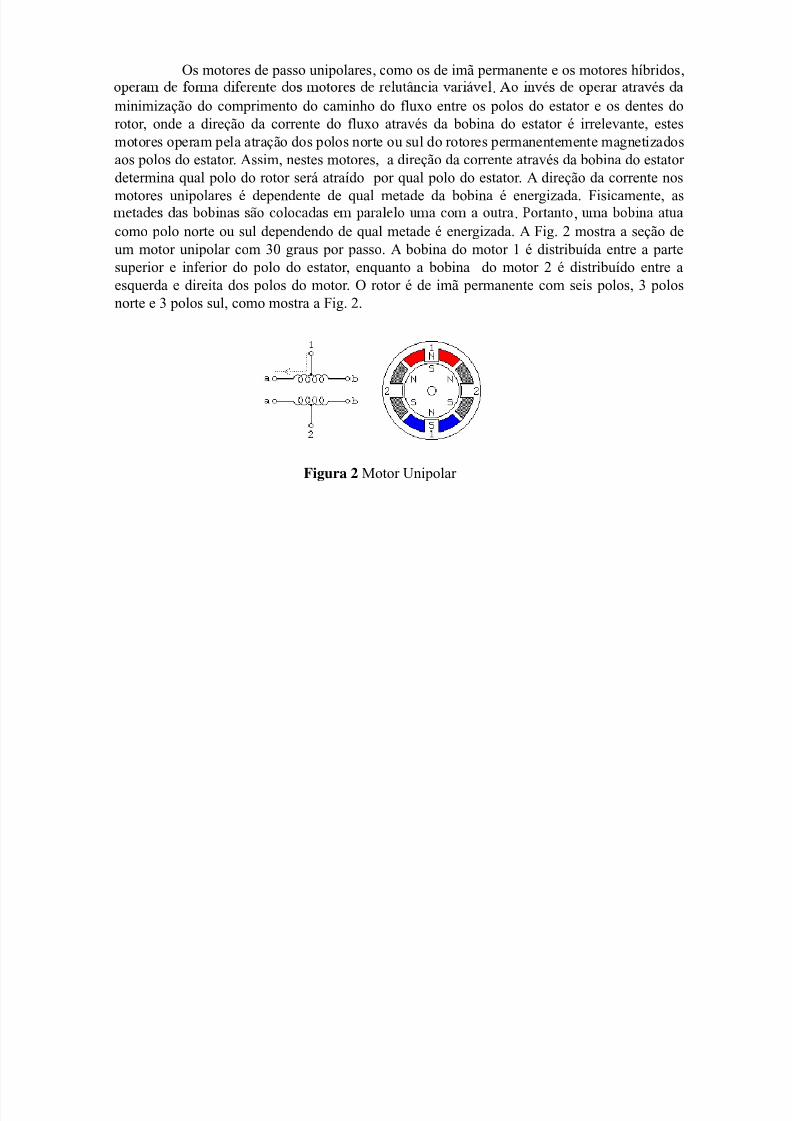
como polo norte ou sul dependendo de qual metade é energizada. A Fig. 2 mostra a seção de
um motor unipolar com 30 graus por passo. A bobina do motor 1 é distribuída entre a parte
superior e inferior do polo do estator, enquanto a bobina do motor 2 é distribuído entre a
esquerda e direita dos polos do motor. O rotor é de imã permanente com seis polos, 3 polos
norte e 3 polos sul, como mostra a Fig. 2.
Figura 2 Motor Unipolar
5/9/2018 Motor de Passo-Aula3 - slidepdf.com
http://slidepdf.com/reader/full/motor-de-passo-aula3 7/15
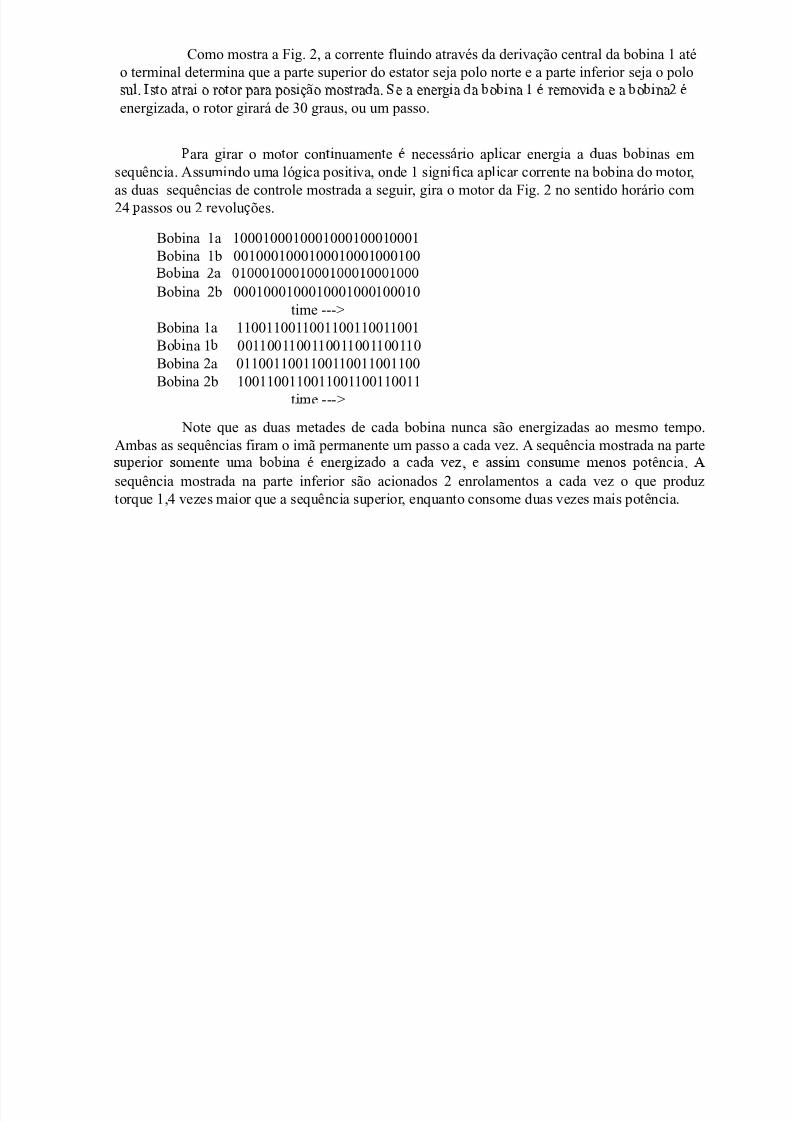
Como mostra a Fig. 2, a corrente fluindo através da derivação central da bobina 1 até
o terminal determina que a parte superior do estator seja polo norte e a parte inferior seja o polo
su . s o a ra o ro or para pos ç o mos ra a. e a energ a a o na remov a e a o na
energizada, o rotor girará de 30 graus, ou um passo.
ara g rar o mo or con nuamen e necess r o ap car energ a a uas o nas em
sequência. Assumindo uma lógica positiva, onde 1 significa aplicar corrente na bobina do motor,
as duas sequências de controle mostrada a seguir, gira o motor da Fig. 2 no sentido horário com24 assos ou 2 revolu ões.
Bobina 1a 1000100010001000100010001
Bobina 1b 0010001000100010001000100
Bobina 2b 0001000100010001000100010time --->
Bobina 1a 1100110011001100110011001
Bobina 1b 0011001100110011001100110
Bobina 2a 0110011001100110011001100
Bobina 2b 1001100110011001100110011
time --->
Note que as duas metades de cada bobina nunca são energizadas ao mesmo tempo.
Ambas as sequências firam o imã permanente um passo a cada vez. A sequência mostrada na parte
, .
sequência mostrada na parte inferior são acionados 2 enrolamentos a cada vez o que produz
torque 1,4 vezes maior que a sequência superior, enquanto consome duas vezes mais potência.
5/9/2018 Motor de Passo-Aula3 - slidepdf.com
http://slidepdf.com/reader/full/motor-de-passo-aula3 8/15
A sequência mostrada abaixo permite giros de meio passo.
Bobina 1b 00011100000111000001110000
Bobina 2a 01110000011100000111000001
Bobina 2b 00000111000001110000011100
time --->
Motores Bipolares
.
Diferentemente dos motores unipolares, os motores bipolares não possuem derivação central.
A vantagem de não possuir derivação central e que a corrente passa através de toda bobina ao
invés de fluir apenas por metade da bobina. Como resultado, os motores bipolares produzem
mais torque que um motor unipolar de mesmo tamanho. A desvantagem dos motores
bipolares é que eles necessitam circuitos de controle mais complexos.
A corrente que flui na bobina do motor bipolar é bidirecional. Isto requer mudança
na po ar a e e ca a term na a o na. omo mostra o na g. , a corrente u r a
esquerda para direita na bobina 1 quano 1a é positivo e 1b é negativo. A corrente fluirá noa
direção oposta quando a polaridade de cada terminal é invertida. O circuito de controle,
conhecido como onte H é usado ara mudan a da olaridade de cada terminal da bobina.
Todo motor bipolar tem duas bobinas, e portanto duas pontes H são necessárias para controle
de cada motor.

5/9/2018 Motor de Passo-Aula3 - slidepdf.com
http://slidepdf.com/reader/full/motor-de-passo-aula3 9/15
Figura 3 Motor de Passo Bipolar
A Fig. 3 ilustra um motor de passo bipolar de 30 graus. A bobina 1 do motor é
distribuída entre a parte superior e inferior do polo estator, enquanto a bobina 2 do motor é
distribuída entre a esquerda e direita do polo estator. O rotor é de imã permanente com 6 polos, 3
po o su e po o norte arran a o na orma e c rcun er nc a.
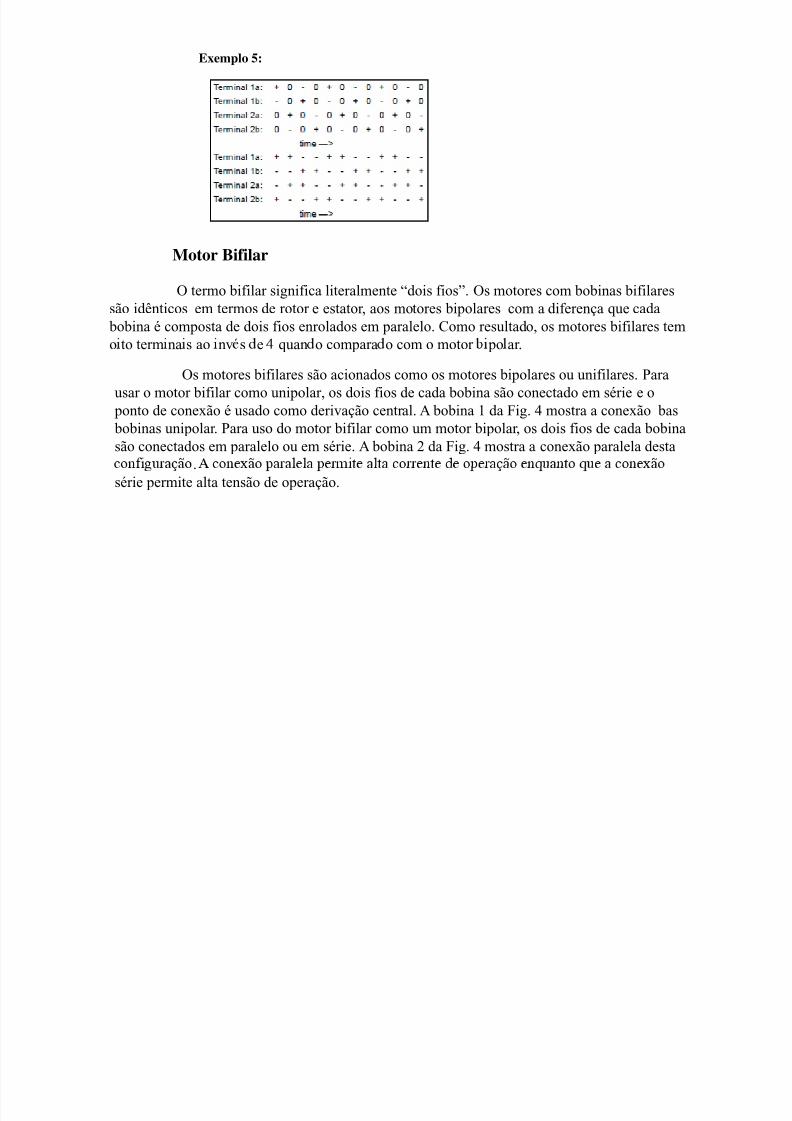
Como o motores unipolares, os motores bipolares podem ser acionados com duas
sequências diferentes. Usando + e – para indicar a polaridade da tensão aplicada, ests
sequências são mostradas no Exemplo 5 para uma revolução ou 12 passos. A primeira
sequência minimiza o consumo de potência através da energização de uma bobina de cada vez,
enquanto a segunda sequência maximiza o torque através da energização das dua bobinas de
.
5/9/2018 Motor de Passo-Aula3 - slidepdf.com
http://slidepdf.com/reader/full/motor-de-passo-aula3 10/15
Exemplo 5:
Motor Bifilar
O termo bifilar significa literalmente “dois fios”. Os motores com bobinas bifilaressão idênticos em termos de rotor e estator, aos motores bipolares com a diferença que cada
bobina é composta de dois fios enrolados em paralelo. Como resultado, os motores bifilares tem
o to term na s ao nv s e quan o compara o com o motor po ar.
Os motores bifilares são acionados como os motores bipolares ou unifilares. Para
usar o motor bifilar como unipolar, os dois fios de cada bobina são conectado em série e oponto de conexão é usado como derivação central. A bobina 1 da Fig. 4 mostra a conexão bas
bobinas unipolar. Para uso do motor bifilar como um motor bipolar, os dois fios de cada bobina
são conectados em paralelo ou em série. A bobina 2 da Fig. 4 mostra a conexão paralela desta
.
série permite alta tensão de operação.
5/9/2018 Motor de Passo-Aula3 - slidepdf.com
http://slidepdf.com/reader/full/motor-de-passo-aula3 11/15
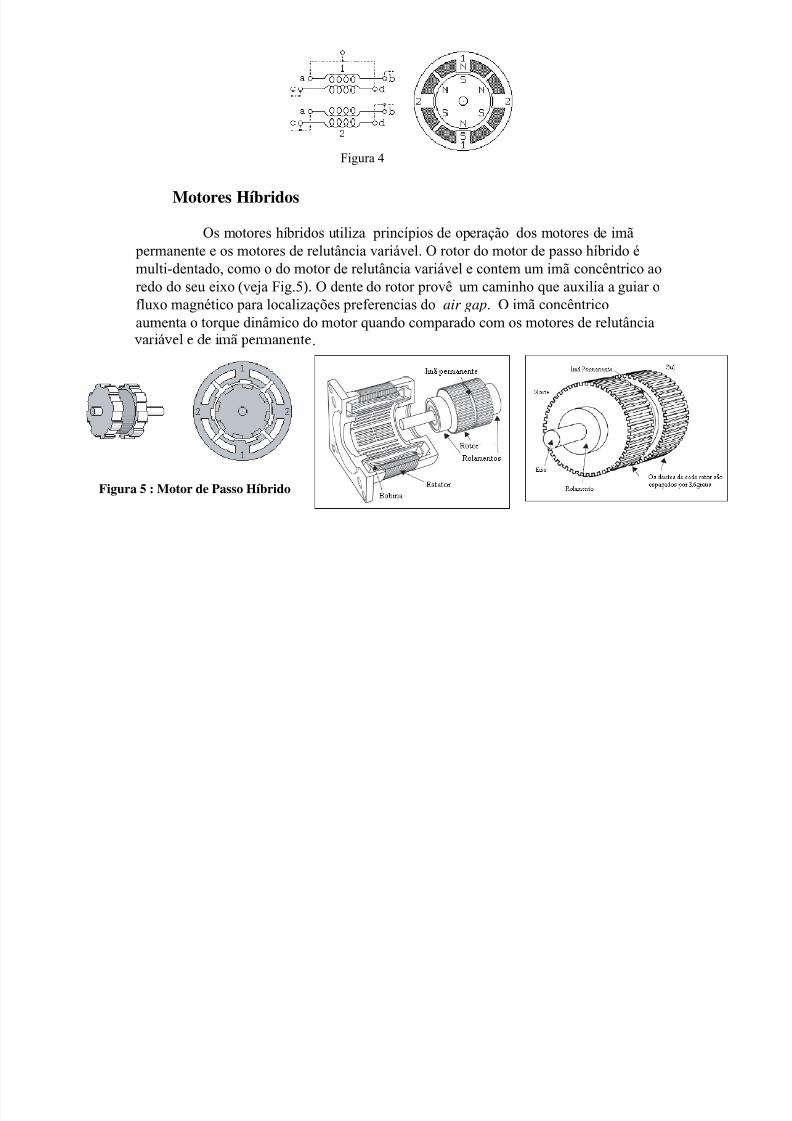
Figura 4
Motores Híbridos
Os motores híbridos utiliza princípios de operação dos motores de imã
permanente e os motores de relutância variável. O rotor do motor de passo híbrido é
multi-dentado, como o do motor de relutância variável e contem um imã concêntrico ao
redo do seu eixo (veja Fig.5). O dente do rotor provê um caminho que auxilia a guiar o
fluxo magnético para localizações preferencias do air gap. O imã concêntrico
aumenta o torque dinâmico do motor quando comparado com os motores de relutância
.
Figura 5 : Motor de Passo Híbrido
5/9/2018 Motor de Passo-Aula3 - slidepdf.com
http://slidepdf.com/reader/full/motor-de-passo-aula3 12/15
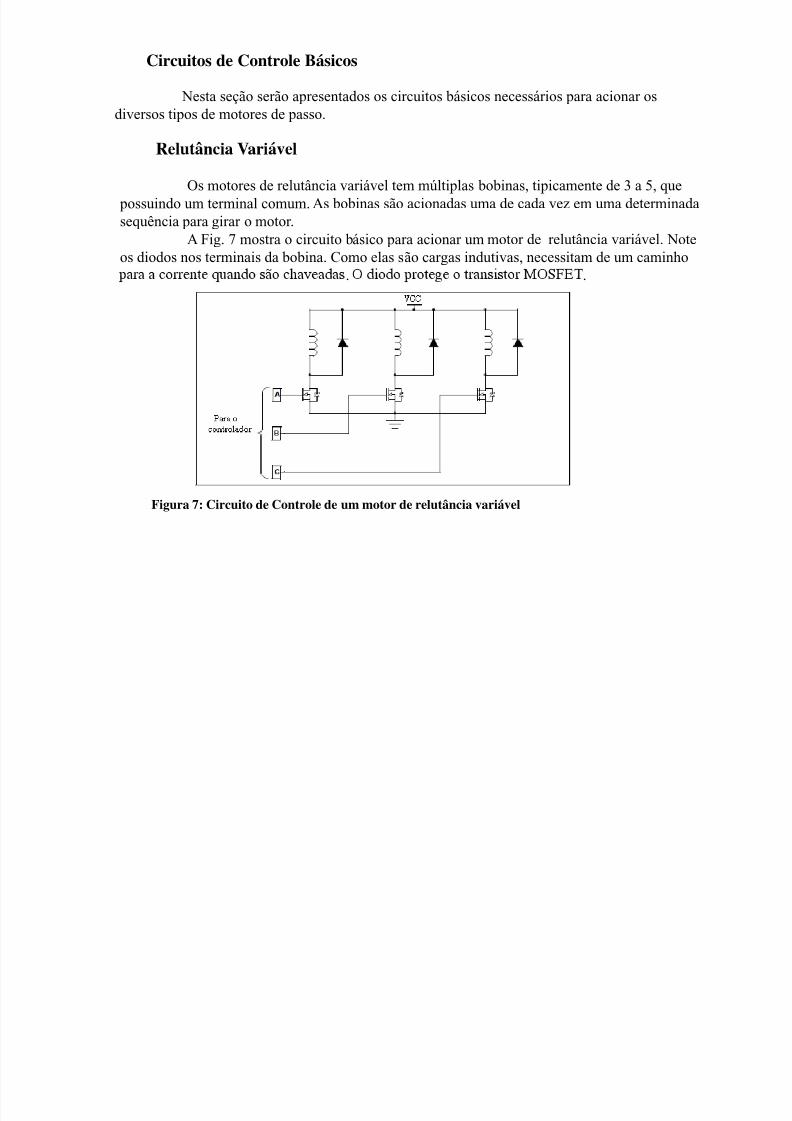
Circuitos de Controle Básicos
Nesta seção serão apresentados os circuitos básicos necessários para acionar osdiversos tipos de motores de passo.
Os motores de relutância variável tem múltiplas bobinas, tipicamente de 3 a 5, que
possuindo um terminal comum. As bobinas são acionadas uma de cada vez em uma determinada
sequência para girar o motor.
A Fig. 7 mostra o circuito básico para acionar um motor de relutância variável. Note
os diodos nos terminais da bobina. Como elas são cargas indutivas, necessitam de um caminho
. .
Figura 7: Circuito de Controle de um motor de relutância variável
5/9/2018 Motor de Passo-Aula3 - slidepdf.com
http://slidepdf.com/reader/full/motor-de-passo-aula3 13/15
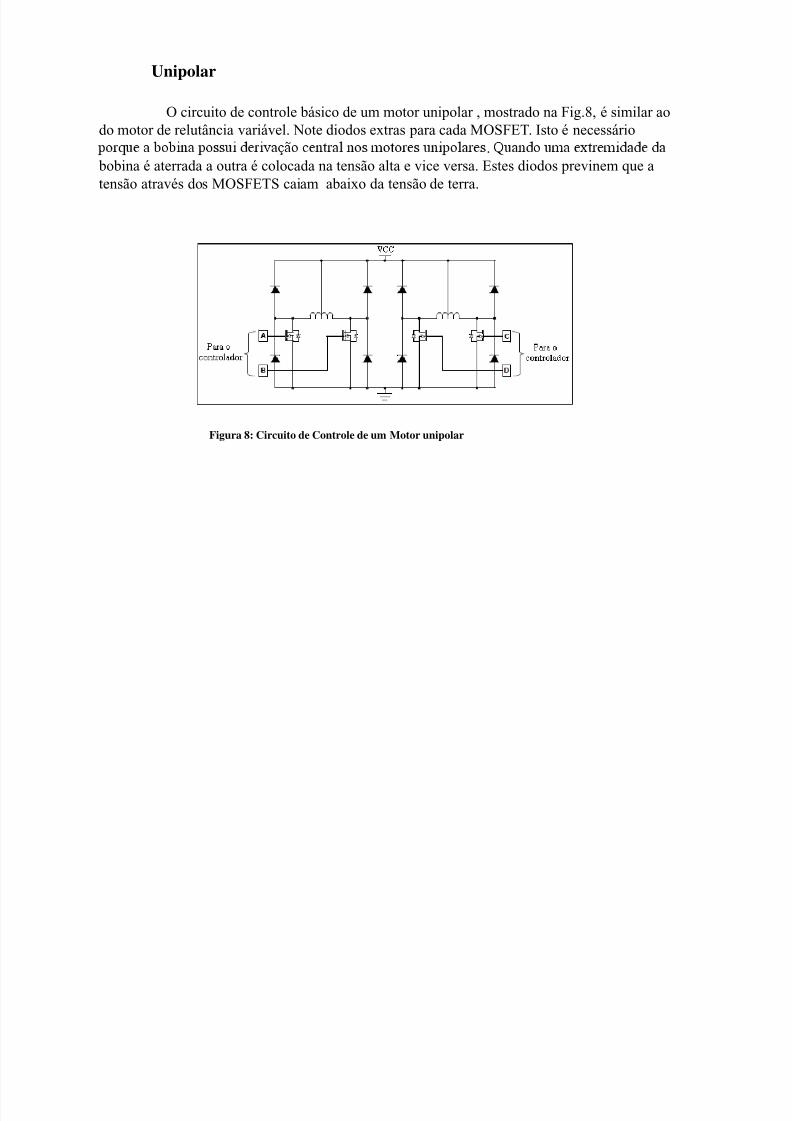
Unipolar
O circuito de controle básico de um motor unipolar , mostrado na Fig.8, é similar ao
do motor de relutância variável. Note diodos extras para cada MOSFET. Isto é necessário
.
bobina é aterrada a outra é colocada na tensão alta e vice versa. Estes diodos previnem que a
tensão através dos MOSFETS caiam abaixo da tensão de terra.
Figura 8: Circuito de Controle de um Motor unipolar
5/9/2018 Motor de Passo-Aula3 - slidepdf.com
http://slidepdf.com/reader/full/motor-de-passo-aula3 14/15
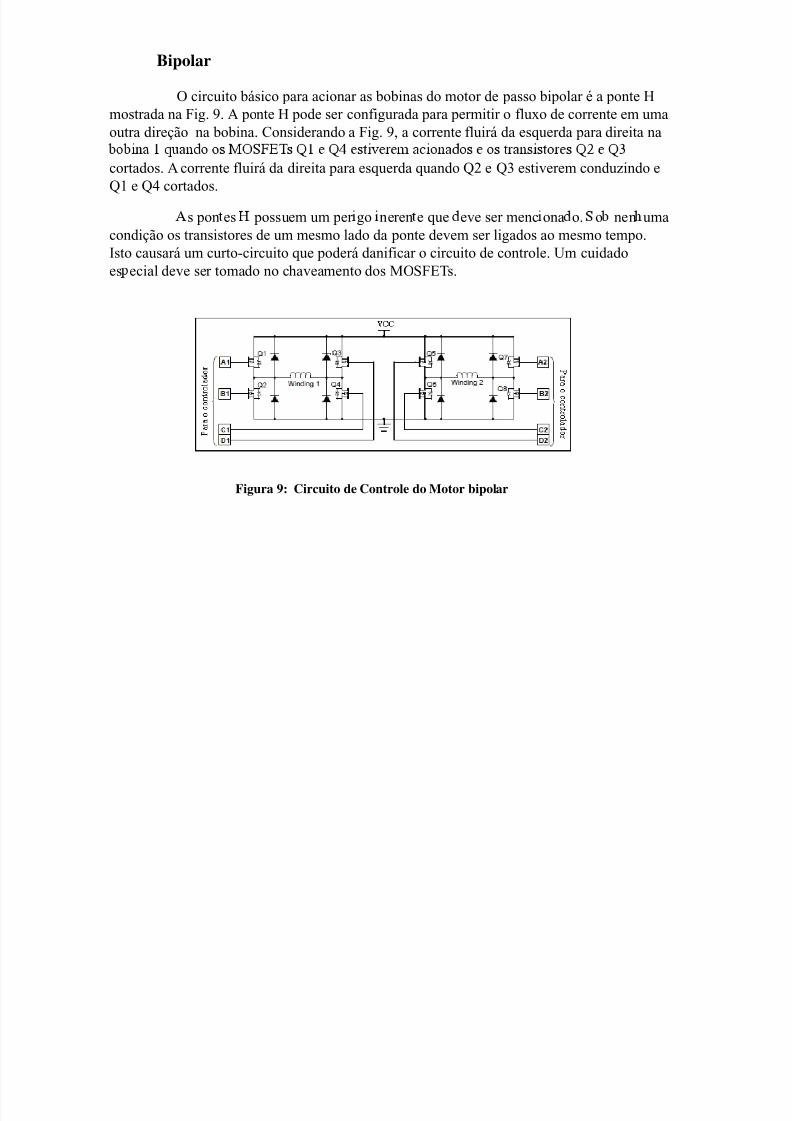
Bipolar
O circuito básico para acionar as bobinas do motor de passo bipolar é a ponte Hmostrada na Fig. 9. A ponte H pode ser configurada para permitir o fluxo de corrente em uma
outra direção na bobina. Considerando a Fig. 9, a corrente fluirá da esquerda para direita na
cortados. A corrente fluirá da direita para esquerda quando Q2 e Q3 estiverem conduzindo e
Q1 e Q4 cortados.
s pon es possuem um per go neren e que eve ser menc ona o. o nen uma
condição os transistores de um mesmo lado da ponte devem ser ligados ao mesmo tempo.
Isto causará um curto-circuito que poderá danificar o circuito de controle. Um cuidado
es ecial deve ser tomado no chaveamento dos MOSFETs.
Figura 9: Circuito de Controle do Motor bipolar
5/9/2018 Motor de Passo-Aula3 - slidepdf.com
http://slidepdf.com/reader/full/motor-de-passo-aula3 15/15
Referência
AN907 Stepping Motors Fundamentals – Applications Note – Microchip,
htt ://ww1.microchi .com/downloads/en/A Notes/00907a. df acessado
em 11/08/2010.