
Motores de Combustão Interna
99
Motores de Combustão Interna Prof. Luiz Carlos Gertz 2013
description
Tecnologia do motor de combustão interna
Transcript of Motores de Combustão Interna
Motores de
Combustão Interna
Prof. Luiz Carlos Gertz
2013
Sumário
1. CLASSIFICAÇÃO DE MOTORES ALTERNATIVOS.................................. 5
1.1. MOTOR EM LINHA ............................................................................... 5
1.2. MOTOR EM V ....................................................................................... 7
1.3. MOTOR HORIZONTAL (BOXER) ......................................................... 8
1.4. MOTOR VR ........................................................................................... 9
1.5. MOTOR EM H: .................................................................................... 10
1.6. MOTOR EM W .................................................................................... 10
1.7. MOTOR RADIAL ................................................................................. 11
1.8. VANTAGENS E DESVANTAGENS .................................................... 12
2. SINCRONISMO DO MOTOR DE COMBUSTÃO INTERNA ..................... 13
2.1. PARTES DO MOTOR ......................................................................... 13
2.1.1. O Bloco ........................................................................................ 13
2.1.2. Êmbolos ...................................................................................... 14
2.1.3. Bielas ........................................................................................... 15
2.1.4. Árvore de Manivelas ................................................................... 15
2.1.5. O Cabeçote .................................................................................. 17
2.1.6. Câmara de Combustão ............................................................... 17
2.1.7. Vela de Ignição ............................................................................ 18
2.1.8. Válvulas ....................................................................................... 18
2.1.9. Comando de Válvulas ................................................................ 19
2.2. FUNCIONAMENTO DE UM MOTOR À COMBUSTÃO INTERNA ...... 21
3. CICLOS TÉRMICOS DOS MOTORES ALTERNATIVOS ......................... 24
3.1. CICLOS TEÓRICOS E CICLOS REAIS .............................................. 24
3.1.1. Analise de um ciclo e seu rendimento térmico ........................ 27
3.1.2. O ciclo Otto teórico .................................................................... 29
3.1.3. Ciclo Diesel teórico .................................................................... 32
3.2. PRESSÃO MÉDIA DE UM CICLO ...................................................... 33
3.3. CICLO INDICADO E PRESSÃO MÉDIA INDICADA ........................... 34
3.4. DIFERENÇA ENTRE OS CICLOS OTTO REAL E TEÓRICO ............ 35
3.5. DIFERENÇAS ENTRE O CICLO DIESEL REAL E TEÓRICO ............ 37
4. DINAMÔMETROS: TIPOS E PRINCÍPIO DE FUNCIONAMENTO ........... 38
4.1. DINAMÔMETROS............................................................................... 38
4.2. TIPOS DE DINAMÔMETROS ............................................................. 40
4.2.1. Dinamômetro Hidráulico ............................................................ 40
4.2.2. Dinamômetro de Corrente de Foucalt ....................................... 42
4.2.3. Dinamômetro de Rolos .............................................................. 43
4.2.4. Dinamômetro de Ventilação....................................................... 43
4.2.5. Dinamômetro Elétrico ................................................................ 44
4.3. DEFINIÇÕES ...................................................................................... 44
5. COMBUSTÃO ANORMAL ........................................................................ 46
5.1. DETONAÇÃO ..................................................................................... 46
5.1.1. Pressões locais com detonação ............................................... 47
5.1.2. Objeção à detonação .................................................................. 48
5.1.3. Teoria da detonação ................................................................... 49
5.1.4. Reação do gás extremo e ondas de pressão ........................... 49
5.1.5. Cálculo da pressão local limite ................................................. 50
5.2. AUTO-IGNIÇÃO .................................................................................. 50
5.2.1. Resultados de ensaios de compressão rápida ........................ 50
5.2.2. Mapa de auto-ignição ................................................................. 51
5.3. REAÇÃO DO GÁS EXTREMO NOS MOTORES ................................ 52
5.3.1. Intensidade de detonação .......................................................... 52
5.4. MEDIDAS DE DETONAÇÃO .............................................................. 53
5.4.1. Razão de compressão limitada pela batida do motor ............. 53
5.4.2. Pressão de admissão limitada pela batida do motor .............. 54
5.5. TEMPERATURA DO GÁS EXTREMO ................................................ 54
5.6. EFEITO DAS CONDIÇÕES DE OPERAÇÃO DO MOTOR SOBRE A
DETONAÇÃO ............................................................................................... 54
5.6.1. Regulagem da centelha .............................................................. 54
5.6.2. Pressão de admissão e razão de compressão......................... 56
5.6.3. Temperatura de admissão ......................................................... 56
5.6.4. Efeito da velocidade do motor ................................................... 56
5.6.5. Umidade atmosférica ................................................................. 57
5.7. EFEITO DO TAMANHO DO CILINDRO SOBRE A DETONAÇÃO ..... 57
5.8. PROJETO DA CÂMARA DE COMBUSTÃO ....................................... 58
5.9. EFEITO DOS DEPÓSITOS SOBRE A DETONAÇÃO ........................ 58
5.10. PRÉ –IGNIÇÃO ............................................................................... 59
6. POTÊNCIA, RENDIMENTO E BALANÇO TÉRMICO............................... 60
6.1. POTÊNCIA .......................................................................................... 60
6.1.1. Potência Indicada ....................................................................... 61
6.1.2. Potência Efetiva ou Potência ao Freio ...................................... 61
6.1.3. Potência Absorvida Pelas Resistências Passivas e
Rendimento Mecânico ............................................................................. 62
6.2. RENDIMENTO .................................................................................... 64
6.3. BALANÇO TÉRMICO .......................................................................... 66
7. CARBURADORES .................................................................................... 69
7.1. CARBURADOR PARA MOTORES DE IGNIÇÃO POR CENTELHA .. 69
7.1.1. Operação Permanente ................................................................ 69
7.1.2. Operação Transiente .................................................................. 69
7.2. CARBURAÇÃO PERMANENTE ......................................................... 69
7.2.1. Carburador Básico ..................................................................... 69
7.2.2. Sistema Principal de Medição ................................................... 71
7.2.3. Sistema de Marcha Lenta ........................................................... 71
7.2.4. Efeitos do escoamento pulsante ............................................... 72
7.3. CARBURAÇÃO TRANSIENTE ........................................................... 73
7.3.1. Partida ......................................................................................... 73
7.3.2. Aceleração .................................................................................. 74
7.4. CARBURADOR COMPLETO DE UM AUTOMÓVEL .......................... 74
7.5. OUTROS TIPOS DE CARBURADORES ............................................ 75
7.5.1. Carburador de Injeção ................................................................ 76
8. INJEÇÃO ELETRÔNICA ........................................................................... 78
8.1. CENTRAL ELETRÔNICA .................................................................... 79
8.2. SENSORES ........................................................................................ 80
8.2.1. Tipos de Sensores ...................................................................... 80
8.2.2. Sensores de Temperatura .......................................................... 80
8.2.3. Sensor de Fase ........................................................................... 84
8.2.4. Medidor de Massa ....................................................................... 85
8.2.5. Sensor de posição da borboleta ............................................... 86
8.2.6. Sensor de Oxigêncio (Sonda Lambda) ..................................... 88
8.2.7. Sensor de detonação ................................................................. 91
8.2.8. Sensor de pressão ...................................................................... 92
8.2.9. Atuadores .................................................................................... 94
8.3. SISTEMA DE ALIMENTAÇÃO ............................................................ 95
8.4. CONTROLE DA INJEÇÃO .................................................................. 96
8.5. AUTOADAPTAÇÃO ............................................................................ 97
5
1. CLASSIFICAÇÃO DE MOTORES ALTERNATIVOS
A forma de configuração mais simples de motores que utilizam êmbolos é
a monocilíndrico (Figura 1), é também a forma fundamental de motor com
êmbolos. Todas as demais configurações derivam desta.
As razões de existirem configurações diferentes de motores com relação à
disposição dos cilindros se devem a uma série de fatores que vão desde
espaço físico ocupado, curva de torque, potência, perdas mecânicas e
vibrações.
Figura 1. Monocilindro.
1.1. MOTOR EM LINHA
O motor em linha é formado por mais de um cilindro em um único
conjunto. Este motor é o mais comum e largamente utilizado pelas montadoras.
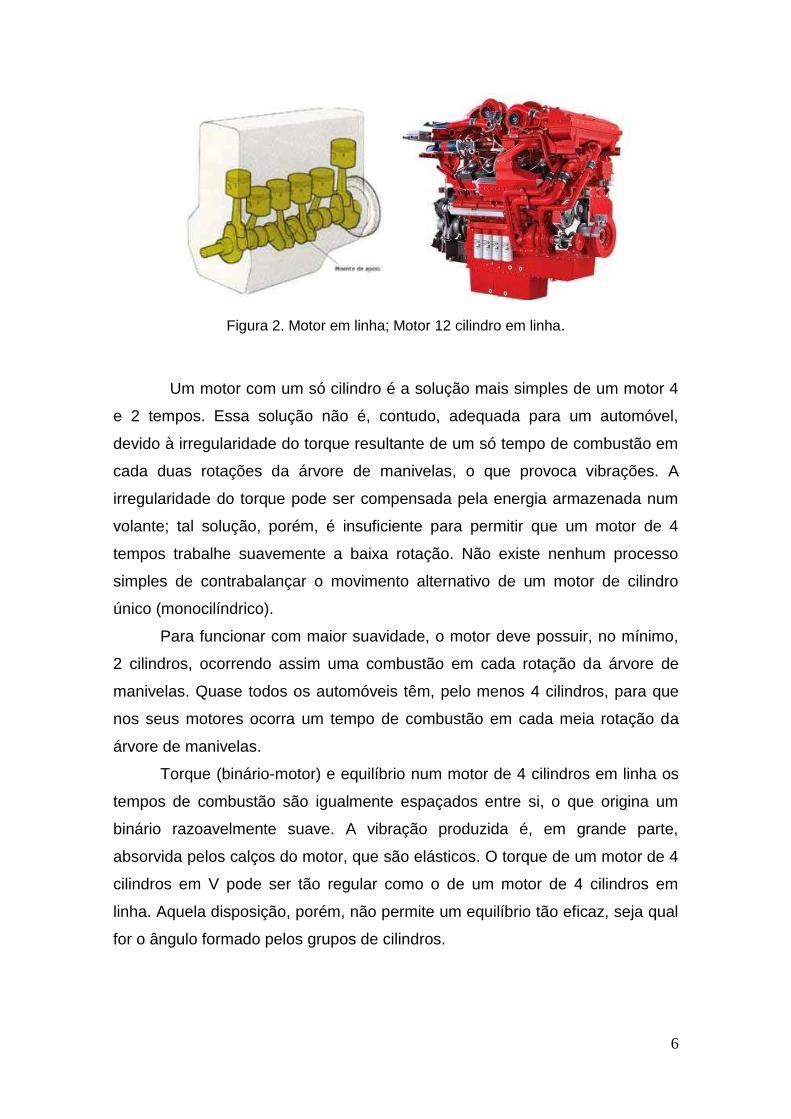
O nome “em linha” vem de cilindros alinhados, posicionados um ao lado
do outro, como uma fila (Figura2). Sua estrutura simples o torna mais barato,
permitindo uma vasta utilização em todos os tipos de automóveis. Podendo ser
de dois ou mais cilindros, alguns carros chegaram a utilizar até 12 cilindros.
Porém, a busca por mais potência e melhor desempenho tornaram o uso deste
tipo de motor em veículos, limitado devido ao comprimento, porém pode-se
encontrar facilmente estes motores movidos à diesel, utilizados na industria de
mineração e construção.
6
Figura 2. Motor em linha; Motor 12 cilindro em linha.
Um motor com um só cilindro é a solução mais simples de um motor 4
e 2 tempos. Essa solução não é, contudo, adequada para um automóvel,
devido à irregularidade do torque resultante de um só tempo de combustão em
cada duas rotações da árvore de manivelas, o que provoca vibrações. A
irregularidade do torque pode ser compensada pela energia armazenada num
volante; tal solução, porém, é insuficiente para permitir que um motor de 4
tempos trabalhe suavemente a baixa rotação. Não existe nenhum processo
simples de contrabalançar o movimento alternativo de um motor de cilindro
único (monocilíndrico).
Para funcionar com maior suavidade, o motor deve possuir, no mínimo,
2 cilindros, ocorrendo assim uma combustão em cada rotação da árvore de
manivelas. Quase todos os automóveis têm, pelo menos 4 cilindros, para que
nos seus motores ocorra um tempo de combustão em cada meia rotação da
árvore de manivelas.
Torque (binário-motor) e equilíbrio num motor de 4 cilindros em linha os
tempos de combustão são igualmente espaçados entre si, o que origina um
binário razoavelmente suave. A vibração produzida é, em grande parte,
absorvida pelos calços do motor, que são elásticos. O torque de um motor de 4
cilindros em V pode ser tão regular como o de um motor de 4 cilindros em
linha. Aquela disposição, porém, não permite um equilíbrio tão eficaz, seja qual
for o ângulo formado pelos grupos de cilindros.
7
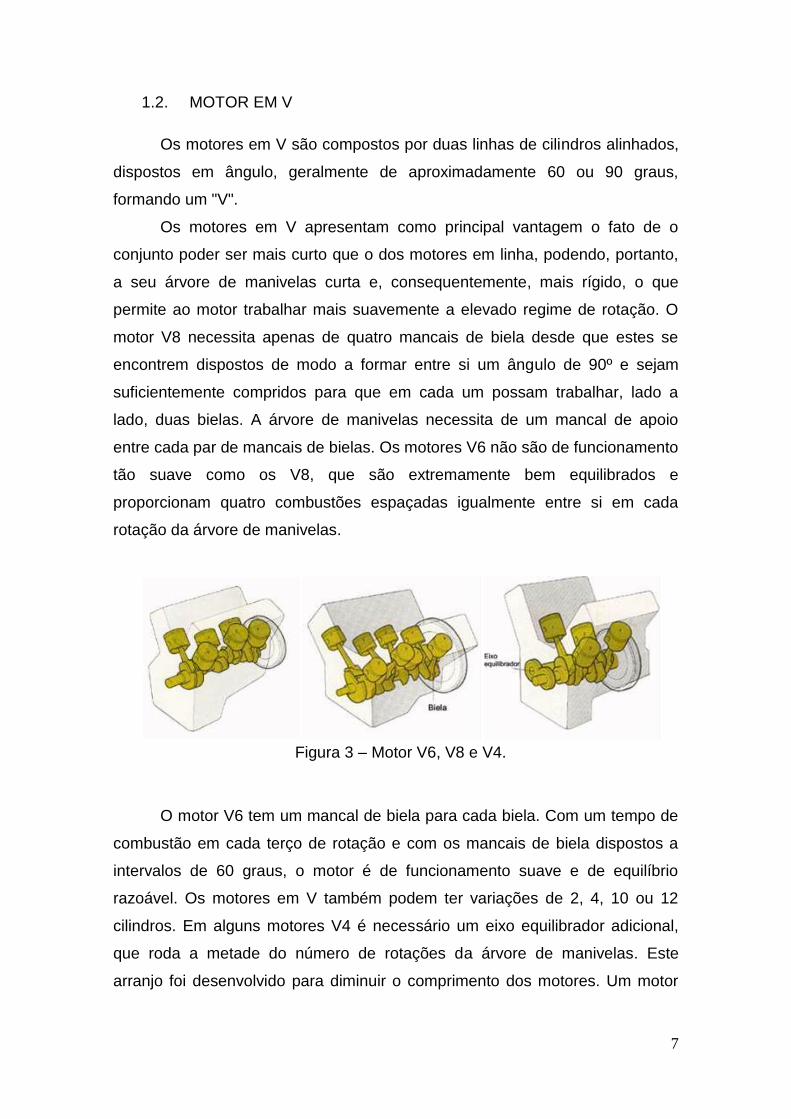
1.2. MOTOR EM V
Os motores em V são compostos por duas linhas de cilindros alinhados,
dispostos em ângulo, geralmente de aproximadamente 60 ou 90 graus,
formando um "V".
Os motores em V apresentam como principal vantagem o fato de o
conjunto poder ser mais curto que o dos motores em linha, podendo, portanto,
a seu árvore de manivelas curta e, consequentemente, mais rígido, o que
permite ao motor trabalhar mais suavemente a elevado regime de rotação. O
motor V8 necessita apenas de quatro mancais de biela desde que estes se
encontrem dispostos de modo a formar entre si um ângulo de 90º e sejam
suficientemente compridos para que em cada um possam trabalhar, lado a
lado, duas bielas. A árvore de manivelas necessita de um mancal de apoio
entre cada par de mancais de bielas. Os motores V6 não são de funcionamento
tão suave como os V8, que são extremamente bem equilibrados e
proporcionam quatro combustões espaçadas igualmente entre si em cada
rotação da árvore de manivelas.
Figura 3 – Motor V6, V8 e V4.
O motor V6 tem um mancal de biela para cada biela. Com um tempo de
combustão em cada terço de rotação e com os mancais de biela dispostos a
intervalos de 60 graus, o motor é de funcionamento suave e de equilíbrio
razoável. Os motores em V também podem ter variações de 2, 4, 10 ou 12
cilindros. Em alguns motores V4 é necessário um eixo equilibrador adicional,
que roda a metade do número de rotações da árvore de manivelas. Este
arranjo foi desenvolvido para diminuir o comprimento dos motores. Um motor
8
de seis ou mais cilindros em linha é extremamente longo e exige que seu
alojamento ocupe considerável espaço no veículo que irá equipar.
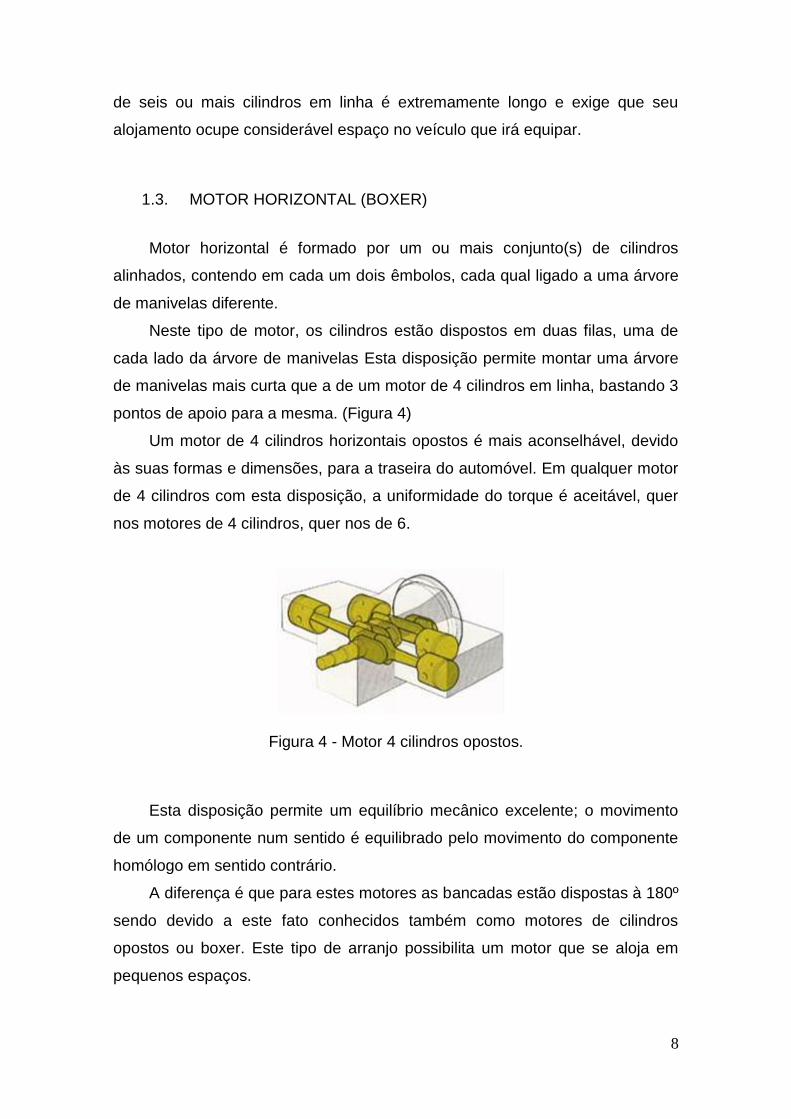
1.3. MOTOR HORIZONTAL (BOXER)
Motor horizontal é formado por um ou mais conjunto(s) de cilindros
alinhados, contendo em cada um dois êmbolos, cada qual ligado a uma árvore
de manivelas diferente.
Neste tipo de motor, os cilindros estão dispostos em duas filas, uma de
cada lado da árvore de manivelas Esta disposição permite montar uma árvore
de manivelas mais curta que a de um motor de 4 cilindros em linha, bastando 3
pontos de apoio para a mesma. (Figura 4)
Um motor de 4 cilindros horizontais opostos é mais aconselhável, devido
às suas formas e dimensões, para a traseira do automóvel. Em qualquer motor
de 4 cilindros com esta disposição, a uniformidade do torque é aceitável, quer
nos motores de 4 cilindros, quer nos de 6.
Figura 4 - Motor 4 cilindros opostos.
Esta disposição permite um equilíbrio mecânico excelente; o movimento
de um componente num sentido é equilibrado pelo movimento do componente
homólogo em sentido contrário.
A diferença é que para estes motores as bancadas estão dispostas à 180º
sendo devido a este fato conhecidos também como motores de cilindros
opostos ou boxer. Este tipo de arranjo possibilita um motor que se aloja em
pequenos espaços.
9
Esse é motor utilizado no Fusca e na Kombi, porém, este grau de
parentesco com esses carros, não significa que é um motor simples – ele
também utilizado em Porsches e Subarus, famosos por seus altos
desempenhos. Trata-se de um propulsor de cilindros horizontais opostos, que
permite outro tipo de configuração e disposição. O Boxer é um motor mais
baixo e largo que o motor em linha, podendo ser utilizados em cofres
(habitáculo do motor) mais baixos que o comum.
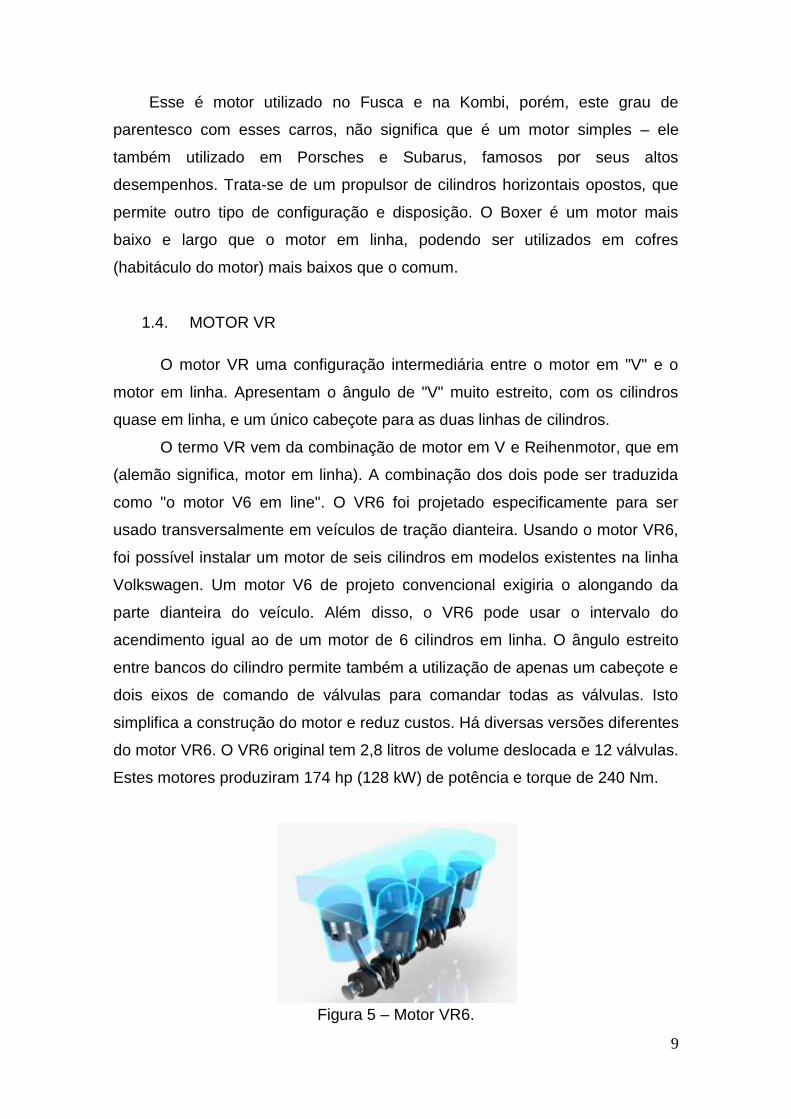
1.4. MOTOR VR
O motor VR uma configuração intermediária entre o motor em "V" e o
motor em linha. Apresentam o ângulo de "V" muito estreito, com os cilindros
quase em linha, e um único cabeçote para as duas linhas de cilindros.
O termo VR vem da combinação de motor em V e Reihenmotor, que em
(alemão significa, motor em linha). A combinação dos dois pode ser traduzida
como "o motor V6 em line". O VR6 foi projetado especificamente para ser
usado transversalmente em veículos de tração dianteira. Usando o motor VR6,
foi possível instalar um motor de seis cilindros em modelos existentes na linha
Volkswagen. Um motor V6 de projeto convencional exigiria o alongando da
parte dianteira do veículo. Além disso, o VR6 pode usar o intervalo do
acendimento igual ao de um motor de 6 cilindros em linha. O ângulo estreito
entre bancos do cilindro permite também a utilização de apenas um cabeçote e
dois eixos de comando de válvulas para comandar todas as válvulas. Isto
simplifica a construção do motor e reduz custos. Há diversas versões diferentes
do motor VR6. O VR6 original tem 2,8 litros de volume deslocada e 12 válvulas.
Estes motores produziram 174 hp (128 kW) de potência e torque de 240 Nm.
Figura 5 – Motor VR6.
10
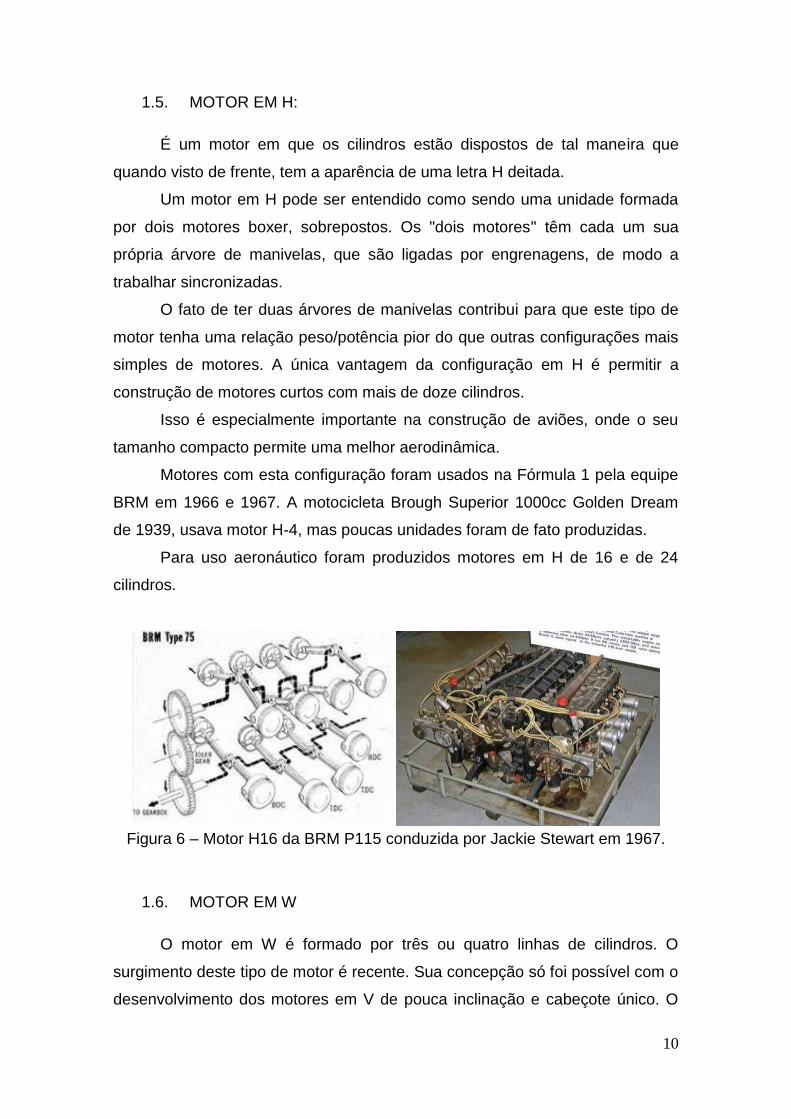
1.5. MOTOR EM H:
É um motor em que os cilindros estão dispostos de tal maneira que
quando visto de frente, tem a aparência de uma letra H deitada.
Um motor em H pode ser entendido como sendo uma unidade formada
por dois motores boxer, sobrepostos. Os "dois motores" têm cada um sua
própria árvore de manivelas, que são ligadas por engrenagens, de modo a
trabalhar sincronizadas.
O fato de ter duas árvores de manivelas contribui para que este tipo de
motor tenha uma relação peso/potência pior do que outras configurações mais
simples de motores. A única vantagem da configuração em H é permitir a
construção de motores curtos com mais de doze cilindros.
Isso é especialmente importante na construção de aviões, onde o seu
tamanho compacto permite uma melhor aerodinâmica.
Motores com esta configuração foram usados na Fórmula 1 pela equipe
BRM em 1966 e 1967. A motocicleta Brough Superior 1000cc Golden Dream
de 1939, usava motor H-4, mas poucas unidades foram de fato produzidas.
Para uso aeronáutico foram produzidos motores em H de 16 e de 24
cilindros.
Figura 6 – Motor H16 da BRM P115 conduzida por Jackie Stewart em 1967.
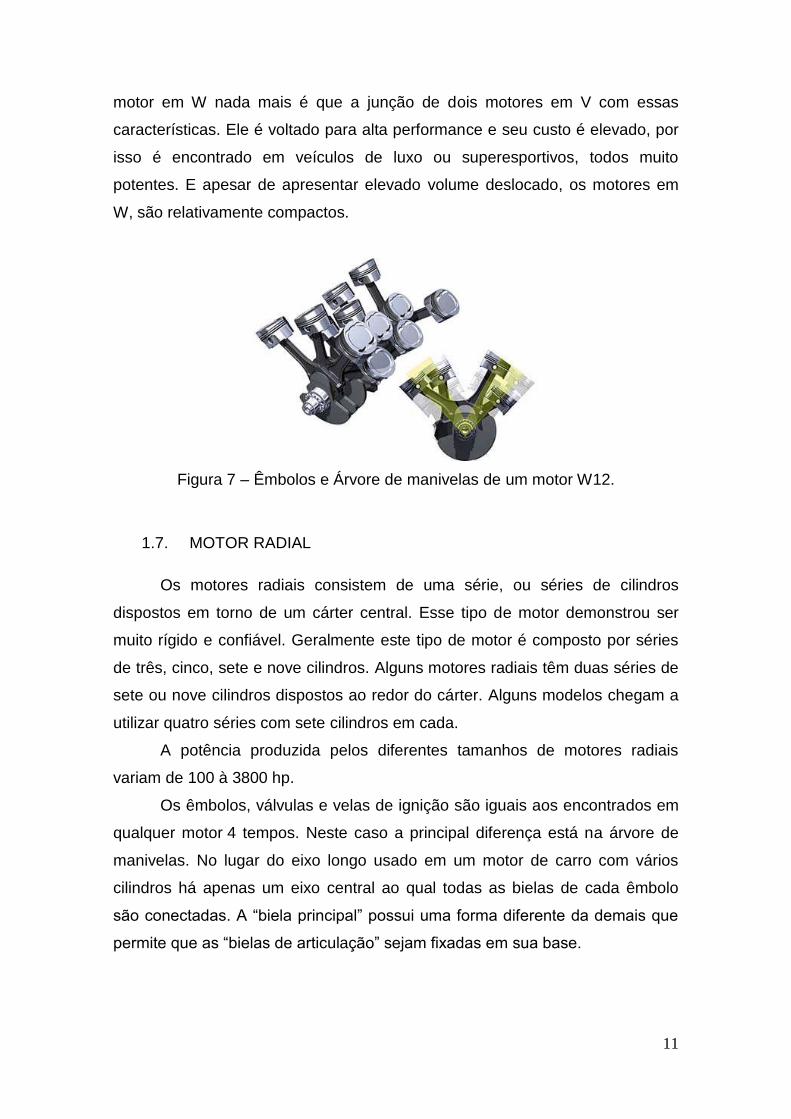
1.6. MOTOR EM W
O motor em W é formado por três ou quatro linhas de cilindros. O
surgimento deste tipo de motor é recente. Sua concepção só foi possível com o
desenvolvimento dos motores em V de pouca inclinação e cabeçote único. O
11
motor em W nada mais é que a junção de dois motores em V com essas
características. Ele é voltado para alta performance e seu custo é elevado, por
isso é encontrado em veículos de luxo ou superesportivos, todos muito
potentes. E apesar de apresentar elevado volume deslocado, os motores em
W, são relativamente compactos.
Figura 7 – Êmbolos e Árvore de manivelas de um motor W12.
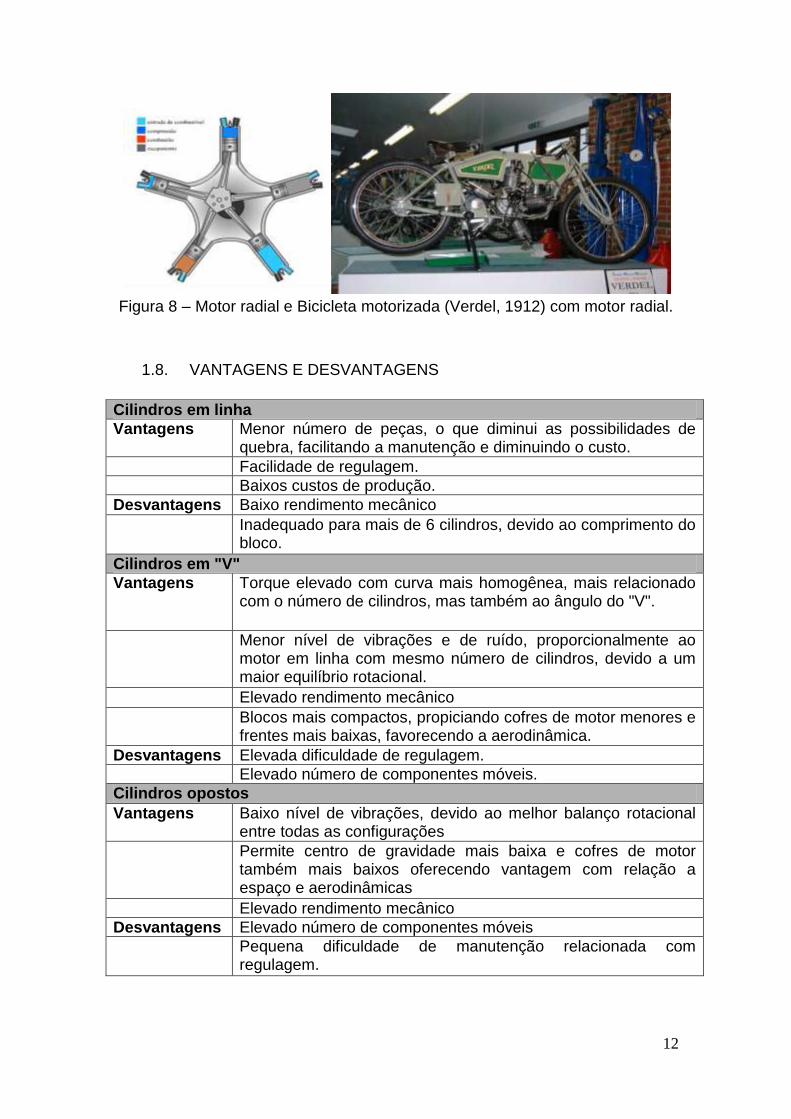
1.7. MOTOR RADIAL
Os motores radiais consistem de uma série, ou séries de cilindros
dispostos em torno de um cárter central. Esse tipo de motor demonstrou ser
muito rígido e confiável. Geralmente este tipo de motor é composto por séries
de três, cinco, sete e nove cilindros. Alguns motores radiais têm duas séries de
sete ou nove cilindros dispostos ao redor do cárter. Alguns modelos chegam a
utilizar quatro séries com sete cilindros em cada.
A potência produzida pelos diferentes tamanhos de motores radiais
variam de 100 à 3800 hp.
Os êmbolos, válvulas e velas de ignição são iguais aos encontrados em
qualquer motor 4 tempos. Neste caso a principal diferença está na árvore de
manivelas. No lugar do eixo longo usado em um motor de carro com vários
cilindros há apenas um eixo central ao qual todas as bielas de cada êmbolo
são conectadas. A “biela principal” possui uma forma diferente da demais que
permite que as “bielas de articulação” sejam fixadas em sua base.
12
Figura 8 – Motor radial e Bicicleta motorizada (Verdel, 1912) com motor radial.
1.8. VANTAGENS E DESVANTAGENS
Cilindros em linha
Vantagens Menor número de peças, o que diminui as possibilidades de quebra, facilitando a manutenção e diminuindo o custo.
Facilidade de regulagem.
Baixos custos de produção.
Desvantagens Baixo rendimento mecânico
Inadequado para mais de 6 cilindros, devido ao comprimento do bloco.
Cilindros em "V"
Vantagens Torque elevado com curva mais homogênea, mais relacionado com o número de cilindros, mas também ao ângulo do "V".
Menor nível de vibrações e de ruído, proporcionalmente ao motor em linha com mesmo número de cilindros, devido a um maior equilíbrio rotacional.
Elevado rendimento mecânico
Blocos mais compactos, propiciando cofres de motor menores e frentes mais baixas, favorecendo a aerodinâmica.
Desvantagens Elevada dificuldade de regulagem.
Elevado número de componentes móveis.
Cilindros opostos
Vantagens Baixo nível de vibrações, devido ao melhor balanço rotacional entre todas as configurações
Permite centro de gravidade mais baixa e cofres de motor também mais baixos oferecendo vantagem com relação a espaço e aerodinâmicas
Elevado rendimento mecânico
Desvantagens Elevado número de componentes móveis
Pequena dificuldade de manutenção relacionada com regulagem.
13
REFERÊNCIAS BIBLIOGRÁFICAS:
Auto Mechanics – Martin W. Stockel Industrial Education consultant
Souht Holland , Illiniois - 1981
Automotive Handbook – Bosch – 1994
2. SINCRONISMO DO MOTOR DE COMBUSTÃO INTERNA
O sincronismo de um motor de combustão interna depende do
funcionamento combinado de várias partes. Se uma destas partes não
trabalhar no compasso correto o motor pode não funcionar adequadamente. A
falta de sincronismo também danificar o motor. Cada uma das partes mais
importantes será apresentada a seguir.
2.1. PARTES DO MOTOR
O motor é constituído basicamente por duas grandes partes: a inferior,
que contém o conjunto da árvore de manivelas, êmbolos, bielas e carter, é
conhecida como bloco.
A parte superior é o cabeçote do motor, ou cabeçote de cilindros, onde
normalmente encontramos as válvulas e o comando de válvulas (existem
motores nos quais o comando de válvulas fica localizado no bloco).
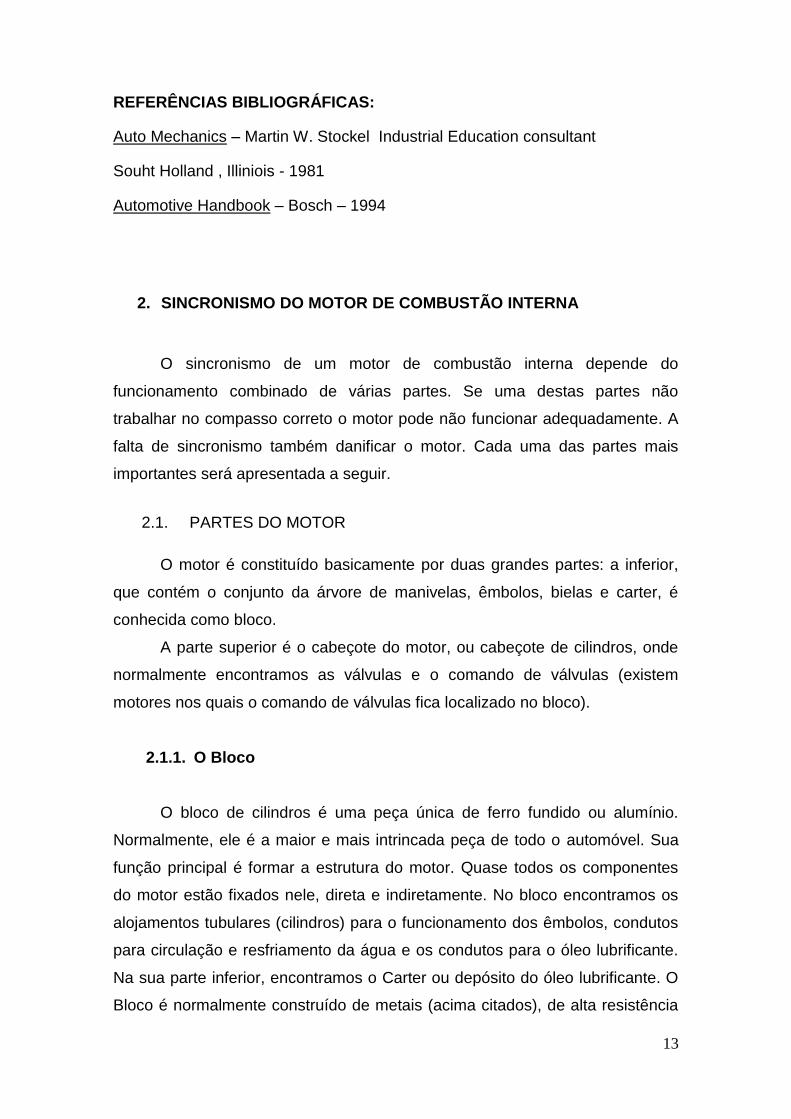
2.1.1. O Bloco
O bloco de cilindros é uma peça única de ferro fundido ou alumínio.
Normalmente, ele é a maior e mais intrincada peça de todo o automóvel. Sua
função principal é formar a estrutura do motor. Quase todos os componentes
do motor estão fixados nele, direta e indiretamente. No bloco encontramos os
alojamentos tubulares (cilindros) para o funcionamento dos êmbolos, condutos
para circulação e resfriamento da água e os condutos para o óleo lubrificante.
Na sua parte inferior, encontramos o Carter ou depósito do óleo lubrificante. O
Bloco é normalmente construído de metais (acima citados), de alta resistência
14
mecânica, pois devem suportar os fortes efeitos de torção e flexão, gerados
pelo funcionamento do motor.
Atualmente existem blocos construídos com outros materiais, como
plástico e até cerâmica, com alta rigidez estrutural e sempre buscando a
redução de massa do motor.
Figura 9 – Bloco de um motor 4 cilindros.
2.1.2. Êmbolos
Os êmbolos têm a função de transformar a energia térmica gerada pela
queima da mistura ar/combustível em energia cinética que faz girar a árvore de
manivelas. Também têm a função de comprimir a mistura. Têm formato
cilíndrico e se movimentam para cima e para baixo dentro dos cilindros, onde
alojam-se com uma folga calibrada que permite seu movimento. Normalmente
são peças feitas de alumínio fundido ou forjado, pois este material, além de ser
leve, é excelente condutor de calor. Possuem ranhuras próximas do topo, onde
estão encaixados normalmente três anéis: de vedação, raspador e coletor de
óleo. A sua parte superior, é também conhecida como cabeça do êmbolo e
pode ser plana, convexa, côncava em um dos muitos tipos, com desenhos para
promover a adequada turbulência da mistura ar-combustível com o objetivo de
melhorar a qualidade da mistura e da combustão.
15
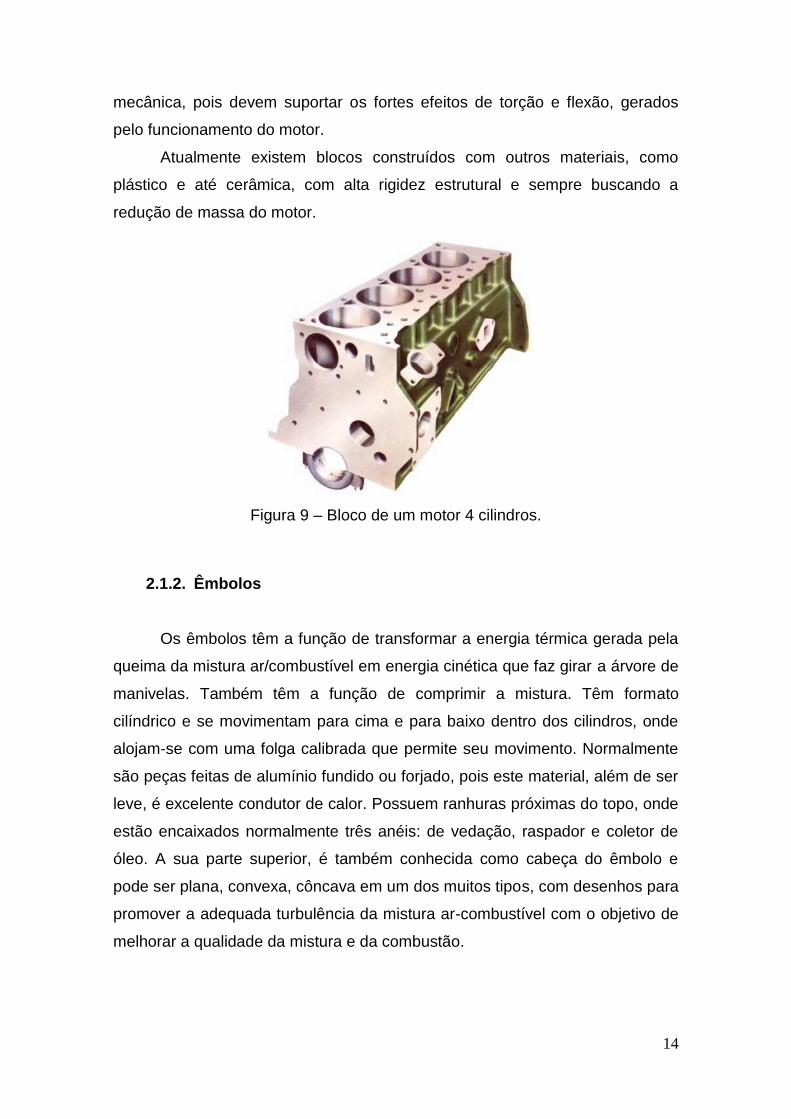
2.1.3. Bielas
As bielas ligam os êmbolos a árvore de manivelas e transformam o
movimento linear dos êmbolos (subida e descida) em movimento rotativo na
árvore de manivelas. Estão ligadas na sua parte superior ao êmbolo, através
de pinos, possibilitando o movimento relativo entre eles. Na parte inferior, as
bielas estão ligadas diretamente a árvore de manivelas através de mancais,
dotados de elementos de desgaste chamados bronzinas. As bielas são feitas,
em sua maioria, de aço forjado de alta resistência. Em uma das extremidades
da árvore de manivela nós vamos encontrar o volante do motor, que dá
uniformidade e inércia aos impulsos motores de cada cilindro movido pelos
êmbolos.
Figura 10 - Êmbolo, Biela e Árvore de Manivelas.
2.1.4. Árvore de Manivelas
Através da ação das bielas, transforma o movimento alternativo de
êmbolos em movimento rotativo, gerando o torque do motor (que é transmitido
às rodas por meio do sistema de transmissão). Normalmente é uma peça
construída em aço forjado ou ferro fundido. A árvore de manivelas pode ser
dividido em três partes básicas: mancais de apoio, mancais das bielas e contra-
pesos. No caso dos motores de quatro cilindros, normalmente existem 4
16
mancais das bielas e 5 mancais de apoio, sendo dois nas extremidades e três
internamente. Estes têm a importante função de impedir que eixo sofra
empenamento. De fato, a árvore de manivelas funciona como manivela,
apoiada pelas duas extremidades. Quando os êmbolos não fornecem qualquer
impulso motor (por exemplo, nos "tempos mortos" do ciclo de quatro tempos), é
o volante, que já adquiriu previamente movimento de rotação, que restitui uma
parte dessa energia, para que a árvore de manivelas continue girando com
uniformidade. É apoiado no bloco do motor pelas extremidades, ou coxins. Nas
"curvas" da árvore de manivelas, existem pequenos eixos, chamados pinos das
manivelas, onde se articulam os “pés” das bielas. Normalmente, cada biela é
articulada em um pino, mas no caso dos motores em V, articulam-se duas em
cada pino.
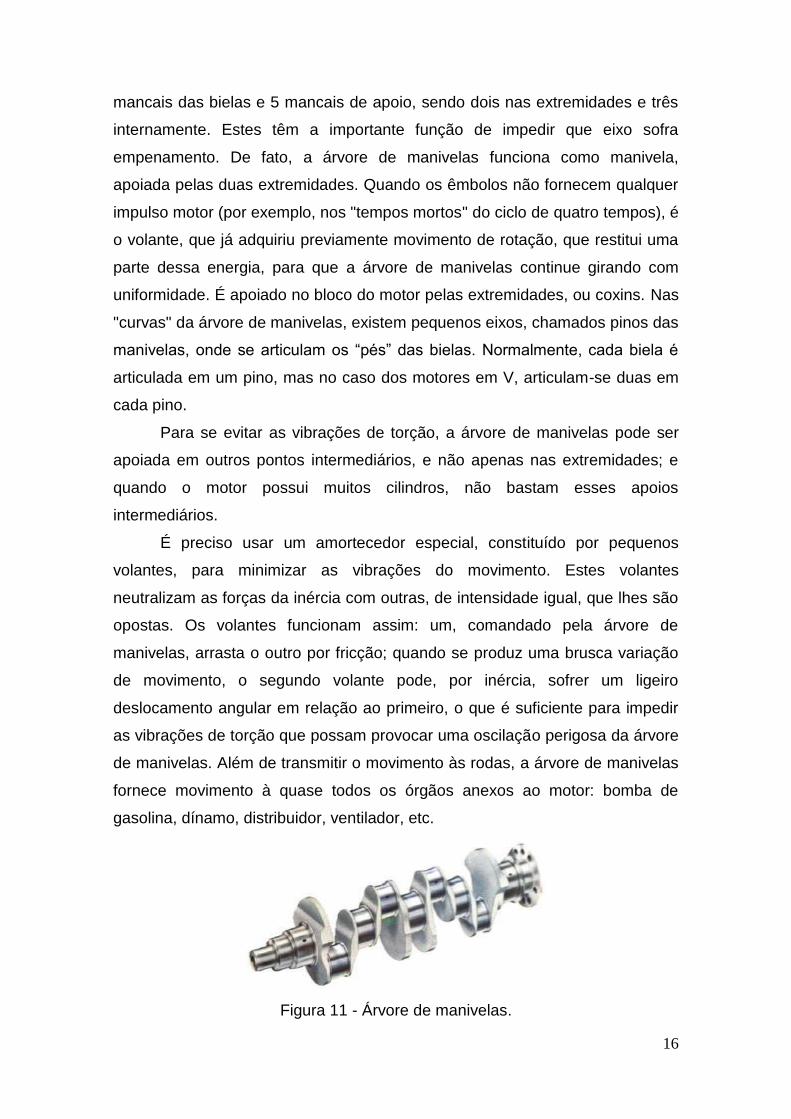
Para se evitar as vibrações de torção, a árvore de manivelas pode ser
apoiada em outros pontos intermediários, e não apenas nas extremidades; e
quando o motor possui muitos cilindros, não bastam esses apoios
intermediários.
É preciso usar um amortecedor especial, constituído por pequenos
volantes, para minimizar as vibrações do movimento. Estes volantes
neutralizam as forças da inércia com outras, de intensidade igual, que lhes são
opostas. Os volantes funcionam assim: um, comandado pela árvore de
manivelas, arrasta o outro por fricção; quando se produz uma brusca variação
de movimento, o segundo volante pode, por inércia, sofrer um ligeiro
deslocamento angular em relação ao primeiro, o que é suficiente para impedir
as vibrações de torção que possam provocar uma oscilação perigosa da árvore
de manivelas. Além de transmitir o movimento às rodas, a árvore de manivelas
fornece movimento à quase todos os órgãos anexos ao motor: bomba de
gasolina, dínamo, distribuidor, ventilador, etc.
Figura 11 - Árvore de manivelas.

17
2.1.5. O Cabeçote
O cabeçote tem a função de cobrir os êmbolos e vedá-los. Geralmente é
de metal (ferro fundido ou alumínio) fixado por parafusos sobre o bloco. É nele
que encontramos, dentre outros itens, as câmaras de combustão, as velas e as
válvulas. Entre ele e o bloco existe a junta do cabeçote, responsável por
manter a vedação do conjunto e evitar perda de compressão.
Figura 12 - Cabeçote.
2.1.6. Câmara de Combustão
Na câmara de combustão ocorre queima da mistura ar combustível.
Localiza-se na parte superior do cilindro e compreende o volume entre a
posição mais alta do êmbolo (PMS - ponto morto superior) e o cabeçote. A
forma mais comum da câmara de combustão é a hemisférica.
Figura 13 - Êmbolo no PMS e câmara de combustão.
18
2.1.7. Vela de Ignição
A vela de ignição é um dispositivo alojado na câmara de combustão
(cabeçote) de um motor, sendo responsável pela ignição da mistura ar-
combustível. De um modo geral, existe 1 vela para cada cilindro. O processo se
inicia na bobina de ignição: um transformador elétrico que aumenta a tensão
normal do sistema elétrico do veículo de 12 volts para tensões aproximadas de
20.000 volts que, quando aplicada à vela, gera uma centelha capaz de
percorrer o ar através da abertura calibrada entre os eletrodos.
Figura 14 – Vela de ignição.
2.1.8. Válvulas
As válvulas são dispositivos, normalmente fabricados com ligas de aço
de alta resistência mecânica que controlam a entrada da mistura ar-
combustível e saída dos gases queimados. As válvulas de admissão liberam a
entrada da mistura nova e as válvulas de descarga permitem a saída dos
gases queimados pelo coletor de exaustão. Em um motor de quatro tempos,
cada cilindro tem, no mínimo, uma válvula de admissão e uma válvula de
descarga. Já os motores dois tempos, geralmente, não utilizam válvulas para
controlar o vazão dos gases, mas sim janelas que abrem e fecham de acordo
com a posição do êmbolo. Neste caso o êmbolo possui orifícios que,
dependendo de sua posição durante o curso entre o ponto morto superior e
inferior, coincidem com outros orifícios localizados no cilindro. Esta
justaposição permite a passagem dos gases.
Para que isto ocorra às válvulas são empurradas por cames, que são
movidos pela árvore de manivelas; para retornar a posição inicial, fechada, as
válvulas são pressionadas por molas.
19
2.1.9. Comando de Válvulas
A função do comando de válvulas é controlar a abertura e o fechamento
das válvulas, garantindo que ocorram no momento adequado. O comando de
válvulas é um eixo com cames, movido pela árvore de manivelas, através de
uma correia, corrente ou engrenagem. O eixo pode acionar as válvulas
diretamente, no caso de comando no cabeçote (OHC) ou indiretamente através
de varetas, quando o comando se localiza no bloco (OHV). O comando dá
meia volta para cada volta completa da árvore de manivelas. Ele está apoiado,
geralmente, por mancais. A árvore de comando abre e fecha as válvulas.
Os comandos de válvulas podem ser basicamente de 3 tipos:
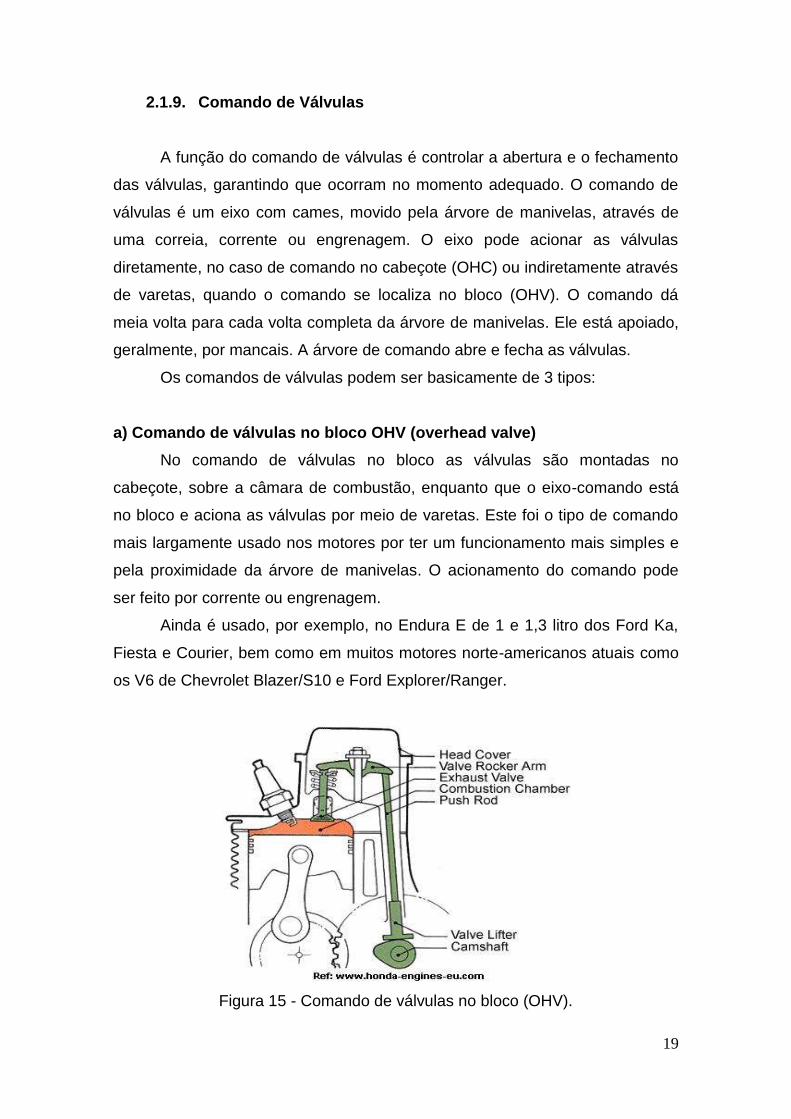
a) Comando de válvulas no bloco OHV (overhead valve)
No comando de válvulas no bloco as válvulas são montadas no
cabeçote, sobre a câmara de combustão, enquanto que o eixo-comando está
no bloco e aciona as válvulas por meio de varetas. Este foi o tipo de comando
mais largamente usado nos motores por ter um funcionamento mais simples e
pela proximidade da árvore de manivelas. O acionamento do comando pode
ser feito por corrente ou engrenagem.
Ainda é usado, por exemplo, no Endura E de 1 e 1,3 litro dos Ford Ka,
Fiesta e Courier, bem como em muitos motores norte-americanos atuais como
os V6 de Chevrolet Blazer/S10 e Ford Explorer/Ranger.
Figura 15 - Comando de válvulas no bloco (OHV).
20
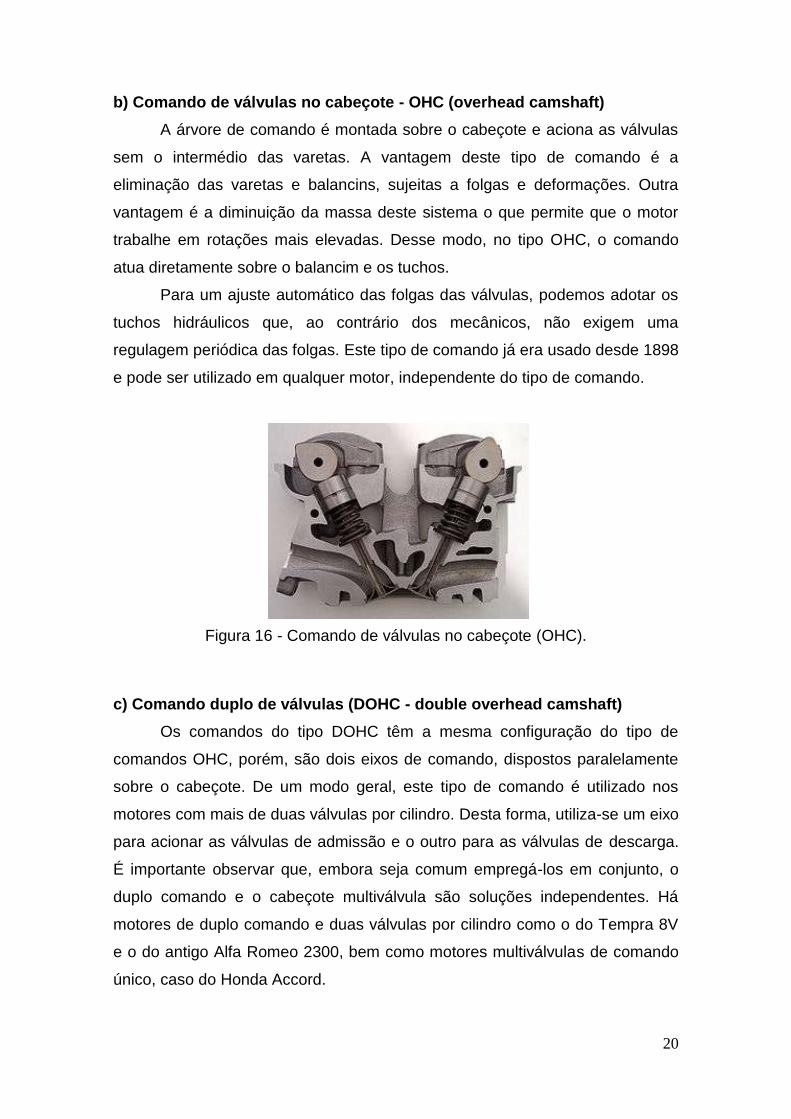
b) Comando de válvulas no cabeçote - OHC (overhead camshaft)
A árvore de comando é montada sobre o cabeçote e aciona as válvulas
sem o intermédio das varetas. A vantagem deste tipo de comando é a
eliminação das varetas e balancins, sujeitas a folgas e deformações. Outra
vantagem é a diminuição da massa deste sistema o que permite que o motor
trabalhe em rotações mais elevadas. Desse modo, no tipo OHC, o comando
atua diretamente sobre o balancim e os tuchos.
Para um ajuste automático das folgas das válvulas, podemos adotar os
tuchos hidráulicos que, ao contrário dos mecânicos, não exigem uma
regulagem periódica das folgas. Este tipo de comando já era usado desde 1898
e pode ser utilizado em qualquer motor, independente do tipo de comando.
Figura 16 - Comando de válvulas no cabeçote (OHC).
c) Comando duplo de válvulas (DOHC - double overhead camshaft)
Os comandos do tipo DOHC têm a mesma configuração do tipo de
comandos OHC, porém, são dois eixos de comando, dispostos paralelamente
sobre o cabeçote. De um modo geral, este tipo de comando é utilizado nos
motores com mais de duas válvulas por cilindro. Desta forma, utiliza-se um eixo
para acionar as válvulas de admissão e o outro para as válvulas de descarga.
É importante observar que, embora seja comum empregá-los em conjunto, o
duplo comando e o cabeçote multiválvula são soluções independentes. Há
motores de duplo comando e duas válvulas por cilindro como o do Tempra 8V
e o do antigo Alfa Romeo 2300, bem como motores multiválvulas de comando
único, caso do Honda Accord.
21
2.2. FUNCIONAMENTO DE UM MOTOR À COMBUSTÃO INTERNA
Um motor de combustão é uma máquina capaz de transformar a energia
química do combustível em trabalho e podem trabalhar segundo dois ciclos:
mecânicos e térmicos.
Os ciclos mecânicos podem ser de dois ou quatro tempos, onde, cada
tempo equivale à meia volta da árvore de manivelas ou 180 graus de giro. Nos
ciclos mecânicos são estudados os movimentos mecânicos das peças móveis
do motor e seu posicionamento, como: válvulas de admissão e descarga,
árvore de manivelas e os êmbolos.
Nos ciclos térmicos se analisa a transformação da energia química em
calor e sua preparação, não importando a posição das peças móveis.
Para que sejam efetuados os quatro tempos do motor, são necessários
duas voltas da árvore de manivelas e quatro cursos do êmbolo.
1 tempo = 1 curso do êmbolo = 1/2 volta da árvore de manivelas ou 180
graus de giro.
Portanto, 4 tempos = 4 cursos do êmbolo = 2 voltas da árvore de
manivelas ou 720 graus de giro.
Durante o funcionamento, o motor exerce quatro funções
importantíssimas que são: admissão, compressão, combustão-expansão e
descarga.
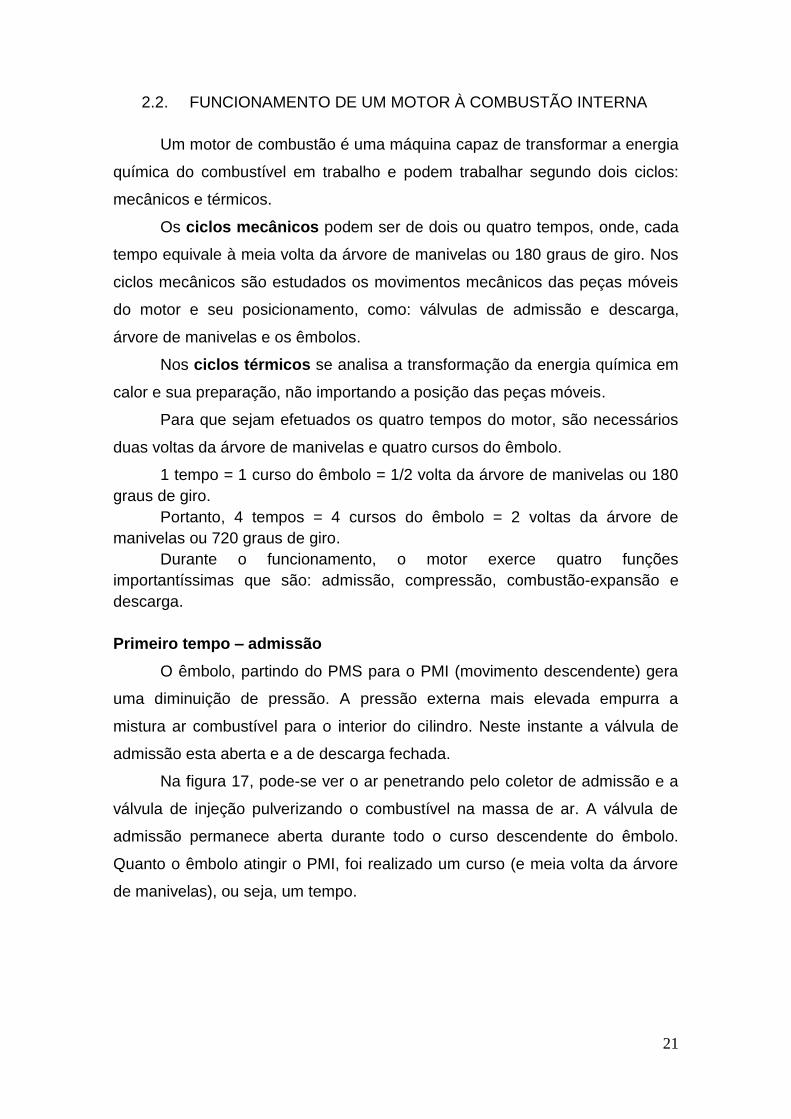
Primeiro tempo – admissão
O êmbolo, partindo do PMS para o PMI (movimento descendente) gera
uma diminuição de pressão. A pressão externa mais elevada empurra a
mistura ar combustível para o interior do cilindro. Neste instante a válvula de
admissão esta aberta e a de descarga fechada.
Na figura 17, pode-se ver o ar penetrando pelo coletor de admissão e a
válvula de injeção pulverizando o combustível na massa de ar. A válvula de
admissão permanece aberta durante todo o curso descendente do êmbolo.
Quanto o êmbolo atingir o PMI, foi realizado um curso (e meia volta da árvore
de manivelas), ou seja, um tempo.
22
Figura 17 - Admissão.
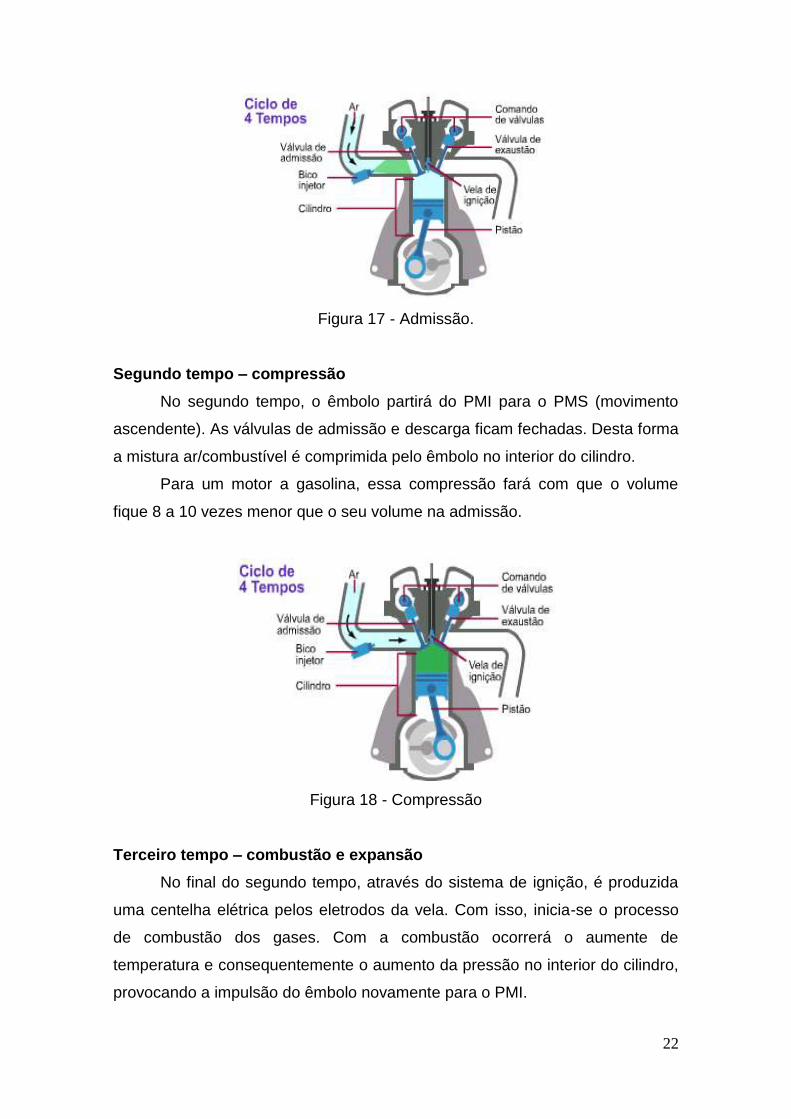
Segundo tempo – compressão
No segundo tempo, o êmbolo partirá do PMI para o PMS (movimento
ascendente). As válvulas de admissão e descarga ficam fechadas. Desta forma
a mistura ar/combustível é comprimida pelo êmbolo no interior do cilindro.
Para um motor a gasolina, essa compressão fará com que o volume
fique 8 a 10 vezes menor que o seu volume na admissão.
Figura 18 - Compressão
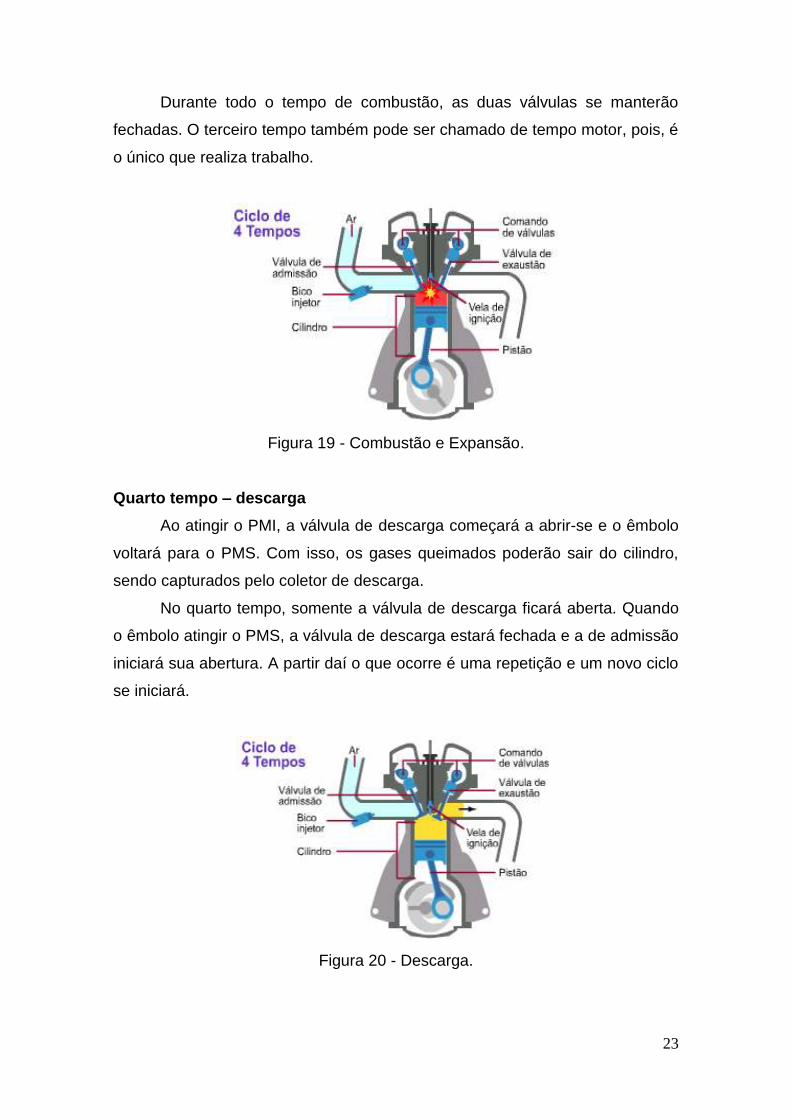
Terceiro tempo – combustão e expansão
No final do segundo tempo, através do sistema de ignição, é produzida
uma centelha elétrica pelos eletrodos da vela. Com isso, inicia-se o processo
de combustão dos gases. Com a combustão ocorrerá o aumente de
temperatura e consequentemente o aumento da pressão no interior do cilindro,
provocando a impulsão do êmbolo novamente para o PMI.
23
Durante todo o tempo de combustão, as duas válvulas se manterão
fechadas. O terceiro tempo também pode ser chamado de tempo motor, pois, é
o único que realiza trabalho.
Figura 19 - Combustão e Expansão.
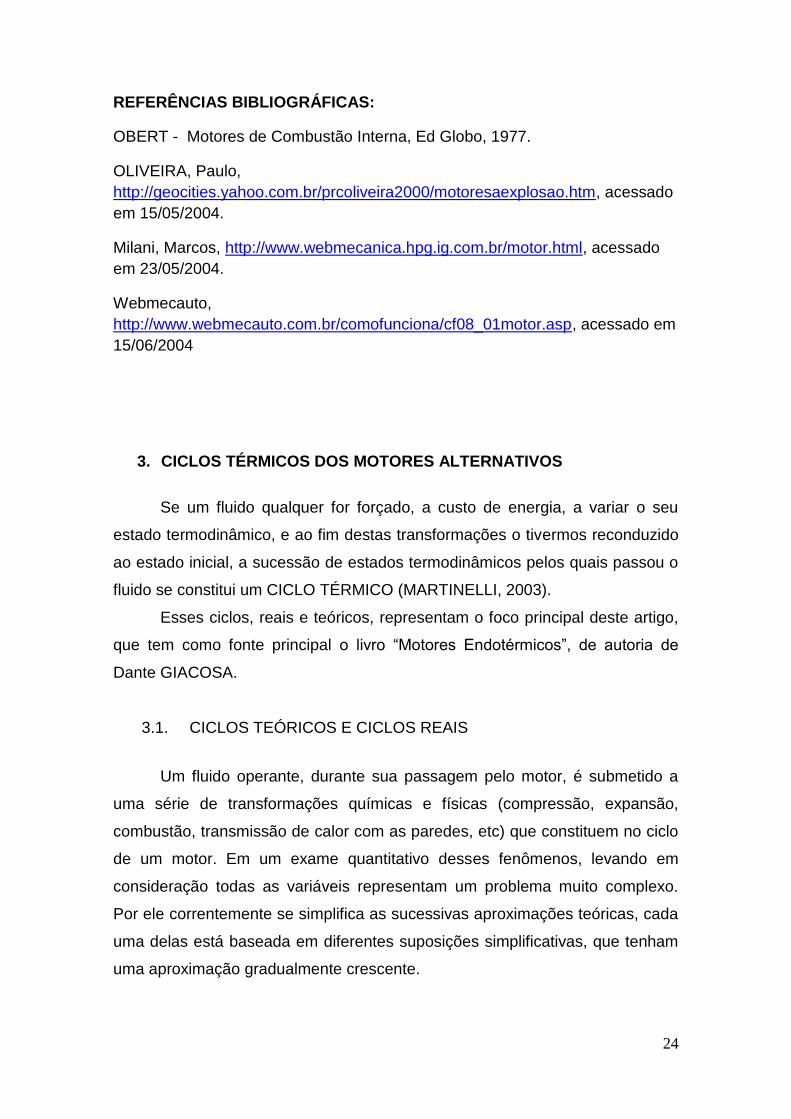
Quarto tempo – descarga
Ao atingir o PMI, a válvula de descarga começará a abrir-se e o êmbolo
voltará para o PMS. Com isso, os gases queimados poderão sair do cilindro,
sendo capturados pelo coletor de descarga.
No quarto tempo, somente a válvula de descarga ficará aberta. Quando
o êmbolo atingir o PMS, a válvula de descarga estará fechada e a de admissão
iniciará sua abertura. A partir daí o que ocorre é uma repetição e um novo ciclo
se iniciará.
Figura 20 - Descarga.
24
REFERÊNCIAS BIBLIOGRÁFICAS:
OBERT - Motores de Combustão Interna, Ed Globo, 1977.
OLIVEIRA, Paulo,
http://geocities.yahoo.com.br/prcoliveira2000/motoresaexplosao.htm, acessado
em 15/05/2004.
Milani, Marcos, http://www.webmecanica.hpg.ig.com.br/motor.html, acessado
em 23/05/2004.
Webmecauto,
http://www.webmecauto.com.br/comofunciona/cf08_01motor.asp, acessado em
15/06/2004
3. CICLOS TÉRMICOS DOS MOTORES ALTERNATIVOS
Se um fluido qualquer for forçado, a custo de energia, a variar o seu
estado termodinâmico, e ao fim destas transformações o tivermos reconduzido
ao estado inicial, a sucessão de estados termodinâmicos pelos quais passou o
fluido se constitui um CICLO TÉRMICO (MARTINELLI, 2003).
Esses ciclos, reais e teóricos, representam o foco principal deste artigo,
que tem como fonte principal o livro “Motores Endotérmicos”, de autoria de
Dante GIACOSA.
3.1. CICLOS TEÓRICOS E CICLOS REAIS
Um fluido operante, durante sua passagem pelo motor, é submetido a
uma série de transformações químicas e físicas (compressão, expansão,
combustão, transmissão de calor com as paredes, etc) que constituem no ciclo
de um motor. Em um exame quantitativo desses fenômenos, levando em
consideração todas as variáveis representam um problema muito complexo.
Por ele correntemente se simplifica as sucessivas aproximações teóricas, cada
uma delas está baseada em diferentes suposições simplificativas, que tenham
uma aproximação gradualmente crescente.
25
Para os ciclos teóricos, as aproximações comumente colocadas em
ordem de aproximação são: ciclo ideal, ciclo de ar e ciclo ar-combustível. Aos
ciclos teóricos se comparam na prática os ciclos reais, que se obtém
experimentalmente por meio dos indicadores; por esta razão, o ciclo real
também se chama ciclo indicativo.
Os ciclos teóricos não correspondem aos ciclos reais, constituem uma
útil referência para o estudo termodinâmico dos motores, particularmente para
compreender quanto influem sobre sua utilização nas condições de
funcionamento e para comparar entre si diversos tipos de motores.
Nos ciclos ideais se supõe que o fluído operante está constituído por ar
e que este se comporta como um gás perfeito. Por ele, os valores dos calores
específicos se consideram constantes e iguais ao do ar a 15ºC de temperatura
e uma atmosfera de pressão:
cp = 0,241 cal/kgoC
cv = 0,172 cal/kgoC
de onde resulta:
k = (cp / cv) = 1,40
Supondo-se, que as fases de introdução e extração de calor tenham
uma duração bem determinada, dependendo do tipo do ciclo, e que em outras
fases não há perda de calor.
É natural que com essas hipóteses, os valores máximos de temperatura
e pressão assim como, em consequência, o trabalho e o rendimento térmico
calculados para o ciclo ideal, sejam mais elevados que os correspondentes a
outros tipos de ciclos.
O ciclo ideal representa, portanto, o limite máximo que teoricamente
pode alcançar o motor e permite um fácil estudo matemático baseado nas leis
dos gases perfeitos. Por estes motivos este ciclo também pode ser chamado
de “ciclo teórico”.
Em um ciclo de ar, o fluído operante também é o ar, porque se supõe
que os calores específicos são variáveis ao longo de uma gama de
temperaturas que se opera.
26
As condições de introdução e extração de calor são iguais às do ciclo
ideal e não existem perdas de perdas de calor. Como o cálculo dos calores
específicos médios é complicado, se usam tabelas que dão diretamente os
valores do calor e do trabalho, em termos de energia interna e entalpia para os
diversos pontos das transformações isentrópicas do ar. Tendo em conta as
variações dos calores específicos, se obtém, para as temperaturas e pressões
máximas, valores inferiores aos calculados para o ciclo ideal; e
consequentemente, o trabalho e o rendimento térmico resultam em valores
mais baixos, mesmo assim, são maiores que os correspondentes ao ciclo real.
O ciclo ar-combustível, é, entre todos os que em geral se calculam, o
mais próximo do ciclo real. Em um motor de combustão por centelha, o fluido
está composto, durante a fase de aspiração, por uma mistura e os gases
residuais da combustão anterior; em um motor de combustão por compressão
está formado por ar e os gases residuais. Depois da combustão, o fluido esta
constituído por produtos mistos, isto é, um mistura de CO2, CO, H2O e N2.
Estes gases têm um calor especifico médio mais alto que os do ar, porque
contam com um incremento posterior dos calores específicos, devido a
dissociação e de composição química das moléculas mais leves submetidas à
ação de altas temperaturas. O aumento dos calores específicos, assim como a
dissociação que, por ser uma reação endotérmica, absorve uma parte do calor
da combustão produzindo uma diminuição da temperatura e a pressão máxima
em comparação com as calculadas para o ciclo de ar.
Para o cálculo do ciclo ar-combustível, se recorre a tabelas que contém
dados obtidos experimentalmente. Neste ciclo se admite que o calor é
introduzido e extraído de maneira instantânea, como no ciclo ideal, e que não
se procedem perdas de calor.
O ciclo real se obtém experimentalmente, por meio de recursos de
diversos aparelhos indicadores, capazes de registrar o diagrama da pressão
em função dos volumes, num cilindro motor em funcionamento. O diagrama
indicado revela as condições reais do ciclo e, por tanto, tem em conta também
as perdas de calor, a duração da combustão, as perdas causadas pelo
deslocamento do fluido, a duração do tempo de abertura das válvulas, o tempo
de combustão, assim como de injeção e as perdas pela descarga.
27
3.1.1. Analise de um ciclo e seu rendimento térmico
A segunda lei da termodinâmica diz que, nenhum motor real, ou ideal
pode converter em trabalho mecânico todo o calor que é introduzido. Para
tanto, somente uma fração do calor resultado da combustão será transformado
em trabalho; esta fração representa um rendimento térmico do motor. Em
outros ciclos térmicos, o rendimento térmico ideal e é a relação entre a
quantidade de calor transformada em trabalho útil e a quantidade de calor
fornecido pelo fluido.
Como o trabalho útil equivale a diferença entre o calor fornecido Q1 e o
calor subtraído Q2, teremos:
1 2
1
e
Q Q
Q
Podemos ter uma ideia melhor do conceito de rendimento térmico
examinando a sucessão de transformações em coordenadas p-v (pressão-
volume específico) e T-s (temperatura-Entropia) para um ciclo ideal.
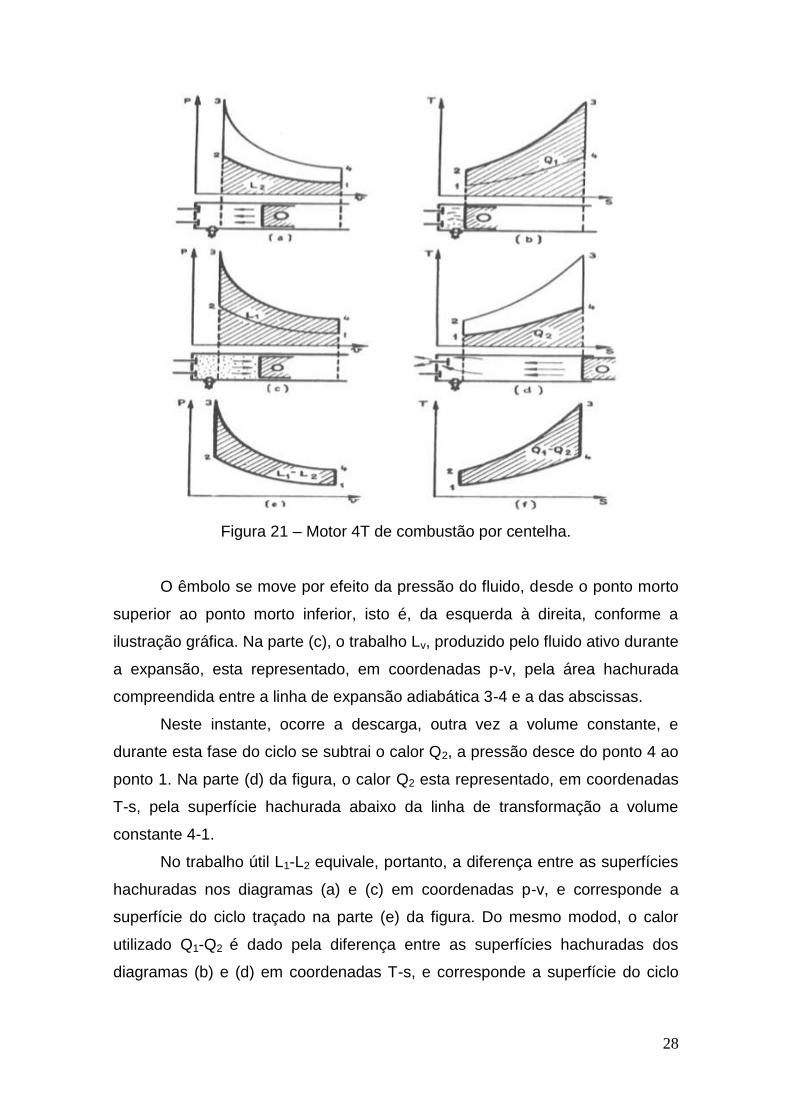
Na figura 21 temos o caso de um motor de combustão por centelha de 4
tempos. Em (a) se representa em coordenadas p-v a fase de compressão. Nos
pontos 1 e 2 correspondem, respectivamente, aos estados dos fluidos em um
ponto morto inferior e um ponto morto superior do êmbolo. O trabalho realizado
pelo êmbolo para a compressão do fluido é o trabalho introduzido L2, o qual
esta representado pela área hachurada compreendida entre as linhas de
compressão adiabática 1-2 e a das abscissas. Ao final da compressão, fase
(b), se introduz de maneira instantânea o calor produzido pela combustão, pois
o ciclo é a volume constante. Esta fase esta representada graficamente em
coordenadas T-s, e o calor fornecido Q1 corresponde a área hachurada
compreendida entre a linha térmica e o volume constante 2-3 e o das
abscissas.
28
Figura 21 – Motor 4T de combustão por centelha.
O êmbolo se move por efeito da pressão do fluido, desde o ponto morto
superior ao ponto morto inferior, isto é, da esquerda à direita, conforme a
ilustração gráfica. Na parte (c), o trabalho Lv, produzido pelo fluido ativo durante
a expansão, esta representado, em coordenadas p-v, pela área hachurada
compreendida entre a linha de expansão adiabática 3-4 e a das abscissas.
Neste instante, ocorre a descarga, outra vez a volume constante, e
durante esta fase do ciclo se subtrai o calor Q2, a pressão desce do ponto 4 ao
ponto 1. Na parte (d) da figura, o calor Q2 esta representado, em coordenadas
T-s, pela superfície hachurada abaixo da linha de transformação a volume
constante 4-1.
No trabalho útil L1-L2 equivale, portanto, a diferença entre as superfícies
hachuradas nos diagramas (a) e (c) em coordenadas p-v, e corresponde a
superfície do ciclo traçado na parte (e) da figura. Do mesmo modod, o calor
utilizado Q1-Q2 é dado pela diferença entre as superfícies hachuradas dos
diagramas (b) e (d) em coordenadas T-s, e corresponde a superfície do ciclo
29
hachurado na parte (f) da figura. Como o trabalho útil é evidentemente, igual ao
calor utilizado, podemos escrever:
A (L2 – L1) = (Q1 – Q2)
Deste modo podemos simplificar o cálculo do trabalho útil e do
rendimento térmico do ciclo usando os valores Q1 e Q2 no lugar de L2 e L1.
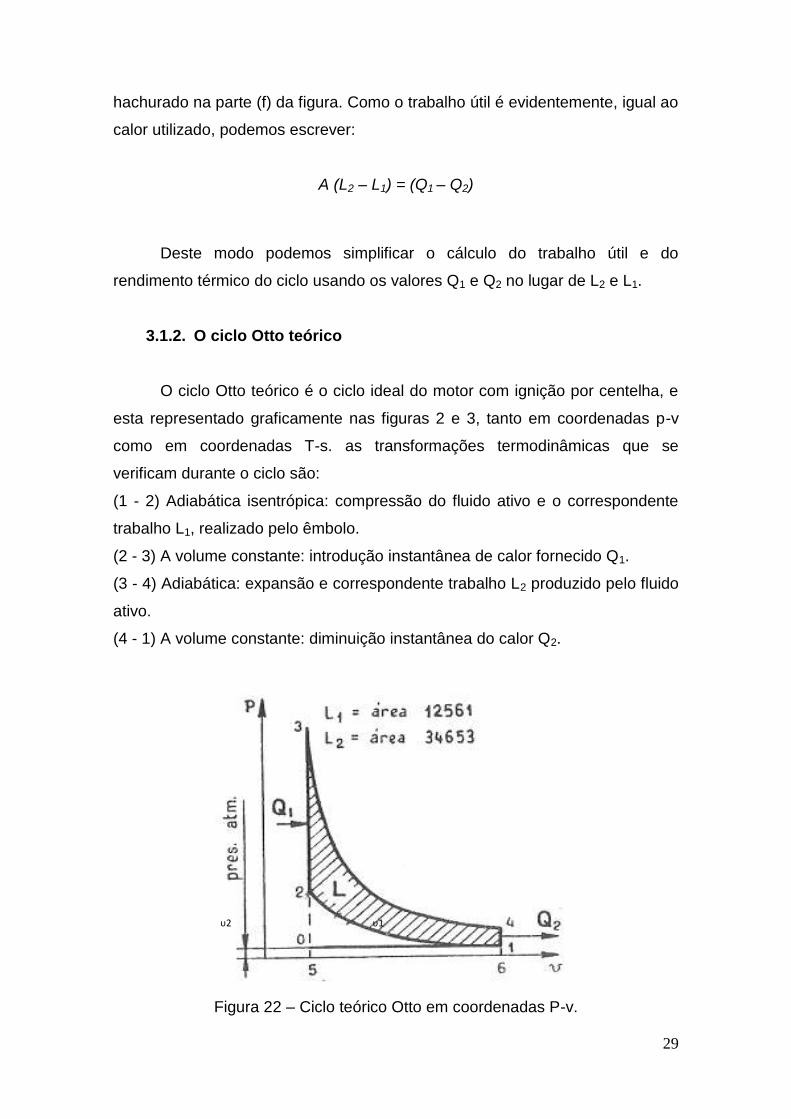
3.1.2. O ciclo Otto teórico
O ciclo Otto teórico é o ciclo ideal do motor com ignição por centelha, e
esta representado graficamente nas figuras 2 e 3, tanto em coordenadas p-v
como em coordenadas T-s. as transformações termodinâmicas que se
verificam durante o ciclo são:
(1 - 2) Adiabática isentrópica: compressão do fluido ativo e o correspondente
trabalho L1, realizado pelo êmbolo.
(2 - 3) A volume constante: introdução instantânea de calor fornecido Q1.
(3 - 4) Adiabática: expansão e correspondente trabalho L2 produzido pelo fluido
ativo.
(4 - 1) A volume constante: diminuição instantânea do calor Q2.
Figura 22 – Ciclo teórico Otto em coordenadas P-v.
υ2 υ1
30
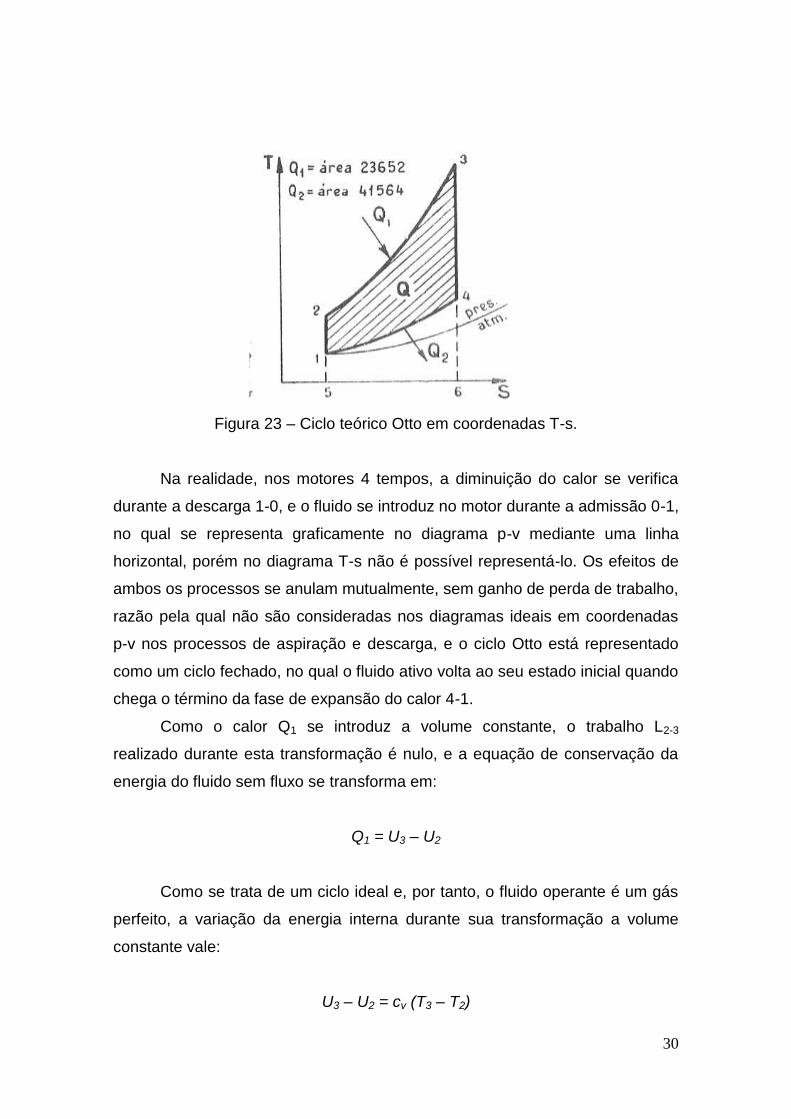
Figura 23 – Ciclo teórico Otto em coordenadas T-s.
Na realidade, nos motores 4 tempos, a diminuição do calor se verifica
durante a descarga 1-0, e o fluido se introduz no motor durante a admissão 0-1,
no qual se representa graficamente no diagrama p-v mediante uma linha
horizontal, porém no diagrama T-s não é possível representá-lo. Os efeitos de
ambos os processos se anulam mutualmente, sem ganho de perda de trabalho,
razão pela qual não são consideradas nos diagramas ideais em coordenadas
p-v nos processos de aspiração e descarga, e o ciclo Otto está representado
como um ciclo fechado, no qual o fluido ativo volta ao seu estado inicial quando
chega o término da fase de expansão do calor 4-1.
Como o calor Q1 se introduz a volume constante, o trabalho L2-3
realizado durante esta transformação é nulo, e a equação de conservação da
energia do fluido sem fluxo se transforma em:
Q1 = U3 – U2
Como se trata de um ciclo ideal e, por tanto, o fluido operante é um gás
perfeito, a variação da energia interna durante sua transformação a volume
constante vale:
U3 – U2 = cv (T3 – T2)

31
De onde resulta:
Q1 = cv (T3 – T2)
Analogamente, como o calor Q2 é extraído também a volume constante,
é em tais condições que trabalho L 4 - 1 = 0, podemos escrever:
Q2 = U4 – U1
Considerando o fluido um gás perfeito:
Q2 = cv (T4 – T1)
Consequentemente, o rendimento térmico ideal para o ciclo Otto teórico
é:
1 2
1
Q Q
Q
2
1
1Q
Q 1
2
4
3
1( )
( )
v
v
C
C
T T
T T
1
2
4
3
1( )
( )
T T
T T
11 4
2 3 2
11
( / )
( / 1)
T T T
T T T
Para as transformações adiabáticas de compressão 1-2 e expansão 3-4
obtemos, respectivamente:
32
1 4
TT
T T 34
1 2
TT
T T 1
2
1T
T
Introduzindo esta relação na expressão do rendimento assim como a
que existe entre as temperaturas T1 e T2 da fase 1-2 de compressão
adiabática, resulta:
1
2
1
1
k
v
v
32
Indicando com ρ a relação entre os respectivos volumes v1 e v2 do inicio
ao final do processo de compressão, se obtém a expressão final do rendimento
térmico ideal do ciclo Otto:
1
11
e k
1
2
v
v
O rendimento térmico do ciclo Otto é, portanto, função da relação de
compressão e da expoente K, relação dos calores específicos do fluido
operante. Aumentando ρ aumenta e ; aumentando os valores dos calores
específicos, diminui k e, em conseqüência, também o rendimento térmico e .
Por isto, o ciclo ideal, para o qual k = 1, 4, tem um rendimento térmico superior
ao ciclo de ar, dado o caso que, para este, k tem um valor médio mais baixo,
por variar os calores específicos com a temperatura.
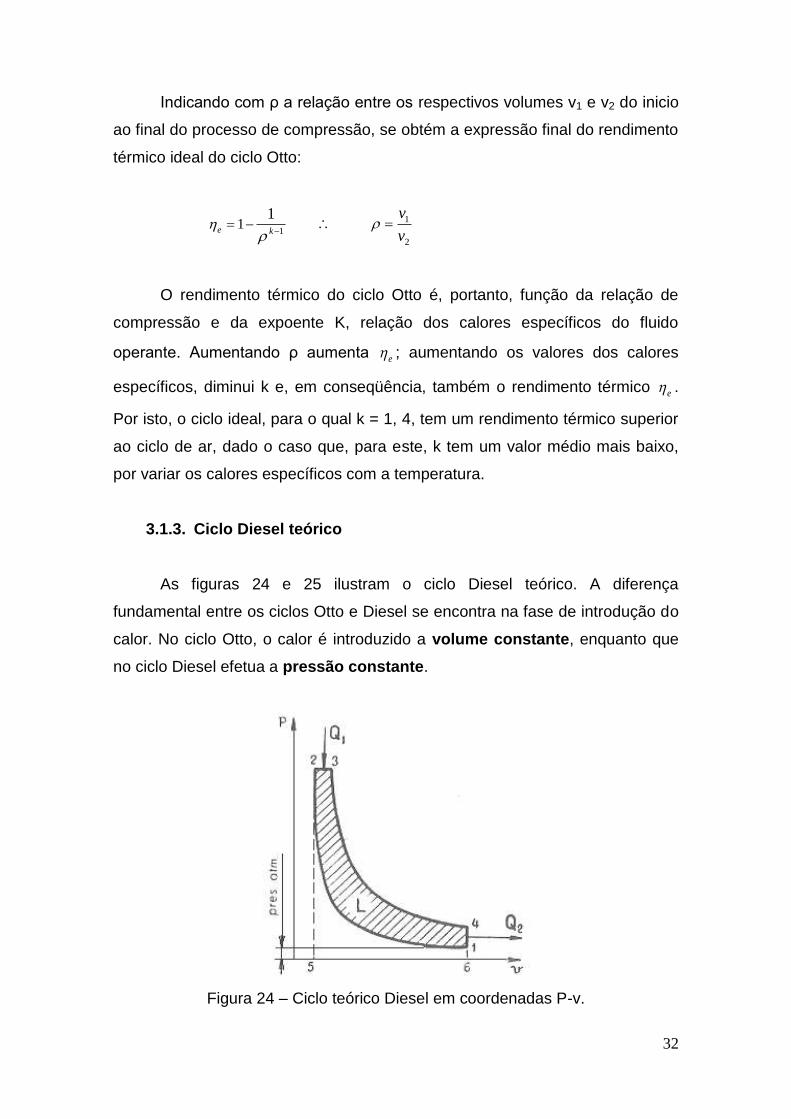
3.1.3. Ciclo Diesel teórico
As figuras 24 e 25 ilustram o ciclo Diesel teórico. A diferença
fundamental entre os ciclos Otto e Diesel se encontra na fase de introdução do
calor. No ciclo Otto, o calor é introduzido a volume constante, enquanto que
no ciclo Diesel efetua a pressão constante.
Figura 24 – Ciclo teórico Diesel em coordenadas P-v.
33
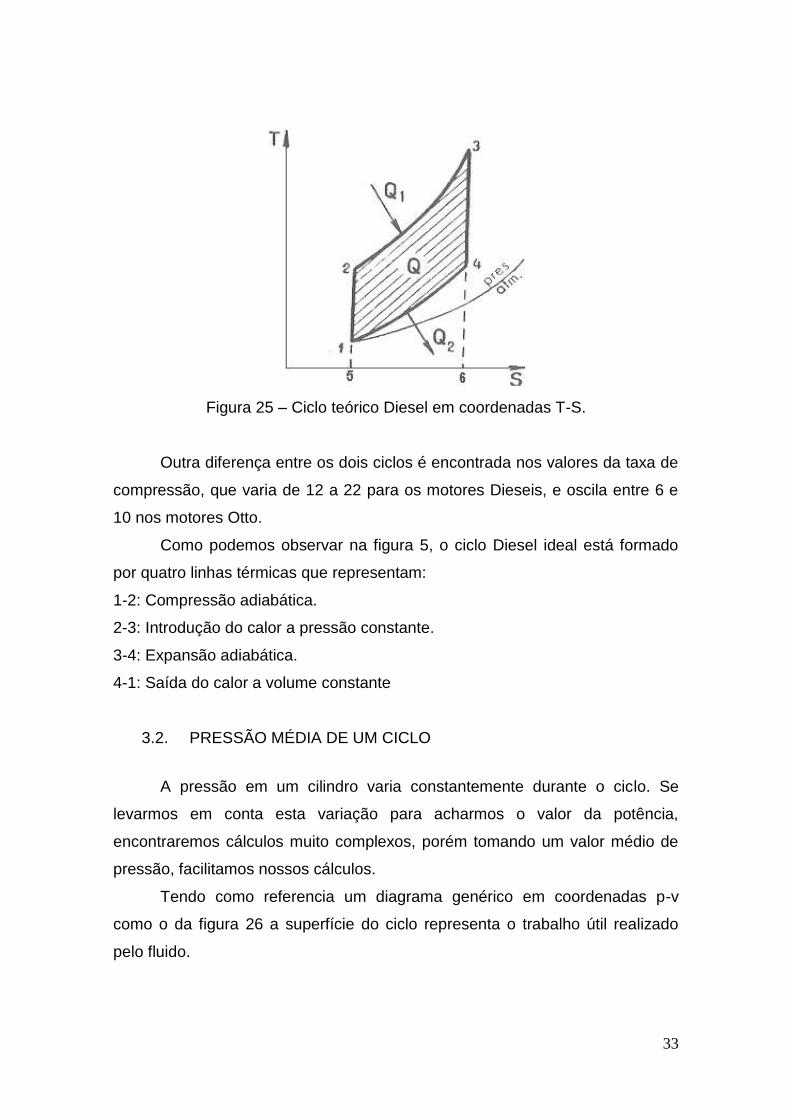
Figura 25 – Ciclo teórico Diesel em coordenadas T-S.
Outra diferença entre os dois ciclos é encontrada nos valores da taxa de
compressão, que varia de 12 a 22 para os motores Dieseis, e oscila entre 6 e
10 nos motores Otto.
Como podemos observar na figura 5, o ciclo Diesel ideal está formado
por quatro linhas térmicas que representam:
1-2: Compressão adiabática.
2-3: Introdução do calor a pressão constante.
3-4: Expansão adiabática.
4-1: Saída do calor a volume constante
3.2. PRESSÃO MÉDIA DE UM CICLO
A pressão em um cilindro varia constantemente durante o ciclo. Se
levarmos em conta esta variação para acharmos o valor da potência,
encontraremos cálculos muito complexos, porém tomando um valor médio de
pressão, facilitamos nossos cálculos.
Tendo como referencia um diagrama genérico em coordenadas p-v
como o da figura 26 a superfície do ciclo representa o trabalho útil realizado
pelo fluido.
34
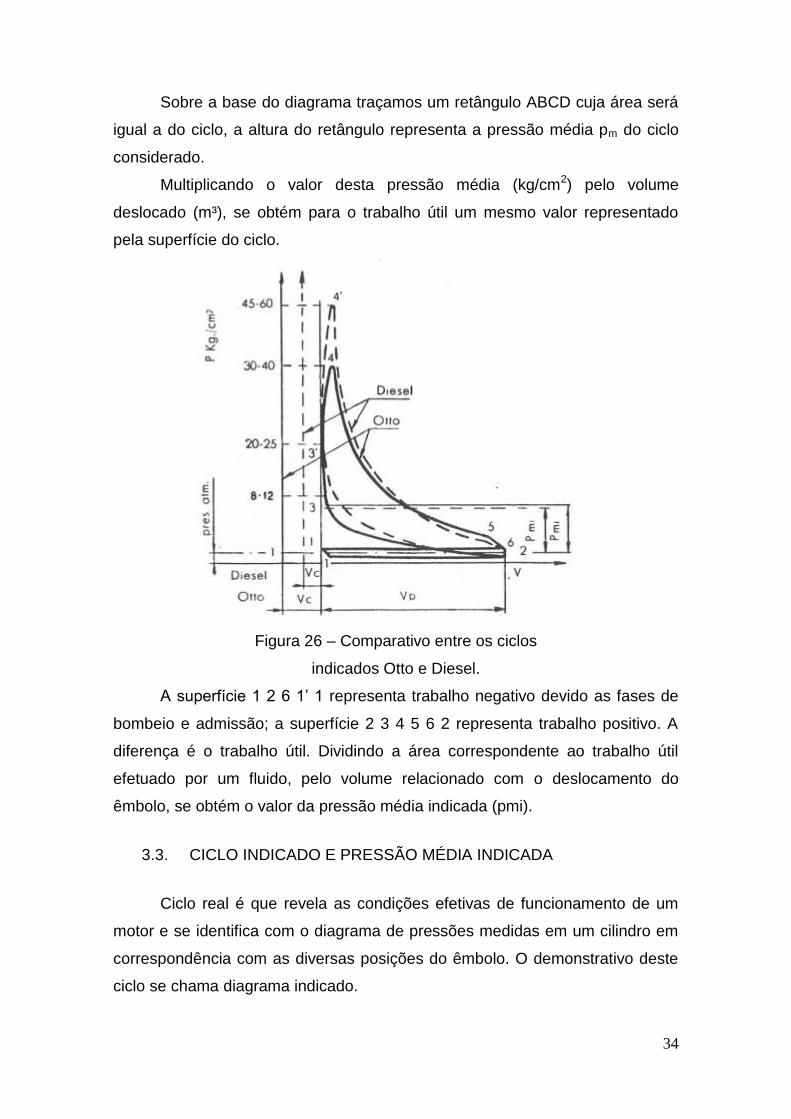
Sobre a base do diagrama traçamos um retângulo ABCD cuja área será
igual a do ciclo, a altura do retângulo representa a pressão média pm do ciclo
considerado.
Multiplicando o valor desta pressão média (kg/cm2) pelo volume
deslocado (m³), se obtém para o trabalho útil um mesmo valor representado
pela superfície do ciclo.
Figura 26 – Comparativo entre os ciclos
indicados Otto e Diesel.
A superfície 1 2 6 1’ 1 representa trabalho negativo devido as fases de
bombeio e admissão; a superfície 2 3 4 5 6 2 representa trabalho positivo. A
diferença é o trabalho útil. Dividindo a área correspondente ao trabalho útil
efetuado por um fluido, pelo volume relacionado com o deslocamento do
êmbolo, se obtém o valor da pressão média indicada (pmi).
3.3. CICLO INDICADO E PRESSÃO MÉDIA INDICADA
Ciclo real é que revela as condições efetivas de funcionamento de um
motor e se identifica com o diagrama de pressões medidas em um cilindro em
correspondência com as diversas posições do êmbolo. O demonstrativo deste
ciclo se chama diagrama indicado.
35
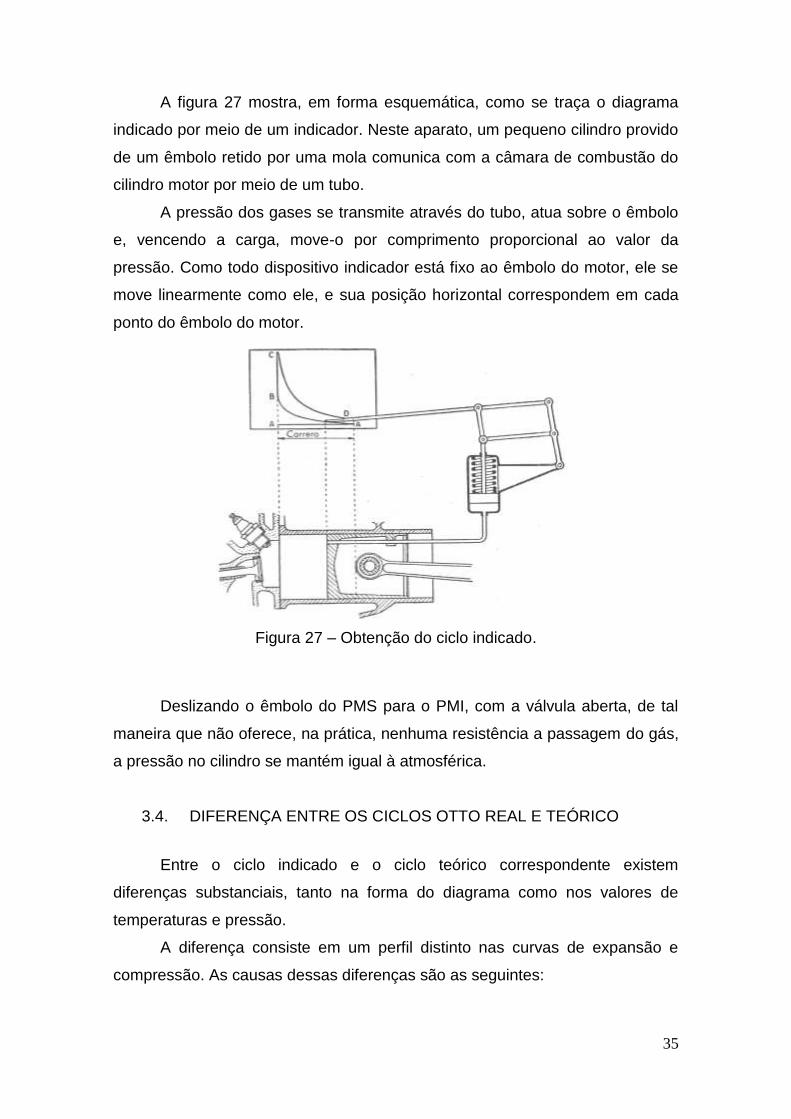
A figura 27 mostra, em forma esquemática, como se traça o diagrama
indicado por meio de um indicador. Neste aparato, um pequeno cilindro provido
de um êmbolo retido por uma mola comunica com a câmara de combustão do
cilindro motor por meio de um tubo.
A pressão dos gases se transmite através do tubo, atua sobre o êmbolo
e, vencendo a carga, move-o por comprimento proporcional ao valor da
pressão. Como todo dispositivo indicador está fixo ao êmbolo do motor, ele se
move linearmente como ele, e sua posição horizontal correspondem em cada
ponto do êmbolo do motor.
Figura 27 – Obtenção do ciclo indicado.
Deslizando o êmbolo do PMS para o PMI, com a válvula aberta, de tal
maneira que não oferece, na prática, nenhuma resistência a passagem do gás,
a pressão no cilindro se mantém igual à atmosférica.
3.4. DIFERENÇA ENTRE OS CICLOS OTTO REAL E TEÓRICO
Entre o ciclo indicado e o ciclo teórico correspondente existem
diferenças substanciais, tanto na forma do diagrama como nos valores de
temperaturas e pressão.
A diferença consiste em um perfil distinto nas curvas de expansão e
compressão. As causas dessas diferenças são as seguintes:
36
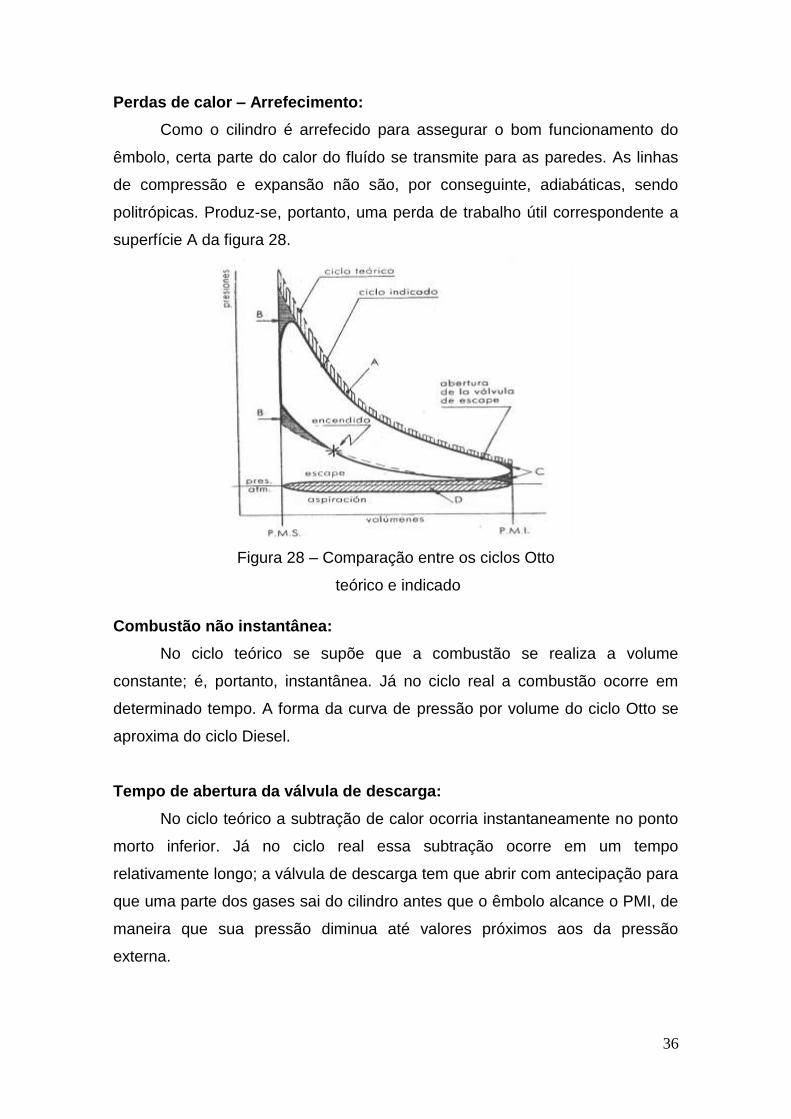
Perdas de calor – Arrefecimento:
Como o cilindro é arrefecido para assegurar o bom funcionamento do
êmbolo, certa parte do calor do fluído se transmite para as paredes. As linhas
de compressão e expansão não são, por conseguinte, adiabáticas, sendo
politrópicas. Produz-se, portanto, uma perda de trabalho útil correspondente a
superfície A da figura 28.
Figura 28 – Comparação entre os ciclos Otto
teórico e indicado
Combustão não instantânea:
No ciclo teórico se supõe que a combustão se realiza a volume
constante; é, portanto, instantânea. Já no ciclo real a combustão ocorre em
determinado tempo. A forma da curva de pressão por volume do ciclo Otto se
aproxima do ciclo Diesel.
Tempo de abertura da válvula de descarga:
No ciclo teórico a subtração de calor ocorria instantaneamente no ponto
morto inferior. Já no ciclo real essa subtração ocorre em um tempo
relativamente longo; a válvula de descarga tem que abrir com antecipação para
que uma parte dos gases sai do cilindro antes que o êmbolo alcance o PMI, de
maneira que sua pressão diminua até valores próximos aos da pressão
externa.
37
As causas das diferenças entre os valores da pressão e temperatura
máxima são explicadas no aumento do calor específico do fluído com a
temperatura e a na dissociação da combustão.
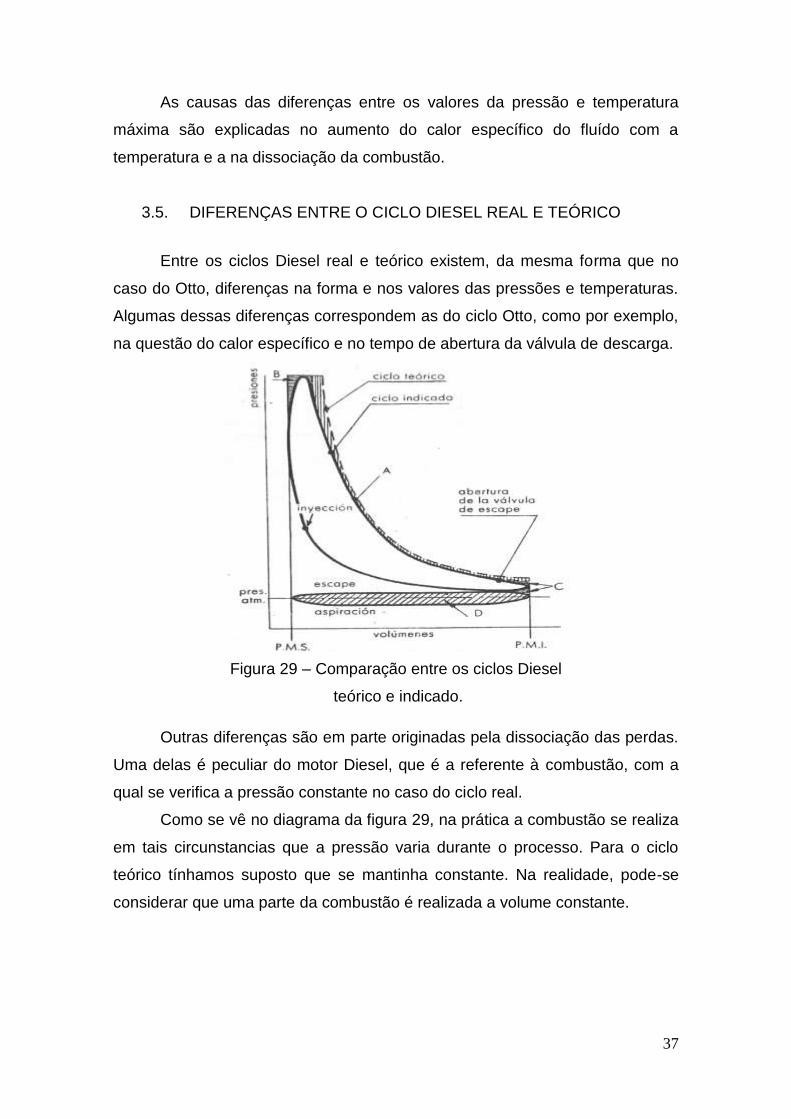
3.5. DIFERENÇAS ENTRE O CICLO DIESEL REAL E TEÓRICO
Entre os ciclos Diesel real e teórico existem, da mesma forma que no
caso do Otto, diferenças na forma e nos valores das pressões e temperaturas.
Algumas dessas diferenças correspondem as do ciclo Otto, como por exemplo,
na questão do calor específico e no tempo de abertura da válvula de descarga.
Figura 29 – Comparação entre os ciclos Diesel
teórico e indicado.
Outras diferenças são em parte originadas pela dissociação das perdas.
Uma delas é peculiar do motor Diesel, que é a referente à combustão, com a
qual se verifica a pressão constante no caso do ciclo real.
Como se vê no diagrama da figura 29, na prática a combustão se realiza
em tais circunstancias que a pressão varia durante o processo. Para o ciclo
teórico tínhamos suposto que se mantinha constante. Na realidade, pode-se
considerar que uma parte da combustão é realizada a volume constante.
38
REFERÊNCIAS BIBLIOGRÁFICAS:
GIACOSA, Dante. Motores Endotérmicos. Barcelona: Hoepli, 1970. 758 p
MARTINELLI, Luiz Carlos. Motores de Combustão Interna. Polígrafo Unijuí,
2003, www.unijui.br
RAHDE, Sérgio Barbosa. Motores de Combustão Interna. Polígrafo Puc, 2002,
www.pucrs.br
4. DINAMÔMETROS: TIPOS E PRINCÍPIO DE FUNCIONAMENTO
A avaliação do desempenho de motores, verificando curva de potência,
curva de torque (momento de força) e consumo específico, são alguns dos
objetivos dos ensaios dinamométricos. Pode-se ainda citar o desenvolvimento
de partes ou sistemas de motores tais como comando de válvulas, coletor de
descarga e de admissão, câmara de combustão, sistema de alimentação de
combustível, sistema de ignição e catalisadores, testes de durabilidade,
avaliação das emissões, impulsionados pela adaptação de motores a novos
combustíveis. O equipamento utilizado para a realização dos ensaios
dinamométricos é conhecido como dinamômetro.
4.1. DINAMÔMETROS
Dinamômetro é o equipamento capaz de medir a potência, trabalho
executado na unidade de tempo, de um motor em suas diversas condições de
funcionamento. O princípio de funcionamento de um dinamômetro é baseado
em um dispositivo constituído por um volante circundado por uma cinta
conectada a um braço cuja extremidade se apóia sobre a plataforma de uma
balança. O volante acionado pelo motor, tem o seu movimento restringido pela
tensão aplicada à cinta, que transmite o esforço ao braço apoiado sobre a
balança. A partir das medições realizadas pela balança calcula-se torque
aplicado pelo motor. Esse dispositivo é conhecido como Freio de Prony
(figura30).
39
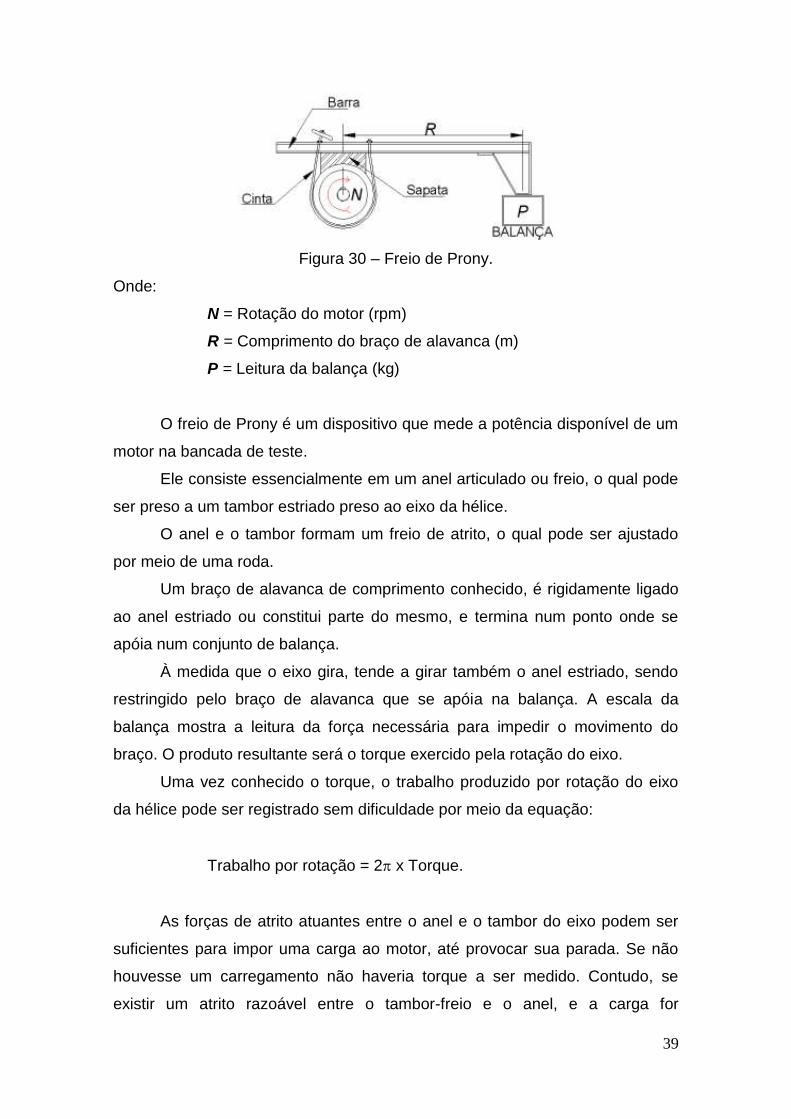
Figura 30 – Freio de Prony.
Onde:
N = Rotação do motor (rpm)
R = Comprimento do braço de alavanca (m)
P = Leitura da balança (kg)
O freio de Prony é um dispositivo que mede a potência disponível de um
motor na bancada de teste.
Ele consiste essencialmente em um anel articulado ou freio, o qual pode
ser preso a um tambor estriado preso ao eixo da hélice.
O anel e o tambor formam um freio de atrito, o qual pode ser ajustado
por meio de uma roda.
Um braço de alavanca de comprimento conhecido, é rigidamente ligado
ao anel estriado ou constitui parte do mesmo, e termina num ponto onde se
apóia num conjunto de balança.
À medida que o eixo gira, tende a girar também o anel estriado, sendo
restringido pelo braço de alavanca que se apóia na balança. A escala da
balança mostra a leitura da força necessária para impedir o movimento do
braço. O produto resultante será o torque exercido pela rotação do eixo.
Uma vez conhecido o torque, o trabalho produzido por rotação do eixo
da hélice pode ser registrado sem dificuldade por meio da equação:
Trabalho por rotação = 2 x Torque.
As forças de atrito atuantes entre o anel e o tambor do eixo podem ser
suficientes para impor uma carga ao motor, até provocar sua parada. Se não
houvesse um carregamento não haveria torque a ser medido. Contudo, se
existir um atrito razoável entre o tambor-freio e o anel, e a carga for
40
aumentada, a tendência do eixo de conduzir o anel e o braço aumenta,
impondo dessa forma, maior força aplicada ao braço de alavanca.
Com os elementos anteriores, sabendo-se que a periferia do volante
percorre, no intervalo de uma rotação, a distância 2 r contra a força de atrito
f, aplicada pela cinta, então, em cada rotação, tem-se:
W = 2 r [Nm/giro] (1)
O conjugado resistente ao atrito é formado pelo produto da leitura P da
balança pelo valor do comprimento do braço de alavanca R e será exatamente
igual ao produto r vezes f, conjugado que tende a mover o braço. Logo:
r. f = P R (2)
e, em uma rotação,
W = 2 P R (3)
Se o motor funcionar a N rpm, o Trabalho por minuto será dado por:
PRN 2 (4)
4.2. TIPOS DE DINAMÔMETROS
Os dinamômetros dividem-se em duas categorias: dinamômetros de
bancada e dinamômetros de rolo. Os de bancada são utilizados para medições
em motores e os de rolos para veículos automotores. Estas categorias ainda
dividem-se em:
4.2.1. Dinamômetro Hidráulico
O Freio de Prony apresenta vários inconvenientes operacionais,
destacando-se o fato de manter a carga constante independente da rotação
empregada. Se a rotação cai, em virtude do motor não suportá-la, a rotação irá
41
diminuir até a parada total do mesmo. Conseqüentemente, essas máquinas
foram substituídas por dinamômetros mais versáteis, com predominância dos
Dinamômetros Hidráulicos, onde a carga aplicada varia em razão diretamente
proporcional ao cubo da rpm. Se a rotação cair a carga imposta pelo
dinamômetro diminuirá, dando tempo ao operador de reajustar a carga e
corrigir a velocidade para o valor desejado.
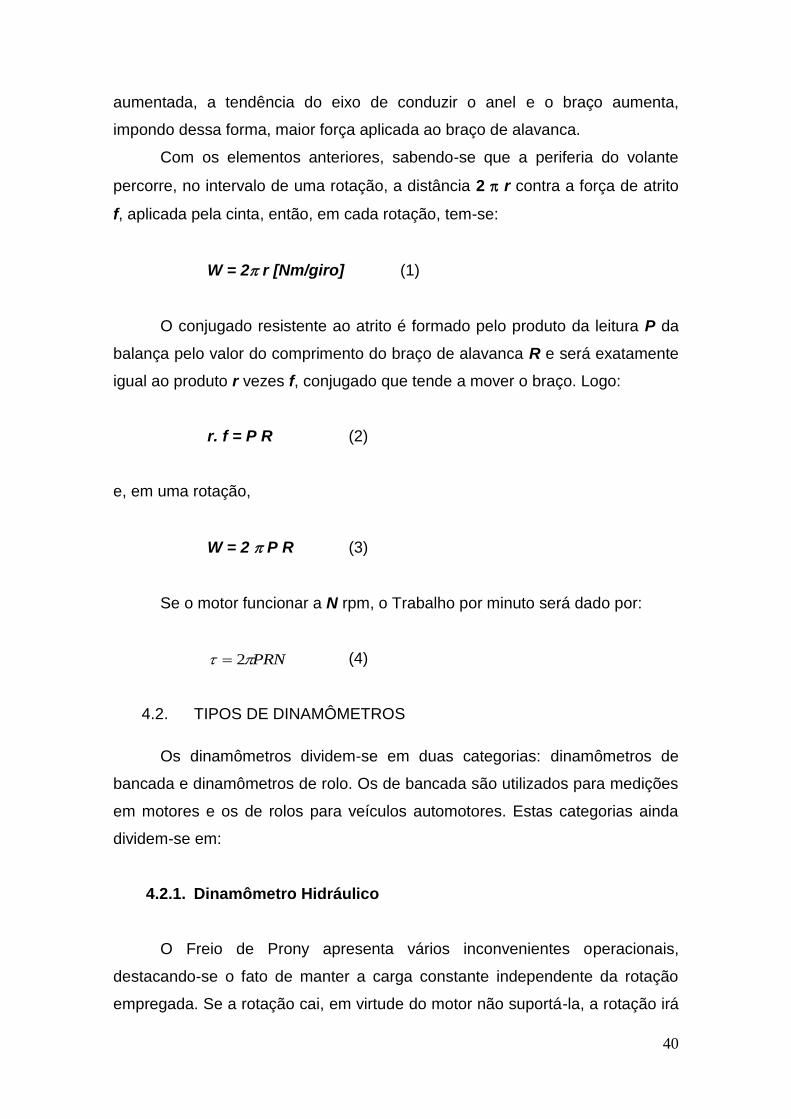
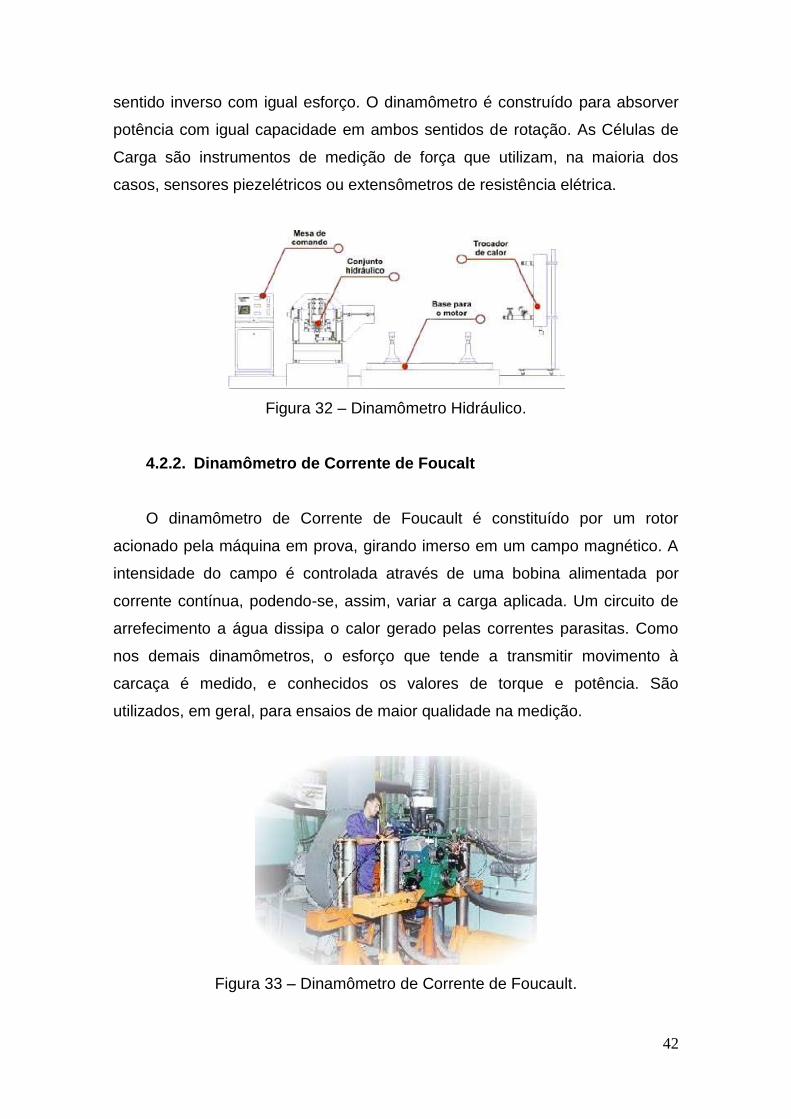
O dinamômetro hidráulico (figura 31) é um dispositivo destinado a
medição de potência produzida por uma fonte capaz de acioná-lo, no caso, um
motor de combustão interna. Para que funcione, é necessário o suprimento de
uma vazão de água contínua, para transformar a energia mecânica em calor.
Figura 31 – Modelo Dinamômetro Hidráulico.
O dinamômetro hidráulico opera como se fosse uma bomba centrífuga
ineficiente. Uma pequena porção da energia mecânica fornecida é convertida
em pressão hidráulica. A pressão centrífuga da água gerada pelo dinamômetro
aumenta com o aumento do volume de água e com o aumento da velocidade
de rotação. A máxima pressão interna é atingida quando o dinamômetro opera
a plena carga com a câmara do rotor e completamente cheia. Os limites de
rotação e potência, são valores definidos pela curva de absorção.
Nos dinamômetros hidráulicos o freio é exercido pela ação de um rotor
que, pressionando água contra aletas fixas na carcaça, produz efeito físico
semelhante ao Freio de Prony. O braço e a balança, embora possam ser
empregados neste tipo de equipamento, foram substituídos por uma Célula de
Carga. A energia mecânica fornecida pelo motor em ensaio é absorvida e
convertida em calor por um remoinho que é gerado com a passagem da água
entre as aletas do rotor e dos estatores. O calço resultante aplica uma
resistência ao movimento de rotação do rotor e tende a girar a carcaça no
42
sentido inverso com igual esforço. O dinamômetro é construído para absorver
potência com igual capacidade em ambos sentidos de rotação. As Células de
Carga são instrumentos de medição de força que utilizam, na maioria dos
casos, sensores piezelétricos ou extensômetros de resistência elétrica.
Figura 32 – Dinamômetro Hidráulico.
4.2.2. Dinamômetro de Corrente de Foucalt
O dinamômetro de Corrente de Foucault é constituído por um rotor
acionado pela máquina em prova, girando imerso em um campo magnético. A
intensidade do campo é controlada através de uma bobina alimentada por
corrente contínua, podendo-se, assim, variar a carga aplicada. Um circuito de
arrefecimento a água dissipa o calor gerado pelas correntes parasitas. Como
nos demais dinamômetros, o esforço que tende a transmitir movimento à
carcaça é medido, e conhecidos os valores de torque e potência. São
utilizados, em geral, para ensaios de maior qualidade na medição.
Figura 33 – Dinamômetro de Corrente de Foucault.
43
4.2.3. Dinamômetro de Rolos
O banco de rolos, dinamômetro (figura34), permite avaliar o
comportamento do sistema de alimentação do veículo, simulando condições de
uso em deslocamentos. Outros instrumentos permitem controlar os demais
parâmetros do veículo, como rotação, potência e emissão de poluentes.
Figura 34 – Dinamômetro de Rolos.
Este equipamento permite colocar um funcionamento o veículo no
interior de uma instalação, à velocidade desejada, simulando várias condições
a que são submetidos os veículos em seu uso, podendo-se registrar em
gráficos e gravar os resultados obtidos. É muito comum um veículo apresentar
defeitos de funcionamento que só podem ser identificados em condições
normais ou forçadas de marcha durante deslocamentos em estradas, quando
aparecem os sintomas. Com o Dinamômetro, bastam alguns minutos para se
estabelecer as causas exatas desses defeitos, já que o veículo é geralmente
analisado em um ambiente fechado, com a tampa do motor aberta e tendo-se a
possibilidade de ligar todo tipo de analisadores para estudo dos sistemas.
4.2.4. Dinamômetro de Ventilação
Utilizado em provas longas, onde não se exija qualidade na medição dos
resultados, como no amaciamento de motores e provas de durabilidade, o
dinamômetro de ventilação é constituído por um ventilador acionado pela
máquina em prova. Para se obter a variação de carga aplicada é necessário
44
alterar o ângulo, o diâmetro ou o tamanho das pás. Embora seja um
dinamômetro de baixo custo, tem pouca utilização.
4.2.5. Dinamômetro Elétrico
Dinamômetro elétrico é um gerador elétrico, que acionado pela máquina
em prova, produz energia elétrica, a qual será consumida por uma carga
variável (cuba eletrolítica ou resistores). A medição exige correção dos
instrumentos elétricos para compensar o rendimento do gerador. Tem a
vantagem de poder ser utilizado como motor elétrico para medição de Potência
de Atrito da máquina em prova. Tem custo elevado e sua utilização só se
justifica em casos especiais.
Figura 35 – Dinamômetro Elétrico.
4.3. DEFINIÇÕES
POTÊNCIA - É o trabalho realizado pelo motor, num intervalo de tempo.
POTÊNCIA OBSERVADA - É a potência medida nas condições do ensaio.
POTÊNCIA BRUTA - É a potência obtida com o motor básico (apenas com os
componentes essenciais ao seu funcionamento, sem ventilador, silencioso,
filtro de ar, alternador ou dínamo sem carga).
45
POTÊNCIA LíQUIDA - É a potência obtida com o motor completo.
POTÊNCIA EFETIVA - É a potência disponível no eixo para produção de
trabalho, abreviadamente designada por BHP (Brake Horse-power).
POTÊNCIA INDICADA - É a potência dentro dos cilindros. Abreviadamente
denominada de IHP (Indicated Horsepower), consiste na soma das potências
efetiva e de atrito nas mesmas condições de ensaio.
IHP = BHP + FHP (5)
RENDIMENTO MECÂNICO - É a razão entre a potência medida no eixo e a
potência total desenvolvida pelo motor, ou seja:
µ= (BHP / IHP) (6)
Da equação (9) sabe-se que BHP = IHP - FHP, então resulta que:
µ= 1 - (FHP / IHP) (7)
PRESSÃO MÉDIA EFETIVA (Pm) - É definida como sendo a pressão hipotética
constante que seria necessária no interior do cilindro, durante o curso de
expansão, para desenvolver uma potência igual à potência no eixo.
PRESSÃO MÉDIA INDICADA (Pi) - É definida como a pressão hipotética que
seria necessária no interior do cilindro, durante o curso de expansão, para
desenvolver uma potência igual à potência indicada. Como o rendimento
mecânico (µ ) é igual a relação BHP / IHP, também tem-se:
µ= (Pm / Pi) (8)
Que é a relação entre as pressões média e efetiva.
REFERÊNCIAS BIBLIOGRÁFICAS:
TAYLOR, Análise de Motores de Combustão Interna, Edgar Blücher, 1976;
Heywood,j.,b., Internal Combustion Engine, McGraw-Hill, 2000;
46
Internet: http://www.bepco.com
http://www.dynamometer-info.co.uk/
http://www.land-and-sea.com/
http://www.bepco.com/dyno.php
http://www.topdyno.com.br
http://www.aerotecnologia.com.br/tecnicos/motores/aula_034.htm
http://www.sismetra.cta.br/labs/labdina17.html
5. COMBUSTÃO ANORMAL
O fenômeno da detonação é muito conhecido pela maioria das pessoas
pelo nome de “batida de pino”. Atualmente tem sido dedicada muita atenção às
pesquisas voltadas para o estudo desse tipo de fenômeno, com maior ênfase
do que qualquer outro aspecto do motor de combustão interna. A ocorrência da
pré-ignição de combustível não permite o aproveitamento dos pontos de
máxima pressão dentro da câmara de combustão, limitando o desempenho do
motor, além de causar danos progressivos ao sistema. Quanto maior o avanço
de ignição aplicado maior a probabilidade de ocorrência da pré-ignição. A pré-
ignição causa vibrações que se propagam pela estrutura do motor com
freqüências características, fenômeno conhecido como detonação. A vibração
estrutural do motor pode ser medida através de um acelerômetro, cujo sinal
gerado pode ser processado para permitir a identificação do fenômeno.
5.1. DETONAÇÃO
Um método de identificar a detonação consiste na observação de seu
som característico, que é, usualmente, audível no caso de motores que são
normalmente silenciosos. O som resulta de intensas ondas de pressão, que
provocam vibrações nas paredes do cilindro, com a conseqüente transmissão
de som para a atmosfera.
47
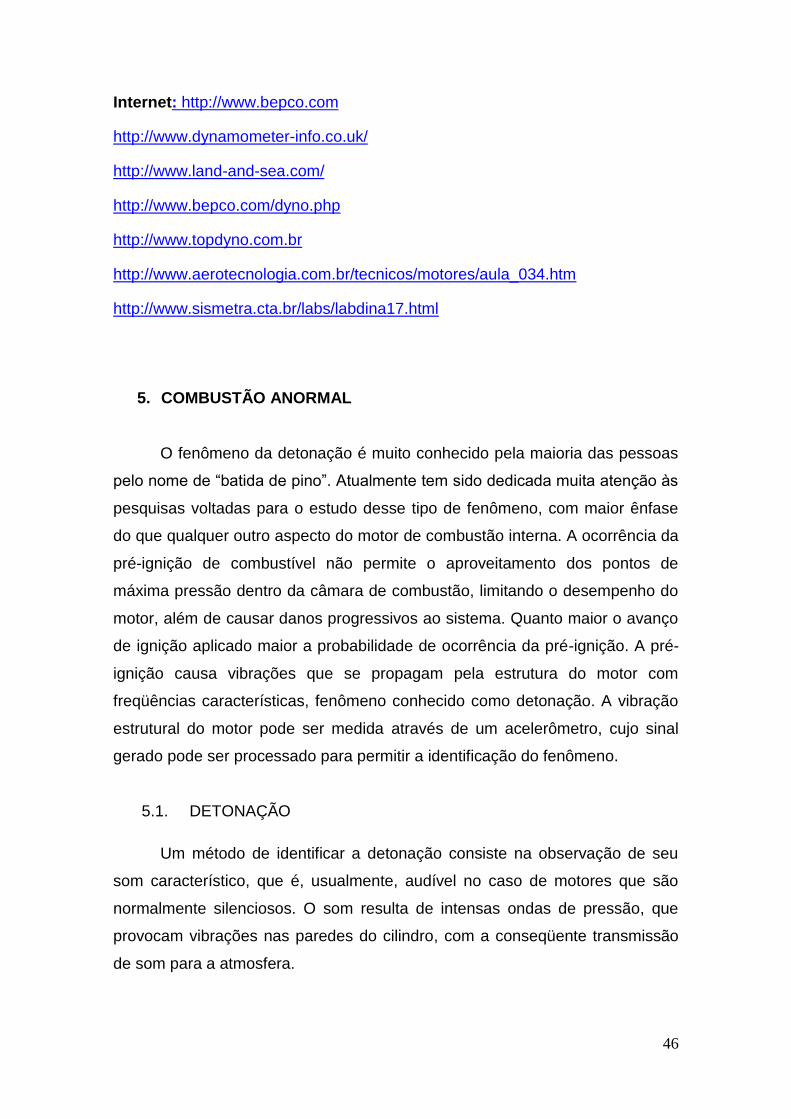
Figura 36 - Diagramas pressão-tempo. (a) p versus t sem detonação;
(b) p versus t com detonação; (c) dp/dt versus t sem detonação;
x indica período de ignição. (Sloan Automotive Laboratories).
Na Figura 36, os dois conjuntos de registros foram tomados em
condições idênticas, exceto que um combustível antidetonante é usado em (a)
e (c). Em cada conjunto, os gráficos permanecem analógicos ao instante da
ignição, até um ponto próximo da máxima pressão de ciclo. Nesse ponto, o
ciclo normal mostra uma mudança suave na pressão, enquanto que o ciclo de
detonação mostra severas flutuações de pressão, ndicando um movimento
vibratório dos gases (ondas de pressão).
5.1.1. Pressões locais com detonação
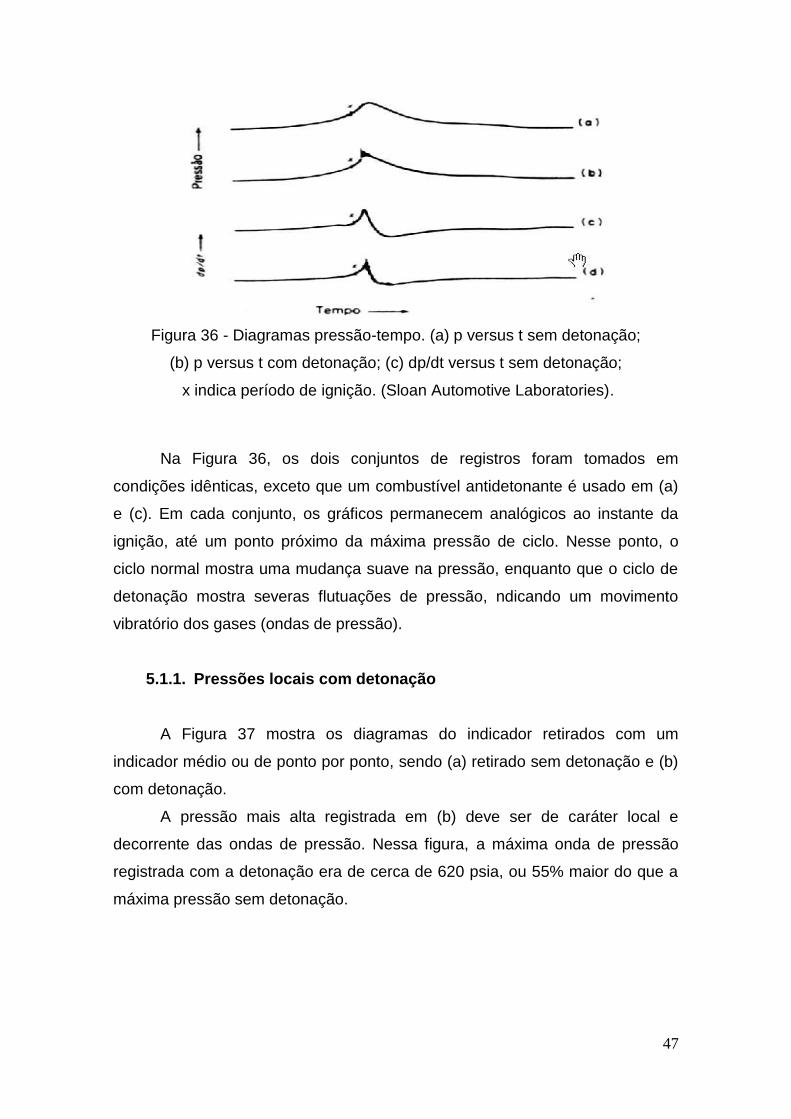
A Figura 37 mostra os diagramas do indicador retirados com um
indicador médio ou de ponto por ponto, sendo (a) retirado sem detonação e (b)
com detonação.
A pressão mais alta registrada em (b) deve ser de caráter local e
decorrente das ondas de pressão. Nessa figura, a máxima onda de pressão
registrada com a detonação era de cerca de 620 psia, ou 55% maior do que a
máxima pressão sem detonação.
48
Figura 37 - Diagramas de pressão versus ângulo de manivela tirados
com o indicador de ponto a ponto do MIT; motor CFR, 1200 rpm:
(a) sem detonação; (b) com detonação induzida pelo etilnitrito.
(Sloan Automotive Laboratories).
5.1.2. Objeção à detonação
A detonação pode provocar superaquecimento em pontos das velas, que
pode provocar pré-ignição, isto é, ignição anterior à ocorrência da centelha. A
pré-ignição severa provoca perda de potência e de economia. Mesmo sem pré-
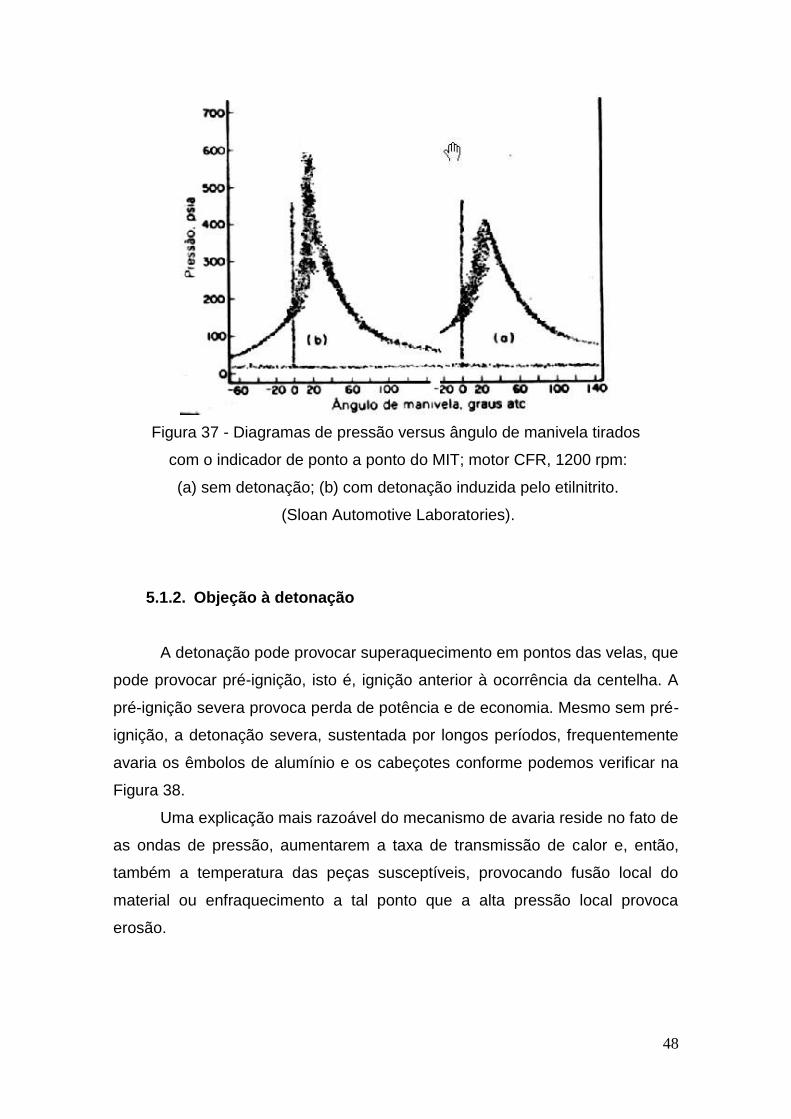
ignição, a detonação severa, sustentada por longos períodos, frequentemente
avaria os êmbolos de alumínio e os cabeçotes conforme podemos verificar na
Figura 38.
Uma explicação mais razoável do mecanismo de avaria reside no fato de
as ondas de pressão, aumentarem a taxa de transmissão de calor e, então,
também a temperatura das peças susceptíveis, provocando fusão local do
material ou enfraquecimento a tal ponto que a alta pressão local provoca
erosão.
49
Figura 38 - Avaria em êmbolos de alumínio e velas decorrentes de trabalho
prolongado sob forte detonação.
5.1.3. Teoria da detonação
Quando a detonação ocorre, é porque a compressão do gás na
extremidade, devido à expansão da parte queimada da carga, eleva sua
temperatura e pressão a um ponto que o gás da extremidade sofre auto-
ignição. Se a reação da auto-ignição é suficientemente rápida e uma
quantidade suficiente de gás extremo é envolvida, a detonação pode ser
observada.
5.1.4. Reação do gás extremo e ondas de pressão
A criação das ondas de pressão por uma rápida reação em uma parte
dos gases, dentro de um espaço fechado, é explicada pelo fato de que a
reação, caso ocorra com suficiente rapidez, ocorrerá com volume praticamente
constante (devido à inércia do gás, uma reação instantânea, evidentemente,
ocorreria exatamente a volume constate). Tal reação provoca alta pressão
local, enviando uma onda de pressão através da câmara. Essa onda de
pressão é refletida nas paredes e rapidamente se estabelece uma configuração
de onda de tipo previsto pela teoria acústica.
50
5.1.5. Cálculo da pressão local limite
É evidente que elevadas pressões locais devem ser esperadas como
resultado da rápida reação do gás extremo e que tais pressões provocarão
intensas ondas de pressão através da carga. De acordo com a teoria acústica e
com a prática atual, a frequência das ondas decresce à medida que o êmbolo
se move para fora, devido à relação entre a velocidade do som e a temperatura
do gás devido à mudança na forma e tamanho da câmara.
Em vista do fato de o processo de detonação parecer associado ao de
auto-ignição, é aconselhável que se considerem os fatos conhecidos acerca da
auto-ignição em maior detalhe.
5.2. AUTO-IGNIÇÃO
Para os propósitos desta discussão, a auto-ignição, em uma mistura de
combustível e ar, será definida como uma rápida reação química não
provocada por uma fonte externa de ignição, tal como uma centelha, uma
chama, ou uma superfície quente. Por essa definição se a combustão ocorrer
apenas pela compressão (motor diesel) constitui uma auto-ignição.
5.2.1. Resultados de ensaios de compressão rápida
O processo de auto-ignição envolve um período de reação relativamente
lenta seguido por outro de reação rápida. As durações relativas dos períodos
de reação lenta e rápida, e a máxima taxa de reação, dependem da
composição do combustível e das condições de ensaio.
Um combustível com alta resistência à detonação nos motores tem
períodos de reação mais longo ou taxa de reação mais baixa (ou,
possivelmente ambos) do que um combustível com menor resistência à
detonação.
51
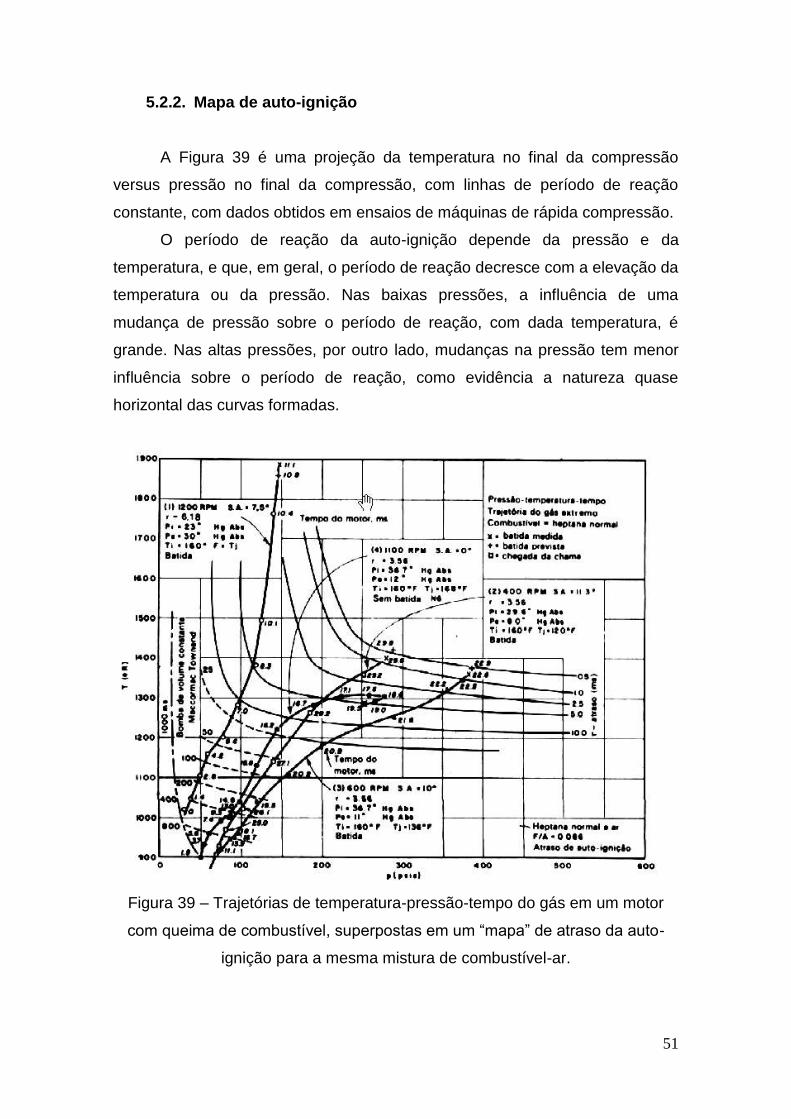
5.2.2. Mapa de auto-ignição
A Figura 39 é uma projeção da temperatura no final da compressão
versus pressão no final da compressão, com linhas de período de reação
constante, com dados obtidos em ensaios de máquinas de rápida compressão.
O período de reação da auto-ignição depende da pressão e da
temperatura, e que, em geral, o período de reação decresce com a elevação da
temperatura ou da pressão. Nas baixas pressões, a influência de uma
mudança de pressão sobre o período de reação, com dada temperatura, é
grande. Nas altas pressões, por outro lado, mudanças na pressão tem menor
influência sobre o período de reação, como evidência a natureza quase
horizontal das curvas formadas.
Figura 39 – Trajetórias de temperatura-pressão-tempo do gás em um motor
com queima de combustível, superpostas em um “mapa” de atraso da auto-
ignição para a mesma mistura de combustível-ar.
52
5.3. REAÇÃO DO GÁS EXTREMO NOS MOTORES
5.3.1. Intensidade de detonação
Em um motor a quantidade de energia provocada pela detonação
dependerá da massa do gás extremo que sofre auto-ignição e da taxa de
reação no processo de auto-ignição. Assim, como para uma taxa de reação,
quanto mais cedo ocorrer à detonação no processo de combustão, mais gás
extremo participará e maior será a intensidade da detonação.
Em serviço, com um motor em operação normal, se as condições são
modificadas no sentido da detonação, por exemplo, pelo aumento da pressão
de admissão, o operador usualmente toma alguma atitude para evitar um
aumento na intensidade quando a detonação se torna audível. Na operação de
veículos de carga, por exemplo, o operador usualmente não abrirá a válvula
além do ponto em que a detonação se torna distintamente audível. Nas
experiências de detonação, o procedimento usual consiste em partir-se de
condições que não produzem detonação e, então, gradualmente se aproximar
do ponto onde a detonação pode ser detectada, em cujo caso denomina-se
detonação “Incipiente” ou “Marginal”. Aqui a detonação ocorre muito próxima
do pico de pressão do ciclo.
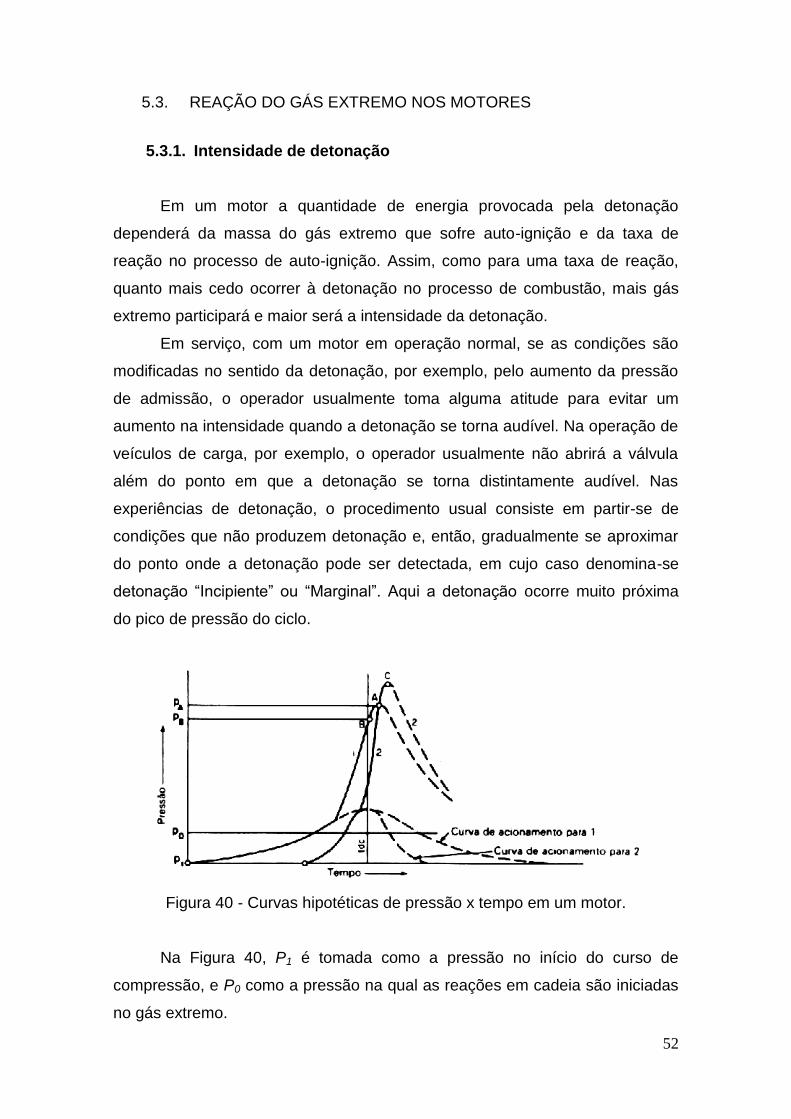
Figura 40 - Curvas hipotéticas de pressão x tempo em um motor.
Na Figura 40, P1 é tomada como a pressão no início do curso de
compressão, e P0 como a pressão na qual as reações em cadeia são iniciadas
no gás extremo.
53
No ciclo indicado por 1, admitamos que o pico de pressão seja PA e que
a detonação ocorra no ponto A. Se a temperatura inicial for elevada, as
reações preliminares serão aceleradas e a detonação ocorrerá em período
mais curto, em um ponto B. Essa mudança causará a ocorrência de detonação
mais cedo no ciclo, e mais gás extremo participará. Assim, a detonação será
mais severa do que com a temperatura original de partida. Uma forma de evitar
a detonação, com a temperatura inicial mais alta, consiste em reduzir a máxima
pressão cíclica abaixo de PB através da redução da razão de compressão ou
fechamento da válvula.
Retornando à temperatura original de admissão, suponhamos que a
velocidade do motor aumente e a escala do tempo seja ajustada de forma que
a curva passe pelo ponto A. A curva 2 da figura representa essa condição.
Comparando essa curva com a de número 1, é evidente que, devido ao curto
período disponível para as reações em cadeia, a detonação será evitada a
menos que o pico de pressão se eleve outra vez, dessa vez para um ponto
como C. Assim, uma pressão de admissão mais elevada, ou uma razão de
compressão maior, pode ser usada com velocidade mais alta. Como veremos,
o aumento da velocidade do motor nem sempre reduz a detonação, pois
fatores outros, além dos incluídos nas premissas anteriores, podem prevalecer.
Mas a discussão não serve para mostrar a relação do “atraso” para as
condições do motor.
5.4. MEDIDAS DE DETONAÇÃO
5.4.1. Razão de compressão limitada pela batida do motor
A razão de compressão limitada pela batida do motor é obtida pelo
aumento da taxa de compressão do motor (em um motor com razão de
compressão variável) até que seja observada a detonação incipiente. Qualquer
mudança nas condições de operação, na composição do combustível, ou no
projeto do motor que aumente a razão de compressão limitada pela batida do
motor é dita redutora da tendência à detonação.
54
5.4.2. Pressão de admissão limitada pela batida do motor
A pressão de admissão pode ser aumentada (pela abertura da válvula
de admissão ou pelo aumento da pressão de descarga) até se observar a
detonação incipiente. Um aumento na “pressão de admissão limitada pela
batida do motor” indica redução na tendência à detonação.
Ambos os métodos envolvem menos tempo e custo do que o método de
requisito de octana sendo, por isso, bastante usados.
5.5. TEMPERATURA DO GÁS EXTREMO
A sensibilidade observada de detonação à pressão do gás extremo
decorre principalmente da influência de uma variação de pressão próximo da
adiabática sobre a temperatura resultante. Assim, o gás extremo, quando sofre
ou não auto-ignição, depende principalmente da temperatura e do período de
compressão.
A temperatura do gás extremo no ponto de detonação incipiente será
constante para dada mistura de combustível-ar-gás residual, velocidade do
motor for constante, ajuste de ignição para a pressão de pico com ângulo de
manivela fixo.
5.6. EFEITO DAS CONDIÇÕES DE OPERAÇÃO DO MOTOR SOBRE A
DETONAÇÃO
Com uma dada mistura de gás residual-combustível-ar, a tendência a
detonar dependerá principalmente da temperatura do gás extremo
imediatamente antes da reação e do período de compressão para essa
temperatura. A influência da pressão de gás extremo nesse período é pequena,
exceto no que ela afeta a temperatura do gás extremo.
5.6.1. Regulagem da centelha
A Figura 41 mostra as curvas de pressão versus ângulo de manivela
para diferentes regulagens de avanço de centelha. Na faixa mostrada, o pico
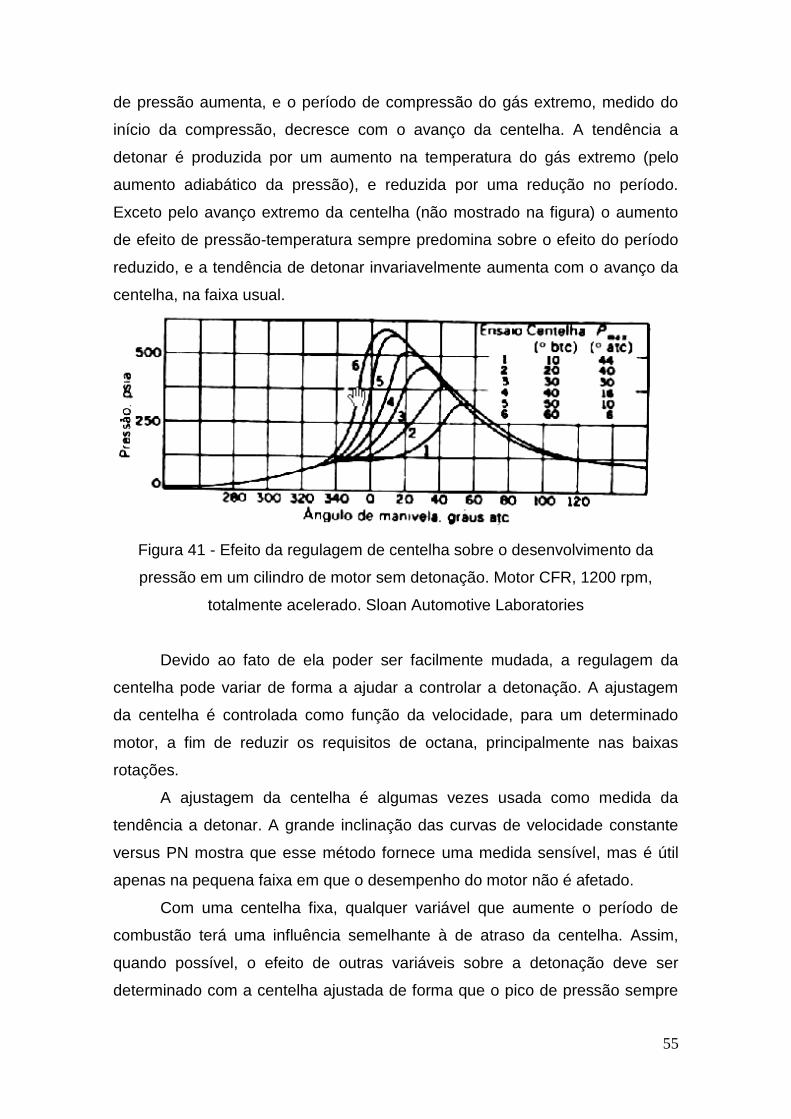
55
de pressão aumenta, e o período de compressão do gás extremo, medido do
início da compressão, decresce com o avanço da centelha. A tendência a
detonar é produzida por um aumento na temperatura do gás extremo (pelo
aumento adiabático da pressão), e reduzida por uma redução no período.
Exceto pelo avanço extremo da centelha (não mostrado na figura) o aumento
de efeito de pressão-temperatura sempre predomina sobre o efeito do período
reduzido, e a tendência de detonar invariavelmente aumenta com o avanço da
centelha, na faixa usual.
Figura 41 - Efeito da regulagem de centelha sobre o desenvolvimento da
pressão em um cilindro de motor sem detonação. Motor CFR, 1200 rpm,
totalmente acelerado. Sloan Automotive Laboratories
Devido ao fato de ela poder ser facilmente mudada, a regulagem da
centelha pode variar de forma a ajudar a controlar a detonação. A ajustagem
da centelha é controlada como função da velocidade, para um determinado
motor, a fim de reduzir os requisitos de octana, principalmente nas baixas
rotações.
A ajustagem da centelha é algumas vezes usada como medida da
tendência a detonar. A grande inclinação das curvas de velocidade constante
versus PN mostra que esse método fornece uma medida sensível, mas é útil
apenas na pequena faixa em que o desempenho do motor não é afetado.
Com uma centelha fixa, qualquer variável que aumente o período de
combustão terá uma influência semelhante à de atraso da centelha. Assim,
quando possível, o efeito de outras variáveis sobre a detonação deve ser
determinado com a centelha ajustada de forma que o pico de pressão sempre
56
ocorra no mesmo ângulo de manivela. Infelizmente, em muitos casos não
existem dados obtidos dessa maneira.
5.6.2. Pressão de admissão e razão de compressão
O aumento em qualquer variável seja ela temperatura ou pressão,
necessariamente aumenta a tendência à detonação. O pico de pressão
aumenta e, como conseqüência a temperatura do gás extremo também
aumenta.
5.6.3. Temperatura de admissão
O aumento da temperatura de admissão aumenta a temperatura do gás
extremo com dada pressão, aumentando a tendência à detonação.
5.6.4. Efeito da velocidade do motor
O aumento da velocidade do motor obviamente diminui o período de
compressão e, como foi visto, esse fato tende a reduzir a tendência à
detonação.
Por outro lado, em um motor de quatro tempos, a temperatura de
compressão aumenta com a velocidade, ainda que a temperatura de admissão
seja mantida constante. Esse aumento na temperatura decorre do fato de que,
à medida que aumenta a velocidade, menos trabalho é efetuado pelos gases
sobre o êmbolo, durante o curso de admissão, e a temperatura da carga no
início da compressão é mais elevada.
Uma mudança na velocidade do motor usualmente muda a eficiência
volumétrica do motor. Na maioria das circunstâncias, o pico de pressão varia
na mesma direção que a eficiência volumétrica.
Considerando a pressão de admissão constante, os efeitos combinados
do período mais curto e da eficiência volumétrica reduzida mostram melhora da
resistência à detonação com o aumento da velocidade, a despeito da elevação
da temperatura de compressão.
57
O aumento do requisito de octana com a velocidade, de 800 para 1200
rpm, decorre provavelmente do aumento da eficiência volumétrica e do
aumento da temperatura o suficiente para sobrepujar o efeito do período
menor. Entretanto o fato de a regulagem da centelha variar, de acordo com um
programa arbitrário, introduz uma influência desconhecida.
Nos motores de automóvel, a ajustagem da centelha é usada para
controlar a detonação. A seqüência de avanço da centelha versus a velocidade
exercerá enorme influência sobre o requisito de octana versus velocidade.
5.6.5. Umidade atmosférica
Os ensaios de motores invariavelmente mostram que o aumento na
umidade atmosférica tende a reduzir a detonação. É provável que o período de
reação reduzido seja a principal causa dessa tendência, ainda que os fatores
químicos também possam ser importantes.
5.7. EFEITO DO TAMANHO DO CILINDRO SOBRE A DETONAÇÃO
À mesma rotação, o período de combustão parece ser independente do
diâmetro do cilindro, conforme evidenciado pelo fato de os motores
necessitarem aproximadamente da mesma regulagem de centelha. Entretanto,
com aumento do diâmetro, existe um aumento na temperatura da superfície do
cilindro, o que provavelmente contribui para o aumento substancial do requisito
de octana. Os ensaios com a temperatura do refrigerante ajustada para dar a
mesma temperatura da superfície interna do cilindro mostram que o requisito
de octana aumenta ainda mais com o aumento do diâmetro, para uma mesma
velocidade do motor.
Os resultados dão ênfase a uma das importantes desvantagens do uso
de grandes cilindros nos motores de ignição por centelha. O problema de
controle da detonação é o principal responsável pelo fato de poucos motores
de ignição por centelha terem cilindros de mais de 6 pol. de diâmetro. Uma
exceção a tal afirmativa está no fato de grandes diâmetros de cilindro serem
usados em alguns motores por centelha que queimam gás. O gás natural tem
58
uma proporção tão elevada de octana que essa prática é possível, ainda que a
detonação constitua uma séria limitação de potência e eficiência.
5.8. PROJETO DA CÂMARA DE COMBUSTÃO
As características que apresentamos a seguir parecem ser desejáveis
nas câmaras de combustão dos motores de ignição por centelha para
proporcionar maior resistência a detonação: (1) diâmetro pequeno; (2) alta
velocidade através das válvulas de admissão; (3) pequena relação da trajetória
da chama para o diâmetro; (4) ausência de superfície quente na região do gás
extremo; (5) uso de áreas de restrição, particularmente na região do gás
extremo.
Os diâmetros dos cilindros são usualmente escolhidos com base em um
número arbitrário de cilindros para determinada potência, e o requisito de alta
velocidade através das válvulas de admissão é conflitante com a necessidade
de alta eficiência volumétrica. Dessa forma, pode-se admitir que o diâmetro do
cilindro e a capacidade da válvula de admissão serão ajustados por meio de
considerações diferentes da resistência a detonação.
5.9. EFEITO DOS DEPÓSITOS SOBRE A DETONAÇÃO
Sabe-se que a tendência a detonar aumenta rapidamente com o
acúmulo de depósito, pelo menos nos estágios iniciais de operação dos
motores de automóveis. Esse aumento é aparentemente causado pelo fato de
que, à medida que os depósitos aumentam, a razão de compressão efetiva e a
temperatura efetiva das superfícies das paredes internas aumentam. Por esse
motivo, as razões de compressão usadas na prática são consideravelmente
menores do que as usadas com câmaras de combustão limpas. Entretanto, o
aspecto mais problemático dos depósitos do motor tem relação com a pré-
ignição, o assunto da seção subseqüente.
59
5.10. PRÉ –IGNIÇÃO
Pré-ignição é a ignição da carga antes de ocorrer a centelha. Esse tipo
de ignição é provocado por uma superfície quente. Na prática, as principais
fontes de pré-ignição são os eletrodos superaquecidos da vela ou depósitos de
carbono muito quentes. A ocorrência de pré-ignição é equivalente ao avanço
da centelha e pode provocar a detonação.
Por outro lado, quando a detonação é severa e prolongada, os pontos da
velas ou as partículas de carbono podem ser aquecidos a um ponto que
provoque a pré-ignição. O efeito de aquecimento da detonação decorre da alta
temperatura do gás extremo que queima e do aumento da velocidade relativa
dos gases causando por ondas de pressão.
Com o aumento das razões de compressão nos motores de automóvel,
aparecem dificuldades com a pré-ignição e considerável pesquisa sobre esse
problema foi desenvolvida. O Problema se manifesta no que chamamos de
ruído ou batida. Esses fenômenos parecem decorrer da pré-ignição, que pode
provocar grandes elevações de pressão devido aos múltiplos pontos de ignição
e avanço da combustão, juntamente com detonação irregular. A principal fonte
de ignição em tais casos parece ser as partículas incandescentes de depósitos
duros, que se projetam na câmara de combustão e tornam-se superaquecidos.
A tendência dos combustíveis à ignição devido a uma superfície quente
parece ter pouca ou nenhuma relação com as características de detonação dos
combustíveis.
REFERÊNCIAS BIBLIOGRÁFICAS
1. TAYLOR, CHARLES F. “Análise dos Motores de Combustão Interna” Vol
2 Editora Edgard Blucher Ltda São Paulo, 1995.
60
6. POTÊNCIA, RENDIMENTO E BALANÇO TÉRMICO Este capitulo apresenta um resumo do capítulo Cálculo de la Potencia –
Rendimientos – Balance Térmico, do livro ESTUDIO GENERAL DE LOS
MOTORES ALTERNATIVOS, de Dante Giacosa, que descreve cálculos e
métodos para obtenção do valor da potência e do rendimento, finalizando com
o demonstrativo do balanço térmico nos motores de ciclo alternativo. Cabe
salientar que algumas informações técnicas foram alteradas com o objetivo de
atualizar o texto.
6.1. POTÊNCIA
A energia gerada pela combustão dentro do cilindro não se transmite
integralmente ao eixo do motor, pois uma parte é perdida pelas resistências
passivas. Pode-se classificar a potência em três categorias: potência indicada,
potência absorvida pelas resistências passivas e potência efetiva no eixo. A
potência indicada pode ser calculada partindo do ciclo indicado, cuja área
representa o trabalho realizado pela mistura no interior do cilindro durante um
ciclo. A potência efetiva é obtida medindo-se com um freio o trabalho no eixo
do motor e a potência absorvida pelas resistências passivas é medida,
fazendo-se girar o motor, sem que haja combustão, com o uso de uma outra
fonte de potência externa. A potência absorvida pelas resistências passivas,
também pode ser obtida pelo cálculo da diferença entre a potência indicada e a
potência efetiva:
epi NNN ou eip NNN
sendo: Ni Potência indicada; Np Potência absorvida pelas resistências
passivas, e; Ne Potência efetiva.
61
6.1.1. Potência Indicada
A Potência Indicada é aquela que esta relacionada com a pressão
gerada dentro do cilindro. A pressão aplicada sobre a face do êmbolo durante o
bombeio (admissão e descarga), ou durante a compressão, geram trabalho
negativo. Somente a pressão realizada durante o ciclo de combustão e
expansão gera trabalho positivo. A Potência Indicada esta relacionada com a
resultante do trabalho gerado pela pressão, que varia continuamente, durante o
ciclo.
A Pressão Média Indicada é a média da ordenada do ciclo indicado e
representa o valor de pressão que, multiplicado pelo volume de um cilindro,
resulta no trabalho útil indicado pelo ciclo.
Pode-se calcular a potência indicada através da seguinte equação:
ii
Vp nN
h
sendo: V valor do volume total; pi pressão média indicada; n velocidade do
motor, e; h número de ciclos do motor (2 ou 4T)
6.1.2. Potência Efetiva ou Potência ao Freio
É a potência medida no eixo do motor, também chamada de potência ao
freio, porque pode ser medida com o uso de um dispositivo frenante adaptado
no eixo do motor, permitindo que se meça o valor do momento frenante.
Conhecendo este valor e a velocidade do motor, podemos calcular a potência
efetiva. Como exemplo de dispositivo frenante usaremos o freio de Prony,
mostrado na figura 42, Este dispositivo é constituído de uma roda de raio r,
fixada ao eixo do motor, disposto no centro de duas sapatas de freio
reguláveis, um braço de comprimento R, que fixa as sapatas numa
extremidade e possui mobilidade dentro de um certo ângulo, sendo que na
outra extremidade é fixado um peso F:
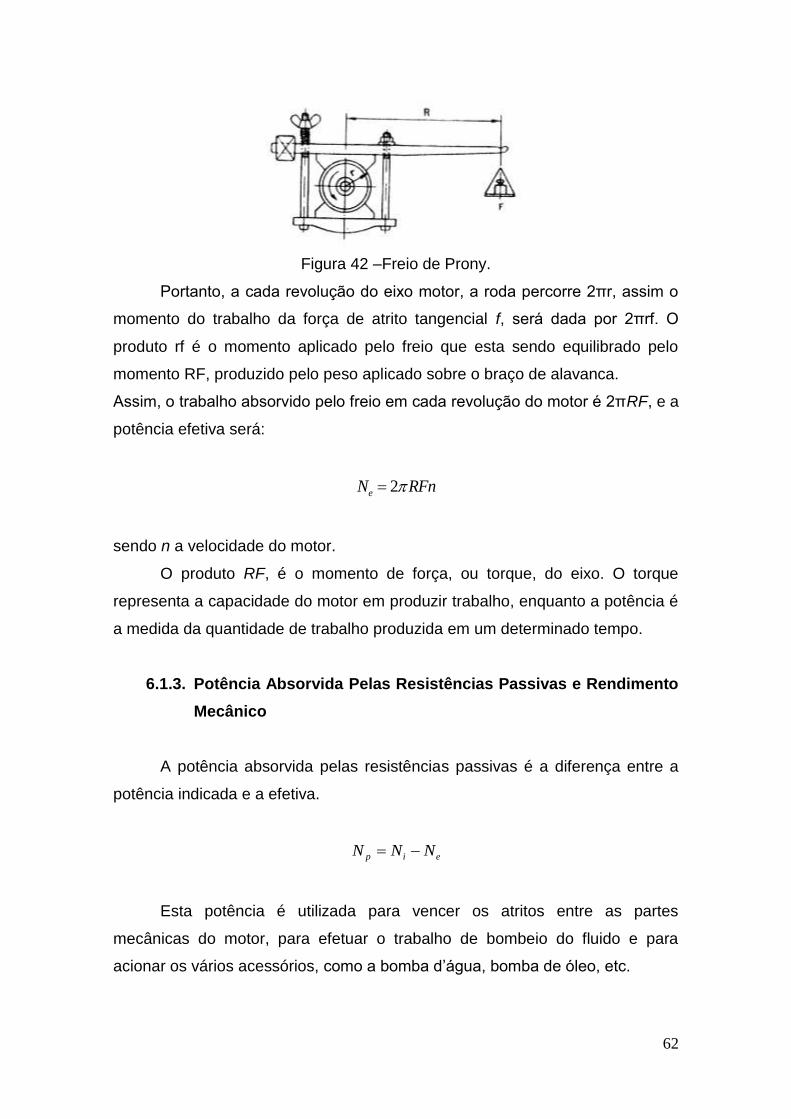
62
Figura 42 –Freio de Prony.
Portanto, a cada revolução do eixo motor, a roda percorre 2πr, assim o
momento do trabalho da força de atrito tangencial f, será dada por 2πrf. O
produto rf é o momento aplicado pelo freio que esta sendo equilibrado pelo
momento RF, produzido pelo peso aplicado sobre o braço de alavanca.
Assim, o trabalho absorvido pelo freio em cada revolução do motor é 2πRF, e a
potência efetiva será:
2eN RFn
sendo n a velocidade do motor.
O produto RF, é o momento de força, ou torque, do eixo. O torque
representa a capacidade do motor em produzir trabalho, enquanto a potência é
a medida da quantidade de trabalho produzida em um determinado tempo.
6.1.3. Potência Absorvida Pelas Resistências Passivas e Rendimento
Mecânico
A potência absorvida pelas resistências passivas é a diferença entre a
potência indicada e a efetiva.
eip NNN
Esta potência é utilizada para vencer os atritos entre as partes
mecânicas do motor, para efetuar o trabalho de bombeio do fluido e para
acionar os vários acessórios, como a bomba d’água, bomba de óleo, etc.
63
Devido à dificuldade de medição das forças de atrito e pelas variações
do resultado nas condições de funcionamento do motor, se torna mais
conveniente medir a potência efetiva do motor com uso de um dinamômetro e
depois com a ignição desligada usar o dinamômetro para impulsionar o motor
nas condições medidas anteriormente (rotação), dessa maneira a potência
utilizada pelo dinamômetro para fazer o motor girar será a potência perdida em
atrito pelo motor. Conhecendo a potência indicada e a efetiva, podemos obter o
rendimento mecânico do motor.
i
e
mN
N
Em grandes motores e com vários cilindros, não se aplica a medida
direta da potência absorvida pelas resistências passivas, o método utilizado é o
seguinte: mede-se primeiro a potência e depois a potência obtida eliminando a
combustão em um dos cilindros. Assim como as perdas mecânicas
permanecem praticamente constantes, a diferença nos dá a potência indicada
no cilindro excluído. Se chamarmos i o número de cilindros i Ne a potência
normal e Ne’ a potência que se obtém eliminando a combustão de um dos
cilindros, teremos:
)'( eei NNiN
Logo o rendimento mecânico será calculado:
'( )
em
e e
N
i N N
Da potência total perdida (em condições de carga plena),
aproximadamente 60% é devida ao atrito do êmbolo e das bronzinas, 25% no
bombeio e o restante, 15%, por atritos de outros acessórios.
PRESSÃO MÉDIA EFETIVA – É a pressão constante que, se fosse aplicada
durante o ciclo motor (combustão e expansão), geraria o mesmo trabalho
64
realizado no ciclo completo. Uma forma prática de determinar a pressão média
efetiva é medir o torque na árvore de manivelas e dividir pelo volume
deslocado.
Utilizando o rendimento mecânico:
i
e
mN
N
podemos escrever:
ie i m m
Vp nN N
h
Sendo: i m ep p ,
ee
Vp nN
h
A pressão média efetiva é muito útil para comparar motores e
estabelecer limites de utilização, ficando a equação da seguinte forma:
para motores de 4 tempos:
4 ee
Np
Vn
para motores de 2 tempos:
2 ee
Np
Vn
6.2. RENDIMENTO
O rendimento termodinâmico é a relação entre trabalho indicado, medido
pela área do ciclo indicado, e o equivalente em trabalho do calor gasto para
obtê-lo. Equivale ao produto dos rendimentos térmico ideal e rendimento
65
indicado. O rendimento térmico ideal é a relação entre trabalho médio pela área
do ciclo ideal e o equivalente em trabalho do calor introduzido no ciclo. O
rendimento térmico dos ciclos ideais é o seguinte:
Para o ciclo Otto:
1
11
k
Para o ciclo Diesel:
)1'(
1'11
1
k
k
k
O rendimento indicado é a relação entre a área do ciclo indicado e a do
ciclo ideal, levando em consideração que a diferença entre o ciclo ideal e o real
depende em grande parte da qualidade termodinâmica da câmara de
combustão (forma e disposição das válvulas, da vela ou do bico injetor).
O rendimento mecânico é a relação do trabalho útil medido sobre o eixo
do motor e o trabalho indicado, tendo em conta o trabalho perdido em atritos
pelo próprio mecanismo do motor. O rendimento mecânico está normalmente
compreendido entre 0,8 e 0,9, sendo que valores mais baixos se referem a
motores de alto giro e de pequeno volume.
O rendimento total de um motor é a relação entre o trabalho útil no eixo
do motor e o equivalente a energia calorífera do combustível consumido, ou
seja, é o produto do rendimento termodinâmico pelo mecânico.
mti
O rendimento volumétrico é a relação entre o peso do ar efetivamente
introduzido por ciclo no cilindro e o peso de uma carga completa ou seja, o
volume de ar é igual ao volume do cilindro, nas condições de 15ºC e 1 atm.
ev
t
P
P
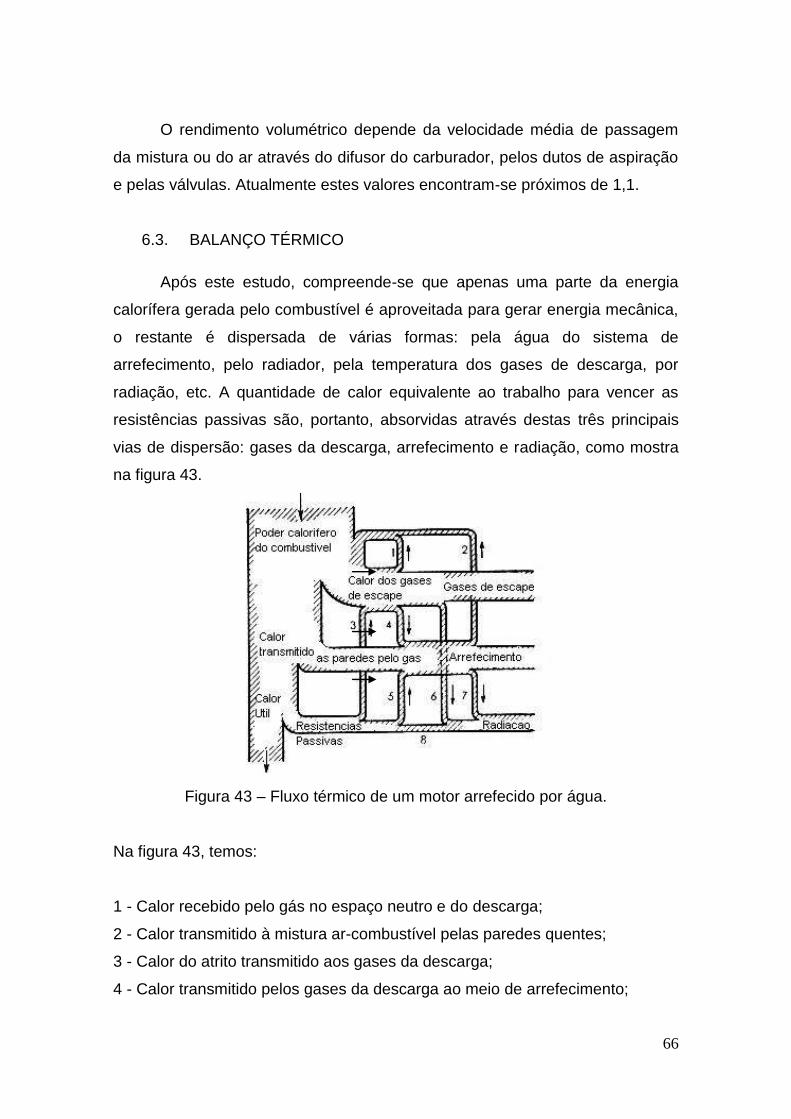
66
O rendimento volumétrico depende da velocidade média de passagem
da mistura ou do ar através do difusor do carburador, pelos dutos de aspiração
e pelas válvulas. Atualmente estes valores encontram-se próximos de 1,1.
6.3. BALANÇO TÉRMICO
Após este estudo, compreende-se que apenas uma parte da energia
calorífera gerada pelo combustível é aproveitada para gerar energia mecânica,
o restante é dispersada de várias formas: pela água do sistema de
arrefecimento, pelo radiador, pela temperatura dos gases de descarga, por
radiação, etc. A quantidade de calor equivalente ao trabalho para vencer as
resistências passivas são, portanto, absorvidas através destas três principais
vias de dispersão: gases da descarga, arrefecimento e radiação, como mostra
na figura 43.
Figura 43 – Fluxo térmico de um motor arrefecido por água.
Na figura 43, temos:
1 - Calor recebido pelo gás no espaço neutro e do descarga;
2 - Calor transmitido à mistura ar-combustível pelas paredes quentes;
3 - Calor do atrito transmitido aos gases da descarga;
4 - Calor transmitido pelos gases da descarga ao meio de arrefecimento;
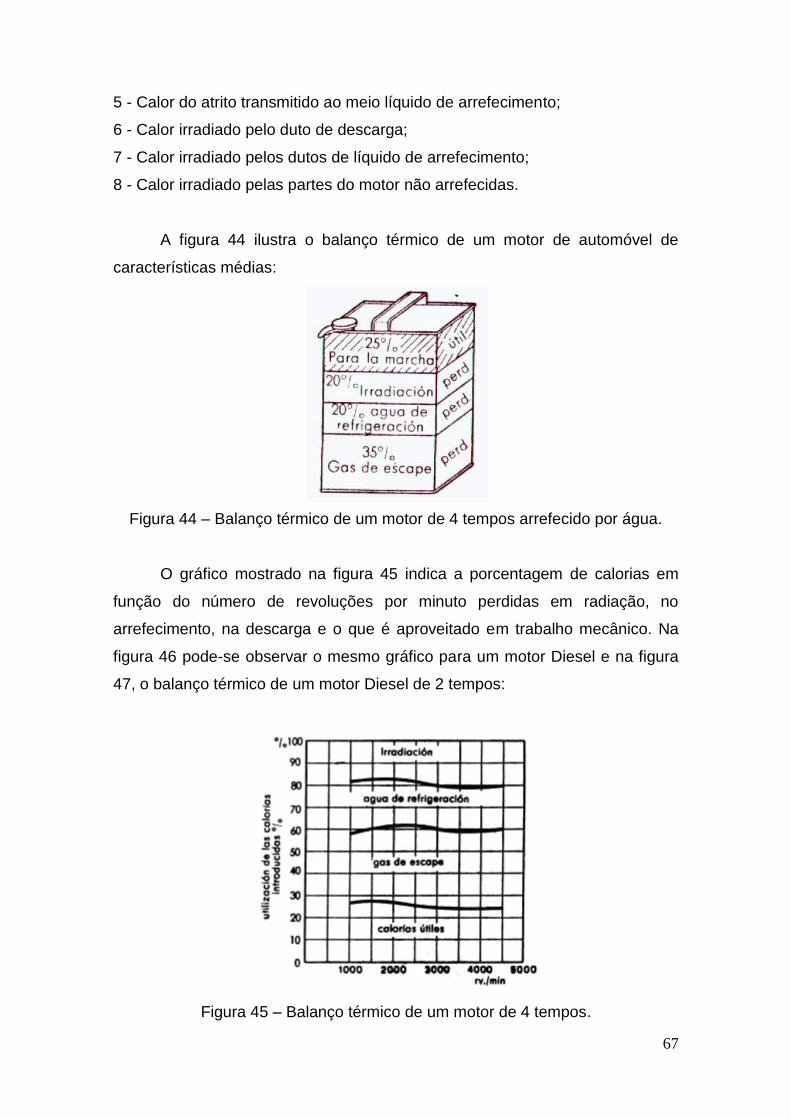
67
5 - Calor do atrito transmitido ao meio líquido de arrefecimento;
6 - Calor irradiado pelo duto de descarga;
7 - Calor irradiado pelos dutos de líquido de arrefecimento;
8 - Calor irradiado pelas partes do motor não arrefecidas.
A figura 44 ilustra o balanço térmico de um motor de automóvel de
características médias:
Figura 44 – Balanço térmico de um motor de 4 tempos arrefecido por água.
O gráfico mostrado na figura 45 indica a porcentagem de calorias em
função do número de revoluções por minuto perdidas em radiação, no
arrefecimento, na descarga e o que é aproveitado em trabalho mecânico. Na
figura 46 pode-se observar o mesmo gráfico para um motor Diesel e na figura
47, o balanço térmico de um motor Diesel de 2 tempos:
Figura 45 – Balanço térmico de um motor de 4 tempos.
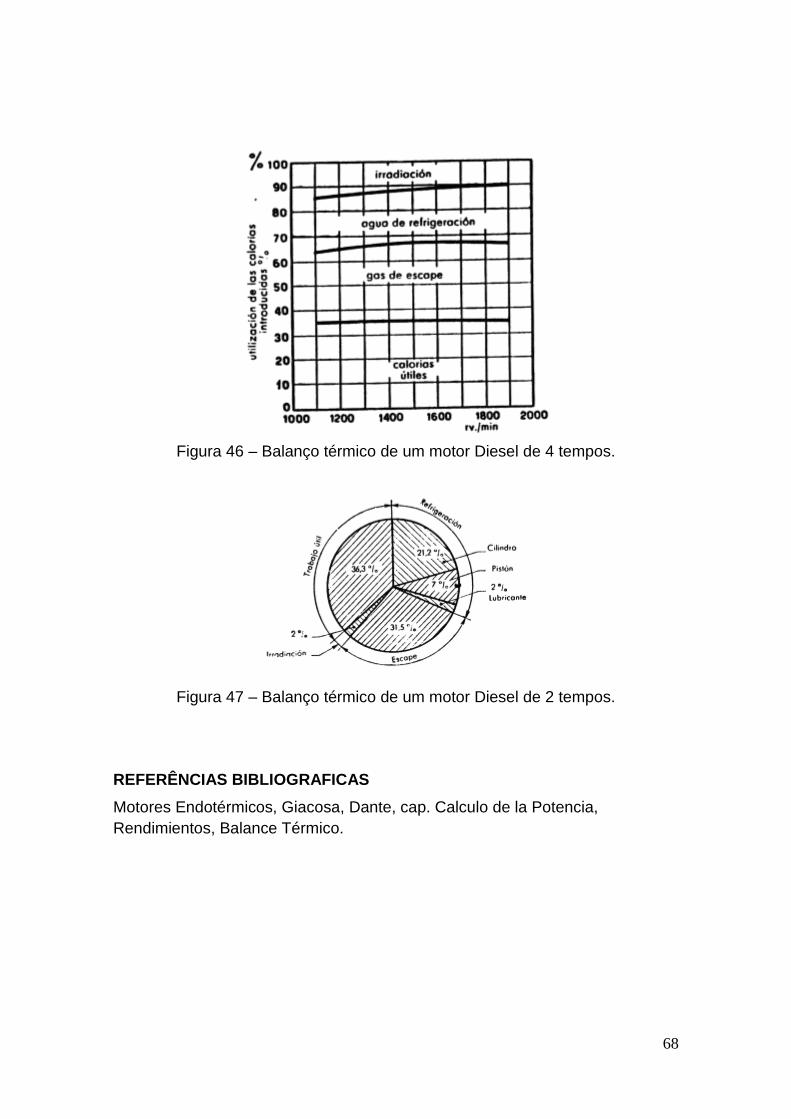
68
Figura 46 – Balanço térmico de um motor Diesel de 4 tempos.
Figura 47 – Balanço térmico de um motor Diesel de 2 tempos.
REFERÊNCIAS BIBLIOGRAFICAS
Motores Endotérmicos, Giacosa, Dante, cap. Calculo de la Potencia,
Rendimientos, Balance Térmico.
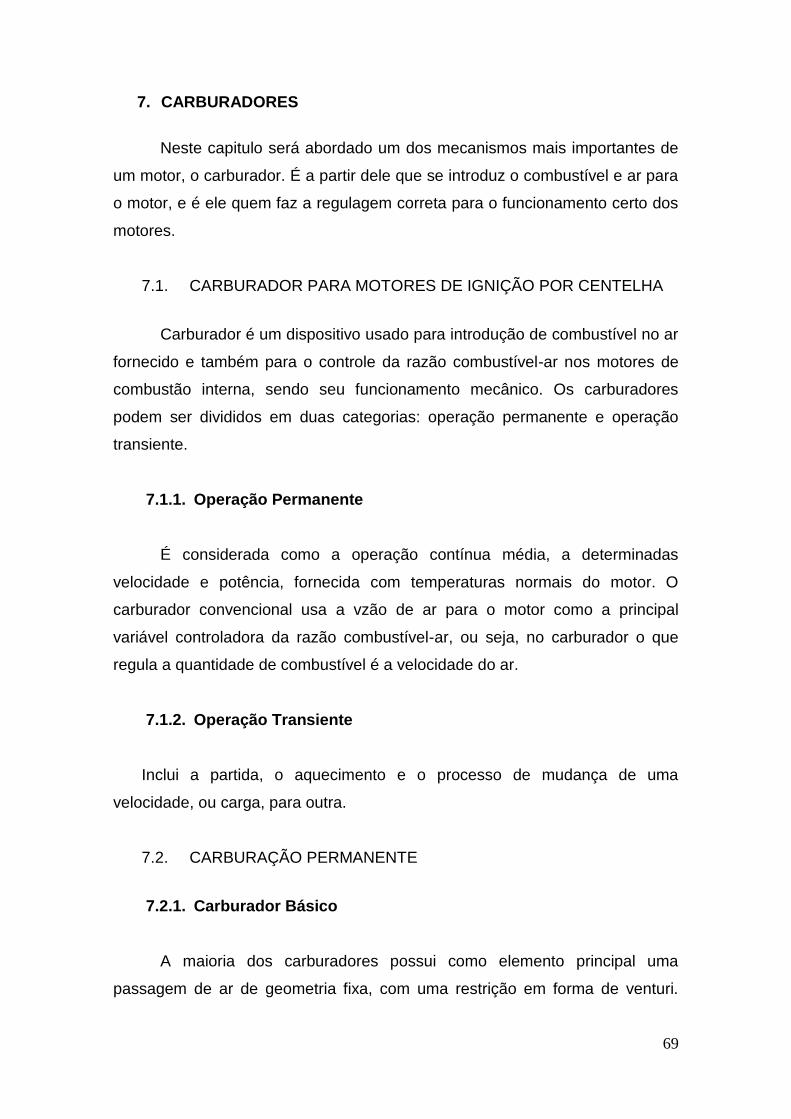
69
7. CARBURADORES
Neste capitulo será abordado um dos mecanismos mais importantes de
um motor, o carburador. É a partir dele que se introduz o combustível e ar para
o motor, e é ele quem faz a regulagem correta para o funcionamento certo dos
motores.
7.1. CARBURADOR PARA MOTORES DE IGNIÇÃO POR CENTELHA
Carburador é um dispositivo usado para introdução de combustível no ar
fornecido e também para o controle da razão combustível-ar nos motores de
combustão interna, sendo seu funcionamento mecânico. Os carburadores
podem ser divididos em duas categorias: operação permanente e operação
transiente.
7.1.1. Operação Permanente
É considerada como a operação contínua média, a determinadas
velocidade e potência, fornecida com temperaturas normais do motor. O
carburador convencional usa a vzão de ar para o motor como a principal
variável controladora da razão combustível-ar, ou seja, no carburador o que
regula a quantidade de combustível é a velocidade do ar.
7.1.2. Operação Transiente
Inclui a partida, o aquecimento e o processo de mudança de uma
velocidade, ou carga, para outra.
7.2. CARBURAÇÃO PERMANENTE
7.2.1. Carburador Básico
A maioria dos carburadores possui como elemento principal uma
passagem de ar de geometria fixa, com uma restrição em forma de venturi.
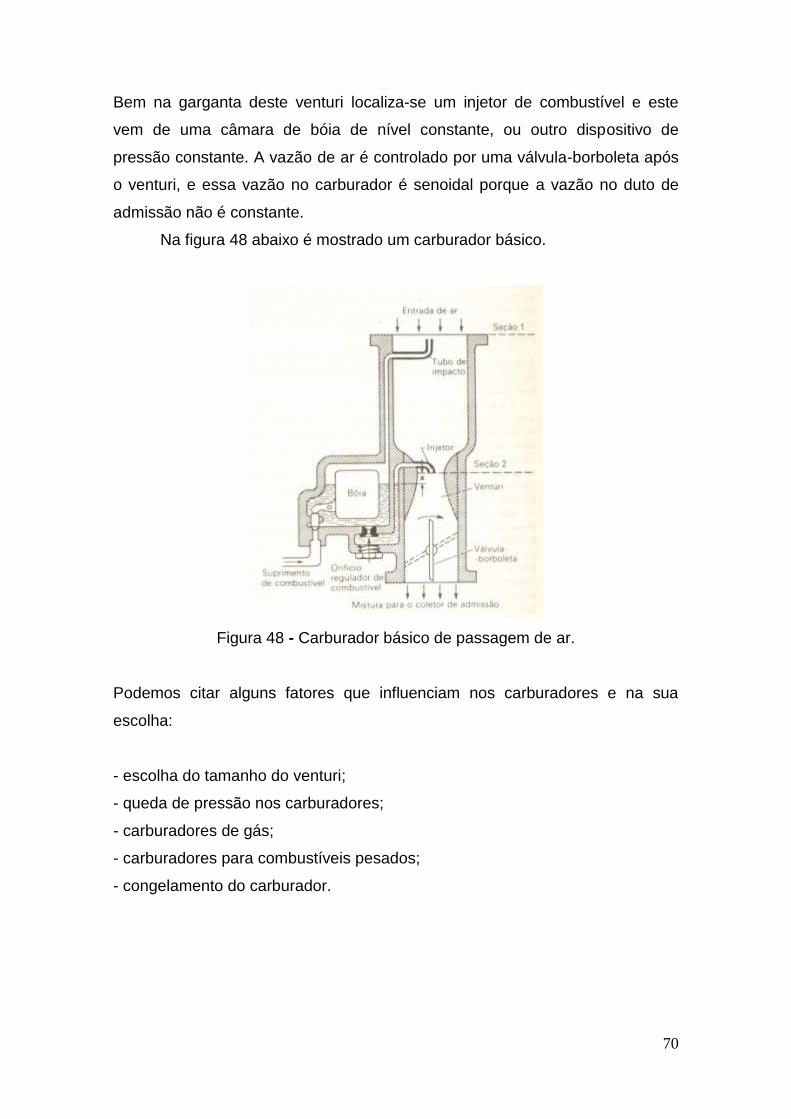
70
Bem na garganta deste venturi localiza-se um injetor de combustível e este
vem de uma câmara de bóia de nível constante, ou outro dispositivo de
pressão constante. A vazão de ar é controlado por uma válvula-borboleta após
o venturi, e essa vazão no carburador é senoidal porque a vazão no duto de
admissão não é constante.
Na figura 48 abaixo é mostrado um carburador básico.
Figura 48 - Carburador básico de passagem de ar.
Podemos citar alguns fatores que influenciam nos carburadores e na sua
escolha:
- escolha do tamanho do venturi;
- queda de pressão nos carburadores;
- carburadores de gás;
- carburadores para combustíveis pesados;
- congelamento do carburador.
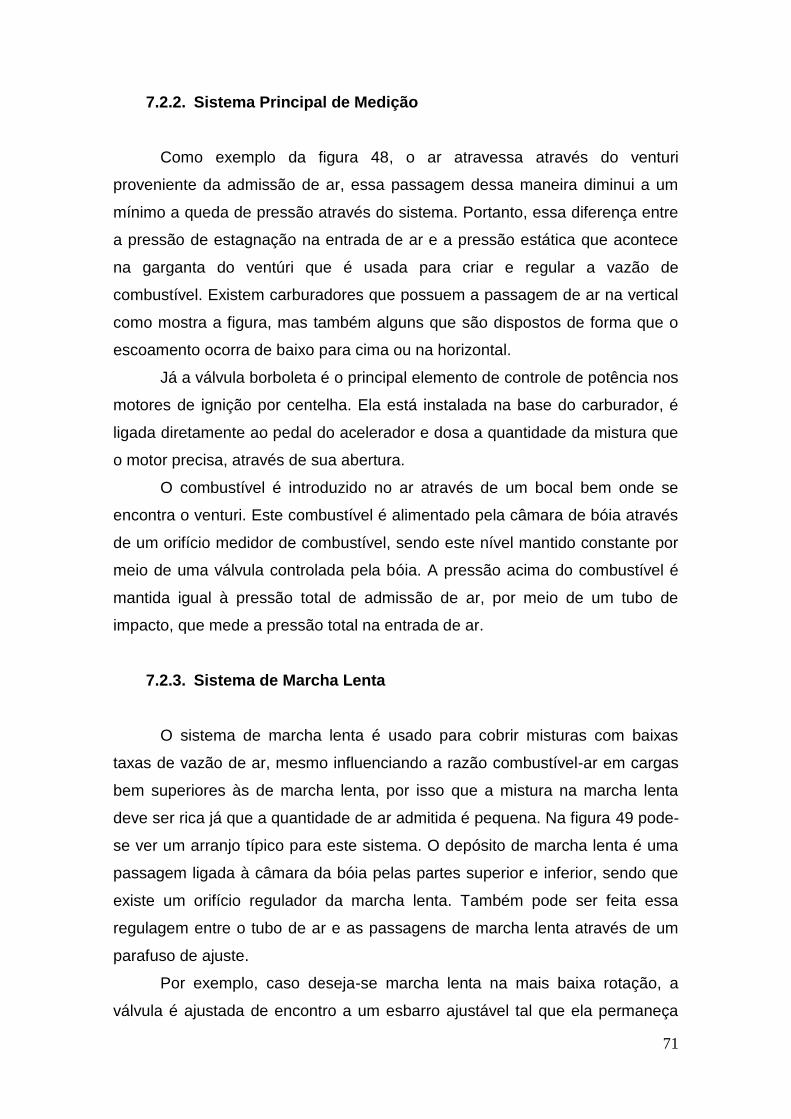
71
7.2.2. Sistema Principal de Medição
Como exemplo da figura 48, o ar atravessa através do venturi
proveniente da admissão de ar, essa passagem dessa maneira diminui a um
mínimo a queda de pressão através do sistema. Portanto, essa diferença entre
a pressão de estagnação na entrada de ar e a pressão estática que acontece
na garganta do ventúri que é usada para criar e regular a vazão de
combustível. Existem carburadores que possuem a passagem de ar na vertical
como mostra a figura, mas também alguns que são dispostos de forma que o
escoamento ocorra de baixo para cima ou na horizontal.
Já a válvula borboleta é o principal elemento de controle de potência nos
motores de ignição por centelha. Ela está instalada na base do carburador, é
ligada diretamente ao pedal do acelerador e dosa a quantidade da mistura que
o motor precisa, através de sua abertura.
O combustível é introduzido no ar através de um bocal bem onde se
encontra o venturi. Este combustível é alimentado pela câmara de bóia através
de um orifício medidor de combustível, sendo este nível mantido constante por
meio de uma válvula controlada pela bóia. A pressão acima do combustível é
mantida igual à pressão total de admissão de ar, por meio de um tubo de
impacto, que mede a pressão total na entrada de ar.
7.2.3. Sistema de Marcha Lenta
O sistema de marcha lenta é usado para cobrir misturas com baixas
taxas de vazão de ar, mesmo influenciando a razão combustível-ar em cargas
bem superiores às de marcha lenta, por isso que a mistura na marcha lenta
deve ser rica já que a quantidade de ar admitida é pequena. Na figura 49 pode-
se ver um arranjo típico para este sistema. O depósito de marcha lenta é uma
passagem ligada à câmara da bóia pelas partes superior e inferior, sendo que
existe um orifício regulador da marcha lenta. Também pode ser feita essa
regulagem entre o tubo de ar e as passagens de marcha lenta através de um
parafuso de ajuste.
Por exemplo, caso deseja-se marcha lenta na mais baixa rotação, a
válvula é ajustada de encontro a um esbarro ajustável tal que ela permaneça
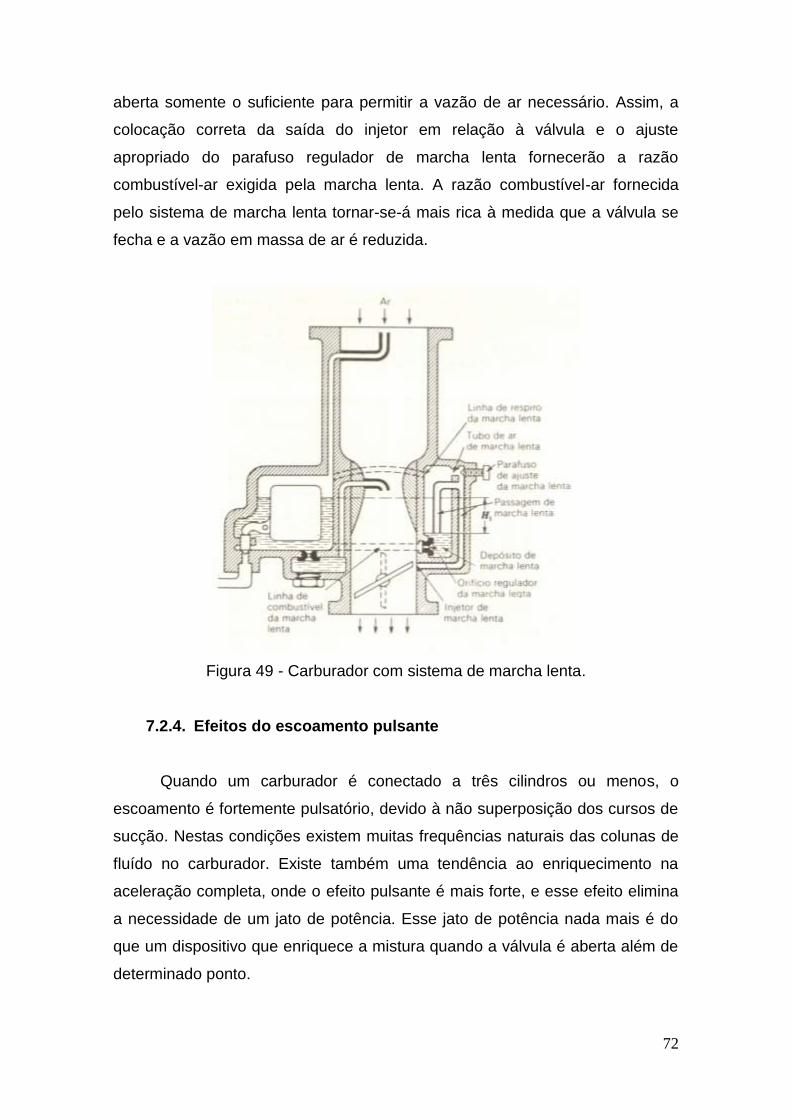
72
aberta somente o suficiente para permitir a vazão de ar necessário. Assim, a
colocação correta da saída do injetor em relação à válvula e o ajuste
apropriado do parafuso regulador de marcha lenta fornecerão a razão
combustível-ar exigida pela marcha lenta. A razão combustível-ar fornecida
pelo sistema de marcha lenta tornar-se-á mais rica à medida que a válvula se
fecha e a vazão em massa de ar é reduzida.
Figura 49 - Carburador com sistema de marcha lenta.
7.2.4. Efeitos do escoamento pulsante
Quando um carburador é conectado a três cilindros ou menos, o
escoamento é fortemente pulsatório, devido à não superposição dos cursos de
sucção. Nestas condições existem muitas frequências naturais das colunas de
fluído no carburador. Existe também uma tendência ao enriquecimento na
aceleração completa, onde o efeito pulsante é mais forte, e esse efeito elimina
a necessidade de um jato de potência. Esse jato de potência nada mais é do
que um dispositivo que enriquece a mistura quando a válvula é aberta além de
determinado ponto.
73
7.3. CARBURAÇÃO TRANSIENTE
7.3.1. Partida
Para veículos rodoviários são necessárias misturas muito ricas para a
partida em clima frio, principalmente devido a facilidade com que ocorre a
condensação causada pela baixa temperatura nos dutos de admissão, e essas
misturas são fornecidas por meio de um afogador. Esse mecanismo consiste
numa válvula-borboleta regulada por mola localizada na admissão de ar. Veja
na figura 50 como é sua forma.
Para assegurar essa razão combustível-ar rica necessária para dar a
partida, o afogador é fechado, isso faz com que ocorra um limitado escoamento
de ar quando o motor dá a partida, ou seja, esse afogador fechado cria uma
grande diferença de pressões e provoca um rápida vazão de combustível do
injetor principal. A máxima razão combustível-ar é determinada pelo tamanho
do furo na válvula do afogador comparado ao tamanho do orifício controlador
principal, e as menores razões são obtidas pela abertura parcial da válvula do
afogador. É importante salientar que é necessária a abertura gradual do
afogador de acordo com o aquecimento do motor.
Figura 50 - Carburador com jato de potência e afogador.
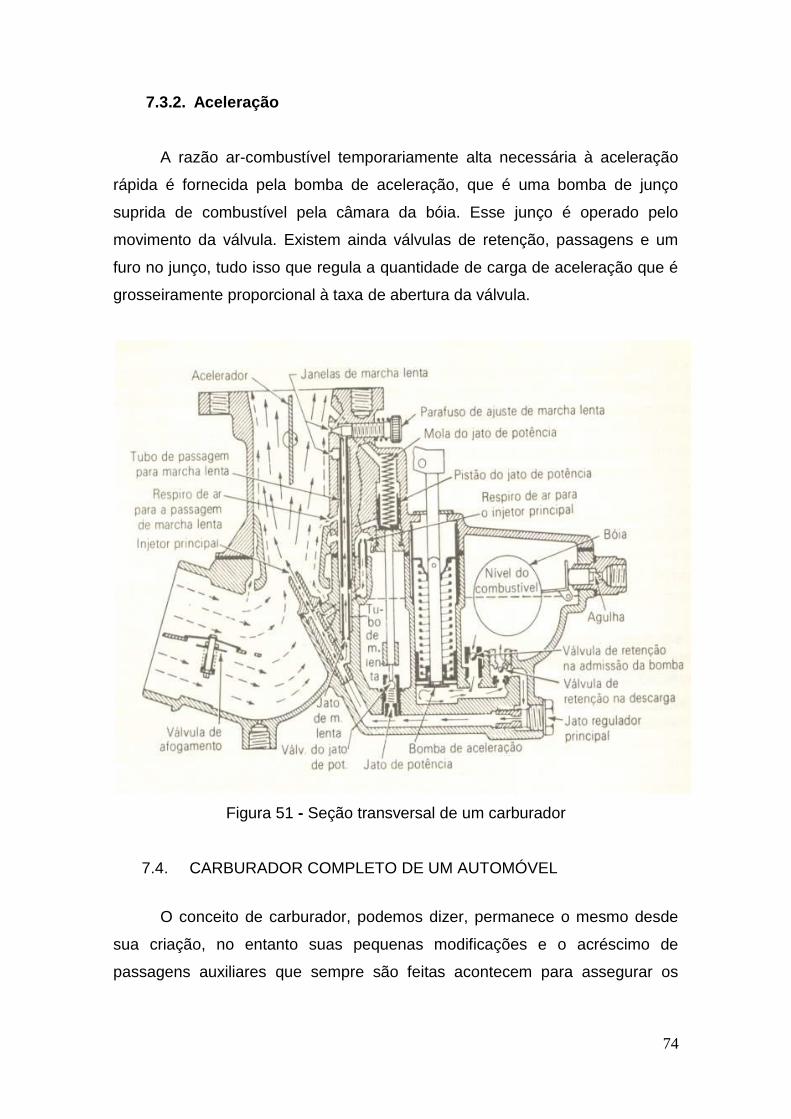
74
7.3.2. Aceleração
A razão ar-combustível temporariamente alta necessária à aceleração
rápida é fornecida pela bomba de aceleração, que é uma bomba de junço
suprida de combustível pela câmara da bóia. Esse junço é operado pelo
movimento da válvula. Existem ainda válvulas de retenção, passagens e um
furo no junço, tudo isso que regula a quantidade de carga de aceleração que é
grosseiramente proporcional à taxa de abertura da válvula.
Figura 51 - Seção transversal de um carburador
7.4. CARBURADOR COMPLETO DE UM AUTOMÓVEL
O conceito de carburador, podemos dizer, permanece o mesmo desde
sua criação, no entanto suas pequenas modificações e o acréscimo de
passagens auxiliares que sempre são feitas acontecem para assegurar os
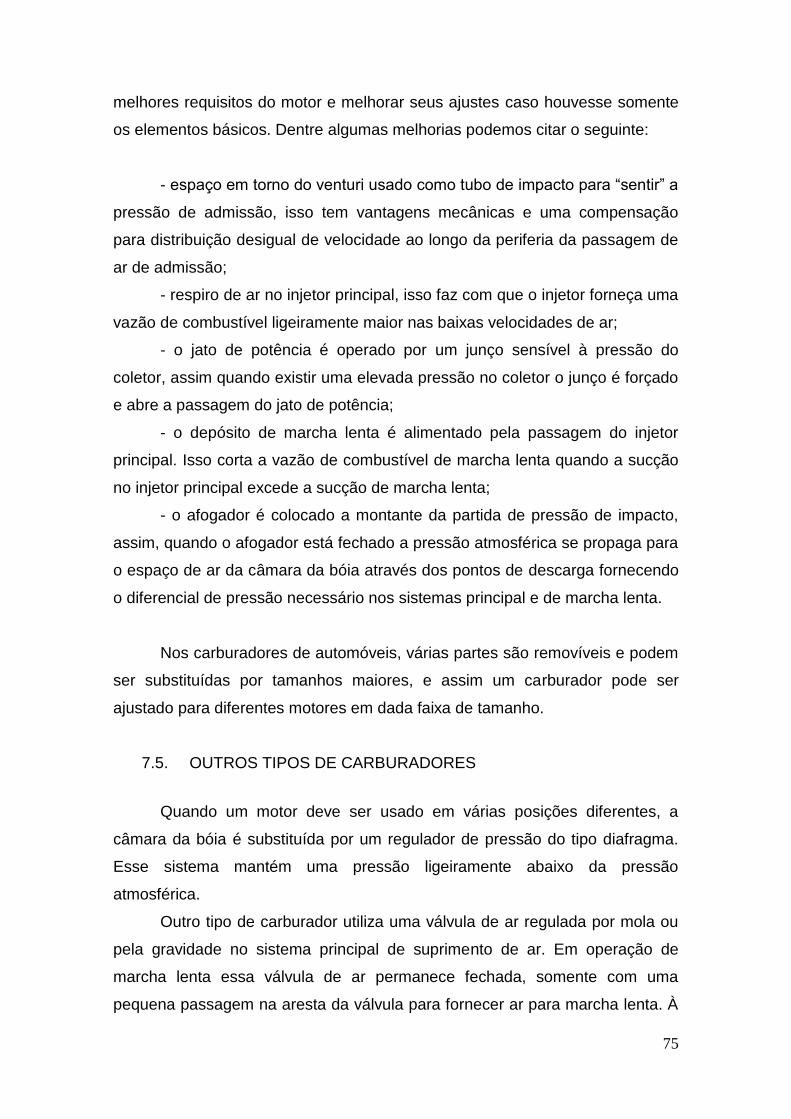
75
melhores requisitos do motor e melhorar seus ajustes caso houvesse somente
os elementos básicos. Dentre algumas melhorias podemos citar o seguinte:
- espaço em torno do venturi usado como tubo de impacto para “sentir” a
pressão de admissão, isso tem vantagens mecânicas e uma compensação
para distribuição desigual de velocidade ao longo da periferia da passagem de
ar de admissão;
- respiro de ar no injetor principal, isso faz com que o injetor forneça uma
vazão de combustível ligeiramente maior nas baixas velocidades de ar;
- o jato de potência é operado por um junço sensível à pressão do
coletor, assim quando existir uma elevada pressão no coletor o junço é forçado
e abre a passagem do jato de potência;
- o depósito de marcha lenta é alimentado pela passagem do injetor
principal. Isso corta a vazão de combustível de marcha lenta quando a sucção
no injetor principal excede a sucção de marcha lenta;
- o afogador é colocado a montante da partida de pressão de impacto,
assim, quando o afogador está fechado a pressão atmosférica se propaga para
o espaço de ar da câmara da bóia através dos pontos de descarga fornecendo
o diferencial de pressão necessário nos sistemas principal e de marcha lenta.
Nos carburadores de automóveis, várias partes são removíveis e podem
ser substituídas por tamanhos maiores, e assim um carburador pode ser
ajustado para diferentes motores em dada faixa de tamanho.
7.5. OUTROS TIPOS DE CARBURADORES
Quando um motor deve ser usado em várias posições diferentes, a
câmara da bóia é substituída por um regulador de pressão do tipo diafragma.
Esse sistema mantém uma pressão ligeiramente abaixo da pressão
atmosférica.
Outro tipo de carburador utiliza uma válvula de ar regulada por mola ou
pela gravidade no sistema principal de suprimento de ar. Em operação de
marcha lenta essa válvula de ar permanece fechada, somente com uma
pequena passagem na aresta da válvula para fornecer ar para marcha lenta. À
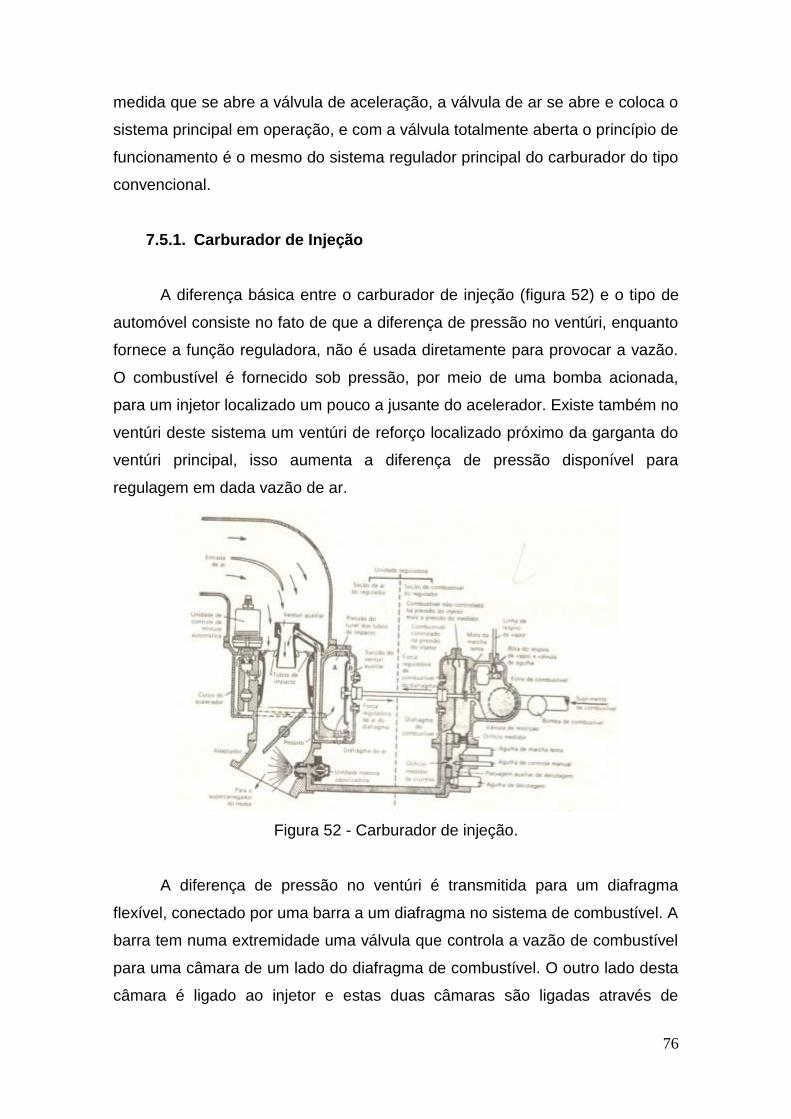
76
medida que se abre a válvula de aceleração, a válvula de ar se abre e coloca o
sistema principal em operação, e com a válvula totalmente aberta o princípio de
funcionamento é o mesmo do sistema regulador principal do carburador do tipo
convencional.
7.5.1. Carburador de Injeção
A diferença básica entre o carburador de injeção (figura 52) e o tipo de
automóvel consiste no fato de que a diferença de pressão no ventúri, enquanto
fornece a função reguladora, não é usada diretamente para provocar a vazão.
O combustível é fornecido sob pressão, por meio de uma bomba acionada,
para um injetor localizado um pouco a jusante do acelerador. Existe também no
ventúri deste sistema um ventúri de reforço localizado próximo da garganta do
ventúri principal, isso aumenta a diferença de pressão disponível para
regulagem em dada vazão de ar.
Figura 52 - Carburador de injeção.
A diferença de pressão no ventúri é transmitida para um diafragma
flexível, conectado por uma barra a um diafragma no sistema de combustível. A
barra tem numa extremidade uma válvula que controla a vazão de combustível
para uma câmara de um lado do diafragma de combustível. O outro lado desta
câmara é ligado ao injetor e estas duas câmaras são ligadas através de
77
orifícios reguladores de combustível. Os diafragmas movem a válvula de
combustível para uma posição que mantenha a mesma diferença de pressão
entre o diafragma de ar e os orifícios reguladores de combustível.
Com relação à marcha lenta, a razão combustível-ar é ajustada pela
limitação da posição mais interna da válvula de marcha lenta.
A mistura rica necessária para a máxima potência é fornecida pela
agulha de partida operada pelo acelerador. A aceleração é feita por meio de
uma bomba de aceleração. O carburador de injeção tem a vantagem de
espalhar o combustível na corrente de ar com considerável pressão a todo
instante, ajudando no processo de atomização e mistura, também conseguindo
manter a pressão aproximadamente constante.
REFERÊNCIAS BIBLIOGRÁFICAS:
TAYLOR, Charles F. Análise dos Motores de Combustão Interna. Ed. Edgard
Blücher Ltda. 1988. Vol. 2. São Paulo
GIACOSA, Dante. Motores Endotérmicos. Barcelona: Hoepli, 1970.
HEYWOOD, John B. Internal Combustion Engine. McGraw-Hill, 2000.
Internet:http://www.enduro.hpg.ig.com.br/mecanica/carburador/carburador.html
Internet: http://www.brosol.com.br/brosol/
78
8. INJEÇÃO ELETRÔNICA
A finalidade dos motores de combustão é transformação da energia
química contida no combustível em energia mecânica. Esta transformação
ocorre devido a queima da mistura ar combustível que ocorre dentro da câmara
de combustão. Porém, esta queima não ocorre de forma otimizada em
sistemas carburados, emitindo grande quantidade de poluentes a atmosfera. A
injeção eletrônica surgiu devido à necessidade das montadoras se adequarem
às exigências governamentais com relação ao índice de emissão de poluentes.
A injeção eletrônica trouxe outras vantagens, tais como aumento de potência
do motor, diminuição do consumo de combustível, diagnóstico do veículo
através de sinalizadores no painel de instrumentos, etc.
A injeção eletrônica possui um sistema de gerenciamento composto de
uma Central Eletrônica (Centralina ou E.C.U.), que recebe informações de
sensores instalados no motor e controla, entre outros sistemas, a injeção de
combustível e a ignição. Para que o motor funcione corretamente, sem falhas,
e com o melhor rendimento, é necessário que se misture uma quantidade
específica de combustível ao ar que entra no motor. Como esta quantidade é
determinada em massa, a central eletrônica calcula a massa de ar que é
admitida pelo motor e comanda a injeção de combustível. Esta tecnologia leva
em conta a rotação do motor e a densidade do ar aspirado. Através da rotação
do motor, levando-se em conta a sua capacidade volumétrica, a central calcula
o volume de ar admitido, e para o cálculo da densidade utiliza os valores da
temperatura e da pressão do ar, que são informados à Central através de
sensores. Tendo a massa de ar admitida pelo motor, a central comandará uma
válvula, que chamamos de eletro injetor, e esta permitirá a passagem da
quantidade exata de combustível para realizar a combustão. Com esta mistura
comprimida no cilindro, a Central atuara sobre o circuito de ignição, definindo o
tempo de início da combustão. Os principais sistemas de injeção e ignição
eletrônica não necessitam de ajustes ou regulagem, porém, por se tratar de
sistemas eletroeletrônicos precisam ser constantemente avaliados, pois
fornecem informações sobre seus componentes, além de informar se
ocorreram defeitos ou anomalias durante seu funcionamento.
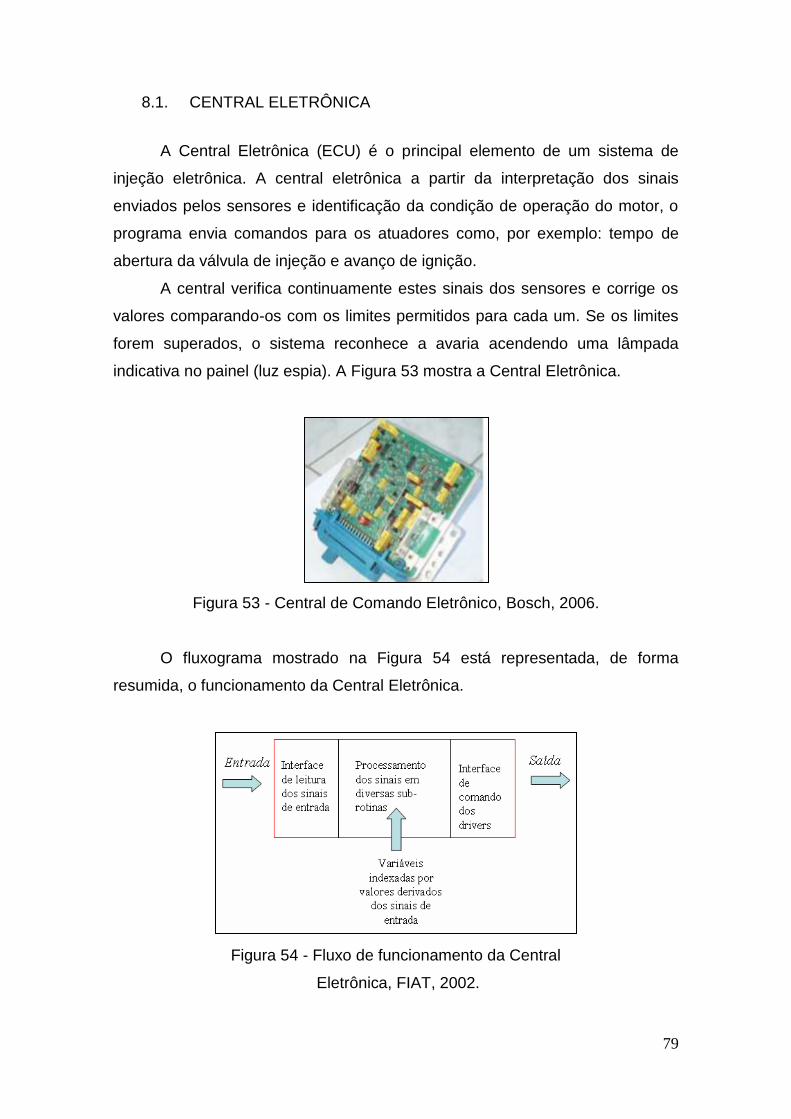
79
8.1. CENTRAL ELETRÔNICA
A Central Eletrônica (ECU) é o principal elemento de um sistema de
injeção eletrônica. A central eletrônica a partir da interpretação dos sinais
enviados pelos sensores e identificação da condição de operação do motor, o
programa envia comandos para os atuadores como, por exemplo: tempo de
abertura da válvula de injeção e avanço de ignição.
A central verifica continuamente estes sinais dos sensores e corrige os
valores comparando-os com os limites permitidos para cada um. Se os limites
forem superados, o sistema reconhece a avaria acendendo uma lâmpada
indicativa no painel (luz espia). A Figura 53 mostra a Central Eletrônica.
Figura 53 - Central de Comando Eletrônico, Bosch, 2006.
O fluxograma mostrado na Figura 54 está representada, de forma
resumida, o funcionamento da Central Eletrônica.
Figura 54 - Fluxo de funcionamento da Central
Eletrônica, FIAT, 2002.
80
8.2. SENSORES
Os sensores são dispositivo eletro-eletrônicos capazes de transformar
um sinal proveniente do motor em sinal elétrico para a central. Esse sinal
informa à central como está o funcionamento do motor. A seguir serão
destacados os principais sensores que compõem a Central Eletrônica.
8.2.1. Tipos de Sensores
Para medição de temperatura podem ser utilizados vários tipos de
sensores: termopar, o BJT (Bipolar Junction Transistor), transistor e as
termoresistências.
Especificamente na linha automotiva, os sensores podem ser
classificados quanto à aplicação:
De temperatura do ar;
De temperatura do fluido de arrefecimento (água).
- Quanto ao princípio de funcionamento:
Coeficiente Negativo de Temperatura (NTC);
Coeficiente Positivo de Temperatura (PTC);
Termostato.
- Quanto à forma de aterramento:
Aterrados Unidade de Comando Eletrônica (U.C.E.)
Aterrados pela própria carcaça do sensor.
8.2.2. Sensores de Temperatura
Uma vez que se deseja controlar a temperatura de um sistema, é
necessário que se disponha de um elemento que tenha algum parâmetro
elétrico que varie com a temperatura.
Principio de Funcionamento
O termopar nada mais é que a junção de dois fios de materiais
diferentes como, por exemplo, cobre e ferro. Quando as extremidades são
81
submetidas a temperaturas diferentes é gerada uma diferença de potencial
(ddp) proporcional a esta grandeza.
O BJT é um dispositivo bastante apropriado para uso como sensor de
temperatura.
Tanto a tensão entre seus terminais Base e Emissor (VBE), como a
diferença entre os VBEs de dois transistores (∆VBE), são variáveis
normalmente utilizadas para representar uma medida da temperatura em que o
sensor se encontra. A relação que há entre ∆VBE e a temperatura é linear, o
que favorece o uso de um par de transistores BJT como sensor de
temperatura. Outro elemento que também pode ser utilizado como sensor de
temperatura, onde não é requerida boa sensibilidade, é o diodo. O diodo
polarizado diretamente exibe uma queda de tensão de 0,1 V/ºC de
aquecimento. Como desvantagem ele requer um bom milivoltímetro para a
leitura direta, ou então de um amplificador linear.
Já as Termoresistências obedecem o Princípio do Efeito
Termomecânico, que consiste em uma alteração da dimensão de um
determinado material, não necessariamente um condutor elétrico, causada por
uma determinada variação de temperatura. Ou seja, em condições normais de
temperatura e pressão, um aumento de temperatura causa um aumento nas
dimensões físicas do material.
O efeito Termoresistivo consiste em explorar a variação da resistência
elétrica produzida por uma determinada variação de temperatura. Os
“termômetros de resistência elétrica” funcionam baseados no fato de que a
resistência de uma grande gama de materiais varia com a temperatura; de um
modo geral, os metais tem um aumentam a resistência elétrica com o aumento
de temperatura, ao passo que os semicondutores diminuem a resistência
elétrica com o aumento da temperatura.
Os termistores mais utilizados são: o Termistor de Coeficiente Positivo
(PTC) e o Termistor de Coeficiente Negativo (NTC).
O PTC, como o próprio nome sugere, exibe um aumento da resistência
com o aumento da temperatura. A variação da resistência é maior que a de um
NTC na mesma faixa de operação.
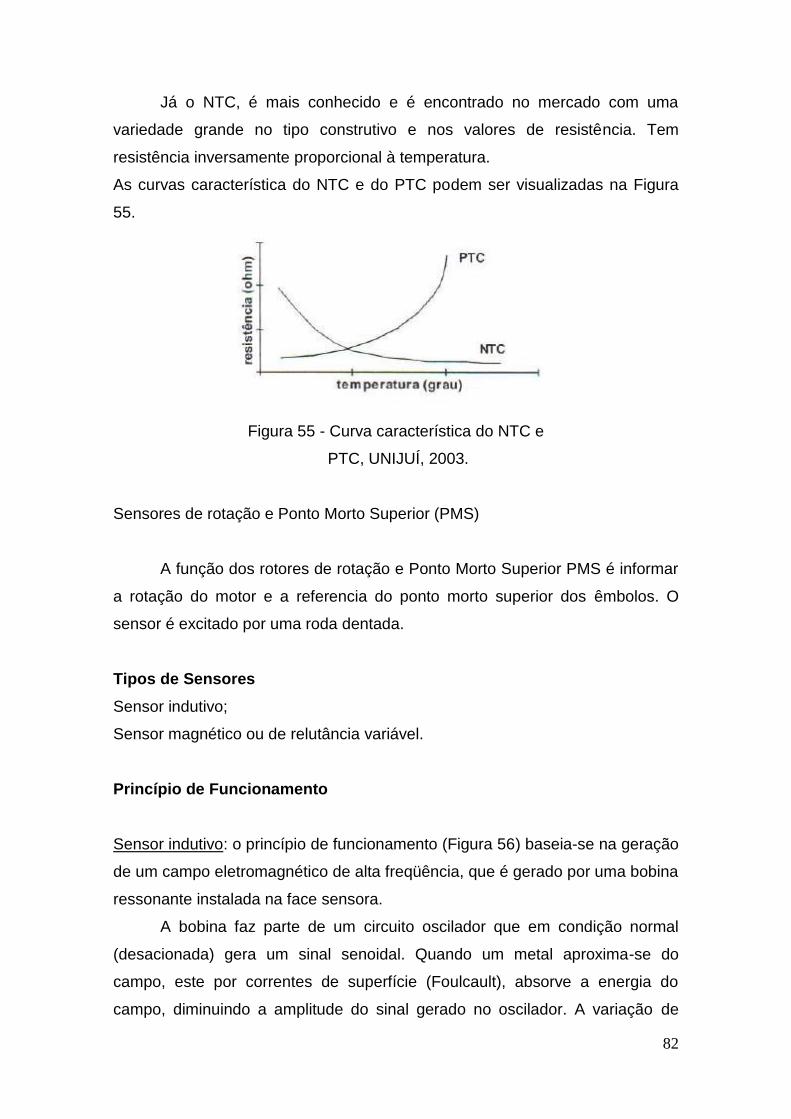
82
Já o NTC, é mais conhecido e é encontrado no mercado com uma
variedade grande no tipo construtivo e nos valores de resistência. Tem
resistência inversamente proporcional à temperatura.
As curvas característica do NTC e do PTC podem ser visualizadas na Figura
55.
Figura 55 - Curva característica do NTC e
PTC, UNIJUÍ, 2003.
Sensores de rotação e Ponto Morto Superior (PMS)
A função dos rotores de rotação e Ponto Morto Superior PMS é informar
a rotação do motor e a referencia do ponto morto superior dos êmbolos. O
sensor é excitado por uma roda dentada.
Tipos de Sensores
Sensor indutivo;
Sensor magnético ou de relutância variável.
Princípio de Funcionamento
Sensor indutivo: o princípio de funcionamento (Figura 56) baseia-se na geração
de um campo eletromagnético de alta freqüência, que é gerado por uma bobina
ressonante instalada na face sensora.
A bobina faz parte de um circuito oscilador que em condição normal
(desacionada) gera um sinal senoidal. Quando um metal aproxima-se do
campo, este por correntes de superfície (Foulcault), absorve a energia do
campo, diminuindo a amplitude do sinal gerado no oscilador. A variação de
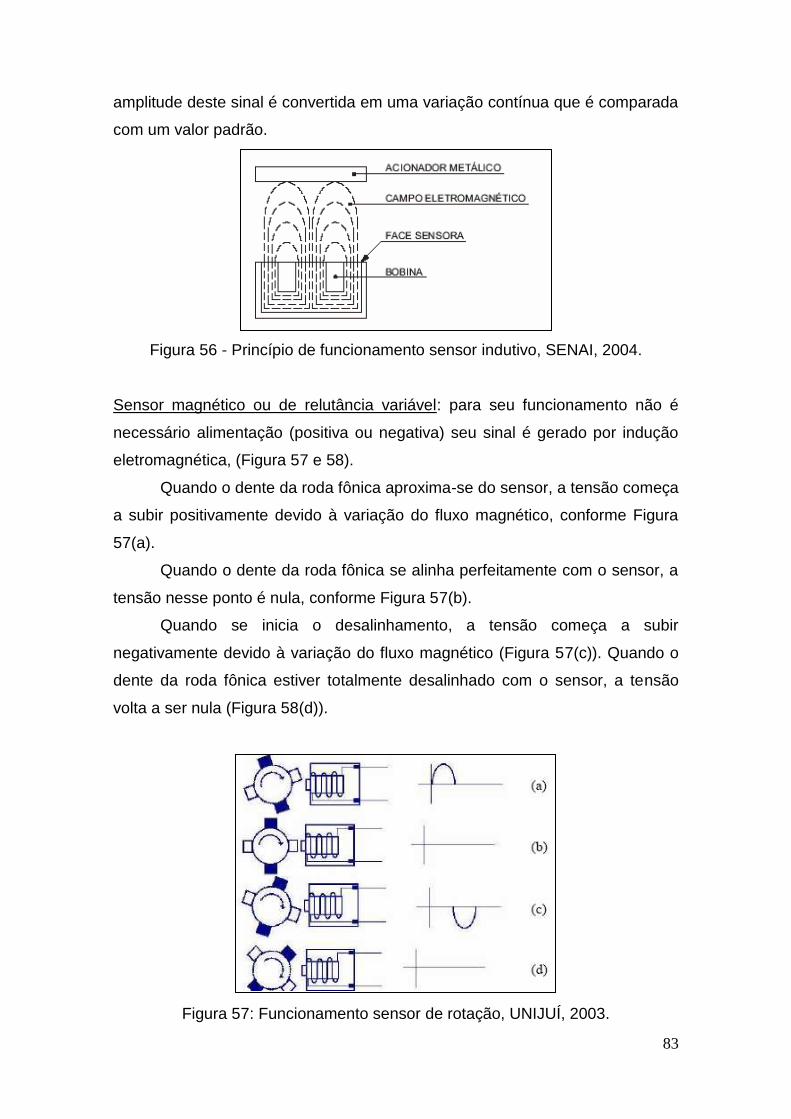
83
amplitude deste sinal é convertida em uma variação contínua que é comparada
com um valor padrão.
Figura 56 - Princípio de funcionamento sensor indutivo, SENAI, 2004.
Sensor magnético ou de relutância variável: para seu funcionamento não é
necessário alimentação (positiva ou negativa) seu sinal é gerado por indução
eletromagnética, (Figura 57 e 58).
Quando o dente da roda fônica aproxima-se do sensor, a tensão começa
a subir positivamente devido à variação do fluxo magnético, conforme Figura
57(a).
Quando o dente da roda fônica se alinha perfeitamente com o sensor, a
tensão nesse ponto é nula, conforme Figura 57(b).
Quando se inicia o desalinhamento, a tensão começa a subir
negativamente devido à variação do fluxo magnético (Figura 57(c)). Quando o
dente da roda fônica estiver totalmente desalinhado com o sensor, a tensão
volta a ser nula (Figura 58(d)).
Figura 57: Funcionamento sensor de rotação, UNIJUÍ, 2003.
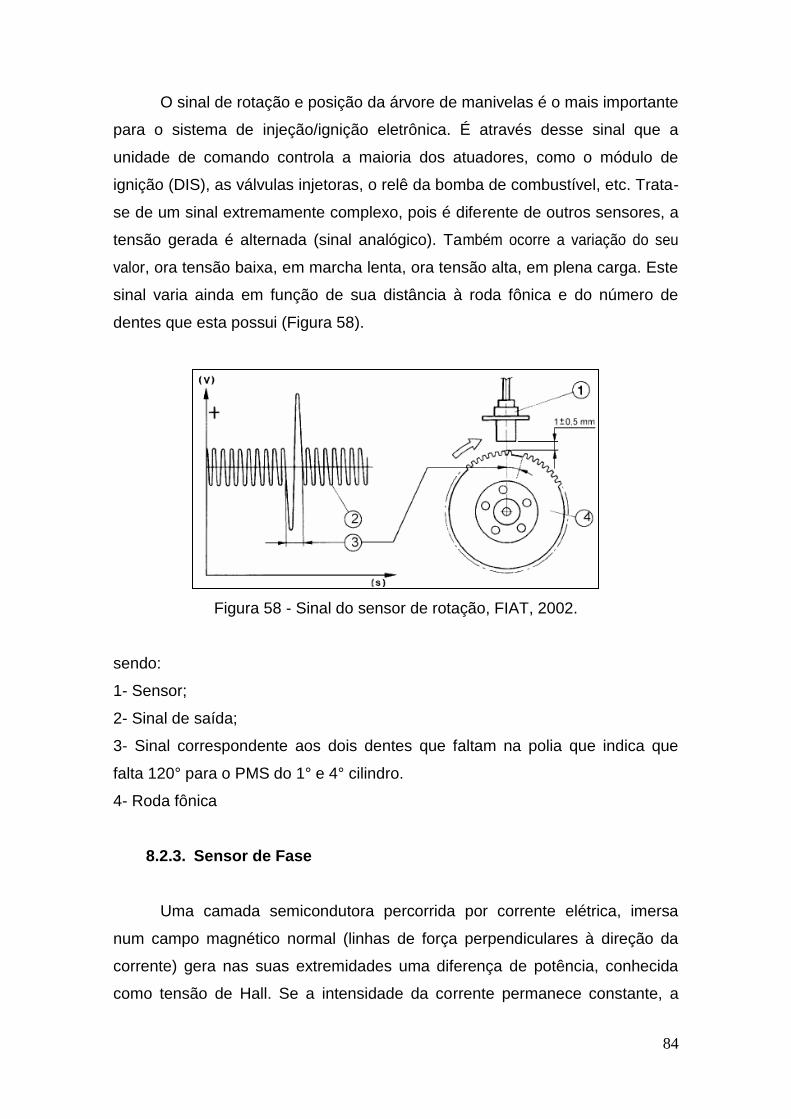
84
O sinal de rotação e posição da árvore de manivelas é o mais importante
para o sistema de injeção/ignição eletrônica. É através desse sinal que a
unidade de comando controla a maioria dos atuadores, como o módulo de
ignição (DIS), as válvulas injetoras, o relê da bomba de combustível, etc. Trata-
se de um sinal extremamente complexo, pois é diferente de outros sensores, a
tensão gerada é alternada (sinal analógico). Também ocorre a variação do seu
valor, ora tensão baixa, em marcha lenta, ora tensão alta, em plena carga. Este
sinal varia ainda em função de sua distância à roda fônica e do número de
dentes que esta possui (Figura 58).
Figura 58 - Sinal do sensor de rotação, FIAT, 2002.
sendo:
1- Sensor;
2- Sinal de saída;
3- Sinal correspondente aos dois dentes que faltam na polia que indica que
falta 120° para o PMS do 1° e 4° cilindro.
4- Roda fônica
8.2.3. Sensor de Fase
Uma camada semicondutora percorrida por corrente elétrica, imersa
num campo magnético normal (linhas de força perpendiculares à direção da
corrente) gera nas suas extremidades uma diferença de potência, conhecida
como tensão de Hall. Se a intensidade da corrente permanece constante, a
85
tensão gerada depende somente da intensidade do campo magnético, assim, é
necessário que a intensidade do campo magnético varie periodicamente para
obter um sinal elétrico modulado, cuja freqüência é proporcional à velocidade
com a qual muda o campo magnético. Para obter esta mudança, o sensor
passa através de um anel metálico (parte interna da polia) provido com uma
série de aberturas. No seu movimento, a parte metálica do anel cobre o sensor,
bloqueando o campo magnético e provocando, assim, uma redução do nível na
saída. Ao contrário, quando estiver junto à abertura e, portanto com o campo
magnético presente, o sensor gera um nível de sinal alto na saída. A
alternância dos sinais depende da seqüência das aberturas.
8.2.4. Medidor de Massa
Esse sensor, também conhecido como medidor de vazão de ar (e
vulgarmente como debímetro) mede a massa de ar admitida pelo motor,
conforme pode ser visto na Figura 58.
Figura 58: Medidor de vazão de ar, BOSCH, 2006.
Este medidor é do tipo a “membrana aquecida”, e seu funcionamento se
baseia numa membrana aquecida interposta num canal de medida, através do
qual flui o ar que entra no motor. A membrana é mantida a uma temperatura
constante (aproximadamente 120°C além da temperatura do ar admitido) pela
resistência de aquecimento colocada em contato.
A massa de ar que atravessa o canal de medida retira calor da
membrana. Para que esta se mantenha a temperatura constante, certa
corrente deve passar pela resistência. Esta corrente é medida por uma Ponte
de Wheatstone. A corrente é proporcional à massa de ar que flui. Assim a
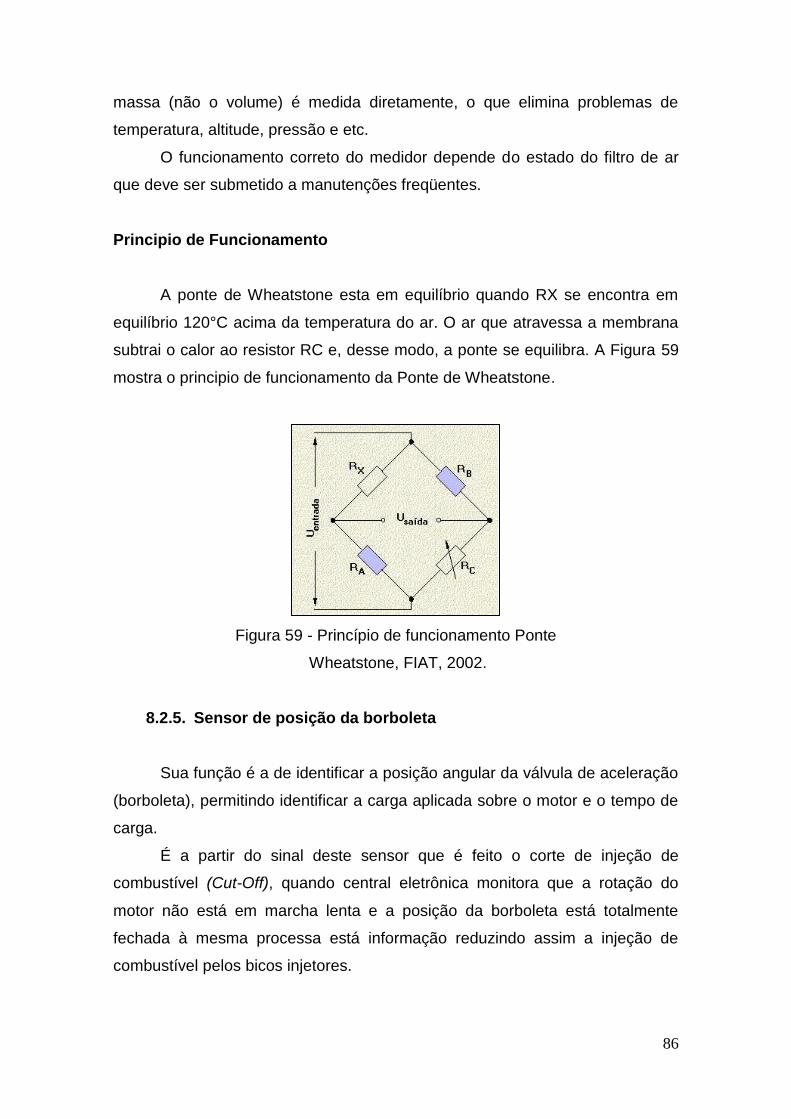
86
massa (não o volume) é medida diretamente, o que elimina problemas de
temperatura, altitude, pressão e etc.
O funcionamento correto do medidor depende do estado do filtro de ar
que deve ser submetido a manutenções freqüentes.
Principio de Funcionamento
A ponte de Wheatstone esta em equilíbrio quando RX se encontra em
equilíbrio 120°C acima da temperatura do ar. O ar que atravessa a membrana
subtrai o calor ao resistor RC e, desse modo, a ponte se equilibra. A Figura 59
mostra o principio de funcionamento da Ponte de Wheatstone.
Figura 59 - Princípio de funcionamento Ponte
Wheatstone, FIAT, 2002.
8.2.5. Sensor de posição da borboleta
Sua função é a de identificar a posição angular da válvula de aceleração
(borboleta), permitindo identificar a carga aplicada sobre o motor e o tempo de
carga.
É a partir do sinal deste sensor que é feito o corte de injeção de
combustível (Cut-Off), quando central eletrônica monitora que a rotação do
motor não está em marcha lenta e a posição da borboleta está totalmente
fechada à mesma processa está informação reduzindo assim a injeção de
combustível pelos bicos injetores.
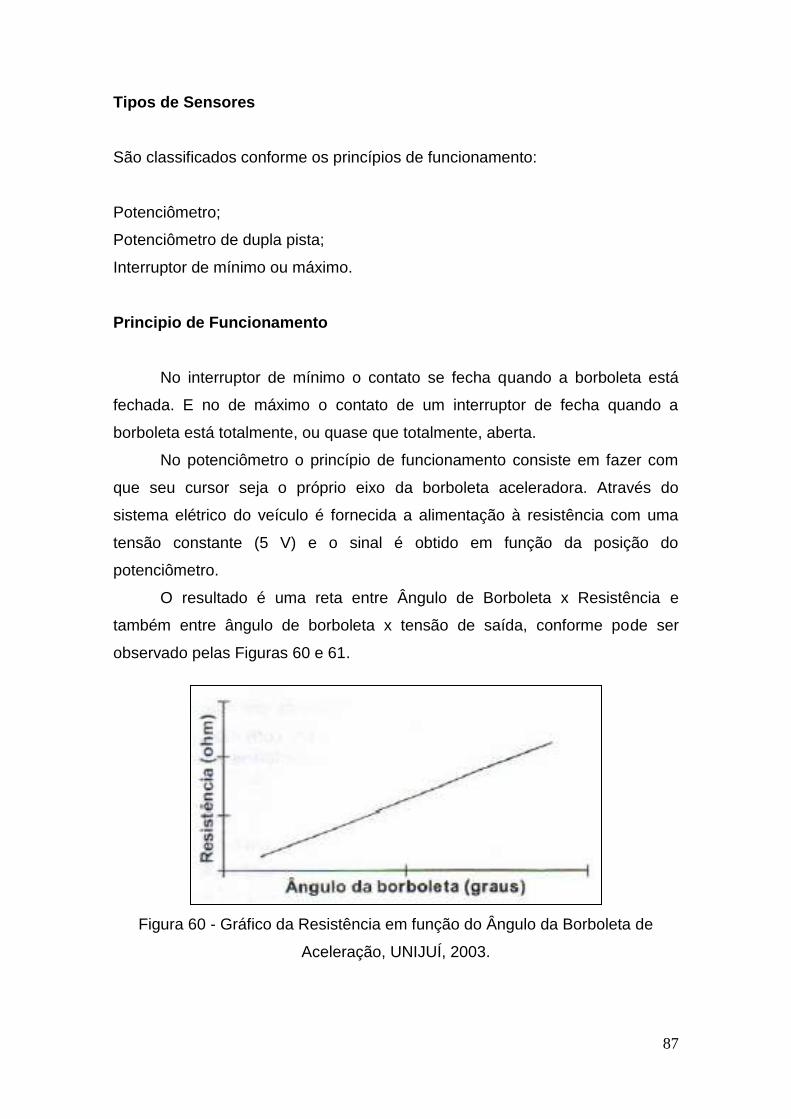
87
Tipos de Sensores
São classificados conforme os princípios de funcionamento:
Potenciômetro;
Potenciômetro de dupla pista;
Interruptor de mínimo ou máximo.
Principio de Funcionamento
No interruptor de mínimo o contato se fecha quando a borboleta está
fechada. E no de máximo o contato de um interruptor de fecha quando a
borboleta está totalmente, ou quase que totalmente, aberta.
No potenciômetro o princípio de funcionamento consiste em fazer com
que seu cursor seja o próprio eixo da borboleta aceleradora. Através do
sistema elétrico do veículo é fornecida a alimentação à resistência com uma
tensão constante (5 V) e o sinal é obtido em função da posição do
potenciômetro.
O resultado é uma reta entre Ângulo de Borboleta x Resistência e
também entre ângulo de borboleta x tensão de saída, conforme pode ser
observado pelas Figuras 60 e 61.
Figura 60 - Gráfico da Resistência em função do Ângulo da Borboleta de
Aceleração, UNIJUÍ, 2003.
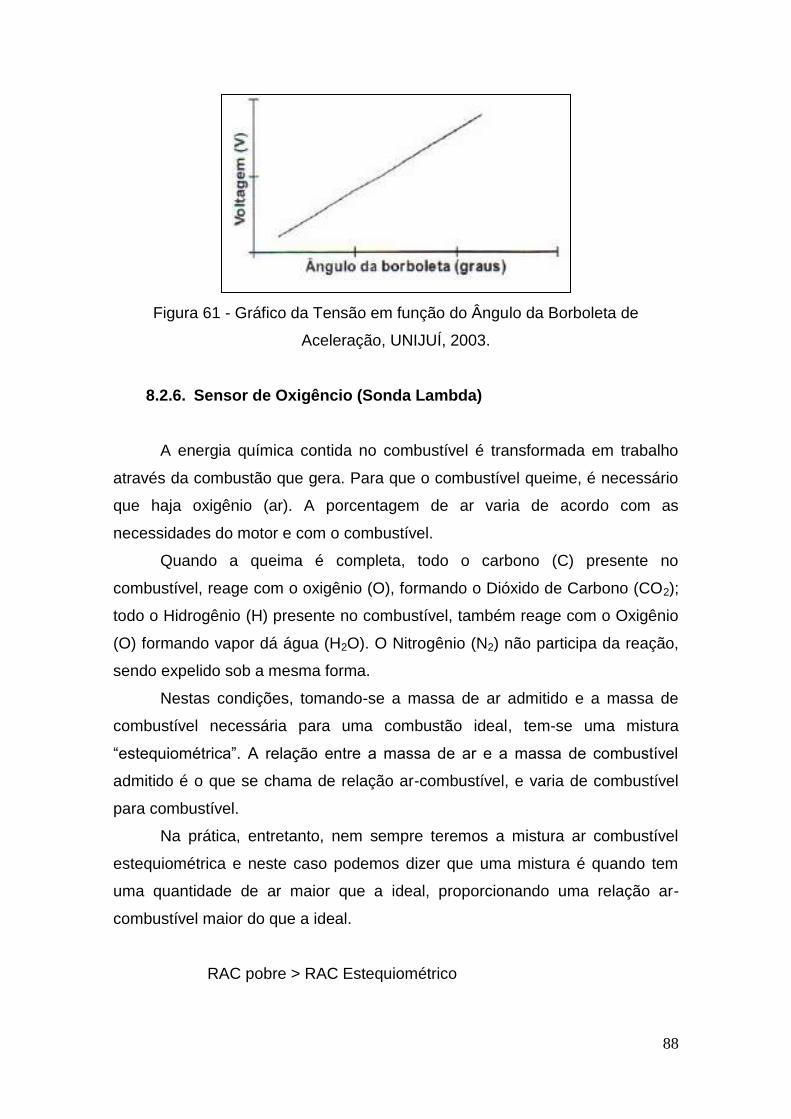
88
Figura 61 - Gráfico da Tensão em função do Ângulo da Borboleta de
Aceleração, UNIJUÍ, 2003.
8.2.6. Sensor de Oxigêncio (Sonda Lambda)
A energia química contida no combustível é transformada em trabalho
através da combustão que gera. Para que o combustível queime, é necessário
que haja oxigênio (ar). A porcentagem de ar varia de acordo com as
necessidades do motor e com o combustível.
Quando a queima é completa, todo o carbono (C) presente no
combustível, reage com o oxigênio (O), formando o Dióxido de Carbono (CO2);
todo o Hidrogênio (H) presente no combustível, também reage com o Oxigênio
(O) formando vapor dá água (H2O). O Nitrogênio (N2) não participa da reação,
sendo expelido sob a mesma forma.
Nestas condições, tomando-se a massa de ar admitido e a massa de
combustível necessária para uma combustão ideal, tem-se uma mistura
“estequiométrica”. A relação entre a massa de ar e a massa de combustível
admitido é o que se chama de relação ar-combustível, e varia de combustível
para combustível.
Na prática, entretanto, nem sempre teremos a mistura ar combustível
estequiométrica e neste caso podemos dizer que uma mistura é quando tem
uma quantidade de ar maior que a ideal, proporcionando uma relação ar-
combustível maior do que a ideal.
RAC pobre > RAC Estequiométrico
89
De modo análogo, quando se tem excesso de de combustível na mistura
ar/combustível, a mistura é rica e é claro, a relação ar combustível é menor do
que a ideal. Deste modo:
RAC rico < RAC Estequiométrico
Para que este conceito seja independente do tipo de combustível
introduziu-se o conceito de razão de equivalência (λ), que nada mais é do que
a relação entre a quantidade real de ar admitido e a quantidade ideal
(estequiométrica).
Deste modo diz-se que uma mistura é rica quando λ < 1 e pobre quando
λ > 1.
Portanto, podemos determinar se uma mistura é rica ou pobre pela
escassez (rica) ou abundância (pobre) de resíduo de oxigênio na descarga.
A função, portanto, da Sonda Lambda (sensor de oxigênio) é levantar o
conteúdo residual de oxigênio na descarga. Esta informação auxilia ajuste do
motor, pois permite que se tenha o controle da mistura.
Conceitualmente, segundo o catálogo do fabricante, a sonda lambda tem
a função de gerar um sinal elétrico para que a unidade de comando possa
variar a quantidade de combustível injetado, garantindo uma mistura ar-
combustível ideal, reduzindo a emissão de gases poluentes.
Tipos de Sensores
As sondas podem ser classificadas em função do material que são
constituídas:
Sonda de zircônio (ZrO2);
Sonda de titânio (TiO2).
São classificadas pela forma como são aquecidas:
Pelo próprio calor da descarga (sonda lambda);
Por uma resistência de aquecimento própria (sonda lambda aquecida).
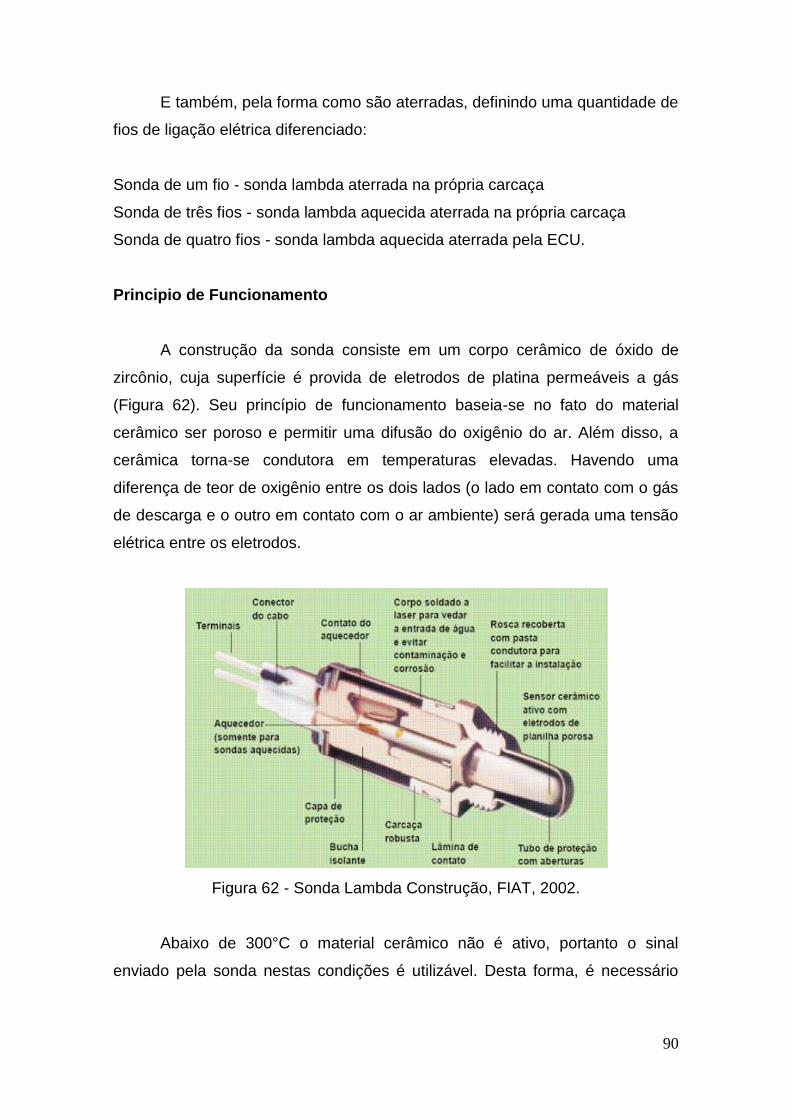
90
E também, pela forma como são aterradas, definindo uma quantidade de
fios de ligação elétrica diferenciado:
Sonda de um fio - sonda lambda aterrada na própria carcaça
Sonda de três fios - sonda lambda aquecida aterrada na própria carcaça
Sonda de quatro fios - sonda lambda aquecida aterrada pela ECU.
Principio de Funcionamento
A construção da sonda consiste em um corpo cerâmico de óxido de
zircônio, cuja superfície é provida de eletrodos de platina permeáveis a gás
(Figura 62). Seu princípio de funcionamento baseia-se no fato do material
cerâmico ser poroso e permitir uma difusão do oxigênio do ar. Além disso, a
cerâmica torna-se condutora em temperaturas elevadas. Havendo uma
diferença de teor de oxigênio entre os dois lados (o lado em contato com o gás
de descarga e o outro em contato com o ar ambiente) será gerada uma tensão
elétrica entre os eletrodos.
Figura 62 - Sonda Lambda Construção, FIAT, 2002.
Abaixo de 300°C o material cerâmico não é ativo, portanto o sinal
enviado pela sonda nestas condições é utilizável. Desta forma, é necessário
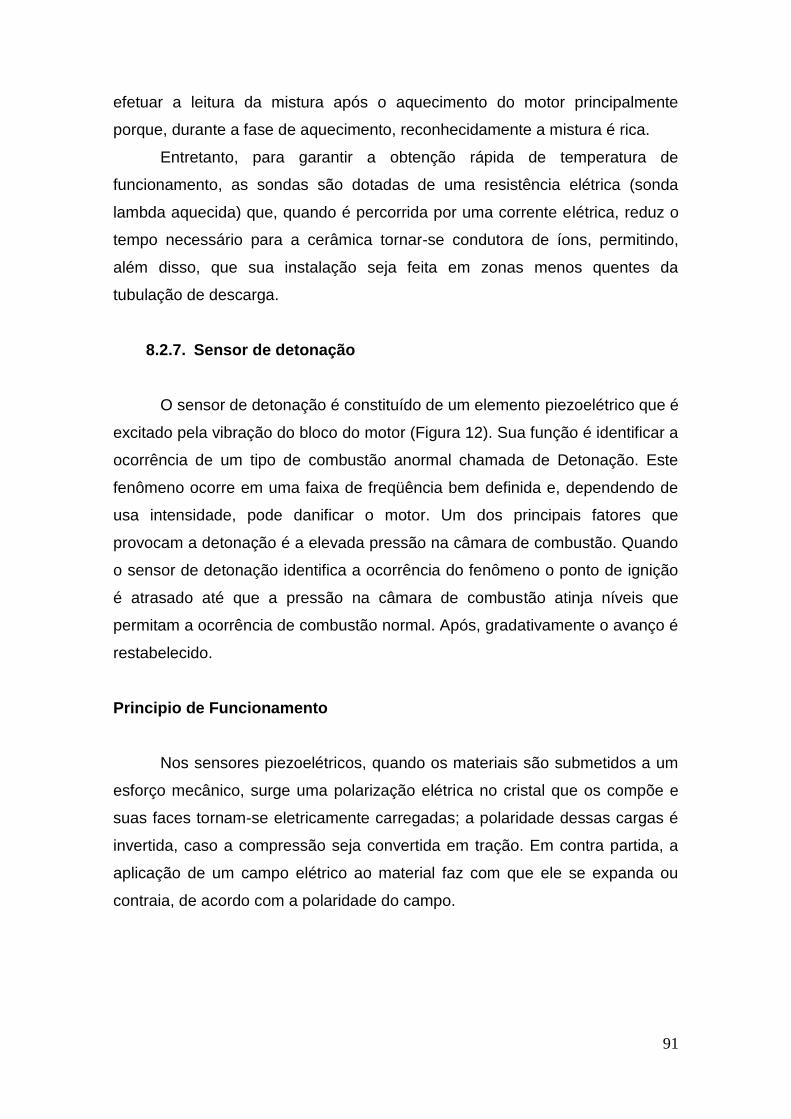
91
efetuar a leitura da mistura após o aquecimento do motor principalmente
porque, durante a fase de aquecimento, reconhecidamente a mistura é rica.
Entretanto, para garantir a obtenção rápida de temperatura de
funcionamento, as sondas são dotadas de uma resistência elétrica (sonda
lambda aquecida) que, quando é percorrida por uma corrente elétrica, reduz o
tempo necessário para a cerâmica tornar-se condutora de íons, permitindo,
além disso, que sua instalação seja feita em zonas menos quentes da
tubulação de descarga.
8.2.7. Sensor de detonação
O sensor de detonação é constituído de um elemento piezoelétrico que é
excitado pela vibração do bloco do motor (Figura 12). Sua função é identificar a
ocorrência de um tipo de combustão anormal chamada de Detonação. Este
fenômeno ocorre em uma faixa de freqüência bem definida e, dependendo de
usa intensidade, pode danificar o motor. Um dos principais fatores que
provocam a detonação é a elevada pressão na câmara de combustão. Quando
o sensor de detonação identifica a ocorrência do fenômeno o ponto de ignição
é atrasado até que a pressão na câmara de combustão atinja níveis que
permitam a ocorrência de combustão normal. Após, gradativamente o avanço é
restabelecido.
Principio de Funcionamento
Nos sensores piezoelétricos, quando os materiais são submetidos a um
esforço mecânico, surge uma polarização elétrica no cristal que os compõe e
suas faces tornam-se eletricamente carregadas; a polaridade dessas cargas é
invertida, caso a compressão seja convertida em tração. Em contra partida, a
aplicação de um campo elétrico ao material faz com que ele se expanda ou
contraia, de acordo com a polaridade do campo.
92
Figura 63 - Sensor de detonação, BOSCH, 2006.
8.2.8. Sensor de pressão
Os sensores de pressão, conforme a Figura 13, possuem diferentes
aplicações. Medem a pressão absoluta no tubo de aspiração (coletor) e
informam à unidade de comando em que condições de pressão o motor está
funcionando, determinar qual o volume de combustível dve se injetado.
Figura 64 - Sensor de pressão, BOSCH, 2006.
Tipos de Sensores
Existem diversos sensores para linha automotiva, suas versões variam
em função da faixa de pressão que o componente suporta na análise.
Estes sensores também podem ser classificados
Quanto a sua aplicação:
De pressão absoluta;
De altitude.
93
Quanto a sua função:
Para cálculo da densidade do ar;
Para determinação do avanço;
Para correção barométrica.
Quanto à característica da curva de saída:
Linear contínua;
Pulsos de freqüência.
Principio de Funcionamento
O sistema de medição de pressão que possui curva de saída linear
contínua utiliza sensores extensômetros de resistência elétrica (strain gage). A
resistência elétrica destes sensores varia proporcionalmente com a deformação
específica do elemento no qual estão fixados.
Estes extensômetros são fixados numa placa de cerâmica muito fina
(diafragma), de forma circular, montada na parte interior de um suporte em
forma de anel do mesmo material cerâmico. Sua geometria permite que o
sensor seja excitado pelas deformações do diafragma geradas pela variação
de pressão.
A parte superior do anel é fechada por uma outra placa que serve
também como suporte de amplificador eletrônico de sinal.
O diafragma divide a câmara em duas partes. Na primeira cria-se vácuo
absoluto, de tal modo que o funcionamento do sensor seja influenciado
somente pela variação de pressão na segunda câmara.
Como a alimentação é mantida constante (5V), ao variar o valor da
pressão, varia linearmente o valor da tensão de saída.
O sistema de medição de pressão que possui curva de saída baseada
em Pulsos de Freqüência possui princípio de funcionamento baseado no modo
funcional de um capacitor.
Originalmente, um capacitor é constituído por duas placas condutoras
distantes entre si e separado por um elemento dielétrico. A variação da
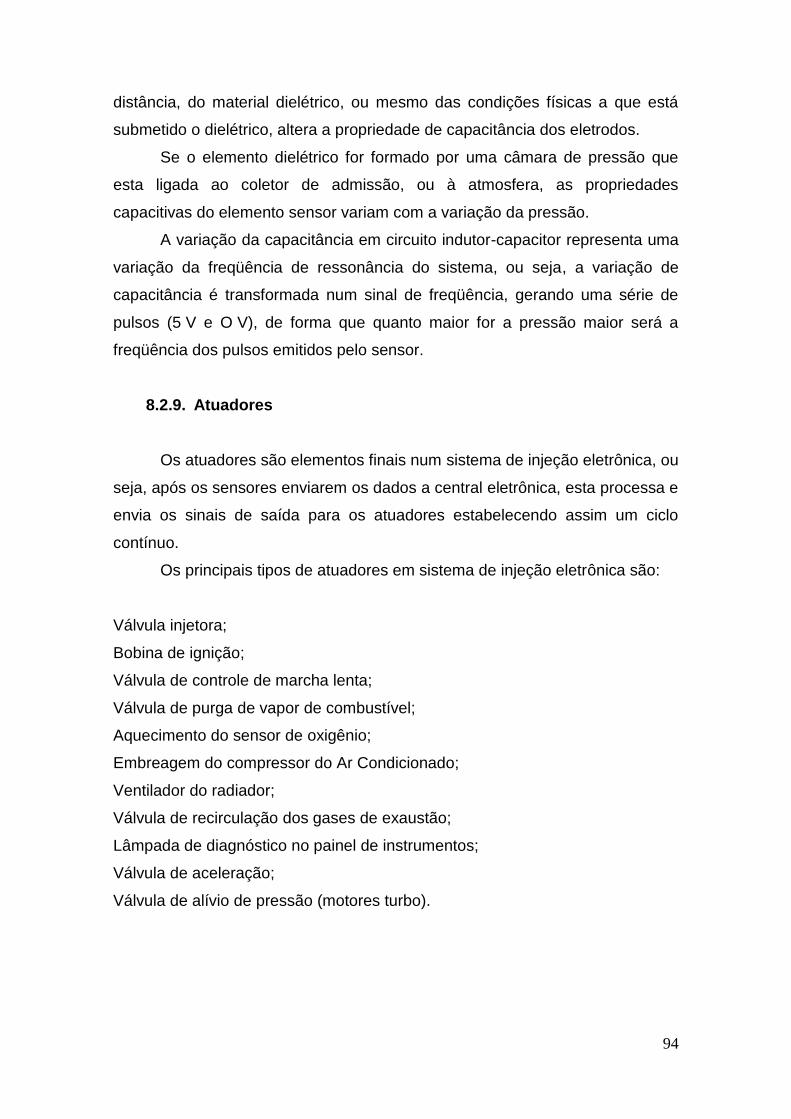
94
distância, do material dielétrico, ou mesmo das condições físicas a que está
submetido o dielétrico, altera a propriedade de capacitância dos eletrodos.
Se o elemento dielétrico for formado por uma câmara de pressão que
esta ligada ao coletor de admissão, ou à atmosfera, as propriedades
capacitivas do elemento sensor variam com a variação da pressão.
A variação da capacitância em circuito indutor-capacitor representa uma
variação da freqüência de ressonância do sistema, ou seja, a variação de
capacitância é transformada num sinal de freqüência, gerando uma série de
pulsos (5 V e O V), de forma que quanto maior for a pressão maior será a
freqüência dos pulsos emitidos pelo sensor.
8.2.9. Atuadores
Os atuadores são elementos finais num sistema de injeção eletrônica, ou
seja, após os sensores enviarem os dados a central eletrônica, esta processa e
envia os sinais de saída para os atuadores estabelecendo assim um ciclo
contínuo.
Os principais tipos de atuadores em sistema de injeção eletrônica são:
Válvula injetora;
Bobina de ignição;
Válvula de controle de marcha lenta;
Válvula de purga de vapor de combustível;
Aquecimento do sensor de oxigênio;
Embreagem do compressor do Ar Condicionado;
Ventilador do radiador;
Válvula de recirculação dos gases de exaustão;
Lâmpada de diagnóstico no painel de instrumentos;
Válvula de aceleração;
Válvula de alívio de pressão (motores turbo).
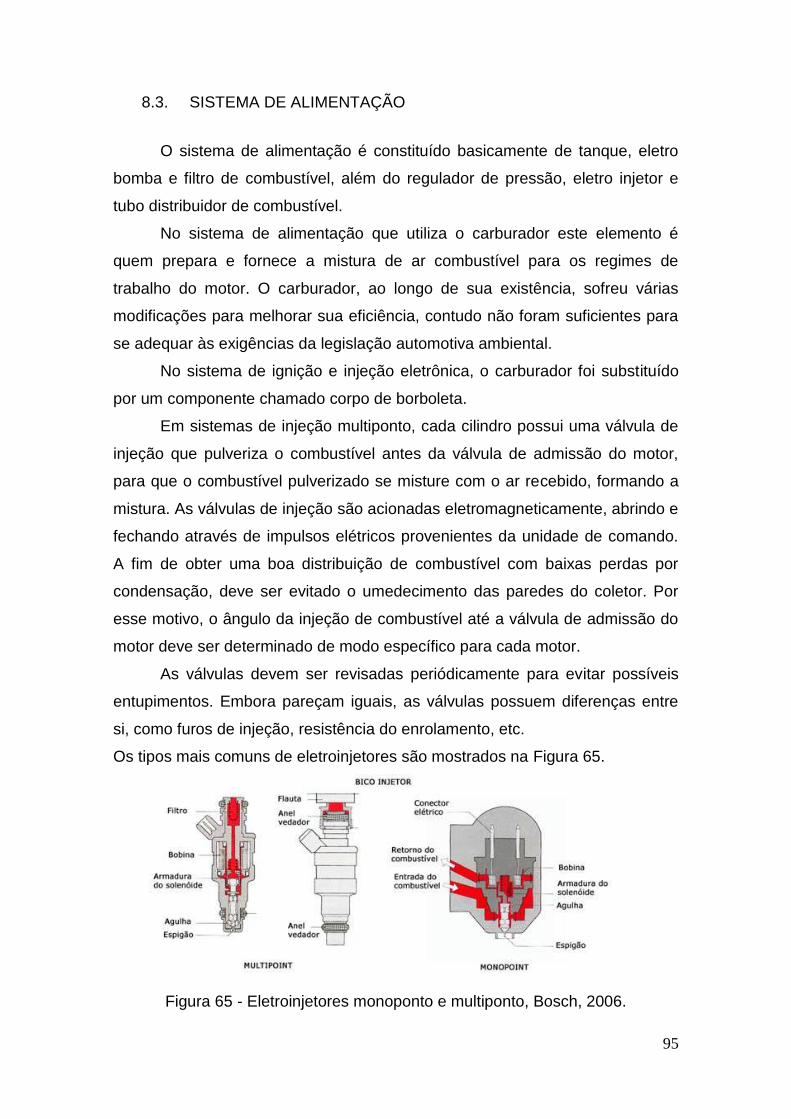
95
8.3. SISTEMA DE ALIMENTAÇÃO
O sistema de alimentação é constituído basicamente de tanque, eletro
bomba e filtro de combustível, além do regulador de pressão, eletro injetor e
tubo distribuidor de combustível.
No sistema de alimentação que utiliza o carburador este elemento é
quem prepara e fornece a mistura de ar combustível para os regimes de
trabalho do motor. O carburador, ao longo de sua existência, sofreu várias
modificações para melhorar sua eficiência, contudo não foram suficientes para
se adequar às exigências da legislação automotiva ambiental.
No sistema de ignição e injeção eletrônica, o carburador foi substituído
por um componente chamado corpo de borboleta.
Em sistemas de injeção multiponto, cada cilindro possui uma válvula de
injeção que pulveriza o combustível antes da válvula de admissão do motor,
para que o combustível pulverizado se misture com o ar recebido, formando a
mistura. As válvulas de injeção são acionadas eletromagneticamente, abrindo e
fechando através de impulsos elétricos provenientes da unidade de comando.
A fim de obter uma boa distribuição de combustível com baixas perdas por
condensação, deve ser evitado o umedecimento das paredes do coletor. Por
esse motivo, o ângulo da injeção de combustível até a válvula de admissão do
motor deve ser determinado de modo específico para cada motor.
As válvulas devem ser revisadas periódicamente para evitar possíveis
entupimentos. Embora pareçam iguais, as válvulas possuem diferenças entre
si, como furos de injeção, resistência do enrolamento, etc.
Os tipos mais comuns de eletroinjetores são mostrados na Figura 65.
Figura 65 - Eletroinjetores monoponto e multiponto, Bosch, 2006.
96
8.4. CONTROLE DA INJEÇÃO
As estratégias de controle da injeção têm o objetivo de fornecer ao motor
a quantidade de combustível correta e no momento certo, em função das
condições do motor.
A quantidade de ar admitido por cada cilindro e para cada ciclo do motor,
depende, além da densidade do ar, da cilindrada unitária, e também da
eficiência volumétrica.
A densidade do ar é calculada em função da pressão absoluta e da
temperatura, ambas detectadas no coletor de admissão. A eficiência
volumétrica é o parâmetro referente ao coeficiente de enchimento dos cilindros,
detectado com base em experimentos feitos no motor em todo o campo de
funcionamento, e depois memorizados na central eletrônica. Estabelecida à
quantidade de ar admitido, o sistema deve fornecer a quantidade de
combustível em função da relação de mistura desejada. Há sistemas que não
utilizam o valor de pressão absoluta, estes sistemas trabalham com um sensor
de vazão de massa (vulgarmente conhecido como debímetro) que envia
diretamente um sinal que corresponde à quantidade de ar admitido.
A fase de distribuição, que é o instante final do processo de injeção,
consta num mapa memorizado na central eletrônica e varia em função do
regime do motor e da pressão no coletor de admissão. Na distribuição, a
central comanda a atuação dos eletros injetores, por um tempo estritamente
necessário para formar a mistura ar combustível mais próxima da relação
estequiométrica. O combustível é injetado diretamente no coletor, perto das
válvulas de admissão, com a pressão especifica para o tipo de sistema usado.
A relação ar/combustível necessária para cada condição de
funcionamento do motor é obtida utilizando a sonda lambda, que analisa
constantemente a quantidade de oxigênio presente nos gases de descarga.
Com esta informação a central eletrônica, baseada em dados memorizados,
corrige em tempo real a relação de mistura.
97
8.5. AUTOADAPTAÇÃO
A central eletrônica possui a função de auto-adaptação da mistura, que
permite memorizar os desvios entre o mapeamento de base e as correções
impostas pela sonda lambda que podem aparecer de maneira persistente
durante o funcionamento.
Estes desvios, devido ao envelhecimento dos componentes e do próprio
motor, são memorizados permanentemente, permitindo à adaptação do
funcionamento do sistema as progressivas alterações.
Uma outra função de autoadaptação corrige a abertura do atuador de
marcha lenta do motor durante a fase de marcha lenta, com base nas
variações ocorridas devido às infiltrações de ar no corpo de borboleta e ao
envelhecimento natural do motor.
REFERÊNCIAS BIBLIOGRÁFICAS:
SENAI. Apostila de treinamento de injeção eletrônica, 2004.
FIAT Apostila de treinamento assistencial, 2002.
UNIJUÍ. Apostila de motores de combustão interna, 2003.
BOSCH. Catálogo injeção eletrônica. Disponível em:
<http://www.bosch.com.br/br/autopecas/servicos/downloads/catalogos/catalogo
_injecao_ignicao_2001.pdf >. Acesso em: 13 de jun. 2006.
98
Considerações finais
Este caderno técnico é composto por uma seleção de artigos, desenvolvidos e
apresentados, por alunos no seminário que ocorre semestralmente na
disciplina de Motores de Combustão Interna. Este seminário ocorre na forma
de apresentação do artigo e posterior discussão sobre o tema tratado. A
apresentação tem a intenção de desenvolver a habilidade de expor ideias em
publico e o artigo, além de trabalhar com o tema sugerido, desenvolver a
habilidade de expressão de forma técnica.
Este material não tem a intenção de substituir literatura clássica que trata de
Motores de Combustão Interna. O aluno deve utilizá-lo como um guia de
referências sobre a teoria que deve ser trabalhada durante o semestre. Assim,
é fundamental o uso dos principais livros da área, além do material disponível
na internet sugerido em sala de aula.


















