Movimento Giroscópico - fenix.tecnico.ulisboa.pt · Portanto, se a velocidade do disco for...
14
Movimento Giroscópico Guia de Ensaio Laboratorial Mecânica Aplicada II Cursos MEAer, MEMec, LEAN Abril 2015
Transcript of Movimento Giroscópico - fenix.tecnico.ulisboa.pt · Portanto, se a velocidade do disco for...

Movimento Giroscópico
Guia de Ensaio Laboratorial
Mecânica Aplicada IICursos MEAer, MEMec, LEAN
Abril 2015

Conteudo
Lista de Sımbolos . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . iii
1 Introducao 1
1.1 Giroscopio e suas Aplicacoes . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 1
1.2 Objectivo do Ensaio . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 2
2 Teoria 3
3 Equipamento 5
3.1 Giroscopio . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 5
3.2 Tacometro . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 6
4 Experiencia 7
4.1 Equilibrio . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 7
4.2 Medicoes . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 7
4.3 Tratamento dos Resultados . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 8
4.4 Discussao dos Resultados . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 8
Referencias 9
A Tabelas de Registo e Tratamento de Dados 10
ii

Lista de Sımbolos
Simbolos gregos
Ω velocidade de precessao no eixo z [rad/s]
ω velocidade de rotacao no eixo x [rad/s]
ρ densidade [kg/m3]
τ momento externo aplicado em relacao ao eixo y [N.m]
θ angulo de precessao no eixo z [rad]
Simbolos romanos
di angulo de precessao no tempo t [rad]
dt tempo de precessao no angulo i [s]
h momento angular [kg m2/s]
J momento de inercia em relacao ao eixo x [kg m2]
k raio de giracao [m]
l comprimento do cilindro [m]
m massa [kg]
M momento externo aplicado em relacao ao eixo y [N.m]
r raio do cilindro [m]
T perıodo de precessao [s]
iii
1. Introducao
Figura 1.1: Giroscopio.
O giroscopio consiste num disco solidario
com um eixo normal que, por sua vez, esta
montado num aro, num plano transversal
do disco que, por sua vez, pode girar em
torno de outro eixo, no plano longitudinal,
conforme ilustrado na figura 1.1.
1.1 Giroscopio e suas Aplicacoes
Figura 1.2: Giroscopio de Foucault.
O giroscopio (Figura 1.2) foi inventado
em 1850 por Jean Bernard Leon Foucault
(1819 - 1868), que o utilizou para mostrar
que a Terra, de facto, gira sobre seu proprio
eixo.
A rotacao do disco a alta velocidade
confere ao mecanismo duas propriedades
importantes que o tornam bastante util, em
diversas aplicacoes:
• a primeira resulta do facto de o vector do momento angular resultante ser constante e ter a
direccao do eixo de suporte do disco, quando este nao esta sujeito a momentos. Portanto, o
eixo do giroscopio tem uma direccao invariavel no espaco, em relacao a um referencial de inercia.
Assim, se o eixo estiver na horizontal, ele efectuara, aparentemente, uma revolucao no sentido
contrario a rotacao da Terra. O movimento e aparente porque a direccao do eixo e invariavel e
o que roda e a Terra. Esta propriedade permitiu Foucault mostrar que a Terra roda em torno do
seu proprio eixo. Esta propriedade justifica a utilizacao em plataformas de inercia, giro-bussolas e
outros instrumentos de navegacao, dando-se, como exemplo, o aparelho de Aubry que estabiliza
o movimento de um torpedo num plano horizontal, em que o eixo do giroscopio coincide com a
direccao do alvo. Se o torpedo, num dado instante, e desviado do seu percurso, o giroscopio, ao
retomar a direccao original, actua, atraves de mecanismos reguladores, sobre o leme do torpedo,
obrigando este a retomar a direccao pre-estabelecida.
1

• a segunda, denominada precessao, e observada, por exemplo, quando o giroscopio e sujeito a
uma rotacao que tende a alterar a direccao do seu eixo. Quando a interseccao dos dois eixos,
o de rotacao e o do referencial, nao coincide com o centro de gravidade, o eixo do giroscopio
descreve uma trajectoria conica em torno do outro eixo. Este movimento denomina-se movimento
de precessao e pode ser observado no movimento de um piao (Figura 1.3). Esta propriedade
tambem pode ser observada no giroscopio onde a interseccao dos eixos coincide com o centro de
gravidade, mas esta sujeito a um momento de torcao aplicado no eixo transversal ao disco. Entao,
o giroscopio efectua um movimento de precessao em torno do eixo longitudinal. A velocidade do
movimento de precessao e proporcional ao momento aplicado. Se fizermos a comparacao com o
que se passa com a aplicacao do mesmo momento a um corpo que nao se encontra em rotacao,
o corpo roda com uma aceleracao angular proporcional ao momento aplicado. Se retirarmos o
momento, o corpo continua em movimento. Quando o momento deixa de actuar no giroscopio, ele
deixa precessar. Um dos exemplos de fenomenos de precessao na Natureza e o da precessao
de equinocios da Terra (Figura 1.3). Se a Terra fosse perfeitamente esferica, nenhum dos outros
membros do sistema solar exerceria qualquer momento gravitacional. Mas, a Terra nao e uma
esfera perfeita e, por isso, principalmente o Sol (pelo seu tamanho) e a Lua (pela sua proximidade)
exercem um momento de torcao gravitacional sobre ela, provocando o movimento de precessao
do seu eixo, com uma velocidade de 50,25”/ano, ou seja, uma rotacao completa em cerca de
26000 anos.
Figura 1.3: Representacao esquematica da precessao da Terra.
1.2 Objectivo do Ensaio
O trabalho experimental a ser realizado no Laboratorio de Mecanica Aplicada utiliza um giroscopio
didactico que permite observar as propriedades deste mecanismo e tem, por finalidade, comprovar que
existe uma relacao de proporcionalidade entre o momento aplicado num dos eixos e a velocidade de
precessao e que essa relacao e o momento angular.
2

2. Teoria
A figura 2.1 representa, esquematicamente, o disco de um giroscopio e o motor ao qual esta acoplado,
que roda em torno do eixo x com uma velocidade angular ~ω.
Figura 2.1: Esquema do rotor e motor do giroscopio.
Se o momento de inercia do conjunto rotor em relacao ao eixo x for J, entao o momento angular em
relacao ao eixo de rotacao x e~h = J~ω , (2.1)
que pode ser representado pelo vector ~ab.
Se se aplicar um momento ~τ ao aro interior, em relacao ao eixo y, num determinado perıodo de
tempo dt, havera uma variacao do momento angular em igual a ~τdt, representado pelo vector ~bc, que
fara o eixo descrever um angulo dθ. Este movimento do eixo e denominado por precessao. A partir da
triangulacao dos vectores ~ab e ~bc, e possıvel concluir que
τdt = Jωdθ (2.2)
ou
τ = Jωdθ
dt= JωΩ = hΩ , (2.3)
em que Ω = dθ/dt, ou seja, a velocidade angular de precessao.
A derivacao da equacao (2.3) tambem pode ser feita partindo da relacao
~M =d~h
dt, (2.4)
3

em que ~M e o momento resultante em relacao ao centro de massa, e a derivada e em relacao ao
um referencial inercial. Na presente situacao, ~M = ~τ = τ~ey e ~h = J~ω = Jω~ex. Se considerarmos o
referencial 0xyz com rotacao ~Ω = Ω~ez, isto e, solidario com a velocidade precessao, entao da definicao
de derivada de um vector num referencial em rotacao [1] resulta
~M = ~τ =
(d~h
dt
)0XY Z
=
(d~h
dt
)0xyz
+ ~Ω × ~h , (2.5)
em que 0XY Z se refere ao referencial inercial. Na situacao em que a velocidade de rotacao do disco e
mantida constante, (d~h
dt
)0xyz
=
(d
dtJ~ω
)0xyz
= 0 , (2.6)
logo a equacao (2.5) pode ser simplificada em
~τ = τ~ey = ~Ω × ~h = Ω~ez × Jω~ex = ΩJω~ey , (2.7)
recuperando assim relacao expressa pela equacao (2.3).
Portanto, se a velocidade do disco for constante, existe uma relacao de proporcionalidade entre o
momento de torcao e a velocidade de precessao. Observa-se, tambem, que a constante de proporcio-
nalidade e funcao do momento polar de inercia. A demonstracao experimental destas relacoes constitui
o objectivo deste ensaio.
4

3. Equipamento
Figura 3.1: Equipamento.
O trabalho experimental sera realizado com o
equipamento ilustrado na figura 3.1.
• (A) giroscopio electrico Cussons P5377
• (B) tacometro optico Cussons P4740
3.1 Giroscopio
O giroscopio utilizado neste trabalho experimental e o modelo P5377 do fabricante Cussons [2], ilus-
trado na figura 3.2.
Figura 3.2: Giroscopio didatico Cussons P5377.
O giroscopio possui um disco montado num veio de um motor de baixa inercia. O disco esta montado
com um anel removıvel.
O motor esta rigidamente ligado a uma proteccao do disco que, com dois pinos bloqueadores,
formam o aro interior que, por sua vez, esta ligado por dois semi-eixos a um suporte em forma de “U”.
Este suporte constitui o aro exterior e e suportado por rolamentos numa coluna vertical, de forma a
poder girar livremente sobre esta.
Ligados ao aro interior, encontram-se dois bracos de extensao calibrados, nos quais e possıvel
colocar tres massas, de 150 g cada, a fim de produzirem um momento externo, em relacao ao eixo
transversal. Se o anel, que se encontra ligado ao disco, for removido, entao o aro interior devera ser
calibrado atraves da colocacao da massa de 50 g no braco de extensao que lhe esta ligado.
5

O giroscopio e a coluna estao montados num conjunto de alimentacao que fornece potencia electrica
de corrente contınua e voltagem variavel ao motor que acciona o giroscopio e que permite que a sua
velocidade de rotacao varie ate cerca de 5000 rpm. Trocando a polaridade da alimentacao electrica e
possıvel inverter o sentido de rotacao do motor.
As dimensoes do disco rotor do giroscopio e do anel removıvel sao indicadas na figura 3.3: O
Figura 3.3: Dimensoes do disco e anel do rotor.
material do disco e anel e latao de densidade, ρ, igual a 8410kg/m3. Esta informacao servira para o
calculo do momento de inercia do giroscopio em relacao ao eixo x.
3.2 Tacometro
A velocidade do disco do giroscopio pode ser medida com precisao, atraves do tacometro optico (mo-
delo P4740 da Cussons). Para tal, e colocada uma fita adesiva nao reflectora para cobrir parte da
periferia do disco rotor, cujo material e reflector. Deste modo, a reflexao do raio de infravermelhos emi-
tido pelo tacometro e interrompida a cada revolucao do rotor. O tacometro regista estes impulsos e
calcula a correspondente velocidade de rotacao.
A velocidade de precessao e medida de forma indirecta: com recurso a um cronometro, e medido o
tempo necessario para completar um (ou mais) perıodos de precessao. Para controlar os perıodos, e
necessario instalar um dispositivo de fim-de-curso para servir de referencia ao movimento de rotacao.
6

4. Experiencia
4.1 Equilibrio
Os alunos deverao garantir que o giroscopio se encontra equilibrado. O seu equilıbrio deve ser efectu-
ado da seguinte forma:
1. Colocar a massa de 50 g no braco de extensao do aro interior do lado do motor. Desapertar o
parafuso de fixacao para libertar o aro interior do aro exterior. Ajustar a posicao da massa de 50 g
na extensao ate que o giroscopio esteja equilibrado relativamente ao eixo y;
2. Segurar um dos bracos de extensao de modo a que o eixo rotativo x esteja na horizontal e ro-
dar, simultaneamente, o controlo de velocidade no sentido dos ponteiros do relogio ate que seja
alcancada a velocidade desejada. Medir a velocidade de rotacao com o tacometro optico;
3. Libertar o braco de extensao com o eixo rotativo na horizontal e, se necessario, ajustar a posicao
a massa de equilıbrio de 50 g de modo a que o giroscopio permaneca horizontal e nao rode em
torno do eixo z.
4.2 Medicoes
Garantido o equilıbrio do giroscopio, e utilizando a tabela de registo de dados A.1 incluıda no anexo, o
trabalho a realizar pelos alunos consistira em:
1. Prender um dos bracos de extensao e colocar uma massa de 150 g no braco de extensao do aro
interior na marca de 20 cm e libertar o braco de extensao com o eixo rotativo na horizontal e medir
o perıodo de precessao e a direccao de precessao. Medir a velocidade de rotacao (propria) do
giroscopio;
7

2. Repetir o procedimento do paragrafo anterior movendo a massa para tres outras distancias dife-
rentes da coluna vertical. Efectuar mais leituras adicionando uma segunda e uma terceira massa,
no braco de extensao, de modo a completar o preenchimento da tabela A.1.
Notas importantes:
• o regime transiente da velocidade de rotacao e elevado devido a inercia do rotor. Assim sendo,
sera necessario garantir que a velocidade de rotacao ja se encontra estabilizada antes de realizar
as medicoes;
• a graduacao da regua nos bracos de extensao NAO corresponde a distancia ao centro de massa
do giroscopio (eixo de rotacao do anel exterior apos o equilıbrio). E necessario medir a distancia
efectiva entre o centro de massa das massas adicionadas e o centro de massa do giroscopio.
4.3 Tratamento dos Resultados
1. Com base nos dados recolhidos na tabela A.1, preencher a folha de calculo na tabela A.2 em
anexo;
2. Tracar um grafico do momento aplicado, τ , em funcao do produto das duas velocidades, ωΩ,
fazendo passar uma recta pelos pontos. Determinar graficamente o valor do momento de inercia
em relacao ao eixo x;
3. Determinar a interseccao da recta, na origem das abcissas (ou seja, para velocidade de precessao
igual a zero);
4. Calcular o momento polar de inercia do disco e do anel e do conjunto motor e compare com o
valor obtido experimentalmente
4.4 Discussao dos Resultados
A partir do tratamento dos resultados, tecer as consideracoes que se considerem pertinentes.
8

Referencias
[1] F. Beer Jr., E. R. Johnston, D. Mazurek, and P. Cornwell. Vector Mechanics for Engineers, volume
Dynamics. McGraw-Hill, 10th edition, 2012. ISBN:9780073398136.
[2] P5377 Mk.2 Electrical Gyroscope Instruction Manual. Cussons Technology Ltd., Manchester, En-
gland, 2002. http://www.cussons.co.uk/education/Data/Product_Downloads/P5377.pdf.
9
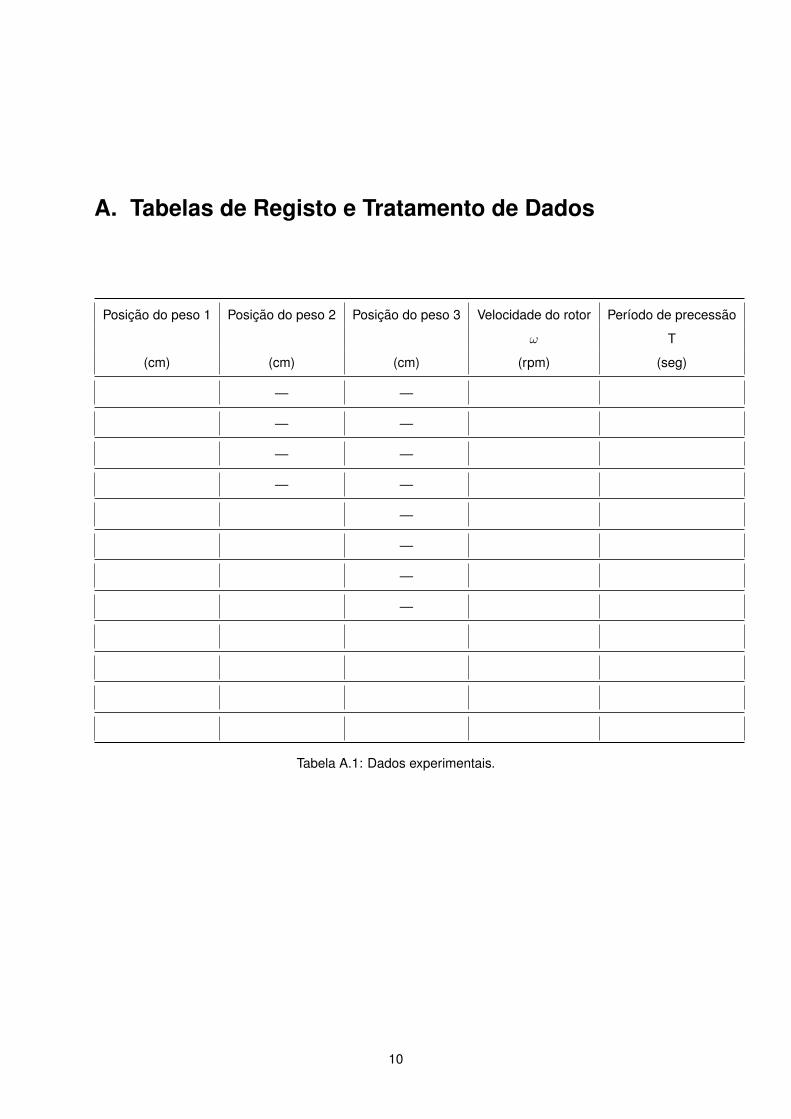
A. Tabelas de Registo e Tratamento de Dados
Posicao do peso 1 Posicao do peso 2 Posicao do peso 3 Velocidade do rotor Perıodo de precessao
ω T
(cm) (cm) (cm) (rpm) (seg)
— —
— —
— —
— —
—
—
—
—
Tabela A.1: Dados experimentais.
10
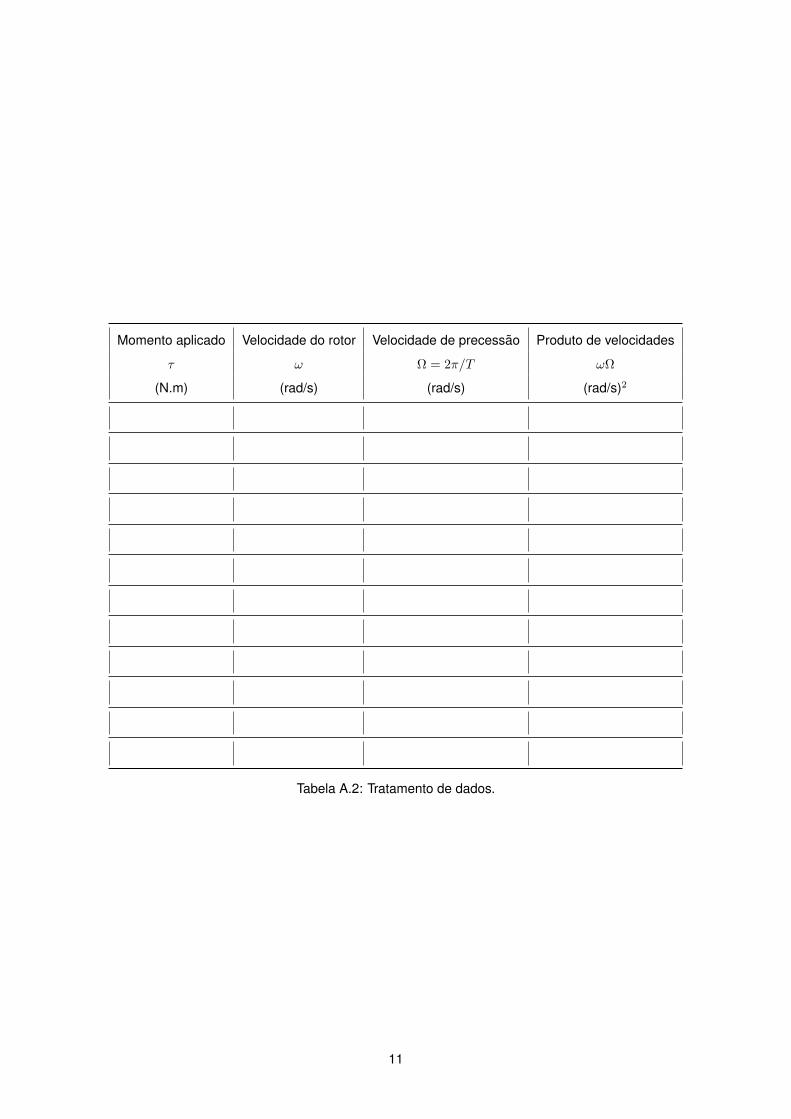
Momento aplicado Velocidade do rotor Velocidade de precessao Produto de velocidades
τ ω Ω = 2π/T ωΩ
(N.m) (rad/s) (rad/s) (rad/s)2
Tabela A.2: Tratamento de dados.
11