Métodos Experimentais para Vibrações Mecânicas · 2014. 8. 18. · Métodos Experimentais...
53
Métodos Experimentais Métodos Experimentais para Vibrações Mecânicas Universidade de Brasília Faculdade de Tecnologia Departamento de Engenharia Mecânica Prof. Aline Souza de Paula
Transcript of Métodos Experimentais para Vibrações Mecânicas · 2014. 8. 18. · Métodos Experimentais...
-
Métodos Experimentais
Métodos Experimentais para Vibrações Mecânicas
Universidade de BrasíliaFaculdade de Tecnologia
Departamento de Engenharia Mecânica
Prof. Aline Souza de Paula
-
A maioria das atividades humanas envolve alguma forma de vibração.
� Ouvimos porque o tímpano vibra;
� Vemos porque ondas luminosas se propagam;
�A respiração está associada à vibração dos pulmões;
� Os batimentos cardíacos são movimentos vibratórios;
Introdução
� Os batimentos cardíacos são movimentos vibratórios;
�A fala se fundamenta na vibração das cordas vocais;
�As movimentos humanos envolvem oscilações de braços e pernas.
-
Em muitos outros campos da atividade humana, fenômenos apresentam
variáveis cujo comportamento é oscilatório:
� Economia
� Medicina
� Engenharia
Introdução
No campo tecnológico, as aplicações de vibrações na engenharia são de
grande importância:
� Projetos de máquinas
� Estruturas
� Motores
� Turbinas
� Sistemas de controle
-
A presença de vibrações frequentemente conduz a efeitos indesejáveis:
� Falhas mecânicas ou estruturais;
� Manutenção freqüente e dispendiosa de máquinas;
� Danos e desconforto para o homem.
Consequência das Vibrações
-
� Elementos concentrados de um oscilador:
� Inércia (massa)
� Rigidez (mola)
� Dissipação de energia (amortecimento)
Vibrações – Modelagem
-
SISTEMAS FÍSICOS
REPRESENTADOS POR REPRESENTADOS POR
OSCILADORES
-
Fluido
Cilindro
u
u
u
Fluido
Corpo submerso em fluido Fluido em tudo em U
-
Sistemas Pendulares
L
m
θ
-
Viga em balanço
m
EI
L
-
Máquinas rotativas
-
Automóvel
-
Oscilador 1GL
ζ=0
ζ=0.5
-
� Ressonância
Consequência das Vibrações
-
� Corpo Humano
Ressonância
-
� Escada Rio Design (Barra da Tijuca / RJ)
Casos
-
�Ponte Rio-Niterói
Casos
-
� Teoria clássica de vibraçoes� resposta dinâmica do sistema.
� Análise modal � relacionada com as propriedades intrinsicas
do sistema:
� Freqüências naturais
� Formas modais
Análise Modal
� Formas modais
� Parâmetros do sistema:
� Massa;
� Rigidez;
� Amortecimento.
-
� Métodos da análise modal se caracterizam pelo cálculo direto
dos parâmetros modais.
� Registros da excitação e resposta – análise no domínio do tempo ou
da frequência;
� Forma mais utilizada (mais eficiente) de investigar a análise
modal: Função de Resposta em Frequência (FRF).
Análise Modal
modal: Função de Resposta em Frequência (FRF).
-
� Equação de movimento:
� Para um forçamento tem-se uma solução do tipo
, , com isso:
tieFtF ω0)( =ti
Xetxω=)(
Fkxxcxm =++ &&&
Análise Modal – 1 G.L.
Logo:
� FRF:
tititiXetxXeitxXetx
ωωω ωω 2)()()( −=→=→= &&&
titi eFekXcXiXm ωωωω 02 )( =++−
cimkF
X
ωωωα
+−==
20
1)(
-
� Uma Função de Resposta em Freqüência (FRF) é uma relação
causa/efeito que descreve o comportamento do sistema com
uma entrada e uma saída.
� Receptância FRF:cimkF
X
ωω
ωωα
+−==
20
1)()(
Análise Modal – 1 G.L.
� Mobilidade FRF:
� Inertância FRF:
cimk
i
F
XY
ωω
ωωω
+−==
20
)()(
&
cimkF
XA
ωω
ωωω
+−
−==
2
2
0
)()(
&&
)()()(2 ωωωωωα AY ==
-
� Relações/definições importantes.
� Rigidez dinâmica:
� Impedância mecânica:
cimkX
Fωω
ωαω+−== 20
)(
1
)(
ωω cimkF +−==
20 1
Análise Modal – 1 G.L.
� Impedância mecânica:
� Massa aparente:
ω
ωω
ωω i
cimk
YX
F +−==0
)(
1
)(&
2
20
)(
1
)( ω
ωω
ωω −
+−==
cimk
AX
F
&&
-
� Rigidez dinâmica:
cimk ωωωα
+−= 2)(
1
Análise Modal – 1 G.L.
-
� Receptância FRF:
� →
� →
cimk ωωωα
+−=
2
1)(
k
1)(
0
≈
Análise Modal – 1 G.L.
0 ωωω m>> 0ωω>>
-
� Fator de qualidade ou Largura de Banda:
Determinação do Amortecimento
Pontos de meia potência:
Largura de Banda:
⇒===2
1
2
1
2)()( max21
ξωω
GGG ξω ±= 12,1
ξωωδ 212 =−=
Fkxxcxm =++ &&&
m
Fxxx =++ 2002 ωξω &&&
Equação Movimento:
Equação Movimento
Adimensionalizada:
-
� Decremento Logaritmico (Resposta Livre)
Determinação do Amortecimento
Decremento logaritmico:
Coeficiente de Amortecimento viscoso:
=
+1
1ln1
ju
u
jγ
224 γπ
γξ
+=
-
� Decremento Linear (Resposta Livre)
Determinação do Amortecimento
Coeficiente de Atrito Seco:
N
uuk
mg
uuk
4
)(
4
)( 2121 −=−
=µ
-
Sistemas Discretos – Base Modal
� Equações de movimento na ausência de amortecimento:
)}({)}(]{[)}(]{[ tftxKtxM =+&&
-
� Equação de Movimento:
� Para um forçamento tem-se uma solução do
tipo , com isso:
)}({)}(]{[)}(]{[ tftxKtxM =+&&
tieFtf
ω}{)}({ =ti
eXtxωω)}({)}({ =
tititieXxeXixeXx
ωωω ωω }{}{}{}{}{}{ 2−=→=→= &&&
Sistemas Discretos – Base Modal
� Com isso, reescreve-se as equações de movimento:
� Receptância FRF:
tititieXxeXixeXx
ωωω ωω }{}{}{}{}{}{ 2−=→=→= &&&
}{}]]{[][[ 2 FXMK =−ω
12 ]][][[)]([ −−= MK ωωα })]{([}{ FX ωα=⇒
-
� Resposta na coordenada ‘i’ devido a uma força aplicada na
coordenada ‘j’.
=
)()()(
)()()(
)()()(
)]([
11
22221
11211
ωαωαωα
ωαωαωα
ωαωαωα
ωα
nnnn
n
n
L
LLLL
L
L
Sistemas Discretos – Base Modal
� i=j: ponto FRF
� i diferente de j: Transferência em FRF
)()()( 11 ωαωαωα nnnn L
})]{([}{ FX ωα=
-
� Realizando a tranformação de coordenadas:
onde é a matriz modal, obtém-se:
� Pré-multiplicando por
)}({)}(]{[)}(]{[ tftxKtxM =+&&
))(]([)}({ tqtx φ=
][φ
Sistemas Discretos – Base Modal
}{}]{][[}]{][[ fqKqM =+ φφ &&
T][φ� Pré-multiplicando por
como e , obtém-se que:
Problema escrito no sistema de coordenadas modais ou
principais.
T][φ
}{][}]{][[][}]{][[][ fqKqM TTT φφφφφ =+&&
][]][[][ IMT =φφ ][]][[][ 2••= r
T K ωφφ
}{][}]{[}{ 2 fqq Tr φω =+ ••
&&
-
� Realiza-se as mesmas transformações utilizadas para
escrever o problema no sistema coordenadas modais:
][]][][[][])][([][ 12 φωφφωαφ −−= MKTT
])([])][([][ 22 •• −= ωωφωαφ r
T
Tr ]][)(][[)]([
22 φωωφωα •• −=
Sistemas Discretos – Base Modal
� Ou ainda:
r ]][)(][[)]([ φωωφωα •−=
−
−
−
=
22
222
221
1111
1
1
1
][)(
ωω
ωω
ωω
φφφφφφωα
n
knjnkjkjij
M
L
-
� Rigidez dinâmica – Sistema Discreto:
Sistemas Discretos – Base Modal
-
� Receptância FRF – Sistema Discreto:
Sistemas Discretos – Base Modal
-
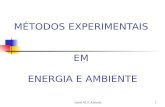
� Shaker:
� Acelerômetro:
FRF Experimental
-
� Martelo:
� Acelerômetro:� Transdutor de força:
FRF Experimental
-
FFT Experimental� Viga (escala logarítmica):
� Máquina Rotativa (escala linear):
-
� Medição de Posição:
� Potenciômetros
� Encoders
� Sensores ópticos: sem contato.
�Medição de deformação:
Sensores
� Strain gages.
�Medição de Velocidade:
� Tacômetros.
�Medição de Aceleração:
�Acelerômetro.
�Medição de torque e força:
� Células de carga.
-
�Converte o deslocamento linear ou angular em variação de resistência.
Potenciômetro
-
O encoder é um transdutor que converte um movimento angular ou linear em
uma série de pulsos digitais elétricos.
� Tipos de Encoder:
� Absoluto
� Incremental
Encoder
� Incremental
-
Encoder Incremental
-
� Ligação esquemática dos sensores ao PC
Encoder
-
� Medição de posição sem contato.
Sensores Ópticos
-
� Os extensômetros elétricos (strain gages) constituem a forma mais usual de se
medir deformação. Seu princípio de funcionamento baseia-se no fato de que os
materiais exibem uma mudança em sua resistência elétrica quando submetidos a
uma deformação mecânica.
Strain Gages
�O condicionamento do sinal é feito através do uso da Ponte de Wheatstone:
-
Variável adotada:
Equação de movimento:
� Princípio de Funcionamento
Acelerômetro
)()()( tytxtz −=
)()()()( tymtzktzctzm &&&&& =++
Movimento da base:
Equação de Movimento:
)sin()( 0 tYty ω=
)sin()( 02
tYty ωω−=&&
)sin()()()( 02
tYmtzktzctzm ωω−=++ &&&
-
Equação de movimento:
Resposta do sistema:
Acelerômetro
)sin()()()( 02
tYmtzktzctzm ωω−=++ &&&
)cos()()(
2
0 φωωω
ω−
= tiGYtz
ou ainda:
onde:
0ω n
)cos()( 0 φω −= tZtz
)(
2
0
0 ωω
ωiG
Y
Z
n
=
-
� Para , tem-se que:
Acelerômetro
1)( ≈ωiG
2
00
≅
n
YZω
ω
-
� Piezoelétrico
Acelerômetro
-
� Frequência máxima < frequência ressonância
Acelerômetros - Especificação
-
� Isoladores
O isolamento de vibrações envolve a inserção de um membro resiliente (ou
isolador) entre a massa vibratória (ou equipamento) e a fonte da vibração de
forma que a redução na resposta dinâmica do sistema é atingida sob condições
específicas de excitação de vibrações.
Controle de Vibrações
-
�Absorvedores dinâmicos
Controle de Vibrações
-
� Stockbridge: Absorvedor de vibrações para linhas de transmissão
Absorvedor Dinâmico de Vibrações
-
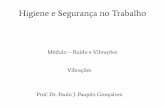
�Absorvedor de Vibrações Pendular (Taipei 101, Taipei, Taiwan)
Absorvedor Dinâmico de Vibrações
-
Métodos Experimentais
Métodos Experimentais para Vibrações Mecânicas
Universidade de BrasíliaFaculdade de Tecnologia
Departamento de Engenharia Mecânica
Prof. Aline Souza de Paula