O Protocolo Profibus - Completo
29
O PROTOCOLO PROFIBUS Autora: Rafaela Castelhano de Souza 2012
-
Upload
jairzinho-fernandes -
Category
Documents
-
view
202 -
download
25
Transcript of O Protocolo Profibus - Completo
O PROTOCOLO
PROFIBUS
Autora: Rafaela Castelhano de Souza
2012
Blog Automação Industrial
Rafaela Castelhano de Souza
1
09 de agosto de 2012
O Protocolo Profibus (Parte I)
28/06/2012 Redes Industriais
Oi pessoal, a partir de agora vou começar a escrever uma série de posts relacionados aos
protocolos de comunicação utilizados na automação industrial. E para o primeiro artigo desta
série, vamos conhecer melhor sobre o protocolo Profibus, sua história e principais vertentes.
O Profibus é um dos protocolos que fazem parte do grupo dos “fieldbuses” abertos e
independentes de fornecedores (não-proprietários), que permitem, portanto a integração de
equipamentos de diversos fabricantes em uma mesma rede. Estamos falando de
interoperabilidade e intercabiabilidade.
O primeiro quer dizer que, em uma rede fieldbus podem estar interligados equipamentos de
diversos fabricantes. Todos se comunicam perfeitamente bem, graças à padronização do
protocolo. Já o segundo quer dizer que, se eu tirar da minha rede um equipamento de um
fabricante (um transmissor de pressão, por exemplo) e colocar o mesmo equipamento de um
outro fabricante, este segundo equipamento vai ser capaz de realizar as mesmas atividades
que o primeiro.
A história do Profibus começou em 1987, na Alemanha, quando 21 companhias e institutos
uniram forças e criaram um projeto estratégico fieldbus. O objetivo era a realização e
estabilização de um barramento de campo bitserial, sendo o requisito básico, a padronização
da interface de dispositivo de campo [2].
Este protocolo começou seu avanço inicialmente na automação de manufatura e, desde 1995,
na automação de processos (Profibus PA). O padrão Profibus atende às exigências das normas
IEC61158 e EN50170 e, conta com 3 tipos de tecnologias: DP, PA e PROFINET. Segue abaixo
uma descrição resumida de cada um desses três protocolos:
Profibus DP: Foi desenvolvido para operar com uma alta velocidade e conexão de baixo custo,
e é utilizado na comunicação entre sistemas de controle de automação e seus respectivos I/O’s
distribuídos no nível de dispositivo. Pode ser usado para substituir a transmissão de sinal em
24 V em sistemas de automação de manufatura assim como para a transmissão de sinais de 4
a 20 mA ou HART® em sistemas de automação de processo [2].
Profibus PA: Esta tecnologia define, em adição às definições padrões do Profibus DP, os
parâmetros e blocos de função para dispositivos de automação de processo, tais como
transmissores, válvulas e posicionadores [2]. O Profibus PA possui uma característica adicional
que é a transmissão intrinsecamente segura, o que faz com que ele possa ser usado em áreas
classificadas, ou seja, ambientes onde existe o perigo de explosão. É indicado por controlar
variáveis digitais em linhas de produção seriada ou células integradas de manufatura.
Encontrado predominantemente nas indústrias de transformação [3].
Blog Automação Industrial
Rafaela Castelhano de Souza
2
09 de agosto de 2012
Profinet: Pode ser utilizado em aplicações em tempo real (rápidas) e em aplicações onde o
tempo não é crítico, por exemplo, na conversão para rede Profibus DP [8].
Características Básicas
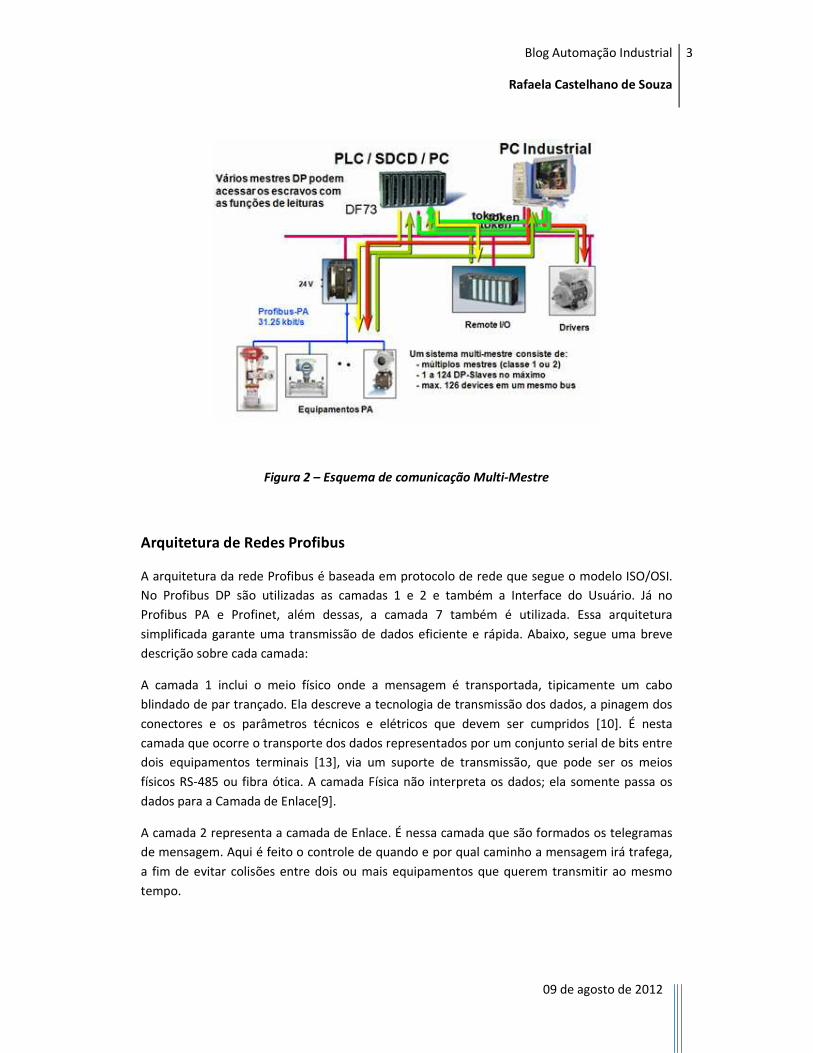
O Profibus é um sistema dito multimestre e permite a operação conjunta de equipamentos ou
controladores terminais de engenharia ou visualização, com seus respectivos periféricos. Os
Dispositivos Mestres determinam a comunicação de dados em um barramento. Essa
comunicação é realizada enquanto o dispositivo mestre possui o direito de acesso ao
barramento (token). O token é um mecanismo de arbitragem que deve ser implementado para
evitar possíveis colisões no barramento quando mais de uma estação deseja transmitir uma
mensagem [5].
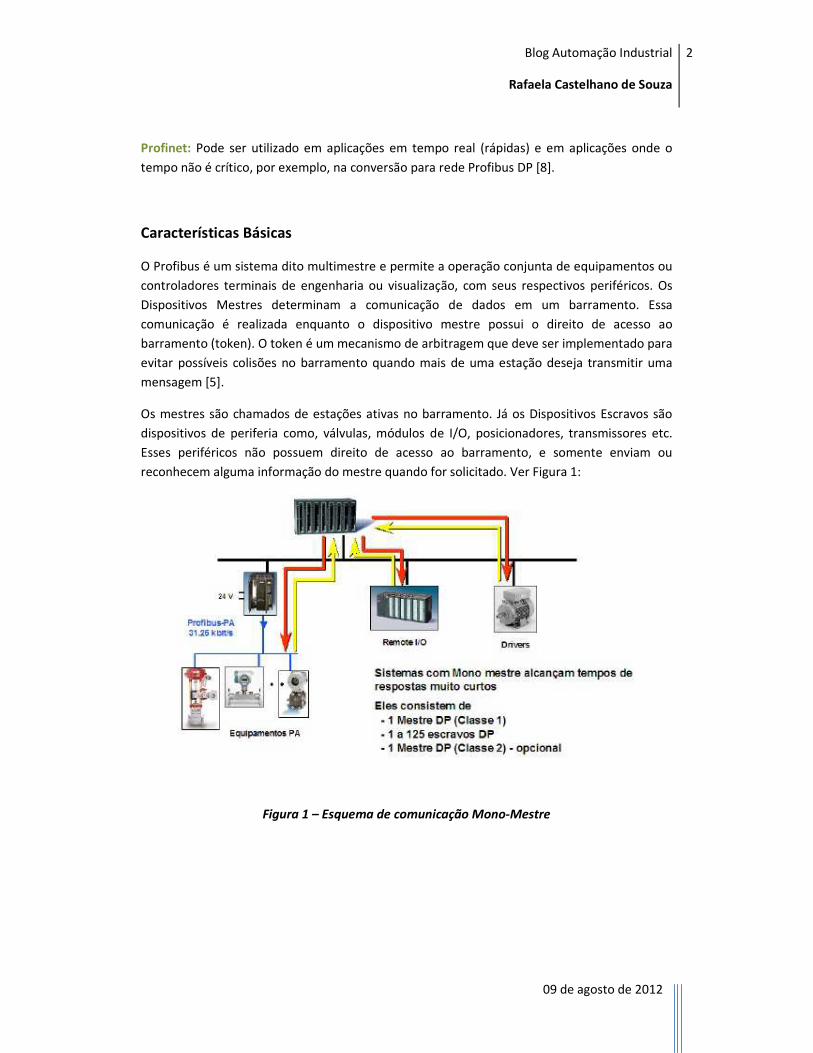
Os mestres são chamados de estações ativas no barramento. Já os Dispositivos Escravos são
dispositivos de periferia como, válvulas, módulos de I/O, posicionadores, transmissores etc.
Esses periféricos não possuem direito de acesso ao barramento, e somente enviam ou
reconhecem alguma informação do mestre quando for solicitado. Ver Figura 1:
Figura 1 – Esquema de comunicação Mono-Mestre
Blog Automação Industrial
Rafaela Castelhano de Souza
3
09 de agosto de 2012
Figura 2 – Esquema de comunicação Multi-Mestre
Arquitetura de Redes Profibus
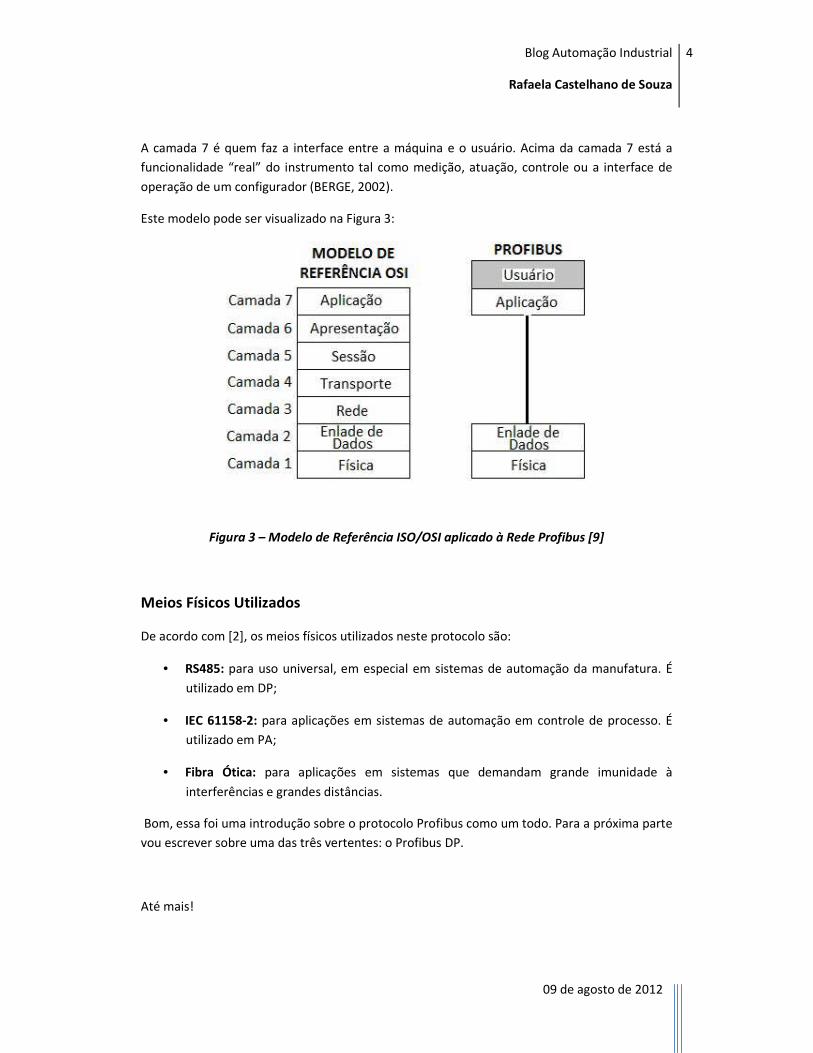
A arquitetura da rede Profibus é baseada em protocolo de rede que segue o modelo ISO/OSI.
No Profibus DP são utilizadas as camadas 1 e 2 e também a Interface do Usuário. Já no
Profibus PA e Profinet, além dessas, a camada 7 também é utilizada. Essa arquitetura
simplificada garante uma transmissão de dados eficiente e rápida. Abaixo, segue uma breve
descrição sobre cada camada:
A camada 1 inclui o meio físico onde a mensagem é transportada, tipicamente um cabo
blindado de par trançado. Ela descreve a tecnologia de transmissão dos dados, a pinagem dos
conectores e os parâmetros técnicos e elétricos que devem ser cumpridos [10]. É nesta
camada que ocorre o transporte dos dados representados por um conjunto serial de bits entre
dois equipamentos terminais [13], via um suporte de transmissão, que pode ser os meios
físicos RS-485 ou fibra ótica. A camada Física não interpreta os dados; ela somente passa os
dados para a Camada de Enlace[9].
A camada 2 representa a camada de Enlace. É nessa camada que são formados os telegramas
de mensagem. Aqui é feito o controle de quando e por qual caminho a mensagem irá trafega,
a fim de evitar colisões entre dois ou mais equipamentos que querem transmitir ao mesmo
tempo.
Blog Automação Industrial
Rafaela Castelhano de Souza
4
09 de agosto de 2012
A camada 7 é quem faz a interface entre a máquina e o usuário. Acima da camada 7 está a
funcionalidade “real” do instrumento tal como medição, atuação, controle ou a interface de
operação de um configurador (BERGE, 2002).
Este modelo pode ser visualizado na Figura 3:
Figura 3 – Modelo de Referência ISO/OSI aplicado à Rede Profibus [9]
Meios Físicos Utilizados
De acordo com [2], os meios físicos utilizados neste protocolo são:
• RS485: para uso universal, em especial em sistemas de automação da manufatura. É
utilizado em DP;
• IEC 61158-2: para aplicações em sistemas de automação em controle de processo. É
utilizado em PA;
• Fibra Ótica: para aplicações em sistemas que demandam grande imunidade à
interferências e grandes distâncias.
Bom, essa foi uma introdução sobre o protocolo Profibus como um todo. Para a próxima parte
vou escrever sobre uma das três vertentes: o Profibus DP.
Até mais!
Blog Automação Industrial
Rafaela Castelhano de Souza
5
09 de agosto de 2012
Referências bibliográficas:
[1] BA034SEN – Manual Profibus E+H, págs 16 à 18.
[2] CASSIOLATO, C.; TORRES, L. H. B.; CAMARGO, P. R. (2012). Profibus – Descrição Técnica. São
Paulo: Associação Profibus Brasil, 2012.
[3] NETO, C. D. (2008). O Profissional de Automação com Nível Superior. III Fórum
Internacional de Automação do Setor Sucroalcoleiro e Alimentício. 2008.
[4] Normative Parts of Profibus FMS, DP and PA, according to the European Standard EN5170
Volume 2. Edition 1.0 (1998).
[5] STEMMER, M. R. (2001). Sistemas Distribuídos e Redes de Computadores para Controle e
Automação Industrial. 2001. Santa Catarina: Universidade Federal de Santa Catarina.
[6] VENTURINI, V. P. (2007). Desenvolvimento de um Mestre Profibus com a Finalidade de
Análise de Desempenho. 2007. Dissertação de Mestrado em Engenharia Mecânica – Escola de
Engenharia de São Carlos, USP, São Carlos.
[7] SOUZA, R. C. (2012). Diagnóstico de Redes Profibus DP baseado em Redes Neurais
Artificiais. 2012. Dissertação de Mestrado em Engenharia Elétrica – Escola de Engenahria de
São Carlos, USP, São Carlos.
[8] LUGLI, A. B.. Uma visão do protocolo industrial Profinet e suas aplicações.
http://www.profibus.org.br/news/marco2009/news.php?dentro=4. Acesso feito em: 14 de
Junho de 2012.
[9] BERGE, J. (2002). Fieldbuses for Process Control: Engeneering, Operation and Maintenance.
ISA – The Instrumentation, Systems and Automation Society, 2002.
[10] Profibus Installation Guideline for Cabling and Assembly. Version 1.0.6. May 2006.
[11] Profibus Installation Guideline for Commissioning. Version 1.0.2. November 2006.
[12] Profibus Interconnection Technology Guideline. Version 1.4. January 2007. Order Nº.
2.142.
[13] TANEMBAUM, A. S., STEEN, M. V. (2002). Distributed Systems – Principles and Paradigms.
Prentice Hall, 2002.
[14] ALBUQUERQUE, P. U. B., ALEXANDRIA, A. R. (2009). Redes Industriais – Aplicações em
Sistemas Digitais de Controle Distribuído. Ensino Profissional Editora.

Blog Automação Industrial
Rafaela Castelhano de Souza
6
09 de agosto de 2012
Blog Automação Industrial
Rafaela Castelhano de Souza
7
09 de agosto de 2012
O Protocolo Profibus (Parte II)
02/07/2012 Redes Industriais
Olá, como falei no artigo anterior, vou começar a descrever cada uma das três tecnologias
disponíveis para o protocolo Profibus, começando pelo DP (Profibus DP).
Então, vamos lá!
De acordo com [1] a tecnologia DP foi desenvolvida para realizar transmissão de dados em alta
velocidade. Esta vertente do protocolo atua no nível 2 da pirâmide de automação. Neste nível
atuam os PCs e CLPs responsáveis pelo controle dos equipamentos de campo que estão
localizados no nível 1. Cada controlador (mestre) pode controlar até 126 escravos.
É daí que surge a necessidade de se utilizar um protocolo que trabalhe com velocidades altas.
Se fosse o contrário o processo seria muito lento e isto poderia prejudicar o bom andamento
de um controle, onde algumas aplicações exigem um tempo de resposta muitoooo baixo e a
troca de informações precisa ser, praticamente, em tempo real.
As regras desta tecnologia são ditadas pela norma EN50170 [4].
Existem disponíveis no mercado diversos modelos de equipamentos mestres e escravos com a
tecnologia DP. Como visto na Parte I desta série, os equipamentos Mestres atuam sobre os
equipamentos Escravos. Os mestres DP controlam tanto escravos DP quanto PA. Porém, neste
último caso, a comunicação entre uma tecnologia e outra (no caso DP e PA) é realizada através
de um outro equipamento, denominado Coupler. Este equipamento é responsável pela
conversão do sinal DP em sinal PA e, vice-versa. Sem este equipamento não é possível a
comunicação entre estas duas tecnologias.
Os Mestres podem ser definidos de duas maneiras: Classe 1 e Classe 2. Os Mestres classe 1 são
os controladores que ficam responsáveis pelo controle dos escravos continuamente,
executando uma ordem definida de tarefas, que se repetem. Cada rede possui um único
mestre classe 1. Este mestre tem prioridade 1 com relação à “dar ordens” para um escravo.
Já os Mestres classe 2 “entram em contato” com os escravos quando o operador precisa fazer
alguma configuração secundária, algo que seja importante, mas que não interfira na
comunicação entre os escravos e o Mestre classe 1.
A troca de mensagens entre Mestres e Escravos pode ser realizada de duas maneiras: cíclica e
acíclicamente. De acordo com [3] a troca de forma cíclica é dividida em três fases:
parametrização, configuração e transferência de dados. Durante as fases de configuração e
parametrização de um Escravo, sua configuração real é comparada com a configuração
projetada no Mestre classe 1. Somente se corresponderem é que o Escravo passará para a fase
de transmissão de dados. Assim, todos os parâmetros de configuração, tais como tipo de
Blog Automação Industrial
Rafaela Castelhano de Souza
8
09 de agosto de 2012
dispositivo, formato e comprimento de dados, número de entradas e saídas, etc. devem
corresponder à configuração real. Estes testes proporcionam ao usuário uma proteção
confiável contra erros de parametrização. Além da transmissão de dados, que é executada
automaticamente pelo Mestre classe 1, uma nova parametrização pode ser enviada a um
Escravo sempre que necessário.
Na forma acíclica [3] é possível transmitir comandos de leitura e escrita, bem como alarmes
entre mestre e escravos, independente da comunicação cíclica de dados. Isto permite, por
exemplo, a utilização de um Terminal de Engenharia (Mestre classe 2) para a otimização dos
parâmetros de um dispositivo (escravo) ou para se obter o valor do status de um dispositivo,
sem perturbar a operação do sistema.
A utilização de protocolo de comunicação em uma aplicação depende das necessidades da
aplicação. Essas necessidades devem ser comparadas com as características que o protocolo
oferece. A utilização do protocolo adequado faz com que o projeto seja realizado de forma
mais simples e com economias. Veja abaixo, alguns exemplos de aplicações onde pode ser
utilizado o protocolo Profibus DP:
• Controle de Motores Inteligente (CCM Inteligente): Usado para realizar a comunicação
com uma rede de Inversores e Soft-Starters para acionamento de motores;
• Manter o controle antigo analógico (4-20mA) levado através de estações remotas,
criando uma rede entre estas estações remotas;
• Como DP é uma rede rápida, pode ser aplicado em gateways DP/AS-I e DP/PA
concentrando a informação de instrumentos de redes mais lentas;
• Energia (acionamento em subestações);
• Manufatura (montadoras de autos, fábricas em geral);
• Mineração (CCMs e remotas);
• Controle de processos rápido (por ex. caldeira a gás);
• Entre outras.
Cada aplicação da rede Profibus é influenciada pela escolha do meio físico. Os requisitos
gerais, como alta confiabilidade de transmissão, grandes distâncias a serem cobertas e alta
velocidade de transmissão somam-se às exigências específicas de cada área de automação do
processo, como operação em áreas classificadas, transmissão de dados e alimentação dos
instrumentos diretamente pelo barramento de dados, entre outras [4]. Devido a este fato, não
é possível usar um único meio físico em todo o processo. Sendo assim foram desenvolvidos 3
tipos físicos que atendem às várias particularidades do sistema. São eles: RS-485, IEC61158-2 e
Fibra Ótica. Segue abaixo uma descrição resumida de cada um destes meios de transmissão:

Blog Automação Industrial
Rafaela Castelhano de Souza
9
09 de agosto de 2012
• RS-485: para uso universal, em especial em sistemas de automação da manufatura;
• IEC61158-2 ou Manchester Bus Powered (MBP): para aplicações em sistemas de
automação em controle e processos. Utilizado somente em rede PA;
• Fibra Ótica: para aplicações em sistemas que demandam grande imunidade à
interferência e grandes distâncias [3].
Vou dividir a explicação detalhada destes meios físicos em duas partes, começando pelo RS-
485. No post da próxima semana vou falar sobre as Fibras Óticas. O meio físico IEC61158-2 é
utilizado em PA, portanto será explicado em breve, no post sobre redes PA.
RS-485
O RS-485 é o meio de transmissão mais utilizado no Profibus DP, pois apresenta como
características principais altas taxas de transmissão e instalação simples e barata. Este meio
físico usa como transporte dos dados um cabo de par trançado e blindado e permite que até
32 estações sejam conectadas ao barramento. Porém, o uso de repetidores é permitido, o que
permite que uma rede se estenda a até 126 estações.
Os cabos usados nas instalações Profibus DP e recomendados pela norma EN 50170 [4],
apresentam as seguintes características:
• Área do Condutor: maior que 0,34 mm²;
• Impedância: 135 a 165 Ohms;
• Capacitância: menor que 30 pF;
• Resistência Específica: 110 Ohms/km;
• Medida do Diâmetro do Cabo: 0,64 mm;
O comprimento máximo de cada lance de cabo na rede varia de acordo com a velocidade de
transmissão especificada para a rede, devendo ser totalizado considerando eventuais
derivações. No caso do Profibus DP, essas derivações devem ser evitadas para baudrate maior
ou igual a 3 Mbps [4]. Segue na Tabela 1 os comprimentos de segmento baseados nas
respectivas velocidades de transmissão e o máximo comprimento das derivações.

Blog Automação Industrial
Rafaela Castelhano de Souza
10
09 de agosto de 2012
Tabela 1 – Comprimento Máximo de Cabo por Segmento [9]
É importante ressaltar também que os cabos de comunicação da rede devem manter uma
certa distância de fontes que possam causar qualquer tipo de interferência no sinal. Além de
mantê-los separados, é aconselhável utilizar bandejamentos ou calhas metálicas fechadas e
aterradas, observando as distâncias conforme Tabela 2. 2. O ideal é utilizar canaletas de
alumínio, onde se tem a blindagem eletromagnética externa e interna. O cruzamento entre os
cabos deve ser feito em ângulo de 90º [5].
Tabela 2 – Distâncias Mínimas de Separação entre Cabeamentos [5]
De acordo com a [4], se um cabo par trançado blindado é utilizado, a blindagem deverá ser
aterrado em ambas as terminações do cabo via conexões de baixa impedância. Isto é
necessário para se alcançar uma razoável blindagem eletromagnética. É altamente
recomendável que a conexão entre o cabo blindado e o terra seja feito por uma canaleta
metálica e parafusos de fixação metálicos do conector.
O cabo é conectado aos equipamentos através de conectores. Estes conectores são
disponibilizados com algumas variedades de classes de proteção e projetos mecânicos. A
escolha do melhor tipo de conector varia de acordo com a necessidade da instalação, porém o
mais recomendado pela norma é o conector Sub-D com 9 pinos. Os pinos 3, 5, 6 e 8 são
sempre utilizados. Os demais pinos são opcionais. Estes conectores em geral apresentam grau

Blog Automação Industrial
Rafaela Castelhano de Souza
11
09 de agosto de 2012
de proteção IP20¹ [5]. A Tabela 3 mostra a descrição dos pinos do conector Sub-D com 9 pinos
e na Figura 1 é mostrado um exemplo deste tipo de conector.
Tabela 3 – Pinagem do Conector Sub-D com 9 Pinos [10]
Figura 1 – Pinagem do Conector Sub-D com 9 Pinos
Em áreas onde se exige um grau de proteção maior, são disponíveis os conectores do tipo
M12 com 5 pinos, que oferecem grau de proteção IP65/67² [5]. Veja na Figura 2 a descrição
dos pinos do conector M12.
NOTA
O grau de proteção (IP) é a proteção oferecida por um invólucro, contra a penetração de
objetos sólidos (pó) e/ou penetração de água em partes perigosas do circuito eletrônico
(CEI/IEC 60529, 2001). O primeiro dígito indica a proteção contra sólidos e o segundo a
proteção contra líquidos. Neste caso, o dígito 2 indica que o invólucro do conector oferece
proteção contra sólidos de diâmetro de até 50 mm e maior e o dígito 0 indica que ele não é
protegido contra a entrada de água.
No caso do grau de proteção IP65/67, o dígito 6 indica que o invólucro do conector é
totalmente protegigo contra sólidos. Já os dígitos 5 e 7 representam proteção contra jatos de
água e imersão contínua em água, respectivemente.

Blog Automação Industrial
Rafaela Castelhano de Souza
12
09 de agosto de 2012
Figura 2 – Conector M12 com 5 Pinos [5]
Os conectores Sub-D com 9 Pinos apresentam em sua estrutura os terminadores de
barramento. Esses terminadores são indispensáveis e é necessário que sejam habilitados dois
terminadores no barramento, um no início e outro no fim de cada segmento. A terminação
ativa na posição incorreta faz com que, tanto o nível quanto a forma de onda sejam
degradados.
A ausência de terminadores nas extremidades do barramento pode causar erro na
transferência de dados, devido à reflexões no sinal que chega ao fim do barramento, fazendo
com que este sinal volte pela linha de dados e se sobreponha ao sinal que está sendo enviado.
Já o excesso de terminadores habilitados pode causar intermitência nos dados transmitidos
fazendo com que ocorram interrupções na comunicação. Na Figura 3 são apresentados os
detalhes de uma conexão entre o cabo Profibus e um terminador e na Figura 4 é mostrado um
exemplo de uma rede Profibus utilizando-se repetidores e terminadores.

Blog Automação Industrial
Rafaela Castelhano de Souza
13
09 de agosto de 2012
Figura 3 – Exemplo de Cabo com Terminação [7]
Figura 4 – Exemplo de uma Rede com Terminadores de Barramento e Repetidores [6]
É importante ressaltar que a habilitação dos terminadores varia de acordo com a topologia da
rede. Analisando-se a Figura 4, pode-se concluir que:

Blog Automação Industrial
Rafaela Castelhano de Souza
14
09 de agosto de 2012
Segmentos 1 e 2: estes segmentos possuem uma topologia do tipo Barramento. Neste caso, é
necessário habilitar um terminador no início (no mestre) e um no final deste barramento
(último escravo do segmento). O último escravo deve permanecer o tempo todo alimentado
com no mínimo 9 V;
Segmento 3: este segmento possui uma topologia do tipo Árvore. Neste caso, os terminadores
devem estar localizados no primeiro escravo (o mais à esquerda do mestre) e no último (o
mais distante).
Codificação dos dados
O RS-485 codifica dados utilizando a técnica Non-return Zero (NRZ). Este tipo de codificação é
a forma mais comum e mais utilizada para se transmitir sinais digitais, já que ela usa dois níveis
de tensão diferentes para os dois dígitos binários, ambos diferentes da tensão nula [8]. De
acordo com a norma EN50170, este método procura assegurar que as transmissões ocorram
somente quando sucessivos bits de dados possuam valores iguais. Um exemplo deste tipo de
codificação pode ser visualizado na Figura 5.
Os dados codificados em NRZ são transmitidos por um cabo de par trançado. O bit “1”
representa uma tensão diferencial positiva constante entre os pinos 3 (RxD/TxD-P) e 8
(RxD/TxD-N) do conector e o bit “0” representa uma tensão diferencial negativa constante. No
RS-485 esses dados são transmitidos por dois condutores, denominados A e B, que transmitem
níveis de tensão iguais, porém com polaridades opostas (VA e VB).
Por esta razão, é importante que a rede seja ligada com a polaridade correta. Embora os sinais
sejam opostos, um não é o retorno do outro, ou seja, não existe um loop de corrente. Cada
sinal tem seu retorno pela terra ou por um terceiro condutor de retorno, entretanto, o sinal
deve ser lido pelo receptor de forma diferencial sem referência a terra ou ao condutor de
retorno.
Figura 5 – Codificação NRZ
Blog Automação Industrial
Rafaela Castelhano de Souza
15
09 de agosto de 2012
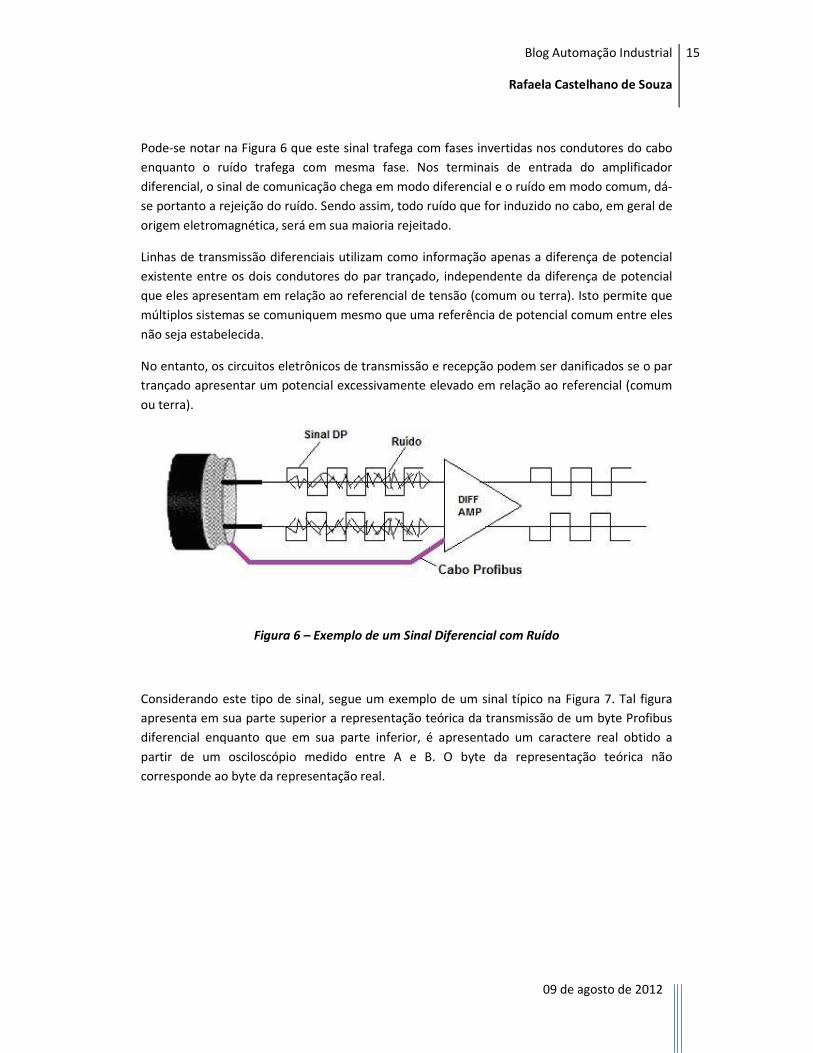
Pode-se notar na Figura 6 que este sinal trafega com fases invertidas nos condutores do cabo
enquanto o ruído trafega com mesma fase. Nos terminais de entrada do amplificador
diferencial, o sinal de comunicação chega em modo diferencial e o ruído em modo comum, dá-
se portanto a rejeição do ruído. Sendo assim, todo ruído que for induzido no cabo, em geral de
origem eletromagnética, será em sua maioria rejeitado.
Linhas de transmissão diferenciais utilizam como informação apenas a diferença de potencial
existente entre os dois condutores do par trançado, independente da diferença de potencial
que eles apresentam em relação ao referencial de tensão (comum ou terra). Isto permite que
múltiplos sistemas se comuniquem mesmo que uma referência de potencial comum entre eles
não seja estabelecida.
No entanto, os circuitos eletrônicos de transmissão e recepção podem ser danificados se o par
trançado apresentar um potencial excessivamente elevado em relação ao referencial (comum
ou terra).
Figura 6 – Exemplo de um Sinal Diferencial com Ruído
Considerando este tipo de sinal, segue um exemplo de um sinal típico na Figura 7. Tal figura
apresenta em sua parte superior a representação teórica da transmissão de um byte Profibus
diferencial enquanto que em sua parte inferior, é apresentado um caractere real obtido a
partir de um osciloscópio medido entre A e B. O byte da representação teórica não
corresponde ao byte da representação real.
Blog Automação Industrial
Rafaela Castelhano de Souza
16
09 de agosto de 2012
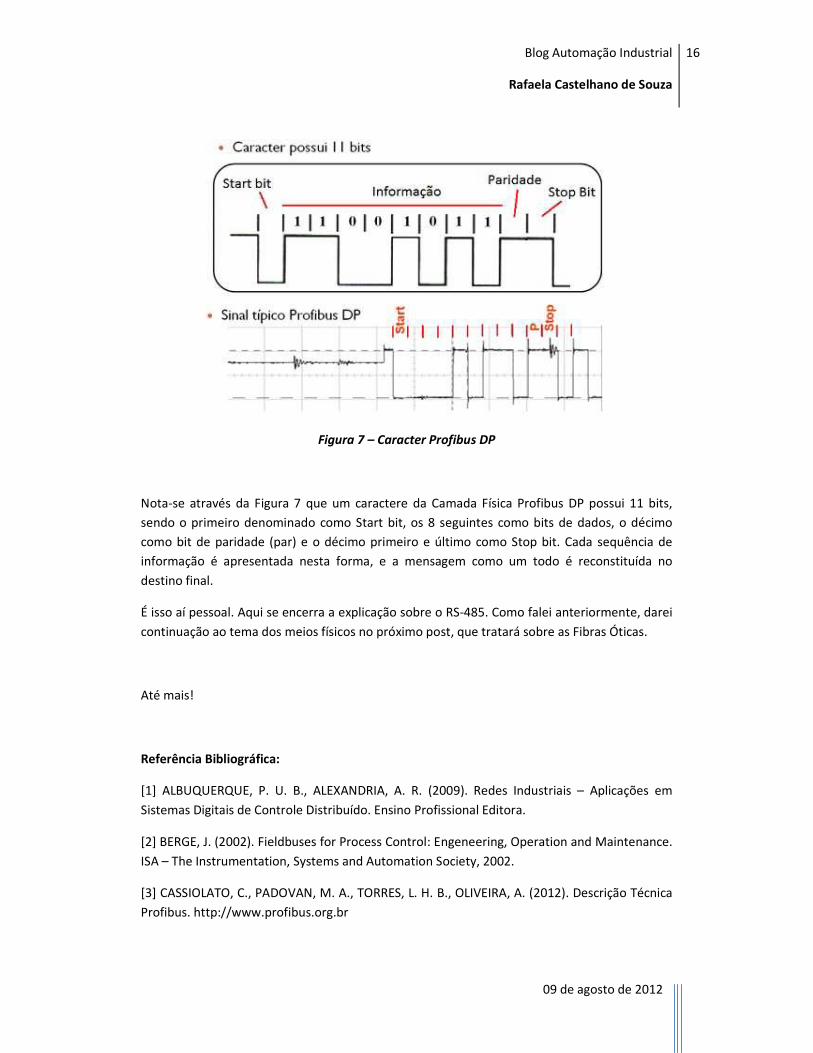
Figura 7 – Caracter Profibus DP
Nota-se através da Figura 7 que um caractere da Camada Física Profibus DP possui 11 bits,
sendo o primeiro denominado como Start bit, os 8 seguintes como bits de dados, o décimo
como bit de paridade (par) e o décimo primeiro e último como Stop bit. Cada sequência de
informação é apresentada nesta forma, e a mensagem como um todo é reconstituída no
destino final.
É isso aí pessoal. Aqui se encerra a explicação sobre o RS-485. Como falei anteriormente, darei
continuação ao tema dos meios físicos no próximo post, que tratará sobre as Fibras Óticas.
Até mais!
Referência Bibliográfica:
[1] ALBUQUERQUE, P. U. B., ALEXANDRIA, A. R. (2009). Redes Industriais – Aplicações em
Sistemas Digitais de Controle Distribuído. Ensino Profissional Editora.
[2] BERGE, J. (2002). Fieldbuses for Process Control: Engeneering, Operation and Maintenance.
ISA – The Instrumentation, Systems and Automation Society, 2002.
[3] CASSIOLATO, C., PADOVAN, M. A., TORRES, L. H. B., OLIVEIRA, A. (2012). Descrição Técnica
Profibus. http://www.profibus.org.br

Blog Automação Industrial
Rafaela Castelhano de Souza
17
09 de agosto de 2012
[4] Normative Parts of Profibus FMS, DP and PA, according to the European Standard EN5170
Volume 2. Edition 1.0 (1998).
[5] Profibus Installation Guideline for Cabling and Assembly. Version 1.0.6. May 2006.
[6] Profibus Installation Guideline for Commissioning. Version 1.0.2. November 2006.
[7] Profibus Interconnection Technology Guideline. Version 1.4. January 2007. Order Nº. 2.142.
[8] STALLINGS, W. (1997). Data and Computer Communications. Prentice Hall, 1997.
[9] Technical Guideline Installation Guideline for Profibus-DP/FMS Version 1.0 September
1998.
[10] Test Specifications for Profibus DP Slaves Version 2.3 March 2004.
[11] SOUZA, R. C. (2012). Diagnóstico de Redes Profibus DP baseado em Redes Neurais
Artificiais. 2012. Dissertação de Mestrado em Engenharia Elétrica – Escola de Engenahria de
São Carlos, USP, São Carlos.
Blog Automação Industrial
Rafaela Castelhano de Souza
18
09 de agosto de 2012

Blog Automação Industrial
Rafaela Castelhano de Souza
19
09 de agosto de 2012
O Protocolo Profibus (Parte III)
11/07/2012 Redes Industriais
E ai pessoal,
Como prometido no post passado, hoje vou falar sobre as Fibras Óticas.
As fibras óticas podem ser utilizadas em aplicações onde existe alto índice de interferência
eletromagnética ou com o objetivo de se aumentar o comprimento máximo do barramento,
independente da velocidade de transmissão. É um meio físico comumente utilizado em
aplicações onde se utiliza tanto a tecnologia DP quanto Profinet.
Figura 1 – Fibra Ótica
Um sistema de transmissão com fibra ótica consiste em três elementos: um dispositivo que
gera a luz, um dispositivo que detecta esta luz e um meio de transmissão por onde a luz irá
trafegar. No momento da transmissão dos dados, um pulso de luz indica bit 1 e a ausência de
luz, indica bit 0 (zero).
Este meio de transmissão pode trabalhar com uma velocidade de até 50 Tbps, porém, para uso
em redes industrias, esta velocidade é limitada em 1 Gbps, devido ao fato de não ser possível
converter sinais elétricos e óticos em uma velocidade maior [1].
Existem dois tipos de fibra ótica:
• Multimodo;
• Monomodo.
Veja abaixo a descrição de cada uma delas:
Blog Automação Industrial
Rafaela Castelhano de Souza
20
09 de agosto de 2012
Multimodo
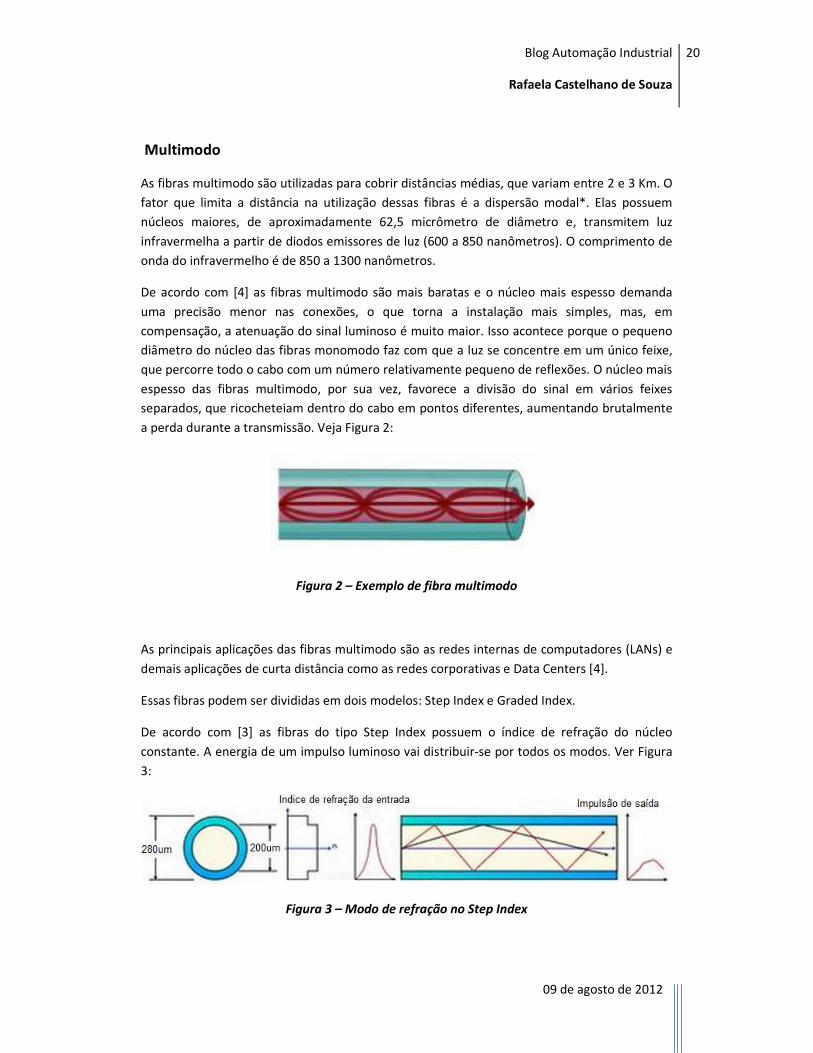
As fibras multimodo são utilizadas para cobrir distâncias médias, que variam entre 2 e 3 Km. O
fator que limita a distância na utilização dessas fibras é a dispersão modal*. Elas possuem
núcleos maiores, de aproximadamente 62,5 micrômetro de diâmetro e, transmitem luz
infravermelha a partir de diodos emissores de luz (600 a 850 nanômetros). O comprimento de
onda do infravermelho é de 850 a 1300 nanômetros.
De acordo com [4] as fibras multimodo são mais baratas e o núcleo mais espesso demanda
uma precisão menor nas conexões, o que torna a instalação mais simples, mas, em
compensação, a atenuação do sinal luminoso é muito maior. Isso acontece porque o pequeno
diâmetro do núcleo das fibras monomodo faz com que a luz se concentre em um único feixe,
que percorre todo o cabo com um número relativamente pequeno de reflexões. O núcleo mais
espesso das fibras multimodo, por sua vez, favorece a divisão do sinal em vários feixes
separados, que ricocheteiam dentro do cabo em pontos diferentes, aumentando brutalmente
a perda durante a transmissão. Veja Figura 2:
Figura 2 – Exemplo de fibra multimodo
As principais aplicações das fibras multimodo são as redes internas de computadores (LANs) e
demais aplicações de curta distância como as redes corporativas e Data Centers [4].
Essas fibras podem ser divididas em dois modelos: Step Index e Graded Index.
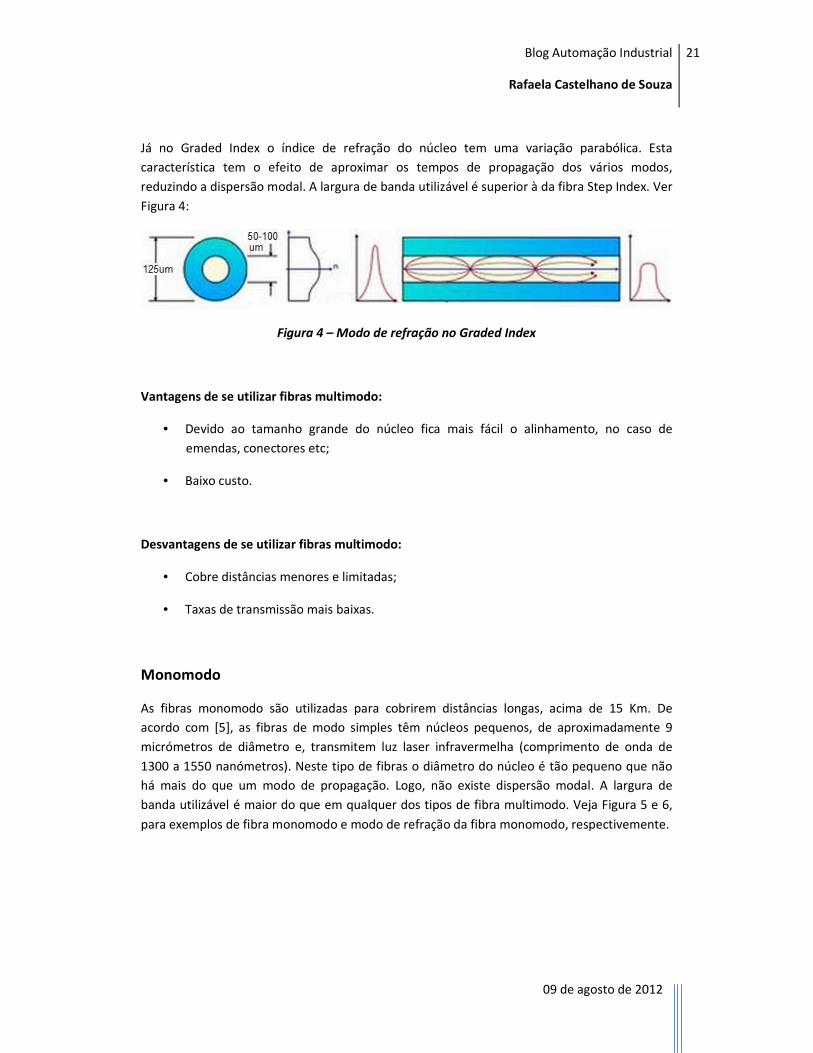
De acordo com [3] as fibras do tipo Step Index possuem o índice de refração do núcleo
constante. A energia de um impulso luminoso vai distribuir-se por todos os modos. Ver Figura
3:
Figura 3 – Modo de refração no Step Index
Blog Automação Industrial
Rafaela Castelhano de Souza
21
09 de agosto de 2012
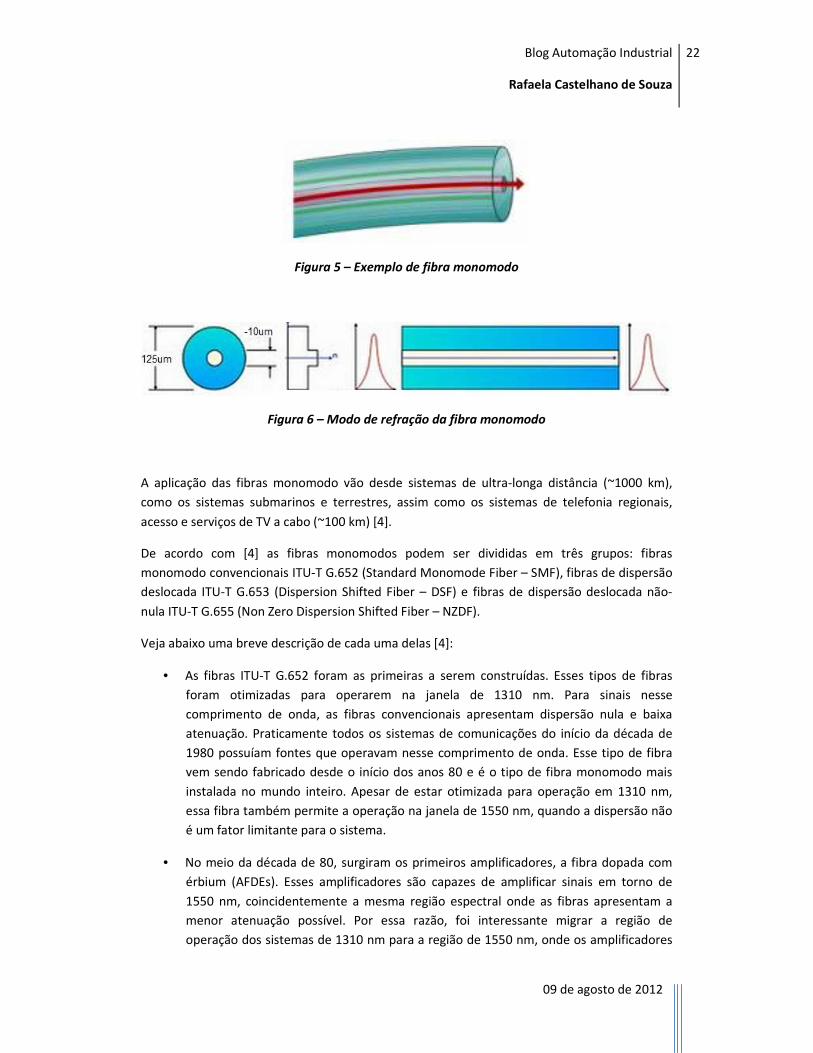
Já no Graded Index o índice de refração do núcleo tem uma variação parabólica. Esta
característica tem o efeito de aproximar os tempos de propagação dos vários modos,
reduzindo a dispersão modal. A largura de banda utilizável é superior à da fibra Step Index. Ver
Figura 4:
Figura 4 – Modo de refração no Graded Index
Vantagens de se utilizar fibras multimodo:
• Devido ao tamanho grande do núcleo fica mais fácil o alinhamento, no caso de
emendas, conectores etc;
• Baixo custo.
Desvantagens de se utilizar fibras multimodo:
• Cobre distâncias menores e limitadas;
• Taxas de transmissão mais baixas.
Monomodo
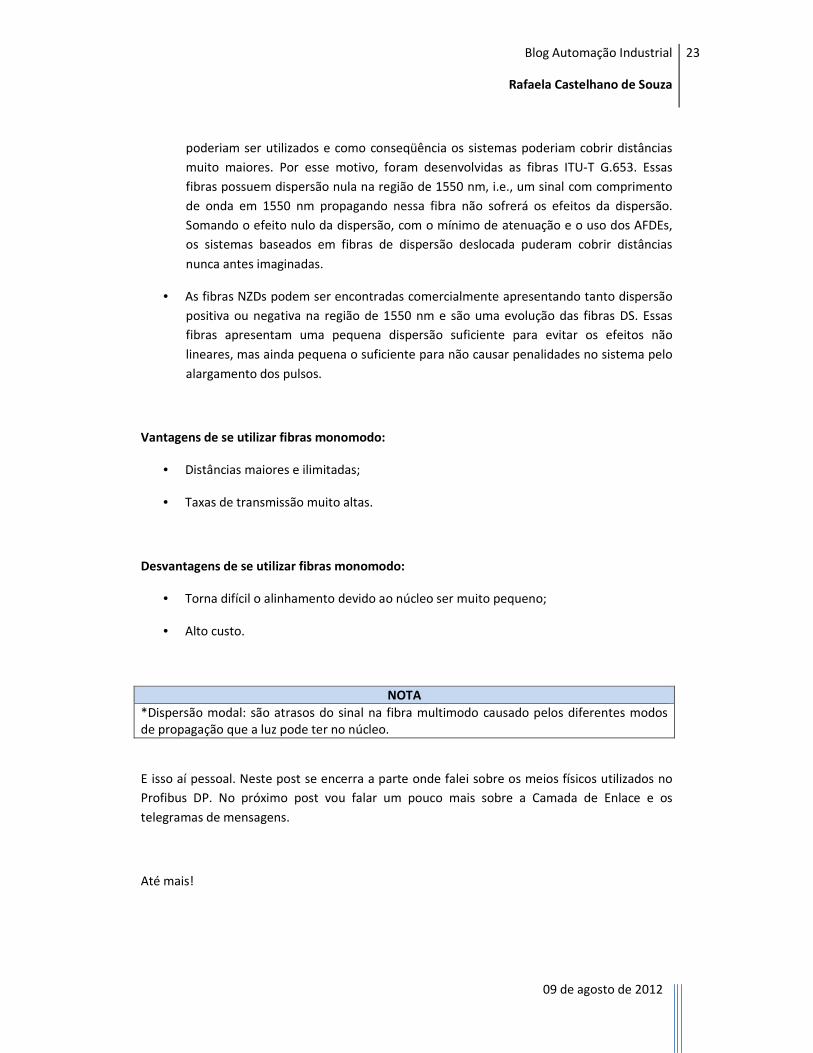
As fibras monomodo são utilizadas para cobrirem distâncias longas, acima de 15 Km. De
acordo com [5], as fibras de modo simples têm núcleos pequenos, de aproximadamente 9
micrómetros de diâmetro e, transmitem luz laser infravermelha (comprimento de onda de
1300 a 1550 nanómetros). Neste tipo de fibras o diâmetro do núcleo é tão pequeno que não
há mais do que um modo de propagação. Logo, não existe dispersão modal. A largura de
banda utilizável é maior do que em qualquer dos tipos de fibra multimodo. Veja Figura 5 e 6,
para exemplos de fibra monomodo e modo de refração da fibra monomodo, respectivemente.
Blog Automação Industrial
Rafaela Castelhano de Souza
22
09 de agosto de 2012
Figura 5 – Exemplo de fibra monomodo
Figura 6 – Modo de refração da fibra monomodo
A aplicação das fibras monomodo vão desde sistemas de ultra-longa distância (~1000 km),
como os sistemas submarinos e terrestres, assim como os sistemas de telefonia regionais,
acesso e serviços de TV a cabo (~100 km) [4].
De acordo com [4] as fibras monomodos podem ser divididas em três grupos: fibras
monomodo convencionais ITU-T G.652 (Standard Monomode Fiber – SMF), fibras de dispersão
deslocada ITU-T G.653 (Dispersion Shifted Fiber – DSF) e fibras de dispersão deslocada não-
nula ITU-T G.655 (Non Zero Dispersion Shifted Fiber – NZDF).
Veja abaixo uma breve descrição de cada uma delas [4]:
• As fibras ITU-T G.652 foram as primeiras a serem construídas. Esses tipos de fibras
foram otimizadas para operarem na janela de 1310 nm. Para sinais nesse
comprimento de onda, as fibras convencionais apresentam dispersão nula e baixa
atenuação. Praticamente todos os sistemas de comunicações do início da década de
1980 possuíam fontes que operavam nesse comprimento de onda. Esse tipo de fibra
vem sendo fabricado desde o início dos anos 80 e é o tipo de fibra monomodo mais
instalada no mundo inteiro. Apesar de estar otimizada para operação em 1310 nm,
essa fibra também permite a operação na janela de 1550 nm, quando a dispersão não
é um fator limitante para o sistema.
• No meio da década de 80, surgiram os primeiros amplificadores, a fibra dopada com
érbium (AFDEs). Esses amplificadores são capazes de amplificar sinais em torno de
1550 nm, coincidentemente a mesma região espectral onde as fibras apresentam a
menor atenuação possível. Por essa razão, foi interessante migrar a região de
operação dos sistemas de 1310 nm para a região de 1550 nm, onde os amplificadores
Blog Automação Industrial
Rafaela Castelhano de Souza
23
09 de agosto de 2012
poderiam ser utilizados e como conseqüência os sistemas poderiam cobrir distâncias
muito maiores. Por esse motivo, foram desenvolvidas as fibras ITU-T G.653. Essas
fibras possuem dispersão nula na região de 1550 nm, i.e., um sinal com comprimento
de onda em 1550 nm propagando nessa fibra não sofrerá os efeitos da dispersão.
Somando o efeito nulo da dispersão, com o mínimo de atenuação e o uso dos AFDEs,
os sistemas baseados em fibras de dispersão deslocada puderam cobrir distâncias
nunca antes imaginadas.
• As fibras NZDs podem ser encontradas comercialmente apresentando tanto dispersão
positiva ou negativa na região de 1550 nm e são uma evolução das fibras DS. Essas
fibras apresentam uma pequena dispersão suficiente para evitar os efeitos não
lineares, mas ainda pequena o suficiente para não causar penalidades no sistema pelo
alargamento dos pulsos.
Vantagens de se utilizar fibras monomodo:
• Distâncias maiores e ilimitadas;
• Taxas de transmissão muito altas.
Desvantagens de se utilizar fibras monomodo:
• Torna difícil o alinhamento devido ao núcleo ser muito pequeno;
• Alto custo.
NOTA
*Dispersão modal: são atrasos do sinal na fibra multimodo causado pelos diferentes modos de propagação que a luz pode ter no núcleo.
E isso aí pessoal. Neste post se encerra a parte onde falei sobre os meios físicos utilizados no
Profibus DP. No próximo post vou falar um pouco mais sobre a Camada de Enlace e os
telegramas de mensagens.
Até mais!
Blog Automação Industrial
Rafaela Castelhano de Souza
24
09 de agosto de 2012
Referências Bibliográficas:
[1] ALBUQUERQUE, P. U. B., ALEXANDRIA, A. R. (2009). Redes Industriais – Aplicações em
Sistemas Digitais de Controle Distribuído. Ensino Profissional Editora.
[2] http://www.teleco.com.br/tutoriais/tutorialfoIII/pagina_4.asp
[3] http://www.melhorseguranca.info/2009/02/fibra-optica-multimodo-vs-monomodo.html
[4] http://www.telcon.com.br/Telcon/Web/Perguntas/Default.aspx?idper=S10110509132753
[5] http://www.melhorseguranca.info/2009/02/fibra-optica-multimodo-vs-monomodo.html
[6]
http://www.dsif.fee.unicamp.br%2F~rudge%2Fpdf%2FDispers_Complet_f201r.pdf&ei=P23sT6
_UMJSQ8wTbx
Blog Automação Industrial
Rafaela Castelhano de Souza
25
09 de agosto de 2012
O Protocolo Profibus (Parte IV)
06/08/2012 Redes Industriais
Oi pessoal, tudo bem?
Continuando nossa série de artigos sobre o Profibus DP, neste post vou falar sobre as camadas
de Enlace e de Usuário deste protocolo. São nessas camadas que são gerados e distribuídos os
telegramas de mensagens. Então, neste post, vocês verão sobre endereçamento das estações,
o significados dos bits dos telegramas e os tipos e formatos dos telegramas. E no próximo post,
será apresentado o procedimento de transmissão dos telegramas.
O texto deste artigo não é de minha autoria. O autor é o professor do IFSP-Sertãozinho,
Eduardo André Mossin, e o texto é parte de sua tese de doutorado.
Então… vamos lá.
Camadas de Enlace e de Usuário
Neste item são descritos os aspectos da camada de enlace e de usuário. Outros
detalhes sobre este assunto poderão ser encontrados em [1].
A rede Profibus DP é uma rede do tipo multidrop, assíncrona, half duplex e utiliza a
comunicação do tipo passagem de token (Token Passing) e mestre-escravo. O
mecanismo de passagem de token permite a aplicação de múltiplos mestres em
uma mesma rede compartilhando o acesso. Somente o mestre pode iniciar a
comunicação na rede. Os escravos comunicam somente para responder
requisições do mestre. A rede Profibus DP permite a operação permanente com
mais de um mestre, desde que configurados individualmente e de maneira
adequada nas restrições da norma.
O número máximo de estações em uma rede Profibus DP é 126. Assim, a faixa de
endereços disponível para uso vai de 0 a 125. Os endereços 126 e 127 são de uso
especial, sendo o 126 utilizado como valor padrão para estações não endereçadas
entrarem na comunicação e o endereço 127 (0x7F) reservado para comandos de
broadcast.
Para a comunicação entre cada estação, o protocolo define alguns telegramas.
Cada telegrama é formado por um conjunto de caracteres, no qual cada caractere
é formado por 11 bits, sendo apenas 8 deles utilizados como dado. Este é o padrão
UART e os três bits extras são utilizados para fornecer uma sinalização de início e
fim de transmissão de cada caractere (2 bits) e um bit de paridade par utilizado
Blog Automação Industrial
Rafaela Castelhano de Souza
26
09 de agosto de 2012
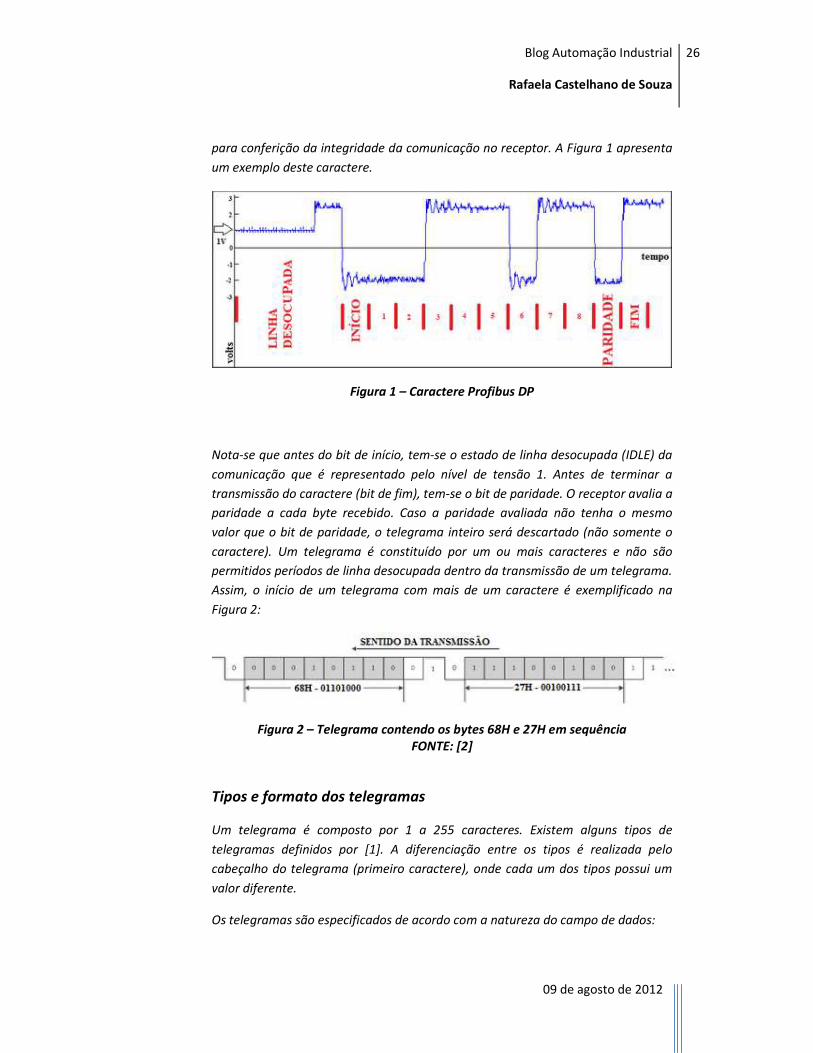
para conferição da integridade da comunicação no receptor. A Figura 1 apresenta
um exemplo deste caractere.
Figura 1 – Caractere Profibus DP
Nota-se que antes do bit de início, tem-se o estado de linha desocupada (IDLE) da
comunicação que é representado pelo nível de tensão 1. Antes de terminar a
transmissão do caractere (bit de fim), tem-se o bit de paridade. O receptor avalia a
paridade a cada byte recebido. Caso a paridade avaliada não tenha o mesmo
valor que o bit de paridade, o telegrama inteiro será descartado (não somente o
caractere). Um telegrama é constituído por um ou mais caracteres e não são
permitidos períodos de linha desocupada dentro da transmissão de um telegrama.
Assim, o início de um telegrama com mais de um caractere é exemplificado na
Figura 2:
Figura 2 – Telegrama contendo os bytes 68H e 27H em sequência FONTE: [2]
Tipos e formato dos telegramas
Um telegrama é composto por 1 a 255 caracteres. Existem alguns tipos de
telegramas definidos por [1]. A diferenciação entre os tipos é realizada pelo
cabeçalho do telegrama (primeiro caractere), onde cada um dos tipos possui um
valor diferente.
Os telegramas são especificados de acordo com a natureza do campo de dados:
Blog Automação Industrial
Rafaela Castelhano de Souza
27
09 de agosto de 2012
• Telegramas de tamanho fixo sem campo de dados;
• Telegrama de resposta curta ou reconhecimento;
• Telegrama com campo de dados de tamanho variável;
• Telegrama de token.
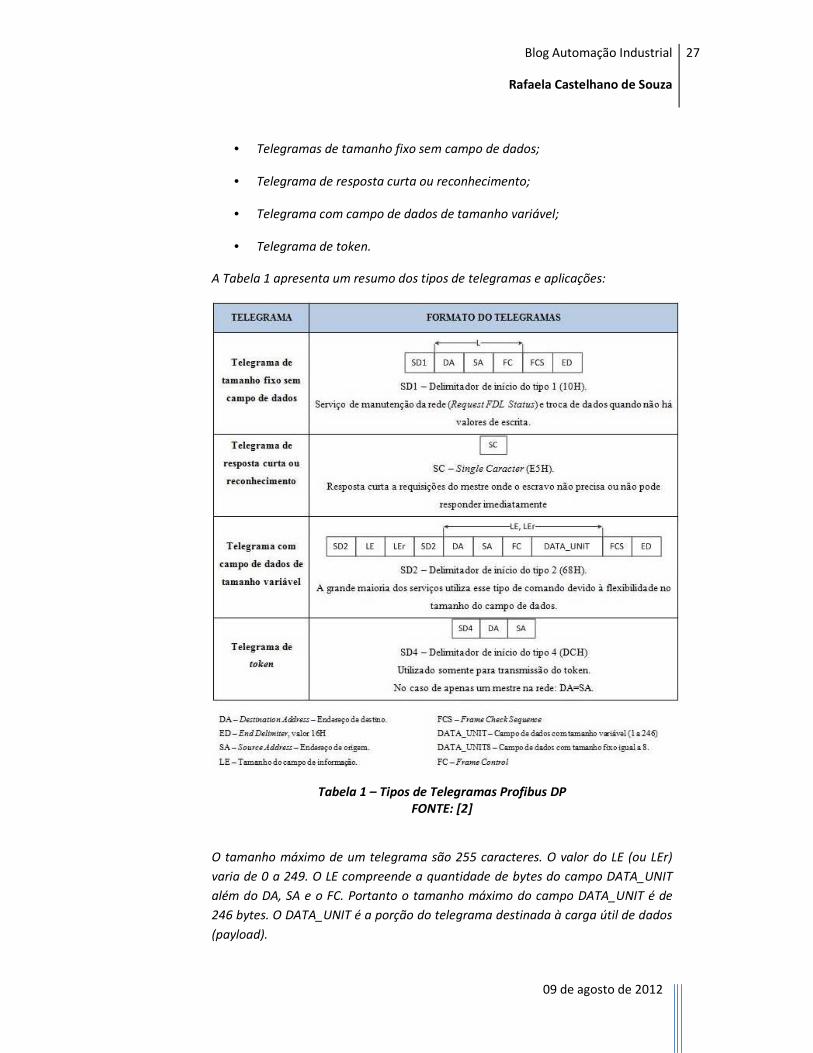
A Tabela 1 apresenta um resumo dos tipos de telegramas e aplicações:
Tabela 1 – Tipos de Telegramas Profibus DP FONTE: [2]
O tamanho máximo de um telegrama são 255 caracteres. O valor do LE (ou LEr)
varia de 0 a 249. O LE compreende a quantidade de bytes do campo DATA_UNIT
além do DA, SA e o FC. Portanto o tamanho máximo do campo DATA_UNIT é de
246 bytes. O DATA_UNIT é a porção do telegrama destinada à carga útil de dados
(payload).
Blog Automação Industrial
Rafaela Castelhano de Souza
28
09 de agosto de 2012
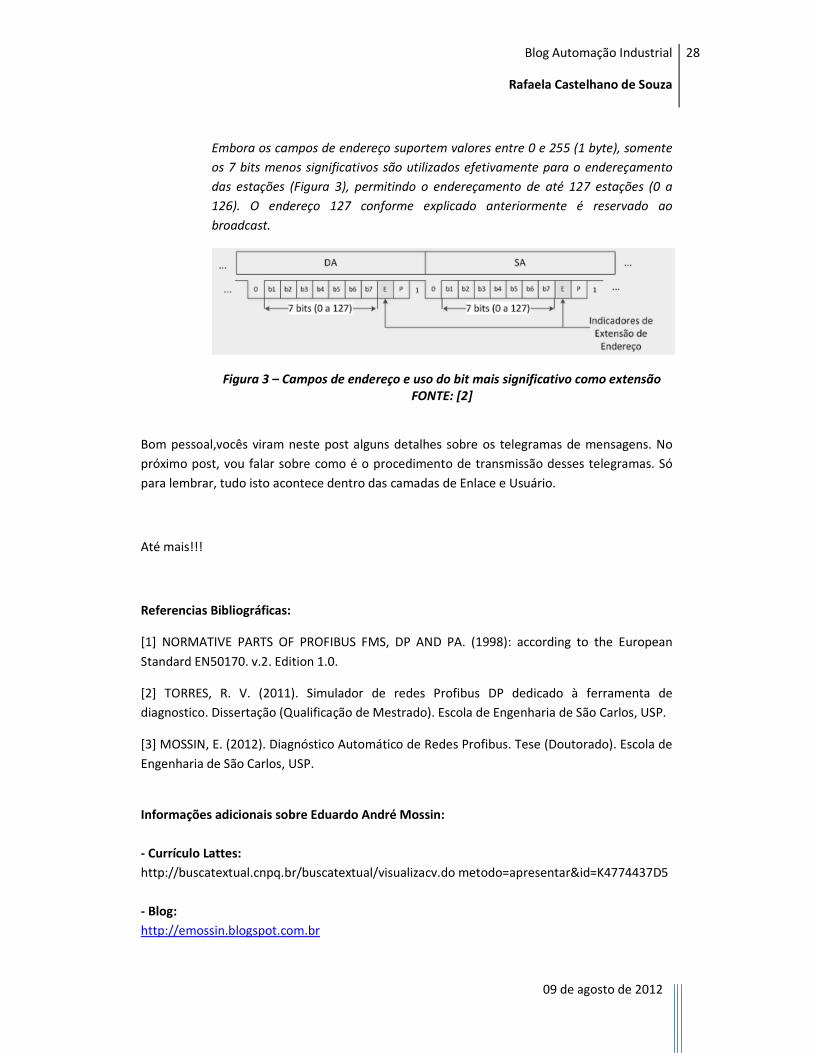
Embora os campos de endereço suportem valores entre 0 e 255 (1 byte), somente
os 7 bits menos significativos são utilizados efetivamente para o endereçamento
das estações (Figura 3), permitindo o endereçamento de até 127 estações (0 a
126). O endereço 127 conforme explicado anteriormente é reservado ao
broadcast.
Figura 3 – Campos de endereço e uso do bit mais significativo como extensão FONTE: [2]
Bom pessoal,vocês viram neste post alguns detalhes sobre os telegramas de mensagens. No
próximo post, vou falar sobre como é o procedimento de transmissão desses telegramas. Só
para lembrar, tudo isto acontece dentro das camadas de Enlace e Usuário.
Até mais!!!
Referencias Bibliográficas:
[1] NORMATIVE PARTS OF PROFIBUS FMS, DP AND PA. (1998): according to the European
Standard EN50170. v.2. Edition 1.0.
[2] TORRES, R. V. (2011). Simulador de redes Profibus DP dedicado à ferramenta de
diagnostico. Dissertação (Qualificação de Mestrado). Escola de Engenharia de São Carlos, USP.
[3] MOSSIN, E. (2012). Diagnóstico Automático de Redes Profibus. Tese (Doutorado). Escola de
Engenharia de São Carlos, USP.
Informações adicionais sobre Eduardo André Mossin:
- Currículo Lattes:
http://buscatextual.cnpq.br/buscatextual/visualizacv.do metodo=apresentar&id=K4774437D5
- Blog:
http://emossin.blogspot.com.br