Parking Spot - Sistema de Gestao e Informac¸˜ ao de ... · de Estacionamento Miguel Jose Matos de...
94
Parking Spot - Sistema de Gest˜ ao e Informac ¸˜ ao de Parques de Estacionamento Miguel Jos ´ e Matos de Almeida Dissertac ¸˜ ao para obtenc ¸˜ ao do Grau de Mestre em Engenharia de Telecomunicac ¸˜ oes e Inform´ atica Orientador: Prof. Teresa Maria S´ a Ferreira Vaz˜ ao Vasques J´ uri Presidente: Prof. Paulo Jorge Pires Ferreira Orientador: Prof. Teresa Maria S´ a Ferreira Vaz˜ ao Vasques Vogal: Prof. Jo˜ ao Paulo Baptista de Carvalho Outubro 2017
Transcript of Parking Spot - Sistema de Gestao e Informac¸˜ ao de ... · de Estacionamento Miguel Jose Matos de...

Parking Spot - Sistema de Gestao e Informacao de Parquesde Estacionamento
Miguel Jose Matos de Almeida
Dissertacao para obtencao do Grau de Mestre em
Engenharia de Telecomunicacoes e Informatica
Orientador: Prof. Teresa Maria Sa Ferreira Vazao Vasques
Juri
Presidente: Prof. Paulo Jorge Pires FerreiraOrientador: Prof. Teresa Maria Sa Ferreira Vazao Vasques
Vogal: Prof. Joao Paulo Baptista de Carvalho
Outubro 2017


Agradecimentos
Queria comecar por agradecer a minha famılia por todo apoio ao longo dos anos, nomeadamente
as pessoas mais importantes da minha vida Mae, Pai e Irmao. Obrigado por toda a educacao que tive,
pelos sacrifıcios que fizeram em prol de mim, tempo investido, por todos os meios que tive sempre a
disposicao para alcancar as minhas metas. Obrigado por terem estado sempre presentes.
Quero agradecer a Carla por todo o apoio que me deu nos momentos em que mais precisei, pela
ajuda e pela paciencia. Um grande obrigado!
Quero tambem agradecer a todos os meus amigos que de uma forma ou de outra sempre me
incentivaram e tiveram ao meu lado nos momentos bons e menos bons, aos colegas e amigos de curso
que fiz durante estes anos e com quem partilhei projetos e noites de estudos no Tecnico. Sao aquelas
memorias que um dia iremos relembrar. Para se chegar a este ponto foi preciso passar por muitas
etapas.
Quero agradecer ao meu irmao e ao meu amigo Luıs pela disponibilidade de me ajudarem a efetuar
os testes ao sistema.
Por fim e nao menos importante, queria agradecer a professora Teresa pelo seu contributo na
orientacao desta dissertacao e pelos conselhos dados fora deste contexto tambem.


Abstract
In large cities and urban centers, it is increasingly difficult to find parking spaces available for parking
cars, which often leads drivers to spend a lot of time looking for parking spaces to park their vehicle.
This problem can cause traffic jams, have a negative influence on people and cause the emission of
gaseous pollutants unnecessarily harming the environment.
In this dissertation, a low-cost intelligent parking system was developed. It automatically detects the
entrance and exit of cars in a car park, without barriers to access and in the open air, and informs the
users about its availability. Usually parks are large in size, so it is proposed to divide the physical space
into several zones in order to provide the users with a more accurate information.
Each zone of the park is equipped with a computing platform linked to sensors that make the de-
tection and accounting of the entry/exit vehicles. The information from each zone is then transmitted
to a system that manages the information received and calculates the total availability of the park and
also provides the data for the users and managers through Web applications, which can be accessed
by several devices and without need to build a mobile application. All the information is transmitted
over a Wi-Fi mesh network using a proactive routing protocol, comprised of all computing platforms that
monitor the various zones.
Keywords
Intelligent Parking System, Wireless Mesh Network, Automatic Vehicle Detection, Proactive routing
iii


Resumo
Nas grandes cidades e nos centros urbanos, e cada vez mais difıcil encontrar lugares de estaciona-
mento disponıveis para estacionar automoveis, o que leva muitas das vezes os condutores passa-
rem muito tempo a procura de lugares de estacionamento para parquearem o seu veıculo. Este pro-
blema pode causar congestionamento de trafego, ter uma influencia negativa sobre pessoas e causa a
emissao de gases poluentes desnecessariamente prejudicando o meio ambiente.
Nesta dissertacao foi desenvolvido um sistema de parqueamento inteligente de baixo custo que
permite detetar automaticamente a entrada e saıda de automoveis num parque de estacionamento, sem
barreiras de acesso e ao ar livre, e informar os utilizadores sobre a lotacao disponıvel. Normalmente os
parques sao de dimensoes grandes, por isso e proposto dividir-se o espaco fısico em varias zonas de
forma a disponibilizar-se aos utentes uma informacao mais precisa.
Cada zona do parque esta equipada com uma plataforma de computacao ligada a sensores que
fazem a detecao e contabilizacao da entrada/saıda veıculos. A informacao de cada zona e depois
transmitida para uma plataforma que faz a gestao das informacoes recebidas e calcula a disponibilidade
total do parque e que providencia tambem os dados para os utentes e gestores atraves de aplicacoes
Web, que podem ser acedidas por varios dispositivos e sem necessidade de construir uma aplicacao
movel. Toda a informacao e transmitida atraves de uma rede de malha sem fios Wi-Fi que usa um
protocolo de rotemanto proativo, constituıda por todas as plataformas de computacao que monitorizam
as diversas zonas.
Palavras Chave
Sistema de parqueamento inteligente, Detecao automatica de automoveis, Rede de malha sem fios,
Roteamento proativo
v


Conteudo
1 Introducao 1
1.1 Enquadramento e Motivacao . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 2
1.2 Objetivos . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 2
1.3 Contribuicao . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 3
1.4 Estrutura do Documento . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 3
2 Trabalho Relacionado 5
2.1 Tecnicas de Localizacao . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 6
2.1.1 Localizacao ao Ar Livre . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 6
2.1.1.A GPS e GLONASS . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 6
2.1.2 Localizacao em Ambientes Fechados . . . . . . . . . . . . . . . . . . . . . . . . . 7
2.1.2.A Dead Reckoning . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 7
2.1.2.B Impressao Digital . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 8
2.1.3 Sıntese e Discussao . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 9
2.2 Tecnologias de Sensores . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 9
2.2.1 Sensor Infravermelho Passivo . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 9
2.2.2 Sensor Magnetico . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 10
2.2.3 Sensor Ultrassonico . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 10
2.2.4 Identificacao por Radiofrequencia . . . . . . . . . . . . . . . . . . . . . . . . . . . 11
2.2.5 Reconhecimento de Imagem . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 11
2.2.6 Sıntese e Discussao . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 12
2.3 Elementos de Rede . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 13
2.3.1 Plataformas de Computacao . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 13
2.3.1.A Arduino . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 13
2.3.1.B RaspberryPi 3 Model B . . . . . . . . . . . . . . . . . . . . . . . . . . . . 13
2.3.1.C Sıntese e Discussao . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 14
2.3.2 Tecnologias de Rede . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 14
2.3.2.A Zigbee . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 14
vii

2.3.2.B Bluetooth Low Energy . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 15
2.3.2.C IEEE 802.11 b/g/n . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 15
2.3.2.D GSM & GPRS . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 16
2.3.2.E Sıntese e Discussao . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 16
2.3.3 MANET . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 17
2.3.4 Rede de Malha sem Fios . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 17
2.3.4.A Tipos de Roteamento . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 18
2.3.4.B Principais protocolos existentes . . . . . . . . . . . . . . . . . . . . . . . 19
A – Roteamento reativo . . . . . . . . . . . . . . . . . . . . . . . . . 19
B – Roteamento proativo . . . . . . . . . . . . . . . . . . . . . . . . 19
C – Roteamento hıbrido . . . . . . . . . . . . . . . . . . . . . . . . . 20
2.3.4.C B.A.T.M.A.N. - advanced . . . . . . . . . . . . . . . . . . . . . . . . . . . 20
2.3.5 Sıntese e Discussao . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 21
2.4 Trabalho Relacionado . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 21
2.4.1 Sistemas de Parqueamento Inteligentes . . . . . . . . . . . . . . . . . . . . . . . . 21
2.4.1.A Casos de uso . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 22
2.4.1.B Sistemas Comerciais . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 25
2.4.1.C Sıntese e Discussao . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 26
2.4.2 Caracterısticas dos IPS . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 28
2.4.2.A Gestao de Ocupacao . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 28
2.4.2.B Reservas . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 29
2.4.2.C Sistemas de Orientacao e Informacao . . . . . . . . . . . . . . . . . . . . 29
2.4.2.D Polıtica de Precos . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 30
2.4.2.E Sensores de Estacionamento . . . . . . . . . . . . . . . . . . . . . . . . 31
2.4.2.F Servidores . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 31
2.4.2.G Aplicacoes de acesso a informacao . . . . . . . . . . . . . . . . . . . . . 31
2.4.2.H Sıntese e Discussao . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 32
3 Arquitetura do Sistema 33
3.1 Analise de Requisitos . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 34
3.1.1 Requisitos funcionais . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 34
A – Inexistencia de barreiras fısicas . . . . . . . . . . . . . . . . . . 34
B – Disponibilizacao de informacao de lotacao . . . . . . . . . . . . 35
C – Facilitar a procura de estacionamento . . . . . . . . . . . . . . . 35
D – Gestao do estacionamento . . . . . . . . . . . . . . . . . . . . . 35
E – Autorizacao de acesso e privacidade . . . . . . . . . . . . . . . 36
viii

3.1.2 Requisitos de arquitetura . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 36
A – Modularidade do codigo . . . . . . . . . . . . . . . . . . . . . . 36
B – Cobertura integral . . . . . . . . . . . . . . . . . . . . . . . . . . 36
C – Encaminhamento dinamico . . . . . . . . . . . . . . . . . . . . . 36
D – Redundancia de dados . . . . . . . . . . . . . . . . . . . . . . . 37
E – Consistencia de informacao . . . . . . . . . . . . . . . . . . . . 37
3.2 Arquitetura Geral . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 37
3.2.1 Visao Geral do Sistema . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 37
3.2.2 No Coletor . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 39
3.2.2.A Arquitetura Detalhada . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 40
3.2.3 No Relay . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 43
3.2.3.A Arquitetura Detalhada . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 44
3.2.4 No Gestor . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 45
3.2.4.A Arquitetura Detalhada . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 45
3.3 Comunicacoes . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 47
3.3.1 Tipos de comunicacoes . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 47
A – Coletor-Relay . . . . . . . . . . . . . . . . . . . . . . . . . . . . 47
B – Relay -Gestor . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 47
C – Coletor-Gestor . . . . . . . . . . . . . . . . . . . . . . . . . . . . 47
3.3.1.A Construcao da malha . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 47
3.4 Sıntese e Discussao . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 48
4 Implementacao 49
4.1 Hardware . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 50
4.1.1 No coletor . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 50
4.1.1.A Plataforma de computacao . . . . . . . . . . . . . . . . . . . . . . . . . . 50
4.1.1.B Sensores para detecao de automoveis . . . . . . . . . . . . . . . . . . . 51
4.1.2 No relay . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 53
4.1.3 No gestor . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 54
4.2 Rede . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 54
4.2.1 Protocolo de roteamento . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 54
4.2.2 Prıncipio de Funcionamento . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 55
4.2.3 Anuncio de clientes . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 56
4.2.4 Tabelas de Traducao . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 57
4.2.4.A Tabela de traducao local . . . . . . . . . . . . . . . . . . . . . . . . . . . 57
4.2.4.B Tabela de traducao global . . . . . . . . . . . . . . . . . . . . . . . . . . . 57
ix

A – Tabela de pedidos de reenvio . . . . . . . . . . . . . . . . . . . 58
4.2.5 Transmissao de pacotes de dados . . . . . . . . . . . . . . . . . . . . . . . . . . . 58
4.2.6 Batctl . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 59
4.3 Componentes de software . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 60
4.3.1 Script de configuracao do no na rede . . . . . . . . . . . . . . . . . . . . . . . . . 60
4.3.2 No coletor . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 60
4.3.3 No gestor . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 61
4.4 Sıntese e Discussao . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 63
5 Testes Experimentais 64
5.1 Teste de roteamento . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 65
5.2 Testes de software . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 68
5.3 Aplicacoes Web . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 68
5.4 Sıntese e Discussao . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 69
6 Conclusoes e Trabalho Futuro 71
6.1 Conclusao . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 72
6.2 Trabalho futuro . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 73
x

Lista de Figuras
3.1 Ligacao de varias zonas a um no gestor . . . . . . . . . . . . . . . . . . . . . . . . . . . . 38
3.2 Arquitetura geral da rede de malha sem fios . . . . . . . . . . . . . . . . . . . . . . . . . . 38
3.3 Divisao em varias zonas do cenario de teste . . . . . . . . . . . . . . . . . . . . . . . . . 40
3.4 Arquitetura geral do no coletor . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 41
3.5 Arquitetura software do no coletor . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 42
3.6 Exemplo de disposicao dos sensores no no coletor . . . . . . . . . . . . . . . . . . . . . . 43
3.7 Arquitetura geral do no de relay . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 44
3.8 Arquitetura software do no de relay . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 44
3.9 Arquitetura geral do no Gestor . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 45
3.10 Arquitetura software do no Gestor . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 46
4.1 RaspberryPi 3 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 50
4.2 Sensor ultrassonico HC-SR04 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 52
4.3 Camera utilizada para captar imagens . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 52
4.4 Posicionamento dos sensores ultrassonicos . . . . . . . . . . . . . . . . . . . . . . . . . . 53
4.5 RaspberryPi Zero W . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 53
4.6 Pacote OGM . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 55
4.7 Mensagem OGM . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 56
4.8 Contrucao dos pacotes . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 59
4.9 Reenvio dos pacotes . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 60
4.10 Entrega dos pacotes . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 60
5.1 Cenario de testes do sistema . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 65
5.2 Distancia aumenta e a comunicacao entre os nos perde qualidade . . . . . . . . . . . . . 66
5.3 Tabela de vizinhos do no 1 com os 4 nos proximos . . . . . . . . . . . . . . . . . . . . . . 66
5.4 Ping com os 4 nos do 1 para o 4 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 67
5.5 Rota de comunicacao do 1 para o 4 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 67
xi

5.6 O no 1 so identifica o no 3 ja com os 4 nos instalados no cenario . . . . . . . . . . . . . . 67
5.7 Tabelas de traducao local e global do no 1 . . . . . . . . . . . . . . . . . . . . . . . . . . . 68
5.8 Resultado do reconhecimento de matrıcula com o OpenALPR . . . . . . . . . . . . . . . 69
5.9 Aplicacao para gestores do parque . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 70
5.10 Aplicacao para clientes do parque . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 70
xii

Lista de Tabelas
2.1 Sumario de Sistemas de Parqueamento Inteligentes importantes . . . . . . . . . . . . . . 27
5.1 Tabela com os dados dos nos . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 65
5.2 Testes de alcance entre nos . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 68
5.3 Taxa de sucesso da leitura de matrıculas . . . . . . . . . . . . . . . . . . . . . . . . . . . 69
xiii

xiv

Acronimos
AODV Adhoc On-demand Distance Vector
B.A.T.M.A.N. Better Approach to Mobile Adhoc Network
BLE Bluetooth Low Energy
CSI Camera Serial Interface
DSDV Destination Sequenced Distance Vector
GLONASS Global Navigation Satellite System
GPIO General Purpose Input/Output
GPRS General Packet Radio Service
GPS Global Positioning System
GSM Global System for Mobile Communications
HTTP Hypertext Transfer Protocol
HWMN Hybrid Wireless Mesh Network
IoT Internet of Things
IP Internet Protocol
IPS Intelligent Parking System
ISM Industrial, Scientific and Medical
IST Instituto Superior Tecnico
ITS Intelligent Transportation Systems
MAC Media Access Control
xv

MANET Mobile Ad Hoc Network
NFC Near Field Communication
OGM Originator Message
OLSR Optimized Link State Routing
OSI Open Systems Interconnection
P2P Peer-to-Peer
PGI Parking Guidance and Information System
RFID Radio Frequency Identification
RPi Raspberry Pi
RSSI Received Signal Strength Indication
ttnv numero da versao da tabela de traducao
TTL Time-to-Live
VANETs Vehicular Ad Hoc Networks
VMS Variable Message Sign
V2I Vehicle-to-Infrastructure
V2V Vehicle-to-Vehicle
WLAN Wireless Local Area Network
WMN Wireless Mesh Network
WPAN Wireless Personal Area Network
xvi

1Introducao
Conteudo
1.1 Enquadramento e Motivacao . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 2
1.2 Objetivos . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 2
1.3 Contribuicao . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 3
1.4 Estrutura do Documento . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 3
1

Neste capıtulo introdutorio apresenta-se o enquadramento e a motivacao desta dissertacao, os ob-
jetivos, a contribuicao e a organizacao da estrutura do documento.
1.1 Enquadramento e Motivacao
Hoje em dia nas grandes cidades e centros urbanos os condutores de automoveis deparam-se
cada vez mais com uma maior escassez de lugares de estacionamento disponıveis. Essa escassez e
provocada, entre outros fatores, pelo aumento do numero de veıculos existentes nas estradas ao longo
dos anos, o que leva a um aumento tempo desperdicado pelos condutores a procura de lugares livres
e tambem a outros fatores ambientais negativos nao menos importantes, como a emissao de gases
poluentes desnecessarios [1]. Deste modo, o processo de procura de um lugar de estacionamento livre
e um processo que hoje em dia acaba por afetar indiretamente a eficiencia de atividades economicas e
as interacoes sociais dos condutores devido ao tempo perdido pelos condutores, e afeta diretamente o
meio ambiente com a poluicao causada pelos motores de combustao dos carros [2] [3].
Devido a estes principais fatores negativos identificados, hoje em dia ja existem alguns Intelligent
Parking System (IPS) implementados em grandes cidades que permitem informar os condutores acerca
da ocupacao disponıvel nos parques de estacionamento, de modo a que estes possam decidir o melhor
parque e lugar para estacionar o veıculo, reduzindo os efeitos negativos descritos acima. Alguns destes
sistemas tem a capacidade de fornecer indicacoes detalhadas aos condutores acerca da localizacao
dos lugares que se encontram livres [3]. Contudo, muitos deles utilizam equipamento caro, e por vezes
alem disso, excesso de equipamento nomeadamente sensores de detecao de veıculos desnecessarios,
tornando o custo global destes sistemas elevado e consequentemente pouco utilizados ainda. Desta
forma, mesmo com o desenvolvimento das tecnologias que permitem construir este tipo de sistemas, os
custos associados a estes sistemas continuam a limitar a sua aplicacao nos espacos de estacionamento
e os efeitos negativos deste problema continuam a existir.
1.2 Objetivos
Esta dissertacao tem como principal objetivo desenvolver um sistema de parqueamento inteligente,
que permita contabilizar automaticamente a ocupacao dos lugares de parques de estacionamento sem
controlo da entrada de veıculos e ao ar livre, informar os utilizadores acerca da disponibilidade dos
espacos de estacionamento, que tenha baixo custo e que seja de facil instalacao de modo a permitir
que este tipo de sistemas comecem a ter uma maior utilizacao nas grandes cidades. Pretende-se que
o sistema a desenvolver alem da contabilizacao de ocupacao total de um parque, permita fornecer
indicacoes mais detalhadas aos condutores atraves da contabilizacao de varias zonas/regioes da area
2

de estacionamento.
Pretende-se que todos estes objetivos sejam alcancados atraves do uso de tecnologias de redes
descentralizadas e de sensorizacao baseadas nas Internet of Things (IoT), nomeadamente comunicacao
entre dispositivos com tecnologia Wi-Fi em redes Ad-Hoc de malha sem fios (Wireless Mesh Network
(WMN)), com comunicacao multi-salto que permite aumentar o alcance das comunicacoes sem fios
e com equipamentos de baixo custo, mas com grandes potencialidades como e o caso dos equipa-
mentos utilizados como plataformas de computacao, os Raspberry Pi (RPi). O objetivo final passa por
demonstrar que e possıvel construir sistemas de gestao de estacionamentos com custos relativamente
baixos combinando tecnologias e solucoes ja disponıveis no mercado, maximizando as potencialidades
dos equipamentos com o mınimo custo possıvel. No fundo nao se pretende desenvolver uma solucao
revolucionaria, mas uma solucao simples, robusta e de baixo custo de forma a que seja utilizada efetiva-
mente que posteriormente pode ser melhorada e adicionar novos servicos ao sistema sem necessidade
de elevar custos de forma desproporcional.
1.3 Contribuicao
Neste documento vai ser apresentado um sistema de baixo custo que permitira detetar a ocupacao
total e parcial, por zonas, de parques de estacionamento atraves de uma infraestrutura com comunicacoes
sem fios e que tambem devera informar os utilizadores acerca dos espacos disponıveis de modo a mi-
tigar os problemas inerentes a procura de um lugar de estacionamento. O sistema tambem informara
as entidades gestoras do parque acerca de dados de ocupacao, e dados detalhados sobre a entrada
de veıculos de forma a poder facultar uma melhor supervisao, com dados concretos, do espaco de
estacionamento.
A contribuicao que se espera deste trabalho e sobretudo melhorar a experiencia dos condutores/uti-
lizadores atraves da reducao do tempo de procura de um lugar de estacionamento e da construcao um
sistema de informacao que permita disponibilizar informacao em tempo real aos utilizadores. Do ponto
de vista de posicionamento de valor deste sistema no mercado, pretende-se demonstrar que e possıvel
construir hoje em dia sistemas de gestao de zonas de estacionamento inteligentes recorrendo a tecno-
logias e equipamentos de baixo custo. Assim consegue-se aliar o baixo custo, pouca infraestrutura e
facil instalacao a melhoria da qualidade de vida das pessoas.
1.4 Estrutura do Documento
O documento esta estruturado em 6 capıtulos: introducao, trabalho relacionado, arquitetura do sis-
tema, implementacao, testes experimentais, conclusoes e trabalho futuro respetivamente.
3

No primeiro e apresentada a introducao que incluı o enquadramento e motivacao do trabalho, os
objetivos e a contribuicao que esta dissertacao visa.
No segundo e apresentado todo o trabalho relacionado que permita arquitetar um sistema de gestao
de parques de estacionamento inteligentes, tanto indoor como outdoor, tecnicas de localizacao, tecno-
logias de sensores de detecao de veıculos, elementos, tecnologias e protocolos de rede que permitam
comunicacoes sem fios neste tipo de ambientes, exemplos de alguns sistemas de parqueamento con-
vencionais e alguns IPS, e as caracterısticas de solucoes ja existentes no mercado.
No terceiro e apresentada toda a arquitetura do sistema desenvolvido, incluindo a analise de requi-
sitos funcionais e de arquitetura, a arquitetura geral e de software, a escolha de tecnologias utilizadas
e a arquitetura de comunicacoes a utilizar.
No quarto e apresentada a implementacao da arquitetura, tanto a nıvel de hardware como software
e rede.
No quinto sao apresentados os resultados de testes ao sistema, incluindo testes de roteamento e
alcance, testes de software e de aplicacoes para os utilizadores.
No sexto e ultimo, sao apresentadas as conclusoes do trabalho realizado, ideias para o trabalho
futuro a desenvolver para otimizar e melhorar as funcionalidade do sistema, e tambem a adicao de
futuros servicos que o sistema podera disponibilizar aos seus utilizadores.
4
2Trabalho Relacionado
Conteudo
2.1 Tecnicas de Localizacao . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 6
2.2 Tecnologias de Sensores . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 9
2.3 Elementos de Rede . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 13
2.4 Trabalho Relacionado . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 21
5

Neste capıtulo sao apresentados conceitos e tecnicas chave que sao necessarias para uma melhor
compreensao do trabalho que ira ser desenvolvido e para sustentar as escolhas efetuadas no desen-
volvimento da solucao final. Inicialmente irao ser apresentadas as principais tecnicas de localizacao
que podem ser adoptadas para localizacoes exteriores e interiores. Seguidamente serao apresentadas
as tecnologias de sensores existentes; os conceitos e equipamentos necessarios para a construcao
de redes de comunicacao Ad-Hoc, e os princıpios de funcionamento de protocolos de roteamento em
redes de malha sem fios. O capıtulo termina com a apresentacao de varios sistemas de IPS existentes.
2.1 Tecnicas de Localizacao
No contexto desta dissertacao irao ser descritas as principais tecnicas de localizacao para ambien-
tes abertos e para ambientes fechados, que permitem obter uma posicao da entidade a localizar, com
alguma certeza.
2.1.1 Localizacao ao Ar Livre
2.1.1.A GPS e GLONASS
O Global Positioning System (GPS) e o Global Navigation Satellite System (GLONASS) sao os
sistemas com maior sucesso e mais acessıveis aos utilizadores comuns para se conseguir calcular
uma localizacao precisa em ambientes abertos, com linha de vista direta para os satelites.
Estes dois sistemas sao constituıdos por uma constelacao de 24 satelites, que orbitam aproximada-
mente 20200 km acima da Terra e fornecem uma excelente estrutura de triangulacao para determinar
posicoes geograficas. Os receptores GPS e GLONASS, localizados na superfıcie terrestre, usam sinais
radio transmitidos a partir desses satelites para determinar a posicao do receptor, expressa em latitude,
longitude e altitude, ou seja, a tres dimensoes.
Estes sistemas tem varias vantagens como a capacidade de oferecerem uma cobertura global
contınua, serem imunes a condicoes climatericas adversas e permitirem que os recetores calculem
a sua posicao com grande precisao, com um erro inferior a 5 metros.
Alem destes sistemas, hoje em dia com o crescente uso de smartphones e outros dispositivos
moveis semelhantes com receptores GPS (e alguns tambem com receptores GLONASS) incorporados,
existe uma tecnica chamada ”GPS-Assistido”onde e possıvel calcular uma posicao precisa de forma
mais rapida, atraves de informacoes uteis fornecidas pela rede movel que ajuda o receptor a selecionar
apenas os satelites necessarios para calcular aquela posicao especıfica. Portanto, esta tecnica utiliza
informacoes provenientes de mais de uma fonte do dispositivo, a informacao do receptor do dispositivo
que coleta medicoes da constelacao de GPS e tambem informacao proveniente da rede movel. Assim,
6

ao utilizar-se o GPS assistido para se estimar uma posicao, e possıvel reduzir o tempo necessario para
a aquisicao de um sinal e consequentemente o tempo de calculo, eliminando seccoes do espaco de
busca de sinal [4].
Contudo, estes sistemas apresentados so sao eficazes neste tipo de ambiente, noutros tipos de
ambientes nao conseguem fornecer uma localizacao precisa devido a falta de linha de vista direta para
um numero suficiente de satelites que permita estimar uma posicao [5].
2.1.2 Localizacao em Ambientes Fechados
Apesar dos sistemas de localizacao para ambientes exteriores, GPS e GLONASS, serem bastante
fiaveis e precisos para esse tipo de ambientes, tornam-se ineficazes em ambientes cobertos ou interi-
ores. Apesar disso ser uma realidade ha muito tempo, ainda nao existe nenhum sistema amplamente
utilizado neste tipo de ambiente. Na proxima seccao sao apresentadas as principais tecnicas utilizadas
para se conseguir extrair uma localizacao em ambientes fechados.
2.1.2.A Dead Reckoning
A tecnica dead reckoning consiste na utilizacao de informacoes previamente adquiridas sobre a
localizacao e movimentos de um veıculo para prever novas localizacoes. Esta tecnica usa informacoes
provenientes de sensores instalados nos veıculos, geralmente fornecidas pela centralina do veıculo.
Atraves desta tecnica consegue-se determinar uma nova posicao do veıculo usando a velocidade media
do veıculo e a velocidade em curva. Nesta ultima, as mudancas de direcao do veıculo sao calculadas
atraves da leitura individual da velocidade das rodas e deste modo as mudancas de direcao podem
ser identificadas. Por exemplo, numa curva a esquerda a velocidade da roda direita e maior porque a
distancia que deve cobrir e maior.
Tambem e possıvel utilizar esta tecnica recorrendo a um smartphone com receptor GPS, recorre-se
ao acelerometro para calcular a distancia percorrida e ao giroscopio para analisar a orientacao tomada
pelo veıculo [6].
Esta tecnica e util somente quando a localizacao do veıculo num determinado ponto de partida e
conhecida e quando a dinamica do movimento do veıculo e bastante constante. O erro de estimativa
pode ser muito grande quando se usa esta tecnica por um perıodo longo de tempo, porque so se
estima a localizacao do veıculo com base na predicao e estimativas anteriores. Se essas estimativas
tem sempre um erro associado, ao longo do tempo os erros vao-se acumulando levando a um erro cada
vez maior e por fim ao calculo de uma posicao errada.
Normalmente, para a obtencao de de resultados mais precisos quando se usa esta tecnica, usam-
se filtros de posicionamento. Os filtros de posicionamento mais populares utilizados para ajudar na
filtragem de erros nesta tecnica sao filtro de kalman e filtro de partıculas que permitem minimizar erros e
7
obter uma posicao com melhor precisao, sendo que o ultimo proporciona resultados com maior precisao
[7].
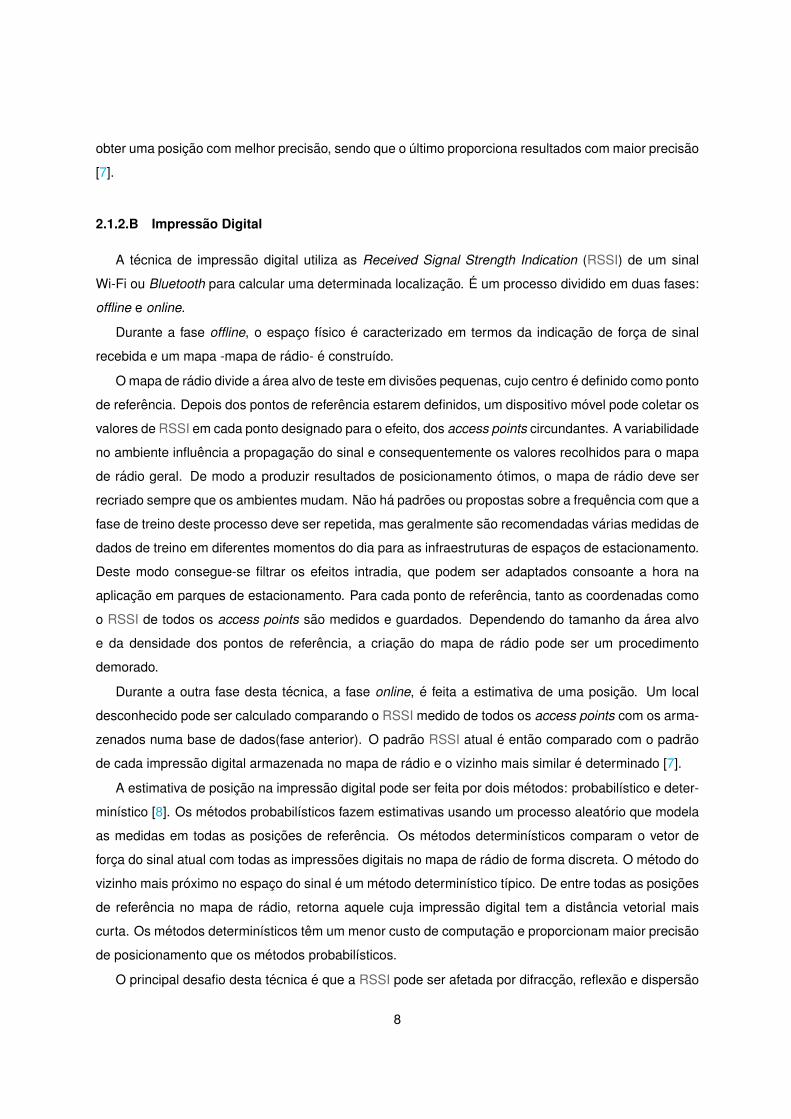
2.1.2.B Impressao Digital
A tecnica de impressao digital utiliza as Received Signal Strength Indication (RSSI) de um sinal
Wi-Fi ou Bluetooth para calcular uma determinada localizacao. E um processo dividido em duas fases:
offline e online.
Durante a fase offline, o espaco fısico e caracterizado em termos da indicacao de forca de sinal
recebida e um mapa -mapa de radio- e construıdo.
O mapa de radio divide a area alvo de teste em divisoes pequenas, cujo centro e definido como ponto
de referencia. Depois dos pontos de referencia estarem definidos, um dispositivo movel pode coletar os
valores de RSSI em cada ponto designado para o efeito, dos access points circundantes. A variabilidade
no ambiente influencia a propagacao do sinal e consequentemente os valores recolhidos para o mapa
de radio geral. De modo a produzir resultados de posicionamento otimos, o mapa de radio deve ser
recriado sempre que os ambientes mudam. Nao ha padroes ou propostas sobre a frequencia com que a
fase de treino deste processo deve ser repetida, mas geralmente sao recomendadas varias medidas de
dados de treino em diferentes momentos do dia para as infraestruturas de espacos de estacionamento.
Deste modo consegue-se filtrar os efeitos intradia, que podem ser adaptados consoante a hora na
aplicacao em parques de estacionamento. Para cada ponto de referencia, tanto as coordenadas como
o RSSI de todos os access points sao medidos e guardados. Dependendo do tamanho da area alvo
e da densidade dos pontos de referencia, a criacao do mapa de radio pode ser um procedimento
demorado.
Durante a outra fase desta tecnica, a fase online, e feita a estimativa de uma posicao. Um local
desconhecido pode ser calculado comparando o RSSI medido de todos os access points com os arma-
zenados numa base de dados(fase anterior). O padrao RSSI atual e entao comparado com o padrao
de cada impressao digital armazenada no mapa de radio e o vizinho mais similar e determinado [7].
A estimativa de posicao na impressao digital pode ser feita por dois metodos: probabilıstico e deter-
minıstico [8]. Os metodos probabilısticos fazem estimativas usando um processo aleatorio que modela
as medidas em todas as posicoes de referencia. Os metodos determinısticos comparam o vetor de
forca do sinal atual com todas as impressoes digitais no mapa de radio de forma discreta. O metodo do
vizinho mais proximo no espaco do sinal e um metodo determinıstico tıpico. De entre todas as posicoes
de referencia no mapa de radio, retorna aquele cuja impressao digital tem a distancia vetorial mais
curta. Os metodos determinısticos tem um menor custo de computacao e proporcionam maior precisao
de posicionamento que os metodos probabilısticos.
O principal desafio desta tecnica e que a RSSI pode ser afetada por difraccao, reflexao e dispersao
8

nos ambientes de propagacao indoor conduzindo a uma variacao frequente dos valores de RSSI.
2.1.3 Sıntese e Discussao
Para areas de estacionamento ao ar livre e sem edifıcios de grandes dimensoes em redor, tanto o
GPS como o GLONASS e o GPS assistido podem fornecer uma localizacao rapidamente e com um
erro de estimacao baixo. Sao sistemas precisos e fiaveis para determinar a localizacao em areas de
estacionamento ao ar livre e para efetuar uma possıvel orientacao dos condutores ate um determinado
local com lugares de estacionamento disponıveis, que o sistema lhes possa indicar. No entanto, em
ambientes fechados/cobertos ou com com muitos edifıcios a volta, a cobertura de satelite e fraca e nao
e por isso possıvel calcular a localizacao dos utilizadores, ja que o numero de satelites descobertos
pelos recetores nao sao suficientes. Dado estes constrangimentos, estas tecnicas nao sao adequadas
para se obter uma localizacao em ambientes interiores/fechados devido a falta de linha de visao para
os satelites.
Para areas de estacionamento indoor, a tecnica da impressao digital pode ser um bom metodo para
localizar um dispositivo estatico equipado com Bluetooth ou Wi-Fi. Hoje em dia, cada smartphone vem
equipado com estas tecnologias o que torna possıvel a utilizacao desta tecnica em grande escala. No
entanto, para a localizacao no interior do veıculo, em movimento, e melhor ter um sistema hıbrido que
combine as tecnicas dead reckoning e impressao digital para obter-se resultados mais precisos, parti-
cularmente no contexto do estacionamento em que a precisao da localizacao e um dado importante.
No ambito em que estas tecnicas sao abordadas, este possıvel sistema hıbrido deveria correlacionar
os dados das duas tecnicas para encontrar uma estimativa de posicao o mais precisa possıvel.
2.2 Tecnologias de Sensores
A detecao de veıculos imobilizados e tipicamente utilizada em aplicacoes de IPS, onde o obje-
tivo e controlar o estado de ocupacao dos lugares de estacionamento. Ao contrario dos veıculos em
movimento, onde a janela de tempo para detetar um veıculo e pequena, os veıculos parados podem
permanecer proximos do sensor por um longo perıodo de tempo.
As proximas seccoes detalham os tipos de sensores frequentemente utilizados para a detecao de
veıculos em parques de estacionamento.
2.2.1 Sensor Infravermelho Passivo
Estes sensores conseguem medir a radiacao infravermelha de objetos presentes na sua linha de
alcance. O princıpio de funcionamento por detras deste sensor, e que todos os objetos com temperatura
9

superior a zero absoluto emitem energia calorıfica em forma de radiacao. A quantidade de radiacao
emitida por um objeto depende da sua superfıcie e da temperatura do meio ambiente [9].
Nao e emitida nenhuma energia por parte do sensor, daı ser passivo, para fazer a detecao de um
objeto simplesmente aguarda por uma radiacao. O sensor depois converte a alteracao da radiacao que
recebe numa carga(voltagem) de saıda que indica a presenca de um objeto. O alcance deste tipo de
sensores e ate cerca de 10 metros.
Este tipo de sensor tem a grande vantagem de ser eficiente do ponto de vista de consumo energetico,
uma vez que nao e feito o scanning do ambiente circundante e consequentemente tambem nao e feito
o processamento desnecessario de dados. Contudo, existem problemas relacionados com o excesso
de sensitividade as alteracoes do meio que podem conduzir a ocorrencia de falsos positivos, como por
exemplo exposicao a luz solar e alteracoes da temperatura ambiente. Devido a estes problemas, a
utilizacao deste tipo de sensores e mais indicada para ambientes cobertos.
2.2.2 Sensor Magnetico
O princıpio de funcionamento deste tipo de sensores tem como base a medicao da variacao do
campo magnetico da Terra atraves dos elementos de ferro de um objeto. O alcance deste tipo de
sensor e baixo, pois e necessario o objeto estar perto do sensor para se conseguir ter uma interacao
magnetica. Estes sensores sao tipicamente de baixa potencia e conseguem fornecer uma detecao bas-
tante precisa. Com estas propriedades sao indicados para detecao de veıculos, principalmente em am-
bientes exteriores. Contudo sao suscetıveis a interferencias, por exemplo outros veıculos numa regiao
proxima que podem originar uma interacao magnetica, que podem levar a originar falsos positivos. Por
outro lado, estes erros podem ser facilmente detetados uma vez que o campo magnetico produzido por
um veıculo que esteja por cima do sensor e substancialmente maior que o campo produzido por um
veıculo que esteja ao lado do sensor [2] [10].
2.2.3 Sensor Ultrassonico
Este tipo de sensor emite uma onda sonora e espera pela reflexao dessa onda para conseguir
medir a distancia ate ao objeto. Como princıpio de funcionamento tem-se como base a velocidade do
som ser constante. Portanto, o tempo de propagacao da onda emitida pelo sensor ate ao objeto e
voltar e diretamente proporcional a distancia que o objeto esta do sensor [2] [9]. Este tipo de sensor
e capaz de detetar quase todo o tipo de objetos que tenham refletividade acustica suficiente. Tem
como desvantagem a menor capacidade de detetar objetos com materiais que absorvam o som, como
espuma, borrachas, roupas, etc. Por isso, este sensor acaba por revelar ser um bom metodo para a
detecao de veıculos visto que exteriormente, estes sao maioritariamente constituıdos por materiais que
10

nao absorvem(chapa). Este tipo de sensor tem um custo extremamente baixo e resultados bastante
fiaveis.
2.2.4 Identificacao por Radiofrequencia
Atraves desta tecnologia, Radio Frequency Identification (RFID), e possıvel armazenar e recuperar
dados atraves de um circuito integrado compatıvel com radio frequencia. E utilizado um princıpio de
medicao de proximidade. O sistema e composto por um leitor e por uma etiqueta designada tag que
usa um circuito de radio frequencia e um protocolo para transmitirem dados. As tags contem informacao
guardada eletronicamente e existem dois tipos: passivas e ativas.
As tags RFID passivas funcionam sem bateria, nao tem uma fonte de energia interna. Alternativa-
mente, sao alimentados pela energia eletromagnetica transmitida a partir do leitor. Estas podem ser
usadas para controlar o acesso de veıculos a parques de estacionamento. Este tipo de tags tem a
grande vantagem de ter um preco mais baixo que as ativas, o que faz com que o uso de sistema seja
uma alternativa mais economica [2].
As tags ativas sao pequenos dispositivos alimentados por uma bateria, que conseguem receber
e enviar informacoes via radio. Estas transmitem ativamente sua identificacao(sinal) em resposta a
uma interrogacao. Sao amplamente usadas como ”beacons”para manter dados com precisao sobre a
localizacao em tempo real dos dispositivos que contem a tag ou em ambientes de alta velocidade, como
a cobranca em portagens ou porticos, ou acesso a espacos de estacionamento(em Portugal temos o
grande exemplo da ViaVerde) [10]. A grande vantagem das tags ativas e o alcance muito maior que as
passivas, contudo tem a desvantagem do custo ser muito mais elevado.
O sistema de identificacao por radiofrequencia consegue providenciar seguranca e rapidez no con-
texto do acesso e saıda de veıculos a parques de estacionamento.
2.2.5 Reconhecimento de Imagem
Atraves desta tecnica, hoje em dia, e possıvel fazer o processamento de dados de uma imagem
para detetar/analisar uma ou varias condicoes especıficas. A captacao de imagens deve ser feita com
recurso a uma camera. Varios tipos de objetos podem ser reconhecidos atraves deste tipo de analise.
A detecao efetuada e baseada em processamentos de dados relativamente simples e rapidos, usados
para detetar pequenas regioes de interesse de uma imagem. Posteriormente, as regioes de interesse
selecionadas, que ja passaram por uma “triagem”, podem ser analisadas com tecnicas mais exigentes
computacionalmente para produzir uma interpretacao e identificacao com maior rigor das regioes de
interesse [2].
O custo destas solucoes normalmente e elevado e a enorme quantidade de dados gerados sao
11

difıceis de transmitir atraves de multiplos saltos numa rede sem fios. Com estes constrangimentos e
tambem com o movimento de outros objetos num espaco de estacionamento, incluindo pessoas, redu-
zem a aplicabilidade das cameras de vıdeo sozinhas para fazer gestao de parques de estacionamento
pois a quantidade de dados gerados com o elevado numero de falsos positivos vai produzir um proces-
samento de dados incomportavel para os sistemas na maioria das vezes.
No entanto, este tipo de sistemas fornecem algumas informacoes importantes sobre cenas criminais
e outras questoes de seguranca relacionadas com o espaco onde estao instalados, que podem ser uteis
para considerar numa solucao de gestao de locais de estacionamento.
2.2.6 Sıntese e Discussao
A partir do conjunto de tipos de sensores que foram estudados no contexto do trabalho, os sensores
magneticos e ultrassonicos revelam ser os mais adequados para a detecao de ocupacao dos espacos
de estacionamento.
Os sensores magneticos sao normalmente usados e instalados no chao, colocados perto dos carros,
pois medem a variacao do campo magnetico da Terra resultante da presenca do carro. Os sensores
produzem resultados bastante confiaveis, e os resultados produzidos nao sao afetados por alteracoes
das condicoes climatericas.
Os sensores ultrassonicos geralmente sao usados em parques cobertos e costumam ser instalados
em lugares de estacionamento individuais com um sensor na posicao central. Estes sensores detetam a
presenca de um objeto de forma confiavel, mas sao sensıveis a mudancas nas condicoes climatericas.
Devido a isso, para instala-los em areas de estacionamento ao ar livre, e necessaria uma protecao de
forma a manter o bom funcionamento dos sensores para evitar falsas detecoes e manter a operacao de
detecao correta.
Os veıculos equipados com tags RFID podem ser detetados pelos leitores instalados em lugares
de estacionamento ou no acesso aos parques. Os leitores sao usados para transmitir o sinal de radio
que e codificado para interrogar a etiqueta. A etiqueta responde com identificacao depois de receber
a interrogacao. Esta tecnologias tambem podem ajudar os veıculos a fazer check-in e check-out dos
parques de estacionamento em menos tempo, e em condicoes seguras e convenientes. Este e um
sistema seguro e que fornece alguns dados importantes aos gestores de estacionamento, mas exige
que cada utilizador ou carro tenha uma tag.
Por ultimo, o reconhecimento da imagem pode ser aplicado para detecao de lugares livres de estaci-
onamentos, de veıculos, e tambem para seguranca. Esta solucao nao requer a instalacao de sensores
em cada lugar de estacionamento, em vez disso, usa um sistema de camera de vıdeo para detetar
e analisar regioes e objetos de interesse. E uma solucao que pode ser economicamente vantajosa,
sobretudo quando e aplicada em parques de estacionamento de grandes dimensoes evitando o custo
12

associado a uma quantidade elevada de sensores que seriam necessarios para fazer a detecao de
ocupacao de todos os lugares. No entanto, e necessaria a instalacao de cameras e tecnicas de proces-
samento de imagem fiaveis para comparar quadros consecutivos e identificar as diferencas entre locais
vazios e ocupados, e ter em custa todo o custo computacional que esta tecnica tem associado.
2.3 Elementos de Rede
Nesta seccao sao apresentados diferentes tipos de tecnologias sem fios de elementos de rede que
devem ser necessarias para fazer uma gestao eficaz de espacos de estacionamento. Isso inclui as pla-
taformas de computacao e as tecnologias e protocolos de rede necessarios para efetuar a transferencia
de dados com outros dispositivos.
2.3.1 Plataformas de Computacao
Apesar de existirem hoje em dia uma grande diversidade de plataformas disponıveis e acessıveis
quer do ponto de vista de oferta, quer de custos no mercado, so se ira focar neste trabalho em dois
tipos de sistemas embebidos de baixo custo e amplamente utilizados em ambito academico e nao so,
o Arduino e o RPi.
2.3.1.A Arduino
O Arduino e um microcontrolador que visa monitorar e controlar dispositivos pequenos como senso-
res e atuadores.
Nao executa um sistema totalmente operacional, e geralmente usa uma linguagem de programacao
baseada em c/c ++. O codigo e interpretado pelo firmware.
A unica interface de comunicacao que vem da origem e a interface USB. Todos as outras interfaces
como Wi-Fi, Bluetooth, Zigbee e Ethernet so podem ser adicionados separadamente por placas com-
patıveis que usam placas de expansao de circuito impresso, que se encaixam nos cabecotes de pinos
Arduino normalmente fornecidos.
Estes dispositivos tem a capacidade de suportar diversos tipos de sensores com varias aplicacoes,
destacando-se os ultrassons, magneticos, infravermelhos passivo, opticos, temperatura, acusticos, etc.
2.3.1.B RaspberryPi 3 Model B
E um mini computador concebido para todos os propositos. Tem um sistema operativo proprio e
otimizado para as suas caracterısticas com base Linux, o ”Raspbian”. Suporta tambem outros sistemas
operativos Linux.
13

Esta plataforma oferece ao utilizador a possibilidade de desenvolver programas em varias lingua-
gens como Python, C, C++, Java e Ruby. Este modelo ja traz integrado varias interfaces de comunicacao,
Wi-Fi(IEEE 802.11n), Bluetooth Low Energy (BLE), porta Ethernet e USB. Depois podem ser adicio-
nados varios modulos extra, dongles, por exemplo modulo de comunicacao Global System for Mobile
Communications (GSM)/General Packet Radio Service (GPRS) alem de suportar ligacoes a diversos ti-
pos de sensores existentes do mercado, normalmente, atraves da interface General Purpose Input/Out-
put (GPIO).
2.3.1.C Sıntese e Discussao
Dada a natureza do problema e do contexto do trabalho, a partida a possibilidade mais economica
e competitiva sera o uso do RPi 3 como plataforma de computacao, dado que este oferece uma vasta
gama de interfaces de comunicacao alem do sistema operativo ”Raspbian”ser uma grande mais valia
para uma instalacao completa de software necessario para o sistema.
2.3.2 Tecnologias de Rede
Nesta seccao sao descritas as principais tecnologias sem fios existentes no ambito deste trabalho,
para poder transmitir dados entre as plataformas computacionais. Pretende-se comparar as principais
solucoes existentes e que se podem aplicar no ambito do sistema a desenvolver.
2.3.2.A Zigbee
Esta tecnologia, conhecida tambem como a norma IEEE 802.15.4, opera na banda dos 2.4GHz
usada para criar sobretudo Wireless Personal Area Network (WPAN), ou seja redes “pessoais” sem
fios com modulos radio digitais pequenos e de baixo consumo. Esta tecnologia oferece encriptacao de
dados, associacao e autenticacao, protocolos de roteamento e servicos de aplicacao. Uma rede Zigbee
e composta por nos coordenadores, roteadores e dispositivos finais. Sucintamente, o no coordenador
e responsavel pela gestao geral da rede, os nos roteadores, que podem ser dispostos em arvores ou
malha, sao responsaveis por retransmitir dados e por aumentar a cobertura da rede, e por fim os dispo-
sitivos finais sao usados para transferencia de dados de (e para) sensores e atuadores. Normalmente
um dispositivo com modulo Zigbee instalado tem um alcance maximo entre 75 e 100 m e tem uma
largura de banda de 250 Kb/s e uma latencia de 30ms. As vantagens mais importantes da tecnologia
Zigbee sao o baixo consumo de energia, alcance e seguranca.
14

2.3.2.B Bluetooth Low Energy
Esta tecnologia, tambem conhecida como a norma IEEE 802.15.1, surge como uma otimizacao da
classica tecnologia Bluetooth e pretende diminuir drasticamente o consumo mantendo uma faixa de
comunicacao identica. Isso hoje em dia e fundamental com a nova realidade das IoT e da comunicacao
Peer-to-Peer (P2P).
Como a tecnologia Zigbee, a BLE opera na banda Industrial, Scientific and Medical (ISM) 2,4 GHz.
Tem uma latencia muito baixa, cerca de apenas 3 ms, uma taxa de transferencia de dados de 1Mb/s e
uma faixa de alcance ate 30 m. No entanto, nao fornece seguranca nem recursos de multiplos saltos
limitando a sua escalabilidade. Usa um protocolo de comunicacao com topologia em estrela, mas
apenas suporta um numero maximo de 8 nos. Um no e coordenador e os outros sete sao nos clientes.
Quando comparados ao Zigbee, os dispositivos BLE sao mais baratos, tem uma menor faixa de
comunicacao e menor consumo de energia (entre 0.01W e 0.5W). Em media, o consumo de energia e
quatro vezes menor do que a tecnologia Zigbee.
2.3.2.C IEEE 802.11 b/g/n
O Wi-Fi representa um conjunto de padroes IEEE 802.11 para comunicacoes sem fios em WLAN,
que atua no espectro nao regulamentado. Este padrao suporta redes geridas por uma estrutura con-
figurada em que a rede esta implementada com pontos de acesso estaticos, e por outro lado tambem
suporta redes Ad-Hoc onde cada elemento da rede participa de forma independente na rede.
O IEEE 802.11b opera ate 11Mbit/s, na banda ISM e usa a mesma frequencia de sinalizacao de
radio nao regulamentada que o padrao 802.11 original. Sendo nao regulamentada, o uso desta norma
IEEE 802.11b pode levar a ocorrencia de interferencias com outros equipamentos que usem a mesma
faixa de frequencia, nomeadamente a este nıvel dispositivos Zigbee e Bluetooth.
O IEEE 802.11g tem velocidade maxima de 54Mbit/s e usa igualmente a frequencia de 2,4 GHz.
O 802.11g e compatıvel com o 802.11b, o que significa que os pontos de acesso 802.11g funcionarao
com adaptadores de rede sem fio 802.11b e vice-versa. Tem o mesmo intervalo de alcance da norma
IEEE 802.11.b.
O IEEE 802.11n ja pode usar duas faixas de frequencia, a convencional de 2,4 GHz e tambem uma
de 5 GHz. Consegue ter uma velocidade maxima superior, de 150Mbit/s. Foi projetado para melhorar o
802.11g na quantidade de largura de banda suportada pela utilizacao de multiplos sinais e antenas sem
fios. Tambem oferece uma melhor faixa de alcance, 250 m para locais externos, em relacao aos padroes
Wi-Fi anteriores devido ao aumento da intensidade do sinal. E compatıvel com IEEE 802.11b/g.
15

WAVE - IEEE 802.11.p
O IEEE 802.11p e uma norma aprovada para o sistema de comunicacao veicular para o padrao IEEE
802.11 para adicionar acesso sem fios em ambientes veiculares, comunicacao com e entre veıculos.
Este protocolo introduz caracterısticas necessarias para o padrao IEEE 802.11 suportar aplicacoes de
Intelligent Transportation Systems (ITS).
Este tipo de comunicacao visa essencialmente a troca de dados entre veıculos que circulam na
via a uma velocidade consideravel (comunicacoes Vehicle-to-Vehicle (V2V)), ou seja os veıculos estao
em constante movimento, e entre os veıculos e a infraestrutura rodoviaria (comunicacoes Vehicle-to-
Infrastructure (V2I)). Assim, esta tecnologia permite que os veıculos transmitam informacoes aos nos
vizinhos (veıculos ou infraestruturas). Para facilitar esse tipo de comunicacao, o IEEE 802.11.p funciona
na faixa ”ITS”licenciada de 5,9 GHz e tem 75MHz alocados para esse fim (5.85-5.925 GHz).
2.3.2.D GSM & GPRS
O GSM e um sistema de telecomunicacoes que e amplamente utilizado em todo o Mundo. E o sis-
tema de telecomunicacoes moveis digital mais bem sucedido ate aos dias de hoje e permite a integracao
de diferentes servicos de voz e dados.
O GPRS fornece capacidade de comutacao de dados para GSM. Anteriormente, o envio de trafego
de dados exigia a abertura de uma ligacao de voz, o envio de dados e posteriormente o termino da
ligacao. O GPRS permite que os utilizadores abram uma ligacao de dados persistente. Tambem esta-
belece uma arquitetura de sistema para transportar o trafego de dados. O GPRS possui uma taxa de
transferencia entre 21,4 e 22,8 Kb/s e pode combinar ate 8 ligacoes GSM.
2.3.2.E Sıntese e Discussao
Para realizar uma rede de sensores sem fios e enviar os dados detetados a um sistema central, e
necessario construir uma rede robusta. As tecnologias de rede mais comuns e eficientes para fazer isso
sao Zigbee e BLE. O Zigbee oferece maiores capacidades de configuracao de rede (menos restricoes)
e maior alcance do que o BLE, contudo este ultimo oferece maior taxa de dados e menos consumo de
energia.
Contudo, apesar das duas tecnologias de rede referidas acima serem opcoes eficientes, nao sao as
mais baratas (Zigbee) ou as mais escalaveis (BLE). Portanto e preciso explorar outro tipo de solucoes.
Das tecnologias estudadas e visto que algumas plataformas de computacao ja trazem um modulo Wi-
Fi IEEE 802.11n incluıdo, torna-se mais barato fazer a comunicacao atraves deste tipo de tecnologia,
que oferece um alcance razoavel, elevada velocidade de transferencia de dados e compatibilidade
com diversos tipos de dispositivos. A tecnologia de GSM/GPRS pode funcionar como backup para
16

transmissao de dados caso a tecnologia principal escolhida falhe.
Para transmitir a informacao de detecao num parque de estacionamento, primeiro e necessario
agregar os dados a transmitir numa plataforma de computacao, como o Arduino ou o RPi. Entao
depois disso, a plataforma de computacao transmitira os dados para outro no atraves de uma tecnologia
sem fios. O RPi para projetos de maior dimensao e que envolvam comunicacoes de maior alcance
e uma melhor escolha, porque tem maior capacidade de processamento e tem varios modulos de
comunicacao ja incluıdos na plataforma evitando a escalada de custos desnecessariamente.
2.3.3 MANET
Neste tipo de rede, Mobile Ad Hoc Network (MANET), sem fios nao e necessaria a existencia de
um ponto de acesso comum, uma entidade central, para haver ligacao aos dispositivos que estao na
rede. Nas redes convencionais, os pontos de acesso sao os locais para onde normalmente todas as
comunicacoes convergem e onde sao providenciadas informacoes de roteamento para outros nos da
rede.
Neste tipo de rede todos os dispositivos da rede funcionam como se fossem roteadores, comuni-
cando diretamente entre si e encaminhando informacoes provenientes de dispositivos vizinhos. Estas
propriedades tornam este tipo de rede mais flexıvel que as convencionais, e pode-se montar uma rede
destas de forma mais rapida, facil e em qualquer lugar que as redes convencionais.
2.3.4 Rede de Malha sem Fios
As WMN, uma variante das MANET, sao redes de comunicacao nao estruturadas entre nos radio
numa topologia de malha que tem a grande vantagem sobre as tradicionais Wireless Local Area Network
(WLAN) a sua facil instalacao, com maior confiabilidade e flexibilidade, e de terem a capacidade de se
auto formar e auto configurar com os restantes nos da rede, estabelecendo uma rede Ad-Hoc e man-
tendo a conectividade da malha [11].
Estas redes tem uma topologia nao estruturada baseadas em redes Ad-Hoc, e podem ser estabele-
cidas usando Bluetooth, Wi-Fi, entre outras tecnologias de comunicacao sem fios validas.
Neste tipo de rede e importante conhecer dois tipos de nos existentes: roteadores da malha e
clientes da malha [12].
Os roteadores de malha tem funcoes especıficas de roteamento para suportar a rede. Os roteadores
sao nos pouco moveis e sao considerados como o backbone da malha para os clientes. Tem varias
interfaces de comunicacao wireless que podem ser de diferentes tipos de tecnologia.
Os clientes da malha tem apenas uma interface, mas suportam funcoes adicionais e podem atuar
tambem como roteadores.
17

Este tipo de rede exige mecanismos de roteamento eficientes, estes mecanismos sao de extrema
importancia para que seja assegurada a transmissao fiavel dos pacotes ao longo de uma longa topo-
logia de rede. Quando um determinado no for abaixo, a rede tem de ser capaz de se auto adaptar de
modo a que as comunicacoes entre os restantes nos continue ativa e nao fique comprometida.
2.3.4.A Tipos de Roteamento
Os nos de uma rede destas comunicam uns com os outros e estabelecem rotas com nos vizinhos e
nao vizinhos(nao alcancaveis diretamente). Os protocolos de roteamento sao responsaveis por desco-
brir, estabelecer e manter essas rotas entre todos os nos da rede. Deste modo, o roteamento e um fator
primordial para retransmitir os pacotes de dados desde a fonte ate ao destino. De modo a garantir uma
boa performance, as metricas de roteamento devem satisfazer requisitos gerais como escalabilidade,
fiabilidade, flexibilidade, throughput, load balancing, controlo de trafego e eficiencia. Portanto, os proto-
colos de roteamento devem ser responsaveis por manter as comunicacoes e adaptar-se as mudancas
dinamicas na topologia da rede.
Existem dois metodos de roteamento possıveis neste tipo de redes: link state routing e distance
vector routing respetivamente. No primeiro metodo, os nos inundam a rede com um mapa dos nos
vizinhos ligados. Todos os nos na rede usam essas informacoes para calcular o mapa global da rede,
contendo o caminho logico mais curto para cada no. O calculo da topologia e realizado sempre que
ocorre uma mudanca na rede e pode ser uma tarefa complexa. Ao usar o segundo metodo, cada no na
rede conhece apenas a direcao(ou o proximo salto) ao qual um pacote de dados deve ser encaminhado.
O proximo salto e escolhido com base na menor contagem de saltos e melhor conectividade em direcao
a um no. Este segundo metodo nao calcula o mapa completo da rede e, consequentemente requer
menos recursos e menos conhecimento sobre a rede. Portanto, as decisoes de roteamento nem sempre
podem ser as melhores.
Os protocolos para este tipo de redes dividem-se em tres famılias: proativos, reativos e hıbridos.
No roteamento proativo os caminhos sao estabelecidos para todos os nos destino independente-
mente de serem ou nao precisas essas rotas para transmitir dados. Para cada no e mantida uma
tabela de roteamento que representa a topologia da rede inteira que e regularmente atualizada. Deste
modo tem de ser continuamente avaliadas as rotas para todos os nos alcancaveis de forma a manter
informacoes de roteamento atualizadas e consistentes. A grande vantagem deste tipo de roteamento e
que os nos conseguem obter rapidamente informacao de roteamento e estabelecer um caminho, pois
em cada instante o no sabe como alcancar outro no da mesma rede. Assim, consegue-se diminuir o
atraso de tempo para descobrir rotas atraves da nao necessidade de trocar mensagens periodicamente
na rede que consome largura de banda.
No roteamento reativo as rotas sao estabelecidas on-demand, ou seja, os nos nao estao informa-
18

dos acerca da topologia da rede. O processo de descoberta de rota e iniciado quando o no fonte
requer(inunda a rede com pedidos) a rota para um no destino. O procedimento de descoberta de uma
rota termina quando a rota e descoberta ou se nao for encontrada nenhuma rota possıvel. Este tipo de
roteamento leva a uma maior latencia devido ao facto da rota ter de ser descoberta mas tambem acaba
por diminuir a sobrecarga de controlo de trafego na rede.
Como nas WMN a mobilidade dos nos e mınima, os protocolos de roteamento reativos acabam por
ter melhor escalabilidade que os protocolos de roteamento proativos.
No roteamento hıbrido procura-se combinar as vantagens dos dois tipos de roteamento descritos
acima. Combina-se o uso de diversos protocolos de roteamento, por exemplo usando protocolos reati-
vos na area de rede Ad-Hoc e protocolos proativos na wireless backbone para manter as rotas para os
nos vizinhos.
Contudo, este tipo de redes tambem sofre de algumas limitacoes devido ao meio de comunicacao
ser partilhado o que limita o desempenho do roteamento; a introducao dos protocolos de roteamento
introduz sobrecarga na rede devido a necessidade de descobrir rotas e nos, e as ligacoes sao perdidas
temporariamente quando um no de roteamento desaparece.
2.3.4.B Principais protocolos existentes
Os diferentes protocolos de roteamento tentam abordar os problemas existentes neste tipo de re-
des com diferentes metodos. Independentemente do metodo de cada protocolo, todos eles tentam
minimizar as sobrecargas e maximizar a robustez e a conectividade da rede. Os principais protocolos
existentes neste tipo de rede serao brevemente descritos em baixo.
A – Roteamento reativo O Adhoc On-demand Distance Vector (AODV) e um protocolo baseado
num vector de distancias como o nome indica, que cria e mantem rotas apenas quando sao solicitadas.
O princıpio de funcionamento baseia-se nos pedidos enviados em broadcast acerca de rotas para um
no destino pretendido, e seleciona depois a melhor rota que e retornada. Este mecanismo tambem
permite evitar a sobrecarga da rede, uma vez que as rotas so sao pedidas quando existem pacotes
de dados para serem transmitidos. Este protocolo tem uma aplicabilidade boa em redes de sensores
devido a esta funcionalidade descrita, pois assim permite evitar consumo de energia desnecessario.
B – Roteamento proativo O Better Approach to Mobile Adhoc Network (B.A.T.M.A.N.)-advanced e
o Optimized Link State Routing (OLSR) sao protocolos principalmente usados em redes moveis com
uma topologia de rede altamente dinamica. Outro grande uso para estes dois protocolos e o uso em
redes de informacao em veıculos, as chamadas Vehicular Ad Hoc Networks (VANETs). Estes protocolos
sao muito utilizados e podem ser importantes no contexto do desenvolvimentos das ITS.
19

O OLSR e um dos protocolos mais utilizados neste tipo de redes muitas vezes implementado em
muitos mesh routers que correm em sistemas Linux. Utiliza enderecos Internet Protocol (IP) e usa um
tipo de roteamento link state. Envia mensagens aos nos de controlo de topologia de forma a evitar
mudancas dos nos invalidadas, e de forma a evitar que essas mensagens de controlo introduzam
sobrecarga na rede. Essas mesmas mensagens so podem ser enviadas a nos que distem ate 1, 2 ou
3 saltos do no de origem.
C – Roteamento hıbrido O protocolo Hybrid Wireless Mesh Network (HWMN), tambem definido
como o protocolo standart para a norma IEEE 802.11s definida para redes de malha sem fio. Este
protocolo baseia-se na combinacao do protocolo AODV e no roteamento baseado em arvore, fornece
a funcionalidade de encaminhamento direto e multi-hop para comunicacao movel ad-hoc. Na camada
de ligacao, o tipo de encaminhamento e selecionado com base caminhos pre-determinados. O HWMN
acaba entao por ser a combinacao do roteamento reativo (em que se conhece a topologia inteira da
rede) e proativo. E uma adaptacao do AODV que opera na camada 2 Open Systems Interconnection
(OSI), que usa enderecos MAC em vez de um endereco IP para encaminhar os pacotes de dados da
origem para os destinos.
2.3.4.C B.A.T.M.A.N. - advanced
Este e um protocolo de roteamento em redes de malha sem fios, que opera na camada 2 do modelo
OSI, camada de enlace, que utiliza os enderecos Media Access Control (MAC) para encontrar caminhos
para o(s) no(s) destino. Os protocolos que operam na camada 2 nao transportam apenas informacao
de roteamento, mas tambem lida com trafego de dados [11].
E um protocolo proativo que utiliza o conceito Destination Sequenced Distance Vector (DSDV) em
que os nos participantes na rede mantem uma lista com a distancia para todos os outros nos na rede.
Cada no seleciona o proximo salto, o proximo no a que se deve ligar, tendo como criterio a distancia
mınima. Visto que e um protocolo proativo, a informacao da rede esta descentralizada, pois a tabela de
roteamento encontra-se distribuıda pelos nos que tenham potenciais saltos para outros nos. O objetivo
passa por disseminar a informacao de modo a ter-se a melhor rota entre todos os nos participantes na
malha, mas sem nunca calcular a rota total, pois como a informacao da rede encontra-se descentrali-
zada a topologia generica da rede nunca e necessaria.
Neste protocolo, que vem instalado no sistema operativo que e utilizado nos RPi por exemplo, cada
no e atualizado e mantem a informacao acerca do melhor vizinho para transmitir os pacotes de dados.
O criterio para decidir o melhor vizinho e baseado na menor distancia calculada entre os nos. Cada no
tambem deve ser capaz de identificar novos nos vizinhos. Alem da lista de distancias para outros nos,
cada no mantem um numero sequencial que atribuıdo ao no destino para conseguir distinguir novas de
20

antigas rotas. Todos os nos enviam mensagens periodicamente em broadcast de modo a atualizarem
as tabelas de roteamento.
Visto que este protocolo opera sempre na camada de enlace do modelo OSI, nao sao transportadas
apenas as informacoes de roteamento, mas tambem sao transportados pacotes de dados. Cada pacote
de dados e encapsulado e encaminhado ate chegar ao destino emulando um switch de rede virtual de
todos os nos que participam. Este protocolo faz a emulacao de uma bridge Ethernet, por isso todos os
nos aparentam estar associados a uma ligacao direta para todos os protocolos que operam em cima
desta. Deste modo, os protocolos nao sabem que estao a operar numa rede multi-salto. Portanto, todos
os nos parecem ser o link local, desconhecem a topologia da rede e tambem nao sao afetados pelas
mudancas de rede.
2.3.5 Sıntese e Discussao
As WMN permitem que se monte uma estrutura de detecao de veıculos em parques de estacio-
namento de grandes dimensoes sem infraestrutura de rede necessaria alem da que a plataforma de
computacao que fazem a detecao de veıculos tem, nomeadamente se for usado RPi3. Dentro das
WMN existem diferentes tipo de protocolo de roteamento para operar nestas redes descentralizadas:
proativos, reativos e hıbridos.
Nos protocolos proativos, onde se insere o B.A.T.M.A.N., os nos nao tem necessidade de conhecer
a topologia da rede onde estao a operar e auto adaptam-se em caso de mudancas na rede e o encami-
nhamento de pacotes de dados e efetuado mais rapidamente porque nao e necessario os nos estarem
a requerer uma rota de encaminhamento sempre que queiram enviar dados.
2.4 Trabalho Relacionado
Nesta seccao sao apresentados conceitos relacionados com os IPS, as suas propriedades, e exem-
plos diversificados de sistemas ja implementados, as principais caracterısticas e os componentes trans-
versais destes sistemas.
2.4.1 Sistemas de Parqueamento Inteligentes
O objetivo principal dos IPS e monitorizar a disponibilidade de lugares de estacionamento e dis-
ponibilizar essa informacao aos utilizadores e administradores de um parque de estacionamento. Os
utilizadores podem usar a informacao prestada pelo sistema para selecionar um lugar de estaciona-
mento disponıvel pretendido, e tambem em alguns casos para serem guiados ate esse lugar atraves de
21

indicacoes de orientacao prestadas pelo sistema. Os administradores usam estes sistemas para fins
de gestao e planeamento da capacidade dos parques.
Esta seccao descreve alguns sistemas utilizados em parques com propriedades e aspetos tecnicos
diferenciadores. De todas as opcoes disponıveis no mercado, foram selecionadas as que representam
diferentes abordagens. Depois disso, as principais propriedades de um IPS sao exploradas e, no final,
e apresentada uma sıntese e discussao das caracterısticas mais relevantes.
2.4.1.A Casos de uso
Os proximos paragrafos descrevem sistemas de estacionamento relevantes para uso publico e pri-
vado existentes no mercado.
Parqueamento publico - Lisboa/EMEL
Em Lisboa, a maioria das areas de estacionamento publicas sao controladas por uma empresa
municipal criada com o objetivo de oferecer solucoes de mobilidade aos cidadaos. Existem dois tipos
de areas de estacionamento controladas por esta empresa publica: na rua e fora da rua.
Normalmente, em areas de estacionamento na rua, os condutores devem aceder a dispositivos es-
pecıficos, colocados em zonas estrategicas ao longo das areas de estacionamento, para alugar um
lugar de estacionamento por um certo perıodo de tempo, retirar um bilhete e colocar esse bilhete na
janela da frente do carro. Estas areas de estacionamento sao controladas manualmente pelas au-
toridades da EMEL, que controlam se os utilizadores do estacionamento pagaram ou nao a taxa de
estacionamento. E um metodo obsoleto e ineficiente para controlar todas as areas de estacionamento
publico da cidade de Lisboa.
Como este estacionamento nao tem nenhum tipo de sensores implementados para detetar a utilizacao
do estacionamento, nao e possıvel medir a ocupacao real do parque. Portanto, e difıcil prever a taxa
de ocupacao do estacionamento e disponibilizar as informacoes certas aos utilizadores e gestores do
parque.
Nas areas de estacionamento fora da rua, e possıvel controlar a ocupacao da area de estaciona-
mento atraves do uso de cancelas que permitem a entrada e a saıda de automoveis da area de estaci-
onamento, enquanto contam o numero de veıculos presentes no parque. Devido a isso, e possıvel que
informacoes de utilizacao de estacionamento estejam disponıveis para os condutores, na entrada do
estacionamento, e tambem para gerentes. O espaco de estacionamento neste tipo de parque e pago
no final, antes de sair do parque.
Recentemente, a EMEL criou um aplicativo chamado ”e-Park”que permite que os utilizadores indi-
quem o local onde estacionam o carro atraves do uso da localizacao GPS fornecida por um smartphone.
22

A aplicacao tambem possui um temporizador, onde os utilizadores podem definir a quantidade espe-
rada de tempo de estacionamento, estender esse perıodo ou cancelar o temporizador, caso o local
de estacionamento nao seja mais necessario. Os pagamentos sao feitos eletronicamente, cobrados
atraves da conta de utilizadores. Esta aplicacao tambem fornece servicos de orientacao para uma area
de estacionamento. O utilizador usa a localizacao atual, e o aplicativo pode orienta-lo para a area de
estacionamento pretendida atraves do uso do GPS do seu dispositivo [13].
Parqueamento publico - Santander Facility
Em Santander, ha um espaco de estacionamento publico gratuito, que foi projetado para fornecer
informacoes de estacionamento aos condutores.
Para detetar a disponibilidade de lugares de estacionamento e fornecer informacoes de orientacao
para lugares livres, este sistema usa quase 400 sensores de estacionamento, que sao enterrados sob
asfalto nas principais areas de estacionamento do centro da cidade.
As informacoes sao recolhidas pelos sensores de estacionamento instalados e entregues a dez
paineis de Variable Message Sign (VMS), que foram instalados para orientar os condutores para os
lugares de estacionamento gratuitos disponıveis. Para serem visıveis, os paineis estao localizados nas
intersecoes das ruas principais da cidade, zonas que sao normalmente de passagem frequente para
os condutores.
Este sistema pode fornecer aos condutores o nıvel de utilizacao geral das areas de estacionamento
principais. Devido a isso, os condutores podem selecionar, antecipadamente, a melhor zona para
estacionar seus carros. Com este sistema, os condutores nao precisam de aceder qualquer aplicativo
para verificar a disponibilidade do parque e, portanto, eles devem passar junto aos paineis de VMS para
serem informados e decidirem o melhor local onde estacionar [14].
Parqueamento publico - SFPark
A cidade de Sao Francisco tem um IPS chamado SFPark, que visa superar o congestionamento de
trafego, alterando dinamicamente os precos com base em dados historicos de ocupacao. O sistema for-
nece informacoes em tempo real aos utilizadores. Essas informacoes incluem areas de estacionamento
na rua, fora da rua e polıtica de precos dinamicos.
Cada lugar de estacionamento possui um sensor magnetico instalado no solo que deteta a ocupacao
e depois transmite-a atraves de uma rede para um sistema central. A informacao e processada sema-
nalmente ou mensalmente. De acordo com dados historicos, os precos sao aumentados ou diminuıdos
proporcionalmente a utilizacao esperada [15].
O SFPark ajusta continuamente os precos para combinar a procura para ajudar a alcancar o nıvel
certo de disponibilidade de estacionamento. O sistema incentiva os condutores para estacionarem em
23

areas subutilizadas, reduzindo a procura em areas em excesso. Embora os precos de estacionamento
que mudem dinamicamente devem equilibrar a oferta e a procura de estacionamento e aumentar a
utilizacao geral. Este sistema e baseado em dados historicos e estatısticas que podem nao ser sufici-
entemente precisas para ter o efeito adequado.
Este sistema permite que os utilizadores paguem atraves de parquımetros tradicionais instalados
ao lado dos lugares de estacionamento. Os parquımetros de estacionamento aceitam tambem cartoes
de credito para fazer pagamentos. Agora tambem e possıvel pagar via smartphone por Near Field
Communication (NFC). Os utilizadores com smartphones podem simplesmente ”tocar”o logotipo NFC
no medidor para iniciar o pagamento simplificado [16].
Estudos revelam que o SFPark reduz 43% do tempo de busca, reduz 30 % das emissoes de carros
e ajudou a reduzir o congestionamento do perıodo de pico e diminui 8% do volume de trafego.
Parqueamento Privado - IST
O sistema de estacionamento do Instituto Superior Tecnico (IST) e composto por tres areas de
estacionamento: campus ”Alameda”, ”Taguspark”e ”Loures”.
No Campus Alameda existem duas areas de estacionamento: uma area de estacionamento na rua
dentro do campus, e outra area fora da rua e do edifıcio principal, perto do parque ”arco do cego”.
Ambas as areas foram fechadas, o acesso e condicionado e e possıvel contar a ocupacao do parque.
Somente pessoas autorizadas podem aceder a estes dois parques atraves de cartoes magneticos.
No Taguspark, existem tambem dois tipos de areas de estacionamento: estacionamento na rua nos
pontos de estacionamento ao redor do edifıcio e tambem existe uma area de estacionamento fora da
rua, a garagem. O acesso a area do parque na rua nao tem controlo, por isso e de acesso aberto e
nao e possıvel contabilizar a ocupacao da area de estacionamento. O parque da garagem ainda nao
funciona atualmente.
O parque de Loures tem uma area de estacionamento na rua. No entanto, o acesso e muito restritivo,
devido ao fato de este lugar ter um reator nuclear. Apenas alguns funcionarios tem permissao para
estacionar o carro e o acesso e controlado.
Parqueamento Privado - Shopping
A maioria dos espacos de estacionamento de shoppings sao parques a superfıcie ou subterraneos,
sendo gratuitos ou pagos. Em geral tem sensores instalados para monitorizar o estado de cada espaco
de estacionamento e tambem possuem Parking Guidance and Information System (PGI) atraves de
paineis VMS. O PGI informa os utilizadores sobre a utilizacao dos espacos de estacionamento e permite
que eles encontrem o ponto de estacionamento mais rapidamente.
24

Os parques gratuitos nao possuem nenhum tipo de cancela instalada na entrada ou saıda. Portanto,
nao e possıvel controlar a utilizacao do parque usando esses portoes. Normalmente, nestes parques a
utilizacao e controlada apenas pelos sensores, normalmente magneticos, instalados em cada espaco
de estacionamento. Com este tipo de monitorizacao de ocupacao e possıvel construir um sistema PGI
atraves de paineis VMS e orientar os condutores para locais livres.
Nos parques pagos, as cancelas sao geralmente utilizadas na entrada e saıda para controlar a
ocupacao e a quantidade de tempo que um carro esta estacionado. Este ultimo controlo pode ser feito
com um cartao de estacionamento ou com uma tag ativa RFID. Com este controlo mais preciso, quem
gere o parque e capaz de monitorizar a utilizacao do espaco de estacionamento com dados mais preci-
sos. Cada sensor de estacionamento e os sistemas de orientacao sao iguais aos dos estacionamentos
gratuitos.
2.4.1.B Sistemas Comerciais
A proxima secao detalha algumas solucoes comerciais que podem ser usadas em qualquer parque
de estacionamento.
Parqueamento Privado - INRIX and BMW
Este sistema de estacionamento INRIX, em colaboracao com o fabricante de automoveis BMW,
ajuda os condutores a encontrarem lugares de estacionamento vazios na rua. Os carros possuem
sensores inteligentes ligados a um data center para transmitirem os seus dados de movimentos. As
informacoes sobre o movimento dos veıculos que estao a deixar um lugar de estacionamento ou a
procura de estacionamento estao ligadas a um modelo de previsao local.
A velocidade e um dado comportamental importante, uma vez que as pessoas que procuram estaci-
onamento tendem a guiar mais devagar enquanto estao a procurar um lugar do que aqueles que estao
apenas a passar por uma area. A tecnica de previsao utilizada, Dynamic Parking Prediction, usa mapas
digitais juntamente com seu algoritmo de previsao para escolher um espaco de estacionamento gratuito
numa frota de mais de mil veıculos. O sistema tambem deteta movimentos anonimos de veıculos para
capturar um espaco disponıvel em qualquer area [17].
A informacao de vaga de parques de servicos da INRIX e atualizada por hora, com taxa de precos,
restricoes de estacionamento e regras de polıtica. Os servicos fornecidos incluem: informacoes de
precos e disponibilidade; comparacao de locais por distancia e preco e localizacao da entrada mais
proxima. Ao avaliar a distancia e o preco, o sistema pode informar se ha lugares perto de locais
disponıveis. Assim, os condutores podem ser guiados para locais de estacionamento fora da rua.
O sistema de estacionamento para o estacionamento na rua inclui informacoes em tempo real,
menor dependencia de sensores caros, melhor visao para planeamento urbano e modelos de precos
25
de procura calibrados.
Sistema comercial - Cisco and StreetlineInc
Essa solucao foi o resultado entre a cooperacao das empresas Cisco e StreetlineInc. O conceito
por de tras deste sistema e o mesmo do SFPark, mas usa um sensor de visao como uma camera. Isso
torna o sistema mais seguro e confiavel. O sistema fornece informacoes em tempo real sobre locais de
estacionamento vazios.
Os sensores do Streetline detectam, em tempo real, a disponibilidade de lugares de estacionamento.
As cameras de vıdeo monitorizam locais de estacionamento e zonas sem estacionamento. O sistema
tambem pode rastrear tipos especıficos de veıculos [18].
Sistema comercial - Siemens overhead radar
Este sistema consiste numa rede de sensores baseada em sensores de radar desenvolvidos recen-
temente. Estes sensores tem instalacao em postes de iluminacao na rua, monitoriza o estacionamento
e revela o estado de ocupacao para um local alvo de controlo de estacionamento. O sistema informa a
ocupacao dos lugares em tempo real, envia informacoes sobre o tamanho e a posicao do veıculo que
ocupam o estacionamento. O sistema tambem pode prever condicoes de espaco de estacionamento
frequentes em determinados momentos, a fim de fornecer aos utilizadores uma previsao precisa que
possam ver no seu destino. Isso e possıvel porque o sistema e capaz de aprender de acordo com os
dados coletados.
Cada sensor na rede tem capacidade para fazer um scanning numa area de aproximadamente 30
metros, o que da para alcancar entre 5 a 8 carros.
Este sistema pode ser a solucao de detecao ideal em qualquer clima. Com este sistema, o tama-
nho e as dimensoes dos veıculos podem ser facilmente identificadas sem cameras, evitando qualquer
violacao dos direitos de privacidade de seus cidadaos [19].
A infraestrutura pode ser invisıvel atraves da integracao em luzes de rua existentes. Uma vez que
os sensores sao menos visıveis, raramente estao sujeitos a danos incidentais ou de vandalismo, mini-
mizando a necessidade de manutencao excessiva.
2.4.1.C Sıntese e Discussao
A Tabela 2.1 resume as propriedades dos sistemas anteriormente descritos. Para cada sistema,
a tabela descreve sucintamente as suas restricoes e propriedades. As restricoes estao relacionadas
com condicoes fısicas que afetam o design do sistema, ou seja, o tipo de parque e o tipo de acesso
relacionado. Em relacao as propriedades, o foco reside nos aspetos de design mais relevantes da
26

Tabela 2.1: Sumario de Sistemas de Parqueamento Inteligentes importantes
Constrangimentos PropriedadesNome Tipo de Par-
queAcesso Custo Ocupacao Reservas PGI
Emel desco-berto
Descoberto Aberto Pago Humana Nao GPS
Emel coberto Coberto Fechado Pago Automatica eHumana
Nao GPS
Santander Fa-cility
Descoberto Aberto Gratuito Automatica Nao VMS
SFPark Coberto eDescoberto
Aberto eFechado
Pago Automatico Nao GPS
Instituto Supe-rior Tecnico
Coberto eDescoberto
Aberto eFechado
Gratuito Humana Nao Nao
Shopping pago Coberto Fechado Pago Automatica eHumana
Sim VMS
Shopping gra-tuito
Coberto Aberto Gratuito Automatica Nao VMS
INRIX+ BMW Descoberto Ambos Ambos Automatica Nao GPSCisco+ Streetli-neInc
Descoberto Pago Ambos Automatica Nao GPS
Siemensoverhead radar
Descoberto Aberto Ambas Automatica Nao GPS
solucao, tais como polıtica de pagamento, disponibilidade de medicao de ocupacao, servico de reserva
e servicos de orientacao de estacionamento.
Foram descritos varios sistemas de estacionamento cobertos e descobertos, e com acesso aberto
ou fechado.
Os parques podem ser gratuitos ou pagos, dependendo da polıtica do seu proprietario. O pagamento
pode ser exigido em parques abertos ou fechados, independentemente do tipo (na rua e fora da rua). No
entanto, o tipo de metodos de pagamento que podem ser usados depende do tipo de acesso fornecido.
Alguns sistemas, como o SFPark e o EMEL, permitem alguns metodos avancados de pagamento de
forma segura, que permitem aos utilizadores poupar tempo e melhorar a comodidade.
Em relacao a ocupacao, todos os sistemas estudados sao capazes de detetar veıculos de alguma
forma. As principais diferencas residem na forma como a deteccao e feita: alguns parques depen-
dem de pessoas para medir a ocupacao enquanto outros tem sistemas que o facam automaticamente
ou com o conjunto das duas. Se a detecao de ocupacao e humana, isso significa que ela exige a
intervencao do utilizador. Isso pode ser feito em parquımetros para entrar no parque, retirar um bilhete
ou por controlo manual pelas autoridades do parque.
Se a medicao de ocupacao for automatica, a deteccao do veıculo e feita por sensores existentes
na area de estacionamento. A informacao obtida a partir desses sensores e enviada para um servidor
central para que o sistema possa calcular o uso da area de estacionamento.
27

A medicao automatica da ocupacao tambem e possıvel em areas de estacionamento pago privado
com cancelas. Veıculos equipados com tags ativas RFID, so precisam que os condutores acionem seu
uso na entrada do parque para ter acesso.
A maioria dos sistemas apresentados nao oferece opcoes de reserva no espaco de estacionamento.
A excecao e o estacionamento privado pago. Geralmente essas areas de estacionamento estao nas
grandes cidades, nas zonas centrais e perto das zonas comerciais. Estas areas de estacionamento ofe-
recem aos utilizadores a possibilidade de reservar um espaco de estacionamento durante um mes mais.
Este tipo de servico e fornecido principalmente em areas de estacionamento com grande capacidade.
Os sistemas de indicacao de estacionamento livre e informacoes nos sistemas apresentados, tem
orientacao e informacoes via paineis informaticos, ou orientacao e informacoes via smartphones equi-
pados com recetor de GPS. A excecao, sao os parques do IST que nao possuem informacoes dis-
ponıveis nem sistemas de orientacao.
Assim, nestes sistemas sao apresentadas algumas propriedades importantes que aumentam a qua-
lidade dos servicos prestados aos utilizadores. Estes sistemas permitem melhorar a experiencia dos
condutores e maximizar de ocupacao dos parques.
2.4.2 Caracterısticas dos IPS
Os resultados da seccao anterior mostraram que os diferentes sistemas que foram apresentados
tem diferentes propriedades, quanto a ocupacao, reserva, estrategias orientadoras de estacionamento
e precos. As proximas seccoes abordam as diferentes opcoes disponıveis para cada uma das proprie-
dades.
2.4.2.A Gestao de Ocupacao
Atualmente, a maioria dos sistemas inteligentes de parqueamento obtem a disponibilidade das areas
de estacionamento atraves do uso de sensores de detecao de veıculos com/sem fios, em todos os luga-
res de estacionamento ou em areas chave, como por exemplo a entrada/saıda de uma zona especıfica.
A gestao de ocupacao e possıvel atraves da recolha de dados desses sensores e transmissao para
um servidor central que interpreta a informacao, armazena-a, e que a disponibiliza para gestores e
utilizadores do sistema.
A solucao mais utilizada para medir a ocupacao consiste na utilizacao de sensores na entrada e nas
saıdas, ou em acessos especıficos dos parques de estacionamento. Esta estrategia e adequada para
a maioria dos casos, pois e uma solucao barata e facil de implementar. No entanto, esta solucao so
oferece informacoes sobre o numero de lugares disponıveis e limita a qualidade de informacao que se
pode extrair e disponibilizar para todas as entidades. Esta limitacao pode implicar a nao resolucao dos
problemas associados a procura de estacionamento, dependendo da topologia de cada parque.
28

Uma alternativa utilizada para complementar a estrategia anterior, consiste em ter um sensor ins-
talado em cada lugar de estacionamento. Desta forma, os condutores podem facilmente encontrar a
localizacao de lugares vazios se o sistema de informacao estiver devidamente preparado para tal com
um PGI. No entanto esta e uma solucao bastante dispendiosa devido ao custo de um numero elevado
de sensores, e difıcil de implementar ao ar livre pois a maioria dos sensores usados nesse ambiente
sao colocados no chao, o que envolve fazer buracos para efetuar a sua instalacao.
2.4.2.B Reservas
Em muitos dos parques de estacionamento pagos, hoje em dia, ja e possıvel fazer a reserva de
um lugar de estacionamento antecipadamente. Dessa forma, um condutor nao tera que se preocupar,
se ao chegar ao parque, este tem disponibilidade de lugares ou nao, porque o seu lugar esta reser-
vado. Para isso ser possıvel, o sistema de gestao de estacionamento do parque em causa tera de
ter uma entidade/autoridade instalada para fazer a gestao dos pedidos de reservas, que autentique os
utilizadores e que possibilite a comunicacao individual com os utilizadores. Uma vez que uma reserva
seja confirmada, a autoridade atualiza a informacao de reserva/ocupacao de forma a manter o lugar de
estacionamento livre para o utilizador que a reservou.
Nos sistemas de reservas existentes atualmente, ha dois tipos de reservas possıveis: em tempo
real e as convencionais reservas antecipadas. As reservas em tempo real sao alcancadas atraves
da realizacao de alocacao dinamica de recursos. Neste caso, os condutores recebem constantemente
informacoes sobre os melhores lugares de estacionamento disponıveis no parque ate chegarem ao des-
tino pretendido [20] [15]. As reservas antecipadas sao alcancadas atraves da realizacao de alocacao
estatica de recursos, baseada num agendamento de tempo, onde um condutor pode escolher explicita-
mente o o lugar pretendido, a data e o perıodo de tempo em que sera ocupado.
A polıtica de estacionamento baseada em reservas simplifica as operacoes dos sistemas de gestao
de estacionamento, diminui o congestionamento do trafego causado e melhora a conveniencia dos
condutores.
2.4.2.C Sistemas de Orientacao e Informacao
Os servicos parqueamento inteligente devem fornecer aos utilizadores informacoes de disponibili-
dade dos espacos de estacionamento, isto e o numero de lugares disponıveis, antes dos condutores
entrarem no parque, navegacao ate aos lugares livres. Nos sistemas de PGI mais avancados, os
condutores podem ser encaminhados ate a entrada de um parque atraves da navegacao GPS de um
smartphone, ou para uma area especıfica ou ponto de estacionamento atraves de uma aplicacao movel,
ou atraves de exibicoes de mensagens em paneıs de VMS. Os sistemas devem ser capazes de detectar
automaticamente mudancas de estado de ocupacao, entradas e saıdas de veıculos, nas areas/lugares
29

de estacionamento abrangidas(os) pelos sistema, e transmitir a informacao com o maximo de detalhes
possıvel para a entidade que faz a gestao [10].
Estes sistemas devem orientar e fornecer informacoes em tempo real sobre a ocupacao dos espacos
de estacionamento, podem incorporar aplicacoes Web e moveis para fornecer acesso remoto a da-
dos de disponibilidade de ocupacao em tempo real para varios locais de estacionamento, bem como
instrucoes de navegacao para esses locais.
Os paineis de VMS, parte integrante de alguns destes sistemas, estao dispostos dentro dos par-
ques e nas entradas destes. Normalmente, sao ecras LED de modo a ter um consumo reduzido e
servem para os condutores visualizarem a disponibilidade de cada zona da area de estacionamento
e indicarem o caminho para os lugares livres atraves de setas [15]. Com estes paineis os condutores
conseguem tomar a decisao de onde estacionar atempadamente evitando perdas de tempo e o uso de
smartphones.
Os servicos prestados por este tipo de sistemas tambem devem ser capazes de fornecer informacoes
para facilitar administradores e gestores dos espacos de estacionamento na gestao de utilizacao, a fim
de maximizar a utilizacao e a receita(o ultimo, no caso dos parques pagos).
2.4.2.D Polıtica de Precos
Hoje em dia ja existem muitos sistemas de parqueamento inteligente que utilizam o e-Parking, que
usa tecnologias avancadas que permitem combinar sistemas de pagamento e de reserva na maioria
das vezes. Com este tipo de sistema os utilizadores conseguem saber se existem lugares disponıveis,
fazer uma reserva de um lugar de estacionamento, e pagarem depois quando terminarem o perıodo de
estacionamento. Este tipo de sistemas estao disponıveis atraves de aplicacoes moveis normalmente.
Nos sistemas que permitem reservas antecipadas, o custo do parqueamento tende a baixar quando um
utilizador efetua a reserva antecipadamente. Portanto os sistemas de e-Parking tendem a aumentar a
comodidade dos utilizadores e a diminuir custos [10].
Polıticas de precos diferenciadoras para os dois tipos de reservas referidos anteriormente sao jus-
tas para os condutores e para gestores de estacionamento. Em algumas situacoes estas polıticas ja
comecam a serem postas em praticas. Alem disso, um mecanismo dinamico de precos que atualiza
periodicamente os precos de estacionamento com base na utilizacao dos parques de estacionamento
em tempo real ja sao propostos em alguns sistemas [15].
Os sistemas de pagamento inteligentes que sao utilizados tem como objetivo substituir o uso dos
parquımetros, aumentar a comodidade dos utilizadores e aumentar a qualidade da informacao dispo-
nibilizada para os sistemas de gestao dos parques. Estes sistemas permitem aos utilizadores terem
pagamentos de forma rapida, conveniente e segura, e utilizam tecnologias avancadas que podem ser
atraves de metodos contacto atraves de cartoes bancarios, ou metodos sem contacto atraves de RFID
30
e NFC, dispositivos moveis. Os pagamentos serao usados para calcular duracoes de ocupacao, o tipo
de utilizacao do parque, e o tipo de perfil dos varios utilizadores. Isto pode ser um valor acrescentado
para os IPS, porque os gestores do parque podem optimizar o modelo de negocio com as informacoes
recolhidas.
2.4.2.E Sensores de Estacionamento
Os sensores sao usados para detetar a ocupacao de lugares de estacionamento ou a passagem
de veıculos. O sistema de deteccao e normalmente composto por uma rede de sensores, com/sem
fios dependendo da opcao tomada pelos gestores do parque, que coletam e fornecem informacoes
sobre o estado de ocupacao de cada lugar de estacionamento ou, alternativamente, informacoes sobre
contabilizacao da entrada e saıda de veıculos de um parque/zona de estacionamento. Este ultimo
metodo, que requer a instalacao de menos sensores, so pode funcionar em ambientes controlados, ou
seja, todas as entradas e saıdas de um parque de estacionamento tem de ter sensores instalados para
controlar as entradas e as saıdas em todos os pontos de acesso do espaco a monitorizar [9] [15].
2.4.2.F Servidores
Os servidores existentes nestes sistemas devem manter bases de dados com dados da ocupacao,
de reservas e pagamentos dos utilizadores, e permitirem fazer pesquisas de informacoes em tempo
real para auxiliar os administradores do parque se necessario. Muitos destes servidores estao alojados
na cloud para terem uma maior redundancia, de forma a manter sempre os dados armazenados e
acessıveis.
O servidor assume a responsabilidade de gerir e manter todo o sistema. Processa todos os dados
dos nos que monitorizam os espacos, podem em muitos casos ter a capacidade(se o sistemas assim
permitir) calcular o espaco de estacionamento ideal para alojar um novo carro no parque, contabiliza
a taxa de ocupacao e controlam tambem paineis informativos alem de disponibilizarem a informacao
para os clientes, nomeadamente atraves aplicacoes para os clientes [9].
Por exemplo, apos um carro estacionar num determinado lugar com detecao de ocupacao, o no de
monitorizacao detetara o estado de ocupacao do lugar num curto espaco de tempo e transmitira os
dados para o servidor, ou seja, notifica o servidor da alteracao. O servidor recalcula a ocupacao dos
espacos e consequentemente altera as informacoes disponibilizadas aos utilizadores do sistema.
2.4.2.G Aplicacoes de acesso a informacao
Este tipo de aplicacoes permitem a ligacao entre clientes e gestores, e os sistemas de gestao de
parques de estacionamento. Esta ligacao pode ser feita atraves de navegadores Web ou aplicacoes
31

moveis especıficas desenvolvidas para o efeito. Estes sistemas devem oferecer uma interface grafica
intuitiva para os utilizadores, em que forneca informacoes em tempo real sobre o estado de ocupacao
estacionamento de acordo com o contexto e com as necessidades dos utilizadores [9].
E possıvel criar diferentes perfis de utilizadores. Os condutores irao ter direitos diferentes dos ges-
tores ou administradores do parque. Desta forma, os condutores so tem permissao para pesquisar,
reservar e pagar, enquanto os administradores sao capazes de executar muitas outras acoes, como
alterar o estado da disponibilidade de uma area de estacionamento inteira, observar praticas de estaci-
onamento incorretas e o tipo de utilizacao de parque de forma a otimizar o seu modelo de negocio.
2.4.2.H Sıntese e Discussao
Existem varias opcoes para fazer a gestao de ocupacao de parques de estacionamento atraves de
sensores para a detecao de veıculos. Pode-se optar por instalar sensores so nos pontos de entrada e
saıda das areas de estacionamento, ou adicionalmente sensores entre divisao de zonas ou sensores
em cada lugar de estacionamento que permitem obter mais dados sobre a utilizacao dos lugares.
Existem sistemas de reserva que permitem que os condutores tenham o lugar escolhido disponıvel,
podendo beneficiar de maior comodidade e tambem de precos mais acessıveis que os normais, sem
reserva associada.
Os sistemas de PGI permitem informar os utilizadores sobre os lugares vagos no parque e depen-
dendo do tipo de gestao de ocupacao pode-se providenciar mais ou menos informacao sobre onde se
encontram os lugares disponıveis aos utentes.
Os sistemas de pagamento inteligente permitem oferecer uma maior comodidade e seguranca aos
utentes, agilizando todo o processo de pagamento e consequentemente de saıda do parque.
Dependendo do grau de complexidade destas caracterısticas quando implementadas, os IPS con-
seguem providenciar melhores servicos aos utentes e facilitar a gestao do parque aos gestores.
32

3Arquitetura do Sistema
Conteudo
3.1 Analise de Requisitos . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 34
3.2 Arquitetura Geral . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 37
3.3 Comunicacoes . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 47
3.4 Sıntese e Discussao . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 48
33
Este capıtulo inicia-se com a apresentacao dos requisitos necessarios para a construcao do sis-
tema de gestao de parques de estacionamento. De seguida, e descrita a visao geral do sistema a
desenvolver tendo por base os requisitos previamente definidos, e depois sao descritas as funcoes de
cada componente do sistema. Nas seccoes seguintes serao detalhadas as funcoes dos nos a nıvel de
arquitetura de hardware e a nıvel de arquitetura de software.
3.1 Analise de Requisitos
Nesta seccao, a analise de requisitos do sistema a desenvolver e dividida em duas subseccoes:
requisitos funcionais e requisitos de arquitetura.
3.1.1 Requisitos funcionais
Existem diversos requisitos funcionais que foram necessarios considerar no desenho da arquitetura
do sistema. A grande maioria dos requisitos funcionais deriva do facto do sistema estar destinado a
gerir parques de estacionamento privados, exteriores e de acesso aberto.
Existem tambem algumas condicionantes que derivam do facto do sistema ser aplicado ao caso
concreto do campus Taguspark do IST. Desta forma, o sistema tem de ser moldado para satisfazer as
restricoes associadas as especificidades do espaco fısico do campus, quer em termos de localizacao e
disposicao dos lugares de estacionamento, quer em termos da polıtica da insituicao neste contexto.
Assim sendo, os principais requisitos funcionais que foram identificados foram: inexistencia de bar-
reiras fısicas, disponibilizacao de informacao aos utentes do parque sobre lugares vagos, facilitar a
procura de estacionamento, possibilidade de gerir os espacos de estacionamento e privacidade.
A – Inexistencia de barreiras fısicas As barreiras fısicas impedem a entrada e saıda de veıculos
nao autorizados num parque. Contudo podem levar a existencia de filas nas entradas dos estaciona-
mentos, que se prolongarem no tempo podem provocar congestionamento de trafego no acesso ao
parque, usualmente realizado numa via publica.
O acesso ao parque de estacionamento exterior do campus Taguspark do IST e realizado atraves
de uma estrada bastante movimentada, muito proxima de uma via rapida. Desta forma, a instalacao de
barreiras fısicas acaba por nao ser uma opcao viavel, visto que pode provocar um efeito nao desejado,
o congestionamento de veıculos na estrada que serve de acesso ao parque de estacionamento.
Para evitar a ocorrencia desta situacao, optou-se pela implementacao de um sistema sem barreiras
fısicas.
Hoje em dia, com as tecnologias existentes, quer a nıvel de sensores quer a nıvel de comunicacoes,
torna-se possıvel construir um sistema, de facil instalacao e de baixo custo, que nao possua qualquer
34

tipo de barreira fısica mas, que permita controlar eficazmente a entrada e saıda de veıculos.
B – Disponibilizacao de informacao de lotacao Para ter o impacto e visibilidade pretendida, um
sistema de gestao de parques de estacionamento deve ter alguns elementos diferenciadores dos par-
ques comuns e antigos. Por isso, um sistema desta natureza deve de alguma forma estar ligado aos
potenciais utilizadores, de forma a providenciar informacoes sobre a lotacao do parque em tempo real.
Para ultrapassar os problemas inerentes ao processo de procura por um lugar de estacionamento
livre, um sistema deste tipo deve conseguir disponibilizar informacao sobre os lugares livres no parque.
Existem duas vias para fazer a disponibilizacao de informacao: local e remota. Pela via local,
temos os paineis de VMS que permitem fazer uma divulgacao de informacao eficaz mas, sao uma
infraestrutura com um custo avultado e estao sujeitos a actos de vandalismo. Pela via remota, a forma
mais pratica e indicada para faze-lo nos dias de hoje, pode ser atraves de uma aplicacao web ou movel,
que e acessıvel pelos utilizadores em qualquer local atraves do seu computador, por exemplo:laptop,
smartphone, tablet.
C – Facilitar a procura de estacionamento Normalmente, os parques de estacionamento tem uma
grande area e podem ser divididos em varios subparques/zonas pelas entidades gestoras. Esta divisao
possibilita dar mais informacao que apenas a entrada/saıda de veıculos no parque, ou seja, possibilita
dar mais detalhes que nao apenas a ocupacao total do parque, que consequentemente ira facilitar
encontrar um lugar vago. Com a divisao do parque em zonas consegue-se obter informacoes sobre
a utilizacao das mesmas, alem da contabilizacao da ocupacao total. Este tipo de requisito quando e
cumprido, permite uma escolha de lugar/zona disponıvel com alguma antecipacao.
Ao dividir o parque por varias subzonas, existem dois tipos de tecnicas que podem ser utilizadas
para contabilizacao de ocupacao: a instalacao de sensores individuais por cada lugar ou sensores a
entrada/saıda de uma zona. A instalacao individual de sensores por cada lugar e uma solucao cara,
mais difıcil de implementar e exige uma manutencao constante. Por outro lado, a instalacao de sensores
apenas na delimitacao de zonas e uma solucao mais barata e simples, que cumpre o requisito de facilitar
a procura de estacionamento com informacoes extra sobre as diversas zonas.
Em parques abertos e exteriores, em que o factor custo e relevante, a segunda opcao surge assim
como a mais viavel e racional.
D – Gestao do estacionamento O sistema deve proporcionar a entidade gestora do parque a pos-
sibilidade de gerir o estacionamento. Deve ser possıvel configurar a capacidade do estacionamento
e controlar o acesso a informacao de ocupacao. O sistema deve estar preparado para que, cada
zona tenha um mecanismo automatico para medir a sua ocupacao e fazer o encaminhamento dessa
informacao para a entidade gestora.
35
Deste modo, num sistema deste tipo cada zona do parque devera ter um no composto por sensores
e uma plataforma de computacao. Plataforma essa que, devera estar inserida numa rede interna, com
ou sem fios, responsavel pela transferencia de dados de sensorizacao que permitam posteriormente a
um no central a extracao e processamento dos dados. Depois dessas etapas feitas sera possıvel efetuar
a contabilizacao de ocupacao das diversas zonas e fazer gestao global da zona de estacionamentos.
Depois da analise de dados feita, o sistema estara apto a providenciar as informacoes aos gestores do
parque do estacionamento.
E – Autorizacao de acesso e privacidade De forma a garantir que os utentes do parque tem
autorizacao de acesso, o sistema deve ser capaz de identificar as viaturas que estao estacionadas
no parque. Para tal, deve proceder a sua identificacao a entrada e saıda e, de alguma, forma mapear a
informacao obtida com os sistemas de informacao do IST.
Todavia, deve ser dada particular importancia a privacidade dos utentes, garantindo que as informacoes
obtidas nao sejam disponibilizadas a outros utilizadores.
3.1.2 Requisitos de arquitetura
O sistema a desenvolver deve ter um baixo custo e deve ser de facil instalacao. Os principais
requisitos de arquitetura irao ser descritos de seguida.
A – Modularidade do codigo O codigo desenvolvido para o sistema deve ser dividido em varios
modulos, cada um com uma funcao especıfica. Cada componente do sistema deve ter o seu proprio
modulo, independente dos outros componentes. Deste modo cada seccao ou funcao do sistema estara
mais facilmente documentada e acessıvel, caso haja necessidade de retificar o codigo ou desenvolver
futuramente novas funcionalidades para o sistema.
B – Cobertura integral O sistema a implementar deve ser capaz de efetuar a cobertura integral do
parque de estacionamento, de forma a fornecer informacao sobre a ocupacao das diversas zonas que
o compoem. Desta forma, o sistema deve dispor de sensores em cada uma das zonas do parque, que
permitam recolher a informacao da referida zona.
Adicionalmente, dada a abrangencia do local, dispersao geografica entre as diversas zonas, pode
ser necessario arranjar nos que efetuem apenas o reencaminhamento da informacao proveniente dos
sensores, ligando entre si, zonas que, de outra forma, estariam desconexas.
C – Encaminhamento dinamico Tendo em consideracao o facto do sistema a implementar ter como
requisito a inexistencia de barreiras fısicas, e como a gestao de ocupacao sera feita tendo como ob-
36

jetivo alcancar a cobertura total do parque de estacionamento, vai ser preciso ter uma maneira de se
estabelecer comunicacoes entre varios pontos da infraestrutura do parque, incluindo pontos distantes.
Desta forma, deve ser implementado um protocolo de roteamento sem fios numa rede sem infraes-
trutura de gestao instalada, ou seja, numa rede Ad-Hoc que assegure a transferencia de dados entre
diversos nos.
D – Redundancia de dados O sistema deve fornecer uma informacao precisa e consistente, de-
vendo para isso ter capacidade para detetar falhas, ou ter diversos metodos de sensorizacao de
veıculos que permitam detetar a entrada e saıda de veıculos.
Para evitar falhas na detecao de veıculos sera necessario ter redundancia de dados, utilizando para
o efeito, pelo menos dois tipos distintos de sensores. Assim, so quando os dados retirados pelos dois
sensores fornecerem informacoes identicas e que a detecao podera ser contabilizada.
As tecnologias de sensores a utilizar devem ser sempre analisadas tendo em conta os pros e os
contras, dado o meio fısico de instalacao (espaco ao ar livre, coberto). Dada a natureza da area
de estacionamento e necessario escolher sensores fiaveis, imunes a condicoes adversas e robustos
fisicamente.
E – Consistencia de informacao E necessario num sistema deste tipo que os dados recolhidos
sejam consistentes. O numero de lugares ocupados em todas as zonas tem de ser igual ao numero
de lugares ocupados na totalidade do parque, a informacao disponibilizada tera de condizer com a
informacao real.
O sistema deve ter mecanismos para detetar inconsistencias temporarias e fornecer ao utilizador
informacao fidedigna.
3.2 Arquitetura Geral
Nesta seccao, e apresentada a arquitetura do sistema de gestao de parques desenvolvido, autonomo
e que fornece informacoes importantes sobre a utilizacao do parque aos utilizadores. Depois de uma
breve apresentacao da arquitetura e das funcionalidades pretendidas para o sistema, serao apresen-
tadas nas seccoes seguintes com detalhe, os varios componentes da arquitura definida, que pretende
satisfazer os requisitos do sistema, previamente apresentados.
3.2.1 Visao Geral do Sistema
De forma a cobrir toda a area de estacionamento onde o sistema vai ser instalado e a fornecer
informacao de lotacao em cada zona distinta, a area total de estacionamento dever ser dividida em
37

varias zonas, conforme se ilustra na Figura 3.1. Em cada zona, procede-se a recolha e contabilizacao
da informacao das entradas e saıdas, a qual deve ser enviada, para posterior processamento para uma
entidade gestora.
Figura 3.1: Ligacao de varias zonas a um no gestor
O envio dessa informacao pode ser feito com a colaboracao dos nos das restantes zonas do parque.
Para tal, o sistema deve ter diferentes tipos de nos. Conforme se encontra ilustrado na Figura 3.2, o
sistema concebido e composto por varios nos, designados nos coletores, nos de relay e um no gestor.
Todos os nos fazem parte de uma rede de malha sem fios que ira possibilitar a comunicacao entre nos.
E preciso que a rede consiga assegurar a comunicacao entre pontos mais distantes, daı ter-se instalado
nos de relay na rede que auxiliam outros nos na transmissao de dados.
Figura 3.2: Arquitetura geral da rede de malha sem fios
Os nos coletores adquirem informacoes acerca da entrada/saıda de veıculos atraves de sensores
instalados nos nos, numa determinada zona do parque de estacionamento onde esta instalado o no.
38

Posteriormente, e detetada a ocupacao da zona controlada pelo no atraves da analise e processamento
dos dados que sao extraıdos pelos sensores. Seguidamente, as informacoes recolhidas pelos nos
coletores irao ser transmitidas para um outro no, chamado gestor. Este ultimo, e o no para onde sao
transmitidas as informacoes de ocupacao das diversas zonas de estacionamento.
O no gestor desempenha um papel de grande relevo no sistema, pois e responsavel pela contabilizacao
da taxa de ocupacao total do parque de estacionamento, guardar a informacao proveniente das varias
zonas de estacionamento numa base de dados, estabelecer a comunicacao e disponibilizar a informacao
com os utilizadores do parque de estacionamento.
Os nos de relay existentes na rede auxiliam os nos coletores a transmitir informacao para o no
gestor, quando a comunicacao entre os dois nos nao e possıvel diretamente. Os varios nos coletores
da rede tem a capacidde de fazer simultaneamente o papel de no coletor e de relay.
Todas as informacoes que os nos coletores enviam para o no gestor sao transmitidas atraves de
uma rede de malha sem fios descentralizada construıda por todos os nos participantes na rede atraves
de um protocolo multi-salto de roteamento proativo.
A rede ira permitir fazer a comunicacao entre os varios nos existentes atraves da tecnologia IEEE
802.11n, na frequencia de 2.4GHz, e sera uma rede Ad-Hoc de malha sem fios. Esta escolha deve-
se ao facto deste tipo de topologia de rede suportar escalabilidade, isto e, o aumento do numero de
nos sem constrangimentos de maior, e de modo a permitir tambem um maior alcance entre nos mais
distantes. Com a introducao da rede de malha sem fios com um protocolo de roteamento proativo
multi salto, consegue-se que os nos que distam uma maior distancia e que nao conseguem comunicar
diretamente com outros nos, consigam comunicar sendo os pacotes de dados transmitidos atraves de
varios outros nos presentes na rede ate chegarem ao no destino.
Na Figura 3.3 encontra-se ilustrada a area de estacionamento para qual o sistema foi desenhado,
o parque exterior do IST-Taguspark. Representadas com retangulos e com letras ”Z”irao ser as varias
zonas a controlar, e com cırculos serao as posicoes onde os varios nos coletores irao estar instalados
de forma a conseguir-se fazer o controlo de gestao de ocupacao das diversas zonas.
3.2.2 No Coletor
Os nos coletores vao ser responsaveis por recolher dados sobre detecao de automoveis e poste-
riormente transmitir esses dados para um outro no da rede, o no gestor. Os nos coletores irao estar
dispostos nas zonas crucialmente escolhidas, isto e na entrada/saıda de zonas, e sao responsaveis por
recolher informacoes que auxiliem a detecao e identificacao de veıculos. Para tal ser possıvel estes nos
vao estar equipados com sensores que irao possibilitar essa identificacao.
A arquitetura geral deste no esta ilustrada na Figura 3.4, onde a ”Aquisicao de Dados”e feita atraves
da ligacao a sensores que vao permitir fazer detecao de carros. Posteriormente esses dados deverao
39

Figura 3.3: Divisao em varias zonas do cenario de teste
ser alvo de um processamento, denominado ”Processamento local”, para a informacao extraıda dos
sensores ficar legıvel para humanos. Depois desse passo efetuado, os dados processados sao guar-
dados numa base de dados local, que na figura se encontra em ”Armazenamento de Dados”. Os dados
processados estao prontos para serem transmitidos para outros nos. Para isso ser possıvel, os dados
provenientes do bloco ”Processamento local”sao enviados para o modulo ”Comunicacao de dados”que
ira enviar pacotes de dados, com informacoes de roteamento provenientes do bloco ”Construcao e
manutencao da malha”, para outros nos inseridos na rede de malha sem fios do sistema de gestao de
estacionamento, representados com o bloco ”Gestor / Relay ”. Os dados contidos na base de dados
tambem poderao ser acedidos pelos outros nos da rede atraves dos blocos ”Gestor / Relay / Coletor”e
”Comunicacao de dados”.
3.2.2.A Arquitetura Detalhada
Na Figura 3.5 esta representada a arquitetura de software do no coletor.
De forma a ter-se redundancia de dados sao utilizados dois tipos diferentes de sensores que irao es-
tar ligados a dois sub-modulos do modulo de ”Aquisicao de dados”, que sao ”Detecao de movimento”e
”Reconhecimento de matrıcula”. Os dois tipos de sensores irao detetar veıculos e identificar veıculos:
40

Figura 3.4: Arquitetura geral do no coletor
sensores ultrassonicos e camera, respetivamente.
Para a detecao de movimento a opcao pela escolha por sensores ultrassonicos deve-se a sua fia-
bilidade na detecao de objetos, pois raramente tem falsos positivos devido ao seu principio de funcio-
namento. Neste caso o tipo de material que vai reflectir a onda sonora tem alta refletividade acustica.
Este sensor, se tiver uma caixa que o isole da queda de agua fica imune a essa condicao climaterica,
e imune a temperatura ambiente. Por fim, a sua escolha deve-se tambem ao seu baixo custo e facil
instalacao que nao envolve instalacoes no chao. Estes sensores irao ser utilizados para medir a que
distancia passa um objeto dos sensores. Primeiro analisa-se a medicao de distancia dos 4 sensores ate
ao objeto mais proximo. Depois e feita uma pre-triagem das distancias medidas para identificar se po-
dera ser um carro, ou se e logo descartada essa hipotese em caso de nao o ser. Se a distancia nos dois
sensores que estao a controlar uma das faixas de rodagem for equivalente, e que sendo uma distancia
que de para se considerar o objeto como um veıculo entao neste caso, admite-se por hipotese que e
um carro e ira entrar em acao o outro tipo de sensor, a camera que recebe uma ordem para capturar
uma imagem. Para isso a camera devera estar devidamente posicionada de forma a conseguir captar
imagens dos veıculos. Depois da fotografia ser tirada os dados irao passar para o sub-modulo ”Detecao
e contagem”do modulo ”Processamento local”. Aqui entrara a acao de um programa que ira analisar
a informacao extraıda pelos dois tipos de sensores. A fotografia devera ser analisada por um software
instalado no no para reconhecimento automatico de matrıculas, atraves da analise de imagens. Se for
identificada uma matrıcula com sucesso, entao aı, pode-se contabilizar o movimento que passou em
frente aos sensores inicialmente detetado como um veıculo, identifica-lo, e contabiliza-lo para dados de
41

Figura 3.5: Arquitetura software do no coletor
gestao de ocupacao. Esses dados seguirao duas vias: serao armazenados no ”Armazenamento de
Dados”e seguirao para o sub-modulo de ”Formatacao de dados”.
Seguidamente, depois do processamento de dados e da detecao do veıculo feita com sucesso,
armazena-se a informacao numa base de dados alojada localmente e atualiza-se em tempo real a
informacao que na mesma esta guardada. A informacao armazenada nesta base dados para cada
detecao de entrada ou saıda de veıculos, em cada no coletor e a seguinte: distancia media do veıculo
aos sensores, entrada ou saıda da zona de estacionamento, matrıcula do veıculo, data, hora e zona do
parque. Desta forma, consegue-se ter sempre a informacao atualizada e detalhadamente armazenada.
Depois destes passos feitos, faz-se a formatacao dos dados a enviar para o no gestor. Nesta formatacao
enviam-se os dados de cada registo. Os dados ja formatados seguem para o modulo de ”comunicacao
de dados”em que sao enviados para o no destino(no gestor), e vao ser colocados numa fila de espera.
Depois de passarem a fila, os dados seguem para um modulo de transferencia de dados(Txd na figura),
que envia o pacote de dados para o no indicado, o no da rede mais proximo, atraves da tabela de
encaminhamento do protocolo utilizado.
Este no tambem podera receber dados de outro tipo de nos, nomeadamente do no gestor e de
42

outros quando e apenas para fazer de relay, ou seja, fazer reenvio dos pacotes de dados enviados por
outro no da rede. Quando recebe pacotes de dados de outro tipo de nos, analisa-se no campo ”Rxd”do
modulo de ”comunicacao de dados”, se o pacote tem como destino outro no ou o proprio. Se for outro
tipo de no, o pacote de dados apenas tem de ser colocado na fila presente no mesmo modulo, de modo
a ser reenviado para outro no. Quando recebe dados do no gestor, normalmente, podem ser pedidos
para aceder a informacao atualizada contida no modulo do ”armazenamento de dados”.
A informacao colectada e processada deve ser transmitida em tempo real para o no gestor, atraves
da rede de malha sem fios pela interface Wi-Fi de cada no coletor, recorrendo ao protocolo de encami-
nhamento.
Figura 3.6: Exemplo de disposicao dos sensores no no coletor
Encontra-se exemplificado na Figura 3.6 a disposicao dos sensores usados no modulo de aquisicao
de dados. Para fazer o reconhecimento de matrıculas que permite identificar os veıculos, e preciso re-
correr a uma camera associada ao no que capture imagens para posteriormente serem analisadas. Os
sensores, camera e sensores ultrassonicos, irao permitir contabilizar a ocupacao de uma determinada
zona a controlar. Estes dois tipos de sensores em conjunto tem um papel crucial para gerir e contabi-
lizar a ocupacao dos parques de estacionamento. Optou-se pela instalacao destes tipos de sensores
para se ter mais e melhor informacao, mas tambem para evitar falsos positivos.
3.2.3 No Relay
Quando existem dois nos que queiram transmitir dados, e que mesmo atraves do uso de protocolo
multi salto o no destino nao seja alcancavel, sera necessaria encontrar uma solucao para efetuar a
comunicacao com sucesso. A solucao passa por instalar estrategicamente este tipo de nos, de forma a
ajudar na retransmissao de dados e ultrapassar as lacunas de alcance das antenas Wi-Fi das platafor-
mas de computacao dos nos, dado a especificidade dos espacos(edıficios em volta) e as distancias as
grandes entre nos do ambiente de instalacao. A gestao da entrega de dados e feita automaticamente
43
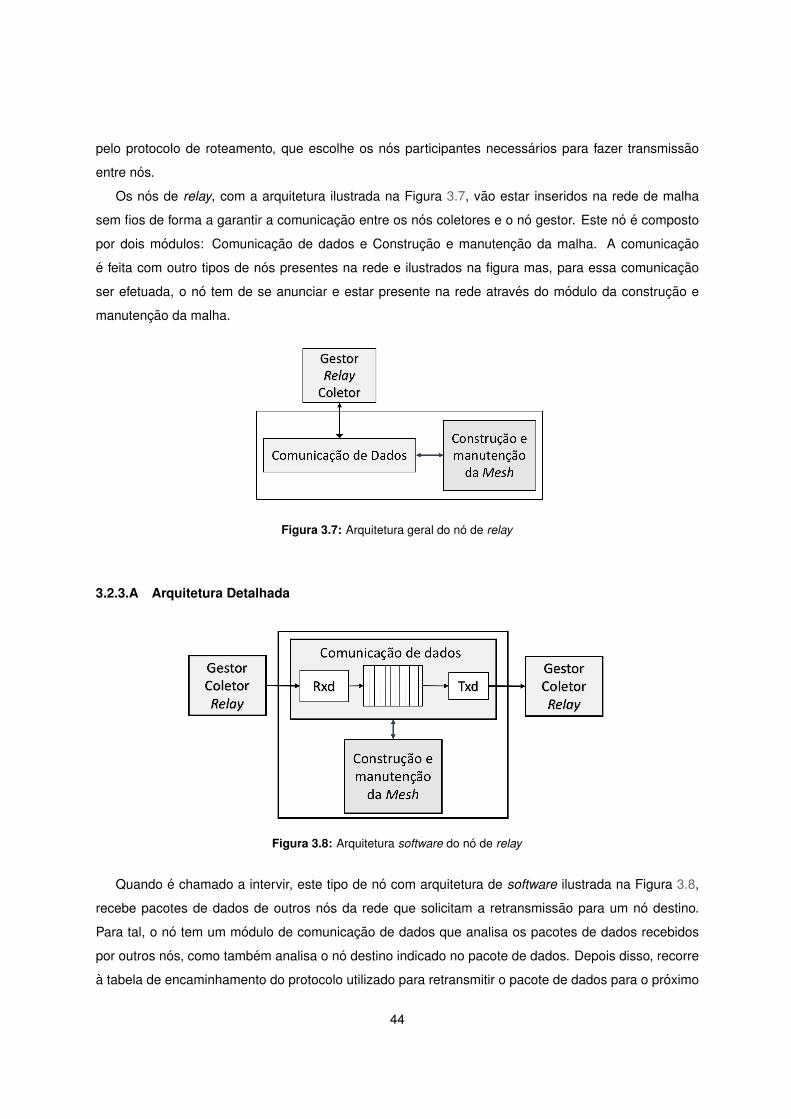
pelo protocolo de roteamento, que escolhe os nos participantes necessarios para fazer transmissao
entre nos.
Os nos de relay, com a arquitetura ilustrada na Figura 3.7, vao estar inseridos na rede de malha
sem fios de forma a garantir a comunicacao entre os nos coletores e o no gestor. Este no e composto
por dois modulos: Comunicacao de dados e Construcao e manutencao da malha. A comunicacao
e feita com outro tipos de nos presentes na rede e ilustrados na figura mas, para essa comunicacao
ser efetuada, o no tem de se anunciar e estar presente na rede atraves do modulo da construcao e
manutencao da malha.
Figura 3.7: Arquitetura geral do no de relay
3.2.3.A Arquitetura Detalhada
Figura 3.8: Arquitetura software do no de relay
Quando e chamado a intervir, este tipo de no com arquitetura de software ilustrada na Figura 3.8,
recebe pacotes de dados de outros nos da rede que solicitam a retransmissao para um no destino.
Para tal, o no tem um modulo de comunicacao de dados que analisa os pacotes de dados recebidos
por outros nos, como tambem analisa o no destino indicado no pacote de dados. Depois disso, recorre
a tabela de encaminhamento do protocolo utilizado para retransmitir o pacote de dados para o proximo
44

no.
3.2.4 No Gestor
O no gestor, com a arquitetura geral ilustrada na figura 3.9, vai ser o no responsavel por receber
todas as informacoes recolhidas e geradas pelos nos coletores presentes na rede de malha sem fios.
As informacoes sao recebidas atraves do modulo de comunicacao de dados. Quando o no recebe
informacoes, faz o processamento da informacao recolhida pelos varios nos no bloco de ”Processa-
mento Global”e armazena a informacao processada numa base de dados geral. Adicionalmente, alem
da comunicacao na rede com os restantes nos, este no e responsavel pela gestao e atualizacao do sis-
tema de informacao. E o mesmo sera responsavel pela comunicacao em tempo real com as aplicacoes
dos clientes, leia-se na figura, o bloco ”Interface Utilizador”. Aplicacoes essas, que irao permitir aos
utilizadores do sistema aceder as informacoes de ocupacao do parque.
Este no acaba por ser o no que vai ter maior responsabilidade no sistema, vai processar em tempo
real a informacao dos varios nos coletores, guarda-la, e disponibiliza-la para os utilizadores. Acaba por
ser este no que faz a ponte entre o sistema interno e a camada de aplicacao para os utilizadores.
Figura 3.9: Arquitetura geral do no Gestor
3.2.4.A Arquitetura Detalhada
A arquitetura de software deste no encontra-se ilustrada na Figura 3.10. O modulo de comunicacao
de dados vai permitir ao no receber e efetuar comunicacoes de dados com outros nos existentes na rede
de malha sem fios presentes no sistema de gestao de estacionamento. Para isso ser possıvel, como nos
restantes tipos de nos existentes na rede, existe um modulo responsavel pela construcao e manutencao
da rede que anuncia a sua existencia. Quando o no recebe ou envia comunicacoes estas vao para uma
45

Figura 3.10: Arquitetura software do no Gestor
fila da interface de comunicacao utilizada pelo no. Quando recebe comunicacoes de dados, estes
dados vao ser alvo de uma interpretacao no sub-bloco ”Formatacao de dados”, dentro do bloco de
”Processamento Global”e depois colocados numa base de dados global. Os dados recebidos sao
importantes para estimar em tempo real a ocupacao das diversas zonas do parque de estacionamento
em que o sistema esta a operar e tambem a ocupacao total. Depois do processamento detalhado
da informacao enviada pelos nos coletor, a informacao e armazenada numa base de dados que e
responsavel pela gestao da capacidade global e das diversas zonas do parque de estacionamento. A
base de dados estara sempre atualizada, porque sempre que um veıculo identificado entra ou saı de
uma determinada zona o no recebe essa informacao.
Este no desempenha outro papel importante alem das comunicacoes com os nos presentes na
rede, do calculo de ocupacao e manutencao dos registos globais de utilizacao do parque. Este no e
responsavel por disponibilizar informacoes sobre a capacidade disponıvel do parque e das diversas
zonas para as aplicacoes que serao responsaveis por fazer a comunicacao com os utilizadores. Por
isso este no tem um outro bloco, ”Interface Utilizador”, que permite a disponibilizacao de informacoes
46

aos utilizadores finais, os gestores e os clientes atraves de aplicacoes web. A disponibilizacao de
informacoes e feita atraves do acesso a base de dados global pela pagina web. Uma vez que a base
de dados estara sempre atualizada, o objectivo e o sistema indicar as interfaces de comunicacao com
os utilizadores o numero de todos os veıculos presentes no parque e nas diversas zonas de estacio-
namento. A aplicacao do gestor pode pedir ou enviar informacoes para outros nos da rede alem do
controlo de ocupacao do parque.
3.3 Comunicacoes
As comunicacoes entre os nos integrantes da rede serao feitas com base numa rede Ad-Hoc, cons-
tituıda pelos varios tipos de nos presentes na mesma(nos coletores, nos de relay, no gestor). Desta
forma garante-se que a rede e descentralizada e nao requer equipamento adicional para alem dos
proprios nos. A operar por cima desta rede estara um protocolo de roteamento de malha sem fios
proativo.
Cada no vai ter uma fila de espera para o envio de pacotes por ordem, que nao e implementada
pelo protocolo utilizado mas sim pela interface Wi-Fi da rede Ad-Hoc.
3.3.1 Tipos de comunicacoes
A – Coletor-Relay Este tipo de comunicacao e efetuada sempre que o no coletor nao consegue
alcancar diretamente, sem saltos, o no gestor. Como ja foi referido anteriormente, os nos de relay po-
dem ser nos instalados unicamente com o proposito de ajudar na transmissao de pacotes de dados ou
entao podem ser nos coletores que tambem tem a capacidade de retransmitir informacao proveniente
de outros nos alem do envio dos dados enviados coletados por si.
B – Relay-Gestor Este tipo de comunicacao vai ser efetuado no ultimo salto entre a transmissao do
no fonte(coletor) para o no destino(gestor). Portanto e neste tipo de comunicacao que a entrega de um
pacote de dados e terminada.
C – Coletor-Gestor Este tipo de comunicacao e efetuada quando um no coletor consegue alcancar
com apenas um salto o no gestor, evitando desta forma a colaboracao de outros nos para transmitir os
seus pacotes de dados.
3.3.1.A Construcao da malha
De forma a que rede de malha sem fios responsavel pela gestao do parque de estacionamento
esteja completamente operacional, os nos que queiram participar na rede tem um modulo descrito nas
47

suas arquitetura para construcao. Para cada no se ligar a rede, tem de se ativar um script com a
configuracao necessaria para pertencer a rede.
3.4 Sıntese e Discussao
Neste capıtulo definiram-se a analise de requisitos para o sistema a desenvolver, arquitetura geral e
o tipo de comunicacoes, sempre com o objetivo de desenvolver um produto simples, de facil instalacao,
e sem infraestrutura de rede associada.
Objetivo principal foi arquitetar um sistema de baixo custo, funcional e sem barreiras fısicas. Para um
sistema deste tipo mitigar o problema da procura de um lugar de estacionamento tem que disponibilizar
a informacao relacionada com a lotacao aos utentes. De forma a melhorar a gestao da area e o detalhe
da informacao disponibilizada, optou-se por dividir a topologia fısica do parque em varias zonas.
Foram definidos tres tipos de nos que permitem efetuar a gestao do estacionamento: coletores, relay
e gestor. Todos os nos conseguem comunicar entre si atraves de um protocolo de malha sem fios. A
disposicao dos 4 sensores ultrassonicos dos nos coletores e feita de forma a identificar automoveis nos
dois lados da faixa de rodagem, e tem-se uma camera para efetuar o reconhecimento automatico de
matrıculas e validar a entrada/saıda de um automovel.
48

4Implementacao
Conteudo
4.1 Hardware . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 50
4.2 Rede . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 54
4.3 Componentes de software . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 60
4.4 Sıntese e Discussao . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 63
49

Neste capıtulo irao ser abordadas as principais decisoes adotadas em relacao ao desenvolvimento
do sistema. Vai haver uma descricao e analise sobre as tecnologias adotadas e o porque da forma de
implementacao escolhida. Irao ser apresentadas e justificadas as escolhas de implementacao efetua-
das para a elaboracao dos varios subsistemas necessarios, para o normal funcionamento do sistema
desenvolvido. Nas opcoes de implementacao efetuadas, teve de se ter em conta o preco dos compo-
nentes de hardware de modo a nao comprometer um dos objetivos do projeto, que acaba por ser a
construcao de um sistema robusto mas ao mesmo tempo economico. A implementacao do sistema vai
ser dividida em tres nıveis: software, rede, e hardware.
4.1 Hardware
Nesta subseccao irao ser descritas todas as escolhas dos componentes para os diversos nos cons-
tituintes do sistema: coletores, relay e gestor. As funcoes detalhadas dos nos ja foram descritas na
seccao da arquitetura, aqui irao ser descritas as formas e as escolhas de implementacao para as
funcoes associadas a cada no serem alcancadas com sucesso.
4.1.1 No coletor
4.1.1.A Plataforma de computacao
Figura 4.1: RaspberryPi 3
Raspberry Pi 3 Depois de uma analise entre as duas plataformas de computacao possıveis para
eleicao, RPi3 e Arduino, decidiu-se que o RPi seria uma plataforma mais poderosa a nıvel de especificacoes
de hardware. Esta plataforma, ilustrada na Figura 4.1, oferece um leque maior de interfaces de comunicacao
50

de origem ja embebidas na plataforma, como tambem maior capacidade de processamento e maior ap-
tidao para instalacao de software, devido ao sistema operativo Raspbian que tem kernel Linux.
A tecnologia de comunicacao foi previamente escolhida foi Wi-Fi, e o RPi ja vem com uma placa de
rede IEEE 802.11n na frequencia de 2.4GHz. Logo ja tem a tecnologia que se pretende utilizar no sis-
tema incorporada na placa de rede Wi-Fi, nao sendo por isso necessaria a instalacao de componentes
adicionais(dongles) para utilizar-se esta tecnologia de comunicacao.
Para as plataformas de computacao funcionarem, obviamente, precisam de ter uma fonte de alimentacao.
Para um sistema de instalacao dos nos fixa, ou se arranja maneira de chegar a rede eletrica ate aos
locais e terem uma tomada de 230V para depois se ligarem os transformandores dos RPi, ou entao
podera recorrer-se a instalacao de mini paneıs solares ligados a uma bateria, em que os paıneis iriam
carrega-la. Isto e possıvel porque o parque e exterior com forte exposicao de luz solar. Isto iria permitir
alimentar as plataformas de computacao tendo uma fonte de energia sustentavel, e a longo prazo pro-
vavelmente o investimento ira ser compensado. Para ja as diversas plataformas de computacao ficaram
ligadas a rede eletrica.
4.1.1.B Sensores para detecao de automoveis
Para efetuar a detecao de veıculos recorreu-se a dois tipos de sensores: ultrassonicos para fazer
detacao de movimento e uma camera concebida para o RPi para fazer reconhecimento de imagem,
conforme foi estipulado na arquitetura do sistema.
Sensores ultrassonicos Estes podem ser ligados a interface GPIO da plataforma de computacao
dos nos coletores. Os sensores utilizados tem a designacao “HC-SR04”, ilustrados na Figura 4.2, e
sao alimentados por uma tensao de 5V DC e uma corrente de 15mA, ou seja, sao um tipo de sensor
com baixo consumo. Tem um alcance entre 2 cm e 4 m. Estes sensores sao ligados diretamente
ao RPi atraves da interface GPIO do RPi. Na plataforma de testes experimentais, a ligacao entre o
sensor e a plataforma de computacao e feita atraves de uma breadbord que funciona de ponte entre os
sensores e a plataforma. Com os sensores encaixados na breadboard consegue-se que estes estejam
estabilizados e numa posicao fixa, permitindo assim obter medicoes corretas e constantes.
Camera para reconhecimento de imagens A camera utilizada para reconhecimento de imagem
escolhida foi uma camera que foi especificamente desenvolvida para os RPi, “Raspberry Pi Camera
Module V2” que se encontra ilustrada na Figura 4.3. Tem uma resolucao de 8 megapixeis, e e capaz de
fazer vıdeos em 1080p. Com esta camera consegue-se obter imagens rapidamente no RPi, e a ligacao
e feita atraves de uma porta Camera Serial Interface (CSI) que este tem incorporada. Com esta camera
pretende-se captar fotografias dos carros que entram ou saiam da regiao delimitada pelos sensores
51

Figura 4.2: Sensor ultrassonico HC-SR04
ultrassonicos. Depois da imagem ser capturada, imagem onde se pretende visualizar a entrada ou
saıda de um carro, ira ser analisada por um programa de detecao de matrıculas, o OpenALPR. O
funcionamento deste programa vai ser explicado na seccao de software.
Figura 4.3: Camera utilizada para captar imagens
Disposicao dos sensores A disposicao dos sensores de detecao de movimentos, em cada no cole-
tor, esta estudada de forma a poder fazer a detecao de um automovel. A distancia entre eixos media
de um carro, a distancia entre S1 e S2 na Figura 4.4, e de cerca e 2,5 m. Contudo, a distancia entre
sensores pode ser alterada, se as medicoes efetuadas nao estiverem de acordo com espectado e caso
nao se consiga detetar todos os automoveis. Portanto, esta e a distancia inicial definida, mas se com a
utilizacao contınua num perıodo experimental se verificar que a distancia nao e ideal, deve ser ajustada
ate satisfazer os requisitos.
52

Figura 4.4: Posicionamento dos sensores ultrassonicos
4.1.2 No relay
Como se ira utilizar a tecnologia IEEE 802.11n para fazer comunicacao de dados, ira ser usada um
plataforma de computacao ainda de menor custo que do no coletor, o RPi Zero W ilustrado na Figura
4.5, para desempenhar a funcao de no de relay. Este dispositivo e muito mais basico que o RPi3, menos
interfaces de comunicacao, mas e de dimensoes muito reduzidas e de um custo extremamente baixo,
continuando a partilhar o mesmo sistema operativo. Para o proposito da existencia deste no no sistema,
esta revelou-se uma escolha mais economica sem comprometer a funcionalidade e o desempenho.
Figura 4.5: RaspberryPi Zero W
53

4.1.3 No gestor
O no gestor ira utilizar uma plataforma de computacao igual a do no coletor. Nao utilizara nenhum
componente de hardware adicional alem da plataforma de computacao, pois esta ja cumpre os requisi-
tos para executar as funcoes deste no.
4.2 Rede
A rede que vai ser implementada tem de ter um numero de nos adequado a topologia fısica do
cenario onde o sistema vai ser instalado, neste caso, o parque exterior do IST-campus Taguspark.
De modo a ter-se um contabilizacao de ocupacao por zonas, e consequentemente uma disponibilizacao
mais detalhada para os utilizadores acerca das informacoes de lotacao do parque de estacionamento,
tem que se ter nos coletores instalados na divisao entre zonas. Essa divisao sera feita em cruzamentos/interseccoes
e nas entradas/saıdas do parque.
Devido a topologia do espaco fısico e consequentemente escolha da colocacao dos nos coletores,
a rede vai ser dimensionada com base nesses aspetos. Ou seja, a rede vai ser composta por todos os
nos coletores que sao necessarios instalar para efetuar a detecao de entrada e saıda de automoveis de
todas as zonas do parque, um no gestor, e depois os nos de relay necessarios que irao permitir obter
uma rede com cobertura de sinal completa do espaco fısico, atraves de um protocolo de comunicacao
de malha sem fios entre os nos.
4.2.1 Protocolo de roteamento
Tendo como base a arquitetura e o tipo de rede do sistema definida, a escolha centrou-se num
protocolo de roteamento proativo. A escolha por este tipo de protocolo traz um benefıcio bastante im-
portante na instalacao dos nos na rede, especialmente se o nosso sistema tiver em conta a aplicacao
em parques de estacionamento bastante amplos, e com diversas zonas. Se estivermos perante um
cenario desse tipo, nenhum no tem que ser sobrecarregado com a necessidade de conhecer a topo-
logia global da rede, cada no mantem a informacao apenas sobre o melhor proximo no, e evita que
em caso de falha de um dos nos que os restantes nao consigam efetuar comunicacoes. Dentro dos
diversos protocolos existentes no mercado, decidiu-se utilizar um protocolo relativamente recente, o
B.A.T.M.A.N.-advanced, porque cumpre os requisitos pre-definidos, usa a metrica de routing DSDV, e
ja vem instalado com a imagem do sistema operativo utilizado pelos RPi, ou seja, e um protocolo ja
testado e com fiabilidade comprovada nestes equipamentos.
54

4.2.2 Prıncipio de Funcionamento
A construcao de rotas entre os diversos nos de uma WMN e baseada na descoberta de nos vizi-
nhos recorrendo a propagacao de Originator Message (OGM) periodicamente para todas as interfaces
configuradas para usar o protocolo, neste caso so a ”Wlan0”(Wi-Fi) de todos os RPi presentes na rede.
Este intervalo de propagracao de mensagens pode ser alterado, mas por definicao e 1 segundo. Neste
intervalo cada no envia uma OGM para informar os nos vizinhos, nos alcancaveis com um unico salto.
Os nos vizinhos vao receber e retransmitir as mensagens para outros nos vizinhos e assim sucessiva-
mente, com o objectivo de informar todos os nos da rede da existencia do novo no originador.
Os pacotes OGM sao pequenos para reduzir a sobrecarga e evitar que a rede seja inundada com
pacotes de controlo desnecessarios. As OGM tem varios propositos: anunciar a presenca de um no
e o possıvel proximo salto em direcao ao no anunciado, e medir a qualidade das possıveis rotas em
direcao ao no originador e ao no encaminhador [11].
Figura 4.6: Pacote OGM
Para tal o formato de cada OGM e ilustrado na Figura 4.6 e tem os campos que se encontram
ilustrados na Figura 4.6, com alguns deles importantes:
• Tipo de pacote
• Versao: neste caso a versao utilizada e a ”BATMAN IV”
• Intervalo de geracao de OGM
• Numero de sequencia
• Endereco do no originador da mensagem
• Qualidade de transmissao
• TT Nº Alteracoes
55

• TTNV
• TTCRC
Este tipo de mensagens e composto por uma estrutura de dados armazenada em cada no que
contem duas listas: lista de nos vizinhos e lista de nos originadores.
A lista dos nos vizinhos permite listar todos os nos que sao alcancaveis atraves de um unico salto,
e a sua escolha e efetuada com base na qualidade de ligacao. A direcao sobre o proximo salto para
alcancar o no destino e selecionada com base na qualidade de ligacao. Se um no quer transmitir dados
e tem dois nos que podem fazer o proximo salto a escolha recai no no que oferece maior qualidade de
ligacao.
A lista com os nos originadores mantem todos os outros nos presentes na malha e relembra em que
direcao devem ser transmitidos os pacotes de dados. Na rede do sistema todos os nos originadores
acabam por ser tambem eles roteadores que mantem a lista dos nos que fazem o roteamento dos
pacotes de dados. Esta ultima lista pode ser alterada a qualquer altura visto que a topologia da rede
e dinamica, e nao sao criados ciclos de roteamento. A lista dos nos originadores e composta pelo
endereco do originador, uma sequencia de numeros das OGM aceites por um dado originador, lista de
roteadores no caminho do no originador, e o no vizinho(roteador) selecionado como o proximo salto na
direcao do originador para para enviar os pacotes de dados de acordo com a intencao do no orginador.
A lista dos nos roteadores mantem todos os nos roteadores, e sempre que existe uma nova OGM valida,
da entrada num buffer a possıvel existencia de um novo no roteador que pode servir para reenviar uma
OGM mais tarde.
4.2.3 Anuncio de clientes
Figura 4.7: Mensagem OGM
Cada protocolo de malha sem fios tem de proporcionar acesso a rede para os clientes que nao
facam parte da malha. Para tal e necessaria a existencia de um sistema que permita o anuncio de
clientes. A tarefa deste tipo de sistemas e informar cada no da malha de qualquer cliente nao ligado, de
forma a encontrar o caminho para esse cliente a partir de qualquer ponto da malha. Um cliente possui
um identificador, o endereco MAC na camada 2 OSI que e inundado atraves da malha.
56

Os nos que recebem a OGM, mensagem que permite anunciar novos clientes ilustrada na Figura
4.7, vao medir uma fracao da OGM chamada qualidade de rececao, e vao fazer broadcast dessa
informacao para os nos vizinhos. Portanto a rede inteira sera inundada de OGM. Os nos depois
comecam a medir a quantidade de OGM que sao alvo de rebroadcast pelos vizinhos. Esta quantizacao
denomina-se echo quality. A qualidade de transmissao das OGM recebidas tambem pode ser calculada
atraves da divisao da echo quality pela qualidade de rececao. Entre todas as mensagens recebidas,
um no vai retransmitir a OGM com melhor qualidade de transmissao.
4.2.4 Tabelas de Traducao
Estas tabelas permitem que os nos nao B.A.T.M.A.N. usem a infraestrutura da malha facilmente,
atraves da traducao dos enderecos MAC dos nos. Quando um no da malha deteta que um cliente quer
comunicar consigo, guarda o enderco do cliente numa tabela de traducao local e inunda a rede com o
endereco do cliente. Sempre que outros nos queiram enviar dados para esse cliente, devem aceder a
tabela de traducao global para chegar ate ao no da malha. Primeiro os dados sao enviados para o no
da malha e seguidamente para o cliente.
4.2.4.A Tabela de traducao local
O endereco MAC de cada cliente que e reconhecido atraves da interface de malha sera armazenado
nesta tabela local do no, que ira conter todos os clientes que o no esta a servir no momento.
Esta tabela consiste na informacao que um no tem de disseminar pela rede para tornar os clientes
acessıveis. Isso ocorre porque quando um no quer entrar em contato com um cliente especıfico, gracas
a essa informacao, ele conhece o originador para o qual ele enviou os dados.
Cada tabela local do no possui um atributo especıfico: o numero da versao da tabela de traducao
(ttnv). Esse valor representa a versao da tabela que e incrementada por 1 sempre que a tabela local
muda, por exemplo, cada vez que um cliente e adicionado ou removido.
Toda a transmissao de OGM contem o ttnv atual e um conjunto de valores de soma de verificacao
CRC32 da tabela de traducao local para permitir que os nos recetores decidam rapidamente se as
tabelas estao em sincronizadas ou nao.
4.2.4.B Tabela de traducao global
No momento da inicializacao, cada no tera uma tabela de traducao local vazia e uma tabela de
traducao global igualmente vazia. O ttnv e sempre inicializado a 0. A transmissao de OGM representa
o evento de propagacao da tabela local.
57

Assim que ocorre um evento local, um cliente ser adicionado/excluıdo, o ttnv e incrementado por 1
no proximo evento de propagacao. Alem disso, as alteracoes locais desde a ultima transmissao OGM
sao anexadas ao proprio OGM. Este mecanismo ajuda a evitar a operacao de pedido de tabela, pois
qualquer no recetor pode recuperar as alteracoes do OGM para atualizar sua tabela de traducao global.
A entrada de alteracao das tabelas e composta pelos seguintes campos: -Flags: Indica se o
endereco do cliente deve ser adicionado ou removido. -Reservado(3 bytes): necessario para tornar
o tamanho da estrutura um multiplo de 32 bits -Endereco do cliente: endereco do cliente em questao.
-Identificador de VLAN: ID da VLAN onde este cliente esta conectado a essas alteracoes tambem
sao anexadas as duas OGM seguintes, se nao houvesse novas alteracoes, entretanto, aumentando a
chance de o nodo vizinho receber as alteracoes no caso de perda de pacotes. Se um no receber um
OGM que contem um novo ttnv sem o conjunto de alteracoes ou qualquer uma das somas de verificacao
CRC32 nao coincide, pode emitir uma solicitacao de tabela. Em particular, um no pode solicitar duas
informacoes diferentes: ou o conjunto de mudancas do ttnv atual ou a tabela local completa.
A – Tabela de pedidos de reenvio Para reduzir a sobrecarga das operacoes de solicitacao de ta-
bela, cada no no caminho de uma mensagem de solicitacao TT examinara o conteudo e decidira se
possui as informacoes corretas para responder a solicitacao diretamente, sem encaminhar a mensa-
gem a mais nos. O ttnv e os checksums CRC32 contidos na mensagem de pedido fornecem meios
suficientes para verificar se coincide com as informacoes disponıveis localmente. Se coincidirem, o no
pode responder diretamente a solicitacao. Se algo nao corresponder, o no encaminhara o pacote para
o proximo salto do caminho para o no destino.
4.2.5 Transmissao de pacotes de dados
Para os pacotes de dados entrarem na malha e necessario terem um header com informacao
necessaria para depois ser possıvel fazer o roteamento e entregar os dados ao no destino. Essa
informacao, normalmente ocupa 28 bytes. Por isso, e recomendado que cada pacote de dados ocupe
no maximo 1500bytes e os restaste 28bytes sao para informacoes de roteamento. Sempre que o tama-
nho de um pacote de dados a transmitir excede os 1500 bytes e fragmentado. O metodo de envio para
todos os pacotes escolhidos foi unicast fragmentation.
O header contem 6 campos importantes:
• Cabecalho comum: contem a versao do protocolo, o tipo de pacote e o Time-to-Live (TTL)
• Destino: usado para efeitos de roteamento de fragmentos do pacote de dados, quando o tamanho
do pacote excede a MTU
• Originador: e usado para agrupar os fragmentos num buffer
58

• Numero do fragmento: Serve para reconstruir o pacote, ao fazer a juncao dos varios fragmentos
• Numero de sequencia: Usado para identificar o grupo de fragmentos e juntamente com o Origi-
nador consegue identificar um pacote
• Tamanho total: Serve para determinar quando e que todos os fragmentos devem ser reagrupados
e verifica tambem se ja recebeu todos os fragmentos que pertencem a um pacote de dados
Para os nos criarem, transmitirem, retransmitirem e receberem pacotes de dados, o procedimento
efetuado pelo protocolo de roteamento e exemplificado nos diagramas de blocos das Figuras 4.8, 4.9,
4.10 respetivamente.
Figura 4.8: Contrucao dos pacotes
4.2.6 Batctl
O ”Batctl”e uma ferramenta usada que permite fazer a configuracao e o debug da rede de malha sem
fios onde opera o protocolo B.A.T.M.A.N.-advanced. Todas as configuracoes que sao efetuadas atraves
desta ferramenta sao feitas no sistema de ficheiros virtual sysfs,a ferramenta apenas visa facilitar essas
altercoes ao utilizador com uma interface mais intuitiva. Tambem permite monitorizar o estado dos nos
da rede e realizar diversos testes para observar o correcto funcionamento do protocolo.
59

Figura 4.9: Reenvio dos pacotes
Figura 4.10: Entrega dos pacotes
4.3 Componentes de software
4.3.1 Script de configuracao do no na rede
Este componente e transversal a todos os nos, e o modo de configuracao dos diversos tipos de nos
e igual. Em cada no existe um script com a pre-configuracao do no na rede, em que se define a forma
como o no esta a operar: a interface de comunicacao, o modo de comunicacao Ad-Hoc, o numero
do canal, a MTU, etc. Este script de configuracao esta programado para arrancar automaticamente
sempre que os nos se ligam ou reiniciam.
4.3.2 No coletor
Programa em Python Este tipo de no neste sistema acaba por ser o mais complexo porque faz
aquisicao, processamento e envio de dados. Como a aquisicao de dados e feita atraves de dois tipos
de sensores, para extrair a informacao dos sensores recorre-se a bibliotecas proprias na linguagem de
programacao Python que conseguem extrair a informacao dos sensores (em forma nao legıvel) para
dados ja legıveis na optica do utilizador. Para os sensores ultrassonicos, que extraem a distancia ate
ao objeto mais proximo atraves da propagacao de uma onda, utiliza-se a biblioteca ”RPI.GPIO”. Para
60

extrair imagens captadas pela camera utiliza-se a biblioteca ”picamera”.
OpenALPR Como ja foi referido a aquisicao de imagens so e feita quando atraves do programa e
solicitada essa acao. Quando o e, vai ser capturada uma ou varias imagens que vao ser guarda-
das temporariamente no RaspberryPi. Depois disso, entra em acao o teste para reconhecimento de
matrıculas para a identificacao e validacao de um possıvel veıculo atraves do software open source
”OpenALPR- Automated License Plate Recognition.
Este software que esta instalado nos nos possibilita o processamento rapido e local das imagens
a analisar. A biblioteca analisa imagens para identificar matrıculas, e o output do processamento de
dados e a representacao de texto de qualquer placa de placa e a probabilidade dessa identificacao
estar correta.
Para se instalar o OpenALPR teve-se que se instalar varios softwares previamente, da qual este
depende: OpenCV, Leptonica, Tesseract OCR. O OpenCV e uma biblioteca de visao computacional
construıda para fornecer uma infraestrutura para aplicacoes de visao por computador. A biblioteca
possui mais de 2500 algoritmos otimizados, o que inclui um conjunto abrangente de algoritmos de
visao e computacao. Esses algoritmos podem ser usados para detectar e reconhecer rostos, identificar
objetos, classificar acoes humanas em vıdeos, rastrear movimentos de camera, rastrear objetos em
movimento, extrair modelos de objetos 3D, juntar imagens para produzir uma imagem de alta resolucao
de uma cena inteira, etc. A biblioteca Leptonica faz processamento de imagem e a Tesseract e um
software de reconhecimento optico de caracteres.
Base de dados Depois dos dados coletados dos sensores serem analisados, sao guardados numa
base de dados local em MySQL, para estarem acessıveis e para se manter um registo de todas as
entradas e saıdas de veıculos do parque, em caso de falha do sistema. A base de dados pode ser
acedida atraves da linha de comandos, ou entao se os gestores do parque/sistema forem menos rotina-
dos neste tipo de procedimento atraves de uma interface php, neste caso o PhpMyAdmin. O no gestor
podera pedir reenvio de todos os dados caso os administradores do sistema pretendam.
Depois de todos os dados recolhidos e guardados pelo no, e necessario transmiti-los para o no
gestor atraves da rede de malha sem fios. Para isso tem que se ter os nos pre-configurados para
estarem na rede e fazer todas as configuracoes da placa de rede. A comunicacao a nıvel de aplicacao
e feita atraves de sockets, e ira ser detalhada na seccao de comunicacoes.
4.3.3 No gestor
Este no ira fazer o processamento de todos os dados recebidos e disponibiliza-los aos utilizadores
e gestor atraves de paginas Web. Para tal, vai gerir todos os dados com informacao de utilizacao das
61

diferentes zonas de estacionamento provenientes nos coletores da rede. Os dados irao estar alojados
numa base de dados MySQL, localmente.
Programa em Python O programa em linguagem python vai ser responsavel por fazer deste no como
um servidor, em que recebe informacoes provenientes de varios nos atraves da rede de malha sem fios.
E definido no programa um socket de comunicacao com o porto de destino do no, e e desenvolvido
todo o codigo para fazer interpretacao dos dados ja padronizados recebidos, e para depois proceder as
alteracoes/atualizacoes na base de dados.
Base de Dados A base de dados ira permitir contabilizar, atraves das informacoes provenientes dos
nos coletores a ocupacao total e por zonas do parque de estacionamento. Para isso, ira conter uma ta-
bela com varios campos que permita inserir a informacao proveniente dos nos coletores como matrıcula,
distancia, data e hora, que permita identificar a zona de cada registo adicionado.
Cada informacao de entrada ou saıda de automoveis detetada pelos nos coletores e recebida neste
no. Sempre que houver uma alteracao de ocupacao numa das zonas a base de dados e atualizada.
Para se conseguir fazer a contabilizacao por zonas, cada no coletor informa qual e a sua zona no pacote
de dados, e assim o no gestor consegue interpretar com sucesso a alteracao de estado da zona correta.
Quando um veıculo entra num parque/zona e essa informacao chega ao no gestor, os dados sao
adicionados a tabela da base de dados, e quando saı dessa zona, a linha que identifica o veıculo e
eliminada. Por isso a PRIMARY KEY da tabela e a matrıcula, visto que e um identificador unico e
inequıvoco para cada veıculo. Deste modo, nao podem coexistir na mesma tabela dois carros com a
mesma matrıcula.
Aplicacao Web Foram construıdas duas aplicacoes Web para disponibilizarem informacoes sobre a
lotacao do parque. Uma foi construıda para os utentes do parque e outra para os gestores. Para isso
utiliza-se uma interface PHP para fazer a ligacao entre a base de dados MySQL e uma pagina em
Hypertext Transfer Protocol (HTTP).
A aplicacao para os gestores disponibiliza mais informacao que a dos clientes, visto que alguns dos
dados envolvem a privacidade dos utilizadores e nao devem ser publicos. A aplicacao dos gestores
permite que se saiba quais os veıculos que entraram no parque/zona atraves da matrıcula, data e hora
do registo de entrada. Esta implementada a funcao de calculo da velocidade a que um veıculo passa
em frente aos sensores, contudo nao e utilizada porque no cenario de testes nao se conseguiu colocar
os sensores de cada faixa de rodagem a distancia ideal um do outro. Optou-se entao por nao se
disponibilizar essa funcionalidade, visto que os dados poderiam nao ser fidedignos.
A aplicacao para os clientes resume a informacao essencial que um utilizador do parque necessita
para ser auxiliado na procura por um lugar, disponibiliza o numero de lugares disponıveis nas diver-
62

sas zonas do espaco de estacionamento e a percentagem de ocupacao da respectiva zona, alem da
percentagem total do parque.
4.4 Sıntese e Discussao
Neste capıtulo, sustentou-se a escolha das plataformas de computacao utilizadas para os diversos
tipos de nos, apresentaram-se os sensores utilizados para a detecao de automoveis e reconhecimento
de matrıculas. Foi explicada a disposicao de cada conjunto de sensores ultrassonicos. Na seccao de
rede foi explicado detalhadamente o princıpio de funcionamento e a operacao do protocolo utilizado
para encaminhar os dados entre os nos. Por fim, foram apresentados os diferentes componentes de
software implementados nos nos.
63

5Testes Experimentais
Conteudo
5.1 Teste de roteamento . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 65
5.2 Testes de software . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 68
5.3 Aplicacoes Web . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 68
5.4 Sıntese e Discussao . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 69
64

Tabela 5.1: Tabela com os dados dos nos
No Nome IP ”bat” MAC address (Wlan0)1 RPi2 172.27.0.3 b8:27:eb:06:23:ea2 RPi-1 172.27.0.2 b8:27:eb:95:ae:5c3 RPi-3 172.27.0.9 b8:27:eb:51:16:fd4 RPi-ZeroW 172.27.0.1 b8:27:eb:dc:fd:9e
Neste capıtulo sao apresentados os testes efetuados ao sistema desenvolvido. Os testes abordam
o funcionamento do protocolo de roteamento de malha sem fios B.A.T.M.A.N.-advanced, testes de al-
cance, testes de software e visualizacao das aplicacoes para os utilizadores(clientes e gestores). Estes
testes visam comprovar a funcionalidade e o correto funcionamento do conceito do sistema desenvol-
vido.
5.1 Teste de roteamento
Os testes de alcance entre nos e de roteamento entre nos distantes foram feitos no parque exte-
rior e aberto do IST-Taguspark. Comecou-se por usar apenas 2 dos 4 nos e, de seguida foram-se
adicionando nos em diferentes pontos, que irao ser identificados atraves no mapa da Figura 5.1. Sao
assinaladas as colocacoes dos nos, atraves do numero identificativo de cada no. Os dados de cada no
sao apresentados na Tabela 5.1, com o numero identificativo, o IP ”batman”, e o MAC address de cada
interface dos nos configurada para ser usada com o protocolo, nomeadamente a Wi-Fi (Wlan0).
Figura 5.1: Cenario de testes do sistema
65

Na Figura 5.1 encontra-se ilustrado o cenario de testes, no parque de estacionamento do IST-
Taguspark, onde foram efetuados testes de rede com os 4 nos descritos na Tabela 5.1. Os numeros
assinalados na Figura 5.1 indicam a colocacºao os nos (com o correspondente numero). Do ponto 1
ao ponto 3 distam sensivelmente 80 metros, do ponto 3 ao ponto 2 distam 75 metros, e do ponto 2 ao
ponto 4 distam 70 metros.
Na Figura 5.2 encontra-se ilustrada a perda de ligacao entre dois nos quando estes ja distam
distancias a rondar os 110 metros, com falhas na sequencia dos ICMP e alta latencia na transferencia
de dados entre os nos, daı a necessidade de tambem se ter de utilizar nos de relay na rede que permi-
tam que a transferencia de dados entre os nos mantenha parametros de qualidade aceitaveis.
Figura 5.2: Distancia aumenta e a comunicacao entre os nos perde qualidade
Figura 5.3: Tabela de vizinhos do no 1 com os 4 nos proximos
Na Figura 5.3 encontra-se a tabela com os vizinhos do no 1 quando os restantes 3 nos estao
proximos. Verifica-se que o no 1 consegue identificar os restantes nos porque estao dentro do alcance
da interface ”Wlan0”.
Com o cenario de teste ja montado, com os nos com uma disposicao igual a Figura 5.1, ilustra-se
na Figura 5.4 a comunicacao do no 1 para 4. Na Figura 5.5 e representada a rota de comunicacao
de forma a que a comunicacao anterior seja possıvel. Verifica-se que a comunicacao e feita de forma
66

multi-salto, primeiro do no 1 para o no 3, depois do no 3 para o no 2 e depois do no 2 para o no 4.
Na Figura 5.6 verifica-se que o no 1 so consegue identificar como vizinho o no 3, daı a comunicacao
para nos mais distantes da rede so ser possıvel atraves de comunicacao multi-salto. Na Figura 5.7 sao
apresentadas as tabelas de traducao local e global do no 1.
Figura 5.4: Ping com os 4 nos do 1 para o 4
Figura 5.5: Rota de comunicacao do 1 para o 4
Figura 5.6: O no 1 so identifica o no 3 ja com os 4 nos instalados no cenario
Na Tabela 5.2 encontram-se os teste de latencia media efetuados para 3 cenarios distintos. No
primeiro cenario efetua-se a comunicacao entre dois nos com uma distancia entre estes de 80m. No
segundo mantem-se o mesmo cenario mas com 110m de distancia a separar os nos e latencia aumenta
cerca de 300 vezes. Ou seja, neste segundo cenario alem de haver falhar de ICMP, como esta visıvel
na Figura 5.2, a latencia fica demasiado elevada. Deste modo a distancia entre nos tem de ser inferior
a 110m de forma a termos uma latencia baixa. No terceiro e ultimo cenario apresentado efetua-se o
teste de latencia com o cenario dos 4 nos montado, percorrendo uma distancia de cerca de 225m entre
o primeiro e ultimo no, com uma latencia media de 66.34 ms. Desta forma consegue-se comprovar a
67

Figura 5.7: Tabelas de traducao local e global do no 1
Tabela 5.2: Testes de alcance entre nos
Nº de nos Distancia (m) Latencia media (ms)1 80 9.321 110 30134 225 66.34
eficiencia do protocolo de roteamento B.A.T.M.A.N.-advanced, que abrange uma distancia significativa
com uma latencia baixa na entrega de dados a um no bastante distante atraves de multi-salto, passando
os dados por mais 2 nos ate serem entregues ao no destino.
5.2 Testes de software
Na Figura 5.8 encontra-se o resultado do teste de uma imagem com o programa OpenALPR. O
programa analisa a imagem capturada aquando da passagem de um objeto pelos sensores de detecao
de movimento, e se identificar os padroes de uma matrıcula retorna os varios resultados possıveis.
Para efeitos de identificacao de matrıcula no sistema e contabilizada a matrıcula que apresenta um
valor mais provavel, com maior intervalo de confianca.
Na Tabela 5.3 encontram-se apresentados os resultados de teste ao software de reconhecimento
de matrıculas com a taxa de sucesso associada. A taxa media de sucesso nos testes foi de 81%. Esta
taxa, embora seja aceitavel como prova de conceito, podera ser melhorada com um uso de cameras de
maior resolucao.
5.3 Aplicacoes Web
Na Figura 5.9 consegue-se visualizar a aplicacao para os gestores do parque. Os dados sao prove-
nientes da base de dados global armazenados no no gestor. Os gestores sao informados das horas de
68

Figura 5.8: Resultado do reconhecimento de matrıcula com o OpenALPR
Tabela 5.3: Taxa de sucesso da leitura de matrıculas
Matrıcula Taxa de Sucesso20-QU-30 85%57-DI-20 81%89-TE-54 78%52-80-LX 92%18-CZ-29 67%
entrada do veıculo, a distancia a que passaram dos sensores, as matrıculas e a zona onde entraram.
A aplicacao apresenta tambem uma tabela com o numero de lugares disponıveis e percentagem de
ocupacao de cada zona e ainda a ocupacao total do parque e respetiva percentagem. A capacidade de
cada zona e definida pelo gestor da aplicacao previamente.
Na Figura 5.10 encontra-se ilustrada a aplicacao do cliente, com os dados essenciais para saber a o
numero de lugares livres e onde este se encontram, sem demonstrar dados que envolvam a privacidade
dos utilizadores nem dados desnecessarios para os clientes como a distancia a que o carro passou dos
sensores.
5.4 Sıntese e Discussao
Com os testes efetuados ao sistema, consegue-se ter uma nocao do desempenho e das limitacoes
do mesmo. Conseguiu-se comprovar o funcionamento e a eficiencia do rotemaento numa rede de malha
sem fios no local de testes, o parque de estacionamento exterior do IST-Taguspark. Conseguiu-se
tambem ter uma taxa de sucesso no reconhecimento de matrıculas basntante elevada a rondar os 80%.
Essa taxa podera ser incrementada utilizando uma camera de maior resolucao para captar imagens. A
nıvel de aplicacoes Web para os clientes, conseguiu-se demonstrar o correcto funcionamento para as
duas aplicacoes, a de gestores e as de utentes.
69

Figura 5.9: Aplicacao para gestores do parque
Figura 5.10: Aplicacao para clientes do parque
70

6Conclusoes e Trabalho Futuro
Conteudo
6.1 Conclusao . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 72
6.2 Trabalho futuro . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 73
71

6.1 Conclusao
Nesta tese conseguiu-se demonstrar que e possıvel construir um sistema gestao de parques de
estacionamento ao ar livre, dentro do ambito das IoT e dos ITS, com um baixo custo, sem instalacao de
barreiras fısicas e de facil instalacao. O sistema para alem de controlar a entrada e saıda de veıculos em
todo parque, consegue tambem fornecer informacoes sobre a lotacao de varias zonas de um parque. As
divisoes entre zonas devem ser feitas consoante o espaco fısico da instalacao do sistema e consoante
as pretensoes dos gestores do parque, para otimizar a qualidade de informacao disponıvel para os
condutores de forma a facilitar e agilizar o processo de procura por um lugar vago. Por outro lado, quanto
mais informacao os gestores conseguirem saber sobre a utilizacao do parque, maiores hipoteses tem
de melhorar e optimizar a gestao do mesmo.
A nıvel de arquitetura do sistema tentou-se simplificar as escolhas efetuadas, privilegiando acima de
tudo a funcionalidade e fiabilidade das tecnicas e tecnologias utilizadas no sistema, tendo sempre em
conta o preco dos componentes de forma a nao a encarecer o custo do sistema. Todos os componentes
de hardware como a plataforma de computacao, sensores para a detecao de veıculos, como a camera e
sensores ultrassonicos, e tecnologia de comunicacao tiveram em conta esse parametros. Utilizou-se em
conjunto com a camera um software de reconhecimento de matrıculas que se revelou uma ferramenta
bastante fiavel para identificar automoveis, e que permite obter mais informacoes aos gestores do
parque que apenas a entrada ou saıda de um veıculo.
Conseguiu-se provar a fiabilidade do protocolo de roteamento proativo para redes de malha sem
fios utilizado, o B.A.T.M.A.N.-advanced. Deste modo, dada a arquitetura desenhada para o sistema
revelou-se uma boa solucao, porque tem-se um no central instalado no parque que recebe dados sobre
a entrada/saıda de veıculos de varios outros nos que estao distantes. Dado essa distancia e falta de
alcance ou perda de qualidade de ligacao das interfaces Wi-Fi das plataformas de computacao utiliza-
das acima de 100m sensivelmente, teve-se de recorrer a este tipo de roteamento multi-salto para fazer
a comunicacao entre os nos mais distantes(nos coletores) e o no central(gestor). Portanto, com uso
desta tecnologia de rede sem uma infraestrutura propria, a entrega de informacao sobre a detecao de
veıculos entre os varios nos coletores e o no gestor foi assegurada com sucesso, sem que fosse ne-
cessario saber a topologia da rede antecipadamente. Visto que e um protocolo de roteamento proativo,
e este faz a gestao das tabelas de encaminhamento automaticamente.
Com a construcao das aplicacoes web e consequente disponibilizacao das informacoes de ocupacao
do parque, simples e/ou detalhada consoante o perfil do utilizador, os objetivos do sistema foram
alcancados e a prova de conceito foi efetuada com sucesso.
72

6.2 Trabalho futuro
Para o sistema ser mais completo, deverao ser adicionadas mais algumas funcionalidades impor-
tantes para um sistema deste tipo, de modo a aumentar a oferta de servicos e a comodidade dos
utilizadores. Isto podera tambem traduzir-se num incremento de valor do sistema desenvolvido. O
hardware devera ter uma estrutura propria e de suporte para estar protegido em bem colocado nos
parques de estacionamento. Devera testar-se o sistema com uma camera de maior resolucao de forma
a aumentar a percentagem de sucesso de leitura de matrıculas.
Para tal, o trabalho futuro devera traduzir-se em 5 pontos principais: integracao do sistema no
sistema do IST ”Fenix”, construcao de um sistema de reservas, construcao de uma aplicacao movel
de modo a fazer-se o guiding dos utilizadores ate uma determinada zona com GPS, instalacao de uma
tecnologia de comunicacao como backup e instalacao de um sistema de autenticacao que permita o
acesso ao parque coberto-garagem.
O sistema de reservas devera ter um sistema de pontos associado, em que os utilizadores poderiam
indicar ao sistema informacoes adicionais, como por exemplo a quantas pessoas um condutor deu
boleia. Os condutores que dessem boleia a mais pessoas, depois das informacoes serem devidamente
comprovadas, teriam direito a reservar um lugar no estacionamento coberto do IST-Taguspark.
O sistema de PGI deveria permitir guiar os condutores ate a um determinado local tanto em am-
bientes exteriores como interiores. No primeiro atraves da aplicacao movel com GPS. No segundo
ambiente, para isso ser possıvel tera que se optar pela utilizacao de tecnicas de localizacao indoor.
A nıvel de tecnologia de comunicacao como backup, poderia ser utilizado GSM/GPRS com a instalacao
de modulos apropriados para suportar essas comunicacoes nos nos da rede.
Para acesso ao parque fechado do IST-Taguspark, e como o objetivo era so as pessoas devidamente
credenciadas pelo sistema o poderem utilizar, o acesso deveria ser feito atraves de um sistema de NFC
ou de RFID com tags passivas, nomeadamente QR codes geradas pelo sistema, em que a autenticacao
era feita atraves do smartphones dos utilizadores.
73

Bibliografia
[1] S. Mahmud, G. Khan, M. Rahman, H. Zafar et al., “A survey of intelligent car parking system,”
Journal of applied research and technology, vol. 11, no. 5, pp. 714–726, 2013.
[2] E. Polycarpou, L. Lambrinos, and E. Protopapadakis, “Smart parking solutions for urban areas,”
in World of Wireless, Mobile and Multimedia Networks (WoWMoM), 2013 IEEE 14th International
Symposium and Workshops on a. IEEE, 2013, pp. 1–6.
[3] J. Rico, J. Sancho, B. Cendon, and M. Camus, “Parking easier by using context information of a
smart city: Enabling fast search and management of parking resources,” in Advanced Information
Networking and Applications Workshops (WAINA), 2013 27th International Conference on. IEEE,
2013, pp. 1380–1385.
[4] P. A. Zandbergen and S. J. Barbeau, “Positional accuracy of assisted gps data from high-sensitivity
gps-enabled mobile phones,” The Journal of Navigation, vol. 64, no. 3, pp. 381–399, 2011.
[5] A. Amini, R. M. Vaghefi, M. Jesus, and R. M. Buehrer, “Improving gps-based vehicle positioning
for intelligent transportation systems,” in Intelligent Vehicles Symposium Proceedings, 2014 IEEE.
IEEE, 2014, pp. 1023–1029.
[6] A. T. Mariakakis, S. Sen, J. Lee, and K.-H. Kim, “Sail: Single access point-based indoor localization,”
in Proceedings of the 12th annual international conference on Mobile systems, applications, and
services. ACM, 2014, pp. 315–328.
[7] R. Wilfinger, T. Moder, M. Wieser, and B. Grosswindhager, “Indoor position determination using
location fingerprinting and vehicle sensor data,” in Navigation Conference (ENC), 2016 European.
IEEE, 2016, pp. 1–9.
[8] A. Baniukevic, C. S. Jensen, and H. Lu, “Hybrid indoor positioning with wi-fi and bluetooth: Ar-
chitecture and performance,” in Mobile Data Management (MDM), 2013 IEEE 14th International
Conference on, vol. 1. IEEE, 2013, pp. 207–216.
74

[9] A. Khanna and R. Anand, “Iot based smart parking system,” in Internet of Things and Applications
(IOTA), International Conference on. IEEE, 2016, pp. 266–270.
[10] M. Patil and V. N. Bhonge, “Wireless sensor network and rfid for smart parking system,” International
Journal of Emerging Technology and Advanced Engineering, vol. 3, no. 4, pp. 188–192, 2013.
[11] M. S. Singh and V. Talasila, “A practical evaluation for routing performance of batman-adv and
hwmn in a wireless mesh network test-bed,” in Smart Sensors and Systems (IC-SSS), International
Conference on. IEEE, 2015, pp. 1–6.
[12] K. Vijayakumar, P. Ganeshkumar, and M. Anandaraj, “Review on routing algorithms in wireless
mesh networks,” International Journal of Computer Science and Telecommunications, vol. 3, no. 5,
pp. 87–92, 2012.
[13] “ePark,” https://www.emel.pt/pt/onde-estacionar/via-publica/meios-de-pagamento/epark/, [Acces-
sed 15-Out-2017].
[14] L. Sanchez, L. Munoz, J. A. Galache, P. Sotres, J. R. Santana, V. Gutierrez, R. Ramdhany,
A. Gluhak, S. Krco, E. Theodoridis et al., “Smartsantander: Iot experimentation over a smart city
testbed,” Computer Networks, vol. 61, pp. 217–238, 2014.
[15] A. O. Kotb, Y.-C. Shen, X. Zhu, and Y. Huang, “iparker—a new smart car-parking system based on
dynamic resource allocation and pricing,” IEEE Transactions on Intelligent Transportation Systems,
vol. 17, no. 9, pp. 2637–2647, 2016.
[16] G. Pierce and D. Shoup, “Sfpark: Pricing parking by demand,” Access Magazine, 2013.
[17] “Bmw dynamic parking prediction,” https://newatlas.com/bmw-dynamic-parking-prediction-research-project/
37853/, [Accessed 10-Oct-2017].
[18] “Cisco Smart+Connected City Parking,” https://www.cisco.com/c/dam/en us/solutions/industries/
docs/parking aag final.pdf, [Accessed 10-Oct-2017].
[19] “Siemens smart parking,” https://www.siemens.com/customer-magazine/en/home/mobility/
smarter-parking.html, [Accessed 10-Oct-2017].
[20] H. Wang and W. He, “A reservation-based smart parking system,” in Computer Communications
Workshops (INFOCOM WKSHPS), 2011 IEEE Conference on. IEEE, 2011, pp. 690–695.
75

76