
Projecto de Actuador Electromagnético para o Ajuste de ... · para o grupo que se juntava em torno...
111
Projecto de Actuador Electromagnético para o Ajuste de Caudal em Contadores de Água com regime de Pré- Pagamento utilizando a norma STS Valter Luzio Dias Jardineiro Dissertação para a obtenção do Grau de Mestre em Engenharia Electrotécnica e de Computadores Orientadores: Professor Paulo José da Costa Branco, Engenheiro Fernando Costa Gaspar Júri Presidente: Professor Rui Manuel Gameiro de Castro Orientador: Professor Paulo José da Costa Branco Vogais: Professora Helena Margarida Machado da Silva Ramos, Professor Mário Rui Melicio da Conceição Novembro 2015
Transcript of Projecto de Actuador Electromagnético para o Ajuste de ... · para o grupo que se juntava em torno...

Projecto de Actuador Electromagnético para o Ajuste de
Caudal em Contadores de Água com regime de Pré-
Pagamento utilizando a norma STS
Valter Luzio Dias Jardineiro
Dissertação para a obtenção do Grau de Mestre em
Engenharia Electrotécnica e de Computadores
Orientadores: Professor Paulo José da Costa Branco,
Engenheiro Fernando Costa Gaspar
Júri
Presidente: Professor Rui Manuel Gameiro de Castro
Orientador: Professor Paulo José da Costa Branco
Vogais: Professora Helena Margarida Machado da Silva Ramos,
Professor Mário Rui Melicio da Conceição
Novembro 2015


i
Agradecimentos
Se um dia me perguntarem o que constituiu a minha dissertação de mestrado, terei que
responder que marcou, indubitavelmente, o final do meu curso; portanto, seria simplesmente
injusto, olhar para ela sem ver a meta da minha passagem pelo Instituto Superior Técnico. E,
quando me referem o nome desta instituição, três pessoas me ocorrem à mente de imediato:
os meus pais e o Professor Paulo Branco. Os primeiros pela razão óbvia: foram quem sempre
me apoiou, e sem eles nunca teria conseguido concluir o meu curso. Quanto ao Professor
Paulo Branco, a história é mais comprida.
Eu conheci o Professor Paulo Branco numa altura em que o meu percurso académico
nada mais me tinha dado a conhecer do que o puro conhecimento científico. Lembrava-me da
célebre frase do Professor Abel Salazar: “O Médico que só sabe de Medicina, nem Medicina
sabe”, e lamentava que o mesmo não se pudesse aplicar à Engenharia. Em suma, imiscuía-se-
me o sentimento de falta: falta de alma. Foi essa alma que o Professor Paulo Branco provou
existir no seio das paredes do Técnico. Trabalhar com o Professor Paulo Branco, para além de
se revelar uma experiência enriquecedora no pragmatismo do Mundo científico, impregna-nos
de valores culturais e sociais, que qualquer pessoa que trabalhou com ele poderá corroborar.
Assim sendo, o meu primeiro grande agradecimento é destinado ao meu Professor e
Orientador, Paulo Branco, não só pelo apoio que me deu ao longo desta dissertação, mas por
todo um conjunto de vivências que proporcionou, tanto a mim, como à sua equipa de alunos de
Mestrado e Doutoramento.
O meu segundo agradecimento é destinado ao Aluno de Doutoramento, e também
amigo, João Fernandes, pelos momentos, conversas e trocas de opiniões, que cobriram um
leque multifacetado de temas, desde os mais pertinentes conceitos científicos, aos mais triviais
motejos lúdicos.
De seguida, queria deixar uma palavra de reconhecimento ao Engenheiro Costa
Gaspar e à Professor Helena Ramos, pelo auxílio e abertura com que me receberam, sempre
que necessitei de esclarecer alguma dúvida, acerca de noções que escapam do foro
Electrotécnico.
Segue também um voto de gratidão para o João Pedro, técnico do laboratório de
hidráulica, que se mostrou sempre disponível durante a montagem do circuito hidráulico, bem
como de todas as vezes em que necessitei de assistência durante os ensaios que tomaram
lugar no laboratório de hidráulica.
Queria mencionar dois amigos que me acompanharam até ao fim do meu percurso
académico, e a quem apelo em agradecimento por todos os momentos que passámos juntos:
Diogo Amado e Diogo Frazão.

ii
Uma palavra de especial amizade para o meu irmão Leandro, que ao ajudar a manter
acesa a chama da minha veia artística ao longo destes anos, permitiu-me expandir a minha
componente humanística, essencial para contrabalançar o puro conhecimento científico
adquirido na Universidade.
Um voto de agradecimento, a duas pessoas que receberam, sempre com gestos de
indulgência e paciência, a minha irascibilidade mal contida, devida às contingências da vida
académica: Tiago Jorge e António Cadima.
Gostava de mencionar uma amiga, Helena Frazão, que, umas vezes mais presente,
outras mais distante, sempre me acompanhou ao longo da minha caminhada Universitária. E,
sendo uma pessoa com quem partilho um leque de memórias desde o divertido ao
melancólico, é também uma pessoa que me acolheu sempre com amizade sincera e honesta,
e que tenho a certeza que o continuará a fazer nos anos vindouros.
Queria também agradecer ao meus colegas (e alguns amigos) que, tal como eu,
desenvolviam dissertações de mestrado com o Professor Paulo Branco, e me proporcionaram
uma experiência de trabalho bastante peculiar e agradável. Neste contexto, segue um abraço
para o grupo que se juntava em torno do gabinete 2i.12, para discutir ideias e projectos.
E, em último lugar, mas não menos importante, gostava de mencionar uma pessoa
que, durante o período em que estive envolvido nesta dissertação, estabeleceu o meu ponto de
equilíbrio entre a vida académica e social; que me relembrou, de diversas formas, que a vida
não se restringe só ao trabalho; e que me demonstrou que as surpresas positivas da vida estão
sempre ocultas entre as sombras do destino: Vera Atanásio.

iii
Resumo
A utilização de contadores de água em regime de pré-pagamento tem vindo a assumir
um papel cada vez mais predominante em diversas zonas do globo, como a Ásia, a África, a
América do Sul, e, também, em certos pontos da Europa, como Portugal e o Reino Unido. Por
essa razão, o desenvolvimento de novas metodologias para o controlo e leitura de água
consumida nas residências passa a assumir pertinência científica e económica, para além das
demais vantagens sociais. Assim, esta dissertação estuda e procura desenvolver um sistema
que pudesse ser implantado em contadores de água convencionais já existentes em
habitações, com o intuito de lhes conferir características de funcionamento em regime de pré-
pagamento. Este é um trabalho que surgiu no âmbito da parceria IST – Resul e que foi
abordado ao longo desta dissertação.
Esta dissertação divide-se em duas vertentes principais. A primeira foca-se no projecto
e dimensionamento de um actuador electromagnético para uma válvula solenóide, que possa
ser aplicada a jusante de um contador de água, com a finalidade de delimitar ou cortar o
abastecimento de água. Neste campo, estudam-se parâmetros pertinentes como a força
electromagnética do actuador, a energia eléctrica consumida, a existência ou não de saturação
magnética, a temperatura de funcionamento, para além de toda a dinâmica mecânica, eléctrica
e térmica do sistema. Na segunda vertente realizada em paralelo com a primeira, desenvolveu-
se e aplicou-se a um contador convencional um sistema de obtenção da contagem de água,
através de um método não intrusivo; instalou-se uma válvula para delimitação de caudais; e,
posteriormente, montou-se um circuito de controlo e alimentação para os equipamentos.
Palavras-chave: Actuador electromagnético, Contador de pré-pagamento, Contagem não-
intrusiva, Delimitação de caudais, Válvula solenóide

iv

v
Abstract
Nowadays, the use of prepayment water meters is becoming more prominent in certain
parts of the world, such as Asia, Africa and South America. Thus, the development of new
methodologies for controlling and reading water consumption in households is in line with
scientific and economic reasons, and not only due to social awareness. Therefore, upon these
beliefs, it was decided to study and develop a system capable of managing the water supply
passing through a conventional water meter, which would be already installed on an arbitrary
residence. This project was set under a partnership between IST and Resul, and it was carried
out during this master’s thesis period.
The line of work was divided in two main courses. The first one focused on the project
of an electromagnetic actuator, to be installed on a solenoid valve, which would be applied in
parallel with a conventional water meter for water flow delimitation purposes. There were some
electrical characteristics under attention during this study, such as the electromagnetic force,
the power consumption, the magnetic saturation and the temperature variation, besides all
aspects concerning mechanical, electric and thermal dynamics of the actuator.
The second line of work was centered on developing a system to obtain the water
metering measure, via a non-intrusive methodology. Afterwards, it was mounted a solenoid
valve to restrict the water flow, and created a control and energy supply circuit, for all the
equipment used in the prototype.
Keywords: Electromagnetic Actuator, Non-intrusive Metering, Prepayment Water Meter,
Solenoid Valve, Water Flow Delimitation

vi

vii
Índice Lista de Figuras ......................................................................................................... ix
Lista de Símbolos .................................................................................................... xiii
1. Introdução ............................................................................................................ 1
1.1 – Motivação e definição do problema ................................................................................ 1
1.2 – Enquadramento do tema na área científica ..................................................................... 2
1.3 – Estrutura da dissertação ................................................................................................... 2
1.4 – Objectivos da dissertação ................................................................................................. 2
2. Projecto do actuador electromagnético ............................................................. 5
2.1 – Conceitos base, geometria do actuador e estudo hidráulico .......................................... 5
2.1.1 – Geometria do actuador ............................................................................................. 7
2.1.2 – Estudo hidráulico ....................................................................................................... 8
2.2 – Estudo teórico da dinâmica do actuador electromagnético e primeiro modelo de
simulação ................................................................................................................................ 10
2.2.1 – Modelação eléctrica ................................................................................................ 11
2.2.2 – Modelação mecânica............................................................................................... 16
2.2.3 – Modelação térmica ................................................................................................. 19
2.2.4 – Primeiro modelo de simulação................................................................................ 20
2.2.5 – Resultados do primeiro modelo de simulação ........................................................ 25
2.3 – Conceitos de saturação magnética e segundo modelo de simulação ........................... 31
2.3.1 – Revisão das equações do circuito magnético .......................................................... 32
2.3.2 – Implementação dos conceitos de saturação magnética no modelo de simulação 35
2.3.3 – Resultados do segundo modelo de simulação ........................................................ 35
2.4 – Modelo térmico em parâmetros concentrados e terceiro modelo de simulação ......... 37
2.4.1 – Modelo térmico em parâmetros concentrados ...................................................... 37
2.4.2 – Implementação do circuito térmico equivalente no modelo de simulação e
resultados. ........................................................................................................................... 39
3. Optimização de parâmetros para o dimensionamento do actuador
electromagnético ...................................................................................................... 42
3.1 – Definição do problema de optimização ......................................................................... 42
3.2 – Metodologia de resolução do problema de optimização .............................................. 46
3.3 – Resultados do processo de optimização ........................................................................ 48
3.4 – Processo de optimização com simulação em paralelo ................................................... 49
3.5 – Análise final da dinâmica do actuador electromagnético .............................................. 54

viii
4. Conversão de um contador convencional para contador de pré-pagamento58
4.1 Estudo dos contadores de água convencionais com pré-pagamento .............................. 58
4.2 Abordagem à obtenção da contagem por via magnética ................................................. 61
4.3 Abordagem à obtenção da contagem por via óptica ........................................................ 61
4.4 Conversão analógico/digital .............................................................................................. 64
4.5 Processamento do sinal digital .......................................................................................... 65
4.6 Concepção do circuito hidráulico para teste do sistema de contagem ............................ 66
4.7 Teste de fiabilidade da leitura óptica ................................................................................ 67
4.8 Instalação de válvula solenóide e circuito de controlo ..................................................... 69
4.9 Alimentação do sistema .................................................................................................... 70
4.10 Controlo de caudais, mediante modulação PWM .......................................................... 71
5. Conclusões e trabalho futuro ........................................................................... 74
6. Referências Bibliográficas ................................................................................ 78
Anexo 1 – Script da Função Objectivo .................................................................... 80
Anexo 2 – Função Principal do Algoritmo Genético .............................................. 86
Anexo 3 – Código do microcontrolador Arduino.................................................... 88
Anexo 4 – Comparação das contagens registadas pelo contador e Arduino. ..... 92

ix
Lista de Figuras
Figura 1 - (Da esquerda para a direita), ITRON TD9 DN15 MID, ITRON MSD CYBLE MG25
DN25 MID R50, e JANZ CA JV400
Figura 2 – Esquema representativo de uma válvula mecânica (adaptado de [2])
Figura 3 – Esquema representativo da primeira geometria idealizada para o actuador
electromagnético
Figura 4 – a) Esquema do actuador electromagnético, com corte central 2D b) Esquema do
actuador electromagnético, com um corte 3D, que permite perceber o formato do eixo central
do circuito magnético
Figura 5 – Corte central 2D do actuador electromagnético com identificação das dimensões
Figura 6 – Circuito magnético do actuador electromagnético (desprezando os efeitos de
saturação magnética)
Figura 7 – Diagrama de forças exercidas sobre o pistão do actuador electromagnético
Figura 8 – Ampliação do corte 2D do actuador electromagnético, na zona do eixo central, junto
ao entreferro
Figura 9 – Esquema principal do primeiro modelo de simulação
Figura 10 – Bloco onde é simulada a equação mecânica no modelo de simulação
Figura 11 – Bloco que estipula as condições relativas à aceleração no modelo de simulação
Figura 12 – Bloco onde se simula a equação eléctrica no modelo de simulação
Figura 13 – Bloco onde se simula a equação térmica no modelo de simulação
Figura 14 – Evolução da corrente após aplicação de um escalão de tensão (primeiro modelo de
simulação)
Figura 15 – Evolução da posição do pistão após aplicação de um escalão de tensão (primeiro
modelo de simulação)
Figura 16 – Ampliação da curva de evolução da posição do pistão (primeiro modelo de
simulação)
Figura 17 –Evolução da velocidade do pistão (primeiro modelo de simulação)
Figura 18 – Evolução do valor de resitência do fio de cobre (primeiro modelo de simulação)
Figura 19 – Evolução da força electromagnética após aplicação de um escalão de tensão
(primeiro modelo de simulação)
Figura 20 – Evolução do aumento de temperatura após aplicação de um escalão de tensão
(primeiro modelo de simulação)
Figura 21 – Evolução do aumento de temperatura após aplicação de uma onda quadrada de
tensão (primeiro modelo de simulação)
Figura 22 – Ampliação da curva de evolução do aumento de temperatura após aplicação de um
onda quadrada de tensão (primeiro modelo de simulação)
Figura 23 – Curva de saturação magnética característica do ferro

x
Figura 24 – Circuito magnético do actuador electromagnético, tendo em conta as várias regiões
Figura 25 – Evolução da densidade de fluxo, Bo, após aplicação de um escalão de tensão
(segundo modelo de simulação)
Figura 26 - Evolução da densidade e fluxo, Bo, após aplicação de um escalão de tensão,
ampliada à região em que o material entra na saturação magnética (segundo modelo de
simulação)
Figura 27 – Circuito térmico equivalente do actuador electromagnético
Figura 28 – Representação de uma geometria cilíndrica com especificação de dimensões
Figura 29 – Evolução do aumento de temperatura, para o modelo térmico de parâmetros
concentrados, aplicando um escalão de tensão
Figura 30 – Curva de Optimização, alimentando o algoritmo genético com os valores
calculados pelas equações
Figura 31 – Última geração de soluções para a optimização com simulação em paralelo
Figura 32 – Diâmetro ‘c’ do pistão para cada uma das soluções da última geração do processo
de optimização
Figura 33 – Força electromagnética exercida pelo actuador para cada uma das soluções da
última geração do processo de optimização
Figura 34 - Corrente consumida pelo actuador para cada uma das soluções da última geração
do processo de optimização
Figura 35 – Aumento de temperatura para cada uma das soluções da última geração do
processo de optimização
Figura 36 – Número de espiras da bobina do actuador para cada uma das soluções da última
geração do processo de optimização
Figura 37 – Potência consumida pelo actuador para cada uma das soluções da última geração
do processo de optimização
Figura 38 – Volume do actuador para cada uma das soluções da última geração do processo de
optimização
Figura 39 – Evolução da corrente para um ciclo de abertura e fecho da válvula (último modelo
de simulação com medidas optimizadas)
Figura 40 - Evolução da força electromagnética para um ciclo de abertura e fecho da válvula
(último modelo de simulação com medidas optimizadas)
Figura 41 - Evolução do coeficiente de indução para um ciclo de abertura e fecho da válvula
(último modelo de simulação com medidas optimizadas)
Figura 42 - Partes superior e inferior de um contador de água
Figura 43 - Esquema representativo da interacção entre o par de ímanes da peça inferior e o
par de ímanes da peça superior
Figura 44 - Identificação dos ponteiros reflectores, em cada uma das peças utilizadas para a
contagem da água

xi
Figura 45 - Esquema representativo do funcionamento de um interruptor do tipo reed
Figura 46 - a) Placa electrónica que executa funções do contador de pré-pagamento; b)
electroválvula que executa o corte de caudal no mesmo sistema
Figura 47 - Sensor Honeywell HOA1405-002 (à esquerda) e Optek OPB705 (à direita)
Figura 48 - Circuito para detecção óptica do consumo de água
Figura 49 - Aspecto superior de um dos contadores, onde se pode verificar a geometria do
ponteiro reflector
Figura 50 - Sinais analógico e digital medidos através do osciloscópio
Figura 51 - Arduino UNO utilizado para processar o sinal digital
Figura 52 – Esquema do circuito Hidráulico montado para testar os métodos de contagem e o
correcto funcionamento
Figura 53 – Circuito de controlo da válvula solenóide (adaptado de [22])
Figura 54 – Consumo da válvula solenóide instalada a jusante do contador, quando alimentada
por um sinal contínuo de tensão
Figura 55 – Protótipo final de um contador convencional convertido em contador de pré-
pagamento

xii

xiii
Lista de Símbolos
Símbolo Designação Unidades
𝐴 Área sobre a qual a força 𝑚2 𝐴1 Área sobre a qual a força é aplicada no ponto 1 𝑚2 𝐴2 Área sobre a qual a força é aplicada no ponto 2 𝑚2 𝐴𝑒 Superfície de fronteira por onde ocorrem trocas de potência térmica 𝑚2 𝑎 Altura do actuador electromagnético 𝑚
𝐵 Densidade de fluxo magnético 𝑇
𝐵𝑜 Densidade de fluxo magnético, correspondente à superfície 𝑆𝑜 𝑇 𝐵𝑟 Densidade de fluxo magnético, correspondente à superfície 𝑆𝑟 𝑇
𝐵𝑇 Densidade de fluxo magnético, correspondente à superfície 𝑆𝑇 𝑇
𝑏 Largura do actuador electromagnético 𝑚
𝐶 Capacidade térmica 𝐽/˚𝐶 𝐶𝑐𝑢 Capacidade térmica do cobre por que é constituída a bobina 𝐽/˚𝐶
𝐶𝑓𝑒 Capacidade térmica do ferro da armadura que envolve a bobina 𝐽/˚𝐶
𝐶𝑖𝑠 Capacidade térmica do isolamento do fio de cobre que constitui a bobina
𝐽/˚𝐶
𝐶𝑣 Coeficiente de vazão
𝑐 Calor específico de um material 𝐽/(𝑘𝑔. ˚𝐶) 𝑐𝑐𝑢 Calor específico do cobre 𝐽/(𝑘𝑔. ˚𝐶) 𝑑 Espessura da bobina 𝑚
𝑑𝑖𝑎𝑚 Diâmetro do condutor por que é constituído a bobina 𝑚
𝑒 Largura da parte fina do pistão 𝑚 𝐸1 Energia no ponto 1 𝐽 𝐸2 Energia no ponto 2 𝐽 𝐸𝑐1 Energia cinético no ponto 1 𝐽 𝐸𝑐2 Energia cinético no ponto 2 𝐽 𝐸𝑝1 Energia potencial no ponto 1 𝐽
𝐸𝑝2 Energia potencial no ponto 2 𝐽
𝐹 Força arbitrária 𝑁 𝐹𝑎𝑔 Força da água 𝑁
𝐹𝑒𝑙 Força electromagnética 𝑁
𝐹𝑚𝑜𝑙𝑎 Força da mola 𝑁 𝑔 Aceleração da gravidade 𝑚/𝑠2 𝐻 Intensidade do campo magnético 𝐴/𝑚
𝐻𝑐 Carga do descarregador 𝑚
𝐻𝑜 Intensidade do campo magnético na secção 𝑆𝑜 𝐴/𝑚
ℎ Altura 𝑚 ℎ1 Altura no ponto 1 𝑚
ℎ2 Altura no ponto 2 𝑚
ℎ𝑐𝑣 Coeficiente de convecção 𝑊/(𝑚2. 𝐾) ℎ𝑒 Coeficiente de condução e convecção 𝑊/(𝑚2. 𝐾) 𝑖 Corrente 𝐴
𝐽 Densidade de corrente 𝐴/𝑚2 𝐽𝑐 Densidade de corrente no condutor 𝐴/𝑚2 𝐿𝑙 Comprimento de uma geometria cilíndrica 𝑚
𝑙 Comprimento do fio de cobre 𝑚 𝑙1 Comprimento do fio de cobre para a primeira camada de espiras 𝑚
𝑙2 Comprimento do fio de cobre para a segunda camada de espiras 𝑚
𝑙3 Comprimento do fio de cobre para a terceira camada de espiras 𝑚 𝐾𝑠 Factor de espaço
𝑘 Constante da mola 𝑘𝑔/𝑠2 𝑙𝑝𝑎𝑡ℎ Caminho magnético 𝑚
𝑙𝑇𝑝𝑎𝑡ℎ Caminho magnético na parte superior do eixo central do actuador electromagnético
𝑚

xiv
𝑙𝑧 Comprimento do fio de cobre para uma camada de espiras ‘z’ 𝑚
𝑚 Massa do pistão do actuador electromagnético 𝑘𝑔
𝑚𝑓 Massa de um fluído 𝑘𝑔
𝑁𝑐𝑎𝑚 Número de camadas de espiras necessário para enrolar ‘n’ espiras em torno do eixo central do actuador electromagnético
𝑛 Número de espiras total por que é constituída a bobina do actuador electromagnético
𝑛1 Número de espiras que é possível enrolar por camada em torno do eixo central do actuador electromagnético
𝑃 Pressão de um fluído 𝑃𝑎
𝑃1 Pressão de um fluído no ponto 1 𝑃𝑎
𝑃2 Pressão de um fluído no ponto 2 𝑃𝑎 𝑝𝑎 Potência térmica acumulada no interior de um corpo homogéneo 𝑊
𝑝𝑐 Quantidade de calor perdida por condução 𝑊
𝑝𝑐𝑣 Quantidade de calor perdida por convecção 𝑊 𝑝𝑑 Trocas de potência térmica com o meio exterior 𝑊
𝑝𝑝 Potência de perdas 𝑊
𝑄 Caudal 𝑚3/𝑠 𝑅 Resistência do fio de cobre 𝛺
𝑅𝑐𝑜𝑛𝑑 Resistência térmica de condução para uma geometria cilíndrica sem produção interna de calor
˚𝐶/𝑊
𝑅𝑐𝑜𝑛𝑑𝑝 Resistência térmica de condução para uma geometria cilíndrica com
produção interna de calor ˚𝐶/𝑊
𝑅𝑐𝑜𝑛𝑣 Resistência térmica de convecção ˚𝐶/𝑊 𝑅𝑐𝑢 Resistência térmica do cobre ˚𝐶/𝑊
𝑅𝑓𝑒 Resistência térmica do ferro da armadura que envolve a bobina do actuador electromagnético
˚𝐶/𝑊
𝑅𝑓𝑒𝑝𝑖𝑠𝑡𝑎𝑜 Resistência térmica do ferro que constitui o eixo do actuador electromagnético
˚𝐶/𝑊
𝑅𝑖𝑠 Resistência térmica do isolamento que envolve o fio de cobre da bobina
˚𝐶/𝑊
𝑅𝑁 Reacção normal de uma força 𝑁
𝑅𝐴𝐶 Reservatório de Ar Comprimido
𝑟 Caminho arbitrário que é percorrido por uma força 𝑚
𝑟1 Raio interior de uma geometria cilíndrica 𝑚
𝑟2 Raio exterior de uma geometria cilíndrica 𝑚 𝑆𝑐𝑎𝑏𝑜 Secção do condutor de cobre 𝑚2 𝑆𝑜 Diferença de secções de diâmetro ‘c’ e ‘e’ 𝑚2 𝑆𝑟 Secção da armadura de ferro que envolve a bobina 𝑚2 𝑆𝑇 Secção da parte superior do eixo central do actuador electromagnético 𝑚2 𝑠 Espessura da armadura que reveste a bobina doa actuador
electromagnético 𝑚
𝑢 Tensão 𝑉 𝑉 Volume 𝑚3
𝑉𝑎𝑐𝑡𝑢𝑎𝑑𝑜𝑟 Volume do actuador electromagnético 𝑚3 𝑣 Velocidade arbitrária de um fluído 𝑚/𝑠 𝑣1 Velocidade de um fluído no ponto 1 𝑚/𝑠 𝑣2 Velocidade de um fluído no ponto 2 𝑚/𝑠 𝑊1 Trabalho no ponto 1 𝐽 𝑊1 Trabalho no ponto 2 𝐽 𝑊𝑐 Trabalho ao longo de um caminho c 𝐽 𝑊𝑚 Energia magnética 𝐽 𝑥 Posição do pistão 𝑚
𝑥𝑓𝑖𝑛𝑎𝑙 Posição final do pistão 𝑚
𝑧 Largura da armadura que reveste a bobina 𝑚 𝛼 Constante relacionada com a evolução da resistividade do cobre
(0.004)
∆𝜃 Variação da temperatura ˚𝐶
𝛿 Entreferro 𝑚

xv
𝛿𝑓𝑖𝑛𝑎𝑙 Valor do entreferro final 𝑚
𝛿𝑜 Valor do entreferro inicial 𝑚
𝜃 Temperatura ˚𝐶 𝜃𝑜 Temperatura inicial (20ºC) ˚𝐶
𝜆 Condutividade térmica de um material 𝑊/(𝑚. ˚𝐶) 𝜇𝑓𝑒 Permeabilidade magnética do ferro 𝐻/𝑚
𝜇𝑜 Permeabilidade magnética do ar 𝐻/𝑚
𝜌 Densidade de um fluído 𝑘𝑔/𝑚3 𝜌𝑐𝑢 Resistividade do cobre 𝛺.𝑚
𝜌𝑐𝑢0 Resistividade do cobre à temperatura 20ºC 𝛺.𝑚 𝜌𝑚 Densidade de um material 𝛺.𝑚
𝜏𝜃 Constante de tempo associada com a equação que descreve a evolução térmica
𝑠
𝛷 Fluxo magnético 𝑊𝑏
𝛷𝑜 Fluxo magnético na secção 𝑆𝑜 𝑊𝑏 𝛷𝑟 Fluxo magnético na secção 𝑆𝑟 𝑊𝑏
𝛷𝑇 Fluxo magnético na secção 𝑆𝑇 𝑊𝑏
𝜓 Fluxo magnético ligado 𝐻

xvi

1
1. Introdução
1.1 – Motivação e definição do problema
Nos dias de hoje, tem-se verificado uma utilização crescente de contadores de água de
pré-pagamento sujeitos à norma “Standard Transfer Specification” (STS), nomeadamente em
vários países em vias de desenvolvimento dos continentes Africano, Asiático e Sul-Americano.
Em termos de mercado actual direccionado a esta necessidade, verifica-se a existência de
variados contadores de pré-pagamento, ainda que muitos deles apresentem tecnologias pouco
fiáveis, ou até mesmo deficitárias. Assim, torna-se imperativo a criação de um contador de
água, cuja tecnologia seja suficientemente fiável para futura aplicação em zonas de consumo,
e que seja ao mesmo tempo compatível com a norma STS.
A norma STS é reconhecida como a única norma em protocolo aberto, aceite
globalmente para sistemas de pré-pagamento, e que garante interoperabilidade entre
componentes de sistema de diferentes fabricantes. A utilização desta tecnologia tem de ser
licenciada pela STS Association, por forma a garantir que os métodos de encriptação,
utilizados para proteger as transacções feitas entre concessionários da comunidade STS, são
fidedignos. A norma STS foi inicialmente criada para ser aplicada a contadores eléctricos; no
entanto, acabou por se expandir ao mercado dos contadores de gás e de água [1].
No início desta dissertação, foi estabelecida uma parceria estratégica entre a empresa
Resul – Equipamentos de Energia, SA e a Área Científica de Energia, do Departamento de
Engenharia Electrotécnica e Computadores do Instituto Superior Técnico, com o intuito de
desenvolver um sistema que, aplicado a um contador de água convencional, permita realizar as
mesmas operações de um contador de água de pré-pagamento. Um sistema com estas
características permite obter como vantagens:
O pagamento adiantado da água a consumir, evitando assim a necessidade de
leituras ou cortes por falta de pagamento;
Uma gestão mais eficiente da rede de abastecimento, ao permitir uma redução das
perdas comerciais, uma vez que o sistema constitui um forte obstáculo antifraude e
anti-roubo;
Um aumento do grau de confiança do cliente face à concessionária, devido ao facto de
deixarem de existir leituras e, por conseguinte, erros concernentes;
A possibilidade de se poder efectuar uma análise estatística relativa ao consumo dos
clientes, permitindo assim determinar quais são os clientes cujo perfil é mais indicativo
de fraude.

2
Para além destas vantagens primárias, a diminuição do desperdício e furto de água
permitirá ainda levar uma quantidade superior de água a outros clientes, bem como racionalizar
as reservas existentes.
1.2 – Enquadramento do tema na área científica
O tema desta dissertação de mestrado insere-se no âmbito da engenharia
electrotécnica, na área dos actuadores electromagnéticos, e surgiu com base nos objectivos do
protocolo estabelecido entre a empresa Resul – Equipamentos de Energia, SA e a Área
Científica de Energia, Departamento de Engenharia Electrotécnica e Computadores do Instituto
Superior Técnico.
1.3 – Estrutura da dissertação
Esta dissertação apresentará três capítulos principais. Os capítulos segundo e terceiro,
descrevem todo o estudo efectuado para um actuador electromagnético, que possa ser
instalado numa válvula solenóide normalmente aberta. Esta válvula poderá ser aplicada junto a
um contador convencional (pós-pago), para que possa efectuar todas as operações
pretendidas de corte e delimitação do caudal de água. No capítulo quarto são explicadas as
aplicações e implementações práticas, realizadas em torno de um contador convencional, para
lhe conceder funcionalidades de contador de pré-pagamento.
1.4 – Objectivos da dissertação
O actuador electromagnético projectado nesta dissertação é caracterizado por um
estado normalmente aberto, e poderá ser accionado através de um ciclo de funcionamento ON-
OFF, modulado de forma a limitar o caudal que passa pelo contador de água. O projecto
enveredou inicialmente por um estudo preliminar de conceitos hidráulicos, como forma de
determinar a força da água que deveria ser contrariada pelo actuador electromagnético.
Seguiu-se a delineação de possíveis geometrias a adoptar, à qual se sucedeu todo um estudo
mecânico, electromagnético e térmico, derivado do funcionamento do actuador
electromagnético. Estes processos foram examinados através de simulações, montadas no
âmbito do programa Simulink© para modelação, simulação e análise de sistemas dinâmicos.
Por fim, efectuou-se uma optimização dos parâmetros que detêm primordial influência no
sistema, estipulando-se como objectivo a minimização do volume total do aparelho e da
corrente utilizada. É de notar que, durante esta optimização, se procurou sempre evitar exceder
o limite térmico máximo suportado pelo fio de cobre, e garantir o limite mínimo de força
necessária.
A segunda vertente desta dissertação, abordada num contexto mais prático, incidiu
sobre o desenvolvimento de um conjunto de subsistemas, que permitem uma interligação entre

3
uma válvula solenóide e o contador. A este ponto estiveram adjacentes as actividades
enumeradas em seguida:
Estudo do funcionamento de contadores convencionais de água, bem como de
contadores utilizados em regime de pré-pagamento;
Elaboração de um sistema não-intrusivo para obtenção da contagem de água
registada no contador, e posterior conversão em sinal digital;
Projecto de um sistema de controlo da válvula solenóide, recorrendo a
comparações entre o registo de água consumida, e o saldo de água disponível.
Este sistema está também preparado para fazer a delimitação do caudal de água,
para que, numa situação de esgotamento de saldo, o utilizador não se veja perante
uma ocorrência de corte total. A acrescer a estas funções, o sistema deverá ser
capaz de cortar por completo o caudal de água, caso se detecte um caudal
contínuo durante um período de tempo pré-estabelecido pelo utilizador (situação
entendida como “fuga de água”);
Implementação de uma fonte de alimentação para a válvula solenóide e restantes
componentes electrónicos do sistema de controlo;
Instalação de uma válvula solenóide disponível no mercado, alimentada a corrente
contínua.
A última actividade referida na enumeração anterior deveu-se ao facto de se ter
desenvolvido o trabalho de componente prática paralelamente ao projecto do actuador
electromagnético. Esta actividade, no entanto, permitiu complementar o trabalho teórico, e
apresentar propostas de estudos futuros, como se poderá constatar no capítulo 5.

4

5
2. Projecto do actuador electromagnético
2.1 – Conceitos base, geometria do actuador e estudo hidráulico
Antes de se efectuar qualquer passo que conduza ao início do projecto do actuador
electromagnético, é necessário precisar o ponto partida. Neste contexto, entende-se que o
ponto inicial é marcado pelas características do material disponibilizado pela empresa Resul –
Equipamentos de Energia SA, ao qual será acoplado não só uma válvula solenóide, mas
também todos os dispositivos de controlo referenciados no primeiro capítulo desta dissertação.
Deve-se referir, então, que quaisquer sistemas e equipamentos desenvolvidos ou
adquiridos no âmbito deste trabalho deverão ser integrados num de três contadores de água
convencionais, cujas amostras foram fornecidas pela empresa em questão (ver Figura 1).
Assim sendo, em baixo, passa-se a apresentar cada um dos contadores, bem como as
características que deverão impor demais influência no decorrer do projecto:
ITRON MSD – Caudal Nominal: 4 m3/h; Caudal Máximo: 5 m3/h; Diâmetro nominal: 25
mm
ITRON TD9 – Caudal Nominal: 1,5 m3/h; Caudal Máximo: 3 m3/h; Diâmetro nominal: 15
mm
Janz JV400 – Caudal Nominal: 1,5 m3/h; Caudal Máximo: 3 m3/h; Diâmetro nominal: 20
mm
Figura 1 - (Da esquerda para a direita), ITRON TD9 DN15 MID, ITRON MSD CYBLE MG25 DN25 MID R50, e JANZ CA JV400
Como se pode constatar na listagem anterior, o contador que permite a passagem de
caudais mais volumosos é o INTRON MSD, sendo também aquele que detém maior diâmetro
6
nominal de tubagem. Por conseguinte, como se poderá verificar nos cálculos apresentados na
secção subsequente, será durante a utilização deste contador que a impulsão total da água
atingirá maior valor. Um outro parâmetro que deterá relevo nos cálculos da força exercida pela
água será a pressão e a quantidade de movimento a que o líquido estará sujeito. O valor de
pressão utilizado para os cálculos deste projecto foi fornecido pela empresa Resul, e trata-se
do valor máximo de pressão de água a que o equipamento estará sujeito, no local de
instalação. Este valor é de 6 Bar (equivalente a 600 kPa).
Para que se possa definir com maior precisão o objectivo deste projecto, é ainda
premente que se compreenda a diferença entre os conceitos de actuador electromagnético e
válvula solenóide, referenciados ao longo do texto. Para isso, começa-se por apresentar um
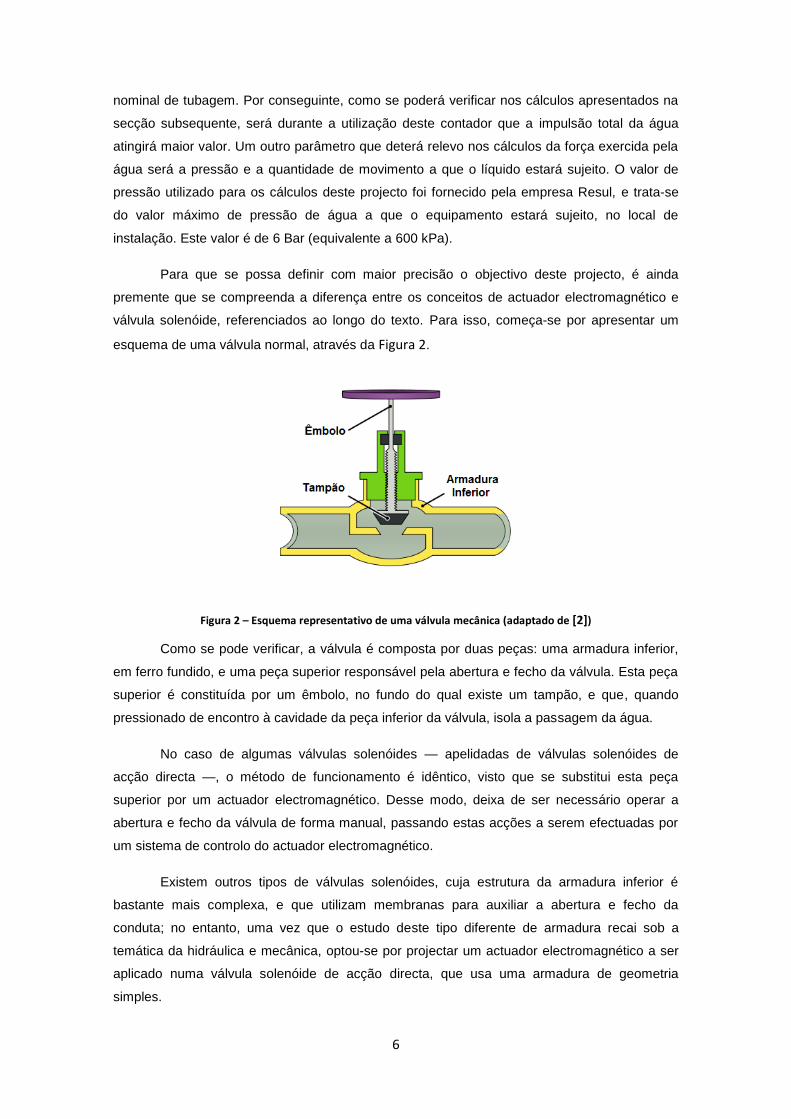
esquema de uma válvula normal, através da Figura 2.
Figura 2 – Esquema representativo de uma válvula mecânica (adaptado de [2])
Como se pode verificar, a válvula é composta por duas peças: uma armadura inferior,
em ferro fundido, e uma peça superior responsável pela abertura e fecho da válvula. Esta peça
superior é constituída por um êmbolo, no fundo do qual existe um tampão, e que, quando
pressionado de encontro à cavidade da peça inferior da válvula, isola a passagem da água.
No caso de algumas válvulas solenóides — apelidadas de válvulas solenóides de
acção directa —, o método de funcionamento é idêntico, visto que se substitui esta peça
superior por um actuador electromagnético. Desse modo, deixa de ser necessário operar a
abertura e fecho da válvula de forma manual, passando estas acções a serem efectuadas por
um sistema de controlo do actuador electromagnético.
Existem outros tipos de válvulas solenóides, cuja estrutura da armadura inferior é
bastante mais complexa, e que utilizam membranas para auxiliar a abertura e fecho da
conduta; no entanto, uma vez que o estudo deste tipo diferente de armadura recai sob a
temática da hidráulica e mecânica, optou-se por projectar um actuador electromagnético a ser
aplicado numa válvula solenóide de acção directa, que usa uma armadura de geometria
simples.

7
Para este tipo de válvulas, a limitação do caudal está unicamente condicionada à
potência do actuador electromagnético, uma vez que este terá de exercer uma força que,
aplicada directamente, seja suficiente para contrariar o fluxo de escoamento.
2.1.1 – Geometria do actuador
Na fase inicial do projecto do actuador electromagnético, começou-se por idealizar
duas geometrias que poderiam cumprir as funções requeridas, sabendo de antemão que se
pretendia uma válvula “normalmente aberta”. A denominação “normalmente aberta” designa
uma válvula que deixa fluir o caudal, quando o actuador electromagnético não está a ser
accionado. A primeira geometria idealizada para a constituição deste tipo de válvula é
apresentada na Figura 3. Como se pode observar, quando aplicada tensão, o pistão central
aproximar-se-ia do topo da carcaça do actuador, comprimindo a mola e fechando a abertura
para passagem de água. Depois de se retirar a alimentação eléctrica, a mola exerceria uma
força sobre o pistão, retornando-o à sua posição original (válvula aberta).
Figura 3 – Esquema representativo da primeira geometria idealizada para o actuador electromagnético
No entanto, após uma análise mais aprofundada, optou-se por não utilizar este design,
por receio de que a água pudesse causar turbulências sobre o tampão, durante as operações
de abertura e fecho. Numa situação de fecho, a água poderia exercer forças contraditórias ao
movimento, sobre a parte superior do tampão, ao passo que, durante a abertura, a força que a
água sob pressão exerceria sobre o tampão seria contraditória à força da mola e ao sentido do
movimento do pistão.
Assim sendo, concebeu-se uma segunda estrutura, que pudesse conceder ao actuador as mesmas características funcionais mecânicas, e cujo resultado é apresentado na
Figura 4. Em termos de movimento, o pistão deste actuador movimenta-se no sentido
oposto ao do anterior, quando é aplicada uma tensão à bobina. Depois de lhe ser retirada a

8
alimentação eléctrica, o retrocesso do pistão é assegurado pela força da água e por uma mola,
estrategicamente colocada entre a carcaça superior do actuador e extremidade alargada do
próprio pistão. Por outro lado, quando o pistão desce para fechar a válvula, existe menor
probabilidade de turbulências sobre o tampão.
Figura 4 – a) Esquema do actuador electromagnético, com corte central 2D b) Esquema do actuador electromagnético, com um corte 3D, que permite perceber o formato do eixo central do circuito magnético
Uma vez que as características funcionais descritas no parágrafo anterior iam de encontro às funcionalidades requeridas pelo actuador, optou-se por adoptar esta
geometria no dimensionamento do actuador electromagnético. Em termos de materiais, é de notar que a carcaça que envolve a bobina e a parte mais grossa do pistão são
constituídas por material ferromagnético (representado a cinza-claro na
Figura 4 a)); a restante porção do pistão é construída em material não-ferromagnético.
Para a bobina é usado fio de cobre, cujo diâmetro e isolamento térmico podem ser consultados
num script de apoio à simulação, apresentado no Anexo 1, e cujos valores foram obtidos a
partir de [3].
2.1.2 – Estudo hidráulico
Uma vez definida a geometria que perfaz o circuito magnético responsável pela criação
da força que irá fechar a válvula, é necessário calcular o valor da força que o pistão terá de
contrariar — neste caso: a força da água. Para se poder calcular este valor, dispõem-se dos
valores de caudal e pressão máximos suportado pelo contador, bem como das dimensões da
armadura da válvula. Para esta última, considera-se que o diâmetro de entrada é igual ao
diâmetro do contador a que será acoplada a válvula. Para saber qual é o valor da força da
água no ponto em que o pistão a contraria — ver Figura 2 —, é necessário determinar qual é a
a) b)

9
queda de pressão ocorrida desde a entrada até esse mesmo ponto. Esta queda de pressão é
devida a uma diferença de superfícies por onde se escoa a água.
Assim sendo, comece-se por estipular o princípio da conservação da energia:
𝐸1 = 𝐸2 (2.1)
Em que 𝐸1 representa a energia num primeiro ponto arbitrário, e 𝐸2 a energia num
segundo ponto.
Separando-se a energia em trabalho, energia cinética e energia potencial, obtém-se:
𝑊1 + 𝐸𝑝1 + 𝐸𝑐1 = 𝑊2 + 𝐸𝑝2 + 𝐸𝑐2 (2.2)
Em que 𝑊1, 𝐸𝑝1, 𝐸𝑐1 representam, respectivamente, o trabalho, a energia potencial e a
energia cinética num primeiro ponto, e 𝑊2, 𝐸𝑝2, 𝐸𝑐2 o trabalho, a energia potencial e a energia
cinética, num segundo ponto, respectivamente.
De seguida, considera-se a equação do trabalho, definida para um caminho, c:
𝑊𝑐 = ∫ 𝐹𝑐
𝑑𝑟 (2.3)
Neste caso, como a força da água é horizontal, a equação (2.3), pode ser desenvolvida
da seguinte forma:
𝑊𝑐 = 𝐹. 𝑟 (2.4)
Em que r representa a distância percorrida.
De seguida, considerando a expressão matemática que define a pressão, P, em termos
da força, F, e da área total onde a força é aplicada, A, é possível manipular a expressão (2.4),
e convertê-la em:
𝑊 = 𝑃𝐴𝑟 = 𝑃𝑉 = 𝑃𝑚𝑓
𝜌 (2.5)
Onde V é o volume total do fluído deslocado, 𝜌 a sua densidade e 𝑚𝑓 a sua massa.
Posteriormente, consideram-se as equações que definem a energia potencial e a
energia cinética:
𝐸𝑐 =1
2𝑚𝑓𝑣
2 (2.6)
𝐸𝑝 = 𝑚𝑓𝑔ℎ (2.7)
Em que 𝑣 representa a velocidade do fluído, ℎ a altura a que este se encontra, e 𝑔 a
aceleração da gravidade.
Assim, substituindo em (2.2), as expressões (2.5), (2.6) e (2.7), obtém-se:

10
𝑃1𝑚𝑓
𝜌+ 𝑚𝑓𝑔ℎ1 +
1
2𝑚𝑓𝑣1
2 = 𝑃2𝑚𝑓
𝜌+ 𝑚𝑓𝑔ℎ2 +
1
2𝑚𝑓𝑣2
2 (2.8)
Também, conhecida como Equação de Bernoulli [4].
Aplicando a Equação de Bernoulli ao problema em questão, e tomando em conta que a
diferença de altura é desprezável, obtém-se uma expressão simplificada:
𝑃1𝜌+1
2𝑣12 =
𝑃2𝜌+1
2𝑣22 (2.9)
Seguidamente, considerando a equação da continuidade (2.10), que parte do princípio
da incompressibilidade dos líquidos, é possível definir a velocidade da água no ponto de acção
do pistão, em função da velocidade da água à entrada da armadura da válvula [4].
𝐴1𝑣1 = 𝐴2𝑣2 ⇒ 𝑣2 = 𝑣1𝐴1𝐴2
(2.10)
Por outro lado, o caudal é definido como:
𝑄 = 𝑣𝐴 (2.11)
Ou seja, conjugando as expressões (2.9), (2.10) e (2.11), é possível definir a pressão
no ponto de acção do pistão como:
𝑃2 = 𝑃1 +1
2𝜌 (
𝑄
𝐴1)2
(1 − (𝐴1𝐴2)2
) (2.12)
De seguida, multiplicando este valor de pressão pelo valor da secção onde esta ocorre,
obtém-se a equação para o cálculo da força da água:
𝐹𝑎𝑔 = 𝑃2𝐴2 = 𝐴2 [𝑃1 +1
2𝜌 (
𝑄
𝐴1)2
(1 − (𝐴1𝐴2)2
)] (2.13)
Uma vez que se pretende que o actuador electromagnético seja capaz de fechar a
válvula em qualquer circunstância, é necessário dimensioná-lo para a situação em que a força
da água é crítica, ou seja, numa altura em que o caudal de água e a pressão sejam máximos.
Em relação às áreas, a de entrada na armadura, 𝐴1, corresponde a uma área circular, com 25
mm de diâmetro. Quanto à área no ponto de acção do pistão, 𝐴2, uma vez que os seu
dimensionamento estaria fora do escopo electrotécnico, adoptou-se uma medida equivalente à
referenciada em [5]. Para esta situação, correspondem os seguintes valores de caudal,
pressão e áreas:
𝑃 = 6𝑏𝑎𝑟 = 600 𝑘𝑃𝑎 ; 𝑄 = 5 𝑚3/ℎ ; 𝐴1 = 4,9087 × 10−04 𝑚2; 𝐴2 = 2,5759 × 10−04 𝑚2
2.2 – Estudo teórico da dinâmica do actuador electromagnético e primeiro
modelo de simulação
Nesta primeira instância, começa-se por efectuar o estudo teórico do circuito magnético da

11
Figura 4, tecendo algumas considerações e simplificações, por forma a obter um primeiro
modelo de simulação, cuja implementação se efectue de forma facilitada, mas que permita
verificar a correcta dinâmica do actuador. Pretende-se desenvolver a simulação através de um
programa de modelação, simulação e análise de sistemas dinâmicos (Simulink©), pelo que
será necessário de antemão, determinar as três equações diferenciais que regem o sistema em
estudo. São elas a equação eléctrica, térmica e mecânica.
2.2.1 – Modelação eléctrica
A equação eléctrica do sistema, que pode ser consultada a partir de [6], é dada como:
𝑢 = 𝑅𝑖 + 𝐿𝑑𝑖
𝑑𝑡+ 𝑖
𝑑𝐿
𝑑𝑥
𝑑𝑥
𝑑𝑡 (2.14)
Em que u é a tensão aplicada ao sistema, i a corrente que percorre a bobina, e R e L a
resistência e o coeficiente de indutância da bobina, respectivamente. É de realçar que o
terceiro membro do lado direito da equação (2.14) representa a corrente induzida pelo
movimento do pistão. Como a tensão é um parâmetro controlado e imposto, é unicamente
necessário calcular os valores da resistência e do coeficiente de indução da bobina, para se
poder antever o comportamento do sistema.
Considere-se em primeiro lugar a resistência, dada pela sua equação geral:
𝑅 = 𝜌𝑐𝑢𝑙
𝑆𝑐𝑎𝑏𝑜 (2.15)
Em que 𝜌𝑐𝑢 é a resistividade eléctrica do fio de cobre que constitui a bobina, 𝑙 o seu
comprimento e 𝑆𝑐𝑎𝑏𝑜 a sua secção.
No entanto, quando calculada a resistência do fio de cobre é necessário compreender
que, como o sistema é dinâmico e lhe está a ser aplicada uma corrente, vão existir perdas por
efeito de Joule sob a forma de calor, que se irão traduzir num aumento de temperatura. Como
a resistividade do cobre depende da variação da temperatura, então é necessário calcular este
valor de resistividade, tendo em conta esta dinâmica térmica. A expressão que permite
relacionar estas duas grandezas, é dada por:
𝜌𝑐𝑢 = 𝜌𝑐𝑢0[1 + 𝛼(𝜃 − 𝜃0)] (2.16)
Em que 𝜌𝑐𝑢0 é a resistividade eléctrica do fio de cobre a 20˚C e 𝛼 é uma constante,
cujo valor vulgarmente usado é de 0.004 [8].
Relativamente ao comprimento do fio de cobre, uma vez que este vai estar
implicitamente relacionado com o número de espiras da bobina, seria proveitoso determinar
uma fórmula através da qual se pudesse calcular o seu comprimento mediante o número de
espiras e as dimensões do actuador electromagnético. A Figura 5 representa um corte central

12
do actuador electromagnético, e permite obter uma percepção das suas dimensões — algumas
das quais serão usadas para determinar a expressão do comprimento do fio de cobre.
Dando início à dedução desta expressão, o primeiro passo é determinar o número de
espiras que se conseguem enrolar em torno do eixo central do actuador electromagnético. Para
isso, basta dividir a altura do espaço central pelo diâmetro do fio de cobre. A expressão que
traduz esta relação é:
𝑛1 =(𝑎 − 2𝑠)
𝑑𝑖𝑎𝑚 (2.17)
Em que 𝑑𝑖𝑎𝑚 representa o diâmetro do fio de cobre, e ‘a’ e ‘s’ são dimensões do
actuador electromagnético apresentadas na Figura 5.
Agora que se detém o número de espiras que é possível enrolar em torno do eixo
central, o passo seguinte será determinar quantas camadas de espiras são necessárias, para
que se possa enrolar um número total de espiras, n. Este valor pode ser obtido, dividindo-se o
número total de espiras, pelo número de espiras que se podem enrolar em cada camada.
Assim sendo, pode-se fazer este cálculo directamente, uma vez que já se calculou
anteriormente, em (2.17), o número de espiras por camada. Tem-se então:
𝑁𝑐𝑎𝑚 =𝑛
𝑛1 (2.18)

13
Figura 5 – Corte central 2D do actuador electromagnético com identificação das dimensões
Por fim, para determinar o comprimento total do fio, 𝑙, deverá somar-se o comprimento
de fio utilizado em cada camada de espiras. No entanto, este comprimento não é linear para
todas as camadas: vai aumentando com o número de camadas, em virtude de cada camada
ser enrolada com espiras de diâmetro superior à da camada anterior. Assim, se se definisse o
comprimento de fio para cada camada de espiras, atribuindo uma nomenclatura de 𝑙1 a 𝑙𝑧, para
cada uma delas, obter-se-ia um comprimento da seguinte ordem:
{
𝑙1 = 2𝜋
𝑐
2𝑛1 = 𝜋𝑐𝑛1
𝑙2 = 𝜋(𝑐 + 2𝑑𝑖𝑎𝑚)𝑛1𝑙3 = 𝜋(𝑐 + 4𝑑𝑖𝑎𝑚)𝑛1
…𝑙𝑧 = 𝜋[𝑐 + 2(𝑁𝑐𝑎𝑚 − 1)𝑑𝑖𝑎𝑚]𝑛1
(2.19)
Ou seja, o valor total do comprimento do fio de cobre seria dado pelo somatório de
todas as parcelas de (2.19), tal que:

14
𝑙 = ∑𝑙𝑖
𝑧
𝑖=1
= 𝑙1 + 𝑙2 + 𝑙3 +⋯+ 𝑙𝑧
= 𝜋𝑐𝑛1 + 𝜋(𝑐 + 2𝑑𝑖𝑎𝑚)𝑛1 + 𝜋(𝑐 + 4𝑑𝑖𝑎𝑚)𝑛1 +⋯+ 𝜋[𝑐 + 2(𝑁𝑐𝑎𝑚 − 1)𝑑𝑖𝑎𝑚]𝑛1
= 𝑛1𝜋[𝑐 + 𝑐 + 2𝑑𝑖𝑎𝑚 + 𝑐 + 4𝑑𝑖𝑎𝑚 +⋯+ 𝑐 + 2(𝑁𝑐𝑎𝑚 − 1)𝑑𝑖𝑎𝑚]
= 𝑛1𝜋 [𝑁𝑐𝑎𝑚𝑐 + ∑ 2𝑘𝑑𝑖𝑎𝑚
𝑁𝑐𝑎𝑚−1
𝑘=0
]
= 𝑛1𝜋 [𝑛
𝑛1𝑐 + ∑ 2𝑘𝑑𝑖𝑎𝑚
𝑁𝑐𝑎𝑚−1
𝑘=0
] = 𝜋 [𝑛𝑐 + 𝑛1 ∑ 2𝑘𝑑𝑖𝑎𝑚
𝑁𝑐𝑎𝑚−1
𝑘=0
] = 𝑙
(2.20)
Obtém-se assim a expressão que permite calcular o comprimento total do fio de cobre,
através do número total de espiras e das dimensões do actuador electromagnético. Esta
expressão ganha bastante utilidade num capítulo subsequente, em que se realiza a
optimização de parâmetros. Nessa fase do projecto, o número de espiras e algumas
dimensões do actuador electromagnético tornam-se variáveis, pelo que é necessário um
método expedito para o cálculo do comprimento do fio de cobre para cada novo valor atribuído
às dimensões.
Outro parâmetro que não está relacionado com a resistência do fio de cobre, mas que
varia mediante o número de camadas de espiras, é a largura do actuador electromagnético, b.
Como a determinação deste parâmetro está directamente relacionada com os cálculos atrás
efectuados, optou-se por referenciar a expressão que explicita o comprimento b nesta secção.
Deste modo, b é dado por:
𝑏 = 2𝑠 + 𝑐 + 2𝑁𝑐𝑎𝑚𝑑𝑖𝑎𝑚 (2.21)
Por fim, regressando ao cálculo da resistência, conjugando as expressões (2.15),
(2.16) e (2.20), e considerando a secção circular do fio de cobre, obtém-se a seguinte fórmula
para o cálculo da resistência:
𝑅 = 4 [𝑛𝑐 + 𝑛1 ∑ 2𝑘𝑑𝑖𝑎𝑚
𝑁𝑐𝑎𝑚−1
𝐾=0
]𝜌𝑐𝑢0[1 + 𝛼∆𝜃]
𝑑𝑖𝑎𝑚2 (2.22)
Uma vez achado o valor da resistência do fio de cobre, para que se possa modelar a equação diferencial eléctrica (2.14), é necessário determinar o valor do coeficiente de
indução do fio eléctrico. Para tal, recorre-se à análise do circuito magnético,
especificado na Figura 6. Desde já, deve-se chamar a atenção para a trajectória que toma o caminho magnético na parte central do actuador electromagnético. Considere-se o corte
vertical representando à direita Figura 6: se se observar com atenção a constituição do actuador, numa linha vertical, de cima a baixo, quando a linha de caminho magnético intercepta o entreferro, uma vez que o pistão central de diâmetro ‘e’ é constituído por
material não-ferromagnético, esta deveria separar-se em duas; no entanto, como a geometria do actuador é circular e o comprimento ‘e’ vai ser bastante mais pequeno que o comprimento ‘c’, então a superfície ferromagnética antes e depois do entreferro vai ser
muito semelhante. Assim sendo, pode-se considerar que a mesma linha de caminho magnético cobre todo o comprimento vertical, desde que, quando se calcule o campo

15
magnético antes e depois do entreferro, se tenha em conta a pequena diferença de superfícies (a
Figura 4 b) poderá auxiliar esta interpretação). Uma vez mais se deve salientar que
este pormenor detém importância não nesta primeira análise em que não se consideram os
efeitos de saturação magnética, mas mais tarde, durante a análise mais aprofundada da
secção 2.3, em que os cálculos são influenciados por estas considerações.
Figura 6 – Circuito magnético do actuador electromagnético (desprezando os efeitos de saturação magnética)
Uma vez esclarecido este ponto, inicia-se a análise física e matemática do circuito
magnético por apelar à Lei de Ampére [9]:
∮ 𝐻𝐶
𝑑𝑙 = ∬ 𝐽𝑆
𝑛𝑠 𝑑𝑆 (2.23)
Aplicando-a ao circuito magnético da Figura 6 obtém-se:
𝐻𝑜𝛿 = 𝑛𝑖 ⇔ 𝐻𝑜(𝛿𝑜 − 𝑥) = 𝑛𝑖 (2.24)
Em que 𝛿𝑜 representa o valor inicial do entreferro, 𝐻𝑜 a intensidade do campo
magnético no entreferro, e x a posição do pistão.
Relacionando o valor de intensidade de campo magnético, 𝐻𝑜, com o valor de
densidade de fluxo magnético, 𝐵𝑜, a equação (2.24) passa à forma:
𝐵𝑜𝜇𝑜(𝛿𝑜 − 𝑥) = 𝑛𝑖 (2.25)
Em que 𝜇𝑜representa a permeabilidade magnética do ar.

16
De seguida, atende-se à definição do fluxo de campo magnético [9]:
𝛷 = ∫ �⃗� 𝑆
𝑑𝑆 (2.26)
Assim, é possível calcular o fluxo de campo magnético para o circuito em questão, que
será dado por:
𝛷 =𝑛𝑖𝜇𝑜𝑆𝑜(𝛿𝑜 − 𝑥)
(2.27)
Onde 𝑆𝑜 representa a secção do entreferro e 𝛷 o fluxo magnético.
Num passo seguinte, pode-se relacionar o fluxo ligado, 𝜓, com o coeficiente de
indução, L, admitindo-se que o material magnético é linear.
𝜓 = 𝑛𝛷 = 𝐿𝑖 (2.28)
Dessa forma, conjugando as expressões (2.27) e (2.28), obtém-se o valor do
coeficiente de indução:
𝐿 =𝑛2𝜇𝑜𝑆𝑜(𝛿𝑜 − 𝑥)
(2.29)
Têm-se assim todos os parâmetros necessários para modelar e simular a equação
eléctrica do sistema.
2.2.2 – Modelação mecânica
Entende-se como equação mecânica, a equação que representa o somatório de forças
que actuam no sistema, quando a válvula se encontra em funcionamento. Deste modo, existem
três forças principais que devem ser consideradas, juntamente com uma força secundária, que
expressa os seus efeitos em ocasiões particulares. As três forças principais que se devem
calcular são a impulsão da água, (calculada anteriormente a partir da equação (2.13)), a força
exercida pela mola e a força magnética. Todas as forças detêm direcção vertical, com as duas
primeiras de sentido ascendente e a última de sentido descendente (ver Figura 7). Esta relação
pode ser descrita através da equação apresentada abaixo:
𝐹𝑒𝑙 − 𝐹𝑎𝑔 − 𝑘𝑥 = 𝑚𝑑𝑥2
𝑑𝑡2 (2.30)
Em que k representa a constante da mola, m a massa do pistão, 𝐹𝑒𝑙 a força
electromagnética, e 𝐹𝑎𝑔 a força da água. É de notar que se está a considerar o sentido positivo
do movimento como sendo o sentido vertical descendente.

17
Figura 7 – Diagrama de forças exercidas sobre o pistão do actuador electromagnético
Para se poder simular e modelar esta equação, é necessário calcular a força
electromagnética, produzida pelo actuador electromagnético. Para tal, toma-se como ponto de
partida a energia magnética [9]:
𝑊𝑚 = ∫ 𝑖 𝑑𝜓 ⇒ 𝑊𝑚 =1
2 𝜓𝑖 =
1
2 𝐿𝑖2 (2.31)
Posteriormente, define-se:
𝐹𝑒𝑙 = −𝑑𝑊𝑚𝑑𝑥
= −𝑑𝑊𝑚𝑑𝐿
𝑑𝐿
𝑑𝑥 (2.32)
Então, recorrendo à equação (2.29), é possível calcular a força magnética para o
circuito magnético em questão.
𝑑𝐿
𝑑𝑥=
𝑛2𝜇𝑜𝑆𝑜(𝛿𝑜 − 𝑥)
2 (2.33)
𝐹𝑒𝑙 = −1
2𝑖2 (
𝑛2𝜇𝑜𝑆𝑜(𝛿𝑜 − 𝑥)
2) = −
𝑛2𝑖2𝜇𝑜𝑆𝑜2(𝛿𝑜 − 𝑥)
2 (2.34)
O cálculo relativo à intensidade da força que a mola exerce sobre o sistema deverá ter
em conta a função específica que se pretende dar à mola. No caso de muitos actuadores, a
força da mola seria necessária para trazer o pistão de regresso à sua posição inicial; contudo,
para este actuador, existirá sempre a impulsão da água aplicada sobre o pistão, visto que a
água se encontra sob pressão constante. Assim sendo, a impulsão da água será suficiente
para retornar o pistão à sua posição inicial. Neste contexto, a força da mola servirá
simplesmente para amortecer o movimento de fecho da válvula, porque, iniciado o movimento
do pistão, a força electromagnética torna-se muito superior à força da água, em virtude do valor
do entreferro diminuir bastante.
Explicado este fenómeno, deverá ser dimensionada a mola necessária ao sistema.
Assuma-se então, que a força da mola deveria ser suficiente para retornar o pistão à sua
posição inicial, caso não existisse a força da água. Nesse caso, a força da mola deveria ser
superior ao peso do pistão, o que pode ser descrito pela seguinte relação:
𝐹𝑚𝑜𝑙𝑎 = 𝑘𝑥𝑓𝑖𝑛𝑎𝑙 > 𝑚𝑔 (2.35)
Em que 𝑥𝑓𝑖𝑛𝑎𝑙 corresponde ao ponto em que o pistão está mais afastado da sua origem
e 𝐹𝑚𝑜𝑙𝑎 representa a força da mola.

18
Assim sendo, a constante da mola pode ser calculada por:
𝑘 >𝑚𝑔
𝑥𝑓𝑖𝑛𝑎𝑙 (2.36)
A partir da relação (2.36) consegue-se calcular um valor mínimo a atribuir à constante
da mola, mas através da simulação será possível calibrar este valor, verificando a dinâmica do
sistema.
Determinadas as forças que entram jogo na equação mecânica, é preciso referir duas
circunstâncias: a primeira diz respeito ao entreferro, ao passo que a segunda é relativa à
influência de uma força secundária em determinadas situações. Quando a válvula fecha, o
entreferro estreita-se, uma vez que a força magnética atrai as duas superfícies
ferromagnéticas; no entanto, deve-se garantir sempre a existência de um pequeno entreferro,
porque, caso contrário, o valor 𝛿 iguala-se a zero, o que constituiria uma impossibilidade para o
cálculo da força magnética através da expressão (2.34). Assim sendo, é necessário colocar
uma película ou barra não-ferromagnética, de espessura diminuta, entre as duas superfícies
ferromagnéticas, para se garantir um entreferro final mínimo. Na Figura 8, apresenta-se uma
imagem ampliada do corte central do actuador electromagnético, onde se pode visualizar o
material não-ferromagnético descrito atrás, bem como o pequeno entreferro final, 𝛿𝑓𝑖𝑛𝑎𝑙, que se
deverá garantir.
Figura 8 – Ampliação do corte 2D do actuador electromagnético, na zona do eixo central, junto ao entreferro
O segundo evento pontual mencionado anteriormente, ocorre numa de duas situações:
o pistão encontra-se em movimento descendente e entra em contacto com a película não-
ferromagnética, ou então, descreve o movimento ascendente de regresso, e atinge a sua
posição inicial. Analisando o primeiro caso através do somatório de forças apresentado em
(2.30), verifica-se que existe uma força electromagnética superior ao somatório da impulsão da
água e da força da mola. Assim sendo, a aceleração do lado direito da expressão deveria obter

19
valor positivo, tornando a velocidade positiva. No entanto, neste caso, o pistão já se encontra
parado, uma vez que entrou em contacto com a película não-ferromagnética, e, por
conseguinte, a velocidade e aceleração são nulas. Para que o somatório de forças descreva a
veracidade destes eventos, terá que se acrescentar mais uma força ao somatório: a reacção da
força. Neste caso, o sistema passa a ser descrito por:
𝐹𝑒𝑙 − 𝐹𝑎𝑔 − 𝑘𝑥 + 𝑅𝑁 = 𝑚𝑑𝑥2
𝑑𝑡2 , 𝑡𝑎𝑙 𝑞𝑢𝑒 𝑅𝑁 = 𝐹𝑎𝑔 + 𝑘𝑥 − 𝐹𝑒𝑙 (2.37)
Em que 𝑅𝑁 representa a reacção da força.
De forma similar, para a segunda situação em que o pistão retorna à sua posição
inicial, a força exercida pela mola readquire o valor nulo, a força electromagnética é inexistente
(uma vez que se deixou de alimentar a bobina), mas a força da água permanece constante.
Assim sendo, mais uma vez, é necessário introduzir a reacção da força no somatório de forças,
para que a equação descreva com acuidade os eventos físicos. Neste caso, poder-se-á
adoptar a equação (2.37), tendo em atenção que a reacção normal deverá assumir o seguinte
valor:
𝑅𝑁 = −𝐹𝑎𝑔 (2.38)
2.2.3 – Modelação térmica
Para este primeiro modelo de simulação, optou-se por definir a variação da
temperatura através de um modelo térmico simplificado para máquinas eléctricas, apresentado
por [8]. Segundo esse modelo, se se considerar um corpo homogéneo, em que se verifique
uma potência de perdas no interior, 𝑝𝑝, e existir um troca de potência com o meio exterior, 𝑝𝑑, o
balanço de energia traduz-se pela seguinte equação:
𝑝𝑝 = 𝑝𝑎 + 𝑝𝑑 (2.39)
Onde 𝑝𝑎 representa a potência térmica acumulada no interior do corpo homogéneo.
Pela mesma fonte, é possível definir a potência acumulada no interior do corpo por:
𝑝𝑎 = 𝐶𝑑∆𝜃
𝑑𝑡 (2.40)
Em que ∆𝜃 representa a variação da temperatura no interior do corpo, e C é a
capacidade térmica do corpo, que pode ser calculada a partir de:
𝐶 = 𝑐𝑐𝑢𝜌𝑐𝑢𝑉 (2.41)
Na expressão anterior, 𝑐𝑐𝑢 representa o calor específico do material porque é
constituído o corpo (neste caso: o cobre), 𝜌𝑐𝑢 a resistividade do cobre, e V o volume ocupado
pelo corpo.

20
De seguida, é possível calcular a troca de potência com o meio exterior, somando a
quantidade de calor que é perdida por condução, 𝑝𝑐, com a quantidade de calor que é perdida
por convecção, 𝑝𝑐𝑣. Estas quantidades de calor são calculadas mediante as expressões abaixo
indicadas:
𝑝𝑐 =𝜆
𝑙𝐴𝑒∆𝜃 (2.42)
𝑝𝑐𝑣 = ℎ𝑐𝑣𝐴𝑒∆𝜃 (2.43)
Sendo 𝜆 a condutividade térmica do material, 𝐴𝑒 a superfície de fronteira do material, e
ℎ𝑐𝑣 o coeficiente de transferência por convecção. Substituindo as expressões (2.40),(2.42) e
(2.43) em (2.39), obtém-se:
𝑝𝑝 = 𝐶𝑑∆𝜃
𝑑𝑡+𝜆
𝑙𝐴𝑒∆𝜃 + ℎ𝑐𝑣𝐴𝑒∆𝜃
= 𝐶𝑑∆𝜃
𝑑𝑡+ 𝐴𝑒∆𝜃 (
𝜆
𝑙+ ℎ𝑐𝑣)
(2.44)
Fazendo,
ℎ𝑒 =𝜆
𝑙+ ℎ𝑐𝑣 (2.45)
e,
𝜏𝜃 =𝐶
ℎ𝑒𝐴𝑒 (2.46)
Então a equação diferencial que rege a evolução da temperatura do actuador
electromagnético pode ser dada por:
𝜏𝜃𝑑∆𝜃
𝑑𝑡+ ∆𝜃 =
𝑝𝑝
ℎ𝑒𝐴𝑒 (2.47)
É ainda de monta referir que a potência de perdas verificada no interior da bobina é
devida ao efeito de Joule, e o seu valor poderá ser calculado mediante a seguinte fórmula:
𝑝𝑝 = 𝑅𝑖2 (2.48)
Repare-se que a resistência apresentada na expressão (2.48) refere-se à resistência
do fio de cobre, que pode ser calculada a partir de (2.22). Ou seja, como a própria resistência
também está dependente da variação da temperatura, quando modelada a equação térmica do
sistema irá existir realimentação de dados, constituindo uma simulação em malha fechada.
2.2.4 – Primeiro modelo de simulação
Para simular a dinâmica do actuador electromagnético, elaborou-se um modelo de
simulação com base nas três equações diferenciais apresentadas nas secções antecedentes.
De seguida, far-se-á uma explicação dos blocos mais importantes do modelo, antes de se
elaborar acerca dos resultados obtidos.

21
Figura 9 – Esquema principal do primeiro modelo de simulação
Na Figura 9 é apresentado o esquema principal do modelo, constituído por três blocos:
“sistema mecânico”, “sistema eléctrico” e “sistema térmico”, correspondentes às equações
mecânica, eléctrica e térmica, respectivamente. Existe interoperabilidade entre estes blocos,
uma vez que algumas grandezas são dependentes de outras grandezas calculadas num bloco
distinto. Um exemplo disso é a velocidade, que é calculada no bloco “sistema mecânico”, mas
que é necessária para calcular a corrente, devido à parcela da corrente que é induzida pela
velocidade. Outro exemplo reside na posição do pistão. Uma vez que o movimento do pistão
faz variar o entreferro, então é necessário realimentar a variável “posição” no bloco do “sistema
eléctrico”, para que se possa calcular o valor da constante de indução dependente da largura
do entreferro.
Atente-se à Figura 10, que representa o interior do bloco “sistema mecânico”, onde se
encontra modelada a equação mecânica. Repare-se que a equação foi modelada, não na
forma apresentada em (2.30), mas só depois de ter sido rearranjada com a seguinte
configuração:
𝑑𝑥2
𝑑𝑡2=𝐹𝑒𝑙𝑚− 𝐹𝑎𝑔
𝑚−𝑘
𝑚𝑥 (2.49)

22
Isto deve-se ao facto de ser necessário determinar a aceleração em primeiro lugar,
para que depois, através dos blocos integradores, se consigam determinar os valores de
velocidade e posição. No entanto, como se percebe, o sinal de aceleração que dá entrada no
bloco integrador está condicionado por outro bloco. Isto deve-se às situações descritas na
secção 2.2.2, em que é necessário acrescentar a influência da reacção normal. Adiante,
explicar-se-á como é feito o condicionamento do sinal de aceleração, neste bloco.
Figura 10 – Bloco onde é simulada a equação mecânica no modelo de simulação
Como se pode visualizar, o modelo utiliza a força da água como uma constante, uma
vez que esta que o seu valor é calculado através de um script auxiliar, que pode ser consultado
no Anexo 1. Neste script, são também especificados os valores da constante da mola, da
massa do pistão, bem como de todos os outros parâmetros necessários para a simulação.
Outro elemento para o qual se deve chamar atenção é o bloco “Fel”, onde é calculado
o valor da força electromagnética, através de uma função Matlab© programável. Esta função
potencia a recepção das amplitudes dos sinais simulados, converte-as em variáveis, e efectua
cálculos com base nesses valores. Assim sendo, a cada ciclo decorrido, a força é calculada
para as novas amplitudes de sinal, consoante a equação (2.34).

23
Figura 11 – Bloco que estipula as condições relativas à aceleração no modelo de simulação
Na Figura 11 é apresentado o subsistema que efectua as restrições para o sinal de
aceleração, e que passará a ser explicado. Quando sinal de aceleração atinge o primeiro bloco,
“Switch 1”, este irá confirmar se o pistão está encostado à película não-ferromagnética; se
estiver, então o bloco impõe um valor de aceleração igual a zero; caso contrário, o sinal de
aceleração, obtido pelo somatório de forças, avança para o bloco seguinte. Este segundo
bloco, “Switch 2”, é necessário para eliminar os efeitos do bloco anterior, caso o pistão deva
retroceder. Por outras palavras, quando o pistão atingiu a película não-ferromagnética, impôs-
se aceleração nula, então, para que o pistão volte a movimentar-se, o somatório das forças
deve ser negativo. Para um somatório negativo, tem-se uma aceleração negativa, o que induz
ao retrocesso do pistão. Assim sendo, o bloco “Switch 2”, verifica o momento em que a
aceleração assume valor negativo, e volta a deixar passar o sinal de aceleração derivado do
somatório de forças (ao invés do zero), para que o pistão se possa movimentar.
De seguida, o sinal é conduzido para um bloco condicional. Este bloco estabelece a
condição com base em dois sinais: o de posição e o de aceleração. Caso o sinal de aceleração
seja negativo e o de posição igual a zero, então é estipulado que a aceleração deverá ser zero.
Esta situação representa a chegada do pistão à posição inicial (posição igual a zero), depois de
ter retrocedido (aceleração negativa). Caso não se verifique esta condição, o sinal de
aceleração prossegue sem alterações.
Em baixo, na Figura 12, apresenta-se o bloco em que foi modelada a equação eléctrica
na seguinte forma:
𝑑𝑖
𝑑𝑡=1
𝐿(𝑢 − 𝑅𝑖 − 𝑖
𝑑𝐿
𝑑𝑥
𝑑𝑥
𝑑𝑡) (2.50)

24
Figura 12 – Bloco onde se simula a equação eléctrica no modelo de simulação
Os blocos “L(x)” e “dL(x)/dt” são semelhantes ao bloco “Fel” do sistema mecânico, e
são usados para calcular o coeficiente de indução e sua derivada em relação ao entreferro,
através de funções programáveis, definidas com base nas equações (2.29) e (2.33),
respectivamente. Existem dois blocos que permitem estabelecer a tensão como um escalão ou
como uma onda modulada PWM, dependendo da simulação que se pretenda. É de relembrar
que a tensão é a variável de controlo para esta simulação, pelo que é imposta pelo utilizador
que está a conduzir a simulação.
Por fim, na Figura 13 é apresentado o subsistema que modela a equação térmica, sob
a forma:
𝑑∆𝜃
𝑑𝑡= (
𝑝𝑝
ℎ𝑒𝐴𝑒− ∆𝜃)
1
𝜏𝜃 (2.51)
Os blocos “Resistividade”, “Resistência”, e “Perdas Joule”, calculam a resistividade do
cobre, a resistência do fio de cobre, e as perdas por efeito de Joule do sistema, através das
equações (2.16), (2.15) e (2.48), respectivamente.

25
Figura 13 – Bloco onde se simula a equação térmica no modelo de simulação
2.2.5 – Resultados do primeiro modelo de simulação
Para confirmar o correcto funcionamento do modelo descrito na secção anterior, numa
primeira instância, aplicou-se uma tensão sobre a forma de escalão e simulou-se para um
tempo de 1 s — intervalo imposto como objectivo limite para o fecho da válvula. Nesta primeira
etapa de simulação, como ainda não se havia procedido a qualquer optimização de parâmetros
relativos ao volume do actuador, tiveram que se adoptar medidas de válvulas já existentes no
mercado, como forma de estabelecer um ponto de partida. Assim sendo, foram recolhidos
dados de uma válvula normalmente aberta, com diâmetro de entrada de 25 mm, através da
referência [5].
Figura 14 – Evolução da corrente após aplicação de um escalão de tensão (primeiro modelo de simulação)
Dá-se início à análise da dinâmica do sistema, através do gráfico da corrente,
apresentado na Figura 14. A curva característica da corrente detém três zonas, que deverão
ser explicadas à luz das equações diferenciais eléctrica e mecânica (ver (2.14) e (2.30)) que

26
regem o sistema. A primeira zona ocorre no período [0,2; 0,3]s, a segunda tem incidência em
torno do momento [0,3;0,35]s, e a última decorre no intervalo [0,35; 0,5]s.
O escalão de tensão é aplicado no momento 0,2 segundos. Durante o período [0,2;
0,3], a corrente vai crescendo, expressando-se num aumento de força electromagnética; no
entanto, como nessa zona o somatório de forças dado por (2.30) é negativo, tal que:
𝐹𝑎𝑔 + 𝑘𝑥 > 𝐹𝑒𝑙 (2.52)
Então, não existe movimento do pistão (ver Figura 15). Assim sendo a velocidade é
nula, pelo que a equação eléctrica característica dessa zona simplifica-se em:
𝑢 = 𝑅𝑖 + 𝐿𝑑𝑖
𝑑𝑡 (2.53)
Figura 15 – Evolução da posição do pistão após aplicação de um escalão de tensão (primeiro modelo de simulação)
De seguida, por volta do instante 0,3 s, a força electromagnética passa a ser maior que
a força conjunta da mola e da água, e o pistão inicia o movimento, elevando a velocidade no
sentido positivo. Ambas ocorrências podem ser visualizadas na Figura 16 e Figura 17,
respectivamente. Atente-se agora à equação diferencial eléctrica (2.14), para perceber a
origem da queda de corrente momentânea em 0,3s. Mantenha-se também em mente que o
valor de tensão é controlado e imposto, pelo que deverá ser sempre constante.

27
Assim sendo, a partir de 0,3s, o pistão fecha a válvula, o que faz diminuir o entreferro.
Ao diminuir o entreferro, o coeficiente de indução, L, aumenta, como se pode verificar na
expressão (2.29). Por outro lado, a derivada do coeficiente de indução é inversamente
proporcional ao quadrado do valor do entreferro, pelo que se regista um aumento substancial
deste valor. Estas duas variações, aliadas a um aumento de velocidade, vão provocar um
desequilíbrio na equação eléctrica, pelo que será necessário uma diminuição de corrente,
como forma de garantir que o valor imposto de tensão se mantenha constante. A veracidade
desta evolução de corrente, com a queda momentânea, poderá ser comprovada através de[6].
Figura 18 – Evolução do valor de resitência do fio de cobre (primeiro modelo de simulação)
Figura 17 –Evolução da velocidade do pistão (primeiro modelo de simulação)
Figura 16 – Ampliação da curva de evolução da posição do pistão (primeiro modelo de simulação)

28
Outro aspecto ao qual se poderá fazer referência diz respeito à evolução do valor de
resistência. Com a ligeira queda de corrente, ocorre uma diminuição de perdas, que faz
diminuir o aumento de temperatura. Por sua vez, a resistividade, que é dependente da variação
da temperatura, diminui, fazendo com que o próprio valor de resistência decresça. Não
obstante, como se poderá verificar na Figura 18, a variação de temperatura é tão diminuta, que
induz uma alteração insignificante na resistência (na ordem dos mΩ). Esta oscilação pode ser
desprezada, quando analisada a nível macroscópico.
Retornado a atenção ao gráfico da corrente, no período [0,35;0,5] s, constata-se um
aumento da corrente. Novamente, recorrendo à equação eléctrica (2.14), é possível explicar
esta ocorrência. Nesta situação, o pistão encontra-se imobilizado, pelo que a velocidade é nula.
Este facto faz com que o sistema passe a ser definido pela equação simplificada (2.53). Como
desaparece o efeito da derivada do coeficiente de indução, para que a tensão mantenha o seu
valor constante é necessário ocorrer um acréscimo de corrente. Em suma, pode-se observar na
Figura 14 que o valor final da corrente é muito próximo do valor de corrente imediatamente
antes de ocorrer o pico. Refira-se mais uma vez que, na primeira e terceira zona, o sistema
pode ser definido pela equação (2.53), pelo que a quebra de corrente verificada na segunda
zona dá-se unicamente devido ao movimento do pistão.
Relativamente à força electromagnética, esta segue a evolução da corrente durante o
período [0,2;0,3], visto que é directamente dependente do seu quadrado (ver equação (2.34)).
No entanto, a partir do momento em que o pistão inicia o movimento, o entreferro diminui, e,
uma vez que a força é inversamente proporcional ao quadrado do entreferro, esta aumenta de
forma exponencial (ver Figura 19).
Figura 19 – Evolução da força electromagnética após aplicação de um escalão de tensão (primeiro modelo de simulação)

29
Por fim, faz-se uma análise à evolução da temperatura. Para se poder analisar este
parâmetro convenientemente, é necessário efectuar uma simulação para um período de tempo
bastante mais delongado, uma vez que a temperatura estabiliza muito depois das outras
grandezas. Isto deve-se ao facto de a temperatura apresentar uma evolução gradual,
característica das transferências de calor por condução e convecção. Assim sendo, simulou-se
durante um período de 5000 segundos, obtendo-se os resultados apresentados na Figura 20.
Figura 20 – Evolução do aumento de temperatura após aplicação de um escalão de tensão (primeiro modelo de simulação)
Como se pode comprovar, a temperatura detém uma evolução exponencial,
característica da equação diferencial (2.47), apresentada em [8]. Por outro lado, o aumento de
temperatura total (cerca de 8˚C) está dentro dos parâmetros de segurança, uma vez que se
está a considerar uma temperatura inicial de 20˚C. Note-se ainda, que a temperatura atingiu
este valor, para a situação mais crítica, em que se aplicou um sinal de tensão contínuo, e
demorou cerca de 1h23min a estabilizar. Para uma situação em que se opere o actuador
electromagnético através de impulsos de tensão, deverá verificar-se uma diminuição no
aumento de temperatura. A Figura 21, obtida a partir de uma simulação em que se operou o
actuador electromagnético com um sinal de tensão de período 2s e 50% duty-cycle, comprova
esta afirmação, uma vez que o aumento de temperatura não excedeu os 4˚C.

30
Figura 21 – Evolução do aumento de temperatura após aplicação de uma onda quadrada de tensão (primeiro modelo de simulação)
No entanto, repare-se que esta evolução, ainda que exponencial, não corresponde a
um aumento estritamente contínuo ao longo do tempo. Se observarmos uma ampliação do
gráfico no período [650,710] s (ver Figura 22), verifica-se que a temperatura aumenta através
de patamares. Note-se contudo, que tanto para o caso em que se trabalha com tensão
contínua, como para esta última situação, os valores de aumento de temperatura detêm
amplitude muito pequena, pelo que será necessário recorrer a outro modelo térmico para
simular a evolução da temperatura e confirmar estes resultados.
Figura 22 – Ampliação da curva de evolução do aumento de temperatura após aplicação de um onda quadrada de tensão (primeiro modelo de simulação)
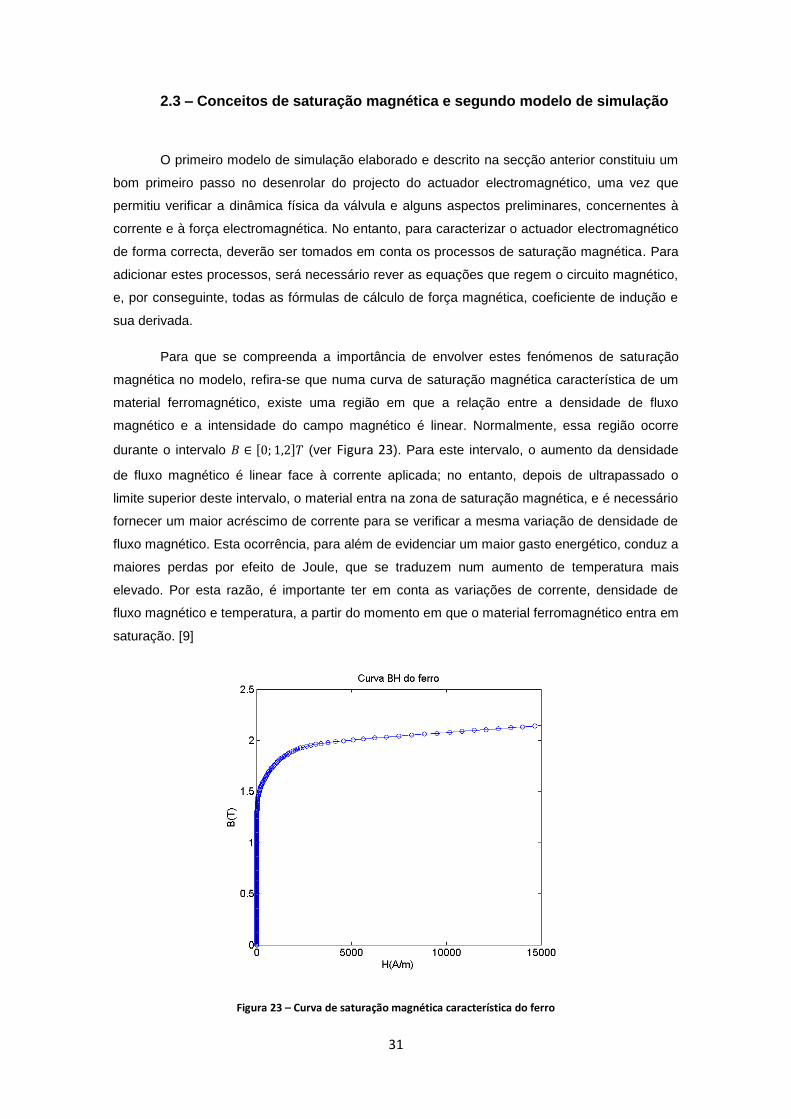
31
2.3 – Conceitos de saturação magnética e segundo modelo de simulação
O primeiro modelo de simulação elaborado e descrito na secção anterior constituiu um
bom primeiro passo no desenrolar do projecto do actuador electromagnético, uma vez que
permitiu verificar a dinâmica física da válvula e alguns aspectos preliminares, concernentes à
corrente e à força electromagnética. No entanto, para caracterizar o actuador electromagnético
de forma correcta, deverão ser tomados em conta os processos de saturação magnética. Para
adicionar estes processos, será necessário rever as equações que regem o circuito magnético,
e, por conseguinte, todas as fórmulas de cálculo de força magnética, coeficiente de indução e
sua derivada.
Para que se compreenda a importância de envolver estes fenómenos de saturação
magnética no modelo, refira-se que numa curva de saturação magnética característica de um
material ferromagnético, existe uma região em que a relação entre a densidade de fluxo
magnético e a intensidade do campo magnético é linear. Normalmente, essa região ocorre
durante o intervalo 𝐵 ∈ [0; 1,2]𝑇 (ver Figura 23). Para este intervalo, o aumento da densidade
de fluxo magnético é linear face à corrente aplicada; no entanto, depois de ultrapassado o
limite superior deste intervalo, o material entra na zona de saturação magnética, e é necessário
fornecer um maior acréscimo de corrente para se verificar a mesma variação de densidade de
fluxo magnético. Esta ocorrência, para além de evidenciar um maior gasto energético, conduz a
maiores perdas por efeito de Joule, que se traduzem num aumento de temperatura mais
elevado. Por esta razão, é importante ter em conta as variações de corrente, densidade de
fluxo magnético e temperatura, a partir do momento em que o material ferromagnético entra em
saturação. [9]
Figura 23 – Curva de saturação magnética característica do ferro

32
Por fim, resta referir que o segundo modelo de simulação consistirá no modelo
elaborado na secção anterior, acrescentado por um subsistema que faça o controlo da
permeabilidade magnética do ferro, mediante a curva de saturação magnética.
2.3.1 – Revisão das equações do circuito magnético
Para que se possa introduzir o conceito de saturação magnética nas equações que
regem o circuito magnético, é necessário voltar a aplicar a Lei de Ampére ao circuito, tendo em
conta as diversas regiões onde a intensidade do campo magnético é diferente. Assim sendo,
tome-se como ponto de partida a Figura 24, onde estão representadas três áreas em que a
intensidade do campo magnético, H, é diferente. A cada uma delas corresponde um caminho
de comprimento diferente, bem como uma superfície e/ou permeabilidade magnética diferente.
Para a zona indicada a laranja, tem-se como parâmetros um caminho de comprimento igual ao
entreferro, a permeabilidade magnética do ar e uma superfície representada do lado esquerdo
da imagem por cor vermelha, 𝑆𝑜. A segunda zona, relevada a azul-cíano, é caracterizada pela
superfície indicada a vermelho, 𝑆𝑜, pela permeabilidade magnética do material ferromagnético,
e pelo caminho 𝑙𝑝𝑎𝑡ℎ, dado por:
𝑙𝑝𝑎𝑡ℎ = (𝑎 − 𝑠 − 𝛿)
2+ (𝑏 − 𝑠) + (𝑎 − 𝑠) (2.54)
Figura 24 – Circuito magnético do actuador electromagnético, tendo em conta as várias regiões onde a intensidade do campo magnético é diferente

33
A última zona, representada a roxo, é caracterizada pela permeabilidade magnética do
material ferromagnético, uma superfície correspondente ao círculo de diâmetro ‘c’, 𝑆𝑇, e um
caminho 𝑙𝑇𝑝𝑎𝑡ℎ, calculado por:
𝑙𝑇𝑝𝑎𝑡ℎ =(𝑎 − 𝑠 − 𝛿)
2 (2.55)
Durante o projecto deste actuador electromagnético, decidiu-se utilizar o ferro como
material ferromagnético, cuja permeabilidade magnética será de ora em diante referida por 𝜇𝑓𝑒.
Por outro lado, deve ser relembrado também que o entreferro é definido por:
𝛿 = 𝛿𝑜 − 𝑥 (2.56)
, onde 𝛿𝑜 representa a medida do entreferro inicial. Esta notação será importante, uma
vez que facilitará os cálculos apresentados abaixo.
Estando, então, definidas as superfícies para as diferentes zonas, analisando o circuito
magnético da Figura 24, pode-se estipular que:
𝛷𝑇 = 2𝛷𝑅
𝛷𝑇 = 𝛷𝑜 (2.57)
Aplicando a definição da densidade de fluxo do campo magnético (2.26), as
expressões anteriores convertem-se em:
𝐵𝑇𝑆𝑇 = 2𝐵𝑟𝑆𝑟 𝑐𝑜𝑚 𝑆𝑇 = 𝜋 (𝑐
2) 2 𝑒 𝑆𝑟 =
𝑆𝑜2
(2.58)
𝐵𝑇𝑆𝑇 = 𝐵𝑜𝑆𝑜 𝑐𝑜𝑚 𝑆𝑜 =𝜋
4(𝑐2 − 𝑒2) (2.59)
Substituindo a identidade (2.59) em (2.58), obtém-se:
𝐵𝑜𝑆𝑜 = 2𝐵𝑟𝑆𝑟 ⇒ 𝐵𝑜 = 𝐵𝑟 (2.60)
Deve-se referir que estas suposições só assumem veracidade se se garantir que
a superfície 𝑺𝒓 corresponde a metade do valor da superfície 𝑺𝒐. Para isso, no dimensionamento da válvula, a medida z apresentada na
Figura 4 b), deverá assumir o seguinte valor:
𝑧 =𝑆𝑜2𝑠
(2.61)
Depois de definidas as relações anteriores, pode-se então aplicar a Lei de Ampére
(2.23) ao circuito, obtendo-se a seguinte relação:
𝐵𝑇𝜇𝑓𝑒
𝑙𝑇𝑝𝑎𝑡ℎ +𝐵𝑜𝜇𝑓𝑒
𝑙𝑝𝑎𝑡ℎ +𝐵𝑜𝜇𝑜𝛿 = 𝑛𝑖 (2.62)
Através da relação (2.59), é possível definir 𝐵𝑇 em função de 𝐵𝑜 da seguinte forma:
𝐵𝑇 = (1 −𝑒2
𝑐2)𝐵𝑜 (2.63)
O que aplicado a (2.62), conduz a:

34
[(1 −
𝑒2
𝑐2)
𝜇𝑓𝑒𝑙𝑇𝑝𝑎𝑡ℎ +
𝑙𝑝𝑎𝑡ℎ
𝜇𝑓𝑒+𝛿
𝜇𝑜] 𝐵𝑜 = 𝑛𝑖 (2.64)
A densidade de fluxo 𝐵𝑜 é, por fim, definida por:
𝐵𝑜 = 𝑛𝑖 [(1 −
𝑒2
𝑐2)
𝜇𝑓𝑒𝑙𝑇𝑝𝑎𝑡ℎ +
𝑙𝑝𝑎𝑡ℎ
𝜇𝑓𝑒+𝛿
𝜇𝑜]
−1
(2.65)
Através do mesmo método de cálculo utilizado nas secções 2.2.1 e 2.2.2, podem-se
calcular os novos valores do coeficiente de indução e sua derivada, e da força
electromagnética.
𝐿 =𝑛𝛷𝑜𝑖=
𝑛2𝑆𝑜
[(1 −
𝑒2
𝑐2)
𝜇𝑓𝑒𝑙𝑇𝑝𝑎𝑡ℎ +
𝑙𝑝𝑎𝑡ℎ𝜇𝑓𝑒
+𝛿𝜇𝑜]
(2.66)
Uma vez que o coeficiente de indução detém variáveis que estão também dependentes
do entreferro, torna-se mais simples calcular a sua derivada através da seguinte expressão:
𝑑𝐿
𝑑𝑥=𝑑𝐿
𝑑𝛿
𝑑𝛿
𝑑𝑥 (2.67)
𝑑𝐿
𝑑𝛿= −
𝑛2𝑆𝑜
[(1 −
𝑒2
𝑐2)
𝜇𝑓𝑒𝑙𝑇𝑝𝑎𝑡ℎ +
𝑙𝑝𝑎𝑡ℎ𝜇𝑓𝑒
+𝛿𝜇𝑜]
2((1 −
𝑒2
𝑐2)
𝜇𝑓𝑒
𝑑𝑙𝑇𝑝𝑎𝑡ℎ
𝑑𝛿+
1
𝜇𝑓𝑒
𝑑𝑙𝑝𝑎𝑡ℎ
𝑑𝛿+1
𝜇𝑜)
(2.68)
Visto que:
𝑑𝑙𝑇𝑝𝑎𝑡ℎ
𝑑𝛿=𝑑𝑙𝑝𝑎𝑡ℎ
𝑑𝛿= −
1
2 𝑒
𝑑𝛿
𝑑𝑥= −1 (2.69)
A derivada do coeficiente de indução é dada por:
𝑑𝐿
𝑑𝑥=
𝑛2𝑆𝑜
[(1 −
𝑒2
𝑐2)
𝜇𝑓𝑒𝑙𝑇𝑝𝑎𝑡ℎ +
𝑙𝑝𝑎𝑡ℎ𝜇𝑓𝑒
+𝛿𝜇𝑜]
2(1
𝜇𝑜−(1 −
𝑒2
𝑐2)
2𝜇𝑓𝑒−
1
2𝜇𝑓𝑒)
(2.70)
Por fim, a força electromagnética pode ser obtida a partir da seguinte expressão:
𝐹𝑒𝑙 = −1
2
𝑛2𝑖2𝑆𝑜
[(1 −
𝑒2
𝑐2)
𝜇𝑓𝑒𝑙𝑇𝑝𝑎𝑡ℎ +
𝑙𝑝𝑎𝑡ℎ𝜇𝑓𝑒
+𝛿𝜇𝑜]
2(1
𝜇𝑜−(1 −
𝑒2
𝑐2)
2𝜇𝑓𝑒−
1
2𝜇𝑓𝑒)
(2.71)

35
2.3.2 – Implementação dos conceitos de saturação magnética no modelo de
simulação
A aplicação do estudo feito no ponto anterior, tal como foi referido no início deste
subcapítulo, será feita através do acrescento de um subsistema à simulação anterior. Este
subsistema desempenhará as funções de controlo da permeabilidade magnética do ferro,
mediante a sua curva de saturação magnética. Para isso, o subsistema recebe os valores da
amplitude de corrente e posição do pistão, que são direccionados para uma função
programável.
Dentro desta função, estão alocados os pontos relativos à curva de saturação
magnética do ferro, que se pode observar na Figura 23. Assim sendo, para cada valor de
corrente e posição do pistão, a função calcula o valor de densidade de fluxo magnético, 𝐵𝑜,
utilizando o valor de permeabilidade magnética característico da zona linear da curva de
saturação (relembre-se que nesta zona a relação entre a intensidade do campo magnético e a
densidade de fluxo magnético é linear). De seguida, calcula a intensidade do campo
magnético, 𝐻𝑜, e verifica se esse valor corresponde a algum dos pontos da curva. Caso
corresponda, a função retorna os valores de intensidade de campo magnético e densidade de
fluxo magnético, correspondentes a esse ponto, bem como a relação entre eles (ou seja, o
valor de permeabilidade magnética, 𝜇𝑓𝑒).
Numa situação em que o valor de intensidade do campo magnético não corresponda
directamente a um dos pontos da curva, mas pelo contrário, se encontre entre dois pontos, a
função executa uma interpolação linear, para calcular o valor de densidade de fluxo magnético.
Seguidamente, calcula o valor de permeabilidade magnética, e efectua um novo ciclo de
cálculo utilizando este novo valor de 𝜇𝑓𝑒. O ciclo mantém-se até que o erro relativo entre dois
valores consecutivos de permeabilidade seja menor que a constante de erro especificada pelo
utilizador.
2.3.3 – Resultados do segundo modelo de simulação
Para se evidenciar o correcto funcionamento da simulação, após a inserção do novo
bloco, tornou-se a aplicar um escalão de tensão ao sistema, para se verificar a evolução da
densidade de fluxo magnético. Note-se que, como o novo bloco faz variar o valor da
permeabilidade magnética ao longo do tempo, formas de onda de grandezas como a força
electromagnética registarão uma ligeira alteração. No entanto, optou-se por fazer a análise
dessas formas de onda, durante a análise de resultados finais, pós-optimização de parâmetros,
por forma a evitar repetições. Assim sendo, nesta secção, far-se-á somente uma breve
avaliação relativa ao comportamento da densidade de fluxo magnético.

36
Figura 25 – Evolução da densidade de fluxo, Bo, após aplicação de um escalão de tensão (segundo modelo de simulação)
Como tal, se se observar a Figura 25, constata-se que a partir do momento em que o
escalão de tensão é aplicado (t=0,2s) e a corrente aumenta, a densidade de fluxo magnético
elava-se segundo a mesma proporção até atingir o valor 1,2T. A partir desse instante verifica-
se um comportamento diferente, onde se destaca veemente a saturação do ferro. Para que se
consiga depreender de forma mais precisa esta variação entre zonas não saturada e saturada,
apresenta-se na Figura 26, uma ampliação do momento em que o ferro inicia a saturação.
Figura 26 - Evolução da densidade e fluxo, Bo, após aplicação de um escalão de tensão, ampliada à região em que o material entra na saturação magnética (segundo modelo de simulação)
37
2.4 – Modelo térmico em parâmetros concentrados e terceiro modelo de
simulação
Esta quarta etapa do projecto visa substituir o modelo térmico simplificado, descrito na
secção 2.2.3, por um modelo em parâmetros concentrados. O modelo em parâmetros
concentrados permite efectuar uma analogia entre as grandezas térmicas e as grandezas
eléctricas, e descrever a componente térmica do actuador electromagnético através de um
circuito. Assim sendo, nesta secção pretende-se elaborar um circuito que represente as
diversas zonas materiais do actuador electromagnético, e posteriormente, proceder à sua
implementação na simulação, em lugar do bloco correspondente à equação diferencial térmica
definida em 2.2.3.
2.4.1 – Modelo térmico em parâmetros concentrados
Para montar este tipo de circuito térmico equivalente, é necessário perceber a analogia
estipulada entre grandezas eléctricas e térmicas. No seguimento desta lógica, explicita-se que
as resistências do circuito são resistência térmicas, que representam processos de condução
ou convecção de energia térmica; as capacidades do circuito são as capacidades térmicas dos
materiais, e representam os processos de acumulação de energia térmica; e, por fim, as
tensões correspondem a valores de temperatura, ao passo que as correntes são vistas como
injecções de quantidades de calor. Estas quantidades de calor são perdas de energia, e, no
caso deste projecto, dizem respeito às perdas por efeito de Joule, que serão injectadas no
circuito térmico equivalente através de uma fonte de corrente.
Mencionadas as relações entre grandezas eléctricas e térmicas, elabora-se o circuito
térmico equivalente do actuador electromagnético. Descrevendo o actuador do eixo central
para o exterior, encontra-se uma camada férrea do pistão, uma camada de cobre que compõe
a bobina (sem esquecer a camada de isolamento que o reveste), e uma última camada de ferro
que circunda parte da bobina. É importante não desprezar a camada de isolamento que
reveste o fio de cobre, uma vez que é nesta camada que é retida a maior parte do calor, em
virtude da condutividade térmica do isolante ser muito menor.
No circuito da Figura 27, cada uma das resistências corresponde a uma camada de
material onde ocorrem processos de condução de calor (exceptuando a resistência 𝑅𝑐𝑜𝑛𝑣, que
representa o processo de convecção de calor com o exterior). Como se pode verificar, as
perdas por efeito de Joule ocorridas no cobre são representadas por uma fonte de corrente, de
amplitude dada pela equação (2.48). Note-se que a fonte de corrente foi estrategicamente
posicionada entre duas resistências, que representam as duas metades da camada de cobre
do sistema. Por outro lado, como se pode verificar, as duas resistências localizadas à direita do
circuito encontram-se em circuito aberto; isto deve-se ao facto de não existir contacto entre as
porções interiores da válvula e o exterior, e ser por isso impossível existir escoamento de calor

38
através desse caminho. Do lado esquerdo da fonte de corrente, são representadas as
resistências correspondentes a metade do volume de cobre e das porções do ferro e
isolamento. O volume de isolamento é calculado a partir dos dados obtidos em [3], que
especificam a diferença de diâmetro entre a situação em que o fio de cobre é revestido por
isolamento e aquela em que não é. Por fim, a fonte de tensão apresentada à esquerda do
circuito representa a temperatura ambiente exterior, para a qual, no âmbito deste projecto, se
assumiu o valor 20ºC.
Figura 27 – Circuito térmico equivalente do actuador electromagnético, em parâmetros concentrados
Para o cálculo das resistências, considera-se que as superfícies de condução e
convecção são radiais, uma vez que o actuador electromagnético é apresentado sob a forma
de um cilindro. Repare-se que, ao fazer esta consideração, a resistência do ferro, 𝑅𝑓𝑒, vai
assumir um valor superior, visto que a sua geometria não é completamente cilíndrica. Se fosse
completamente cilíndrica, o enrolamento de cobre estaria inteiramente envolto por uma
camada férrea. No entanto, como o ferro tem uma condutividade térmica elevada, esta
consideração torna-se aceitável. Por outro lado, veja-se que o valor simulado de aumento de
temperatura será ligeiramente superior ao verificado na realidade, o que não corresponderá a
um subdimensionamento, que poderia vir a colocar em perigo o fio de cobre. De qualquer das
formas, como se verificará nas secções subsequentes (ver capítulo 3), o limite de temperatura
não será atingido com base neste modelo, o que acaba por o tornar viável.
Em termos de cálculos teóricos, mediante [10], sabe-se que o cálculo da resistência
térmica de condução, para uma geometria cilíndrica, sem produção interna de calor, é dado
por:
𝑅𝑐𝑜𝑛𝑑 = (1
2𝜋𝜆𝐿𝑙) ln (
𝑟2𝑟1) (2.72)
Em que 𝑟1 representa o raio interior da camada cilíndrica, e 𝑟2 o raio exterior, tal como
está exemplificado na Figura 28. 𝐿𝑙 é o comprimento da estrutura cilíndrica e 𝜆 a condutividade
térmica do material. Esta expressão permite calcular as resistências das camadas de ferro e
isolante; no entanto, para calcular a resistência da camada de cobre, onde existe produção
interna de calor, é necessário recorrer a outra equação, referenciada em [11]:

39
𝑅𝑐𝑜𝑛𝑑𝑝
=1
4𝜋𝜆𝐿𝑙(1 − 2
𝑟12
𝑟22 − 𝑟1
2 ln (𝑟2𝑟1)) (2.73)
Figura 28 – Representação de uma geometria cilíndrica com especificação de dimensões
Para a resistência de convecção, relembrando os conceitos introduzidos na secção
2.2.3, calcula-se o seu valor através da seguinte expressão:
𝑅𝑐𝑜𝑛𝑣 =∆𝜃
𝑝𝑐𝑣=
1
ℎ𝑐𝑣𝐴𝑒 (2.74)
Finalmente, os valores das capacidades térmicas são calculados mediante a seguinte
equação[10]:
𝐶 = 𝑐𝜌𝑚𝑉 (2.75)
Em que c é o calor específico do material, 𝜌𝑚 é a sua densidade e V o seu volume.
2.4.2 – Implementação do circuito térmico equivalente no modelo de simulação e
resultados.
A implementação do circuito térmico foi feita de forma directa na simulação,
implantando um circuito eléctrico dentro do bloco relativo à modelação da temperatura. Este
circuito recebe o valor das perdas por efeito de Joule, calculadas no bloco “Perdas Joule” (ver
Figura 13), e converte-o num sinal de corrente. Os valores das resistências e capacidades são
calculadas através de um script auxiliar, que pode ser consultado no Anexo 1.
Para comprovar o correcto funcionamento do circuito térmico equivalente inserido no
modelo de simulação, tornou-se a aplicar um escalão de tensão ao sistema, mantendo-se o
actuador alimentado durante um período de 7000 segundos. Repare-se que esta situação é
aquela em que o actuador está sujeito a um maior aumento de temperatura, uma vez que lhe
está a ser aplicado uma corrente de valor constante durante um vasto período de tempo. Assim
sendo, esta simulação adquire interesse, pois permite verificar qual a elevação de temperatura
máxima, depois de esta estabilizar.

40
Figura 29 – Evolução do aumento de temperatura, para o modelo térmico de parâmetros concentrados, aplicando um escalão de tensão
Como se pode comprovar pela Figura 29, o aumento de temperatura estabilizou ao fim
de 6000 segundos, depois de evoluir de forma exponencial, tal como no modelo inicial da
secção 2.2. No entanto, através deste circuito em parâmetros concentrados verifica-se que o
aumento de temperatura é bastante superior ao simulado anteriormente. Não obstante, este
valor de aumento de temperatura continua a ser aceitável, uma vez que o fio de cobre está
preparado para suportar temperaturas na ordem dos 105ºC graus [3].

41

42
3. Optimização de parâmetros para o dimensionamento do
actuador electromagnético
Neste ponto do projecto, já foram caracterizados todos os aspectos físicos e funcionais
do actuador electromagnético, e modelado o sistema através de um programa de simulação.
No entanto, durante o dimensionamento de um actuador existem sempre alguns objectivos —
para além do correcto funcionamento do sistema — que deverão ser considerados.
Referenciando o caso concreto deste projecto, pretende-se que o actuador electromagnético,
para além de conseguir exercer a força magnética necessária ao fecho da válvula, respeite
também algumas condições que permitam ao sistema funcionar de forma segura, ou então,
que tornem a sua utilização prática. De seguida, passam-se a apresentar essas condições,
algumas das quais foram já referenciadas nas secções antecedentes:
A entrada na saturação do material ferromagnético deverá ser controlada, uma vez
que em caso de entrada na saturação, é necessário fornecer um maior incremento
de corrente, para que se verifique o mesmo aumento de fluxo magnético que
ocorreria fora desta situação. Este incremento de corrente poderá provocar
aumentos de temperatura indesejados.
O aumento de temperatura, derivado das perdas por efeito de Joule, deverá ser
condicionado, uma vez que existe um limite térmico que o isolamento do fio de
cobre é capaz de suportar. Uma deterioração do isolamento devida ao aumento de
temperatura pode conduzir a danos permanentes no sistema.
Às duas condições anteriores, está aliado o valor de corrente requerido pelo
sistema; por essa razão, outro parâmetro que detém influência é o valor de tensão
aplicado, que condiciona a corrente que percorre o sistema.
Por fim, é também definido como objectivo, a minimização do volume ocupado pelo
actuador.
3.1 – Definição do problema de optimização
As condições apresentadas anteriormente podem ser expressas sob a forma de um
problema de optimização, definido por um conjunto de objectivos e restrições. Assim sendo,
para o caso específico deste actuador electromagnético, pretende-se minimizar o volume
ocupado pelo actuador e a corrente utilizada, para que o gasto energético seja atenuado. Por
outro lado, pretende-se também que o actuador não tenha uma geometria desproporcional,
pelo que a largura do actuador, b, não deverá ser muito maior que a sua altura, a (ver Figura 5).
Estes objectivos devem ser procurados, tendo em atenção algumas restrições que
garantem o correcto funcionamento do sistema. Como restrições assumem-se:

43
Delimitação da força, que deverá ser superior à força conjunta da mola e da
água.
Restrição da temperatura, que não deve exceder o limite de temperatura
suportado pelo fio de cobre (tenha-se em conta que para o fio utilizado a
temperatura limite é de 105ºC [3], e considera-se a temperatura ambiente
como 20ºC)
A densidade de fluxo magnético, 𝐵𝑜, não deverá exceder os 1,2T, altura pela
qual a peça de material ferromagnético entrará em saturação. Tenha-se em
conta que a zona caracterizada por esta densidade de fluxo será a primeira a
saturar, pelo que se se garantir que esta zona não satura, também as outras
não saturarão.
Definidos os objectivos e restrições, é necessário entender que se está a dimensionar
um sistema físico dinâmico, regido por equações diferencias. Por isso, é necessário identificar
qual é o momento em que o sistema apresenta a situação crítica, e desenvolver a optimização
para os valores que os parâmetros assumem nessa situação. Por outras palavras, neste caso
específico do actuador electromagnético, é necessário saber em que situação as grandezas de
corrente, força electromagnética, densidade de fluxo magnético e temperatura assumem os
valores mais elevados. Analisando os dados apresentados nas secções antecedentes é
possível afirmar que, para cada uma das grandezas, a situação crítica ocorre no seguinte
momento:
Para a força electromagnética, a situação crítica dá-se quando o entreferro
detém maior valor (válvula aberta), e é necessário vencer a impulsão da água.
A partir do momento em que o pistão comece a mover-se para fechar a válvula,
o entreferro diminui e a força aumentará (ver (2.71)). No entanto, para garantir
uma amplitude de força suficiente para fechar a válvula, define-se que a força
deverá ser maior que a força da água em conjunto com a força da mola no seu
momento de maior amplitude.
Em relação à corrente, o valor de maior amplitude ocorre após o fecho da
válvula. Nesta situação, o sistema incorre em regime estacionário pelo que o
valor da corrente é dado directamente pela Lei de Ohm. Por outro lado, ainda
não existem aumentos de temperatura significativos, pelo que a resistência do
fio de cobre se encontra no seu valor mais baixo, e por conseguinte, a corrente
é mais alta.
A densidade de fluxo magnético será mais alta para o mais alto valor de
corrente e para o menor valor de entreferro — situação de válvula fechada (ver
(2.65)).
Por fim, a temperatura alcança o seu maior incremento de forma exponencial,
depois de o sistema ser submetido a uma corrente constante, durante um
grande intervalo de tempo.

44
Estas relações podem ser expressas pelas seguintes expressões matemáticas:
𝐵𝑜 = 𝑛𝐼 [(1 −
𝑒2
𝑐2)
𝜇𝑓𝑒𝑙𝑇𝑝𝑎𝑡ℎ +
𝑙𝑝𝑎𝑡ℎ
𝜇𝑓𝑒+𝛿𝑓𝑖𝑛𝑎𝑙
𝜇𝑜]
−1
≤ 1.2
𝐹𝑒 = −1
2
𝑛2𝐼2𝑆𝑜
[(1 −
𝑒2
𝑐2)
𝜇𝑓𝑒𝑙𝑇𝑝𝑎𝑡ℎ +
𝑙𝑝𝑎𝑡ℎ𝜇𝑓𝑒
+𝛿𝑜𝜇𝑜]
2(1
𝜇𝑜−(1 −
𝑒2
𝑐2)
2𝜇𝑓𝑒−
1
2𝜇𝑓𝑒) > 𝐹𝑎𝑔 + 𝐹𝑚𝑜𝑙𝑎
𝐼 =𝑢
𝑅
(2.76)
Tenha-se em atenção que, para que a força da mola assegure o seu valor máximo,
esta deverá ser definida por:
𝐹𝑚𝑜𝑙𝑎 = 𝑘(𝛿𝑜 − 𝛿𝑓𝑖𝑛𝑎𝑙) (2.77)
Em (2.76) não se fez qualquer referência ao aumento da temperatura, porque tentar
estabelecer o valor final da temperatura através de equações não é trivial — repare-se que na
simulação se recorreu a um modelo em parâmetros concentrados. No entanto, para que se
possa proceder à optimização, deverá existir uma forma de calcular o incremento de
temperatura do sistema. Assim sendo, recorrendo a [12], é possível definir a densidade de
corrente máxima, 𝐽𝑐, que pode percorrer um condutor de cobre, face ao aumento de
temperatura, ∆𝜃, que este suporta:
𝐽𝑐 = (2ℎ𝑐𝑣∆𝜃
𝜌𝑐𝑢𝑑𝑘𝑠)1/2
(2.78)
, onde 𝑑 define a grossura da bobina (ver Figura 5); ℎ𝑐𝑣 é o coeficiente de transferência
por convecção; 𝜌𝑐𝑢 é a resistividade do cobre; e 𝑘𝑠 é o chamado ‘factor de espaço’, que
representa a percentagem do condutor que é cobre, sendo o restante isolamento.
Se se usar esta expressão de forma inversa, isto é, se se introduzir o valor de
densidade de corrente que percorre o condutor, consegue-se obter uma estimativa da
temperatura máxima que a bobina poderá atingir. Note-se que, apesar de tudo, este método
não se versa por acuidade total, uma vez que obtém um valor de temperatura ligeiramente
acima do real. Por esta razão existirá uma ligeira discrepância entre o valor de corrente
calculado com base nestas equações e o valor de corrente simulado. No entanto, a
discrepância constatada é bastante pequena — na ordem dos 100 mA —, pelo que o ligeiro
incremento de corrente não conduz a resultados que possam influenciar a viabilidade do
actuador. Por outro lado, finda esta primeira etapa, será apresentado um segundo método de
aplicação da optimização, utilizando os dados simulados em tempo real, que acaba por
convergir para resultados de optimização mais precisos.

45
Sabendo, então, que a densidade de corrente pode ser obtida por:
𝐽𝑐 =𝐼
𝐴𝑐𝑢=
4𝐼
𝜋𝑑𝑖𝑎𝑚2 (2.79)
Pode-se aplicar este resultado à equação (2.78), para se obter a definição da última
restrição:
∆𝜃 =𝜌𝑐𝑢𝑑𝑘𝑠2ℎ𝑐𝑣
(4𝐼
𝜋𝑑𝑖𝑎𝑚2)2
≤ 60 (2.80)
A condição assume que a temperatura ambiente é de 20ºC, pelo que estipulando um
acréscimo de 60ºC, se está a dimensionar o actuador para uma temperatura máxima de 80ºC.
Visto que os condutores conseguem suportar uma temperatura de 105ºC, o
sobredimensionamento implementado pela restrição representa uma margem de segurança,
devida à aproximação que se fez através da utilização da equação (2.78). Por outro lado, como
se verá adiante, a optimização torna perceptível que, para esta geometria de actuador, é
impossível cumprir todas as restrições de forma rigorosa. Alguns parâmetros ultrapassarão os
limites desejáveis, embora os excessos não sejam suficientes para colocar em perigo o
funcionamento ou segurança do sistema.
Por fim, é necessário expressar a condição relativa ao volume do actuador, através de
uma equação matemática:
𝑉𝑎𝑐𝑡𝑢𝑎𝑑𝑜𝑟 = 𝜋𝑎 (
𝑏
2)2
(2.81)
Estando agora os objectivos e restrições definidos através de relações matemáticas,
resta estabelecer quais são as variáveis de que estão dependentes. Comece-se por mencionar
que o comprimento, b, está dependente do número de espiras, n (ver (2.21)). No caso da
resistência do fio de cobre, o seu valor está dependente do comprimento 𝑙, que por sua vez
depende de ‘a’ e ‘n’. Portanto, o valor da resistência pode ser definido em função de ‘a’ e ‘n’, e,
por conseguinte, também a amplitude de corrente o poderá ser:
𝐼(𝑎, 𝑛, 𝑢) =𝑢
𝑅(𝑎, 𝑛) (2.82)
De igual forma as variáveis 𝑙𝑇𝑝𝑎𝑡ℎ e 𝑙𝑝𝑎𝑡ℎ estão dependentes dos comprimentos ‘a’ e ‘b’
(ver (2.54) e (2.55)); e, como ‘b’ depende de ‘n’, então 𝑙𝑇𝑝𝑎𝑡ℎ e 𝑙𝑝𝑎𝑡ℎ são dependentes de ‘a’ e
‘n’. Por outro lado, a superfície 𝑆𝑜 depende unicamente dos comprimentos ‘c’ e ‘e’ (ver (2.59)).
Assim sendo, a força electromagnética e a densidade de fluxo magnético podem ser expressas
da seguinte forma:

46
𝐵𝑜(𝑎, 𝑛, 𝑐, 𝑒, 𝑢) = 𝑛𝐼(𝑎, 𝑛, 𝑢) [(1 −
𝑒2
𝑐2)
𝜇𝑓𝑒𝑙𝑇𝑝𝑎𝑡ℎ(𝑎, 𝑛) +
𝑙𝑝𝑎𝑡ℎ(𝑎, 𝑛)
𝜇𝑓𝑒+𝛿𝑓𝑖𝑛𝑎𝑙
𝜇𝑜]
−1
𝐹𝑒(𝑎, 𝑛, 𝑐, 𝑒, 𝑢) = −1
2
𝑛2𝐼2(𝑎, 𝑛, 𝑢)𝑆𝑜(𝑐, 𝑒)
[(1 −
𝑒2
𝑐2)
𝜇𝑓𝑒𝑙𝑇𝑝𝑎𝑡ℎ(𝑎, 𝑛) +
𝑙𝑝𝑎𝑡ℎ(𝑎, 𝑛)𝜇𝑓𝑒
+𝛿𝑜𝜇𝑜]
2(1
𝜇𝑜−(1 −
𝑒2
𝑐2)
2𝜇𝑓𝑒−
1
2𝜇𝑓𝑒)
(2.83)
Em relação à temperatura, através de (2.80), compreende-se que o seu aumento está
definido em função da corrente. Portanto, em última instância, o problema de optimização é
descrito pela seguinte função objectivo:
𝑚𝑖𝑛
𝑎, 𝑛, 𝑒, 𝑐, 𝑢
𝑉𝑎𝑐𝑡𝑢𝑎𝑑𝑜𝑟(𝑎, 𝑛);
𝐼(𝑎, 𝑛, 𝑢)
𝑠𝑢𝑗𝑒𝑖𝑡𝑜 𝑎
𝐵𝑜(𝑎, 𝑛, 𝑐, 𝑒, 𝑢) ≤ 1,2;
𝐹𝑒(𝑎, 𝑛, 𝑐, 𝑒, 𝑢) ≥ 𝐹𝑎𝑔 + 𝐹𝑚𝑜𝑙𝑎∆𝜃(𝑎, 𝑛, 𝑢) ≤ 60
(2.84)
Ou seja, o problema de optimização tem dois objectivos e três restrições, definidos por
cinco variáveis.
3.2 – Metodologia de resolução do problema de optimização
Uma vez que o problema de optimização detém mais do que um objectivo e utiliza
várias variáveis, optou-se por utilizar um algoritmo genético na sua resolução. O programa
utilizado, de nome “NSGA-II Program in Matlab”, constitui um algoritmo genético
multiobjectivos, desenvolvido por K. Deb [13].
Os algoritmos genéticos, por analogia da teoria da evolução de Darwin, funcionam com
base na sobrevivência dos mais aptos. Numa fase inicial, é criada uma primeira geração,
constituída por um conjunto de soluções do problema. Na terminologia de algoritmos genéticos,
é atribuído o nome “cromossoma” a cada uma destas soluções, ao passo que o seu conjunto é
denominado por “população”. A população desta primeira geração é constituída por
cromossomas, obtidos através da atribuição de valores aleatórios às variáveis do problema de
optimização; por outras palavras: existe um conjunto de soluções, geradas de forma aleatória.
De seguida, de entre a população, são escolhidos os cromossomas mais aptos para cumprirem
os requisitos de solução do problema (objectivos e restrições), através de uma operação
intitulada “selecção”. Por noma, de entre os elementos desta selecção, os mais aptos têm
maior probabilidade de reproduzir mais descendentes. Durante a reprodução desta população,

47
para formar a nova geração, podem ocorrer fenómenos de recombinação (crossover) ou
mutação. Os processos de recombinação correspondem à troca de genes entre dois
cromossomas, para formar um novo descendente. A mutuação, por sua vez, corresponde à
troca aleatória de genes de um cromossoma, ocorrida durante a formação de um novo
descendente [14].
Em termos um pouco mais práticos, o algoritmo genético começa por formar uma
população de soluções, geradas através da atribuição de valores aleatórios às variáveis do
problema de optimização. De entre estas primeiras soluções, são escolhidas as que melhor se
ajustam aos objectivos e restrições impostos, e criada uma nova geração de soluções a partir
desta selecção. Durante o cálculo destas novas soluções, os processos de recombinação
representam troca de dados entre duas soluções, ao passo que os de mutação representam
alteração aleatória de dados de uma antiga solução para criar uma nova. Com cada nova
geração de soluções, verifica-se uma convergência na direcção de um conjunto de resultados
óptimos do problema.
No caso concreto deste projecto, a função principal do algoritmo genético “NSGA-II
Program in Matlab” é alimentada por uma função objectivo, descrita através de um script
Matlab. A função objectivo utilizada durante este processo de optimização poderá ser
consultada no Anexo 1, e define os objectivos e restrições com base nas equações
apresentadas no ponto 3.1. Para além desta função objectivo, é necessário especificar na
função principal do algoritmo genético quais são os limites de valores que podem ser atribuídos
às variáveis, assim como o número pretendido de gerações, e o número de elementos
(soluções) que constituem cada população. No desenrolar deste projecto, adoptaram-se
populações de 250 elementos, e constatou-se que existia convergência de soluções em
relação ao resultado óptimo, após 500 gerações. Em termos de variáveis, definiu-se para altura
máxima do actuador, um comprimento de “7 cm”, para que as dimensões do sistema não
ultrapassassem os valores habituais das válvulas existentes no mercado [5]. Em relação às
medidas ‘c’ e ‘e’, delimitou-se a atribuição de valores em [1;2,5]cm e [1,5;3] cm,
respectivamente, para que o tamanho do pistão não fizesse expandir a largura do actuador de
forma desproporcional, quando comparada com a sua altura. Por outro lado, delimitou-se o
número máximo de espiras em 1100, para que a largura do actuador não se tornasse
desproporcional, face à sua altura. A função principal do algoritmo genético, onde são definidos
estes limites, pode ser consultada no Anexo 2.
Relembre-se que, como se referiu na secção anterior, o resultado desta optimização
conduzirá a soluções em que o valor de corrente é ligeiramente inferior ao obtido quando se
implementam os resultados de optimização na simulação. Assim sendo, propõe-se uma
segunda forma de conduzir a optimização, para que se possam comprovar os resultados do
primeiro método. Neste âmbito, como o algoritmo genético utilizado trabalha em ambiente
Matlab — o mesmo em que se processa o modelo de simulação construído para o actuador —,
é possível alimentar os dados da simulação para cada uma das soluções criadas pelo

48
algoritmo genético. Ou seja, para cada elemento de uma população, o algoritmo genético corre
a simulação e obtém os valores pretendidos de força electromagnética, corrente, resistência,
densidade de fluxo e aumento de temperatura. Neste ponto, o leitor pode perguntar-se como
será possível aplicar este método para determinar o aumento de temperatura final, uma vez
que este demora cerca de 12 mil segundos (simulados) a ser atingido; assim sendo, seria
necessário correr uma simulação de 12 mil segundos para cada elemento de uma população, o
que delongaria demasiado o processo de optimização. Repare-se, contudo, que o modelo
térmico foi elaborado através de um circuito equivalente, com resistências e condensadores.
Dessa forma, se se desprezarem os condensadores do circuito, o valor final do aumento de
temperatura é dado logo que a corrente estabilize. Isso permitirá obter o valor final de aumento
de temperatura através de uma simulação de 1 s.
3.3 – Resultados do processo de optimização
Numa primeira instância do processo de optimização, depois de correr o algoritmo
genético, comprovou-se que não era possível a convergência para uma curva de soluções
óptimas, em virtude de não existir nenhuma solução na janela de resultados formada pelas
restrições e limites de variáveis impostos. Nesta situação, todos os elementos da população
adquiriam o mesmo resultado final, ao invés de formarem uma curva de optimização (curva de
Pareto). Assim sendo, para contornar este impedimento, estabeleceram-se novos limites para o
aumento de temperatura e de valor de densidade de fluxo magnético.
𝐵𝑜 ≤ 1,8
∆𝜃 ≤ 80 (2.85)
Note-se que ao estipular estes novos limites, se está a permitir que a electroválvula
entre na saturação magnética. No entanto, caso esta saturação não conduza a um aumento de
corrente, que proporcione uma ultrapassagem do limite de aumento de temperatura (80ºC), não
existirá perigo para o equipamento. Posto isto, voltou-se a correr o algoritmo genético,
redefinindo as restrições, e obteve-se a curva de optimização da Figura 30, característica da
população de soluções da última geração.
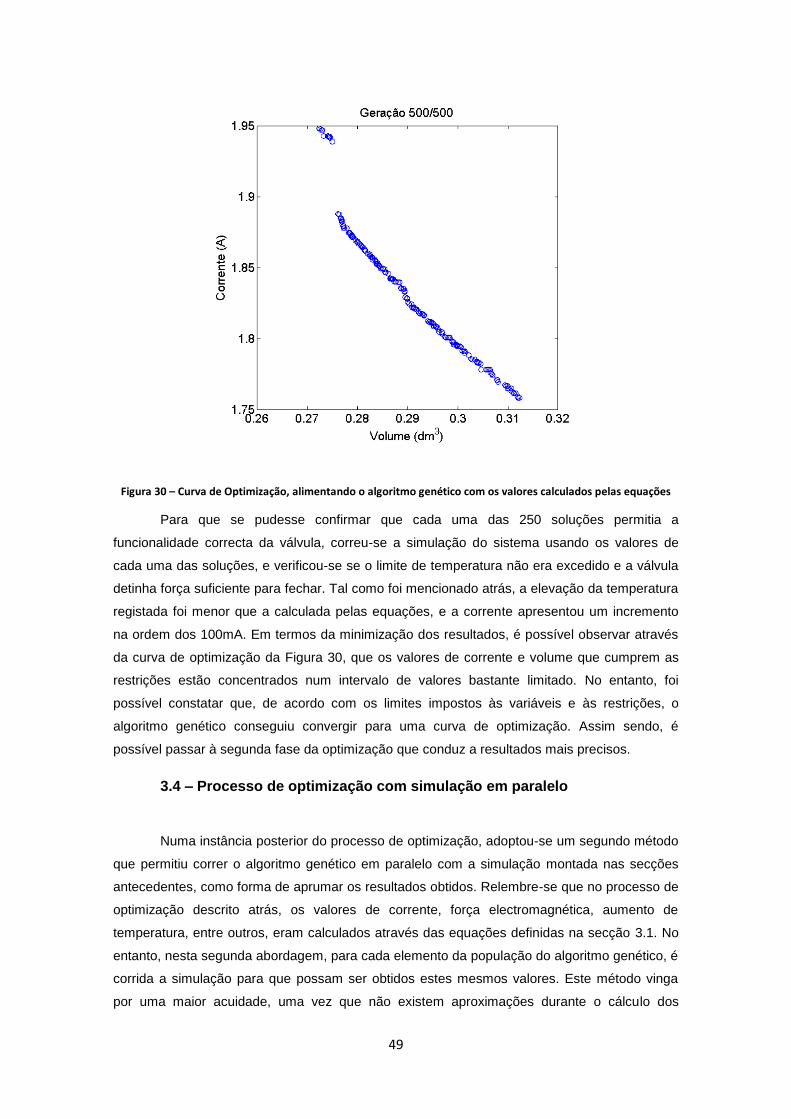
49
Figura 30 – Curva de Optimização, alimentando o algoritmo genético com os valores calculados pelas equações
Para que se pudesse confirmar que cada uma das 250 soluções permitia a
funcionalidade correcta da válvula, correu-se a simulação do sistema usando os valores de
cada uma das soluções, e verificou-se se o limite de temperatura não era excedido e a válvula
detinha força suficiente para fechar. Tal como foi mencionado atrás, a elevação da temperatura
registada foi menor que a calculada pelas equações, e a corrente apresentou um incremento
na ordem dos 100mA. Em termos da minimização dos resultados, é possível observar através
da curva de optimização da Figura 30, que os valores de corrente e volume que cumprem as
restrições estão concentrados num intervalo de valores bastante limitado. No entanto, foi
possível constatar que, de acordo com os limites impostos às variáveis e às restrições, o
algoritmo genético conseguiu convergir para uma curva de optimização. Assim sendo, é
possível passar à segunda fase da optimização que conduz a resultados mais precisos.
3.4 – Processo de optimização com simulação em paralelo
Numa instância posterior do processo de optimização, adoptou-se um segundo método
que permitiu correr o algoritmo genético em paralelo com a simulação montada nas secções
antecedentes, como forma de aprumar os resultados obtidos. Relembre-se que no processo de
optimização descrito atrás, os valores de corrente, força electromagnética, aumento de
temperatura, entre outros, eram calculados através das equações definidas na secção 3.1. No
entanto, nesta segunda abordagem, para cada elemento da população do algoritmo genético, é
corrida a simulação para que possam ser obtidos estes mesmos valores. Este método vinga
por uma maior acuidade, uma vez que não existem aproximações durante o cálculo dos

50
parâmetros da dinâmica do actuador (como se dava no caso do aumento de temperatura), e,
por conseguinte, o algoritmo genético é capaz de apresentar uma gama mais alargada de
soluções.
Figura 31 – Última geração de soluções para a optimização com simulação em paralelo
Atente-se à Figura 31, onde está representada a curva de optimização obtida durante a
aplicação deste método. Repare-se que os valores de volume assumem ordens de grandeza
menores do que aqueles obtidos para as soluções optimizadas da secção anterior. Isto
acontece, porque a utilização da simulação em paralelo, permite ao algoritmo genético gerar
soluções em que se verifica uma maior variação dos valores de ‘c’ e ‘e’. Através do método em
que se definiam os objectivos e restrições através de equações, as soluções geradas
apresentavam valores de ‘c’ e ‘e’ com pouca variação entre si, o que exercia influência diminuta
nos parâmetros de que depende o volume — ‘a’ e ‘b’. Contudo, para este caso, uma variação
significativa dos valores de ‘c’ e ‘e’, implicam uma variação da dimensão, ‘s’, de que depende a
secção da armadura férrea que reveste a bobina (ver Figura 5). Ao diminuir-se o valor de ‘s’, a
altura e a largura do actuador também diminuem, o que conduz a uma diminuição do volume.
Por outro lado, uma diminuição de ‘c’ reduz a massa do pistão central do actuador, o que se
reflecte num decréscimo da força exercida pela mola (ver (2.35)). Note-se que também a força
electromagnética está dependente de ‘c’ (ver (2.83)), pelo que a força electromagnética diminui
de acordo com o decremento desta dimensão, como se pode verificar nas Figura 32 e Figura
33.

51
Figura 32 – Diâmetro ‘c’ do pistão para cada uma das soluções da última geração do processo de optimização
Figura 33 – Força electromagnética exercida pelo actuador para cada uma das soluções da última geração do processo de optimização
Repare-se que entre as soluções 200 e 250, a força electromagnética apresenta uma
subida de proporção superior ao incremento de ‘c’, porque nesse intervalo de soluções se
constata um grande incremento de corrente, como se pode visualizar através da Figura 34.
Uma vez que a força depende da corrente numa relação proporcional quadrática, o seu valor
eleva-se de acordo com a variação da corrente.
Figura 34 - Corrente consumida pelo actuador para cada uma das soluções da última geração do processo de optimização

52
Outro factor de análise diz respeito à evolução do aumento de temperatura, que está
inerente às perdas por efeito de Joule do sistema, dadas por (2.48). Assim sendo, através da
comparação dos resultados da Figura 34 com os da Figura 35, verifica-se que o aumento de
temperatura acompanha a subida do aumento de corrente entre as soluções 0 e 200.
Figura 35 – Aumento de temperatura para cada uma das soluções da última geração do processo de optimização
No entanto, durante o intervalo de soluções [200;250], a temperatura apresenta uma
estabilização que destoa do aumento de corrente. Isto é explicado pela diminuição no número
de espiras que se regista durante este intervalo (ver Figura 36). Uma diminuição no número de
espiras conduz a uma redução no comprimento do fio de cobre, do qual está directamente
dependente a resistência. Assim sendo, a resistência do fio de cobre apresenta uma descida,
que compensa a subida da corrente. Esta compensação mantém o valor das perdas por efeito
de Joule, estabilizando o aumento de temperatura.
Figura 36 – Número de espiras da bobina do actuador para cada uma das soluções da última geração do processo de optimização
Constate-se ainda que para o método de optimização que utiliza a simulação em
paralelo, a amplitude máxima de corrente atingida — 2,4 A — é superior à amplitude máxima
de corrente atingida pelo método que faz uso das equações — 1,95 A. Este evento está
interligado com a expressão utilizada para calcular o aumento de temperatura, no primeiro
método de optimização (2.78). Uma vez que esta equação conduzia a valores de aumento de
temperatura mais elevados do que os verificados com o modelo térmico em parâmetros
concentrados, o algoritmo genético considerava uma gama mais baixa de valores de corrente.
No entanto, para o método de optimização com simulação em paralelo, os valores de aumento
de temperatura são mais baixos, pelo que é possível explorar soluções com amplitudes de
corrente mais altas.

53
Figura 37 – Potência consumida pelo actuador para cada uma das soluções da última geração do processo de optimização
Resta fazer uma análise final em termos do volume do actuador, face à potência
consumida. Como é demonstrado pela curva de optimização, quanto menor é o volume do
actuador, maior é a potência consumida que acompanha o aumento mútuo da corrente e da
tensão aplicada. Este facto é também constatável através da comparação das curvas da Figura
37 e da Figura 38. Do ponto de vista energético, a melhores soluções são aquelas que
apresentam maior volume, uma vez que a potência consumida é a menor. Para estas soluções
também se verifica uma maior proporcionalidade entre os comprimentos de altura e largura do
actuador — 7cm e 6,5 cm, respectivamente. Para a situação de menor volume, para além de o
consumo energético ser o mais elevado, as dimensões do actuador são as mais
desproporcionais, uma vez que altura regista um comprimento de 4,5 cm e a largura um
comprimento de 6,8 cm. Relembre-se, ainda, que estas soluções são obtidas com o material
ferromagnético saturado. No entanto, para evitar a saturação, ter-se-ia que expandir bastante o
volume do actuador, o que não seria justificável face aos resultados apresentados. Para as
soluções dadas nesta dissertação, ainda que exista saturação magnética, o valor de corrente
aplicado não é suficiente para fazer exceder o limite de temperatura suportado pelo fio de
cobre, e, por conseguinte, não coloca em perigo o equipamento.
Figura 38 – Volume do actuador para cada uma das soluções da última geração do processo de optimização
Num cômputo geral, verifica-se semelhança entre as formas das duas curvas de
optimização — uma obtida pela optimização utilizando equações e outra pela optimização
utilizando a simulação em paralelo. O ponto primordial de diferença reside nos próprios valores
das variáveis e objectivos, que são minimizados com maior acuidade através do método que
utiliza a simulação em paralelo. No entanto, deve-se destacar a importância de fazer primeiro a
54
optimização através das equações, uma vez que o tempo consumido por este tipo de
optimização é muito menor. Por esta razão, em primeiro lugar deverá ser feita a optimização
através de equações, como forma de comprovar a convergência de soluções para uma curva
de optimização, dado o espaço de soluções definido pelas restrições e limites de variáveis.
3.5 – Análise final da dinâmica do actuador electromagnético
Numa última análise — agora que foram já definidos os valores óptimos para o
funcionamento da válvula — existe algum interesse científico em estudar o comportamento das
formas de onda que representam a força electromagnética, a corrente e o coeficiente de
indução, para um ciclo de abertura e fecho da válvula. Relembre-se que, após implementação
dos conceitos de saturação magnética na secção 2.3, não se efectuou a análise da evolução
destas grandezas.
Comece-se por explanar a evolução da corrente, representada na Figura 39. Tal como
foi explicado na secção 2.2.5, no momento 0,2s o pistão move-se para fechar a válvula; isto
induz uma velocidade, bem como uma diminuição do entreferro, que faz aumentar o valor do
coeficiente de indução, L(ver Figura 41). É, então, necessário ocorrer uma diminuição de
corrente para manter a igualdade verificada em (2.14) (relembre-se que o valor de tensão é
imposto e constante). Depois de o actuador deixar de ser alimentado, a corrente diminui, mas
verifica-se um pico de tensão, derivado da variação do coeficiente de indução. Nesta situação
dá-se o caso inverso ao anterior: o entreferro aumenta, o coeficiente de indução diminui, pelo
que a corrente aumenta momentaneamente para compensar esta diminuição. Note-se que
para esta mesma situação, também existe uma velocidade negativa, o que constitui outra razão
para o aumento de corrente.

55
Figura 39 – Evolução da corrente para um ciclo de abertura e fecho da válvula (último modelo de simulação com medidas optimizadas)
Relativamente à força electromagnética, esta evolui consoante a corrente até atingir
cerca de 150 N (momento em que ultrapassa a amplitude da força da água). Neste momento,
embora ocorra uma queda de corrente, o entreferro diminui face ao movimento do pistão,
fazendo com que a força electromagnética se eleve numa proporção superior da verificada até
então. Depois de ultrapassar a marca dos 220 N, o entreferro já se encontra no seu valor final,
pelo que a elevação da amplitude da força é explicado pelo aumento da corrente, que recupera
da sua ligeira quebra. Durante a abertura da válvula, passa-se o inverso. A força diminui
consoante a corrente, até que a impulsão da água suplanta a força electromagnética
reminiscente. A partir desse momento o decréscimo de força é mais abrupto, porque o
entreferro aumenta de acordo com a abertura da válvula.
Por fim, faz-se referência à evolução do coeficiente de indução. No momento inicial, o
coeficiente de indução é somente definido pela equação (2.29). De seguida, a corrente inicia a
sua evolução positiva (sem que haja ainda variações de entreferro), pelo que é necessário que
o coeficiente de indução decresça para manter a igualdade (2.53). No momento 0,2s, o
entreferro diminui, o que provoca o aumento de L. De seguida, a corrente recupera da sua
breve quebra, o que induz um decréscimo no coeficiente L para manter a relação (2.53). No
intervalo [1;1,1]s, a corrente inicia o seu processo de descida; por conseguinte, a derivada da
corrente assume valor negativo. Por outro lado, o valor da tensão passou a ser nulo no
momento 1s. Assim sendo, a equação (2.53) assume a seguinte relação:
0 = 𝑅𝑖 + 𝐿𝑑𝑖
𝑑𝑡 (2.86)

56
Figura 40 - Evolução da força electromagnética para um ciclo de abertura e fecho da válvula (último modelo de simulação com medidas optimizadas)
Dada a relação (2.86), compreende-se que o membro 𝑅𝑖 vai ser positivo e o membro
𝐿𝑑𝑖
𝑑𝑡 negativo, pelo que o valor do coeficiente de indução multiplicado pela derivada da corrente
deve ser suficiente para anular o primeiro membro. Assim sendo, constata-se um aumento de L
à medida que o módulo da derivada da corrente diminui. Quanto se atinge o momento 1,2s, o
entreferro aumenta bruscamente, face á retracção do pistão, o que conduz a uma diminuição
brusca no coeficiente de indução. De seguida, dá-se uma nova subida no valor do coeficiente
L, porque é necessário compensar o decréscimo gradual do módulo da derivada da corrente.
Note-se que nos instantes finais, o coeficiente de indução volta a assumir o valor inicial,
somente definido por (2.29).

57
Figura 41 - Evolução do coeficiente de indução para um ciclo de abertura e fecho da válvula (último modelo de simulação com medidas optimizadas)

58
4. Conversão de um contador convencional para contador
de pré-pagamento
Numa nota introdutória deste quarto capítulo, relembrem-se os leitores que um dos
objectivos principais desta dissertação consiste na aplicação de um sistema a um contador de
água convencional, para que este pudesse assumir as funcionalidades de um contador em
regime de pré-pagamento. Assim sendo, este capítulo irá focar-se na apresentação das
metodologias utilizadas para efectuar esta conversão, nas aplicações realizadas e nos testes
conduzidos para comprovar o correcto funcionamento do sistema.
Neste âmbito, refere-se ainda que, para cumprir os objectivos, será necessário
idealizar um método de obtenção da contagem mecânica registada pelo contador, para
convertê-la em sinal eléctrico. De seguida, terá de ser implementada uma válvula solenóide
que possa actuar sobre o caudal de água, e, numa instância posterior, desenvolver um sistema
de controlo para esta válvula.
4.1 Estudo dos contadores de água convencionais com pré-pagamento
O primeiro passo relacionado com esta conversão convencional/pré-pagamento
consistiu na inspecção dos contadores onde se pretendia efectuar a instalação, como forma de
perceber o seu funcionamento e antever alguns aspectos de que se pudessem retirar partido.
Neste contexto, foram estudados três modelos: o “Janz CA JV400 DN15”, o “ITRON TD9 DN15
MID” e o “ITRON MSD CYBLE MG25 DN25 MID R50”, cada um dos quais pode ser observado
na Figura 1.
Figura 42 - Partes superior e inferior de um contador de água
Os contadores de água convencionais são constituídos por duas peças: uma peça
inferior moldada em metal onde circula a água (Figura 42, em cima), e um dispositivo mecânico

59
(Figura 42, em baixo) que é responsável por calcular e indicar a leitura do volume de água
consumido.
Uma vez que não existe qualquer conexão física entre estas duas peças — para evitar
uma fuga de água da peça inferior para a peça superior —, a interacção entre elas é feita,
única e exclusivamente, através de um campo magnético criado por dois ímanes, separados
por uma zona metálica, de fina espessura.
Figura 43 - Esquema representativo da interacção entre o par de ímanes da peça inferior e o par de ímanes da peça superior
O acoplamento entre as duas peças processa-se da seguinte forma: na parte de baixo
do contador, passa a água, que faz girar um mecanismo acoplado a um dos ímanes; a rotação
deste íman faz girar o segundo íman colocado na parte superior do contador, e este, por sua
vez, faz girar um conjunto de engrenagens, responsáveis por incrementar os números no
contador (ver esquema da Figura 43). [15]
Em todos os contadores estudados foi verificada a existência de um ponteiro de
superfície metálica (Figura 44), cuja rotação representa uma determinada percentagem de um
metro cúbico de água consumido. Quer para os contadores da ITRON quer para os da JANZ,
esta percentagem corresponde a 1 dm3. No entanto, foi registada uma diferença entre as duas
marcas de contadores interligada com a capacidade de registo: os contadores da ITRON têm
uma precisão de registo com 3 casas decimais e magnitude de até 5 casas de unidades (de
relembrar que a unidade correspondente é o metro cúbico), enquanto o contador da JANZ tem
uma precisão de registo com 2 casas decimais e magnitude de até 4 casas unidades.

60
Figura 44 - Identificação dos ponteiros reflectores, em cada uma das peças utilizadas para a contagem da água
Foi também estudado um contador equipado com sistema de pré-pagamento, da marca
Joymeter. Após desmantelamento deste contador, verificou-se que a peça giratória onde passa
a água está acoplada a um ponteiro magnético. Sobre este ponteiro, é colocado um interruptor
que é accionado mediante a intensidade do campo magnético que lhe é aplicada. A Figura 45
representa um esquema do circuito do interruptor. Este tipo de interruptor é alimentado por
uma fonte de tensão e deve ser instalado nas proximidades de uma qualquer fonte de campo
magnético — no caso da Figura 45, uma roldana contendo um íman no seu limiar. Com cada
passagem deste íman pelo dispositivo, uma patilha metálica é atraída pelo íman fechando o
interruptor, obtendo-se assim um impulso de tensão. [16]
Figura 45 - Esquema representativo do funcionamento de um interruptor do tipo reed
No caso deste contador com pré-pagamento, o impulso de tensão é, de seguida,
conduzido a uma placa electrónica (ver Figura 46 a)), com um microprocessador integrado.
Este microprocessador, para além de estar ligado ao interruptor, está também conectado a um
display e a um painel de botões através do qual se podem inserir códigos relativos à compra de

61
água. Outras ligações a este microprocessador incluem uma ligação à fonte de alimentação —
feita através de uma bateria —, e outra a um pequeno motor eléctrico (ver
Figura 46 b)), que através de um sistema de engrenagens está encarregue de cortar o fluxo de
água, caso termine o saldo. Neste contador não existe a possibilidade de existir um caudal de
água mínimo, depois do fim do saldo.
Figura 46 - a) Placa electrónica que executa funções do contador de pré-pagamento; b) electroválvula que executa o corte de caudal no mesmo sistema
4.2 Abordagem à obtenção da contagem por via magnética
Uma vez que, durante a análise da composição e funcionamento dos contadores de
água, se constatou que a comunicação entre as peças inferiores e superiores do contador era
realizada através de sinais magnéticos oscilatórios, procurou-se aplicar inicialmente uma
metodologia que permitisse obter impulsos de tensão através da detecção desses sinais
magnéticos. Constatou-se, no entanto, após algumas medições com uma sonda de efeito Hall,
que a intensidade do campo magnético resultante da interacção entre o par de ímanes era
demasiado ténue para que se pudessem obter quaisquer impulsos de tensão.
4.3 Abordagem à obtenção da contagem por via óptica
Numa segunda abordagem, optou-se por utilizar um sensor óptico. Uma vez que a
peça superior dos contadores (a responsável por registar a contagem) detém um ponteiro com
superfície metálica (ver Figura 44), investigou-se a possível obtenção de impulsos de tensão
através da utilização de um sensor óptico reflector. O intento desta metodologia seria obter um
impulso de tensão por cada passagem do ponteiro pelo feixe do sensor reflector. Neste
sentido, adquiriram-se dois sensores ópticos — o Optek OPB705 e o Honeywell HOA1405-002
(ver Figura 47) —, e os testes conduzidos revelaram que o sensor HOA1405-002 é mais
a) b)

62
indicado para aplicação pretendida. Isto deve-se ao facto de que em presença do ponteiro
metálico o sensor HOA1405-002 emite um sinal na ordem dos 4,5 V, e na ausência do ponteiro
emite um sinal na ordem dos 0,8 V, concedendo assim uma variação perceptível. Por outro
lado, o sensor OPB705 apresentava uma intensidade de sinal na ordem dos 0,8 V em
presença de ponteiro, e na ordem dos 0,1 V na ausência deste. Assim, optou-se por utilizar o
primeiro sensor, uma vez que esse apresenta patamares de tensão muito mais definidos e que
são menos sujeitos a variações devido a fontes de ruído.
No caso do sensor OPB705, como os valores de 0,1 V e 0,8 V são próximos,
verificava-se que à mais pequena interferência o valor de tensão variava de forma imprecisa.
Assim sendo, nestas condições tornava-se mais difícil a conversão analógico-digital, uma vez
que estas perturbações de tensão poderiam originar um número de pulsos digitais diferente do
que era desejado. Esta questão da conversão analógico-digital será abordada em pormenor
mais à frente, na secção 4.4.
Figura 47 - Sensor Honeywell HOA1405-002 (à esquerda) e Optek OPB705 (à direita)
O sensor reflector HOA1405-002 consiste num díodo emissor de infravermelhos,
montado ao lado de um fototransístor NPN de silício. Para além disso, o HOA1405-002 tem
incorporado um filtro que minimiza os efeitos da luz visível e compensa a eventual presença de
contaminantes sobre as lentes [17]. Este sensor foi montado como parte integrante do circuito
eléctrico representado na Figura 48; onde a resistência R1 limita a corrente que passa no LED
e a resistência R2 amplifica o sinal de saída.

63
Figura 48 - Circuito para detecção óptica do consumo de água
Por forma a analisar a evolução do sinal de saída do sensor óptico, impôs-se um fluxo
de ar constante a atravessar o contador, utilizando um compressor, e registou-se a evolução
dos impulsos de tensão, com o movimento do ponteiro. Recorda-se, mais uma vez, que o
funcionamento do contador está dependente de dois pares de ímanes, que asseguram a
interacção entre a peça onde circula a água, e a peça onde é registada a contagem. A
passagem da água pelo contador inicia a rotação destes ímanes. Em seguida o par de ímanes
da peça superior do contador, faz rodar um conjunto de engrenagens, que abrangem as
roldanas numéricas e o ponteiro que é utilizado para gerar impulsos de tensão. Assim, como
uma rotação do ponteiro representa uma fracção de 1 m3 de água consumido, um impulso de
tensão vai corresponder a essa mesma fracção. Uma vez que o ponteiro tem o aspecto que se
pode verificar na Figura 49, receava-se que pudessem ser detectados dois impulsos de tensão
com cada passagem do ponteiro — um respeitante à parte metálica do ponteiro e outro relativo
à parte fina do ponteiro. No entanto, os ensaios conduzidos com o registo do sinal de tensão no
osciloscópio eliminaram este receio, comprovando a viabilidade do sistema.

64
Figura 49 - Aspecto superior de um dos contadores, onde se pode verificar a geometria do ponteiro reflector
4.4 Conversão analógico/digital
Uma vez obtido um sinal analógico através do qual é possível determinar a leitura
apresentada no contador, o passo seguinte seria converter esse sinal num sinal digital, para
que pudesse ser processado posteriormente. Para cumprir esta meta, juntou-se ao circuito um
comparador (ver Figura 48) [18]. Utilizou-se um circuito integrado LM358N, que contém dois
comparadores, onde se efectua a comparação entre o sinal analógico proveniente do sensor,
com uma tensão fixa de 3,125 V, obtida por aplicação de duas resistências. Assim, quando o
sinal de tensão proveniente do sensor for superior à tensão 3,125 V de comparação, o sinal
digital assume o valor 1 (5V); caso contrário, o sinal digital assume o valor 0 (0V), como se
pode verificar na Figura 50.
Figura 50 - Sinais analógico e digital medidos através do osciloscópio
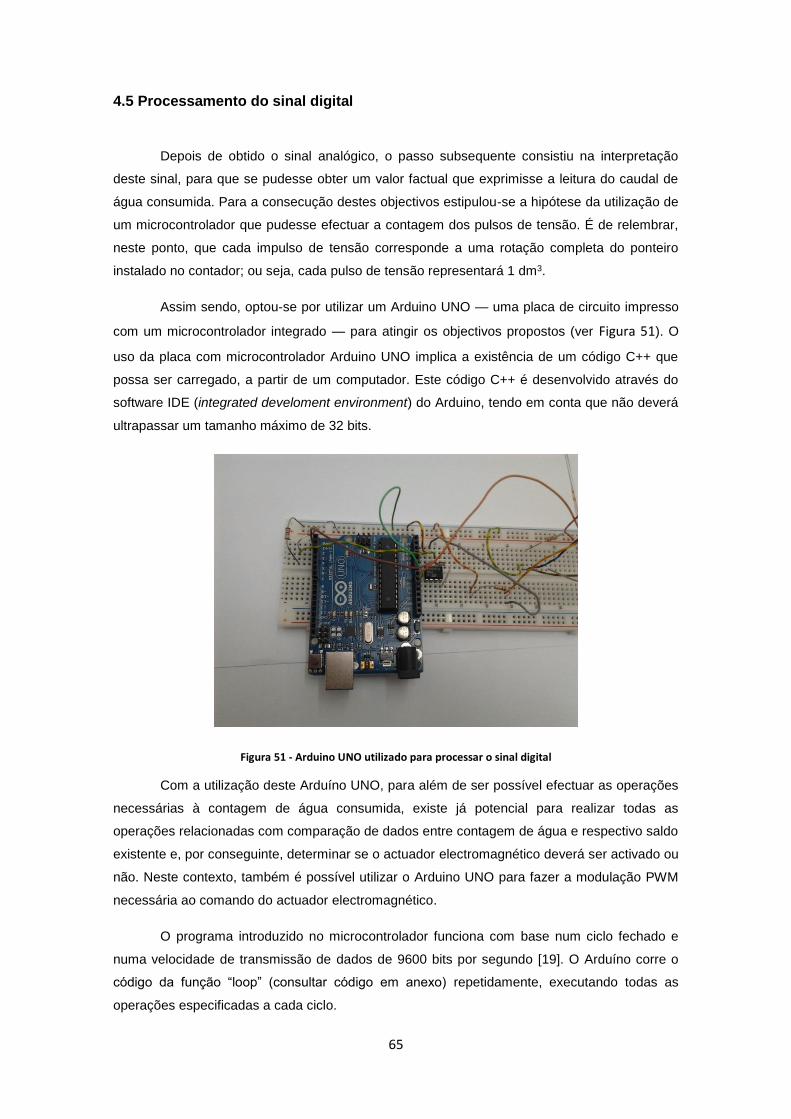
65
4.5 Processamento do sinal digital
Depois de obtido o sinal analógico, o passo subsequente consistiu na interpretação
deste sinal, para que se pudesse obter um valor factual que exprimisse a leitura do caudal de
água consumida. Para a consecução destes objectivos estipulou-se a hipótese da utilização de
um microcontrolador que pudesse efectuar a contagem dos pulsos de tensão. É de relembrar,
neste ponto, que cada impulso de tensão corresponde a uma rotação completa do ponteiro
instalado no contador; ou seja, cada pulso de tensão representará 1 dm3.
Assim sendo, optou-se por utilizar um Arduino UNO — uma placa de circuito impresso
com um microcontrolador integrado — para atingir os objectivos propostos (ver Figura 51). O
uso da placa com microcontrolador Arduino UNO implica a existência de um código C++ que
possa ser carregado, a partir de um computador. Este código C++ é desenvolvido através do
software IDE (integrated develoment environment) do Arduino, tendo em conta que não deverá
ultrapassar um tamanho máximo de 32 bits.
Figura 51 - Arduino UNO utilizado para processar o sinal digital
Com a utilização deste Arduíno UNO, para além de ser possível efectuar as operações
necessárias à contagem de água consumida, existe já potencial para realizar todas as
operações relacionadas com comparação de dados entre contagem de água e respectivo saldo
existente e, por conseguinte, determinar se o actuador electromagnético deverá ser activado ou
não. Neste contexto, também é possível utilizar o Arduino UNO para fazer a modulação PWM
necessária ao comando do actuador electromagnético.
O programa introduzido no microcontrolador funciona com base num ciclo fechado e
numa velocidade de transmissão de dados de 9600 bits por segundo [19]. O Arduíno corre o
código da função “loop” (consultar código em anexo) repetidamente, executando todas as
operações especificadas a cada ciclo.

66
De seguida, descreve-se a porção de código destinada à obtenção da contagem (ver
Anexo 3). Não obstante, note-se que depois de conduzidos ensaios em laboratório, tiveram que
se implementar duas condições, cujo cumprimento é obrigatório para se incrementar o valor de
água consumida. Estas condições devem-se ao facto de o sinal recebido pelo Arduino não se
comportar de forma ideal e perfeita, podendo por vezes induzir erros no incremento da
contagem. Contudo, para não criar confusão nesta primeira fase da explicação, assuma-se que
o sinal recebido pelo Arduino evolui de forma perfeita nas suas subidas e descidas. Assim
sendo, a cada ciclo, a função “loop” lê o valor do sinal digital que é recebido pelo Arduíno e
regista-o numa variável de nome “valorPulso”. Antes de o fazer, no entanto, guarda o valor
anterior do sinal digital noutra variável de nome “pulsoAnterior”.
Na etapa seguinte, são comparadas as variáveis “valorPulso” e “pulsoAnterior”. Se a
variável “valorPulso” for superior à variável “pulsoAnterior” significa que o sinal digital transitou
do valor 0 para o valor 1 (ponteiro efectuou uma rotação). Neste caso, a variável “contagem”,
referente ao valor de caudal de água consumido, incrementa.
Numa instância seguinte, elaboraram-se mais algumas linhas de código que permitem
ao Arduino calcular o caudal instantâneo que passa pelo contador. Esta medida é alcançável,
porque cada volta do ponteiro reflector corresponde à medida fixa 1 dm3 de água consumida.
Assim, se se registarem dois instantes consecutivos em que se deu uma transição do pulso de
tensão de 0 para 1, consegue-se obter o tempo que o ponteiro demorou a percorrer 360º.
Dividindo o volume de água correspondente a uma volta do ponteiro, pelo tempo que demora
esta acção, é possível obter o caudal instantâneo.
4.6 Concepção do circuito hidráulico para teste do sistema de contagem
Derivado da necessidade de conduzir testes com o sistema desenvolvido para
obtenção da contagem, procedeu-se ao projecto e montagem de um circuito hidráulico, cuja
instalação foi efectuada no laboratório de hidráulica, do Departamento de Engenharia Civil.
Como se pode visualizar na Figura 52, o ramo principal do circuito detém um diâmetro de
50mm, e tem origem num depósito de água. A água é puxada do reservatório através de uma
bomba, e conduzida até um reservatório com ar comprido (RAC), necessário à estabilização da
pressão nos ramos. À saída do RAC existe um caudalímetro, que permite obter uma primeira
medida do caudal. No interior do reservatório de água existe um descarregador triangular, que
permite obter o valor de caudal instantâneo através da Lei de Vazão para descarregadores
triangulares:
𝑄 = 𝐶𝑣8
15√2𝑔𝐻𝑐
5/2 (4.1)
Em que 𝐶𝑣 é um coeficiente de vazão, g é a aceleração da gravidade, e H a carga do
descarregador dada em metros. No entanto, na prática é comum utilizar a fórmula de Gourley e
Grimp:

67
𝑄 = 1,32𝑡𝑔 (𝜃
2)𝐻2.47 (4.2)
Onde 𝜃 representa o ângulo do descarregador (neste caso 𝜃 = 90˚)[20]. Através do
caudalímetro e do descarregador, conseguem-se obter duas medidas de caudal para
comparação com o valor que irá ser calculado pelo Arduino.
Retornando a atenção para a Figura 52, é possível observar que existe um troço final
do circuito hidráulico, amovível, e que suporta tubagens de diâmetros de 15mm, 20mm e
25mm. Assim, é possível ir alternando os contadores disponíveis para que se possa testar a
fiabilidade do sistema, quando aplicado a cada um.
Figura 52 – Esquema do circuito Hidráulico montado para testar os métodos de contagem e o correcto
funcionamento da válvula solenóide (de acordo com a simbologia apresentada em [21])
4.7 Teste de fiabilidade da leitura óptica
Alguns testes efectuados utilizando o circuito hidráulico permitiram aferir dois erros na
leitura óptica efectuada pelo Arduino, que tiveram de ser corrigidos mediante o acrescento de
algumas linhas de código. Estes erros manifestaram-se porque, ao fim de um determinado
tempo, existia inconsistência entre a leitura mecânica registada pelo contador e a leitura
registada pelo Arduino. O primeiro erro é originado devido a um impulso repentino, não
desejado. Durante os momentos em que o contador permite a passagem de caudais elevados
de água, ocorre alguma vibração. Como o sensor óptico está acoplado no topo do contador,
esta vibração pode originar, por vezes, um pulso indesejado. Para estes casos indesejados,

68
verificou-se que o valor de caudal calculado era muito elevado e acima dos limites do contador.
Por essa razão, estabeleceu-se, como condição, que a variável “contagem” só poderia
incrementar caso o valor de caudal estivesse dentro dos limites aceites pelo contador — na
prática, especificou-se que o caudal teria de ser inferior a 2 dm3/s (ver Anexo 3).
O segundo erro de leitura verificava-se unicamente para situações em que o caudal
que percorria o contador era muito pequeno (inferior a 0,02 dm3/s). Para estes casos, o erro
ocorria em certas ocasiões, quando se dava a subida do impulso de tensão do valor 0 para o
valor 1 (ou na situação inversa: numa descida de 1 para 0). Esta ocorrência tem que ver com a
amplitude do sinal analógico que é enviado do sensor óptico para o comparador. Repare-se
que a amplitude do sinal é tanto maior quanto maior for a intensidade do feixe luminoso que é
reflectido. Seguindo esta ideologia, constatou-se que para caudais pequenos, a amplitude do
sinal analógico aumenta gradualmente com a superfície do ponteiro em que é reflectida. De
início existe apenas uma pequena superfície reflectora, e à medida que o ponteiro efectua a
sua rotação, uma maior superfície cobre a zona onde está a ser aplicado o feixe de luz. Por
esta razão, o sinal analógico demora mais tempo a efectuar a sua subida dos 0,8V até aos
4,5V, referidos na secção 4.3. Como este espaço de tempo é bastante alongado, o Arduino tem
uma janela de oportunidade de registo muito maior. Acontece que, a subida do sinal analógico
não é uma linha perfeitamente constante; a sua evolução regista ligeiras quebras ou elevações
de tensão, durante as subidas e descidas, respectivamente. Agora, assuma-se que uma destas
quebras de tensão acontece em torno do valor 3,125V, que é o valor utilizado pelo comparador
para converter o sinal analógico em digital. Neste caso, dar-se-ia um evento em que se
registava um impulso digital de tensão erróneo, que se traduziria num incremento da variável
“contagem”. No entanto, na realidade não seria consumida esta porção de caudal. A ocorrência
desta eventualidade durante um período de subida do sinal analógico, ou durante um período
de descida, repercute-se em duas situações distintas:
Numa situação de subida do sinal analógico: relembre-se que os instantes de tempo
guardados para calcular o caudal são sempre registados aquando a subida do sinal
analógico. Assim sendo, se o erro se desse durante o período de subida do sinal
analógico, seriam registados dois instantes de tempo muito próximos, pelo que o
caudal assumiria um número colossal. Neste caso a condição estipulada para o
primeiro erro resolveria o problema.
Numa situação de descida do sinal analógico: O segundo problema de leitura ocorre
para esta situação. Neste caso, o primeiro instante de tempo guardado corresponderia
à subida do sinal digital de 0 para 1. No entanto, quando o sinal analógico iniciasse o
seu processo de descida, caso se desse um pulso indesejado, este faria incrementar a
variável “contagem”. A razão para esta ocorrência é derivada da baixa velocidade de
rotação do ponteiro, que permite que se escoe um intervalo de tempo suficientemente
grande entre a subida e a descida do impulso analógico, para que o caudal calculado
esteja dentro dos limites aceitáveis.

69
Para resolver o problema derivado da segunda situação, criou-se uma variável auxiliar
que regista todos os instantes em que se verifica uma transição de HIGH-LOW. Assim, quando
o programa detecta uma transição de LOW-HIGH, pode comparar este instante de tempo com
o instante de tempo em que se verificou a última transição HIGH-LOW. Se este intervalo de
tempo for muito reduzido, significa que ocorreu um pulso indesejado e a variável “contagem”
não é incrementada.
De forma resumida e em termos práticos, os dois erros de leitura foram resolvidos
através da estipulação da seguinte condição: a variável “contagem” só incrementa se o caudal
calculado for menor que 2 dm3/s, e se o intervalo de tempo entre uma transição HIGH-
LOW/LOW-HIGH for maior que 1ms. Depois de aplicada esta condição ao código Arduino,
todos os testes conduzidos para diferentes caudais revelaram fiabilidade de leitura (ver Anexo
4).
4.8 Instalação de válvula solenóide e circuito de controlo
Depois de desenvolvida uma metodologia de registo do volume de água consumido, foi
necessário instalar um equipamento que permitisse fazer o controlo de caudal fornecido,
durante as situações que em seguida se descrevem. Os objectivos do projecto estabeleciam
que o sistema deveria estar preparado para fazer a delimitação do caudal (a uma percentagem
pré-estabelecida), quando o saldo de consumo expirasse. Por outro lado, também deveria estar
apto a cortar o caudal por completo se se registasse uma fuga de água. Esta última
eventualidade poderá ser identificada, se o controlador registar um caudal ininterrupto durante
um intervalo de tempo pré-definido pelo utilizador. Assim sendo, para se cumprir estes
objectivos, adquiriu-se uma válvula solenóide, que se instalou em paralelo com o contador,
através de junções e reduções apropriadas.
É importante referir que a válvula adquirida funciona em regime “normalmente fechado”
(regime de funcionamento contrário ao da válvula projectada no capítulo 2). Esta disparidade
justifica-se pelo seguinte facto: no início do projecto pretendia-se implementar uma válvula que
funcionasse em regime normalmente aberto, daí se ter efectuado um estudo para este tipo de
válvula. No entanto, numa fase final do período desta dissertação, em que se resolveu adquirir
uma válvula para instalação, resolveu-se em conjunto com empresa Resul instalar uma válvula
normalmente fechada, por motivos de segurança. Uma válvula normalmente aberta é mais
indicada do ponto de vista funcional, uma vez que o contador está a fornecer água durante a
maior parte do tempo. Desse ponto de vista, este tipo de válvula apresentaria menor consumo
energético. No entanto, para uma situação em que a válvula normalmente aberta deva estar
fechada, uma falha de alimentação conduz a um fornecimento de caudal. Por esta razão,
preferiu-se instalar uma válvula que opera em regime normalmente fechado.

70
Em termos de mecanismos de controlo, a válvula é controlada por um sinal proveniente
do Arduino, que trabalha em conjunto com o circuito electrónico da Figura 53. Quando é
necessário que a válvula seja activada, o Arduino envia um sinal digital para o transístor, que
age como um interruptor, e permite que circule corrente pelo relé. Ao ser magnetizado, o relé
fecha o circuito de alimentação da válvula, accionando-a.
Figura 53 – Circuito de controlo da válvula solenóide (adaptado de [22])
4.9 Alimentação do sistema
O sistema desenvolvido para aplicação junto ao contador convencional está repartido
em alguns subsistemas que funcionam mediante diferentes valores de tensão — todos de
corrente contínua. O primeiro circuito, destinado à obtenção dos pulsos de tensão por via
óptica para que se possa processar a contagem no Arduino, trabalha mediante uma tensão de
5V. O próprio Arduino pode ser alimentado através de uma tensão que se deverá situar entre
os 7V e os 12V. E, por fim, a válvula solenóide é accionada mediante uma tensão de 9V, ao
passo que o seu circuito de controlo funciona a 5V. Assim sendo, verifica-se que o Arduino e a
válvula solenóide são os equipamentos que operam com base numa tensão mais alta. Como o
Arduino trabalha com tensões entre os 7V e os 12V, é suficiente garantir uma alimentação de
9V (igual à da válvula solenóide). Assim sendo, só será necessário uma fonte de alimentação
de 9V, para que se possa alimentar todo o conjunto. A alimentação dos circuitos electrónicos
poderá ser derivada a partir do Arduino, que detém uma saída de 5V. Seguindo esta ideologia,
adquiriu-se um transformador (Figura 55) que pode ser ligado à rede eléctrica 230V AC, e que
apresenta uma saída de corrente contínua, cuja amplitude pode assumir diversos valores —
entre os quais 9V. Em relação à corrente consumida pelos equipamentos, sabe-se que os
constituintes electrónicos do circuito consomem 50mA [17][23][24] e os pinos de entrada e
saída do Arduino podem consumir até uma corrente máxima de 50mA [25]. Assim sendo, como
se estão a utilizar dois pinos, considera-se que no pior caso os pinos poderão consumir até
100mA. Por fim, mediu-se a corrente consumida pela válvula solenóide numa situação em que
lhe é aplicada um sinal contínuo de tensão, e verificou-se que o consumo de corrente se insere

71
na ordem dos 100mA (ver Figura 54). Somando todas as parcelas relativas ao consumo de
corrente, deduz-se que numa eventual situação crítica, o equipamento poderá consumir cerca
de 250mA, pelo que não existirão problemas de alimentação, uma vez que o transformador
está preparado para fornecer até 500mA de corrente.
Figura 54 – Consumo da válvula solenóide instalada a jusante do contador, quando alimentada por um sinal contínuo de tensão
4.10 Controlo de caudais, mediante modulação PWM
O último desenvolvimento do protótipo, efectuado no âmbito desta dissertação, diz
respeito ao controlo da válvula solenóide para que se pudesse delimitar o caudal nominal que
dá entrada no contador, até um valor relativo a uma percentagem de 10%. Para cumprir este
objectivo, criou-se um sinal PWM para controlar a válvula solenóide através de impulsos. Estes
impulsos introduzem a válvula num ciclo de abertura e fecho que, aliado à pressão da água,
consegue garantir um caudal contínuo e delimitado, a jusante do conjunto contador-válvula.
Para testar este método de contagem, aplicaram-se diversos sinais modulados,
variando o período e duty-cycle, até que o sistema de leitura óptica detectasse um caudal da
ordem dos 10% do caudal nominal. Por outro lado, verificou-se visualmente se o fluxo de água
apresentava continuidade, uma vez que para determinados sinais modulados, o caudal média
era o pretendido, mas o fluxo de água apresentava breves descontinuidades.
Mediante as informações expressas anteriormente, vale a pena referir que este método
de controlo foi testado para condições de pressão na ordem dos 3,2 Bar (condições de pressão
limite para ensaio no circuito hidráulico), que garantiam o maior valor de caudal nominal com o
qual se podiam conduzir os ensaios. No entanto, ensaiou-se o mesmo sistema de controlo para
situações em que o caudal era bastante menor, e concluiu-se que, depois de delimitado, o fluxo
hídrico não era suficiente para manter um abastecimento. Não obstante, como foi referido
anteriormente, a pressão apresentada à entrada dos contadores onde se pretende instalar o

72
sistema adquire um valor semelhante ao utilizado nos ensaios, pelo que se poderá utilizar este
método de controlo sem quaisquer constrangimentos.
Os constituintes deste primeiro protótipo englobaram um custo da ordem dos 70 euros,
sendo que os preços associados a cada constituinte passam a ser enumerados em seguida:
Válvula solenóide: 14 €
Sensor óptico e constituintes electrónicos: 3€
Mircro-controlador: 10€
Transformador: 6€
Contador convencional: 30€
Ligações entre contador e válvula solenóide: 3€
Resta ainda mencionar numa nota destinada a trabalhos futuros, que caso as
condições de pressão variem significativamente para vários locais de instalação, deverá existir
um perfil que defina as características do sinal modulado, face à pressão a que a água esteja
sujeito. Isto significa que uma variação da pressão conduz a uma variação do caudal, e, por
conseguinte, existe uma alteração no comportamento entre a dinâmica da válvula e o fluxo de
água. Assim sendo, para diferentes casos de condições de pressão, terá de ser aplicado um
diferente sinal de controlo da válvula, para que se verifique um caudal contínuo e delimitado.
Figura 55 – Protótipo final de um contador convencional convertido em contador de pré-pagamento

73

74
5. Conclusões e trabalho futuro
Neste último capítulo, é possível analisar os resultados principais obtidos nos capítulos
2, 3 e 4, sob um cômputo geral, relacionando diversos aspectos do trabalho teórico com as
aplicações práticas, e apresentar, por fim, actividades futuras que possam conduzir a
desenvolvimentos posteriores no âmbito do tema desta dissertação.
Começa-se por comparar os valores de consumo energético da válvula dimensionada
nos capítulos 2 e 3, e da válvula adquirida para instalação no capítulo 4. No primeiro caso, o
sistema funciona a cerca de 7-8 V, com uma corrente da ordem dos 1,5-2,3A, ao passo que a
segunda válvula opera a uma corrente de 100 mA, sob uma tensão de 9V. Assim sendo, a
válvula dimensionada detém uma potência mínima na ordem dos 10,5 W, ao passo que aquela
instalada no sistema trabalha a 0,9W. Por esta razão a válvula adquirida irá consumir uma
quantidade de energia muito inferior à válvula que foi dimensionada. Esta diferença de
potência, que verifica uma diferença de grandeza de doze vezes, pode ser explicada pelo facto
de a válvula dimensionada nos capítulos 2 e 3 utilizar um actuador electromagnético de volume
muito superior ao utilizado pela válvula que foi adquirida. No entanto, é importante
compreender porque ocorre esta diferença de volumes.
Mencione-se, então, que o dimensionamento efectuado para a válvula, nos capítulos 2
e 3, foi realizado relegando quaisquer considerações referentes à mecânica da parte inferior da
válvula solenóide. Muitas válvulas existentes no mercado — tal como a válvula que foi
adoptada no capítulo 4 — têm uma mecânica muito específica que lhes permite operar o
actuador electromagnético juntamente com uma membrana. Isto conduz a uma redução da
força que o actuador electromagnético terá de efectuar e, por conseguinte, a uma redução
significativa do seu volume. No entanto, no projecto desta dissertação, o actuador
electromagnético exerce força directamente sobre o fluxo de água, sem recorrer ao auxílio de
qualquer membrana. Por esta razão, a força necessária ao fecho da válvula é maior, e maior
será também a corrente consumida, uma vez que a força é uma grandeza dependente do
quadrado da corrente.
Numa segunda conclusão, verifique-se que a modelação, simulação e optimização de
parâmetros, elaboradas ao longo dos capítulo 2 e 3, poderão ser utilizadas para um eventual
dimensionamento futuro de outras válvulas solenóides, quer sejam normalmente abertas ou
fechadas. Para isso, é unicamente necessário alterar as expressões que definem alguns
parâmetros dependentes da geometria de cada actuador electromagnético, como é o caso do
coeficiente de indução ou da força electromagnética.
Relativamente ao trabalho de implementação efectuado no capítulo 4, foi possível
retirar algumas ilações de componente mais prática que deverão ser aqui mencionadas, em
virtude de constituírem pontos de interesse no avanço futuro do projecto entre o IST e a

75
empresa Resul S.A.. A primeira referência faz-se em relação ao subsistema de leitura, o qual
utiliza um circuito electrónico e um microcontrolador Arduino. Como foi demonstrado ao longo
desta dissertação, este subsistema está operacional, pelo que é possível obter um registo
electrónico da contagem de água consumida nos contadores de água. Para além disso, ao
analisar-se este subsistema de forma independente, é premente referir que, depois de
adicionados mais alguns constituintes, será possível obter uma solução que efectue a leitura
remota do consumo registado pelos contadores a um baixo custo.
Numa nota referente à delimitação dos caudais, relembre-se que se pretendia obter
uma redução na ordem dos 10% do caudal nominal, para uma situação de esgotamento de
saldo de consumo. Através dos ensaios realizados nesta dissertação, verificou-se ser possível
fazer esta delimitação através de uma modulação de sinal PWM. Este sinal comanda o
actuador electromagnético num ciclo de abertura e fecho contínuo, acabando por delimitar o
caudal enquanto o mantém ininterrupto à saída da válvula. Note-se, contudo, que esta
delimitação fará sentido numa situação em que a pressão da água garanta um caudal nominal
de uma ordem de grandeza significativa; caso contrário, se o caudal for bastante pequeno, o
caudal delimitado será tão reduzido que dificilmente conseguirá o abastecimento da residência,
em virtude da falta de pressão. Por outro lado, para esta situação de caudal nominal reduzido,
é necessário encurtar bastante o período do sinal modulado do Arduino, para se conseguir
fazer a delimitação. Neste caso, ocorrem problemas ao nível dos sinais digitais do Arduino. O
sinal digital de comando da válvula solenóide interage com o sinal proveniente do sensor óptico
e podem ocorrer falhas na leitura. Portanto, é necessário coadunar os tempos de recepção e
emissão destes dois sinais de forma a garantir o bom funcionamento do sistema. No entanto,
uma vez que este evento de interacção de sinais só ocorre para caudais muito baixos, e como
este caso não tem aplicação prática para abastecimento de uma residência (em virtude de não
existir pressão de água suficiente para o abastecimento), a falha de fiabilidade do Arduino para
estas situações acaba por ser uma contingência sem consequências visíveis. Como o sistema
nunca operará nestas condições de caudal reduzido, também o Arduino nunca terá de efectuar
contagens para estas condições.
Na temática anterior, realça-se ainda outra condicionalidade que deverá ser
mencionada. Para que se pudessem conduzir os ensaios referentes a esta delimitação de
caudal, adquiriu-se uma válvula de custo bastante reduzido, a qual faz interagir o actuador
electromagnético em conjunto com uma membrana, para efectuar as operações de abertura e
fecho. Assim sendo, ainda que se tenha podido observar que é possível fazer uma delimitação
de caudal através de um ciclo de abertura e fecho da válvula, deve-se referir que a operação
continuada deste método de funcionamento induz desgastes na membrana, acabando por
encurtar o seu tempo de vida útil. Assim, ao conduzirem-se ensaios ao longo de quatro meses
para aprimorar a modelação PWM, verificaram-se danos ao nível da membrana. Os efeitos
destes danos são visíveis durante o fecho da válvula quando a falta de escoamento produz
uma pressão elevada sobre a membrana. Neste caso, ainda que o actuador electromecânico
76
funcione em resposta ao sinal PWM, a membrana não é capaz de contrariar a pressão
hidráulica e, por conseguinte, não reabre. Note-se, contudo, que esta é uma contingência
unicamente presente quando se aplica o método PWM para delimitação dos caudais, uma vez
que o ciclo contínuo de abertura e fecho desgasta o material. Se se considerar um regime em
que a abertura e fecho da válvula ocorram esporadicamente, o contador funciona de forma
correcta, sem apresentar desgaste a curto prazo. Os contadores de pré-pagamento existentes
no mercado não disponibilizam a função de delimitação de caudais, pelo que a solução
desenvolvida nesta dissertação continua a ser competitiva ao nível de funcionamento e custo.
No entanto, para o acrescento desta função de delimitação, é aconselhável a instalação de
uma outra válvula solenóide de maior fiabilidade e que possa funcionar de acordo com o sinal
PWM.
Para o desenvolvimento da situação anterior, apresentam-se várias soluções. A
primeira considera o uso de uma válvula semelhante à instalada nesta dissertação, com
melhores garantias de qualidade (relembre-se que a válvula utilizada apresenta o menor preço
de mercado). Para uma segunda solução, poder-se-ia instalar uma válvula solenóide de acção
directa, cujo funcionamento está somente dependente do tempo de vida do actuador
electromagnético, uma vez que é este que contraria a impulsão da água directamente. E, por
fim, poder-se-ia considerar a aquisição de uma válvula que delimite o caudal consoante a
amplitude do sinal de comando. Note-se, contudo, que esta solução poderá ter um custo 4 a 5
vezes superior das restantes soluções mencionadas.
Numa segunda instância, apresentam-se, também, alguns trabalhos futuros que
poderão ser desenvolvidos no âmbito deste tema de dissertação. Assim sendo, a primeira
proposta de trabalho futuro diz respeito a um estudo mecânico que incida sobre a armadura
inferior da válvula solenóide, com o intuito de identificar uma arquitectura que permita reduzir a
força que o actuador electromagnético terá de exercer. Neste caso, reduzindo-se a força
aplicada pelo actuador electromagnético, poder-se-ia também conseguir resolver a ocorrência
de saturação magnética, através de uma redução da corrente.
Um segundo trabalho que se sugere visa o projecto de um actuador electromagnético,
para instalar na armadura inferior da válvula adquirida no capítulo 4. Esta válvula está
preparada para funcionar em regime “normalmente fechado”. Contudo, se se substituir o
actuador electromagnético existente por um que funcione em modo contrário, a válvula passa a
adquirir funções de normalmente aberta. Este estudo pode ser efectuado com relativa
facilidade, uma vez que o comportamento dinâmico deste tipo de actuador electromagnético foi
já modelado e simulado nesta dissertação. De seguida, num passo final, voltaria a efectuar-se
a optimização de parâmetros, utilizando a metodologia desenvolvida nesta dissertação.
Relembre-se que, como o programa de optimização e a simulação são executados ambos em
ambiente MATLAB, a optimização está preparada para ser realizada em paralelo com a
simulação. Neste âmbito, para cada elemento de uma população, a função objectivo do

77
algoritmo genético realiza a simulação para utilizar os valores simulados no processo de
optimização.
Existe ainda um outro ponto de interesse relativo ao consumo energético da válvula
solenóide e que poderá deter alguma preponderância. Como se pôde verificar, a válvula
integrada no sistema apresenta um consumo médio de 0,9 W. Caso a válvula tenha de operar
durante um longo período de tempo, o consumo energético não se torna crítico se a válvula for
alimentada a partir da rede eléctrica. No entanto, se se pretender alimentar a válvula de modo
autónomo — por exemplo, por uma bateria —, deverá ser estudada uma forma de accionar a
válvula só quando existir consumo efectivo de água na residência. Neste campo, poderia ser
também considerado o uso de células fotovoltaicas para o carregamento da bateria.
Outra proposta para desenvolvimentos futuros, passa pela aplicação de uma
configuração diferente no contexto da delimitação de caudais. Assim sendo, terá interesse
analisar a possibilidade de fazer a delimitação de caudais, não através de uma válvula, mas
utilizando um mecanismo mecânico ligado a um pequeno motor de corrente contínua. Dessa
forma, acabar-se-ia por reduzir o consumo energético em virtude de o motor só ter de operar
durante breves períodos de tempo para mover um mecanismo de restrição de caudal.
Por fim, deve-se referir que é necessário implementar ainda um descodificador que
siga a norma STS, e que permita efectuar a transmissão de informação entre as
concessionárias STS e os contadores onde se pretende instalar o sistema desenvolvido nesta
dissertação.

78
6. Referências Bibliográficas
[1] “STS Association Services”, [Online]. Available: http://www.sts.org.za/ . [Acedido em 13 de
Dezembro de 2014]
[2] “Globe Valve Diagram”,[Online]. Available:
https://commons.wikimedia.org/wiki/File:Globe_valve_diagram.svg [Acedido em 28
Agosto de 2015]
[3] Centelsa, Magnet Wires Datasheet
[4] Y. Cengel, J. Cimbala, Fluid Mechanics – Fundamentals and Applications, McGraw-Hill,
2nd Edition, 2010
[5] “PVL”, 2/2 Brass Type UWNO Datasheet
[6] Marcel Jufer, Transducteurs Électromécaniques, vol. IX of Traité d’Electricité, Presses
Polytechniques Romandes, 2nd Edition, 1985
[7] S. Palma, Projecto de Micro-Actuadores Electromagnéticos, Lisboa: Relatório de Trabalho
Final de Curso, Instituto Superior Técnico, 2005
[8] António Dente, A Componente Térmica das Máquinas Eléctricas, Lisboa: Instituto
Superior Técnico, 2012
[9] J. A. Brandão Faria, Electromagnetic Foundations of Electrical Engeneering, John Wiley
and Sons Ltd, 1st Edition 2008
[10] J. Holman, Heat Transfer, McGraw-Hill, 10ª edição, 1997
[11] Z. Makni, Contribution au Développment d’un Outil d’Analyse Multiphysique pour la
Conception et l’Optimisation d’Actionneurs Électromagnétiques, Universite Paris-Sud XI-
Faculté des Sciences d’Orsay: Thèse de Doctorat, 2006
[12] G. Slemon, Electric Machines and Drives, Addison-Wesley Publishing Company,1992
[13] Deb K, Pratap A, Agarwal S, et al. A fast and elitist multiobjective genetic algorithm
NSGA-II. Evolutionary Computation, 2002
[14] M. Mitchell, An Introduction to Genetic Algorithms, 5th edition, A Bradford Book The MIT
Press, 1999
[15] “Medindo Água, “Hidrômetros Velocimétricos”,” [Online]. Available:
http://medindoagua.com.br/watermeter/ . [Acedido em 26 de Dezembro de 2014]
[16] “Explain That Stuff, “”Reed Switches”,” [Online]. Available:
http://www.explainthatstuff.com/howreedswitcheswork.html . [Acedido em 26 de
Dezembro de 2014]
[17] “Honeywell”, HOA1405-002 Datasheet
[18] “How to build an IR Sensor”,” [Online]. Available: http://maxembedded.com/2013/08/how-
to-build-an-ir-sensor/ [Acedido em 26 de Dezembro de 2014]
[19] “Arduino, “Serial.begin function”,” [Online]. Available:
http://arduino.cc/en/pmwiki.php?n=Serial/Begin [Acedido em 26 de Dezembro de 2014]
[20] A.H. Cardoso, D. Covas, Hidráulica Geral – Manual dos trabalhos de laboratório, Lisboa:
Instituto Superior Técnico, 2007

79
[21] “Simbologia da EPAL”, Available:
http://operadordecad.files.wordpress.com/2011/01/anexo_b1_simbologia.pdf
[22] “Wiring of the Solenoid Valves”,” [Online]. Available:
http://web.cecs.pdx.edu/~eas199/B/howto/fishtank/wiring/solenoid_wiring.html [Acedido
em 27 de Agosto de 2014]
[23] “National Semiconductor”, LM358N Datasheet
[24] “Celduc”, D31A.1.0 Datasheet
[25] “Arduino Uno”, [Online]. Available: https://www.arduino.cc/en/Main/ArduinoBoardUno
[Acedido em 1 de Outubro de 2015]

80
Anexo 1 – Script da Função Objectivo
Este script foi utilizado para definir a função objectivo do problema de optimização, para
a situação em que esta é feita em paralelo com a simulação. Assim sendo, calcula todos os
parâmetros necessários para que a simulação corra e envia-os para o workspace, para que
esta os possa usar. Posteriormente, recolhe os resultados e verifica se existem violações às
restrições.
function [y, cons] = OP_VALVULA_objfun(x) % Objective function : Optimization of servo-valve's volume and
current %********************************************************************* % DADOS GERAIS %*********************************************************************
r0=1.68E-8; % resistividade eléctrica do cobre a 20ºC alpha=.004; % cte para o cálculo da resitência eléctrica lambda=128; % condutividade térmica do cobre h=8; % constante de convecção hr=6; % constante de radiação pcobre=8940; % densidade do cobre caloresp=385; % calor especifico do cobre k=5E4; % constante da mola diam=0.724E-03; % diametro do fio de cobre pferro=7874; % densidade do ferro espinvolucro=1E-03; %espessura do involucro que cobre o solenoide Kcu=401; %condutividade termica do cobre Kfe=80.2; %condutividade termica do ferro esp_is=0.046E-03; %espessura do isolamento do fio diam=diam+esp_is; %alteração da espessura do fio para somar o
islamento hconv=40; u=x(3); % tensão
%********************************************************************* % PARTE ELECTRICA %*********************************************************************
uo=4*pi()*1E-07; %permeabilidade magnética do vácuo ur=200000; %permeabilidade relativa do ferro ufe=ur*uo; %permeabilidade do ferro a=x(1); % altura do actuador (m) c=x(5); % diametro da peça interior (m) e=x(4); % diametro da parte conectada ao tampão (m) f=14.11E-03; % largura da abertura da valvula solenoide (m)
s=(c-e)/2; % espessura do circuito magnético
So=pi()*((c/2)^2-(e/2)^2); %(m^2)
n=x(2); % número de espiras delta=2E-03; % entreferro quando aberta (m) delta_final=1E-03; % entreferro quando fechada (m)
largura=So/(2*s); % medida denominada por 'z' na dissertação

81
%*********************************************************************
% PARTE AGUA %*********************************************************************
ro=1000; % densidade da água (Kg/m^3)
r1=25E-03/2; % raio da abertura de entrada do contador (m) r2=f/2; %variável % raio da passagem onde actua o actuador (m) Q=4/3600; % Caudal máximo (m^3/s) A1=pi()*r1^2; % área da abertura de entrada do contador (m^2) A2=pi()*r2^2; % área da passagem onde actua o actuador (m^2) P1=600000; % Pressão da água à entrada(Pa)
P2=P1+1/2*ro*(Q/A1)^2*(1-(A1/A2)^2); %Pressão jutno ao actuador (Pa)
Fag=P2*A2; %Força da água junto ao actuador (N)
%*********************************************************************
% CALCULOS %*********************************************************************
%*********************************************************************
%lenght %*********************************************************************
n1=(a-2*s)/diam; %numero de espiras por camada Ncam=n/n1; Ncam=round(Ncam); %numero de camadas de espiras
if(Ncam>1) for z=1:(Ncam-1) l=2*z*diam; end else l=0; end
l=l*n1+n*c; l=l*2*pi(); l=l/2; % comprimento do fio de cobre
%Note-se que o comprimento está dividido por 2 em cima, porque quando
se %implementou o cálculo do fio, devido a um erro o comprimento estava a
ser %multiplicado por dois. Assim sendo, foi mais fácil resolver o
problema %dividindo por 2 o comprimento %*********************************************************************
b=c+2*Ncam*diam+2*s; % diametro exterior do actuador (chamado de
largura) d=Ncam*diam; % espessura da bobina de cobre
he=h+hr+lambda/l; % constante que toma em a dispersão de calor A=pi()*(diam/2)^2; % secção do fio de cobre

82
C=caloresp*pcobre*(l*A); %capacidade térmica do cobre Ae=pi()*(b^2-c^2); %area de escoamento de calor teta=C/(he*Ae); %constante de tempo térmica m=pi()*c^2*a*pferro; %massa da peça móvel
%PARTE MAGNETICA
St=pi()/4*c^2; % Secção onde existe fluxo magnético S=s*largura; % Secção onde existe fluxo magnético lpath=(a-s-delta)/2+b-s+a-s; %caminho magnético ltpath=(a-s-delta)/2; %caminho magnético R=r0*l/A; % Resistência do fio de cobre Ks=diam^2*l/(((b-2*s)^2-c^2)*(a-2*s)); %factor de espaço comprimento=(b-s+a-s)*2; %*********************************************************************
% PARTE TEMPERATURA %*********************************************************************
%*********************************************************************
% Calculos para as resistencia do modelo em parametros concentrados %*********************************************************************
Kis=0.385; perc_is=esp_is/diam; raio1=c/2; raio2=b/2-s; raio25=raio2*(1-perc_is); raio3=b/2; raio4=b/2+espinvolucro; lfe=a; lcu=a-2*s; lfe2=lfe; Rfe=log(raio3/raio2)*1/(2*pi()*Kfe*lfe); Rcu=(1-2*(raio1^2/raio25^2)-
raio1^2*log(raio25/raio1))*1/(4*pi()*Kcu*lcu); Ris=log(raio2/(raio2*(1-perc_is)))*1/(2*pi()*Kis*lcu); Rfe2=log(raio1/1E-06)*1/(2*pi()*Kfe*lfe2); Rconv=1/(h*Ae);
%*********************************************************************
% Calculos para as capacidades dos condensadores do modelo em
parametros % concentrados %*********************************************************************
Vferro=comprimento*largura*s; densidade_ferro=7874; capacidade_ferro=450; C_ferro=Vferro*densidade_ferro*capacidade_ferro;
Vcobre=l*pi()*(diam*(1-perc_is)/2)^2; densidade_cobre=8920; capacidade_cobre=385; C_cobre=Vcobre*densidade_cobre*capacidade_cobre;
Vcobre=l*pi()*(diam*perc_is/2)^2; densidade_poly=910; capacidade_poly=2302.7; C_poly=Vcobre*densidade_poly*capacidade_poly;

83
%*********************************************************************
% OPTIMIZACAO %*********************************************************************
% Calculos para a optimização %********************************************************************* %Envio das variaveis usadas pela simulacao para o workspace assignin('base', 'u', u); assignin('base', 'Rfe', Rfe); assignin('base', 'Rcu', Rcu); assignin('base', 'Ris', Ris); assignin('base', 'Rfe2', Rfe2); assignin('base', 'l', l); assignin('base', 'Fag', Fag); assignin('base', 'delta', delta); assignin('base', 'uo', uo); assignin('base', 'A', A); assignin('base', 'n', n); assignin('base', 'St', St); assignin('base', 'So', So); assignin('base', 'lpath', lpath); assignin('base', 'ltpath', ltpath); assignin('base', 'ufe', ufe); assignin('base', 'c', c); assignin('base', 'e', e); assignin('base', 'k', k); assignin('base', 'm', m); assignin('base', 'alpha', alpha); assignin('base', 'r0', r0); assignin('base', 'C_cobre', C_cobre); assignin('base', 'C_ferro', C_ferro); assignin('base', 'C_poly', C_poly); assignin('base', 'Rconv', Rconv);
if(Rfe<0 || Rcu<0 || Ris<0 || So<0)
%Esta secção existe, porque para determinados valores arbitrários de
variáveis %as resistências do modelo térmico assumem valores negativos. Assim
sendo, %a simulação não poderá correr, uma vez que não existe com um circuito %negativo. Nesse caso, deve-se descartar essa solução, pelo que, para
que a %optimização possa continuar sem ter de correr a simulação, se induzem %resultados fictícios e que violam as restrições, para que o algoritmo %genético possa descartar estas soluções.
I=200; Bo=2.2; Fel=10; DTeta=200;
else %Corre a simulação SimOut=sim('Simulacao8.slx');
%Obtenção dos valores finais das variáveis Bo, Fel, I, R e DTeta tamanho=size(Bo); Bo=Bo(150,1) tamanho=size(Fel);

84
Fel=Fel(150,1) tamanho=size(I); I=I(150,1) tamanho=size(R); R=R(150,1) tamanho=size(DTeta); DTeta=DTeta(150,1)
end
Volume=pi()*(b/2)^2*a; %Volume do actuador electromagnético
%*********************************************************************
y = [0,0]; cons = [0,0,0];
y(1) = Volume; % objectivo 1 y(2) = I; % objectivo 2
%*********************************************************************
% Cálculo das violações às restrições %*********************************************************************
%Restrição relativa à forca electromagnética
c =Fel-Fag-k*(delta-delta_final); if(c<0) cons(1) = abs(c); end
%Restrição relativa ao aumento de temperatura
c=80-DTeta;
if(c<0) cons(2) = abs(c); end
%Restrição relativa à saturação magnética
c = 1.8-Bo; if(c<0) cons(3) = abs(c); end

85

86
Anexo 2 – Função Principal do Algoritmo Genético
Este script apresenta a função principal do algoritmo genético, onde são definidos o
número de elementos da população, o número de gerações, o número de objectivos, o número
de restrições, e o número de variáveis e os seus limites superiores e inferiores.
%*********************************************************************
% Test Problem : 'Optimization of servo-valve's volume and current' % Description: % (1)constrained % % Reference : [1] Deb K, Pratap A, Agarwal S, et al. A fast and
elitist % multiobjective genetic algorithm NSGA-II[J]. Evolutionary
Computation. % 2002, 6(2): 182-197. %*********************************************************************
options = nsgaopt(); % create default options
structure options.popsize =250; % populaion size options.maxGen = 500; % max generation
options.numObj = 2; % number of objectives options.numVar = 5; % number of design variables options.numCons = 3; % number of constraints options.lb = [4E-2 100 7 10E-03 15E-03]; % lower bound of x options.ub = [7E-2 1.1E3 15 25E-03 30E-03]; % upper bound of x options.objfun = @OP_VALVULA_objfun; % objective function handle options.plotInterval = 1; % interval between two calls of
"plotnsga". options.initfun={@initpop, 'populations.txt'}; result = nsga2(options); % begin the optimization!

87
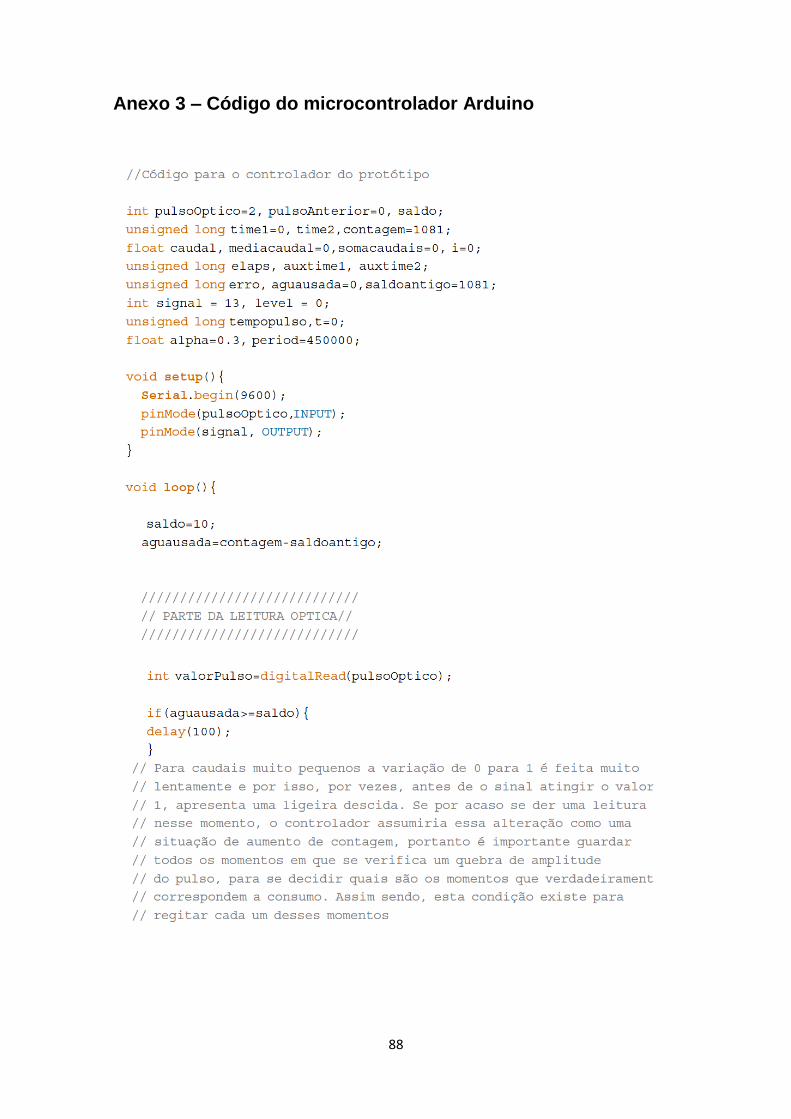
88
Anexo 3 – Código do microcontrolador Arduino
89

90

91

92
Anexo 4 – Comparação das contagens registadas pelo
contador e Arduino.
O Gráfico 1 abaixo apresenta a comparação das contagens registada pelo contador e
Arduino, para caudais de dimensões elevadas. Deverá ser referido que para a construção de
cada curva foram usados dez pontos, registados com um espaçamento de 5 dm3. Este facto
explica a variação da extensão das diferentes curvas, uma vez que para caudais menores é
necessário mais tempos para que se consuma a mesma quantidade de água.
Gráfico 1 – Comparação entre contagem registada pelo Contador e pelo Arduino, para caudais elevados
No Gráfico 2, é representada a comparação dos caudais para caudais menores. Este
segundo gráfico é pertinente, uma vez que permite demonstrar que o sistema de contagem
está preparado para detectar caudais bastante pequenos, característicos de uma fuga. Estas
curvas de consumo foram traçadas com base em dez pontos, registados em intervalos de 1
dm3 de consumo.
2400
2500
2600
2700
2800
2900
3000
3100
3200
3300
0 100 200 300 400 500
Co
nta
gem
da
águ
a co
nsu
mid
a (d
m3 )
Tempo (s)
Arduino
Contador
Q=0,10 dm3/s
Q=0,15 dm3/s
Q=0,20 dm3/s
Q=0,25 dm3/s
Q=0,30 dm3/s
Q=0,40 dm3/s
Q=0,43 dm3/s

93
Gráfico 2 - Comparação entre contagem registada pelo Contador e pelo Arduino, para caudais diminutos
3230
3240
3250
3260
3270
3280
3290
3300
3310
0 200 400 600 800 1000
Co
nta
gem
da
águ
a co
nsu
mid
a (d
m3)
Tempo (s)
Arduino
Contador
Q=0,05 dm3/s
Q=0,04 dm3/s
Q=0,03 dm3/s
Q=0,02 dm3/s
Q=0,01 dm3/s










![9- Capitulo 1 - ULisboa · Figura 1.1: Espectro electromagnético (adaptado de [Bovey, 1958]). A maioria dos estudos sobre a interacção da radiação ionizante com polímeros, com](https://static.fdocumentos.com/doc/165x107/601550d57f2381097a18dee6/9-capitulo-1-ulisboa-figura-11-espectro-electromagntico-adaptado-de-bovey.jpg)







