
PROJETO DE GRADUAÇÃO - app.uff.brapp.uff.br/riuff/bitstream/1/1791/1/Projeto final Caetano...
61
UNIVERSIDADE FEDERAL FLUMINENSE TCE - Escola de Engenharia TEM - Departamento de Engenharia Mecânica PROJETO DE GRADUAÇÃO Título do Projeto : PROJETO BÁSICO DE UMA PONTE ROLANTE POLAR Autor : CAETANO VIDAL PORTO Orientador : Professor BRUNO CAMPOS PEDROZA, D.Sc. Data : 09 de JULHO de 2015
Transcript of PROJETO DE GRADUAÇÃO - app.uff.brapp.uff.br/riuff/bitstream/1/1791/1/Projeto final Caetano...

UNIVERSIDADE FEDERAL FLUMINENSE
TCE - Escola de Engenharia
TEM - Departamento de Engenharia Mecânica
PROJETO DE GRADUAÇÃO
Título do Projeto :
PROJETO BÁSICO
DE UMA PONTE ROLANTE POLAR
Autor :
CAETANO VIDAL PORTO
Orientador :
Professor BRUNO CAMPOS PEDROZA, D.Sc.
Data : 09 de JULHO de 2015

CAETANO VIDAL PORTO
PROJETO BÁSICO
DE UMA PONTE ROLANTE POLAR
Trabalho de Conclusão de Curso apresentado
ao Curso de Engenharia Mecânica da Universidade
Federal Fluminense, como requisito parcial para obtenção
do grau de Engenheiro Mecânico.
Orientador:
Prof. BRUNO CAMPOS PEDROZA
Niterói
2015
Ficha Catalográfica elaborada pela Biblioteca da Escola de Engenharia e Instituto de Computação da UFF

UNIVERSIDADE FEDERAL FLUMINENSE
TCE - Escola de Engenharia
TEM - Departamento de Engenharia Mecânica
PROJETO DE GRADUAÇÃO I
AVALIAÇÃO FINAL DO TRABALHO
Título do Trabalho:
PROJETO BASICO DE UMA PONTE ROLANTE POLAR.
Parecer do Professor Orientador da Disciplina:
- Grau Final recebido pelos Relatórios de Acompanhamento:
- Grau atribuído ao grupo nos Seminários de Progresso:
Parecer do Professor Orientador:
Nome e assinatura do Prof. Orientador:
Prof.: Bruno Campos Pedroza D.Sc. Assinatura:
Parecer Conclusivo da Banca Examinadora do Trabalho:
Projeto Aprovado sem restrições
Projeto Aprovado com restrições
Prazo concedido para cumprimento das exigências: / /
Discriminação das exigências e/ou observações adicionais:

UNIVERSIDADE FEDERAL FLUMINENSE
TCE - Escola de Engenharia
TEM - Departamento de Engenharia Mecânica
PROJETO DE GRADUAÇÃO I
AVALIAÇÃO FINAL DO TRABALHO
(continuação)
Aluno : CAETANO VIDAL PORTO Grau :
Composição da Banca Examinadora :
Prof.: Angela Cristina Cardoso de Souza, D.Sc. Assinatura :
Prof.: Bruno Campos Pedroza, D.Sc. Assinatura :
Prof.: Juan Manuel Pardal, D.Sc. Assinatura :
Data de Defesa do Trabalho :
Departamento de Engenharia Mecânica, / /

DEDICATÓRIA
Dedico este trabalho aos meus irmãos Bianca, Clara e Pablo, aos meus pais, Dila e
Alexandre, por todo o apoio e suporte durante estes anos de graduação.
Caetano Vidal Porto

AGRADECIMENTOS
Em meio a genialidade de seus trabalhos Isaac Newton disse uma frase de indiscutível
relevância. “Se enxerguei mais longe, foi porque me apoiei sobre os ombros de gigantes” –
Isaac Newton.
Os caminhos seriam muito mais tortuosos se fossem seguidos sozinho, sem o apoio
daqueles que já os percorreram. Agradeço aos professores que tive dentro e fora da universidade
ao longo desse tempo e que me disponibilizaram conhecimento e me proporcionaram
oportunidades, agradeço ao professor Bruno que me orientou neste trabalho e agradeço aos
colegas que percorreram o caminho junto comigo.

RESUMO
O objetivo deste trabalho é desenvolver o projeto básico de uma ponte rolante polar
formada por duas vigas paralelas. A ponte rolante tem seus deslocamentos descritos em termos
de coordenadas polares para se adaptar ao prédio de contenção de uma usina termoelétrica a
combustível nuclear, que usualmente tem formato cilíndrico ou esférico. Com o auxílio dos
softwares SolidWorks, MDSolids e Excel foi realizado o cálculo estrutural, definição e
dimensionamento dos principais componentes necessários para o funcionamento da ponte
rolante polar, para que ela seja a prova de falha simples. Foi realizada uma análise em elementos
finitos para validação dos cálculos obtidos através das normas utilizadas.
Palavras-Chave: Ponte Rolante Polar; Planta Nuclear, Análise Elementos Finitos.

ABSTRACT
The objective of this paper is to develop a basic polar crane design using two parallel
beans. The crane has its displacements described by polar coordinates to adapt itself to the
containment building of a nuclear power plant, which have usually cylindrical or spherical
format. With aid of SolidWorks, MDSolids and Excel softwares was developed the structural
calculation and dimensioning of the main necessary components for the operation of the polar
crane, to attend the single failure proof criteria. A simulation was performed on finite elements
for validation of the results obtained through the used standards.
Key-Words: Polar Crane; Nuclear Plant; Finite Elements Analysis.
LISTA DE ILUSTRAÇÕES
Figura 1- Interior usina nuclear 16 Figura 2- Planta Nuclear 18 Figura 3- Ponte Rolante Polar 19 Figura 4- Moto redutor 23 Figura 5- Redundâncias dos cabos 24 Figura 6- Viga Bi-apoiada 28 Figura 7- Perfil utilizado 30 Figura 8- Solda K0 qualidade especial tipo 0,33 37 Figura 9- Solda K0 qualidade especial tipo 0,12 38 Figura 10- Solda K1 qualidade especial tipo 1,1 38 Figura 11- Solda K3 em ângulo qualidade comum tipo 3.21. 39 Figura 12- Carregamentos aplicados 40 Figura 13- Malha 40 Figura 14- Análise de tensões 41 Figura 15- Concentração de tensões 42 Figura 16- Deslocamentos 43 Figura 17- Cabo de aço 6x36 Warrington-Seale 1+7+(7+7)+14 47 Figura 18- Tambor 49

LISTA DE TABELAS
Tabela 1 – Características ASTM A-36 26 Tabela 2 – Características do perfil 31 Tabela 3 – Classes de utilização 31 Tabela 4 – Estados de carga 32 Tabela 5 – Classificação dos equipamentos (ou elementos de estrutura) em grupos. 32 Tabela 6 – Valores do coeficiente de majoração para equipamentos industriais 33 Tabela 7 – Fator de segurança FSp 33 Tabela 8 – Valores do coeficiente dinâmico 𝛹 34 Tabela 9 – Classe de funcionamento 44 Tabela 10 – Estado de solicitação dos mecanismos 45 Tabela 11 – Grupos dos mecanismos 45 Tabela 12 – Valores mínimos de Q 46 Tabela 13 – Cabo de aço classe 6x36 – alma de aço 47 Tabela 14 – Valores de H1 50 Tabela 15 – Valores de 52 Tabela 16 – Valores de FSr 52 Tabela 17 – Valores de H2 53 Tabela 18 – Pressão Limite 54 Tabela 19 – Valores de c1 em função do diâmetro e da velocidade de translação 55 Tabela 20 – Valores de c2 55 Tabela 21 – Coeficientes de acoplamento 56

LISTA DE SÍMBOLOS
b - Dimensão do boleto do trilho.
c - Distância entre a linha neutra e a extremidade da alma.
C1 - Coeficiente em função do diâmetro da roda e velocidade de movimentação.
C2 - Coeficiente em função do grupo do mecanismo.
dc - Diâmetro externo mínimo.
Df - Diâmetro do tambor de frenagem.
Dr - Diâmetro da roda.
Dt - Diâmetro do tambor.
E - Módulo de elasticidade.
EG - Coeficiente de acoplamento por engrenagem.
FL - Coeficiente de acoplamento por junta flexível.
Fpp - Força devido ao peso próprio.
Fr - Força de rolamento.
FSp - Fator de segurança.
FSr - Fator de segurança em função do grupo do mecanismo.
g - Aceleração da gravidade.
H1 - Coeficiente de acordo com o tipo e grupo do mecanismo.
Hi - Altura máxima de içamento.
I - Momento de inércia.
L - Comprimento do vão.
Ls – Largura da sapata de freio.
Lt - Largura do tambor.
MMáx,c - Momento fletor máximo devido a carga.
MMáx,pp - Momento fletor máximo devido ao peso próprio.
Mx - Coeficiente de majoração.
ncabos - Número de cabos.
Ne - Potencia de regime do motor.

nEG - Número de acoplamentos por engrenagem.
nFL - Número de acoplamentos por junta flexível.
npolias - Número de polias.
nred - Número de redundâncias.
nRO - Número de acoplamentos por rolamento.
nvoltas - Número de voltas.
Padm - Pressão admissível de frenagem. ,
Pi - Carga de içamento.
Plim - Pressão limite.
Pv - Passe entre voltas.
Q1 - Fator de dimensionamento.
RA - Reação nos apoios.
RO - Coeficiente de acoplamento por rolamento.
Rtambor - Raio do tambor.
T - Esforço máximo de tração.
t - espessura do tambor.
Tf - Torque de frenagem.
Ttambor - Torque no tambor.
wmotor - Rotação do motor.
wmotor - Velocidade de içamento.
wtambor - Rotação do tambor.
x - Posição.
Y(x) - Flecha.
YP – Flecha máxima com trolley carregado.
Yp – Flecha máxima com trolley não carregado.
β - Angulo de contato entre sapata e tambor de frenagem.
δ - Coeficiente em função do grupo de mecanismo.
ηf – Eficiência da sapata de freio.
ηt - Eficiência do conjunto moto redutor.
μ - Coeficiente de atrito.
σa - Tensão admissível do projeto.
σC - Tensão devido a carga.
σe - Tensão de escoamento do material.
σpp - Tensão devido ao peso próprio.
σr - Tensão de ruptura.
σx - Tensão combinada.
Ψ - Coeficiente dinâmico.
ω - massa linear.
ω – Massa linear.

SUMÁRIO
1 INTRODUÇÃO 16
1.1 UTILIZAÇÃO DA PONTE ROLANTE POLAR 19
1.2 METODOLOGIA 20
1.3 ESTUDO E NORMAS UTILIZADAS NO EXTERIOR 21
1.3.1 NORMA UTILIZADA NOS ESTADOS UNIDOS 21
1.3.2 NORMA UTILIZADA NA ALEMANHA 21
1.3.3 NORMA UTILIZADA NO BRASIL 22
1.3.4 FALHA SIMPLES 22
2 ESPECIFIÇÕES 24
2.1 DIMENSÕES 25
2.2 CARGAS 25
2.3 VELOCIDADE DE IÇAMENTO 25
2.4 VELOCIDADE DO TROLLEY 25
3 CÁLCULO ESTRUTURAL 25
3.1 CÁLCULO ANALÍTICO 26
3.1.1 LINHA ELÁSTICA 27
3.1.2 PERFIL 30
3.1.3 VERIFICAÇÃO EM ACORDO COM CRITÉRIOS DA NORMA 31
3.1.3.1 Classificação da estrutura 31
3.1.3.2 Majoração 33
3.1.3.3 Fator de segurança 33
3.1.3.4 Tensão admissível 33
3.1.3.5 Valor do coeficiente dinâmico 34
3.1.3.6 Tensão combinada 35
3.1.4 DETALHES DE SOLDA 37
3.1.4.1 Solda em alma e abas 37
3.1.4.2 Solda em nervuras 38
3.2 SIMULAÇÃO EM ELEMENTOS FINITOS 39
4 MECANISMOS 44
4.1 CABOS 46
4.2 TAMBOR 49

4.2.1 DIÂMETRO DO TAMBOR 49
4.2.2 ESPESSURA DE PAREDE DO TAMBOR 51
4.3 POLIAS 52
4.4 RODAS 53
4.5 MOTOR 56
4.5.1 MOTOR DE ELEVAÇÃO 56
4.6 FREIO 57
4.6.1 FREIO DO TAMBOR 57
5 CONCLUSÃO 59
6 REFERÊNCIAS BIBLIOGRAFICAS 60

16
1 INTRODUÇÃO
A geração de energia através de fontes nucleares acontece dentro de reator que aquece
um grande volume de água em um circuito fechado. Este circuito interage através de um
trocador de calor com um segundo circuito fechado que aciona turbinas para geração de energia
elétrica. Os principais elementos de uma usina nuclear estão representados na Figura 1, são eles
as bombas do circuito primário, os geradores de vapor o reator, o pressurizador e as tubulações
que os interligam. O reator é responsável pelo aquecimento da água pressurizada que circula
no circuito fechado primário e que é bombeada para os geradores de vapor onde trocam calor
com o circuito secundário. O circuito fechado secundário circula vapor não radioativo para fora
do prédio de contenção onde alimenta uma turbina que é responsável pela geração de energia
elétrica que é distribuída no sistema integrado nacional.
Figura 1- Interior usina nuclear
Fonte: http://www.konecranes.com.br/equipamentos
17
A energia nuclear, produzida através da fissão de núcleos de urânio, é uma eficaz fonte
de energia. O minério de urânio após um tratamento de enriquecimento do isótopo 238 permite
uma reação em cadeia de fissão dos núcleos dos átomos que, se feita de forma controlada, pode
produzir grande quantidade de energia útil.
A demanda por energia para crescimento do parque industrial, diminuição dos custos
de produção e aumento da competitividade leva a busca de novas formas de geração de energia,
aumento da capacidade instalada e aperfeiçoamentos visando aumentar a eficiência e eficácia
na sua produção.
A produção de uma usina termoelétrica a combustível nuclear varia em torno de 90%
de sua capacidade instalada, índice elevado se comparado a outras formas de geração, pois é
possível mantê-la operando em capacidade máxima durante onze meses ao ano, deixando o mês
restante para manutenção e troca de combustível.
A eficiência da geração através de combustível nuclear torna essa modalidade
especialmente atraente e em foco de pesquisas e modernizações. Embora o princípio não tenha
se alterado, inúmeras melhorias e inovações em eficiência e segurança foram realizadas nas
últimas décadas.
O processo de fissão libera radiação ionizante e tem como subprodutos elementos
naturalmente radioativos também na faixa ionizante que são nocivos ao meio ambiente e
potencialmente perigosos para aqueles que tenham recebido dose acima de um valor.
Ambientes que manipulam este tipo de material de risco devem seguir procedimentos e
especificações técnicas próprias que elevem a confiabilidade e reduzam drasticamente o risco
de acidente.
Uma vez que é manipulado material de característica potencialmente nociva no
ambiente de uma usina termoelétrica a combustível nuclear é, sua concepção é realizada em
uma filosofia que prevê projeto, organização e comportamento que em conjunto sejam capazes
de compensar potenciais falhas de forma a não violar a premissa fundamental de não expor o
meio ambiente a radiação ionizante.

18
As especificações e filosofias de segurança se desdobram a todos os itens envolvidos
na usina, como bombas, vasos de pressão, instrumentos, dispositivos de içamento e outros que
operem na ilha nuclear, obedecendo a uma classificação que define onde são adequados
componentes nos padrões da indústria e onde padrões específicos devem ser aplicados.
Dentre os equipamentos que estão contemplados no projeto de uma planta nuclear
estão diversas maquinas de içamento, indicadas na Figura 2, que fazem as operações de
deslocamento de cargas necessárias para a montagem, operação e manutenção da planta.
Figura 2- Planta Nuclear
Fonte: http://www.konecranes.com.br/equipamentos
19
1.1 UTILIZAÇÃO DA PONTE ROLANTE POLAR
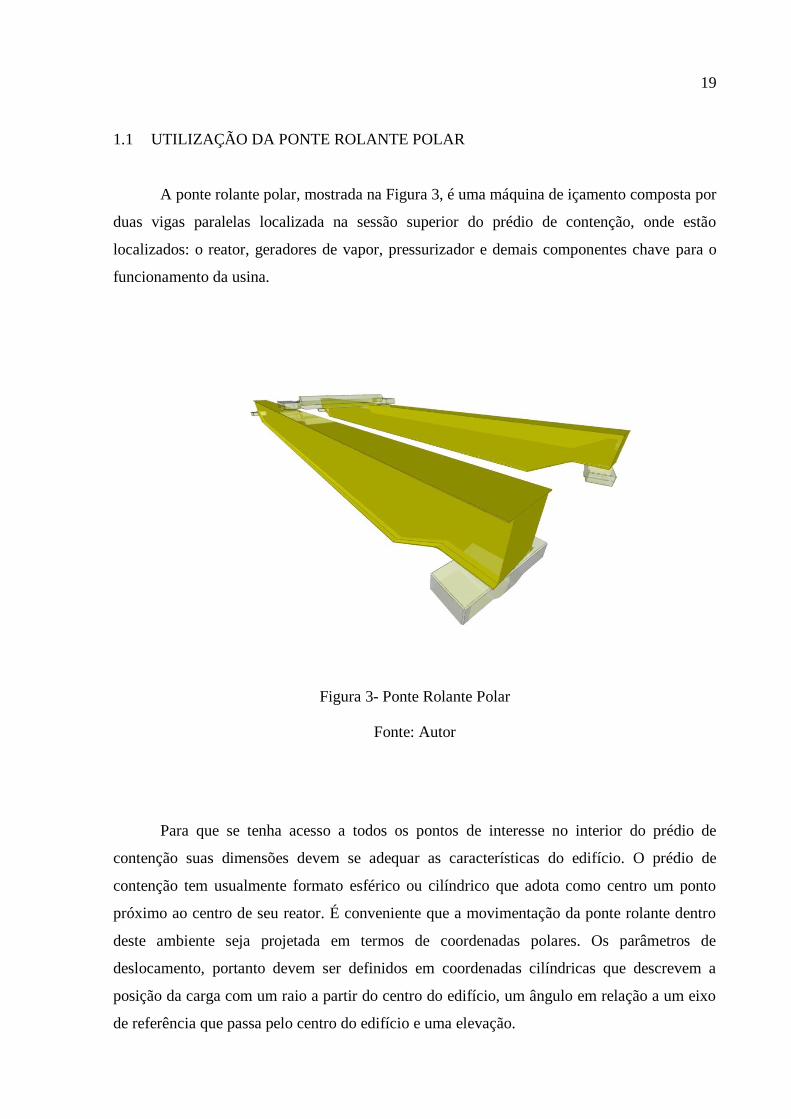
A ponte rolante polar, mostrada na Figura 3, é uma máquina de içamento composta por
duas vigas paralelas localizada na sessão superior do prédio de contenção, onde estão
localizados: o reator, geradores de vapor, pressurizador e demais componentes chave para o
funcionamento da usina.
Figura 3- Ponte Rolante Polar
Fonte: Autor
Para que se tenha acesso a todos os pontos de interesse no interior do prédio de
contenção suas dimensões devem se adequar as características do edifício. O prédio de
contenção tem usualmente formato esférico ou cilíndrico que adota como centro um ponto
próximo ao centro de seu reator. É conveniente que a movimentação da ponte rolante dentro
deste ambiente seja projetada em termos de coordenadas polares. Os parâmetros de
deslocamento, portanto devem ser definidos em coordenadas cilíndricas que descrevem a
posição da carga com um raio a partir do centro do edifício, um ângulo em relação a um eixo
de referência que passa pelo centro do edifício e uma elevação.
20
A ponte rolante polar é utilizada durante a fase de comissionamento para
posicionamento de equipamentos e posteriormente assume a função de manutenção, quando as
cargas são significativamente menores. A principal função durante o período em que opera na
fase de manutenção é o içamento da tampa do reator durante o período de troca de combustível
para permitir que uma segunda ponte rolante tenha acesso as varetas onde se encontram as
cápsulas de urânio e possa reposicioná-las ou substituí-las. Embora tenha boa parte da sua vida
útil destinada a içamento de cargas reduzidas, a ponte rolante deve ser capaz de içar e
reposicionar todo o vaso do reator e os geradores de vapor caso haja necessidade e para isso é
exigido que passe por uma carga de teste em seu comissionamento de algumas centenas de
toneladas a mais do que sua carga usual.
A operação de troca e reposicionamento do combustível ocorre uma vez ao ano ou uma
vez a cada dois anos e em adição a outras operações de içamento de equipamentos para
manutenção, a ponte rolante opera com uma frequência de 6 a 12 vezes ao ano.
1.2 METODOLOGIA
A metodologia utilizada neste projeto consiste em uma pesquisa bibliográfica das
regulamentações utilizadas em algumas das referências mundiais em geração de energia através
de usinas termoelétricas a combustível nuclear seguido de um projeto baseado na norma
brasileira NBR 8400 e uma validação com resultados obtidos através de simulações em um
software elementos finitos.
Foram eleitos os estudos e regulamentações dos Estados Unidos e Alemanha como
ponto de partida para pesquisa bibliográfica. Ambos os países têm vasta experiência na
produção de energia através de usinas termoelétricas movidas a combustível nuclear e dispõem
de vasto material bibliográfico disponível em língua inglesa.
O projeto estrutural e especificação de componentes aqui desenvolvido é baseado na
norma brasileira NBR 8400 - Cálculo de equipamento para levantamento e movimentação de
cargas.

21
Uma simulação estrutural com software em elementos finitos foi feita no software
SolidWorks, os resultados obtidos foram comparados com os cálculos estruturais resultantes do
projeto baseado na NBR 8400.
1.3 ESTUDO E NORMAS UTILIZADAS NO EXTERIOR
1.3.1 Norma utilizada nos Estados Unidos
A Comissão Regulatória Nuclear (NRC) emitiu diversos documentos diretrizes a
respeito do içamento de cargas pesadas em plantas nucleares (Lloyd, 2003), dentre elas a
NUREG-0612, “Control of haavy loads at nuclear power plants” (US Nuclear Regulatory
Comission, 1980), que define na seção 5.1.1 que pontes rolantes devem ser projetadas para
atender os critérios aplicáveis no capitulo 2-1 da ASME B30.2-1976, “Overhead and Gantry
Cranes” (American Society of Mechanical Engineers, 2005). Se pontes rolantes forem
desenvolvidas para esta norma, então a Comissão Regulatória Nuclear tem a segurança de que
a ponte rolante pode acomodar o carregamento e degradação sem falhas que possam resultar
em queda ou escorregamento de carga (Nuclear Regulatory Comission, 2005).
1.3.2 Norma utilizada na Alemanha
Na Alemanha o documento que rege o tratamento dado a projetos na indústria de
termoelétricas nucleares é Comissão Normativa de Segurança Nuclear, “Kerntechnischer
Ausschuss” – (KTA) que define os princípios e normas pertinentes a serem satisfeitos para o
licenciamento de operação. A KTA 3902, “Design of Lifting Equipment in Nuclear Power
Plants” (Kerntechnischer Ausschuss, 2012) define a norma DIN 15018-1 (1984-11) “Cranes;
steel structures; verification and analyses” (Deutsches Institut für Normung, 1974) para a
verificação e análise de pontes rolantes e estruturas metálicas.

22
1.3.3 Norma utilizada no Brasil
O Brasil não possui regulamentação específica para equipamentos utilizados na
indústria nuclear e, nos projetos já construídos em território nacional, utilizou-se a
regulamentação vigente nos países de origem dos projetos que e são os Estados Unidos em
Angra 1 e na Alemanha em Angra 2 e 3. Projetos da Westing House e Siemens KWU,
respectivamente.
Ambas as regulamentações nos Estados Unidos e na Alemanha, definem a utilização de
normas ASME e DIN, normas usuais fora da indústria nuclear.
Considerando-se a utilização de normas usuais da indústria não nuclear por ambas as
regulamentações vigentes nos Estados Unidos e Alemanha a utilização da norma brasileira
ABNT NBR 8400 “Cálculo de equipamento para levantamento e movimentação de cargas” sem
prejuízo de qualidade ou segurança ao projeto uma vez que são equivalentes em rigor de. A
norma brasileira ABNT NBR 8400 pode ser utilizada desde que atendidas as exigências de
projeto a prova de falha simples.
1.3.4 Falha simples
Um projeto a prova de falha simples é um projeto em que a falha de um componente
não coloca em risco a segurança da operação. A forma usual de atingir esse objetivo é adicionar
redundâncias aos componentes críticos. Foi utilizado neste projeto o sistema de redundâncias
mostrado na Figura 4. Nele um motor com saída de eixo para os dois lados se conecta a duas
caixas de redução. As caixas de redução se conectam a um único tambor que, portanto, pode
ser acionado por qualquer uma das duas caixas de redução. Ambas as caixas de redução são
dimensionadas para suportar toda a carga de içamento de forma que na falha de uma, a segunda
será capaz de terminar a operação ou rebaixar a carga com total segurança.
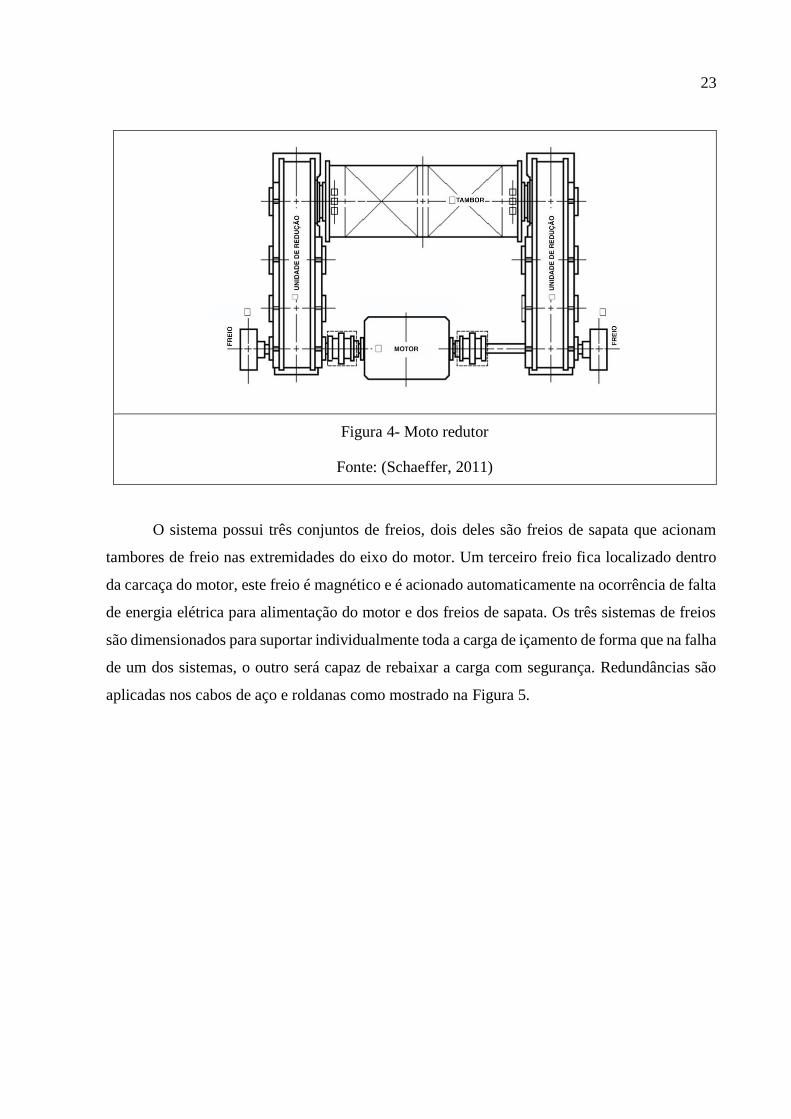
23
Figura 4- Moto redutor
Fonte: (Schaeffer, 2011)
O sistema possui três conjuntos de freios, dois deles são freios de sapata que acionam
tambores de freio nas extremidades do eixo do motor. Um terceiro freio fica localizado dentro
da carcaça do motor, este freio é magnético e é acionado automaticamente na ocorrência de falta
de energia elétrica para alimentação do motor e dos freios de sapata. Os três sistemas de freios
são dimensionados para suportar individualmente toda a carga de içamento de forma que na falha
de um dos sistemas, o outro será capaz de rebaixar a carga com segurança. Redundâncias são
aplicadas nos cabos de aço e roldanas como mostrado na Figura 5.

24
Figura 5- Redundâncias dos cabos
Fonte: (Schaeffer, 2011)
Foram utilizados no projeto quatro cabos de aço com alma de aço sendo que dois deles
são redundantes, isto é, na falha de um dos cabos a sua redundância será capaz de continuar a
operação e rebaixar a carga com segurança.
2 ESPECIFIÇÕES
O projeto foi elaborado levando-se em consideração as características de carga e
dimensões para que seja instalada na usina. As dimensões devem estar de acordo com o projeto
civil e a viga principal atendendo as tolerâncias de máximas flexão, medidas em seu centro.

25
2.1 DIMENSÕES
A ponte rolante deve ser projetada para operar sobre um trilho circular dentro do edifício
de contenção. O círculo descrito pelo trilho para movimentação da ponte rolante tem 41.0m de
diâmetro e aproximadamente 129m de perímetro.
2.2 CARGAS
O projeto deve ser dimensionado para o içamento de 500t durante a fase de montagem
com flecha máxima de 1/500 de seu vão e içamento de 180t durante a fase de operação com
flecha máxima de 1/1000 de seu vão. Durante o comissionamento será realizado um teste para
determinar se a flecha máxima mantém dentro da tolerância de 1/500 do seu vão.
2.3 VELOCIDADE DE IÇAMENTO
A ponte deverá ser capaz de fazer o içamento das cargas com velocidade de 1m/min.
2.4 VELOCIDADE DO TROLLEY
O trole deve ser capaz de movimentar as cargas a uma velocidade de 16m/min.
3 CÁLCULO ESTRUTURAL
O cálculo estrutural neste projeto foi dividido em duas etapas, a etapa um consiste no
cálculo analítico realizado em atendimento a norma NBR8400 (ABNT - Associação Brasileira
de Normas Técnicas, 1987) e os princípios de resistência dos materiais. A etapa dois consiste
na utilização do um software de simulação em elementos finitos.

26
3.1 CÁLCULO ANALÍTICO
O cálculo da viga principal foi realizado de forma a atender tanto as condições descritas
na norma brasileira NBR 8400 (ABNT - Associação Brasileira de Normas Técnicas, 1987)
quanto o critério de comissionamento para a operação em ambiente nuclear. Existindo
divergência deve-se adotar o critério mais conservador que atenda a ambos a norma e o critério
de comissionamento.
A metodologia de cálculo adotada nesta etapa foi a determinação da equação da linha
elástica da viga para que seja possível determinar o momento de inércia necessário para garantir
que a flecha máxima não seja superior a 1/500 do vão da ponte rolante. Para o perfil a ser
utilizado foi feito uma verificação do projeto da viga com relação aos critérios da NBR8400
(ABNT - Associação Brasileira de Normas Técnicas, 1987).
A ponte rolante é formada por duas vigas caixão montadas paralelamente. O ambiente
dentro da usina nuclear não está exposto a externalidades climáticas o que nos permite
desconsiderar os carregamentos devido a efeitos climáticos e ter total liberdade para aproximar
e afastar as vigas sem implicações nas solicitações impostas.
O material utilizado para a fabricação da viga deve dar sinais de falhas detectáveis antes
de uma falha abrupta. Por isso é comum a utilização de aços dúcteis pois neles a propagação de
trincas demanda milhares de ciclos para atingir o tamanho para uma falha do equipamento,
fornecendo tempo suficiente para a identificação da trinca e manutenção necessária.
O material escolhido é o aço estrutural ASTM A-36, características expostas na Tabela
1, material largamente utilizado na fabricação de maquinas de içamento.
Tabela 1 – Características ASTM A-36
TENSÃO DE ESCOAMENTO 250MPa
TENSÃO DE RUPTURA 450MPa
MODULO DE ELASTICIDADE 200GPa
COEFICIENTE DE POISSON 0,26
MASSA ESPECÍFICA 7850kg/m3
Fonte: http://www.cemacobr.com.br/_midia/pdf/a36.pdf

27
3.1.1 Linha elástica
O vão entre os apoios tem a dimensão de 41m e, portanto, a tolerância para a flecha
máxima no teste de comissionamento é:
41𝑚
500= 0,082𝑚
(1)
Esta tolerância representa a diferença entre a flecha de peso próprio da ponte rolante e
a flecha com o carregamento e, portanto, as duas condições devem ser calculadas.
Foi utilizado um modelo de viga bi apoiada com um carregamento distribuído acrescido
de um carregamento concentrado em seu centro (Figura 6), condição que reflete o cenário mais
crítico para flexão e, portanto, uma vez satisfeito, estará também satisfazendo para
carregamentos posicionados em outros pontos ao logo do vão da ponte rolante.
Foi considerado uma carga de 550t, 10% maior do que a carga de projeto, com o intuito
de projetar um perfil de viga que atenda o critério de flecha máxima abaixo do seu limite. O
peso dos motores, trolley, cabos e outros componentes foi estimado em 10% do peso da viga.
Dado que as duas vigas que compões a ponte rolante polar sofrem esforções simétricos,
consideraremos pare efeito de cálculo uma viga sujeita a metade do esforço de projeto.
x

28
Figura 6- Viga Bi-apoiada
Fonte: Autor
Utilizando o método das funções singulares (Beer, 1915) se determinou a seguinte
equação para a linha elástica da viga para P em 𝑥 = 𝐿/2:
𝑌(𝑥) =
1
𝐸𝐼[𝑅𝐴𝑥3
6−
𝜔𝑥4
24−
𝑃
6⟨𝑥 −
𝐿
2⟩ +
𝑤𝐿3𝑥
48−
𝑅𝐴𝐿2𝑥
8]
(2)
Onde:
Y(x) - Flecha
RA - Reação nos apoios
x - Posição
ω - massa linear
Pi - Carga de içamento
L - Comprimento do vão
E - Módulo de elasticidade
I - Momento de inércia
Uma análise desta equação mostrou que a flecha máxima se dá no ponto 𝑥 = 𝐿/2. O
próximo passo foi calcular o valor de Y, sabendo que pelas especificações do projeto ∆𝑌𝑚𝑎𝑥 ≤
𝐿/500.
∆𝑌(𝐿/2) = 𝑌𝑃(𝐿/2) − 𝑌𝑝(𝐿/2) ≤
𝐿
500
(3)

29
Onde:
YP – Flecha máxima com trolley carregado
Yp – Flecha máxima com trolley não carregado
∆𝑌(𝑥) =
1
𝐸𝐼[𝑅𝐴𝑥3
6−
𝜔𝑥4
24−
𝑃
6⟨𝑥 −
𝐿
2⟩3 +
𝜔𝐿3𝑥
48−
𝑅𝐴𝐿2𝑥
8]
−1
𝐸𝐼[𝑟𝐴𝑥3
6−
𝜔𝑥4
24−
1.1𝜔𝐿
6⟨𝑥 −
𝐿
2⟩3 +
𝜔𝐿3𝑥
48−
𝑟𝐴𝐿2𝑥
8] ≤
𝐿
500
(4)
O próximo passo foi calcular o valor de I para o pior caso, isto é, I quando ∆𝑌𝑚𝑎𝑥 =
𝐿/500.
𝐼(𝐿2⁄ ) =
500
𝐿𝐸[𝑅𝐴
𝐿2⁄
3
6−
𝜔 𝐿2⁄
4
24−
𝑃
6⟨𝐿
2⁄ −𝐿
2⟩3 +
𝜔𝐿3 𝐿2⁄
48−
𝑅𝐴𝐿2 𝐿2⁄
8]
−500
𝐿𝐸[𝑟𝐴
𝐿2⁄
3
6−
𝜔 𝐿2⁄
4
24−
1.1𝜔𝐿
6⟨𝐿
2⁄ −𝐿
2⟩3 +
𝜔𝐿3 𝐿2⁄
48
−𝑟𝐴𝐿2 𝐿
2⁄
8]
(5)
Substituindo os valores chegamos a um I de 0,262m4. Valor que foi utilizado para
calcular o perfil de viga no item 3.1.2.

30
3.1.2 Perfil
Nesta etapa foi utilizado o software MDSolid para dimensionar perfil utilizado, Figura
7. Foram utilizadas chapas de dimensões típicas de mercado em sua construção para que o perfil
seja condizente com os materiais disponíveis. Dimensões em mm.
Figura 7- Perfil utilizado
Fonte: Autor
Com a massa especifica 7850 𝑘𝑔/𝑚3 do material utilizado, aço ASTM A-36, e área
da seção reta de 0,248𝑚2 este perfil apresenta um peso linear de 1952𝑘𝑔/𝑚 (Tabela 2)

31
Tabela 2 – Características do perfil
ÁREA 0,248m2
MASSA ESPECÍFICA 7850kg/m3
MASSA LINEAR 1952kg/m
MOMENTO DE INÉRCIA 0,262m4
C 1,280m
Fonte: Autor
3.1.3 Verificação em acordo com critérios da norma
3.1.3.1 Classificação da estrutura
A ponte rolante terá utilização inferior a 20 ciclos/ano, em um horizonte de 40 anos, tempo de
vida útil típico de uma usina nuclear terá um número de ciclos inferior a 800. Este número de
ciclos encaixa a ponte rolante com folga na estrutura tipo A, Tabela 3.
Tabela 3 – Classes de utilização
Fonte: NBR8400 (ABNT - Associação Brasileira de Normas Técnicas, 1987)
32
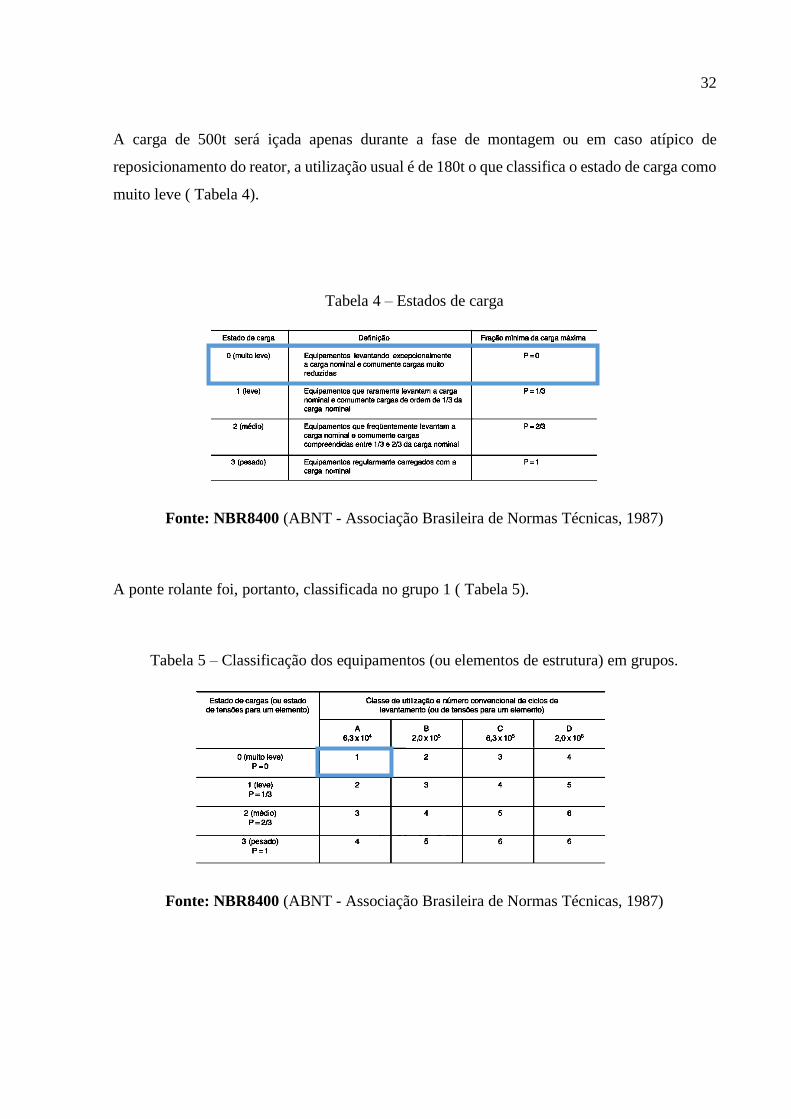
A carga de 500t será içada apenas durante a fase de montagem ou em caso atípico de
reposicionamento do reator, a utilização usual é de 180t o que classifica o estado de carga como
muito leve ( Tabela 4).
Tabela 4 – Estados de carga
Fonte: NBR8400 (ABNT - Associação Brasileira de Normas Técnicas, 1987)
A ponte rolante foi, portanto, classificada no grupo 1 ( Tabela 5).
Tabela 5 – Classificação dos equipamentos (ou elementos de estrutura) em grupos.
Fonte: NBR8400 (ABNT - Associação Brasileira de Normas Técnicas, 1987)

33
3.1.3.2 Majoração
Foi definido o valor de majoração baseado na no grupo da ponte rolante.
Tabela 6 – Valores do coeficiente de majoração para equipamentos industriais
Fonte: NBR8400 (ABNT - Associação Brasileira de Normas Técnicas, 1987)
De onde temos o fator de majoração 𝑀𝑥 = 1
3.1.3.3 Fator de segurança
Foi definido o valor do fator de segurança baseado no caso de solicitação.
Tabela 7 – Fator de segurança FSp
Fonte: NBR8400 (ABNT - Associação Brasileira de Normas Técnicas, 1987)
De onde temos o fator de segurança 𝐹𝑆𝑝 = 1.5
3.1.3.4 Tensão admissível
Foi definido a tensão admissível 𝜎𝑎de acordo com a tensão de escoamento do material 𝜎𝑒 e o
fator de segurança 𝐹𝑆𝑝 de acordo com a equação:

34
𝜎𝑎 =𝜎𝑒
𝐹𝑆𝑝
(6)
Onde:
σa - Tensão admissível do projeto
σe - Tensão de escoamento do material
FSp - Fator de segurança
De onde temos a tensão admissível 𝜎𝑎 = 167𝑀𝑃𝑎.
3.1.3.5 Valor do coeficiente dinâmico
Foi calculado o valor do coeficiente dinâmico em função da velocidade de içamento da carga
de acordo com a Tabela 8.
Tabela 8 – Valores do coeficiente dinâmico Ψ
Fonte: NBR8400 (ABNT - Associação Brasileira de Normas Técnicas, 1987)

35
De onde temos o valor de coeficiente dinâmico Ψ = 1.15.
3.1.3.6 Tensão combinada
Foi calculado a tensão atuante devido ao peso próprio de acordo com as equações:
𝜎𝑝𝑝 =
𝑀𝑚á𝑥,𝑝𝑝 × 𝑐
𝐼1
(7)
𝑀𝑚á𝑥,𝑝𝑝 =
𝜔 × 𝐿2
8
(8)
Onde:
σpp - Tensão devido ao peso próprio
c - Distância entre a linha neutra e a extremidade da alma
MMáx,pp - Momento fletor máximo devido ao peso próprio
𝜔 – Massa linear
De onde temos que 𝜎𝑝𝑝 = 40,7𝑀𝑃𝑎
Foi calculado a tensão atuante devido a carga de acordo com as equações:
𝜎𝑐 =𝑀𝑚á𝑥,𝑐 × 𝑐
𝐼1
(9)

36
𝑀𝑚á𝑥,𝑐 =𝑃 × 𝐿
4
(10)
Onde:
σC - Tensão devido a carga
MMáx,c - Momento fletor máximo devido a carga
De onde temos que 𝜎𝑐 = 91,5𝑀𝑃𝑎
Com as tensões devido a peso próprio e tensões devido a carga foi calculada a tensão combinada
𝜎𝑥 de acordo com a equação:
𝜎𝑥 = 𝑀𝑥(𝜎𝑝𝑝 + Ψ𝜎𝑐)
(11)
Onde:
σx - Tensão combinada
Mx - Coeficiente de majoração
Ψ - Coeficiente dinâmico
De onde temos que 𝜎𝑥 = 146𝑀𝑃𝑎, valor abaixo da tensão admissível 𝜎𝑎 = 167𝑀𝑃𝑎 e portanto
dentro dos limites aceitáveis para o projeto.

37
3.1.4 Detalhes de solda
A viga tem três diferentes tipos de soldas, soldas em ângulo com qualidade especial, solda topo-
a-topo com qualidade especial e solda em ângulo ininterrupta com qualidade.
3.1.4.1 Solda em alma e abas
Entre alma e abas será realizado solta em ângulo com qualidade especial K0 tipo 0,33
como mostra a Figura 8.
Figura 8- Solda K0 qualidade especial tipo 0,33
Fonte: NBR8400 (ABNT - Associação Brasileira de Normas Técnicas, 1987)
Está disponível no mercado chapas de até 18m de comprimento, portanto as almas
possuem duas juntas sodadas, sendo utilizada solda topo-a-topo com qualidade especial caso
K0 tipo 0,12 (Figura 9). As soldas de uma alma em relação a outra devem estar defasadas a fim
de evitar duas soldas próximas a um mesmo plano da seção transversal da viga.

38
Figura 9- Solda K0 qualidade especial tipo 0,12
Fonte: NBR8400 (ABNT - Associação Brasileira de Normas Técnicas, 1987)
Está disponível no mercado chapas de até 18m de comprimento, portanto as mesas
possuem duas juntas sodadas, sendo utilizada solda topo-a-topo com qualidade especial caso
K1 tipo 1,1 (Figura 10). As soldas de uma mesa em relação a outra devem estar defasadas a
fim de evitar duas soldas próximas a um mesmo plano da seção transversal da viga.
Figura 10- Solda K1 qualidade especial tipo 1,1
Fonte: NBR8400 (ABNT - Associação Brasileira de Normas Técnicas, 1987)
3.1.4.2 Solda em nervuras
Por se tratar de uma estrutura do grupo 1 e para as solicitações obtidas, as soldas para
as nervuras poderiam ser soldas K4. No entanto foi adotado a soldas K3 com qualidade
comum para evitar que existam no projeto cruzamento de condão de soldas. As soldas
adotadas para nervuras são soldas K3 em ângulo com qualidade comum tipo 3,21, Figura 11.

39
Figura 11- Solda K3 em ângulo qualidade comum tipo 3.21.
Fonte: NBR8400 (ABNT - Associação Brasileira de Normas Técnicas, 1987)
3.2 SIMULAÇÃO EM ELEMENTOS FINITOS
Nesta etapa utilizou-se o software SolidWorks para a modelagem e simulação em
elementos finitos da viga projetada no item 3.1. O SolidWorks permite que a modelagem seja
feita com precisão e que diversos carregamentos complexos ou não sejam considerados
simultaneamente. É possível adotar simplificações de cálculo para casos tipicamente tratados
como unidimensionais, como vigas e vasos de pressão de paredes finas. No entanto optou-se
por não adotar tais simplificações e aplicar uma malha em 3 dimensões. Este caminho pode
levar a uma divergência de resultados quando comparado ao modelo simplista de viga bi
apoiada utilizada para os cálculos no item 3.1, no entanto permite que sejam identificadas
regiões de concentração de tensões, fornecendo assim um resultado mais preciso e assertivo
quando comparado ao real comportamento da viga.
Na simulação não foram adotados carregamentos concentrados, considera-se que
mesmo um carregamento usualmente tratado como concentrado na realidade é um
carregamento distribuído em uma reduzida área de atuação. Assim foi feito para o carregamento

40
central que representa a carga sendo içada e para as restrições de deslocamento que representam
os apoios. Os carregamentos aplicados estão representados na Figura 12.
Figura 12- Carregamentos aplicados
Fonte: Autor
A malha para cálculo deve ser suficientemente refinada para que tensões concentradas
em pequenas regiões não sejam mascaradas por uma tensão média calculada com uma malha
bruta. Foi utilizada uma malha com 18400 elementos e 34900 nós. Uma plotagem da malha
está representada na Figura 13- Malha.
Figura 13- Malha
Fonte: Autor
Utilizando o critério de von Mises para análise é verificado que a tensão se mantém
abaixo de 70MPa em grande parte da viga, tensão que está muito abaixo dos valores críticos
e ainda no início do regime elástico do material. As regiões mais solicitadas estão abaixo
160MPa e tensões que checam a180MPa estão presentes na região onde foi aplicada o
carregamento principal. Uma plotagem das tensões atuantes na viga pode ser vista na Figura
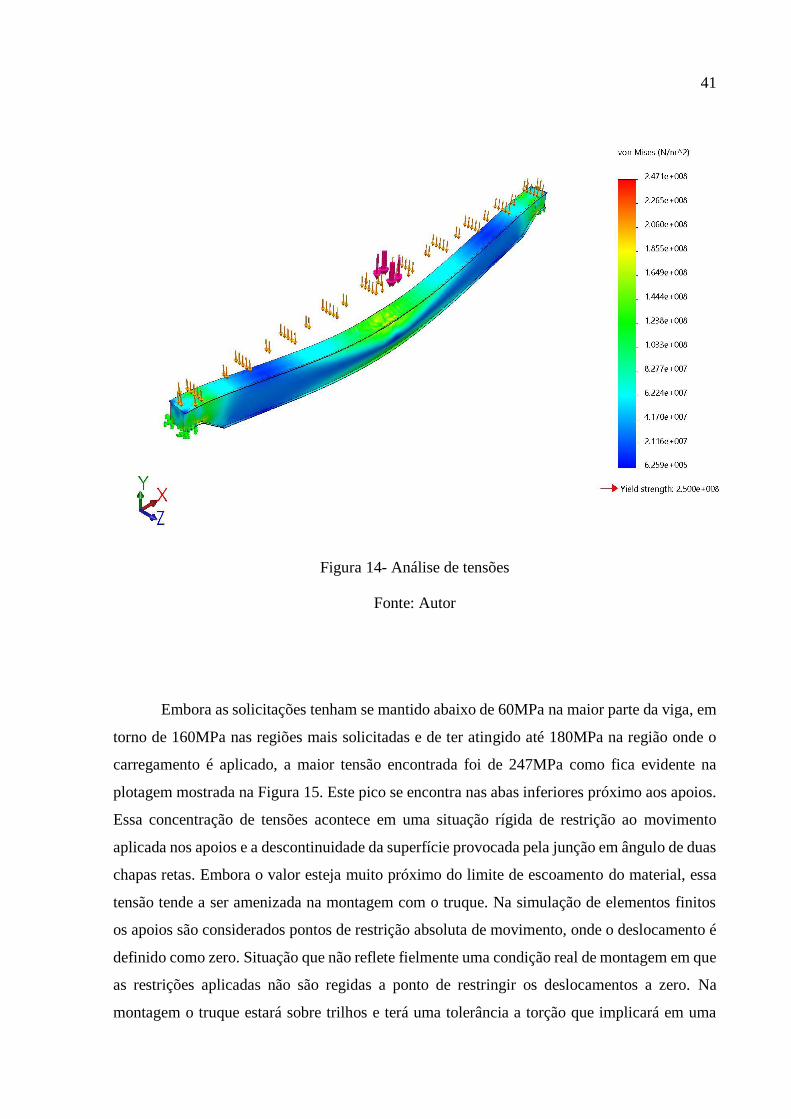
14. A deformação vista nas plotagens está exagerada na escala de 50:1.
41
Figura 14- Análise de tensões
Fonte: Autor
Embora as solicitações tenham se mantido abaixo de 60MPa na maior parte da viga, em
torno de 160MPa nas regiões mais solicitadas e de ter atingido até 180MPa na região onde o
carregamento é aplicado, a maior tensão encontrada foi de 247MPa como fica evidente na
plotagem mostrada na Figura 15. Este pico se encontra nas abas inferiores próximo aos apoios.
Essa concentração de tensões acontece em uma situação rígida de restrição ao movimento
aplicada nos apoios e a descontinuidade da superfície provocada pela junção em ângulo de duas
chapas retas. Embora o valor esteja muito próximo do limite de escoamento do material, essa
tensão tende a ser amenizada na montagem com o truque. Na simulação de elementos finitos
os apoios são considerados pontos de restrição absoluta de movimento, onde o deslocamento é
definido como zero. Situação que não reflete fielmente uma condição real de montagem em que
as restrições aplicadas não são regidas a ponto de restringir os deslocamentos a zero. Na
montagem o truque estará sobre trilhos e terá uma tolerância a torção que implicará em uma

42
restrição menos severa comparada com a restrição considerada na simulação. Este alívio na
restrição implicará também em um alívio na tensão das abas inferiores na região próxima.
Figura 15- Concentração de tensões
Fonte: Autor

43
Por fim foi realizado uma simulação dos deslocamentos obtidos ao longo da viga, o
resultado da plotagem pode ser visto na Figura 16. O maior valor está na região central e
representa a flecha máxima que chega a 6,4cm. O valor atende ao critério de flecha máxima e,
portanto, ratifica a escolha da viga projetada no item 3.1.2.
Figura 16- Deslocamentos
Fonte: Autor

44
4 MECANISMOS
A norma classifica os mecanismos em função da classe de funcionamento e o estado de
solicitação dos mecanismos.
Tabela 9 – Classe de funcionamento
Fonte: NBR8400 (ABNT - Associação Brasileira de Normas Técnicas, 1987)
Com uma utilização de apenas algumas vezes ao ano a classe de funcionamento é V0,25, com
tempo médio de funcionamento menor que 0,5h por dia.
45
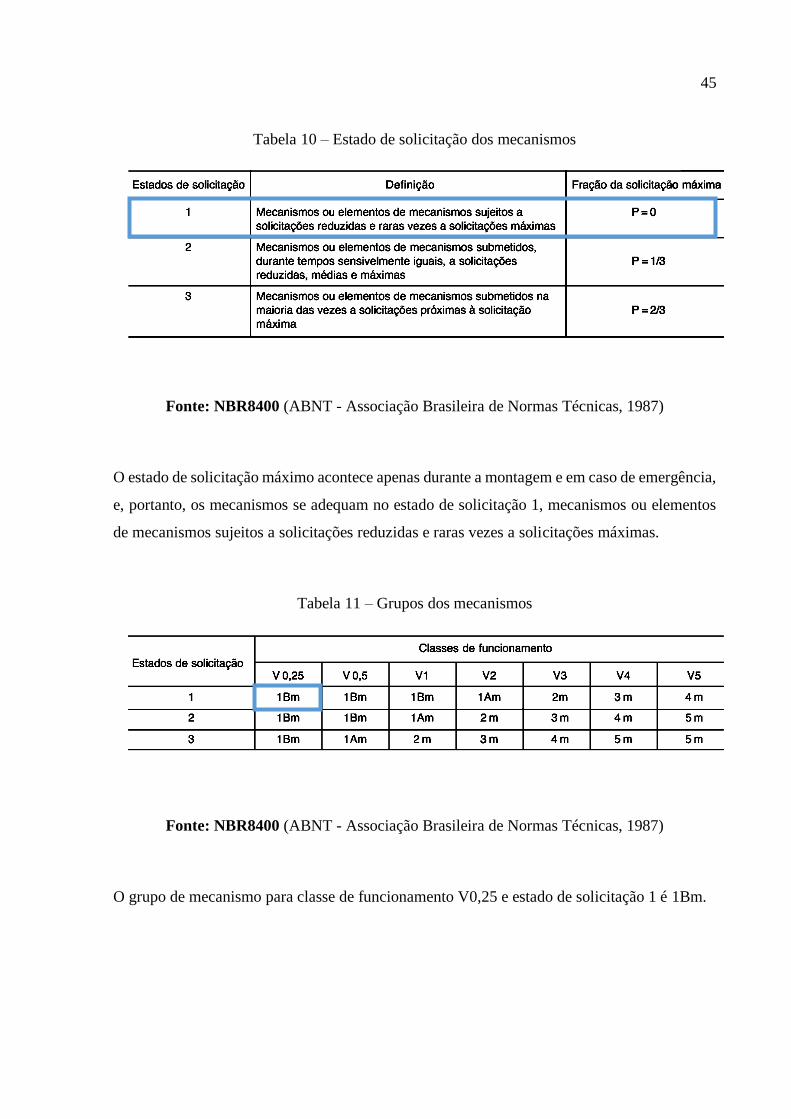
Tabela 10 – Estado de solicitação dos mecanismos
Fonte: NBR8400 (ABNT - Associação Brasileira de Normas Técnicas, 1987)
O estado de solicitação máximo acontece apenas durante a montagem e em caso de emergência,
e, portanto, os mecanismos se adequam no estado de solicitação 1, mecanismos ou elementos
de mecanismos sujeitos a solicitações reduzidas e raras vezes a solicitações máximas.
Tabela 11 – Grupos dos mecanismos
Fonte: NBR8400 (ABNT - Associação Brasileira de Normas Técnicas, 1987)
O grupo de mecanismo para classe de funcionamento V0,25 e estado de solicitação 1 é 1Bm.

46
4.1 CABOS
De acordo com a norma (ABNT - Associação Brasileira de Normas Técnicas, 1987) , o
critério da escolha do cabo de aço deve assegurar uma vida satisfatória do mesmo. O método
utilizado pela aplica-se para cabos formados por mais de 100 fios, com resistência a ruptura de
1600 N/mm² a 2200 N/mm². A escolha do diâmetro dos cabos e dos diâmetros de enrolamento
é feita em função do grupo de mecanismo de levantamento, determinado anteriormente como
5m e utilizando-se da seguinte formulação.
𝑑𝑐 = 𝑄1√𝑇 (12)
Onde:
T - Esforço máximo de tração
Q1 - Fator de dimensionamento
dc - Diâmetro externo mínimo
O fator de dimensionamento 1Q é determinado pela Tabela 12 – Valores mínimos de Q
Tabela 12 – Valores mínimos de Q
Fonte: NBR8400 (ABNT - Associação Brasileira de Normas Técnicas, 1987)
47
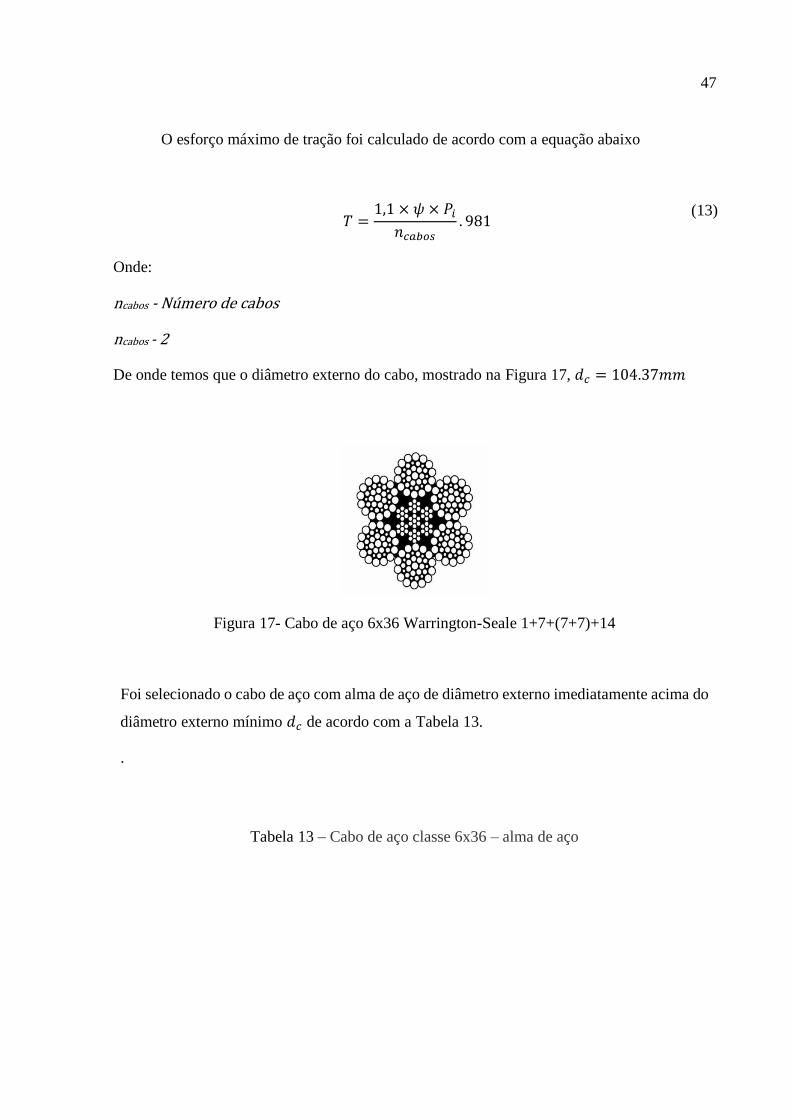
O esforço máximo de tração foi calculado de acordo com a equação abaixo
𝑇 =
1,1 × 𝜓 × 𝑃𝑖
𝑛𝑐𝑎𝑏𝑜𝑠. 981
(13)
Onde:
ncabos - Número de cabos
ncabos - 2
De onde temos que o diâmetro externo do cabo, mostrado na Figura 17, 𝑑𝑐 = 104.37𝑚𝑚
Figura 17- Cabo de aço 6x36 Warrington-Seale 1+7+(7+7)+14
Foi selecionado o cabo de aço com alma de aço de diâmetro externo imediatamente acima do
diâmetro externo mínimo 𝑑𝑐 de acordo com a Tabela 13.
.
Tabela 13 – Cabo de aço classe 6x36 – alma de aço

48
Fonte: Neade industria e comercio de produtos para elevação e movimentação de
carga
49
4.2 TAMBOR
O tambor utilizado é um tambor de peça única dimensionado para ser capaz de fazer o
enrolamento de quatro cabos que representam os dois cabos de içamento e suas redundâncias.
4.2.1 Diâmetro do tambor
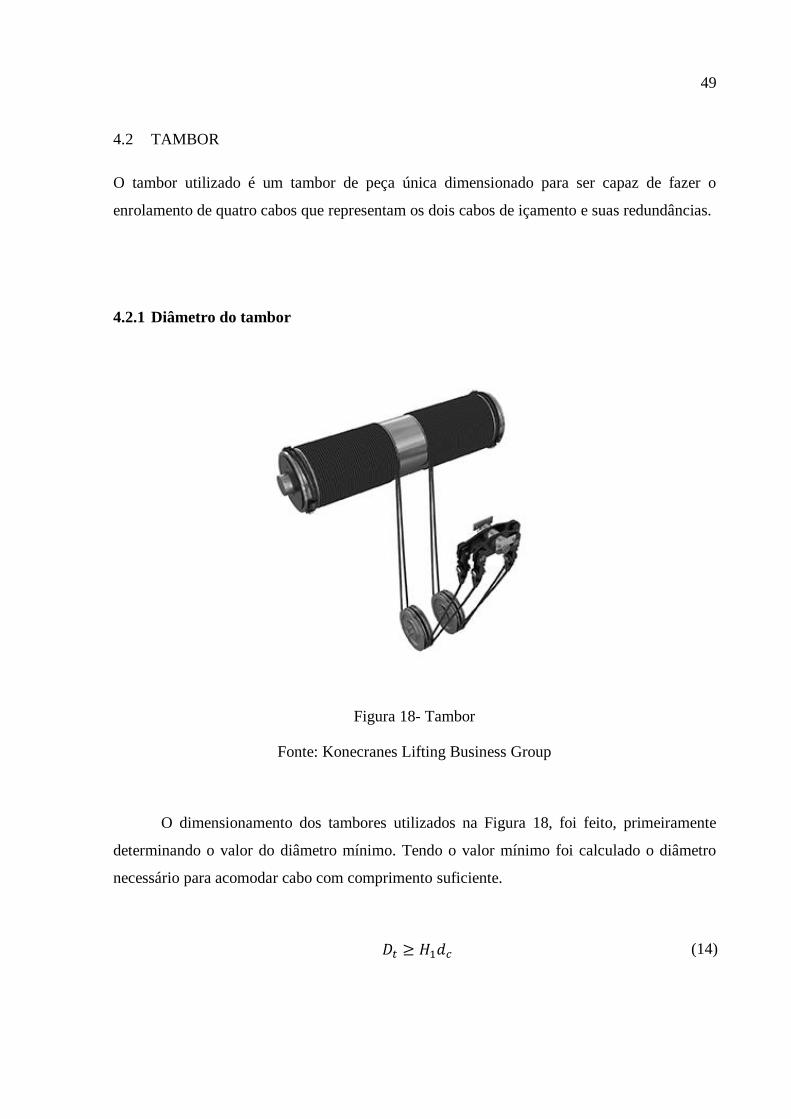
Figura 18- Tambor
Fonte: Konecranes Lifting Business Group
O dimensionamento dos tambores utilizados na Figura 18, foi feito, primeiramente
determinando o valor do diâmetro mínimo. Tendo o valor mínimo foi calculado o diâmetro
necessário para acomodar cabo com comprimento suficiente.
𝐷𝑡 ≥ 𝐻1𝑑𝑐 (14)

50
Onde:
Dt - Diâmetro do tambor
H1 - Coeficiente de acordo com o tipo e grupo do mecanismo
Tabela 14 – Valores de H1
Fonte: NBR8400 (ABNT - Associação Brasileira de Normas Técnicas, 1987)
De onde temos que 𝐷𝑡 ≥ 1728𝑚𝑚.
O diâmetro do tambor deve ser suficiente para acomodar todo o comprimento de cabos
quando o moitão estiver em sua posição mais elevada.
𝐿𝑡 = 𝑛𝑝𝑜𝑙𝑖𝑎𝑠 × 𝑛𝑟𝑒𝑑 × (𝑛𝑣𝑜𝑙𝑡𝑎𝑠 + 3)𝑃𝑣 (15)
𝑛𝑣𝑜𝑙𝑡𝑎𝑠 =
2𝐻𝑖
𝜋(𝐷𝑡 + 𝑑𝑐)
(16)
𝐷𝑡 ≥
2𝐻
𝜋(𝐿
𝑛𝑝𝑜𝑙𝑖𝑎𝑠𝑛𝑟𝑒𝑑𝑃𝑖− 3)
− 𝑑𝑐 (17)

51
Onde:
Lt - Largura do tambor
npolias - Número de polias
nred - Número de redundâncias
nvoltas - Número de voltas
Pv - Passe entre voltas
Hi - Altura máxima de içamento
De onde temos que 𝐷𝑡 = 1190𝑚𝑚, valor abaixo dos 1728𝑚𝑚 encontrados anteriormente.
Portanto prevalece o maior valor 𝐷𝑡 = 1728𝑚𝑚.
4.2.2 Espessura de parede do tambor
A espessura de parede mínima para o tambor é dada por:
𝑡 ≥
𝑇
𝜎𝑎𝑃𝑖
(18)
𝜎𝑎 =𝜎𝑟
𝛿 × 𝐹𝑆𝑟 (19)
Onde:
t - espessura do tambor
σr - Tensão de ruptura
FSr - Fator de segurança em função do grupo do mecanismo
δ - Coeficiente em função do grupo de mecanismo
Foi determinado o valor de 𝛿 de acordo com a Tabela 15.

52
Tabela 15 – Valores de
Fonte: NBR8400 (ABNT - Associação Brasileira de Normas Técnicas, 1987)
Tabela 16 – Valores de FSr
Fonte: NBR8400 (ABNT - Associação Brasileira de Normas Técnicas, 1987)
Temos portanto 𝑡𝑚𝑖𝑛 = 11.6𝑚𝑚 e selecionamos a chapa disponível imediatamente superior,
𝑡𝑚𝑖𝑛 = 12.7𝑚𝑚.
4.3 POLIAS
Foram utilizadas duas polias sem inversão e nenhuma polia de compensação, de acordo com a
norma ∑ 𝑊𝑡 = 4.

53
Tabela 17 – Valores de H2
Fonte: NBR8400 (ABNT - Associação Brasileira de Normas Técnicas, 1987)
𝑑𝑝 ≥ 𝐻1𝐻2𝑑𝑐 = 1728𝑚𝑚 (20)
4.4 RODAS
A norma determina a seguinte formulação para o diâmetro das rodas.
𝐷𝑟 =
𝐹𝑟
𝑏 × 𝑃𝑙𝑖𝑚 × 𝐶1 × 𝐶2
(21)
Onde:
Dr - Diâmetro da roda
Fr - Força de rolamento
b - Dimensão do boleto do trilho
Plim - Pressão limite
C1 - Coeficiente em função do diâmetro da roda e velocidade de movimentação
C2 - Coeficiente em função do grupo do mecanismo
Foram utilizados 4 truques, um em cada extremidade das vigas. Cada um dos truque formado
por 4 rodas, totalizando 16 rodas apoiadas em um trilho de boleta 150mm. Para calcular a força
de rolamento utilizasse da formulação abaixo.

54
𝐹𝑟 =
2𝐹𝑚𝑎𝑥 + 𝐹𝑚𝑖𝑛
3
(22)
𝐹𝑚𝑖𝑛 =
𝐹𝑝𝑝
𝑁𝑜 𝑑𝑒 𝑟𝑜𝑑𝑎𝑠; 𝐹𝑚𝑎𝑥 =
𝐹𝑝𝑝 + 𝑃
𝑁𝑜 𝑑𝑒 𝑟𝑜𝑑𝑎𝑠
(23)
Onde:
Fpp - Força devido ao peso próprio
Temos então que 𝐹𝑟 = 309,83𝑘𝑁
Tabela 18 – Pressão Limite
Fonte: NBR8400 (ABNT - Associação Brasileira de Normas Técnicas, 1987)

55
Tabela 19 – Valores de c1 em função do diâmetro e da velocidade de translação
Fonte: NBR8400 (ABNT - Associação Brasileira de Normas Técnicas, 1987)
Tabela 20 – Valores de c2
Fonte: NBR8400 (ABNT - Associação Brasileira de Normas Técnicas, 1987)
Temos então 𝐷𝑟 = 302𝑚𝑚, No entanto foi selecionado a roda de diâmetro imediatamente
acima de acordo com a Tabela 19, portanto 𝐷𝑟 = 315𝑚𝑚.

56
4.5 MOTOR
4.5.1 Motor de elevação
Foi calculado a eficiência do sistema pelo produtório dos coeficientes de acoplamento de acordo
com a seguinte equação:
𝜂𝑡 = ∏[𝐸𝐺𝑛𝐸𝐺 × 𝐹𝐿𝑛𝐹𝐿 × 𝑅𝑂𝑛𝑅𝑂] (24)
Onde:
ηt - Eficiência do conjunto moto redutor
EG - Coeficiente de acoplamento por engrenagem
FL - Coeficiente de acoplamento por junta flexível
RO - Coeficiente de acoplamento por rolamento
nEG - Número de acoplamentos por engrenagem
nFL - Número de acoplamentos por junta flexível
nRO - Número de acoplamentos por rolamento
Tabela 21 – Coeficientes de acoplamento
TIPO DE ACOPLAMENTO Coeficiente Quantidade
ENGRENAGEM A 0.98 12
FLEXÍVEL B 0.98 4
ROLAMENTO C 0.99 18

57
𝑟𝑒𝑑𝑢çã𝑜 =𝑤𝑡𝑎𝑚𝑏𝑜𝑟
𝑤𝑚𝑜𝑡𝑜𝑟
(25)
𝑤𝑡𝑎𝑚𝑏𝑜𝑟 =𝑣
2𝜋𝐷𝑡 ; 𝑤𝑚𝑜𝑡𝑜𝑟 = 800𝑟𝑝𝑚 (26)
𝑁𝑒 ≥
𝑃 × 𝑉
𝜂𝑇= 133,6𝑘𝑊
(27)
Onde:
wtambor - Rotação do tambor
wmotor - Rotação do motor
wmotor - Velocidade de içamento
Ne - Potencia de regime do motor
Onde temos que a potência de regime do motor deve ser 𝑁𝑒 ≥ 133,6𝑘𝑊.
Foi, portanto, selecionado o motor de potência imediatamente acima no catalogo WEG – Mores
elétricos de corrente alternada. Motor W22 150kW com 8 polos.
4.6 FREIO
4.6.1 Freio do tambor
𝑇𝑡𝑎𝑚𝑏𝑜𝑟 =
𝑃 × 𝑅𝑡𝑎𝑚𝑏𝑜𝑟 × 𝑔
𝑛𝑜𝑑𝑒 𝑐𝑎𝑏𝑜𝑠
(28)
𝑇𝑓 =
𝑇𝑡𝑎𝑚𝑏𝑜𝑟
1000 × 𝑟𝑒𝑙𝑎çã𝑜 𝑑𝑒 𝑟𝑒𝑑𝑢çã𝑜 ∗ 𝜂𝑡
(29)

58
𝐿𝑠 =
2 × 𝑇𝑓
𝐷𝑓2 × 𝜇 × 𝜂𝑓 × 𝛽 × 𝑃𝑎𝑑𝑚
= 204𝑚𝑚 (30)
Onde:
Ls – Largura da sapata de freio
Ttambor - Torque no tambor
Rtambor - Raio do tambor
g - Aceleração da gravidade
Tf - Torque de frenagem
Df - Diâmetro do tambor de frenagem= 400mm
μ - Coeficiente de atrito
β - Angulo de contato entre sapata e tambor de frenagem
Padm - Pressão admissível de frenagem
ηf – Eficiência da sapata de freio = 0,9
De onde temos portanto uma sapada de largura 𝐿𝑠 = 204𝑚𝑚 que atua em um tambor de
diâmetro 𝐷𝑓 = 400𝑚𝑚.

59
5 CONCLUSÃO
Utilizando do conhecimento adquirido ao longo do curso de engenharia mecânica da foi
possível desenvolver o projeto básico da ponte rolante polar e com o conhecimento adquirido
em seu desenvolvimento pode-se dimensionar outros tipos de maquinas de içamento de carga
para outras aplicações.
Foram determinadas as especificações dos principais componentes da ponte, foi
realizado um cálculo estrutural baseado na norma e uma posterior validação através da análise
por elementos finitos que atestou a viabilidade das vigas projetadas para a uma operação segura.
Durante o desenvolvimento foram aprimoradas as habilidades em analise por elementos
finitos e através de uma profunda pesquisa bibliográfica foram adquiridos conhecimentos sobre
critérios de segurança não usuais em maquinas de içamento utilizadas em outros ambientes.
Um desafio para o projeto foi a pesquisa para definir os critérios e exigências aplicáveis
ao ambiente de uma planta nuclear. A não existência de uma norma brasileira que trate do
assunto demandou a investigação de regulamentos e normas aplicáveis nos Estados Unidos e
Alemanha, que sãs as principais referências em termos de energia nuclear com algum material
disponível em língua inglesa. Embora existente, este material não foi largamente difundido e
muitas vezes é de difícil acesso. Por serem materiais de dois sistemas concorrentes acontece de
serem contraditórios em alguns aspectos, contradições que demandam análise por parte de
quem estão desenvolvendo o projeto.
Como desdobramento deste projeto podem ser explorados e aprofundados temas como:
esquema de proteção anticorrosivo, comparação entre frequência natural e frequências típicas
de possíveis terremotos na região de instalação da planta nuclear, procedimentos para a
confecção das soldas, utilização de materiais modernos e de maior resistência e uma avaliação
de custos e disponibilidade em mercado.

60
6 REFERÊNCIAS BIBLIOGRAFICAS
ABNT - Associação Brasileira de Normas Técnicas. (1987). NBR 8400: Cálculo de
equipamento para levantamento e movimentação de cargas - Procedimento. Rio de
Janeiro: ABNT - Associação Brasileira de Normas Técnicas.
American Society of Mechanical Engineers. (2005). Overhead and Gantry Cranes (Top
Running Bridge, Single or Multiple, Girder,Top Running, Trolley Hoist). New York:
American Society of Mechanical Engineers.
Beer, F. P. (1915). Resistência dos Materiais. São Paulo: Pearson Education do Brasil.
Deutsches Institut für Normung. (1974). Cranes; steel structures; verification and analyses.
Berlin: Deutsches Institut für Normung.
Kerntechnischer Ausschuss. (2012). Design of Lifting Equipment in Nuclear Power Plants.
Salzgitter: KTA-Geschaeftsstelle.
KTA 3902. (2012). Design of Lifiting Equipment in Nuclear Power Plantas. Salzgitter: KTA-
Geschaeftsstelle Bundesamt fuer Strahlenschutz (BfS).
Lloyd, R. (2003). A Survay of Crane Operating Experience at U.S. Nuclear Power Plants from
1968 through 2002. Washington: Nuclear Regulatory Commission.
Nuclear Regulatory Comission. (2005). NRC REGULATORY ISSUE SUMMARY 2005-25:
CLARIFICATION OF NRC GUIDELINES FOR CONTROL OF HEAVY LOADS.
Washington: Nuclear Regulatory Comission.
Schaeffer, J. E. (2011). Dry Cask Storage; Safely Moving Spent Nuclear Fuel - 11169. New
Berlin.
U.S. Nuclear Regulatory Commission. (2005). NRC REGULATORY ISSUE SUMMARY 2005-
25: Clarification of NRC Guidelines for Control of Heavy Loads. Washington: U.S.
Nuclear Regulatory Commission.
US Nuclear Regulatory Comission. (1980). Control of Heavy Loads at Nuclear Power Plantas.


















