Sebenta Robotica Industrial
75
Licenciatura em Engenharia Electrotécnica e Computadores Robótica Industrial Apontamentos Teóricos
-
Upload
ricardo-cruz -
Category
Documents
-
view
44 -
download
9
description
Sebenta Robotica Industrial
Transcript of Sebenta Robotica Industrial
-
Licenciatura em
Engenharia Electrotcnica e
Computadores
Robtica Industrial
Apontamentos Tericos
-
Robtica Industrial
2 Licenciatura em Engenharia Electrotcnica e Computadores
-
Robtica Industrial
Licenciatura em Engenharia Electrotcnica e Computadores 3
CONTEDO
1 Introduo .......................................................................................................................... 7
1.1 Origem do termo 'rob' ............................................................................................... 7
1.2 Algumas definies de Rob E ROBTICA ................................................................... 7
1.3 Classificao de robs .................................................................................................. 9
1.3.1 Geraes (cronologicamente) .............................................................................. 9
1.3.2 1.3.2 Nvel de inteligncia do controlador (pela JIrsA) ........................................ 9
1.3.3 Nvel de controlo dos programas no controlador .............................................. 10
1.3.4 Linguagem de programao ............................................................................... 10
1.4 Alguns marcos na histria da robtica ...................................................................... 10
1.5 Os manipuladores Robticos ..................................................................................... 11
1.5.1 Robtica fixa versus robtica mvel .................................................................. 11
1.5.2 Elementos principais de um manipulador (ou rob industrial) ......................... 11
1.6 O rob e a automao ............................................................................................... 13
1.6.1 Tipos de automao ........................................................................................... 13
1.6.2 Aplicaes tradicionais dos manipuladores industriais ..................................... 13
1.7 Importncia do robot industrial ................................................................................ 14
2 Descrio Espacial e Transformaes .............................................................................. 15
2.1 Descries, posio, orientao e eixos de coordenadas ......................................... 15
2.1.1 Descrio de um sistema de eixos de coordenadas; ......................................... 18
2.2 Mapeamento ............................................................................................................. 19
2.2.1 Translao .......................................................................................................... 19
2.2.2 Rotao ............................................................................................................... 20
2.2.3 Rotao+Translao ........................................................................................... 21
2.3 Operadores translao, rotao e transformao .................................................... 22
2.3.1 operadores translao ....................................................................................... 22
-
Robtica Industrial
4 Licenciatura em Engenharia Electrotcnica e Computadores
2.3.2 Operadores Rotao........................................................................................... 23
2.3.3 Operadores Transformao ............................................................................... 24
2.4 Aritmtica de transformaes ................................................................................... 24
2.4.1 Multiplicao de matrizes de transformao .................................................... 25
2.4.2 Inverso de uma transformao ........................................................................ 25
2.5 Equaes de transformaes .................................................................................... 26
2.6 Mais sobre matrizes de orientao ........................................................................... 28
2.6.1 ngulos fixos x-y-z .............................................................................................. 29
2.6.2 ngulos de Euler z-y-x ........................................................................................ 30
2.6.3 Eixos equivalentes .............................................................................................. 31
3 Estrutura e Tipologia dos manipuladores ........................................................................ 34
3.1 Componentes ............................................................................................................ 34
3.1.1 Brao mecnico .................................................................................................. 34
3.1.2 Ponta ou Garra (End-effector) ............................................................................ 34
3.1.3 Actuadores ......................................................................................................... 35
3.1.4 Sensores ............................................................................................................. 37
3.1.5 Controlador ........................................................................................................ 39
3.2 Tipos de juntas ........................................................................................................... 40
3.2.1 Graus de liberdade e graus de mobilidade ........................................................ 40
3.2.2 Representao e arranjo cinernitico .................................................................. 41
3.2.3 0 brao humano ................................................................................................. 42
3.3 Espao de trabaLho e tipos de manipuladores ......................................................... 42
3.3.1 cartesiana (PPP) .................................................................................................. 43
3.3.2 cilindrica (RPP) .................................................................................................... 43
3.3.3 Esfrica (RRp) ..................................................................................................... 44
-
Robtica Industrial
Licenciatura em Engenharia Electrotcnica e Computadores 5
3.3.4 Articulado Horizontal (RRp)................................................................................ 44
3.3.5 Articulado vertical .............................................................................................. 45
3.4 Resoluo, repetibilidade e preciso......................................................................... 45
4 Cinemtica direta ............................................................................................................. 46
4.1 Cinemtica de um manipulador ................................................................................ 46
4.1.1 Definio ............................................................................................................. 46
4.1.2 0 algoritmo da Cinemtica Directa ..................................................................... 47
4.2 Parmetros de juntas e elos ...................................................................................... 47
4.2.1 Eixo de uma junta ............................................................................................... 47
4.2.2 Os quatro parmetros de elos e juntas .............................................................. 48
4.2.3 Alguns exemplos de elos .................................................................................... 49
4.2.4 Os parmetros cinemticos variveis ................................................................ 53
4.2.5 Transformao associada a um elo ....................................................... 53
4.3 Atribuio dos sistemas de coordenadas .................................................................. 55
4.3.1 Exemplos bsicos de sistemas de coordenadas ................................................. 55
4.3.2 Algoritmo de Denavit-hartenberg ...................................................................... 58
4.3.3 Manipulador 5 DOF (Microbot alpha II) ............................................................. 59
4.3.4 Manipulador SCARA (4 DOF) .............................................................................. 61
4.4 ngulos finais de orientao em funo das variveis da junta ............................... 62
4.4.1 Comparao da matriz RPY com a matriz de tranformao final ............. 62
4.4.2 Limitaes de preciso e reformulao ............................................................. 63
5 Cinemtica Inversa ........................................................................................................... 65
5.1 O Problema ................................................................................................................ 65
5.1.1 Manipulador RR Planar ...................................................................................... 65
5.1.2 Resoluo para o manipulador RR a 3D ............................................................. 67
5.1.3 Mtodos e condies de existncia de solues ............................................... 68
-
Robtica Industrial
6 Licenciatura em Engenharia Electrotcnica e Computadores
5.1.4 A redundncia cinemtica .................................................................................. 68
5.2 Algoritmo para uma Heurstica de Cinemtica Inversa ............................................. 70
5.3 Recurso a transformaes inversas e comparao dos elementos matriciais ......... 71
5.4 Soluo de uma equao usual no problema da cinemtica inversa ....................... 72
5.5 Algumas solues analticas padro .......................................................................... 73
5.5.1 Robot planar de 3 elos ....................................................................................... 73
5.6 Exerccios propostos .................................................................................................. 74
5.6.1 Punho esfrico .................................................................................................... 75
-
Robtica Industrial
Licenciatura em Engenharia Electrotcnica e Computadores 7
1 INTRODUO
1.1 ORIGEM DO TERMO 'ROB'
O termo eslavo Roba significa trabalhos forados ou escravos, e teve a sua divulgao
numa pea de 1921 de Karel :Capek.
Numa evoluo do mito passando pelo sonho de Capek (entre outros) at fico dos
tempos correntes, o conceito de rob ou servo do homem tem ocupado a mentalidade do
ser humano. Um exemplo contemporneo dessa realidade foi dado pelo grande contributo
de Isaac Asimov, que chegou a definir as Leis da Robtica por volta de 1950:
1 LEI: UM ROB NO PODE MALTRATAR UM SER HUMANO, OU
PELA SUA PASSIVIDADE DEIXAR QUE UM SER HUMANO SEJA
MALTRATADO.
2 LEI: UM ROB DEVE OBEDECER AS ORDENS DADAS POR UM
SER HUMANO, EXCEPTO SE ENTRAREM EM CONFLITO COM A 1
LEI.
3 LEI: UM ROB DEVE PROTEGER A SUA PRPRIA EXISTNCIA
DESDE QUE ESSA PROTECO NO ENTRE EM CONFLITO COM A
1 OU 2 LEI.
1.2 ALGUMAS DEFINIES DE ROB E ROBTICA
Texto da FAQ comp.robics:
"Dispositivos electromecnicos pr-programveis para execuo de
uma variedade de funes."
Dicionrio Webster:
"Dispositivo automtico que executa funes normalmente
atribudas a humanos ou uma mquina com a forma de um
humano."
ESHED Robics. 1984
-
Robtica Industrial
8 Licenciatura em Engenharia Electrotcnica e Computadores
"Um rob um brao mecnico; um manipulador concebido para
levar a cabo muitas tarefas diferentes, e capaz de ser programado
sucessivamente. Para levar a cabo as tarefas atribudas, o rob
move componentes, objectos, ferramentas e outros dispositivos
especiais por meio de movimentos e pontos pr-programados."
Em 1986. P. McKerrow props para rob a seguinte definio:
"Um rob uma mquina que pode ser programada para fazer
uma variedade de tarefas, do mesmo modo que um computador
um circuito electrnico que pode ser programado para fazer uma
variedade de tarefas."
McKerrow:
"Robtica a disciplina que envolve: a) o projecto, construo,
controlo e programao de robs; b) o uso de robs para resolver
problemas; c) o estudo dos processos de controlo, sensores e
algoritmos usados em humanos, animais e mquinas, e; d) a
aplicao destes processos de controlo e destes algoritmos para o
projecto de robs."
The Robot Institute of America
"Um rob manipulador multi-funcional, programvel, projectado
para mover materiais, componentes, ferramentas ou dispositivos
especiais atravs de movimentos programveis variveis pare a
execuo de uma variedade de tarefas."
Standard International ISO 8373:1994(E/F):
"Manipulating industrial robot: Automatically controlled,
reprogrammable multipurpose manipulator programmable in three
or more axes, which may be either fixed to place or mobile, of use in
industrial automation applications. The robot includes - the
manipulator - the control system (hardware and software). "
Usualmente o termo robtica emprega-se para indicar a disciplina associada ao uso e
programao de robs e a expresso engenharia robtica mais especifico e refere-se
construo de robs e dispositivos robticos.
-
Robtica Industrial
Licenciatura em Engenharia Electrotcnica e Computadores 9
Nem todos os sistemas automticos so robs. Os sistemas automticos de funes fixas
como alguns brinquedos com mobilidade ou mesmo uma mquina de comando numrico
no so considerados robs. Para ter esse estatuto, dever o dispositivo ter uma capacidade
de programao e, mais ainda, de alguma adaptao ao problema prtico. Claramente, um
rob pressupe um sistema que interage fisicamente pelo movimento de certas
componentes mecnicas.
1.3 CLASSIFICAO DE ROBS
1.3.1 GERAES (CRONOLOGICAMENTE)
1-Robs executores (playback) - repetem uma sequncia de instrues pr gravada como a
pintura ou soldadura.
2-Robs controlados por sensores - possuem malhas fechadas de realimentao sensorial.
Tomam decises com base nos sensores.
3-Robs controlados por viso - a malha fechada de controlo inclui um sistema de viso
(imagem que processada).
4-Robs com controlo adaptativo - o rob pode reprogramar as suas aces com base nos
seus sensores.
5 Robs com inteligncia artificial - usa tcnicas de inteligncia artificial para tomar as suas
decises e at resolver problemas.
1.3.2 1.3.2 NVEL DE INTELIGNCIA DO CONTROLADOR (PELA JIRSA)
Dispositivos manuais operados por pessoas;
Robs de sequncias fixas;
Robs de sequncias variveis - onde o operador pode mudar a sequncia com facilidade.;
Rob executores (playback) - onde o operador humano guia o rob na execuo de uma
tarefa fixa;
Robs controlados numericamente - o operador fornece apenas o programa do movimento,
em vez de o ensinar manualmente;
Robs inteligentes percebem e interagem com alteraes no ambiente.
-
Robtica Industrial
10 Licenciatura em Engenharia Electrotcnica e Computadores
1.3.3 NVEL DE CONTROLO DOS PROGRAMAS NO CONTROLADOR
Inteligncia artificial: instrues de alto nvel que sero decompostas pelo sistema em
funes de baixo nvel.
Modo de controlo: os movimentos do sistema so modelizados incluindo as interaces
dinmicas entre os diferentes mecanismos. As trajectrias so planeadas partida, bem
como os pontos de contacto com os elementos que vo ser manipulados. Deste modelo
formulada uma estratgia e os comandos de controlo so enviados para prximo nvel mais
baixo.
Servo-sistema: os actuadores controlam os parmetros do dispositivo usando os dados
sensoriais nas malhas de controlo.
1.3.4 LINGUAGEM DE PROGRAMAO
Sistema guiados: o operador indica os movimentos que o rob deve fazer.
Programao ao nvel do rob: o utilizador escreve um programa a especificar as sequncias
de movimentos que o rob ter de executar.
Programao ao nvel de tarefa: o programador especifica apenas as aces a tomar sobre
os objectos que o rob manipular.
1.4 ALGUNS MARCOS NA HISTRIA DA ROBTICA
1801 J. Jacquard inventou um tear programvel.
1959 Primeiro rob comercial introduzido pela Planet Corporation. Era controlado por
finsde-curso e excntricos.
1960 Primeiro rob "Unimate": princpios de controlo numrico e actuadores hidrulicos.
No ano seguinte foi instalado na Ford.
1968 Uni rob mvel desenvolvido no Stanford Research Institute: "Shakey". Tinha
cmara de vdeo e sensores de contacto.
1971 O brao de Stanford desenvolvido pela Universidade de Stanford com actuao
elctrica.
1973 Primeira linguagem de programao de robs: WAVE seguida em 1974 pela
linguagem AL. As duas deram lugar mais tarde ao aparecimento da VAL, linguagem comercial
da Unimation.
1978 PUMA introduzido pela Unimation
-
Robtica Industrial
Licenciatura em Engenharia Electrotcnica e Computadores 11
1979 SCARA desenvolvido na Universidade de Yamanashi com introduo comercial em
1981.
1981 Rob com actuao directa ("direct drive") desenvolvido na CMU.
1983 Projecto para uma linha flexvel de montagem automatizada com o uso de robs.
1997 A Honda anuncia o primeiro rob humanide que sobe escadas.
1.5 OS MANIPULADORES ROBTICOS
1.5.1 ROBTICA FIXA VERSUS ROBTICA MVEL
As trs categorias principais de robs so:
Os manipuladores - robs industriais;
Os veculos auto-guiados (AGV);
Os robs mveis.
As principais diferenas entre estas categorias incidem nos seguintes pontos:
-Conhecimento contnuo da posio (verdade nos braos);
-Aplicaes distintas (manipulao e transporte);
-Necessidade de percepo do ambiente (crucial nos mveis);
-Tipo de programao usada (normalmente mais exigente nos rob mveis).
1.5.2 ELEMENTOS PRINCIPAIS DE UM MANIPULADOR (OU ROB INDUSTRIAL)
1.5.2.1 BRAO E PUNHO (ARM-WRIST)
O brao a parte do manipulador que est normalmente associada ao posicionamento
zyx ,, espao fsico cartesiano ou operacional. O punho afecta essencialmente a
orientao ,, da garra, pina ou outros terminadores (end effector).
Todavia, muito comum que haja efeitos cruzados o brao afectar tambm a orientao
e o punho afectar a posio cartesiana. Estes componentes de um manipulador so
constitudos por partes rgidas, os elos (links), ligados entre si pelas juntas (joints).
-
Robtica Industrial
12 Licenciatura em Engenharia Electrotcnica e Computadores
Figura 1-1 - Elos e junta de um manipulador
1.5.2.2 O CONTROLADOR
Unidade capaz de gerar informao de activao de um ou mais actuadores com base num
algoritmo de controlo. Esse algoritmo pode levar em linha de conta o comando desejado, o
estado actual do actuador e o prprio ambiente. Um dos algoritmos mais comuns recorre ao
chamado controlo PID (proporcional-integral-derivativo).
O controlador pode incluir a unidade de potncia, ou seja, o elemento que liga directamente
ao actuador, fornecendo-lhe a energia que necessita com base numa informao de baixo
teor energtico, como so os sinais elctricos sada de muitos controladores. Porm
tambm comum que a unidade de potncia esteja fisicamente separada do controlador.
Por vezes, o controlador faz parte de um sistema maior de interface com o utilizador como
o caso de um computador pessoal. Nestes casos o controlador pode assumir a forma de uma
carta de expanso do prprio computador, ou ser um dispositivo exterior que comunica com
o computador de uma forma padro, como por exemplo, uma ligao srie RS232.
Esta integrao num computador, devido ao abundante nmero de ferramentas de interface
disponveis, permite mais facilmente especificar os comandos desejados para o controlador,
ou at de os gerar de forma automtica, como fazem muitos programas (software).
1.5.2.3 ACTUADORES
Dispositivos que geram e impem movimento a uma qualquer parte mecnica pelo
desenvolvimento de foras e binrios baseada num principio fsico de converso de energia.
Podem ser, por exemplo, motores elctricos, cilindros hidrulicos ou pneumticos,
electromanes, etc. Tm muitas vezes associados elementos adicionais de transmisso
mecnica.
1.5.2.4 SENSORES
-
Robtica Industrial
Licenciatura em Engenharia Electrotcnica e Computadores 13
Elementos destinados medio do estado interno do manipulador bem como percepo
do ambiente exterior. Principais tipos de sensores usados num manipulador: codificadores,
fins-de-curso, sensores de fora, detectores de proximidade capacitivos e indutivos, etc.
Comando
desejado
Fonte de
energia para os
actuadores
Controlador (decide
que medida de
actuao deve ser
imposta)
Unidade de potncia
(fornece energia ao
actuador com base
nas ordens do
controlador)
Actuador (gera deslocamento
linear ou rotacional)Sensor
Figura 1-2 - Um sistema de controlo tradicional
1.6 O ROB E A AUTOMAO
1.6.1 TIPOS DE AUTOMAO
A automao pode ser de dois tipos fundamentais: rgida e flexvel (programada).
Rgida cada componente do sistema tem sempre a mesma funo ou conjunto limitado de funes, sem possibilidade de alterao de modo simples, obrigando existncia de vrios componentes por vezes afins.
Flexvel - a multiplicidade de componentes da automao rgida reduzida pela introduo de um sistema mais verstil: caso dos manipuladores
1.6.2 APLICAES TRADICIONAIS DOS MANIPULADORES INDUSTRIAIS
As aplicaes tradicionais mais importantes so as seguintes: manipulao de materiais,
soldadura (spot welding), pintura a spray. H muitos construtores de robs manipuladores
no mundo actual: alguns exemplos mais importantes de construtores e marcas so: ABB.
KUKA, STAUBLI, ADEPT e PUMA.
-
Robtica Industrial
14 Licenciatura em Engenharia Electrotcnica e Computadores
Pintura a Spray Soldadura Polimento
Figura 1-3 Algumas aplicaes industriais de manipuladores
1.7 IMPORTNCIA DO ROBOT INDUSTRIAL
O rob industrial v a sua importncia surgir a vrios nveis:
Tcnica: Vantagem e versatilidade;
Humana: Tarefas pesadas ou desagradveis para humanos;
Econmica: Um mesmo equipamento pode ter mltiplas funes e substituir vrios
equipamentos distintos.
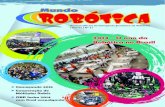
A atestar a importncia do rob industrial vm os nmeros expressos na figura seguinte. O
parque robtico mundial estima-se que atingiu 8,6 milhes de robs em 2008 (Fonte:
Relatrio anual da International Federation of Robotics (IFR), 2008).
Figura 1-4 Populao robtica mundial (Revista IEEE Spectrum com dados da World Robotics 2009 da IFR)
-
Robtica Industrial
Licenciatura em Engenharia Electrotcnica e Computadores 15
2 DESCRIO ESPACIAL E TRANSFORMAES
Um rob manipulador pode definir-se como um mecanismo que permite a movimentao
de partes e ferramentas num determinado espao. Como tal existe a necessidade de
representar a posio e orientao das partes, ferramentas e do prprio mecanismo de
movimentao no espao. Este captulo fornece as bases e ferramentas matemticas
essencias representao do rob no espao.
2.1 DESCRIES, POSIO, ORIENTAO E EIXOS DE COORDENADAS
Uma descrio utilizada para especificar os atributos dos vrios objectos que fazem parte
do sistema de manipulao. Assim que um sistema de coordenadas definido possvel
localizar qualquer ponto do universo atravs de um vector de posio de dimenso 31. A
cada vector de posio necessrio associar um sistema de coordenadas.
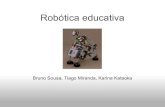
A Figura seguinte mostra o sistema de coordenadas {A} com trs vectores unitrios
mutuamente ortogonais.
Figura 2-1 Sistema de coordenadas {A} com respetivos vetores unitrios
Um ponto AP representado pelo vector:
Para alm da posio, a representao da orientao de um corpo no espao tambm
fundamental para representar a sua localizao .
z
y
x
A
p
p
p
P
-
Robtica Industrial
16 Licenciatura em Engenharia Electrotcnica e Computadores
Figura 2-2 Representao da orientao
Relativamente Fig. 2-2, a localizao correcta da garra s est completamente definida,
quando houver informao sobre a sua orientao. Se o manipulador tiver um nmero
suficiente de juntas, ento para uma determinada posio no espao (x,y,z), a garra pode ter
vrias orientaes.
Para descrever a orientao de um corpo, procede-se associao de um sistema de
coordenadas a esse corpo. De seguida deve-se descrever esse sistema de coordenadas em
relao ao sistema de coordenadas de referncia, tambm conhecido como o eixo de
coordenadas do mundo (World-Frame).
Na Fig. Seguinte o sistema de coordenadas {B} foi associado ao corpo (garra) numa
determinada forma conhecida.
Figura 2-3 Representao da orientao
-
Robtica Industrial
Licenciatura em Engenharia Electrotcnica e Computadores 17
Para saber a orientao do corpo (garra) suficiente conhecer a descrio de {B} em relao
a {A}. Ou seja, as posies dos pontos so descritas atravs de vectores, enquanto que a
orientao descrita a partir da associao de um corpo a um sistema de coordenadas.
A pergunta que se coloca a seguir como que se descreve o sistema de eixos de
coordenadas {B}?
Uma forma possvel consiste em descrever os versores, ou vetores unitrios, dos trs eixos
principais de {B} em relao ao sistema de eixos de coordenadas {A}. Para tal, considere-se
as seguintes notaes para o sistema de eixos de coordenadas {B}:
Considere-se ainda a seguinte notao para definir um sistema {B}, em relao ao sistema de
referncia {A} :
Colocando os ltimos trs vectores como as trs colunas de uma matriz 33, obtm-se a
matriz de rotao do sistema. Esta matriz descreve {B} em relao a {A};
333231
232221
131211
rrr
rrr
rrr
ZYXR BA
B
A
B
AA
B
Relativamente s componentes rij da matriz de rotao, reala-se que as componentes de
qualquer vector consistem na projeco desse vector nas direces unitrias do sistema de
referncia. Adicionalmente, cada componente pode ser escrito como o produto interno de
um par de versores. Ou seja, uma materiz de rotao pode ser genericamente descrita da
seguinte forma:
ABABAB
ABABAB
ABABAB
A
B
B
A
B
A
B
AA
B
ZZZYZX
YZYYYX
XZXYXX
R
ZYXR
RAB
-
Robtica Industrial
18 Licenciatura em Engenharia Electrotcnica e Computadores
Note-se que as linhas da matriz de rotao consistem nos versores de {A} expressos em
relao a {B}.
Logo a matriz de rotao dada pela transposta da matriz . Ou seja, a inversa da
matriz de rotao igual sua transposta.
2.1.1 DESCRIO DE UM SISTEMA DE EIXOS DE COORDENADAS;
Por convenincia define-se que o ponto do corpo cuja posio conhecida a origem do
sistema de eixos de coordenadas associado a esse corpo.
Normalmente a associao dos quatro vectores que definem um ponto (x,y,z) e um sistema
de eixos de coordenadas (que define a orientao do corpo) designa-se por referencial -
frame. Um referencial tambm poder ser entendido como uma associao entre um
vector (que define a posio) e uma matriz de rotao.
Figura 2-4 Exemplos de referenciais
Note-se que um referencial um sistema de eixos de coordenadas, o qual, para alm da
orientao integra um vector posio que localiza a sua origem em relao a outros
referenciais.
O referencial {B} descrito pela matriz de rotao e pelo vector posio APBORG . Este
ltimo localiza a origem do referencial {B}.
RBA RA
B
-
Robtica Industrial
Licenciatura em Engenharia Electrotcnica e Computadores 19
Figura 2-5 Definio do referencial {B} em relao ao referencial {A}
Em suma, o referencial {B} pode ser definido por um vetor posio e por uma matriz de
rotao.
BORGAAB PRB ,
2.2 MAPEAMENTO
Um problemas da robtica consiste em expressar a mesma quantidade associada a
diferentes sistemas de eixos de coordenadas. A questo agora prende-se com as
ferramentas matemticas que permitem as mudanas de referencial.
2.2.1 TRANSLAO
Na Fig. 2-5 aparece uma posio definida pelo vector BP. Neste momento pretende-se
expressar ponto no espao em relao ao referencial {A}, sabendo que o referencial {A}
possui a mesma orientao do referencial {B}.
Neste caso o referencial {B} difere do {A} devido ocorrncia de uma translao dada pelo
vector APBORG, o qual nos d a localizao da origem de {B} relativamente a {A}.
Dado que quer o vector BP, quer o vector APBORG esto definidos para referenciais com a
mesma orientao possvel calcular um ponto P relativo ao referencial {A}, AP, apenas pela
adio dos dois vectores.
BORG
ABA PPP
Note-se que s possvel adicionar vectores de referencias diferentes se estes tiverem a
mesma orientao. No ltimo exemplo pode-se afirmar que o vector APBORG define o
mapeamento, dado que toda a informao necessria para realizar a mudana de referencial
-
Robtica Industrial
20 Licenciatura em Engenharia Electrotcnica e Computadores
est contida em APBORG (sabendo-se ainda que os referenciais possuem a mesma
orientao).
2.2.2 ROTAO
A orientao descrita por trs versores, os quais so armazenados numa matriz 33, que se
designa por matriz de rotao. Se esta matriz descreve um referencial {A} em relao a um
referencial {B}, ento aplica-se:
T
A
B
T
A
B
T
A
B
B
A
B
A
B
AA
B
TB
A
B
A
A
B
Z
Y
X
ZYXR
RRR
1
O problema agora consiste em saber a descrio de um ponto em relao a um referencial
{A}, quando o que se conhece a sua descrio em relao a um referencial {B}, sabendo
ainda que as origens dos dois referencias so coincidentes.
O clculo desta descrio possvel, bastando para tal conhecer a orientao de {B} em
relao a {A}.
Esta orientao dada pela matriz de rotao, cujas colunas so constitudas pelos vectores
unitrios de {B} definidos em relao a {A}.
Figura 2-6 Rotao do referencial {B} em relao ao referencial {A}
-
Robtica Industrial
Licenciatura em Engenharia Electrotcnica e Computadores 21
Para calcular o vector AP importante notar que os componentes de qualquer vector so
simples projeces desses vectores nas direces unitrias dos seus referenciais. A projeco
calculada a partir de um produto interno, logo as componentes de AP ficam da forma:
PZP
PYP
PXP
B
A
B
z
A
B
A
B
y
A
B
A
B
x
A
Expressando o ltimo sistema de equaes em termos da matriz de rotao, obtm-se:
PRP BABA
Esta ltima equao implementa o mapeamento, i.e., muda a descrio de um vector BP,
que descreve um ponto associado ao referencial {B}, para AP, que descreve o mesmo ponto
relativo ao referencial {A}.
2.2.3 ROTAO+TRANSLAO
Considere-se agora o caso geral em que se pretende um mapeamento que efectue uma
rotao e uma translao em simultneo. Neste caso a origem do referencial {B} no
coincidente com a origem do referencial {A}, conhecendo-se, porm, o vector APBORG que
localiza a origem de {B} em relao a {A}. Para alm disso, {B} tem uma orientao diferente
de {A}, a qual descrita pela matriz de rotao definida anteriormente.
Para resolver este problema procede-se da seguinte forma:
1. Primeiro descreve-se BP em relao a um referencial intermdio que possui a
mesma orientao de {A} e origem coincidente com {B}, ou seja, multiplica-se BP pela
matriz de rotao.
2. De seguida basta adicionar APBORG, obtendo-se a descrio do ponto em relao ao
referencial {A}.
BORG
ABA
B
A PPRP
Figura 2-7 Rotao e translao do referencial {B} em relao ao referencial {A}
-
Robtica Industrial
22 Licenciatura em Engenharia Electrotcnica e Computadores
No entanto seria prefervel que a ltima equao fosse apresentada numa forma mais
conceptual, i.e.:
PTP BABA
A equao anterior inclui uma nica matriz de transformao capaz de mudar a descrio de
um ponto de um referencial para outro.
Para se obter a ltima equao necessrio definir a matriz de transformao 44 e o vector
de posio 41:
1|000
____|_________
|
1
___
1|000
____|_________
|
1
___
BORG
AA
B
A
B
BBORG
AA
BA
PR
T
PPRP
A matriz 44 apresentada na equao anterior designada por matriz de transformao
homognea.
2.3 OPERADORES TRANSLAO, ROTAO E TRANSFORMAO
As formas matemticas utilizadas para mapear pontos de uns referenciais para outros,
podem tambm ser interpretados como operadores que realizam a translao de pontos,
rodam vectores, ou ambos.
2.3.1 OPERADORES TRANSLAO
Uma translao responsvel por mover um ponto no espao, por uma distncia finita, ao
longo de um determinado vector de direco. Para realizar a translao de um ponto s
necessrio um referencial.
Note-se que a translao de um ponto no espao realizado utilizado as mesmas operaes
matemticas necessrias para realizar o mapeamento de um ponto para um segundo
referencial.
A Figura seguinte mostra como um vector AP1 sofre uma translaco atravs de um vector AQ1, este ltimo contm a informao necessria para realizar a translao.
-
Robtica Industrial
Licenciatura em Engenharia Electrotcnica e Computadores 23
Figura 2-8 Operador translao
Obtm-se um vector AP2 da seguinte forma:
QPP AAA 12
Para escrever esta operao de translao atravs de um operador matricial, deve-se utilizar
a seguinte notao:
12 )( PqDPA
Q
A
Q consiste na amplitude da translao ao longo da direco, dada pelo vector AQ. O
operador DQ consiste numa forma especial da matriz de transformao homognea. Onde
qx, qy e qz so os componentes do vector de translao AQ e q a distncia:
222
zyx qqqq
2.3.2 OPERADORES ROTAO
Outra interpretao da matriz de rotao consiste no operador rotao que opera sob um
vector AP1 e o transforma num vector AP2, por meio de uma rotao R.
12 PRPAA
Tambm aqui a matriz de rotao que roda um determinado vector de R, a mesma matriz
que roda um referencial em relao a outro.
Embora a matriz de rotao seja facilmente entendida como um operador, define-se agora
uma outra notao para operador rotacional, a qual indica de forma clara qual o eixo que se
encontra a ser rodado.
12 )( PRPA
K
A
Nesta notao RK() um operador rotacional que realiza a rotao de em torno do eixo K.
-
Robtica Industrial
24 Licenciatura em Engenharia Electrotcnica e Computadores
Este operador pode ser reescrito como a matriz de transformao homognea, cujo vector
de posio zero. Uma rotao de graus em torno do eixo dos Z dada pela seguinte
matriz de transformao homognea:
Figura 2-9 Operador rotao
Note-se que para realizar uma rotao apenas basta utilizar a matriz de rotao 33.
2.3.3 OPERADORES TRANSFORMAO
Tal como no caso dos vectores e das matrizes de rotao, um referencial tem uma outra
interpretao que se designa por operador transformao. Nesta interpretao apenas se
encontra envolvido um referencial, utilizando-se apenas o smbolo T para designar a
transformao.
O operador T roda e realiza a translao um vector AP1 de modo a obter-se um novo vector AP2, ou seja:
12 PTPAA
Note-se que a transformao que realiza uma rotao R e uma translao DQ a mesma
transformao que descreve um referencial com uma rotao R e translao DQ em relao a
outro referencial.
2.4 ARITMTICA DE TRANSFORMAES
As duas operaes elementares que constituem o conjunto de operadores de
transformaes:
Multiplicao de matrizes de transformao;
Inverso de matrizes de transformao.
-
Robtica Industrial
Licenciatura em Engenharia Electrotcnica e Computadores 25
2.4.1 MULTIPLICAO DE MATRIZES DE TRANSFORMAO
A Figura seguinte mostra um exemplo em que se conhece CP e pretende-se determinar AP.
Figura 2-10 Aritmtica de transformaes
De acordo com a figura 2-10, o referencial {C} conhecido em relao ao {B}, sendo este
ltimo conhecido em relao ao referencial {A}. Deste modo pode-se transformar CP em BP,
do seguinte modo:
PTP CBCB
De seguida basta transformar BP em AP:
PTP BABA
Combinando as duas ltimas equaes obtm-se:
PTTP CBCA
B
A
Deste modo pode ento definir-se:
1|000
|
| BORGA
CORG
BA
B
B
C
A
B
A
C
B
C
A
B
A
C
PPRRR
T
TTT
2.4.2 INVERSO DE UMA TRANSFORMAO
-
Robtica Industrial
26 Licenciatura em Engenharia Electrotcnica e Computadores
Considere-se um referencial {B} que conhecido em relao a um referencial {A}. Por vezes
conveniente inverter a matriz de transformao de modo a obter-se a descrio de {A} em
relao a {B}. Sabendo que:
TA
B
B
A RR
De seguida obtm-se a descrio de APBORG em relao ao referencial {B}:
AORG
B
BORG
AB
ABORG
AB PPRP )(
O lado esquerdo da ltima equao tem de ser zero, portanto:
BORG
ATA
BBORG
AB
AAORG
B PRPRP
De seguida obtm-se a descrio de {A} em relao ao referencial {B}:
1|000
|
| BORGATA
B
TA
B
B
A
PRR
T
2.5 EQUAES DE TRANSFORMAES
A Figura seguinte mostra uma situao em que o referencial {D} pode ser expresso a partir
de produtos de matrizes de transformao.
Figura 2-11 Equaes de transformaes
-
Robtica Industrial
Licenciatura em Engenharia Electrotcnica e Computadores 27
Isto pode ser feito de duas formas:
TTT ADU
A
U
D
Ou:
TTTT CDB
C
U
B
U
D
Igualando os dois ltimos resultados, obtm-se a equao da transformao:
TTTTT CDB
C
U
B
A
D
U
A
Estas equaes podem ser utilizadas para resolver transformaes, em que existam n
transformaes desconhecidas e n equaes de transformaes. Tendo em conta a ltima
equao, caso se conhecessem todas as transformaes excepto :
11 TTTTT CDA
D
U
A
U
B
B
C
Notar que a direco das setas indica qual o referencial de referncia. Para a figura, duas
descries possveis de {C} so:
Figura 2-12 Equaes de transformaes
TTT
TTTT
B
C
U
B
U
C
D
C
D
A
U
A
U
C
1
Resolvendo agora em relao a TUA , por exemplo:
TTTTT DAD
C
B
C
U
B
U
A 1
-
Robtica Industrial
28 Licenciatura em Engenharia Electrotcnica e Computadores
2.6 MAIS SOBRE MATRIZES DE ORIENTAO
As matrizes de rotao, tal como foram vistas at agora, tm as seguintes caractersticas:
Todas as colunas mutuamente ortogonais;
Amplitude de 1;
O determinante destas matrizes 1, sendo por isso designadas por matrizes prprias
ortonormais.
Ser possvel representar uma matriz de rotao com menos de 9 nmeros? A frmula de
Cayley para matrizes ortonormais diz que para qualquer matriz prpria ortonormal, R, existe
uma matriz anti-simtrica S, tal que:
131
3
SISIR
Onde I3 uma matriz identidade 33. A matriz anti-simtrica especificada por trs
parmetros (sx,sy,sz).
0
0
0
xy
xz
yz
ss
ss
ss
S
Uma consequncia imediata da frmula de Cayley que qualquer matriz de rotao pode
ser representada por apenas trs parmetros.
Os nove elementos da matriz de rotao no so independentes. Escrevendo a matriz de
rotao fcil perceber as seis dependncias entre os elementos:
ZYXR
Estes trs vectores so os versores de um determinado referencial. Como todos so vectores
unitrios e tm de ser mutuamente perpendiculares, conclui-se que existem seis restries
sobre os nove elementos da matriz de rotao, as quais se apresentam de seguida:
0
,0
,0
,1
,1
,1
ZY
ZX
YX
Z
Y
X
-
Robtica Industrial
Licenciatura em Engenharia Electrotcnica e Computadores 29
2.6.1 NGULOS FIXOS X-Y-Z
Um mtodo de descrever a orientao de um referencial {B} o seguinte:
Comear com o referencial {B} coincidente com {A};
o Rodar {B} um ngulo em torno de XA;
o Rodar {B} um ngulo em torno de YA;
o Rodar {B} um ngulo em torno de ZA;
O termo fixo serve para indicar que as rotaes so feitas sobre um referencial fixo. Esta
conveno normalmente designada pelos ngulos roll, pitch e yaw.
Figura 2-13 ngulos fixos
A matriz de rotao equivalente ento obtida da seguinte forma (onde c significa cos e s
significa sin):
cs
sc
cs
sc
cs
sc
R
RRRR
XYZ
A
B
XYZXYZ
A
B
0
0
001
0
010
0
100
0
0
,,
,,
Note-se que a ordem da multiplicao tem de ser respeitada. Realizando a multiplicao
obtm-se:
ccscs
sccssccssscs
sscsccsssccc
XYZ ,,
Este resultado implica a ordem de rotao X-Y-Z.
O problema inverso, i.e., extrair os ngulos fixos de uma matriz de rotao tambm tem
bastante interesse. A obteno da soluo consiste em resolver nove equaes (trs
incgnitas) que se obtm igualando a ltima matriz matriz de rotao:
-
Robtica Industrial
30 Licenciatura em Engenharia Electrotcnica e Computadores
333231
232221
131211
,,
rrr
rrr
rrr
RXYZA
B
Para se obter os ngulos, basta resolver:
cr
cr
A
cr
cr
A
rrrA
3332
1121
2
21
2
1131
,2tan
,,2tan
,,2tan
2.6.2 NGULOS DE EULER Z-Y-X
Outro mtodo de descrever a orientao de um referencial {B} o seguinte:
Comear com o referencial {B} coincidente com {A} conhecido;
o Rodar {B} um ngulo em torno de ZB;
o Rodar {B} um ngulo em torno de YB;
o Rodar {B} um ngulo em torno de XB;
Nesta representao cada rotao realizada em torno de um eixo do sistema em
movimento {B}, ao contrrio do referencial fixo {A}. Este conjunto de trs rotaes designa-
se por ngulos de Euler.
Figura 2-14 ngulos de Euler
Note-se que a rotao realizada em torno de um eixo cuja localizao depende da rotao
anterior. De acordo com a Figura 2-14:
-
Robtica Industrial
Licenciatura em Engenharia Electrotcnica e Computadores 31
A rotao de em torno de Z faz com que o eixo X rode para X e Y para Y;
A matriz de rotao tem os ndices especificados por linhas, indicando que a
parametrizao teve por base ngulos de Euler.
Ainda relativamente Figura, podem-se usar referenciais intermdios {B} e {B}, de modo a
obter-se a expresso de ABRZYX(,,):
RRRR BBB
B
A
B
A
B
'''
'''
A matriz de rotao equivalente ento obtida da seguinte forma (onde c significa cos e s
significa sin):
cs
sc
cs
sc
cs
sc
R
RRRR
XYZ
A
B
XYZXYZ
A
B
0
0
001
0
010
0
100
0
0
,,
,,'''
Note-se que a ordem da multiplicao tem de ser respeitada. Realizando a multiplicao
obtm-se:
ccscs
sccssccssscs
sscsccsssccc
R XYZA
B ,,'''
Este resultado exactamente igual ao obtido para os ngulos fixos. Trs rotaes realizadas
em torno de eixos fixos origina o mesmo resultado que trs rotaes na ordem inversa em
torno de eixos em movimento.
2.6.3 EIXOS EQUIVALENTES
A notao RX(30) corresponde descrio da orientao em torno do eixo X de 30; Esta
notao corresponde a um exemplo de uma representao de eixos equivalentes. O mtodo
de descrever a orientao de um referencial {B} o seguinte:
Comear com o referencial {B} coincidente com {A} conhecido;
Rodar {B} um ngulo em torno de um vector AK de acordo com a regra da mo
direita;
O vector K tambm conhecido como o eixo equivalente de uma rotao finita.
Em termos globais, uma orientao de {B} em relao a {A} pode ser representada por A
BR(K,), ou por RK().
-
Robtica Industrial
32 Licenciatura em Engenharia Electrotcnica e Computadores
Figura 2-15 Eixos equivalentes
Escolhendo os eixos de {A} como os eixos de rotao equivalentes, as matrizes de rotao
passam a ser:
100
0cossin
0sincos
)(
cos0sin
010
sin0cos
)(
cossin0
sincos0
001
)(
Z
Z
X
R
R
R
Observando a Fig 2.15, se a rotao for em torno de um eixo geral:
cvkkskvkkskvkk
skvkkcvkkskvkk
skvkkskvkkcvkk
R
zzxzyyzx
xzyyyzyx
yzxzyxxx
K
Onde v=1-cos e AK=[kx ky kz]
T. O sinal de definido pela regra da mo direita.
Caso o vector em torno do qual se faz a rotao no passar pela origem:
-
Robtica Industrial
Licenciatura em Engenharia Electrotcnica e Computadores 33
Determinar {A} e {B} que tm a mesma orientao de {A} e {B};
{A} e {B} sofreram uma translao em relao a {A} e {B} que os coloca com a sua
origem coincidente com a do vector K (eixo de rotao).
TTTT BBA
B
A
A
A
B
''
''
Figura 2-16 Eixos equivalentes
-
Robtica Industrial
34 Licenciatura em Engenharia Electrotcnica e Computadores
3 ESTRUTURA E TIPOLOGIA DOS MANIPULADORES
3.1 COMPONENTES
3.1.1 BRAO MECNICO
O brao mecnico constitudo por juntas e elos (joints and links). Os elos so usualmente
blocos alongados rgidos, e so ligados uns aos outros atravs das juntas. Os elos podem
variar a sua posio relativa e estilo normalmente associados em srie. Existem
variadssimas combinaes de elos e juntas de acordo com as aplicaes, e que mais adiante
se descrevero os tipos mais comuns.
3.1.2 PONTA OU GARRA (END-EFFECTOR)
Componente ligado extremidade do brao, isto , ligado ao ltimo elo do manipulador, e
que tem funes adicionais (agarrar ou prender um objecto. ou ainda um dispositivo com
funes adicionais mais especificas). A ponta ou end-effector pode ser do tipo garra (gripper)
ou uma ferramenta (tool).
3.1.2.1 GARRAS
As garras de preenso mecnica (pinga) so bastante comuns e eis de seguida alguns
exemplos:
Figura 3-1 Alguns princpios e tipologias de garras
-
Robtica Industrial
Licenciatura em Engenharia Electrotcnica e Computadores 35
De notar o tipo de foras/movimentos aplicados e os resultados nas diversas situaes.
Saliente-se a garra do topo direito que pode servir para agarrar objectos de dimenso
varivel graas A sua mola. Ou ainda, a garra na ltima ilustrao, na regio inferior direita,
cujos dedos (pingas) de deslocam de forma perfeitamente linear. Alm das garras do tipo
pina h ainda aquelas de funcionamento baseado em:
Vcuo;
Magntica;
Adesivos;
Ou outros tipos dos quais se destacam as mos antropomrficas.
Figura 3-2 Mo (garra) antropomrfica
3.1.2.2 FERRAMENTAS
Nas ferramentas a variedade muito grande mas as principais incluem as seguintes:
Soldadura;
Corte jacto de gua;
Furador polidor, etc.
3.1.3 ACTUADORES
Os componentes que utilizam uma fonte de energia para mover as juntas so de trs tipos
essenciais. Eis uma breve comparao dos trs tipos de actuadores:
Caracterstica Tipos de Actuadores
-
Robtica Industrial
36 Licenciatura em Engenharia Electrotcnica e Computadores
Elctricos Hidrulicos Pneumticos
Controlo Fcil, mas pode ser elaborado
Actualmente mais simples com as electro-vlvulas servo
Muito difcil devido s questes de compressibilidade do ar
Velocidade Grande Mdia/grande Muito grande
Binrio a baixa velocidade
Pequeno/mdio Grande Pequenos
Preciso (repetibilidade) Boa e limitada pelo uso de transmisso
Boa M, excepto em operaes a posies fixas
Preciso em situao esttica
Mau, requer traves Excelente, trata-se do funcionamento normal
Boa, no h risco de danificao do sistema
Questes ambientais Arcos elctricos podem ser indesejveis
Perigo de fugas de leo Sistemas limpos, poluio sonora devido aos compressores e fugas
Custos Relativamente baixos Elevado Relativamente baixos
Tabela 1: Breve comparao dos principais tipos de actuadores
Em cada junta h normalmente um actuador. Ao contrrio, no corpo humano h
normalmente dois msculos por cada junta (articulao) para a moverem em direces
opostas.
3.1.3.1 TIPO DE ACTUAO
Directa - o elemento mvel do actuador acoplado junta directamente.
Indirecta - o elemento mvel do actuador acoplado junta mediante um sistema
de transmisso.
Figura 3-3 Ilustrao da actuao directa e indirecta
Os motores elctricos so normalmente usados em actuao indirecta (indirect drive) devido
combinao alta velocidade/binrio baixo. So excepes os casos dos motores especiais
como os motores passo a passo, ou os chamados direct-drive motors, que tm uma
concepo especial e permitem altos binrios a baixas rotaes. Porm, alguns destes tipos
so par enquanto motores de grandes dimenses e peso, portanto limitados a poucas
-
Robtica Industrial
Licenciatura em Engenharia Electrotcnica e Computadores 37
aplicaes nos manipuladores: possvel encontr-los na base, ou seja, a actuar a primeira
junta do manipulador.
3.1.4 SENSORES
Fornecem informao ao controlador, nomeadamente em que local esto as diversas juntas
do manipulador Alm destes sensores internos h tambm os interruptores de fim de curso
que delimitam as deslocaes extremas das juntas. Existem tambm os sensores externos
dedicados a recolher informao adicional sobre o ambiente.
3.1.4.1 SENSORES DE POSIO
3.1.4.1.1 POTENCIMETRO
Num potencimetro o movimento do cursor pode ser linear ou rotacional (angular). Para um
potencimetro a tenso de sada dada por )()( tKtVO .
Figura 3-4 Ilustrao da actuao directa e indirecta
3.1.4.1.2 CODIFICADORES PTICOS INCREMENTAIS E ABSOLUTOS
Os codificadores (especialmente os pticos) apresentam a vantagem de no possuir
contactos sujeitos a desgaste, o que sucede com o cursor de um potencimetro.
O deslocamento uma das poucas grandezas que pode ser traduzida numa sada digital,
sem a necessidade de utilizar conversores A/D. os codificadores podem ser do tipo:
Incrementais: medem o deslocamento a partir de um ponto inicial de partida. So
normalmente conhecidos com Encoders Incrementais.
Absolutos: medem o deslocamento em relao a um ponto de referncia interno
fixo. Este tipo de sensor apresenta o deslocamento em incrementos codificados
discretamente.
A natureza dos sectores e o tipo de dispositivo de leitura, depende do tipo de transdutor
utilizado. Com um deslocamento ptico incremental de uma pista impossvel distinguir o
-
Robtica Industrial
38 Licenciatura em Engenharia Electrotcnica e Computadores
sentido de rotao. Essa dificuldade pode ser superada se forem usadas duas pistas, cada
uma desfasada de de perodo.
Figura 3-5 Codificador ptico incremental
Figura 3-6 Codificador ptico absoluto
-
Robtica Industrial
Licenciatura em Engenharia Electrotcnica e Computadores 39
Os Sensores pticos absolutos possuem o mesmo princpio de operao que os sensores
incrementais, excepto que possuem quatro ou mais pistas. Os sectores so arranjados de tal
maneira que um cdigo binrio nico seja produzido de acordo com a posio.
Tipos de cdigos utilizados:
Binrio natural: mais simples, requer pistas adicionais para detectar erros.
Cdigo Gray: apenas se altera um bit de cada vez. Isso traz menor margem de erro
causado por imperfeies de alinhamento dos circuitos de leitura.
3.1.4.1.3 SENSORES DE VELOCIDADE E ACELERAO
A princpio possvel determinar a velocidade instantnea e a acelerao pela diferenciao
electrnica do sinal de sada de um sensor de deslocamento. A primeira derivada d a
velocidade dt
dxv e a segunda derivada a acelerao.
3.1.5 CONTROLADOR
O controlador o componente que determina e, frequentemente, monitoriza o movimento
de cada junta. Geralmente o controlador faz outras operaes relacionadas com a aplicao.
A operao fundamental a funo de controlo em cada junta, isto , o processo pela qual
se procura que os elos/juntas fiquem posicionados ou tenham o movimento desejado numa
dada tarefa a cumprir. Esse processo tem de obviar os problemas de que as aces de um
certo actuador no tm os efeitos desejados, ou seja, ter de haver um controlo em malha
fechada ou chamado controlo com realimentao. Note-se porm que h sistemas
(mormente didcticos) onde o controlo feito em malha aberta. Quer isso dizer que os
actuadores so activados e que se espera que cumpram exactamente o previsto. Isso
possvel em certa medida com motores passo-a-passo.
Se designarmos por a entrada de um controlador, e diferena entre a sada desejada
para o sistema (actuador) e a sua real sada chamarmos erro , as funes de controlo
mais comuns so as seguintes:
On/OFF:
Proporcional:
Proporcional+Diferencial:
-
Robtica Industrial
40 Licenciatura em Engenharia Electrotcnica e Computadores
Proporcional+Integral+Derivativo:
3.2 TIPOS DE JUNTAS
As juntas so essencialmente de dois grandes tipos:
As prismticas (P) onde o movimento relativo dos elos linear.
As rotacionais (R) onde o movimento relativo dos elos rotacional.
Existe ainda um terceiro tipo de junta designada par esfrica (S) que no fundo a
combinao de trs juntas rotacionais com o mesmo ponto de rotao.
a) Junta Rotacional b) Junta Prismtica c) Junta Esfrica
Figura 3-7 Principais tipos de juntas
Na maioria dos manipuladores as juntas so normalmente divididas em dois grupos:
Juntas principais (3 juntas mais prximas da base).
Juntas secundrias ou juntas do punho (as restantes juntas, mais prximas do end
effector).
3.2.1 GRAUS DE LIBERDADE E GRAUS DE MOBILIDADE
O conceito graus de liberdade (degrees-of-freedom - DOF) exprime o nmero total de
movimentos independentes que um dispositivo pode efectuar. Um cubo no espao a 3
dimenses pode deslocar-se ao longo dos trs eixos e tambm rodar em torno de cada um
deles, dando assim um total de 6 graus de liberdade para a sua movimentao.
Um conceito diferente termo os graus de mobilidade, associados ao nmero de juntas
existentes. Um exemplo comum desta diferena o trip: na verdade em cada p existe
vrias juntas prismticas que afectam o mesmo, isto , ao longo daquele eixo em particular.
-
Robtica Industrial
Licenciatura em Engenharia Electrotcnica e Computadores 41
Se em cada p houver 3 juntas, teremos um trip com 3 graus de liberdade mas 9 graus de
mobilidade.
Exemplos de graus de liberdade necessrios para certas tarefas:
Para mudar esta pea e rod-la so necessrios 4 graus de liberdade apenas (nota: o manipulador ilustrado poder no ter a possibilidade de o fazer, para certas orientaes).
Para colocar esta pea no encaixe (que pode ter uma orientao arbitrria) so necessrios 6 graus de liberdade: 3 para as posies xyz e 3 para as 3 orientaes do encaixe (nota: o manipulador ilustrado no o permite).
Figura 3-8 Graus de liberdade necessrias para dois exemplos de movimento
3.2.2 REPRESENTAO E ARRANJO CINERNITICO
Frequentemente, em diversa literatura existe uma simbologia prpria para representar de
uma forma padro um manipulador e as suas juntas. De seguida ilustra-se um caso para um
manipulador RRP e mais uma junta esfrica.
Figura 3-9 Representao de um manipulador com as juntas RRPS num total de 6 DOF
-
Robtica Industrial
42 Licenciatura em Engenharia Electrotcnica e Computadores
3.2.3 0 BRAO HUMANO
Cada brao humano, excluindo a mo e os dedos, dispe de 7 graus de liberdade:
Junta Tipo Graus de
liberdade (DOF)
Ombro (Shoulder) Esfrica 3
Cotovelo (Elbow) Rotacional 1
Pulso (Wrist) Esfrica 3
Figura 3-10 Graus de liberdade do brao humano
3.3 ESPAO DE TRABALHO E TIPOS DE MANIPULADORES
Espao ou volume de trabalho (work space or volume space) de um manipulador a regio
dentro da qual o manipulador pode posicionar o end-effector.
Quando se classifica um rob pela sua estrutura cinemtica, isto pelo seu espao de
trabalho, apenas as juntas principais so usadas. Assim, h essencialmente 5 categorias de
estruturas cinemticas que se ilustram e descrevem resumidamente de seguida:
Cartesiana (PPP);
Cilndrica (RPP);
Esfrica (RRP);
Articulado horizontal ou SCARA (RRP);
Articulado vertical ou antropomrfico (ERR);
-
Robtica Industrial
Licenciatura em Engenharia Electrotcnica e Computadores 43
3.3.1 CARTESIANA (PPP)
3.3.2 CILINDRICA (RPP)
-
Robtica Industrial
44 Licenciatura em Engenharia Electrotcnica e Computadores
3.3.3 ESFRICA (RRP)
3.3.4 ARTICULADO HORIZONTAL (RRP)
-
Robtica Industrial
Licenciatura em Engenharia Electrotcnica e Computadores 45
3.3.5 ARTICULADO VERTICAL
3.4 RESOLUO, REPETIBILIDADE E PRECISO
Resoluo: menor movimento incremental de uma junta;
Repetibilidade (ou por vezes preciso): traduz a diferena de posio (linear em
geral) com que o rob volta a recolocar-se num ponto visitado anteriormente
(afectada por variabilidade do movimento mecnico, materiais, etc.);
Exactido: Traduz a diferena entre uma posio realmente atingida e a posio
desejada pela programao.
-
Robtica Industrial
46 Licenciatura em Engenharia Electrotcnica e Computadores
4 CINEMTICA DIRETA
4.1 CINEMTICA DE UM MANIPULADOR
4.1.1 DEFINIO
A cinemtica de um manipulador o estudo do conjunto de relaes entre as posies
velocidades e aceleraes dos seus elos.
O estudo que aqui se inicia diz respeito apenas aos manipuladores srie, que alis a
categoria que inclui a grande maioria de manipuladores industriais e didcticos. Os
manipuladores srie caracterizam-se pelo facto de todas as juntas ligarem dois e apenas dois
elos consecutivos.
A relao entre o referencial de origem e o referencial da extremidade (mo) do
manipulador dada por uma transformao que, todavia, no d qualquer indicao sobre
as relaes entre os elos intermdios. Desse modo para fazer um estudo da cinemtica
necessrio, antes de mais, definir sistemas de coordenadas associados a cada elo, ou seja,
atribuir-lhe referenciais. Por outro lado, a relao geomtrica entre elos representada por
uma matriz de transformao: para ir de um extremo de um elo (junta ou base do rob) at
ao outro extremo do elo (a junta seguinte ou a extremidade do rob) far-se-o translaes e
rotaes. Em suma, um dado elo i ter associado a si a matriz de transformao ,: onde
a primeira matriz relaciona o primeiro elo com a base fixa, e a ltima matriz
relaciona o referencial da mo com o ltimo elo. ento claro que
.
O estudo da cinemtica divide se em dois tipos de problemticas: localizao da mo a partir
das posies das juntas (cinemtica directa) e determinao das posies das juntas a partir
da posio da mo (cinemtica inversa).
Podemos assim definir dois espaos de variveis: o espao das variveis da juntas, ou
simplesmente espao das juntas, e o espao cartesiano ou operacional. A dimenso do
espao operacional 6 (3 translaes e 3 orientaes) e o espao das juntas tem como
dimenso o nmero de juntas do manipulador.
As operaes do espao das juntas para o espao cartesiano no apresentam qualquer
ambiguidade, mas o contrrio pode no ser verdade. De facto, o espao das juntas muitas
vezes redundante, isto , nem sempre possvel estabelecer urna relao unvoca com o
espao cartesiano, significando que vrias configuraes no espao das juntas resultam na
mesma configurao no espao operacional.
-
Robtica Industrial
Licenciatura em Engenharia Electrotcnica e Computadores 47
Figura 4-1 Cinemtica directa e inversa: a natureza no biunvoca da sua relao
4.1.2 0 ALGORITMO DA CINEMTICA DIRECTA
Implementar a cinemtica directa de um manipulador significa, portanto, determinar as
relaes que exprimem um ponto no espao cartesiano, em funo de um ponto no
espao das juntas , isto , .
Os passos ou algoritmo para definir tal relao so essencialmente os seguintes:
Colocar o rob na posio zero (descrito adiante);
Atribuir um sistema de coordenadas a cada elo;
Descrever as relaes (translaes e rotaes) entre as variveis das juntas e dos
elos;
Determinar as matrizes de transformao, , dos diversos elos;
Multiplicar os e obter a expresso
;
Obter as coordenadas de posio da mo;
Obter as coordenadas de orientao da mo.
4.2 PARMETROS DE JUNTAS E ELOS
Para atribuir sistemas de coordenadas a um elo ser preciso levar em conta a sua prpria
geometria e as consequncias que ter no elo seguinte da cadeia. No intuito de obter uma
forma coerente e prtica de determinao desses sistemas de coordenadas necessrio
definir conceitos tais como o eixo de uma junta ou os parmetros cinemticos dos elos e
juntas associadas.
4.2.1 EIXO DE UMA JUNTA
O eixo de uma junta o eixo relacionado com a simetria do movimento inerente prpria
junta e que pode coincidir com o eixo de um ou outro elo ou mesmo ser-lhe ortogonal: de
-
Robtica Industrial
48 Licenciatura em Engenharia Electrotcnica e Computadores
seguida descrevem-se as situaes tipo. O eixo de uma junta far parte do sistema de
coordenadas associados ao elo, e convenciona-se que seja o eixo das coordenadas zz.
Eixo de junta rotacional
No caso de termos dois elos colineares, ento o eixo da junta coincide com o eixo
longitudinal dos elos, como se ilustra na Figura 3.2 do lado esquerdo. Este tipo de arranjo de
junta colinear rotacional muito usado em punhos de manipuladores. No caso de os elos
terem o eixo de rotao perpendicular ao seu eixo longitudinal (Figura 3.2. lado direito),
estamos em presena de um arranjo muito comum para cotovelos, ou seja o eixo da junta
ortogonal.
Figura 4-2 Eixo de junta colinear e ortogonal em eixos de juntas rotacionais
Eixo de uma junta prismtica
Para juntas prismticas a abordagem semelhante. Existem os casos de junta colinear ou
junta ortogonal, conforme se ilustra na Figura 3.3, do lado esquerdo e direito,
respectivamente.
Figura 4-3 Eixo de junta colinear e ortogonal em eixos de juntas prismticas
4.2.2 OS QUATRO PARMETROS DE ELOS E JUNTAS
Um elo um elemento rgido que mantm fixas as relaes entre juntas sucessivas e pode
ser caracterizado com um determinado nmero de parmetros geomtricos/cinemticos no
que diz respeito a transformao geomtrica que opera. Os elos intermdios so delimitados
por duas juntas: que o precede na srie de ligaes designa se aqui por junta anterior, e
outra designa se posterior ou seguinte. Excepes devem ser levadas em conta para os elos
extremos do manipulador, onde s h uma junta delimitadora. Apresenta se de seguida uma
-
Robtica Industrial
Licenciatura em Engenharia Electrotcnica e Computadores 49
definio conceptual de cada um dos quatro parmetros cinemticos, qual se junta uma
definio formal que ser usada mais adiante, a propsito do Algoritmo de Denavit
Hartenberg. Para se compreender a definio formal recorre se a uma a simbologia prpria,
a saber:
Ponto de origem do sistema de coordenadas;
Ponto de interseco entre o eixo e o eixo ;
: Distncia do ponto ao ponto , medida ao longo de ;
: ngulo medido entre e em torno de ;
4.2.2.1 COMPRIMENTO DO ELO
Define-se como a distncia medida ao longo da normal comum entre os eixos das juntas.
Traduz o conceito de afastamento linear entre os eixos das juntas. Formalmente define-se
como:
4.2.2.2 DISTNCIA ENTRE ELOS OU DESLOCAMENTO DAS JUNTAS
O deslocamento de juntas traduz. em geral. a distncia entre elos medida ao longo do eixo
da junta anterior. Definio formal:
4.2.2.3 NGULO DA JUNTA
ngulo definido normalmente entre o eixo de um elo e o eixo do elo seguinte. Definio
formal:
4.2.2.4 NGULO DE TORO DO ELO
Angulo de toro que o elo impe desde o eixo da junta anterior at ao eixo da junta
seguinte. Definio formal:
4.2.3 ALGUNS EXEMPLOS DE ELOS
De seguida apresentam- se vrias geometrias de elos com o intuito de ilustrar os diversos
parmetros que afectam a cinemtica de um manipulador. A definio dos sistemas de
coordenadas no muito rgida excepo da definio do eixo dos zz que coincide com o
eixo da junta, tal como convencionado. O n-simo elo e a sua junta anterior (n-sima) so
responsveis pela definio do sistema de coordenadas n que se considera solidrio com o
elo. O sistema de coordenadas (n-1) aquele sobre o qual opera a junta n e o respectivo elo
n. Desse modo. o sistema de coordenadas O (zero) o primeiro de todos e refere se base
fixa do manipulador.
-
Robtica Industrial
50 Licenciatura em Engenharia Electrotcnica e Computadores
Regras adicionais sero propostas mais adiante de uma forma estruturada para a definio
do algoritmo de Denavit-Hartenberg. Em todos os casos seguintes. o elo o n-simo da
cadeia.
Figura 4-4 Exemplo 1: elo com juntas rotacionais paralelas
Figura 4-5 Exemplo 2: elo com juntas rotacionais paralelas com desalinhamento
Figura 4-6 Exemplo 3: elo com juntas rotacionais ortogonais
-
Robtica Industrial
Licenciatura em Engenharia Electrotcnica e Computadores 51
Figura 4-7 Exemplo 4: elo com juntas rotacionais ortogonais e com desalinhamento
Figura 4-8 Exemplo 5: elo com juntas rotacionais ortogonais, 2 tipo
Figura 4-9 Exemplo 6: elo com junta prismtica e junta rotacional ortogonais
-
Robtica Industrial
52 Licenciatura em Engenharia Electrotcnica e Computadores
Figura 4-10 Exemplo 7: elo com junta prismtica e junta rotacional ortogonais, 2 tipo
Figura 4-11 Exemplo 8: elo com duas juntas prismticas ortogonais
Figura 4-12 Exemplo 9: elo com duas juntas rotacionais ortogonais
-
Robtica Industrial
Licenciatura em Engenharia Electrotcnica e Computadores 53
Os casos representados na Figura 4.11 e na Figura 4.12 so os mais complexos de todos os
apresentados aqui, e uma aplicao simplista das regras usadas nos casos restantes mostrar-
se-a insuficiente porque aparentemente faltaria um termo de translao. Na verdade, uma
escolha mais criteriosa de dois parmetros permitiria obviar esse problema. Na referidas
figuras ilustra-se a trao mais grosso (e de cor diferente) essas medidas a ter de levar em
conta: bastaria repensar, por exemplo, os parmetros e . Note-se que em algumas
situaes, como o caso da Figura 4.11, a definio da matriz de transformao simples
(translaes e rotaes simples e bem definidas), e prescindiria de todo este processo de o
recurso aos parmetros cinemticos.
4.2.4 OS PARMETROS CINEMTICOS VARIVEIS
Obviamente que os parmetros cinemticos no so sempre todos constantes, seno a
transformao geomtrica seria constante, e portanto o manipulador imvel. Dos quatro
parmetros indicados dois esto associados componente mvel (juntas): so as variveis
de junta. Se uma junta for rotacional, a varivel de junta o ngulo de junta . Se a junta
for prismtica, a varivel de junta o deslocamento da junta, ou distancia entre elos . A
tabela seguinte resume os conceitos mais importantes sobre os parmetros cinemticos.
Parmetro Smbolo Junta Rotacional
Junta Prismtica
Definio Formal
ngulo da junta Varivel Fixo
Deslocamento da junta
Fixo
Varivel
Comprimento do elo
Fixo Fixo
ngulo de toro Fixo Fixo
Tabela 2: Resumo dos parmetros cinemticos
Para efeitos de uma abordagem genrica, diz se que o vector variveis de junta designado
por q e dado pela seguinte expresso:
4.2.5 TRANSFORMAO ASSOCIADA A UM ELO
Depois do exposto imediato concluir que o elo i associado sua junta i realiza uma
transformao geomtrica, dando origem ao referencial i+1, que pode ser decomposta nas
quatro operaes elementares:
Rotao em torno do eixo da junta ;
-
Robtica Industrial
54 Licenciatura em Engenharia Electrotcnica e Computadores
Translao longitudinal ao longo do eixo do elo (xi) do seu prprio comprimento
;
Translao "transversal ao longo do eixo da junta (zi) do afastamento entre juntas
;
Rotao do eixo da junta (zi) em torno do eixo longitudinal (xi) do elo.
Repare-se que estas transformaes elementares surgem concatenadas em sequncia, e por
esta ordem, se bem que as translaes possam comutar entre si, o que significa globalmente
obter-se uma transformao final por ps-multiplicao sucessiva, resultando na matriz
.
.
(4-1)
Os elos de um manipulador so numerados a partir da base e o primeiro elo (mvel) o elo
nmero 1 que se segue primeira junta, ou junta nmero 1. A base fixa designada o elo 0.
Sistema de coordenadas O (zero) ser aquele a partir do qual se faz toda a transformao
geomtrica do manipulador. H frequentemente mais do que uma possibilidade de o fazer.
conforme o interesse do problema. A Figura 4.13 ilustra duas possibilidades alternativas (a
segunda a tracejado/ para definir o sistema de coordenadas inicial (zero) de um manipulador
do tipo PUMA com 6 graus de liberdade: 6 juntas, 6 elos (mveis mais uma base ou elo 0).
Deve referir-se que haveria ainda vrias outras possibilidades de escolher os sistemas de
eixos.
-
Robtica Industrial
Licenciatura em Engenharia Electrotcnica e Computadores 55
Figura 4-13 Elos e juntas de um manipulador do tipo PUMA. Assinala-se a tracejado uma alternativa para o sistema de referncia
4.3 ATRIBUIO DOS SISTEMAS DE COORDENADAS
4.3.1 EXEMPLOS BSICOS DE SISTEMAS DE COORDENADAS
Apresentam-se agora dois exemplos de atribuio de sistemas de coordenadas e a
determinao de parmetros cinemticos de coordenadas em dois manipuladores simples.
Antes de mais defina-se que a posio zero de um manipulador (Zero ou Home Position)
aquela em que as variveis de junta esto nos seus valores O. Ou seja. as juntas rotacionais
esto alinhadas com a referncia e as juntas prismticas esto recolhidas.
Figura 4-14 Atribuio do sistema de coordenadas a um rob planar de duas juntas
O manipulador planar de duas juntas o mais simples dos manipuladores interessantes, e a
atribuio de sistemas de coordenadas relativamente bvia; bastar atender ao eixo das
duas juntas. e o resto sai naturalmente. Outras configuraes seriam possveis mas sem
vantagens adicionais. Podemos agora determinar as suas expresses de cinemtica directa
usando a relao (4-1) e fazendo as simplificaes de escrita C1 = C1 e S1 = S1.
Multiplicando as duas matrizes de transformao:
Elo 1 L1 0 0 1
2 L2 0 0 2
-
Robtica Industrial
56 Licenciatura em Engenharia Electrotcnica e Computadores
Fazendo C12 = C1C2-S1S2 e S12=C1S2+C2S1, fica
Analisando esta matriz podemos desde logo individuar as coordenadas (x,y,z) do terminador
do manipulador. Dada a simplicidade do manipulador, era possivel obter estas mesmas
coordenadas por anlise geomtrica directa como se demonstra na Fig. 4-15. Porm, a
matriz de transformao alm de ser genrica, possui mais informao. Por exemplo, dela se
extrai tambm que a orientao do sistema de coordenadas da mo (xH,yH) aponta nas
novas direces dadas pelos vectores [C12 S12]T e [-S12 C12]T respectivamente. Mais uma
vez claro que estas orientaes tambm se deduziriam pela anlise geomtrica, mas no
de forma to directa.
Figura 4-15 Coordenadas para um rob planar de duas juntas
Elo 1 0 L1 +90 1
2 L2 0 0 2
-
Robtica Industrial
Licenciatura em Engenharia Electrotcnica e Computadores 57
Figura 4-16 Atribuio do sistema de coordenadas a um rob ortogonal de duas juntas
O manipulador 2 juntas no espao 3D, embora simples, j exigiu mais alguma ateno na
atribuio dos sistemas de coordenadas. Vejamos, por exemplo, o caso do referencial da
base. Se xo no tivesse a direco indicada e apontasse ao invs na direco simtrica de y0
(indicado), e dada a direco apresentada par x1, a ngulo de junta 1 (que se mede de x0
para x1 em torno de z0) teria de ter um termo constante que seria neste caso +90! ou seja
(1+90)!. S assim se garantiria uma expresso correcta do referencial da mo em relao
ao referencial de origem(x0, y0, z0). Repare-se tambm que neste manipulador j h
distncia entre elos, di = Li.
As expresses para obter a cinemtica directa so as seguintes:
Multiplicando as duas matrizes de transformao obtm-se:
Como esperado, os resultados so um pouco mais complexos, mas mesmo assim verificveis
por uma anlise geomtrica. Por exemplo, observa-se que a coordenada z dada pela soma
L2S2+L1. Se 2 for maior que zero e menor que 90, ou seja, quando a junta 2 levanta, o
elo que lhe sucede, v-se que coordenada z da posio de repouso L1 (como indicado na
-
Robtica Industrial
58 Licenciatura em Engenharia Electrotcnica e Computadores
Fig. 4-16), adicionado um termo proporcional ao comprimento do segundo elo afectado do
seno do ngulo da sua orientao.
4.3.2 ALGORITMO DE DENAVIT-HARTENBERG
Nos exemplos anteriores, a atribuio dos sistemas de coordenadas foi muito emprica,
tendo-se usado o eixo da junta e procurado que os diversos eixos x sassem sempre
colineares para facilitar a definio do ngulo de junta, conforme definio j referida na
seco 4.2.2., obter as expresses da cinemtica directa a partir dos parmetros tabelados
foi feito sem dificuldades de maior. No entanto, se os manipuladores se complicarem o
procedimento complica-se e dever-se- recorrer a uma metodologia mais sistemtica. O
algoritmo de Denavit-Hartenberg (algoritmo D-H) prope essa metodologia muito bem
estruturada para, no algoritmo da cinemtica directa, obter os sistemas de coordenadas e as
transformaes associadas a cada elo de um manipulador. Para ser aplicado, as juntas tm
de estar numeradas por ordem crescente, comeando pela base do manipulaclor. Pode ser
dividido em 4 etapas fundamentais que se subdividem em vrios passos elementares
repetidos parcialmente em ciclos, consoante o nmero de elos do manipulador. Na Tabela 3,
que descreve o algoritmo. admite- se que o manipulador tem n juntas e para ele se definiro
n+1 sistemas de coordenadas, sendo o ltimo o associado mo ou garra.
1 Estabelecer o sistema de coordenadas (x0, y0, z0) na base de suporte, com z0 ao longo do eixo da junta 1. Convencionar x0 e y0 de forma conveniente.
2
For i=1 to n-1
2.1 Definir eixo da junta i e alinhar zi com eixo da junta i+1
2.2 Definir Oi (origem do sistema de coordenadas) de um dos seguintes modos:
2.3 Interseco de zi com zi-1 Interseco da normal comum entre zi e zi-1 com zi
2.4 Definir xi=(zi-1zi), ou ao longo da normal comum a zi-1 e zi quando so paralelos
2.5 Definir yi=zi xi
Next i
3 Estabelecer o sistema de cooedenadas da mo On (o ltimo). Normalmente, a junta n rotacional:
Zn colinear com zn-1 e apontar para fora Xn normal a Zn e Zn-1
Yn de acordo com o sistema direto usual
4
Determinar parmteros de elos e juntas For i=1 to n-1
4.1 ; a varivel da junta se a junta for prismtica
4.2
4.3 ; a varivel da junta se a junta for rotacional
4.4
Next i
Tabela 3: Algoritmo de Denavit-Hartenberg
-
Robtica Industrial
Licenciatura em Engenharia Electrotcnica e Computadores 59
4.3.3 MANIPULADOR 5 DOF (MICROBOT ALPHA II)
Aplicando o algoritmo de Denavit-Hartenberg possivel chegar soluo ilustrada na Figura
4-17 para os sistemas de coordenadas de um manipulador do tipo Microbot Alpha II.
Figura 4-17 Atribuio do sistema de coordenadas a um rob 5 DOF
As origens O3 e O4 coincidem, pois que O4 dado pela interseco de z4 com z3. Note-se
tambm que o rob no est na posio zero e, por isso, a junta 4 tem na definio da sua
varivel o termo correctivo de +90. ou seja, nesta posio inicial, na qual os ngulos de
junta assumem o valor zero, o eixo X4 j est "adiantado" 90 em relao a X3.
Na sequncia do algoritmo da cinemtica directa basta obter as matrizes de transformao
associadas a cada elo e ps-multiplic-las em sequncia. Para a primeira matriz vem:
Para as matrizes seguintes tambm imediato chegar s expresses das matrizes de
transformao para cada elo.
-
Robtica Industrial
60 Licenciatura em Engenharia Electrotcnica e Computadores
A expresso final da transformao geomtrica do referencial da base para o referencial da
mo obtm-se pela seguinte multiplicao:
Repartindo o produto em dois termos (
).
obtm-se:
Para efeitos de verificao admitamos. par exemplo, que todas as juntas tern valor 0, ou seja
a representao ilustrada na Figura 4.17. Assim. par substituio directa na expresso
anterior teramos:
-
Robtica Industrial
Licenciatura em Engenharia Electrotcnica e Computadores 61
Desta expresso sai que a origem da sistema de coordenadas da mo est em (LB+LC+LD, 0,
LA), que aponta na direco de z0, y4 aponta na direco simtrica de y0, e z4 aponta na
direco de x0, o que se confirma observando a Figura 4.17.
4.3.4 MANIPULADOR SCARA (4 DOF)
Um manipulador muito usado na prtica o SCARA de 4 graus de liberdade, de que se ilustra
uma representao na Figura 4.18. As 4 juntas foram numeradas obedecendo sua ordem
de aparecimento a partir da base. Podem surgir dvidas, na junta 3, se, na verdade, a ordem
a representada. Esta representao assume que a junta rotacional do punho est aps a
junta prismtica, e que de facto o caso mais comum. Porm, tambm se poderia ter o caso
que a junta ratacional estivesse 'antes" da prismtica, implicando um sistema mecnico
diverso que realmente suportasse a junta linear "sobre" um elo que poderia rodar em torno
de si prprio. Nesse caso a ordem das juntas seria a inversa da indicada e tambm os
parmetros cinemticos seriam outros, mas o resultado final seria o mesmo.
Figura 4-18 Atribuio do sistema de coordenadas e parmetros D-H de um rob um SCARA de 4 DOF
Note-se que na representao o manipulador no est na posio zero. Em especial
notrio a junta prismtica que, para melhor visualizao, est estendida apresentando, por
isso, um valor de junta no nulo.
A metodologia seguida similar do manipulador anterior e, assim, a determinao das
matrizes de transformao tambm muito sistemtica. Vir portanto:
-
Robtica Industrial
62 Licenciatura em Engenharia Electrotcnica e Computadores
4.4 NGULOS FINAIS DE ORIENTAO EM FUNO DAS VARIVEIS DA JUNTA
Para completar o algoritmo da cinemtica directa delineado anteriormente falta ainda
determinar os ngulos de orientao final do sistema de coordenadas na mo, ou, caso se
preferir, os ngulos de Euler. Como visto num capitulo 2, existem diversos tipos de ngulos
de Euler sendo dois deles mais comuns e dos quais se escolhe o caso RPY para ilustrar esta
parte final do algoritmo. Note-se todavia que o procedimento seria estritamente o mesmo
para qualquer outro tipo de ngulos de orientao (Euler) porque nos baseamos afinal na
matriz de transformao associada. O problema que est aqui em causa o de determinar
os ngulos de Euler a partir dos elementos da matriz de transformao do manipulador.
4.4.1 COMPARAO DA MATRIZ RPY COM A MATRIZ DE TRANFORMAO FINAL
A expresso genrica de transformao global no espao a 6 dimenses usando ngulos RPY
dada por:
=
A matriz de transformao do manipulador resulta do produto das transformaes
intermdias dos N elos e pode ser expressa do seguinte modo:
Se o vector p tem um significado de imediato entendimento (coordenadas da origem do
sistema da mo medidas no sistema de origem), o mesmo no se aplica aos trs vectores
-
Robtica Industrial
Licenciatura em Engenharia Electrotcnica e Computadores 63
individualizados na expresso anterior, , que esto