SEM0104 - Aula 2 Graus de Liberdade em Cadeias Cinemáticas · trajetórias paralelas (curvas ou...
48
SEM0104 - Aula 2 Graus de Liberdade em Cadeias Cinemáticas Prof. Dr. Marcelo Becker SEM - EESC - USP
Transcript of SEM0104 - Aula 2 Graus de Liberdade em Cadeias Cinemáticas · trajetórias paralelas (curvas ou...

SEM0104 - Aula 2
Graus de Liberdade em
Cadeias Cinemáticas
Prof. Dr. Marcelo Becker SEM - EESC - USP
• Introdução
• Graus de Liberdade
• Cadeias Cinemáticas
• Exercícios Recomendados
• Bibliografia Recomendada
Sumário da Aula
EESC-USP © M. Becker 2012 2/48

Introdução
• O que são mecanismos?
• O que são Máquinas?
EESC-USP © M. Becker 2012 3/48

• Introdução
• Graus de Liberdade
• Cadeias Cinemáticas
• Exercícios Recomendados
• Bibliografia Recomendada
Sumário da Aula
EESC-USP © M. Becker 2012 4/48

Graus de Liberdade
• GDL ou DOF (Degree Of Freedom)
• O que significa Grau de Liberdade?
Definição: é o número de parâmetros
independentes que são necessários para
se definir a posição de um corpo no
espaço em qualquer instante.
EESC-USP © M. Becker 2012 5/48

Graus de Liberdade
• No Plano: 3 GDL
x
y
P
O
EESC-USP © M. Becker 2012 6/48
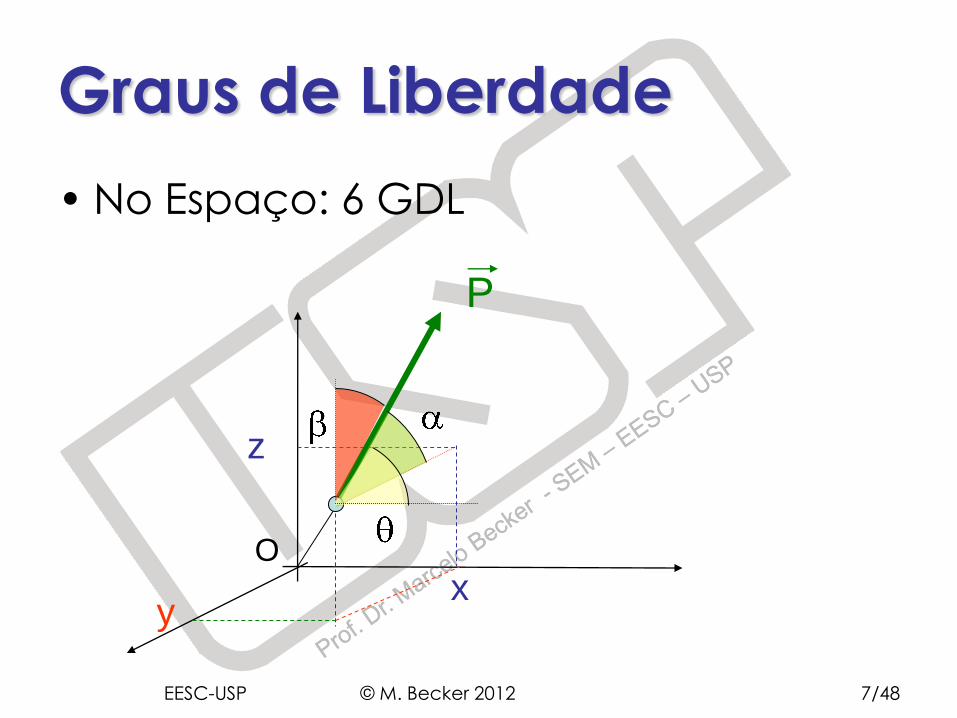
Graus de Liberdade
• No Espaço: 6 GDL
x y
z
P
O
EESC-USP © M. Becker 2012 7/48

Graus de Liberdade
• Corpo Rígido
Definição: Corpo que não sofre deformações
em nenhuma de suas direções
EESC-USP © M. Becker 2012 8/48

Graus de Liberdade
• Link
Definição: Corpo que une 2 juntas
EESC-USP © M. Becker 2012 9/48
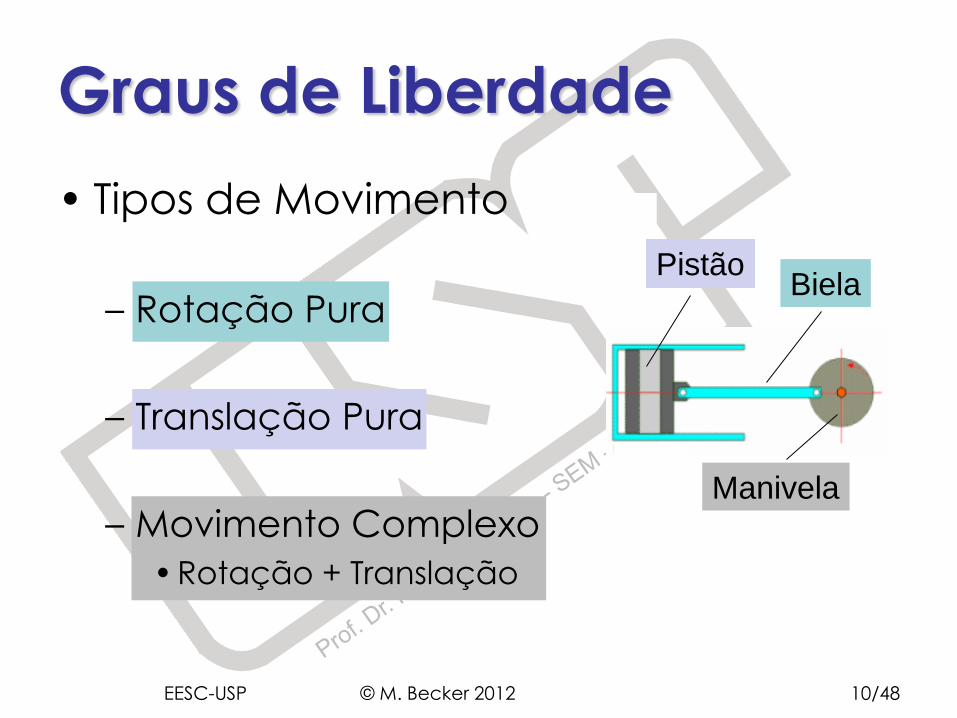
Graus de Liberdade
• Tipos de Movimento
– Rotação Pura
– Translação Pura
– Movimento Complexo
• Rotação + Translação
Manivela
Pistão Biela
EESC-USP © M. Becker 2012 10/48

Graus de Liberdade
• Rotação Pura
– Todos os pontos do corpo descrevem
trajetórias circulares
x O
EESC-USP © M. Becker 2012 11/48

Graus de Liberdade
• Translação Pura
– Todos os pontos do corpo descrevem
trajetórias paralelas (curvas ou retas)
P1 P2 P1 P2
Posição Inicial Posição Final
EESC-USP © M. Becker 2012 12/48

Graus de Liberdade
• Movimento Complexo
– Pode ser descrito como a combinação
de rotação e translação
Início Fim Rotação Translação
P1
P1
P1 P1
P1
P2
P2 P2
P2 P2
P2
EESC-USP © M. Becker 2012 13/48
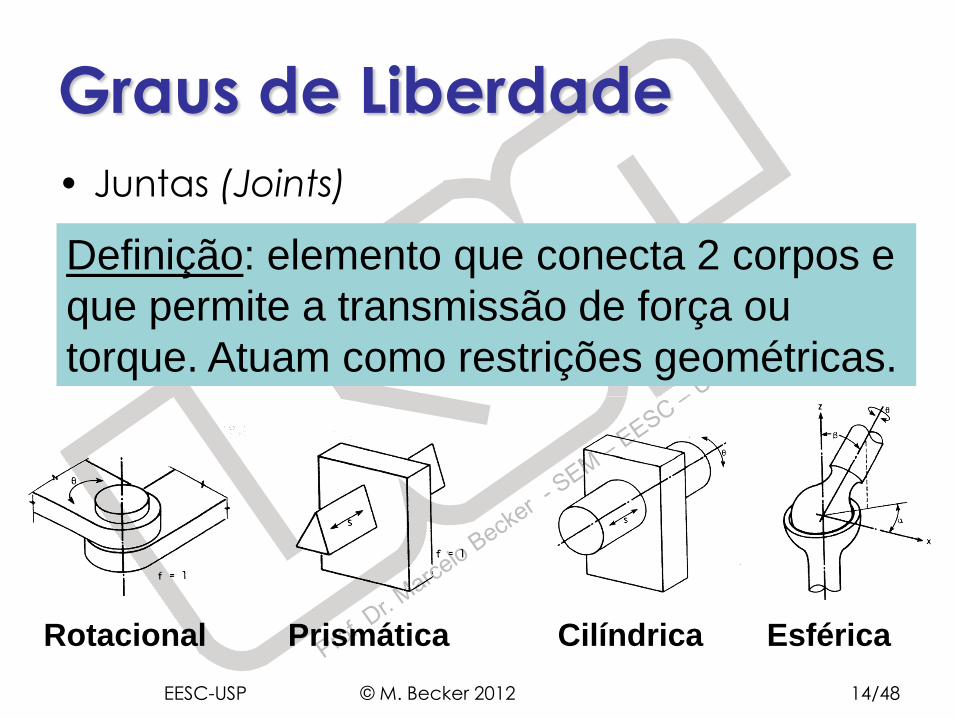
Graus de Liberdade
• Juntas (Joints)
Definição: elemento que conecta 2 corpos e
que permite a transmissão de força ou
torque. Atuam como restrições geométricas.
Rotacional Prismática Cilíndrica Esférica
EESC-USP © M. Becker 2012 14/48

Tipo Símbolo Esquema GDL
Helicoidal H 1
Rotação R 1
Prismática P 1 s
Cilíndrica C 2 s
s
s
Juntas versus DOF
s
s
s
EESC-USP © M. Becker 2012 15/48

Tipo Símbolo Esquema GDL
Universal T 2
Plana E 3 s1 s2
Esférica S 3
Juntas versus DOF
s1
s1
s2
2
1
EESC-USP © M. Becker 2012 16/48

Juntas versus DOF
Tipo Símbolo Esquema GDL
Contato Co 1
Rotação
SEM
Escorrega-
mento
Engrenagem Eng 2 Rotação com
Escorrega-
mento
Came -
Seguidor CS 2
Translação
com
Escorrega-
mento EESC-USP © M. Becker 2012 17/48

Graus de Liberdade Mecanismos Planares
• Critério de Kutzbach
N = 3.(B-1) – 2.nJ1 – nJ2
• Onde:
N: Número de GDLs
B: Número de Total de Corpos (incluindo o solo)
nJ1: Número de Juntas com 1 GDL
nJ2: Número de Juntas com 2 GDLs
EESC-USP © M. Becker 2012 18/48

Graus de Liberdade Mecanismos Planares
• Critério de Kutzbach
N = 3.(B-1) – 2.nJ1 – nJ2
• Se:
N = 0 : Sistema Estático
N > 0 : Sistema com “N” graus de liberdade
N < 0 : Sistema Hiperestático
EESC-USP © M. Becker 2012 19/48

Graus de Liberdade Mecanismos Planares - Exemplos
• Pêndulo Simples
B = 2 nJ1 = 1 nJ2 = 0
N = 3.(2-1) – 2.(1) – (0) = 1 GDL
• Pêndulo Duplo
B = 3 nJ1 = 2 nJ2 = 0
N = 3.(3-1) – 2.(2) – (0) = 2 GDL
EESC-USP © M. Becker 2012 20/48

Graus de Liberdade Mecanismos Planares – Pêndulo Simples
• Quais são os GDLs?
x
y
L
1 GDL
EESC-USP © M. Becker 2012 21/48

Graus de Liberdade Mecanismos Planares – Pêndulo Simples
• Equações de Posição:
L
1 GDL
P = L.e i
P
P = L.(sin i + cos j)
O
EESC-USP © M. Becker 2012 22/48

Graus de Liberdade Mecanismos Planares – Pêndulo Duplo
• Quais são os GDLs?
x1
y2
2 GDL
x2
y1
L1
L2
EESC-USP © M. Becker 2012 23/48

Graus de Liberdade Mecanismos Planares – Pêndulo Duplo
• Equações de Posição:
L1
2 GDL
L2
P = L1.e i 1 L2.e i 2
P = L1.(sin 1 i + cos 1 j) +
L2.(sin 2 i + cos 2 j)
P
O
EESC-USP © M. Becker 2012 24/48

Graus de Liberdade Mecanismos Planares – Observações
(1) Contagem do solo
(2) Existem exceções ao Critério de Kutzbach
O1 O2 O3 O1 O2 O3
O1
O2
O3
EESC-USP © M. Becker 2012 25/48

Graus de Liberdade Mecanismos Planares – Observações
(3) Molas
(4) Sistemas Hidráulicos e Pneumáticos
O1
O2
O3
EESC-USP © M. Becker 2012 26/48
• Introdução
• Graus de Liberdade
• Cadeias Cinemáticas
• Exercícios Recomendados
• Bibliografia Recomendada
Sumário da Aula
EESC-USP © M. Becker 2012 27/48

Cadeias Cinemáticas Topologias
• Cadeias Abertas
– A trajetória entre 2 corpos é única
– Excluindo o solo, o número de corpos é igual ao número de juntas
EESC-USP © M. Becker 2012 28/48

Cadeias Cinemáticas Topologias
• Cadeias Fechadas
– Loops
nL = nJ – nB
• Onde:
nL: Número de Loops
nJ: Número de Juntas
nB: Número de Corpos (excluindo o solo)
EESC-USP © M. Becker 2012 29/48

Cadeias Cinemáticas Topologias
• Cadeias Fechadas - Exemplos
nL = nJ – nB
EESC-USP © M. Becker 2012 30/48

Cadeias Cinemáticas Topologias
• Cadeias Parcialmente Fechadas
EESC-USP © M. Becker 2012 31/48
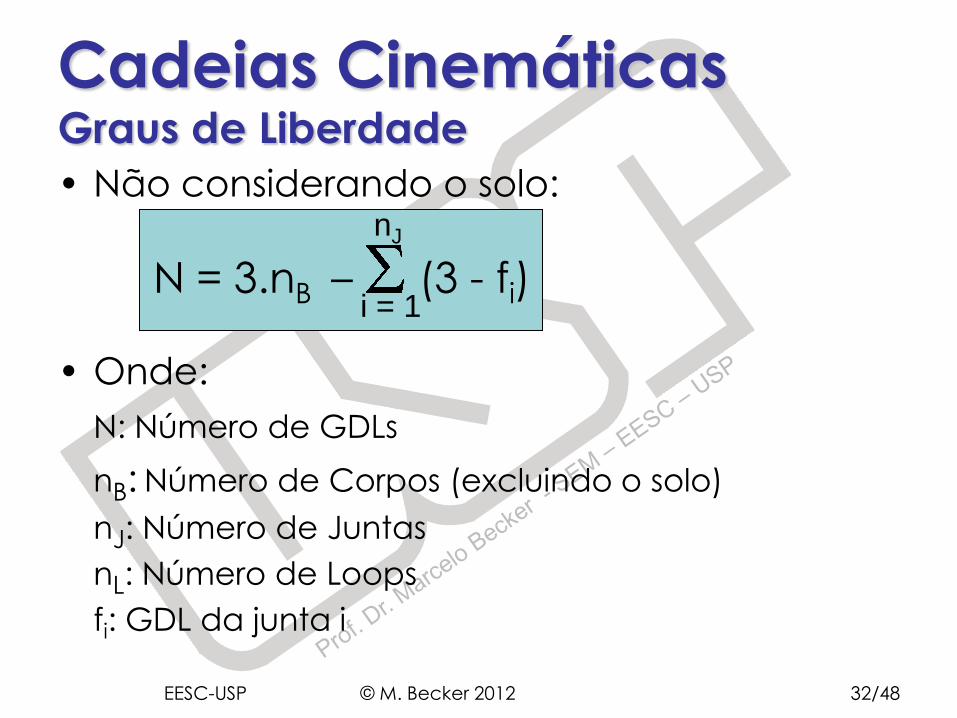
Cadeias Cinemáticas Graus de Liberdade
• Não considerando o solo:
N = 3.nB – (3 - fi)
• Onde:
N: Número de GDLs
nB: Número de Corpos (excluindo o solo)
nJ: Número de Juntas
nL: Número de Loops
fi: GDL da junta i
nJ
i = 1
EESC-USP © M. Becker 2012 32/48

Graus de Liberdade Mecanismos Planares – Exemplos
O1
O2
O3
O1
O2
EESC-USP © M. Becker 2012 33/48

Graus de Liberdade Mecanismos Planares – Exemplos
EESC-USP © M. Becker 2012 34/48

Graus de Liberdade Mecanismos Planares – Exemplos
O1 O3
EESC-USP © M. Becker 2012 35/48

Graus de Liberdade Mecanismos Planares – Exemplos
O1
O2
O3
EESC-USP © M. Becker 2012 36/48

Graus de Liberdade Mecanismos Planares – Exemplos
EESC-USP © M. Becker 2012 37/48

Graus de Liberdade Pergunta da Aula Passada
Quantos GDLs possui uma mão?
EESC-USP © M. Becker 2012 38/48

Tipo Símbolo Esquema GDL
Helicoidal H 1
Rotação R 1
Prismática P 1 s
Cilíndrica C 2 s
s
s
Juntas versus DOF
s
s
s
EESC-USP © M. Becker 2012 39/48

Tipo Símbolo Esquema GDL
Universal T 2
Plana E 3 s1 s2
Esférica S 3
Juntas versus DOF
s1
s1
s2
2
1
EESC-USP © M. Becker 2012 40/48

Graus de Liberdade Pergunta da Aula Passada
Junta Universal
Junta Rotacional
x
22 DOFs
x
x x x x x
EESC-USP © M. Becker 2012 41/48

Próxima Aula
• Mecanismos Simples
• Mecanismos Complexos
• Pergunta:
E o conjunto
braço, ante-braço
e mão, quantos
GDLs possui?
EESC-USP © M. Becker 2012 42/48
• Introdução
• Graus de Liberdade
• Cadeias Cinemáticas
• Exercícios Recomendados
• Bibliografia Recomendada
Sumário da Aula
EESC-USP © M. Becker 2012 43/48

Graus de Liberdade Mecanismos Planares – Exercícios
EESC-USP © M. Becker 2012 44/48

Graus de Liberdade Mecanismos Planares – Exercícios
EESC-USP © M. Becker 2012 45/48

Graus de Liberdade Mecanismos Planares – Exercícios
EESC-USP © M. Becker 2012 46/48

• Introdução
• Graus de Liberdade
• Cadeias Cinemáticas
• Exercícios Recomendados
• Bibliografia Recomendada
Sumário da Aula
EESC-USP © M. Becker 2012 47/48

Bibliografia Recomendada
EESC-USP © M. Becker 2012 48/48
• Shigley, JE. e Uicker, JJ., 1995, “Theory of Machines
and Mechanisms”.
• MABIE, H.H., OCVIRK, F.W. “Mecanismos e dinâmica
das máquinas”.
• MARTIN, G.H. “Cinematics and dynamics of
machines”.
• NORTON, R. “Machinery dynamics”.
• Notas de Aula