SENSORES BASEADOS EM REDES DE BRAGG EM FIBRAS...
109
UNIVERSIDADE TECNOLÓGICA FEDERAL DO PARANÁ PROGRAMA DE PÓS-GRADUAÇÃO EM ENGENHARIA ELÉTRICA E INFORMÁTICA INDUSTRIAL PAULA FERNANDES DO NASCIMENTO SENSORES BASEADOS EM REDES DE BRAGG EM FIBRAS ÓTICAS PARA ANÁLISE DE MOVIMENTOS MANDIBULARES E FORÇAS DE MORDIDA DISSERTAÇÃO CURITIBA 2018
Transcript of SENSORES BASEADOS EM REDES DE BRAGG EM FIBRAS...

UNIVERSIDADE TECNOLÓGICA FEDERAL DO PARANÁ PROGRAMA DE PÓS-GRADUAÇÃO EM ENGENHARIA ELÉTRICA E
INFORMÁTICA INDUSTRIAL
PAULA FERNANDES DO NASCIMENTO
SENSORES BASEADOS EM REDES DE BRAGG EM FIBRAS ÓTICAS PARA ANÁLISE DE MOVIMENTOS MANDIBULARES E
FORÇAS DE MORDIDA
DISSERTAÇÃO
CURITIBA
2018

PAULA FERNANDES DO NASCIMENTO
SENSORES BASEADOS EM REDES DE BRAGG EM FIBRAS ÓTICAS PARA ANÁLISE DE MOVIMENTOS MANDIBULARES E
FORÇAS DE MORDIDA
Dissertação apresentada ao Programa de Pós-Graduação em Engenharia Elétrica e Informática Industrial da Universidade Tecnológica Federal do Paraná, como requisito parcial para a obtenção do grau de “Mestre em Ciências” – Área de Concentração: Fotônica em Engenharia.
Orientador: Profª. Drª. Ilda Abe Coorientador: Profª. Drª. Ana Paula Gebert de Oliveira Franco
CURITIBA 2018
Dados Internacionais de Catalogação na Publicação
N244s Nascimento, Paula Fernandes do 2018 Sensores baseados em redes de Bragg em fibras óticas para análise de movimentos mandibulares e forças de mordida / Paula Fernandes do Nascimento.-- 2018. 104 f.: il.; 30 cm. Disponível também via World Wide Web. Texto em português com resumo em inglês. Dissertação (Mestrado) - Universidade Tecnológica Federal do Paraná. Programa de Pós-graduação em Engenharia Elétrica e Informática Industrial. Área de Concentração: Fotônica em Engenharia, Curitiba, 2018. Bibliografia: f. 98-104. 1. Redes de Bragg. 2. Detectores de fibra óptica. 3. Mandíbula - Movimentos. 4. Articulação temporomandibular. 5. Oclusão (Odontologia). 6. Biomecânica. 7. Métodos de simulação. 8. Fotônica. 9. Engenharia elétrica - Dissertações. I. Abe, Ilda, orient. II. Franco, Ana Paula Gebert de Oliveira, coorient. III. Universidade Tecnológica Federal do Paraná. Programa de Pós-Graduação em Engenharia Elétrica e Informática Industrial. IV. Título. CDD: Ed. 22 -- 621.3
Biblioteca Central do Câmpus Curitiba – UTFPR Bibliotecária: Luiza Aquemi Matsumoto CRB-9/794

Ministério da Educação Universidade Tecnológica Federal do Paraná Diretoria de Pesquisa e Pós-Graduação
TERMO DE APROVAÇÃO DE DISSERTAÇÃO Nº 782
A Dissertação de Mestrado intitulada “Sensores baseados em Redes de Bragg em fibras óticas para análise de movimentos mandibulares e forças de mordida” defendida em sessão pública pelo(a) candidato(a) Paula Fernandes do Nascimento, no dia 09 de fevereiro de 2018, foi julgada para a obtenção do título de Mestre em Ciências, área de concentração Fotônica em Engenharia, e aprovada em sua forma final, pelo Programa de Pós-Graduação em Engenharia Elétrica e Informática Industrial.
BANCA EXAMINADORA:
Prof(a). Dr(a). Ilda Abe - Presidente – (UTFPR)
Prof(a). Dr(a). Meire Cristina Fugihara - (UTFPR)
Prof(a). Dr(a). Elisa Souza Camargo - (PUC-PR)
A via original deste documento encontra-se arquivada na Secretaria do Programa, contendo a
assinatura da Coordenação após a entrega da versão corrigida do trabalho.
Curitiba, 09 de fevereiro de 2018.

AGRADECIMENTOS
Primeiramente agradeço a Deus pela força e sustento, sem os quais nada disto
teria sido possível.
Agradeço à minha família, em especial minha mãe Aldaci, minha irmã Gabriela
e minha prima Thamires pelo amor, amizade, compreensão e apoio aos estudos.
Aos meus amigos de São Paulo que me ajudaram em alguma etapa desta
trajetória, desde minha mudança para Curitiba até a minha defesa, em especial à
Tatiane e ao Henrique, que me acompanham durante todo o processo.
À Aliança Bíblica Universitária do Brasil (ABU), em especial à ABU Curitiba pelo
acolhimento na cidade e apoio espiritual.
Ao Jhonny pelo amor e compreensão nos momentos mais difíceis ao longo
deste trabalho.
À minha orientadora Prof. Drª Ilda Abe pelo direcionamento da pesquisa, por
compartilhar conhecimentos e ter me orientado com muita paciência e generosidade.
À minha coorientadora Prof. Drª Ana Paula Gebert de Oliveira Franco pela
orientação em laboratório, pelo compartilhamento de conhecimentos da odontologia e
por todo o apoio oferecido ao longo do mestrado.
Aos membros da banca, pela disposição e tempo para examinarem este
trabalho.
E, por fim, a todos que de alguma forma contribuíram para a realização deste
trabalho.

“Penso noventa e nove vezes e
nada descubro; deixo de pensar,
mergulho em profundo silêncio e eis
que a verdade se me revela.”
(Albert Einstein)

RESUMO
NASCIMENTO, Paula Fernandes do. SENSORES BASEADOS EM REDES DE BRAGG EM FIBRAS ÓTICAS PARA ANÁLISE DE MOVIMENTOS MANDIBULARES E FORÇAS DE MORDIDA. 2018. 108 f. Dissertação (Mestrado em Ciências) -Programa de Pós-Graduação em Engenharia Elétrica e informática Industrial, Universidade Tecnológica Federal do Paraná. Curitiba, 2018. Neste trabalho é relatado o desenvolvimento de um método para caracterização de movimentos mandibulares e forças de mordida baseados em redes de Bragg em fibras óticas. As redes são inseridas em dispositivos interoclusais, normalmente utilizados para alívio de sintomas causados por hábitos parafuncionais, como bruxismo do sono, e/ ou alterações oclusais. Os sensores são posicionados nos primeiros molares maxilares na região dos pontos de contato com os dentes antagonistas. Os experimentos foram realizados in vivo por um paciente com bruxismo do sono e os sensores foram utilizados para medir movimentos mandibulares. A caracterização de distribuição de forças nos dispositivos é realizado usando diferentes movimentos induzidos pelo voluntário. São investigados dois dispositivos interoclusais diferentes, sendo um resiliente e outro rígido, através dos resultados obtidos com os sensores. Análise de fadiga muscular é realizada no paciente usando um dispositivo interoclusal resiliente. Forças máximas de mordida são utilizadas para induzir rápida exaustão para a análise de fadiga. Além disso, os sensores também são usados para monitorar a distribuição da força no voluntário com bruxismo que utiliza um dispositivo interoclusal resiliente durante o sono. Os resultados indicam que o método proposto é uma potente ferramenta para a caracterização de dispositivo interoclusais e para a investigação de problemas parafuncionais como fadiga e bruxismo. Palavras chave: Redes de Bragg, sensores a fibra ótica, movimentos mandibulares.

ABSTRACT
NASCIMENTO, Paula Fernandes do. SENSORS BASED ON BRAGG GRATINGS IN OPTICAL FIBERS FOR ANALYSIS OF MANDIBULAR MOVEMENTS AND BITE FORCES. 2018. 108 f. Dissertação (Mestrado em Ciências) -Programa de Pós-Graduação em Engenharia Elétrica e Informática Industrial, Universidade Tecnológica Federal do Paraná. Curitiba, 2018. In this work we report the development of a method to characterize mandibular movements and bite force based on Bragg Gratings in optical fibers. The gratings are inserted in to the occlusal splints, usually used to treatment of muscle pain resulting from parafunctional habit and or occlusal alterations. The sensors are positioned in the maxillary first molars regions above the points of contact with opposing teeth. The experiments are realized in vivo by patients with occlusal parafunction and the sensors are used to measure different jaw movements. The characterizations of the force distribution in the splints are realized by using different movements induced by the volunteer. Two different occlusal splints are investigated, resilient and rigid splints, through the obtained results with the sensors. The analysis of muscle fatigue is performed with a patient that wears a resilient occlusal splint. Maximum bite forces are used to induce rapid exhaustion for the analysis of fatigue. In addition, sensors are also used to monitor the force distribution in a volunteer with bruxism that wear a resilient occlusal splint during sleep. The results indicate that the proposed method is a powerful tool for the characterization of occlusal splints and for the investigation of parafunctional problems like fatigue and bruxism. Keywords: Bragg Gratings, optical fiber sensors, mandibular movements.

LISTA DE ILUSTRAÇÕES
Figura 1 - Ilustração da FBG fixada no tórax do voluntário com uma cinta
elástica (KALINOWSKI, ABE, et al., 2010). 23
Figura 2 - Diagrama do dispositivo interoclusal com os sensores FBG
embutidos (TJIN, TAN, et al., 2001). 23
Figura 3 - (a) FBG inserida numa agulha hipodérmica. (b) Sensor FBG e
extensômetro elétrico inseridos no disco invertebral de ex vivo humano (DENNISON,
WILD, et al., 2008). 24
Figura 4 - Sensores FBG e extensômetros elétricos utilizados por Fresvig em
um tubo de acrílico para comparação dos dois sensores ao simular medição de
deformação em ossos (FRESVIG, LUDVIGSEN, et al., 2008). 25
Figura 5 - (a) Montagem do experimento; (b) esquemático da localização do
sensor FBG entre o braquete do aparelho ortodôntico e o dente (MILCZEWSKI,
SILVA, et al., 2006). 27
Figura 6 - (a)Montagem do modelo de maxila utilizado no experimento, (b)
esquemático da distribuição espacial das redes de Bragg nos dentes e na maxila, (c)
foto do modelo de maxila com o aparelho ortodôntico, (d) vista oclusal dos dentes com
o aparelho fixo e dispositivo intra-oral conectado nos primeiros molares
(MILCZEWSKI, SILVA, et al., 2012). 28
Figura 7 – Dispositivo interoclusal sendo utilizado pela voluntária, com detalhe
para as fibras óticas (MARIN, MILCZEWSKI, et al., 2014). 28
Figura 8 - (a) voluntário do sexo masculino com sensor FBG envolto em silicone
posicionado no primeiro molar superior direito (b) modelo de gesso do voluntário com
o sensor inserido no primeiro molar superior direito em posição de máxima
intercuspidação. 29
Figura 9 - Representação esquemática de uma rede de Bragg gravada no
núcleo de uma fibra ótica. 32
Figura 10 - Espectros de emissão da potência incidente (canto superior à esq.),
de transmissão (à dir.) e de reflexão da radiação (canto inferior à esq.), característicos
de uma rede de Bragg. 35
Figura 11 – Desenho esquemático de gravação de uma rede de Bragg por
máscara de fase. 38

Figura 12 - Esquema da direção de deslocamento do comprimento de onda de
Bragg quando o material sofre uma deformação longitudinal de estiramento. 41
Figura 13 - Esquema da direção de deslocamento do comprimento de onda de
Bragg quando o material sofre uma deformação longitudinal de compressão. 41
Figura 14 - Diagrama da direção longitudinal z da fibra no espaço, e uma força
transversal aplicada. 42
Figura 15 - Gráfico ilustrativo das bandas desdobradas devido à aplicação de
uma força transversal. 43
Figura 16 - Diagrama de leitura de uma rede de Bragg utilizando fonte ótica,
circulador ótico e analisador de espectros óticos. 43
Figura 17 - Diagrama de utilização de um acoplador ótico para leitura de duas
FBGs simultaneamente no interrogador. 44
Figura 18 – Desenho esquemático de gravação da rede de Bragg por máscara
de fase. A figura mostra os itens utilizados na montagem da bancada para a gravação.
45
Figura 19 - Fotos da bancada de gravação das redes de Bragg por máscara de
fase. A vista lateral é indicada na figura (a) e a vista superior é mostrada na figura (b).
46
Figura 20 - Equipamentos utilizados durante os ensaios in vitro e in vivo e no
processo de gravação das redes: (a) analisador de espectros, (b) circulador e fonte
ótica, e (c) interrogador. 47
Figura 21 – (a) Arcada dentária superior com indicação dos pontos de contato
nos primeiros molares do paciente e (b) respectivo modelo de gesso. 48
Figura 22 - Localização dos ângulos (a) inclinação condilar de 30° e (b) Ângulo
de Bennett. 49
Figura 23 - Foto do modelo de gesso da arcada inferior (à esquerda); dispositivo
interoclusal resiliente com a FBG posicionada no lado esquerdo do modelo de gesso
da arcada superior (à direita). 50
Figura 24 - Foto de dois dispositivos interoclusais resilientes com a localização
das FBGs indicada. 50
Figura 25 - Foto do modelo de gesso da arcada inferior (à esquerda); dispositivo
interoclusal rígido com a FBG posicionada no lado esquerdo do modelo de gesso da
arcada superior (à direita). 51

Figura 26 - Foto dos dispositivos interoclusais com indicação da rede
posicionada no lado esquerdo de cada uma delas, correspondente ao lado esquerdo
da arcada dentária superior (a) dispositivo interoclusal resiliente (b) dispositivo
interoclusal rígido. 52
Figura 27 – Desenho esquemático de: (a) Vista superior do modelo de gesso
da arcada superior, com os incisivos para cima, mostrando as duas fibras óticas. (b)
Vista lateral dos modelos de gesso superior e inferior, e a montagem experimental na
alavanca para os experimentos in vitro. 53
Figura 28 - Foto dos dispositivos interoclusais (a) rígido e (b) resiliente e
sensores FBG posicionados no lado esquerdo dos modelos de gesso. 53
Figura 29 - Esquema ilustrando as forças aplicadas no ponto de contato dental
e, consequentemente, medidas pela FBG. A figura ilustra a distribuição dessas forças
devido à inclinação do plano oclusal. 54
Figura 30 – Vista superior dos pontos de aplicação das cargas: (a) centralizada,
(b) descentralizada à direita e (c) descentralizada à esquerda cargas durante o
experimento in vitro. A figura (d) indica a posição considerada para a arcada dentária
para os três casos. 54
Figura 31 - Diagrama da montagem experimental para a aquisição simultânea
de dois sensores com aplicação de carga centralizada, utilizando um acoplador e o
interrogador SM 125. 55
Figura 32 - Paciente utilizando dispositivo interoclusal com os sensores a fibra
ótica. 56
Figura 33 - Dispositivo interoclusal na posição de oclusão e localização da FBG
do lado esquerdo para o dispositivo resiliente. 56
Figura 34 – Dispositivo interoclusal na posição oclusal e localização da FBG do
lado esquerdo para o dispositivo rígido. 57
Figura 35 – (a) Fotografia da montagem experimental para o ensaio de
bruxismo do sono. (b) Detalhe do paciente utilizando o dispositivo interoclusal
resiliente, com as fibras óticas demarcadas na extremidade do dispositivo e o
interrogador utilizado para a aquisição dos dados. 61
Figura 36 – Variação do espectro de reflexão em função da carga aplicada para
o dispositivo rígido com o sensor localizado do lado esquerdo. Carga descentralizada.
63
Figura 37 - Variação do espectro de reflexão em função da carga aplicada para
o dispositivo resiliente com o sensor localizado do lado esquerdo. Carga
descentralizada. 63
Figura 38 - Variação do comprimento de onda central da FBG como função do
peso aplicado no primeiro molar esquerdo para o dispositivo interoclusal rígida. Carga
descentralizada. Os símbolos representam os dados experimentais, e a linha
tracejada é o ajuste linear. 64
Figura 39 – Variação do comprimento de onda central da FBG como função do
peso aplicado no primeiro molar esquerdo para o dispositivo interoclusal resiliente.
Carga descentralizada. Os símbolos representam os dados experimentais, e a linha
tracejada é o ajuste linear. 64
Figura 40 - Variação do comprimento de onda central da FBG como função do
aumento do peso aplicado no primeiro molar esquerdo para os dispositivos
interoclusais rígido e resiliente. Carga centralizada. Os símbolos representam os
dados experimentais, e a linha tracejada é o ajuste linear. 65
Figura 41 - Variação do comprimento de onda central da FBG como função da
diminuição do peso aplicado no primeiro molar esquerdo para os dispositivos
interoclusais rígido e resiliente. Carga centralizada. Os símbolos representam os
dados experimentais, e a linha tracejada é o ajuste linear. 66
Figura 42 - Comprimento de onda central da FBG em função aumento das
forças aplicadas no primeiro molar esquerdo para o dispositivo interoclusal resiliente.
Cargas centralizadas. Os símbolos representam os dados experimentais e a linha
tracejada mostra o melhor ajuste linear. 67
Figura 43 - Comprimento de onda central da FBG em função do aumento das
forças aplicadas no primeiro molar direito para o dispositivo interoclusal resiliente.
Cargas centralizadas. Os símbolos representam os dados experimentais e a linha
tracejada mostra o melhor ajuste linear. 67
Figura 44 – Estabilidade térmica do sensor com o dispositivo interoclusal
resiliente inserido na boca do paciente. Sensor do lado esquerdo. Símbolos são dados
experimentais. 69
Figura 45 - Estabilidade térmica do sensor com o dispositivo interoclusal rígido
inserido na boca do paciente. Sensor do lado esquerdo. Símbolos são dados
experimentais. 69

Figura 46 – Força de mordida e movimentos em função do tempo para o sensor
localizado no lado esquerdo do dispositivo resiliente. 72
Figura 47 – Padrão de força para movimento mordida para o dispositivo
resiliente com o sensor localizado do lado esquerdo. 72
Figura 48 – Detalhe do padrão de força para movimento mordida para o
dispositivo resiliente com o sensor localizado do lado esquerdo. 73
Figura 49 - Padrão de força para movimentos laterais direito e esquerdo para o
dispositivo resiliente com o sensor localizado do lado esquerdo. 73
Figura 50 – Detalhe do padrão de força para movimentos laterais direito e
esquerdo para o dispositivo resiliente com o sensor localizado do lado esquerdo. 74
Figura 51 - Padrão de força para movimento anteroposterior para o dispositivo
resiliente com o sensor localizado do lado esquerdo. 74
Figura 52 – Detalhe do padrão de força para movimento anteroposterior para o
dispositivo resiliente com o sensor localizado do lado esquerdo. 75
Figura 53 - Força de mordida e movimentos em função do tempo para o sensor
localizado no lado esquerdo do dispositivo rígido. 75
Figura 54 - Padrão de força para movimento mordida para o dispositivo rígido
com o sensor localizado do lado esquerdo. 76
Figura 55 – Detalhe do padrão de força para movimento mordida para o
dispositivo rígido com o sensor localizado do lado esquerdo. 76
Figura 56 - Padrão de força para movimentos laterais direito e esquerdo para o
dispositivo rígido com o sensor localizado do lado esquerdo. 77
Figura 57 – Detalhe do padrão de força para movimentos laterais direito e
esquerdo para o dispositivo rígido com o sensor localizado do lado esquerdo. 77
Figura 58 – Padrão de força para movimento anteroposterior para o dispositivo
rígido com o sensor localizado do lado esquerdo. 78
Figura 59 – Detalhe do padrão de força para movimento anteroposterior para o
dispositivo rígido com o sensor localizado do lado esquerdo. 78
Figura 60 – Padrão de força de mordida para o sensor do lado esquerdo do
dispositivo interoclusal resiliente. Tempo de mordida de 15 segundos e tempo de
relaxamento de 60 segundos. 80

Figura 61 - Padrão de força de mordida para o sensor do lado esquerdo do
dispositivo interoclusal rígido. Tempo de mordida de 15 segundos e tempo de
relaxamento de 60 segundos. 80
Figura 62 - Padrão de força de mordida para o sensor do lado esquerdo do
dispositivo interoclusal resiliente. Tempo de mordida de 20 segundos e tempo de
relaxamento de 5 segundos. 81
Figura 63 - Padrão de força de mordida para o sensor do lado esquerdo do
dispositivo interoclusal resiliente. Tempo de mordida de 20 segundos e tempo de
relaxamento de 5 segundos. 81
Figura 64 - Padrão de força de mordida para o sensor do lado esquerdo do
dispositivo interoclusal resiliente 1. Tempo de mordida de 30 segundos e tempo de
relaxamento de 30 segundos. 82
Figura 65 - Padrão de força de mordida para o sensor do lado esquerdo do
dispositivo interoclusal resiliente 2. Tempo de mordida de 30 segundos e tempo de
relaxamento de 30 segundos. 83
Figura 66 – Avaliação in vivo: forças para o sensor do primeiro molar superior
esquerdo do voluntário, em diferentes estágios. 84
Figura 67 - Avaliação in vivo: forças para o sensor do primeiro molar superior
direito do voluntário, em diferentes estágios. 84
Figura 68 - Padrão de força de mordida para o sensor do lado esquerdo do
dispositivo interoclusal resiliente. Tempo de mordida de 15 segundos e tempo de
relaxamento de 180 segundos. 85
Figura 69 - Padrão de força de mordida para o sensor do lado esquerdo do
dispositivo interoclusal resiliente. Tempo de mordida de 15 segundos e tempo de
relaxamento de 60 segundos. 85
Figura 70 - Padrão de força de mordida para o sensor do lado esquerdo do
dispositivo interoclusal resiliente. Tempo de mordida de 20 segundos e tempo de
relaxamento de 5 segundos. 86
Figura 71 - Padrão de força de mordida para o sensor do lado esquerdo do
dispositivo interoclusal resiliente. Tempo de mordida de 20 segundos e tempo de
relaxamento de 5 segundos. 87

Figura 72 - Fases de indução da fadiga: maior tempo de mordida máxima (fase
1), processo de exaustão (fase 2) e processo de fadiga (fase 3). Os símbolos são os
dados experimentais, as linhas são apenas guia para os olhos. 88
Figura 73 - Detalhamento dos dois picos de mordida para a segunda e terceira
fase da indução à fadiga, mostrando o aumento da força de mordida juntamente com
o tempo. Os símbolos são os dados experimentais, as linhas são apenas guia para os
olhos, a linha tracejada é o melhor ajuste. 89
Figura 74 – Padrão de força em função do tempo para o primeiro ciclo de sono.
Dispositivo resiliente com o sensor localizado do lado direito. 91
Figura 75 - Padrão de força em função do tempo para o primeiro ciclo de sono.
Dispositivo resiliente com o sensor localizado do lado esquerdo. 91
Figura 76 - Padrão de força em função do tempo para o segundo ciclo de sono.
Dispositivo resiliente com o sensor localizado do lado direito. 92
Figura 77 - Padrão de força em função do tempo para o segundo ciclo de sono.
Dispositivo resiliente com o sensor localizado do lado esquerdo. 92

LISTA DE TABELAS
Tabela 1 - Valores dos coeficientes de sensibilidade utilizados para os
experimentos in vivo. ................................................................................................. 68

LISTA DE SIGLAS
ASE Amplified Spontaneous Emission (Emissão Espontânea
Amplificada)
ATM Articulação Temporomandibular
DTM Desordem Temporomandibular
FBG Fiber Bragg Grating (Rede de Bragg)
IR Infrared (Infravermelho)
OSA Optical Spectrum Analizer (Analisador de Espectro Ótico)
UV Ultraviolet (Ultravioleta)

LISTA DE SÍMBOLOS
a Raio da Fibra Ótica
Constante de Propagação no eixo z
Período de Modulação da Rede de Bragg
PM Período de Modulação da Máscara de Fase
k Número de Onda
no Índice de Refração da Casca
n1 Índice de Refração do Núcleo
neff Índice de Refração Efetivo
Índice de Refração Normalizado
n Amplitude da Modulação do Índice de Refração
TEMP(t) Variação do Comprimento de Onda em Função da
Temperatura
0 Comprimento de Onda no Vácuo
B Comprimento de Onda de Bragg

SUMÁRIO
1. INTRODUÇÃO ................................................................................................... 16
1.1 ESTADO DA ARTE ...................................................................................... 17
1.1.1. Movimentos Mandibulares e Forças de Mordida .......................................... 17 1.1.2. Sensores a Fibra Ótica Baseados em Redes de Bragg na Biomecânica ..... 22 1.2 OBJETIVOS ................................................................................................. 30
1.2.1 Objetivo Geral .............................................................................................. 30 1.2.2 Objetivos Específicos ................................................................................... 30 1.3 ESTRUTURA DA DISSERTAÇÃO ............................................................... 30
2. FUNDAMENTAÇÃO TEÓRICA ......................................................................... 32
2.1. REDE DE BRAGG ........................................................................................ 32
2.1.1. Princípios das Redes de Bragg .................................................................... 33 2.1.2. Sistema de Gravação ................................................................................... 36 2.2. SENSORES BASEADOS EM REDES DE BRAGG...................................... 38
2.2.1. Tensão Longitudinal e Temperatura ............................................................. 38 2.2.2. Tensão Transversal ...................................................................................... 42 2.3. CARACTERIZAÇÃO DAS REDES DE BRAGG ........................................... 43
3. METODOLOGIA ................................................................................................ 45
3.1 REDES DE BRAGG ..................................................................................... 45
3.2 DISPOSITIVOS INTEROCLUSAIS ............................................................... 48
3.3 ENSAIO IN VITRO ........................................................................................ 52
3.4 ENSAIO IN VIVO .......................................................................................... 55
3.4.1. Estabilidade Térmica e Deformação dos Dispositivos Interoclusais ............. 57 3.4.2. Força de Mordida e Movimentos .................................................................. 57 3.4.3. Ensaio de Repetição – Dispositivo Resiliente ............................................... 58 3.4.4. Ensaio de Mordida – Dispositivo Resiliente .................................................. 59 3.4.5. Ensaio de Fadiga .......................................................................................... 59 3.4.6. Ensaio de Bruxismo ...................................................................................... 60 4. RESULTADOS E DISCUSSÕES ....................................................................... 62
4.1 ENSAIO ESTÁTICO ..................................................................................... 62
4.1.1. Forças Descentralizadas .............................................................................. 62 4.1.2. Forças Centralizadas .................................................................................... 65 4.1.3. Dispositivo Interoclusal Resiliente ................................................................ 66 4.2 ENSAIO IN VIVO .......................................................................................... 68
4.2.1. Estabilidade Térmica e Deformação dos Dispositivos Interoclusais ............. 68 4.2.2. Força de Mordida e Movimentos .................................................................. 70 4.2.3. Ensaio de Repetição – Dispositivo Resiliente ............................................... 81 4.2.4. Ensaio de Mordida – Dispositivo Resiliente .................................................. 83 4.2.5. Ensaios de Fadiga ........................................................................................ 84 4.2.6. Ensaio de Bruxismo ...................................................................................... 89 5. CONCLUSÕES E TRABALHOS FUTUROS ..................................................... 93

5.1 CONCLUSÕES............................................................................................. 93
5.2 TRABALHOS FUTUROS .............................................................................. 96
5.3 PUBLICAÇÕES E SUBMISSÕES ................................................................ 97
5.3.1. Artigos publicados em conferência ............................................................... 97 5.3.2. Artigos submetidos ....................................................................................... 97 REFERÊNCIAS ......................................................................................................... 98

16
1. INTRODUÇÃO
As fibras óticas são amplamente conhecidas pelas aplicações envolvendo
telecomunicações. Desde meados da década de 1970, quando foram aprimoradas
as técnicas utilizadas, diminuindo as perdas por transmissão de informações, o uso
de fibras óticas foi cada vez mais disseminado.
A fotossensibilidade foi apresentada pela primeira vez por Hill em 1978, ao
lançar luz com comprimento de onda de 488 nm em uma fibra de sílica dopada com
germânio e perceber que isto causava um aumento na atenuação da luz e na luz
refletida. A partir disto, em 1989, Meltz demonstrou um primeiro método de escrita
de redes em fibras óticas (OTHONOS e KALLI, 1999). Estas descobertas
proporcionaram o surgimento das redes de Bragg (FBG, do inglês, Fiber Bragg
Gratings) e suas diversas aplicações, que são sensores intrínsecos que podem ser
gravados no núcleo de fibras óticas.
Em relação ao uso das FBGs como sensores, observa-se uma crescente
busca de aplicações nas mais diversas áreas do conhecimento devido suas várias
vantagens quando comparadas com as tecnologias convencionais (LEE, 2003) de
sensoriamento resistivo (extensômetros elétricos - strain gauges), piezoeléctrico ou
do estado sólido. As FBGs têm pequenas dimensões e baixo peso - uma FBG típica
tem um comprimento de 3 mm e o diâmetro da fibra monomodo é de 125 µm sem
revestimento. A FBG pode ser multiplexada, permitindo medições quasi-
distribuídas. Algumas características tornam as FBGs particularmente atraentes
para aplicações in vivo. A fibra ótica é um dispositivo não-elétrico e não-condutor,
e são imunes ao ruído eletromagnético.
Além das vantagens citadas acima, as FBGs têm grande potencial para
aplicações biomecânicas e biomédicas (KALINOWSKI, ABE, et al., 2010), pois a
sensibilidade à temperatura e pressão destes sensores é compatível com as da
fisiologia humana. As FBGs são flexíveis e podem se adaptar a contornos
complexos, além de serem menos invasivas. As fibras são feitas de vidro de silicato,
que é um material biocompatível. Além disso, as FBGs podem ser incorporadas em
materiais poliméricos ou compósitos para serem utilizadas em instrumentos que
necessitam de esterilização. Sensores de fibra ótica também apresentam pequeno
risco de infecção. As FBGs são resistentes a ambientes corrosivos e também são
resistentes à água e aos produtos químicos relacionados às medições in vivo.

17
1.1 ESTADO DA ARTE
1.1.1. Movimentos Mandibulares e Forças de Mordida
A necessidade de medir o processo de mordida humana levanta muitas
questões interessantes em campos como anatomia, fisiologia, nutrição, odontologia
e farmacologia. Portanto, o interesse em estudar o processo de mordida depende
de conhecer as relações entre a magnitude da força e a oclusão correta, a anatomia
e a posição dentária. Além disso, fornece conhecimento para otimização de
próteses dentárias, implantes e dispositivos interoclusais, e para explicar
traumatismos dentários ou bruxismo, podendo ajudar a compreender doenças orais
e disfunções de mastigação (GRABER e VANARSDALL, 1963; KOC, DOGAN e
BEK, 2010; TOMITA, MATSUURA e ICHINOHE, 2013).
A magnitude da força de mordida foi estudada em animais e em seres
humanos empregando diferentes métodos de medições. No século 20 a força de
mordida foi estudada com vários tipos de dispositivos mecânicos. E desde a década
de 1950, tem sido estudada empregando dispositivos eletrônicos (KOC, DOGAN e
BEK, 2010). As dimensões associadas a este tipo de instrumento são superiores a
10 mm na parte intraoral, o que produz interferências na oclusão. Métodos como
eletromiografia, que medem a atividade dos músculos com eletrodos, têm sido
amplamente utilizados até hoje. Mais recentemente, estudos foram realizados
combinando sedação muscular com medicamentos apropriados, a fim de
compreender seus efeitos sobre a força de mordida e como isso pode influenciar o
processo mastigatório. Além disso, há expressivas pesquisas voltadas à indústria
de alimentos, considerando materiais e texturas, a fim de desenvolver novos
alimentos adequados à alimentação humana e animal (MEULENET e
GANDHAPUNENI, 2006).
A força de mordida estimada depende em grande parte do número de
contatos oclusais usados durante os métodos específicos de medição. A oclusão é
a relação que envolve os contatos dos dentes em um sistema complexo de
estruturas integradas, articulação maxilar e sistema neuromuscular. Este sistema é
responsável pela função de mastigação, relacionada à abertura e fechamento da
boca (GRABER e VANARSDALL, 1963). A função mastigatória é estudada em

18
termos de abertura e fechamento da mandíbula (oclusão), atividade da articulação
temporomandibular (ATM), anatomia dentária, posição dentária e contração
muscular (TOMITA, MATSUURA e ICHINOHE, 2013). O estudo das desordens de
oclusão pode ajudar a esclarecer as doenças orais e disfunções da mastigação
(GRABER e VANARSDALL, 1963; KOC, DOGAN e BEK, 2010; TOMITA,
MATSUURA e ICHINOHE, 2013).
O termo “desordens temporomandibulares” (DTM) se refere a alterações
clínicas caracterizadas por sinais e sintomas envolvendo os músculos
mastigatórios e/ou ATM. Conti, et al. (CONTI, FERREIRA, et al., 1996),
observaram, em uma amostra de 310 pessoas com idade média de 18,8 anos, a
existência de DTM leve, moderada e severa em, respectivamente, 49,35%, 10,32%
e 0,97% da amostra testada. Estes autores concluíram que, ainda que o
aparecimento de DTM na população jovem seja relativamente alto, os casos em
que há a necessidade de tratamento (ou seja, DTM moderada ou severa) na
população pesquisada foi 11,29%. Os sintomas de DTM são dor de cabeça, dor
pré-auricular, dor nos músculos mastigatórios, ruídos articulares, limitações na
amplitude de movimento ou desvios mandibulares ao abrir e fechar a boca
(OKESSON, 1996; SHETTY, 2010; LAVIGNE, 1996; LAVIGNE, ROMPRE, et al.,
2001).
A dor orofacial é reportada em 60% dos pacientes que têm bruxismo. O
bruxismo é um distúrbio motor do sono caracterizado pelo aumento da atividade
muscular dos músculos masseter e temporal, causando assim desgastes dentários
devido à atividade repetitiva destes músculos. Esses episódios são observados em
60% da população adulta durante o sono. O apertamento dental ocorre na maioria
dos episódios de bruxismo diurno, enquanto que no bruxismo noturno, tanto o
apertamento como o ranger são observados. A duração do bruxismo varia de
pessoa para pessoa. O tempo de aperto ou ranger dos dentes pode variar de 5 a
38 minutos por noite. Durante a atividade parafuncional, a força pode chegar a ser
três vezes maior que a da atividade funcional (OKESSON, 2008; LAVIGNE,
MANZINI e HUYNH, 2011).
A desordem temporomandibular pode causar fadiga muscular. A fadiga
muscular é caracterizada pela incapacidade dos músculos de gerar altos níveis de
força muscular e/ou de manter os níveis atuais em um intervalo de tempo mais
longo (BARRY e ENOKA, 2007; GREEN, 1997).

19
Os efeitos da fadiga podem ser observados pela diminuição de sua
velocidade de contração muscular e pelo aumento do tempo de relaxamento após
exercícios de máximo alcance (ALLEN, LANNERGREN e WESTERBLAD, 1995).
A fadiga muscular pode ocorrer por falha de qualquer um dos processos
responsáveis pela contração muscular (SILVA, MARTINEZ, et al., 2006). Além
disso, é identificada como um mecanismo de defesa contra efeitos nocivos sobre a
integridade da fibra muscular (WILLIAMS e KLUG, 1995). A fadiga é descrita como
um fator predisponente de dores de cabeça e dor muscular facial apresentada por
pacientes. Farella et al. (FARELLA, SONEDA, et al., 2010) relataram que a dor dos
músculos mastigatórios após o aperto depende do nível de força exercido pelo
paciente.
As formas de tratamento de DTM incluem estratégias comportamentais,
técnica de relaxamento muscular, terapia de reeducação postural global, hipnose,
terapia de reabilitação oclusal, farmacoterapia, cirurgia e terapia oclusal por
dispositivos interoclusais.
Os dispositivos interoclusais são feitos de forma personalizada para cada
paciente. Eles recobrem a superfície dos dentes (alterando a oclusão dos
pacientes) e criam contatos oclusais mais adequados. Os dispositivos interoclusais
mantêm a estabilidade ortopédica, alterando temporariamente a condição oclusal,
reduzindo os sintomas de desordem temporomandibular e atividade parafuncional,
promovendo o relaxamento muscular.
Hiyama et al. (HIYAMA, ONO, et al., 2003), Amorin et al. (AMORIM, PAES,
et al., 2012) e Daif (DAIF, 2012) observaram uma diminuição na atividade elétrica
dos músculos temporais e masseteres em pacientes utilizando dispositivos
interoclusais. Além da diminuição da atividade elétrica muscular, há a redução da
duração destas atividades, o que torna possível concluir que o uso de dispositivos
interoclusais é efetivo no relaxamento dos músculos investigados.
Clinicamente, há três tipos de dispositivos interoclusais: rígido, feito de resina
acrílica; resiliente, feito de silicone; e misto, que é composto por ambos os
materiais. Dispositivos interoclusais rígidos são recomendados por dentistas por
serem duráveis e possuírem facilidade de ajuste ao preservar a estabilidade dos
contatos oclusais (CLARK, 1984). Os dispositivos rígidos protegem os dentes e as
estruturas associadas, já os dispositivos resillientes visam o contato simultâneo e
estável entre os dentes opostos, protegem as estruturas dentárias, mas
20
impossibilita o ajuste adequado, apresentando instabilidade da posição condilar e
aumentando a atividade eletromiográfica noturna, estimulando assim a mastigação
e o bruxismo (CLARK, 1984). Contudo, Pettergnil et al. (PETTENGILL, GROWNEY,
et al., 1998) não encontraram diferenças significativas entre os dispositivos
interoclusais rígido e resiliente no que diz respeito ao alívio da dor.
Narita et al. (NARITA, ISHII, et al., 2009) avaliaram os efeitos de cerrar a
mandíbula com dispositivos rígidas e resilientes em relação a cansaço, força de
mordida e atividade eletroencefalográfica. Os resultados revelaram que apertar os
dentes com dentição natural e dispositivo interoclusal rígido não causou
consciência significativa de cansaço, e não houve alteração significativa dos
valores do espectro eletroencefalográfico nessas condições. Em contrapartida o
aperto dos dentes com dispositivos interoclusal resiliente aumentou a consciência
de cansaço, bem como causou diminuição significativa na força de mordida e nos
valores eletroencefalográficos. Na literatura é possível encontrar estudos
informando que os dispositivos interoclusais alteram a relação crânio-mandibular e
as funções dos músculos mastigatórios reduzindo o envio de informações
proprioceptivas periodontais para o sistema nervoso central (RAMFJORD e ASH,
1971; YUSTIN, NEFF, et al., 1993) e fornece ao paciente um esquema ideal de
oclusão ou livre de interferência dentária (POSSELT, 1968; TIMM e ASH, 1977).
Na área de Odontologia, diversos trabalhos têm sido reportados utilizando
extensômetros elétricos para a obtenção das forças máximas de mordida humana.
Uma grande faixa de forças pode ser encontrada na literatura, de 50 a 800 N (KOC,
DOGAN e BEK, 2010). A grande variabilidade dos resultados para a força de
mordida máxima pode ser associada a vários fatores como idade, sexo, índice de
massa corporal, DTM, força dos músculos, morfologia craniofacial, estado oclusal,
condição periodontal e fatores psicológicos.
O estudo realizado por Fernandes et al. (FERNANDES, GLANTZ, et al.,
2003) reporta o uso de um extensômetro elétrico para determinar a força de
mordida máxima em voluntários do sexo masculino e feminino, e os resultados
relataram valores de 75 N e 100 N, respectivamente.
Mais recentemente, em 2009, Bonakdarchian et al. mostraram resultados de
forças de mordida máxima de adultos com oclusão normal e os efeitos das formas
faciais para tais resultados utilizando extensômetros (BONAKDARCHIAN, ASKARI
e ASKARI, 2009).

21
Marquezin et al. mostraram o uso de extensômetros elétricos para medir as
forças de mordida na dentição das crianças no primário em comparação com
crianças pré-escolares (MARQUEZIN, KOBAYASHI, et al., 2013).
Karakis, Dogan e Bek (KARAKIS, DOGAN e BEK, 2014) estudaram a força
máxima antes e após o uso de dispositivos interoclusais rígidos e resilientes com
transdutores de extensômetros elétricos. Os autores concluíram que o uso de
dispositivos rígidos não apresentam diferenças significativas na força de mordida
máxima e o uso de dispositivos resilientes foi acompanhado por diminuição da força
oclusal em pacientes com bruxismo.
Pizolato et al. (PIZOLATO, GAVIÃO, et al., 2007) compararam as forças de
mordida máxima em pacientes saudáveis e em pacientes com bruxismo e DTM
através da utilização de gnatodinamômetro. Os autores observaram que a força de
mordida máxima foi reduzida em mulheres com DTM e bruxismo (185,79 N), os
homens apresentaram maior força de mordida (653,88 N) do que mulheres em
ambos os grupos, mas o DTM e bruxismo não diminuíram significativamente a força
de mordida dos homens.
Nishigawa, Bando e Nakano (NISHIGAWA, BANDO e NAKANO, 2001)
avaliaram a força de mordida máxima associada ao bruxismo com dispositivos
interoclusais acrílicos rígidos de dentições superiores e inferiores e mediram as
forças de mordida máxima de 10 pacientes com transdutores de extensômetros
elétricos em miniatura. O pico médio da força de mordida de todos os eventos de
bruxismo foi de 220,6 N e a duração deste foi de 7,1 s. A máxima variação entre
um pico de força e um mínimo, em relação aos eventos de bruxismo, foi, em média,
de 796,3 N e a maior duração foi de 41,6 s. A força média de mordida voluntária
máxima foi de 774,7 N e a amplitude média da força de mordida noturna mais
elevada foi de 414,8 N.
Diraçoglu et al. (DIRAÇOGLU, ALPTEKIN, et al., 2011) compararam
indivíduos com e sem bruxismo em termos da força máxima de mordida e do
desgaste dentário por meio de transdutores de extensômetros elétricos. Os
pesquisadores observaram que as pontuações máximas da força de mordida e do
índice de desgaste dos dentes foram significativamente maiores nos pacientes com
bruxismo (105,1 ± 34,2 N) comparados aos sem bruxismo (81,3 ± 31 N).

22
1.1.2. Sensores a Fibra Ótica Baseados em Redes de Bragg na Biomecânica
No caso da utilização dos sensores de fibras óticas, podemos destacar os
dispositivos baseados em intensidade. Komi et al. (KOMI, BELLI, et al., 1996)
utilizam-se da alteração da intensidade luminosa em fibras plásticas multimodo
para medir forças no tendão de Aquiles de um coelho, e apesar de obter bons
resultados na medição, a replicabilidade do método é questionável, pois conectores
são fonte de perda de intensidade da luz. Por causa de problemas desta natureza,
os sensores baseados em espectro são mais estudados, visto que independem da
variação da potência luminosa causada por ruídos. Dentre eles, destaca-se o uso
de redes de Bragg.
O uso de redes de Bragg para fins biomecânicos vêm se mostrado uma boa
alternativa aos sensores habituais devido a suas vantagens e a literatura relata
diversos trabalhos realizados utilizando sensores FBG em biomecânica de animais
e estudos com estrutura óssea. As primeiras medidas com os sensores FBG em
biomecânica, realizadas em tempo real e in vivo, foram demonstradas em 2001 por
Werhle e Tjin (WERHLE, NOHAMA, et al., 2001; TJIN, TAN, et al., 2001).
Werhle et al. (WERHLE, NOHAMA, et al., 2001) relatou o uso de redes de
Bragg para medir a deformação do tórax e demonstrou que os sensores são
eficazes em medir movimentos ventilatórios e frequência de respiração. Para tanto,
a FBG foi fixada no tórax de um voluntário com uma cinta elástica conforme Figura
1, e a respiração foi captada pelo sensor mediante a movimentação da caixa
torácica. Os autores concluíram que este método é eficaz para medir a ventilação
pulmonar de pacientes utilizando aparelhos de respiração artificial, uma vez que as
redes de Bragg não sofrem influência de tensão ou campo magnético.
Tjin et al. (TJIN, TAN, et al., 2001) aplicaram os sensores FBG para avaliar
a pressão e a temperatura da placa dentária em função do tempo para pacientes
com apneia. Numa mesma fibra ótica foram gravadas duas FBGs, sendo que uma
atuou como sensor de temperatura e a outra como sensor de tensão, e a fibra ótica
contendo os sensores foi acoplada ao dispositivo interoclusal. O dispositivo foi
utilizado em oclusão de pacientes para obtenção dos resultados e a Figura 2
apresenta o desenho esquemático da montagem em vistas isométrica, em corte
transversal e vista superior. Os sensores foram calibrados independentes um do
outro e foram obtidas precisões de 0,5 N para o sensor de força e 0,1°C para o

23
sensor de temperatura. Com resultados obtidos no experimento, os autores
concluíram que a medição de força e temperatura são formas eficazes de monitorar
o uso adequado de dispositivos interoclusais por pacientes (TJIN, TAN, et al.,
2001).
Figura 1 - Ilustração da FBG fixada no tórax do voluntário com uma cinta elástica (KALINOWSKI, ABE, et al., 2010).
Figura 2 - Diagrama do dispositivo interoclusal com os sensores FBG embutidos (TJIN, TAN, et al., 2001).
Talaia et al. (TALAIA, RAMOS, et al., 2007) compararam a utilização de
FBGs com o uso de extensômetros para acompanhar o tratamento de fraturas

24
ósseas. Para tanto, simularam uma fratura em osso sintético e acompanharam a
cura com ambos os sensores, concluindo que o uso redes de Bragg é uma
alternativa viável aos extensômetros para obter tensões superficiais de placas
ósseas, além de que as FBGs podem ser utilizadas para determinar deformações
superficiais de tecidos biológicos e de implantes em locais em que o uso de
extensômetros possui limitações.
Dennison et al. (DENNISON, WILD, et al., 2008) mostraram a utilização de
FBGs medições de pressão em disco invertebral lombar humano de ex vivo. A
Figura 3 mostra a montagem do experimento realizado: um cabo de fibra ótica é
inserido numa agulha hipodérmica de 38 mm para introduzir a FBG no núcleo
pulposo, que é onde o sensor se localiza durante as medições. O sensor possui
10 mm de comprimento e está apresentado na Figura 3 (a); a Figura 3 (b) apresenta
a montagem completa para o experimento. Também foram coletados resultados
com a utilização de extensômetro a fim de comparação das respostas de ambos os
sensores. Os resultados apresentados pelo sensor FBG foram satisfatórios, com o
valor da pressão medida variando linearmente com a força aplicada. Os sensores
FBG e extensômetro apresentaram uma diferença de 12,9%, e os autores
concluíram que a diferença se deu porque a pressão sentida pelo sensor não era
puramente hidrostática, e isso afetou a sensibilidade do sensor FBG.
Figura 3 - (a) FBG inserida numa agulha hipodérmica. (b) Sensor FBG e extensômetro elétrico inseridos no disco invertebral de ex vivo humano (DENNISON, WILD, et al., 2008).
Fresvig et al. (FRESVIG, LUDVIGSEN, et al., 2008) demonstraram a eficácia
da aplicação de FBGs para medidas de deformações em ossos. Eles simularam
um osso utilizando tubo de acrílico e inseriram 4 FBGs e 4 extensômetros

25
alternadamente ao redor do tubo e realizaram aplicações de cargas utilizando uma
máquina de testes. O mesmo experimento foi realizado com um osso real e ambos
os sensores apresentaram uma linearidade menor, devido à irregularidade da
superfície óssea. Uma desvantagem dos extensômetros elétricos em relação às
FBGs é que os extensômetros devem ser ligados num esquema de 4 fios, o que
introduz um volume extra na cavidade oral (vide Figura 4, que compara o tamanho
dos sensores de extensômetros elétricos com os de fibra ótica). A detecção de
pontos múltiplos em sensores de extensômetros elétricos (várias posições de
dentes, por exemplo) acaba tornando algo não confortável para o paciente,
comprometendo a função mastigatória.
Figura 4 - Sensores FBG e extensômetros elétricos utilizados por Fresvig em um tubo de acrílico para comparação dos dois sensores ao simular medição de deformação em ossos (FRESVIG, LUDVIGSEN, et al., 2008).
A monitorização da descalcificação de ossos utilizando estes sensores foi
realizada em 2010 (MISHRA, SINGH, et al., 2010). O trabalho descreve os ensaios
de resistência óssea à carga aplicada, antes, durante e depois do processo de
descalcificação.
Ramos et al. (RAMOS, SCHILLER, et al., 2012) estudaram perfis de
deformação e máxima temperatura de polimerização dentro de um manto de
cimento de uma reconstrução de quadril in vitro fazendo uso de redes de Bragg. Os
resultados foram comparados com um modelo matemático e foi obtida boa

26
correlação entre o simulado matematicamente e o realizado in vitro.
Kalinowski et al. (KALINOWSKI, KARAM, et al., 2017) mediram a
deformação mecânica causada por mastigação e ruminações, na superfície óssea
de uma mandíbula bovina com o uso de FBGs. O sensor foi encapsulado e
implantado em um animal, que foi estimulado a mastigar diferentes alimentos, e o
sinal coletado foi aplicado a um algoritmo que auxilia a identificar o tipo de alimento
pelo padrão de mastigação realizado pelo animal.
Martelli et al. (MARTELLI, DA SILVA, et al., 2017) utilizaram sensores FBG
para estudar a andadura de equinos e mostraram que a técnica pode ser utilizada
para detectar problemas de locomoção destes animais e também para avaliação
física de cavalos atletas para competições.
Galvão et al. (GALVÃO, ZAMARREÑO, et al., 2017) utilizaram FBGs para
mapear, em diferentes posições, a deformação de uma prótese transtibial (abaixo
do joelho) composta de polímero reforçado com fibra de carbono e os resultados
mostraram a deformação da estrutura da prótese em diversos pontos e em tempo
real, o que pode ser útil para a detecção de falhas no material, registro de sessões
de treinamentos, ou o estudo das forças de impacto com o solo durante avaliações
periódicas.
Milczewski et al. (MILCZEWSKI, SILVA, et al., 2006) avaliaram as forças em
vários dentes em função da carga aplicada. Para tanto, uma arcada dentária de
metal com aparelho ortodôntico foi fixada em um braquete, e a FBG foi colocada
entre o braquete do aparelho e o dente, conforme Figura 5 e o experimento foi
realizado cinco vezes para obtenção de média. Os resultados obtidos mostraram
que a superfície do dente está sujeita à carga de 0,13 N, demonstrando ser possível
a utilização de FBGs em fibra de alta birrefringência ou fibra polimérica, colocada
entre o braquete e a superfície do dente para investigação de aparelhos
ortodônticos.
Em outro trabalho, Milczewski et al. (MILCZEWSKI, SILVA, et al., 2012)
mostraram o uso dos sensores FBGs em um modelo artificial de maxila, e relataram
a possibilidade de monitorar as forças adjacentes às raízes dentárias e a tensão
que ocorre dentro da maxila. Para tanto, foram coladas FBGs nas coroas dos
dentes incisivo, canino e molar do modelo; e outra FBG de comprimento de onda
diferente mas na mesma fibra foi colada na raiz de cada um dos três dentes. Outro
conjunto de quatro redes multiplexadas foi colocado transversalmente ao longo do

27
eixo das raízes dos dentes. A montagem do modelo com as FBGs, bem como a
identificação da localização das redes estão apresentadas na Figura 6 (a) e (b) e
esta montagem foi submetida à aplicação de forças, de maneira semelhante à
realizada durante o tratamento ortodôntico, para investigação das forças aplicadas
durante este tipo de tratamento, conforme mostra a Figura 6 (c) e (d).
Figura 5 - (a) Montagem do experimento; (b) esquemático da localização do sensor FBG entre o braquete do aparelho ortodôntico e o dente (MILCZEWSKI, SILVA, et al., 2006).
Marin et al. (MARIN, MILCZEWSKI, et al., 2014) relataram o uso de sensores
FBG para medir a magnitude de uma mordida humana na intercuspidação molar,
utilizando-se de um dispositivo interoclusal resiliente, que foi modelado para uso de
uma voluntária, e continha duas fibras óticas contendo uma rede de Bragg cada
uma. O dispositivo interoclusal foi calibrado in vitro com a aplicação de cargas, e
após a calibragem o dispositivo foi oferecido à voluntária para oclusão. A utilização
do dispositivo pela voluntária é apresentada na Figura 7.

28
Figura 6 - (a)Montagem do modelo de maxila utilizado no experimento, (b) esquemático da distribuição espacial das redes de Bragg nos dentes e na maxila, (c) foto do modelo de maxila com o aparelho ortodôntico, (d) vista oclusal dos dentes com o aparelho fixo e dispositivo intra-oral conectado nos primeiros molares (MILCZEWSKI, SILVA, et al., 2012).
Figura 7 – Dispositivo interoclusal sendo utilizado pela voluntária, com detalhe para as fibras óticas (MARIN, MILCZEWSKI, et al., 2014).

29
Abe et al. (ABE, MILCZEWSKI, et al., 2017) estudaram a magnitude da força
de mordida humana em condição de máxima intercuspidação molar com o uso de
FBGs. Para a análise, utilizaram-se de sensor FBG envolto em silicone e
precisamente posicionado no ponto de contato do primeiro molar inferior para os
lados direito e esquerdo de dois voluntários saudáveis, sendo um do sexo
masculino e outro do sexo feminino. Foi realizada a calibragem do sensor in vitro
utilizando-se de modelos de gesso da arcada dentária dos voluntários, e
posteriormente o sensor foi utilizado pelos voluntários em quatro situações: antes
da oclusão, oclusão, mordida e mordida máxima. A Figura 8 (a) apresenta o
voluntário do sexo masculino com o sensor posicionado no primeiro molar inferior
direito, e a Figura 8 (b) apresenta o modelo de gesso em oclusão. As medidas
obtidas para força de mordida máxima foram 85 N para voluntário feminino e 76 N
para voluntário masculino, com a diferença podendo ser associada ao padrão facial.
Como conclusão do trabalho, os autores afirmam que o sensor é capaz de realizar
medições de forças ortodônticas para análise de diferentes padrões faciais.
Figura 8 - (a) voluntário do sexo masculino com sensor FBG envolto em silicone posicionado
no primeiro molar superior direito (b) modelo de gesso do voluntário com o sensor inserido
no primeiro molar superior direito em posição de máxima intercuspidação.

30
1.2 OBJETIVOS
1.2.1 Objetivo Geral
Este trabalho tem como objetivo a instrumentação de dispositivos
interoclusais com redes de Bragg em fibras óticas para avaliação do
comportamento biomecânico dos dispositivos interoclusais de material rígido e
resiliente e avaliar a força dos diferentes movimentos maxilomandibulares.
1.2.2 Objetivos Específicos
A calibração do sensor tem como objetivo apresentar o valor da força
aplicada em função da variação do comprimento de onda central e a utilização do
dispositivo instrumentado em paciente voluntário com bruxismo, além de obter a
máxima sensibilidade do sensor in vitro, e uma simulação do caso real.
Nos ensaios in vivo, tem-se como objetivo garantir que a variação do
comprimento de onda central da rede seja dada pela força aplicada pelo paciente;
a comparação entre o uso de dispositivos interoclusais rígido e resiliente para
estudo das forças aplicadas pelo paciente durante a realização de mordida e
movimentos mandibulares; verificar a repetitividade e replicabilidade do sensor
proposto, determinar os padrões de mordida apresentados por meio do sensor e,
por fim, avaliar a qualidade do sensor para medição da atividade de bruxismo
durante o período de sono.
1.3 ESTRUTURA DA DISSERTAÇÃO
Este trabalho está estruturado em cinco capítulos, de modo a descrever a
fundamentação teórica, a metodologia utilizada, os resultados e por fim, as
conclusões e considerações finais.
O capítulo 1 faz uma introdução ao trabalho, fazendo revisão de literatura
sobre o uso de FBGs na biomecânica, e descrevendo os objetivos desta
dissertação.
No capítulo 2 encontra-se a fundamentação teórica do trabalho,
descrevendo os princípios das redes de Bragg, os fundamentos para o uso das

31
FBGs como sensores de deformação e temperatura, e a caracterização das redes.
O terceiro capítulo apresenta a metodologia utilizada durante os
experimentos in vitro e in vivo, bem como os métodos de caracterização e
interrogação de redes utilizados para obtenção dos dados.
O capítulo 4 apresenta os resultados obtidos para o experimento in vitro e
como estes resultados foram utilizados para análise e discussão dos resultados
obtidos para os estudos in vivo.
No capítulo 5 a conclusão é apresentada, bem como sugestão de trabalhos
futuros e as publicações geradas por esta dissertação.
Por fim, são apresentadas as referências utilizadas ao longo deste trabalho.

32
2. FUNDAMENTAÇÃO TEÓRICA
As redes de Bragg são dispositivos fotorrefrativos produzidos por iluminação
UV ou visível. A FBG consiste em mudanças fotoinduzidas que geram uma modulação
periódica no índice de refração do núcleo da fibra ótica, 1n , ao longo de seu eixo
longitudinal, com período espacial 500 nm.
2.1. REDE DE BRAGG
O valor de n em função da distância longitudinal z é dado pela equação (1). Na
rede, o índice de refração 1n intercala-se com um índice 1n + n com espaçamento
de entre eles.
)2
cos(n(z) 1
znn
(1)
A modulação do índice de refração causa o acoplamento da luz do modo
propagante para o modo contra-propagante, em uma faixa estreita de comprimentos
de onda. O eixo longitudinal z de propagação, bem como os vetores de onda estão
representados na Figura 9.
Figura 9 - Representação esquemática de uma rede de Bragg gravada no núcleo de uma fibra ótica.

33
2.1.1. Princípios das Redes de Bragg
Para determinar o comprimento de onda de uma rede de Bragg deve-se
observar a conservação de energia e a conservação do momento. A energia é
conservada, pois a frequência da radiação incidente e da radiação refletida é a
mesma; e a conservação do momento é dada pela soma do vetor de onda incidente
e o vetor de onda da rede é igual ao vetor de onda da radiação espalhada, conforme
a equação (2), em que o índice i se refere ao vetor de onda incidente e o índice f se
refere ao vetor de onda da radiação espalhada.
KKK if
(2)
Para uma luz com ângulo θ de incidência, a conservação do momento é dada
pela equação (3):
2
)(sen2
)(sen2
mnn
if (3)
A equação (4) define índice de refração efetivo como:
effnn )(sen (4)
Substituindo m = -1 para fibras monomodo e a expressão para effn , a equação
(3) torna-se:
222 ,, iefffeff nn (5)
com os índices f representando final e i representando inicial.
Como feffn , e ieffn , são iguais em magnitude, diferenciando-se apenas na
direção, podemos reescrever a equação (5) da seguinte forma:

34
22
2effn
(6)
Por fim, a partir da equação (6) podemos definir o comprimento de onda de
Bragg pela equação (7):
2 Λ nλ effB (7)
A largura de banda zero a zero FWFZ (Full Width at First Zero) é apresentada
na equação (8) e está relacionada com o perfil da modulação do índice de refração e
com o comprimento L da rede, com o pico do espectro de reflexão centrado
aproximadamente no comprimento de onda de Bragg:
222
)( kL
Lneff
BFWFZ (8)
em que k é o coeficiente de acoplamento entre o modo de propagação de entrada e o
modo refletido acoplado pela estrutura da rede, conforme equação (9):
B
nk
(9)
com n sendo a amplitude do índice de refração causada pela perturbação e é a
parcela de potência contida no núcleo da fibra.
Uma onda incidente com comprimento de onda da ordem de Δλ na rede será
refletida em uma faixa estreita de λ centrada em λB, e a onda transmitida terá espectro
complementar ao espectro de reflexão, conforme o diagrama esquemático
apresentado na Figura 10.

35
Figura 10 - Espectros de emissão da potência incidente (canto superior à esq.), de transmissão (à dir.) e de reflexão da radiação (canto inferior à esq.), característicos de uma rede de Bragg.
A refletividade é a razão entre a luz refletida e a luz incidente, e para a rede de
Bragg, ela é definida pela equação (10),
)(senh2
)(cosh
)(senh)(
2
2
22
22
gLgLg
gLkR B
(10)
em que é o descasamento de fase para um determinado comprimento de onda do
espectro da fonte ótica, e é definido na equação (11),
222
s
effn (11)
e a equação (12) define o parâmetro g como:

36
2
2kg (12)
Como na condição de Bragg há um casamento de fase, = 0 e a refletividade
em função do coeficiente k de acoplamento e do comprimento L pode ser simplificada
para a equação (13):
)(tanh)(2
kLR B (13)
Deste modo, qualquer grandeza física que afete as características da rede ou
as condições dos modos de propagação da luz no interior da fibra causa uma
mudança no comprimento de onda de Bragg para aquela rede. Diversos dispositivos
têm como princípio esta característica, em especial os sensores à fibra ótica.
2.1.2. Sistema de Gravação
A técnica de gravação direta de rede de Bragg sob máscara de fase é um
método de gravação bastante efetivo (OTHONOS e KALLI, 1999) que emprega um
elemento ótico difrativo dielétrico, que é a máscara de fase, para modulação do feixe
UV incidente. As máscaras de fase podem ser produzidas holograficamente ou por
litografia por feixe de elétrons. As máscaras de fase induzidas por holografia não
possuem erros pontuais, presentes no método por feixe de elétrons. No entanto,
padrões complexos podem ser escritos nas máscaras fabricadas por feixe de elétrons
(chirps quadráticos, padrões de Moiré etc.). A máscara de fase tem uma estrutura
unidimensional de relevo de superfície fabricada em uma sílica fundida de alta
qualidade plana transparente ao feixe de escrita UV.
O perfil da máscara é escolhido de modo que quando um feixe UV incide sobre
a máscara de fase o feixe difratado de ordem zero seja suprimido para menos que
uma determinada porcentagem (tipicamente de 5%) da potência transmitida. Além
disto, as ordens difratadas m = +1 e m = -1 são maximizadas, com cada uma

37
contendo cerca de 35% da potência transmitida (OTHONOS e KALLI, 1999). Um
padrão de franja de campo próximo é produzido pela interferência dos feixes de
difração com ordens m = +1 e m = -1. Onde há interferência construtiva, o índice de
refração é aumentado em Δn, período das franjas é metade do período da máscara
de fase, e o período da rede, Λ, é metade do período da máscara de fase, PM ,
conforme apresentado na equação (14),
2)
2(sen2
PM
m
UV
(14)
O padrão de interferência fotograficamente imprime uma modulação do índice
de refração no núcleo de uma fibra óptica fotossensível colocada em contato com ou
próximo dele imediatamente atrás da máscara de fase. Uma lente cilíndrica pode ser
usada para focalizar o padrão de franja ao longo do núcleo da fibra.
A principal vantagem deste método de gravação, e também a razão pela qual
este método foi escolhido para ser utilizado durante este trabalho, é o fato de que para
produzir FBGs de comprimentos de onda diferentes basta trocarmos a máscara de
fase utilizada. Isto faz com que uma mesma montagem de bancada e um mesmo laser
UV sejam úteis para produção de redes em diversos comprimentos de onda, trocando
apenas a máscara utilizada. Além disto, esta simplicidade faz com que este método
de gravação seja um método robusto e estável, pois a fibra é colocada diretamente
atrás da máscara de fase, no campo próximo aos raios UV difrativos, fazendo com
que problemas de estabilidade por vibração mecânica sejam minimizados.
Normalmente, as fontes de radiação UV utilizadas para gravação de FBGs
possuem baixa coerência espacial e temporal. Um laser bastante utilizado em
gravações de redes de Bragg é o excímero KrF (OTHONOS e KALLI, 1999). A baixa
coerência requer que a fibra seja colocada em contato diretamente com a máscara
para induzir a modulação máxima do índice de refração.
Considere agora o núcleo da fibra a uma distância h da máscara de fase. As
ordens m = +1 e m = -1 interferem de modo a formar a rede. Já que a distância entre
a fibra e a máscara é a mesma para ambas as ordens de difração, a coerência
temporal não é crítica para formação de um padrão de franjas de alto contraste. Por

38
outro lado, como a distância h aumenta, a separação d entre os dois feixes de
interferência é incrementada. Neste caso, é exigida uma boa coerência espacial para
a formação de um padrão de franjas de alto contraste. À medida que uma distância h
estende-se para além da coerência espacial do raio incidente UV, o contraste de
interferência da franja tende a se deteriorar. A Figura 11 apresenta o desenho
esquemático de gravação de uma rede de Bragg por máscara de fase, considerando
a referência longitudinal para a fibra.
Figura 11 – Desenho esquemático de gravação de uma rede de Bragg por máscara de fase.
2.2. SENSORES BASEADOS EM REDES DE BRAGG
O comprimento de onda central da luz refletida a partir de uma FBG, a
ressonância da rede de Bragg, depende do índice de refração efetivo do núcleo e da
periodicidade da rede. Deformações na FBG e alterações de temperatura causam
variações longitudinais e/ou transversais, resultando em alterações no índice de
refração efetivo e na periodicidade da rede, gerando um deslocamento no
comprimento de onda de pico da FBG.
2.2.1. Tensão Longitudinal e Temperatura
Um sensor baseado em redes de Bragg em fibras óticas tem como princípio a
monitoração do deslocamento espectral causado por alterações no comprimento de

39
onda de Bragg, chamado ΔλB, devido à ação de uma tensão longitudinal, , e/ou
temperatura, T. A variação do comprimento de onda de Bragg é dada pela equação
(15):
TT
nT
nn
neff
eff
eff
eff
B
22
(15)
A tensão longitudinal é dada pela equação (16):
L
L (16)
onde L é o comprimento do segmento de fibra sujeito à força externa aplicada e L é
a variação do comprimento devido à aplicação da força externa.
Para a aplicação de uma tensão mecânica longitudinal, a tensão longitudinal
provoca uma deformação, que pode ser expressa pela equação (17):
)([
212 121112
2
pppn
neff
effB (17)
que indica a relação entre a variação do comprimento de onda e a sensibilidade à
tensão longitudinal. Os coeficientes fotoelásticos são representados por p11 e p12, e ν
é o coeficiente de Poisson. Para uma fibra de sílica com dopagem de germânio,
p11 = 0,113, p12 = 0,252, ν = 0,16 (KERSEY, DAVIS, et al., 1997).
Para a variação do comprimento de onda causada pela sensibilidade térmica,
a expressão para ΔλB é dada pela equação (18):

40
Tn
Tnn
eff
effB
)/(2 (18)
com sendo o coeficiente de expansão térmica da fibra, e effn
Tn )/( é o coeficiente
termo-ótico. Para uma fibra de sílica dopada com germânio, estes valores são,
respectivamente, = 0,55x10-6°C-1 e effn
Tn )/( = 8,6x10-6°C-1 (OTHONOS e KALLI,
1999).
Em uma rede gravada na faixa de 1550 nm, com índice de refração efetivo no
valor de 1,484, a sensibilidade teórica para a variação do comprimento de onda de
Bragg causada pela tensão é de aproximadamente 1,2 pm/µε. µε (microstrain) é a
unidade de medida de deformação, e cada µε indica uma deformação de 1 µm em
uma fibra de 1 m de comprimento. Para esta mesma fibra, a sensibilidade causada
pela variação de 1°C em temperatura é de, aproximadamente, 13,7 pm/°C
(OTHONOS e KALLI, 1999).
A Figura 12 ilustra o que ocorre quando a rede sofre uma tensão longitudinal
de estiramento. Nesta situação, o período da rede aumenta e, portanto, o
comprimento de onda de Bragg se desloca para maiores comprimentos de onda.
Quando a rede sofre uma tensão longitudinal de compressão, o período da rede
diminui e, portanto, o comprimento de onda de Bragg se desloca para menores
comprimentos de onda, conforme ilustra a Figura 13.

41
Figura 12 - Esquema da direção de deslocamento do comprimento de onda de Bragg quando o material sofre uma deformação longitudinal de estiramento.
Figura 13 - Esquema da direção de deslocamento do comprimento de onda de Bragg quando o material sofre uma deformação longitudinal de compressão.

42
2.2.2. Tensão Transversal
O resultado da aplicação de forças transversais sobre toda a extensão da rede
de Bragg em fibras monomodo padrão é a indução de birrefringência.
A força transversal aplicada provoca uma anisotropia no índice de refração da
fibra devido às diferentes tensões em cada um dos eixos transversais. A
birrefringência local induzida pela força é definida como a diferença entre os índices
de refração dos eixos transversais.
O espectro de reflexão das redes devido às tensões transversais mostram
bandas desdobradas devido aos diferentes índices de refração da fibra gerados pela
carga transversal aplicada. Um esquema da aplicação de força transversal é
apresentado na Figura 14 e o desdobramento de uma segunda banda causado pela
força pode ser visto na Figura 15.
Figura 14 - Diagrama da direção longitudinal z da fibra no espaço, e uma força transversal aplicada.

43
Figura 15 - Gráfico ilustrativo das bandas desdobradas devido à aplicação de uma força transversal.
2.3. CARACTERIZAÇÃO DAS REDES DE BRAGG
Como a gravação de redes é imediata, sua caracterização é feita
simultaneamente, observando-se a rede pelo analisador de espectro ótico (OSA –
Optical Spectrum Analyzer), que apresenta o diagrama de reflexão e o comprimento
de onda de Bragg. Para a caracterização, são necessários também uma fonte ótica
de grande largura espectral (ASE – Amplified Spontaneous Emission) e um circulador
ótico ou acoplador direcional (BARBOSA, RABELO, et al., 2000). A caracterização é
feita observando-se a variação do diagrama de reflexão da fibra.
Figura 16 - Diagrama de leitura de uma rede de Bragg utilizando fonte ótica, circulador ótico e analisador de espectros óticos.
A utilização de um circulador ótico é necessária para que possamos enviar à

44
fibra ótica a luz emitida pela fonte ASE e ao mesmo tempo possamos obter o espectro
que é refletido por esta mesma fibra. A Figura 16 ilustra o funcionamento de um
circulador ótico e sua utilidade na montagem experimental para caracterização de
redes de Bragg. O sinal luminoso é acoplado à porta 1 do circulador. A partir disto,
este sinal é transmitido à porta 2 do equipamento, que está conectada à fibra ótica
contendo a FBG de interesse. A rede refletirá uma determinada componente espectral
do sinal e deixará passar as demais, gerando os espectros de transmissão e reflexão
já apresentados na Figura 10. Esta luz refletida retorna à porta 2 do equipamento,
podendo então, ser desviada para a porta 3, que pode ser conectada ao analisador
de espectros. Neste caso, a caracterização é feita pelo espectro de reflexão
observado no equipamento ASE, este tipo de observação é interessante quando
temos baixa refletividade. Quando a refletividade é mais alta, podemos, como
alternativa, observar o espectro de transmissão da rede e observar o vale obtido para
análise das características da rede de Bragg.
Duas redes ou mais redes de Bragg podem ser demoduladas com o
interrogador através de um acoplador a fibra ótica. Um diagrama do sistema é
mostrado na Figura 16.
Figura 17 - Diagrama de utilização de um acoplador ótico para leitura de duas FBGs simultaneamente no interrogador.
A gravação dos sensores pode ser otimizada para outras aplicações, e para as
aplicações em biomecânica geralmente utiliza-se o método de gravação por máscara
de fase por atender aos requisitos necessários para as análises.

45
3. METODOLOGIA
As redes de Bragg utilizadas como sensores para a área de biomecânica não
necessitam de características especiais, pois os parâmetros medidos estão
diretamente ligados à deformação e temperatura. Com isto, geralmente são utilizadas
redes curtas, fabricadas pelo método de máscara de fase, e estas também foram
utilizadas ao longo deste trabalho.
3.1 REDES DE BRAGG
A FBG foi gravada numa fibra monomodo padrão SSMF utilizando um laser
Excímero KrF (Coherent, Xantos XS 500) com comprimento de onda de emissão de
248 nm, cujo feixe ilumina a fibra através de uma máscara de fase. Durante a gravação
da rede, o laser operou em 5 mJ/pulso, com taxa de repetição de 200 Hz. O
comprimento estimado da rede é 3 mm, obtido a partir da incidência do feixe laser
numa íris antes da máscara de fase. A Figura 18 mostra diagrama esquemático de
gravação da rede, indicando os equipamentos utilizados.
Figura 18 – Desenho esquemático de gravação da rede de Bragg por máscara de fase. A figura
mostra os itens utilizados na montagem da bancada para a gravação.

46
A Figura 19 (a) mostra a vista lateral do sistema de gravação utilizado, com as
indicações do laser, da lente cilíndrica e dos espelhos apresentadas na imagem. A
Figura 19 (b) apresenta a vista superior, com indicação do caminho percorrido pelo
feixe de laser e da fibra ótica.
(a)
(b)
Figura 19 - Fotos da bancada de gravação das redes de Bragg por máscara de fase. A vista
lateral é indicada na figura (a) e a vista superior é mostrada na figura (b).
As aquisições dos espectros óticos foram realizadas durante o processo de

47
gravação das redes utilizando-se de um analisador de espectro ótico (OSA - Optical
Spectrum Analyzer) fabricado pela Yokogawa, modelo AQ6375 (resolução em
comprimento de onda de 0,05 nm), um circulador ótico de três portas fabricado pela
THORLABS, modelo 6015-3-FC e de uma fonte de emissão espontânea amplificada
(ASE - Amplified Spontaneous Emission) fabricada pela Amonics, modelo ALS-10-M.
Estes equipamentos estão apresentados na Figura 20 (a) (OSA) e na Figura 20 (b)
(circulador ótico e ASE).
As análises in vitro foram realizadas utilizando-se de um analisador de
espectros óticos, o mesmo utilizado para a interrogação durante a gravação das
redes.
Durante as análises in vivo, utilizou-se um interrogador (Micron Optics, SM125-
500), com resolução em comprimento de onda de 0,001 nm e taxa de aquisição de 2
Hz, apresentado na Figura 20 (c) para as aquisições dos espectros óticos.
Figura 20 - Equipamentos utilizados durante os ensaios in vitro e in vivo e no processo de
gravação das redes: (a) analisador de espectros, (b) circulador e fonte ótica, e (c) interrogador.

48
3.2 DISPOSITIVOS INTEROCLUSAIS
Um cirurgião dentista especialista em Disfunção temporomandibular e dor
orofacial realizou a moldagem das arcadas dentárias superior e inferior do paciente
com uma moldeira de metal e alginato (Cavex Color Change Fast Set Dustfree,
Cavex). Posteriormente, os moldes foram vazados com gesso pedra especial
(Durone, Dentsply) com auxílio de um vibrador de gesso (Master, Biotron) para
prevenir a formação de bolhas e obtidos os modelos de gesso das arcadas dentarias.
Em seguida foi gravado o registro da arcada facial do paciente. Os contatos oclusais
foram demarcados com tiras de papel carbono (Occlufast, Zhermack) através da
manipulação longa do maxilar do paciente até a posição de máxima intercuspidação.
Na sequência, os modelos de gesso da arcada superior e inferior do paciente foram
cortados em um aparador de gesso. O modelo de gesso da arcada dentária superior
com os pontos de contatos oclusais dos primeiros molares reforçados é apresentado
na Figura 21. Os mesmos modelos de gesso foram utilizados para preparar todos os
dispositivos interoclusais utilizados durante os experimentos.
(a) (b)
Figura 21 – (a) Arcada dentária superior com indicação dos pontos de contato nos primeiros
molares do paciente e (b) respectivo modelo de gesso.
Para a realização do teste in vitro, o modelo de gesso foi fixado na posição de
oclusão utilizando-se um articulador semi-ajustável (4000-S Articulator, Bio-art).
Articulador semi-ajustável é um instrumento utilizado para registrar as relações
maxilomandibulares e reproduz os movimentos da mandíbula. Com este dispositivo é
possível a fixação de modelos de gesso para reproduzirem as arcadas dentárias do
paciente para observação e análise do movimento maxilomandibular sem sua
presença. Para ajuste do articulador foram utilizados valores médios padrão para a
direito esquerdo

49
mandíbula: inclinação condilar horizontal na fossa glenoide de 30° e deslocamento
lateral de Bennett de 15°, no lado de balanceio com o plano sagital durante o
movimento lateral da mandíbula; tais ângulos são utilizados para reproduzir a
condição fisiológica humana na posição de oclusão e suas localizações estão
indicadas na figura Figura 22 (a) e (b), respectivamente.
Figura 22 - Localização dos ângulos (a) inclinação condilar de 30° e (b) Ângulo de Bennett.
Dispositivo resiliente
Após a confecção dos modelos de gesso, o modelo da arcada superior foi
levado para um plastificador a vácuo (Nite White, Nite White). Uma placa de silicone
Whiteness (FGM, Dentscare Ltda) de 1 mm de espessura foi aquecida e pressionada
à vácuo no modelo de gesso. Após 1 minuto, a placa de silicone foi removida do
modelo de gesso e cortada. Em seguida, a FBG foi posicionada no contato oclusal do
primeiro molar e colada com cianoacrilato. Uma segunda placa de silicone (também
com 1 mm de espessura) foi pressionada à vácuo no sensor. A Figura 23 apresenta
uma foto do dispositivo interoclusal pronto e posicionado no modelo de gesso utilizado
para sua confecção. A espessura final do dispositivo resiliente, após plastificação e
prensagem, é cerca de 2 mm. Durante a execução dos experimentos, dispositivos
interoclusais foram confeccionados por este processo, e a Figura 24 apresenta dois
dispositivos resilientes em que foram inseridos duas FBGs, uma em cada contato
oclusal, conforme indicado na Figura 21.

50
Figura 23 - Foto do modelo de gesso da arcada inferior (à esquerda); dispositivo interoclusal
resiliente com a FBG posicionada no lado esquerdo do modelo de gesso da arcada superior (à
direita).
Figura 24 - Foto de dois dispositivos interoclusais resilientes com a localização das FBGs
indicada.
Dispositivo rígido
Para a confecção do dispositivo rígido, os modelos foram montados em um
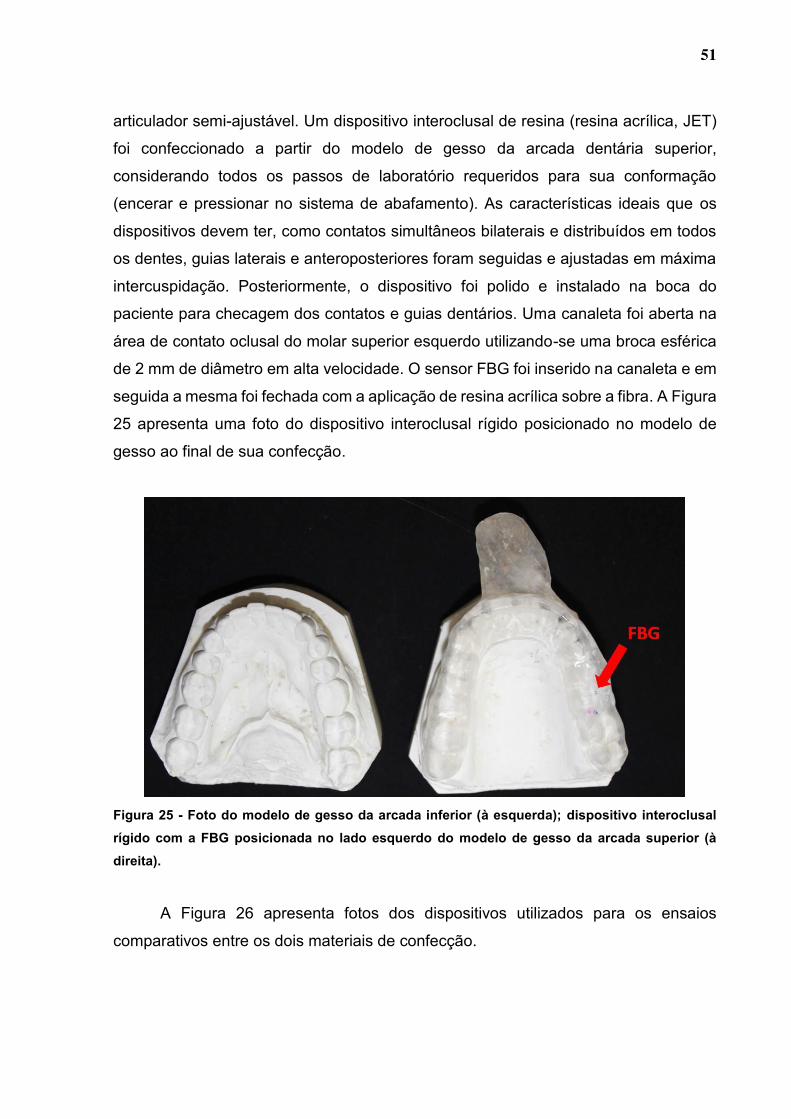
51
articulador semi-ajustável. Um dispositivo interoclusal de resina (resina acrílica, JET)
foi confeccionado a partir do modelo de gesso da arcada dentária superior,
considerando todos os passos de laboratório requeridos para sua conformação
(encerar e pressionar no sistema de abafamento). As características ideais que os
dispositivos devem ter, como contatos simultâneos bilaterais e distribuídos em todos
os dentes, guias laterais e anteroposteriores foram seguidas e ajustadas em máxima
intercuspidação. Posteriormente, o dispositivo foi polido e instalado na boca do
paciente para checagem dos contatos e guias dentários. Uma canaleta foi aberta na
área de contato oclusal do molar superior esquerdo utilizando-se uma broca esférica
de 2 mm de diâmetro em alta velocidade. O sensor FBG foi inserido na canaleta e em
seguida a mesma foi fechada com a aplicação de resina acrílica sobre a fibra. A Figura
25 apresenta uma foto do dispositivo interoclusal rígido posicionado no modelo de
gesso ao final de sua confecção.
Figura 25 - Foto do modelo de gesso da arcada inferior (à esquerda); dispositivo interoclusal
rígido com a FBG posicionada no lado esquerdo do modelo de gesso da arcada superior (à
direita).
A Figura 26 apresenta fotos dos dispositivos utilizados para os ensaios
comparativos entre os dois materiais de confecção.

52
Figura 26 - Foto dos dispositivos interoclusais com indicação da rede posicionada no lado
esquerdo de cada uma delas, correspondente ao lado esquerdo da arcada dentária superior (a)
dispositivo interoclusal resiliente (b) dispositivo interoclusal rígido.
3.3 ENSAIO IN VITRO
O estudo in vitro foi realizado utilizando um sistema mecânico com alavanca e
massas de carga. Cargas com força peso (P) variando de 0 a 90 N foram aplicadas
sobre o modelo de gesso ocluído, conforme diagrama ilustrado na Figura 27 (b). A
Figura 27 (a) indica vista superior da localização horizontal da esfera para o
experimento utilizando duas fibras óticas, e a Figura 28 mostra fotografias dos
dispositivos interoclusais posicionados no modelo de gesso.
O plano oclusal do modelo de gesso não é perpendicular à direção da carga
aplicada, e, por isto, existem componentes da força aplicada ao longo das duas
direções perpendiculares ao plano oclusal, isto é, forças longitudinais e transversais
no plano oclusal, conforme ilustrado na Figura 29.
As forças longitudinais induzem deformações longitudinais no sensor FBG e é
possível analisar a variação da carga pelo deslocamento da banda de reflexão
espectral do sensor. Cargas mais elevadas aplicadas ao sistema também podem
induzir birrefringência na fibra, devido às componentes transversais da força. No
entanto, para as forças analisadas neste trabalho, a deformação longitudinal é o

53
principal componente envolvido.
Figura 27 – Desenho esquemático de: (a) Vista superior do modelo de gesso da arcada superior,
com os incisivos para cima, mostrando as duas fibras óticas. (b) Vista lateral dos modelos de
gesso superior e inferior, e a montagem experimental na alavanca para os experimentos in vitro.
(a) (b)
Figura 28 - Foto dos dispositivos interoclusais (a) rígido e (b) resiliente e sensores FBG
posicionados no lado esquerdo dos modelos de gesso.

54
Figura 29 - Esquema ilustrando as forças aplicadas no ponto de contato dental e,
consequentemente, medidas pela FBG. A figura ilustra a distribuição dessas forças devido à
inclinação do plano oclusal.
As cargas foram aplicadas nos ensaios in vitro em diferentes pontos sobre o
modelo de gesso. Os pontos de aplicação das forças são indicados na Figura 30.
As cargas foram aplicadas de maneira descentralizada, segundo a posição do
sensor a fim de maximizar a sensibilidade em cada um dos lados. Depois foram
utilizadas forças centralizadas com os sensores distribuídos dos lados direito e
esquerdo, a fim de simular o caso in vivo. Para os três casos, a força foi aplicada na
mesma direção em relação à mandíbula e o modelo de gesso e a Figura 30 apresenta
os pontos de aplicação de carga considerando a arcada dentária com os dentes
incisivos para cima.
(a) (b) (c) (d)
Figura 30 – Vista superior dos pontos de aplicação das cargas: (a) centralizada, (b)
descentralizada à direita e (c) descentralizada à esquerda cargas durante o experimento in vitro.
A figura (d) indica a posição considerada para a arcada dentária para os três casos.

55
O diagrama esquemático apresentado na Figura 31 mostra a aquisição
simultânea dos dois sensores com aplicação de carga centralizada. O mesmo sistema
foi utilizado para a aquisição simultânea dos dois sensores in vivo.
Figura 31 - Diagrama da montagem experimental para a aquisição simultânea de dois sensores
com aplicação de carga centralizada, utilizando um acoplador e o interrogador SM 125.
3.4 ENSAIO IN VIVO
As análises in vivo foram realizadas em paciente do sexo feminino com
bruxismo (desordem temporomandibular). O dispositivo interoclusal foi colocado na
arcada dentária superior do paciente. O monitoramento foi iniciado 3 minutos depois
para esperar a estabilidade de deformação e temperatura após a inserção do
dispositivo na boca. As variações de deformação e temperatura identificadas no
presente estudo estão relacionadas às variações de comprimento de onda dos
sensores de fibra óptica. Os experimentos foram realizados em um ambiente
controlado à temperatura ambiente (21C). A Figura 32 mostra a fotografia do paciente
voluntário ao utilizar o dispositivo interoclusal resiliente.
O sensor FBG está posicionado no interior do dispositivo interoclusal, em uma
das cúspides (vertente triturante da cúspide disto-vestibular) do primeiro molar (direito
e esquerdo do dispositivo resiliente e esquerdo do dispositivo rígido). As Figura 33 e
Figura 34 mostram a posição do sensor no dispositivo durante o experimento
in vivo para os dispositivos interoclusais resiliente e rígido, respectivamente.
Os ensaios foram realizados em três estágios de mordida: oclusão, mordida e

56
mordida máxima. O estágio de oclusão se refere ao contato superficial dos dentes
superiores e inferiores. O estágio de mordida se refere à mordida padrão do paciente
e o estágio de mordida máxima está relacionado ao limite de força aplicado pelo
paciente.
Figura 32 - Paciente utilizando dispositivo interoclusal com os sensores a fibra ótica.

57
Figura 33 - Dispositivo interoclusal na posição de oclusão e localização da FBG do lado esquerdo para o dispositivo resiliente.
Figura 34 – Dispositivo interoclusal na posição oclusal e localização da FBG do lado esquerdo para o dispositivo rígido.
3.4.1. Estabilidade Térmica e Deformação dos Dispositivos Interoclusais
Como o sensor possui sensibilidade cruzada (deformação e temperatura),
quando o paciente insere o dispositivo interoclusal na boca, a diferença de
temperatura entre o ambiente externo e o corpo do paciente causa uma variação do

58
comprimento de onda central da rede, até a completa estabilização da temperatura.
Para avaliar a estabilidade térmica e de deformação do dispositivo interoclusal
resiliente, este foi inserido na boca do paciente na posição de oclusão e mantido por
2,5 minutos (150 segundos), que é o tempo mínimo para estabilização da temperatura.
Para o dispositivo rígido, o procedimento foi realizado por aproximadamente 30
minutos (2000 segundos), pois o tempo de 150 segundos não é suficiente para
estabilização adequada.
3.4.2. Força de Mordida e Movimentos
Para os ensaios de movimentos e mordida máxima, foram utilizados
dispositivos interoclusais dos tipos resiliente e rígido, com o sensor localizado no
primeiro molar superior esquerdo de cada dispositivo. Os ensaios com cada placa
foram realizados em diferentes momentos. O dispositivo interoclusal foi posicionado
na boca da paciente conforme Figura 32 e foi solicitado ao voluntário a realização de
movimentos bucais (com diferentes tempos de mordida e movimento), que foram
divididos nas seguintes sequências:
I. Três mordidas, com as seguintes durações:
30 segundos de mordida e relaxamento de 180 segundos;
20 segundos de mordida e relaxamento de 180 segundos;
10 segundos de mordida e relaxamento de 180 segundos;
II. Três sequências de movimentos laterais direito e esquerdo, com as
seguintes durações:
30 segundos de movimentos laterais e relaxamento de 180 segundos;
20 segundos de movimentos laterais e relaxamento de 180 segundos;
10 segundos de movimentos laterais e relaxamento de 180 segundos;
III. Três sequências de movimento anteroposterior, com as seguintes
durações:
30 segundos de movimento anteroposterior e relaxamento de 180
segundos;
20 segundos de movimento anteroposterior e relaxamento de 180
segundos;

59
10 segundos de movimento anteroposterior e relaxamento de 180
segundos;
IV. Três mordidas máximas com duração de 15 segundos e relaxamento de
60 segundos.
A fim de analisar se o padrão de mordida permanece o mesmo após longos
períodos de mordida e curtos períodos de intervalo, foi solicitado ao voluntário a
realização de mordida por 20 segundos, seguido por 5 segundos de relaxamento, para
os dois dispositivos, até exaustão.
3.4.3. Ensaio de Repetição – Dispositivo Resiliente
Para conferir a repetitividade e replicabilidade do sistema, ensaios foram
realizados com os sensores embutidos em dois dispositivos diferentes (Figura 24) e a
análise foi feita observando-se os sensores localizados no lado esquerdo do paciente.
Para cada dispositivo interoclusal resiliente foram realizados dois ensaios, solicitando
à voluntária a realização de 30 segundos de mordida, seguido de 30 segundos de
relaxamento. Para cada dispositivo, a sequência foi repetida seis vezes, com a
utilização dos mesmos equipamentos e ambiente com temperatura controlada.
O ensaio de repetição in vivo foi realizado com a voluntária utilizando apenas o
dispositivo resiliente.
3.4.4. Ensaio de Mordida – Dispositivo Resiliente
Para os ensaios de mordida, três casos foram analisados: oclusão, mordida e
mordida máxima. A posição de repouso sem oclusão dentária (antes da oclusão) é
considerada como o ponto inicial.
O estágio de oclusão apresenta forças inferiores em relação ao estágio de
mordida para ambos os lados da boca, conforme esperado; no entanto, no estágio de
mordida máxima a força torna-se menor. Esse comportamento pode ser relacionado
à distribuição da força sobre o dispositivo nesta etapa.
A partir da inclinação obtida pelo melhor ajuste linear, é possível correlacionar
os padrões de força com a variação do comprimento de onda.

60
3.4.5. Ensaio de Fadiga
Através do sensor FBG é possível monitorar as forças geradas pelo primeiro
molar superior esquerdo durante as diferentes sequências de movimento realizadas
para identificar e caracterizar a exaustão e a fadiga muscular.
Para o estudo da fadiga, foi utilizado outro dispositivo interoclusal resiliente,
com um sensor localizado no primeiro molar superior esquerdo, e outro sensor no
primeiro molar superior direito. As seguintes sequências foram solicitadas:
I. Sequência de mordidas máximas, com 20 segundos de mordida e
relaxamento de 5 segundos. A sequência era mantida até a presença de dor;
II. Sequência de mordidas máximas, com 10 segundos de mordida e
relaxamento de 3 segundos. A sequência era mantida até esgotamento
muscular e presença de dor.
Os ensaios de fadiga e exaustão são exercícios induzidos pelo paciente, e,
portanto, a fim de obter uma análise mais completa, é necessária à realização de um
ensaio espontâneo realizado pelo paciente.
3.4.6. Ensaio de Bruxismo
Um ensaio in vivo foi realizado por um paciente voluntário portador do hábito
de bruxismo do sono, utilizando o dispositivo interoclusal resiliente durante o sono. O
dispositivo resiliente foi instrumentado por duas FBGs, localizadas nos primeiros
molares superiores.
Uma sala contendo os equipamentos necessários para as medições e
temperatura ambiente controlada de 22°C foi adaptada para abrigar o paciente
durante o sono. Durante o teste, o paciente dormiu sem uso de fármaco e não realizou
movimentos que resultassem na quebra da fibra ótica.
A Figura 35 mostra o paciente em repouso utilizando o dispositivo interoclusal
instrumentado (detalhe da Figura 35) e os equipamentos utilizados para a
demodulação dos sensores. A aquisição dos dados foi feita continuamente pelo
interrogador SM 125, durante o ciclo de sono do paciente.
Os dados obtidos com as redes de Bragg são de variação do comprimento de

61
onda de pico em função da variação das forças e da temperatura. A fim da obtenção
dos dados in vivo destas forças e das mudanças de temperatura, foram utilizados
dados obtidos em ensaios prévios com modelo in vitro para a obtenção dos
coeficientes de sensibilidade dos sensores.
Figura 35 – (a) Fotografia da montagem experimental para o ensaio de bruxismo do sono. (b)
Detalhe do paciente utilizando o dispositivo interoclusal resiliente, com as fibras óticas
demarcadas na extremidade do dispositivo e o interrogador utilizado para a aquisição dos
dados.

62
4. RESULTADOS E DISCUSSÕES
Análises in vitro foram realizadas num modelo de gesso para que as
caracterizações sejam o mais próximo possível do sistema real. Os modelos
biomecânicos não são homogêneos e apresentam estruturas complexas. Por este
motivo é necessária a caracterização dos sensores pela aplicação das forças com as
redes embutidas no próprio modelo complexo.
4.1 ENSAIO ESTÁTICO
4.1.1. Forças Descentralizadas
Os testes iniciais das forças de mordida foram realizados no modelo de oclusão
estática, para obter a máxima sensibilidade do sensor.
Os pontos de contato nos primeiros molares, mostrados na Figura 21, obtidos
com o papel carbono, indicam distribuição maior da carga no lado direito do paciente.
Portanto, devido ao fato do sensor ser pontual e bem localizado, a força no sensor
deverá ser menor para este lado.
Por isso, a fim de obter a máxima sensibilidade do sensor, a FBG localizada no
lado esquerdo foi analisada utilizando os dispositivos rígido e resiliente, com aplicação
de carga descentralizada neste mesmo lado.
A Figura 36 e a Figura 37 mostram o deslocamento da posição espectral das
FBGs em função da carga aplicada para o sensor posicionado no lado esquerdo.
O coeficiente de sensibilidade obtido para o dispositivo rígido foi de
- 0,109 nm/N e para o dispositivo resiliente foi de 0,028 nm/N para os sensores
localizados no primeiro molar superior esquerdo de cada dispositivo (Figura 38 e
Figura 39, respectivamente). Estes valores para as sensibilidades foram obtidos a
partir do melhor ajuste linear aos dados. Pela inclinação obtida é possível determinar
a força como função da carga aplicada durante os testes.
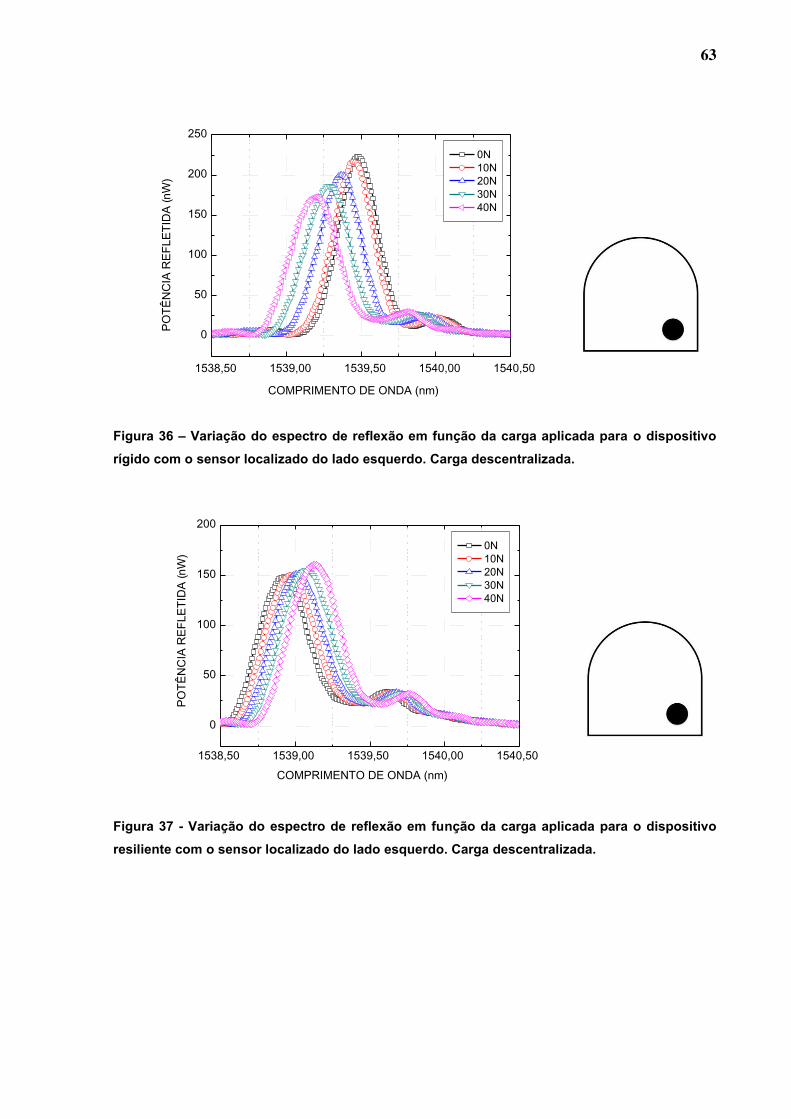
63
1538,50 1539,00 1539,50 1540,00 1540,50
0
50
100
150
200
250
0N
10N
20N
30N
40N
PO
TÊ
NC
IA R
EF
LET
IDA
(nW
)
COMPRIMENTO DE ONDA (nm)
Figura 36 – Variação do espectro de reflexão em função da carga aplicada para o dispositivo
rígido com o sensor localizado do lado esquerdo. Carga descentralizada.
1538,50 1539,00 1539,50 1540,00 1540,50
0
50
100
150
200
0N
10N
20N
30N
40N
PO
TÊ
NC
IA R
EF
LET
IDA
(nW
)
COMPRIMENTO DE ONDA (nm)
Figura 37 - Variação do espectro de reflexão em função da carga aplicada para o dispositivo
resiliente com o sensor localizado do lado esquerdo. Carga descentralizada.

64
0 10 20 30 40-0,50
-0,40
-0,30
-0,20
-0,10
0,00
VA
RIA
ÇÃ
O D
O
CO
MP
RIM
EN
TO
DE
ON
DA
(nm
)
PESO (N)
Figura 38 - Variação do comprimento de onda central da FBG como função do peso aplicado no
primeiro molar esquerdo para o dispositivo interoclusal rígida. Carga descentralizada. Os
símbolos representam os dados experimentais, e a linha tracejada é o ajuste linear.
0 10 20 30 40
0,00
0,20
0,40
0,60
0,80
1,00
1,20
VA
RIA
ÇÃ
O D
O
CO
MP
RIM
EN
TO
DE
ON
DA
(nm
)
PESO (N)
Figura 39 – Variação do comprimento de onda central da FBG como função do peso aplicado no
primeiro molar esquerdo para o dispositivo interoclusal resiliente. Carga descentralizada. Os
símbolos representam os dados experimentais, e a linha tracejada é o ajuste linear.
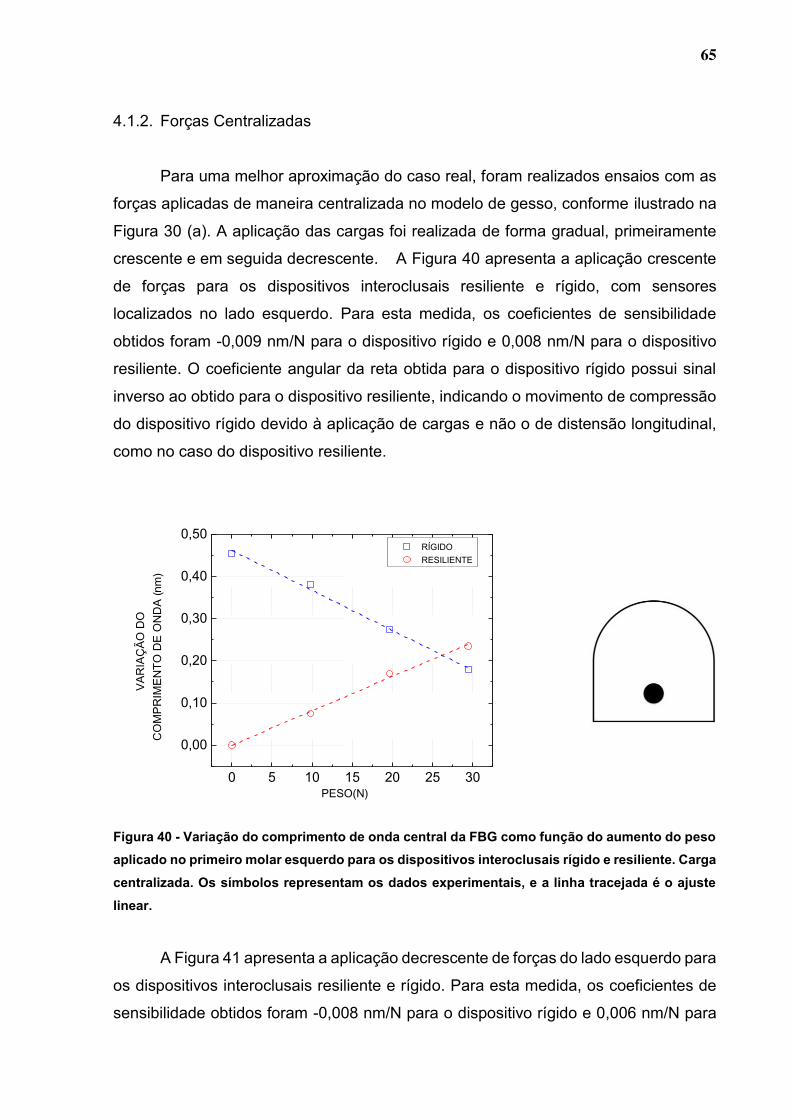
65
4.1.2. Forças Centralizadas
Para uma melhor aproximação do caso real, foram realizados ensaios com as
forças aplicadas de maneira centralizada no modelo de gesso, conforme ilustrado na
Figura 30 (a). A aplicação das cargas foi realizada de forma gradual, primeiramente
crescente e em seguida decrescente. A Figura 40 apresenta a aplicação crescente
de forças para os dispositivos interoclusais resiliente e rígido, com sensores
localizados no lado esquerdo. Para esta medida, os coeficientes de sensibilidade
obtidos foram -0,009 nm/N para o dispositivo rígido e 0,008 nm/N para o dispositivo
resiliente. O coeficiente angular da reta obtida para o dispositivo rígido possui sinal
inverso ao obtido para o dispositivo resiliente, indicando o movimento de compressão
do dispositivo rígido devido à aplicação de cargas e não o de distensão longitudinal,
como no caso do dispositivo resiliente.
0 5 10 15 20 25 30
0,00
0,10
0,20
0,30
0,40
0,50
RÍGIDO
RESILIENTE
VA
RIA
ÇÃ
O D
O
CO
MP
RIM
EN
TO
DE
ON
DA
(nm
)
PESO(N)
Figura 40 - Variação do comprimento de onda central da FBG como função do aumento do peso
aplicado no primeiro molar esquerdo para os dispositivos interoclusais rígido e resiliente. Carga
centralizada. Os símbolos representam os dados experimentais, e a linha tracejada é o ajuste
linear.
A Figura 41 apresenta a aplicação decrescente de forças do lado esquerdo para
os dispositivos interoclusais resiliente e rígido. Para esta medida, os coeficientes de
sensibilidade obtidos foram -0,008 nm/N para o dispositivo rígido e 0,006 nm/N para
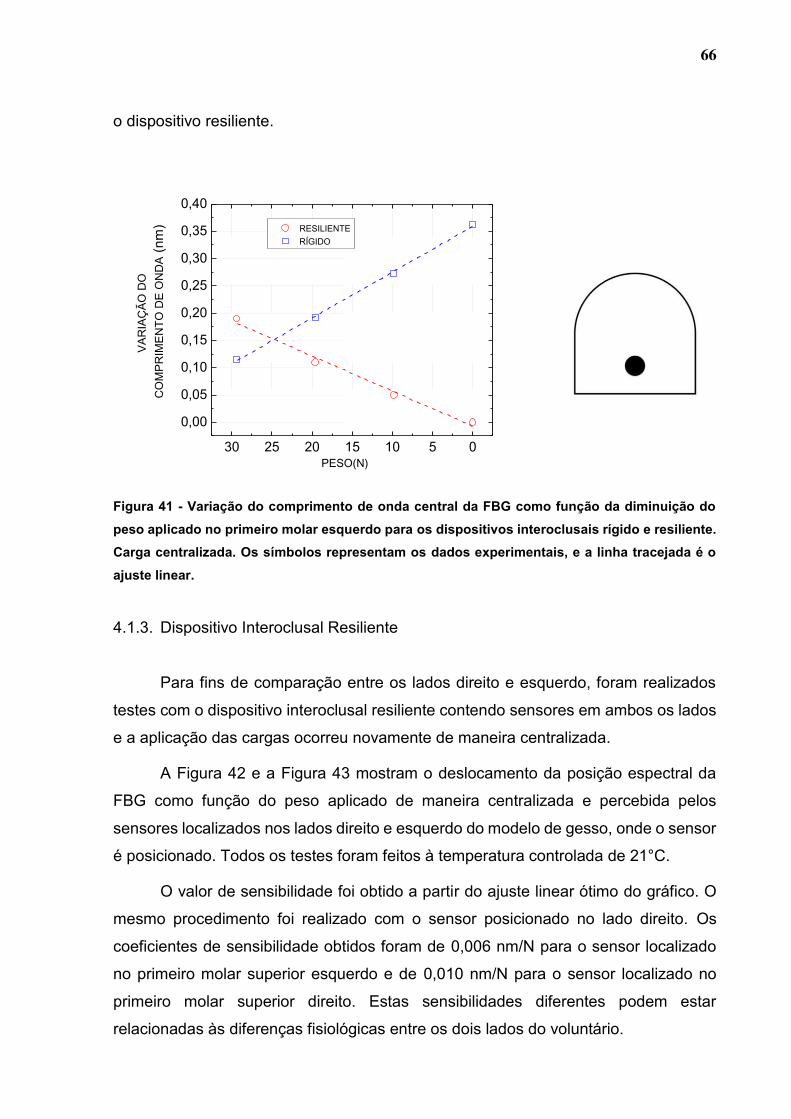
66
o dispositivo resiliente.
30 25 20 15 10 5 0
0,00
0,05
0,10
0,15
0,20
0,25
0,30
0,35
0,40
RESILIENTE
RÍGIDO
VA
RIA
ÇÃ
O D
O
CO
MP
RIM
EN
TO
DE
ON
DA
(n
m)
PESO(N)
Figura 41 - Variação do comprimento de onda central da FBG como função da diminuição do
peso aplicado no primeiro molar esquerdo para os dispositivos interoclusais rígido e resiliente.
Carga centralizada. Os símbolos representam os dados experimentais, e a linha tracejada é o
ajuste linear.
4.1.3. Dispositivo Interoclusal Resiliente
Para fins de comparação entre os lados direito e esquerdo, foram realizados
testes com o dispositivo interoclusal resiliente contendo sensores em ambos os lados
e a aplicação das cargas ocorreu novamente de maneira centralizada.
A Figura 42 e a Figura 43 mostram o deslocamento da posição espectral da
FBG como função do peso aplicado de maneira centralizada e percebida pelos
sensores localizados nos lados direito e esquerdo do modelo de gesso, onde o sensor
é posicionado. Todos os testes foram feitos à temperatura controlada de 21°C.
O valor de sensibilidade foi obtido a partir do ajuste linear ótimo do gráfico. O
mesmo procedimento foi realizado com o sensor posicionado no lado direito. Os
coeficientes de sensibilidade obtidos foram de 0,006 nm/N para o sensor localizado
no primeiro molar superior esquerdo e de 0,010 nm/N para o sensor localizado no
primeiro molar superior direito. Estas sensibilidades diferentes podem estar
relacionadas às diferenças fisiológicas entre os dois lados do voluntário.

67
O espectro de reflexão da FBG é obtido quando o dispositivo interoclusal é
inserido na boca do voluntário. O comprimento de onda central da FBG pode ser
associado a diferentes forças aplicadas pelo voluntário, utilizando as sensibilidades
previamente determinadas.
0 20 40 60 80 100
1530,4
1530,5
1530,6
1530,7
1530,8
1530,9
1531,0SENSOR ESQUERDO
CO
MP
RIM
EN
TO
DE
ON
DA
(n
m)
PESO (N)
Figura 42 - Comprimento de onda central da FBG em função aumento das forças aplicadas no primeiro molar esquerdo para o dispositivo interoclusal resiliente. Cargas centralizadas. Os símbolos representam os dados experimentais e a linha tracejada mostra o melhor ajuste linear.
0 20 40 60 80 1001526,2
1526,4
1526,6
1526,8
1527,0
1527,2
1527,4
CO
MP
RIM
EN
TO
DE
ON
DA
(nm
)
PESO (N)
SENSOR DIREITO
Figura 43 - Comprimento de onda central da FBG em função do aumento das forças aplicadas no primeiro molar direito para o dispositivo interoclusal resiliente. Cargas centralizadas. Os símbolos representam os dados experimentais e a linha tracejada mostra o melhor ajuste linear.

68
4.2 ENSAIO IN VIVO
Todos os experimentos in vivo foram realizados em ambiente controlado, à
temperatura ambiente de 21C. Não foram identificadas variações de temperatura no
intervalo de tempo estudado.
Para todos os ensaios envolvendo força em relação ao tempo, foram utilizados
os valores apresentados na Tabela 1, que foram obtidos com aplicação de cargas
centralizadas in vitro, conforme resultados apresentados na seção 4.1 do presente
trabalho.
Tabela 1 - Valores dos coeficientes de sensibilidade utilizados para os experimentos in vivo.
Tipo de
Dispositivo
Interoclusal
Lado do
sensor
Valor do coeficiente de
sensibilidade (nm/N)
Rígido Esquerdo -0,009 nm /N
Resiliente Esquerdo 0,006 nm/N
Resiliente Direito 0,010 nm/N
4.2.1. Estabilidade Térmica e Deformação dos Dispositivos Interoclusais
Foram realizados ensaios de variação térmica para avaliação do tempo de
estabilização da variação de comprimento de onda com a temperatura corporal.
Um intervalo de tempo de aproximadamente dois minutos foi analisado para o
dispositivo interoclusal resiliente, até a estabilidade térmica do sensor, conforme
mostra a Figura 44. É possível observar que após 60 segundos a variação é menor
que 3% considerando uma mordida simples. O valor teórico de sensibilidade à
temperatura para uma fibra monomodo padrão é de 13,7 pm/ºC, o que indicaria uma
variação de 0,22 nm para uma variação de temperatura de 16ºC - de 20ºC
(temperatura ambiente) à 36ºC (temperatura do corpo humano). Esta variação está
coerente com a variação de aproximadamente 0,25 nm, que pode ser observada nos
60s iniciais do gráfico apresentado na Figura 44.
O ensaio de estabilização também foi realizado para o dispositivo interoclusal
rígido. É possível observar no gráfico da Figura 45 que a maior variação do
comprimento de onda, de 1,3 nm, ocorre entre os primeiros 60 s; esta variação está
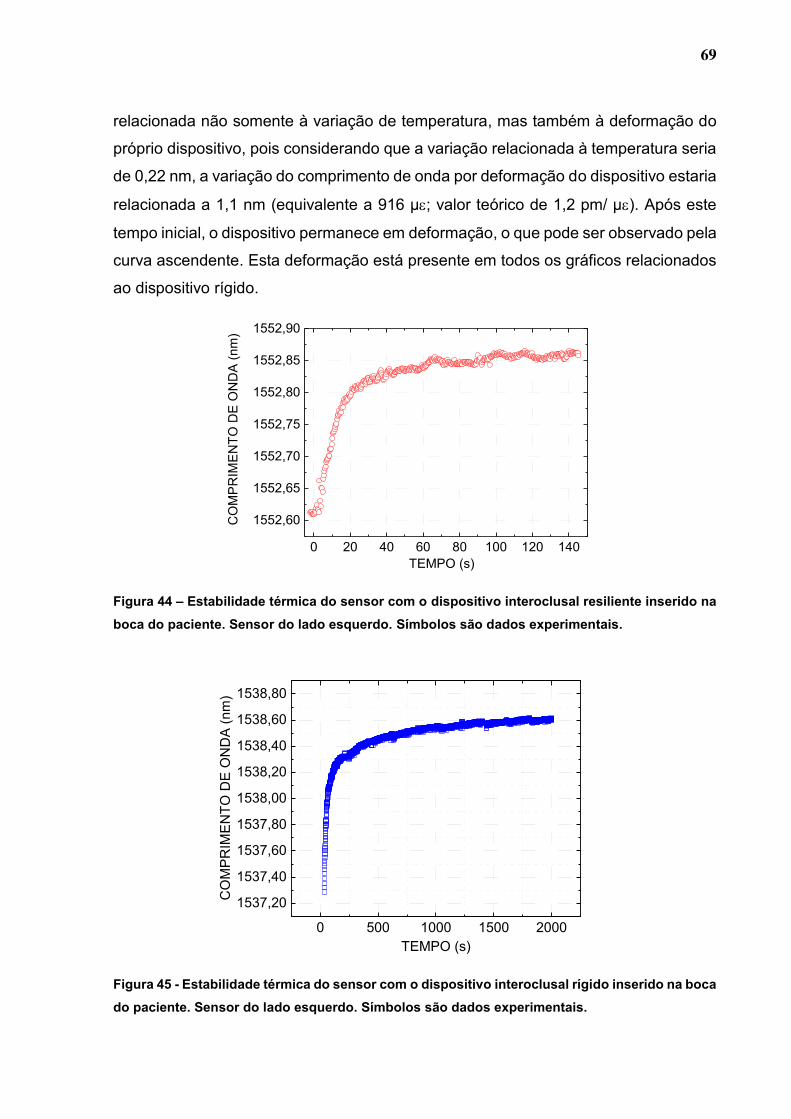
69
relacionada não somente à variação de temperatura, mas também à deformação do
próprio dispositivo, pois considerando que a variação relacionada à temperatura seria
de 0,22 nm, a variação do comprimento de onda por deformação do dispositivo estaria
relacionada a 1,1 nm (equivalente a 916 µ; valor teórico de 1,2 pm/ µ). Após este
tempo inicial, o dispositivo permanece em deformação, o que pode ser observado pela
curva ascendente. Esta deformação está presente em todos os gráficos relacionados
ao dispositivo rígido.
0 20 40 60 80 100 120 140
1552,60
1552,65
1552,70
1552,75
1552,80
1552,85
1552,90
CO
MP
RIM
EN
TO
DE
ON
DA
(n
m)
TEMPO (s)
Figura 44 – Estabilidade térmica do sensor com o dispositivo interoclusal resiliente inserido na
boca do paciente. Sensor do lado esquerdo. Símbolos são dados experimentais.
0 500 1000 1500 2000
1537,20
1537,40
1537,60
1537,80
1538,00
1538,20
1538,40
1538,60
1538,80
CO
MP
RIM
EN
TO
DE
ON
DA
(n
m)
TEMPO (s)
Figura 45 - Estabilidade térmica do sensor com o dispositivo interoclusal rígido inserido na boca
do paciente. Sensor do lado esquerdo. Símbolos são dados experimentais.

70
4.2.2. Força de Mordida e Movimentos
Foram realizados ensaios de força de mordida e movimentos para os
dispositivos interoclusais resiliente e rígido. O paciente foi instruído a realizar três
ciclos de movimentos com três repetições cada.
Os dados da Figura 45 mostram os resultados obtidos nos ensaios de mordida
e movimentos para o dispositivo resiliente. É possível comparar as amplitudes das
forças para estes três tipos de movimentos através do gráfico. As maiores amplitudes
estão relacionadas aos movimentos anteroposteriores da mandíbula.
A Figura 46 mostra a comparação entre as repetições realizadas com o ensaio
de mordida para o dispositivo resiliente. Pode-se observar que as amplitudes em
média permanecem as mesmas para os três ensaios, porém, os padrões não são os
mesmos, e apesar do tempo de manutenção das mordidas ser menor a cada
repetição, os máximos de mordida não são constantes, mas com a repetição, a
mordida inicial é menor e aumenta com a manutenção do movimento.
A Figura 47 mostra o primeiro pico do processo de mordida, mostrando que a
força não varia com o tempo, mas permanece em média a mesma (aproximadamente
150 N). A Figura 48 mostra os gráficos obtidos com a indução dos movimentos laterais
da mandíbula para o dispositivo resiliente e a Figura 49 mostra em detalhe o primeiro
pico do movimento lateral. A Figura 50 e Figura 51 mostram os dados experimentais
para os movimentos anteroposteriores da mandíbula, ensaios dos três movimentos
com variação do tempo de manutenção dos movimentos e o primeiro ensaio em
detalhe, respectivamente.
Os dados experimentais mostrados na Figura 52 são dos movimentos de
mordida, laterais e anteroposterior, obtidos com o dispositivo interoclusal rígido. Os
gráficos da Figura 53 e Figura 54 mostram os três ensaios de mordida para o
dispositivo rígido e o padrão do movimento para o primeiro ensaio, respectivamente.
A Figura 55 mostra os ensaios de movimento lateral para o dispositivo rígido e a Figura
56 o detalhe do primeiro ensaio de movimento lateral. A Figura 57 mostra os ensaios
de movimento anteroposterior para o dispositivo rígido e a Figura 58, o detalhe do
primeiro ensaio. Nos ensaios de lateralidade e anteroposterior os padrões de
amplitude da força não são constantes durante a sequência do movimento e também
não são constantes após a interrupção e retorno do movimento.

71
Os dispositivos resilientes e rígidos mostraram para o ensaio I (de mordida),
força constante ao longo do tempo com baixa taxa de declínio devido ao esgotamento
dos músculos. No ensaio II (movimentos laterais direito e esquerdo) é possível
observar a variação da força. No entanto, as amplitudes dos picos desses movimentos
foram menores do que nos movimentos anteroposteriores (ensaio III). Essas
amplitudes foram relacionadas ao alcance do movimento que é maior quando
combinados os movimentos de protrusão e retrusão da mandíbula, como no caso do
ensaio III.
Na avaliação do ensaio de mordida, para os dispositivos rígido e resiliente, a
força muscular diminuiu ao longo do tempo devido ao esgotamento, ao comparar 30,
20 e 10 segundos da duração do movimento. No entanto, na transição entre diferentes
movimentos, a intensidade da força é restaurada de um ciclo para outro. A restauração
da força está relacionada aos diferentes músculos que são necessários em diferentes
tipos de movimento.
As curvas do dispositivo resiliente apresentam maiores valores do comprimento
de onda e portanto da força devido à composição do material. O material resiliente
sofreu compressão e expansão lateral, o que gera deformação longitudinal do sensor
de fibra.
No dispositivo rígido pode-se observar um efeito diferente. O material rígido não
sofre expansão longitudinal quando submetido a forças transversais. Portanto, o
sensor não sofre tensões longitudinais. O sensor é submetido à compressão
transversal neste caso. Assim, o componente de deformação só está associado a uma
componente transversal.
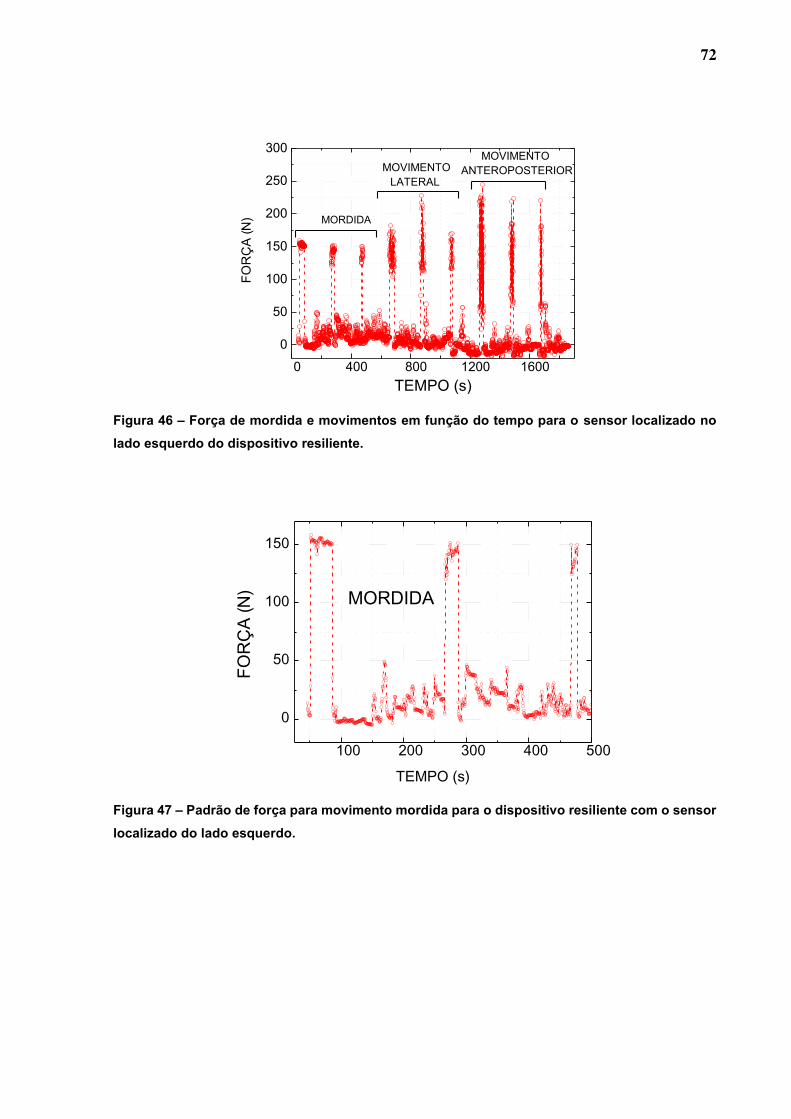
72
0 400 800 1200 1600
0
50
100
150
200
250
300
FO
RÇ
A (N
)
TEMPO (s)
MORDIDA
MOVIMENTO
LATERAL
MOVIMENTO
ANTEROPOSTERIOR
Figura 46 – Força de mordida e movimentos em função do tempo para o sensor localizado no
lado esquerdo do dispositivo resiliente.
Figura 47 – Padrão de força para movimento mordida para o dispositivo resiliente com o sensor
localizado do lado esquerdo.
100 200 300 400 500
0
50
100
150
MORDIDA
FO
RÇ
A (N
)
TEMPO (s)

73
50 60 70 80 90 100
0
50
100
150
MORDIDA
FO
RÇ
A (N
)
TEMPO (s)
Figura 48 – Detalhe do padrão de força para movimento mordida para o dispositivo resiliente
com o sensor localizado do lado esquerdo.
700 800 900 1000 1100
0
50
100
150
200
250
MOVIMENTO LATERAL
FO
RÇ
A (N
)
TEMPO (s)
Figura 49 - Padrão de força para movimentos laterais direito e esquerdo para o dispositivo
resiliente com o sensor localizado do lado esquerdo.
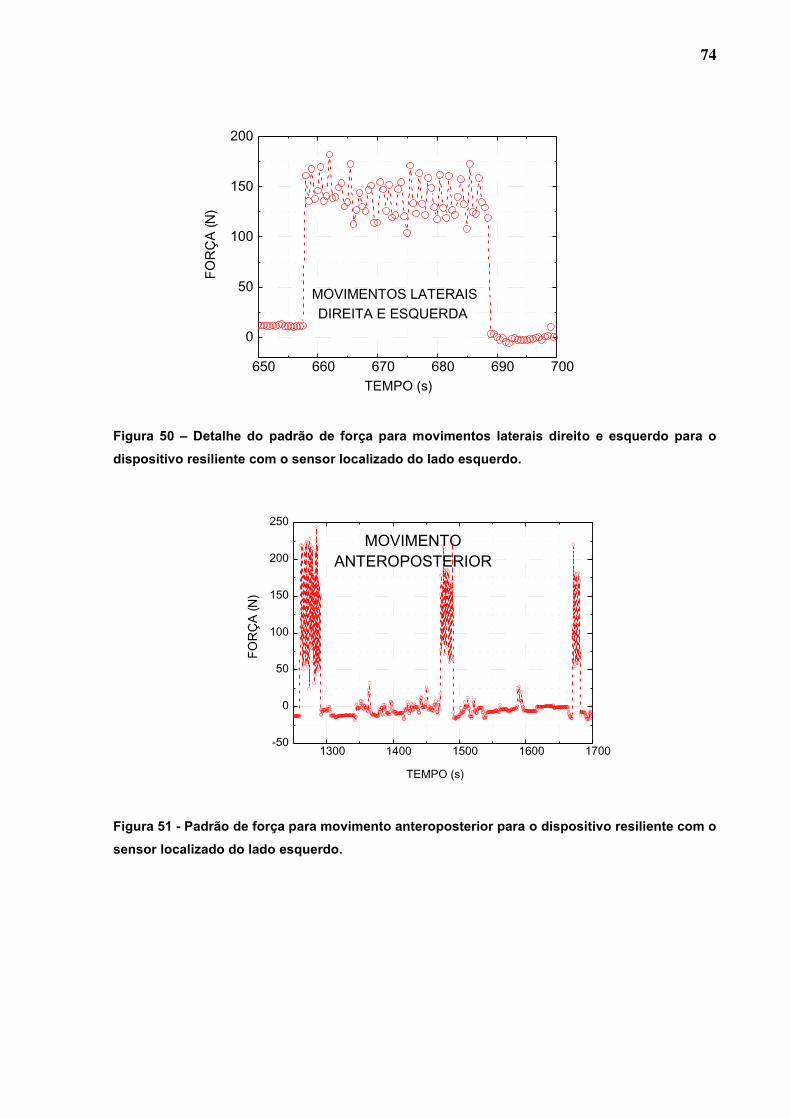
74
650 660 670 680 690 700
0
50
100
150
200
MOVIMENTOS LATERAIS
DIREITA E ESQUERDA
FO
RÇ
A (N
)
TEMPO (s)
Figura 50 – Detalhe do padrão de força para movimentos laterais direito e esquerdo para o
dispositivo resiliente com o sensor localizado do lado esquerdo.
1300 1400 1500 1600 1700-50
0
50
100
150
200
250
MOVIMENTO
ANTEROPOSTERIOR
FO
RÇ
A (N
)
TEMPO (s)
Figura 51 - Padrão de força para movimento anteroposterior para o dispositivo resiliente com o
sensor localizado do lado esquerdo.

75
1250 1260 1270 1280 1290 1300-50
0
50
100
150
200
250
MOVIMENTO
ANTEROPOSTERIOR
FO
RÇ
A (N
)
TEMPO (s)
Figura 52 – Detalhe do padrão de força para movimento anteroposterior para o dispositivo
resiliente com o sensor localizado do lado esquerdo.
0 500 1000 1500 2000-20,0
0,0
20,0
40,0
60,0
80,0
100,0
120,0
140,0
160,0
MOVIMENTO
ANTEROPOSTERIORMORDIDA
MOVIMENTO
LATERAL
FO
RÇ
A (N
)
TEMPO (s)
Figura 53 - Força de mordida e movimentos em função do tempo para o sensor localizado no
lado esquerdo do dispositivo rígido.

76
200 300 400 500 600 7000,0
20,0
40,0
60,0
80,0 MORDIDA
FO
RÇ
A (N
)
TEMPO (s)
Figura 54 - Padrão de força para movimento mordida para o dispositivo rígido com o sensor
localizado do lado esquerdo.
200 210 220 230 240 2500,0
20,0
40,0
60,0
80,0
MORDIDA
FO
RÇ
A (N
)
TEMPO (s)
Figura 55 – Detalhe do padrão de força para movimento mordida para o dispositivo rígido com
o sensor localizado do lado esquerdo.

77
800 900 1000 1100 1200 13000,0
10,0
20,0
30,0
40,0
50,0
MOVIMENTOS LATERAIS
FO
RÇ
A (N
)
TEMPO (s)
Figura 56 - Padrão de força para movimentos laterais direito e esquerdo para o dispositivo rígido
com o sensor localizado do lado esquerdo.
800 810 820 830 840 8500,0
10,0
20,0
30,0
40,0
50,0MOVIMENTOS LATERAIS
FO
RÇ
A (N
)
TEMPO (s)
Figura 57 – Detalhe do padrão de força para movimentos laterais direito e esquerdo para o
dispositivo rígido com o sensor localizado do lado esquerdo.

78
1400 1500 1600 1700 1800-10,0
0,0
10,0
20,0
30,0
40,0
50,0
60,0MOVIMENTO ANTEROPOSTERIOR
FO
RÇ
A (N
)
TEMPO (s)
Figura 58 – Padrão de força para movimento anteroposterior para o dispositivo rígido com o
sensor localizado do lado esquerdo.
1390 1400 1410 1420 1430 1440 1450-10,0
0,0
10,0
20,0
30,0
40,0
50,0MOVIMENTO
ANTEROPOSTERIOR
FO
RÇ
A (N
)
TEMPO (s)
Figura 59 – Detalhe do padrão de força para movimento anteroposterior para o dispositivo rígido
com o sensor localizado do lado esquerdo.

79
Ao comparar as três repetições da mordida para o dispositivo resiliente na
Figura 47 com o dispositivo rígido na Figura 60, pode-se observar que o esgotamento
muscular ocorre mais rápido no dispositivo rígido do que no dispositivo resiliente.
Após o início do esgotamento muscular na segunda mordida do dispositivo
rígido, ocorreu a manutenção de uma mordida padrão em baixos níveis de
deformação.
As Figura 60 e Figura 61 mostram três movimentos de mordida com
dispositivos resiliente e rígido e 15 segundos de duração com um intervalo de
relaxamento dos 60 segundos, e as Figura 62 e Figura 63 mostram mordidas com os
mesmos dispositivos, com 20 segundos de duração e 5 segundos de relaxamento.
Na primeira avaliação, a curva padrão foi mantida e no segundo, pode-se
observar uma não-linearidade do gráfico padrão que aumenta com a repetição do
movimento até a exaustão muscular. Estes resultados podem estar relacionados à
duração da mordida e o relaxamento, que influenciaram a velocidade do cansaço
muscular.
O teste de exaustão com o dispositivo resiliente revelou uma rampa do terceiro
movimento de mordida, caracterizada inicialmente por uma redução seguida por um
aumento na força de mordida.
Esse comportamento ocorre devido ao tempo elevado de contração muscular,
menor tempo de relaxação muscular e a frequência dos movimentos, resultando no
esgotamento do músculo.
O tempo de mordida foi maximizado e o tempo de espera foi minimizado a fim
de induzir fadiga por exaustão.
Nos gráficos obtidos com o dispositivo resiliente pode-se observar os padrões
de exaustão e fadiga, enquanto no gráfico da rígida não aparece devido à existência
de deformação do dispositivo. Por esse motivo os ensaios subsequentes foram
realizados apenas para o dispositivo resiliente.

80
50 100 150 200 250 300-20
0
20
40
60
80
100
120
140
160
FO
RÇ
A (N
)
TEMPO (s)
Figura 60 – Padrão de força de mordida para o sensor do lado esquerdo do dispositivo
interoclusal resiliente. Tempo de mordida de 15 segundos e tempo de relaxamento de 60
segundos.
50 100 150 200 250 300
0
10
20
30
40
50
60
FO
RÇ
A (
N)
TEMPO (s)
Figura 61 - Padrão de força de mordida para o sensor do lado esquerdo do dispositivo
interoclusal rígido. Tempo de mordida de 15 segundos e tempo de relaxamento de 60 segundos.

81
20 40 60 80 100 120 140 160-20
0
20
40
60
80
100
120
140
FO
RÇ
A (N
)
TEMPO (s)
Figura 62 - Padrão de força de mordida para o sensor do lado esquerdo do dispositivo
interoclusal resiliente. Tempo de mordida de 20 segundos e tempo de relaxamento de 5
segundos.
60 80 100 120 140 160 180
0
10
20
30
40
50
60
FO
RÇ
A (N
)
TEMPO (s)
Figura 63 - Padrão de força de mordida para o sensor do lado esquerdo do dispositivo
interoclusal resiliente. Tempo de mordida de 20 segundos e tempo de relaxamento de 5
segundos.
4.2.3. Ensaio de Repetição – Dispositivo Resiliente
Ensaios de repetição de mordida foram realizados para dois dispositivos
resilientes com as redes inseridas do lado esquerdo do paciente. As Figuras 63 e 64
mostram os padrões de mordida para o dispositivo resiliente 1 e dispositivo resiliente

82
2, respectivamente (Figura 23 mostram os dois dispositivos resilientes
instrumentados).
Os gráficos mostram a variação do comprimento de onda em função do tempo,
com a repetição do padrão de mordida. É possível observar que apesar da amplitude
não ser constante ao longo da repetição, o padrão se mantém para as duas
sequências. Também é possível observar o aumento da variação do comprimento de
onda e, portanto da amplitude da força de mordida durante a manutenção do
movimento.
0 100 200 3001531,20
1531,40
1531,60
1531,80
1532,00
1532,20
1532,40
CO
MP
RIM
EN
TO
DE
ON
DA
(n
m)
TEMPO (s)
ENSAIO1
ENSAIO2
Figura 64 - Padrão de força de mordida para o sensor do lado esquerdo do dispositivo
interoclusal resiliente 1. Tempo de mordida de 30 segundos e tempo de relaxamento de 30
segundos.

83
-50 0 50 100 150 200 250 300 3501531,60
1531,80
1532,00
1532,20
1532,40
1532,60
1532,80
CO
MP
RIM
EN
TO
DE
ON
DA
(n
m)
TEMPO (s)
ENSAIO2
ENSAIO3
Figura 65 - Padrão de força de mordida para o sensor do lado esquerdo do dispositivo
interoclusal resiliente 2. Tempo de mordida de 30 segundos e tempo de relaxamento de 30
segundos.
4.2.4. Ensaio de Mordida – Dispositivo Resiliente
A Figura 66 e a Figura 67 mostram os gráficos de barras para os lados esquerdo
e direito da mandíbula, respectivamente. A posição de repouso sem oclusão dentária
(antes da oclusão) é considerada como o ponto inicial e as diferentes forças mostradas
nos gráficos das referidas figuras estão relacionadas a este ponto inicial.
O estágio de oclusão apresenta forças inferiores em relação ao estágio de
mordida para ambos os lados da boca, conforme esperado. No entanto, no estágio de
mordida máxima a força torna-se menor, comportamento que pode ser relacionado à
distribuição da força sobre o dispositivo nesta etapa.

84
OCLUSÃO MORDIDA MORDIDA
MÁXIMA
0
25
50
75
100
125
150
FO
RÇ
A (N
)
SENSOR
ESQUERDO
Figura 66 – Avaliação in vivo: forças para o sensor do primeiro molar superior esquerdo do
voluntário, em diferentes estágios.
OCLUSÃO MORDIDA MORDIDA
MÁXIMA
0
25
50
75
100
125
150
FO
RÇ
A (N
)
SENSOR
DIREITO
Figura 67 - Avaliação in vivo: forças para o sensor do primeiro molar superior direito do
voluntário, em diferentes estágios.
4.2.5. Ensaios de Fadiga
Os gráficos das Figuras 67 e 68 mostram os resultados de experimentos
conduzidos com uma taxa de frequência baixa (amostragem) para determinar o
comportamento padrão da mordida máxima, a fim de verificar se após cada mordida
máxima a curva retorna ao valor inicial. Os resultados obtidos verificam a
replicabilidade do sistema. Os dois experimentos foram realizados com mordidas de
curta duração de duração (15 s); mudando apenas o período de relaxamento: no

85
primeiro ciclo o relaxamento é de 180 s (ciclo I) e o segundo é realizado com um
intervalo menor (60 s - ciclo II).
0 100 200 300 400 500 600 700 800
0
10
20
30
40
50
FO
RÇ
A (N
)
TEMPO (s)
Figura 68 - Padrão de força de mordida para o sensor do lado esquerdo do dispositivo
interoclusal resiliente. Tempo de mordida de 15 segundos e tempo de relaxamento de 180
segundos.
50 100 150 200 250 300 350-10
0
10
20
30
40
50
FO
RÇ
A (N
)
TEMPO (s)
Figura 69 - Padrão de força de mordida para o sensor do lado esquerdo do dispositivo interoclusal resiliente. Tempo de mordida de 15 segundos e tempo de relaxamento de 60 segundos.
A Figura 70 apresenta o resultado obtido com um tempo de mordida máximo
maior (de 20 s) que foi utilizado (movimento isométrico) na tentativa de induzir fadiga
mais rapidamente (ciclo III). Portanto, a exaustão foi utilizada para estimulação da

86
fadiga. Nesse gráfico pode-se observar que os três primeiros picos na força de
mordida máxima têm replicabilidade aproximada. No entanto, depois disso (no quarto
pico de mordida) ocorre uma redução mais evidente na força de mordida máxima em
função do tempo que é seguido por um aumento na atividade muscular onde outras
unidades motoras são recrutadas para compensar a fadiga do grupo muscular
principal. A Figura 71 mostra em detalhe os dois últimos picos (quarto e quinto na
Figura 70), e é possível notar que a força de mordida ao longo do tempo não é
constante, mas aumenta de forma constante a partir do início da ação de mordida.
Esta tendência também é parcialmente perceptível na terceira mordida na Figura 70.
Usando um procedimento linear de melhor ajuste para a força de mordida ao longo do
tempo é possível determinar as variações de 0,73 N/s e 1,28 N/s para a quarta e quinta
mordidas, respectivamente. O maior tempo necessário para atingir a força máxima de
mordida pode indicar que o processo de fadiga ocorreu, o que também é suportado
pelo maior valor de força na quinta mordida, resultante dos músculos adicionais
envolvidos.
0 25 50 75 100 125 150
0
10
20
30
40
50
60
FO
RÇ
A (N
)
TEMPO (s)
Figura 70 - Padrão de força de mordida para o sensor do lado esquerdo do dispositivo
interoclusal resiliente. Tempo de mordida de 20 segundos e tempo de relaxamento de 5
segundos.

87
90 96 102 108 114 120 126 132 138
0
10
20
30
40
50
60
FO
RÇ
A (N
)
TEMPO (s)
Figura 71 - Padrão de força de mordida para o sensor do lado esquerdo do dispositivo
interoclusal resiliente. Tempo de mordida de 20 segundos e tempo de relaxamento de 5
segundos.
A evolução da força de mordida ao longo de três fases diferentes (com base no
tempo de relaxamento de 3 s - ciclo IV) é apresentada na Figura 72. É possível notar
que cada fase apresenta um padrão característico para cada mordida. Os primeiros
seis picos de mordida correspondem à primeira fase, identificada pela característica
de replicabilidade; Para induzir a exaustão foi utilizado um tempo de mordida máximo
mais elevado (10 s); pode ser percebido que a força de mordida máxima é constante
ao longo da mordida. O sétimo pico mostra o início do processo de fadiga como
descrito no parágrafo anterior. Os oitavo a décimo segundo picos de mordida são
caracterizados como a segunda fase, onde pode ser observada uma redução na força
de mordida inicial, que é seguida por um aumento da força ao longo do tempo (como
também discutido no final do parágrafo anterior). A força de mordida máxima em cada
pico é maior em comparação com os dos picos na primeira fase. Isto significa que
outras unidades motoras estão a ser recrutadas para compensar a redução da força
de mordida máxima causada pelo esgotamento. Consequentemente, a partir do
décimo terceiro ao décimo oitavo picos (terceira fase), pode ser observado que a força
máxima inicial é reduzida e o valor de força máximo é menor se comparado com a
segunda fase. Este comportamento sugere que, a partir deste momento, as unidades
motoras recrutadas não podem manter a força de mordida máxima devido à presença
de dor muscular. Esse comportamento é identificado como fadiga muscular. A Figura

88
73 mostra a comparação do último pico de mordida da segunda fase e da primeira
das terceiras fases. As linhas pontilhadas mostram o melhor ajuste da força de
mordida ao longo do tempo. A inclinação obtida para a segunda fase tem um valor de
1,37 N/s, enquanto a inclinação na terceira fase apresenta um valor maior, 2,54 N/s.
Outra diferença percebida é que a força de mordida máxima atingida, que é quase
20% menor na terceira fase em comparação com a segunda fase. Isso significa que a
terceira fase pode ser associada a um processo muscular de maior fadiga.
A resposta muscular à exaustão neste tipo de exercício se traduz em um
aumento no número de unidades motoras recrutadas e/ ou sua sincronização para
compensar a capacidade reduzida de gerar força para as principais unidades motoras.
Esta resposta pode ser responsável pelo aumento da amplitude do sinal óptico. Estes
resultados estão de acordo com estudos anteriores que investigaram a fadiga
muscular por eletromiografia (LUTTMANN, JÄGER e LAURIG, 2000; MERLETTI,
RAINOLDI e FARINA, 2001).
0 50 100 150 200 250
0
10
20
30
40
50
60
fase 3fase 2
FO
RÇ
A (N
)
TEMPO (s)
fase 1
Figura 72 - Fases de indução da fadiga: maior tempo de mordida máxima (fase 1), processo de
exaustão (fase 2) e processo de fadiga (fase 3). Os símbolos são os dados experimentais, as
linhas são apenas guia para os olhos.

89
105 110 115 230 235 240
0
10
20
30
40
50
60
FO
RÇ
A (N
)
TEMPO (s)
Figura 73 - Detalhamento dos dois picos de mordida para a segunda e terceira fase da indução à fadiga, mostrando o aumento da força de mordida juntamente com o tempo. Os símbolos são os dados experimentais, as linhas são apenas guia para os olhos, a linha tracejada é o melhor ajuste.
4.2.6. Ensaio de Bruxismo
Foram realizadas medidas in vivo com o paciente utilizando o dispositivo
oclusal resiliente contendo duas fibras óticas, com uma FBG localizada no primeiro
molar superior de cada fibra. O paciente dormiu com o dispositivo interoclusal por um
período de uma hora, ficou acordado por dez minutos, retornou ao sono e dormiu por
uma hora e trinta e cinco minutos direto. Neste segundo período de sono o paciente
relatou ter sonhado.
Os dados coletados foram divididos em:
Primeiro ciclo de sono (período de 1h)
o Sensor direito
o Sensor esquerdo
Segundo ciclo de sono (período de 1h 30 min)
o Sensor direito
o Sensor esquerdo

90
No primeiro ciclo de sono, ambos os sensores apresentaram um período com
picos muito próximos (na região dos 1000 s, conforme se observa nas Figura 74 e
Figura 75) e os demais picos mais espaçados.
Os picos da região próxima apresentam intervalo médio de 120 s tanto para o
lado direito quanto para o lado esquerdo, e os demais picos apresentam intervalo
médio de 478 s para o lado direito e 477 s para o lado esquerdo. Os picos
apresentados pelo sensor direito possuem localizações muito semelhantes aos
valores encontrados para os picos mostrados pelo sensor esquerdo, com diferença
máxima de 1 s em seus valores.
No segundo ciclo de sono, os gráficos apresentados nas Figura 76 e Figura 77
apresentam algumas diferenças nos primeiros 1000 s (o sensor esquerdo apresenta
uma curva inexistente no lado direito e o lado esquerdo apresenta um pico de força
nos segundos iniciais inexistente no sensor direito).
Excetuando-se os primeiros 1000 s os picos apresentam comportamento
semelhante ao observado no primeiro ciclo, com todos os picos do sensor esquerdo
aparecendo no sensor direito, e intervalo médio de 618 s para o lado direito e 619 s
para o lado esquerdo.
Nos primeiros 1000 s do segundo ciclo, ocorre a presença de um pico extra aos
3 s do lado esquerdo. Se considerarmos este pico no intervalo médio, o valor para o
sensor esquerdo é de 665 s médio de intervalo entre um pico e outro.
Ainda que a força medida seja diferente para ambos os lados, a força do lado
esquerdo é maior para ambos os períodos de sono, o que está de acordo com os
dados obtidos pelos ensaios de mordida, e os picos identificados em um sensor
aparecem também no outro sensor, indicando que a FBG consegue detectar bem os
movimentos realizados pelo paciente.
No que se refere à intensidade, um evento de bruxismo moderado chega a 60%
da força máxima de apertamento e apenas 1% excede a força máxima de apertamento
voluntário.

91
0 1000 2000 3000 4000
0
10
20
30
40
50
FO
RÇ
A (N
)
TEMPO (s)
SENSOR
DIREITO
Figura 74 – Padrão de força em função do tempo para o primeiro ciclo de sono. Dispositivo
resiliente com o sensor localizado do lado direito.
0 1000 2000 3000 4000
0
10
20
30
40
50
FO
RÇ
A (N
)
TEMPO (s)
SENSOR
ESQUERDO
Figura 75 - Padrão de força em função do tempo para o primeiro ciclo de sono. Dispositivo
resiliente com o sensor localizado do lado esquerdo.

92
0 1000 2000 3000 4000 50000
10
20
30
40
50
60
70
FO
RÇ
A (N
)
TEMPO (s)
SENSOR
DIREITO
Figura 76 - Padrão de força em função do tempo para o segundo ciclo de sono. Dispositivo
resiliente com o sensor localizado do lado direito.
0 1000 2000 3000 4000 5000
0
10
20
30
40
50
60
70
FO
RÇ
A (N
)
TEMPO (s)
SENSOR
ESQUERDO
Figura 77 - Padrão de força em função do tempo para o segundo ciclo de sono. Dispositivo
resiliente com o sensor localizado do lado esquerdo.
Os resultados obtidos em todas as etapas deste trabalho mostram o potencial
de sensores à fibra ótica baseados em redes de Bragg para a utilização em aplicações
de tratamento dos sintomas de bruxismo do sono, sendo uma potente ferramenta para
instrumentação de dispositivos interoclusais, utilizados para tratamento dos sintomas
de bruxismo.

93
5. CONCLUSÕES E TRABALHOS FUTUROS
5.1 CONCLUSÕES
Experimentos in vitro foram realizados com o objetivo de determinar a
sensibilidade do sensor. Após a confecção do modelo de gesso das arcadas dentárias
do paciente voluntário e marcação dos pontos de contato, foi realizada a aplicação de
cargas na montagem experimental com os dispositivos interoclusais do tipo rígido e
resiliente inseridos no modelo de gesso do paciente.
Inicialmente, aplicou-se a força diretamente sobre o primeiro molar superior
esquerdo do modelo, com o objetivo de se obter a máxima sensibilidade do sensor,
uma vez que a máxima sensibilidade é obtida com a aplicação de força perpendicular
na menor área de contato possível. A escolha do primeiro molar esquerdo ocorreu a
partir da análise dos pontos de contato, em que foi possível perceber que a superfície
de contato entre os dentes era menor que a área do primeiro molar superior direito.
Os dados obtidos indicam a linearidade necessária para correlacionar a variação do
comprimento de onda central da rede de Bragg com a força aplicada.
Para simular o caso real, o experimento in vitro foi repetido, porém a carga foi
aplicada de maneira centralizada. Os resultados obtidos para este teste foram os
valores de coeficientes de sensibilidade utilizados nos resultados para os testes in
vivo.
O sensor FBG possui sensibilidade cruzada (à deformação e à temperatura
simultaneamente), fazendo-se necessária uma análise da estabilidade térmica a fim
de garantir que a variação do comprimento de onda da rede seja dada pela força
aplicada pelo paciente.
A curva de estabilidade térmica foi obtida para os sensores embutidos nos
dispositivos interoclusais rígido e resiliente. Para o dispositivo resiliente, o gráfico
obtido indica rápida estabilização térmica, com pequenas oscilações de valores
desprezíveis considerando o movimento padrão de mordida. Porém, para o dispositivo
interoclusal rígido há espera maior para a estabilização que, inclusive, não ocorre
completamente, pois é possível observar inclinação ascendente ao longo do gráfico;
e a análise do gráfico obtido em comparação com os valores teóricos para variação
do comprimento de onda em função da temperatura indica a presença de variação por
deformação, e não somente da temperatura, o que pode modificar resultados na
avaliação das forças com o dispositivo interoclusal rígido.

94
Para obtenção de mais um dado comparativo entre os dispositivos interoclusais
rígido e resiliente, estes foram utilizados para estudo de diferentes movimentos
mandibulares realizados pelo paciente. Os resultados apresentados indicaram
padrões de força de mordida para os diferentes movimentos realizados, e apesar de
os sensores presentes em ambos os dispositivos apontarem os movimentos
realizados, os resultados para o dispositivo interoclusal rígido foram prejudicados pela
deformação que ocorre quando o paciente insere o dispositivo interoclusal na boca. É
possível perceber que a curva dos resultados acompanha a curva de estabilização, o
que não ocorre com o dispositivo resiliente.
As forças de mordida máxima para os dispositivos rígido e resiliente também
foram estudadas, e os resultados mostraram que através do uso do dispositivo
interoclusal resiliente é possível detectar padrões de exaustão e fadiga no paciente,
enquanto que para o dispositivo rígida esta análise é prejudicada pela presença de
deformação pelo posicionamento do dispositivo na boca do paciente. Com isto,
conclui-se que para uma primeira análise de exaustão e fadiga, o dispositivo
interoclusal resiliente é o mais indicado para utilização nas análises por não sofrer
influência de forças externas à força do paciente.
Uma vez determinado que o dispositivo resiliente apresentaria resultados mais
fieis, realizou-se o ensaio de repetição para dispositivos com este material, a fim de
verificar a repetitividade e replicabilidade do sistema, isto é, analisar a variação
ocorrida pelo sistema de medição causada pelo uso de, respectivamente, diferentes
dispositivos do mesmo material, e de repetições ao utilizar um mesmo dispositivo. Os
resultados foram satisfatórios para o objetivo proposto.
Após a verificação de repetitividade e replicabilidade dos dispositivos
resilientes, foram realizados estudos para avaliar a força de mordida do paciente para
ambos os lados e validar a hipótese de que a força apresentada pelo sensor para o
lado esquerdo é maior devido a existência de menos pontos de contato. Foram
estudados os movimentos de oclusão, mordida e mordida máxima; e os sensores para
ambos os lados (direito e esquerdo) apresentaram força menor para a mordida
máxima, sendo possível concluir que na mordida máxima há o aumento da quantidade
de pontos de contato e distribuição da força aplicada entre mais dentes. Isto ocorre
devido ao fato de que o sensor é pontual e mede apenas a força aplicada no ponto
em que está inserido.

95
Os estudos de exaustão e fadiga no paciente foram realizados a fim de
determinar os padrões de mordida apresentados pelo sensor nestes casos. Com os
dados obtidos foi possível determinar três fases de indução à fadiga e seus padrões
de mordida, a saber, mordida máxima, exaustão e fadiga.
Com os padrões de força de mordida para diversos testes (diversos
movimentos, exaustão e fadiga), objetivou-se estudar o fenômeno do bruxismo para
identificar os padrões de força aplicados pelo paciente durante o sono e para avaliar
a qualidade do sensor para realizar este tipo de medição. Utilizou-se para este ensaio
um dispositivo interoclusal resiliente com sensores FBG no lado direito e no lado
esquerdo do paciente.
Os dados obtidos, tanto para o lado esquerdo quanto para o lado direito,
indicaram os mesmos instantes de aplicação de força; além disto, os valores para
força foram maiores do lado esquerdo, concordando com os ensaios de mordida. Os
resultados indicam que o sensor FBG é uma potente ferramenta para identificar a
presença e frequência de movimentos realizados por pacientes com bruxismo.
Conforme citado na literatura, 60 a 80% dos episódios de bruxismo ocorrem
durante o estágio 2 do sono leve ou durante as trocas de estágio (LAVIGNE, KATO,
et al., 2003; MADDALENA DIAS, RAMALHO DE MELLO, et al., 2014). Cada estágio
do sono leve dura entre 60 e 90 minutos, por este motivo, os ensaios foram divididos
de maneira a cumprir estes períodos. Os resultados indicaram uma diminuição da
atividade de bruxismo conforme o tempo de sono, concordando com a literatura, que
diz que os episódios de bruxismo são menos frequentes nos demais ciclos de sono, e
sendo possível concluir que durante uma noite completa de sono esses estágios se
repitam e, ao longo do sono, o paciente apresente oscilações na frequência de
episódios de bruxismo.
Entretanto, não foi possível realizar uma avaliação do bruxismo pela
identificação dos padrões de movimento, pois o intervalo de aplicação de força
durante o sono é muito pequeno e, portanto, necessitam de uma análise de um
especialista odontológico para avaliação de seu significado.
Os resultados obtidos em ambos os lados do paciente indicam que o método
proposto é uma ferramenta eficiente para a análise e caracterização de dispositivos
interoclusais.

96
5.2 TRABALHOS FUTUROS
Sugere-se como trabalhos futuros a análise de repetitividade, reprodutividade e
replicabilidade para mais de um paciente. Será necessário avaliar diferentes
espessuras para os dispositivos resiliente e rígido.
Para a utilização do dispositivo interoclusal rígido em ensaios de fadiga e
bruxismo será necessário um estudo aprofundado do gráfico de deformação para
identificação de possíveis deformações plásticas para eliminar as interferências na
medição devido a deformações.
Essas avaliações podem proporcionar o desenvolvimento de dispositivos
interoclusais otimizados, utilizando diferentes materiais e/ ou dimensões. Estes
trabalhos poderão otimizar o tratamento dos sintomas do paciente, prevendo melhor
distribuição das forças de mordida ao longo do dispositivo.

97
5.3 PUBLICAÇÕES E SUBMISSÕES
5.3.1. Artigos publicados em conferência
NASCIMENTO, PAULA F. et al. Characterization of the occlusal splints
using optical fiber sensors. In: 2017 SBMO/IEEE MTTS International Microwave and
Optoelectronics Conference (IMOC), 2017, Águas de Lindóia. 2017 SBMO/IEEE MTT-
S International Microwave and Optoelectronics Conference (IMOC), 2017. p. 1.
5.3.2. Artigos submetidos
A.P.G.O. Franco, R. Fiorin, P.F. Nascimento, M.A. Souza, H.J. Kalinowski, I.
Abe. Study of muscle fatigue in parafunctional patient using occlusal splint fibre Bragg
grating sensor. Submetido para Journal of Biomechanics.

98
REFERÊNCIAS
ABE, I. et al. The force magnitude of a human bite measured at the molar
intercuspidation using fiber Bragg gratings. Journal of Microwaves, Optoelectronics
and Electromagnetic Applications, v. 16, n. 2, p. 434-444, 2017.
ADAM, A.; DE LUCA, C. J. Firing rates of motor units in human vastus lateralis
muscle during fatiguing isometric contractions. Journal of Applied Physiology, v. 99,
n. 1, p. 268-280, 2005.
ALLEN, D. G.; LANNERGREN, J.; WESTERBLAD, H. Muscle cell function
during prolonged activity: cellular mechanisms of fatigue. Experimental physiology,
v. 80, n. 4, p. 497-527, 1995.
AMERICAN ACADEMY OF SLEEP MEDICINE (AASM). International
classification of sleep disorders. Westchester: Section on sleep related bruxism.
2nd edition. American Academy of Sleep Medicine, 2005.
AMORIM, C. F. et al. Electromyographic analysis of masseter and anterior
temporalis muscle in sleep bruxers after occlusal splint wearing. Journal of bodywork
and movement therapies, v. 16, n. 2, p. 199-203, 2012.
BAKKE, M. et al. Ultra sonographic assessment of the swelling of the human
masseter muscle after static and dynamic activity. Archives of oral biology, v. 41, n.
2, p. 133-140, 1996.
BARBOSA, C. L. et al. Fabricação e Caracterização de Grades de Bragg
através do uso da Técnica da Máscara de Fase. Telecomunicações, v. 03, n. 02, p.
22-26, 2000.
BARBOSA, C. L. et al. Fabricação e Caracterização de Grades de Bragg
através do uso da Técnica da Máscara de Fase. Revista Científica Periódica -
Telecomunicações, Santa Rita do Sapucaí, v. 03, n. 02, p. 22-26, Dezembro 2000.
BARRY, B. K.; ENOKA, R. M. The neurobiology of muscle fatigue: 15 years
later. Integrative and comparative biology, v. 47, n. 4, p. 465-473, 2007.
BEHRMANN, G. P.; HIDLER, J.; MIROTZNIK, M. S. Fiber optic micro sensor
for the measurement of tendon forces. Biomedical Engineering Online, v. 11, p. 77,
2012. ISSN 1.

99
BONAKDARCHIAN, M.; ASKARI, N.; ASKARI, M. Effect of face form on maxilar
molar bite force with natural dentition. Archives of Oral Biology, v. 54, p. 201-204,
2009.
CLARK, G. T. A critical evaluation of orthopedic interocclusal appliance therapy:
design, theory, and overall effectiveness. The Journal of the American Dental
Association, v. 108, n. 3, p. 359-364, 1984.
CONTI, P. C. A. et al. A cross-sectional study of prevalence and etiology of
signs and symptoms of temporomandibular disorders in high school and university
students. Journal of orofacial pain, v. 10, n. 3, 1996.
COSTEN, J. B. I. A Syndrome of Ear and Sinus Symptoms Dependent upon
Disturbed Function of the Temporomandibular Joint, v. 43, n. 1, p. 1-15, 1934.
DAIF, E. T. Correlation of splint therapy outcome with the electromyography of
masticatory muscles in temporomandibular disorder with myofascial pain. Acta
Odontologica Scandinavica, v. 70, n. 1, p. 72-77, 2012.
DENNISON, C. R. et al. Ex vivo measurement of lumbar intervertebral disc
pressure using fibre-Bragg gratings, v. 41, p. 221-225, 2008. ISSN 1.
DIRAÇOGLU, D. et al. Relationship between maximal bite force and tooth wear
in bruxist and non-bruxist individuals, v. 56, p. 1569-1575, 2011. ISSN 12.
FARELLA, M. et al. Jaw muscle soreness after tooth-clenching depends on
force level. Journal of dental research, v. 89, n. 7, p. 717-721, 2010.
FERNANDES, C. P. et al. A novel sensor for bite force determinations. Dental
Materials, v. 19, p. 118- 126, 2003.
FITTS, R. H. Mechanisms of muscular fatigue. In: POORTMANS, J. R.
Principles of exercise biochemistry. Brussels: Karger Publishers, 2004. p. 279-300.
FRANCO, A. P. G. O. et al. Measurement of mandibular movements in
parafunctional patient using occlusal splint with Bragg gratings: pilot study. Sixth
European Workshop on Optical Fibre Sensors (EWOFS'2016). [S.l.]: International
Society for Optics and Photonics. 2016. p. 991618-991618.
FRESVIG, T. et al. Fibre optic Bragg grating sensors: an alternative method to
strain gauges for measuring deformation in bone. Medical engineering & physics, v.
30, p. 104-108, 2008. ISSN 1.
FRIAS, C. et al. Mechanical characterization of bone cement using fiber Bragg
grating sensors, v. 30, p. 1841-1844, 2009. ISSN 5.

100
GALVÃO, J. R. et al. Strain Mapping in Carbon-Fiber Prosthesis Using Optical
Fiber Sensors. IEEE Sensors Journal, v. 17, n. 1, p. 3-4, 2017.
GRABER, T. M.; VANARSDALL, J. R. Orthodontics principles and practice.
Philadelphia and London: W B Saunders Company, 1963.
GREEN, H. J. Mechanisms of muscle fatigue in intense exercise. Journal of
sports sciences, v. 15, n. 3, p. 247-256, 1997.
HICKEY, J. C.; BOUCHER, C. O.; HUGHES, G. A. Glossary of prosthodontic
terms. Journal of Prosthetic Dentistry, v. 20, n. 5, p. 443-480, 1968.
HIYAMA, S. et al. First night effect of an interocclusal appliance on nocturnal
masticatory muscle activity. Journal of oral rehabilitation, v. 30, n. 2, p. 139-145,
2003.
HUNTER, S. K. Sex differences in human fatigability: mechanisms and insight
to physiological responses. Acta physiologica, v. 210, n. 4, p. 768-789, 2014.
KALINOWSKI, A. et al. Optical Fiber Bragg Grating Strain Sensor for Bone
Stress Analysis in Bovine During Masticatory Movements. IEEE Sensors Journal, v.
17, n. 8, p. 2385-2392, 2017.
KALINOWSKI, H. J. et al. Application of fibre Bragg grating sensors in
biomechanics. Trends in Photonics, p. 315-343, 2010.
KARAKIS, D.; DOGAN, A.; BEK, B. Evaluation of the effect of two diferente
occlusal splints on maximum occlusal force in patients with sleep bruxism: a pilot study,
v. 6, p. 103-108, 2014. ISSN 2.
KERSEY, A. D. et al. Fiber Grating Sensors. Journal of Lightwave
Technology, v. 15, n. 8, p. 1442-1463, 1997.
KOC, D.; DOGAN, A.; BEK, B. Bite force and influential factors on bite
measurement: A literature review. European Journal of Dentistry, v. 4, p. 223-232,
2010.
KOMI, P. V. et al. Optic fibre as a transducer of tendomuscular forces.
European journal of applied physiology and occupational physiology, 1996.
LAAT, A. D.; MACALUSO, G. M. Sleep bruxism as a motor disorder, v. 17, 2002.
ISSN S2.
LANTADA, A. D. et al. Novel System for Bite-Force Sensing and Monitoring
Based on Magnetic Near Field. Communication Sensors, v. 12, p. 11544-11558,
2012.

101
LAVIGNE, G. J. . R. P. H. . &. M. J. Y. Sleep bruxism: validity of clinical research
diagnostic criteria in a controlled polysomnographic study. Journal of dental
research, v. 75, n. 1, p. 546-552, 1996.
LAVIGNE, G. J. et al. Rhythmic masticatory muscle activity during sleep in
humans., v. 80, p. 443-448, 2001. ISSN 2.
LAVIGNE, G. J. et al. Neurobiological mechanisms involved in sleep bruxism,
v. 14, p. 30-46, 2003. ISSN 1.
LAVIGNE, G.; MANZINI, C.; HUYNH, N. T. Sleep bruxism. In: KRYGER, M. H.;
ROTH., T.; DEMENT, W. C. Principles and practice os sleep medicine. 5th. ed.
[S.l.]: Elsevier Saunders, 2011. p. 1129-1139.
LEE, B. Review of the present status of optical fiber sensor. Optical Fiber
Technology, v. 9, n. 2, p. 57-79, 2003.
LOBEZOO, F. et al. Principles for the management of bruxism. Journal of oral
rehabilitation, v. 35, n. 7, p. 509-523, 2008.
LUTTMANN, A.; JÄGER, M.; LAURIG, W. Electromyographical indication of
muscular fatigue in occupational field studies. International Journal of Industrial
Ergonomics, v. 25, n. 6, p. 645-660, 2000.
MADDALENA DIAS, I. et al. Avaliação dos fatores de risco do bruxismo do
sono. Archives of Dental Science/Arquivos em Odontologia, v. 50, n. 3, 2014.
MARIN, G. C. et al. The magnitude of a human bite measured exactly at the
molar intercuspidation using FBG. OFS2014 23rd International Conference on
Optical Fiber Sensors. [S.l.]: International Society for Optics and Photonics. 2014. p.
91575J-91575J.
MARQUEZIN, M. C. S. et al. Assessment of masticatory performance bite force,
orthodontic treatment need and orofacial dysfunction in children and adolescents.
Archives of oral biology, v. 58, p. 286-292, 2013.
MARTELLI, C. et al. Photonic sensors: from horse racing to horse power.
Optical Fiber Sensors Conference (OFS), 2017 25th. [S.l.]: IEEE. 2017. p. 1-4.
MERLETTI, R.; RAINOLDI, A.; FARINA, D. Surface electromyography for
noninvasive characterization of muscle. Exercise and sport sciences reviews, v. 29,
n. 1, p. 20-25, 2001.
MEULENET, J. F.; GANDHAPUNENI, R. K. Development of the Bite Master II
and is application to the study of cheese hardeness. Physiology & behavior, v. 89,
p. 39-43, 2006.

102
MILCZEWSKI, M. S. et al. Measuring Orthodontic Forces with HiBi FBG
Sensors. Proceedings of 18th Optical Fiber Sensors Conference, Cancun, p. 23–
27, 2006.
MILCZEWSKI, M. S. et al. Sensitivity of silica and polymer microstructured
fibres transversal pressure. Glass Technology, v. 50, p. 211–213, 2009.
MILCZEWSKI, M. S. et al. Force Monitoring in a Maxilla Model and Dentition
Using Optical Fiber Bragg Gratings. Sensors, v. 12, p. 11957-11965, 2012.
MISHRA, V. et al. Fiber Bragg grating sensor for monitoring bone
decalcification. Orthopaedics & Traumatology: Surgery & Research, v. 96, p. 646-
651, 2010. ISSN 6.
MONCAYO, S. Biomechanics of pivoting appliances. Journal of orofacial
pain, v. 8, n. 2, 1994.
MONTEIRO, A. A.; KOPP, S. The sufficiency of blood flow in human masseter
muscle during endurance of biting in the intercuspal position and on a force transducer.
Proceedings of the Finnish Dental Society. Suomen Hammaslaakariseuran
toimituksia, v. 85, n. 4-5, p. 261-272, 1989.
MOREIRA, M. F. Desenvolvimento e caracterização de um sistema laser de
cristal líquido colestérico acoplado à fibra óptica, Rio de Janeiro, PUC-Rio, 2004.
NARITA, N. . F. M. et al. Effects of jaw clenching while wearing an occlusal splint
on awareness of tiredness, bite force, and EEG power spectrum. Journal of
prosthodontic research, v. 53, n. 3, p. 120-125, 2009.
NISHIGAWA, K.; BANDO, E.; NAKANO, M. Quantitative study of bite force
during sleep associated bruxism, v. 28, p. 485-491, 2001. ISSN 5.
OKESSON, J. P. Orofacial pain: guidelines for assessment, diagnosis, and
management. Chicago: The American Academy of Orofacial Pain. 1996. p. 116.
OKESSON, J. P. Management of temporomandibular disorders and
occlusion. 6th. ed. London: Elsevier Health Sciences, 2008.
OMMERBORN, M. A. et al. Therapies most frequently used for the management
of bruxism by a sample of German dentists. The Journal of prosthetic dentistry, v.
105, n. 3, p. 194-202.
OTHONOS, A.; KALLI, K. Fiber Bragg Gratings: Fundamental and
Applications in Telecommunications and Sensing. [S.l.]: Artech House, 1999.

103
PETTENGILL, C. A. et al. A pilot study comparing the efficacy of hard and soft
stabilizing appliances in treating patients with temporomandibular disorders. The
Journal of prosthetic dentistry, v. 79, n. 2, p. 165-168, 1998.
PIZOLATO, R. A. et al. Maximal bite forces in Young adults with
temporomandibular disorders and bruxism, v. 21, p. 278-283, 2007. ISSN 3.
POSSELT, U. Physiology of occlusion and rehabilitation. Blackwell Scientific,
1968.
RAMFJORD, S. P.; ASH, M. M. Occlusion. 2. ed. Philadelphia, London,
Toronto: WB Saunders Company, 1971.
RAMOS, A. et al. Experimental measurement and numerical validation of bone
cement mantle strains of an in vitro hip replacement using optical FBG sensors.
Experimental mechanics, v. 52, n. 9, p. 1267-1274, 2012.
SHETTY, S. . P. V. . B. C. S. . K. G. S. . &. D. B. C. Bruxism: a literature review.
The Journal of Indian Prosthodontic Society, v. 10, n. 3, p. 141-148, 2010.
SILVA, B. A. R. S. et al. Efeitos da fadiga muscular induzida por exercícios no
tempo de reação muscular dos fibulares em indivíduos sadios. Rev Bras Med
Esporte, v. 12, n. 2, p. 85-89, 2006.
TALAIA, P. M. et al. Plated and intact femur strains in fracture fixation using
fiber Bragg gratings and strain gauges. Experimental mechanics, v. 47, n. 3, p. 355-
363, 2007.
THE ACADEMY OF PROSTHODONTICS. The glossary of prosthodontic terms.
The Journal of Prosthetic Dentistry, v. 81, n. 8th, p. 48-110, 2005. ISSN 1.
TIMM, T. A.; ASH, M. M. The occlusal bite plane splint. An adjunct to orthodontic
treatment. Journal of clinical orthodontics: JCO, v. 11, n. 6, p. 383, 1977.
TJIN, S. C. et al. Recording compliance of dental splint use in obstructive sleep
apnea patients by force and temperature modeling. Medical and Biology
Engineering and Computing, v. 39, p. 182–184, 2001.
TOMITA, N.; MATSUURA, N.; ICHINOHE, T. The combined effects midazolam
and propofol sedation on muscle power. Anaesthesia, v. 68, p. 478-483, 2013.
WERHLE, G. et al. A fibre optic Bragg grating strain sensor for monitoring
ventilator movements. Measurement and Science Technology, v. 12, p. 805-809,
2001.
WILLIAMS, J. H.; KLUG, G. A. Calcium exchange hypothesis of skeletal muscle
fatigue: a brief review. Muscle & nerve, v. 18, n. 4, p. 421-434, 1995.

104
YEUNG, S. S.; AU, A. L.; CHOW, C. C. Effects of fatigue on the temporal
neuromuscular control of vastus medialis muscle in humans. European journal of
applied physiology and occupational physiology, v. 80, n. 4, 1999.
YUSTIN, D. et al. Characterization of 86 Bruxing Patients and Long-Term Study
of Their Management With Occlusal Devices and Other Forms of Therapy. Journal of
orofacial pain, v. 7, n. 1, p. 542-554, 1993.